


Guía del usuario
HugoTM
Sistema de cirugía asistida por robot (RAS)
Número de revisión: PT00154004


Tabla de contenidos
Capítulo 1. Introducción
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Indicaciones de uso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Beneficios clínicos para los pacientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Procedimientos clínicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Capacitación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Convenciones de seguridad utilizadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Advertencias y precauciones generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
Resumen de riesgos residuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-27
Capítulo 2. Descripción general del sistema
Descripción general del sistema Hugo™ RAS . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Componentes del sistema Hugo™ RAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Interfaz gráfica de usuario (GUI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
Luces LED de los carros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-38
Luces LED de los controles de mano del cirujano. . . . . . . . . . . . . . . . . . . . . 2-39
Capítulo 3. Configuración del quirófano
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Lista de comprobación preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Selección de los componentes del sistema. . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Preparación del quirófano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Conexiones del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
Conexión de los cables de datos del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
Configuración de equipos de vídeo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-12
Conexión de los cables de alimentación del sistema . . . . . . . . . . . . . . . . .3-14
Encendido y preparación del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17
Secuencia de configuración del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
Configuración del generador electroquirúrgico . . . . . . . . . . . . . . . . . . . . . . 3-24
Almacenamiento de las imágenes del sistema . . . . . . . . . . . . . . . . . . . . . . . 3-28
Ajustar el brillo y el contraste de la pantalla interactiva
del equipo quirúrgico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-30
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-35
Capítulo 4. Preparación para la cirugía
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Lista de comprobación preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ i

Confirmación de los componentes de la torre del sistema . . . . . . . . . . . . . 4-3
Comprobaciones del sistema. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
Guía de configuración del brazo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
Enfundado de los carros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
Colocación de los puertos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18
Colocación de los carros para cirugía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18
Configuración del endoscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-27
Intervención de cirugía mínimamente invasiva antes
de la cirugía asistida por robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-33
Configuración de la consola del cirujano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-34
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-36
Capítulo 5. Colocación de los puertos
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Lista de comprobación preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Colocación específica de puertos en el sistema Hugo™ RAS . . . . . . . . . . . 5-2
Gama de puertos robóticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
Principios de colocación de los puertos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-6
El punto de pivote . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
Colocación de los puertos para la intervención quirúrgica . . . . . . . . . . . . . 5-8
Capítulo 6. Uso del endoscopio y los instrumentos
a pie de cama
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Lista de comprobación preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Ajuste del ángulo y de la posición del brazo . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Propósito y control del endoscopio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-6
Conexión e inserción del endoscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-7
Gama de instrumentos Hugo™ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-11
Conexión e inserción de instrumentos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-12
Petición de instrumentos y posiciones de brazos. . . . . . . . . . . . . . . . . . . . . 6-22
Extracción y retirada de un instrumento o endoscopio . . . . . . . . . . . . . . . 6-24
Reposicionamiento del paciente y de la mesa quirúrgica . . . . . . . . . . . . .6-29
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-31
Capítulo 7. Funcionamiento y personalización
de la consola del cirujano
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
Lista de comprobación preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
Controles de mano del cirujano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-3
ii Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Pedales de la consola del cirujano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
Sistema de seguimiento de cabeza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-6
Control de los brazos en la consola del cirujano . . . . . . . . . . . . . . . . . . . . . . . 7-7
Control del endoscopio en la consola del cirujano . . . . . . . . . . . . . . . . . . . 7-15
Movimientos básicos del instrumento con los controles
de mano del cirujano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-18
Uso de los instrumentos en la consola del cirujano . . . . . . . . . . . . . . . . . . . 7-21
Preferencias de la consola del cirujano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-28
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-35
Capítulo 8. Desmontaje, procedimientos y limpieza
postoperatorios
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-2
Lista de comprobación preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-2
Extracción de los instrumentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-2
Desplazamiento de los carros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-6
Retirada de las fundas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-9
Cuidados postoperatorios del instrumento . . . . . . . . . . . . . . . . . . . . . . . . . . 8-12
Limpieza del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-14
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8-16
Capítulo 9. Apagado y traslado del sistema Hugo™
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Colocación de los brazos en la configuración de almacenamiento
y transporte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Apagado del sistema. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-6
Desconexión del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-8
Transporte del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-10
Capítulo 10. Simulador de tareas
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-2
Lista de comprobación preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-2
Configuración del simulador de tareas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-3
Calibración de la consola del cirujano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-5
Pantalla de bienvenida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-7
Selección del ejercicio MIMIC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-7
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10-13
Capítulo 11. Acceso inmediato y resolución de problemas
Obtención de acceso inmediato al paciente, conversión a cirugía
no robótica mínimamente invasiva o cirugía abierta . . . . . . . . . . . . . . . . . 11-2
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ iii

Solución de problemas de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-6
Solución de problemas de brazos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-9
Reemplazo de instrumentos deshabilitados . . . . . . . . . . . . . . . . . . . . . . . .11-17
Solución de problemas de la consola del cirujano . . . . . . . . . . . . . . . . . . .11-18
Resolución de problemas de la torre del sistema . . . . . . . . . . . . . . . . . . . .11-20
Lista de alarmas del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-25
Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-32
Apéndice A. Información técnica del sistema
Apéndice B. Símbolos e iconos
Apéndice C. Especificaciones técnicas
Apéndice D. Mantenimiento y reparaciones
Apéndice E. Glosario
iv Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Capítulo 1
Introducción
Este capítulo contiene la siguiente información:
• Descripción general en la página 1-2
• Indicaciones de uso en la página 1-2
• Beneficios clínicos para los pacientes en la página 1-3
• Procedimientos clínicos en la página 1-3
• Capacitación en la página 1-4
• Convenciones de seguridad utilizadas en la página 1-5
• Advertencias y precauciones generales en la página 1-6
• Resumen de riesgos residuales en la página 1-27
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-1

Descripción general
Descripción general
Hugo™ RAS es una plataforma robótica modular para realizar cirugía robótica mínimamente
invasiva (Minimally Invasive Surgery, MIS). Permite que el cirujano, sentado en una consola
ergonómicamente ajustable, pueda ver el campo quirúrgico en 3D y controlar los
movimientos del endoscopio y los instrumentos con brazos individuales en la mesa
quirúrgica. Además, permite a los cirujanos o al personal de quirófano controlar
manualmente los brazos a pie de cama, incluso utilizando uno de los brazos como soporte
del endoscopio.
El sistema Hugo™ RAS admite toda la gama de instrumentos con articulación de muñeca de
Medtronic y el endoscopio KARL STORZ* Tipcam1 S™ 3D.
Esta guía de usuario contiene información específica para utilizar el sistema Hugo™ RAS.
Siga todas las instrucciones de uso suministradas con el sistema y sus instrumentos y
accesorios, incluidas las instrucciones de uso del generador electroquirúrgico Valle yla b™ FT10,
del sistema de endoscopio y visualización 3D KARL STORZ* y de los instrumentos con
articulación de muñeca Hugo™ RAS, la Guía del procedimiento de reprocesamiento y otras
instrucciones de uso facilitadas con los demás instrumentos o accesorios.
Indicaciones de uso
El sistema de cirugía asistida por robot (RAS) Hugo™ está diseñado para ayudar a controlar
con precisión los instrumentos y accesorios, tales como endoscopios rígidos, disectores
endoscópicos romos y afilados, tijeras, forceps/pinzas, portagujas, retractores endoscópicos,
herramientas electroquirúrgicas y accesorios para la manipulación endoscópica de tejidos,
lo que incluye agarre, corte, disección roma y afilada, aproximación, ligadura, electrocirugía
y sutura durante procedimientos quirúrgicos urológicos y laparoscópicos ginecológicos.
El sistema está indicado para uso en adultos. Se diseñó para que lo utilicen médicos con
capacitación en un entorno de quirófano de acuerdo con los procedimientos quirúrgicos
representativos que se exponen en la Guía del usuario.
1-2 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Beneficios clínicos para los pacientes
Beneficios clínicos para los pacientes
Cuando se usa para lo que se diseñó, el sistema Hugo™ RAS es seguro y tiene un rendimiento
apropiado. Todos los riesgos o efectos colaterales indeseables que pueden asociarse con el
dispositivo en condiciones de uso normales constituyen riesgos aceptables cuando se
sopesan con las ventajas para el paciente.
El sistema Hugo™ RAS proporciona a los cirujanos una tecnología avanzada para la
realización de intervenciones quirúrgicas laparoscópicas. En comparación con la
laparoscopia convencional, el sistema Hugo™ RAS ofrece una visualización mejorada,
instrumentación con grados adicionales de libertad, y mayor ergonomía y precisión para
el cirujano dentro del campo quirúrgico.
Las ventajas potenciales de llevar a cabo cirugías urológicas y ginecológicas con el sistema
Hugo™ RAS son similares a las que ofrecen los sistemas quirúrgicos asistidos por robot en
venta en el mercado. La seguridad y los resultados de desempeño en el paciente del sistema
Hugo™ RAS son comparables a los de las intervenciones quirúrgicas laparoscópicas y
abiertas. Las ventajas para el paciente que tiene el sistema Hugo™ RAS incluyen, entre otras,
las tasas de complicación postoperatorias, la duración del ingreso en el hospital, el intervalo
quirúrgico positivo, la conversión a cirugía abierta (frente a laparoscópica), la pérdida de
sangre y los eventos adversos durante la operación.
1
Introducción
Procedimientos clínicos
Precaución
La demostración de la seguridad y eficacia de los procedimientos específicos que se describen en
este documento se basó en la evaluación del dispositivo como herramienta quirúrgica que facilita el
control preciso de los instrumentos asistidos por robot para realizar tareas quirúrgicas coordinadas.
La evaluación no incluyó la evaluación de los resultados relacionados con el tratamiento del cáncer
(p. ej.: supervivencia general, supervivencia sin enfermedad, recidiva local) ni ningún tratamiento
específico de una enfermedad o afección subyacente.
1. Cuando se utiliza conforme a las indicaciones del fabricante
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-3

Capacitación
Especialidad Procedimiento tipo paraguas Procedimientos cubiertos
Ginecología Histerectomía radical • Histerectomía benigna, parcial
simple, supracervical y total
• Salpingectomía
• Ooforectomía
• Adnexectomía
(salpingooforectomía)
•Sacrocolpopexia
• Linfadenectomía abdominal/
pélvica
• Cistectomía ovárica
• Resección de endometriosis
• Omentectomía
• Parametrectomía
• Lisis de adherencias
Miomectomía Miomectomía
Urología Prostatectomía radical • Cistectomía parcial
Cistectomía radical con
derivación urinaria
Nefrectomía (parcial, radical)
• Extracción de quistes
• Adhesiólisis
•Pieloplastia
• Nefrectomía de donante
• Reimplante ureteral
• Suprarrenalectomía
• Linfadenectomía
Capacitación
El sistema de cirugía asistida por robot Hugo™ RAS es un equipo complejo y solo debe
ser utilizado por profesionales médicos que hayan obtenido la capacitación para el uso de
este dispositivo. Los nuevos usuarios deben asegurarse de sentirse cómodos y estar
capacitados para utilizar el sistema antes de su uso clínico. La capacitación impartida por
Medtronic sobre el uso de este dispositivo no sustituye el conocimiento y la experiencia
médicas necesarias para realizar intervenciones quirúrgicas.
1-4 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Convenciones de seguridad utilizadas
Convenciones de seguridad utilizadas
A lo largo de esta guía de usuario se utilizan las siguientes convenciones para proveer
información de seguridad a los usuarios, que siempre deberán tomar las debidas
precauciones mientras utilizan el sistema Hugo™ RAS.
Advertencia
Indica una situación peligrosa que, de no evitarse, podría ocasionar la muerte o lesiones en el
paciente u operador.
Precaución
Indica una situación peligrosa que, de no evitarse, puede provocar daños en el equipo, pérdida
de tiempo o esfuerzo o la necesidad de interrumpir el uso del sistema.
Nota: Indica directrices o información adicionales.
Introducción
Sugerencia: Indica una sugerencia de configuración o resolución de problemas.
Punto de control: Indica un momento en que usuario debe hacer una pausa, evaluar
el estado actual de una configuración y considerar medidas adicionales. También puede
indicar una bifurcación en los procedimientos que puede ofrecer varias opciones.
Instrucciones y referencias al sistema
• Las referencias a los botones del sistema se indican en negrita. “Pulse” y “Apriete”
se utilizan en función de la interfaz. Por ejemplo:
– Mantenga pulsado uno de los botones de la unidad de control del instrumento
para bajar la unidad de control del instrumento por su guía.
– Mantenga apretado el mango de punto de pivote para extender el brazo
hacia afuera.
• Las referencias a los botones de la interfaz gráfica de usuario (GUI) se muestran en
negrita. La palabra “Toque” se utiliza para describir la acción. Por ejemplo:
– Toque el botón Instrumento en la parte inferior de la pantalla de Configuración.
• Los pasos secuenciales se indican con una lista numerada.
• Los pasos no secuenciales pero relacionados se indican mediante una lista no numerada.
• Las referencias cruzadas a otros capítulos o secciones de esta guía de usuario se
muestran en cursiva. En las versiones electrónicas, las referencias cruzadas son enlaces
activos en los que se puede hacer clic.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-5
Advertencias y precauciones generales
Advertencias y precauciones generales
El sistema Hugo™ RAS debe utilizarse con arreglo a este manual y ninguna persona
que no haya sido formada por un representante de Medtronic deberá moverlo ni usarlo.
Lea detenidamente todas las instrucciones. Si no se siguen debidamente las instrucciones,
notas, precauciones y advertencias asociadas con este equipo, podría dar lugar a muerte,
lesiones graves o complicaciones quirúrgicas en el paciente. Si bien estos mensajes aparecen
en todo el manual, este capítulo contiene algunas precauciones generales.
Advertencia
Para evitar daños en el sistema, ÚNICAMENTE personal autorizado por el hospital debe acceder,
utilizar o mover el sistema Hugo™ RAS.
El sistema Hugo™ RAS no es adecuado para utilizarse en presencia de mezclas anestésicas
inflamables de aire, oxígeno u óxido nitroso.
NO utilice el botón de inclinación para mover el punto de pivote o forzar el brazo, para evitar un mal
ajuste de la inclinación respecto a las indicaciones de la guía de configuración y la pérdida de espacio
de trabajo.
Compruebe los iconos en los botones del control del asistente a pie de cama para asegurarse de que
está activando el movimiento deseado, con el fin de evitar movimientos inesperados del instrumento
y posibles lesiones al paciente.
Mueva SIEMPRE los brazos y carros de forma lenta y controlada cuando los coloque a pie de cama, a
fin de evitar colisiones que provoquen lesiones al paciente y/o daños al equipo.
Verifique la ubicación de la cabeza, las extremidades y la anatomía del paciente antes de ajustar la
articulación de codo del brazo o la altura del carro. Compruebe SIEMPRE la separación entre el
paciente y las piezas móviles de todos los brazos antes de la cirugía y durante cualquier
reposicionamiento de los brazos o carros a mitad de la intervención . Las colisiones o la presión
prolongada de un brazo en movimiento pueden causar graves lesiones al paciente.
El control del asistente a pie de cama tiene prioridad sobre el control del cirujano en el mismo brazo.
Comuníquese SIEMPRE verbalmente con el cirujano cuando tome el control del asistente a pie de
cama durante el control del cirujano, para evitar la interrupción inesperada del control del cirujano.
Sitúese SIEMPRE de forma que pueda evitar el contacto con los brazos en movimiento a pie de cama.
Los brazos pueden moverse de forma rápida y repentina, y una colisión involuntaria puede causar
graves lesiones.
NO gire el carro sobre ningún cable, a fin de evitar daños en los cables. En su lugar, disponga los cables
de modo que el carro tenga vía libre a pie de cama.
NO se siente en la consola del cirujano durante la calibración de la consola, para evitar lesiones
al paciente y/o daños al equipo.
Compruebe SIEMPRE que el brazo tenga suficiente espacio para su calibración, a fin de evitar
colisiones con el personal u otros equipos. La unidad de control del instrumento se moverá hasta
la mitad de la guía del instrumento, y esta última se moverá 2,5-5 cm (1-2 pulgadas) en varias
direcciones durante la calibración.
1-6 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Advertencia (continuación)
Compacte SIEMPRE el brazo después de colocar la funda del carro, antes de colocar el brazo a pie de
cama para acoplarlo a los puertos del paciente. De esta forma se minimizará el riesgo de colisiones
del carro y/o lesiones personales.
Compruebe SIEMPRE que la inclinación del brazo y el ángulo de acoplamiento coinciden con
lo indicado en la guía de configuración, a fin de evitar la pérdida de espacio de trabajo durante
la intervención.
Conecte ÚNICAMENTE cables de alimentación con certificado UL a la torre del sistema y a la consola
del cirujano, para evitar lesiones por descargas eléctricas o un fallo de inicio del sistema.
Mantenga SIEMPRE las manos y los dedos apartados de las zonas anaranjadas de los sensores de
contacto y de cualquier parte del sistema en movimiento durante la configuración y teleoperación
para evitar lesiones por pinzamiento o aplastamiento.
Gire el carro lenta y cuidadosamente para mantener el control de su movimiento, con el fin de evitar
colisiones con el paciente, el personal u otro equipo, que pudieran causar lesiones al paciente
y/o daños al equipo.
Introducción
NO siga moviendo el brazo hacia arriba o hacia abajo si no se mueve suavemente, para evitar que
se rompa la funda y se comprometa el campo estéril. En su lugar, DEJE de mover el brazo y
compruebe si la funda ha quedado atrapada en algún punto.
Asegúrese de que cada cable esté conectado a la toma correcta en la parte posterior del generador
electroquirúrgico. Las conexiones incorrectas pueden dar lugar a un suministro imprevisto o fallido
de energía, y pueden causar graves lesiones al paciente.
Antes de iniciar una intervención, compruebe SIEMPRE el volumen de sonido del generador para
evitar el riesgo de no escuchar las importantes señales de audio de la electrocirugía.
Después de conectar los cables, enrolle SIEMPRE el cable sobrante en los ganchos para cables de la
torre del sistema para minimizar el riesgo de lesiones por tropiezos con los cables.
Realice SIEMPRE una comprobación del intervalo de movimiento de los brazos antes de iniciar la
telecirugía y después de realizar ajustes en los brazos o en la posición de los carros; asegúrese de que
los brazos no puedan colisionar con los componentes del sistema u otros equipos, a fin de evitar
obstáculos en el espacio de trabajo y daños al equipo por el movimiento de los brazos.
Coloque los carros conforme a la Guía de configuración correspondiente a su intervención, a menos
que haya algún condicionante específico que lo impida, a fin de evitar colisiones de los brazos con el
personal a pie de cama y la pérdida de espacio de trabajo.
Para evitar interrupciones en el control del cirujano o el control del asistente a pie de cama en caso
de pérdida del suministro eléctrico en el hospital, enchufe cada cable de alimentación directamente
a un circuito eléctrico específico provisto de un sistema de alimentación de reserva (por lo general
rojo). Para prevenir la sobrecarga del circuito y la pérdida de alimentación del sistema, NO comparta
estos circuitos con otro equipo del hospital. NO utilice alargadores ni bases múltiples.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-7

