


D
Mclennan Servo Supplies Ltd.
User Manual
for
SimStep
Single Axis
Stepper Drive & Controller

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 1
User Manual for SimStep
Single Axis Stepper Motor Drive and Controller
Mclennan Drg. No. 3400 Issue D
Associated Documents:
MSE570 E2 Data Sheet
PM600 Manual
Software:
McTerminal Terminal and Monitor Program
The associated documents are available from the technical documents section of our web site
www.mclennan.co.uk
SAFETY NOTICE!
Position control systems are inherently hazardous. Even a small motor, if
coupled to a leadscrew, gearbox, or any other form of mechanism that
provides a mechanical advantage, can generate considerable force and
could cause serious injury. Incorrect operation can also lead to damage to
the motor or associated machinery. It is essential that the purpose of the
various fault detection features built into the SimStep’s PM600 controller be
fully understood and used correctly.
Mclennan Servo Supplies Ltd.
22 Doman Road,
Yorktown Industrial Estate,
Camberley,
Surrey,
GU15 3DF
UK
Telephone: +44 (0)8707 700 700
FAX: +44 (0)8707 700 699
Sales EMAIL: sales@mclennan.co.uk
Technical support EMAIL: tech@mclennan.co.uk
The manufacturer reserves the right to update the data used in this manual in line with
product development without prior notice.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 2
CONTENTS
1D
ESCRIPTION
.......................................................................................................................................... 3
1.1 R
EAR VIEW
: ..................................................................................................................................4
1.2 L
INK SETTINGS
.............................................................................................................................. 6
2E
XTERNAL INTERFACE CONNECTIONS
....................................................................................................... 7
3C
ABLES
................................................................................................................................................. 10
3.1 M
OTOR AND LIMIT/DATUM CABLES
................................................................................................ 10
3.2 E
LECTRO-MAGNETIC COMPATIBILITY
(EMC) ................................................................................. 10
3.3 E
NCODER CABLES
....................................................................................................................... 11
3.3.1 Typical Motor Encoders..................................................................................................11
4M
OTOR CONNECTIONS
........................................................................................................................... 12
4.1 C
OLOUR CODE FOR 8 LEAD MOTORS
: ........................................................................................... 12
4.2 C
ONNECTING TO THE
MSA889 J
UNCTION BOX
............................................................................ 13
4.3 C
ONNECTION OF LIMITS AND DATUM
............................................................................................ 14
4.3.1 Datum Position................................................................................................................15
4.3.2 Using Over-travel limits as datum inputs........................................................................ 15
5P
OWER SUPPLY UNIT
............................................................................................................................. 16
6 MSE570 S
TEPPER DRIVE
...................................................................................................................... 17
6.1 G
ENERAL SET-UP
:.......................................................................................................................17
6.2 C
URRENT SETTING
...................................................................................................................... 17
6.3 O
THER
MSE570 C
URRENT SETTINGS
.......................................................................................... 18
7M
ANUAL OPERATION USING THE JOG BOX OR JOYSTICK
.......................................................................... 19
7.1 J
OG BOXES
- JC S
ERIES
............................................................................................................. 19
7.2 S
INGLE AND DUAL AXIS JOG BOX OPERATION
............................................................................... 20
7.3 M
ULTI-AXIS JOG BOX OPERATION
................................................................................................ 20
7.4 J
OYSTICK
- JC S
ERIES
................................................................................................................ 21
7.5 J
OYSTICK OPERATION
.................................................................................................................. 21
8 PM600 I
NTELLIGENT STEPPER MOTOR CONTROLLER
............................................................................. 22
8.1 G
ENERAL
.................................................................................................................................... 22
8.2 S
ETTING UP THE ENCODER (CLOSED-LOOP CONTROL MODES ONLY
)............................................ 22
8.2.1 Encoder Termination ...................................................................................................... 22
8.2.2 Encoder Scaling.............................................................................................................. 23
8.2.3 Encoder Direction ........................................................................................................... 23
8.3 P
ROGRAMMING VIA THE
RS232 I
NTERFACE
.................................................................................. 23
8.4 G
ENERAL COMMAND STRUCTURE
................................................................................................ 25
8.5 E
XAMPLES OF COMMAND STRUCTURE
.......................................................................................... 25
9 I/O C
ABLE AND BREAKOUT BOX
............................................................................................................. 26
9.1 I
SOLATION
................................................................................................................................... 27
9.2 T
YPICAL CONNECTIONS
............................................................................................................... 27
9.3 R
EAD PORTS
............................................................................................................................... 27
9.4 W
RITE PORTS
............................................................................................................................. 28
9.4.1 Inductive Loads............................................................................................................... 28
10 SIMS
TEP
E
XAMPLE SEQUENCE
............................................................................................................... 28
10.1 S
EQUENCE DEFINITIONS
.............................................................................................................. 28
10.2 C
ONFIGURATION
.......................................................................................................................... 29
10.3 R
UN SEQUENCE
.......................................................................................................................... 29
11 O
RDER CODES
...................................................................................................................................... 30
11.1 S
YSTEM
...................................................................................................................................... 30
11.2 M
OTOR ENCODERS
..................................................................................................................... 30
11.3 C
ABLES
...................................................................................................................................... 30
11.4 J
UNCTION BOXES
........................................................................................................................ 30
11.5 J
OG BOXES
& J
OYSTICK
.............................................................................................................. 30
11.6 EMC F
ERRITES
........................................................................................................................... 30
12 L
IMITATIONS OF USE
.............................................................................................................................. 31

