

Page 1
General Description
MAX1846/MAX1847 high-efficiency PWM inverting controllers allow designers to implement compact, lownoise, negative-output DC-DC converters for telecom
and networking applications. Both devices operate
from +3V to +16.5V input and generate -2V to -200V
output. To minimize switching noise, both devices feature a current-mode, constant-frequency PWM control
scheme. The operating frequency can be set from
100kHz to 500kHz through a resistor.
The MAX1846 is available in an ultra-compact 10-pin
µMAX package. Operation at high frequency, compatibility with ceramic capacitors, and inverting topology
without transformers allow for a compact design.
Compatibility with electrolytic capacitors and flexibility
to operate down to 100kHz allow users to minimize the
cost of external components. The high-current output
drivers are designed to drive a P-channel MOSFET and
allow the converter to deliver up to 30W.
The MAX1847 features clock synchronization and shutdown functions. The MAX1847 can also be configured
to operate as an inverting flyback controller with an Nchannel MOSFET and a transformer to deliver up to
70W. The MAX1847 is available in a 16-pin QSOP
package.
Current-mode control simplifies compensation and provides good transient response. Accurate current-mode
control and over current protection are achieved
through low-side current sensing.
Applications
Cellular Base Stations
Networking Equipment
Optical Networking Equipment
SLIC Supplies
CO DSL Line Driver Supplies
Industrial Power Supplies
Automotive Electronic Power Supplies
Servers
Features
♦ 90% Efficiency
♦ +3.0V to +16.5V Input Range
♦ -2V to -200V Output
♦ Drives High-Side P-Channel MOSFET
♦ 100kHz to 500kHz Switching Frequency
♦ Current-Mode, PWM Control
♦ Internal Soft-Start
♦ Electrolytic or Ceramic Output Capacitor
♦ The MAX1847 also offers:
Synchronization to External Clock
Shutdown
N-Channel Inverting Flyback Option
MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
________________________________________________________________ Maxim Integrated Products 1
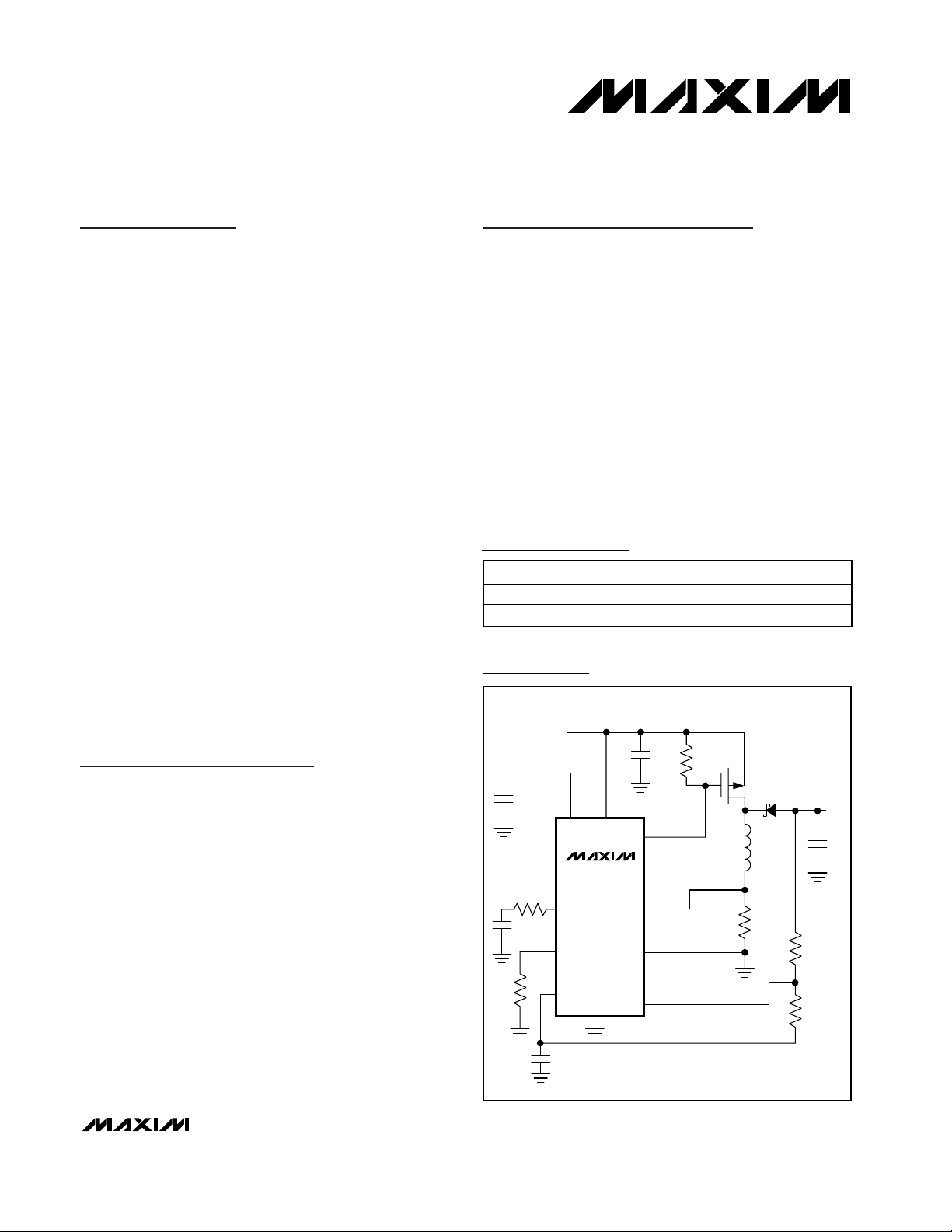
Typical Operating Circuit
19-2091; Rev 0; 8/01
For pricing, delivery, and ordering information, please contact Maxim/Dallas Direct! at
1-888-629-4642, or visit Maxim’s website at www.maxim-ic.com.
Ordering Information
Pin Configurations appear at end of data sheet.
PART TEMP. RANGE PIN-PACKAGE
MAX1846EUB -40°C to +85°C 10 µMAX
MAX1847EEE -40°C to +85°C 16 QSOP
POSITIVE
V
IN
P
VL IN
EXT
COMP
MAX1846
MAX1847
CS
FREQ
PGND
REF
GND
FB
NEGATIVE
V
OUT
Page 2
MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
2 _______________________________________________________________________________________
ABSOLUTE MAXIMUM RATINGS
ELECTRICAL CHARACTERISTICS
(V
SHDN
= VIN= +12V, SYNC = GND, PGND = GND, R
FREQ
= 147kΩ ±1%, C
VL
= 0.47µF, C
REF
= 0.1µF, TA= 0°C to +85°C, unless
otherwise noted.)
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to
absolute maximum rating conditions for extended periods may affect device reliability.
IN, SHDN to GND...................................................-0.3V to +20V
PGND to GND .......................................................-0.3V to +0.3V
VL to PGND for V
IN
≤ 5.7V...........................-0.3V to (VIN+ 0.3V)
VL to PGND for V
IN
> 5.7V .......................................-0.3V to +6V
EXT to PGND ...............................................-0.3V to (V
IN
+ 0.3V)
REF, COMP to GND......................................-0.3V to (VL + 0.3V)
CS, FB, FREQ, POL, SYNC to GND .........................-0.3V to +6V
Continuous Power Dissipation (T
A
= +70°C)
10-Pin µMAX (derate 5.6mW/°C above +70°C) ...........444mW
16-Pin QSOP (derate 8.3mW/°C above +70°C)...........696mW
Operating Temperature Range ...........................-40°C to +85°C
Junction Temperature......................................................+150°C
Storage Temperature Range .............................-65°C to +150°C
Lead Temperature (soldering, 10s) .................................+300°C
PARAMETER CONDITIONS MIN TYP MAX UNITS
PWM CONTROLLER
Operating Input Voltage Range 3.0 16.5 V
V
rising 2.8 2.95
UVLO Threshold
IN
VIN falling 2.6 2.74
UVLO Hysteresis 60 mV
FB Threshold No load -12 0 12 mV
FB Input Current V
Load Regulation
Line Regulation
= -0.1V -50 -6 50 nA
FB
C
= 0.068µF, V
COMP
I
= 20mA to 200mA (Note 1)
OUT
C
= 0.068µF, V
COMP
V
= +8V to +16.5V, I
IN
OUT
OUT
OUT
= -48V,
= -48V,
= 100mA
Current-Limit Threshold 85 100 115 mV
CS Input Current CS = GND 10 20 µA
Supply Current V
Shutdown Supply Current
= -0.1V, VIN = +3.0V to +16.5V 0.75 1.2 mA
FB
SHDN = GND, V
= +3.0V to +16.5V
IN
REFERENCE AND VL REGULATOR
REF Output Voltage I
REF Load Regulation I
VL Output Voltage I
VL Load Regulation I
= 50µA 1.236 1.25 1.264 V
REF
= 0 to 500µA -2 -15 mV
REF
= 100µA 3.85 4.25 4.65 V
VL
= 0.1mA to 2.0mA -20 -60 mV
VL
-1 0 %
0.04 %
10 25 µA
V
Page 3
MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
_______________________________________________________________________________________ 3
ELECTRICAL CHARACTERISTICS (continued)
(V
SHDN
= VIN= +12V, SYNC = GND, PGND = GND, R
FREQ
= 147kΩ ±1%, C
VL
= 0.47µF, C
REF
= 0.1µF, TA= 0°C to +85°C, unless
otherwise noted.)
Note 1: Production test correlates to operating conditions.
Note 2: Guaranteed by design and characterization.
OSCILLATOR
Maximum Duty Cycle
SYNC Input Signal Duty-Cycle
Range
Minimum SYNC Input Logic Low
Pulse Width
R
= 500kΩ ±1% 90 100 110
FREQ
R
= 147kΩ ±1% 255 300 345 Oscillator Frequency
FREQ
R
= 76.8kΩ ±1% 500
FREQ
R
= 500kΩ ±1% 93 96 97
FREQ
R
= 147kΩ ±1% 85 88 90
FREQ
R
= 76.8kz ±1% 80
FREQ
kHz
7 93 %
50 200 ns
%
SYNC Input Rise/Fall Time (Note 2) 200 ns
SYNC Input Frequency Range 100 550 kHz
DIGITAL INPUTS
POL, SYNC, SHDN Input High
Voltage
POL, SYNC, SHDN Input Low
Voltage
2.0 V
0.45 V
POL, SYNC Input Current POL, SYNC = GND or VL 20 40 µA
V
= +5V or GND -12 -4 0
SHDN Input Current
SHDN
V
= +16.5V 1.5 6
SHDN
µA
SOFT-START
Soft-Start Clock Cycles 1024
Cycles
Soft-Start Levels 64
EXT OUTPUT
EXT Sink/Source Current V
EXT On-Resistance
= +5V, V
IN
forced to +2.5V 1 A
EXT
EXT high or low, tested with 100mA load, V
EXT high or low, tested with 100mA load, V
= +5V 2 5
IN
= +3V 5 10
IN
Ω
Page 4

