

Page 1
71M6531/71M6533/71M6534
Energy Meter IC Family
SOFTWARE USER’S GUIDE
5/8/2008
TERIDIAN Semiconductor Corporation
6440 Oak Canyon Rd., Suite 100
Irvine, CA 92618-5201
Ph: (714) 508-8800 ▪ Fax: (714) 508-8878
Meter.support@teridian.com
http://www.teridian.com/
Page 2

71M653X Software User’s Guide
TERIDIAN Semiconductor Corporation makes no warranty for the use of its products, other than expressly contained in the
Company’s warranty detailed in the TERIDIAN Semiconductor Corporation standard Terms and Conditions. The company assumes
no responsibility for any errors which may appear in this document, reserves the right to change devices or specifications detailed
herein at any time without notice and does not make any commitment to update the information contained herein.
v1.1
TERIDIAN Proprietary 2 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 3

71M653X Software User’s Guide
71M653X
Energy Meter IC FAMILY
SOFTWARE USER’S GUIDE
v1.1 TERIDIAN Proprietary 3 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 4

71M653X Software User’s Guide
Table of Contents
1 INTRODUCTION............................................................................................................................ 11
1.1 Using this Document .............................................................................................................. 11
1.2 Related Documentation ......................................................................................................... 12
1.3 Compatibility Statement ......................................................................................................... 12
2 DESIGN GUIDE ............................................................................................................................. 13
2.1 Hardware Requirements ........................................................................................................ 13
2.2 Software Requirements ......................................................................................................... 13
2.3 Software Architecture ............................................................................................................ 14
2.4 Utilities ..................................................................................................................................... 15
2.4.1 D_MERGE ............................................................................................................................. 15
2.4.2 CE_MERGE ........................................................................................................................... 15
2.4.3 BANK_MERGE ...................................................................................................................... 16
3 DESIGN REFERENCE .................................................................................................................. 17
3.1 Program Memory .................................................................................................................... 17
3.2 Data Memory ........................................................................................................................... 17
3.3 Programming the 71M653X Chips ........................................................................................ 18
3.4 Debugging of the 71M653X Chips ......................................................................................... 18
3.5 Test Tools ................................................................................................................................ 18
3.5.1 Running the 653X_Demo.hex Program.................................................................................. 19
3.5.2 CLI Commands ...................................................................................................................... 20
3.5.3 Command (Macro) Files ......................................................................................................... 20
4 TOOL INSTALLATION GUIDE ..................................................................................................... 21
4.1 Installing the Programs for the ADM51 Emulator ............................................................... 21
4.2 Installing the Wemu Program (Chameleon Debugger) ....................................................... 21
4.3 Installing the ADM51 USB Driver .......................................................................................... 22
4.4 Installing Updates to the Emulator Program and Hardware .............................................. 23
4.5 Creating a Project ................................................................................................................... 24
4.6 Installing the Keil Compiler ................................................................................................... 27
4.7 Creating a Project for the Keil Compiler .............................................................................. 28
4.7.1 Directory Structure ................................................................................................................. 28
4.7.2 Adjusting the Keil Compiler Settings ...................................................................................... 29
4.7.3 Manually Controlling the Keil Compiler Settings ..................................................................... 30
4.8 Output File Format .................................................................................................................. 32
4.8.1 Basic Intel Hex Format ........................................................................................................... 33
4.8.2 Intel Hex386 File Format ........................................................................................................ 34
4.9 Writing Bank-Switched Code ................................................................................................ 35
4.9.1 Hardware Overview ................................................................................................................ 35
4.9.2 Software Overview ................................................................................................................. 35
4.9.3 Software Tool Versions .......................................................................................................... 36
v1.1v1.1 TERIDIAN Proprietary 4 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 5

71M653X Software User’s Guide
4.9.4 Setup of the Compiler Project ................................................................................................ 36
4.9.5 Startup ................................................................................................................................... 37
4.9.6 Bank-Switching Code ............................................................................................................. 37
4.9.7 Page Table Setup and Debug ................................................................................................ 37
4.9.8 Producing a Banked Hex File ................................................................................................. 39
4.9.9 Placing Interrupts in Banked Code ......................................................................................... 39
4.9.10 Calling Banked Functions via Function Pointers .................................................................... 39
4.9.11 Putting Constants in Banks .................................................................................................... 40
4.9.12 Write-Protecting Flash in the 653X ......................................................................................... 40
4.10 Project Management Tools .................................................................................................... 41
4.11 Alternative Compilers ............................................................................................................. 41
4.12 Alternative Editors .................................................................................................................. 41
4.13 Alternative Linkers ................................................................................................................. 42
5 Demo Code Description .............................................................................................................. 43
5.1 80515 Data Types and Compiler-Specific Information ....................................................... 43
5.1.1 Data Types ............................................................................................................................. 43
5.1.2 Compiler-Specific Information ................................................................................................ 46
5.2 Demo Code Options and Program Size................................................................................ 47
5.3 Program Flow .......................................................................................................................... 51
5.3.1 Startup and Initialization ......................................................................................................... 52
5.4 Basic Code Architecture ........................................................................................................ 52
5.4.1 Initialization ............................................................................................................................ 53
5.4.2 Interrupts ................................................................................................................................ 53
5.4.2.1 Pulse Counting Interrupts ................................................................................................ 54
5.4.2.2 FWCOL0 and FWCOL1 ................................................................................................... 55
5.4.2.3 CE_BUSY Interrupt .......................................................................................................... 55
5.4.2.4 PLL_ISR ........................................................................................................................... 55
5.4.2.5 EEPROM Isr ..................................................................................................................... 56
5.4.2.6 Timer Interrupt .................................................................................................................. 56
5.4.2.7 The XFER_BUSY, RTC and NEAR_OVERFLOW Interrupt ............................................ 56
5.4.2.8 SERIAL Interrupt .............................................................................................................. 57
5.4.3 Background Tasks ................................................................................................................. 57
5.4.3.1 meter_run() ...................................................................................................................... 57
5.4.3.2 Command Line Interpreter (CLI) ...................................................................................... 58
5.4.3.3 Auto-Calibration ............................................................................................................... 58
5.4.3.4 EEPROM Read/Write ...................................................................................................... 61
5.4.3.5 Battery Test ...................................................................................................................... 61
5.4.3.6 Power Factor Measurement............................................................................................. 61
5.4.4 Watchdog Timer ..................................................................................................................... 62
5.4.5 Real-Time Clock (RTC) .......................................................................................................... 62
5.5 Managing Mission and Battery Modes ................................................................................. 62
5.6 Data Flow ................................................................................................................................. 63
5.7 CE/MPU Interface .................................................................................................................... 64
v1.1v1.1 TERIDIAN Proprietary 5 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 6

71M653X Software User’s Guide
5.8 Boot Loader ............................................................................................................................. 64
5.9 Source Files ............................................................................................................................ 6 4
5.10 Auxiliary Files.......................................................................................................................... 66
5.11 Include/Header Files ............................................................................................................... 66
5.11.1 OPTIONS.H ........................................................................................................................... 66
5.11.2 Register Definitions ................................................................................................................ 67
5.11.3 Other Include/Header Files .................................................................................................... 67
5.12 CE Image Files ........................................................................................................................ 68
5.13 Common MPU Addresses ...................................................................................................... 69
5.14 Firmware Application Information ........................................................................................ 77
5.14.1 General Design Considerations ............................................................................................. 77
5.14.1.1 Multitasking ................................................................................................................... 77
5.14.1.2 Synchronization ............................................................................................................ 77
5.14.1.3 Bank Switching ............................................................................................................. 77
5.14.1.4 Economic Usage of RAM.............................................................................................. 78
5.14.1.5 Trading Space for Speed .............................................................................................. 78
5.14.1.6 Object-Oriented Design ................................................................................................ 78
5.14.1.7 Reconfiguring “Glue Logic” ........................................................................................... 79
5.14.1.8 DSP Operations ............................................................................................................ 79
5.14.1.9 Coping with Various Current Sensors .......................................................................... 79
5.14.1.10User Interface ............................................................................................................... 79
5.14.1.11Operating without User Interface .................................................................................. 79
5.14.1.12Communication with a Computer ................................................................................. 79
5.14.1.13Support of Automatic Meter Reading ........................................................................... 79
5.14.1.14Communication between MPU and CE ........................................................................ 80
5.14.1.15Timing Control .............................................................................................................. 80
5.14.1.166531: Calculation of max(VA*IA, VA*IB) Option, Equation 0 ....................................... 80
5.14.1.176534: Calculation of VA*IA+VB*IB+VC*IC Option, Equation 5 .................................... 81
5.14.1.18How Register Data is Stored ........................................................................................ 82
5.14.1.19Managing Power Failures ............................................................................................. 83
5.14.1.20Pulse Counting ............................................................................................................. 83
5.14.1.21Battery Modes ............................................................................................................... 83
5.14.1.22Real-Time Performance................................................................................................ 83
5.14.2 Firmware Application: Selected Tasks ................................................................................... 84
5.14.2.1 Sag Detection ............................................................................................................... 84
5.14.2.2 Temperature Measurement .......................................................................................... 84
5.14.2.3 Temperature Compensation for Measurements ........................................................... 85
5.14.2.4 Temperature Compensation for the RTC ..................................................................... 85
5.14.2.5 Validating the Battery .................................................................................................... 86
5.15 Alphabetical Function Reference .......................................................................................... 87
5.16 Errata ........................................................................................................................................ 98
5.17 Porting 71M6511/6513 Code to the 71M653x ....................................................................... 99
v1.1v1.1 TERIDIAN Proprietary 6 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 7

71M653X Software User’s Guide
5.17.1 Flash Use ............................................................................................................................... 99
5.17.2 Extra RAM .............................................................................................................................. 99
5.17.3 CE Data Location is at XDATA 0x0000 .................................................................................. 99
5.17.4 CE Data Access is Transparent to the MPU .......................................................................... 99
5.17.5 Read-only areas in MPU RAM ............................................................................................... 99
5.17.6 CE Code Location .................................................................................................................. 99
5.17.7 CE Causes Flash Write-Protection ......................................................................................... 99
5.17.8 Watchdog Location .............................................................................................................. 100
5.17.9 Software Watchdog Now Deprecated .................................................................................. 100
5.17.10 Real Time Clock Compensation ........................................................................................... 100
5.17.11 Battery Modes ...................................................................................................................... 100
5.18 Porting 71M6521 Code to the 71M653x .............................................................................. 101
5.18.1 Flash Use ............................................................................................................................. 101
5.18.2 Extra RAM ............................................................................................................................ 101
5.18.3 CE Data Location is at XDATA 0x0000 ................................................................................ 102
5.18.4 CE Data Access is Transparent to the MPU ........................................................................ 102
5.18.5 Read-only areas in MPU RAM ............................................................................................. 102
5.18.6 CE Code Location ................................................................................................................ 102
5.18.7 CE Causes Flash Write-Protection ....................................................................................... 102
5.18.8 Watchdog Location .............................................................................................................. 102
5.18.9 Software Watchdog Now Deprecated .................................................................................. 102
5.18.10 Real Time Clock Compensation ........................................................................................... 103
5.18.11 Battery Modes ...................................................................................................................... 103
5.18.12 Watchdog Reset .................................................................................................................. 103
5.18.13 Temperature Compensation ................................................................................................ 103
6 80515 MPU REFERENCE ........................................................................................................... 105
6.1 The 80515 Instruction Set .................................................................................................... 105
6.1.1 Instructions Ordered by Function ......................................................................................... 106
6.1.2 Instructions Ordered by Opcode (Hexadecimal) .................................................................. 110
6.1.3 Instructions that Affect Flags ................................................................................................ 113
7 Appendix ..................................................................................................................................... 115
7.1 Acronyms .............................................................................................................................. 115
7.2 Revision History ................................................................................................................... 116
v1.1v1.1 TERIDIAN Proprietary 7 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 8

71M653X Software User’s Guide
List of Figures
Figure 2-1: Software Structure ....................................................................................................................................... 14
Figure 3-1: Port Speed and Handshake Setup ............................................................................................................... 19
Figure 4-1, Setup of Keil Compiler for bank-switched code ............................................................................................ 36
Figure 4-2, Selecting a Bank for a File Group in Keil C .................................................................................................. 37
Figure 4-3, Setting Keil’s Linker for Bank-switched Code ............................................................................................... 38
Figure 5-1: Sag and Dip Conditions ............................................................................................................................... 84
Figure 5-2: Sag Event .................................................................................................................................................... 84
Figure 5-3: Crystal Frequency over Temperature........................................................................................................... 85
Figure 5-4: Crystal Compensation .................................................................................................................................. 86
Figure 5-5, State Diagram of Operating Modes ............................................................................................................ 101
List of Tables
Table 3-1: Memory Map ................................................................................................................................................. 17
Table 4-1: Code Bank Memory Addresses and Availability ............................................................................................ 35
Table 5-1: Internal Data Memory Map ............................................................................................................................ 43
Table 5-2: Internal Data Types ....................................................................................................................................... 46
Table 5-3: Demo Code Versions .................................................................................................................................... 47
Table 5-4: Current Sensing Options ............................................................................................................................... 47
Table 5-5: Compensation Features ................................................................................................................................ 48
Table 5-6: Power Registers and Pulse Output Features ................................................................................................ 49
Table 5-7: Creep Functions ............................................................................................................................................ 50
Table 5-8: Operating Modes ........................................................................................................................................... 50
Table 5-9: Calibration and Various Services .................................................................................................................. 51
Table 5-10: Interrupt Service Routines ........................................................................................................................... 53
Table 5-11: Interrupt Priority Assignment ....................................................................................................................... 54
Table 5-12: MPU Memory Locations .............................................................................................................................. 74
Table 5-13: MPU Status Bits .......................................................................................................................................... 76
Table 5-14: Frequency over Temperature ...................................................................................................................... 85
Table 6-7: Notes on Data Addressing Modes ............................................................................................................... 105
Table 6-8: Notes on Program Addressing Modes ........................................................................................................ 105
Table 6-9: Arithmetic Operations .................................................................................................................................. 106
Table 6-10: Logic Operations ....................................................................................................................................... 107
Table 6-11: Data Transfer Operations .......................................................................................................................... 108
Table 6-12: Program Branches .................................................................................................................................... 109
Table 6-13: Boolean Manipulations .............................................................................................................................. 109
Table 6-14: Instruction Set in Hexadecimal Order ........................................................................................................ 110
Table 6-15: Instruction Set in Hexadecimal Order ........................................................................................................ 111
Table 6-16: Instruction Set in Hexadecimal Order ........................................................................................................ 112
Table 6-17: Instructions Affecting Flags ....................................................................................................................... 113
v1.1v1.1 TERIDIAN Proprietary 8 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 9
71M653X Software User’s Guide
LIMITED USE LICENSE AGREEMENT
Acceptance
(“Licensed Software”) and provided by TERIDIAN Semiconductor Corporation (“TSC”), the recipient of the software
(“Licensee”) accepts, and agrees to be bound by the terms and conditions hereof.
Acknowledgment
TSC’s meter products: 71M6531, 71M6534, and 71M653xB. Licensee acknowledges that the Licensed Software was
not designed for use with, nor has it been checked for performance with, any other devices.
Title
: Title to the Licensed Software and related documentation remains with TSC and its licensors. Nothing contained
in this Agreement shall be construed as transferring any right, title, or interest in the Licensed Software to Licensee
except as expressly set forth herein. TSC expressly disclaims liability for any patent infringement claims based upon
use of the Licensed Software either solely or in conjunction with third party software or hardware.
Licensee shall not make nor to permit the making of copies of the Licensed Software (including its documentation)
except as authorized by this License Agreement or otherwise authorized in writing by TSC. Licensee further agrees not
to engage in, nor to permit the recompilation, disassembly, or other reverse engineering of the Licensed Software.
License Grant
ferable license to use the software solely in conjunction with the meter devices manufactured and sold by TSC.
Non-disclosure and confidentiality
Licensed Software and related documentation and information received by Licensee from TSC. All Confidential
Information shall be maintained in confidence by Licensee and shall not be disclosed to any third party and shall be
protected with the same degree of care as the Licensee normally uses in the protection of its own confidential
information, but in no case with any less degree than reasonable care. Licensee further agrees not to use any
Confidential Information received from TSC except as contemplated by the license granted herein.
Disclaimer of Warranty
Software, including any implied warranty of title, no infringement, merchantability, or fitness for a particular purpose,
regardless of whether TSC knows or has reason to know Licensee’s particular needs. TSC does not warrant that the
functions of the Licensed Software will be free from error or will meet Licensee’s requirements. TSC shall have no
responsibility or liability for errors or product malfunction resulting from Licensee’s use and/or modification of the
Licensed Software.
Limitation of Damages/Liability
LICENSEE FOR INDIRECT, INCIDENTAL, SPECIAL OR CONSEQUENTIAL DAMAGES IN CONNECTION WITH,
OR ARISING OUT OF, THIS LICENSE AGREEMENT OR USE OF THE LICENSED SOFTWARE.
Export: Licensee shall adhere to the U.S. Export Administration Laws and Regulations (“EAR”) and shall not export or
re-export any technical data or products received from TSC or the direct product of such technical data to any
proscribed country listed in the EAR unless properly authorized by the U.S. Government.
Termination
material breach within thirty (30) days from receipt of notice from TSC. Upon termination, Licensee shall return or, at
TSC’s option certify destruction of, all copies of the Licensed Software in its possession.
Law: This Agreement shall be construed in accordance with the laws of the State of California. The Courts located in
Orange County, CA shall have exclusive jurisdiction over any legal action between TSC and Licensee arising out of this
License Agreement.
Integration: This License Agreement constitutes the entire agreement of the parties as to the subject matter hereof.
No modification of the terms hereof shall be binding unless approved in writing by TSC.
: By using the Application Programming Interface and / or other software described in this document
: The Licensed Software has been developed for use specifically and exclusively in conjunction with
: TSC grants Licensee a limited, non-exclusive, non-sub licensable, non-assignable and non-trans-
: For the purpose of this Agreement, “Confidential Information” shall mean the
: TSC makes no representations or warranties, express or implied, regarding the Licensed
: IN NO EVENT WILL TSC NOR ITS VENDORS OR AGENTS BE LIABLE TO
: TSC shall have the right to terminate the license granted herein in the event Licensee fails to cure any
v1.1v1.1 TERIDIAN Proprietary 9 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 10

71M653X Software User’s Guide
v1.1v1.1 TERIDIAN Proprietary 10 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 11
71M653X Software User’s Guide
1
1 INTRODUCTION
TERIDIAN Semiconductor Corporation’s (TSC) 71M653X single chip Energy Meter Controllers are a family of Systemson-Chip that supports all the functionalities required to build energy meters. Demo Boards are available for each chip
(71M6531, 71M6532, 71M6533, 71M6534) to allow development of embedded applications, in conjunction with an InCircuit Emulator.
Development of a 71M653X application can be started in either 80515 assembly language, or preferably in C using the
Demo Boards. TSC provides, along with the 71M653X Demo Boards, a development toolkit that includes a
demonstration program (“Demo Code”) written in ANSI C that controls all features present on the Demo Boards. This
Demo Code includes functions to manage the low level 80515 core such as memory, clock, power modes, interrupts;
and high level functions such as the LCD, Real Time Clock, Serial interfaces and I/Os. The use of Demo Code portions
will help reduce development time dramatically, since they allow the developer to focus on developing the application
without dealing with the low-level layer such as hardware control, timing, etc. This document describes the different
software layers and how to use them.
The Demo Code should allow customers to evaluate various resources of the 653X ICs but should not be
regarded as production code. The Demo Code and all its components, with the exception of the CE code, are
only example code and the use of it is “as is” and without implied guarantees. Customers may use the Demo
Code as a starting point at any given released revision level but should keep themselves informed about
subsequent revisions of the Demo Code. Demo Code revisions may not be directly compatible with previously
released revisions and/or embedded software used by customers. Custo mers need to ad apt the Demo Code or
other example code supplied by TERIDIAN Application Engineering to their own code base, and in this context
TERIDIAN Semiconductor can only provide indirect assistance and support.
This Software User’s Guide provides information on the following separate subjects:
• General software architecture and minimum requirements (Design Guide)
• Memory model, programming, test tools (Design Reference)
• Demo code structure, data flow, functions (Demo Code Description)
• Installing and using the EEP, compiler, ICE (Tool Installation Guide)
• Understanding and using the 80515 micro controller (80515 Reference)
1.1 USING THIS DOCUMENT
The reader should have a basic familiarity with microprocessors, particularly the 80515 architecture, firmware, software
development and power meter applications. Prior experience with, or knowledge of, the applicable ANSI and/or IEC
standards will also be helpful.
This document presents the features included in the 71M653X Demo Boards in terms of software and some hardware.
To get the most out of this document, the reader should also have available other 71M653X publications such as the
71M653X Demo Board User’s Manual, respective data-sheets, errata list and application notes for additional details
and recent developments.
v1.1v1.1 TERIDIAN Proprietary 11 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 12
71M653X Software User’s Guide
1.2 RELATED DOCUMENTATION
Please refer to the following documents for further information:
• 71M653X Demo Board User’s Manual for the IC of interest
• 71M653X Data Sheet for the IC of interest.
• Signum Systems ADM-51 In-Circuit Emulator Manual (Software Version 3.11.4 or later)
• Keil Compiler Manual (Version 7.5 or later)
• μVision2 (Version 2.20a or later) Manual
TERIDIAN’s web site (http://www.teridian.com
helpful information.
Questions to TERIDIAN Applications Engineering can be directed via e-mail to the address:
• meter.support@teridian.com
) should be frequently checked for updates, application notes and other
1.3 COMPATIBILITY STATEMENT
Information presented in this manual applies to the following hardware and software revisions:
• 71M6531 and 71M6534 Demo Code Revision 4.4.15
• 71M6531 and Demo Board D6531N12A1 (68-pin QFN) Revision 1.0 or later
• 71M6534 Demo Board D6534T4A1 (120-pin LQFP) Revision 1.0 or later
• Signum Systems Wemu51 Software 4.4.11 (8/15/2007) or later
• Signum Systems ADM51 firmware version 4.4.11 (2007/07/15) or later
The revision 4.15 of the Demo Board Code is the basis for all discussed sources, commands, register
addresses and so forth. If applicable, known issues with revision 4.15 are disclosed within the code
description, and workarounds or improvements are shown.
v1.1v1.1 TERIDIAN Proprietary 12 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 13

71M653X Software User’s Guide
2
2 DESIGN GUIDE
This section provides designers with some basic guidance in developing power meter applications utilizing the TSC
71M653X devices. There are two types of applications that can be developed:
• Embedded application using the sources provided by TERIDIAN, or
• Embedded application using only customer generated functions.
2.1 HARDWARE REQUIREMENTS
The following are the minimum hardware requirements for developing custom programs:
• TERIDIAN 71M6531 Demo Board. This board interfaces with a PC via the RS232 serial interface (COM
port).
• AC Adaptor (AC/DC output) or variable power supply.
• PC Pentium with 512MB RAM and 10GB hard drive, 1 COM port and 1 USB port, running either Windows
2000, or Windows ME or Windows XP.
• Signum Systems ADM-51 In-Circuit Emulator (for loading and debugging the embedded application) and
its associated cables. Signum references this device as ADM-51.
2.2 SOFTWARE REQUIREMENTS
The following are the minimum software requirements for embedded application programming:
• Keil Compiler version 8.03a or later.
• μVision2 version 3.33 (Note: this version comes with Keil Compiler version 8.03a).
• Signum Systems software Wemu51 (comes with Signum Systems ADM-51 ICE hardware).
The following software tools/programs are included in the 71M653X development kit and should be present on the
development PC:
• Demo Code with Command Line Interface (CLI) - Used to interface directly to metering functions and to
the chip hardware.
• Source files
• Demo Code object file (hex file).
v1.1v1.1 TERIDIAN Proprietary 13 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 14
71M653X Software User’s Guide
In order to generate and test software, the Keil compiler and the Signum in-circuit emulator (ICE) must be installed per
the instructions in section 4. The include files and header files must also be present on the development PC. Typically,
a design session consists of the following steps:
• Editing C source code using µVision2
• Compiling the source code using the Keil compiler
• Modifying the source code and recompiling until all compiler error messages are resolved
• Using the assembler and linker to generate executable code
• Downloading the executable code to the ICE
• Executing the code and watching its effects on the target
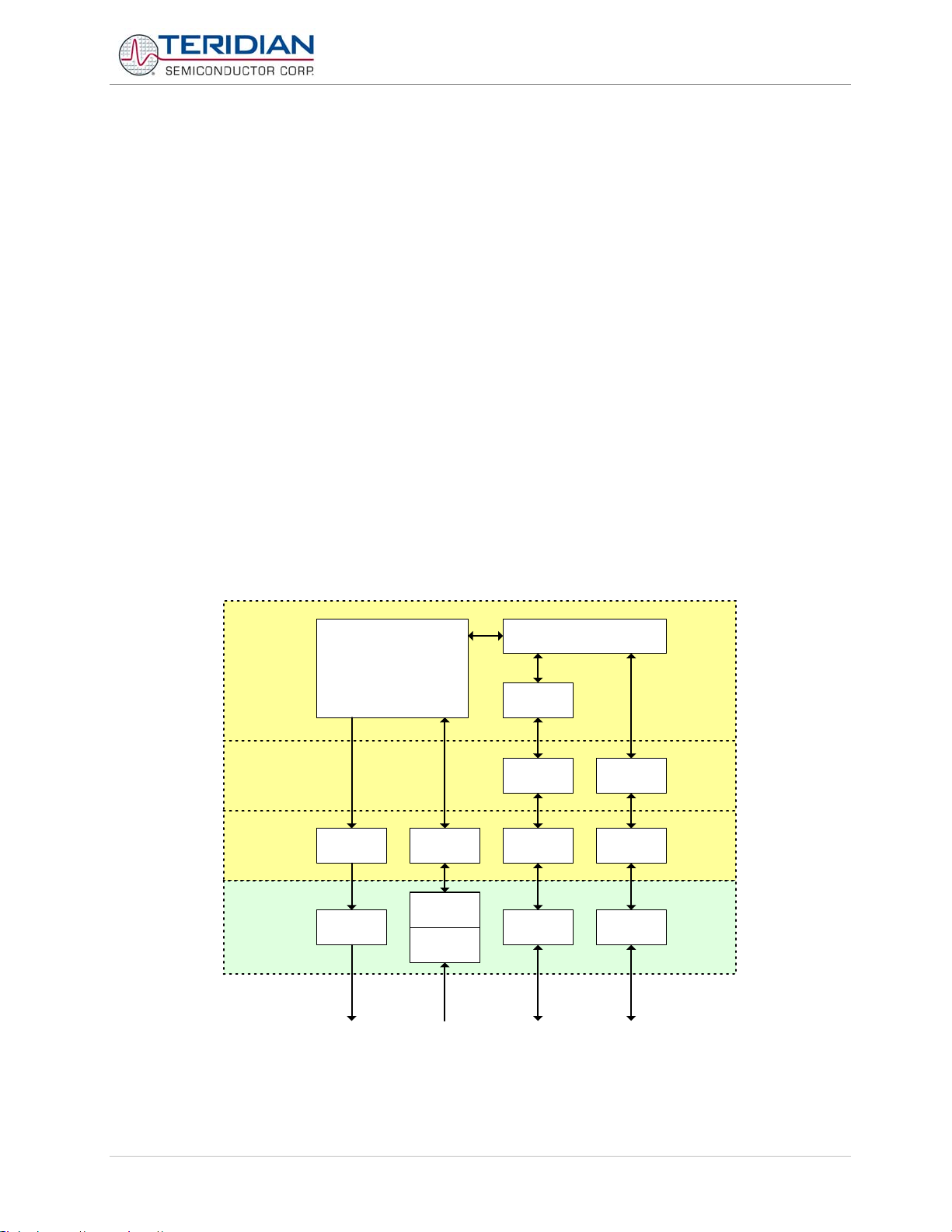
2.3 SOFTWARE ARCHITECTURE
The 71M653X software architecture is partitioned into three separate layers:
1. The lowest level is the device or hardware layer, i.e. the layer that directly communicates with the discrete
functional blocks of the chip and the peripheral components (“hardware”), such as serial interfaces, AFE, LCD
etc.
2. The second layer consists of buffers needed for some functions.
3. The third layer is the application layer. This layer is partially implemented by the Demo Code for evaluation
purposes, but extensions and enhancements can be added by the application software developer to design
suitable electronic power meter applications.
Figure 2-1: shows the partitions of each software component. As illustrated, there are many different designs an
application can develop depending on its usage. Section 5 describes in more detail the functions within each
component.
Application
Layer
Buffer
Layer
Hardware
Layer
Hardware
Meter
CE
CE RAM
LCD
AFE
Display Sensors
Figure 2-1: Software Structure
Totals (Meter Data)
CLI
SerCLI FLAG
Ser0 Ser1LCD
UART0 UART1
Terminal/
PC
AMR
v1.1v1.1 TERIDIAN Proprietary 14 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 15

71M653X Software User’s Guide
The Demo Code is modular. Each device in the chip and on the Demo Board has a corresponding set of driver
software in the Hardware Layer. These driver software modules are very basic, enabling customers to easily locate and
reuse the logic. For the serial devices and for the CE, the buffer handling has been separated from the driver modules.
Where there are several similar devices (e.g. ser0, ser1, or tmr0, tmr1), the Demo Code simulates a virtual object base
class using C preprocessor macros. For example, to initialize the first serial interface, ser0, the source file can include
ser0.h, and then call ser_initialize(). To transmit a byte on ser0, the file can include ser0.h, and then call
ser_xmit(). The convenience is that high-level code can be ported to another device by just (for example) including
ser1.h, rather than ser0.h. Just by making variables static, entire high-level protocols can be written and maintained by
copying the code debugged on one device, and having it include the other device’s .h file.
The demo firmware uses this technique for the command line interface (ser0cli.c, ser1cli.c), the FLAG AMR interface
(flag0.c, flag1.c) and for the software timer module (stm.c). The base-class emulation uses macros because on the
80515 MPU macros execute faster and are also more compact than the standard C++ (object-oriented) design with an
implicit structure containing function pointers.
The Demo Code is also designed with an “options.h” file, which enables and disables entire features in the firmware.
The macro approach combined with the “options.h” file permitted the firmware team to adapt the same Demo Code to
both the 6531 and 6534 versions.
2.4 UTILITIES
Three utilities are offered that make it possible to perform certain operations on the object (HEX) files without having to
use a compiler:
• D_MERGE.EXE allows combining the object file with a text script in order to change certain default settings of
the program. For example, modified calibration coefficients resulting from an actual calibration can be inserted
into the object file.
• CE_MERGE.EXE allows combining the object file with an updated image of the CE code.
• BANK_MERGE.EXE combines the hex files the Keil tools provide for each code bank.
All utilities are executed from a DOS window (DOS command prompt). To invoke the DOS window, the “command
prompt” option is selected after selecting Start – All Programs – Accessories.
The GUI subdirectory contains an unsupported MS Windows .NET implementation of a FLAG hand-held unit.
2.4.1 D_MERGE
Many changes to the firmware’s defaults can be made permanent by merging them into the object file. The first step for
this is to create a macro file (macro.txt) containing the commands adjusting the I/O RAM or other defaults, such as the
following commands affecting calibration:
]8=+16381
]9=+16397
]E=+237
The d_merge program updates the 653x_demo.hex file with the values contained in the macro file. The d_merge
program must be in the same directory as the source files, or a path to the executable must be declared. Executing the
d_merge program with no arguments will display the syntax description. To merge the file macro.txt and the object file
old_653x_demo.hex into the new object file new_653x_demo.hex, use the command:
d_merge old_653x_demo.hex macro.txt new_653x_demo.hex
2.4.2 CE_MERGE
The ce_merge program updates the 653x_demo.hex file with the CE program image contained in the CE.CE file
and the data image CE.DAT. Both CE.CE and CE.DAT must be i
source format but in the compiled format (intel hex). These files will be made available from Teridian in the
cases when updates to the CE images are necessary.
To merge the object file old_653x_demo.hex with CE.CE and CE.DAT into the new object file new_653x_demo.hex,
use the command:
n Intel HEX format, i.e. both files are not in the
v1.1v1.1 TERIDIAN Proprietary 15 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 16

