

Page 1
GPIB-488.2 Porting Guide
A Guide to Converting IOtech 488.2 API to MCC 488.2 API
GPIB-488.2 Porting Guide
Project 495
IOtech
25971 Cannon Road
Cleveland, OH 44146-1833
*372219A-01*
372219A-01
(440) 439-4091
Fax: (440) 439-4093
sales@iotech.com
productsupport@iotech.com
www.iotech.com
Page 2

Contents
CH 1 - Introduction to the GPIB Porting Guide
CH 2 - API Cross-Reference
CH 3 - IOtech to Associated MCC APIs
Overview …… 1-1
Major Conceptual Differences between IOtech and MCC Routines …… 1-2
API Replacement, the Four Levels of Effort …… 1-3
How to Use the Guide …… 1-4
Terms … 1-4
Comparing IOtech GPIB with MCC GPIB 488.2 Commands …… 1-5
Part 1 – IOtech to MCC …… 2-1
Part 2 – MCC to IOtech …… 2-8
For detailed information refer to the GPIB Porting Guide folder at www.iotech.com.
The folder is located on our Tech Manuals Download Page. It includes this porting guide
and the following documentation:
o Personal488 User's Manual for Windows 95/98/Me/NT/2000
p/n 495-0903 (for IOtech API)
o GPIB-488 Programming Reference Manual
p/n 371930C-01 (for MCC 488.2 commands)
o GPIB-488 Code Examples
GPIB 488.2 Porting Guide 978492 Contents
Page 3

Introduction to the GPIB Porting Guide 1
Overview …… 1-1
Major Conceptual Differences between IOtech and MCC Routines …… 1-2
API Replacement, the Four Levels of Effort …… 1-3
How to Use the Guide …… 1-4
Terms … 1-4
Comparing IOtech GPIB with MCC GPIB 488.2 Commands …… 1-5
Overview
This guide is to be used by individuals who need to port from the IOtech API to the MCC 488.2
API. The reason for this is that IOtech 488 devices have reached an End of Life phase and we
therefore recommend replacing the IOtech API with that used by MCC (Measurement
Computing Corporation).
Chapter 2 consists of tables which allow you to look up, either an IOtech or MCC API, and
cross reference it to its associated counterpart. Chapter 3 consists of command syntax and
usage notes.
For each API command a level of effort value icon is provided. These indicate the relative
effort needed to convert an IOtech function to so it can use the MCC API call. We have
identified four levels of effort. These are as follows:
Direct Replacement – The MCC API command is directly related to the
associated IOtech API. The MCC API can be easily substituted for the IOtech
API after the conceptual issues have been addressed.
Minor Modification – Simple modifications to the IOtech code are required
to achieve the same functionality, between the associated MCC and IOtech
command.
Major Modification – Substantial modifications to the IOtech code are
required to achieve the same functionality, between the associated MCC and
IOtech command. Modifications may include data type changes and/or calls
to multiple MCC APIs.
No Equivalent Command – Indicates one of the following two
possibilities.
(a) There is no mechanism to convert to, or to achieve equivalent or similar
functionality, between the IOtech function call and the MCC API. Digital
commands are an example of this category.
(b) Similar functionality can only be achieved by coding efforts, of such
magnitude, that they are beyond the scope of this document.
GPIB 488.2 Porting Guide 978492 Introduction 1-1
Page 4
Major Conceptual Differences between IOtech and MCC Routines
Handle-Based vs. Address-Based
Many of the IOtech API calls are handle-based. All devices, when opened successfully via
IOtech API command, are assigned a handle which subsequent calls to the device made
reference to. With the IOtech API it was also possible to assign a name to the device. The
device name could be used to open or close a configured device at a later time; the device name
could also be used to make a duplicate copy (or clone) of a configured device. This functionality
does not exist within the MCC API. The reason lies in the fact that MCC API calls are device
address based.
Single vs. Multiple Devices
In general, IOtech API calls tend to deal with an individual device, whereas many MCC API
calls can deal with multiple devices via an address array. The ‘Minor Modification’ section of
this document provides detailed information regarding this difference.
Error Status Returns
IOtech API calls automatically return an error status. MCC API calls do not. With MCC’s
488.2 GPIB system, it is the responsibility of the programmer to evaluate the error status register,
after a function call is made, and then take the appropriate action to address any error. Sample
code, for error status checking, is included in the GPIB 488 Projects folder on our web-site,
under Code Examples.
Digital Control
Another difference between IOtech and MCC API pertains to digital control. A user-accessible
digital port exists on the IOtech Personal 488 GPIB card. Because there is no similar MCC 488
board, none of the digital IOtech API commands have an associated MCC command.
Command Terminations
IOtech API includes functionality that deals specifically with send and receive command
termination. The MCC API includes no such send/receive termination commands; however, for
many of the MCC function calls, termination can be set as a parameter.
1-2 Introduction 978492 GPIB 488.2 Porting Guide
Page 5
API Replacement, the Four Levels of Effort
Direct Replacement
IOtech: lol(Handle)
MCC: Send(Board)
The MCC API command is directly related to the associated IOtech API and
can therefore be easily substituted for the IOtech API. However, conceptual issues
must be dealt with. For example, Handles do not exist within the MCC API;
instead, the address of the controller is passed to the function.
Minor Modification
IOtech: ClearList(Handle, Array of device names)
MCC: DevClearList(Board, Array of device address)
The IOtech device handle [of the GPIB controller] becomes the controller board
address in the MCC call. There is no device name in the MCC API, so an array of
device address is passed to the function call. NOTE: with all address list arrays in
the MCC API, the array terminator ‘NOADDR’ is used to signify the end of the list.
See the MCC GPIB manual for more information.
Major Modification
IOtech: Abort(Handle)
MCC: ResetSys(Board, Array of device address)
SendIFC(Board)
Equivalent functionality of the IOtech Abort command is achieved by calling the
MCC ResetSys command with an array of device addresses to be reset and then
calling the MCC SendIFC command.
No Equivalent Command
IOtech: KeepDevice(Handle)
MCC: No Equivalent Command
The MCC API has no concept of Devices and their associated settings as a complete
entity. As such, a device cannot be stored for later use, or duplicated for use with
other similar devices. If this functionality is required, the programmer must
implement it.
GPIB 488.2 Porting Guide 978492 Introduction 1-3
Page 6

How to Use the Guide
Before beginning any API conversions, you will need, in addition to this guide, the following:
o Your API code
o IOtech’s Personal488 User’s Manual (495-0903)
o MCC’s GPIB-488 Programming Reference Manual (371930C-01)
Both documents are available, in PDF format, from the IOtech website.
To make the conversions:
1) From your API routine, identify your current IOtech commands; for example,
CheckListener
2) From chapter 2 of this porting guide, find the associated MCC commands; for
example, FindLstn
3) From GPIB-488 Programming Reference Manual, look up the detailed information,
i.e., Syntax, Parameters, Returns, Usage Notes, and Examples.
4) Substitute the IOtech routines with MCC routines.
Terms
The following term definitions were obtained from the MCC document, GPIB-488
Programming Reference Manual, p/n 371930C-01.
GPIB - General Purpose Interface Bus
System controller - The system controller has the unique ability to retrieve active control of
the bus or to enable devices to be remotely programmed. It takes control of the bus by issuing
an IFC (Interface Clear) message for at least 200 µsec. It also can put devices into the remote
state by asserting the REN (Remote Enable) line.
There is always one system controller in a GPIB system. The system controller is designated at
system initialization either through the use of hardware switches or by some type of
configuration software, and is not changed. The system controller can be the same controller as
the one which is the current active controller or an entirely different one. Note that if a
controller is both a system controller and the active controller and it passes control to another
controller, the system controller capability is not passed along with it.
Active controller - The active controller is the controller which has the ability to mediate all
communications which occur over the bus. In other words, the active controller designates
(addresses) which device is to talk and which devices are to listen. The active controller is also
capable of relinquishing its position as active controller and designating another controller to
become the active controller.
Device - A device is any IEEE-488 instrument which is not a system controller or active
controller. It can be idle or act as a talker and/or listener when addressed or unaddressed by the
active controller.
1-4 Introduction 978492 GPIB 488.2 Porting Guide
Page 7
Listener - A listener is any device which is able to receive data when properly addressed. There
can be up to 14 active listeners on the bus concurrently. Some devices can also be a talker or
controller; however, only one of these functions can be performed at a time.
Talker - A talker is a device which can transmit data over the bus when properly addressed.
Only one device can transmit at a time. Some devices can also be a listener or controller;
however, only one of these functions can be performed at a time.
Comparing IOtech GPIB with MCC GPIB 488.2 Commands
Chapter 2 of this guide consists of tables which list commands in alphabetical order. The first
table is for looking up IOtech commands and cross-referencing them to associated MCC GPIB
488.2 commands. For example, when looking up IOtech’s CheckListener we will see that
FindLstn is the associated MCC command.
IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
CheckListener FindLstn
A second set of tables is for looking up MCC commands and cross-referencing them to
associated IOtech commands.
MCC 488.2 addresses contain two bytes packed into a word. The low byte is the primary
address and the high byte is the secondary address. If secondary addressing is not used, then the
high byte should be zero.
High Byte: Secondary Address (0, or 96-126)
Low Byte: Primary Address: (0-30)
MCC 488.2 routines use a board address as the first argument (typically zero), instead of a
handle.
For both IOtech and MCC commands, this porting guide includes Syntax and Usage Notes. It
also includes an example in C language, for MCC 488.2 routines.
In the following text we will look briefly at IOtech’s CheckListener command and MCC’s
related FindLstn command.
IOtech
CheckListener: INT WINAPI CheckListener(DevHandleT devHandle,
BYTE primary, BYTE secondary);
devHandle refers to either an IEEE 488 hardware interface or an external device.
If devHandle refers to an external device, the CheckListener command acts
on the hardware interface to which the external device is attached.
primary is the primary bus address to check for a Listener (00 to 30)
secondary is the secondary bus address to check for a Listener (00 to 31).
For no secondary address, a -1 must be specified
Bus States
GPIB 488.2 Porting Guide 978492 Introduction 1-5
: ATN•UNL, LAG, (check for NDAC asserted)
Page 8

