

General Description
The MAX12528 is a dual 80Msps, 12-bit analog-to-digital converter (ADC) featuring fully differential wideband
track-and-hold (T/H) inputs, driving internal quantizers.
The MAX12528 is optimized for low power, small size,
and high dynamic performance in intermediate frequency (IF) and baseband sampling applications. This dual
ADC operates from a single 3.3V supply, consuming
only 726mW while delivering a typical 69.8dB signal-tonoise ratio (SNR) performance at a 175MHz input frequency. The T/H input stages accept single-ended or
differential inputs up to 400MHz. In addition to low operating power, the MAX12528 features a 330µW powerdown mode to conserve power during idle periods.
A flexible reference structure allows the MAX12528 to
use the internal 2.048V bandgap reference or accept
an externally applied reference and allows the reference to be shared between the two ADCs. The reference structure allows the full-scale analog input range
to be adjusted from ±0.35V to ±1.15V. The MAX12528
provides a common-mode reference to simplify design
and reduce external component count in differential
analog input circuits.
The MAX12528 supports either a single-ended or differential input clock. User-selectable divide-by-two (DIV2)
and divide-by-four (DIV4) modes allow for design flexibility and help eliminate the negative effects of clock jitter.
Wide variations in the clock duty cycle are compensated
with the ADC’s internal duty-cycle equalizer (DCE).
The MAX12528 features two parallel, 12-bit-wide,
CMOS-compatible outputs. The digital output format is
pin-selectable to be either two’s complement or Gray
code. A separate power-supply input for the digital outputs accepts a 1.7V to 3.6V voltage for flexible interfacing with various logic levels. The MAX12528 is available
in a 10mm x 10mm x 0.8mm, 68-pin thin QFN package
with exposed paddle (EP), and is specified for the
extended (-40°C to +85°C) temperature range.
Applications
IF and Baseband Communication Receivers
Cellular, LMDS, Point-to-Point Microwave,
MMDS, HFC, WLAN
I/Q Receivers
Medical Imaging
Portable Instrumentation
Digital Set-Top Boxes
Low-Power Data Acquisition
Features
♦ Direct IF Sampling Up to 400MHz
♦ Excellent Dynamic Performance
70.7dB/69.8dB SNR at f
IN
= 70MHz/175MHz
78.2dBc/72.9dBc SFDR at fIN= 70MHz/175MHz
♦ 3.3V Low-Power Operation
760mW (Differential Clock Mode)
726mW (Single-Ended Clock Mode)
♦ Fully Differential or Single-Ended Analog Input
♦ Adjustable Differential Analog Input Voltage
♦ 750MHz Input Bandwidth
♦ Internal, External, or Shared Reference
♦ Differential or Single-Ended Clock
♦ Accepts 25% to 75% Clock Duty Cycle
♦ User-Selectable DIV2 and DIV4 Clock Modes
♦ Power-Down Mode
♦ CMOS Outputs in Two’s Complement or Gray
Code
♦ Out-of-Range and Data-Valid Indicators
♦ Compact, 68-Pin Thin QFN Package (10mm x
10mm x 0.8mm)
♦ Evaluation Kit Available (Order MAX12528EVKIT)
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
________________________________________________________________ Maxim Integrated Products 1
Ordering Information
19-3643; Rev 0; 4/05
For pricing, delivery, and ordering information, please contact Maxim/Dallas Direct! at
1-888-629-4642, or visit Maxim’s website at www.maxim-ic.com.
EVALUATION KIT
AVAILABLE
Pin Configuration appears at end of data sheet.
*EP = Exposed paddle.
Selector Guide
PART
SAMPLING RATE
(Msps)
RESOLUTION
(Bits)
MAX12528 80 12
MAX12557 65 14
MAX12527 65 12
PART TEMP RANGE PIN-PACKAGE
MAX12528ETK -40°C to +85°C
68 Thin QFN-EP*
PKG
CODE
T6800-2
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
2 _______________________________________________________________________________________
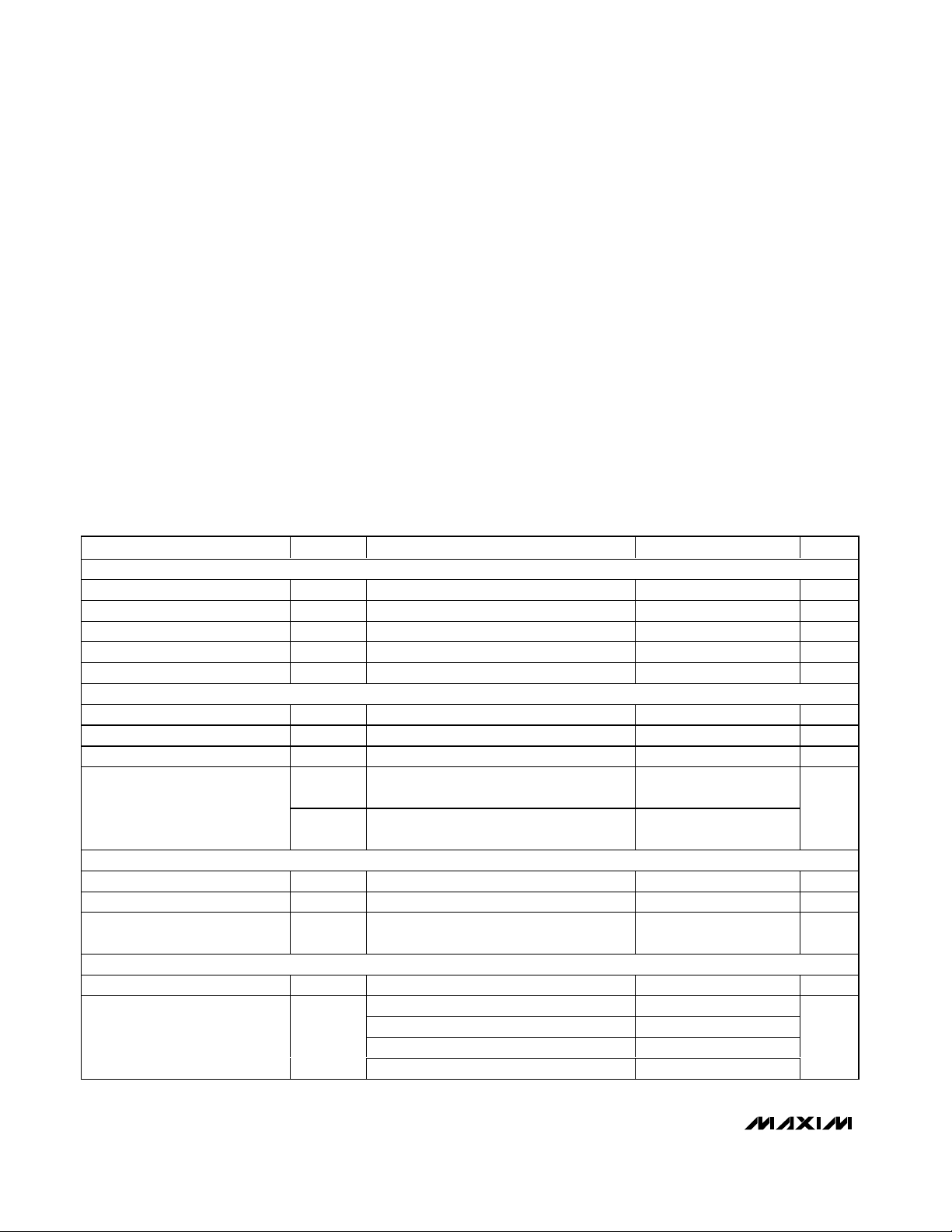
ABSOLUTE MAXIMUM RATINGS
ELECTRICAL CHARACTERISTICS
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference), CL≈ 10pF at digital outputs, AIN= -0.5dBFS (differential), DIFFCLK/SECLK = OV
DD
, PD = GND, SHREF = GND, DIV2 = GND, DIV4 = GND, G/T = GND, f
CLK
= 80MHz, TA= -40°C to
+85°C, unless otherwise noted. Typical values are at T
A
= +25°C.) (Note 1)
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to
absolute maximum rating conditions for extended periods may affect device reliability.
VDDto GND ................................................................-0.3V to +3.6V
OV
DD
to GND............-0.3V to the lower of (VDD+ 0.3V) and +3.6V
INAP, INAN to GND ...-0.3V to the lower of (V
DD
+ 0.3V) and +3.6V
INBP, INBN to GND ...-0.3V to the lower of (V
DD
+ 0.3V) and +3.6V
CLKP, CLKN to
GND ........................-0.3V to the lower of (V
DD
+ 0.3V) and +3.6V
REFIN, REFOUT
to GND ..................-0.3V to the lower of (V
DD
+ 0.3V) and +3.6V
REFAP, REFAN,
COMA to GND ......-0.3V to the lower of (V
DD
+ 0.3V) and +3.6V
REFBP, REFBN,
COMB to GND ......-0.3V to the lower of (V
DD
+ 0.3V) and +3.6V
DIFFCLK/SECLK, G/T, PD, SHREF, DIV2,
DIV4 to GND .........-0.3V to the lower of (V
DD
+ 0.3V) and +3.6V
D0A–D11A, D0B–D11B, DAV,
DORA, DORB to GND..............................-0.3V to (OV
DD
+ 0.3V)
Continuous Power Dissipation (T
A
= +70°C)
68-Pin Thin QFN 10mm x 10mm x 0.8mm
(derate 70mW/°C above +70°C) ....................................4000mW
Thermal Resistance θjc........................................................0.4°C/W
Operating Temperature Range................................-40°C to +85°C
Junction Temperature ...........................................................+150°C
Storage Temperature Range .................................-65°C to +150°C
Lead Temperature (soldering, 10s)......................................+300°C
DC ACCURACY
Resolution 12 Bits
Integral Nonlinearity INL fIN = 3MHz ±0.6 ±1.6 LSB
Differential Nonlinearity DNL fIN = 3MHz, no missing codes ±0.3 ±0.85 LSB
Offset Error ±0.1 ±0.7 %FSR
Gain Error ±0.5 ±4.3 %FSR
ANALOG INPUT (INAP, INAN, INBP, INBN)
Differential Input Voltage Range V
Common-Mode Input Voltage V
Analog Input Resistance R
Analog Input Capacitance
CONVERSION RATE
Maximum Clock Frequency f
Minimum Clock Frequency 5 MHz
Data Latency Figure 5 8
DYNAMIC CHARACTERISTICS
Small-Signal Noise Floor SSNF Input at -35dBFS 71.0 72.1 dBFS
Signal-to-Noise Ratio SNR
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
DIFF
C
PAR
C
SAMPLE
CLK
IN
Differential or single-ended inputs ±1.024 V
Each input (Figure 3) 2 kΩ
Fixed capacitance to ground,
each input (Figure 3)
Switched capacitance,
each input (Figure 3)
fIN = 3MHz at -0.5dBFS 69.3 71.2
fIN = 40MHz at -0.5dBFS 70.7
fIN = 70MHz at -0.5dBFS 70.7
f
= 175MHz at -0.5dBFS 67.1 69.8
IN
/ 2 V
DD
2
4.5
80 MHz
pF
Clock
Cycles
dB
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
_______________________________________________________________________________________ 3
ELECTRICAL CHARACTERISTICS (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference), CL≈ 10pF at digital outputs, AIN= -0.5dBFS (differential), DIFFCLK/SECLK = OV
DD
, PD = GND, SHREF = GND, DIV2 = GND, DIV4 = GND, G/T = GND, f
CLK
= 80MHz, TA= -40°C to
+85°C, unless otherwise noted. Typical values are at T
A
