

Page 1

A Maxim Integrated Products Brand
78M6612 M-API Library
User Guide
September 30, 2010
Rev. 1.00
UG_6612_036
Page 2

78M6612 M-API Library User Guide UG_6612_036
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit
patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.
Maxim Int egrated Products, 120 San Gabriel Drive, Sunnyvale, CA 9408 6 408-737-7600
2010 Maxim Integrated Products Maxim is a registered trademark of Maxim Integrated Products.
Page 3

UG_6612_036 78M6612 M-API Library User Guide
Table of Contents
1 Introduction ......................................................................................................................................... 5
1.1 Terminology .................................................................................................................................. 5
1.2 Library Measurement Equations ................................................................................................... 6
1.3 Library Parameters ....................................................................................................................... 7
1.3.1 Global Symbols ................................................................................................................. 7
1.3.2 Formulae for Scaled Parameters ...................................................................................... 7
1.3.3 Example Calculation of Sensor Parameters ..................................................................... 8
1.4 Reference Documentation ............................................................................................................ 8
2 Firmware Partitions ............................................................................................................................ 9
3 Build Environment and Software/Firmware Configurations ........................................................ 10
3.1 Firmware Library and CE Mem ory Configurations ..................................................................... 10
3.2 Program and RAM Memory ........................................................................................................ 10
3.2.1 Program Memory ............................................................................................................. 10
3.2.2 RAM/Data Memory .......................................................................................................... 11
3.3 Build Configuration...................................................................................................................... 11
3.3.1 Flash/Code and RAM Size .............................................................................................. 11
3.3.2 Flash/Code Space Assignment ....................................................................................... 12
3.3.3 Library Assignment .......................................................................................................... 13
3.3.4 Module’s Selection within a Library ................................................................................. 14
4 MAPI Libraries ................................................................................................................................... 17
4.1 Library Initialization and Operation ............................................................................................. 17
4.1.1 MAPI_Init() ....................................................................................................................... 17
4.1.2 MAPI_MeterRun() ........................................................................................................... 17
4.1.3 MAPI_MinMaxSetGet() ................................................................................................... 17
4.2 Library Inputs and Outputs ......................................................................................................... 18
4.2.1 MAPI_GetSetRegister() ................................................................................................... 18
4.3 CE and MPU Control .................................................................................................................. 23
4.3.1 MAPI_CEOn().................................................................................................................. 23
4.3.2 MAPI_CEOff().................................................................................................................. 23
4.3.3 MAPI_GetCEName() ....................................................................................................... 23
4.3.4 MAPI_SoftReset() ........................................................................................................... 23
4.3.5 MAPI_HardReset() .......................................................................................................... 24
4.3.6 MAPI_UpdateMPU() ........................................................................................................ 24
4.3.7 MAPI_UpdateCE() ........................................................................................................... 24
4.4 Calibration and Power Measurement ......................................................................................... 25
4.4.1 MAPI_CalSetGet() ........................................................................................................... 25
4.4.2 MAPI_Calibrate() ............................................................................................................. 27
4.4.3 MAPI_MeterStatus() ........................................................................................................ 28
4.4.4 MAPI_TimeToAverage() .................................................................................................. 30
4.4.5 MAPI_GetEnergyUsed() .................................................................................................. 30
4.4.6 MAPI_GetVoltageCurrent() ............................................................................................. 31
4.5 Zero Crossing and Relay Control ............................................................................................... 32
4.5.1 MAPI_RelayConfig() ........................................................................................................ 32
4.5.2 MAPI_RelayControl () ..................................................................................................... 33
4.5.3 MAPI_CloseCircuit_0X() ................................................................................................. 33
4.5.4 MAPI_OpenCircuit_0X() .................................................................................................. 33
4.6 Soft-Timers ................................................................................................................................. 34
4.6.1 MAPIstm_init() ................................................................................................................. 34
4.6.2 MAPIstm_fn_start() ......................................................................................................... 34
4.6.3 MAPIstm_run() ................................................................................................................ 34
4.6.4 MAPIstm_wait() ............................................................................................................... 34
Rev. 1.00 3
Page 4

78M6612 M-API Library User Guide UG_6612_036
4.7 DIO Configuration (future release) .............................................................................................. 35
4.7.1 MAPI_DIOConfig() .......................................................................................................... 35
4.7.2 MAPI_DIORW() ............................................................................................................... 36
4.8 Flash Management ..................................................................................................................... 37
4.8.1 Memcpy_rx() .................................................................................................................... 37
4.8.2 Memcpy_xr() .................................................................................................................... 38
4.8.3 Memcpy_xx() ................................................................................................................... 38
4.9 Serial/RS232 Interface ................................................................................................................ 39
4.9.1 MAPI_UARTInit() ............................................................................................................. 39
4.9.2 MAPI_UARTTx().............................................................................................................. 39
4.9.3 MAPI_TxLen() ................................................................................................................. 40
4.9.4 MAPI_UARTRx() ............................................................................................................. 40
4.9.5 MAPI_RxLen() ................................................................................................................. 40
5 Default Values ................................................................................................................................... 41
6 Contact Information .......................................................................................................................... 42
Revision History ........................................................................................................................................ 43
Figure
Figure 1: High Level Host/Firmware Interface Architecture
Tables
Table 1: CE Configuration ........................................................................................................................... 10
Table 2: Flash Memory Map ....................................................................................................................... 10
Table 3: Data RAM Shared by CE and MPU .............................................................................................. 11
Table 4: Flash and RAM Consumption by MAPI and Sample Application ................................................. 11
Table 5: Breakdown of M-API’s Flash Consumption .................................................................................. 11
Table 6: MAPI Feature/Module Selections ................................................................................................. 15
.......................................................................... 9
4 Rev. 1.00
Page 5

UG_6612_036 78M6612 M-API Library User Guide
1 Introduction
This document describes the Metrology Appl icat ion Pro gr am ming Interface (M-API) version 2.00 firmware
libraries available from Teridian for use with the 78M6612 IC. These libraries are specifically designed for
measurement and switch control of two (2) single-phase AC outlets (same phase).
The firmware delivery is a set of metrology libraries that configure and operate the measurement front
end (e.g. MUX, ADC, CE, etc.) and provides simplified access to measurement output data such as
Power, Voltage, Current, accumulated Energy and Line Frequency. All measurement calculations are
computed by the MAPI library every accumulation interval and mapped to a dedicated block of registers
reserved by the library.
Measurement data are made available to the user application via API calls. A demo application making
use of the M-API library set and serial UART interface is included as part of the 78M6612 OMU
Evaluation Kit.
Timer functions using the hardware RTC are also available and can be accessed directly by the
application. APIs specific to RTC are not available in the current library. Contact a Teridian
representative for more information on non-Volatile RTC operation (e.g. battery backup modes).
1.1 Terminology
The following terminology is used throughout this document:
• CREEP – Threshold value where meas urem ent outp ut s are sque lched t o zero.
• IMAX – External RMS current corresponding to 250 mVpk at the current input of the 78M6612. It should be set
IMAX= (Vpk/√2)/R
• VARs – Reactive Power (Q)
SENSE
.
• VAs – Apparent Power (S).
• Watts – Active Power (P).
• VMAX – External RMS voltage corresponding to 250 mVpk at the voltage input of the 78M6612 (VA, VB). It
must be set high enough to account for over-voltages.
• NB – Narrowband values.
• WB – Wideband values.
Rev. 1.00 5
Page 6

78M6612 M-API Library User Guide UG_6612_036
1.2 Library Measurement Equations
The integrated Compute Engine (CE) accumulates the raw samples from the ADC and provides to the
80515 MPU the critical *atomic measurements needed to derive all other data. This consists of RMS
Voltage, Voltage Sag Status , and AC Line Freq uency data as well as RMS Current, Active Po wer, and
Reactive Power for each outlet. The MAPI library provides the application developer with two equation
options for processing the atomic values before updating the libraries output data registers. One equation
option is defined as “Narrowband” (NB) and the other is defined as “Wideband” (WB).
When using NB equations; RMS Voltage, Active Power, and Reactive Power data is provided by
the CE and used to derive RMS Current, Apparent Power, and Power Factor in the MPU for each
outlet. Harmonic content is not included in the reported current measurement.
*Voltage (V
Current (I
) = √∑v(t)2
RMS
) = S/V
RMS
RMS
*Active Power (P) = ∑ (i(t) * v(t))
*Reactive Power (Q) = ∑ (i(t) * v(t) shift 90º)
Apparent Power (S) = √(P
2
+ Q2)
Power Factor (PF) = P/S
When using WB equations (recommended); RMS Voltage, RMS Current, and Active Power data
provided by the CE is used to derive Reactive Power, Apparent Power, and Power Factor in the
MPU for each outlet.
*Voltage (V
*Current (I
) = √∑v(t)2
RMS
) = √∑i(t)2
RMS
*Active Power (P) = ∑ (i(t) * v(t))
RMS
2
– P2)
* I
RMS
Reactive Power (Q) = √(S
Apparent Power (S) = V
Power Factor (PF) = P/S
6 Rev. 1.00
Page 7

UG_6612_036 78M6612 M-API Library User Guide
1.3 Library Parameters
This section describes critical constants and variable parameters of the MAPI library and their
recommended usage.
1.3.1 Global Symbols
The following symbols are fixed constants for the MAPI v2.00 firmware library:
Samples : 1806
FS : 3641
POWERSCALE : 2.3439E-06
VRMS_MSCALE : 9.6827E-05
IRMS_MSCALE : 2.4207E-05
The following variables are unique to the sensor configuration and represent the real world values
mapped to the upper range of the 78M6612 analog front end.
IMAX : 52 Amps for 4mOhm shunt
VMAX : 471.5 Volts
1.3.2 Formulae for Scaled Parameters
The measurement outputs (and respective alarm thresholds) for the M-API library are stored in a raw
format to preserve native resolution of the computed measurements. When using API calls to access or
fetch measurement data, the values are automatically scaled and converted according to the data types,
below.
I
rms
V
rms
Watts = float(Val)* POWERSCALE*IMAX*VMAX/1000
Frequency = integer(Val)/100
Val : library data
In some rare cases, when raw measurement data (Val) is directly accessed without going through the
library, which is not recommended, scaling to and from real world or usable values must be done using
the formulae above.
= float(Val)* IRMS_MSCALE* IMAX*√(FS/Sampl es)
= float(Val)* VRMS _MSCALE* VMAX*√(FS/Samples)
Rev. 1.00 7
Page 8

