

Page 1

Microwave Data Systems Inc.
MDS 9810
900 MHz Spread Spectrum
Data T ransceivers
MDS 05-3301A01, Rev. C
JULY 2004
Installation & Operation Guide
Installation and Operation Guide
Page 2

a
b
c
QUICK START GUIDE
Below are the basic steps for installing the transceiver. Detailed instructions are given in “INSTALLATION” on Page 14 of this guide.
1. Install and connect the antenna system to the radio
• Use good quality, low-loss coaxial cable. Keep the feedline as short as possible.
• Preset directional antennas in the direction of desired transmission.
2. Connect the data equipment to the radio’s INTERFACE connector
• Connection to the radio must be made with a DB-25 Male connector. Connections for typical systems are shown below.
• Connect only the required pins. Do not use a straight-through RS-232 cable with all pins wired.
• Verify the data equipment is configured as DTE. (By default, the radio is configured as DCE.)
DB-9 to DB-25 ExampleDB-25 to DB-25 Example
RTU
DB-25 DB-25
11
GND
2
TXD
3
RXD
RTS
4
(DTE)
CTS
5
6DSR
GND
20
77
DCD
8 8
As required for application
GND
2
TXD
3
RXD
4
4
RTS
5
5
CTS
DSR
6
GND
DCD
(DCE)
TRANSCEIVER
RTU
DB-9 DB-25
18
DCD
2
RXD
3
TXD
5
GND
(DTE)
6
20
DSR
7
RTS
CTS
As required for application
DCD
3
RXD
2
TXD
5
7
GND
DSR
6
4
RTS
CTS8
5
(DCE)
TRANSCEIVER
3. Apply DC power to the radio
• Observe proper polarity. The red wire is the positive lead; the black is negative.
4. Set the radio’s basic configuration with a Hand-Held Terminal (HHT)
• Set the baud rate/data interface parameters as follows. Use the BAUD xxxxx abc command,
where xxxxx equals the data speed and abc equals the communication parameters as follows:
= Data bits (7 or 8)
= Parity (N for None, O for Odd, E for Even
= Stop bits (1 or 2)
(Example: BAUD 9600 8N1 ) NOTE: 7N1, 8E2 and 8O2 are invalid data parameters.
5. Verify proper operation by observing the LED display
• Refer to Table 4 on Page 26 for a description of the status LEDs.
• Refine directional antenna headings for best received signal strength using the RSSI command.
• If difficulties are encountered, please refer to Table 14 on Page 56 for troubleshooting help.
Page 3
TABLE OF CONTENTS
1.0 ABOUT THIS MANUAL.........................................................................................................1
2.0 PRODUCT DESCRIPTION...................................................................................................1
Transceiver Features........................................................................................................................2
Model Configuration Codes .............................................................................................................2
2.1 Spread Spectrum Radios—How Are They Different? ....................................................................3
2.2 Typical Applications .......................................................................................................................3
Multiple Address Systems (MAS) ....................................................................................................3
Simplex “Peer-to-Peer”.....................................................................................................................4
Peer-to-Peer with Repeater Assistance...........................................................................................4
Point-to-Point System.......................................................................................................................5
Tail-End Link (“MAS Extension”)......................................................................................................5
Repeater System—Traditional.........................................................................................................6
“Single-Radio” Repeater—Alternative Method.................................................................................6
2.3 Accessories ...................................................................................................................................7
3.0 INSTALLATION PLANNING.................................................................................................. 7
3.1 General Requirements ..................................................................................................................7
3.2 Site Selection ................................................................................................................................8
Terrain and Signal Strength .............................................................................................................9
Conducting a Site Survey ................................................................................................................9
3.3 A Word About Radio Interference ................................................................................................10
3.4 Antenna & Feedline Selection .....................................................................................................11
Antennas........................................................................................................................................11
Feedlines .......................................................................................................................................12
3.5 How Much Output Power Can be Used? .....................................................................................13
Transmitter Power vs. Antenna System Gain.................................................................................13
4.0 INSTALLATION...................................................................................................................14
4.1 Transceiver Installation ................................................................................................................15
4.2 Peer-to-Peer Systems .................................................................................................................19
Simplex Peer-to-Peer.....................................................................................................................19
Peer-to-Peer with Repeater Assistance.........................................................................................20
4.3 Tail-End Links ..............................................................................................................................21
Interface Wiring..............................................................................................................................21
Programming .................................................................................................................................22
4.4 Repeaters—Traditional Method ...................................................................................................22
Antennas........................................................................................................................................23
System Addresses.........................................................................................................................23
Interface Wiring..............................................................................................................................23
Diagnostic Limitations....................................................................................................................23
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide i
Page 4
4.5 “Single-Radio” Repeater—Alternative Method ............................................................................24
Interface Wiring..............................................................................................................................24
Software Programming (TDD Command)......................................................................................24
Limitations of Single-Radio Repeaters...........................................................................................25
4.6 Using the Radio’s Sleep Mode ....................................................................................................25
Sleep Mode Example.....................................................................................................................25
5.0 OPERATION....................................................................................................................... 26
5.1 Initial Start-up ..............................................................................................................................26
5.2 Performance Optimization ...........................................................................................................26
Antenna Aiming..............................................................................................................................27
Antenna SWR Check.....................................................................................................................27
Data Buffer Setting.........................................................................................................................27
Hoptime Setting .............................................................................................................................27
Baud Rate Setting..........................................................................................................................28
Radio Interference Checks.............................................................................................................28
6.0 PROGRAMMING................................................................................................................28
6.1 Hand-Held Terminal Connection & Start-up ................................................................................28
6.2 Hand-Held Terminal Setup ..........................................................................................................29
6.3 Keyboard Commands ..................................................................................................................30
Entering Commands......................................................................................................................30
Error Messages..............................................................................................................................31
6.4 Detailed Command Descriptions .................................................................................................35
ADDR [1...65000]...........................................................................................................................36
AMASK [0000 0000–FFFF FFFF]..................................................................................................36
ASENSE [HI/LO]............................................................................................................................36
BAUD [xxxxx abc]..........................................................................................................................36
BUFF [ON, OFF]............................................................................................................................37
CTS [0–255]...................................................................................................................................37
CTSHOLD [0-6000]........................................................................................................................38
DEVICE [DCE, CTS KEY].............................................................................................................38
DLINK [xxxxx] ................................................................................................................................39
DMGAP [xx]...................................................................................................................................39
DTYPE [NODE/ROOT/GATE/PEER].............................................................................................39
HOPTIME [XSHORT, 16, 20, 25, 32, SHORT, NORMAL, LONG] .................................................40
INIT................................................................................................................................................41
MODE [M, R, R-M].........................................................................................................................41
OWM [xxxxx]..................................................................................................................................42
OWN [xxxxx]..................................................................................................................................42
PWR [xx–30]..................................................................................................................................42
RSSI...............................................................................................................................................42
RTU [ON/OFF/0-80].......................................................................................................................43
RX [xxxx]........................................................................................................................................43
RXTOT [NONE, 0–1440]................................................................................................................43
SEND [n, -n, +n].............................................................................................................................43
SETUP...........................................................................................................................................44
SHOW [PORT, DC, PWR]..............................................................................................................45
SIMPLEX [ON, OFF]......................................................................................................................45
ii MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 5
SKIP [NONE, 1...8] ........................................................................................................................46
SKIPSYNC [ON/OFF]....................................................................................................................46
SNR ...............................................................................................................................................46
SREV.............................................................................................................................................47
STAT...............................................................................................................................................47
TDD [ON/OFF]...............................................................................................................................47
TEMP.............................................................................................................................................48
TX [xxxx]........................................................................................................................................48
UNIT [10000–65000]......................................................................................................................48
ZONE DATA ...................................................................................................................................49
ZONE CLEAR................................................................................................................................50
7.0 TROUBLESHOOTING........................................................................................................ 50
7.1 LED Indicators .............................................................................................................................50
7.2 Alarm Codes ................................................................................................................................51
Checking for Alarms—STAT command..........................................................................................51
Major Alarms vs. Minor Alarms......................................................................................................51
Alarm Code Definitions..................................................................................................................52
7.3 Performing Network-Wide Remote Diagnostics ..........................................................................53
DLINK [xxxxx] ................................................................................................................................55
DTYPE [NODE/ROOT/GATE/PEER].............................................................................................55
7.4 Troubleshooting Chart .................................................................................................................56
RF
Exposure
8.0 TECHNICAL REFERENCE.................................................................................................56
8.1 Technical Specifications ..............................................................................................................56
8.2 RSSI Checks with a Voltmeter .....................................................................................................58
8.3 Data Interface Connections (DB-25) ...........................................................................................58
8.4 Bench Testing Setup ....................................................................................................................61
8.5 Using Radio Configuration Software ...........................................................................................61
Connecting a PC............................................................................................................................62
Upgrading the Radio’s Software ....................................................................................................62
8.6 dBm-Watts-Volts Conversion Chart .............................................................................................63
9.0 GLOSSARY OF TERMS.....................................................................................................63
Copyright Notice
This Installation and Operation Guide and all software described herein are protected by
right: 2004 Microwave Data Systems
Inc. All rights reserved.
Microwave Data Systems reserves its right to correct any errors and omissions in this document.
copy-
Operational Safety Notice
The radio equipment described in this guide emits radio frequency energy. Although the power
level is low, the concentrated energy from a directional antenna may pose a health hazard. All
antennas used with this transmitter, whether indoor or outdoor mounted, must be installed to provide a separation distance of at least
ating in conjunction with any other antenna or transmitter. In mobile applications (vehicle
23 cm from all persons, and must not be co-located or oper-
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide iii
Page 6
mounted) the above separation distance must be maintained at all times. More information on RF
exposure is available on the Internet at
is intended to guide a professional installer to install, operate and perform basic system maintenance on the described radio.
www.fcc.gov/oet/info/documents/bulletins . This manual
CSA/
This product is available for use in Class I, Division 2, Groups A, B, C & D Hazardous Locations. Such
locations are defined in Article 500 of the National Fire Protection Association publication NFPA 70, oth-
erwise known as the National Electrical Code.
The product has been recognized for use in hazardous locations by the Canadian Standards Association
(CSA), which also issues the US mark of approval (CSA/
CSA STD C22.2 No. 213-M1987. The product has been evaluated in accordance with the following standards:
• CSA Std C22.2 No. 142-M1987 - Process Control Equipment
• CSA Std C22.2 No. 213-M1987 - Non-Incendive Electrical Equipment for Use in Class I, Division 2
• ANSI/UL Std No. 508 - Industrial Control Equipment
• UL Std No. 1604 - Electrical Equipment for Use in Class I and II, Division 2; Class III Hazardous (Clas-
US
Notice
Hazardous Locations
sified) Locations
US
). The CSA Certification is in accordance with
ISO 9001 Registration
Microwave Data Systems' adherence to this internationally accepted quality system standard provides one of the strongest assurances of product and service quality available.
MDS Quality Policy Statement
We, the employees of Microwave Data Systems, are committed to achieving total customer satisfaction in everything we do.
Total Customer Satisfaction in:
• Conception, design, manufacture and marketing of our products.
• Services and support we provide to our internal and external customers.
Total Customer Satisfaction Achieved Through:
• Processes that are well documented and minimize variations.
• Partnering with suppliers who are committed to providing quality and service.
• Measuring our performance against customer expectations and industry leaders.
• Commitment to continuous improvement and employee involvement.
iv MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 7

FCC Notice, U.S.A.
The transceiver complies with Part 15 of the FCC Rules. Operation is subject to the following two
conditions: (1) this device may not cause harmful interference, and (2) this device must accept any
interference received, including interference that may cause undesired operation.
This device is specifically designed to be used under Section 15.247 of the FCC Rules and Regulations. Any unauthorized modification or changes to this device without the express approval of
Microwave Data Systems may void the user’s authority to operate this device.
Furthermore, this device is indented to be used only when installed in accordance with the instructions outlined in this manual. Failure to comply with these instructions may also void the user’s
authority to operate this device.
Manual Revisions/Updates
While every reasonable effort has been made to ensure the accuracy of this manual, product
improvements may result in minor differences between the manual and the product shipped to you.
If you have additional questions or need an exacts specification for a product, please contact our
Customer Service Team using the information at the back of this guide. In addition, manual
updates can often be found on the MDS Web site at www.microwavedata.com.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide v
Page 8
vi MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 9
1.0 ABOUT THIS MANUAL
This guide presents installation and operating instructions for the
MDS 9810 transceiver. Following installation, we suggest keeping this
guide near the equipment for future reference.
NOTE: Earlier versions of this manual also covered the MDS 24810
(2.4 GHz) transceiver, which has been discontinued by MDS.
An electronic version of the earlier manual is available for
download at www.microwavedata.com.
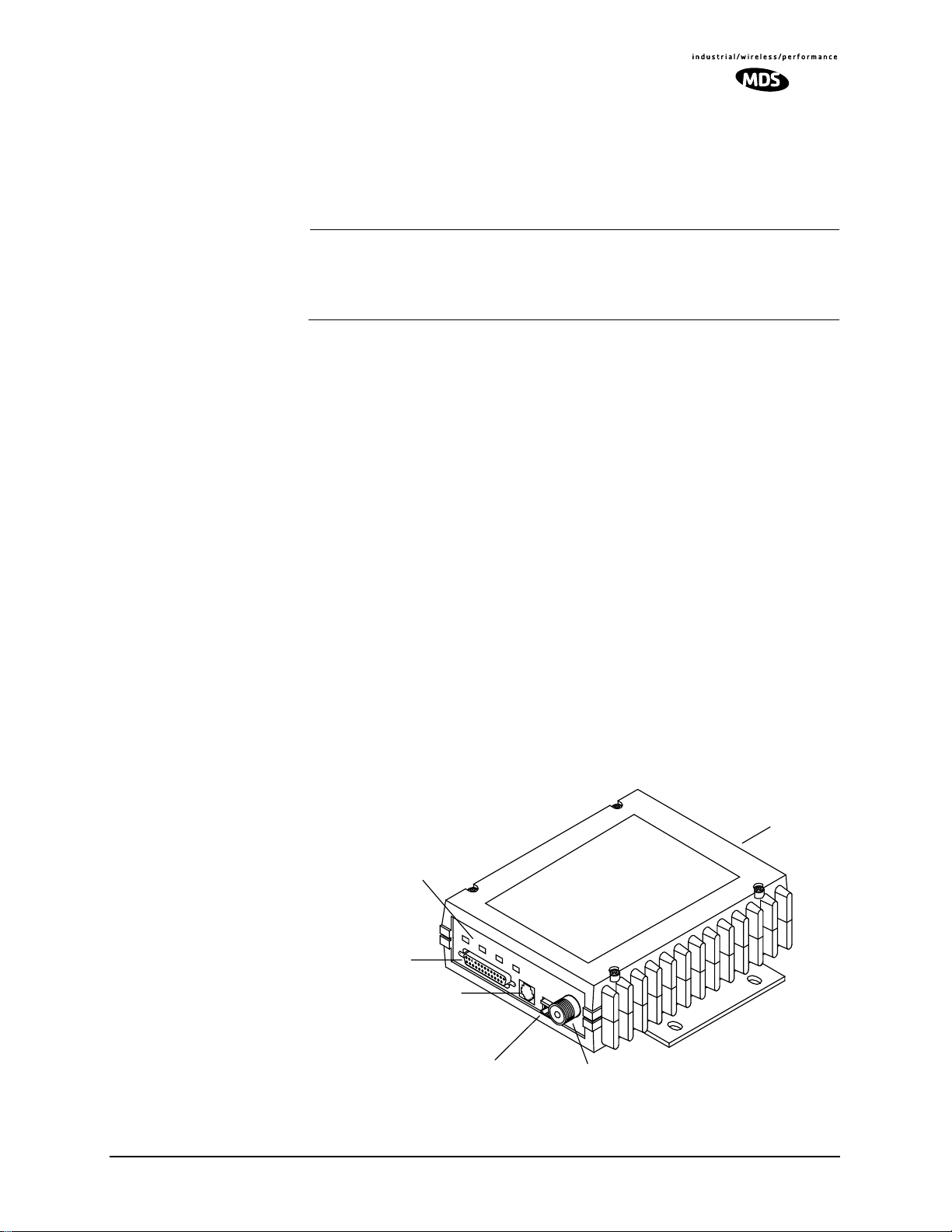
2.0 PRODUCT DESCRIPTION
The transceiver, shown in Figure 1, is a spread spectrum radio designed
for license-free operation in the 900 MHz frequency band. Employing
microprocessor control and Digital Signal Processing (DSP) technology, the unit is highly reliable for long-distance communications,
even in the presence of weak signals or interference.
DSP technology also makes it possible to obtain information about radio
operation and troubleshoot problems, without going to the remote radio
site. Using the appropriate software at the master station, diagnostic data
can be obtained on any DSP radio in the system, even while payload
data is being transmitted. (See “Performing Network-Wide Remote
Diagnostics” on Page 53.)
The transceiver is housed in a compact and rugged die-cast aluminum
case that need only be protected from direct exposure to the weather. It
contains a single printed circuit board with all necessary components for
radio operation. No jumper settings or adjustments are required to configure the radio for operation.
Invisible place holder
SERIAL NUMBER
LABEL
LED INDICATORS (4)
EXTERNAL
INTERFACE
CONNECTOR
(DB-25)
DIAGNOSTICS
CONNECTOR (RJ-11)
13.8 VDC POWER
CONNECTOR
ANTENNA CONNECTOR
(TYPE “N”)
Figure 1. MDS 9810 Transceiver
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 1
Page 10

