

Page 1
19-3360; Rev 0; 8/04
用于
________________________________
MAX8707
型控制器,用于为
工作减少了输入电流纹波和输出电压波纹,同时简化了
元件选择和布局设计。
有源电压定位功能,降低了功耗和对大体积输出电容的
要求。
MAX8707
直接从电池降压或从
一次变换方案直接从高压电池降压,可达到尽可能高的
效率。另外一种方案,二次变换 (从
而不是从电池降压) 方案能够工作在更高的开关频率,可
获得最小的物理尺寸。
MAX8707
对检流输入,利用单个检流电阻可提供精确的电压定位
斜率和平均电流限流保护。
入,提供差分远端电压检测。
MAX8707
用于在
器降低了启动和关断期间的转换摆率,提供具有最小输
入浪涌电流的软启动,阻尼软关断功能保证没有负输出
下冲。
锁定过压和热过载保护——以及一个独立的电压调节器
电源好”(
“
MAX8707
300kHz或600kHz
引脚
40
请参考
是一款多相 (
AMD Hammer CPU
可以用于两种不同的笔记本
的每一相都有专门的差分检流输入,并包括第
具有一个设置挂起电压的模拟输入,以及一个
码或挂起电压之间转换的摆率控制器。控制
VID
MAX8707
6mmx6mm
MAX8702/MAX8703
集成了输出故障保护电路——欠压、非
)输出。
VROK
提供可选择的开关频率,每相可选择为
的工作频率。
相)、交错式、固定频率、降压
3/4
核供电。多相交错
MAX8707
+5V
的薄型
包含可调增益和偏移的
CPU
系统电源降压,产生核电压。
的系统电源降压
+5V
MAX8707
QFN
。
还有两个专用的输
MAX8707
封装。与其兼容的驱动器
AMD Hammer CPU
概述
核供电方案:
200kHz
采用低截面的
核电源的多相、
固定频率控制器
________________________________
相交错式、固定频率控制器
♦
3/4
在整个输入、负载和温度变化范围内保持
♦
精度
V
OUT
位内置数/模转换器
♦
5
可调挂起电压输入
♦
有源电压定位,具有可调增益和偏移
♦
精确、无损的电流均衡
♦
精确的下垂和电流限制
♦
远端输出和地检测
♦
输出摆率控制
♦
电源好”窗口比较器
♦
5
“
可选开关频率:
♦
输出过压和欠压保护
♦
热故障保护
♦
♦
2V ±0.7%
软启动和关断
♦
基准输出
____________________________
PART TEMP RANGE PIN-PACKAGE
、
MAX8707ETL -40°C to +85°C 40 Thin QFN 6mm x 6mm
________________________________
AMD Hammer
多相
电压定位降压型转换器
笔记本电脑/台式计算机
服务器
CPU
核电源
(DAC)— 0.80V至1.55V
200kHz/300kHz/600kHz
台式计算机
特性
±0.75%
的
定购信息
应用
MAX8707
________________________________________________________________ Maxim Integrated Products 1
本文是
翻译错误,如需确认任何词语的准确性,请参考
索取免费样品和最新版的数据资料,请访问
正式英文资料的译文,
Maxim
不对翻译中存在的差异或由此产生的错误负责。请注意译文中可能存在文字组织或
Maxim
Maxim
Maxim
引脚配置在数据资料的最后部分给出。
提供的英文版资料。
的主页:
www.maxim-ic.com.cn
。
Page 2
用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
ABSOLUTE MAXIMUM RATINGS
VCCto GND..............................................................-0.3V to +6V
D0–D4 to GND..........................................................-0.3V to +6V
SKIP, SUS, VROK, ILIM(AVE) to GND......................-0.3V to +6V
SUSV, OFS, OSC to GND.........................................-0.3V to +6V
CSP_, CSN_, CRSP, CRSN to GND .........................-0.3V to +6V
VPS, FBS, CCV, REF to GND .....................-0.3V to (V
ILIM(PK), TRC, TIME to GND .....................-0.3V to (V
PWM_, DRSKP to PGND ............................-0.3V to (V
PGND, GNDS to GND ...........................................-0.3V to +0.3V
MAX8707
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to
absolute maximum rating conditions for extended periods may affect device reliability.
Note 1: SHDN can be forced to 12V for debugging prototype boards using the no-fault test mode, which disables fault protection.
CC
CC
CC
+ 0.3V)
+ 0.3V)
+ 0.3V)
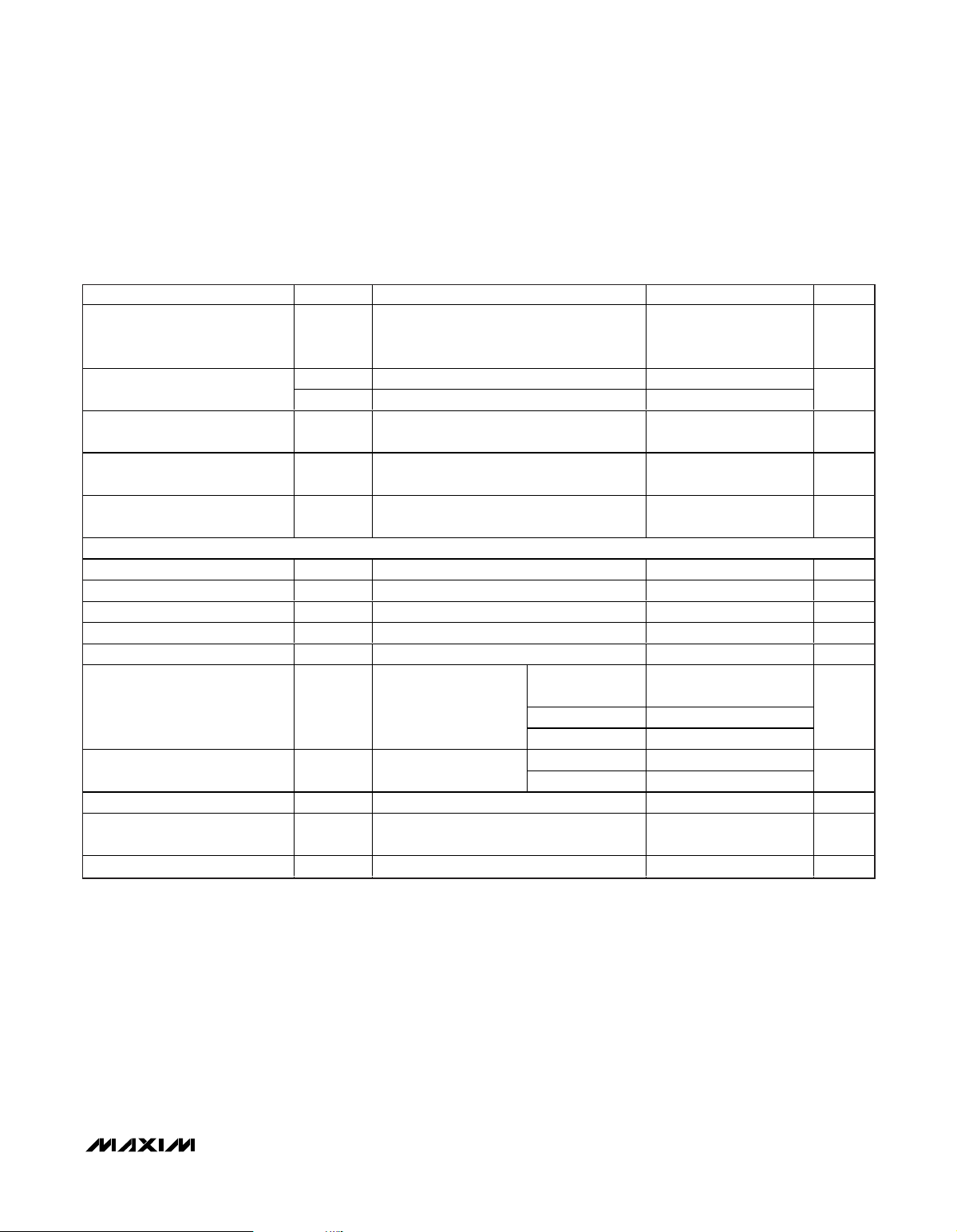
ELECTRICAL CHARACTERISTICS
(Circuit of Figure 1. VCC= V
GNDS = PGND = SKIP = GND, D0–D4 set for 1.20V (D0–D4 = 01110). T
are at T
PWM CONTROLLER
Input Voltage Range V
DC Output Voltage Accuracy V
SUSV Input Range V
SUSV Input-Bias Current I
OFS Input Range V
OFS GAIN A
OFS Input-Bias Current I
GNDS Input Range V
GNDS Gain A
GNDS Input-Bias Current I
FBS Input-Bias Current I
Switching Frequency Accuracy
(Per Phase)
= +25°C.)
A
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
= 5V, OSC = REF, V
SHDN
SUSV
SUSV
OFS
GNDS
GNDS
GNDS
FBS
f
CC
OUT
OFS
OFS
SW
= V
VPS
Includes loadregulation error
(VPS = FBS)
V
= 0.4V to 2V -0.1 +0.1 µA
SUSV
Negative offsets 0 0.8
Positive offsets 1.2 2.0
∆V
/ ∆V
OUT
V
OFS
∆V
OUT
V
OFS
V
OFS
∆V
OUT
-200mV ≤ V
CRSP = CRSN, CSP_ = CSN_ -10 +10 µA
OSC = GND 180 200 220
OSC = REF 270 300 330
OSC = V
OFS
= 0 to 0.8V
/ ∆V
OFS
= 1.2V to 2V
= 0 to 2V -0.1 +0.1 µA
/ ∆V
GNDS
GNDS
CC
SHDN to GND (Note 1)...........................................-0.3V to +14V
REF Short-Circuit Duration .........................................Continuous
Continuous Power Dissipation (T
40-Pin 6mm x 6mm Thin QFN
(derate 26.3mW/°C above +70°C)................................2.105W
Operating Temperature Range ...........................-40°C to +85°C
Junction Temperature......................................................+150°C
Storage Temperature Range .............................-65°C to +150°C
Lead Temperature (soldering, 10s) .................................+300°C
= V
FBS
, ∆V
, ∆V
,
≤ +200mV
= V
CRSN
= 0°C to +85°C, unless otherwise specified. Typical values
A
DAC codes from
1.10V to 1.55V
DAC codes from
0.80V to 1.075V
SUS = V
= V
OFS
OFS
= V
OFS
OFS-VREF
CRSP
CC
,
= V
,
CSP_
= 1.20V, V
= +70°C)
A
= 0.8V, OFS = SUS =
SUSV
4.5 5.5 V
-0.75 +0.75
-2.0 +2.0
-20 +20 mV
0.4 2.0 V
-0.131 -0.125 -0.118
-0.131 -0.125 -0.118
-200 +200 mV
0.95 1.00 1.05 V/V
-2 +2 µA
540 600 660
%
V
V/V
kHz
2 _______________________________________________________________________________________
Page 3
用于
)
AMD Hammer CPU
核电源的多相、
固定频率控制器
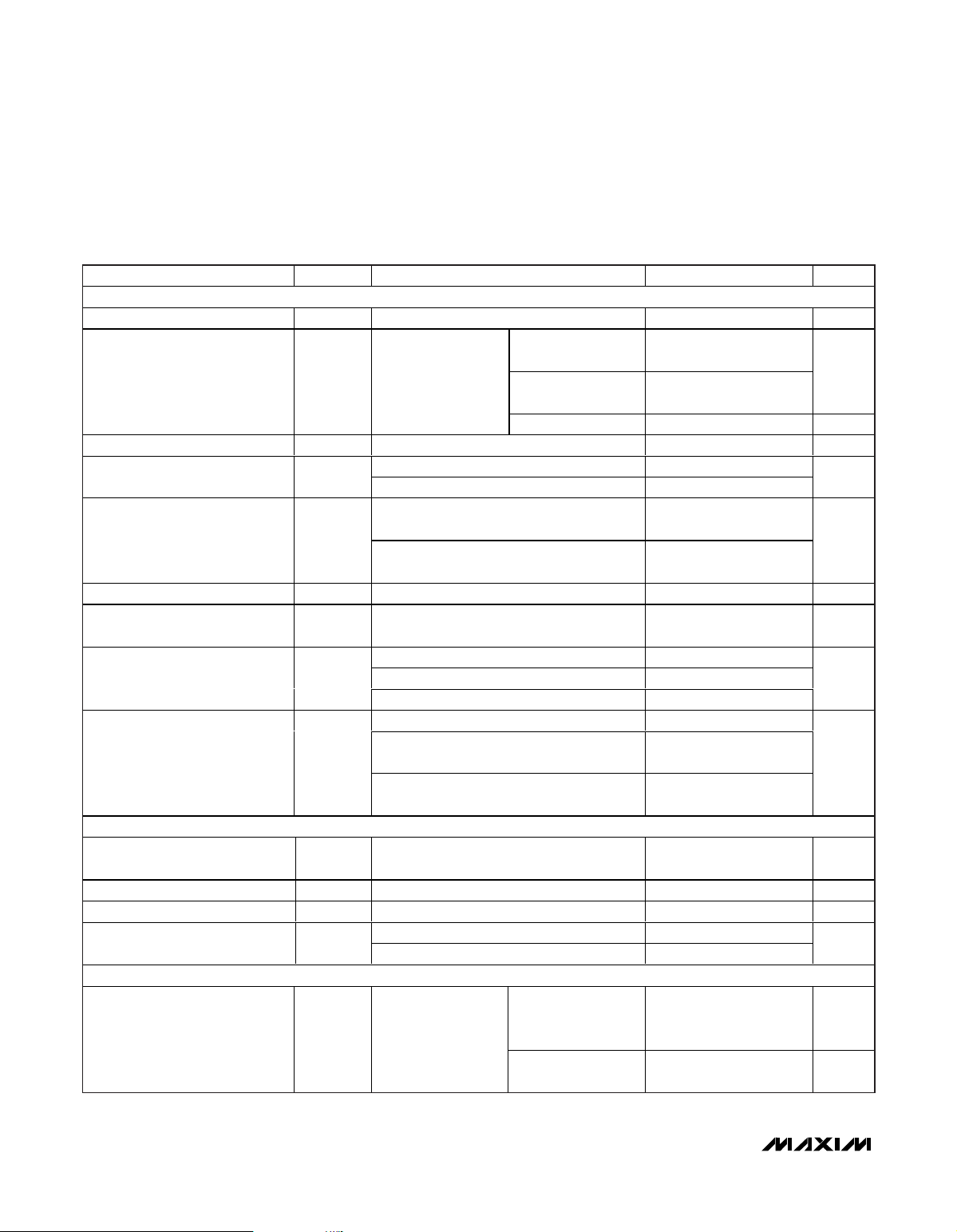
ELECTRICAL CHARACTERISTICS (continued)
(Circuit of Figure 1. VCC= V
GNDS = PGND = SKIP = GND, D0–D4 set for 1.20V (D0–D4 = 01110). T
are at T
TIME Slew-Rate Accuracy
BIAS AND REFERENCE
Quiescent Supply Current (VCC)I
Shutdown Supply Current (VCC)I
Reference Voltage V
Reference Load Regulation ∆V
FAULT PROTECTION
Output Overvoltage-Protection
Threshold
Output Overvoltage Propagation
Delay
Output Undervoltage-Protection
Threshold
Output Undervoltage
Propagation Delay
VROK Transition Blanking Time t
= +25°C.)
A
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
= 5V, OSC = REF, V
SHDN
CC
CC(SHDN
REF
V
OVP
t
OVP
V
UVP
t
UVP
BLANK
= V
FBS
= V
REF
VPS
R
= 143kΩ (6.25mV/µs) -10 +10
TIME
R
= 47kΩ (19mV/µs) to 392kΩ
TIME
(2.28mV/µs)
Startup and shutdown, R
(4.75mV/µs) to 392kΩ (0.57mV/µs)
Measured at VCC, VPS and FBS forced
above the regulation points
Measured at VCC, SHDN = GND 0.05 10 µA
V
= 4.5V to 5.5V, I
CC
I
= 0 to 500µA -2 -0.2
REF
REF
I
= -100µA to 0 0.21 6.2
REF
Measured at VPS
with respect to
unloaded output
voltage, rising edge,
8mV hysteresis
Minimum OVP level 1.1
VPS forced 25mV above trip threshold 10 µs
Measured at VPS with respect to 70% of the
unloaded nominal output voltage
VPS forced 25mV below trip threshold 10 µs
Measured from the time when VPS reaches
the target voltage, slew rate set by R
(Note 2)
= V
CRSN
= 0°C to +85°C, unless otherwise specified. Typical values
A
TIME
= 0 1.986 2.000 2.014 V
PWM (SKIP = GND)
or SKIP mode when
V
≤ V
OUT
SKIP = V
V
> V
OUT
CRSP
= 47kΩ
TRIP
and
CC
TRIP
= V
TIME
= 1.20V, V
CSP_
-15 +15
-20 +20
150 200 250 mV
1.70 1.75 1.80
-30 +30 mV
= 0.8V, OFS = SUS =
SUSV
712mA
20 µs
MAX8707
%
mV
V
Undervoltage measured at VPS with
respect to 87.5% unloaded output voltage,
VROK Threshold
VROK Delay t
VROK Output Low Voltage I
VROK Leakage Current High state, VROK forced to 5.5V 1 µA
_______________________________________________________________________________________ 3
VROK
falling edge, 15mV hysteresis
Overvoltage measured at VPS with respect
to 112.5% of the unloaded output voltage,
rising edge, 15mV hysteresis
VPS forced 25mV outside the VROK trip
thresholds
= 3mA 0.4 V
SINK
-30 +30
-30 +30
10 µs
mV
Page 4
用于
)
)
)
)
)
)
)
AMD Hammer CPU
核电源的多相、
固定频率控制器
ELECTRICAL CHARACTERISTICS (continued)
(Circuit of Figure 1. VCC= V
GNDS = PGND = SKIP = GND, D0–D4 set for 1.20V (D0–D4 = 01110). T
are at T
= +25°C.)
A
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
VCC Undervoltage-Lockout
Threshold
MAX8707
Thermal-Shutdown Threshold T
DROOP AND TRANSIENT RESPONSE
DC Droop Amplifier Offset -1.5 +1.5 mV
DC Droop Amplifier
Transconductance
(CRS Sense Enabled)
= 5V, OSC = REF, V
SHDN
V
UVLO(VCC
SHDN
G
m(VPS
= V
FBS
= V
VPS
Rising edge, hysteresis = 20mV, PWM_
disabled below this level
= V
CRSN
= 0°C to +85°C, unless otherwise specified. Typical values
A
CRSP
= V
CSP_
= 1.20V, V
= 0.8V, OFS = SUS =
SUSV
4.10 4.25 4.45 V
Rising edge hysteresis = 15°C +160 °C
∆I
V
CRSP
VPS
/ (N x ∆V
- V
CRSN
), V
VPS
= V
CRSN
CRS
= -60mV to +60mV,
= 1.2V,
194 200 206 µS
N = number of phases enabled
DC Droop Amplifier
Transconductance
(CRS Sense Disabled)
Transient-Droop Transresistance R
Transient Detection Threshold
CURRENT LIMIT AND BALANCE
Current-Sense Input Preamplifier
Offsets
ILIM(AVE) Input Range
(Adjustable Mode)
V
ILIM(AVE) Average Current-Limit
Threshold Voltage
V
(Positive, Default)
ILIM(AVE) Average Current-Limit
Threshold Voltage
V
(Positive, Adjustable)
ILIM(AVE) Average Current-Limit
Threshold Voltage (Negative)
ILIM(AVE) Input Current I
ILIM(AVE) Current-Limit Default
Switchover Threshold
ILIM(PK) Peak Current-Limit
Threshold Voltage (Positive)
ILIM(PK) Peak Current-Limit
Threshold Voltage (Negative)
G
m(VPS
TRANS
ILIM(AVE
AVELIMIT
AVELIMIT
ILIM(AVE
V
PKLIMIT
∆I
V
V
VPS
VPS
CSP
/ (Σ∆VCS), V
= V
_ = 1.2V,
CSN
_ – V
CSN
_ = -60mV to +60mV
CRSP
= VCC,
194 200 206 µS
Current-sense gain (ACS = 10 typ) divided
by the voltage preamplifier
transconductance (G
m(TRC)
= 2ms typ)
4.75 5.0 5.25 kΩ
Measured at VPS with respect to steadystate VPS regulation voltage; falling edge,
-30 -25 -20 mV
5.5mV hysteresis (typ)
CSP_ - CSN_ -2.0 +2.0 mV
V
REF
- 0.2
V
mV
CRSP - CRSN; ILIM(AVE) = V
V
ILIM(AVE
CRSP - CRSN
V
ILIM(AVE
CRSP - CRSN; ILIM(AVE) = V
CC
= V
= V
CC
V
REF
- 1.0
22 25 28 mV
- 0.2V 7 10 13
REF
- 1.0V 46 50 54
REF
-30 -25 -20 mV
-0.1 +0.1 µA
CC
V
CC
- 0.4
V
mV
CSP_ - CSN_,
ILIM(PK)
LIM(PK)
= R
TRC
R
8V / V
CSP_ - CSN_, R
V
PKLIMIT
, V
PKLIMIT
x
ILIM(PK)
= 50mV
V
PKLIMIT
V
PKLIMIT
= R
V
3
- 1.0
= 30mV 24 30 36
= 50mV 40 50 60
x 8V /
TRC
-60 -50 -40 mV
4 _______________________________________________________________________________________
Page 5
用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
ELECTRICAL CHARACTERISTICS (continued)
