

Page 1

µ
www.maxim-ic.com
Quad IMUX Ethernet Mapper
DS33Z41
GENERAL DESCRIPTION
The DS33Z41 extends a 10/100 Ethernet LAN
segment by encapsulating MAC frames in HDLC or
X.86 (LAPS) for transmission over up to four
interleaved PDH/TDM data streams using robust,
balanced, and programmable inverse multiplexing.
The Interleave Bus (IBO) serial link supports
seamless bidirectional interconnection with Dallas
Semiconductor’s T1/E1 framers and transceivers.
The device performs store-and-forward of packets
with full wire-speed transport capability. The built-in
Committed Information Rate (CIR) Controller
provides fractional bandwidth allocation up to the
line rate in increments of 512kbps.
FUNCTIONAL DIAGRAM
Serial
BERT
HDLC/X.86
Mapper
10/100
MAC
DS33Z41
IBO
Config.
Loader
MII/RMII
Up to 4
Transceivers
or Framers
C
SDRAM
10/100
Ethernet
PHY
FEATURES
10/100 IEEE 802.3 Ethernet MAC (MII and
RMII) Half/Full Duplex with Automatic Flow
Control
Layer 1 Inverse Multiplexing Allows Bonding of
Up to 4 T1/E1/J1 or DSL Links
Supports Up to 7.75ms Differential Delay
Channel (Byte) Interleaved Bus Operation
In-Band OAM and Signaling Capability
HDLC/LAPS Encapsulation with Programmable
FCS, Interframe Fill
Committed Information Rate Controller Provides
Fractional Allocation in 512kbps Increments
Programmable BERT for the Serial Interface
External 16MB, 100MHz SDRAM Buffering
Parallel Microprocessor Interface
1.8V Operation with 3.3V Tolerant I/O
IEEE 1149.1 JTAG Support
Features continued on page 8.
APPLICATIONS
Bonded Transparent LAN Service
LAN Extension
Ethernet Delivery Over T1/E1/J1, T3/E3, OC-1/EC-1,
G.SHDSL, or HDSL2/4
ORDERING INFORMATION
Note: Some revisions of this device may incorporate deviations from published specifications known as errata. Multiple revisions of any device
may be simultaneously available through various sales channels. For information about device errata, click here: www.maxim-ic.com/errata
1 of 167
PART TEMP RANGE PIN-PACKAGE
DS33Z41
REV: 122006
-40°C to +85°C
169 CSBGA
.
Page 2

DS33Z41 Quad IMUX Ethernet Mapper
TABLE OF CONTENTS
1 DESCRIPTION....................................................................................................................7
2 FEATURE HIGHLIGHTS ....................................................................................................8
2.1 GENERAL ......................................................................................................................................8
2.2 LINK AGGREGATION (INVERSE MULTIPLEXING) ...............................................................................8
2.3 HDLC ...........................................................................................................................................8
2.4 COMMITTED INFORMATION RATE (CIR) CONTROLLER .....................................................................8
2.5 X.86 SUPPORT..............................................................................................................................8
2.6 SDRAM INTERFACE ...................................................................................................................... 9
2.7 MAC INTERFACE ........................................................................................................................... 9
2.8 MICROPROCESSOR INTERFACE ...................................................................................................... 9
2.9 TEST AND DIAGNOSTICS ................................................................................................................9
2.10 SPECIFICATIONS COMPLIANCE .....................................................................................................10
3 APPLICATIONS................................................................................................................11
4 ACRONYMS AND GLOSSARY........................................................................................12
5 MAJOR OPERATING MODES .........................................................................................13
6 BLOCK DIAGRAMS .........................................................................................................13
7 PIN DESCRIPTIONS.........................................................................................................14
7.1 PIN FUNCTIONAL DESCRIPTION .................................................................................................... 14
8 FUNCTIONAL DESCRIPTION..........................................................................................22
8.1 PROCESSOR INTERFACE ..............................................................................................................23
8.1.1 Read-Write/Data Strobe Modes..........................................................................................................23
8.1.2 Clear on Read.....................................................................................................................................23
8.1.3 Interrupt and Pin Modes......................................................................................................................23
8.2 CLOCK STRUCTURE .....................................................................................................................24
8.2.1 Serial Interface Clock Modes..............................................................................................................26
8.2.2 Ethernet Interface Clock Modes .........................................................................................................26
8.3 RESETS AND LOW-POWER MODES...............................................................................................27
8.4 INITIALIZATION AND CONFIGURATION ............................................................................................ 28
8.5 GLOBAL RESOURCES................................................................................................................... 28
8.6 PER-PORT RESOURCES............................................................................................................... 28
8.7 DEVICE INTERRUPTS.................................................................................................................... 29
8.8 SERIAL INTERFACE ......................................................................................................................31
8.9 LINK AGGREGATION (IMUX).........................................................................................................31
8.9.1 Microprocessor Requirements............................................................................................................33
8.9.2 IMUX Command Protocol ...................................................................................................................34
8.9.3 Out of Frame (OOF) Monitoring..........................................................................................................36
8.9.4 Data Transfer ......................................................................................................................................36
8.10 CONNECTIONS AND QUEUES........................................................................................................37
8.11 ARBITER .....................................................................................................................................38
8.12 FLOW CONTROL ..........................................................................................................................39
8.12.1 Full-Duplex Flow Control.....................................................................................................................40
8.12.2 Half-Duplex Flow control.....................................................................................................................41
8.12.3 Host-Managed Flow control ................................................................................................................41
8.13 ETHERNET INTERFACE PORT ....................................................................................................... 42
8.13.1 DTE and DCE Mode ...........................................................................................................................43
2 of 167
Page 3

DS33Z41 Quad IMUX Ethernet Mapper
8.14 ETHERNET MAC..........................................................................................................................46
8.14.1 MII Mode .............................................................................................................................................47
8.14.2 RMII Mode ..........................................................................................................................................47
8.14.3 PHY MII Management Block and MDIO Interface ..............................................................................48
8.15 BERT .........................................................................................................................................48
8.15.1 BERT Features ...................................................................................................................................48
8.15.2 Receive Data Interface .......................................................................................................................49
8.15.3 Repetitive Pattern Synchronization.....................................................................................................49
8.15.4 Pattern Monitoring...............................................................................................................................50
8.15.5 Pattern Generation..............................................................................................................................50
8.16 TRANSMIT PACKET PROCESSOR ..................................................................................................52
8.17 RECEIVE PACKET PROCESSOR .................................................................................................... 53
8.18 X.86 ENCODING AND DECODING.................................................................................................. 55
8.19 COMMITTED INFORMATION RATE CONTROLLER ............................................................................58
9 DEVICE REGISTERS .......................................................................................................60
9.1 REGISTER BIT MAPS....................................................................................................................61
9.1.1 Global Register Bit Map......................................................................................................................61
9.1.2 Arbiter Register Bit Map......................................................................................................................62
9.1.3 BERT Register Bit Map.......................................................................................................................62
9.1.4 Serial Interface Register Bit Map ........................................................................................................63
9.1.5 Ethernet Interface Register Bit Map....................................................................................................65
9.1.6 MAC Register Bit Map ........................................................................................................................66
9.2 GLOBAL REGISTER DEFINITIONS ..................................................................................................68
9.3 ARBITER REGISTERS ...................................................................................................................81
9.3.1 Arbiter Register Bit Descriptions.........................................................................................................81
9.4 BERT REGISTERS.......................................................................................................................82
9.5 SERIAL INTERFACE REGISTERS .................................................................................................... 89
9.5.1 Serial Interface Transmit and Common Registers..............................................................................89
9.5.2 Serial Interface Transmit Register Bit Descriptions ............................................................................89
9.5.3 Transmit HDLC Processor Registers..................................................................................................90
9.5.4 X.86 Registers ....................................................................................................................................97
9.5.5 Receive Serial Interface......................................................................................................................99
9.6 ETHERNET INTERFACE REGISTERS.............................................................................................112
9.6.1 Ethernet Interface Register Bit Descriptions.....................................................................................112
9.6.2 MAC Registers..................................................................................................................................124
10 FUNCTIONAL TIMING....................................................................................................140
10.1 MII AND RMII INTERFACES ........................................................................................................ 140
11 OPERATING PARAMETERS .........................................................................................142
11.1 THERMAL CHARACTERISTICS ..................................................................................................... 143
11.2 MII INTERFACE.......................................................................................................................... 144
11.3 RMII INTERFACE ....................................................................................................................... 146
11.4 MDIO INTERFACE .....................................................................................................................148
11.5 TRANSMIT WAN INTERFACE ...................................................................................................... 149
11.6 RECEIVE WAN INTERFACE ........................................................................................................ 150
11.7 SDRAM TIMING........................................................................................................................151
11.8 MICROPROCESSOR BUS AC CHARACTERISTICS .........................................................................155
11.9 JTAG INTERFACE TIMING ..........................................................................................................158
12 JTAG INFORMATION.....................................................................................................159
12.1 JTAG TAP CONTROLLER STATE MACHINE DESCRIPTION...........................................................160
12.2 INSTRUCTION REGISTER............................................................................................................162
12.2.1 SAMPLE:PRELOAD .........................................................................................................................163
3 of 167
Page 4

DS33Z41 Quad IMUX Ethernet Mapper
12.2.2 BYPASS............................................................................................................................................163
12.2.3 EXTEST ............................................................................................................................................163
12.2.4 CLAMP..............................................................................................................................................163
12.2.5 HIGHZ...............................................................................................................................................163
12.2.6 IDCODE ............................................................................................................................................163
12.3 JTAG ID CODES ....................................................................................................................... 164
12.4 TEST REGISTERS ......................................................................................................................164
12.4.1 Boundary Scan Register ...................................................................................................................164
12.4.2 Bypass Register................................................................................................................................164
12.4.3 Identification Register .......................................................................................................................164
12.5 JTAG FUNCTIONAL TIMING........................................................................................................165
13 PACKAGE INFORMATION ............................................................................................166
13.1 169-BALL CSBGA, 14MM X 14MM (56-G6035-001)................................................................... 166
14 DOCUMENT REVISION HISTORY.................................................................................167
4 of 167
Page 5

DS33Z41 Quad IMUX Ethernet Mapper
LIST OF FIGURES
Figure 3-1. Quad T1/E1 SCT to DS33Z41 .............................................................................................................. 11
Figure 6-1. Detailed Block Diagram......................................................................................................................... 13
Figure 7-1. DS33Z41 256-Ball CSBGA Pinout........................................................................................................ 21
Figure 8-1. Clocking for the DS33Z41..................................................................................................................... 25
Figure 8-2. Device Interrupt Information Flow Diagram .......................................................................................... 30
Figure 8-3. IMUX Interface to T1/E1 Transceivers.................................................................................................. 32
Figure 8-4. Diagram of Data Transmission with IMUX Operation ........................................................................... 32
Figure 8-5. Command Structure for IMUX Function................................................................................................ 34
Figure 8-6. Flow Control Using Pause Control Frame ............................................................................................ 41
Figure 8-7. IEEE 802.3 Ethernet Frame.................................................................................................................. 42
Figure 8-8. Configured as DTE Connected to an Ethernet PHY in MII Mode ......................................................... 44
Figure 8-9. DS33Z41 Configured as a DCE in MII Mode ........................................................................................ 45
Figure 8-10. RMII Interface...................................................................................................................................... 47
Figure 8-11. MII Management Frame...................................................................................................................... 48
Figure 8-12. PRBS Synchronization State Diagram................................................................................................ 49
Figure 8-13. Repetitive Pattern Synchronization State Diagram............................................................................. 50
Figure 8-14. LAPS Encoding of MAC Frames Concept .......................................................................................... 55
Figure 8-15. X.86 Encapsulation of the MAC field .................................................................................................. 56
Figure 8-16. CIR in the WAN Transmit Path ........................................................................................................... 59
Figure 10-1. MII Transmit Functional Timing......................................................................................................... 140
Figure 10-2. MII Transmit Half Duplex with a Collision Functional Timing............................................................ 140
Figure 10-3. MII Receive Functional Timing.......................................................................................................... 141
Figure 10-4. RMII Transmit Interface Functional Timing ....................................................................................... 141
Figure 10-5 RMII Receive Interface Functional Timing ......................................................................................... 141
Figure 11-1. Transmit MII Interface ....................................................................................................................... 144
Figure 11-2. Receive MII Interface Timing ............................................................................................................ 145
Figure 11-3. Transmit RMII Interface..................................................................................................................... 146
Figure 11-4. Receive RMII Interface Timing.......................................................................................................... 147
Figure 11-5. MDIO Timing ..................................................................................................................................... 148
Figure 11-6. Transmit WAN Timing ....................................................................................................................... 149
Figure 11-7. Receive WAN Timing........................................................................................................................ 150
Figure 11-8. SDRAM Interface Timing .................................................................................................................. 152
Figure 11-9. Receive IBO Channel Interleave Mode Timing................................................................................. 153
Figure 11-10. Transmit IBO Channel Interleave Mode Timing.............................................................................. 154
Figure 11-11. Intel Bus Read Timing (MODEC = 00)............................................................................................ 156
Figure 11-12. Intel Bus Write Timing (MODEC = 00) ............................................................................................ 156
Figure 11-13. Motorola Bus Read Timing (MODEC = 01) .................................................................................... 157
Figure 11-14. Motorola Bus Write Timing (MODEC = 01)..................................................................................... 157
Figure 11-15. JTAG Interface Timing Diagram ..................................................................................................... 158
Figure 12-1. JTAG Functional Block Diagram....................................................................................................... 159
Figure 12-2. TAP Controller State Diagram .......................................................................................................... 162
Figure 12-3. JTAG Functional Timing.................................................................................................................... 165
5 of 167
Page 6

DS33Z41 Quad IMUX Ethernet Mapper
LIST OF TABLES
Table 2-1. T1 Related Telecommunications Specifications .................................................................................... 10
Table 7-1. Detailed Pin Descriptions ....................................................................................................................... 14
Table 8-1. Clock Selection for the Ethernet (LAN) Interface ................................................................................... 24
Table 8-2. Reset Functions ..................................................................................................................................... 27
Table 8-3. Commands Sent and Received on the IMUX Links............................................................................... 34
Table 8-4. Command and Status for the IMUX for Processor Communication....................................................... 35
Table 8-5. Registers Related to Connections and Queues ..................................................................................... 38
Table 8-6. Options for Flow Control......................................................................................................................... 39
Table 8-7. Registers Related to the Ethernet Port .................................................................................................. 43
Table 8-8. MAC Control Registers........................................................................................................................... 46
Table 8-9. MAC Status Registers ............................................................................................................................ 46
Table 9-1. Register Address Map............................................................................................................................ 60
Table 9-2. Global Register Bit Map ......................................................................................................................... 61
Table 9-3. Arbiter Register Bit Map ......................................................................................................................... 62
Table 9-4. BERT Register Bit Map .......................................................................................................................... 62
Table 9-5. Serial Interface Register Bit Map ........................................................................................................... 63
Table 9-6. Ethernet Interface Register Bit Map ....................................................................................................... 65
Table 9-7. MAC Indirect Register Bit Map............................................................................................................... 66
Table 11-1. Recommended DC Operating Conditions.......................................................................................... 142
Table 11-2. DC Electrical Characteristics.............................................................................................................. 142
Table 11-3. Thermal Characteristics ..................................................................................................................... 143
Table 11-4. Theta-JA vs. Airflow ........................................................................................................................... 143
Table 11-5. Transmit MII Interface ........................................................................................................................ 144
Table 11-6. Receive MII Interface ......................................................................................................................... 145
Table 11-7. Transmit RMII Interface...................................................................................................................... 146
Table 11-8. Receive RMII Interface....................................................................................................................... 147
Table 11-9. MDIO Interface ................................................................................................................................... 148
Table 11-10. Transmit WAN Interface ................................................................................................................... 149
Table 11-11. Receive WAN Interface.................................................................................................................... 150
Table 11-12. SDRAM Interface Timing.................................................................................................................. 151
Table 11-13. AC Characteristics—Microprocessor Bus Timing ............................................................................ 155
Table 11-14. JTAG Interface Timing ..................................................................................................................... 158
Table 12-1. Instruction Codes for IEEE 1149.1 Architecture ................................................................................ 163
Table 12-2. ID Code Structure............................................................................................................................... 164
6 of 167
Page 7

DS33Z41 Quad IMUX Ethernet Mapper
1 DESCRIPTION
The DS33Z41 provides interconnection and mapping functionality between Ethernet Packet Systems and WAN
Time-Division Multiplexed (TDM) systems such as T1/E1/J1, HDSL, and T3/E3. The device is composed of a
10/100 Ethernet MAC, Packet Arbiter, Committed Information Rate controller (CIR), HDLC/X.86 (LAPS) Mapper,
SDRAM interface, control ports, and Bit Error Rate Tester (BERT). The packet interface consists of an Ethernet
interface using several physical layer protocols. The Ethernet interface can be configured for 10Mbps or 100Mbps
service. The DS33Z41 encapsulates Ethernet traffic with HDLC or X.86 (LAPS) to be transmitted over the WAN
interface. The WAN interface also receives encapsulated Ethernet packets and transmits the extracted packets
over the Ethernet port. The WAN physical interface is based on the Dallas Semiconductor Interleaved Bus
Operation (IBO), running at 8.192Mbps. The IBO interface can be configured to allow up to four bonded T1 or E1
data streams. The IBO interface provides for seamless connection to the Dallas Semiconductor/Maxim multi-port
T1/E1/J1 Framers and Single-Chip Transceivers (SCTs). See Application Note 3411: DS33Z11—Ethernet LAN to
Unframed T1/E1 WAN Bridge for an example of a complete LAN to WAN solution.
The DS33Z41 is controlled through an 8-bit microcontroller port. The DS33Z41 has a 100MHz SDRAM controller
and interfaces to a 32-bit wide 128Mb SDRAM. The SDRAM is used to buffer the data from the Ethernet and
WAN ports for transport. The external SDRAM can accommodate up to 8192 frames with a maximum frame size
of 2016 bytes. The DS33Z41 operates with a 1.8V core supply and 3.3V I/O supply.
7 of 167
Page 8

