

Page 1

maxon motor
maxon motor control EPOS Positioning Controller
Hardware Reference December 2008 Edition
70/10
Positioning Controller
Documentation
Hardware Reference
maxon document number: 752380-04
Page 2
maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
1 Table of contents
1
Table of contents................................................................................................................... 2
2 Table of figures ..................................................................................................................... 3
3 Introduction ........................................................................................................................... 4
4 How to use this guide............................................................................................................ 4
5 Safety Instructions................................................................................................................. 5
6 Performance Data ................................................................................................................. 6
6.1 Electrical data...................................................................................................................... 6
6.2 Inputs .................................................................................................................................. 6
6.3 Outputs................................................................................................................................ 6
6.4 Voltage outputs ................................................................................................................... 6
6.5 Motor connections...............................................................................................................6
6.6 Interfaces ............................................................................................................................ 7
6.7 LED indicator....................................................................................................................... 7
6.8 Ambient temperature- / Humidity range.............................................................................. 7
6.9 Mechanical data.................................................................................................................. 7
6.10 Connections ........................................................................................................................ 7
6.11 Order number...................................................................................................................... 7
7 Connections 300583 ............................................................................................................. 8
7.1 Power supply connector (J1) .............................................................................................. 9
7.2 Logic supply connector (J1A)............................................................................................ 10
7.3 Motor connector (J2)......................................................................................................... 11
7.3.1 maxon EC motor .......................................................................................................... 11
7.3.2 maxon DC motor with separated motor and encoder cable ........................................ 11
7.4 Hall sensor connector (J3) ................................................................................................ 12
7.5 Encoder connector (J4)..................................................................................................... 13
7.6 Signal 1 connector (J5) ..................................................................................................... 14
7.6.1 Digital input 1, 2, 3 “General Purpose“ ........................................................................ 15
7.6.2 Digital input 4, 5, 6 "Home Switch", "Positive and Negative Limit Switch" .................. 16
7.6.3 “+V Opto IN” external supply Input voltage for Digital Outputs.................................... 18
7.6.4 Digital output 1, 2, 3 “General Purpose“ ...................................................................... 19
7.6.5 Digital output 4 "Brake"................................................................................................ 20
7.7 Signal 2 connector (J5A)................................................................................................... 21
7.7.1 Reference Output voltage............................................................................................ 22
7.7.2 Analogue input 1 "General Purpose" ........................................................................... 23
7.7.3 Analogue input 2 "General Purpose" ........................................................................... 23
7.7.4 Digital input 7 "High Speed Command"....................................................................... 24
7.7.5 Digital input 8 "High Speed Command"....................................................................... 25
7.8 RS-232 connector (J6)...................................................................................................... 26
7.9 CAN connector (J7, J8)..................................................................................................... 27
7.10 CAN Node Identification (JP 1) ......................................................................................... 28
8 LED status........................................................................................................................... 29
9 Dimension drawing.............................................................................................................. 29
2 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 3
maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
2 Table of figures
Figure 1: EPOS 70/10 photo ........................................................................................................... 4
Figure 2: EPOS documentation hierarchy....................................................................................... 4
Figure 3: EPOS photo with connector description .......................................................................... 8
Figure 4: Wiring diagram (overview) ............................................................................................... 8
Figure 5: Power connector (J1)....................................................................................................... 9
Figure 6: Logic supply connector (J1A)......................................................................................... 10
Figure 7: Motor connector (J2)...................................................................................................... 11
Figure 8: Motor connector (J2)...................................................................................................... 11
Figure 9: Hall sensor input circuit.................................................................................................. 12
Figure 10: Hall sensor connector (J3) ...........................................................................................12
Figure 11: Encoder input circuit sketch .........................................................................................13
Figure 12: Encoder connector (J4)................................................................................................ 13
Figure 13: Signal connector (J5) ................................................................................................... 14
Figure 14: Logic level .................................................................................................................... 15
Figure 15: Digital input 1..3 ........................................................................................................... 15
Figure 16: Logic level .................................................................................................................... 16
Figure 17: Digital input 4…6.......................................................................................................... 16
Figure 18: Digital input 4,5,6 external wiring examples ................................................................ 17
Figure 19: Digital output 1, 2, 3 circuit........................................................................................... 19
Figure 20: Signal connector (J5A)................................................................................................. 21
Figure 21: Analogue input 1 circuit................................................................................................ 23
Figure 22: Analogue input 2 circuit................................................................................................ 23
Figure 23: Digital input 7 “Differential” circuit ................................................................................ 24
Figure 24: Digital input 7 “Single-ended” circuit ............................................................................ 24
Figure 25: Digital input 8 “Differential” circuit ................................................................................ 25
Figure 26: Digital input 8 “Single-ended” circuit ............................................................................ 25
Figure 27: RS232 cable connector (J6) ........................................................................................ 26
Figure 28: CAN connector (J7,J8)................................................................................................. 27
Figure 29: Table binary code value............................................................................................... 28
Figure 30: CAN ID examples ........................................................................................................ 28
Figure 31: Dimensions EPOS 70/10 ............................................................................................. 29
3 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 4