78M6612 M-API Library User Guide UG_6612_036
1.3.3 Exam pl e Calculati on of Sensor Parameters
This example demonstrates the calculation of IMAX and VMAX for the default sensor configuration. For
more information on sensor selection and configuration, refer to the 78M6612 Hardware Design
Guidelines.
IMAX Calculation:
IMAX = Imax (pk) / sqrt(2) = Imax (rms)
Max ADC input = 250 mV = IMax (pk) * R shunt
Example:
With a 4 MΩ current shunt, IMax (pk) = 62.5A
=> IMAX = 52 Amps.
VMAX Calculation:
VMAX = Vmax (pk) / sqrt(2) = Vmax (rms)
Max ADC input = 250 mV = Vmax (pk) * Shunt R / (Series R - Shunt R)
Example:
With a Series R of 2 MΩ and a Shunt R of 750 ohms, VMax (pk) = 666.42 Volts.
=> VMAX = 471.23 Volts
1.4 Reference Documentation
• 78M6612 Data Sheet
• 78M6612 Hardware R efer e nce Manua l
• 78M6612 OMU Evaluat ion Boar d User Manua l (reference schematics)
• 78M6612 OMU Demo Application User Manual (CLI)
• 78M6612 OMU Firmware Description Document (register descriptions)
8 Rev. 1.00
Page 9
UG_6612_036 78M6612 M-API Library User Guide
UART/RS232 or I2C
Serial/I2C Host
Application
Host Controller
78M6612
CE
M-API
Application
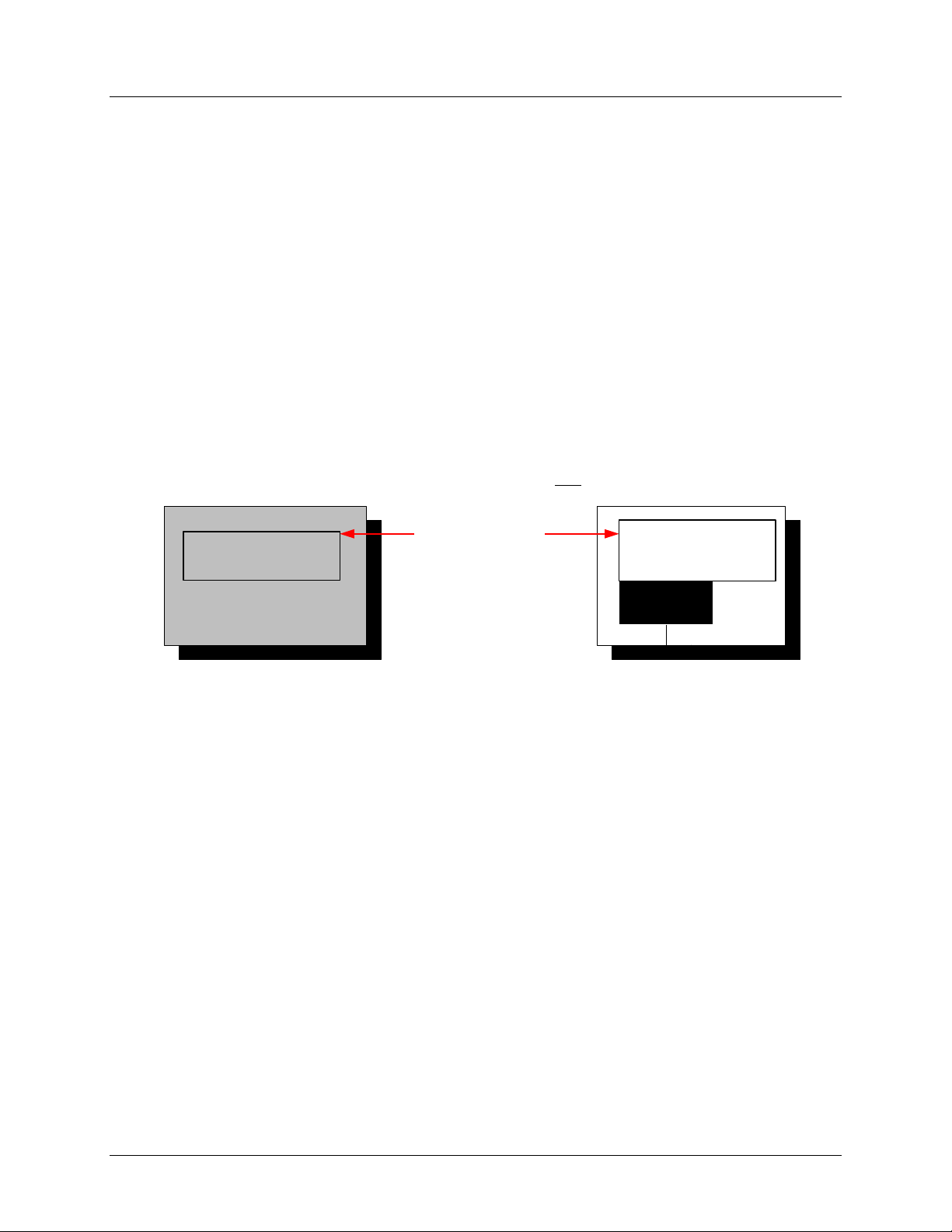
2 Firmware Partitions
The 78M6612 firmware provided by Teridian is partitioned into three main components:
• The Compute Engine (CE) firmware, although a separate set of source code, is a component of the
MAPI libraries responsible for precision Voltage, Current, Watts, and VARs measurements handled
by a dedicated processor. The source code for the CE is not described in this document or made
available for user modification.
• The 80515-based M-API firmware, in combination with the CE firmware, completes the M-API librar y
set and provides all the necessary IC configuration, calibration sub-routines, scaling, data conversion,
and timing control. This set of libraries is to be linked to the application firmware specific to the
desired host interface.
• The Application firmware exercises the M-API library and manages the communication to the host
controller/application. Teridian provides an example Serial Driver to be used as sample code as well
as the application firmware that uses this Serial Driver to exercise the MAPI library. Refer to the
applicable Firmware Description Document for more information on the application firmware.
Figure 1 shows a high level partitioning of the firmware architecture. The black boxes indicate object
and
code to be provided by Teridian. The white box indicates object
source code provided by Teridian.
Figure 1: High Level Host/Firmware Interface Architecture
Rev. 1.00 9
Page 10
78M6612 M-API Library User Guide UG_6612_036
3 Build Environment and Software/Firmware Configurati ons
The Metrology Application Programming Interface (MAPI) is built using Keil Compiler version 8.02,
although any Keil version 7.00 or higher is also compatible.
The MAPI is built using specific default configuration as listed below.
3.1 Firmware Library and CE Memory Configurations
Processing of ADC inputs is done by the CE. The MAPI libraries are built to link to the specific CE code
according to the specific hardware conf ig urati on. The table below shows the different libraries as built
with specific CE code to support different configurations:
Table 1: CE Configuration
Library Name Default Accumulation Interval = 500ms
6612S22_WB_MAPI.lib Built for Wide-Band.
6612S22_NB_MAPI.lib Built for Narrow-Band.
3.2 Program and RAM Memory
The embedded 80515 MPU within the 78M6612 has separate program memory (32K bytes) and data
memory (2K bytes).
3.2.1 Pr ogr am Memory
The Flash program memory is non-volatile and is segmented into 512-byte pages. The last 2.5K (five
512-byte pages) of Flash space is reserved for CE data, CE code and default values used for Energy
Calibration and Measurement. The code for the Compute Engine program resides in the MPU program
memory (flash) and must begin on 1K-byte boundary.
Table 1 below shows the partitions of Flash memory.
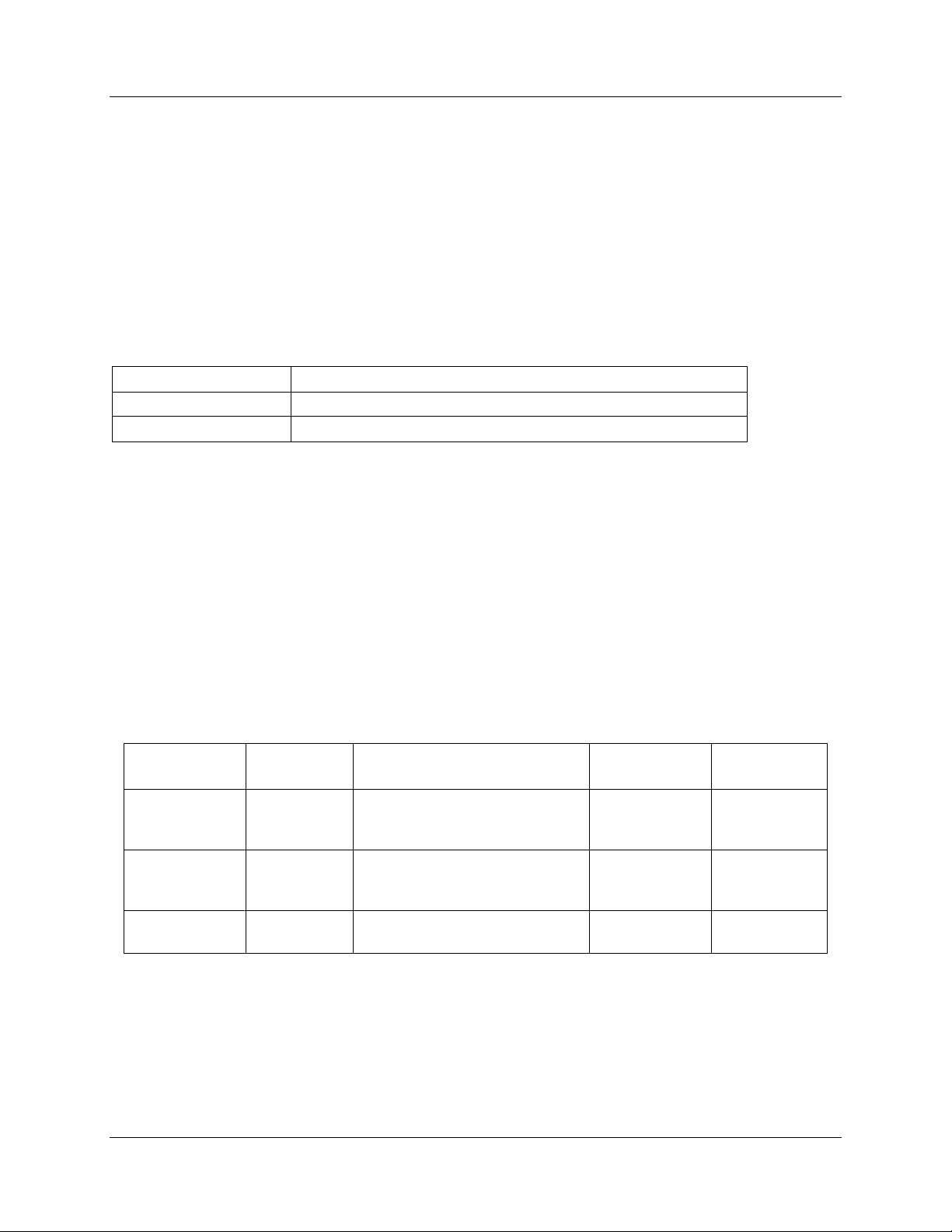
Table 2: Flash Memory Map
Address (hex) Type Typical Usage
0000-75FF
7600-773E
777F-7FFF Non-volatile
Non-volatile
Non-volatile
Program and any non-volatile
data. Shared by the MAPI and
application layer.
Reserved for MAPI energy
measurement constants
(defaults).
Reserved for CE code and CE
data.
Wait States
(at 5 MHz)
0
0
0
Size (bytes)
