

Page 1
Model 9116
Intelligent Pressure Scanner
User’s Manual
August 2007
NetScanner™ System
www.PressureSystems.com
Page 2
Pressure Systems, Inc. Model 9116 User’s Manual
REVISION REVISION HISTORY PRINT DATE
1
Updated manual terminology and deleted all
April 2004
references to UDP Query and to O-ring part
numbers.
2 Update terminology November 2004
3 Update commands August 2007
©This User’s Manual is a copyright product of Pressure Systems, Inc. , 2007.
Permission is hereby granted to make copies and distribute verbatim copies of this manual,
provided the copyright notice and this permission notice are preserved on all copies.
Page i www.PressureSystems.com
Page 3

Pressure Systems, Inc. Model 9116 User’s Manual
Table of Contents
Chapter 1: General Information ...........................................................................................1
1.1 Introduction ..............................................................................................................1
1.2 Description of the Instrument ....................................................................................... 2
1.2.1 Differences Between Models 9016 and 9116................................................... 3
1.3 Options.........................................................................................................................5
1.3.1 Pressure Ranges.............................................................................................. 5
1.3.2 Manifolds and Pressure Connections............................................................... 5
1.3.3 Communication Interfaces................................................................................ 6
Chapter 2: Installation and Set Up ......................................................................................7
2.1 Unpacking and Inspection............................................................................................ 7
2.2 Safety Considerations ..................................................................................................7
2.3 Preparation for Use ......................................................................................................7
2.3.1 Environment .....................................................................................................7
2.3.2 Power ............................................................................................................... 8
2.3.3 Mounting and Module Dimensions ................................................................... 9
2.3.4 Network Communications Hookup ................................................................... 9
2.3.4.1 Ethernet Host Port Hookup................................................................ 9
2.3.5 Diagnostic Port Hookup.................................................................................... 13
2.3.6 Pressure Connections ......................................................................................13
2.3.6.1 RUN Mode Inputs .............................................................................. 14
2.3.6.2 CAL Mode Inputs............................................................................... 15
2.3.6.3 PURGE Mode Inputs ......................................................................... 15
2.3.6.4 LEAK Mode Inputs.............................................................................16
2.3.6.5 Supply Air .......................................................................................... 16
2.3.7 Case Grounding ............................................................................................... 17
2.3.8 Trigger Input Signal ..........................................................................................17
2.3.9 Power Up Checks and Self-Diagnostics........................................................... 17
Chapter 3: Programming and Operation ............................................................................18
3.1 Commands & Responses ............................................................................................18
3.1.1 Introduction....................................................................................................... 18
3.1.1.1 TCP/UDP/IP Protocols....................................................................... 18
3.1.2 Commands ....................................................................................................... 19
3.1.2.1 General Command Format ................................................................19
3.1.2.2 Command Field ................................................................................. 20
3.1.2.3 Position Field ..................................................................................... 20
3.1.2.4 Datum Fields......................................................................................21
3.1.2.5 Format Field.......................................................................................21
Page ii www.PressureSystems.com
Page 4

Pressure Systems, Inc. Model 9116 User’s Manual
Table of Contents (continued)
3.1.3 Responses ....................................................................................................... 22
3.1.3.1 Interpreting Offset Values (Re-zero Calibration Adjustment)............. 23
3.1.3.2 Interpreting Gain Values (Span Calibration Adjustment) ................... 23
3.1.3.3 Interpreting Engineering Units Output ............................................... 23
3.1.4 Functional Command Overview ....................................................................... 23
3.1.4.1 Startup Initialization ...........................................................................24
3.1.4.2 Module Data Acquisition.................................................................... 24
3.1.4.3 Calibration Adjustment of Offset/Gain Correction Coefficients .......... 25
3.1.4.4 Delivery of Acquired Data to Host...................................................... 26
3.1.4.5 Network Query and Control Functions............................................... 27
3.1.4.6 Other Functions ................................................................................. 27
3.2 Detailed Command Description Reference.................................................................. 28
TCP/IP Commands
Power Up Clear (Command ‘A’) ....................................................................... 29
Reset (Command ‘B’) ....................................................................................... 30
Configure/Control Multi-point Calibration (Command ‘C’) ................................31
Sub-command Index 00: Configure & Start Multi-Point Calibration.............. 32
Sub-command Index 01: Collect Data for a Calibration Point ...................... 34
Sub-command Index 02: Calculate & Apply Correction Coefficients............ 36
Sub-command Index 03: Abort Multi-Point Calibration................................. 38
Read Tranducer Voltages (Command ‘V’)........................................................39
Calculate and Set Gains (Command ‘Z’).......................................................... 41
Read Transducer A/D Counts (Command ‘a’).................................................. 43
Read High-Speed Data (Command ‘b’)............................................................ 45
Define/Control Autonomous Host Streams (Command ‘c’) .............................. 46
Sub-command Index 00: Configure a Host Delivery Stream........................ 48
Sub-command Index 01: Start Streams(s) ................................................... 52
Sub-command Index 02: Stop Stream(s) ..................................................... 54
Sub-command Index 03: Clear Stream(s) .................................................... 55
Sub-command Index 04: Return Stream Information ...................................56
Sub-command Index 05: Select Data in a Stream .......................................58
Sub-command Index 06: Select Protocol for Stream Delivery .....................61
Calculate and Set Offsets (Command ‘h’) ........................................................ 63
Read Temperature Counts (Command ‘m’) .....................................................65
Read Temperature Voltages (Command ‘n’).................................................... 67
Read Module Status (Command ‘q’) ................................................................69
Read High-Precision Data (Command ‘r’) ........................................................ 72
Read Transducer Temperature (Command ‘t’)................................................. 74
Read Internal Coefficients (Command ‘u’)........................................................76
Download Internal Coefficients (Command ‘v’) ................................................80
Set/Do Operating Options/Functions (Command ‘w’).......................................83
UDP/IP Commands
Network Query (UDP/IP Command ‘psi9000’) .................................................87
Re-Boot Module (UDP/IP Command ‘psireboot’) ............................................. 89
Change Module’s IP Address Resolution Method & Re-Boot
(UDP/IP Command ‘psirarp’) ............................................................. 90
Page iii www.PressureSystems.com
Page 5

Pressure Systems, Inc. Model 9116 User’s Manual
Table of Contents (continued)
Chapter 4: Calibration ...........................................................................................................91
4.1 Introduction .................................................................................................................. 91
4.2 Re-Zero Calibration...................................................................................................... 93
4.2.1 Re-Zero Calibration Valve Control....................................................................93
4.2.2 Re-Zero Calibration Summary.......................................................................... 94
4.3 Span Calibration........................................................................................................... 94
4.3.1 Span Calibration Valve Control ........................................................................95
4.3.2 Span Calibration Summary ..............................................................................96
4.4 Integrated Multi-Point Calibration Adjustment.............................................................. 98
4.4.1 Multi-Point Calibration Valve Control................................................................ 98
4.4.2 Multi-Point Calibration Summary...................................................................... 99
4.5 Coefficient Storage....................................................................................................... 100
4.6 Line Pressure Precautions ...........................................................................................101
Chapter 5: Service .................................................................................................................102
5.1 Maintenance................................................................................................................. 102
5.1.1 Common Maintenance ..................................................................................... 104
5.1.2 Module Disassembly ........................................................................................105
5.1.3 Electronic Circuit Board Replacement.............................................................. 105
5.1.3.1 PC-327 Analog Board .........................................................................106
5.1.3.2 PC-322/323 Main Board/Power PC Daughter Board Assembly.......... 106
5.1.3.3 Remove and Replace PC-323 on PC-322........................................... 108
5.1.4 Replacement of Transducers ...........................................................................109
5.1.5 Calibration Valve Solenoid Replacement ......................................................... 110
5.1.6 Replacement of O-Rings .................................................................................. 111
5.1.6.1 DH200 Pressure Transducer O-Ring Replacement ............................ 112
5.1.6.2 Tubing Plate O-Ring Replacement...................................................... 113
5.1.6.3 Adapter Plate O-Ring Replacement .................................................... 114
5.1.6.4 Calibration Manifold Piston O-Ring Replacement ............................... 115
5.1.6.5 Solenoid Valve O-Ring Replacement .................................................. 116
5.2 Upgrading Module Firmware........................................................................................ 117
5.2.1 Upgrading Firmware Via Host TCP/IP Port ...................................................... 117
Page iv www.PressureSystems.com
Page 6
Pressure Systems, Inc. Model 9116 User’s Manual
Table of Contents (continued)
Chapter 6: Troubleshooting Guide...................................................................................... 118
6.1 Ethernet Module Troubleshooting ................................................................................118
6.1.1 Checking Module Power-Up Sequence............................................................118
6.1.2 Checking Module TCP/IP Communications .....................................................119
6.1.2.1 Module IP Address Assignment ..........................................................119
6.1.2.2 Host IP Address Assignment for Windows® 95/98/2000/XP/NT......... 120
6.1.2.3 Verifying Host TCP/IP Communications..............................................121
6.2 Zero and Gain Calibration Troubleshooting ................................................................. 122
6.3 User Software .............................................................................................................. 123
Chapter 7: Start-up Software ................................................................................................124
7.1 Introduction .................................................................................................................. 124
Appendices:
Appendix A: All Commands – Quick Reference .....................................................................125
Appendix B: Model 9116 Response Error Codes ................................................................... 126
Appendix C: Cable Diagrams.................................................................................................. 127
Appendix D: 9116 Mounting Dimensions................................................................................ 129
Appendix E: Model 9116 Range Codes.................................................................................. 130
Appendix F: NetScannerAppendix D: 9116 Mounting Dimensions........................................ 132
Appendix G: Binary Bit Map.................................................................................................... 133
Page v www.PressureSystems.com
Page 7

Pressure Systems, Inc. Model 9116 User’s Manual
Preface
This manual describes the NetScanner
9116). It does not cover the pressure scanner Models 9016, 9021, 9022, the 98RK Scanner
Interface Rack, Model 9816 Intelligent Pressure Scanner, nor Models 903x (Pressure
Standards/Controllers. These products are covered in their individual User’s Manuals.
This manual is divided into six (6) chapters and several appendices, each covering a specific
topic. They are summarized below:
Chapter 1: General Information describes Model 9116 Intelligent Pressure
Chapter 2: Installation and Set Up describes the unpacking and inspection of a
Chapter 3: Programming & Operation provides the information needed to program a
Chapter 4: Calibration describes methods of calibrating a module.
Chapter 5: Service describes general safety precautions and
Chapter 6: Troubleshooting describes module troubleshooting techniques.
Chapter 7: Start-up Software briefly describes NUSS software.
Appendix A: All Commands — Quick Reference
Appendix B: Response Error Codes
Appendix C: Cable Diagrams
Appendix D: Module Mounting Dimensions
Appendix E: NetScanner System Range Codes
Appendix F: NetScanner
™
System Products
Appendix G: Binary Bit Map
™
System Intelligent Pressure Scanner module (Model
Scanner and its various options.
module, and its connection to power, pressure,
and a communications network.
module from a host computer and to get
meaningful data from it.
maintenance procedures.
Page vi www.PressureSystems.com
Page 8

Pressure Systems, Inc. Model 9116 User’s Manual
Our Company
Pressure Systems Incorporated, (PSI) develops, manufactures, and services level and pressure
measuring instruments where the highest level of traceable accuracy is required for aerospace,
industrial, municipal, and environmental applications. Our products have become the world
standard for electronic level and pressure measurement and scanning. We are committed to
the highest quality design, manufacture, and support of level and pressure instrumentation that
is in the best interest of our customers. PSI is an ISO-9001:2000 certified company.
Our Warranty
Pressure Systems, Inc., warrants NetScanner
material and workmanship under normal use and service for one (1) year.
™
System products to be free of defects in
Technical Support
Monday through Friday, during normal working hours, (7:30 am through 5:30 pm, Eastern time)
knowledgeable personnel are available for assistance and troubleshooting. Contact the
Applications Support Group or the Customer Services Department at Pressure Systems
(757-865-1243 or toll free 1-800-328-3665) if your scanner is not operating properly or if you
have questions concerning any of our products. E-mail assistance is available by contacting
Applications@PressureSystems.com.
Merchandise Return Procedures
If your scanner needs to be returned to Pressure Systems, obtain a Returned Merchandise
Authorization (RMA) from the Customer Service Department.
Be prepared to supply the following information when requesting the RMA:
• Part number
• Serial number
• Complete description of problems/symptoms
• Bill To and Ship To address
• Purchase order number (not required by PSI warranty repairs)
• Customer contact and telephone number
The above information, including the RMA number must be on the customer’s shipping
documents that accompany the equipment to be repaired. PSI also requests that the outside of
the shipping container be labeled with the RMA number to assist in tracking the repairs. All
equipment should be sent to the following address:
ATTN: PSI REPAIR DEPARTMENT (7-digit RMA number)
Pressure Systems, Inc.
34 Research Drive
Hampton, Virginia 23666
Page vii www.PressureSystems.com
Page 9
Pressure Systems, Inc. Model 9116 User’s Manual
PSI will return warranty items prepaid via UPS GROUND. If the customer desires another
method of return shipment, PSI will prepay and add the shipping charges to the repair bill.
Incoming freight charges are the customer’s responsibility. The customer is also responsible for
paying shipping charges to and from PSI for any equipment not under warranty.
All products covered under the PSI warranty policy will be repaired at no charge. An analysis
fee will be charged to quote the cost of repairing any item not under warranty. If, for any
reason, the customer decides not to have the item repaired, the analysis fee will still be
charged. If the quote is approved by the customer, the analysis fee will be waived. The quote
for repair will be based on the PSI flat rate for repair, calibration, and board replacement. When
these prices do not apply, the quote will be based on an hourly labor rate plus parts. All
replaced parts are warranted for 90 days from the date of shipment. The 90-day warranty is
strictly limited to parts replaced during the repair.
Website and E-Mail
Visit our website at www.PressureSystems.com to look at our new product releases, application
notes, product certifications, and specifications. E-mail your questions and comments to us:
Sales@PressureSystems.com
.
Our Firmware
This manual was prepared for various versions of module firmware as were released at
the time of this manual publication. Addenda will be distributed as deemed necessary
by PSI. Any questions regarding firmware upgrades may be addressed to the
Applications Support Group. Firmware revisions, manual addenda, and utility
software may also be obtained from the PSI web page at www.PressureSystems.com.
Our Publication Disclaimer
This document is thoroughly edited and is believed to be thoroughly reliable. Pressure
Systems, Inc., assumes no liability for inaccuracies. All computer programs supplied
with your products are written and tested on available systems at the factory. PSI
assumes no responsibility for other computers, languages, or operating systems. PSI
reserves the right to change the specifications without notice.
Page viii www.PressureSystems.com
Page 10
Pressure Systems, Inc. Model 9116 User’s Manual
Chapter 1
General Information
1.1 Introduction
This User’s Manual will:
! Explain the electrical and pneumatic pressure connections for the Model 9116 Intelligent
Pressure Scanner.
! Provide computer set-up instructions to make a proper Ethernet connection on most
Windows
! Instruct you on using the PSI start-up software to manipulate and acquire data from each
module.
! Instruct you on how to program each module with computer software.
Model 9116 is a pneumatic Intelligent Pressure Scanner, with integral pressure transducers and
a pneumatic calibration manifold.
The Model 9116 provides engineering unit pressure data with guaranteed system accuracy.
This is achieved by reading factory-determined pressure and temperature engineering-unit data
conversion coefficients from its transducers’ nonvolatile memories at power-up. It also allows
additional adjustment coefficients to be “fine-tuned” with a multi-point calibration under host
control (e.g., possibly utilizing optional Pressure Systems 903x Pressure Calibrator modules).
Model 9116 provides an auto-configuring 10BaseT/100BaseT Ethernet communications port.
Half duplex/full duplex operation is also automatically configured. The Model 9116
communicates using the TCP/UDP/IP protocols.
The Model 9116 Intelligent Pressure Scanner is a component of a networked data acquisition
concept called the NetScanner™ System. Multiple NetScanner modules measuring a wide
variety of parameters can be networked to form a distributed intelligent data acquisition system.
®
95/98/XP/NT-based personal computers.
Page 1 www.PressureSystems.com
Page 11
Pressure Systems, Inc. Model 9116 User’s Manual
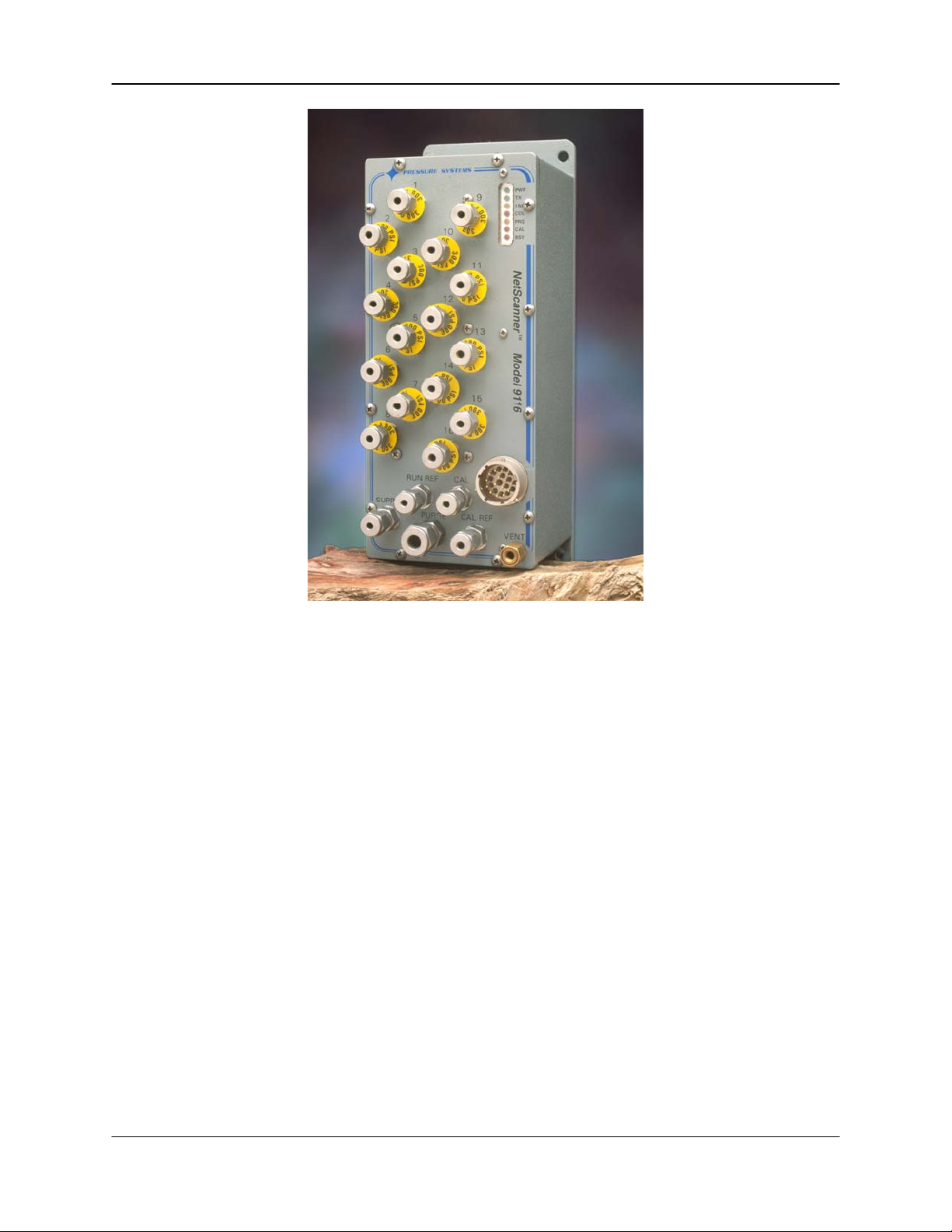
Figure 1.1
Model 9116 Intelligent Pressure Scanner
1.2 Description of the Instrument
The Model 9116 is available with16 channels, each with individual pneumatic transducers per
channel. The most distinctive features are highlighted below:
● Pre-calibrated Transducer - a memory chip containing full calibration data is embedded
within each internal transducer.
● Individual transducer per measurement input channel - mixed transducer ranges may
be installed in a single Model 9116 module.
● Low cost per point - per-channel cost is less than a typical industrial pressure
transducer/transmitter.
Page 2 www.PressureSystems.com
Page 12

