

Maxsine EP100-2A, EP100-3A, EP100-5A, EP100B-2A, EP100B-3A User Manual

Maxsine
EP100 系列
交流伺服驱动器
简明手册
EP100 交流伺服驱动器简明手册
驱 动 器
EP100-2A/EP100-3A/EP100-5A
EP100B-2A/EP100B-3A
武汉迈信电气技术有限公司
1
EP100 交流伺服驱动器简明手册
第 1 章 产品检查与安装
1.3 伺服电机安装
1.3.1 安装环境条件
工作环境温度:0~40℃;工作环境湿度:80%以下(无结露)。
贮存环境温度:-40~50℃;贮存环境湿度:80%以下(无结露)。
振动:0.5G以下。
通风良好、少湿气及灰尘之场所。
无腐蚀性、引火性气体、油气、切削液、切削粉、铁粉等环境。
无水汽及阳光直射的场所。
1.3.2 安装方法
水平安装:为避免水、油等液体自电机出线端流入电机内部,请将电缆出口置于下方。
垂直安装:若电机轴朝上安装且附有减速机时,须注意并防止减速机内的油渍经由电
机轴渗入电机内部。
电机轴的伸出量需充分,若伸出量不足时将容易使电机运动时产生振动。
安装及拆卸电机时,请勿用榔头敲击电机,否则容易造成电机轴及编码器损坏。
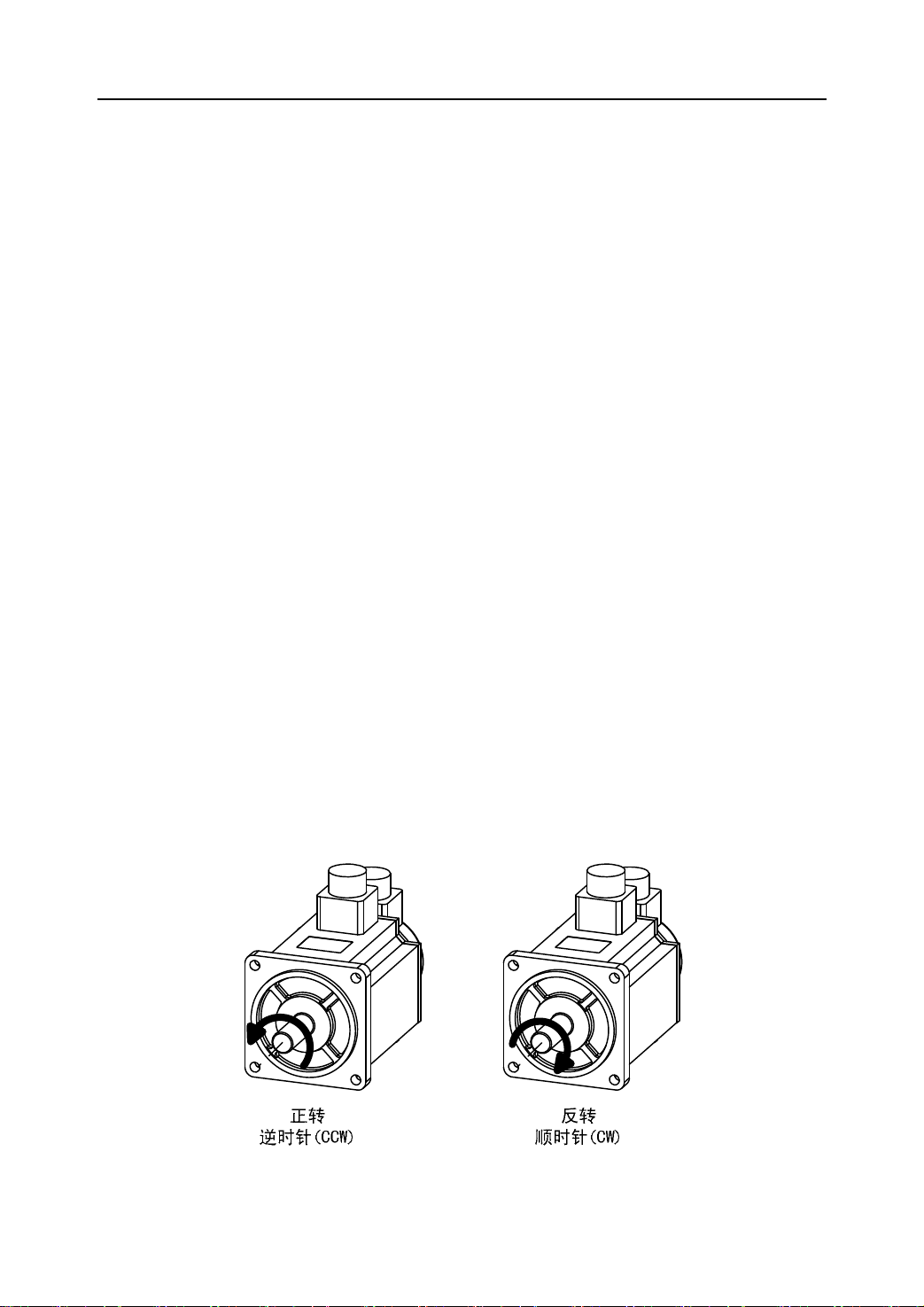
1.4 电机旋转方向定义
本手册描述的电机旋转方向定义:面对电机轴伸,转动轴逆时针旋转(CCW)为正转,
转动轴顺时针旋转(CW)为反转。
图 1.2 电机旋转方向定义
2

EP100 交流伺服驱动器简明手册
第 2 章 接线
2.1 配线规格
线径:R、S、T、PE、U、V、W 端子线径≥1.5mm2(AWG14-16),r、t 端子线径≥
2
0.75mm
端子采用预绝缘冷压端子,务必连接牢固;
建议采用三相隔离变压器供电;
2.2 配线方法
输入输出信号线和编码器信号线,请使用推荐的电缆或相似的屏蔽线,配线长度为:
输入输出信号线 3m 以下,编码器信号线 20m 以下。接线时按最短距离连接,越短
越好,主电路接线与信号线要分离。