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
3 Introduction
This documentation “Hardware Reference” provides the hardware details of the EPOS 70/10
positioning controller. It contains performance data, connections, specification, pin assignment
and wiring examples.
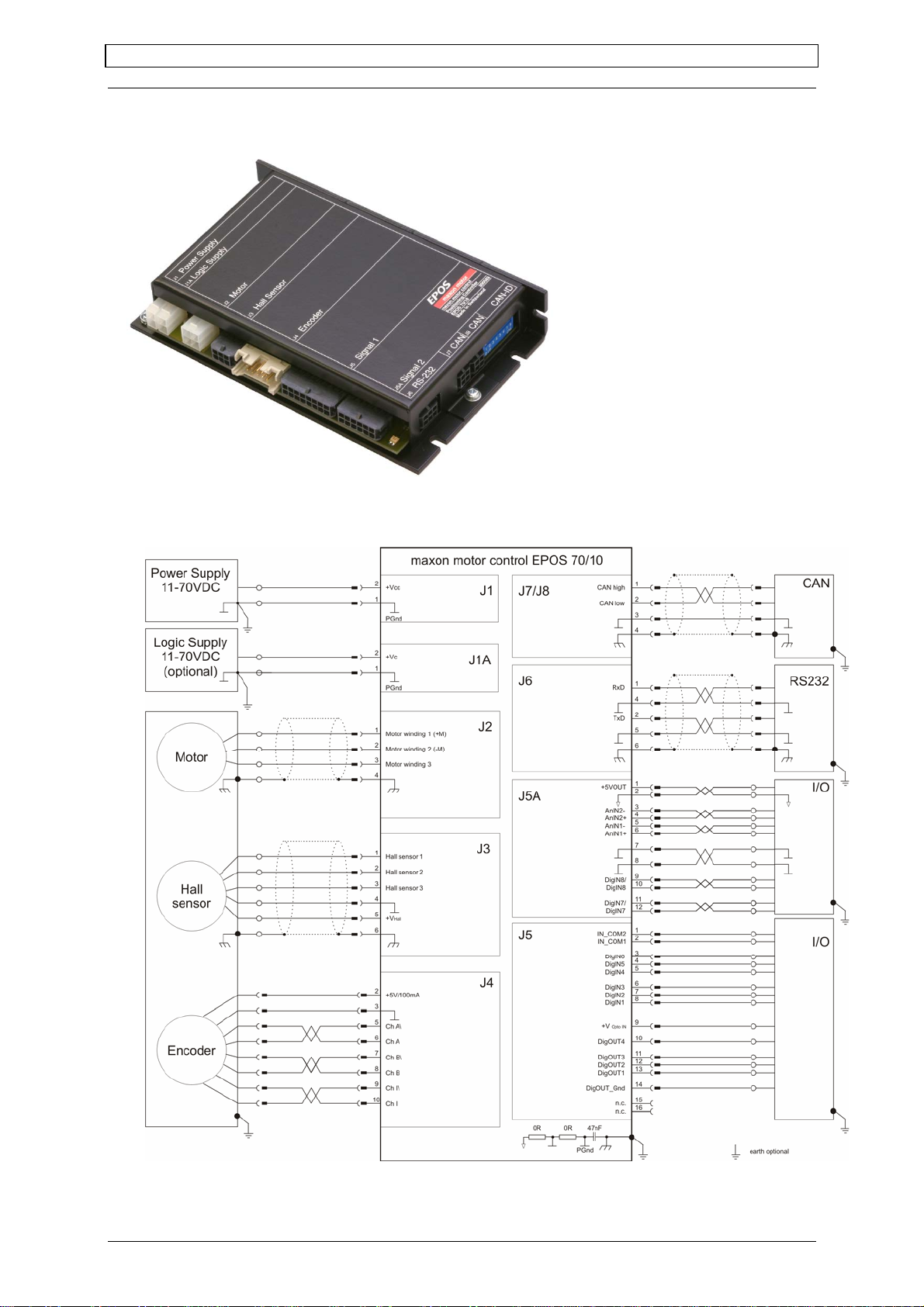
The maxon motor EPOS 70/10 is a small-sized full digital
smart motion controller. Due to the flexible and high efficient
power stage the EPOS 70/10 drives brushed DC motors with
digital encoder as well as brushless EC motors with digital
Hall sensors and encoder.
Figure 1: EPOS 70/10 photo
control functionality allows sophisticated positioning applications. It is specially designed being
commanded and controlled as a slave node in the CANopen network. In addition the unit can be
operated through any RS-232 communication port.
The latest edition of these “Hardware Reference”, additional documentation and software to the
EPOS positioning controller may also be found on the internet in
category <Service>, subdirectory <Downloads>.
The sinusoidal current commutation by space vector control
offers to drive brushless EC motors with minimal torque ripple
and low noise. The integrated position-, velocity- and current
http://www.maxonmotor.com
4 How to use this guide
Setup
Getting Started
Installation Configuration Programming Application
• Cable Starting Set
• Hardware
Reference
• Graphical User
Interface
• Windows DLL
• IEC1131 libraries
• Application Notes
• Application
Samples
Figure 2: EPOS documentation hierarchy
4 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
• Firmware
Specification
• Communication
Guide
Page 5

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
5 Safety Instructions
Skilled Personnel
Installation and starting of the equipment shall only be performed by experienced,
skilled personnel.
Statutory Regulations
The user must ensure that the positioning controller and the components belonging
to it are assembled and connected according to local statutory regulations.
Load Disconnected
For primary operation the motor should be free running, i.e. with the load
disconnected.
Additional Safety Equipment
An electronic apparatus is not fail-safe in principle. Machines and apparatus must
therefore be fitted with independent monitoring and safety equipment. If the
equipment breaks down, if it is operated incorrectly, if the control unit breaks down
or if the cables break, etc., it must be ensured that the drive or the complete
apparatus is kept in a safe operating mode.
Repairs
Repairs may be made by authorized personnel only or by the manufacturer. It is
dangerous for the user to open the unit or make repairs to it.
Danger
Do ensure that during the installation of the EPOS 70/10 no apparatus is
connected to the electrical supply. After switching on, do not touch any live parts!
Max. Supply Voltage
Make sure that the supply voltage is between 11 and 70 VDC. Voltages higher than
77 VDC or of wrong polarity will destroy the unit.
Electrostatic Sensitive Device (ESD)
5 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 6