Pressure Systems, Inc. Model 9116 User’s Manual
● High accuracy - Model 9116 pressure scanners are capable of accuracies up to
±0.05%. Accuracy is maintained through use of built-in re-zero, span, or multi-point
calibration capabilities. Accuracies are maintained for six (6) months after calibration.
● Low thermal errors - each internal transducer contains an individual
temperature sensor and thermal calibration data for internal use by software
correction algorithms. Thermal errors are reduced as low as ±0.001%FS/ºC over
the calibrated temperature span.
● Re-zero upon demand - an integrated calibration valve allows for automatic re zero adjustment calibration of dry gas transducers to null offset drift errors.
● Ease of transducer replacement - factory calibrated transducer assemblies may
be stocked and rapidly replaced in the field. Storage of thermal coefficients
within the transducer allows for ‘plug and play’ transducer replacement.
● Ease of calibration - each Model 9116 module contains a pneumatic
calibration manifold and software commands to automatically perform re-zero,
span, and multi-point adjustment calibrations. New offset and gain coefficients
that result from the most recent calibration may be stored in non-volatile
transducer memory.
● Ease of use - modules have simple command sets and provide engineering units
output. They may interface directly to a desktop or laptop computer or they may
be interconnected into a large network controlled by many types of host
computers.
● Connectivity - use of industry-standard communications network protocols to
control and read data from NetScanner
™
System modules allows distribution to
the point of measurement and ensures compatibility with third party hardware
and software.
1.2.1 Differences Between Models 9016 and 9116
The all new electronics of the Model 9116 reduces data acquisition noise and capture latency,
while actually improving channel settling time and boosting data throughput. Additionally, the
Ethernet interface has been upgraded to 10BaseT/100BaseT with half and full duplex
capabilities to provide significant flexibility in network configuration. The Ethernet interface is
completely auto-configuring, ensuring the best utilization of network capabilities, while ensuring
the maximum backward compatibility. The trigger circuitry has been upgraded to allow triggering
on positive, negative, or both transitions of the trigger signal. By configuring the Model 9116 to
trigger on both transitions, the Model 9116 can be integrated into existing systems, providing
twice the data throughput for most users, without modification to the system trigger circuit.
The firmware in the Model 9116 implements the Model 9016 command set further simplifying
use with existing systems. In fact, the Model 9116 can be configured to report its identity as a
Model 9016 to ensure compatibility with system software that is sensitive to the reported model
type.
Page 3 www.PressureSystems.com
Page 13
Pressure Systems, Inc. Model 9116 User’s Manual
Consolidated below are the new commands added to the Model 9016 command set, as well as
differences in existing commands, command parameters, or command responses:
Set Module type alias: w3200 xxxx
See the ‘SET/DO OPTION/FUNCTIONS’ (command ‘w’)’ in Section 3.2.
Configures the Model 9116 to report its model type as Model 9116 or as a
Model 9016 for compatibility with model type sensitive system software.
Set Hardware Trigger Mode: w320x
See the ‘SET/DO OPTION/FUNCTIONS’ (command ‘w’)’ in Section 3.2.
Configures the trigger to response to positive going, negative going, or to
any transition on the trigger input.
Query the Hardware Trigger Mode: q32
See the ‘READ MODULE STATUS’ (command ‘q’)’ in Section 3.2.
The Model 9116 will respond with a 1, 2, or 3 indicating, respectively, that its
trigger is set to respond to a positive going, negative going or to any
transition on the trigger input. The Model 9016 will respond to this command
with an ‘N08’.
Query the Module Hardware Version: w31
See the ‘READ MODULE STATUS’ (command ‘q’)’ in Section 3.2.
The Model 9116 will report the version of hardware present as a floating
point number of the format x.xxxxxx The Model 9016 will respond to this
command with a ‘N08’.
Modifications to existing commands, (See Section 3.2):
In the ‘CONFIGURE A HOST DELIVERY STREAM’ (command ‘c’), the sync delay
can now be set as small as 2 milliseconds and the granularity is 2 milliseconds with
all other values rounded down to the nearest 2 milliseconds. This value was 10
milliseconds in the Model 9016.
In the Set Number of A/D Samples to Average, (command ‘w’). the minimum
value and the default value is 4. The interleaved instrumentation amplifiers utilized
in the Model 9116 allows it to provide the same throughput with one to four
averages. With the quieter electronics of the Model 9116 and no speed advantage
for lower numbers of averaged samples, the minimum and default is set to four.
Valid values are 4, 8, 16, 32, and 64. Other values below 64 are rounded up to the
next valid value listed above.”
Page 4 www.PressureSystems.com
Page 14

Pressure Systems, Inc. Model 9116 User’s Manual
Additional enhancements to the Model 9116
Software Scan List Speeds:
Software Scan lists can be run as fast as hardware trigger scan lists on the
Model 9116 (~500 Hz. See specification sheet). The Model 9016 was
limited to 100 Hz maximum software trigger scan lists.
Firmware Updates/Boot Loader:
The firmware in the Model 9116 may be updated in situ, over its Ethernet
connection. This is the preferred method for updating the firmware and may
be invoked at any time. (See Section 5.2.1).
The user must connect to the updated module. Establishing a TCP/IP
connection is the last step in validating a successful firmware update. If the
unit is power-cycled four times without establishing a TCP/IP connection, the
firmware update will be tagged as invalid. The Model 9116 contains a
protected resident boot loader that will then take over operation of the
module. The resident boot loader resides in protected memory. It monitors
the state of the firmware and the operation of any downloads. Even in the
event of a power failure during a firmware update, upon return of power, the
resident boot loader will be available, and will establish communications for
downloading new firmware. The user can determine that the Model 9116 is
in boot loader mode by observing that the firmware version reported by the
module is less than 1.0 In boot loader mode, the Model 9116 will return an
‘N08’ in response to the ‘a’, ‘c’, ‘m’, ‘n’, ‘r’, and ‘t’ commands.
1.3 Options
1.3.1 Pressure Ranges
Model 9116 contains sixteen (16) DH200 transducers. These transducers are available with full
scale pressure ranges from 10" H
kPa). Transducers with different pressure ranges may be combined in a single module.
Please consult the Sales Department at Pressure Systems for availability of other pressure
ranges (1-800-678-SCAN (7226)).
1.3.2 Manifolds and Pressure Connections
Model 9116 sixteen-channel Intelligent Pressure Scanners are available with a true differential
or common reference pneumatic manifold, and have a standard purge and leak check manifold.
They are available with standard 1/8" or optional 1/16" and 1/4" compression fittings. All fittings
utilize an SAE 5/16 - 24 O-ring boss which supports a variety of other adapter compression
fittings. They are also available with a quick disconnect plate which contains 0.063" bulge
tubulation. The common differential version is available with all choices of fittings. The true
differential version is available with 0.063" bulged tubulation fittings only.
Consult the Sales Department at Pressure Systems at 1-800-678-SCAN (7226) for availability of
other input fittings.
Page 5 www.PressureSystems.com
O (inches of water column) to 750 psid (2.5 kPa to 5200
2
Page 15

Pressure Systems, Inc. Model 9116 User’s Manual
1.3.3 Communication Interfaces
All standard NetScanner
compensated and linearized pressure data in engineering units via digital methods. They have a
10BaseT Ethernet host communications interface using industry standard TCP/IP or UDP/IP
protocol. This interface provides high data transfer rates and system connectivity. The Model
9116 adds auto-configuring 10BaseT/100BaseT, half duplex/full duplex capabilities for improved
network flexibility.
™
System Intelligent Pressure Scanners provide temperature
Page 6 www.PressureSystems.com
Page 16
Pressure Systems, Inc. Model 9116 User’s Manual
Chapter 2
Installation and Set Up
2.1 Unpacking and Inspection
The NetScanner
either as an entire system, or as individual pieces of equipment. Before assembling the system,
use the shipping bill as a reference to ensure that all parts have arrived. Pressure Systems
takes no responsibility for equipment that is damaged during shipment. If containers are
broken, ripped, or damaged, contact the transportation carrier. If the equipment itself appears
to be damaged, contact the Repair Department at Pressure Systems.
Each Model 9116 Intelligent Pressure Scanner shipment will contain the following minimum
components:
• Model 9116 Intelligent Pressure Scanner module
• Start-up software CD-ROM
• Model 9116 User’s Manual for Intelligent Pressure Scanners CD-ROM
™
System product family has many components which may be purchased
2.2 Safety Considerations
It is always a good idea to wear safety glasses when operating this equipment or when working
with pressurized lines. Always ensure that high pressure lines are properly secured and that all
pneumatic lines are rated for the proper pressure and temperature environments.
All system power should be OFF during installation (or removal) of any components in a
NetScanner
permanent damage to the module. Use caution and check line voltages before applying power
to the module.
™
System module. Failure to turn power OFF prior to installation may cause
2.3 Preparation for Use
2.3.1 Environment
All standard Intelligent Pressure Scanners are factory calibrated to be accurate over a specified
temperature range, but may be operated or stored over a wider temperature range (see
Environmental/Physical Specifications in the Model 9116 Data Sheet. Operating or storing
an instrument outside its specified range(s) will result in a loss of measurement accuracy and
may cause permanent damage to the instrument electronics.
Page 7 www.PressureSystems.com
Page 17
Pressure Systems, Inc. Model 9116 User’s Manual
WARNING: Exceeding the specified storage or operating temperatures may result
in permanent damage to the Model 9116 electronics.
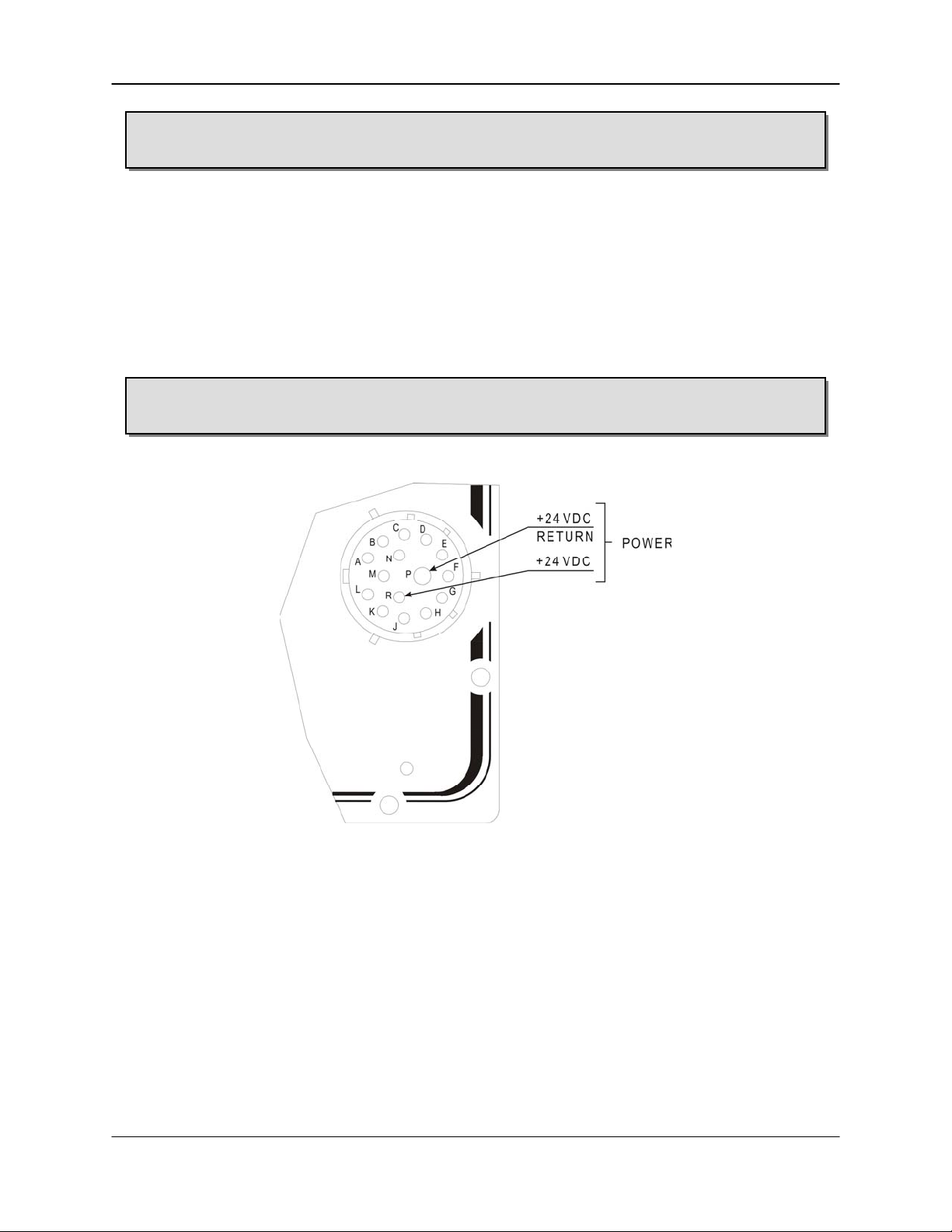
2.3.2 Power
The Model 9116 Intelligent Pressure Scanner needs only a single unregulated power supply.
See the Model 9116 Data Sheet for actual power requirements.
Model 9116 has a single round, ruggedized connector through which all power and input/output
signals pass as shown in Figure 2.1.
WARNING: Improper connection of power to the Intelligent Pressure Scanner can
result in permanent damage to module electronics.
Figure 2.1
9116 Power Pin Assignments
Page 8 www.PressureSystems.com
Page 18
Pressure Systems, Inc. Model 9116 User’s Manual
2.3.3 Mounting and Module Dimensions
See the Model 9116 Data Sheet for exact dimensions of the module. A detailed mechanical
drawing is also included in Appendix E.
2.3.4 Network Communications Hookup
Every NetScanner
interconnected in a network with other modules and a host computer. Model 9116 has an
Ethernet Host Port using TCP/IP and UDP/IP transmission protocols.
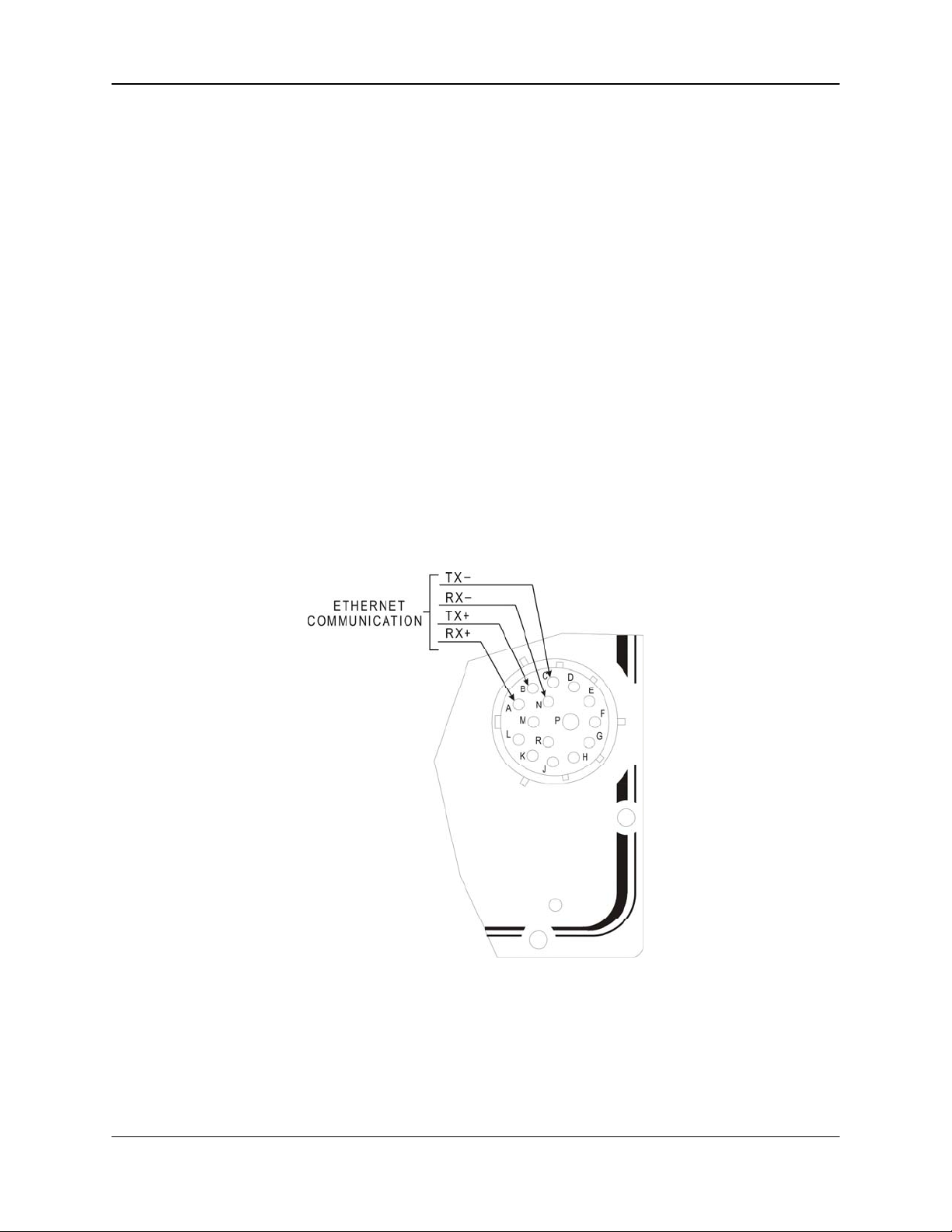
2.3.4.1 Ethernet Host Port Hookup
The Ethernet Host port of every Model 9116 Intelligent Pressure Scanner module, and its host
computer, may be interconnected in a “star” network via a standard 10BaseT or 100BaseT, half
or full duplex hub or switch. These standard devices will have their own power requirements.
Hubs will treat the host computer connection and all NetScanner
alike. Switches may provide, or negotiate different speeds and/or different handshaking on its
various ports. The Model 9116 will auto-negotiate through the hub or with the switch, for a half
or full duplex connection at 10BaseT or 100BaseT speeds, establishing the best connection
available. Ethernet communications pin assignments for the Model 9116 electrical connector
are shown in Figure 2.2. See Figure 2.3 for typical network topology.
™
System Intelligent Pressure Scanner contains a Host Port, allowing it to be
™
System module connections
Figure 2.2
Ethernet Host Port Connector Pins
Page 9 www.PressureSystems.com
Page 19