2 FEATURE HIGHLIGHTS
2.1 General
• 169-pin, 14mm x 14mm CSBGA package
• 1.8V supply with 3.3V tolerant inputs and outputs
• IEEE 1149.1 JTAG boundary scan
• Software access to device ID and silicon revision
• Development support includes evaluation kit, driver source code, and reference designs
2.2 Link Aggregation (Inverse Multiplexing)
• Link aggregation for up to 4 T1/E1 Links
• 8.192Mbps IBO interface to Dallas Semiconductor Framers/Transceivers
• Differential delay compensation up to 7.75ms for the 4 T1/E1 links
• Handshaking protocol between local and distant end for establishment of aggregation
2.3 HDLC
• HDLC controller engine
• Compatible with polled or interrupt driven environments
• Programmable FCS insertion and extraction
• Programmable FCS type
• Supports FCS error insertion
• Programmable packet size limits (Minimum 64 bytes and maximum 2016 bytes)
• Supports bit stuffing/destuffing
• Selectable packet scrambling/descrambling (X
• Separate FCS errored packet and aborted packet counts
• Programmable inter-frame fill for transmit HDLC
43
DS33Z41 Quad IMUX Ethernet Mapper
+1)
2.4 Committed Information Rate (CIR) Controller
• CIR controller limits transmission of data from the Ethernet Interface to the Serial Interface.
• CIR granularity at 512kbps
• CIR Averaging for smoothing traffic peaks
2.5 X.86 Support
• Programmable X.86 address/control fields for transmit and receive
• Programmable 2-byte protocol (SAPI) field for transmit and receive
• 32 bit FCS
• Transmit Transparency processing - 7E is replaced by 7D, 5E
• Transmit Transparency processing – 7D replaced by 7D, 5D
• Receive rate adaptation (7D, DD) is deleted.
• Receive Transparency processing - 7D, 5E is replaced by 7E
• Receive Transparency processing – 7D, 5D is replaced by 7D
• Receive Abort Sequence the LAPS packet is dropped if 7D7E is detect
• Self-synchronizing X
• Frame indication due to bad Address/Control/SAPI, FCS error, abort sequence or frame size longer
than preset max.
43
+1 payload scrambling.
8 of 167
Page 9

2.6 SDRAM Interface
• Interface for 128Mb, 32-bit-wide SDRAM
• SDRAM Interface speed up to 100MHz
• Auto Refresh Timing
• Automatic Precharge
• Master clock provided to the SDRAM
• No external components required for SDRAM connectivity
2.7 MAC Interface
• MAC port with standard MII (less TX_ER) or RMII
• 10Mbps and 100Mbps Data rates
• Configurable DTE or DCE modes
• Facilitates auto-negotiation by host microprocessor
• Programmable half and full-duplex modes
• Flow control for both half-duplex (back-pressure) and full-duplex (PAUSE) modes
• Programmable Maximum MAC frame size up to 2016 bytes
• Minimum MAC frame size: 64 bytes
• Discards frames greater than Programmed Maximum MAC frame size and Runt, non-octet bounded,
or bad-FCS frames upon reception
• Programmable threshold for SDRAM queues to initiate flow control and status indication
• MAC Loopback support for Transmit data looped to Receive Data at the MII/RMII interface
DS33Z41 Quad IMUX Ethernet Mapper
2.8 Microprocessor Interface
• 8 bit data bus
• Non-multiplexed Intel and Motorola Timing Modes
• Internal software reset and External Hardware reset input pin
• Global interrupt output pin
2.9 Test and Diagnostics
• IEEE 1149.1 Support
• Programmable on-chip Bit Error Rate Tester (BERT)
• Patterns include Pseudorandom QRSS, Daly, and user-defined repetitive patterns
• Loopbacks (remote, local, analog, and per-channel loopback)
9 of 167
Page 10

DS33Z41 Quad IMUX Ethernet Mapper
2.10 Specifications compliance
The DS33Z41 meets relevant telecommunications specifications. The following table provides the specifications
and relevant sections that are applicable to the DS33Z41.
Table 2-1. T1 Related Telecommunications Specifications
IEEE 802.3-2002—CSMA/CD access method and physical layer specifications
RFC1662—PPP in HDLC-like Framing
RFC2615—PPP over SONET/SDH
X.86—Ethernet over LAPS
RMII—Industry Implementation Agreement for “Reduced MII Interface” (Sept. 1997)
10 of 167
Page 11

DS33Z41 Quad IMUX Ethernet Mapper
3 APPLICATIONS
• Bonded Transparent LAN Service
• LAN Extension
• Ethernet Delivery Over T1/E1/J1, T3/E3, OC-1/EC-1, G.SHDSL, or HDSL2/4
Refer also to Application Note 3411: DS33Z11—Ethernet LAN to Unframed T1/E1 WAN Bridge for an example of
a complete LAN to WAN design.
Figure 3-1. Quad T1/E1 SCT to DS33Z41
T1/E1
Framer/LIU
DS21455
DS21458
DS26528
HDLC/X.86
Serial
Stream
(IBO)
RMII, MII
10 Base T
100 Base T
EthernetDS33Z41
Clock
Sources
SDRAM
11 of 167
Page 12
DS33Z41 Quad IMUX Ethernet Mapper
4 ACRONYMS AND GLOSSARY
• BERT—Bit Error Rate Tester
• DCE—Data Communication Interface
• DTE—Data Terminating Interface
• FCS—Frame Check Sequence
• HDLC—High Level Data Link Control
• MAC—Media Access Control
• MII—Media Independent Interface
• RMII—Reduced Media Independent Interface
• WAN—Wide Area Network
Note 1: Previous versions of this document used the term “Subscriber” to refer to the Ethernet Interface function.
The register names have been allowed to remain with a “SU.” prefix to avoid register renaming.
Note 2: Previous versions of this document used the term “Line” to refer to the Serial Interface. The register
names have been allowed to remain with a “LI.” prefix to avoid register renaming.
Note 3: The terms “Transmit Queue” and “Receive Queue” are with respect to the Ethernet Interface. The
Receive Queue is the queue for the data that arrives on the MII/RMII interface, is processed by the MAC and
stored in the SDRAM. Transmit queue is for data that arrives from the Serial port, is processed by the HDLC and
stored in the SDRAM to be sent to the MAC transmitter.
Note 4: This data sheet assumes a particular nomenclature of the T1 and E1 operating environment. In each
125µs T1 frame, there are 24 8-bit channels plus a framing bit. It is assumed that the framing bit is sent first
followed by channel 1.
TIME SLOT NUMBERING SCHEMES
Time Slot
Channel
Phone
Channel
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
12 of 167
Page 13
DS33Z41 Quad IMUX Ethernet Mapper
5 MAJOR OPERATING MODES
Operation of the DS33Z41 operation requires a host microprocessor for initialization and maintenance of the link
aggregation functions. Microprocessor control is possible through the 8-bit parallel control port. More information
on microprocessor control is available in Section 8.1
.
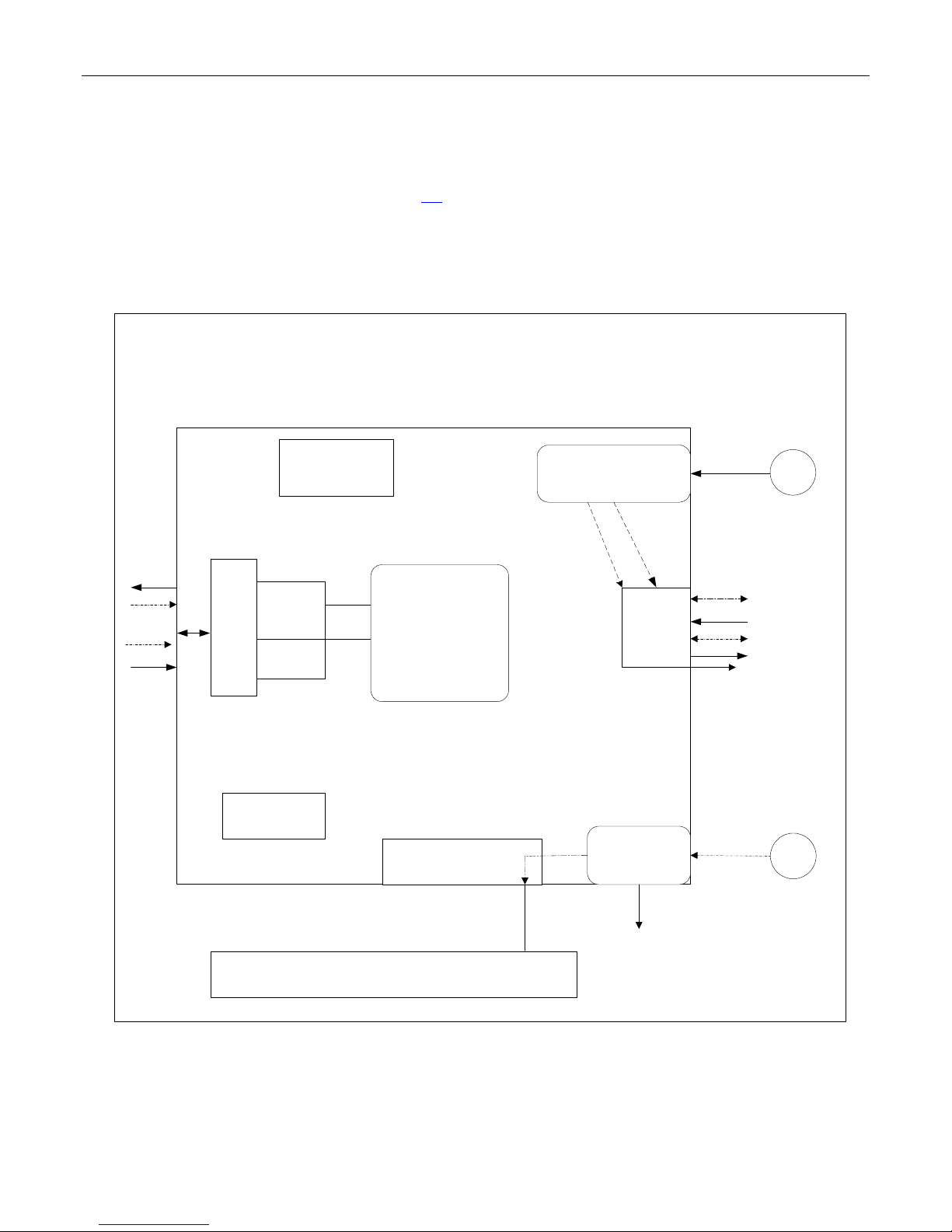
6 BLOCK DIAGRAMS
Figure 6-1. Detailed Block Diagram
50 or 25 Mhz Oscillator
Microport
Buffer
Div by 1,2,4,8,10
Output clocks:
50,25 Mhz,2.5 Mhz
REF_CLK
TSER
TCLKI1
RCLKI1
RSER
Line 1
IMUX
HDLC
Serial
Interface
JTAG
+
X.86
CIR
SDRAM
Arbiter
SDRAM
Interface
SDCLKO
MAC
RMII
MII
Buffer Dev
Div by 2,4,12
Output Clocks
25,50
Mhz
REF_CLKO
50 or 25 Mhz
TX_CLK1
RXD
RX_CLK1
TXD
MDC
100 Mhz Oscillator
SYSCLKI
13 of 167
Page 14
DS33Z41 Quad IMUX Ethernet Mapper
7 PIN DESCRIPTIONS
7.1 Pin Functional Description
Note that all digital pins are inout pins in JTAG mode. This feature increases the effectiveness of board level
ATPG patterns.
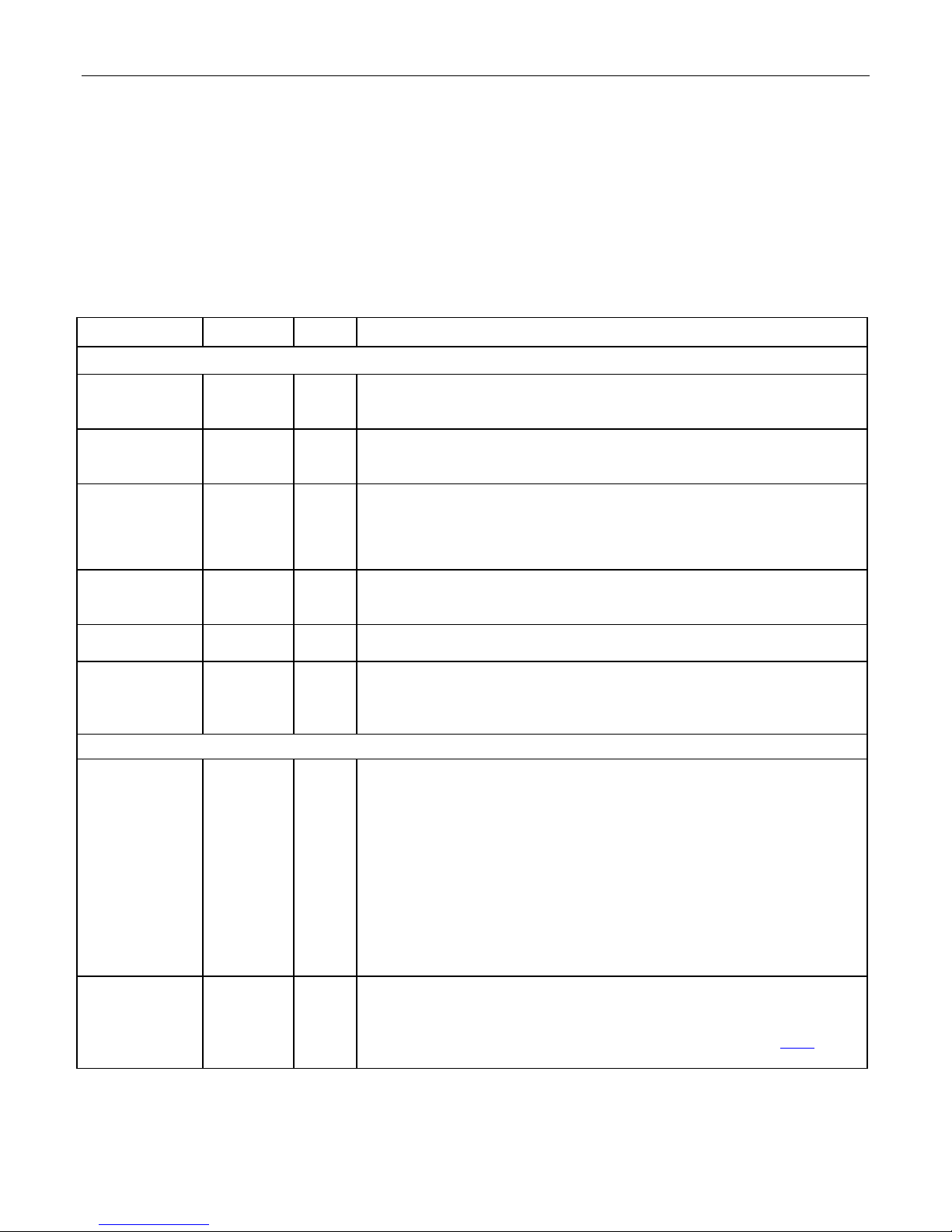
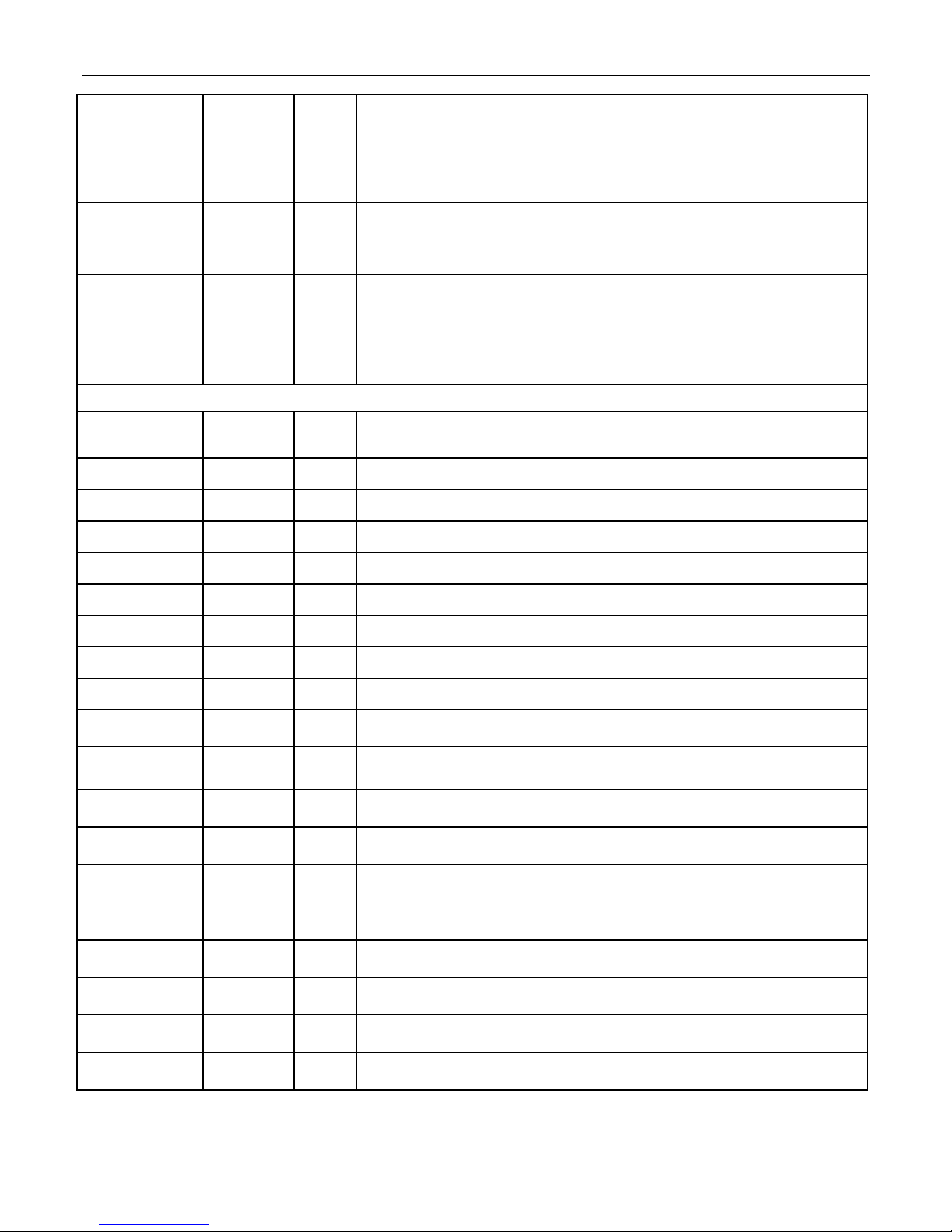
Table 7-1. Detailed Pin Descriptions
Note: I = Input; O = Output; Ipu = Input with pullup; Oz = Output with tri-state; IO = Bidirectional pin; IOz = Bidirectional pin with tri-state.
NAME PIN TYPE FUNCTION
SERIAL INTERFACE IO PINS
Serial Interface Transmit Clock Input. The clock reference for TSER,
TCLKI F1 I
TSER F2 O
TSYNC G3 I
RCLKI G2 I
RSER H1 I
RSYNC G1 I
REF_CLK D13 I
REF_CLKO E13 O
which is output on the rising edge of the clock. TCLKI supports gapped
clocking, up to a maximum frequency of 52MHz.
Transmit Serial Data Output. Output on the rising edge of TCLKI.
Selective clock periods can be skipped for output of TSER with a
gapped clock input on TCLKI. The maximum data rate is 52Mbps.
Transmit Synchronization Input. An 8lHz synchronization pulse, used
to denote the first Channel 1 of the 8.192Mbps byte-interleaved IBO
data stream. Note that this input is also used to generate the transmit
byte synchronization if X.86 mode is enabled.
Serial Interface Receive Clock Input. Reference clock for receive
serial data on RSER. Gapped clocking is supported, up to the
maximum RCLKI frequency of 52MHz.
Receive Serial Data Input. Receive Serial data arrives on the rising
edge of the clock.
Receive Synchronization Input. An 8kHz synchronization pulse, used
to denote the first Channel 1 of the 8.192Mbps byte-interleaved IBO
data stream. Note that this input is also used to generate the receive
byte synchronization if X.86 mode is enabled.
MII/RMII PORT
Reference Clock (RMII and MII). When in RMII mode, all signals from
the PHY are synchronous to this clock input for both transmit and
receive. This required clock can be up to 50MHz and should have
±100ppm accuracy.
When in MII mode in DCE operation, the DS33Z41 uses this input to
generate the RX_CLK and TX_CLK outputs as required for the
Ethernet PHY interface. When the MII interface is used with DTE
operation, this clock is not required and should be tied low.
In DCE and RMII modes, this input must have a stable clock input
before setting the RST pin high for normal operation.
Reference Clock Output (RMII and MII). A derived clock output up to
50MHz, generated by internal division of the SYSCLKI signal.
Frequency accuracy of the REF_CLKO signal will be proportional to the
accuracy of the user-supplied SYSCLKI signal. See Section 8.2.2
more information.
for
14 of 167
Page 15

