

Page 1
User's Guide
USB-CTR04
USB Counter/Timer Device
Document Revision 4
March 2015
© Copyright 2015
Page 2
Your new Measurement Computing product comes with a fantastic extra —
Management committed to your satisfaction!
Thank you for choosing a Measurement Computing product—and congratulations! You own the finest, and you can now enjoy
the protection of the most comprehensive warranties and unmatched phone tech support. It’s the embodiment of our mission:
To provide data acquisition hardware and software that will save time and save money.
Simple installations minimize the time between setting up your system and actually making measurements. We offer quick and
simple access to outstanding live FREE technical support to help integrate MCC products into a DAQ system.
Limited Lifetime Warranty : Most MCC products are covered by a limited lifetime warranty against defects in materials or
workmanship for the life of the product, to the original purchaser, unless otherwise noted. Any products found to be defective in
material or workmanship will be repaired, replaced with same or similar device, or refunded at MCC’s discretion. For specific
information, please refer to the terms and conditions of sale.
Harsh Environment Program: Any Measurement Computing product that is damaged due to misuse, or any reason, may be
eligible for replacement with the same or similar device for 50% of the current list price. I/O boards face some harsh
environments, some harsher than the boards are designed to withstand. Contact MCC to determine your product’s eligibility for
this program.
30 Day Money-Back Guarantee: Any Measurement Computing Corporation product may be returned within 30 days of
purchase for a full refund of the price paid for the product being returned. If you are not satisfied, or chose the wrong product by
mistake, you do not have to keep it.
These warranties are in lieu of all other warranties, expressed or implied, including any implied warranty of merchantability or
fitness for a particular application. The remedies provided herein are the buyer’s sole and exclusive remedies. Neither
Measurement Computing Corporation, nor its employees shall be liable for any direct or indirect, special, incidental or
consequential damage arising from the use of its products, even if Measurement Computing Corporation has been notified in
advance of the possibility of such damages.
Trademark and Copyr ight Info rmation
Measurement Computing Corporation, InstaCal, Universal Library, and the Measurement Computing logo are either trademarks
or registered trademarks of Measurement Computing Corporation. Refer to the Copyrights & Trademarks section on
mccdaq.com/legal for more information about Measurement Computing trademarks. Other product and company names
mentioned herein are trademarks or trade names of their respective companies.
© 2015 Measurement Computing Corporation. All rights reserved. No part of this publication may be reproduced, stored in a
retrieval system, or transmitted, in any form by any means, electronic, mechanical, by photocopying, recording, or otherwise
without the prior written permission of Measurement Computing Corporation.
Notice
Measurement Computing Corporation does not authorize any Measurement Computing Corporation product for use
in life support systems and/or devices without prior written consent from Measurement Computing Corporation.
Life support devices/systems are devices or systems that, a) are intended for surgical implantation into the body, or
b) support or sustain life and whose failure to perform can be reasonably expected to result in injury. Measurement
Computing Corporation products are not designed with the components required, and are not subject to the testing
required to ensure a level of reliability suitable for the treatment and diagnosis of people.
HM USB-CTR04
Page 3

