

Page 1

Maxsine
EP100 系列
交流伺服驱动器
简明手册
EP100 交流伺服驱动器简明手册
驱 动 器
EP100-2A/EP100-3A/EP100-5A
EP100B-2A/EP100B-3A
武汉迈信电气技术有限公司
1
Page 2
EP100 交流伺服驱动器简明手册
第 1 章 产品检查与安装
1.3 伺服电机安装
1.3.1 安装环境条件
工作环境温度:0~40℃;工作环境湿度:80%以下(无结露)。
贮存环境温度:-40~50℃;贮存环境湿度:80%以下(无结露)。
振动:0.5G以下。
通风良好、少湿气及灰尘之场所。
无腐蚀性、引火性气体、油气、切削液、切削粉、铁粉等环境。
无水汽及阳光直射的场所。
1.3.2 安装方法
水平安装:为避免水、油等液体自电机出线端流入电机内部,请将电缆出口置于下方。
垂直安装:若电机轴朝上安装且附有减速机时,须注意并防止减速机内的油渍经由电
机轴渗入电机内部。
电机轴的伸出量需充分,若伸出量不足时将容易使电机运动时产生振动。
安装及拆卸电机时,请勿用榔头敲击电机,否则容易造成电机轴及编码器损坏。
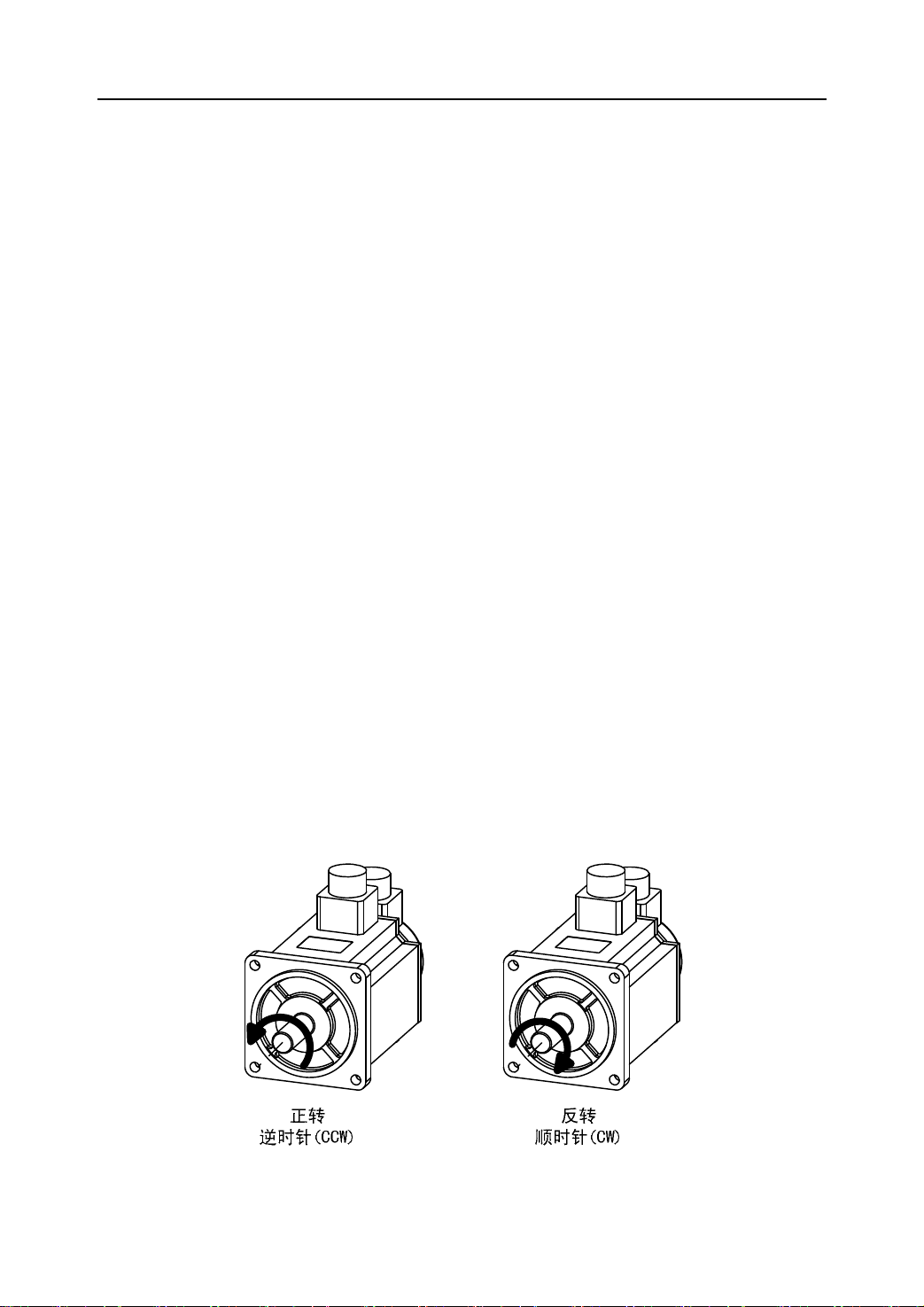
1.4 电机旋转方向定义
本手册描述的电机旋转方向定义:面对电机轴伸,转动轴逆时针旋转(CCW)为正转,
转动轴顺时针旋转(CW)为反转。
图 1.2 电机旋转方向定义
2
Page 3