29.5KB
< ~350B
2KB
10 Rev. 1.00
Page 11
UG_6612_036 78M6612 M-API Library User Guide
3.2.2 RAM/Data Memory
The 78M6612 has 2K bytes of Data Memory for exclusive use by the embedded 80515 MPU library and
application layers. In addition, there are 512 bytes reserved for the Compute Engine.
Table 3: Data RAM Shared by CE and MPU
Address (hex) Type Typical Usage Size (bytes)
0000-07FF Volatile MPU data XRAM, 2KB
1000-11FF Volatile CE data 512
2000-20FF Volatile
Miscellaneous I/O RAM
(configuration RAM)
256
3.3 Build Configuration
The accompanying example application source code has been set up to link to each library under specific
hardware configuration. Each configuration is defined under a different ‘Target’. However, for all ‘Targets’,
specific area of Flash is reserved for specific function as described below.
3.3.1 Flash/Code and RAM Size
The attached zipped file (78M6612MAPIv200.zip) contains a sample Application code, of which source
code is also included. The functions of this application are detailed in Section 6.
This sample applic at ion is taking up Flash/RAM usage according to the table below. It was written to
demonstrate the use of the MAPI libraries via two types of commands: the ‘M’ commands (as shown in
Section 6) to specifically address the MAPI calls; and the ‘CLI’, aka Command Line Interface, commands
for backward compatibility to support those who have evaluated, or are familiar with, Teridian OMU
products in the past.
The following tables show RAM and Flash consumptions by this sample application. They also show a
breakdown of Flash consumption by different features as implemented in the MAPI libraries.
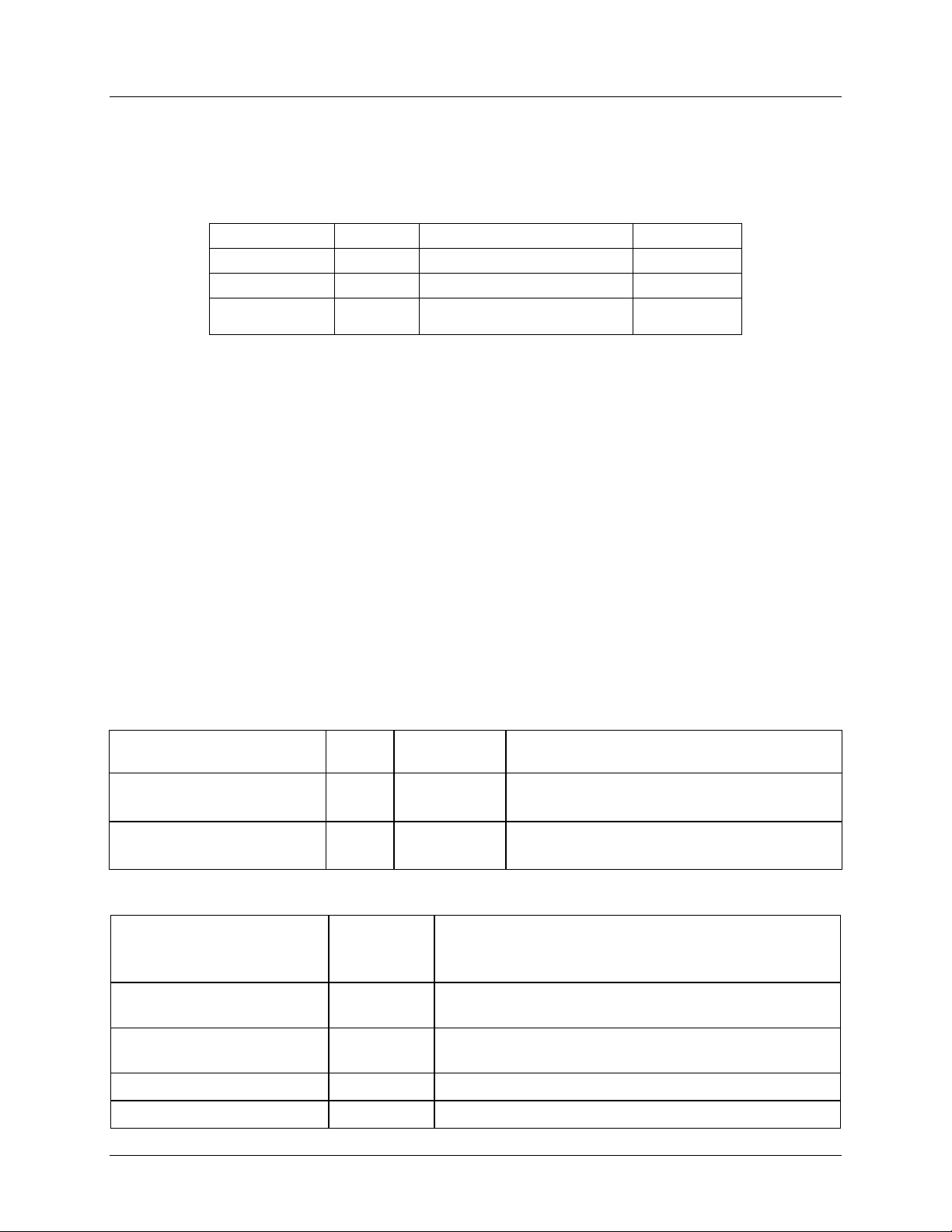
Table 4: Flash and RAM Consumption by MAPI and Sample Application
Firmware Module
6612S22_WB_MAPI.lib
6612S22_NB_MAPI.lib
6612IVIV_50F0_v200WB.hex
6612IVIV_50F0_v200NB.hex
Table 5: Breakdown of M-API’s Flash Consumption
Library:
6612S22_WB_MAPI.lib
6612S22_NB_MAPI.lib
Calibration 5.7K Includes calibration for: Temperature, Current, Voltage,
Initialization, Default Settings 5.8K Initializes Defaults, Metering Constants Tables,
MAPI Interface (to App) 1.5K Direct interface to the library from application.
Flash Manager 2K Flash Read/Write management.
Rev. 1.00 11
RAM
Used
~ 26K The RAM usage is overlay-able. See the
1.7K 6K + 26K(lib) The app from this build uses every single API
Flash Used Features
Flash Used Note
breakdown of Flash usage in Table 5.
library call.
Watt and Phase.
Registers, etc.
Page 12
78M6612 M-API Library User Guide UG_6612_036
Metering 6K Metrology functions (alarms, power factor, RMS, etc.)
Measurement 2K Metrology computations
Serial Driver 1K Serial 0/RS232 I/O
Timer < 0.5K Timer 0 driver.
Relay Management/Misc . 2K Relay Control/On/Off, some math logic, IRQ.
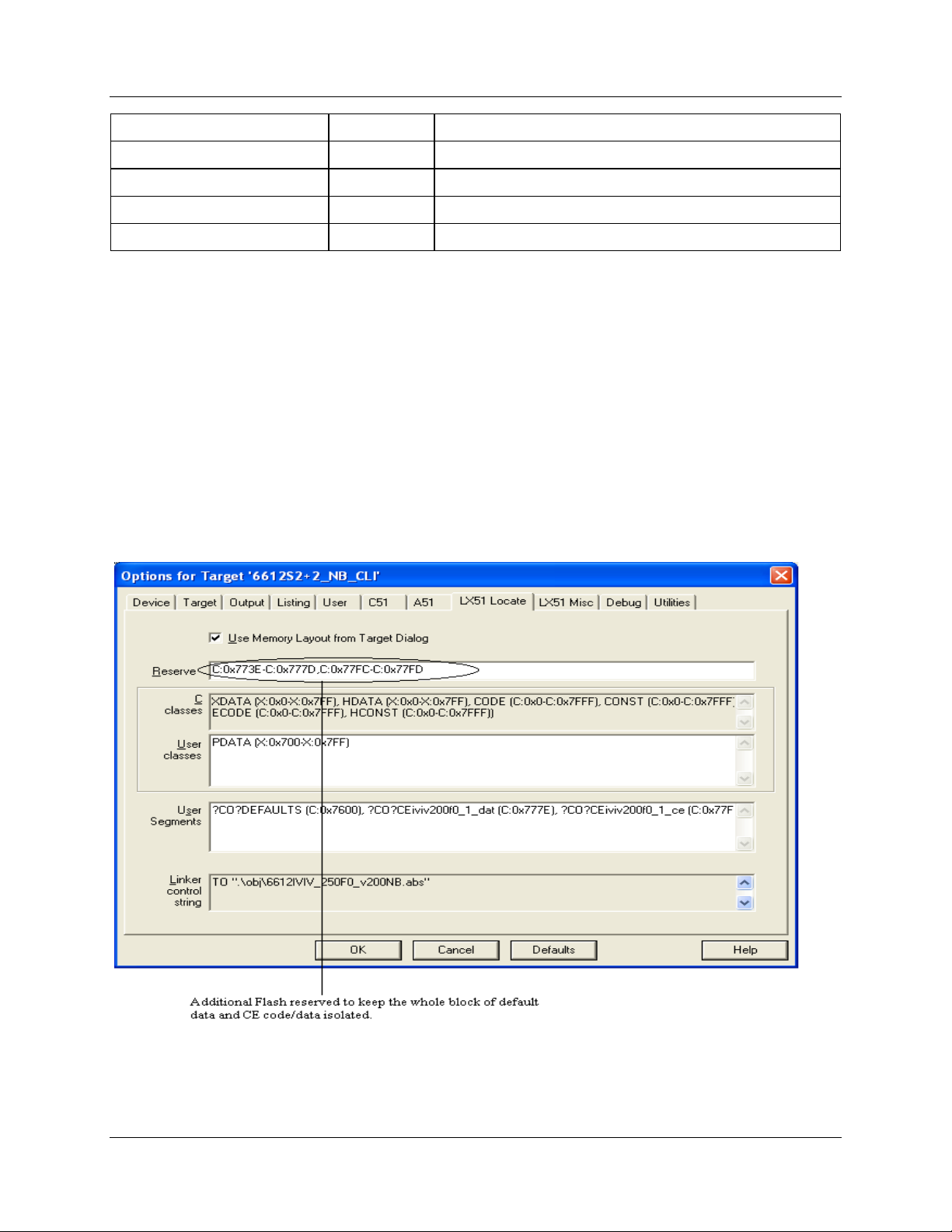
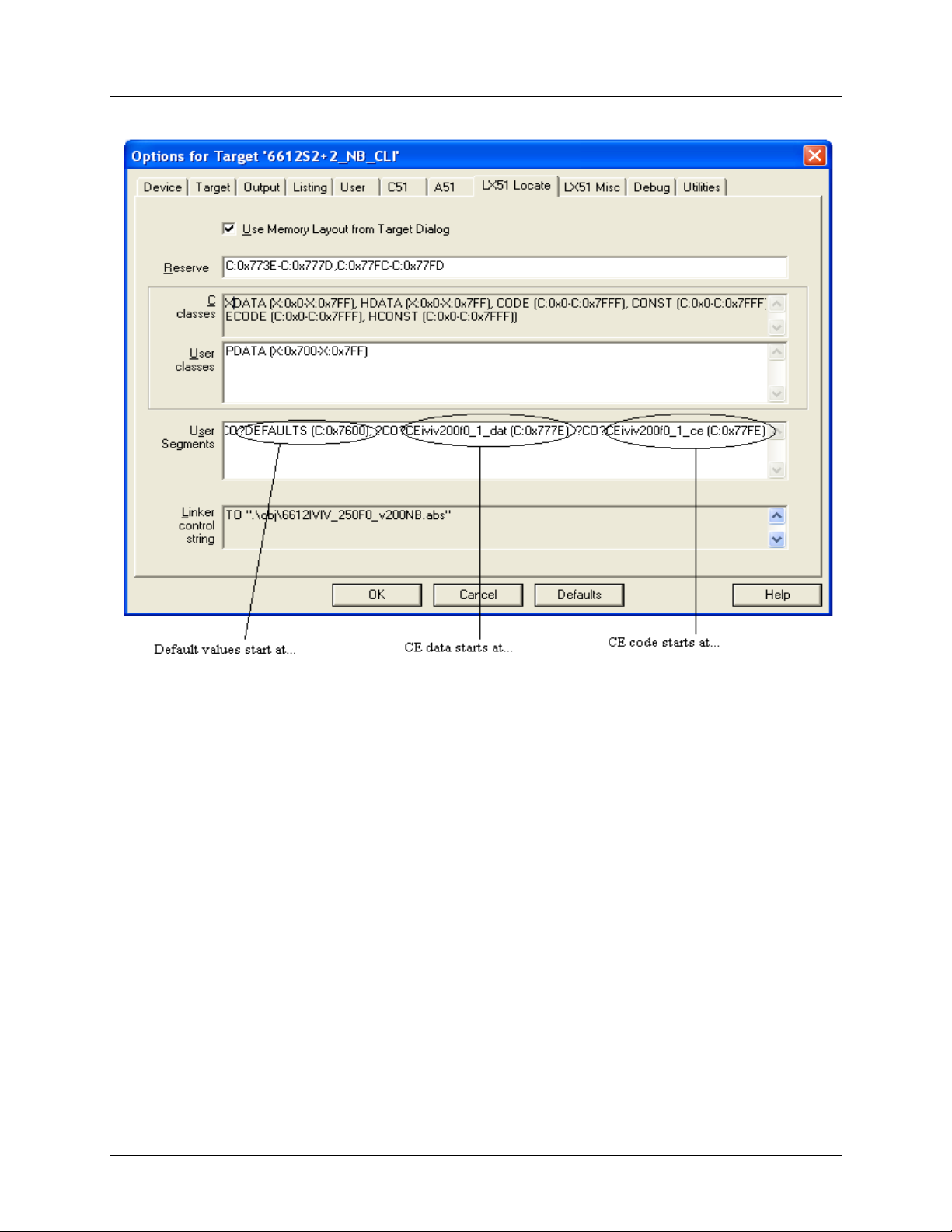
3.3.2 Flash/Code Space Assignment
As shown in Table 1, in order to reserve specific regions of Flash for specific MAPI default data, CE code
and CE data, the build file of the firmware application must be setup to specify where the modules will
reside. It is necessary to keep images of CE code/data and default data isolated at the application’s build
file. The accompanying application code has setup these assignments as follows: Default data is at
starting address 0x7600. CE Data is at starting address 0x777E. CE Code is at starting address
0x77FE.
This information is represented in the mapped file (.M51) as follows:
SEGMENTS (?CO?DEFAULTS(C:0X7600),
?CO?CEIVIV200F0_1_DAT(C:0X777E),
?CO?CEIVIV200F0_1_CE (C:0X77FE))
The following figures show how the setup is done.
12 Rev. 1.00
Page 13
UG_6612_036 78M6612 M-API Library User Guide
3.3.3 Library Assignment
The firmware application source code, as shipped with this document, is setup such that its project file
contains all the supported libraries as built for the specific CE code and data to support different
configuration options. As sho wn in the projec t, the libr ar ies built for Narrow-Band and Wide-Band are
included in the project but only one library shall be selected to be built with a specific ‘Target’ at a time.
The ‘Target’s as defin ed in the Keil proj ec t file for the sample application are shown below. When modify
this project’s targets, it is important that the correct library is selected:
Rev. 1.00 13
Page 14