Transceiver Features
Listed below are several key features of the transceiver. These are
designed to ease the installation and configuration of the radio, while
retaining the ability to make changes in the future.
• 1,019 frequencies over 902–928 MHz, subdivided into eight
frequency zones
• Configurable operating zones to omit frequencies with constant
interference
• 65,000 available network addresses
• Network-wide configuration from the master station; eliminates
most trips to remote sites
• Data transparency–ensures compatibility with virtually all
asynchronous SCADA system RTUs
• Peak-hold RSSI, averaged over eight hop cycles
• Operation at up to 19200 bps continuous data flow;
38400 bps non-continuous
THIS INFORMATION IS
SUBJECT TO CHANGE.
DO NOT USE FOR
PRODUCT ORDERING.
• Same hardware for all supported data rates:
1200, 2400, 4800, 9600, 19200, 38400 bps asynchronous
• Same hardware for master or remote configuration
• Data latency typically less than 10 ms
• Supports EIA-232 (formerly called RS-232) user interface
• Low current consumption–30 mA or less average draw in
“sleep” mode.
Model Configuration Codes
The radio model number is printed on the end of the radio enclosure, and
provides key information about how the radio was configured when it
left the factory. See Figure 2 for an explanation of the model number
characters.
Invisible place holder
OPERATION
X= Remote/Master
PACKAGE
1= Transceiver only
98
POWER SETTING
1= 10.5 - 30 Vdc*
X
N
0
AGENCY APPROVAL
N= N/A
F= FCC/IC
SAFETY APPROVAL
N= N/A
U= FM/UL/CSA
MOUNTING BRACKETS
A= Standard
B= None
DIAGNOSTICS
0= None
1= Non-Intrusive
* Units shipped prior to Revision “U” (November 1999) may be configured for 25 Vdc maximum DC input.
Figure 2. Transceiver Model Configuration Codes
2 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 11
Invisible place holder
2.1 Spread Spectrum Radios—How Are They
Different?
The main difference between a traditional (licensed) radio system and
the MDS 9810 transceiver is that these units “hop” from channel to
channel many times per second using a specific hop pattern applied to
all radios in the network. A distinct hopping pattern is provided for each
of the 65,000 available network addresses, thereby minimizing the
chance of interference with other spread spectrum systems. In the USA,
and certain other countries, no license is required to install and operate
this type of radio system.
2.2 Typical Applications
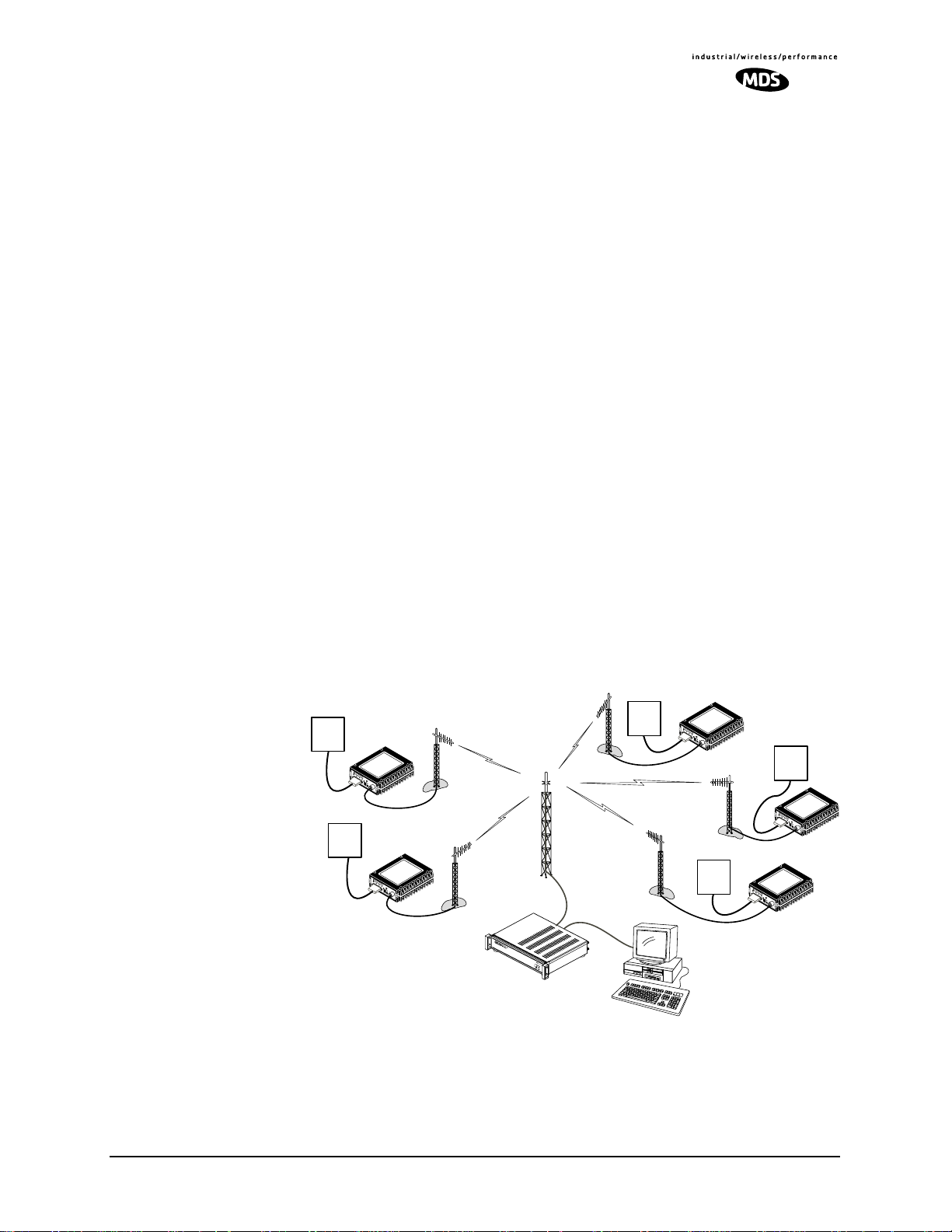
Multiple Address Systems (MAS)
This is the most common application of the transceiver. It consists of a
central control station (master) and two or more associated remote units,
as shown in Figure 3. An MAS network provides communications
between a central host computer and remote terminal units (RTUs) or
other data collection devices. The operation of the radio system is transparent to the computer equipment. When used in this application, the
transceiver provides an excellent alternative to traditional (licensed)
MAS radio systems.
Invisible place holder
REMOTE RADIO
RTU
REMOTE RADIO
REMOTE RADIO
RTU
REMOTE RADIO
RTU
RTU
REMOTE RADIO
RTU
HOST SYSTEM
MASTER RADIO
(MDS 9820 Shown)
Figure 3. Typical MAS Network
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 3
Page 12
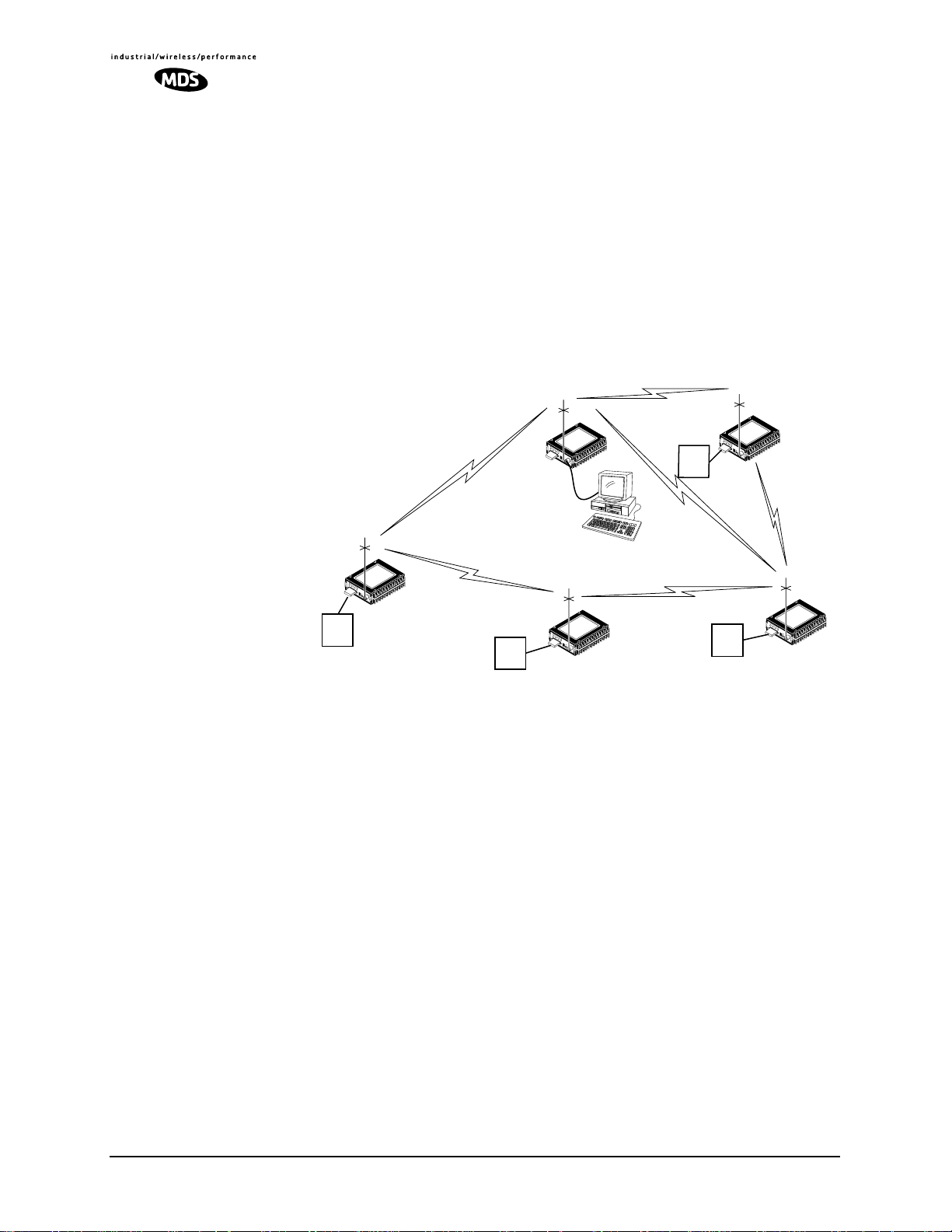
Simplex “Peer-to-Peer”
Peer-to-peer communication is possible using the transceiver’s simplex
mode. With this arrangement (Figure 4), two or more remote units can
share information by direct communication with each other in addition
to communicating with a central master radio. This is possible because
the transmit and receive frequencies for each hop channel are the same
at each radio when simplex mode is enabled. If adequate transmission
paths exist, each radio can communicate with all other units in the network. Additional details for peer-to-peer systems are provided in
Section 4.2 (Page 19).
Invisible place holder
RTU
REMOTE RADIO
PEER-TO-PEER
MASTER RADIO
RTU
RTU
HOST SYSTEM
PEER-TO-PEER
RTU
REMOTE RADIO
REMOTE RADIO
PEER-T
O-PEER
REMOTE RADIO
Figure 4. Typical simplex “Peer-to-Peer” Network
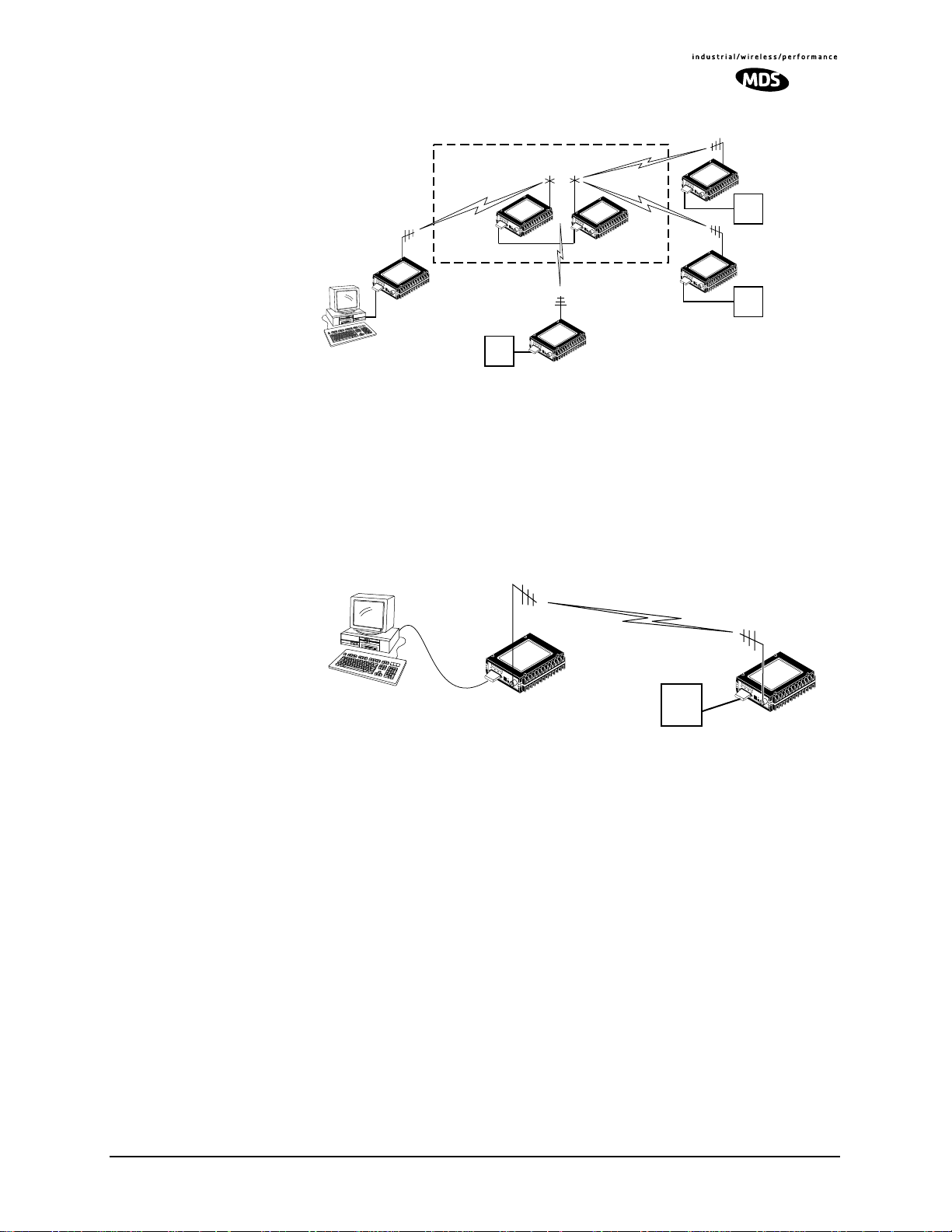
Peer-to-Peer with Repeater Assistance
Peer-to-peer communication is also possible using this alternate
arrangement (see Figure 5). It overcomes the range limitations of a simplex peer-to-peer system by using a repeater to re-transmit the signals of
all stations in the network. The repeater consists of two radios—one programmed as a remote using master frequencies (
MODE R-M
command),
and the other programmed as a conventional master. Additional details
for peer-to-peer systems are given in Section 4.2 (Page 19).
4 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 13
REPEATER STATION
REMOTE-MASTER*
Invisible place holder
REMOTE
RTU
MASTER
REMOTE
RTU
REMOTE
* Special operating mode.
See Programming section of manual.
HOST COMPUTER
Pin 3 Pin 2
REMOTE
RTU
Figure 5. Typical Peer-to-Peer Network with Repeater Assistance
Point-to-Point System
A point-to-point configuration (Figure 6) is a simple arrangement consisting of just two radios—a master and a remote. This provides a simplex or half-duplex communications link for the transfer of data between
two locations.
Invisible place holder
HOST
SYSTEM
MASTER RADIO
RTU
REMOTE RADIO
Figure 6. Typical Point-to-Point Link
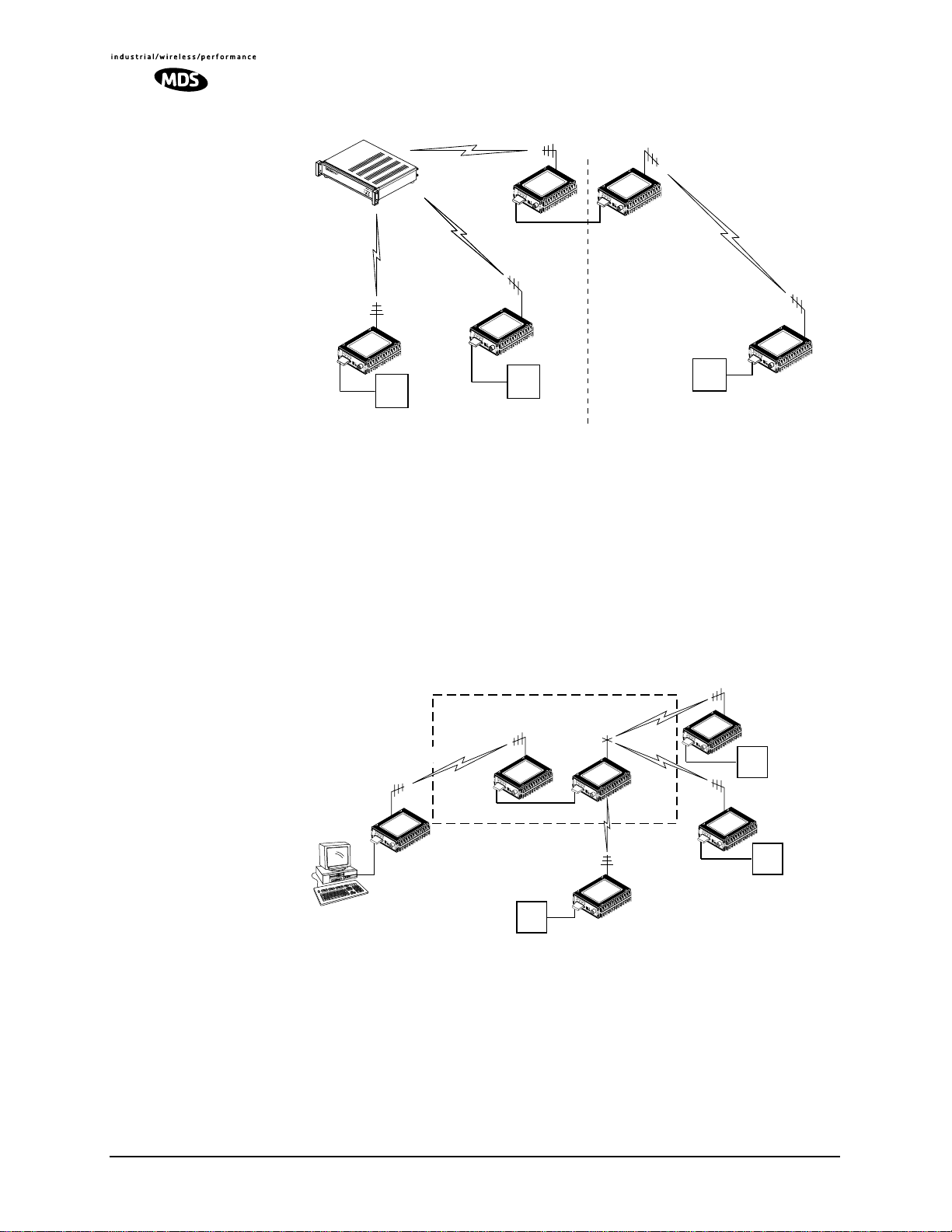
Tail-End Link (“MAS Extension”)
A tail-end link can be used to extend the range of a traditional (licensed)
MAS system. This might be required if an outlying site is blocked from
the MAS master station by a natural or man-made obstruction. In this
arrangement, an MDS 9810 radio links the outlying remote site into the
rest of a licensed MAS system by sending data from that site to an associated MDS 9810 installed at one of the licensed remote sites. (See
Figure 7).
As the data from the outlying site is received at the licensed remote site,
it is transferred to the licensed radio (via a local cable connection) and
is then transmitted to the MAS master station in the usual manner. Additional details for tail-end links are given in Section 4.3 (Page 21).
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 5
Page 14
MASTER
STATION
REMOTE
RADIO
REPEATER
Null-Modem
Cable
Invisible place holder
POINT
SPREAD
-T
O-POINT
SPECTRUM
MDS 9810 / 9820
MASTER RADIO
LINK
RTU
REMOTE
RADIO
RTU
MDS 9810
/ 9820
REMOTE RADIO
REMOTE
RADIO
RTU
MAS SYSTEM (LICENSED OR UNLICENSED) MDS 9810/9820 LINK TO AN OUTLYING SITE
Figure 7. Typical Tail-End Link Arrangement
Repeater System —Traditional
Although the range between MDS 9810 radios is typically 10 to15 miles
over average terrain, it is possible to extend the range considerably by
connecting two units together at one site in a “back-to-back” fashion to
form a repeater, as shown in Figure 8. Additional details for repeater
systems are given in Section 4.4 (Page 22).
Invisible place holder
POINT-TO-POINT LINK
MASTER
RADIO
REPEATER LINK
Null-Modem Cable
MASTER
RADIO
REMOTE RADIO
RTU
REMOTE RADIO
REMOTE RADIO
HOST COMPUTER
RTU
REMOTE RADIO
RTU
Figure 8. Typical Repeater System Configuration
“Single-Radio” Repeater —Alternative Method
A repeater may also be established using a single MDS x810 Transceiver. This type of repeater cannot operate in full-duplex mode as with
the traditional repeater described above. However, if a loss in transmission speed and efficiency can be tolerated, it may be a viable solution in
some systems.
6 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 15
A single-radio repeater works similar to the system shown in Figure 8,
but consists of just one transceiver at the repeater site. It works by buffering (storing) incoming messages and retransmitting them a short time
later. Accordingly, there will be a delay in transmissions through this
type of repeater. Additional details for Single-Radio repeater s are given
in Section 4.5 (Page 24).
2.3 Accessories
The transceiver can be used with one or more of the accessories listed in
Table 1. Contact the factory for ordering details.
Table 1. Accessories
Accessory Description MDS P/N
Power Supply
Kit
Hand-Held
Terminal Kit
(HHT)
RTU Simulator Test unit that simulates data from a remote
Radio
Configuration
Software
Paging Filter Antenna system filter used to reduce RF
Paging Filter Antenna system filter used to reduce RF
EIA-232 to
EIA-422
Converter
For powering the transceiver from an AC source. 01-3682A01
Terminal that plugs into the radio’s RJ-11
DIAG(NOSTICS) connector. Allows radio
programming, diagnostics & control. Includes
carrying case, cable set and manual.
terminal unit. Comes with polling software that
runs on a PC. Useful for testing radio operation.
Windows-based software that allows radio
programming and control using a PC. Includes
on-line instructions. (See Section 8.5 (Page 61)
for PC connection details.)
interference from paging transmitters operating
in the 905-915 MHz band.
interference from paging transmitters operating
in the 902-927 MHz band.
External adapter that converts the radio’s DATA
INTERFACE connector to EIA-422 compatible
signaling. May be required for long cable runs
(over 50 feet/15 meters).
02-1501A01
03-2512A01
03-3156A01
20-2822A01
20-22822A02
03-2358A01
3.0 INSTALLATION PLANNING
The installation of the radio is not difficult, but it does require some
planning to ensure station reliability and efficiency. This section provides tips for selecting an appropriate site, choosing an antenna system,
and reducing the chance of harmful interference.
3.1 General Requirements
There are three main requirements for installing the radio—adequate
and stable primary power, a good antenna system, and the correct interface between the transceiver and the data device.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 7
Page 16
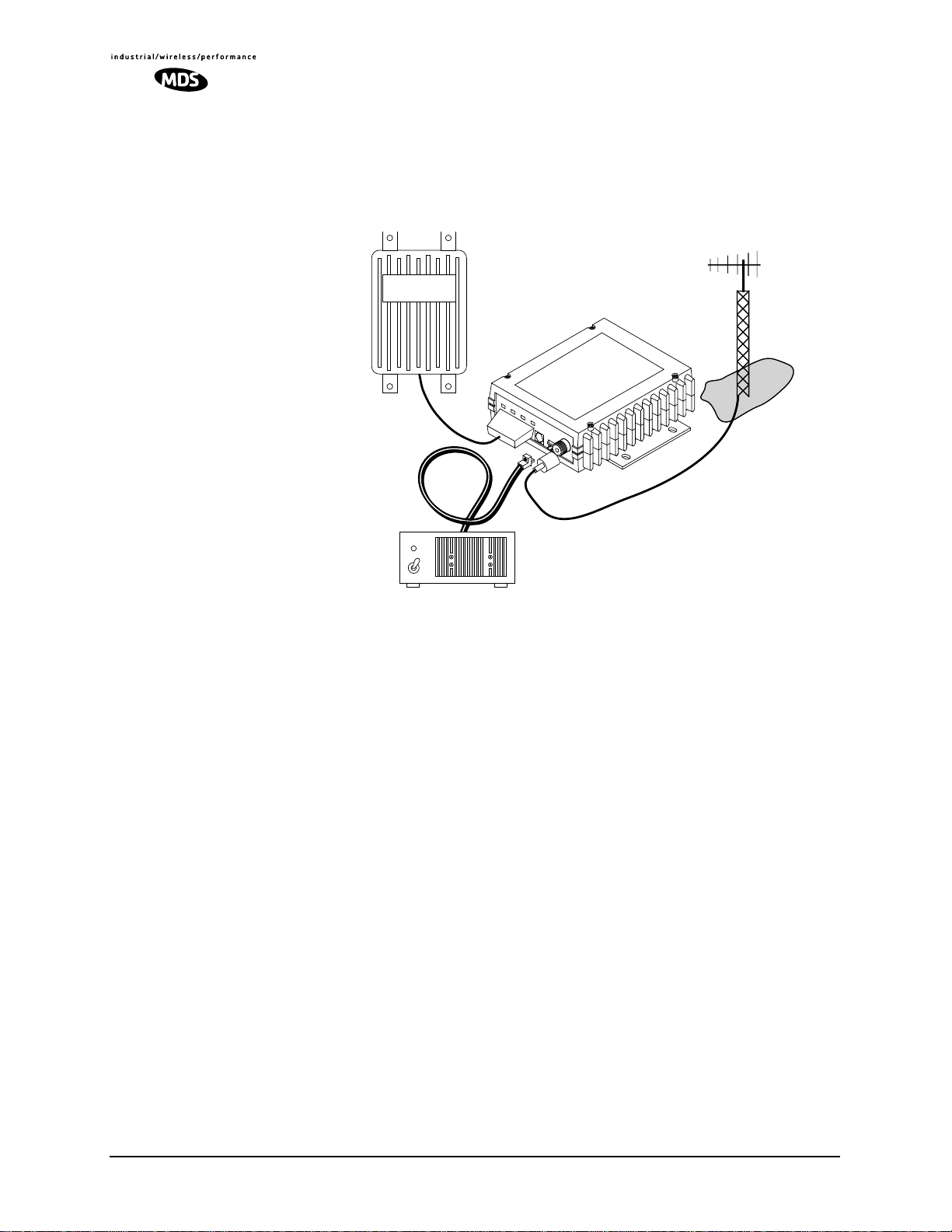
Figure 9 shows a typical remote station arrangement. At a remote station, a directional antenna is normally used, and a Remote Terminal Unit
(RTU) or other telemetry equipment replaces the host computer normally used in a master station.
Invisible place holder
REMOTE TERMINAL
13.8 VDC
POWER
CABLE
UNIT
REMOTE RADIO
13.8 VDC
POWER
SUPPLY
ANTENNA SYSTEM
(Directional Type
Normally Used)
LOW-LOSS FEEDLINE
Figure 9. Typical Remote Station Arrangement
3.2 Site Selection
For a successful installation, careful thought must be given to selecting
proper sites for the master and remote stations. Suitable sites should provide:
• Protection from direct weather exposure
• A source of adequate and stable primary power
• Suitable entrances for antenna, interface or other required
cabling
• Antenna location that provides an unobstructed transmission
path in the direction of the associated station
These requirements can be quickly determined in most cases. A possible
exception is the last item—verifying that an unobstructed transmission
path exists. Radio signals travel primarily by line-of-sight, and obstructions between the sending and receiving stations will affect system performance. If you are not familiar with the effects of terrain and other
obstructions on radio transmission, the discussion below will provide
helpful background.
(s)
8 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 17