EP100 交流伺服驱动器简明手册
第 2 章 接线
2.1 配线规格
线径:R、S、T、PE、U、V、W 端子线径≥1.5mm2(AWG14-16),r、t 端子线径≥
2
0.75mm
端子采用预绝缘冷压端子,务必连接牢固;
建议采用三相隔离变压器供电;
2.2 配线方法
输入输出信号线和编码器信号线,请使用推荐的电缆或相似的屏蔽线,配线长度为:
输入输出信号线 3m 以下,编码器信号线 20m 以下。接线时按最短距离连接,越短
越好,主电路接线与信号线要分离。
接地线要粗壮,作成一点接地,伺服电机的接地端子与伺服驱动器的接地端子 PE
务必相连。
为防止干扰引起误动作,建议安装噪声滤波器,并注意:
1) 噪声滤波器、伺服驱动器和上位控制器尽量近距离安装。
2) 继电器、电磁接触器、制动器等线圈中务必安装浪涌抑制器。
3) 主电路和信号线不要在同一管道中通过及不要扎在一起。
在附近用强烈干扰源时(如电焊机、电火花机床等),输入电源上使用隔离变压器可
以防止干扰引起误动作。
请安装非熔断型断路器(NFB)使驱动器故障时能及时切断外部电源。
正确连接电缆屏蔽层。
(AWG18);
2.3 注意事项
驱动器 U、V、W 的接线端子必须与电机端子 U、V、W 一一对应,注意不能用调
换三相端子的方法来使电机反转,这一点与异步电动机完全不同。
由于伺服电机流过高频开关电流,因此漏电流相对较大,电机接地端子必须与伺服
驱动器接地端子 PE 连接一起并良好接地。
因为伺服驱动器内部有大容量的电解电容,所以即使切断了电源,内部电路中仍有
高电压。在电源被切断后,最少等待 5 分钟以上,才能接触驱动器和电机。
长时间不使用,请将电源切断。
本接线图针对武汉华大伺服电机。
3
Page 4
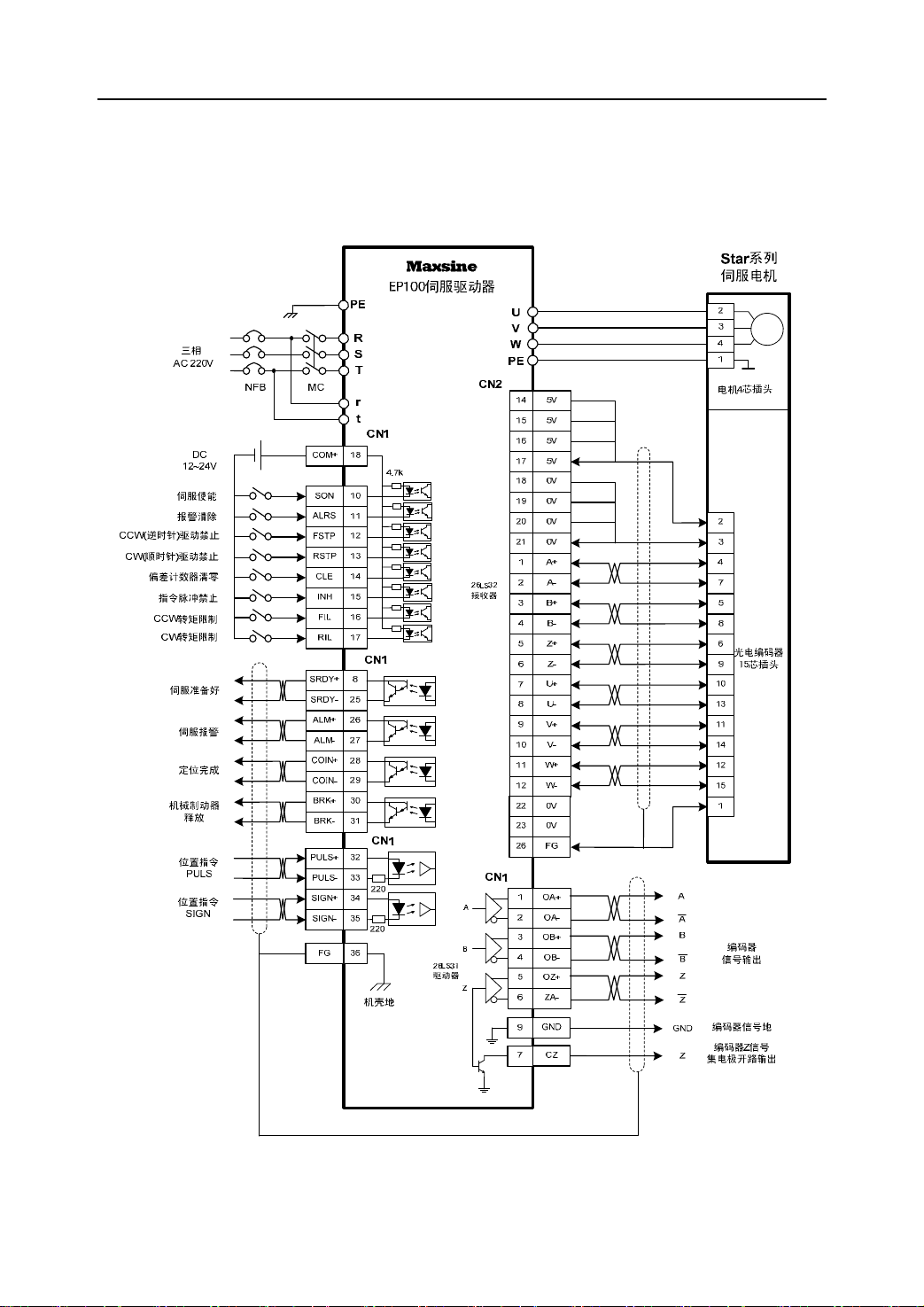
2.4 标准连接
2.4.1 位置控制
EP100 交流伺服驱动器简明手册
图 2.1 位置控制的标准接线
4
Page 5
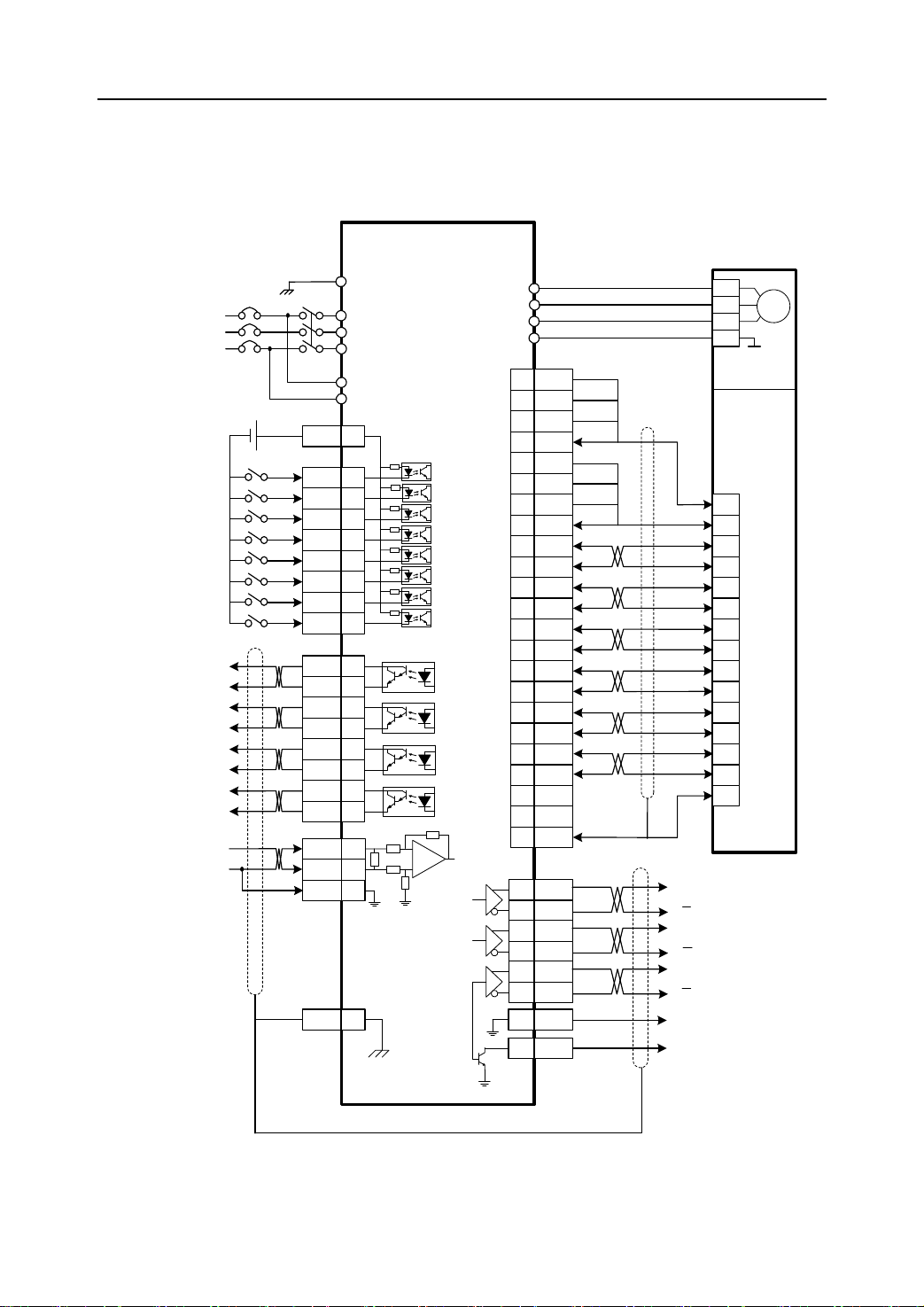
2.4.2 速度控制
EP100 交流伺服驱动器简明手册
三相
AC 220V
DC
12~24V
伺服使能
报警清除
CCW(逆时针)驱动禁止
CW(顺时针)驱动禁止
速度选择1/零速箝位
速度选择2
CCW转矩限制
CW转矩限制
伺服准备好
伺服报警
速度到达
机械制动器
释放
速度模拟指令
(-10V~+10V)
NFB MC
+
-
COM+ 18
SON 10
ALRS 11
FSTP 12
RSTP 13
SC1/ZEROS
PD
SC2 15
FIL 16
RIL 17
SRDY+ 8
SRDY- 25
ALM+ 26
ALM- 27
COIN+ 28
COIN- 29
BRK+ 30
BRK- 31
AS+ 19
AS- 20
AGND 23
FG 36
EP100伺服驱动器
PE
R
S
T
r
t
CN1
4.7k
14
CN1
CN1
10K
机壳地
Maxsine
-
+
26LS31
驱动器
A
B
Z
CN2
26LS32
接收器
CN1
U
V
W
PE
14 5V
15 5V
16 5V
17 5V
18 0V
19 0V
20 0V
21 0V
1 A+
2 A-
3 B+
4 B-
5 Z+
6 Z-
7 U+
8 U-
9 V+
10 V-
11 W+
12 W-
22 0V
23 0V
26 FG
1 OA+
2 OA-
3 OB+
4 OB-
5 OZ+
6 ZA-
9 GND
7 CZ
A
A
B
B
Z
Z
GND
Z
Star系列
伺服电机
2
3
4
1
电机4芯插头
2
3
4
7
5
8
6
光电编码器
9
15芯插头
10
13
11
14
12
15
1
编码器
信号输出
编码器信号地
编码器Z信号
集电极开路输出
图 2.2 速度控制的标准接线
5
Page 6
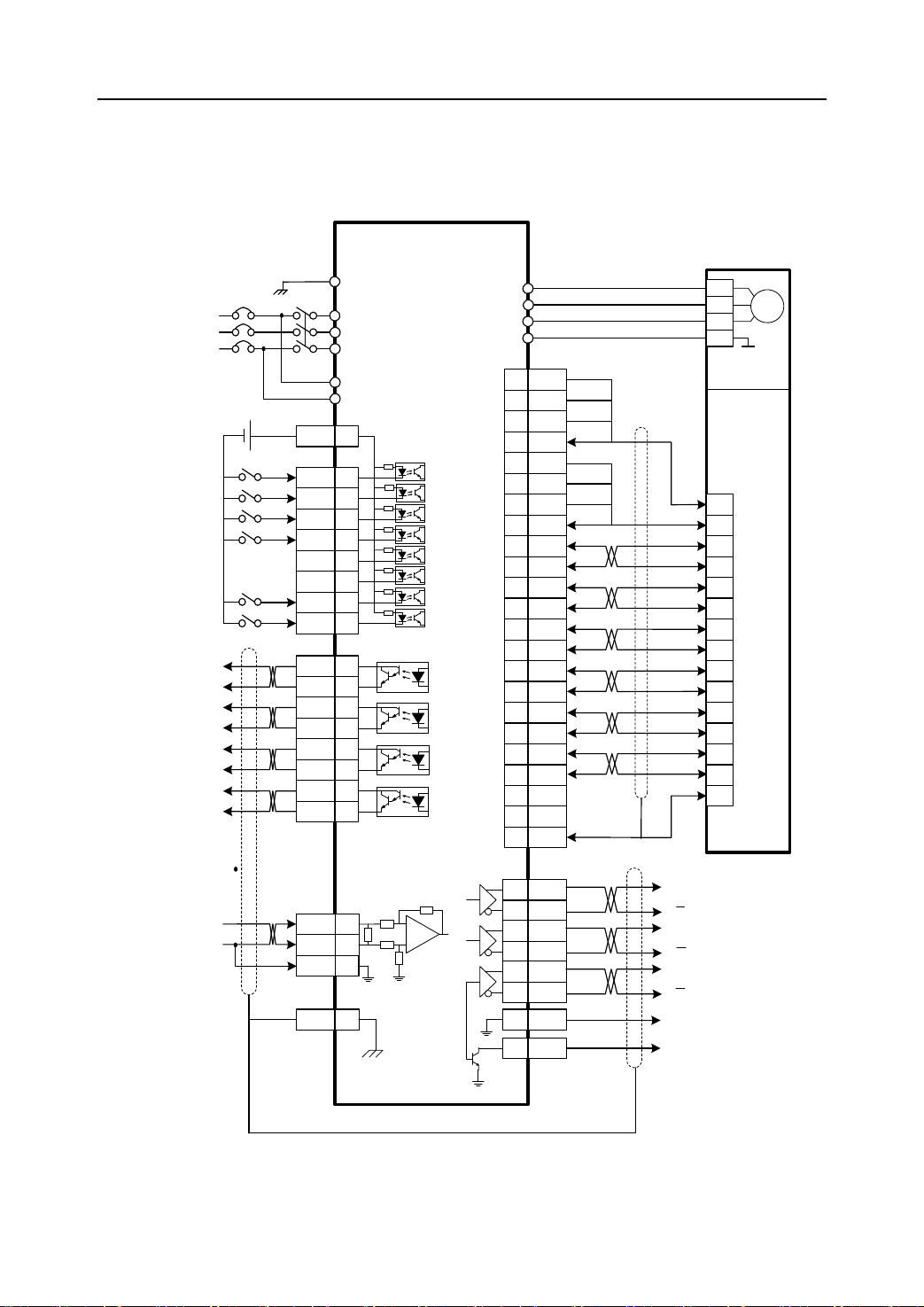
2.4.3 转矩控制
EP100 交流伺服驱动器简明手册
三相
AC 220V
DC