78M6612 M-API Library User Guide UG_6612_036
3.3.4 Module’s Selection within a Library
The M-API libraries are organized into separate modules based on their functions so that code size and
RAM size can be easily optimized during Keil’s build/link time. Some of the modules are mandatory and
must be included while others can be de-selected to save Flash space if the functions/features are not
used. Typically, when an API is called directly, the Keil Linker would automatically include the module.
However, in some cases, a needed module used by the library would not be included as it is only called
within the library. In this case, the application would need to exclusively include the module. Table 6
shows the individual modules as built with the library and the selection criteria that an application is
recommended to follow.
14 Rev. 1.00
Page 15

UG_6612_036 78M6612 M-API Library User Guide
LIBRARY
modules
SET_DEFAULTS
Table 6: MAPI Feature/Module Selections
Module Optional (O)/Mandatory
Description
(M)
?C_STARTUP M 80515 Startup
CEIVIV200F0_1_CE
CEIVIV200F0_1_DAT
CALW (Watt cal)
CALP (Phase cal)
CALT (Temperature cal)
CALV (Volt cal)
CALI (Current cal)
REINIT_CALI (Current cal)
FLASH
TSC
ACCESS
DEFAULTS
MAPI
IOMAP
M
O
O
O
O
O
M (if any CALW/CALI is M)
M
M
M
O
CE data and code modules
If calib2ration is required, these modules are
needed based on the type of calibration is
required.
If Phase calibration is not needed, the
application can exclusively de-select it by
unchecking CALP.
Required by Meter, Measure, and calibration
Required for all initialization of Energy
measurement.
Interface layer between the librar y and the
app.
When a permanent change to any of the
initialization/default constant values for MPU
or CE is necessary.
MEASURE
Part of Energy Measurement function.
Rms
CE6612
CE
M
CE_ACCESS
IO6612
FREQ
Part of Metering function.
METER
PEAK_ALERTS
PHASE_ANGLE
POWER
PWRFACT
RMS_METER
M
VAH
VARH
WH
MATH
UPDATE
IRQ
SER0CLI O Serial UART/RS232 driver
TMR0
STM
M
Soft-Timer and Timer0 interrupt service
routine.
TRIP O Relay control
Rev. 1.00 15
Page 16

78M6612 M-API Library User Guide UG_6612_036
The following figure shows the Keil IDE/UV4 IDE menu where the module can be selected or de-selected.
To invoke this menu, left-click on a highlighted library and select ‘Options for File
‘6612S22_NB_MAPI.LIB or 6612S22_WB_MAPI.LIB’:
16 Rev. 1.00
Page 17

UG_6612_036 78M6612 M-API Library User Guide
4 MAPI Libraries
The following sections describe the available MAPI calls supported by these libraries.
4.1 Library Initialization and Opera ti on
4.1.1 MAPI_Init()
Purpose Initialize all critical variables, start the Compute Engine (CE) and its interrupts,
start the MPU timer, setup all default values. The application must first call this
API before any attempt to use other API s.
Synopsis Void MAPI_Init( void );
Parameters None.
Return Codes None.
4.1.2 MAPI_MeterRun()
Purpose Run this function in foreground mode periodically to reset the watchdog, update
all measurement outputs, and compare data to Min/Max thresholds. Once
MAPI_Init is called, the CE will update all atomic measurements periodically. It
is the task of the application to put this API into its main loop so that it can post-
process the data just imported from the CE. If this API is called more than once
within the same accumulation interval, no changes will be updated and a FALSE
will be returned. Typically, the application layer will then call
MAPI_MeterStatus() to check for any alarm conditions and call
MAPI_GetSetRegister()to get updated measurement data.
Synopsis Bool MAPI_MeterRun ( void );
Parameters None.
Return Codes TRUE (1) – New data has been updated.
FALSE(0) – No change from the last update run.
4.1.3 MAPI_MinMaxSetGet()
Purpose Start or Stop MinMax control.
Synopsis uint8_t MAPI_MinMaxSetGet( uint8_t SetData, uint8_t Op)
Parameters Op: input parameter.
Get = 0, Set = 1.
SetData: input parameter.
When Op = 1, set MinMax control register to SetData. MinMax control register is
defined as: Bit1=Start_MinMax, Bit0=Reset_MinMax. It is customary that when
Start_MinMax is set (Bit1 = 1), Reset_MinMax (Bit0 = 1) shall also be set.
Reset_MinMax is auto-cleared by the library.
Return Codes Current value of MinMax register.
Rev. 1.00 17
Page 18

78M6612 M-API Library User Guide UG_6612_036
4.2 Library Inputs and Outputs
4.2.1 MAPI_GetSetRegister()
Purpose Get or Set the value of a specific register location. An error will be returned if the
address is out of range or within the restricted location. Care must be taken when
calling this API to Set the value into a register. There are three types of registers:
MPU, CE and I/O Hardware Control. The range of address indicates the type of
0x0000 – 0x03FF: MPU Address
0x0400 – 0x07FF: CE Address
0x2001 – 0x2001: Hardware I/O Control registers. Only address 2001 is accessible.
CE_ADDRESS = 0x1000,
RI_ADDRESS = 0x2000};
MAPI_GetSetRegisters (READ, &Regt);
Synopsis enum MAPI_RC MAPI_GetSetRegister( bool Operation,
Where Reg_t is defined as:
registers as follows:
When calling this function, make sure the Reg.Address is OR’ed with the specific
type of register (CE or MPU or I/O RAM) defined such as:
enum REG_TYPE {
MPU_ADDRESS = 0x0000,
For example:
{ //example code to get different types of registers
Struct Reg_t xdata Regt;
//CE Address
//shift 2 to accommodate 4-byte increment. Get CE add 100E
Regt.Address = (unsigned long) (CE_ADDRESS | ( 0x01 << 2));
MAPI_GetSetRegister (READ, &Regt);
//Change CE contents at address 0x100E
Regt.Value = 0x6050; //Change SAG counts
MAPI_GetSetRegister (WRITE, &Regt);
//MPU Address
//Get MPU address 0x07 – Read-only
Regt.Address = (unsigned long) (MPU_ADDRESS | (0x07));
MAPI_GetSetRegister (READ, &Regt);
//RI address
Regt_Address = (unsigned long) ((RI_ADDRESS) | (0x01));
....
}
struct Reg_t *Reg)
Struct Reg_t
{
Unsigned Integer Address;
Unsigned Long Value;
Unsigned Char TypeSize;
Unsigned Integer ScaleFactor;
};
18 Rev. 1.00
Page 19

