

Page 1
E V A L U A T I O N K IT A V A I L A B L E
19-5891; Rev 1; 9/11
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
General Description
The MAX9257A serializer pairs with the MAX9258A
deseri alizer to form a complete digital video serial link.
The devices feature programmable parallel data width,
parallel clock frequency range, spread spectrum, and
preemphasis. An integrated control channel trans fers
data bidirectionally at power-up during video blanking over the same differential pair used for video data.
This feature eliminates the need for external CAN or LIN
interface for diagnostics or programming. The clock is
recovered from input serial data at MAX9258A, hence
eliminating the need for an external reference clock.
The MAX9257A serializes 10, 12, 14, 16, and 18 bits
with the addition of two encoding bits for AC-coupling.
The MAX9258A deserializer links with the MAX9257A to
deseri alize a maximum of 20 (data + encoding) bits per
pixel/parallel clock period for a maximum serial-data rate
of 840Mbps. The word length can be adjusted to accommodate a higher pixel/parallel clock frequency. The pixel
clock can vary from 5MHz to 70MHz, depend ing on the
serial-word length. Enabling parity adds two parity bits to
the serial word. The encoding bits reduce ISI and allow
AC-coupling.
The MAX9258A receives programming instructions from
the electronic control unit (ECU) during the control
channel and transmits to the MAX9257A over the serial
video link. The instructions can program or update the
MAX9257A, MAX9258A, or an external peripheral device,
such as a camera. The MAX9257A communicates with
the peripheral device with I2C or UART.
The devices operate from a +3.3V core supply and feature separate supplies for interfacing to +1.8V to +3.3V
logic levels. These devices are avail able in 40-lead TQFN
or 48-pin LQFP packages. These devices are specified
over the -40NC to +105NC temper ature range.
Features
S 10/12/14/16/18-Bit Programmable Parallel Data
Width
S MAX9258A Does Not Require Reference Clock
S Parity Protection for Video and Control Channels
S Programmable Spread Spectrum
S Programmable Rising or Falling Edge for HSYNC,
VSYNC, and Clock
S Up to 10 Remotely Programmable GPIO on
MAX9257A
S Automatic Resynchronization in Case of Loss of
Lock
S MAX9257A Parallel Clock Jitter Filter PLL with
Bypass
S DC-Balanced Coding Allows AC-Coupling
S Levels of Preemphasis for Up to 20m STP Cable
Drive
S Integrity Test Using On-Chip Programmable PRBS
Generator and Checker
S LVDS I/O Meet ISO 10605 ESD Protection (±10kV
Contact and ±30kV Air Discharge)
S LVDS I/O Meet IEC 61000-4-2 ESD Protection
(±8kV Contact and ±20kV Air Discharge)
S LVDS I/O Meet ±200V Machine Model ESD
Protection
S -40NC to +105NC Operating Temperature Range
S Space-Saving, 40-Pin TQFN (5mm x 5mm) with
Exposed Pad or 48-Pin LQFP Packages
S 3.3V Core Supply and 1.8V to 3.3V I/O Supply
Applications
Ordering Information appears at end of data sheet.
Automotive Cameras
Industrial Cameras
Navigation Systems Display
In-Vehicle Entertainment Systems
����������������������������������������������������������������� Maxim Integrated Products 1
For pricing, delivery, and ordering information, please contact Maxim Direct at 1-888-629-4642,
or visit Maxim’s website at www.maxim-ic.com.
Typical Operating Circuit and Pin Configurations appear at
end of data sheet.
For related parts and recommended products to use with this part,
refer to www.maxim-ic.com/MAX9257A.related.
Page 2
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
ABSOLUTE MAXIMUM RATINGS
V
to GND ........................................................-0.5V to +4.0V
CC_
Any Ground to Any Ground .................................-0.5V to +0.5V
SDI+, SDI-, SDO+, SDO- to GND ........................-0.5V to +4.0V
SDO+, SDO- Short Circuit to GND or V
DIN[0:15], GPIO[0:9], PCLK_IN, HSYNC_IN, VSYNC_IN,
SCL/TX, SDA/RX, REM to GND ......... -0.5V to (V
DOUT[0:15], PCLK_OUT, CCEN, HSYNC_OUT,
VSYNC_OUT, RX, LOCK, TX, PD,
ERROR to GND ..............................-0.5V to (V
Continuous Power Dissipation (TA = +70NC)
40-Lead TQFN
Multilayer PCB (derate 35.7mW/NC above +70NC) ...2857mW
48-Lead LQFP
Multilayer PCB (derate 21.7mW/NC above +70NC) ...1739mW
ESD Protection
Human Body Model (RD = 1.5kI, CS = 100pF)
All Pins to GND ............................................................Q3kV
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability.
CCLVDS
.......Continuous
+ 0.5V)
CCIO
+ 0.5V)
CCOUT
IEC 61000-4-2 (RD = 330I, CS = 150pF)
Contact Discharge
(SDI+, SDI-, SDO+, SDO-) to GND ..............................Q8kV
Air Discharge
(SDI+, SDI-, SDO+, SDO-) to GND ............................Q20kV
ISO 10605 (RD = 2kI, CS = 330pF)
Contact Discharge
(SDI+, SDI-, SDO+, SDO-) to GND ............................Q10kV
Air Discharge
(SDI+, SDI-, SDO+, SDO-) to GND ............................Q30kV
Machine Model (RD = 0I, CS = 200pF)
All Pins to GND ......................................................... Q200V
Storage Temperature Range ............................ -65NC to +150NC
Junction Temperature .....................................................+150NC
Lead Temperature (soldering, 10s) ................................+300NC
Soldering Temperature (reflow) ......................................+260NC
PACKAGE THERMAL CHARACTERISTICS (Note 1)
Junction-to-Ambient Thermal Resistance (qJA)
40-Pin TQFN ................................................................28NC/W
48-Pin LQFP ................................................................46NC/W
Note 1: Package thermal resistances were obtained using the method described in JEDEC specification JESD51-7, using a four-
layer board. For detailed information on package thermal considerations, refer to www.maxim-ic.com/thermal-tutorial.
Junction-to-Case Thermal Resistance (qJC)
40-Pin TQFN ...............................................................1.7NC/W
48-Pin LQFP ................................................................10NC/W
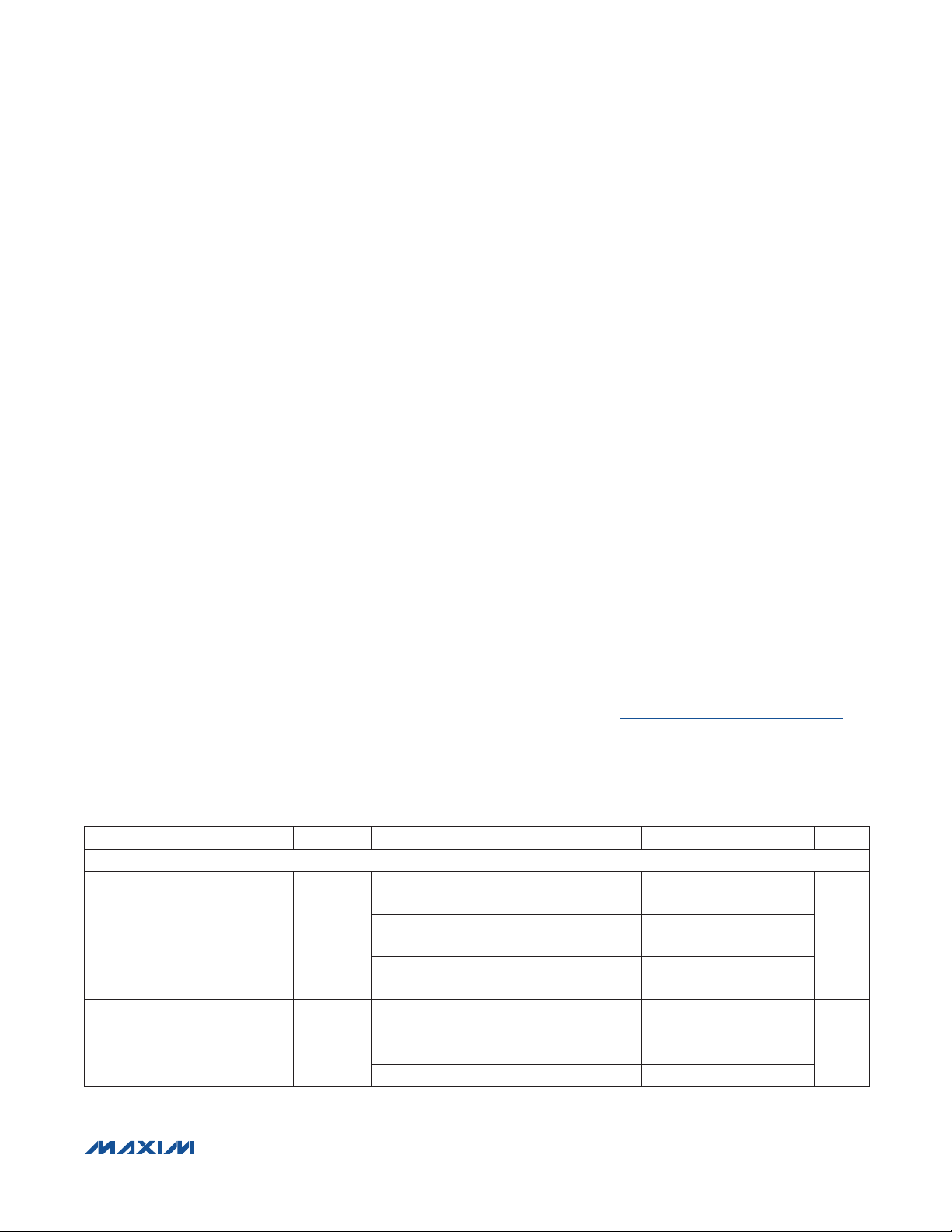
MAX9257A DC ELECTRICAL CHARACTERISTICS
(V
= +3.0V to +3.6V, V
CC_
at V
= +3.3V, TA = +25NC.) (Notes 2, 3)
CC_
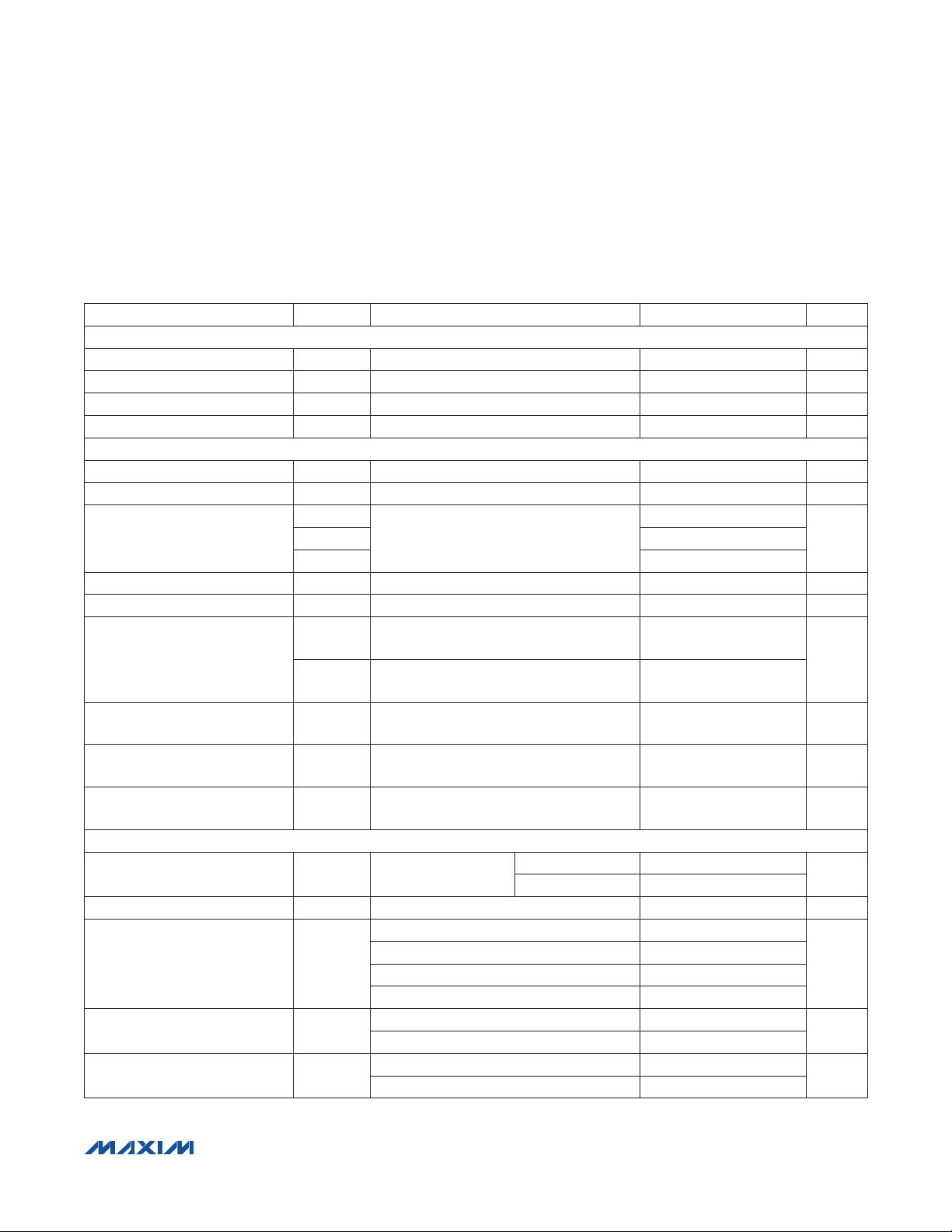
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
SINGLE-ENDED INPUTS
High-Level Input Voltage
Low-Level Input Voltage V
= +1.71V to +3.6V, RL = 50I Q1%, TA = -40NC to +105NC, unless otherwise noted. Typical values are
CCIO
V
= +1.71V to +3V
CCIO
V
IH
IL
= +3V to +3.6V 2
CCIO
REM input 2
V
= +1.71V to +3V 0
CCIO
V
= +3V to +3.6V 0 0.8
CCIO
REM input 0 0.8
0.65 x
V
CCIO
V
CCIO
V
CCIO
VCC +
V
+
0.3
+
0.3
0.3
0.3 x
CCIO
VV
V
����������������������������������������������������������������� Maxim Integrated Products 2
Page 3
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A DC ELECTRICAL CHARACTERISTICS (continued)
(V
= +3.0V to +3.6V, V
CC_
at V
= +3.3V, TA = +25NC.) (Notes 2, 3)
CC_
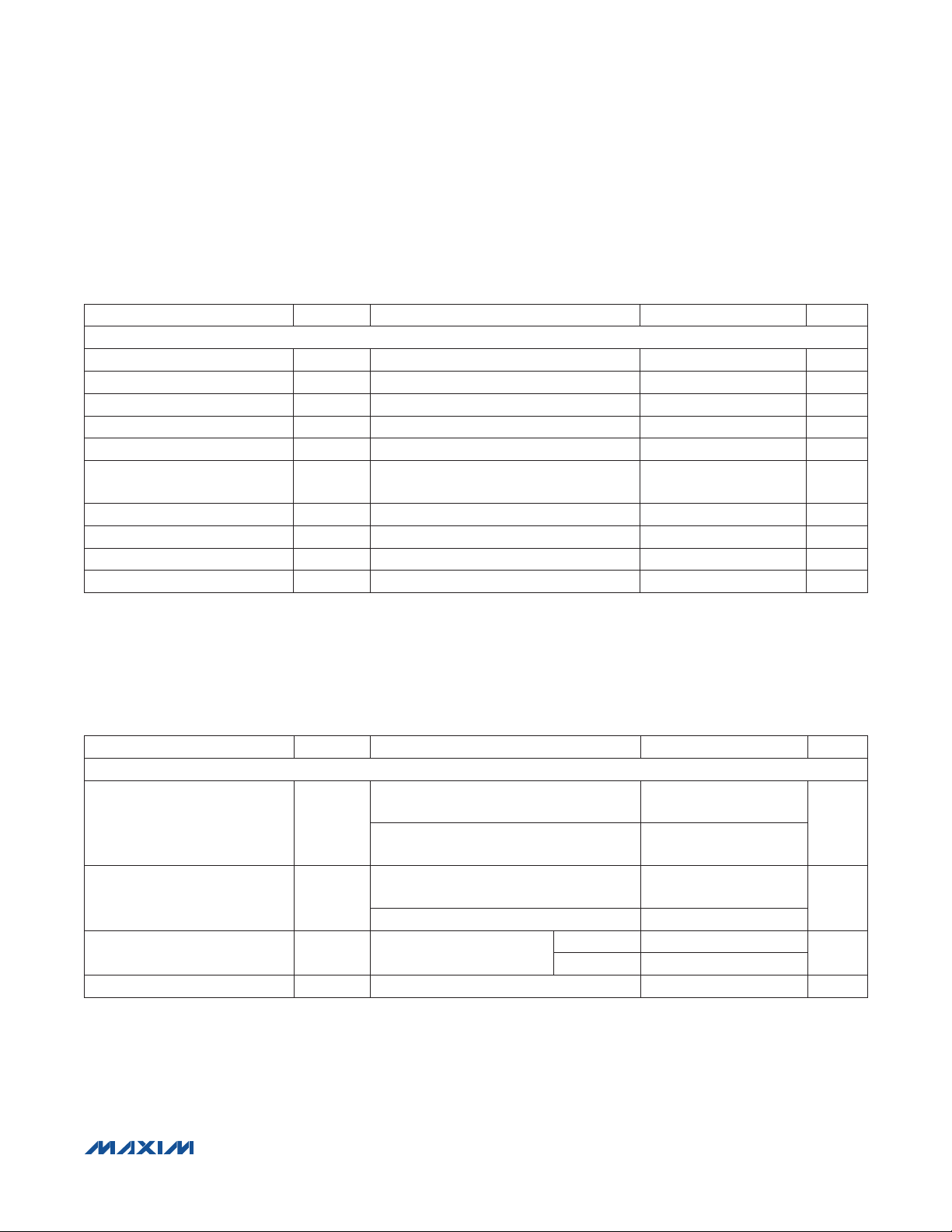
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Input Current I
Input Clamp Voltage V
SINGLE-ENDED OUTPUTS
High-Level Output Voltage V
Low-Level Output Voltage V
Output Short-Circuit Current I
I2C/UART I/O
Input Leakage Current I
High-Level Input Voltage SDA/RX V
Low-Level Input Voltage SDA/RX V
Low-Level Output Voltage
SCL, SDA
LVDS OUTPUTS (SDO+, SDO-)
Differential Output Voltage V
Change in VOD Between
Complementary Output States
Common-Mode Voltage V
Change in VOS Between
Complementary Output States
Output Short-Circuit Current I
Magnitude of Differential Output
Short-Circuit Current
CONTROL CHANNEL TRANSCEIVER
Differential Output Voltage V
Input Hysteresis
(Figure 2)
= +1.71V to +3.6V, RL = 50I Q1%, TA = -40NC to +105NC, unless otherwise noted. Typical values are
CCIO
IN
CL
VIN = 0 to V
VIN = 0 to V
ICL = -18mA -1.5 V
CCIO
REM input -20 +20
CC,
IOH = -100FA
OH
IOH = -2mA
IOL = 100FA
OL
OS
ILKG
IH2
IL2
V
OL2
OD
DV
OS
DV
OS
I
OSD
OD
VHYST+
V
HYST-
IOL = 2mA 0.3
V
= +1.71V to +3V -40 -4
CCIO
V
= +3V to +3.6V -50 -10
CCIO
V
= +1.71V to +3V 4 40
CCIO
V
= +3V to +3.6V 10 50
CCIO
CCIO
OD
Shorted to GND
Shorted to V
VI = V
R
PULLUP
CCIO
CCIO
= 1.6kI to V
Preemphasis off
(Figure 1)
OS
V
or V
SDO+
V
= 0V 15 mA
OD
= 0 or 3.6V -15 +15 mA
SDO-
Differential low-to-high threshold 25 90 165
Differential high-to-low threshold -25 -90 -165
-20 +20
V
-
CCIO
0.1
V
-
CCIO
0.35
0.1
-1 +1
0.7 x
V
CCIO
0.3 x
V
CCIO
0.4 V
250 350 460 mV
25 mV
1.050 1.25 1.375 V
30 mV
250 350 460 mV
FA
V
V
mA
FA
V
V
mV
����������������������������������������������������������������� Maxim Integrated Products 3
Page 4
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
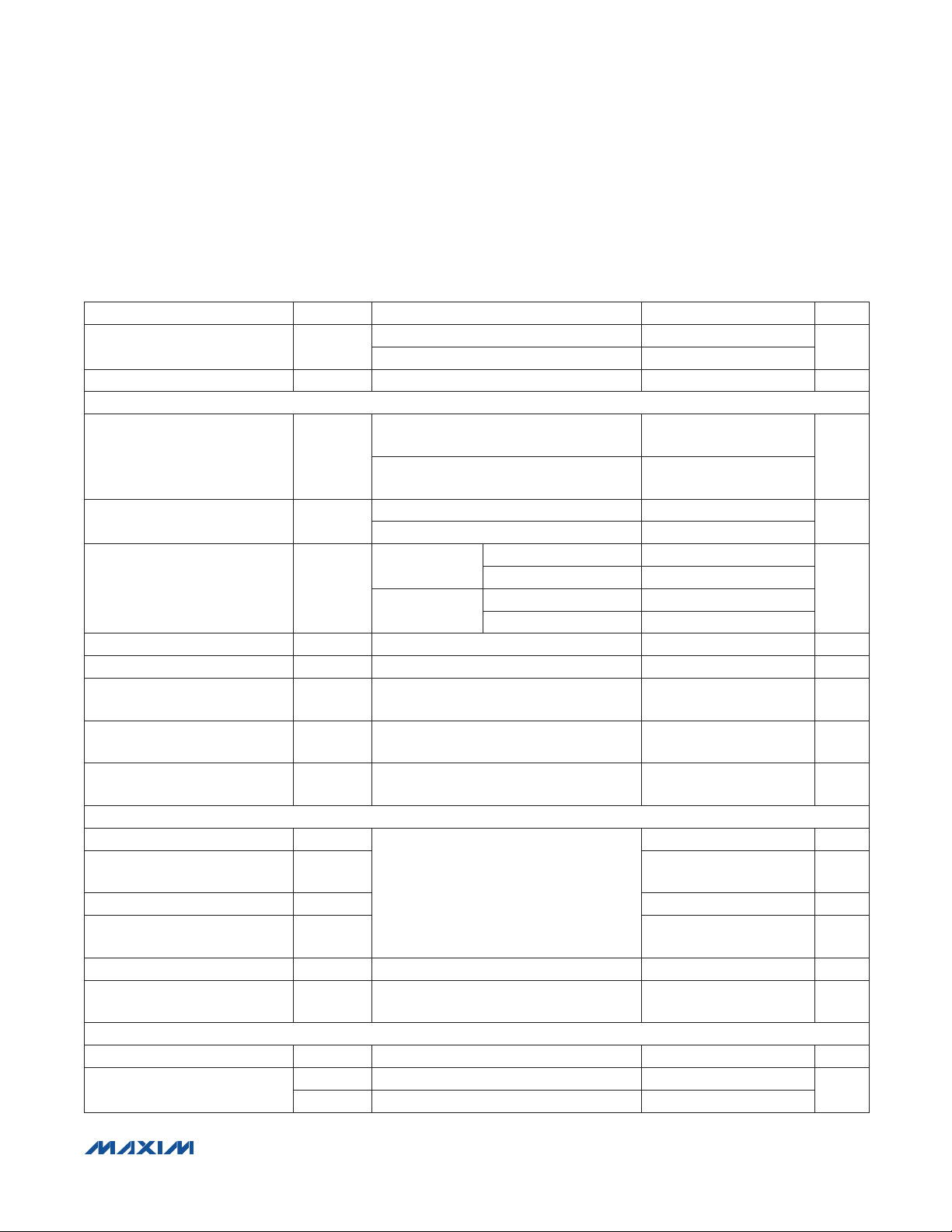
MAX9257A DC ELECTRICAL CHARACTERISTICS (continued)
(V
= +3.0V to +3.6V, V
CC_
at V
= +3.3V, TA = +25NC.) (Notes 2, 3)
CC_
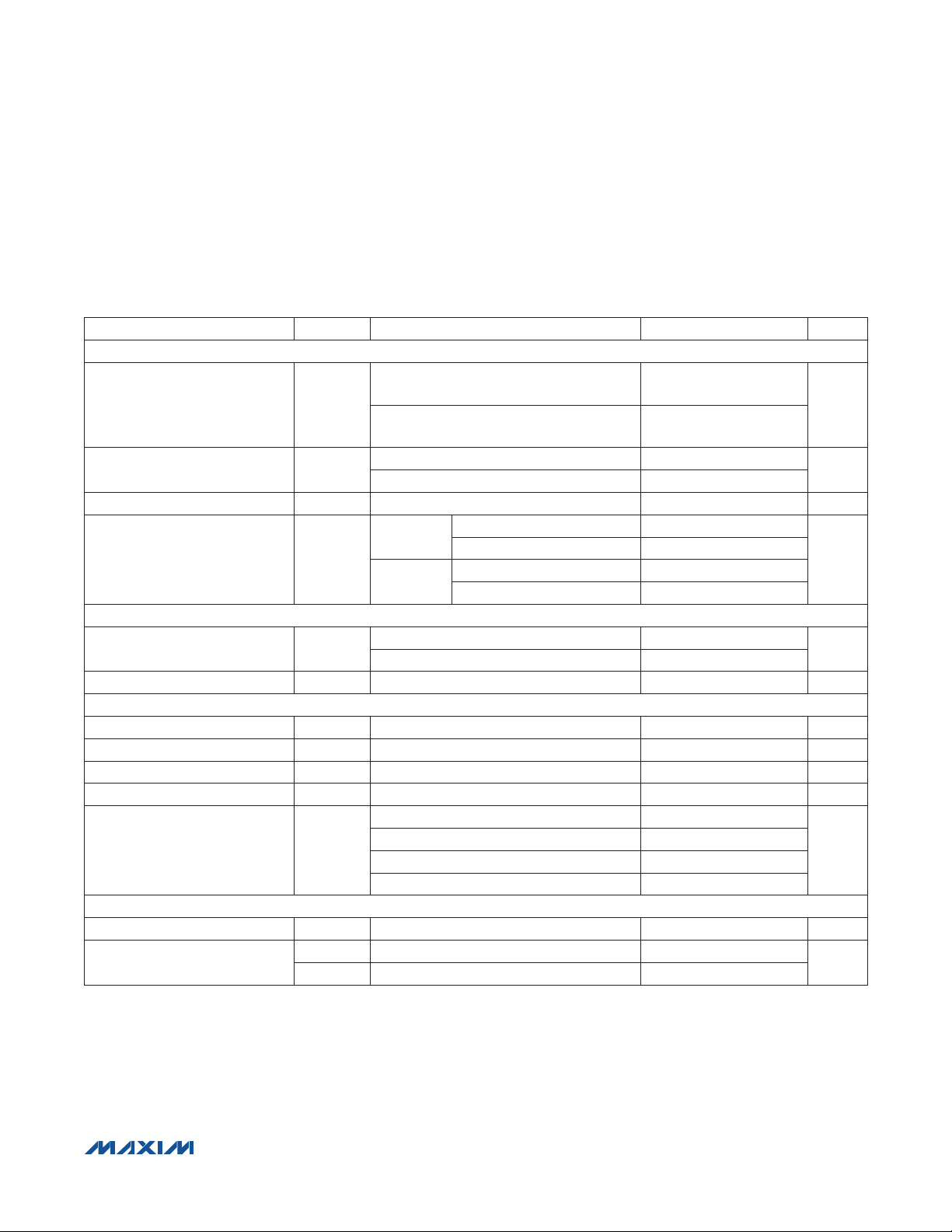
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
POWER SUPPLY
Worst-Case Supply Current
(Figure 3)
CL = 8pF, 12 bits
Sleep Mode Supply Current I
= +1.71V to +3.6V, RL = 50I Q1%, TA = -40NC to +105NC, unless otherwise noted. Typical values are
CCIO
Q2% spread, preemphasis off,
PRATE = 60MHz, SRATE = 840Mbps
No spread, preemphasis off,
PRATE = 60MHz, SRATE = 840Mbps
No spread, preemphasis = 20%,
PRATE = 60MHz, SRATE = 840Mbps
No spread, preemphasis = 60%,
PRATE = 60MHz, SRATE = 840Mbps
No spread, preemphasis = 100%,
PRATE = 60MHz, SRATE = 840Mbps
Q2% spread, preemphasis off,
PRATE = 28.57MHz, SRATE = 400Mbps
No spread, preemphasis off,
PRATE = 28.57MHz, SRATE = 400Mbps
No spread, preemphasis = 100%,
PRATE = 28.57MHz, SRATE = 400Mbps
I
CCW
CCS
Q2% spread, preemphasis off,
PRATE = 14.29MHz, SRATE = 200Mbps
No spread, preemphasis off,
PRATE = 14.29MHz, SRATE = 200Mbps
No spread, preemphasis = 100%,
PRATE = 14.29MHz, SRATE = 200Mbps
Q2% spread, preemphasis off,
PRATE = 7.14MHz, SRATE = 100Mbps
No spread, preemphasis off,
PRATE = 7.14MHz, SRATE = 100Mbps
No spread, preemphasis = 100%,
PRATE = 7.14MHz, SRATE = 100Mbps
Q2% spread, preemphasis off,
PRATE = 5MHz, SRATE = 70Mbps
No spread, preemphasis off,
PRATE = 5MHz, SRATE = 70Mbps
No spread, preemphasis = 100%,
PRATE = 5MHz, SRATE = 70Mbps
Sleep mode 92
102 138
101 130
102 135
111
113 139
80 104
79 100
88 111
56 74
55 72
61 78
45 59
44 57
47 61
34 45
34 44
36 47
137
mA
FA
����������������������������������������������������������������� Maxim Integrated Products 4
Page 5
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A AC ELECTRICAL CHARACTERISTICS