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 3
1 Description
The system is a single axis stepper motor control and drive rack. Motor motion is
commanded either from a computer or from a terminal via the RS232 (or RS485) serial
data port or from a manual Jog Box or Joystick controller. The controller can drive stepper
motors in open-loop (step counting) mode or encoded motors/mechanisms in closed-loop
mode.
The controller consists of:
1 MSE570-Evo2 3.5A Stepper Drive
1 PM600 Motor Controller
1 MSB867 Backplane
1 MSE779 Power Supply Board
These are mounted in a 3U high 28HP rack unit. The SimStep is supplied with a mains
lead, an RS232 cable and an RS232 terminator. A range of standard motor, encoder,
limits/datum and I/O cables are available.
Fig.1.1
SimStep
Front View
The system has a PM600 controller and a MSE570 Stepper drive powered by a power
supply based on the MSE779 power supply board.
The PM600 controller and the MSE570 plug into the MSB867 backplane.
Step, clock
and
direction
signals from the PM600 are fed to the MSE570 Stepper drive. The bipolar
stepper motor is connected to the MSB867 backplane via a rear panel connector.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 4
The PM600 position controller generates the
clock
and
direction
signals for the MSE570
drive in response to move commands.
The PM600
enable
output is connected to the
enable
input of the MSE570 drive. If the
PM600’s
enable
output is turned off (e.g. as a result of an error) the motor current will
turned off. The
enable
output may be turned off by an AB
abort
command, or
reset
(turned
on) by an RS command (see Section 6.4).
The
Idle
output from the PM600 is connected to the
current reduction
input on the
MSE570 to reduce the motor current to about 25% when the motor is not moving.
An incremental encoder can be fitted to the motor or mechanism to monitor the movement
of the mechanism. The quadrature signals from the encoder are connected to the PM600
to allow passive closed-loop operation. The system is initially supplied with the PM600
configured for open-loop operation. The PM600 must be reconfigured for closed-loop
operation (see Section 8.2).
The MSB867 has a multi-axis jog receiver; it allows the PM600’s Jog inputs to be
controlled by a JC809 Jog Box. The axis addresses shown on the JC809 may be
changed by altering the settings of the rotary switches accessible by removing the top
cover of the unit.
The power supply provides +24V (nominal) to energise the supply rail on the PM600
controller, and +40V (nominal) to energise the supply rail on the MSE570 drive.
The PM600 manual referred to in this document can be found on www.mclennan.co.uk.
1.1 Rear View:
Fig.1.2 SimStep Rear Panel
Connections for motors, limits/datum, I/O, encoders, RS232 and mains are taken from the
MSB867 backplane to connectors on the rear panel.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 5
The mains input is a filtered IEC inlet.
The MOTOR connector has outputs from the PM570-Evo2 stepper drive to connect to a
bipolar stepper motor.
WARNING! Serious damage will occur if the motor is connected or disconnected
whilst the power is switched on. Allow 30 seconds after switching off.
The LIMITS/DATUM connectors have inputs for the Upper and Lower Limit switches, a
Datum Approach switch and a Datum Stop switch. The connections to the Limit switch
inputs must be made for normal operation of the PM600 controllers.
Limit switches must not be used as a safety device or part of a safety system for
ensuring the safety of persons
The ENCODER connector is for the position encoder input. It has a +5V supply to
energise the encoder, complementary
quadrature
inputs and complementary
index
inputs.
The JOG A and JOG B connectors have inputs for Jog pushbuttons, a Joystick control
and data connections for a JC809 Jog Box.
They have connections for Jog, Jog- and Jog Fast pushbuttons compatible with a JC100
Jog Box and +5V, 0V Joystick input and Joystick centre tap compatible with a JC400
Joystick. The JC100 and JC400 may be plugged into either connector.
If using a JC809 Multi axis jog box, the axis address that is assigned to Jog is set on the
MSB867 interface board using a rotary switch (see section 5.2). The JC809 can be
connected to other axes by using a ‘Jog daisy-chain’ cable plugged into the vacant JOG A
or JOG B connector. The Jog Terminator supplied with the JC809 must be plugged into
the vacant connector in the last axis in the daisy-chain.
The I/O connector has inputs and outputs from PM600’s
Read
inputs and
Write
outputs.
There are also connectors for RS232 IN for connecting to the computer or terminal that
supplies the control data and RS232 OUT for connecting either to a subsequent control
rack (
daisy-chain
) or to an RS232 terminator. These connectors can also be configured for
RS485 communications (see section 1.2).
Note: The RS232 Terminator supplied with the control system must be fitted to the last
unit in the
daisy-chain
. This allows both replies from, and commands sent to, the controller
to be echoed back.
WARNING! To avoid overheating, the vents in the top and bottom of the unit must
be unobstructed at all times.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 6
1.2 Link Settings
The control operation of the SimStep can be configured by means of links fitted to the
MSE867. The links can be accessed by removing the rear top cover of the unit.
Fig. 1 Link Location
Link Action Default
LK1 Select automatic current reduction from PM600 idle output On
LK2 Drive over-temperature activates PM600
abort stop
input On
LK3 Drive overload activates PM600
abort stop
input On
LK4 to LK7 1-2 selects RS485, 2-3 selects RS232 RS232
LK8 Select internal (on) or external (off)
abort stop
Internal
LK1 If LK1 is on, the current to the motor will be reduced to about 25% of the current
set on the drive when the motor has finished its move and the controller returns to
Idle
. The primary use of this function is to reduce the heating effect caused by the
motor. It is not intended to produce a precise holding-torque.
If LK1 is removed, the motor current will remain at the current set on the drive.
This setting is usually only needed when a high holding-torque is required. E.g.
when driving a mechanism with an offset load.
LK2 If LK2 is on, an over-temperature fault detected on the drive output stage will
cause the controller
abort stop
input to be activated.
LK3 Likewise if LK3 is on, an overload fault detected on the drive output stage will
cause the controller
abort stop
input to be activated.
LK4-7 These two position links select either the RS232 or RS485 communication
interfaces. When the links LK4 to LK7 are all in the 1-2 position, RS485 is selected
and when all in the 2-3 position, RS232 is selected.
If using RS485 communication, The last SimStep in the line should have SW3-8
on the PM600 switched to the ON position. This selects a 100Ω terminating
resistor. See figs 8.2 and 8.3 in section 8.3.
LK8 If LK8 is removed (off) the external ‘Abort Stop’ input selected. Pins 7 and 14 on
the Limits/Datum connector must be linked (via a normally-closed contact or
switch) to enable moves.
LK8 LK7 to LK1