Advertencias y precauciones generales
Advertencia
NO acople los brazos a puertos no indicados, para evitar roturas de puerto que podrían aumentar el
riesgo de pérdida de insuflación y/o causar daños al sistema.
NUNCA acople un brazo a un puerto que aún no se haya colocado dentro del paciente, para evitar
un movimiento inesperado del brazo durante el acoplamiento. Un carro no frenado puede arrastrar
los puertos o instrumentos al cuerpo del paciente con una gran fuerza y producirle graves lesiones.
Suelte ÚNICAMENTE los frenos del carro cuando las luces LED del carro estén en color verde, para
evitar movimientos inesperados del brazo y lesiones graves al paciente. Los LED del carro se muestran
en verde cuando el brazo está desacoplado, los instrumentos se han extraído y el carro está frenado,
lo que indica que el carro está listo para que se suelten sus frenos.
NO quite el freno del carro mientras esté acoplado a un puerto. Si lo quita, se desbloqueará el codo
del brazo como medida de seguridad, lo que puede causar un movimiento no intencionado del brazo
y lesiones al usuario o al paciente.
NO acople ni conecte un puerto a un carro no frenado. Si conecta un puerto a un carro no frenado, se
desbloqueará el codo del brazo como medida de seguridad y puede producirse un movimiento
incontrolado del brazo.
Utilice gafas 3D con marcadores reflectantes ÚNICAMENTE cuando esté manejando la consola del
cirujano. Los observadores solo deben usar gafas marcadas con bandas amarillas y sin marcadores
reflectantes, para evitar fallos en el sistema de seguimiento de cabeza y posibles movimientos
imprevistos de los instrumentos dentro del paciente.
NUNCA modifique ni altere las gafas 3D del cirujano ni las gafas del observador para evitar una
disminución del rendimiento y posibles lesiones al paciente.
NUNCA libere los frenos del carro mientras el brazo está acoplado al puerto del paciente para evitar
movimientos imprevistos de los puertos o instrumentos en el paciente. Un carro no frenado puede
arrastrar los puertos o instrumentos al cuerpo del paciente con una gran fuerza y producirle
graves lesiones.
Verifique SIEMPRE la estabilidad de cada carro sobre una superficie plana después de aplicar el freno
al carro. Si se coloca sobre una superficie irregular, el carro podría desviarse y producir movimientos
incorrectos en el instrumento o lesiones al paciente.
Mueva las asas del carro después de aplicar el freno para verificar si hay balanceos o desplazamientos.
Si el carro bascula o se desplaza, suelte el freno y muévalo a una ubicación más nivelada.
Active ÚNICAMENTE la liberación mecánica de la columna del carro para retirar el brazo de encima
del paciente si el brazo ha perdido potencia. La activación de la liberación mecánica durante el uso
normal puede producir un movimiento incorrecto del puerto y/o el instrumento en el paciente que
puede causarle lesiones.
Compruebe SIEMPRE la interfaz gráfica de usuario (GUI) para asegurarse de que el control de mano
está bloqueado antes de soltarlo, con el fin de evitar movimientos inesperados del instrumento y
posibles lesiones al paciente.
NO desconecte ningún cable de la parte posterior de la torre del sistema durante el uso del sistema,
a fin de evitar interrupciones del control del cirujano o del asistente a pie de cama, o pérdida de
visualización del endoscopio.
1-8 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Advertencia (continuación)
NO utilice el botón de apagado de emergencia (Emergency Power Off, EPO), excepto como último
recurso para apagar la alimentación de todo el sistema. La activación del botón EPO detendrá el
funcionamiento de todo el sistema e impedirá el control del asistente a pie de cama, lo que hará
necesario el uso de liberaciones mecánicas para retirar del paciente cada instrumento y cada brazo.
Escuche y vigile SIEMPRE los tonos y mensajes del generador electroquirúrgico para garantizar la
aplicación correcta de electrocirugía y evitar lesiones al paciente.
Todos los tonos y mensajes del generador electroquirúrgico provienen del propio generador; el
Hugo™ RAS NO los reproduce ni amplifica.
NO apoye los pies contra los pedales, para evitar movimientos inesperados del brazo de reserva.
Esto puede provocar la pérdida de retracción y posibles lesiones al paciente.
NO continúe empujando ninguna parte del sistema si no se mueve según lo previsto, a fin de evitar
lesiones al paciente o al personal y daños en los equipos.
Introducción
Supervise detenidamente el sitio del puerto durante y después del acoplamiento, para asegurarse de
que el puerto no tracciona del abdomen del paciente ni lo empuja. Las fuerzas elevadas ejercidas
sobre el puerto pueden afectar a la insuflación y provocar un funcionamiento incorrecto del sistema,
como el deslizamiento del brazo, lo que puede causar lesiones al paciente y/o al usuario.
A fin de no perder la vista del endoscopio, NO permita que otros equipos de la sala impacten contra
la pantalla interactiva del personal de quirófano.
NO desconecte ni desenchufe los cables de datos de la torre del sistema, de los carros ni de la consola
del cirujano durante el uso normal o mientras obtiene acceso inmediato al paciente.
Si se desenchufa un cable de datos del sistema, puede perderse el control del asistente a pie de cama
o el control del cirujano para manejar un brazo, causando retrasos para retirarlo del paciente.
Además, puede ocasionar la pérdida de control del cirujano en todos los brazos, lo que provoca
retrasos mientras se reinicia la consola y se restablece el sistema.
Asegúrese SIEMPRE de que la línea de láser esté paralela al lado largo de la mesa quirúrgica, con
la línea verde dirigida hacia la cabeza y la línea roja dirigida hacia los pies. Una línea de láser mal
alineada puede causar movimientos incorrectos de los brazos o instrumentos y provocar lesiones
al paciente.
NO tome el control a pie de cama de un brazo en el que el cirujano esté activando energía, a fin de
evitar la aplicación de energía en otro tejido y lesiones al paciente.
Mueva los instrumentos ÚNICAMENTE bajo visualización directa para evitar lesiones en los tejidos
del paciente.
NUNCA ajuste la mesa quirúrgica mientras haya brazos acoplados a los puertos del paciente o
colocados sobre el paciente, para evitar lesiones al paciente y/o daños a los equipos. Esto podría
arrastrar o empujar al paciente contra puertos e instrumentos fijos o hacer que quede colgado de
estos, provocándole graves lesiones. El sistema no se integra con los controles de la mesa quirúrgica
en modo alguno ni responde a los movimientos de la mesa quirúrgica.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-9

Advertencias y precauciones generales
Advertencia (continuación)
NO intente desfibrilar a un paciente ni realizar compresiones torácicas mientras los brazos del sistema
estén cerca del paciente y/o acoplados a este. La desfibrilación o las compresiones torácicas pueden
provocar que se fuerce el movimiento del paciente contra equipos fijos, puertos o instrumentos,
causándole graves lesiones.
NO intente desfibrilar a un paciente mientras los brazos del sistema estén acoplados o en contacto
con el paciente. El flujo de corriente a través del paciente puede detener el sistema e impedir el
control a pie de cama de los brazos, obligando a usar las liberaciones mecánicas para extraer del
paciente los instrumentos y brazos uno a uno.
NO espere que el sistema proporcione retroalimentación de la fuerza quirúrgica cuando se manipule
el tejido desde la consola del cirujano. Use señales visuales para valorar la cantidad de fuerza que se
está aplicando al movilizar el tejido.
NO intente extraer agujas o suturas usando los brazos del sistema Hugo™ RAS para evitar que la aguja
o sutura caiga dentro de la cavidad del paciente. En su lugar, utilice el puerto de asistencia.
NO utilice los brazos del sistema Hugo™ RAS para pasar objetos dentro o fuera de la cavidad del
paciente, con el fin de impedir que caigan dentro de su cavidad corporal. Utilice SIEMPRE técnicas de
cirugía abierta o laparoscópica para pasar las agujas, otros objetos o tejido dentro o fuera de la
cavidad corporal del paciente durante la intervención quirúrgica.
Gire SIEMPRE el puerto en el paciente de tal forma que la llave de cierre de insuflación NO presione
al paciente cuando el brazo esté en movimiento.
NO desconecte ni desenchufe los cables de alimentación de la torre durante la intervención
quirúrgica. Desenchufar el sistema puede interrumpir su funcionamiento y/o incluso provocar la
pérdida de funcionalidad de la electrocirugía.
Utilice ÚNICAMENTE el interruptor de alimentación de CA de la consola del cirujano cuando tenga
que solucionar problemas con la consola del cirujano. NO lo apague durante el uso normal, ya que
el control de la consola del cirujano no podrá recuperarse hasta que se reinicie la consola.
NO apague el sistema para solucionar una alarma o error de la consola del cirujano. En su lugar,
desconecte y vuelva a conectar, y/o apague y encienda la alimentación de CA en la consola
del cirujano.
NO rasgue las suturas en el interior de la cavidad del paciente para evitar el movimiento repentino
del instrumento y posibles lesiones al paciente. En lugar de ello, corte las suturas únicamente.
En caso de error o fallo del generador electroquirúrgico, DEJE de utilizar inmediatamente los pedales
de la consola del cirujano para evitar ligar vasos deficientemente sellados o prevenir efectos
indeseados de la electrocirugía.
Si pierde la vista del endoscopio, detenga inmediatamente el control del cirujano bloqueando los
controles de mano o pulsando el botón de pausa del sistema, para evitar el movimiento o la
activación de los instrumentos y posibles lesiones al paciente.
NO acceda al interior del anillo de la funda para quitar la cubierta de cartón, a fin de evitar la
contaminación de los guantes.
1-10 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Advertencia (continuación)
Coloque SIEMPRE la consola del cirujano a más de 1,8 metros (6 pies) del paciente para evitar el riesgo
de descarga eléctrica.
NO toque simultáneamente la consola del paciente y del cirujano para evitar posibles lesiones al
paciente y/o al operador debido a una descarga eléctrica.
Inspeccione SIEMPRE un instrumento para detectar daños si se encuentra dentro del campo estéril,
con el fin de evitar la pérdida de funcionalidad del instrumento y/o la liberación de residuos en la
cavidad del paciente.
Incline o gire SIEMPRE la mesa quirúrgica tal como se indica en el documento de configuración
correspondiente a su intervención, a fin de evitar la pérdida de espacio quirúrgico.
NO establezca la escala de movimiento o el multiplicador de rotación a un ajuste más alto (escala de
movimiento más rápida o mayor multiplicador de rotación) del necesario para la tarea, con el fin de
evitar movimientos imprevistos del instrumento y posibles lesiones al paciente.
Introducción
Advertencia
Confirme SIEMPRE que los pedales independientes de electrocirugía estén bien conectados a la parte
posterior del generador antes de realizar una laparoscopia no robótica, a fin de evitar un fallo en la
aplicación de energía o la activación accidental de energía desde la consola del cirujano.
Advertencia
NO vierta ni rocíe líquidos en ninguna parte del sistema Hugo™ RAS, a fin de evitar posibles daños al
sistema o lesiones por descargas eléctricas.
Advertencia
Las mordazas del instrumento se abrirán por completo al hacer clic por primera vez en el botón o los
botones de la unidad de control del instrumento. Asegúrese SIEMPRE de que el instrumento se
encuentre en un lugar seguro antes de utilizar el botón o los botones de la unidad de control del
instrumento para abrir, cerrar o enderezar las mordazas del instrumento.
Cuando utilice la liberación mecánica de las mordazas del instrumento, gire el collar SOLO en el
sentido de las flechas, para evitar el cierre o pinzamiento de las mordazas en el tejido y posibles
lesiones al paciente.
Confirme SIEMPRE que el módulo de interfaz estéril esté completamente conectado al brazo, sin
pliegues en la funda, para evitar la desconexión imprevista del módulo de interfaz estéril y el
instrumento y prevenir posibles lesiones al paciente.
Active ÚNICAMENTE la liberación mecánica de las mordazas del instrumento para retirar las
mordazas del tejido si el brazo no responde a los controles del asistente a pie de cama o al control de
la consola del cirujano, o si un mensaje en pantalla le indica que lo haga. La activación de la liberación
mecánica impedirá controlar el instrumento desde la consola del cirujano. El módulo de interfaz
estéril no puede reutilizarse una vez que se ha activado la liberación mecánica, lo cual puede exigir
la aplicación de una nueva funda para seguir utilizando el brazo.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-11

Advertencias y precauciones generales
Advertencia (continuación)
Suba SIEMPRE la unidad de control del instrumento lo suficiente por la guía para conectar el
instrumento o endoscopio con su punta por encima del puerto, a fin de evitar daños al instrumento
o endoscopio o lesiones al paciente por fallar la inserción en la apertura del puerto.
Active ÚNICAMENTE la liberación mecánica de la unidad de control para extraer un instrumento si el
brazo ha perdido potencia. La activación de la liberación mecánica durante el uso normal puede
producir movimientos incorrectos del instrumento en el paciente y causarle lesiones. El brazo será
inutilizable hasta que el personal del servicio técnico de Medtronic lo restablezca.
NO intente presionar la pestaña naranja de liberación mecánica de la unidad de control del
instrumento para reponerla en su sitio original ni recolocar de ningún modo la liberación mecánica,
ni tampoco forzar la unidad de control del instrumento en la dirección de inserción, para evitar daños
o problemas de funcionamiento en el brazo. El brazo no se puede utilizar hasta que el servicio técnico
de Medtronic restablezca esta liberación mecánica.
NO se apoye ni empuje lateralmente contra la unidad de control o la guía del instrumento al insertar
o extraer los instrumentos, para evitar movimientos involuntarios del instrumento y posibles lesiones
al paciente.
Estabilice SIEMPRE la parte giratoria de la unidad de control del instrumento con una mano mientras
acciona la liberación mecánica de las mordazas del instrumento con la otra, para evitar retorcer el
tejido sujetado y causar lesiones al paciente.
Advertencia
NO cambie el ajuste “Fuente de salida 3D” o “Relación de aspecto” del endoscopio, para evitar la
pérdida parcial de visualización y/o la capacidad para cambiar los ajustes del endoscopio o responder
a sus mensajes.
Mientras controla el endoscopio, mantenga SIEMPRE una distancia segura respecto a las puntas y ejes
del instrumento para evitar colisiones y movimientos involuntarios de los instrumentos.
Deje de mover las manos SIEMPRE antes de soltar el pedal del endoscopio para evitar movimientos
indeseados de los instrumentos.
Al embragar, compruebe SIEMPRE que los brazos están embragados antes de mover los controles de
mano, para evitar movimientos involuntarios del instrumento y posibles lesiones al paciente.
Mantenga SIEMPRE los instrumentos en el campo de visión del endoscopio para evitar movimientos
del instrumento y posibles lesiones al paciente fuera de la vista de endoscopio. Posicione y embrague
activamente para mantener los instrumentos a la vista cuando mueva el endoscopio.
Visualice SIEMPRE la punta del instrumento con el endoscopio cuando use el control del asistente a
pie de cama para mover un instrumento dentro del paciente, a fin de evitar lesiones al paciente por
contacto con el instrumento.
El movimiento del mango de punto de pivote u otro reposicionamiento del brazo durante y/o
después de la solución de problemas cambiará la ruta de inserción del instrumento. Reinserte
SIEMPRE los instrumentos bajo visualización directa para evitar impactos con los tejidos internos
que causen lesiones al paciente.
1-12 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Advertencia (continuación)
Extraiga SIEMPRE los instrumentos y el endoscopio y desacople todos los brazos antes de recolocar
al paciente para evitar lesionarlo.
Enjuague SIEMPRE el instrumento o endoscopio durante al menos un minuto después del baño
ultrasónico para evitar insertar contaminación biológica o materiales bioincompatibles a
los pacientes.
Advertencia
Enrolle SIEMPRE los cables de alimentación en los ganchos antes de transportar los componentes
del sistema, para evitar el riesgo de tropiezos.
Desenchufe SIEMPRE todos los cables de alimentación antes de transportar los componentes del
sistema, para evitar daños en los cables o posibles descargas eléctricas.
Aplique SIEMPRE los frenos a la consola del cirujano después de desplazarla para evitar movimientos
imprevistos de la consola, lesiones, o daños a la consola u otros equipos.
Introducción
Aplique SIEMPRE los frenos a la torre del sistema después de desplazarla para evitar movimientos
imprevistos de la torre, lesiones, o daños a la torre u otros equipos.
Coloque SIEMPRE el brazo en la posición de transporte y almacenamiento para apagar, almacenar y
transportar el sistema fuera del quirófano. De esta forma se minimizará el riesgo de colisiones del
carro y/o lesiones personales.
Cuando traslade el carro, NUNCA empuje ninguna parte del carro que no sean las asas, a fin de evitar
posibles lesiones.
Desplácese SIEMPRE lentamente para controlar y detener el carro de forma cómoda, y cuente
SIEMPRE con dos personas para mover el carro fuera del quirófano, a fin de evitar la pérdida de control
del carro, lesiones o daños al carro u otros equipos.
SIEMPRE son necesarias dos personas para transportar la torre del sistema. Desplácese lentamente
para controlar y detener la torre de forma cómoda, a fin de evitar, la pérdida de control de la torre,
lesiones o daños en la torre u otros equipos.
SIEMPRE debe haber dos personas para transportar la consola del cirujano. Desplácese lentamente
para controlar y detener la consola de forma cómoda, a fin de evitar la pérdida de control de la
consola e impedir que se produzcan lesiones o daños en la consola u otros equipos.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-13