MCC
FindLstn: FindLstn(int board, short addresslist[],
short resultlist[], int limit)
board is an integer which identifies the GPIB board to be used for this operation.
In most applications, this value is 0.
addresslist is an array of GPIB addresses, terminated by the value NOADDR.
limit is an integer which specifies how many address entries can be placed into the resultlist
array. Set to the size of the resultlist array.
resultlist will contain the addresses of all detected listeners.
Usage Notes
CheckListener, no longer to be used, checked for the existence of a device on the IEEE 488
bus at the specified address.
FindListn
finds all listeners on the GPIB. The addresses specified by addresslist are
tested to see if a listening device is present. If a listener is found at a primary address, its
address is placed in resultlist. If no listeners are detected at a primary address, then all
secondary addresses associated with that primary address are tested. If any listeners are
detected, their addresses are placed in resultlist. You can use this routine to determine
how many devices on the network are capable of listening. Once these devices are detected,
they can be identified by their response to identification request messages.
The following would be used to check for listening devices present at GPIB primary addresses
6 and 7, on Board 0.
Example:
short addresslist[3] = {6,7,NOADDR};
short resultlist[4];
FindLstn(0, addresslist, resultlist, 4);
1-6 Introduction 978492 GPIB 488.2 Porting Guide
Page 9
API Cross-Reference 2
Part 1 – IOtech to MCC, page 2-1
Part 2 – MCC to IOtech, page 2-8
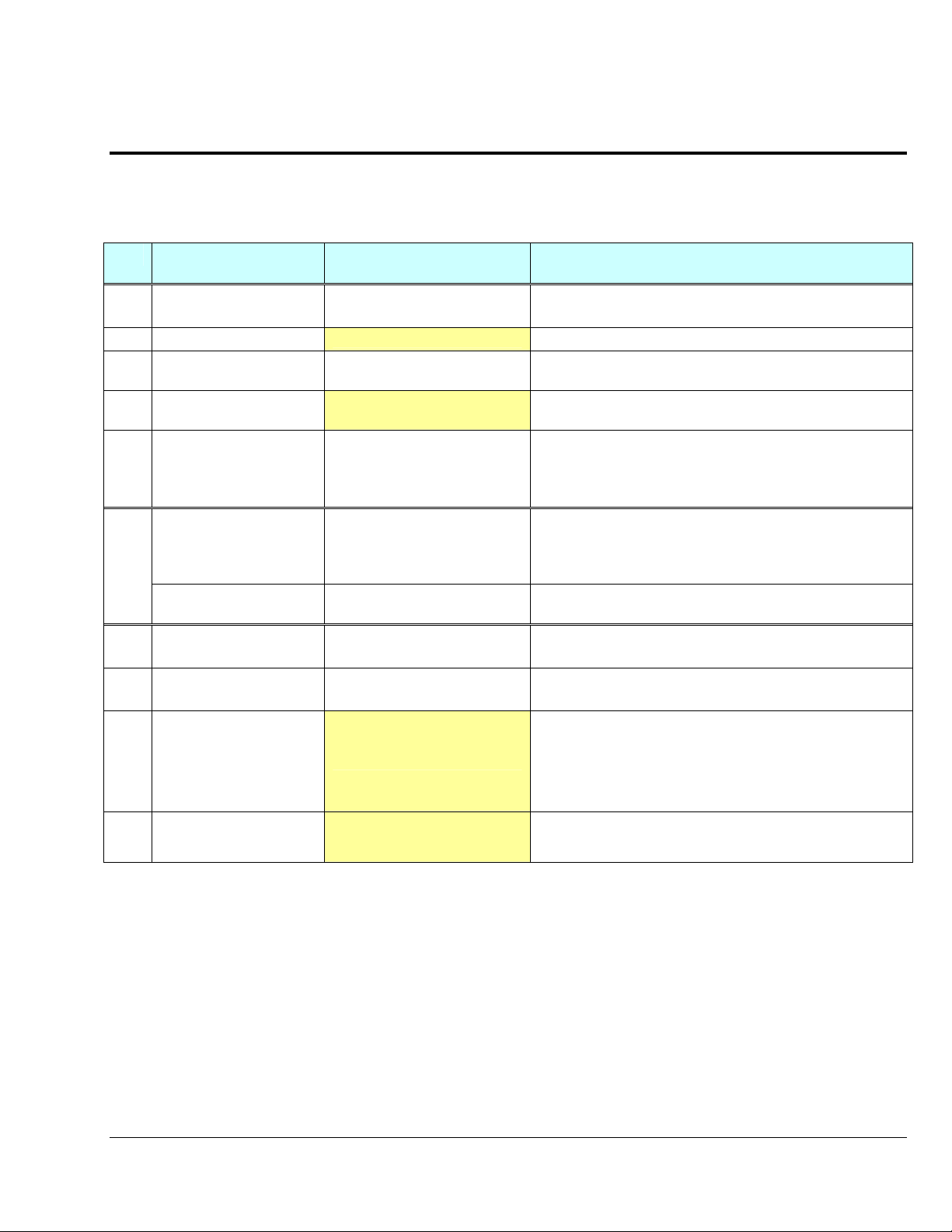
IOtech to MCC GPIB 488.2 Cross-Reference
IOtech GPIB
API Reference
1 Abort SendIFC
2 Arm
3 AutoRemote
4 BusAddress
5 CheckListener
Also see:
FindListeners
6 Clear DevClear
ClearList DevClearList
7 Close DevClear
8 ControlLine TestSRQ
9 DigArm;
DigArmSetup;
DigRead;
DigSetup;
DigWrite
MCC GPIB 488.2
Library Routine
ResetSys
NO EQUIVALENT
Manual via
EnableRemote
NO EQUIVALENT
FindLstn
EnableLocal
Limited Functionality)
(
NO EQUIVALENT
Comments
Abort – Causes the Interface Clear (IFC).
Forces all IEEE488 devices to a quiescent state.
Arm – supports acSRQ and acDigMatch
AutoRemote – Enables or disables automatic
assertion of Remote Enable (REN)
BusAddress – Sets the IEEE 488 bus address.
Default fro Driver488 is 21.
CheckListener – Checks for the existence of a
device on the IEEE 488 bus at the specified address.
Clear – Causes the Device Clear (DCL) bus
command to be issued to a specific interface; or
causes a Selected Device Clear (SDC) command to
be issued to an external device.
ClearList – Causes the Selected Device Clear (SDC)
command to be issued to a list of external devices.
Close – waits for I/O to complete; flushes buffers for
the device; invalidates the device handle.
ControlLine - returns the status of the IEEE 488 bus
control lines as an 8-bit unsigned value
These commands do not apply.
10 Disarm
NO EQUIVALENT
Disarm - prevents Driver488 from invoking an event
handler.
GPIB 488.2 Porting Guide 986992 API Cross-Reference 2-1
Page 10
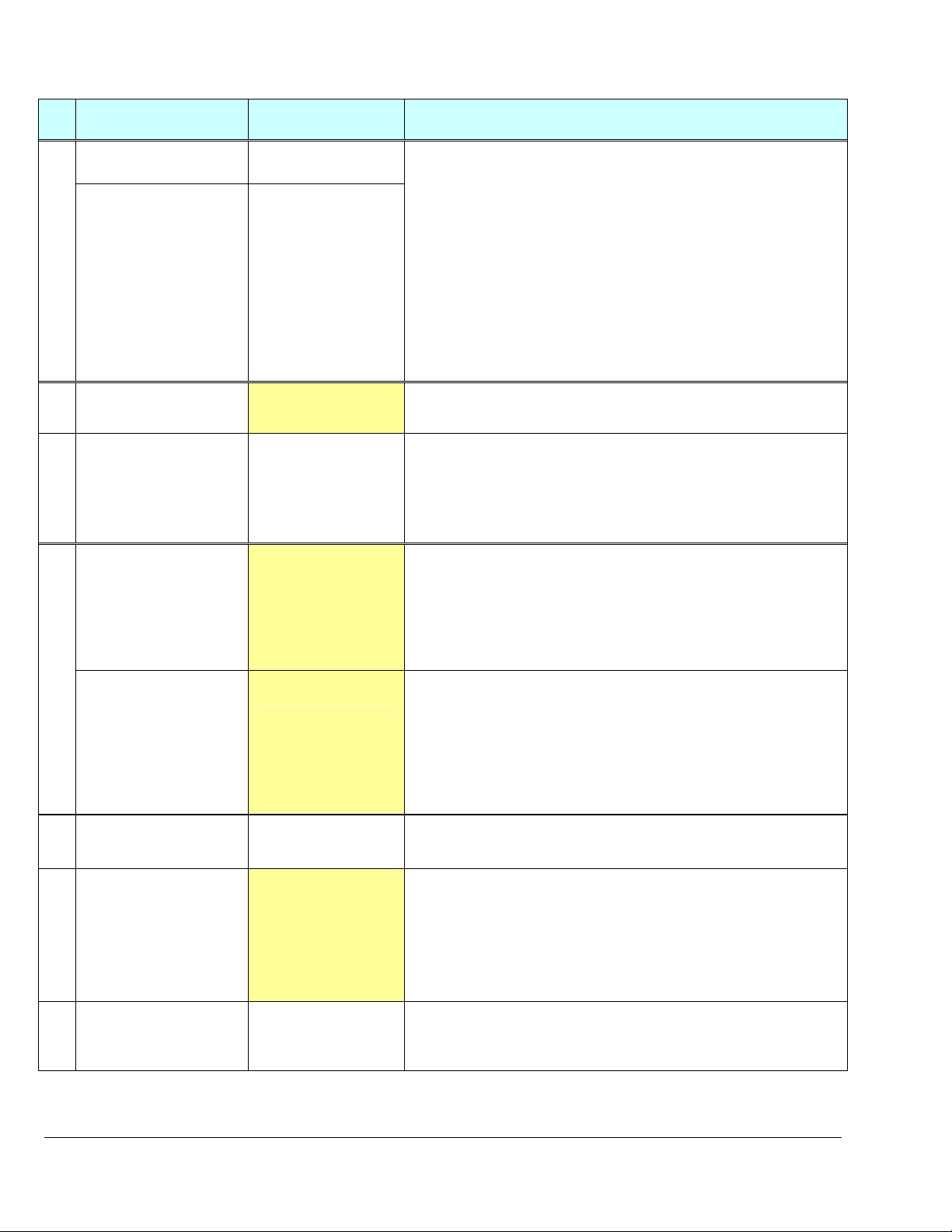
IOtech to MCC GPIB 488.2 Cross-Reference
IOtech GPIB
API Reference
11 EnterX RcvRespMsg
Enter
EnterN
EnterMore
EnterNMore
MCC GPIB 488.2
Library Routine
Receive
Receive
Comments
EnterX - reads data from the I/O adapter. If an external
device is specified, then Driver488 is addressed to Listen,
and that device is addressed to Talk. If an interface is
specified, then Driver488 must already be configured to
receive data and the external device must be configured to
Talk, either as a result of an immediately preceding EnterX
command or as a result of one of the Send commands.
EnterX terminates reception on either the specified count of
bytes transferred, or the specified or default terminator being
detected. Terminator characters, if any, are stripped from the
received data before the EnterX command returns to the
calling application.
12 Error
13
FindListeners
Also see:
CheckListener
GetError
14
GetErrorList
15 Hello
NO EQUIVALENT
FindLstn
NO EQUIVALENT
NO EQUIVALENT
TestSys
(
Limited Functionality)
Error – Enables [or disables] automatic on-screen display of
Driver488 error messages.
FindListeners - finds all of the devices configured to Listen at
the specified primary address on the IEEE 488 bus.
GetError - user-called after another function returns an error
indication. The device handle sent to the function that
returned the error indication is sent to GetError as its
devHandle parameter. GetError finds the error associated
with that device and returns the error code associated with
that error.
GetErrorList - user-called, after another function identifying a
list of device handles, returns an error indication. The device
handle list sent to the function that returned the error
indication, is sent to GetErrorList. GetErrorList finds the
device that returned the error indication, returning the handle
through errHandle, and returns the error code associated with
that error.
Hello - verifies communication with Driver488; reads software
rev. number.
16 KeepDevice
17 Listen
Also See:
MyListenAddr
NO EQUIVALENT
EnableRemote
SendSetup
KeepDevice - updates existing device; creates a new device
in the Registry. Example use: change device bus address;
make it a permanent change. Unless KeepDevice is used,
all temporary Driver488 devices are forgotten when
Driver488 is closed. To remove the permanent device, use
the RemoveDevice command.
Listen - addresses an external device to Listen.
2-2 API Cross-Reference 986992 GPIB 488.2 Porting Guide
Page 11