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 7
2 External Interface Connections
MAINS supply
Connector type: IEC chassis plug
Terminal Connection
L Live input 115/230V AC
(Internally selectable)
N Neutral input
E
Earth. THIS UNIT MUST BE EARTHED
MOTOR
Connector type: HAN-4A socket
Mating Cable: 507MOCxx892 (xx = length)
Terminal Connection
1 Motor Phase A+
2 Motor Phase A3 Motor Phase B+
4 Motor Phase BE Screen
LIMITS/DATUM RED
Connector type: 15 way ‘D’ Plug
Mating Cable: 507LDCxx894 (xx = length)
Terminal Connection
1
2 0V
3 Upper Limit Input 4 Lower Limit Input 5 Datum Approach Input 6 Datum Stop Input 7 Abort Stop – (selected by internal link LK8)
8
9
10 Upper Limit Input + (24V)
11 Lower Limit Input + (24V)
12 Datum Approach Input + (24V)
13 Datum Stop Input + (24V)
14 Abort Stop + (24V)
15
Link pins 3 and 10 to enable positive moves
Link pins 4 and 11 to enable negative moves
Link pins 5 and 12 for fast datum search
If external ‘Abort Stop’ selected, link pins 7 and 14 to enable moves.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 8
ENCODER BLUE
Connector type: 15 way ‘D’ socket
Mating Cable: 507ENCxx893 (xx = length)
Terminal Connection
1
2 0V
3 Channel A4 Channel B5 Channel I6
7
8
9 +5V
10
11 Channel A+
12 Channel B+
13 Channel I+
14
15
I/O YELLOW
Connector type: 25 way 'D' socket
Mating Cable: 507IOCxx895 (xx = length)
Terminal Connection
1 Write Port 1
2 Write Port 2
3 Write Port 3
4 Write Port 4
5 Write Port 5
6 Write Port 6
7 Write Port 7
8 Write Port 8
9 Write Port Common (Isolated Supply)
10 +VLL (Controller Supply)
11
12
13
14 Read Port 1
15 Read Port 2
16 Read Port 3
17 Read Port 4
18 Read Port 5
19 Read Port 6
20 Read Port 7
21 Read Port 8
22 Read Port Common (Isolated 0V)
23 0V (Controller 0V)
24
25
Refer to PM600 Manual sections 2.18 and 3.16 for typical connections.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 9
JOG A and JOG B GREEN
Connector type: 15 way 'D’ socket
Compatible with JC100, JC400 and JC809 manual controls
Terminal Connection
1 Jog Common (~+24V)
2 0V
3 Jog + Input
4 Jog – Input
5 Jog Fast Input
6
7
8
9 Joystick Supply (+5V)
10 Joystick Input
11
12 Joystick Centre Tap Input
13
14 Data A
15 Data B
RS232 IN
Connector type: 9 way 'D' type socket
Terminal RS232 Connection RS485 Connection
1 RS485-A
2 Transmit Data
3 Receive Data
4
5 0V
6 RS485-B
7 CTS
8 RTS
9
RS232 OUT
Connector type: 9 way 'D' type plug
Terminal RS232 Connection RS485 Connection
1 RS485-A
2 Receive Data
3 Transmit Data
Link to echo replies
and commands
4
5 0V
6 RS485-B
7 RTS
8 CTS
Link to echo replies
and commands
9
SimStep Manual - 3400 Iss. D 7
th
June 2004 page 10
3 Cables
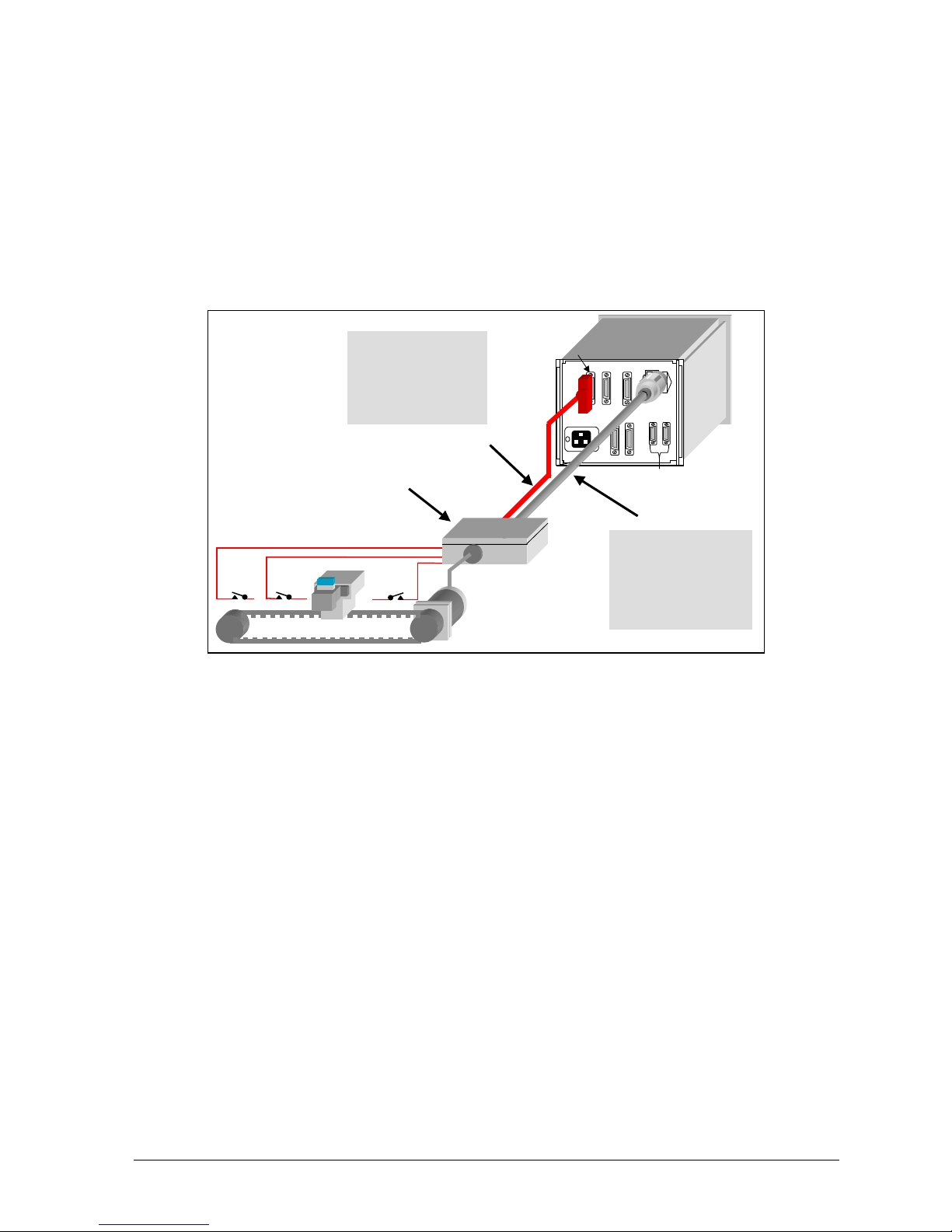
3.1 Motor and Limit/Datum cables
Motor and limit/datum cables fitted with connectors to plug into the rear panel of the
SimStep may be specified. The available lengths are shown below. The motor cables
have a connector on both ends, which can be connected either to the connector fitted to
the stepper motor or to the stepper motor wires via an MSA889 Junction Box.
Likewise, the
Limit
and
Datum
connections can be made either by connecting to the