(Circuit of Figure 1. VCC= V
GNDS = PGND = SKIP = GND, D0–D4 set for 1.20V (D0–D4 = 01110). T
are at T
ILIM(PK) Idle Current-Limit
Threshold Voltage (Skip Mode)
Current-Sense Input Current
Current-Sense Common-Mode
Input Range
Phase Disable Threshold CSP4 3 VCC - 1
CRS Sense Input Disable
Threshold
LOGIC AND I/O
Logic Input High Voltage V
Logic Input Low Voltage V
SHDN No-Fault Threshold To enable no-fault mode 11 13 V
D0–D4 Logic Input High Voltage 0.8 V
D0–D4 Logic Input Low Voltage 0.4 V
OSC 3-Level Input Logic Levels V
SKIP Input Logic Levels V
Logic Input Current SHDN, SKIP, SUS, OSC, D0–D4 = 0 to 5V -1 +1 µA
Logic Output High Voltage V
Logic Output Low Voltage V
= +25°C.)
A
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
= 5V, OSC = REF, V
SHDN
V
IDLE
OSC
SKIP
IH
IL
OH
OL
= V
FBS
S KI P
T RC
= V
≥ 1.2V ,
x 8V / V
SOURCE
SINK
VPS
C S P _ - C S N _, V
I LI M ( P K )
P KL IM IT
= R
= 50m V
R
V
CSP_, CRSP -0.2 +0.2
CSN_, CRSN -1.0 +1.0
CRSP, CRSN, CSP_, CSN_ 0 2 V
CRSP 3 V
SHDN, SUS 2.4 V
SHDN, SUS 0.8 V
PWM_, DRSKP; I
PWM_, DRSKP; I
= V
CRSN
= 0°C to +85°C, unless otherwise specified. Typical values
A
P KL IM IT
High (VCC)
Medium (REF) 1.8 2.2
Low (GND) 0.4
High 1.2
Low (GND) 0.8
= 3mA
= 3mA 0.4 V
CRSP
,
= V
CSP_
= 1.20V, V
258mV
V
-
CC
0.4
V
-
CC
0.4
= 0.8V, OFS = SUS =
SUSV
V
CC
0.4
V
-
CC
- 1
CC
0.4
-
MAX8707
µA
V
V
V
V
V
_______________________________________________________________________________________ 5
Page 6
用于
)
AMD Hammer CPU
核电源的多相、
固定频率控制器
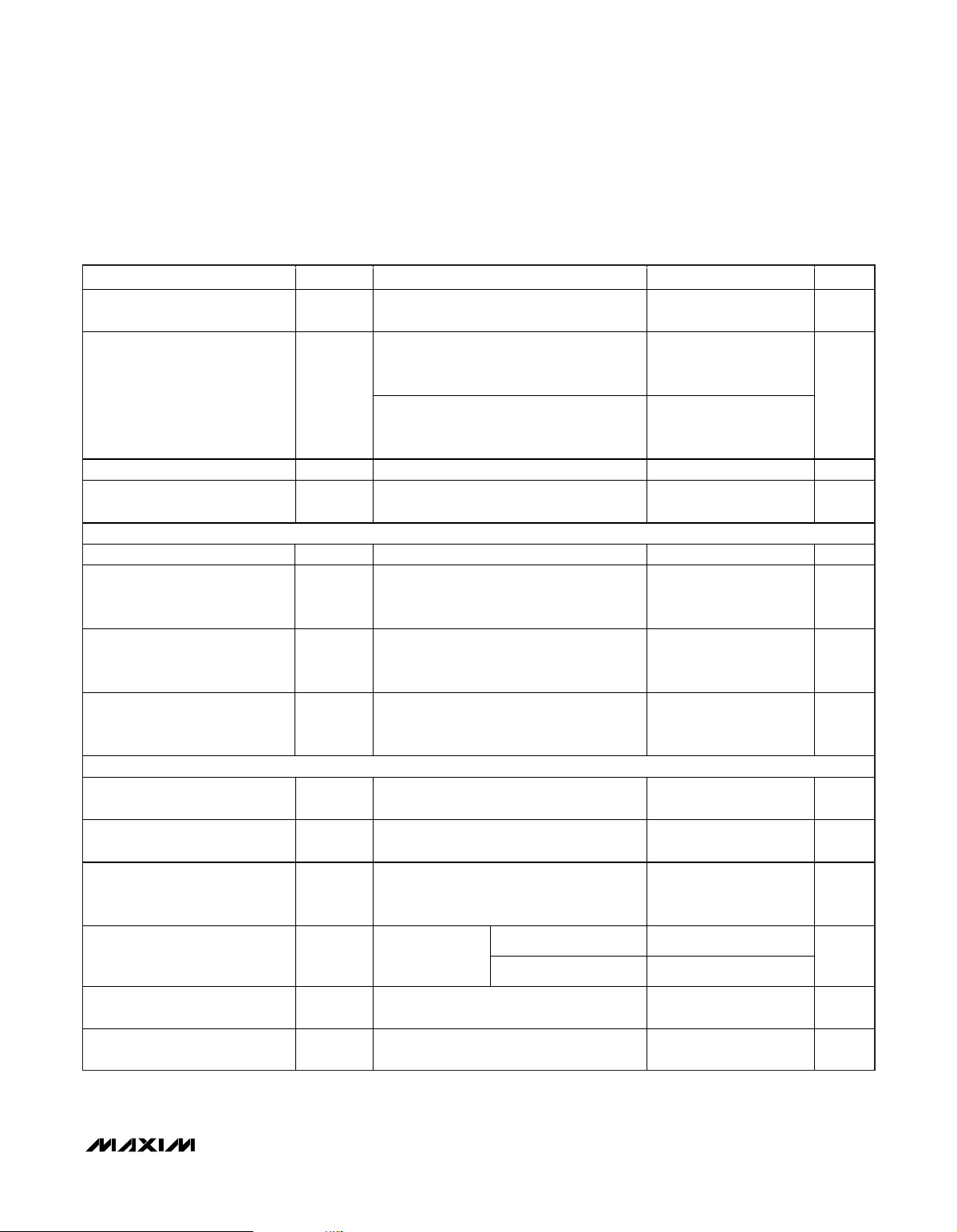
ELECTRICAL CHARACTERISTICS
(Circuit of Figure 1. VCC= V
GNDS = PGND = SKIP = GND, D0–D4 set for 1.20V (D0–D4 = 01110). T
PARAMETER SYMBOL CONDITIONS MIN MAX UNITS
PWM CONTROLLER
Input Voltage Range V
MAX8707
DC Output Voltage Accuracy V
SUSV Input Range V
OFS Input Range V
OFS GAIN A
GNDS Input Range V
GNDS Gain A
Switching Frequency Accuracy
(Per Phase)
TIME Slew-Rate Accuracy
BIAS AND REFERENCE
Quiescent Supply Current (VCC)I
Shutdown Supply Current (VCC)I
Reference Voltage V
Reference Load Regulation ∆V
FAULT PROTECTION
Output Overvoltage-Protection
Threshold
= 5V, OSC = REF, V
SHDN
OUT
SUSV
OFS
OFS
GNDS
GNDS
f
SW
CC(SHDN
V
OVP
CC
CC
REF
REF
= V
VPS
Includes loadregulation error
(VPS = FBS)
Negative offsets 0 0.8
Positive offsets 1.2 2.0
∆V
/ ∆V
OUT
V
OFS
∆V
OUT
V
OFS
∆V
OUT
-200mV ≤ V
OSC = GND 180 220
OSC = REF 270 330
OSC = V
R
TIME
R
TIME
(2.28mV/µs)
Startup and shutdown, R
(4.75mV/µs) to 392kΩ (0.57mV/µs)
Measured at VCC, VPS and FBS forced
above the regulation points
Measured at VCC, SHDN = GND 10 µA
V
CC
I
REF
I
REF
Measured at VPS
with respect to
unloaded output
voltage, rising edge,
8mV hysteresis
OFS
= 0 to 0.8V
/ ∆V
OFS
= 1.2V to 2V
/ ∆V
GNDS
GNDS
CC
= 143kΩ (6.25mV/µs) -10 +10
= 47kΩ (19mV/µs) to 392kΩ
= 4.5V to 5.5V, I
= 0 to 500µA -2
= -100µA to 0 6.2
= V
FBS
; ∆V
; ∆V
,
≤ +200mV
= V
CRSN
= -40°C to +85°C, unless otherwise specified.) (Note 3)
A
DAC codes from
1.10V to 1.55V
DAC codes from
0.80V to 1.075V
SUS = V
= V
OFS
OFS,
= V
OFS
OFS
TIME
= 0 1.98 2.02 V
REF
PWM (SKIP = GND)
or SKIP mode when
≤ V
V
OUT
SKIP = V
V
> V
OUT
CRSP
CC
- V
REF,
= 47kΩ
TRIP
and
CC
TRIP
= V
= 1.20V, V
CSP_
4.5 5.5 V
-1.0 +1.0
-3.0 +3.0
-25 +25 mV
0.4 2.0 V
-0.131 -0.118
-0.131 -0.118
-200 +200 mV
0.95 1.05 V/V
540 660
-15 +15
-20 +20
150 250 mV
1.70 1.80 V
= 0.8V, OFS = SUS =
SUSV
%
V
V/V
kHz
%
12 mA
mV
6 _______________________________________________________________________________________
Page 7
用于
)
)
)
)
)
)
AMD Hammer CPU
核电源的多相、
固定频率控制器
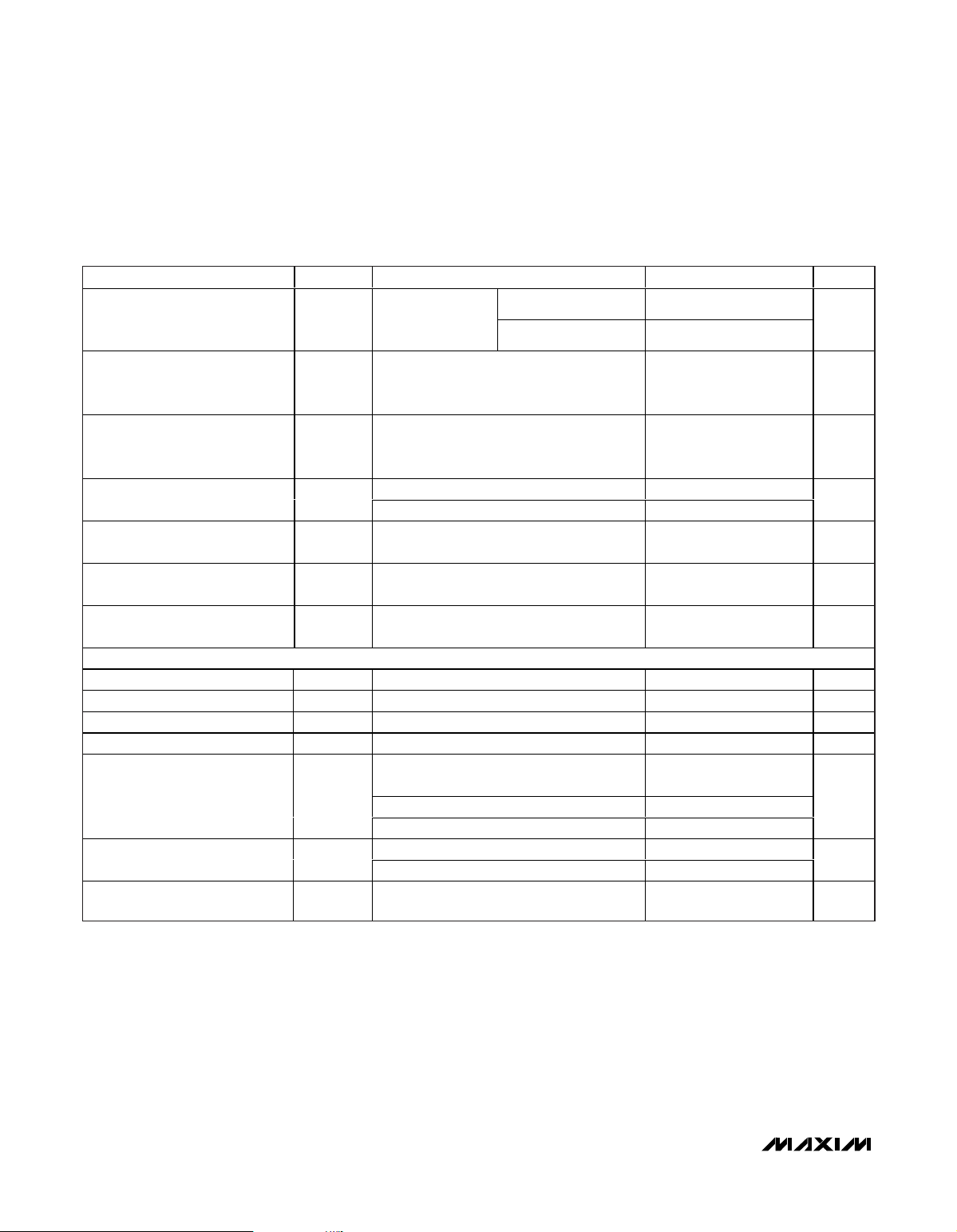
ELECTRICAL CHARACTERISTICS (continued)
(Circuit of Figure 1. VCC= V
GNDS = PGND = SKIP = GND, D0–D4 set for 1.20V (D0–D4 = 01110). T
PARAMETER SYMBOL CONDITIONS MIN MAX UNITS
Output Undervoltage-Protection
Threshold
VROK Threshold
VROK Output Low Voltage I
VCC Undervoltage-Lockout
Threshold
DROOP AND TRANSIENT RESPONSE
DC Droop Amplifier Offset -2 +2 mV
DC Droop Amplifier
Transconductance
(CRS Sense Enabled)
DC Droop Amplifier
Transconductance
(CRS Sense Disabled)
= 5V, OSC = REF, V
SHDN
V
V
UVLO(VCC
G
m(VPS
G
m(VPS
UVP
= V
VPS
Measured at VPS with respect to 70% of the
unloaded nominal output voltage
Undervoltage, measured at VPS with
respect to 87.5% of the unloaded output
voltage, falling edge, 15mV hysteresis
Overvoltage, measured at VPS with respect
to 112.5% of the unloaded output voltage,
rising edge, 15mV hysteresis
= 3mA 0.4 V
SINK
Rising edge, hysteresis = 20mV, PWM_
disabled below this level
∆I
/ (N x ∆V
VPS
- V
V
CRSP
N = number of phases enabled
∆I
/ (Σ∆VCS), V
VPS
= V
V
VPS
CSP
CSN
_ - V
V
= V
FBS
), V
CRS
= -60mV to +60mV,
CRSN
CRSP
_ = 1.2V,
_ = -60mV to +60mV
CSN
= V
CRSN
= -40°C to +85°C, unless otherwise specified.) (Note 3)
A
= V
VPS
= VCC,
CRSP
CRSN
= V
CSP_
= 1.2V,
= 1.20V, V
-40 +40 mV
-40 +40
-40 +40
4.10 4.45 V
190 210 µS
190 210 µS
= 0.8V, OFS = SUS =
SUSV
MAX8707
mV
Transient-Droop Transresistance R
CURRENT LIMIT AND BALANCE
Current-Sense Input Preamplifier
Offsets
ILIM(AVE) Input Range
(Adjustable Mode)
ILIM(AVE) Average Current-Limit
Threshold Voltage
(Positive, Default)
ILIM(AVE) Average Current-Limit
Threshold Voltage
(Positive, Adjustable)
ILIM(AVE) Average Current-Limit
Threshold Voltage (Negative)
ILIM(AVE) Current-Limit Default
Switchover Threshold
_______________________________________________________________________________________ 7
V
V
V
TRANS
ILIM(AVE
AVELIMIT
AVELIMIT
Current-sense gain (ACS = 10 typ) divided
by the voltage preamplifier
transconductance (G
CSP_ - CSN_ -2.5 +2.5 mV
CRSP - CRSN; ILIM(AVE) = V
CRSP - CRSN
CRSP - CRSN; ILIM(AVE) = V
m(TRC)
V
ILIM(AVE
V
ILIM(AVE
= 2mS typ)
CC
= V
REF
= V
REF
CC
- 0.2V 5 15
- 1.0V 44 56
4.50 5.25 kΩ
V
REF
- 1.0
20 30 mV
-31 -19 mV
3
V
REF
- 0.2
V
CC
- 0.4
mV
V
V
Page 8
用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
ELECTRICAL CHARACTERISTICS (continued)
(Circuit of Figure 1. VCC= V
GNDS = PGND = SKIP = GND, D0–D4 set for 1.20V (D0–D4 = 01110). T
PARAMETER SYMBOL CONDITIONS MIN MAX UNITS
ILIM(PK) Peak Current-Limit
Threshold Voltage (Positive)
MAX8707
ILIM(PK) Peak Current-Limit
Threshold Voltage (Negative)
= 5V, OSC = REF, V
SHDN
V
PKLIMIT
= V
VPS
CSP_ - CSN_,
R
8V / V
CSP_ - CSN_,
R
V
ILIM(PK)
LIM(PK)
ILIM(PK)
PKLIMIT
= R
= R
= 50mV
FBS
TRC
TRC
= V
x
x 8V / V
= V
CRSN
= -40°C to +85°C, unless otherwise specified.) (Note 3)
A
V
PKLIMIT
V
PKLIMT
PKLIMIT
= V
CRSP
= 30mV 24 36
= 50mV 40 60
,
CSP_
= 1.20V, V
-60 -40 mV
= 0.8V, OFS = SUS =
SUSV
mV
ILIM(PK) Idle Current-Limit
Threshold Voltage (Skip Mode)
Current-Sense Input Current
Current-Sense Common-Mode
Input Range
Phase Disable Threshold CSP4 3
CRS Sense Input Disable
Threshold
LOGIC AND I/O
Logic Input High Voltage V
Logic Input Low Voltage V
D0–D4 Logic Input High Voltage 0.8 V
D0–D4 Logic Input Low Voltage 0.4 V
OSC 3-Level Input Logic Levels V
SKIP Input Logic Levels V
Logic Output High Voltage V
Note 2: VROK is blanked during the transitions, when the internal target is being slewed. See the Output-Voltage Transition Timing
Note 3: Specifications to T
section. VROK is reenabled in t
= -40°C are guaranteed by design and are not production tested.
A
V
IDLE
OSC
SKIP
OH
BLANK
C S P _ - C S N _, V
R
V
CSP_, CRSP -0.2 +0.2
CSN_, CRSN -1.0 +1.0
CRSP, CRSN, CSP_, CSN_ 0 2 V
CRSP 3
SHDN, SUS 2.4 V
IH
SHDN, SUS 0.8 V
IL
High (VCC)
Medium (REF) 1.8 2.2
Low (GND) 0.4
High 1.2
Low (GND) 0.8
PWM_, DRSKP; I
(20µs) after the transition is completed.
I LI M ( P K )
P KL IM IT
= R
= 50m V
S KI P
T RC
≥ 1.2V ,
x 8V / V
SOURCE
P KL IM IT
= 3mA
,
28mV
µA
V
V
CC
- 0.4
V
CC
- 0.4
CC
- 0.4
V
CC
- 0.4
V
V
V
V
V
8 _______________________________________________________________________________________
Page 9
用于
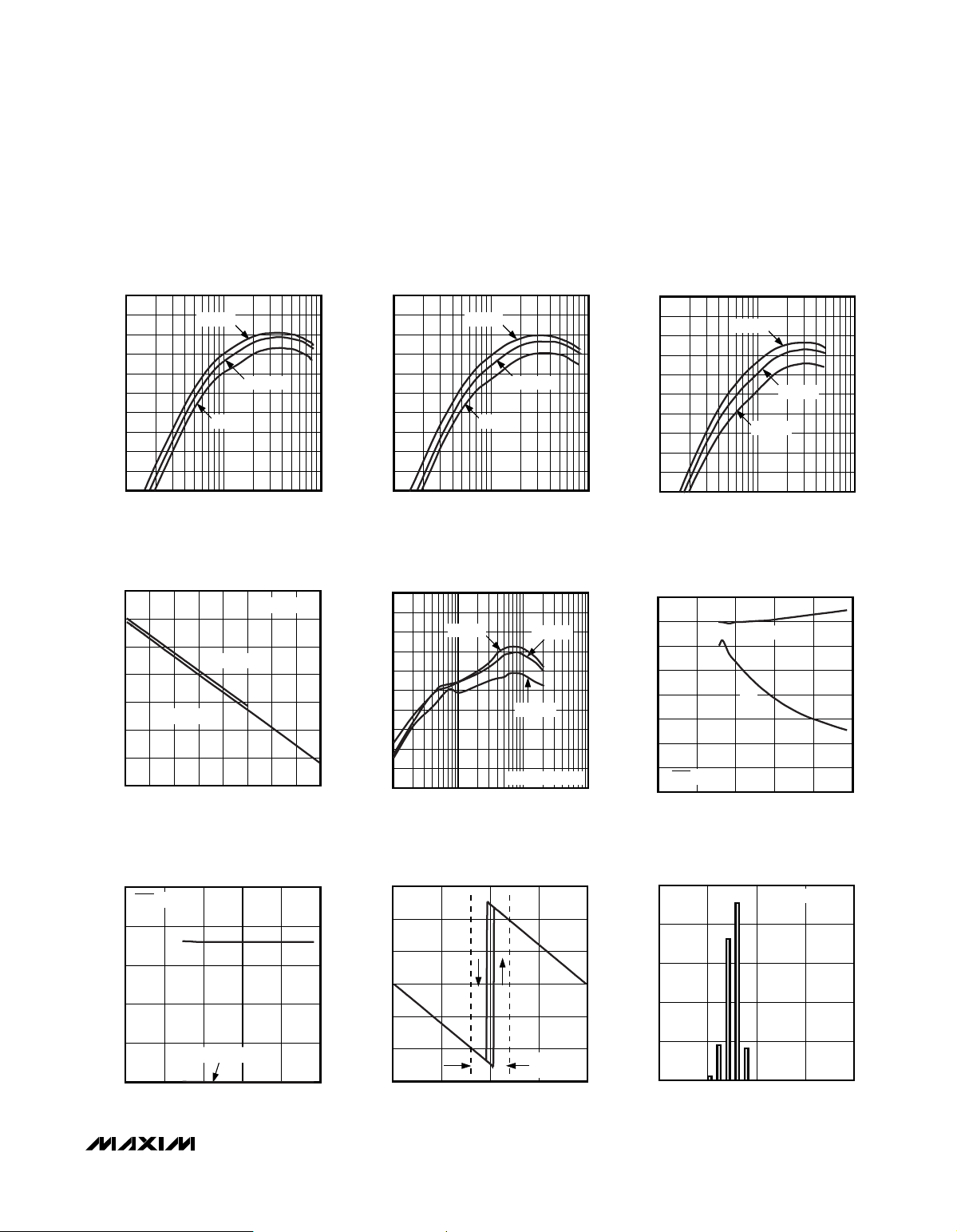
OUTPUT VOLTAGE DEVIATION
vs. LOAD CURRENT
MAX8707 toc04
LOAD CURRENT (A)
OUTPUT VOLTAGE (mV)
604020
-100
-80
-60
-40
-20
0
20
-120
080
V
OUT
= 1.00V
V
OUT
= 1.30V
VIN = 12V
SINGLE-PHASE
EFFICIENCY vs. LOAD CURRENT
(V
OUT
= 0.800V)
MAX8707 toc05
LOAD CURRENT (A)
EFFICIENCY (%)
110
60
70
80
90
100
50
0.1 100
VIN = 8V
VIN = 12V
VIN = 20V
SKIP = SUS = V
CC
0
50
100
150
200
0 5 10 15 20 25
NO-LOAD SUPPLY CURRENT
vs. INPUT VOLTAGE
(4-PHASE FORCED-PWM MODE)
MAX8707 toc06
INPUT VOLTAGE (V)
SUPPLY CURRENT (mA)
I
BIAS
I
IN
SKIP = V
CC
0
2
6
4
8
10
0105152025
NO-LOAD SUPPLY CURRENT
vs. INPUT VOLTAGE
(1-PHASE PULSE SKIPPING)
MAX8707 toc07
INPUT VOLTAGE (V)
SUPPLY CURRENT (mA)
SKIP = GND
I
BIAS
I
IN
= 15µA
OUTPUT OFFSET VOLTAGE
vs. OFS VOLTAGE
MAX8707 toc08
OFS VOLTAGE (V)
OUTPUT OFFSET VOLTAGE (mV)
1.51.00.5
-100
-50
0
50
100
150
-150
0 2.0
UNDEFINED
REGION
REFERENCE VOLTAGE
DISTRIBUTION
MAX8707 toc09
REFERENCE VOLTAGE (V)
SAMPLE PERCENTAGE (%)
2.0052.0001.995
10
20
30
40
50
0
1.990 2.010
SAMPLE SIZE = 100
AMD Hammer CPU
核电源的多相、
固定频率控制器
_______________________________________________________________
(Circuit of Figure 1. VIN= 12V, VCC= 5V, SUS = SKIP = GND, SHDN = VCC, V
EFFICIENCY vs. LOAD CURRENT
(V
100
90
OUT
VIN = 8V
= 1.525V)
MAX8707 toc01
EFFICIENCY vs. LOAD CURRENT
(V
100
90
OUT
VIN = 8V
= 1.300V)
= 0.80V, TA= +25°C, unless otherwise specified.)
SUSV
EFFICIENCY vs. LOAD CURRENT
(V
100
MAX8707 toc02
90
典型工作特性
= 1.000V)
OUT
VIN = 8V
MAX8707
MAX8707 toc03
80
70
EFFICIENCY (%)
60
50
1 100
LOAD CURRENT (A)
VIN = 12V
VIN = 20V
10
80
70
EFFICIENCY (%)
60
50
1 100
LOAD CURRENT (A)
VIN = 12V
VIN = 20V
10
80
VIN = 12V
70
EFFICIENCY (%)
60
50
1100
VIN = 20V
10
LOAD CURRENT (A)
_______________________________________________________________________________________ 9
Page 10