DS33Z41 Quad IMUX Ethernet Mapper
NAME PIN TYPE FUNCTION
Transmit Clock (MII). Timing reference for TX_EN and TXD[3:0]. The
TX_CLK frequency is 25MHz for 100Mbps operation and 2.5MHz for
10Mbps operation.
TX_CLK A8 IO
In DTE mode, this is a clock input provided by the PHY. In DCE mode,
this is an output derived from REF_CLK providing 2.5MHz (10Mbps
operation) or 25MHz (100Mbps operation).
Transmit Enable (MII):
This pin is asserted high when data TXD [3:0] is being provided by the
DS33Z41. The signal is deasserted prior to the first nibble of the next
frame. This signal is synchronous with the rising edge TX_CLK. It is
TX_EN E10 O
asserted with the first bit of the preamble.
Transmit Enable (RMII):
When this signal is asserted, the data on TXD [1:0] is valid. This signal
is synchronous to the REF_CLK.
Transmit Data 0 through 3(MII). TXD [3:0] is presented synchronously
TXD[0]
TXD[1]
TXD[2]
TXD[3]
B9
C9
D9
E9
with the rising edge of TX_CLK. TXD [0] is the least significant bit of the
data. When TX_EN is low the data on TXD should be ignored.
O
Transmit Data 0 through 1(RMII). Two bits of data TXD [1:0]
presented synchronously with the rising edge of REF_CLK.
Receive Clock (MII). Timing reference for RX_DV, RX_ERR and
RXD[3:0], which are clocked on the rising edge. RX_CLK frequency is
RX_CLK A10 IO
25MHz for 100Mbps operation and 2.5MHz for 10Mbps operation. In
DTE mode, this is a clock input provided by the PHY. In DCE mode,
this is an output derived from REF_CLK providing 2.5MHz (10Mbps
operation) or 25MHz (100Mbps operation).
Receive Data 0 through 3(MII). Four bits of received data, sampled
synchronously with the rising edge of RX_CLK. For every clock cycle,
the PHY transfers 4 bits to the DS33Z41. RXD[0] is the least significant
RXD[0]
RXD[1]
RXD[2]
RXD[3]
B11
C11
D11
A11
bit of the data. Data is not considered valid when RX_DV is low.
I
Receive Data 0 through 1(RMII). Two bits of received data, sampled
synchronously with REF_CLK with 100Mbps mode. Accepted when
CRS_DV is asserted. When configured for 10Mbps mode, the data is
sampled once every 10 clock periods.
RX_DV D10 I
Receive Data Valid (MII). This active high signal indicates valid data
from the PHY. The data RXD is ignored if RX_DV is not asserted high.
Receive Carrier Sense (MII). Should be asserted (high) when data
from the PHY (RXD[3:0) is valid. For each clock pulse 4 bits arrive from
RX_CRS/
CRS_DV
C8 I
the PHY. Bit 0 is the least significant bit. In DCE mode, connect to V
Carrier Sense/Receive Data Valid (RMII). This signal is asserted
(high) when data is valid from the PHY. For each clock pulse 2 bits
arrive from the PHY. In DCE mode, this signal must be grounded.
Receive Error (MII). Asserted by the MAC PHY for one or more
RX_CLK periods indicating that an error has occurred. Active High
indicates Receive code group is invalid. If CRS_DV is low, RX_ERR
RX_ERR B12 I
has no effect. This is synchronous with RX_CLK. In DCE mode, this
signal must be grounded.
Receive Error (RMII). Signal is synchronous to REF_CLK.
DD
.
15 of 167
Page 16
DS33Z41 Quad IMUX Ethernet Mapper
NAME PIN TYPE FUNCTION
Collision Detect (MII). Asserted by the MAC PHY to indicate that a
COL_DET B13 I
collision is occurring. In DCE Mode this signal should be connected to
ground. This signal is only valid in half duplex mode, and is ignored in
full duplex mode
Management Data Clock (MII). Clocks management data between the
MDC C12 O
PHY and DS33Z41. The clock is derived from SYSCLKI, with a
maximum frequency is 1.67MHz. The user must leave this pin
unconnected in the DCE Mode.
MII Management data IO (MII). Data path for control information
between the PHY and DS33Z41. When not used, pull to logic high
MDIO C13 IO
externally through a 10kΩ resistor. The MDC and MDIO pins are used
to write or read up to 32 Control and Status Registers in 32 PHY
Controllers. This port can also be used to initiate Auto-Negotiation for
the PHY. The user must leave this pin unconnected in the DCE Mode.
MICROPROCESSOR PORT
A0 A1 I
Address Bit 0. Address bit 0 of the microprocessor interface. Least
Significant Bit.
A1 B1 I Address Bit 1. Address bit 1 of the microprocessor interface.
A2 A2 I Address Bit 2. Address bit 2 of the microprocessor interface.
A3 B2 I Address Bit 3. Address bit 3 of the microprocessor interface.
A4 C2 I Address Bit 4. Address bit 4 of the microprocessor interface.
A5 A3 I Address Bit 5. Address bit 5 of the microprocessor interface.
A6 B3 I Address Bit 6. Address bit 6 of the microprocessor interface.
A7 C3 I Address Bit 7. Address bit 7 of the microprocessor interface.
A8 A4 I Address Bit 8. Address bit 8 of the microprocessor interface.
A9 B4 I
D0 A5 IOZ
D1 A6 IOZ
D2 A7 IOZ
D3 B5 IOZ
D4 B6 IOZ
D5 B7 IOZ
D6 C5 IOZ
D7 C6 IOZ
CS
C1 I
Address Bit 9. Address bit 9 of the microprocessor interface. Most
Significant Bit.
Data Bit 0. Bidirectional data bit 0 of the microprocessor interface.
Least Significant Bit. Not driven when CS = 1 or RST = 0.
Data Bit 1. Bidirectional data bit 1 of the microprocessor interface. Not
driven when CS = 1 or RST = 0.
Data Bit 2. Bidirectional data bit 2 of the microprocessor interface. Not
driven when CS = 1 or RST = 0.
Data Bit 3. Bidirectional data bit 3 of the microprocessor interface. Not
driven when CS = 1 or RST = 0.
Data Bit 4. Bidirectional data bit 4 of the microprocessor interface. Not
driven when CS = 1 or RST = 0.
Data Bit 5. Bidirectional data bit 5 of the microprocessor interface. Not
driven when CS = 1 or RST = 0.
Data Bit 6. Bidirectional data bit 6 of the microprocessor interface. Not
driven when CS = 1 or RST = 0.
Data Bit 7. Bidirectional data bit 7 of the microprocessor interface. Most
Significant Bit. Not driven when CS = 1 or RST = 0.
Chip Select. This pin must be taken low for read/write operations.
When CS is high, the RD/DS and WR signals are ignored.
16 of 167
Page 17
DS33Z41 Quad IMUX Ethernet Mapper
NAME PIN TYPE FUNCTION
Read Data Strobe (Intel Mode). The DS33Z41 drives the data bus
(D0-D7) with the contents of the addressed register while RD and CS
are both low.
RD/DS
E1 I
Data Strobe (Motorola Mode). Used to latch data through the
microprocessor interface. DS must be low during read and write
operations.
Write (Intel Mode). The DS33Z41 captures the contents of the data
bus (D0:D7) on the rising edge of WR and writes them to the addressed
register location. CS must be held low during write operations.
WR/RW
E2 I
Read Write (Motorola Mode). Used to indicate read or write
operation. RW must be set high for a register read cycle and low for a
register write cycle.
Interrupt Output. Outputs a logic zero when an unmasked interrupt
event is detected. Outputs a logic zero when an unmasked interrupt
event is detected. INT is deasserted when all interrupts have been
INT
F3 OZ
acknowledged and serviced. Active low. Inactive state is programmable
in register GL.CR1. is deasserted when all interrupts have been
acknowledged and serviced. Active low. Inactive state is programmable
in register GL.CR1.
Reset. An active-low signal on this pin resets the internal registers and
logic. This pin should remain low until power, SYSCLKI, RX_CLK, and
RST
D8 I
TX_CLK are stable, then set high for normal operation. This input
requires a clean edge with a rise time of 25ns or less to properly reset
the device.
Mode Control
MODEC[0]
MODEC[1]
D6
D7
00 = Read/Write Strobe Used (Intel Mode)
I
01 = Data Strobe Used (Motorola Mode)
10 = Reserved. Do not use.
11 = Reserved. Do not use.
DCE or DTE Selection. The user must set this pin high for DCE Mode
selection or low for DTE Mode. In DCE Mode, the DS33Z41 MAC port
can be directly connected to another MAC. In DCE Mode, the Transmit
DCEDTES A13 I
clock (TX_CLK) and Receive clock (RX_CLK) are output by the
DS33Z41. Note that there is no software bit selection of DCEDTES.
Note that DCE Mode is only relevant when the MAC interface is in MII
mode.
RMIIMIIS C4 I
RMII or MII Selection. Set high to configure the MAC for RMII
interfacing. Set low for MII interfacing.
17 of 167
Page 18
DS33Z41 Quad IMUX Ethernet Mapper
NAME PIN TYPE FUNCTION
SDRAM CONTROLLER
SDATA[0]
SDATA[1]
SDATA[2]
SDATA[3]
SDATA[4]
SDATA[5]
SDATA[6]
SDATA[7]
SDATA[8]
SDATA[9]
SDATA[10]
SDATA[11]
SDATA[12]
SDATA[13]
SDATA[14]
SDATA[15]
SDATA[16]
SDATA[17]
SDATA[18]
SDATA[19]
SDATA[20]
SDATA[21]
SDATA[22]
SDATA[23]
SDATA[24]
SDATA[25]
SDATA[26]
SDATA[27]
SDATA[28]
SDATA[29]
SDATA[30]
SDATA[31]
SDA[0]
SDA[1]
SDA[2]
SDA[3]
SDA[4]
SDA[5]
SDA[6]
SDA[7]
SDA[8]
SDA[9]
SDA[10]
SDA[11]
M1
L2
N1
M2
N2
N4
N3
L4
J3
M3
H3
J1
J2
K1
K2
L1
M12
H11
M11
N13
N11
L13
N12
K13
J13
J12
H13
H12
G12
F11
G11
L10
N9
N10
L11
K11
L7
L8
L9
L5
M5
M7
M8
N8
IOZ
O
SDRAM Data Bus Bits 0 to 31: The 32 pins of the SDRAM data bus
are inputs for read operations and outputs for write operations. At all
other times, these pins are high impedance.
Note: All SDRAM operations are controlled entirely by the DS33Z41.
No user programming for SDRAM buffering is required.
SDRAM Address Bus 0 to 11. The 12 pins of the SDRAM address bus
output the row address first, followed by the column address. The row
address is determined by SDA0 to SDA11 at the rising edge of clock.
Column address is determined by SDA0-SDA9 and SDA11 at the rising
edge of the clock. SDA10 is used as an auto-precharge signal.
Note: All SDRAM operations are controlled entirely by the DS33Z41.
No user programming for SDRAM buffering is required.
SDRAM Bank Select. These 2 bits select 1 of 4 banks for the
SBA[0]
SBA[1]
M6
N7
read/write/precharge operations.
I
Note: All SDRAM operations are controlled entirely by the DS33Z41.
No user programming for SDRAM buffering is required.
SDRAM Row Address Strobe. Active-low output, used to latch the row
SRAS
K6 O
address on rising edge of SDCLKO. It is used with commands for Bank
Activate, Precharge, and Mode Register Write.
18 of 167
Page 19

DS33Z41 Quad IMUX Ethernet Mapper
NAME PIN TYPE FUNCTION
SDRAM Column Address Strobe. Active-low output, used to latch the
SCAS
H4 O
column address on the rising edge of SDCLKO. It is used with
commands for Bank Activate, Precharge, and Mode Register Write.
SWE
SDMASK[0]
SDMASK[1]
SDMASK[2]
SDMASK[3]
M4 O
N6
G4
M10
M9
SDCLKO N5
(4mA)
SDRAM Write Enable. This active-low output enables write operation
and auto precharge.
SDRAM Mask 0 to 3. When high, a write is done for that byte. The
O
least significant byte is SDATA7 to SDATA0. The most significant byte
is SDATA31 to SDATA24.
O
SDRAM CLK Out. System clock output to the SDRAM. This clock is a
buffered version of SYSCLKI.
System Clock In. 100MHz System Clock input to the DS33Z41, used
for internal operation. This clock is buffered and provided at SDCLKO
SYSCLKI G13 I
for the SDRAM interface. The DS33Z41 also provides a divided version
output at the REF_CLKO pin. A clock supply with ±100ppm frequency
accuracy is suggested.
SDCS
L6 O SDRAM Chip Select. Active-low output enables SDRAM access.
QUEUE STATUS
Queue Overflow. This pin goes high when the transmit or receive
QOVF C7 O
queue has overflowed. This pin will go low when the high watermark is
reached again.
JTAG INTERFACE
JTAG Reset. JTRST is used to asynchronously reset the test access
port controller. After power-up, a rising edge on JTRST will reset the
JTRST
E6 Ipu
test port and cause the device I/O to enter the JTAG DEVICE ID mode.
Pulling JTRST low restores normal device operation. JTRST is pulled
HIGH internally via a 10kΩ resistor operation. If boundary scan is not
used, this pin should be held low.
JTCLK D4 Ipu
JTAG Clock. This signal is used to shift data into JTDI on the rising
edge and out of JTDO on the falling edge.
JTAG Data Out. Test instructions and data are clocked out of this pin
JTDO E5 Oz
on the falling edge of JTCLK. If not used, this pin should be left
unconnected.
JTDI E4 Ipu
JTAG Data In. Test instructions and data are clocked into this pin on
the rising edge of JTCLK. This pin has a 10kΩ pullup resistor.
JTAG Mode Select. This pin is sampled on the rising edge of JTCLK
JTMS F7 Ipu
and is used to place the test access port into the various defined IEEE
1149.1 states. This pin has a 10kΩ pullup resistor.
19 of 167
Page 20

DS33Z41 Quad IMUX Ethernet Mapper
NAME PIN TYPE FUNCTION
POWER SUPPLIES
G5–G10,
VDD3.3
H2, H5,
H6,
I
VDD3.3: Connect to 3.3V Power Supply
H7–H10
D3, D2,
E3, F4,
J4, K4,
VDD1.8
L3, F10,
I
VDD1.8: Connect to 1.8V Power Supply
E11, E12,
D12, M13,
L12
A9, A12,
B10, C10,
D1, D5,
E7, E8,
F6, F8,
F12, F13,
VSS
J5, J6,
I
VSS: Connect to the Common Supply Ground
J11, J7,
J8, J9,
J10, K3,
K5, K7,
K8, K9,
K10, K12
N.C.
F5, F9, B8
— No Connection. Do not connect these pins.
20 of 167
Page 21