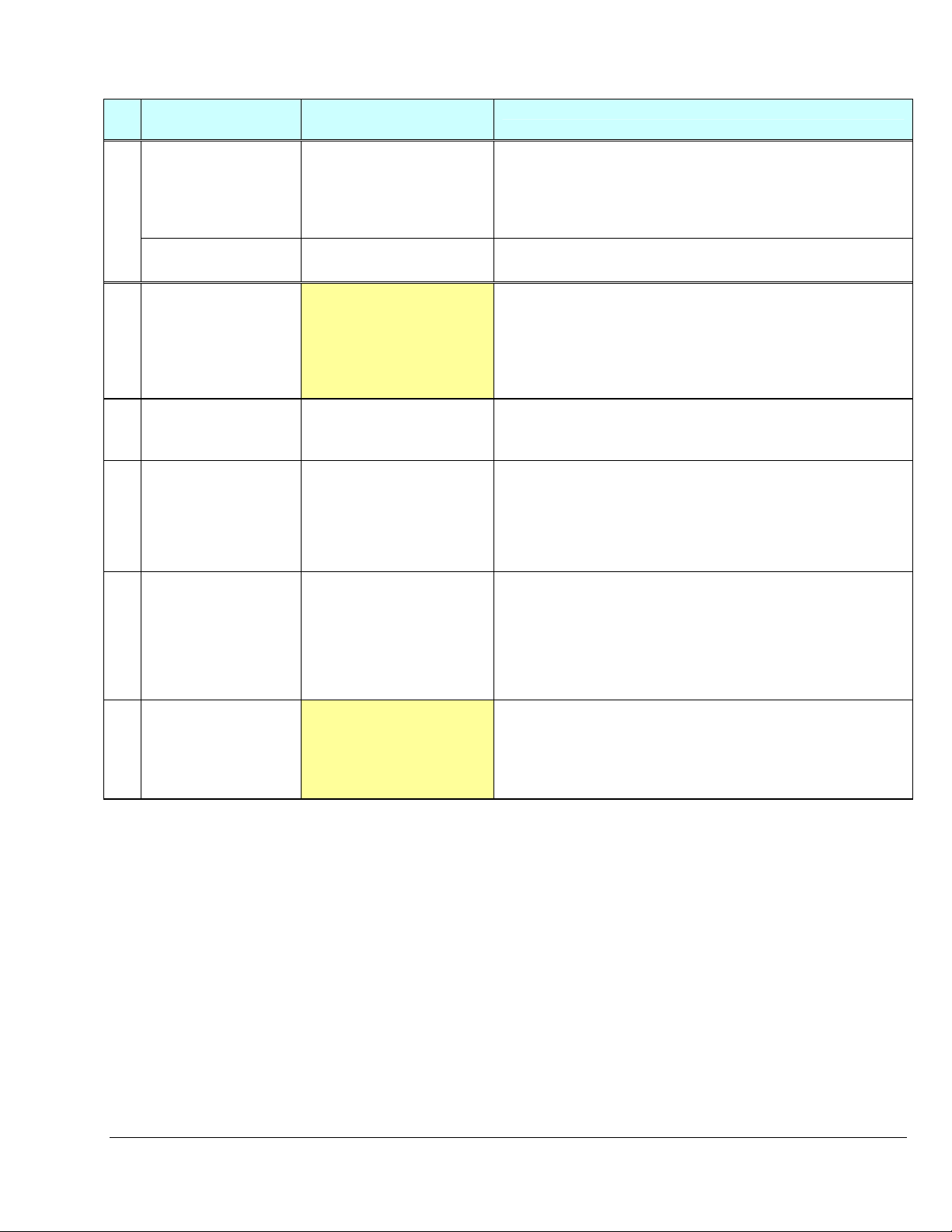
IOtech to MCC GPIB 488.2 Cross-Reference
IOtech GPIB
API Reference
MCC GPIB 488.2
Library Routine
Comments
18 Local EnableLocal
LocalList EnableLocal
19 Lol SendLLO
SetRWLS
20 MakeDevice
NO EQUIVALENT
Local - used in System Controller mode, issued to an
interface device; causes Driver488 to unassert the Remote
Enable (REN) line. This causes devices on the bus to return
to manual operation. A Local command addressed to an
external device, places the device in the local mode via the
Go To Local (GTL) bus command.
Like Local, but with list of devices.
Lol - causes Driver488 to issue an IEEE 488 LocalLockout
(LLO). Bus devices that support this command are thereby
inhibited from being controlled manually from their
front panels.
MakeDevice - creates a new temporary Driver488 device
that is an identical copy of an already existing Driver488
external device. The new device is attached to the same I/O
adapter of the existing device and has the same bus
address, terminators, timeouts, and other characteristics.
The newly created device is temporary and is removed
when Driver488 is closed. KeepDevice may be used to
make the device permanent. To change the default values
assigned to the device, it is necessary to call the appropriate
configuration functions such as BusAddress, IOAddress,
and TimeOut.
MakeNewDevice
21 MyListenAddr
Also see:
Listen
22 MyTalkAddr
OnDigEvent;
23
OnDigEventVDM
OnEvent
OnEventVDM
NO EQUIVALENT
EnableRemote
NO EQUIVALENT
NO EQUIVALENT
NO EQUIVALENT
NO EQUIVALENT
MakeNewDevice - similar to MakeDevice, except new
device is based on the parameters specified, instead of
copying an existing device.
MyListenAddr - addresses the interface to Listen.
The MyTalkAddr command addresses the interface to Talk.
Digital commands. No equivalent MCC API commands.
OnEvent - causes a message upon occurrence of an Armed
event. The message will have a type of:
WM_IEEE488EVENT
OnEventVDM - allows a call back to a user-specified function
in an application.
GPIB 488.2 Porting Guide 986992 API Cross-Reference 2-3
Page 12