Pressure Systems, Inc. Model 9116 User’s Manual
The host and each module must have a unique Ethernet Hardware Address (a.k.a. MAC
Address) and a unique IP Address. The Ethernet Hardware address is generally fixed (at
manufacturing time of the Ethernet microprocessor board inside the module). The Ethernet
Hardware address is shown on each module’s label. The Ethernet Intelligent Pressure
Scanners are capable of supporting various methods for IP address assignment, using either
the factory default (static IP addressing) or user-configured Static IP addressing or Dynamic IP
address assignment. Dynamic IP address assignment is through the use of RARP or BOOTP
protocols. Unless your application requires the use of Dynamic IP address assignments, it is
strongly suggested that the module be left configured for the Static IP address protocol. This
default method is typically the simplest method for using the Intelligent Pressure
Scanner.
In the Static IP addressing mode, the module will use a factory default IP address on power-up.
This default address is set to 200.20x.yyy.zzz where x is derived from the module type (0 for
Model 9116 and 1 for 9021/9022) and yyy.zzz is derived from the module serial number. A
similar method is used to calculate each module’s Ethernet hardware address shown on the
module tag. Note that each of these fields (separated by a period, ‘.’) is a decimal
representation of a byte value. This means that each field may have a maximum value of 255.
For Model 9116 modules, the default IP address will be 200.200.y.zzz where y and zzz are
calculated as follows:
y is the integer result of dividing the module serial number by 256.
zzz is the remainder of dividing the serial number by 256 (serial number modulus 256).
These calculations may be verified by checking that y * 256 + zzz equals the original module
serial number. Once a module has powered-up and has assigned itself a default IP address, it
is capable of communications.
An alternate method for assigning an IP address to an Ethernet module is referred to as a
Dynamic IP assignment. This method allows a module to have its IP address dynamically
assigned at power-up by an application running on a node of the TCP/IP or UDP/IP network.
When configured for Dynamic IP address assignment protocols, the reset module will broadcast
its Ethernet hardware (MAC) address on the network in a Dynamic IP request packet. This
broadcast packet identifies the module by its hardware address and requests that a dynamic IP
server application return to it an IP address for use. Once this broadcast message is received,
the dynamic server application will then return an IP address to the module in a dynamic IP
reply packet. Most dynamic IP server applications determine this IP address from a user
maintained file that lists Ethernet hardware addresses with their desired IP address. If modules
are added to the network or module IP addresses are to be changed, the user can simply edit
this configuration file. This capability is common on most UNIX based machines and is also
available (although less common) in some TCP/IP packages available for PC platforms.
Support of the Dynamic IP server protocol is not currently included in the Windows
Windows
Dynamic IP capabilities of the Model 9116, a simple Windows
®
NT operating systems. In order to allow users of PC platforms to make use of the
®
95/98/XP/NT application was
®
95/98/XP or
developed by Pressure Systems which is capable of acting as a Dynamic IP server. This
application is referred to as BOOTP Lite since it actually makes use of the BOOTP protocol that
closely resembles the Dynamic IP request. Like traditional dynamic IP servers, this application
allows the user to configure a file that contains Ethernet hardware addresses and the
corresponding IP address to assign to those devices. This application is free of charge and
capable of running as a background program on Windows
®
95/98 and NT machines. It may be
downloaded from the PSI home page, www.PressureSystems.com.
Page 10 www.PressureSystems.com
Page 20
Pressure Systems, Inc. Model 9116 User’s Manual
Use of Static or Dynamic IP settings may be selected through the Set Operating Options ('w')
command. If you are unsure how your module is configured, check the Tx LED during module
power-up. If it begins to blink periodically after the module power-up, your instrument is
configured for the Dynamic IP assignment protocol. (Tx LED remains OFF in static IP
configuration.) If configured for Dynamic IP assignment, a dynamic server must be configured
on the network to return an IP address to the module. Without an IP address, the host will be
unable to open a TCP/IP or UDP/IP connection to the module.
Note
Obtaining the maximum performance of an Ethernet network is a
complex process, involving many tradeoffs and is best performed by
IT professionals or other personnel familiar with Ethernet
parameters, topologies, and equipment capabilities. See Pressure
Systems Web site (www.PressureSystems.com)
for application
notes and characteristics of the Model 9116 together with some
hints for its use in high-speed, high-volume Ethernet networks.
Note
After closing the TCP/IP connection to the Model 9116, the host must
wait 10 seconds before re-connecting.
Page 11 www.PressureSystems.com
Page 21
Pressure Systems, Inc. Model 9116 User’s Manual
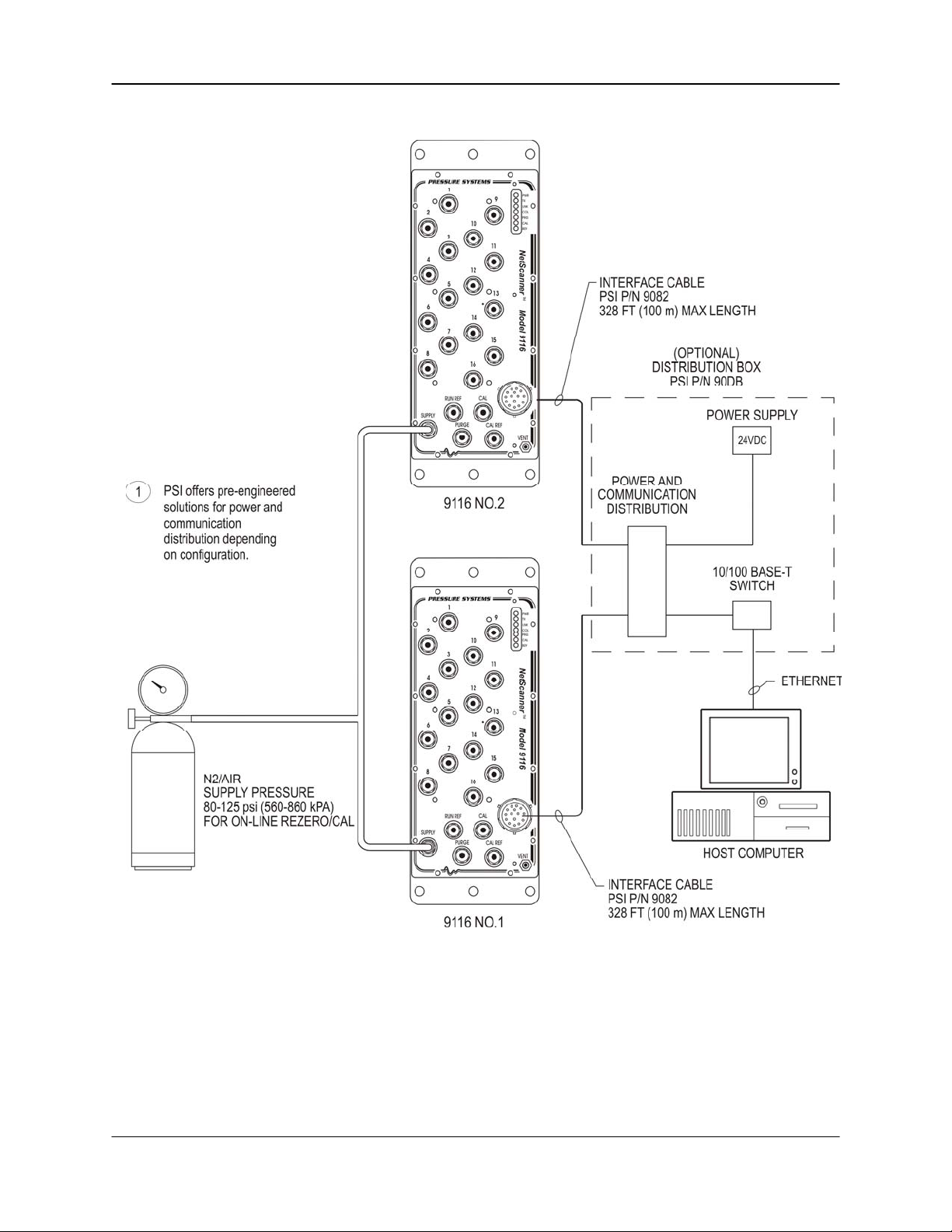
Figure 2.3
Ethernet Network Topology
Page 12 www.PressureSystems.com
Page 22
Pressure Systems, Inc. Model 9116 User’s Manual
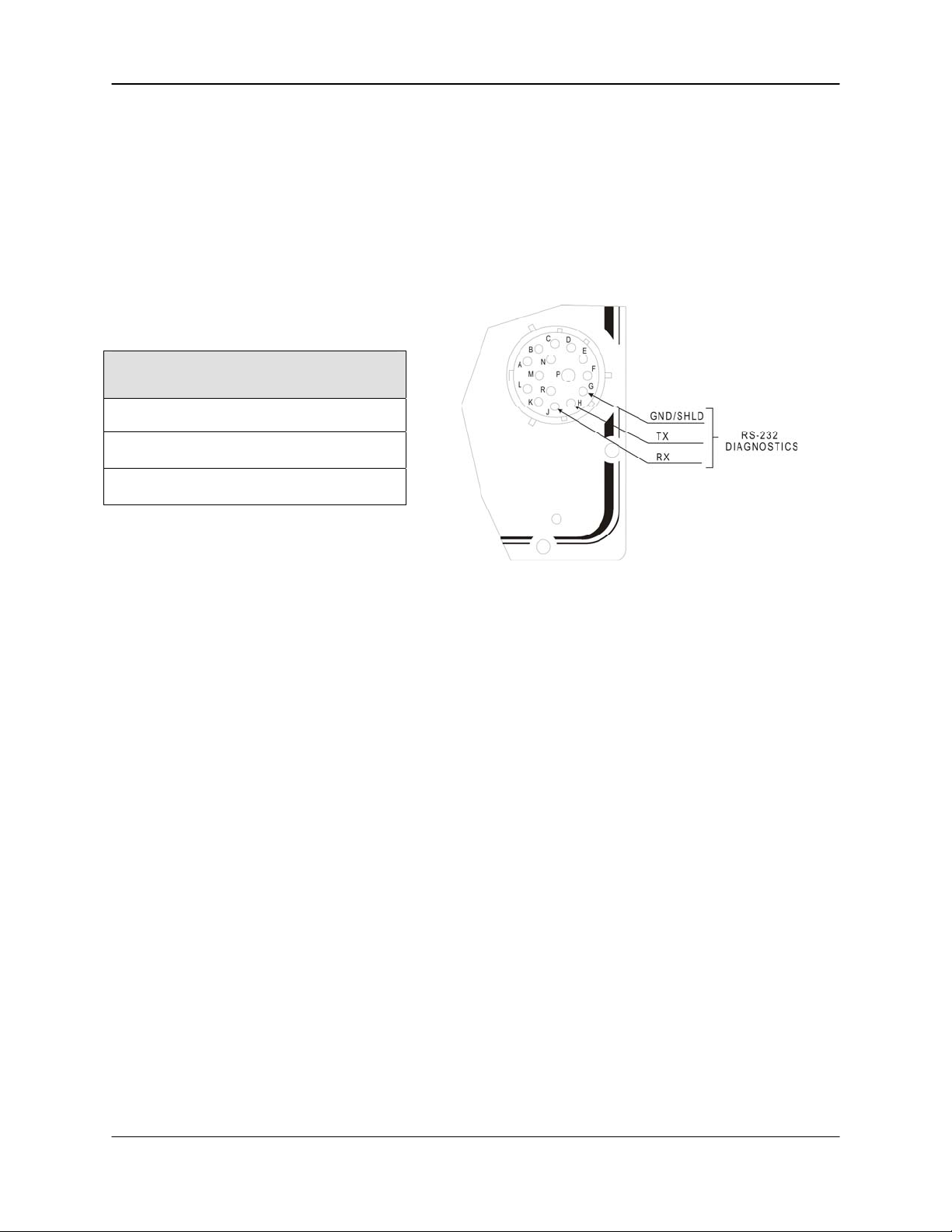
2.3.5 Diagnostic Port Hookup
Each NetScanner
operational functions. The Diagnostic Port has only a simple RS-232 asynchronous serial
interface. The connections are made via certain pins of its common circular connector. Cable
connection should be made according to Table 2.1.
NetScanner™ System
Diagnostic Port Connector
The RS-232 interface is capable of supporting simple asynchronous communications with fixed
parameters of 9600 baud, no parity, 8 data bits, and 1 stop bit. Only communication cable
lengths less than 30 feet (10 m) are recommended.
The Model 9116 uses the diagnostic interface for optional configuration and diagnostic
purposes only. The diagnostic port functions on the Model 9116 is generally not required by the
end user. Standard cables for this module do not include diagnostic port connections.
™
System module contains a Diagnostic Port that supports diagnostic and
Table 2.1
Diagnostic Port Wiring
GND
Tx
Rx
2.3.6 Pressure Connections
All pneumatic connections to Model 9116 are found on the instrument top panel. The function
of each input port is clearly engraved or printed next to each input. Connections are through
bulge tubing, compression fittings, or special user-supplied fittings on the tubing plate. All
pneumatic inputs to the Model 9116 should contain only dry, non-corrosive gas.
All Model 9116 standard Intelligent Pressure Scanners are supplied with the purge/leak check
calibration manifold. Through software commands, this valve may be placed in one of four
positions; RUN, CAL, PURGE, or LEAK-CHARGE. Pneumatic input requirements for these
four operating positions are described in the following sections.
Page 13 www.PressureSystems.com
Page 23
Pressure Systems, Inc. Model 9116 User’s Manual
The following guidelines should be used when installing pressure connections to the Model
9116 Intelligent Pressure Scanner modules.
● Always wear safety glasses when working with pressurized lines.
● Ensure that user input pressure will not exceed the proof pressure ratings of
the corresponding instrument transducer. Applying excessive pressure to
measurement inputs can permanently damage the pressure transducers.
● Ensure that all tubing material is rated for the expected pressure and
environmental conditions. Failure to use the proper tubing material may
result in ruptured lines and possible personal injury.
● Ensure all high pressure lines are properly secured.
● Place retaining springs over all bulge tube fittings to ensure pneumatic lines
remain attached and leak free. Springs should be pushed down on
connections so that half of the spring length extends past the tube bulge.
Warning: Introduction of contaminants or corrosive materials to the module
pneumatic inputs may damage module transducers, manifolds, and O-ring seals.
2.3.6.1 RUN Mode Inputs
The standard pneumatic tubing plate for the Model 9116 contains sixteen numbered pneumatic
input channels. These numbered inputs are attached to corresponding pressure transducers
inside the instrument and should be pneumatically attached to the pressure measurement
points under test.
The standard tubing plate also contains an input labeled RUN REF. The RUN REF input is
pneumatically connected to the reference side of all internal DH200 pressure transducers. The
RUN REF connection is used for situations where all channels have one reference pressure.
The reference pressure may be as high as 250 PSI (1720 kPa). See the Model 9116 Data
Sheet for detailed specifications. This input may also be left unattached to provide atmospheric
reference pressure.
When using instruments with the reference per channel option (true differential), two pneumatic
inputs will be provided for every numbered channel. These inputs are labeled ‘P’ and ‘R’. The
‘P’ connection is the test pressure input. The ‘R’ connection is the transducer reference input
pressure. Since each channel has its own reference pressure input, the RUN REF input is not
provided on the true differential tubing plate.
Page 14 www.PressureSystems.com
Page 24
Pressure Systems, Inc. Model 9116 User’s Manual
p
2.3.6.2 CAL Mode Inputs
The Model 9116 tubing plates contain inputs labeled CAL and CAL REF. When the module’s
internal calibration valve is placed in the CAL/RE-ZERO position, all DH200 transducer
pressure inputs are pneumatically connected to the CAL input port. All DH200 reference inputs
are pneumatically connected to the CAL REF input port. The CAL input may be used to
perform on-line zero adjustment of the transducers. The CAL input may also be used for DH200
span adjustment calibrations and accuracy tests if appropriate pressure calibrators (such as the
903x series) are available. Span calibration of multi-range scanners may also utilize the CAL
port if the highest applied pressure does not exceed the proof pressure rating of any other
installed transducer, otherwise the individual transducers must be calibrated with the valve in
the RUN position.
When the internal calibration valve is in the CAL/RE-ZERO position, the RUN inputs (RUN REF
and numbered input ports) are pneumatically dead-ended to prevent migration of contaminants
into the instrument.
2.3.6.3 PURGE Mode Inputs
All standard Model 9116s contain a purge/leak check option. The purge option allows users to
apply positive pressure to the PURGE input which will then be vented out of the user input
ports, forcing contaminants (such as moisture) out of the pneumatic input lines. Note that on
common reference Model 9116 scanners, only the numbered input ports will be purged
(RUN REF is not purged). True differential Model 9116 scanners will purge both the run and
reference input ports for all channels. The purge supply provided to the Model 9116 must
always be a higher pressure than the highest pressure present on the input ports of the
module. The purge supply must also be capable of maintaining proper purge pressure at
the high flow rates encountered while the module is in the purge mode.
Warning: Failure to provide proper purge supply pressure will result in
migration of moisture and contaminants into the Model 9116 module which can
result in
ermanent damage to module components.
When commanded into the PURGE position, the purge input pressure will be connected to the
numbered measurement input ports allowing for a flow of air away from the instrument. The
purge cycle should be terminated by commanding the Model 9116 into a non-purge mode such
as CAL. Purge cycles should never be terminated by turning off the purge supply air
while in the purge position.
Page 15 www.PressureSystems.com
Page 25
Pressure Systems, Inc. Model 9116 User’s Manual
2.3.6.4 LEAK Mode Inputs
The purge/leak charge valve design includes a leak check feature capable of testing the
integrity of user pneumatic connections as well as those within the Model 9116 module. For the
leak mode to be used, all RUN mode pressure inputs must be dead ended (closed) by the user.
When the Model 9116 is commanded into the LEAK-CHARGE position, the CAL input port will
be pneumatically connected to module run side inputs. Common reference modules will
connect only the numbered run side inputs to CAL (RUN REF is not charged). True differential
(reference per port) modules will connect both the measurement input and reference port to
CAL. While in the LEAK-CHARGE position, a test pressure may be applied through the CAL
port which will charge the dead ended run side tubulation.
Test pressures applied to the CAL port during the leak check
Note
operation must not exceed the full scale pressure of any internal
transducers.
Once the lines are charged, the Model 9116 may be commanded back to the RUN position.
This will reattach the charged run side lines to their corresponding internal transducer.
Consecutive pressure readings from the Model 9116 will now allow user calculation of the line
leak rates. Once returned to the RUN position, lack of a pressure indicates a gross leak. A
slowly declining pressure indicates a slight leak. A leak is more difficult to detect as tubing
volume increases. In the case of true differential units where both sides of the sensor are
pressurized with the leak test pressure, an initial differential pressure of 0.0 psi should be
measured when the unit is placed in the RUN position. If the measurement or RUN side of the
channel leaks at a rate greater than the reference side, a resulting negative differential pressure
will be measured. Likewise, if the reference port tubing leaks at a rate greater than the
measurement side, a resulting positive differential pressure will be measured.
2.3.6.5 Supply Air
The Model 9116 modules require an 80 psig minimum dry air (or inert gas) supply which is used
to shift the internal calibration valve between its different positions. Each module contains a
fitting marked “SUPPLY” for this input. Internal solenoid valves direct this supply pressure to
the proper control port on the calibration valve as required by instrument commands. The
absence of sufficient supply air to the module will prevent the calibration valve from shifting into
requested positions (i.e., RUN, CAL, PURGE, LEAK-CHARGE).
WARNING! Supply air should not exceed 125 psi (875 kPa). Excessive pressure
may damage the internal solenoids.
Page 16 www.PressureSystems.com
Page 26