Figure 7-1. DS33Z41 256-Ball CSBGA Pinout
DS33Z41 Quad IMUX Ethernet Mapper
1 2 3 4 5 6 7 8 9 10 11 12 13
A0 A2 A5 A8 D0 D1 D2 TX_CLK VSS RX_CLK RXD[3] VSS DCEDTES
A
A1 A3 A6 A9 D3 D4 D5 NC TXD[0] VSS RXD[0] RX_ERR COL_DET
B
CS
C
VSS VDD1.8 VDD1.8 JTCLK VSS MODEC[0] MODEC[1]
D
RD /
E
DS
TCLKI TSER
F
RSYNC RCLKI TSYNC SDMASK[1] VDD3 VDD3 VDD3 VDD3 VDD3 VDD3 SDATA[30] SDATA[28] SDCLKI
G
RSER VDD3 SDATA[10]
H
SDATA[11] SDATA[12] SDATA[8] VDD1.8 VSS VSS VSS VSS VSS VSS VSS SDATA[25] SDATA[24]
J
SDATA[13] SDATA[14] VSS VDD1.8 VSS
K
SDATA[15] SDATA[1] VDD1.8 SDATA[7] SDA[7]
L
A4 A7 RMIIMIIS D6 D7 QOVF RX_CRS TXD[1] VSS RXD[1] MDC MDIO
TXD[2] RX_DV RXD[2] VDD1.8 REF_CLK
WR /
RW
VDD1.8 JTDI JTDO
INT
VDD1.8 NC VSS JTMS VSS NC VDD1.8 SDATA[29] VSS VSS
SCAS
VDD3 VDD3 VDD3 VDD3 VDD3 VDD3 SDATA[17] SDATA[27] SDATA[26]
JTRST
SRAS
SDCS
RST
VSS VSS TXD[3] TX_EN VDD1.8 VDD1.8 REF_CLKO
VSS VSS VSS VSS SDA[3] VSS SDATA[23]
SDA[4] SDA[5] SDA[6] SDATA[31] SDA[2] VDD1.8 SDATA[21]
SDATA[0] SDATA[3] SDATA[9]
M
SDATA[2] SDATA[4] SDATA[6] SDATA[5] SDCLKO SDMASK[0] SBA[1] SDA[11] SDA[0] SDA[1] SDATA[20] SDATA[22] SDATA[19]
N
SWE
SDA[8] SBA[0] SDA[9] SDA[10] SDMASK[3] SDMASK[2] SDATA[18] SDATA[16] VDD1.8
21 of 167
Page 22

DS33Z41 Quad IMUX Ethernet Mapper
8 FUNCTIONAL DESCRIPTION
The DS33Z41 provides interconnection and mapping functionality between Ethernet Packet Systems and WAN
Time-Division Multiplexed (TDM) systems such as T1/E1/J1, HDSL, and T3/E3. The device is composed of a
10/100 Ethernet MAC, Packet Arbiter, Committed Information Rate controller (CIR), HDLC/X.86(LAPS) Mapper,
SDRAM interface, Serial IBO interface, control ports, and Bit Error Rate Tester (BERT).
The Ethernet Packet interfaces support MII and RMII interfaces allowing DSZ33Z41 to connect to commercially
available Ethernet PHY and MAC devices. The Ethernet interfaces can be individually configured for 10Mbps or
100Mbps service, in DTE and DCE configurations. The DS33Z41 MAC interface can be configured to reject
frames with bad FCS and short frames (less than 64 bytes).
Ethernet frames are queued and stored in external 32-bit SDRAM. The DS33Z41 SDRAM controller enables
connection to a 128Mbit SDRAM without external glue logic, at clock frequencies up to 100MHz. The SDRAM is
used for both the Transmit and Receive Data Queues. The Receive Queue stores data to be sent from the Packet
interface to the WAN interface. The Transmit Queue stores data to be sent from the WAN interface to the Packet
interface. The external SDRAM can accommodate up to 8192 frames with a maximum frame size of 2016 bytes.
The sizing of the queues can be adjusted by software. The user can also program high and low watermarks for
each queue that can be used for automatic or manual flow control. The packet data stored in the SDRAM is
encapsulated in HDLC or X.86 (LAPS) to be transmitted over the WAN interfaces. The device also provides the
capability for bit and packet scrambling.
The WAN interface also receives encapsulated Ethernet packets and transmits the extracted packets over the
Ethernet port. The WAN physical interface supports up to four serial data streams on a 8.192Mbps IBO bus. The
WAN serial port can operate with a gapped clock, and can be connected to a framer or T/E-Carrier transceiver for
transmission to the WAN. The WAN interface can be seamlessly connected to the Dallas Semiconductor/Maxim
T1/E1/J1 Framers and Single-Chip Transceivers (SCTs).
The DS33Z41 can be configured through an 8-bit Microprocessor interface port. The DS33Z41 also provides two
on-board clock dividers for the System Clock input and Reference Clock Input for the 802.3 interfaces, further
reducing the need for ancillary devices.
22 of 167
Page 23

DS33Z41 Quad IMUX Ethernet Mapper
8.1 Processor Interface
Microprocessor control of the DS33Z41 is accomplished through the 20 interface pins of the microprocessor port.
The 8-bit parallel data bus can be configured for Intel or Motorola modes of operation with the two MODEC[1:0]
pins. When MODEC[1:0] = 00, bus timing is in Intel mode, as shown in Figure 11-11
MODEC[1:0] = 01, bus timing is in Motorola mode, as shown in Figure 11-13
space is mapped through the use of 8 address lines, A0 - A7. Multiplexed Mode is not supported on the processor
interface.
The Chip Select (CS) pin must be brought to a logic low level to gain read and write access to the microprocessor
port. With Intel timing selected, the Read (RD) and Write (WR) pins are used to indicate read and write operations
and latch data through the interface. With Motorola timing selected, the Read-Write (RW) pin is used to indicate
read and write operations while the Data Strobe (DS) pin is used to latch data through the interface.
The interrupt output pin (INT) is an open-drain output that will assert a logic-low level upon a number of software
maskable interrupt conditions. This pin is normally connected to the microprocessor interrupt input. The register
map is shown in Table 9-1
.
and Figure 11-14. The address
8.1.1 Read-Write/Data Strobe Modes
The processor interface can operate in either read-write strobe mode or data strobe mode. When MODEC[1:0] =
00 the read-write strobe mode is enabled and a negative pulse on RD performs a read cycle, and a negative
pulse on WR performs a write cycle. When MODEC[1:0] pins = 01 the data strobe mode is enabled and a
negative pulse on DS when RW is high performs a read cycle, and a negative pulse on DS when RW is low
performs a write cycle. The read-write strobe mode is commonly called the “Intel” mode, and the data strobe
mode is commonly called the “Motorola” mode.
and Figure 11-12. When
8.1.2 Clear on Read
The latched status registers will clear on a read access. It is important to note that in a multi-task software
environment, the user should handle all status conditions of each register at the same time to avoid inadvertently
clearing status conditions. The latched status register bits are carefully designed so that an event occurrence
cannot collide with a user read access.
8.1.3 Interrupt and Pin Modes
The interrupt (INT) pin is configurable to drive high or float when not active. The INTM bit controls the pin
configuration, when it is set the INT pin will drive high when not active. After reset, the INT pin is in high
impedance mode until an interrupt source is active and enabled to drive the interrupt pin.
23 of 167
Page 24

DS33Z41 Quad IMUX Ethernet Mapper
8.2 Clock Structure
The DS33Z41 clocks sources and functions are as follows:
• Serial Transmit Data (TCLKI) and Serial Receive Data (RCLKI) clock inputs are used to transfer data from
the serial interface. These clocks can be gapped.
• System Clock (SYSCLKI) input. Used for internal operation. This clock input cannot be a gapped clock. A
clock supply with ±100ppm frequency accuracy is suggested. A buffered version of this clock is provided
on the SDCLKO pin for the operation of the SDRAM. A divided and buffered version of this clock is
provided on REF_CLKO for the RMII/MII interface.
• Packet Interface Reference clock (REF_CLK) input that can be 25MHz or 50MHz. This clock is used as
the timing reference for the RMII/MII interface.
• The Transmit and Receive clocks for the MII Interface (TX_CLK and RX_CLK). In DTE mode, these are
input pins and accept clocks provided by an Ethernet PHY. In the DCE mode, these are output pins and
will output an internally generated clock to the Ethernet PHY. The output clocks are generated by internal
division of REF_CLK. In RMII mode, only the REF_CLK input is used.
• REF_CLKO is an output clock that is generated by dividing the 100MHz System clock (SYSCLKI) by 2 or
4.
• A Management Data Clock (MDC) output is derived from SYSCLKI and is used for information transfer
between the internal Ethernet MAC and external PHY. The MDC clock frequency is 1.67MHz.
The following table provides the different clocking options for the Ethernet interface.
Table 8-1. Clock Selection for the Ethernet (LAN) Interface
RMIIMIIS
PIN
0 (MII) 10 DTE 25
0 (MII) 10 DCE 25
0 (MII) 10 DCE 25
1 (RMII) 10 — 50
1 (RMII) 10 — 50
SPEED
(Mbps)
DCE/
DTE
REF_CLKO
OUTPUT
(MHz)
REF_CLK
INPUT
25MHz
±100ppm
25MHz
±100ppm
25MHz
±100ppm
50MHz
±100ppm
50MHz
±100ppm
RX_CLK TX_CLK
Input from
PHY
2.5MHz
(Output)
25MHz
(Output)
Not Applicable Not Applicable 1.67
Not Applicable Not Applicable 1.67
Input from
PHY
2.5MHz
(Output)
25MHz
(Output)
MDC
OUTPUT
(MHz)
1.67
1.67
1.67
24 of 167
Page 25

Figure 8-1. Clocking for the DS33Z41
Microport
DS33Z41 Quad IMUX Ethernet Mapper
50 or 25 Mhz Oscillator
Buffer
Div by 1,2,4,8,10
Output clocks:
50,25 Mhz,2.5 Mhz
REF_CLK
TSER
TCLKI1
RCLKI1
RSER
Line 1
IMUX
HDLC
Serial
Interface
JTAG
+
X.86
CIR
SDRAM
Arbiter
SDRAM
Interface
SDCLKO
MAC
RMII
MII
Buffer Dev
Div by 2,4,12
Output Clocks
25,50
Mhz
REF_CLKO
50 or 25 Mhz
TX_CLK1
RXD
RX_CLK1
TXD
MDC
100 Mhz Oscillator
SYSCLKI
25 of 167
Page 26

DS33Z41 Quad IMUX Ethernet Mapper
8.2.1 Serial Interface Clock Modes
The Serial Interface timing is determined by the line clocks. 8.192MHz is the required clock rate for interfacing the
IBO bus to Dallas Semiconductor Framers and Single-Chip Transceivers. Both the transmit and receive clocks
(TCLKI and RCLKI) are inputs.
8.2.2 Ethernet Interface Clock Modes
The Ethernet PHY interface has several different clocking requirements, depending on the mode of operation.
Table 8-1 outlines the possible clocking modes for the Ethernet Interface. The buffered REF_CLKO output is
generated by division of the 100MHz system clock input by the user on SYSCLKI. The frequency of the
REF_CLKO pin is automatically determined by the DS33Z41 based on the state of the RMIIMIIS pin. The
REF_CLKO function can be turned off with the GL.CR1
the REF_CLKO signal should not be used to provide an input to REF_CLK, due to the reset requirements in these
operating modes.
In RMII mode, receive and transmit timing is always synchronous to a 50MHz clock input on the REF_CLK pin.
The source of REF_CLK is expected to be the external PHY. More information on RMII mode can be found in
Section 8.14.2
.
While using MII mode with DTE operation, the MII clocks (RX_CLK and TX_CLK) are inputs that are expected to
be provided by the external PHY. While using MII mode with DCE operation, the MII clocks (TX_CLK and
RX_CLK) are output by the DS33Z41, and are derived from the 25MHz REF_CLK input. More information on MII
mode can be found in Section 8.14.1
.
.RFOO bit. Note that in DCE and RMII operating modes,
26 of 167
Page 27

DS33Z41 Quad IMUX Ethernet Mapper
8.3 Resets and Low-Power Modes
The external RST pin and the global reset bit in GL.CR1 create an internal global reset signal. The global reset
signal resets the status and control registers on the chip (except the GL.CR1. RST bit) to their default values and
resets all the other flops to their reset values. The device should be reset after all power supplies, SYSCLKI,
RX_CLK, and TX_CLK are stable. The processor bus output signals are also placed in high-impedance mode
when the RST pin is active (low). The global reset bit (GL.CR1
reset to zero when the external RST pin is active or when a zero is written to it. Allow 5ms after initiating a reset
condition for the reset operation to complete.
. RST) stays set after a one is written to it, but is
The Serial Interface reset bit in LI.RSTPD
default values, except for the LI.RSTPD.RST bit. The Serial Interface includes the HDLC encoder/decoder, X86
encoder and decoder and the corresponding serial port. The Serial Interface reset bit (LI.RSTPD.RST) stays set
after a one is written to it, but is reset to zero when the global reset signal is active or when a zero is written to it.
resets all the status and control registers on the Serial Interface to their
Table 8-2. Reset Functions
RESET FUNCTION LOCATION COMMENTS
Hardware Device Reset
Hardware JTAG Reset
Global Software Reset GL.CR1 Writing to this bit resets the device.
Serial interface Reset LI.RSTPD
Queue Pointer Reset GL.C1QPR
There are several features in the DS33Z41 to reduce power consumption. The reset bit in the LI.RSTPD register
minimizes power usage in the Serial Interface. Additionally, the RST pin or GL.CR1
indefinitely to keep the device in a low-power mode. Note that exiting a reset condition requires re-initialization
and configuration. For the lowest possible standby current, clocks may be externally gated.
RST Pin
JTRST Pin
Transition to a logic 0 level resets the
device.
Resets the JTAG test port.
Writing to this bit resets a Serial
Interface.
Writing to this bit resets the Queue
Pointers.
.RST bit may be held in reset
27 of 167
Page 28
8.4 Initialization and Configuration
EXAMPLE DEVICE INITIALIZATION SEQUENCE:
DS33Z41 Quad IMUX Ethernet Mapper
STEP 1: Reset the device by pulling the RST pin low or by using the software reset bits outlined in Section 8.3
Clear all reset bits. Allow 5 milliseconds for the reset recovery.
STEP 2: Check the Device ID in the GL.IDRL
STEP 3: Configure the system clocks. Allow the clock system to properly adjust.
STEP 4: Initialize the entire remainder of the register space with 00h (or otherwise if specifically noted in the
register’s definition), including the reserved bits and reserved register locations.
STEP 5: Write FFFFFFFFh to the MAC indirect addresses 010Ch through 010Fh.
STEP 6: Setup connection in the GL.CON1 register.
STEP 7: Configure the Serial Port register space as needed.
STEP 8: Configure the Ethernet Port register space as needed.
STEP 9: Configure the Ethernet MAC indirect registers as needed.
STEP 10: Configure the external Ethernet PHYs through the MDIO interface.
STEP 11: Clear all counters and latched status bits.
STEP 12: Set Queue sizes in the Arbiter and reset the queue pointers for the Ethernet and Serial interfaces.
STEP 13: Enable Interrupts as needed.
STEP 14: Initiate link aggregation as discussed in Section 8.9
STEP 15: Begin handling interrupts and latched status events.
and GL.IDRH registers.
.
.
8.5 Global Resources
In order to maintain software compatibility with the multiport devices in the product family, a set of Global registers
are located at 0F0h-0FFh. The global registers include Global resets, global interrupt status, interrupt masking,
clock configuration, and the Device ID registers. See the Global Register Definitions in Table 9-2
.
8.6 Per-Port Resources
Multi-port devices in this product family share a common set of global registers, BERT, and Arbiter. All other
resources are per-port.
28 of 167
Page 29

DS33Z41 Quad IMUX Ethernet Mapper
8.7 Device Interrupts
Figure 8-2 diagrams the flow of interrupt conditions from their source status bits through the multiple levels of
information registers and mask bits to the interrupt pin. When an interrupt occurs, the host can read the Global
Latched Status registers GL.LIS
to initially determine the source of the interrupt. The host can then read the LI.TQCTLS
LI.RX86S, SU.QCRLS, and BSRL registers to further identify the source of the interrupt(s). In order to maintain
software compatibility with the multiport devices in the product family, the global interrupt status and interrupt
enable registers have been preserved, but do not need to be used. If GL.TRQIS
source, the host will then read the LI.TPPSRL and LI.RPPSRL registers for the cause of the interrupt. If GL.LIS is
determined to be the interrupt source, the host will then read the LI.TQCTLS
LI.RX86S registers for the source of the interrupt. If GL.SIS is the source, the host will then read the SU.QCRLS
register for the source of the interrupt. If GL.IBIS is the source, the host will then read the BSRL register for the
source of the interrupt. All Global Interrupt Status Register bits are real-time bits that will clear once the
appropriate interrupt has been serviced and cleared, as long as no additional, enabled interrupt conditions are
present in the associated status register. All Latched Status bits must be cleared by the host writing a “1” to the bit
location of the interrupt condition that has been serviced. In order for individual status conditions to transmit their
status to the next level of interrupt logic, they must be enabled by placing a “1” in the associated bit location of the
correct Interrupt Enable Register. The Interrupt enable registers are LI.TPPSRIE
BSRIE, SU.QRIE, GL.LIE, GL.SIE, GL.IBIE, GL.TRQIE, GL.IMXSIE, GL.IMXDFEIE, and GL.IMXOOFIE. Latched
Status bits that have been enabled via Interrupt Enable registers are allowed to pass their interrupt conditions to
the Global Interrupt Status Registers. The Interrupt enable registers allow individual Latched Status conditions to
generate an interrupt, but when set to zero, they do not prevent the Latched Status bits from being set. Therefore,
when servicing interrupts, the user should AND the Latched Status with the associated Interrupt Enable Register
in order to exclude bits for which the user wished to prevent interrupt service. This architecture allows the
application host to periodically poll the latched status bits for non-interrupt conditions, while using only one set of
registers. Note the bit-orders of SU.QRIE and SU.QCRLS are different.
, GL.SIS, GL.IBIS, GL.TRQIS, GL.IMXSLS, GL.IMXDFDELS, and GL.IMXOOFLS
, LI.TPPSRL, LI.RPPSRL,
is determined to be the interrupt
, LI.TPPSRL, LI.RPPSRL, and
, LI.RPPSRIE, LI.RX86LSIE,
Note that the inactive state of the interrupt output pin is configurable. The INTM bit in GL.CR1
controls the inactive
state of the interrupt pin, allowing selection of a pull-up resistor or active driver.
The interrupt structure is designed to efficiently guide the user to the source of an enabled interrupt source. The
latched status bits for the interrupting entity must be read to clear the interrupt. Also reading the latched status bit
will reset all bits in that register. During a reset condition, interrupts cannot be generated. The interrupts from any
source can be blocked at a global level by the placing a zero in the global interrupt enable registers (GL.LIE
GL.SIE, GL.IBIE, GL.TRQIE, GL.IMXSIE, GL.IMXDFEIE, and GL.IMXOOFIE). Reading the Latched Status bit for
all interrupt generating events will clear the interrupt status bit and Interrupt signal will be deasserted.
,
29 of 167
Page 30