Table of Contents
Preface
About this User's Guide ....................................................................................................................... 4
What you will learn from this user's guide ......................................................................................................... 4
Conventions in this user's guide ......................................................................................................................... 4
Where to find more information ......................................................................................................................... 4
Chapter 1
Introducing the USB-CTR04 ................................................................................................................. 5
Functional block diagram ................................................................................................................................... 5
Chapter 2
Installing the USB-CTR04 ..................................................................................................................... 6
Unpacking........................................................................................................................................................... 6
Installing the software ........................................................................................................................................ 6
Installing the hardware ....................................................................................................................................... 6
Chapter 3
Functional Details ................................................................................................................................. 7
External components .......................................................................................................................................... 7
Screw terminals................................................................................................................................................................. 7
LED indicators .................................................................................................................................................................. 8
USB connector .................................................................................................................................................................. 8
Counter I/O and gating ....................................................................................................................................... 8
Counter input modes ......................................................................................................................................................... 9
Debounce filters ...............................................................................................................................................................12
Digital I/O ......................................................................................................................................................... 15
Timer output ..................................................................................................................................................... 16
Trigger input ..................................................................................................................................................... 17
External clock pacing ....................................................................................................................................... 17
Power ................................................................................................................................................................ 17
Ground .............................................................................................................................................................. 17
Mechanical Drawings ....................................................................................................................................... 18
Chapter 4
Specifications ...................................................................................................................................... 19
Counter ............................................................................................................................................................. 19
Timers ............................................................................................................................................................... 20
Digital input/output........................................................................................................................................... 20
External trigger ................................................................................................................................................. 21
External clock input/output............................................................................................................................... 21
Memory ............................................................................................................................................................ 22
Power ................................................................................................................................................................ 22
USB .................................................................................................................................................................. 22
Environmental .................................................................................................................................................. 22
Mechanical ....................................................................................................................................................... 22
Signal connector ............................................................................................................................................... 23
Screw terminal pinout ....................................................................................................................................... 23
Declaration of Conformity .................................................................................................................. 24
3
Page 4
About this User's Guide
What you will learn from this user's guide
This user's guide describes the Measurement Computing USB-CTR04 data acquisition device and lists device
specifications.
Conventions in this user's guide
For more information
Text presented in a box signifies additional information and helpful hints related to the subject matter you are
reading.
Caution! Shaded caution statements present information to help you avoid injuring yourself and others,
damaging your hardware, or losing your data.
bold text Bold text is used for the names of objects on a screen, such as buttons, text boxes, and check boxes.
italic text Italic text is used for the names of manuals and help topic titles, and to emphasize a word or phrase.
Preface
Where to find more information
Additional information about USB-CTR04 hardware is available on our website at www.mccdaq.com. You can
also contact Measurement Computing Corporation with specific questions.
Knowledgebase:
Tech support form:
Email: techsupport@mccdaq.com
Phone: 508-946-5100 and follow the instructions for reaching Tech Support
For international customers, contact your local distributor. Refer to the International Distributors section on our
website at
www.mccdaq.com/International.
kb.mccdaq.com
www.mccdaq.com/support/support_form.aspx
4
Page 5
Chapter 1
Introducing the USB-CTR04
The USB-CTR04 is a USB 2.0 high-speed data acquisition device that provides the following features:
Four counter I/O
o High-speed pulse counter for general counting applications; multiple counting modes supported
o 48 MHz, programmable resolution up to 64-bits
o An aggregate scan rate of 8 MB/s
Four PWM timers with count, period, delay, and pulse-width registers
Eight individually-configurable digital I/O channels
External clock input and internal clock output
External digital trigger; software-selectable for edge or level sensitive, rising or falling edge, high or low
level
The USB-CTR04 is a USB 2.0 high speed device that is compatible with USB 3.0 ports. The device is also
compatible with USB 1.1 ports, but use with this older hardware is not recommended due to longer initialization
times that can occur when the USB-CTR04 is connected through USB 1.1 ports or hubs.
I/O connections are made to two banks of screw terminals. The USB-CTR04 is powered by the 5 volt USB
supply from your computer.
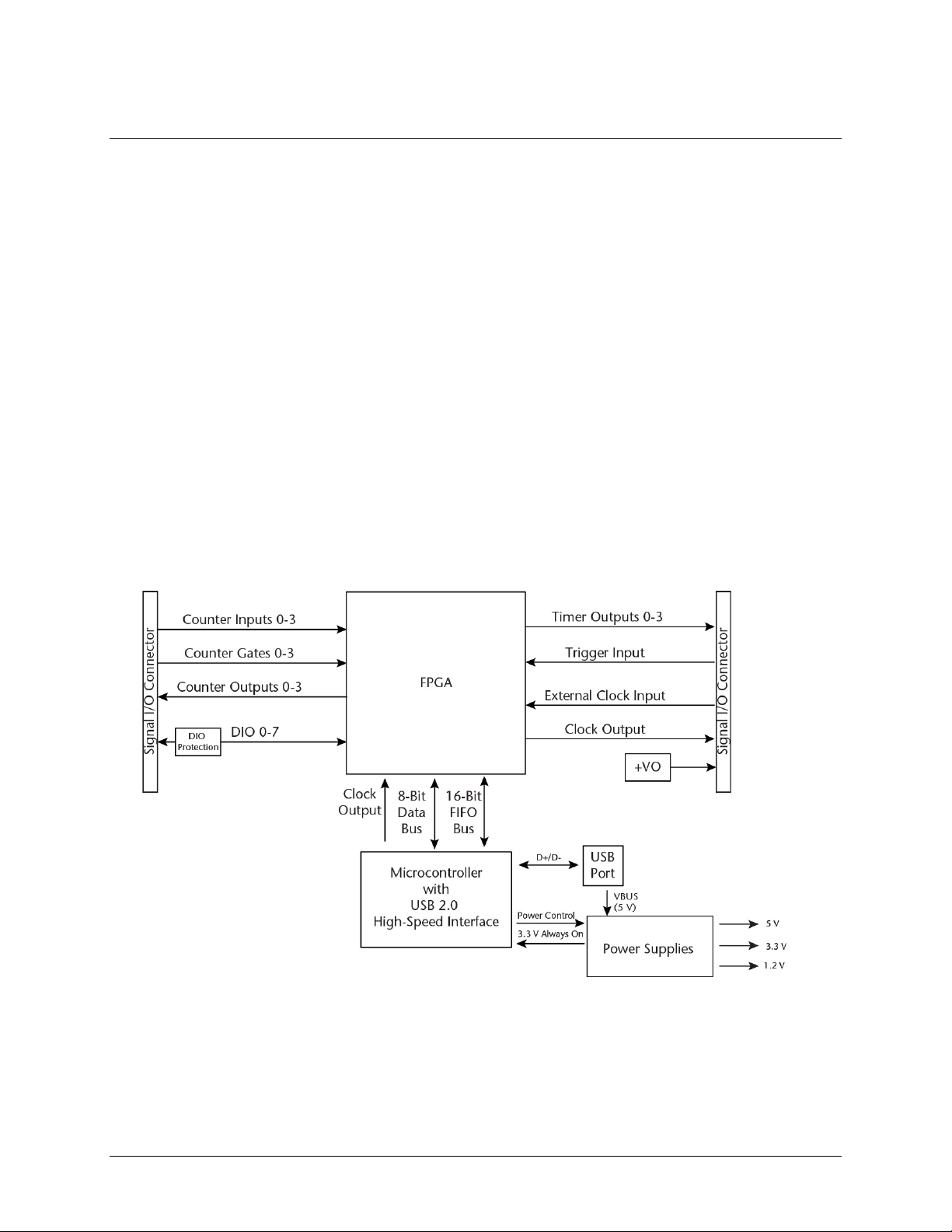
Functional block diagram
Device functions are illustrated in the block diagram shown here.
Figure 1. USB-CTR04 functional block diagram
5
Page 6
Chapter 2
Installing the USB-CTR04
Unpacking
As with any electronic device, you should take care while handling to avoid damage from static
electricity. Before removing the device from its packaging, ground yourself using a wrist strap or by simply
touching the computer chassis or other grounded object to eliminate any stored static charge.
Contact us immediately if any components are missing or damaged.
Installing the software
Refer to the MCC DAQ Quick Start for instructions on installing the software on the MCC DAQ CD. Refer to
the device product page on the Measurement Computing website for information about the included and
optional software supported by the USB-CTR04.
Install the software before you install your device
The driver needed to run the USB-CTR04 is installed with the software. Therefore, you need to install the
software package you plan to use before you install the hardware.
Installing the hardware
To connect the USB-CTR04 to your system, connect the USB cable to an available USB port on the computer
or to an external USB hub connected to the computer. Connect the other end of the cable to the USB connector
on the device. No external power is required.
When connected for the first time, a
device. When the dialog closes, the installation is complete. The
successfully installed (see Figure 2 on page 7).
If the Status LED turns off
If communication is lost between the device and the computer, the Status LED turns off. To restore
communication, disconnect the USB cable from the computer and then reconnect it. This should restore
communication, and the Status LED should turn on.
Found New Hardware dialog opens when the operating system detects the
Status LED turns on after the device is
6
Page 7