Advertencias y precauciones generales
Advertencia
El uso seguro y eficaz de la electrocirugía depende en gran medida de factores que están únicamente
bajo el control del operador. No hay sustituto para un personal de quirófano debidamente formado
y atento. Es importante leer, comprender y seguir las instrucciones de funcionamiento que se
ofrecen en este documento y las instrucciones de funcionamiento de la plataforma de energía
Valleylab™ FT10 de la serie FT.
La electrocirugía lleva utilizándose de forma segura en millones de intervenciones. Antes de iniciar
cualquier intervención quirúrgica, el cirujano debe estar capacitado en la técnica y la intervención
quirúrgica concretas que vaya a utilizar, además de estar familiarizado con las publicaciones médicas
relacionadas con la intervención y sus posibles complicaciones; asimismo, debe ser consciente de la
relación que existe entre los riesgos y los beneficios de utilizar la electrocirugía en la intervención.
Utilice los dispositivos electroquirúrgicos Hugo™ con precaución cuando haya dispositivos
conductores eléctricos implantados o conectados externamente al paciente. Estos dispositivos
incluyen, entre otros, equipos de administración de insulina, marcapasos, neuroestimuladores,
desfibriladores cardioversores implantables (DCI), dispositivos de asistencia ventricular (DAV),
estimuladores de la médula espinal, implantes cocleares, bombas de infusión y estimuladores del
crecimiento óseo.
La interferencia producida por el equipo electroquirúrgico puede hacer que un marcapasos u otro
dispositivo empiecen a funcionar en un modo poco seguro o sufran daños permanentes. Consulte
con el fabricante del dispositivo o con el departamento hospitalario responsable para obtener más
información cuando se prevea el uso en pacientes con dispositivos médicos implantados o
conectados externamente.
Advertencia
Peligro: Peligro de explosión. NO emplee la electrocirugía en presencia de anestésicos inflamables ni
de gases oxidantes (como óxido nitroso [N2O] y oxígeno), ni cerca de disolventes volátiles (como éter
o alcohol).
Riesgo de incendio: NO coloque instrumentos activos en proximidad o contacto con materiales
inflamables (como gasas o fundas quirúrgicas). Los instrumentos electroquirúrgicos que estén
activos o calientes por el uso pueden provocar incendios. Cuando no se utilicen, coloque los
instrumentos electroquirúrgicos en una funda de seguridad o en un lugar seguro alejado de los
pacientes, del personal de quirófano y de los materiales inflamables.
Las chispas y el calentamiento asociados a la electrocirugía pueden ser una fuente de ignición.
Mantenga la gasa y las esponjas húmedas. Mantenga los electrodos electroquirúrgicos alejados de
materiales inflamables y de entornos enriquecidos con oxígeno (O
).
2
El uso de electrocirugía en entornos ricos en O2 aumenta el riesgo de incendio. Por lo tanto, tome
medidas para reducir la concentración de O
en el lecho quirúrgico.
2
Si es posible, detenga el suministro de oxígeno suplementario al menos un minuto antes y durante
el uso de electrocirugía.
Siempre que sea posible, se recomienda el uso de agentes no inflamables para el mantenimiento
opcional. Si se utilizan agentes inflamables, no active la plataforma de energía hasta que se hayan
disipado los vapores inflamables de las soluciones de preparación de la piel y las tinturas.
1-14 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Advertencia (continuación)
Existe el riesgo de que se acumulen soluciones inflamables bajo el paciente o en depresiones
corporales, como el ombligo, y en cavidades corporales, como la vagina. Cualquier líquido
acumulado en estas zonas debe retirarse antes de activar la plataforma de energía.
Evite la acumulación de gases inflamables de origen natural que puedan acumularse en
determinadas cavidades del organismo, como el intestino.
Evite la acumulación de gases o vapores inflamables u oxidantes debajo de las fundas quirúrgicas o
cerca del lecho quirúrgico.
La acu mul ación de t eji do ( escar a) e n la punta de un electrodo activo puede crear brasas que suponen
un riesgo de incendio, especialmente en entornos enriquecidos con oxígeno. Mantenga el electrodo
limpio y libre de residuos.
El vello facial y de otros lugares del cuerpo es inflamable. Puede utilizarse gel lubricante quirúrgico
soluble en agua para cubrir el vello cerca del lecho quirúrgico con el fin de disminuir la inflamabilidad.
Introducción
Verifique que ninguna de las conexiones del circuito de anestesia tenga fugas antes y durante el uso
de electrocirugía.
Advertencia
NO intente utilizar electrodos de retorno del paciente que desactiven el sistema de monitorización
del electrodo de retorno (Return Electrode Monitoring, REM). El sistema REM™ de la plataforma de
energía Valleylab™ FT10 solo funcionará correctamente con electrodos de retorno del paciente de
tipo dividido que incluyan el sistema de monitorización de calidad del contacto (Contact Quality
Monitoring, CQM). Es posible que otros productos con electrodos de retorno del paciente no
identifiquen la pérdida de contacto seguro entre el electrodo de retorno y el paciente, por lo que no
emitirán una alarma auditiva y producirán lesiones al paciente y/o daños en el producto.
Para que la electrocirugía monopolar resulte segura, es necesario colocar correctamente el electrodo
de retorno del paciente lo más cerca posible del lugar de la cirugía.
Para evitar quemaduras electroquirúrgicas debajo del electrodo de retorno del paciente, siga todas
las instrucciones suministradas con el electrodo de retorno y las instrucciones de funcionamiento de
la plataforma de energía Valleylab™ FT10 de la serie FT.
NO recorte el electrodo de retorno del paciente para reducir su tamaño. Pueden producirse
quemaduras en el paciente debido a la alta densidad de corriente.
Para evitar quemaduras en el paciente, asegúrese de que el electrodo de retorno del paciente esté en
contacto firme y por completo con la piel. Compruebe SIEMPRE periódicamente el electrodo de
retorno del paciente, después de reposicionar al paciente y durante intervenciones que impliquen
largos períodos de activación.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-15

Advertencias y precauciones generales
Advertencia
En algunas circunstancias, existe la posibilidad de que se produzcan quemaduras en otros puntos de
contacto piel con piel (p. ej., entre el brazo y el lado del cuerpo). Esto ocurre cuando la corriente
electroquirúrgica busca una ruta hacia el electrodo de retorno del paciente que incluye el punto de
contacto piel con piel. La corriente que pasa a través de pequeños puntos de contacto piel con piel
se concentra y puede causar una quemadura. Esta situación se produce con sistemas de energía
electroquirúrgica de salida aislada y con referencia a tierra.
Para reducir la posibilidad de quemaduras en otros lugares, realice una o más de las acciones
siguientes:
• A la hora de colocar al paciente, evite los puntos de contacto piel con piel, como dedos en contacto
con una pierna o una rodilla en contacto con la otra.
• Coloque un aislamiento, como una gasa o toalla seca, entre los puntos de contacto para asegurarse
de que no se produzca el contacto.
• Coloque el electrodo de retorno del paciente de forma que exista una vía de corriente directa entre
el lecho quirúrgico y el electrodo de retorno, lo que evita las zonas de contacto piel con piel.
Advertencia
El equipo portátil de comunicaciones por radiofrecuencia (incluidos los dispositivos periféricos,
como cables de antena y antenas externas) nunca deben usarse a menos de 30 cm (12 pulgadas)
de distancia de cualquier pieza del EQUIPO ELÉCTRICO MÉDICO, incluidos los cables especificados
por el fabricante. De lo contrario, el funcionamiento del equipo podría verse afectado.
Los síntomas de las interferencias pueden consistir en fallos repetitivos, movimientos imprevistos de
brazos, instrumento o endoscopio, pérdida de la conexión de vídeo o pérdida de la conectividad
inalámbrica. Si sospecha que existen interferencias de otros equipos que impiden el correcto
funcionamiento del sistema Hugo™ RAS, póngase en contacto con Medtronic y/o deje de utilizar el
sistema hasta que el problema se pueda solucionar.
Advertencia
El fallo del equipo quirúrgico de alta frecuencia podría dar lugar a un aumento indeseado de la
potencia de salida. Consulte la Guía del usuario de Valleylab™ FT10 para abordar los posibles fallos en
la administración de energía electroquirúrgica.
NO ajuste el nivel de energía del generador electroquirúrgico por encima de 60 W para monopolar y
70 W para bipolar, para evitar un sellado inadecuado del tejido o lesiones en el tejido del paciente.
Antes del disparo, compruebe SIEMPRE el modo de electrocirugía que está habilitado, a fin de evitar
que se active un modo indeseado y posibles lesiones al paciente.
Extraiga SIEMPRE el instrumento electroquirúrgico del paciente antes de retirar el cable
electroquirúrgico para evitar posibles lesiones al usuario o al paciente.
1-16 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Advertencia (continuación)
NO active ningún instrumento electroquirúrgico a menos que lo esté visualizando y controlando
directamente, para evitar el riesgo de lesiones al paciente o al personal a pie de cama.
NO pulse ningún pedal de electrocirugía o LigaSure™ hasta que esté listo para disparar ese
instrumento. Pisar los pedales activados en la consola siempre disparará su correspondiente
instrumento electroquirúrgico, si está conectado por cable.
• Los pedales monopolares disparan energía monopolar de coagulación o corte en cualquier
instrumento monopolar que esté conectado.
• El pedal bipolar dispara energía bipolar en cualquier instrumento bipolar conectado.
Los pedales habilitados dispararán un instrumento conectado:
- Tanto si el instrumento está asignado a la mano izquierda como a la derecha.
- Tanto si el instrumento está dentro como fuera del paciente.
- Incluso si el instrumento está en reserva (no controlado); en este caso, el sistema mostrará y emitirá
una alarma.
Introducción
- Incluso si el cirujano no tiene apoyadas las manos en los controles de mano o no está mirando a la
pantalla (en este caso, el sistema mostrará y emitirá una alarma).
NO utilice cables de instrumentos electroquirúrgicos que no sean los especificados para utilizarse con
el sistema Hugo™ RAS.
Antes de cada uso, inspeccione SIEMPRE los cables utilizados con los instrumentos electroquirúrgicos
para detectar roturas, grietas, mellas y otros daños. Si están dañados, no los utilice. Los cables
dañados pueden provocar lesiones o descargas eléctricas al paciente o al personal de quirófano.
Peligro de descarga eléctrica. NO conecte instrumentos húmedos al sistema.
Asegúrese SIEMPRE de que el cable electroquirúrgico esté completamente asentado en el generador
y el instrumento, y de que no haya metal expuesto en ningún punto de conexión.
Advertencia
Durante el uso de electrocirugía, no debe permitir que el usuario y el paciente entren en contacto
directo con objetos metálicos conectados a tierra (p. ej., estructura de la mesa quirúrgica, mesa de
instrumental, etc.).
NO envuelva los cables del instrumento ni los del electrodo de retorno del paciente alrededor de
objetos metálicos. Esto podría inducir corrientes (acoplamiento capacitivo) que podrían provocar
descargas, incendios o lesiones al paciente o al personal de quirófano. El contacto entre el electrodo
activo y cualquier metal aumentará considerablemente el flujo de corriente y puede provocar un
efecto quirúrgico no intencionado.
Las configuraciones de cánula en las que se inserta una cánula metálica a través de otra de plástico
NUNCA deben utilizarse con instrumentos monopolares. Estas configuraciones pueden provocar
riesgos térmicos para el paciente debido al acoplamiento capacitivo de la energía electroquirúrgica
con la cánula metálica.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-17

Advertencias y precauciones generales
Advertencia
Active la energía electroquirúrgica ÚNICAMENTE bajo visualización directa para evitar lesiones
al paciente.
Advertencia
NUNCA utilice un instrumento u otro objeto duro para raspar la escara o suciedad de un instrumento
monopolar, a fin de evitar daños en el instrumento o la funda de la punta monopolar y posibles
lesiones al paciente.
No utilice NUNCA otros instrumentos o herramientas para retirar la funda de la punta monopolar, a
fin de evitar descargas eléctricas en el paciente debido a daños en el instrumento.
Asegúrese SIEMPRE de que la funda de la punta monopolar esté colocada y no presente daños antes
de insertar las tijeras curvas monopolares en el paciente, para evitar lesiones graves a causa de la
energía electroquirúrgica.
Pise SIEMPRE con cuidado el pedal de CUT (CORTE) o COAG (COAGULACIÓN) para evitar suministrar
el tipo de energía incorrecto y prevenir posibles lesiones al paciente.
No active NUNCA los instrumentos monopolares mientras toca otros instrumentos metálicos
o equipos o accesorios quirúrgicos, para evitar lesiones al paciente y/o al operador a causa de
descargas eléctricas.
Pise SIEMPRE con cuidado el pedal de CUT o COAG para evitar suministrar el tipo de energía
incorrecto y prevenir posibles lesiones al paciente.
NUNCA dispare un instrumento electroquirúrgico que se esté extrayendo o cambiando, para evitar
daños en el puerto y/o lesiones al paciente.
Retire y deseche SIEMPRE la funda de la punta monopolar antes del procesamiento estéril para evitar
insertar contaminación biológica a los pacientes.
Tenga SIEMPRE cuidado al manipular tejido después de aplicar energía monopolar. Las puntas del
instrumento monopolar conservan una alta temperatura durante un tiempo después del disparo, y
pueden producir lesiones térmicas a los tejidos circundantes del paciente.
Tenga SIEMPRE en cuenta el tiempo de activación de la energía y de accionamiento de las mordazas
adecuado para el tipo de tejido del paciente al activar la energía bipolar, con el fin de evitar una
aplicación de energía insuficiente o excesiva en el tejido y posibles lesiones al paciente.
Advertencia
Desactive SIEMPRE la energía o active un modo diferente cuando extraiga un instrumento
electroquirúrgico del paciente, para evitar que se active fuera del paciente y pueda causar lesiones.
Advertencia
NO aplique energía hasta que el instrumento esté colocado correctamente en el tejido diana y
suficientemente apartado del tejido circundante, para evitar la aplicación involuntaria de energía y
posibles lesiones al paciente.
1-18 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Advertencia (continuación)
A fin de evitar lesiones al paciente, utilice la liberación mecánica de las mordazas antes de extraer un
instrumento si queda bloqueado mientras sujeta tejido.
Tenga SIEMPRE cuidado al limpiar los instrumentos provistos de bordes afilados o que puedan
producir daños para evitar lesiones.
Verifique SIEMPRE el número de brazo y/o el instrumento correcto en la pantalla del brazo o en la
pantalla interactiva del personal de quirófano antes de extraer un instrumento, para evitar el
movimiento inesperado de otro instrumento y posibles lesiones al paciente.
NO cierre las mordazas de un instrumento sobre otro o sobre un objeto duro, para evitar dañar el
instrumento o insertar residuos en la cavidad del paciente.
Extraiga SIEMPRE el instrumento en su totalidad, de manera que la punta del instrumento quede
totalmente fuera del puerto, antes de desconectar el instrumento del brazo. Desconectar el
instrumento mientras sigue insertado puede dañarlo o producir lesiones al paciente.
Introducción
Sujete SIEMPRE el tejido con la parte distal del portagujas SutureCut, para evitar cortar el tejido y
lesionar al paciente.
Inspeccione SIEMPRE la punta del instrumento después de limpiarla y antes de reinsertarla, para
evitar dejar fibras o trozos de material de limpieza en el instrumento que puedan insertarse en la zona
quirúrgica.
NUNCA desacople un brazo de su puerto cuando tenga insertado un instrumento, para evitar que el
instrumento realice movimientos imprevistos en el paciente. Un brazo desacoplado puede desplazar
el instrumento al cuerpo del paciente con una gran fuerza y producirle graves lesiones. Extraiga
SIEMPRE todo el instrumento antes de desacoplar un brazo de su puerto.
Inserte SIEMPRE los instrumentos bajo visualización directa para evitar impactos con los tejidos
internos que causen lesiones al paciente.
Compruebe SIEMPRE si los instrumentos presentan daños antes de connectarlos a un brazo para
evitar la pérdida de funcionalidad durante la intervención.
Mientras manipula instrumentos durante el uso normal, mantenga las manos apartadas de las puntas
afiladas para evitar lesiones.
Si se retira el puerto junto con un instrumento que tenga mordazas grandes o en un ángulo muy
pronunciado, extraiga SIEMPRE el instrumento hasta que las mordazas estén situadas en la punta
del puerto, para evitar movimientos innecesarios del instrumento dentro del paciente durante
la extracción.
Extraiga SIEMPRE del brazo los instrumentos antes de retirar el módulo de interfaz estéril, para evitar
la caída de instrumentos en la cavidad del paciente que provoquen lesiones o comprometan el
campo estéril.
Mueva SIEMPRE el instrumento a un lugar seguro y visible antes de solicitar el cambio o la extracción
del instrumento, para evitar lesiones al paciente.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-19