Terrain and Signal Strength
While the 900 MHz band offers many advantages over VHF and lower
UHF frequencies for data transmission, they are also more prone to
signal attenuation from obstructions such as terrain, foliage or buildings
in the transmission path.
A line-of-sight transmission path between the master station and its
associated remote site
(s) is highly desirable and provides the most reli-
able communications link. A line-of-sight path can often be achieved by
mounting the station antenna on a tower or other elevated structure that
raises it to a level sufficient to clear surrounding terrain and other
obstructions.
The importance of a clear transmission path relates closely to the distance to be covered by the system. If the system is to cover only a limited
geographic area, say up to 3 miles (4.8 km), then some obstructions in
the transmission path can usually be tolerated with minimal impact. For
longer range systems, any substantial obstruction in the transmission
path could compromise the performance of the system, or block transmission entirely.
Much depends on the minimum signal strength that can be tolerated in
a given system. Although the exact figure will differ from one system to
another, a Received Signal Strength Indication (RSSI) of –90 dBm or
stronger will provide acceptable performance in many systems. While
the equipment will work at lower signal strengths, this provides a “fade
margin” to account for variations in signal strength which may occur
from time-to-time. RSSI can be measured with a Hand-Held Terminal
connected to the remote radio’s
DIAG(NOSTICS) connector. (See Section
6.0, beginning on Page 28.)
Conducting a Site Survey
If you are in doubt about the suitability of the radio sites in your system,
it is best to evaluate them before a permanent installation is begun. This
can be done with an on-the-air test (preferred method); or indirectly,
using path-study software.
An on-the-air test is preferred because it allows you to see firsthand the
factors involved at an installation site and to directly observe the quality
of system operation. Even if a computer path study was conducted earlier, this test should be done to verify the predicted results.
The test can be performed by first installing a radio and antenna at the
proposed master station site and then visiting each remote site with a
transceiver and a hand-held antenna. (An RTU simulator—MDS Part
No. 03-2512A01—can be connected to each radio in the network to simulate data during this test.)
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 9
Page 18

With the hand-held antenna positioned near the proposed mounting
spot, a technician can check for synchronization with the master station
(shown by a lit
SYNC lamp on the front panel) and measure the reported
RSSI value. If adequate signal strength cannot be obtained, it may be
necessary to mount the station antennas higher, use higher gain
antennas, or select a different site. To prepare the equipment for an
on-the-air test, follow the general installation procedures given in this
guide and become familiar with the operating instructions given in Section 5.0, beginning on Page 26.
If time is short, and a site survey is impractical, a computer path study
is a good alternative. Factors such as terrain, distance, transmitter
power, receiver sensitivity, and other conditions are taken into account
to predict the performance of a proposed system. Contact MDS for more
information on path study services.
3.3 A Word About Radio Interference
The transceiver shares frequency spectrums with other services and
other Part 15 (unlicensed) devices in the USA. As such, near 100% error
free communications may not be achieved in a given location, and some
level of interference should be expected. However, the radio’s flexible
design and hopping techniques should allow adequate performance as
long as care is taken in choosing station location, configuration of radio
parameters and software/protocol techniques.
In general, keep the following points in mind when setting up your communications network:
1. Systems installed in rural areas are least likely to encounter
interference; those in suburban and urban environments are more
likely to be affected by other devices operating in the license-free
frequency band and by adjacent licensed services.
2. If possible, use a directional antenna at remote sites. Although these
antennas may be more costly than omnidirectional types, they confine the transmission and reception pattern to a comparatively narrow lobe, which minimizes interference to (and from) stations
located outside the pattern. (The use of a directional antenna may
not be possible in a simplex peer-to-peer network, where all remotes
are designed to communicate with one another.)
3. If interference is suspected from a nearby licensed system (such as a
paging transmitter), it may be helpful to use horizontal polarization
of all antennas in the network. Because most other services use vertical polarization in this band, an additional 20 dB of attenuation to
interference can be achieved by using horizontal polarization.
10 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 19
4. Multiple MDS 9810 systems can co-exist in proximity to each other
with only very minor interference as long as they are each assigned
a unique network address. Each network address has a dif ferent hop
pattern.
5. If constant interference is present in a particular frequency zone, it
may be necessary to “lock out” that zone from the radio’s hopping
pattern. The radio includes built-in software to help users identify
and remove blocked frequenc y zones from its hopping pattern. Refer
to the discussion of
ZONE DATA (Page 49) and SKIP (Page 46) com-
mands for more information.
6. If interference problems persist even after removing blocked zones,
try reducing the length of data streams. Groups of short data streams
have a better chance of getting through in the presence of interference than do long streams.
7. The power output of all radios in a system should be set for the lowest level necessary for reliable communications. This lessens the
chance of causing unnecessary interference to nearby systems.
3.4 Antenna & Feedline Selection
Antennas
The equipment can be used with a number of antennas. The exact style
used depends on the physical size and layout of a system. Contact your
MDS representative for specific recommendations on antenna types and
hardware sources.
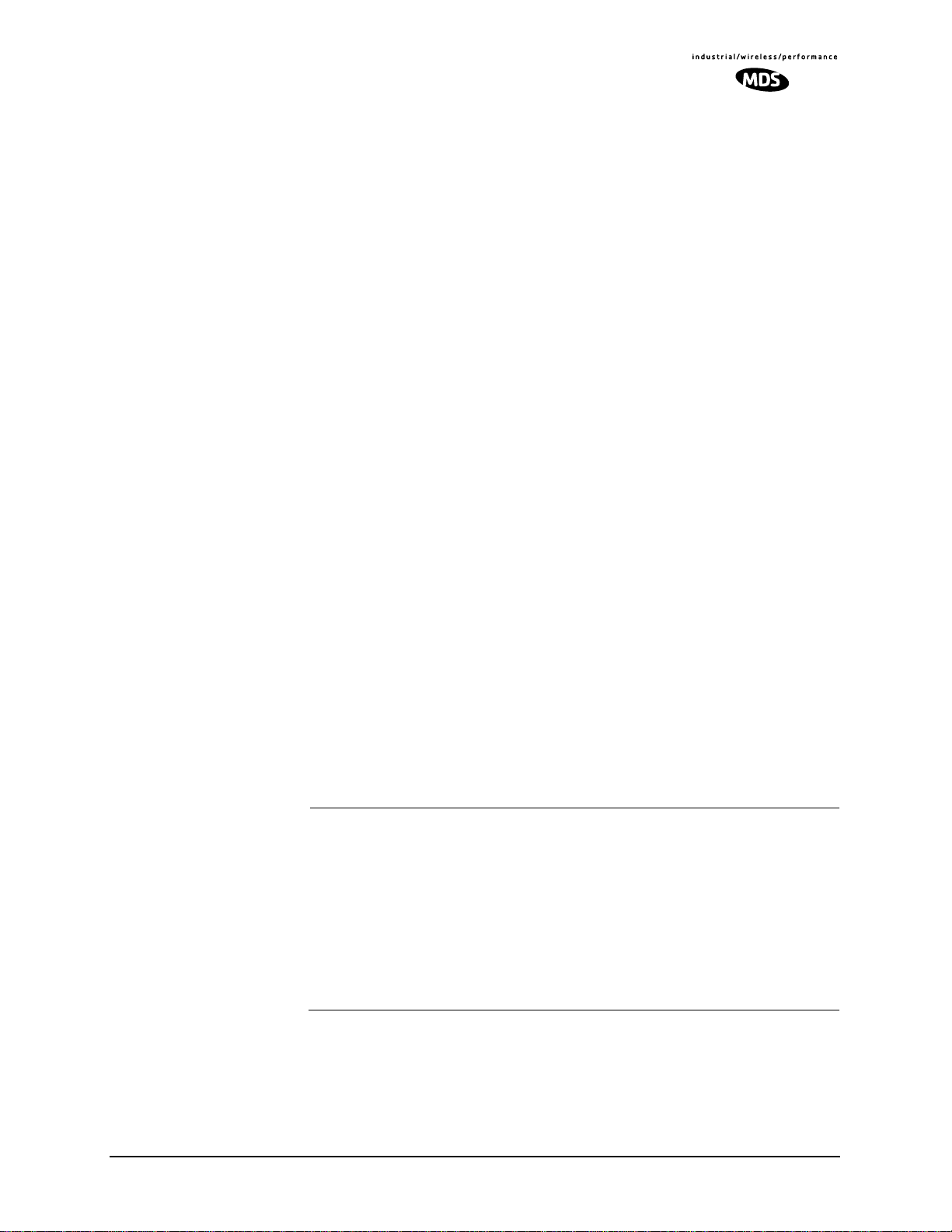
In general, an omnidirectional antenna (Figure 10) is used at the master
station site in an MAS system. This provides equal coverage to all of the
remote sites.
NOTE: Antenna polarization is important. If the wrong polarization is
used, a signal reduction of 20 dB or more will result. Most
systems using a gain-type omnidirectional antenna at the
master station employ vertical polarization of the signal; therefore, the remote antenna(s) must also be vertically polarized
(elements oriented perpendicular to the horizon).
When required, horizontally polarized omnidirectional
antennas are also available. Contact your MDS representative
for details.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 11
Page 20
Invisible place holder
Figure 10. Typical Omnidirectional Antenna
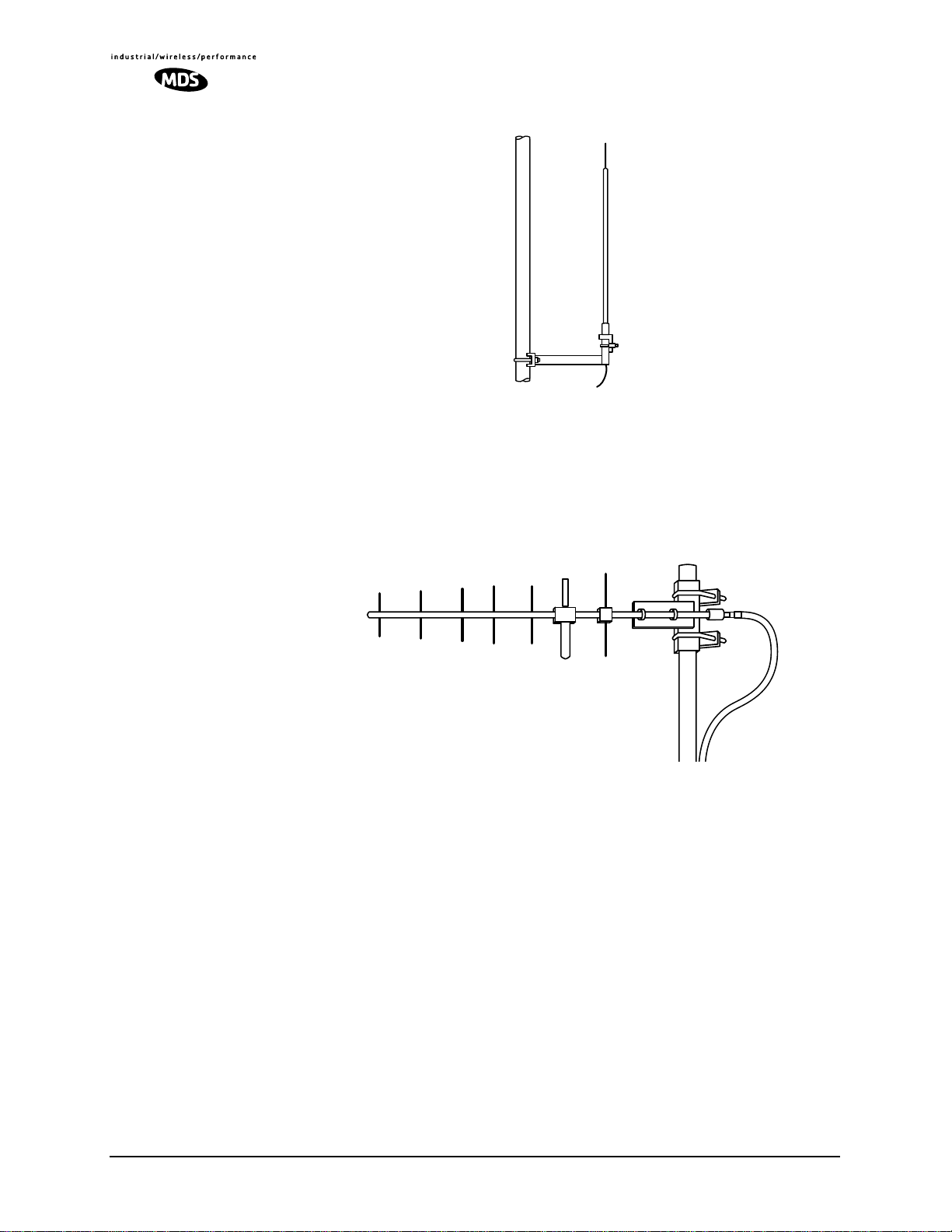
At remote sites and point-to-point systems, a directional antenna, such
as a Yagi is generally recommended to minimize interference to and
from other users. Antennas are available from a number of manufacturers.
Invisible place holder
Figure 11. Typical Yagi Antenna (mounted to mast)
Feedlines
The choice of feedline used with the antenna should be carefully considered. Poor-quality coaxial cables should be avoided, as they will
degrade system performance for both transmission and reception. The
cable should be kept as short as possible to minimize signal loss.
For cable runs of less than 20 feet (6 meters), or for short range transmission, an inexpensive type such as Type RG8A/U may be acceptable.
Otherwise, we recommend using a low-loss cable type suited for 900
MHz, such as Heliax
12 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
®
.
Page 21
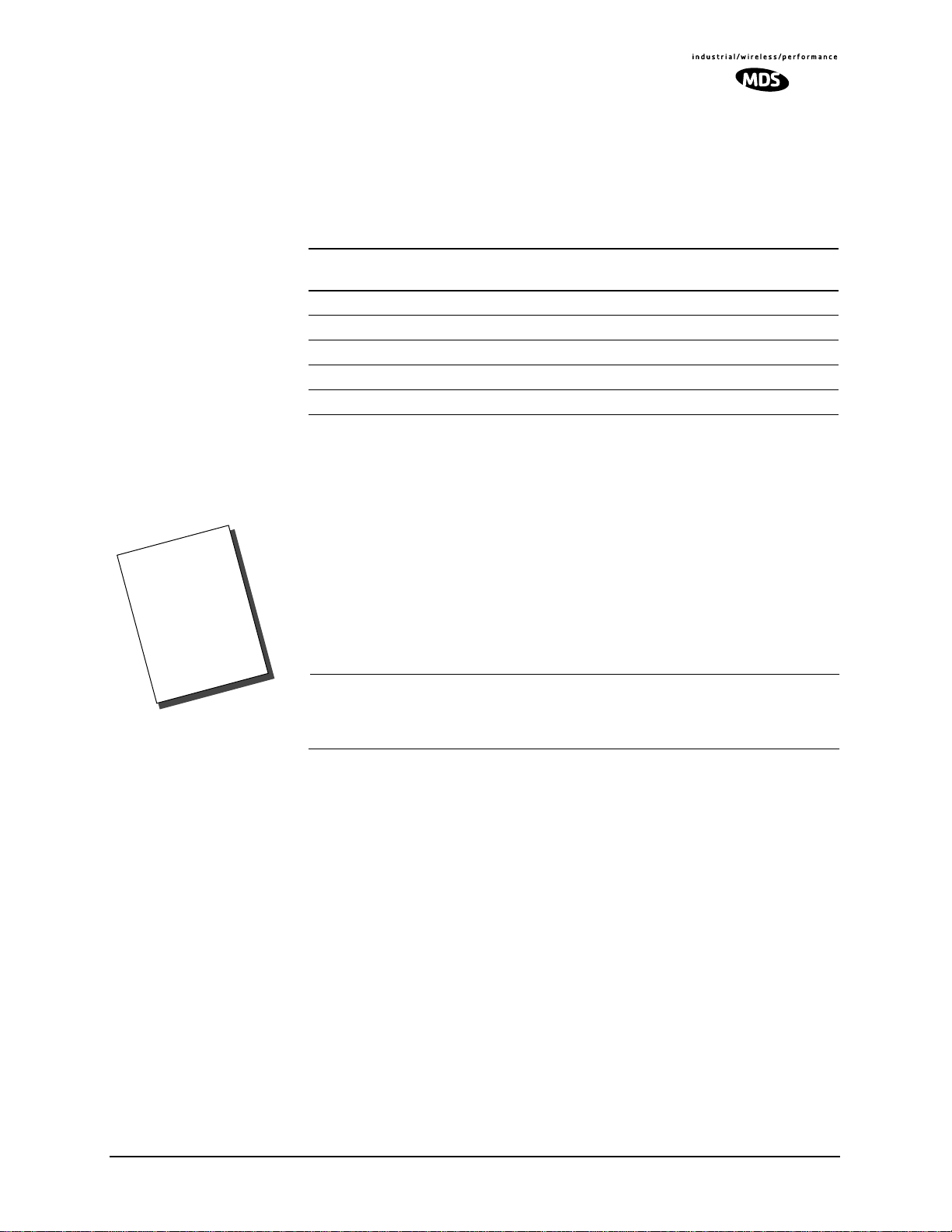
Table 2 lists several types of feedlines and indicates the signal losses (in
dB) that result when using various lengths of each cable at 900 MHz.
The choice of cable will depend on the required length, cost considerations, and the amount of signal loss that can be tolerated.
Table 2. Length vs. Loss in Coaxial Cables at 900 MHz
IMPORTANT
The maximum
EIRP allowed under
FCC/IC rules is +36
dBm. Follow this
section carefully to
ensure compliance.
Cable Type
RG-8A/U 0.85 dB 4.27 dB 8.54 dB 42.70 dB
1/2 inch HELIAX 0.23 dB 1.15 dB 2.29 dB 11.45 dB
7/8 inch HELIAX 0.13 dB 0.64 dB 1.28 dB 6.40 dB
1 1/4 inch HELIAX 0.10 dB 0.48 dB 0.95 dB 4.75 dB
1 5/8 inch HELIAX 0.08 dB 0.40 dB 0.80 dB 4.00 dB
10 Feet
(3.05 Meters)
50 Feet
(15.24 Meters)
100 Feet
(30.48 Meters)
500 Feet
(152.4 Meters)
3.5 How Much Output Power Can be Used?
The transceiver is normally supplied from the factory set for a nominal
+30 dBm (1 Watt) RF power output setting; this is the maximum transmitter output power allowed under FCC/IC rules. The power must be
decreased from this level if the antenna system gain exceeds 6 dBm. The
allowable level is dependent on the antenna gain, feedline loss, and the
transmitter output power setting. Power considerations for various
antenna systems are discussed below.
NOTE: In some countries, the maximum allowable RF output may be
limited to less than 1 watt (e.g., 100 mW /+20 dBm). Be sure
to check for and comply with the requirements for your area.
Transmitter Power vs. Antenna System Gain
To determine the maximum allowable power setting of the radio, follow
the steps below. It is imperative that professional system planning
include cable loss or attenuators to ensure that the FCC/IC limit of 36
dBm EIRP is not exceeded under any circumstances.
1. Determine the antenna system gain by subtracting the feedline loss
(in dB) from the antenna gain (in dBi). For example, if the antenna
gain is 9.5 dBi, and the feedline loss is 1.5 dB, the antenna system
gain would be 8 dB. (If the antenna system gain is 6 dB or less, no
power adjustment is required.)
2. Subtract the antenna system gain from 36 dBm (the maximum
allowable EIRP). The result indicates the maximum transmitter
power (in dBm) allowed under the rules. In the example above, this
is 28 dBm.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 13
Page 22
3. If the maximum transmitter power allowed is less than 30 dBm, use
the
PWR command (described on Page 42) to set the power accord-
ingly.
For convenience, Table 3 lists several antenna system gains and shows
the maximum allowable power setting of the radio. Note that a gain of
6 dB or less entitles you to operate the radio at full power output—30
dBm (1 watt).
Table 3. Antenna System Gain vs. Power Output Setting (USA)
Antenna System Gain
(Antenna Gain in dBi*
minus Feedline Loss in dB†)
6 (or less) 30 36
72936
82836
10 26 36
Maximum Power
Setting
(in dBm)
EIRP
(in dBi
* Many antenna manufacturers rate antenna gain in dBd in their
literature. To convert to dBi, add 2.15 dB.
† Feedline loss varies by cable type and length. To determine the
loss for common lengths of feedline, see Table 2 on Page 13.
4.0 INSTALLATION
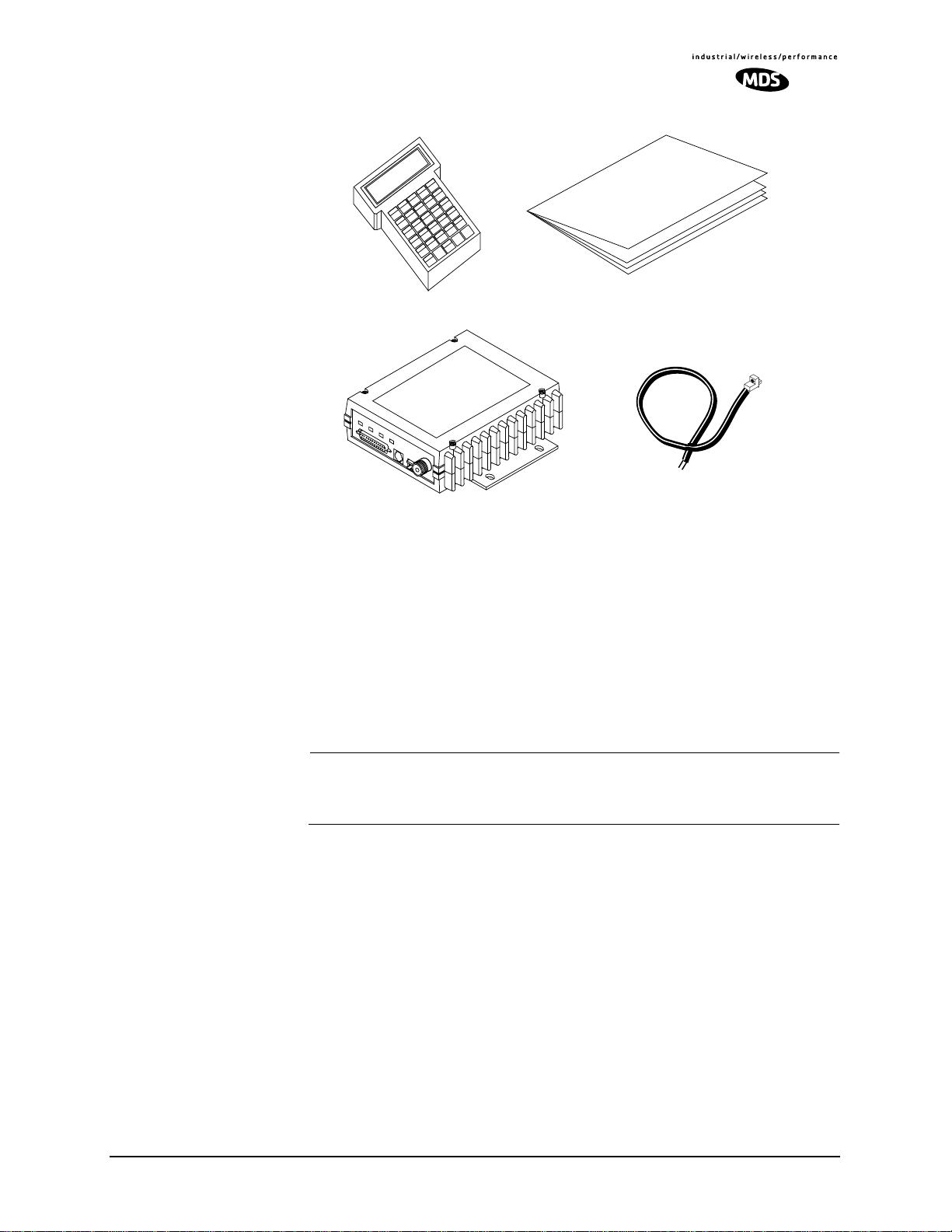
Figure 12 shows a typical transceiver product shipment, along with an
optional Hand-Held Terminal (HHT). Check the contents against the
packing list secured to the outside of the shipping box. Accessories and
spare parts kits, if any, are wrapped separately. Inspect all items for
signs of damage and save all packing materials for possible re-shipment.
14 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 23
Invisible place holder
F5
E
F4
3
D
F3
J
2
6
C
F2
I
1
O
5
B
F1
A
/
9
(
H
N
4
T
8
G
.
)
M
S
7
F
*
K
–
Y
0
L
R
#
X
ENTER
=
Q
SPACE
W
,
ESC
P
BKSP
V
+
U
SHIFT
CTRL
Z
HAND-HELD
TERMINAL
(OPTIONAL)
INSTALLATION &
OPERATION GUIDE
13.8 VDC
POWER CABLE
TRANSCEIVER
Figure 12. Typical Transceiver Shipment
Below are the basic steps for installing the transceiver. In most cases,
these steps alone will be sufficient to complete the installation. Should
further information be required, contact the factory at the number given
on the inside back cover of this manual.
If you are installing a peer-to-peer, tail-end link or repeater system, you
should also review Sections 4.2 (Page 19) and 4.3 (Page 21) for important details on antennas, cabling and software settings.
NOTE: It is recommended that the master station be installed first. In
this way, it will be possible to quickly check the operation of
each associated remote station as it is placed on the air.
4.1 Transceiver Installation
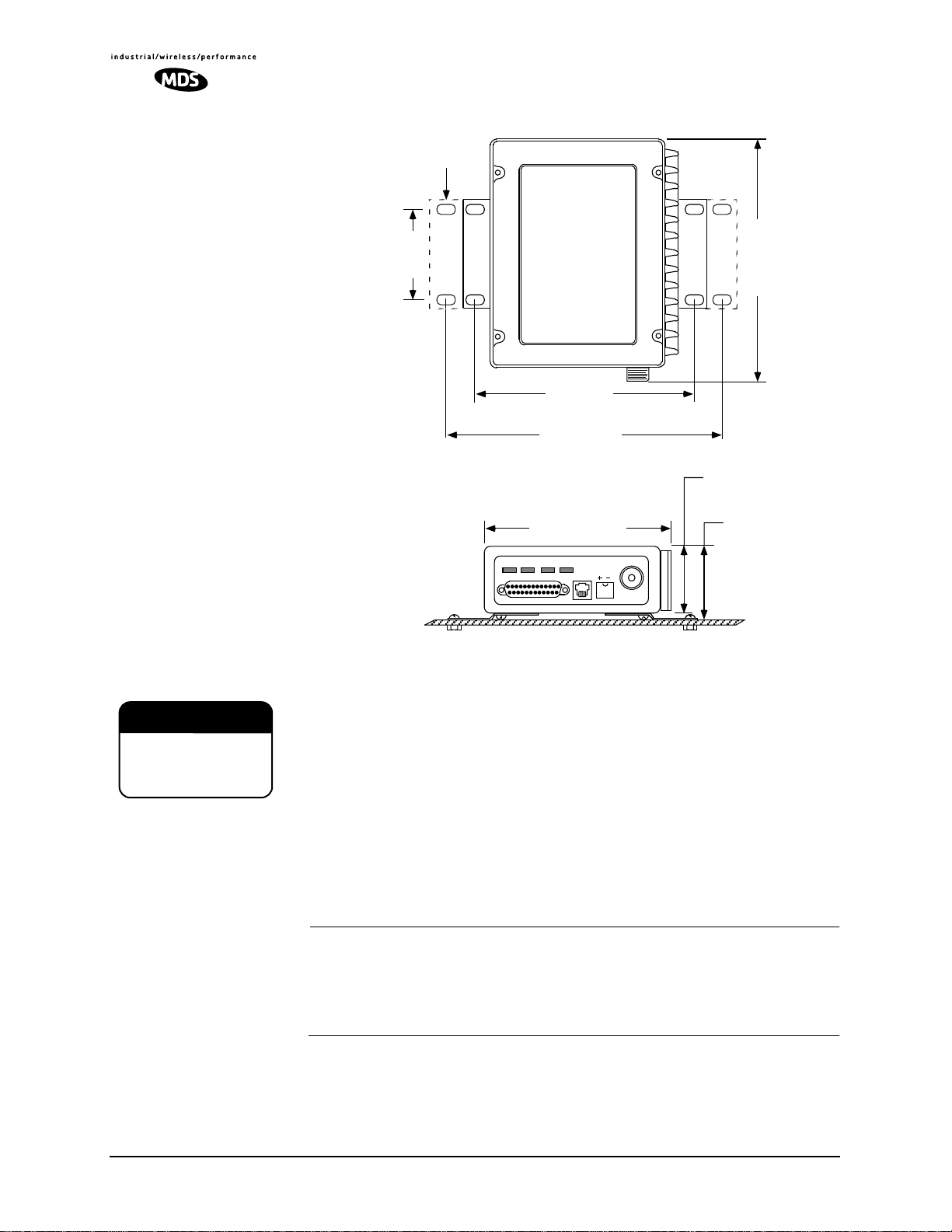
1. Mount the transceiver to a stable surface using the brackets supplied
with the radio. (Fasteners/anchors are not supplied.) Figure 13
shows the dimensions of the transceiver case and its mounting
bracket. If possible, choose a mounting location that provides easy
access to the connectors on the end of the radio and an unobstructed
view of the LED status indicators.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 15
Page 24
Alternate
Position
1.75"
2.75"
70 mm
4.44 CM
Invisible place holder
6.63"
168 mm
8.5"
216 mm
2.0"
50 mm
7.25"
184 mm
CAUTION
POSSIBLE
EQUIPMENT
DAMAGE
5.625"
143 mm
2.25"
57 mm
Figure 13. Transceiver Mounting Dimensions
The screws holding the brackets to the radio are 5⁄16 inch (8 mm). If
replacement screws are used for any reason, they must not exceed
this length to avoid damage to the radio’s PC board.
2. Install the antenna and antenna feedline for the station. Antennas
should be mounted in the clear and in accordance with the manufacturer’s instructions.
Additional information on antennas and feedlines is contained in
Section 3.4 (Page 11).
NOTE: Strong fields near the antenna can interfere with the operation
of the low level RTU circuits and change the reported values
of the data being monitored. For this reason, the antenna
should be mounted at least 10 feet (>3 meters) from the radio,
RTU, sensors and other components of the system.
3. Connect the data equipment to the transceiver’s
DATA INTERFACE
connector. Use only the required pins for the application—Do not
use a fully pinned (25 conductor) cable. Typical applications require
the use of Pin 2 (transmit data—TXD), Pin 3 (received data—RXD)
16 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 25