(V
= +3.0V to +3.6V, V
CC_
at V
= +3.3V, TA = +25NC.) (Notes 5, 9)
CC_
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
PCLK�IN TIMING REQUIREMENTS
Clock Period t
Clock Frequency f
Clock Duty Cycle DC t
Clock Transition Time tR, t
SWITCHING CHARACTERISTICS
LVDS Output Rise Time t
LVDS Output Fall Time t
Control Transceiver Transition
Time
Input Setup Time t
Input Hold Time t
Parallel-to-Serial Delay
PLL Lock Time t
Random Jitter t
Deterministic Jitter t
SCL/TX, SDA/RX
Rise Time t
Fall Time t
Pulse Width of Spike Suppressed
in SDA
Data Setup Time t
Data Hold Time t
= +1.71V to +3.6V, RL = 50I Q1%, TA = -40NC to +105NC, unless otherwise noted. Typical values are
CCIO
T
1/t
T
or t
HIGH/tT
(Figure 7) 4 ns
F
20% to 80% (Figure 4) 315 370 ps
R
20% to 80% (Figure 4) 315 370 ps
F
, t
F1A
20% to 80% (Figure 16)
F2
, t
F1B
(Figure 5) 0 ns
S
(Figure 5) 3 ns
H
LOW/tT
Spread off (Figure 6)
Q4% spread
Combined FPLL and SPLL; PCLK_IN stable
420MHz LVDS output, spread off,
FPLL = bypassed
18
2
- 1 PRBS, SRATE = 840Mbps, 18 bits,
no spread
0.3 x V
V
CCIO
0.7 x V
to 0.7 x
CCIO
, CL = 30pF
to 0.3 x V
CCIO
CCIO, CL
t
R1A
t
R1B
CLK
t
PSD1
t
PSD2
LOCK
RJ
DJ
RS
FS
95kbps to 400kbps 100
t
SPK
400kbps to 1000kbps 50
1000kbps to 4250kbps 10
DC to 10Mbps (bypass mode) 10
400kbps 100
SETUP
4.25Mbps, CL = 10pF 60
400kbps 100
HOLD
4.25Mbps, CL = 10pF 0
MAX9257A/MAX9258A
14.28 200.00 ns
5 70 MHz
35 50 65 %
642 970 1390
810 1140 1420
290 386 490
(4.55 x t
(36.55 x t
32,768
R
R
PULLUP
PULLUP
= 10kI
= 1.6kI
= 30pF 40 ns
+ 11
+ 11
x t
T
12
142 ps (P-P)
400
60
pstR2, t
T)
ns
T)
ns
ps
(RMS)
ns
ns
ns
ns
����������������������������������������������������������������� Maxim Integrated Products 5
Page 6
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A AC ELECTRICAL CHARACTERISTICS (continued)
(V
= +3.0V to +3.6V, V
CC_
at V
= +3.3V, TA = +25NC.) (Notes 5, 9)
CC_
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
I2C TIMING (Note 8)
Maximum SCL Clock Frequency f
Minimum SCL Clock Frequency f
Start Condition Hold Time t
Low Period of SCL Clock t
High Period of SCL Clock t
Repeated START Condition
Setup Time
Data Hold Time t
Data Setup Time t
Setup Time for STOP Condition t
Bus Free Time t
= +1.71V to +3.6V, RL = 50I Q1%, TA = -40NC to +105NC, unless otherwise noted. Typical values are
CCIO
SCL
SCL
HD:STA
LOW
HIGH
t
SU:STA
HD:DAT
SU:DAT
SU:STO
BUF
(Figure 30) 0.6
(Figure 30) 1.1
(Figure 30) 0.6
(Figure 30) 0.5
(Figure 30) 0 0.9
(Figure 30) 100 ns
(Figure 30) 0.5
(Figure 30) 1.1
4.25 MHz
95 kHz
Fs
Fs
Fs
Fs
Fs
Fs
Fs
MAX9258A DC ELECTRICAL CHARACTERISTICS
(V
= +3.0V to +3.6V, V
CC_
mode voltage VCM = |VID/2| to VCC - |VID/2|, TA = -40NC to +105NC, unless otherwise noted. Typical values are at V
= 0.2V, VCM = 1.2V, TA = +25NC) (Notes 2, 3)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
SINGLE-ENDED INPUTS
High-Level Input Voltage V
Low-Level Input Voltage V
Input Current I
Input Clamp Voltage V
= +1.71V to +3.6V, RL = 50I Q1%, differential input voltage |VID| = 0.05V to 1.2V, input common-
CCIO
0.65 x
V
CCOUT
-20 +20
IN
CL
V
IH
V
V
IL
V
VIN = 0 to V
ICL = -18mA -1.5 V
= +1.71V to +3V
CCOUT
= +3V to +3.6V 2.0
CCOUT
= +1.71V to +3V 0
CCOUT
= +3V to +3.6V 0 0.8
CCOUT
CCOUT
TXIN -60 +60
PD
= +3.3V, |VID|
CC_
V
CCOUT
+ 0.3
V
CCOUT
+ 0.3
0.3 x
V
CCOUT
V
V
FA
����������������������������������������������������������������� Maxim Integrated Products 6
Page 7
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9258A DC ELECTRICAL CHARACTERISTICS (continued)
(V
= +3.0V to +3.6V, V
CC_
mode voltage VCM = |VID/2| to VCC - |VID/2|, TA = -40NC to +105NC, unless otherwise noted. Typical values are at V
= 0.2V, VCM = 1.2V, TA = +25NC) (Notes 2, 3)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
SINGLE-ENDED OUTPUTS
High-Level Output Voltage V
Low-Level Output Voltage V
High-Impedance Output Current I
Output Short-Circuit Current I
OPEN-DRAIN OUTPUTS
Output Low Voltage V
Leakage Current I
LVDS INPUTS (SDI+, SDI-)
Differential Input High Threshold V
Differential Input Low Threshold V
Input Current I
Power-Off Input Current I
Activity-Detector Input Offset V
CONTROL CHANNEL TRANSCEIVER
Differential Output Voltage V
Input Hysteresis
(Figure 2)
= +1.71V to +3.6V, RL = 50I Q1%, differential input voltage |VID| = 0.05V to 1.2V, input common-
CCIO
V
IOH = -100FA
OH
IOH = -2mA
OL
OZ
OS
OL
LEAK
IN+, IIN-
INO+, IINO-VCC_
OFFSET
OD
V
HYST+
V
HYST-
IOL = 100FA
IOL = 2mA 0.3
PD = low, VO = 0 to V
VO = 0V
(Note 4)
PCLK_OUT,
VO = 0V
V
CCOUT
V
CCOUT
VO = 0V or V
TH
TL
ACTOFFSET = 00 23
ACTOFFSET = 01 11
ACTOFFSET = 10 59
ACTOFFSET = 11 75
Differential low-to-high threshold 25 90 165
Differential high-to-low threshold -25 -90 -165
CCOUT
V
V
V
V
= +3V, IOL = 6.4mA 0.55
= +1.71V, IOL = 1.95mA 0.3
CCOUT
= 0 or open -70 +70
= +1.71V to +3V -4 -44
CCOUT
= +3V to +3.6V -16 -65
CCOUT
= +1.71V to +3.6V -5 -55.1
CCOUT
= +3V to +3.6V -22 -80
CCOUT
CCOUT
- 0.1
V
CCOUT
-0.35
-1 +1
-50 mV
-60 +60
250 460 mV
= +3.3V, |VID|
CC_
0.1
1
50 mV
V
V
FA
mA
V
FA
FA
FA
mV
mV
����������������������������������������������������������������� Maxim Integrated Products 7
Page 8
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
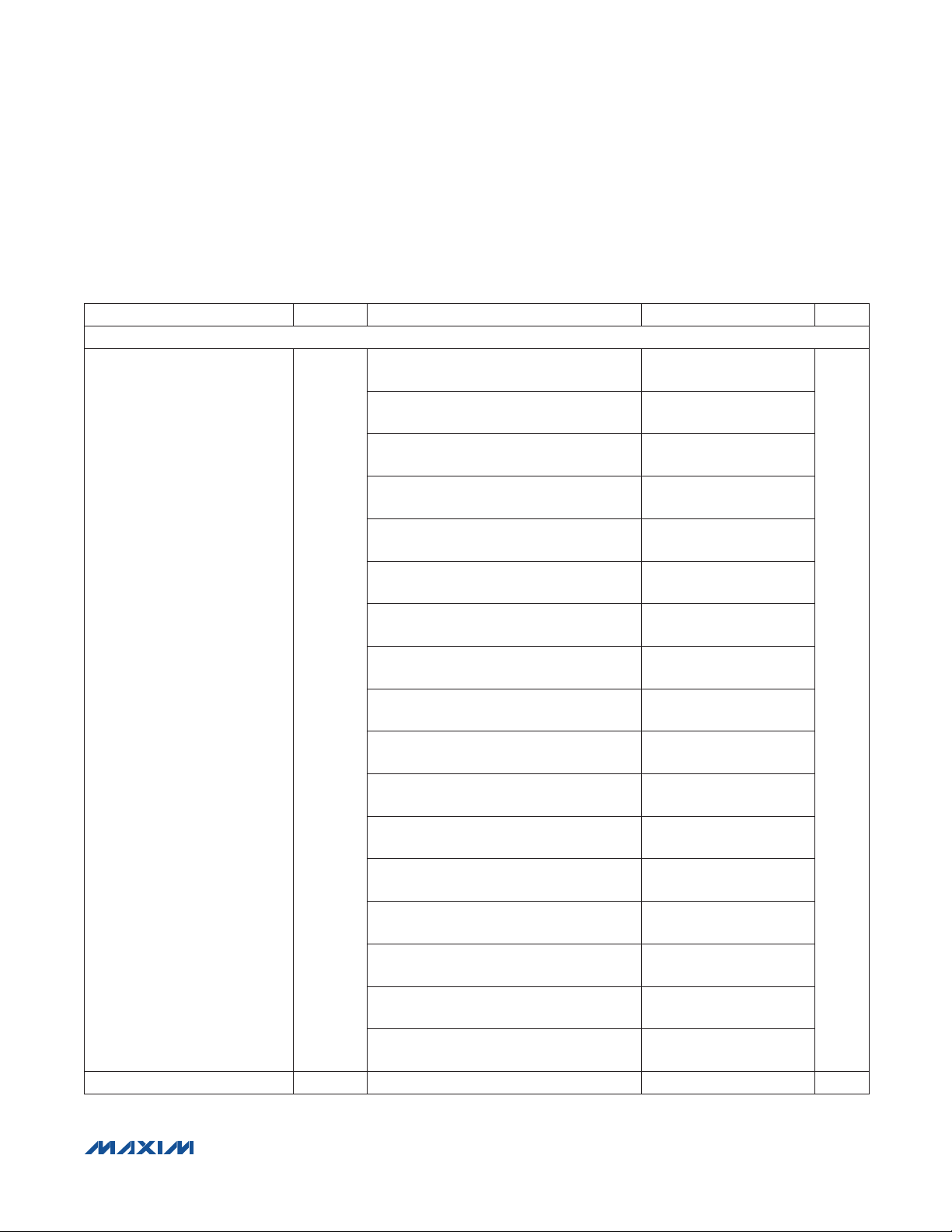
MAX9258A DC ELECTRICAL CHARACTERISTICS (continued)
(V
= +3.0V to +3.6V, V
CC_
mode voltage VCM = |VID/2| to VCC - |VID/2|, TA = -40NC to +105NC, unless otherwise noted. Typical values are at V
= 0.2V, VCM = 1.2V, TA = +25NC) (Notes 2, 3)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
POWER SUPPLY
Worst-Case Supply Current
CL = 8pF, 12 bits
(Figure 8)
Power-Down Supply Current I
= +1.71V to +3.6V, RL = 50I Q1%, differential input voltage |VID| = 0.05V to 1.2V, input common-
CCIO
I
CCW
CCZ
Q4% spread, PRATE = 60MHz,
SRATE = 840Mbps
Spread off, PRATE = 60MHz,
SRATE = 840Mbps
Q4% spread, PRATE = 28.57MHz,
SRATE = 400Mbps
Spread off, PRATE = 28.57MHz,
SRATE = 400Mbps
Q4% spread, PRATE = 14.29MHz,
SRATE = 200Mbps
Spread off, PRATE = 14.29MHz,
SRATE = 200Mbps
Q4% spread, PRATE = 5MHz,
SRATE = 70Mbps
Spread off, PRATE = 5MHz,
SRATE = 70Mbps
PD = low
95 135
80 120
67 102
57
55 82
46 67
42 57
34 49
10 50
= +3.3V, |VID|
CC_
84
mA
FA
MAX9258A AC ELECTRICAL CHARACTERISTICS
(V
= +3.0V to +3.6V, V
CC_
common-mode voltage VCM = |VID/2| to VCC - |VID/2|, TA = -40NC to +105NC, unless otherwise noted. Typical values are at V
+3.3V, |VID| = 0.2V, VCM = 1.2V, TA = +25NC) (Notes 5, 6 and 7)
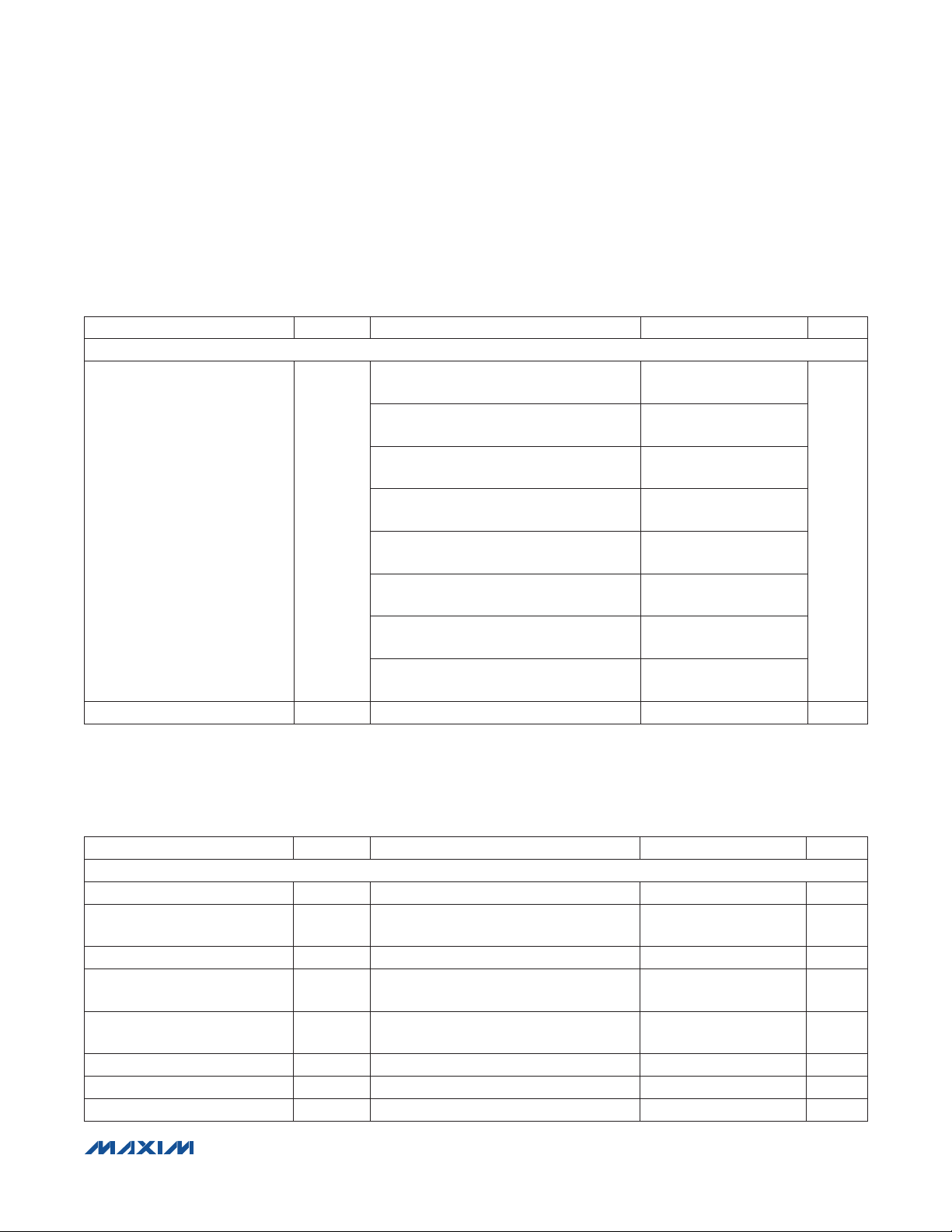
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
SWITCHING CHARACTERISTICS
Output Transition Time t
Output Transition Time,
PCLK_OUT
Output Transition Time t
Output Transition Time,
PCLK_OUT
Control Channel Transition Time
Control Channel Transition Time t
PCLK_OUT High Time t
PCLK_OUT Low Time t
����������������������������������������������������������������� Maxim Integrated Products 8
= +1.71V to +3.6V, RL = 50I Q1%, CL = 8pF, differential input voltage |VID| = 0.1V to 1.2V, input
CCIO
R, tF
t
R, tF
R, tF
t
R, tF
t
R1A, tF1A,
t
R1B, tF1B
R2, tF2
HIGH
LOW
(Figure 9) 0.7 2.2 ns
(Figure 9) 0.5 1.5 ns
V
V
(Figure 16) 0.5 1.2 ns
(Figure 16) 0.6 1.3 ns
(Figure 10) 0.4 x t
(Figure 10) 0.4 x t
= 1.71V (Figure 9) 1.0 2.8 ns
CCOUT
= 1.71V (Figure 9) 0.7 2.2 ns
CCOUT
T
T
0.6 x t
0.6 x t
T
T
CC_
ns
ns
=
Page 9
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9258A AC ELECTRICAL CHARACTERISTICS (continued)
(V
= +3.0V to +3.6V, V
CC_
common-mode voltage VCM = |VID/2| to VCC - |VID/2|, TA = -40NC to +105NC, unless otherwise noted. Typical values are at V
+3.3V, |VID| = 0.2V, VCM = 1.2V, TA = +25NC) (Notes 5, 6 and 7)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Data Valid Before PCLK_ OUT t
Data Valid After PCLK_OUT t
Serial-to-Parallel Delay
Power-Up Delay t
Power-Down to High Impedance t
Jitter Tolerance t
Note 2: Current into a pin is defined as positive. Current out of a pin is defined as negative. All voltages are referenced to ground
except VTH and VTL.
Note 3: Maximum and minimum limits over temperature are guaranteed by design and characterization. Devices are production
tested at TA = +105NC.
Note 4: One output at a time.
Note 5: AC parameters are guaranteed by design and characterization, and are not production tested.
Note 6: CL includes probe and test jig capacitance.
Note 7: tT is the period of the PCLK_OUT.
Note 8: For high-speed mode timing, see the Detailed Description section.
Note 9: I2C timing parameters are specified for fast-mode I2C. Max data rate = 400kbps.
= +1.71V to +3.6V, RL = 50I Q1%, CL = 8pF, differential input voltage |VID| = 0.1V to 1.2V, input
CCIO
DVB
DVA
t
SPD1
t
SPD2
PUD
PDD
(Figure 11) 0.35 x t
(Figure 11) 0.35 x t
Spread off (Figure 14) 8t
Q4% spread
T
T
T
40t
T
(Figure 12) 100 ns
(Figure 13) 100 ns
Each half of the UI, 12 bit,
JT
SRATE = 840Mbps, PRBS
No spread 0.25 0.30 UI
pattern (Figure 15)
CC_
ns
ns
ns
=
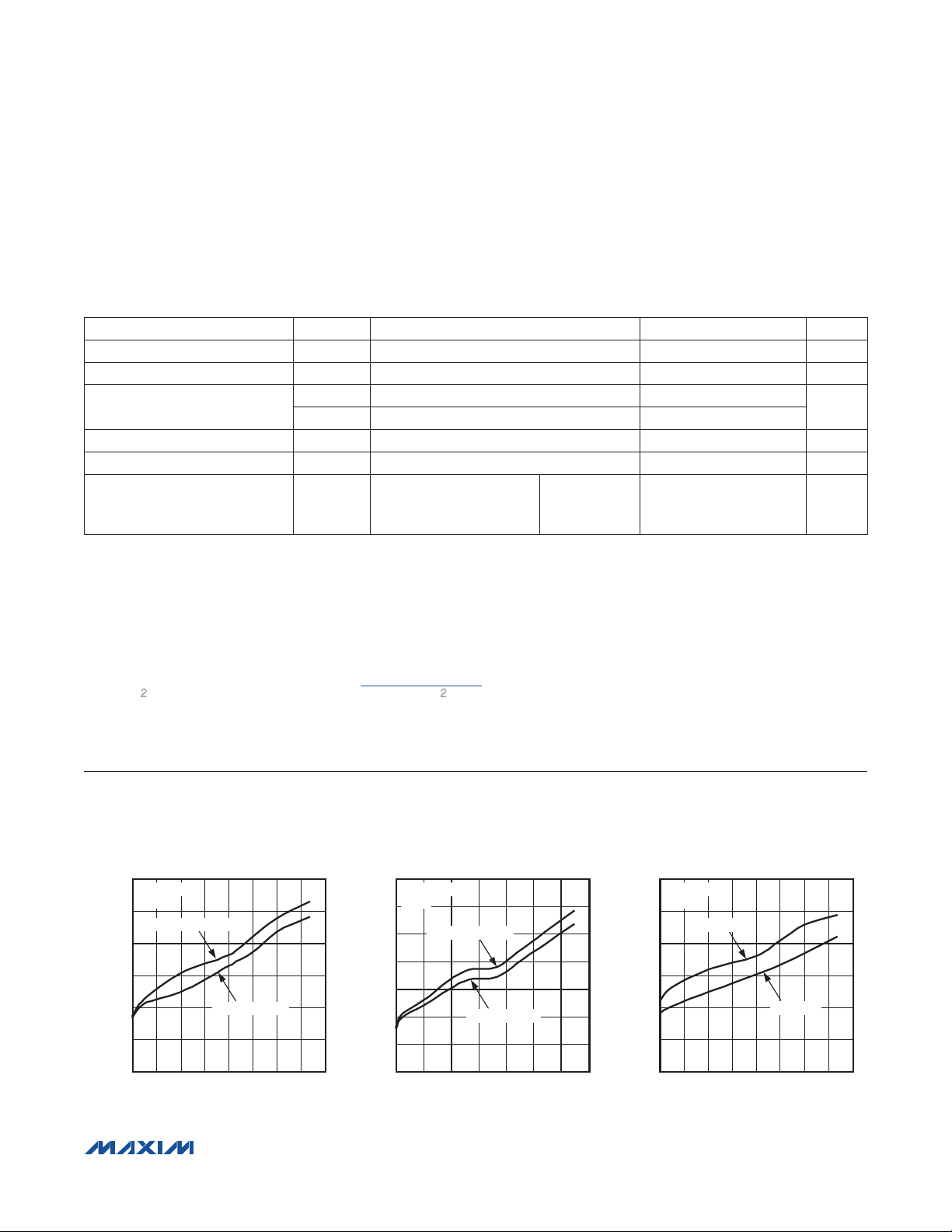
(V
= +3.3V, RL = 50O, CL = 8pF, TA = +25NC, unless otherwise noted.)
CC_
MAX9257A SUPPLY CURRENT
MAX9257A SUPPLY CURRENT
vs. FREQUENCY
120
PRBS PATTERN
18-BIT
100
100% PREEMPHASIS
80
60
40
SUPPLY CURRENT (mA)
20
0
5 45
NO PREEMPHASIS
20 4025 3515 3010
PCLK FREQUENCY (MHz)
140
120
MAX9257A/58A toc01
100
80
60
SUPPLY CURRENT (mA)
40
20
0
PRBS PATTERN
10-BIT
100% PREEMPHASIS
5 7535 6525
����������������������������������������������������������������� Maxim Integrated Products 9
Typical Operating Characteristics
vs. FREQUENCY
NO PREEMPHASIS
5515 45
PCLK FREQUENCY (MHz)
120
100
MAX9257A/58A toc02
80
60
40
SUPPLY CURRENT (mA)
20
0
MAX9258A SUPPLY CURRENT
vs. FREQUENCY
PRBS PATTERN
18-BIT
4% SPREAD
5 452520 30
PCLK FREQUENCY (MHz)
MAX9257A/58A toc03
NO SPREAD
4010 3515
Page 10
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
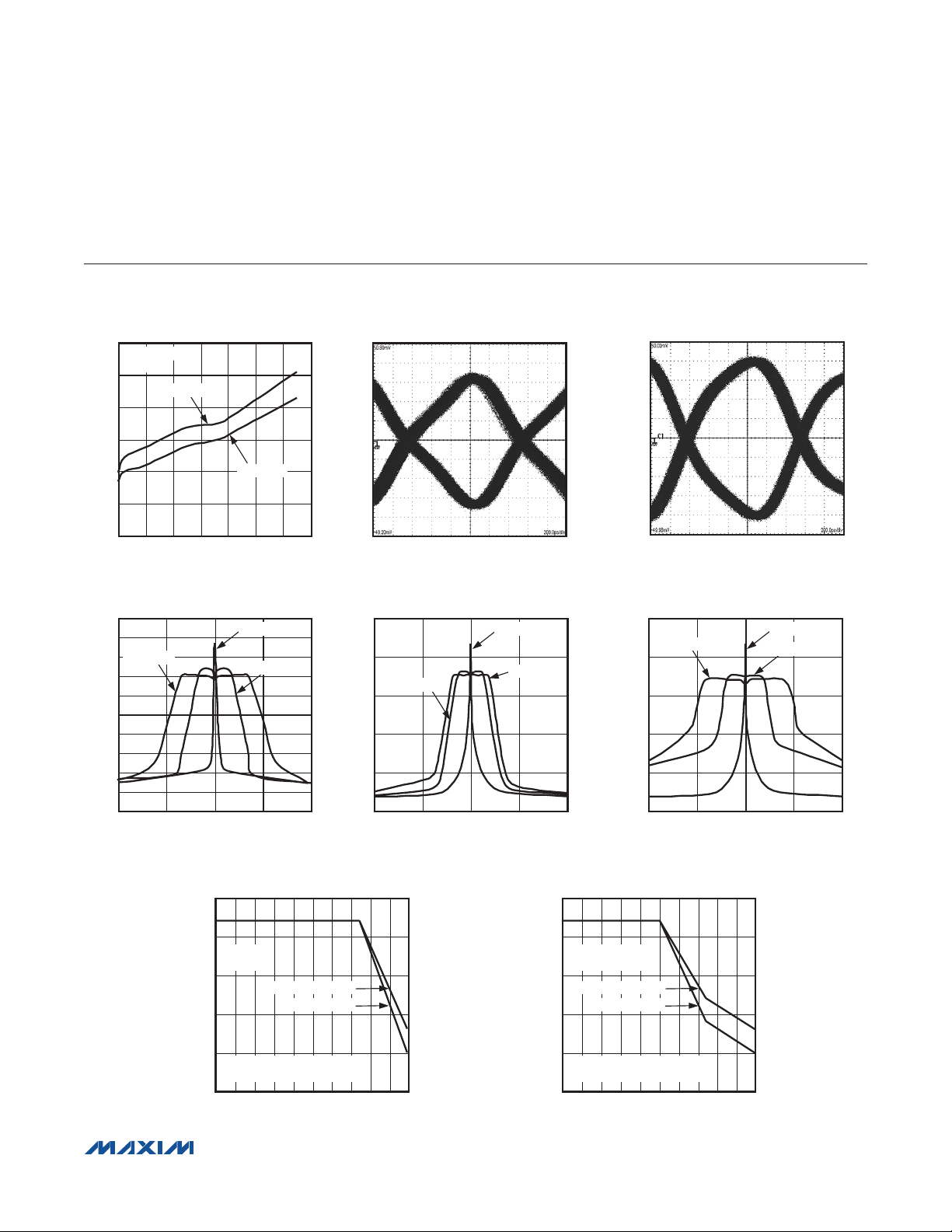
Typical Operating Characteristics (continued)
(V
= +3.3V, RL = 50O, CL = 8pF, TA = +25NC, unless otherwise noted.)
CC_
MAX9258A SUPPLY CURRENT
vs. FREQUENCY
120
PRBS PATTERN
10-BIT
100
80
60
4% SPREAD
SERIAL LINK SWITCHING PATTERN WITHOUT
PREEMPHASIS (BIT RATE = 840MHz, 2m STP CABLE)
MAX9257A/58A toc04
MAX9257A/MAX9258A
SERIAL LINK SWITCHING PATTERN WITH
PREEMPHASIS (BIT RATE = 840MHz, 2m STP CABLE)
MAX9257A/58A toc05
(PREEMPHASIS = 100%)
MAX9257A/58A toc06
40
SUPPLY CURRENT (mA)
20
0
5 452520 30
PCLK FREQUENCY (MHz)
MAX9257A OUTPUT POWER
SPECTRUM vs. PCLK FREQUENCY
20
10kHz BW
10
4% SPREAD
0
-10
-20
-30
-40
-50
-60
OUTPUT POWER SPECTRUM (dBm)