接地线要粗壮,作成一点接地,伺服电机的接地端子与伺服驱动器的接地端子 PE
务必相连。
为防止干扰引起误动作,建议安装噪声滤波器,并注意:
1) 噪声滤波器、伺服驱动器和上位控制器尽量近距离安装。
2) 继电器、电磁接触器、制动器等线圈中务必安装浪涌抑制器。
3) 主电路和信号线不要在同一管道中通过及不要扎在一起。
在附近用强烈干扰源时(如电焊机、电火花机床等),输入电源上使用隔离变压器可
以防止干扰引起误动作。
请安装非熔断型断路器(NFB)使驱动器故障时能及时切断外部电源。
正确连接电缆屏蔽层。
(AWG18);
2.3 注意事项
驱动器 U、V、W 的接线端子必须与电机端子 U、V、W 一一对应,注意不能用调
换三相端子的方法来使电机反转,这一点与异步电动机完全不同。
由于伺服电机流过高频开关电流,因此漏电流相对较大,电机接地端子必须与伺服
驱动器接地端子 PE 连接一起并良好接地。
因为伺服驱动器内部有大容量的电解电容,所以即使切断了电源,内部电路中仍有
高电压。在电源被切断后,最少等待 5 分钟以上,才能接触驱动器和电机。
长时间不使用,请将电源切断。
本接线图针对武汉华大伺服电机。
3
2.4 标准连接
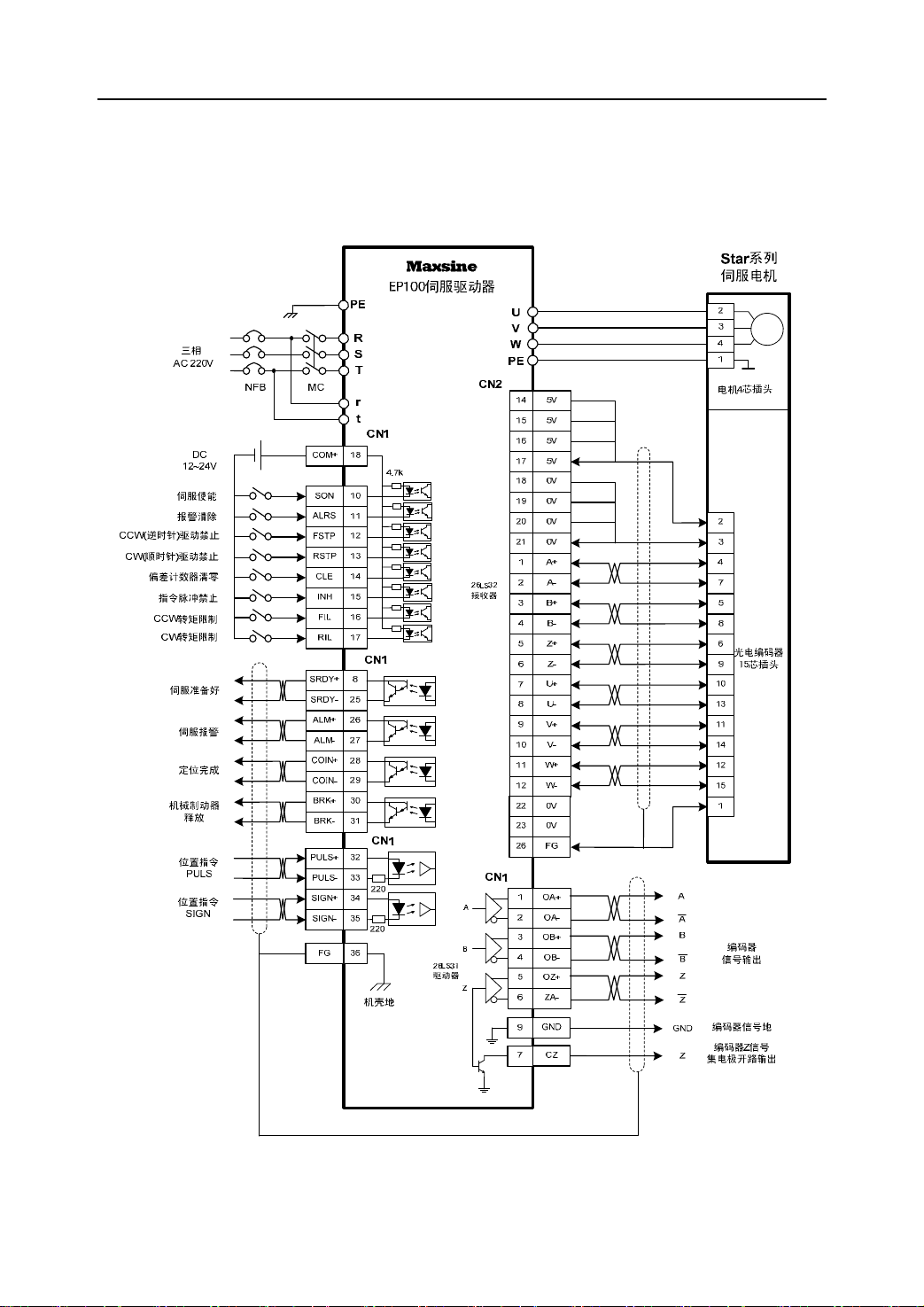
2.4.1 位置控制
EP100 交流伺服驱动器简明手册
图 2.1 位置控制的标准接线
4
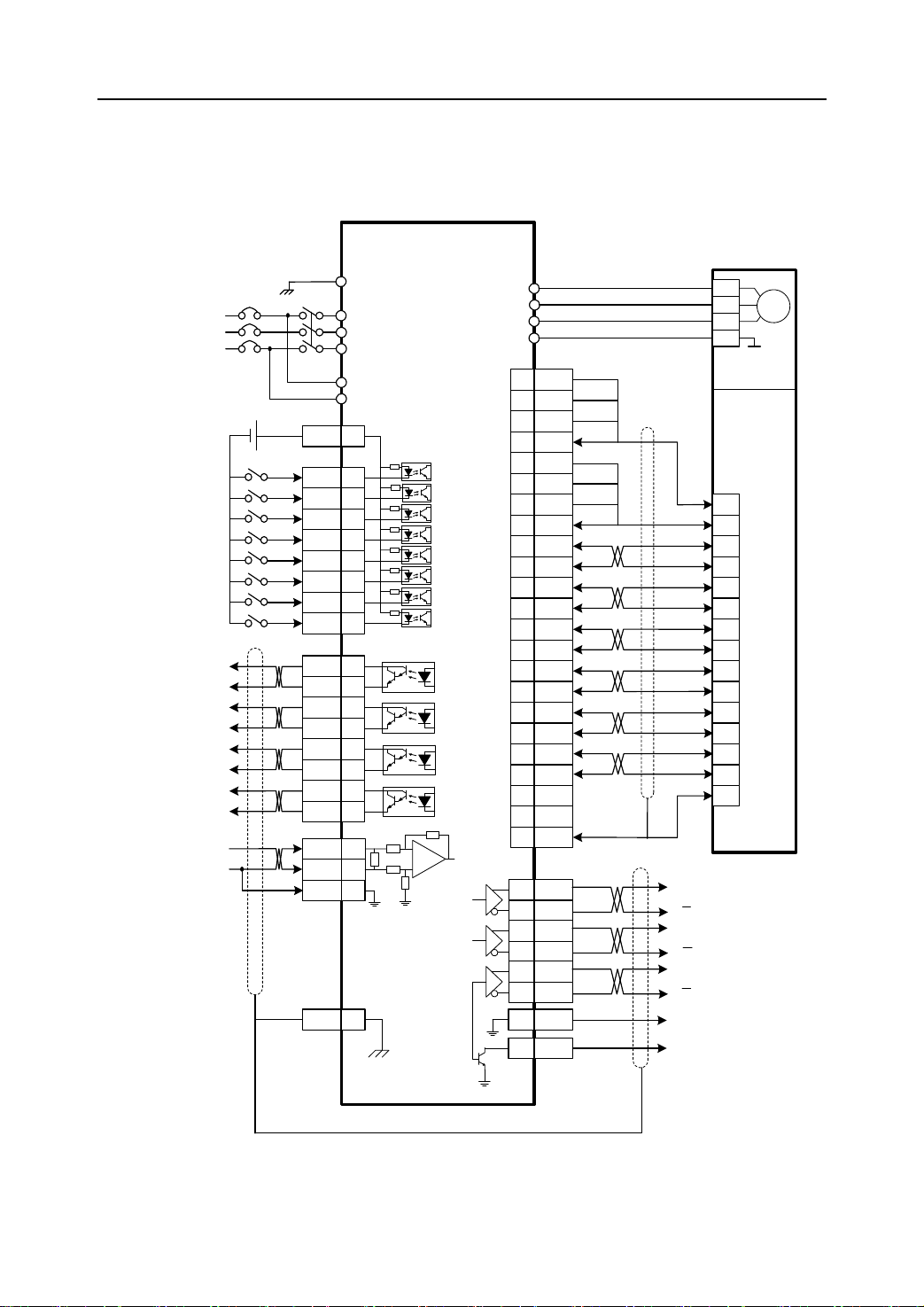
2.4.2 速度控制
EP100 交流伺服驱动器简明手册
三相
AC 220V
DC
12~24V
伺服使能
报警清除
CCW(逆时针)驱动禁止
CW(顺时针)驱动禁止
速度选择1/零速箝位
速度选择2
CCW转矩限制
CW转矩限制
伺服准备好
伺服报警
速度到达
机械制动器
释放
速度模拟指令
(-10V~+10V)
NFB MC
+
-
COM+ 18
SON 10
ALRS 11
FSTP 12
RSTP 13
SC1/ZEROS
PD
SC2 15
FIL 16
RIL 17
SRDY+ 8
SRDY- 25
ALM+ 26
ALM- 27
COIN+ 28