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
6 Performance Data
6.1 Electrical data
Power supply voltage VCC (Ripple < 10%) .......................................... 11 … 70 VDC
Logic supply voltage V
Max. output voltage .................................................................................... 0.9 • V
Max. output current I
Continuous output current I
Switching frequency ....................................................................................... 50 kHz
Max. efficiency .................................................................................................. 93 %
Sample rate PI - current controller ................................................................. 10 kHz
Sample rate PI - speed controller .................................................................... 1 kHz
Sample rate PID - positioning controller .......................................................... 1 kHz
Max. speed (motors with 2 poles) ........................................................... 25 000 rpm
Built-in motor choke per phase ............................................................. 25 µH / 10 A
6.2 Inputs
Hall sensor signals ........................... Hall sensor 1, Hall sensor 2 and Hall sensor 3
...................... for Hall effect sensor IC's (Schmitt trigger with open collector output)
Encoder signals .......................................................... A, A\, B, B\, I, I\ (max. 1MHz)
................................................................ internal line receiver EIA standard RS-422
Digital input 1 (“General Purpose”) ......... opto-isolated +9 ... +24 VDC (Ri = 1.8kΩ)
Digital input 2 (“General Purpose”) ......... opto-isolated +9 ... +24 VDC (Ri = 1.8kΩ)
Digital input 3 (“General Purpose”) ......... opto-isolated +9 ... +24 VDC (Ri = 1.8kΩ)
Digital input 4 (“Home Switch”) ............... opto-isolated +9 ... +24 VDC (Ri = 1.8kΩ)
Digital input 5 (“Positive Limit Switch”) ... opto-isolated +9 ... +24 VDC (Ri = 1.8kΩ)
Digital input 6 (“Negative Limit Switch”) .. opto-isolated +9 ... +24 VDC (Ri = 1.8kΩ)
Digital input 7 (“High Speed Command”).internal line receiver EIA standard RS-422
Digital input 8 (“High Speed Command”).internal line receiver EIA standard RS-422
Analogue input 1 ...................................... resolution 10-bit 0 ... +5 V (differential)
Analogue input 2 ...................................... resolution 10-bit 0 ... +5 V (differential)
+V Opto IN ...................................................................................... +12 … +24 VDC
CAN-ID (CAN identification) ........... ID 1-127configured by DIP-Switch or Software
(Ripple < 10%) (optional) ............................. 11 … 70 VDC
C
(<1sec) ........................................................................ 25 A
max
........................................................................... 10 A
cont
CC
6.3 Outputs
Digital output 1 (“General Purpose”) ........ opto-isolated max. 24 VDC (IL < 20 mA)
Digital output 2 (“General Purpose”) ........ opto-isolated max. 24 VDC (I
Digital output 3 (“General Purpose”) ........ opto-isolated max. 24 VDC (I
Digital output 4 (“Brake”)……………………opto-isolated max. 24 VDC (I
6.4 Voltage outputs
Encoder supply voltage ........................................................ +5 VDC, max. 100 mA
Hall sensors supply voltage .................................................... +5 VDC, max. 30 mA
Reference Output voltage ........................................................... +5 VDC (Ri =1 kΩ)
6.5 Motor connections
maxon EC motor maxon DC motor
Motor winding 1 +Motor
Motor winding 2 -Motor
Motor winding 3
6 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
< 20 mA)
L
< 20 mA)
L
< 500 mA)
L
Page 7