用于
OUTPUT OFFSET VOLTAGE
DISTRIBUTION
MAX8707 toc10
OUTPUT OFFSET VOLTAGE (mV)
SAMPLE PERCENTAGE (%)
1-1-3
10
20
30
40
50
0
-5 53
SAMPLE SIZE = 100
1.550V
0.800V
VPS TRANSCONDUCTANCE
DISTRIBUTION
MAX8707 toc11
TRANSCONDUCTANCE (µS)
SAMPLE PERCENTAGE (%)
203201199197
10
20
30
40
50
60
70
0
195 205
SAMPLE SIZE = 100
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20 25
CURRENT-SENSE VOLTAGE DIFFERENCE
vs. LOAD CURRENT
MAX8707 toc12
LOAD CURRENT (A)
CURRENT-SENSE DIFFERENCE (mV)
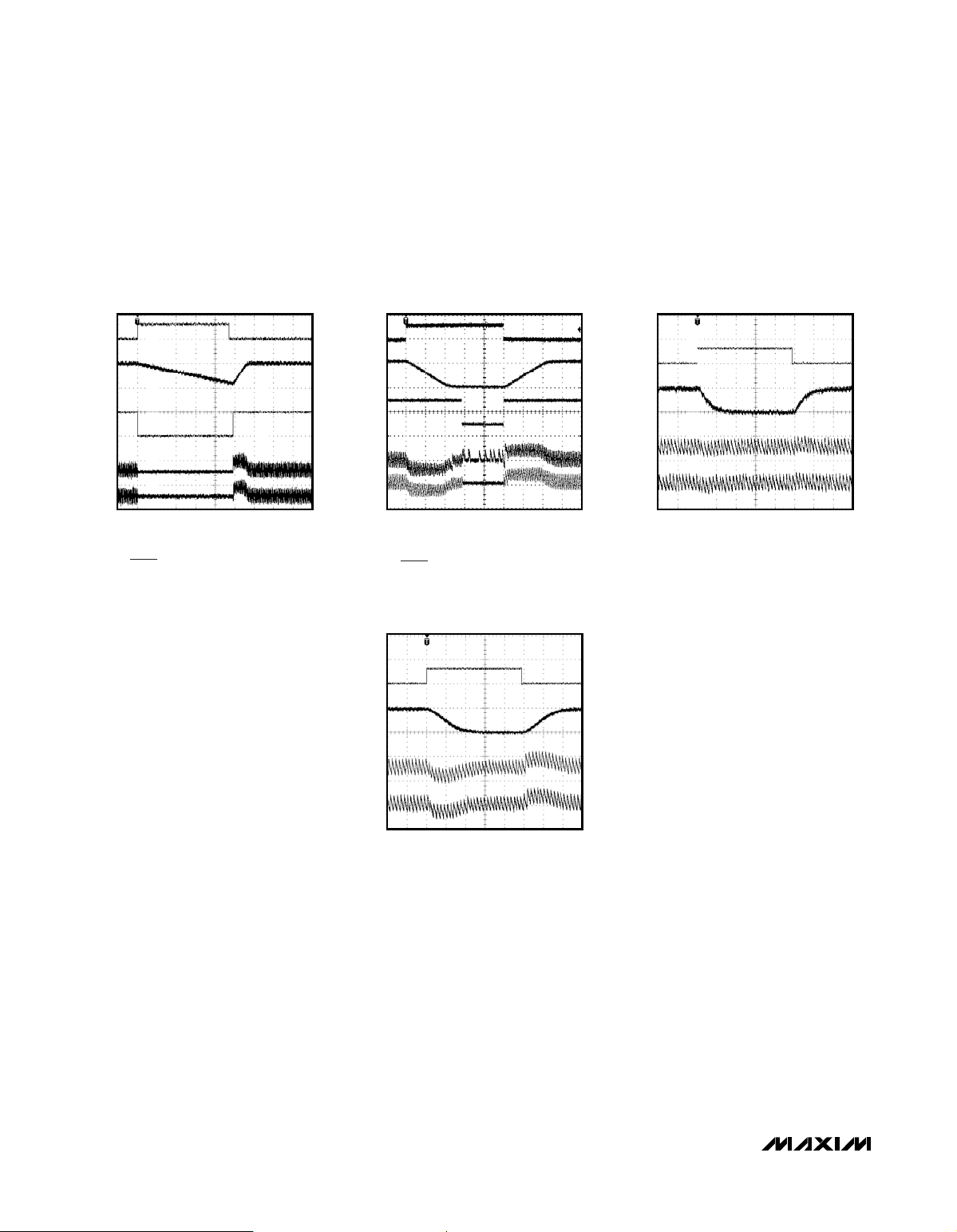
STARTUP WAVEFORM
(NO LOAD)
MAX8707 toc13
A. SHDN, 5V/div
B. DRSKP, 10V/div
C. REF, 2V/div
D. OUT, 1V/div
E. VROK, 10V/div
F. DL1, 10V/div
G. INDUCTOR CURRENT
(I
L1
), 10A/div
200µs/div
0
0
3.3V
A
B
C
D
E
F
G
0
0
5V
2V
1V
STARTUP WAVEFORM
(20A LOAD)
MAX8707 toc14
A. SHDN, 5V/div
B. DRSKP, 10V/div
C. REF, 2V/div
D. OUT, 1V/div
E. VROK, 10V/div
F. DL1, 10V/div
G. INDUCTOR CURRENT
(I
L1
), 10A/div
200µs/div
0
0
3.3V
A
B
C
D
E
F
G
0
0
5V
2V
1V
SHUTDOWN WAVEFORM
(NO LOAD)
MAX8707 toc15
A. SHDN, 5V/div
B VROK, 10V/div
C. OUT, 1V/div
D. DL1, 10V/div
E. INDUCTOR CURRENT
(I
L1
), 10A/div
200µs/div
0
0
3.3V
A
B
C
D
E
0
0
5V
1.3V
AMD Hammer CPU
固定频率控制器
核电源的多相、
____________________________________________________________
(Circuit of Figure 1. VIN= 12V, VCC= 5V, SUS = SKIP = GND, SHDN = VCC, V
= 0.80V, TA= +25°C, unless otherwise specified.)
SUSV
MAX8707
典型工作特性(续
)
10 ______________________________________________________________________________________
Page 11