-70
-80
18 2220
PCLK FREQUENCY (MHz)
900
NO SPREAD
4010 3515
NO SPREAD
2% SPREAD
2119
20
0
MAX9257A/58A toc07
-20
-40
-60
OUTPUT POWER SPECTRUM (dBm)
-80
BIT ERROR RATE (< 10-9) vs.
CABLE LENGTH
MAX9257A OUTPUT POWER
SPECTRUM vs. PCLK FREQUENCY
10kHz BW
1.5% SPREAD
38 4642
PCLK FREQUENCY (MHz)
NO SPREAD
2% SPREAD
4440
900
MAX9258A OUTPUT POWER
SPECTRUM vs. PCLK FREQUENCY
20
10kHz BW
4% SPREAD
MAX9257A/58A toc08
0
-20
-40
-60
OUTPUT POWER SPECTRUM (dBm)
-80
38 4642
BIT ERROR RATE (< 10-9) vs.
CABLE LENGTH
NO SPREAD
2% SPREAD
MAX9257A/58A toc09
4440
PCLK FREQUENCY (MHz)
800
NO SPREAD
STP CABLE
700
600
SERIAL-DATA RATE (Mbps)
500
BER CAN BE AS LOW AS 10
CABLE LENGTHS LESS THAN 10m.
400
0 862 4 10 12 14 16 18 20
100% PREEMPHASIS
NO PREEMPHASIS
-12
CABLE LENGTH (m)
MAX9257A/58A toc10
FOR
800
2% SPREAD ON
MAX9257, STP CABLE
700
100% PREEMPHASIS
600
SERIAL-DATA RATE (Mbps)
500
400
NO PREEMPHASIS
BER CAN BE AS LOW AS 10
CABLE LENGTHS LESS THAN 10m.
0 862 4 10 12 14 16 18 20
CABLE LENGTH (m)
-12
FOR
MAX9257A/58A toc11
���������������������������������������������������������������� Maxim Integrated Products 10
Page 11
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
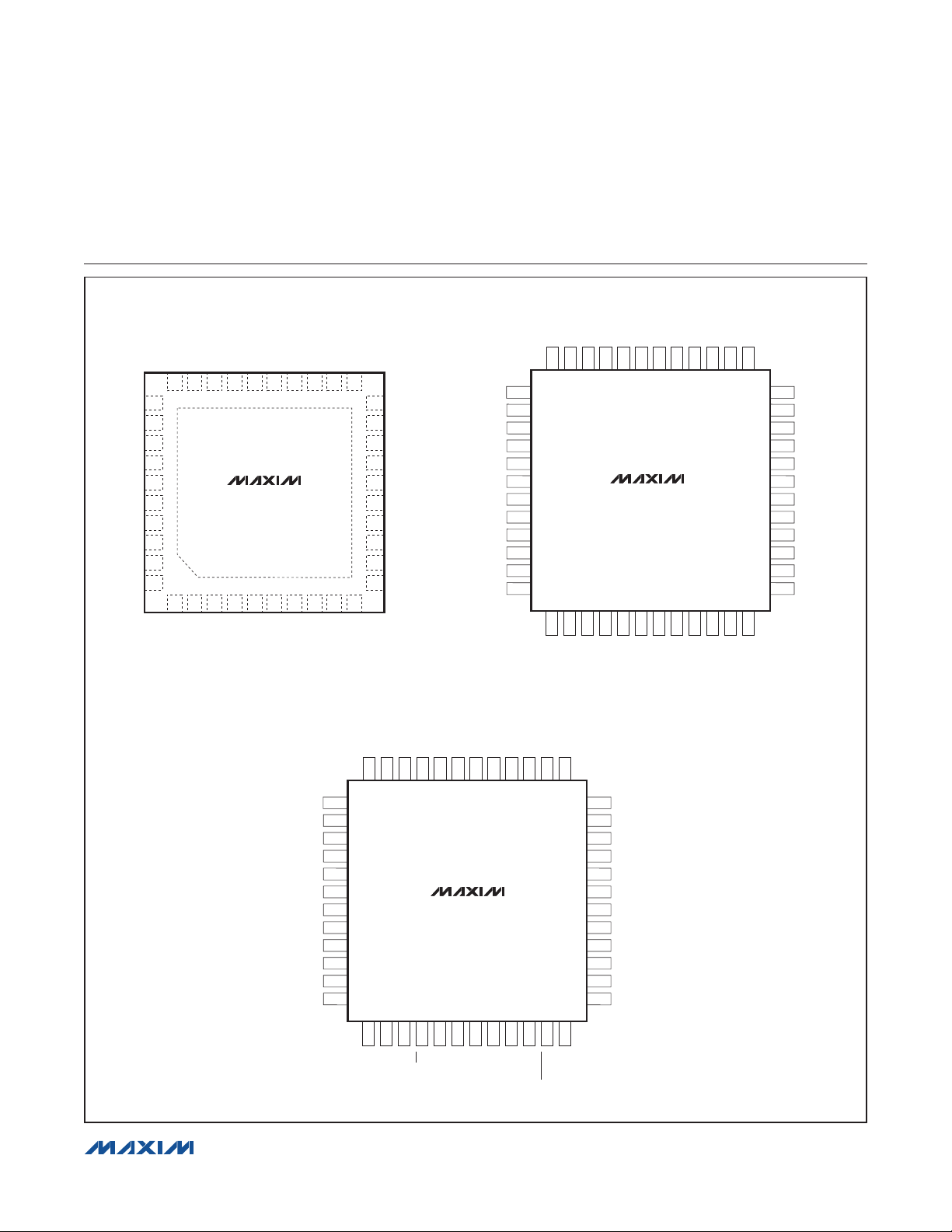
Pin Configuration
TOP VIEW
DIN1
DIN2
V
GND
DIN3
DIN4
DIN5
DIN6
DIN7
DIN8/GPIO0
N.C.
25
DIN0
CCIO
V
REM
GND
CCLVDS
V
SDO+
MAX9257A
DIN9/GPIO1
DIN10/GPIO2
SDO-
678
DIN11/GPIO3
LQFP
N.C.
CCLVDS
SDO+
V
REM
DIN0
31
32
33
CC
34
35
36
37
38
39
+
40
21 3 4 5 6 7 8 9 10
CCIO
GND
V
SDO-
27282930 22 21
2526
MAX9257A
DIN9/GPIO1
DIN10/GPIO2
DIN11/GPIO3
GNDSPLL
GNDLVDS
24
DIN13/GPIO5
DIN12/GPIO4
23
CCSPLL
V
DIN14/GPIO6
GPIO9
GNDFPLL
GPIO8
20
19
18
17
16
15
14
13
12
11
CCFPLL
V
V
CC
GND
V
CCIO
SDA/RX
SCL/TX
PCLK_IN
VSYNC_IN
HSYNC_IN
DIN15/GPIO7
GND
N.C.
DIN1
DIN2
V
GND
DIN3
DIN4
DIN5
DIN6
DIN7
DIN8/GPIO0
N.C.
3635343332313029282726
37
38
39
40
CC
41
42
43
44
45
46
47
48
+
12345
N.C.
TQFN-EP
CONNECT EP TO GND
N.C.
DOUT7
DOUT8
DOUT9
DOUT10
DOUT11
DOUT12
DOUT13
3635343332313029282726
DOUT14
GNDSPLL
CCSPLL
V
GNDLVDS
GNDSPLL
DIN12/GPIO4
DIN13/GPIO5
CCSPLL
V
9
DIN14/GPIO6
GPIO9
GPIO8
101112
CCFPLL
V
GNDFPLL
N.C.
25
N.C.
24
23
22
21
20
19
18
17
16
15
14
13
N.C.
V
CC
GND
V
CCIO
SDA/RX
SCL/TX
PCLK_IN
VSYNC_IN
HSYNC_IN
DIN15/GPIO7
GND
N.C.
N.C.
GNDOUT
V
CCOUT
DOUT6
DOUT5
DOUT4
DOUT3
DOUT2
DOUT1
DOUT0
CCEN
GNDOUT
37
38
39
40
41
42
GND
MAX9258A
5
PD
CCLVDS
V
678
SDI-
SDI+
9
GNDPLL
GNDLVDS
101112
CCPLL
ERROR
V
N.C.
43
44
45
46
47
48
+
1
234
CC
V
N.C.
24
23
22
21
20
19
18
17
16
15
14
13
N.C.
GNDOUT
V
CCOUT
DOUT15
HSYNC_OUT
VSYNC_OUT
PCLK_OUT
LOCK
TX
RX
GND
N.C.
LQFP
���������������������������������������������������������������� Maxim Integrated Products 11
Page 12
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A Pin Description
PIN
TQFN LQFP
1, 18 2, 21 V
2, 11,
19, 34
3–8 4–9
9 10 GNDFPLL Filter PLL Ground
10 11 V
12 15 DIN15/GPIO7
13 16 HSYNC_IN Horizontal SYNC Input. HSYNC_IN is internally pulled down to ground.
14 17 VSYNC_IN Vertical SYNC Input. VSYNC_IN is internally pulled down to ground.
15 18 PCLK_IN
16 19 SCL/TX
17 20 SDA/RX
20, 33 23, 40 V
21 26 GPIO8 General Purpose Input/Output
22 27 GPIO9 General Purpose Input/Output
23 28 V
24 29 GNDSPLL SPLL Ground
25 30 GNDLVDS LVDS Ground
26 31 SDO- Serial LVDS Inverting Output
27 32 SDO+ Serial LVDS Noninverting Output
28 33 V
3, 14,
22, 41
NAME FUNCTION
Single-Ended Input/Output Buffer Supply Voltage. Bypass V
CCIO
GND Digital Supply Ground
DIN[9:14]/
GPIO[1:6]
CCFPLL
CC
CCSPLL
CCLVDS
0.001FF capacitors in parallel as close as possible to the device with the smallest value
capacitor closest to V
Data Input/General Purpose Input/Output. When a serial-data word is less than 18 bits word
length, DIN_ not programmed as data inputs becomes GPIO (Table 22). DIN[9:14] are internally pulled down to ground.
Filter PLL Supply Voltage. Bypass V
in parallel as close as possible to the device with the smallest value capacitor closest to
V
Data Input/General Purpose Input/Output. When a serial-data word is less than 18 bits word
length, DIN_ not programmed as data input becomes GPIO (Table 22). DIN15 is internally
pulled down to ground.
Parallel Clock Input. PCLK_IN latches data and sync inputs and provides the PLL reference
clock. PCLK_IN is internally pulled down to ground.
Open-Drain Control Channel Output. SCL/TX becomes SCL output when UART-to-I2C is active.
SCL/TX becomes TX output when UART-to-I2C is bypassed. Externally pull up to VCC.
Open-Drain Control Channel Input/Output. SDA/RX becomes bidirectional SDA when UARTto-I2C is active. SDA/RX becomes RX input when UART-to-I2C is bypassed. SDA output
requires a pullup to VCC.
Digital Supply Voltage. Bypass VCC to ground with 0.1FF and 0.001FF capacitors in parallel
as close as possible to the device with the smallest value capacitor closest to VCC.
Spread PLL Supply Voltage. Bypass V
tors in parallel as close as possible to the device with the smallest value capacitor closest to
V
LVDS Supply Voltage. Bypass V
in parallel as close as possible to the device with the smallest value capacitor closest to
V
CCFPLL
CCSPLL
CCLVDS
.
.
.
CCIO
.
to GNDFPLL with 0.1FF and 0.001FF capacitors
CCFPLL
to GNDSPLL with 0.1FF and 0.001FF capaci-
CCSPLL
to GNDLVDS with 0.1FF and 0.001FF capacitors
CCLVDS
CCIO
to GND with 0.1FF and
���������������������������������������������������������������� Maxim Integrated Products 12
Page 13
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A Pin Description (continued)
PIN
TQFN LQFP
29 34 REM
30, 31, 32,
35–39
35, 38, 39,
42–46
40 47 DIN8/GPIO0
1, 12, 13
—
24, 25, 36,
37, 48
— — EP Exposed Pad for TQFN Package Only. Connect EP to ground.
NAME
Remote Power-Up/Power-Down Select Input. Connect REM to ground for power-up to follow
VCC. Connect REM high to VCC through 10kI resistor for remote power-up. REM is internally
pulled down to GND.
DIN[0:7] Data Inputs. DIN[0:7] are internally pulled down to ground.
Data Input/General Purpose Input/Output. When a serial-data word is less than 18 bits word
length, DIN_ not programmed as data input becomes GPIO (Table 22). DIN8 is internally
pulled down to ground.
N.C. No Connection. Not internally connected.
FUNCTION
MAX9258A Pin Description
PIN NAME FUNCTION
1, 12, 13, 24,
25, 36, 37
2 V
3, 14 GND Digital Supply Ground
4
5 V
6 SDI- Serial LVDS Inverting Input
7 SDI+ Serial LVDS Noninverting Input
8 GNDLVDS LVDS Supply Ground
9 GNDPLL PLL Supply Ground
10 V
11 ERROR
15 RX LVCMOS/LVTTL Control Channel UART Output
N.C. No Connection. Not internally connected.
CC
PD
CCLVDS
CCPLL
Digital Supply Voltage. Bypass VCC to GND with 0.1FF and 0.001FF capacitors in parallel as close
as possible to the device with the smallest value capacitor closest to VCC.
LVCMOS/LVTTL Power-Down Input. Drive PD high to power up the device and enable all outputs.
Drive PD low to put all outputs in high impedance and reduce supply current. PD is internally
pulled down to ground.
LVDS Supply Voltage. Bypass V
as close as possible to the device with the smallest value capacitor closest to V
PLL Supply Voltage. Bypass V
close to the device as possible with the smallest value capacitor closest to V
Active-Low, Open-Drain Error Output. ERROR asserts low to indicate a data transfer error was
detected (parity, PRBS, or UART control channel error). ERROR is high to indicate no error detected. ERROR resets when the error registers are read for parity, control channel errors, and when
PRBS enable bit is reset for PRBS errors. Pull up to V
CCLVDS
to GNDPLL with 0.1FF and 0.001FF capacitors in parallel as
CCPLL
to GNDLVDS with 0.1FF and 0.001FF capacitors in parallel
CCOUT
CCPLL
with a 1kI resistor.
CCLVDS
.
.
���������������������������������������������������������������� Maxim Integrated Products 13
Page 14
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9258A Pin Description (continued)
PIN NAME FUNCTION
16 TX LVCMOS/LVTTL Control Channel UART Input. TX is internally pulled up to V
Open-Drain Lock Output. LOCK asserts high to indicate PLLs are locked with correct serial-word
17 LOCK
18 PCLK_OUT LVCMOS/LVTTL Recovered Clock Output
19 VSYNC_OUT LVCMOS/LVTTL Vertical SYNC Output
20 HSYNC_OUT LVCMOS/LVTTL Horizontal SYNC Output
21, 28–35,
40–46
22, 39 V
23, 38, 48 GNDOUT Output Supply Ground
26 V
27 GNDSPLL SPLL Ground
47
DOUT[15:0] LVCMOS/LVTTL Data Outputs
CCOUT
CCSPLL
CCEN
boundary alignment. LOCK asserts low to indicate PLLs are not locked or incorrect serial-word
boundary alignment was detected. Pull up to V
Output Supply Voltage. V
with 0.1FF and 0.001FF capacitors in parallel as close as possible to the device with the smallest
value capacitor closest to V
Spread-Spectrum PLL Supply Voltage. Bypass V
capacitors in parallel as close as possible to the device with the smallest value capacitor closest to
V
LVCMOS/LVTTL Control Channel Enabled Output. CCEN asserts high to indicate that control channel is enabled.
CCSPLL
.
is the supply for all output buffers. Bypass V
CCOUT
.
CCOUT
with a 1kI resistor.
CCOUT
to GNDSPLL with 0.1FF and 0.001FF
CCSPLL
CCOUT
CCOUT
.
to GNDOUT
���������������������������������������������������������������� Maxim Integrated Products 14
Page 15
SDO-
SDO+
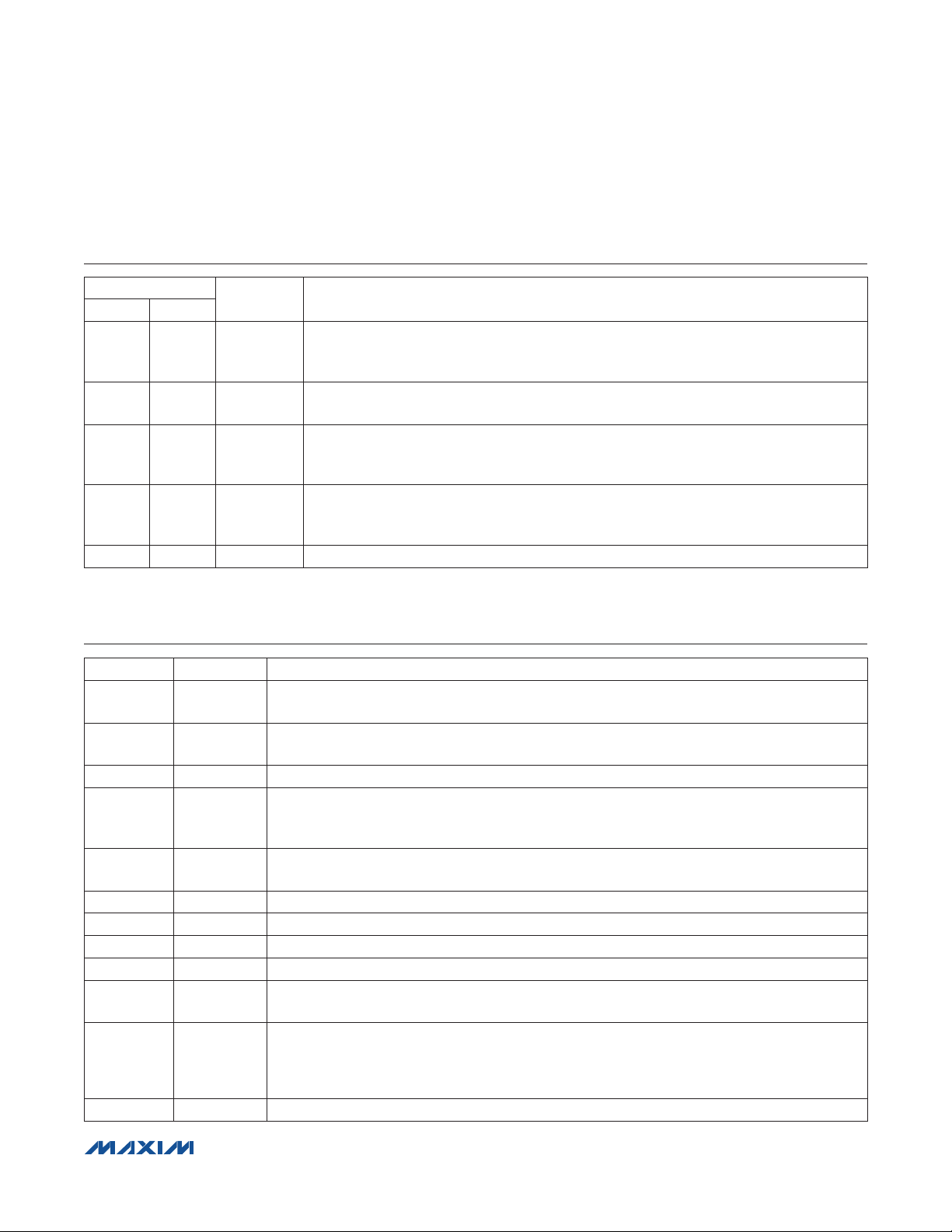
(SDO+) - (SDO-)
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
/2
R
V
OD
((SDO+) + (SDO-))/2
L
V
GND
OS
V
(-)
OS
V
= 0V
OD
(-)
V
OD
/2
R
L
(-) VOS(+)
V
OS
V
= |VOS(+) - VOS(-)|
OS
(-)
V
OD
VOD = |VOD(+) - VOD(-)|
SDO+
SDO-
VOD(+)
Figure 1. MAX9257A LVDS DC Output Parameters
V
OUT
PCLK_IN
DIN
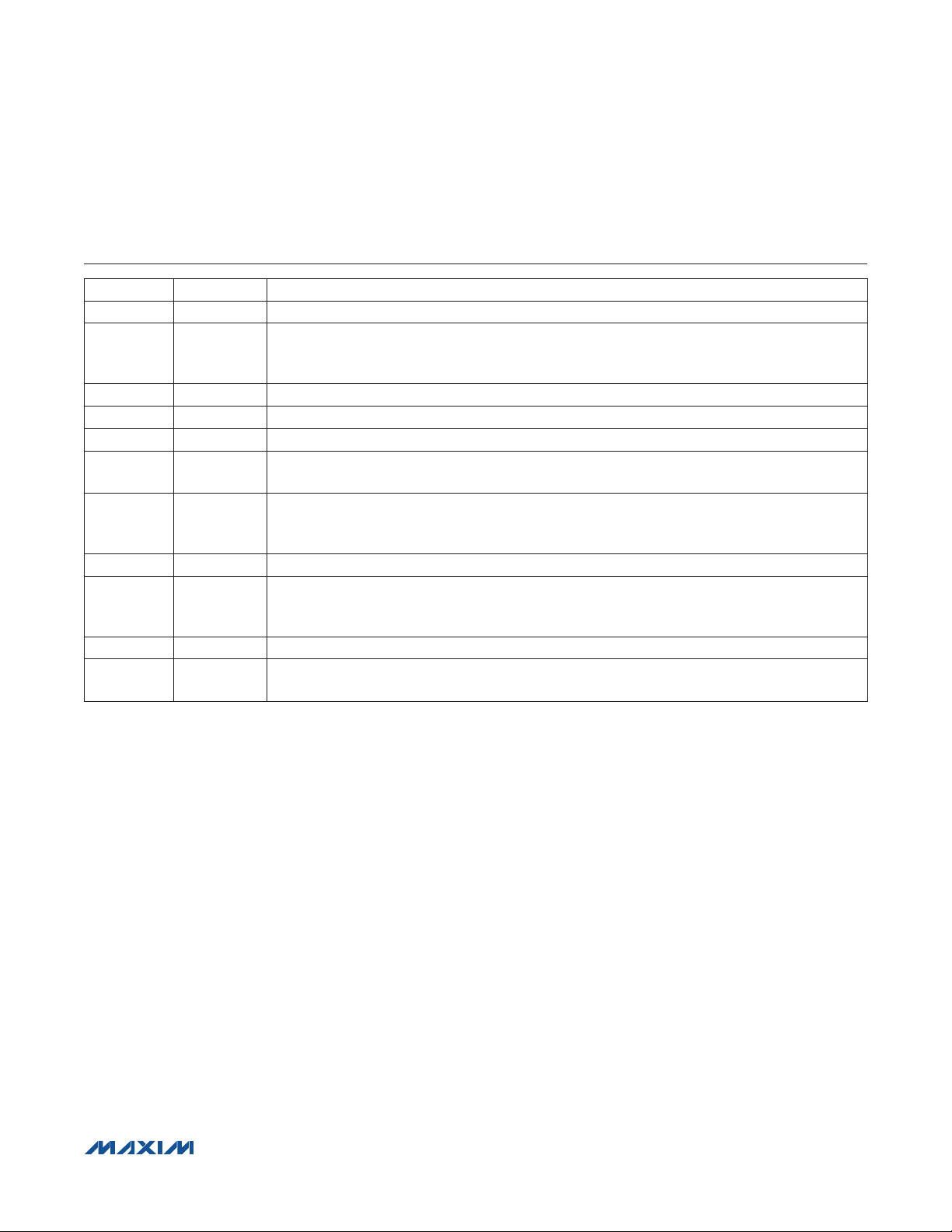
V
V
HYST+
HYST-
-V
ID
VID = 0V
+V
ID
NOTE: PCLK_IN PROGRAMMED FOR RISING LATCH EDGE.
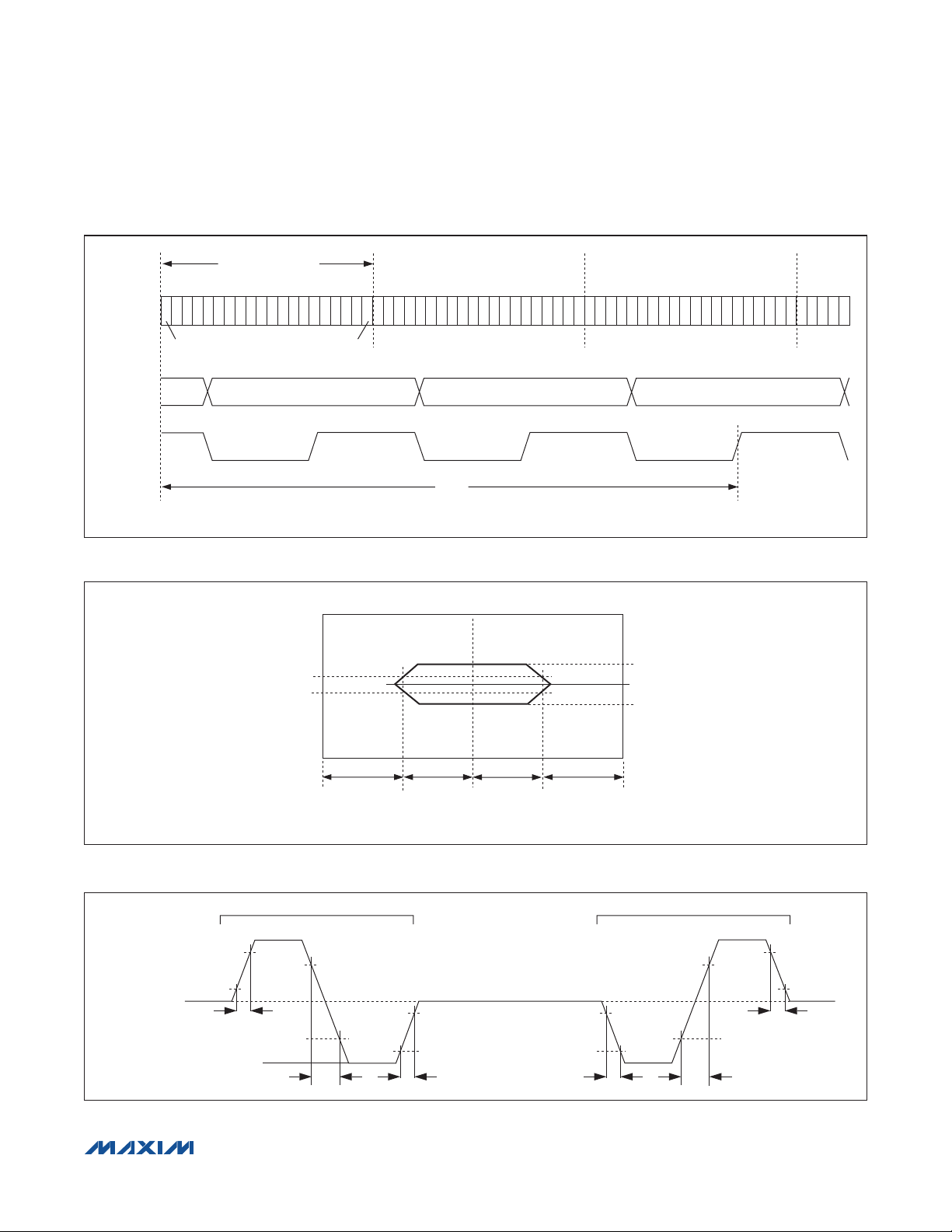
Figure 2. Input Hysteresis Figure 3. MAX9257A Worst-Case Pattern Input
���������������������������������������������������������������� Maxim Integrated Products 15
Page 16
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
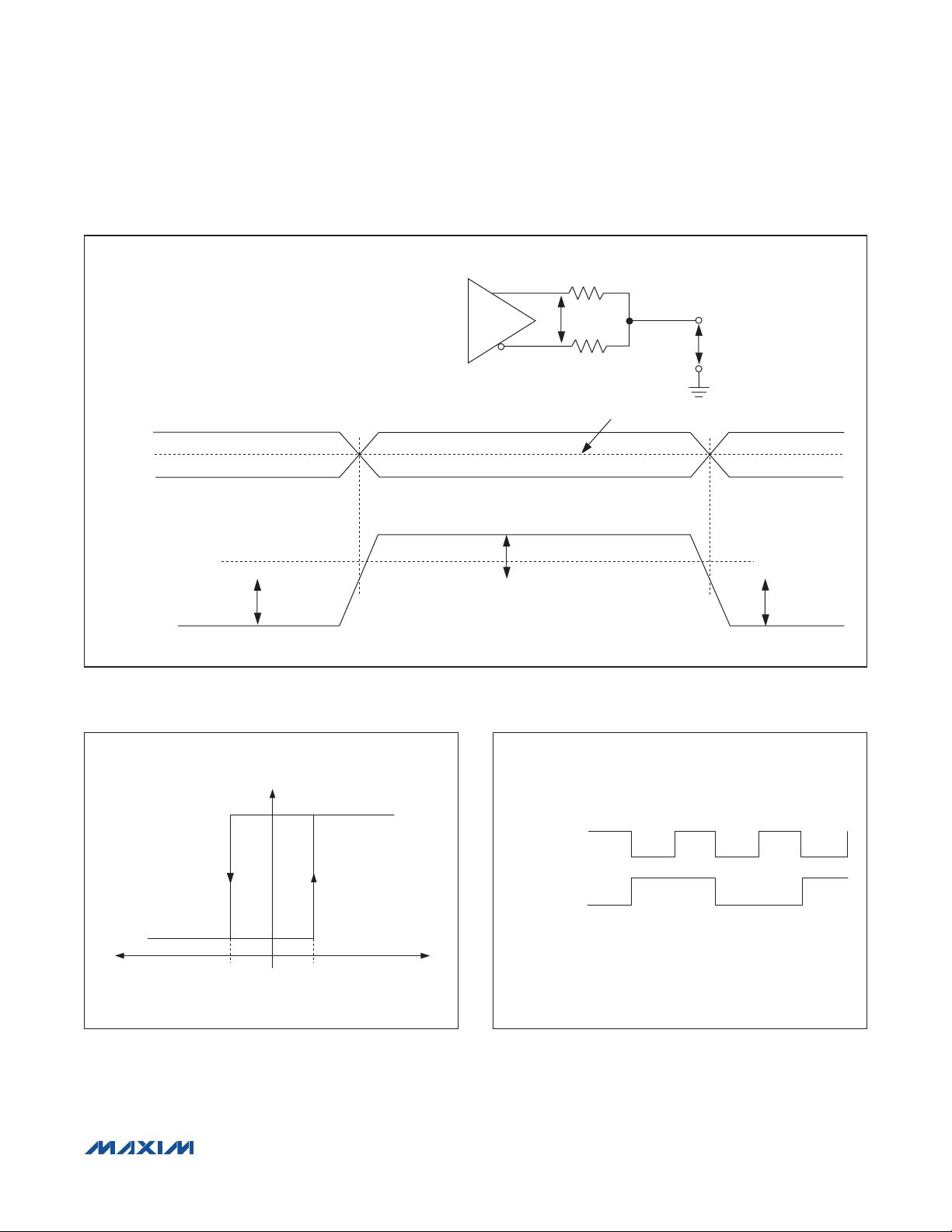
SDO+
R
L
SDO-
C
L
(SDO+) - (SDO-)
80%
C
L
t
RISE
Figure 4. MAX9257A LVDS Control Channel Output Load and Output Rise/Fall Times
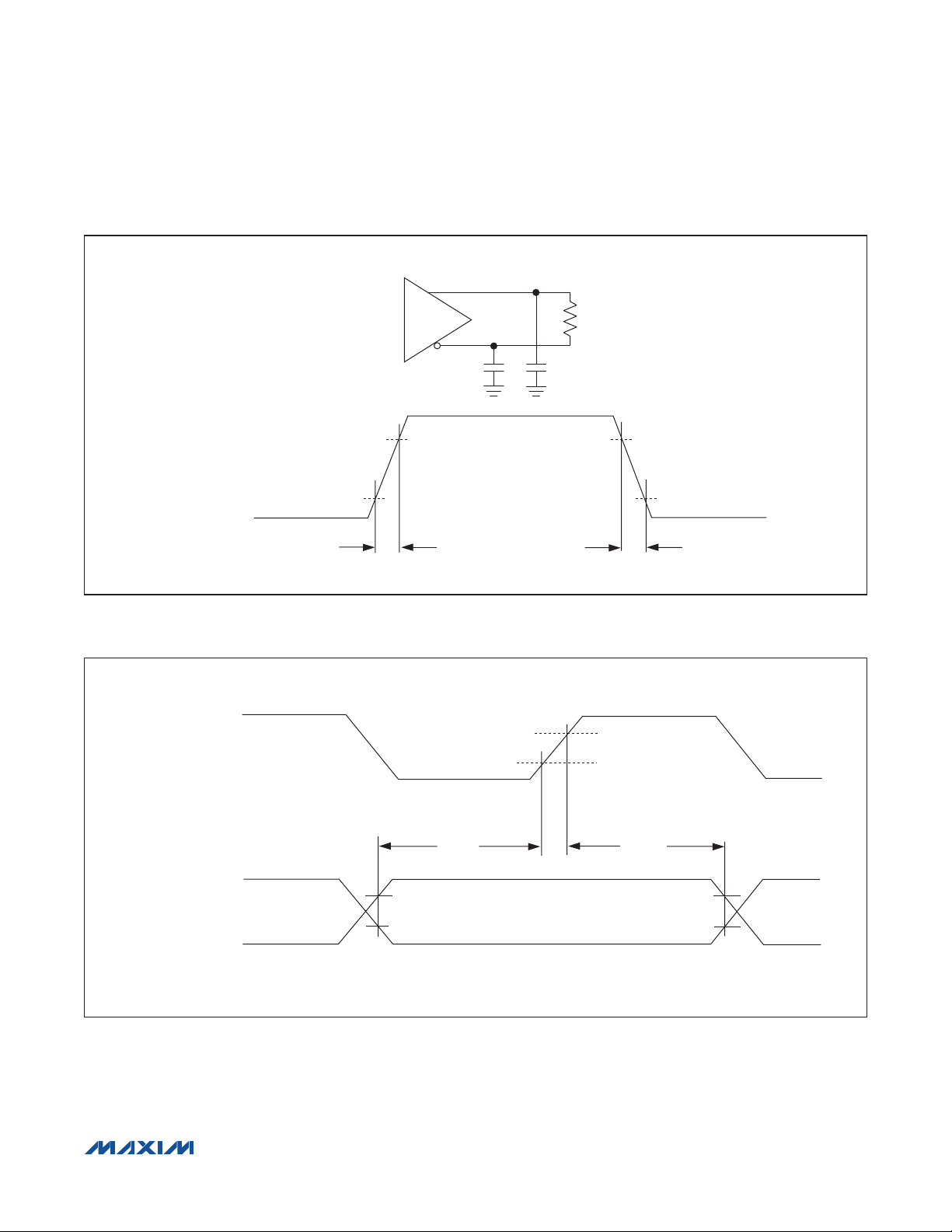
PCLK_IN
V
ILMAX
t
FALL
V
80%
20%20%
IHMIN
DIN, VSYNC_IN, HSYNC_IN
Figure 5. MAX9257A Input Setup and Hold Times
���������������������������������������������������������������� Maxim Integrated Products 16
t
SET
V
IHMIN
V
ILMAX
NOTE: PCLK_IN PROGRAMMED FOR RISING LATCHING EDGE.
t
HOLD
V
V
IHMIN
ILMAX
Page 17