Advertencias y precauciones generales
Advertencia (continuación)
NO extraiga un instrumento de un puerto si no se encuentra en una ubicación segura y visible para
su extracción, salvo en los casos en que una situación de emergencia así lo exija. La extracción de un
instrumento que no se haya soltado del tejido o que no se haya apartado de él puede provocar
lesiones al paciente.
NO extraiga un instrumento de un puerto si no se ha preparado para su extracción, salvo en los
casos en que una situación de emergencia así lo exija. La extracción de un instrumento que no
esté enderezado, no se haya cerrado o no se haya soltado del tejido puede causar lesiones al paciente
y/o daños al instrumento y el puerto.
Aparte SIEMPRE el instrumento del tejido antes de enderezarlo para evitar posibles lesiones en
los tejidos.
Coloque SIEMPRE la consola del cirujano a más de 1,8 metros (6 pies) del paciente en la mesa de
operaciones, para evitar que cualquier miembro del equipo toque al paciente y la consola del
cirujano al mismo tiempo y cree una posible vía eléctrica.
Apague SIEMPRE el sistema entre procedimientos para asegurarse de que se ejecutan las
comprobaciones del sistema y para evitar un funcionamiento incorrecto del sistema.
Advertencia
Antes de realizar el mantenimiento del sistema Hugo™ RAS, desconecte SIEMPRE los cables de
alimentación del sistema de las tomas de corriente para aislar completamente el sistema de la
red eléctrica.
NO intente reparar el sistema Hugo™ RAS durante una intervención quirúrgica, para evitar lesiones
en el paciente y riesgo de descarga eléctrica. El sistema solo puede ser reparado por personal de
servicio capacitado de Medtronic.
Advertencia
Peligro de descarga eléctrica. Inspeccione SIEMPRE si hay humedad en ambos lados de las
conexiones cuando conecte los módulos de interfaz estériles, los instrumentos y los cables de
electrocirugía en el brazo y el generador electroquirúrgico. Seque y/o limpie las interfaces antes de
conectarlas, si es necesario.
Advertencia
Para evitar el riesgo de descarga eléctrica, este equipo debe conectarse únicamente a un suministro
eléctrico con toma de tierra.
Precaución
NO abra ninguna tapa de acceso a servicio técnico en el sistema para evitar daños en el equipo,
un funcionamiento incorrecto del mismo o el riesgo de descarga eléctrica.
1-20 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™
Advertencias y precauciones generales
Precaución
Asegúrese SIEMPRE de que los tres cables de alimentación de CA de la torre del sistema se enchufen
en tres circuitos eléctricos independientes con un minuto de intervalo entre ellos durante la
preparación del quirófano, para evitar que la fuente de alimentación se descargue y se retrase
la cirugía.
Precaución
El asistente quirúrgico debe permanecer en el lugar que se indica en la Guía de configuración de la
intervención, cuando sea posible, para evitar el contacto con los brazos en movimiento.
Precaución
Tenga SIEMPRE cuidado cuando limpie las gafas 3D del cirujano para evitar daños en las lentes y los
marcadores reflectantes.
Revise SIEMPRE los marcadores reflectantes de las gafas 3D del cirujano para ver si están desgastados
o dañados antes del uso. Si están desgastados o dañados, no las utilice. Use otras gafas 3D para
cirujano que tenga en reserva y llame a Medtronic para solicitar un juego de recambio.
Introducción
Precaución
Si experimenta algún efecto negativo en la visualización 3D, como fatiga ocular, cinetosis o náuseas,
DEJE de usar la consola del cirujano.
Precaución
Evite SIEMPRE los bordes afilados de los instrumentos mientras los endereza o los cierra
manualmente para no sufrir lesiones ni alterar la integridad del campo estéril.
Enderece y cierre las mordazas de todos los instrumentos de muñeca antes de conectar el
instrumento al brazo para evitar daños al instrumento o al puerto cuando lo inserte en el paciente.
Evite las colisiones de la punta y el eje del instrumento en todo lo posible, a fin de evitar daños o
pérdida de funcionalidad de los instrumentos e impedir la posible entrada de residuos en la cavidad
del paciente.
Precaución
Utilice SIEMPRE el cable de extensión de datos del endoscopio, para que la longitud total del cable de
datos coincida con la longitud del cable de luz de fibra óptica. No utilizar el cable de extensión puede
causar dificultades para manipular los cables, una posible pérdida de visualización del sitio quirúrgico
o una reducción de espacio de trabajo.
Asegúrese de que los cables del endoscopio y de electrocirugía estén dispuestos de forma que
permitan el intervalo adecuado de movimiento de los brazos robóticos, con el fin de evitar que los
cables se dañen o se salgan de la torre del sistema durante el movimiento del brazo. Los cables
traccionados o dañados pueden provocar la pérdida de suministro de energía electroquirúrgica,
pérdida de visión del endoscopio o lesiones al paciente.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-21

Advertencias y precauciones generales
Precaución (continuación)
Inserte SIEMPRE el endoscopio lentamente con una mano para guiar el extremo distal al interior del
puerto, a fin de evitar colisiones y posibles daños al endoscopio.
Mueva SIEMPRE el endoscopio de manera lenta y controlada para minimizar las colisiones con ejes
del instrumento y elementos anatómicos fuera del campo de visión del endoscopio. Las colisiones del
endoscopio pueden provocar movimientos inesperados del instrumento y/o lesiones al paciente.
NO habilite el giro del endoscopio a menos que esté familiarizado a manejar vistas giradas del
endoscopio, a fin de evitar la pérdida de horizonte o referencias anatómicas.
NUNCA cambie los ajustes de “red” en el sistema KARL STORZ*, para evitar perder la vista del
endoscopio.
No cambie ni active los ajustes predeterminados de KARL STORZ*, para evitar una pérdida inesperada
de la vista del endoscopio o alteraciones de imagen.
Asegúrese de que los cables del endoscopio y electrocirugía estén conectados a fondo y con firmeza
para evitar la desconexión imprevista del cable y la consiguiente pérdida de visualización o de
capacidad para aplicar energía.
Pulse el botón de alimentación de la consola del cirujano ÚNICAMENTE cuando haya finalizado la
intervención, para evitar interrumpir el control del cirujano y perder la vista del endoscopio sobre la
zona quirúrgica.
Al trabajar con un brazo colocado de forma que la punta del instrumento esté más alta que el cabezal
de conexión (más allá de la horizontal), la sangre u otros líquidos pueden fluir a través del eje
del instrumento hasta el módulo de interfaz estéril. Compruebe SIEMPRE el módulo de interfaz
estéril/cabezal de conexión del instrumento y séquelos, si es necesario, antes de conectar
los instrumentos.
Precaución
NO coloque ningún brazo en un ángulo de acoplamiento inferior a 10 grados respecto a otro brazo,
para evitar que aparezca información incompleta o incorrecta sobre el mapa de quirófano en la
pantalla interactiva del personal de quirófano.
NO empuje, levante ni tire del puerto durante el acoplamiento u otras maniobras de ajuste, para
evitar una fuerza excesiva sobre el paciente y posibles lesiones.
Guarde los cables desconectados enrollándolos y colgándolos en la parte posterior de la consola del
cirujano y en los carros para evitar el riesgo de tropiezos.
Mantenga las manos apartadas de las mordazas del instrumento al pulsar los botones de la unidad
de control del instrumento para insertarlo, con el fin de evitar el riesgo de lesiones.
NO comprima las pestañas azules de liberación del instrumento mientras está insertado, para evitar
que se desconecte.
Apoye SIEMPRE la unidad de control del instrumento con una mano mientras acciona el mecanismo
de liberación mecánica de la unidad de control del instrumento con la otra mano, para evitar que
la unidad de control se deslice en la dirección de extracción (fuera del paciente) debido a la gravedad
si la guía del instrumento está inclinada hacia abajo.
1-22 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Precaución (continuación)
Sujete SIEMPRE el puerto robótico con una mano y pulse el botón del seguro del puerto con la
otra mano mientras desacopla el brazo de su puerto, para asegurarse de que el seguro del puerto
se desprende completamente del puerto y para evitar ejercer una fuerza elevada sobre el puerto.
Las fuerzas elevadas pueden provocar la rotura del puerto y lesiones al paciente.
NO intente mover de nuevo el collar de liberación mecánica de las mordazas del instrumento
hacia arriba ni recolocarlo, para evitar daños o problemas de funcionamiento en el módulo de
interfaz estéril.
Asegúrese SIEMPRE de que haya suficiente espacio vertical entre los carros y el techo y las luces del
quirófano para poder realizar ajustes durante la configuración del sistema.
Supervise SIEMPRE la parte superior de los componentes del sistema (guías del instrumento del brazo
o pantalla interactiva del personal de quirófano) para evitar colisiones con luces y otros equipos
montados en paredes o techos.
Introducción
Precaución
La electrocirugía puede producir interferencias con los marcapasos internos o externos u otros
dispositivos implantados. La interferencia producida por el equipo electroquirúrgico puede hacer
que estos dispositivos funcionen en un modo poco seguro o dañen permanentemente el dispositivo.
Consulte con el fabricante del implante o con el departamento hospitalario responsable para
informarse en detalle cuando utilice electrocirugía en pacientes con dispositivos médicos implantados.
La electrocirugía puede influir negativamente en el funcionamiento de otros equipos electrónicos,
como los monitores de paciente. Consulte la Guía del usuario de Valleylab™ para conocer las
precauciones adecuadas.
Precaución
Asegúrese SIEMPRE de que el personal de quirófano esté debidamente capacitado en el uso del
sistema Hugo™ RAS y de la plataforma de energía Valleylab™ FT10 de la serie FT, y de que comprenda
y siga las instrucciones de funcionamiento de cada sistema. Antes de iniciar una intervención
quirúrgica, el cirujano debe recibir capacitación sobre la técnica y la intervención quirúrgica concreta
que vaya a realizar.
El generador electroquirúrgico FT10 ofrece monitorización de la impedancia como una característica
de seguridad para el suministro de energía bipolar. Consulte la Guía del usuario de FT10 para obtener
más información sobre la monitorización de la impedancia.
Para electrocirugía, utilice únicamente los siguientes instrumentos y accesorios aprobados por
Medtronic que se indican en esta Guía del usuario:
- Gama de puertos robóticos
- Gama de instrumentos de electrocirugía
- Gama de electrodos de retorno monopolar
- Gama de cables de electrocirugía
El rendimiento del sistema no está garantizado si se utilizan instrumentos electroquirúrgicos o
accesorios no aprobados por Medtronic.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-23
Advertencias y precauciones generales
Precaución (continuación)
Asegúrese de que las mordazas de las tijeras estén cerradas y la muñeca del instrumento esté recta
antes de instalar la funda de la punta monopolar, para evitar daños al instrumento o a la funda.
NO utilice la llave del instrumento para abrir o enderezar las mordazas.
NO doble los ejes del instrumento, a fin de evitar daños en este que provoquen un funcionamiento
incorrecto o pérdida de funcionalidad.
Utilice SIEMPRE un cable monopolar de 4,57 m (15 pies) de un solo uso y el puerto 2 para conectar
instrumentos monopolares al generador. NO utilice un cable más corto o el puerto 1, ya que el
sistema no suministrará energía con esta configuración.
Precaución
Los electrodos conectados al paciente deben colocarse de forma que se evite el contacto con el
paciente u otros electrodos, ya que la capacitancia entre el cable del electrodo y el paciente puede
dar lugar a densidades de corriente elevadas. Cuando no se utilicen, coloque los instrumentos y
cables de electrocirugía en un lugar seguro alejado de los pacientes, del personal de quirófano y
de los materiales inflamables.
Cuando se utilice instrumental laparoscópico con cánulas metálicas, existe la posibilidad de que
se produzcan quemaduras en la pared abdominal debido al contacto directo con el electrodo o al
acoplamiento capacitivo de la corriente de RF. Esto es más probable que ocurra cuando la plataforma
de energía está activada.
Las cánulas VersaOne™ proporcionan una salida para la insuflación o la evacuación de humos.
Consulte la Guía del usuario de Valleylab™ FT10 para obtener más información sobre la evacuación de
humos durante la electrocirugía.
Precaución
Pulse el botón de alimentación de la consola del cirujano ÚNICAMENTE cuando haya finalizado la
intervención, para evitar interrumpir el control del cirujano y perder la vista del endoscopio sobre la
zona quirúrgica.
Tenga cuidado al traccionar, empujar o levantar el puerto mientras realiza el acoplamiento o ajusta el
punto de pivote. Forzar el brazo puede amplificar la fuerza sobre el puerto, lo que puede provocar la
rotura del puerto.
NO desenchufe los cables de datos del carro ni el cable de datos de la consola del cirujano mientras
está activo el control del cirujano, a fin de evitar interrupciones en el control del cirujano o el control
del asistente a pie de cama.
Si un brazo pierde potencia, el instrumento conectado girará libremente y puede producirse una
pérdida de retracción o tensión.
Aparte del pie de cama los brazos no utilizados para minimizar obstáculos en el espacio de trabajo
y evitar bloquear el acceso al paciente.
Utilice ÚNICAMENTE el botón naranja de pausa del sistema en caso de emergencia. NO lo pulse
durante el uso normal. La pausa del sistema requiere pasos adicionales para reanudar su
funcionamiento y puede causar retrasos en la intervención.
1-24 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Advertencias y precauciones generales
Precaución (continuación)
Utilice SIEMPRE los botones de alimentación azules para apagar el sistema. NO utilice el botón de
apagado de emergencia (EPO) excepto como último recurso para apagar la alimentación de todo
el sistema, ni desenchufe los componentes del sistema que están en ejecución, a fin de evitar daños
al sistema.
Extraiga todos los instrumentos del paciente antes de que el temporizador de la batería de reserva
llegue a su fin. Una vez que se agote la batería, deberá utilizar las liberaciones mecánicas para extraer
los instrumentos y mover los brazos.
NO aplique una fuerza excesiva al ajustar el punto de pivote; evite elevar todos los puntos de pivote/
brazos o bajar la cama mientras están acoplados. Esto ejercería una fuerza muy elevada sobre los
puertos y puede provocar la rotura del puerto y lesiones al paciente.
NO utilice una litotomía alta con el paciente en las posiciones de Trendelenburg o Trendelenburg
invertida, para evitar el aumento de colisiones entre los brazos del sistema y las piernas del paciente
durante la intervención quirúrgica.
Introducción
Precaución
Al final de una intervención, retire los instrumentos de los brazos inmediatamente después de
extraerlos para evitar la exposición innecesaria del personal de quirófano a peligros biológicos
mientras se mueven los brazos.
Utilice ÚNICAMENTE los productos químicos indicados en esta Guía del usuario cuando limpie el
sistema para evitar daños en los componentes o las etiquetas del sistema.
Precaución
Guarde los cables desconectados enrollándolos y colgándolos en la parte posterior de la consola del
cirujano y en los carros para evitar el riesgo de tropiezos.
Aviso
El sistema de endoscopio KARL STORZ* genera mensajes que se muestran en la parte inferior de la
vista del endoscopio. Observe los mensajes del sistema de endoscopio y siga las instrucciones tal
como lo haría en una configuración mínimamente invasiva, para evitar perder la vista del endoscopio
sobre la zona quirúrgica.
Seguridad láser
Producto láser de clase 1: La unidad de alineación láser tiene la designación de producto
láser de Clase 1 durante todos los procedimientos de uso, y ha sido evaluada y validada
conforme a la norma 21 CFR (FDA-CDRH) y EN 60825-1 para dispositivos láser de Clase 1. La
unidad de alineación láser ha sido evaluada para cumplir la norma IEC 60825-1 Ed. 2 (2007).
Precaución
El uso de controles o ajustes o la realización de procedimientos distintos de los especificados en el
presente documento pueden dar lugar a una exposición a radiación peligrosa.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-25

Advertencias y precauciones generales
Precaución
Si bien los productos láser de Clase 1 se consideran “seguros para la vista” sin necesidad de utilizar
protección adicional, deben observarse las siguientes directrices generales de seguridad para reducir
el riesgo de exposición de los ojos o la piel a la radiación láser:
• NO deje que la luz láser apunte o se refleje hacia otras personas u objetos reflectantes.
• NO utilice el láser si la unidad está defectuosa o la cubierta o el precinto están dañados.
• Los ajustes y configuraciones, el mantenimiento, los parámetros operativos y los procedimientos
distintos de los especificados y permitidos en el presente documento y en la etiqueta de
especificaciones de la unidad de alineación láser pueden dar lugar a una exposición a radiación
peligrosa. NO modifique la unidad ni retire ninguna de las cubiertas protectoras.
• NO intente realizar ninguna reparación o mantenimiento en la unidad de alineación láser. No hay
ningún mantenimiento programado que sea necesario para mantener la unidad conforme a sus
requisitos. Las reparaciones y el mantenimiento fuera de lo permitido en el presente documento
solo deben ser realizadas por personal de servicio autorizado de Medtronic.
Interconexión de equipos auxiliares
Los equipos auxiliares conectados a interfaces analógicas y digitales deben estar
homologados conforme a sus correspondientes normas IEC (p. ej., IEC 60950 para equipos
de procesamiento de datos e IEC 60601-1 para equipos médicos). Todas las configuraciones
deberán cumplir con los requisitos para sistemas electromédicos establecidos en la norma
IEC 60601-1. Cualquier persona que conecte equipos adicionales a los componentes de
entrada o salida de señal está configurando un sistema médico y, por lo tanto, es responsable
de garantizar que el sistema cumple con los requisitos de la norma IEC 60601-1. Si tiene
alguna pregunta, póngase en contacto con su representante de Medtronic.
Precaución
La corriente de fuga procedente de equipos eléctricos interconectados puede exceder los niveles de
seguridad. Para mantener la seguridad de pacientes y usuarios, es importante interconectar
únicamente con dispositivos que cumplan los requisitos de la norma IEC 60601-1. Es responsabilidad
del usuario asegurarse de que cualquier equipo interconectado que no haya sido suministrado por
Medtronic esté en conformidad con los requisitos de la norma IEC 60601-1.
Compensación de potencial
Cuando lo exijan las leyes o normativas nacionales o locales, la conexión equipotencial de
equipos puede realizarse conectando un conductor de compensación de potencial a los
terminales situados cerca de la entrada de red en cada subconjunto del sistema. Consulte los
requisitos de los sistemas electromédicos establecidos en la norma IEC 60601-1.
1-26 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Resumen de riesgos residuales
Resumen de riesgos residuales
Aunque se ha hecho todo lo posible para reducir los riesgos para el paciente y para el
usuario, todas las intervenciones quirúrgicas en las que se utiliza el sistema de cirugía
asistida por robot Hugo™ conllevan algún riesgo residual, incluso cuando lo utilizan médicos
debidamente formados. Entre los posibles acontecimientos adversos que se relacionan con
el uso de dispositivos de cirugía asistida por robot se incluyen los siguientes:
Introducción
• Toxicidad
• Quemadura (en distintos grados)
• Infección
• Traumatismo contuso
•Daño tisular
•Fuego
• Daños al equipo/la instalación
• Lesión por aplastamiento
• Retraso del tratamiento (intervenciones
prolongadas)
• Hemorragia
• Daño/traumatismo tisulares
• Reacción a cuerpo extraño
• Exposición a agentes cancerígenos
•Inflamación
• Perforación intestinal
• Descarga eléctrica
• Arritmia
• Fallo del implante
• Perforación vascular
•Neumotórax
• Hemotórax
• Quemadura intestinal
• Quemadura térmica
Informe de incidentes graves
Todo incidente grave que se produzca en relación con este dispositivo debe informarse al
fabricante y a la autoridad competente del Estado miembro en el cual se encuentren
establecidos el usuario o el paciente.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 1-27