71M653X Software User’s Guide
ce_merge old_653x_demo.hex ce.ce ce.dat 653x_demo.hex
2.4.3 BANK_MERGE
If using Keil’s professional package, bank_merge.exe is not needed to produce Intel-386 files from banked code.
Simply go to the pull-down hex file selection in the output section of the project configuration of uVision, and select
“i386”. Keil’s premium OHX51 hex file converter will automatically produce a single intel-386 file containing all the code
banks.
If producing banked code with Keil’s standard package, the BL51 linker is tightly coupled to the OC51 and OH51 code
converters. These produce one 64K Intel hex file for each code bank. The Signum emulator and TSC’s TFP (in-circuit
programmer) require that banked code be in a different format, a single Intel-386 hex file.
Bank_merge.exe is a program that converts Keils’ multiple hex files into a single Intel-386 hex file.
Usage: bank_merge <Number of Banks> <ROM Size> <Input Name> <Output>\n");
<Number of Bank> - 3 for 6531, and 7 for 6534");
<ROM Size> - The memory size of ROM in kbyte (128,256,...)"
<Input> - Compiled files' name without extension"
<Output> - Output file name. Must have '.hex' extension\n");
For example:
bank_merge 3 128 banktest31 new_code.hex
This merges the three compiled hex files, banktest31.H01, banktest31.H02, banktest31.H03 and produces
new_code.hex in a 128kbyte intel-386 hex file.
v1.1v1.1 TERIDIAN Proprietary 16 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 17
71M653X Software User’s Guide
3
3 DESIGN REFERENCE
As depicted in Figure 1 of section 2, the 71M653X provides a great deal of design flexibility for the application developer. Programming details are described below.
3.1 PROGRAM MEMORY
The embedded 80515 MPU within the 71M653X has separate program (128K or 256K bytes) and data memory (4K
bytes). The code for the Compute Engine program resides in the MPU program memory (flash).
The Flash program memory is addressed as a 64KB block. The upper 32K is a window on a code banked. It can be
switched to other code banks by writing a banke numbe rto the banked register FL_BANK. The flash memory is further
segmented in 512-byte pages which can be individually erased. Selection of these individual blocks is accomplished
using the function calls related to flash memory, which are described in more detail below.
3.2 DATA MEMORY
The 71M653X has 4K bytes of Data Memory used by the embedded 80C515 MPU, and shared with the proprietary
computer-engine (CE). In most configurations, the CE uses 1K of this RAM, leaving 3K for use by the MPU. See Table
3-1: for a summary.
Address
(hex)
0000-7FFF Flash Memory Non-volatile
8000-FFFF Flash Memory Non-volatile
0000-03FF Static RAM Volatile
0400-1000 Static RAM Volatile MPU data 0 3KB
2000-20FF Static RAM
Memory
Technology
Memory Type Typical Usage
Common code area for the
program and non-volatile
data.
Bank window code area for
the program and nonvolatile data. The 6531, 32,
and 33 have 3 banks
yielding 128K total. The
6534 has 7 banks, yielding
256K total
CE data, actual last byte
may be somewhat less than
1K, depending on the CE
code.
Volatile 0 256
Miscellaneous I/O RAM
(configuration RAM)
Wait States
(at 5MHz)
0 32K
0 32K
0 1KB
Memory Size
(bytes)
Table 3-1: Memory Map
v1.1v1.1 TERIDIAN Proprietary 17 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 18
71M653X Software User’s Guide
3.3 PROGRAMMING THE 71M653X CHIPS
There are two ways to download a hex file to the 71M653X Flash Memory:
• Using a Signum Systems ADM-51 ICE.
• Using the TERIDIAN Semiconductor Flash Download FDBM-TFP-2 Stand-Alone Module
Note: For both programming and debugging code it is important that the hardware watchdog timer is
disabled. See the Demo Board User’s Manual for details.
Before downloading code to a 71M653x:
• Stop the MPU
• Disable the CE by writing a 0 to XDATA at address 0x2000.
• Erase the flash memory.
3.4 DEBUGGING OF THE 71M653X CHIPS
When debugging with the ADM51 in-circuit emulator, the CE continues to run, and this disables flash memory access
because the code of the CE is located in flash memory.
When setting breakpoints, only tw o breakpoints can be used, because the first two breakpoints are
“hardware” breakpoints, while the rest attempt to write to flash memory.
3.5 TEST TOOLS
A command line interface operated via the serial interface of the 71M653X MPU provides a test tool that can be used
to exercise the functions provided by the low-level libraries. The command-line interface requires the following
environment:
1) Demo Code (653X_demo.hex) must be resident in flash memory
2) The Demo Board is connected via a Debug Board to a PC running Hyperterminal or another type of terminal
program.
3) The communication parameters are set at 300 bps, 7N2, XON/XOFF flow control, as described in section
3.5.1 .
v1.1v1.1 TERIDIAN Proprietary 18 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 19
71M653X Software User’s Guide
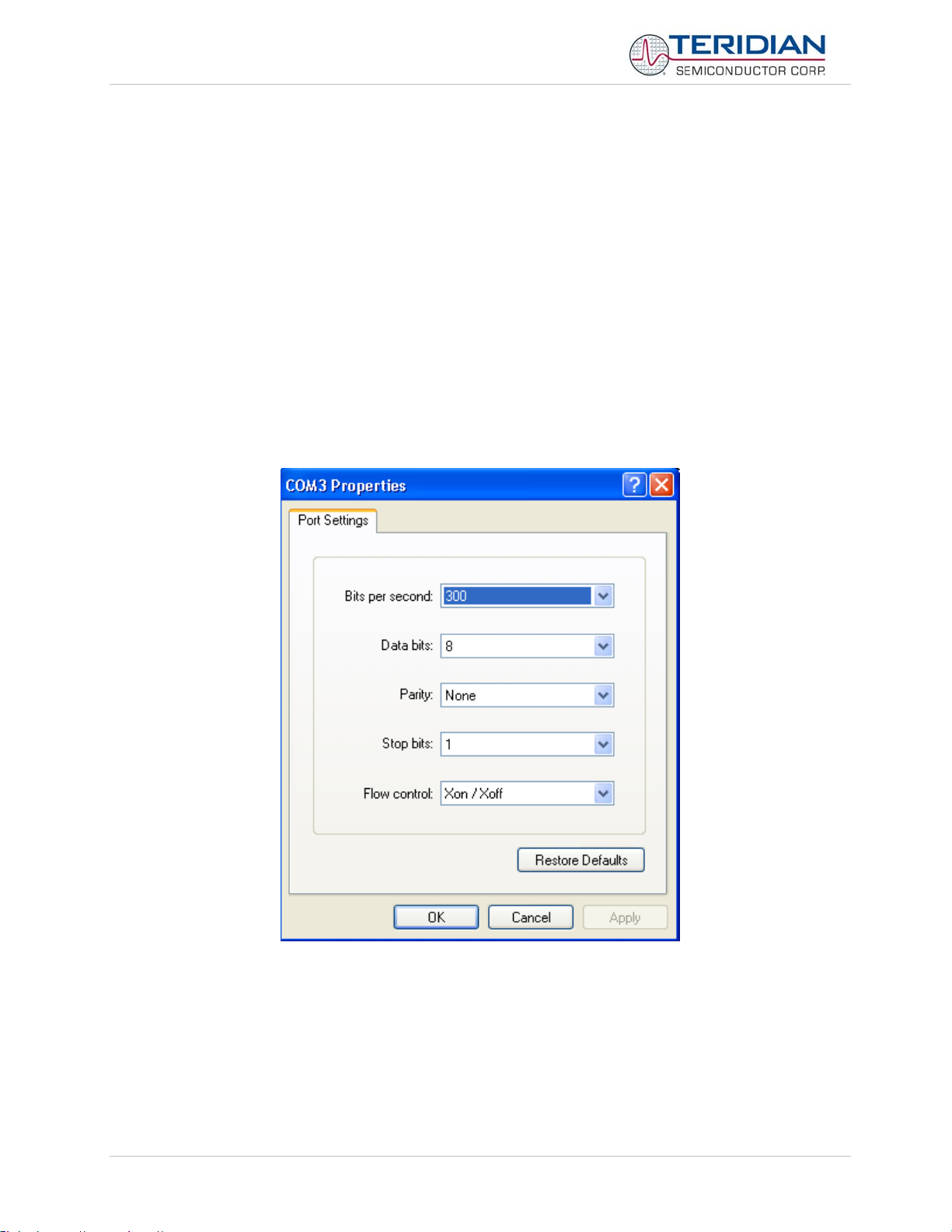
3.5.1 Running the 653X_Demo.hex Program
This object file is the 71M653X embedded application developed by TERIDIAN to exercise all low-level function calls
using a serial interface. Demo Boards ship pre-installed with this program. To run this program:
• Connect a serial cable between the serial port of the Debug Board RS232 and a COM port of a Windows
PC.
• Open a Windows’ Hyperterminal session at 2400 or 300 bps (depending on jumper settings – see the
DBUM), 8N1, one stop bit with XON/XOFF flow control enabled. The setup dialog box is shown in Figure
3-1: Port Speed and Handshake Setup.
• Power on the Demo Board and hit <CR> a few times on the PC keyboard until ‘>’ is displayed on the
Hyperterminal screen.
• Type a command from the CLI Reference ( 3.5.2 )
• All references to ‘c’ (lower case c) indicate any ASCII character, all other lowercase letters are one-byte
numbers
• Numbers can be entered in decimal by preceding them with a plus-sign (e.g. hex 20 = +32)
The 71M653x Demo Board User’s Manual contains instructions on how to connect the serial cable.
Figure 3-1: Port Speed and Handshake Setup
©
Note: HyperTerminal can be found by selecting Programs ÆAccessories Æ Communications from the Windows
start
menu. The connection parameters are configured by selecting File Æ Properties and then by pressing the
Configure button. Port speed and flow control are configured under the General tab, bit settings are configured
by pressing the Configure button (Figure 3-1: Port Speed and Handshake Setup) as shown below.
v1.1v1.1 TERIDIAN Proprietary 19 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 20

71M653X Software User’s Guide
3.5.2 CLI Commands
The Demo Board User’s Manual (DBUM) for the 71M653x contains a complete list of the available commands.
3.5.3 Command (Macro) Files
Commands or series of commands may be stored in text (ASCII) files and sent to the 71M653X using the “Transfer –
Send Text File” command of Hyperterminal or any other terminal program.
v1.1v1.1 TERIDIAN Proprietary 20 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 21
71M653X Software User’s Guide
4
4 TOOL INSTALLATION GUIDE
This section provides detailed installation instructions for the Signum ADM-51 in-circuit emulator and for the Keil
compiler.
4.1 INSTALLING THE PROGRAMS FOR THE ADM51 EMULATOR
The AMD51 ICE interfaces with the PC is via the USB serial interface.
The installation process consists of the following steps:
1. Installing the Chameleon Debugger used with the Signum ICE
2. Installing the ADM51 USB driver
3. Installing updates
4. Creating a project
4.2 INSTALLING THE WEMU PROGRAM (CHAMELEON DEBUGGER)
Insert the CD from Signum Systems and connect the ICE ADM51 to the PC with the provided USB cable.
The following dialog box will appear (this dialog box also shows the release date of the program):
Click on “Chameleon Debugger” and then select “ADM51 Emulator”.
Follow the instructions given by the installation program.
v1.1v1.1 TERIDIAN Proprietary 21 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 22
71M653X Software User’s Guide
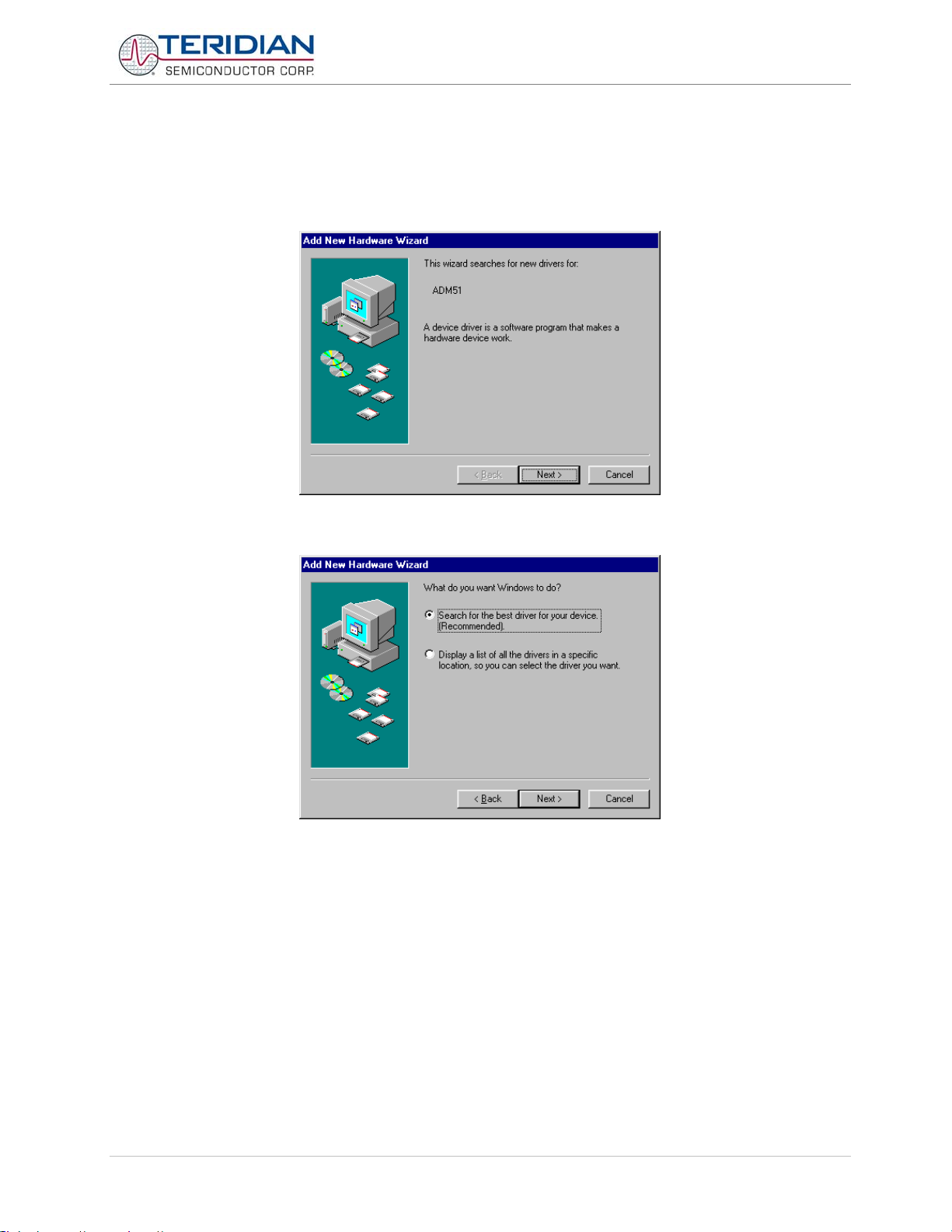
4.3 INSTALLING THE ADM51 USB DRIVER
The Wemu51 program communicates with the emulator ADM51 via the USB interface of the PC. The USB driver for
the ADM51 has to be installed prior to using the emulator. After plugging in the USB cable into the PC and the ADM51
ICE the status light of the ADM51 emulator should come on.
A dialog box will appear, asking you to install the ADM51 driver.
Click Next. Another dialog box will appear, asking how to search for the driver. Use the recommended method.
Click Next.
Another screen (not shown) will appear asking to locate the driver. Select Specific Path and browse to:
C:\Program Files\Signum Systems\Wemu51\Drivers\USB. Click Next.
v1.1v1.1 TERIDIAN Proprietary 22 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 23
71M653X Software User’s Guide
Click Finish.
Click Finish again.
Note: USB 1.1 is sufficient for operation of the ADM51. If higher performance is desired and no USB 2.0 port is
available on the host PC, a USB 2.0 card can be installed as an option.
4.4 INSTALLING UPDATES TO THE EMULATOR PROGRAM AND HARDWARE
If the Wemu51 program is revision 3.11.4 or later, no special precautions have to be taken. Otherwise, the program
should be updated using the Signum Systems web site (www.signum.com
When running the Wemu51 program revision 3.11.4 or later, the firmware in the ADM51 will be checked automatically.
ADM51 emulators with outdated firmware will not function properly. The Wemu51 will offer an automatic update for the
ADM51, if necessary. For a successful upgrade it is vital to follow the instructions on screen precisely.
v1.1v1.1 TERIDIAN Proprietary 23 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
).
Page 24
71M653X Software User’s Guide
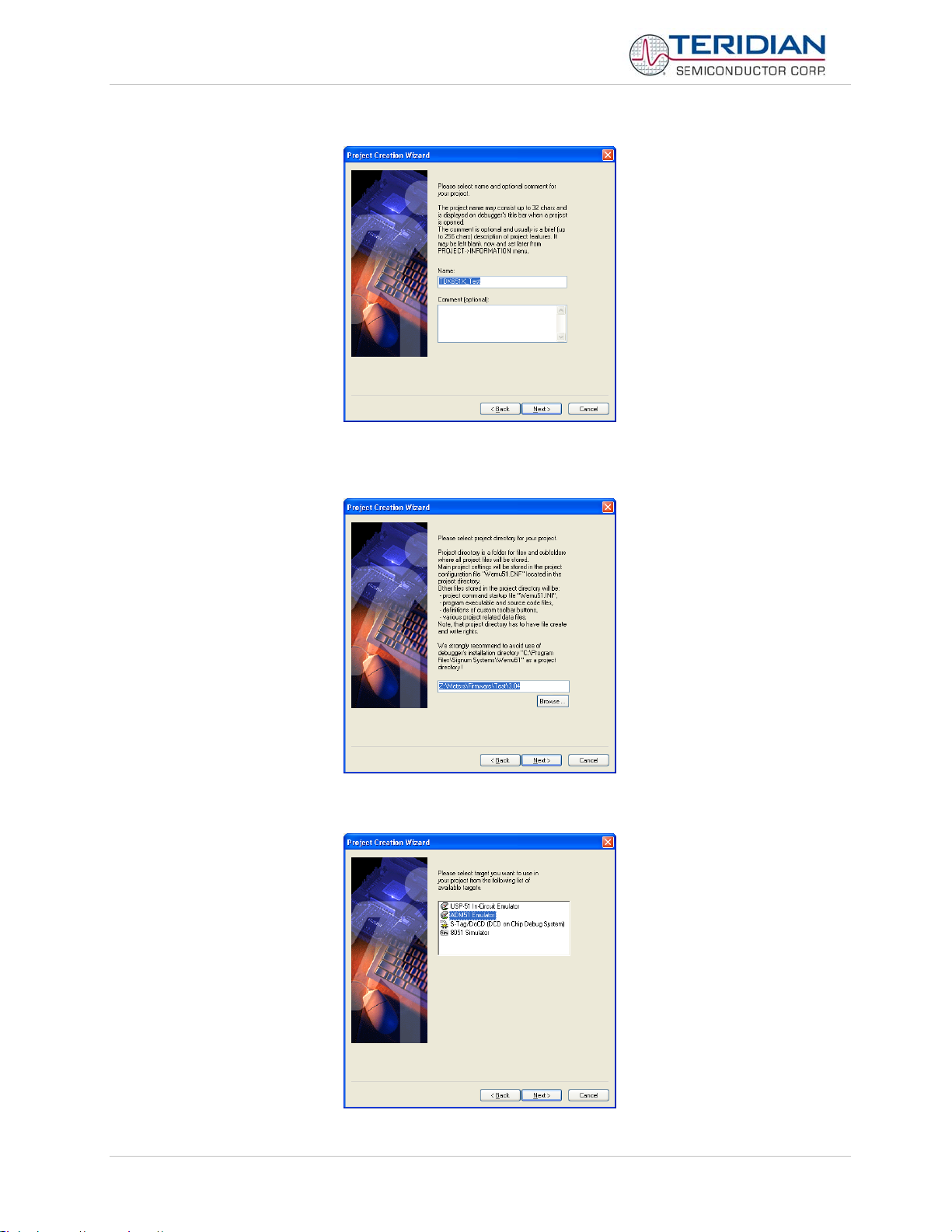
4.5 CREATING A PROJECT
Double click on the WEMU51 icon to start the Chameleon debugger.
Click Project/Create New Project. The following screen will appear:
Follow the instructions of the Create Project Wizard by selecting Next.
v1.1v1.1 TERIDIAN Proprietary 24 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 25
71M653X Software User’s Guide
When prompted for the project name to be used, type a convenient project name. Click Next.
When prompted for the project directory to be used, select an existing folder on the PC. Do NOT select any folder in
the Wemu51 installation directory! Click Next.
When prompted for the emulator to be used, select ADM51 Emulator. Click Next.
v1.1v1.1 TERIDIAN Proprietary 25 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 26
71M653X Software User’s Guide
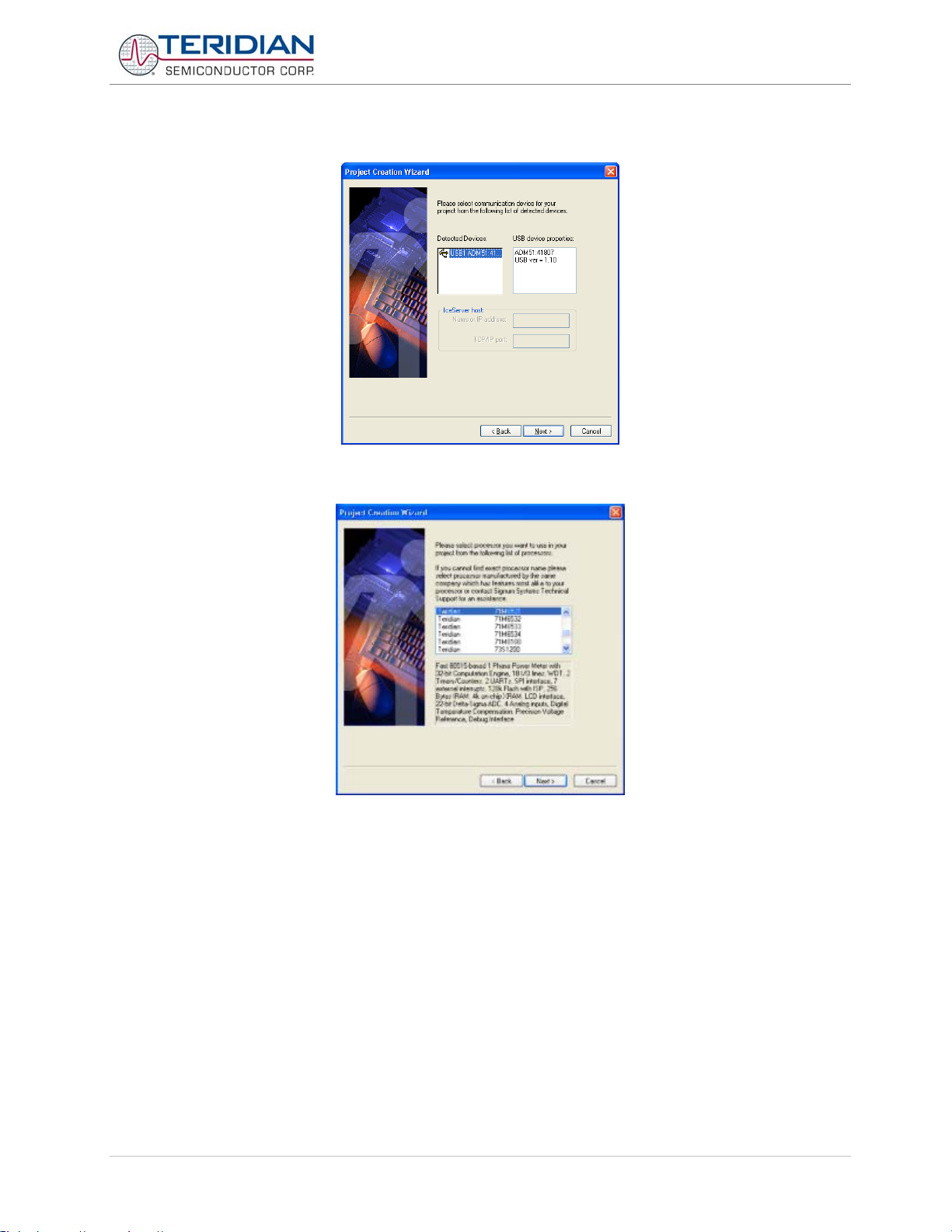
When prompted for the communication device to be used, select USB ADM51. Click Next.
When prompted for the processor to be used, select the correct IC. Click Next.
Click Finish.
v1.1v1.1 TERIDIAN Proprietary 26 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 27

