

Page 1
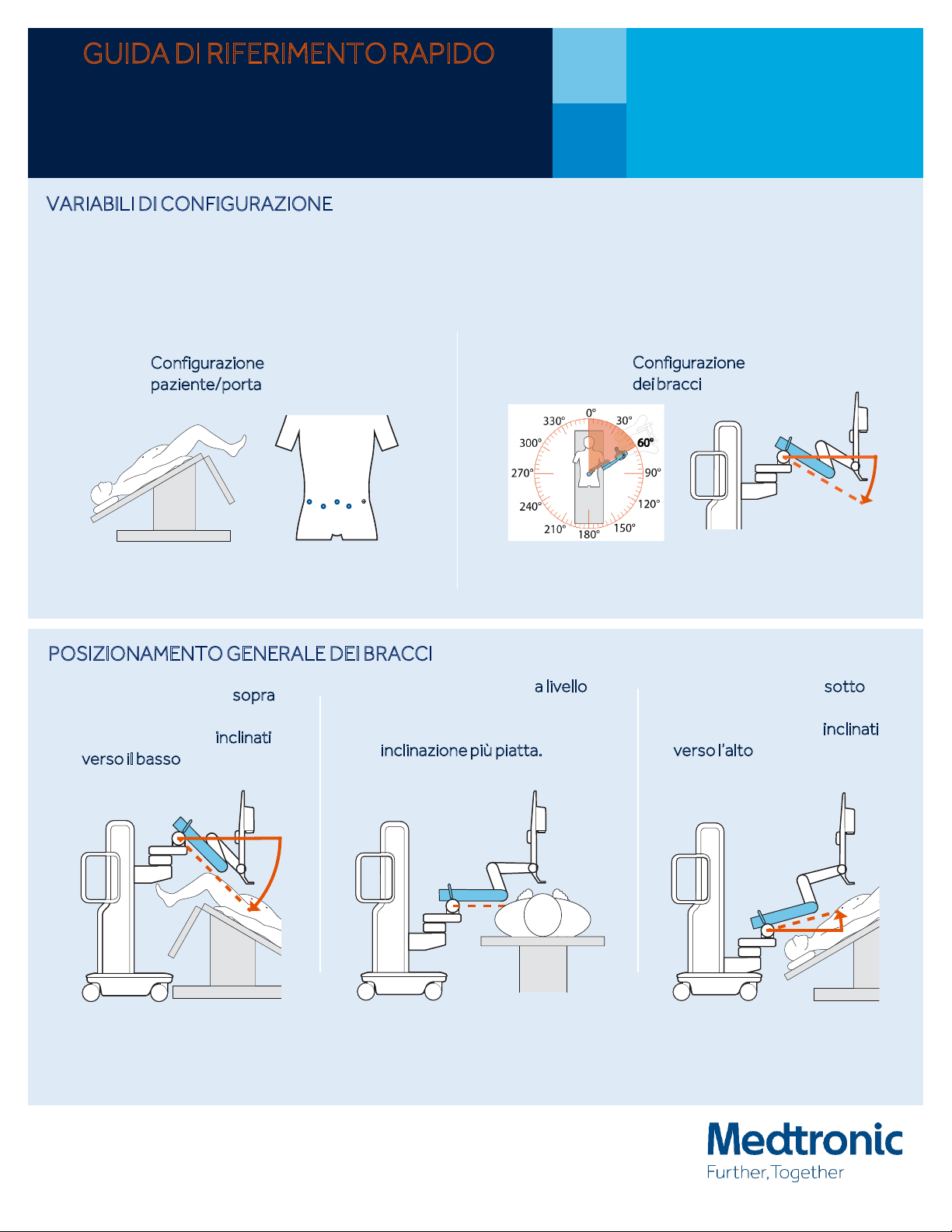
La configurazione può essere suddivisa in due parti: configurazione del paziente e configurazione del braccio.
La configurazione del paziente determina dove si trova ogni porta in relazione all’altra. La configurazione dei
bracci indica come si muove un braccio in relazione all’altro per raggiungere l’anatomia target.
Configurazione
paziente/porta
Angolo di
collegamento
Inclinazione del
braccio
I bracci che operano
sopra
il paziente vengono
posizionati in alto,
inclinati
verso il basso.
I bracci che operano più
a livello
del paziente possono essere
posizionati a mezza altezza con
un’
inclinazione più piatta.
I bracci che operano sotto e
davanti al paziente vengono
posizionati in basso,
inclinati
verso l’alto.
Posizionament
o della porta
Posizione del
paziente
C
onfigurazione
d
ei bracci
Inclinazione verso
il basso -30°
L’altezza del braccio è determinata dall’inclinazione del braccio e dall’altezza della relativa porta; non è
un’impostazione specifica.