Resumen de riesgos residuales
1-28 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Capítulo 2
Descripción general del sistema
Este capítulo contiene la siguiente información:
• Descripción general del sistema Hugo™ RAS en la página 2-2
• Compatibilidad del sistema en la página 2-2
• Componentes del sistema Hugo™ RAS en la página 2-4
• Componentes y descripciones de la torre del sistema en la página 2-6
• Componentes y descripciones de la consola del cirujano en la página 2-10
• Componentes y descripciones de los carros en la página 2-14
• Interfaz gráfica de usuario (GUI) en la página 2-23
• Luces LED de los carros en la página 2-38
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-1
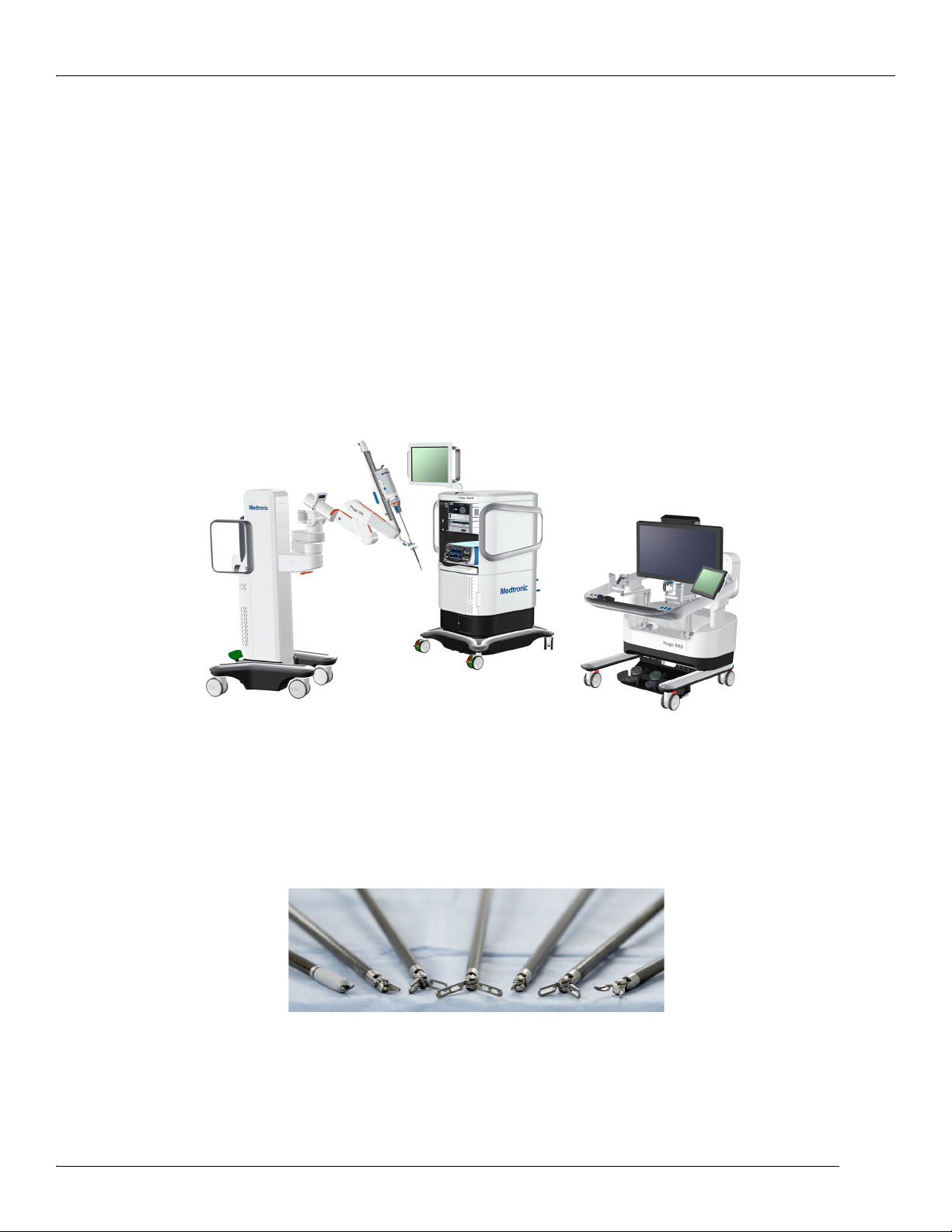
Descripción general del sistema Hugo™ RAS
Descripción general del sistema
Hugo™ RAS
El sistema de cirugía asistida por robot Hugo™ RAS (Robotically Assisted Surgery) de
Medtronic incluye visualización en 3D de alta definición y dispositivos electromecánicos
para la cirugía mínimamente invasiva.
Los tres componentes principales del sistema Hugo™ RAS son los carros, la torre del sistema
y la consola del cirujano.
Compatibilidad del sistema
El sistema Hugo™ RAS está diseñado para ser compatible con los siguientes equipos:
• Instrumentos quirúrgicos con articulación de muñeca del sistema RAS de Medtronic
2-2 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Descripción general del sistema Hugo™ RAS
• Sistema de endoscopio y visualización 3D KARL STORZ* (0° y/o 30° con tecnología de
chip en la punta cuando se utiliza con el adaptador especificado).
Descripción general
• Generador electroquirúrgico Valleylab™ FT10 de Covidien
• Sistema de trócar de posicionamiento VersaOne™ y sistema de trócar de
posicionamiento reutilizable VersaOne™
del sistema
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-3

Componentes del sistema Hugo™ RAS
Componentes del sistema Hugo™ RAS
Torre del sistema
La torre del sistema contiene los ordenadores, el sistema de endoscopio, el generador
electroquirúrgico, el sistema de gestión de energía con una batería de reserva y la pantalla
interactiva táctil de alta definición del personal de quirófano. La torre del sistema permite
que la consola del cirujano pueda controlar los movimientos de hasta cuatro brazos. La torre
también puede utilizarse sin la consola del cirujano para activar hasta cuatro brazos para un
control manual independiente a pie de cama, o por sí misma para la visualización
laparoscópica estándar y para electrocirugía.
MRASC0003 Torre del sistema, 120 V
MRASC0005 Torre del sistema, 240 V
1 Botones de pausa y alimentación del sistema
2 Interfaz USB
3 Pantalla interactiva del personal de quirófano
4 Sistema de endoscopio
5 Generador electroquirúrgico
6 Bandeja de accesorios
7 Frenos de rueda
8 Guías de referencia rápida (sujetas; liberación rápida)
2-4 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componentes del sistema Hugo™ RAS
del sistema
Descripción general
9 Ganchos para cables
10 Conexiones de cables
11 Botón de apagado de emergencia (Emergency Power Off, EPO)
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-5

Componentes del sistema Hugo™ RAS
Componentes y descripciones de la torre del sistema
Componente Descripción
1. Botones
de pausa y
alimentación del
sistema
2. Interfaz USB La interfaz USB (Universal Serial Bus) es un
3. Pantalla
interactiva del
personal de
quirófano
El botón de pausa del sistema naranja interrumpe
el control de los brazos de la consola del cirujano o
del asistente a pie de cama y pone el sistema
RETENCIÓN. El botón de alimentación azul
permite iniciar y apagar el sistema.
receptáculo situado en el panel frontal de la torre
del sistema donde los usuarios pueden conectar
dispositivos de memoria USB, como unidades USB,
para descargar imágenes del sistema.
La pantalla interactiva del personal de quirófano
es una pantalla táctil 2D que permite al personal
configurar el sistema Hugo™ RAS para la cirugía,
monitorizar la vista del endoscopio, responder a
las notificaciones y alarmas y ver los estados
de los carros, los instrumentos y el sistema RAS.
La posición de la pantalla pueden cambiarla
manualmente los miembros del personal de
quirófano para ajustar la visibilidad.
Los elementos de la interfaz gráfica de usuario (GUI,
Graphic User Interface) del sistema Hugo™ RAS
proporcionan a los integrantes del equipo
quirúrgico información sobre las acciones del
cirujano y el estado del sistema.
4. Sistema de
endoscopio
El sistema de endoscopio y visualización 3D
KARL STORZ* está compuesto por las siguientes
tres unidades:
• La unidad IMAGE1 S CONNECT™ (TC 200) sirve
de enlace entre el sistema KARL STORZ* y el
usuario. Este equipo genera la interfaz gráfica
de usuario (GUI) del sistema KARL STORZ* y
ofrece funciones de mejora de imágenes y
de otro tipo.
• La unidad IMAGE1 S D3-LINK™ (TC 302) es la
interfaz de endoscopio que transfiere la imagen
capturada por el endoscopio al sistema
KARL STORZ*.
• La unidad de fuente de luz fría POWER LED 300
(TL 300) transmite la luz al endoscopio a través
de un cable de fibra óptica.
2-6 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componente Descripción
Componentes del sistema Hugo™ RAS
5. Generador
electroquirúrgico
6. Bandeja de
accesorios
7. Frenos de rueda Los frenos de rueda permiten bloquear las ruedas
8. Ganchos para
cables
El equipo es un generador electroquirúrgico
Valleylab™ FT10 de Covidien. El generador
suministra energía de radiofrecuencia (RF) para
aplicaciones quirúrgicas monopolares y bipolares.
La energía de RF puede activarse mediante pedales
e instrumentos de mano desde la consola del
cirujano durante la cirugía asistida por robot, o
mediante pedales independientes conectados al
generador electroquirúrgico que estén aprobados
para el generador electroquirúrgico Valleylab™
FT10 de Covidien.
La bandeja de accesorios almacena los accesorios
del sistema, como las gafas 3D adicionales, la guía
del usuario y las guías de configuración.
de la torre del sistema para evitar que gire o se
mueva de forma inesperada.
Los ganchos para el cable permiten colgar el exceso
de cable conectado a la consola del cirujano y a los
carros.
Descripción general
del sistema
9. Conexiones de
cables
10. Botón de
apagado de
emergencia
(Emergency
Power Off, EPO)
La parte posterior de la torre incluye las tomas para
los cables de alimentación de la torre, los cables de
datos de los carros, los cables de datos de la consola
del cirujano y las conexiones de entrada y salida de
vídeo.
El botón de apagado de emergencia (EPO) rojo
apaga la alimentación de CA en la torre del sistema
y los brazos en caso de emergencia.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-7

Componentes del sistema Hugo™ RAS
Consola del cirujano
La consola del cirujano es una consola abierta que consta de una gran pantalla plana pasiva 3D
de alta definición, una pequeña pantalla táctil interactiva, controles ergonómicos ajustables, un
reposabrazos, dos controles de mano del cirujano, un conjunto de pedales y gafas 3D para el
cirujano y observador. Los sensores de la consola del cirujano siguen el movimiento de las gafas
3D que lleva el cirujano y pueden aplicar el embrague al movimiento de los instrumentos si el
cirujano aparta la mirada de la pantalla 3D. Los controles de mano del cirujano son fáciles de
mover y responden al movimiento de la muñeca. El simulador de tareas proporciona ejercicios
de práctica de destrezas para el sistema Hugo™ RAS.
Nota: La consola del cirujano contienen partes móviles. Los usuarios deben saber cuáles
son estas piezas en movimiento y actuar con precaución para evitar lesiones y daños
en el sistema.
MRASC0001 Consola del cirujano
MRASC0004 Simulador de tareas
1 Sistema de seguimiento de cabeza
2 Pantalla 3D del cirujano
3 Controles de mano del cirujano
4 Botones de pausa y alimentación del sistema
5 Pantalla interactiva del cirujano
6 Controles ergonómicos
7 Gafas 3D
8 Pedales
2-8 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componentes del sistema Hugo™ RAS
del sistema
Descripción general
9 Gancho movible para cables
10 Conexiones de cables
11 Interruptor de alimentación de CA de la consola del cirujano
12 Frenos de rueda
13 Simulador de tareas
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-9

Componentes del sistema Hugo™ RAS
Componentes y descripciones de la consola del cirujano
Componente Descripción
1. Sistema de
seguimiento de
cabeza
2. Pantalla 3D del
cirujano
3. Controles de
mano del cirujano
El sistema de seguimiento de cabeza sigue la
posición de los marcadores reflectantes ubicados
en las gafas 3D del cirujano. Deben llevarse puestas
las gafas 3D del cirujano durante el control del
cirujano. Como característica de seguridad, los
controles de mano del cirujano se embragarán
automáticamente si el sistema de seguimiento de
cabeza detecta que el cirujano deja de mirar la
pantalla 3D.
La pantalla 3D del cirujano es un monitor de alta
definición que muestra la vista del endoscopio y la
información sobre el estado actual del sistema,
incluidos los carros, el endoscopio y otros
instrumentos. Deben llevarse puestas las gafas 3D
del cirujano para ver el efecto 3D.
Los controles de mano constan de dos interfaces de
mano que se extienden desde la consola del
cirujano. Los controles de mano convierten el
movimiento del cirujano en movimiento de los
instrumentos asistido por robot. Además, los
controles de mano indican los límites del área de
trabajo de los brazos e instrumentos al cirujano,
mostrando resistencia al movimiento cuando el
brazo o instrumento correspondiente alcanza
un límite.
4. Botón de
alimentación y
botones de pausa
del sistema
5. Pantalla
interactiva
del cirujano
6. Controles
ergonómicos
El botón de pausa del sistema naranja interrumpe
control de los brazos de la consola del cirujano o del
asistente a pie de cama de los brazos y pone
el sistema RETENCIÓN. El botón de alimentación
azul permite realizar el apagado del sistema.
La pantalla interactiva del cirujano es una pantalla
táctil 2D que sirve para gestionar la asignación de
los carros disponibles y ver y ajustar la
configuración. La pantalla está conectada al lado
derecho de la consola del cirujano.
Los controles ergonómicos ajustan la altura del
reposabrazos, la altura de la pantalla 3D del cirujano
y la distancia entre los pedales y el cirujano.
2-10 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™
Componente Descripción
7. Gafas 3D Las gafas 3D las lleva el cirujano y/o un observador
para ver el efecto 3D en la pantalla 3D del cirujano.
A diferencia de las gafas 3D del observador, las gafas
3D del cirujano tienen marcadores reflectantes que
permiten que el sistema de seguimiento de cabeza
pueda seguir la mirada del cirujano. Las gafas 3D del
observador tienen un etiquetado de color adicional
para distinguirlas de las gafas 3D del cirujano.
Componentes del sistema Hugo™ RAS
8. Pedales Los pedales permiten embragar los controles de
mano del cirujano, cambiar entre los brazos activos
y los de reserva, reposicionar el movimiento del
endoscopio y activar la energía electroquirúrgica.
9. Gancho
movible para
cables
10. Conexiones
de cables
11. Interruptor de
alimentación de
CA de la consola
del cirujano
El gancho para cables permite guardar el cable de
alimentación de la consola del cirujano y el cable de
datos cuando están desconectados, y puede
colgarse en los lados o la parte posterior del
reposabrazos de la consola del cirujano.
La parte posterior de la consola del cirujano
contiene las tomas para el cable de alimentación de
la consola, el cable de datos y el dispositivo USB.
El interruptor de alimentación de CA de la
consola del cirujano rojo desconecta la
alimentación de CA de la consola para guardar la
consola o apagarla/reiniciarla manualmente.
Descripción general
del sistema
12. Frenos de
rueda
13. Simulador de
tareas
Los pedales de freno bloquean las ruedas de la
consola del cirujano para evitar que se muevan
inesperadamente.
El simulador de tareas es un módulo de
capacitación basado en simulaciones, diseñado
para utilizarse mientras está conectado a la parte
posterior del reposabrazos de la consola del
cirujano. La torre del sistema y los carros no son
necesarios cuando se utiliza el simulador de tareas.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-11

Componentes del sistema Hugo™ RAS
Componentes de los carros
Los carros están formados por plataformas móviles con ruedas, cada una con un brazo
modular y extensible. Es posible conectar a la torre hasta cuatro carros para utilizarlos
simultáneamente durante la cirugía asistida por robot. Los carros son portátiles y pueden
moverse fácilmente por el quirófano y el hospital. Antes de la cirugía, el personal de
quirófano coloca los carros alrededor de la mesa quirúrgica con arreglo a la intervención
quirúrgica. El personal puede ajustar los carros y los brazos para facilitar la colocación del
paciente y optimizar el acceso al paciente a pie de cama.
Nota: Hay partes móviles en el brazo robótico y en la guía del instrumento. Los usuarios
deben saber cuáles son estas piezas en movimiento y actuar con precaución para
evitar lesiones y daños en el sistema.
MRASC0002 Carro
1 Brazo
2 Guía del instrumento
3 Unidad de control del instrumento
4 Módulo de interfaz estéril
5 Seguro del puerto
6 Pantalla del brazo
7 Columna del carro
8 Codo
9 Toma del cable
2-12 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componentes del sistema Hugo™ RAS
del sistema
Descripción general
10 Unidad de alineación láser
11 Gancho para cables
12 Pedales de freno
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-13
Componentes del sistema Hugo™ RAS
Componentes y descripciones de los carros
Componente Descripción
1. Brazo Cada uno de los brazos sostiene y mueve un
instrumento o endoscopio conectado. El cirujano
puede controlar activamente el brazo y el
instrumento o endoscopio conectado desde su
consola. Los miembros del personal de quirófano
pueden mover a pie de cama el brazo y el
instrumento o endoscopio conectado.
2. Guía del
instrumento
3. Unidad de
control del
instrumento
4. Módulo de
interfaz estéril
La guía del instrumento facilita el movimiento de la
unidad de control para insertar o extraer los
instrumentos. Cuando se controla un brazo desde
la consola del cirujano o con el mango de punto
de pivote a pie de cama, la guía del instrumento
pivotará alrededor de punto de pivote central
del brazo.
La unidad de control mueve el instrumento a lo
largo de la guía para su inserción y extracción.
El módulo de interfaz estéril es un componente
estéril y reutilizable que se conecta a la unidad de
control del instrumento. Permite conectar el
instrumento estéril a los brazos.
2-14 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componente Descripción
Componentes del sistema Hugo™ RAS
5. Seguro del
puerto
6. Pantalla del
brazo
7. Columna del
carro
El seguro del puerto conecta el brazo a los puertos
del paciente (trócares).
La pantalla del brazo muestra la información que
es específica para ese brazo, como el número de
identificación del brazo, qué instrumento o
endoscopio está conectado y si el brazo está en
movimiento o no.
La columna del carro permite colocar
verticalmente el brazo para acomodar la
constitución corporal del paciente y la posición de
la mesa quirúrgica.
Descripción general
del sistema
8. Codo El codo del brazo permite colocar el punto de
pivote del brazo y puede ajustarse para gestionar
el área de trabajo alrededor de la mesa quirúrgica.
9. Toma del
cable
La toma del cable permite conectar el cable de
datos del carro que conecta cada carro a la torre
del sistema.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-15