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
____________________________________________________________
(Circuit of Figure 1. VIN= 12V, VCC= 5V, SUS = SKIP = GND, SHDN = VCC, V
65A
10A
1.30V
12V
20A
10A
0
0
A. I
OUT
50A/div
B. V
OUT
LOAD TRANSIENT
(V
OUT
= 10A TO 65A,
, 100mV/div
= 1.30V)
20µs/div
C. LX1, 10V/div
D. INDUCTOR CURRENT
(I
), 10A/div
L1
MAX8707 toc16
30A
A
B
C
D
1.00V
12V
10A
0
0
0
A. I
50A/div
B. V
= 0 TO 30A,
OUT
, 50mV/div
OUT
LOAD TRANSIENT
= 1.00V)
(V
OUT
20µs/div
C. LX1, 10V/div
D. INDUCTOR CURRENT
(I
= 0.80V, TA= +25°C, unless otherwise specified.)
SUSV
TRANSIENT PHASE REPEAT
0
0
A. I
= 0 TO 70A,
OUT
100A/div
, 100mV/div
B. V
OUT
), 10A/div
L1
MAX8707 toc17
70A
A
0A
1.30V
B
20V
C
20A
10A
D
典型工作特性(续
MAX8707 toc18
VIN = 20V
2µs/div
C. LX1, 10V/div
D. INDUCTOR CURRENT
), 10A/div
(I
L1
MAX8707
)
A
B
C
D
3.3V
0.2V
1.300V
1.275V
5A
5A
0
0
A. DPSLP, 5V/div
B. OFS, 200mV/div
C. V
OUT
DEEP-SLEEP TRANSITION
I
OUT
20µs/div
D. INDUCTOR CURRENT
), 10A/div
(I
, 25mV/div
L1
E. INDUCTOR CURRENT
), 10A/div
(I
L3
MAX8707 toc19
= 20A
SUSPEND EXIT TRANSITION
3.3V
A
B
C
D
E
0
1.30V
0.80V
5V
0
A. SUS, 5V/div
, 500mV/div
B. V
OUT
C. DRSKP, 5V/div
20µs/div
MAX8707 toc20
D. INDUCTOR CURRENT
(IL1), 10A/div
E. INDUCTOR CURRENT
), 10A/div
(I
L3
3.3V
A
0
1.30V
B
0.80V
C
5V
0
D
E
A. SUS, 5V/div
B. V
C. DRSKP, 5V/div
, 500mV/div
OUT
(SKIP = SUS)
200µs/div
MAX8707 toc21
D. INDUCTOR CURRENT
(IL1), 10A/div
E. INDUCTOR CURRENT
), 10A/div
(I
L3
A
B
C
D
E
SUSPEND TRANSITION
______________________________________________________________________________________ 11
Page 12
用于
SUSPEND TRANSITION
(SKIP = SUS)
MAX8707 toc22
A. SUS, 5V/div
B. V
OUT
, 500mV/div
C. DRSKP, 5V/div
D. INDUCTOR CURRENT
(IL1), 10A/div
E. INDUCTOR CURRENT
(I
L3
), 10A/div
100µs/div
0
3.3V
A
B
C
D
E
0
1.30V
0.80V
5V
SUSPEND TRANSITION
(SKIP = GND)
MAX8707 toc23
A. SUS, 5V/div
B. V
OUT
, 500mV/div
C. DRSKP, 5V/div
D. INDUCTOR CURRENT
(IL1), 10A/div
E. INDUCTOR CURRENT
(I
L3
), 10A/div
40µs/div
0
3.3V
A
B
C
D
E
0
1.30V
0.80V
5V
D1 (25mV) VID TRANSITION
MAX8707 toc24
A. D1, 5V/div
B. V
OUT
, 25mV/div
C. INDUCTOR CURRENT
(IL1), 10A/div
D. INDUCTOR CURRENT
(I
L3
), 10A/div
20µs/div
0
0
3.3V
A
B
C
D
0
1.30V
1.275V
D3 (200mV) VID TRANSITION
MAX8707 toc25
A. D3, 5V/div
B. V
OUT
, 200mV/div
C. INDUCTOR CURRENT
(IL1), 10A/div
D. INDUCTOR CURRENT
(I
L3
), 10A/div
20µs/div
0
0
3.3V
A
B
C
D
0
1.30V
1.10V
AMD Hammer CPU
固定频率控制器
核电源的多相、
____________________________________________________________
(Circuit of Figure 1. VIN= 12V, VCC= 5V, SUS = SKIP = GND, SHDN = VCC, V
= 0.80V, TA= +25°C, unless otherwise specified.)
SUSV
MAX8707
典型工作特性(续
)
12 ______________________________________________________________________________________
Page 13

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
___________________________________________________________________
MAX8707
引脚说明
PIN NAME FUNCTION
引脚
1D2
2 D3 Low-Voltage VID DAC Code Input
3 D4 Low-Voltage VID DAC Code Input (MSB)
4 N.C. No Connect. Leave open. Pin internally connected.
5 SKIP
6 SHDN
7 SUS
名称
功能
Low-Voltage VID DAC Code Input. The D0–D4 inputs do not have internal pullups. These 1.0V logic inputs
低电压
VID DAC
are designed to interface directly with the CPU. In normal mode (Table 4, SUS = GND), the output voltage
在正常模式下 (表4中,
is set by the VID code indicated by the logic-level voltages on D0–D4. In suspend mode (SUS = high), the
在挂起模式下 (
output voltage tracks the voltage at SUSV.
低电压
VID DAC
低电压
VID DAC
不连接。保持开路。该引脚有内部连接。
Pulse-Skipping Indicator Input. When pulse skipping, the controller blanks the VROK upper threshold.
跳脉冲指示输入。跳脉冲模式时,控制器屏蔽
3.3V or V
3.3V或V
GND = multiphase forced-PWM operation
GND =
The controller automatically enters forced-PWM mode during startup, shutdown, and the no-CPU VID
在启动、关断和无
mode.
Shutdown Control Input. This input cannot withstand the battery voltage. Connect to V
operation. Connect to ground to put the IC into its 50nA (typ) shutdown state. During the startup and
关断控制输入。该输入端不能承受电池电压。接至
shutdown transitions, the output voltage is ramped at 1/4th the output-voltage slew rate programmed by
状态。在启动和关断过渡过程中,输出电压的变化速率为
. After completing soft-shutdown, the drivers are disabled—DRSKP and PWM_ are pulled low.
R
驱动器——拉低
TIME
并清除故障锁存器。不要将
Forcing SHDN to 11V~13V disables both overvoltage-protection and undervoltage-protection circuits, and
clears the fault latch. Do not connect SHDN to >13V.
Suspend Control Input. When the controller detects a transition on SUS, the controller slews the output
挂起模式控制输入。当控制器检测到
voltage to the new voltage level determined by SUSV (SUS = high) or D0–D4 (SUS = low). The controller
或
D0–D4 (SUS =
blanks VROK during the transition and another 20µs after the new target voltage is reached. When SUS is
当
为高时,偏移 (
SUS
high, the offset (OFS) is automatically disabled.
码输入。
SUS = GND
高),输出电压跟踪
SUS =
码输入
码输入 (
MSB
(high) = 1-phase pulse-skipping operation (phases 2, 3, and 4 disabled)
CC
(高)= 单相跳脉冲工作模式 (2、3和4相被关闭)
CC
多相强制
工作模式
PWM
CPU VID
DRSKP和PWM_。将SHDN
低) 确定的电压。控制器在过渡期间和目标电压到达后的另外
OFS
输入不具有内部上拉。这些
D0–D4
),由
)
模式期间,控制器自动进入强制
接至大于
SHDN
SUS
) 被自动禁止。
的逻辑电平电压表示的
D0–D4
脚的电压。
SUSV
上门限。
VROK
V
CC
强拉到
11V~13V
的电压。
13V
有变化时,控制器将输出电压摆动至新的、由
时正常工作。接地则使IC进入
逻辑输入设计用来直接与
1.0V
码来设定输出电压。
VID
模式。
PWM
设定摆率的
R
TIME
,可禁止过压保护电路和欠压保护电路,
。软关断结束后,禁止
1/4
20µs屏蔽VROK
CPU
for normal
CC
(典型) 关断
50nA
SUSV (SUS =
连接。
高)
。
8 SUSV
9 ILIM(AVE)
10 OFS
Suspend-Mode Voltage Input. Connect to the output of a resistive voltage-divider from REF to GND to
挂起模式电压输入。连接到一个
provide an analog voltage between 0.4V to 2V. The output voltage is set by the voltage at SUSV when SUS
为高时输出电压由
SUS
is high.
Average Current-Limit Threshold Adjustment. The controller uses the accurate CRSP-to-CRSN current-
sense voltage to limit the average current per phase. When the average current-limit threshold is
平均电流限制门限调节端。控制器利用精确的
exceeded, the controller internally reduces the peak inductor current-limit threshold (ILIM(PK))
门限时,控制器内部以每
I
per µs until the average current remains within the programmed limits. When the accurate current
PKLIMIT
的门限内。禁止精确电流检测时 (
sensing is disabled (CRSP = V
connected to V
如果
ILIM(AVE)
The average current-limit threshold defaults to 25mV if ILIM(AVE)
ILIM(AVE)
the average current-limit threshold voltage is precisely 1/20th the voltage difference between ILIM(AVE)
内。切换到
and the reference: (V
threshold for switchover to the 25mV default value is approximately V
Adjustable Offset Voltage Input. For 0 < V
可调偏移电压输入。当
output. For 1.2V < V
REF和OFS
Voltages in the range of 0.8V < V
控制器禁止偏移放大器。
during suspend mode (SUS = high).
______________________________________________________________________________________ 13
CC
电压与基准电压差的
25mV
电压差的
SUSV
.
电压接至
默认值的逻辑门限约为
- V
REF
0 < V
< 2.0V, 1/8th the difference between REF and OFS is added to the output.
OFS
1/8
REF至GND
电压设定。
µs 2% I
PKLIMIT
CRSP = V
), the average current-limit circuit is disabled and I
CC
,则默认平均电流门限为
V
CC
1/20:(V
ILIM(AVE)
被加到输出上。
) / 20 for a range of 1.0V (V
< 0.8V时,OFS
OFS
< 1.2V are undefined. The controller disables the offset amplifier
OFS
之间的电阻分压器输出,提供
CRSP-CRSN
的速率降低峰值电感电流门限 (
),平均电流限制电路被禁止,
CC
- V
REF
ILIM(AVE
。
- 1V
V
CC
< 0.8V, 1/8th the voltage at OFS is subtracted from the
OFS
电压的
0.8V < V
OFS
检流电压来限制每相平均电流。当超过平均电流
。可调模式中,平均电流门限精确等于
25mV
)
)
1/8
< 1.2V
is connected to VCC. In adjustable mode,
/20,在1.0V(V
REF
被从输出中减去。当
范围没有定义。在挂起模式中 (
0.4V至2V
ILIM(PK
I
LIM(AVE)
- 1V)至1.8V(V
REF
- 1V) to 1.8V (V
- 1V.
CC
的模拟电压。
)),直至平均电流回到设定
应该接至
LIM(AVE)
- 0.2V). The logic
REF
1.2V < V
OFS
at 2% of
V
CC
should be
- 0.2V
REF
< 2.0V
SUS =
。
)范围
时,
高),
Page 14

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
________________________________________________________________
引脚
PIN NAME FUNCTION
11 OSC
MAX8707
12 GNDS
13 TIME
14 ILIM(PK)
名称
功能
振荡器选择输入。
Oscillator Select Input. OSC is a 3-level logic input for selecting the per-phase switching frequency.
对于每相
Connect to GND for 200kHz, connect to REF for 300kHz, or connect to V
Ground Remote-Sense Input. Connect GNDS directly to the CPU ground-sense pin. GNDS internally
地远端检测输入。将
connects to an amplifier that adjusts the output voltage, compensating for voltage drops from the regulator
补偿稳压器地到负载地的压差。
ground to the load ground.
Slew-Rate Adjustment Pin. Connect a resistor from TIME to GND to set the internal slew rate. A 47kΩ to
摆率调节引脚。
392kΩ corresponds to slew rates of 19mV/µs to 2.28mV/µs, respectively, for all suspend voltage
2.28mV/µs
transitions.
where dV
其中,
controller automatically reduces the slew rate by 1/4th. For all dynamic VID transitions, the rate at which
降至
the VID inputs (D0–D4) are clocked sets the slew rate, as long as it is less than the dv/dt set by R
dv/dt
Peak Inductor Current-Limit Threshold Adjustment (Cycle-by-Cycle Current Limit). If the voltage across the
峰值电感电流门限调节端 (逐周期限流 ) 。如果检流输入端(
current-sense inputs (CSP to CSN) exceeds the peak current-limit threshold, the controller immediately
控制器立即结束相应相的导通周期。
terminates the respective phase’s on-time. Connect a resistor R
cycle-by-cycle peak current-limit threshold:
300kHz
的摆率,对于所有挂起电压的转变
TARGET
dV
TARGET
。对于所有动态
1/4
。
为选择每相开关频率的3电平逻辑输入。对于每相
OSC
,接至
TIME对GND
t
TRAN SUS
/ dt = 6.25mV/µs × 143kΩ / R
/dt = 6.25mV/µs x 143kΩ/R
R
REF
GNDS
()
VID
ILIM PK
,对于每相
直接接至
()
CPU
接一只电阻,设置内部摆率。
||
VV
NEW OLD
=
dV dt
TARGET
转变,
VID
ILIM(PK)对GND
VR
×8
=
IR
PKLIMIT CS
,接至
600kHz
地检测引脚。
:
−
/
TIME
为摆率。对于软启动和关断过程,控制器自动将摆率
TIME
输入(
D0–D4
TRC
V
CC
GNDS
is the slew rate. For soft-start and shutdown, the
) 的变化速率决定了摆率,只要其小于
接一只电阻
。
内接至调节输出电压的一个放大器,
47kΩ至392kΩ
CSP至CSN
ILIM(PK)
200kHz
for 600kHz per phase.
CC
的阻值分别对应
) 的压降大于峰值限流门限,
R
,设置逐周期峰值限流门限:
from ILIM(PK) to GND to set the
ILIM(PK)
,接至
引脚说明(续
,
GND
19mV/µs
R
TIME
至
设定的
TIME
)
.
其中,
where R
望的峰值电流门限 (每相)。
R
TRC
Voltage Integrator Capacitor Connection. Connect a 470pF x (4 / η
15 CCV
16 TRC
14 ______________________________________________________________________________________
电压积分器电容连接端。
常数。
analog ground (GND) to set the integration time constant.
Transient-Voltage Preamplifier Output. Connect a resistor (R
瞬态电压预放大器输出。
transient droop based on the voltage-positioning requirements. TRC does not affect the DC steady-state
TRC
droop. Choose R
as defined in the Design Procedure (page 33). If voltage positioning is not required, R
如
设计步骤中所定
by the stability requirements. TRC is high impedance in shutdown.
TRC
为检流元件 (电感的
R
CS
is the resistance value of the current-sense element (inductors’ DCR or current-sense resistor),
CS
is the resistance between TRC and REF, and I
CCV
不影响直流稳态下垂。根据以下公式来选择
TRC
RA
为高阻。
TRC与REF
based on the equation:
=
TRC CS
(第33页)。如果不需要电压定位,则根据稳定性要求来确定
或检流电阻) 的阻值,
DCR
对模拟地 (
⎛
⎜
⎝
GND
间接一只电阻 (
RR
TRANS CS
R
η
PH DROOP AC
) 接一只
R
TRC
()
为
R
PKLIMIT
470pF x (4/η
),根据电压定位要求来设定瞬态下垂。
R
TRC
:
TRC和REF
TRC
is the desired peak current limit (per phase).
) or greater capacitor from CCV to
) 或容值更大的电容,以设置积分时间
PH
PH
) between TRC and REF to set the
TRC
之间的电阻值,
⎞
⎟
⎠
。在关断模式中,
R
TRC
I
is determined
TRC
PKLIMIT
为期
Page 15