UG_6612_036 78M6612 M-API Library User Guide
Parameters Operation Input parameter.
WRITE(1) – Set Operation, READ(0) – Get Operation.
Struct _Reg_t When Operation=READ, Output parameter.
When Operation=WRITE, Input parameter.
Address Four-byte address location.
Address where its content will be extracted
(Operation=READ) or stored (Operation = WRITE).
Value Four-byte value to be stored or retrieved. If
Content from Address to be extracted (Operation=READ) or
stored (Operation = WRITE).
TypeSize Type and Size of register’s content. Read-only.
This byte is defined as follows:
Bit 8 Bit 7…4 Bit 3…1
SIGNED: Register
value is a signed
value (1-negative,
0-positive).
TYPE: Register value is one
of the following types. Note
this is a
read-only field used
to determine the type of the
Register content that is
returned (see mapi_t.h):
SIZE
: Indicates
storage size (in
bytes) of register
where:
1 – Char, 1-byte
2 - Integer, 2-byte
4 - Word, 4-byte
INTEGER
FLOAT
IRMS_M
VRMS_M
CONTROL
CONFIG
POWER
ENERGY
FREQ
COUNT
TIMER
STATUS
STRING
0x00
0x10
0x40
0x50
0x60
0x70
0x18
0x28
0x38
0x48
0x58
0x68
0x78
Typically used for
power factor,
phase adjust.
ScaleFactor Output parameter.
This byte indicates presentation format of the register
content defined as follows:
10 – Tenth unit factor.
100 – Hundredth unit factor.
1000 – Thousandth unit factor.
Return Codes MAPI_OK – successful operation.
MAPI_RESTRICTED – specified address is restricted.
Rev. 1.00 19
Page 20

78M6612 M-API Library User Guide UG_6612_036
MAPI_MeterStatus() for
4.2.1.1 Auto-Scaling
When retrieving measurement data using the MAPI_GetSetRegister() call, the returned data value is
automatically converted to usable data according to the TypeSize of the register location. The
ScaleFactor is for information only.
When writing alarm thresholds to library input registers, usable data values are automatically converted to
raw values according to the TypeSize of the target register address.
4.2.1.2 Output Data Address Locations
The following output data is updated once per accumulation interval and available via the
MAPI_GetSetRegister() call.
MPU
Address
NB WB
00 20 Delta Temperature 0.1 °C FLOAT Temperature difference from 22 °C.
01 21 Line Frequency 0.01 Hz FREQ Line Frequency.
02 22
03 23
Name LSB Type Description
Alarm Status
(common)
OverCurrent Event
Count
STATUS
1
INTEGER
See Section 4.4.3 –
details.
Number of event counts where value
exceeded over current alarm thresh old.
04 24
05 25
06 26 Volts mVrms VRMS_M AC Line Voltage (RMS)
Under Voltage Event
Count
Over Voltage Event
Count
1 INTEGER
1 INTEGER
Number of event counts where value
exceeded under voltage alarm threshold.
Number of event counts where value
exceeded over voltage alarm threshold.
MPU Address
Name LSB Type Description Outlet 1 Outlet 2
NB WB NB WB
07 27 47 67
08 28 48 68 Energy mWh ENERGY
09 29 49 69 Cost mUnits FLOAT Accumulated Cost.
0A 2A 4A 6A Current mArms IRMS_M RMS Current.
0B 2B 4B 6B
0C 2C 4C 6C
0D 2D 4D 6D
Active
Power
Reactive
Power
Apparent
Power
Power
Factor
mW POWER Active Power (per accum inter v al).
Accumulated Energy.
mW POWER Reactive Power (per accum interval).
mW POWER Apparent Power (per accum interval).
– FLOAT
Power factor.
(output will be between -1.00 and 1.00)
20 Rev. 1.00
Page 21

UG_6612_036 78M6612 M-API Library User Guide
D0
D2
D6
Max Voltage (A) Alarm Threshold
DA
DC
E0
E2
Current -Outlet 1
A1
Imin(IA) - "creep" or squelch level
4.2.1.3 MPU Library Inputs
The following inputs can be modified (and saved to Flash) using API calls. For more information on
register descriptions, refer to the 6612_OMU Firmware Description Document.
Category
Common Alarm
Threshold
Name
Temperature
Frequency
Voltage (A)
LSB
MPU
Address
D1
D3
D4
D5
Description
Min Temperature Alarm Threshold
Max Temperature Alarm Threshold
Min Frequency Alarm Threshold
Max Frequency Alarm Threshold
SAG (A) Voltage Alarm Threshold
Min Voltage (A) Alarm Threshold
Outlet Specific
Alarm Thresholds
Alarm Mask
Alarm Mask
Sensor Scaling
Cost Factor Cost AA
Relay Control Relay Configuration AC
Calibration Calibration
Creep Threshold
Current - Outlet 1 D8 D9 Max Current Alarm Threshold
Power Factor - Outlet 1
Current - Outlet 2 DE DF Max Current Alarm Threshold
Power Factor - Outlet 2
Total Current E4 E5 Max Current Alarm Threshold
Alarm Mask for Status Registers E6
Alarm Mask for Alarm DIO4 E7
Voltage - V(A)
Current -Outlet 1
Current - Outlet 2
Configuration
Parameters
Current - Outlet 2
NB
DB
E1
A0
A2
A4
AB
AD
AE
AF
BF
C0
C1
C2
C3
C4
C5
C6
C7
C8
C9
CA
CB
CC
CD
CE
CF
A3
WB
Power Factor Alarm - Threshold
DD
Power Factor Alarm + Threshold
Power Factor Alarm - Threshold
E3
Power Factor Alarm + Threshold
32-BIT alarm mask (0=masked)
32-BIT alarm mask (0=masked)
VMAX A
IMAX Outlet 1 (IA)
IMAX Outlet 2 (IB)
Cost per KWh
Cost Unit string
Polarity, Latch type
Sequence Delay
Energize Delay
De-energize Delay
Tolerance on Phase Calibration
Calibration Type
Calibration Voltage (Target)
Calibration Current (Target)
Calibration Phase (Target)
Tolerance on Voltage Calibration
Tolerance on Current Calibration
Average Count for Voltage
Average Count for Current
Max Iterations for Voltage
Max Iterations for Current
Tolerance on Watts Calibration
Average Count for Watts
Max Iterations for Watts
Calibration WRATE
Calibration Temperature
Calibration Wattage (Target)
Imin(IB) - "creep" or squelch level
Rev. 1.00 21
Page 22

78M6612 M-API Library User Guide UG_6612_036
4.2.1.4 CE Library Inputs
The following inputs can
only
be modified (and saved to Flash) using API calls. For more information on
register descriptions, refer to the 6612 OMU Firmware Description Document.
CATEGORY CE Address Description
Calibration
0A-0B Calibration Gain VA, VB
Phase Adjust
CE Configuration
Pulse Rate
Quantization Corrections
Temperature Compensation
SAG Threshold
More Temperature
Compensation
08-09 Calibration Gain IA-IB (Outlet 1-2)
0C-0D Phase Adjust IA - IB
0E CE State
0F Wrate
12-13 Quantization offset Watt 1 to Watt 2
14-15 Quantization offset VAR A – VAR B
16-17 Quantization offset IA – IB
19 Temperature Gain Adjust
10 SAG Threshold on kVar
11 SAG Threshold
A6 Temperature Nominal
A7 Degree Scale
A8 ppm / ˚c
A9
ppm / ˚c2
22 Rev. 1.00
Page 23

UG_6612_036 78M6612 M-API Library User Guide
4.3 CE and MPU Control
4.3.1 MAPI_CEOn()
Purpose Turn CE on. After calling MAPI_Init(), CE is automatically turned on. This
API is provided as a convenience for the Application level to control the CE,
especially when reading/writing to Flash is necessary (writing to Flash is not
allowed when CE is on).
Synopsis void MAPI_CEOn ( void );
Parameters None.
Return Codes None.
4.3.2 MAPI_CEOff()
Purpose Turn CE off. When writing to flash, the CE must be turned off. This API is
necessary with MAPI_UpdateCE, MAPI_UpdateMPU or memcpy_rx calls.
Synopsis void MAPI_CEOff ( void );
Parameters None.
Return Codes None.
4.3.3 MAPI_GetCEName()
Purpose Get the CE name embedded as part of the CE data. The CE name size is 24
bytes and these exact 24 bytes will be returned in the XDATA string pointed to by
ptr.
Synopsis void MAPI_GetCEName ( unsigned char xdata *ptr );
Parameters ptr Output parameter.
The CE name will be returned at the xdata location pointed to by
ptr. For version 2.00 Library release, the string will look as follows:
CE6612_OMU_S2+2_A01_V1_4.
Return Codes None.
4.3.4 MAPI_SoftReset()
Purpose Reset the MPU, this includes stopping the CE, and setting all registers to
hardware Power-On Reset values.
Synopsis void MAPI_SoftReset ( Void );
Parameters None.
Return Codes None.
Rev. 1.00 23
Page 24