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
4 _______________________________________________________________________________________
ELECTRICAL CHARACTERISTICS
(V
SHDN
= VIN= +12V, SYNC = GND, PGND = GND, R
FREQ
= 147kΩ ±1%, CVL= 0.47µF, C
REF
= 0.1µF, TA= -40°C to +85°C,
unless otherwise noted.) (Note 3)
PARAMETER CONDITIONS MIN MAX UNITS
PWM CONTROLLER
Operating Input Voltage Range 3.0 16.5 V
V
rising 2.95
UVLO Threshold
IN
V
falling 2.6
IN
FB Threshold No load -20 20 mV
FB Input Current V
Load Regulation
= -0.1V -50 50 nA
FB
C
= 0.068µF, V
COMP
I
= 20mA to 200mA (Note 1)
OUT
OUT
= -48V,
-2 0 %
Current Limit Threshold 85 115 mV
CS Input Current CS = GND 20 µA
Supply Current V
Shutdown Supply Current SHDN = GND, V
= -0.1V, VIN = +3.0V to +16.5V 1.2 mA
FB
= +3.0V to +16.5V 25 µA
IN
REFERENCE AND VL REGULATOR
REF Output Voltage I
REF Load Regulation I
VL Output Voltage I
VL Load Regulation I
= 50µA 1.225 1.275 V
REF
= 0 to 500µA -15 mV
REF
= 100µA 3.85 4.65 V
VL
= 0.1mA to 2.0mA -60 mV
VL
OSCILLATOR
R
= 500kΩ ±1% 84 116
Oscillator Frequency
Maximum Duty Cycle
SYNC Input Signal Duty-Cycle
Range
Minimum SYNC Input Logic Low
Pulse Width
FREQ
R
= 147kΩ ±1% 255 345
FREQ
R
= 500kΩ ±1% 93 98
FREQ
R
= 147kΩ ±1% 84 93
FREQ
7 93 %
200 ns
SYNC Input Rise/Fall Time (Note 2) 200 ns
SYNC Input Frequency Range 100 550 kHz
DIGITAL INPUTS
POL, SYNC, SHDN Input High
Voltage
POL, SYNC, SHDN Input Low
Voltage
2.0 V
0.45 V
V
kHz
%
Page 5
MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
_______________________________________________________________________________________ 5
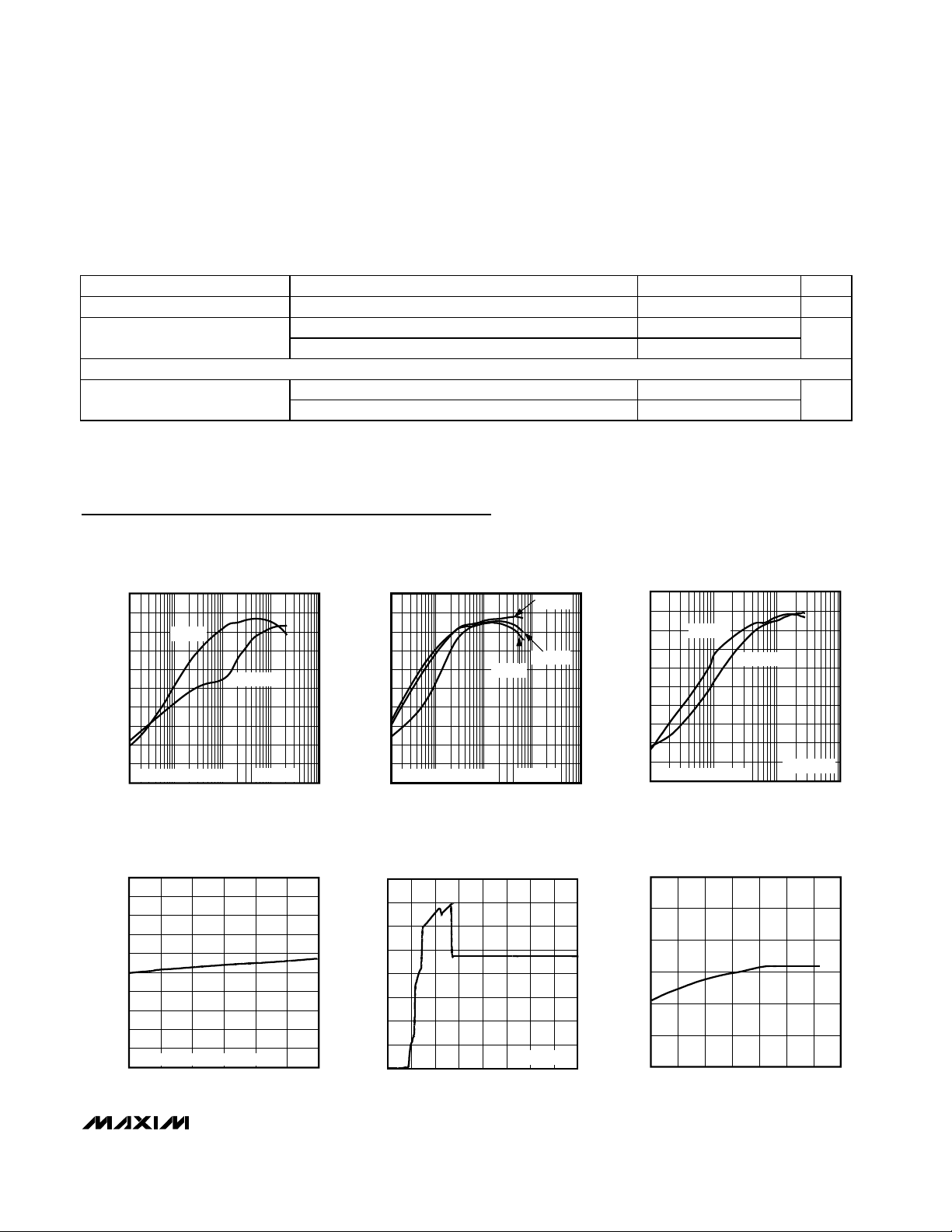
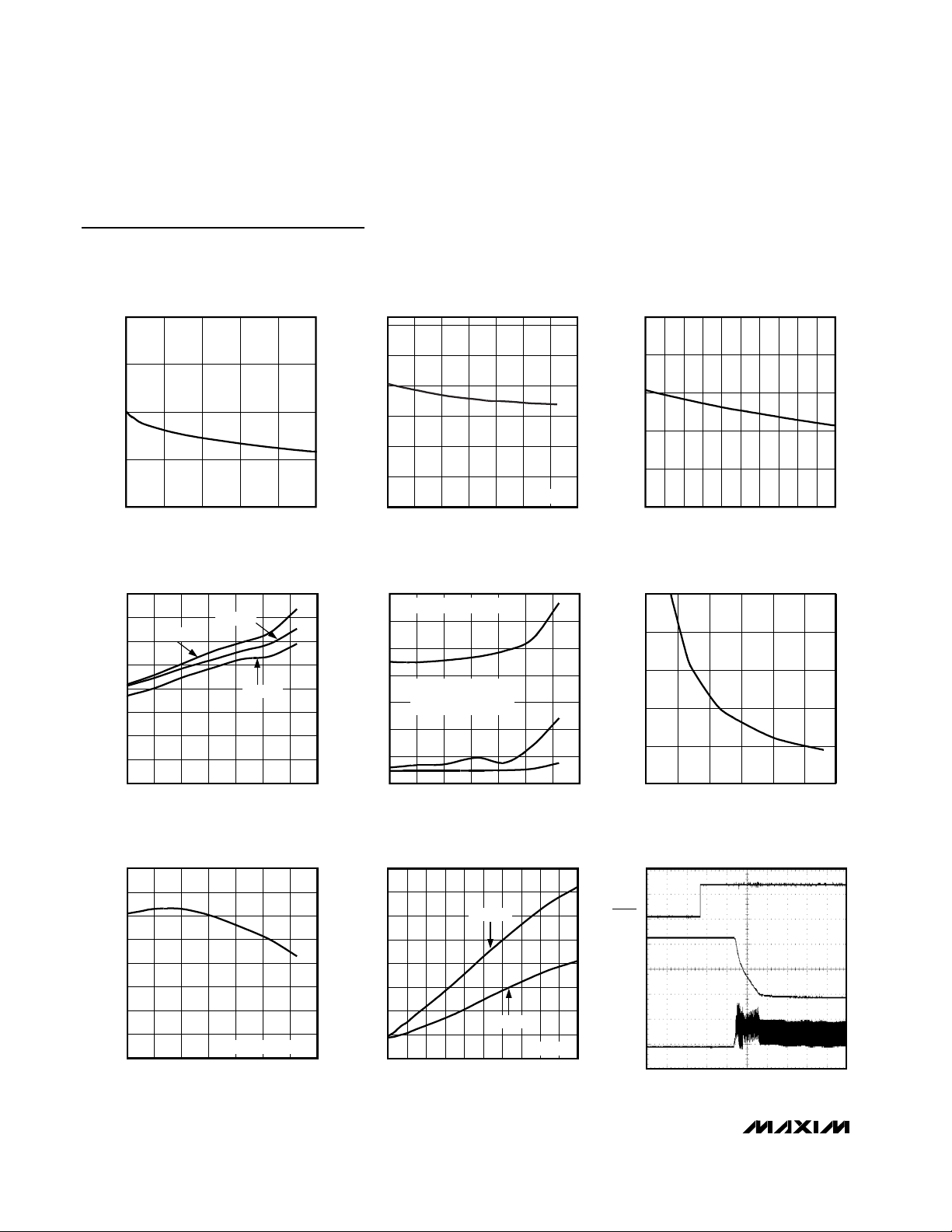
Typical Operating Characteristics
(Circuit references are from Table 1 in the Main Application Circuits section, CVL= 0.47µF, C
RE
F
= 0.1µF, TA = +25°C, unless otherwise
noted.)
ELECTRICAL CHARACTERISTICS (continued)
(V
SHDN
= VIN= +12V, SYNC = GND, PGND = GND, R
FREQ
= 147kΩ ±1%, CVL= 0.47µF, C
REF
= 0.1µF, TA= -40°C to +85°C,
unless otherwise noted.) (Note 3)
Note 3: Parameters to -40°C are guaranteed by design and characterization.
PARAMETER CONDITIONS MIN MAX UNITS
POL, SYNC Input Current POL, SYNC = GND or VL 40 µA
V
= +5V or GND -12 0
SHDN Input Current
SHDN
V
= +16.5V 6
SHDN
EXT OUTPUT
EXT On-Resistance
EXT high or low, I
EXT high or low, I
= 100mA, VIN = +5V 7.5
EXT
= 100mA, VIN = +3V 12
EXT
EFFICIENCY vs. LOAD CURRENT
100
90
80
70
60
50
40
EFFICIENCY (%)
30
20
10
0
VIN = 5V
VIN = 16.5V
APPLICATION CIRCUIT A
1 10 100 1000 10,000
LOAD CURRENT (mA)
MAX1846/7 toc01
EFFICIENCY (%)
V
= -5V
OUT
EFFICIENCY vs. LOAD CURRENT
100
90
80
70
60
50
40
30
20
10
APPLICATION CIRCUIT B
0
1 10 100 1000 10,000
LOAD CURRENT (mA)
VIN = 3V
V
OUT
VIN = 5V
VIN = 3.3V
= -12V
EFFICIENCY vs. LOAD CURRENT
100
90
MAX1846/7 toc02
EFFICIENCY (%)
80
70
60
50
40
30
20
10
0
VIN = 12V
VIN = 16.5V
APPLICATION CIRCUIT C
1 100010010
LOAD CURRENT (mA)
V
= -48V
OUT
µA
Ω
MAX1846/7 toc03
OUTPUT VOLTAGE LOAD REGULATION
-11.90
-11.92
-11.94
-11.96
-11.98
-12.00
-12.02
OUTPUT VOLTAGE (V)
-12.04
-12.06
-12.08
APPLICATION CIRCUIT B VIN = 5V
-12.10
0 200100 300 400 500 600
LOAD CURRENT (mA)
MAX1846/7 toc04
SUPPLY CURRENT
vs. SUPPLY VOLTAGE
0462 8 10 12 14 16
VIN (V)
(mA)
IN
I
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0
VFB = -0.1V
MAX1846/7 toc05
REFERENCE VOLTAGE
vs. TEMPERATURE
1.262
1.258
1.254
(V)
1.250
REF
V
1.246
1.242
1.238
-40 20 40-20 0 60 80 100
TEMPERATURE (°C)
MAX1846/7 toc06
Page 6
MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
6 _______________________________________________________________________________________
Typical Operating Characteristics (continued)
(Circuit references are from Table 1 in the Main Application Circuits section, CVL= 0.47µF, C
RE
F
= 0.1µF, TA = +25°C, unless otherwise
noted.)
1.240
1.245
1.255
1.250
1.260
0 100 200 300 400 500
REFERENCE LOAD REGULATION
MAX1846/7 toc07
I
REF
(µA)
V
REF
(V)
4.100
4.180
4.140
4.260
4.220
4.300
4.340
-40 20 40-20 0 60 80 100
VL VOLTAGE
vs. TEMPERATURE
MAX1846/7 toc08
TEMPERATURE (°C)
VL (V)
I
VL
= 0
4.22
4.23
4.24
4.25
4.26
4.27
0 0.8 1.00.4 0.60.2 1.2 1.4 1.6 1.8 2.0
VL LOAD REGULATION
MAX1846/7 toc09
IVL (mA)
VL (V)
SHUTDOWN SUPPLY CURRENT
16
14
12
10
SHUTDOWN SUPPLY CURRENT (µA)
302
301
300
299
298
297
FREQUENCY (kHz)
296
295
294
VIN = 16.5V
8
6
4
2
0
-40 0 20-20
-40 0 20-20
SWITCHING FREQUENCY
vs. TEMPERATURE
VIN = 10V
VIN = 3V
40
TEMPERATURE (°C)
vs. TEMPERATURE
R
= 147kΩ ±1%
FREQ
40
TEMPERATURE (°C)
60 80 100
60 80 100
14
12
MAX1846/7 toc10
10
8
6
4
OPERATING CURRENT (mA)
2
0
-40 0 20-20 40 60 80 100
160
140
MAX1846/7 toc13
120
100
80
TIME (ns)
60
40
20
0
OPERATING CURRENT
vs. TEMPERATURE
A: VIN = 3V, V
APPLICATION CIRCUIT A
B: VIN = 5V, V
C: V
IN
= -12V
OUT
= -5V
OUT
= 16.5V, V
OUT
TEMPERATURE (°C)
= -5V
A
B
C
EXT RISE/FALL TIME
vs. CAPACITANCE
FALL TIME
RISE TIME
VIN = 12V
0 2000 4000 6000 8000 10,000
CAPACITANCE (pF)
MAX1846/7 toc11
MAX1846/7 toc14
SHDN
500
400
300
(kHz)
OSC
f
200
100
V
OUT
0
0
I
L
SWITCHING FREQUENCY
vs. R
FREQ
0 200100 300 400 500 600
R
(kΩ)
FREQ
EXITING SHUTDOWN
APPLICATION CIRCUIT B
1ms/div
MAX1846/7 toc12
MAX1846/7 toc15
5V/div
5V/div
1A/div
Page 7