12~24V
伺服使能
报警清除
CCW(逆时针)驱动禁止
CW(顺时针)驱动禁止
CCW转矩限制
CW转矩限制
伺服准备好
伺服报警
速度到达
机械制动器
释放
NFB MC
SC1/ZEROS
COM+ 18
SON 10
ALRS 11
FSTP 12
RSTP 13
PD
SC2 15
FIL 16
RIL 17
SRDY+ 8
SRDY- 25
ALM+ 26
ALM- 27
COIN+ 28
COIN- 29
BRK+ 30
BRK- 31
EP100伺服驱动器
PE
R
S
T
r
t
CN1
4.7k
14
CN1
CN1
Maxsine
CN2
26LS32
接收器
U
V
W
PE
14 5V
15 5V
16 5V
17 5V
18 0V
19 0V
20 0V
21 0V
1 A+
2 A-
3 B+
4 B-
5 Z+
6 Z-
7 U+
8 U-
9 V+
10 V-
11 W+
12 W-
22 0V
23 0V
26 FG
Star系列
伺服电机
2
3
4
1
电机4芯插头
2
3
4
7
5
8
6
光电编码器
9
15芯插头
10
13
11
14
12
15
1
转矩模拟指令
(-10V~+10V)
CN1
A
+
-
AT+ 21
AT- 22
AGND 24
FG 36
10K
-
B
+
26LS31
Z
驱动器
1 OA+
2 OA-
3 OB+
4 OB-
5 OZ+
6 ZA-
9 GND
7 CZ
机壳地
A
A
B
B
Z
Z
GND
Z
编码器
信号输出
编码器信号地
编码器Z信号
集电极开路输出
图 2.3 转矩控制的标准接线
6
Page 7
EP100 交流伺服驱动器简明手册
第 3 章 接口
3.1 EP100-2A/3A驱动器电源端子TB
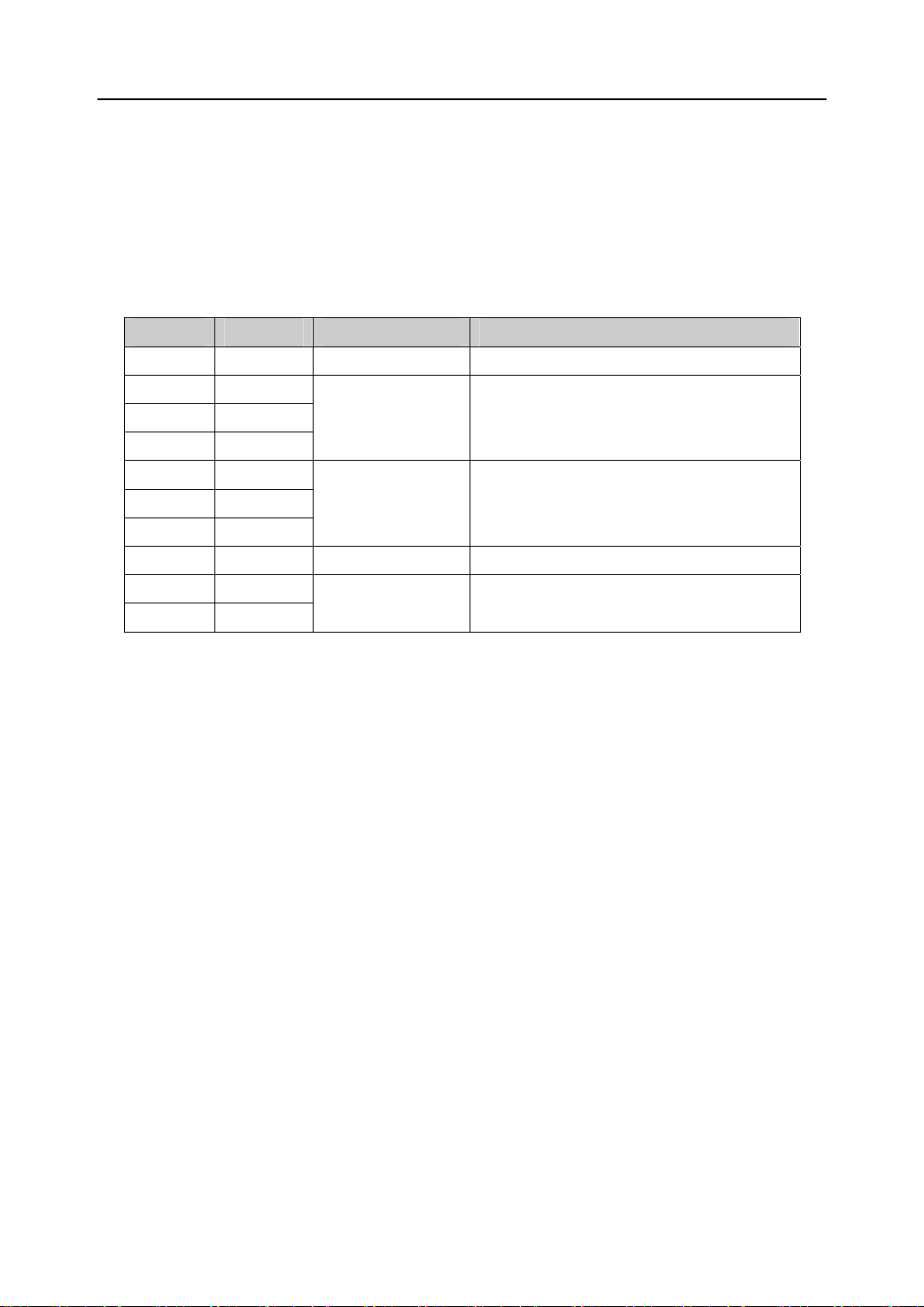
表 3.1 电源端子 TB
端子号 端子记号 信号名称 功能
1 PE
2 R
3 S
4 T
5 U
6 V
7 W
8 PE
9 r
10 t
系统接地 接地端子
主回路电源输入
三相 AC220V
伺服电机电源输出 输出到伺服电机的电源,
接地 接地端子,接电机的外壳地
控制电源输入
单相 AC220V
主回路电源输入端子
AC220V 50Hz
注意:不要同电机输出端子 U、V、W 连接。
必须与电机 U、V、W 端子一一对应连接。
控制回路电源输入端子
AC 220V 50Hz
7
Page 8
EP100 交流伺服驱动器简明手册
3.2 控制信号输入/输出端子CN1
控制方式简称:P 代表位置控制方式 ; S代表速度控制方式;T 代表转矩控制方式。
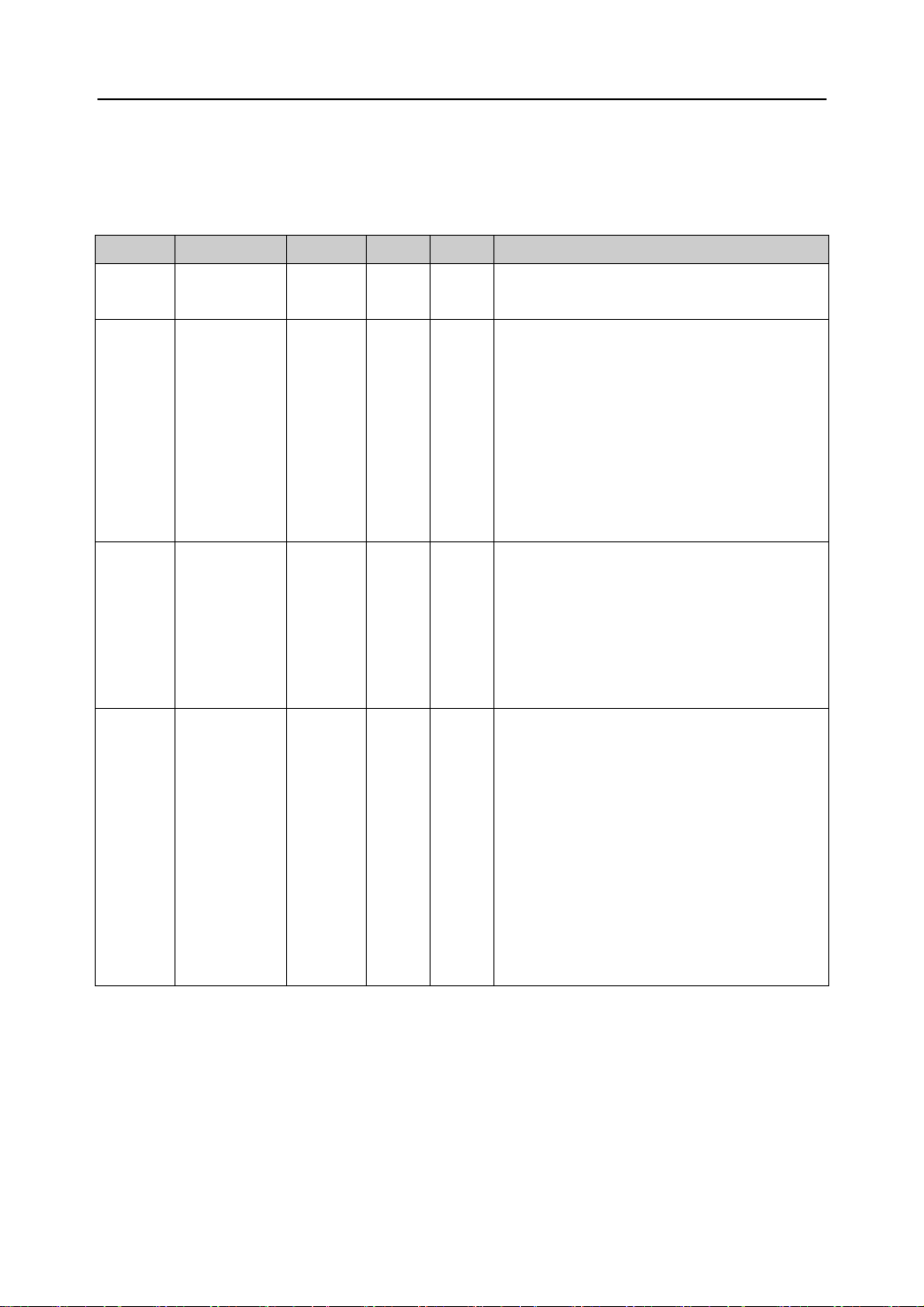
表 3.2 控制信号输入/输出端子 CN1
端子号 信号名称 记号
18
10
11
12
输入端子的
电源正极
伺服使能
报警清除
CCW 驱动禁
止
COM+
SON Type1
ALRS Type1
FSTP Type1
I/O
Type1
方式 功能
输入端子的电源正极,用来驱动输入端子的光
电耦合器,DC12~24V,电流≥100mA。
伺服使能输入端子。
SON ON:允许驱动器工作;
SON OFF:驱动器关闭,停止工作,
电机处于自由状态。
注 1:当从 SON OFF 打到 SON ON 前,
电机必须是静止的。
注 2:打到 SON ON 后,至少等待 50ms
再输入命令。
报警清除输入端子。
ALRS ON:清除系统报警;
ALRS OFF:保持系统报警。
注 1:对于故障代码大于 8 的报警,无法
用此方法清除,需要断电检修,
然后再次通电。
CCW(逆时针方向)驱动禁止输入端子。
FSTP ON :CCW 驱动允许,电机可以逆时针
方向旋转;
FSTP OFF:CCW 驱动禁止,电机禁止逆时针
方向旋转。
注 1:用于机械超限,当开关 OFF 时,CCW
方向转矩保持为 0。
注 2: 可以通过设置参数 PA 20 =1 屏蔽此功
能,用户不用连此端子,也能使 CCW
驱动允许。
8
Page 9