78M6612 M-API Library User Guide UG_6612_036
4.3.5 MAPI_HardReset()
Purpose Reset the MPU, this includes stopping the CE, and setting all registers to
hardware Power-On Reset values.
Synopsis void MAPI_HardReset ( Void );
Parameters None.
Return Codes None.
4.3.6 MAPI_UpdateMPU()
Purpose Update the MPU contents permanently into Flash. The MPU measurement input
and calibration default values are stored in Flash. During power up, its content is
copied to XRAM to be used as a working copy. The application can change
some of the registers’ values using the MAPI_SetGetRegister(). This
change only takes effect in the XRAM copy of the data. To permanently save the
new data into Flash, the application must exclusively call this function to perform
the permanent save. This function is not to, and should not, be called too often
as Flash Write does have a life-expectancy. It is typically used after the part is
calibrated successfully to save the coefficient values. See the
OMU_MAPICLI.uproj for sample usage of this API. In order for this function to
perform properly, the CE must be turned off by calling MAPI_CEOff().
Synopsis Bool MAPI_UpdateMPU ( void );
Parameters none
Return Codes TRUE – Successful write of MPU data to Flash.
FALSE – Write was not successful; perhaps CE is still running.
4.3.7 MAPI_UpdateCE()
Purpose Update the CE Data contents permanently into Flash. The CE Data Image is
programmed into Flash, starting at address 0x775E. During power up, its
content is copied to XRAM to be used as a working copy. Thou gh it is NOT
recommended to change any CE Data, occasionally such needs arise, such as
changing the IMAX, VMAX or WRATE values. The application can change some
of the registers’ values using the MAPI_SetGetRegister(). This change only
takes effect in the XRAM copy of the data. To permanently save the data into
Flash, the application must exclusively call this function to perform the permanent
save into its specific location of Flash. This function is not, and should not, be
called too often as Flash Write does have a life-expectancy. See the
OMU_MAPICLI.uproj for sample usage of this API. In order for this function to
perform properly, the CE must be turned off by calling MAPI_CEOff().
Synopsis Bool MAPI_UpdateCE ( void );
Parameters None.
Return Codes TRUE – Successful write of MPU data to Flash.
FALSE – Write was not successful; perhaps CE is still running.
24 Rev. 1.00
Page 25

UG_6612_036 78M6612 M-API Library User Guide
4.4 Calibration and Power Measurement
4.4.1 MAPI_CalSetGet()
Purpose Set or Get Calibration referenced and tolerance parameters as specified in the
MPU_CParms_t structure. New values are kept in RAM only. When all
calibration data is setup and calibrated correctly, it shall be kept and recorded,
permanently in Flash by calling MAPI_UpdateCE() and MAPI_UpdateMPU().
A typical calibration of the part proceeds as follows:
1. Call MAPI_CalSetGet (FALSE, ….) to get current calibration data.
2. If necessary, call MAPI_SetGetCal (TRUE,…) to set new calibration data
(tolerance values, referenced values, etc.).
3. Call MAPI_Calibrate() to start the calibration. If calibration passes,
continue to step 4. If calibration fails, repeat step 1.
4. Call MAPI_UpdateCE() and MAPI_UpdateMPU() to permanently update
the new values in Flash.
5. Call MAPI_CalSetGet (FALSE,…) to make sure the new data is written,
preserved and correct.
Synopsis Bool MAPI_CalSetGet(IN unsigned char SetData,
Struct MPU_CParms_t *MAPI_CParams);
Struct MPU_CParms_t
{
uint8_t C_Tcal; // Type calibration. Read-Only.
float C_Wcal; // Wattage calibration value (Watts).
float C_Vcal; // Voltage calibration value (Vrms).
float C_Ical // Current calibration value (Arms).
int16_t C_Pcal; // Phase calibration value (Degrees).
float C_Wtolerance; // Watts Tolerance (Watts).
float C_Vtolerance; // Voltage Tolerance (Vrms).
float C_Itolerance; // Current Tolerance (Arms).
float C_Ptolerance; // Phase Tolerance (degrees).
uint8_t C_Vavg_cnt; // Voltage Average count.
uint8_t C_Iavg_cnt; // Current Average count.
uint8_t C_Wavg_cnt; // Watts Average count.
uint16_t C_Vmax_cnt; // Voltage Max count.
uint16_t C_Imax_cnt; // Current Max count.
uint16_t C_Wmax_cnt; // Watts Max count.
uint16_t C_Wrate_cal; // Wrate during calibration
(~.32Kh). Read-Only
uint16_t C_Tempcal; // Calibration temperature (0.1
degree).
};
Rev. 1.00 25
Page 26

78M6612 M-API Library User Guide UG_6612_036
Parameters SetData Input parameter.
TRUE(1) – Set calibration data as specified in MPU_CParms_t.
FALSE(0) – Get current calibration data and return values in MPU_CParms_t.
MAPI_CParams:
C_Tcal Input parameter – read-only. Calibration type. None(0x00).
C_Wcal Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Referenced Wattage calibration value (in Watts). Default = 120W.
C_Vcal Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Referenced Voltage calibration value (Vrms) . Default = 120V.
C_Ical Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Referenced Current calibration value (Arms). Default = 1A.
C_Pcal Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Referenced Phase calibration value (in 0.1 C Degrees). Default = 0 degree.
C_Wtolerance Output parameter (SetData = FALSE), Input parameter (SetData = TRUE).
Watts Tolerance (Watts). Default = 0.01W or 10mW.
C_Vtolerance Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Voltage Tolerance (Vrms). Default = 10mV.
C_Itolerance Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Current Tolerance (Arms). Default = 10mA.
C_Ptolerance Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Phase Tolerance (degrees). Default = 0.1 Degree.
C_Vavg_cnt Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Voltage Average count. Default = 3.
C_Iavg_cnt Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Current Average count. Default = 3.
C_Wavg_cnt Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Watts Average count. Default = 3.
C_Vmax_cnt Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Maximum number of voltage reads to test for pass/fail result. Default = 10.
C_Imax_cnt Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Maximum number of current reads to test for pass/fail result. Default = 10.
C_Wmax_cnt Output parameter (SetData = FALSE), Input parameter (SetData = TRUE)
Maximum number of Watts reads to test for pass/fail result. Default = 10.
C_Wrate_cal Output parameter.
Wrate use during calibration (~.32kh). Read-only.
C_Tempcal Output parameter (SetData = FALSE), Input parameter (SetData = TRUE).
Calibration temperature. In 0.1 degree unit.
Return Codes MAPI_OK //Calibration succeeded.
MAPI_ERROR //Calibration failed.
//For more detailed descriptions of the failure, call MAPI_CALStatus().
26 Rev. 1.00
Page 27

UG_6612_036 78M6612 M-API Library User Guide
4.4.2 MAPI_Calibrate()
Purpose Calibrate the part using referenced meter values and tolerance values as
specified in the MPU_CParms_t data structure (see the MAPI_CalSetGet API
for more information).
1. Call MAPI_CalSetGet (FALSE, ….) to get current calibration data.
2. If necessary, call MAPI_CalGetSet (TRUE,…) to set new calibration data
(tolerance values, referenced values, average count, maximum count, etc.).
3. Call MAPI_Calibrate() to start the calibration.
4. Call MAPI_UpdateCE() and MAPI_UpdateMPU() to permanently update
the new values in Flash.
5. Call MAPI_CalSetGet (FALSE,…) to make sure the new data is
written/preserved.
It is up to the application level to select the CAL_TYPE appropriately. It is
recommended that temperature calibration (CTYPE = C_TEMP) shall always be
part of CAL_TYPE; thus, C_TEMP shall always be OR’ing with c_type. When
this API is called with multiple CAL_TYPEs, calibration will be done in the
following order:
A typical application shall use this API as follows:
Temperature,
Phase,
Voltage,
Current,
Wattage.
Make sure the referenced values are setup correctly, using MAP_CalSetGet();
otherwise, calibration will not pass. See Section 4 for default valu es .
When the return code is not MAPI_OK, call MAPI_CalStatus() to get detailed
descriptions of the calibration error(s). If an error occurs during this call, the part
is NOT calibrated. It is the task of the application to call this API again if
recalibration of the part is necessary.
Synopsis MAPI_RC MAPI_Calibrate(IN enum CAL_TYPE c_type,
IN Unsigned Char Outlets);
Parameters c_type Input parameter.
The following types are acceptable:
Enum CAL_TYPE {
C_WATT = 0x01 – Calibrate Wattage.
C_VOLT = 0x02 – Calibrate Voltage.
C_CURRENT = 0x04 – Calibrate Current.
C_PHASE = 0x08 – Calibrate Phase Adjust.
C_TEMP = 0x10 – Calibrate Temperature.
}
Calibration source. The values can be OR’ing. For example: C_WATT | C_VOLT
indicate calibration to be done on Voltage first, then Wattage; C_TEMP | C_VOLT
indicate calibration to be done on Temperature then Voltage.
Rev. 1.00 27
Page 28

78M6612 M-API Library User Guide UG_6612_036
Outlets Input parameter
Bit representations of outlet # to be calibrated. For example: 0x03
represents outlet #1 and 2 to be calibrated.
Return Codes MAPI_OK //Calibration passed.
MAPI_ERROR //Calibration failed. Call MAPI_CalStatus() for specifics.
4.4.3 MAPI_MeterStatus()
Purpose Run this function after a failed calibration or per io dica ll y to detect any
error/warning. Any non-zero value returned indicates some failure/w arn ing has
occurred. MPU Output Threshold levels and mask settings for the alarms can be
read, modified, and saved using the MAPI_GetSetRegister() API call.
Synopsis void MAPI_MeterStatus ( unsigned long Status);
Parameters Status Output parameter.
Min Temperature exceeded Bit 0 = 1 //0000 0001
Max Temperature exceeded Bit 1 = 1 //0000 0002
Min Frequency exceeded Bit 2 = 1 //0000 0004
Max Frequency exceeded Bit 3 = 1 //0000 0008
SAG A detected Bit 4 = 1 //0000 0010
Under Min VA on A Bit 5 = 1 //0000 0020
Over Max Voltage on A Bit 6 = 1 //0000 0040
Over Max I on A – narro w Band Bit 7 = 1 //0000 0080
Over Max I on A – wide Ba nd Bit 8 = 1 //0000 0100
Min Power Factor exceeded on A -NB Bit 9 = 1 //0000 0200
Max Power Factor exceeded on A-NB Bit 10 = 1 //0000 0400
Min Power Factor exceeded on A -WB Bit 11 = 1 //0000 08 00
Max Power Factor exceeded on A-WB Bit 12 = 1 //0000 1000
Max Current exceeded on B - NB Bit 1 3 = 1 //0000 2000
Max Current exceeded on B - WB Bit 14 = 1 //0000 4000
Min Power Factor exceeded on B -NB Bit 15 = 1 //0000 8000
Max Power Factor exceeded on B-NB Bit 16 = 1 //0001 0000
Min Power Factor exceeded on B -WB Bit 17 = 1 //0002 0000
Max Power Factor exceeded on B-WB Bit 18 = 1 //0004 0000
Max Current Total exceeded - NB Bit 19 = 1 //0008 0000
Max Current Total exceeded - WB Bit 20 = 1 //0010 0000
Creep on A Bit 21 = 1 //0020 0000
Creep on B Bit 22 = 1 //0040 0000
_FAULT – Neutral/Line reversal Bit 23 = 1 //0080 0000
Power Register Not Accurate Bit 27 = 1 //0800 0000
Return Codes None.
A 32-bit word status that indicates statuses as follows:
28 Rev. 1.00
Page 29