and Pin 7 (signal ground). Figure 14 shows a detailed view of the
DATA INTERFACE connector.
If hardware flow control is desired, Pin 4 (request to send—RTS)
and Pin 5 (Clear-to-Send—CTS) are also required. A detailed chart
of pin functions is provided in Table 15 on Page 59.
Invisible place holder
Pin
Description
Alarm Output
Diagnostic Channel Enable
Future use— do not connect
Unregulated DC Input/Output
Analog Input Pin
Unused
RSSI Voltage
9.9 Vdc Regulated Output
Digital Output Pin
Unused
Unused
Unused
Pin
No.
25
24
23
22
21
20
19
18
17
16
15
14
Pin
Pin
No.
Description
Unused
13
Radio Inhibit (Sleep)
12
Unused
11
10
Receiver Unsquelched Sensor
9
Unused
8
Data Carrier Detect (DCD)
7
Signal Ground*
6
Data Set Ready (DSR)
5
Clear-to-Send Output (CTS)
4
Request-to-Send Input (RTS)
3
Received Data (RXD)*
2
Transmitted Data (TXD)*
1
Protective Ground
* Required in most installations
Figure 14. Transceiver Interface Connector Pins
(As viewed from outside the radio)
NOTE: The data cabling between the transceiver and the connected
device should be kept as short as possible. Cable runs over 50
feet (15 meters) may require the use of EIA-422 signaling.
Consult the factory for details.
4. Measure and install the primary power for the transceiver . It must be
within 10.5–30 Vdc* and be capable of furnishing up to 500 mA. Be
sure to observe proper polarity. The red wire on the power cable is
the positive lead; the black is negative.
* Transceivers shipped prior to Revision “U” (November 1999) may be
configured for 25 Vdc maximum DC input voltage.
NOTE: The radio is designed for use only in negative ground systems.
Additionally, the chassis must be bonded to an Earth ground,
either directly, through its mounting bracket, or via the antenna
system ground (coaxial shield). The radio may be damaged if
the chassis is not properly grounded per this recommendation.
Radios damaged in this way will not be covered under
warranty.
The power supply used with the transceiver should be equipped
with overload protection (NEC Class 2 rating), to protect against a
short circuit between its output terminals and the transceiver power
connector.
5. Set the radio’s configuration using a Hand-Held Terminal (HHT).
Review Section 6.0, PROGRAMMING (beginning on Page 28), if
you are unfamiliar with connecting and using the HHT.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 17
Page 26

The three essential settings for the transceiver are:
ENTER
Mode—Master or Remote
Network Address—a unique number from 1–65000
Data Interface Parameters—bps, data bits, parity, stop bits
a. Connect an HHT to the DIAG(NOSTICS) connector (see
Figure 15). After the HHT beeps, press to display the
ENTER
ready “>” prompt.
b. Set the Mode—Determine whether the transceiver will be used
as a master or remote, and program it accordingly using the
MODE M or MODE R command (Page 41). (MODE M = Master,
MODE R = Remote.) Press . The HHT will display PROGRAMMED OK
.
NOTE: Transceivers are normally shipped from the factory
pre-configured as remotes. A master must be specifically
programmed using the MODE M command.
Invisible place holder
ANTENNA
13.8
VDC
+
F5
F4
E
F3
D
3
F2
C
2
F1
A
/
F
J
B
1
I
(
6
H
5
G
O
4
N
)
9
M
8
*
L
T
7
S
K
#
R
0
–
P
+
U
CTRL
Y
Q
=
,
X
W
ENTER
ACE
V
SP
ESC
BKSP
SHIFT
Z
–
Figure 15. HHT Connected to Transceiver
c. Program the network address—Type ADDR (Page 36) followed
SPACE SHIFT
by , , and then the desired address number
(1–65000). Press . All radios in a given system must be
ENTER
progr ammed with the same network addr ess. After programming
the address,
PROGRAMMED OK will be displayed.
NOTE: It is strongly recommended that the last four digits of the
master radio’s serial number be used as the network address.
In this way, it is unlikely that two systems will have the same
address.
18 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 27

d. Set the data interface parameters to match the connected data
device—The default setting is 4800 baud, 8 data bits, no parity, 1
stop bit. If your data equipment requires a different setting, use
the
BAUD xxxxx abc command (Page 36), where xxxxx equals the
baud rate (1200, 2400, 4800, 9600, 19200, or 38400 bps) and
indicates the control bits as follows:
a = Data bits (7 or 8)
b = Parity (N for None, O for Odd, E for Even)
c = Stop bits (1 or 2)
abc
Using this scheme, a sample entry for the
mand would look like this:
BAUD 4800 8N1 (A similar example
using a five-character baud rate would appear as follows:
19200 8N1
Press . After setting the data parameters,
OK
will be displayed.
)
ENTER
BAUD xxxxx abc com-
BAUD
PROGRAMMED
NOTE: 7N1, 8O2, and 8E2 are invalid communication settings and are
not supported by the transceiver.
e. Record the Mode, Network Address, and Baud Rate settings on
a label and affix it to the transceiver cover.
6. Repeat the above steps for each transceiver in the network.
This completes the basic installation of the transceiver. Section 5.1, Ini-
tial Start-up (beginning on Page 26), contains steps for evaluating radio
performance.
4.2 Peer-to-Peer Systems
Peer-to-peer systems allow remote radios to communicate with each
other as well as with the master station. The paragraphs below describe
two types of peer-to-peer systems—simplex and repeater assisted.
Simplex Peer-to-Peer
A simplex peer-to-peer system is one in which all radios use the same
transmit and receive frequencies. This is also known as single-frequency
operation. A simplex arrangement is the simplest configuration for
peer-to-peer systems, but it usually has limited transmission range
because of the need for all stations to use omnidirectional antennas. (If
range is a concern, see “Peer-to-Peer with Repeater Assistance” on page
20.)
With a simplex peer-to-peer system, there are three key items to
remember:
Programming To program a system for simplex operation, the master radio must
be set to
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 19
SIMPLEX ON (Page 45). This setting is automatically
Page 28

applied to all remote radios as soon as they become synchronized
with the master radio.
Antennas Omnidirectional antennas are normally required at all stations in a
simplex system. The transmission range may be significantly
reduced as compared with stations using directional antennas, so it
is especially important that sites be chosen to allow sufficient signal
strength between all units. A discussion of site selection is pro vided
in Section 3.2.
Data “Collision”
Avoidance
One drawback with peer-to-peer systems is the risk of data “collisions” that can occur through self-interference. This problem can be
alleviated with data protocols (such as Harris DNP3) which use
Carrier Sense Multiple Access (CSMA) to detect a b usy channel. In
these systems, Pin 10 (Receiver Unsquelched-RUS) on the transceiver should be connected to the RTU’s Data Carrier Detect
(DCD) pin.
Peer-to-Peer with Repeater Assistance
A shortcoming of a simplex peer-to-peer network is that communication
range is often reduced because of the need for all stations to use omnidirectional antennas. An alternative peer-to-peer network can be established using a repeater station to re-transmit the signals of all stations in
the network. (See Figure 16.) Because directional antennas (aimed at the
repeater site) can be used at all remote sites, the communication range
of the system is greatly increased. Like a simplex peer-to-peer system,
each remote station can “hear” the transmissions of the others so that
data collisions can be avoided.
Invisible place holder
REPEA
TER
STATION
REMOTE-MASTER
REMOTE
RTU
MASTER
REMOTE
RTU
REMOTE
HOST
COMPUTER
Pin 3 Pin 2
REMOTE
RTU
Figure 16. Peer-to-Peer Network with Repeater Assistance
Here are some specific requirements for peer-to-peer systems with
repeater assistance:
Repeater Setup The repeater station in a peer-to peer network consists of two
co-located transceivers—one programmed as a remote using master
20 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 29

frequencies (MODE R-M command, Page 41), and the other programmed as a master (
Interface Wiring Pin 2 (TXD) of the master radio must be connected to Pin 3 (RXD)
of the other radio (the one programmed as
interface cable. This allows the signals received by the
MODE M command).
MODE R-M) using a local
MODE R-M
radio to be re-transmitted by the master. The signal ground leads
(Pin 7) must also be connected to each other.
Invisible place holder
DB-25 DB-25
Antennas
Full-Duplex
Configuration
RXD
TXD
GND
(Mode R-M)
Remote Master
Figure 17. Data Interface Cable Wiring
for Peer-to-Peer Systems with Repeater Assistance
3
2
7
2
TXD
3
RXD
Master
7
GND
(Mode M
Two omnidirectional antennas are required at peer-to-peer repeater
stations—one for each radio. It is important to minimize coupling
between these antennas. The necessary isolation can be achiev ed by
vertical separation. In this arrangement, one antenna is mounted
directly over the other, separated by at least 10 feet (3.2 Meters).
This takes advantage of the minimal radiation exhibited by vertically polarized antennas directly above and below one another.
The paragraphs above discuss the requirements for a basic Repeater
Assisted Peer-to-Peer system. If a full-duplex system is required
(with the SCADA host computer located at the repeater), additional
considerations apply. If you are constructing this type of system,
contact the factory and request a copy of Application Bulletin
97002. The bulletin can also be found at www.microwavedata.com.
4.3 Tail-End Links
A tail-end link is established by connecting the radio “back-to-back”
with another radio such as a licensed MDS 2300/4300 series transceiver.
This can be used to link an outlying remote site into the rest of an MAS
network. Here are some specific requirements for tail-end link systems:
Interface Wiring
The connection between the two radios in a tail-end link system
must be made as shown in Figure 18.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 21
Page 30

DCE
DB-25 DB-25
2
TXD
Invisible place holder
DCE
3
RXD
3
RXD
GND
7
CTS RTS
Remote XCVR
(DEVICE CTS KEY)
MDS Spread Spectrum
54
Keyline
2
TXD
GND
7
(or device requiring keyline)
MDS 2000/4000 Series XCVR
Figure 18. Data Interface Cable Wiring for Tail-End Links
Programming
In a tail-end link system, the radio’s device behavior must be set to
DEVICE CTS KEY (Page 38) using the HHT. This allows one radio to
control the keying of another. Also, the CTS delay time must be set
(using the
CTS xxx command, Page 37) to the time required for the
other transceiver to key up. This time is typically 10 ms for MDS
2000/4000 series transceivers.
4.4 Repeaters—Traditional Method
Two MDS 9810 radios (or another MDS spread spectrum radio) may be
connected “back-to-back” using a null-modem cable to form a repeater
station. This is sometimes required in a network that includes a distant
remote station that would otherwise be unable to communicate with the
master station due to distance or terrain.
A repeater works by re-transmitting data from the outlying remote site
to the master station and vice versa. It introduces a small amount of
end-to-end transmission delay, but this is not a problem in most systems.
The geographic location of a repeater station is especially important. A
site must be chosen that allows good communication with both the
master and the outlying remote site. This is often on top of a hill, or other
elevated terrain from which both sites can be “seen” by the repeater station antennas. A detailed discussion on the effects of terrain is given in
Section 3.2, Site Selection (beginning on Page 8).
The following paragraphs contain specific requirements for repeater
systems.
22 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 31

Antennas
Two antennas are required at repeater stations—one for each radio.
Measures must be taken to minimize the chance of interference between
these antennas. One effective technique for limiting interference is to
employ vertical separation. In this arrangement, one antenna is
mounted directly over the other, separated by at least 10 feet (3 Meters).
This takes advantage of the minimal radiation exhibited by most
antennas directly above and below their driven elements.
Another interference reduction technique is to cross-polarize the
repeater antennas. If one antenna is mounted in the vertical plane, and
the other in the horizontal plane, an additional 20 dB of attenuation can
be achieved. (Remember that the corresponding stations must use the
same antenna orientation when cross-polarization is used.)
System Addresses
The two radios that are wired together at the repeater site must have different system addresses. To set or view the system address, see “ADDR
[1...65000]” on page 36.
Interface Wiring
A null-modem cable (Figure 19) is required between the
FACE connectors of the two radios forming a repeater station. This
DATA INTER-
allows them to freely exchange data even though they are both configured as DCE devices.
Invisible place holder
DB-25 DB-25
TXD
RXD
(DCE)
Remote
GND
Spread Spectrum
2
3
7
3
RXD
2
TXD
7
GND
(DCE)
Master
Spread Spectrum
Figure 19. Data Interface Cable Wiring for Null-Modem Cable
(used for traditional repeater)
Diagnostic Limitations
As of the date of publication, over-the-air diagnostics is not fully supported in repeater systems. Diagnostic data from these systems may be
unavailable or unreliable. This is particularly true if a repeater radio is
configured as the “root” in a diagnostics scheme (See “Performing Network-Wide Remote Diagnostics” on Page 53.) Better success might be
achieved by picking a standard remote to use as the root.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 23
Page 32

4.5 “Single-Radio” Repeater—Alternative Method
A single MDS x810 transceiver may be used to form a repeater station
to extend the range of a system. The general repeater principles discussed in Section 4.4 apply to single-radio repeaters—why repeaters are
used, geographic site considerations, etc. However, there are some
important differences in single-radio repeater systems:
• Only one transceiver is used at the repeater site.
• The transceiver’s TXD & RXD pins must be tied together (DB-25).
• There may be considerable delay through the repeater, because the
radio buffers (stores) incoming data and retransmits it a short time
later.
The paragraphs that follow contain specific requirements for
single-radio repeater systems.
Interface Wiring
A single-radio repeater is formed by connecting TXD (Pin 2) and RXD
(Pin 3) on the
Figure 20.
DATA INTERFACE connector together as shown in
Invisible place holder
DB-25
Pins 2 & 3
Connected Together
for Single-Radio Repeater
Figure 20. Data Interface Cable Wiring for Single-Radio Repeater
DATA INTERFACE
CONNECTOR
23TXD
RXD
Software Programming (TDD Command)
As with other repeater systems, the network must be configured for
TDD operation by programming the master radio with
places the
DATA INTERFACE port in time division duplex (sometimes
TDD ON. This
called “simulated full-duplex”) mode.
Although a single radio can never actually transmit and receive RF data
at the same time, the
TDD ON command enables the radio to simulate
full-duplex at the data port, by designating alternate channel hops as
transmit or receive hops, and buffering data when transmission is not
permitted.
24 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 33