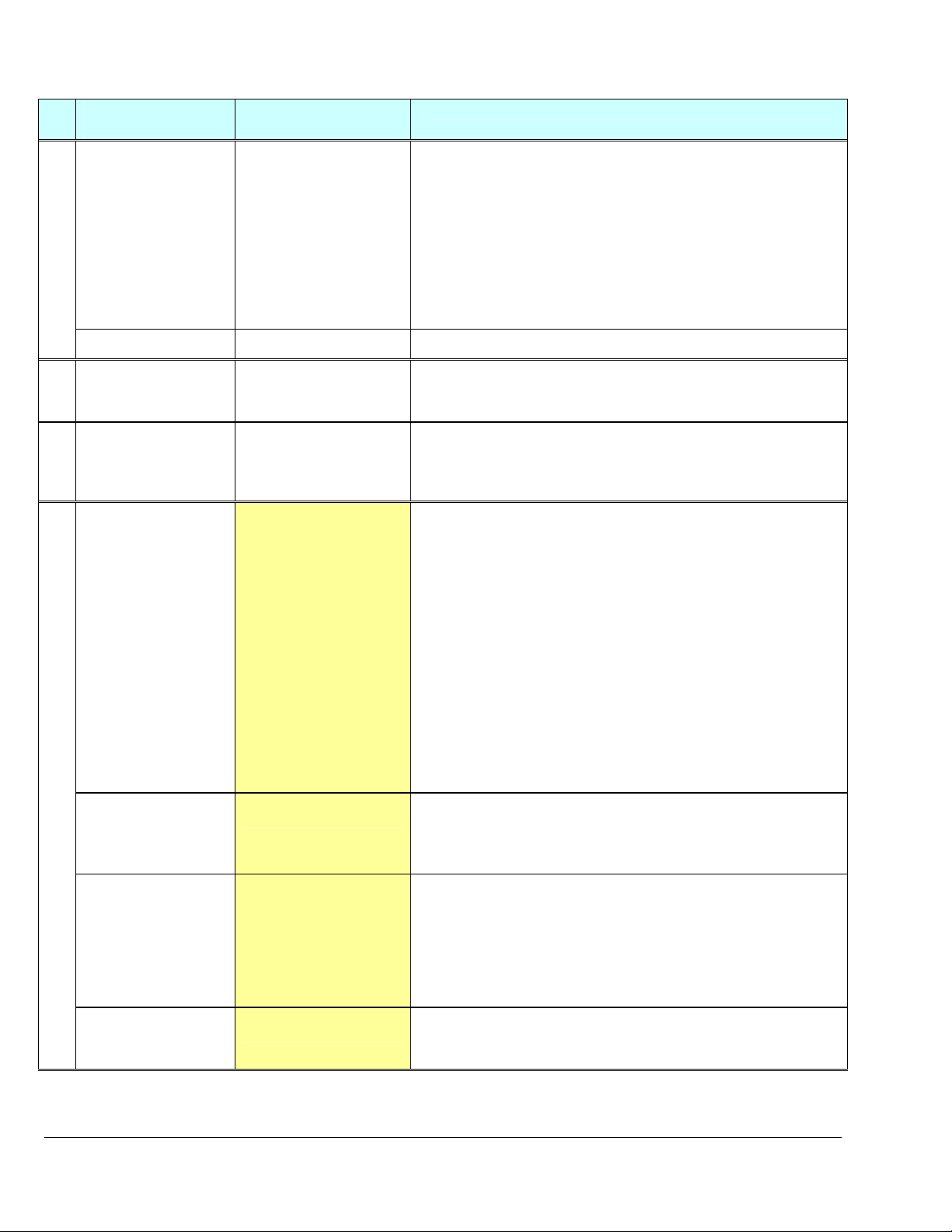
IOtech to MCC GPIB 488.2 Cross-Reference
IOtech GPIB
API Reference
MCC GPIB 488.2
Library Routine
Comments
24 OpenName
25 OutputX
Also see:
SendData
SendCmd
Output
OutputN
NO EQUIVALENT
Send
SendDataBytes
SendList
Send
OutputMore
OutputNMore
26 PPoll PPoll
PPollConfig PPollConfig
OpenName - opens the specified interface or external device
and returns a device handle for use in accessing that device.
OutputX - sends data to an interface or external device. The
Remote Enable (REN) line is first asserted if Driver488 is the
System Controller and AutoRemote is enabled. Then, if a
device address (with optional secondary address) is
specified, Driver488 is addressed to Talk and the specified
device is addressed to Listen. If no address is specified,
then Driver488 must already be configured to send data,
either as a result of a preceding OutputX command, or as
the result of a Send command. Terminators are
automatically appended to the output data as specified.
PPoll (Parallel Poll) – simultaneously request status
information from many bus devices. If a device requires
service then it responds to a Parallel Poll by asserting one of
the eight IEEE 488 bus data lines (DIO1 through DIO8, with
DIO1 being the least significant). In this manner, up to eight
devices may simultaneously be polled by the controller.
More than one device can share any particular DIO line. In
this case, it is necessary to perform further Serial Polling
(SPoll) to determine which device actually requires service.
PPollConfig - configures the Parallel Poll response of a
specified bus device. Not all devices support Parallel Polling
and, among those that do, not all support the software
control of their Parallel Poll response. Some devices are
configured by internal switches.
PPollDisable PPollUnconfig
PPollDisableList PPollUnconfig
PPollUnconfig PPollUnconfig
PPollDisable - disables the Parallel Poll response of a
selected bus device.
Like PPollDisable, but uses a list for devices.
PPollUnconfig - disables the Parallel Poll response of all bus
devices.
2-4 API Cross-Reference 986992 GPIB 488.2 Porting Guide
Page 13
IOtech to MCC GPIB 488.2 Cross-Reference
IOtech GPIB
API Reference
27 Remote EnableRemote
MCC GPIB 488.2
Library Routine
Comments
Remote - asserts the Remote Enable (REN) bus
management line. If an external device is specified, then
Remote will also address that device to Listen, placing it
in the Remote state.
RemoteList EnableRemote
28 RemoveDevice
NO EQUIVALENT
29 Reset ResetSys
30 SendCmd
SendCmds
Also see:
OutputX
SendData
31 SendData
Also see:
OutputX
SendCmd
SendEoi
Send
SendList
SendDataBytes
RemoteList - like Remote; but uses list.
RemoveDevice - removes the specific temporary [or
permanent Driver488 device] that was created with
MakeDevice [or the startup configuration]. This
command also removes a device that was made
permanent through a KeepDevice command.
Reset - provides a warm start of the interface. Related to
Disarm and Abort.
SendCmd - sends a specified string of bytes with
Attention (ATN) asserted, causing the
data to be interpreted as IEEE 488 command bytes.
SendData - provides byte-by-byte control of data
transfers. Can specify exactly which operations
Driver488 executes.
32 SendEoi
NO EQUIVALENT
SendEoi - provides byte-by-byte control of data transfers.
Can specify exactly which operations Driver488 executes.
Driver488 asserts EOI during the transfer of the final byte.
GPIB 488.2 Porting Guide 986992 API Cross-Reference 2-5
Page 14
IOtech to MCC GPIB 488.2 Cross-Reference
IOtech GPIB
API Reference
33 SPoll AllSpoll
SPollList AllSpoll
MCC GPIB 488.2
Library Routine
Comments
SPoll - In Active Controller mode, SPoll performs a Serial
Poll of the specified device and responds with a number
from 0 to 255 representing the decimal equivalent of the
eight-bit device response. If rsv (DIO7, decimal value 64) is
set, then that device is signaling that it requires service. The
meanings of the other bits are device-specific.
Serial Polls are normally performed in response to assertion
of the Service Request (SRQ) bus signal by some bus
device.
As with SPoll, but uses list.
34 Status ReadStatusByte
35 Talk
Also see:
MyTalkAddr
ReceiveSetup
36 Term
TermQuery
NO EQUIVALENT
NO EQUIVALENT
Status - returns various items detailing the current state of
Driver488. They are returned in a data structure.
Talk - addresses an external device to Talk.
Term - sets the end-of-line (EOL) terminators for input from,
and output to, I/O adapter devices. These terminators are
sent at the end of output data and expected at the end of
input data, in the manner of CR LF as used with printer data.
During output, Term appends the bus output terminator to
the data before sending it to the I/O adapter device.
Conversely, when Driver488 receives the bus input
terminator, it recognizes the end of a transfer and returns
the data to the calling application. The terminators never
appear in the data transferred to or from the calling
application. The default terminators for both input and
output are set by the startup configuration and are normally
CR LF EOI, which is appropriate for most bus devices.
TermQuery - queries the terminators setting. Terminators
are defined by the TermT structure.
TimeOut
TimeOutQuery
NO EQUIVALENT
NO EQUIVALENT
TimeOut - sets the number of milliseconds that Driver488
waits for a transfer before declaring a timeout error. The
timeout value sets a limit on the total time allowed for an
operation. For example, when using the Enter command all
expected data must be received within the specified timeout
period or a timeout error will occur.
TimeOutQuery - queries the timeout setting,
given in milliseconds.
2-6 API Cross-Reference 986992 GPIB 488.2 Porting Guide
Page 15
IOtech to MCC GPIB 488.2 Cross-Reference
IOtech GPIB
API Reference
MCC GPIB 488.2
Library Routine
Comments
37 Trigger Trigger
TriggerList TriggerList
38 UnListen DevClear
39 UnTalk DevClear
Trigger - issues a Group Execute Trigger (GET) bus
command to the specified device. If no interface
devices are specified, then GET only affects those
devices that are already in the Listen state [as a result
of a previous Output or Send command].
TriggerList - as Trigger, but uses a list.
UnListen - unaddresses an external device that was
addressed to Listen.
UnTalk - unaddresses an external device that was
addressed to Talk.
GPIB 488.2 Porting Guide 986992 API Cross-Reference 2-7
Page 16
MCC to IOtech GPIB 488.2 Cross-Reference
MCC GPIB 488.2
Library Routine
1 AllSpoll SPollList
2 DevClear Clear
3 DevClearList ClearList
4 EnableLocal LocalList
5 EnableRemote AutoRemote
6 FindLstn FindListeners
7 FindRQS SPoll
8 PassControl
9 Ppoll Ppoll
10 PPollConfig PPollConfig
11 PPollUnconfig PPollDisable
12 RcvRespMsg EnterX
13 ReadStatusByte Status
14 Receive EnterX
IOtech GPIB
API Reference
SPoll
UnListen
UnTalk
Local
Listen
MyListenAddr
RemoteList
Remote
CheckListener
SPollList
Status
NO EQUIVALENT
PPollDisableList
PPollUnconfig
Enter
EnterN
EnterMore
EnterNMore
Comments
AllSpoll performs a serial poll on all specified
devices.
DevClear – clears one device
DevClearList – Clears specified devices
EnableLocal – Places specified devices in local
mode.
EnableRemote uses short addresslist to identify the
remote devices
FindLstn – Finds all Listeners on the GPIB
FindRQS – Identifies the device requesting service.
PassControl – Makes another specified device the
Active Controller.
Performs a parallel poll.
Configures a device for parallel polls.
Unconfigures devices for parallel polls.
RcvRespMsg – Reads data from a previously
addressed device.
ReadStatusByte – Serial poll a single device and
read its status byte.
Receive - Reads data from a GPIB device
2-8 API Cross-Reference 986992 GPIB 488.2 Porting Guide
Page 17
MCC to IOtech GPIB 488.2 Cross-Reference
MCC GPIB 488.2
Library Routine
15 ReceiveSetup Talk
16 ResetSys Reset
IOtech GPIB
API Reference
Comments
ReceiveSetup - Addresses a GPIB Interface Board as
a listener and a GPIB device as a Talker, in
preparation for data transmission. Compare to
SendSetup.
RestSys – Initializes GPIB System.
Abort
17 Send SendData
Send – Sends data to only 1 GPIB device.
OutputX
Output
OutputN
OutputMore
OutputNMore
18 SendCmds SendCmd
19 SendDataBytes OutputX
SendData
20 SendIFC Abort
21 SendList OutputX
SendCmds sends GPIB commands.
SendDataBytes – sends data to previously addressed
devices
SendIFC – Clears GPIB bus by asserting IFC
(Interface Clear) line.
SendList - Sends data to multiple GPIB devices.
SendData
22 SendLLO Lol
23 SendSetup Listen
MyTalkAddr
Talk
24 SetRWLS Lol
25 TestSRQ ControlLine
SendLLO – Sends Local Lockout (LLO) message to all
GPIB devices.
SendSetup - Addresses a GPIB Board as a Talker
and specified GPIB devices as Listeners. Compare to
Receive Setup.
Puts all devices in Remote state with Local Lockout
and addresses specified as Listeners.
Tests (evaluates) the SRQ line
(Limited applicability)
26 TestSys Hello
Compare to API “Hello”
(Limited applicability)
27 Trigger Trigger
28 TriggerList TriggerList
29 WaitSRQ
NO EQUIVALENT
Triggers one device.
Triggers multiple devices.
Wait until a device asserts SRQ.
GPIB 488.2 Porting Guide 986992 API Cross-Reference 2-9
Page 18