Sistema Hugo™ RAS
Pagina 1 di 5
VARIABILI DI CONFIGURAZIONE
GUIDA DI RIFERIMENTO RAPIDO
Principi di configurazione del sistema
POSIZIONAMENTO GENERALE DEI BRACCI
Page 2
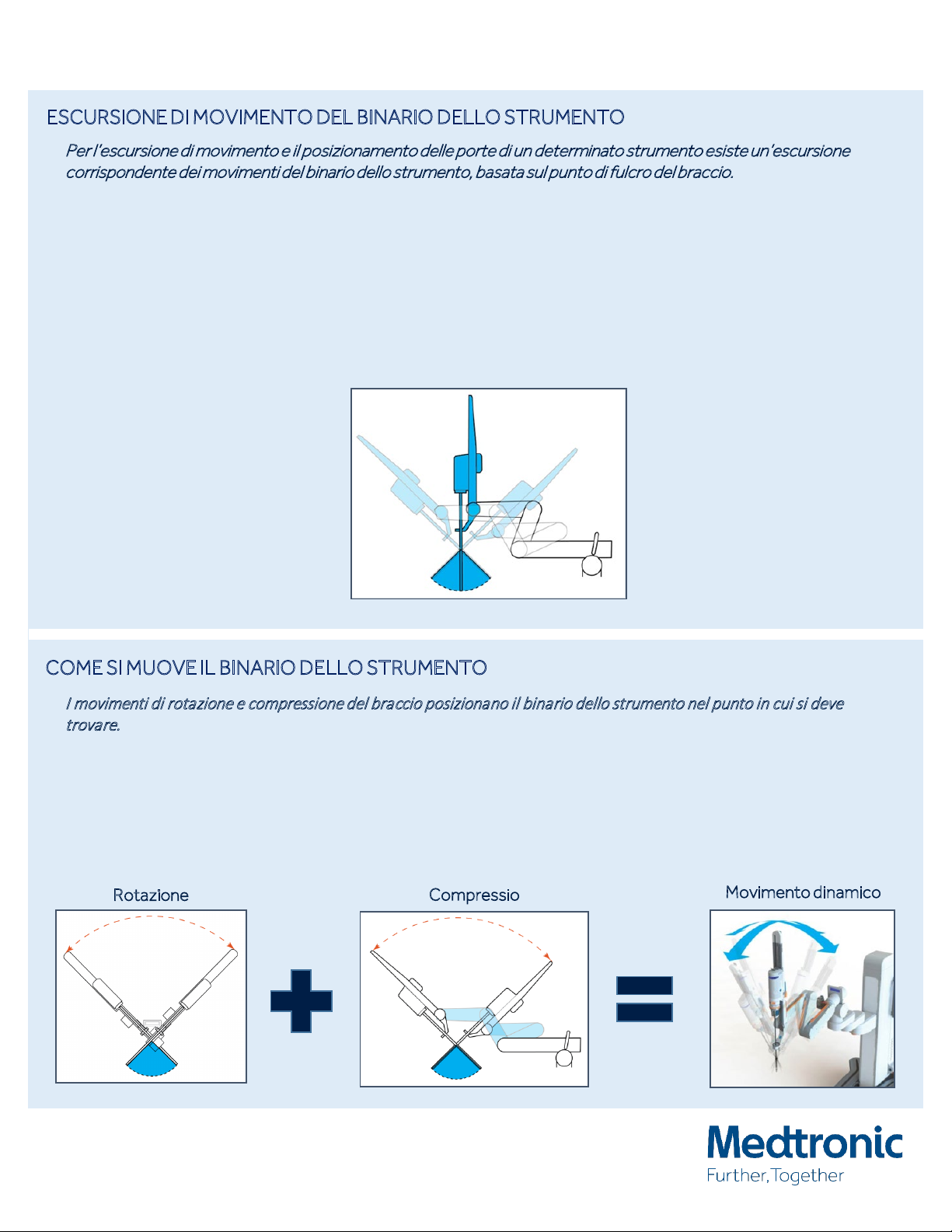
Per l’escursione di movimento e il posizionamento delle porte di un determinato strumento esiste un’escursione
corrispondente dei movimenti del binario dello strumento, basata sul punto di fulcro del braccio.
L’area di lavoro è lo spazio 3D che lo strumento deve raggiungere per completare un intervento. L’asta dello
strumento è in linea con il binario; pertanto, ruotano intorno allo stesso punto di fulcro per raggiungere l’anatomia
target. Questo punto di fulcro condiviso crea un intervallo di angoli e movimenti che lo strumento usa per
completare l’intervento. Questo intervallo rimane costante indipendentemente dalla configurazione del
resto del braccio, dato che è determinato dall’anatomia e dalla posizione delle porte.
