

Page 1
AVAILABLE
USER GUIDE
6613_OMU_2+2S_URT_V100
Firmware Description Document
November 9, 2011
Rev. 1.1
UG_6613_060
Page 2

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit
patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.
Maxim Integr ated Products, 12 0 San Gabriel Drive, Sun nyvale, CA 94086 408- 737-7600
2011 Maxim Integrated Products Maxim is a registered trademark of Maxim Integrated Products.
Page 3

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Table of Contents
1 Introduction ......................................................................................................................................... 5
2 Measurement Description .................................................................................................................. 6
2.1 Basic Measurement Equations ..................................................................................................... 6
2.2 Sample Rate and Accumulation Interval ...................................................................................... 6
3 Serial Communication ........................................................................................................................ 6
4 Command Line Interface .................................................................................................................... 7
4.1 Identification and Information Commands .................................................................................... 7
4.2 Reset Commands ......................................................................................................................... 7
4.3 MPU Data Access Command ....................................................................................................... 8
4.3.1 Individual Address Read .................................................................................................. 8
4.3.2 Consecutive Read ........................................................................................................... 8
4.3.3 Block Reads ..................................................................................................................... 9
4.3.4 Concatenated Reads ....................................................................................................... 9
4.3.5 U Command ..................................................................................................................... 9
4.4 Auxiliary Commands ................................................................................................................... 11
4.4.1 Repeat Command .......................................................................................................... 11
4.5 Calibration Commands ............................................................................................................... 12
4.5.1 Complete Calibration Commands (“Single Command Calibration”) .............................. 12
4.5.1.1 CAL Command ................................................................................................ 12
4.5.1.2 CALW Command ............................................................................................ 13
4.5.2 Atomic Calibration Commands ...................................................................................... 14
4.5.2.1 CLV Command ................................................................................................ 14
4.5.2.2 CLI Command ................................................................................................. 14
4.5.2.3 CLP Command ................................................................................................ 14
4.5.2.4 CLT Command ................................................................................................ 15
4.5.2.5 CLW Command ............................................................................................... 15
4.6 Relay Control Command ............................................................................................................ 16
4.6.1 TC Command................................................................................................................. 16
4.7 CE Data Access Commands ...................................................................................................... 17
4.7.1 Single Register CE Access ............................................................................................ 17
4.7.2 Consecutive CE Reads .................................................................................................. 17
4.7.3 CE Data Write ................................................................................................................ 17
4.7.4 U Command ................................................................................................................... 17
4.8 CE Control Commands ............................................................................................................... 19
4.8.1 Disable CE Command ................................................................................................... 19
4.8.2 Turn On CE Command .................................................................................................. 19
5 MPU Measurement Outputs ............................................................................................................. 20
6 Configuration Parameter Entry........................................................................................................ 29
6.1 MPU Parameters ........................................................................................................................ 29
E8-EF 35
6.2 CE Parameters ........................................................................................................................... 36
7 Address Content Summary.............................................................................................................. 40
8 Contact Information .......................................................................................................................... 45
Document Revision History ..................................................................................................................... 46
Rev. 1.1 3
Page 4