71M653X Software User’s Guide
4.6 INSTALLING THE KEIL COMPILER
After inserting the Keil CD-ROM into the CD drive of the PC, the on-screen instructions should be followed to install the
Keil compiler.
The installer will display the following screen:
Select Install Products & Updates
Select C51 Compiler and Tools
Follow the on-screen instructions of the installation program. When prompted for the add-on disk, insert the disk in the
floppy drive and click Next or browse to the location of the files (if they were previously copied to the hard drive of the
PC) by clicking Browse.
v1.1v1.1 TERIDIAN Proprietary 27 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 28
71M653X Software User’s Guide
4.7 CREATING A PROJECT FOR THE KEIL COMPILER
4.7.1 Directory Structure
The following directory structure is established when the files from the archive 653X_Demo.zip are unpacked while
maintaining the structure of subdirectories:
<drive letter>:\…\meter project\
<drive letter>:\…\meter project\CE
<drive letter>:\…\meter project\CLI
<drive letter>:\…\meter project\docs
<drive letter>:\…\meter project\flag
<drive letter>:\…\meter project\IO
<drive letter>:\…\meter project\Main
<drive letter>:\…\meter project\Main_653x_CLI
<drive letter>:\…\meter project\Meter
<drive letter>:\…\meter project\Util
The project control file 653X_demo.uv2 will be in the directory <drive letter>:\…\meter project. The Keil compiler can be
configured easily by loading the file 653X_demo.uv2, using the Project Menu and selecting the Open Project
command.
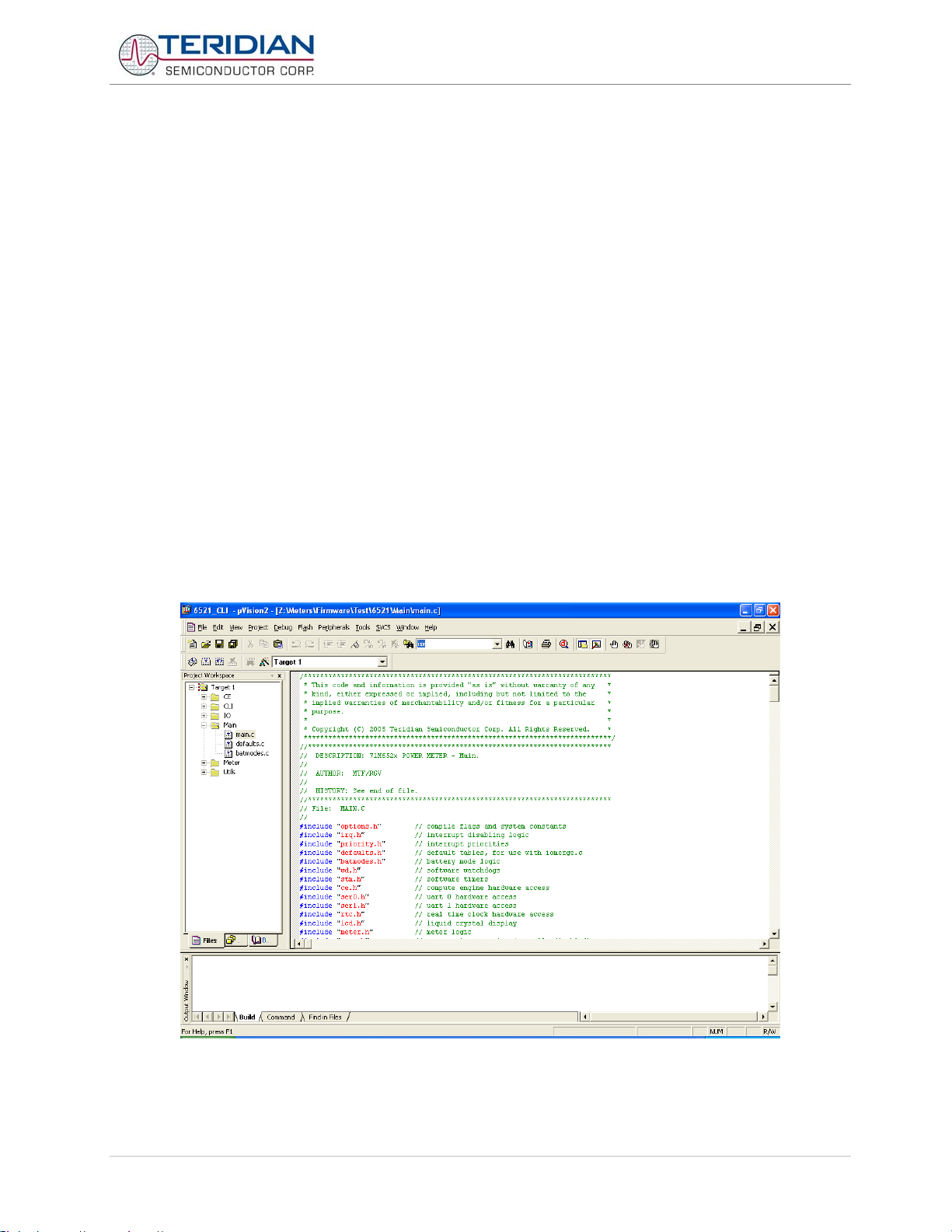
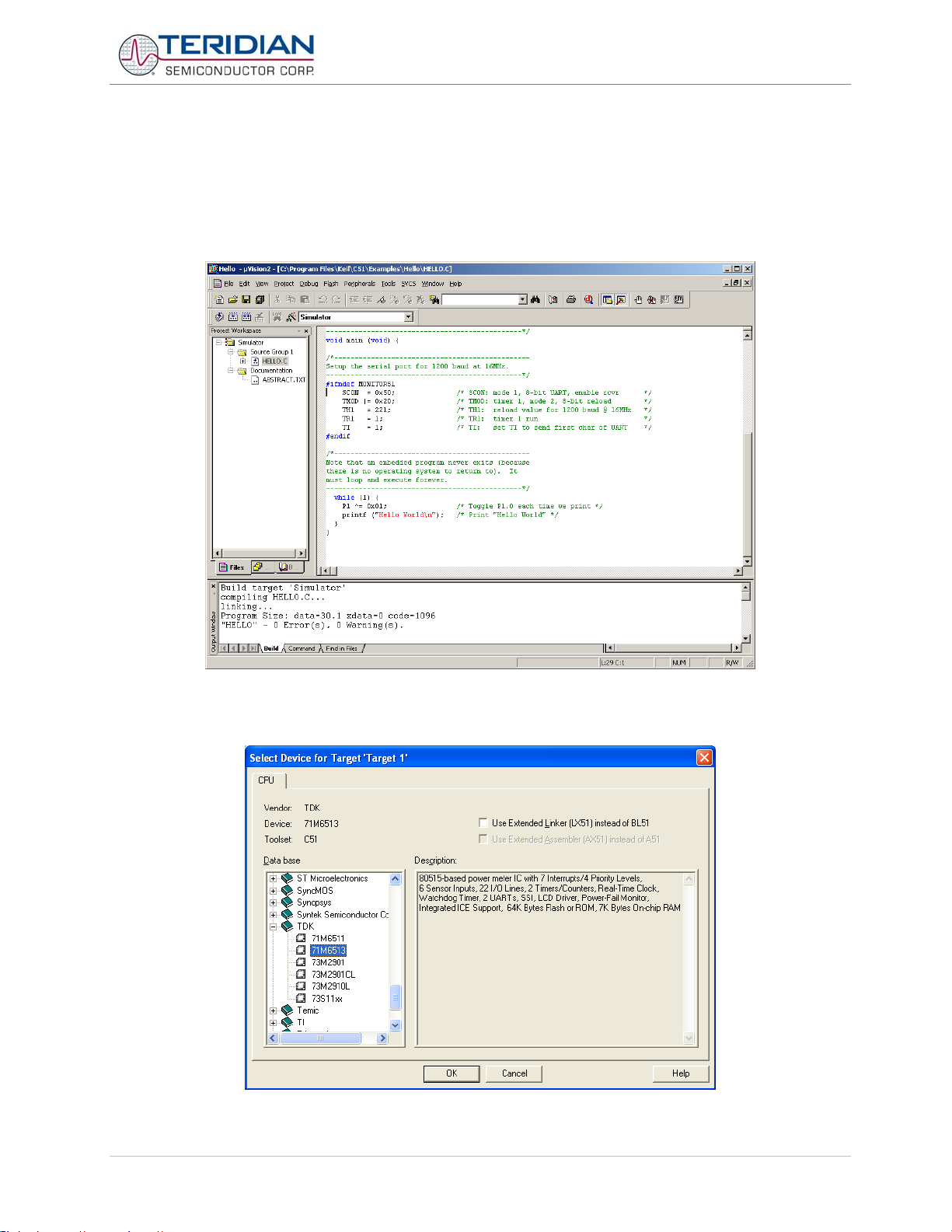
The window shown below should appear when the project control file is opened.
The Project Workspace screen on the left side of the window shows the main components of the source (CE, CLI, IO,
Main, Meter, Utils) in folders. Folders can be opened by clicking on the plus sign next to them. Opening the folders will
display the source files associated with them.
v1.1v1.1 TERIDIAN Proprietary 28 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 29
71M653X Software User’s Guide
It should be noted that not all header files are physically present in the project directory. The files absacc.h, string.h,
ctype.h, and setjmp.h are provided by the compiler manufacturer, and they are located in the Keil\C51\INC directory.
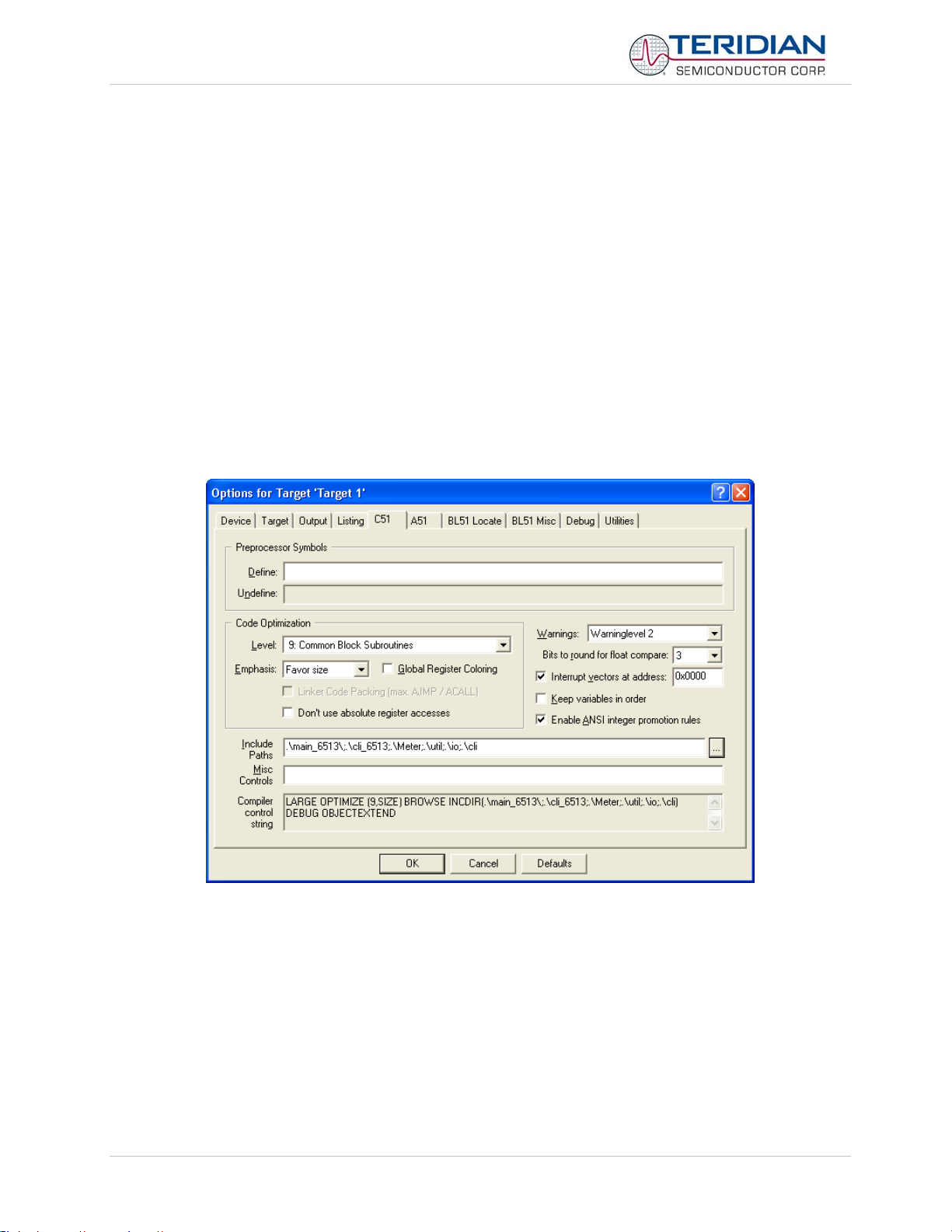
4.7.2 Adjusting the Keil Compiler Settings
Once, the Keil compiler is installed, the most convenient method to start the project is to double-click on the file
653x.UV2 (or 653x.UV3). This will start the Keil compiler with the proper settings stored in the 653x.UV2 file.
Directory structures and drive names vary from PC to PC. The settings for the compiler can be adjusted using the
following method:
1. Select “target1” in the leftmost window.
2. Select “project” from the top menu and then select “options for target 1”.
3. Select the “C51” tab.
4. Click the button right next to the “Include Paths” window. Three paths will be listed, pointing to meter
projects, meter projects\demo, and meter projects\demo\header files.
5. If necessary, delete these path entries (X button) and replace them with the corresponding path
entries for your PC ( button).
The dialog box should look like shown below. After making the necessary changes, the project file (653X_demo.UV2)
should be stored.
v1.1v1.1 TERIDIAN Proprietary 29 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 30
71M653X Software User’s Guide
4.7.3 Manually Controlling the Keil Compiler Settings
If the method described in section “Adjusting the Keil Compiler Settings” is not used, the Keil compiler settings can also
be controlled manually.
The target options should be selected in order to adapt the compiler controls properly to the target. The uVision
compiler environment is started by selecting Programs Æ Keil Æ uVision2. uVision should start up and present the
following window:
Under Project Æ Options for Target1, select the Device tab and check the selected device. Newer versions of the Keil
Compiler offer selection of TERIDIAN (labeled “TDK”) 71M653x devices:
v1.1v1.1 TERIDIAN Proprietary 30 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 31

71M653X Software User’s Guide
For older versions of the Keil compiler, select the TERIDIAN folder (labeled “TDK”), open it by clicking on the + sign
and select 73M2910L as the target device. Confirm by clicking OK.
Under Project Æ Options for Target1, select the Target tab and enter the values in the fields as shown above. Confirm
by clicking OK.
v1.1v1.1 TERIDIAN Proprietary 31 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 32

71M653X Software User’s Guide
Under the Output tab, select a name for the executable (object) file with .abs extension’ in the field labeled “Name of
the executable” and check the fields by “Debug Information”, “Browse Information” and “Create HEX File”. This will
guarantee that high-level source information will be embedded in the output file. Select HEX-80 as the output format,
as shown below:
Under the C51 tab, provide path names for the source files to be included, as shown below.
Click OK to set all the options selected for project and return to the main menu.
With the source and header files now existing in the newly created project, the files can be compiled using the Build
Target option under the Project menu.
4.8 OUTPUT FILE FORMAT
Both the Keil compiler and the Signum WEMU51 emulator program accept executable programs for download to the
653X ICs in Intel Hex format.
v1.1v1.1 TERIDIAN Proprietary 32 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 33

71M653X Software User’s Guide
4.8.1 Basic Intel Hex Format
The Intel HEX file is an ASCII text file with lines of text that follow the Intel HEX file format. Each line in an Intel HEX file
contains one HEX record. These records are made up of hexadecimal numbers that represent machine language code
and/or constant data. Intel HEX files are often used to transfer the program and data that would be stored in a ROM or
EPROM. Most EPROM programmers or emulators can use Intel HEX files.
Record Format
An Intel HEX file is composed of any number of HEX records. Each record is made up of five fields that are arranged in
the following format:
:llaaaatt[dd...]cc
Each group of letters corresponds to a different field, and each letter represents a single hexadecimal digit. Each field
is composed of at least two hexadecimal digits-which make up a byte-as described below:
: is the colon that starts every Intel HEX record.
ll is the record-length field that represents the number of data bytes (dd) in the record.
aaaa is the address field that represents the starting address for subsequent data in the record.
tt is the field that represents the HEX record type, which may be one of the following:
00 - data record
01 - end-of-file record
02 - extended segment address record
04 - extended linear address record
dd is a data field that represents one byte of data. A record may have multiple data bytes. The number of data
bytes in the record must match the number specified by the ll field.
cc is the checksum field that represents the checksum of the record. The checksum is calculated by summing
the values of all hexadecimal digit pairs in the record modulo 256 and taking the two's complement.
Data Records
The Intel HEX file is made up of any number of data records that are terminated with a carriage return and
a linefeed. Data records appear as follows:
:10246200464C5549442050524F46494C4500464C33
This record is decoded as follows:
:10246200464C5549442050524F46494C4500464C33
||||||||||| CC->Checksum
|||||||||DD->Data
|||||||TT->Record Type
|||AAAA->Address
|LL->Record Length
:->Colon
where:
10 is the number of data bytes in the record.
2462 is the address where the data are to be located in memory.
00 is the record type 00 (a data record).
464C...464C is the data.
33 is the checksum of the record.
v1.1v1.1 TERIDIAN Proprietary 33 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 34

71M653X Software User’s Guide
4.8.2 Intel Hex386 File Format
For banked code, the Intel Hex386 file format (Extended Linear Address Records) is used:
Extended linear address records are also known as 32-bit address records and HEX386 records. These records
contain the upper 16 bits (bits 16-31) of the data address. The extended linear address record always has two data
bytes and appears as follows:
:02000004FFFFFC
where:
02 is the number of data bytes in the record.
0000 is the address field. For the extended linear address record, this field is always 0000.
04 is the record type 04 (an extended linear address record).
FFFF is the upper 16 bits of the address.
FC is the checksum of the record and is calculated as
01h + NOT(02h + 00h + 00h + 04h + FFh + FFh).
When an extended linear address record is read, the extended linear address stored in the data field is saved and is
applied to subsequent records read from the Intel HEX file. The linear address remains effective until changed by
another extended address record.
The absolute-memory address of a data record is obtained by adding the address field in the record to the shifted
address data from the extended linear address record. The following example illustrates this process:
Address from the data record's address field 2462
Extended linear address record data field FFFF
-------Absolute-memory address FFFF2462
v1.1v1.1 TERIDIAN Proprietary 34 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 35

71M653X Software User’s Guide
4.9 WRITING BANK-SWITCHED CODE
The 80515 microcontroller contained in the 71M653X Energy Meter chips can only address 64Kbytes of code. This
section explains how to design firmware with more than 64K of code for the 71M653X Energy Meter chips.
4.9.1 Hardware Overview
In the 71M6531 there is a 32K area from code address 0x0000 to 0x7FFF. The code in this area is always available to
the 8051. This area is “common” and is the same memory area as “bank 0”. Since it is always present, it never needs
to be switched into the bank area.
A 32K bank is selected by writing the bank’s number in the register FL_BANK, an SFR at 0xB6. After this, the bank’s
code is visible to the MPU in addresses 0x8000 to 0xFFFF.
The 71M6531 has four 32K banks (128K bytes total). Bank 0 is the common area. Banks 1, 2, and 3 are the banked
code areas selected by FL_BANK.
The 71M6534 has eight 32K banks (256K total). Bank 0 is the common area. Banks 1 through 7 are the banked code
areas selected by FL_BANK.
A reset sets FL_BANK to 1, so any 71M653x IC can run 64K of non-bank-switching code.
The 71M653x ICs have two write protect registers to protect ranges at the beginning and end of flash.
The beginning is protected by BOOT_SIZE, XDATA 0x20A7 when WRPROT_BT is set in FLSHCTL, SFR 0xB2.
The end can be protected by placing the CE program at the start of the area to protect, and setting WRPROT_CE in
FLSHCTL, SFR 0xB2.
Address Range for
FL_BANK
[2:0]
000 0x0000-0x7FFF 0x0000-0x7FFF X X X
001 0x0000-0x7FFF 0x8000-0xFFFF X X X
010 0x0000-0x7FFF 0x10000-0x17FFF X X X
011 0x0000-0x7FFF 0x18000-0x1FFFF X X X
100 0x0000-0x7FFF 0x20000-0x27000 X
101 0x0000-0x7FFF 0x28000-0x2FFFF X
110 0x0000-0x7FFF 0x30000-0x37FFF X
111 0x0000-0x7FFF 0x38000-0x3FFFF X
The 71M653x ICs’ flash memory are very similar to the ROM arrangement in Keil’s example “Banking With Common
Area” of chapter 9 (linker) of Keil’s “Macro assembler and Utilities” manual.
Lower Bank
(Common)
(0x000-0x7FFF)
Table 4-1: Code Bank Memory Addresses and Availability
Address Range for
Upper Bank
(0x8000-0xFFFF)
6531
128KB
6533
128KB
6534
256KB
4.9.2 Software Overview
Teridian’s demonstration code uses the Keil compiler’s standard bank switching system (www.Keil.com).
This is completely supported by Keil, a major compiler vendor for 8051s, and Signum, the emulator vendor. Code can
be ported from non-banked projects, and full symbolic banked debugging is available.
Keil’s scheme puts a “page table” in common memory. Code calls an entry in the page table. Each entry is a bit of
code that switches to the subroutine’s bank, and jumps to the subroutine in the bank.
Keil’s linker automatically produces the page table. In Teridian’s demo code, the size of this table is less than 1K.
Code using the page table is slower than native 16-bit code, because it has to set the page register.
v1.1v1.1 TERIDIAN Proprietary 35 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 36

71M653X Software User’s Guide
Interrupts must start in the common (non-banked) area, because the bank register could have any value.
Calls via function pointers (e.g. “callback routines”) are supported, but need to be made global, and mapped to their
caller with the linker’s overlay functions. Keil’s linker often omits callback routines from the page table when it
optimizes the page table, and this causes incorrect operation.
Constant values have to be accessed from the same bank, or common code. When accessed from common code the
bank has to be switched manually with switchbank(), a subroutine in the bank logic.
4.9.3 Software Tool Versions
The development software used with these examples was Keil C version 8.03, with the BL51 linker (the Lx51 linker is
actually easier to use, but not shown). The Signum emulator software used was version 3.11.04.
4.9.4 Setup of the Compiler Project
This dialogue is for the project options of a 71M6531, which has 4 banks (see Figure 4-1).
Figure 4-1, Setup of Keil Compiler for bank-switched code
When opening individual files by right-clicking on the file names (after opening the group folders listed under “Target”) ,
file options can be edited. These options can be set to assign code to pages (as shown in Figure 4-2, ).
v1.1v1.1 TERIDIAN Proprietary 36 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 37

71M653X Software User’s Guide
Figure 4-2, Selecting a Bank for a File Group in Keil C
4.9.5 Startup
TSC provides special start-up code on the CD-ROMs shipped with the 71M653X Demo Kits. The code can be found at
Util\startup_30_banked.a51. This file sets up the bank-switching logic. It must be included in the build. Any other
startup.a51 file must be removed.
4.9.6 Bank-Switching Code
TSC has already ported Keil’s bank-switching code, Util\L51_bank.a51. TSC’s version of this file should be included in
the build. TSC has already selected the fastest standard bank-switching method as the default.
During performance testing, TSC made a good-faith attempt to port the other bank-switching methods in this code,
including features needed by Keil’s advanced Lx51 linker. However these versions are not extensively tested.
4.9.7 Page Table Setup and Debug
Keil’s linkers produce the page table automatically, once paging is selected in the Microvision options->target dialogue.
Keil usually places the page table at an address of 0x100 in the common bank. It is visible in the linker .m51 file. To
see how it works, one can use the emulator to single-step through at a banked function call at the assembly language
level.
To call a paged subroutine, Keil’s linker arranges to call one of the entries of the page table. The page table consists
of one entry per subroutine. Each entry is a small piece of code that loads the address of the banked subroutine into
the 8051 register DPTR, and then jumps to paging code. The paging code sets the bank register FL_BANK, and then
jumps to the banked code’s address contained in the DPTR.
v1.1v1.1 TERIDIAN Proprietary 37 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 38

71M653X Software User’s Guide
Keil’s linkers minimize the size of the page table. A subroutine has an entry in the page table only if:
1. The subroutine is in a bank, and
2. The subroutine is called from outside its bank.
Most problems with banking code occur because the linker omits a function from the page table. The result is that the
call to a function in a different bank goes to code in the current bank, causing unexpected code in the current bank to
be executed.
One major cause of this is a callback subroutine called via a function pointer. Another is an interrupt defined in banked
assembly language file (fortunately, Keil detects and flags banked interrupts in C code).
To solve problems stemming from callback routines, all subroutines called from other banks should be made global, so
that the linker can use their data.
Next, overlay commands should be used to inform the Keil linker that a banked function is called from a caller in a
different bank. This forces the linker to put the callee function into the page table. To use the overlay command in the
linker, see the discussion of “overlay” in the Keil linker’s documentation. Here’s an example of the overlay commands
from the demo code. They map the callback routines that are called from the software timer, and hardware timer
interrupt 0.
Figure 4-3, Setting Keil’s Linker for Bank-switched Code
However, if there should be other problems, there is a way to isolate them:
1. Remove code from the project until all code fits in common and bank 1.
2. Move modules individually each to a bank until the problem occurs.
3. At some point, the problem is likely to show up as an unexpected reset. What is happening is that the call to
code in bank 1 is probably going to uninitialized code memory in another bank. It will execute until the
program counter wraps around to zero and begins executing the reset vector.
4. Place a break point near the end of the other bank, to catch the erroneous execution.
5. After trapping the error, set the program counter to the address of a RET instruction, and single-step. The
code will return to the code that called the wrong bank.
6. Fix the calling routine, and all similar problems!
v1.1v1.1 TERIDIAN Proprietary 38 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 39

71M653X Software User’s Guide
4.9.8 Producing a Banked Hex File
The BL51 linker and its associated hex converter produce a separate Intel hex file for each bank. These files end with
names such as .H01 for bank 1, .H02 for bank 2, etc. The emulator and the production programmer expect a single
Intel 386 hex file with a .HEX ending.
TSC’s demo CD ROM has a utility called bank_merge.exe. It runs in a DOS command window and merges the bank
files from Keil’s hex converter into one Intel-386 hex file. This can be placed in the build automatically. (how?)
Another manual solution is to erase the flash, load the .abs file to an emulator, and then use the file->save range: All
menu selection to save a copy of flash as an Intel hex file.
When using Keil’s Lx51 advanced linker, the output dialog contains a pull-down list of hex formats. Select the “i386”
hex file option.
The emulator’s verification option is a convenient way to verify that the .abs and .hex file have the same content. To
use it, invoke the menu File->Load, then check the verify box, but not the load box.
4.9.9 Placing Interrupts in Banked Code
The interrupts must start in the common code. TSC starts most interrupts from a “trampoline” routine that saves and
restores the bank register. The demo code’s trampoline routines are in Meter\io653x.c, with the stub interrupts and
decoded interrupts. An example of a trampoline is this serial interrupt from Meter\io653x.c, used to service UART0:
#pragma save
#pragma REGISTERBANK (ES0_BANK)
void es0_trampoline (void) small reentrant interrupt ES0_IV using ES0_BANK
{
uint8_t my_fl_bank = FL_BANK; // save the bank register
FL_BANK = BANK_DEFAULT; // BANK_DEFAULT is 1
es0_isr();
FL_BANK = my_fl_bank; // restore the bank register
}
#pragma restore
This is clumsy and slow. Why do this?
A trampoline lets most interrupt code be in bank-switched code space with other code from the same file. This may
make the code easier to read. It also leaves more space in common memory, and permits a larger system to exist.
The penalty is a few tens of microseconds per interrupt.
Very frequent interrupts should not use trampoline routines. In TSC’s demo code, the CE code, Meter\ce.c has an
interrupt that runs every 396 microseconds (ce_busy_isr()). ce.c is placed in the common area, and ce_busy’s
trampoline is disabled (in Meter\io653x.c).
If an interrupt calls code in a bank, as above, it must save and restore the bank-switching register, FL_BANK.
Keil’s Lx51 advanced linker has an option to automatically save and restore the bank register in an interrupt. TSC’s
L51_bank.a51 code provides the necessary symbols.
4.9.10 Calling Banked Functions via Function Pointers
In a banking system, functions placed in function pointers cannot have the word “static” in front of their definition. They
must be global.
Also, the linker must be informed of the actual caller of the function in the function pointers. For example, in the
TERIDIAN Demo Code, the software timer module (Util\stm.c) calls many routines. There is also an interrupt for
hardware timer 1 that calls the software timer’s interrupt code. This linker dialogue tells the linker the true relationship.
The command to the linker is “caller ! callee” or “caller ! (callee_1, callee_2, …)” (See the linker command figure, 0-3).
Why do this? If a function pointer points at a function’s entry in the page table, the function pointer can be executed
from any bank, at any time. So, in theory, function pointers are supported via the page table.
v1.1v1.1 TERIDIAN Proprietary 39 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 40

71M653X Software User’s Guide
In practice, the Keil linker tries to save space in the page table. So, it only puts global functions into the page table if
they are in a bank area and are called from outside the bank. Often, function pointers are used for callback routines.
In these cases, the linker often does not detect the true caller and so cannot detect the cross-bank function call. Then,
it places a banked address into the code that sets the function pointer. If this is executed from another bank, the code
jumps to code in the current, wrong bank!
Using overlay commands informs the linker of the actual caller, so it can detect cross-bank calls.
To increase reliability, the demo code that sets a function pointer also checks to make sure that the pointer is in
common memory rather than a bank. The code looks like this:
if (((uint16_t)fn_ptr) > 0x7FFF) // only accept functions in common
{
main_software_error (); // report a software error at a central breakpoint.
return NULL; // indicate a failure to the caller
}
4.9.11 Putting Constants in Banks
Space in the common code area can be precious. It often helps to put large tables in a different code bank. The
TERIDIAN Demo Code, places the help text, CE code and the CE’s data initialization table into banked flash.
In order for this to work, every reference to the data must be from the same bank or from common.
In the demo code, the largest set of constant tables is the help text. The help text (CLI\Help.c) is in the same bank as
the printing routines, which copy the text into RAM for use by the serial interrupts (see CLI\io.c). Since the help text is
in the same bank as the accessing routines, no other special coding is needed.
In the demo code, the CE code is referenced from the Meter\ce.c. ce.c could not be placed in the last bank with the
tables because it also has a very fast interrupt, ce_busy_isr(), so ce.c was placed in common. Also, the CE code is in
the last bank, so the code in ce.c had to explicitly switch it in to read it.
Designers must be careful that any code in common is smaller than the data table! Some systems may need a library
routine in common to copy part of the banked data to RAM for use by banked code.
Next, the data should be located in the desired bank, using compiler and linker’s BANK commands. (See the compiler
and linker command figures, 0-2, 0-3)
The code using the banked data should include Util\bank.h, which defines switchbank() to access banked data.In
the code that accesses the data, the bank must be switched in. For example, when the demo code copies the starting
data for the CE (ce_init() in Meter\ce.c), it executes the following code:
switchbank (BANK_CE);
memcpy_cer (
(int32x_t *)CE_DATA_BASE,
(int32r_t *)&CeData[0],
(uint8_t)(0xff & NumCeData)
);
switchbank () sets the bank register without side effects for other bank switching. It is defined in Util\bank.h.
BANK_CE is the bank number containing the CE initialization table (in Main_6531\options.h or Main_6534\Options.h).
memcpy_cer () copies 32-bit words from code to CE memory. CE_DATA_BASE is the start of CE memory, 0x0000
in XDATA in 71M653x ICs. CeData[] is the array of 32-bit integers containing the CE’s default data. NumCeData is
the count of data words in the table, a constant value that precedes the CE default data table.
4.9.12 Write-Protecting Flash in the 653X
Besides safety interlocks in software that prevent accidental write operations to flash, the 71M653x ICs also have a
write-protection mechanism implemented in hardware. Some systems might permit code or customization tables to be
downloaded to flash, and designers might wish to assure that this process cannot corrupt other code or data.
v1.1v1.1 TERIDIAN Proprietary 40 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 41

71M653X Software User’s Guide
To protect flash starting at address 0x00000, write the number of 1,024-byte blocks into BOOT_SIZE (at XDATA
0x20A7), and set WRPROT_BT (bit 5 of SFR 0xB2). Since this range covers the code’s interrupt vectors, it is perfect for
protecting a boot loader (i.e. code that can load other code into the system). It is also the logical choice for generalpurpose write-protection.
To protect flash near the end of memory, place the CE’s data area at that point (and set CE_LCTN, XDATA 0x20A8),
and set the WRPROT_CE (bit 4 of SFR 0xB2). This protects not only the CE code, but also all flash memory after it.
This is excellent for protecting the CE code and calibration tables stored in flash. The demo code uses this method to
protect the CE code and its default initialization table.
4.10 PROJECT MANAGEMENT TOOLS
With large software projects involving a multitude of source, object, list and other files in various revisions, it is very
helpful to use a version control tool.
To manage file versions under Windows, Tortoise CVS, a free version control utility, might be useful. This utility can be
found at http://www.tortoisecvs.org/
.
4.11 ALTERNATIVE COMPILERS
The Demo Code was written for the Keil compiler. However, alternative compilers may be used if the code is modified
to ensure compatibility with the alternative compiler. One example of an alternative compiler is SDCC, a free compiler
available from www. Sourceforge.net.
Note: The Keil extensions for the 8051 are not compatible with the 8051 extensions used by the SDCC.
The batch file BUILD653X.BAT is provided with the Demo Kit to support building object files using alternative
compilers. This batch file uses the Keil compiler calls with the applicable compiler options and can therefore serve as
examples on how to invoke alternative compilers. The linker control file LINK653x.TXT called by the batch files can
show how to properly invoke linkers.
To compile with DOS-style tools, arrange for a DOS batch file to invoke the tools and set the properties of the batch file
to leave the window open, so that errors can be seen. Then, to compile, double click on this batch file in Windows
explorer.
4.12 ALTERNATIVE EDITORS
Many modern text editors have a feature called “tag jumping” that helps a programmer to read and understand unfamiliar code. TERIDIAN Semiconductor recommends using such an editor to read, understand and modify
demonstration code. Tag jumping is a feature that is not supported by the Keil uVision editor.
This is how tag jumping works:
1. A “tag file generator” program is run on some directories full of .c or .h files. TERIDIAN Semiconductor
recommends placing the tag file generator in a DOS batch file in the same directory as the project’s make file.
Wattmeter demonstration code includes such a batch file: “T.BAT”. To run a batch file, double-click it in
windows explorer. A DOS batch file is just an ASCII file (like a .C file) containing DOS commands. DOS
commands are described at http://www.computerhope.com/msdos.htm
2. The tag file should then be copied to convenient places for a text editor. TERIDIAN Semiconductor
recommends copying the tag file into each source code directory. In that way, the default tag file location for
most editors becomes just “.\tags” for all projects, and multiple projects do not conflict. Copying the tag file
can be an automatic part of the DOS batch file that generates the tag file.
3. It is easiest if Windows explorer opens .C files automatically with the editor when they are clicked. To do this,
change file associations. (See Windows help.)
4. Inside the editor, select a subroutine name or variable, then use the editor’s “tag jump” feature. The editor
immediately opens the file at the line where the subroutine or variable is defined. Or, if the same symbol is in
several places, it offers a choice of files.
TERIDIAN Semiconductor recommends the “exuberant CTAGs utility” for generating tag files. The code can be found
for free at: http://ctags.sourceforge.net/
CTAGS. See the list of supporting tools at http://ctags.sourceforge.net/tools.html
. The choice of a text editor is very personal. Many editors support Exuberant
.
.
v1.1v1.1 TERIDIAN Proprietary 41 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 42