This page is intentionally blank.
2-10 API Cross-Reference 986992 GPIB 488.2 Porting Guide
Page 19
IOtech to Associated MCC APIs Alphabetical Listing 3
This chapter includes the IOtech routines which were previously used for Driver488/W95 and Driver488/WNT. It
also includes the associated MCC GPIB 488.2 commands which are now to be used in place of the IOtech
commands. Syntax examples provided are in the C language.
For detailed information refer to the GPIB Porting Guide folder at www.iotech.com. The folder is located on our
Tech Manuals Download Page. It includes this porting guide and the following documentation:
o Personal488 User's Manual for Windows 95/98/Me/NT/2000
p/n 495-0903 (for IOtech API)
o GPIB-488 Programming Reference Manual
p/n 371930C-01 (for MCC 488.2 commands)
o GPIB-488 Code Examples
IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
Abort
SendIFC
ResetSys
Syntax
Abort INT WINAPI Abort(DevHandleT devHandle);
SendIFC SendIFC(int board)
ResetSys ResetSys(int board, short addresslist[])
Usage Notes
Abort, no longer to be used, caused the Interface Clear (IFC) bus management line to be
asserted for at least 100µs. It forced all IEEE 488 device interfaces into a quiescent state.
SendIFC is used as part of the GPIB initialization procedure. When the system controller
asserts the IFC line, it unlistens and untalks all GPIB devices, forcing them to an idle state. The
system controller also becomes the Controller-In-Charge (CIC). In the following example we
clear the GPIB bus from Board 0.
Example:
SendIFC(0);
ResetSys initializes the GPIB bus and all specified devices. First, the system controller asserts
the REN (Remote Enable) line and then the IFC (Interface Clear) line. This action unlistens and
untalks all of the attached GPIB devices and causes the system controller to become the
Controller-In-Charge (CIC).
The Device Clear (DCL) message is then sent to all of the connected devices. This forces the
devices to return to their default states and ensures that they can receive the Reset (RST)
message. A reset message (RST) is then sent to all of the devices specified by addresslist. This
resets the devices to specific parameters.
In the following example we are resetting GPIB devices which are connected to GPIB board 0
and assigned GPIB bus addresses of 6 and 7.
Example: short addresslist[3] = {6, 7, NOADDR};ResetSys(0, addresslist);
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-1
Page 20
IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Arm
No Equivalent Commands
Syntax INT WINAPI Arm(DevHandleT devHandle,
ArmCondT condition);
Usage Notes
The Arm command allowed Driver488 to signal to the user-specified function when one or
more specified conditions occurred. Arm set a flag for each implementation of the userindicated conditions. Arm conditions were often combined using the bitwise OR operator.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
AutoRemote
EnableRemote
Syntax
AutoRemote INT WINAPI AutoRemote(DevHandleT devHandle,
BOOL flag);
EnableRemote EnableRemote(int board, short addresslist[])
Usage Notes
AutoRemote, no longer to be used, enabled [or disabled] the automatic assertion of the Remote
Enable (REN) line by Output. When AutoRemote was enabled, Output automatically
asserted REN before transferring any data. When AutoRemote was disabled, there was no
change to the REN line. AutoRemote was on by default.
EnableRemote - When this routine is executed, the system controller asserts the Remote
Enable (REN) line and the Controller addresses the specified devices as listeners.
The command issued in the following example places devices at GPIB addresses 6 and 7
(connected to GPIB board) in remote mode.
Example:
short addresslist[3] = {6,7,NOADDR};
EnableRemote(0, addresslist);
3-2 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 21

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
BusAddress
No Equivalent Commands
Syntax INT WINAPI BusAddress (DevHandleT devHandle,
BYTE primary, BYTE secondary);
Usage Notes
The BusAddress command was used to set the IEEE 488 bus address of the IEEE 488
hardware interface or an external device.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
CheckListener FindLstn
Syntax
CheckListener INT WINAPI CheckListener(DevHandleT devHandle,
BYTE primary, BYTE secondary);
FindListn FindLstn(int board, short addresslist[],
short resultlist[], int limit)
Usage Notes
CheckListener, no longer to be used, checked for the existence of a device on the IEEE 488
bus at the specified address.
FindListn finds all listeners on the GPIB. The addresses specified by addresslist are
tested to see if a listening device is present. If a listener is found at a primary address, its
address is placed in resultlist. If no listeners are detected at a primary address, then all
secondary addresses associated with that primary address are tested. If any listeners are
detected, their addresses are placed in resultlist. You can use this routine to determine
how many devices on the network are capable of listening. Once these devices are detected,
they can be identified by their response to identification request messages.
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-3
Page 22

The following would be used to check for listening devices present at GPIB primary addresses
6 and 7, on Board 0.
Example:
short addresslist[3] = {6,7,NOADDR};
short resultlist[4];
FindLstn(0, addresslist, resultlist, 4);
Also see IOtech’s:
FindListeners
IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
Clear DevClear
Syntax
Clear INT WINAPI Clear(DevHandleT devHandle);
DevClear DevClear(int board, short address)
Usage Notes
Clear, no longer to be used, caused the Device Clear (DCL) bus command to be issued to an
interface or a Selected Device Clear (SDC) command to be issued to an external device. IEEE
488 bus devices that receive a Device Clear or Selected Device Clear command normally reset
to their power-on state.
DevClear
(SDC) message to the specified device. To clear multiple devices, use the DevClearList
routine. If address is set to NOADDR, then all connected devices on the GPIB, are cleared
through the Universal Device Clear (UDC) message.
To clear the device at GPIB primary address 4, secondary address 30, and connected to GPIB
board 0, we would follow the example.
Example:
is used to clear one device. This routine sends the GPIB Selected Device Clear
DevClear(0, MakeAddr (4,30));
/* Use MakeAddr macro (in GPIB.H) to pack
primary and secondary address */
3-4 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 23

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
ClearList DevClearList
Syntax
ClearList INT WINAPI ClearList(DevHandlePT devHandleList);
DevClearList DevClearList(int board, short addresslist[])
Usage Notes
ClearList, no longer to be used, caused the Selected Device Clear (SDC) command to be issued
to a list of external devices. IEEE 488 bus devices that receive a Selected Device Clear
command normally reset to their power-on state.
DevClearList is used to clear specified devices. This routine sends the GPIB Selected Device
Clear (SDC) to the devices specified by addresslist. To clear only one device, use
DevClear.
The following example would clear the devices at GPIB addresses 6 and 7, which are connected
to GPIB board 0.
Example:
short addresslist[3] = {6,7,NOADDR};
DevClearList(0, addresslist);
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-5
Page 24

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
Close DevClear
EnableLocal
Syntax
Close INT WINAPI Close(DevHandleT devHandle);
DevClear DevClear(int board, short address)
EnableLocal EnableLocal(int board, short addresslist[])
Usage Notes
Close, no longer to be used, commanded to wait for I/O to complete, then flush any buffers
associated with the device being closed. It then made the device handle invalid.
DevClear
is used to clear one device. This routine sends the GPIB Selected Device Clear
(SDC) message to the specified device. To clear multiple devices, use the DevClearList
routine. If address is set to NOADDR, then all connected devices on the GPIB, are cleared
through the Universal Device Clear (UDC) message.
To clear the device at GPIB primary address 4, secondary address 30, and connected to GPIB
board 0, we would follow the example.
Example:
DevClear(0, MakeAddr (4,30));
/* Use MakeAddr macro (in GPIB.H) to pack
primary and secondary address *
EnableLocal is used to place specified devices in local mode, meaning that they can be
programmed from their local, on-device, controls. When this routine is executed, the Controller
addresses the specified GPIB devices as listeners and then sends the GPIB Go To Local (GTL)
command. To put all devices in local mode, use an array containing only the NOADDR value.
This unasserts the GPIB Remote Enable (REN) line, thereby placing all GPIB devices in local
mode.
The following example shows instruction to put the GPIB devices, at addresses 6 and 7
(connected to board 0), in local mode.
Example:
short addresslist[3] = {6,7,NOADDR};
EnableLocal(0, addresslist);
3-6 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 25

IOtech GPIB Command Associated MCC GPIB 488.2 Command
ControlLine TestSRQ
Limited functionality
Syntax
ControlLine INT WINAPI ControlLine(DevHandleT devHandle);
TestSRQ TestSRQ(int board, short *result)
Usage Notes
ControlLine, no longer to be used. The ControlLine command could only be used only
on IEEE 488 devices. This command returned the status of the IEEE 488 bus control lines as
an 8-bit unsigned value (bits 2 and 1 were reserved for future use), as indicated in the table.
Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1
EOI SRQ NRFD NDAC DAV ATN 0 0
TestSRQ Is used to evaluate state of the SRQ line. TestSRQ does not alter the state of the
SRQ line. In the example, we test to see if SRQ is asserted.
Example:
Short result;
TestSRQ (0, &result);
if (result == 1)
{ /* SRQ is asserted */}
else
{ /* No SRQ at this time */}
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-7
Page 26

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
DigArm
No Equivalent Commands
DigArmSetup
DigRead
DigSetup
DigWrite
Syntax The syntax for these commands is no longer valid.
Usage Notes
The above-listed digital commands applied to AT488pnp, PCI488, but to no other devices.
There is no mechanism to convert to, or to achieve equivalent or similar functionality.
IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
DisArm
No Equivalent Commands
Syntax INT WINAPI Disarm(DevHandleT devHandle,
ArmCondT condition);
Usage Notes
The Disarm command, no longer to be used, prevented Driver488 from invoking an event
handler and interrupting the PC, even when the specified condition occurred.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
3-8 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 27

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Enter
Receive
{also see the following EnterX,
EnterN, EnterMore, and
EnterNMore set of commands}
Syntax
Enter LONG WINAPI Enter(DevHandleT devHandle,
LPBYTE data)
Receive
Receive(int board, int address,char data[],
unsigned long count, int termination)
Usage Notes
The Enter function, no longer to be used, passed the device handle, and a pointer to the data
buffer, to the EnterX function (see next entry). Enter determined the size of the data buffer
and passed that value as the count parameter. It specified forceAddr is TRUE, causing
Driver488 to re-address the device.
Receive is used to read data from a GPIB device. The input data string is not terminated with a
zero byte.
The following example instructs to receive 50 bytes of data from the specified talker (device at
address 2, connected to board). EOI signals the end of the message.
Example:
char data[50];
Receive (0, 2, data, 50, STOPend);
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-9
Page 28

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
EnterX
EnterN
EnterMore
EnterNMore
RcvRespMsg
Receive
Note 1: RcvRespMsg pertains only to EnterX.
Note 2: Receive pertains to all four of these listed
IOtech Enter… commands.
: Also see the previous entry for Enter.
Note 3
Syntax
EnterX LONG WINAPI EnterX(DevHandleT devHandle,LPBYTE
data,DWORD count,BOOL forceAddr,TermT*term,BOOL
reserved,LPDWORD compStat);
EnterN LONG WINAPI EnterN(DevHandleT devHandle,
LPBYTE data,int count)
EnterMore LONG WINAPI EnterMore(DevHandleT devHandle,
LPBYTE data)
EnterNMore LONG WINAPI EnterNMore(DevHandleT devHandle,LPBYTE
data,int count);
RcvRespMsg RcvRespMsg(int board, char data[], long count,
int termination)
Receive Receive(int board, int address,char data[],
unsigned long count, int termination)
Usage Notes
EnterX, Enter, EnterN, EnterMore, and EnterNMore are no longer to be used. The
EnterX command read data from the I/O adapter. If an external device was specified, then
Driver488 was addressed to Listen, and the external device was addressed to Talk. If an
interface was specified, then Driver488 had to have been previously configured to receive data.
and the external device previously configured to Talk, either as a result of an immediately
preceding EnterX command or as a result of one of the Send commands. EnterX
terminated reception on either (a) the specified count of bytes transferred, or (b) the specified or
default terminator being detected. Terminator characters, if any, were stripped from the
received data before the EnterX command was returned to the calling application.
EnterN, EnterMore, and EnterNMore were short-form versions of the EnterX function.
They are not detailed in this porting guide. In regard to Enter, see the preceding entry.
.
3-10 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 29