1
Screw terminals 1 to 28
4
Activity LED
3
Stat us LED
Functional Det ails
External components
The USB-CTR04 has the following external components, as shown in Figure 2.
Two screw terminal banks
Device Status and Activity LEDs
USB connector
Chapter 3
2 Screw terminals 29 to 56 5 USB connector
Figure 2. USB-CTR04 external components
Screw terminals
The device has two banks of screw terminals that provide the following connections:
Four counter inputs
Four counter outputs
Four counter gates
Eight DIO
Four timer outputs
External trigger input
External clock input
Internal clock output
Power output
Digital grounds
7
Page 8
USB-CTR04 User's Guide Functional Details
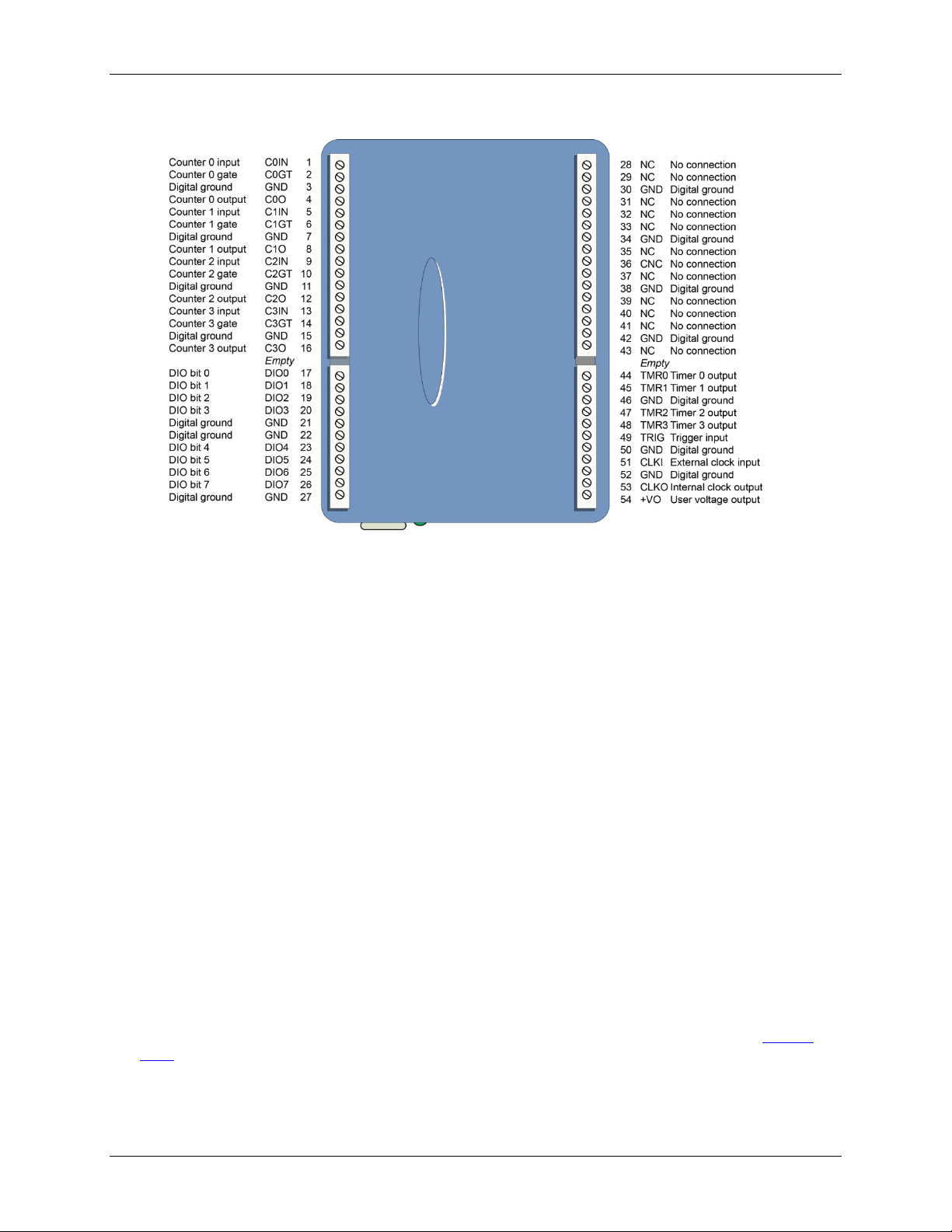
The USB-CTR04 pinout is shown in Figure 3.
Figure 3. USB-CTR04 pinout
LED indicators
The device has two LED indicators – Status and Activity.
The
The
Refer to Figure 2 on page 7 for the location of these LEDs.
Status LED (top) turns on when the device is detected and installed on the computer.
Activity LED (bottom) blinks when data is transferred, and is off otherwise.
USB connector
The USB connector provides 5 V power and communication.
Counter I/O and gating
The USB-CTR04 has a counter input (CxIN), counter output (CxO), counter gate (CxGT) screw terminal for
each of its four counter channels.
Counter inputs can be read asynchronously under program control, or synchronously as part of a digital scan
group. In both cases, you can configure counters so that they:
get set to 0 after each read
count up or down and then roll over at a user-set limit
count until the user-set limit has been reached.
Counter inputs can concurrently monitor time periods, frequencies, pulses, and other event-driven incremental
occurrences directly from pulse-generators, limit switches, proximity switches, and magnetic pick-ups.
Counter outputs can be used to control or transmit signals to external devices, and also to
USB-CTR04 counter inputs, counter gates, or digital inputs. Counter outputs are commonly used in
mode.
Counter gates use input signals to clear a counter, change counter direction, or start/stop counting. Gate options
are software-selectable and are available when counting in Totalize mode.
8
Totalize
Page 9