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Tables
Table 1: Measurement Equations Definitions ............................................................................................... 6
Table 2: Outlet 1 MPU Outputs
Table 3: Outlet 2 MPU Outputs
Table 4: MPU Parameters
Table 5: CE Parameters
Table 6: MPU Output Summary Chart
Table 7: MPU Input Summary Chart
Table 8: CE Input Summary Chart
................................................................................................................... 20
................................................................................................................... 25
........................................................................................................................... 29
.............................................................................................................................. 36
........................................................................................................ 40
........................................................................................................... 43
.............................................................................................................. 45
4 Rev. 1.1
Page 5
UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Shunt 1
NEUTRAL
A0
A3
750
1M
1M
100nF
A2
LOAD 1
78M6613
V3P3
1
4
3
2
INLET
LINE
Shunt 2
LOAD 2
A1
750
100nF
750
100nF
1M
1M
EARTH
750
1 Introduction
This document describes the 6613_OMU_2+2S_URT_v100 firmware, which is used with the Teridian
78M6613 power and energy measurement IC. This firmware provides simple methods for calibration and
access to measurement data such as Instantaneous Power, Voltage, Current, Power Factor, and Line
Frequency. It is specifically developed for measurement of up to two single phase loads with the
following key features:
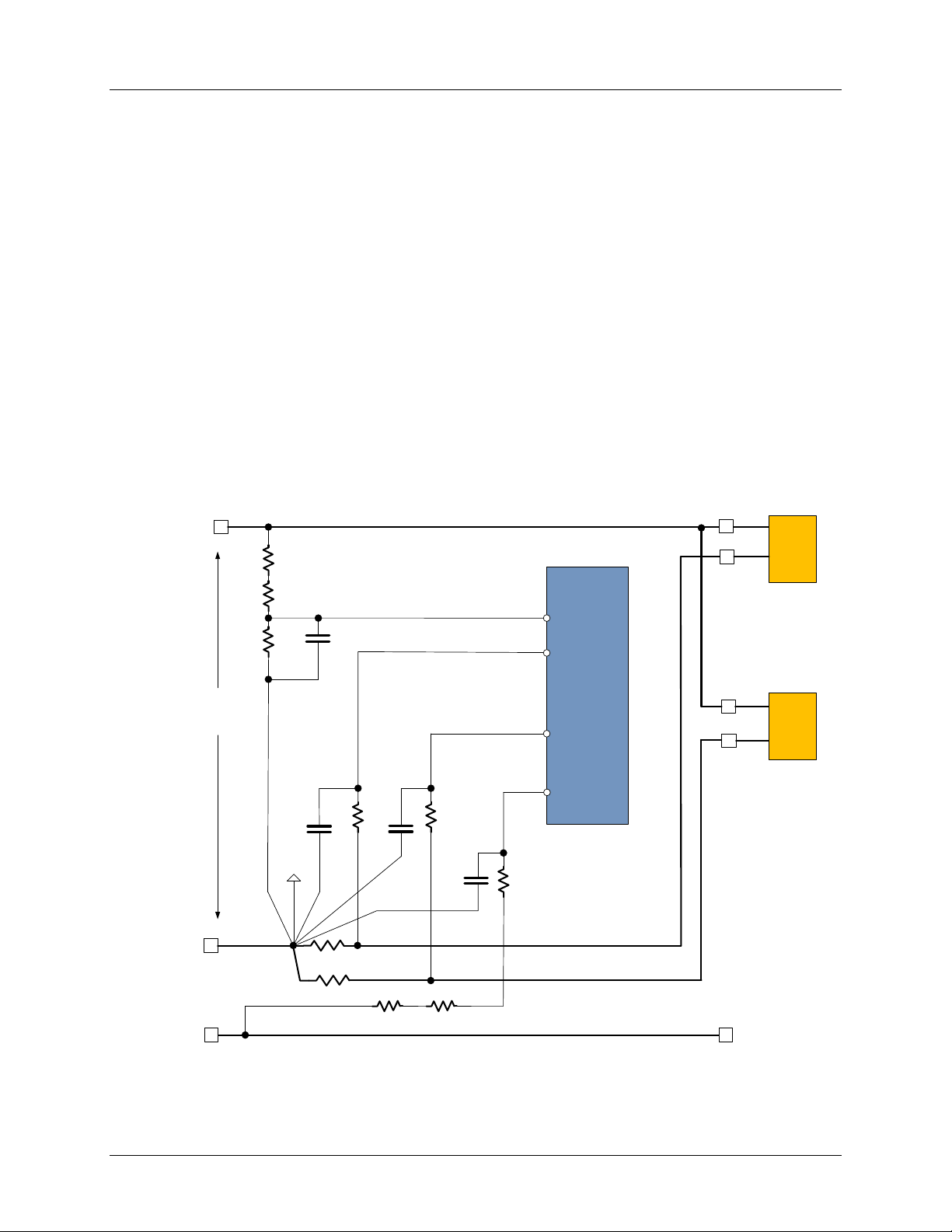
• Optimized for using current shunt resistors with analog inputs A0, A2 are configured as Voltage input
• Phase error calibration routine included for use of current transformers and/or maintaining accuracy
• Low-latency SAG status pin for sub-cycle AC fault detection.
• UART (RS232) host interface (Command Line Interface).
All measurement calculations are computed by the 78M6613 and communicated to the host processor
over a serial interface (UART0) on the TX and RX pins of the 78M6613 device. Digital IOs utilized by this
firmware include:
Figure 1 shows a simplified connection diagram of the 78M6613 (emulator connections, decoupling
capacitors and 3.3VDC power supply are omitted in this diagram).
and input A1,A3 are configured as Current inputs.
over non-ideal power factors.
Figure 1: Typical 78M6613 Connection Diagram for 6613_OMU_2+2S_URT_v100
Rev. 1.1 5
Page 6
6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
2 Measurement Description
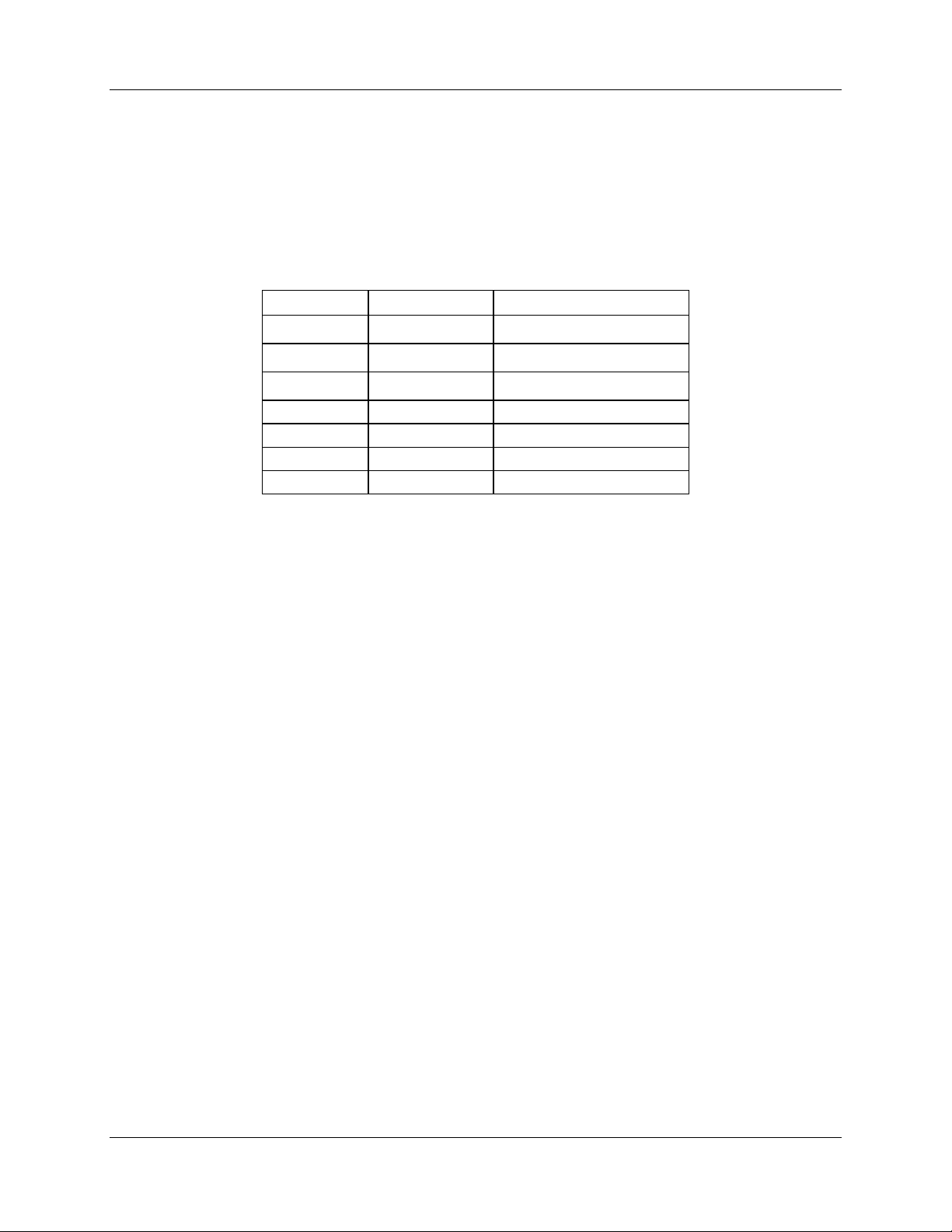
2.1 Basic Measurement Equations
The Teridian 78M6613 with firmware 6613_OMU_2+2S_URT_v100 provides the user with measurement
data referred to as “Wideband” (WB). Wideband measurements are generally of interest when measuring
non-sinusoidal current/voltage, a typical condition in switched mode power supplies or similar systems.
Table 1: Measurement Equations Definitions
Symbol Parameter Wideband Equation
V RMS Voltage
I RMS Current
P Active Power
Q Reactive Power Q = √(S2 – P2)
S Apparent Power S = V * I
PF Power Factor P/S
PA Phase Angle ACOS (P/S)
V = √∑
I = √∑
P = ∑
The measurement outputs are continuously available to the user. To obtain measurement outputs, the
serial UART interface between the 78M6613 and the host processor must be set up and is described in
Section 3.
2.2 Sample Rate and Accumulation Interval
2
v(t)
2
i(t)
(i(t) * v(t))
This firmware utilizes an effective sampling rate of 3641 samples per second for each input.
The values described in section 2.1 are calculated over a period commonly referred as accumulation
interval. The registers containing the measurements are updated at the completion of every accumulation
time. The accumulation interval for this firmware is fixed at roughly 496 milliseconds.
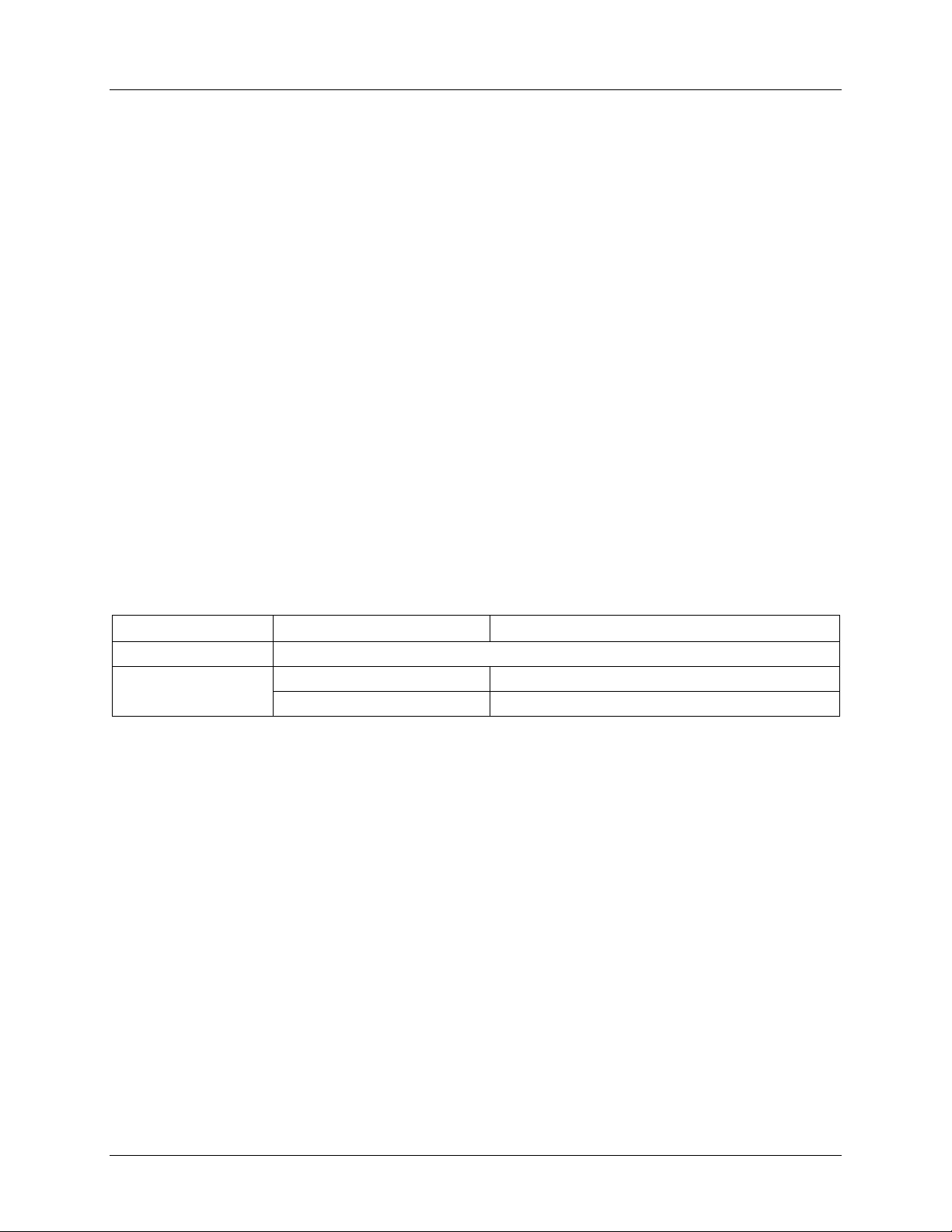
3 Serial Communication
The serial communication with the 78M6613 takes place over a UART (RS232) interface. The default
settings for the UART of the 78M6613, as implemented in this firmware, are given below:
Baud Rate: 38400bps
Data Bits: 8
Parity: None
Stop Bits: 1
Flow Control: Xon/Xoff
The firmware allows communication through UART0 also known as CLI (Command Line Interface) mode.
6 Rev. 1.1
Page 7
UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
4 Command Line Interfac e
The 6613_OMU_2+2S_URT_v100 firmware implements an instruction set called the Command Line
Interface (CLI), which facilitates communication via UART between the 78M6613 and the host processor.
4.1 Identification and Information Commands
The I command is used to identify the revisions of the 6613_OMU_2+2S_URT_v100 firmware code and
the embedded CE code. The host sends the I command to the 78M6613 as follows:
>I<CR>
The 78M6613 will reply the following:
TSC 78M6613 OMU 2+2S URT V1.00, Nov 05 2010(c) 2010 Teridian Semiconductor Corp.
All Rights Reserved
CEVIVI200F0
>
4.2 Reset Commands
A soft reset of the 78M6613 can be performed by using the Z command. The soft reset restarts code
execution at addr 0000 and does not alter flash contents. To issue a soft reset to the 78M6613, the host
sends the following:
>Z<CR>
The W command acts like a hardware reset. The energy accumulators in XRAM will retain their values.
Z Reset
Description: Allows the user to cause soft resets.
Usage: Z Soft reset.
W Simulates watchdog reset.
Rev. 1.1 7
Page 8