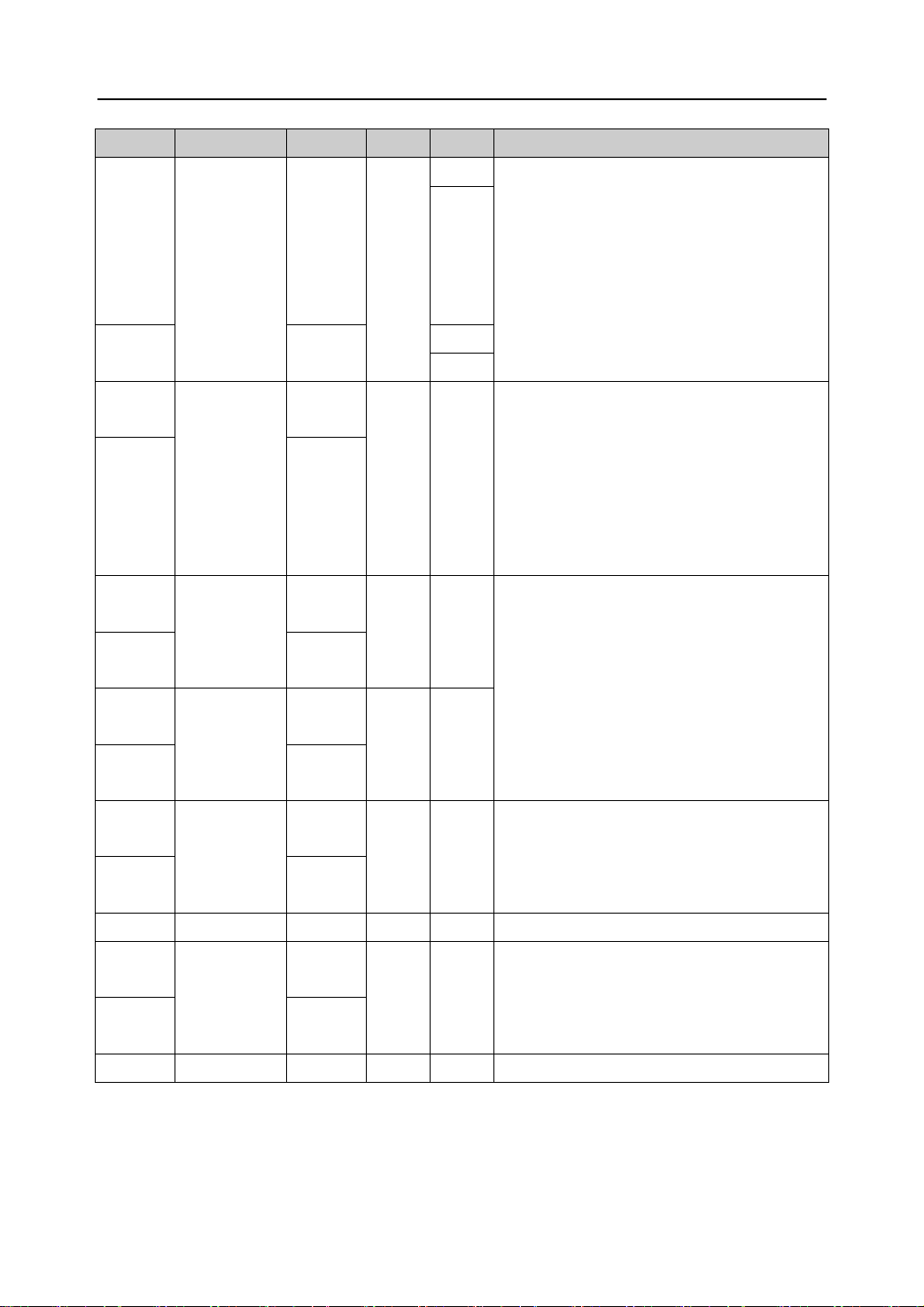
端子号 信号名称 记号
13
14
CW 驱动禁止
偏差计数器
清零
速度选择 1
零速箝位
RSTP Type1
CLE Type1 P
SC1 Type1 S
ZEROSPD Type1 S
EP100 交流伺服驱动器简明手册
I/O
方式 功能
CW(顺时针方向)驱动禁止输入端子。
RSTP ON :CW 驱动允许,电机可以顺时针
RSTP OFF:CW 驱动禁止,电机禁止顺时针方
注 1:用于机械超限,当开关 OFF 时,CW
方向转矩保持为 0。
注 2: 可以通过设置参数 PA 20 =1 屏蔽此功
能,用户不用连此端子,也能使 CW 驱
动允许。
位置控制方式下(参数 PA4=0),位置偏差计数
器清零输入端子。
CLE ON:位置控制时,位置偏差计数器
清零。
速度控制方式下参数(PA4=1),选择内部速度
时(参数 No22=0)速度选择 1 输入端子,
在速度控制方式下,SC1 和 SC2 的组合用来选
择不同的内部速度。
SC1 OFF,SC2 OFF :内部速度 1;
SC1 ON,SC2 OFF :内部速度 2;
SC1 OFF,SC2 ON :内部速度 3;
SC1 ON,SC2 ON :内部速度 4。
注:内部速度 1~4 的数值可以通过参数修改。
速度控制方式下参数(PA4=1),选择外部模拟
速度时(参数 PA22=1,缺省值)。
ZEROSPD ON:不管模拟输入是多少,强迫
ZEROSPD OFF:速度指令为模拟输入数值。
方向旋转;
向旋转。
速度指令为零;
9
Page 10