Componentes del sistema Hugo™ RAS
Componente Descripción
10. Unidad de
alineación láser
11. Gancho para
cables
12. Pedales de
freno
La unidad de alineación láser crea un marco de
referencia para el sistema Hugo™ RAS, registrando
la alineación de cada brazo en la mesa quirúrgica.
El gancho para cables permite almacenar el cable
de datos del carro cuando está desconectado.
Los pedales de frenado bloquean las ruedas del
carro y permiten dos modos de movimiento:
movimiento libre en el que el carro puede
empujarse y girarse en cualquier dirección, y
movimiento de transporte para un mayor control
por pasillos y esquinas.
2-16 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componentes del sistema Hugo™ RAS
Controles del carro - Control general del asistente
apiedecama
Los controles de los carros para realizar un control general del asistente a pie de cama son de
color azul.
Descripción general
del sistema
1 Botones de la unidad de control del instrumento
2 Mango de punto de pivote
3 Botón de posición
4 Botón de inclinación
5 Botón de codo
6 Perilla de alineación láser y botón de ajuste
7 Botón del seguro del puerto
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-17

Componentes del sistema Hugo™ RAS
Carro - Componentes y descripciones de los controles generales del asistente a pie
de cama
Componente Descripción
1. Botones de la
unidad de
control del
instrumento
2. Mango de
punto de pivote
Los botones de la unidad de control del
instrumento azules sirven para mover la unidad
de control a lo largo de la guía, lo que permite al
usuario insertar y extraer manualmente los
instrumentos. Los botones de la unidad de
control del instrumento pueden utilizarse con
el mango de punto de pivote para activar el
mismo conjunto de movimientos del endoscopio
o instrumento que la laparoscopia manual.
El mango de punto de pivote sirve para hacer
pivotar el brazo alrededor del punto de pivote.
Esto permite al usuario orientar un endoscopio
o instrumento dentro del paciente o alinear la
guía del instrumento con un puerto durante la
configuración. El mango de punto de pivote
puede utilizarse con los botones de la unidad de
control del instrumento para activar el mismo
conjunto de movimientos del endoscopio o
instrumento que la laparoscopia manual.
2-18 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componente Descripción
Componentes del sistema Hugo™ RAS
3. Botón de
posición
4. Botón de
inclinación
El botón de posición azul sirve para mover el
codo del brazo y desplazar verticalmente el brazo
en el carro. Esto permite al usuario mover el brazo
en cualquier dirección para acoplarlo al puerto del
paciente o para ajustar el punto de pivote durante
la cirugía.
Descripción general
del sistema
El botón de inclinación permite inclinar el
brazo hacia arriba y hacia abajo para optimizar
el área de trabajo quirúrgica en las diferentes
intervenciones.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-19

Componentes del sistema Hugo™ RAS
Componente Descripción
5. Botón de codo El botón de codo activa el movimiento del codo
del brazo, lo que permite al usuario reposicionar
el codo para gestionar el área de trabajo a pie
de cama.
6. Perilla y botón
de alineación
láser
7. Botón del
seguro del
puerto
La perilla de alineación láser permite al usuario
orientar hacia el suelo una línea láser proyectada.
El botón de ajuste láser azul permite confirmar la
alineación de la línea con el borde de la mesa
quirúrgica, creando un marco de referencia para
posicionar el sistema Hugo™ RAS.
El botón del seguro del puerto azul permite abrir
las mordazas del seguro del puerto en el extremo
del brazo para liberar el brazo del puerto
del paciente.
2-20 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Componentes del sistema Hugo™ RAS
Controles y funciones del carro - Uso específico
Los controles y funciones del carro de color naranja o gris están diseñados para usos
específicos: liberar mecánicamente los instrumentos o componentes, o detener el
movimiento del brazo.
Descripción general
del sistema
1 Botones de liberación del módulo de interfaz estéril
2 Liberación mecánica de las mordazas del instrumento
3 Liberación mecánica de la unidad de control del instrumento
4 Sensores de contacto
5 Botón de pausa del sistema
6 Liberación mecánica de la columna del carro
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-21

Componentes del sistema Hugo™ RAS
Componentes y descripciones de los controles mecánicos del carro o los controles de
usos específicos
Componente Descripción
1. Botones de
liberación del
módulo de
interfaz estéril
2. Collar de
liberación
mecánica de las
mordazas del
instrumento
3. Liberación
mecánica de la
unidad de control
del instrumento
4. Sensores de
contacto
Los botones de liberación del módulo de
interfaz estéril grises liberan el módulo de interfaz
estéril del brazo después de la cirugía, lo que
permite al usuario retirar la funda del brazo.
El collar de liberación mecánica de las mordazas
del instrumento (con anillo naranja) puede girarse
para abrir las mordazas de un instrumento
conectado en caso de pérdida de suministro
eléctrico o de funcionalidad del brazo, lo que
permite al usuario liberar un instrumento que esté
sujetando tejido.
La liberación mecánica de la unidad de control
del instrumento naranja sirve para subir la unidad
de control por la guía en caso de pérdida de
suministro eléctrico o funcionalidad del brazo,
lo que permite al usuario la extracción manual
del instrumento.
Los sensores de contacto detectan el contacto
con objetos extraños (por ej., miembros del
personal de quirófano o cables) e interrumpen el
control desde la consola del cirujano para dicho
brazo, poniéndolo en estado RETENCIÓN.
5. Botón de pausa
del sistema
6. Liberación
mecánica de la
columna del carro
El botón de pausa del sistema naranja
interrumpe el control de los brazos desde la
consola del cirujano o del asistente a pie de cama y
pone el sistema RETENCIÓN.
La liberación mecánica de la columna del carro
naranja activa el movimiento vertical del brazo
en caso de pérdida de suministro eléctrico o
funcionalidad del brazo, lo que permite al usuario
subir el brazo para sacarlo del paciente.
2-22 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Interfaz gráfica de usuario (GUI)
Interfaz gráfica de usuario (GUI)
La interfaz gráfica de usuario, o GUI, es el conjunto de pantallas, indicadores, mensajes y
elementos interactivos digitales que aparecen en las pantallas del sistema Hugo™ RAS.
Durante la configuración del sistema y de la intervención, las pantallas de la GUI muestran
información sobre el inicio del sistema y la configuración general. Durante la cirugía, las
pantallas muestran la vista del endoscopio e información continua sobre el estado del
sistema, los brazos y los instrumentos.
Salvo por algunas excepciones, la GUI presenta la misma información al cirujano y al
personal de quirófano sobre los eventos y el estado del sistema.
Pantallas del sistema
Pantallas de la consola del cirujano
Descripción general
del sistema
La pantalla 3D del cirujano muestra la vista del endoscopio, el estado de los brazos y los
instrumentos, y los mensajes del sistema. La pantalla interactiva del cirujano permite al
cirujano asignar brazos a sus controles de mano y ajustar la configuración de la consola,
el sistema y el endoscopio.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-23

Interfaz gráfica de usuario (GUI)
Pantalla interactiva del personal de quirófano
La pantalla interactiva del personal de quirófano muestra pantallas centradas en la
configuración del sistema y de la intervención quirúrgica. Durante la cirugía, se muestra una
pantalla de cirugía que puede cambiarse entre vista de configuración y vista de cirugía.
La vista de configuración ofrece áreas de información ampliadas para que el personal de
quirófano pueda configurar el sistema y monitorizar la información y el estado del sistema,
mientras que la vista de cirugía maximiza la vista del endoscopio.
Pantalla del brazo
Cada brazo tiene su propia pantalla que muestra el estado de ese brazo y del instrumento
o endoscopio conectado.
2-24 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Interfaz gráfica de usuario (GUI)
Indicadores de alarma y notificación
En todas las pantallas del sistema pueden mostrarse mensajes de alarma y notificaciones,
diferenciadas por colores según su grado de urgencia.
Las alarmas de
ALTO NIVEL son
de color rojo.
Descripción general
del sistema
Las alarmas de
NIVEL MEDIO o
BAJO son de color
amarillo.
Las
NOTIFICACIONES
son de color
negro/blanco.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-25

Interfaz gráfica de usuario (GUI)
Identificación del origen de la alarma
Los mensajes de alarma y las notificaciones del sistema mostrarán qué componente del
sistema se ha visto afectado para ayudar a solucionar los problemas. Las alarmas sobre un
brazo concreto incluirán el número de brazo en el mensaje de alarma, y la barra de estado
del brazo y el mapa de quirófano mostrarán el estado de alarma de ese brazo.
Si es posible solucionar una alarma de la consola del cirujano o la torre, el mensaje de alarma
indicará la consola del cirujano o la torre, así como los pasos que deben realizarse.
En algunos casos, puede emitirse una alarma sobre el sistema en general. El mensaje de
alarma indicará la acción que se debe realizar en relación con todo el sistema.
Ignorar una alarma
Algunas alarmas pueden ignorarse pulsando el botón DESCARTAR en la pantalla para
garantizar que el personal de quirófano conozca la condición de alarma. El botón
DESCARTAR está situado en la barra de mensajes junto al mensaje, y la alarma se puede
descartar desde la pantalla interactiva del personal de quirófano o la pantalla interactiva del
cirujano. Al pulsar el botón DESCARTAR se silencia y se borra la condición de alarma.
Si la alarma incluye un botón DESCARTAR pero el botón está deshabilitado, se deben seguir
las instrucciones del mensaje de alarma para resolver la condición de alarma antes de que
pueda descartarse. Una vez que se haya solucionado la condición, se habilitará el botón
DESCARTAR.
Las alarmas que no incluyen un botón DESCARTAR se borran automáticamente.
Dependiendo de la prioridad de la alarma, pueden borrarse después de que se haya
solucionado la condición o después de un breve periodo de tiempo en la pantalla.
Transición de alarma
Si se produce una alarma nueva mientras hay una alarma presente, el sistema reproducirá un
sonido de transición de alarma y la nueva alarma aparecerá en las pantallas del sistema. Los
LED del carro también parpadearán en blanco/rojo o blanco/amarillo según el nivel de
alarma. Para que se produzca la transición de alarma, la nueva alarma debe tener una
prioridad superior a la alarma existente. Si la nueva alarma es de igual o menor prioridad, en
primer lugar debe atenderse la alarma existente antes de que el sistema muestre la
nueva alarma.
2-26 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Interfaz gráfica de usuario (GUI)
Barra de estado del brazo
Las pantallas del cirujano y la pantalla interactiva del personal de quirófano muestran todos
los brazos conectados en una barra de estado combinada, con un módulo de estado
individual para cada brazo, incluido el endoscopio.
Descripción general
del sistema
Módulos de estado del brazo
Todas las pantallas del sistema muestran el estado de los brazos mediante módulos de
estado del brazo. Estos módulos tienen un tamaño y forma ligeramente diferente en cada
pantalla, pero muestran información similar.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-27

Interfaz gráfica de usuario (GUI)
Instrumentos con funciones de energía disponible
Cuando un instrumento conectado tiene funcionalidad electroquirúrgica, por ejemplo
energía monopolar o bipolar, la barra de estado del brazo muestra un icono que representa
esa función de energía.
Módulo de estado de energía
Los pedales de la consola del cirujano permiten activar las funciones de energía (consulte el
Capítulo 7, Instrumentos electroquirúrgicos y de energía). Solo puede habilitarse una función
de energía al mismo tiempo.
Cuando se activa una función de energía, el módulo de estado de energía aparece en el
centro superior de la vista del endoscopio, debajo de la barra de mensajes. El módulo
muestra el modo de energía que esté activado en ese momento y sus modalidades.
• Monopolar: CUT / COAG
•BIPOLAR
2-28 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Interfaz gráfica de usuario (GUI)
El modo de energía activado coincide con el icono situado en el brazo con el instrumento
correspondiente. En este ejemplo, el cirujano ha activado la energía monopolar en el Brazo 2
con las tijeras curvas monopolares, asignadas a la mano derecha del cirujano.
Descripción general
del sistema
Cuando se activa (“se dispara”) una función de energía, el módulo de estado de energía
muestra un icono de función animado, y el módulo de estado de energía aparece con un
borde blanco parpadeante para indicar la activación de la función.
En este ejemplo, el cirujano ha activado (“disparado”) la energía bipolar en el brazo 3 con los
fórceps Maryland bipolares, asignados a la mano izquierda del cirujano.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-29

Interfaz gráfica de usuario (GUI)
En caso de que se produzca una alarma asociada con el uso de la función de energía, el
módulo de estado de energía puede mostrar el estado de la alarma. Al igual que con las
demás alarmas, el mensaje asociado se mostrará en la barra de mensajes.
Módulo de estado del endoscopio
El módulo de estado del endoscopio muestra el endoscopio conectado (0° o 30°). Si se
utiliza un endoscopio de 30°, el módulo de estado mostrará la orientación del endoscopio
con una flecha hacia arriba o hacia abajo. El indicador de endoscopio circular muestra el
cabeceo y la rotación del endoscopio (consulte el Capítulo 7, Control del endoscopio en la
consola del cirujano).
En caso de que se produzca una alarma asociada con el uso del endoscopio, el módulo
del endoscopio puede mostrar el estado de la alarma. Al igual que con las demás alarmas,
el mensaje asociado se mostrará en la barra de mensajes.
2-30 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Estados en la barra de estado del brazo
Estado Descripción Pantalla
Estado ACTIVO El módulo de estado de brazo
muestra el estado ACTIVO,
sobre fondo azul claro, cuando
el brazo se encuentra bajo
control activo por parte del
cirujano. Los módulos de
estado de los brazos activos se
muestran cerca del centro de la
pantalla, inmediatamente a la
izquierda y derecha del módulo
de estado del endoscopio.
Estado PREPARADO El módulo de estado del brazo
muestra el estado PREPARADO,
con un fondo azul oscuro y un
icono de candado, cuando el
brazo está asignado a una de
las manos del cirujano pero
está bloqueado, o si la mano
del cirujano no está sobre el
control de mano.
Interfaz gráfica de usuario (GUI)
Descripción general
del sistema
Estado RESERVA El módulo de estado del brazo
muestra el estado RESERVA
cuando el brazo está asignado
a un lugar de reserva,
disponible para cambiar a
una de las manos. El brazo
de reserva se muestra hacia
el exterior de la pantalla,
apartado del endoscopio.
Estado CONTROL
DEL ASISTENTE A PIE
DE CAMA
Estado ALARMA El módulo de estado del brazo
Cuando un miembro del
personal de quirófano mueve
manualmente el brazo a pie
de cama, el módulo de estado
del brazo muestra el estado
CONTROL DEL ASISTENTE A
PIE DE CAMA.
también puede mostrar el
estado ALARMA del brazo.
Las alarmas se diferencian
por colores en función de
la urgencia.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-31

Interfaz gráfica de usuario (GUI)
Estados en las pantallas del brazo
Nota: Las pantallas del brazo muestran estados ligeramente diferentes que las pantallas
interactivas del cirujano y del personal de quirófano. Las pantallas del brazo solo
indican cuándo está en movimiento el brazo, cuándo no se está moviendo o si está
siendo bajo control del asistente a pie de cama, así como los errores y alarmas.
Estado Descripción Pantalla
Estado EN
MOVIMIENTO
Estado NO EN
MOVIMIENTO
Estado CONTROL
DEL ASISTENTE A PIE
DE CAMA
Estado ALARMA La pantalla del brazo también
La pantalla del brazo muestra
el estado EN MOVIMIENTO
cuando el brazo se está
moviendo.
La pantalla del brazo muestra
el estado NO EN MOVIMIENTO
cuando el brazo no se ha
movido durante más de
10 segundos.
La pantalla del brazo muestra el
estado CONTROL DEL
ASISTENTE A PIE DE CAMA
cuando un miembro del
personal de quirófano mueve
manualmente el brazo a pie
de cama.
puede mostrar el estado
ALARMA del brazo. Las alarmas
se diferencian por colores en
función de la urgencia.
2-32 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Interfaz gráfica de usuario (GUI)
La barra de mensajes
La barra de mensajes está directamente situada bajo la barra de estado del brazo en la
pantalla 3D del cirujano y la pantalla interactiva del personal de quirófano (cuando está
configurada para mostrar la vista de cirugía en la pantalla de cirugía), y en la parte superior
de la pantalla interactiva del cirujano.
Descripción general
del sistema
La barra de mensajes muestra las dos alarmas, mensajes o cuadros de diálogo más críticos
en cualquier momento dado. Si el sistema genera un mensaje o cuadro de diálogo nuevo
que es más crítico que uno de los dos mostrados, el mensaje nuevo reemplazará al
menos crítico.
Acceso a los mensajes del sistema
Es posible acceder con el botón Mensajes a una lista de todos los mensajes del sistema
para la intervención actual, organizados en orden cronológico inverso (los mensajes
más recientes en la parte superior) en la pantalla interactiva del personal de quirófano.
Cada mensaje se muestra con el tiempo transcurrido desde el inicio de la intervención.
Todos los mensajes y alarmas del sistema se incluyen en esta lista. Si un mensaje tiene una
prioridad inferior a los otros dos mensajes existentes, no se mostrará inmediatamente en la
barra de mensajes y, si se resuelve antes de que se borren los dos mensajes de prioridad más
alta, no aparecerá nunca en la barra de mensajes, pero SEGUIRÁ apareciendo en la lista de
mensajes cronológicos.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-33

Interfaz gráfica de usuario (GUI)
La memoria del sistema está diseñada para tener una capacidad suficiente para almacenar
todos los mensajes para una sola intervención. En caso de que se alcance la capacidad de
memoria, los mensajes más antiguos (los que aparecieron primero) de la intervención se
sobrescriben con los mensajes más recientes.
Únicamente personal de servicio cualificado de Medtronic puede acceder a los registros de
datos del sistema, que incluyen las notificaciones y condiciones de alarma de las últimas
intervenciones. Para obtener información sobre los registros de datos del sistema, póngase
en contacto con el servicio técnico de Medtronic.
El mapa de quirófano
El mapa de quirófano se muestra en la pantalla de cirugía de la pantalla interactiva del
cirujano y en la pantalla interactiva del personal de quirófano. El mapa de quirófano muestra
el ángulo de acoplamiento de cada brazo alrededor de la mesa quirúrgica, para ayudar
al cirujano y al personal de quirófano a realizar un seguimiento de los brazos cuando se
comunican entre ellos sobre los intercambios de instrumento y las notificaciones del
sistema. Estos ángulos se establecen durante la configuración del brazo y no se ven
afectados por el control de la consola del cirujano.
2-34 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Interfaz gráfica de usuario (GUI)
Cada brazo en el mapa de quirófano cambia su apariencia de la misma manera que los
módulos de estado del brazo.
Estado ACTIVO
Estado PREPARADO
Estado RESERVA
Descripción general
del sistema
Estado CONTROL
DEL ASISTENTE A PIE
DE CAMA
Estado ALARMA
Estado
PRECONFIRMACIÓN
DEL BRAZO
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-35