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
_______________________________________________________________________________________ 7
Typical Operating Characteristics (continued)
(Circuit references are from Table 1 in the Main Application Circuits section, CVL= 0.47µF, C
RE
F
= 0.1µF, TA = +25°C, unless otherwise
noted.)
SHDN
V
OUT
ENTERING SHUTDOWN
0
I
L
APPLICATION CIRCUIT B
1ms/div
MAX1846/7 toc16
5V/div
5V/div
1A/div
V
OUT
I
L
LX
LIGHT-LOAD SWITCHING
WAVEFORM
V
OUT
HEAVY-LOAD SWITCHING
APPLICATION CIRCUIT B
MAX1846/7 toc18
100mV/div
WAVEFORM
1µs/div
I
= 600mA
LOAD
MAX1846/7 toc17
100mV/div
1A/div
10V/div
I
V
LOAD
OUT
LOAD-TRANSIENT RESPONSE
I
L
APPLICATION CIRCUIT B
I
LOAD
2ms/div
= 10mA to 400mA
MAX1846/7 toc19
I
L
LX
500mV/div
1A/div
APPLICATION CIRCUIT B
1µs/div
I
= 50mA
LOAD
I
LOAD
V
OUT
I
1A/div
10V/div
LOAD-TRANSIENT RESPONSE
L 500mA/div
APPLICATION CIRCUIT C
400µs/div
I
= 4mA to 100mA
LOAD
MAX1846/7 toc20
200mV/div
Page 8