71M653X Software User’s Guide
Some editors to be considered are:
• VIM, see http://www.vim.org/
of the POSIX standard, so using it is a portable skill. VIM wins awards for usability.
• UltraEdit http://www.ultraedit.com/
This editor works like all other Windows applications, with extra features to support programming languages.
NEDIT (The Nirvana Editor) is very similar, at http://www.nedit.org/
supports exuberant CTAGs.
• GNU Emacs, a free editor, also supports exuberant CTAGs. See:
http://www.gnu.org/software/emacs/emacs.html
a free VI editor. VIM is available in full-featured versions for Windows. VI is part
, an inexpensive (not free), professional Windows programming editor.
. NEDIT runs on Unix with Motif, and also
4.13 ALTERNATIVE LINKERS
Compiled and linked code can be significantly compacted by using the linker available with the Professional Compiler
Kit PK51 from Keil (www.keil.com
The LX51 Enhanced Linker supplied with the PK51 kit (http://www.keil.com/c51/lx51.asp) is capable of code
compression by up to 8% by rearranging code segments for AJMP and ACALL usage.
All executables supplied with the Demo Boards were generated using the conventional compilers and linkers from Keil.
That way, the supplied sources compile and link to the same code size as the pre-compiled object files.
If it is desired to add more options to the source code than the BL51 linker can pack into a given code space,
the LX51 Enhanced Linker should be considered.
).
v1.1v1.1 TERIDIAN Proprietary 42 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 43

71M653X Software User’s Guide
5
5 DEMO CODE DESCRIPTION
5.1 80515 DATA TYPES AND COMPILER-SPECIFIC INFORMATION
5.1.1 Data Types
The 80515 MPU core is an 8-bit micro controller (MPU); thus operations that use 8-bit data types such as “char” or
“unsigned char” work more efficiently than operations that use multi-byte types, such as “int” or “long”. The Keil C51
compiler supports ANSI C data types as well as data types that are unique to the generic 8051 controller family. Table
5-2 lists available data types. Please refer to the Keil Cx51 Compiler User’s Guide for more details.
Various types of address spaces are available for the 80515 MPU core of the 71M653X, and in order to utilize the
various memory space types efficiently, the Demo Code uses variable type definitions (typedefs.) presented in this
chapter.
To understand the data types, it helps to examine the internal data memory map of the 80515 MPU core, as shown in
Table 5-1: .
Address Direct addressing Indirect addressing
0xFF
0x80
0x7F
0x30
0x2F
0x20
0x1F
0x00
Special Function Registers
(SFRs)
Byte-addressable area
Bit-addressable area
Register banks R0…R7
Table 5-1: Internal Data Memory Map
RAM
v1.1v1.1 TERIDIAN Proprietary 43 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 44

71M653X Software User’s Guide
The demo software defines standard integers in util\stdint.h following the industry-standard notation.
General data type definitions:
typedef unsigned char uint8_t; // an 8-bit byte, unsigned
typedef unsigned short uint16_t; // a 16-bit unsigned integer
typedef unsigned long uint32_t; // a 32-bit unsigned integer
typedef signed char int8_t; // a signed 8-bit integer
typedef signed short int16_t; // a signed 16-bit integer
typedef signed long int32_t; // a signed 32-bit integer
Type definitions for internal data, lower 128 bytes, addressed directly:
typedef unsigned char data uint8d_t;
typedef unsigned short data uint16d_t;
typedef unsigned long data uint32d_t;
typedef signed char data int8d_t;
typedef signed short data int16d_t;
typedef signed long data int32d_t;
Internal data is the fastest available memory (except registers), not battery-backed-up, but competes with stack,
registers, booleans, and idata for space.
Note: For portability, see uint_fast8_t and its sisters, which are POSIX standard.
Type definitions for internal data, 16 bytes (0x20 to0x2F), addressed directly, and bit addressable
:
typedef unsigned char bdata uint8b_t;
typedef unsigned short bdata uint16b_t;
typedef unsigned long bdata uint32b_t;
typedef signed char bdata int8b_t;
typedef signed short bdata int16b_t;
typedef signed long bdata int32b_t;
Bit addressable memory is the fastest available memory, but it is not battery-backed-up. It competes with stack,
registers, bools, data, and idata for space. The space is valuable for boolean globals and should not be wasted.
Booleans are not a normal part of stdint.h, but they are fairly portable. When using the Keil compiler, the Booleans are
stored in the address range 0x20 to 0x2F. Keil functions return bools in the carry bit, which makes code that's fast and
small.
typedef bit bool;
#define TRUE 1
#define FALSE 0
#define ON 1
#define OFF 0
v1.1v1.1 TERIDIAN Proprietary 44 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 45

71M653X Software User’s Guide
Type definitions for internal data, 256 bytes, in the upper 128 bytes addressed indirectly:
typedef unsigned char idata uint8i_t;
typedef unsigned short idata uint16i_t;
typedef unsigned long idata uint32i_t;
typedef signed char idata int8i_t;
typedef signed short idata int16i_t;
typedef signed long idata int32i_t;
Indirectly addressed internal memory is fairly fast, not battery-backed-up, slower than the data in the lower 128 bytes of
internal memory. Competes with data for space.
Type definitions for external data, 256 bytes of 2K of CMOS RAM:
typedef unsigned char pdata uint8p_t;
typedef unsigned short pdata uint16p_t;
typedef unsigned long pdata uint32p_t;
typedef signed char pdata int8p_t;
typedef signed short pdata int16p_t;
typedef signed long pdata int32p_t;
The upper byte of the XDATA address is supplied by the SFR 0xBF (ADRMSB or USERP) on the 71M653x meter ICs.
On other 8051 processors, P2 is used for this purpose. This memory range is accessed indirectly, still fairly fast, not
battery backed-up. This is a logical place for nonvolatile globals like power registers and configuration data.
Type definitions for external data, 2Kbytes of CMOS RAM, accessed indirectly via a 16-bit register:
This is the slowest but largest memory area, not battery backed-up. It can be used for everything possible. On Keil's
large memory model, this is the default.
typedef unsigned char xdata uint8x_t;
typedef unsigned short xdata uint16x_t;
typedef unsigned long xdata uint32x_t;
typedef signed char xdata int8x_t;
typedef signed short xdata int16x_t;
typedef signed long xdata int32x_t;
Type definitions for external read-only data, located in code space:
typedef unsigned char code uint8r_t;
typedef unsigned short code uint16r_t;
typedef unsigned long code uint32r_t;
typedef signed char code int8r_t;
typedef signed short code int16r_t;
typedef signed long code int32r_t;
Access is indirect via a 16-bit register. This is the slowest but largest space, nonvolatile programmable flash memory. It
should be used for constants and tables. If the table is in banked space, the banking function switchbank() (defined
in utils\bank.h and L51_BANK.A51) may be needed to bring the code bank into the address space.
v1.1v1.1 TERIDIAN Proprietary 45 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 46

71M653X Software User’s Guide
Note: Throughout the Demo Code, an attempt has been made to put the most frequently used variables in the
fastest memory space.
Data Type Notation Bits Bytes Comments
bit bool 1 Unique to 8051
sbit 1 Unique to 8051
SFR 8 1 Unique to 8051
SFR16 16 2 Unique to 8051
signed/unsigned char uint8_t 8 1 ANSI C
enum enum 8 or 16 1 or 2 ANSI C
unsigned short uint16_t 16 2 ANSI C
signed short int16_t 16 2 ANSI C
unsigned int uint16_t 16 2 ANSI C
signed int int16_t 16 2 ANSI C
unsigned long uint32_t 32 4 ANSI C
float float 32 4 ANSI C
Table 5-2: Internal Data Types
5.1.2 Compiler-Specific Information
The 8051 has 128 bytes of stack, and this motivates Keil C's unusual compiler design. By default, the Keil C compiler
does not generate reentrant code. The linker manages local variables of each type of memory as a series of overlays,
and uses a call-tree of the subroutines to arrange that the local variables of active subroutines do not overlap.
The overlay scheme can use memory very efficiently. This is useful because the 71M653X chips only have 2k of RAM,
and 256 bytes of internal memory.
The compiler treats uncalled subroutines as possible interrupt routines, and starts new hierarchies, which can rapidly
fragment each type of memory and interfere with its reuse.
To combat this, the following measures were taken when generating the Demo Code:
• The code is organized as a control loop, keeping most code in a single hierarchy of subroutines,
• The programmers eliminated unused subroutines by commenting them out when the linker complained
about them. Also, the Demo Code explicitly defines interrupt code and routines called from interrupt code
as "reentrant" so that the compiler keeps their variables on a stack.
• When data has a stable existence, the Demo Code keeps a single copy in a shared static structure.
With these measures applied, the Demo Code uses memory efficiently, and normally no memory issues are encountered. The Demo Code does not have deep call trees from the interrupts, so "small reentrant" definitions can be
used, which keep the stack of reentrant variables in the fast (small) internal RAM.
The register sets are also in internal memory. The C compiler has special interrupt declaration syntax to use them. The
"noaregs" pragma around reentrant routines stops the compiler from accessing registers via the shorter absolute
memory references. This is because the Demo Code uses all four sets of registers for different high-speed interrupts.
Using "noaregs" lets any interrupt routine call any reentrant routine without overwriting a different interrupt's registers.
v1.1v1.1 TERIDIAN Proprietary 46 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 47

71M653X Software User’s Guide
There is a known defect in version 7.50a of the Keil compiler:
Memory types must be explicitly defined in local variables. Using a predefined ty pe is not explicit
enough, i.e. "char xdata c;" is ok. "typedef char int8_t; ... int8_t data c;" is OK,
but "typedef char data int8d_t; ... int8d_t c;" is not OK.
5.2 DEMO CODE OPTIONS AND PROGRAM SIZE
Since the 71M6531 is single phase, and the 71M6534 is tree-phase, different versions of the Demo Code are provided
that take into account the different features (see Table 5-3). An attempt has been made to provide the most common
features in each version of the Demo Code. Flexibility is provided by the source code for users when recompiling the
source code: If a certain feature is not required, it can be left out and replaced with a different feature.
The object files contained in the Demo Kits have been generated with the following Keil compiler versions:
• C compiler: C51.exe, V8.05a
• Assembler: A51.exe, V8.00b
• Linker/Locator: BL51.exe, V6.05
• Librarian: LIB51.exe, V4.24
• Hex-converter: OH51.exe, V2.6
Version
Single Phase ~45KB Demonstrates a single phase meter. The software offers calibration and nonvolatile
Three Phase ~49KB Demonstrates a three-phase meter. The software is easy to reconfigure by recompiling.
In addition to providing flexibility, an attempt has been made to leave a certain amount of unoccupied memory space
when generating the Demo Code. This should provide some room for users who want to modify the Demo Code and
experiment with small changes.
The tables presented below show the features available for the three versions of the Demo Code plus the code size
required for each feature. Entries for code size are approximated and depend on code module combination.
Y means that the feature is implemented, N means that it is not. N/opt means that the feature may be implemented if
enough memory space is available.
Feature Code
CT and shunt
resistors
Flash
Code Size
Size
1KB to
2.5KB
Description
energy registers. It utilizes one set of CE code for 1 element two wire meters, and
another set for 1 element three wire, and 2 element three wire delta.
It has calibration and nonvolatile energy registers. The software demonstrates a full
feature set.
Table 5-3: Demo Code Versions
1φ 3φ
Y Y Configurations include all 2 element 3 wire delta, and
Description
3 element 4 wire wye with neutral current. These
were selected for demonstration because they permit
easy measurements of individual elements.
Rogowski coils 2.5KB N N Needs special CE code; contact factory
Table 5-4: Current Sensing Options
v1.1v1.1 TERIDIAN Proprietary 47 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 48

Feature Code
Size
71M653X Software User’s Guide
1φ 3φ
Description
Chopping of
0.06KB Y Y Control of the chopping bit
VREF
Temperature
compensation of
VREF
RTC compensation using mains
frequency
0.1KB Y Y Digital compensation using the GAIN_ADJ input of
the CE, based on linear and quadratic temperature
coefficients
0.2KB N/opt N/opt Optional compensation of RTC by counting cycles on
mains.
Correction does not occur when frequency
measurement is inhibited by low voltages.
Full RTC
compensation
0.2KB Y Y 2nd
temperature. Temperature based correction does not
-order compensation of RTC to 4ppm, using
occur when the ADC mux is off-line.
Temperature
measurement
0.0K Y Y Provides difference from calibration temperature to
precision of 0.1 C when calibrated
Table 5-5: Compensation Features
Code
1φ 3φ
Description Feature
Size
Wh imports Y Y Standard option of milliwatt hours, “999.999”
Pulse output for
Wh imports
0.23KB Y Y Standard option of 1 kh/pulse on both DIO 6 and DIO
2.
VAn pulse output 0.25KB Y Y Volt-amperes, 1 kh/pulse
Wh equation 0 0.2KB N/opt N 1 element 2 wire
Wh equation 1 0.2KB N/opt N 1 element 3 wire
Wh equation 2 0.2KB Y N 2 element 3 wire delta
Wh equation 3 0.2KB N N/opt 2 element 4 wire delta
Wh equation 4 0.2KB N N/opt 2 element 4 wire wye
Wh equation 5 0.2KB N Y 3 element 4 wire wye
Frequency
register
0.1KB Y Y Inhibited if freq > 70Hz or voltage is below the
threshold
Wh export register 0.25KB Y Y Wh exported, display reads “999.999”
Wh export pulse
0.25KB Y Y Wh exported, display reads “999.999”
output
VARh signed
register
VARh import
0.1KB Y Y Used for autocalibration, and power factor
calculations.
0.4KB Y Y
register
VARh import
0.25KB Y Y
pulse output
v1.1v1.1 TERIDIAN Proprietary 48 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 49

71M653X Software User’s Guide
Code
1φ 3φ
Description Feature
Size
VARh export
0.4KB Y Y
register
VARh export
0.25KB Y Y
pulse output
Operating hours
register
0.36KB Y Y “99999.9” Nonvolatile count of hundredths of hours
of powered operation since first cold start.
RTC time register 0.18KB Y Y
RTC date register 0.21KB Y Y
Pulse source
selection
Dual IMAX
registers
0.4KB Y Y This is the ability to route most calculated energy
values to a pulse output.
0.2KB Y N IMAX2 adjusts current, Wh and VARh from channel B
to same units as A. Creep thresholds are required,
but need not be adjusted when IMAX2 changes.
Neutral Current 0.3KB N Y This includes not just a measurement, but also a limit,
and a count of overcurrent events.
RMS current
register
0.2KB Y Y Implemented for all phases “000.000” Includes
element currents, arithmetic sum of currents and (if
supported) neutral current.
RMS voltage
0.2KB Y Y Implemented for all elements “000.000”
register
Power factor
0.3KB Y Y All phases are displayed with sign. Volatile.
register
Pulse count 1.2KB Y Y Both the Wh and VARh pulses are counted.
Mains edge count 0.3KB Y Y Counts total zero crossings, and zero crossings in the
last accumulation interval, of element A.
Table 5-6: Power Registers and Pulse Outpu t Features
v1.1v1.1 TERIDIAN Proprietary 49 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 50

71M653X Software User’s Guide
Feature
Feature Code
1φ 3φ
Description
Size
Creep mode 0.37KB Y Y Adjustable at calibration.
If V < Vthreshold and I < Ithreshold for all elements,
then creep.
Zero accumulator
of CE
N/A Y Y The pulse accumulation register in the CE is cleared
to prevent spurious pulses from low current noise.
Current threshold N/A Y Y Adjustable at calibration.
Set If max(abs(IA2), abs(IB2)) < Current threshold
then creep mode.
Current is calculated from RMS if possible, or, if
below 0.1A, from VA / V, where VA is calculated as
sqrt(Wh^2 + VARh^2)
For all elements.
Voltage threshold 0.12KB Y Y Adjustable at calibration.
If max(abs(VA2), abs(VB2)) < Volt threshold
inhibit frequency measurement, (frequency of zero)
Inhibit use of zero crossing counts, (main edge count
is zero), iInhibit voltage phase measurement (if any)
This feature is needed only if frequency or mains
edge count is present.
Table 5-7: Creep Functions
Feature Code
1φ 3φ
Description
Size
Brownout mode 0.1KB Y Y Used to enter sleep and LCD modes. Command line
interface is available (32KB) when resetting into this
mode. Command prompt in this mode to be “B>”.
LCD mode 0.5KB Y Y Is entered automatically when power fails. Displays
the Wh register, waits 7 sec using wakeup timer, then
initiates sleep mode.
Wake button 0.5KB Y Y When in sleep mode, enters LCD mode.
Wake timer 0.5KB Y Y Used to exit the LCD mode, and enter sleep mode.
Table 5-8: Operating Modes
Note: The sleep mode does not require any support by MPU code. The mission mode performs the other code
features.
v1.1v1.1 TERIDIAN Proprietary 50 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 51

71M653X Software User’s Guide
Feature
Feature Code
Size
1φ 3φ
Description
Reception of
calibration
parameters via
the serial interface
Count of
calibrations since
first cold reset.
Auto-calibration 3.5KB Y Y Internal automatic calibration, from command line
Command Line
Interface (CLI)
Save registers
when sag occurs
Save to flash
memory
Save to and
restore from
EEPROM
2.0KB Y Y Simple serial calibration system to read and set data
and calibration values, including CE data, MPU
calibration and RTC settings. Meter operation is not
required when this feature is in use. Intel hex records
are used.
01.KB Y Y Counts calibrations. 0..254, 255 = “many”. The count
is protected by a checksum. The first cold reset is
detected by an invalid EEPROM. This is a tamperdetection feature.
interface. Calibration adjusts phase, as in the “fast
calibration” described in the DBUM.
23KB Y Y Text-based commands give access to CE data, RAM,
IO registers. Includes on-line help. No profile or load
features..
0.75KB Y Y Saves power and error registers on sag detection.
0.9KB N/opt N/opt Compilation option to save calibration, error and
power register data to internal flash.
When a flash area is used-up, it is marked, and the
next one is used. When all areas are used up, an
error is recorded and write operations are inhibited.
0.7KB Y Y Saves and restores calibration, error and power
register data to and from EEPROM.
When an EEPROM area is used-up, it is marked, and
the next one is used. When all areas are used up, an
error is recorded and write operations are inhibited.
Checksum 0.2KB Y Y Each revenue-affecting data area is protected by a
simple checksum
Error recording
and saving
Microwire
EEPROM
I2C EEPROM 0.2KB Y Y For an Atmel AT24C256.
0.4KB Y Y Errors are recorded. Error data is protected by a
checksum. The time stamp (minute, hour, day and
month of assertion) and the bit number of the five
most recent errors are saved.
0.2KB N/opt N/opt Compilation option
Table 5-9: Calibration and Various Services
5.3 PROGRAM FLOW
This section should be read with a PC that has demo code’s source code installed. This section is supposed to help
you learn to find and change things in the demo code, not just learn theory.
So please, put the demo code sources on a PC now, and sit next to it!
v1.1v1.1 TERIDIAN Proprietary 51 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 52

71M653X Software User’s Guide
5.3.1 Startup and Initialization
The top-level functionality of the Demo Board is controlled by the high-level functions. The start-up code and main loop
is in the main() program (in main\main.c). It performs the following steps:
1. Reset watchdog timer
2. Process the pushbutton (PB) when in BROWNOUT mode.
3. Initialize hardware, pointers, metering variables, UART buffers and pointers, CE, restoration of calibration coefficients, initialization of LCD w/ “HELLO” message), enabling CE and pulse generators.
4. Execute the main_run() routine in an endless loop. In this loop, the background tasks, such as metering,
processing of timers, etc. are performed. In this loop, if a command is waiting, the command line interface
(CLI) reads it and does it.
Before the MPU gets to execute the main() program, it will execute the startup code contained in the STARTUP.A51
assembly program. This code jumps form the reset vector, at address 0x0000, to C_START, the startof the
initialization code.
After disabligninterrupts, setting the security bit (if needed) and clearing memory, STARTUP.A51 jumps to C_START,
in Keil’s assembly program init.A51 (in Keil/C51/LIB). Init.A51 sets up the 8051 for Keil C and jumps to main(). The
startup files are described in section 5.10 .
The stack is located at 0x80, growing to higher values, while the reentrant stack is located at 0xFF, growing downwards.
Once operating, the main() program expects regular interrupts from the CE.
The main() program calls the main_init()and the main_run() routines. main_init() initializes the meter’s
hardware and software. main_run() is the main loop.
5.4 BASIC CODE ARCHITECTURE
The TERIDIAN 71M653X firmware can be divided into two code parts, the main loop (or “background”), and the
interrupts (or “foreground”).
The initialization and main loop takes care of the non time-critical functions. After the meter is initialized, the main loop
runs all the time. The main loop is a small loop near the end of main() in main\main.c.
The main loop performs multitasking by calling a different subroutine for each major system task. The subroutines
called in the main loop are usually either waiting for data, or the data is available and they can process it.
If they are waiting, they test a flag or counter and then return to the main loop, freeing the MPU to call other
subroutines. The meter doesn’t have many tasks, so checking flags is much faster than putting event records in a
queue and then interpreting them. (Queuing is the other common scheme.) It’s also easier to read the code.
These task routines will be discussed more below.
As much code as possible is called from the main loop. This helps the Keil linker to use less RAM when it organizes
the overlays for the temporary variables. Also, code for the main loop is easier to write than interrupt code. For
example, the software timers’ update routine, stm_run() (Util\stm.c) is called from the main loop (see
main_background() in main\main.c) instead of a timer interrupt, because it reduces the chances that a timer routine
will be called in an unexpected way at an unexpected time.
The meter has to keep running while waiting for serial input or output from the user. So, the main loop has two parts
(see main_run()and main_background() in main\main.c). The serial input and output routines call
main_background() to keep the meter running while waiting for serial input from or output. For example, see
Serial0_CTx() in cli\ser0cli.c. main_background() calls the task subroutines needed to keep the meter running.
main_run() calls the serial input and output code (e.g. the command line interface or an AMR system) in addition to
calling main_background() to run the meter. Thus, no routine called from main_background() should perform
serial I/O, because the serial I/O might try to call main_background() and this could cause an infinite recursion that
would overflow the stack. The Keil linker automatically generates a “recursion error” if such code is written.
The second part is the interrupt-driven code (Foreground), such as the CE_BUSY Interrupt, Timer Interrupt, and other
Interrupt service routines. The interrupt service routines (ISRs) get the data, and set a flag or counter to tell the
background routine to stop waiting. These will be discussed more below.
v1.1v1.1 TERIDIAN Proprietary 52 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 53

71M653X Software User’s Guide
5.4.1 Initialization
When the power applied for the first time or RESETZ is asserted, the 71M653X device executes the code pointed to by
the reset vector.
5.4.2 Interrupts
There are 13 interrupts available for the 80515, and the revision 4.4 Demo Code uses 11 interrupts. Table 5-10 shows
the interrupt service routines (ISRs), the corresponding vectors (Table 6-58 in section 6.3.5.4) and their priority, as
assigned by the MPU using the IP0 and IP1 registers (see section 6.3.5.2). In general, stubbed interrupts or shared
interrupt code is defined in meter\io653x.c.
Interrupt Source Interrupt Service
Routine
Pulse count pcnt_w_isr() EXT0 Meter\pcnt.c 0x03 0
Pulse count pcnt_v_isr() EXT1 Meter\pcnt.c 0x13 3
Flash-Write collision
fwcol0
Flash-Write collision
fwcol1
CE Busy ce_busyz_int() EXT3 Meter\ce.c 0x53 3
Power fail/power return pll_isr() EXT4 Main\batmodes
EEPROM eeprom_isr() EXT5 IO\eeprom.c 0x63 0
XFER busy ce_xfer_busyz_isr () EXT6 (shared
RTC rtc_isr() EXT6 (shared
NEAR_OVERFLOW xfer_rtc_isr () EXT6 (shared
Timer0 tmr0_isr() IO\tmr0.c 0x0B 0
Timer1 tmr1_isr() IO\tmr1.c 0x1B 3
UART 0 es0_isr IO\serial.c 0x23 0
UART 1 es1_isr IO\serial.c 0x83 0
fwcol_isr() EXT2 Meter\io653x.c 0x4B 0
fwcol_isr() EXT2 Meter\io653x.c 0x4B 0
External or
Internal
Interrupt
w/ RTC)
w/ XFER)
w/ XFER)
In source file Vector Priority
(3 =
highest)
0x5B 3
.c
Meter\ce.c 0x6B 2
IO\rtc_30.c 0x6B 2
Meter\io653x.c 0x6B 2
Table 5-10: Interrupt Service Routines
In general, a higher priority interrupt can preempt lower-priority interrupt code. The interrupt priority hardware is
controlled by two registers, IP and IP1 (named IPL and IPH in the demo code). The MPU supports four priorities, and a
fifth is possible with a small amount of software support.
The best practice is to set priorities once, near the start of initialization. Setting priorities dynamically while interrupts
occur can have undefined results. Since some of the interrupts detect power failures that can occur at any time,
changing interrupt priorities in the middle of the code is not recommended.
In the 653x demo code, interrupt priorities are set higher for urgent tasks. Among equally-urgent tasks, priorities are set
higher for faster interrupts. The following describes interrupt priorities for the version 4.3.3 of the Demo Code:
The priority is set once, in main_init() of main\Main.c. It is also cleared to 0s in the soft reset routine, but this is
followed by logic that calls four RTIs to reset the interrupt acknowledge logic for all four hardware interrupt levels. The
system priority value is assembled from constants in Main\options_gbl.h. The constants are defined in Util\priority2x.h.
The highest priority interrupt group is the PLL_OK interrupt (external interrupt 4, see Main\batmodes.c), and timer 1.
PLL_OK is urgent because it indicates power supply failure, and the software must start battery modes. Timer 1 shares
the same priority bits, and is currently unused (sample code is in Io\tmr1.c, &.h), though earlier versions used it to set
the real-time-clock.
v1.1v1.1 TERIDIAN Proprietary 53 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 54

71M653X Software User’s Guide
The high-priority interrupt group is used for CE_BUSY (external interrupt 3, see Meter\ce.c), pulse counting (external
interrupts 0 and 1, Meter\pcnt.c) and Serial 1 (Io\ser1.c&.h). External interrupt 3 and 1 share priority bits, as does
external interrupt 0 and serial 1. CE_BUSY is urgent because it occasionally reads the CE's status to detect sag. The
pulse counting interrupts are less urgent, but they are small and run very quickly. Serial 1 is intended for AMR, so
making its interrupts high priority should help its data transfer timing to be more reliable.
The low priority group contains Serial 0 and Timer 0. These can generally wait a millisecond, and if necessary, can
afford to miss fast interrupts. Serial 0 is the command line interface (See the directory Cli), and Timer 0 is run at a 10
millisecond interval as the timebase for the software timers (Util\tmr.c, Io\tmr0.c&.h). Serial 0 shares its priority bits with
the interrupt of the EEPROM (external interrupt 5), currently unused (code is available in Io\eeprom.c). Timer 0 shares
its interrupt priority bits with FWCOL, the flash write timing interrupt, also unused (flash code is in Util\flash.c).
The lowest priority is xfer_busy_isr() (Meter\ce.c) and the rtc_isr() interrupts (Io\rtc_30.c; both share external interrupt
6, Meter\io653X.c). These can usually wait up to half a second. The XFER_BUSY interrupt, in particular, takes up to 4
milliseconds to copy data from the CE, so though it is very important, it needs to be low priority in order to let other
interrupts run.
The RTC can be calibrated by using the 1 seconds and 4 second outputs of TMUX, and measuring the external square
wave against a traceable time standard.
All unused interrupts have stub routines that record and count a spurious interrupt, and then disable the interrupt.
These are in meter\io653x.c.
Although the demo code does not do this, it is possible to run preemptive code at the same interrupt priority as the
main loop. This creates a fifth priority below the lowest priority. To do this, set an interrupt to the lowest priority. This
interrupt's service routine must push the address of the fifth-priority code on the stack, and run RTI. RTI clears the
fourth-priority hardware, and then returns into the fifth-priority code, running it at the same interrupt level as the main
loop. For example, this permits preemptive software timers that run at the same priority as the main loop.
All interrupt service routines (ISRs) must be declared “small reentrant”. Also, all routines called by ISRs must be reentrant as well. Priorities are set using the IP0 and IP1 SFRs, as follows:
• IP0 (SFR 0xA9) = 0x1A = 0001 1010
• IP1 (SFR 0xB9) = 0x2C = 0000 1100
This results in the priority assignment shown in Table 5-11.
Group IP1 Bit IP0 Bit Priority Affected Interrupts
0 0 0 0 External interrupt
0 (DIO)
1 0 1 1 Timer 0 interrupt - Ext 2 (comparators)
2 1 0 2 External interrupt
1 (DIO)
3 1 1 3 Timer 1 interrupt - Ext 4 (comparators)
4 0 1 1 UART 0 interrupt - Ext 5 (EEPROM)
5 0 0 0 - - Ext 6 (XFER_BUSY,
Table 5-11: Interrupt Priority Assignment
UART 1 interrupt -
- Ext 3 (CE_BUSY)
RTC_1S
5.4.2.1 Pulse Counting Interrupts
The pulse count code is in meter\pcnt.c.
There are four digital pulse outputs, and these outputs share a pin with DIO_6, 7, 8 or 9. DIOs from 0 (the push button)
to 12 can be configured to generate interrupts, gate a timer, or count a timer (See the data sheet, DIO_RPB..DIO_RRX
starting at 0x2009).
The pulse counting interrupts count Wh and VARh pulses by setting up int0 and int1 (generic external interrupts) to
read the Wh and VARh pulse outputs on DIO_6 and DIO_7. Although the demo code does not do it, the timers could
also be used to count pulses, especially at high rates. The demo code does not currently use timer 1, and uses timer 0
as described below (in the section on the timer interrupt).
v1.1v1.1 TERIDIAN Proprietary 54 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 55