socket on the end of the cable or via an MSA889 junction box. The connections to the
MSA889 junction box are shown in figures 4.2 and 4.3.
Fig. 3.1 Motor and Limit/Datum Cables
3.2 Electro-magnetic Compatibility (EMC)
The SimStep complies with EN-50081-1 and EN50082-1 when properly with cables that
use EMC connectors. The cable used to connect the motor to the drive should be a
screened, twisted pair type. The screen should be connected at both ends of the cable.
On the drive end, the screen should be connected to earthed metalwork of the case and
on the motor end, the screen should be connected to the motor body.
The EMC profile may be improved by fitting ferrite sleeves to the motor cables. For cable
diameters from 7mm to 8.5mm use RS part number 260-6492. For cable diameters from
8.5mm to 10mm use RS part number 309-7962.
Limit/Datum Cables
Length Type
1 m 507LDC01894
2 m 507LDC02894
3 m 507LDC03894
5 m 507LDC05894
10m 507LDC10894
Limit/Datum Cable
Junction Box
Type MSA889
Motor Cable
Motor Cables
Length Type
1 m 507MOC01892
- Limit Datum + Limit 2 m 507MOC02892
3 m 507MOC03892
Motor 5 m 507MOC05892
10m 507MOC10892
SimStep Manual - 3400 Iss. D 7
th
June 2004 page 11
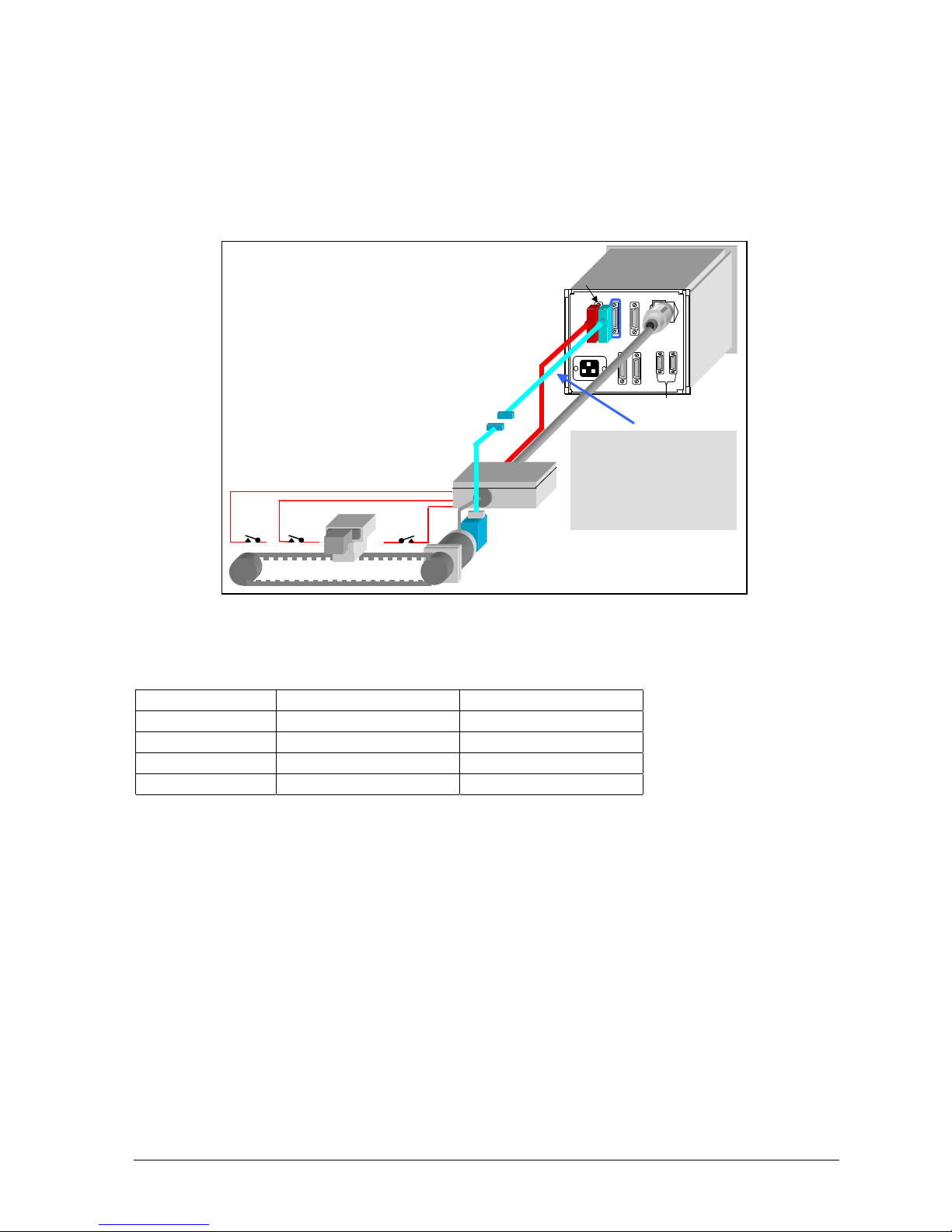
3.3 Encoder Cables
The SimStep can be connected to the encoder via an encoder cable that is equipped with
connectors at each end. One connector plugs into the controller, the other into the motorencoder extension cable as shown in fig 3.2.
Alternatively, if the motor has a connector box, the cable can be plugged in directly.
Fig. 3.2 Encoder Cable
3.3.1 Typical Motor Encoders
Frame size Motor Encoder Order Code
Size 23 23HSX-206 CI 500L 301HSE00053
23HSX-306 CI 500L 301HSE00054
Size 34 34HSX-108 RI 500L 301HSE00055
34HSX-208 RI 500L 301HSE00056
.
- Limit Datum + Limit
Motor-encoder
Encoder Cables
Type Cable length
507ENC01893 1 m
507ENC02893 2 m
507ENC03893 3 m
507ENC05893 5 m
507ENC10893 10 m
SimStep Manual - 3400 Iss. D 7
th
June 2004 page 12
4 Motor Connections
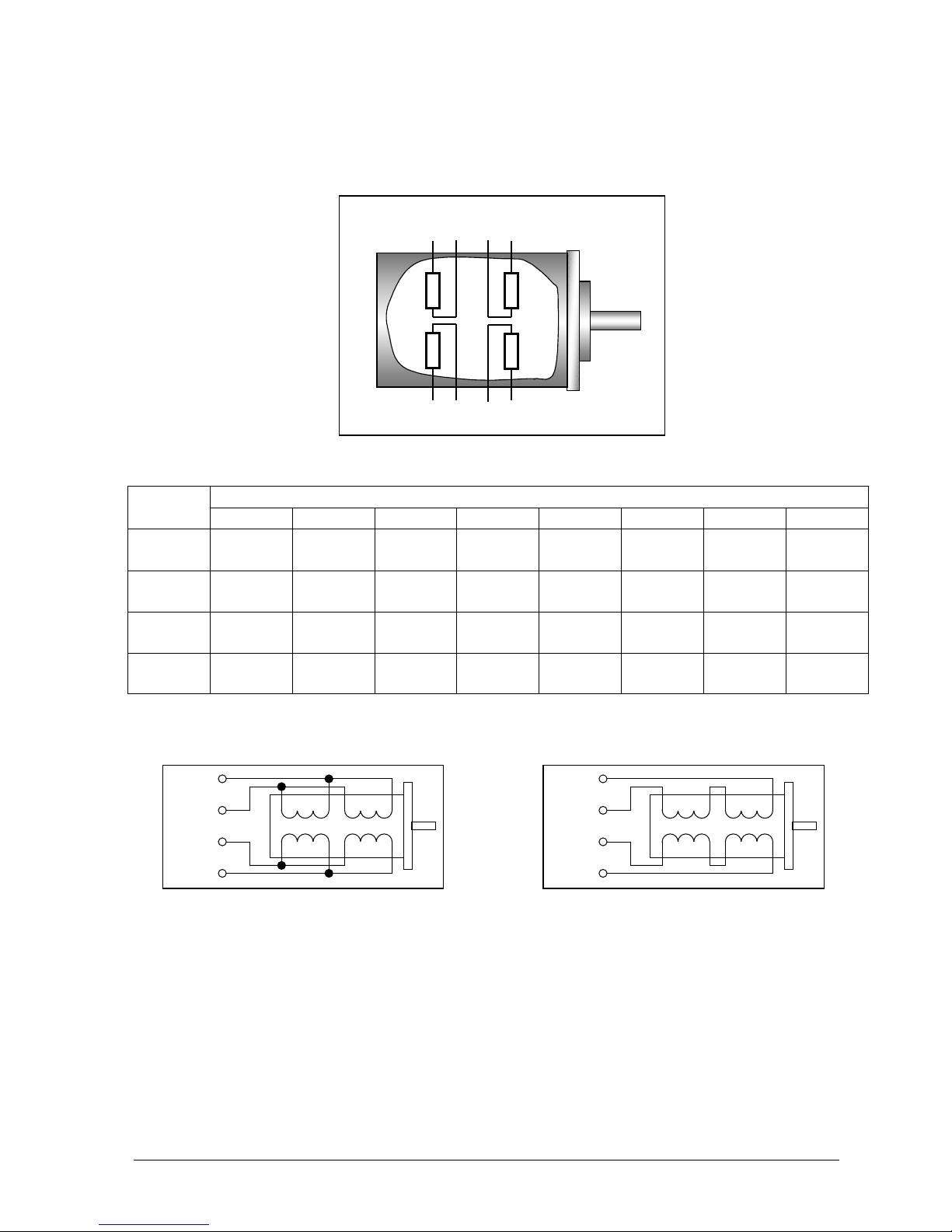
4.1 Colour Code for 8 lead motors:
The motor will have eight leads that can be identified as shown in figure 4.1.
Fig. 4.1 Eight lead 23 & 34 frame size motors
Lead identificationMotor
1 1’ 2’ 2 3 3’ 4’ 4
HS
Series
Red White/
Red
White/
Yellow
Yellow Black White/
Black
White/
Orange
Orange
or
Red Black White White/
Red
White/
Green
White/
Black
Orange Green
23HSX
Red White/
Red
White/
Yellow
Yellow Orange White/
Orange
White/
Brown
Brown
34HSX
Red White/
Red
White/
Yellow
Yellow Black White/
Black
White/
Orange
Orange
The motor can be connected into the MSA889 junction box as shown in fig. 4.4. Internal
links select parallel or series operation. This function is shown in figures 4.2 and 4.3.
The maximum drive current for coils wired in parallel is the unipolar motor phase current
rating x √2. The maximum drive current for coils wired in series is the unipolar motor
phase current rating / √2.
To reverse motor direction, swap the connections to one phase. E.g., swap B with B’.
1 1’ 3’ 3
2 2’ 4’ 4
Phase A’
Phase A
Phase B’
Phase B
11’2
2’
33’ 4
4’
Phase A’
Phase A
Phase B’
Phase B
11’2
2’
33’ 4
4’
Fig. 4.2 Coils in Parallel Fig. 4.3 Coils in Series