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
6.6 Interfaces
RS-232 .............................. RxD; TxD ......................................... max. 115 200 bit/s
CAN (1) ............................. CAN_H (high); CAN_L (low) .................... max.1 MBit/s
CAN (2) ............................. CAN_H (high); CAN_L (low) .................... max.1 MBit/s
6.7 LED indicator
2 colours LED ............................................................................... ENABLE / FAULT
................................................................................. green = ENABLE, red = FAULT
6.8 Ambient temperature- / Humidity range
Operating .............................................................................................. -10 ... +45°C
Storage ................................................................................................. -40 ... +85°C
Non condensating .................................................................................... 20 ... 80 %
6.9 Mechanical data
Weight ................................................................................................. approx. 330 g
Dimensions (L x W x H) ................................................................ 150 x 93 x 27 mm
Mounting plate .................................................................................... for M3 screws
6.10 Connections
Power on board: .................. dual row male header (2 poles) Molex Mini-Fit Jr.TM
Supply
Suitable plug: .......... dual row female receptacle (2 poles) Molex Mini-Fit Jr.
Suitable terminal: ..... female crimp terminal Molex Mini-Fit Jr.
TM
444-76-1111 (AWG 18-24)
Logic On board: ....................... dual row male header (2 poles) Molex Mini-Fit Jr.
Supply Suitable plug: ............. dual row female receptacle (2 poles) Molex Mini-Fit Jr.
Suitable terminal: ...... female crimp terminal Molex Mini-Fit Jr.
TM
444-76-1111 (AWG 18-24)
Motor On board: ....................... dual row male header (4 poles) Molex Mini-Fit Jr.
Suitable plug: ............. dual row female receptacle (4 poles) Molex Mini-Fit Jr.
Suitable terminal: ...... female crimp terminal Molex Mini-Fit Jr.
TM
444-76-1111 (AWG 18-24)
Hall On board: ................... dual row male header (6 poles) Molex Micro-Fit 3.0
Suitable plug: ........ dual row female receptacle (6 poles) Molex Micro-Fit 3.0
Suitable terminal: .... female crimp terminal Molex Micro-Fit 3.0
TM
430-30-0010 (AWG26-30)
Signal 1 On board: ................ dual row male header (16 poles) Molex Micro-Fit 3.0
Suitable plug: dual row female receptacle (16 poles) Molex Micro-Fit 3.0
Suitable terminal: ..... female crimp terminal Molex Micro-Fit 3.0
TM
430-30-0010(AWG26-30)
Signal 2 On board: ................ dual row male header (12 poles) Molex Micro-Fit 3.0
Suitable plug: ...... dual row female receptacle (12 poles) Molex Micro-Fit 3.0
Suitable terminal: ..... female crimp terminal Molex Micro-Fit 3.0
TM
430-30-0010(AWG26-30)
RS232 On board: ................... dual row male header (6 poles) Molex Micro-Fit 3.0
Suitable plug: ........ dual row female receptacle (6 poles) Molex Micro-Fit 3.0
Suitable terminal: ..... female crimp terminal Molex Micro-Fit 3.0
TM
430-30-0010(AWG26-30)
CAN 1 On board: ................... dual row male header (4 poles) Molex Micro-Fit 3.0
Suitable plug: ........ dual row female receptacle (4 poles) Molex Micro-Fit 3.0
Suitable terminal: ..... female crimp terminal Molex Micro-Fit 3.0
TM
430-30-0010(AWG26-30)
CAN 2 On board: ................... dual row male header (4 poles) Molex Micro-Fit 3.0
Suitable plug: ........ dual row female receptacle (4 poles) Molex Micro-Fit 3.0
Suitable terminal: ..... female crimp terminal Molex Micro-Fit 3.0
TM
430-30-0010(AWG26-30)
Encoder On board: ........................................... Plug DIN41651 (10 poles) for flat band cable
............................................................................................................... pitch 1.27mm, AWG 28
Suitable locking clip: .............................................................. Tyco C42334-A421-C42 (right)
.................................................................................................. Tyco C42334-A421-C52 (left)
TM
39-01-2020
TM
39-01-2020
TM
39-01-2040
TM
430-25-0600
TM
430-25-1600
TM
430-25-1200
TM
430-25-0600
TM
430-25-0400
TM
430-25-0400
TM
TM
TM
TM
TM
TM
TM
TM
6.11 Order number
EPOS 70/10 .................................................................................................. 300583
7 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 8
maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7 Connections 300583
Figure 3: EPOS photo with connector description
Figure 4: Wiring diagram (overview)
8 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 9
maxon motor
∆
EPOS Positioning Controller EPOS 70/10 Hardware Reference
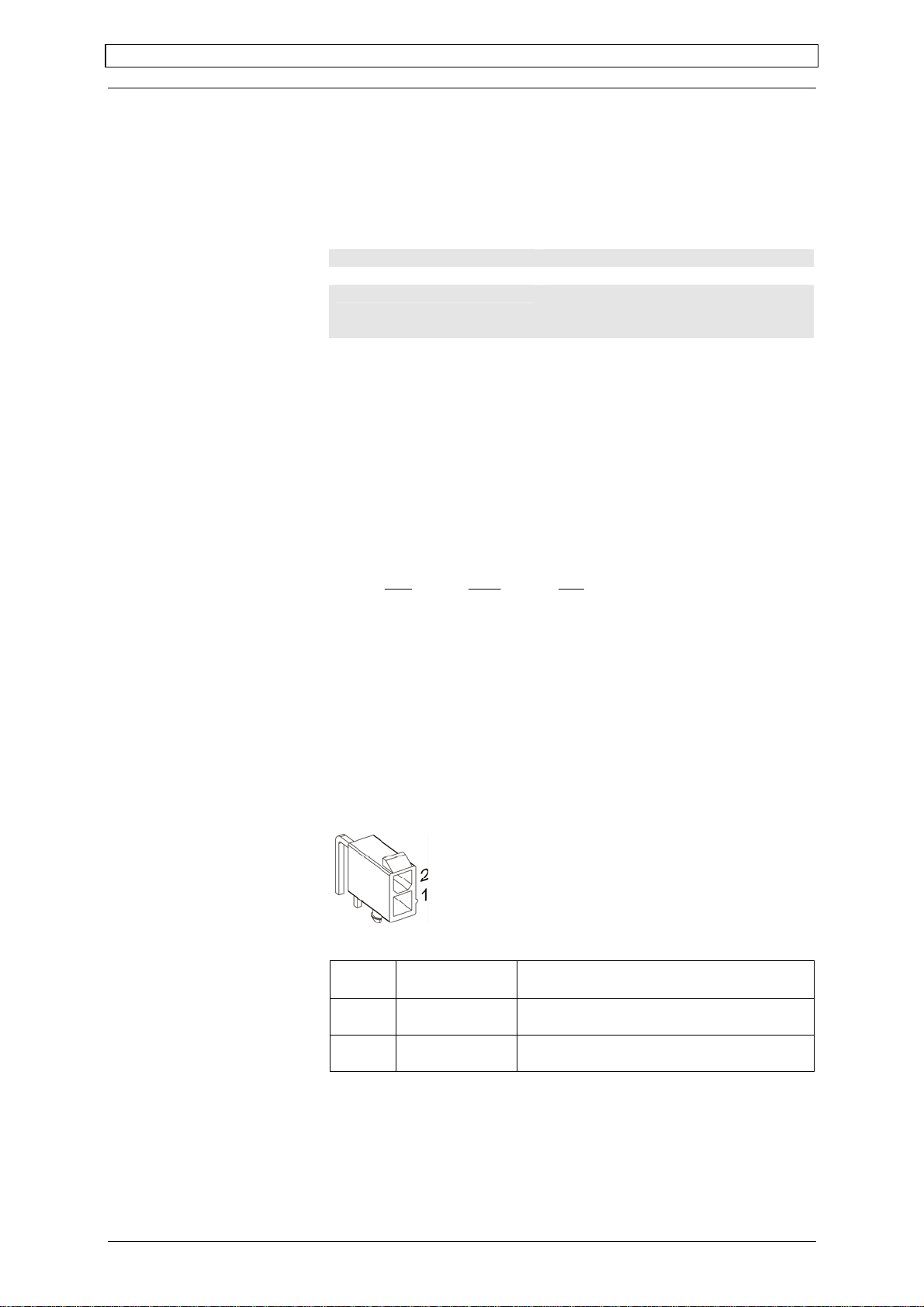
7.1 Power supply connector (J1)
Any available power supply can be used, provided it meets the
minimal requirements set out below.
During set up and adjustment phases, we recommend separating the
motor mechanically from the machine to prevent damage due to
uncontrolled motion.
Ripple < 10 %
Output current Depending on load,
Power supply requirements
Output voltage VCC min. 11 VDC; VCC max. 70 VDC
continuous min. 10 A
acceleration, short-time min. 25 A
The required voltage can be calculated as follows:
Known values:
• Operating torque M
• Operating speed n
• Nominal motor voltage U
• Motor no-load speed at U
• Speed/torque gradient of the motor ∆n/∆M [min
[mNm]
B
[min-1]
B
[Volt]
N
, n0 [min-1]
N
-1
mNm-1]
Sought value:
• Supply voltage
V
CC
[Volt]
Solution:
V
CC
U
N
n
n
0
n
+⋅=
M
∆
1
)(
BB
9.0
][1
VM
+⋅⋅
Choose a power supply capable of supplying this calculated voltage
under load. The formula takes a max. PWM cycle of 90 % and
a 1 volts max. voltage drop at EPOS 70/10 into account.
Consider:
During braking of the load, the power supply must be capable of
buffering the fed back energy, e.g. in a capacitor or shunt regulator
(235811).
When using an electronically stabilized power supply observe that the
over current protection shall not be activated in any operating state
Figure 5: Power connector (J1)
Pin
Signal Description
No.
1 Power_Gnd Ground of supply voltage
2 +VCC Power supply voltage
+11 ... +70 VDC
Accessories: EPOS power cable maxon order number: 275829
Notes: Suitable connector: Molex Mini-Fit Jr.
Suitable crimp terminals: Molex Mini-Fit Jr.
TM
2 poles (39-01-2020)
TM
female crimp
terminals (444-76-1111)
Suitable hand crimper: Molex hand crimper (69008-0724)
9 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 10