71M653X Software User’s Guide
Once per second, the RTC_1_SEC interrupt runs. It calls a pulse counting routine that takes the counts from the pulse
interrupts, and adds them to global pulse counts. These pulse counts roll over at one million (1x10
needed to synchronize the pulse counts with real time, since most tests of the pulse counts compare them against real
time.
TSC deprecates pulse counting because the direct CE registers are more precise, and easier to synchronize. The
accuracies are the same, because the pulse outputs are driven from CE register data.
6
). This step is
5.4.2.2 FWCOL0 and FWCOL1
These occur when the CE is active, and there’s an attempt to erase or write to flash.
TSC’s demo code has no flash write routines in the standard release, so these interrupts are directed to a stub that
detects spurious interrupts.
5.4.2.3 CE_BUSY Interrupt
The CE_BUSY interrupt (ce_busy_isr() in meter\ce.c) detects mains power failure by reading the CE’s status. If
there’s a power failure, it saves two copies of the power registers.
Why two copies? The meter cannot predict when a power failure will occur. So, it always has to have valid data. The
first copy is updated by the meter calculations. The second is copied after the first one is done. So, one copy or the
other always has good data.
Both copies have a check for bad data. When the meter starts up, it uses the first copy with good data.
Many power grids have reclosers, circuit breakers that reset automatically several times. When a recloser trips, the
power grid rapidly switches from two to ten times. The time between reclosings varies, but is usually near 100
milliseconds.
Some utilities simulate recloser operation and test meters for anomalies. Some meters have anomalies from recloser
operation.
The demo code copes with reclosers by saving registers on the first power failure, and then ignoring following power
failures for up to 1/3 second. It ignores them by testing a counter (sag_timer) for zero, before saving registers. It
restarts the counter when the CE starts up and each time power fails. It counts down on normal ce_busy interrupts.
This interrupt occurs very often, 2500 times per second. So, the interrupt saves MPU time by running all the logic only
1/8 of the time. It has a counter.
5.4.2.4 PLL_ISR
When V1 goes below the comparison voltage, the meter IC switches to battery power. At the same time, the IC’s
electronics automatically takes action to reduce the power use. It switches off the CE, ADCs and phase-locked loop,
and switches the MPU clock from the phase-locked loop to 28kHz (7/8 of the crystal rate, but able to operate the serial
ports at 300 BAUD).
It then sets the PLL_FALL bit, which causes an interrupt.
The interrupt code (pll_isr() in main\batmodes.c) tests to see if a battery exists.
Since some meter ICs can operate the MPU with VCC as low as 1.5V, when there is no battery the MPU can corrupt
some EEPROMs by trying to write to them. So, if there’s no battery, the interrupt waits forever for the power to come
back. If the power does not return, the loop in this high priority interrupt prevents the MPU from trying to write to the
EEPROM. Basically, the loop confines the MPU’s low-power behavior to the loop.
If there’s no battery and the power returns while the interrupt is waiting, the code simulates a reset to start up the meter
again. When leaving brownout, the code could just restore the system state in some way, but the CE was turned off,
and its filters have unlocked from the mains. A simulated reset reuses reliable pre-existing code, and still starts up the
meter well before the CE could regain PLL lock.
If there is a battery, the code immediately performs a simulated reset to quickly get to the battery mode code in
main\main.c
The simulated reset in the battery case keeps the battery mode code in one place. The sleep and LCD-only states
start the MPU from the reset vector. So, some location on the reset path is the only place in which all system restart
v1.1v1.1 TERIDIAN Proprietary 55 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 56

71M653X Software User’s Guide
execution paths can be made to occur. The early part of main() is convenient, and a simulated reset is an easy,
reliable way to get there.
The code does not display the normal reset indications when doing simulated resets, because when debugging
electrostatic discharge problems, displaying reset indications causes engineers to try to fix the reset pin, rather than
V1.
5.4.2.5 EEPROM Isr
The IC’s two-wire interface operates at the standard clock rate of about 30kHz. It can be operated reasonably
efficiently with a polling interface or an interrupting interface.
The interrupting interface (IO\eeprom.c) is installed in the demo code as an example. It uses less CPU time, and
interacts less with other system software. The interrupt steps through a state machine that writes the needed bytes to
read or write data to an Atmel EEPROM with 19-bit addressing.
A polling interface to the IC’s two-wire interface works well, and TSC uses one to support drivers for many other types
of EEPROMs. To install them, see the all-options code set (in io\iiceep.c, io\eepromp.c, io\eep24c08.c) or contact
factory support.
Bit-banging drivers are not recommended for the two-wire interface. In the two-wire interface, each 8 data bits sent are
followed by a received “ACK” bit. Some EEPROMs start the ack bit as soon as 50 nanoseconds after the clock line
falls. This can easily be before the bit-banging driver switches the data line to an input. The resulting brief, highfrequency electrical short can cause system anomalies.
Typical EEPROMs delay 1.5 microseconds before asserting ACK, so bit-banging will usually work on the bench, but in
high-volume production, an occasional EEPROM will cause bus contention. It is possible to reduce the contention
current by placing a 1K resistor in the data line, but it’s even better to use non-contending driver software using the IC’s
two-wire electronics.
5.4.2.6 Timer Interrupt
timer0 of the MPU is the main system timer (IO\tmr0.c, .h). The demo code has it call a callback routine, so that the
timer code can be applied to any need. Also, the timer code can automatically run the timer as a periodic timer.
In the demo code, timer 0 is used to generate a 10ms timer tick, which is adjusted for the MPU’s clock speed. The
timer tick (variable tck_cnt) is started from and used to update the software timers (See Util\stm.c). The software
timers are updated by the stm_run() function in the main loop of the background task. Eight software timers can be
simultaneously running.
If it is desired to change the system timer to timer1, the include file called out in stm.c has to be changed to tmr1.h.
timer1 is unused, and may be used for other purposes. Tested code to operate timer 1 is available in the extended
code release.
Various macros are available to control the timers:
• tmr_start(A, B, C) has three parameters: A is the timer time, the number of ticks to reload on each
interrupt. B is true if the timer should restart itself when it expires. C is a pointer to a reentrant function.
• tmr_stop() stops the timer.
• tmr_running() returns TRUE if the timer is running.
These routines are very similar to the software timer commands, in stm.h.
5.4.2.7 The XFER_BUSY, RTC and NEAR_OVERFLOW Interrupt
All of these slow events share one external interrupt. The interrupt is decoded by an interrupt routine in Meter\io653x.c.
The XFER Busy interrupt (xfer_busyz_isr() in Meter\ce.c) is requested by the CE at the conclusion of every
accumulation interval. In the 6530 series, waits until the CE is operating, then it enables the pulse outputs. After that,
for every interrupt it just sets a flag to tell the background data that fresh metering data is available. The CE’s data is
read directly from CE RAM.
After reset the first second of data from the CE is discarded. It takes about one second for the PLL in the CE to settle
and (therefore) for the filtering to be reliable (variable ce_first_pass).
v1.1v1.1 TERIDIAN Proprietary 56 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 57

71M653X Software User’s Guide
The RTC interrupt performs any resynchronization of the real-time clock. In the 6530, this loads the latest timing
adjustment, and transfers pulse counts.
The near overflow interrupt is a diagnostic tool to find code that causes a watchdog interrupt.
5.4.2.8 SERIAL Interrupt
es0_isr() (IO\ser0.c, CLI\serial0.c) is the ISR servicing UART 0. This isr is just the hardware layer. It calls an input
macro (SER0_RCV_INT), and an output macro (SER0_XMIT_INT) that buffer the data. The macros are defined in the
options.h include file. They map to cli0_in() and cli0_out() (in CLI\ser0cli.c). An AMR routine can be spliced in
just by writing the input and output code, and changing the options.h file.
In this ISR, the UART data is sent and received using XON/XOFF flow control. Parity and other serial controls are
managed in this ISR. The guts of the code are in ser0cli.c.
cli0_in() takes a character in, and decides if it is XON or XOFF. If not, it puts it into a circular buffer and counts it.
The circular buffer’s index is made to restart by masking (logical anding) it. If the count of data in the buffer is too big, it
sends an XOFF. The XON is sent later, by the code that takes data out of the buffer: see the code that calls
flow_on().
cli0_out() first sees if it has to write a flow character. If not, then if there’s no more characters to send, it disables
the transmit interrupt. If there’s more to send, and the flow is enabled, it gets a character out of the circular transmit
buffer and sends it. If the flow is turned off, it disables the transmit interrupt.
The output code is designed to switch a driving pin, as well. There’s a flag “has_run”, which is polled by a software
timer routine, ser0_free_timer(). If has_run is not set, the timer switches off the external pin or driver. In the
demo code, this switches DIO2 between OPT_TX from serial output 1, and WPULSE. The timer is used so that the
output switches well after the last character is sent. The serial interrupt overhead is low, because the timer routine is
only allocated once, at the start of transmission. Pulse outputs change so slowly that they are invisible to most UARTs.
The alternative serial port, UART 1 uses an ISR with identical code structure and function (es1_isr in IO\ser1.c and
CLI\ser1cli.c). The code can be identical because it uses a different .h file to define different serial IO macros that have
the same names. The buffer-level code was written once, and then ported instantly by copying the code and just
testing it.
Both serial ports are enabled at all times.
5.4.3 Background Tasks
5.4.3.1 meter_run()
This does all the metering calculations. It’s in Meter\meter.c, called from the main loop main_background() in
Main\main.c Putting the calculations in the background makes the code faster because the local variables don’t have
to be on Keil’s reentrant stack. They can be statically allocated overlays, instead.
First, it checks to see if there’s more meter data. That is, whether an accumulation interval finished and caused a
xfer_busy interrupt. It checks the flag, xfer_update set by the xfer_busy() interrupt in meter\ce.c.
If the flag is clear, then there’s no new meter data, so it returns to the main loop. If there’s new data, it processes it.
In the processing, first it checks to see if there was a request to clear the metering registers (“)1=2” clears the metering
registers). The clearing has to be synchronized with the meter calculation.
Next it counts accumulation intervals (variable cai). This count is useful to find the exact number of accumulation
intervals for calibration or meter tests. In a real meter, this number is useful in a demand calculation, because the
average demand in a demand interval is the total VAh in a demand interval, divided by the number of accumulation
intervals. Util\math.c has a routine s2f() to convert a power register into a floating point number. Accumulating
demand in a power register, and then dividing avoids any possibility of floating point underflow in the demand
calculation. The demo code does not include a demand calculation because most customers have preferred
algorithms.
The while loop synchronizes the meter calculation with the CE’s accumulation interval.
RescalePhaseB() is used only in the single-phase demo code. Some customers use a shunt on one element, and a
current transformer on the other. These elements have different Wh/count, and rescaling adjusts PhaseB, usually the
lower-accuracy, in terms of PhaseA, usually the higher accuracy current sensor.
v1.1v1.1 TERIDIAN Proprietary 57 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 58

71M653X Software User’s Guide
ComputeRMS() derives the voltages and current numbers used for creep detection.
ComputeSmallRMS() divides the Wh or VAh by the voltage to derive more accurate current values at small currents.
This works because the Wh and VARh have better filtering and a lower noise floor than the basic current calculation.
This calculation is especially useful to prevent creep using shunts.
ApplyCreepThreshold() (meter\meter.c) clears the Wh to zero if either the volts or current are below the
minimum thresholds VThrshld and IThreshld.
The calculation is designed for use in an AMR system. Basically, as long as XFER_UPDATE is true, the meter
calculation is in progress. TSC has code for a FLAG interface in the all options code set.
Wh_Accumulate() (meter\Wh.c) adds up the watt-hours. Since the CE’s output is signed, true four-quadrant
metering is possible. The demo code separates code into imports and exports. Antitamper “absolute value” versions
are available as well. The phase shift behavior, DC response, and other signal-processing traits depend on the CE’s
code. For special signal processing needs, contact the factory.
VARh_Accumulate() (meter\VARh.c) adds up the volt-amp-reactive-hours. Since the CE’s output is signed, true fourquadrant metering is possible. The demo code separates VARh into imports and exports. Antitamper “absolute value”
versions are available as well. The 6530 does IEEE “pure” signed VARh measurements. They have the same
accuracy as the Wh measurements. The phase shift behavior and other signal-processing traits depend on the CE’s
code. For special signal processing needs, contact the factory.
SelectPulses() (meter\pulse_src.c) selects the pulse sources to emit to the pulse outputs. Every element’s Wh,
VARh and VAh are available, as well as totals, A2h, and V2h.
DetermineFrequency() (meter\freq.c) handles the creep associated with frequency and the mains edge count. The
mains edge count is important when the real-time-clock is slaved to the line frequency.
DeterminePeaks() (meter\Peak.c) detects peaks and sags, over-current, and also temperature excursions, which
can be a sign of over-current.
ComputePowerFactor() performs the power factor calculation once and caches it. TSC also has sample code to
calculate phase angles and phase-to-phase voltages. Contact the factory or see the code set with all options.
GainCompensation() adjusts the meter’s rate for the current temperature, using a quadratic adjustment. This is the
logic that uses PPMC1 and PPMC2 to adjust for the ADC’s voltage reference, and temperature-based changes in the
current and voltage sensors.
RTCCompensation() adjusts the rate of the meter’s real-time-clock for temperature, using a quadratic adjustment.
This is the logic that uses Y_CAL0, Y_CAL1 and Y_CAL2.
5.4.3.2 Command Line Interpreter (CLI)
The command line interpreter is cli(), (in cli\cli.c) called from main_run() (in main\main.c).
In main_run(), cmd_pending() (in CLI\io.c) gets a line of text from the user. Then, it returns a nonzero to indicate
that the line buffer has data. cmd_pending() is complicated because it echos the characters, and edits the line
using backspace.
main_run() then calls cli() to interpret the characters in the line buffer. cli() calls routines like get_upper()
(CLI\io.c) to get characters from the line buffer.
While the idea is simple, the code is surprisingly large, and resists simplification.
5.4.3.3 Auto-Calibration
The auto-calibration is an automated version of the “fast” calibration discussed in the DBUM. This section describes
the code, then derives the mathematics.
Before the calibration starts, the applied (ideal) voltage and current have to be entered by the user in the MPU memory
locations VCAL and ICAL. TSC’s experience is that optimal results are obtained with the default two second
calibration, but this time can be extended by writing the number of accumulation intervals to SCAL.
The procedure of this calibration method is the same as for the fast calibration procedure, as described in the DBUM:
The tangent of the ratio of VARh and Wh determines the phase angle. The ratio between applied (ideal) and measured
voltage determines the voltage gain. However, whereas the calibration spreadsheet uses extensive trigonometric
v1.1v1.1 TERIDIAN Proprietary 58 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 59

71M653X Software User’s Guide
functions, the same equations were rewritten in the Demo Code to use much simpler mathematical operations that are
closer to the capabilities of the MPU.
As with the procedure presented in the DBUM, a signal with the described voltage and current should be applied to the
meter and held constant during the auto-calibration process.
The cal_begin() routine starts the calibration state-machine by setting the flag cal_flag to YES, after setting the
calibration factors to default values, recording the calibration temperature, calculating the temperature compensation
coefficients and setting the counter cs for calibration cycles.
The calibration state machine is the routine Calibrate() (in meter\calphased.c) called by meter_run() (in
meter\meter.c). After calibration is started by cal_begin(), meter_run() calls Calibrate() once per
accumulation interval, when new metering data is available.
Calibrate() uses the variable cs (count of seconds) to control the stabilization delay, measurement time and adjustment
phase. cs counts down.
1) If cs > Scal: The state machine waits for the CE to settle after the unity gain and temperature
compensation data are loaded in the routine cal_begin().
2) If cs = Scal: The variables for cumulative V, Wh and VARh are cleared.
3) If 0 <= cs <= Scal: For V, Wh and VARh are added to the variables. Using two accumulation intervals is
enough because it covers both chop polarities of temperature measurements.
4) If cs = 0: This signals the end of the calibration. measurements are then used to calculate and set the
calibration coefficients for phase, voltage and currents in CE DRAM.
5) The adjustments are saved to nonvolatile memory.
The calibration is fast because the measurements are collected from all the elements simultaneously during the
measurement interval. When the gains and phases are adjusted, the code quickly steps through a table of indexes,
reading the data from each element and writing the adjustments for each element.
The calibration is so fast that TSC believes that it may pay to use this method to calibrate a meter in equation 2 or 5,
and then change to the actual metering equation, possibly even reloading the code.
High accuracy temperature calibration:
For accuracies up to 0.5%, standard values can compensate the ADC and voltage regulator for temperature. For 0.2%
or better accuracy, high accuracy “trimmed” parts are usually required. The trimmed parts have a temperature
response that is characterized at the factory, and programmed into the part.
The demo code has sample code to adjust the quadratic temperature parameters of a meter containing a trimmed part.
See compensation() in meter\calphased.c
In these meters, the current and voltage sensors also usually have temperature compensation curves, and these
usually need to be compensated as well. The demo code has an explicit place to combine the data into a single
quadratic compensation. See compensation() in meter\calphased.c.
Contact factory support for information about trimmed parts.
Linear (non-phase-adjusted) calibration:
In the extended code set, TSC maintains autocalibration code that does a linear adjustment of the gains for current and
voltage, without adjusting phase.
Derivation of the calibration equations:
These calculations assume that during the meter's calibration measurements, the CE gains are unity, 16384, and the
phase adjustments are zero. The applied signal is assumed to be a sine applied to both the current and voltage
measurement with no phase shift.
A non-trignometric derivation for the fast calibration is generally superior because the cos() of the typically tiny
corrective angle Φ is just not that accurate.
v1.1v1.1 TERIDIAN Proprietary 59 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 60

71M653X Software User’s Guide
Here's how it is derived:
To calculate phase correction:
tan (Φ) = -VARh_measured/Wh_measured
The value of tan(Φ) can be used directly without calculating trigonometric values.
For 60Hz metering, from the data sheet,
ce_phase_corr = 1048576 * ((0.02229 * tan(Φ))/(0.1487 - (0.0131 * tan(Φ))))
For 50Hz metering, from the data sheet,
ce_phase_corr = 1048576 * ((0.0155 * tan(Φ))/(0.1241 - (0.009695 * tan(Φ))))
For the volts:
V_gain = Volts_applied/Volts_measured
But, the CE’s value for unity is 16,384, so:
ce_v_gain = 16384 * V_gain
For the current:
The meter's signal is a vector sum of the real (Wh) and imaginary (VARh) parts of the power. i_gain, the current gain,
needs scaling to eliminate power errors, and rotation in the complex plane to eliminate phase error.
Let Φ be the phase adjust angle.
A vector is rotated by multiplying by a 2x2 matrix:
cos(Φ) -sin(Φ)
sin(Φ) cos(Φ)
The linear adjustment vector is:
{Wh_applied/(Wh_measured * V_gain), VARh_applied/(VARh_measured * V_gain)}
i_gain is the real part of multiplying the rotation matrix by the linear adjustment vector.:
i_gain = cos(Phi)(Wh_Applied/(Wh_measured * V_gain))
+ sin(Phi)(VARh_Applied/(VARh_measured * V_gain))
But, the applied signal's VARh_applied = 0, so that term is negligible:
i_gain = cos(Phi)(Wh_Applied/(Wh_measured * V_gain))
Further, cos(Phi) = Wh_measured/VAh_measured; So substituting, one gets a classic fast current-calibration equation
for a meter:
i_gain = Wh_applied / (VAh_measured * V_gain)
VAh_measured is easy to calculate, and the meter's signal processing gives it good linearity and repeatability, so we
keep it and calculate it:
VAh_measured = sqrt(Wh_measured^2 + VARh_measured^2)
The CE's value for unity is 16384. Substituting:
v1.1v1.1 TERIDIAN Proprietary 60 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 61

71M653X Software User’s Guide
ce_i_gain = (16384 * Wh_applied) / (VAh_measured * V_gain)
See the source file meter\calphased.c for more details.
5.4.3.4 EEPROM Read/Write
The interrupt code is eeprom_isr() in io\eeprom.c. The read and write commands set variables and then start the
interrupt.
On each interrupt, the code reads or writes the next byte to send or receive to the EEPROM data register (EEDATA,
SFR 0x9E), and then writes a command to the command register (EECTRL, SFR 0x9F).
For information on the sequence and content of bytes, see the data sheet for an Atmel AT24C256.
The demo code is designed to run any 19-bit address Atmel EEPROM (i.e. it will also run AT24C1024, AT24C512,
AT24C128). However, different sizes of Atmel EEPROMs have different page sizes. The page size is set in the
options.h file.
If the EEPROM interrupt service routine (INT5) returns the value 0x80 (illegal command), the loop should be exited, all
registers should be refreshed and the operation should be restarted.
Notes:
• The extended code set has non-interrupting code to run both 19 and 11-bit Atmel EEPROMs (e.g. AT24C02s)
as well as a variety of others. The non-interrupting EEPROM driver code is easier to modify because it just
reads and writes the bytes that go to and from the EEPROM.
• For larger EEPROMs, 1010xxR can be the first command (R=1 for read, R = 0 for write operation).
• The START command should be sent to the EEPROM before any read or write operation
• The algorithms cover single and multi-byte operations limited to a single page.
• Special precautions apply when a page boundary is crossed for write operations: When the end of a page is
reached, the write to the next page has to be preceded by a START command.
• EEPROMs typically respond to START commands with 5ms delay.
5.4.3.5 Battery Test
The battery test is based on sampling the voltage applied to the VBAT pin during an alternative multiplexer cycle. The
function used for calculating the battery voltage from the count obtained from the ADC is int32_t mVBat (int32_t v).
In this function, the ADC sample count is shifted right 9 bits (to account for the left-shift operation automatically done by
the ADC). The measured value is not very accurate, since the chip-to-chip variations in offset and LSB resolution are
not calibrated (these may have 5% variations).
The routine battest_start() may be invoked from the command line interface. battest_start() sets the variable
bat_sample_cnt to 2. This signals to the XFER_BUSY interrupt (in ce.c) to take two measurement (to account for the
variations caused by the amplifier chopping). The RTC date is recorded in the structure last_day. That way, an
automated battery test is run only once per day (when the date changes right after midnight).
The routine battest_run (void) is called from the part of meter_run() that only operates when the CE is active. This is
because the battery test can only run when the CE is active. The routine battest_run (void) compares the current date
with last_day. If it detects a difference, indicating that the date has just changed), it calls battest_start ().
5.4.3.6 Power Factor Measurement
The power-factor option provides both instantaneous and accumulated (over fractions of an hour) display of power
factor by phase. All power factor calculations are performed using floating point variables.
The power factor (PF = cosϕ) calculation is based on the equations:
P = S * cosϕ = S * PF
==> PF = P/S,
with P = real energy, S = apparent energy, PF = power factor
v1.1v1.1 TERIDIAN Proprietary 61 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 62

71M653X Software User’s Guide
or VAh divided by Wh.
5.4.4 Watchdog Timer
The Demo Code revision 4.4 uses only the hardware watchdog timer provided by the 80515. This fixed-duration timer
is controlled with SFR register INTBITS (0xF8).
The hardware watchdog timer requires a refresh by the MPU firmware, i.e. bit 7 of INTBITS set, at least every 1.5
seconds. If this refresh does not occur, the hardware watchdog timer overflows, and the 80515 is reset as if RESETZ
were pulled low. When overflow occurs, the bit WD_OVF is set in the configuration RAM. Using the WD_OVF bit, the
MPU can determine whether a reset or a hardware watchdog timer overflow occurred. The WD_OVF bit is cleared
when RESETZ is pulled low.
5.4.5 Real-Time Clock (RTC)
The RTC is accessible through the I/O RAM (Configuration RAM) registers RTC_SEC through RTC_YR (addresses
0x2015 through 0x201B), as described in the data sheets.
The RTC can be updated any time after the second turns over. So, when the clock is set, the demo code clears the
subsecond counter, forcing the second to start now, and then writes the rest of the data to the clock.
One tricky part of the code is the calculation of the digital adjustment (PREG and QREG), based on temperatures. The
code first calculates the adjustment in parts per billion, and then scales it to the adjustment register.
Another tricky part is that the code includes date and calendar calculations (Julian() and Unjulian()).. Julian() converts
a date and time to a count of seconds since 00:00 January 1, 2000. Unjulian() takes a number of seconds, and
converts it to a date and time. The routines are based on standard astronomical julian day calculations. The
spreadsheet used to develop the algorithm is Doc\JulianDays.xls
The combination of routines is powerful. One can easily figure the day of week or day of year, find the time between
two dates, adjust from GMT to civil time, and validate dates.
The routines were validated by having another piece of code implement a simulated clock and calendar, and then
running the combination on a PC. The test verified that all three routines agreed about the time and date for every
second of a day, and for every day between January 1, 2000 and December 31, 2100.
5.5 MANAGING MISSION AND BATTERY MODES
After a reset or power up, the processor must first decide what mode it is in and then take the appropriate action. It is
useful to concentrate all activities related to power modes and reset into one centralized module. The Demo Code
revision 4.4 does the switching of modes in the main() routine, based on decisions made in batmodes.c.
It first decides what the next state should be, then enters the state.
The code uses the following inputs and flags to determine which mode to enter:
• Battery mode enable jumper (see the DBUM for a detailed description of this input)
• PLL_OK flag
• RESET input
• PB input
Precautions when adding a battery: When a battery or other DC supply is added to a Demo Board that is
powered down, the 71M653x Demo Code will cause the chip to enter Brownout mode and stay in Brownout
mode. It is possible that the VBAT pins of the chip draws up to 1mA in this state, since the I/O pins are not
initialized when Brownout mode is entered from a state where the chip is powered down (if Brownout mode is entered
from Mission mode, the I/O pins are properly initialized, and the chip will enter Sleep mode automatically causing much
lower supply current into the VBAT).
In general, to work in an operational meter (not a demo meter), the firmware has to be written to
handle the case of connecting a battery to a powered-down board (since in a factory setting,
batteries will most likely be added to meter boards that are powered down). The firmware must
immediately enter sleep mode in this situation.
v1.1v1.1 TERIDIAN Proprietary 62 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 63

71M653X Software User’s Guide
5.6 DATA FLOW
The ADC collects data from the electrical inputs on a cycle that repeats at 2520Hz. On each ADC cycle, the compute
engine (CE) code digitally filters and adjusts the data using gain parameters (CAL_Ix, CAL_Vx) and phase adjustment
parameters (PHADJ_x).
Normally, a calibration operation during manufacturing defines these adjustments and stores them in flash or EEPROM
to be placed into CE memory. The Demo Code includes a fast self-calibration function that can typically reach 0.05%
accuracy. (See Calibration() in meter\calphased.c, called from meter_run(0 in meter\meter.c).
The calibration save and restore operations (cal_save() and cal_restore() ) save and restore all adjustment variables,
such as the constants for the real-time clock, not just the ones for electrical measurements.
On each ADC cycle, 2520 times per second, the CE performs the following tasks:
1. It calculates intermediate results for that set of samples.
2. It runs a debounced check for sagging mains, with a configurable debounce.
3. It has three equally-spaced opportunities to pulse each pulse output.
On each ADC cycle, an MPU interrupt, "ce_busy" (see ce.c, ce_busy_isr() ) is generated. Normally, the interrupt
service routine checks the CE's status word for the sag detection bits, and begins sag logic processing if a sag of the
line voltage is detected.
In the event of a sag detection (announcing a momentary brownout condition or even a blackout), the cumulative
quantities in memory are written to the EEPROM.
By the end of each accumulation interval, each second on the Demo Code, the CE performs the following tasks:
1. It calculates deviation from nominal calibration temperature (TEMP_X).
2. It calculates the frequency on a particular phase (FREQ_X).
3. It calculates watt hours (Wh) for each conductor, and the meter (WxSUM_X).
4. It calculates var hours (VARh) for each phase and the meter (VARxSUM_X).
5. It calculates summed squares of currents for each phase (IxSQSUM_X).
6. It calculates summed squares of voltages for each phase (VxSQSUM_X).
7. It counts zero crossings on the same phase as the frequency (MAINEDGE_X).
The CE code (see ce\ce3x_ce.c) digitally filters out the line frequency component of the signals, eliminating any longterm inaccuracy caused by heterodyning between the line frequency and the sampling or calculation rates. This also
permits a meter to be used at 50 or 60Hz, or with inaccurate line frequencies.
The CE has several equations of calculation, so that it can calculate according to the most common methods.
Once per accumulation interval, the MPU requests the CE code to fetch an alternative measurement (alternate multiplexer cycle).
At the end of each accumulation interval, an MPU interrupt, the "xfer_interrupt" occurs (see meter\ce.c, xfer_busy_isr())
occurs. This is the signal for the MPU to use the CE’s data.
At this time, the MPU performs creep detection (ce.c Apply_Creep() ). If the current or the accumulated energy (watt
hours) are below the minimum, no current or watts are reported. If volts are below the threshold, no frequency or edge
counts are reported. The MPU's creep thresholds are configurable (VThrshld, IThrshld). If Ithrshld is 0, creep logic is
disabled.
The MPU calculates human-readable values, and accumulates cumulative quantities (see meter\meter.c, meter_run()
). The MPU scales these values to the PCB's voltage and current sensors (see VMAX and IMAX).
The CE’s Wh and VARh quantities are signed, permitting the MPU to perform net metering by assigning negative
values to "export" and positive values to "import" (see meter.c. Wh.c, VAh.c and VARh.c.
The calculations needed for a meter require more precision than standard C floating point provides. The Demo Code
has a “meter math” package to add CE Wh or VARh data to a meter register without overflow (see Util\math.c). There
are also routines to add a meter register to another meter register (add8), and a routine to convert a meter register to a
floating point value (s2f(), useful to calculate ratios).
v1.1v1.1 TERIDIAN Proprietary 63 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 64