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 13
4.2 Connecting To The MSA889 Junction Box
Fig. 4.4 Parallel Motor Coil Connections
Fig. 4.5 Series Motor Coil Connections
57 mm
Motor Lead connections
4 Lead motors
1
1’ 1’
2’
2
3
Link for parallel 3’
Operation 4’
4
126 mm
8 Lead motors
Motor Lead 11
507MOCxx892 Motor leads 1’ 1’
2’ 2’
22
33
3’ 3’
4’ 4’
4 4
Junction Box MSA889
57 mm
Motor Lead connections
126 mm
Link for series
Operation
Motor Lead
507MOCxx892
8 Lead motors
Motor Leads
1
1’
2’
2
3
3’
4’
4
Junction Box MSA889
1
1’
2’
2
3
3’
4’
4

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 14
4.3 Connection of Limits And Datum
Fig. 4.5 Limit/Datum Connections
All limit and datum signal inputs should utilise normally closed contacts.
Note* The datum approach signal is not always required. This is the case when:
a) The motor is operated at slow (creep speed) since it is not necessary to
decelerate before stopping at the datum point. In this case the datum
approach terminals should not be connected.
b) When the controller is configured to utilise the high-speed datum registration
feature. In this case, the datum approach connections should be linked.
Note ** This connection enables an external open contact to abort a move. However
for this feature to be utilised it is necessary to remove an internal link LK8
within the controller.
It should be noted that the limit switches should be placed sufficiently within the total travel
distance to allow the motor to decelerate from high speed.
They should also be mounted for sliding operation, so that they do not become crushed on
first use. No mechanism can decelerate instantaneously.
Limit / datum connections
0VLL
+VLL +over-travel limit
Upper Limit
+VLL - over-travel limit
Lower Limit
Limits datum cable +VLL datum approach *
507LDCxx894 Datum App
+VLL datum stop
Datum stop
+VLL
Abort stop abort stop **
Allow sufficient deceleration over-travel
1’ deceleration deceleration
zone working zone zone
- Limit + Limit

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 15
4.3.1 Datum Position
The
datum
position is detected as the
datum stop
switch opens. It is also summed with
the encoder
index
signal (if fitted). For further information, refer to the Datum Search
Strategies section (2.13) of the PM600 manual.
4.3.2 Using Over-travel limits as datum inputs.
In applications where space is limited, the over-travel
limit switches may also be used as the datum stop
switch. In the example shown the lower limit switch is
also connected to the datum stop input and the
controller is configured to utilise the high-speed
datum approach facility.
Fig. 4.6 Limit/Datum Connections
0VLL
+VLL
Upper Limit
+VLL
Lower Limit
+VLL
Datum Approach
+VLL
Datum Stop
+VLL
Abort stop
SimStep Manual - 3400 Iss. D 7
th
June 2004 page 16
5 Power Supply Unit
The power supply unit used in this system has been designed to energise an MSE570
stepper drive and a PM600 Position Controller.
It provides the unregulated logic supply of +24V (nominal) to the PM600, and an
unregulated supply of +40V (nominal) to the MSE570.
There is a mains fuse fitted in the mains inlet, its rating is 2A anti-surge. There are two
front panel fuseholders that protect the DC outputs of the power supply. The rating of the
fuses are 3.15A for the motor rail and 1A for the logic rail.
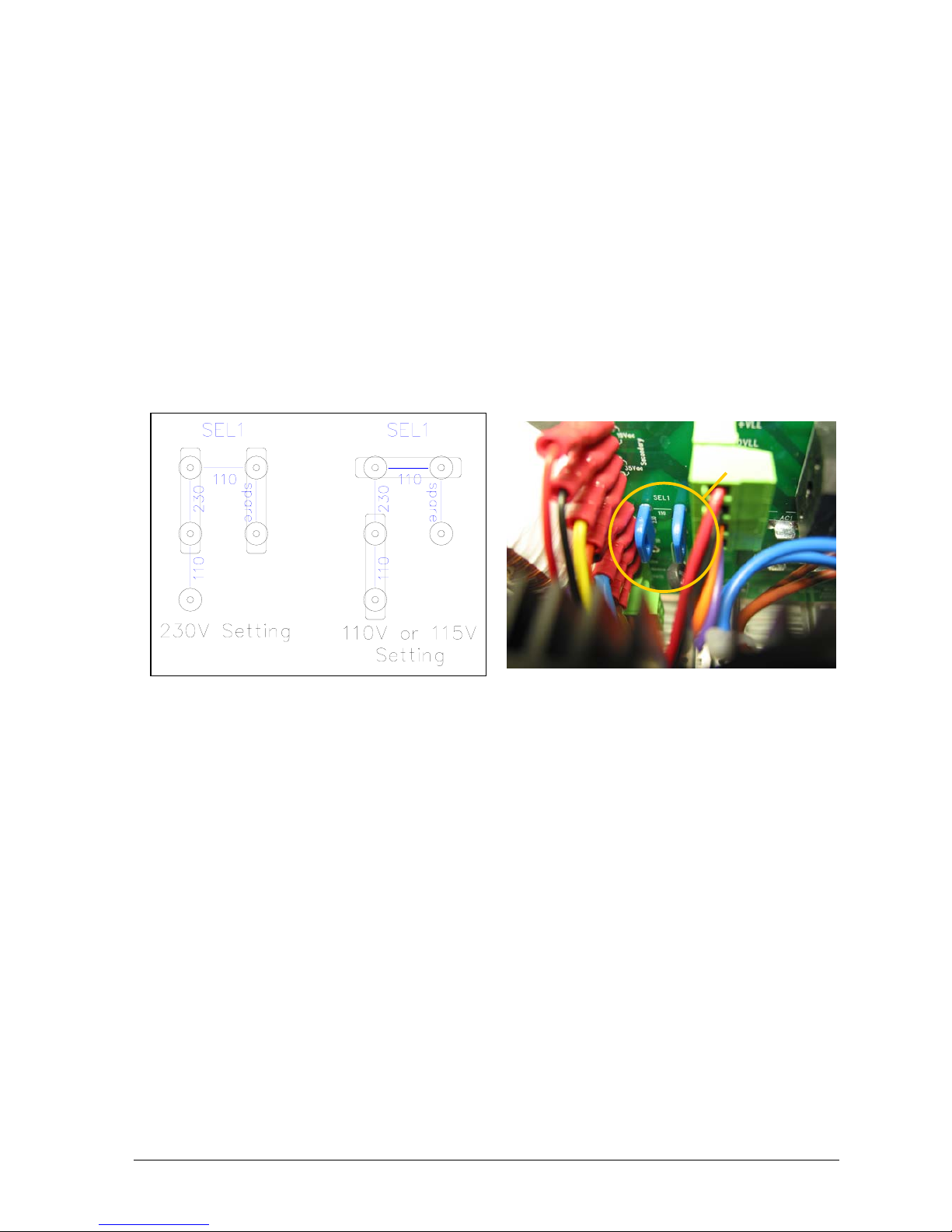
The mains voltage may be changed from 230V to 115V by changing the position of the
links on the MSE779 PCB.
Fig. 5.1 Mains Voltage Selector
SEL1