COIN- 29
BRK+ 30
BRK- 31
AS+ 19
AS- 20
AGND 23
FG 36
EP100伺服驱动器
PE
R
S
T
r
t
CN1
4.7k
14
CN1
CN1
10K
机壳地
Maxsine
-
+
26LS31
驱动器
A
B
Z
CN2
26LS32
接收器
CN1
U
V
W
PE
14 5V
15 5V
16 5V
17 5V
18 0V
19 0V
20 0V
21 0V
1 A+
2 A-
3 B+
4 B-
5 Z+
6 Z-
7 U+
8 U-
9 V+
10 V-
11 W+
12 W-
22 0V
23 0V
26 FG
1 OA+
2 OA-
3 OB+
4 OB-
5 OZ+
6 ZA-
9 GND
7 CZ
A
A
B
B
Z
Z
GND
Z
Star系列
伺服电机
2
3
4
1
电机4芯插头
2
3
4
7
5
8
6
光电编码器
9
15芯插头
10
13
11
14
12
15
1
编码器
信号输出
编码器信号地
编码器Z信号
集电极开路输出
图 2.2 速度控制的标准接线
5
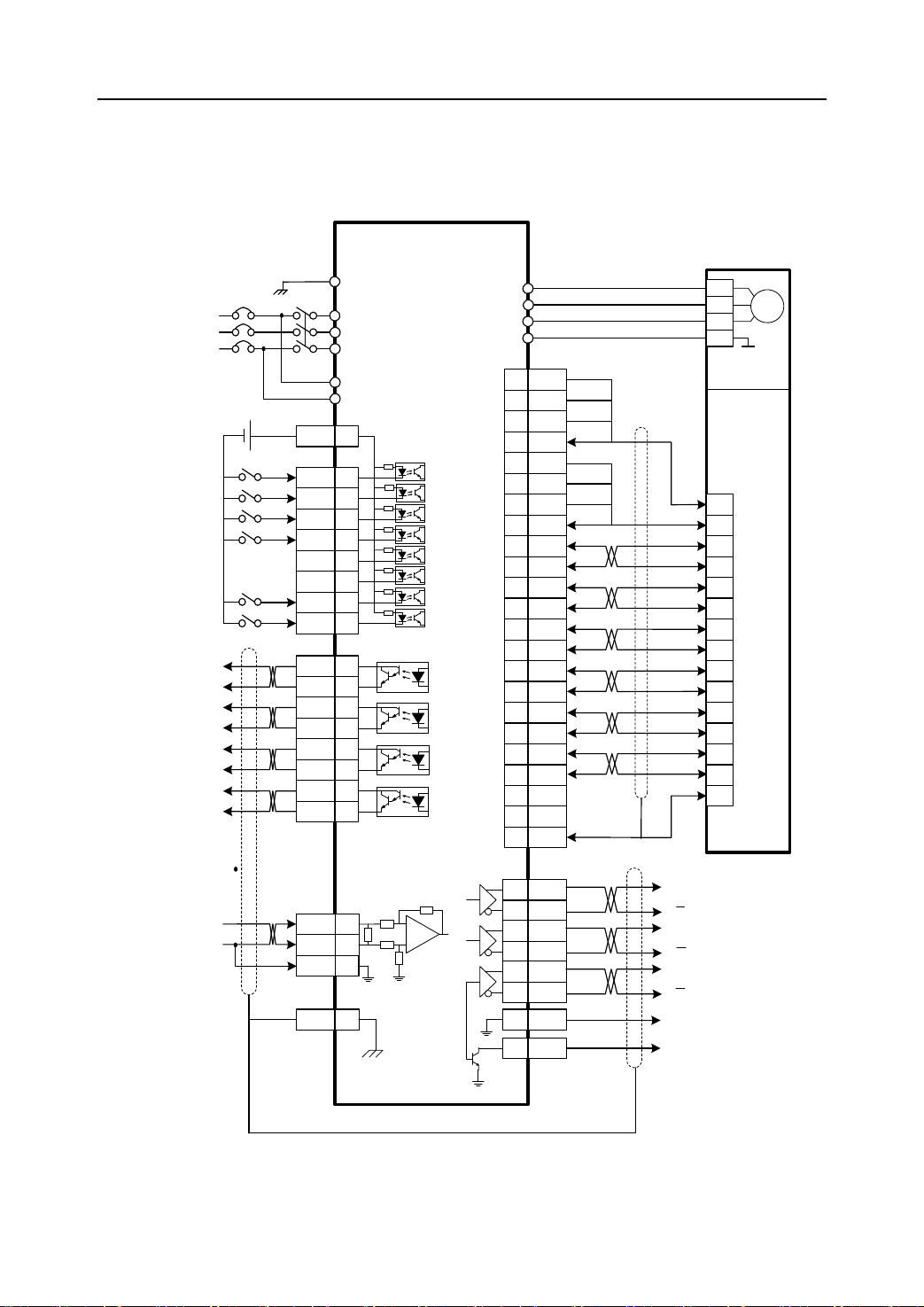
2.4.3 转矩控制
EP100 交流伺服驱动器简明手册
三相
AC 220V
DC
12~24V
伺服使能
报警清除
CCW(逆时针)驱动禁止
CW(顺时针)驱动禁止
CCW转矩限制
CW转矩限制
伺服准备好
伺服报警
速度到达
机械制动器
释放
NFB MC
SC1/ZEROS
COM+ 18
SON 10
ALRS 11
FSTP 12
RSTP 13
PD
SC2 15
FIL 16
RIL 17
SRDY+ 8
SRDY- 25
ALM+ 26
ALM- 27
COIN+ 28
COIN- 29
BRK+ 30
BRK- 31
EP100伺服驱动器
PE
R
S
T
r
t
CN1
4.7k
14
CN1
CN1
Maxsine
CN2
26LS32
接收器
U
V
W
PE
14 5V
15 5V
16 5V
17 5V
18 0V
19 0V
20 0V
21 0V