= +25°C.) (Note 1)
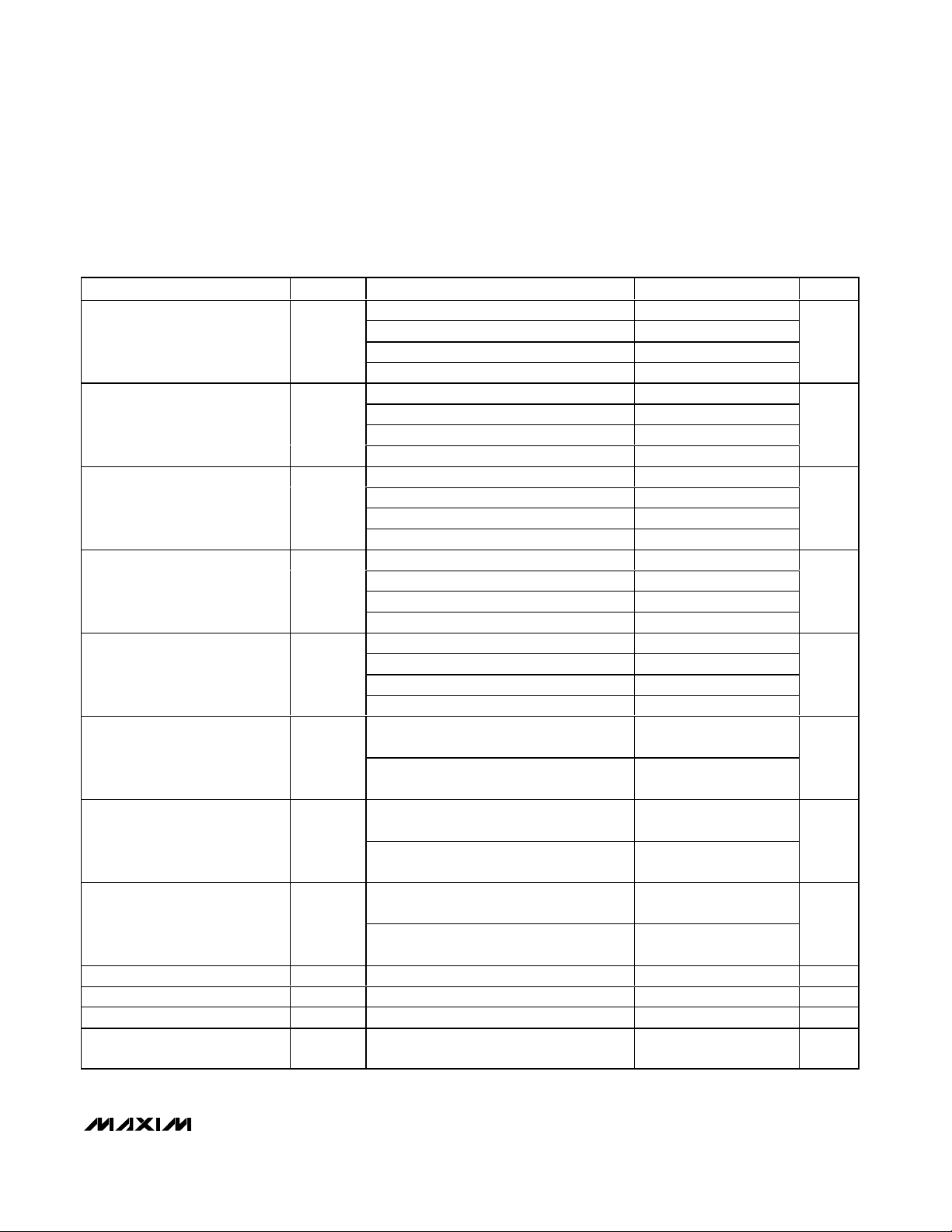
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Signal-to-Noise Plus Distortion SINAD
Spurious-Free Dynamic Range SFDR
Total Harmonic Distortion THD
Second Harmonic HD2
Third Harmonic HD3
Two-Tone Intermodulation
Distortion (Note 2)
3rd-Order Intermodulation
Distortion
Two-Tone Spurious-Free
Dynamic Range
Full-Power Bandwidth FPBW Input at -0.2dBFS, -3dB rolloff 750 MHz
Aperture Delay t
Aperture Jitter t
Output Noise n
fIN = 3MHz at -0.5dBFS 68.9 70.8
fIN = 40MHz at -0.5dBFS 70.2
fIN = 70MHz at -0.5dBFS 69.6
= 175MHz at -0.5dBFS 64.6 67.7
f
IN
fIN = 3MHz at -0.5dBFS 74.7 85.6
fIN = 40MHz at -0.5dBFS 81.8
fIN = 70MHz at -0.5dBFS 78.2
f
= 175MHz at -0.5dBFS 67.2 72.9
IN
fIN = 3MHz at -0.5dBFS -84.2 -73.3
fIN = 40MHz at -0.5dBFS -79.3
fIN = 70MHz at -0.5dBFS -75.8
f
= 175MHz at -0.5dBFS -71.9 -66.4
IN
fIN = 3MHz at -0.5dBFS -87.2
fIN = 40MHz at -0.5dBFS -85.2
fIN = 70MHz at -0.5dBFS -85
= 175MHz at -0.5dBFS -81.5
f
IN
fIN = 3MHz at -0.5dBFS -92.1
fIN = 40MHz at -0.5dBFS -85.5
fIN = 70MHz at -0.5dBFS -78.2
= 175MHz at -0.5dBFS -72.9
f
IN
f
= 68.5MHz at -7dBFS
IN1
f
= 71.5MHz at -7dBFS
TTIMD
IM3
SFDR
AD
AJ
OUT
IN2
f
= 172.5MHz at -7dBFS
IN1
f
= 177.5MHz at -7dBFS
IN2
f
= 68.5MHz at -7dBFS
IN1
f
= 71.5MHz at -7dBFS
IN2
f
= 172.5MHz at -7dBFS
IN1
f
= 177.5MHz at -7dBFS
IN2
f
= 68.5MHz at -7dBFS
IN1
= 71.5MHz at -7dBFS
f
IN2
TT
f
= 172.5MHz at -7dBFS
IN1
= 177.5MHz at -7dBFS
f
IN2
Figure 5 1.2 ns
INAP = INAN = COMA
INBP = INBN = COMB
-77.5
-72.8
-78.6
-74.3
78.6
74.3
<0.15 ps
0.3 LSB
dB
dBc
dBc
dBc
dBc
dBc
dBc
dBc
RMS
RMS
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
4 _______________________________________________________________________________________
ELECTRICAL CHARACTERISTICS (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference), CL≈ 10pF at digital outputs, AIN= -0.5dBFS (differential), DIFFCLK/SECLK = OV
DD
, PD = GND, SHREF = GND, DIV2 = GND, DIV4 = GND, G/T = GND, f
CLK
= 80MHz, TA= -40°C to
+85°C, unless otherwise noted. Typical values are at T
A
= +25°C.) (Note 1)
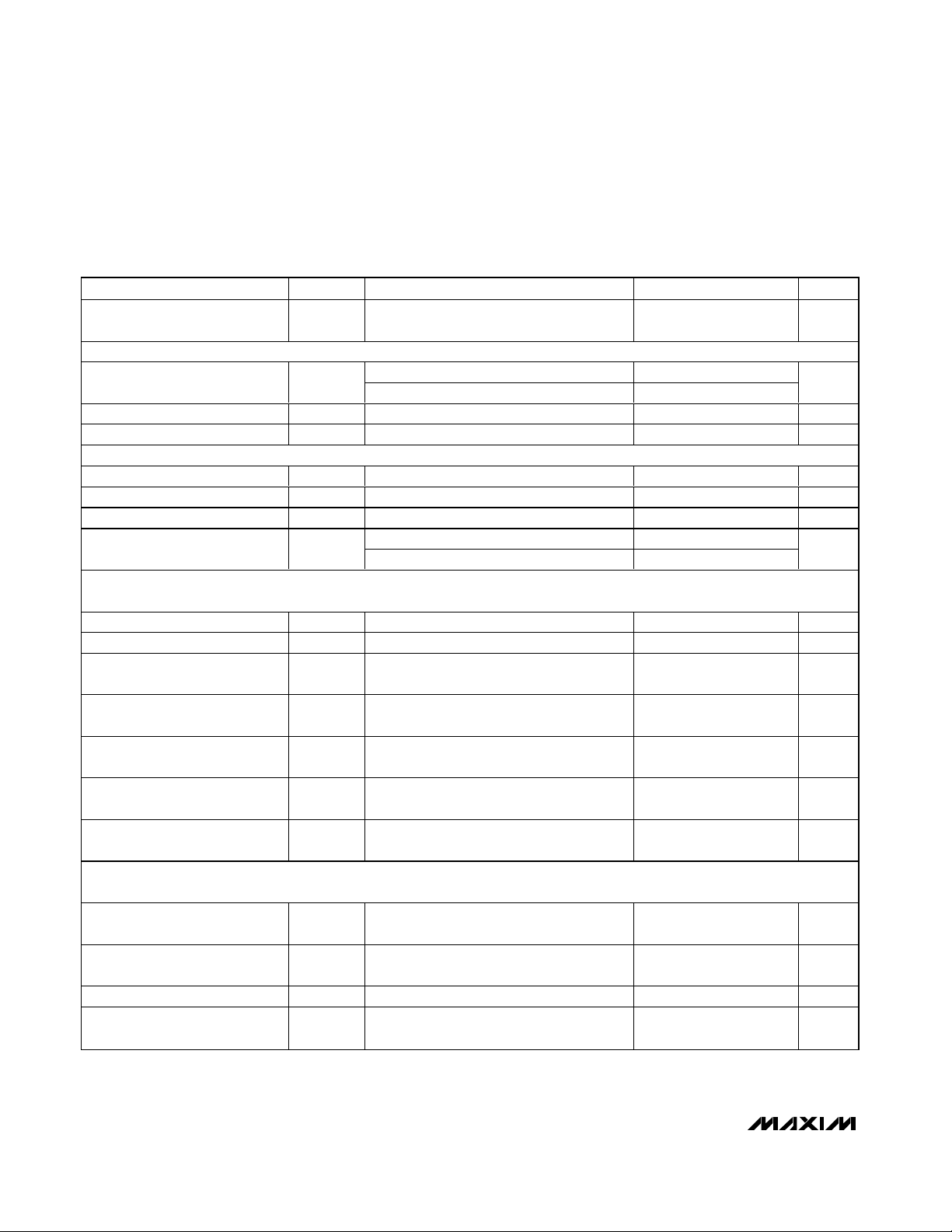
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Overdrive Recovery Time ±10% beyond full scale 1
INTERCHANNEL CHARACTERISTICS
Crosstalk Rejection
Gain Matching ±0.01 ±0.1 dB
Offset Matching ±0.01 %FSR
INTERNAL REFERENCE (REFOUT)
REFOUT Output Voltage V
REFOUT Load Regulation -1mA < I
REFOUT Temperature Coefficient TC
REFOUT Short-Circuit Current
BUFFERED REFERENCE MODE (REFIN is driven by REFOUT or an external 2.048V single-ended reference source;
V
REFAP/VREFAN/VCOMA
REFIN Input Voltage V
REFIN Input Resistance R
COM_ Output Voltage
REF_P Output Voltage
REF_N Output Voltage
Differential Reference Voltage
Differential Reference
Temperature Coefficient
UNBUFFERED EXTERNAL REFERENCE (REFIN = GND, V
externally, V
COMA
= V
REF_P Input Voltage
REF_N Input Voltage
COM_ Input Voltage V
Differential Reference Voltage
REFOUT
REF
f
or f
INA
INB
f
or f
INA
INB
REFOUT
= 70MHz at -0.5dBFS 90
= 175MHz at -0.5dBFS 85
< +1mA 35 mV/mA
Short to VDD—sinking 0.24
Short to GND—sourcing 2.1
and V
COMB
REFBP/VREFBN/VCOMB
REFIN
REFIN
V
COMA
V
COMB
V
REFAP
V
REFBP
V
REFAN
V
REFBN
V
REFA
V
REFB
TC
REF
= VDD / 2)
V
REFAP
V
REFBP
V
REFAN
V
REFBN
COM
V
REFA
V
REFB
are generated internally)
VDD / 2 1.60 1.65 1.70 V
VDD / 2 + (V
VDD / 2 - (V
V
= V
REFA
V
= V
REFB
V
- V
REF_P
V
- V
REF_N
x 3/8) 2.418 V
REFIN
x 3/8) 0.882 V
REFIN
- V
REFAP
REFBP
COM
COM
REFAN
- V
REFBN
REFAP/VREFAN/VCOMA
and V
VDD / 2 1.65 V
V
REF_
= V
REF_P
- V
REF_N
= V
x 3/4 1.536 V
REFIN
1.995 2.048 2.075 V
65 ppm/°C
2.048 V
>50 MΩ
1.440 1.536 1.590 V
30 ppm/°C
REFBP/VREFBN/VCOMB
are applied
+0.768 V
-0.768 V
Clock
cycle
dB
mA
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
_______________________________________________________________________________________ 5
ELECTRICAL CHARACTERISTICS (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference), CL≈ 10pF at digital outputs, AIN= -0.5dBFS (differential), DIFFCLK/SECLK = OV
DD
, PD = GND, SHREF = GND, DIV2 = GND, DIV4 = GND, G/T = GND, f
CLK
= 80MHz, TA= -40°C to
+85°C, unless otherwise noted. Typical values are at T
A
= +25°C.) (Note 1)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
REF_P Sink Current
REF_N Source Current
COM_ Sink Current
REF_P, REF_N Capacitance
COM_ Capacitance C
CLOCK INPUTS (CLKP, CLKN)
Single-Ended Input High
Threshold
Single-Ended Input Low
Threshold
Minimum Differential Clock Input
Voltage Swing
Differential Input Common-Mode
Voltage
CLK_ Input Resistance R
CLK_ Input Capacitance C
DIGITAL INPUTS (DIFFCLK/SECLK, G/T, PD, DIV2, DIV4)
Input High Threshold V
Input Low Threshold V
Input Leakage Current
Digital Input Capacitance C
DIGITAL OUTPUTS (D0A–D11A, D0B–D11B, DORA, DORB, DAV)
Output-Voltage Low V
Output-Voltage High V
Three-State Leakage Current
(Note 3)
I
REFAP
I
REFBP
I
REFAN
I
REFBN
I
COMA
I
COMB
C
REF_P
C
REF_N
COM_
V
V
CLK
CLK
,
IH
IL
IH
IL
V
= 2.418V 1.2 mA
REF_P
V
= 0.882V 0.85 mA
REF_N
V
= 1.65V 0.85 mA
COM_
DIFFCLK/SECLK = GND, CLKN = GND
DIFFCLK/SECLK = GND, CLKN = GND
DIFFCLK/SECLK = OV
DIFFCLK/SECLK = OV
DD
DD
Each input (Figure 4) 5 kΩ
Each input 2 pF
OVDD applied to input ±5
Input connected to ground ±5
DIN
D0A–D11A, D0B–D11B, DORA, DORB:
I
= 200µA
SINK
DAV: I
D0A–D11A, D0B–D11B, DORA, DORB:
I
SOURCE
DAV: I
= 600µA 0.2
SINK
OV
= 200µA
SOURCE
= 600µA
OV
OVDD applied to input ±5
Input connected to ground ±5
OH
I
LEAK
OL
0.8 x
V
DD
0.8 x
OV
DD
0.2
DD
0.2
13 pF
6pF
0.2 V
V
DD
DD
5pF
-
-
0.2 x
V
DD
/ 2 V
0.2 x
OV
DD
0.2
V
V
P-P
V
V
µA
V
V
µA
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
6 _______________________________________________________________________________________
ELECTRICAL CHARACTERISTICS (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference), CL≈ 10pF at digital outputs, AIN= -0.5dBFS (differential), DIFFCLK/SECLK = OV
DD
, PD = GND, SHREF = GND, DIV2 = GND, DIV4 = GND, G/T = GND, f
CLK
= 80MHz, TA= -40°C to
+85°C, unless otherwise noted. Typical values are at T
A
= +25°C.) (Note 1)
D 0A–D 11A, D O RA,
D 0B–D 11B and D ORB Thr ee- S tate
O utp ut C ap aci tance
DAV Three-State Output
Capacitance
POWER REQUIREMENTS
Analog Supply Voltage V
Digital Output Supply Voltage OV
Analog Supply Current I
Analog Power Dissipation P
Digital Output Supply Current I
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
C
OUT
C
DAV
DD
VDD
VDD
OVDD
DD
( N ote 3) 3 pF
(Note 3) 6 pF
Normal operating mode
f
= 175MHz at -0.5dBFS,
IN
single-ended clock
(DIFFCLK/SECLK = GND)
Normal operating mode
= 175MHz at -0.5dBFS,
f
IN
differential clock
(DIFFCLK/SECLK = OV
Power-down mode (PD = OVDD)
clock idle
Normal operating mode
f
= 175MHz at -0.5dBFS,
IN
single-ended clock
(DIFFCLK/SECLK = GND)
Normal operating mode
= 175MHz at -0.5dBFS,
f
IN
differential clock
(DIFFCLK/SECLK = OV
Power-down mode (PD = OVDD)
clock idle
Normal operating mode
= 175MHz at -0.5dBFS
f
IN
Power-down mode (PD = OVDD)
clock idle
DD
DD
)
)
3.15 3.30 3.60 V
1.70 2.0 V
220
230 250
0.1
726
760 825
0.330
20.7
0.004
DD
V
mA
mW
mA