Limitations of Single-Radio Repeaters
Diagnostics As of the date of publication, over-the-air diagnostics is not fully sup-
ported in repeater systems. Diagnostic data from these systems may be
unavailable or unreliable. This is particularly true if a repeater radio is
configured as the “root” in a diagnostics scheme (See “Performing Network-Wide Remote Diagnostics” on Page 53.) Better success might be
achieved by picking a standard remote to use as the root.
Data Throughput
Delay
When TDD is set to ON, there will be a significant delay in data
throughput and an increase in latency (see Glossary of Terms). In general, the data throughput will be cut in half, and worst case latency will
increased by two hoptimes.
4.6 Using the Radio’s Sleep Mode
In some installations, such as at solar-powered sites, it may be necessary
to keep the transceiver’s power consumption to an absolute minimum.
This can be accomplished using Sleep Mode. In this mode, power consumption is reduced to less than 30 milliamperes.
Sleep Mode can be enabled under RTU control by asserting a ground (or
EIA-232 low) on Pin 12 of the radio’s
radio stays in Sleep Mode until the low is removed, and all normal functions are suspended. As a status indication, the radio’s
once every four seconds to indicate that it is in Sleep Mode.
The radio can be “woken up” by your RTU every minute or so to verify
synchronization with the master station. When Pin 12 is opened (or an
EIA-232 high is asserted), the radio will be ready to receive data within
75 milliseconds.
DATA INTERF A CE connector. The
PWR LED flashes
It is important to note that power consumption will increase significantly as communication from the master station degrades. This is
because the radio will spend a greater period of time “awake,” looking
for synchronization messages from the master radio.
Sleep Mode Example
The following example describes Sleep Mode implementation in a typical system. Using this information, you should be able to configure a
system that meets your own particular needs.
Suppose you need communications to each remote site only once
per hour. Program the RTU to raise an EIA-232 line once each hour
(DTR for example) and wait for a poll and response before lowering it again. Connect this line to Pin 12 of the radio’s
FACE connector. This will allow each RTU to be polled once per
DATA INTER-
hour, with a significant savings in power consumption.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 25
Page 34

5.0 OPERATION
5.1 Initial Start-up
In-service operation of the transceiver is completely automatic. Once
the unit has been properly installed and configured, operator actions are
limited to observing the LED status indicators for proper operation.
If all parameters are correctly set, operation of the radio can be started
by following these steps:
1. Apply primary power to the radio.
2. Observe the transceiver LED status panel (Figure 21) for the proper
indications. Table 4 provides a complete explanation of the LED
functions.
In a normally operating system, the following LED indications will
be seen within 16 seconds of start-up:
•
PWR lamp lit continuously
• SYNC lamp lit continuously
• Remote radio(s) transmitting data (TXD) and receiving data
(
RXD) with the master station
Invisible place holder
PWR SYNC TXD RXD
Figure 21. LED Status Indicators
Table 4. LED Status Indicators
LED Name Description
PWR • Continuous—Power is applied to the radio; no problems detected.
• Flashing 5 times per second—Fault indication.
See Section 7.0, TROUBLESHOOTING (beginning on Page 50).
• Flashing once every 4 seconds—radio is in Sleep mode.
SYNC Lights continuously to indicate the radio is receiving/sending
TXD Indicates EIA-232 space (logic high) signal input to the DB-25
RXD Indicates EIA-232 space (logic high) signal output from the DB-25
synchronization frames. Within 16 seconds of power-up, this LED
should be lit continuously.
connector.
connector.
5.2 Performance Optimization
After the basic operation of the radio has been checked, you may wish
to optimize its performance using some of the suggestions given here.
The effectiveness of these techniques will vary with the design of your
system and the format of the data being sent.
26 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 35

Complete instructions for using the software commands referenced
herein are provided in Section 6.0, PROGRAMMING (beginning on
Page 28).
Antenna Aiming
For optimum performance of directional antennas, they must be accurately aimed in the direction of desired transmission. The easiest way to
do this is to point the antenna in the approximate direction, then use the
remote radio’s built-in Received Signal Strength Indication (RSSI) feature to further refine the heading for maximum received signal strength.
RSSI can be read by connecting an HHT to the remote radio’s RJ-11
DIAG(NOSTICS) jack and entering the RSSI command. Instructions on
connecting and using an HHT are given in Section 6.0, PROGRAMMING (beginning on Page 28).
In an MAS system, RSSI readings are only meaningful when initiated
from a remote station. This is because the master station typically
receives signals from several remote sites, and the RSSI would be continually changing as the master receives from each remote in turn.
Antenna SWR Check
It is necessary to briefly key the transmitter for this check by placing the
radio in the
HHT. (To unkey the radio, enter
return the radio to normal operation, enter
SETUP mode (Page 44) and using the KEY command on the
DKEY; to disable the setup mode and
Q or QUIT.)
The SWR of the antenna system should be checked before the radio is
put into regular service. For accurate readings, a wattmeter suited for
1000 MHz is required. One unit meeting this criteria is the Bird Model
™
43
directional wattmeter with an 5J element installed.
The reflected power should be less than 10% of the forward power (≈2:1
SWR). Higher readings usually indicate problems with the antenna,
feedline or coaxial connectors.
Data Buffer Setting
The default setting for the data buffer is ON to accommodate virtually
any data format. However, if the system can operate satisfactorily with
the buffer OFF, we recommend doing so using the
BUFF OFF command
(Page 37). This allows the radio to operate with the lowest possible
latency and improves channel efficiency.
Hoptime Setting
The default hop time setting is
HOPTIME NORMAL. If message sizes typi-
cally exceed 256 bytes, channel efficiency can be improved by setting
this parameter to
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 27
HOPTIME LONG.
Page 36

A detailed explanation of the HOPTIME command, and a table listing the
available selections and the channel efficiency associated with each, can
be found on Page 40.
Baud Rate Setting
The default baud rate setting is 4800 bps to accommodate most systems.
If your system will support a higher data rate, you should increase the
radio’s transmission speed using the
BAUD xxxxx abc command (Page
37). It should be set to the highest speed that can be sent by the data
equipment in the system. (The transceiver supports 1200 to 38400 bps)
Radio Interference Checks
The
ZONE DATA command (Page 49) can be used to check for interfer-
ence in the radio’s eight frequency zones. If interference is found in one
or more of these zones, the
SKIP command (Page 46) can be used to omit
them from the hop pattern. You should also review Section 3.3, A W or d
About Radio Interference (beginning on Page 10), when dealing with
interference problems.
6.0 PROGRAMMING
There are no manual adjustments on the transceiver. Programming and
control is performed remotely, using one of these methods:
• MDS Hand-Held Terminal (P/N 02-1501A01)
• MDS Radio Configuration Software (P/N 03-3156A01)
• MDS Network Management Software
This manual describes control of the radio using the Hand-Held Ter-
minal (HHT). Instructions for using the other methods are contained in
their respective user manuals or on-line documentation.
6.1 Hand-Held Terminal Connection & Start-up
This section gives basic information for connecting and using the MDS
Hand-Held Terminal for control of the radio. For more information
about the terminal, see the instructions supplied with each HHT kit.
The steps below assume that the HHT has been configured for use with
the transceiver (80 character screen display). If the HHT was previously
used with a different model transceiver, or if its default settings have
been changed, refer to Section 6.2 for setup details.
1. Connect the HHT’s coiled cord to the
DIAG(NOSTICS) (RJ-11) jack
on the radio as shown in Figure 22. This automatically places the
radio into the control and programming mode.
As an alternative, the
28 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
DATA INTERFACE (DB-25) connector may be
Page 37

used for programming instead of the DIAG(NOSTICS) jack. With this
SHIFT
SPACE
arrangement, Pin 23 of the HHT cable must be grounded to enable
the diagnostic channel. (See Table 15 on Page 59.)
Invisible place holder
ANTENNA
13.8
VDC
+
F5
F4
E
F3
D
3
F2
C
2
F1
J
B
1
I
A
(
6
/
H
5
G
O
4
N
)
F
9
M
8
*
L
T
7
S
K
#
R
0
–
Q
=
,
X
P
W
+
ACE
V
SP
ESC
U
BKSP
SHIFT
CTRL
Z
Figure 22. Hand-Held Terminal Connected to the Transceiver
–
Y
ENTER
2. When the HHT is connected, it runs through a brief self-check, ending with a beep. After the beep, press to receive the ready
ENTER
“>” prompt.
6.2 Hand-Held Terminal Setup
The following is a set of instructions for re-initializing an HHT for use
with the transceiver. These steps may be required if the HHT was previously used with a different radio, or if the HHT default settings have
been inadvertently altered.
1. Plug the HHT into the
mode by pressing the , and keys in sequence.
The display shown in Figure 23 will appear.
DIAG(NOSTICS) connector. Enable the setup
CTRL
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 29
Page 38

Invisible place holder
Figure 23. HHT setup display
2. The first of 15 menu items will be displayed. Settings can be
E
reviewed by pressing the NEXT function ( key). Parameter settings can be changed by pressing the ROLL function ( key).
Z
A
3. Set up the HHT as listed in Table 5.
Table 5. HHT Operational Settings
Parameter Setting Parameter Setting
Re-init HT NO Scroll On 33rd
Baud Rate= 1200 Cursor ON
Comm bits= 8,1,n CRLF for CR OFF
Parity Error OFF Self Test SLOW
Key Repeat OFF Key Beep ON
Echo OFF Screen Size 80
Shift Keys YES Menu Mode LONG
Ctl Chars PROCS
4. Exit the HHT setup mode by pressing for Exit, or by pressing the
A
(Roll) key after the final menu item has been reviewed.
C
6.3 Keyboard Commands
Table 6 is a reference chart of software commands for the transceiver.
See Section 6.4 for detailed command descriptions.
Entering Commands
The proper procedure for entering commands is to type the command,
followed by an keystroke. For programming commands, the
command is followed by and the appropriate information or
values, then
30 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
ENTER
ENTER
SPACE
.
Page 39

Here are some additional points to remember when using the HHT:
• Use the key to access numbers; press again to return let-
SHIFT
ters.
• Flashing square cursor ( ) denotes letter mode.
• Flashing superscript rectangular cursor ( ) denotes number
mode.
• Use key to edit information or commands being typed
ESC/BKSP
into the terminal.
Error Messages
Below are some HHT error messages you may encounter and their probable causes:
•
UNKNOWN COMMAND—Command was not recognized.
• INCORRECT ENTRY—Command format or its arguments invalid.
• COMMAND FAILED—Command was unable to complete success-
fully. Possible software problem.
•
NOT PROGRAMMED—Software was unable to program the
EEPROM or the requested display item was not programmed.
•
TEXT TOO LONG—Response to OWN or OWM command when too
many characters have been entered.
•
NOT A V AILABLE—The entered command or parameter was valid,
but it referred to a currently unavailable choice.
•
PASSWORD INVALID—The entered password was invalid, and
was not accepted.
•
ACCESS DENIED—Command is invalid for current password
level.
• EPROM FAILURE—The INIT command cannot write to the radio’s
EEPROM.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 31
Page 40

BUFF [ON, OFF]
Details Page 37
HOPTIME [XSHORT, 16, 20,
25, 32, SHORT, NORMAL,
LONG]
Details Page 40
SEND [n, -n, +n]
Details Page 43
SIMPLEX [ON, OFF]
Details Page 45
NETWORK
NETWORK-WIDE
SKIP [NONE, 1...8]
Details Page 46
CONFIGURATION
SKIPSYNC [ON/OFF]
These programming commands
Details Page 46
can only be set at the master radio.
TDD [ON/OFF]
Details Page 47
DLINK [xxxxx]
Details Page 39
DTYPE
[NODE/ROOT/GATE/PEER]
Details Page 39
UNIT [10000–65000]
Details Page 48
DIAGNOSTICS
CONFIGURATION
Table 6. Command Summary
COMMAND DESCRIPTION
ON = Seamless data, OFF = Fast byte throughput.
Select hop time—XSHORT, 16 ms, 20 ms, 25
ms, 32 ms, SHORT, NORMAL, LONG
Sets/displays re-send count for data packets.
Useful in areas with heavy radio interference.
Program simplex/half-duplex selection.
ON = simplex, OFF = half-duplex
Select combination of frequency operating
zones to avoid.
May be used to suppress transmission of
SYNC messages in skipped zones. (See also
SKIP command). Default setting is OFF.
Sets or displays time-division multiplex status of
DATA INTERFACE connector. (Sometimes
referred to as “simulated full-duplex” mode.)
Set baud rate of diagnostics link
Set radio’s operational characteristics for network-wide diagnostics
Program unit address. Used to set a unique
address for network-wide diagnostics.
32 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 41

Table 6. Command Summary (Continued)
COMMAND DESCRIPTION
ADDR [1...65000]
Details Page 36
AMASK [0000 0000–FFFF
FFFF]
Details Page 36
ASENSE [HI/LO]
Details Page 36
BAUD [xxxxx abc]
Details Page 36
CTS [0–255]
Details Page 37
CTSHOLD [0-6000]
Details Page 38
DEVICE [DCE, CTS KEY]
Details Page 38
INIT
Details Page 41
MODE [M, R, R-M]
Details Page 41
OWM [xxxxx]
Details Page 42
OWN [xxxxx]
Details Page 42
PWR [xx–30]
Details Page 42
RTU [ON/OFF/0-80]
SET/PROGRAM COMMANDS
Details Page 43
RXTOT [NONE, 0–1440]
Details Page 43
SEND [n, -n, +n]
Details Page 43
TDD [ON/OFF]
Details Page 47
UNIT [10000–65000]
Details Page 48
ZONE DATA
Details Page 49
ZONE CLEAR
Details Page 50
Program network address
Sets alarm response. Default is FFFF FFFF.
Changes the sense of the alarm output. Default
sense is HI.
Set data communication parameters
Program CTS delay in milliseconds.
(A value of 0 returns CTS immediately)
Set/display “hold time” that CTS remains
present following last character transmission
from DD-25 port.
Set device behavior; DCE (normal) or CTS K e y
(Repeater)
Initialize parameters to factory default values
Program operating mode, where M = Master,
R = Remote, R-M = Remote-Master (Remote
radio programmed to operate on Master frequencies)
Program owner’s message
(30 characters maximum)
Program owner’s name
(30 characters maximum)
Program forward power output in dBm.
Re-enables or disables the radio’s internal RTU
simulator and sets the RTU address.
Specifies max. duration (in minutes) to wait
before issuing a time-out alarm. Default is OFF.
Sets/displays re-send count for data packets.
Useful in areas with heavy radio interference.
Sets or displays time-division multiplex status of
DATA INTERFACE connector. (Sometimes
referred to as “simulated full-duplex” mode.)
Program unit address. Used to set a unique
address for network-wide diagnostics.
Show zone data statistics. Press “Q” to quit
Reset zone data statistics
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 33
Page 42

Table 6. Command Summary (Continued)
COMMAND DESCRIPTION
ADDR [1...65000]
Details Page 36
AMASK [0000 0000–FFFF
FFFF]
Details Page 36
ASENSE [HI/LO]
Details Page 36
BAUD [xxxxx abc]
Details Page 36
BUFF [ON, OFF]
Details Page 37
CTS [0–255]
Details Page 37
DUMP Show all settings. Use with PC-based Radio
DEVICE [DCE, CTS KEY]
Details Page 38
HOPTIME [XSHORT, 16, 20,
25, 32, SHORT, NORMAL,
LONG]
Details Page 40
HREV Hardware revision level
MODE [M, R, R-M]
Details Page 41
OWM Owner’s message or site name
OWN Owner’s name or system name
PWR [xx–30]
Details Page 42
RSSI
Details Page 42
DISPLAY OPERATING STATUS
RXTOT [NONE, 0–1440]
Details Page 43
SEND [n, -n, +n]
Details Page 43
SER Serial number of radio
SHOW [PORT , DC, PWR]
Details Page 45
SIMPLEX [ON, OFF]
Details Page 45
SKIP [NONE, 1...8]
Details Page 46
SKIPSYNC [ON/OFF]
Details Page 46
Network address (1-65000)
Sets alarm mask (response). Default is FFFF
FFFF.
Changes the sense of the alarm output. Default
sense is HI.
Display data communication parameters.
Example: BAUD 9600 8N1
Data buffering mode: ON = seamless data
OFF = fast byte throughput
CTS delay in ms (0-255 ms)
Configuration software (P/N 03-3156A01).
Device behavior (DCE, or CTS KEY)
Show hop time in milliseconds (ms).
Show operating mode: M = Master, R =
Remote, R-M = Remote-Master (remote oper.
on master freqs.)
Forward power output setting in dBm
Received signal strength in dBm (continuously
updated). Not available at master radio unless
SETUP is enabled.
Specifies amount of time (in seconds) to wait
before issuing a time-out alarm. Default is
NONE.
Sets/displays re-send count for data packets.
Useful in areas with heavy radio interference.
Show active port, DC voltage or measured RF
power (dBm)
Simplex/half-duplex selection
ON = Simplex, OFF = half-duplex
Skip a frequency operating zone
When ON, suppresses transmission of SYNC
messages in skipped zones. Default setting is
OFF.
Display parameters continued...
34 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 43

Table 6. Command Summary (Continued)
COMMAND DESCRIPTION
SNR
Details Page 46
SREV
Details Page 47
STAT
Details Page 47
TDD [ON/OFF]
Details Page 47
TEMP
(CONTINUED)
Details Page 48
UNIT [10000–65000]
Details Page 48
DISPLAY OPERATING STATUS
ZONE DATA
Details Page 49
KEY Enables the transmitter.
DKEY Disables the transmitter.
DMGAP [xx]
Details Page 39
TX [xxxx]
Details Page 48
RX [xxxx]
DIAGNOSTIC/TEST
Details Page 43
SETUP
Details Page 44
Signal-to-noise ratio. Expressed in dB.
Display transceiver firmware revision level
Show current alarm status
Sets or displays time-division multiplex status of
DATA INTERFACE connector. (Sometimes
referred to as “simulated full-duplex” mode.)
Transceiver’s internal temperature (°C)
Show programmed unit address for network-wide diagnostics
Show zone data statistics (see text for details).
Press “Q” to quit.
(Radio must be in Setup mode.)
(Radio must be in Setup mode.)
Sets the amount of time to wait after the
receipt of a character before interpreting the
next received character as the start of a new
message.
Set/display transmit test frequency.
(Radio must be in Setup mode.)
Set/display receive test frequency.
(Radio must be in Setup mode.)
Enables Setup mode. Times out after 15 minutes. Press “Q” to quit.
6.4 Detailed Command Descriptions
The essential commands for most applications are Network Address
(
ADDR), Mode, (MODE) and Baud Rate (BAUD). However, proper use of
the additional commands allows you to tailor the transceiver for a specific use, or to conduct basic diagnostics on the radio. This section gives
more detailed information for many of the user commands listed in
Table 6.
Most of the commands below can be used in two ways. First, you can
type only the command name (for example,
programmed data. Second, you can set or change the existing data by
typing the command, followed by a space, and then the desired entry
(for example,
ADDR 1234). In the list below, allowable programming
variables, if any, are shown in brackets [ ] following the command
name.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 35
ADDR) to view the currently
Page 44

ADDR [1...65000]
This command sets or displays the radio’s network address. The network address can range from 1 to 65000.
Network address must be programmed at the time of installation and
must be common across each radio in a given network. Radios are typically shipped with the network address unprogrammed. This causes the
address to display as
NONE. This leaves the system in an invalid state and
prevents operation.
NOTE: It is recommended that the last four digits of the master radio’s
serial number be used for the network address (or chassis serial
number if the radio is installed in a P-20 redundant chassis).
AMASK [0000 0000–FFFF FFFF]
This command sets the alarm bits that cause the alarm output signal to
be triggered. The
PWR LED will still flash for all alarms, but the alarm
output signal will only be activated for those alarms that have the corresponding mask bit set. The hex value for the mask aligns directly with
the hex value for the
Through proper use of the
ALARM command. The default is FFFF FFFF.
AMASK command, it is possible to tailor the
alarm response of the radio. Contact the factory for more information on
configuring the alarm mask.
ASENSE [HI/LO]
This command is used to set or display the sense of the alarm output at
Pin 25 of the
active
HI.
DAT A INTERF A CE connector. The default for transceivers is
BAUD [xxxxx abc]
This command sets or displays the communication attributes for the
DATA INTERFACE port. The command has no effect on the RJ-11
DIAG(NOSTICS) port.
The first parameter (
xxxxx) is baud rate. Baud rate is specified in
bits-per-second and must be one of the following speeds: 1200, 2400,
4800, 9600, 19200, or 38400. In the worst case, the radio will always
accept a minimum of 500 data bytes in a single continuous data transmission. At baud rates of 4800 bps or less, the radio can support unlimited continuous data transmission at any hop rate. If hop time is set to
NORMAL or LONG, baud rates of up to 19200 bps with continuous unlim-
ited data transmission are possible. (See
The second parameter of the
BAUD command (abc) is a 3-character block
HOPTIME command.)
indicating how the data is encoded. The following is a breakdown of
each character’s meaning:
36 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 45

a = Data bits (7 or 8)
b = Parity (N for None, O for Odd, E for Even)
c = Stop bits (1 or 2)
The factory default setting is 4800 baud, 8 data bits, no parity, 1 stop bit
(Example:
4800 8N1).
NOTE: 7N1, 8O2, and 8E2 are invalid communication settings and are
not supported by the transceiver.
BUFF [ON, OFF]
This command sets or displays the received data handling mode of the
radio. The command parameter is either ON or OFF. (The default is ON.)
The setting of this parameter affects the timing of received data sent out
the
DATA INTERFACE connector. Data transmitted over the air by the
radio is unaffected by the
BUFF setting.
If data buffering is set to
sible average latency. Data bytes are sent out the
OFF, the radio will operate with the lowest pos-
DAT A INTERFACE port
as soon as an incoming RF data frame is disassembled. Average and typical latency will both be below 10 ms, but idle character gaps may be
introduced into the outgoing data flow.
If data buffering is
ON, the radio will operate in a seamless mode. That
is, data bytes will be sent over the air as quickly as possible, but the
receiver will buffer the data until enough bytes have arrived to cover
worst case gaps in transmission. The delay introduced by data buffering
may range from 25 to 50 ms, but the radio will not create any gaps in the
output data stream. This mode of operation is required for protocols
such as MODBUS™ that do not allow gaps in their data transmission.
Note that seamless mode (
BUFF ON) is intended only for applications
where the transmitter’s baud rate is greater than or equal to the
receiver’s baud rate. Enforcement of this rule is left up to the user.
Changes to the
BUFF setting may only be made at the master radio. This
is because the master radio broadcasts the buffer setting for the entire
network. At remote radios, the buffer setting may be read when the radio
is in synchronization with the master, but it may not be changed.
CTS [0–255]
The
CTS (clear-to-send) command sets or displays the timer value asso-
ciated with the CTS line response. The command parameter ranges from
0 to 255 milliseconds.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 37
Page 46