USB-CTR04 User's Guide Functional Details
Clear on read
The counter is cleared after each read (synchronous or asynchronous). The value of the counter
counting mode, it may be cleared to the value stored in the min limit register.
Range Limit
When the range limit option is enabled, you can set the max limit and the min limit register values to
Non-recycle
The counter freezes if the max limit or the min limit is reached.
CountDown
Enables count down mode. (This is overridden by the state of the gate input if the gate is
programmed for direction control.)
Output On
Enables counter output mode. Based on the output initial state of the counter (high or low), the
Output Initial
Sets the initial state of the counter output to either high or low (default).
Counter input modes
The USB-CTR04 supports the following counter input modes:
Totalize
Period measurement
Pulse-width measurement
Timing measurement
Counter input modes are programmable with software. Some modes include software-selectable max limit and
min limit register values . These values do not directly affect the current count, but set limits in some modes to
determine counter behavior.
Each mode supports additional counter operation options. Refer to the discussion of each counter mode in the
pages that follow for specific information.
Totalize mode
You can use the USB-CTR04 as a high speed pulse counter for general counting applications.
Each counter can be set to any resolution up to 64-bits based on the software-selectable max limit and min limit
register values. The counters can accept frequency inputs up to 48 MHz.
In totalize mode,
CxIN is used as the primary counter input. CxGT can be used to set the count direction, to gate
the counter, to clear/reload the counter with the min limit value, or to trigger a particular counter to begin
counting.
All totalize measurement mode options are software-selectable. Each option is explained in the table below.
Totalize counter mode options
Counter option Description
before it was cleared is latched and returned. It is typically cleared to zero, but depending on
mimic limit switches in a mechanical counter.
When counting up, the counter freezes or rolls over to the min limit count whenever the count
reaches the max limit register value.
When counting down, the counter freezes or rolls over to the max limit count whenever the count
reaches the min limit register value
When counting up, the counter stops when the max limit is reached.
When counting down, the counter stops when the min limit is reached.
Counting resumes if the direction is reversed or if the counter is reloaded with a value between the
max limit and the min limit.
counter output toggles the state of the counter when it reaches the value of output register 0, and
toggles back to output initial state of the counter when the it reaches the value of output register 1.
State
9
Page 10

USB-CTR04 User's Guide Functional Details
Direction Control
Direction control allows CxIN to act as the pulse source and CxGT as the direction. By default, the
counter increments when CxGT =1 (high), and decrements when CxGT=0 (low).
Gating
Gating allows the CxGT input to gate the counter. By default, the counter is enabled when the
value.
Clear/Reload
Clears the count to zero unless counting in Range Limit mode.
register.
Count Trigger
The counter starts counting when the CxGT input goes active. By default, active is on the rising
edge.
Period mode
X1 – The measurement is latched each time one complete period is observed.
Tick size (period
The tick size is a fundamental unit of time derived from the period of the 96 MHz system clock. Four
Totalize options that are specific to the counter gate signal (CxGT) are explained below.
Counter gate (CxGT) input mode options (Totalize mode)
Gate option Description
CxGT signal is high. When the CxGT signal is low the counter is disabled, but holds the count
If counting in Range Limit mode, the CxGT signal reloads the counter from the min limit
Period measurement mode
You can use the USB-CTR04 to measure the period of any signal at a counter input (
CxIN). The device counts
the integral number of ticks that make up the period, and the data returned is always time measured in ticks.
Data sample errors come from two sources:
the sampling error caused by not being able to count a partial tick
the USB-CTR04 internal timebase inaccuracy.
The measurement period is the time from edge-to-edge, either both rising or both falling. Period data is latched
as it becomes available, and is acquired at the counter read rate.
Because updates occur only when another full period becomes available:
If the counter read period is faster than the input period, period values repeat in the acquisition. The bigger
the difference between the counter read period and the input period, the more period values are repeated.
If the counter read period is slower than the input period, then the acquisition misses some periods. The
bigger the difference between the counter read period and the input period, the more period values are
missed.
To obtain greater resolution, increase the counter read period, or use a period mode option.
The data returned is interpreted as time measured in ticks. This data represents the number of tick size intervals
counted during the period measurement.
Optionally, you can use the counter gate signal (
When
When
CxGT is high, the counter is enabled.
CxGT is low, the counter is disabled, but holds the count value.
CxGT) to gate the counter.
The 96 MHz system clock is used as the timing source. Periods from sub-microsecond to many seconds can be
measured.
All period measurement mode options are software-selectable. Each period measurement option is explained in
the table below.
Period option Description
X10 – The measurement is latched each time 10 complete periods are observed.
X100 – The measurement is latched each time 100 complete periods are observed
X1000 – The measurement is latched each time 1000 complete periods are observed.
resolution)
counter channel tick sizes are available – 20.83 ns, 208.3 ns, 2083.3 ns, and 20833.3 ns.
The USB-CTR04 internal timebase has an absolute accuracy of 30 ppm. The sampling error varies based on the
input frequency, selected tick size, and selected period mode. The absolute error is the root-sum-of-squares of
the two independent error sources.
10
Page 11