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
_______________________________________________________________________________________ 7
ELECTRICAL CHARACTERISTICS (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference), CL≈ 10pF at digital outputs, AIN= -0.5dBFS (differential), DIFFCLK/SECLK = OV
DD
, PD = GND, SHREF = GND, DIV2 = GND, DIV4 = GND, G/T = GND, f
CLK
= 80MHz, TA= -40°C to
+85°C, unless otherwise noted. Typical values are at T
A
= +25°C.) (Note 1)
Note 1: Specifications ≥+25°C guaranteed by production test, <+25°C guaranteed by design and characterization.
Note 2: Two-tone intermodulation distortion measured with respect to a single-carrier amplitude, and not the peak-to-average input
power of both input tones.
Note 3: During power-down, D0A–D11A, D0B–D11B, DORA, DORB, and DAV are high impedance.
Note 4: Guaranteed by design and characterization.
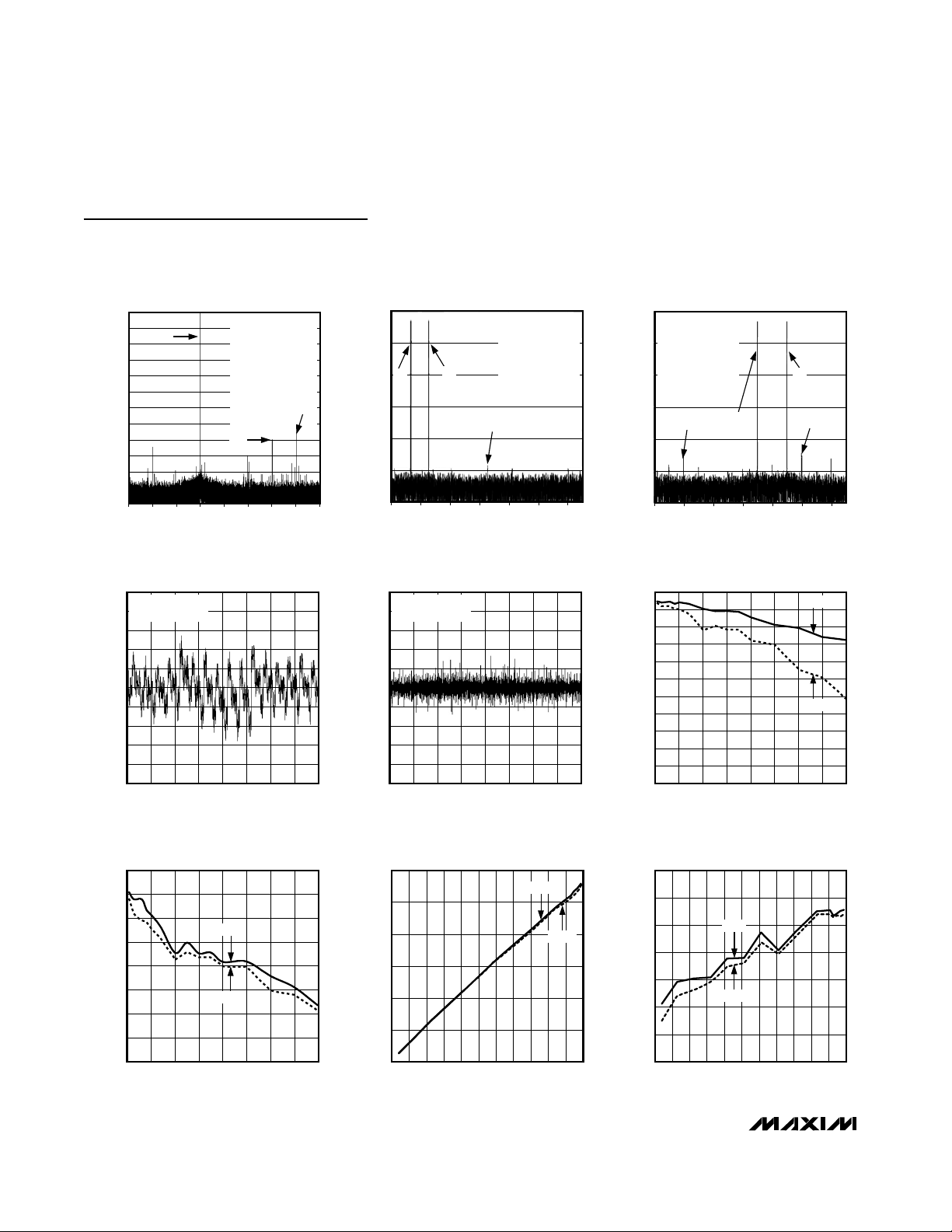
Typical Operating Characteristics
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference mode), CL≈ 5pF at digital outputs, AIN= -0.5dBFS,
DIFFCLK/SECLK = OVDD, PD = GND, G/T = GND, f
CLK
= 80MHz (50% duty cycle), TA= +25°C, unless otherwise noted.)
ANALOG INPUT FREQUENCY (MHz)
AMPLITUDE (dBFS)
30 35 402515 20105
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
-120
0
FFT PLOT (16,384-POINT DATA RECORD)
MAX12528 toc01
f
CLK
= 80MHz
f
IN
= 2.99926758MHz
A
IN
= -0.46dBFS
SNR = 70.9dB
SINAD = 70.7dB
THD = -84dBc
SFDR = 85.5dBc
HD2 = -86dBc
HD3 = -101dBc
f
IN
HD2
HD3
FFT PLOT (32,768-POINT DATA RECORD)
MAX12528 toc02
ANALOG INPUT FREQUENCY (MHz)
AMPLITUDE (dBFS)
30 35 402515 20105
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
-120
0
f
CLK
= 80MHz
f
IN
= 39.5092773MHz
A
IN
= -0.482dBFS
SNR = 71.1dB
SINAD = 70.5dB
THD = -79.1dBc
SFDR = 82.7dBc
HD2 = -87.6dBc
HD3 = -82.7dBc
f
IN
HD2
HD3
FFT PLOT (32,768-POINT DATA RECORD)
MAX12528 toc03
ANALOG INPUT FREQUENCY (MHz)
AMPLITUDE (dBFS)
30 35 402515 20105
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
-120
0
f
CLK
= 80MHz
f
IN
= 69.8999023MHz
A
IN
= -0.437dBFS
SNR = 71dB
SINAD = 69.2dB
THD = -73.9dBc
SFDR = 74.6dBc
HD2 = -94.6dBc
HD3 = -74.6dBc
HD3
HD2
f
IN
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
TIMING CHARACTERISTICS (Figure 5)
Clock Pulse-Width High t
Clock Pulse-Width Low t
Data-Valid Delay t
Data Setup Time Before Rising
Edge of DAV
Data Hold Time After Rising Edge
of DAV
Wake-Up Time from Power-Down t
CH
CL
DAV
t
SETUP
t
HOLD
WAKE
(Note 4) 5.0 ns
(Note 4) 5.5 ns
V
= 2.048V 10 ms
REFIN
6.2 ns
6.2 ns
5.3 ns
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
8 _______________________________________________________________________________________
Typical Operating Characteristics (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference mode), CL≈ 5pF at digital outputs, AIN= -0.5dBFS,
DIFFCLK/SECLK = OV
DD
, PD = GND, G/T = GND, f
CLK
= 80MHz (50% duty cycle), TA= +25°C, unless otherwise noted.)
FFT PLOT (32,768-POINT DATA RECORD)
0
-10
-20
-30
-40
-50
-60
-70
AMPLITUDE (dBFS)
-80
-90
-100
-110
-120
f
IN
0
ANALOG INPUT FREQUENCY (MHz)
f
= 80MHz
CLK
= 174.9780273MHz
f
IN
= -0.468dBFS
A
IN
SNR = 69.5dB
SINAD = 67.9dB
THD = -73.1dBc
SFDR = 75dBc
HD2 = -79.3dBc
HD3 = -75dBc
HD2
30 35 402515 20105
MAX12528 toc04
HD3
AMPLITUDE (dBFS)
0
-20
-40
-60
-80
-100
-120
TWO-TONE IMD PLOT
(16,384-POINT DATA RECORD)
f
CLK
f
IN1
f
IN2
A
2f
+ f
IN2
A
IM3 = -92.3dBc
IMD = -89.1dBc
IN1
f
IN1
0
f
IN2
ANALOG INPUT FREQUENCY (MHz)
= 65.00352MHz
= 68.49889MHz
= 71.49832MHz
= -6.96dBFS
IN1
= -7.02dBFS
IN2
(16,384-POINT DATA RECORD)
0
f
= 65.00352MHz
CLK
= 172.50293MHz
f
IN1
-20
= -6.99dBFS
A
MAX12528 toc05
30252015105
IN1
= 177.40198MHz
f
IN2
= -7.01dBFS
A
IN2
-40
IM3 = -88.9dBc
IMD = -82.2dBc
-60
f
AMPLITUDE (dBFS)
-100
-120
IN2
-80
0
ANALOG INPUT FREQUENCY (MHz)
- f
TWO-TONE IMD PLOT
f
IN2
IN1
f
IN1
f
MAX12528 toc06
+ f
IN1
IN2
30252015105
INTEGRAL NONLINEARITY
vs. DIGITAL OUTPUT CODE
1.0
f
= 80MHz
CLK
0.8
= 2.1655273MHz
f
0.6
0.4
0.2
0
INL (LSB)
-0.2
-0.4
-0.6
-0.8
-1.0
IN
3072 3584 409625601536 204810245120
DIGITAL OUTPUT CODE
MAX12528 toc07
DNL (LSB)
-THD, SFDR vs. ANALOG INPUT FREQUENCY
= 80MHz, AIN = -0.5dBFS)
(f
CLK
90
85
80
75
70
65
-THD, SFDR (dBc)
60
55
50
0400
SFDR
-THD
fIN (MHz)
MAX12528 toc10
350300200 250100 15050
DIFFERENTIAL NONLINEARITY
vs. DIGITAL OUTPUT CODE
1.0
f
= 80MHz
CLK
0.8
= 2.1655273MHz
f
IN
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1.0
SNR, SINAD vs. ANALOG INPUT AMPLITUDE
(f
75
65
55
45
SNR, SINAD (dB)
35
25
15
CLK
-55 0
3072 3584 409625601536 204810245120
DIGITAL OUTPUT CODE
= 80MHz, fIN = 70MHz)
SNR
AIN (dBFS)
SINAD
-5-10-15-20-25-30-35-40-45-50
MAX12528 toc08
MAX12528 toc11
SNR, SINAD vs. ANALOG INPUT FREQUENCY
= 80MHz, AIN = -0.5dBFS)
(f
CLK
72
70
68
66
64
62
60
58
SNR, SINAD (dB)
56
54
52
50
0 400
fIN (MHz)
SINAD
-THD, SFDR vs. ANALOG INPUT AMPLITUDE
= 80MHz, fIN = 70MHz)
(f
90
80
70
60
50
-THD, SFDR (dB)
40
30
20
CLK
SFDR
-THD
-55 0
AIN (dBFS)
SNR
MAX12528 toc09
350300200 250100 15050
MAX12528 toc12
-5-10-15-20-25-30-35-40-45-50
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
_______________________________________________________________________________________ 9
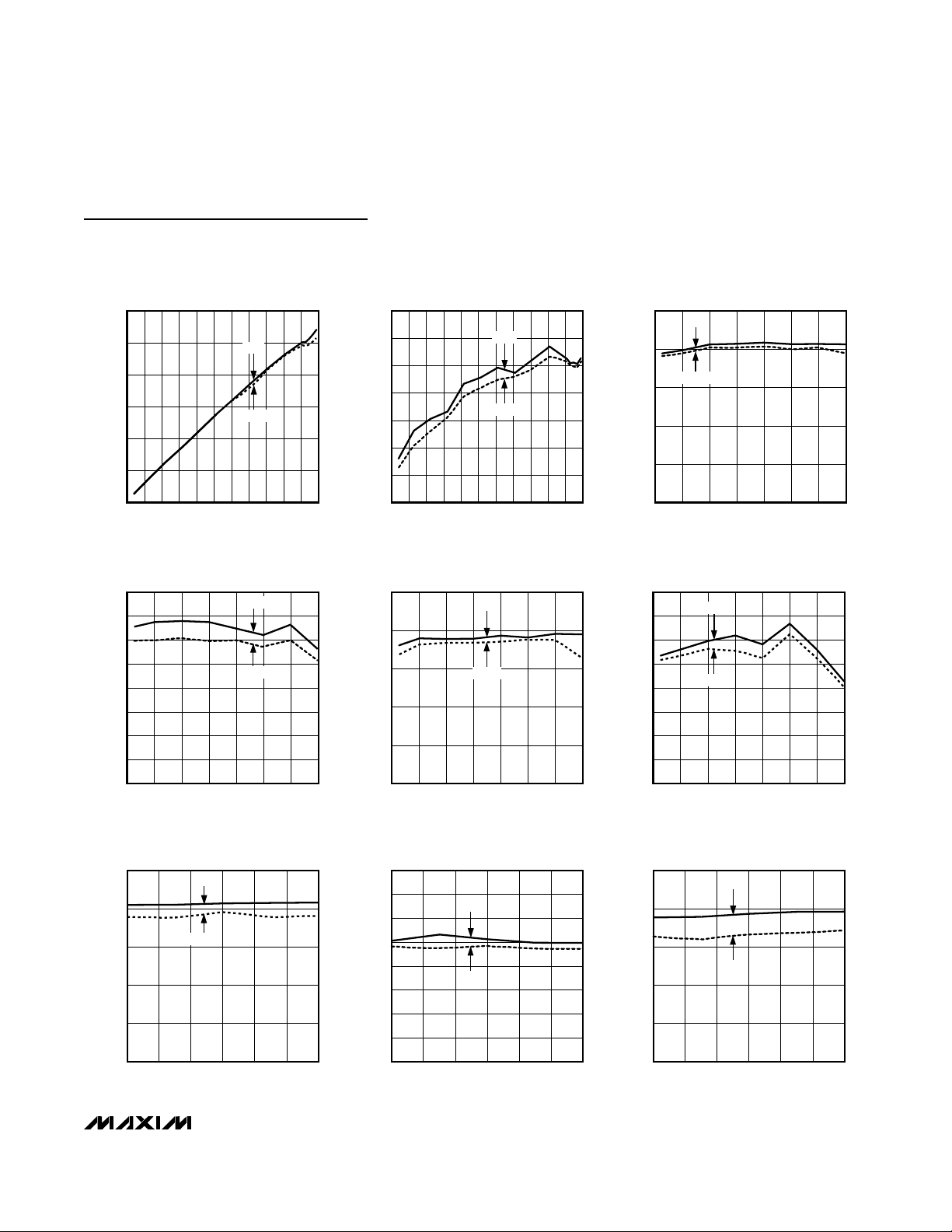
Typical Operating Characteristics (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference mode), CL≈ 5pF at digital outputs, AIN= -0.5dBFS,
DIFFCLK/SECLK = OV
DD
, PD = GND, G/T = GND, f
CLK
= 80MHz (50% duty cycle), TA= +25°C, unless otherwise noted.)
SNR, SINAD vs. ANALOG INPUT AMPLITUDE
75
65
55
45
SNR, SINAD (dB)
35
25
15
-55 0
= 80MHz, fIN = 175MHz)
(f
CLK
SNR
SINAD
AIN (dBFS)
-THD, SFDR vs. CLOCK SPEED
= 70MHz, AIN = -0.5dBFS)
(f
90
85
80
75
70
65
-THD, SFDR (dBc)
60
55
50
IN
SFDR
-THD
10 80
f
(MHz)
CLK
SNR, SINAD vs. ANALOG SUPPLY VOLTAGE
= 70MHz)
(f
75
70
65
60
SNR, SINAD (dB)
55
50
3.0 3.6
IN
SNR
SINAD
VDD (V)
MAX12528 toc13
-THD, SFDR (dBc)
-5-10-15-20-25-30-35-40-45-50
MAX12528 toc16
SNR, SINAD (dB)
706050403020
MAX12528 toc19
-THD, SFDR (dBc)
3.53.43.33.23.1
-THD, SFDR vs. ANALOG INPUT AMPLITUDE
90
80
70
60
50
40
30
20
-55 0
= 80MHz, fIN = 175MHz)
(f
CLK
SFDR
-THD
AIN (dBFS)
-5-10-15-20-25-30-35-40-45-50
SNR, SINAD vs. CLOCK SPEED
75
70
65
60
55
50
10 80
f
CLK
SNR
SINAD
706050403020
(MHz)
= 175MHz, AIN = -0.5dBFS)
(f
IN
-THD, SFDR vs. ANALOG SUPPLY VOLTAGE
= 70MHz)
(f
90
85
80
75
70
65
60
55
50
3.0 3.6
IN
SFDR
-THD
3.53.43.33.23.1
VDD (V)
MAX12528 toc14
SNR, SINAD (dB)
MAX12528 toc17
-THD, SFDR (dBc)
MAX12528 toc20
SNR, SINAD (dB)
SNR, SINAD vs. CLOCK SPEED
= 70MHz, AIN = -0.5dBFS)
(f
75
70
65
60
55
50
IN
SNR
SINAD
10 80
-THD, SFDR vs. CLOCK SPEED
= 175MHz, AIN = -0.5dBFS)
(f
IN
90
85
80
75
70
65
60
55
50
10 80
SNR, SINAD vs. ANALOG SUPPLY VOLTAGE
75
70
65
60
55
50
3.0 3.6
SFDR
-THD
(f
f
(MHz)
CLK
f
(MHz)
CLK
= 175MHz)
IN
SNR
SINAD
VDD (V)
706050403020
706050403020
3.53.43.33.23.1
MAX12528 toc15
MAX12528 toc18
MAX12528 toc21