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.2 Logic supply connector (J1A)
Optionally, the logic supply voltage can be sourced separately.
This allows a safe and economical power backup feature.
In case no separate Logic supply is applied, the Logic supply will be
sourced by the Power supply voltage automatically.
Any available power supply can be used, provided it meets the
minimal requirements set out below.
Ripple < 10 %
Logic supply requirements
Output voltage VCC min. 11 VDC; VCC max. 70 VDC
Min. Output power PCC min. 5W
Figure 6: Logic supply connector (J1A)
Pin
Signal Description
No.
1 Power_Gnd Ground of supply voltage
2 +VC Logic supply voltage
+11 ... +70 VDC
Accessories: EPOS power cable maxon order number: 275829
Notes: Suitable connector: Molex Mini-Fit Jr.
Suitable crimp terminals: Molex Mini-Fit Jr.
TM
2 poles (39-01-2020)
TM
female crimp
terminals (444-76-1111)
Suitable hand crimper: Molex hand crimper (69008-0724)
10 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 11

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.3 Motor connector (J2)
7.3.1 maxon EC motor
Connect the maxon EC motor (brushless) motor windings on motor
connector (J2).
Figure 7: Motor connector (J2)
Pin
Signal Description
No.
1 Motor winding 1 EC motor: Winding 1
2 Motor winding 2 EC motor: Winding 2
3 Motor winding 3 EC motor: Winding 3
4 Motor shield Cable shield
Accessories: EPOS motor cable maxon order number: 275851
Notes: Suitable connector: Molex Mini-Fit Jr.
(39-01-2040)
Suitable crimp terminals: Molex Mini-Fit Jr.
terminals (444-76-1111)
Suitable hand crimper: Molex hand crimper (69008-0724)
7.3.2 maxon DC motor with separated motor and encoder cable
Connect the maxon DC motor (brush) on motor connector (J2).
Figure 8: Motor connector (J2)
TM
4 poles
TM
female crimp
11 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Pin
Signal Description
No.
1 Motor (+M) DC motor: Motor +
2 Motor (-M) DC motor: Motor 3 Do not connect Do not connect
4 Motor shield Cable shield
Accessories: EPOS motor cable maxon order number: 275851
Notes: Suitable connector: Molex Mini-Fit Jr.
(39-01-2040)
Suitable crimp terminals: Molex Mini-Fit Jr.
TM
4 poles
TM
female crimp
terminals (444-76-1111)
Suitable hand crimper: Molex hand crimper (69008-0724)
Page 12

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.4 Hall sensor connector (J3)
Hall sensors are needed for detecting rotor position of maxon EC
motors (brushless).
Suitable for Hall Effect sensors IC using Schmitt-trigger with open
collector output.
Hall sensor supply voltage +5 VDC
Input voltage 0…+10 VDC
Logic 1 typical > 2.4 VDC
Max. Hall sensor supply current 30 mA
Logic 0 typical < 0.8 VDC
Internal pull-up resistor
2.7 kΩ (against +5 VDC)
Figure 9: Hall sensor input circuit
Figure 10: Hall sensor connector (J3)
Pin
Signal Description
No.
1 Hall sensor 1 Hall sensor 1 Input
2 Hall sensor 2 Hall sensor 2 Input
3 Hall sensor 3 Hall sensor 3 Input
4 GND Ground of Hall sensor supply
5 +V
Hall sensor supply voltage
Hall
+5 VDC / 30 mA
6 Hall shield Cable shield
Accessories: EPOS Hall sensor cable maxon order number: 275878
Notes: Suitable connector: Molex Micro-Fit 3.0
(430-25-0600)
Suitable crimp terminals: Molex Micro-Fit 3.0
TM
6 poles
TM
female crimp
terminals (430-30-0010)
Suitable hand crimper: Molex hand crimper (69008-0983)
12 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 13