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 17
6 MSE570 Stepper Drive
The MSE570 stepper drive translator is a 3.5A per phase bi-polar stepper drive.
The clock and direction signals from the PM600 controller are converted into chopped,
constant current drive levels to energise a bipolar stepper motor.
The step sequence is set to
half step
. Using a hybrid type stepper motor, 400 steps per
revolution will be obtained.
A thermal sensor protects the output devices in case of overheating. If the drive
temperature exceeds 80° C, the thermal sensor will operate. With the switch settings
shown below, the drive is disabled (SW1-1=on) and the condition is latched (SW1-2=on).
The latched condition can only be reset by removing the power.
Fig. 6.1 MSE570 Set-up Switches
6.1 General Set-up:
1
4
3
2
DT
OnOff
SS
CC
LT
Disable on Overtemperature - on
Latch Overtemperature - on
Slave Sync – off
Current Control Type - slow
SW1
6.2 Current Setting
As delivered the motor phase current is set to 3.5A/phase.
1
4
3
2
OnOff
SW2
SW2
SW1

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 18
6.3 Other MSE570 Current Settings
The current setting for the motors detailed below when wired with coils in parallel is
3.5A (default).
Current settings for motors wired with coils in series.
Motor Current (A)
23HSX-206 2.1
23HSX-306 2.1
34HSX-108 2.7
34HSX-208 2.7
2
4
3
OnOff
0.0A 0.5A 0.9A 1.2A 1.3A 1.6A 1.85A 2.1A
1
SW2
2
4
3
OnOff
2.3A 2.5A 2.7A 2.9A 3.0A 3.1A 3.3A 3.5A
1
SW2
WARNING! Failure to make the correct current settings can damage the motor

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 19
7 Manual Operation Using the Jog Box or Joystick
The SimStep controller can be operated in manual mode by means of either a jog box or
joystick. These devices should be connected to the
Jog
connectors on the rear of the unit.
7.1 Jog Boxes - JC Series
JC Series Jog boxes provide a convenient way to manually control motor control systems.
Three models, the JC100 single-axis, the JC200 dual axis and the JC809 multi-axis are
available and provide the following manual control functions:
• Bi-directional single step (jog) function by momentary depression of ‘+’ or ‘-’ buttons.
• Slow speed continuous operation in desired direction by the depression and holding of
the ‘+’ or ‘-’ buttons. The speed of movement can be programmed using SJ command
into the SimStep during commissioning.
• Fast speed, continuous operation in desired direction by depressing & holding the ‘F’
button together with either the ‘+ or ‘- button. The fast positioning rates are can also be
programmed using SF command into the SimStep during commissioning.
Figures 7.1 to 7.3 show the connections of the JC series Jog Boxes to the SimStep.
For single axis drives specify JC100 Jog box and connect it to the green ‘D’ connector on
the SimStep as shown in fig 7.1.
Fig. 7.1 Single axis installations
For dual axis drives specify JC200 Jog box and connect it to the green ‘D’ connector on
the SimStep as shown in fig 7.2.
Fig. 7.2 Dual axis installations
Sim-Step
SINGLE
AXIS
JOG BOX
JC100
JC200
Use jog link cable 507JDC05916
AXIS
DUAL
AXIS
JOG
JC200
Note: Jog link cable is handed, identified by
the colour of the screw heads as shown
1
2

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 20
For 3-15 axes drives specify JC809 Jog Box and connect it to the green ‘D’ connector on
the SimStep as shown in fig. 7.3.
Fig. 7.3 3-15 axis installations
7.2 Single and Dual Axis Jog Box Operation
Jog box operation is very straightforward. Once connected, the jog box will control the
motor as follows. Pressing either the + or – button causes the motor to move in the
positive or negative rotation direction. The speed of rotation is determined by the
Slow Jog (SJ command) speed that has been set in the PM600. Momentarily
pressing the + or – buttons causes the motor to move in single steps.
Pressing the F button together with either the + or – buttons causes the motor to move
at the Fast Jog (SF command) speed that has been programmed into the PM600 (see
pages 7-48 and 7-49 of the PM600 manual)
7.3 Multi-axis Jog Box Operation
The MSB867 interfaces between the JC809 Multi-axis Jog Box and the PM600.
It communicates to the JC809 via signals transferred over a RS485 link. The outputs
from the MSB867 connect to the PM600’s Jog inputs. Connecting the ‘Jog DaisyChain’ lead between the JOG B connector on one system to the JOG A connector on
the next system allows further systems to be connected to the JC809.
A rotary switch on the MSB867 sets the axis address that is shown on the JC809. This
switch is accessible by removing the rear top cover of the unit. A setting of 0 will mean
that the axis cannot be controlled by the JC809. The default axis is 1 but any axis
between 1 and 15 can be selected. Note that axes 10, 11, 12, 13, 14 and 15 are
represented by the letters A, B, C, D, E and F respectively.
Fig. 7.4 Jog Axis Selector
JC809
Use jog link cables 507JDC05916
Fit terminator
Supplied with
JC809