USB-CTR04 User's Guide Functional Details
Pulse width measurement mode
You can use the USB-CTR04 to measure the time from the rising edge to the falling edge, or vice versa, on a
counter input signal (CxIN). The measurement is either pulse width low or pulse width high, depending upon
the edge detection setting.
If the counter read period is faster than the input period, pulse widths repeat in the acquisition. The bigger
the difference between the counter read period and the input period, the more pulse widths are repeated.
If the counter read period is slower than the input period, then the acquisition misses some pulse widths.
The bigger the difference between the counter read period and the input period, the more pulse width
values are missed.
Decrease the counter read period in order to increase the number of different pulse widths received.
Every time the pulse width measurement is latched from the counter, the counter is immediately cleared and
enabled to count the time for the next pulse width. The pulse width measurements are latched as they become
available.
The data returned is interpreted as time measured in ticks. This data represents the number of tick size intervals
counted during the pulse width measurement.
Optionally, you can use the counter gate signal (
When
When
CxGT is high, the counter is enabled.
CxGT is low, the counter is disabled, but holds the count value.
CxGT) to gate the counter.
The 96 MHz system clock is used as the timing source. Pulse widths from sub-microsecond to many seconds
can be measured.
Pulse width measurement mode tick size options are software-selectable. The tick size is a fundamental unit of
time derived from the period of the 96 MHz system clock.
Four counter channel tick sizes (pulse width resolutions) are available – 20.83 ns, 208.3 ns, 2083.3 ns, and
20833.3 ns.
Timing mode
You can use the USB-CTR04 to measure the time between an event on
CxIN and a subsequent event on CxGT,
such as the rising or falling edge of one event with respect to the rising or falling edge of another event (based
on the edge detection setting).
Whenever the time measurement is latched from the counter, the counter is immediately cleared and enabled for
accepting the subsequent time period, which starts with the next edge on the main channel.
The following example measures the time between the rising edge on a counter input (
edge on the counter gate (
CxGT). The counter read operation returns zeroes until one complete time
CxIN) and the falling
measurement has been taken. Then, the value (time in ticks) is latched by the device until the next time
measurement is completed. At that time, rising edges on the counter input channel clear the counter and falling
edges on the gate input latch the output of the counter.
Figure 4. Counter input channel in timing mode
11
Page 12

USB-CTR04 User's Guide Functional Details
If the counter read period is faster than the than the occurrence of the next time-frame rate (available on the
two channels), then some time frames repeat in the acquisition. The bigger the difference between the
counter read period and the time frame occurrence, the more time frames are repeated.
If the counter read period is slower than the time-frame occurrence, then the acquisition misses some time
frames. The bigger the difference between the counter read period and the time frame occurrence, the more
time frames are missed.
Decrease the counter read period in order to capture more time frames.
The data returned is interpreted as time measured in ticks. This data represents the number of tick size intervals
counted during the timing measurement.
Timing mode tick size options are software-selectable. The tick size is a fundamental unit of time derived from
the period of the 96 MHz system clock.
Four counter channel tick sizes are available – 20.83 ns, 208.3 ns, 2083.3 ns, and 20833.3 ns.
Debounce filters
The USB-CTR04 has debounce circuitry which eliminates switch-induced transients that are typically
associated with electro-mechanical devices including relays, proximity switches, and encoders.
All debounce filter options are software-selectable. You can select a debounce time, debounce mode, and risingedge or falling-edge sensitivity. Each channel can be debounced with 16 programmable debounce times in the
range of 500 ns to 25.5 ms.
Two debounce filter modes (trigger after stable and trigger before stable) and a debounce bypass are shown in
Figure 5. The signal from the buffer can be inverted before it enters the debounce circuitry. The inverter is used
to make the input rising-edge or falling-edge sensitive.
Figure 5. Debounce block diagram
Edge selection is available with or without debounce. In this case, the debounce time setting is ignored and the
input signal goes straight from the inverter or inverter bypass to the counter module.
The two debounce filter modes are trigger after stable and trigger before stable. In either mode, the selected
debounce time determines how fast the signal can change and still be recognized.
Trigger after stable mode
In the trigger after stab le mode, the output of the debounce module does not change state until a period of
stability has been achieved. This means that the input has an edge, and then must be stable for a period of time
equal to the debounce time. Refer to Figure 6.
Figure 6. Trigger after stable mode
12
Page 13

USB-CTR04 User's Guide Functional Details
T1 through T5 indicate time periods. In trigger after stable mode, the input signal to the debounce module is
required to have a period of stability after an incoming edge, in order for that edge to be accepted (passed
through to the counter module). For this example, the debounce time is equal to T2 and T5.
T1 – In Figure 6, the input signal goes high at the beginning of time period T1, but never stays high for a
period of time equal to the debounce time setting (equal to T2 for this example.)
T2 – At the end of time period T2, the input signal has transitioned high and stayed there for the required
amount of time—therefore the output transitions high. If the input signal does not stabilize in the high state
long enough, no transition would have appeared on the output and the entire disturbance on the input would
have been rejected.
T3 – During time period T3, the input signal remained steady. No change in output is seen.
T4 – During time period T4, the input signal has more disturbances and does not stabilize in any state long
enough. No change in the output is seen.
T5 – At the end of time period T5, the input signal has transitioned low and stayed there for the required
amount of time—therefore the output goes low.
Trigger before stable mode
In the trigger before stable mode, the output of the debounce module immediately changes state, but will not
change state again until a period of stability has passed. For this reason the mode can be used to detect glitches.
Refer to Figure 7.
Figure 7. Trigger before stable mode
T1 through T5 in Figure 7 indicate time periods:
T1 – The input signal is low for the debounce time (equal to T1); therefore when the input edge arrives at
the end of time period T1, it is accepted and the output (of the debounce module) goes high. Note that a
period of stability must precede the edge in order for the edge to be accepted.
T2 – During time period T2, the input signal is not stable for a length of time equal to T1 (the debounce
time setting for this example.) Therefore, the output stays "high" and does not change state during time
period T2.
T3 – During time period T3, the input signal is stable for a time period equal to T1, meeting the debounce
requirement. The output is held at the high state. This is the same state as the input.
T4 – At anytime during time period T4, the input can change state. When this happens, the output will also
change state. At the end of time period T4, the input changes state, going low, and the output follows this
action by going low.
T5 – During time period T5, the input signal again has disturbances that cause the input to not meet the
debounce time requirement. The output does not change state.
T6 – After time period T6, the input signal has been stable for the debounce time, and therefore any edge
on the input after time period T6 is immediately reflected in the output of the debounce module.
Debounce filter mode comparisons
Figure 8 shows how the two modes interpret an input signal, which exhibits glitches. Notice that the trigger
before stable mode recognizes more glitches than the trigger after stable mode. Enable the
bypass option in
software to achieve maximum glitch recognition.
13
Page 14