Figure 8-2. Device Interrupt Information Flow Diagram
Receive FCS Errored Packet
Receive Aborted Packet
Receive Invalid Packet Detected
Receive Small Packet Detected
Receive Large Packet Detected
Receive FCS Errored Packet Count
Receive Aborted Packet Count
Receive Size Violation Packet Count
<Reserved>
<Reserved>
<Reserved>
<Reserved>
<Reserved>
<Reserved>
<Reserved>
Transmit Errored Packet Insertion Finished
<Reserved>
<Reserved>
<Reserved>
<Reserved>
SAPI High is not equal to LI.TRX86SAPIH
SAPI Low is not equal to LI.TRX86SAPIL
Control is not equal to LI.TRX8C
Address is not equal to LI.TRX86A
<Reserved>
<Reserved>
<Reserved>
<Reserved>
Transmit Queue FIFO Overflowed
Transmit Queue Overflow
Transmit Queue for Connection Exceeded Low Threshold
Transmit Queue for Connection Exceeded High
Threshold
<Reserved>
<Reserved>
<Reserved>
<Reserved>
Receive Queue FIFO Overflowed
Receive Queue Overflow
Receive Queue for Connection Exceeded Low Threshold
Receive Queue for Connection Exceeded High Threshold
<Reserved>
<Reserved>
<Reserved>
<Reserved>
Performance Monitor Update
Bit Error Detected
Bit Error Count
Out Of Synchronization
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
7
6
5
4
3
2
1
0
LI.RPPSL
LI.RPPSRIE
LI.TPPSRL
LI.TPPSRIE
LI.RX86S
LI.RX86LSIE
LI.TQTIE
LI.TQCTLS
SU.QRIE
SU.QCRLS
BSRL
BSRIE
DS33Z41 Quad IMUX Ethernet Mapper
Drawing Legend:
Interrupt Status
Registers
Interrupt Enable
Registers
Register Name
Register Name
6
5
4
3
2
GL.TRQIS
1
0
6
5
4
3
GL.LIS
2
1
0
...
GL.SIS
...
GL.TRQIE
GL.LIE
GL.SIE
Interrupt Pin
GL.IBIS
GL.IBIE
GL.IMXSIE
GL.IMXSLS
30 of 167
GL.IMXDFDELS
GL.IMXOOFLS
GL.IMXDFEIE
GL.IMXOOFIE
Page 31

DS33Z41 Quad IMUX Ethernet Mapper
8.8 Serial Interface
The Serial Interface consists of physical serial port, IMUX/IBO Formatter, and HDLC/X.86 engine. The Serial
Interface supports time-division multiplexed serial data, in a format compatible with Dallas Semiconductor’s
8.192Mbps Channel Interleaved Bus Operation (IBO). The Serial Interface receives and transmits the
encapsulated Ethernet packets. The physical interface consists of Transmit Data, Transmit Clock, Transmit
Synchronization, Receive Data, Receive Clock, and Receive Synchronization. The Serial Interface can be
seamlessly connected to the IBO bus of the Dallas Semiconductor/Maxim T1/E1/J1 Framers and Single-Chip
Transceivers (SCT’s) such as the DS21Q42, DS21Q44, DS2155, and DS21458. Functional timing is shown in
Figure 11-9
.
• Byte-aligned data is always input through the RSER pin at a rate of 8.192Mbps. RSYNC is an 8kHz
reference input used to determine the position of channel 1 for the first T1/E1 link. If the device is
configured to use less than 4 T1/E1 links, the data on RSER associated with the unused links must
be filled with “all ones”.
• Data on the IBO bus is byte-interleaved (by channel) for up to 4 T1/E1 interfaces, and is “byte-striped”
across the available links. The Channel 1 byte arrives (MSB first) for all four T1/E1 links, followed by
the Channel 2 byte for all four T1/E1 links, etc.
• Channel 1 is never used for data. In T1 mode, channels 5, 9, 13, 17, 21, 25, 29 are also not used for
data. Bytes for all unused timeslots will be replaced with FFh. All 4 TDM links must be configured for
T1 operation, or all 4 links must be configured for E1 operation.
• Channel 2 is a reserved for link management and coordination. This timeslot is used for inter-node
communication to initiate, control, and monitor the IMUX function. The IMUX operation is initiated with
a handshaking procedure and if successful, followed by a data phase. There is no data transfer
during the handshaking phase. During data transfer, channel 2 is used to provide frame sequence
numbers. The receiver uses the sequence numbers (0-63) to reassemble the frames to compensate
for a differential delay of up to 7.75ms. If the differential delay exceeds 7.75ms, packet errors will
occur.
• Byte-aligned data is output on the TSER pin at a rate of 8.192Mbps. TSYNC is used as an 8kHz
synchronization for the TSER data and is used to determine the position of channel 1 for the first
T1/E1 link. If the device is configured to use less than 4 T1/E1 links, data bytes on TSER associated
with the unused links are set to FFh.
8.9 Link Aggregation (IMUX)
The DS33Z41 has a link aggregation feature that allows data from the Ethernet interface to be inverse multiplexed
over up to 4 bonded T1/E1 links. The T1/E1 data streams are input and output from the DS33Z41 on an
8.192Mbps Interleaved Bus (IBO). The IMUX function is shown graphically in Figure 8-3
and Figure 8-4.
31 of 167
Page 32
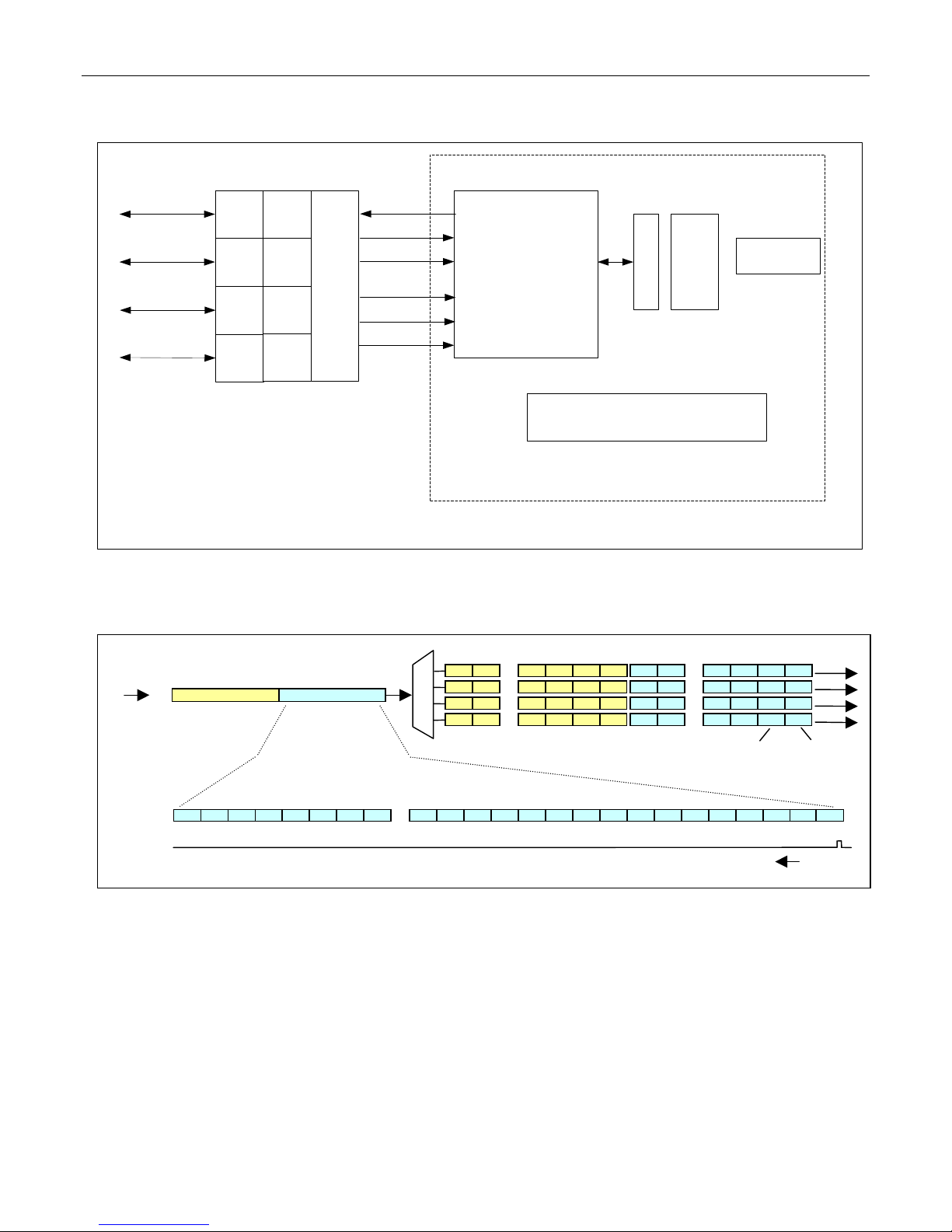
Figure 8-3. IMUX Interface to T1/E1 Transceivers
DS33Z41 Quad IMUX Ethernet Mapper
T1E1
T1E1
LIU
Framer
TSER
TSYNC
T1E1
T1E1
T1E1
T1E1
LIU
LIU
LIU
Framer
Framer
Framer
I
B
O
TCLKI
RSER
RSYNC
RCLKI
Line 1
IMUX
SDRAM
Interface
Figure 8-4. Diagram of Data Transmission with IMUX Operation
H
D
Arbiter
L
Ethernet Port
C
From TSER
. . .
Encapsulated
Packet Byte:
TSYNC:
Data on IBO Bus
. . .
128 Byte Sequence 01 128 Byte Sequence 02
Byte Sequence Detail
. . .
. . .
L1 32
L2 32
L3 32
L4 32
FRAMER IBO
Sequence 02
. . .
L1 04
L1 31
. . .
L2 04
L2 31
. . .
L3 31
L3 04
. . .
L4 04
L4 31
L1 03
L2 03
L3 03
L4 03
Sequence 01
. . .
L1 31
s02
s02
s02
s02
L1 32
xxxx
L2 32
xxxx
L3 32
xxxx
L4 32
xxxx
L1 03L2 03L3 03L4 03L1 04L2 04L3 04L4 04L1 31L2 31 L3 31 L4 31 L1 32 L2 32 L3 32 L4 32 s01 s01 s01 s01 xxxxxxxxxxxxxxxx
N N+1N+2N+3N+4N+5N+6N+7N+119 N+120
L2 31
L3 31
L4 31
. . .
. . .
. . .
L1 04
L2 04
L3 04
L4 04
L1 03
L2 03
L3 03
L4 03
Sequence
Numbers
s01
s01
s01
s01
xxxx
xxxx
xxxx
xxxx
Signaling
Channel
Time
LINK 1
LINK 2
LINK 3
LINK 4
32 of 167
Page 33

DS33Z41 Quad IMUX Ethernet Mapper
8.9.1 Microprocessor Requirements
Link aggregation requires an external host microprocessor to issue instructions and to monitor the IMUX function
of the DS33Z41. The host microprocessor is responsible for the following tasks to open a transmit channel:
• Configuring GL.IMXCN
• Issuing a link start command through GL.IMXC
• Monitoring the ITSYNC1-4 status from GL.IMXSS
• Monitoring GL.IMXDFDELS
• Setting GL.IMXCN
• Resetting the queue pointers in GL.C1QPR
• Monitoring the TOOFLS1-4 status from GL.IMXOOFLS
to control the links participating in the aggregation.
.
or GL.IMXSLS.
.IDDELS0 to ensure that differential delay is not larger than 7.75ms.
.SENDE to begin transmitting data after all links are synchronized.
.
to restart handshaking procedure if needed.
The host microprocessor is also responsible for the following tasks to open a receive channel:
• Monitoring the status of IRSYNC1-4 and setting GL.IMXCN
.RXE to receive data.
When in the data phase, if any of the links are detected to be out of frame (OOF), data will be corrupted. The link
initialization procedure must be initiated again. Note that the serial HDLC or X.86 encoded data is sent on 4 T1/E1
links, each link will not have separate HDLC/X.86 encoded data. The HDLC/X.86 encoding and decoding is data
is only available when the DS33Z41 has performed an IMUX function. Hence on the line the FCS for a given
HDLC packet could transport on a separate link than the HDLC data.
33 of 167
Page 34

DS33Z41 Quad IMUX Ethernet Mapper
8.9.2 IMUX Command Protocol
The format for all commands sent and received in Channel 2 of the IBO Serial Interface is shown in Figure 8-5.
The MSB for all commands is a “1”. The next 6 bits contain the actual opcode for the command. The LSB is the
even parity calculation for the byte. These commands will be sent and received on Channel 2 of each of the
T1/E1 interleaved IBO data. The commands that are possible are outlined in Table 8-3
. Note that the 4 portions of
the IMUX link are separate and the Channel 2 for each link will send and receive commands specific to that link.
The microprocessor can disable links that are not to be aggregated.
Figure 8-5. Command Structure for IMUX Function
M
S
B
Command
"1"
L
S
B
Even
Parity
Table 8-3. Commands Sent and Received on the IMUX Links
COMMAND
NAME
Link Start 1000 001P Tx or Rx
Sequence 1sss 010P Tx or Rx
Rsync 1000 011P Tx or Rx
COMMAND BYTE
(P IS EVEN
PARITY)
TRANSMIT/
RECEIVE
Initiate the link. The receiver will then search for 3
consecutive sequence numbers.
“sss” contains the frame sequence number for
packet segmentation and reassembly.
This command is sent to indicate to the distant
node that link synchronization has been achieved.
COMMENTS
OOF 1000 100P Tx or Rx
Nop 1111 111P Tx or Rx No operation.
The transmitting device has detected an out of
frame condition.
34 of 167
Page 35

DS33Z41 Quad IMUX Ethernet Mapper
The command and status registers for the IMUX function are detailed below:
Table 8-4. Command and Status for the IMUX for Processor Communication
REGISTER NAME COMMENTS
IMUX Configuration Register GL.IMXCN
IMUX Command Register GL.IMXC
IMUX Sync Status Register GL.IMXSS
IMUX Sync Latched Status Register GL.IMXSLS
IMUX Interrupt Mask Register GL.IMXSIE
Differential Delay Register GL.IMXDFD
Differential Delay Error Interrupt
Enable Register
Differential Delay Latched Status
Register
GL.IMXDFEIE
GL.IMXDFDELS
OOF Interrupt Enable GL.IMXOOFIE
Used to configure the number of links
participating and select T1 or E1.
Used to issue commands for link
management
Provides the real time sync status of
the 4 transmit and receive links
Latched status register for the IMXSS
register.
Interrupt enable bits for Sync Latched
Status bits
Provides the largest differential delay
value for the receive path. Measured
only at link initialization.
Interrupt enable for the differential
delay register.
Latched Status for GL.IMXDFD. Note
that differential delay is measured
only at link initiation.
Interrupt enable for the IMXOOFLS
register.
OOF Latched Status Register GL.IMXOOFLS
35 of 167
Indicates out of frame conditions for
both ends of the communication. If
detected, the user must re-initiate all
links.
Page 36

DS33Z41 Quad IMUX Ethernet Mapper
8.9.3 Out of Frame (OOF) Monitoring
Once the links are in synchronization, frame synchronization monitoring is started. The device will declare an out
of frame (OOF) if 2 consecutive sequence errors are received. The device automatically adjusts for single-frame
slips by increasing or decreasing the expected frame sequence number. If a frame sequence number is neither
repeated nor skipped by one (indicating a single-frame slip), it is considered a sequence error. Two consecutive
frames with sequence errors result in an OOF state being declared. The OOF state is used to set OOF Latched
bits in GL.IMXOOFLS and an OOF command is sent to the distant end. If an OOF command is received from the
distant end, the latched status register will be updated.
8.9.4 Data Transfer
Once synchronization is established, data transfer is enabled by the microprocessor setting the GL.IMXCN.RXE
and GL.IMXCN.SENDE bits. The user must then reset the queue pointers (GL.C1QPR) for proper data transfer.
Data is byte-striped across the available links.
36 of 167
Page 37