UG_6612_036 78M6612 M-API Library User Guide
Rev. 1.00 29
Page 30

78M6612 M-API Library User Guide UG_6612_036
4.4.4 MAPI_TimeToAverage()
Purpose Set/Get the time increment (in seconds) in which the power (in Watts) is to be
averaged. If a Time Interval has been set previously, it will be reset from this
point forward and the accumulator’s value will also be reset. Default value will be
10 seconds if this API is not called or if it is called with TimeInterval = 0. This
time is global time that is applicable to both channels.
Synopsis Void MAPI_TimeToAverage ( IN Bool SetTIME,
IN unsigned int TimeInterval);
Parameters SetTIME Input parameter.
TRUE (1) will set the time to TimeInterval seconds.
FALSE(0) will return the current Time Increment Query to
TimeInterval.
TimeInterval Input parameter (SetTIME = TRUE), Output parameter
(SetTIME = FALSE). Time in units of seconds, used to
average the Watts used.
Return Codes None.
4.4.5 MAPI_GetEnergyUsed()
Purpose Get the energy used per time increment query. This API will return the current
values as recorded according to Index and the Time Increment Interval.
Synopsis Void MAPI_GetEnergyUsed(OUT struct E_Query_t *EQuery);
Where E_Query_t is defined as:
struct E_Query_t
{
Unsigned char Chan; //Channel/Outlet number
float mWattsUsed;
float WattHrsUsed;
Unsigned char Index;
Unsigned int cLineFreq;
}
Parameters Chan Input parameter.
Channel/Outlet number to get the energy information from.
mWattsUsed Output param eter .
Instantaneous Power used in milli-Watts.
WattHrsUsed Output param eter .
WattHour used over the past hour as pointed to by Index.
Index Output parameter.
Number of hours past since power up. This value will reset to
0 (wrap-around) once the maximum is reached, i.e. 255 hours.
cLineFreq Output: Current line frequency value in ##.##Hz format.
Return Codes None.
30 Rev. 1.00
Page 31

UG_6612_036 78M6612 M-API Library User Guide
4.4.6 MAPI_GetVoltageCurrent()
Purpose Get the current values of Voltage and Current . This function can be useful for
determining referenced voltage and current values for calibration. Follow the
steps below for a sample usage of this API:
1. Call MAPI_CalSetGet() to get default calibration values.
2. Call MAPI_GetVoltageCurrent() to get current Voltage and Current.
3. Set new parameters with call to MAPI_CalSetGet().
4. Call MAPI_Calibrate() to start the calibration.
5. As a check call MAPI_GetVoltageCurrent() to confirm new calibrated
values.
Synopsis void MAPI_GetVoltageCurrent( OUT struct VIT_t *VIT_Params);
Where VIT_t is defined as:
struct VIT_t
{
Unsigned char Channel;
float Current_I;
float Current_V;
};
Parameters Channel Input parameter.
Channel/outlet number (1 or 2) where present Current va lue will be
read.
Current_I Output parameter.
Present value of Current (in mAmps) for the specified outlet.
Current_V Output parameter
Present value of Voltage for Voltage A (in mVolts).
Return Codes None.
Rev. 1.00 31
Page 32

78M6612 M-API Library User Guide UG_6612_036
4.5 Zero Crossing and Rel ay Control
4.5.1 MAPI_RelayConfig()
Purpose Read/Write relay configuration values. Relay configuration is applicable to all
channels/outlets.
Synopsis void MAPI_RelayControl( IN Bool Operation, OUT/IN struct
Relay_Config_t Relay_Config);
Where Relay_Config_t is defined as:
struct Relay_Config_t
{
Unsigned Char Relay_CTL;
Unsigned Integer SeqDlyTime;
Unsigned Integer DeEnergizedTime;
Unsigned Integer EnergizedTime;
Unsigned Char InvertPNonLatch;
};
Parameters Operation Input parameter.
TRUE (1) = set operation. FALSE (0) = get operation,
Relay_Config will all be output parameter.
When Operation = TRUE:
Relay_CTL Output parameter.
This parameter is output only. It is set via
MAPI_RelayControl().
SeqDlyTime Input parameter.
Set the new Sequence Delay Time in 10ms
units. Delay time is time between turning
Relays ON (close circuit). Default value is 10
100ms.
DeEngergizedTime Input parameter.
Time in mseconds + 1msecond to delay after
open circuit.
EngergizedTime Input parameter.
Time in msecond + 1msecond to delay after
close circuit.
InvertPolarity Input parameter.
Bit 1 = Polarity (0 = non-inverted). Bit 0 =
Latch type (0 = non-latched).
Notes:
Sequence Delay Time will be used between turning relays ON.
Energized Delay Time is used as the delay time to wait
immediately after a zero-crossing before close circuit.
DeEnergized Delay Time is used as delay time to wait
immediately after a zero-crossing before open circuit.
Return Codes None.
32 Rev. 1.00
Page 33

UG_6612_036 78M6612 M-API Library User Guide
4.5.2 MAPI_RelayControl ()
Purpose Turning Relay ON/OFF (close/open circuit) on all channels.
Synopsis void MAPI_RelayControl( IN unsigned char Channels);
Parameters Channels Input parameter.
Each bit indicates turning ON(1) or OFF(0). The bit’s position
represents the specific channel/outlet number. For example:
0x01h – Turn relay ON on channel 1/A. Turn relays OFF on channel 2/B.
0x02h – Turn relay ON on channel 2/B. Turn relays OFF on channel 1/A.
Both channels can be turned ON with a single call to this API by setting 1 at the
bits representing the channels. For example:
0x03h – Turn relay ON on both channels.
Note: in the library code, channel 1 relay is mapped to DIO7 and channel 2 to
DIO19. But all other evaluation boards (6612, 6613, etc) are setup such that
DIO19 to TP4 and DIO7 is grounded. This means relay control doesn’t mean
much since only DIO19 would be suitable to be controlled in this case but since
there is only one channel, there is no point of having a control.
Return Codes None.
4.5.3 MAPI_CloseCircuit_0X()
Purpose Get zero-crossing status when positioning from open circuit to close circuit. The
value returned TRUE/FALSE indicates whether
occurred. The usage of this API is intended to be for when the circuit is
transitioning from open to close. This API uses the hardware Timer 1 in the case
when zero crossing does not take place. A delay of 12ms is set for such break.
Synopsis bool MAPI_CloseCircuit_0X( void );
Parameters None.
Return Codes TRUE – Zero crossing occurs.
FALSE – Zero crossing does not occur.
4.5.4 MAPI_OpenCircuit_0X()
Purpose Get zero-crossing status when transitioning from close circuit to open circuit.
The value returned TRUE/FALSE indicates whether
occurred for a specific channel. There is no indication of either direction
(falling/rising). The usage of this API is intended to be for when the circuit is
transitioning from close to open. This API uses the hardware Timer 1 in the case
when zero crossing does not take place. A delay of 10ms is set for such break.
Synopsis bool MAPI_OpenCircuit_0X( unsigned char Channel );
Parameters Channel Input parameter.
Channel/outlet number (1 or 2) where zero crossing will be
detected.
Return Codes TRUE – Zero crossing occurs.
FALSE – Zero crossing does not occur.
Voltage
Current
zero-crossing has
zero-crossing has
Rev. 1.00 33
Page 34

78M6612 M-API Library User Guide UG_6612_036
4.6 Soft-Timers
There are eight soft-timers in the 8051 Timer 0. Only six of these timers are available to application level
as two are used internally by the library. The timer is a fixed 10-milisecond time increment. When
TSC_Init() is called, the timer will be started and setup. It also calls MAPIstm_init() so the
application layer does NOT need to call MAPIstm_init().
4.6.1 MAPIstm_init()
Purpose Initialize soft-timers variables and structures.
Synopsis void MAPIstm_init ( void );
Parameters None.
Return Codes None.
4.6.2 MAPIstm_fn_start()
Purpose Start a soft-timer with a call-back function pointer. Upon expiration of the timer,
execute the function then remove/free the timer.
Synopsis unsigned integer *MAPIstm_fn_start (unsigned integer tenms_count,
Parameters tenms _count Input parameter.
Number of counts (in 10ms units) passed to execute the call
*fn_ptr Input parameter.
Return Codes NULL_PTR: if there is no more soft-timer available. Or,
The address of where tenms_count value is stored, and counted down, is returned.
This is useful when the application needs to stop the timer at any time before it is expired.
4.6.3 MAPIstm_run()
void (code *fn_ptr) (void))
back function fn_ptr.
Pointer to the call-back function to execute when the
tenms_count has expired. The function should be a reentrant.
Purpose Keep the soft-timers updated and current. This API shall be called in the
application’s main loop after MAPIstm_fn_start() is used. This is where
fn_ptr (in MAPIstm_fn_start() above) is processed.
Synopsis void MAPIstm_run ( void );
Parameters None.
Return Codes None.
4.6.4 MAPIstm_wait()
Purpose Delay processing for a fixed time (in 10ms increment). Typically use when it is
Synopsis void MAPIstm_wait ( IN unsigned integer DelayTime );
Parameters DelayTime Input parameter
Wait (hold up CPU processing) for DelayTime * 10ms.
Return Codes None.
34 Rev. 1.00
necessary to wait for something to stabilize.
Page 35

UG_6612_036 78M6612 M-API Library User Guide
4.7 DIO Configuration (future release)
4.7.1 MAPI_DIOConfig()
Purpose Configure the DIOs to be a specific function. Note: DIO 1 – 8 are part of 80515
USER0 SFR (0x80). DIO8-15 are part of 80515 USER1 SFR (0x90). And
DIO16-21 are part of 80515 USER2 SFR (0xA0). These are all bit-addressable
SFR. An application shall call this API either right before or right after calling
MAPI_Init() to setup all the signals properly. Each member of the Signals_t
structure shall be assigned the appropriate DIO pin as defined in the enum type
DIO_NO. The library is built with specific default assignments as follows: ActiveB
= DIO20, FaultB = DIO21, ReadyB = DIO11, Relay1 = DIO7, Relay2 = DIO19.
When unsure, it’s best to call this API with a Get Operation (OP=1) to get current
settings prior to changing any DIO assignments.
Synopsis void MAPI_DIOConfig (struct Signals_t *Signals, uint8_t OP)
Where:
//all possible DIO signals
struct Signals_t {
uint8_t Act ive B;
uint8_t Al arm;
uint8_t FaultB;
uint8_t Rea d yB;
uint8_t Rel a y1;
uint8_t Rel a y2;
uint8_t SAG_sign;
uint8_t WPulse;
uint8_t RFU; //Customer’s specific –delete?
uint8_t RFU; //Customer’s specific –delete?
uint8_t RFU; //Customer’s specific –delete?
uint8_t RFU; //Customer’s specific –delete?
uint8_t RFU; //Customer’s specific –delete?
uint8_t Unus e d1;
uint8_t Unus e d2;
uint8_t Unus e d3;
};
enum DIO_NO { DIO0=0x00, DIO1, DIO2, DIO3, DIO4, DIO5, DIO6, DIO7,
DIO8, DIO9, DIO10, DIO11, DIO12, DIO13, DIO14, DIO15,
DIO16, DIO17, DIO18, DIO19, DIO20, DIO21, DIO22, DIO23};
Parameters OP - Input parameter
Get (1) or Set DIO assignments.
Signals - Input parameter (OP = 1)/ Output parameter (OP = 0)
When OP = 1, return the current DIO pin assignments.
When OP = 0, set all DIO pin assignment according to the value assigned to
Signals..
Return Codes None.
Note: care must be taken when assigning the same DIO to be used for different functions as
there is no checking in the library for any conflict that may arise. For example, DIO6 may be used
to drive a LED and to be used as part of the I2C function. The library does NOT check for this
conflict of usage.
Rev. 1.00 35
Page 36