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
4.3 MPU Data Access Command
All the measurement calculations are stored in the MPU data addresses of the 78M6613. The host
requests measurement information using the MPU data access command which is a right parenthesis
)
To request information, the host sends the MPU data access command, the address (in hex) which is
requested, the format in which the data is desired (Hex or Decimal) and a carriage return. The contents
of the addresses that would be requested by the host are contained in Section 7.
4.3.1 Individual Address Read
The host can request the information in hex or decimal format. $ requests information in hex, and ?
requests information in decimal. When requesting information in decimal, the data is preceded by a + or
a -. The exception is )AB? which returns a string (see Table 3, MPU location address 0xAB).
An example of a command requesting the measured power in Watts (located at address 0x08) in decimal
is as follows:
>)08?<CR>
An example of a command requesting the measured power in Watts (located at address 0x08) in hex is
as follows:
>)08$<CR>
4.3.2 Consecutive Read
The host can request information from consecutive addresses by adding additional ? for decimal or
additional $ for hex.
An example of requests for the contents in decimal of ten consecutive addresses starting with 0x12 is:
>)12??????????<CR>
An example of requests for the contents in hex of ten consecutive addresses starting with 0x12 would be:
>)12$$$$$$$$$$<CR>
Note: The number of characters per line is limited to no more than 60.
8 Rev. 1.1
Page 9
UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
4.3.3 Block Reads
The block read command can also be used to read consecutive registers: )saddr:eaddr? For decimal
format or )saddr:eaddr$ for hex format where saddr is the start address and eaddr is the final address.
The following block read command requests the information contained in Table 2 in decimal format:
>)20:3D?<CR>
4.3.4 Concatenated Reads
Multiple commands can also be added on a single line. Requesting information in decimal from two
locations and the block command from above are given below:
>)12?)15?)20:3D?<CR>
Note: The number of characters per line is limited to no more than 60.
4.3.5 U Command
The U command is used for updating default values of the MPU Data permanently in the flash. Before
issuing the U command, CE must first be turned off by the disable CE command. An example of a U
command is as follows:
>)U
Additional examples of MPU Data Access commands are provided in the following table:
) MPU Data Access
Description: Allows user to read from and write to MPU data space.
Usage: ) {Starting MPU Data Address} {option}…{option}<CR>
Command
Combinations:
)saddr? <CR> Read the register in decimal.
)saddr?? <CR> Read two consecutive registers in decimal.
)saddr???<CR> Read three consecutive registers in decimal.
)saddr:eaddr?
Block read command in decimal format. Read
consecutive registers starting with starting
address saddr and ending with addres s eaddr.
Results given in decimal.
)saddr$<CR> Read the register word in h ex.
)saddr$$ <CR> Read two consecutive register words in hex.
)saddr$$$<CR> Read three consecutive register words in hex.
)saddr:eaddr$
Block read command in hex format. Read
consecutive registers starting with starting
address saddr and ending with addres s eaddr.
Results given in hex.
)saddr=n<CR> Write the value n to address saddr in hex format.
)saddr=n=m<CR> Write the values n and m to two consecutive
addresses starting at saddr in hex format.
)saddr=+n<CR> Write the value n to address saddr in decim al
format.
)saddr=+n=+m<CR> Write the values n and m to two consecutive
addresses starting at saddr in decimal format.
Rev. 1.1 9
Page 10
6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
)U<CR>
Updates the default values of the MPU Data
permanently in the flash.
Examples: )08$<CR> Reads data word at MPU address location 0x08
in hex format.
)08$$<CR> Reads data words at MPU address location
0x08, 0x09 in hex format.
)08$$$<CR> Reads data words at MPU address location
0x08, 0x09, 0x0A in hex format.
)28:4D$ Read data words in hex.
)08?<CR> Reads data word at MPU address location 0x08
in decimal format.
)08??<CR> Reads data words at MPU address location
0x08, 0x09 in decimal format.
)08???<CR> Reads data words at MPU address location
0x08, 0x09, 0x0A in decimal format.
)28:4D? Read data words at MPU a ddres s locatio n
starting 0x28 to 0x4D in decimal.
)04=12345678<CR> Writes 0x12345678 to MPU address location
0x04 in the hex format.
)04=12345678=9876ABCD<CR> Writes 0x12345678 to MPU address location
0x04 and 0x9876ABCD at MPU address location
0x05 in the hex format.
)04=+123<CR> Writes 123 to MPU address location 0x04 in the
decimal format.
)04=+123=-334<CR> Writes 123 to MPU address location 0x04 and
-334 to MPU address location 0x05 in the
decimal format.
10 Rev. 1.1
Page 11
UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
4.4 Auxiliary Commands
4.4.1 Repeat Command
The repeat command can be useful for monitoring measurements and is efficient in demands from the
host.
If the host requests line frequency, alarm status, Irms wb overcurrent event count, Vrms SAG event
count, Vrms overvoltage event count, vo lta ge, po wer, and accumulated energy measurements with the
following command string:
>)20????????<CR>
If the host then desires this same request without issuing another command, the repeat command can be
used:
>, (no carriage return needed for the repeat command)
The host only needs to send one character rather than an entire string.
Auxiliary
Description: Various
Commands: , Typing a comma (“,”) repeats the command
issued from the previous command line. This is
very helpful when examining the value at a
certain address over time, such as the CE
DRAM address for the temperature.
/ The slash (“/”) is useful to separate comments
from commands when sending macro text files
via the serial interface. All characters in a line
after the slash are ignored.
Rev. 1.1 11
Page 12

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
4.5 Calibration Commands
Using the precision source method, the user provides a precision voltage and precision current load to the
device for calibration. The 6613_OMU_2+2S_URT_v100 firmware provides commands to calibrate the
measurement units. For linear current sensors, such as current shunt, no phase calibration is necessary.
There are two types of calibration commands. The first type provides complete calibration. The second
group, called atomic calibration commands, provides calibration for individual energy measurement
parameters of the IC.
4.5.1 Complete Calibration Commands (“Single Command Calibration”)
There are two calibration commands in this first group: CAL and CALW. Only one of these commands
is needed to calibrate the System/Unit.
To use these commands, a precision voltage source and a precision current source are required for the
calibration routine to use as a reference.
4.5.1.1 CAL Command
The CAL command calibrates the temperature, voltage, and current.
To calibrate channel 1, enter the following:
>CAL<CR> or CAL1<CR>
The response is:
TCal OK
VCal OK:
ICal 1 OK:
>
The device calibrates:
• The temperature (adjusts the Temperature Nominal MPU location 0xA6, saves to flash, and initiates
temperature gain compensation).
• The voltage (adjusts CAL VA and CAL VB registers and saves them to flash).
• And finally the current (adjusts CAL IA or CAL IB register and saves them to flash).
To calibrate the temperature, voltage, and current on channel 2, use the CAL2 command:
>CAL2<CR>
The response is:
TCal OK
VCal OK:
ICal 2 OK:
>
The CAL3 command calibrates both channel 1 and channel 2.
12 Rev. 1.1
Page 13
UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
4.5.1.2 CALW Command
The CALW command calibrates the temperature, voltage, and power (instead of the current).
To calibrate channel 1, enter the following:
>CALW<CR> or CALW1<CR>
The response is:
TCal OK
VCal OK:
WCal 1 OK:
>
To calibrate channel 2, enter the CAL2 command:
>CALW2<CR>
The response is:
TCal OK
VCal OK:
WCal 2 OK:
>
The device calibrates the temperature, the volta ge, and the power and save all values to flash.
The CALW3 command calibrates both channel 1 and channel 2.
The complete calibration commands are summarized in the following table:
Complete Calibration Commands
Description: Calibrates the IC.
Usage: CAL<channel> Calibrates temperature, then voltage,
and finally current for the given channel.
CAL1 = Calibra tes channel 1
CAL2 = Calibrates channel 2
CAL3 = Calibrates channel 1 and 2
CALW<channel> Calibrates temperature, then voltage,
and finally power for the given channel.
CALW1 = Calibrates channel 1
CALW2 = Calibrates channel 2
CALW3 = Calibrates channel 1 and 2
Rev. 1.1 13
Page 14

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
4.5.2 Atomic Calibration Commands
The atomic calibration commands provide individual calibration of:
• Voltage.
• Current.
• Phase.
• Temperature.
• Power.
A sequence of these commands results in full calibration of the unit.
4.5.2.1 CLV Command
The CLV atomic calibration command calibrates voltage to the target value and tolerance and saves the
coefficients to flash. To calibrate the voltage, enter the CLV command:
>CLV<CR>
The response is:
VCal OK:
>
4.5.2.2 CLI Command
The user can then calibrate the current using the CLI command. The CLI command calibrates the current
from the specified channel to the target value and tolerance and saves the coefficients CLW. To calibrate
the current for channel 1, enter the following:
>CLI<CR> or CLI1<CR>
The response is:
ICal 1 OK:
>
The CLI2 command performs the current calibration for channel 2.
The CLI3 command performs the current calibration for both channel 1 and channel 2.
4.5.2.3 CLP Command
The user can calibrate for phase added by a current transformer by using the CLP command. The CLP1
command calibrates the phase from channel 1 to the target value and tolerance and saves the coefficient
to flash. An example of the procedure is given below.
Apply a controlled precision voltage and current signal at a set phase angle.
1. Enter target phase angle at )C3.
2. Enter phase tolerance at )BF
3. Enter phase calibration command.
>CLP<CR> or CLP1<CR>
The response is
>PCal 1 OK:
14 Rev. 1.1
Page 15

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
The CLP2 command performs the phase calibration for channel 2.
The CLP3 command performs the phase calibration for both channel 1 and channel 2.
4.5.2.4 CLT Command
The CLT command is used for the temperature calibration. This command adjusts the Temperature
Nominal at MPU location 0xA6, saves to flash and initiates temperature gain compensation. The CLT
command example is given below:
>CLT<CR>
The response is:
TCal OK
>
4.5.2.5 CLW Command
The CLW command is used for the power calibration. This command adjusts the power from CLI, saves
to flash. To calibrate the power for channel 1, enter the CLW command:
>CLW<CR> or CLW1<CR>
The response is:
WCal1 OK
>
The CLW2 command performs the power calibration for channel 2.
The CLW3 command performs the power calibration for both channel 1 and channel 2.
The following table provides a summary of the atomic calibration commands:
Atomic Calibration Commands
Description: Calibrates individual sections of the IC.
Usage: CLV Calibrates voltage only.
CLI<channel> Calibrates current only for given channel.
CLI1 = Calibrates c hann el 1
CLI2 = Calibrates c hann el 2
CLI3 = Calibrates channel 1 and 2
CLP<channel> Calibrate for phase only for given channel.
CLP1 = Calibrates channel 1
CLP2 = Calibrates channel 2
CLP3 = Calibrates channel 1 and 2
CLT Calibrates temperature only.
CLW<channel> Calibrates power only for given channel.
CLW1 = Calibrate channel 1
CLW2 = Calibrate channel 2
CLW3 = Calibrate channel 1 and 2
The commands that follow are mainly for advanced users and are included for reference on ly.
Rev. 1.1 15
Page 16