USB-CTR04 User's Guide Functional Details
Figure 8. Example of two debounce modes interpreting the same signal
Set the debounce time according to the amount of instability expected in the input signal. Setting a debounce
time that is too short may result in unwanted glitches clocking the counter. Setting a debounce time that is too
long may result in an input signal being rejected entirely. Some experimentation may be required to find the
appropriate debounce time for a particular application.
To see the effects of different debounce time settings, view the analog waveform along with the counter output.
This can be done by connecting the source to an analog input.
Use trigger before stable mode when the input signal has groups of glitches and each group is to be counted as
one. The trigger before stable mode recognizes and counts the first glitch within a group but rejects the
subsequent glitches within the group if the debounce time is set accordingly. Set the debounce time to
encompass one entire group of glitches, as shown in Figure 9.
Figure 9. Optimal debounce time for trigger before stable mode
Trigger after stable mode behaves more like a traditional debounce function: rejecting glitches and only passing
state transitions after a required period of stability. Trigger after stable mode is used with electro-mechanical
devices like encoders and mechanical switches to reject switch bounce and disturbances due to a vibrating
encoder that is not otherwise moving.
The debounce time should be set short enough to accept the desired input pulse but longer than the period of the
undesired disturbance, as shown in Figure 10.
14
Page 15

USB-CTR04 User's Guide Functional Details
Figure 10. Optimal debounce time for trigger after stable mode
Digital I/O
You can connect up to eight digital I/O lines to DIO0 through DIO7. The digital I/O terminals can detect the
state of any TTL-level input. Refer to the schematic shown in Figure 11.
Figure 11. Schematic showing switch detection by digital channel DIO0
If you set the switch to the +5 V input, DIO0 reads TRUE (1). If you move the switch to GND, DIO0 reads
FALSE (0).
Pull-up/down jumper
The digital port has 47 kΩ resistors that you can configure as pull-up or pull-down with internal jumper (see
Figure 12 on page 16 for the location of this jumper).
Unconnected inputs are pulled low by default to 0 V through 47 kΩ resistors. The pull-up/pull-down voltage is
common to all 47 kΩ resistors.
You must remove the cover from the device in order to access the jumper.
Caution! The discharge of static electricity can damage some electronic components. Before removing the
device from its housing, either ground yourself using a wrist strap or touch the computer chassis or
other grounded object to eliminate any stored static charge.
To open the case and set the pull-up/down jumper, complete the following steps:
1. Turn the device over and rest the top of the housing on a flat, stable surface.
2. Peel off the four rubber feet on the bottom of the device to access the screws.
3. Remove the four screws from the bottom of the device.
4. Hold both the top and bottom sections together, turn the device over and rest it on the surface, and then
carefully remove the top section of the case to expose the circuit board.
5. Configure the jumper for either pull-up or pull-down. The jumper is configured by default for pull-down
(see Figure 12 and Figure 13).
Figure 12 shows the location of the pull-up/down jumper on the USB-CTR04 with the enclosure removed.
15
Page 16

USB-CTR04 User's Guide Functional Details
Pull-up/pull-down jumper
Figure 12. Pull-up/down jumper location
The pull-up/down jumper is configured by default for pull-down (see Figure 13).
Pull-down (factory default)
Pull-up
Figure 13. Pull-up/down jumper configurations
To pull the digital inputs high (5 V), configure the jumper for pull-up.
Proper LED alignment
When placing the circuit board within the housing, align the board LEDs with the top of the housing before
attaching the housing bottom.
Timer output
You can use TMR0 through TMR3 as 32-bit timer outputs. Each timer can generate a programmable width pulse
with a software-selectable frequency in the range of 0.022 Hz to 48 MHz. At higher frequencies, the timer
output frequency and duty cycle depend on the load impedance and the supply.
The timer output rate and pulse width can be updated asynchronously at any time, however, doing so results in a
pulse stream that is not seamless.
The following timer output options are software-selectable:
pulse frequency
duty cycle (pulse width divided by the pulse period)
16
Page 17

USB-CTR04 User's Guide Functional Details
number of pulses to generate
time delay before starting the timer output after it's enabled
resting state of the output (idle hig h or idle low)
Both the period and time delay ranges are 20.83 ns to 44.739 seconds.
Figure 14. USB-CTR04 PWM timer channel
Trigger input
You can trigger synchronous acquisitions of counter data internally with software or externally using the TRIG
digital trigger input screw terminal.
TRIG input allows TTL-level triggering with latencies guaranteed to be less than 20.83 ns. The acquisition
The
can be triggered
one sample period, maximum. The input signal range is –0.5 V to 5.5 V maximum. The logic level (1 or 0) and
the rising or falling edge for the discrete trigger input are software-selectable.
on a rising or falling edge, or on a high or low level. The trigger input is TTL logic . Latency is
When using the external trigger, the counter begins counting when the scan starts, even though acquisition of
the count is held off by the trigger. To coordinate the start of acquisition with the start of the count, you could
use the trigger signal to also trigger the gate of the counter in use. Clearing the counter before starting the scan
will re-arm the gate trigger.
External clock pacing
You can pace synchronous acquisition of counter data by the onboard clock or by an external clock connected
CLKI external clock input terminal.
to the
Power
You can use the +VO power output terminal to supply power to external devices or circuitry.
Caution! The +VO terminal is an output. Do not connect to an external power supply or you may damage
the USB-CTR04 and possibly the computer.
The maximum total output current that can be drawn from all USB-CTR04 connections (counter outputs, timer
outputs, digital outputs, pacer clock output, and
computers and self-powered USB hubs. Bus-powered hubs and notebook computers may limit the maximum
available output current to 100 mA.
If the current requirement of the device exceeds the current available from the computer, connect to a selfpowered hub or power the computer with an external power adapter.
+VO) is 240 mA. This maximum applies to most personal
Ground
The ground (GND) connections provide a common ground for the digital, counter, and power connections.
Caution! Make sure that the signals are connected such that there is no potential between PC ground and
signal ground.
17
Page 18