RcvRespMsg is used to read data from a previously addressed device. You must address the
appropriate devices as Listeners/Talkers prior to calling this routine. The input data string is not
terminated with a zero byte.
In the following example, a previously addressed Listener receives 50 bytes of data from a
previously addressed Talker. The transmission is terminated when EOI is detected.
Example:
char data[50];
RcvRespMsg(0, data, 50, STOPend)
Receive is used to read data from a GPIB device. The input data string is not terminated with a
zero byte.
The following example instructs to receive 50 bytes of data from the specified talker (device at
address 2, connected to board). EOI signals the end of the message.
Example:
char data[50];
Receive (0, 2, data, 50, STOPend);
IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Error
Syntax INT WINAPI Error(DevHandleT devHandle, BOOL display);
Usage Notes
The Error command, no longer to be used, enabled or disabled automatic on-screen display of
Driver488 error messages. Specifying ON enabled the error message display, while specifying
OFF disabled it.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
No Equivalent Commands
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-11
Page 30

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
FindListeners FindLstn
Syntax
FindListeners INT WINAPI FindListeners(DevHandleT devHandle, BYTE
primary, LPWORD listener, DWORD limit);
FindListn FindLstn(int board, short addresslist[],
short resultlist[], int limit)
Usage Notes
FindListeners, no longer to be used, located all of the devices that were configured to Listen at
the specified primary address. The command first identified the primary address to check; and
then returned the number of Listeners found and their addresses. Then, it filled the usersupplied array with the addresses of the Listeners found.
FindListn finds all listeners on the GPIB. The addresses specified by addresslist are
tested to see if a listening device is present. If a listener is found at a primary address, its
address is placed in resultlist. If no listeners are detected at a primary address, then all
secondary addresses associated with that primary address are tested. If any listeners are
detected, their addresses are placed in resultlist. You can use this routine to determine
how many devices on the network are capable of listening. Once these devices are detected,
they can be identified by their response to identification request messages.
The following would be used to check for listening devices present at GPIB primary addresses
6 and 7, on Board 0.
Example:
short addresslist[3] = {6,7,NOADDR};
short resultlist[4];
FindLstn(0, addresslist, resultlist, 4);
Also see IOtech’s:
CheckListener
3-12 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 31

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
GetError
No Equivalent Commands
GetErrorList
Syntax
GetError ErrorCodeT WINAPI GetError(DevHandleT devHandle,
LPSTR errText);
GetErrorList ErrorCodeT WINAPI GetErrorList(DevHandlePT
devHandleList, LPSTR errText, DevHandlePT
errHandle);
Usage Notes
The GetError command, no longer to be used, was user-called after another function
returned an error indication.
The GetErrorList, no longer to be used, was user-called, after another function [which
identified a list of device handles] returned an error indication.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
.
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-13
Page 32

IOtech GPIB Command Associated MCC GPIB 488.2 Command
Hello TestSys
Limited functionality
Syntax
Hello INT WINAPI Hello(DevHandleT devHandle,
LPSTR message);
TestSys SendSetup(int board, short addresslist [],
short resultlist[])
Usage Notes
The Hello command, no longer to be used, verified communication with Driver488, and read
the software revision number. When the Hello command was sent, Driver488 returned a
string similar to the following: Driver488 Revision X.X (C)199X ...where X was the
appropriate revision or year number.
TestSys When this routine is executed, all of the devices identified within the
addresslist array are concurrently sent a message which directs them to perform their selftest procedures. Each device returns an integer code indicating the results of its tests. This code
is placed into the corresponding element of the resultlist array. Note: according to the
IEEE-488.2 standard, a result code of 0 indicates the device passed its test. Any other value
indicates an error.
In the following example the command is telling the devices at addresses 6 and 7 [from Board
0] to perform their self-test procedures.
Example:
short addresslist[3] = {6, 7, NOADDR};
short resultlist[2];
TestSys(0, addresslist, resultlist);
3-14 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 33

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
KeepDevice
No Equivalent Commands
Syntax
KeepDevice INT WINAPI KeepDevice(DevHandleT devHandle);
Usage Notes
The KeepDevice command was used to change the indicated temporary Driver488 device to
a permanent device, visible to all applications. Permanent Driver488 devices were not removed
when Driver488 is closed.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
.
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-15
Page 34

IOtech GPIB Command Associated MCC GPIB 488.2 Command
Listen EnableRemote
SendSetup
Syntax
Listen INT WINAPI Listen(DevHandleT devHandle,
BYTE primary,BYTE secondary);
EnableRemote EnableRemote(int board, short addresslist[])
SendSetup SendSetup(int board, short addresslist [])
Usage Notes
Listen is no longer to be used. Was used to address an external device to Listen.
EnableRemote - When this routine is executed, the system controller asserts the Remote
Enable (REN) line and the Controller addresses the specified devices as listeners.
The command issued in the following example places devices at GPIB addresses 6 and 7
(connected to GPIB board) in remote mode.
Example:
short addresslist[3] = {6,7,NOADDR};
EnableRemote(0, addresslist);
SendSetup addresses a GPIB board as a Talker and the specified GPIB devices as Listeners.
Following this routine, you should call a routine such as SendDataBytes to actually
transfer the data.
The following example prepares GPIB board 0 to send data to GPIB devices 6 and 7.
Example:
short addresslist[3] = {6, 7, NOADDR};
SendSetup(0, addresslist);
Also see IOtech’s: MyListenAddr
3-16 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 35

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
Local EnableLocal
IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
LocalList EnableLocal
Syntax
Local INT WINAPI Local(DevHandleT devHandle);
LocalList INT WINAPI LocalList(DevHandlePT devHandleList);
EnableLocal EnableLocal(int board, short addresslist[])
Usage Notes
Local is no longer to be used. When in the System Controller mode, the Local command was
used to unassert the Remote Enable (REN) line. This caused devices to return to manual
operation.
LocalList is no longer to be used. Used like Local, but for a list of devices.
EnableLocal is used to place specified devices in local mode, meaning that they can be
programmed from their local, on-device, controls. When this routine is executed, the Controller
addresses the specified GPIB devices as listeners and then sends the GPIB Go To Local (GTL)
command. To put all devices in local mode, use an array containing only the NOADDR value.
This unasserts the GPIB Remote Enable (REN) line, thereby placing all GPIB devices in local
mode.
The following example shows instruction to put the GPIB devices, at addresses 6 and 7
(connected to board 0), in local mode.
Example:
short addresslist[3] = {6,7,NOADDR};
EnableLocal(0, addresslist);
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-17
Page 36

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
Lol SendLol
SetRWLS
Syntax
Lol INT WINAPI Lol(DevHandleT devHandle);
SendLol SendLLO(int board)
SetRWLS SetRWLS(int board, short addresslist [])
Usage Notes
Lol is no longer to be used. The Lol command caused Driver488 to issue an IEEE 488
LocalLockout (LLO) bus command. Devices that support this command were inhibited from
being controlled manually from their front panels.
SendLol sends the GPIB Local Lockout (LLO) message to all devices. This means that once
they have been addressed as listeners, the devices will respond only to messages sent over the
GPIB by the Controller. In other words, they can not be locally programmed from front panel
controls. Only the Controller can return them to a local programming state. In the following
example, GPIB board 0 sends a Local Lockout to all GPIB devices connected to it.
Example: SendLLO (0);
SetRWLS is used to put all devices into the Remote state, with Local Lockout and addresses
specified devices as Listeners. This routine puts the specified devices in remote mode with
local lockout. The system controller asserts the REN (Remote Enable) line and addresses the
specified devices as listeners. These devices can then be programmed by messages sent over the
GPIB bus; in other words, they can not be locally programmed from front panel controls.
In the following example, all devices controlled by GPIB board 0 are put into Remote mode.
Devices 6 and 7 are then addressed as Listeners by the Controller.
Example:
short addresslist[3] = {6, 7, NOADDR};
SetRWLS(0, addresslist);
3-18 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 37

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
MakeDevice
No Equivalent Commands
MakeNewDevice
Syntax
MakeDevice INT WINAPI MakeDevice(DevHandleT devHandle,
LPSTR name);
MakeNewDevice DevHandleT WINAPI MakeNewDevice(LPSTR iName,
LPSTR aName,BYTE primary,BYTE secondary,TermPT
In,TermPT Out,DWORD timeout);
Usage Notes
The MakeDevice command, no longer to be used, created a new temporary Driver488 device
that was an identical copy of an existing Driver488 external device. The new device was
attached to the same I/O adapter of the existing device and had the same bus address,
terminators, timeouts, and other characteristics. The newly created device was temporary and
was removed when Driver488 was closed.
MakeNewDevice, no longer to be used, was similar to the MakeDevice function except the
new device was created based on specified parameters.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
.
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-19
Page 38

IOtech GPIB Command Associated MCC GPIB 488.2 Command
MyListenAddr EnableRemote
Syntax
MyListenAddr INT WINAPI MyListenAddr (DevHandleT devHandle);
EnableRemote EnableRemote(int board, short addresslist[])
Usage Notes
MyListenAddr is no longer to be used. It was used to address the interface to listen.
EnableRemote - When this routine is executed, the system controller asserts the Remote
Enable (REN) line and the Controller addresses the specified devices as listeners.
The command issued in the following example places devices at GPIB addresses 6 and 7
(connected to GPIB board) in remote mode.
Example:
short addresslist[3] = {6,7,NOADDR};
EnableRemote(0, addresslist);
Also see IOtech’s: Listen
3-20 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 39

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
MyTalkAddr
No Equivalent Commands
Syntax
MyTalkAddr INT WINAPI MyTalkAddr (DevHandleT devHandle);
Usage Notes
MyTalk is no longer to be used. It was previously used to address the interface to Talk.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-21
Page 40

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
OnDigEvent
No Equivalent Commands
OnDigEventVDM
OnEvent
OnEventVDM
Syntax
OnDigEvent INT WINAPI OnDigEvent(DevHandleT devHandle, HWND
hwnd, OpaqueP lParam);
OnDigEventVDM INT WINAPI OnDigEventVDM(DevHandleT devHandle,
DigEventFuncT func, OpaqueP lParam);
OnEvent INT WINAPI OnEvent(DevHandleT devHandle,
HWND hWnd, OpaqueP lParam);
OnEventVDM INT WINAPI OnEventVDM(DevHandleT devHandle,
EventFuncT func);
Usage Notes
OnDigEvent and OnDigEventVDM are no longer to be used. They are digital commands
which applied only to AT488pnp and PCI488.
The OnDigEvent command was used to set the handle of a window to receive a notification
message when a digital match event was triggered.
The OnDigEventVDM command was used to set the address of a “C”-style function to be
called when a digital match event occurred. This function used a similar mechanism as the
OnEventVDM command.
In regard to the OnDigEvent
convert to, or to achieve equivalent or similar functionality.
The OnEvent command caused the event handling mechanism to issue a message upon
occurrence of an Armed event.
The OnEventVDM allowed a call back to a user-specified function in an application.
In regard to the OnEvent and OnEventVDM commands, similar functionality can only be
achieved by coding efforts, of such magnitude, that they are beyond the scope of this document.
and OnDigEventVDM commands, there is no mechanism to
3-22 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 41