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
4.6 Relay Control Command
Relay control is sup porte d by the TC command. The TC command can be used to open (0) or close (1)
circuit of all 2 channels. All necessary Sequence (time between each channel), Energized (for closing
circuit), and De-Energized (for opening circuit) delay times are set up and used by the library using the
following default values:
Energized delay time = 0ms
De-Energized delay time = 0ms
Sequence delay time = 100ms
4.6.1 TC Command
The format of the TC command is as follows (where it is not a case sensitive):
>tc is the same as >TC or >Tc or >tC.
>TCxx where xx is a hex value with each bit represents the setting of each channel. The value of each bit
is determined as 1 = closing and 0 = opening 0. Both channels will be processed sequentially starting
from the highest channel number first with a sequence delay time in between. It is important to note that if
the polarity for each Channel is inverted, bit 1 of the Relay Config register (0xF0) will be set accordingly in
order for the Relay Control to work properly.
The TC commands are summarized in the following table:
TCx Relay Control Commands
Description Allows the user to control the relay of all channels in one command.
Usage
TC1 or TC01
TC2 or TC02
TC3 or TC03
TC0 or TC00
The TC command can be used to turn
on/off relay of both channels. Each bit
represents the control (1=on, 0=off) for
each channel where the LSB represents
the lowest channel number.
Examples:
Relay ON for Outlet 1, OFF all others.
Relay ON for Outlet 2, OFF all others.
Relay ON for both channels.
Relay OFF for both channels.
16 Rev. 1.1
Page 17

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
4.7 CE Data Access Commands
The CE is the main signal processing unit in the 78M6613. The user wr ites to the CE data space are
mainly for calibration purposes. For the advanced user, details of CE data access commands are
described. The commands similar to the MPU access except that ] is used for the CE data access
command.
The host requests access to information from the CE data space using the CE data access command
which is a right bracket:
]
To request information, the host sends the CE data access command, the address location (in hex), the
format in which the data is desired (hex or decimal) and a carriage return. The contents of the addresses
that would be requested by the host are contained in Section 8.2.
The host can request the information in hex or decimal format. $ requests information in hex and ?
requests information in decimal.
4.7.1 Single Register CE Access
An example of a command requesting the calibration constant for current (located at address 0x08) in
decimal is as follows:
>]08?<CR>
An example of a command requesting the calibration constant for current (located at address 0x08) in hex
is as follows:
>]08$<CR>
4.7.2 Consecutive CE Reads
The host can request information from consecutive addresses by adding additional ? for decimal or
additional $ for hex.
An example of requests for the contents in decimal of ten consecutive addresses starting with 0x08 would be:
>]08??????????<CR>
An example of requests for the contents in hex of ten consecutive addresses starting with 0x08 would be:
>]08$$$$$$$$$$<CR>
Note: The number of characters per line is limited to 60 characters. Any character beyond the 60
character limit will be ignored by the CLI command interpreter.
4.7.3 CE Data Write
An example of a command writing to calibration constant for current (located at address 0x08) in decimal
is as follows:
>]08 = +16384 <CR>
An example of a command writing to calibration constant for current (located at address 0x08) in hex is as
follows:
>]08=4000 <CR>
4.7.4 U Command
Rev. 1.1 17
Page 18

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
The U command is used for updating default values of the CE Data permanently in the flash. Before
issuing the U command, CE must first be turned off by the disable CE command.
An example of a U command is as follows:
>CE0
>]U
Additional examples of CE Data Access commands are provided in the following table:
] CE Data Access
Description: Allows user to read from and write to CE data space.
Usage: ] {Starting CE Data Address}{option}…{option}<CR>
Command
Combinations:
Examples: ]40$<CR> Reads CE data word at address location 0x40 in
]saddr?<CR> Read 32-bit word in decimal.
]saddr??<CR> Read two consecutive 32-bit words in decimal.
]saddr???<CR> Read three consecutive 32-bit words in decimal.
]saddr$<CR> Read 32-bit words in hex.
]saddr$$<CR> Read two consecutive 32-bit words in hex.
]saddr$$$<CR> Read thr ee consecutive 32-bit words in hex.
]U<CR> Update default version of CE Data in
FLASH. Important: The CE must be
stopped (CE0) before issuing this
command! Also, remember to restart
by executing the CE1 command prior to
attempting measurements.
the hex format.
]40$$<CR> Reads CE data word at address location 0x40
and 0x41 in the hex format.
]40$$$<CR> Reads CE data word at address location
0x40,0x41 and 0x42 in the hex format.
]40?<CR> Reads CE data word at address location 0x40 in
the decimal format.
]40??<CR> Reads CE data word at address location 0x40
and 0x41 in the decimal format.
]40???<CR> Reads CE data word at address location
0x40,0x42 and 0x43 in the decimal format.
]7E=12345678<CR> Writes 0x12345678 to CE address location 0x7E
in the hex format.
]7E=12345678=9876ABCD<CR> Writes 0x12345678 to CE address location 0x7E
and 0x9876ABCD to CE address location 0x7F
in the hex format.
]7E=+2255<CR> Writes 2255 to CE address location 0x7E in the
decimal format.
]7E=+2255=-456<CR> Writes 2255 to CE address location 0x7E and
-456 to CE address location 0x7F in the decimal
format.
18 Rev. 1.1
Page 19

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
The commands that follow are included for reference only.
4.8 CE Control Comma nds
The most pertinent command is the CE enable command, CEn. It is mainly used to turn the CE on or off.
The CE is normally enabled but in order to update the CE data entry to flash, the CE must first be turned
off using the CE0 command.
4.8.1 Disable CE Command
The CE can be disabled by using the following command:
>CE0<CR>
4.8.2 Turn On CE Command
The CE can be enabled by following command:
>CE1<CR>
Additional examples of CE Control Commands are provided in the following table:
C Compute Engine Control
Description: Allows the user to enable and configure the compute engine.
Usage: C {option} {argument}<CR>
Command
Combinations:
Examples: CE0<CR> Disables the CE.
CEn<CR> Compute Engine Enable (1 Enable,
0 Disable)
CTn<CR> Select input n for TMUX output pin. Enter n in hex
notation.
CREn<CR> RTM output control (1 Enable, 0 Disable)
CRSa.b.c.d<CR> Selects CE addresses for RTM output. (maximum
of four).
CE1<CR> Enables the CE.
CT1E<CR> Selects the CE_BUSY signal for the TMUX output
pin.
Rev. 1.1 19
Page 20

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
(hex)
Temperature difference from 22° C.
5 MPU Measurement Outputs
This section describes the measurement outputs that can be obtained in Manual CLI Mode. Energy
outputs are accumulated numbers. The host accessing the measurement information from the 78M6613
more frequently than the accumulation interval will not result in any update in the information.
Table 2 lists the wideband measurement outputs for outlet1 and table 3 for outlet 2.
Table 2: Outlet 1 MPU Outputs
Output
Delta
Temperature
Line
Frequency
Alarm Status 22
Location
20 0.1 °C
21 0.01 Hz Line Frequency
LSB Comment Example
Definition for Status Register
Bit 0: Minimum Temperature Alarm.
Bit 1: Maximum Temperature Alarm.
Bit 2: Minimum Frequency Alarm.
Bit 3: Maximum Frequency Alarm.
Bit 4: SAG Voltage Alarm.
Bit 5: MINVA
voltage on VA input.
Bit 6: MAXVA
voltage on VA input.
Bit 7: Reserved.
Bit 8: MAXIA WB
current exceeded on outlet 1.
Bit 9: Reserved.
Bit 10: Reserved.
Bit 11: PFA negative WB - Power
Factor Negative Threshold Alarm.
Only available if )F2 bit 2 is 1.
Bit 12: PFA positive WB
Factor Positive Threshold Alarm for
outlet 1.
Bit 13: Reserved.
Bit 14: MAXIB_WB
wideband current exceeded on
Outlet 2.
Bit 15: Reserved.
Bit 16: Reserved.
Bit 17: PFB_WB negative
Wideband Power Factor Negative
Threshold Alarm for Outlet 2. Only
available if )F2 bit 2 is 1.
Bit 18: PFB_WB positive
Wideband Power Factor Positive
Threshold Alarm for Outlet 2.
Bit 19: MAXIT_WB
wideband current exceeded on both
Outlet 1 and Outlet 2.
– under minimum
– over maximum
– maximum WB
– Power
– maximum
–
–
– maximum total
If external temperature is 32 °C
)20?<CR>
Returns:
+10.0
If the line frequency is 60 Hz:
)21?<CR>
Returns:
+60.00
Alarms become “1” when
thresholds exceeded.
Note: Additional Status Alert is
Located at addr 0xBD (see Table 4)
Note: When AC voltage input is less
than or equal to 10 V
• Only MINVA alarm is active.
• All measurements are forced
to 0 except power factor,
which is forced to 1.
Note: The frequency measurement
is forced to 0 as long as the SAG
voltage alarm is active.
RMS
,
20 Rev. 1.1
Page 21