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
________________________________________________________________
引脚说明(续
MAX8707
)
引脚
17 REF
18 VROK
19 GND
20 PGND
21 V
22 PWM1
23 PWM2
24 PWM3
25 PWM4
26 DRSKP
27 FBS
名称
CC
功能
基准电压输出。对
2.0V
电流。由于
500µA
开漏极电源好输出。上电后,只要输出电压处于稳压状态,则
(输出电压转换),则控制器屏蔽
(
模拟地。将
功率地。驱动器控制输出 (
模拟电源输入。
大的旁路陶瓷电容到模拟
相1的
相2的
相3的
相4的
驱动器跳脉冲控制输出。推挽逻辑输出,用于控制跳脉冲模式的驱动器IC的工作模式。
PGND
零比较器,并工作在跳脉冲模式。
远端反馈检测输入。
控制器产生了一个与
SKIP =
高)下,
PWM
PWM
PWM
PWM
间摆动。当
REF
VROK
MAX8707
串联一只
V
CC
驱动器控制输出。关断模式中为逻辑低。
驱动器控制输出。关断模式中为逻辑低。
驱动器控制输出。关断模式中为逻辑低。
驱动器控制输出。当禁止 (
DRSKP
FBS接至CPU
接一只
GND
的负载调整误差,加载
上限被禁止。
的裸露垫盘接至模拟地。
PWM_
GND
为高时,驱动器IC工作在强制
输出电流等幅且极性相反的
VPS
0.22µF至1µF
(高阻)。在启动和关断期间,
VROK
)和驱动器跳脉冲输出 (
电阻到系统电源电压 (
10Ω
。
CSP4 = V
输出检测点上。为使因
(最大值)的旁路陶瓷电容。基准电压能为外部负载提供
会降低输出电压精确度。
REF
保持为高阻。一旦摆率控制有效
VROK
) 的地。
DRSKP
4.5V至5.5V
) 时或在关断模式中为逻辑低。
CC
模式。当
PWM
输入串联电阻引起的输出电压误差最小,
FBS
输入偏置电流。在关断模式中,
FBS
被强制拉低。在跳脉冲模式
VROK
) 。尽可能靠近IC接一只
为低时,驱动器IC使能过
DRSKP
1µF
DRSKP在V
为高阻。
FBS
或容值更
和
CC
28 VPS
29 CRSN
电压定位跨导放大器输出。在
下垂 (负载线)(请参见
= R
R
VPS
DROOP
其中,
R
电压 (
CSN_
来降低电压定位斜率的温度依赖性。要禁止电压定位功能,可将
高阻。
检流电阻负极输入。
流电阻,用于精确电压定位和电流限制。不使用时,浮空
______________________________________________________________________________________ 15
DROOP
CRSP和CRSN
) 输入之和。将电感直流电阻 (
电压定位放大器
/ (R
为期望的直流电压定位斜率,
) 的精密检测电阻。当
CRSN
VPS和FBS
x G
SENSE
为差分负极输入,用于1相电感电流的精确检测。在
之间接一只电阻
一节) 。
)
M(VPS)
为检流阻值,
R
SENSE
CRSP接至V
) 用作检流元件时 (无损检测) ,
R
DCR
CC
,根据要求的电压定位斜率来设定直流稳态
R
VPS
)
G
时,跨导放大器的输入电压为检流电压 (
VPS与FBS
CRSN(CRSP
M(VPS
= 200µs。R
应该包括一只
R
VPS
短接。在关断模式下,
CRSP和CRSN
上拉至
) 。
V
CC
SENSE
为形成检流
NTC
间接一只检
和
CSP_
热敏电阻
为
VPS
Page 16

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
________________________________________________________________
引脚
30 CRSP
名称
正极检流电阻输入。
电阻。如果所有相 (
检流(
CRSP和CRSN
功能
为差分正极输入,用于1相电感电流的精确检测。在
CRSP
CSP_和CSN_
) 功能。
) 都使用检流电阻,则将
CRSP接至V
CC
并浮空
MAX8707
31 CSP1
32 CSN1
33 CSN2
34 CSP2
35 CSP3
36 CSN3
37 CSN4
38 CSP4
相1的正极检流输入。根据检流的实现方式,该输入引脚应该接至检流电阻或
相1的负极检流输入。
相2的负极检流输入。
相2的正极检流输入。根据检流的实现方式,该输入引脚应该接至检流电阻或
相3的正极检流输入。根据检流的实现方式,该输入引脚应该接至检流电阻或
相3的负极检流输入。
相4的负极检流输入。
相4的正极检流输入。根据检流的实现方式,该输入引脚应该接至检流电阻或
若为固定3相工作时,则
CSP4接至V
CC
。
引脚说明(续
CRSP和CRSN
,省掉这个额外的
CRSN
检测滤波电容的正端。
DCR
检测滤波电容的正端。
DCR
检测滤波电容的正端。
DCR
检测滤波电容的正端。
DCR
)
间接一只检流
低压
39 D0
40 D1
VID-DAC
模式下 (表4中,
电压跟踪
低压
VID-DAC
____________________________
除了电池,
MAX8707
一般来说,这个
系统电源。采用外部偏置电源,可提高效率,并省下了
一个
线性稳压器的成本,否则的话,还需要集成一
+5V
个线性稳压器来为
独运行,则可外接一只线性稳压器来提供
16 ______________________________________________________________________________________
还需要一个外部的
偏置电源取自效率高达
+5V
电路和栅极驱动器供电。若需单
PWM
SUSV
码输入。
SUS =
脚的电压。
码输入。
偏置电源
+5V
+5V
+5V
输入没有内部上拉。这些
D0–D4
低),输出电压由
详细说明
(
)
V
CC
偏置电源。
95%的+5V
偏置电源。
D0– D4上VID-DAC
+5V
V
DRV
其中,
x Q
G
1.0V
偏置电源必须提供给
(
的栅极-驱动电源),这样需要的最大电流为:
FET
取自
I
CC
(每相) 确定的驱动器电源电流,如驱动器数据资料
中所确定。如果
须延迟使能信号 (
绪,以确保启动。
逻辑输入设计用来直接与
输入来设定。在挂起模式下(
(用于
V
CC
I
= ICC+ I
BIAS
DRIVE
Electrical Characteristics
偏置电源比电池电源先上电,则必
+5V
由低变高) ,直至电池电压已就
SHDN
连接。在正常
CPU
SUS =
PWM
表,
高),输出
控制器)和
为
I
DRIVE
f
SW
Page 17

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
开关频率
三电平逻辑输入可用来设置每相开关频率。
OSC
与
GND、REF或V
300kHz和600kHz
减小元件的尺寸,使应用在尺寸方面得到优化,但由于
较高的开关损耗,效率方面有所折扣。负载电流比较低
的超轻便设备能够接受这种折衷。低工作频率 (
OSC = GND
寸和板上空间为代价。
) 提供最佳的总体效率,但要以更大的元件尺
连接分别可设置工作频率为
CC
。高工作频率 (
600kHz,OSC = V
(OSC)
直接
OSC
200kHz
CC
200kHz
) 可
交错式多相工作
MAX8707
式对于输入和输出滤波的要求最低,降低了电磁干扰
(
EMI
流,这些相电路之间相位差
工作。正常工作时,不会同时开启高侧
输入电流随着工作相数的增加而同比降低,从而降低了
输入电压纹波、
入电容选择
少了元件数量——这就降低了成本,节省了板面空间,并
降低了元件的功率要求——使
本敏感应用的理想器件。
的所有工作相交错运行——这种错相工作方
) ,并提高了效率。多相控制器在多个相之间分摊电
相) 或
90°(4
功率损耗和
ESR
一节) 。因此,控制器获得了高性能,同时减
RMS
MAX8707
120°(3
MOSFET
纹波电流(请参见
成为大功率、成
相) 错相
。瞬态
输
瞬态相重复
出现一个瞬变时,控制器的响应时间取决于其自身快速
响应输出电压偏移和将电感电流摆动至新的电流水平的
能力。多相、固定频率控制器一般只在时钟沿响应,这
样就产生了一个相对于实际瞬态事件的响应延迟。为消
除这种延迟时间,
使控制器检测到重负载瞬态变化时立即响应。如果控制
器检测到输出电压降低了
重新触发已完成前一次导通周期的相。后面的相依然正
MAX8707
采用一种瞬态相重复功能,
,则瞬态检测比较器立即
25mV
常触发——在对应的振荡器边沿。这相当于提前一个整周
期触发了某一相,提高了总电感电流的摆率,提供一个
立即的瞬态响应。
、
反馈-调节放大器
电压定位放大器(稳态下垂
多相控制器集成了一个跨导放大器,用来给电压定位检
,
测通道增加增益。电流检测输入以差分方式检测一只检
流电阻(使能
上的压降。
单相检测 (
的检流输入(
出接至调节器的电压定位反馈输入(
输出电压检测点 (
其中,目标电压(
给出,跨导放大器输出电流 (
(
) 来确定(当
η
PH
I
VPS
或者:
当禁止
其中,如
为
阻而引起输出电压误差,另一个跨导放大器产生一个等
值且反向的电流施加到
将
CRS
Electrical Characteristics
。为避免因
200µs
VPS与FBS
检测时) 或电感
CRS
(电压定位检测) 放大器的输入可以来自于
VPS
检测) 结果乘以工作相数,或所有工作相
CRS
) 之和(
CS_
V
OUT
CRS
= η
I
= ∑ (V
VPS
检测时 (
直接短路,可禁止电压定位。
CRSP = V
) 之间的电阻确定了电压定位增益:
FBS
= V
TARGET
V
PH (VCRSP
) 的定义在
TARGET
I
检测被使能时) :
CRSP = V
VPS
VPS
- V
- V
CSP_
FBS
CSN_
CC
电流流经引线电阻或反馈滤波电
输入。
(禁止
DCR
) 。跨导放大器的输
CC
) ,因此,
VPS
- R
VPS IVPS
额定电压选择
) 由检流电压和工作相数
) G
CRSN
) 。
M(VPS)
) G
M(VPS)
表所示,
CRS
G
M(VPS
检测时)
和
VPS
一节中
一般
)
MAX8707
)
______________________________________________________________________________________ 17
Page 18

用于
AMD Hammer CPU
固定频率控制器
5V BIAS
MAX8707
VDD1
C
VCC1
R
4.7µF
10Ω
CC
DD
V
V
C
VCC1
TSET
核电源的多相、
VDD2
4.7µF
C
DRHOT
100kΩ
R
1.0µF
TSET1
R
AGND
VRON
SHDN
DRHOT
SKIP
PWM1
PWM2
R
VCC2
VCC2
C
1.0µF
TSET2
TSET
R
SKIP
AGND
10Ω
CC
DD
V
V
PWM1
PWM2
VRON
DRHOT
SHDN
R
VCC
8V TO 20V
5V BIAS
10Ω
CC
V
BST1
PWR INPUT
IN
C
CSP1
R
1.5kΩ
VCC
1.0µF
C
GND
CSP1
D0D1D2D3D4
N
CS1
C
H1
BST2
0.22µF
DH1
CSN1
SHDN
R
CSN1
C
L1
CRSP
4700pF
SKIP
MAX8702
LX1
DL1
L1
N
CRSENSE
R
100Ω
R
CRSP
H2
N
CRSN
CRS
C
1.0mΩ
100Ω
1000pF
DH2
CRSN
LX2
DL2
PGND
L2
N
L2
CSP3
R
1.5kΩ
CS2
0.22µF
C
CSN2
C
4700pF
CSN2
CSP2
PWM2
PWM1
DRSKP
PWM3
8V TO 20V
CCV
C
PWM4
BST1
IN
C
PWR INPUT
1000pF
CCV
H3
N
BST2
TIME
R
TIME
DH1
143kΩ
LX1
L3
CSN3
MAX8702
DL1
H4
N
CSP3
R
1.5kΩ
CS3
0.22µF
C
CSN3
4700pF
C
L3
N
CSP3
DH2
LX2
DL2
PGND
L4
N
L4
CSP4
R
1.5kΩ
CS4
0.22µF
C
CSN4
C
4700pF
CSP4
CSN4
PGND
OUTPUT
(CPU CORE SUPPLY)
MAX8707
TRC
REF
ILIM(AVE)
OFS
ILIM(PK)
VROK
OSC
SUS
SUSV
GNDS
VPS
CPU REMOTE-SENSE CONNECTIONS
FBS
VID INPUTS
图
1. 标准MAX8707 AMD Hammer
(VRON)
ON
OFF
SKIP
TRC
R
2.0kΩ
PWM
应用电路
ILIMAVE1
REF
C
R
0.22µF
OFS1
R
49.9kΩ
ILIMAVE2
R
182kΩ
150kΩ
OFS2
R
20kΩ
ILIM(PK)
200kΩ
R
VROK
100kΩ
R
DPRSLPVR
3-LEVEL PIN
5V
REF
SUSV1
R
120kΩ
SUSV2
R
81kΩ
VPS
R
18 ______________________________________________________________________________________
6.49kΩ
GNDS
C
C
1000pF
R
FBS
GNDS
FBS
R
1000pF
10Ω
10Ω
Page 19

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
瞬态下垂放大器
MAX8707
控制负载的瞬态变化 (在
控制器集成了一个瞬态下垂跨导放大器,用来
应用中很常见)。瞬态下垂
CPU
放大器可控制负载瞬变期间的电压定位,使其具有合适
的斜率,以补偿较慢的稳态电压定位放大器。检流输入
以差分方式检测
CSP_和CSN_
检流元件(电感的
DCR
或
检流电阻)上的压降。跨导放大器的输出连接到调节器的
瞬态响应输入端 (
间的电阻决定了瞬态电压定位增益,正如
率设计步骤
一节中所定义的。
如果不需要电压定位,则
载 (
∆V
OUT
/ ∆I
OUT
定性要求影响。
TRC
),因此,
和基准电压 (
TRC
REF
多相、固定频
R
由最差情况下的瞬态负
DROOP
) 的最大输出电压下降量来确定,受稳
在关断模式中为高阻抗。
TRC
) 之
差分远端检测
多相控制器还包含了差分远端检测输入,以补偿电压在
印刷板走线和处理器电源引脚上的电压降。
MAX8707的GNDS
放大器直接对目标电压叠加一个偏移
量,调节输出电压,抵消地通道的压降。将反馈检测
(
) 、电压定位电阻 (
FBS
) 和地检测 (
R
VPS
GNDS
) 输入直接
接到处理器的核电源远端检测输出端。
积分放大器
积分放大器驱使
电压的直流平均值等于目标电压。
VPS
这个跨导放大器对反馈电压积分,精细调整输出电压
(图2) ,提供一个精确的、与输出纹波电压无关的直流输
出电压。积分放大器能使输出电压偏移
值) 。差分输入电压范围至少为
和交流纹波量。
地确定积分时间常数。采用
引脚外接的一只补偿电容可很方便
CCV
470pF x(4/η
,包括直流偏移量
±60mV
±100mV
PH
(典型
) 或容值更高
的陶瓷电容。
如果在跳脉冲模式 (
SKIP =
高) 发生瞬态变化,
MAX8707
会在瞬态过程开始时将放大器的输入端短接来禁止积分
器。积分器一直保持无效,直到瞬态过程结束 (内部目标
电压稳定下来) ,并且输出进入稳定状态 (检测到误差比
较器跳变)
当禁止电压定位 (
放大器的
20µs
±80mV
后。
VPS = FBS
) 时,瞬态下垂必须小于积分
最小调节范围,以保证足够的直流输出
精度。
表
标准多相应用中的元件选择
1.
MAX8707
DESIGNATION
Input Voltage Range 7V to 24V
VID Output Voltage (D4–D0) 1.50V (D4–D0 = 00010)
SUSV Suspend Voltage
(SUS = High)
Maximum Load Current 80A
Number of Phases (η
Inductor (Per Phase)
Switching Frequency
(Per Phase)
High-Side MOSFET
(N
, Per Phase)
H
Low-Side MOSFET
(N
, Per Phase)
L
Total Input Capacitance (CIN)
Total Output Capacitance
)
(C
OUT
Current-Sense Resistor
SENSE
)
(R
TOTAL
)
AMD HAMMER
COMPONENTS
Circuit of Figure 1
0.80V
4 phases
(1) MAX8705 + (2) MAX8702
0.56µH, 1.6mΩ
Panasonic ETQP4LR56WFC
300kHz (OSC = REF)
Siliconix (1) Si7892DP
Siliconix (2) Si7356DP
(8) 10µF, 25V
TDK C3225X7R1E106M
Taiyo Yuden
TMK325BJ106MN
(6) 330µF, 2.5V, 9mΩ
Sanyo 2R5TPE330M9
1.0mΩ
Panasonic ERJM1WTJ1M0U
偏移放大器
多相控制器还包括第五个放大器,用于给电压定位的负
载线叠加一个很小的偏移量。偏移放大器的输出直接与
目标电压相加,使偏移增益与
够使输出电压偏移
±100mV
来调节偏移量。输入为0至
。利用
0.8V
电压叠加一个负偏移电压,偏移量等于
电压 (
V
OFFSET
= -0.125 x V
OFS
码无关。该放大器能
DAC
输入端的分压电阻
OFS
时,偏移放大器对输出
1/8倍OFS
) 。输入为
1.2V至2V
输入端
时,
偏移放大器对输出电压叠加一个正偏移电压,偏移量等
MAX8707
______________________________________________________________________________________ 19
Page 20

用于
AMD Hammer CPU
固定频率控制器
V
CC
核电源的多相、
REF
GND
D4
DECODER
D3
MAX8707
D2
D1
D0
SUSV
SUS
SHDN
FBS
TRC
SKIP
REF
(2.0V)
DAC
TRC
CLAMP
FAULT
G
REFOK
M(TRC)
UVLO
TARGET
REF
ERROR
x 4
AMP
CHANGE
C
SLEW
TARGET
x 4
A = 10
RUN
WINDOW
COMPARATOR
REF
OSCILLATOR
R-TO-I
CONVERTER
PHASE ENABLE
DETECT
MAX8707
SUS
G
M
OFS
GNDS
G
M
TIME
CSP_
CSN_
SKIP
OSC
R-TO-I
CONVERTER
CURRENT-
LIMIT
COMPARATOR
DROOP
G
M(VPS)
INTEGRATOR
160µS
AMP
EA[4:1]
SUS
25mV
500kΩ
VPS
TARGET
RUN
TRAN
LOAD-TRANSIENT
DETECT COMPARATOR
CHANGE
FAULT
(UVP + THERMAL)
4-PHASE
FIXED-FREQ
CURRENT-MODE
PWM LOGIC
PGOOD AND
FAULT DETECT
图
2. MAX8707
ILIM(PK)
ILIM(AVE)
CRSP
CRSN
VPS
CCV
功能框图
20 ______________________________________________________________________________________
PWM_
DRSKP
PGND
VROK
Page 21