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
OpenName
No Equivalent Commands
Syntax
OpenName DevHandleT WINAPI OpenName(LPSTR name);
Usage Notes
OpenName is no longer to be used. The command opened a specified interface or external
device and returned a device handle for use in accessing that device.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-23
Page 42

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
OutputX
Send
SendDataBytes
SendList
Syntax
OutputX LONG WINAPI OutputX(DevHandleT devHandle, LPBYTE
data, DWORD count, BOOL last, BOOL forceAddr,
TermT *term,BOOL reserved, LPDWORD compStat);
Send Send (int board, short address,char data[],long
count, int eotmode)
SendDataBytes SendDataBytes(int board, char data[], long count,
int eotmode)
Send List SendList(int board, short addresslist[], char
data[], long count, int eotmode)
Usage Notes
OutputX is no longer to be used. The OutputX command was used to send data to an
interface or external device. The Remote Enable (REN) line was first asserted, if Driver488 was
the System Controller and AutoRemote was enabled. Then, if a device address (with optional
secondary address) was specified, Driver488 was addressed to Talk and the specified device
was addressed to Listen. If no address was specified, then Driver488 had to have been
previously configured to send data, either as a result of a preceding OutputX command, or as
the result of a Send command. Terminators were automatically appended to the output data as
specified.
Also See: Output, OutputN, OutputMore, and OutputNMore, which are short-form
versions of the OutputX function.
Send is used to send data to one GPIB device. When this routine is executed, the specified
GPIB board is addressed as a Talker, the designated GPIB device is addressed as a Listener and
the number of bytes (specified by count) in data is sent.
Values for eotmode are as follows. The constants are defined in the header file.
o NLend — Send NL (Line Feed) with EOI after last data byte.
o DABend — Send EOI with the last data byte in the string.
o NULLend — Do not mark the end of the transfer.
In the example, GPIB board 0 sends an identification query to the GPIB device at address 3.
End of data is signalled by an EOI.
Example: Send (0, 3, "*IDN?", DABend)
3-24 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 43

SendDataBytes is used to send data to previously addressed devices. This routine assumes that
the desired GPIB listeners have already been addressed (by using SendSetup, for example).
Values for eotmode are as follows. The constants are defined in the header file.
o NLend — Send NL (Line Feed) with EOI after last data byte.
o DABend — Send EOI with the last data byte in the string.
o NULLend — Do not mark the end of the transfer.
In the following example, GPIB board 0 sends an identification query to all previously
addressed listeners. End of data is signaled by an EOI.
Example: SendDataBytes (0, "*IDN?", 5, DABend)
SendList is used to send data to multiple GPIB devices. When this routine is executed, the
specified GPIB board is addressed as a Talker and the designated GPIB devices as Listeners.
The board then sends the given number of bytes of data from the data string to the listening
GPIB devices.
The constants are defined in the header file.
o NLend — Send NL (Line Feed) with EOI after last data byte.
o DABend — Send EOI with the last data byte in the string.
o NULLend — Do not mark the end of the transfer.
In the following example, GPIB board 0 sends an identification query to the GPIB devices at
addresses 6 and 7. End of data is signalled by an EOI.
Example:
short addresslist[3] = {6, 7, NOADDR};
SendList (0, addresslist, "*IDN?", 5, DABend)
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-25
Page 44

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Output
Send
OutputN
OutputMore
OutputNMore
Syntax
Output LONG WINAPI Output(DevHandleT devHandle,LPBYTE
data);
OutputN LONG WINAPI OutputN(DevHandleT devHandle,LPBYTE
data,DWORD count);
OutputMore LONG WINAPI OutputMore(DevHandleT devHandle,
LPBYTE data);
OutputNMore LONG WINAPI OutputNMore (DevHandleT devHandle,
LPBYTE data, DWORD count);
Send Send (int board, short address,char data[],long
count, int eotmode)
Usage Notes
Output, OutputN, OutputMore, and OutputNMore are no longer to be used.
The Output function passed the device handle and data buffer to the OutputX function. It
determined the size of the user-provided data buffer, and passed that value as the count
parameter.
The OutputN function passed the device handle and a pointer to the data buffer to the
OutputX function. It specified that the forceAddr flag was set TRUE, which caused
Driver488 to address the device if an external device was specified.
The OutputMore function passed the device handle and data buffer to the OutputX
function. It determined the size of the user-provided data buffer, and passed that value as the
count parameter.
The OutputNMore function passed the device handle and a pointer [to the data buffer] to the
OutputX function. It specified that the forceAddr flag wa set FALSE, so Driver488 would
not re-address the device, if it had the same device previously used.
Note that Output, OutputN, OutputMore, and OutputNMore were short-form versions of
the OutputX function (previously discussed).
3-26 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 45

Send is used to send data to one GPIB device. When this routine is executed, the specified
GPIB board is addressed as a Talker, the designated GPIB device is addressed as a Listener and
the number of bytes (specified by count) in data is sent.
Values for eotmode are as follows. The constants are defined in the header file.
o NLend — Send NL (Line Feed) with EOI after last data byte.
o DABend — Send EOI with the last data byte in the string.
o NULLend — Do not mark the end of the transfer.
In the example, GPIB board 0 sends an identification query to the GPIB device at address 3.
End of data is signalled by an EOI.
Example: Send (0, 3, "*IDN?", DABend)
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-27
Page 46

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
PPoll PPoll
Syntax
PPoll {IOtech} INT WINAPI PPoll(DevHandleT devHandle);
PPoll {MCC} PPoll(int board, short *result)
Usage Notes
IOtech’s PPoll (Parallel Poll) command was used to request status information from many
bus devices simultaneously. If a device required service then it responded to a Parallel Poll by
asserting one of the eight IEEE 488 bus data lines (DIO1 through DIO8, with DIO1 being the
least significant). In this manner, up to eight devices could be simultaneously polled by the
controller. More than one device can share any particular DIO line. In this case it was
necessary to perform further Serial Polling (SPoll) to determine which device actually
requires service.
The MCC PPoll (Parallel Poll) command performs a parallel poll. In regard to “Returns,”
result will contain the eight-bit result of the parallel poll. Each bit of the poll result contains
one bit of status information from each device which has been configured for parallel polls. The
value of each bit is dependent on the latest parallel poll configuration sent to the devices
through PPollConfig and the individual status of each device.
The following example is to perform a parallel poll of all devices connected to board 0.
Example:
short result;
PPoll(0, &result);
3-28 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 47

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
PPollConfig PPollConfig
Syntax
PPollConfig {IOtech} INT WINAPI PPollConfig(DevHandleT
devHandle,BYTE ppresponse);
PPollConfig {
MCC} PPollConfig(int board, short address,
int dataline, int sense)
Usage Notes
IOtech’s PPollConfig command was used to configure the Parallel Poll response of a
specified bus device. Not all devices supported Parallel Polling; among those that did, some
still did not support the software control of their Parallel Poll response. Some devices were
configured by internal switches.
MCC’s PPollConfig command is used to configure a device for parallel polls.
Note: If a device is locally configured for a parallel poll, then the Controller's parallel poll
configuration instruction is ignored.
In the following example, the command configures the device connected to board 0 at address 6
to respond to parallel polls on line 7 with sense 1. The device asserts line 7 if its IST bit = 1,
and unasserts line 7 if IST = 0.
Example: PPollConfig(0, 6, 7, 1)
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-29
Page 48

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
PPollDisable PPollUnconfig
Syntax
PPollDisable {IOtech} INT WINAPI PPollDisable(DevHandleT
devHandle);
PPollUnconfig {MCC} PPollUnconfig(int board, short addresslist[]
Usage Notes
IOtech’s PPollDisable command, to no longer be used, disabled the Parallel Poll response
of a selected bus device.
MCC’s PPollUnconfig command is used to unconfigure devices for parallel polls.
In the following example, the command unconfigures all devices connected to board 0, which
are located at GPIB addresses 6 and7.
Example:
short addresslist[3] = {6, 7, NOADDR};
PPollUnconfig(0, addresslist);
3-30 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 49

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
PPollDisableList
PPollUnconfig
PPollUnconfig
Syntax
PPollDisableList {IOtech} INT WINAPI PPollDisableList(DevHandlePT
devHandleList);
PPollUnconfig {IOtech} INT WINAPI PPollUnconfig(DevHandleT
devHandle);
PPollUnconfig {MCC} PPollUnconfig(int board, short
addresslist[])
Usage Notes
IOtech’s PPollDisableList command, to no longer be used, disabled the Parallel Poll
response of selected bus devices.
IOtech’s PPollUnconfig command was used to disable the Parallel Poll response of all bus
devices.
MCC’s PPollUnconfig command is used to unconfigure devices for parallel polls.
In the following example, the command unconfigures all devices connected to board 0, which
are located at GPIB addresses 6 and7.
Example:
short addresslist[3] = {6, 7, NOADDR};
PPollUnconfig(0, addresslist);
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-31
Page 50

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Remote
EnableRemote
IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
RemoteList EnableRemote
Syntax
Remote {IOtech} INT WINAPI Remote(DevHandleT devHandle);
RemoteList {IOtech} INT WINAPI RemoteList(DevHandlePT
devHandleList);
EnableRemote {MCC} EnableRemote(int board, short addresslist[])
Usage Notes
Remote and RemoteList are no longer to be used. Each of these commands asserted the
Remote Enable (REN) bus management line. If an external device was specified, then Remote
also addressed that device to Listen, placing it in the Remote state.
EnableRemote - When this routine is executed, the system controller asserts the Remote
Enable (REN) line and the Controller addresses the specified devices as listeners.
The command issued in the following example places devices at GPIB addresses 6 and 7
(connected to GPIB board) in remote mode.
Example:
short addresslist[3] = {6,7,NOADDR};
EnableRemote(0, addresslist);
3-32 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 51

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
RemoveDevice
No Equivalent Commands
Syntax
RemoveDevice INT WINAPI RemoveDevice(DevHandleT devHandle);
Usage Notes
RemoveDevice is no longer to be used. This command removed the specific temporary or
permanent Driver488 device that was created with either the MakeDevice command or the
startup configuration. This command also removed a device that was made permanent through
the KeepDevice command.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-33
Page 52

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Reset ResetSys
Syntax
Reset INT WINAPI Reset(DevHandleT devHandle);
ResetSys ResetSys(int board, short addresslist[])
Usage Notes
Reset is no longer to be used. The Reset command provided a warm-start of the interface.
ResetSys - This routine initializes the GPIB bus and all specified devices. First, the system
controller asserts the REN (Remote Enable) line and then the IFC (Interface Clear) line. This
action unlistens and untalks all of the attached GPIB devices and causes the system controller to
become the Controller-In-Charge (CIC).The Device Clear (DCL) message is then sent to all of
the connected devices. This forces the devices to return to their default states and ensures that
they can receive the Reset (RST) message. A reset message (RST) is then sent to all of the
devices specified by addresslist. This resets the devices to specific parameters.
The command, in the following example, resets the GPIB devices connected to GPIB board 0
and assigned GPIB bus addresses of 6 and 7.
Example:
short addresslist[3] = {6, 7, NOADDR};
ResetSys(0, addresslist);
3-34 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 53