1 A+
2 A-
3 B+
4 B-
5 Z+
6 Z-
7 U+
8 U-
9 V+
10 V-
11 W+
12 W-
22 0V
23 0V
26 FG
Star系列
伺服电机
2
3
4
1
电机4芯插头
2
3
4
7
5
8
6
光电编码器
9
15芯插头
10
13
11
14
12
15
1
转矩模拟指令
(-10V~+10V)
CN1
A
+
-
AT+ 21
AT- 22
AGND 24
FG 36
10K
-
B
+
26LS31
Z
驱动器
1 OA+
2 OA-
3 OB+
4 OB-
5 OZ+
6 ZA-
9 GND
7 CZ
机壳地
A
A
B
B
Z
Z
GND
Z
编码器
信号输出
编码器信号地
编码器Z信号
集电极开路输出
图 2.3 转矩控制的标准接线
6
EP100 交流伺服驱动器简明手册
第 3 章 接口
3.1 EP100-2A/3A驱动器电源端子TB
表 3.1 电源端子 TB
端子号 端子记号 信号名称 功能
1 PE
2 R
3 S
4 T
5 U
6 V
7 W
8 PE
9 r
10 t
系统接地 接地端子
主回路电源输入
三相 AC220V
伺服电机电源输出 输出到伺服电机的电源,
接地 接地端子,接电机的外壳地
控制电源输入
单相 AC220V
主回路电源输入端子
AC220V 50Hz
注意:不要同电机输出端子 U、V、W 连接。
必须与电机 U、V、W 端子一一对应连接。
控制回路电源输入端子
AC 220V 50Hz
7
EP100 交流伺服驱动器简明手册
3.2 控制信号输入/输出端子CN1
控制方式简称:P 代表位置控制方式 ; S代表速度控制方式;T 代表转矩控制方式。
表 3.2 控制信号输入/输出端子 CN1
端子号 信号名称 记号
18
10
11
12
输入端子的
电源正极
伺服使能
报警清除
CCW 驱动禁
止
COM+
SON Type1
ALRS Type1
FSTP Type1
I/O
Type1
方式 功能
输入端子的电源正极,用来驱动输入端子的光
电耦合器,DC12~24V,电流≥100mA。
伺服使能输入端子。