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Bit 20: Reserved.
Bit 24 –31:
Output
Irms A
Overcurrent
Event Count
Location
(hex)
23
LSB Comment Example
Bit 21: CREEP A Alert – Creep Alert
on Outlet 1.
Bit 22: CREEP B Alert – Creep Alert
on Outlet 2.
Bit 23: Line/Neutral Reversal
detected. Only available in nonisolated mode (CESTATE, Bit 2=1)
Reserved.
Counter increments on each edge
event.
If four over current events have
occurred:
)23?<CR>
Returns: +4
Rev. 1.1 21
Page 22

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
+12.000
+120.000
Output
Vrms Under
Voltage
Event Count
Vrms Over
Voltage
Event Count
Vrms A 26 mV Vrms voltage
Watts A 27 mW
Wh A 28 mWh
Total Cost A 29 mUnits Cost of Wh A.
Irms A 2A mA rms current measurement.
Location
(hex)
24
25
LSB Comment Example
If four under voltage events have
Counter increments on each edge
event.
If four over voltage events have
Counter increments on each edge
event.
If the line voltage is 120 V
If 120 Watts are measured
Active power measurement (per
second).
Active accumulated energy
measurement (per hour).
If the cost is 102.536 units
occurred:
)24?<CR>
Returns: +4
occurred:
)25?<CR>
Returns: +4
)26?<CR>
Returns:
+120.000
)27?<CR>
Returns:
+120.000
If 120 Wh are measured
)28?<CR>
Returns:
+120.000
)29?<CR>
+102.536
If current measured
is 12 Amps
)2A?<CR>
Returns:
VARs A 2B mW
VAs A 2C mW
Power
Factor A
Phase
Angle A
2D
2E
–
–
Reactive power measurement (per
second).
Apparent power measurement (per
second).
Power factor. The output will be
between -0.950 and 1.000.
Positive power factor is defined as
current lagging voltage (inductive).
Negative power factor is defined as
voltage lagging current
(capacitive).
Phase angle. The output will be
between 180.000 and -180.000.
If 120 VARs
are measured
)2B?<CR>
Returns:
+120.000
If 120 VAs
are measured
)2C?<CR>
Returns:
If the power factor
is 0.95
)2D?<CR>
Returns:
+0.950
If the phase angle measured is 60
degrees
)2E?<CR>
Returns:
+60.000
22 Rev. 1.1
Page 23

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Output
Reserved 2F
Vrms A Min 30 mV Minimum Vrms measur e d
Vrms A Max 31 mV Maximum Vrms measur e d
Watts A Min 32 mW
Watts A Max 33 mW
Irms A Min 34 mArms Minimum rms current measured.
Irms A Max 35 mArms Maximum rms current measured.
VARs A Min 36 mW
VARs A Max 37 mW
VAs A Min 38 mW
Location
(hex)
LSB Comment Example
–
Reserved
If the minimum line voltage
If the maximum line voltage
If the minimum power measured
Minimum active power measured
(per second)
If the maximum power measured
Maximum active power measured
(per second)
If the smallest current measured is
If the largest current measured is
If the largest VARs measured
Minimum reactive power measured
(per second).
If the largest VARs measured
Maximum reactive power
measured (per second).
If the smallest VAs measured
Minimum apparent power
measured (per second).
Reserved
measured was 105 V
)30<CR>
Returns:
+105.000
measured was 130 V
)31<CR>
Returns:
+130.000
is 80 Watts
)32?<CR>
Returns:
+80.000
is 200 Watts
)33?<CR>
Returns:
+200.000
1 Amp
)34?<CR>
Returns:
+1.000
30 Amps
)35?<CR>
Returns:
+30.000
is 80 VARs
)36?<CR>
Returns:
+80.000
is 300 VARs
)37?<CR>
Returns:
+300.000
is 80 VARs
)38?<CR>
Returns:
+80.000
Rev. 1.1 23
Page 24

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Output
VAs A Max 39 mW
Power
Factor A Min
Power
Factor A
Max
Phase
Angle A Min
Phase
Angle A Max
Reserved 3E
Reserved 3F
Location
(hex)
3A
3B
3C
3D
LSB Comment Example
If the largest VAs measured
is 300 VARs
)39?<CR>
Returns:
+300.000
is –0.6
)3A?<CR> Returns:
-0.600
is 0.9
)3B?<CR> Returns:
+0.900
measured is 10 degrees
)3C?<CR>
Returns:
+10.000
measured is 70 degrees
)3D?<CR>
Returns:
+70.000
Reserved
Reserved
–
–
–
–
–
–
Maximum apparent power
measured (per second).
Minimum power factor measured.
Minimum is defined as the most
negative or least positive number.
Maximum power factor measured.
Maximum is defined as the most
positive or least negative number.
Minimum phase angle measured.
Maximum phase angle measured.
Reserved
Reserved
If minimum power factor measured
If maximum power factor measured
If the minimum phase angle
If the maximum phase angle
24 Rev. 1.1
Page 25

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Temperature difference from 22° C.
Table 3: Outlet 2 MPU Outputs
Output
Delta
Temperature
Line
Frequency
Alarm Status 62
Location
(hex)
60 0.1 °C
61 0.01 Hz Line Frequency
LSB Comment Example
Definition for Status Register
Bit 0: Minimum Temperature Alarm.
Bit 1: Maximum Temperature Alarm.
Bit 2: Minimum Frequency Alarm.
Bit 3: Maximum Frequency Alarm.
Bit 4: SAG Voltage Alarm.
Bit 5: MINVA – under minimum
voltage on VA input.
Bit 6: MAXVA
voltage on VA input.
Bit 7: Reserved.
Bit 8: MAXIA WB
current exceeded on outlet 1.
Bit 9: Reserved.
Bit 10: Reserved.
Bit 11: PFA negative WB
Factor Negative Threshold Alarm.
Only available if )F2 bit 2 is 1.
Bit 12: PFA positive WB
Factor Positive Threshold Alarm for
outlet 1.
Bit 13: Reserved.
Bit 14: MAXIB_WB
wideband current exceeded on
Outlet 2.
Bit 15: Reserved.
Bit 16: Reserved.
Bit 17: PFB_WB negative –
Wideband Power Factor Negative
Threshold Alarm for Outlet 2. Only
available if )F2 bit 2 is 1.
Bit 18: PFB_WB positive
Wideband Power Factor Positive
Threshold Alarm for Outlet 2.
Bit 19: MAXIT_WB – maximum total
wideband current exceeded on both
Outlet 1 and Outlet 2.
Bit 20: Reserved.
Bit 21: CREEP A Alert – Creep Alert
on Outlet 1.
Bit 22: CREEP B Alert – Creep Alert
on Outlet 2.
Bit 23: Line/Neutral Reversal
detected. Only available in nonisolated mode (CESTATE, Bit 2=1)
Bit 24 –31: Reserved.
– over maximum
– maximum WB
– Power
– Power
– maximum
–
If external temperature is 32 °C
)60?<CR>
Returns:
+10.0
If the line frequency is 60 Hz:
)61?<CR>
Returns:
+60.00
Alarms become “1” when
thresholds exceeded.
Note: Additional Status Alert is
Located at addr 0xBD (see Table 4)
Note: When AC voltage input is less
than or equal to 10 V
• Only MI N VA alarm is active.
• All measurements are forced
to 0 except power factor,
which is forced to 1.
Note: The frequency measurement
is forced to 0 as long as the SAG
voltage alarm is active.
RMS
,
Rev. 1.1 25
Page 26

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Output
Irms B
Overcurrent
Event Count
Vrms Under
Voltage
Event Count
Vrms Over
Voltage
Event Count
Vrms B 66 mV Vrms voltage
Watts B 67 mW
Wh B 68 mWh
Total Cost B 69 mUnits Cost of Wh B.
Irms B 6A mA rms current measurement.
VARs B 6B mW
VAs B 6C mW
Power
Factor B
Phase
Angle B
Location
(hex)
63
64
65
6D
6E
LSB Comment Example
If four over current events have
occurred:
)63?<CR>
Returns: +4
If four under voltage events have
occurred:
)64?<CR>
Returns: +4
If four over voltage events have
occurred:
)65?<CR>
Returns: +4
If the line voltage is 120 V
)66?<CR>
Returns:
+120.000
If 120 Watts are measured
)67?<CR>
Returns:
+120.000
If 120 Wh are measured
)68?<CR>
Returns:
+120.000
If the cost is 102.536 units
)69?<CR>
+102.536
If current measured
is 12 Amps
)6A?<CR>
Returns:
+12.000
If 120 VARs
are measured
)6B?<CR>
Returns:
+120.000
If 120 VAs
are measured
)6C?<CR>
Returns:
+120.000
If the power factor
is 0.95
)6D?<CR>
Returns:
+0.950
If the phase angle measured is 60
degrees
)6E?<CR>
Returns:
+60.000
–
–
Counter increments on each edge
event.
Counter increments on each edge
event.
Counter increments on each edge
event.
Active power measurement (per
second).
Active accumulated energy
measurement (per hour).
Reactive power measurement (per
second).
Apparent power measurement (per
second).
Power factor. The output will be
between -0.950 and 1.000.
Positive power factor is defined as
current lagging voltage (inductive).
Negative power factor is defined as
voltage lagging current
(capacitive).
Phase angle. The output will be
between 180.000 and -180.000.
26 Rev. 1.1
Page 27