用于
表
元件供应商
2.
MANUFACTURER WEBSITE
BI Technologies www.bitechnologies.com
Central Semiconductor www.centralsemi.com
Coilcraft www.coilcraft.com
Coiltronics www.coiltronics.com
Fairchild Semiconductor www.fairchildsemi.com
International Rectifier www.irf.com
Kemet www.kemet.com
Panasonic www.panasonic.com
Sanyo www.secc.co.jp
Siliconix (Vishay) www.vishay.com
Sumida www.sumida.com
Taiyo Yuden www.t-yuden.com
TDK www.component.tdk.com
TOKO www.tokoam.com
AMD Hammer CPU
核电源的多相、
固定频率控制器
MAX8707
表
X =
工作模式真值表
3.
SHDN SUS SKIP OFS
GND X X X GND
V
CC
V
CC
V
CC
V
CC
V
CC
无关
GND GND GND or REF
GND V
GND X
V
CC
X X X GND
CC
XX
GND或REF
GND或REF
GND or REF
0 to 0.8V
0至0.8V
或
or
1.2V至2.0V
1.2V to 2.0V
OUTPUT
输出电压
VOLTAGE
GND
D0–D4
D0–D4
(无偏差)
(no offset)
D0–D4
D0–D4
(无偏差)
(no offset)
D0–D4
D0–D4
(加偏差)
(plus offset)
SUSV
SUSV
(无偏差)
(no offset)
GND
工作模式
OPERATING MODE
Low-Power Shutdown Mode. PWM_ outputs are forced low,
低功耗关断模式。强制拉低
and the controller is disabled. The supply current drops to
电源电流降低至
10µA (max).
Normal Operation. The no-load output voltage is determined
正常工作。由选定的
by the selected VID DAC code (D0–D4, Table 4).
空载输出电压。
Pulse-Skipping Operation. When SKIP is pulled high, the
跳脉冲工作。当拉高
MAX8707 immediately enters pulse-skipping operation
工作模式,可在轻载情况下自动在
allowing automatic PWM/PFM switchover under light loads.
上限被屏蔽。
VROK
The VROK upper threshold is blanked.
Deep-Sleep Mode. The no-load output voltage is determined
深睡眠模式。由选定的
by the selected VID-DAC code (D0–D4, Table 4) plus the
引脚设定的偏移电压之和来确定空载输出电压。
offset voltage set by OFS.
Suspend Mode/One Phase Skip. The no-load output voltage
挂起模式/单相跳脉冲。空载输出电压由出现在
is determined by the suspend voltage present on SUSV,
挂起电压决定,忽略其他所有有效的工作模式。
overriding all other active modes of operation.
Fault Mode. The fault latch has been set by either UVP or
故障模式。故障锁存器已被
控制器将一直保持
thermal shutdown. The controller remains in FAULT mode
切换
until V
。
SHDN
power is cycled or SHDN toggled.
CC
(最大值)。
10µA
VID DAC
SKIP时,MAX8707
VID DAC
模式,直到循环加载
FAULT
输出,禁止控制器。
PWM_
码 (表4中,
立即进入跳脉冲
PWM/PFM
码 (表4中,
或热关断故障置位。
UVP
) 来确定
D0 –D4
模式间切换。
D0–D4
SUSV
V
CC
) 与
上的
或
OFS
______________________________________________________________________________________ 21
Page 22

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
于基准电压与
0.125 x (V
REF-VOFS
输入电压差值的
OFS
1/8
倍 (
))。利用这种方式,控制器只需单个
V
OFFSET
输入就可实现正和负偏移。图3给出了这种分段线性传递
函数。传递函数中零以下、
个域没有定义。
输入不允许在这些区域,对于输出
OFS
2.0V
以上以及
0.8V至1.2V
的影响也没有规定。
在挂起模式中 (
高),控制器禁止偏移放大器。
SUS =
MAX8707
额定输出电压选择
额定空载输出电压 (
DAC或SUSV
V
TARGET
)与偏移电压以及远端地检测调整量(
之和确定,如下式所示:
V
TARGET
(当
SUD = GND
其中,
V
DAC
电压,
VID
在挂起模式(
压跟踪
(当
SUSV
SUS = V
MAX8707
一种 (图2)
CC
使用一个多路复用器,从三种不同输入中选择
—VID DAC
= V
DAC
时)
为正常工作 (
V
SUS =
为
OFFSET
高) ,偏移电压放大器被关闭,目标电
输入电压:
V
TARGET
时)
制器被关闭) 。启动时,
提升到
(
SUS =
D0–D4
高)。
在正常的强制
D0–D4
输入来设定输出电压。
输入,可直接与
D0–D4
可在
译码后的电压(
工作模式下 (
PWM
CPU
MAX8707
新的输出电压。必须同时改变
时间偏差不要大于
50ns
据,造成输出在部分时间内向错误的电压摆动,随后才
摆向需要的电压,延长了总的转换时间。
应的输出电压兼容于
AMD Hammer
) 由选定的电压基准 (
+ V
OFFSET
SUS =
引脚确定的偏移电压(表3) 。
OFS
= V
SUSV
的输出、
MAX8707
D0– D4
连接。不要悬空
+ V
GNDS
低,见表4) 期间选定的
+ V
GNDS
挂起电压或地 (控
SUSV
将目标电压从地逐渐
低) 或
SUS =
DAC
SUS =
输入
低) ,
为低压 (
SUSV
(
DAC
1.0V
D0–D4
工作的时候改变,以转变到一个
D0– D4
。否则,
,各位之间的转换
会读取不正确的数
DAC
DAC
编码和对
的规定 (表4)。
VID
V
GNDS
电压
D0–D4
利用
)逻辑
引脚。
几
=
OUTPUT OFFSET VOLTAGE
vs. OFS INPUT VOLTAGE
200mV
100mV
0
)
图
OUTPUT OFFSET VOLTAGE
-100mV
-200mV
输出偏移电压与
3.
0.8V 1.2V
0 2.0V
OFS VOLTAGE (V
输入电压。
OFS
UNDEFINED
REGION
1.5V0.5V 1.0V
)
OFS
当进入小功率挂起模式时,处理器可将电压调节器设置
到更低的输出电压,以降低功耗。
带缓冲的挂起电压输入(
SUSV
入。挂起电压可利用外部连接在
MAX8707
) 和一个数字
REF、SUSV
间的一个电阻分压器来调节。挂起电压调节范围为
至
2.0V(V
当
CPU
)
D0–D4
SUSV
蔽掉两个
式电压
切换到1相、跳脉冲控制方式,强制拉低
掉
VROK
)。
REF
挂起时(
设置的5位
高),控制器关闭偏移放大器,忽略
SUS =
VID-DAC
码,并将输出电压调整到由
电压设定的目标电压。转换过程中,
门限检测,直到摆率控制器到达挂起模
VROK
20µs
后。
20µs
后,
MAX8707(SKIP
DRSKP
上限检测。
输出电压的过渡过程
MAX8707
输入浪涌电流减至最小。这个特性给电路设计者带来了
以一种受控的方式实现模式间的过渡,自动使
挂起模式
集成了一个
控制输
SUS
和模拟地之
0.4V
MAX8707
屏
被拉低) 自动
,并屏蔽
22 ______________________________________________________________________________________
Page 23

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
表
4. AMD Hammer
D4 D3 D2 D1 D0
0 0 0 0 0 1.550 1 0 0 0 0 1.150
0 0 0 0 1 1.525 1 0 0 0 1 1.125
0 0 0 1 0 1.500 1 0 0 1 0 1.100
0 0 0 1 1 1.475 1 0 0 1 1 1.075
0 0 1 0 0 1.450 1 0 1 0 0 1.050
0 0 1 0 1 1.425 1 0 1 0 1 1.025
0 0 1 1 0 1.400 1 0 1 1 0 1.000
0 0 1 1 1 1.375 1 0 1 1 1 0.975
0 1 0 0 0 1.350 1 1 0 0 0 0.950
0 1 0 0 1 1.325 1 1 0 0 1 0.925
0 1 0 1 0 1.300 1 1 0 1 0 0.900
0 1 0 1 1 1.275 1 1 0 1 1 0.875
0 1 1 0 0 1.250 1 1 1 0 0 0.850
0 1 1 0 1 1.225 1 1 1 0 1 0.825
0 1 1 1 0 1.200 1 1 1 1 0 0.800
0 1 1 1 1 1.175 1 1 1 1 1 No CPU*
*无CPU
升到新的
模式:控制器进入无
输出电压。在无
VID
输出电压
模式时,以关断摆率将输出电压降低到0V。退出无
CPU
模式中,控制器保持待命状态,可以检测到
CPU
VID DAC
OUTPUT VOLTAGE
(V)
编码 (
SUS = GND
D4 D3 D2 D1 D0
VID
)
CPU
的变化。
OUTPUT VOLTAGE
模式时,控制器以启动摆率控制输出电压上
MAX8707
(V)
近乎理想的过渡过程,保证新输出电压的到来恰到好
处,同时又尽可能降低给定输出电容下的峰值电流。
输出电压的过渡过程开始时,
门限检测,阻止
VROK
VROK
MAX8707
开漏输出在过渡过程中改
屏蔽掉两个
变状态。在摆率控制器达到目标输出电压后再经过约
,控制器开启
20µs
在强制
PWM
模式时才开启
进入跳脉冲工作模式,则一直关闭
率 (由电阻
设定) 必须足够快,以确保在最长允许期
R
TIME
下限检测,但只有控制器工作
VROK
上限检测。如果控制器
VROK
VROK
上限检测。摆
限内完成过渡。
当过渡过程发生在跳脉冲模式时,
,并在开始时关闭积分器。
1.75V
MAX8707
OVP
设置
值保持在
OVP
1.75V
至
积分器保持关闭状态,一直到过渡过程完成 (内部目标达
到) ,并且输出进入稳定状态 (检测到一个误差比较器跳变
沿) 后
20µs
。
______________________________________________________________________________________ 23
MAX8707
自动将电流控制到在计算出的时间内完成过渡
过程所需的最低水平。摆率控制器利用一个内部的电容
和一个由
过程。总的过渡时间取决于
的精度 (
和
C
SLEW
ILIM(PK
设定的电流源来控制输出电压的过渡
R
TIME
、电压差和摆率控制器
R
TIME
的精度)。只要浪涌电流小于
)设定的电流门限,则摆率与输出总电容无
关。对于进入和退出挂起模式的过渡过程,过渡时间
(
)取决于下式:
t
TRAN
VV
||
-
NEW OLD
=
dV dt
TARGET
V
/
为新的目标电压。有
NEW
Electrical Characteristics
指标。在软启动和关断中,控
:
1/4
,
其中,
dV
V
OLD
的极限值参见
SLEW
TARGET
为初始输出电压,
率,
关
t
TIME Slew-Rate Accuracy
制器自动将摆率降低到
t
TRAN SUS
()
/ dt = 6.25mV/µs x 143kΩ / R
ILIM(AVE
为摆
TIME
表中的
)
Page 24

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
V
4
tt
TRAN START TRAN SHDN
() ()
在所有动态
率决定了电压的摆率,摆率的最大极限由
定。实际
于
MAX8707
压而摆动,使过渡过程相当平滑。
要产生一定的输出电压变化,每相需要提供的平均电感
电流为:
其中,
值,
R
TIME
19mV/µs至2.28mV/µs
dV
TARGET
为工作相数。
η
PH
==
过渡过程中,
VID
的阻值范围是
C
OUT
I
≅×
L
η
PH
为要求的摆率,
/dt
VID
47kΩ至392kΩ
的摆率。输出电压跟踪目标电
dV dt
(/)
TARGET
TARGET
dV dt
TARGET
输入(
D0–D4
R
TIME
为输出总电容
C
OUT
/
)的变化速
,分别对应
挂起模式过渡过程
(
选择强制
当配置为强制
挂起模式时,控制器按照
低到预先设定的
VROK
电压等于
控制器自动关断相2、相3和相4(拉低
相跳脉冲操作模式。跳脉冲模式下
退出挂起模式时 (拉低
使能的相 (拉高
摆率上升。在此期间控制器屏蔽
到转换结束—内部目标电压等于选定的
20µs
(强制为高阻态),直到过渡过程结束—内部目标
SUSV
后。
PWM
电压—
DRSKP
模式的
SUSV
MAX8707(SKIP
R
TIME
电压。 在此期间控制器屏蔽
后。在此屏蔽过程结束后,
20µs
) ,
SUS
MAX8707
) ,使输出电压按照
设定的速率将输出电压降
VROK
VROK
DRSKP
(强制为高阻) ,直
VID-DAC
工作模式
PWM
被拉低) 进入
),进入单
只监测下限。
立即激活所有被
R
TIME
挂起模式过渡过程
(
选择跳脉冲工作模式
如果
MAX8707
变高时,
SUS
DRSKP
载和输出电容确定的速率下降。内部目标电压仍然按以
前的速率变化,
),进入跳脉冲操作模式 (图5)。输出电压按照负
被设置成跳脉冲模式 (
MAX8707
VROK
立即关闭相2、相3和相4(拉低
保持为高阻态,直至输出到达新
SKIP =
高),则当
阻值设
确定的
电压—
的目标电压并经过了额外的
只进行下限监测。
VROK
退出深睡眠模式时 (拉低
电压向新的目标摆动。当输出电压高于内部目标时控制
器维持跳脉冲模式。随着内部目标电压接近输出电压,
MAX8707
压按照
VROK
在软启动、软关断和正常工作—
SKIP =
PWM
驱动器关闭过零比较器,迫使低侧栅极驱动波形完全互
补于高侧栅极驱动波形。这就使开关频率保持恒定,并
允许电感电流在轻载时反向,迅速给输出电容放电,实
现快速、精确的负向输出电压跳变。
强制
电流保持在每相
)
MOSFET
控制器进入挂起模式后,切换到一种低功率跳脉冲控制
方式。
启动所有被使能的相(拉高
R
(强制为高阻),直到过渡过程结束
控制方式。强制
PWM
确定的摆率上升。在此期间控制器屏蔽
TIME
低) —过程中,
工作模式的代价是:空载时
10mA至200mA
和开关频率有关。为在轻载情况下保持高效,
SUS),MAX8707
强制
PWM
MAX8707
PWM
后。这个时段结束后,
20µs
调整内部目标
DRSKP
20µs
工作模式(正常工作模式
正常运行(表5中,
CPU
工作于低噪声、强制
模式强行拉高
之间,和所用的外部
DRSKP
+5V
轻载跳脉冲模式
MAX8707
关闭多余的相,并使能/禁止驱动器的过零比较器。当使
能驱动器的过零比较器(拉低
关闭相的
零时拉低
迫使控制器在轻载时跳过一定数量的脉冲,防止输出电
容被过充电。当禁止过零比较器时,每个控制器在轻载
时保持
当配置为强制
起模式时,控制器会在目标电压到达预定的
)
经过
当跳脉冲工作模式被使能时,控制器在输出电压大于反
馈门限,并且电流检测电压超过
(
V
IDLE
连续的电感电流始终在
具有一个轻载工作模式控制输入(
DRSKP
为低,当其检流输入检测到电感电流为
PWM_
。这样可以阻止电感对输出电容放电,并
DL_
工作模式(强制
PWM
模式的
PWM
后自动切换到跳脉冲控制方式。
20µs
=0.1xV
PKLIMIT
PWM
MAX8707
)时终止导通周期。在重载时,
Idle Mode
SKIP
)时,控制器强制被
)。
(拉低
SKIP
SUSV
Idle Mode
检流门限以上,因此导
),使输出电
后。
,命令
偏置电源的
),用来
)进入挂
电压并
TM
检流门限
)
Idle Mode是Maxim Integrated Products, Inc.
24 ______________________________________________________________________________________
的商标。
Page 25

CPU CORE
VOLTAGE
SUS
INTERNAL
PWM CONTROL
PWM1
PWM2
PWM3
PWM4
DRSKP
FORCED-PWM
用于
AMD Hammer CPU
AUTO 1-PHASE SKIP
核电源的多相、
固定频率控制器
MAX8707
VID
SUSV
FORCED-PWM
图
4. 强制PWM
VROK
NOTE: OVP CONSTANTLY TRACKS THE INTERNAL TARGET, AND THE INTEGRATOR (CCV) IS CONSTANTLY ENABLED.
模式
(
SKIP =
CPU CORE
VOLTAGE
SKIP = SUS
INTERNAL
PWM CONTROL
PWM1
PWM2
PWM3
PWM4
DRSKP
HIGH-Z
t
BLANK
20µs typ
低)与挂起模式间的过渡。
LOW THRESHOLD ONLY
ACTUAL V
OUT
TARGET
1-PHASE SKIP FORCED PWM
HIGH-Z
t
BLANK
20µs typ
VID
SUSV
图
5.
OVP/CCV
跳脉冲模式
VROK
(
SKIP = SUS
HIGH-Z
OVP = 1.8V INTEGRATOR DISABLED
t
BLANK
20µs
)
与挂起模式间的过渡。
LOW VROK THRESHOLD ONLY
HIGH-Z
OVP TRACKS INTERNAL TARGET
INTEGRATOR ENABLED
t
BLANK
20µs
______________________________________________________________________________________ 25
Page 26