For DCE operation, the timer specifies how long to wait after the RTS
line goes high before asserting the CTS line. A timer value of zero
means that the CTS line will always be asserted (unless the radio is
attempting to throttle back data as part of normal flow control operation).
For CTS Key operation (see the
DEVICE command), the timer specifies
how long to wait after asserting the CTS line before sending data out the
DAT A INTERF ACE port. A timer value of zero means that data will be sent
out the data port without imposing a key-up delay. (Other delays may be
in effect from other radio operating parameters.)
CTSHOLD [0-6000]
Used in
DEVICE CTS KEY mode, this command sets the amount of time in
milliseconds that CTS remains present following transmission of the
last character out the RXD pin of the
DAT A INTERFACE port. This “hold
time” can be used to prevent squelch tail data corruption when interworking with other radios.
The
CTSHOLD setting can range from 0 to 6000 (i.e., 6 seconds). The
default value is 0, which means that CTS will drop immediately after the
last character is transmitted. If the command is entered when the radio
is in
DEVICE DCE mode, the response CTSHOLD N/A will be displayed.
DEVICE [DCE, CTS KEY]
The
DEVICE command sets or displays the device behavior of the radio.
The command parameter is either
DCE or CTS KEY.
The default selection is
DCE. In this mode, CTS will go high following
RTS, subject to the CTS programmable delay time. Keying is stimulated
by the input of characters at the data port. Hardware flow control is
implemented by dropping the CTS line if data arrives faster than it can
be transmitted.
If
CTS KEY is selected, the radio is assumed to be controlling another
radio, such as in a repeater system. The RTS line is ignored and the CTS
line is used as a keyline control for the other radio. CTS is asserted
immediately after the receipt of RF data, but data will not be sent out the
DAT A INTERFACE port until after the CTS programmable delay time has
expired. (This gives the other radio time to key.)
Following transmission of the last byte of data, CTS will remain
asserted for the duration specified by the
CTSHOLD command. CTSHOLD
should be set sufficiently high.
38 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 47

DLINK [xxxxx]
DLINK followed by the baud rate sets the baud rate (bps) of the diagnos-
tics link. The following
DLINK baud rates selections are allowed:
• 1200
• 2400
• 4800
• 9600
• 19200 (default setting)
Example:
The default is
DLINK 4800 sets the RJ-11 DIAG port to operate at 4800 bps.
DLINK 19200 and DLINK ON.
NOTE: The same baud rate must be entered into the appropriate
field(s) of any Network Management Software, if used.
DMGAP [xx]
DMGAP command sets the amount of time in milliseconds to wait
The
after the receipt of a character before interpreting the next received character as the start of a new message. When data port baud rates are slow,
the gap between characters within a poll may be so long that the radio
interprets the next character as the start of a new poll. When diagnostics
is being performed using passive messaging (see Performing Net-
work-Wide Remote Dia gnostics on page 53), this command may be used
to change this behavior.
DTYPE [NODE/ROOT/GATE/PEER]
The
DTYPE command specifies the radio’s operational characteristics for
network-wide diagnostics. There are four possible types of nodes in a
network-wide diagnostics system.
The common types are:
•
NODE–The most common setting, and the default. This is the
basic system radio device-type. Typically, the radio network is
comprised of nodes and one root. Intrusive diagnostics can originate from any node. However, non-intrusive diagnostics can
only be conducted from the root node.
•
ROOT–Always one, and only one, per network. The root is the
focal point of network-wide diagnostics information. Intrusive
diagnostics can originate from any radio, including the root.
However, the root is the only radio through which non-intrusive
diagnostics can be conducted.
The default radio device-type is
• GATE
• PEER
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 39
NODE. Less used are:
Page 48

These node types are needed for repeater sub-networks and simplex
sub-networks where simplex frequencies are used. See the Network-Wide Diagnostics System Handbook (05-3467A01) for an explanation of these node types.
HOPTIME [XSHORT, 16, 20, 25, 32, SHORT, NORMAL, LONG]
The
HOPTIME command sets or displays the hop time setting. The com-
mand is one of eight keywords whose parameters and related efficiencies are shown in Table 7.
Although the default setting is
ciency can usually be improved by using
HOPTIME NORMAL, transmission effi-
HOPTIME LONG when message
sizes typically exceed 256 bytes. This is because there will be less frequent channel hops when using this setting, contributing to a smoother
flow of transmitted data.
Table 7. Hoptime Parameters
Normally,
Hop Time
Keyword
XSHORT 10 ms 9 32.1%
16 16 ms 21 46.7%
20 20 ms 30 53.6%
25 25 ms 39 55.7%
32 32 ms 57 63.3%
SHORT 40 ms 72 64.3%
NORMAL 80 ms 162 72.0%
LONG 160 ms 336 74.5%
HOPTIME NORMAL and LONG are the only settings required.
Time
per
Hop
Max.
Bytes
per Hop
Channel
Efficiency
Other hoptimes can be used to customize performance based on SEND
count settings and payload data poll length.
The only time shorter settings (
SHORT through XSHORT) should be con-
sidered is when the message size is very small and strong interference
of a persistent nature is occurring on many frequencies. In these cases,
a shorter hop time may improve the chances of a message getting
through—but at the cost of reduced channel efficiency.
Changes to the
HOPTIME setting may only be made at the master radio.
(This is because the master radio establishes the hop time setting for the
entire network.) At remote radios, the hop time setting may be read
when the radio is in synchronization with the master, but it may not be
changed.
40 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 49

INIT
The INIT command is used to reset the radio’s operating parameters to the
factory defaults. This may be helpful when trying to resolve configuration problems that may have resulted from the entry of one or more
improper command settings. If you are unsure of which command setting may have caused the problem, this command allows you to get back
to a known working state.
Use of the
INIT command causes the changes shown in Table 8 to be
applied.
Table 8. Factory Default Values
Produced by INIT Command
Default Setting
For all radios
Device operation DCE DEVICE DCE
RF output power 30 dBm (1 watt) PWR 30
CTS delay 0
DATA INTERFACE port 4800 baud
Remote radios
Transmitter
test frequency
Receiver
test frequency
Master radios
Transmitter
test frequency
Receiver
test frequency
Skipped frequencies None (radio will hop
Hop time Normal (80 ms per hop) HOPTIME NORMAL
Simplex/duplex
operation
Buffer mode Seamless data mode
(CTS is continuously
asserted)
8 data bits
no parity
1 stop bit
Per factory default TX xxx
Per factory default RX xxx
Per factory default TX xxx
Per factory default RX xxx
across all 1019
frequencies)
Half-duplex SIMPLEX OFF
enabled
Corresponding
Command
CTS 0
BAUD 4800 8N1
SKIP NONE
BUFF ON
MODE [M, R, R-M]
The
MODE command sets or displays the operating mode of the radio. A
master radio is designated by an
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 41
M; a remote is designated by an R.
Page 50

R-M indicates that the transceiver has been programmed to the special
remote-master mode (remote radio operating on master frequencies)
This is used in repeater-assisted peer-to-peer systems; see Section 2.2,
Typical Applications (beginning on Page 3) for details. The
R-M mode
denotes a remote radio operating on master frequencies. In all other
respects, a remote-master behaves the same as a normal remote.
All units default to remotes; other modes must be specifically programmed with the
MODE command.
OWM [xxxxx]
The
OWM command sets or displays an optional owner’s message, such
as the system name. The entry can contain up to 30 characters.
OWN [xxxxx]
The
OWN command sets or displays an optional owner’s name, such as
the site name. The entry can contain up to 30 characters.
PWR [xx–30]
This command displays or sets the desired RF forward output power setting of the radio. The
PWR command parameter is specified in dBm and
can range from 20 to 30 dBm in 1 dBm steps. The default setting is 30
dBm (1 watt). To read the actual (measured) power output of the radio,
use the
SHOW PWR command.
In the USA and Canada, maximum allowable power is governed by
limits on Effective Isotropic Radiated Power output (EIRP). The EIRP
limit of +36 dBm means that any user with a net antenna gain greater
than 6 dBi must decrease the
PWR setting accordingly. Section 3.5, How
Much Output Power Can be Used? (beginning on Page 13) contains a
detailed discussion of this topic.
RSSI
This command displays the radio’s Received Signal Strength Indication
in dBm (decibels relative to 1 mW). The output can range from –50 dBm
to –110 dBm. Command availability and results depend on the mode of
operation (master or remote). The closer to 0 dBm, the stronger the
signal, thus a reading of –70 dBm is stronger than –80 dBm.
For a remote radio, under normal operation, RSSI is based on the
average signal strength of the SYNC message received in each of the
eight frequency zones. (RSSI is sampled each time a SYNC message is
received—every 1.6 seconds.) When using the RSSI reading to align a
directional antenna, it is important to make changes slowly so that the
RSSI reading will provide meaningful results. It will take several seconds to indicate a change in signal level. The radio stays in RSSI mode
until
ENTER
is pressed.
42 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 51

For a master radio, under normal operation, entering the RSSI command
causes the response
NOT AVAILABLE to be returned. This is because a
master is normally receiving signals from several remote stations and an
RSSI reading would be continually changing. The only exception is
when the
SETUP command has been asserted. This disables hopping and
allows reading a “raw” RSSI signal level in real time from a master or
remote radio.
NOTE: RSSI Readings are not accurate for incoming signals stronger
than –50 dBm.)
RTU [ON/OFF/0-80]
This command re-enables or disables the radio’s internal RTU simulator, which runs with MDS’ proprietary polling programs (poll.exe and
rsim.exe). The internal RTU simulator is available whenever a radio has
diagnostics enabled. This command also sets the RTU address that the
radio will respond to.
The internal RTU can be used for testing system payload data or pseudo
bit error rate (BER) testing. It can be helpful in isolating a problem to
either the external RTU or the radio.
RX [xxxx]
This command sets or displays the test receive frequency used in place
of hopping whenever the radio is in Setup mode. The test receive frequency can be reprogrammed to any value between 927.975 MHz and
902.025 MHz, inclusive. The factory default settings are listed below
and have been selected to be non-intrusive to normal operation.
Default Receive Frequencies
Master Remote
927.975 MHz 902.025 MHz
RXTOT [NONE, 0–1440]
This command sets or displays the amount of time (in minutes) to wait
for the next received data packet before issuing a receiver time-out
alarm. The default is
NONE.
SEND [n, -n, +n]
The
SEND command selects or displays the number of times that a radio
will re-transmit data. This command is associated with “robust” or “bulletproof” operation of the radio and is intended for use in areas with
heavy radio interference.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 43
Page 52

When the SEND command is issued without parameters, the cumulative
retransmission count is shown. A value of 1 represents the default selection, meaning “normal, non-robust operation.” Values greater than 1
successively improve the chance of successful data delivery in spectrally harsh environments. (Note that the
SEND count for a remote radio
is only viewable when the remote is synchronized with its master station.)
There are two formats for entering the
(
SEND n) can be used only at the master station, and selects the base
transmission count for the entire network. The other format (
–n) can be used at any radio in the network, and provides a means to cus-
SEND command. One format
SEND +n or
tomize the transmission count locally at each radio, as a delta (amount
of change) from the base.
For both formats,
n represents number between 1 and 10; for the “delta”
format a value of zero is also permitted. The net transmission count for
a particular radio is determined by adding the local “delta” (
+n or –n) to
the base transmission count for the network. The net transmission count
is automatically bounded to the range 1..10, irrespective of the delta.
The combination of the two formats provides a means to highly customize the retransmission behavior of network.
Higher retransmission counts come at the cost of increased latency and
reduced data throughput. With
operation based on timing derived from the network
use of any tailored
SEND values (e.g. SEND +/-x) within the system may
BUFF ON, the radio maintains seamless
SEND value. The
disrupt seamless operation. This is because the increased latency makes
seamless mode impractical. Table 2 lists the maximum cumulative
SEND
count for continuous operation, at some typical data rates.
Table 9. Baud Rate vs. Maximum SEND Count
BAUD
RATE
1200 3 8 10 10 10 10 10 10
2400 N/A 4 5 5 5 7 8 8
4800 N/A 2 2 2 2 3 4 4
9600 N/A N/A N/A N/A N/A N/A 2 2
(BPS)
XSHORT
(max. send
count)
16 ms
(max. send
count)
20 ms
(max. send
count)
25 ms
(max. send
count)
32 ms
(max. send
count)
SHORT
(max. send
count)
NORMAL
(max. send
count)
LONG
(max. send
count)
SETUP
This command sets up the transceiver for checking antenna SWR or
transmitter power with external measuring equipment. Do not use this
mode during normal operation.
44 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 53

When the SETUP command is entered, the HHT prompt changes to
SETUP>, and:
• Hopping is disabled.
• Synthesizer frequencies are reset to the test frequencies specified by the
• The radio can be keyed using the
TX and RX commands.
KEY command. DKEY is used
to unkey the radio. (If the radio is left in a keyed state it is automatically unkeyed after several minutes.)
• The
RSSI is sampled in a raw, continuous fashion regardless of
whether the unit is a master or a remote.
Entering Q or QUIT returns the system to normal operation.
A timer keeps the Setup mode from accidentally leaving the system dis-
abled. After 10 minutes the system behaves as if
Q or QUIT had been
entered, returning to normal operation.
SHOW [PORT, DC, PWR]
The
SHOW command displays three types of information based on the
command variables. These are:
•
PORT—Displays which connector port (RJ-11 or DB-25) is cur-
rently active for diagnostics and control.
•
DC—Displays DC input/output voltages.
PWR—Displays the actual (measured) RF power output in dBm.
•
Unlike the
PWR command, this command shows the actual level
being measured, not the programmed RF power setting.
SIMPLEX [ON, OFF]
SIMPLEX command sets or displays the radio’s mode of operation
The
(simplex or half-duplex).
By default, the system operates in half-duplex mode (
SIMPLEX OFF). In
this mode, the transmit frequency of the master is the receive frequency
of the remote (and vice-versa). The transceiver uses a transmit/receive
frequency split of ±1.6 MHz. The offset varies such that both frequencies will always fit within the same zone. (A zone is a 3.2 MHz
sub-band—see the
When simplex mode is selected (
ZONE DATA command.)
SIMPLEX ON), the master and remotes
always transmit and receive on the same frequency. This setting is
required for peer-to-peer simplex networks where remotes must be able
to communicate with other remotes. A slight increase in end-to-end
delay will occur when using this mode.
This command is “read-only” at remote radios. (Remotes must be synchronized with the master radio to read the simplex status.)
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 45
Page 54

SKIP [NONE, 1...8]
This command sets or displays which, if any, of the eight 3.2 MHz (128
frequency) zones will be skipped from the radio’s hopping sequence.
Skipping zones is one way of dealing with constant interference on one
or more frequencies. See Section 3.3 (Page 10) for more information on
dealing with interference.
Figure 24 shows the frequency range covered by each zone. The command parameter is either the keyword
NONE or an undelimited string of
up to seven digits where each digit 1...8 represents a corresponding zone
to skip. (For zone parameter input, the digits can appear in any order and
can be optionally separated by a blank space.) The
SKIP command is
read-only at remote radios. (Remotes must be synchronized with the
master radio to read the skip status.)
ZONE 1
902.200
to
905.375
ZONE 2
905.400
to
908.575
ZONE 3
908.600
to
911.775
ZONE 4
911.800
to
914.975
ZONE 5
915.000
to
918.175
ZONE 6
918.200
to
921.375
ZONE 7
921.400
to
924.575
ZONE 8
924.600
to
927.775
Figure 24. Frequency Zones for MDS 9810 Transceiver
SKIPSYNC [ON/OFF]
Selectively suppresses transmission of SYNC messages in skipped
zones (see
SKIP command above). With SKIPSYNC set to ON, the trans-
ceiver will not transmit SYNC messages in skipped frequency zones.
This command is only available to transceivers that are set to be a master
(
MODE M). The default setting for this command is OFF.
NOTE: Using SYNCSKIP when many zones are skipped will signifi-
cantly lengthen the time it takes a remote to achieve synchronization with the master. (This will also manifest itself as very
slow RSSI reading response).
SNR
This command displays the signal-to-noise ratio of the received signal
expressed in dB. As used in this guide, the definition of signal-to-noise
is based upon the signal level following equalization, for valid frames
only. (A valid frame is defined as containing no more than one bit error,
and belonging to a frame addressed for the receiving radio.) SNR is
updated and latched for each valid frame received. A filter in the DSP
tempers the effect of any sudden changes in the value.
46 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 55

SNR output ranges from 10 dB to 33 dB. A value of 10 dB represents
little or no signal. A value of 24 dB represents a very strong signal. For
remote radios, a value of 0 is reserved to mean “no signal”; it is displayed whenever a remote is not in synchronization with the master station.
When the
SNR command is used, it causes the DIAG(NOSTIC) port to
enter an update mode, and it will provide an updated signal-to-noise
ratio every 1.6 seconds. It stays in this mode until the
ENTER
key is
pressed.
SREV
This command displays the software version currently loaded into the
transceiver.
A display of
06-3111A01, 3.5.1 is an example of the software version iden-
tifier.
STAT
This command is used to check alarm status. If no alarms exist, the message
NO ALARMS PRESENT appears at the top of the HHT display.
If an alarm does exist, a two-digit event code (00–31) is displayed and
the event is identified as a “major” or “minor” alarm. A brief description
of the event is also given.
If more than one alarm exists, the word
the screen and additional alarms are viewed by pressing the
MORE appears at the bottom of
ENTER
key. Detailed descriptions of the alarm codes are provided in Table 12
on Page 52.
TDD [ON/OFF]
The
TDD command selects or displays whether or not the DATA INTER-
port is operating in time division duplex (sometimes called “sim-
FACE
ulated full-duplex”) mode. This command is “read-only” at remote
radios.
The x810 Transceiver is physically a half-duplex device. The radio can
never actually transmit and receive RF data at the same time. However,
TDD mode enables the radio to simulate full-duplex at the data port, by
designating alternate hops as transmit or receive hops, and buffering
(storing) data when transmission is not permitted. Default operation is
TDD OFF.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 47
Page 56

Note that when TDD is enabled (TDD ON), there is a significant impact
on both data throughput and latency. Data throughput is roughly cut in
half. Worst case data latency is increased by two hoptimes. The effect in
seamless mode (
BUFF ON) is even more pronounced, as shown in Table
10.
Table 10. Hoptime Setting vs. Delay (BUFF ON—”Seamless Mode”)
HOP TIME MINIMUM DELAY MAXIMUM DELAY
XSHORT 33 ms 66 msec
16 39 ms 78 ms
20 43 ms 86 ms
25 48 ms 96 ms
32 55 ms 110 ms
SHORT 63 ms 126 msec
NORMAL 103 ms 206 msec
LONG 183 ms 366 msec
TEMP
This command displays the internal temperature of the transceiver in
degrees Celsius. (Note that the radio is specified to operate in an environment between –30 C° and +60 C°). This internal reading may be
higher than the outside temperature by several degrees.
TX [xxxx]
This command sets or displays the test transmit frequency used in place
of hopping whenever the radio is in Setup mode. The test transmit frequency can be reprogrammed to any value between 902.025 MHz and
927.975 MHz, inclusive. The factory default settings are listed below
and have been selected to be non-intrusive to normal system operation.
Default Transmit Frequencies
Master Remote
902.025 MHz 927.975 MHz
UNIT [10000–65000]
This command sets the unit addressing for network-wide diagnostics.
The unit address is factory programmed to the last four digits of the
serial number. If re-programmed in the field, the entry must consist of
five digits between 10000 and 65000.
48 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 57

ZONE DATA
The transceiver divides its frequency operating spectrum into eight contiguous 3.2 MHz zones. (These are the same zones referenced by the
SKIP command described earlier.) Data frame statistics are maintained
for each zone to indicate the transmission quality through the network.
This information is useful for identifying zones where significant interference exists.
Zone quality information can be accessed using the
ZONE DATA com-
mand on a connected HHT. For each zone (1–8), it shows you the
number of data frames sent, the number received, and the number
received with errors. If an excessive number of errors are seen in one or
more frequency zones, it may indicate interference, and you should consider “skipping” those zones using the
ZONE DA T A command displays its information on four lines as shown
The
SKIP command.
in Figure 25. If the display seems to “roll off” the screen, verify that
your HHT is set for an 80 character screen size. See Section 6.2,
Hand-Held Terminal Setup (beginning on Page 29).
Invisible place holder
ZONE #
DATA FRAME STATISTICS
TOTAL SENT
TOTAL RECEIVED
TOTAL REC'D WITH ERRORS
Figure 25. HHT Display for ZONE DATA Command
If ZONE DATA alone is entered, the information for Zone 1 is displayed
first. Successive zones can be viewed by pressing the
entering the zone number of your choice (1...8) at the
ENTER key, or by
NEXT ZONE?>
prompt.
It is also possible to go directly to a specific zone by entering
[1...8]
, where the number entered equals the desired zone. Data for the
ZONE DATA
specified zone is displayed and then control returns to the command
prompt.
Entering
Q or QUIT causes the program to exit and return to the command
prompt.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 49
Page 58

A variation on the ZONE DAT A command is ZONE DATA! This causes data
to be retrieved from all zones. Data is sequentially displayed for each of
the 8 zones and then control returns to the command prompt.
(Note: If a frequency zone has been skipped, statistics will still be gathered for that zone when
ZONE DATA is invoked at a remote site, but the
numbers will accumulate very slowly since the only data being passed
in a skipped zone is the radio’s synchronization signal. When invoked
at a master, no polls will be received from a skipped zone.)
ZONE CLEAR
The
ZONE CLEAR command clears the zone data for all zones, resetting
the count to 0. (Zone data is also cleared automatically upon reboot, or
upon saturation of a zone data counter.)
7.0 TROUBLESHOOTING
Successful troubleshooting of an MDS transceiver system is not difficult, but requires a logical approach. It is best to begin troubleshooting
at the master station, as the rest of the system depends on the master for
polling instructions and synchronization data. If the master station has
problems, the operation of the entire network will be affected.
When communication problems are found, it is good practice to begin
by checking the simple things. All radios in the network must meet these
basic requirements:
• Adequate and stable primary power
• An efficient and properly aligned antenna system
• Secure connections (RF, data & power)
• Proper programming of the radio’s operating parameters, especially Mode selection (
interface Baud Rate (
MODE), Network Address (ADDR), and
BAUD)
• The correct interface between the radio and the connected data
equipment (proper cable wiring, data format and timing).
7.1 LED Indicators
The LED status indicators are an important troubleshooting tool and
should be checked whenever a problem is suspected. Table 11 describes
the function of each status LED.
50 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 59

PWR SYNC TXD RXD
Table 11. LED Status Indicators
LED Name Description
PWR • Continuous—Power is applied to the radio, no problems detected.
• Flashing 5 times per second—Fault indication.
See Section 7.0, TROUBLESHOOTING (beginning on Page 50).
• Flashing once every 4 seconds—Radio is in Sleep Mode.
SYNC Lights continuously to indicate the radio is receiving/sending
TXD Indicates EIA-232 space signal (logic high) input to the DB-25
RXD Indicates EIA-232 space signal (logic high) output from the DB-25
synchronization frames. Within 16 seconds of start-up, this LED
should be lit continuously.
connector.
connector.
7.2 Alarm Codes
When an alarm condition exists, the transceiver creates an alarm code
that can be read on an HHT connected to the radio’s
port. These codes can be very helpful in resolving many system difficulties.
DIAG(NOSTICS)
Checking for Alarms—STAT command
To check for the presence of alarms, enter
exist, the message
NO ALARMS PRESENT appears at the top of the display.
STAT on the HHT. If no alarms
If an alarm does exist, a two-digit alarm code (00–31) is displayed, and
it is identified as a major or minor alarm. A brief description of the alarm
is also given. Alarm codes and their meanings are listed in Table 12.
If more than one alarm exists, the word
the screen; additional alarms can be viewed by pressing .
MORE appears at the bottom of
ENTER
Major Alarms vs. Minor Alarms
Major alarms report serious conditions that generally indicate a hardware failure, or other abnormal condition that will prevent (or seriously
hamper) further operation of the transceiver.
With the exception of alarm code 00 (network address not programmed), major alarms generally indicate the need for factory repair.
Contact MDS for further assistance.
Minor alarms report conditions which, under most circumstances, will
not prevent transceiver operation. This includes out-of-tolerance conditions, baud rate mismatches, etc. The cause of these alarms should be
investigated and corrected to prevent system failure.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 51
Page 60