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
10 ______________________________________________________________________________________
Typical Operating Characteristics (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference mode), CL≈ 5pF at digital outputs, AIN= -0.5dBFS,
DIFFCLK/SECLK = OV
DD
, PD = GND, G/T = GND, f
CLK
= 80MHz (50% duty cycle), TA= +25°C, unless otherwise noted.)
-THD, SFDR vs. ANALOG SUPPLY VOLTAGE
90
85
80
75
70
65
-THD, SFDR (dBc)
60
55
50
3.0 3.6
= 175MHz)
(f
IN
SFDR
-THD
VDD (V)
SNR, SINAD vs. DIGITAL SUPPLY VOLTAGE
= 175MHz)
(f
75
70
65
60
SNR, SINAD (dB)
55
50
1.5 3.6
IN
SNR
SINAD
OVDD (V)
MAX12528 toc22
SNR, SINAD (dB)
3.53.43.33.23.1
MAX12528 toc25
-THD, SFDR (dBc)
3.33.02.72.42.11.8
SNR, SINAD vs. DIGITAL SUPPLY VOLTAGE
= 70MHz)
(f
75
70
65
60
55
50
1.5 3.6
IN
SNR
SINAD
3.33.02.72.42.11.8
OVDD (V)
-THD, SFDR vs. DIGITAL POWER SUPPLY
= 175MHz)
(f
80
76
72
68
64
60
1.5 3.6
IN
SFDR
-THD
3.33.02.72.42.11.8
OVDD (V)
MAX12528 toc23
MAX12528 toc26
-THD, SFDR vs. DIGITAL SUPPLY VOLTAGE
90
85
80
75
70
65
-THD, SFDR (dBc)
60
55
50
1.5 3.6
P
, I
DISS
1000
900
800
700
600
(mW, mA)
VDD
500
, I
DISS
400
P
300
200
100
(ANALOG) vs. ANALOG SUPPLY VOLTAGE
VDD
3.0 3.6
P
DISS
= 70MHz)
(f
IN
OVDD (V)
= 175MHz)
(f
IN
(ANALOG)
I
VDD
VDD (V)
SFDR
-THD
MAX12528 toc24
3.33.02.72.42.11.8
MAX12528 toc27
3.53.43.33.23.1
P
, I
DISS
100
(mW, mA)
OVDD
, I
DISS
P
(DIGITAL) vs. DIGITAL SUPPLY VOLTAGE
OVDD
90
80
70
60
50
40
30
20
10
0
1.5 3.6
= 175MHz)
(f
IN
P
DISS
I
OVDD (V)
(DIGITAL)
OVDD
SNR, SINAD vs. CLOCK DUTY CYCLE
= 70MHz, AIN = -0.5dBFS)
(f
75
MAX12528 toc28
3.33.01.8 2.1 2.4 2.7
70
65
60
SNR, SINAD (dB)
55
50
IN
SNR
SINAD
SINGLE-ENDED CLOCK DRIVE
25 75
CLOCK DUTY CYCLE (%)
65554535
MAX12528 toc29
-THD, SFDR vs. CLOCK DUTY CYCLE
= 70MHz, AIN = -0.5dBFS)
(f
90
85
80
75
-THD, SFDR (dBc)
70
65
60
IN
SINGLE-ENDED CLOCK DRIVE
25 75
CLOCK DUTY CYCLE (%)
MAX12528 toc30
SFDR
-THD
65554535

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 11
Typical Operating Characteristics (continued)
(VDD= 3.3V, OVDD= 2.0V, GND = 0, REFIN = REFOUT (internal reference mode), CL≈ 5pF at digital outputs, AIN= -0.5dBFS,
DIFFCLK/SECLK = OV
DD
, PD = GND, G/T = GND, f
CLK
= 80MHz (50% duty cycle), TA= +25°C, unless otherwise noted.)
SNR, SINAD (dB)
-0.5
GAIN ERROR (%FSR)
-1.0
-1.5
-2.0
SNR, SINAD vs. TEMPERATURE
= 175MHz, AIN = -0.5dBFS)
(f
IN
72
70
68
66
64
62
60
-40 85
SNR
SINAD
TEMPERATURE (°C)
GAIN ERROR vs. TEMPERATURE
= 2.048V)
(V
2.0
1.5
1.0
0.5
0
-40 -15 10 35 60 85
REFIN
TEMPERATURE (°C)
MAX12528 toc31
-THD, SFDR (dBc)
603510-15
-THD, SFDR vs. TEMPERATURE
= 175MHz, AIN = -0.5dBFS)
(f
IN
90
85
80
SFDR
75
70
65
60
-40 85
-THD
603510-15
TEMPERATURE (°C)
MAX12528 toc32
OFFSET ERROR vs. TEMPERATURE
0.20
MAX12528 toc33
0.15
0.10
0.05
0
-0.05
OFFSET ERROR (%FSR)
-0.10
-0.15
-0.20
-40 -15 10 35 60 85
TEMPERATURE (°C)
MAX12528 toc34