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.5 Encoder connector (J4)
It is necessary that an encoder with a built-in line driver is used
(3-channel recommended).
The standard encoder adjustment (original packing) refers to a
500-count per turn encoder. For other encoders the adjustment must
be modified with the software.
Max. encoder supply current 100 mA
Line receiver (internal) EIA standard RS-422
Encoder supply voltage +5 VDC
Min. differential Input voltage ± 200 mV
Max. encoder input frequency 1 MHz
1 n.c. Not connected
2 +5 VDC / 100 mA Encoder supply voltage
3 GND Ground
4 n.c. Not connected
5 Channel A\ Channel A complement
6 Channel A Channel A
7 Channel B\ Channel B complement
8 Channel B Channel B
9 Channel I\ Index complement
10 Channel I Index
Accessories: EPOS encoder cable maxon order number: 275934
Notes: Suitable connector: DIN 41651 Plug, pitch 2.54 mm,
Figure 11: Encoder input circuit sketch
Figure 12: Encoder connector (J4)
Pin
No.
Encoder pin out suits for example to:
- maxon digital MR-Encoder type ML, L all with Line Driver
- maxon digital encoder HEDL 55__ with Line Driver RS 422
Signal Description
10 poles, plug strain relief
13 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 14

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.6 Signal 1 connector (J5)
Signal connector contains smart multi-purpose digital I/O’s
configurable as: “Positive- and Negative Limit Switches”, “Home
Switch” and “Brake Output”.
Additionally “General Purpose” digital I/O’s are provided.
1 IN_COM 2 Common signal 2 for DigIN 4…6
2 IN_COM 1 Common signal 1 for DigIN 1…3
3 DigIN 6 Digital input 6 “Negative Limit Switch”
4 DigIN 5 Digital input 5 “Positive Limit Switch”
5 DigIN 4 Digital input 4 “Home Switch”
6 DigIN 3 Digital input 3 “General Purpose”
7 DigIN 2 Digital input 2 “General Purpose”
8 DigIN 1 Digital input 1 “General Purpose”
9 +V Opto IN External supply Input voltage for
10 DigOUT 4 Digital output 4 “Brake”
11 DigOUT 3 Digital output 3 “General Purpose”
12 DigOUT 2 Digital output 2 “General Purpose”
13 DigOUT 1 Digital output 1 “General Purpose”
14 DigOUT_Gnd Digital OUT Ground
15 n.c. Not connected
16 n.c. Not connected
Accessories: EPOS signal cable maxon order number: 275932
Notes: Suitable connector: Molex Micro-Fit 3.0
Suitable crimp terminals: Molex Micro-Fit 3.0
Suitable hand crimper: Molex hand crimper (69008-0983)
Figure 13: Signal connector (J5)
Pin
Signal Description
No.
Digital Outputs (+12 … 24VDC)
referred to “+V Opto IN”
TM
16 poles
(430-25-1600)
TM
female crimp
terminals (430-30-0010)
14 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 15

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.6.1 Digital input 1, 2, 3 “General Purpose“
These opto-isolated inputs are defined as “General Purpose” by
default and can be configured via software setting.
Digital input 2 [DigIN2] Connector [J5] Pin number [7]
Common signal [IN_COM1] Connector [J5] Pin number [2]
Type of Input
Max. input voltage ± 30 VDC
Logic 1
Digital input 1 [DigIN1] Connector [J5] Pin number [8]
Digital input 3 [DigIN3] Connector [J5] Pin number [6]
Optical isolated
Single ended, Bipolar
Input voltage ±24 VDC
Logic 0
| Iin | < 1 mA
| Uin | < 5 VDC
| > 3 mA
| I
in
| U
| > 9 VDC
in
Input current at logic 1 typical 13.2 mA
Figure 14: Logic level
Input resistance
Switching delay
typical 1.8 kΩ
@ 24 VDC
< 300 µs @ 24 VDC
15 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Figure 15: Digital input 1..3
Page 16

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.6.2 Digital input 4, 5, 6 "Home Switch", "Positive and Negative Limit Switch"
These opto-isolated inputs are defined as:
Digital input 4: “Home Switch”
Digital input 5: “Positive Limit Switch“
Digital input 6: “Negative Limit Switch“
by default and can be configured via software setting.
Digital input 5 [DigIN5] Connector [J5] Pin number [4]
Common signal [IN_COM2] Connector [J5] Pin number [1]
Type of Input
Max. input voltage ± 30 VDC
Logic 1
Digital input 4 [DigIN4] Connector [J5] Pin number [5]
Digital input 6 [DigIN6] Connector [J5] Pin number [3]
Optical isolated
Single ended, Bipolar
Input voltage ±24 VDC
Logic 0
| Iin | < 1 mA
| Uin | < 5 VDC
| > 3 mA
| I
in
| > 9 VDC
| U
in
Input current at logic 1 typical 13.2 mA
Figure 16: Logic level
Input resistance
Switching delay
typical 1.8 kΩ
@ 24 VDC
< 300 µs @ 24 VDC
16 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Figure 17: Digital input 4…6
Page 17

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
Wiring examples:
Different types of proximity switches
Figure 18: Digital input 4,5, external wiring examples
6
Notes:
• Use of 3-wire PNP proximity switches is preferred.
• Use of 3-wire NPN proximity switches needs an additional
external pull-up resistor
(12V) = 560 Ω (300mW)
R
ext
(24V) = 3 kΩ (200mW)
R
ext
• Use of 2-wire proximity switches is possible.
17 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 18

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.6.3 “+V Opto IN” external supply Input voltage for Digital Outputs
An external supply voltage has to be applied for supplying the EPOS
70/10 digital optical-isolated outputs.
Digital OUT Ground [DigOUT_Gnd] Connector [J5] Pin number [14]
Supply voltage +12…+24 VDC
+V Opto IN [+V Opto IN] Connector [J5] Pin number [9]
Any available power supply can be used, provided it meets the
minimal requirements set below.
Min. current 560 mA
18 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 19