DS33Z41 Quad IMUX Ethernet Mapper
8.10 Connections and Queues
The multi-port devices in this product family provide bidirectional cross-connections between the multiple Ethernet
ports and Serial ports when operating in software mode. A single connection is preserved in this single-port
device to provide software compatibility with multi-port devices. The connection will have an associated transmit
and receive queue. Note that the terms “Transmit Queue” and “Receive Queue” are with respect to the Ethernet
Interface. The Receive queue is for data arriving from Ethernet interface to be transmitted to the WAN interface.
The Transmit queue is for data arriving from the WAN to be transmitted to the Ethernet interface. Hence the
transmit and receive direction terminology is the same as is used for the Ethernet MAC port.
The user can define the connection and the size of the transmit and receive queues. The size is adjustable in
units of 32(by 2048 byte) packets. The external SDRAM can hold up to 8192 packets of data. The user must
ensure that all the connection queues do no exceed this limit. The user also must ensure that the transmit and
receive queues do not overlap each other. Unidirectional connections are not supported.
When the user changes the queue sizes, the connection must be torn down and re-established. When a
connection is disconnected all transmit and receive queues associated with the connection are flushed and a one
is sourced towards the Serial transmit and the HDLC receiver. The clocks to the HDLC are sourced a zero.
The user can also program High and Low watermarks. If the queue size grows past the High watermark, an
interrupt is generated if enabled. The registers of relevance are described in Table 8-5
provides the size of the transmit queue for the connection. The High Watermark will set a latched status bit. The
latched status bit will clear when the register is read. The status bit is indicated by LI.TQCTLS
can be enabled on the latched bit events by LI.TQTIE. A latched status bit (LI.TQCTLS.TQLTS) is also set when
the queue crosses a low watermark.
. The AR.TQSC1 size
.TQHTS. Interrupts
The Receive Queue functions in a similar manner. Note that the user must ensure that sizes and watermarks are
set in accordance with the configuration speed of the Ethernet and Serial interfaces. The DS33Z41 does not
provide error indication if the user creates a connection and queue that overwrites data for another connection
queue. The user must take care in setting the queue sizes and watermarks. The registers of relevance are
AR.RQSC1
and SU.QCRLS. Queue size should never be set to 0.
37 of 167
Page 38

DS33Z41 Quad IMUX Ethernet Mapper
It is recommended that the user reset the queue pointers for the connection after disconnection. The pointers
must be reset before a connection is made. If this disconnect/connect procedure is not followed, incorrect data
may be transmitted. The proper procedure for setting up a connection follows:
• Set up the queue sizes for both transmit and receive queue (AR.TQSC1
• Set up the high/low thresholds and interrupt enables if desired (GL.TRQIE
• Reset all the pointers for the connection desired (GL.C1QPR
• Set up the connections (GL.CON1
• If a connection is disconnected, reset the queue pointers after the disconnection.
)
)
and AR.RQSC1).
, LI.TQTIE, SU.QRIE)
Table 8-5. Registers Related to Connections and Queues
REGISTER FUNCTION
Enables connection between the Ethernet Interface and the Serial Interface. Note that
GL.CON1
AR.TQSC1 Size for the Transmit Queue in Number of 32—2K packets.
AR.RQSC1 Size for the Receive Queue in Number of 32—2K packets.
GL.TRQIE Interrupt enable for items related to the connections at the global level.
GL.TRQIS Interrupt enable status for items related to the connections at the global level.
LI.TQTIE Enables for the Transmit queue crossing high and low thresholds.
LI.TQCTLS Latched status bits for connection high and low thresholds for the transmit queue.
SU.QRIE Enables for the receive queue crossing high and low thresholds.
once connection is set up, then the queues and thresholds can be setup for that
connection.
SU.QCRLS Latched status bits for receive queue high and low thresholds.
GL.C1QPR Resets the connection pointer.
8.11 Arbiter
The Arbiter manages the transport between the Ethernet port and the Serial port. It is responsible for queuing and
dequeuing packets to a single external SDRAM. The arbiter handles requests from the HDLC and MAC to
transfer data to and from the SDRAM.
38 of 167
Page 39

DS33Z41 Quad IMUX Ethernet Mapper
8.12 Flow Control
Flow control may be required to ensure that data queues do not overflow and packets are not lost. The DS33Z41
allows for optional flow control based on the queue high watermark or through host processor intervention. There
are 2 basic mechanisms that are used for flow control:
• In half duplex mode, a jam sequence is sent that causes collisions at the far end. The collisions cause the
transmitting node to reduce the rate of transmission.
• In full duplex mode, flow control is initiated by the receiving node sending a pause frame. The pause
frame has a timer parameter that determines the pause timeout to be used by the transmitting node.
Note that the terms “transmit queue” and “receive queue” are with respect to the Ethernet Interface. The Receive
Queue is the queue for the data that arrives on the MII/RMII interface, is processed by the MAC and stored in the
SDRAM. Transmit queue is for data that arrives from the Serial port, is processed by the HDLC and stored in the
SDRAM to be sent to the MAC transmitter.
The following flow control options are possible:
• Automatic flow control can be enabled in software mode with the SU.GCR
user does not have control over SU.MACFCR
sending pause or jam is dependent only on the receive queue high threshold.
• Manual flow control can be performed through software when SU.GCR
must monitor the receive queues and generate pause frames (full duplex) and/or jam bytes through the
SU.MACFCR
Note that in order to use flow control, the receive queue size (in AR.RQSC1
queue high threshold (in SU.RQHT) must be set to 01h or greater, but must be less than the queue size. If the
high threshold is set to the same value as the queue size, automatic flow control will not be effective. The high
threshold must always be set to less than the corresponding queue size.
The following table provides all the options on flow control mechanism for DS33Z41.
.FCB, SU.GCR.JAME, and SU.MACFCR FCE bits.
.FCE and FCB bits if ATFLOW is set. The mechanism of
) must be 02h or greater. The receive
.ATFLOW bit. Note that the
.ATFLOW=0. The host processor
Table 8-6. Options for Flow Control
OPTION MODE
Half Duplex;
Configuration
ATFLOW Bit 0 1 0 1
JAME Bit Controlled By User
FCB Bit
(Pause)
FCE Bit Controlled by User
Manual Flow
Control
NA NA Controlled by User
Half Duplex;
Automatic Flow
Control
Controlled
Automatically
Controlled
Automatically
Full Duplex; Manual
Flow Control
N/A N/A
Controlled by User
Full Duplex;
Automatic Flow
Control
Controlled
Automatically
Controlled
Automatically
Pause Timer N/A N/A Programmed by User Programmed by User
39 of 167
Page 40

DS33Z41 Quad IMUX Ethernet Mapper
8.12.1 Full-Duplex Flow Control
Automatic flow control is enabled by default. The host processor can disable this functionality with
SU.GCR.ATFLOW. The flow control mechanism is governed by the high watermarks (SU.RQHT). The SU.RQLT
low threshold can be used as indication that the network congestion is clearing up. The value of SU.RQLT
not affect the flow control. When the connection queue high threshold is exceeded the DS33Z41 will send a
pause frame with the timer value programmed by the user. See Table 8-8
for more information. It is
recommended that 80 slots (80 by 64 bytes or 5120 bytes) be used as the standard timer value.
The pause frame causes the distant transmitter to “pause for a time” before starting transmission again. The
pause command has a multicast address 01-80-62-00-00-01. The high and low thresholds for the receive queue
are configurable by the user but it is recommended that the high threshold be set approximately 96 packets from
the maximum size of the queue and the low threshold 96 packets lower than the high threshold. The DS33Z41 will
send a pause frame as the queue has crossed the high threshold and a frame is received. Pause is sent every
time a frame is received in the “high threshold state.” Pause control will only take care of temporary congestion.
Pause control does not take care of systems where the traffic throughput is too high for the queue sizes selected.
If the flow control is not effective the receive queue will eventually overflow. This is indicated by
SU.QCRLS
.RQOVFL latched bit. If the receive queue is overflowed any new frames will not be received.
The user has the option of not enabling automatic flow control. In this case the thresholds and corresponding
interrupt mechanism to send pause frame by writing to flow control busy bit in the MAC flow control registers
SU.MACFCR
.FCB, SU.GCR.JAME, and SU.MACFCR. This allows the user to set not only the watermarks but
also to decide when to send a pause frame or not based on watermark crossings.
On the receive side the user has control over whether to respond to the pause frame sent by the distant end (PCF
bit). Note that if automatic flow control is enabled the user cannot modify the FCE bit in the MAC flow control
register. On the Transmit queue the user has the option of setting high and low thresholds and corresponding
interrupts. There is no automatic flow control mechanism for data received from the Serial side waiting for
transmission over the Ethernet interface during times of heavy Ethernet congestion.
does
40 of 167
Page 41

Figure 8-6. Flow Control Using Pause Control Frame
8
Receive Queue Low
Water
DS33Z41 Quad IMUX Ethernet Mapper
Rx
Data
Receive Queue
Growth
Receive Queue High
Water Mark
Initiate Flow control
8.12.2 Half-Duplex Flow control
Half duplex flow control uses a jamming sequence to exert backpressure on the transmitting node. The receiving
node jams the first 4 bytes of a packet that are received from the MAC in order to cause collisions at the distant
end. In both 100Mbps and 10Mbps MII/RMII modes, 4 bytes are jammed upon reception of a new frame. Note
that the jamming mechanism does not jam the current frame that is being received during the watermark crossing,
but will wait to jam the next frame after the SU.RQHT
received frames will continue to be jammed. This jam sequence is stopped when the queue falls below the high
threshold.
bit is set. If the queue remains above the high threshold,
8.12.3 Host-Managed Flow control
Although automatic flow control is recommended, flow control by the host processor is also possible. By utilizing
the high watermark interrupts, the host processor can manually issue pause frames or jam incoming packets to
exert backpressure on the transmitting node. Pause frames can be initiated with SU.MACFCR.FCB bit. Jam
sequences can be initiated be setting SU.GCR.JAME. The host can detect pause frames by monitoring
SU.RFSB3.UF and SU.RFSB3.CF. Jammed frames will be indistinguishable from packet collisions.
41 of 167
Page 42

DS33Z41 Quad IMUX Ethernet Mapper
8.13 Ethernet Interface Port
The Ethernet port interface allows for direct connection to an Ethernet PHY. The interface consists of a
10/100Mbps MII/RMII interface and an Ethernet MAC. In RMII operation, the interface contains 7 signals with a
reference clock of 50MHz. In MII operation, the interface contains 17 signals and a clock reference of 25MHz. The
DS33Z41 can be configured to RMII or MII interface by the Hardware pin RMIIMIIS. If the port is configured for
MII in DCE mode, REF_CLK must be 25MHz. The DS33Z41 will internally generate the TX_CLK and RX_CLK
outputs (at 25MHz for 100Mbps, 2.5MHz for 10Mbps) required for DCE mode from the REF_CLK input. In MII
mode with DTE operation, the TX_CLK and RX_CLK signals are generated by the PHY and are inputs to the
DS33Z41. For more information on clocking the Ethernet Interface, see Section 8.2.2
The data received from the MII or RMII interface is processed by the internal IEEE 802.3 compliant Ethernet
MAC. The user can select the maximum frame size (up to 2016 bytes) that is received with the SU.RMFSRH
SU.RMFSRL registers. The maximum frame length (in bits) is the number specified in SU.RMFSRH and
SU.RMFSRL
multiplied by 8. Any programmed value greater than 2016 bytes will result in unpredictable
behavior and should be avoided. The maximum frame size is shown in Figure 8-7. The length includes only
destination address, source address, VLAN tag (2 bytes), type length field, data and CRC32. The frame size is
different than the 802.3 “type length field.”
Frames coming from the Ethernet PHY or received from the packet processor are rejected if greater than the
maximum frame size specified. Each Ethernet frame sent or received generates status bits (SU.TFSH
SU.TFSL
and SU.RFSB0 to SU.RFSB3). These are real time status registers and will change as each frame is
sent or received. Hence they are useful to the user only when one frame is sent or received and the status is
associated with the frame sent or received.
.
and
and
Figure 8-7. IEEE 802.3 Ethernet Frame
Preamble SFD Destination Adrs Source Address
7 1 6 6 2 46-1500
Max Frame Length
The distant end will normally reject the sent frames if jabber timeout, loss of carrier, excessive deferral, late
collisions, excessive collisions, under run, deferred or collision errors occur. Transmission of a frame under any of
theses errors will generate a status bit in SU.TFSL, SU.TFSH. The DS33Z41 provides user the option to
automatically retransmit the frame if any of the errors have occurred through the bit settings in SU.TFRC
Deferred frames and heartbeat fail have separate resend control bits (SU.TFRC
SU.TFRC
.TPRHBC). If there is no carrier (indicated by the MAC Transmit Packet Status), the transmit queue
(data from the Serial Interface to the SDRAM to Ethernet Interface) can be selectively flushed. This is controlled
by SU.TFRC
.NCFQ.
The MAC circuitry generates a frame status for every frame that is received. This real time status can be read by
SU.RFSB0
to SU.RFSB3. Note the frame status is the “real time” status and hence the value will change as new
frames are received. Hence the real time status reflects the status in time and may not correspond to the current
received frame being processed. This is also true for the transmitted frames.
Type
Length
Data CRC32
4
.
.TFBFCB and
Frames with errors are usually rejected by the DS33Z41. The user has the option of accepting frames by settings
in Receive Frame Rejection Control register (SU.RFRC
frames with the following errors:
). The user can program whether to reject or accept
42 of 167
Page 43