Interfaz gráfica de usuario (GUI)
La vista del endoscopio
La vista del endoscopio ocupa la mayor parte de la pantalla 3D del cirujano y de la pantalla
interactiva del personal de quirófano (cuando está configurada en la vista de cirugía).
Las pantallas 3D del cirujano y del personal de quirófano siempre muestran la misma
vista del endoscopio: si se visualiza una característica anatómica en una pantalla, se
visualizará en la misma ubicación en la otra.
Vista del endoscopio en la pantalla 3D del cirujano
Vista del endoscopio en la pantalla interactiva del personal de quirófano
La vista del endoscopio puede incluir mensajes procedentes del sistema de endoscopio
acerca del estado del sistema o los componentes del endoscopio. Estos mensajes aparecen
en la parte inferior de la vista del endoscopio y están diferenciados por colores en función de
la urgencia.
2-36 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Interfaz gráfica de usuario (GUI)
Configuración
La configuración para el cirujano puede ajustarse a través de un conjunto específico
de pantallas en la pantalla interactiva del cirujano. La configuración para el personal de
quirófano está siempre disponible en el lado derecho de la pantalla interactiva del personal
de quirófano. Tanto el cirujano como el personal de quirófano pueden configurar una gran
cantidad de ajustes para mayor comodidad.
Ajustes en la pantalla interactiva del cirujano
Descripción general
del sistema
Ajustes en la pantalla interactiva del personal de quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-37

Luces LED de los carros
Luces LED de los carros
Cada brazo tiene luces LED que indican el estado del brazo. Las luces LED están situadas en
la parte superior de la unidad de control del instrumento y en la base del carro para aportar
visibilidad desde ambos lados de la mesa quirúrgica.
Cada brazo siempre mostrará su propio estado respecto al movimiento y control del
asistente a pie de cama. Si un brazo tiene una notificación o alarma, las luces LED de ese
brazo se iluminarán con los patrones estándar de color e intermitencia para indicar la
prioridad del problema.
Patrón de
color de LED
Blanco fijo No en movimiento Brazo en reposo
Blanco
parpadeante
Blanco
intermitente
Azul fijo Brazo en movimiento Brazo controlado por el cirujano
Azul
parpadeante
Azul
intermitente
Blanco/azul
intermitente
Amarillo fijo Alarma de prioridad baja Instrumento conectado insertado (con punta
Amarillo
intermitente
Estado o alarma del brazo Ejemplo
Espere; procesando
Espere; movimiento
automatizado
Notificación informativa Acción no permitida, ej., botón deshabilitado
Espere; procesando
Espere; movimiento
automatizado
Control del asistente a pie
de cama
Inserción de memoria activada El sistema inserta el instrumento a la misma
Alarma de prioridad media Fallo del sistema de endoscopio; retire del
Calibración del instrumento
Calibración del brazo
Uso del mango de punto de pivote, o carro
no frenado
profundidad que el instrumento anterior
durante el intercambio de instrumentos
dentro del puerto); debe extraerse
paciente los instrumentos e interrumpa el uso
Amarillo/
blanco
intermitente
Transición de alarma Nueva alarma de prioridad media, de
prioridad igual o superior a la alarma existente
de prioridad media
2-38 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Luces LED de los controles de mano del cirujano
Patrón de
color de LED
Rojo
intermitente
Rojo/blanco
intermitente
Verde fijo Es seguro soltar el freno El instrumento se ha extraído; el carro está
Estado o alarma del brazo Ejemplo
Alarma de prioridad alta Carro no frenado mientras está acoplado
al paciente; aplique los frenos al carro y
compruebe si el paciente ha sufrido lesiones
Transición de alarma Nueva alarma de prioridad alta, de prioridad
igual o superior a la alarma existente de
prioridad alta
desacoplado y frenado
Luces LED de los controles de mano del
cirujano
Cada control de mano en la consola del cirujano tiene un LED situado en el área superior
distal a los pulsadores.
El LED del control de mano cambiará a amarillo claro cuando ese control de mano esté
bloqueado; por ejemplo, cuando el cirujano accione el activador para bloquearlo.
Descripción general
del sistema
Algunas alarmas interrumpen el control del cirujano por razones de seguridad. Cuando esto
sucede, los LED de los controles de mano del cirujano se iluminarán en amarillo para indicar
que están bloqueados, y el cirujano deberá recuperar el control accionando los activadores
o el pedal de embrague.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 2-39

Luces LED de los controles de mano del cirujano
2-40 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Capítulo 3
Configuración del quirófano
Este capítulo contiene la siguiente información:
• Descripción general en la página 3-2
• Lista de comprobación preliminar en la página 3-2
• Selección de los componentes del sistema en la página 3-3
• Preparación del quirófano en la página 3-4
• Conexiones del sistema en la página 3-7
• Conexión de los cables de datos del sistema en la página 3-8
• Configuración de equipos de vídeo en la página 3-12
• Conexión de los cables de alimentación del sistema en la página 3-14
• Encendido y preparación del sistema en la página 3-17
• Configuración del generador electroquirúrgico en la página 3-24
• Ajustar el brillo y el contraste de la pantalla interactiva del equipo quirúrgico
en la página 3-30
• Almacenamiento de las imágenes del sistema en la página 3-28
• Resumen en la página 3-35
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-1

Descripción general
Descripción general
El sistema Hugo™ RAS ofrece un medio flexible y modular para satisfacer las necesidades
de múltiples tipos de intervenciones y variaciones de las mismas. La consola del cirujano
permite a los cirujanos realizar cirugías mínimamente invasivas asistidas por robot con
el sistema Hugo™ RAS, mientras que el control del asistente a pie de cama les permite
efectuar intervenciones endoscópicas mínimamente invasivas mediante la torre del sistema
y un brazo opcional.
Este capítulo describe la configuración del quirófano y el encendido y preparación del
sistema, que incluye:
• preparación de la torre del sistema, la consola del cirujano y los carros necesarios para
la intervención en el quirófano
• conexión de los cables de alimentación, los cables de datos y los equipos externos de
vídeo necesarios
• encendido y preparación del sistema
• calibración de la consola del cirujano
Lista de comprobación preliminar
Asegúrese de tener disponibles los componentes del sistema, instrumentos y
accesorios indicados a continuación antes de configurar el sistema Hugo™ RAS para
la intervención quirúrgica.
• La torre del sistema, incluido el sistema de endoscopio y el generador electroquirúrgico,
la consola del cirujano y el número de carros necesarios para la intervención quirúrgica
• Fundas (un juego para cada brazo y un juego de respaldo)
• Módulo de interfaz estéril para cada brazo (y uno de respaldo)
• Adaptador de endoscopio y endoscopios (0° y/o 30°) necesarios para la intervención
quirúrgica (y uno de respaldo)
• Instrumentos necesarios para la intervención quirúrgica (y uno de respaldo para
cada uno)
• Juego completo de instrumentos laparoscópicos
• Gafas 3D del observador y dos pares de gafas 3D del cirujano
• Guía de configuración y guías de referencia rápida
• Cuatro circuitos dedicados en el quirófano
3-2 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™
Selección de los componentes del sistema
Selección de los componentes del sistema
Antes de preparar la sala para la intervención, el personal de quirófano deberá seleccionar
qué componentes del sistema Hugo™ RAS debe obtener de los almacenes centrales para
conectarlos durante la configuración del sistema. Si bien la torre del sistema deberá estar
siempre configurada para utilizar el sistema, el uso de la consola del cirujano y el número de
carros necesarios (de 0 a 4) dependerán de las preferencias del cirujano y de la intervención
quirúrgica que vaya a realizarse. Generalmente, el personal de quirófano debe seleccionar y
preparar el máximo número de componentes que puedan utilizarse durante la intervención.
Nota: Si sospecha que el sistema se ha manipulado o modificado de alguna manera durante
la configuración o el uso, deje de utilizarlo y póngase en contacto con Medtronic.
Warning
Para evitar daños en el sistema, ÚNICAMENTE personal autorizado por el hospital debe acceder,
utilizar o mover el sistema Hugo™ RAS.
Selección de los carros
Cuando el cirujano vaya a controlar dos o más brazos desde la consola del cirujano, deberá
consultar en la Guía de configuración las recomendaciones sobre el número necesario de
carros. Cuando se realiza una cirugía mínimamente invasiva estándar a pie de cama,
puede utilizarse un solo brazo para sujetar y estabilizar el endoscopio o un instrumento
para la retracción.
Si se desconoce el número de carros que van a utilizarse, conecte cuatro carros
durante la configuración para evitar retrasos en caso de añadir otro carro durante la
intervención quirúrgica.
Selección de la consola del cirujano
La consola del cirujano es necesaria para que el cirujano pueda controlar dos o más brazos.
Si se va a controlar manualmente un solo brazo a pie de cama, o si va a utilizarse un
endoscopio de mano a pie de cama, la consola del cirujano no es necesaria.
Si existe la posibilidad de cambiar de control del asistente a pie de cama a control desde la
consola del cirujano durante la intervención quirúrgica, se recomienda configurar el sistema
con la consola y con todos los brazos adicionales que puedan utilizarse.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-3

Preparación del quirófano
Preparación del quirófano
Prepare el quirófano para la cirugía con el sistema Hugo™ RAS con arreglo a los
pasos siguientes.
Nota: La altura mínima del techo del quirófano compatible con el sistema es de 2,6 metros
1. Obtenga los componentes del sistema, los instrumentos y otros elementos necesarios de
los almacenes centrales. Determine qué instrumentos y componentes del sistema son
los recomendados para la intervención quirúrgica.
2. La torre del sistema no es estéril. Coloque la torre del sistema lo más cerca posible de la
mesa quirúrgica. Deje espacio suficiente para que el personal a pie de cama mantenga el
campo estéril y para que el personal de quirófano no estéril pueda acceder a la parte
frontal y posterior de la torre del sistema (a fin de permitir la conexión de cables y el
acceso al botón de apagado de emergencia [EPO]). Consulte la Guía de configuración para
obtener instrucciones adicionales sobre la colocación de la torre.
(8,5 pies).
Warning
Aplique SIEMPRE los frenos a la torre del sistema después de desplazarla para evitar movimientos
imprevistos de la torre, lesiones, o daños a la torre u otros equipos.
Warning
A fin de no perder la vista del endoscopio, NO permita que otros equipos de la sala impacten contra
la pantalla interactiva del personal de quirófano.
Precaution
Supervise SIEMPRE la parte superior de los componentes del sistema (guías del instrumento del brazo
o pantalla interactiva del personal de quirófano) para evitar colisiones con luces y otros equipos
montados en paredes o techos.
Nota: La torre del sistema debe estar lo suficientemente cerca de los cables
electroquirúrgicos y del endoscopio para llegar a los instrumentos conectados a los
brazos, con suficiente holgura para que los brazos puedan moverse libremente en
el espacio quirúrgico.
a. Oriente la pantalla interactiva del personal de quirófano mediante las dos asas
situadas a los lados de la pantalla. La pantalla puede moverse hacia arriba y hacia
abajo, moverse y girarse a izquierda y derecha, y recogerse o extenderse más cerca
o más lejos de la torre.
3-4 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Preparación del quirófano
b. Asegúrese de que el campo quirúrgico sea visible en la pantalla interactiva del
personal de quirófano. La pantalla interactiva del personal de quirófano no debe
quedar bloqueada por otras personas o equipos.
Nota: El personal de quirófano debe poder leer las notificaciones en su pantalla
interactiva y escuchar los tonos de audio del sistema desde el pie de cama. Utilice
monitores adicionales según sea necesario para garantizar la legibilidad de la pantalla
interactiva del personal de quirófano.
3. Prepare la mesa quirúrgica y las ayudas de posicionamiento del paciente en función de
la intervención quirúrgica y el paciente. Consulte en la Guía de configuración las
instrucciones sobre el posicionamiento de la mesa quirúrgica y el paciente.
Warning
Si es posible, incline o gire SIEMPRE la mesa quirúrgica tal como se indica en el documento de
configuración correspondiente a su intervención, a fin de evitar la pérdida de espacio quirúrgico.
Nota: Cuando se intervenga a pacientes grandes, baje la mesa quirúrgica todo lo
que sea posible para seguir manteniendo la configuración prevista del sistema.
En algunos casos, la Guía de configuración específica del procedimiento le indicará
que utilice las marcas de altura situadas a los lados del carro para ajustar la altura
de la mesa quirúrgica y asegurarse de que los brazos puedan acoplarse en
determinados puertos.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-5

Preparación del quirófano
4. Coloque los carros en el área general de la zona quirúrgica y fuera del campo estéril (en el
lado previsto de la mesa quirúrgica y en el mismo lado donde estarán situados la cabeza
y los pies de paciente), con arreglo a las preferencias del cirujano y a las instrucciones de
la Guía de configuración. Asegúrese de que haya suficiente espacio para extender cada
brazo (p. ej., uno a uno) de forma puntual para su funda, y de contar con suficientes carros
durante la intervención quirúrgica.
5. Coloque la consola del cirujano de modo que maximice la visión del entorno del
quirófano mientras está sentado en la consola.
Warning
Aplique SIEMPRE los frenos a la consola del cirujano después de desplazarla para evitar movimientos
imprevistos de la consola, lesiones, o daños a la consola u otros equipos.
Nota: No coloque otros equipos quirúrgicos u objetos que ejerzan cargas externas sobre los
componentes del sistema Hugo™ RAS ni cerca de ellos.
3-6 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Conexiones del sistema
Conexiones del sistema
Warning
NO desconecte ningún cable de la parte posterior de la torre del sistema durante el uso del sistema,
a fin de evitar interrupciones del control del cirujano o del asistente a pie de cama, o pérdida de
visualización del endoscopio.
La preparación del sistema Hugo™ RAS implica la conexión cuidadosa de varios cables de
alimentación y cables de datos. Algunos de esos cables suministran alimentación a la torre
del sistema y a la consola del cirujano. Los cables de datos suministran información
procedente de la torre del sistema a la consola del cirujano y los carros.
Nota: Este capítulo describe únicamente los cables de alimentación y los cables de datos del
sistema. No enchufe los cables de electrocirugía y del endoscopio hasta que se le indique,
ya que estos cables se introducen en el campo estéril y deben manejarse en consecuencia.
Torre del sistema
La torre del sistema tiene tres cables de alimentación negros, cada uno de 7,6 m (25 pies)
de largo, que van conectados al panel posterior de la torre del sistema. Cada cable de
alimentación debe conectarse a su propio circuito eléctrico dedicado.
Precaution
Asegúrese SIEMPRE de que los tres cables de alimentación de CA de la torre del sistema se enchufen en
tres circuitos eléctricos independientes con un minuto de intervalo entre ellos durante la preparación
del quirófano, para evitar que la fuente de alimentación se descargue y se retrase la cirugía.
Consola del cirujano
La consola del cirujano tiene un cable de alimentación negro de 7,6 m (25 pies) de largo que
va conectado al panel posterior de la consola. El cable de alimentación debe conectarse a su
propio circuito eléctrico dedicado.
La consola del cirujano utiliza un cable de datos gris con extremos en verde claro de 10 m
(33 pies) de largo, que se conecta a la parte posterior de la torre del sistema.
MRASF05009 Cable de datos de la consola del cirujano
Carros
Cada uno de los carros utiliza su cable de datos negro con extremos azules de 10 m (33 pies)
de largo, que se conecta a la parte posterior de la torre del sistema.
Configuración del quirófano
MRASF01006 Cable de datos del carro
Nota: Póngase en contacto con su representante local de Medtronic para obtener
recambios de los cables de alimentación del sistema o los cables de datos de
la consola del cirujano o del carro.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-7

Conexión de los cables de datos del sistema
Conexión de los cables de datos del
sistema
Punto de control: Si se realiza una intervención quirúrgica a pie de cama con la torre del
sistema y un carro opcional, no es necesario utilizar la consola del cirujano. Vaya a Conexión
de los cables de datos del carro en la página 3-9 si utiliza el carro opcional.
Punto de control: Si se realiza una intervención quirúrgica a pie de cama con la torre del
sistema y un endoscopio de mano, no es necesario utilizar un carro. Vaya a Configuración de
equipos de vídeo en la página 3-12.
Conexión del cable de datos de la consola del cirujano
La consola del cirujano utiliza un cable de datos gris con extremos en verde claro de 10 m
(33 pies) de largo, que se conecta a la parte posterior de la torre del sistema.
1. Alinee el punto rojo situado en el conector del cable con el punto rojo situado en la toma
verde claro de la consola del cirujano. Presione el conector del cable en la toma hasta que
esté completamente insertado.
Nota: Para desconectar un cable de datos, tire hacia atrás del cilindro metálico del
conector con relieve cuadrado. El cilindro metálico saldrá un poco y el cable se
desconectará.
2. Recoja toda la bobina del cable de datos y desenróllela en forma de rueda. Coloque el
cable de datos sobre el suelo y llévelo hacia la torre del sistema, deshaciendo las vueltas
o bucles.
3-8 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Conexión de los cables de datos del sistema
3. Conecte el cable de datos al panel posterior de la torre, en la toma verde claro situada
junto al icono de consola del cirujano. Alinee el punto rojo del conector del cable de
datos con el punto rojo de la toma e introduzca el conector hasta que quede
completamente insertado.
4. Enrolle el cable de datos sobrante en los ganchos para cables situados en la torre
del sistema.
Conexión de los cables de datos del carro
El sistema Hugo™ RAS admite hasta cuatro carros, con arreglo a las preferencias del cirujano
y a la intervención quirúrgica.
Nota: El número de carros necesarios para una configuración específica puede consultarse
en la Guía de configuración.
Cada uno de los carros utiliza su cable de datos negro con extremos azules de 10 m (33 pies)
de largo, que se conecta a la parte posterior de la torre del sistema.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-9