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
12 ______________________________________________________________________________________
Pin Description
PIN NAME FUNCTION
1, 4, 5, 9,
13, 14, 17
2 INAP Channel A Positive Analog Input
3 INAN Channel A Negative Analog Input
6 COMA Channel A Common-Mode Voltage I/O. Bypass COMA to GND with a 0.1µF capacitor.
7 REFAP
8 REFAN
10 REFBN
11 REFBP
12 COMB Channel A Common-Mode Voltage I/O. Bypass COMB to GND with a 0.1µF capacitor.
15 INBN Channel B Negative Analog Input
16 INBP Channel B Positive Analog Input
18
19 CLKN
20 CLKP
21 DIV2 Divide-by-Two Clock-Divider Digital Control Input. See Table 2 for details.
22 DIV4 Divide-by-Four Clock-Divider Digital Control Input. See Table 2 for details.
23–26, 61,
62, 63
27, 43, 60 OV
28, 29, 45,
46
GND Converter Ground. Connect all ground pins and the exposed paddle (EP) together.
DIFFCLK/
SECLK
V
DD
DD
N.C. No Connection
Channel A Positive Reference I/O. Channel A conversion range is ±2/3 x (V
REFAP with a 0.1µF capacitor to GND. Connect a 10µF and a 1µF bypass capacitor between REFAP
and REFAN. Place the 1µF REFAP-to-REFAN capacitor as close to the device as possible on the
same side of the PC board.
Channel A Negative Reference I/O. Channel A conversion range is ±2/3 x (V
REFAN with a 0.1µF capacitor to GND. Connect a 10µF and a 1µF bypass capacitor between REFAP
and REFAN. Place the 1µF REFAP-to-REFAN capacitor as close to the device as possible on the
same side of the PC board.
Channel B Negative Reference I/O. Channel B conversion range is ±2/3 x (V
REFBN with a 0.1µF capacitor to GND. Connect a 10µF and a 1µF bypass capacitor between REFBP
and REFBN. Place the 1µF REFBP-to-REFBN capacitor as close to the device as possible on the
same side of the PC board.
Channel B Positive Reference I/O. Channel B conversion range is ±2/3 x (V
REFBP with a 0.1µF capacitor to GND. Connect a 10µF and a 1µF bypass capacitor between REFBP
and REFBN. Place the 1µF REFBP-to-REFBN capacitor as close to the device as possible on the
same side of the PC board.
Differential/Single-Ended Input Clock Drive. This input selects between single-ended or differential clock
input drives.
DIFFCLK/SECLK = GND: Selects single-ended clock input drive.
DIFFCLK/SECLK = OV
Negative Clock Input. In differential clock input mode (DIFFCLK/SECLK = OV
clock signal between CLKP and CLKN. In single-ended clock mode (DIFFCLK/SECLK = GND), apply the
clock signal to CLKP and connect CLKN to GND.
Positive Clock Input. In differential clock input mode (DIFFCLK/SECLK = OV
clock signal between CLKP and CLKN. In single-ended clock mode (DIFFCLK/SECLK = GND), apply
the single-ended clock signal to CLKP and connect CLKN to GND.
Analog Power Input. Connect VDD to a 3.15V to 3.60V power supply. Bypass VDD to GND with a parallel
capacitor combination of ≥10µF and 0.1µF. Connect all V
Output-Driver Power Input. Connect OVDD to a 1.7V to VDD power supply. Bypass OVDD to GND with a
parallel capacitor combination of ≥10µF and 0.1µF.
: Selects differential clock input drive.
DD
pins to the same potential.
DD
- V
REFAP
- V
REFAP
REFBP
- V
REFBP
), connect a differential
DD
), connect a differential
DD
REFAN
- V
REFBN
REFBN
REFAN
). Bypass
). Bypass
). Bypass
). Bypass

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 13
Pin Description (continued)
PIN NAME FUNCTION
30 D0B Channel B CMOS Digital Output, Bit 0 (LSB)
31 D1B Channel B CMOS Digital Output, Bit 1
32 D2B Channel B CMOS Digital Output, Bit 2
33 D3B Channel B CMOS Digital Output, Bit 3
34 D4B Channel B CMOS Digital Output, Bit 4
35 D5B Channel B CMOS Digital Output, Bit 5
36 D6B Channel B CMOS Digital Output, Bit 6
37 D7B Channel B CMOS Digital Output, Bit 7
38 D8B Channel B CMOS Digital Output, Bit 8
39 D9B Channel B CMOS Digital Output, Bit 9
40 D10B Channel B CMOS Digital Output, Bit 10
41 D11B Channel B CMOS Digital Output, Bit 11 (MSB)
Channel B Data Out-of-Range Indicator. The DORB digital output indicates when the channel B analog
42 DORB
44 DAV
47 D0A Channel A CMOS Digital Output, Bit 0 (LSB)
48 D1A Channel A CMOS Digital Output, Bit 1
49 D2A Channel A CMOS Digital Output, Bit 2
50 D3A Channel A CMOS Digital Output, Bit 3
51 D4A Channel A CMOS Digital Output, Bit 4
52 D5A Channel A CMOS Digital Output, Bit 5
53 D6A Channel A CMOS Digital Output, Bit 6
54 D7A Channel A CMOS Digital Output, Bit 7
55 D8A Channel A CMOS Digital Output, Bit 8
56 D9A Channel A CMOS Digital Output, Bit 9
57 D10A Channel A CMOS Digital Output, Bit 10
58 D11A Channel A CMOS Digital Output, Bit 11 (MSB)
59 DORA
64 G/T
65 PD
input voltage is out of range.
DORB = 1: Digital outputs exceed full-scale range.
DORB = 0: Digital outputs are within full-scale range.
Data-Valid Digital Output. The rising edge of DAV indicates that data is present on the digital outputs.
The MAX12528 evaluation kit (MAX12528 EV kit) utilizes DAV to latch data into any external back-end
digital logic.
Channel A Data Out-of-Range Indicator. The DORA digital output indicates when the channel A analog
input voltage is out of range.
DORA = 1: Digital outputs exceed full-scale range.
DORA = 0: Digital outputs are within full-scale range.
Output Format Select Digital Input.
G/T = GND: Two’s-complement output format selected.
G/T = OV
Power-Down Digital Input.
PD = GND: ADCs are fully operational.
PD = OV
: Gray-code output format selected.
DD
: ADCs are powered down.
DD
MAX12528
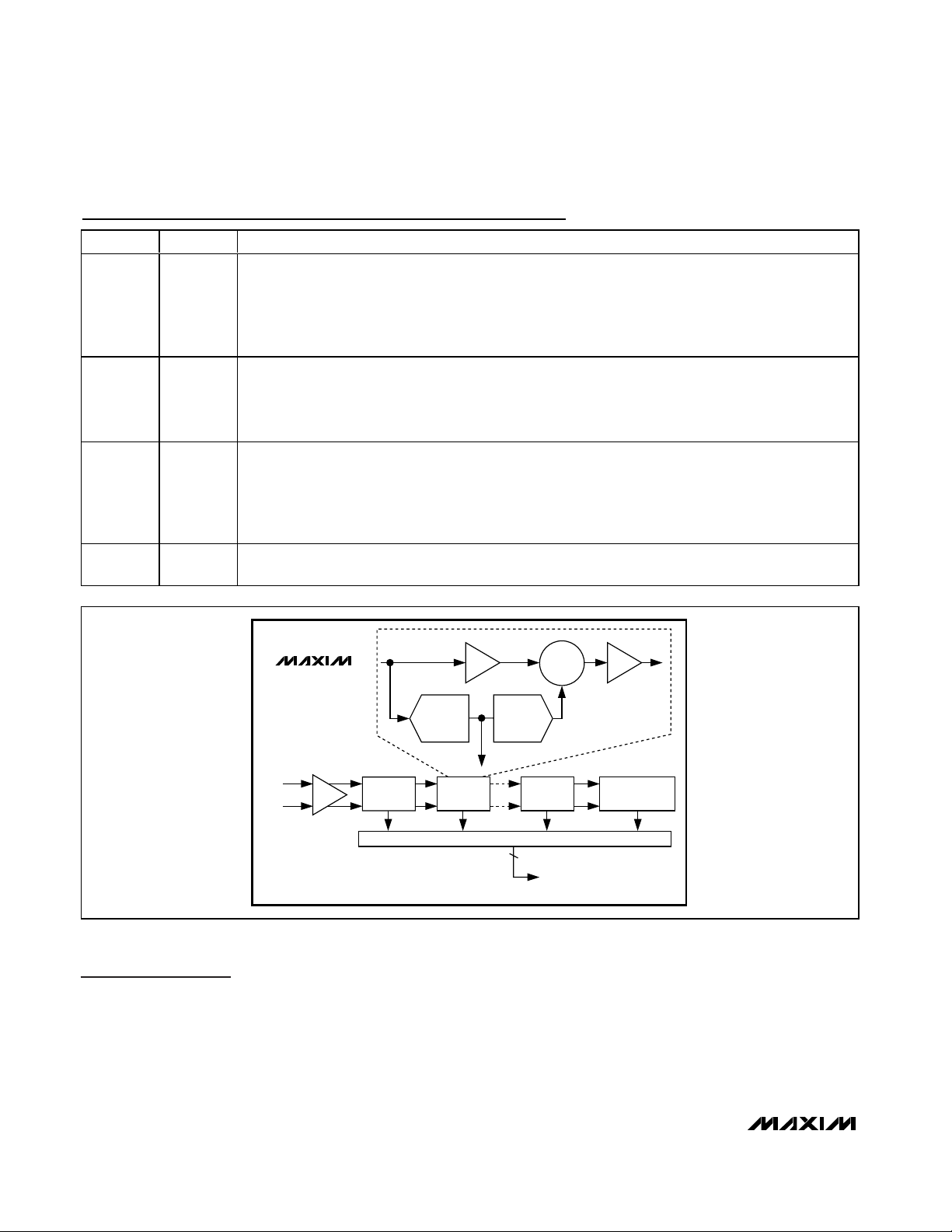
Detailed Description
The MAX12528 uses a 10-stage, fully differential,
pipelined architecture (Figure 1) that allows for highspeed conversion while minimizing power consumption. Samples taken at the inputs move progressively
through the pipeline stages every half clock cycle.
From input to output the total latency is 8 clock cycles.
Each pipeline converter stage converts its input voltage
to a digital output code. At every stage, except the last,
the error between the input voltage and the digital output code is multiplied and passed along to the next
pipeline stage. Digital error correction compensates for
ADC comparator offsets in each pipeline stage and
ensures no missing codes. Figure 2 shows the
MAX12528 functional diagram.
Dual, 80Msps, 12-Bit, IF/Baseband ADC
14 ______________________________________________________________________________________
Pin Description (continued)
Figure 1. Pipeline Architecture—Stage Blocks
PIN NAME FUNCTION
66 SHREF
67 REFOUT
68 REFIN
—EP
Shared Reference Digital Input.
SHREF = V
SHREF = GND: Shared reference disabled.
When sharing the reference, externally connect REFAP and REFBP together to ensure that V
equals V
ensure that V
Internal Reference Voltage Output. The REFOUT output voltage is 2.048V and REFOUT can deliver 1mA.
For internal reference operation, connect REFOUT directly to REFIN or use a resistive divider from
REFOUT to set the voltage at REFIN. Bypass REFOUT to GND with a ≥0.1µF capacitor.
For external reference operation, REFOUT is not required and must be bypassed to GND with a ≥0.1µF
capacitor.
Single-Ended Reference Analog Input. For internal reference and buffered external reference operation,
apply a 0.7V to 2.3V DC reference voltage to REFIN. Bypass REFIN to GND with a 4.7µF capacitor.
Within its specified operating voltage, REFIN has a >50MΩ input impedance, and the differential
reference voltage (V
operation, connect REFIN to GND. In this mode REF_P, REF_N, and COM_ are high-impedance inputs
that accept the external reference voltages.
Exposed Paddle. EP is internally connected to GND. Externally connect EP to GND to achieve specified
dynamic performance.
: Shared reference enabled.
DD
. Similarly, when sharing the reference, externally connect REFAN to REFBN together to
REFBP
MAX12528
REFAN
= V
REF_P
REFBN
- V
.
) is generated from REFIN. For unbuffered external reference
REF_N
FLASH
ADC
+
Σ
DAC
x2
−
REFAP
IN_P
IN_N
STAGE 1 STAGE 9
STAGE 2
DIGITAL ERROR CORRECTION
D0_ THROUGH D11_
STAGE 10
END OF PIPELINE

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 15
Figure 2. Functional Diagram
INAP
INAN
REFAP
COMA
REFAN
REFIN
REFOUT
SHREF
REFBP
COMB
REFBN
INBP
INBN
12-BIT
PIPELINE
ADC
CHANNEL A
REFERENCE
SYSTEM
CHANNEL B
REFERENCE
SYSTEM
12-BIT
PIPELINE
ADC
DIGITAL
ERROR
CORRECTION
MAX12528
INTERNAL
REFERENCE
GENERATOR
DIGITAL
ERROR
CORRECTION
CLOCK
DATA
FORMAT
DATA
FORMAT
OUTPUT
DRIVERS
OUTPUT
DRIVERS
D0A TO D11A
DORA
G/T
DAV
OV
DD
D0B TO D11B
DORB
DIFFCLK/SECLK
CLKP
CLKN
DIV2
DIV4
CLOCK
DIVIDER
DUTY-CYCLE
EQUALIZER
CLOCK
CLOCK
POWER
CONTROL
AND
BIAS CIRCUITS
V
DD
PD
GND