71M653X Software User’s Guide
The MPU also places a scaled value into the CE RAM for each pulse output (meter\meter.c, meter_run(),
meter\pulse_src.c, selectpulses() ). This adjusts the pulse output frequency in such a way as to reflect that
accumulation's contribution to the total pulse interval. Pulse intervals are cumulative, and cumulatively accurate, even
though the frequency is updated only periodically.
Placing the pulse value selection logic into the MPU software means that any quantity from any phase or combination
of phases can control either pulse output (see PulseSrcFunc[] for a list of transfer functions).
The MPU also performs temperature adjustments of the real-time clock (rtc_30.c, RTC_Trim(), RTC_Adjust_Trim() ).
The Demo Code can adjust the clock speed to a resolution of 1 part per billion, roughly one second per thirty years.
The adjustments include offset (Y_CAL), temperature-linear (Y_CALC) and temperature-squared (Y_CALC2)
parameters.
Once a human-readable quantity is available, it can be translated into a set of segments (meter.c, lcd.c) to display on
the liquid crystal display, or read from a register in memory by means of the command-line interface (cli.c), or possibly
some other serial protocol such as Flag (see flag.c) or NEMA.
5.7 CE/MPU INTERFACE
The interface between the CE and the MPU is described completely in the 71M653x Data Sheet.
5.8 BOOT LOADER
It is possible to implement code that functions as a boot loader. This feature is useful for field updates and various test
scenarios.
See the TERIDIAN Application Note number 031 for details.
5.9 SOURCE FILES
The functionality of the Demo Code is implemented in the following files and directories:
1. CLI: Command Line Interface – General Commands
access.c SFR, I/O RAM, MPU and CE memory access routines
access_x.c extended memory access routines
c_serial.c parser for command line interface
cli.c command line interface routines
cmd_ce.c sub-parser for CE commands
cmd_misc.c sub-parser for RTC, EEPROM, trim and PS commands
help.c display of help text
io.c number conversion functions and auxiliary routines for CLI
load.c upload and download
profile.c data collection for support of profile command
ser0cli.c
ser1cli.c
sercli.c buffer serial I/O for the CLI
These files take about 19Kbytes of program space. In production meters, this code
can easily be removed without major changes to the software.
2. IO: Input/Output
cal_ldr.c load routines for calibration factors
eep24C08.c routines supporting the 24C08 EEPROM
eeprom.c interrupt-driven serial EEPROM routines
eepromp.c high-speed polling EEPROM routines
eepromp3.c polling interface for µWire EEPROM
iiceep.c I2C bus interface using the chip’s I2C hardware
iolite.c IO subroutines for use by the calibration loader (cal_ldr.c)
lcd.c initialization, configuration, read and write routines for LCDs
rtc_30.c RTC read, write, reset, and trim routines
ser.c baud rate table shared by ser0.c and ser1.c
ser0.c initialization, configuration, interrupt, read and write routines for SER0
ser1.c initialization, configuration, interrupt, read and write routines for SER1
v1.1v1.1 TERIDIAN Proprietary 64 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 65

71M653X Software User’s Guide
tmr0.c initiali zation, configuration, interrupt, read and write routines for TMR0
tmr1.c initialization, configuration, interrupt, read and write routines for TMR1
uwrdio.c 3-wire interface using direct control of DIO4 and DIO5. It can be adapted to nonstandard
clock polarities and edges, 4-wire SPI EEPROMs, and TSC chips other than the 71M653x
(see comments in the source file)
uwreep.c a 3-wire interface using the high-speed 3-wire interface hardware of the 71M653x
3. LCD_VIM828 Code for the Varitronix VIM-828 Display
Lcd_symbols.h Code to describe which segments are on and off for each character.
Lcd_vim828_ext.c Displays modes correctly.
Lcd_vim828_31.c Tables for the segments used on a 71M6531 demo PCB.
Lcd_vim828_34.c Tables for the segments used on a 71M6534 demo PCB.
4. Main: Main top-level tasks, 653x-specific
batmodes.c battery mode logic
defaults.c contains the table of start-up default values
main.c main() with startup sequence and main task switch
main.c initialization and main loop
5. Meter: Metering Functions
calphased.c auto-calibration
ce.c initialization, configuration, interrupt, read and write routines for the compute engine
ce653X.c data exchange between CE data RAM and XRAM
error.c error recording and logging
freq.c routines to calculate and display frequency
io653X.c control of analog front end, multiplexer, RTM, I/O pins
meter.c contains overall meter logic to calculate and display meter data
misc.c unused legacy code for managing interrupts and priorities
pcnt.c code for counting output pulses
peak_alerts.c detects out-of-range line values
phase_angle.c calculates and displays voltage-to-current phase angles
psoft.c generates two additional pulse outputs using DIO pins
pulse_src.c directs line measurements to any pulse output
pwrfct.c routines for calculating the power factor
rms.c calculates and displays Vrms and Irms
vah.c calculates VAh
varh.c calculates VARh
vphase.c calculates voltage-to-voltage phase angles for multiphase meters
wh.c calculates Wh
6. Util: Utilities
dead.c defines unused flash space for the boot loader
dio.h defines high-level access to DIO pins
flash.c flash memory read, write, erase, compare and checksum calculation
irq.c securely disables and enables interrupts
library.c routines for memory copy, compare, CRC calculation, string length
math.c contains routines for multiple-precision math
onek_c.asm test code that must be included in ROMmable images
oscope.h a utility to trigger oscilloscope loops using DIO7
priority.h header file defining priorities for IP0 and IP1
sfrs.c access to SFRs
startup.a51 startup assembly code
startup_boot.a51
startup_boot_secure.a51
startup_secure.a51
stm.c software timer routines
timers.c unused software timer legacy code
wd.c routines that support the hardware watchdog
v1.1v1.1 TERIDIAN Proprietary 65 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 66

71M653X Software User’s Guide
5.10 AUXILIARY FILES
A variety of startup files is provided with the Demo Kits. The function of these files is as follows:
1. STARTUP_30.A51:
This file provides memory and stack initialization. It is derived from the Keil compiler package.
2. STARTUP_30_BANKED.A51:
This file provides memory and stack initialization for a 6530 using code banks. It is derived from the Keil
compiler package.
3. STARTUP_SECURE_30.A51:
This file is almost identical to STARTUP.A51. The only difference is that this variation sets the SECURE bit.
This bit enables security provisions that prevent external reading of flash memory and CE program memory.
The code segment below sets the security bit located at SFR register address 0xB2:
STARTUP1:
CLR 0xA8^7 ; Disable interrupts
MOV 0B2h,#40h ; Set security bit.
MOV 0E8h,#0FFh ; Refresh nonmaskable watchdog
4. L51_BANK.A51:
This file provides bank-switching logic for a 6530 using code banks. It is derived from the Keil compiler
package.
5. INIT.A51:
A secondary startup file. It is part of the Keil compiler package. This code is executed, if the application
program contains initialized variables at file level.
6. STARTUP_BOOT.A51:
This startup file is to be used when the code is to be compiled as a bootloader.
5.11 INCLUDE/HEADER FILES
In line with common industry practice, each C file in the Demo Code source code has a corresponding header file that
ends in .H and that provides the interface to the C file’s code. A number of include files are special cases, and provide
global data or hardware definitions.
• Main_653x\options.h selects the features used by the code
• main\option_gbl.h defines global configuration values used in all meter versions.
• meter\meter.h defines the meter’s configuration and power registers.
• meter\ce653X.h defines the CE memory used to communicate with the MPU.
• meter\io653X.h defines the memory-mapped registers of the 653X chips.
• util\reg653X.h defines the special function registers of the 653X chips.
• Util\reg80515.h defines the registers common to TSC meter chip 8051s
• util\stdint.h defines standard integers for TSC meter chips using 8051s.
5.11.1 OPTIONS.H
TSC normally can provide two versions of the demo code. One version has optional code removed using the utility
SUNIFDEF.EXE. This code is small and easier to read, but inflexible. In this code, options.h documents the features
that are present and absent in the code.
TSC’s software engineers develop meter code from a single code set with optional configurations, the “all options”
version. It is more complex, and has files for most TSC meter ICs, all meter equations and other optional features that
TSC has developed. It is usually provided “as is” with minimal or no testing.
The two code sets are validated during release by assuring that both code sets produce the same binary when
compiled with the same compiler.
v1.1v1.1 TERIDIAN Proprietary 66 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 67

71M653X Software User’s Guide
The file OPTIONS.H controls entire features in the “all options” code set. When an option is 1, it means that the
feature is to be compiled and linked into the build. The idea is that by adding or subtracting features, a customer or
TSC application engineer can quickly tune the code to approximate a desired meter configuration. If the comments in
OPTIONS.H are not clear, feel free to use grep, or another code-searching tool to locate where the flags occur in the
code. While TERIDIAN has made a good-faith effort to test representative combinations of compile flags, there are too
many combinations to test exhaustively.
When OPTIONS.H is changed in the all-options code, there are three usual results. Either the build complains that it
needs some subroutines, or it complains that it has too many subroutines, or it is good. When it needs subroutines,
enable the option flags for the needed subroutines. When it has too many subroutines, try to disable the option flags
for the unneeded subroutines.
On smaller ICs, if the resulting build is too big to fit the available program memory, then more features must be
disabled. Usually this is not an issue on the 653x series.
Usually, the option flags are tested either right after options.h is included in a file, or around the subroutines.
5.11.2 Register Definitions
Register definitions can be found in the following files:
• REG80515.H - Register definition for the 80515 MPU core
• REG653X.H - Register definition of 653X SFRs and I/Os
• IO653X.H and IO653x.c - I/O RAM register definitions
• CE653X.H and CE653X.C - CE data and structure declarations
5.11.3 Other Include/Header Files
Other Include/Header files are:
• CLI.H - Result code and Common ASCII code definition used for CLI
• HELP.H - HELP message prototype declarations
• IO.H – I/O subroutines for CLI
• SER0CLI.H, SER1CLI.H – hardware access layer for UART0/UART1
• SERCLI.H – include definitions for UART 0/1 debug routines
• FLAG0.H, FLAG1.H, FLAG.H – shared logic for all FLAG interfaces
• EEPROM.H – EEPROM
• II2.H – I2C Interface
• LCD.H – LCD
• RTC.H – Real-Time clock
• SER0.H, SER1.H, SER.H – serial interface
• SERIAL.H – serial interface API prototypes and definitions
• TMR0.H, TMR1.H – timer routines
• UWR.H – microwire (µwire), or three-wire interface
• BATMODES.H – battery modes (BROWNLOUT, LCD, SLEEP)
• DEFAULTS.H – default values
• OPTIONS_GBL.H – global compile-time options
• OPTIONS.H – general compile-timeoptions, defining meter functionality
• CALIBRATION.H – calibration
• CE.H – compute engine interface includes
• FREQ.H – frequency and main-edge count
• METER.H – meter structures, enumerates and definitions
• PCNT.H – pulse counting
• PEAK_ALERTS.H – voltage/current peak alerts
v1.1v1.1 TERIDIAN Proprietary 67 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 68

71M653X Software User’s Guide
• PHASE_ANGLE.H – phase angle calculation
• PSOFT.H – pulse generation by MPU software (external pulse generation)
• PULSE_SRC.H – pulse source definitions and support
• RMS.H – RMS calculation
• VAH.H – VAh accumulation
• VARH.H – VARh accumulation
• WH.H – Wh accumulation
• DIO.H – DIO structures, enumerations and definitions
• FLASH.H – flash copy and CRC routines
• IRQ.H – interrupt kernel
• LIBRARY.H – library routines
• MATH.H – meter math library
• PRIORITY.H – interrupt masks and priority definitions
• SERIAL.H – serial interface structures, enumerates and definitions
• SFRS.H – low-level API for SFRs and memory
• STDINT.H – standard integer definitions
• STM.H – software timer definitions
• WD.H – watchdog bit definitions
5.12 CE IMAGE FILES
The CE code uses pre-designed, pre-validated algorithms and calculations, which are accurate to the noise floor of the
integrated circuit, saving substantial engineering and development time.
The source code for the CE is proprietary. Only the code and data images (binary images) are available to the user.
The code image must be merged with the MPU code residing in flash memory.
Images of the CE data and program code are provided with the Demo Kits. They are to be linked into the object code.
CE images are provided by the following files:
1. CE31_CE.C:
This file provides the image of the 71M6531 CE program in C notation.
2. CE31_DAT.C:
This file provides the image of the 71M6531 CE default data in C notation.
3. CE34_CE.C:
This file provides the image of the 71M6534 CE program in C notation.
4. CE34_DAT.C:
This file provides the image of the 71M6534 CE default data in C notation.
v1.1v1.1 TERIDIAN Proprietary 68 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 69

71M653X Software User’s Guide
5.13 COMMON MPU ADDRESSES
In the Demo Code, certain MPU XRAM parameters have been given fixed addresses in order to permit easy external
access. These variables can be read via the command line interface (if available), with the )n$ command and written
with the )n=xx command where n is the word address. Note that accumulation variables are 64 bits long and are
accessed with )n$$ (read) and )n=hh=ll (write) in the case of accumulation variables.
Name Purpose LSB Default )? Signed? Bits
513421 (6531)
16
),
IThrshldA Starting current, element A
sqrt(i0sqsum)*(2
0 in this position
disables creep logic for
both element A and B.
bit 0:** reserved;
0:VA=Vrms*Irms;
2
+VARh2)
Config
Configure meter operation on
the fly.
1:VA=sqrt(Wh
bit1:
1=clear accumulators
(e.g. “)1=2”)
bit2:1=Calibration mode
bit3:**Reserved:
1=Enable Tamper
VPThrshld sqrt(v0sqsum)*216
error if exceeded. sqrt(i0sqsum)*216
Y_Cal_Deg0 RTC adjust 100ppb
Y_Cal_Deg1 RTC adjust, linear by temp. 10ppb*ΔT, in 0.1˚C 0 )5 signed 16
Y_Cal_Deg2 RTC adjust, squared by temp. 1ppb*ΔT2, in 0.1˚C 0 )6 signed 16
433199 (6533,
6534)
0.08A, just less
than 0.1A. Without
)0 unsigned 32
high-accuracy CE
code, the noise
floor is around
0.076A
0
)1 N/A 8
Do nothing
906156350 (6531)
764569660 (6533
& 6534)
)2 unsigned 32 error if exceeded.
240V*sqrt(2)
*120%
544498635 (6531)
275652520 (6533
& 6534)
)3 unsigned IPThrshld 32
50.9A
30A*sqrt(2) *120%
0
Read only at reset
)4 signed 16
in demo code.
v1.1v1.1 TERIDIAN Proprietary 69 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 70

PulseWSource
PulseVSource
71M653X Software User’s Guide
Wh Pulse source,
VARh pulse source
selection
0=wsum
1=w0sum
2=w1sum
3=w2sum‡
4=varsum
5=var0sum
6=var1sum
7=var2sum‡
8=i0sqsum
9=i1sqsum
10=i2sqsum‡
11=insqsum
12=v0sqsum
13=v1sqsum†
14=v2sqsum‡
15=vasum**
16=va0sum**
17=va1sum**
18=va2sum‡
19=wsum_i**
20=w0sum_i**
21=w1sum_i**
22=w2sum_i‡
23=varsum_i*
24=var0sum_i*
25=var1sum_i*
26=var2sum_i‡
27=wsum_e**
28=w0sum_e**
29=w1sum_e**
30=w2sum_e‡
31=varsum_e**
32=var0sum_e**
33=var1sum_e**
34=var2sum_e‡
0 (wsum)
4 (varsum)
In demo code, these are the values
from the element with the maximum
current.
A different equation can be chosen
as a compilation option, and these
become sums.
)7
unsigned 8
)8
v1.1v1.1 TERIDIAN Proprietary 70 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 71

71M653X Software User’s Guide
6000
600.0V, from the PCB’s
design.
2080
208.0A, from the PCB’s
)9 unsigned 16
)A unsigned 16
Vmax
ImaxA
Scaling Maximum
Volts for PCB
0.1V
Scaling Maximum
Volts for PCB element A 0.1A
design.
0
temp_nom, )14, must
be set to a real value
from ]7B before this
can work.
)B signed 16
ppmc1
ADC linear adjust with
temperature
parts per million per degree
centigrade
Then it should become
-150
0
ppmc2
ADC quadratic adjust
with temperature
parts per million per degree
centigrade squared
Should become
-392 after setting
)C signed 16
temp_nom
Pulse 3
source
Source for software
pulse output 3**
Indexed as )7
0
wsum; requires
software pulse module.
)D unsigned 8
4
Pulse 4
source
Source for software
pulse output 4**
Indexed as )7
varsum;
requires software pulse
)E unsigned 8
module.
2
Scal
Accumulation intervals
of autocalibration**
Count of accumulation
intervals of calibration.
2 accumulation
intervals covers both
)F unsigned 16
chop polarities.
2400
240V is a standard fullscale set-up for meter
test.
300
30A is a standard fullscale set-up for meter
test.
)10 unsigned 16
)11 unsigned 16
Vcal
Ical
Volts of
autocalibration**
0.1V rms of AC signal applied
to all elements during
calibration.
0.1A rms of AC signal applied
Amps of
autocalibration**
to all elements during
calibration. Power factor must
be 1.
88992958 (6531)
75087832 (6533 &
VThrshld
Volts at which to
measure frequency,
zero crossing, etc.
sqrt(v0sqsum)*2
16
6534)
40V
A real meter should use
sag, but the demo
)12 unsigned 16
operates with a power
supply.
v1.1v1.1 TERIDIAN Proprietary 71 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 72

71M653X Software User’s Guide
PulseWidth
Maximum time pulse
is on.
microseconds =
(2*PulseWidth + 1)*397,
0xFF disables this feature.
Takes effect only at start-up.
50
10ms
)13 signed 16
0x408D1800
847662 (6531)
0x3DCC7800
(6533, 6534)
From a real PCB at
)14 unsigned 32
temp_nom
Nominal temperature,
the temperature at
which calibration
Units of TEMP_RAW, from
CE.
occurs.
23C
2080
208.0A
)15 unsigned 16
ImaxB 1
Scaling Maximum
amps for PCB
0.1A
element B
The time that neutral
ncount 2
current can exceed
INThrsld before the
neutral bit is
Count of accumulation
intervals
10, ~10 secs )15 unsigned 16
asserted.
513421 (6531)
433199 (6533 &
Starting current,
1
element B
sqrt(i0sqsum)*(2
16
)
6534)
)16 unsigned 32 IThrshldB
0.08A, same
rationale as
Ithrshld
641776
Maximum valid
neutral current
sqrt(i0sqsum)*(216)
)16 unsigned INThrshld 2 32
0.1A
0x00E54D4C
(6531)
0x00723D00 (6533
VBatMin
Minimum valid battery
current.
Same as Vbat, below
& 6534)
2V on a real PCB;
)17 unsigned 32
should be adjusted
for battery and
chip.
Counts number of times
CalCount Count of calibrations
calibration is saved, to a
)18 unsigned 8
maximum of 255.
)19,
1A,
RTC copy
Nonvolatile copy of
the most recent time
the RTC was read.
Sec, Min, Hr, Day, Date,
Month, Year
1B,
1C,
1D,
unsigned
8
each
1E,
1F
deltaT
Difference between
raw temperature and
temp_nom
Units of TEMP_RAW, from
CE.
)20, signed 32
Frequency Frequency Units from CE. )21 unsigned 32
v1.1v1.1 TERIDIAN Proprietary 72 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 73

71M653X Software User’s Guide
Vbat
Last measured battery voltage.* (Note: battery
voltage is measured once per day, except
when it is being displayed).
]7 / (2^9) (ADC counts,
logically shifted right 9 bits)
)22 unsigned 32
Vrms_A Vrms, element A sqrt(v0sqsum)*(216) )24 unsigned 32
Irms_A Irms, element A sqrt(i0sqsum)*(216) )25 unsigned 32
Vrms_B Vrms, element B**,† sqrt(v1sqsum)*(216) )26 unsigned 32
Irms_B Irms, element B sqrt(i1sqsum)*(216) )27 unsigned 32
Vrms_C Vrms, element C‡ sqrt(v2sqsum)*(216) )28 unsigned 32
Irms_C Irms, element C‡ sqrt(i2sqsum)*(216) )29 unsigned 32
Status Status of meter
CAI
Count of accumulation intervals since reset, or
last clear (“)1=2”)
Bits:
See table below.
)2A unsigned 32
count )2b signed 32
Whi** Imported Wh, all elements. LSB of w0sum )2c signed 64
Whi_A** Imported Wh, element A “ )2e signed 64
Whi_B** Imported Wh, element B “ )30 signed 64
Whi_C**‡ Imported Wh, element C “ )32 signed 64
VARhi* Imported VARh, all elements. LSB of w0sum )34 signed 64
VARhi_A Imported VARh, element A “ )36 signed 64
VARhi_B Imported VARh, element B “ )38 signed 64
VARhi_C*‡ Imported VARh, element C “ )3A signed 64
VAh** Volt-amps, all elements. LSB of w0sum )3C signed 64
VAh_A** Volt-amps, element A “ )3e signed 64
VAh_B** Volt-amps, element B “ )40 signed 64
VAh_C**‡ Volt-amps, element C “ )42 signed 64
Whe** Exported Wh, all elements. LSB of w0sum )44 signed 64
Whe_A** Exported Wh, element A “ )46 signed 64
Whe_B** Exported Wh, element B “ )48 signed 64
Whe_C**‡ Exported Wh, element C “ )4A signed 64
VARhe** Exported VARh, all elements. LSB of w0sum )4C signed 64
VARhe_A** Exported VARh, element A “ )4e signed 64
VARhe_B** Exported VARh, element B “ )50 signed 64
VARhe_C**‡ Exported VARh, element C “ )52 signed 64
Whn Net metered, all elements LSB of w0sum )54 signed 64
Whn_A Net metered Wh, element A, for autocalibration “ )56 signed 64
Whn_B Net metered Wh, element B, for autocalibration “ )58 signed 64
Whn_C‡ Net metered Wh, element C, for autocalibration “ )5A signed 64
VARhn Net metered VARh, sum, all elements LSB of w0sum )5c signed 64
VARhn_A
Net metered VARh, element A, for
autocalibration
“ )5e signed 64
v1.1v1.1 TERIDIAN Proprietary 73 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 74

71M653X Software User’s Guide
VARhn_B Net metered VARh, element B, for autocalibration “ )60 signed 64
VARhn_C*‡ Net metered VARh, element C, for autocalibration “ )62 signed 64
MainEdgeCnt Count of edges Count of zero-crossings. )64 unsigned 32
Wh Default sum of Wh, nonvolatile LSB of w0sum )65 signed 64
Wh_A Wh, element A, nonvolatile “ )67 signed 64
Wh_B Wh, element B, nonvolatile “ )69 signed 64
Wh_C‡ Wh, element C, nonvolatile “ )6B signed 64
StatusNv Nonvolatile status See Status )6D n/a 32
‡ Three phase chips (i.e. 6533, 6534) only.
1
Two phase chips (i.e. 6531), this compilation option is normally on to enable mixing a shunt and CT as current
sensors. Uses same space as neutral current threshold.
2
Three phase chips (i.e. 6533. 6534) with neutral current, this compilation option is normally on to enable tests of
neutral current. Uses same space as Threshold B.
Table 5-12: MPU Memory Locations
v1.1v1.1 TERIDIAN Proprietary 74 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 75

71M653X Software User’s Guide
Discussion of the bits in Status:
Bit
Discussion Name
No.
CREEP 0 Indicates that all elements are in creep mode. The CE’s pulse variables will be “jammed”
with a constant value on every accumulation interval to prevent spurious pulses. Note that
creep mode therefore halts pulsing even when the CE’s pulse mode is “internal”.
MINVC‡ 1 Element C has a voltage below VThrshld. This forces that element into creep mode.
PB_PRESS 2 A push button press was recorded at the most recent reset or wake from a battery mode.
Recorded because the push button flag in the hardware must be cleared in order to reenter
a power-saving mode. May be unused in some softwares.
SPURIOUS 3 An unexpected interrupt was detected.
MINVB 4 Element B has a voltage below VThrshld. This forces that element into creep mode.
MAXVA 5 Element A has a voltage above VThrshldP.
MAXVB 6 Element B has a voltage above VThrshldP.
MAXVC‡ 7 Element C has a voltage above VThrshldP.
MINVA 8 Element A has a voltage below VThrshld. This forces that element into creep mode. It
also forces the frequency and main edge count to zero.
WD_DETECT 9 The most recent reset was a watchdog reset. This usually indicates a software error.
MAXIN‡ 10 The neutral current is over INThrshld. In a real meter this could indicate faulty distribution
or tampering.
MAXIA 11 The current of element A is over IThrshld. In a real meter this could indicate overload.
MAXIB 12 The current of element B is over IThrshld. In a real meter this could indicate overload.
MAXIC‡ 13 The current of element C is over IThrshld. In a real meter this could indicate overload.
MINT 14 The temperature is below the minimum, -40C, established in option_gbl.h, This is not very
accurate in the demo code, because the calibration temperature is usually poorly
controlled, and the default temp_nom is usually many degrees off. –40C is the minimum
recommended operating temperature of the chip.
MAXT 15 The temperature is above the maximum, 85C, established in option_gbl.h, This is not
very accurate in the demo code, because the calibration temperature is usually poorly
controlled, and the default temp_nom is usually many degrees off. 85C is the maximum
recommended operating temperature of the chip.
BATTERY_BAD 16 Just after midnight, the demo code sets this bit if VBat < VBatMin. The read is infrequent
to reduce battery loading to very low values. When the battery voltage is being displayed,
the read occurs every second, for up to 20 seconds.
CLOCK_TAMPER 17 Clock set to a new value more than two hours from the previous value.
CAL_BAD 18 Set after reset when the read of the calibration data has a bad longitudinal redundancy
check or read failure.
CLOCK_UNSET 19 Set when the clock’s current reading is A) More than a year after the previously saved
reading, or B) Earlier than the previously saved reading, or C) There is no previously saved
reading. In this case, the clock’s time is preserved, but clock software cannot compensate
for drift while it was turned off, because it cannot find the interval of the power failure.
POWER_BAD 20 Set after reset when the read of the power register data has a bad longitudinal redundancy
check or read failure in both copies. Two copies are used because a power failure can
occur while one of the copies is being updated.
GNDNEUTRAL 21 Indicates that a grounded neutral was detected.
TAMPER 22 Tamper was detected †**
v1.1v1.1 TERIDIAN Proprietary 75 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 76

71M653X Software User’s Guide
Bit
Discussion Name
No.
SOFTWARE 23 A software defect was detected. error_software() was called. E.g.: In banked code, a
subroutine address outside common code is given as a callback routine. Or: irq_enable()
(interrupt disable) is called more than irq_disable().
SAGA 25 Element A has a sag. Set in real time by the CE and detected by the ce_busy interrupt
(ce_busy_isr() in ce.c) within 8 sample intervals, about 2.6ms. A transition from normal
operation to SAGA causes the power registers to be saved, because the demo PCB is
powered from element A. For a multiphase power supply, modify the bit mask constant
POWERED_PHASE, in options.h to select the sag bits from the most-significant 8 bits of
Status, then recompile. In this case, all the bits in POWERED_PHASE must become
asserted to cause a save of the powered registers.
SAGB 26 Element A has a sag. Set in real time by the CE and detected by the ce_busy interrupt
(ce_busy_isr() in ce.c) within 8 sample intervals, about 2.6ms. On the 6520, the demo
code operates with an equation that does not use element B’s voltage, but the meter
simulates this by wiring element A’s V to VB on the chip.
SAGC‡ 27 Element C has a sag. Works like other sag bits.
F0_CE 28 A square wave at the line frequency, with a jitter of up to 8 sample intervals, about 2.6ms.
The jitter is caused because the ce_busy interrupt only executes all of its code every 8
th
sample interval.
ONE_SEC 31 Changes each accumulation interval.
‡ Three phase chips (i.e. 6533, 6534) only.
Table 5-13: MPU Status Bits
v1.1v1.1 TERIDIAN Proprietary 76 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 77

71M653X Software User’s Guide
5.14 FIRMWARE APPLICATION INFORMATION
5.14.1 General Design Considerations
5.14.1.1 Multitasking
The meter appears to do many things at once. How does this happen?
Each “task” is a subroutine call in the main loop in Main\main.c: main_run(). The tasks are called repeatedly by the
main loop, giving each of them many opportunities to use the MPU. They usually check for “data present”, and then
either exit or process the data and then exit. Prominent examples include: meter_run() in meter\meter.c (the
meter’s main process), cli() in cli\cli.c (the command line interface’s process), stm_run() in Util\stm.c (the
software timers’ update task).
This scheme is well suited to such a small system, but it also has problems when an IO process must wait for input or
output. This happens in only two major subsystems, the serial command line interface, and the metering system.
While the serial command logic is waiting for another serial character, it calls a subset of the main loop, in Main\main.c
main_background(). main_background() does all of the meter’s main loop except for serial protocols. In that
way, the meter keeps “running” while the serial IO is “waiting.”
The main metering routine, Meter\meter.c meter_run(), skips most of its logic until a flag, ce_update, is set. At
this point meter_run() runs to completion. meter_run() performs many calculations. These calculations stop the
rest of the main loop from running for up to several hundred milliseconds (depends on clock speed). This delay is
nearly impossible for a person to see, so it does not affect human I/O at all. The time-critical machine I/O during this
period is handled by interrupts that buffer data for the main loop.
5.14.1.2 Synchronization
Interrupts do the work that needs immediate attention, then set a flag or count to start code that runs in the main loop.
To keep the main loop simple, the flag, the routine to run in the main loop, and the interrupt code should be defined in
the class’s .c file. The main loop should just call the “run” routine continually.
Software timers (Util\stm.c, .h) are started by an interrupt that counts every 10 milliseconds in real time. In the main
loop, stm_run() decrements software timer variables and runs the associated callback routine if a timer expires.
stm_run() calculates the real interval since its last invocation in order to reduce jitter.
The code also has a shared, calibrated delay loop routine, in IO/delay.c. It’s calibrated in the normal clock modes, and
runs at reasonable rates in all clock modes, including brownout mode.
State machines are invoked in the main loop. The main loop will just call a “run” routine with no parameters and no
returns. No state variables or other state-machine logic will be defined in the main loop.
5.14.1.3 Bank Switching
The code has to be able to grow to fill the 128KB to 256KB memory space of this chip. So, it is bank-switched.
Keil’s standard bank-switching schemes were all tested for speed, and then the fastest was left installed. See
Util\L51_BANK.A51, for the modified Keil assembly file that performs the bank switching.
The selected Keil scheme sets the bank-sfr register FL_BANK directly, from code. Keil’s bank-switching scheme has
the linker build a table of global subroutine entry-points in common memory. Calls to global subroutines are actually to
an entry in the table, which switches the bank and jumps to the the bank-switching routines. The SUG has more
details, including debugging suggestions.
Fast interrupts has to be in the common page, so that their code is always available. Slower interrupts have a
trampoline in the common page that performs a bank-switching call to the main interrupt code. This permits entire
modules to be placed in different banks, so that the code’s functionally-pure structure doesn’t have to be damaged in
order to do bank-switching. The trampolines are in Meter\io653x.c, with other shared interrupt logic.
v1.1v1.1 TERIDIAN Proprietary 77 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 78