Pressure Systems, Inc. Model 9116 User’s Manual
2.3.7 Case Grounding
The Model 9116 module contains a case bypass capacitor which allows the module case to be
mounted on hardware with a small common mode line voltage (less than 20 Volts).
2.3.8 Trigger Input Signal
Model 9116 supports the use of a data acquisition synchronization signal, sometimes called
“Hardware Trigger.” When configured through the Define/Control Host Stream (‘c’) command,
the trigger signal can be used to initiate and synchronize data acquisition and stream outputs to
the host.
The trigger signal is intended to be a 2-wire differential signal brought in through the Model
9116 main electrical connector. The signal may be driven by a standard TTL compatible device.
The switching threshold for this signal is set at 2.5 VDC.
2.3.9 Power Up Checks and Self-Diagnostics
Upon power-up of the module, the internal firmware will perform a number of self-diagnostic
checks. The results of these tests are reflected by the ‘OK’ LED on the top panel. The Model
9116 module completes the power up and self diagnostic.
See Chapter 6, Troubleshooting Guide for additional information and potential problem areas
during the power-up sequence.
Page 17 www.PressureSystems.com
Page 27
Pressure Systems, Inc. Model 9116 User’s Manual
Chapter 3
Programming and Operation
3.1 Commands & Responses
3.1.1 Introduction
This chapter describes all commands a host computer program may send to a Model 9116
Intelligent Pressure Scanner module, as well as the data or status responses returned by the
module. Most applications require a working knowledge of only a small number of these
commands.
Model 9116 has an Ethernet interface, and uses layered TCP/IP or UDP/IP transmission
protocols to communicate with a host computer. All commands/responses to/from Model 9116
modules are embedded in the data fields of either a TCP or UDP packet header. In turn, these
packets are themselves embedded in the data field of an IP packet header, which is embedded
in the data field of an Ethernet packet header. Thus, the term layered protocols.
3.1.1.1 TCP/UDP/IP Protocols
Both TCP/IP and UDP/IP protocols are a well-established set of rules for communicating over a
network (LAN, intranet, or internet), and are independent of the network’s physical medium. All
the modules use the TCP/IP protocols for most commands and responses since the TCP layer
provides a robust error detection and correction mechanism. TCP/IP requires a formal
connection be established between host and module. The simpler UDP layer, requiring no
formal connection, is utilized for a subset of commands and query responses.
Using the underlying basic IP protocol, the host computer and interconnected modules are all
“peers” that can communicate equally. Each “peer” must have its own unique “logical” IP
Address (as well as its own unique “physical” Ethernet Address) to be directly addressed. Any
“peer” may initiate transmissions without permission from the receiver. In the NetScanner
System implementation, the host computer is normally a client and generally initiates most
transmissions by sending commands to the modules, which are normally servers. However, a
module can initiate its own transmissions in some operating modes (e.g., the hardware-
triggered or free-run autonomous host streams generated by the Configure/Control
Autonomous Host Streams (‘c’) command).
A “peer” may be directly addressed by its IP address (in xxx.xxx.xxx.xxx format), or by use of a
predefined logical name that allows its IP Address to be looked-up in the sender’s database or
in a central network server’s database. The Windows
a simple text file database called “Hosts.” Review the file “Hosts.sam” in the “C:\windows”
directory. Modify and rename it “Hosts.” (no file extension) to activate it.
Before the host computer and any module can communicate with the higher level TCP/IP
protocols, the host (client) must request a connection be established with the module (server).
Each module expects all such requests for connection to be requested by its IP Address, and
®
95/98/XP/NT operating systems provide
™
Page 18 www.PressureSystems.com
Page 28
Pressure Systems, Inc. Model 9116 User’s Manual
directed to “well-known” port 9000 (default). After the connection is made, a socket is
established as a logical handle to this connection. The host and module may then
communicate, via this socket, until it is closed or is lost at either module or host end, due to
power failure or reboot). The host and module may also communicate in a limited fashion
without a connection, using the middle-level UDP/IP protocols. In that case, the host simply
broadcasts commands via port 7000, and each module (that chooses to respond) returns the
response on port 7001. Only a few commands use UDP/IP in Model 9116 modules.
3.1.2 Commands
The commands (and responses) used by Model 9116 modules consist of short strings of ASCII
characters. The TCP/IP and UDP/IP protocols allow for the transfer of either printable ASCII
characters or binary data. When using certain formats, internal binary data values are often
converted to ASCII-hex digit strings externally. Such values may include the ASCII number
characters ‘0’ through ‘9,’ the uppercase ASCII characters ‘A’ through ‘F,’ and the lowercase
letters ‘a’ through ‘f’.’ These hex values may represent bit maps of individual options, or actual
integer or floating point (IEEE) binary data values. In other cases (see optional format 7 below)
binary data may be transmitted directly as 4-byte (32-bit) binary values without any formatting
change. Such binary transmissions use big-endian (default) byte ordering but may be
commanded to use little-endian for some data.
3.1.2.1 General Command Format
A typical TCP/IP command (contained in the data field following a TCP packet header) is a
variable-length character string with the following general fields:
! a 1-character command letter (c).
! an optional position field (pppp), a variable length string of hexadecimal digits.
! a variable number of optional datum fields ( dddd): each a variable length string, normally
formatted as a decimal number (with a leading space character, and with or without sign
and/or decimal point, as needed).
Using brackets ( [ ] ) to show optional elements, and ellipsis ( ...) to show indefinite repetition, a
typical TCP/IP command may be viewed schematically as follows:
“c[[[[p]p]p]p][ dddd][ dddd]...]”
From this schematic, it should be clear that the command letter (c) is required, the position field
(pppp) immediately follows it, and may have 0, 1, 2, 3, or 4 characters, and there may be zero
or more datum fields ( dddd), as required. For simplicity, the variable length nature of each “
dddd” string is not shown [with brackets] above, but the required leading space character is
shown. The position field is similarly simplified (as “pppp”) below.
Page 19 www.PressureSystems.com
Page 29
Pressure Systems, Inc. Model 9116 User’s Manual
A typical UDP/IP command (contained in the data field following a UDP packet header) is also a
variable length character string, but has a simpler format. Generally, it has a variable length
command string (cccccc), followed by one optional datum ( dddd) field (preceded by one space
character):
“cccccc[ dddd]”
Since there are only a few simple UDP/IP commands, all references to commands below should
assume TCP/IP commands, unless otherwise indicated.
3.1.2.2 Command Field
All Model 9116 scanners recognize a set of predefined commands. Most are TCP/IP
commands, having only a single alphabetic letter for a command field. These are recognized
only when a formal socket connection is established with the host computer. A few are UDP/IP
commands with a longer command field. These are recognized any time the module has power
applied. All commands are functionally summarized in the following sections and detailed in
reference Section 3.2.
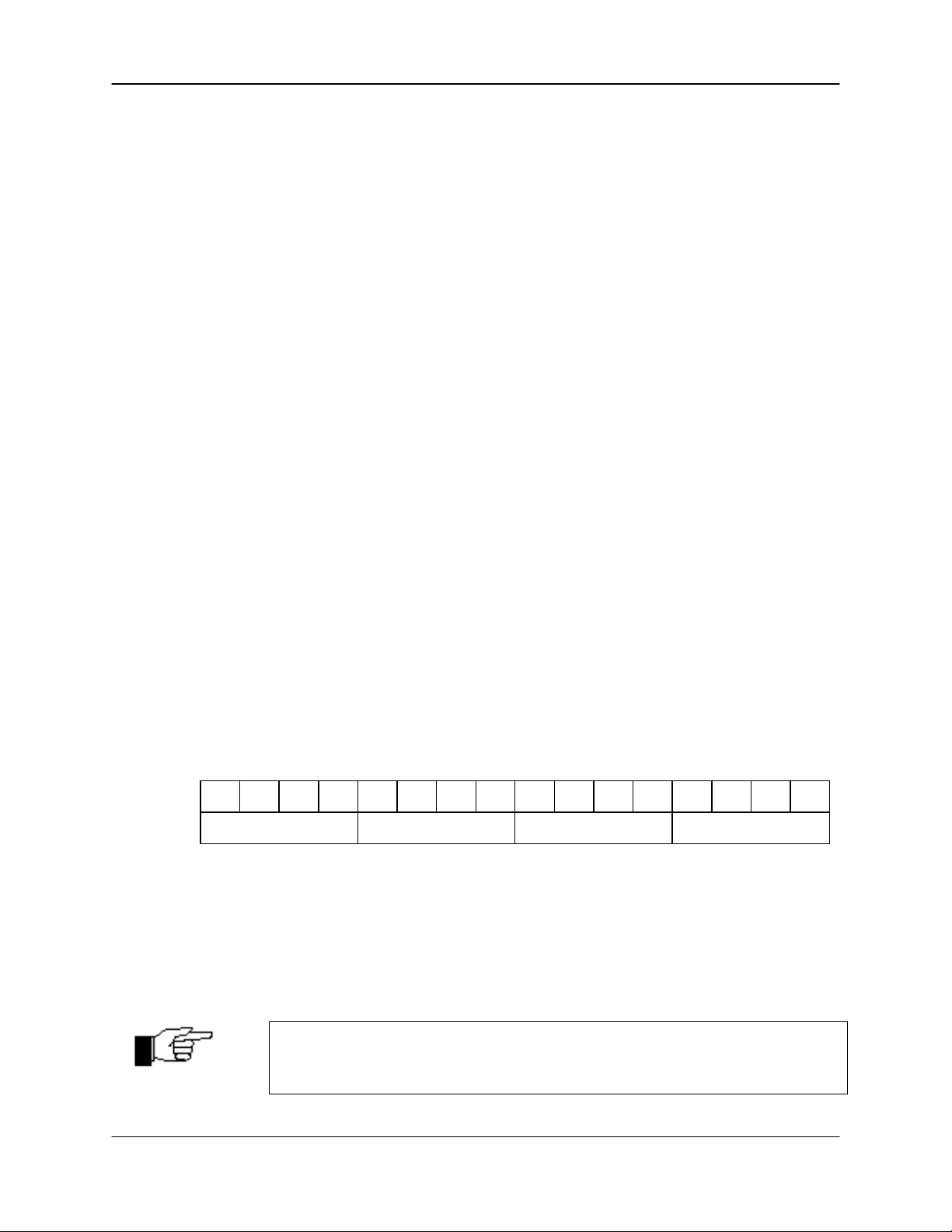
3.1.2.3 Position Field
The Model 9116 Intelligent Pressure Scanner may contain up to sixteen (16) separate
input/output channels. When commands affect certain channels scanned by the module, the
position field is used to identify those channels as bits in a bit map. If a channel’s corresponding
bit in the position field is set to a one (1), then that channel is affected by the command. The
least-significant (rightmost) bit 0 corresponds to Channel 1, and the most-significant (leftmost)
bit 15 corresponds to Channel 16. Since neither model has more than sixteen (16) channels,
the position field will usually be 16-bits, represented by four (4) ASCII-hex characters in the
command. For example, only Channels 16 and 1 are selected below in this 16-bit (4-character)
position field:
Bit# 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Chan#
Binary 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Hex 8 0 0 1
15 14 13 12 11 10 9 8 7 6 5 4 3 2
16
1
The above position field, with all applicable bits set (i.e., FFFF for 16-channel module), specifies
all channels. However, a module-independent variation allows a missing position field to
designate all channels — but only when there are no other parameters following the position
field in the command. For such commands, the hex position field may be reduced to 3, 2, or 1
characters when no channel bits need be set (1) in the discarded high-order characters
(nibbles).
Note
The channel data requested will always be returned in order of
highest requested channel to lowest requested channel.
Page 20 www.PressureSystems.com
Page 30

Pressure Systems, Inc. Model 9116 User’s Manual
3.1.2.4 Datum Fields
Any datum fields in a command generally contain data to be sent to the module, usually
specified by a position field bit map. In some commands (when data are received from a module
instead) no datum fields are required in the command itself but the position field bit map is still
used to specify the order that data are returned in the command’s response. In either case, the
order bits are set (to 1) in the position field bit map (highest channel # to lowest channel#, left to
right) is the order these datum fields are received or sent.
Each datum field may be variable in length, whether part of the command itself or the
command’s response. In its most common format, a datum begins with a space character (‘ ’),
and is followed by an optional sign, decimal digits, and a decimal point, as needed (e.g., ‘ vv.vvvvvv’). For other formats it may be a hex digit string or pure binary number.
3.1.2.5 Format Field
Some commands, that either send data to a module (as command parameters), or cause the
host to receive data (via command’s response), have an extra format parameter (f digit)
appended to (or specified in) the position field. This parameter, when specified (or implied by
default), governs how internal data are converted to/from external (user-visible) form.
• The most common format (f=0) causes each datum (in command or response) to be
represented as printable ASCII numbers externally (with optional sign and decimal point
as needed). Internally, the module sets/obtains each converted datum to/from a single
precision binary (32-bit) IEEE float
• Some formats (f=1, 2, 5) encode/decode the internal binary format to/from ASCII
hexadecimal external form. Some of these “hex dump” formats provide an external hex
bit map of the internal binary value (float or integer as appropriate). Format 5 may
encode/decode the internal float value to/from an intermediate scaled binary integer
(e.g., float value * 1000 into integer, then to/from a hex bit map).
• Two special “binary dump” formats (f=7 and f=8) may be used by some commands to
accept/return binary data directly from/to the user’s command/response. Such values
are not user-readable in their external form, but are directly machine readable and
provide highly compact storage without any accuracy loss due to formatting. Use of
these formats allows both the module and host program to operate in their most efficient,
low overhead mode. Format 7 returns the most significant byte first (i.e., big endian).
Format 8 returns the least significant byte first (i.e., little endian).
See the individual command descriptions for the formats a particular command recognizes.
Page 21 www.PressureSystems.com
Page 31

Pressure Systems, Inc. Model 9116 User’s Manual
3.1.3 Responses
Four (4) types of responses can be returned from a Model 9116 Intelligent Pressure
Scanner module:
• an Error response,
• an Acknowledge response,
• an Acknowledge with Data response, or
• a Network Query response.
The first three may be returned by TCP/IP commands, the latter from a UDP/IP command.
The error response consists of the letter ‘N’ (for NAK, or negative acknowledge), followed by a
2-digit hexadecimal error code. The following table lists the error codes that can be returned
from a Model 9116
module:
Table 3.1
Error Codes
CODE MEANING
00 (Unused)
01 Undefined Command Received
02 Unused by TCP/IP
03 Input Buffer Overrun
04 Invalid ASCII Character Received
05 Data Field Error
06 Unused by TCP/IP
07 Specified Limits Invalid
08 NetScanner error; invalid parameter
09 Insufficient source air to shift calibration valve
0A Calibration valve not in requested position
The Acknowledge response is returned from a module when a command is received that
requires no data to be returned, and no error is detected. It indicates successful parsing and
execution of the last received command. It consists of the letter ‘A’ (for ACK, or acknowledge).
The Acknowledge with Data response is returned when a module receives a command
requesting data. Model 9116 modules will typically return only the requested data values, each
preceded by a space character (except for format 7). No ‘A’ acknowledge letter begins this
data response. Data are returned for the highest requested channel number first.
Page 22 www.PressureSystems.com
Page 32

Pressure Systems, Inc. Model 9116 User’s Manual
3.1.3.1 Interpreting Offset Values (Re-zero Calibration Adjustment)
When a module is instructed to execute the command Calculate and Set Offsets (‘h’), a datum
corresponding to the calculated offset correction term (or coefficient) is returned for each
affected channel. Each such coefficient value is stored internally, and will be subtracted in all
subsequently calculated data conversions, to correct for zero drift effects. The command only
returns them in the response (in current engineering units (EU) of pressure) to allow the user to
make reasonableness checks on them. The Read Internal Coefficients (‘u’) command will
return them on demand.
3.1.3.2 Interpreting Gain Values (Span Calibration Adjustment)
When a module is instructed to execute the command Calculate and Set Gains (‘Z’), a datum
corresponding to the calculated gain correction term (or coefficient) is returned for each
affected channel. Like the offset coefficient, each gain coefficient is stored internally, and will
be used in all subsequently calculated data conversions, to correct for gain change effects. The
command returns them in the response (as a unitless scale factor near 1.0) to allow the user to
make reasonableness checks on them. The Read Internal Coefficients (‘u’) command will
return them on demand.
3.1.3.3 Interpreting Engineering Units Output
All modules perform all internal pressure calculations in engineering units of pounds per square
inch (psi). By default, all pressure data in responses and command parameters will also be in
psi. A different engineering unit (e.g., kPa) may be obtained by changing an internal EU
Pressure Conversion Scaler (normally 1.0). See the “Read/Download Internal Coefficients”
(‘u’/‘v’) commands (array 11, coefficient 01). Change this default multiplier value (1.0) to obtain
units other than psi.
3.1.4 Functional Command Overview
The various commands for Model 9116 modules are best introduced by classifying them into
functional groups and then describing how each function is carried out in a typical system. The
following functions are defined for this purpose:
• Start-up Initialization
• Scan List Definition for Acquisition
• Calibration Adjustment of Engineering Unit Correction Coefficients
• Acquisition/Delivery of Data to Host
• Network Query and Control
Please look ahead to Table 3.1, labeled Model 9116 Intelligent Pressure Scanner
Commands, in Section 3.2, for a quick-look summary of all commands available to the Model
9116 modules. Each command may be referenced by both its functional title and by its
command id in the functional discussion sub-sections below.
The Detailed Command Description Reference immediately follows the table in Section 3.2,
with each command description occupying a page (or more if necessary). Command
descriptions in this section (as in the table) are ordered first by type (TCP/IP then UDP/IP), then
by “command id” in ASCII order (UPPERCASE letters (A .. Z) first, then lowercase letters (a ..
z)) .
Page 23 www.PressureSystems.com
Page 33

Pressure Systems, Inc. Model 9116 User’s Manual
3.1.4.1 Startup Initialization
Since power supplies may be distributed widely across a network of modules and host
computer(s), it is not uncommon for modules (singly or together) and the host to lose power
independently. Thus, their power may be restored at different times. Startup initialization, for
every module, must normally be performed when its power is restored, as each module enters
default states after power-up, which may not be the state the host computer had previously
been operating in. Any previous TCP/IP socket connection is also lost after power failure and
must be re-established between host and module before any TCP/IP commands can be
recognized by the module. These commands are generally used to detect that startup
initialization has occurred (or to force reset at other times), after which other commands may be
used to restore the original operating condition.
With Model 9116 modules, the Power-Up Clear (‘A’) command is used as a simple command
to elicit a known response from a module. Although this causes no internal function within the
module, it will result in an acknowledgment being returned to the host computer to verify proper
communications. The best way to detect that a power reset has occurred in a module is to
notice that the TCP/IP socket connection is no longer valid. At any point during module
operation, the Reset (‘B’) command may be used to return any module to its default “reset”
state. If the module is then required to enter any other states (that were previously programmed
for it by the host), the host must then restore these states accordingly using the appropriate
commands. This reset command simply returns internal software parameters to a default state
(as after power up or reboot). It will not close the existing TCP/IP socket (as will power up or
reboot).
The Set/Do Operating Options/Functions (‘w’) command has many purposes, but may first
be utilized during the module initialization stage. It may also be executed at any time during
data acquisition. However, some non-factory-default options of ‘w’ may become the new reset
default, if a particular function is used to establish them in non-volatile memory.
If any form of the Configure/Control Autonomous Host Streams (‘c’) command or the
Configure/Control Multi-Point Calibration (‘C’) command was in use before reset, it must be
executed again after the reset to restore it. Any other command, that establishes the module in
a non-default reset state, must be re-executed after a reset, if processing is to continue in that
state.
The Network Query (“psi9000”) UDP/IP command may be used (at any time) to make each
module on the network identify itself to the host(s). A parameter, returned in each module’s
response, indicates whether or not a module still has a valid connection. This is a useful way to
detect if an overt reset occurs in a module. The module may be configured to emit this
response automatically after any reset (power on or reboot).
3.1.4.2 Module Data Acquisition
After power-up, all modules will begin to scan all attached transducer channels in channel
number order. Scanning will occur at the module’s maximum internal rate (using the previously
stored number of data averages per channel). The data are stored in an internal buffer,
available for retrieval by the host computer. Engineering units conversion of the scanned
channels is accomplished using thermal correction data extracted from each transducer at
power-up. While scanning, the module will automatically monitor the attached transducer’s
temperature, correcting engineering unit output for any temperature effects.
Page 24 www.PressureSystems.com
Page 34

Pressure Systems, Inc. Model 9116 User’s Manual
All modules effectively defer the host computer’s decision of “which channels of data do I want”
until that time when the host chooses to send read commands to actually retrieve the desired
data from the latest “buffered copy” of the continuously scanned, averaged, and engineeringunit-converted data.
See Section 3.1.4.4 (Delivery of Acquired Data to Host) for more information.
While scanning, all modules take multiple samples and average each channel. The number of
samples per scanned channel defaults to 8, but may be set to one (to disable averaging) or to
any power of 2 (1, 2, 4, 8, 16, 32) to change the degree of averaging (and its effect on
maximum scan rate). The Set Operating Options (‘w’) command may change this variable at
any time.
3.1.4.3 Calibration Adjustment of Offset/Gain Correction Coefficients
All Model 9116 Intelligent Pressure Scanners have built in software commands (and pneumatic
hardware) to perform a periodic zero and span calibration adjustment of attached pressure
transducers. Use of these periodic adjustments result in the highest possible data accuracy.
The result of these calibrations are a new set of internal offset and gain coefficients. These
correction coefficients are over and above those factory-determined and unchanging thermal
correction coefficients stored in each transducer's non-volatile memory. The factory coefficients
provide the basic engineering unit conversion capability, while also correcting for various nonlinear effects, including temperature effect compensation. The offset and gain correction
coefficients provide for fine linear fit adjustment of the factory calibration of each transducer. If
used properly, the periodic zero and span calibration adjustment should be the only
calibration required to maintain specified performance through the life of the Intelligent
Pressure Scanner.
It is generally necessary for the transducer to have real zero and span pressure (specified as 2
or more values) applied when calibration adjustment is required. These pressure values may
be generated by secondary pressure standards, such as the model 903x calibrator module or by
other external means provided by the customer (such as a dead weight calibrator). For the
more common zero-only calibration adjustment, zero differential pressures can typically be
provided without the need for external pressure generators. All Model 9116 modules have builtin pneumatic inputs (CAL side inputs) and calibration manifolds required for directing the
generated pressures to the various channels of the module(s) being calibrated. Refer to
Chapter 4 of this manual for detailed background and procedures for periodic calibration
of the Intelligent Pressure Scanners. A summary of the commands used for calibration
purposes is included below.
The Calculate and Set Offsets (‘h’) command is executed only when a suitable “minimum”
(e.g., zero) pressure has been applied to all channels of the module. The new offset
coefficients that result from execution of this command are stored in the module’s volatile (or
temporary) engineering-unit conversion database. They are also returned to the host in the
command’s response.
The Calculate and Set Gains (‘Z’) command should be executed only when “full-scale” (or
other suitable specified up-scale) pressure has been applied to the appropriate channels of a
module. The new gain coefficients that result from this command are stored in the module’s
volatile (or temporary) engineering-unit conversion database. They are also returned to the host
in the command’s response.
Page 25 www.PressureSystems.com
Page 35

Pressure Systems, Inc. Model 9116 User’s Manual
The Configure/Control Multi-Point Calibration (‘C’) command, actually 4 sub-commands, is
an improvement over the single calibration commands (‘h’ and ‘Z’) described above. Though
‘C’ provides for the adjustment of the same offset and gain correction coefficients already
described above, it does so with two or more applied pressure calibration points. The final
linear fit (i.e., new offset and gain correction coefficients) is a “least squares” correction fit
between all the calibration points specified. This ‘C’ command is particularly useful in
calibrating differential transducers over their entire negative-to-positive range.
Although the calculated offset and gain correction coefficients are kept in volatile memory
following execution of the calibration commands, they may be stored in non-volatile transducer
memory following the execution of the calibration commands (for use by all subsequent EU
conversions). This is accomplished with the Set/Do Operating Options (‘w’) command (Index
08 and 09).
The above correction coefficients are maintained internally in IEEE floating-point format. The
Read Internal Coefficients (‘u’) command and the Download Internal Coefficients (‘v’)
command can return (or manually set) calibration coefficients to the host in decimal or hex
dump formats in their responses.
3.1.4.4 Delivery of Acquired Data To Host
Several commands apply to host delivery of acquired data, either on demand or autonomously.
The Read High Precision Data (‘r’) command may be used to obtain high precision data
(selected channels in various formats). The modules also provide several high speed, high
resolution output commands. The Read High-Speed Data (‘b’) command is used to read “pure
binary” engineering unit pressure (all channels in the lowest overhead format). Use the ‘r’ and
‘b’ commands to get acquired data on demand.
The module can also deliver EU pressure data in streams, which consist of TCP/IP or UDP/IP
data packets that arrive autonomously in the host (with data from selected channels being
delivered in various formats at various rates). Up to three independent streams may be
configured, started, stopped, and cleared with the Define/Control Autonomous Host Streams
(‘c’) command. In conjunction with hardware triggering, this autonomous
delivery method can
also make the module acquire (as well as deliver) data in its most efficient and timesynchronized manner. This also frees the host to receive, process, or record these data in its
most efficient manner, since it need not waste time continually requesting new data with
commands.
The modules also have special purpose on demand data acquisition commands, including:
Read Transducer Voltages (‘V’) and Read Transducer Raw A/D Counts (‘a’), which provide
two views of raw pressure data. It has similar commands providing EU temperature (C) and
other raw views of each channel’s special temperature signal, including Read Transducer
Temperatures (‘t’), Read Temperature A/D Counts (‘m’), and Read Temperature Voltages
(‘n’). This command group is generally used for diagnostic purposes. All of these special
purpose data (plus other module status information) may also be periodically delivered to the
host automatically in any of the three flexible autonomous streams configured by the ‘c’
command.
Page 26 www.PressureSystems.com
Page 36