Alarm Code Definitions
Table 12 contains a listing of all event codes that may be reported by the
transceiver.
Table 12. Alarm Codes
Alarm
Code
00 Major The network address is not programmed.
01 Major Improper software detected for this radio model.
02, 03 -- Reserved for factory use.
04 Major One or more of the programmable synthesizer loops is
05 -- Reserved for factory use.
06 Major Analog-to-Digital (A-to-D) fault.
07 Major One or more of the radio’s internal voltage regulators is
08 Major The system is reporting that it has not been calibrated. Factory
09 -- Reserved for factory use.
10 Major The microcontroller unit (MCU) was unable to properly
11 -- Reserved for factory use.
12 Major Receiver time-out alarm.
13-15 -- Reserved for factory use.
16 Minor The unit address is not programmed.
17 Minor A data parity fault has been detected on the DATA
18 Minor A data framing error has been detected on the DATA
19–24 -- Reserved for factory use.
25 Minor The 6.0 volt power regulator is out-of-tolerance. If the error is
26 Minor The dc input voltage is out-of-tolerance. If the voltage is too far
27, 28 -- Reserved for factory use.
29 Minor RF output power fault detected. (Power differs by more than 2
30 Minor The system is reporting an RSSI reading below –105 dBm. Bit
31 Minor The transceiver’s internal temperature is approaching an
Alarm
Type Description
reporting an out-of-lock condition.
reporting a failure. The radio will not operate.
calibration is required for proper radio operation.
program the system to the appropriate defaults. A hardware
problem may exist.
INTERFACE connector. This usually indicates a parity setting
mismatch between the radio and the RTU.
INTERFACE connector. This may indicate a baud rate
mismatch between the radio and the RTU.
excessive, operation may fail.
out-of-tolerance, operation may fail.
dB from set level.) Often caused by high antenna system
SWR. Check antenna, feedline and connectors.
errors are likely to be present in the data.
out-of-tolerance condition. If the temperature drifts outside of
the recommended operating range, system operation may
fail.
52 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 61

7.3 Performing Network-Wide Remote Diagnostics
Diagnostics data from a remote radio can be obtained by connecting a
laptop or personal computer running MDS Network Management Software to any radio in the network. Figure 30 shows an example of a setup
for performing network-wide remote diagnostics.
Invisible place holder
REMOTE NODE
OPERATION
Intrusive messaging only
(not preferred)
RTU
RTU
DIAGNOSTICS
RUNNING InSite
TO DATA
PORT
COMPUTER
TO RJ-11
DIAGNOSTICS
TO
DIAGNOSTICS
PORT
PORT
REPEATER
DTYPE
ROOT
RTU
ROOT NODE OPERATION
Active messaging or
passive messaging (preferred)
POLLING REMOTE
ROOT NODE
DIAGNOSTICS DATA
(To InSite)
HOST COMPUTER
PAYLOAD DATA
(To SCADA application)
Figure 26. Network-Wide Remote Diagnostics Setup
If a PC is connected to any radio in the network, intrusive polling
(polling which briefly interrupts payload data transmission) can be performed. To perform diagnostics without interrupting payload data transmission, connect the PC to a radio defined as the “root” radio. A radio
is defined as a root radio using the
DTYPE ROOT command locally, at the
radio.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 53
Page 62

A complete explanation of remote diagnostics can be found in MDS’
Network-Wide Diagnostics System Handbook (MDS P/N
05-3467A01).
Table 13. Network-Wide Diagnostics Radio Setup Commands
COMMAND DESCRIPTION
DLINK [xxxxx]
Details Page 55
DTYPE
[NODE/ROOT/GATE/PEER]
Details Page 55
DIAGNOSTICS
NETWORK-WIDE
CONFIGURATION
Set baud rate of diagnostics link
Set radio’s operational characteristics
for network-wide diagnostics
1. Program one radio in the network as the root radio by entering the
DTYPE ROOT command at the radio.
2. At the root radio, use the
DLINK ON and DLINK [baud rate] commands
to configure the diagnostic link protocol on the RJ-11 port.
3. Program all other radios in the network as nodes by entering the
DTYPE NODE command at each radio.
4. Use the
DLINK ON and DLINK [baud rate] commands to configure the
diagnostic link protocol on the RJ-11 port of each node radio.
5. Connect same-site radios using a null-modem cable at the radios’
diagnostic ports.
6. Connect a PC on which MDS Network Management Software is
installed to the root radio, or to one of the nodes, at the radio’s diagnostic port. (This PC may be the PC being used to collect payload
data, as shown in Figure 30.)
To connect a PC to the radio’s
DIAG. port, an RJ-11 to DB-9 adapter
(MDS P/N 03-3246A01) is required. If desired, an adapter cable
may be constructed from scratch, using the information shown in
Figure 27.
Invisible place holder
RJ-11 PLUG
(TO RADIO)
TXD
4
RXD
1
6
RJ-11 PIN LAYOUT
5
GND
6
Figure 27. RJ-11 to DB-9 Adapter Cable
54 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
DB-9 FEMALE
(TO COMPUTER)
RXD
2
TXD
3
GND
5
Page 63

7. Launch the MDS Network Management application at the PC.
(Refer to the software user’s manual for details.)
DLINK [xxxxx]
DLINK followed by the baud rate sets the baud rate (bps) of the diagnos-
tics link. The following DLINK baud rates selections are allowed:
• 1200
• 2400
• 4800
• 9600
• 19200 (default setting)
Example:
The default is
DLINK 4800 sets the RJ-11 DIAG port to operate at 4800 bps.
DLINK 19200 and DLINK ON.
NOTE: The same baud rate must be entered into the appropriate
field(s) of any Network Management Software, if used.
DTYPE [NODE/ROOT/GATE/PEER]
DTYPE command specifies the radio’s operational characteristics for
The
network-wide diagnostics. There are four possible types of nodes in a
network-wide diagnostics system.
The common types are:
NODE–The most common setting, and the default. This is the
•
basic system radio device-type. Typically, the radio network is
comprised of nodes and one root. Intrusive diagnostics can originate from any node. However, non-intrusive diagnostics can
not be facilitated through a node.
ROOT–Always one, and only one, per network. The root is the
•
focal point of network-wide diagnostics information. Intrusive
diagnostics can originate from any radio, including the root.
However, the root is the only radio enabling non-intrusive diagnostics.
The default radio device-type is
• GATE
• PEER
NODE. Less used are:
These node types are needed for repeater sub-networks and simplex
sub-networks where simplex frequencies are used. See the Network-Wide Diagnostics System Handbook for an explanation of these
node types.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 55
Page 64

7.4 Troubleshooting Chart
Table 14 provides suggestions for resolving system difficulties that may
be experienced in the radio system. If problems persist, contact the factory for further assistance. Refer to the inside back cover of this guide
for contact information.
Table 14. Troubleshooting Chart
Difficulty Recommended System Checks
Unit is
inoperative.
Interference is
suspected.
No
synchronization
with master, or
poor overall
performance.
a. Check for the proper supply voltage at the power connector.
b. The transceiver’s internal resettable fuse may have tripped. To
reset it, momentarily remove and re-apply power to the radio.
a. Verify that the system has a unique network address. Nearby
systems with the same address will cause interference.
b. Use the ZONE DATA command (Page 49) to check for
interference in specific zones. Lock out affected zone(s) using
the SKIP command (Page 46).
c. If omnidirectional antennas are used on remote stations,
consider changing to directional antennas. This will often limit
interference to and from other stations.
a. Check for secure interface connections at the radio and the
connected device.
b. Check the antenna, feedline and connectors. Reflected power
should be less than 10% of the forward power reading
(SWR
≈2:1 or lower).
c. If the remote radio is in synchronization, but performance is
poor, check the received signal strength using the RSSI
command (Page 42). If RSSI is low, it may indicate antenna
problems, or misalignment of directional antenna headings.
d. Verify proper programming of system parameters: mode,
network address, data interface baud rate, transmitter power,
CTS delay, etc. It may be helpful to use the INIT command
(Page 41), which resets all parameters to factory defaults.
e. Check for alarms using the STAT command (Page 47)
8.0 TECHNICAL REFERENCE
The following section contains material that is not essential to using the
radio, but may prove helpful in diagnosing performance problems or in
gaining a better understanding of the unit’s operation.
8.1 Technical Specifications
GENERAL
Frequency Hopping Range: Up to 1019 frequencies within:
902–928 MHz,
configurable in 3.2 MHz zones
Hop Pattern: Based on network address
Frequency Stability: ±1.5 ppm
Simplex Operation: User selectable
Half-Duplex Operation: ±1.6 MHz TX/RX split
56 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 65

Network Addresses: 65,000
Temperature Range: –30°C to +60°C
Humidity: 95% at +40°C; non-condensing
Primary Power: 13.8 Vdc (10.5–30 Vdc range)*
* Transceivers shipped prior to Revision “U”
(November 1999) may be configured for 25 Vdc
maximum DC input.
Supply Current (typical):
Transmit: 400 mA @ 13.8 Vdc
Receive: 125 mA @ 13.8 Vdc
Sleep Mode: <30 mA @ 13.8 Vdc
Size (excluding mtg. hardware): 2.0" x 5.62" x 7.25"
Weight: 2.38 lb/1.08 kg
Case: Die-cast aluminum
Approvals: • FCC Part 15.247
51 x 143 x 184 mm
• Industry Canada RSS-210 and RSS-139
• CSA/
US Class 1, Div. 2; Groups A, B, C and D
hazardous locations
• Contact MDS for information on availability and
governmental approvals in other countries
DATA CHARACTERISTICS
Data Interface: EIA-232 signaling standard
Interface Connector: DB-25 female
Data Rate: 1200, 2400, 4800, 9600, 19200, 38400 bps
Data Latency: <10 ms typical (buffer off)
Byte Length: 10 or 11 bits
Maximum Data Transmission: Continuous up to 19200 bps;
asynchronous
Non-continuous at 38400 bps
RF CHARACTERISTICS
TRANSMITTER:
Power Output
(at antenna
Duty Cycle: Continuous
Modulation Type: Binary CPFSK
Output Impedance: 50 Ohms
Spurious: –60 dBc
Harmonics: –80 dBc
RECEIVER
Type: Double conversion superheterodyne
Bit-Error Rate: Less than 1x10
Intermodulation: 59 dB minimum (EIA)
connector): 0.1 to 1.0 watt (+20 dBm to +30 dBm) ±1.0 dB, set
by user
-
6
at –110 dBm
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 57
Page 66

Desensitization: 75 dB
Spurious: 70 dB minimum
Bandwidth: 25 kHz
Interference Ratio
(BER degraded by 10
Time Required to Synchronize
with Master Radio: Less than 13 seconds (typical)
-1
): Co-channel: –10 dB
Adjacent channel: +30 dB
Two channels away: +50 dB
Three channels away: +60 dB
8.2 RSSI Checks with a Voltmeter
As an alternative to the HHT method of measuring RSSI (see Antenna
Aiming on page 27), a dc voltmeter may be connected to Pin 21 of the
transceiver’s
Figure 28 shows the relationship between RSSI and the dc voltage at Pin
21.
NOTE: RSSI Readings are not accurate for incoming signals stronger
DATA INTERFACE connector.
than –50 dBm.)
Invisible place holder
5.0
4.5
4
3.5
3
2.5
+ DC VOLTS (PIN 21)
2
–110
–90
–70
–50
SIGNAL LEVEL (dBm)
Figure 28. RSSI vs. Vdc at Pin 21 of DATA INTERFACE Connector
8.3 Data Interface Connections (DB-25)
The DATA INTERFACE connector is used to connect the radio to an
external DTE data terminal that supports the EIA-232 format. The radio
supports data rates of 1200, 2400, 4800, 9600, 19200 and 38400 bps
(asynchronous data only).
The
DAT A INTERFACE connector mates with a standard DB-25 plug that
is available from many electronics parts distributors. Figure 29 shows
the layout of the
DATA INTERFACE connector.Table 15 lists each pin on
the connector and describes its function.
58 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 67

Invisible place holder
Pin
Unused
Unused
Unused
Unused
Pin
No.
25
24
23
22
21
20
19
18
17
16
15
14
Description
Alarm Output
Diagnostic Channel Enable
Future use— do not connect
Unregulated DC Input/Output
Analog Input Pin
RSSI Voltage
9.9 Vdc Regulated Output
Digital Output Pin
Figure 29. Data Interface Connector (DB-25) Pins
(As viewed from outside the radio)
Table 15. Data Interface Connector (DB-25) Pin Descriptions
Pin
Pin
No.
Description
Unused
13
Radio Inhibit (Sleep)
12
Unused
11
10
Receiver Unsquelched Sensor
9
Unused
8
Data Carrier Detect (DCD)
7
Signal Ground*
6
Data Set Ready (DSR)
5
Clear-to-Send Output (CTS)
4
Request-to-Send Input (RTS)
3
Received Data (RXD)*
2
Transmitted Data (TXD)*
1
Protective Ground
* Required in most installations
Pin
Number
Input/
Output Pin Description
1--Protective Ground
Connects to ground (negative supply potential) on the
radio’s PC board and chassis.
2INTXD—Transmitted Data
Accepts TX data from the connected device.
3 OUT RXD—Received Data
Supplies received data to the connected device.
4INRTS—Request-to-Send Input
5 OUT CTS—Clear-to-Send Output
Goes “high” after the programmed CTS delay time has
elapsed (DCE), or keys an attached radio when RF data
arrives (CTS KEY).
6 OUT DSR—Data Set Ready
Provides a +6 Vdc DSR signal through a 2.5 kΩ resistor.
7--Signal Ground
Connects to ground (negative supply potential) at the
radio’s PC board.
8 OUT DCD—Data Carrier Detect
A “high” indicates hopping synchronization.
9 -- Unused.
10 OUT RUS—Receiver Unsquelched Sensor
Provides +8 Vdc through a 1 kΩ resistor whenever the
receiver squelch is open, and drops to less than 1 Vdc
when the squelch is closed.
11 -- Unused.
12 IN Sleep Mode
A ground on this pin turns off most circuits in the radio,
including transmit, receive, modem and diagnostic
functions. This allows for greatly reduced power
consumption, yet preserves the radio’s ability to be
quickly brought on line. See Section 4.6, Using the
Radio’s Sleep Mode (beginning on Page 25) for details.
13 -- Unused.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 59
Page 68

Table 15. Data Interface Connector (DB-25) Pin
Pin
Number
14 -- Unused.
15 -- Do not connect—Factory test point.
16 -- Unused.
17 -- Digital Output Pin
18 IN/OUT Accessory Power
19 OUT 9.9 Vdc Regulated Output
20 -- Do not connect—Reserved for future use.
21 OUT RSSI—Received Signal Strength Indication
22 -- Unused.
23 IN Diagnostic Channel Enable
24 IN Analog Input Pin
25 OUT Alarm Output
Input/
Output Pin Description
Output value is 3 Vdc for set and 0 Vdc for clear. May be
activated via MDS Network Management Software.
Unregulated input/output. Provides a source of power
for low-current accessories. The supply voltage may be
between 11.0 and 25 volts.
Provides a source of regulated voltage at 100 mA for
low-power accessories.
A dc voltmeter may be connected to this pin to read the
relative strength of the incoming signal. Figure 28 on
page 58 compare RSSI to dc voltage.
A ground on this pin causes the radio’s microcontroller
to open the DB-25 DATA INTERFACE connector for
diagnostics and control (in place of the more commonly
used RJ-11 DIAG(NOSTICS) connector).
Input value can range between 0 and 5 volts DC.
Voltage must not exceed 5 Vdc or damage may result.
Analog input voltage may be monitored via MDS
Network Management software, where the 0-5 Vdc
range is translated to a value between 0 and 255 (hex
address 0xFF).
A logic low (less than 0.5 volts) on this pin indicates
normal operation. A logic high (greater than 4 volts)
indicates that an alarm condition is present. This pin can
be used as an alarm output, provided the internal series
resistance of 1 kΩ is considered.
8.4 Bench Testing Setup
Figure 30 shows a sample test setup that can be used to verify the basic
operation of MDS radios. This test can be performed with any number
of remote radios by using a power divider with the required number of
output connections.
60 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 69

The RTU simulator shown in the test setup (MDS Part No. 03-2512A01)
is a microcontroller that emulates a remote terminal unit operating at
1200, 2400, 4800, or 9600 bps. Custom software is supplied with the
RTU simulator that allows continuous polling of remote radios. The
software reports the number of polls sent, polls received, and the number
of errors detected. The software runs on an IBM-compatible personal
computer.
NOTE: It is very important to use attenuation between all units in the
test setup. The amount of attenuation required will depend on
the number of units being tested and the desired signal strength
(RSSI) at each transceiver during the test. In no case should a
signal greater than –50 dBm be applied to any transceiver in
the test setup.
Invisible place holder
RTU SIMULATORS
MDS P/N 03-2512A01
REMOTE
ANTENNA
13.8
VDC
+
COMPUTER RUNNING
MDS POLLING SOFTWARE
–
REMOTE
ANTENNA
13.8
VDC
–
+
REMOTE
ANTENNA
3.8
1
VDC
–
+
ANTENNA
8
13.
VDC
–
+
MASTER
POWER ATTENUATORS
• Fixed or adjustable
• 2W Minimum Rating
POWER DIVIDER
NON-RADIATING ATTENUATORS
• Install on Unused Divider Ports (if any)
• 2W Minimum Rating
Figure 30. Typical Setup for Bench Testing of Radios
8.5 Using Radio Configuration Software
Windows-based Radio Configuration software (MDS P/N 03-3156A01)
is used for upgrading the internal radio software when new features
become available from Microwave Data Systems. The software
includes on-line user instructions, and an installation booklet is provided
with the software package. Contact MDS for ordering information.
NOTE: The latest firmware revision for all MDS products may be
obtained at www.microwavedata.com.
Connecting a PC
To connect a PC to the radio’s
DIAG(NOSTICS) port, an RJ-11 to DB-9
adapter cable (MDS P/N 03-3246A01) is required. If desired, this cable
may be constructed from scratch using the information shown in
Figure 31.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 61
Page 70

Upgrading the Radio’s Software
Using the Radio Configuration software, select RADIO SOFTWARE
UPGRADE
under the SYSTEM menu. Follow the prompts and on-line
instructions to complete the upgrade procedure.
Software upgrades are distributed as ASCII files with a
.S28 extension.
These files use the Motorola S-record format. When the download is
activated, the radio’s
PWR LED will flash rapidly, confirming that a
download is in process. The download takes about two minutes.
NOTE: If a download fails, the radio is left unprogrammed and inop-
erative. This is indicated by the PWR LED flashing slowly (1
second on/1 second off). This condition is only likely to occur
if there is a power failure to the computer or radio during the
downloading process. The download can be attempted again
when the fault has been corrected.
Invisible place holder
DB-9 FEMALE
(TO COMPUTER)
RXD
2
TXD
3
GND
5
1
6
RJ-11 PIN LAYOUT
(for software upgrade using connected PC)
RJ-11 PLUG
(TO RADIO)
TXD
4
RXD
5
GND
6
Figure 31. RJ-11 to DB-9 Adapter Cable
62 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 71

8.6 dBm-Watts-Volts Conversion Chart
Table 16 is provided as a convenience for determining the equivalent
voltage or wattage of an RF power expressed in dBm.
Table 16. dBm-Watts-Volts Conversion—for 50 ohm Systems
dBm V Po
+53 100.0 200W
+50 70.7 100W
+49 64.0 80W
+48 58.0 64W
+47 50.0 50W
+46 44.5 40W
+45 40.0 32W
+44 32.5 25W
+43 32.0 20W
+42 28.0 16W
+41 26.2 12.5W
+40 22.5 10W
+39 20.0 8W
+38 18.0 6.4W
+37 16.0 5W
+36 14.1 4W
+35 12.5 3.2W
+34 11.5 2.5W
+33 10.0 2W
+32 9.0 1.6W
+31 8.0 1.25W
+30 7.10 1.0W
+29 6.40 800mW
+28 5.80 640mW
+27 5.00 500mW
+26 4.45 400mW
+25 4.00 320mW
+24 3.55 250mW
+23 3.20 200mW
+22 2.80 160mW
+21 2.52 125mW
+20 2.25 100mW
+19 2.00 80mW
+18 1.80 64mW
+17 1.60 50mW
+16 1.41 40mW
+15 1.25 32mW
+14 1.15 25mW
+13 1.00 20mW
+12 .90 16mW
+11 .80 12.5mW
+10 .71 10mW
+9 .64 8mW
+8 .58 6.4mW
+7 .500 5mW
+6 .445 4mW
+5 .400 3.2mW
+4 .355 2.5mW
+3 .320 2.0mW
+2 .280 1.6mW
+1 .252 1.25mW
dBm V Po
0 .225 1.0mW
-1 .200 .80mW
-2 .180 .64mW
-3 .160 .50mW
-4 .141 .40mW
-5 .125 .32mW
-6 .115 .25mW
-7 .100 .20mW
-8 .090 .16mW
-9 .080 .125mW
-10 .071 .10mW
-11 .064
-12 .058
-13 .050
-14 .045
-15 .040
-16 .0355
dBm mV Po
-17 31.5
-18 28.5
-19 25.1
-20 22.5 .01mW
-21 20.0
-22 17.9
-23 15.9
-24 14.1
-25 12.8
-26 11.5
-27 10.0
-28 8.9
-29 8.0
-30 7.1 .001mW
-31 6.25
-32 5.8
-33 5.0
-34 4.5
-35 4.0
-36 3.5
-37 3.2
-38 2.85
-39 2.5
-40 2.25 .1µW
-41 2.0
-42 1.8
-43 1.6
-44 1.4
-45 1.25
-46 1.18
-47 1.00
-48 0.90
dBm mV Po
-49 0.80
-50 0.71 .01µW
-51 0.64
-52 0.57
-53 0.50
-54 0.45
-55 0.40
-56 0.351
-57 0.32
-58 0.286
-59 0.251
-60 0.225 .001µW
-61 0.200
-62 0.180
-63 0.160
-64 0.141
dBm µV Po
-65 128
-66 115
-67 100
-68 90
-69 80
-70 71 .1nW
-71 65
-72 58
-73 50
-74 45
-75 40
-76 35
-77 32
-78 29
-79 25
-80 22.5 .01nW
-81 20.0
-82 18.0
-83 16.0
-84 11.1
-85 12.9
-86 11.5
-87 10.0
-88 9.0
-89 8.0
-90 7.1 .001nW
-91 6.1
-92 5.75
-93 5.0
-94 4.5
-95 4.0
-96 3.51
-97 3.2
dBm µV Po
-98 2.9
-99 2.51
-100 2.25 .1pW
-101 2.0
-102 1.8
-103 1.6
-104 1.41
-105 1.27
-106 1.18
dBm nV Po
-107 1000
-108 900
-109 800
-110 710 .01pW
-111 640
-112 580
-113 500
-114 450
-115 400
-116 355
-117 325
-118 285
-119 251
-120 225 .001pW
-121 200
-122 180
-123 160
-124 141
-125 128
-126 117
-127 100
-128 90
-129 80 .1ƒW
-130 71
-131 61
-132 58
-133 50
-134 45
-135 40
-136 35
-137 33
-138 29
-139 25
-140 23 .01ƒW
9.0 GLOSSARY OF TERMS
If you are new to spread spectrum radio, some of the terms used in this
guide may be unfamiliar. The following glossary explains many of these
terms and will prove helpful in understanding the operation of the transceiver.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 63
Page 72