I movimenti di rotazione e compressione del braccio posizionano il binario dello strumento nel punto in cui si deve
trovare.
Il braccio usa rotazione e compressione per completare l’intera escursione di movimento del binario (descritta nella
sezione precedente) ruotando lo strumento intorno al punto di fulcro in vari angoli per raggiungere l’anatomia target.
I due momenti del movimento del braccio, rotazione e compressione, sono controllati dalla console del chirurgo.
La configurazione del braccio determina l’entità dei movimenti di rotazione/compressione e l’intera escursione di
movimento del binario dello strumento.
Rotazione
Compressio
ne
Movimento dinamico
Sistema Hugo™ RAS
Pagina 2 di 5
Concetti proattivi
ESCURSIONE DI MOVIMENTO DEL BINARIO DELLO STRUMENTO
COME SI MUOVE IL BINARIO DELLO STRUMENTO
PRINCIPI DI CONFIGURAZIONE DEL SISTEMA
Page 3

La configurazione del braccio (inclinazione e angolo di blocco) determina dove si verifica l’escursione target dei
movimenti di rotazione e compressione all’interno dell’intera escursione di movimento del braccio.
L’esatta escursione ed entità dei movimenti di rotazione e compressione dipendono dalla configurazione del
braccio. Presupponendo che paziente e porte siano posizionati, le altre due variabili controllate durante la
configurazione (angolo di blocco e inclinazione) determinano dove si verificano questi movimenti all’interno
dell’escursione di movimento del braccio.
Per accedere alla stessa anatomia attraverso la stessa porta, il binario dello strumento si trova nella stessa
posizione. Nell’esempio seguente, un cambio dell’inclinazione mostra come il braccio si comprime meno per
raggiungere la stessa posizione del binario dello strumento. Se il braccio era inizialmente al limite dell’escursione
di movimento in quanto completamente compresso, inclinandolo verso l’alto si allontana da questo limite.
L’inclinazione e la compressione del braccio possono essere scambiati utilizzando l’inclinazione e/o l’angolo di blocco
del braccio.
Nell’esempio precedente, l’angolo di inclinazione è stato cambiato, ma una soluzione alternativa poteva essere
cambiare l’angolo di blocco, come mostrato di seguito. Questo cambio ha causato una maggiore rotazione e
una minore compressione del braccio, per orientare il binario nella stessa posizione. Se il braccio era inizialmente
al limite dell’escursione di movimento in quanto completamente compresso, cambiare l’angolo di blocco ha
sostituito con efficacia la compressione con la rotazione.
Sistema Hugo™ RAS
COME LA CONFIGURAZIONE DEL BRACCIO INFLUISCE SU ROTAZIONE E COMPRESSIONE
Completamente
compresso
Minore compressione con
cambiamento dell’inclinazione
Questo esempio evidenzia gli effetti dell’inclinazione della configurazione sull’escursione della compressione
del braccio. Nella pratica, cambiare l’inclinazione o l’angolo di blocco del braccio influisce sull’escursione dei
movimenti di compressione/estensione e rotazione.
Completamente
compresso senza
rotazione
Completamente
compresso con
più rotazione
Questi rapporti sono presi in considerazione nelle Guide di configurazione. Se sono necessarie modifiche alla
configurazione del braccio per evitare collisioni o limiti dell’escursione di movimento, fare riferimento alla sezione
Risoluzione dei problemi di configurazione.
Concetti proattivi
Pagina 3 di 5
PRINCIPI DI CONFIGURAZIONE DEL SISTEMA
Page 4

In genere, se la porta adiacente è relativa a un braccio che proviene dal lato opposto dell’area di lavoro, alternare le
porte per creare uno sfasamento nella distanza, in modo da aumentare gli spazi tra i bracci. Ad esempio, la porta
di un braccio dell’endoscopio inclinata verso l’alto e che opera in avanti deve essere sfasata verso il basso se la
porta adiacente è un braccio dinamico inclinato verso il basso che opera retrocedendo sul lato opposto del tavolo
operatorio.
Sistema Hugo™ RAS
Pagina 4 di 5
DISTANZIAMENTO GENERALE DELLE PORTE
Cavi dati dei carrelli del braccio:
Per migliorare il traffico in sala operatoria e l’efficienza della
configurazione, instradare i cavi dati dei carrelli dai bracci
verso la base del tavolo operatorio. Da qui, instradarli
insieme verso la torre.
Cavi dati della console del chirurgo:
Instradare i cavi dati della console del chirurgo alla torre
lungo la parete o fuori dalla portata del movimento dei
carrelli durante la configurazione del sistema per non
limitare la mobilità dei carrelli.