Pressure Systems, Inc. Model 9116 User’s Manual
3.1.4.5 Network Query and Control Functions
A special subset of three (3) UDP/IP commands may be sent to a module at any time power is
applied to it (i.e., neither a host socket connection nor a unique IP Address assignment is
required). Each such command is broadcast to all modules (i.e., sent to IP Address
255.255.255.255) via Port 7000, and any module wishing to respond will return a UDP/IP
broadcast response via Port 7001.
Only one of these commands returns a response. This is the Network Query (“psi9000”)
command. The others cause the module to be re-booted, therefore no response is possible.
One command changes the way the module gets its IP address assignment (i.e., dynamically
from a server or statically from factory-set internal data).
3.1.4.6 Other Functions
Some commands may be used at any time to obtain information about the internal setup and
status of a module. The Read Module Status (‘q’) command is an example. Also, the Set/Do
Operating Options (‘w’) command, though generally used after power-up reset, may also be
used at other times to change system operation. The actual feedback position status of internal
valves, and several temperature status conditions may be configured to be periodically
delivered to the host automatically in any of the three autonomous streams configured by the ‘c’
command.
Page 27 www.PressureSystems.com
Page 37

Pressure Systems, Inc. Model 9116 User’s Manual
3.2 Detailed Command Description Reference
All commands applicable to the Model 9116 Intelligent Pressure Scanner modules are
described on the following pages. They are summarized in the following table. For
convenience, this table is also repeated in Appendix B.
TYPE COMMAND ID COMMAND FUNCTIONS
A Power-Up Clear
B Reset
TCP/IP
Commands
C
V Read Transducer Voltages
Z Calculate and Set Gains (Span Cal)
a Read Transducer Raw A/D Counts
b Acquire High Speed Data
c
h Calculate and Set Offsets (Re-zero Cal)
m Read Temperature A/D Counts
n Read Temperature Voltage
q Read Module Status
r Read High Precision Data
t Read Transducer Temperature
u Read Internal Coefficients
Configure/Control Multi-Point Calibration
(4 sub-commands)
Define/Control Autonomous Host Streams
(6 sub-commands)
v Download Internal Coefficients
w Set/Do Operating Options/Functions
psi9000 Query Network
UDP/IP
Commands
psireboot Reboot Specified Module
psirarp
Change Specified Module’s IP Address
Resolution Method (then Reboot)
Page 28 www.PressureSystems.com
Page 38

Pressure Systems, Inc. Model 9116 User’s Manual
POWER UP CLEAR (Command ‘A’)
Purpose: This command has no internal module affect. It is used as a simple method to
verify proper communications to the Model 9116 module.
Command
“A”
‘A’ is the command letter.
Response
“A”
‘A’ is the acknowledge letter.
Description: This command is generally used as a simple ‘NOP’ mechanism to verify proper
communications with a module.
Example:
● Send TCP/IP command to a module (via its open socket) to acknowledge module
power on:
“A”
Read following response:
“A”
Page 29 www.PressureSystems.com
Page 39

Pressure Systems, Inc. Model 9116 User’s Manual
RESET (Command ‘B’)
Purpose: Instructs the module to reset internal operating parameters, and to set all internal
control variables to their default “reset” state (see description below). The current
TCP/IP socket connection will remain open. Execution after a power off/on cycle
is optional (unnecessary).
Command
“B”
‘B’ is the command letter.
Response
Description: The module returns to the following “reset” states if this command is executed:
● Re-zero correction (offset) terms are set to the last values stored in
transducer memory.
● Span correction (gain) terms are set to the last values stored in transducer
memory.
● Calibration Valve is set to the RUN Position
● Number of Samples for Data Averaging is set to last value stored in non volatile memory (factory default = 8).
● Any autonomous host data delivery streams defined by ‘c’ sub-commands
are reset (undefined).
● The Multi-Point Calibration function defined by ‘C’ sub-commands is reset
(undefined) if in progress.
Example:
● Send TCP/IP command to a Model 9116 module (via open socket) to reset defaults:
“B”
Read following response:
“A”
“A”
‘A’ is the acknowledge letter.
Page 30 www.PressureSystems.com
Page 40

Pressure Systems, Inc. Model 9116 User’s Manual
CONFIGURE/CONTROL MULTI-POINT CALIBRATION (Command ‘C’)
Purpose: This command is actually four (4) sub-commands. The first configures and starts
a Multi-Point Calibration adjustment function for selected channels in the
module. Another is repeated multiple times to collect data for each defined
calibration point. Another ends the calibration function normally by calculating
new offset and gain adjustment coefficients from the collected data. It then
returns the module to its normal state, but with improved accuracy. A final sub-
command is used only if it becomes necessary to abort the calibration function
while in progress. The general form of all sub-commands is described in the
table below. Subsequent pages separately describe each individual sub-
command and give examples of each.
Command
Response
“C ii[ dddd]... ”
‘C’ is the command letter.
‘ ii’ is a required sub-command index preceded by a space character.
‘ dddd’ are zero or more optional datum (or parameter) fields, each
preceded by a space character. These vary with the sub-command used.
Depends upon the particular sub-command (ii) used.
Description: The four ‘C’ sub-commands configure and control operation of a Multi-Point
Calibration function that is similar to the simpler re-zero and span calibration
adjustment functions (see separate ‘h’ and ‘Z’ commands). However, ‘C’ adjusts
both the offset and gain correction coefficients of each affected transducer at the
same time, using two or more calibration points. Thus, instead of simply
calculating a new linear (i.e., straight line) adjustment function that passes
through the supplied zero and span calibration points, it calculates a best-fit
straight line, using the least squares method, that comes “as close as
possible” to all the supplied calibration points. This correction method
provides the very best adjustment throughout the entire range (negative to
positive) of a differential transducer.
Avoid confusing this Calibrate command ‘C’ (upper case C) with the
Note
Configure/Control Autonomous Host Streams command ‘c’ (lower
case c). Like “c,” but unlike most other module commands, all subcommands of this command require a space between the command
id (‘C’) and the first parameter (ii).
Page 31 www.PressureSystems.com
Page 41

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘C’— Sub-command Index 00: Configure & Start Multi-Point Calibration
This sub-command has four (4) additional required parameters used to configure and start the
Multi-Point Calibration function.
Command
“C 00 pppp npts ord avg”
‘C’ is the command letter.
‘ 00’ is the sub-command index (ii) for Configure & Start.
‘ pppp’ is a 1-4 hex digit position field (channel selection bit map), that
selects any of the 1-16 (9116) internal channels to be affected by the
multi-point calibration.
‘ npts’ is the number of unique calibration points (between 1 and 19) to be
supplied during the calibration function.
‘ ord’ is the order of the adjustment fit, which currently must be 1 for a 1st
order linear fit of the calibration data (i.e., a straight line).
‘ avg’ is the number of A/D data samples collected and averaged for each
calibration point supplied (must be a power of 2 in the set 2, 4, 8, 16, or
32)
NOTE: all parameters are separated by a space.
Response
Description: Configures and starts the Multi-Point Calibration function. It specifies the
particular channels (pppp) whose offset and span adjustment coefficients will be
replaced when the function is completed. All specified channels must have the
same full-scale pressure range. Modules with more than one range of internal
transducers installed must have channels from each range calibrated separately.
This sub-command immediately alters the module’s normal data acquisition,
processes A/D samples for average count (default = 8, or as per the ‘w10dd’
command), and uses the sub-command’s avg parameter sample count instead.
A larger count (e.g., 32) is encouraged for calibration purposes. The original
sample count will not be restored until the calibration function ends or is aborted
(per other sub-commands described on the following pages).
The npts parameter fixes how many calibration points must be supplied when the
Multi-Point Calibration function’s data collection phase starts later with multiple
invocations of another sub-command (described below). Currently, only a linear
(1st order) (‘ ord=1’) fit of the calibration points is available.
“A”
‘A’ is the acknowledge letter and is returned if all parameters are supplied
with reasonable values. Else, an error (‘N’) response is returned.
Page 32 www.PressureSystems.com
Page 42

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Configure and start the Multi-Point Calibration function so that it affects only the first
four (4) channels of the module. Three (3) pressure calibration points will by supplied
when we continue this function later (see example for ‘01’ sub-command below). A
linear (1st order) fit will be used to obtain a new set of offset and gain correction
coefficients for these four (4) channels. The maximum average sample count (32) is
used to collect each calibration data point, so as to minimize any noise in the data
samples. The module’s data acquisition process is altered immediately to collect the
increased number of averages.
“C 00 F 3 1 32”
Read response:
“A”
Page 33 www.PressureSystems.com
Page 43

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘C’— Sub-command Index 01: Collect Data for a Calibration Point
This sub-command has two (2) additional required parameters.
Command
“C 01 pnt pppp.pppp”
‘C’ is the command letter.
‘ 01’ is the sub-command index (ii) for Collect Data
‘ pnt’ identifies a particular calibration point that will be supplied. It must
be between 1 and npts, where npts was a parameter of the previously
executed Configure & Start (‘00’) sub-command.
‘ pppp.pppp’ is the pressure value (in current EU) that is actually applied
currently to the module’s transducers by a precision calibrator.
NOTE: all parameters are separated by a space.
Response
“pppp.pppp [pppp.pppp]...”
The actual measured pressure values (in current EU) from each affected
channel of the module (highest numbered specified channel first, lowest
numbered specified channel last, as per the pppp bit map parameter of the
Configure & Start (‘00’) sub-command. The decimal response datum
format (format 0) is always used.
Description: This sub-command (to be executed two or more times) carries out the data
collection phase of the Multi-Point Calibration function for exactly one (1)
calibration point (i.e., per parameter pnt). Each execution applies a specified
pressure value; then collects, averages, and stores the data for that calibration
point. It must be repeated until all pressure points, as specified by the npts
parameter of the original Configure & Start (‘00’) sub-command, are applied and
their data collected. For each particular point, enter the sub-command after that
point’s pressure value has been properly applied to the module, and that value is
stable (unchanging). Pressure may be applied to either the Cal or Run ports, as
necessary. Use a Model 903x Calibrator or some other suitable precision
pressure source to generate the pressure.
It is not necessary to enter the two or more calibration points in strict numerical
order (i.e., 1, 2, ... npts). Any convenient entry order is allowed, though each
point’s actual pressure value must be correctly stated (with the pppp.pppp
parameter) when executed. Previously entered points may be reentered if it is
necessary to account for hysteresis. However, all the points specified by the
pts parameter of the Configure & Start (‘00’) sub-command must be supplied
before the final Calculate and Apply (‘02’) sub-command can be executed, else
an error will result.
Page 34 www.PressureSystems.com
Page 44

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Supply each of the previously-specified three (3) pressure calibration points to the Multi-
Point Calibration function, as was stated in the previous example of the Configure and
Start (‘00’) sub-command. Assume that all the affected four (4) channels have
differential transducers with the same -5 to +5 psi range. Include at least one pressure
point in the negative range of these transducers
“C 01 1 -2.5”
“C 01 2 0.0”
“C 01 3 5.0”
Read responses (separately after each command executed above):
“-2.4998 -2.4999 -2.5001 -2.500”
“0.0 0.0013 -0.0133 -0.00001”
“5.0091 4.9992 5.0010 4.9998”
Data are returned in reverse channel number order (i.e., 4, 3, 2, 1) in each response.
Page 35 www.PressureSystems.com
Page 45

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘C’- Sub-command Index 02: Calculate & Apply Correction Coefficients
This sub-command has no additional parameters.
Command
“C 02”
‘C’ is the command letter.
‘ 02’ is the sub-command index (ii) for Calculate & Apply
NOTE: all parameters are separated by a space.
Response
“A”
‘A’ is the acknowledge letter — returned if the required number of
calibration data points had their data successfully collected previously, and
the resulting calculated data is reasonable. Else, an error (‘N’) response is
returned.
Description: This sub-command finishes the Multi-Point Calibration function, previously
started by the Configure & Start (‘00’) sub-command. It calculates new
correction coefficients using the pressure data collected by all required
executions of the Collect Data (‘01’) sub-command.
All the averaged data points collected previously are checked for
reasonableness, and then a new set of zero and gain correction coefficients are
calculated by the least-squares method for each channel (transducer) affected by
the calibration. These are stored in the module’s volatile memory for use by all
subsequent EU data conversion of these channels until the module is reset or
powered off. These coefficients may be stored in the non-volatile memory of the
module’s transducers with the ‘w’ command (see indexes 08 and 09 for that
command). The latest calculated zero and gain coefficients may be inspected
with the ‘u’ command at any time for any channel.
Finally, this sub-command restores the original “A/D samples for averaging”
count used by the module’s data acquisition process to the value that was in use
before the Multi-Point Calibration function was originally started.
Page 36 www.PressureSystems.com
Page 46

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Finish the Multi-Point Calibration function previously started (as indicated by
the previous examples of ‘C’ sub-commands ‘00’ and ‘01’). Calculate new
adjustment coefficients, and save them in the non-volatile memory of the
module’s transducers. These new coefficients will then be used for all
subsequently calculated EU data acquired by the module, until another
calibration function is performed in the future.
“C 02”
“w08”
“w09”
Read responses (separately for each command executed above):
“A”
“A”
“A”
If an error (“N”) response is returned on the first command, either the correct
number of calibration points (per ‘00’ sub-command) were not supplied with
reasonable pressure data values (via the multiple ‘01’ sub-commands), or the
collected data yielded new calculated coefficients with unreasonable values. In
that case, the other two commands should not be used.
If execution of the last two ‘w’ commands is skipped above, the new calibration
data obtained will be stored only in volatile storage, and will be available for use
only until the module is RESET or loses power.
Page 37 www.PressureSystems.com
Page 47

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘C’— Sub-command Index 03: Abort Multi-Point Calibration
This sub-command has no additional parameters.
Command
“C 03”
‘C’ is the command letter.
‘ 03’ is the sub-command index (ii) for Abort.
NOTE: all parameters are separated by a space.
Response
“A”
‘A’ is the acknowledge letter
Description: Aborts the Multi-Point Calibration function, if it is currently in progress. This
sub-command also restores the original “A/D samples for averaging” count to the
module that was in use before the calibration function was started.
It should be noted that executing the Configure & Start (‘00’) sub-command
again, after the calibration function has started collecting data (per Collect Data
(‘01’) sub-commands), but before the final data are calculated (per Calculate &
Apply (‘02’) sub-command), will have the same affect as this Abort function.
Example:
● Abort the Multi-Point Calibration function previously started
“C 03”
Read response:
“A”
Page 38 www.PressureSystems.com
Page 48

Pressure Systems, Inc. Model 9116 User’s Manual
READ TRANSDUCER VOLTAGES (Command ‘V’)
Purpose: Returns for the specified channels, the most recently acquired raw pressure data,
converted to volts directly from the averaged A/D counts. This simple
engineering-unit conversion bypasses any usage of the transducer’s factory calculated coefficients or the final calibration process’s correction coefficients
(offset and gain). Each datum returned in the response will be in the specified
high-precision data format. This command is intended for advanced users
only and is not required for normal operation.
Command
Response
“Vppppf”
‘V’ is the command letter
‘pppp’ is the position field
‘f’ is the format field
“ dddd.. [dddd]”
‘ dddd’ are the data fields, each with a leading space (except f =7 or 8).
Description: The 4-character hex position field (pppp) specifies a 16-bit binary bit-map, with
each bit (set to 1) specifying a particular channel number (16-1, left-to-right).
The 1-character format field (f) specifies the format of each datum field (‘ dddd’)
that will be returned in the requested response. The first datum returned in the
response will be for the highest channel number requested, and each (nonbinary) datum will be preceded by a space character. Some formats may not be
applicable to the specific type of data being requested. Valid formats are shown
in the following table:
f converts each internal response datum value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
2 double binary float to 16-digit hex integer “ xxxxxxxxxxxxxxxx” 17
5 single binary float to long integer (EU*1000) then to 8-digit hex integer 9
7 single binary float to single binary float (big endian: msb first) 4
8 single binary float to single binary float (little endian: lsb first) 4
Page 39 www.PressureSystems.com
Page 49

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to a Model 9116 module (via its connected socket) that
returns ASCII decimal fixed-point voltage data for channels 1, 5, 9, and 13:
“V11110”
Response contains data for channels 13, 9, 5, and 1 (left to right):
“ 4.999999 -4.989500 0.005390 2.500001”
Page 40 www.PressureSystems.com
Page 50

Pressure Systems, Inc. Model 9116 User’s Manual
CALCULATE AND SET GAINS (Command ‘Z’)
Purpose: Instructs a module to calculate new gain coefficients, with either full-scale
pressure (or a specified pressure) applied to the specified channels. These new
coefficients update part of the module’s internal calibration coefficient database,
used to convert any subsequent raw data (from any of the specified channels)
into engineering units data. The new gain values are also returned in the
response. This command is sometimes called a Span or Span-only calibration.
Command
“Zpppp[ vv.vvvv]”
‘Z’ is the command letter
‘pppp’ is the position field
‘ vv.vvvv’ is an [optional] pressure value, preceded by a space character
.
Response
Description: The position field may have 0 or 4 characters. If no position field is specified,
gain coefficients for all module input channels will be calculated and returned. If
a position field is specified, gain coefficients for only the channels whose bits are
set (=1) will be calculated and returned. If the optional pressure value (vv.vvvv)
is specified, the position field must be 4 characters, even when all channels are
to be specified. Gain values are returned in the response in order of highest
specified channel to lowest specified channel, with data formatted per an implied
decimal format (f=0).
Normally this command requires that the exact full scale input pressure be
applied to the affected channels. The optional pressure value [ vv.vvvv] allows
the user to specify any suitable upscale pressure in the current engineering units.
For best results, pressures in excess of 90% of full scale should be applied. A
leading space character must precede the pressure value parameter.
The desired calibrating pressure must be applied to all of the specified channels
and allowed to stabilize before this command is executed. Such a pressure is
presumably generated by a separate model 903x calibrator module or suitable
user-supplied substitute.
Notice that unlike the Calculate and Set Offsets (‘h’) command, this command
does not automatically move a Model 9116 module’s calibration valve to its Cal
position. A command to do this must precede this command. The reader is
referred to Chapter 4, Section 4.3 for additional details concerning the
performance of a Span Calibration.
“g.gggg .. g.gggg”
‘g.gggg’ are the actual gain data values returned, each preceded by a
space.
Page 41 www.PressureSystems.com
Page 51

Pressure Systems, Inc. Model 9116 User’s Manual
Internal firmware limits calculated gains to values are software limited to values between 0.0
and 100.0. Any calculated value outside of this range will result in the gain coefficient being set
to 1.00.
The calculated gain values from the latest ‘Z’ command will be lost
Note
when the module is powered off. To save these gain terms to each
transducer’s non-volatile memory, refer to the Set Operating Options
(‘w’) command (index 09).
Example:
● Send TCP/IP command to a Model 9116 module (via its open socket) to
calculate and set gain coefficients for channels 8 through 4. Instruct the module
to use 14.8890 psi as the applied pressure instead of each transducer’s full-scale
value:
“Z00F8 14.8890”
Read response, containing the new gain values (also stored in the module’s
volatile main memory):
“1.000212 1.000269 1.000437 1.000145 .999670”
Actual gain values are returned in the above response as decimal ASCII strings,
each preceded by a space character. From left-to-right: they are for channels 8,
7, 6, 5, and 4.
Page 42 www.PressureSystems.com
Page 52

Pressure Systems, Inc. Model 9116 User’s Manual
READ TRANSDUCER A/D COUNTS (Command ‘a’)
Purpose: Returns the most recently acquired raw pressure data for the specified channels
in averaged signed A/D counts (in the range -32768 to +32767). This simple
data bypasses any usage of the transducer’s factory-calculated coefficients or
the final calibration process’s adjustment coefficients (offset and gain). Each
datum returned in the response will be in the specified high-precision data
format, but representing A/D counts as a signed integer average. (The formula
for converting A/D counts to volts is: Volts = A/D Counts * 5/32768) This
command is intended for advanced users only and is not required for normal
operation.
Command
“appppf”
‘a’ is the command letter
‘pppp’ is the position field
‘f’ is the format field
Response
“ dddd.. dddd”
‘ dddd’ are the data fields, each with leading space (except f = 7 or 8).
Description: The 4-character hex position field (pppp) specifies a 16-bit binary bit-map, with
each bit (set to 1) specifying a particular channel number (16-1, left-to-right).
Only channels 12-1 are allowed for Models 9021 and 9022.
The 1-character format field (f) specifies the format of each data field (dddd) that
will be returned in the requested response. The first datum returned in the
response will be for the highest channel number requested. Each datum will be
preceded by a space character. Some formats may not be applicable to the
specific type of data being requested. Valid formats are shown in the following
table:
f converts each internal response datum value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
2 double binary float to 16-digit hex integer “ xxxxxxxxxxxxxxxx” 17
5 single binary float to long integer (EU*1000) then to 8-digit hex integer 9
7 single binary float to single binary float (big endian: msb first) 4
8 single binary float to single binary float (little endian: lsb first) 4
Page 43 www.PressureSystems.com
Page 53