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 21
7.4 Joystick - JC Series
The JC Series Joysticks provide an alternative way to manually control motor speed.
The JC400 is a dual axis Joystick that can be used to control either one or two axes.
The JC400 is connected in a similar way to the JC100 and JC200 Jog Boxes shown in
figures 7.1 and 7.2.
7.5 Joystick Operation
In order to set the joystick parameters, the RS232 connection must be connected to a
PC.
The joystick option gives variable control of the motor speed – the further the joystick
is moved from the centre position, the faster the motor moves. Before the joystick
option can be used, the joystick centre and minimum/maximum positions must be
calibrated. Note that the SimStep is set up for Jog Box operation as standard.
The controller must then be told to accept the joystick input using the command
1JM01000000 (see PM600 manual page 7-27).
Assume that the controller is set as Axis 1 and that the joystick is in the “free” (i.e. mid
range) position. The command 1AI3 will interrogate the joystick position; the controller
will then display a value in the format 01:2126, where 01: refers to Axis 1, and 2126 is
the joystick centre position.
Now hold the joystick at one extreme of its range and repeat the 1AI3 command; note
this number and then repeat at the other extreme of the joystick range. Let us assume
that the following data are given from the 1AI3 command:
Low 1688
Centre 2126
High 2568
This means that the
range
either side of centre is ~440 units (note that the “centre
position” may not be
exactly
in the middle of the upper and lower readings).
1JC2126 This sets the centre position. A value of JC=0 will use the value of a joystick
centre tap signal, connected to Analogue input 5, to set the centre position.
1JR340 This sets the +/- range of the joystick (JR =
range
– 2 x JT)
1JT50 This sets the joystick threshold – this is the “deadband” around the centre
position. If the joystick is moved by less than the deadband value, the
motor will not move.
Note: You must use the 1BD (backup digiloop) command in order to store these
parameters otherwise they will be lost when power to the controller is switched off.
For further information, refer to the Joystick Calibration section (2.19) of the PM600
manual.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 22
8 PM600 Intelligent Stepper Motor Controller
The PM600 is a microprocessor-based unit for controlling servo or stepper motors. The
controller has a wide range of functions available; these are described in detail in the
PM600 manual included with this documentation. The SimStep will operate under manual
control with either a jog box or joystick, or can run under remote control through the
RS232 (or RS485) interface.
Basic information on the command structure and the RS232 interface is given below; the
user should refer to the PM600 manual for complete details.
8.1 General
The PM600’s switches have been set as follows:
RS232 Control
The controllers are set to axis address 1
The baud rate is set to 9600 baud
The word mode is set to 7 bits, even parity
Quiet mode is selected
Rotary switches SW1 and SW2 set the axis address. These are set to the actual
address required. SW3 sets the communication configuration. For further information
refer to the Switch Setting section (10) of the PM600 manual
The control mode has been set to open-loop stepper mode by the command 1CM11.
When using the SimStep with an encoder, the control mode can be changed to
closed-loop stepper by the command 1CM14.
8.2 Setting Up The Encoder (Closed-loop Control Modes Only)
Each edge of the quadrature signals is counted, so the number of encoder counts per
revolution will be four times the line count of the encoder.
The PM600 can be used with encoder producing either 5V TTL signals or
5V line
driver
signals. The correct termination should be set. This gives maximum noise
immunity. The use of encoders with
line driver
type signals is recommended where the
encoder lead length will exceed 1m.
8.2.1 Encoder Termination
Switch SW4 selects the termination for the encoder signals. If using differential signals
then the encoder termination should be switched on. With 5V TTL encoders, the
encoder termination switches should be switched off.
1B
1I
1A
3
O
N
1
2
1
2
Single
ended
(TTL)
3
1
2
Line Driver
(Default)
3
Fig.8.1 Encoder Termination Configuration Switch SW4
SW4
SimStep Manual - 3400 Iss. D 7
th
June 2004 page 23
8.2.2 Encoder Scaling
The incoming encoder pulses are scaled by the encoder ratio (ER) formed by the
Encoder Numerator (EN) and the Encoder Denominator (ED) i.e. the number of
pulses received is multiplied by the numerator and divided by the denominator, to
become the Actual Position.
If the ratio between the number of steps and the encoder counts is 1:1 (e.g. 100 line
encoder = 400 counts per revolution mounted on a 400 step per rev motor) then the
encoder scaling factors; Encoder Numerator and Encoder Denominator can be left at
their default of 1, otherwise they will need to be changed.
If the Encoder Numerator (EN) is set to the number of motor steps per revolution and
the Encoder Denominator (ED) is set to the number of encoder counts per revolution,
then the ratio will be correct. For example, if a 400 step per revolution motor fitted with
a 500 line (2000 counts) encoder, then set the Numerator to 400 and the Denominator
to 2000 (ER400/2000 or EN400, ED2000).
8.2.3 Encoder Direction
On switch on, both the Command Position and the Actual Position will both be at zero.
Try a test move (e.g. MR1000) and query the positions with the OC and OA (or QP)
commands, to ensure the scaling is correct. If one is the negative of the other, then
the ‘sense of direction’ needs to be reversed, by either swapping the A and B signals
OR by setting the Encoder Numerator to a negative value.
8.3 Programming via the RS232 Interface
Any suitable communication programme can be used to communicate with the
SimStep controller. For example, the MyTerminal programme (available from
www.SimStep.co.uk) or the Windows Hyper Terminal programme can be used to
make the communications link.
Whichever software is used, the communications interface is set by default, as
follows:
Baud Rate 9600
Data Bits 7
Stop Bits 1
Parity Even
Flow Control None
Once the communications software has been set up, the remote computer should be
connected to the SimStep via the RS232 IN port. Multiple SimStep units can be
daisy-chained
together to build multi-axis systems. Rotary switches SW1 and SW2 on
the PM600 card are used to set the units axis address (0 to 99). This is the address of
the serial commands that it will respond to. Each controller in a system will be set to a
different address.
The switches on the PM600 are accessible by removing the slotted top cover of the
unit. The left-hand switch SW1 sets the decade value and SW2 sets the units. They
can be set using a small screwdriver. See figures 8.2 and 8.3.
Note that the RS232 loop-back connector must be fitted to the RS232 OUT connector
of the final SimStep in the RS232 chain.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 24
Fig. 8.2 PM600 Switch Positions
Fig. 8.3 Positions of PM600 Switches SW1, SW2 and SW3
SW3
SW4
1 2 3 4 5 6 7 8
1 2 3 4 5 6 7 8
P2
LK2
SWAP8
LD1
ULOAD
SW1
SW2
10 1
1A
1B
1I
2I
2B
2A
3A
3B
LD2 LD3
ON
ON
LK1
1
32
SW2SW1 SW3

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 25
8.4 General Command Structure
The PM600 responds to a character string (sent over the RS232 interface) that
defines a command in the following way:
adXXnnn<cr> where
ad = address for the axis (see 8.1 above)
XX = command notation – all commands are two letters
nnn = numeric value for the command argument (if required)
<cr> = carriage return
Command strings must be terminated with a carriage return (ASCII 0D hex). Upper or
lower case characters maybe used for the command. Spaces in the command line are
ignored. Commands are acted upon sequentially, as they have been entered.
8.5 Examples of Command Structure
Set-up commands:
2SA5000 Set Axis 2 acceleration to 5000 steps/sec
2
1LL-20000 Set Axis 1 lower software limit to –20000 steps
1QA Query all settings for Axis 1
M
OVE COMMANDS
:
1MR5000 Move Axis 1 relative to current position by +5000 steps
1ST Soft stop on Axis 1
2MA-2000 Move Axis 2 to absolute position –2000 steps
2OA Output the encoder position of Axis 2
The SimStep controller responds to all commands once the command has been
accepted. However, not all commands can be accepted immediately. For example, a
move command sent whilst a previous command is still taking place, will be delayed
until the previous one is finished. Commands in general will have an OK response.
Some commands, however, will produce a numeric response (e.g.2OA) or produce a
string of data (e.g. 1QA).
All replies are preceded by the address of the axis that generated the response – e.g.
for axis one the replies will be preceded by 01:OK.
Important – if the set-up of the PM600 is changed then the BA (backup all command)
must be executed to save set-up values and sequences to Flash memory. If this not
done, the values will be lost on power-down.
The user may encounter error message from the controller under certain
circumstances, e.g. mistakes in commands or conflicting instructions. The messages
are usually self-explanatory; they are listed on page 8-1 of the PM600 manual.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 26
9 I/O Cable and Breakout Box
Eight inputs (Read Ports) and eight outputs (Write Ports) can be used for external digital
interfacing.
An I/O cable with the ‘breakout’ DIN rail mounting terminal box can be used to interface to
the SimStep without needing to make a special cable.
The I/O breakout box features screw terminals to enable the 16 Digital I/O to be
connected. The unit is DIN rail mounted so that it can be sited next to a typical PLC
control unit
Fig. 9.1 I/O Breakout Box and I/O Cable
Fig. 9.2 I/O Breakout Box Connections
85 mm
70 mm
I O Breakout Box ordering details
- Limit Datum + Limit
I/O Breakout Box 506MSC00891
Motor 1m I/O Cable 507IOC01895
2m I/O Cable 507IOC02895
3m I/O Cable 507IOC03895
5m I/O Cable 507IOC05895
I / O Breakout box 506MSC00891 Connections
:
Output Lines Input Lines
WP1 RP1
WP2 RP2
WP3 RP3
WP4 RP4
WP5 RP5
WP6 RP6
WP7 RP7
WP8 RP8
WP com RP-com
Diode-com N/C
+VLL +VLL
0V 0V
Screw Terminal connections