SON ON:允许驱动器工作;
SON OFF:驱动器关闭,停止工作,
电机处于自由状态。
注 1:当从 SON OFF 打到 SON ON 前,
电机必须是静止的。
注 2:打到 SON ON 后,至少等待 50ms
再输入命令。
报警清除输入端子。
ALRS ON:清除系统报警;
ALRS OFF:保持系统报警。
注 1:对于故障代码大于 8 的报警,无法
用此方法清除,需要断电检修,
然后再次通电。
CCW(逆时针方向)驱动禁止输入端子。
FSTP ON :CCW 驱动允许,电机可以逆时针
方向旋转;
FSTP OFF:CCW 驱动禁止,电机禁止逆时针
方向旋转。
注 1:用于机械超限,当开关 OFF 时,CCW
方向转矩保持为 0。
注 2: 可以通过设置参数 PA 20 =1 屏蔽此功
能,用户不用连此端子,也能使 CCW
驱动允许。
8

端子号 信号名称 记号
13
14
CW 驱动禁止
偏差计数器
清零
速度选择 1
零速箝位
RSTP Type1
CLE Type1 P
SC1 Type1 S
ZEROSPD Type1 S
EP100 交流伺服驱动器简明手册
I/O
方式 功能
CW(顺时针方向)驱动禁止输入端子。
RSTP ON :CW 驱动允许,电机可以顺时针
RSTP OFF:CW 驱动禁止,电机禁止顺时针方
注 1:用于机械超限,当开关 OFF 时,CW
方向转矩保持为 0。
注 2: 可以通过设置参数 PA 20 =1 屏蔽此功
能,用户不用连此端子,也能使 CW 驱
动允许。
位置控制方式下(参数 PA4=0),位置偏差计数
器清零输入端子。
CLE ON:位置控制时,位置偏差计数器
清零。
速度控制方式下参数(PA4=1),选择内部速度
时(参数 No22=0)速度选择 1 输入端子,
在速度控制方式下,SC1 和 SC2 的组合用来选
择不同的内部速度。
SC1 OFF,SC2 OFF :内部速度 1;
SC1 ON,SC2 OFF :内部速度 2;
SC1 OFF,SC2 ON :内部速度 3;
SC1 ON,SC2 ON :内部速度 4。
注:内部速度 1~4 的数值可以通过参数修改。