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to Model 9116 module (via its connected socket) that returns
decimal raw “pressure” A/D counts data for channels 1, 5, 9, and 13:
“a11110”
Response contains data for channels 13, 9, 5, and 1 (left to right):
“ 32767.000000 -32700.000000 10.000000 16385.000000”
Please note that channel 13 is saturated at +full scale and channel 9 is almost saturated
at -full scale. Channel 5 reads near zero and channel 1 is about ½ +full-scale.
Page 44 www.PressureSystems.com
Page 54

Pressure Systems, Inc. Model 9116 User’s Manual
READ HIGH-SPEED DATA (Command ‘b’)
Purpose: Returns the most recent scanned/averaged data from all channels of the
module as fast as possible. Data is returned directly in its internal (IEEE
single-precision float) binary form (as per implied format 7). It is used as a
faster alternative to the Read High-Precision Data (‘r’) command, since ‘b’
does not have to parse the position or format parameters, nor does it have
transform or encode the internal data into any other format when the
response is generated.
Command
Response
Description: Returns data for all of the module’s channels, in order highest channel number to
lowest channel number. Thus for a Model 9116, channel #16 will always be the
first 4-byte (32-bit binary, big-endian, IEEE floating-point) value (‘aaaa’) sent in
the response. It is followed by similar values for lower numbered channels.
Unless the EU conversion scalar is altered, the returned data will be in units of
psi.
Example:
“b”
‘b’ is the command letter
“aaaabbbbcccc..rrrr”
each 4-byte datum (e.g, ‘aaaa’) is a non-human readable 32-bit (4-byte)
big-endian value (format 7) representing an IEEE single-precision internal
float value.
● Send command to a module (via its “socket” connection) to return data as fast
possible:
“b”
Data from the most recent scan of all the module’s channels are returned in pure
binary form, 4-bytes per channel (big endian):
aaaabbbbcccc .. rrrr
Note that this response is not shown within quotes “ ” since it is not a valid ASCII
character string
Page 45 www.PressureSystems.com
Page 55

Pressure Systems, Inc. Model 9116 User’s Manual
DEFINE/CONTROL AUTONOMOUS HOST STREAMS (Command ‘c’)
Purpose: Defines and controls the autonomous delivery of any of up to three concurrent
high-speed autonomous data streams to the host computer. Such data streams
may be delivered “continuously” without bound (i.e., until a command explicitly
stops them), or be delivered in a “limited” amount (until a pre-specified fixed
number of data packets have been sent). Each packet delivered may be
synchronized by a user-supplied “hardware trigger” or each packet may be
delivered periodically as synchronized by an internal software clock. These
concurrent host streams are an alternate method of acquiring/delivering data
rather than using the Read High-Precision Data (‘r’) command, the Read High-
Speed Data (‘b’) command or the many other special purpose read commands
(‘V,’ ‘a,’ ‘t,’ ‘m,’ and ‘n,’) for reading alternate data values.
Host data streams, once activated in a module, deliver a sequence of TCP/IP or
UDP/IP data packets autonomously to the host (i.e., without the host sending any
particular command to the module to request each packet).
WARNING: If these data streams are defined to occur at high rates, then each data
packet received by the host must be processed and disposed of in a timely
manner. NetScanner™ System modules are capable of generating autonomous
data faster than some “slow” hosts (or incapable software) can absorb.
Command
“c ii[ dddd] ... ”
‘c’ is the command letter
‘ ii’ is a space + a sub-command index (augment code)
‘ dddd’ are one or more optional datum fields, each preceded by a space
character which are parameters that differ per augment code ii.
NOTE: all parameters are separated by a space.
Response
Depends upon particular sub-command (‘ ii’) sent. See below.
Autonomous
Packet
Depends upon the particular sub-command
(‘ ii’) sent. See below.
Description: The firmware of any module, once fully initialized, continuously scans and
converts data for all pressure channels at the highest possible speed. The result
of such scanning is a continuously updated EU data buffer, available to three
concurrent host data delivery tasks, or available to other standard data
acquisition commands in the module. Each host delivery task can grab
engineering-unit data values from the EU data buffer and deliver them to the host
in its own programmable data stream (a sequence of TCP/IP or UDP/IP packets
that autonomously arrive in the host, as long as the host has enough TCP/IP
buffering space to hold them).
Page 46 www.PressureSystems.com
Page 56

Pressure Systems, Inc. Model 9116 User’s Manual
Special augments of this command, called sub-commands (distinguished by the
first parameter ii) can configure each data stream with the particular channels
whose data are delivered, the datum format, the delivery rate, and other
characteristics. It can also start, stop, or undefine a single stream or all defined
streams.
The maximum rate of any one stream’s delivery is practically limited to the
maximum possible scan and data conversion rate of all the module’s channels.
Normally, these programmable host streams deliver host data at rates equal to or
slower than this natural cycle. For a typical application, the first stream delivers a
few channels at a high rate as defined by a hardware trigger. The second stream
delivers other channels at a medium rate (some multiple of the trigger), and the
third stream can deliver still other channels at a slow rate (a larger multiple of the
trigger). In another application, the three streams might all be programmed to
deliver all the same channels, but the first stream might deliver pressure data
(EU only) at high speed. The second stream might deliver pressure counts or
volts at a slower rate, and the third stream might deliver temperature in all forms
(EU, counts, volts) at a very slow rate.
Avoid confusing this Configure/Control Autonomous Host Streams
Note
command ‘c’ (lower case c) with the Configure/Control Multi-Point
Calibration command ‘C’ (upper case C). Like ‘C’, but unlike most
other module commands, all sub-commands of this command
require a space between the command id (‘c’) and the first parameter
(ii).
Page 47 www.PressureSystems.com
Page 57

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘c’— Sub-command Index 00: Configure A Host Delivery Stream
This sub-command is used to configure the principal parameters of each of the three possible
concurrent host delivery streams, one at a time. Following this configuration phase, the stream
(1, 2, or 3) or all streams may be started and stopped with other sub-commands. The subcommand’s format is:
Command
Response
“c 00 st [[[[p]p]p]p sync per f num”
‘c’ is the command letter
‘00’ is the sub-command index (ii) for configuration
‘st’ is the stream id digit (1, 2, or 3)
‘[[[[p]p]p]p’ is a 1-4 hex digit position field (channel selection bit map)
capable of selecting 1-16 internal channels
‘sync’ is sync type character (0= hardware trigger or 1= clock)
‘per’ is the period (if sync=0: # of trigger periods or if sync=1: delay timer
period in msec).
‘f’ is the format of each acquired datum in stream
‘num’ is the number of packets delivered in the stream
(0=unlimited/continuous).
NOTE: all parameters are separated by a space character.
“A”
‘A’ is the acknowledge letter
Autonomous
none generated
Packet
Description: Configures a particular stream (‘st’) to deliver data packets autonomously to the
host, with each packet containing selected acquired data for the channels
specified. The channels are specified by a standard 16-bit position field bit map
(encoded as a 1-4 hex digit position field ([[[[p]p]p]p). A separate sub-command
(ii=05) may be used to select which acquired data are included in each stream.
By default, only pressure (EU) data are selected (if ii=05 sub-command is never
executed for the stream).
The individual data packets of the stream may be synchronized with either an
external user-supplied hardware trigger or a periodic clock interrupt generated
inside each module. This choice is made with the sync type ‘sync’ parameter (a
single digit) where: 0 = synchronize with hardware trigger; 1= synchronize with
periodic software clock.
When the hardware trigger is used to synchronize data output ( sync = 0), it is
assumed that the user would prefer to also synchronize internal data acquisition
cycle. For this reason, when a stream utilizing hardware trigger is started, the
module firmware switches out of the free-running continuous data acquisition
mode described earlier. Instead, the module waits in an idle mode until a
hardware trigger is received to initiate a host stream output. Only on the receipt
of that hardware trigger will the module scan and EU convert all attached
Page 48 www.PressureSystems.com
Page 58

Pressure Systems, Inc. Model 9116 User’s Manual
channels. Following completion of the acquisition and EU conversion cycle, the
module will also deliver the requested data channels to the host. In this manner,
users are provided with highly synchronized data acquisition and delivery from
one or more modules. If a module waits in the idle mode for an extended period
of time without receiving a data request, it will periodically initiate its own internal
data acquisition cycles so as to update internal thermal coefficients.
When all hardware triggered streams are complete or aborted, an individual
module will return to the default mode of continuous scanning and EU
conversion.
When the internal software timer is used to control host stream output rates
(sync=1), note that internal clock frequency variances will result in slightly
different timing between modules. Although these differences in timing are slight,
they may result in noticeable differences in output timing between modules over
a long period of time. If highly synchronized data output is required from multiple
modules, the hardware trigger mode should be used.
The period ‘per’ parameter is a positive decimal integer count (from 0 to
2147483647, specified with 1 to 10 numeric digits as needed), and its meaning
depends on the sync type ‘sync’ parameter described above.
‘sync’ meaning of ‘per’
0 number of hardware trigger periods to wait before sending each packet
delay period (in milliseconds) to wait before sending each packet
1
NOTE: minimum is 2 milliseconds and the granularity is 2 milliseconds
with values rounded down to the nearest 2 milliseconds.
The ‘f’ parameter identifies the format of each selected acquired datum in each
stream packet, and is a single numeric digit. Valid format codes are listed in the
following table:
f converts each internal selected acquired datum value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
2 double binary float to 16-digit hex integer “ xxxxxxxxxxxxxxxx” 17
5 single binary float to long integer (EU*1000) then to 8-digit hex integer 9
7 single binary float to single binary float (big endian: msb first) 4
8 single binary float to single binary float (little endian: lsb first) 4
Unless the EU conversion scalar is altered, the returned pressure data will be in units of psi.
(See command ‘v’, array 11, coefficient 01 for other units.
Page 49 www.PressureSystems.com
Page 59

Pressure Systems, Inc. Model 9116 User’s Manual
With the exception of binary formats 7 and 8, all other formats
Note
include a leading space in each datum delivered in each stream
packet.
The number of stream packets (‘num’) parameter is a positive integer count (from
0 to 2147483647, specified with 1 to 10 numeric digits as needed). It sets a finite
limit on the number of packets delivered in the host data stream. The value 0 for
this parameter requests “continuous” output packets for the defined host stream
(unbounded).
While the ‘c 00’ command will allow hardware and software trigger
Note
scan lists to operate concurrently, this is not a recommended mode
of operation. Running hardware and software trigger scan lists
concurrently diminishes the degree of determinism for the hardware
scan lists. The hardware trigger lists will determine the frequency of
pressure readings and the update of internal pressure, current value
table. The software trigger lists will return data from this table at the
requested software trigger rate, however the table will only be
updated at the rate of the fastest hardware trigger scan lists.
Page 50 www.PressureSystems.com
Page 60

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Configure three (3) separate autonomous host delivery streams, and divide the module’s
channels between them. Channels (1-4) must be delivered to host as fast as possible,
channels 5-8 may be delivered at half that rate, while the remaining channels 9-16 are
delivered at half the previous rate. All streams are generated continuously and
synchronized with the internal clock at 100 msec., 200 msec., and 400 msec. periods,
respectively. Data are requested in single precision binary IEEE float format f=7).
“c 00 1 000F 1 100 7 0”
“c 00 2 00F0 1 200 7 0"
“c 00 3 FF00 1 400 7 0"
Read response:
“A”
“A”
“A”
To similarly acquire data at “relative” rates (1, 2, and 4) using a periodic hardware
trigger (assumed to also cycle at 10 Hz rate), enter the commands:
“c 00 1 000F 0 1 7 0”
“c 00 2 00F0 0 2 7 0”
“c 00 3 FF00 0 4 7 0”
Read responses:
“A”
“A”
“A”
The type of data delivered for each specified channel (when the
Note
streams are started) is EU pressure unless sub-command “05” is
also executed to select other types of data in each stream.
Page 51 www.PressureSystems.com
Page 61

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘c’— Sub-command Index 01: Start Stream(s)
This sub-command is used to start the delivery of any previously configured host stream in a
module. If the stream started is of “continuous” duration, then it will be necessary to use the
Stop Stream sub-command later. Otherwise, the stream will end automatically if a finite number
of packets has been specified for it. This sub-command may also be used to resume a
previously stopped host stream that has not transmitted all requested data packets. The subcommand’s format is:
Command
“c 01 st”
‘c’ is the command letter
‘01’ is the sub-command index (‘ii’) for Start Stream(s)
‘st’ is the stream id digit (1, 2, or 3, or 0=all streams)
NOTE: all parameters are separated by a space character.
Response
Autonomous
Packet
“A”
‘A’ is the acknowledge letter
“tssss[dddd] .. [dddd]”
‘t’ is a 1-byte binary (8-bit) value identifying the stream number (1-3).
‘ssss’ is a 4-byte binary integer (32-bit, big-endian) packet sequence.
number. Optional binary status may follow the sequence number. (See
“05” sub-command.)
‘dddd’ are the acquired datum values in the selected format plus a leading
space (except f=7 or 8).
Description: This sub-command starts a particular specified host stream (st=1-3), or starts all
configured host streams with a single command (st=0). Each autonomous host
stream packet begins with a 5-byte fixed-format (binary) data header (tssss).
The first byte (t) identifies the host stream, while a 32-bit unsigned binary
sequence number (ssss) completes the header. This sequence number will start
at one (1) for the first packet returned by a stream and increment for each other
returned packet of that stream. In the case of a “continuous” data stream, the
sequence number may overflow the maximum permissible 32-bit integer value. If
this occurs, the sequence number value will wrap around to zero (0) following the
largest 32-bit value (4294967295) and then continue to increment by one for
each returned packet. The sequence number field is intended to provide a
mechanism for host software to ensure that host data stream packets are
processed or stored in the order in which they were obtained by the module.
Each of the three possible host streams will report their own unique sequence
number. Note that if a previously stopped data stream is restarted, the returned
sequence numbers will resume with the next number at the point of the stream’s
termination. The sequence numbers will not restart at one (1) if a scan list is
temporarily stopped and then restarted without reconfiguring the stream. A
“limited” stream will terminate once this sequence number equals the requested
number of packets for the stream. If a “limited” stream is restarted after expiring,
it will restart at sequence number 1.
Page 52 www.PressureSystems.com
Page 62

Pressure Systems, Inc. Model 9116 User’s Manual
For periodic hardware-triggered streams, that are never suspended and resumed
after being initially enabled, the sequence number may also serve as a “relative”
time stamp if the period (in milliseconds) of the hardware trigger is known.
If a special sub-command (ii=05) is used to select the content of a stream, other
binary status data may immediately follow the binary stream header and precede
the default Pressure EU Data (if selected). Other special acquired data groups
(per selected channel) may follow or replace the Pressure EU Data. Each datum
group in each packet will be ordered from highest channel number requested to
lowest channel number requested. Each datum (dddd) will be output per the
format code specified when the stream was configured (by sub-command “00” or
combination of “00” and “05”).
Example:
● Start all the streams configured in the previous example:
“c 01 0”
Read response:
“A”
Soon after the response is received, the requested data stream packets will
begin arriving in the host at a quantity, content, and rate determined by each
stream’s own particular current configuration (per both the “00” and “05” subcommands).
Page 53 www.PressureSystems.com
Page 63

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘c’— Sub-command Index 02: Stop Stream(s)
This sub-command is used to stop (or temporarily suspend) the delivery of any previously
started host stream in a module, one at a time or all together, whether the stream was
“continuous” or “limited.” The sub-command’s format is:
Command
“c 02 st”
‘c’ is the command letter
‘02’ is the sub-command index (‘ii’) for Stop Stream
‘st’ is the stream id digit (single stream 1, 2, or 3, or 0=all streams)
NOTE: all parameters are separated by a space.
Response
Autonomous
Packet
Description: This sub-command stops the current “run” of a particular specified host stream
(st=1-3), or stops the current “run” of “all configured” host streams with a single
command (st=0).
Any stopped stream may be resumed (i.e., restarted) with the Start Stream subcommand as long as that stream remains defined in the module and any limited
sequence count has not yet expired. The Clear Stream sub-command may be
used to undefine a stream. Any continuous stream or unexpired limited stream
that is restarted continues generating new sequence numbers (i.e., at the count
where it left off when stopped). However, the stream must be reconfigured with
the Configure a Host Delivery Stream sub-command (00) before it restarts with
sequence count =1. Any expired limited stream must be reconfigured to restart
at all.
Example:
“A”
‘A’ is the acknowledge letter
command stops generation of autonomous packets from the requested
stream(s).
● Stop all the streams configured in the previous example:
“c 02 0”
Read response:
“A”
Page 54 www.PressureSystems.com
Page 64

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘c’— Sub-command Index 03: Clear Stream(s)
This sub-command is used to “undefine” any previously configured host stream in a module,
one at a time, or all together. The sub-command’s format is:
Command
“c 03 st”
‘c’ is the command letter
‘03’ is the sub-command index (‘ii’) for configuration
‘st’ is the stream identifier character (1, 2, or 3 or 0=all streams)
NOTE: all parameters are separated by a space character.
Response
Autonomous
Packet
Description: This sub-command clears (un-defines) the particular specified host stream (st=1-
3), or un-defines “all configured” host streams with a single command (st=0).
Once cleared, a stream must be reconfigured before it can be started.
Example:
“A”
‘A’ is the acknowledge letter
none generated
● Stop all the streams configured previously. Then clear (un-define) only stream 3.
Finally, resume the remaining defined streams 1 and 2:
“c 02 0”
“c 03 3”
“c 01 0”
Read response:
“A”
“A”
“A”
Page 55 www.PressureSystems.com
Page 65

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘c’ — Sub-command Index 04: Return Stream Information
This sub-command returns current stream configuration information in its response. Its format
is:
Command
“c 04 st”
‘c’ is the command letter
‘04’ is the sub-command index (‘ii’) for configuration
‘st’ is the stream identifier character (1, 2, or 3 only)
NOTE: all parameters are separated by a space character.
Response
Autonomous
Packet
“st [[[[p]p]p]p sync per f num pro remport ipaddr bbbb ”
‘st’ is the stream identifier digit (1,2, or 3)
‘ pppp’ is a hex position field (channel selection bit map)
‘sync’ is sync type character (0 or 1)
‘per’ is the period (# trigger periods or delay timer period)
‘f’ is the format of the data delivered in stream
‘num’ is the number of packets delivered in the stream
‘pro’ identifies the protocol used for stream delivery (1=UDP/IP, 0=TCP/IP.
This protocol identifier pertains to stream delivery only.
‘remport’ identifies the remote port number to which each stream delivery
is directed in the host. A value of -1 indicates that stream delivery is
directed to the same port number the host is using to send commands to
the module.
‘ipaddr’ identifies the IP address of the host to which the stream delivery is
directed.
‘bbbb’ another position field (data options bit map) as specified by the “05”
sub-command.
NOTE: All datum fields separated by a space character.
none generated
Description: This sub-command returns current configuration information for a particular
stream. Returned values are defined the same as the sub-command parameters
of separate commands Configure a Host Delivery Stream (“00,” Select Protocol,
“06,” and Select Data in a Stream, “05.”). Note that the ‘num’ field represents the
number of packets returned so far (= last sequence number returned, or =0 if
stream not yet started.
Page 56 www.PressureSystems.com
Page 66

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Return configuration information for stream l
“c 04 1”
Read response:
“1 FFFF 0 20 7 32000 1 7002 200.200.200.1”
The above example shows all 16 (sixteen) channels. Data is acquired using
hardware trigger with one (1) data packet acquired for every trigger events. Data
is returned in format 7. (In the above example, 32000 packets have been
returned so far.) Data is sent using UDP protocol to port 7002 at IP address
200.200.200.1. Pressure EU data only is returned for the requested channels.
Page 57 www.PressureSystems.com
Page 67

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘c’ — Sub-command Index 05: Select Data in a Stream
This sub-command sets options that cause a specified stream to deliver specific kinds of
information to host. By default, only Pressure EU data are delivered for the channels already
specified by the “00” command.
Command
Response
Description: If this sub-command is never executed for a particular stream, then Pressure EU
Data are delivered (by default) in that stream following the fixed format binary
header ( tssss as described by the “01” sub-command). However, this sub-
command may also delete these default pressure readings from a stream (by not
specifying them) as well as add other selected acquired data to a stream (by
specifying them).
The bit map values (shown in the following table) may be added together to
specify all the actual data groups that will be delivered in each packet of the
specified stream. The first two table entries, if their “bits” are specified, will
cause two-byte binary (16-bit, big endian) status values to be delivered in the
stream packet (immediately following the binary stream header). The third table
entry, if specified, will cause the Pressure EU Data to be delivered (next), per
the specified format (f), and for just the channels specified in the configured
stream. The remaining table entries will cause other special data groups (i.e.,
raw pressures and EU temperature values, also in A/D counts or voltage forms)
to also be delivered in each stream packet. Each of these special data groups is
also output, if its “bit” is specified, in the order of its table entry (within the
packet). Each group will also have a datum per the specified channels, and be in
the specified format (per f).
“c 05 st bbbb”
‘c’ is the command letter
‘05’ is the sub-command index (‘ii’) for Select Data.
‘st’ is the stream id digit (1, 2, or 3, (0 not allowed)
‘ bbbb’ is the hex option field (bit map) to select which options will be
returned in the data stream (see table)
NOTE: all parameters are separated by a space character.
“A”
‘A’ is the acknowledge letter
Note
Selecting too many other data groups will compromise module
performance.
Page 58 www.PressureSystems.com
Page 68