71M653X Software User’s Guide
The Keil linker’s dependency command must be used to tell the linker about the caller of every routine called via a
function pointer. If this is not done, Keil’s address for the called routine is often in a bank, and the bank is rarely the
current bank. So, the caller goes to the called routine’s address, but in the wrong bank. This doesn’t work.
When the linker is told that a called routine is called from a caller, then it places a bank-switching stub for that routine in
the common bank, and the call via function pointer works splendidly.
The function pointer issue is a problem for the timer code, and the software timer code. These call an error function
when they get function pointer addresses greater than 0x7FFF.
5.14.1.4 Economic Usage of RAM
The IC has only 3K of RAM for use by the MPU. There are two main tricks to fit the data in:
• The main-loop organization lets Keil’s linker use overlays to maximum advantage, multiplying the utility of the
small amount of RAM.
• Also, the big pieces of stable data are global, and shared. Most of them are in Totals, a large C structure
defined in meter\meter.h. Totals contains all MPU calibration and register items. The CE interface is in CE, a
large C structure defined in meter\ce653x.h.
The largest unshared items are the serial buffers, defined in serial0cli.c and serial1cli.c. For most people, removing
serial1 has no effect at all on the usability of the debug interface, and it frees the port and RAM for use by an AMR
system.
5.14.1.5 Trading Space for Speed
The 8051 has seven types of memory space. If used correctly, they can help code run faster.
The Keil compiler provides memory type names like “data” “xdata” and “pdata” so that the programmer can place
particular data items in particular memory spaces. See the manual for more information.
Some memory areas are faster to access, because the code to access the memory is shorter. In decreasing order:
The code keeps a few critical high-speed bit-flags in BDATA, the fastest, rarest memory.
The code keeps a few high-speed counters in DATA, a fast data space. This is intentionally underutilized to make
room for customer data.
The code makes very little use of IDATA in order to conserve stack space.
The CE’s output registers are mapped to PDATA. This gives the math fast access to the CE output values.
XDATA is used for most variable data.
CODE is used for code, and a few large tables, like the CE’s code and initialization data.
5.14.1.6 Object-Oriented Design
First, is it worth it? An object-oriented design can use the same control code to run similar electronics or data. This
has several advantages. The big one for firmware is that the higher levels of the firmware can quickly change to use
other related devices with a minimum of introduced defects.
The trick in a small embedded system is to implement a base class (the “integration interface”) in a way that is efficient
and not too hard to understand.
In this design, a base class is an include file of macros (i.e. a “.h” file). Two schemes will be used.
When there are several devices or data structures and switching is not needed, each device will have its own .h file.
The macros and function prototypes will provide an interface that is the same for all callers. For example, instead of
including ser.h, and calling ser0_getc(), this scheme will have the caller include ser0.h, and then call ser_getc(). By
including ser1.h, the same calling code can be instantly ported to serial port 1.
If dynamic calling is needed, the .h file can conceal switching code that tests a bit and selects a daughter-class’s
methods. For example Cli\sercli.c conceals an interface that can write to either UART, based on a port parameter.
These schemes are efficient in the 8051, producing code as fast as individual calls for each daughter class.
v1.1v1.1 TERIDIAN Proprietary 78 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 79

71M653X Software User’s Guide
The classic C++ scheme uses a table of subroutine pointers for each class. It performs poorly on the 8051. The 8051
accesses tables of indirect addresses rather slowly.
5.14.1.7 Reconfiguring “Glue Logic”
Compilation switches enable cases. In many cases, code can include a different include (.h) file to customize for a
different device. If code is not enabled, it shouldn’t run or be in the code.
For released code, or other point releases, an “unifdef” utility will be used to remove unused conditional code. This
makes the code easier to read, but reduces flexibility.
5.14.1.8 DSP Operations
Teridian’s solution for providing a superios electricity metering IC has been to use a simplified 32-bit digital signal
processor, the CE, triggered by the ADC multiplexer. Since DSP Code is too hard to develop, prewritten DSP code is
provided for the CE. This code is suitable for most metering applications, with optimized performance going right to the
chip’s noise floor. It helps that metering is a standard application for most customers.
5.14.1.9 Coping with Various Current Sensors
The MPU code has Imax and Imax2. The calculations automatically convert data from phase B into the same units as
phase A, if the “dual Imax” compilation option is set. See meter\meter.c RescalePhaseB().
5.14.1.10 User Interface
The main user interface is an RS-232 command line interface with a help system. This consumes a surprisingly large
amount of code because it performs line editing.
There is code that controls an LCD. The meter chip has bits in its I/O area that turn each LCD segment on and off.
The segments form segments of numerals, etc. Software arranges to turn the right segments on and off in order to
show numbers and annunciators. The code for this looks up a bit mask for each character to decide which pieces of
numeral to turn on and off.
In this demo software, pressing the pushbutton changes the display items, or wakes the meter from its low power
mode. Most meters have at least one operating switch. The classic is a magnetic reed switch controlled by a magnet
outside the meter enclosure. Real meters (but not this demo software) use it to step through a menu system.
5.14.1.11 Operating without User Interface
The EEPROM can be initialized in a programmer with the calibration data. This saves the code and data needed by
the meter.
5.14.1.12 Communication with a Computer
This demo code implements both a CLI, and the CP. Code is available for FLAG.
The classic scheme, not provided by this demo code, is to use a serial port communicating via either an infra-red LED
and phototdiode, or a low-speed current-loop. The infrared interface is popular in areas where the meter-reader has
access to the meter. The current-loop is popular when the meters are inside a building. In this case, a connector is
avialable on the outside of the building to read all the meters within it.
5.14.1.13 Support of Automatic Meter Reading
The meter must keep running, but must also present a consistent set of data for the asynchronous meter-reading
system. The solution is to make a stable copy at a controlled time in the metering cycle, and then let the AMR system
read the stable data.
When the hand-held unit logs on, the serial protocol sets a flag (update_register) asking the meter to copy the
registers to stable storage. See Meter\meter.c, the call to Update_register() in meter_run(). When the stable
copy is available, the flag register_available is set to true.
If a read request occurs while the copy is going on (i.e. register_available is false), the protocol requests that the
message be resent (see Flag\Flag0.c orflag1.c, case “R” of the NoError case of do_cmd()). This negative
v1.1v1.1 TERIDIAN Proprietary 79 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 80

71M653X Software User’s Guide
acknowledge is supposed to occur when the message was garbled, but in this case has the effect of delaying the read
command until the copy is complete and a stable copy of the meter data is available for use by the protocol.
When the AMR system logs-off, or the AMR interface times out, the flags are reset to mark the stable copy invalid.
5.14.1.14 Communication between MPU and CE
The communication between CE and MPU has evolved since early versions. The current best practice is to divide the
CE’s data into four parts.
1. Configuration data set by the MPU, and read by the CE. This includes gains and other static adjustments.
2. Constant data needed by the CE, and never adjusted by the MPU. The MPU simply sets it. It could be fixed,
stored in the CE’s program code, but isn’t.
3. Data read and written by both CE and MPU. These usually begin execution as constant values. This includes
pulse input values set by the MPU, which can alternatively be set by the CE’s native code, and the main gain
adjustment for making the meter run at different speed in different temperatures.
4. Data written by the CE, and initialized by the MPU to zero. This includes all of the CE’s output values.
Parts 1, 2, and 3 are set to defaults from a table of constants in the MPU’s code area.
Part 1 is saved and restored as part of the EEPROM configuration, as an overlay of the constants.
Part 4 is cleared to zero by the MPU, to permit the table of constants to be as small as possible.
In the 6530, unlike earlier versions, reading and writing the CE is transparent because the CE and MPU share the
RAM. No copy is necessary, which saves both MPU time, and RAM. The destination table and CE was moved to start
of RAM location zero. The CE’s output data was moved to location 0x0200, so that PDATA can still be used to access
it quickly.
5.14.1.15 Timing Control
The chip has two high-speed timers. It also has an electronic clock. Further, there is a timer to wake the chip from its
low power modes. The demo code has facilities to demonstrate all of these.
5.14.1.16 6531: Calculation of max(VA*IA, VA*IB) Option, Equation 0
The global flow of Wh calculation is an important optimization, and will be selected by compile flag:
Vrms_A = sqrt(v0sqsum) from the CE.
Irms_A = sqrt(i0sqsum) from the CE.
Irms_B = sqrt(i1sqsum) from the CE.
Volts and Current are now available for all elements.
Figure Wh, VARh and VAh for this accumulation interval:
If Vrms_A < Vthreshold (i.e. there’s no voltage, probably tampering)
Figure watts with a default voltage, but don’t lie about sensed voltage:
Vrms_A = 0
if abs(Irms_A) > IThreshold,
va0sum = Irms_A * defaultV
w0sum = va0sum
else
set them to zero
varh0 = 0
Repeat for element B
else
v1.1v1.1 TERIDIAN Proprietary 80 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 81

71M653X Software User’s Guide
Get Wh (wxsum) and VARh (varxsum) from CE:
w0sum, w1sum (element Wh for one accumulation interval),
var0sum, var1sum (element VARhs are from CE.
2
va0sum = sqrt(w0sum
va1sum = sqrt(w0sum
+ var0sum2)
2
+ var0sum2)
endif
va0sum, va1sum, w0sum, w1sum, var0sum, var1sum are now available.
Figure current, the best available way:
If Irms_A < noise-floor of current measurement && Vrms_A > 0
Irms_A = va0sum/Vrms_A
If Irms_N < noise-floor of current measurement && Vrms_A > 0
Irms_B = va1sum/Vrms_A
Do the creep calculation:
If (Vrms_A < Vthreshold)
creep mode, set element A and B’s voltage, current and watts to zero
else
if (Irms_A < Ithreshold)
creep mode: set element A’s current and watts to zero
if (Irms_B < Ithreshold)
creep mode: set element B’s current and watts to zero
Set the pulse outputs.
Sum positive values to normal registers, negative values to export registers.
5.14.1.17 6534: Calculation of VA*IA+VB*IB+VC*IC Option, Equation 5
The global flow of Wh calculation is an important optimization, and will be selected by compile flag:
Vrms_A = sqrt(v0sqsum) from the CE.
Irms_A = sqrt(i0sqsum) from the CE.
etc. for B and C
Volts and Current are now available for all elements.
Figure Wh, VARh and VAh for this accumulation interval:
If Vrms_A < Vthreshold (i.e. there’s no voltage, probably tampering)
Figure watts with a default voltage, but don’t lie about sensed voltage:
Vrms_A = 0
if abs(Irms_A) > IThreshold,
va0sum = Irms_A * defaultV
w0sum = va0sum
else
set them to zero
varh0 = 0
else
v1.1v1.1 TERIDIAN Proprietary 81 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 82

71M653X Software User’s Guide
Get Wh (w0sum) and VARh (var0sum) from CE:
va0sum = sqrt(w0sum2 + var0sum2)
endif
Repeat for elements B and C
va0sum,.. va2sum, w0sum,.. w2sum, var0sum,.. var2sum are now available.
Figure current, the best available way:
If Irms_A < noise-floor of current measurement && Vrms_A > 0
Irms_A = va0sum/Vrms_A
Repeat for elements B and C
Do the creep calculation:
If (Vrms_A < Vthreshold)
creep mode, set element A’s voltage, current and watts to zero
else
if (Irms_A < Ithreshold)
creep mode: set element A’s current and watts to zero
Repeat for element B and C
Set the pulse outputs.
Sum positive values to normal registers, negative values to export registers.
5.14.1.18 How Register Data is Stored
The registers cannot just be kept as a floating point number. When floating point numbers are added, the mantissa of
the smaller number has to be shifted to the right, losing precision, so that it can be added to the mantissa of the larger.
In less than an hour, a meter implemented with 32-bit floating point arithmetic begins losing billing revenue because of
underflow.
In the Teridian implementation, a variable wh_cnt contains the number of CE counts per Wh.
The registers are stored as a 32-bit count of Wh, and a 32-bit remainder in CE counts. The math adds the new CE
value to the fractional part, and then transfers even Whs to the Wh count. To do that, it divides the fraction by wh_cnt
to get the new Wh to add to the count of Wh. Then, it multiples the number of Wh by wh_cnt to get the number of CE
counts to subtract from the fractional CE count. This logic is in normalize8() inUtil\math.c.
This scheme has no underflow. It has a tiny, controlled round-off of ½ of a CE LSB per Wh, which the CE calibration
arranges to average to zero. Otherwise, all the fractional data is preserved. The overflow is perfectly controlled, and
is made to wrap around to zero at a decimal limit.
The register logic is applied so that the registers only increase. Negative values of watt hours are subtracted from an
“export” register.
wh_cnt does not usually change; in a real meter, this would be a constant, not a variable. However, in TSC’s demo
meter, the Imax and Vmax (see glossary) are variables, and therefore so must the CE counts per Wh. So, wh_cnt is
recalculated on each accumulation interval by the routine wh_cnt_set(), defined in Util\math.c.
Unlike earlier demo code versions, this register math is easy to modify to use realistic units. The WH_RESOLUTION (in
Util\mmath.h) is already realistic number, 1.0 (Wh), with a UNITS_RANGE limit of a billion (1x10
The display routines (in Meter\wh.c) can divide the registers by 1000 in order to display KWh. This is controlled by a
compilation flag, DISPLAY_KWH, which also changes the decimal points and labels for the LCD.
The registers cannot be kept only in RAM. If there is a power failure, they would be lost. The logical scheme is to write
them to the EEPROM once each accumulation interval. The problem is that the EEPROM has only 1 million writes,
and these would be used up in a few years. So, the revenue registers are kept in a special block of memory, the C
structure Totals.Acc. This data is saved only when there is a power failure.
9
) Wh.
v1.1v1.1 TERIDIAN Proprietary 82 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 83

71M653X Software User’s Guide
5.14.1.19 Managing Power Failures
There is no way to delay power failure to a convenient time, so the meter must always have a valid value for its
revenue registers. There are two copies of the register data: Totals.Acc, and Totals.AccB. When Totals.Acc is valid,
and its checksum is calculated, it is copied to Totals.AccB. Therefore, in normal operation, one of these is always
valid.
Both are saved by the power failure detection logic. When the meter starts up, it checks both, and uses the first one
with a valid checksum.
Version 4.6 and later implement a true power failure interrupt from the CE. External interrupt INT0 on the MPU is set
up on DIO_9, the same pin as Y_PULSE, one of the spare pulse outputs from the CE (see meter\ce_30.c ce_init()).
The CE’s configuration variable CE_STATE has four additional bits, 16:19 which enable and select the elements
sensed for power failure. The CE detects power failures as before, but now checks selected status bits in order to
cause an MPU interrupt. When all of the elements fail, the CE pulses Y_PULSE, causing an MPU interrupt, which
saves the power registers to the EEPROM (see ce_sag_isr () in Meter\ce_30.c).
Before version 4.6, the CE detected power failures by detecting when each mains voltage stayed below a threshold for
a configurable number of samples, usually 80 decimal, about two cycles. The MPU discovered this state by reading
the CE’s status register. The polling test if the CE’s status registers was done in the CE busy interrupt
(\meter\ce.c\ce_busy_isr ()), that occurs once per sample time, about every 396 microseconds. To save the MPU’s
time, the sample is compared only once per sample.
5.14.1.20 Pulse Counting
In version 4.6 and later, INT0 is used for the sag interrupt, therefore it cannot be used to count pulses. Therefore, the
pulse counting assigns timer 1 (formerly unused) to count the watt-hour pulse. The gate of timer 1 is set to the correct
DIO, and timer 1 is set to be a 16 bit counter. (see pcnt_init() in Meter\pcnt_30.c)
The counter is read once per second, in the real-time-clock’s timer interrupt.
The counter is read as two 8-bit values. The lower value could turn over while being read. So, the logic re-reads the
lower value if the upper value changes. The exact logic is read-upper, read-lower, read-upper second time. If the
second time of the upper counter is different from the first, read the lower again.
After that, each second the number of pulses in that second is the current value of the timer’s register less the previous
value. This math automatically handles turn-over of the counter as long as less than 32768 pulses occurred in the last
second . For example, say the timer turns over from 0xFFFE to 0x0002. In signed 16 bit math, this is 2 – (-2), or 4.
int1 is still used to count VARh, with one interrupt per pulse.
Before version 4.6, int0 counted watt-hour pulses, and int1 counted var-hour pulses.
5.14.1.21 Battery Modes
The IC has several battery modes. See the section on the battery mode logic for more information, including a state
diagram, and special problems.
The demo code displays the main watt-hours when the pushbutton is pressed, as an example of a typical need in a real
meter. It does this with full use of the battery modes for minimum power.
5.14.1.22 Real-Time Performance
The main figure of merit is the time to update the registers and display a new result. This is about 50 milliseconds
when the MPU runs at 5MHz. This is faster than earlier demo codes (i.e. 200ms on the 6513) because:
1. The data from the CE is not copied.
2. CE data is accessed as PDATA. This permits any register to be used as an indirection pointer.
3. The calculations use fast floating point logic, rather than the custom-written 64-bit multiple-precision math of
some earlier versions.
v1.1v1.1 TERIDIAN Proprietary 83 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 84

71M653X Software User’s Guide
5.14.2 Firmware Application: Selected Tasks
5.14.2.1 Sag Detection
A sag is an undervoltage condition that persists for more than one period. A shorter undervoltage condition is called a
dip (see Figure Figure 5-1). The occurrence of sags can announce an impending loss of power. Since accumulated
energy values etc. in the meter will have to be saved to non-volatile memory in the case of loss of power, a sag can be
used to initiate data saving operations. Some applications may instead save or count the sag event for the purpose of
recording power quality data.
dip
sag
Figure 5-1: Sag and Dip Conditions
Sag detection is performed by the CE, based on the CE DRAM registers SAG_THR and SAG_CNT. SAG_THR defines
the threshold which the input voltage has to be continuously below, and SAG_CNT defines the number of samples
required to trigger the sag bit (see Figure 5-2).
SAG_THR
SAG_THR
84 sample s
84 sample s
16.67ms
16.67ms16.67ms
When the CE detects a sag that meets the sag conditions specified in SAG_THR and SAG_CNT on one of the input
voltage channels, it will reflect this in the corresponding bit (SAG for single-phase, or SAG_A, SAG_B, SAG_C for polyphase) of the CE STATUS Word. See the CE Interface section in the 653X Data Sheet for details.
The demo code saves the power registers to the EEPROM when a sag is detected. It also has a timer to avoid
multiple saves because of grid-switching from a recloser or noisy power when the grid starts up. See the 5.4.2.3 about
the CE_BUSY interrupt for more information.
See Application Note AN651X_044 for more information.
SAG_CNT
SAG_CNT
Figure 5-2: Sag Event
5.14.2.2 Temperature Measurement
The temperature output of the on-chip temperature sensor (TEMP_RAW) is provided by the CE in CE DRAM location
0x7B. The relative chip temperature deltaT (MPU location 0x20) is derived by subtracting the raw temperature from the
nominal temperature (TEMP_NOM) and multiplying it with a constant factor. Thus, once the raw temperature obtained
at a known environmental temperature is stored in TEMP_NOM, deltaT will always reflect the deviation from nominal
temperature. The scaling is in tenths of Centigrades, i.e. a reading of 75 means that the measured temperature is
7.5°C higher than the reference temperature.
v1.1v1.1 TERIDIAN Proprietary 84 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 85

71M653X Software User’s Guide
5.14.2.3 Temperature Compensation for Measurements
The internal voltage reference of the 653X ICs is calibrated during device manufacture. Trim data is stored in on-chip
fuses. The temperature coefficients TC1 and TC2 are given as constants that represent typical component behavior.
The bandgap temperature is provided to the embedded MPU, which then may digitally compensate the power outputs.
This permits a system-wide temperature correction over the entire system rather than local to the chip. The
incorporated thermal coefficients may include the current sensors, the voltage sensors, and other influences. Since the
band gap is chopper stabilized via the CHOP_EN bits, the most significant long-term drift mechanism in the voltage
reference is removed.
The CE applies the gain supplied by the MPU in GAIN_ADJ. This external type of compensation enables the MPU to
control the CE gain based on any variable, and when EXT_TEMP = 15, GAIN_ADJ is an input to the CE.
5.14.2.4 Temperature Compensation for the RTC
The flexibility provided by the MPU allows for compensation of the RTC using the substrate temperature. To achieve
this, the crystal has to be characterized over temperature and the three coefficients Y_CAL, Y_CALC, and Y_CAL_C2
have to be calculated. Provided the IC substrate temperatures tracks the crystal temperature the coefficients can be
used in the MPU firmware to trigger occasional corrections of the RTC seconds count, using the RTC_DEC_SEC or
RTC_INC_SEC registers in I/O RAM.
Example: Let us assume a crystal characterized by the measurements shown in Table 5-14.
Deviation from
Nominal
Temperature [°C]
+50 32767.98 -0.61
+25 32768.28 8.545
0 32768.38 11.597
-25 32768.08 2.441
-50 32767.58 -12.817
Measured
Frequency [Hz]
Deviation from
Nominal
Frequency [PPM]
Table 5-14: Frequency over Temperature
The values show that even at nominal temperature (the temperature at which the chip was calibrated for energy), the
deviation from the ideal crystal frequency is 11.6 PPM, resulting in about one second inaccuracy per day, i.e. more
than some standards allow. As Figure 5-3 shows, even a constant compensation would not bring much improvement,
since the temperature characteristics of the crystal are a mix of constant, linear, and quadratic effects.
32768.5
32768.4
32768.3
32768.2
32768.1
32768
32767.9
32767.8
32767.7
32767.6
32767.5
-50 -25 0 25 50
Figure 5-3: Crystal Frequency over Temperature
v1.1v1.1 TERIDIAN Proprietary 85 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 86

71M653X Software User’s Guide
One method to correct the temperature characteristics of the crystal is to obtain coefficients from the curve in Figure 31
by curve-fitting the PPM deviations A fairly close curve fit is achieved with the coefficients a = 10.89, b = 0.122, and c =
–0.00714 (see Figure 32).
f = f
* (1 + a/106 + T * b/106 + T2* c/106)
nom
When applying the inverted coefficients, a curve (see Figure 5-4) will result that effectively neutralizes the original
crystal characteristics. The frequencies were calculated using the fit coefficients as follows:
32768.5
32768.4
32768.3
32768.2
32768.1
32768
32767.9
32767.8
32767.7
32767.6
32767.5
-50 -25 0 25 50
crystal
curve fit
inverse curve
Figure 5-4: Crystal Compensation
The MPU Demo Code supplied with the TERIDIAN Demo Kits has a direct interface for these coefficients and it directly
controls the QREG and PREG registers. This interface is implemented by the MPU variables Y_CAL, Y_CALC, and
Y_CALC2 (MPU addresses 0x04, 0x05, 0x06). For the Demo Code, the coefficients have to be entered in the form:
ppmCORRECTION ⋅+⋅+=
)(
CALY
_
10
CALCY
_
T
T
100
CALCY
2
1000
2_
Note that the coefficients are scaled by 10, 100, and 1000 to provide more resolution. For our example case, the
coefficients would then become (after rounding):
Y_CAL = 109, Y_CALC = 12, Y_CALC2 = 7
Alternatively, the mains frequency may be used to stabilize or check the function of the RTC. For this purpose, the CE
provides a count of the zero crossings detected for the selected line voltage in the MAIN_EDGE_X address. This count
is equivalent to twice the line frequency, and can be used to synchronize and/or correct the RTC.
5.14.2.5 Validating the Battery
For applications that utilize the RTC it is very important to validate the battery. A brief loss of battery power when the
653X IC is powered down may result in corrupted RTC data.
The battery monitor function can be used to obtain the battery charge status.
After battery power is lost, the RTC is usually invalid, and the MPU start-up code will then set it to read the year 2001,
the month January, and the day 1 (2001/01/01). The time information will be 01:01:01. If the MPU firmware program
detects the date 01/01/2001 upon power-up or reset, it is safe to conclude that the RTC is corrupted, most likely due to
a missing or low-voltage battery.
v1.1v1.1 TERIDIAN Proprietary 86 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 87

71M653X Software User’s Guide
5.15 ALPHABETICAL FUNCTION REFERENCE
Function/Routine
Name
add8_4(r, wh_ce)
add8_8 (r0, r1)
Apply_Creep_Threshol
d()
batmode_is_brownout
()
batmode_lcd ()
batmode_sleep ()
batmode_wait_minutes
()
batmode_wait_seconds
()
cal_begin()
cal_restore()
cal_save()
Calc_Voltage_Phase()
Calibration()
ce_active()
ce_enable()
ce_init()
ce_reset()
cli ()
cli_init()
cli0_init()
cli1_init()
Description Input Output File Name
Adds Wh inCE counts to a
register r, converting to display
units. No underflow or fractional
value is lost.
Adds register r1 to register r0.
Prevents creep. void void Meter\meter.c
Returns true if battery mode is
brownout. False is mission
mode
Enters LCD-only mode from
brownout mode. Exit from LCDonly mode resembles a reset.
Enters sleep mode from
brownout mode. Exit from sleep
mode resembles a reset.
Sets the wake timer in minutes. uint16_t minutes none Main\batmode.c
Sets the wake timer in seconds. uint16_t seconds none Main\batmode.c
starts auto-calibration process none bool Meter\calphased.c
Restores calibration from
EEPROM
saves calibration data to
EEPROM
Calculates phase angles
between voltages of different
phases.
processes measurements
during auto-calibration
returns CE status none bool Meter\io651x.c
Enables or disables the CE bool enable none Meter\io651x.c
Initializes the CE none bool Meter\ce.c
resets the CE none none Meter\io651x.c
command Line Interpreter none none Cli\cli.c
Initializes the SLI's interface to
any serial port.
Initializes the SLI's interface to
SER0
Initializes the SLI's interface to
SER1
uint8_tx *r, in32_t none Util\math.c
uint8_tx *r0,
uint8_tx *r1
void bool Main\batmode.c
void void Main\batmode.c
void void Main\batmode.c
none bool Meter\calphased.c
none none Meter\calphased.c
void void Meter\vphase.c
none none Meter\calphased.c
enum
SERIAL_PORT
port, enum
SERIAL_SPD
speed, bool
xon_xoff
enum
SERIAL_SPD
speed, bool
xon_xoff
enum
SERIAL_SPD
speed, bool
none Util\math.c
bool Cli\sercli.c
bool Cli\ser0cli.c
bool Cli\ser1cli.c
v1.1v1.1 TERIDIAN Proprietary 87 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 88

71M653X Software User’s Guide
Function/Routine
Name
cmax()
cmd_ce ()
cmd_ce_data_access()
cmd_download()
cmd_eeprom()
cmd_error()
cmd_load()
cmd_meter()
cmd_mpu_data_access(
)
cmd_power_save()
cmd_rtc()
cmd_trim()
cmin()
Compute_Phase_Angle(
)
Compute_RMS()
CRC_Calc()
CRC_Calc_NVR()
ctoh()
date_lcd ()
Delta_Time ()
Determine_Frequency(
)
Determine_Peaks()
divide()
divide_ ()
divide_1()
Description Input
xon_xoff
returns maximum of unsigned
char 'a' and 'b'.
processes CE commands none none cmd_ce.c
Processes context for CE DATA none none Cli\access.c
downloads/uploads code/data
between various sources and
serial port
processes EEPROM commands none none Cli\cmd_misc.c
assigns generic command mode
error result code
implements user dialog for
data/code download/upload
processes "M" commands none none Meter\meter.c
processes context for MPU
DATA
processes power save
command
processes RTC commands none none Cli\cmd_misc.c
processes trim commands none none Cli\cmd_misc.c
returns minimum of unsigned
char 'a' and 'b'.
Computes the V/I phase angle. void void Meter\phase_angle.c
Computes Vrms and Irms. void void Meter\rms.c
calculates standard 16-bit CRC
polynomial per ISO/IEC 3309 on
flash memory (x
calculates the 16-bit CRC
polynomial per ISO/IEC 3309 on
NVRAM
converts ascii hex character to
hexadecimal digit
Displays the current date. void void IO\rtc_30.c
Figure the elapsed time
between two times.
Sets the frequency. Uses sag
status and voltage thresholds to
return 0 if the voltages are off.
Sets status bits if voltages,
currents or temperature are
outside limits. Sag tests are in
xfer_busy_int()
*u /= *v
*u /= *v
*x /= y uint8_tx *x, y, n none Util\math.c
16+x12+x5
+1)
uint8_t a, uint8_t b uint8_t Util\math.c
none none Cli\load.c
none none Cli\cli.c
none none Cli\load.c
none none Cli\access.c
none none Cli\cmd_misc.c
uint8_t a, uint8_t b uint8_t Util\math.c
uint8_tr *ptr,
uint16_t len, U01
set
uint8_tx *ptr,
uint16_t len, U01
set
uint8_t c uint8_t Cli\load.c
struct RTC_t start,
struct RTC_t end
void void Meter\freq.c
void void Meter\peak_alerts.c
uint8_tx *u, uint8_tx
*v, m, n, uint8_tx
*v0
uint8_tx *u, uint8_tx
*v, m, n, uint8_tx
*v0
Output File Name
bool Util\flash.c
bool Util\math.c
int32_t
seconds
uint8_t Util\math.c
none Util\math.c
IO\rtc_30.c
v1.1v1.1 TERIDIAN Proprietary 88 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 89

71M653X Software User’s Guide
Function/Routine
Name
done()
EEProm_Config()
es0_isr ()
es1_isr()
frequency_lcd ()
get_ce_constants()
get_char()
get_char_d()
get_digit()
get_long()
get_long_decimal()
get_long_hex()
get_num()
get_num_decimal()
get_num_hex()
get_short()
get_short_decimal()
get_short_hex()
htoc()
IICGetBit()
IICInit()
IICStart()
IICStop()
init_meter()
IRQ_DEFINES
Description Input
exits control uint8_td *c *c Cli\cli.c
connects/disconnects DIO4/5
for I2C interface to serial
EEPROM
serial port 0 service routine none none IO\ser0.c
serial port 1 service routine none none IO\ser1.c
Displays the frequency on the
LCD.
Copies CE configuration
constants to a data structure so
they can be viewed in the
emulator.
gets next character from CLI
buffer
gets next character from CLI
buffer
gets next decimal (or hex) digit
from CLI buffer
converts ascii decimal (or hex)
long to binary number
converts ascii decimal long to
binary number.
converts ASCII hexadecimal
number to binary number
converts ascii decimal (or hex)
number to binary number
converts ascii decimal number
to binary number
converts ascii hexdecimal byte
to binary number
converts ascii decimal (or hex)
short to binary number
converts ascii decimal short to
binary number
converts ascii hexdecimal short
to binary number
converts hexadecimal digit to
ascii hex character
gets a bit, used to reset some
parts
initializes DIO4/5 as EEPROM
interface
IIC bus's start condition none none io\iiceep.c
IIC bus's stop condition none none io\iiceep.c
Initializes meter to default
values
Defines variables used by
macros to enable and disable
interrupts.
bool access,
uint16_t page_size,
uint8_t tWr
void void Meter\freq.c
void void Meter\ce.c
none uint8_t cli\io.c
uint8_t idata *d uint8_t cli\io.c
uint8_t idata *d uint8_t cli\io.c
none int32_t cli\io.c
uint8_t c int32_t cli\io.c
none U32 cli\io.c
none S08 cli\io.c
none S08 cli\io.c
none uint8_t cli\io.c
none int16_t cli\io.c
none int16_t cli\io.c
none uint16_t cli\io.c
uint8_t c uint8_t Cli\load.c
none uint8_t io\iiceep.c
none none io\iiceep.c
none none defaults.c
n/a n/a util\irq.h
Output File Name
none
IO\eeprom.c,
IO\eepromp3.c
v1.1v1.1 TERIDIAN Proprietary 89 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 90