速度控制方式下参数(PA4=1),选择外部模拟
速度时(参数 PA22=1,缺省值)。
ZEROSPD ON:不管模拟输入是多少,强迫
ZEROSPD OFF:速度指令为模拟输入数值。
方向旋转;
向旋转。
速度指令为零;
9

端子号 信号名称 记号
15
16
17
8
25
26
27
指令脉冲禁
止
速度选择 2
CCW 转矩限
制
CW 转矩限制
伺服准备好
输出
伺服报警输出 ALM+
INH Type1 P
SC2 Type1 S
FIL Type1
RIL Type1
SRDY+
SRDY-
ALM-
EP100 交流伺服驱动器简明手册
I/O
Type2
Type2
方式 功能
位置控制方式下(参数 PA4=0),位置指令脉
冲禁止输入端子。
INH ON :指令脉冲输入禁止;
INH OFF:指令脉冲输入有效。
速度控制方式下参数(PA4=1),选择内部速度
时(参数 PA 2 2= 0 )速度选择 2 输入端子,
在速度控制方式下,SC1 和 SC2 的组合用来选
择不同的内部速度。
SC1 OFF,SC2 OFF :内部速度 1;
SC1 ON, SC2 OFF :内部速度 2;
SC1 OFF,SC2 ON :内部速度 3;
SC1 ON, SC2 ON :内部速度 4。
CCW(逆时针方向)转矩限制输入端子。
FIL ON :CCW 转矩限制在参数 PA 3 6 范围
内;
FIL OFF:CCW 转矩限制不受参数 PA 3 6 限制。
注 1:不管 FIL 有效还是无效,CCW 转矩
还受参数 PA 3 4 限制,一般参数 PA34>
参数 PA 3 6。
CW(顺时针方向)转矩限制输入端子。
RIL ON :CW 转矩限制在参数 PA 37 范围
内;
RIL OFF:CW 转矩限制不受参数 PA 37 限制。
注 1 :不管 RIL 有效还是无效,CW 转矩
还受参数 PA 35 限制,一般| 参数
PA35|>|参数 PA37|。
伺服准备好输出端子。
SRDY ON:控制电源和主电源正常,驱动器
SRDY OFF:主电源未合或驱动器有报警,伺
伺服报警输出端子。