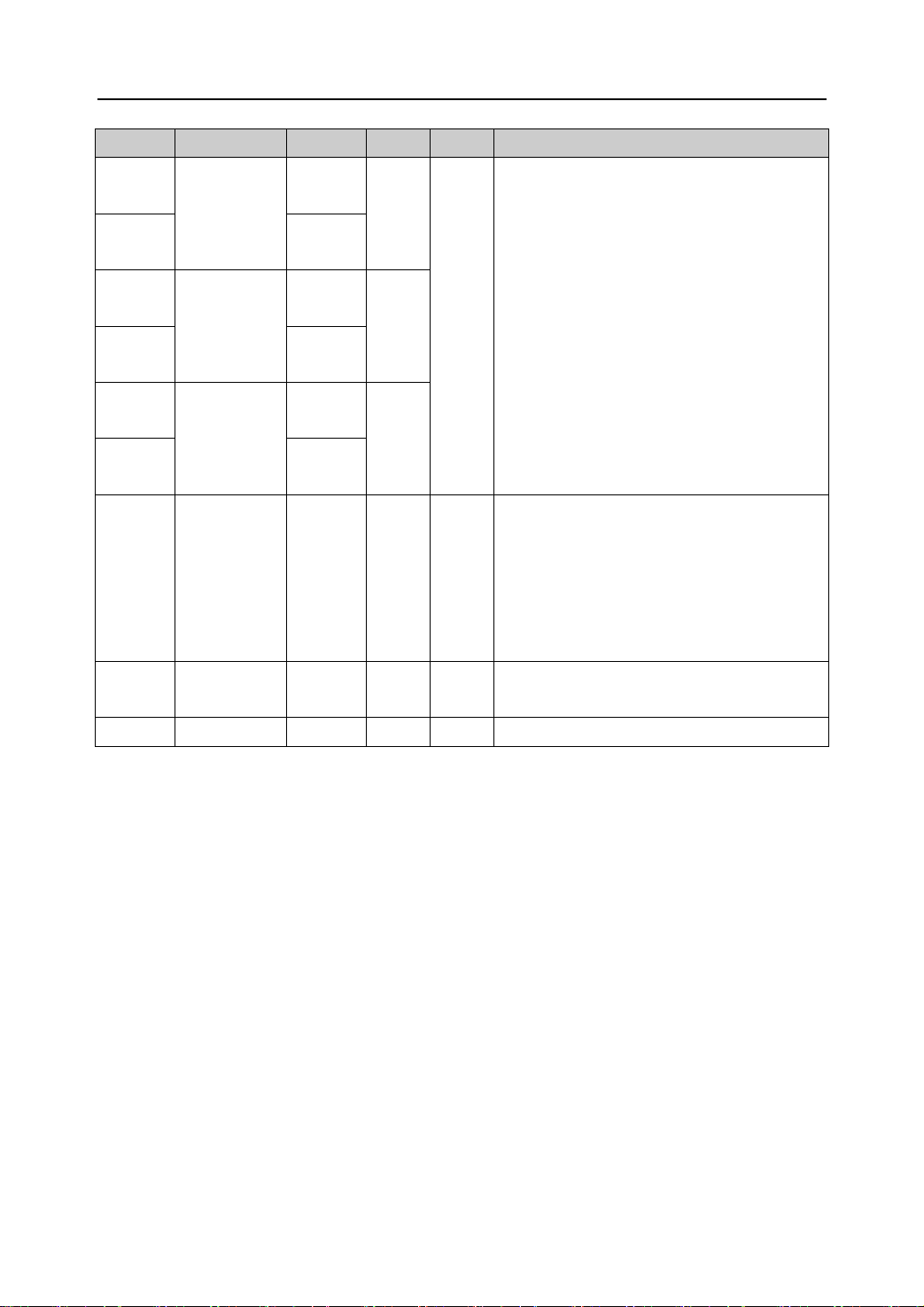
端子号 信号名称 记号
15
16
17
8
25
26
27
指令脉冲禁
止
速度选择 2
CCW 转矩限
制
CW 转矩限制
伺服准备好
输出
伺服报警输出 ALM+
INH Type1 P
SC2 Type1 S
FIL Type1
RIL Type1
SRDY+
SRDY-
ALM-
EP100 交流伺服驱动器简明手册
I/O
Type2
Type2
方式 功能
位置控制方式下(参数 PA4=0),位置指令脉
冲禁止输入端子。
INH ON :指令脉冲输入禁止;
INH OFF:指令脉冲输入有效。
速度控制方式下参数(PA4=1),选择内部速度
时(参数 PA 2 2= 0 )速度选择 2 输入端子,
在速度控制方式下,SC1 和 SC2 的组合用来选
择不同的内部速度。
SC1 OFF,SC2 OFF :内部速度 1;
SC1 ON, SC2 OFF :内部速度 2;
SC1 OFF,SC2 ON :内部速度 3;
SC1 ON, SC2 ON :内部速度 4。
CCW(逆时针方向)转矩限制输入端子。
FIL ON :CCW 转矩限制在参数 PA 3 6 范围
内;
FIL OFF:CCW 转矩限制不受参数 PA 3 6 限制。
注 1:不管 FIL 有效还是无效,CCW 转矩
还受参数 PA 3 4 限制,一般参数 PA34>
参数 PA 3 6。
CW(顺时针方向)转矩限制输入端子。
RIL ON :CW 转矩限制在参数 PA 37 范围
内;
RIL OFF:CW 转矩限制不受参数 PA 37 限制。
注 1 :不管 RIL 有效还是无效,CW 转矩
还受参数 PA 35 限制,一般| 参数
PA35|>|参数 PA37|。
伺服准备好输出端子。
SRDY ON:控制电源和主电源正常,驱动器
SRDY OFF:主电源未合或驱动器有报警,伺
伺服报警输出端子。
ALM ON:伺服驱动器无报警,伺服报警输出
ALM OFF:伺服驱动器有报警,伺服报警输
没有报警,伺服准备好输出 ON
(输出导通);
服准备好输出 OFF(输出截止)。
ON(输出导通);
出 OFF(输出截止)。
10
Page 11
端子号 信号名称 记号
定位完成输
出;(位置控
制方式下)
速度到达输
出;(速度控
制方式下)
30
31
32
33
34
35
19
20
23
21
22
24
机械制动器
释放
指令脉冲
PLUS 输入
指令脉冲
SIGN 输入
模拟速度指
令输入
模拟地
模拟转矩指
令输入
模拟地
COIN+
COIN-
BRK+
BRK-
PULS+
PULS-
SIGN+
SIGN-
AS+
AS-
AGND
AT +
AT -
AGND
EP100 交流伺服驱动器简明手册
I/O
Type2
Type2
Type3 P
Type3 P
Type4 S
Type4 T
方式 功能
P 28
S
P 29
S
定位完成输出端子。
COIN ON:当位置偏差计数器数值在设定的定
COIN ON:当速度到达或超过设定的速度时,
当电机具有机械制动器(失电保持器)时,可
以用此端口控制制动器。
BRK ON:制动器通电,制动无效,电机可以
BRK OFF:制动器截止,制动有效,电机被锁
注:BRK 功能是由驱动器内部控制。
外部指令脉冲输入端子。
注 1:由参数 PA 14 设定脉冲输入方式,
PA14=0,指令脉冲+符号方式;(缺省状
态);
PA14=1,CCW/CW 指令脉冲方式;
PA14=2,2 相指令脉冲方式。
外部模拟速度指令输入端子,差分方式,输入
阻抗 10kΩ,输入范围-10V~+10V。
模拟输入的地线。
外部模拟转矩指令输入端子,差分方式,输入
阻抗 10kΩ,输入范围-10V~+10V。
模拟输入的地线。
位范围时,定位完成输出 ON(输出
导通),否则输出 OFF(输出截止)。
速度到达输出端子。
速度到达输出 ON(输出导通),否
则输出 OFF(输出截止)。
运行;
死,不能运行。
11
Page 12
端子号 信号名称 记号
1
2
3
4
5
6
7
9
36
编码器 A 相
信号
编码器 B 相
信号
编码器 Z 相
信号
编码器 Z 相
集电极开路
输出
编码器公共
地线
屏蔽地线
OA+
OA-
OB+
OB-
OZ+
OZ-
CZ Type6
GND
FG
EP100 交流伺服驱动器简明手册
I/O
Type5
Type5
Type5
方式 功能
编码器 ABZ 信号差分驱动输出(26LS31
输出,相当于 RS422);
非隔离输出(非绝缘)。
编码器 Z 相信号由集电极开路输出,编
码器 Z 相信号出现时,输出 ON(输出导
通),否则输出 OFF(输出截止);
非隔离输出(非绝缘);
在上位机,通常 Z 相信号脉冲很窄,故
请用高速光电耦合器接收。
编码器公共地线。
屏蔽地线端子。
12
Page 13
EP100 交流伺服驱动器简明手册
3.3 编码器信号输入端子CN2
表 3.3 编码器信号输入端子 CN2
记号
14
15
16
17
18
19
20
21
22
23
10
11
12
26
5V 电源
电源公共地
1
编码器 A+输入 A+ 与光电编码器 A+相连接。
2
编码器 A-输入 A-
3
编码器 B+输入 B+ 与光电编码器 B+相连接。
4
编码器 B-输入 B-
5
编码器 Z+输入 Z+ 与光电编码器 Z+相连接。
6
编码器 Z-输入
7
编码器 U+输入 U+ 与光电编码器 U+相连接。
8
编码器 U-输入
9
编码器 V+输入 V+ 与光电编码器 V+相连接。
编码器 V- 输入
编码器 W+输入 W+ 与光电编码器 W+相连接。
编码器 W- 输入
屏蔽地线
+5V
0V
Type7
Type7
Type7
Z-
Type7
U-
Type7
V-
Type7
W-
FG
I/O
功能 端子号 信号名称
描述
伺服电机光电编码器用+5V 电源和公共
地;电缆长度较长时,应使用多根芯线并
联,减小线路压降。
与光电编码器 A-相连接。
与光电编码器 B-相连接。
与光电编码器 Z-相连接。
与光电编码器 U-相连接。
与光电编码器 V- 相连接。
与光电编码器 W- 相连接。
屏蔽地线端子。
13
Page 14