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
8 _______________________________________________________________________________________
Pin Description
PIN
MAX1846 MAX1847
— 1 POL
1 2 VL VL Low-Dropout Regulator. Connect 0.47µF ceramic capacitor from VL to GND.
2 3 FREQ
3 4 COMP
4 5 REF
56FB
— 7,9 N.C. No Connection
— 8 SHDN
6 10,11 GND Analog Ground. Connect to PGND.
7 12 PGND Negative Rail for EXT Driver and Negative Current-Sense Input. Connect to GND.
813CS
9 14 EXT External MOSFET Gate-Driver Output. EXT swings from IN to PGND.
10 15 IN Power-Supply Input
— 16 SYNC
NAME FUNCTION
Sets polarity of the EXT pin. Connect POL to GND to set EXT for use with an external
PMOS high-side FET. Connect POL to VL to set EXT for use with an external NMOS lowside FET in transformer-based applications.
Oscillator Frequency Set Input. Connect a resistor (R
internal oscillator frequency from 100kHz (R
R
FREQ
Frequency section.
Compensation Node for Error Amp/Integrator. Connect a series resistor/capacitor network
from COMP to GND for loop compensation. See Design Procedure.
1.25V Reference Output. REF can source up to 500µA. Bypass with a 0.1µF ceramic
capacitor from REF to GND.
Feedback Input. Connect FB to the center of a resistor-divider connected between the
output and REF. The FB threshold is 0.
Shutdown Control. Drive SHDN low to turn off the DC-DC controller. Drive high or connect
to IN for normal operation.
P osi ti ve C ur r ent- S ense Inp ut. C onnect a cur r ent- sense r esi sto r ( R
Operating Frequency Synchronization Control. Drive SYNC low or connect to GND to set
the internal oscillator frequency with R
signal to externally set the converter’s operating frequency. DC-DC conversion cycles
initiate on the rising edge of the input clock signal. Note that when driving SYNC with an
external signal, R
) from FREQ to GND to set the
FREQ
= 500kΩ) to 500kHz (R
is still required if an external clock is used at SYNC. See Setting the Operating
must still be connected to FREQ.
FREQ
FREQ
) b etw een C S and
C S
. Drive SYNC with a logic-level clock input
FREQ
FREQ
= 76.8kΩ).
Page 9

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
_______________________________________________________________________________________ 9
Typical Application Circuit
0.22µF
0.47µF
V
+3V to +5.5V
150kΩ
IN
10kΩ
2
VL
8
SHDN
16
SYNC
MAX1847
4
COMP
3
FREQ
5
REF FB
POL
1
3 x 22µF
15
IN
GND
10V
PGND
10, 11
EXT
N.C.
22kΩ
FDS6375
CMSH5-40
14
13
CS
7, 9
12
6
1200pF
10µH
DO5022P-103
0.02Ω
1W
47µF
16V
Sanyo
16TPB47M
R1
95.3kΩ
1%
R2
10.0kΩ
1%
47µF
16V
V
OUT
-12V AT 400mA
0.1µF
Page 10

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
10 ______________________________________________________________________________________
Functional Diagram
IN
SHDN
MAX1847 ONLY
STARTUP
CIRCUITRY
EXT
PGND
EXT DRIVER
VL
REGULATOR
POL
SYNC
MAX1847 ONLY
FREQ
COMP
FB
REF
UNDER-
VOLTAGE
LOCK OUT
OSCILLATOR
SOFT-START
REFERENCE
G
M
ERROR
AMPLIFIER
CONTROL
CIRCUITRY
SLOPE
COMP
ERROR
COMPARATOR
CURRENT-
SENSE
AMPLIFIER
VL
MAX1846
MAX1847
CS
PGND
GND
Page 11