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
EXPANDED TIME SCALE
DIN, HSYNC_IN,
VSYNC_IN
PCLK_IN
SDO
N
N+1
Figure 6. MAX9257A Parallel-to-Serial Delay
PCLK_IN
N+2
t
PSD1
N-1
N+3
N
FIRST BIT LAST BIT
t
T
t
HIGH
N+4
V
V
IHMIN
ILMAX
t
F
t
R
t
LOW
Figure 7. MAX9257A Parallel Input Clock Requirements
C
CCOUT
CCOUT
L
t
F
PCLK_OUT
DOUT
NOTE: PCLK_OUT PROGRAMMED FOR RISING LATCH EDGE.
MAX9258A
SINGLE-ENDED OUTPUT LOAD
0.9 x V
0.1 x V
t
R
Figure 8. MAX9258A Worst-Case Pattern Output Figure 9. MAX9258A Output Rise and Fall Times
���������������������������������������������������������������� Maxim Integrated Products 17
Page 18

Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
PCLK_OUT
Figure 10. MAX9258A Clock Output High and Low Time
PCLK_OUT
MAX9257A/MAX9258A
t
T
t
HIGH
t
LOW
V
OHMIN
V
OLMAX
V
V
OHMIN
OLMAX
DOUT, VSYNC_OUT,
HSYNC_OUT, LOCK
Figure 11. MAX9258A Output Data Valid Times
PD
POWERED DOWN
V
IHMIN
t
PUD
POWERED UP
(OUTPUTS ACTIVE)
t
DVB
V
OHMIN
V
OLMAX
NOTE: PCLK_OUT PROGRAMMED FOR RISING LATCHING EDGE.
PD
DOUT,
VSYNC,
HSYNC
V
ILMAX
t
DVA
t
PDD
HIGH IMPEDANCE
POWERED DOWNPOWERED UP
Figure 12. MAX9258A Power-Up Delay Figure 13. MAX9258A Power-Down Delay
���������������������������������������������������������������� Maxim Integrated Products 18
Page 19
SDI
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
SERIAL-WORD LENGTH
SERIAL WORD N
SERIAL WORD N+1 SERIAL WORD N+2
FIRST BIT
DOUT,
HSYNC_OUT,
VSYNC_OUT
PCLK_OUT
NOTE: PCLK_OUT PROGRAMMED FOR RISING LATCHING EDGE.
LAST BIT
PARALLEL WORD N-2
Figure 14. MAX9258A Serial-to-Parallel Delay
+25mV
-25mV
NOTE: UI IS ONE SERIAL BIT. TIME INPUT IS MEASURED DIFFERENTIALLY (V
PARALLEL WORD N-1 PARALLEL WORD N
t
SPD1
INPUT TEMPLATE FOR LVDS SERIAL
V
- V
SDI+
SDI-
+100mV
0V
-100mV
t
JT
t
S
t
S
t
JT
1.0UI0.75UI0.50UI0.25UI0.0UI
- V
).
SDI+
SDI-
Figure 15. MAX9258A Jitter Tolerance
1 0
0.8V
(SDO+) - (SDO-)
0.2V
OD(+)
OD(+)
0.2 x | V
t
R1A
+ V
OD(+)
0.8 x | V
| 0.2 x | V
OD(-)
t
F2
Figure 16. Control Channel Transition Time
���������������������������������������������������������������� Maxim Integrated Products 19
OD(+)
+ V
| 0.8 x | V
OD(-)
0.2V
OD(-)
0.8V
OD(-)
t
R1B
0.2V
0.8V
OD(-)
OD(-)
0.8V
OD(+)
OD(+)
0.2V
OD(+)
t
F1B
+ V
|
OD(-)
+ V
OD(-)
|
t
R2
OD(+)
t
F1A
Page 20