78M6612 M-API Library User Guide UG_6612_036
4.7.2 MAPI_DIORW()
Purpose Perform the Read/Write operation of/to the DIO.
Synopsis void MAPI_DIORW ( enum SIGNAL_TYPE Signal,
unsigned char *Value,
uint8_t OP );
Where:
enum SIGNAL_TYPE {ACTIVEB, ALARM, FAULTB, READYB, RELAY1B,
RELAY2B, SAG, WATTPULSE,
AC_OK, PFC_CTRL, PFC_OK, PFC_ON, Q183_ON,
UNUSED1, UNUSED2, UNUSED3};
Also where OP = (READ/ 0, WRITE = 1
Parameters OP: Input parameter.
0 = read, 1 = write.
Value: Input parameter (OP=0)/ Output parameter (OP=1)..
Read the value of the specified signal (OP=0) or write (OP=1) to it (assuming pin
direction is output). There is no checking of pin direction.
Signal: Input parameter
Value is one of: ACTIVEB, ALARM, FAULTB, READYB, RELAY1B,
RELAY2B, SAG, WATTPULSE,
AC_OK, PFC_CTRL, PFC_OK, PFC_ON, Q183_ON,
UNUSED1, UNUSED2, UNUSED3
Return Codes None.
36 Rev. 1.00
Page 37

UG_6612_036 78M6612 M-API Library User Guide
4.8 Flash Management
4.8.1 Memcpy_rx()
Purpose Write to Flash the content data from a specific RAM location. If the length of the
source and the starting ROM location cause the write operation to span more than
one 512-byte Flash page, the Read/Erase/Verify/Write will take place on all the
pages involved. An erase operation will result in the Flash contents being set to
0xFF. CE will be disabled during execution of this API. After the write, this API will
validate the write by comparing the Flash content against the RAM content and the
return code is reflected from this comparison.
Note1: When calling this API, CE must be turned off. See MAPI_CEOff and
MAPI_CEOn APIs in the sections above.
Note2: it is the task of the application to setup the specific Flash bank before calling
Synopsis Bool memcpy_rx ( Unsigned char code *dst,
Unsigned char xdata *src,
Unsigned integer len );
Parameters dst Input parameter.
Return Codes TRUE if the Write was successful.
FALSE if the Write was not completed.
Note: To avoid accidental write to Flash, this function requires a ‘flash write’ confirmation from the
application layer. This confirmation is done such as follows: there shall be a function called
get_buff(), at application level, which returns a pointer of Xdata whose content is checked as
the following:
uint8x_t xdata *bptr;
bptr = get_buff ();
if ((']' == toupper (*(bptr + 0)) && 'U' == toupper (*(bptr + 1))) ||
(')' == toupper (*(bptr + 0)) && 'U' == toupper (*(bptr + 1))) ||
('C' == toupper (*(bptr + 0)) && 'A' == toupper (*(bptr + 1))) ||
('C' == toupper (*(bptr + 0)) && 'L' == toupper (*(bptr + 1))) ||
('C' == toupper (*(bptr + 1)) && 'C' == toupper (*(bptr + 2))) ||
('U' == toupper (*(bptr + 1)) && 'C' == toupper (*(bptr + 2))) ||
('U' == toupper (*(bptr + 1)) && 'M' == toupper (*(bptr + 2)))
uint8x_t *get_buff (void)
{
return Bufptr;
}
this API. An example use of this API is as follows:
ok = memcpy_rx ((int8r_t *) ROMData, (int8x_t *) RAMData, ROMSIZE);
Specifies starting ROM address of Flash to be written (destination).
src Input parameter.
Use contents at this RAM address location as the source data.
len Input parameter.
Length (in bytes) of data to write to Flash.
)
Rev. 1.00 37
Page 38

78M6612 M-API Library User Guide UG_6612_036
4.8.2 Memcpy_xr()
Purpose Use to write to Flash the content data to a speci fic RAM loca tion. An example use
of this API is as follows:
memcpy_xr (RAMData, ROMData, ROMSIZE);
Synopsis Void memcpy_xr ( Unsigned char xdata *dst,
Unsigned char code *src,
Unsigned integer len );
Parameters dst Input parameter
Specifies starting RAM address to be written (destination).
src Input parameter
Use contents at this ROM/Flash address location as the source data.
len Input parameter
Length (in bytes) of data to write to RAM.
Return Codes TRUE if the Write was successful.
FALSE if the Write was not completed.
4.8.3 Memcpy_xx()
Purpose Use to copy data from an xdata location to another xdata location.
Synopsis Void memcpy_xx ( Unsigned char xdata *dst,
Unsigned char xdata *src,
Unsigned integer len );
Parameters dst Input parameter
Specifies starting RAM address to be written (destination).
src Input parameter
Use contents at this RAM address location as the source data.
len Input parameter
Length (in bytes) of data to write to RAM.
Return Codes None.
38 Rev. 1.00
Page 39

UG_6612_036 78M6612 M-API Library User Guide
4.9 Serial/RS232 Interface
4.9.1 MAPI_UARTInit()
Purpose Configure the communication speed, flow control, character parity and number of
stop bits. The serial interrupt service routine is NOT maskable, the interrupt
vector is set internally. Xon/Xoff will always be enabled. Non-parity, 8 data bit, 1
stop bit is the only supported configuration. The only thing the application can
change is the baud rate.
Synopsis Bool MAPI_UARTInit ( IN enum SERIAL_SPD speed, Bool XOnOff)
Parameters speed: Input parameter
This selects the communication speed. Possible values are:
_RATE_300 0
_RATE_600, 1
_RATE_1200, 2
_RATE_2400, 3
_RATE_4800, 4
_RATE_9600, 5
_RATE_19200, 6
_RATE_38400, 7 (default)
Return Codes None.
4.9.2 MAPI_UARTTx()
Purpose Setup the Tx buffer before sending data to the PC UART. Subsequent call to this
API will append the buffer to the existing transmittal buffer. An application should
call this API immediately after calling MAPI_UARTInit(). This is a non-
blocking call so always call MAPI_TxLen to make sure the transmission is
completed successfully.
Synopsis enum SERIAL_RC data MAPI_UARTTx ( U08x xdata *buffer, U16 len )
Parameters buffer Input parameter.
Specifies a pointer to the data buffer containing data to send to the
PC UART.
Len Input parameter.
Specifies the current number of bytes to be sent.
Return Codes: S_EMPTY Successful transmission.
S_PENDING, Successful transmission thus far but not yet finished.
Where return code SERIAL_RC is defined as: Enum SERIAL_RC.
After calling this API, an applica tion can m ake sure all bytes were transm itted by
checking that MAPI_TxLen() returns a 0.
Rev. 1.00 39
Page 40

78M6612 M-API Library User Guide UG_6612_036
4.9.3 MAPI_TxLen()
Purpose Number of bytes transmitted thus far.
Synopsis Unsigned integer MAPI_ TxLen ( void )
Parameters None.
Return Value Unsigned integer specifying the number of bytes left in the Tx buffer, i.e. the
remaining bytes to be sent.
4.9.4 MAPI_UARTRx()
Purpose Setup the receive buffer and start receiving. Always call this function after
MAPI_UARTInit() to make sure the receive buffer is available. Subsequent
call to this API will append the data to the existing buffer queue, if data is being
received. This is a non-blocking call so always check for completion of the
reception by calling MAPI_RxLen().
Synopsis uint16_t MAPI_UARTRx ( U08x xdata *buffer, U16 len )
Parameters buffer Input parameter.
Specifies a pointer to the data buffer to store the data received from
the PC UART.
len Input parameter.
Specifies the maximum number of bytes to receive at any one time.
Return Codes Unsigned integer specifying the number of bytes fetched thus far. Use
MAPI_RxLen() to keep track of the remaining number of bytes unfetched in the
Rx buffer.
4.9.5 MAPI_RxLen()
Purpose Number of bytes received thus far.
Synopsis Unsigned Integer MAPI_ RxLen ( void )
Parameters None.
Return Value Unsigned integer specifying the number of bytes in the queued buffer.
40 Rev. 1.00
Page 41

UG_6612_036 78M6612 M-API Library User Guide
5 Default Values
The following default values are used to build the MAPI library:
struct MPU_CParms_t MPU_CParams =
{
Unsigned Char Channels = 0
float C_Wcal = 120W
float C_Vcal = 120V
float C_Ical = 1A
Unsigned Integer t C_Pcal = 0
float C_Wtolerance = 10mA
float C_Vtolerance = 10mV
float C_Itolerance = 10mA
float C_Ptolerance = 0.1 degree
Unsigned Char C_Vavg_cnt = 3
Unsigned Char C_Iavg_cnt = 3
Unsigned Char C_Wavg_cnt = 3
Unsigned Integer C_Vmax_cnt = 10
Unsigned Integer C_Imax_cnt = 10
Unsigned Integer C_Wmax_cnt = 10
Unsigned Integer C_Wrate_cal = 4860 (shall not change)
Unsigned Integer C_Tempcal (read-only)
};
#define DefaultTIQ 10 //Default Time Increment Query
struct VIT_t xdata mapi_tVIT =
{
0x01, //Channel 1
0.00, //Current_I;
0.00, //Current_V;
};
struct Relay_Config_t xdata RlyConfig =
{
0x00, //unsigned char Relay_CTL;
0x64, //unsigned int SeqDlyTime;
0x01, //unsigned int DeEnergizedTime;
0x01, //unsigned int EnergizedTime;
0x00, //InvertPNonLatch
};
Rev. 1.00 41
Page 42

78M6612 M-API Library User Guide UG_6612_036
6 Contact Information
For more information about Maxim products or to check the availability of the 78M6612, contact technical
support at
www.maxim-ic.com/support.
42 Rev. 1.00
 Loading...
Loading...