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
______________________________________________________________________________________ 11
Detailed Description
The MAX1846/MAX1847 current-mode PWM controller
use an inverting topology that is ideal for generating
output voltages from -2V to -200V. Features include
shutdown, adjustable internal operating frequency or
synchronization to an external clock, soft-start,
adjustable current limit, and a wide (+3V to +16.5V)
input range.
PWM Controller
The architecture of the MAX1846/MAX1847 currentmode PWM controller is a Bi-CMOS multi-input system
that simultaneously processes the output-error signal,
the current-sense signal, and a slope-compensation
ramp (Functional Diagram). Slope compensation prevents subharmonic oscillation, a potential result in current-mode regulators operating at greater than 50%
duty cycle. The controller uses fixed-frequency, current-mode operation where the duty ratio is set by the
input-to-output voltage ratio. The current-mode feedback loop regulates peak inductor current as a function
of the output error signal.
Internal Regulator
The MAX1846/MAX1847 incorporate an internal lowdropout regulator (LDO). This LDO has a 4.25V output
and powers all MAX1846/MAX1847 functions (excluding EXT) for the primary purpose of stabilizing the performance of the IC over a wide input voltage range
(+3V to +16.5V). The input to this regulator is connected to IN, and the dropout voltage is typically 100mV, so
that when VINis less than 4.35V, VL is typically V
IN
minus 100mV. When the LDO is in dropout, the
MAX1846/MAX1847 still operate with VINas low as 3V.
For best performance, it is recommended to connect
VL to IN when the input supply is less than 4.5V.
Undervoltage Lockout
The MAX1846/MAX1847 have an undervoltage lockout
circuit that monitors the voltage at VL. If VL falls below
the UVLO threshold (2.8V typ), the control logic turns the
P-channel FET off (EXT high impedance). The rest of the
IC circuitry is still powered and operating. When VL
increases to 60mV above the UVLO threshold, the IC
resumes operation from a start up condition (soft-start).
Soft-Start
The MAX1846/MAX1847 feature a “digital” soft-start
that is preset and requires no external capacitor. Upon
startup, the FB threshold decrements from the reference voltage to 0 in 64 steps over 1024 cycles of f
OSC
or f
SYNC
. See the Typical Operating Characteristics for
a scope picture of the soft-start operation. Soft-start is
implemented: 1) when power is first applied to the IC,
2) when exiting shutdown with power already applied,
and 3) when exiting undervoltage lockout.
Shutdown (MAX1847 only)
The MAX1847 shuts down to reduce the supply current
to 10µA when SHDN is low. In this mode, the internal reference, error amplifier, comparators, and biasing circuitry turn off. The EXT output becomes high impedance
and the external pullup resistor connected to EXT pulls
V
EXT
to VIN, turning off the P-channel MOSFET. When in
shutdown mode, the converter’s output goes to 0.
Frequency Synchronization
(MAX1847 only)
The MAX1847 is capable of synchronizing its switching
frequency with an external clock source. Drive SYNC
with a logic-level clock input signal to synchronize the
MAX1847. A switching cycle starts on the rising edge
of the signal applied to SYNC. Note that the frequency
of the signal applied to SYNC must be higher than the
default frequency set by R
FREQ
. This is required so that
the internal clock does not start a switching cycle prematurely. If SYNC is inactive for an entire clock cycle of
the internal oscillator, the internal oscillator takes over
the switching operation. Choose R
FREQ
such that f
OSC
= 0.9 ✕f
SYNC
.
EXT Polarity (MAX1847 only)
The MAX1847 features an option to utilize an N-channel
MOSFET configuration, rather than the typical P-channel MOSFET configuration (Figure 1). In order to drive
the different polarities of these MOSFETs, the MAX1847
is capable of reversing the phase of EXT by 180
degrees. When driving a P-channel MOSFET, connect
POL to GND. When driving an N-Channel MOSFET,
connect POL to VL. These POL connections ensure the
proper polarity for EXT. For design guidance in regard
to this application, refer to the MAX1856 data sheet.
Design Procedure
Initial Specifications
In order to start the design procedure, a few parameters
must be identified: the minimum input voltage expected
(V
IN(MIN)
), the maximum input voltage expected
(V
IN(MAX)
), the desired output voltage (V
OUT
), and the
expected maximum load current (I
LOAD
).
Calculate the Equivalent Load Resistance
This is a simple calculation used to shorten the verification equations:
R
LOAD
= V
OUT
/ I
LOAD
Page 12

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
12 ______________________________________________________________________________________
Calculate the Duty Cycle
The duty cycle is the ratio of the on-time of the MOSFET
switch to the oscillator period. This is determined by the
ratio of the input voltage to the output voltage. Since
the input voltage typically has a range of operation, a
minimum (D
MIN
) and maximum (D
MAX
) duty cycle is
calculated by:
where VDis the forward drop across the output diode,
VSWis the drop across the external FET when on, and
V
LIM
is the current-limit threshold. To begin with,
assume VD= 0.5V for a Schottky diode, VSW= 100mV,
and V
LIM
= 100mV. Remember that V
OUT
is negative
when using this formula.
Setting the Output Voltage
The output voltage is set using two external resistors to
form a resistive-divider to FB between the output and
REF (refer to R1 and R2 in Figure 1). V
REF
is nominally
1.25V and the regulation voltage for FB is nominally 0.
The load presented to the reference by the feedback
resistors must be less than 500µA. This is to guarantee
that V
REF
is in regulation (see Electrical Characteristics
Table). Conversely, the current through the feedback
resistors must be large enough so that the leakage current of the FB input (50nA) is insignificant. Therefore,
select R2 so that I
R2
is between 50µA and 250µA.
IR2= V
REF
/ R2
where V
REF
= 1.25V. A typical value for R2 is 10kΩ.
Once R2 is selected, calculate R1 with the following
equation:
R1 = R2 x (-V
OUT
/ V
REF
)
Setting the Operating Frequency
The MAX1846/MAX1847 are capable of operating at
switching frequencies from 100kHz to 500kHz. Choice
of operating frequency depends on a number of factors:
1) Noise considerations may dictate setting (or syn-
chronizing) f
OSC
above or below a certain frequency or band of frequencies, particularly in RF
applications.
Figure 1. Using an N-Channel MOSFET (MAX1847 only)
V
IN
+12V
12µF
25V
VP1-0190
12.2µH
1:4
2
POL
VL
8
SHDN
16
SYNC
MAX1847
4
COMP
3
FREQ
5
REF
0.033µF
0.47µF
270kΩ
150kΩ
0.1µF
D
MIN
D
MAX
VV
−
=
VVVVV
IN MAX SW LIM OUT D
()
=
VVVVV
IN MIN SW LIM OUT D
()
OUT D
−−−
−
VV
+
OUT D
−−−
+
+
+
1
15
IN
PGND
GND
10, 11
EXT
N.C.
IRLL2705
14
13
CS
7, 9
0.05Ω
0.5W
12
6
FB
CMR1U-02
470Ω
100pF
100V
1800pF
383kΩ
1%
10.0kΩ
1%
V
OUT
-48V AT 100mA
12µF
100V
Page 13