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.6.4 Digital output 1, 2, 3 “General Purpose“
These opto-isolated outputs are defined as “General Purpose” by
default and can be configured via software setting.
Digital output 2 [DigOUT2] Connector [J5] Pin number [12]
+V Opto IN [+V Opto IN] Connector [J5] Pin number [9]
Output voltage
Leakage current
Digital output 1 [DigOUT1] Connector [J5] Pin number [13]
Digital output 3 [DigOUT3] Connector [J5] Pin number [11]
Type of Output
Max. load current
Optical isolated
Open-Emitter
≥ + V Opto IN – 3V
U
out
I
≤ 20 mA
load
≤ 20 µA
I
leak
Switching delay < 500 µs @ 24 VDC
Figure 19: Digital output 1, 2, 3 circuit
19 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 20

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.6.5 Digital output 4 "Brake"
Apply permanent magnet brake for DC voltage.
+V Opto IN [+V Opto IN] Connector [J5] Pin number [9]
Output voltage
Leakage current
Max. inductive load 2 H @ 24VDC; 500mA
Digital output 4 [DigOUT4] Connector [J5] Pin number [10]
Digital OUT Ground [DigOUT_Gnd] Connector [J5] Pin number [14]
Type of Output
Max. load current
Optical isolated
Open-Emitter
≥ +V Opto IN – 1V
U
out
I
≤ 500 mA
load
≤ 50 µA
I
leak
Switching delay < 300 µs @ 24 VDC
Wiring example:
Permanent magnet brake
20 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 21

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.7 Signal 2 connector (J5A)
Signal 2 connector contains differential “High Speed Command” digital
I/O’s and additionally differential analogue inputs are provided.
1 +5VOUT Reference Output voltage +5V
2 A_Gnd Analogue signal ground
3 AnIN2 - Negative analogue signal input 2
4 AnIN2 + Positive analogue signal input 2
5 AnIN1 - Negative analogue signal input 1
6 AnIN1 + Positive analogue signal input 1
7 D_Gnd Digital signal ground
8 D_Gnd Digital signal ground
9 DigIN 8/ Digital input 8 “High Speed
10 DigIN 8 Digital input 8 “High Speed
11 DigIN 7/ Digital input 7 “High Speed
12 DigIN 7 Digital input 7 “High Speed
Accessories: EPOS signal 2 cable maxon order number: 300586
Notes: Suitable connector: Molex Micro-Fit 3.0
Suitable crimp terminals: Molex Micro-Fit 3.0
Suitable hand crimper: Molex hand crimper (69008-0983)
Figure 20: Signal connector (J5A)
Pin
Signal Description
No.
Command” complement signal
Command”
Command” complement signal
Command” complement signal
TM
12 poles
(430-25-1200)
TM
female crimp
terminals (430-30-0010)
21 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 22

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.7.1 Reference Output voltage
Reference Output voltage can be used as supply voltage for external
loads connected to EPOS 70/10 analogue inputs.
Output voltage +5 VDC
Connector No. and Pin No. Connector [J5A] Pin number [1]
Output resistance
1.0 kΩ
22 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 23

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.7.2 Analogue input 1 "General Purpose"
“General Purpose” differential analogue input by default. Not
configurable via software setting.
Input voltage range 0 ... 5 VDC (differential)
Common-mode voltage range - 5 ... + 10 VDC (referenced to AGnd)
A/D converter 10-bit
Bandwidth 2 KHz
Connector No. and Pin No.
Max. input voltage - 30 ... + 30 VDC
Input resistance
Resolution 0.005 V
Connector [J5A] Pin number [5]
Connector [J5A] Pin number [6]
30.2 kΩ (differential)
25.1 kΩ (referenced to AGnd)
Figure 21: Analogue input 1 circuit
7.7.3 Analogue input 2 "General Purpose"
“General Purpose” differential analogue input by default. Not
configurable via software setting.
Input voltage range 0 ... 5 VDC (differential)
Common-mode voltage range - 5 ... + 10 VDC (referenced to AGnd)
A/D converter 10-bit
Bandwidth 2 KHz
Connector No. and Pin No.
Max. input voltage - 30 ... + 30 VDC
Input resistance
Resolution 0.005 V
Connector [J5A] Pin number [3]
Connector [J5A] Pin number [4]
30.2 kΩ (differential)
25.1 kΩ (referenced to AGnd)
23 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Figure 22: Analogue input 2 circuit
Page 24

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.7.4 Digital input 7 "High Speed Command"
“High Speed Command” differential input by default and can be
configured via software setting.
Differential
Min. differential input voltage ±200 mV
Max. input frequency 1 MHz
Connector No. and Pin No.
Line receiver (internal) EIA standards RS-422
Connector [J5A] Pin number [11]
Connector [J5A] Pin number [12]
Single-ended DigIN7 Connector No. and Pin No. Connector [J5A] Pin number [12]
Max. input voltage ± 24 VDC
Logic 1 > 3.0 V
Figure 23: Digital input 7 “Differential” circuit
Input voltage 0…5 VDC
Logic 0 < 2.0 V
Input resistance
Figure 24: Digital input 7 “Single-ended” circuit
typical 48 kΩ
(referenced to D_Gnd)
24 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Notes: Connect signal to DigIN7 [J5A/12] and do not connect DigIN7/ [J5A/11]
Page 25