EP100 交流伺服驱动器简明手册
3.4 接口端子配置
图 3.1 为伺服驱动器接口端子 CN1 配置图。CN1 为 36 芯接插件。图 3.2 为伺服驱
动器接口端子 CN2 配置图,CN2 为 26 芯接插件。
12
14
16
18 6
11
13
15
17
30
32
34
36
29
31
3335
810
79
28
25
27
4
5223201
2426
23
2
1921
图 3.1 CN1 插头焊片(S360 或 S361,面对插头的焊片看)
6
8
10
12
5
7
9
11
13
19
21
23
25
18
20
22
24
26
24
13
1517
1416
图 3.2(a) CN2 插头焊片(新 S261,面对插头的焊片看,2008 年 6 月以后采用)
3.5 输入/输出接口类型
3.5.1 开关量输入接口
servo amplifier
COM+
4.7K12~24V
SW
图 3.3 Type1 开关量输入接口
由用户提供电源,DC12~24V,电流≥100mA;
注意,如果电流极性接反,会使伺服驱动器不能工作。
14
Page 15

EP100 交流伺服驱动器简明手册
VCC
3.5.2 开关量输出接口
servo amplifier
ma x 5 0 mA
ma x 2 5 V
a. 继电器连接
max 25V
max 50mA
servo amplifier
b. 光电耦合器连接
图 3.4 Type2 开关量输出接口
输出位达林顿晶体管,与继电器或光电耦合器连接;
外部电源由用户提供,但是必需注意,如果电源的极性接反,会使伺服驱动器损坏;
输出为集电极开路形式,最大电流 50mA,外部电源最大电压 25V。因此,开关量
输出信号的负载必须满足这个限定要求。如果超过限定要求或输出直接与电源连接,
会使伺服驱动器损坏;
如果负载是继电器等电感性负载,必须在负载两端反并联续流二极管。如果续流二
极管接反,会使伺服驱动器损坏。
输出晶体管是达林顿晶体管,导通时,集电极和发射集之间的压降 V
不能满足 TTL 低电平要求,因此不能和 TTL 集成电路直接连接。
约有 1V 左右,
ce
15
Page 16

3.5.3 脉冲量输入接口
r
EP100 交流伺服驱动器简明手册
servo amplifier
PULS+
PULS-
220
SI GN +
SI GN -
220
图 3.5 Type3 脉冲量输入接口的差分驱动方式
VCC
PULS+
R
R
PULS-
SI G N +
SI G N -
servo amplifie
220
220
图 3.6 Type3 脉冲量输入接口的单端驱动方式
为了正确地传送脉冲量数据,建议采用差分驱动方式;
差分驱动方式下,采用 AM26LS31、MC3487 或类似的 RS422 线驱动器;
采用单端驱动方式,会使动作频率降低。根据脉冲量输入电路,驱动电流 10~15mA,
限定外部电源最大电压 25V 的条件,确定电阻 R 的数值。经验数据:VCC=24V,
R=1.3~2k;VCC=12V,R=510~820Ω;VCC=5V,R=82~120Ω 。
采用单端驱动方式时,外部电源由用户提供。但必需注意,如果电源极性接反,会
使伺服驱动器损坏。
脉冲输入形式详见表 3.4,箭头表示计数沿,表 3.5 是脉冲输入时序及参数。当使用
2 相输入形式时,其 4 倍频脉冲频率≤500kHz。
16
Page 17

EP100 交流伺服驱动器简明手册
表 3.4 脉冲输入形式
脉冲指令形式
脉冲列
符号
CCW脉冲列
CW脉冲列
A相脉冲列
B相脉冲列
PULS
SIGN
PULS
SIGN
PULS
SIGN
3.5.4 模拟输入接口
Controller
-
+
CCW CW 参数设定值
0
指令脉冲+符号
1
CCW脉冲/CCW脉冲
2
2相指令脉冲
servo amplifier
AS+ or AT+
10k
-
+
AS- or AT-
AGND
图 3.10 a 模拟差分输入接口(type4)
Controller
-
+
图 3.
10 b 模拟单端输入接口(type4)
servo amplifier
AS+ or AT+
10k
AS- or AT-
AGND
17
-
+
Page 18

r
12V
r
12V
Controlle
R
200(1/2W)
R
200(1/2W)
VR
2K(1/2W)
EP100 交流伺服驱动器简明手册
servo amplifier
AS+ or AT+
AS- or AT-
10k
-
+
AGND
图 3.10 c 模拟差分电位器输入接口(type4)
Controlle
12V
12V
R
200(1/2W)
2K(1/2W)
R
200(1/2W)
servo amplifier
VR
AS+ or AT+
10k
AS- or AT-
AGND
-
+
图 3.10 d 模拟单端电位器输入接口(type4)
模拟输入接口是差分方式,根据接法不同,可接成差分和单端两中形式,输入阻抗
为 10kΩ。输入电压范围是-10V~+10V;
在差分接法中,模拟地线和输入负端在控制器侧相连,控制器到驱动器需要三根线
连接;
在单端接法中,模拟地线和输入负端在驱动器侧相连,控制器到驱动器需要两根线
连接;
差分接法比单端接法性能优秀,它能抑制共模干扰;
输入电压不能超出-10V~+10V 范围,否则可能损坏驱动器;
建议采用屏蔽电缆连接,减小噪声干扰;
模拟输入接口存在零偏是正常的,可通过调整参数 PA 45 对零偏进行补偿;
模拟接口是非隔离的(非绝缘)。
18
Page 19

EP100 交流伺服驱动器简明手册
A
r
A
3.5.5 编码器信号输出接口
servo amplifierController
OA+
OA-
OB+
OB-
OZ+
OZ-
AM26LS32 AM26LS31
GND
B
Z
图 3.11 a 光电编码器输出接口(Type5)
编码器信号经差分驱动器(AM26LS31)输出。
控制器输入端可采用 AM26LS32 接收器,必须接终端电阻,约 330Ω左右。
控制器地线与驱动器地线必须可靠连接。
非隔离输出。
控制器输入端也可采用光电耦合器接受,但必须采用高速光电耦合器(例如 6N137)。
Controlle
1N4148
220
OA+
OA-
servo amplifier
1N4148
200
1N4148
220
6N137 AM26LS31
OB+
OB-
OZ+
OZ-
B
Z
图 3.11 b 光电编码器输出接口(Type5)
19
Page 20

EP100 交流伺服驱动器简明手册
VCC
3.5.6 编码器Z信号集电极开路输出接口
max 25V
max 50mA
servo amplifier
CZ
Z
GND
图 3.12 光电编码器输出接口(Typ e6)
编码器 Z 相信号由集电极开路输出,编码器 Z 相信号出现时,输出 ON(输出导通),
否则输出 OFF(输出截止);
非隔离输出(非绝缘);
在上位机,通常 Z 相信号脉冲很窄,故请用高速光电耦合器接收(例如 6N137)
3.5.7 伺服电机光电编码器输入接口
X+
X-
X=A, B,Z,U, V,W
图 3.13 伺服电机光电编码器输入接口
servo amplifierservo motor
AM26LS32
20
Page 21

EP100 交流伺服驱动器简明手册
3.6 EP100-5A驱动器电源端子TB
图 3.14 EP100-5A 驱动器电源端子 TB
21
Page 22

EP100 交流伺服驱动器简明手册
第 4 章 参数
4.1 参数一览表
下表中的出厂值以 110ST-M02030(配 2A 驱动器)为例,带”*”标志的参数在其它型号
中可能不一样。
表 4.1 用户参数一览表
序号 名称 适用方式 参数范围 出厂值 单位
0
密码 P,S,T
1
型号代码 P,S,T
2
软件版本(只读) P,S,T
3
初始显示状态 P,S,T
4
控制方式选择 P,S,T
5
速度比例增益 P,S
6
速度积分时间常数 P,S
7
转矩滤波器 P,S,T
8
速度检测滤波器 P,S
9
位置比例增益
10
位置前馈增益
11
位置前馈滤波器截止频率
12
位置指令脉冲分频分子
13
位置指令脉冲分频分母
14
位置指令脉冲输入方式
15
位置指令脉冲方向取反
16
定位完成范围
17
位置超差检测范围
18
位置超差错误无效
19
位置指令平滑滤波器
20
驱动禁止输入无效 P,S,T
21
JOG 运行速度
22
内外速度指令选择
23
最高速度限制 P,S,T
24
内部速度 1
25
内部速度 2
26
内部速度 3
P 1~1000 40 1/s
P 0~100 0 %
P 1~1200 300 Hz
P 1~32767 1
P 1~32767 1
P 0~2 0
P 0~1 0
P 0~30000 20
P 0~30000 400
P 0~1 0
P 0~30000 0 0.1ms
S -3000~3000 120 r/min
S 0~2 1
S -3000~3000 0 r/min
S -3000~3000 100 r/min
S -3000~3000 300 r/min
0~9999 315
0~51 30*
* *
0~21 0
0~6 0
5~2000 150* Hz
1~1000 20* ms
20~500 100 %
20~500 100 %
0~1 0
0~4000 3600 r/min
脉冲
×100 脉冲
22
Page 23

EP100 交流伺服驱动器简明手册
序号 名称 适用方式 参数范围 出厂值 单位
27
内部速度 4
28
到达速度
29
模拟量转矩指令输入增益
30
用户转矩过载报警值 P,S,T
31
用户转矩过载报警检测时间 P,S,T
32
控制方式切换允许 P,S,T
33
模拟量转矩指令输入方向取反
34
内部 CCW 转矩限制 P,S,T
35
内部 CW 转矩限制 P,S,T
36
外部 CCW 转矩限制 P,S,T
37
外部 CW 转矩限制 P,S,T
38
速度试运行、JOG 运行转矩限制
39
模拟量转矩指令零偏补偿
40
加速时间常数
41
减速时间常数
42
S 型加减速时间常数
43
模拟速度指令增益
44
模拟速度指令方向取反
45
模拟速度指令零偏补偿
46
模拟速度指令滤波器
47
电机停止时机械制动器动作设定 P,S,T
48
电机运转时机械制动器动作设定 P,S,T
49
电机运转时机械制动器动作速度 P,S,T
50
转矩控制时速度限制
51
动态电子齿轮有效
52
第二位置指令脉冲分频分子
53
低 4 位输入端子强制 ON 控制字 P,S,T
54
高 4 位输入端子强制 ON 控制字 P,S,T
55
低 4 位输入端子取反控制字 P,S,T
56
高 4 位输入端子取反控制字 P,S,T
57
输出端子取反控制字 P,S,T
58
输入端子去抖动时间常数 P,S,T
59
演示运行 P,S
S -3000~3000 -100 r/min
S 0~3000 500 r/min
T 10~100 30 0.1V/100%
1~300 300 %
0~32767 0 ms
0~1 0
T 0~1 0
0~300 300* %
-300~0 -300* %
0~300 100 %
-300~0 -100 %
S 0~300 100 %
T -2000~2000 0
S 1~10000 0 ms
S 1~10000 0 ms
S 1~1000 0 ms
S 10~3000 300 (r/min) / V
S 0~1 0
S -5000~5000 0
S 0~1000 300 Hz
0~200 0
0~200 50
0~3000 100 r/min
T 0~5000 3600* r/min
P 0~1 0
P 1~32767 1
0000~1111 0000
0000~1111 0000
0000~1111 0000
0000~1111 0000
0000~1111 0000
1~1000 16 0.1ms
0~1 0
×10ms
×10ms
二进制
二进制
二进制
二进制
二进制
23
Page 24