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
______________________________________________________________________________________ 13
2) Higher frequencies allow the use of smaller value
(hence smaller size) inductors and capacitors.
3) Higher frequencies consume more operating
power both to operate the IC and to charge and
discharge the gate of the external FET. This tends
to reduce the efficiency at light loads.
4) Higher frequencies may exhibit lower overall efficiency due to more transition losses in the FET;
however, this shortcoming can often be nullified
by trading some of the inductor and capacitor size
benefits for lower-resistance components.
5) High-duty-cycle applications may require lower
frequencies to accommodate the controller minimum off-time of 0.4µs. Calculate the maximum
oscillator frequency with the following formula:
Remember that V
OUT
is negative when using this formula.
The oscillator frequency is set by a resistor, R
FREQ
,
connected from FREQ to GND. The relationship
between f
OSC
(in Hz) and R
FREQ
(in Ω) is slightly non-
linear, as illustrated in the Typical Operating
Characteristics. Choose the resistor value from the
graph and check the oscillator frequency using the following formula:
External Synchronization (MAX1847 only)
The SYNC input provides external-clock synchronization (if desired). When SYNC is driven with an external
clock, the frequency of the clock directly sets the
MAX1847’s switching frequency. A rising clock edge
on SYNC is interpreted as a synchronization input. If
the sync signal is lost, the internal oscillator takes over
at the end of the last cycle, and the frequency is
returned to the rate set by R
FREQ
. Choose R
FREQ
such
that f
OSC
= 0.9 x f
SYNC
.
Choosing Inductance Value
The inductance value determines the operation of the
current-mode regulator. Except for low-current applica-
tions, most circuits are more efficient and economical
operating in continuous mode, which refers to continuous current in the inductor. In continuous mode there is
a trade-off between efficiency and transient response.
Higher inductance means lower inductor ripple current,
lower peak current, lower switching losses, and, therefore, higher efficiency. Lower inductance means higher
inductor ripple current and faster transient response. A
reasonable compromise is to choose the ratio of inductor ripple current to average continuous current at minimum duty cycle to be 0.4. Calculate the inductor ripple
with the following formula:
Then calculate an inductance value:
L = (V
IN(MAX)
/ I
RIPPLE
) x (D
MIN
/ f
OSC
)
Choose the closest standard value. Once again, remember that V
OUT
is negative when using this formula.
Determining Peak Inductor Current
The peak inductor current required for a particular output is:
I
LPEAK
= I
LDC
+ (I
LPP
/ 2)
where I
LDC
is the average DC input current and I
LPP
is
the inductor peak-to-peak ripple current. The I
LDC
and
I
LPP
terms are determined as follows:
where L is the selected inductance value. The saturation rating of the selected inductor should meet or
exceed the calculated value for I
LPEAK
, although most
coil types can be operated up to 20% over their saturation rating without difficulty. In addition to the saturation
criteria, the inductor should have as low a series resistance as possible. For continuous inductor current, the
power loss in the inductor resistance (PLR) is approximated by:
PLR~ (I
LOAD
x V
OUT
/ VIN)2x R
L
where RLis the inductor series resistance.
VVV
f
()
OSC MAX
=
VVVVV
×
t
IN MIN SW LIM
()
IN MIN SW LIM OUT D
1
()
OFF MIN
−−
()
−−−
+
f
=
OSC
()
−− −
711 19
.. .
5 21 10 1 92 10 4 86 10
+×
×
()
1
××
−
RR
()
FREQ FREQ
×
2
()
I
RIPPLE
04.
=
IVVVVV
×× +
() ()
LOAD MAX IN MAX SW LIM OUT D
()
VVV
()
()
IN MAX SW LIM
−−−
−−
I
I
IVV
×+
−
LOAD OUT D
=
LDC
VVV
IN MIN SW LIM
VVVVV
()
=
LPP
()
−−
()
IN MIN SW LIM OUT D
−− −
()
Lf V V
×× +
OSC OUT D
×+
()
−
()
Page 14

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
14 ______________________________________________________________________________________
Once the peak inductor current is calculated, the current sense resistor, R
CS
, is determined by:
R
CS
= 85mV / I
LPEAK
For high peak inductor currents (>1A), Kelvin-sensing
connections should be used to connect CS and PGND
to RCS. Connect PGND and GND together at the
ground side of RCS. A lowpass filter between RCSand
CS may be required to prevent switching noise from
tripping the current-sense comparator at heavy loads.
Connect a 100Ω resistor between CS and the high side
of RCS, and connect a 1000pF capacitor between CS
and GND.
Checking Slope-Compensation Stability
In a current-mode regulator, the cycle-by-cycle stability
is dependent on slope compensation to prevent subharmonic oscillation at duty cycles greater than 50%.
For the MAX1846/MAX1847, the internal slope compensation is optimized for a minimum inductor value (L
MIN
)
with respect to duty cycle. For duty cycles greater then
50%, check stability by calculating LMIN using the following equation:
where V
IN(MIN)
is the minimum expected input voltage,
Msis the Slope Compensation Ramp (41 mV/µs) and
D
MAX
is the maximum expected duty cycle. If L
MIN
is
larger than L, increase the value of L to the next standard value that is larger than L
MIN
to ensure slope
compensation stability.
Power MOSFET Selection
The MAX1846/MAX1847 drive a wide variety of P-channel power MOSFETs (PFETs). The best performance,
especially with input voltages below 5V, is achieved
with low-threshold PFETs that specify on-resistance
with a gate-to-source voltage (VGS) of 2.7V or less.
When selecting a PFET, key parameters include:
1) Total gate charge (QG)
2) Reverse transfer capacitance (C
RSS
)
3) On-resistance (R
DS(ON)
)
4) Maximum drain-to-source voltage (V
DS(MAX)
)
5) Minimum threshold voltage (V
TH(MIN)
)
At high switching rates, dynamic characteristics (parameters 1 and 2 above) that predict switching losses
may have more impact on efficiency than R
DS(ON
),
which predicts DC losses. QGincludes all capacitance
associated with charging the gate. In addition, this
parameter helps predict the current needed to drive the
gate at the selected operating frequency. The power
MOSFET in an inverting converter must have a high
enough voltage rating to handle the input voltage plus
the magnitude of the output voltage and any spikes
induced by leakage inductance.
Choose R
DS(ON)(MAX)
specified at VGS< V
IN(MIN)
to be
one to two times RCS. Verify that V
IN(MAX)
< V
GS(MAX)
and V
DS(MAX)
> V
IN(MAX)
- V
OUT
+ VD. Choose the rise-
and fall-times (tR, tF) to be less than 50ns.
Output Capacitor Selection
The output capacitor (C
OUT
) does all the filtering in an
inverting converter. The output ripple is created by the
variations in the charge stored in the output capacitor
with each pulse and the voltage drop across the
capacitor’s equivalent series resistance (ESR) caused
by the current into and out of the capacitor. There are
two properties of the output capacitor that affect ripple
voltage: the capacitance value, and the capacitor’s
ESR. The output ripple due to the output capacitor’s
value is given by:
V
RIPPLE-C
= (I
LOAD
✕
D
MAX
✕
T
OSC
) / C
OUT
The output ripple due to the output capacitor’s ESR is
given by:
V
RIPPLE-R
= I
LPP
✕
R
ESR
These two ripple voltages are additive and the total output ripple is:
V
RIPPLE-T
= V
RIPPLE-C
+ V
RIPPLE-R
The ESR-induced ripple usually dominates this last
equation, so typically output capacitor selection is
based mostly upon the capacitor’s ESR, voltage rating,
and ripple current rating. Use the following formula to
determine the maximum ESR for a desired output ripple
voltage (V
RIPPLE-D
):
R
ESR
= V
RIPPLE-D
/ I
L
PP
Select a capacitor with ESR rating less than R
ESR
. The
value of this capacitor is highly dependent on dielectric
type, package size, and voltage rating. In general, when
choosing a capacitor, it is recommended to use low-ESR
capacitor types such as ceramic, organic, or tantalum
capacitors. Ensure that the selected capacitor has sufficient margin to safely handle the maximum ripple current
(I
LPP
) and the maximum output voltage.
Choosing Compensation Components
The MAX1846/MAX1847 are externally loop-compensated devices. This provides flexibility in designs to
accommodate a variety of applications. Proper com-
LV RM
=×
()
MIN IN MIN CS S
/211
()
[]
DD
××
()()
[]
MAX MAX
/
−−
Page 15