MAX12528
Analog Inputs and Input Track-and-Hold
(T/H) Amplifier
Figure 3 displays a simplified functional diagram of the
input T/H circuit. This input T/H circuit allows for high
analog input frequencies of 175MHz and beyond and
supports a VDD/ 2 common-mode input voltage.
The MAX12528 sampling clock controls the switchedcapacitor input T/H architecture (Figure 3) allowing the
analog input signals to be stored as charge on the
sampling capacitors. These switches are closed (track
mode) when the sampling clock is high and open (hold
mode) when the sampling clock is low (Figure 4). The
analog input signal source must be able to provide the
dynamic currents necessary to charge and discharge
the sampling capacitors. To avoid signal degradation,
these capacitors must be charged to one-half LSB
accuracy within one-half of a clock cycle. The analog
input of the MAX12528 supports differential or singleended input drive. For optimum performance with differential inputs, balance the input impedance of IN_P
and IN_N and set the common-mode voltage to midsupply (VDD/ 2). The MAX12528 provides the optimum
common-mode voltage of VDD/ 2 through the COM
output when operating in internal reference mode and
buffered external reference mode. This COM output
voltage can be used to bias the input network as shown
in Figures 9, 10, and 11.
Reference Output
An internal bandgap reference is the basis for all the
internal voltages and bias currents used in the
MAX12528. The power-down logic input (PD) enables
and disables the reference circuit. REFOUT has approximately 17kΩ to GND when the MAX12528 is powered
down. The reference circuit requires 10ms to power up
and settle to its final value when power is applied to the
MAX12528 or when PD transitions from high to low.
The internal bandgap reference produces a buffered
reference voltage of 2.048V ±1% at the REFOUT pin
with a ±50ppm/°C temperature coefficient. Connect an
external ≥0.1µF bypass capacitor from REFOUT to
GND for stability. REFOUT sources up to 1mA and
sinks up to 0.1mA for external circuits with a 35mV/mA
load regulation. Short-circuit protection limits I
REFOUT
to a 2.1mA source current when shorted to GND and a
0.24mA sink current when shorted to VDD. Similar to
REFOUT, REFIN should be bypassed with a 4.7µF
capacitor to GND.
Reference Configurations
The MAX12528 full-scale analog input range is ±2/3 x
V
REF
with a VDD/ 2 ±0.5V common-mode input range.
V
REF
is the voltage difference between REFAP (REFBP)
and REFAN (REFBN). The MAX12528 provides three
modes of reference operation. The voltage at REFIN
(V
REFIN
) selects the reference operation mode (Table 1).
Connect REFOUT to REFIN either with a direct short or
through a resistive divider to enter internal reference
mode. COM_, REF_P, and REF_N are low-impedance
outputs with V
COM_
= VDD/ 2, V
REFP
= VDD/ 2 + 3/8 x
V
REFIN
, and V
REF_N
= VDD/ 2 - 3/8 x V
REFIN
. Bypass
REF_P, REF_N, and COM_ each with a 0.1µF capacitor
to GND. Bypass REF_P to REF_N with a 10µF capacitor.
Dual, 80Msps, 12-Bit, IF/Baseband ADC
16 ______________________________________________________________________________________
Table 1. Reference Modes
Figure 3. Internal T/H Circuit
V
BOND WIRE
INDUCTANCE
1.5nH
IN_P
BOND WIRE
INDUCTANCE
1.5nH
IN_N
SAMPLING
CLOCK
*THE EFFECTIVE RESISTANCE OF THE
SWITCHED SAMPLING CAPACITORS IS:
DD
MAX12528
x C
1
SAMPLE
*C
4.5pF
*C
4.5pF
SAMPLE
SAMPLE
C
PAR
2pF
V
DD
C
PAR
2pF
RIN =
f
CLK
V
REFIN
Internal Reference Mode.
35% V
REFOUT
to 100%
V
REFOUT
0.7V to 2.3V
<0.5V
REFIN is driven by REFOUT either through a
direct short or a resistive divider.
V
= VDD / 2
COM_
= VDD / 2 + 3/8 x V
V
REF_P
V
= VDD / 2 - 3/8 x V
REF_N
Buffered External Reference Mode.
An external 0.7V to 2.3V reference voltage is
applied to REFIN.
V
= VDD / 2
COM_
= VDD / 2 + 3/8 x V
V
REF_P
V
= VDD / 2 - 3/8 x V
REF_N
U nb uffer ed E xter nal Refer ence M od e.
RE F_P , RE F_N , and C O M _ ar e d r i ven b y
exter nal r efer ence sour ces. The ful l - scal e
anal og i np ut r ang e i s ± ( V
REFERENCE MODE
REFIN
REFIN
REFIN
REFIN
- V
R E F _P
R E F _N
) x 2/3.

Bypass REFIN and REFOUT to GND with a 0.1µF capacitor. The REFIN input impedance is very large (>50MΩ).
When driving REFIN through a resistive divider, use
resistances ≥10kΩ to avoid loading REFOUT.
Buffered external reference mode is virtually identical to
the internal reference mode except that the reference
source is derived from an external reference and not the
MAX12528’s internal bandgap reference. In buffered
external reference mode, apply a stable reference voltage source between 0.7V to 2.3V at REFIN. Pins COM_,
REF_P, and REF_N are low-impedance outputs with
V
COM_
= VDD/ 2, V
REF_P
= VDD/ 2 + 3/8 x V
REFIN
, and
V
REF_N
= VDD/ 2 - 3/8 x V
REFIN
. Bypass REF_P, REF_N,
and COM_ each with a 0.1µF capacitor to GND. Bypass
REF_P to REF_N with a 10µF capacitor.
Connect REFIN to GND to enter unbuffered external reference mode. Connecting REFIN to GND deactivates
the on-chip reference buffers for COM_, REF_P, and
REF_N. With their buffers deactivated, COM_, REF_P,
and REF_N become high-impedance inputs and must
be driven with separate, external reference sources.
Drive V
COM_
to VDD/ 2 ±5%, and drive REF_P and
REF_N so V
COM_
= (V
REF_P_
+ V
REF_N_
) / 2. The analog
input range is ±(V
REF_P_
- V
REF_N
) x 2/3. Bypass
REF_P, REF_N, and COM_ each with a 0.1µF capacitor
to GND. Bypass REF_P to REF_N with a 10µF capacitor.
For all reference modes, bypass REFOUT with a 0.1µF
and REFIN with a 4.7µF capacitor to GND.
The MAX12528 also features a shared reference mode,
in which the user can achieve better channel-to-channel matching. When sharing the reference (SHREF =
VDD), externally connect REFAP and REFBP together to
ensure that V
REFAP
= V
REFBP
. Similarly, when sharing
the reference, externally connect REFAN to REFBN
together to ensure that V
REFAN
= V
REFBN
.
Connect SHREF to GND to disable the shared reference mode of the MAX12528. In this independent reference mode, a better channel-to-channel isolation is
achieved.
For detailed circuit suggestions and how to drive the
ADC in buffered/unbuffered external reference mode,
see the Applications Information section.
Clock Duty-Cycle Equalizer
The MAX12528 has an internal clock duty-cycle equalizer, which makes the converter insensitive to the duty
cycle of the signal applied to CLKP and CLKN. The converters allow clock duty-cycle variations from 25% to 75%
without negatively impacting the dynamic performance.
The clock duty-cycle equalizer uses a delay-locked
loop (DLL) to create internal timing signals that are
duty-cycle independent. Due to this DLL, the
MAX12528 requires approximately 100 clock cycles to
acquire and lock to new clock frequencies.
Clock Input and Clock Control Lines
The MAX12528 accepts both differential and singleended clock inputs with a wide 25% to 75% input clock
duty cycle. For single-ended clock input operation,
connect DIFFCLK/SECLK and CLKN to GND. Apply an
external single-ended clock signal to CLKP. To reduce
clock jitter, the external single-ended clock must have
sharp falling edges. For differential clock input operation, connect DIFFCLK/SECLK to OVDD. Apply an
external differential clock signal to CLKP and CLKN.
Consider the clock input as an analog input and route it
away from any other analog inputs and digital signal
lines. CLKP and CLKN enter high impedance when the
MAX12528 is powered down (Figure 4).
Low clock jitter is required for the specified SNR performance of the MAX12528. The analog inputs are sampled on the falling (rising) edge of CLKP (CLKN),
requiring this edge to have the lowest possible jitter.
Jitter limits the maximum SNR performance of any ADC
according to the following relationship:
where fINrepresents the analog input frequency and t
J
is the total system clock jitter. Clock jitter is especially
critical for undersampling applications. For instance,
assuming that clock jitter is the only noise source, to
obtain the specified 69.8dB of SNR with an input frequency of 175MHz the system must have less than
0.29ps of clock jitter. However, in reality there are other
noise sources such as thermal noise and quantization
noise that contribute to the system noise requiring the
clock jitter to be less than 0.14ps to obtain the specified 69.8dB of SNR at 175MHz.
Clock-Divider Control Inputs (DIV2, DIV4)
The MAX12528 features three different modes of sampling/clock operation (see Table 2). Pulling both control
lines low, the clock-divider function is disabled and the
converters sample at full clock speed. Pulling DIV4 low
and DIV2 high enables the divide-by-two feature, which
sets the sampling speed to one-half the selected clock
frequency. In divide-by-four mode, the converter sampling speed is set to one-fourth the clock speed of the
MAX12528. Divide-by-four mode is achieved by applying
a high level to DIV4 and a low level to DIV2. The option to
select either one-half or one-fourth of the clock speed for
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 17
SNR
20
log
=×
⎛
⎜
2 π
⎝
1
ft
×× ×
IN J
⎞
⎟
⎠

MAX12528
sampling provides design flexibility, relaxes clock
requirements, and can minimize clock jitter.
System Timing Requirements
Figure 5 shows the timing relationship between the
clock, analog inputs, DAV indicator, DOR_ indicators,
and the resulting output data. The analog input is sampled on the falling (rising) edge of CLKP (CLKN) and
the resulting data appears at the digital outputs 8 clock
cycles later.
The DAV indicator is synchronized with the digital output and optimized for use in latching data into digital
back-end circuitry. Alternatively, digital back-end cir-
cuitry can be latched with the rising edge of the conversion clock (CLKP - CLKN).
Data-Valid Output
DAV is a single-ended version of the input clock that is
compensated to correct for any input clock duty-cycle
variations. The MAX12528 output data changes on the
falling edge of DAV, and DAV rises once the output
data is valid. The falling edge of DAV is synchronized
to have a 5.4ns delay from the falling edge of the input
clock. Output data at D0A/B–D11A/B and DORA/B are
valid from 7ns before the rising edge of DAV to 7ns
after the rising edge of DAV.
DAV enters high impedance when the MAX12528 is
powered down (PD = OVDD). DAV enters its highimpedance state 10ns after the rising edge of PD and
becomes active again 10ns after PD transitions low.
DAV is capable of sinking and sourcing 600µA and has
three times the driving capabilities of D0A/B–D11A/B
and DORA/B. DAV is typically used to latch the
MAX12528 output data into an external digital back-end
circuit. Keep the capacitive load on DAV as low as possible (<15pF) to avoid large digital currents feeding back
into the analog portion of the MAX12528, thereby
degrading its dynamic performance. Buffering DAV
Dual, 80Msps, 12-Bit, IF/Baseband ADC
18 ______________________________________________________________________________________
Figure 4. Simplified Clock Input Circuit
Table 2. Clock-Divider Control Inputs
Figure 5. System Timing Diagram
V
DD
S
CLKP
CLKN
GND
S
1L
1H
10kΩ
10kΩ
S
2H
10kΩ
SWITCHES S1_ AND S2_ ARE OPEN
DURING POWER-DOWN MAKING
S
2L
CLKP AND CLKN HIGH IMPEDANCE.
SWITCHES S
SINGLE-ENDED CLOCK MODE.
10kΩ
MAX12528
DUTY-CYCLE
EQUALIZER
ARE OPEN IN
2_
(V
(V
REF_P
REF_N
- V
REF_N
- V
REF_P
DAV
D0_–D11_
DOR
DIFFERENTIAL ANALOG INPUT (IN_P–IN_N)
) x 2/3
N - 3
N - 2
) x 2/3
CLKN
CLKP
t
DAV
N
N - 1
t
AD
N + 1
N + 3
N +2
t
CL
t
SETUP
8.0 CLOCK-CYCLE DATA LATENCY
N + 4
t
N + 5
CH
DIV4 DIV2 FUNCTION
00
01
10
Clock Divider Disabled
f
SAMPLE
Divide-by-Two Clock Divider
f
SAMPLE
Divide-by-Four Clock Divider
f
SAMPLE
1 1 Not Allowed
N + 6
t
HOLD
N + 7
N + 9
N + 8
N N + 1 N + 2 N + 3 N + 5 N + 6 N + 7N - 1N - 2N - 3 N + 9N + 8
N + 4
t
SETUP
= f
CLK
= f
/ 2
CLK
= f
/ 4
CLK
t
HOLD