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
表
5. SKIP
SKIP
(输入)
(INPUT)
MAX8707
Low
低
(GND)
(GND)
High
高
(>1.2V)
(>1.2V)
设置表
SUS
(输入)
(INPUT)
Low
(GND)
(GND)
High
(3.3V或V
(3.3V or V
Don’t Care
低
高
无关
CC
CC
)
)
模式
MODE
Multiphase
多相
强制
PWM
Forced-PWM
1-Phase Pulse
单相
Skipping
跳脉冲
1-Phase Pulse
单相
跳脉冲
Skipping
通时间只取决于反馈电压门限。在轻载时,控制器始终
在反馈电压门限以上, 因此导通时间只取决于
Idle Mode
设定) 的
当控制器进入挂起模式,同时
器立即关闭另外三相,只保留一个主相
工作于跳脉冲模式时,控制器屏蔽
OVP
接,
PWM
闲置模式
检流门限,它接近于满负载限流门限 (由
。
10%
SKIP
门限跟踪选定的
MAX8707
在软启动和软关断期间都会自动采用强制
VID DAC
编码。无论
模式。
闲置模式
(
Idle Mode
) 电流门限迫使调节器在轻载时于每
被拉高时,多相控制
(
VROK
PWM1
)工作。当
上限检测,
SKIP
电流门限
(Idle Mode
)
个导通周期向负载输送一个最小数量的能量,因为控制
器不能在电流检测电压超过闲置模式电流门限
0.1 x V
PKLIMIT
) 前终止导通周期。由于过零比较器阻止开
(
关调节器吸收电流,因此控制器必须跳过一些脉冲,以
免对输出电容过度充电。当时钟沿到来时,如果输出电
压仍然大于反馈门限,控制器不会启动另一个导通周
期。实际上,这就迫使控制器在轻载工作条件下对输出
电压纹波的谷值进行调节。
DRSKP
DRSKP
输出)
(
(OUTPUT)
High
(V
(V
Low
(PGND)
(PGND)
Low
(PGND)
(PGND)
ILIM(PK)
如何连
V
IDLE
工作方式
OPERATION
The controller operates with a constant switching
frequency, providing low-noise forced-PWM operation. The
高
DD
低
低
DD
)
)
控制器工作在恒定的开关频率下,提供低噪强制
controller disables the zero-crossing comparators, forcing
方式。控制器禁止过零比较器,迫使低侧栅极驱动波形
the low-side gate-drive waveform to constantly be the
恒为高侧栅极驱动波形的互补。
complement of the high-side gate-drive waveform.
The controller automatically switches to pulse-skipping
operation 20µs after the target voltage reaches the SUSV
控制器在目标电压到达
voltage. Pulse-skipping operation forces the controller into
跳脉冲方式。跳脉冲方式迫使控制器在轻载时进入
PFM operation under light loads. Phase 1 remains active
工作模式。相1保持工作,而其他三相被关闭 (
PWM3和PWM4
while the other three phases are disabled—PWM2, PWM3,
and PWM4 pulled low.
Pulse-skipping operation forces the controller into PFM
跳脉冲模式强制控制器在轻载时进入
operation under light loads. Phase 1 remains active while
相1保持工作,其他三相被关闭—
the other three phases are disabled—PWM2, PWM3, and
PWM4 pulled low.
PWM4
被拉低。
SUSV电压20µs
被拉低)。
后自动切换到
工作模式。
PFM
PWM2、PWM3
跳脉冲模式的自动切换
在跳脉冲模式中,
DRSKP
,命令跳脉冲模式驱动器激活过零比较器。这样,
MAX8707
轻载时控制器会自动切换到
关闭三个相并强制拉低
工作模式 (图6),提供更
PFM
高的效率。这种切换受控于一个比较器,该比较器在电
感电流过零时终止低侧开关的导通周期。驱动器的过零
比较器在低侧
MOSFET
驱动器数据手册)。一旦
上检测电感电流 (参见跳脉冲模式
V
LX-VPGND
压差降低到过零比
较器阀值以下,则驱动器强制拉低DL。这种机制形成的
跳脉冲
PFM
和非跳脉冲
两种工作模式间的分界
PWM
点,与连续和非连续两种电感工作模式 (也称为临界传导
点) 间的分界点相重合。
I
LOAD(SKIP)
=
,计算如下:
I
LOAD SKIP
()
PFM/PWM
VVV
OUT IN OUT
=
转折点的负载电流,
−
()
Vf L
2
IN SW
当轻载导致跳脉冲工作模式时,开关波形中可能会出现
杂波和异步,但这是获得高轻载效率的正常工作情况。
通过改变电感值,可在
噪声与轻载效率间取得平
PFM
衡。通常来讲,电感量较低时,效率-负载曲线上高效
率的平坦区域更为宽阔,而更高的电感值会得到更高的
PWM
PFM
PWM2
和
、
26 ______________________________________________________________________________________
Page 27

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
满载效率(假定线圈电阻保持不变) 和更小的输出电压纹
波。使用更高值的电感会增大物理尺寸,降低负载瞬态
响应 (在低输入电压时更为显著) 。
电流检测
每一相的输出电流都采用差分方式检测。
MAX8707
的每
一相都具有独立的回路用于全差分电流检测。由于各相
采用了低失调电压、高增益 (
)差分电流检测放大
10V/V
器,允许使用低阻值检流电阻,使功耗降至最低。在每
相的输出端检测电流有很多优点,包括更低的噪声敏感
度、各相之间更精确的电流均衡、以及可灵活选择利用
检流电阻或输出电感的直流电阻来作为检流元件。
利用输出电感的直流电阻
检流可提供更高效率。采
R
DCR
用这种配置时,在进行输出电压下垂误差预算时,必须
考虑电感
的初始容差和温度系数。此种检流方式采
DCR
用RC滤波网络从输出电感中提取电流信息(图7)。RC电
路的时间常数应该与电感的时间常数(
L
=
RC
EQ SENSE
R
其中,
C
SENSE
R
DCR
为检测电容,
L/R
为等效检测电阻。为了
EQ
降低因电流检测输入端的输入偏置电流(
起的检测误差,选择
确定检测电容(
C
SENSE
小于
R
EQ
,并根据上述公式来
2kΩ
)。电容器应具有5%的容差,电阻
DCR
I
CSP_
)匹配:
和
I
CSN_
)引
应为1%容差。在这种检流方式中建议采用温度补偿。
为实现更精确的输出电压定位,可采用一只检流电阻检
测电流(
MAX8707
中接于
CRSP至CRSN
之间) ,同时应
使用差分RC滤波电路来消除检流电阻等效串联电感的影
响 (图7) 。与电感
常数应该与检流电阻的寄生电感
检测方式类似,RC滤波器的时间
DCR
时间常数匹配:
L/R
L
ESL
=
RC
R
SENSE
EQ SENSE
V
ON(SKIP)
OUT
=
VINf
SW
I
IDLE
I
≈ I
LOAD
LOAD(SKIP)
2
SENSE
为检流
R
为等效补偿电阻。
R
EQ
INDUCTOR CURRENT
0
图
跳脉冲/非连续转折点
6.
其中,
L
电阻阻值,
ESL
C
t
ON-TIME TIME
为检流电阻的等效串联电感,
为补偿电容,
SENSE
电流均衡
固定频率、多相、电流模式结构可自动平衡各相的电
流。振荡器触发一个导通周期后,直到放大后的差分检
流电压到达积分后的门限电压 (
V
REF-VTRC
),控制器才
会终止导通周期。这种控制机制调节每相电感的峰值电
流,强制它们保持适当的均衡。因此,平均电感电流的
偏差主要取决于检流元件和电感值的偏差。
峰/均电流限
MAX8707
法。一旦工作相的检流信号 (
流门限,
采用一种速度较慢的平均电流检测手段,采用
CRSN
限被超过时,限流电路降低峰值电流门限,等效地降
低了平均电感电流。请参见
一节。
的限流电路采用一种快速峰值电感电流检测方
) 超过了峰值电
CRSP
还
和
MAX8707
控制器立即终止导通周期。
PWM
CSP至CSN
之间的检流电阻精确限制电感电流。当平均检流门
设计步骤
部分中的
电流限制
MAX8707
______________________________________________________________________________________ 27
Page 28

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
C
IN
DRIVER
N
H
DH
LX
MAX8707
PWM
PWM_
CONTROLLER
图
两种检流方式
7.
N
L
DL
PGND
CSP_
CSN_
A) OUTPUT SERIES RESISTOR SENSING
D
L
上电顺序
当
故障锁存器,使控制器做好运行前的准备。
能控制器—
上升至约2V以上时,启动上电复位 (
V
CC
(
PWM_
)电路禁止开关动作—强制拉高
UVLO
输出—直到
高于
V
CC
V
CC
4.25V
上升至
并且
INPUT (VIN)
LR
SENSE
(POR、UVLO
DRSKP
以上。一旦系统使
4.25V
被拉高,控制器即
SHDN
POR
V
CC
开始给基准上电。基准稳定后,控制器开始提升输出电
压逐步趋于目标电压—
起电压 (
其中,
dV
SUS =
TARGET
高)—以
t
TRAN START
()
/dt = 6.25mV/µs x 143kΩ /R
VID DAC(SUS =
设定摆率的
R
TIME
V
4
TARGET
=
dV dt
TARGET
低) 或
速率摆动:
1/4
/
TIME
摆率。软启动电路没有使用可变电流限,因此可立即供
出满额输出电流。
20µs,VROK
MAX8707
变成高阻态。
如果配置为自动启动,则应先于
达到目标电压后再经过约
施加电池电压。如
V
CC
果控制器在没有电池电压的情况下试图调节输出至稳定
值,就会触发故障锁存器。这会使控制器保持关断状
态,直至通过触发
SHDN
或将
降低到1V以下再重新
V
CC
上电清除锁定故障。
C
),清除
欠压锁定
,拉低
挂
SUSV
为设定
INPUT (VIN)
INDUCTOR
LR
R
C
EQ
OUT
C
IN
DRIVER
N
H
DH
LX
N
L
DL
电压降低到
V
CC
PGND
CSP_
CSN_
B) LOSSLESS INDUCTOR SENSING
PWM
PWM_
CONTROLLER
如果
)
D
L
以下,控制器即认为电源电压
4.25V
不足以支持正常的工作。进入输出过压故障保护时,控
制器立即关断—强制拉高
当
拉低
SHDN
VROK
变低时,
MAX8707
,输出电压按照
DRSKP
并拉低
PWM_
进入低功耗关断模式。立即
1/4倍R
TIME
降:
V
4
OUT
dV dt
TARGET
/
其中,
dV
t
TRAN SHDN
TARGET
()
=
/ dt = 6.25mV/µs x 143kΩ/R
的摆率。在一个较长的时间内为输出电容缓慢放电使
负向电感电流保持在比较低的水平 (阻尼摆动),因而消
除了输出电压的负向偏移,否则,如果永久开启低侧
MOSFET
而使输出迅速放电 (欠阻尼摆动),则会使输出
产生负偏移,通常需要在输出和地之间接一只肖特基二
极管来钳制这个负压。因此,这种关断方式省掉了这个
肖特基二极管。当控制器达到0V目标电压时,驱动器被
禁止 (拉低
DRSKP和PWM_
输出电压),基准关闭,电源
DCR
C
SENSE
输出。
关断
设定的摆率下
为设定
TIME
OUT
28 ______________________________________________________________________________________
Page 29

V
SHDN
VID (D0-D4)
用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
MAX8707
CC
INVALID
CODE
INVALID
CODE
SOFT-START
TH
1/4
PWM CONTROL
图
上电和关断时序定时图
8.
电流降低到约
出
或热关断—启动关断时序,则保护电路同时置
UVLO
SLEW RATE SET BY R
V
CORE
INTERNAL
DRSKP
VROK
(最大值)。如果是某种故障情况—输
10µA
TIME
FORCED-PWM FORCED-PWM
t
BLANK
20s typ
位故障锁存器,阻止控制器重新启动。要清除故障锁存
器并重新启动控制器,可重新触发
SHDN
或使
电源
V
CC
从1V以下重新上电。
故障保护
输出过压保护(非锁定
过压保护 (
MOSFET
电流使电池保险丝熔断。
压故障。如果输出电压超出设定的目标电压
控制器检测到一个
(
上升沿),在输出电压首次跌至目标电压下之前,
SKIP
门限始终被设定在
OVP
出即将稳定 (
目标电压。当
制
工作模式—拉高
PWM
侧栅极驱动器 (
(
DH = LX
)电路设计用来保护
OVP
短路而损坏
。保护启动后电路吸取很大的
CPU
MAX8707
故障。进入跳脉冲工作模式后
OVP
1.75V
V
≈ V
OUT
OVP
TARGET
电路检测到过压故障时,立即进入强
DRSKP
DL = V
),并且将高侧栅极驱动器拉低
DD
)。这就使同步整流
,防止因高侧
CPU
连续监视输出上的过
200mV
。一旦
),
OVP
MAX8707
门限随即开始跟踪
检测到输
,因此驱动器强制拉高低
MOSFET以100%
的占空比
,则
SOFT-SHUTDOWN
TH
SLEW RATE SET BY R
1/4
t
BLANK
20s typ
导通,从而迅速使输出滤波电容放电,迫使输出电压降
低。如果引起过压的故障持续存在 (例如高侧
路),则会使电池保险熔断。
通过无故障测试模式可禁止过压保护功能 (请参见
测试模式
一节)。
输出欠压保护(锁定
输出欠压保护 (
)
一个定时器而不是可变电流限。如果
低于标称值的
)功能与折返式限流相似,但采用的是
UVP
MAX8707
,则控制器启动关断时序,并设置故
70%
障锁存器。控制器将输出缓降至0V目标电压后,强制拉
低
驱动器输出。触发
PWM_
SHDN
或使
V
CC
以下可清除故障锁存器并重新启动控制器。
通过无故障测试模式可禁止
UVP
(请参见
无故障测试模式
一节)。
热故障保护(锁定
MAX8707
具有热故障保护电路。当结温上升到
以上时,热传感器设置故障锁存器并启动软关断时序。
控制器将输出缓降至0V目标电压后,强制拉低
TIME
MOSFET
无故障
输出电压
电源降到
+160
PWM_
短
)
1V
)
°C
驱
______________________________________________________________________________________ 29
Page 30

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
动器输出。结温下降
源降到1V以下可清除故障锁存器并重新启动控制器。
通过无故障测试模式可禁止热关断 (请参见
式
一节)。
15°C
以后,触发
或使
SHDN
无故障测试模
无故障测试模式
锁定式故障保护特性使原型样板的调试复杂化,因为 (最
多)只有几毫秒的时间可供设计者确定问题所在。因此,
MAX8707
该芯片提供了一种无故障测试模式,可禁止掉故障保护
—过压保护、欠压保护和热关断。此外,测试模式还可
清除故障锁存器 (如果它已被置位)。施加
到
上可进入无故障测试模式。
SHDN
11V至13V
多相、固定频率
____________________________
选择开关频率和电感工作点 (纹波电流比)之前,首先要落
实输入电压范围和最大负载电流。主要的设计折衷点在
于选择一个适宜的开关频率和电感工作点,下面的四个
要素可引领你完成余下的设计:
输入电压范围:最大值 (
流适配器的电压上限。最小值 (
器、 保险丝和电池选择开关上的压降。如果可以选择,
较低的输入电压会提供更佳的效率。
最大负载电流:需要考虑两个值。 峰值负载电流
(
I
LOAD(MAX)
了输出电容的选择,电感饱和额定值以及限流电路的设
计。连续负载电流 (
入电容的选择、
现代的笔记本
。
80%
在多相系统中,根据电流均衡度,每相支持一部分负
载。平衡得比较好时,负载电流均匀分配于各相中:
) 决定瞬时元件应力和滤波要求,并因此决定
MOSFET
CPU
I
LOAD PHASE
V
IN(MAX)
) 决定热应力,并因此决定了输
I
LOAD
和其他重要的发热元件的规格。
通常表现为
()
) 必须承受最坏情况下交
V
IN(MIN)
I
LOAD
I
LOAD
=
η
PH
设计步骤
) 必须考虑连接
= (I
LOAD(MAX)
V
CC
电压
电
)x
其中,
开关频率:该项选择确定了尺寸与效率之间基本的平衡
点。最优化频率很大程度上取决于最高输入电压,因为
MOSFET
是与时俱进的,随着
的频率成为可能。
电感工作点。该项选择提供了尺寸与效率之间、瞬态响
应和输出噪声之间的折衷。小电感值可提供更好的瞬态
响应和更小的物理尺寸,但由于纹波电流的增加,也具
有更低的效率和更高的输出噪声。最小的实用电感值在
最大负载下使电路工作在临界传导的边缘 (电感电流在每
个周期刚好归零)。比此临界点更低的电感值将不会带来
进一步缩减尺寸的好处。最佳工作点通常为
的纹波电流。
为总的工作相数。
η
PH
的开关损耗正比于频率和
MOSFET
2
。最优化频率也
V
IN
技术的迅速改进,使更高
20%至50%
电感选择
开关频率和工作点( 纹波电流百分比或
感值:
⎛
VV
−
L
=
η
PH
其中,
选择一只能够安装在预定尺寸内,直流电阻尽可能低的
低损耗电感。如果使用摆动电感 (空载电感值随电流增长
线性降低), 则应将电感值乘以适当的比例因子后估算
LIR
(∆I
INDUCTOR
铁氧体芯的电感通常是最佳选择,不过铁粉芯更便宜,
而且能在
值电感电流
为总相数,
η
PH
。对于选定的电感值,实际的峰-峰电感纹波电流
计算如下:
)
∆I
INDUCTOR
200kHz
(I
PEAK
I
=
PEAK
IN OUT
⎜
f I LIRVV
SW LOAD MAX
⎝
下很好地工作。磁芯必须足够大,在峰
下不应饱和:
)
I
⎛
LOAD MAX
⎜
⎝
()
为每相开关频率。
f
SW
VVV
OUT IN OUT
=
⎞
()
PH
⎟
⎠
η
⎞
⎟
⎠
−()
Vf L
IN SW
I
∆
⎛
INDUCTOR
+
⎜
⎝
⎛
⎜
⎝
2
) 决定了电
LIR
⎞
OUT
⎟
⎠
IN
⎞
⎟
⎠
30 ______________________________________________________________________________________
Page 31