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Output
Reserved 6F
Vrms B Min 70 mV Minimum Vrms measured
Vrms B Max 71 mV Maximum Vrms measured
Watts B Min 72 mW
Watts B Max 73 mW
Irms B Min 74 mArms Minimum rms current measured.
Irms B Max 75 mArms Maximum rms current measured.
VARs B Min 76 mW
VARs B Max 77 mW
VAs B Min 78 mW
Location
(hex)
LSB Comment Example
–
Reserved
If the minimum line voltage
If the maximum line voltage
If the minimum power measured
Minimum active power measured
(per second)
If the maximum power measured
Maximum active power measured
(per second)
If the smallest current measured is
If the largest current measured is
If the largest VARs measured
Minimum reactive power measured
(per second).
If the largest VARs measured
Maximum reactive power
measured (per second).
If the smallest VAs measured
Minimum apparent power
measured (per second).
Reserved
measured was 105 V
)70<CR>
Returns:
+105.000
measured was 130 V
)71<CR>
Returns:
+130.000
is 80 Watts
)72?<CR>
Returns:
+80.000
is 200 Watts
)73?<CR>
Returns:
+200.000
1 Amp
)74?<CR>
Returns:
+1.000
30 Amps
)75?<CR>
Returns:
+30.000
is 80 VARs
)76?<CR>
Returns:
+80.000
is 300 VARs
)77?<CR>
Returns:
+300.000
is 80 VARs
)78?<CR>
Returns:
+80.000
Rev. 1.1 27
Page 28

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Output
VAs B Max 79 mW
Power
Factor B Min
Power
Factor B
Max
Phase
Angle B Min
Phase
Angle B Max
Reserved 7E
Reserved 7F
Location
(hex)
7A
7B
7C
7D
LSB Comment Example
If the largest VAs measured
is 300 VARs
)79?<CR>
Returns:
+300.000
is –0.6
)7A?<CR> Returns:
-0.600
is 0.9
)7B?<CR> Returns:
+0.900
measured is 10 degrees
)7C?<CR>
Returns:
+10.000
measured is 70 degrees
)7D?<CR>
Returns:
+70.000
Reserved
Reserved
–
–
–
–
–
–
Maximum apparent power
measured (per second).
Minimum power factor measured.
Minimum is defined as the most
negative or least positive number.
Maximum power factor measured.
Maximum is defined as the most
positive or least negative number.
Minimum phase angle measured.
Maximum phase angle measured.
Reserved
Reserved
If minimum power factor measured
If maximum power factor measured
If the minimum phase angle
If the maximum phase angle
28 Rev. 1.1
Page 29

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
6 Configuration Paramet e r E ntry
6.1 MPU Parameters
Table 4 lists the MPU parameters configurable by the 6613_OMU_2+2S_URT_v100 Firmware.
Table 4: MPU Parameters
MPU
Parameter
VMAX A0 mVrms +471.500
Starting IA A1 mArms +0.007
IMAX A A2 mArms +52.000
Starting IB A3 mArms +0.007
IMAX B A4 mArms +52.000
Unused A5 – – Unused
Location
(hex)
LSB Default Comment Example
External rms voltage
corresponding to 250 mVpk at the
VA input of the 78M6613. It must
be set high enough to account for
overvoltages. Usually set to
471.500 V (471.500d).
Minimum current value to be
measured on the IA input.
Currents below this value will be
ignored. Also known as CREEP
IA.
External rms current
corresponding to 250 mVpk at the
IA input of the 78M6613.
Minimum current value to be
measured on the IB input.
Currents below this value will be
ignored. Also known as CREEP
IB.
External rms current
corresponding to 250 mVpk at the
IB input of the 78M6613.
If only using a 120V
system, the user can set
VMAX A to about 2x the
maximum voltage for added
resolution. Set VMAX A to
270V:
)A0=+270.000<CR>
Default setting is 7 mA. If
start current on channel A
desired is 10 mA:
)A1=+0.010<CR>
The default is set to 52
Amps for overhead. For
added margin, in a system
using current shunts IMAX
could be changed as
follows:
IMAX= (Vpk/√2)/R
For a 4 mΩ current shunt
IMAX=44.19 Amps
To set IMAX A:
)A2=+44.190<CR>
Default setting is 7 mA. If
start current on channel A
desired is 10 mA:
)A3=+0.010<CR>
The default is set to 52
Amps for overhead. For
added margin, in a system
using current shunts IMAX
could be changed as
follows:
IMAX= (Vpk/√2)/R
For a 4 mΩ current shunt
IMAX=44.19 Amps
To set IMAX A:
)A4=+44.190<CR>
shunt
shunt
Rev. 1.1 29
Page 30

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Parameter given in relay
entered in )AE.
If the user desires 8 ms of
Parameter given in relay
entered in )AF.
If the user desires 8 ms of
MPU
Parameter
Temperature
Nominal
Reserved A7 – – Reserved
PPMC A8 ppm/°C -668 ppm per °C.
PPMC2 A9
Location
(hex)
A6 – +0
LSB Default Comment Example
ppm/°C
2
-341
Temp_raw_x reading at 22 °C.
Needed to enable temperature
compensation.
ADC temperature compensation
ppm per °C2.
Temp _raw_x is obtained
from the CE:
]71?<CR>
This value is then entered
here:
)A6=+value in decimal
Also, the command:
>CLT<CR>
Will do the same as the
steps above.
Do not change the default
setting.
Do not change the default
setting.
MPU
Parameter
Cost/kWh AA mUnits +0.150
Units of Cost AB N/A USD
Relay
Configuration
Sequence
Delay
Location
(hex)
AC – 0
AD 0.1s +0.1 Time delay between relays.
LSB Default Comment Example
Cost per kWh (kilowatt hour) in
milliunits.
4-byte string describing unit of
cost
(e.g. USD, EURO etc.). There
must be 4 characters. If entering
US dollars, USD, there needs to
be a space after the D to make it a
four character string.
Bit 1 (Relay Polarity)
0 = Normal Polarity
1 = Inverted Polarity
Bit 0 (Relay Type)
0 = non-latched
1 = latched
If the cost per kWh is to be
10 units:
)AD=+10.000<CR>
To enter US Dollars:
)AB=”USD “<CR>
To enter Euros:
)AB=”EURO”<CR>
If the user desires a 1
second delay between the
closing of the first and
second relays and also a
one second delay between
the opening of the first and
second relays, then enter
the following:
>)AD=+1<CR>
Energize
Delay
De-Energize
Delay
30 Rev. 1.1
AE ms +0.000
AF ms +0.000
manufacturer’s data sheet is
entered here. The amount of
delay will be 1 ms plus the value
manufacturer’s data sheet is
entered here. The amount of
delay will be 1 ms plus the value
delay then enter the
following:
>)AE=+0.007<CR>
delay then enter the
following:
>)AF=+0.007<CR>
Page 31

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
–
Reserved B0 - BC – 0 Reserved Reserved
Bit 0 – Reserved.
Additional
Status
Unused BE
Tolerance on
Phase
Reserved C0 – 0 Reserved Reserved
Calibration
Voltage
BD – 1
BF
C1 mVrms +120.000
0.001°
0.100°
Bit 1 – WPULSE Disable.
Bit 2 – VCal Failure.
Bit 3 – ICal1 Failure.
Bit 4 – WCal1 Failure.
Measured value to fall within this
set tolerance of the target value
(Calibration Current entry) for the
calibration to be complete.
Target line voltage (rms) used for
calibration.
If the tolerance to the target
phase is desired to be more
coarse, to within 0.5°, the
user can enter the
>)BF=+0.500<CR>
If the target line voltage for
calibration is 220V, enter
>)C1=+220<CR>
following:
the following:
MPU
Parameter
Calibration
Current
Calibration
Phase
Tolerance on
Voltage
Tolerance on
Current
Average
Count for
Voltage
Average
Count for
Current
Location
(hex)
C2 mArms +1.000
C3 0.1° +0
C4 mVrms +0.010
C5 mArms +0.010
C6 1 +3
C7 1 +3
LSB Default Comment Example
Target load current (rms) used for
calibration.
Target Phase (voltage to current).
Normally set to zero.
Measured value to fall within this
set tolerance of the target value
(Calibration Voltage entry) for the
calibration to be complete.
Measured value to fall within this
set tolerance of the target value
(Calibration Current entry) for the
calibration to be complete.
Number of voltage measurements
taken and averaged to be
compared to the target value
(Calibration Voltage entry).
Number of current measurements
taken and averaged to be
compared to the target value
(Calibration Current entry).
If the target load current for
calibration is 2A, enter the
following:
>)C2=+2<CR>
If the tolerance to the target
voltage is desired to be
more coarse, to within
0.1V, the user can enter the
following:
>)C4=+0.100<CR>
If the tolerance to the target
current is desired to be
more coarse, to within
0.1A, the user can enter the
following:
>)C5=+0.100<CR>
If the amount of averaging
for the voltage
measurement is desired to
increase to 10 enter the
following:
>)C6=+10<CR>
If the amount of averaging
for the current
measurement is desired to
increase to 10 enter the
following:
>)C7=+10<CR>
Rev. 1.1 31
Page 32

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
If maximum number of
iterations to be tried for
obtaining the target value of
voltage within the set
tolerance (at C4) is to be
reduced to 5, then enter:
>)C8=+5<CR>
If maximum number of
iterations to be tried for
obtaining the target value of
power within the set
tolerance (at C5) is to be
reduced to 5, then enter:
>)C9=+5<CR>
Max Iteration
for Voltage
Max Iteration
for Current
C8 1 +10
C9 1 +10
Number of attempts to reach the
target value (Calibration Voltage
entry) within the programmed
tolerance.
Number of attempts to reach the
target value (Calibration Voltage
entry) within the programmed
tolerance.
32 Rev. 1.1
Page 33