5.1 报警一览表
报警代码 报警名称 内容
--
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
19
20
21
22
23
29
30
31
32
正常
超速 伺服电机速度超过设定值
主电路过压 主电路电源电压过高
主电路欠压 主电路电源电压过低
位置超差 位置偏差计数器的数值超过设定值
电机过热 电机温度过高
速度放大器饱和故障 速度调节器长时间饱和
驱动禁止异常 CCW、CW 驱动禁止输入都 OFF
位置偏差计数器溢出 位置偏差计数器的数值的绝对值超过 2
编码器故障 编码器信号错误
控制电源欠压 控制电源偏低
IPM 模块故障 IPM 智能模块故障
过电流 电机电流过大
过负载 伺服驱动器及电机过负载(瞬时过热)
制动故障 制动电路故障
编码器计数错误 编码器计数异常
电机热过载 电机电热值超过设定值(I
速度响应故障 速度误差长期过大
热复位 系统被热复位
EEPROM 错误 EEPROM 错误
U4 错误 U4 错误
保留
U6 芯片错误 U6 芯片或电流传感器错误
用户转矩过载报警 电机负载超过用户设定的数值和持续时间
编码器 Z 脉冲丢失 编码器 Z 脉冲错
编码器 UVW 信号错误 编码器 UVW 信号错误或与编码器不匹配
编码器 UVW 信号非法
编码
EP100 交流伺服驱动器简明手册
第 5 章 保护功能
表 5.1 报警一览表
UVW 信号存在全高电平或全低电平
24
2
t 检测)
30
Page 25

EP100 交流伺服驱动器简明手册
第 6 章 显示与键盘操作
面板由 6 个 LED 数码管显示器和 4 个按键↑、↓、←、Enter 组成,用来显示系统各
种状态、设置参数等。操作是分层操作,←、Enter 键表示层次的后退和前进,Enter 键有
进入、确定的意义,←键有退出、取消的意义;↑、↓键表示增加、减少序号或数值大小。
如果按下↑、↓键并保持,则具有重复效果,并且保持时间越长,重复速率越高。
如果 6 个数码管或最右边数码管的小数点显示闪烁,表示发生报警。POWER 指示灯
点亮表示主电源已上电,RUN 指示灯点亮表示电机正在运转。
Maxsine
EP100 Series
AC Servo Amplifier
图 6.0 面板
Power
Run
Enter
25
Page 26

EP100 交流伺服驱动器简明手册
6.1 第 1 层
第 1 层用来选择操作方式,共有 7 种方式,用↑、↓键改变方式,按 Enter 键进入选
定的方式的第 2 层,按←键从第 2 层退回第 1 层。
图 6.1 方式选择操作框图
26
Page 27

EP100 交流伺服驱动器简明手册
6.2 第 2 层
6.2.1 监视方式
在第 1 层中选择“dP-@@@”,并按 Enter 键进入监视方式。共有 21 种显示状态,用户
用↑、↓键选择需要的显示模式,再按 Enter 键,就进入具体的显示状态了。
dp-spd
dp-pos
dp-pos.
dp-[po
dp-[po.
dp-epo
dp-epo.
dp-trq
dp- I
dp-lsp
dp-[nt
dp-frq
dp- [s
dp- [t
dp-apo
dp- In
dp-out
dp-[od
dp- rn
dp-err
电机速度(r/min)
当前位置低5位(脉冲)
当前位置高5位(×100000脉冲)
位置指令低5位(脉冲)
位置指令高5位(×100000脉冲)
位置偏差低5位(脉冲)
位置偏差高5位(×100000脉冲)
电机转矩(%)
电机电流(A)
直线速度(m/min)
当前控制方式
位置指令脉冲频率(kHz)
速度指令(r/min)
转矩指令(%)
一转中转子绝对位置(脉
冲)
输入端子状态
输出端子状态
编码器输入信号
运行状态
报警代码
Enter
r 1000
p45806
p. 12
[45810
[. 12
e4
e. 0
t70
I2.3
l 5.000
[nt 0
f12.6
r. -35
t. -20
a 3265
In!!!!
out !!
[od!!!
rn- on
err 9
电机速度1000r/min
当前位置1245806脉冲
位置指令1245810脉冲
位置偏差4脉冲
电机转矩 70%
电机电流 2.3A
直线速度5.000m/min
控制方式 0
位置指令脉冲频率12.6kHz
速度指令 -35r/min
转矩指令 -20%
转子绝对位置3265
输入端子
输出端子
编码器信号
运行状态:正在运行
9号报警
dp-res
保留
u0
图 6.2 监视方式操作框图
27
Page 28

EP100 交流伺服驱动器简明手册
图 6.3 输入端子显示(笔划点亮表示 ON,熄灭表示 OFF)
图 6.4 输出端子显示(笔划点亮表示 ON,熄灭表示 OFF)
图 6.5 编码器信号显示(笔划点亮表示 ON,熄灭表示 OFF)
6.2.2 参数设置
在第 1 层中选择“PA-@@@”,并按 Enter 键进入参数设置方式。用↑、↓键选择参数
号,按 Enter 键,显示该参数的数值,用↑、↓键可以修改参数值。按↑或↓键一次,参
数增加或减少 1,按下并保持↑或↓键,参数能连续增加或减少。参数值被修改时,最右
边的 LED 数码管小数点点亮,按 Enter 键确定修改数值有效,此时右边的 LED 数码管小
数点熄灭,修改后的数值将立刻反映到控制中,此后按↑或↓键还可以继续修改参数,修
改完毕按←键退回到参数选择状态。如果对正在修改的数值不满意,不要按 Enter 键确定,
可按←键取消,参数恢复原值,并退回到参数选择状态。
28
Page 29

6.2.3 参数管理
EP100 交流伺服驱动器简明手册
图 6.6 参数设置操作框图
图 6.7 参数管理操作框图
29
Page 30

EP100 交流伺服驱动器简明手册
第 7 章 运行
7.1 位置控制模式的简单接线运行
1.接线
按图 7.8 接线,主电路端子,三相 AC 220V 接 R、S、T 端子。
控制电压端子 r、t 接单相 AC 220V。
编码器信号接插件 CN2 与伺服电机连接好。
控制信号接插件 CN1 按图示连接。
图
7.8 位置控制模式的简单接线图
30
Page 31

EP100 交流伺服驱动器简明手册
2.操作
接通控制电路电源和主电源,显示器有显示,POWER 指示灯点亮。
按下表设置参数值:
参数号 意义 参数值 出厂缺省值
PA4 控制方式选择 0 0
PA12 电子齿轮分子 用户设置 1
PA13 电子齿轮分母 用户设置 1
PA19 位置指令平滑滤波器 0 0
PA20 驱动禁止输入无效 1 0
没有报警和任何异常情况后,使伺服使能(SON) ON,RUN 指示灯点亮;从控制器
送低频脉冲信号到驱动器,使电机运行在低速。
31
Page 32

8.1 伺服驱动器规格
8.2 伺服驱动器尺寸
EP100 交流伺服驱动器简明手册
第 8 章 规格
Maxsine
EP100 Series
AC Servo Amplifier
PE
R
S
T
U
V
W
PE
r
t
45
Power
Run
Enter
CN1 Control
216 230
`
CN2 Feedback
接
线
端
子
A
铭牌
4--R3
200
B
尺寸(mm) A B
EP100(B)-2A/3A 152 77
EP100-5A 200 108
图1-1 EP100尺寸图
32
Page 33

EP100 交流伺服驱动器简明手册
8.3 伺服驱动器规格
型号 EP100(B)-2A EP100(B)-3A EP100-5A
输入电源 三相 AC220V
-15%~+10%
50/60Hz
温度 工作:0~40°C 存贮:-40°C~50°C
使
用
湿度 40%~80%(无结露)
环
大气压强
境
再生制动 内置
速度频率响应 ≥250Hz
特
性
速度波动率 <±0.03(负载 0~100%);<±0.02(电源-15%~+10%)
调速比
脉冲频率 ≤500kHz
86~106kPa
EP100 系列 位置控制、速度控制、转矩控制 控制方法
EP100B 系列 位置控制
(数值对应于额定速度)
1:5000
控制输入 ① 伺服使能 ②报警清除 ③CCW 驱动禁止 ④CW 驱动禁止
⑤偏差计数器清零/速度选择 1/零速箝位 ⑥指令脉冲禁止/速度选择 2
⑦CCW 转矩限制 ⑧CW 转矩限制
控制输出 ① 伺服准备好输出 ②伺服报警输出 ③定位完成输出/速度到达输出
④ 机械制动输出
位置控制
速度控制 4种内部速度
加减速功能 参数设置 1~10000ms / 1000r/min
监视功能 转速、当前位置、指令脉冲积累、位置偏差、电机转矩、电机电流、直线速
保护功能 超速、主电源过压欠压、过流、过载、制动异常、编码器异常、控制电源异
适用负载惯量 小于电机惯量的 5 倍
输入方式 ①脉冲+符号 ②CCW 脉冲/CW 脉冲 ③两相 A/B 正交脉冲
电子齿轮
反馈脉冲 2500 线/转
度、转子绝对位置、指令脉冲频率、运行状态、输入输出端子信号等
常、位置超差等
1~32767/1~32767
33
Page 34