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
______________________________________________________________________________________ 15
pensation of the control loop is important to prevent
excessive output ripple and poor efficiency caused by
instability. The goal of compensation is to cancel
unwanted poles and zeros in the DC-DC converter’s
transfer function created by the power-switching and
filter elements. More precisely, the objective of compensation is to ensure stability by ensuring that the DCDC converter’s phase shift is less than 180° by a safe
margin, at the frequency where the loop gain falls
below unity. One method for ensuring adequate phase
margin is to introduce corresponding zeros and poles
in the feedback network to approximate a single-pole
response with a -20dB/decade slope all the way to
unity-gain crossover.
Calculating Poles and Zeros
The MAX1846/MAX1847 current-mode architecture
takes the double pole caused by the inductor and output capacitor and shifts one of these poles to a much
higher frequency. This makes loop compensation easier. To compensate these devices, we must know the
center frequencies of the right-half plane zero (z
RHP
)
and the higher frequency pole (p
OUT2
). Calculate the
z
RHP
frequency with the following formula:
The calculations for p
OUT2
are very complex. For most
applications where V
OUT
does not exceed -48V (in a
negative sense), the p
OUT2
will not be lower than 1/8th
of the oscillator frequency and is generally at a higher
frequency than z
RHP
. Therefore:
p
OUT2
≥ 0.125 ✕f
OSC
A pole is created by the output capacitor and the load
resistance. This pole must also be compensated and
its center frequency is given by the formula:
p
OUT1
= 1 / (2π✕R
LOAD
✕
C
OUT
)
Finally, there is a zero introduced by the ESR of the output capacitor. This zero is determined from the following equation:
z
ESR
= 1 / (2π✕C
OUT
✕
R
ESR
)
Calculating the Required Pole Frequency
To ensure stability of the MAX1846/MAX1847, the introduced pole (P
DOM
) by the compensation network must
roll-off the error amplifier gain to 1 before z
RHP
or
P
OUT2
occurs. First calculate the DC open-loop gain to
determine the frequency of the pole to introduce.
where:
B is the feedback divider attenuation factor =
(-V
OUT
/ V
REF
),
GMis the error amplifier transconductance =
400 µA/V,
ROis the error amplifier output resistance = 3 MΩ,
MS1is the slope compensation factor =
[(1.636A / µs) ✕RCS],
RCSis the selected current sense resistor,
L is the selected inductance value
If z
RHP
is at a lower frequency than p
OUT2
, the required
dominant pole frequency is given by:
p
DOM
= z
RHP
/ A
DC
Otherwise the required dominant pole frequency is:
p
DOM
= p
OUT2
/ A
DC
Determining the Compensation Component Values
Using p
DOM
, calculate the compensation capacitor
required:
C
COMP
= 1 / (2π✕R
O
✕
p
DOM
)
Select the next largest standard value of capacitor and
then calculate the compensation resistor required to
cancel out the output-capacitor-induced pole (p
OUT1
)
determined previously. A zero is needed to cancel the
output-induced pole and the frequency of this zero
must equal p
OUT1
. Therefore:
z
COMP
= p
OUT1
R
COMP
= R
LOAD
✕
C
OUT
/ C
COMP
Choose the nearest lower standard value of the resistor. Now check the final values selected for the compensation components:
p
COMP
= 1 / [2π✕C
COMP
x (RO+ R
COMP
)]
In order for p
COMP
to compensate the loop, the openloop gain must reach unity at a lower frequency than
the right-half-plane zero or the second output pole,
whichever is lower in frequency. If the second output
pole and the right-half-plane zero are close together in
frequency, the higher resulting phase shift at unity gain
ZRHP
−− −1
()
=
2
DVVR
×
MAX IN MIN OUT LOAD
()
()
VL
2
π
××
()
OUT
×
()
V
()
IN MIN
2
2
×
()
()
−
1
()
RM
CS S
L
+
1
GR D V V
××
M O MAX IN MIN OUT
R
×
LOAD
DC
=
()
B
×
A
−−
1
()
RV T D
×
CS IN MIN OSC MAX
R
××+
LOAD
Page 16

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
16 ______________________________________________________________________________________
may require a larger compensation capacitor than calculated. It might take more than a couple of iterations to
obtain a suitable combination.
Finally, the zero introduced by the output capacitor’s
ESR must be compensated. This is accomplished by
placing a capacitor between REF and FB creating a
pole directly in the feedback loop. Calculate the value
of this capacitor using the frequency of z
ESR
and the
selected feedback resistor values with the formula:
Applications Information
Maximum Output Power
The maximum output power that the MAX1846/MAX1847
can provide depends on the maximum input power available and the circuit’s efficiency:
P
OUT(MAX)
= Efficiency ✕P
IN(MAX)
Furthermore, the efficiency and input power are both
functions of component selection. Efficiency losses can
be divided into three categories: 1) resistive losses
across the inductor, MOSFET on-resistance, currentsense resistor, and the ESR of the input and output
capacitors; 2) switching losses due to the MOSFET’s
transition region, and charging the MOSFET’s gate
capacitance; and 3) inductor core losses. Typically
80% efficiency can be assumed for initial calculations.
The required input power depends on the inductor current limit, input voltage, output voltage, output current,
inductor value, and the switching frequency. The maximum output power is approximated by the following
formula:
P
MAX
= [VIN- (V
LIM
+ I
LIM
x R
DS(ON)
)] x I
LIM
x
[1 - (LIR / 2)] x [(-V
OUT
+ VD) / (VIN- VSW- V
LIM
- V
OUT
+ VD)]
where I
LIM
is the peak current limit and LIR is the
inductor current-ripple ratio and is calculated by:
LIR = I
LPP
/ I
LDC
Again, remember that V
OUT
for the MAX1846/
MAX1847 is negative.
Diode Selection
The MAX1846/MAX1847’s high-switching frequency
demands a high-speed rectifier. Schottky diodes are
recommended for most applications because of their
fast recovery time and low forward voltage. Ensure that
the diode’s average current rating exceeds the peak
inductor current by using the diode manufacturer’s data.
Additionally, the diode’s reverse breakdown voltage must
exceed the potential difference between V
OUT
and the
input voltage plus the leakage inductance spikes. For
high output voltages (-50V or more), Schottky diodes may
not be practical because of this voltage requirement. In
these cases, use an ultrafast recovery diode with adequate reverse-breakdown voltage.
Input Filter Capacitor
The input capacitor (CIN) in inverting converter designs
reduces the current peaks drawn from the input supply
and reduces noise injection. The source impedance of
the input supply largely determines the value of CIN.
High source impedance requires high input capacitance, particularly as the input voltage falls. Since
inverting converters act as “constant-power” loads to
their input supply, input current rises as the input voltage falls. Consequently, in low-input-voltage designs,
increasing CINand/or lowering its ESR can add as
much as 5% to the conversion efficiency.
Bypass Capacitor
In addition to CINand C
OUT
, other ceramic bypass
capacitors are required with the MAX1846/MAX1847.
Bypass REF to GND with a 0.1µF or larger capacitor.
Bypass V
L
to GND with a 0.47µF or larger capacitor. All
bypass capacitors should be located as close to their
respective pins as possible.
PC Board Layout Guidelines
Good PC board layout and routing are required in highfrequency-switching power supplies to achieve good
regulation, high efficiency, and stability. It is strongly
recommended that the evaluation kit PC board layouts
be followed as closely as possible. Place power components as close together as possible, keeping their
traces short, direct, and wide. Avoid interconnecting
the ground pins of the power components using vias
through an internal ground plane. Instead, keep the
power components close together and route them in a
“star” ground configuration using component-side copper, then connect the star ground to internal ground
using multiple vias.
Main Application Circuits
The MAX1846/MAX1847 are extremely versatile devices.
Figure 2 shows a generic schematic of the MAX1846.
Table 1 lists component values for several typical applications. These component values also apply to the
MAX1847. The first two applications are featured in the
MAX1846/MAX1847 EV Kit.
CR C
=××
FB ESR OUT
RR
RR
+
12
×
12
Page 17