Antenna System Gain—A figure, normally expressed in dB, representing the power increase resulting from the use of a gain-type antenna.
System losses (from the feedline and coaxial connectors, for example)
are subtracted from this figure to calculate the total antenna system gain.
Bit—The smallest unit of digital data, often represented by a one or a
zero. Eight bits (plus start, stop, and parity bits) usually comprise a byte.
Bits-per-second—See BPS.
BPS—Bits-per-second. A measure of the information transfer rate of
digital data across a communication channel.
Byte—A string of digital data usually made up of eight data bits and
start, stop and parity bits.
Decibel (dB)—A measure of the ratio between two signal levels. Frequently used to express the gain (or loss) of a system.
Data Circuit-terminating Equipment—See DCE.
Data Communications Equipment—See DCE.
Data Terminal Equipment—See DTE.
dBi—Decibels referenced to an “ideal” isotropic radiator in free space.
Frequently used to express antenna gain.
dBm—Decibels referenced to one milliwatt. An absolute unit used to
measure signal power, as in transmitter power output, or received signal
strength.
DCE—Data Circuit-terminating Equipment (or Data Communications
Equipment). In data communications terminology, this is the “modem”
side of a computer-to-modem connection. By default, MDS transceivers
are set as DCE devices.
Digital Signal Processing—See DSP.
DSP—Digital Signal Processing. In the MDS 9810 transceiver, the DSP
circuitry is responsible for the most critical real-time tasks; primarily
modulation, demodulation, and servicing of the data port.
DTE—Data Terminal Equipment. A device that provides data in the
form of digital signals at its output. Connects to the DCE device.
Equalization—The process of reducing the effects of amplitude, frequency or phase distortion with compensating networks.
64 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 73

Fade Margin—The greatest tolerable reduction in average received
signal strength that will be anticipated under most conditions. Provides
an allowance for reduced signal strength due to multipath, slight antenna
movement or changing atmospheric losses. A fade margin of 20 to 30
dB is usually sufficient in most systems.
Frame—A segment of data that adheres to a specific data protocol and
contains definite start and end points. It provides a method of synchronizing transmissions.
Frequency Hopping—The spread spectrum technique used by the
MDS 9810 transceiver, where two or more associated radios change
their operating frequencies several times per second using a set pattern.
Since the pattern appears to jump around, it is said to “hop” from one
frequency to another.
Frequency Zone—The transceivers use up to 1,019 discrete channels
in the 902 to 928 MHz spectrum. A group of 128 channels is referred to
as a zone. The transceivers use eight frequency zones. (Five channels are
reserved for network control purposes.)
Hardware Flow Control—A transceiver feature used to prevent data
buffer overruns when handling high-speed data from the RTU or PLC.
When the buffer approaches overflow, the radio drops the clear-to-send
(CTS) line, which instructs the RTU or PLC to delay further transmission until CTS again returns to the high state.
Host Computer—The computer installed at the master station site,
which controls the collection of data from one or more remote sites.
Latency—The delay (usually expressed in milliseconds) between when
data is applied to TXD (Pin 2) at one radio, until it appears at RXD
(Pin 3) at the other radio.
MAS—Multiple Address System. A radio system where a central
master station communicates with several remote stations for the purpose of gathering telemetry data. Figure 3 on page 3 shows an example
of an MAS system.
Master (Station)—The one radio transceiver in a spread spectrum network that automatically provides synchronization information to one or
more associated remote transceivers. A radio may be programmed for
either master or remote mode using software commands. See Section
6.0, PROGRAMMING (beginning on Page 28).
MCU—Microcontroller Unit. This is the processor responsible for con-
trolling system start-up, synthesizer loading, hop timing, and key-up
control.
Microcontroller Unit—See MCU.
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide 65
Page 74

Mode—This refers to the programmed function of an MDS spread spectrum radio—master or remote. (See also Remote Station and Master Sta-
tion.)
Multiple Address System (MAS)—See Point-Multipoint System.
Network Address—User-selectable number between 1 and 65000 that
is used to identify a group of transceivers that form a communications
network. The master and all remotes within a given system must have
the same network address.
Network-Wide Diagnostics—An advanced method of controlling and
interrogating MDS radios in a radio network. It works by interspersing
diagnostic data with payload data.
Point-Multipoint System—A radio communications network or
system designed with a central control station that exchanges data with
a number of remote locations equipped with terminal equipment.
Poll—A request for data issued from the host computer (or master PLC)
to a remote radio.
PLC—Programmable Logic Controller. A dedicated microprocessor
configured for a specific application with discrete inputs and outputs. It
can serve as a host or as an RTU.
Remote Radio—A radio in a spread spectrum network that communicates with an associated master station. A radio may be programmed for
either master or remote mode using software commands. See Section
6.0, PROGRAMMING (beginning on Page 28).
Remote Terminal Unit—See RTU.
RTU—Remote Terminal Unit. A data collection device installed at a
remote radio site.
SCADA—Supervisory Control And Data Acquisition. An overall term
for the functions commonly provided through an MAS radio system.
Standing Wave Ratio—See SWR.
SWR—Standing Wave Ratio. A parameter related to the ratio between
forward transmitter power and the reflected power from the antenna
system. As a general guideline, reflected power should not exceed 10%
of the forward power (≈ 2:1 SWR).
Zone—See Frequency Zone.
66 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 75

INDEX
A
ACCESS DENIED error message 31
Accessories (table) 7
ADDR command (set/display radio network address) 36
Alarm
checking for 51
code definitions 52
codes 51
codes, table 52
major vs. minor 51
output pin (Pin 25) 60
receiver timeout (RXTOT command) 43
reset output signal 36
set/display output sense (ASENSE command) 36
status (STAT command) 47
ALARM command (obsolete; see STAT command) 47
AMASK command (configure alarm output signal) 36
Antenna
installation 16
performance optimization 26
selection 11
SWR check 27
system gain vs. power output setting, table 14
system gain, defined 64
Yagi, illustrated 12
ASENSE command (set/display alarm output sense) 36
B
BAUD command (set/display data interface port attributes) 36
Baud rate
setting 28
setting for RJ-11 DIAG port (DLINK command) 54
Baud rate (diagnostics link) 39, 55
Bit, defined 64
BPS (bits-per-seond), defined 64
BUFF command (set/display received data handling mode) 37
Byte, defined 64
C
Cable
adapter, for connecting diagnostics PC to radio 54, 62
adapter, RJ-11 to DB-9 (illustrated) 54, 62
data equipment to DATA INTERFACE connector 16
data interface wiring for null-modem 23, 24
data interface wiring for peer-to-peer systems with repeater
assistance 21
data interface wiring for tail-end links 22
feedlines 12
HHT to radio (coiled cord) 28
local interface for repeater system 21
maximum length, recommended 17
null-modem, for repeater system 22, 23
null-modem, for same-site radios 54
power (positive/negative leads) 17
COMMAND FAILED error message 31
Commands
ADDR (set/display radio network address) 36
AMASK (configure alarm output signal) 36
ASENSE (set/display alarm output sense) 36
BAUD (set/display data interface port attributes) 36
BUFF (set/display received data handling mode) 37
CTS (set/display CTS line response timer) 37
CTSHOLD (set/display CTS hold timer) 38
detailed descriptions 32–50
DEVICE (set/display DCE or CTS Key behavior) 38
display operating status 34
DLINK (set/display baud rate of diagnostics link) 39
DMGAP (set time to wait between characters) 39
DTYPE (set radio’s diagnopstics type) 39
entering on Hand-Held Terminal (HHT) 30
Hand-Held Terminal (HHT) 30
HOPTIME (set/display hoptime setting) 40
how used 35
INIT (restore factory default settings) 41
MODE (set/display master/remote operation) 41
most used 32, 35
network configuration 32, 54
OWM (set/display optional owner’s message) 42
OWN (set/display optional owner’s name) 42
PWR (set/display RF forward output power) 42
RSSI (display received signal strength) 42
RTU (enable/disable internal RTU) 43
RX (set/display test receive frequency) 43
RXTOT (set/display received data timeout value) 43
SEND (set/display number of re-sends) 43
set/program 33
SETUP (enter testing and setup mode) 44
SHOW (display active port, dc volts, measured power
output) 45
SIMPLEX (set/display simplex/half-duplex operation) 45
SKIP (set/display frequency zone to skip) 46
SKIPSYNC (set/display status of SYNC messages in
skipped zones) 46
SNR (display signal-to-noise ratio) 46
SREV (display transceiver software version) 47
STAT (list alarms) 47
summary, table 32
TDD (set/display time division multiplex status) 47
TEMP (display internal temperature) 48
CTS command (set/display CTS line response timer) 37
CTSHOLD command (set/display CTS hold timer) 38
D
Data buffer setting 27, 37
DATA INTERFACE
connections 58
connector pin descriptions, table 59
connector pins, illustrated 59
connector, RSSI vs. V dc at Pin 21 of (illustrated) 58
Data interface
cable wiring for peer-to-peer systems with repeater
assistance 21
cable wiring for repeater, illustrated 23, 24
cable wiring for tail-end links, illustrated 22
setting parameters 19
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide I-1
Page 76

dBi, defined 64
dBm, defined 64
DCE, defined 64
Decibel (dB), defined 64
Default settings
data interface baud rate 28
factory settings reset by INIT command (table) 41
re-initializing HHT to 29
restoring (INIT command) 41
See also individual command descriptions
DEVICE command (set/display DCE or CTS Key
behavior) 38
Diagnostics
network-wide, performing 53
setup mode (SETUP command) 44
using InSite software for network-wide 53
Display
alarm output sense (ASENSE command) 36
alarms (STAT command) 47
connector port, diagnostics (SHOW command) 45
CTS hold timer value (CTSHOLD command) 38
CTS line response timer value (CTS command) 37
data interface baud rate (BAUD command) 36
dc input/output voltages (SHOW command) 45
device behavior (DEVICE command) 38
hoptime setting (HOPTIME command) 40
master or remote operation (MODE command) 41
network address (ADDR command) 36
operating status commands 34
owner’s message (OWM command) 42
owner’s name (OWN command) 42
received data handling mode (BUFF command) 37
received data timeout value (RXTOT command) 43
received signal strength (RSSI command) 42
RF forward output power (PWR command) 42
RF power output, actual measured (SHOW command) 45
signal-to-noise ratio (SNR command) 46
simplex or half-duplex operation (SIMPLEX command) 45
skipped frequency zones (SKIP command) 46
software version, transceiver (SREV command) 47
temperature, internal (TEMP command) 48
test receive frequency (RX command) 43
DKEY command (dekey transmitter) 27, 35, 45
DLINK command (set/display baud rate of diagnostics
link) 39, 54, 55
DMGAP command (set/display time to wait between
characters) 39
DSP (Digital Signal Processing), defined 64
DTE, defined 64
DTYPE command (set radio’s diagnostics type) 39, 54, 55
E
EEPROM FAILURE error message 32
Enable
diagnostics channel by grounding Pin 23 of HHT cable 29
HHT setup mode 29
internal RTU (RTU command) 43
master/remote operation (MODE command) 41
network-wide diagnostics, procedures 54
Setup mode (SETUP command) 44
simplex/half-duplex operation (SIMPLEX command) 45
skipped zone (SKIP command) 46
Sleep Mode 25
Equalization, defined 64
Error messages
on Hand-Held Terminal (HHT) 31
F
Fade margin, defined 65
Feedline
selection 11, 12
Frame, defined 65
Frequency hopping, defined 65
Frequency zone
defined 65
table 46
G
Gate (radio diagnostics type) 39, 55
Glossary 63–66
H
Hand-Held Terminal (HHT)
command summary, table 32
connected to transceiver, illustrated 18, 29
connection and start-up 28
entering commands 30
error messages 31
keyboard commands 30
operational settings, table 30
re-initialization 29
setup display, illustrated 30
Hardware flow control, defined 65
Hopping, defined 65
Hoptime
parameters, table 40
setting 27
HOPTIME command (set/display hoptime setting) 40
Host computer, defined 65
I
Illustrations
antenna, Y agi 12
bench test setup 61
data interface cable wiring 21
data interface cable wiring for repeater 23, 24
data interface cable wiring for tail-end links 22
DATA INTERFACE connector pins 59
HHT connected to transceiver 18, 29
HHT setup display 30
LED status indicators 26
model configuration code 2
network-wide diagnostics 53
peer-to-peer network with repeater assistance 5, 20
point-to-point link 5
remote station arrangement 8
repeater system configuration 6
RJ-11 to DB-9 adapter 62
RJ-11 to DB-9 adapter cable 54
RSSI vs. V dc at Pin 21 of DATA INTERFACE
connector 58
simplex peer-to-peer network 4
tail-end link 6
transceiver 1
typical MAS network 3
INCORRECT ENTRY error message 31
INIT command (restore factory default settings) 41
InSite software 53
Installation 14–25
antenna 16
configuring the transceiver 17
connecting transceiver to data equipment 16
I-2 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 77

feedline selection 12
peer-to-peer systems 19
performance optimization 26
primary power 17
programming network address 18
repeaters 22
requirements 7
setting data interface parameters 19
site selection 8
site survey 9
tail-end links 21
transmission path 8
Interference
about 10
checks 28
troubleshooting 56
K
Key
set to CTS keying (DEVICE command) 38
transmitter, for antenna SWR check 27
KEY command (key transmitter) 27, 35, 45
L
Latency, defined 65
LED status indicators
illustrated 26
table 26
M
Master Station
default settings 41
defined 65
MCU (Microcontroller Unit), defined 65
MDS Radio Configuration software 61
MODE command (set/display master/remote operation) 41
Mode, defined 66
Model configuration code, illustrated 2
Mounting instructions 15
Multiple Address System (MAS)
defined 65
network, illustrated 3
N
Network address
defined 66
programming 18
Network configuration commands 32, 54
Network-wide diagnostics
defined 66
illustrated 53
procedures 53
Node (radio diagnostics type) 39, 55
NOT AVAILABLE error message 31
NOT PROGRAMMED error message 31
O
Operation 26–28
OWM command (set/display optional owner’s message) 42
OWN command (set/display optional owner’s name) 42
P
PASSWORD INVALID error message 31
PC
connecting to radio for software upgrade 62
connecting to radio’s diagnostic port 54
launching InSite application at 55
performing diagnostics using connected 53
Peer (radio diagnostics type) 39, 55
Peer-to-peer network
installation 19
with repeater assistance, illustrated 5, 20
Performance optimization 26
Pins, DATA INTERFACE connector descriptions (table) 59
PLC (Programmable Logic Controller), defined 66
Point-to-multipoint system
defined 66
power usage 13
Point-to-point system
link, illustrated 5
Poll, defined 66
Power
how much can be run 13
measuring and installing primary 17
set/display RF forward output (PWR command) 42
sleep mode 25
Procedures
antenna aiming 27
antenna and feedline selection 11
antenna SWR check 27
configuring the transceiver 17
connecting data equipment to DATA INTERFACE
connector 16
connecting PC and radios for network-wide diagnostics 54
enabling sleep mode 25
entering commands using Hand-Held Terminal (HHT) 30
Hand-Held Terminal (HHT) connection and start-up 28
Hand-Held Terminal (HHT) set-up 29
installation 14–25
installation planning 7
installing the antenna and feedline 16
interference check 28
measuring and installing primary power 17
mounting the transceiver 15
network-wide diagnostics 53
performance optimization 26
performing network-wide diagnostics 53
programming radio for network-wide diagnostics 54
programming the radio 28–32
reading LED status indicators 26
site selection 8
troubleshooting 50–56
Programming radio 28–50
as root or node 54
PWR command (set/display RF forward output power) 42
R
Radio
bench test setup, illustrated 61
bench testing setup 61
checking RSSI with voltmeter 58
connecting PC to (for software upgrade) 62
inoperative (troubleshooting chart) 56
no synchronization with master (troubleshooting chart) 56
poor performance (troubleshooting chart) 56
Remote radio
default settings 41
defined 66
Remote station
typical arrangement, illustrated 8
Repeater
MDS 05-3301A01, Rev. C MDS 9810 Installation and Operation Guide I-3
Page 78

data interface cable wiring for, illustrated 23, 24
installation 22
installing peer-to-peer with 20
system, illustrated 6
using single radio for 24
Root (radio diagnostics type) 39, 55
RSSI
checking with voltmeter 58
RSSI command (display received signal strength) 42
RTU (Remote Terminal Unit)
defined 66
simulator (used in test setup) 61
RTU command (enable/disable internal RTU) 43
RX command (set/display test receive frequency) 43
RXTOT command (set/display received data timeout
value) 43
S
SCADA (Supervisory Control and Data Acquisition),
defined 66
SEND command (set/display number of re-sends) 43
Set
alarm output sense (ASENSE command) 36
alarm output signal (AMASK command) 36
CTS hold timer (CTSHOLD command) 38
CTS line response timer (CTS command) 37
data interface baud rate (BAUD command) 36
DCE or CTS Key device behavior (DEVICE command) 38
frequency zone to skip (SKIP command) 46
hoptime (HOPTIME command) 40
master/remote operation (MODE command) 41
network address (ADDR command) 36
owner’s message (OWM command) 42
owner’s name (OWN command) 42
received data handling mode (BUFF command) 37
received data timeout value (RXTOT command) 43
simplex or half-duplex operation (SIMPLEX command) 45
test receive frequency (RX command) 43
testing mode (SETUP command) 44
Set/program commands 33
SETUP command (enter testing and setup mode) 44
SHOW command (display active port, dc volts, measured
power output) 45
Simplex
installing peer-to-peer system 19
peer-to-peer network, illustrated 4
SIMPLEX command (set/display simplex/half-duplex
operation) 45
Single-radio repeater 24
Site selection 8
SKIP command (set/display frequency zone to skip) 46
SKIPSYNC (set/display status of SYNC messages in skipped
zones) 46
Sleep mode 25
SNR command (display signal-to-noise ratio) 46
Software
cable connection for upgrade 62
radio configuration 61
SREV command (display transceiver software version) 47
STAT command (list alarms) 47
SWR (Standing Wave Ratio)
defined 66
performance optimization 27
T
Tables
accessories 7
alarm codes 52
antenna system gain vs. power output setting 14
DATA INTERFACE connector pin descriptions 59
frequency zones 46
Hand-Held Terminal (HHT) command summary 32
HHT operational settings 30
hop time parameters 40
LED status indicators 26
troubleshooting 56
Tail-end link
cable wiring for, illustrated 22
illustrated 6
installation 21
TDD (set/display time division multiplex status) 47
Technical reference 56–63
Technical specifications 56–58
TEMP command (display internal temperature) 48
Temperature, display internal (TEMP command) 48
Testing
bench setup 61
bench setup, illustrated 61
TEXT TOO LONG error message 31
Transceiver
configuring 17
connected to HHT, illustrated 18
connecting to data equipment 16
default settings 41
HHT connected to, illustrated 29
illustrated 1
mounting instructions 15
performance optimization 26
sleep mode 25
Troubleshooting 50–56
performing network-wide diagnostics 53
table 56
U
UNKNOWN COMMAND error message 31
I-4 MDS 9810 Installation and Operation Guide MDS 05-3301A01, Rev. C
Page 79

IN CASE OF DIFFICULTY...
MDS products are designed for long life and trouble-free operation. However, this equipment, as
with all electronic equipment, may have an occasional component failure. The following information will assist you in the event that servicing becomes necessary.
TECHNICAL ASSISTANCE
Technical assistance for MDS products is available from our Technical Support Department during
business hours (8:00 A.M.–5:30 P.M. Eastern Time). When calling, please give the complete
model number of the radio, along with a description of the trouble/symptom(s) that you are experiencing. In many cases, problems can be resolved over the telephone, without the need for
returning the unit to the factory. Please use one of the following means for product assistance:
Phone: 585 241-5510 E-Mail: TechSupport@microwavedata.com
FAX: 585 242-8369 Web: www.microwavedata.com
FACTORY SERVICE
Component level repair of radio equipment is not recommended in the field. Many components are
installed using surface mount technology, which requires specialized training and equipment for
proper servicing. For this reason, the equipment should be returned to the factory for any PC board
repairs. The factory is best equipped to diagnose, repair and align your radio to its proper operating
specifications.
If return of the equipment is necessary, you will be issued a Service Request Order (SRO) number.
The SRO number will help expedite the repair so that the equipment can be repaired and returned
to you as quickly as possible. Please be sure to include the SRO number on the outside of the shipping box, and on any correspondence relating to the repair. No equipment will be accepted for
repair without an SRO number.
A statement should accompany the radio describing, in detail, the trouble symptom(s), and a
description of any associated equipment normally connected to the radio. It is also important to
include the name and telephone number of a person in your organization who can be contacted if
additional information is required.
The radio must be properly packed for return to the factory. The original shipping container and
packaging materials should be used whenever possible. All factory returns should be addressed to:
Microwave Data Systems
Product Services Department
(SRO No. XXXX)
175 Science Parkway
Rochester, NY 14620 USA
When repairs have been completed, the equipment will be returned to you by the same shipping
method used to send it to the factory. Please specify if you wish to make different shipping arrangements. To inquire about an in-process repair, you may contact our Product Services Group at
585-241-5540 (FAX: 585-242-8400), or vie e-mail at ProductServices@microwavedata.com.
Page 80

Microwave Data Systems Inc.
175 Science Parkway
Rochester, NY 14620
General Business: +1 585 242-9600
FAX: +1 585 242-9620
Web: www.microwavedata.com
A product of Microwave Data Systems Inc.
 Loading...
Loading...