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
CAMERAECU
VIDEO DATA
MAX9258A
MAX9257A
VIDEO DATA
PIXEL CLOCK
HSYNC_OUT
VSYNC_OUT
PD
CCEN
ERROR
LOCK
RX
TX
DESERIALIZER
100100
UARTUART
Figure 17. Serial Link with I2C Camera Programming Interface (Base Mode)
VIDEO DATA
PIXEL CLOCK
HSYNC_OUT
VSYNC_OUT
PD
CCEN
ERROR
LOCK
RX
TX
MAX9258A
DESERIALIZER
100100
UARTUART
SERIALIZER
UART-
2
C
TO-I
MAX9257A
SERIALIZER
UART
PIXEL CLOCK
HSYNC_IN
VSYNC_IN
GPIO
SDA
SCL
VIDEO DATA
PIXEL CLOCK
HSYNC_IN
VSYNC_IN
GPIO
RX
TX
I2C
CAMERAECU
UART
Figure 18. Serial Link with UART Camera Programming Interface (Bypass Mode)
���������������������������������������������������������������� Maxim Integrated Products 20
Page 21

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Detailed Description
The MAX9257A serializer pairs with the MAX9258A
deseri alizer to form a complete digital video serial link.
The electronic control unit (ECU) programs the registers
in the MAX9257A, MAX9258A, and peripheral devices,
such as a camera, during the control channel phase that
occurs at startup or during the vertical blanking time.
All control channel communication is half-duplex. The
UART communication between the MAX9258A and the
MAX9257A is encoded to allow transmission through
AC-coupling capacitors. The MAX9257A communicates
to the peripheral device through UART or I2C.
8t
VSYNC_IN
SDI/O
SDI/O
T
VIDEO
The MAX9257A/MAX9258A DC-balanced serializer and
deserializer operate from a 5MHz-to-70MHz parallel
clock frequency, and are capable of serializing and
deserializing programmable 10, 12, 14, 16, and 18
bits parallel data during the video phase. The devices
have two phases of operation: video and control channel (Figure 19 and 20). During the video phase, the
MAX9257A accepts parallel video data and transmits
serial encoded data over the LVDS link. The MAX9258A
accepts the encoded serial LVDS data and converts
it back to parallel output data. The MAX9257A has
dedicated inputs for HSYNC and VSYNC. The selected
VSYNC edge causes the MAX9257A/MAX9258A to enter
the control channel phase. Nonactive VSYNC edge can
be asserted after eight pixel clock cycles.
CONTROL
HSK
VIDEO
CCEN
HSK = HANDSHAKING
Figure 19. Video and Control Channel Phases (Spread Off)
0.5/f
SSM
VSYNC_IN
SDI/O
SPREAD
PROFILE
SDI/O
CCEN
Figure 20. Video and Control Channel Phases (MAX9257A Spread is Enabled)
���������������������������������������������������������������� Maxim Integrated Products 21
VIDEO
(max)
CONTROL
HSK = HANDSHAKING
HSK
VIDEO
Page 22

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
The video data are coded using two overhead bits (EN0
and EN1) resulting in a serial-word length of N+2 bits.
The devices feature programmable parity encoding that
adds two parity bits to the serial word. Bit 0 (EN0) is the
LSB that is serialized first with out parity enabled. The parity bits are serialized first when parity is enabled.
The ECU programs the MAX9258A, MAX9257A, and
peripheral devices at startup and during the control
channel phase. In a digital video system, the control
channel phase occurs during the vertical blanking time
and synchronizes to the VSYNC signal. The programmable active edge of VSYNC initiates the control channel
phase. Nonactive edge of VSYNC can transition at any
time after 8 x tT if MAX9257A spread is not enabled and
0.5/f
when enabled. At the end of video phase, the
SSM
MAX9258A drives CCEN high to indicate to the ECU
that the control channel is open. Programmable timers
and ECU signal activity determine how long the control
channel stays open. The timers are reset by ECU signal
activity. ECU programming must not exceed the vertical
blanking time to avoid loss of video data.
After the control channel phase closes, the MAX9257A
sends a 546 or 1090 word pattern as handshaking (HSK)
to synchronize the MAX9258A’s internal clock recovery
circuit to the MAX9257A’s transmitted data. Following
the handshaking, the control channel is closed and the
video phase begins. The serial LVDS data is recovered
and parallel data is valid on the pro grammed edge of the
recovered pixel clock.
Table 1 and 2 show the default power-up values for the
MAX9257A/MAX9258A registers. Tables 3 and 4 show
the input and output supply references.
Table 1. MAX9257A Power-Up Default Register Map (see the MAX9257A Register Table)
REGISTER NAME
REG0 0x00 0xB5
REGISTER
ADDRESS (hex)
POWER-UP VALUE
(hex)
POWER-UP DEFAULT SETTINGS
PRATE = 10, 20MHz to 40MHz
SRATE = 11, 400Mbps to 840Mbps
PAREN = 0, parity disabled
PWIDTH = 101, parallel data width = 18
REG1 0x01 0x1F
REG2 0x02 0xA0
REG3 0x03 0xA0
REG4 0x04
���������������������������������������������������������������� Maxim Integrated Products 22
1) REM = 0, 0x28
2) REM = 1, 0x30
SPREAD = 000, spread = off
Reserved = 11111
STODIV = 1010, STO clock is pixel clock divided by 1024
STOCNT = 0000, STO counter counts to 1
ETODIV = 1010, ETO clock is pixel clock divided by 1024
ETOCNT = 0000, ETO counter counts to 1
VEDGE = 0, VSYNC active edge is falling
Reserved = 0
CKEDGE = 1, pixel clock active edge is rising
PD: 1) If REM = 0, PD = 0
2) If REM = 1, PD = 1
SEREN: 1) If REM = 0, SEREN = 1
2) If REM = 1, SEREN = 0
BYPFPLL = 0, filter PLL is active
Reserved = 0
PRBSEN = 0, PRBS test disabled
Page 23

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Table 1. MAX9257A Power-Up Default Register Map (continued)
REGISTER NAME
REG5 0x05 0xFA MAX9257A address = 1111 1010
REG6 0x06 0xFF End frame = 1111 1111
REG7 0x07 0xF8 MAX9258A address = 1111 1000
REG8 0x08 0x00
REG9 0x09 0x00
REG10 0x0A 0x00
REG11 0x0B 0x00
REG12 0x0C 0xE0
REG13 0x0D 0x00
REG14 0x0E 0x00
REGISTER
ADDRESS (hex)
POWER-UP VALUE
(hex)
POWER-UP DEFAULT SETTINGS
INTMODE = 0, interface with peripheral is UART
INTEN = 0, interface with peripheral is disabled
FAST = 0, UART bit rate = DC to 4.25Mbps
CTO = 000, never come back
BITRATE = 00, base mode bit rate = 95kbps to 400kbps
PRBSLEN = 0000, PRBS word length = 2
GPIO9DIR = 0, GPIO9 = input
GPIO8DIR = 0, GPIO8 = input
GPIO9 = 0
GPIO8 = 0
GPIO7DIR = 0, GPIO7 = input
GPIO6DIR = 0, GPIO6 = input
GPIO5DIR = 0, GPIO5 = input
GPIO4DIR = 0, GPIO4 = input
GPIO3DIR = 0, GPIO3 = input
GPIO2DIR = 0, GPIO2 = input
GPIO1DIR = 0, GPIO1 = input
GPIO0DIR = 0, GPIO0 = input
GPIO7 = 0
GPIO6 = 0
GPIO5 = 0
GPIO4 = 0
GPIO3 = 0
GPIO2 = 0
GPIO1 = 0
GPIO0 = 0
PREEMP = 111, preemphasis = 0%
Reserved = 00000
Reserved = 000000
I2CFILT = 00, I2C glitch filter settings:
1) 95kbps to 400kbps = 100ns
2) 400kbps to 1000kbps = 50ns
3) 1000kbps to 4250kbps = 10ns
Reserved = 0000 000
LOCKED = read only
21
���������������������������������������������������������������� Maxim Integrated Products 23
Page 24

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Table 2. MAX9258A Power-Up Default Register Map (see the MAX9258A Register Table)
REGISTER NAME
REG0 0x00 0xB5
REG1 0x01 0x00
REG2 0x02 0xA0
REG3 0x03 0xA0
REG4 0x04 0x20
REG5 0x05 0xF8 MAX9258 address = 1111 1000
REG6 0x06 0xFF End frame = 1111 1111
REG7 0x07 0x00
REG8 0x08 0x10
REG9 0x09 0x00
REG10 0x0A 0x00 Parity errors video (8 LSBs) = read only
REG11 0x0B 0x00 Parity errors video (8 MSBs) = read only
REG12 0x0C 0x00 PRBS bit errors = read only
REG13 0x0D 0x00
REGISTER
ADDRESS (hex)
POWER-UP VALUE
(hex)
POWER-UP DEFAULT SETTINGS
PRATE = 10, 20MHz to 40MHz
SRATE = 11, 400Mbps to 840Mbps
PAREN = 0, parity disabled
PWIDTH = 101, parallel data width = 18
SPREAD = 00, spread spectrum = off
AER = 0, error count is reset by reading error registers
ACTOFFSET = 00, 23mV offset
Reserved = 000
STODIV = 1010, STO clock is pixel clock divided by 1024
STOCNT = 0000, STO counter counts to 1
ETODIV = 1010, ETO clock is pixel clock divided by 1024
ETOCNT = 0000, ETO counter counts to 1
VEDGE = 0, VSYNC active edge is falling
HEDGE = 0, HSYNC active edge is falling
CKEDGE = 1, pixel clock active edge is rising
Reserved = 0
ACTLP = 0, short stretcher output pulse
Reserved = 00
PRBSEN = 0, PRBS test disabled
INTMODE = 0, interface with peripheral is UART
INTEN = 0, interface with peripheral is disabled
FAST = 0, UART bit rate = DC to 4.25Mbps
CTO = 000, never come back
BITRATE = 00, base mode bit rate = 95kbps to 400kbps
PATHRLO = 0001 0000
parity threshold = 16
PATHRHI = 0000 0000,
parity threshold = 16
Reserved = 000
Parity error, communication with MAX9258A = read only
Frame error, communication with MAX9258A = read only
Parity error, communication with MAX9257A = read only
Frame error, communication with MAX9257A = read only
I2C error, communication with peripheral = read only
���������������������������������������������������������������� Maxim Integrated Products 24
Page 25

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Parallel-Word Width
The parallel-word width is made up of the video data
bits, HSYNC, and VSYNC. The video data bits are programmable from 8 to 16 depending on the pixel clock,
Table 3. MAX9257A I/O Supply
INPUTS/OUTPUTS SUPPLY
PCLK_IN, HSYNC_IN, VSYNC_IN,
DIN[0:7], DIN[8:15]/GPIO[0:7],
GPIO8, GPIO9, SCL/TX, SDA/RX
SDO+, SDO- V
REM V
V
CCIO
CCLVDS
CC
serial-data rate, and parity. Table 16 shows the parallelword width.
Serial-Word Length
The serial-word length is made up of the parallel-word
width, encoding bits, and parity bits. Tables 5–9 show the
serial video format and serial-word lengths without parity.
Tables 10–13 show with parity bits included.
Table 4. MAX9258A I/O Supply
INPUTS/OUTPUTS SUPPLY
All inputs and outputs V
SDI+, SDI- V
CCOUT
CCLVDS
Table 5. Serial Video Data Format for 20-Bit Serial-Word Length (Parallel-Word Width = 18)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13 D14 D15
Table 6. Serial Video Data Format for 18-Bit Serial-Word Length (Parallel-Word Width = 16)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13
Table 7. Serial Video Data Format for 16-Bit Serial-Word Length (Parallel-Word Width = 14)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11
Table 8. Serial Video Data Format for 14-Bit Serial-Word Length (Parallel-Word Width = 12)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12 13 14
EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7 D8 D9
Table 9. Serial Video Data Format for 12-Bit Serial-Word Length (Parallel-Word Width = 10)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12
EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7
Table 10. Format for 20-Bit Serial-Word Length with Parity (Parallel-Word Width = 16)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
PR PRB EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 D13
���������������������������������������������������������������� Maxim Integrated Products 25
Page 26

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Table 11. Format for 18-Bit Serial-Word Length with Parity (Parallel-Word Width = 14)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
PR PRB EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11
Table 12. Format for 16-Bit Serial-Word Length with Parity (Parallel-Word Width = 12)
BIT
NAME
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
PR PRB EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7 D8 D9
Table 13. Format for 14-Bit Serial-Word Length with Parity (Parallel-Word Width = 10)
BIT
NAME
Serial LVDS data is transmitted least significant bit (LSB)
to most significant bit (MSB) as shown in Tables 5 through
13. The ECU at startup can program the parallel word
width, serial frequency range, parity, spread-spec trum,
and pixel clock frequency range (see the MAX9257A
Register Table and the MAX9258A Register Table).
The devices each have registers that can be configured
at startup. Depending on the word length, the MAX9257A
multiplies PCLK_IN (pixel clock) by 12, 14, 16, 18, or
20 using an internal PLL to gener ate the serial clock.
Use Table 20 for proper selection of available PCLK frequency and serial-data ranges. Parallel data is serialized
using the serial-clock and serialized bits are transmitted
at the MAX9257A LVDS outputs. The devices support
a wide range for PCLK_IN (Table 14). If the pixel clock
frequency needs to change to a frequency outside the
pro grammed range, the ECU must program both the
MAX9257A and the MAX9258A in the same control channel session.
The word length and pixel clock is limited by the maximum serial-data rate of 840Mbps. The following formula
shows the relation between word length, pixel clock, and
serial clock:
Serial-word length x pixel clock = serial-data rate =
For example, if PCLK_IN is 70MHz, the serial-word length
has to be 12 bits including DC balance bits if parity is not
enabled to keep the serial-data rate under 840Mbps. If
1 2 3 4 5 6 7 8 9 10 11 12 13 14
PR PRB EN0 EN1 HSYNC VSYNC D0 D1 D2 D3 D4 D5 D6 D7
LVDS Serial Data
Table 14. MAX9257A Pixel Clock Range
(PCLK�IN)
FREQUENCY (MHz) PRATE (REG0[7:6])
5–10 00
10–20 01
Pixel Clock Frequency Range
20–40 10
40–70 11
Table 15. Serial-Data Rate Range
SERIAL-DATA RATE (Mbps) SRATE (REG0[5:4])
60–100 00
100–200 01
200–400 10
400–840 11
the serial-word length is 20 bits, the maxi mum PCLK_IN
frequency is 42MHz. The serial-data rate can vary from
Serial-Data Rate Range
840Mbps
60Mbps to 840Mbps and can be programmed at powerup (Table 15). Use Table 20 for proper selection of available PCLK frequency and serial data ranges. Operating
in the incorrect range for either the serial-data rate or
PCLK_IN can result in excessive current dissipation and
failure of the MAX9258A to lock to the MAX9257A.
LVDS Common-Mode Bias
The output common-mode bias is 1.2V at the LVDS
inputs on the MAX9258A and LVDS outputs on the
MAX9257A. No external resistors are required to provide
bias for AC-coupling the LVDS inputs and outputs.
���������������������������������������������������������������� Maxim Integrated Products 26
Page 27

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
FREQUENCY
1/f
SSM
f
(MAX)
SPREAD
f
PCLK_IN
f
(MIN)
SPREAD
Figure 21. Simplified Modulation Profile for the MAX9257A/
MAX9258A
TIME
LVDS Termination
Terminate the LVDS link at both ends with the characteristic impedance of the transmission line (typically
100O differential). The LVDS inputs and outputs are high
impedance to GND and differentially.
Spread-Spectrum Selection
The devices each have spread-spectrum options. Both
should not be turned on at the same time. When the
MAX9257A is programmed for spread spectrum, the
MAX9258A tracks and passes the spread to its clock and
data outputs. The MAX9257A/MAX9258A are both center
spread (Figure 21). The control channel does not use
spread spectrum, but has slower transition times.
MAX9258A Spread Spectrum
The MAX9258A features a programmable spread-spec trum
clock and data outputs for reduced EMI. The sin gle-ended
data outputs are programmable for no spread, Q2%, or
Q4% (see the Typical Operating Characteristics) around the
recovered pixel clock fre quency. The output spread is programmed in register REG1[7:6]. Table 17 shows the spread
options, and Table 18 shows the various modulation rates.
MAX9257A Spread Spectrum
The MAX9257A features programmable spread spectrum for the LVDS outputs. Table 19 shows various
spread options, and Table 20 shows the various modulation rates. Only one device (the MAX9257A or the
MAX9258A) should be programmed for spread spectrum
at a time. If the MAX9257A is programmed for spread,
the MAX9258A tracks and passes the spread to the data
and clock out puts. The PRATE range of 00 and 01 (5MHz
≤ PCLK ≤ 20MHz) supports all the spread options. The
PRATE range of 10 and 11 (20MHz ≤ PCLK ≤ 70MHz)
requires that the spread be 2% or less.
Table 16. Parallel-Word Width
PARALLEL-WORD WIDTH PWIDTH (REG0[2:0])
10 000
12 001
14 010
16 011
18 1XX
Table 17. MAX9258A Spread
PRATE (REG1[7:6]) SPREAD (%)
00 Off
01
10 Off
11
Q2
Q4
Table 18. MAX9258A Modulation Rate
PRATE
(REG1[7:6])
00 PCLK/312 16 to 32
01 PCLK/520 19.2 to 38.5
10 PCLK/1040 19.2 to 38.5
11 PCLK/1248 32 to 56
MODULATION RATE f
RANGE (kHz)
SSM
Table 19. MAX9257A LVDS Output Spread
REG1[7:5] SPREAD (%)
000 Off
001
010
011
100 Off
101
110
111
Pixel Clock Jitter Filter
The MAX9257A has a PLL to filter high-frequency pixel
clock jitter on PCLK_IN. The FPLL can be bypassed by
writing 1 to REG4[2]. The FPLL improves the MAX9258A’s
data recovery by filtering out the high-fre quency components from the pixel clock that the MAX9258A cannot
track. The 3dB bandwidth of the FPLL is 100kHz (typ).
Q1.5
Q1.75
Q2
Q3
Q3.5
Q4
���������������������������������������������������������������� Maxim Integrated Products 27
Page 28

Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Table 20. MAX9257A Modulation Rate
MAX9257A/MAX9258A
SERIAL-WORD LENGTH SRATE PRATE PCLK RANGE (MHz) MODULATION RATE f
11 11 40–70 PCLK/2728 14.7 to 25.7
11 10 33.3–40 PCLK/1736 19.2 to 23.0
10 10 20–33.3 PCLK/1612 12.4 to 20.7
12
14
16
18
20
10 01 16.6–20 PCLK/992 16.7 to 20.2
01 01 10–16.6 PCLK/1116 9.0 to 14.9
01 00 8.3–10 PCLK/744 11.2 to 13.4
00 00 5–8.3 PCLK/868 5.8 to 9.6
11 11 40–60 PCLK/2304 17.4 to 26.0
11 10 28.6–40 PCLK/1728 16.6 to 23.1
10 10 20–28.6 PCLK/1440 13.9 to 19.9
10 01 14.3–20 PCLK/1008 14.2 to 19.8
01 01 10–14.3 PCLK/1008 9.9 to 14.2
01 00 7.1–10 PCLK/720 9.9 to 13.9
00 00 5–7.1 PCLK/720 6.9 to 9.9
11 11 40–52.5 PCLK/1968 20.3 to 26.7
11 10 25–40 PCLK/1640 15.2 to 24.4
10 10 20–25 PCLK/1312 15.2 to 19.1
10 01 12.5–20 PCLK/984 12.7 to 20.3
01 01 10–12.5 PCLK/820 12.2 to 15.2
01 00 6.25–10 PCLK/656 9.5 to 15.2
00 00 5–6.25 PCLK/656 7.6 to 9.5
11 11 40–46.6 PCLK/1840 21.7 to 25.3
11 10 22.2–40 PCLK/1472 15.1 to 27.2
10 10 20–22.2 PCLK/1104 18.1 to 20.1
10 01 11.1–20 PCLK/920 12.1 to 21.7
01 01 10–11.1 PCLK/736 13.6 to 15.1
01 00 5.6–10 PCLK/736 7.6 to 13.6
00 00 5–5.6 PCLK/552 9.1 to 10.1
11 11 40–42 PCLK/1632 24.5 to 25.7
11 10 20–40 PCLK/1632 12.3 to 24.5
10 01 10–20 PCLK/1020 9.8 to 19.6
01 00 5–10 PCLK/816 6.1 to 12.3
RANGE (kHz)
SSM
���������������������������������������������������������������� Maxim Integrated Products 28
Page 29