Pressure Systems, Inc. Model 9116 User’s Manual
bbbb (hex) data selected for inclusion in each stream packet
0001 ** Enable Valve Position Status (reserved for future use)
0002 Enable DH Temperature Status (see bit map below)
0010 Enable Pressure EU Data (default if “05” never executed after “00”)
0020 Enable Pressure A/D Counts
0040 Enable Pressure Voltages
0080 Enable DH Temperature EU Data (degrees C)
0100 Enable DH Temperature A/D Counts
0200 Enable DH Temperature Voltages
Any DH Temperature Status datum is delivered as a two-byte binary bit map (16-bit, big
endian) with each bit representing the status of DH #16 through DH #1 respectively. A bit value
of 0 (zero) indicates the DH is operating within its specified limits. A value of 1 (one) indicates
the DH is outside its specified limits.
Bit # 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Chan # 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Binary 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Hex 8 0 0 1
The above example indicates that Channels 1 and 16 are operating outside the specified
temperature limits.
** This status field (0001) cannot be specified for Model 9116.
Note
However it is shown should the capability be added to future
firmware versions. Currently, only Models 9816 and 903x can return
Valve Position status in their streams.
Page 59 www.PressureSystems.com
Page 69

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Configure stream l to return temperature status field, and all Pressure EU data
“c 05 1 0012”
Read response:
“A”
If or when stream 1 is subsequently enabled, data groups in that stream with the
lowest-bit-numbers (table positions) selected are delivered first. In this example
(bbbb = 0012), the DH Temperature Status datum would be first, and then all
the specified Pressure EU data would follow (highest specified channel to lowest
specified channel). The standard 5-byte binary prefix (tssss) that begins all
stream packets would precede this status and data group.(See the Autonomous
Packet box in Start Stream sub-command (index 01.)
Page 60 www.PressureSystems.com
Page 70

Pressure Systems, Inc. Model 9116 User’s Manual
Command ‘c’ — Sub-command Index 06: Select Protocol For Stream Delivery
Command
Response
“c 06 st pro [remport [ipaddr]]”
‘c’ is the command letter.
‘ 06’ is the sub-command index (ii) for Select Protocol.
‘ st’ is the stream id digit (0=the ONLY acceptable entry).
‘ pro’ is the protocol id digit (1=UDP/IP, 0=TCP/IP)
‘ remport’ is an optional remote port number to which each UDP stream is
directed in the host (port 9000 is the default if unspecified). It is ignored if
pro=0.
‘ ipaddr’ is an optional host IP address to which each UDP stream is
directed (default is the host IP address per current TCP connection that
sent this command). It is ignored if pro=0.
NOTE: all parameters separated by a space.
“A”
‘A’ is the acknowledge letter
Description: This command sets the protocol by which every configured autonomous stream
is delivered to the host. It must be executed after streams are configured,
but before they are enabled.
By default, streams are delivered via the same TCP/IP protocol used to receive
commands from host (i.e., via the existing TCP/IP connection used to send this
command). However, for special circumstances, all autonomous streams may
be delivered to the host via the UDP/IP protocol instead. This command is
required only when UDP/IP is to be used. It also can restore the default protocol
(to TCP/IP) once it has been changed. The TCP/IP version of the command
ignores the optional (pro and ipaddr) parameters, which have meaning only to
the UDP/IP protocol.
Though the command has a stream parameter, it is currently limited to changing
the protocol of all defined streams at the same time (i.e., parameter st must be =
0, meaning all configured streams).
The optional remport parameter may be any value in the range 1024 to 65535.
However, remport = 7001 should be avoided, since NetScanner modules emit
UDP Query responses to that port, and most host programs should have a UDP
socket already bound to that port for receiving these special responses. The
choice of remport parameter will affect the way host software must handle
multiple modules sending streams. If every module uses the same port, then a
single host socket can be bound to that port to receive all responses from all
modules. The remote IP address, given to that socket, at time of receipt of the
stream’s datagram, will identify the particular module who sent the datagram.
Alternately, every module may be given a unique remport number, requiring that
a host program bind a unique UDP socket to each of these unique remport
numbers. Then, when a particular socket receives a UDP datagram to its unique
port, the module sending it is automatically identified.
Page 61 www.PressureSystems.com
Page 71

Pressure Systems, Inc. Model 9116 User’s Manual
The optional ipaddr parameter is normally unspecified, causing it to default to use
the IP address of the current TCP/IP connection. That way the host need not
have to be aware of its own IP address. This parameter is provided in case a
special host has multiple network interfaces and wants to use more than one.
When used, ipaddr requires four dotted numeric fields (d.d.d.d). Each d is a 1-3
digit decimal number in the range 0-255. The ipaddr = 255.255.255.255 is best
avoided, unless the UDP datagrams of streams are to be broadcast to all
network nodes.
Example:
● Configure all streams to be delivered via UDP/IP protocol. Host expects the UDP
datagrams to arrive via port 7500. The IP Address of the current TCP/IP
connection is also used to send each UDP datagram.
“c 06 0 1 7500”
Read response:
“A”
● Configure all streams to be delivered via the default TCP/IP protocol.
“c 06 0 0”
Read response:
“A”
Page 62 www.PressureSystems.com
Page 72

Pressure Systems, Inc. Model 9116 User’s Manual
CALCULATE AND SET OFFSETS (Command ‘h’)
Purpose: Instructs a module to calculate new offset coefficients with zero differential
pressure (or a specified “generated” pressure) applied to the specified channels.
These new coefficients update part of the module’s internal calibration coefficient
database, used to convert any subsequent raw data into engineering units data.
The new offset values are also returned in the response. This command is
sometimes called a Re-zero or zero-only calibration.
Command
“hpppp [vv.vvvv]”
‘h’ is the command letter
‘pppp’ is the position field
‘vv.vvvv’ is an [optional] applied pressure value preceded by a space
character
Response
Description: The position field may have 0 or 4 characters. If no position field is specified,
offset coefficients for all of a module’s input channels will be calculated and
returned. If a position field is specified, offset coefficients for only the channels
whose bits are set (=1) will be calculated and returned. If the optional pressure
value [ vv.vvvv] is specified, the position field must be 4 characters, even when
all channels are to be specified. If the optional pressure value [‘vv.vvv’] is not
provided, an applied pressure of 0.0 psi(a) will be assumed when calculating
coefficients. Offset values are returned in the response in order of highest
specified channel to lowest specified channel, with data formatted per an implied
decimal format (f=0).
Before acquiring data with this command, any addressed Model 9116 module
will normally attempt to place the calibration valve in the CAL position, so that a
zero differential pressure can be applied to all channels via the module’s CAL
and CAL Ref input port. Simply leaving these ports unattached will allow the
transducers to read the appropriate zero differential pressure if ambient air
pressure is stable. After data are acquired, the calibration valve will be placed in
the RUN position. To disable the automatic shifting of the calibration valve, refer
to the Set Operating Options (‘w’) command (index 0B). The reader is also
referred to Section 4.2 of Chapter 4 for additional details concerning the
performance of a Re-zero Calibration.
Note
“g.gggg .. [g.gggg]...”
‘g.gggg’ are the actual offset data values returned, each preceded by a
space.
The calculated offset values from the latest ‘h’ command will be lost
when the module is powered off. To save these offset terms to each
transducer’s non-volatile memory refer to the Set Operating Options
(‘w’) command (index 08).
Page 63 www.PressureSystems.com
Page 73

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to a Model 9116 module (via its open socket) to
calculate and set new offset coefficients for channels 16 through 13.
“hF000”
volatile main memory):
Actual offset values are returned in the above response as decimal fixed-point
ASCII strings, each preceded by a space character. From left-to-right: they are
for channels 16, 15, 14, and 13.
Read response, containing all new offset values (also stored in the module’s
“0.0010 0.0020 0.0015 0.0025”
Page 64 www.PressureSystems.com
Page 74

Pressure Systems, Inc. Model 9116 User’s Manual
READ TEMPERATURE COUNTS (Command ‘m’)
Purpose: Returns the most recently acquired raw temperature data for the specified
channels in averaged A/D counts (in the range -32768 to +32767). This
command is similar to command ‘a,’ except that the raw data reflects a channel’s
temperature signal instead of its pressure signal. Each datum returned in the
response will be in the specified high-precision data format, but representing A/D
counts as a signed integer average. This command is intended for advanced
users only and is not required for normal operation.
Command
“mppppf”
‘m’ is the command letter
‘pppp’ is the position field
‘f’ is the format field
Response
“ dddd.. dddd”
‘ dddd’ are the datum fields, each with a leading space (except f= 7
or 8).
Description: The 4-character hex position field (pppp) specifies a 16-bit binary bit-map, with
each bit (set to 1) specifying a particular channel number (16-1, left-to-right).
The 1-character format field (f) specifies the format of each data field (dddd) that
will be returned in the requested response. The first datum returned in the
response will be for the highest channel number supplied, and each (non-binary)
datum will be preceded by a space character. Some formats may not be
applicable to the specific type of data being requested. Valid formats are shown
in the following table:
f converts each internal response datum value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
2 double binary float to 16-digit hex integer “ xxxxxxxxxxxxxxxx” 17
5 single binary float to long integer (EU*1000) then to 8-digit hex integer 9
7 single binary float to single binary float (big endian: msb first) 4
8 single binary float to single binary float (little endian: lsb first) 4
Page 65 www.PressureSystems.com
Page 75

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to Model 9116 module (via its connected socket) that
returns decimal raw “temperature” A/D counts data for channels 1, 5, 9, and 13:
“ m11110”
Response contains data for channels 13, 9, 5, and 1 (left to right):
“ 20692.000000 19783.000000 19204.000000 20432.000000”
Page 66 www.PressureSystems.com
Page 76

Pressure Systems, Inc. Model 9116 User’s Manual
READ TEMPERATURE VOLTAGES (Command ‘n’)
Purpose: Returns the most recently acquired raw temperature data for the specified
channels converted to engineering-unit Volts directly from the averaged A/D
counts. It is similar to command ‘V,’ except that the raw data reflects a channel’s
temperature signal instead of its pressure signals. Each datum returned in the
response will be in the specified high-precision data format. This command is
intended for advanced users only and is not required for normal operation.
Command
Response
“nppppf”
‘n’ is the command letter
‘pppp’ is the position field
‘f’ is the format field
“ dddd.. dddd”
‘ dddd’ are the datum fields, each with a leading space (except f= 7
or 8).
Description: The 4-character hex position field (pppp) specifies a 16-bit binary bit-map, with
each bit (set to 1) specifying a particular channel number (16-1, left-to-right).
The 1-character format field (f) specifies the format of each datum field (dddd)
that will be returned in the requested response. The first datum returned in the
response will be for the highest channel number supplied, and each (non-binary)
datum will be preceded by a space character. Some formats may not be
applicable to the specific type of data being requested. Valid formats are shown
in the following table:
f converts each internal response datum value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
2 double binary float to 16-digit hex integer “ xxxxxxxxxxxxxxxx” 17
5 single binary float to long integer (EU*1000) then to 8-digit hex integer 9
7 single binary float to single binary float (big endian: msb first) 4
8 single binary float to single binary float (little endian: lsb first) 4
Page 67 www.PressureSystems.com
Page 77

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to Model 9116 module (via its connected socket) that
returns decimal voltage data (of the raw temperature signal) for channels 1, 5, 9,
and 13:
“n11110”
Response contains data for channels 13, 9, 5, and 1 (left to right):
“ 0.53013 0.541698 0.503633 0.000000”
In this example channels 13, 9, and 5 return normal temperature voltage signals
in the range of 0.5 to 0.6 volts. Note that channel 1 returns a value of 0.0 volts,
indicating a possible error in its temperature signal.
Page 68 www.PressureSystems.com
Page 78

Pressure Systems, Inc. Model 9116 User’s Manual
READ MODULE STATUS (Command ‘q’)
Purpose: Returns requested module status information.
Command
“qii”
‘q’ is the command letter
‘ii’ is the status index field
Response
Description: The 2-digit hex index field (ii) chooses a particular status field to be returned.
Returned value is described in the following table for each index (a third column
shows any ‘w’ command index for setting same option.
ii
00 Module’s Model Number, as decimal (**) integer value (e.g, 9116).
01 Firmware Version, as hex value
(expressed internally as integer version * 100).
(e.g. hex ‘0100’ = 256 decimal, means Version 2.56)
02
Power-up Status, as 16-bit hex bit map, bits having the following
meaning:
Bit 0 (LSB): A/D Failure Error.
Bit 1: Transducer Re-zero Adjustment (offset) Term Range Error (out of-range values set to 0.0 internally).
Bit 2: Transducer Span Adjustment (gain) Term Range Error (out-of range values set to 1.0 internally).
Bit 3: Temperature Correction Coefficients Not Present or Out-of-Range
(if transducer has one or more bad coefficients, all set to 0.0).
Bit 4: reserved (for transducer checksum)
“hhhh”
‘hhhh’ is a 4-digit hex datum (or other (**) decimal datum
returned value
4-digit hex or other decimal (**)
‘w’ set
index
Bit 5: FLASH Initialized Data Section Checksum Error (if error, all data
variables set to factory defaults and stored in FLASH).
Bit 6: SRAM Error.
03 reserved
04 reserved
05
Number of A/D Samples To Average, as hex value (e.g., 000A=10
decimal).
10
Page 69 www.PressureSystems.com
Page 79

Pressure Systems, Inc. Model 9116 User’s Manual
IP Address Resolution Method, as hex state: (default = 0000)
0000 = Use Static IP Address stored in module’s non-volatile
06
memory
13
0001 = Get Dynamic IP Address from external RARP/BOOTP
server
Host Response/Stream Back-Off Delay, as hex value (or FFFF). FFFF
means use low-order byte of module’s Ethernet Address as value
07
instead. In either case, back-off delay in microseconds is calculated from
14
decimal equivalent of hex value:
delay = decvalue * 20
Host Response/Stream Total Size Prefix (with 2-byte big-endian binary
value), added to all command responses and streams to indicate their
08
true length in bytes:
16
0000 = None (default)
0001 = Yes
09 TCP Connect Port, as hex value (e.g. 2328 = 9000 decimal, default). 17
Auto UDP Broadcast@Reset, as hex state:
0A
0000 = No (default)
18
0001 = Yes
Temperature Status of Each Scanner Transducer, as 16-bit hex bit
map, each bit representing the current status of a transducer/channel
0C
(16-1)). Bit values are:
0= transducer operating within the specified operational limits.
1= transducer operating outside the specified limits.
(see end-of-table NOTE +)
0D
0E
11
31
Minimum Temperature Alarm Set Point (in degrees C), as decimal (**)
format 0 representation of internal IEEE float, with leading space).
Maximum Temperature Alarm Set Point (in degrees C), as decimal (**)
format 0 representation of internal IEEE float, with leading space).
Thermal Update Scan Interval (in seconds) as decimal (**) integer
value.
Module hardware version number in the form e.eeeeee. (9016 returns
‘N08’
19
19
1B
Hardware trigger mode.
0=positive going edge
32
1=negative going edge
32
2=trigger on any edge
(9016 returns a ‘N08’)
Temperature Range, as a hex value
3c
0000 = range 0 to 60ºC (default)
0006 = range -30 to 60º C
0007 = range -20 to 70ºC
(+) NOTE: This 4-byte hex status fields may also be returned in autonomous data streams, but as
pure binary extensions of each stream’s packet binary header (see ‘c’ command, ii=05,
bbbb=0002).
Page 70 www.PressureSystems.com
Page 80

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Request model number from a Model 9116 module:
“q00”
Read response indicating it is a Model 9116:
“9116”
● Request TCP back-off delay for a Model 9116 module:
“Q07"
Read hex (16-bit binary) response:
“001F” (31 decimal, or 31 x 20=620 µsec.)
Page 71 www.PressureSystems.com
Page 81

Pressure Systems, Inc. Model 9116 User’s Manual
READ HIGH-PRECISION DATA (Command ‘r’)
Purpose: Returns the most recently acquired engineering-unit pressure data for the
specified channels. Each datum returned in the response will be in the specified
high-precision data format.
Command
“rppppf”
‘r’ is the command letter
‘pppp’ is the position field
‘f’ is the format field
Response
Description: The 4-character hex position field (pppp) specifies a 16-bit binary bit-map, with
each bit (set to 1) specifying a particular channel number (16-1, left-to-right).
Models 9021 and 9022 use only channels 12-1.
The 1-character format field (f) specifies the format of each data field (dddd) that
will be returned in the requested response. The first datum returned in the
response will be for the highest channel number specified. Each (nonbinary) datum will be preceded by a space character (except in the case of f= 7).
Some formats may not be applicable to the specific type of data being requested.
Valid formats are shown in the following table:
f converts each internal response datum value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
“ dddd.. dddd”
‘ dddd’ are datum fields, each with leading space (except f= 7 or 8).
2 double binary float to 16-digit hex integer “ xxxxxxxxxxxxxxxx” 17
5 single binary float to long integer (EU*1000) then to 8-digit hex integer 9
7 single binary float to single binary float (big endian: msb first) 4
8 single binary float to single binary float (little endian: lsb first) 4
Unless the EU conversion scalar is altered, the returned data will be in units of
psi
Page 72 www.PressureSystems.com
Page 82

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to Model 9116 module (via its connected socket), that
returns decimal pressure data for channels 1, 5, 9, and 13 in ASCII fixed point
format:
“r11110”
Response contains data for channels 13, 9, 5, and 1 (left to right):
“ 1.234000 0.989500 1.005390 0.899602”
Page 73 www.PressureSystems.com
Page 83

Pressure Systems, Inc. Model 9116 User’s Manual
READ TRANSDUCER TEMPERATURE (Command ‘t’)
Purpose: Returns the most recently acquired engineering-unit temperature data (in ºC) for
the specified channels. Each datum returned in the response will be in the
specified high-precision data format.
Command
“tppppf”
‘t’ is the command letter
‘pppp’ is the position field
‘f’ is the format field
Response
Description: The 4-character hex position field (pppp) specifies a 16-bit binary bit-map, with
each set bit (1) specifying a particular channel number (16-1, left-to-right).
The 1-character format field (f) specifies the format of each data field (dddd) that
will be returned in the requested response. The first datum returned in the
response will be for the highest channel number specified. Each (non binary) datum will be preceded by a space character. Some formats may not be
applicable to the specific type of data being requested. Valid formats are shown
in the following table:
f converts each internal response datum value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
2 double binary float to 16-digit hex integer “ xxxxxxxxxxxxxxxx” 17
“ dddd.. dddd”
‘ dddd’ are the datum fields, each with leading space (except f =7
or 8).
5 single binary float to long integer (EU*1000) then to 8-digit hex integer 9
7 single binary float to single binary float (big endian: msb first) 4
8 single binary float to single binary float (little endian: lsb first) 4
Page 74 www.PressureSystems.com
Page 84

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to Model 9116 module (via its connected socket) that
returns decimal temperature data for channels 1, 5, 9, and 13:
“t11110”
Response contains data (in ºC) for channels 13, 9, 5, and 1 (left to right):
“ 21.234000 20.989500 21.005390 20.899602”
Page 75 www.PressureSystems.com
Page 85

Pressure Systems, Inc. Model 9116 User’s Manual
READ INTERNAL COEFFICIENTS (Command ‘u’)
Purpose: Returns one (or more contiguous) requested internal coefficient(s) in a specified
internal coefficient array, and in the specified response data format.
Command
“ufaacc[-cc]”
‘u’ is the command letter.
‘f’ is the format field.
‘aa’ is the array index field.
‘cc[-cc]’ is coefficient index [or contiguous range].
Response
Description: The 1-character format field (f) is a single decimal digit that defines the format of
each returned datum in the response. All datum ( dddd) fields returned will be
preceded by a space character. Most coefficients have a floating point datum
type (f=0-1), while others have an integer datum type (f=5). Requesting an
improper format will result in an “N08" error response. Valid format types for
coefficients are shown in the following table:
f converts each internal value from . . . max. char.
0 single binary float to 7-10-digit signed decimal “ [-xxx]x.xxxxxx” 13
1 single binary float to 8-digit hex integer “ xxxxxxxx” 9
5 long binary integer to 8-digit hex integer “ xxxxxxxx” 9
The 2-character array index field (aa) is a hexadecimal value selecting a
particular internal coefficient array. The first array index (aa=01) refers to
channel one’s transducer, the 16th (aa=10) refers to channel sixteen’s
transducer. Finally, the last array (aa=11) refers to a special global array.
A single 2- character coefficient index field ( cc) is a hexadecimal value that
selects a particular coefficient within the specified array. Multiple contiguous
coefficients of the same type may be specified by using a coefficient index“range”
specified by adding a hyphen (negative sign) between two such indexes (cc-cc).
The coefficients of internal DH200 transducers used in the Model 9116 are
selected with array indexes aa=01 through 10 (hex). All valid coefficient indexes
(for each of these arrays) are listed in the following table:
“ dddd.. dddd”
‘dddd’ are the datum fields, each with leading space character.
Page 76 www.PressureSystems.com
Page 86