USB-CTR04 User's Guide Functional Details
Mechanical Drawings
Figure 15. USB-CTR04 circuit board (top) and enclosure dim ensi ons
18
Page 19

Counter type
FPGA
Counters
4 (each with a corresponding Input, Gate, and Output)
Counter input modes
Totalize, Pulse width, Period, Timing
Gate options
Clear|Reload, Direction Control, Gate, Count trigger; mode dependent
Resolution
Up to 64-bits (software-selectable)
Maximum input frequency
48 MHz
Debounce times
16 steps from 500 ns to 25.5 ms; positive or negative edge sensitive; glitch detect
mode or debounce mode; software-selectable.
Timebase and accuracy
96 MHz (24 MHz – 30 ppm with a 4x DLL (delay-locked loop))
Counter read pacer
Internal or external scan pacer up to 4 MHz
Period/pulse width resolution
20.83 ns; 208.3 ns; 2.083 µs; or 20.83 µs
Input type (C0IN to C3IN and
C0GT to C3GT)
Schmitt trigger, 47 kΩ pull-down to ground with 33 Ω in series
Schmitt trigger hysteresis (C0IN to
0.76 V typ
Input high voltage threshold (C0IN
1.74 V typ
2.2 V max
Input high voltage limit (C0IN to
5.5 V absolute max
Input low voltage threshold (C0IN
0.98 V typ
1.5 V max
Input low voltage limit (C0IN to
–0.5 V absolute min
0 V recommended min
Output high voltage
4.4 V min (IOH = –50 µA)
3.76 V min (IOH = –24 mA)
Output low voltage
0.1 V max (IOL = 50 µA)
Output current
24 mA max per pin, constrained to 240 mA across all output pins (counter outputs,
timer outputs, digital outputs, pacer clock output, and +VO)
Specifications
All specifications are subject to change without notice.
Typical for 25°C unless otherwise specified.
Specifications in italic text are guaranteed by design.
Counter
Table 1. Counter specifications
Parameter Specification
Mode options Non-Recycle, Range Limit, Clear on Read, Up/Down,
Chapter 4
C3IN and C0GT to C3GT)
to C3IN and C0GT to C3GT)
C3IN and C0GT to C3GT)
to C3IN and C0GT to C3GT)
C3IN and C0GT to C3GT)
0.4 V min
1.2 V max
1.3 V min
0.6 V min
0.44 V max (IOL = 24 mA)
19
Page 20

USB-CTR04 User's Guide Specifications
Terminal names
TMR0, TMR1, TMR2, TMR3
Timer type
PWM output with count, period, delay, and pulse width registers
Output value
Default state is idle low with pulses high, software-selectable output invert
Internal clock frequency
96 MHz
Effective frequency range
0.022 Hz to 48 MHz
High pulse width
10.42 ns min
Low pulse width
10.42 ns min
Output high voltage
4.4 V min (IOH = –50 µA)
Output low voltage
0.1 V max (IOL = 50 µA)
0.44 V max (IOL = 24 mA)
Output current
24 mA max per pin, constrained to 240 mA across all output pins (counter outputs,
timer outputs, digital outputs, pacer clock output, and +VO)
Number of I/O
8
Configuration
Bit-configurable as input (power on default) or output
Pull-up configuration
The port has a 47 kΩ resistor configurable as a pull-up or pull-down (default) with
Digital I/O transfer rate
33 to 8000 port reads/writes or single bit reads/writes per second typical, system
Digital input pacing
Onboard clock, external input scan clock (CLKI)
Digital input trigger source
External single channel digital trigger (TRIG)
Input high voltage
2.0 V min
Input low voltage
0.8 V max
0 V recommended min
Output high voltage
4.4 V min (IOH = –50 µA)
3.76 V min (IOH = –24 mA)
Output low voltage
0.1 V max (IOL = 50 µA)
0.44 V max (IOL = 24 mA)
Output current
24 mA max per pin, constrained to 240 mA across all output pins (counter
Timers
Table 2. Timer specifications
Parameter Specification
Register widths 32-bit
3.76 V min (IOH = –24 mA)
Digital input/output
Table 3. Digital input/output specifications
Parameter Specification
Digital type TTL
an internal jumper.
(system-paced, asynchronous)
dependent.
5.0 V absolute max
outputs, timer outputs, digital outputs, pacer clock output, and +VO)
20
Page 21

USB-CTR04 User's Guide Specifications
Trigger source
External digital; TRIG terminal
Trigger mode
Software-selectable for edge or level sensitive, rising or falling edge, high or low
Trigger latency
100 ns max
Trigger pulse width
100 ns min
Input type
Schmitt trigger, 47 kΩ pull-down to ground with 33 Ω in series
Schmitt trigger hysteresis
0.76 V typ
1.2 V max
2.2 V max
Input high voltage limit
5.5 V absolute max
Input low voltage threshold
0.98 V typ
1.5 V max
Input low voltage limit
–0.5 V absolute min
0 V recommended min
Terminal names
CLKI, CLKO
Terminal type
CLKI: Input, active on rising edge
CLKO: Output, power on default is 0V, active on rising edge
Input clock pulse width
10.417 ns min
Input type
Schmitt trigger, 47 kΩ pull-down to ground with 33 Ω in series
Input Schmitt trigger hysteresis
0.76 V typ
1.2 V max
Input high voltage threshold
1.74 V typ
Input high voltage limit
5.5 V absolute max
Input low voltage threshold
0.98 V typ
1.5 V max
Input low voltage limit
–0.5 V absolute min
0 V recommended min
Output clock frequency
4 MHz, max
Output high voltage
4.4 V min (IOH = –50 µA)
3.78V min (IOH = –24 mA)
Output low voltage
0.1 V max (IOL = 50 µA)
0.44 V max (IOL = 24 mA)
Output current
24 mA max per pin, constrained to 240 mA across all output pins (counter outputs,
timer outputs, digital outputs, pacer clock output, and +VO)
External trigger
Table 4. Digital trigger specifications
Parameter Specification
level.
0.4 V min
Input high voltage threshold 1.74 V typ
1.3 V min
0.6 V min
External clock input/output
Table 5. External clock input/output specifications
Parameter Specification
Input clock frequency 4 MHz, max
0.4 V min
1.3 V min
2.2 V max
0.6 V min
Output clock pulse width 10.417 ns
21
Page 22