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
LVDS Output Preemphasis (SDO±)
The MAX9257A features programmable preemphasis
where extra current is added when the LVDS outputs
transition on the serial link. Preemphasis provides additional current to the normal drive current. For example,
20% preemphasis provides 20% greater current than
the normal drive current. Current is boosted only on the
transitions and returns to the normal drive current after
switching. Select the preemphasis level to optimize the
eye diagram. Preemphasis boosts the high-frequency
content of the LVDS outputs to enable driving greater
cable lengths. The amount of preemphasis is programmed in REG12[7:5] (Table 21).
VSYNC, HSYNC, and Pixel Clock Polarity
PCLK: The MAX9257A is programmable to latch data
on either rising or falling edge of PCLK. The polarity of
PCLKOUT at the MAX9258A can be independent of the
MAX9257A PCLK active edge. The polarity of PCLK can
be programmed using REG4[5] of the MAX9257A and
the MAX9258A.
VSYNC: The MAX9257A and the MAX9258A enter control channel on the falling edge of VSYNC. The default
reg ister settings are VSYNC active falling edge for both
the MAX9257A and the MAX9258A. If the VSYNC active
edge is programmed for rising edge at the MAX9257A,
the MAX9258A VSYNC active edge must also be programmed for rising edge to reproduce VSYNC rising
edge at the MAX9258A output. However, matching
the polarity of the VSYNC active edge between the
MAX9257A and the MAX9258A is not a requirement for
proper operation.
HSYNC: HSYNC active-edge polarity is programmable
for the MAX9258A.
General-Purpose I/Os (GPIOs)
The MAX9257A has up to 10 GPIOs available. GPIO8 and
GPIO9 are always available while GPIO[0:7] are available depending on the parallel-word width (Table 22).
If GPIOs are not available, the corresponding GPIO bits
are not used.
A GPIO can be programmed to drive an LVCMOS logic level
or to read a logic input. The register bit that sets the output
level when the GPIO is programmed as an output stores the
input level when the GPIO is programmed as an input.
Table 21. Preemphasis
REG12[7:5] PREEMPHASIS (%)
000,101,110 20
001 40
010 60
011 80
100 100
111 0
Table 22. GPIOs vs. Parallel-Word Width
PARALLEL-WORD WIDTH (N) GPIOs AVAILABLE
18 GPIO[8:9]
16 GPIO[6:9]
14 GPIO[4:9]
12 GPIO[2:9]
10 GPIO[0:9]
Open-Drain Outputs (LOCK, ERROR)
LOCK and ERROR are open-drain outputs that require a
pullup resistor to an external supply. ERROR asserts low
when an error occurs and LOCK is high impedance when
the MAX9258A is locked to the MAX9257A and remains
high under the locked condition. When the devices are
in shutdown, the channel is not locked and LOCK goes
high impedance, is pulled high, and should be ignored.
ERROR is high impedance at shutdown and remains
high. In choosing pullup resistors, there is a tradeoff
between power dissipation and speed; 10kI pullup
should be sufficient.
The LOCK and ERROR outputs can be wired in an AND
configuration if you have multiple serializers and deserializers, or a single serializer fanned out to multi ple deserializers through a repeater. For such situa tions, wire the
multiple LOCK outputs together and use a single pullup
resistor to pull up all the lines high. LOCK is high if all
the devices are locked. Do the same thing for ERROR;
ERROR is low if any MAX9258A reports errors.
���������������������������������������������������������������� Maxim Integrated Products 29
Page 30

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Base Mode and Bypass Mode (Basics)
In the control channel phase, there are two modes: base
and bypass. In base mode, ECU always communicates
using the MAX9257A/MAX9258A UART protocol and
com munication with a peripheral device is performed
in I2C by the MAX9257A. Packets not addressed to
the MAX9257A or the MAX9258A get converted to I2C
and passed to the peripheral device. Similarly, I2C
packets from the peripheral device get converted to
UART pack ets in the reverse direction. ECU can disable
communi cation to the peripheral device by writing a 0 to
INTEN (REG8[6] in the MAX9257A and REG7[6] in the
MAX9258A). Base mode is the default mode. Bypass
mode is entered by writing a 0 to INTMODE and 1 to
INTEN (Table 23). Bypass mode is exited if there is no
activity from ECU in the control channel for the duration of
CTO. When CTO times out, INTEN reverts back to 0 and
the devices revert back to base mode. To permanently
stay in bypass mode, ECU can lock the CTO timer or
program CTO to be longer than ETO and STO.
Timers
The devices feature three different timers. The start timeout (STO) and end timeout (ETO) control the duration of
the control channel. The come-back timeout (CTO) controls the duration of bypass mode.
Table 23. Selection of Base Mode or
Bypass Mode
STO Timer
The STO (start timeout) timer closes the control channel if the ECU does not start using the control channel
within the STO timeout period. The STO timer is configured by register REG2 for both the MAX9257A and the
MAX9258A. The four bits of REG2[7:4] select the divide
ratio (STODIV) for the STO clock as a function of the pixel
clock (Table 24). The timeout period is determined by
counter bits REG2[3:0] that increment once every STO
clock period. Write to REG2[3:0] to determine the counter
end time. The STO counter counts to the programmed
STOCNT + 1. The ECU must begin communicating
before STO times out, otherwise, the control channel
closes (Figure 22). The STO timeout period is given by:
t STODIV (STOCNT 1)
STO
1
= × × +
f
CLK
For example:
If the pixel clock frequency is set to 16MHz, STODIV is
set to 1010 (STODIV = 1024), and STOCNT is set to 1001
(STOCNT = 9), the STO timer counts with 15.625kHz STO
clock (16MHz/1024) internally until it reaches 10 and
timer expires. The t
is equal to tT x 1024 x 10 = 640Fs.
STO
The default value for STODIV is 1024 while the default
value for STOCNT is 0. That means the STO timeout
period is equal 1024 pixel clock cycles. Activity from the
ECU on the control channel shuts off the STO timer and
starts the ETO timer.
INTEN
MAX9257A REG8[6],
MAX9258A REG7[6]
0 X
1 1
1 0
���������������������������������������������������������������� Maxim Integrated Products 30
INTMODE
MAX9257A REG8[7],
MAX9258A REG7[7]
MODE
Base mode, communication
with peripheral is
not enabled
Base mode,
communication
with peripheral is
enabled (I2C)
Bypass mode,
communication
with MAX9257A/
MAX9258A is not
enabled, communication
with peripheral is
enabled (UART)
Table 24. STO Clock Divide Ratio
REG2[7:4] STODIV
00XX 16
0100 16
0101 32
0110 64
0111 128
1000 256
1001 512
1010 1024
1011 2048
1100 4096
1101 8192
1110 16,384
1111 32,768
Page 31

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
VSYNC_IN
T1
SDI/O
CCEN
TX
RX
DOUT_
T1 = TIME TO ENTER CONTROL CHANNEL
T2 = STO TIMEOUT PERIOD
T3 = CONTROL CHANNEL EXIT TIME DUE TO STO
HSK = HANDSHAKING BETWEEN THE MAX9257 AND THE MAX9258
Figure 22. Control Channel Closing Due to STO Timeout
VIDEO
ETO Timer
The ETO (end timeout) timer closes the control channel if
the ECU stops communicating for the ETO timeout period.
Configure register REG3[7:4] for both the MAX9257A and
the MAX9258A to select the divide ratio (ETODIV) for the
ETO clock as a function of the pixel clock (Table 25). The
timeout period is determined by counter bits REG3[3:0]
that increment once every ETO clock period. Write to
REG3[3:0] to determine the counter end time. The ETO
counter counts to the pro grammed ETOCNT + 1. Any
ECU activity resets the ETO timer. When the ECU stops
transmitting data for the ETO timeout period, the control
channel closes (Figure 23).
t ETODIV (ETOCNT 1)
ETO
1
= × × +
f
CLK
For example:
If the pixel clock frequency is set to 16MHz, ETODIV is
set to 1010 (ETODIV = 1024), and ETOCNT is set to 1001
(ETOCNT = 9), the ETO timer counts with the 15.625kHz
ETO clock (16MHz/1024) internally until it reaches 10 and
timer expires. The t
is equal to tT x 1024 x 10 = 640Fs.
ETO
T2
FROZEN
T3
HSK
VIDEO
Table 25. ETO Clock Divide Ratio
REG3[7:4] ETODIV
00XX 16
0100 16
0101 32
0110 64
0111 128
1000 256
1001 512
1010 1024
1011 2048
1100 4096
1101 8192
1110 16,384
1111 32,768
The default value for ETODIV is 1024 while the default
value for ETOCNT is 0. That means the ETO timeout
period is equal to 1,024 pixel clock cycles.
���������������������������������������������������������������� Maxim Integrated Products 31
Page 32

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
VSYNC_IN
T1
SDI/O
CCEN
TX
RX
DOUT_
T1 = TIME TO ENTER CONTROL CHANNEL
T4 = ETO TIMEOUT PERIOD
T5 = CONTROL CHANNEL EXIT TIME DUE TO ETO
HSK = HANDSHAKING BETWEEN MAX9257 AND MAX9258
Figure 23. Control Channel Closing Due to ETO Timeout
VIDEO
ECU
ACTIVITY
Closing the Control Channel
After the MAX9257A detects the active VSYNC edge, it
sends three synchronization words. Once the MAX9258A
sees the active VSYNC transition and detects three synchronization words, it enters the control channel phase
and CCEN goes high. There is a brief delay of T1 between
the VSYNC transition and CCEN transitioning high. The
ECU is allowed to communicate when CCEN is high.
If the ECU does not communicate while CCEN is high
(Figure 22), the link remains silent and STO starts counting
towards its preset timeout counter value. If STO times out
(T2), CCEN transitions low and the con trol channel closes.
If the ECU communicates while CCEN is high and before
STO expires (Figure 23), the STO timer is turned off and
ETO timer is enabled. The ETO counter (ETOC NT+1) is
reset to 0 whenever activity from ECU (base mode) or
ECU and Camera (bypass mode) is detected. As long
as there is activity from ECU (base mode) or ECU and
Camera (bypass mode) on the link, the chan nel does not
close and the ETO counter resets. After the ECU (base
mode) or ECU and Camera (bypass mode) ceases link
activity, ETO times out (T4), CCEN transitions low, and
the control channel closes.
T5
HSK
T4 (BASE MODE)
T4 (BYPASS MODE)
FROZEN
VIDEO
Another way to close the control channel in base mode
is for the ECU to send an end frame (EF) to close the
control channel without waiting for ETO to time out.
Whenever EF is received by both the devices, control
channel closes immediately and CCEN goes low. A synchronization frame must precede EF. End frame cannot
be used in bypass mode. The control channel must close
by EF to report errors back to the ECU.
After the control channel closes, there is a brief hand shake
period (T3 in Figure 22 and T5 in Figure 23) between the
MAX9257A and the MAX9258A. The MAX9258A sends a
special lock frame to the MAX9257A to indicate if PLL is
still locked. The MAX9258A sends the lock frame if the
number of decoding errors didn’t exceed a threshold in
the last LVDS video phase ses sion. The MAX9258A features a proprietary VCO lock that prevents frequency drift
while in the control chan nel for extended periods of time.
If MAX9257A receives the lock frame, it understands that
the MAX9258A is in a locked state and sends a short
training sequence. If the lock frame is not received by the
MAX9257A, it assumes that the MAX9258A is not locked
and sends a long train ing sequence. After the short
or long training sequence is complete, the MAX9257A
���������������������������������������������������������������� Maxim Integrated Products 32
Page 33

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
sends three special synchro nization words before entering the video phase. Training sequence is used to resynchronize the devices before the video phase starts.
The MAX9257A/MAX9258A control channel duration is
independent of VSYNC. The control channel does not
close when VSYNC deasserts, which allows the use
of a VSYNC interrupt signal on VSYNC_IN. The control
channel must be closed by STO, ETO, or EF. If the control channel does not close before video data becomes
available, video data can be lost.
STO/ETO Timer Programming
STO and ETO can be programmed given the values of
T2, T4, and maximum values of T1, T3, and T5 (Figures
28, 23):
tT = pixel clock period, t
= UART period
UCLK
When spread spectrum is not enabled in MAX9257A:
max(T1) = 2.5Fs + (3 x tT) + (4 x t
UCLK
)
When spread spectrum is enabled in MAX9257A:
max(T1) = 2.5Fs + (1400 x tT) + (4 x t
T2 = t
STO
T4 = t
ETO
UCLK
)
When pixel clock frequency range (PRATE) is 00 or 01:
t
STO
max(T3) 546 t (20 t )
max(T5) 546 t (20 t )
When pixel clock frequency range (PRATE) is 10 or 11:
max(T3) 1090 t (20 t )
max(T5) 1090 t (20 t )
= + × + ×
8
t
ETO
= + × + ×
8
t
STO
= + × + ×
8
t
ETO
= + × + ×
8
T UCLK
T UCLK
T UCLK
T UCLK
CTO Timer
The CTO (come-back timeout) timer temporarily or
per manently blocks programming to the MAX9257A/
MAX9258A registers. CTO keeps the devices in bypass
mode for the CTO timeout period (Table 26). Bypass
mode can only be exited when the CTO timer expires.
The CTO timer uses the UART bit times for its counter.
Note that STO and ETO timers use the pixel clock while
Table 26. CTO Counter Timeout Period
MAX9257A REG2[7:4]
MAX9258A REG3[7:4]
000
001 16
010 32
011 48
100 64
101 80
110 96
111 112
CTO uses the UART bit times. The UART period t
synchronizes with the UART bit times, which synchronize
every time the SYNC frame is sent.
When the CTO timer times out, INTEN bit in both devices
is set to 0 and the devices revert back to base mode.
If communication with the MAX9257A/MAX9258A is not
needed after initial program ming is complete, CTO may
be set to 000 (never come back). In this case, CTO never
expires and the devices stay in bypass mode until they
are powered down. This prevents accidental programming of the devices while ECU communicates with the
peripheral using a different UART protocol from the
MAX9257A/MAX9258A UART protocol.
The overall CTO timeout is calculated as follows:
t
CTO
Assuming a UART bit rate of 2Mbps, REG2[7:4],
REG3[7:4] = 100 (Table 26), CTO = 64, CTO timeout
calculated as:
t
= (0.5Fs) O 64 = 32Fs
CTO
The MAX9258A powers up when the power-down input
PD goes high. After approximately 130Fs, CCEN goes
high, indicating the control channel is available. This delay
is required because the analog circuitry has to fully wake
up. There are two ways to power up the MAX9257A. The
MAX9257A powers up according to the state of REM. ECU
powers up MAX9257A remotely (ECU sends command to
power up) when REM is pulled to VCC. The MAX9257A
powers up according to the supply voltage when REM is
grounded.
COUNTER USING UART BIT
TIMES
Never come back
(lockout)
= t
UCLK
x CTO
Link Power-Up
UCLK
���������������������������������������������������������������� Maxim Integrated Products 33
Page 34

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Powering the MAX9257A with Serialization Enabled
(REM = Ground at Power-Up)
When REM is grounded, the MAX9257A fully powers up when power is applied. The power-down bit
PD (REG4[4]) is disabled and serialization bit SEREN
(REG4[3]) is enabled. If PCLK_IN is not running, the
MAX9257A stays in the control channel. After PCLK_IN
is applied, the control channel times out due to STO,
ETO, or EF. The MAX9257A starts the handshaking after
the MAX9257A locks to PCLK after 32,768 clock cycles.
If PCLK_IN is running, serialization starts automatically
after PLL of the MAX9257A locks to PCLK_IN with default
values in the registers.
Remote Power-Up of the MAX9257A
(REM = Pulled Up to VCC)
When REM is pulled up to VCC, the MAX9257A wakes
up in a low power state, drawing less than 100FA supply
current. To wake-up the MAX9257A, the ECU first transmits a dummy frame 0xDB and then waits at least 100Fs
to allow the MAX9257A’s internal analog circuitry to fully
power up. Then the ECU configures the MAX9257A registers, including a write to disable the PD bit (REG4[4])
so that the MAX9257A does not return back to the low
power state. Every packet needs to start with a synchronization frame (see the UART sec tion). If the PD bit is not
disabled within 70ms after transmitting the dummy frame,
the MAX9257A returns to the low power state and the
whole power-up sequence needs to be repeated. After
configuration is complete, the ECU also needs to enable
the SEREN bit to start the video phase.
At initial power-up with REM pulled to VCC, default value
of SEREN bit is 0, so STO and ETO timers are not active.
Control channel is enabled as long as SEREN is 0. This
allows the control channel to be used for extensive programming at initial power-up without the channel timing
out. UART, parity, framing and packet errors in the control channel communications are reported if end frame is
used to close control channel (see the MAX9258A Error
Checking and Reporting section). For faster identification
of errors, verify every write com mand by reading back
the registers before enabling serialization.
Link Power-Down
When the control channel is open, the ECU writes to the
PD bit to power down the MAX9257A. In this case, to
power up the MAX9257A again, the power-up sequence
explained in the Remote Power-Up of the MAX9257A
(REM = Pulled Up to VCC) section needs to be repeated.
The MAX9258A has a PD input that powers down the device.
MAX9258A Error Checking and Reporting
The MAX9258A has an open-drain ERROR output. This
output indicates various error conditions encountered
during the operation of the system. When an error condition is detected and needs to be reported, ERROR
asserts low. ERROR indicates three error conditions:
UART, video parity, and PRBS errors.
UART Errors
During control channel communication in base mode, the
devices record UART frame, parity, and packet errors.
I2C errors are also recorded by MAX9257A when I2C
interface is enabled. If ECU closes the control channel
by using end frame (EF), the MAX9257A sends a special
internal UART frame back to the MAX9258A called error
frame. The MAX9257A UART and I2C errors are reset at
the next control channel. The MAX9258A receives the
error frame and records the error status in its UART error
register (REG13). ECU must use end frame to the close
control channel for the MAX9257A to report back UART
and I2C errors to the MAX9258A. Whenever one of the
bits in the UART error register is 1, ERROR asserts low.
The UART error regis ter is reset when ECU reads it, and
ERROR deasserts high immediately if UART errors were
the only reason that ERROR was asserted low. If the
MAX9258A is not locked (LOCK = low), UART error is not
reported.
Video Parity Errors
When video parity check is enabled (REG0[3] in both
devices), the MAX9258A counts the number of video
pari ty errors by checking recovered video words. Value
of this counter is reflected in PAERRHI (8 MSB bits,
REG11) and PAERRLO (8 LSB bits, REG10). If the number of detected parity errors is greater than or equal
to the parity error threshold PATHRHI (REG9) and
PATHRLO (REG8), then ERROR asserts low. In this case,
ERROR deasserts high after next video phase starts if
video parity errors were the only reason that ERROR was
asserted low. To report parity errors in bypass mode,
program autoerror reset (AER) to 1 (REG1[5] = 1).
Autoerror Reset
The default method to reset errors is to read the respective error registers in the MAX9258A (registers 10, 11,
and 13). If errors were present before the next control
chan nel, the error count gets incremented to the previous number. By setting the autoerror reset (AER) bit to 1,
the error registers reset when the control channel ends.
Setting AER to 1 does not reset PRBS errors.
���������������������������������������������������������������� Maxim Integrated Products 34
Page 35