ALM ON:伺服驱动器无报警,伺服报警输出
ALM OFF:伺服驱动器有报警,伺服报警输
没有报警,伺服准备好输出 ON
(输出导通);
服准备好输出 OFF(输出截止)。
ON(输出导通);
出 OFF(输出截止)。
10
端子号 信号名称 记号
定位完成输
出;(位置控
制方式下)
速度到达输
出;(速度控
制方式下)
30
31
32
33
34
35
19
20
23
21
22
24
机械制动器
释放
指令脉冲
PLUS 输入
指令脉冲
SIGN 输入
模拟速度指
令输入
模拟地
模拟转矩指
令输入
模拟地
COIN+
COIN-
BRK+
BRK-
PULS+
PULS-
SIGN+
SIGN-
AS+
AS-
AGND
AT +
AT -
AGND
EP100 交流伺服驱动器简明手册
I/O
Type2
Type2
Type3 P
Type3 P
Type4 S
Type4 T
方式 功能
P 28
S
P 29
S
定位完成输出端子。
COIN ON:当位置偏差计数器数值在设定的定
COIN ON:当速度到达或超过设定的速度时,
当电机具有机械制动器(失电保持器)时,可
以用此端口控制制动器。
BRK ON:制动器通电,制动无效,电机可以
BRK OFF:制动器截止,制动有效,电机被锁
注:BRK 功能是由驱动器内部控制。
外部指令脉冲输入端子。
注 1:由参数 PA 14 设定脉冲输入方式,
PA14=0,指令脉冲+符号方式;(缺省状
态);
PA14=1,CCW/CW 指令脉冲方式;
PA14=2,2 相指令脉冲方式。
外部模拟速度指令输入端子,差分方式,输入
阻抗 10kΩ,输入范围-10V~+10V。
模拟输入的地线。
外部模拟转矩指令输入端子,差分方式,输入
阻抗 10kΩ,输入范围-10V~+10V。
模拟输入的地线。
位范围时,定位完成输出 ON(输出
导通),否则输出 OFF(输出截止)。
速度到达输出端子。
速度到达输出 ON(输出导通),否
则输出 OFF(输出截止)。
运行;
死,不能运行。
11
端子号 信号名称 记号
1
2
3
4
5
6
7
9
36
编码器 A 相