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
电流限制
峰值电感电流限制
MAX8707
流电阻或电感的
节)。 由于控制器限制了峰值电感电流,最大平均负载
电流就比峰值电流门限低出电感纹波电流的一半。因
此,最大负载能力由检流电阻、电感值、开关频率和输
入电压来决定。与欠压保护电路组合时,这种限流方式
非常有效。
峰值电流门限由一只连接于
阻设定,根据以下公式来确定阻值:
其中,
阻),
得到的峰值电流门限(每相)。 峰值电流门限电压具有
20mV至80mV
V
OUT
向电感电流。负向电流门限等于正向电流门限,并在调
节
R
降到负电流门限以下时,不管误差放大器的状态如何,
控制器都会在下一个时钟沿到来时发出一个导通周期的
脉冲,直到电感电流上升到负电流门限以上。
的过流保护电路采用峰值电流检测法,采用检
作为检流元件(参见
DCR
ILIM(PK)
R
ILIM PK
()
R
R
TRC
吸收电流时,峰值电流限制电路还可阻止过大的反
ILIM(PK)
为检流元件的阻值(电感的
SENSE
为
TRC和REF
的调节范围。
或
时跟踪正向电流门限。当某一相电流
R
TRC
VR
=
IR
PKLIMIT SENSE
间的电阻,而
和模拟地之间的电
×8
TRC
平均电感电流限制
MAX8707
电压限制每一相的平均电流。当平均电流门限被突破
时,控制器会在内部降低峰值电感电流门限(
直到平均电流回到设定的门限以内。当禁止精确电流检
测时 (
还利用
CRSP = V
CRSP与CRSN
),平均电流限制电路也被禁止。
CC
之间更精确的电流检测
电流检测
DCR
I
PKLIMIT
(
ILIM(AVE
ILIM(PK)
(
ILIM(PK
或检流电
为期望
))
一
))
),
如果连接
认值
于
ILIM(AVE)
向
25mV
V
OUT
向电感电流。负电流门限等于正电流门限,并在调节
V
LAVE
ILIM(AVE)
。在可调模式下,平均电流门限电压精确地等
25mV
引脚和基准之间电压差的
默认值切换的逻辑门限近似为
吸收电流时,平均电流限制电路也可阻止过量的反
时跟踪正电流门限。
V
LAVE
引脚至
VV
REF ILIM AVE
=
,则平均电流门限取默
V
CC
:
1/20
−
()
20
V
CC
-1V
。当
输出电容选择
输出滤波电容必须有足够低的等效串联电阻 (
足输出纹波和负载瞬态响应要求。在
和其他可能会面临剧烈的负载瞬变的应用中,输出电容
的尺寸一般取决于对负载瞬态响应的要求,要求在瞬态
负载的作用下
略有限容值引起的电压下跌:
在非
纹波电压的要求,要求因
接受的水平。降压型控制器的输出纹波电压等于总的电
感纹波电流与输出电容的
系统中,各相的峰值电感电流是交错的,这就降低了总
的纹波电流,从而降低了输出纹波电压 (
不重叠的多相工作模式 (
波电压要求的最大
类应用中,输出电容的尺寸通常取决于对输出
CPU
R
ESR
不应使输出产生过大的下跌。如果忽
ESR
()
RR
+≤
ESR PCB
ESR
⎡
≤
⎢
VVV
−
()η
⎢
IN PH OUT OUT
⎣
∆
ESR
ESR
VIN≥ ηPHx V
为:
Vf L
IN SW
CPU V
V
STEP
I
LOAD MAX
()
产生的输出纹波电压在可
之积。在错相工作的多相
V
OUT
⎤
V
⎥
RIPPLE
⎥
⎦
),以满
ESR
转换器
CORE
)。对于
RIPPLE
),满足输出纹
MAX8707
其中,
实际容值与满足
容的化学特性有关。因此,电容的选择通常受限于
和额定电压而非容值 (对于聚合物类的电容)。
______________________________________________________________________________________ 31
为总工作相数,
η
PH
为每相开关频率。所需的
f
SW
要求所需的物理尺寸有关,也与电
ESR
ESR
Page 32

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
电容值的选择主要取决于输出瞬态响应要求。低值电感
允许电感电流更快地摆动,这样,在负载发生突变时可
以更迅速地补充或释放输出滤波电容上的电荷。当负载
被移走后输出电压上冲的幅度是输出电压和电感值的函
数。防止电感储能引起过冲 (
) 所需的最小输出电容
V
SOAR
可计算如下:
MAX8707
其中,
η
C
OUT
为总有效相数。当使用低容值陶瓷滤波电容
PH
IL
()
∆
LOAD MAX
≥
VV
2η
PH OUT SOAR
2
()
时,电容器尺寸通常取决于负载瞬变期间,防止
超出允许范围所需的电容量。一般来讲,只要容量满足
上冲要求,那么负载上升沿产生的下冲也不会有问题。
输入电容选择
输入电容必须满足开关电流产生的纹波电流要求(
错相工作的多相控制器将输入电流分配于多个交错的相中,
降低了
时,根据以下公式来确定
I
其中,
流出现在
简化为
大多数应用中可优先考虑非钽质电容(陶瓷、铝或
) ,因为它们对于浪涌电流具有抑制作用,尤其是在
CON
输入端串接了机械式开关或连接器的系统中。 如果
MAX8707
虑钽输入电容。无论何种配置,都应保证输入电容在
输入电流的作用下温升小于
RMS
作寿命。
输入电流。当占空比小于每相
RMS
规格:
I
RMS
⎛
=
RMS
⎜
η
⎝
为开关调节器的总相数。最坏情况的
η
PH
= 2ηPHV
V
IN
=0.5xI
I
RMS
I
LOAD
PH IN
⎞
ηη()
VV V
PH OUT IN PH OUT
⎟
V
⎠
工作条件下。此时,上述公式
OUT
。
/η
LOAD
PH
−
100%/η
被用于两级功率转换系统中的第二级,则可考
,以获得更长的工
10°C
V
SOAR
I
RMS
RMS
) 。
PH
电
OS-
设置电压定位
电压定位功能随着负载电流的增加动态降低输出电压,
从而降低了对输出电容的要求和处理器的功耗。控制器
采用两个跨导放大器分别设置瞬态和稳态输出电压下垂
(图2)。瞬态补偿 (
瞬变的速度。较慢的电压定位 (
) 放大器确定
TRC
MAX8707
) 放大器根据负载情况
VPS
响应负载
调整稳态电压。这种可调节性使设计者能够灵活选择检
流电阻阻值或电感
,并允许采用更小的检流电阻,
DCR
降低总体功耗。
稳态电压定位
在
VPS和FBS
电压定位斜率 (
其中,检流电阻 (
器的跨导 (
型值为
200µs
就是精确的
禁止
MAX8707 CRS
(
CSP_, CSN_
流电阻(
检流电阻 (请参见
当电感的
中应该包含一只
R
VPS
间接一只电阻(
R
DROOP
R
VPS
R
SENSE
M(VPS
) 根据
)
G
。当使能
检流电阻:
CRS
R
SENSE=RCRS
) 来设置稳态直流下垂(负载线) :
=
RG
SENSE M VPS
) 取决于检流方式,电压定位放大
Electrical Characteristics
MAX8707 CRS
) ,可根据需要的直流
R
VPS
R
DROOP
()
检测时,
(使能
CRS
检测时)
时,控制器将电流检测输入信号
) 相加在一起。这些输入通常采用电感的直
) 检测电流,因此
R
DCR
电流检测
R
SENSE
DCR(R
DCR
R
一节) :
= R
DCR
(禁止
) 被用作检流元件时 ( 无损检测) ,
热敏电阻,以便使电压定位斜
NTC
SENSE
CRS
检测时)
为平均的有效
表中的典
R
SENSE
被
CS
率的温度依赖性减至最小。
为避免电压定位电流引起输出电压误差,用另一个跨导
放大器产生一个相等的电流注入
连接,可禁止精确的
V
CC
MAX8707 CRS
FBS
输入。将
检测功能。
CRSP
与
32 ______________________________________________________________________________________
Page 33

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
将
VPS
直接与
短接,可禁止电压定位功能。
FBS
瞬态下垂
在
TRC和REF
求设置适当的瞬态下垂 (
速响应负载瞬变,但不会影响直流稳态下垂。根据以下
公式来选择
其中,
R
感的有效
测放大器的增益除以跨导放大器的跨导 (见
Characteristics
定位斜率的
电阻还设定了小信号环路增益,因此, 即使没使
TRC
用电压定位 (
稳定。
在关断模式中为高阻。
TRC
____________________________
间接一只电阻 (
R
:
R
TRC
R
TRC
为接在
CS
DCR:RCS=L/REQC
表中
,以便使瞬态电压下跌最小。
80%
VPS = FBS
V
RIPPLERTRC
RR
=
η
PH DROOP AC
CSP_至CSN_
的规定),
),也需要最大值的
< (R
),可根据电压定位要
R
TRC
)。
DROOP(AC)
TRANS CS
R
间的检流元件 (通常为电
SENSE
R
DROOP(AC)
TRANSRSENSE∆IL
TRC
()
),
R
TRANS
通常为直流电压
使控制器快
为电流检
Electrical
,以求
R
TRC
) / 3
应用信息
占空比限制
最小输入电压
最小输入工作电压 (电压降) 受限于稳定性要求,而不是
最小关闭时间 (
此每相占空比大于
但是,控制器可以在重载瞬变期间以
短暂工作。
t
OFF(MIN)
V
)。
MAX8707
时,控制器就不稳定:
50%
IN(MIN)
≥ 2V
OUT(MAX)
没有斜率补偿,因
以上的占空比
50%
最大输入电压
MAX8707
了维持开关频率不变条件下的最大输入电压。输入电压
更高时,每个脉冲传递的能量就高出了输出输送给负载
的能量。在每个周期开始时,如果输出电压仍然大于反
馈门限电压,控制器将不触发导通脉冲,这样,无论
SKIP
以这种方式,控制器能够在输入高于最大输入电压时保
持输出稳定,但迫使控制器等效工作于较低的开关频
控制器和驱动器具有一个最短导通时间,决定
选择何种工作模式,控制器都以跳脉冲方式工作。
率。这就形成一个使控制器开始进入跳脉冲方式的输入
门限电压 (
其中,
110ns
的开启延迟 (
性能,可将开关频率设置成最低 ( 每相
GND
仔细的PC板布局是实现低开关损耗和干净、稳定工作的
关键。开关功率级尤其需要特别注意 ( 图9)。如果可能,
所有功率元件安装在印刷板的顶层,它们的接地端彼此
靠近。良好的PC板布局应遵从以下准则:
) 保持大电流通道尤其是接地端尽可能短。这是获得稳
1
) 将所有模拟地接至一个单独的实心覆铜层,该层连接
2
) 功率线和负载连线要尽量短。 这对于高效率非常重
3
) 为确保检流精度,必须采用
4
) 高速开关节点和驱动器引线要远离敏感的模拟区域
5
) 驱动器靠近
6
V
为
f
SW
加驱动器的关闭延迟 (
)。
定的、无抖动工作的关键。
至控制器的
GNDS
I
要。采用厚铜膜PC板 (
1%
作,必须在几分之一厘米的范围内布局,哪怕是毫欧
级的过量引线电阻都会造成显著的效率损失。
电流限制 (
CRSN
(
行配置的控制输入(
接到模拟地或
LX和BST
感。这一点非常重要,高功率
极驱动,以避免产生穿透电流。
旁路电容、 补偿 (
LIM(AVE)
或更多。恰当地在PC板上走线是一件困难的工
)。
REF、CCV、TRC和VPS
):
IN(SKIP)
VV
IN SKIP OUT
OSC
PWM
GND
、
CSP_和CSN_
) 要尽量短而宽,尽量减小引线电阻和电
=
()
引脚选定的每相开关频率,
高到LX高 ) 。 要获得最佳的高压
脚。其中包括
SUSV和OFS
,而不要连接到功率地或
V
CC
MOSFET
⎛
⎜
ft
⎝
SW ON MIN
低到LX低) 减去驱动器
PWM
V
CC
CCV和TRC
之间的电阻分压器。
2oz对1oz
Kelvin
) 和电压定位电路(
等) 。所有通过引脚连接进
SHDN、SKIP、SUS和OSC
放置,栅极驱动线 (DL、DH、
MOSFET
⎞
1
⎟
⎠
()
t
ON(MIN)
200kHz,OSC =
板布局准则
PC
旁路电容、
)能将满载效率提高
检测连接方式连接
REF
)元件和接在
CRSP
V
DD
要求低阻抗栅
为
和
和
) 需连
。
MAX8707
______________________________________________________________________________________ 33
Page 34

用于
AMD Hammer CPU
固定频率控制器
KELVIN SENSE VIAS UNDER
THE SENSE RESISTOR
(REFER TO THE EVALUATION KIT)
MAX8707
核电源的多相、
CPU
R
SENSE
OUTPUT
OUT
OUT
C
INDUCTOR INDUCTOR INDUCTOR INDUCTOR
OUT
C
C
C
OUT
OUT
OUT
C
C
PLACE CONTROLLER ON
BACKSIDE WHEN POSSIBLE,
USING THE GROUND PLANE
TO SHIELD THE IC FROM EMI
POWER
GROUND
CINCINC
CONNECT THE
EXPOSED PAD TO
ANALOG GND
POWER GROUND
(INNER LAYER)
POWER
GROUND
IN
INPUT
CINCINC
ANALOG GROUND
(INNER LAYER)
CONNECT GND AND PGND TO THE
CONTROLLER AT ONE POINT
ONLY AS SHOWN
IN
图
9. PC
板布局范例
34 ______________________________________________________________________________________
Page 35

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
) 必须加长连线时,应首先考虑加长电感的充电通道而
7
非放电通道。例如,最好加长输入电容和高侧
间的距离,而不要增加电感和低侧
输出滤波器电容间的距离。
MOSFET
MOSFET
或电感和
布局步骤
) 首先放置功率器件, 并使它们的接地端子靠近(低侧
1
MOSFET
在顶层利用较宽的敷铜区域建立这些连接。
) 靠近低侧
2
短而宽(如果
为
50mil至100mil
) 将栅极驱动器相关元件 (
3
电容)靠近驱动器IC集中在一起。
源极,
MOSFET
MOSFET
,
C
IN
放置驱动器IC。DL栅极连线必须
)。
和D1阳极)。如有可能,
C
OUT
距驱动器IC为1英寸,则线宽
二极管和电容、
BST
V
DD
旁路
标准应用电路
) 如
4
地。 该图可被视作有三个独立的地平面:输入/输出
地,连接所有大功率器件;功率地平面,连接
引脚、
V
模拟地平面,连接敏感的模拟元件、主控制器的
引脚和
须与功率地平面(
IC
MOSFET
高功率输出地。
) 用多个过孔将输出功率平面 (
5
连至输出滤波电容的正、负端。尽量靠近
个
DD
V
CC
正下方。用一条短而厚的金属线条从
DC-DC
所示的那样建立
旁路电容和驱动器IC接地;以及控制器的
旁路电容。控制器的模拟地平面 (
)仅在单点交汇,交汇点可位于
PGND
的源极(星形地的中点),连接功率地平面至
转换器电路。
V
DC-DC
CORE
控制器的接
GND
PGND
和系统地平面)直
CPU
MAX8707
PGND
GND
) 必
到低侧
放置整
______________________________________________________________________________________ 35
Page 36

用于
AMD Hammer CPU
固定频率控制器
核电源的多相、
____________________________
TOP VIEW
D1
40 39 38 37
D2
1
D3
N.C.
SKIP
SHDN
SUS
SUSV
OFS
2
D4
3
4
5
6
7
8
9
10
OSC
MAX8707
ILIM(AVE)
CSP4
D0
CSN4
MAX8707
1211
13 14 15 16 17 18 19 20
TIME
GNDS
ILIM(PK)
THIN QFN
6mm x 6mm
CSN3
CCV
CSP3
TRC
CSP2
REF
CSN2
VROK
引脚配置
CSN1
CSP1
313233343536
GND
PGND
____________________________
芯片信息
TRANSISTOR COUNT: 9011
PROCESS: BiCMOS
CRSP
30
CRSN
29
VPS
28
FBS
27
DRSKP
26
PWM4
25
PWM3
24
PWM2
23
PWM1
22
21
V
CC
36 ______________________________________________________________________________________
Page 37

用于
AMD Hammer CPU
核电源的多相、
固定频率控制器
___________________________________________________________________
(本数据资料提供的封装图可能不是最近的规格,如需最近的封装外型信息,请查询 www.maxim-ic.com.cn/packages。)
D
D/2
E/2
(NE-1) X e
E
e
A1 A2
A
L
L1
D2
C
L
k
(ND-1) X e
C
L
e e
PACKAGE OUTLINE
36, 40, 48L THIN QFN, 6x6x0.8mm
b
D2/2
e
21-0141
E2/2
C
E2
L
k
L
C
L
QFN THIN 6x6x0.8.EPS
LL
1
E
2
封装信息
MAX8707
NOTES:
1. DIMENSIONING & TOLERANCING CONFORM TO ASME Y14.5M-1994.
2. ALL DIMENSIONS ARE IN MILLIMETERS. ANGLES ARE IN DEGREES.
3. N IS THE TOTAL NUMBER OF TERMINALS.
4. THE TERMINAL #1 IDENTIFIER AND TERMINAL NUMBERING CONVENTION SHALL CONFORM TO JESD 95-1
SPP-012. DETAILS OF TERMINAL #1 IDENTIFIER ARE OPTIONAL, BUT MUST BE LOCATED WITHIN THE
ZONE INDICATED. THE TERMINAL #1 IDENTIFIER MAY BE EITHER A MOLD OR MARKED FEATURE.
5. DIMENSION b APPLIES TO METALLIZED TERMINAL AND IS MEASURED BETWEEN 0.25 mm AND 0.30 mm
FROM TERMINAL TIP.
6. ND AND NE REFER TO THE NUMBER OF TERMINALS ON EACH D AND E SIDE RESPECTIVELY.
7. DEPOPULATION IS POSSIBLE IN A SYMMETRICAL FASHION.
8. COPLANARITY APPLIES TO THE EXPOSED HEAT SINK SLUG AS WELL AS THE TERMINALS.
Maxim不对Maxim
9. DRAWING CONFORMS TO JEDEC MO220, EXCEPT FOR 0.4mm LEAD PITCH PACKAGE T4866-1.
10. WARPAGE SHALL NOT EXCEED 0.10 mm.
产品以外的任何电路使用负责,也不提供其专利许可。
保留在任何时间、没有任何通报的前提下修改产品资料和规格的权利。
Maxim
PACKAGE OUTLINE
36, 40, 48L THIN QFN, 6x6x0.8mm
21-0141
2
E
2
Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 (408) 737-7600 ___________________37
© 2004 Maxim Integrated Products Printed USA
是
Maxim Integrated Products, Inc.
的注册商标。
 Loading...
Loading...