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.7.5 Digital input 8 "High Speed Command"
“High Speed Command” differential input by default and can be
configured via software setting.
Min. differential Input voltage ±200 mV
Max. input frequency 1 MHz
Connector No. and Pin No.
Line receiver (internal) EIA standards RS-422
Connector [J5A] Pin number [9]
Connector [J5A] Pin number [10]
Single-ended DigIN8 Connector No. and Pin No. Connector [J5A] Pin number [10]
Max. input voltage ± 24 VDC
Logic 1 > 3.0 V
Figure 25: Digital input 8 “Differential” circuit
Input voltage 0…5 VDC
Logic 0 < 2.0 V
Input resistance
Figure 26: Digital input 8 “Single-ended” circuit
typical 48 kΩ
(referenced to D_Gnd)
25 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Notes: Connect signal to DigIN8 [J5A/10] and do not connect DigIN8/ [J5A/9]
Page 26

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.8 RS-232 connector (J6)
Output voltage
Internal RS232 driver/receiver EIA RS232 standard
Connection EPOS - PC
Connector J6 pin 4 + 5 “GND” Pin 5 “GND”
Connector J6 pin 2 “EPOS TxD” Pin 2 “PC RxD”
Maximum input voltage
± 30 V
typical ± 9 V
@ 3kΩ to Ground
Maximum bit rate 115 200 bit/s
Note:
• Please consider your PC’s serial port maximal baud rate.
• The standard baud rate setting (factory setting) is 38’400 bauds.
Positioning Controller EPOS 70/10
PC Interface (RS232),
DIN41652
Connector J6 pin 1 “EPOS RxD” Pin 3 “PC TxD”
Figure 27: RS232 cable connector (J6)
Pin
Signal Description
No.
1 EPOS RxD EPOS RS232 receive
2 EPOS TxD EPOS RS232 transmit
3
4 GND RS232_Ground
5 GND RS232_Ground
6 Shield Cable shield
Accessories: EPOS RS232-COM cable maxon order number: 275900
Notes: Suitable connector: Molex Micro-Fit 3.0
(430-25-0600)
Suitable crimp terminals: Molex Micro-Fit 3.0
TM
6 poles
TM
female crimp
terminals (430-30-0010)
Suitable hand crimper: Molex hand crimper (69008-0983)
26 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 27

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.9 CAN connector (J7, J8)
ISO 11898 compatible
Max. number of CAN nodes 127
Identifier setting by DIP-Switch or software
Connection EPOS - CAN
bus line CiA DS-102
Connector J7 (J8) pin 1 “CAN high” Pin 7 “CAN_H” high bus line
Connector J7 (J8) pin 3 “CAN GND” Pin 3 “CAN_GND” Ground
Standard type CAN high-speed
Maximum bit rate 1 MBit/s
Protocol CANopen DS-301 V4.02
Positioning Controller EPOS 70/10
CAN 9 pin D-Sub
(DIN41652)
Connector J7 (J8) pin 2 “CAN low” Pin 2 “CAN_L” low bus line
Connector J7 (J8) pin 4 “CAN shield” Pin 5 “CAN_Shield” Cable
shield
Note:
• Please consider your CAN Master port maximal baud rate.
• The standard baud rate setting (factory setting) is 1 MBit/s.
• Further CAN information may be found in the “Communication
Guide” documentation.
• Use termination resistor on both ends of the CAN bus.
Figure 28: CAN connector (J7,J8)
Pin
Signal Description
No.
1 CAN high CAN high bus line
2 CAN low CAN low bus line
3 CAN GND CAN Ground
4 CAN shield Cable shield
Accessories: EPOS CAN-COM cable maxon order number: 275908
EPOS CAN-CAN cable maxon order number: 275926
EPOS CAN termination plug maxon order number: 275937
Notes: Suitable connector: Molex Micro-Fit 3.0
(430-25-0400)
Suitable crimp terminals: Molex Micro-Fit 3.0
terminals (430-30-0010)
TM
4 poles
TM
female crimp
Suitable hand crimper: Molex hand crimper (69008-0983)
27 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 28

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
7.10 CAN Node Identification (JP 1)
The CAN-ID (node address) is set at DIP-Switch 1 ... 7.
All addresses can be coded from 1 ... 127 using the binary code.
Switch
Binary
Value
1 20 1
2 21 2
3 22 4
4 23 8
5 24 16
6 25 32
7 26 64
Figure 29: Table binary code value
If the value of all switches set at “ON” are added together, this gives
the set CAN-ID (node address).
Examples:
The following table can be used as a guide, but is not comprehensive.
Switch 1 2 3 4 5 6 7
Value 1 2 4 8 16 32 64
CAN-ID Switch setting
Calculation
1
2
32
35
127
1 0 0 0 0 0 0 1
0 1 0 0 0 0 0 2
0 0 0 0 0 1 0 32
1 1 0 0 0 1 0 1 + 2 + 32
1 1 1 1 1 1 1
1 + 2 + 4 + 8 +
16 + 32 + 64
Figure 30: CAN ID examples
Notes:
• The Node ID set by software is valid, if DIP-Switch is set to value
0.
• DIP-Switch 8 has no impact on the CAN-ID.
28 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
Page 29

maxon motor
EPOS Positioning Controller EPOS 70/10 Hardware Reference
8 LED status
The green LED shows the operating status and the red LED indicates
an error of the positioning controller EPOS 70/10. Detailed information
may be found in the Firmware Specification document.
Red LED Green LED Description
OFF Slow blinking
(≈ 1Hz)
OFF
ON
ON ON
ON
ON
OFF The EPOS is in state
Flashing There is no valid firmware on the
The EPOS is in state:
Switch ON Disabled
Ready to Switch ON
Switched ON
-
The power stage is disabled
The EPOS is in state:
- Operation Enable
- Quick St p Active
The power stage is enabled
- Fault
The EPOS is in temporary state
- Fault Reaction Active
The power stage is enabled
EPOS (due to a failed firmware
download)
o
9 Dimension drawing
Dimensions in [mm]
Figure 31: Dimensions EPOS 70/10
29 maxon motor control December 2008 Edition / document number 752380-04 / subject to change
 Loading...
Loading...