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
MPU
Parameter
Tolerance on
Watts
Average
Count for
Watts
Max Iteration
for Watts
Calibration
WRATE
Calibration
Temperature
Calibration
Watts
Temp Alarm
Min Threshold
Temp Alarm
Max
Threshold
Location
(hex)
CA mW +0.010
CB 1 +3
CC 1 +10
CD 1 +6350
CE
CF mW 120.000 Target Watts used for calibration.
D0 0.1°C +0.0°C
D1 0.1°C +70°C
LSB Default Comment Example
Measured value to fall within this
set tolerance of the target value
(Calibration Voltage multiplie d by
the calibration current entries) for
the calibration to be complete.
Measured value to fall within this
set tolerance of the target value
(Calibration Voltage multiplie d by
the calibration current entries) for
the calibration to be complete.
Number of attempts to reach the
target value (Calibration Voltage
multiplied by the calibration
current entries) within the
programmed tolerance.
Entry for WRATE during the
calibration step only. After
calibration, WRATE returns to the
value entered in ]0F.
0.1°C
+22.0
Target nominal temperature for
calibration.
Minimum Temperature Alarm
Threshold. A temperature below
this threshold will set the alarm
(bit 0 of the Alarm Status
Register).
Maximum Temperature Alarm
Threshold. A temperature above
this threshold will set the alarm
(bit 1 of the Alarm Status
Register).
If the tolerance to the target
power is desired to be more
coarse, to within 0.1W, the
user can enter the
following:
>)CA=+0.100<CR>
If the amount of averaging
for the power measurement
is desired to increase to 10
enter the following:
>)CB=+10<CR>
If maximum number of
iterations to be tried for
obtaining the target value of
power within the set
tolerance (at CA) is to be
reduced to 5, then enter:
>)CC=+5<CR>
If the user desires the
target nominal temperature
to be 25°C, then set as
follows:
>)CE=+25.0<CR>
If the target Watts for
calibration is 240, enter the
following:
>)CF=+240.000<CR>
If the minimum temperature
threshold is to be change to
10°C then set as follows:
>)D0=+10.0
If the maximum
temperature threshold is to
be change to 50°C then set
as follows:
>)D1=+50.0
Rev. 1.1 33
Page 34

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
MPU
Parameter
Frequency
Minimum
Threshold
Frequency
Maximum
Threshold
SAG Voltage
Alarm
Threshold
Min Voltage
Alarm
Threshold
Peak Voltage
Alarm
Threshold
Unused D7-D8 –
Peak IA
Alarm
Threshold
Location
(hex)
D2 0.01Hz +59.00
D3 0.01Hz +61.00
D4 mVpk +80.0
D5 mVrms +100.000
D6 mVrms +140.000
D9 mArms +15.000
LSB Default Comment Example
Minimum Frequency Alarm
Threshold. A frequency below
this threshold will set the alarm
(bit 2 of the Alarm Status
Register).
Maximum Frequency Alarm
Threshold. A frequency above
this threshold will set the alarm
(bit 3 of the Alarm Status
Register).
Sets an alarm (bit 4 of the Alarm
Status Register) if voltage drops
below the SAG threshold.
Minimum voltage level selected to
flag user (bit 5 of the Alarm Status
Register).
Peak voltage setting that user
wishes to flag (bit 6 of the Alarm
Status Register).
Maximum Current measured on
the IA channel above which a flag
must set (bit 8 of the Alarm Status
Register).
If the minimum frequency
threshold is to be changed
to 59.50 Hz then enter the
following:
>)D2=+59.50
If the maximum frequency
threshold is to be changed
to 60.50 Hz then enter the
following:
>)D2=+60.50
To change the minimum
voltage threshold from the
40 Volt default to 80 Volts:
)D5=+80.000<CR>
To change the peak voltage
threshold from the default
407.3 Volts to 280 Volts:
)D6=+280.000<CR>
If the peak current
threshold is to be changed
from the default value of 15
Amps to 30 Amps then set
as follows:
)D9=+30.000<CR>
34 Rev. 1.1
Page 35

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
MPU
Parameter
Unused DA - DB –
PFA_ Neg
Threshold
PFA_ Pos
Threshold
Unused DE - DF – – Unused
Unused E0 - E5 – – Unused
Alarm
Mask_Reg
Alarm
Mask_DIO
RESERVED E8-EF – –
Control Relay F0
Min/Max
Control
Clear Control
and Power
Factor Polarity
Location
(hex)
DC – -0.700
DD – +0.700
E6
E7 – 00201FFF
F1
F2 – 0
LSB Default Comment Example
–
–
–
00201FFF
Power Factor Negative Threshold.
A less negative power factor than
this threshold will set an alarm (bit
11 of the Alarm Status Register).
Only available if )F2 bit 2 is set to
1.
Power Factor Positive Threshold.
A positive power factor less than
this threshold will set an alarm (bit
12 of the Alarm Status Register).
Alarm mask for bits in the Alarm
Status register. A “0” masks the
alarm from the register bit.
Alarm mask for an alarm pin
(DIO20). A “0” masks the alarm
from DIO20
RESERVED
Bit 1 (Relay for Outlet 2)
0 = DIO19 = 0
1 = DIO19 =1
0
0
Bit 0 (Relay for Outlet 1)
0 = DIO7 = 0
1 = DIO7 = 1
Note: AC[1] = 1 inverts the bits
above.
BIT1 – 1 Start/Stop MIN/MAX
recording.
1 = Start
0 = Stop
BIT0 – 1 Reset MIN/MAX
registers before recording. Bit
autoclears.
Clear Control and Power Factor
Polarity Register:
Bit 2 – Power Factor Polarity
0 = Power Factor is
positive only. Negative alarm
thresholds and alarms are not
enabled.
1 = Power factor can be
positive or negative.
Bit1 – Clears Counts
Bit 0 – Clears Accumulators.
If the negative power factor
threshold is to be changed
from the default to -0.6 then
set as follows:
)DC=-0.600<CR>
If the positive power factor
threshold is to be changed
from the default to +0.6
then set as follows:
)DD=+0.600<CR>
If bits 0 and 1 are to be
masked then set as follows:
>)E6=00801FFC
Alarm mask for an alarm
pin (DIO20). A “0” masks
the alarm from DIO20
Control Relay
Reset & Start MIN/MAX
recording.
)F1=3<CR>
Stop MIN/MAX recording
)AC=00<CR>
Rev. 1.1 35
Page 36

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
6.2 CE Parameters
Table 5 lists the CE parameters configurable by the 6613_OMU_2+2S_URT_v100 Firmware. The user
does not need to alter any of these parameters.
Table 5: CE Parameters
CE
Parameter
CAL IA 08
CAL IB 09
CAL VA 0A
CAL VB 0B
PHASE_
ADJ_IA
PHASE_
ADJ_IB
Location
(hex)
0C
0D
LSB Default Comment Example
If current on channel A is low by 1%
16384 is
the default
and is a
gain of 1.
32767 is
max giving
a gain of
2.
16384 is
the default
and is a
gain of 1.
32767 is
max giving
a gain of
2.
16384 is
the default
and is a
gain of 1.
32767 is
max giving
a gain of
2.
16384 is
the default
and is a
gain of 1.
32767 is
max giving
a gain of
2.
-16384 ≤
PHASE_A
DJ_IA ≤
+16384
-16384 ≤
PHASE_A
DJ_IB ≤
+16384
+13873
+13873
+16384
+16384
0
0
Gain constant for IA
input.
Gain constant for IB
input.
Gain constant for
VA input.
Gain constant for
VB input.
Phase adjustment
=15 *
PHASE_ADJ_IA *
-14
(degrees)
2
Phase adjustment
=15 *
PHASE_ADJ_IB *
-14
(degrees)
2
scale the nominal number, 16384 by
1/(1-0.01). Number to be entered would
be 16549:
]08=+16549<CR>
If current on channel A is high by 1%
scale the nominal number, 16384 by
1/(1+0.01). Number to be entered would
be 16222:
]08=+16222<CR>
If current on channel B is low by 1%
scale the nominal number, 16384 by
1/(1-0.01). Number to be entered would
be 16549:
]08=+16549<CR>
If current on channel B is hig h by 1%
scale the nominal number, 16384 by
1/(1+0.01). Number to be entered would
be 16222:
]08=+16222<CR>
If voltage on channel A is low by 1%
scale the nominal number, 16384 by
1/(1-0.01). Number to be entered would
be 16549:
]0A=+16549<CR>
If current on channel A is high by 1%
scale the nominal number, 16384 by
1/(1+0.01). Number to be entered would
be 16222:
]0A=+16222<CR>
If voltage on channel B is low by 1%
scale the nominal number, 16384 by
1/(1-0.01). Number to be entered would
be 16549:
]0A=+16549<CR>
If current on channel B is hig h by 1%
scale the nominal number, 16384 by
1/(1+0.01). Number to be entered would
be 16222:
]0A=+16222<CR>
No adjustment should be necessary
when using current shunts.
No adjustment should be necessary
when using current shunts.
36 Rev. 1.1
Page 37

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
CE
Parameter
CESTATE 0E 5005h
Location
(hex)
LSB Default Comment Example
SAG CNT
Bits 15:8 –
determines the
consecutive voltage
samples below
SAG_Threshold
before a sag alarm
is declared. 255 is
the maximum
value.
Current Sensor
Configuration
Bit 7
0 use IA for current
1 use I0 - I1for
current.
Dual Voltage
Bit 6
1-VB is separate
from VA.
0 – Single voltage
input
Reserved
Bit 5
Pulse Selection
(PULSEL)
Bit 4
0 – chooses Outlet
1 (IA input) for
pulse generation
1 – chooses Outlet
2 (IB input) for
pulse generation.
Reserved
Bit 3
Voltage Sensor
Configuration
Bit 2
0 – Isolated mode
uses VA-VB for
Voltage
1 – Non-isolated
mode uses VA for
voltage; V3P3 must
be tied to NTRL; VB
can be tied to
EGND for reversal
detection
Pulse gain factor
Bits 1 an d 0
00 – 6x
01 – (6/64)x
10 – 96x
11 – 1.5x
Selects at least 80 (50h) consecutive
voltage samples below SAG_Threshold
Selects Pulse Gain Factor equal to 6/64
]0E=5001
before SAG alarm.
(1h)
Rev. 1.1 37
Page 38