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
PRBS Errors
During the PRBS test, the MAX9258A checks received
PRBS data words by comparing them to internally generated PRBS data. Detected errors are counted in the PRBS
error register (REG12) in the MAX9258A. Whenever the
number of detected PRBS errors is more than 0, ERROR
asserts low. The PRBS error register is reset when ECU
writes a 0 to PRBSEN register (REG4[0]). In this case,
ERROR deasserts high immediately if PRBS errors were
the only reason that ERROR was asserted low.
Short Synchronization Pattern
The short synchronization pattern is part of the handshaking procedure between the MAX9257A and MAX9258A
after the control channel phase. It is used to resynchronize the MAX9258A’s clock and data recovery circuit
to the MAX9257A before the video phase begins. The
MAX9257A transmits the short synchronization pattern
when it receives the lock frame from the MAX9258A. The
length of short synchronization pattern is dependant on
the PRATE range. When PRATE is 00 or 01, the short
synchroniza tion pattern consists of 546 words and when
PRATE is 10 or 11, the short synchronization pattern consists of 1090 words. Every word is one pixel clock period.
Long Synchronization Pattern
At power-up or when the MAX9257A does not receive a
lock frame from the MAX9258A, the MAX9257A transmits
a long synchronization pattern. The long synchronization
pattern consists of 17,410 words. Every word is one pixel
clock period. When REM is high, if synchroniza tion is not
achieved after 62 attempts, the MAX9257A resets SEREN
to 0 so that the control channel stays open to allow troubleshooting. When REM is low, the MAX9257A/MAX9258A
continuously tries to reestablish the connection.
Lock Verification (Handshaking)
At the end of every vertical blanking time, the MAX9257A
verifies that the MAX9258A did not lose lock. The
MAX9258A handshakes with the MAX9257A to indicate
lock status. The handshaking occurs after the channel
closes (Figures 28 and 23). If the number of decoding
errors in a time window did not exceed a certain threshold during the last video phase, the MAX9258A sends
back the lock frame that indicates lock. If the MAX9257A
receives the lock frame, the MAX9257A transmits a short
synchronization pattern. The MAX9258A features a proprietary VCO mechanism that prevents frequency drift
while in the control channel. This allows for successful
resynchronization after extended use of control channel. If the number of decoding errors in a time window
Table 27. Link Status
LOCK CCEN INDICATION
1 0 LVDS channel active
1 1 Control channel active
0 X PLL loss of lock
exceeds a certain threshold, the MAX9258A loses lock,
LOCK goes low, and the lock frame is not sent. The
MAX9258A also loses lock if handshaking is not successful. If the MAX9257A does not receive the lock frame,
it transmits a long synchronization pattern before the start
of next video phase. When REM = 1, if the lock frame
is not received by the MAX9257A after 62 consec utive
attempts to synchronize, SEREN is disabled so that the
control channel opens permanently for trou bleshooting.
Link Status (LOCK and CCEN)
The LOCK output indicates whether the MAX9258A is
locked to the MAX9257A. LOCK is an open-drain output that needs to be pulled up to VCC. LOCK asserts
low to indicate that the MAX9258A is not locked to the
MAX9257A and high when it is. In the control channel
phase, LOCK stays high if LOCK is high in the video
phase. While in the control channel phase, the MAX9258A
PLL frequency is held constant, PCLK output is active
and data outputs are frozen at their last valid value before
entering the control channel. CCEN output indicates
whether the devices are in the control channel phase
or video phase. CCEN goes high when the devices are
in the control channel phase (Table 27). Only at initial
power-up, CCEN goes high before communication in the
control channel is ready (see the Link Power-Up section).
Control Channel
Overview of Control Channel Operation
The control channel is used by the ECU to program
registers in the MAX9257A, MAX9258A, and peripheral
devices (such as a camera) during vertical blanking, after
power-up, or when serialization is disabled. Control channel communication is half-duplex UART. The peripheral
interface on the MAX9257A can be pro grammed to be I2C
or UART. Operation of the control channel is synchronized
with the VSYNC input after the ECU starts serialization of
video data. Programmable timers, ECU signal activity,
and end frame determine how long the control channel
stays open. The control channel remains open as long
as there is signal activity from the ECU. When the control
channel closes, the LVDS serial link is reestablished.
���������������������������������������������������������������� Maxim Integrated Products 35
Page 36
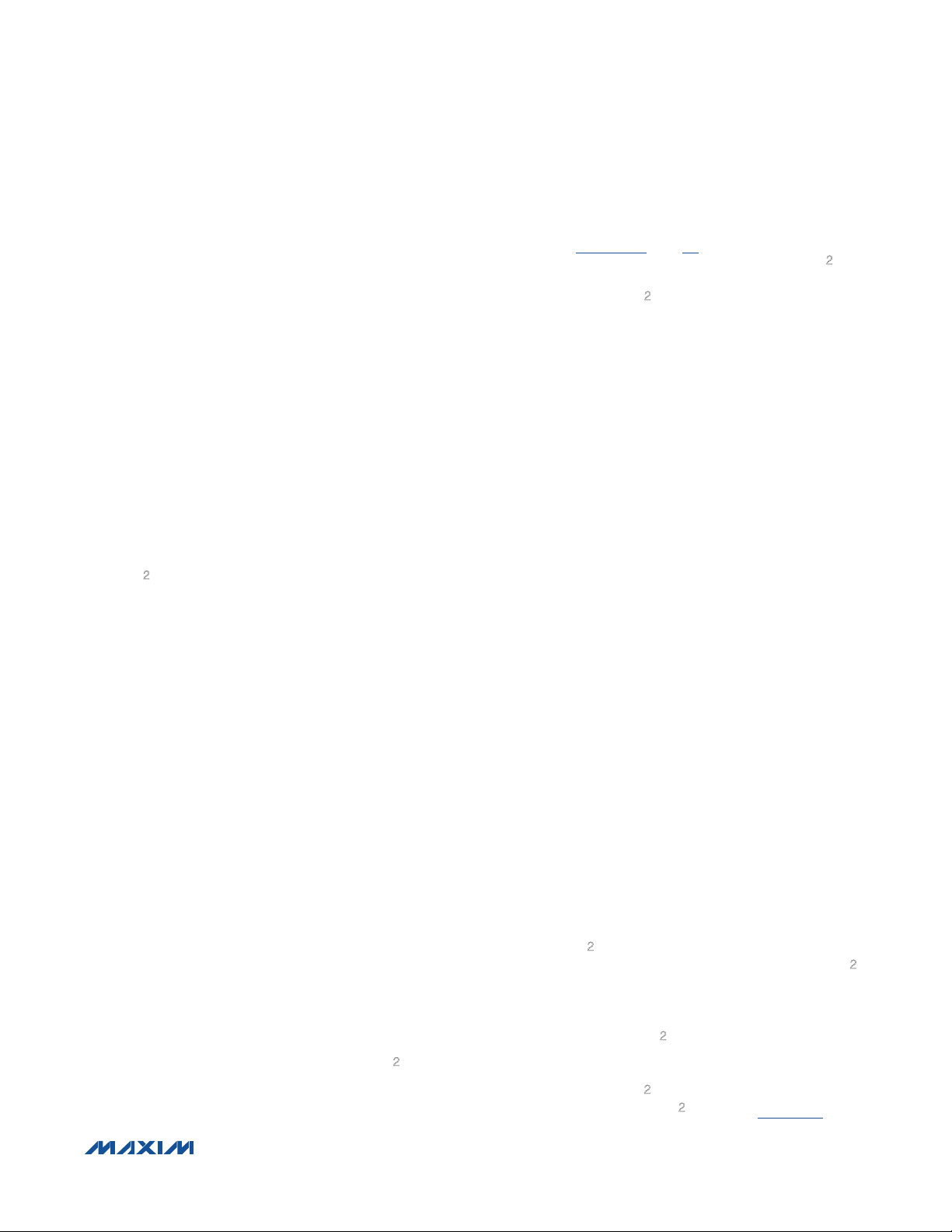
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Once serialization is enabled, the programming of registers (including the control channel overhead time) must
be completed within the vertical blanking time to avoid
loss of video data. VSYNC can deassert while control
channel remains open after eight pixel clock cycles.
The control channel phase begins on the transition of
the programmed active edge of VSYNC_IN. In video
applications, the VSYNC signal of the peripheral device
is connected to VSYNC_IN on the MAX9257A. In other
applications, a different signal can be used to trigger
the control channel phase. When the devices detect the
VSYNC_IN transition, the LVDS video phase disables and
the control channel phase is enabled.
The control channel operates in two modes: base and
bypass. In base mode, the ECU issues UART commands in a specified format to program the MAX9257A/
MAX9258A registers. GPIO on the MAX9257A are also
programmed in base mode. UART commands are translated to I2C and output to peripheral devices connected
to the MAX9257A when not addressed to either the
MAX9257A or the MAX9258A.
In bypass mode, programming of the MAX9257A/
MAX9258A registers are temporarily or permanently blocked depending on the programmed value of
CTO. Blocking prevents unintentional programming of
the MAX9257A/MAX9258A registers when the ECU
communi cates with the peripheral using a UART protocol
differ ent than the one specified to program the devices.
When the control channel is open, the MAX9258A continues outputting the pixel clock while HSYNC and video
data are held at the last value. If spread is enabled on the
MAX9258A, the pixel clock is spread.
Control Channel Overhead
Control channel overhead consists of lock frame, short
synchronization sequence, and error frame. The lock
frame is transmitted between the MAX9257A and the
MAX9258A without action by the ECU. The error frame
is only sent in response to end frame. When MAX9257A
spread spectrum is enabled, the control channel is
entered after spread reaches center frequency. The overhead from VSYNC falling edge to control channel enable
accounts for a maximum of 1400 pixel clock cycles.
Base Mode (Details)
Base mode allows the ECU to communicate with the
devices in UART and a peripheral device in I2C. UART
programming of the peripheral device is not possible in
base mode. UART packets from the ECU need to follow
a certain protocol to program the MAX9257A and the
MAX9258A (Figures 28 and 29). Packets not addressed
to the MAX9257A/MAX9258A get converted to I2C by
the MAX9257A and pass to the peripheral device. The
MAX9257A receives I2C packets from the peripheral
device and converts them to UART packets to send back
to the ECU. To disable communication to the peripheral
device, write a 0 to INTEN (REG8[6] in the MAX9257A
and REG7[6] in the MAX9258A).
In base mode, the STO/ETO timers and the EF command
are used to control the duration of the control channel.
STO and ETO count up and expire when they reach their
programmed value. STO and ETO are not enabled at
the same time. STO is enabled after CCEN goes high. If
there is activity from the ECU before STO times out, STO
is dis abled and ETO is enabled. The ECU must begin
a trans action within an STO timeout or else the channel
closes. The ECU can close the channel by allowing ETO
to time-out. Activity from the ECU resets the ETO timer.
Another way to close the control channel is by sending an end frame (EF). EF closes the channel within 2
to 3 bit times after being received by the MAX9257A/
MAX9258A. The default value of EF is 0xFF, but can be
programmed to any other value besides the MAX9257A
and the MAX9258A device addresses. The control channel must be closed with EF for control channel errors to
be reported.
Program STO to be longer than the time the ECU takes to
respond to opening of channel. Program ETO to be longer than the time the ECU pauses between transac tions.
As long as the ECU performs transactions, ETO is reset
and the channel stays open.
The ECU must wait 14 or more bit times before addressing another device during the same control channel
ses sion. Failure to wait 14 bit times may result in the
packet boundary not being reset. Internal handshaking
opera tions are automatically performed after the channel
is closed and before the video phase begins.
UART-to-I2C Converter
The UART-to-I2C converter accepts UART read or write
packets issued by the ECU and converts them to an I2C
master protocol when in base mode. A slave can use an
ACK or NACK to indicate a busy or wait state, but cannot
hold SCL low to indicate a wait state. Multiple slaves are
supported. The UART-to-I2C conversion delay is less than
22 UART bit times and needs to be taken into account
when setting the ETO and STO timeout periods for read
commands. UART-to-I2C converter converts standard
UART format to standard I2C format (Figure 25). This
���������������������������������������������������������������� Maxim Integrated Products 36
Page 37

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
includes data-bit ordering conversion because UART
transmits the LSB in first while I2C transmits the MSB first.
UART/I2C read delay is a maximum 34 bit times when
reading from an I2C peripheral.
The devices store their own 7-bit device addresses
in register REG5. All packets not addressed to the
MAX9257A/MAX9258A are forwarded to the UART toI2C converter. The I2C interfaces (SDA and SCL) are
open drain and actively drive a low state. When idle,
SDA and SCL are high impedance and pulled high by a
pullup resistor. SDA and SCL are idle when packets are
addressed to the MAX9257A or MAX9258A. SDA and
SCL are also idle when the I2C interface is programmed
to be disabled.
Bypass Mode (Details)
In bypass mode, ECU activity and UART communica tion
from the camera reset the ETO and CTO timers. This
allows the control channel to stay in bypass as long as
there is camera activity. In base mode, only ECU activity
resets the ETO and CTO timers.
Bypass mode temporarily or permanently blocks programming of the devices. Bypass mode allows only UART
programming of peripheral device by ECU. There is no
I2C connection in bypass mode. Bypass mode is entered
by writing a 0 to INTMODE and by writ ing a 1 to INTEN
(Table 23). Bypass mode disables ECU programming of
the devices to allow any UART communication protocol
with the peripheral device. Once bypass mode is entered,
the devices stay in bypass mode until CTO times out.
In bypass mode, the STO and ETO timers determine the
control channel duration. CTO timer determines whether to
revert back to base mode or not, and EF is not recognized.
A useful setting in bypass mode is to set STO > CTO >
ETO because this setting is an alternative to permanent
bypass (Figure 24). Use this setting to stay in bypass
mode to avoid the overhead of entering from base mode
every time the control channel opens. If the ECU uses
the channel within a CTO timeout, ETO is activated and
then ETO times out before CTO. The channel closes
because ETO times out, but channel stays in bypass
mode because CTO does not time out. At the next vertical blanking time, bypass mode continues with CTO
reset and the ECU can immediately send commands to
the camera. If the ECU or camera does not use the channel, CTO times out before STO. STO closes the channel
(because ETO is not enabled) if no communication is
sent, but since CTO timed out, bypass mode ends and
base mode is active for the next vertical blanking period.
With STO > CTO > ETO, bypass mode can be made
continuous by having the ECU send real commands or
dummy commands (such as a command to a nonexist ing
address) each time the control channel opens. Then the
ECU does not have to send a command to enter bypass
mode each time it wants to program the peripheral device.
VSYNC_IN
T1
SDI/O
CCEN
DOUT_
CONTROL
CHANNEL
Figure 24. CTO Timing
VIDEO VIDEOHSK
TX
RX
T1 = TIME TO ENTER CONTROL CHANNEL
T2 = STO TIMER
T3 = CTO TIMER
T4 = ETO TIMER
T5 = CONTROL CHANNEL EXIT TIME
HSK = HANDSHAKING BETWEEN THE MAX9257 & THE MAX9258
= TIMER RESET
���������������������������������������������������������������� Maxim Integrated Products 37
ECU
T2
ACTIVITY
T4
T3
FROZEN
BYPASS MODE
STO > CTO > ETO
T1 T2T5 T5
VIDEO VIDEOHSK
FROZEN
T3
BYPASS MODE BASE MODE
Page 38
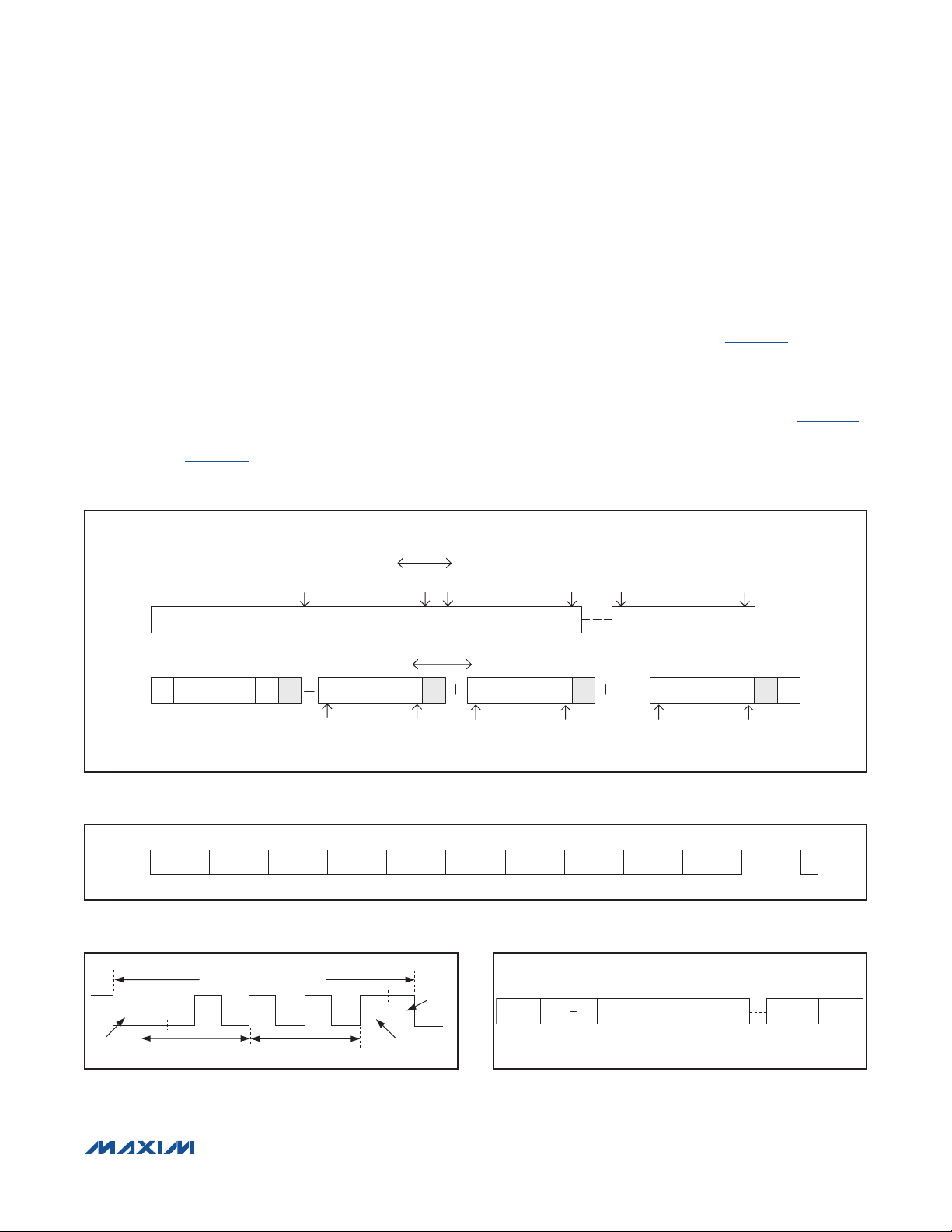
MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
UART
UART Frame Format
The UART frame used to program the MAX9257A and the
MAX9258A has a low start bit, eight data bits, an even
parity bit and a high stop bit. The data following the start
bit is the LSB. With even parity, when there are an odd
number of 1s in the data bits (D0 through D7) the parity
bit is set to 1. The stop bit is sampled and if it is not high,
a frame error is generated (Figure 26).
UART Synchronization Frame
The synchronization frame must precede any read or
write packets (Figure 26). Transitions in the frame calibrate the oscillators on the devices. The baud rate of the
UART
ECU
LSB MSB LSB
2
I
C SLAVE ADDRESS + Wr
S
SLAVE ADDRESS
A
W
REG ADDR DATA 0 DATA N
MAX9257
REG ADDRESS
I2C
A
synchronization frame sets the operat ing baud rate of the
control channel. At power-up, UART data rate must be
between 95kbps to 400kbps. After power-up, UART data
rate can be programmed according to Tables 28 and 29.
Data is serialized start ing with the LSB first. The synchronization frame is 0x54 as shown in Figure 27.
Write Packet
The ECU writes the sync frame, 7-bit device address plus
read/write bit (R/W = 0 for write), 8-bit register address,
number of bytes to be written, and data bytes (Figure 28).
The ECU must follow this UART protocol to correctly program the devices.
MAX9258
MSB
PERIPHERAL
DATA 0 A
LSB MSB
DATA N A
P
MSB
LSB
MSB
LSB
MSB
LSB
Figure 25. UART-to-I2C Conversion
START
D0
D1
D2
D3
D4
D5
D6 D7
PARITY
STOP
Figure 26. UART Frame Format
SYNCHRONIZATION FRAME
START
0
1
0
0
0
4 5
1
0
1
0
1
STOP
1
PARITY
SYNC
DEV ADDR +
R/W
REG ADDRESS
NUMBER OF BYTES
BYTE 1 BYTE N
Figure 27. UART Synchronization Frame Figure 28. UART Write Packet to MAX9257A/MAX9258A
���������������������������������������������������������������� Maxim Integrated Products 38
Page 39

Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Read Packet
The ECU writes the sync frame, 7-bit device address plus
read/write bit (R/W = 1 for read), 8-bit register address,
and number of bytes to be read. The addressed device
responds with read data bytes (Figure 29). UART read
delay is maximum 4 bit times when reading from the
MAX9257A or the MAX9258A.
Time Between Frames
Up to two high bit times are allowed between frames.
Reset of Packet Boundary
A high time ranging from 14 UART bit times or more
resets the packet boundary. In this case, the next frame
received is assumed to belong to a new packet by
the MAX9257A/MAX9258A and UART-to-I2C converter.
Resetting the boundary is required. Not resetting the
boundary treats the following packets as part of the first
packet, and they may be processed incorrectly.
Data Rate
The control channel data rate in base mode is between
95kbps to 4.25Mbps (Table 28). In bypass mode, the
allowed data rate is DC to 10Mbps (Table 29). For data
rates faster than 4.25Mbps in bypass mode, REG8[5]
in MAX9257A and REG7[5] in MAX9258A must be set
high. Set the control channel data rate in base mode by
writ ing to REG8[1:0] in the MAX9257A and REG7[1:0] in
the MAX9258A. These write commands take effect in the
next control channel.
Programming the FAST bit takes effect in the same control channel. Both the MAX9257A and the MAX9258A
should have the same settings for FAST. It is recommended to first program the FAST bit in the MAX9257A.
Programming FAST to 1 results in shorter UART pulses
on the differential link.
MAX9257A/MAX9258A
Device Address Programming
The MAX9257A/MAX9258A have device addresses that
can be programmed to any 7-bit address. Table 30
shows the default addresses.
MAX9257A/MAX9258A
DEV ADDR +
SYNC
Figure 29. UART Read Packet
Table 28. Control Channel Data Rate in
Base Mode
MAX9257A REG8[1:0]
MAX9258A REG7[1:0]
Table 29. Control Channel Data Rate in
Bypass Mode
MAX9257A REG8[5]
MAX9258A REG7[5]
Table 30. Default Device Address
DEVICE
MAX9257A 1111 1010 0xFA
MAX9258A 1111 1000 0xF8
REG ADDRESS
R/W
00
01 400kbps–1Mbps
10 1Mbps–4.25Mbps
11 1Mbps–4.25Mbps
0 DC–4.25Mbps
1 4.25Mbps–10Mbps
NUMBER OF BYTES
BYTE 1
RANGE
95kbps–400kbps
(default)
RANGE
DEFAULT
BINARY HEX
BYTE N
���������������������������������������������������������������� Maxim Integrated Products 39
Page 40

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
I2C
The MAX9257A features a UART-to-I2C converter that
converts UART packets to I2C. The UART-to-I2C converter works as a repeater between the ECU and exter nal
I2C slave devices. The MAX9257A acts as the master
and converts UART read/write packets from the ECU to
I2C read/write for external I2C slave devices. For writes,
the UART-to-I2C converts the UART packets received
directly into I2C. For reads, the UART-to-I2C converter
follows the UART packet protocol. The I2C SCL clock
period is approximately the same as the UART bit clock
The MAX9257A acts like a master in I2C communication
with the peripheral device. The MAX9257A takes less
than 22 UART bit times to convert UART packets into I2C.
The SCL and SDA timings are based on the UART bit
clock. The I2C data rate is determined by UART and can
range from 95kbps to 4.25Mbps. The I2C timing requirements scale linearly from fast mode to higher speeds.
Table 31 shows the I2C timing information for data rates
greater than 400kbps. The I2C parameters scale with
t
. See Figure 30 for timing parameters.
UCLK
period (tUCLK). The I2C speed varies with UART speed.
I2C reads from the peripheral device do not disable the
ETO timer. Choose ETO large enough so that I2C read
commands are not lost due to ETO timing out.
Table 31. Timing Information for I2C Data Rates Greater than 400kbps
PARAMETER SYMBOL MIN TYP MAX UNIT
SCL Clock Frequency f
Start Condition Hold Time t
Low Period of SCL Clock t
High Period of SCL Clock t
Repeated START Condition Setup Time t
Data Hold Time t
Data Setup Time t
Setup Time for STOP Condition t
Bus Free Time t
*t
is equal to one UART period.
UCLK
SCL
HD:STA
LOW
HIGH
SU:STA
HD:DAT
SU:DAT
SU:STO
BUF
1 1 t
1 1 t
0.5 0.5 t
0.5 0.5 t
0.25 0.25 t
0.25 0.25 t
0.25 0.25 t
0.25 0.25 t
0.5 0.5 t
I2C Timing
UCLK*
UCLK
UCLK
UCLK
UCLK
UCLK
UCLK
UCLK
UCLK
t
LOW
SCL
t
HD;STA
SDA
t
BUF
P
Figure 30. I2C Timing Parameters
S
���������������������������������������������������������������� Maxim Integrated Products 40
t
R
t
HD;DAT
t
HIGH
t
F
t
t
SU;DAT
SU;STA
t
HD;STA
t
SU;STO
S
P
Page 41

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Applications Information
PRBS Test
The devices have built-in circuits for testing bit errors
on the serial link. The MAX9257A has a PRBS generator
and the MAX9258A has a PRBS checker. The length of
the PRBS pattern is programmable from 221 to 235 word
length or continuous by programming REG9[7:4] in the
MAX9257A. In case of errors, errors are counted in the
MAX9258A PRBSERR register (REG12), and the ERROR
output on the MAX9258A goes low. To start the test, the
ECU writes a 1 to PRBSEN bit of both the MAX9257A
and the MAX9258A. The PRBS test can be performed
with or without spread spectrum. If the PRBS test is
programmed to run continuously, the MAX9257A must
be powered down to stop the test. When pro grammed
for a finite number of repetitions, the control channel is
enabled after the PRBS test finishes and serialization
enable (SEREN) is reset to 0. To start nor mal operation,
the ECU must disable PRBSEN and enable SEREN.
Video Data Parity
Parity protection of video data is programmable for parallel-word widths of 16 bits or less. When programmed,
two parity bits are appended to each parallel word
latched into the MAX9257A. In the MAX9258A, a 16-bit
parity error counter logs parity errors. The ERROR output on the MAX9258A goes low if parity errors exceed a
programmable threshold.
Table 32. Maximum Data Rate at Different
Input Offset Settings
OFFSET BITS
(REG1[4:3)
00 23 780
01 11 940
10 59 520
11 75 400
TYPICAL INPUT
OFFSET (mV)
MAXIMUM
FREQUENCY (Mbps)
Activity Detector
Most applications use the default activity-detector settings. If there is excessive noise on the link when the link
is not driven (during control channel mode), increase
the activity-detector offset to filter out noise amplitudes.
Using a larger offset threshold affects the maximum data
rate available.
Table 32
lists the maximum recommended
data rate at different input offset settings for a 150mV
peak input signal.
AC-Coupling Benefits
AC-coupling increases the input voltage of the LVDS
receiver to the voltage rating of the capacitor. Two from
18MHz to 42MHz capacitors are sufficient for isolation,
but four capaci tors—two at the serializer output and two at
the deseri alizer input—provide protection if either end of
the cable is shorted to a high voltage. AC-coupling blocks
low-frequency ground shifts and common-mode noise.
Selection of AC-Coupling Capacitors
See Figure 31 for calculating the capacitor values for
AC-coupling depending on the parallel clock frequency.
The plot shows minimum capacitor values for two- and
four-capacitor-per-link systems. To block the highest
common-mode frequency shift, choose the minimum
capacitor value shown in Figure 31. In general, 0.1FF
capacitors are sufficient.
AC-COUPLING CAPACITOR VALUE
60
40
20
CAPACITOR VALUE (nF)
0
vs. SERIAL-DATA RATE
FOUR CAPACITORS PER LINK
TWO CAPACITORS PER LINK
360 840
SERIAL-DATA RATE (Mbps)
780720660600540480420
Figure 31. AC-Coupling Capacitor Values vs. Clock Frequency
from 18MHz to 42MHz
���������������������������������������������������������������� Maxim Integrated Products 41
Page 42