USB-CTR04 User's Guide Specifications
FIFO
8 KS
Non-volatile EEPROM
32 KB (10 KB firmware storage, 22 KB user data)
Supply current, USB source
During enumeration
< 100 mA
After USB enumeration
< 500 mA
+VO output current
After USB enumeration
24 mA max per pin, constrained to 240 mA
USB device type
USB 2.0 (high-speed)
Device compatibility
USB 1.1, USB 2.0, USB 3.0
USB cable type
A-B cable, UL type AWM 2725 or equivalent. (min 24 AWG VBUS/GND,
min 28 AWG D+/D–)
USB cable length
3 m (9.84 ft) max
Operating temperature range
0 °C to 50 °C
Humidity
0% to 90% non-condensing
Dimensions (L × W × H)
127 × 89.9 × 35.6 mm (5.00 × 3.53 × 1.40 in.)
User connection length
3 m (9.84 ft) max
Memory
Table 6. Memory specifications
Parameter Specification
Power
Table 7. Power specifications
Parameter Condition Specification
+VO power available After USB enumeration 5 V, ± 5%
across all output pins (counter outputs, timer
outputs, digital outputs, pacer clock output, and
+VO)
USB
Parameter Specification
Environmental
Table 9. Environmental specifications
Parameter Specification
Storage temperature range –40 °C to 70 °C
Mechanical
Table 10. Mechanical specifications
Parameter Specification
Table 8. USB specifications
22
Page 23

USB-CTR04 User's Guide Specifications
Connector type
Screw terminal
Wire gauge range
16 AWG to 30 AWG
Pin
Signal name
Pin description
Pin
Signal name
Pin description
1
C0IN
Counter 0 input
28
N/C
No connection
2
C0GT
Counter 0 gate
29
N/C
No connection
3
GND
Digital ground
30
GND
Digital ground
5
C1IN
Counter 1 input
32
N/C
No connection
7
GND
Digital ground
34
GND
Digital ground
8
C1O
Counter 1 output
35
N/C
No connection
9
C2IN
Counter 2 input
36
N/C
No connection
10
C2GT
Counter 2 gate
37
N/C
No connection
11
GND
Digital ground
38
GND
Digital ground
12
C2O
Counter 2 output
39
N/C
No connection
13
C3IN
Counter 3 input
40
N/C
No connection
14
C3GT
Counter 3 gate
41
N/C
No connection
16
C3O
Counter 3 output
43
N/C
No connection
17
DIO0
DIO bit 0
44
TMR0
Timer 0 output
18
DIO1
DIO bit 1
45
TMR1
Timer 1 output
19
DIO2
DIO bit 2
46
GND
Digital ground
20
DIO3
DIO bit 3
47
TMR2
Timer 2 output
21
GND
Digital ground
48
TMR3
Timer 3 output
22
GND
Digital ground
49
TRIG
Trigger input
24
DIO5
DIO bit 5
51
CLKI
External clock input
26
DIO7
DIO bit 7
53
CLKO
Internal clock output
27
GND
Digital ground
54
+VO
User voltage output
Signal connector
Table 11. Screw terminal specifications
Parameter Specification
Screw terminal pinout
Table 12. Screw terminal pinout
4 C0O Counter 0 output 31 N/C No connection
6 C1GT Counter 1 gate 33 N/C No connection
15 GND Digital ground 42 GND Digital ground
Empty Empty
23 DIO4 DIO bit 4 50 GND Digital ground
25 DIO6 DIO bit 6 52 GND Digital ground
23
Page 24

Declaration of Conformity
Manufacturer: Measurement Computing Corporation
Address: 10 Commerce Way
Suite 1008
Norton, MA 02766
USA
Category: Electrical equipment for measurement, control and laboratory use.
Date of Issue: March 26, 2014
Measurement Computing Corporation declares under sole responsibility that the product
USB-CTR04
to which this declaration relates is in conformity with the relevant provisions of the following standards or other
documents:
EC EMC Directive 2004/108/EC: General Requirements, EN 61326-1:2006 + CRG:2011 / IEC 61326-1:2005.
Emissions:
EN 55011:2009 + A1:2010 / CISPR 11:2009 + A1:2010: Radiated emissions: Group 1, Class A
EN 55011:2009 + A1:2010 / CISPR 11:2009 + A1:2010: Conducted emissions: Group 1, Class A
Immunity: EN 61326-1:2006, Table 3.
IEC 61000-4-2:2008: Electrostatic Discharge immunity.
IEC 61000-4-3:2010: Radiated Electromagnetic Field immunity.
To maintain compliance to the standards of this declaration, the following conditions must be met.
The host computer, peripheral equipment, power sources, and expansion hardware must be CE compliant.
All I/O cables must be shielded, with the shields connected to ground.
I/O cables must be less than 3 meters (9.75 feet) in length.
The host computer must be properly grounded.
The host computer must be USB 2.0 compliant.
Equipment must be operated in a controlled electromagnetic environment as defined by Standards EN
61326-1:2006, or IEC 61326-1:2005.
Note: Data acquisition equipment may exhibit noise or increased offsets when exposed to high RF fields
(>1V/m) or transients.
Declaration of Conformity based on tests conducted by Chomerics Test Services, Woburn, MA 01801, USA in
March, 2014. Test records are outlined in Chomerics Test Report #EMI6482.14
We hereby declare that the equipment specified conforms to the above Directives and Standards.
Carl Haapaoja, Director of Quality Assurance
Page 25

Measurement Computing Corporation
10 Commerce Way
Suite 1008
Norton, Massachusetts 02766
(508) 946-5100
Fax: (508) 946-9500
E-mail:
info@mccdaq.com
www.mccdaq.com
 Loading...
Loading...