信号
编码器 B 相
信号
编码器 Z 相
信号
编码器 Z 相
集电极开路
输出
编码器公共
地线
屏蔽地线
OA+
OA-
OB+
OB-
OZ+
OZ-
CZ Type6
GND
FG
EP100 交流伺服驱动器简明手册
I/O
Type5
Type5
Type5
方式 功能
编码器 ABZ 信号差分驱动输出(26LS31
输出,相当于 RS422);
非隔离输出(非绝缘)。
编码器 Z 相信号由集电极开路输出,编
码器 Z 相信号出现时,输出 ON(输出导
通),否则输出 OFF(输出截止);
非隔离输出(非绝缘);
在上位机,通常 Z 相信号脉冲很窄,故
请用高速光电耦合器接收。
编码器公共地线。
屏蔽地线端子。
12
EP100 交流伺服驱动器简明手册
3.3 编码器信号输入端子CN2
表 3.3 编码器信号输入端子 CN2
记号
14
15
16
17
18
19
20
21
22
23
10
11
12
26
5V 电源
电源公共地
1
编码器 A+输入 A+ 与光电编码器 A+相连接。
2
编码器 A-输入 A-
3
编码器 B+输入 B+ 与光电编码器 B+相连接。
4
编码器 B-输入 B-
5
编码器 Z+输入 Z+ 与光电编码器 Z+相连接。
6
编码器 Z-输入
7
编码器 U+输入 U+ 与光电编码器 U+相连接。
8
编码器 U-输入
9
编码器 V+输入 V+ 与光电编码器 V+相连接。
编码器 V- 输入
编码器 W+输入 W+ 与光电编码器 W+相连接。
编码器 W- 输入
屏蔽地线
+5V
0V
Type7
Type7
Type7
Z-
Type7
U-
Type7
V-
Type7
W-
FG
I/O
功能 端子号 信号名称
描述
伺服电机光电编码器用+5V 电源和公共
地;电缆长度较长时,应使用多根芯线并
联,减小线路压降。
与光电编码器 A-相连接。
与光电编码器 B-相连接。
与光电编码器 Z-相连接。
与光电编码器 U-相连接。
与光电编码器 V- 相连接。
与光电编码器 W- 相连接。
屏蔽地线端子。
13
 Loading...
Loading...