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
SendCmd SendCmds
Syntax
SendCmd INT WINAPI SendCmd(DevHandleT devHandle,
LPBYTE commands, DWORD count);
SendCmds SendCmds (int board, char commands[],
unsigned long count)
Usage Notes
SendCmd is no longer to be used. The command was used to send a specified string of bytes
with Attention (ATN) asserted, causing the data to be interpreted as IEEE 488 command bytes.
SendCmds - This routine is useful in situations where specialized GPIB command sequences
are called for. In the following example, the GPIB board (at 0) simultaneously triggers the
GPIB devices at addresses 8 and 9 and quickly puts them in local mode.
Example: SendCmds0, "\x3F\x40\x28\x29\x04\x01",6);
Also see IOtech’s OutputX, SendData
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-35
Page 54

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
SendData Send
SendDataBytes
SendList
Syntax
SendData {IOtech} INT WINAPI SendData(DevHandleT devHandle,
LPBYTE data, DWORD count);
Send {MCC} Send (int board, short address,
char data[],long count, int eotmode)
SendDataBytes {MCC} SendDataBytes(int board, char data[],
long count, int eotmode)
SendList {MCC} SendList(int board, short addresslist[],
char data[], long count, int eotmode)
Usage Notes
SendData – No longer to be used. This command provided byte-by-byte control of data
transfers and had great flexibility. The command specified exactly which operations Driver488
was to execute.
Send is used to sends data to one GPIB device. When this routine is executed, the specified
GPIB board is addressed as a Talker, the designated GPIB device is addressed as a Listener and
the number of bytes (specified by count) in data is sent.
Values for eotmode are as follows. These constants are defined in the header file.
o NLend — Send NL (Line Feed) with EOI after last data byte.
o DABend — Send EOI with the last data byte in the string.
o NULLend — Do not mark the end of the transfer.
In the following example, GPIB board 0 sends an identification query to the GPIB device at
address 3. End of data is signaled by an EOI.
Example: Send (0, 3, "*IDN?", DABend)
3-36 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 55

SendDataBytes is used to send data to previously addressed devices. This routine assumes that
the desired GPIB listeners have already been addressed (by using SendSetup, for example).
Values for eotmode are as follows. The constants are defined in the header file.
o NLend — Send NL (Line Feed) with EOI after last data byte.
o DABend — Send EOI with the last data byte in the string.
o NULLend — Do not mark the end of the transfer.
In the following example, GPIB board 0 sends an identification query to all previously
addressed listeners. End of data is signaled by an EOI.
Example: SendDataBytes (0, "*IDN?", 5, DABend)
SendList is used to send data to multiple GPIB devices. When this routine is executed, the
specified GPIB board is addressed as a Talker and the designated GPIB devices as Listeners.
The board then sends the given number of bytes of data from the data string to the listening
GPIB devices.
The constants are defined in the header file.
o NLend — Send NL (Line Feed) with EOI after last data byte.
o DABend — Send EOI with the last data byte in the string.
o NULLend — Do not mark the end of the transfer.
In the following example, GPIB board 0 sends an identification query to the GPIB devices at
addresses 6 and 7. End of data is signalled by an EOI.
Example:
short addresslist[3] = {6, 7, NOADDR};
SendList (0, addresslist, "*IDN?", 5, DABend)
Also see IOtech’s OutputX and SendCmd
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-37
Page 56

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
SendEoi
No Equivalent Commands
Syntax
SendEOI INT WINAPI SendEoi(DevHandleT devHandle,
LPBYTE data, DWORD count);
Usage Notes
SendEOI – No longer to be used. This command provided byte-by-byte control of data
transfer and had great flexibility. This command could specify exactly which operations
Driver488 was to execute. Driver488 asserted EOI during the transfer of the final byte.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they
are beyond the scope of this document.
3-38 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 57

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
SPoll
AllSpoll
IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
SPollList AllSpoll
Syntax
SPoll INT WINAPI SPoll(DevHandleT devHandle);
SPollList INT WINAPI SPollList(DevHandlePT devHandleList,
LPBYTE resultList, BYTE SPollFlag);
AllSpoll AllSpoll (int board, short addresslist[],
short resultlist[])
Usage Notes
SPoll and SPollList – No longer to be used. In Active Controller mode, these commands
performed a Serial Poll of the bus device specified and responded with a number from 0 to 255
representing the decimal equivalent of the eight-bit device response.
Serial Polls were normally performed in response to assertion of the Service Request (SRQ) bus
signal by some bus device.
In the following example, we see serial polls two devices (GPIB address 6 and 7) connected to
GPIB board 0.
Example:
short addresslist[3] = {6,7,NOADDR};
short resultlist[2];
AllSpoll (0, addresslist, resultlist);
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-39
Page 58

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Status
ReadStatusByte
Syntax
Status INT WINAPI Status(DevHandleT devHandle,
IeeeStatusPT result);
ReadStatusByte ReadStatusByte(int board, int address,
short *result)])
Usage Notes
The Status command, no longer to be used, returned various items detailing the current state
of Driver488.
ReadStatusByte serial polls a single device and reads its status byte. In the following example
the command instructs to: serial poll the device [at address 2] and retrieve its status byte.
Example: short result;
ReadStatusByte (0, 2, &result);
3-40 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 59

IOtech GPIB Command Associated MCC GPIB 488.2 Command
Talk ReceiveSetup
Syntax
Talk INT WINAPI Talk(DevHandleT devHandle,
BYTE primary,BYTE secondary);
ReceiveSetup ReceiveSetup(int board, short address))
Usage Notes
Talk – No longer to be used. Was used to address an external device to Talk.
ReceiveSetup – In order to actually transfer any data, you must call a routine such as
RcvRespMsg following this routine. This routine is useful in instances where you need to
transfer multiple blocks of data between devices. For example, you could initially address the
devices using ReceiveSetup, then make multiple calls of RcvRespMsg to transfer the data.
For typical cases, Receive is simpler to use, since it takes care of both the setup and the data
transfer. Note that board is an integer which identifies the GPIB board to be used for this
operation. In most applications, this value is 0. address is an integer representing the GPIB
address of the device to send the data..
The following example instructs a GPIB device at address 5 to send data to GPIB Board 0. Up
to 50 bytes of data is received and then stored in a string. The message is terminated with an
EOI.
Example:
char message[100];
ReceiveSetup(0, 5);
RcvRespMsg (0, message, 50, STOPend);
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-41
Page 60

IOtech GPIB Commands Associated MCC GPIB 488.2 Command(s)
Term
No Equivalent Commands
TermQuery
TimeOut
TimeOutQuery
Syntax
Term INT WINAPI Term(DevHandleT devHandle,
TermT *term,DWORD termFlag);
TermQuery INT TermQuery(DevHandleT devHandle,
TermT *term,INT termFlag);
TimeOut INT WINAPI TimeOut(DevHandleT devHandle,
DWORD millisec);
TimeOutQuery INT WINAPI TimeOutQuery(DevHandleT devHandle,
DWORD *millisec);
Usage Notes
These four IOtech commands are not used with MCC API.
Term - was used to set the end-of-line (EOL) terminators for input from and output to I/O
adapter devices.
TermQuery - queried the terminators setting.
TimeOut - was used to set the number of milliseconds that Driver488 would wait for a
transfer, before declaring a timeout error. The timeout value set a limit on the total time
allowed for an operation.
TimeOutQuery - queried the timeout setting, given in milliseconds.
Similar functionality can only be achieved by coding efforts, of such magnitude, that they are
beyond the scope of this document.
3-42 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 61

IOtech GPIB Command Associated MCC GPIB 488.2 Command
Trigger Trigger
Syntax
Trigger {IOtech} INT WINAPI Trigger(DevHandleT devHandle);
Trigger {MCC} Trigger(int board, short address)
Usage Notes
Trigger {IOtech} – IOtech’s Trigger command issued a Group Execute Trigger (GET) bus
command to a specified device. If no interface device was specified, then the GET only
affected a device that was already in the Listen state, as a result of a previous Output or Send
command.
Trigger {
MCC} – This command triggers one device. When this call is executed, the GPIB
GET (Group Execute Trigger) message is sent to the specified device. To trigger several GPIB
devices, use TriggerList.
The following example triggers a device connected to board 0, whose primary GPIB address is
6 and secondary address is 12.
Example: Trigger (0, MakeAddr (6, 12));
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-43
Page 62

IOtech GPIB Command Associated MCC GPIB 488.2 Command
TriggerList TriggerList
Syntax
TriggerList {IOtech} INT WINAPI TriggerList(DevHandlePT
devHandleList);
TriggerList {MCC} void TriggerList(int board, int addresslist[])
Usage Notes
TriggerList {IOtech} – IOtech’s TriggerList command issued a Group Execute Trigger
(GET) bus command to the specified devices. If no interface devices were specified, then the
GET only affected devices that were already in the Listen state, as a result of a previous
Output or Send command.
TriggerList {MCC} – Used to trigger multiple devices. Use Trigger to trigger only one
device.
The following example shows how we would trigger two devices simultaneously. The example
devices are connected to board 0; and are at GPIB addresses 6 and 7.
Example:
short addresslist[3] = {6, 7, NOADDR};
TriggerList(0, addresslist);
3-44 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
Page 63

IOtech GPIB Command Associated MCC GPIB 488.2 Command(s)
UnListen
DevClear
UnTalk
Syntax
UnListen INT WINAPI UnListen (DevHandleT devHandle);
UnTalk INT WINAPI UnTalk (DevHandleT devHandle);
DevClear DevClear(int board, short address)
Usage Notes
UnListen, no longer to be used. This command was used to unaddress an external device that
was addressed to Listen.
UnTalk, no longer to be used. This command was used to unaddress an external device that
was addressed to Talk.
DevClear
(SDC) message to the specified device. To clear multiple devices, use the DevClearList
routine. If address is set to NOADDR, then all connected devices on the GPIB, are cleared
through the Universal Device Clear (UDC) message.
is used to clear one device. This routine sends the GPIB Selected Device Clear
To clear the device at GPIB primary address 4, secondary address 30, and connected to GPIB
board 0, we would follow the example.
Example:
DevClear(0, MakeAddr (4,30));
/* Use MakeAddr macro (in GPIB.H) to pack
primary and secondary address */
GPIB 488.2 Porting Guide 986992 IOtech to Associated MCC APIs 3-45
Page 64

This page is intentionally blank.
3-46 IOtech to Associated MCC APIs 986992 GPIB 488.2 Porting Guide
 Loading...
Loading...