71M653X Software User’s Guide
Function/Routine
Name
irq_disable()
IRQ_DISABLE()
irq_enable()
IRQ_ENABLE()
irq_init()
labsx()
latan2()
LCD_CE_Off()
LCD_Command()
LCD_Config()
LCD_Data_Read()
LCD_Data_Write()
LCD_Hello()
LCD_Init()
LCD_Mode
LCD_Number()
lmax()
lmin()
log2()
LRC_Calc_NVR ()
Lroundf()
main_background()
main_edge_cnt_lcd ()
Description Input
Disables interrupts. void void util\irq.c
The fastest way to disable
interrupts. Requires
IRQ_DEFINES to be earlier in
the code, or that the needed
symbols be defined.
Enables interrupts void void util\irq.c
The fastest way to enable
interrupts. Requires
IRQ_DEFINES to be earlier in
the code, or that the needed
symbols be defined.
Initializes interrupt control. void void util\irq.c
returns the absolute value int32_t x S332 Util\math.c
returns the arcTangent
displays “CE OFF” on LCD none none io\lcd.c
turns LCD on or off, clears
display
configures LCD parameters
reads from selected icon of LCD uint8_t Icon uint16_t io\lcd.c
writes to selected icon of LCD
displays “HELLO” on LCD none none io\lcd.c
clears LCD, enables LCD
segment drivers
Display a mode number. Uint8_t mode none io\lcd.c
Displays a number on the LCD.
returns maximum of unsigned
long ‘a’ and ‘b’.
returns minimum of unsigned
long ‘a’ and ‘b’.
returns binary logarithm uint16_t k uint8_t Util\math.c
Calculates a longitudinal
redundancy check (bitwise
parity)
Returns long rounded from float.
Standard C99 library routine not
provided by Keil
executes background
processing
Displays either the Uint8_t select void Meter\freq.c
n/a n/a util\irq.h
n/a n/a util\irq.h
int32_t sy, int32_t
sx
uint8_t LcdCmd none io\lcd.c
uint8_t num, enum
eLCD_mode bias,
enum LCD_CLK
clock
uint8_t icon,
uint16_t Mask
none none io\lcd.c
Int32_t number
uint8_t
num_digits_before_
decimal_point,
uint8_t
num_digits_after_d
ecimal_point
U32 a, U32 b U32 Util\math.c
U32 a, U32 b U32 Util\math.c
Bool (ok/bad)
Long Float Util\math.c
none none main.c
Output File Name
U32 Util\math.c
none io\lcd.c
none io\lcd.c
none io\lcd.c
Pointer,
length, set
Util\library.c
v1.1v1.1 TERIDIAN Proprietary 90 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 91

71M653X Software User’s Guide
Function/Routine
Name
main_soft_reset()
max()
memcpy_cei ()
memcpy_cer ()
memcpy_cex ()
memcpy_ice ()
memcpy_xce ()
memget_ce ()
memset_ce ()
meter_lcd ()
meter_run ()
memcmp_rx()
memcmp_xx()
memcpy_ix()
memcpy_px()
memcpy_rce()
memcpy_rx()
memcpy_xi()
memcpy_xp()
memcpy_xr()
Description
instantaneous edge count, or
the cumulative edge count.
initiates soft reset
returns maximum of unsigned
int ‘a’ and ‘b’.
Copies from IDATA to the CE
memory.
Copies from flash to the CE
memory.
Copies from XDATA to the CE
memory.
Copies from the CE memory to
IDATA.
Copies from the CE memory to
XDATA.
Reads a word of the CE
memory
Sets a word of the CE memory
Display the current quantity on
the LCD.
Performs meter data
processing.
compares xdata to flash code
compares xdata to xdata
copies xdata to idata
Copies data to serial EEPROM
reads from or writes to flash
Copies xdata to code (flash)
Copies idata to xdata
copies data from serial
EEPROM
copies xdata from code (flash) uint8_tx *dst, none library.c
Input Output File Name
none none main.c
uint16_t a, uint16_t
b
Int32x_t *pDst,
int32i_t *pSrc,
uint8_t len
Int32x_t *pDst,
int32r_t *pSrc,
uint8_t len
Int32x_t *pDst,
int32x_t *pSrc,
uint8_t len
Int32i_t *pDst,
int32x_t *pSrc,
uint8_t len
Int32x_t *pDst,
int32x_t *pSrc,
uint8_t len
int32i_t *pDst int32_t Meter\ce.c
int32i_t *pDst,
int32_t src
Void void Meter\meter.c
Void void Meter\meter.c
uint8_tr *rsrc,
uint8_tx *xsrc,
uint16_t len
uint8_tx *xsrc1,
uint8_tx *xsrc2,
uint16_t len
uint8_ti *dst,
uint8_tx *src,
uint8_t len
U32 Dst, uint8_tx
*pSrc, uint16_t len
int32_tr *dst,
int32_tx *src,
uint8_t len
uint8_tr *dst,
uint8_tx *src,
uint16_t len
uint8_tx *dst,
uint8_ti *src,
uint8_t len
uint8_tx *pDst, U32
Src, uint16_t len
uint16_t options_glib.h
void Meter\ce.c
void Meter\ce.c
void Meter\ce.c
void Meter\ce.c
void Meter\ce.c
void Meter\ce.c
S08 library.c
S08 library.c
none library.c
enum
none Util\flash.c
bool Util\flash.c
none library.c
enum
IO\eeprom.c,
IO\eepromp.c,
IO\eepromp3.c
IO\eeprom.c,
IO\eepromp.c,
IO\eepromp3.c
v1.1v1.1 TERIDIAN Proprietary 91 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 92

71M653X Software User’s Guide
Function/Routine
Name
memcpy_xx()
memset_x()
meter_initialize()
meter_totals ()
microseconds2tmr_reg
()
milliseconds()
milliseconds2tmr_reg
()
min()
MPU_Clk_Select()
MPU_Clk_Select()
MPU_Clk_Select0()
MPU_Clk_Select1()
multiply_1()
multiply_4_1()
multiply_4_4()
multiply_8_1()
multiply_8_4()
normalize8()
operating_lcd ()
OperatingHours()
Description Input
uint8_tr *src,
uint16_t len
copies xdata to xdata
sets xdata to specified value
initializes most I/O functions
thaty read line power
Display a selected quantity on
the LCD.
Converts to timer’s count. Number uint16_t tmr0.h, tmr1.h
Converts milliseconds to clock
ticks, usually for a software
timer.
Converts to timer’s count. Number uint16_t tmr0.h, tmr1.h
returns minimum of unsigned int
‘a’ and ‘b’.
selects MPU clock speed
Describes the clock speed of
the MPU to a serial interface.
Describes the clock speed of
the MPU to the serial interface.
Describes the clock speed of
the MPU to the serial interface.
W = x * y
(uint32_t) w = (uint32_t) x *
(uint8_t) y
(uint64_t) w = (uint32_t) x *
(uint32_t) y
(uint64_t) w = (uint64_t) x *
(uint8_t) y
(uint96_t) w = (uint64_t) x *
(uint32_t) y
Puts a register into normal form.
I.e., fractional part is less than
one display unit, both units and
fraction are positive or zero, and
display units is less than the
UNITS_RANGE.
Displays the number of hours of
operation.
Calculates hours of operation
from the last valid mark.
uint8_tx *dst,
uint8_tx *src,
uint16_t len
uint8_tx *dst,
uint8_t s, uint16_t
len
none none meter.c
Uint8_t
select,uint8_t
phase
Any number uint16_t stm.h
uint16_t a, uint16_t
b
enum MPU_SPD
speed
Enum
SERIAL_PORT
port, enum
eMPU_DIV speed
Enum eMPU_DIV
speed
Enum eMPU_DIV
speed
uint8_tx *w,
uint8_tx *x, y, n
uint8_tx *w,
uint8_tx *x, y
uint8_tx *w,
uint8_tx *x, uint8_tx
*y
uint8_tx *w,
uint8_tx *x, y
uint8_tx *w,
uint8_tx *x, uint8_tx
*y
Uint8_tx *r void Util\math.c
Void void Io\rtc_30.c
None int32_t hours Io\rtc_30.c
Output File Name
none library.c
none library.c
void meter.c
uint16_t options_glib.h
bool IO\serial.c
bool Cli\sercli.c
bool Cli\ser0cli.c
bool Cli\ser1cli.c
uint8_t Util\math.c
uint8_t Util\math.c
none Util\math.c
uint8_t Util\math.c
none Util\math.c
v1.1v1.1 TERIDIAN Proprietary 92 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 93

71M653X Software User’s Guide
Function/Routine
Name
OSCOPE_INIT
OSCOPE_ONE
OSCOPE_TOGGLE
OSCOPE_ZERO
pcnt_accumulate()
pcnt_init ()
pcnt_lcd()
pcnt_start()
pcnt_update()
phase_angle_lcd ()
psoft_init ()
psoft_out()
psoft_update ()
put_char()
Read_Trim()
rms_I_lcd()
rms_v_lcd()
RTC_Adjust_Trim()
RTC_Compensation()
rtc_isr ()
RTClk_Read()
RTClk_Reset()
RTC_Trim()
RTClk_Write()
s2f()
Description Input
Defines DIO_7, the VAR pulse
output as a DIO.
Set DIO_7, the same pin as the
VARh pulse output, to high.
Inverts DIO_7, the same pin as
the VARh pulse output.
Set DIO_7, the same pin as the
VARh pulse output, to low.
Accumulates counts from the
previous second.
Initialize logic to count output
pulses.
Display pulse count on LCD uint8_t select void Meter\pcnt.c
Starts plse-counting for a fixed
number of seconds.
Synchronizes pulse counts with
noninterrupting code.
Displays a V/I phase angle. Uint8_t phase void meter\phase_angle.c
Initializes software pulse
outputs.
Generates two additional pulse
outputs. Call from ce_busy_isr
The inputs are watt hours, as
generated by the CE, and set
the extra pulse generators to
blink at the same rate as CE
pulse outputs, with the same
units. This should be called
each time a new accumulation
interval has data.
puts character into CLI buffer uint8_t idata *c none cli\io.c
reads the trim value for selected
trim word
Displays current. Uint8_t phase void Meter\rms.c
Displays voltage. Uint8_t phase void Meter\rms.c
Safely sets the compensation
variables.
Calculates and adjusts the
temperature compensation for
the RTC.
Interrupt code to adjust clock
each second.
reads current values of RTC none none IO\rtc_30.c
resets the RTC none none IO\rtc_30.c
Calculates the temperature
compensation using Y_Cals
writes/sets to RTC none none IO\rtc_30.c
Returns the floating point CE
units value closest to the
register value. Can lose up to
N/a n/a Util\oscope.h
N/a n/a Util\oscope.h
N/a n/a Util\oscope.h
N/a n/a Util\oscope.h
Void void Meter\pcnt.c
Void void Meter\pcnt.c
Int16_t seconds void Meter\pcnt.c
Void void Meter\pcnt.c
Void void Meter\psoft.c
void void Meter\psoft.c
int32_t pulse3_in,
int32_t pulse4_in
enum eTRIM select S08 Meter\io653x.c
Bool clr_cnt,
int32_t value
None none IO\rtc_30.c
Void void IO\rtc_30.c
none int32_t ppb IO\rtc_30.c
uint8x_t *register float util\math.c
Output File Name
void Meter\psoft.c
none IO\rtc_30.c
v1.1v1.1 TERIDIAN Proprietary 93 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 94

71M653X Software User’s Guide
Function/Routine
Name
seconds()
SelectPulses()
send_a_result()
send_byte()
send_char()
send_crlf()
send_digit()
send_help()
send_hex()
send_long()
send_long_hex()
send_num()
send_result()
send_rtc()
send_short()
send_short_hex()
ser_disable_rcv_rdy(
)
ser_disable_xmit_rdy
()
ser_enable_rcv_rdy()
ser_enable_xmit_rdy(
)
Ser_initialize()
ser_rcv ()
ser_rcv_err()
ser_rcv_rdy()
ser_xmit ()
ser_xmit_err()
Description
40 bits of precision. Use only to
calculate ratios.
Converts seconds to clock ticks,
usually for a software timer.
Selects pulse sources for 2 CE
pulse outputs, and optionally, for
two additional software pulse
outputs. The controls are in
MPU variables initialized from
the default table.
sends passed result code to
UART
sends a [0, 255] byte to DTE. S08 n none cli\io.c
sends single character uint8_t c none cli\io.c
sends <CR><LF> out to UART. None none cli\io.c
sends single ASCII hex or
decimal digit out to SERIAL0
sends text in code at specified
location to serial port
sends byte out SERIAL0 in HEX uint8_t n none cli\io.c
sends a [0, 9,999,999,999]
value to DTE.
sends a [0, FFFFFFFF] value to
DTE
sends a [0, 9,999,999,999]
value to DTE
looks up result code, primes
pump for result codes
displays RTC data none none Cli\cmd_misc.c
sends a [0, 99,999] value to
DTE.
sends a [0, FFFF] value to DTE uint16_t n none cli\io.c
Disable the receive interrupt. Void void Io\ser0.h, ser1.h
Disable the transmit interrupt. Void void Io\ser0.h, ser1.h
Enable the receive interrupt. Void void Io\ser0.h, ser1.h
Enable the transmit interrupt. Void void Io\ser0.h, ser1.h
configures the serial port
specified in the include file
ser0.h or ser1.h
Get a byte from the serial port. Void uint8_t Io\ser0.h, ser1.h
Returns true if the last received
byte had an error.
Returns true if the serial port
has gotten another byte.
Send a byte to the serial port. Uint8_t void Io\ser0.h, ser1.h
Returns true if the last sent byte
had an error.
Input Output File Name
Any number uint16_t Util\stm.h
Void void Meter\pulse_src.c
uint8_t c none Cli\cli.c
uint8_t c none cli\io.c
uint8_tr * code *s none Cli\cli.c
Int32_t n none cli\io.c
U32 n none cli\io.c
int32_t n, uint8_t
size
none none Cli\cli.c
Int16_t n none cli\io.c
enum baud none Io\ser0.h, ser1.h
Void bool Io\ser0.h, ser1.h
Void bool Io\ser0.h, ser1.h
Void bool Io\ser0.h, ser1.h
none cli\io.c
v1.1v1.1 TERIDIAN Proprietary 94 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 95

71M653X Software User’s Guide
Function/Routine
Name
ser_xmit_free ()
ser_xmit_off ()
ser_xmit_on ()
ser_xmit_rdy()
Serial_CRx()
Serial_CTx()
Serial_CRx()
Serial_CTx ()
Serial_Rx()
Serial_Rx ()
Serial_RxFlowOff()
Serial_RxFlowOn()
Serial_RxLen()
Serial_Tx()
Serial_Tx()
Serial_TxLen()
Serial0_CRx()
Description Input
Unimplemented routine to
permit other uses of transmit
electronics.
Unimplemented routine to
disable transmit electronics.
Unimplemented routine to
enable transmit electronics.
Returns true if the serial port
can send another byte.
Receive a string up to a
maximum length.
Transmit a string up to a
maximum length.
gets additional bytes from the
receive buffer
puts additional bytes into the
transmit buffer
Receive a string of any length.
sets up receive buffer and starts
receiving
Force an XOFF to be sent on
the selected port.
Force an XON to be sent on the
selected port.
returns the number of bytes
received
Transmit a string of any length.
sets up transmission buffer and
starts transmission
returns the number of bytes left
to transmit
Receive a string up to a
maximum length.
Void void Io\ser0.h, ser1.h
Void void Io\ser0.h, ser1.h
Void void Io\ser0.h, ser1.h
Void bool Io\ser0.h, ser1.h
Enum
SERIAL_PORT
port, uint8x_t
*buffer, uint16_t len
Enum
SERIAL_PORT
port, uint8x_t
*buffer, uint16_t len
enum
SERIAL_PORT
port, uint8_tx
*buffer, uint16_t len
enum
SERIAL_PORT
port, uint8_tx
*buffer, uint16_t len
Enum
SERIAL_PORT
port, uint8x_t
*buffer, uint16_t len
enum
SERIAL_PORT
port, uint8_tx
*buffer, uint16_t len
Enum
SERIAL_PORT
port
Enum
SERIAL_PORT
port
enum
SERIAL_PORT
port
Enum
SERIAL_PORT
port, uint8x_t
*buffer, uint16_t len
enum
SERIAL_PORT
port, uint8_tx
*buffer, uint16_t len
enum
SERIAL_PORT
port
Uint8x_t *buffer,
uint16_t len
Output File Name
uint16_t
lengthreceived
uint16_t
length-sent
uint16_t Io\sercli.c
uint16_t Io\sercli.c
none Cli\sercli.c
enum
SERIAL_RC
data
none Cli\sercli.c
none Cli\sercli.c
uint16_t Io\sercli.c
none Io\sercli.c
enum
SERIAL_RC
data
uint16_t Io\sercli.c
uint16_t
length-
Cli\sercli.c
Cli\sercli.c
Io\sercli.c
Io\sercli.c
Cli\ser0cli.c
v1.1v1.1 TERIDIAN Proprietary 95 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 96

71M653X Software User’s Guide
Function/Routine
Name
Serial0_CTx()
Serial0_Rx()
Serial0_RxFlowOff()
Serial0_RxFlowOn()
Serial0_Tx()
Serial1_CRx()
Serial1_CTx()
Serial1_Rx()
Serial1_RxFlowOff()
Serial1_RxFlowOn()
Serial1_Tx()
SFR_Read()
SFR_Write()
start_tx_ram()
start_tx_rslt()
stm_run()
stm_start()
stm_stop()
stm_wait()
strlen_r ()
strlen_x()
sub8_4(r, wh_ce)
sub8_8(r0, r1)
Description Input
Transmit a string up to a
maximum length.
Receive a string of any length.
Force an XOFF to be sent on
this port.
Force an XON to be sent on this
port.
Transmit a string of any length.
Receive a string up to a
maximum length.
Transmit a string up to a
maximum length.
Receive a string of any length.
Force an XOFF to be sent on
this port.
Force an XON to be sent on this
port.
Transmit a string of any length.
reads from SFR uint8_t s, S08d *pc
writes to SFR
sends RAM string out PC UART uint8_tx *c none cli\io.c
sends ROM string out PC UART uint8_tr *c none cli\io.c
This counts down the software
timers when called from the
main loop.
Starts a software timer. If
restart is zero, the timer stops,
otherwise it continues
indefinitely. When a timer
expires, its function is run.
Timers count down and are
deallocated if they cease to run.
Uses a count pointer from start
to identify which software timer
to stop.
Waits for the passed number of
clock ticks.
returns length of string in flash
code
returns length of string in xdata uint8_tx *src uint16_t Util\library.c
register r -= CE units
register r0 -= register r1 uint8_tx *x, uint8_tx none Util\math.c
Uint8x_t *buffer,
uint16_t len
Uint8x_t *buffer,
uint16_t len
None none Cli\ser0cli.c
None none Cli\ser0cli.c
Uint8x_t *buffer,
uint16_t len
Uint8x_t *buffer,
uint16_t len
Uint8x_t *buffer,
uint16_t len
Uint8x_t *buffer,
uint16_t len
None none Cli\ser1cli.c
None none Cli\ser1cli.c
Uint8x_t *buffer,
uint16_t len
uint8_t s, uint8_t
c_set, uint8_t c_clr
Void void Util\stm.c
Uint16_t
tick_count, uint8_t
restart, void (code
*fn_ptr) (void)
Volatile uint16x_t
*cnt_ptr
Uint16_t void Util\stm.c
uint8_tr *src uint16_t Util\library.c
uint8_tx *r, long
wh_ce
Output File Name
received
uint16_t
length-sent
none Cli\ser0cli.c
none Cli\ser0cli.c
uint16_t
lengthreceived
uint16_t
length-sent
none Cli\ser1cli.c
none Cli\ser1cli.c
enum
SFR_RC
enum
SFR_RC
volatile
uint16x_t
*cnt_ptr
void Util\stm.c
none Util\math.c
Cli\ser0cli.c
Cli\ser1cli.c
Cli\ser1cli.c
Util\sfrs.c
Util\sfrs.c
Util\stm.c
v1.1v1.1 TERIDIAN Proprietary 96 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 97

71M653X Software User’s Guide
Function/Routine
Name
temperature_lcd()
time_lcd ()
tmr_disable ()
tmr_enable ()
tmr_running ()
tmr_start ()
tmr_stop ()
tmr0_isr ()
tmr1_isr ()
update_register ()
uwr_busy_wait ()
uwr_init ()
uwr_read ()
uwr_select ()
uwr_write ()
Ah_Accumulate()
VARh_Accumulate()
voltage_phase_lcd()
wd_create()
wd_destroy()
wd_reset()
wh_accumulate()
wh_brownout_to_lcd()
wh_cnt_set()
wh_lcd()
Description Input
*y
Displays the current delta from
the calibration temperature in
degrees C on the LCD.
Displays the current time. Void void io\rtc_30.c
Halt a timer. None none io\tmr0.h, tmr1.h
Lets a timer run (timer start
does this by default)
Returns true if the timer is
running.
Starts a hardware timer.
Stops a hardware timer. None none io\tmr0.h, tmr1.h
Timer interrupt for TMR0 none none io\tmr0.c
Timer interrupt for TMR1 none none io\tmr1.c
Move data from AMR’s copy of
power registers into power
registers.
Wait for programming complete
indication.
Initialize a 3-wire (similar to
uWire™) interface
Get a counted string of bytes.
Select a chip by passing its
address; 0 = none; This must be
ported to new PCBs.
Transmit a counted string of
bytes.
Calculates VAh void void meter\vah.c
Calculates VARh void void meter\varh.c
Display voltage phases on LCD. Uint8_t select void meter\vphase.c
Creates a software watchdog. Uint8_t wd void util\wd.c
Destroys a software watchdog. Uint8_t wd void util\wd.c
Resets a software watchdog. If
all software watchdogs have
been reset, the hardware
watchdog is reset.
Calculate watt hours. Void void meter\wh.c
Displays a precalculated 6-digit
number.
Sets wh_cnt to the number of
CE Wh units per display unit.
Displays a watt-hour value on
the LCD in milliwatt-hours.
Void void Meter\meter.c
none none io\tmr0.h, tmr1.h
none bool io\tmr0.h, tmr1.h
Uint16_t time (in
timer units), uint8_t
restart_flag (zero
means interrupt
once), void (code
*pfn) (void) (code to
execute)
Void void Meter\meter.c
None none io\uwrdio.c, uwreep.c2
none none io\uwrdio.c, uwreep.c2
Uint8x_t *pbOut,
uint16_t cnt
Uint8_t address none io\uwrdio.c, uwreep.c2
Uint8x_t *pbOut,
uint16_t cnt
Uint8_t wd void util\wd.c
Uint32_t number void meter\wh.c
void void util\math/c
uint8_t *val void meter\wh.c
Output File Name
none
none io\uwrdio.c, uwreep.c2
bool true =
success.
io\tmr0.h, tmr1.h, tmr0.c,
tmr1.c
Io\uwrdio.c, uwreep.c2
v1.1v1.1 TERIDIAN Proprietary 97 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 98

71M653X Software User’s Guide
Function/Routine
Name
wh_sum_export ()
wh_sum_import ()
wh_sum_net()
wh_to_long ()
Description Input
Adds (0 - w1) to s, only if w1 is
negative, yielding a total of
exported power in w.
Adds w1 to s, only if w1 is
positive, yielding a total of
imported power in w.
Adds w1 to s, yielding a net sum
of watthours in s.
Convert a 64-bit internal watts
count to a 6-digit value (i.e. this
is the routine that precalculates
values for
wh_brownout_to_lcd()).
uint8x_t *s, int32i_t
*wl
uint8x_t *s, int32i_t
*wl
uint8x_t *s, int32i_t
*wl
uint8_t *val uint32_t meter\wh.c
Output File Name
void meter\wh.c
void meter\wh.c
void meter\wh.c
5.16 ERRATA
The up-to-date list of known issues with revision 4.4.15 of the Demo Code can be found in the readme.txt file contained
in the 653x_demo ZIP file shipped with the Demo Kits.
The factory should be contacted for updates to the Demo Code.
Known Firmware Errata for version 4.4.15 are listed in the table below.
Number Issue Comment
v1.1v1.1 TERIDIAN Proprietary 98 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 99

71M653X Software User’s Guide
5.17 PORTING 71M6511/6513 CODE TO THE 71M653X
5.17.1 Flash Use
The biggest issue when moving code from the 6511/6513 to the 71M653x is the increased program memory. While the
71M6511 and 6513 have 64K, the 71M6531 has 128K and the 71M6534 has 256K. The 653x defaults to a 64K
configuration, so code from earlier meter chips will fit easily.
Creating banked code that uses the extra flash is a substantial discussion in itself. See the section “Creating banked
code.”
5.17.2 Extra RAM
The MPU now has access to 4K of RAM, up from 2K. Roughly 1K is allocated to the CE, leaving 3K.
5.17.3 CE Data Location is at XDATA 0x0000
CE data now resides in roughly the first 1K bytes of RAM, from 0x0000 to 0x03FF. The exact CE RAM usage varies
with different CE code versions, with single-phased CE codes taking less RAM, and three-phase CE codes taking up to
the limit. Nonstandard CE codes may take more than 1K, but these will come with instructions.
Standard CE configuration begins at 0x0010. Standard CE output areas begin at 0x0200.
The Keil compiler must be configured to avoid the CE RAM. If not, both the CE code and MPU code will misbehave
when the MPU writes data into the CE code’s internal data area and vice-versa.
5.17.4 CE Data Access is Transparent to the MPU
The MPU can now simply read and write the CE RAM. No special buffering or access routines are required.
The demo code, for example, no longer copies data from the CE’s output area to the MPU RAM. The Keil C code
simply uses the CE’s output data.
It’s fast to access the CE’s output as PDATA variables, so in the demo code, the PDATA page register (SFR 0xB7) is
set to 0x200. The CE output registers begin on a page boundary, 0x200.
5.17.5 Read-only areas in MPU RAM
The direct-memory-access ADC writes automatically to XDATA locations 0x0000..0x000E, so these are not stable for
memory tests, and there is no way to disable the writes. Also 0x000F is a read-only alternate location of the chip’s
version identification.
5.17.6 CE Code Location
Another difference between 71M6511/6513 and the 71M653x is that the CE code now resides in the flash. It is not
copied to the CE program RAM as in the 71M651X chips. Instead, the register CE_LCTN, bits 0…7 at XDATA 0x20A8
is set to the most significant 8 bits of the program flash address where the CE program resides. It is best to place the
CE program in a high code bank so it does not compete with the MPU for flash. The demo code puts it near the end of
the last bank.
5.17.7 CE Causes Flash Write-Protection
Since the CE resides in flash memory, there are safeguards that prevent the CE program memory from being erased or
reprogrammed while the CE is running.
When programming flash memory from an emulator, the CE must first be disabled by writing 00 to XDATA 0x2000.
Only then, programming of the flash memory can occur.
Most practical flash write code simply disables the CE, writes the flash, and enables the CE. This is the fastest way to
write the flash, and the metering values for the disabled period can be interpolated.
Automated flash writes with the CE running are theoretically possible. The writes have to be synchronized with an
interrupt from the correct (trailing) edge of the CE_BUSY signal. Also, with three phase CE code, there is usually only
v1.1v1.1 TERIDIAN Proprietary 99 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
Page 100

71M653X Software User’s Guide
enough time to write one byte before the next CE run starts. This would confine a transparent flash write scheme to a
maximum data rate of 2520 bytes per second. If the MPU disables interrupts at all, the write can miss the window and
fail. In this case, the write can detect a failure to write by examining and clearing the FWCOL0 bit. If the FWCOL1 bit
is set, the write was in progress when the CE pass should have started. In this case, the code must count the failed
CE code passes and prorate the metering data. Prorating the metering data is unacceptable to many users.
5.17.8 Watchdog Location
The watchdog reset bit moved to bit 7 of SFR 0xF8. The other bits of this register are read-only.
5.17.9 Software Watchdog Now Deprecated
The 651x series had a software watchdog that was part of the 8051 core, and which could be disabled by software.
The 653x series no longer supports the core’s watchdog. Instead, use the standard watchdog, which cannot be
disabled by software.
5.17.10 Real Time Clock Compensation
The real-time clock compensation is very different from the 651x series. Fixed rate adjustments are nonvolatile and
automatic, so that they continue when the MPU is not operating.
The 32 KHz crystal rate can be measured precisely in the factory by using a precision frequency counter to measure
the 1 second or 4 second output from the TMUX pin. During this measurement, the RTCA_ADJ register should be set
to the middle of its range, 0x40, and PREG and QREG should be set to the middle of their range.
After this, the capacitance driving the crystal can be adjusted by have the meter software write and preserve a value for
the real time clock analog adjustment, RTCA_ADJ XDATA 0x2011.
After RTCA_ADJ is set, the clock rate can be remeasured using the frequency counter with TMUX.
In operation the clock’s rate can be digitally adjusted for temperature or to follow the line frequency by adjusting the
PREG and QREG registers. These are actually a single register that adds or subtracts a count after a certain number
of counts.
Setting PREG and QREG to zero will cause the seconds register to count at ½ Hz, rather than 1 Hz.
5.17.11 Battery Modes
One of the most significant innovations for the 71M653x is the battery-power feature. This feature provides three
operational modes that apply when the supply voltage is removed and the chip is powered by the battery. The
operation modes and their transitions are shown in Figure 5-5, State Diagram of Operating Modes.
In the brownout mode, operation continues at 32kHz, and RAM and DIO pins remain powered. However, the clock
slows down and is so slow that the timers and serial port give dramatically different timings. Only the RTC, and its 1second interrupt run at an unchanged speed.
In addition to the flags given in Figure 5-5, State Diagram of Operating Modes, the following considerations apply to
state transitions:
• Mission to brownout mode: The MPU keeps running, but the clock slows down.
• Brownout to mission mode: The MPU keeps running, but the clock speeds up.
• LCD or sleep mode to brownout mode: The MPU will start code execution at address 0x000.
The sleep and LCD modes shut down all of the 71M653x’s internal and XDATA RAM, as well as the pin drivers for
DIOs, and most of the memory cells that store the hardware configuration.
The lack of nonvolatile memory during the battery modes can be disconcerting at first. Only GP0..GP7 and the clock
are guaranteed nonvolatile. GP0..GP7 are cleared on reset.
In particular, the meter should be designed so that the DIO pins and serial port outputs do not need to be powered in
battery modes.
The data sheet for the 71M653x shows which bits are reset, and which are maintained in the battery modes.
The transitions between the modes are managed by changes in supply voltage, transitions of the push button pin
signal, and a wake-up timer.
v1.1v1.1 TERIDIAN Proprietary 100 of 116
© Copyright 2005-2008 TERIDIAN Semiconductor Corporation
 Loading...
Loading...