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
CE
Parameter
WRATE 0F
Reserved 10 Reserved
SAG
Threshold
QUANTA 12
QUANTB 13
QUANT
VAR A
Location
(hex)
11
14
LSB Default Comment Example
Kh =
VMAX A *
IMAX A /
(WRATE *
X)
1.6826E+0
1 WattSec
VMAX A
*4.2551E-
07 (Vpk)
VMAX A *
IMAX A *
1.8541E-
10 (Watt)
VMAX A *
IMAX B *
1.8541E-
10 (Watt)
VMAX A *
IMAX A *
1.8541E10 (Watt)
+4860
+168225
0
0
0
Controls the
number of pulses
that are generated
per measured Wh
and VARh
measurements.
The voltage
threshold for SAG
warnings. The
default value is 80
Vpk if VMAX = 600
V.
Compensation
added to the Watt
calculation. Used
for compensation at
low current levels.
Keep below
10000d.
Compensation
added to the Watt
calculation for
Outlet 2. Used for
compensation at
low current levels.
Keep below
10000d.
Compensation
added to the VAR
calculation for
Outlet 1. Used for
compensation at
low current levels.
Keep below
10000d.
Kh = 0.32 * Wh / pulse with X = 6/64,
]0F=+4860
VMAX =600 V
IMAX = 52 A
]11=+313350
80 Vpk SAG Threshold.
and
Compensation
added to the VAR
QUANT
VAR B
15
VMAX A *
IMAX B *
1.8541E-10
(Watt)
0
calculation for
Outlet 2. Used for
compensation at
low current levels.
Keep below
10000d.
38 Rev. 1.1
Page 39

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
CE
Parameter
QUANT IA 16
QUANT IB 17
Reserved 18 – – Reserved
Location
(hex)
LSB Default Comment Example
IA input
compensation
added for input
noise and
truncation in the
squaring calculation
2
. Used for
for I
(A
2
*
2
)
(IMAX A)
4.6351E-11
0
compensation at
low current levels.
Keep below
10000d.
IA input
compensation
added for input
noise and
truncation in the
squaring calculation
2
. Used for
for I
(A
2
*
2
)
(IMAX B)
4.6351E-11
0
compensation at
low current levels.
Keep below
10000d.
Reserved
Gain Adjust 19
16384 is
the default
and is a
gain of 1.
+16384
32767 is max giving
a
gain of 2.
Reserved 1A-1B – – Reserved
To increase all channels equally by 1%
scale the nominal number, 16384 by
1/(1-0.01). Number to be entered would
be 16549:
]19=+16549<CR>
To decrease all channels 1% scale the
nominal number, 16384 by 1/(1+0.01).
Number to be entered would be 16222:
]19=+16222<CR>
Reserved
Rev. 1.1 39
Page 40

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
7 Address Content Summary
If the color shading is the same, the information in the table cells is the same between narrowband and
wideband measurements. Note that Outlet 1 = channel A and Outlet 2 = channel B.
Table 6: MPU Output Summary Chart
Outlet 1 Address Wideband
Common Data 20 Delta Temp
21 Line Frequency
22 Alarm Status
23 Over Current Event Count
24 Under Voltage Event Count
25 Over Voltage Event Count
26 Volts
Common, Outlet 1
Specific Data
Tier 1, Outlet 1 Specific
Data
Tier 2, Outlet 1 Specific
Min/Max Data
27 Watts (A)
28 Energy (A)
29 Cost (A)
2A Current (A)
2B VAR (A)
2C VA (A)
2D Power Factor (A)
2E Phase (A)
2F (Reserved for Future)
30 Vrms Min
31 Vrms Max
32 Watts Min (A)
33 Watts Max (A)
34 Current Min (A)
35 Current Max (A)
36 VAR Min (A)
37 VAR Max (A)
38 VA Min (A)
39 VA Max (A)
3A Power Factor Min (A)
3B Power Factor Max (A)
3C Phase Min (A)
3D Phase Max(A)
3E (Reserved for Future)
3F (Reserved for Future)
40 Rev. 1.1
Page 41

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Outlet 2 Address Wideband
Common Data 60 Delta Temp
61 Frequency
62 Alarm Status
63 Over Current Event Count
64 Voltage SAG Event Count
65 Over Voltage Event Count
66 Volts
Common, Outlet 2
Specific Data
Tier 1, Outlet 2 Specific
Data
Tier 2, Outlet 2 Specific
Max/Min Data
67 Watts (B)
68 Energy (B)
69 Cost (B)
6A Current (B)
6B VAR (B)
6C VA (B)
6D Power Factor (B)
6E Phase (B)
6F (Reserved for Future)
70 Vrms Min
71 Vrms Max
72 Watts Min (B)
73 Watts Max (B)
74 Current Min (B)
75 Current Max (B)
76 VAR Min (B)
77 VAR Max (B)
78 VA Min (B)
79 VA Max (B)
7A Power Factor Min (B)
7B Power Factor Max (B)
7C Phase Min (B)
7D Phase Max (B)
7E (Reserved for Future)
7F (Reserved for Future)
Rev. 1.1 41
Page 42

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Totals of Multiple
Outlets
Common Total Data 90 Total Watts
Bandwidth Specific
Totals
Common Total Max/Min
Data
Bandwidth Specific
Total Max/Min Data
Address Wideband
91 Total Energy
92 Total Cost
93 Total Current
94 Total VARs
95 Total VA's
96 Total Over Current Count
97 (Reserved for Future)
98 Total Watts Min
99 Total Watts Max
9A
9B Total Current Max
9C Total VAR Min
9D Total VAR Max
9E Total VA Min
9F Total VA Max
Total Current Min
42 Rev. 1.1
Page 43

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Table 7: MPU Input Summary Chart
Voltage
Current - Outlet 1
Current - Outlet 2
Unused
Temperature
Cost
Relay Configuration
Misc. Config
Unused
Quick Calibration Parameters
Temperature
Frequency
A0
A1
A2 Imax (A) - Outlet1
A3
A4 Imax (B) - Outlet2
A5 Unused
A6
A7 Reserved
A8 PPMC
A9 PPMC2
AA
AB Cost Unit s tring
AC
AD Sequence Delay
AE Energize Delay
AF Denergize Delay
B0 -BC Unused
BD
BE Unused
BF Tolerance on Phase Calibration
C0
C1 Calibration Voltage (Target)
C2 Calibration Current (Target)
C3 Calibration Phase
C4 Tolerance on Voltage Calibration
C5 Tolerance on Current Calibration
C6 Average Count for Voltage
C7 Average Count for Current
C8 Max Iterations for Voltage
C9 Max Iterations for Current
CA Tolerance on Watts Calibration
CB Average Count for Watts
CC Max Iterations for Watts
CD Calibration WRATE
CE Calibration Temperature
CF Calibration Watts (Target)
D0
D1 Max Temperature Alarm Threshold
D2
D3 Max Frequency Alarm Threshold
Vmax
Imin (Creep A) - Outlet1
Imin (Creep B) - Outlet2
TEMPERATURE NOMINAL
Cost per KWh
Polarity, Latch type
Configuration
Calibration Type
Min Temperature Alarm Threshold
Min Frequency Alarm Threshold
Rev. 1.1 43
Page 44

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Voltage
Unused
Current - Outlet 1
Power Factor - Outlet 1
Current - Outlet 2
Power Factor - Outlet 2
Total Current
Alarm Mask for Status Regs
Alarm Mask for Alarm DI/O
Relay Controls
Min/Max Controls
Clear Control
D4
D5 Min Voltage Alarm Threshold
D6 Max Voltage Alarm Threshold
D7 Unused
D8
D9 Max Current Alarm Threshold (WB)
DA
DB Reserved
DC Power Factor Alarm - Threshold (WB)
DD Power Factor Alarm + Threshold (WB)
DE
DF Max Current Alarm Threshold (WB)
E0
E1 Reserved
E2 Power Factor Alarm - Threshold (WB)
E3 Power Factor Alarm + Threshold (WB)
E4
E5 Max Current Alarm Threshold (WB)
E6
E7
F0
F1
F2
SAG Voltage Alarm Threshold
Reserved
Reserved
Reserved
Reserved
Reserved
Alarm Mask for Status
Alarm Mask for Alarm DIO
Relay On/Off Control
Min/Max Controls
Accumulator and Counter Clear. Power Factor Polarity
44 Rev. 1.1
Page 45

UG_6613_ 060 6613_OMU_2+2S_URT_V1_00 Firmware Description Document
Table 8: CE Input Summary Chart
Calibration
Phase Compensation
CE Configuration
Pulse Rate
SAG Threshold
Quantization Corrections
Gain Adjust
8 Contact Information
08
09 Calibration Gain IB
0A Calibration Gain VA
0B Calibration Gain VB
0C
0D Phase Adjust IB
0E
0F
10 Reserved
11
12
13 Quantization offset Watts B
14 Quantization offset VAR A
15 Quantization offset VAR B
16 Quantization offset IA
17 Quantization offset IB
18 Reserved
19
Calibration Gain IA
Phase Adjust IA
CE State
WRATE
SAG Threshold
Quantization offset Watts A
Temperature Gain Adjust
For more information about Maxim products or to check the availability of the 78M6613, contact technical
support at www.maxim-ic.com/support.
Rev. 1.1 45
Page 46

6613_OMU_2+2S_URT_V1_00 Firmware Desc rip tio n Doc ument UG_6613_060
Document Revision His t ory
Version Date History
1.0 1/14/2011 First publication.
1.1 11/9/2011 Changed the CESTATE parameter default from 5001h to 5005h.
46 Rev. 1.1
 Loading...
Loading...