EP100 交流伺服驱动器简明手册
8.4 型号代码参数与电机对照表
参数 PA 1( 型号代码)的设置值必须与采用的驱动器和电机匹配,参数 PA 1 的设置值
参见下表,如果不匹配会造成性能下降或出现报警。每种型号代码具有不同的缺省参数
组合。装置在出厂时已经设置好相应的参数 PA 1,并恢复成对应缺省参数组合。如果需
要修改型号代码或需要恢复出厂的缺省参数组合,请参考 7.14.1 章节实施。
表8.1
型号代码 适配STAR 系列电机 功率
25
26
27
30 110ST-M02030 0.6 2 3000
31 110ST-M04030 1.2 4 3000
32 110ST-M05030 1.5 5 3000
33 110ST-M06020 1.2 6 2000
39 130ST-M04025 1 4 2500
40 130ST-M05025 1.3 5 2500
41 130ST-M06025 1.5 6 2500
42 130ST-M07720 1.6 7.7 2000
43 130ST-M10015 1.5 10 1500
适配 EP100-2A 驱动器的电机
额定转矩
80ST-M01330
80ST-M02430
80ST-M03330
(kW)
0.4 1.3 3000
0.75 2.4 3000
1.0 3.3 3000
(N·m)
额定转速
(r/min)
34
Page 35

EP100 交流伺服驱动器简明手册
表8.2
型号代码 适配STAR 系列电机 功率
28
29
34 110ST-M02030 0.6 2 3000
35 110ST-M04030 1.2 4 3000
36 110ST-M05030 1.5 5 3000
37 110ST-M06020 1.2 6 2000
38 110ST-M06030 1.8 6 3000
44 130ST-M04025 1 4 2500
45 130ST-M05025 1.3 5 2500
46 130ST-M06025 1.5 6 2500
47 130ST-M07720 1.6 7.7 2000
48 130ST-M07730 2.4 7.7 3000
49 130ST-M10015 1.5 10 1500
50 130ST-M10025 2.6 10 2500
51 130ST-M15015 2.3 15 1500
52 130ST-M12020 2.4 12 2000
适配 EP100-3A 驱动器的电机
额定转矩
80ST-M02430
80ST-M03330
(kW)
0.75 2.4 3000
1.0 3.3 3000
(N·m)
额定转速
(r/min)
表8.3
型号代码 适配 STAR 系列电机 功率
0 130ST-M07720 1.6 7.7 2000
1 130ST-M07730 2.4 7.7 3000
2 130ST-M10015 1.5 10 1500
3 130ST-M10025 2.6 10 2500
4 130ST-M15015 2.3 15 1500
5 130ST-M15025 3.9 15 2500
6 150ST-M12030 3.6 12 3000
7 150ST-M15025 3.8 15 2500
8 150ST-M18020 3.6 18 2000
9 150ST-M23020 4.7 23 2000
10 150ST-M27020 5.5 27 2000
11 130ST-M12020 2.4 12 2000
适配 EP100-5A 驱动器的电机
额定转矩
(kW)
(N·m)
额定转速
(r/min)
35
Page 36

8.5 伺服电机型号
EP100 交流伺服驱动器简明手册
8.6 伺服电机接线
8.6.1 绕组接线
端子符号 端子序号 端子说明
U 2 电机U相电源输入
V 3 电机V相电源输入
W 4 电机W相电源输入
8.6.2 制动器
端子符号 端子序号 端子说明
DC+ 1
DC- 2
1 电机外壳接地端子
制动器电源
3 电机外壳接地端子
36
Page 37

8.6.3 标准编码器
端子符号 端子序号 端子说明
5V 2
0V 3
A+ 4
A- 7
B+ 5
B- 8
Z+ 6
Z- 9
U+ 10
U- 13
V+ 11
V- 14
W+ 12
W- 15
FG 1 编码器外壳
EP100 交流伺服驱动器简明手册
编码器5V电源输入
编码器A相输出
编码器B相输出
编码器Z相输出
编码器U相输出
编码器V相输出
编码器W相输出
8.6.4 省线编码器
端子符号 端子序号 端子说明
5V 2
0V 3
A+ 4
A- 7
B+ 5
B- 8
Z+ 6
Z- 9
FG 1 编码器外壳
编码器5V电源输入
编码器A相输出
编码器B相输出
编码器Z相输出
37
Page 38

8.7 伺服电机参数
8.7.1 80 系列电机参数
EP100 交流伺服驱动器简明手册
电机型号
功率(kW)
额定转矩(N·m)
额定转速(r/min)
额定电流(A)
转子惯量(kg·m2)
电机重量(kg)
80ST-M01330L 80ST-M02430L 80ST-M03330L
0.4 0.75 1.0
1.3 2.4 3.3
3000 3000 3000
2.6 4.2 4.8
-4
0.74×10
1.2×10-4 1.58×10-4
2.2 2.8 3.3
编码器线数 2500(省线式)
极对数
电机绝缘等级
防护等级
15.5
0
-0.03
6
0
-0.1
4
B
IP65
B
4-Φ6
Φ90
0
-0.013
0
-0.03
Φ70
额定转矩(N·m)
A(mm)
B(mm)
Φ19
25
30
2
3
10
A
1.3 2.4 3.3
128 150 165
500 500 500
80
80
38
Page 39

EP100 交流伺服驱动器简明手册
8.7.2 110 系列电机参数
电机型号
功率(kW)
额定转矩(N·m)
额定转速(r/min)
额定电流(A)
转子惯量(kg·m2) 0.425×10-3 0.828×10-3 0.915×10-3 1.111×10-3 1.111×10-3
电机重量(kg)
编码器线数
极对数
电机绝缘等级
防护等级
制动器 电压:24VDC(-15%~+10%),电流≤0.6A,制动转矩≥8Nm,转动惯量:0.64×10-4kg·m2
110ST-M02030L 110ST-M04030L 110ST-M05030L 110ST-M06020L 110ST-M06030L
0.6 1.2 1.5 1.2 1.6
2 4 5 6 6
3000 3000 3000 2000 3000
4.0 6.0 7.0 6.0 8.5
4.2 6.0 6.8 7.8 7.8
2500
4
B
IP65
额定转矩(N·m)
A(mm)无制动器
A(mm)含制动器
2 4 5 6
158 185 200 217
200 227 242 259
B(mm) 76 102 118 134
39
Page 40

EP100 交流伺服驱动器简明手册
8.7.3 130 系列电机参数
电机型号
功率(kW)
额定转矩(N·m)
额定转速(r/min)
额定电流(A)
转子惯量(kg·m2)
电机重量(kg)
编码器线数
极对数
电机绝缘等级
防护等级
制动器 电压:24VDC(-15%~+10%),电流≤0.6A,制动转矩≥12Nm,转动惯量:1.67×10-4kg·m2
130ST-M04025L 130ST-M05020L 130ST-M05025L 130ST-M06025L
1.0 1.0 1.3 1.5
4 5 5 6
2500 2000 2500 2500
5.0 5.5 6.0 7.0
-3
1.101×10
1.333×10-3 1.333×10-3 1.544×10-3
6.0 6.9 6.9 7.6
2500
4
B
IP65
电机型号
功率(kW)
额定转矩(N·m)
额定转速(r/min)
额定电流(A)
转子惯量(kg·m2)
电机重量(kg)
编码器线数
极对数
电机绝缘等级
防护等级
制动器 电压:24VDC(-15%~+10%),电流≤0.6A,制动转矩≥12Nm,转动惯量:1.67×10-4kg·m2
130ST-M07720L
1.6
7.7
2000
6.5
-3
2.017×10
2.017×10-3 2.017×10-3 2.595×10-3
8.6
130ST-M07725L
2.0
7.7
2500
8.5
8.6 8.6 10.6
130ST-M07730L 130ST-M10015L
2.4 1.5
7.7 10
3000 1500
10.5 6.5
2500
4
B
IP65
40
Page 41

EP100 交流伺服驱动器简明手册
电机型号
功率(kW)
额定转矩(N·m)
额定转速(r/min)
额定电流(A)
转子惯量(kg·m2)
电机重量(kg)
编码器线数
极对数
电机绝缘等级
防护等级
制动器 电压:24VDC(-15%~+10%),电流≤0.6A,制动转矩≥12Nm,转动惯量:1.67×10-4kg·m2
130ST-M10025L 130ST-M15015L
2.6 2.3
10 15
2500 1500
11.5 9.5
-3
2.595×10
4.32×10-3 4.32×10-3
10.6 14.6 14.6
2500
4
B
IP65
130ST-M15025L
3.9
15
2500
17.0
额定转矩(N·m)
A(mm)无制动器
A(mm)含制动器
B(mm) 80 89 98 112 136 184
4 5 6 7.7 10 15
163 171 181 195 219 267
205 213 223 237 261 309
41
Page 42

EP100 交流伺服驱动器简明手册
8.7.4 150 系列电机参数
电机型号
功率(kW)
额定转矩(N·m)
额定转速(r/min)
额定电流(A)
转子惯量(Kg·m2) 6.15×10-3 6.33×10-3 8.94×10-3 11.19×10-3
电机重量(kg)
编码器线数
极对数
电机绝缘等级
防护等级
制动器 电压:100VDC(-15%~+10%),电流≤0.4A,制动转矩≥30Nm,转动惯量:6×10-4kg·m2
150ST-M15025 150ST-M18020 150ST-M23020 150ST-M27020
3.8 3.6 4.7 5.5
15 18 23 27
2500 2000 2000 2000
16.5 16.5 20.5 26.0
15.7 17.8 21.4 23.7
2500
4
B
IP65
额定转矩(Nm)
A(mm)无制动器
A(mm)含制动器
B(mm) 146 166 196 222
15 18 23 27
231 250 280 306
293 312 342 368
42
Page 43

武汉迈信电气技术有限公司
地址:湖北省武汉市东湖技术开发区民族大道
藏流路 3 号金桥工业园 6 栋 3 楼东
邮编:430223
电话:027-87921284,87922796
传真:027-87921280
主页:www.maxsine.com
2008年12月编制
严禁转载·复制
 Loading...
Loading...