DS33Z41 Quad IMUX Ethernet Mapper
• MII error asserted during the reception of the frame.
• Dribbling bits occurred in the frame.
• CRC error occurred.
• Length error occurred—the length indicated by the frame length is inconsistent with the number of bytes
received.
• Control frame was received. The mode must be full duplex.
• Unsupported control frame was received.
Note that frames received that are runt frames or frames with collision will automatically be rejected.
Table 8-7. Registers Related to the Ethernet Port
REGISTER FUNCTION
SU.TFRC
SU.TFSL and SU.TFSH
SU.RFSB0 to 3
SU.RFRC
SU.RMFSRH and SU.RMFSRL
SU.MACCR This register provides configuration control for the MAC
This register determines if the current frame is retransmitted due to various
transmit errors
These 2 registers provide the real time status of the transmit frame. Only apply
to the last frame transmitted.
These registers provide the real time status for the received frame. Only apply
to the last frame received.
This register provides settings for reception or rejection of frame based on
errors detected by the MAC.
The settings for this register provide the maximum size of frames to be
accepted from the MII/RMII receive interface.
8.13.1 DTE and DCE Mode
The Ethernet MII/RMII port can be configured for DCE or DTE Mode. When the port is configured for the DTE
Mode it can be connected to an Ethernet PHY. In DCE mode, the port can be connected to MII/RMII MAC devices
other than an Ethernet PHY. The DTE/DCE connections for the DS33Z41 in MII mode are shown in the following
two figures.
In DCE Mode, the DS33Z41 transmitter is connected to an external receiver and DS33Z41 receiver is connected
to an external MAC transmitter. The selection of DTE or DCE mode is done by the hardware pin DCEDTES.
43 of 167
Page 44
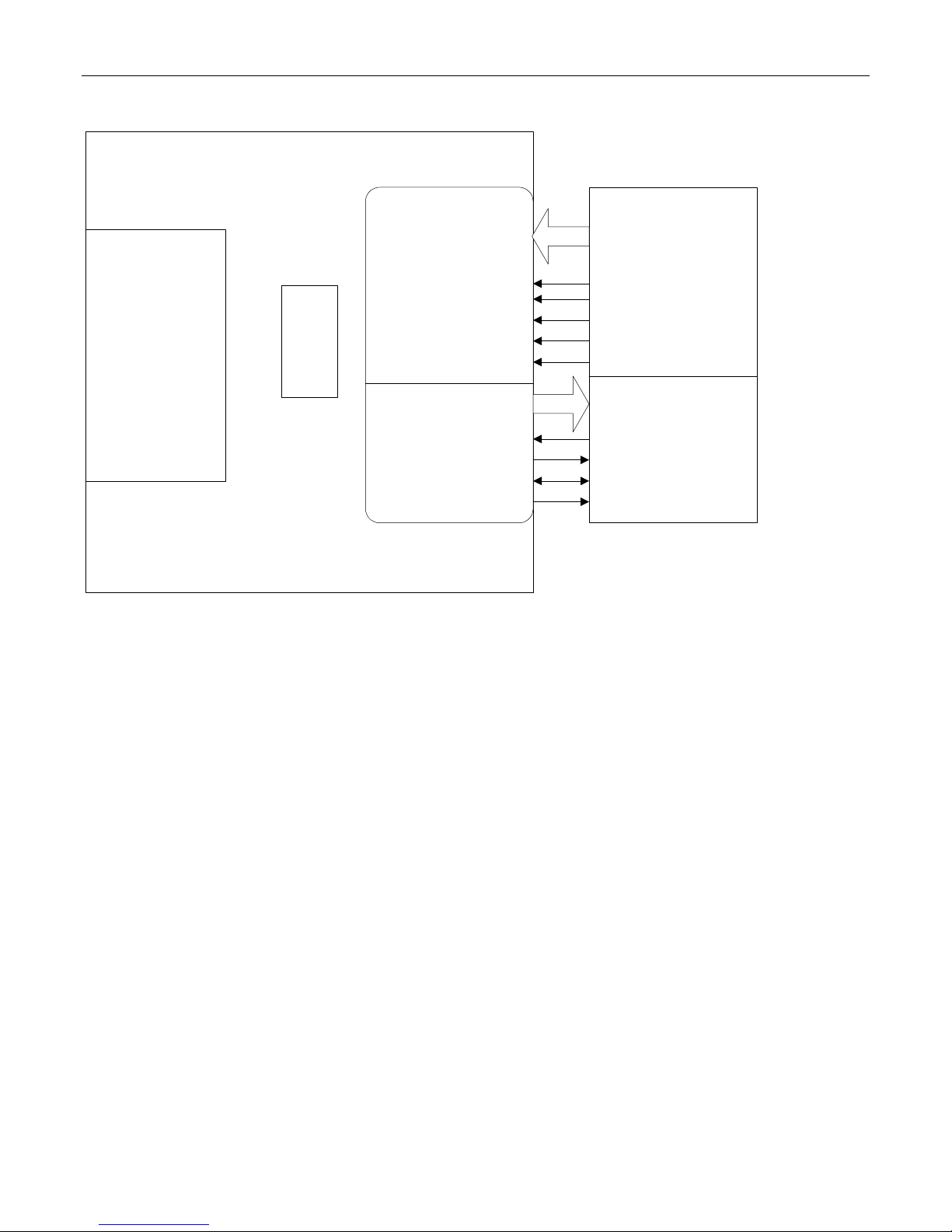
DS33Z41 Quad IMUX Ethernet Mapper
Figure 8-8. Configured as DTE Connected to an Ethernet PHY in MII Mode
DS33Z41
WAN
Arbiter
Rx
DTE
MAC
Tx
RXDV
RX_CLK
RX_CRS
COL_DET
TXD[3:0] TXD[3:0]
TX_CLK
TX_EN
MDIO
MDC
RXD[3:0]RXD[3:0]
RXDV
RX_CLK
RX_ERRRX_ERR
RX_CRS
COL_DET
TX_CLK
TX_EN
MDIO
MDC
Ethernet Phy
Rx
DCE
Tx
44 of 167
Page 45
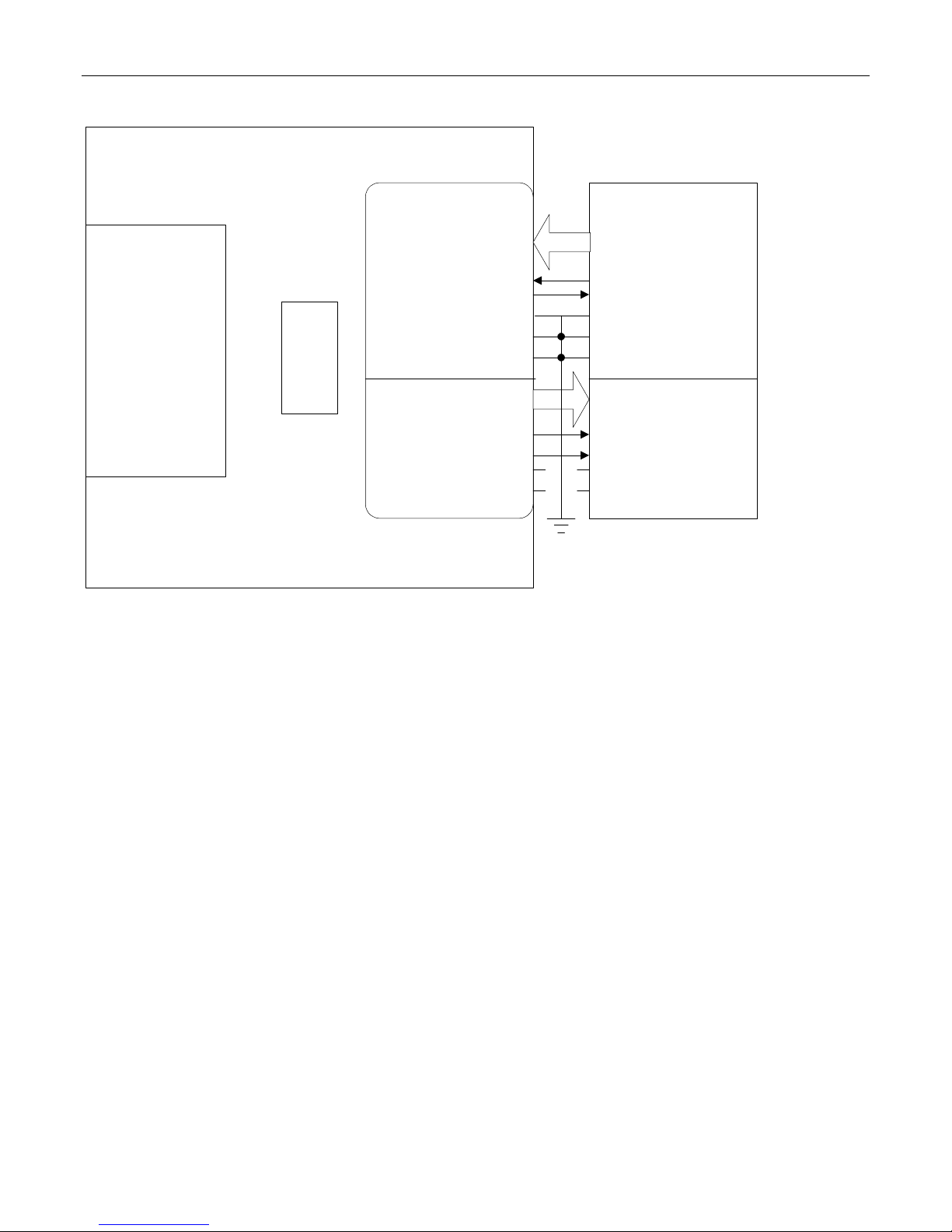
Figure 8-9. DS33Z41 Configured as a DCE in MII Mode
DS33Z41
DS33Z41 Quad IMUX Ethernet Mapper
DTE
MAC
Rx
WAN
Arbiter
DCE
Rx Tx
RXD[3:0]
RXDV
RX_CRS
MAC
COL_DET COL_DET
TXD[3:0] RXD[3:0]
Tx
TX_CLK
TX_EN
MDIO
MDC
TXD[3:0]
TX_EN
TX_CLKRX_CLK
TX_ERRRX_ERR
RX_CRS
RX_CLK
RXDV
MDIO
MDC
45 of 167
Page 46
DS33Z41 Quad IMUX Ethernet Mapper
8.14 Ethernet MAC
Indirect addressing is required to access the MAC register settings. Writing to the MAC registers requires the
SU.MACWD0-3 registers to be written with 4 bytes of data. The address must be written to SU.MACAWL and
SU.MACAWH
SU.MACRWC
. A write command is issued by writing a zero to SU.MACRWC.MCRW and a one to
.MCS (MAC command status). MCS is cleared by the DS33Z41 when the operation is complete.
Reading from the MAC registers requires the SU.MACRADH
address for the read operation. A read command is issued by writing a one to SU.MACRWC.MCRW and a zero to
SU.MACRWC
is clear, valid data is available in SU.MACRD0-SU.MACRD3. Note that only one operation can be initiated (read
or write) at one time. Data cannot be written or read from the MAC registers until the MCS bit has been cleared by
the device. The MAC Registers are detailed in the following table.
.MCS. SU.MACRWC.MCS is cleared by the DS33Z41 when the operation is complete. After MCS
and SU.MACRADL registers to be written with the
Table 8-8. MAC Control Registers
ADDRESS REGISTER DESCRIPTION
MAC Control Register. This register is used for programming full
0000h-0003h SU.MACCR
0004h-0007h SU.MACAH
0008h-000Bh SU.MACAL
0014h-0017h SU.MACMIIA
0018h-001Bh SU.MACMIID
001Ch-001Fh SU.MACFCR Flow Control Register
0100h-0103h SU.MMCCTRL MMC Control Register bit 0 for resetting the status counters
duplex, half duplex, promiscuous mode, and back-off limit for half
duplex. The transmit and receive enable bits must be set for the
MAC to operate.
MAC Address High Register. This provides the physical address for
this MAC.
MAC Address Low Register. This provides the physical address for
this MAC.
MII Address Register. The address for PHY access through the
MDIO interface.
MII Data Register. Data to be written to (or read from) the PHY
through MDIO interface.
Table 8-9. MAC Status Registers
ADDRESS REGISTER DESCRIPTION
0200h-0203h SU.RxFrmCntr All Frames Received counter
0204h-0207h SU.RxFrmOKCtr Number of Received Frames that are Good
0300h-0303h SU.TxFrmCtr Number of Frames Transmitted
0308h-030Bh SU.TxBytesCtr Number of Bytes Transmitted
030Ch-030Fh SU.TxBytesOkCtr Number of Bytes Transmitted with good frames
0334h-0337h SU.TxFrmUndr Transmit FIFO underflow counter
0338h-033Bh SU.TxBdFrmsCtr Transmit Number of Frames Aborted
46 of 167
Page 47

DS33Z41 Quad IMUX Ethernet Mapper
8.14.1 MII Mode
The Ethernet interface can be configured for MII operation by setting the hardware pin RMIIMIIS low. The MII
interface consists of 17 pins. For instructions on clocking the Ethernet Interface while in MII mode, see Section
8.2.2
. Diagrams of system connections for MII operation are shown in Figure 8-8 and Figure 8-9.
8.14.2 RMII Mode
The Ethernet interface can be configured for RMII operation by setting the hardware pin RMIIMIIS high. RMII
interface operates synchronously from the external 50MHz reference (REF_CLK). Only 7 signals are required.
The following figure shows the RMII architecture. Note that DCE mode is not supported for RMII mode and RMII
is valid only for full duplex operation.
Figure 8-10. RMII Interface
MAC MII to RMII PHY RMII to MII
TX_EN
TX_EN
TXD[3:0]
TX_ERR
TX_CLK
TXD[1:0]
TX_EN
TXD[3:0]
TX_ERR
TX_CLK
CRS
RX_CRS
RX_DV
RX_CRS
RX_CLK
CRS_DV
RXD[1:0]
REF_CLK
RX_DV
RXD[3:0]
RX_ER
RX_CLK
47 of 167
Page 48

DS33Z41 Quad IMUX Ethernet Mapper
8.14.3 PHY MII Management Block and MDIO Interface
The MII Management Block allows for the host to control up to 32 PHYs, each with 32 registers. The MII block
communicates with the external PHY using 2-wire serial interface composed of MDC (serial clock) and MDIO for
data. The MDIO data is valid on the rising edge of the MDC clock. The Frame format for the MII Management
Interface is shown Figure 8-11
. The read/write control of the MII Management is accomplished through the
indirect SU.MACMIIA MII Management Address Register and data is passed through the indirect SU.MACMIID
Data Register. These indirect registers are accessed through the MAC Control Registers defined in Table 8-8
The MDC clock is internally generated and runs at 1.67MHz. Note that the DS33Z41 provides a single MII
Management port, and all control registers for this function are located in MAC 1.
Figure 8-11. MII Management Frame
Preamble Start
32 bits 2 bits
Opco
Phy Adrs Phy Reg
de
2 bits 5 bits
5 bits
Turn
Aroun
d
2 bits
Data
16
bits
Idle
1
Bit
.
READ
WRITE
111...111 010110
111...111 PHYA[4:0] PHYR[4:0] PHYD[15:0]
PHYA[4:0] PHYR[4:0] ZZ10ZZZZZZZZZ Z
01
Z
8.15 BERT
The BERT can be used for generation and detection of BERT patterns. The BERT is a software programmable
test pattern generator and monitor capable of meeting most error performance requirements for digital
transmission equipment. The following restrictions are related to the BERT:
• The user should provide a gapped clock on RCLKI and TCLKI that is active during channels in which the
user wishes to insert the BERT pattern. Several of the Dallas Semiconductor Framers and Transceivers
provide programmable channel blocking pins for this purpose.
• BERT will transmit even when the device is set for X.86 mode.
• The normal traffic flow is halted while the BERT is in operation.
• If the BERT is enabled for a Serial port, it will override the normal connection.
• If there is a connection overridden by the BERT, when BERT operation is terminated the normal
operation is restored.
The transmit direction generates the programmable test pattern, and inserts the test pattern payload into the data
stream. The receive direction extracts the test pattern payload from the receive data stream, and monitors the test
pattern payload for the programmable test pattern.
8.15.1 BERT Features
• PRBS and QRSS patterns of 29-1, 215-1, 223-1, and QRSS pattern support.
• Programmable repetitive pattern. The repetitive pattern length and pattern are programmable (length n =
1 to 32 and pattern = 0 to (2
• 24-bit error count and 32-bit bit count registers.
• Programmable bit error insertion. Errors can be inserted individually.
n
– 1).
48 of 167
Page 49

DS33Z41 Quad IMUX Ethernet Mapper
8.15.2 Receive Data Interface
8.15.2.1 Receive Pattern Detection
The Receive BERT receives only the payload data and synchronizes the receive pattern generator to the
incoming pattern. The receive pattern generator is a 32-bit shift register that shifts data from the least significant
bit (LSB) or bit 1 to the most significant bit (MSB) or bit 32. The input to bit 1 is the feedback. For a PRBS pattern
(generating polynomial x
n
+ xy + 1), the feedback is an XOR of bit n and bit y. For a repetitive pattern (length n),
the feedback is bit n. The values for n and y are individually programmable (1 to 32). The output of the receive
pattern generator is the feedback. If QRSS is enabled, the feedback is an XOR of bits 17 and 20, and the output
is forced to one if the next 14 bits are all zeros. QRSS is programmable (on or off). For PRBS and QRSS
patterns, the feedback is forced to one if bits 1 through 31 are all zeros. Depending on the type of pattern
programmed, pattern detection performs either PRBS synchronization or repetitive pattern synchronization.
8.15.2.2 PRBS Synchronization
PRBS synchronization synchronizes the receive pattern generator to the incoming PRBS or QRSS pattern. The
receive pattern generator is synchronized by loading 32 data stream bits into the receive pattern generator, and
then checking the next 32 data stream bits. Synchronization is achieved if all 32 bits match the incoming pattern.
If at least is incoming bits in the current 64-bit window do not match the receive pattern generator, automatic
pattern resynchronization is initiated. Automatic pattern resynchronization can be disabled.
Figure 8-12. PRBS Synchronization State Diagram
Sync
6
s
r
o
r
r
e
t
u
o
h
t
i
w
s
t
i
b
2
3
1 bit error
o
f
6
4
b
i
t
s
w
i
t
h
e
r
r
o
r
s
LoadVerify
32 bits loaded
8.15.3 Repetitive Pattern Synchronization
Repetitive pattern synchronization synchronizes the receive pattern generator to the incoming repetitive pattern.
The receive pattern generator is synchronized by searching each incoming data stream bit position for the
repetitive pattern, and then checking the next 32 data stream bits. Synchronization is achieved if all 32 bits match
the incoming pattern. If at least sis incoming bits in the current 64-bit window do not match the receive PRBS
pattern generator, automatic pattern resynchronization is initiated. Automatic pattern resynchronization can be
disabled.
49 of 167
Page 50

DS33Z41 Quad IMUX Ethernet Mapper
Figure 8-13. Repetitive Pattern Synchronization State Diagram
Sync
6
s
r
o
r
r
e
t
u
o
h
t
i
w
s
t
i
b
2
3
1 bit error
o
f
6
4
b
i
t
s
w
i
t
h
e
r
r
o
r
s
MatchVerify
Pattern Matches
8.15.4 Pattern Monitoring
Pattern monitoring monitors the incoming data stream for Out Of Synchronization (OOS) condition, bit errors, and
counts the incoming bits. An OOS condition is declared when the synchronization state machine is not in the
“Sync” state. An OOS condition is terminated when the synchronization state machine is in the “Sync” state.
Bit errors are determined by comparing the incoming data stream bit to the receive pattern generator output. If
they do not match, a bit error is declared, and the bit error and bit counts are incremented. If they match, only the
bit count is incremented. The bit count and bit error count are not incremented when an OOS condition exists.
8.15.5 Pattern Generation
Pattern Generation generates the outgoing test pattern, and passes it onto Error Insertion. The transmit pattern
generator is a 32-bit shift register that shifts data from the least significant bit (LSB) or bit 1 to the most significant
bit (MSB) or bit 32. The input to bit 1 is the feedback. For a PRBS pattern (generating polynomial x
feedback is an XOR of bit n and bit y. For a repetitive pattern (length n), the feedback is bit n. The values for n
and y are individually programmable. The output of the receive pattern generator is the feedback. If QRSS is
enabled, the feedback is an XOR of bits 17 and 20, and the output is forced to one if the next 14 bits are all zeros.
QRSS is programmable (on or off). For PRBS and QRSS patterns, the feedback is forced to one if bits 1 through
31 are all zeros. When a new pattern is loaded, the pattern generator is loaded with a pattern value before pattern
generation starts. The pattern value is programmable (0 – 2
n
- 1). When PRBS and QRSS patterns are generated
the seed value is all ones.
8.15.5.1 Error Insertion
n
+ xy + 1), the
Error insertion inserts errors into the outgoing pattern data stream. Errors are inserted one at a time Single bit
error insertion can be initiated from the microprocessor interface. If pattern inversion is enabled, the data stream
is inverted before the overhead/stuff bits are inserted. Pattern inversion is programmable (on or off).
50 of 167
Page 51

DS33Z41 Quad IMUX Ethernet Mapper
8.15.5.2 Performance Monitoring Update
All counters stop counting at their maximum count. A counter register is updated by asserting (low to high
transition) the performance monitoring update signal (PMU). During the counter register update process, the
performance monitoring status signal (PMS) is deasserted. The counter register update process consists of
loading the counter register with the current count, resetting the counter, forcing the zero count status indication
low for one clock cycle, and then asserting PMS. No events shall be missed during an update procedure.
51 of 167
Page 52

DS33Z41 Quad IMUX Ethernet Mapper
8.16 Transmit Packet Processor
The Transmit Packet Processor accepts data from the Transmit FIFO performs bit reordering, FCS processing,
packet error insertion, stuffing, packet abort sequence insertion, inter-frame padding, and packet scrambling. The
data output from the Transmit Packet Processor to the Transmit Serial Interface is a serial data stream (bit
synchronous mode). HDLC processing can be disabled (clear channel enable). Disabling HDLC processing
disables FCS processing, packet error insertion, stuffing, packet abort sequence insertion, and inter-frame
padding. Only bit reordering and packet scrambling are not disabled.
Bit reordering changes the bit order of each byte. If bit reordering is disabled, the outgoing 8-bit data stream
DT[1:8] with DT[1] being the MSB and DT[8] being the LSB is output from the Transmit FIFO with the MSB in
TFD[7] (or 15, 23, or 31) and the LSB in TFD[0] (or 8, 16, or 24) of the transmit FIFO data TFD[7:0] 15:8, 23:16,
or 31:24). If bit reordering is enabled, the outgoing 8-bit data stream DT[1:8] is output from the Transmit FIFO with
the MSB in TFD[0] and the LSB in TFD[7] of the transmit FIFO data TFD[7:0]. In bit synchronous mode, DT [1] is
the first bit transmitted.
FCS processing calculates an FCS and appends it to the packet. FCS calculation is a CRC-16 or CRC-32
calculation over the entire packet. The polynomial used for FCS-16 is x
FCS-32 is x
32
+ x26 + x23 + x22 + x16 + x12 + x11 + x10 + x8 + x7 + x5 + x4 + x2 + x + 1. The FCS is inverted after
16
+ x12 + x5 + 1. The polynomial used for
calculation. The FCS type is programmable. If FCS append is enabled, the calculated FCS is appended to the
packet. If FCS append is disabled, the packet is transmitted without an FCS. The FCS append mode is
programmable. If packet processing is disabled, FCS processing is not performed.
Packet error insertion inserts errors into the FCS bytes. A single FCS bit is corrupted in each errored packet. The
FCS bit corrupted is changed from errored packet to errored packet. Error insertion can be controlled by a register
or by the manual error insertion input (LI.TMEI
.TMEI). The error insertion initiation type (register or input) is
programmable. If a register controls error insertion, the number and frequency of the errors are programmable. If
FCS append is disabled, packet error insertion will not be performed. If packet processing is disabled, packet
error insertion is not performed.
Stuffing inserts control data into the packet to prevent packet data from mimicking flags. A packet start indication
is received, and stuffing is performed until, a packet end indication is received. Bit stuffing consists of inserting a
zero directly following any five contiguous ones. If packet processing is disabled, stuffing is not performed.
There is at least one flag plus a programmable number of additional flags between packets. The inter-frame fill
can be flags or all ones followed by a start flag. If the inter-frame fill is all ones, the number of ones between the
end and start flags does not need to be an integer number of bytes, however, there must be at least 15
consecutive ones between the end and start flags. The inter-frame padding type is programmable. If packet
processing is disabled, inter-frame padding is not performed.
Packet abort insertion inserts a packet abort sequences as necessary. If a packet abort indication is detected, a
packet abort sequence is inserted and inter-frame padding is done until a packet start flag is detected. The abort
sequence is FFh. If packet processing is disabled, packet abort insertion is not performed.
The packet scrambler is a x
43
+ 1 scrambler that scrambles the entire packet data stream. The packet scrambler
runs continuously, and is never reset. In bit synchronous mode, scrambling is performed one bit at a time. In byte
synchronous mode, scrambling is performed 8 bits at a time. Packet scrambling is programmable.
Once all packet processing has been completed serial data stream is passed on to the Transmit Serial Interface.
52 of 167
Page 53