externally isolates it from heavy capacitive loads. Refer
to the MAX12557 EV kit schematic for recommendations
of how to drive the DAV signal through an external buffer.
Data Out-of-Range Indicator
The DORA and DORB digital outputs indicate when the
analog input voltage is out of range. When DOR_ is high,
the analog input is out of range. When DOR_ is low, the
analog input is within range. The valid differential input
range is from (V
REF_P
- V
REF_N
) x 2/3 to (V
REF_N
-
V
REF_P
) x 2/3. Signals outside of this valid differential
range cause DOR_ to assert high as shown in Table 1.
DOR is synchronized with DAV and transitions along
with the output data D11–D0. There is an 8 clock-cycle
latency in the DOR function as is with the output data
(Figure 5). DOR_ is high impedance when the
MAX12528 is in power-down (PD = high). DOR_ enters
a high-impedance state within 10ns after the rising edge
of PD and becomes active 10ns after PD’s falling edge.
Digital Output Data and Output Format Selection
The MAX12528 provides two 12-bit, parallel, tri-state
output buses. D0A/B–D11A/B and DORA/B update on
the falling edge of DAV and are valid on the rising edge
of DAV.
The MAX12528 output data format is either Gray code
or two’s complement depending on the logic input G/T.
With G/T high, the output data format is Gray code.
With G/T low, the output data format is set to two’s complement. See Figure 8 for a binary-to-Gray and Gray-tobinary code conversion example.
The following equations, Table 3, Figure 6, and Figure 7
define the relationship between the digital output and
the analog input.
Gray Code (G/T = 1):
V
IN_P
- V
IN_N
= 2/3 x (V
REF_P
- V
REF_N
) x 2 x
(CODE10- 2048) / 4096
Two’s Complement (G/T = 0):
V
IN_P
- V
IN_N
= 2/3 x (V
REF_P
- V
REF_N
) x 2 x
CODE10/ 4096
where CODE10is the decimal equivalent of the digital
output code as shown in Table 3.
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 19
Table 3. Output Codes vs. Input Voltage
BINARY
D11A–D0A
D11B–D0B
1000 0000 0000 1 0x800 +4095 0111 1111 1111 1 0x7FF +2047
1000 0000 0000 0 0x800 +4095 0111 1111 1111 0 0x7FF +2047 +1.0235V
1000 0000 0001 0 0x801 +4094 0111 1111 1110 0 0x7FE +2046 +1.0230V
GRAY-CODE OUTPUT CODE
(G/T = 1)
H EXA D ECIM A L
EQUIVALENT
DOR
OF
D11A–D0A
D11B–D0B
DECIMAL
EQUIVALENT
OF
D11A–D0A
D11B–D0B
(CODE
10
)
TWO’S COMPLEMENT OUTPUT CODE
(G/T = 0)
HEXADECIMAL
BINARY
D11A–D0A
D11B–D0B
DOR
EQUIVALENT
OF
D11A–D0A
D11B–D0B
DECIMAL
EQUIVALENT
OF
D11A–D0A
D11B–D0B
(CODE10)
- V
V
IN_P
V
= 2.418V
REF_P
V
= 0.882V
REF_N
>+1.0235V
(DATA OUT OF
RANGE)
IN_N
1100 0000 0011 0 0xC03 +2050 0000 0000 0010 0 0x002 +2 +0.0010V
1100 0000 0001 0 0xC01 +2049 0000 0000 0001 0 0x001 +1 +0.0005V
1100 0000 0000 0 0xC00 +2048 0000 0000 0000 0 0x000 0 +0.0000V
0100 0000 0000 0 0x400 +2047 1111 1111 1111 0 0xFFF -1 -0.0005V
0100 0000 0001 0 0x401 +2046 1111 1111 1110 0 0xFFE -2 -0.0010V
0000 0000 0001 0 0x001 +1 1000 0000 0001 0 0x801 -2047 -1.0235V
0000 0000 0000 0 0x000 0 1000 0000 0000 0 0x800 -2048 -1.0240V
<-1.0240V
0000 0000 0000 1 0x000 0 1000 0000 0000 1 0x800 -2048
(DATA OUT OF
RANGE)

MAX12528
The digital outputs D0A/B–D11A/B are high impedance
when the MAX12528 is in power-down (PD = 1) mode.
D0A/B–D11A/B enter this state 10ns after the rising
edge of PD and become active again 10ns after PD
transitions low.
Keep the capacitive load on the MAX12528 digital outputs D0A/B–D11A/B as low as possible (<15pF) to
avoid large digital currents feeding back into the analog portion of the MAX12528 and degrading its dynamic performance. Adding external digital buffers on the
digital outputs helps isolate the MAX12528 from heavy
capacitive loads. To improve the dynamic performance
of the MAX12528, add 220Ω resistors in series with the
digital outputs close to the MAX12528. Refer to the
MAX12557 EV kit schematic for guidelines of how to
drive the digital outputs through 220Ω series resistors
and external digital output buffers.
Power-Down Input
The MAX12528 has two power modes that are controlled with a power-down digital input (PD). With PD
low, the MAX12528 is in its normal operating mode.
With PD high, the MAX12528 is in power-down mode.
The power-down mode allows the MAX12528 to efficiently use power by transitioning to a low-power state
when conversions are not required. Additionally, the
MAX12528 parallel output bus goes high-impedance in
power-down mode, allowing other devices on the bus
to be accessed.
In power-down mode all internal circuits are off, the
analog supply current reduces to less than 100µA, and
the digital supply current reduces to less than 1µA. The
following list shows the state of the analog inputs and
digital outputs in power-down mode:
1) INAP/B and INAN/B analog inputs are disconnected from the internal input amplifier (Figure 3).
2) REFOUT has approximately 17kΩ to GND.
3) REFAP/B, COMA/B, and REFAN/B enter a highimpedance state with respect to VDDand GND, but
there is an internal 4kΩ resistor between REFAP/B
and COMA/B, as well as an internal 4kΩ resistor
between REFAN/B and COMA/B.
4) D0A–D11A, D0B–D11B, DORA, and DORB enter a
high-impedance state.
5) DAV enters a high-impedance state.
6) CLKP and CLKN clock inputs enter a high-impedance state (Figure 4).
The wake-up time from power-down mode is dominated
by the time required to charge the capacitors at REF_P,
REF_N, and COM. In internal reference mode and
buffered external reference mode the wake-up time is
typically 10ms. When operating in the unbuffered external reference mode the wake-up time is dependent on
the external reference drivers.
Dual, 80Msps, 12-Bit, IF/Baseband ADC
20 ______________________________________________________________________________________
Figure 6. Two’s-Complement Transfer Function (G/T= 0)
Figure 7. Gray-Code Transfer Function (G/T= 1)
1 LSB = 4/3 x (V
2/3 x (V
0x7FF
0x7FE
0x7FD
0x001
0x000
0xFFF
0x803
TWO'S-COMPLEMENT OUTPUT CODE (LSB)
0x802
0x801
0x800
- V
REFP
REFN
-2045 +2047+2045-1 0 +1-2047
DIFFERENTIAL INPUT VOLTAGE (LSB)
- V
REFP
REFN
) 2/3 x (V
) / 4096
REFP
- V
REFN
1 LSB = 4/3 x (V
)
0x800
0x801
0x803
0xC01
0xC00
0xC00
GRAY OUTPUT CODE (LSB)
0x002
0x003
0x001
0x000
2/3 x (V
- V
REFP
REFN
-2045 +2047+2045-1 0 +1-2047
DIFFERENTIAL INPUT VOLTAGE (LSB)
- V
REFP
REFN
) 2/3 x (V
) / 4096
REFP
- V
REFN
)

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 21
Figure 8. Binary-to-Gray and Gray-to-Binary Code Conversion
BINARY-TO-GRAY CODE CONVERSION
1) THE MOST SIGNIFICANT GRAY-CODE BIT IS THE SAME
AS THE MOST SIGNIFICANT BINARY BIT.
D11 D7 D3 D0
0111 0100 1100 BINARY
2) SUBSEQUENT GRAY-CODE BITS ARE FOUND ACCORDING
TO THE FOLLOWING EQUATION:
GRAYX = BINARYX +BINARY
+
WHERE IS THE EXCLUSIVE OR FUNCTION (SEE TRUTH
TABLE BELOW) AND X IS THE BIT POSITION:
GRAY
= BINARY10BINARY
10
+
GRAY10 = 1 0
GRAY
= 1
10
D11 D7 D3 D0
+
0 111 0100 1100 BINARY
1
3) REPEAT STEP 2 UNTIL COMPLETE:
GRAY
= BINARY9BINARY
9
+
GRAY9 = 1 1
= 0
GRAY
9
X + 1
+
11
+
10
BIT POSITION
GRAY CODE0
BIT POSITION
GRAY CODE0
GRAY-TO-BINARY CODE CONVERSION
1) THE MOST SIGNIFICANT BINARY BIT IS THE SAME AS THE
MOST SIGNIFICANT GRAY-CODE BIT.
D11 D7 D3 D0
0 BINARY
2) SUBSEQUENT BINARY BITS ARE FOUND ACCORDING TO
THE FOLLOWING EQUATION:
BINARYX = BINARY
+
WHERE IS THE EXCLUSIVE OR FUNCTION (SEE TRUTH
TABLE BELOW) AND X IS THE BIT POSITION:
= BINARY11GRAY
BINARY
10
BINARY10 = 0 1
BINARY
= 1
10
D11 D7 D3 D0
0 100 1110 1010
+
0
1
3) REPEAT STEP 2 UNTIL COMPLETE:
BINARY
= BINARY10GRAY
9
BINARY9 = 1 0
= 1
BINARY
9
+
GRAY
X+1
+
+
X
+
10
+
9
BIT POSITION
GRAY CODE0100 11 011010
BIT POSITION
GRAY CODE
BINARY
D11 D7 D3 D0
+
01 11 0100 1100 BINARY
10
4) THE FINAL GRAY-CODE CONVERSION IS:
D11 D7 D3 D0
0111 0100 1100 BINARY
1001101 1010
FIGURE 8 SHOWS THE GRAY-TO-BINARY AND BINARY-TO-GRAY
CODE CONVERSION IN OFFSET BINARY FORMAT. THE OUTPUT
FORMAT OF THE MAX12528 IS TWO'S-COMPLEMENT BINARY,
HENCE EACH MSB OF THE TWO'S-COMPLEMENT OUTPUT CODE
MUST BE INSERTED TO REFLECT TRUE OFFSET BINARY FORMAT.
BIT POSITION
GRAY CODE0
BIT POSITION
GRAY CODE0
EXCLUSIVE OR TRUTH TABLE
AB Y=AB
00
01
10
11
D11 D7 D3 D0
01 00 1110 1010
+
11
0
4) THE FINAL BINARY CONVERSION IS:
D11 D7 D3 D0
0100 1110 1010
0111 0100 1100
+
0
1
1
0
BIT POSITION
GRAY CODE
BINARY
BIT POSITION
GRAY CODE
BINARY

MAX12528
Applications Information
Using Transformer Coupling
In general, the MAX12528 provides better SFDR and
THD with fully differential input signals than singleended input drive, especially for input frequencies
above 125MHz. In differential input mode, even-order
harmonics are lower as both inputs are balanced, and
each of the ADC inputs only requires half the signal
swing compared to single-ended input mode.
An RF transformer (Figure 9) provides an excellent
solution to convert a single-ended input source signal
to a fully differential signal, required by the MAX12528
for optimum performance. Connecting the center tap of
the transformer to COM provides a V
DD
/ 2 DC level
shift to the input. Although a 1:1 transformer is shown, a
step-up transformer can be selected to reduce the
drive requirements. A reduced signal swing from the
input driver, such as an op amp, can also improve the
overall distortion. The configuration of Figure 9 is good
for frequencies up to Nyquist (f
CLK
/ 2).
The circuit of Figure 10 converts a single-ended input
signal to fully differential just as Figure 9. However,
Figure 10 utilizes an additional transformer to improve
the common-mode rejection allowing high-frequency
signals beyond the Nyquist frequency. A set of 75Ω
and 113Ω termination resistors provide an equivalent
50Ω termination to the signal source. The second set of
termination resistors connects to COM_ providing the
correct input common-mode voltage. Two 0Ω resistors
in series with the analog inputs allow high IF input frequencies. These 0Ω resistors can be replaced with lowvalue resistors to limit the input bandwidth.
Single-Ended AC-Coupled Input Signal
Figure 11 shows an AC-coupled, single-ended input
application. The MAX4108 provides high speed, high
bandwidth, low noise, and low distortion to maintain the
input signal integrity.
Dual, 80Msps, 12-Bit, IF/Baseband ADC
22 ______________________________________________________________________________________
Figure 9. Transformer-Coupled Input Drive for Input Frequencies
Up to Nyquist
Figure 10. Transformer-Coupled Input Drive for Input Frequencies beyond Nyquist
Figure 11. Single-Ended, AC-Coupled Input Drive
24.9Ω
5.6pF
0.1µF
1
V
IN
N.C.
MINICIRCUITS
6
T1
5
2
24.9Ω
0.1µF
5.6pF
3
4
TT1-6
OR
T1-1T
IN_P
MAX12528
COM_
IN_N
V
IN
MAX4108
100Ω
100Ω
0.1µF
0Ω
24.9Ω
24.9Ω
IN_P
5.6pF
MAX12528
COM_
0.1µF
IN_N
5.6pF
0Ω*
0.1µF
1
V
IN
N.C.
6
T1
5
2
3
4
MINICIRCUITS
ADT1-1WT
N.C.
75Ω
1%
75Ω
1%
*0Ω RESISTORS CAN BE REPLACED WITH
LOW-VALUE RESISTORS TO LIMIT THE INPUT BANDWIDTH.
N.C.
MINICIRCUITS
1
T2
5
3
ADT1-1WT
6
2
N.C.
4
113Ω
0.5%
113Ω
0.5%
5.6pF
0.1µF
0Ω*
5.6pF
IN_P
MAX12528
COM_
IN_N

Buffered External Reference Drives
Multiple ADCs
The buffered external reference mode allows for more
control over the MAX12528 reference voltage and
allows multiple converters to use a common reference.
The REFIN input impedance is >50MΩ.
Figure 12 shows the MAX6029 precision 2.048V bandgap
reference used as a common reference for multiple converters. The 2.048V output of the MAX6029 passes
through a single-pole 10Hz LP filter to the MAX4230.
The MAX4250 buffers the 2.048V reference and provides additional 10Hz LP filtering before its output is
applied to the REFIN input of the MAX12528.
Unbuffered External Reference Drives
Multiple ADCs
The unbuffered external reference mode allows for precise control over the MAX12528 reference and allows
multiple converters to use a common reference.
Connecting REFIN to GND disables the internal reference,
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 23
Figure 12. External Buffered (MAX4230) Reference Drive Using a MAX6029 Bandgap Reference
3.3V
0.1µF
1
16.2kΩ
5
MAX6029
(EUK21)
2
NOTE: ONE FRONT-END REFERENCE CIRCUIT IS
CAPABLE OF SOURCING UP TO 15mA AND
SINKING UP TO 30mA OF OUTPUT CURRENT.
1µF
0.1µF
V
DD
GND
V
REF_P
REF_N
COM_
0.1µF
DD
REF_P
2.048V
0.1µF
3
4
MAX4230
5
1
2
47Ω
1.47kΩ
300µF
6V
0.1µF
REFIN
MAX12528
REFOUT
REFIN
MAX12528
10µF
10µF
2.2µF
0.1µF
0.1µF
0.1µF
0.1µF
3.3V
2.2µF
0.1µF
0.1µF
REFOUT
0.1µF
GND
REF_N
0.1µF
COM_
0.1µF