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 27
9.1 Isolation
The
Read Port
inputs and
Write Port
outputs are opto-isolated. A +24V nominal supply
must be used as the common for these inputs. This supply can either be a separate
external supply or the SimStep’s internal +24V supply. If the internal supply is used, then
the WP-com terminal must be connected the +VLL terminal on the Breakout box and the
RP-com terminal must be connected the 0V terminal on the Breakout box. If a separate
supply is used then the WP-Com terminal must be connected to the +24V terminal of the
external power supply and the RP-Com terminal must be connected to the 0V terminal of
the external power supply. The +24V output from the external supply can be used for the
common of the switches.
9.2 Typical Connections
Fig. 9.3 Typical Connections to the I/O Breakout Box
Fig. 9.4 Typical I/O Connections using an External Supply
9.3 Read Ports
The
read ports
can be connected to a PNP signal output, a switch, or another SimStep’s
write port
.
The RP Read input Port command is used to check the operation of the
read ports
. This
instruction returns an eight digit binary number of either 0 or 1 characters to represent the
current state of the read port. These start with
read port
8, through to 1. Referring to
figures 9.3 and 9.4, a 1 represents a closed switch and a 0 represents an open switch.
The input voltage that is considered as a logic 1 signal is 10-35V and the input voltage that
is considered as a logic 0 is 0-5V.
Typical Output Line Connections Typical Input Line connections
WP RP
Low current Relay
WP – com RP-com
Diode com
+VLL +VLL
0V 0V
Typical Output Line Connections Typical Input Line connections
+24V 0V
External
PSU
WP
Diode com
WP – com
RP-com
RP
Low current Rela
y

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 28
9.4 Write Ports
The
write ports
can be connected to an indicator (LED), an opto-isolator, a low-current
relay or another SimStep’s
read port
. The WP(bit pattern) command is used to write to
the output port
.
The bit pattern is specified as an eight digit binary number. The digits will be either
characters 0, 1 or 2 starting with
write port
8 through to 1. A 0 defines that the output will
be off, a 1 defines that the output will be on and a 2 defines that the output will not
change from its current state. The power-on states of the
write ports
are 00000000 - i.e. all
off.
The outputs are rated at 50mA, 35V.
9.4.1 Inductive Loads
The
write ports
must not be reverse biased. If used to drive an inductive load such as a
relay, then protection diodes must be used. If using an MSE891, this can be done by
connecting Diode-Com to 0V (either 0V on the Breakout box or the external supply 0V).
10
SimStep
Example Sequence
An example sequence is shown below. Three switches are connected to the
Read Port
to
control the action of the sequence and three outputs are used to monitor the action of the
sequence. One switch executes a 'home to datum' move and two switches initiate moves.
The ‘home to datum’ move must be done before the other moves can be selected.
The moves are controlled by the following inputs.
Read Port 1 = home to datum (datum search)
Read Port 2 = move to position 1
Read Port 3 = move to position 2
When the moves are completed, the following outputs turn on.
Write Port 1 = datum search complete
Write Port 2 = at position 1
Write Port 3 = at position 2
10.1 Sequence Definitions
Sequence 0 waits for the ‘Home to Datum’ input to be ‘1’ and then executes a ‘home to
datum’ (HD) move.
1ds0 Sequence 0 – Search for Datum
1wp22222000 Turn off outputs
1wa22222221 Wait for Home input to go on
1hd Search for datum
1we Wait for end of move
1wp22222001 Turn on axis 1 homed
1wa22222220 Wait for Home input to go off
1xs2 Goto input scanning sequence
1es

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 29
Sequence 2 scans the read port inputs and depending on the state of the inputs executes
the moves in sequence 3 or 4. After the move is complete, the operation goes back to
scanning the
read port
inputs.
1ds2 Sequence 2 - Scan for Move inputs
1it22222212 Is Move 1 input on
1xs3 Yes - do move
1it22222122 Is Move 2 input on
1xs4 Yes - do move
1xs2 No rescan inputs
1es
1ds3 Sequence 3 - Move 1
1wp22222002 Turn off 'At Position' outputs
1ma1000 Move to position 1000
1we Wait for end of move
1wp22222012 Turn on 'At Position 1' output
1wa22222202 Wait for Move 1 input to go off
1xs2 Goto input scanning sequence
1es
1ds4 Sequence 4 - Move 2
1wp22222002 Turn off 'At Position' outputs
1ma5000 Move to position 5000
1we Wait for end of move
1wp22222102 Turn on 'At Position 2' output
1wa22222022 Wait for Move 2 input to go off
1xs2 Goto input scanning sequence
1es
1bs Save sequences
1ae0 Execute sequence 0 on power-up
10.2 Configuration
Configure the SimStep to set the position to zero when the datum position is found. This
will mean that moves are relative to the datum position.
1dm00100000 Set datum position to home position (0)
1bd Save settings
10.3 Run Sequence
Either the sequence can be run by sending a 1xs command or as sequence 0 has been
set as an automatically executing sequence, by cycling the power to the SimStep.

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 30
11 Order Codes
11.1 System
Type Order Code
SimStep
508SMS09749
11.2 Motor Encoders
Frame size Type Order Code
Size 23 23HSX-206 CI 500L 301HSE00053
23HSX-306 CI 500L 301HSE00054
Size 34 34HSX-108 RI 500L 301HSE00055
34HSX-208 RI 500L 301HSE00056
11.3 Cables
Type Order Code
Motor – 1m 507MOC01892
Motor – 2m 507MOC02892
Motor – 3m 507MOC03892
Motor – 5m 507MOC05892
Motor – 10m 507MOC10892
Encoder – 1m 507ENC01893
Encoder – 2m 507ENC02893
Encoder – 3m 507ENC03893
Encoder – 5m 507ENC05893
Encoder – 10m 507ENC10893
Limits/Datum – 1m 507LDC01894
Limits/Datum – 2m 507LDC02894
Limits/Datum – 3m 507LDC03894
Limits/Datum – 5m 507LDC05894
Limits/Datum – 10m 507LDC10894
Jog Link – 0.5m 507JDC05916
I/O – 0.5m 507IOC05895
I/O – 1m 507IOC01895
I/O – 2m 507IOC02895
I/O – 3m 507IOC03895
11.4 Junction Boxes
Type Order Code
MSA889 – Motor & Limits/Datum 506MSC00889
MSA891 – I/O Breakout 506MSC00891
11.5 Jog Boxes & Joystick
Type Order Code
JC100 – Single Axis 506JCT00100
JC200 – Dual Axis 506JCT00200
JC809 – Multi-Axis 506JCT00809
JC400 – Dual Axis Joystick 506JCT00400
11.6 EMC Ferrites
Type Order Code
Cable Dia. 7 – 8.5mm 114FER00003
Cable Dia. 8.5 – 10.5mm 114FER00004

SimStep Manual - 3400 Iss. D 7
th
June 2004 page 31
12 Limitations of Use
This system has been designed to drive a hybrid type stepper motor. Any other use has
not been considered, therefore could damage the drive and could be dangerous for the
users.
Good engineering practices should be employed when using this product.
The operating temperature should be between 0ºC and 30ºC.
Users should take suitable precautions in the application of this product, to ensure that the
overall system complies with EN50081-1 and EN50082-1 (EMC directive).
These products should not be put into service until the machinery in which they are
incorporated has been declared in conformity with the provisions of The Supply of
Machinery (Safety) Regulations 1992 and The Supply of Machinery (Safety) (Amendment)
Regulations 1994 (Machinery Directive).
Motor control systems are inherently hazardous. Even a small motor, if coupled to a
leadscrew, gearbox, or any other form of mechanism that provides a mechanical
advantage, can generate considerable force and could cause serious injury. Incorrect
operation can also lead to damage to the motor or associated machinery.
 Loading...
Loading...