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Optimally Choosing AC-Coupling Capacitors
Voltage droop and the digital sum variaton (DSV) of
trans mitted symbols cause signal transitions to start
from dif ferent voltage levels. Because the transition time
is finite, starting the signal transition from different voltage levels causes timing jitter. The time constant for an
AC-coupled link needs to be chosen to reduce droop
and jitter to an acceptable level. The RC network for an
AC-coupled link consists of the LVDS receiver termination resistor (RTR), the LVDS driver termination resistor
(RTD), and the series AC-coupling capacitors (C). The
RC time constant for four equal-value series capacitors is
(C x (RTD + RTR))/4. RTD and RTR are required to match
the transmission line impedance (usually 100I). This
leaves the capacitor selection to change the system time
constant. In the fol lowing example, the capacitor value
for a droop of 2% is calculated:
4 t DSV
× ×
C
= −
ln(1 - D) (R R )
where:
C = AC-coupling capacitor (F)
tB = bit time(s)
DSV = digital sum variation (integer)
ln = natural log
D = droop (% of signal amplitude)
RTD = driver termination resistor (I)
RTR = receiver termination resistor (I)
The bit time (tB) is the serial-clock period or the period
of the pixel clock divided by the total number of bits. The
maximum DSV for the MAX9257A encoding equals to the
total number of bits transmitted in one pixel clock cycle.
This means that tB x DSV = tT.
The capacitor for 2% maximum droop at 16MHz paral lel
rate clock is:
C -
=
ln(1 - D) (R R )
Total number of bits is = 10 (data) + 2 (HSYNC and
VSYNC) + 2 (encoding) + 2 (parity) = 16
=
C -
ln(1 - .02) (100 100 )
C ≥ 0.062FF
B
× +
TR TD
4 t DSV
× ×
B
× +
TR TD
× ×
4 3.91ns 16
× Ω+ Ω
Jitter due to droop is proportional to the droop and transition time:
tJ = tTT x D
where:
tJ = jitter(s)
tTT = transition time(s) (0 to 100%)
D = droop (% of signal amplitude)
Jitter due to 2% droop and assumed 1ns transition time is:
tJ = 1ns x 0.02
tJ = 20ps
The transition time in a real system depends on the frequency response of the cable driven by the serializer.
The capacitor value decreases for a higher frequency
parallel clock and for higher levels of droop and jitter.
Use high-frequency, surface-mount ceramic capacitors.
Power-Supply Circuits and Bypassing
All single-ended inputs and outputs on the MAX9257A
are powered from V
MAX9258A are powered from V
can be connected to a +1.71V to +3.6V sup ply. The input
levels or output levels scale with these supply rails.
. All single-ended outputs on the
CCIO
CCOUT
. V
CCIO
and V
CCOUT
Board Layout
Separate the LVCMOS/LVTTL signals and LVDS signals
to prevent crosstalk. A four-layer PCB with separate
lay ers for power, ground, LVDS, and digital signals is
rec ommended. Layout PCB traces for 100I differential
characteristic impedance. The trace dimensions depend
on the type of trace used (microstrip or stripline). Note
that two 50I PCB traces do not have 100I differential
impedance when brought close together—the impedance goes down when the traces are brought closer.
Route the PCB traces for an LVDS channel (there are
two conductors per LVDS channel) in parallel to main tain
the differential characteristic impedance. Place the 100I
(typ) termination resistor at both ends of the LVDS driver
and receiver. Avoid vias. If vias must be used, use only
one pair per LVDS channel and place the via for each
line at the same point along the length of the PCB traces.
This way, any reflections occur at the same time. Do not
make vias into test points for ATE. Make the PCB traces
that make up a differential pair the same length to avoid
skew within the differen tial pair.
���������������������������������������������������������������� Maxim Integrated Products 42
Page 43

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Cables and Connectors
Interconnect for LVDS typically has a differential impedance of 100I. Use cables and connectors that have
matched differential impedance to minimize impedance
discontinuities. Twisted-pair and shielded twisted-pair
cables offer superior signal quality compared to ribbon
cable and tend to generate less EMI due to magnetic
field canceling effects. Balanced cables pick up noise
as common mode that is rejected by the LVDS receiver.
I2C requires pullup resistors to provide a logic-high level
to data and clock lines. There are tradeoffs between
power dissipation and speed, and a compromise must
be made in choosing pullup resistor values. Every device
connected to the bus introduces some capacitance even
when device is not in operation. I2C specifies 300ns
rise times to go from low to high (30% to 70%) for fast
mode, which is defined for a date rate up to 400kbps
Choosing I2C Pullup Resistors
(see I2C specifications for details). To meet the rise time
require ment, choose the pullup resistors so the rise time
tR = 0.85R
PULLUP
x C
BUS
becomes too slow, the setup and hold times may not be
met and waveforms will not be recognized.
MAX9257A Register Table
ADDRESS BITS DEFAULT NAME DESCRIPTION
Pixel clock frequency range
00 = 5MHz to 10MHz
7:6 10 PRATE
5:4 11 SRATE
0
3 0 PAREN Parity enable 0 = disabled (default), 1 = enabled
2:0 101 PWIDTH
1
7:5 000 SPREAD
4:0 11111 Reserved (set to 11111)
01 = 10MHz to 20MHz
10 = 20MHz to 40MHz (default)
11 = 40MHz to 70MHz
Serial-data rate range
00 = 60Mbps to 100Mbps
01 = 100Mbps to 200Mbps
10 = 200Mbps to 400Mbps
11 = 400Mbps to 840Mbps (default)
Parallel data width
(includes HSYNC and VSYNC, excludes DCB, INV, and parity bits)
000 = 10 100 = 18
001 = 12 101 = 18 (default)
010 = 14 110 = 18
011 = 16 111 = 18
Spread-spectrum setting
For PRATE ranges 00, 01: all spread options possible
For PRATE ranges 10, 11: maximum spread is 2%
000 = Off (default) 100 = Off
001 = 1.5% 101 = 3%
010 = 1.75% 110 = 3.5%
011 = 2% 111 = 4%
< 300ns. If the transition time
���������������������������������������������������������������� Maxim Integrated Products 43
Page 44

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A Register Table (continued)
ADDRESS BITS DEFAULT NAME DESCRIPTION
Control channel start timeout: (STO) times out if ECU does not start using control channel within this amount of
time after control channel session is enabled.
Control channel start timeout divider
Pixel clock is first divided by:
0000 = 16 1000 = 256
0001 = 16 1001 = 512
2
3
7:4 1010 STODIV
3:0 0000 STOCNT
Control channel end timeout: (ETO) times out if ECU does not use control channel for this amount of time after it
has already used at least once.
7:4 1010 ETODIV
3:0 0000 ETOCNT
0010 = 16 1010 = 1024 (default)
0011 = 16 1011 = 2048
0100 = 16 1100 = 4096
0101 = 32 1101 = 8192
0110 = 64 1110 = 16,384
0111 = 128 1111 = 32,768
Control channel start timeout counter
Divided pixel clock is used to count up to (STOCNT + 1)
Control channel end timeout divider
Pixel clock is first divided by:
0000 = 16 1000 = 256
0001 = 16 1001 = 512
0010 = 16 1010 = 1024 (default)
0011 = 16 1011 = 2048
0100 = 16 1100 = 4096
0101 = 32 1101 = 8192
0110 = 64 1110 = 16,384
0111 = 128 1111 = 32,768
Control channel end timeout counter
Divided pixel clock is used to count up to (ETOCNT + 1)
���������������������������������������������������������������� Maxim Integrated Products 44
Page 45

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A Register Table (continued)
ADDRESS BITS DEFAULT NAME DESCRIPTION
7 0 VEDGE
6 0 Reserved (set to 0)
5 1 CKEDGE
4 0 PD
4
3 1 SEREN
2 0 BYPFPLL
1 0 Reserved (set to 0)
0 0 PRBSEN
5
6
7
8
7:1 1111101 DEVICEID 7-bit address of MAX9257A
0 0 Reserved (set to 0)
7:1 1111111 EF End frame to close control channel
0 1 Reserved (set to 1)
7:1 1111100 DESID 7-bit address ID of MAX9258A
0 0 Reserved (set to 0)
7 0 INTMODE
6 0 INTEN
5 0 FAST
4:2 000 CTO
1:0 00 BITRATE
VSYNC active edge at camera interface
0 = falling (default), 1 = rising
PCLK active edge at camera interface
0 = falling, 1 = rising (default)
Power mode
0 = power-up, 1 = power-down
(when REM = 1 default is 1)
Serialization enable
0 = disabled, 1 = enabled
(when REM = 1 default is 0)
Bypass filter PLL
0 = active (default), 1 = bypass
PRBS test enable
0 = disabled (default), 1 = enabled
Interface mode
0 = UART (default), 1 = I2C
Interface enable
0 = disabled (default), 1 = enabled
Fast UART transceiver
0 = bit rate = DC to 4.25Mbps (default), 1 = bit rate = 4.25Mbps to 10Mbps
Timer to come back from bypass mode (in bit time)
000 = never come back (default) 100 = 64
001 = 16 101 = 80
010 = 32 110 = 96
011 = 48 111 = 112
Control channel bit rate range in base mode
00 = 95kbps to 400kbps (default)
01 = 400kbps to 1000kbps
10 = 1000kbps to 4250kbps
11 = 1000kbps to 4250kbps
���������������������������������������������������������������� Maxim Integrated Products 45
Page 46

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9257A Register Table (continued)
ADDRESS BITS DEFAULT NAME DESCRIPTION
7:4 0000 PRBSLEN
9
10
11
12
13
14
15 7:0 (RO) Reserved
3 0 GPIO9DIR GPIO 9 direction 0 = input (default), 1 = output
2 0 GPIO8DIR GPIO 8 direction 0 = input (default), 1 = output
1 0 GPIO9* General purpose input output 9
0 0 GPIO8* General purpose input output 8
7 0 GPIO7DIR GPIO 7 direction 0 = input (default), 1 = output
6 0 GPIO6DIR GPIO 6 direction 0 = input (default), 1 = output
5 0 GPIO5DIR GPIO 5 direction 0 = input (default), 1 = output
4 0 GPIO4DIR GPIO 4 direction 0 = input (default), 1 = output
3 0 GPIO3DIR GPIO 3 direction 0 = input (default), 1 = output
2 0 GPIO2DIR GPIO 2 direction 0 = input (default), 1 = output
1 0 GPIO1DIR GPIO 1 direction 0 = input (default), 1 = output
0 0 GPIO0DIR GPIO 0 direction 0 = input (default), 1 = output
7 0 GPIO7* General purpose input output 7
6 0 GPIO6* General purpose input output 6
5 0 GPIO5* General purpose input output 5
4 0 GPIO4* General purpose input output 4
3 0 GPIO3* General purpose input output 3
2 0 GPIO2* General purpose input output 2
1 0 GPIO1* General purpose input output 1
0 0 GPIO0* General purpose input output 0
7:5 111 PREEMP
4:0 00000 Reserved (set to 00000)
7:2 000000 Reserved (set to 000000)
1:0 00 I2CFILT
7:1 (RO) Reserved
0 (RO) LOCKED PLL locked to pixel clock
PRBS test number of words
1111 = continuous else = 2
LVDS driver preemphasis setting
000 = 20% 111 = off (default)
001 = 40% 101 = 20%
010 = 60% 110 = 20%
011 = 80%
100 = 100%
I2C glitch filter setting
00 = set according to programmed bit rate (default)
100ns at (95kbps to 400kbps) bit rate
50ns at (400kbps to 1000kbps) bit rate
10ns at (1000kbps to 4250kbps) bit rate
01 = 10ns, 10 = 50ns, 11 = 100ns
(PRBSLEN + 21)
���������������������������������������������������������������� Maxim Integrated Products 46
Page 47

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9258A Register Table
ADDRESS BITS DEFAULT NAME DESCRIPTION
Pixel clock frequency range
00 = 5MHz to 10MHz
7:6 10 PRATE
5:4 11 SRATE
0
3 0 PAREN Parity enable 0 = disabled (default), 1 = enabled
2:0 101 PWIDTH
7:6 00 SPREAD
5 0 AER
1
4:3 00 ACTOFFSET
2:0 000 Reserved (set to 000)
Control channel start timeout: (STO) times out if ECU does not start using control channel within this amount of
time after control channel session is enabled.
2
7:4 1010 STODIV
3:0 0000 STOCNT
01 = 10MHz to 20MHz
10 = 20MHz to 40MHz (default)
11 = 40MHz to 70MHz
Serial-data rate range
00 = 60Mbps to 100Mbps
01 = 100Mbps to 200Mbps
10 = 200Mbps to 400Mbps
11 = 400Mbps to 840Mbps (default)
Parallel data width
(includes HSYNC and VSYNC, excludes encoding and parity bits)
000 = 10 100 = 18
001 = 12 101 = 18 (default)
010 = 14 110 = 18
011 = 16 111 = 18
Spread-spectrum setting
00 = Off (default) 10 = Off
01 = 2% 11 = 4%
Autoerror reset
1 = Reset error count when control channel ends.
0 = Reset upon reading error registers 10, 11, 13 (default)
Activity detector offset level
00 = 23mV offset
01 = 11mV offset
10 = 59mV offset
11 = 75mV offset
Control channel start timeout divider
Pixel clock is first divided by :
0000 = 16 1000 = 256
0001 = 16 1001 = 512
0010 = 16 1010 = 1024 (default)
0011 = 16 1011 = 2048
0100 = 16 1100 = 4096
0101 = 32 1101 = 8192
0110 = 64 1110 = 16,384
0111 = 128 1111 = 32,768
Control channel start timeout counter
Divided pixel clock is used to count up to (STOCNT + 1)
���������������������������������������������������������������� Maxim Integrated Products 47
Page 48

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9258A Register Table (continued)
ADDRESS BITS DEFAULT NAME DESCRIPTION
Control channel end timeout: (ETO) times out if ECU does not use control channel for this amount of time after it
has already used at least once.
Control channel end timeout divider
Pixel clock is first divided by:
0000 = 16 1000 = 256
0001 = 16 1001 = 512
3
4
5
6
7:4 1010 ETODIV
3:0 0000 ETOCNT
7 0 VEDGE
6 0 HEDGE
5 1 CKEDGE
4 0 Reserved (set to 0)
3 0 ACTLP
2:1 00 Reserved (set to 00)
0 0 PRBSEN
7:1 1111100 DEVICEID 7-bit address of MAX9258A
0 0 Reserved (set to 0)
7:1 1111111 EF End frame to close control channel
0 1 Reserved (set to 1)
0010 = 16 1010 = 1024 (default)
0011 = 16 1011 = 2048
0100 = 16 1100 = 4096
0101 = 32 1101 = 8192
0110 = 64 1110 = 16,384
0111 = 128 1111 = 32,768
Control channel end timeout counter
Divided pixel clock is used to count up to (ETOCNT + 1)
VSYNC active edge at ECU interface
0 = falling (default), 1 = rising
HSYNC active edge at ECU interface
0 = falling (default), 1 = rising
PCLK active edge at ECU interface
0 = falling, 1 = rising (default)
0 = stretcher output pulse is short
1 = stretcher output pulse is long
PRBS test enable
0 = disabled (default), 1 = enabled
���������������������������������������������������������������� Maxim Integrated Products 48
Page 49

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
MAX9258A Register Table (continued)
ADDRESS BITS DEFAULT NAME DESCRIPTION
7 0 INTMODE Interface mode 0 = UART (default), 1 = I2C
6 0 INTEN Interface enable 0 = disabled (default), 1 = enabled
5 0 FAST
7
8 7:0 00010000 PATHRLO
9 7:0 00000000 PATHRHI
10 7:0 (RO) PAERRLO Number of video parity errors (8 LSBs)
11 7:0 (RO) PAERRHI Number of video parity errors (8 MSBs)
12 7:0 (RO) PRBSERR
13
14 7:0 (RO) Reserved
4:2 000 CTO
1:0 00 BITRATE
7:5 (RO) Reserved
4 (RO) DESPERR Parity error during communication with deserializer
3 (RO) DESFERR Frame error during communication with deserializer
2 (RO) SERPERR Parity error during communication with serializer
1 (RO) SERFERR Frame error during communication with serializer
0 (RO) I2CERR Error during communication with camera in I2C mode
Fast UART transceiver
0 = bit rate = DC to 4.25Mbps (default), 1 = bit rate = 4.25Mbps to 10 Mbps
Timer to come back from bypass mode (in bit time)
000 = never come back (default) 100 = 64
001 = 16 101 = 80
010 = 32 110 = 96
011 = 48 111 = 112
Control channel bit rate range in base mode
00 = 95kbps to 400kbps (default)
01 = 400kbps to 1000kbps
10 = 1000kbps to 4250kbps
11 = 1000kbps to 4250kbps
Threshold for number of video parity errors (8 LSBs)
If the number of errors exceeds this value, ERR pin is asserted.
Threshold for number of video parity errors (8 MSBs)
If the number of errors exceeds this value, ERR pin is asserted.
PRBS test number of bit errors
Automatically reset when PRBS test is disabled
0xFF indicates 255 or more errors
���������������������������������������������������������������� Maxim Integrated Products 49
Page 50

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
ESD Protection
The MAX9257A/MAX9258A ESD tolerance is rated for
Human Body Model, Machine Model, IEC 61000-4-2
and ISO 10605. The ISO 10605 and IEC 61000-4-2
standards specify ESD tolerance for electronic sys tems.
LVDS outputs on the MAX9257A and LVDS inputs on
the MAX9258A meet ISO 10605 ESD protection and IEC
61000-4-2 ESD protection. All other pins meet the Human
R
D
330I
CHARGE-CURRENT-
DC
LIMIT RESISTOR
150pF
HIGH-
VOLTAGE
SOURCE
Figure 32. IEC 61000-4-2 Contact Discharge ESD Test Circuit
DISCHARGE
RESISTANCE
C
S
STORAGE
CAPACITOR
DEVICE
UNDER
TEST
Body Model and Machine Model ESD toler ances. The
Human Body Model discharge components are CS =
100pF and RD = 1.5kI (Figure 33). The IEC 61000-4-2
discharge components are CS = 150pF and RD = 330I
(Figure 32). The ISO 10605 discharge com ponents are
CS = 330pF and RD = 2kI (Figure 34). The Machine
Model discharge components are CS = 200pF and RD =
0I (Figure 35).
R
1MI
CHARGE-CURRENT-
DC
LIMIT RESISTOR
C
100pF
S
HIGH-
VOLTAGE
SOURCE
Figure 33. Human Body ESD Test Circuit
D
1.5kI
DISCHARGE
RESISTANCE
STORAGE
CAPACITOR
DEVICE
UNDER
TEST
R
D
2kI
HIGH-
VOLTAGE
DC
SOURCE
CHARGE-CURRENT-
LIMIT RESISTOR
330pF
DISCHARGE
RESISTANCE
C
S
STORAGE
CAPACITOR
DEVICE
UNDER
TEST
Figure 34. ISO 10605 Contact Discharge ESD Test Circuit
���������������������������������������������������������������� Maxim Integrated Products 50
R
D
0I
HIGH-
VOLTAGE
DC
SOURCE
CHARGE-CURRENT-
LIMIT RESISTOR
200pF
C
S
DISCHARGE
RESISTANCE
STORAGE
CAPACITOR
Figure 35. Machine Model ESD Test Circuit
DEVICE
UNDER
TEST
Page 51

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Functional Diagram
BYPASS
MAX9257A SERIALIZER
PCLK_IN
DIN[0:15]
HSYNC_IN
VSYNC_IN
PARALLEL INPUTS
SCL(TX)
SDA(RX)
PCLK_OUT
CLK IN
DETECT/TIMER
FILTER PLL
ENCODE/
DC BALANCE
+
FIFO
BLANK
VSYNC
POLARITY
2% OR 4%
SPREAD PLL
CLK OUT
1x
DIN WIDTH
UART-TO-I
SPREAD PLL
PARALLEL TO
SERIAL
UART
2
C
TO I
2
C BYPASS
PLL
N x PCLK_IN
OSC
MAX9258A DESERIALIZER
1.5% TO 4%
LVDS Tx
CONTROL
Tx/Rx
FREQ
DETECT
1.2V
BIAS
SDO-
SDO+
100
TRANSMISSION LINE
Z
= 100
D
DOUT[0:15]
HSYNC_OUT
VSYNC_OUT
PARALLEL OUTPUTS
TX
RX
���������������������������������������������������������������� Maxim Integrated Products 51
CLK OUT CLK IN
DECODE/
DC BALANCE
+
FIFO
BLANK
DETECT/TIMER
VSYNC
POLARITY
1x
N x PCLK_IN
SERIAL TO
PARALLEL
DOUT WIDTH
ADDRESS
UART
OSC
LVDS Rx
CONTROL
TX/RX
1.2V
BIAS
SDI+
100
SDI-
Page 52

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Typical Operating Circuit
10
DATA
PCLK
ECU
HSYNC
VSYNC
LOCK
TX
C
RX
SERIAL
MAX9258A
CONTROL UNIT
I/O
100I 100I
Ordering Information
PART TEMP RANGE PIN-PACKAGE
MAX9257AGTL/V+
MAX9257AGCM/V+
MAX9258AGCM/V+
-40NC to +105NC
-40NC to +105NC
-40NC to +105NC
/V denotes an automotive qualified part.
+Denotes a lead(Pb)-free/RoHS-compliant package.
*EP = Exposed pad.
40 TQFN-EP*
48 LQFP
48 LQFP
UP TO 20m
CABLE LENGTH
SERIALIZED
DIGITAL VIDEO
CONTROL
CHANNEL
PROCESS: BiCMOS
For the latest package outline information and land patterns
(footprints), go to www.maxim-ic.com/packages. Note that a
“+”, “#”, or “-” in the package code indicates RoHS status only.
Package drawings may show a different suffix character, but
the drawing pertains to the package regardless of RoHS status.
10
DATA
SERIAL
I/O
MAX9257A
REMOTE CAMERA ASSEMBLY
PCLK
HSYNC
VSYNC
SCL
SDA
CMOS
IMAGE
SENSOR
Chip Information
Package Information
PACKAGE
TYPE
40 TQFN T4055+1
48 LQFP C48+3
���������������������������������������������������������������� Maxim Integrated Products 52
PACKAGE
CODE
OUTLINE
NO.
LAND
PATTERN NO.
21-0140 90-0016
21-0054 90-0093
Page 53

MAX9257A/MAX9258A
Fully Programmable Serializer/Deserializer
with UART/I2C Control Channel
Revision History
REVISION
NUMBER
0 6/11 Initial release —
1 9/11
REVISION
DATE
DESCRIPTION
Changed ACTOFFSET range settings from 00 = 11mV to 23mV and 01 =
23mV to 11mV
PAGES
CHANGED
7, 24, 41, 47
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied.
Maxim reserves the right to change the circuitry and specifications without notice at any time. The parametric values (min and max limits) shown in the Electrical
Characteristics table are guaranteed. Other parametric values quoted in this data sheet are provided for guidance.
Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600 53
©
2011 Maxim Integrated Products Maxim is a registered trademark of Maxim Integrated Products, Inc.
 Loading...
Loading...