Pressure Systems, Inc. Model 9116 User’s Manual
Coefficients used for typical applications are shown in BOLD type.
Note
All other coefficients are typically not used outside of advanced
diagnostic functions.
cc Transducer Coefficients Description
Datum
Type
00 Re-zero Cal Adjustment (offset) term FLOAT
01 Span Cal Adjustment (gain) term FLOAT
02
03
04
05
Dynamic EU Conversion coefficient c0
Dynamic EU Conversion coefficient c1
Dynamic EU Conversion coefficient c2
Dynamic EU Conversion coefficient c3
FLOAT
FLOAT
FLOAT
FLOAT
06 Reserved for Factory Use ---
07
User Defined Date field (see end-of-table note)
INTEGER
08 Date of Factory Calibration (see end-of-table note) INTEGER
09
0A
Transducer Manufacturing Reference number
Transducer Full-Scale Range code (see Appendix F)
INTEGER
INTEGER
0B-0F Temperature 1, Pressures 1-5 voltages FLOAT
10-14 Temperature 2, Pressures 1-5 voltages FLOAT
15-19 Temperature 3, Pressures 1-5 voltages FLOAT
1A-1E Temperature 3, Pressures 1-5 voltages FLOAT
1F-23 Temperature 5, Pressures 1-5 voltages FLOAT
24-28 Temperature 6, Pressures 1-5 voltages FLOAT
29-2D reserved for future use (temperature 7) FLOAT
2E Temperature 1 Temperature Output voltage at 0 psi FLOAT
2F Temperature 2 Temperature Output voltage at 0 psi FLOAT
30 Temperature 3 Temperature Output voltage at 0 psi FLOAT
31 Temperature 4 Temperature Output voltage at 0 psi FLOAT
32 Temperature 5 Temperature Output voltage at 0 psi FLOAT
Page 77 www.PressureSystems.com
Page 87

Pressure Systems, Inc. Model 9116 User’s Manual
cc Transducer Coefficients Description
Datum
Type
33 Temperature 6 Temperature Output voltage at 0 psi FLOAT
34 (reserved) Temperature 7 Temperature Output voltage at 0 psi FLOAT
35 Temp Vs Pressure Correction coefficient (t0) FLOAT
36 Temp Vs Pressure Correction coefficient (t1) FLOAT
37 Temp Vs Pressure Correction coefficient (t2) FLOAT
38 Temp Vs Pressure Correction coefficient (t3) FLOAT
4D Pressure Voltage Gain Index INTEGER
4E Temperature Voltage Gain Index INTEGER
5F Current Calculated Pressure (PSI) FLOAT
The User Defined Date field (cc=07) is also a 32-bit integer which may be
encoded in a similar manner. Possible uses are to indicate the date of last user
zero and/or span calibration or possibly the date of next required calibration. If
this optional field is used, the user is responsible for correctly encoding the date
into the appropriate 32-bit integer value. Any modifications of this field (using
the Download Internal Coefficients (‘v’) command) will result in the new value
automatically being entered to transducer non-volatile memory.
The Date of Factory Calibration field (cc=08) identifies the date of factory
calibration for the DH200 transducer (9116). It is stored internally as a 32-bit
integer whose value (viewed as a decimal number) is in the format of yymmdd
(year, month, day).
A special single Other Coefficients array is selected with array index aa=11
(hex). All the valid coefficient indexes (for this array only) are listed in the
following table:
cc Other Coefficients Description
Datum
Type
00 reserved - EU conversion offset term FLOAT
01
EU Pressure Conversion scaler (default=1.0)
FLOAT
02 Reserved - EU conversion Non-Linearity term FLOAT
03 Reserved-Reference Voltage value FLOAT
Page 78 www.PressureSystems.com
Page 88

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to module (via its connected socket) requesting the most
recent calibration adjustment’s offset and gain terms (cc=00-01), and the
adjacent factory-determined transducer coefficients C0 through C4 (cc=02-06) for
transducer 1: Data requested in ASCII-hex format representing the internal
binary floating point format.
“u10100-06”
Response returned is:
“ 3B200A6E . . 00000000”
The maximum response size is 300 characters. If the requested
Note
range of coefficients requested exceeds this, the module will return
an “N07" error response.
Page 79 www.PressureSystems.com
Page 89

Pressure Systems, Inc. Model 9116 User’s Manual
DOWNLOAD INTERNAL COEFFICIENTS (Command ‘v’)
Purpose: Downloads one or more internal coefficients to the module.
Command
““vfaacc[-cc]dddd..dddd”
‘v’ is the command letter.
‘f’ is the format field.
‘aa’ is the array index field.
‘cc[-cc]’ is coefficient index [or contiguous range].
‘dddd’ are the datum field(s) each with a leading space.
Response
Description: The 1-character format field (f) is a single decimal digit that defines the format of
each coefficient to be downloaded in the command’s datum ( dddd) fields, with
each datum preceded by a space character. Most coefficients have a floating
point datum type (f=0-1), while others have an integer datum type (f=5). Sending
a datum in the improper format will result in an “N08" error response. Valid format
types are shown in the following table:
f converts each internal value from . . . max. char.
0 1-10-digit signed decimal “ [-xxx]x.[xxxxxx]” to single binary float 13
1 8-digit hex integer “ xxxxxxxx” to single binary float 9
5 8-digit hex integer “ xxxxxxxx” to long binary integer 9
The 2-character array index field (aa) is a hexadecimal value selecting a
particular internal coefficient array to receive the downloaded data. The first
array index (aa=01) refers to channel 1's transducer, the 16th (aa=10) refers to
channel 16's transducer. Finally, the last array (aa=11) refers to a special global
array.
A single 1- or 2- character coefficient index field (c or cc) is a hexadecimal value
that selects a particular coefficient within the specified array. Multiple contiguous
coefficients may be specified by using a coefficient index “range” specified by
adding a hyphen (negative sign) between two such indexes.
The coefficients of internal DH200 transducers used in the Model 9116 are
selected with array indexes aa=01 through 10 (hex). All valid coefficient indexes
(for each of these arrays) are listed in the following table:
“A”
‘A’ is the acknowledge letter
Page 80 www.PressureSystems.com
Page 90

Pressure Systems, Inc. Model 9116 User’s Manual
cc Transducer Coefficients Description
Datum
Type
00 Re-zero Cal Adjustment (offset) term (Note 1) FLOAT
01 Span Cal Adjustment (gain) term (Note 2) FLOAT
07 User Defined Field (Note 4) INTEGER
09 Transducer Manufacturing Reference Number (Note 5) INTEGER
0A Transducer Full-Scale Range Code (See Appendix F) (Note 5) INTEGER
(Note 1) Related command ‘w08’ can be used to download the offset term to the
sensor’s non-volatile memory (digitally or non-digitally compensated sensor).
(Note 2) Related command ‘w09’ can be used to download the gain term to the
sensor’s non-volatile memory (digitally or non-digitally compensated sensor).
(Note 4) Data is immediately stored to the sensor’s non-volatile memory.
The User Defined Date field (cc=07) is a 32-bit integer. Possible uses are to I
ndicate the date of last user zero and/or span calibration or possibly the date of
next required calibration. If this optional field is used, the user is responsible for
correctly encoding the date into the appropriate 32-bit integer value e.g., a
decimally encoded ‘yymmdd’ date. Any modifications of this field (using the
Download Internal Coefficients (‘v’) command) will result in the new value
automatically being entered to transducer non-volatile memory.
A special single Other Coefficients array is selected with array index aa=11
(hex). All the valid coefficient indexes (for this array only) are listed in the
following table:
cc Other Coefficients Description
Datum
Type
01 EU Pressure Conversion scaler (default=1.0) FLOAT
Page 81 www.PressureSystems.com
Page 91

Pressure Systems, Inc. Model 9116 User’s Manual
Example:
● Send TCP/IP command to module (i.e., via its connected socket): with
replacement values for the channel’s offset and gain correction terms loaded into
the module’s volatile memory (cc=00-01). Load these into channel # 8's
Transducer Coefficient array (aa=08).
“v00800-01 0.000 1.000”
Response returned is:
“A”
● Send command to Model 9116 module (via its connected socket) to change its
default EU output from psi to kPa. This will be done by changing the EU
Pressure Conversion Scaler to 6.894757.
“v01101 6.894757”
Response returned is
“A”
Page 82 www.PressureSystems.com
Page 92

Pressure Systems, Inc. Model 9116 User’s Manual
SET/DO OPERATING OPTIONS/FUNCTIONS (Command ‘w’)
Purpose: Change a module’s default operating option settings, or invoke special internal
operations or functions.
Command
“wii[dd[ eeee]]”
‘w’ is the command letter.
‘ii’ is the option index field.
‘dd’ is an [optional] hex datum field.
‘eeee’ is an [optional] extra datum with a leading space character.
Response
“A”
‘A’ is the acknowledge letter
Description: The index field (ii) contains two hex digits that identify the specific option to be
set or function to be performed. The datum field (dd), when present, contains 2
hex digits. A few indexes also require an extra datum field (eeee). Valid
options/functions are listed in the table below (-- marks a missing datum field in
its column, and fourth column shows any ‘q’ command index that reads same
option):
ii dd Description
‘q’ read
index
00 --- Execute Internal Self Test.
01 --- Update Internal Thermal Coefficients.
02-06 --- Reserved for factory use
07 --- Store Operating Options in non-volatile flash memory.
08 ---
09 ---
Store Current Offset Terms in transducers’ non-volatile
memories.
Store Current Gain Terms in transducers’ non-volatile
memories.
0A 01-10 Set Number of Channels in Module (default =16 for 9116).
0B
00
01
Enable Automatic Shifting of Calibration Valve during
Calculate and Set Offsets (‘h’) command (default).
Disable Automatic Shifting of Calibration Valve in ‘h’.
User will manually control calibration value.
Page 83 www.PressureSystems.com
Page 93

Pressure Systems, Inc. Model 9116 User’s Manual
ii dd Description
0C
00
01
Set Cal Valves to RUN or LEAK Position (default)
— choice made by ii=12.
Set Cal Valves to CAL/RE-ZERO or PURGE Position —
choice made by ii=12.
‘q’ read
index
0B
see chart
below
0D-0E -- Reserved for factory use
0F
00
01
Disable periodic Thermal Coefficient Update task.
Enable periodic Thermal Coefficient Update task (default).
01-20 Set Number of A/D Samples to Average, (default = 8).
10
Valid values are 4, 8,16, 32, and 64. Other values below 64
are rounded up to the next valid value listed above.
11 -- Reserved for factory use
12
13
00
01
00
01
Set Cal Valves to RUN or CAL/RE-ZERO Position (default)
— choice made by ii=0C.
Set Cal Valves to PURGE or LEAK Position — choice made
by ii=0C.
Use Static IP Address Resolution (default)
Use Dynamic IP Address Resolution (RARP/BOOTP)
(Results in immediately becoming the module’s new power-on
see chart
below
default)
Disable Host Response/Stream Back-Off Delay (default).
Enable Host Response/Stream Back-Off Delay as low-order
byte of Ethernet Address(converted to decimal value * 20
sec.).
Enable Host Response/Stream Back-Off Delay specified
per eeee as decimal value (* 20 sec.)
Disable Host Response/Stream Total Size Prefix (default).
Enable Host Response/Stream Total Size Prefix (2-byte
big-endian binary value with total size of response or stream
14
16
00
01
02
00
01
data in bytes that follows it).
17
18
19
1B
00 Set TCP Connect Port per eeee as decimal value
(default=9000).
00
01
00
01
Disable Auto UDP Broadcast at Reset (default).
Enable Auto UDP Broadcast at Reset.
Set Minimum Temperature Alarm Set Point (in
per eeee as decimal value (default = 0
Set Maximum Temperature Alarm Set Point ( in
per eeee as decimal value (default = 60
N
C).
N
C).
N
C)
N
C)
00 Set Thermal Update Scan Interval per eeee as decimal
value (seconds), 1 <= eeee <= 3600 seconds (default = 15).
0D
0E
05
0B
06
07
08
09
0A
11
Page 84 www.PressureSystems.com
Page 94

Pressure Systems, Inc. Model 9116 User’s Manual
ii dd Description
31 00 Set module type alias. 1 eeee=9116 (default) or 9016 00
2
dd Set hardware trigger mode.
dd=00 trigger on positive going edge (default)
32
dd=01 trigger on negative going edge
dd=02 trigger on any edge (duty cycle must be taken into
account in order to avoid over-triggering)
00
3c
06
07
1. The set module type alias command instructs the 9116 to identify itself as a 9016 in response to the ‘psi9000' UDP broadcast
command, the UDP startup broadcast messages, and in response to the q0 command. This command is provided in support
of legacy software. Valid command responses are; ‘A’ - acknowledge, ‘N08’ - invalid command (9016s always return’N08’),
and ‘N07’ - invalid alias type. The module type alias setting can be made nonvolatile with the ‘w07’ command.
2. The Set hardware trigger mode is always volatile and will be set to the default upon any interruption of power. Valid command
responses are; ‘A’ - acknowledge and ‘N08’ - invalid command (9016s always return ‘N08’).
Set temperature range = 0 to 60ºC (default)
Set temperature range = -30 to 60ºC
Set temperature range = -20 to 70ºC
Modification of option 13 hex results in the new option selection becoming the module’s new
power-on default. All other options must be stored in non-volatile flash memory using ‘w07’
command in order to be retained after the module power cycles.
‘q’ read
index
32
Page 85 www.PressureSystems.com
Page 95

Pressure Systems, Inc. Model 9116 User’s Manual
The Valve Position indexes (ii=12 and ii=0C) each have two states (00/01) that when combined
provide four (4) possible states of the C1/C2/C3/C4 internal valves. This “Logical Rotary
Switch” with four (4) positions is summarized in the following chart:
C1 Energized
C2 Not
(0C=01)
C2 Energized
C1 Not
(0C=00)
C3 Energized
C4 Not
(12=01)
C4 Energized
C3 Not
(12=00)
PURGE
position
CAL/RE-ZERO
position
LEAK/CHECK
position
RUN
position
Example:
● Send TCP/IP commands to Model 9116 module (via its connected socket)
setting the calibration valve to the CAL (or Re-Zero) position:
“w1200" (Set RUN/CAL valve position)
“w0C01” (Set CAL position)
Responses (both commands):
“A”
“A”
If the programmer “knows” that the module is already in the RUN/CAL
Note
valve mode, the first command above is optional. For more information,
see Figures 4.1 through 4.4 in Chapter 4.
Page 86 www.PressureSystems.com
Page 96

Pressure Systems, Inc. Model 9116 User’s Manual
NETWORK QUERY (UDP/IP Command ‘psi9000’)
Purpose: To determine how many (and which) modules are powered-up and operational
on the network.
Command
“psi9000"
Response
“ipadr, ethadr, sernum, mtype, sfwver, connst, ipadrst, lisport,
subnet, iparpst, udpast, pwrst,”
Description: When a module receives this broadcast command (by continuously monitoring
port 7000) it responds with a broadcast (on port 7001) with an ASCII response
containing comma-separated parameters. These are listed in the following table
Parameter Meaning
ipadr
ethadr
sernum
mtype
sfwver
connst
IP address
Ethernet address
Serial number
Module type (e.g., Model 9116)
Software version (e.g., x.xx decimal format)
Connection status (1=connected, 0=available)
:
ipadrst
lisport
subnet
iparpst
udpast
pwrst
Some special rack-mounted module types (e.g., 9816) also add rack, cluster, and slot
parameters to the response above. These additional parameters are added following the
‘pwrst’ parameter.
IP address status (1=has one, 0=waiting for server)
IP listening port for connections (default=9000)
Subnet mask
IP address resolution status (1=uses RARP/BOOTP server, 0=uses
static IP address stored internally)
UDP auto status (1=broadcasts this response automatically after
connection possible, 0=only sends response for “psi9000" UDP/IP
command.
Power-up status (same as a ‘q02' command response)
Page 87 www.PressureSystems.com
Page 97

Pressure Systems, Inc. Model 9116 User’s Manual
This uniform network query response allows a client host program to identify, configure, and use
any suitable group of modules (for the task at hand) by simply opening a TCP/IP connection
between itself and each available module needed.
Example:
● Query all module(s) on the network.
“psi9000”
Response(s):
200.201.7.207, 0-e0-8d-1-7-cf, 1999, 9116, 2.32, 0, 1, 9000, 192.0.0.0, 0, 1, 0x0
Page 88 www.PressureSystems.com
Page 98

Pressure Systems, Inc. Model 9116 User’s Manual
RE-BOOT MODULE (UDP/IP Command ‘psireboot’)
Purpose: To unconditionally “reboot” a specified module.
Command
Response
Description: When a Model 9116 module receives this broadcast command, (by continuously
monitoring port 7000) it responds by immediately restarting its firmware. The
result is essentially the same as a power-up restart, in that any TCP/IP
connection is lost, and the module returns to its normal startup state. The host
must wait long enough for the re-boot process to be completed before it can
again request a connection to the module.
Example:
“psireboot ethadr”
where ethadr is the Ethernet address of the specified module in the
following special hex-digit format
‘xx-xx-xx-xx-xx-xx’
none (module reboots)
● Re-boot a specified module on the network.
“psireboot 00-E0-8D-00-00-01”
Response:
(None)
Page 89 www.PressureSystems.com
Page 99

Pressure Systems, Inc. Model 9116 User’s Manual
CHANGE MODULE’S IP ADDRESS RESOLUTION METHOD & RE-BOOT
(UDP/IP Command ‘psirarp’)
Purpose: To change (toggle) the current IP address resolution state (ipaarpst) of a
specified module, and then unconditionally “re-boot” it.
Command
Response
Description: When a Model 9116 module receives this broadcast command, (by continuously
monitoring port 7000) it responds by toggling its current ARP method to one of
two states: dynamic resolution or static resolution. Then it restarts its firmware.
The result is essentially the same as a power-up restart, in that any TCP/IP
connection is lost, and the module returns to its normal startup state. However, if
it used the static resolution method before it received this command, after the re boot, it will not have a valid IP address until an external network server (RARP or
BOOTP) provides it with one. However, executing the command a second time
will restore it to using its original statically-assigned IP address (after another re boot finishes).
Just as for the “psireboot” command, the host must wait long enough for the reboot process to be completed before it can again request a connection to the
module.
Example:
“psirarp ethadr”
where ethadr is the Ethernet address of the specified module in the
following special hex-digit format
‘xx-xx-xx-xx-xx-xx’
none (module re-boots)
● Reconfigure a specified module on the network so that it uses its “other” IP
address resolution method, and also re-boot it. Presumably, the host knew the
module’s current state (iparpst) as a result of a recent Network Query response
from the module.
“psirarp 00-E0-8D-00-00-01”
Response:
(None)
Page 90 www.PressureSystems.com
Page 100

Pressure Systems, Inc. Model 9116 User’s Manual
Chapter 4
Calibration
4.1 Introduction
Each internal DH200 transducer in a Model 9116 Intelligent Pressure Scanner contains nonvolatile read/write memory capable of storing the transducer's full thermal and pressure
calibration data.
The Model 9116 Intelligent Pressure Scanner module uses a third-order polynomial to convert
transducer output voltage to pressure. All calculations are carried out internally using high
precision math. The following formula is used for all pressure output calculations.
P
where:
P
V = Transducer output voltage
C
C
C
Since the polynomial’s coefficients are a function of the current temperature, they are
dynamically re-calculated by the module firmware (with other equations) to compensate for each
transducer’s measured temperature change.
Each Model 9116 Intelligent Pressure Scanner contains an integral purge/leak check calibration
manifold. Through software commands, this valve may be placed in one of four positions: RUN,
CAL, PURGE, or LEAK-CHARGE. (See the Set/Do Operating Options/Functions (‘w’)
command (ii=0C & 12) in Chapter 3, and in particular the Valve Position Chart at the end of
command’s description.) When each module’s internal calibration valve is placed in the
CAL/RE-ZERO position (through software commands), all DH200 transducer pressure inputs
are pneumatically connected to the CAL input ports. All DH200 reference inputs are
pneumatically connected to the CAL REF input port. The CAL input may be used to perform
on-line zero adjustment of the 9116’s transducers. This capability virtually eliminates sensor
zero drift error and ensures the highest possible data accuracy. The CAL input may also be
used for DH200 span adjustment calibrations. Span calibration of multi-range scanners may
also utilize the CAL input ports if the highest applied pressure does not exceed the proof
pressure rating of any installed transducer.
(V) = [C0(T) + C1(T)*V + C2(T)*V2 + C3(T)*V3] * C
T
= Calculated applied pressure
T
(T) .. C3(T) = Conversion coefficients generated from calibration data at
0
temperature T.
= Re-zero adjustment’s “offset”correction coefficient
RZ
= Span adjustment’s “gain” correction coefficient
SPAN
- CRZ
SPAN
Page 91 www.PressureSystems.com
 Loading...
Loading...