Cavi elettrochirurgici:
Instradare i cavi elettrochirurgici lungo i teli del paziente
e fino al collegamento dello strumento. Lasciare il cavo
abbastanza lento da consentire di collegare, inserire e
spostare lo strumento per l’escursione necessaria senza
tirare il cavo.
COME GESTIRE I CAVI
Se si prevede di utilizzare entrambi gli endoscopi a 0 e 30 gradi durante la procedura:
• Utilizzare un secondo cavo luce in fibra ottica e un adattatore per endoscopio con il secondo endoscopio in
modo che i cambi durante la procedura non richiedano lo spostamento e la sostituzione dell’endoscopio
nell’adattatore.
• Eseguire il bilanciamento del bianco per entrambi gli endoscopi durante la configurazione del sistema per
evitare pause durante la procedura.
PREPARAZIONE PER L’USO DI ENTRAMBI GLI ENDOSCOPI
Adattamento della sala e
configurazione del sistema
Per evitare collisioni con un braccio non utilizzato durante la teleoperazione, spostare lo strumento non attivo in
alto o in basso nel campo chirurgico. La direzione di questo movimento dipende dalla configurazione del braccio
in rapporto ai bracci attivi.
COME ACCANTONARE UNO STRUMENTO NON UTILIZZATO PER EVITARE COLLISIONI
PRINCIPI DI CONFIGURAZIONE DEL SISTEMA
Page 5

Sistema Hugo™RAS
Pagina 5 di 5
Adattamento della sala e
configurazione del sistema
Per migliorare il traffico in sala operatoria, mantenere la
stessa angolazione di blocco e posizionare il carrello fuori
dalla zona di traffico.
Quando si esegue questa operazione, assicurarsi di non
posizionare il carrello in modo tale che possa essere urtato
dal binario dello strumento del braccio durante l’escursione di
movimento target.
REGOLAZIONE DELLA POSIZIONE DEL CARRELLO
Originale Modificata
Se la situazione clinica richiede un’inclinazione
meno pronunciata del tavolo operatorio rispetto a
quella specificata nella guida di configurazione,
ridurre in maniera simile l’inclinazione del braccio (ad
esempio, se l’inclinazione è di 15° invece dei >20°
specificati, inclinare i bracci meno di quanto
specificato).
REGOLAZIONE DELL’INCLINAZIONE DEL BRACCIO PER UN TAVOLO OPERATORIO
M
ENO INCLINATO
Per evitare urti con gli elementi fissi (es. paziente, retrattore, asta di posizionamento, staffe, asta per flebo, tavolo
operatorio):
• Regolare gli elementi fissi in modo da mantenere la configurazione del braccio consigliata
• Controllare se gli angoli di blocco devono essere modificati in modo da evitare il paziente o il dispositivo montato
• Regolare l’inclinazione in modo da liberare il paziente o il dispositivo montato
• Valutare l’imp
atto dei cambiamenti sull’escursione di movimento del braccio o la potenziale collisione con altri
bracci o con il paziente
COME EVITARE URTI CON ELEMENTI FISSI
Effettuare un controllo manuale del range di movimento dei bracci prima di iniziare l’operazione a distanza e dopo
qualsiasi regolazione della posizione del braccio o del carrello, assicurandosi che i bracci non entrino in collisione
con i componenti del sistema, le apparecchiature o il paziente, al fine di evitare problemi nell’area di lavoro, lesioni
al paziente e danni alle apparecchiature dovuti al movimento del braccio.
COME CONTROLLARE MANUALMENTE LA CONFIGURAZIONE
Originale
Modificata
Anche con questa modifica, le collisioni sono ancora possibili. È importante utilizzare le impostazioni della
Guida di configurazione ogni volta che è possibile.
© 2021 Medtronic. All rights reserved. Medtronic, Medtronic logo and
Further, Together are trademarks of Medtronic. All other brands are
trademarks of a Medtronic company. PT00149596-17SEP2021
PRINCIPI DI CONFIGURAZIONE DEL SISTEMA
Attenzione, consultare i
documenti di accompagnamento
© 2021 Medtronic. All rights reserved.
Covidien llc, 15 Hampshire Street, Mansfield, MA 02048 USA.
Medtronic B.V., Earl Bakkenstraat 10, 6422 PJ Heerlen, Paesi Bassi.
PT00149596 23SEP2021
Medtronic, and Medtronic logo are trademarks of Medtronic.
All other brands are trademarks of a Medtronic company.
Third-party brands are trademarks of their respective owners.
Pagina 5 di 5
Sistema Hugo™ RAS
2797
Page 6

Pagina lasciata
intenzionalmente vuota
 Loading...
Loading...