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
______________________________________________________________________________________ 17
Figure 2. MAX1846 Main Application Circuit
Table 1. Component List for Main Application Circuits
V
APPLICATION B
0.47µF
C
COMP
NOTE: APPLICATIONS A & B USE POS CAPACITORS. APPLICATIONS C & D USE ALUMINUM ELECTROLYTIC CAPACITORS.
R
COMP
R
FREQ
IN
22k
C
IN
10
GND
EXT
PGND
6
IN
P
D1
9
8
CS
7
5
FB
L1
R
CS
C
FB
V
OUT
C
OUT
R1
R2
ONLY
3
2
4
1
VL
MAX1846
COMP
FREQ
REF
0.1µF
CIRCUIT ID ABCD
Input (V) 12 3 to 5.5 12 12
Output (V) -5 -12 -48 -72
Output (A) 2 0.4 0.1 0.1
C
(µF) 0.047 0.22 0.068 0.1
COMP
CIN (µF) 3 x 10 3 x 22 10 10
C
(µF) 2 x 100 2 x 47 47 33
OUT
CFB (pF) 390 1200 1800 1800
R1 (kΩ) (1%) 40.2 95.3 383 576
R2 (kΩ) (1%)10101010
R
(kΩ) 8.2 10 150 1800
COMP
RCS (Ω) 0.02 0.02 0.05 0.05
R
(kΩ) 150 150 150 150
FREQ
D1 CMSH5-40 CMSH5-40 CMR1U-02 CMR1U-02
L1 (µH) 10 10 47 82
P1
FDS6685 FDS6375 IRFR5410 IRFR5410
Page 18

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
18 ______________________________________________________________________________________
Chip Information
TRANSISTOR COUNT: 2441
PROCESS TECHNOLOGY: BiCMOS
Component Suppliers
Note: Please indicate that you are using the MAX1846/MAX1847 when contacting these component suppliers.
Pin Configurations
SUPPLIER COMPONENT PHONE WEBSITE
AVX Capacitors 803-946-0690 www.avxcorp.com
Central Semiconductor Diodes 516-435-1110 www.centralsemi.com
Coilcraft Inductors 847-639-6400 www.coilcraft.com
Dale Resistors 402-564-3131 www.vishay.com/brands/dale/main.html
Fairchild MOSFETs 408-721-2181 www.fairchildsemi.com
International
Rectifier
MOSFETs 310-322-3331 www.irf.com
IRC Resistors 512-992-7900 www.irctt.com
Kemet Capacitors 864-963-6300 www.kemet.com
On Semiconductor MOSFETs, Diodes 602-303-5454 www.onsemi.com
Panasonic Capacitors, Resistors 201-348-7522 www.panasonic.com
Sanyo Capacitors 619-661-6835 www.secc.co.jp
Siliconix MOSFETs 408-988-8000 www.siliconix.com
Sprague Capacitors 603-224-1961 www.vishay.com/brands/sprague/main.html
Sumida Inductors 847-956-0666 www.remtechcorp.com
Vitramon
Resistors 203-268-6261 www.vishay.com/brands/vitramon/main.html
TOP VIEW
VL
FREQ
COMP
1
2
MAX1846
3
4
5
10-PIN µMAX
1
10
9
8
7
6
POL SYNC
IN
2
VL
EXT
FREQ
COMP
N.C.
SHDN
REF
FB
3
MAX1847
4
5
6
7
8
16-PIN QSOP
CS
PGNDREF
GNDFB
16
15
IN
14
EXT
13
CS
12
PGND
GND
11
10
GND
9
N.C.
Page 19
MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
______________________________________________________________________________________ 19
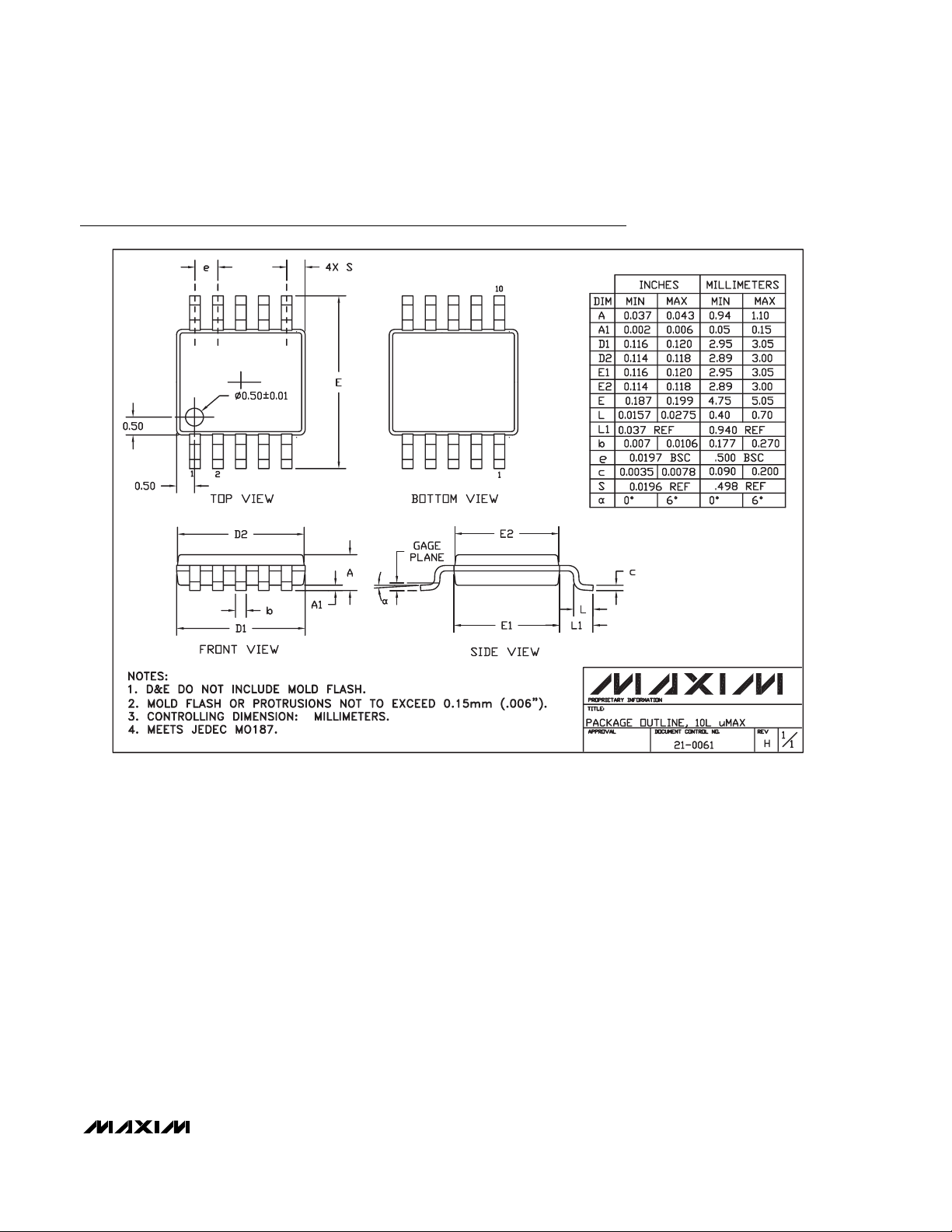
Package Information
10LUMAX.EPS
Page 20

MAX1846/MAX1847
High-Efficiency, Current-Mode,
Inverting PWM Controller
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are
implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.
20 ____________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600
© 2001 Maxim Integrated Products Printed USA is a registered trademark of Maxim Integrated Products.
Package Information (continued)
QSOP.EPS
 Loading...
Loading...