Conexión de los cables de datos del sistema
1. Alinee el punto rojo del conector del cable de datos con el punto rojo de la toma azul
situada en el carro. Inserte en la toma el conector del cable de datos hasta que quede
encajado con un ‘clic’.
2. Sujete toda la bobina del cable de datos. Desenrolle cuidadosamente el cable de datos y
llévelo a la torre del sistema. Asegúrese de colocar el cable de datos plano sobre el suelo
y deshaga las vueltas o bucles.
3. Conecte el cable de datos al panel posterior de la torre del sistema, en una de las cuatro
tomas numeradas junto al icono de carro. Alinee el punto rojo del conector del cable de
datos con el punto rojo de la toma azul e introduzca el conector en la toma hasta que
quede encajado con un ‘clic’.
3-10 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Conexión de los cables de datos del sistema
4. Si va a conectar varios carros, repita los pasos anteriores. Utilice un cable de datos negro
con extremos azules para cada carro adicional, y conecte cada cable de datos al panel
posterior de la torre del sistema, en las tomas numeradas junto al icono de carro.
5. Disponga los brazos alrededor de la mesa quirúrgica fuera del campo estéril, con arreglo
a la preferencia del cirujano y a las instrucciones de la Guía de configuración.
Warning
NO gire el carro sobre ningún cable, a fin de evitar daños en los cables. En su lugar, disponga los cables
de modo que el carro tenga vía libre a pie de cama.
Precaution
NO desenchufe los cables de datos del carro ni el cable de datos de la consola del cirujano mientras
está activo el control del cirujano, a fin de evitar interrupciones en el control del cirujano o el control
del asistente a pie de cama.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-11

Configuración de equipos de vídeo
6. Enrolle el cable de datos sobrante en los ganchos para cables situados en la torre
del sistema.
Warning
Después de conectar los cables, enrolle SIEMPRE el cable sobrante en los ganchos para cables de la
torre del sistema para minimizar el riesgo de lesiones por tropiezos con los cables.
Configuración de equipos de vídeo
La torre del sistema incluye tres tomas de entrada auxiliares: dos tomas DVI y una toma BNC
(estas tomas están deshabilitadas, pero vienen incorporadas para un futuro uso).
La torre del sistema incluye una toma de salida DVI. La toma de salida permite copiar y
visualizar la señal de vídeo procedente de la pantalla interactiva del personal de quirófano
a otros dispositivos externos (p. ej., pantallas externas o grabadoras de vídeo). Todos los
dispositivos externos deben estar conectados antes de poner en marcha el sistema para
garantizar su funcionamiento.
3-12 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Configuración de equipos de vídeo
Grabación o duplicación del vídeo de la intervención
El vídeo de la intervención puede grabarse en un sistema de vídeo externo o duplicarse en
otros monitores instalados en el quirófano; para ello, conecte el monitor o sistema externo a
la salida de vídeo situada en el panel posterior de la torre del sistema antes de iniciar el
sistema.
Nota: Antes de enchufar los cables de alimentación de la torre, asegúrese de que el equipo
de vídeo esté conectado a la torre del sistema.
Si lo desea, puede grabar o duplicar el vídeo de la intervención solamente con la vista del
endoscopio (sin la interfaz gráfica de usuario del sistema Hugo™), conectándolo a la parte
posterior del equipo KARL STORZ* IMAGE1 S CONNECT™.
Grabación de la vista del endoscopio con la interfaz gráfica
de usuario
Conecte un cable DVI desde la toma de salida situada en el panel posterior de la torre al
sistema de grabación antes de iniciar el sistema y empiece a grabar en cualquier momento.
El cable DVI ofrecerá una señal de vídeo de la vista del endoscopio con la interfaz gráfica de
usuario, tal como se ve en la pantalla interactiva del personal de quirófano.
Grabación de la vista del endoscopio únicamente
Para grabar un vídeo que solamente abarque la vista del endoscopio, haga lo siguiente:
1. Conecte un cable SDI a la toma SDI situada en la parte posterior del equipo KARL STORZ*
IMAGE1 S CONNECT™.
2. El sistema de endoscopio KARL STORZ* generará una señal de salida de vídeo de la vista
del endoscopio. Consulte los manuales de instrucciones del KARL STORZ* para obtener
más detalles sobre las opciones de grabación disponibles.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-13

Conexión de los cables de alimentación del sistema
Conexión de los cables de alimentación
del sistema
Warning
Para evitar interrupciones en el control del cirujano o el control del asistente a pie de cama en caso
de pérdida del suministro eléctrico en el hospital, enchufe cada cable de alimentación directamente
a un circuito eléctrico específico provisto de un sistema de alimentación de reserva (por lo general
rojo). Para prevenir la sobrecarga del circuito y la pérdida de alimentación del sistema, NO comparta
estos circuitos con otro equipo del hospital. NO utilice alargadores ni bases múltiples.
Warning
Conecte ÚNICAMENTE cables de alimentación con certificado UL a la torre del sistema y a la consola
del cirujano, para evitar lesiones por descargas eléctricas o un fallo de inicio del sistema.
El cable de alimentación de la consola del cirujano y los tres cables de alimentación de la
torre deben conectarse a un circuito eléctrico independiente en el quirófano para prevenir
la sobrecarga del circuito.
Punto de control: Si se realiza una intervención quirúrgica a pie de cama con la torre del
sistema y un carro opcional, no es necesario utilizar la consola del cirujano. Vaya a Conexión
de los cables de alimentación de la torre del sistema en la página 3-16.
Conexión del cable de alimentación de la consola
del cirujano
La consola del cirujano tiene un cable de alimentación negro de 7,6 m (25 pies) de largo que
va conectado al panel posterior de la consola.
1. Conecte el extremo del cable de alimentación al panel posterior de la consola
del cirujano.
3-14 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Conexión de los cables de alimentación del sistema
2. Conecte el cable de alimentación de la consola del cirujano a su propio circuito eléctrico
dedicado.
3. Cuelgue o gire el cable sobrante en el gancho para cables situado en la consola
del cirujano.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-15

Conexión de los cables de alimentación del sistema
Encendido de la alimentación de CA en la consola
del cirujano
Localice el interruptor de alimentación de CA rojo en el panel posterior de la consola del
cirujano y póngalo en la posición de encendido ( | ).
Nota: Si el interruptor rojo de alimentación de CA ya está encendido ( | ) apáguelo y vuelva
aencenderlo.
Conexión de los cables de alimentación de la torre
del sistema
La torre del sistema tiene tres cables de alimentación negros, cada uno de 7,6 m (25 pies) de
largo, que van conectados al panel posterior de la torre del sistema.
1. Conecte el extremo de cada cable de alimentación en las tomas del panel posterior
de la torre.
2. Enchufe cada uno de los cables de alimentación de la torre a un circuito eléctrico
dedicado.
3-16 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Encendido y preparación del sistema
3. Cuelgue el cable sobrante en los ganchos para cables situados en la torre del sistema.
Encendido y preparación del sistema
El sistema se iniciará automáticamente una vez enchufados los cables de alimentación de la
torre. Si los cables de alimentación ya están conectados de una intervención anterior, deberá
utilizar el botón de alimentación azul de la torre del sistema para iniciar el sistema.
Nota: El botón de alimentación azul debe estar encendido y azul parpadeante si los cables
de alimentación de la torre se dejan conectados de una intervención anterior.
1. Presione el botón de alimentación azul en el panel frontal de la torre del sistema.
2. Asegúrese de que el sistema de endoscopio KARL STORZ* esté encendido. Las unidades
IMAGE1 CONNECT™ (TC200) y POWER LED 300 (TL 300) tienen sus propios botones de
alimentación y pueden haberse apagado.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-17

Secuencia de configuración del sistema
3. Pulse el botón de alimentación situado en la parte frontal del generador electroquirúrgico
Valleylab™ FT10 de Covidien. El botón de alimentación se iluminará en verde y la pantalla
principal aparecerá en la pantalla táctil del FT10 después de que este finalice la prueba
automática de encendido y preparación.
Secuencia de configuración del sistema
Una vez que se pulsa el botón de alimentación azul en la torre del sistema, la pantalla
interactiva del personal de quirófano mostrará un temporizador de cuenta atrás del proceso
de encendido y preparación mientras se inician los componentes del sistema.
Mientras se inicia el sistema, compruebe que los carros y la consola del cirujano necesarios
para la intervención están conectados y que el interruptor de alimentación de CA rojo de la
parte posterior de la consola del cirujano está en la posición de encendido ( | ). Los botones
de pausa del sistema naranjas se iluminarán, la consola del cirujano se activará y las
pantallas e indicadores LED en los brazos se encenderán.
Una vez que finalice correctamente el encendido y preparación, aparecerá la pantalla de
bienvenida en la pantalla interactiva del personal de quirófano.
3-18 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Secuencia de configuración del sistema
Si falla el encendido y preparación del sistema, la pantalla interactiva del personal de
quirófano mostrará un mensaje indicando que pulse el botón de alimentación azul para
apagar y reiniciar el sistema. Pulse el botón de alimentación azul y espere a que se reinicie
el sistema. Cuando el botón de alimentación azul parpadee, púlselo de nuevo para volver
a intentar el encendido y preparación.
Calibración de la consola del cirujano
La pantalla de calibración de la consola del cirujano que se muestra en la pantalla interactiva
del cirujano le dará instrucciones para comenzar la calibración.
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-19

Secuencia de configuración del sistema
Asegúrese de que no haya nada que bloquee los movimientos de la pantalla 3D del cirujano
(arriba y abajo), del reposabrazos (arriba y abajo) y de la placa del pedal (adelante y atrás).
Los controles de mano del cirujano deben estar en reposo orientados hacia delante y tener
espacio para moverse libremente en el interior del reposabrazos. Asegúrese de que la
pantalla interactiva del cirujano esté abatida de modo que no bloquee el movimiento de los
controles de manos.
Warning
NO se siente en la consola del cirujano durante la calibración de la consola, para evitar lesiones
personales al paciente y/o daños al equipo.
Toqu e Calibrar consola. La consola del cirujano realizará automáticamente la siguiente
secuencia de calibración:
1. La pantalla 3D del cirujano, el apoyabrazos y la placa del pedal se moverán a un extremo
del intervalo de movimiento y después volverán al centro.
Los controles de mano del cirujano y sus carros se moverán y realizarán las
comprobaciones de alineación.
Para interrumpir la calibración de la consola del cirujano, pulse el botón de pausa del
sistema naranja situado en el reposabrazos. La consola del cirujano mostrará un mensaje
indicándole que la reinicie.
a. Desactive la pausa del sistema de la pantalla interactiva del personal de quirófano
y apague el interruptor de alimentación de CA situado en la parte posterior de la
consola del cirujano.
b. Una vez que haya desactivado la pausa del sistema, vuelva a encender el interruptor
de alimentación de CA en la parte posterior de la consola del cirujano. La consola del
cirujano se reiniciará y se volverá a mostrar la pantalla de calibración.
Nota: Si la calibración falla, la consola del cirujano mostrará un mensaje indicándole
que la reinicie. Apague el interruptor de alimentación de CA en la parte posterior de
la consola del cirujano y vuelva a encenderlo. La consola del cirujano se reiniciará y se
volverá a mostrar la pantalla de calibración.
3-20 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Secuencia de configuración del sistema
2. Una vez que la consola esté correctamente calibrada, la pantalla interactiva del cirujano
avanzará automáticamente a la pantalla de bienvenida.
Pantalla de bienvenida
En este punto, la pantalla de bienvenida se mostrará en la consola del cirujano y en
la pantalla interactiva del personal de quirófano. La pantalla de bienvenida ofrece
opciones para realizar la configuración del sistema o ver la información del servicio de
asistencia técnica.
Para comenzar con la configuración del sistema para la intervención quirúrgica, toque el
botón Iniciar configuración en la pantalla interactiva del personal de quirófano.
Para iniciar la configuración de la consola del cirujano, toque Iniciar configuración en la
pantalla interactiva del cirujano.
Configuración del quirófano
Para ver la información del servicio de asistencia técnica, toque el botón Soporte. La pantalla
Soporte incluye la información de contacto del servicio de asistencia técnica.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-21

Secuencia de configuración del sistema
Acceso al acuerdo de licencia para el usuario final y acuerdo de
licencia para terceros
En la pantalla interactiva del equipo quirúrgico y la pantalla interactiva del cirujano pueden
verse el acuerdo de licencia para el usuario final y los acuerdos de licencia para terceros. Para
acceder al acuerdo de licencia para el usuario final y al acuerdo de licencia para terceros y
verlos, siga estos pasos:
1. Presione el botón Soporte en la pantalla interactiva del equipo quirúrgico o la pantalla
interactiva del cirujano.
2. Presione el botón Información legal que está al pie de la pantalla Soporte.
3-22 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Secuencia de configuración del sistema
3. En la pantalla Información legal aparecerá el acuerdo de licencia para el usuario final y los
acuerdos de licencia de terceros. La barra de desplazamiento de la derecha permite al
usuario desplazarse hacia arriba y hacia abajo por la información de la pantalla.
4. Para regresar a la pantalla Soporte, presione el botón Volver que está en la esquina
inferior izquierda de la pantalla Información legal. Para regresar al menú Bienvenido,
presione el botón Volver que está en la esquina inferior izquierda de la pantalla Soporte.
Para regresar a la pantalla Soporte: Para regresar a la pantalla Bienvenido:
Prueba de alarma del sistema
Precaution
NO utilice el sistema si no suena el tono de prueba de alarma, para evitar un funcionamiento
incorrecto del sistema de alarma o la pérdida de alarmas críticas del sistema.
Configuración del quirófano
Tan pronto como se pulse el botón Iniciar configuración, el sistema mostrará un mensaje y
sonará un tono de prueba de alarma.
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-23

Configuración del generador electroquirúrgico
Confirme que oye la alarma. Si NO oye el tono de alarma, no debe utilizar el sistema; póngase
en contacto con el servicio técnico de Medtronic.
Configuración del generador
electroquirúrgico
Warning
NO utilice cables de instrumentos electroquirúrgicos que no sean los especificados para utilizarse con
el sistema Hugo™ RAS.
Warning
Antes de iniciar una intervención, compruebe SIEMPRE el volumen de sonido del generador para
evitar el riesgo de no escuchar las importantes señales de audio de la electrocirugía.
Warning
Escuche y esté atento SIEMPRE a los tonos y mensajes del generador electroquirúrgico para
garantizar la aplicación correcta de electrocirugía y evitar lesiones al paciente.
Todos los tonos y mensajes del generador electroquirúrgico provienen del propio generador;
el sistema Hugo™ RAS NO los reproduce ni amplifica.
Warning
En caso de error o fallo del generador electroquirúrgico, DEJE de utilizar inmediatamente los pedales
de la consola del cirujano, para evitar ligar vasos deficientemente sellados o prevenir efectos
indeseados de la electrocirugía.
3-24 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™

Configuración del generador electroquirúrgico
El generador electroquirúrgico Valleylab™ FT10 de Covidien suministra energía de
radiofrecuencia para aplicaciones quirúrgicas bipolares y monopolares, así como para
aplicaciones de fusión de tejidos y sellado de vasos sanguíneos.
El panel frontal del generador electroquirúrgico incluye la interfaz táctil, las tomas para los
cables del instrumento electroquirúrgico y los botones del sistema del generador.
El panel posterior del generador electroquirúrgico incluye los conectores del pedal y las
tomas del cable de alimentación.
El generador electroquirúrgico no es estéril. Un miembro del personal de quirófano no
estéril debe instalar el generador electroquirúrgico de la siguiente manera:
1. Asegúrese de que el generador electroquirúrgico esté encendido. El botón de
encendido/apagado del panel frontal se iluminará en color verde.
a. Para encender el generador electroquirúrgico, pulse el botón de encendido/
apagado. Una vez completado el autodiagnóstico de encendido, aparecerá la
pantalla principal en la pantalla táctil de la interfaz.
2. Compruebe que los cables del pedal del Hugo™ RAS estén conectados al panel posterior
del generador electroquirúrgico. Estos cables deben estar conectados al generador para
controlar los instrumentos electroquirúrgicos desde la consola del cirujano (es posible
que se encuentren desconectados).
Configuración del quirófano
Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™ 3-25

Configuración del generador electroquirúrgico
Warning
Asegúrese de que cada cable esté conectado a la toma correcta en la parte posterior del generador
electroquirúrgico. Las conexiones incorrectas pueden dar lugar a un suministro imprevisto o fallido
de energía, y pueden causar graves lesiones al paciente.
Nota: Es posible conectar pedales independientes al generador electroquirúrgico si
está utilizando la torre del sistema y un brazo opcional para realizar una intervención
quirúrgica a pie de cama.
3. Ajuste el nivel de energía del generador electroquirúrgico dentro del intervalo indicado
a continuación y de acuerdo con las preferencias del cirujano.
Warning
NO ajuste el nivel de energía del generador electroquirúrgico por encima de 60 W para
monopolar y 70 W para bipolar, a fin de evitar un sellado inadecuado del tejido o lesiones
en el tejido del paciente.
Modo de energía Intervalo de niveles de energía (para uso con el sistema
Hugo™ RAS)
Monopolar Desactivado, 1 - 60 W
Bipolar Desactivado, 1 - 70 W
Nota: Todos los instrumentos electroquirúrgicos monopolares y bipolares del
Hugo™ RAS son compatibles con las tensiones máximas (pico) de salida monopolar y
bipolar, respectivamente, del Valleylab™ FT10. Las tensiones máximas de salida del
generador Valleylab™ FT10 para los modos monopolar y bipolar se indican mediante
gráficos de tensión frente a potencia en la Guía del usuario de Valleylab™ FT10.
Nota: Todos los instrumentos electroquirúrgicos monopolares Hugo™ RAS son
compatibles con la tensión máxima (pico) de salida monopolar del Valleylab™ FT10.
Las tensiones máximas de salida del generador Valleylab™ FT10 para los modos
monopolares de CUT y COAG se indican mediante gráficos de tensión frente a
potencia en la Guía del usuario de Valleylab™ FT10.
Nota: Todos los instrumentos electroquirúrgicos bipolares del Hugo™ RAS son
compatibles con las tensiones máximas (pico) de salida bipolar del Valleylab™ FT10.
Las tensiones máximas de salida del generador Valleylab™ FT10 para los modos
bipolares se indican mediante gráficos de tensión frente a potencia en la Guía del
usuario de Valleylab™FT10.
Consulte la Guía del usuario del generador electroquirúrgico Valleylab™ FT10 de Covidien
para conocer las especificaciones sobre las características de potencia y tensión de salida
monopolar y bipolar, y los controles correspondientes del generador electroquirúrgico.
Precaution
Las cánulas VersaOne™ proporcionan una salida para la insuflación o la evacuación de humos.
Consulte la Guía del usuario de Valleylab™ FT10 para obtener más información sobre la evacuación
de humos durante la electrocirugía.
3-26 Guía del usuario del sistema de cirugía asistida por robot (RAS) Hugo™
 Loading...
Loading...