MAX12528
allowing REF_P, REF_N, and COM_ to be driven directly
by a set of external reference sources.
Figure 13 uses a MAX6029 precision 3.000V bandgap
reference as a common reference for multiple converters. A seven-component resistive divider chain follows
the MAX6029 voltage reference. The 0.47µF capacitor
along this chain creates a 10Hz LP filter. Three
MAX4230 amplifiers buffer taps along this resistor
chain providing 2.413V, 1.647V, and 0.880V to the
MAX12528 REF_P, REF_N, and COM_ reference
inputs. The feedback around the MAX4230 op amps
provides additional 10Hz LP filtering. Reference voltages 2.413V and 0.880V set the full-scale analog input
range for the converter to ±1.022V (±[V
REF_P
- V
REF_N
]
x 2/3).
Note that one single power supply for all active circuit
components removes any concern regarding powersupply sequencing when powering up or down.
Grounding, Bypassing, and
Board Layout
The MAX12528 requires high-speed board layout
design techniques. Refer to the MAX12528 EV kit data
sheet for a board layout reference. Locate all bypass
capacitors as close to the device as possible, preferably on the same side as the ADC, using surface-
Dual, 80Msps, 12-Bit, IF/Baseband ADC
24 ______________________________________________________________________________________
Figure 13. External Unbuffered Reference Driving Multiple ADCs
3.3V
0.1µF
1
MAX6029
(EUK30)
2
5
0.47µF
3V
20kΩ
1%
20kΩ
1%
52.3kΩ
1%
52.3kΩ
1%
20kΩ
1%
20kΩ
1%
20kΩ
1%
0.1µF
10µF
0.1µF
1
47Ω
10µF
10µF
10µF
4
6V
1.47kΩ
47Ω
4
6V
1.47kΩ
47Ω
4
6V
1.47kΩ
MAX4230
3
1
MAX4230
3
1
MAX4230
3
2.413V
0.1µF
330µF
6V
1.647V
330µF
6V
0.880V
330µF
6V
0.1µF
0.1µF
0.1µF
0.1µF
10µF
0.1µF
REF_P
REF_N
COM_
3.3V
REF_P
REF_N
COM_
V
DD
MAX12528
GND
V
DD
MAX12528
GND
0.1µF
REFOUT
REFIN
0.1µF
REFOUT
REFIN
2.2µF
0.1µF
2.2µF
0.1µF

mount devices for minimum inductance. Bypass VDDto
GND with a 220µF ceramic capacitor in parallel with at
least one 10µF, one 4.7µF, and one 0.1µF ceramic
capacitor. Bypass OVDDto GND with a 220µF ceramic
capacitor in parallel with at least one 10µF, one 4.7µF,
and one 0.1µF ceramic capacitor. High-frequency
bypassing/decoupling capacitors should be located as
close as possible to the converter supply pins.
Multilayer boards with ample ground and power planes
produce the highest level of signal integrity. All grounds
and the exposed backside paddle of the MAX12528
package (package code: T6800-2) must be connected
to the same ground plane. The MAX12528 relies on the
exposed backside paddle connection for a low-inductance ground connection. Isolate the ground plane
from any noisy digital system ground planes such as a
DSP or output buffer ground.
Route high-speed digital signal traces away from the
sensitive analog traces. Keep all signal lines short and
free of 90° turns.
Ensure that the differential, analog input network layout
is symmetric and that all parasitic components are balanced equally. Refer to the MAX12528 EV kit data
sheet for an example of symmetric input layout.
Parameter Definitions
Integral Nonlinearity (INL)
INL is the deviation of the values on an actual transfer
function from a straight line. For the MAX12528, this
straight line is between the endpoints of the transfer
function, once offset and gain errors have been nullified. INL deviations are measured at every step of the
transfer function and the worst-case deviation is reported in the Electrical Characteristics table.
Differential Nonlinearity (DNL)
DNL is the difference between an actual step width and
the ideal value of 1 LSB. A DNL error specification of
less than 1 LSB guarantees no missing codes and a
monotonic transfer function. For the MAX12528, DNL
deviations are measured at every step of the transfer
function and the worst-case deviation is reported in the
Electrical Characteristics table.
Offset Error
Offset error is a figure of merit that indicates how well
the actual transfer function matches the ideal transfer
function at a single point. Ideally, the midscale
MAX12528 transition occurs at 0.5 LSB above midscale. The offset error is the amount of deviation
between the measured midscale transition point and
the ideal midscale transition point.
Gain Error
Gain error is a figure of merit that indicates how well the
slope of the actual transfer function matches the slope of
the ideal transfer function. The slope of the actual transfer function is measured between two data points: positive full scale and negative full scale. Ideally, the positive
full-scale MAX12528 transition occurs at 1.5 LSBs below
positive full scale, and the negative full-scale transition
occurs at 0.5 LSB above negative full scale. The gain
error is the difference of the measured transition points
minus the difference of the ideal transition points.
Small-Signal Noise Floor (SSNF)
SSNF is the integrated noise and distortion power in the
Nyquist band for small-signal inputs. The DC offset is
excluded from this noise calculation. For this converter,
a small signal is defined as a single tone with an amplitude of -35dBFS. This parameter captures the thermal
and quantization noise characteristics of the data converter and can be used to help calculate the overall
noise figure of a digital receiver signal path.
Signal-to-Noise Ratio (SNR)
For a waveform perfectly reconstructed from digital
samples, the theoretical maximum SNR is the ratio of
the full-scale analog input (RMS value) to the RMS
quantization error (residual error). The ideal, theoretical
minimum analog-to-digital noise is caused by quantization error only and results directly from the ADC’s resolution (N bits):
SNR
[max]
= 6.02 × N + 1.76
In reality, there are other noise sources besides quantization noise: thermal noise, reference noise, clock jitter,
etc. SNR is computed by taking the ratio of the RMS
signal to the RMS noise. RMS noise includes all spectral components to the Nyquist frequency excluding the
fundamental, the first six harmonics (HD2 through
HD7), and the DC offset.
SNR = 20 x log (SIGNAL
RMS
/ NOISE
RMS
)
Signal-to-Noise Plus Distortion (SINAD)
SINAD is computed by taking the ratio of the RMS signal to the RMS noise plus distortion. RMS noise plus
distortion includes all spectral components to the
Nyquist frequency excluding the fundamental and the
DC offset.
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 25

MAX12528
Total Harmonic Distortion (THD)
THD is the ratio of the RMS sum of the first six harmonics of the input signal to the fundamental itself. This is
expressed as:
where V1is the fundamental amplitude, and V2through
V7are the amplitudes of the 2nd- through 7th-order
harmonics (HD2 through HD7).
Spurious-Free Dynamic Range (SFDR)
SFDR is the ratio expressed in decibels of the RMS
amplitude of the fundamental (maximum signal component) to the RMS value of the next largest spurious
component, excluding DC offset.
Intermodulation Distortion (IMD)
IMD is the total power of the IM2 to IM5 intermodulation
products to the Nyquist frequency relative to the total
input power of the two input tones f
IN1
and f
IN2
. The
individual input tone levels are at -7dBFS. The intermodulation products are as follows:
2nd-Order Intermodulation products (IM2):
f
IN1
= f
IN2
, f
IN2
- f
IN1
3rd-Order Intermodulation products (IM3):
2 x f
IN1
- f
IN2
, 2 x f
IN2
- f
IN1
, 2 x f
IN1
+ f
IN2
,
2 x f
IN2
+ f
IN1
4th-Order Intermodulation products (IM4):
3 x f
IN1
- f
IN2
, 3 x f
IN2
- f
IN1
, 3 x f
IN1
+ f
IN2
,
3 x f
IN2
+ f
IN1
, 2 x f
IN1
- 2 x f
IN2
, 2 x f
IN1
+ 2 x f
IN2
,
2 x f
IN2
- 2 x f
IN1
5th-Order Intermodulation products (IM5):
3 x f
IN1
- 2 x f
IN2
, 3 x f
IN2
- 2 x f
IN1
, 3 x f
IN1
+ 2 x f
IN2
,
3 x f
IN2
+ 2 x f
IN1
, 4 x f
IN1
- f
IN2
, 4 x f
IN2
- f
IN1
,
4 x f
IN1
+ f
IN2
, 4 x f
IN2
+ f
IN1
Note that the two-tone intermodulation distortion is measured with respect to a single-carrier amplitude and not
the peak-to-average input power of both input tones.
3rd-Order Intermodulation (IM3)
IM3 is the total power of the 3rd-order intermodulation
product to the Nyquist frequency relative to the total
input power of the two input tones f
IN1
and f
IN2
. The
individual input tone levels are at -7dBFS. The 3rdorder intermodulation products are 2 x f
IN1
- f
IN2
, 2 x
f
IN2
- f
IN1
, 2 x f
IN1
+ f
IN2
, 2 x f
IN2
+ f
IN1
.
Aperture Jitter
Figure 14 shows the aperture jitter (tAJ), which is the
sample-to-sample variation in the aperture delay.
Aperture Delay
Aperture delay (tAD) is the time defined between the
rising edge of the sampling clock and the instant when
an actual sample is taken (Figure 14).
Full-Power Bandwidth
A large -0.2dBFS analog input signal is applied to an
ADC and the input frequency is swept up to the point
where the amplitude of the digitized conversion result
has decreased by -3dB. This point is defined as fullpower input bandwidth frequency.
Output Noise (n
OUT
)
The output noise (n
OUT
) parameter is similar to thermal
plus quantization noise and is an indication of the converter’s overall noise performance.
No fundamental input tone is used to test for n
OUT
.
IN_P, IN_N, and COM_ are connected together and
1024k data points are collected. n
OUT
is computed by
taking the RMS value of the collected data points after
the mean is removed.
Overdrive Recovery Time
Overdrive recovery time is the time required for the
ADC to recover from an input transient that exceeds the
full-scale limits. The MAX12528 specifies overdrive
recovery time using an input transient that exceeds the
full-scale limits by ±10%. The MAX12528 requires one
clock cycle to recover from an overdrive condition.
Crosstalk
Coupling onto one channel being driven by a
(-0.5dBFS) signal when the adjacent interfering channel
is driven by a full-scale signal. Measurement includes
all spurs resulting from both direct coupling and mixing
components.
Dual, 80Msps, 12-Bit, IF/Baseband ADC
26 ______________________________________________________________________________________
Figure 14. T/H Aperture Timing
THD
log
=×
20
⎛
2
2
2
2
VVVVVV
+++++
2
3
4
⎜
⎜
⎝
5
V
1
2
6
2
7
CLKN
CLKP
⎞
⎟
⎟
⎠
ANALOG
INPUT
SAMPLED
DATA
T/H
TRACKHOLD HOLD
t
AD
t
AJ

Gain Matching
Gain matching is a figure of merit that indicates how
well the gains between the two channels are matched
to each other. The same input signal is applied to both
channels and the maximum deviation in gain is reported (typically in dB) as gain matching.
Offset Matching
Like gain matching, offset matching is a figure of merit
that indicates how well the offsets between the two channels are matched to each other. The same input signal is
applied to both channels and the maximum deviation in
offset is reported (typically in %FSR) as offset matching.
MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
______________________________________________________________________________________ 27
Pin Configuration
TOP VIEW
D5A
D6A
D7A
D8A
D9A
D10A
D11A
DORA
OV
V
V
V
G/T
SHREF
REFOUT
REFIN 68
N.C.
DAV
OVDDDORB
D11B
D10B
D9B
D8B
D7B
GND
GND
INBN
D6B
INBP
3536
1716
D5B
GND
34 D4B
D3B
33
32
D2B
31 D1B
D0B
30
N.C.
29
28
N.C.
27
OV
DD
V
26
DD
25
V
DD
V
24
DD
V
23
DD
22
DIV4
21
DIV2
CLKP
20
19
CLKN
18
DIFFCLK/SECLK
D4A
51
52
53
54
55
56
57
58
59
60
DD
61
DD
62
DD
63
DD
64
65
PD
66
67
GND
INAP
N.C.
47
484950
EXPOSED PADDLE (GND)
654321098711211 151413
GND
GND
INAN
COMA
MAX12528
REFAP
REFAN
GND
4142434445 3738394046
REFBN
REFBP
COMB
D0A
D3A
D2A
D1A
THIN QFN

MAX12528
Dual, 80Msps, 12-Bit, IF/Baseband ADC
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are
implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.
28 ____________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600
© 2005 Maxim Integrated Products Printed USA is a registered trademark of Maxim Integrated Products, Inc.
Package Information
(The package drawing(s) in this data sheet may not reflect the most current specifications. For the latest package outline information,
go to www.maxim-ic.com/packages
.)
68L QFN THIN.EPS
PACKAGE OUTLINE
68L THIN QFN, 10x10x0.8mm
21-0142
1
C
2
PACKAGE OUTLINE
68L THIN QFN, 10x10x0.8mm
21-0142
2
C
2
 Loading...
Loading...