DS33Z41 Quad IMUX Ethernet Mapper
8.17 Receive Packet Processor
The Receive Packet Processor accepts data from the Receive Serial Interface performs packet descrambling,
packet delineation, inter-frame fill filtering, packet abort detection, destuffing, packet size checking, FCS error
monitoring, FCS byte extraction, and bit reordering. The data coming from the Receive Serial Interface is a serial
data stream. Packet processing can be disabled (clear channel enable). Disabling packet processing disables
packet delineation, inter-frame fill filtering, packet abort detection, destuffing, packet size checking, FCS error
monitoring, and FCS byte extraction. Only packet descrambling and bit reordering are not disabled.
The packet descrambler is a self-synchronous x
stream. Packet descrambling is programmable. The descrambler runs continuously, and is never reset. The
descrambling is performed one bit at a time. Packet descrambling is programmable. If packet processing is
disabled, the serial data stream is demultiplexed in to an 8-bit data stream before being passed on.
If packet processing is disabled, a packet boundary is arbitrarily chosen and the data is divided into "packets" of
programmable size (dependent on maximum packet size setting). These packets are then passed on to bit
reordering with packet start and packet end indications. Data then bypasses packet delineation, inter-frame fill
filtering, packet abort detection, destuffing, packet size checking, FCS error monitoring, and FCS byte extraction.
Packet delineation determines the packet boundary by identifying a packet start or end flag. Each time slot is
checked for a flag sequence (7Eh). Once a flag is found, it is identified as a start/end flag and the packet
boundary is set. The flag check is performed one bit at a time. If packet processing is disabled, packet delineation
is not performed.
Inter-frame fill filtering removes the inter-frame fill between packets. When a packet end flag is detected, all data
is discarded until a packet start flag is detected. The inter-frame fill can be flags or all ones. The number of ones
between flags does not need to be an integer number of bytes, and if at least seven ones are detected in the first
16 bits after a flag, all data after the flag is discarded until a start flag is detected. There may be only one flag
between packets. When the inter-frame fill is flags, the flags may have a shared zero (011111101111110). If there
is less than 16 bits between two flags, the data is discarded. If packet processing is disabled, inter-frame fill
filtering is not performed.
43
+ 1 descrambler that descrambles the entire packet data
Packet abort detection searches for a packet abort sequence. Between a packet start flag and a packet end flag,
if an abort sequence is detected, the packet is marked with an abort indication, the aborted packet count is
incremented, and all subsequent data is discarded until a packet start flag is detected. The abort sequence is
seven consecutive ones. If packet processing is disabled, packet abort detection is not performed.
Destuffing removes the extra data inserted to prevent data from mimicking a flag or an abort sequence. A start
flag is detected, a packet start is set, the flag is discarded, destuffing is performed until an end flag is detected, a
packet end is set, and the flag is discarded. In bit synchronous mode, bit destuffing is performed. Bit destuffing
consists of discarding any zero that directly follows five contiguous ones. After destuffing is completed, the serial
bit stream is demultiplexed into an 8-bit parallel data stream and passed on with packet start, packet end, and
packet abort indications. If there is less than eight bits in the last byte, an invalid packet flag is raised, the packet
is tagged with an abort indication, and the packet size violation count is incremented. If packet processing is
disabled, destuffing is not performed.
Packet size checking checks each packet for a programmable maximum and programmable minimum size. As
the packet data comes in, the total number of bytes is counted. If the packet length is below the minimum size
limit, the packet is marked with an aborted indication, and the packet size violation count is incremented. If the
packet length is above the maximum size limit, the packet is marked with an aborted indication, the packet size
violation count is incremented, and all packet data is discarded until a packet start is received. The minimum and
maximum lengths include the FCS bytes, and are determined after destuffing has occurred. If packet processing
is disabled, packet size checking is not performed.
FCS error monitoring checks the FCS and aborts errored packets. If an FCS error is detected, the FCS errored
packet count is incremented and the packet is marked with an aborted indication. If an FCS error is not detected,
the receive packet count is incremented. The FCS type (16-bit or 32-bit) is programmable. If FCS processing or
packet processing is disabled, FCS error monitoring is not performed.
53 of 167
Page 54

DS33Z41 Quad IMUX Ethernet Mapper
FCS byte extraction discards the FCS bytes. If FCS extraction is enabled, the FCS bytes are extracted from the
packet and discarded. If FCS extraction is disabled, the FCS bytes are stored in the receive FIFO with the packet.
If FCS processing or packet processing is disabled, FCS byte extraction is not performed.
Bit reordering changes the bit order of each byte. If bit reordering is disabled, the incoming 8-bit data stream
DT[1:8] with DT[1] being the MSB and DT[8] being the LSB is output to the Receive FIFO with the MSB in RFD[7]
(or 15, 23, or 31) and the LSB in RFD[0] (or 8, 16, or 24) of the receive FIFO data RFD[7:0] (or 15:8, 23:16, or
31:24). If bit reordering is enabled, the incoming 8-bit data stream DT[1:8] is output to the Receive FIFO with the
MSB in RFD[0] and the LSB in RFD[7] of the receive FIFO data RFD[7:0]. DT[1] is the first bit received from the
incoming data stream.
Once all of the packet processing has been completed, The 8-bit parallel data stream is demultiplexed into a 32bit parallel data stream. The Receive FIFO data is passed on to the Receive FIFO with packet start, packet end,
packet abort, and modulus indications. At a packet end, the 32-bit word may contain 1, 2, 3, or 4 bytes of data
depending on the number of bytes in the packet. The modulus indications indicate the number of bytes in the last
data word of the packet.
54 of 167
Page 55

DS33Z41 Quad IMUX Ethernet Mapper
8.18 X.86 Encoding and Decoding
X.86 protocol provides a method for encapsulating Ethernet Frame onto LAPS. LAPS provides a HDLC-type
framing structure for encapsulation of Ethernet frames, but does not inflict dynamic bandwidth expansion as
HDLC does. LAPS encapsulated frames can be used to send data onto a SONET/SDH network. The DS33Z41
expects a byte synchronization signal to provide the byte boundary for the X.86 receiver. This is provided by the
RSYNC pin. The functional timing is shown in Figure 11-7
. The X.86 transmitter provides a byte boundary
indicator with the signal TSYNC. The functional timing is shown in Figure 11-6. Note that in some cases,
additional logic may be required to meet RSYNC/TSYNC sychronization timing requirements when operating in
X.86 mode.
Figure 8-14. LAPS Encoding of MAC Frames Concept
IEEE
802.3 MAC Frame
LAPS
Rate Adaption
SDH
55 of 167
Page 56

Figure 8-15. X.86 Encapsulation of the MAC field
Number of Bytes
DS33Z41 Quad IMUX Ethernet Mapper
Flag(0x7E)
Address(0x04)
Control(0x03)
1st Octect of SAPI(0xfe)
2nd Octect of SAPI(0x01)
Destination Adrs(DA)
Source Adrs(SA)
Length/Type
MAC Client Data
PAD
FCS for MAC
FCS for LAPS
Flag(0x7E)
1
1
1
1
1
6
6
2
46-1500
4
4
MSB LSB
The DS33Z41 will encode the MAC Frame with the LAPS encapsulation on a complete serial stream if configured
for X.86 mode in the register LI.TX86E
. The DS33Z41 provides the following functions:
• Control Registers for Address, SAPI, Destination Address, Source Address.
• 32 bit FCS enabled.
• Programmable X
43
+1 scrambling.
The sequence of processing performed by the receiver is as follows:
• Programmable octets X
43
+1 descrambling.
• Detect the Start Flag (7E).
• Remove Rate adaptation octets 7d, dd.
• Perform transparency-processing 7d, 5e is converted to 7e and 7d, 5d is converted to 7d.
• Check for a valid Address, Control and SAPI fields (LI.TRX86A
to LI.TRX86SAPIL).
• Perform FCS checking.
• Detect the closing flag.
56 of 167
Page 57

DS33Z41 Quad IMUX Ethernet Mapper
The X86 received frame is aborted if:
• If 7d, 7E is detected. This is an abort packet sequence in X.86.
• Invalid FCS is detected.
• The received frame has less than 6 octets.
• Control, SAPI and address field are mismatched to the programmed value.
• Octet 7d and octet other than 5d, 5e, 7e, or dd is detected.
For the transmitter if X.86 is enabled the sequence of processing is as follows:
• Construct frame including start flag SAPI, Control and MAC frame
• Calculate FCS
• Perform transparency processing - 7E is translated to 7D5E, 7D is translated to 7D5D
• Append the end flag(7E)
• Scramble the sequence X
43
+1
Note that the Serial transmit and receive registers apply to the X.86 implementations with specific exceptions. The
exceptions are outlined in the Serial Interface transmit and receive register sections.
57 of 167
Page 58

DS33Z41 Quad IMUX Ethernet Mapper
8.19 Committed Information Rate Controller
The DS33Z41 provides a CIR provisioning facility. The CIR can be used to restrict the transport of received MAC
data to the serial port at a programmable rate. This is shown in Figure 8-16. The CIR will restrict the data flow
from the Receive MAC to Transmit HDLC. This can be used for provisioning and billing functions towards the
WAN. The user must set the CIR register to control the amount of data throughput from the MAC to the
HDLC/X.86 transmitter. The CIR register is in granularity of 500kbps with a range of 0 to 52Mbps. The operation
of the CIR is as follows:
• The CIR block counts the credits that are accumulated at the end of every 125ms.
• If data is received and stored in the SDRAM to be sent to the Serial Interface, the interface will request
the data if there is a positive credit balance. If the credit balance is negative, transmit interface does not
request data.
• New credit balance is calculated: credit balance = old credit balance – frame size in bytes after the frame
is sent.
• The credit balance is incremented every 125ms by CIR/8.
• Credit balances not used in 250ms are reset to 0.
• The maximum value of CIR can not exceed the transmit line rate.
• If the data rate received from the Ethernet interface is higher than the CIR, the receive queue buffers will
fill and the high threshold water mark will invoke flow control to reduce the incoming traffic rate.
• CIR function is only available in data received at the Ethernet Interface to be sent to WAN. There is not
CIR functionality for data arriving from the WAN to be sent to the Ethernet Interface.
• Negative credits are not allowed, if there is not a credit balance, no frames are sent until there is a credit
balance again.
58 of 167
Page 59

Figure 8-16. CIR in the WAN Transmit Path
DS33Z41 Quad IMUX Ethernet Mapper
TSER
TCLKI1
RCLKI1
RSER
Line 1
IMUX
HDLC
Serial
Interface
JTAG
+
X.86
Microport
CIR
Arbiter
Interface
SDRAM
Buffer
Dev
Div by 1,2,4,8,10
Output clocks:
50,25 Mhz,2.5 Mhz
Buffer Dev
Div by 2,4,12
Output Clocks
25,50
Mhz
MAC
RMII
MII
50 or 25 Mhz Oscillator
REF_CLKI
TX_CLK1
RXD
RX_CLK1
TXD
MDC
100 Mhz Oscillator
SYSCLKI
SDCLKO
REF_CLKO
50 or 25 Mhz
SDRAM
59 of 167
Page 60
DS33Z41 Quad IMUX Ethernet Mapper
9 DEVICE REGISTERS
Ten address lines are used to address the register space. Table 9-1 shows the register map for the DS33Z41.
The addressable range for the device is 0000h to 08FFh. Each Register Section is 64 bytes deep. Global
Registers are preserved for software compatibility with multiport devices. The Serial Interface (Line) Registers are
used to configure the serial port and the associated transport protocol. The Ethernet Interface (Subscriber)
registers are used to control and observe the Ethernet port. The registers associated with the MAC must be
configured through indirect register write /read access due to the architecture of the device.
When writing to a register input values for unused bits and registers (those designated with “–“) should be zero
unless specifically noted otherwise, as these bits and registers are reserved. When a register is read from, the
values of the unused bits and registers should be ignored. A latched status bit is set when an event happens and
is cleared when read.
The register details are provided in the following tables.
Table 9-1. Register Address Map
0000h – 003Fh 0040h – 007Fh 0080h – 00BFh - -
Port 1
Reserved address space: 0180h - 07FFh.
Global Registers Arbiter BERT Serial Interface Ethernet
Interface
- - - 00C0h – 013Fh 0140h – 017Fh
60 of 167
Page 61
DS33Z41 Quad IMUX Ethernet Mapper
9.1 Register Bit Maps
Table 9-2, Table 9-3, Table 9-4, Table 9-5, Table 9-6, and Table 9-7 contain the registers of the DS33Z41. Bits
that are reserved are noted with a single dash “-“. All registers not listed are reserved and should be initialized
with a value of 00h for proper operation, unless otherwise noted.
9.1.1 Global Register Bit Map
Table 9-2. Global Register Bit Map
ADDR Name BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
000h
001h
002h
003h
004h
005h
006h
007h
008h
009h
00Ah
00Bh
00Ch
00Dh
00Eh
012h
016h
017h
018h
019h
01Ah
01Bh
01Ch
01Dh
01Eh
01Fh
020h
021h
03Ah
03Bh
03Ch
03Dh
Note: All address locations not listed are reserved.
GL.IDRL ID07 ID06 ID05 ID04 ID03 ID02 ID01 ID00
GL.IDRH ID15 ID14 ID13 ID12 ID11 ID10 ID09 ID08
GL.CR1 - - - - - REF_CLKO INTM RST
GL.BLR - - - - - - - GL.BLC1
GL.RTCAL - - - RLCALS1 - - - TLCALS1
GL.SRCALS - - - - - - REFCLKS SYSCLS
GL.LIE - - - LIN1TIE - - - LIN1RIE
GL.LIS - - - LIN1TIS - - - LIN1RIS
GL.SIE - - - - - - - SUB1IE
GL.SIS - - - - - - - SUB1IS
GL.TRQIE - - - TQ1IE - - - RQ1IE
GL.TRQIS - - - TQ1IS - - - RQ1IS
GL.IBIE - - - - - - IMUXIE BIE
GL.IBIS - - - - - - IIS BIS
GL.CON1 - - - - - - - LINE1[0]
GL.C1QPR - - - - C1MRPRR C1HWPRR C1MHPR C1HRPR
GL.IMXCN - T1E1 RXE SENDE L4 L3 L2 L1
GL.IMXC IMUXC7 IMUXC6 IMUXC5 IMUXC4 IMUXC3 IMUXC2 IMUXC1 IMUXC0
GL.IMXSS ITSYNC4 ITSYNC3 ITSYNC2 ITSYNC1 IRSYNC4 IRSYNC3 IRSYNC2 IRSYNC1
GL.IMXSIE ITSYNCIE4 ITSYNCIE3 ITSYNCIE2 ITSYNCIE1 IRSYNCIE4 IRSYNCIE3 IRSYNCIE2 IRSYNCIE1
GL.IMXSLS ITSYNCLS4 ITSYNCLS3 ITSYNCLS2 ITSYNCLS1 IRSYNCLS4 IRSYNCLS3 IRSYNCLS2 IRSYNCLS1
GL.IMXDFD IMUXDFD7 IMUXDFD6 IMUXDFD5 IMUXDFD4 IMUXDFD3 IMUXDFD2 IMUXDFD1 IMUXDFD0
GL.IMXDFEIE - - - - - - - IDDEIE0
GL.IMXDFDELS - - - - - - - IDDELS0
GL.IMXOOFIE
GL.IMXOOFLS TOOFLS4 TOOFLS3 TOOFLS2 TOOFLS1 ROOFL4 ROOFL3 ROOFLS2 ROOFLS1
GL.BISTEN - - - - - - - BISTE
GL.BISTPF - - - - - - BISTDN BISTPF
GL.SDMODE1 - - - - WT BL2 BL1 BL0
GL.SDMODE2 - - - - - LTMOD2 LTMOD1 LTMOD0
GL.SDMODEWS - - - - - - - SDMW
GL.SDRFTC SREFT7 SREFT6 SREFT5 SREFT4 SREFT3 SREFT2 SREFT1 SREFT0
TOOFIE4 TOOFIE3 TOOFIE2 TOOFIE1 ROOFIE4 ROOFIE3 ROOFIE2 ROOFIE1
61 of 167
Page 62

9.1.2 Arbiter Register Bit Map
Table 9-3. Arbiter Register Bit Map
DS33Z41 Quad IMUX Ethernet Mapper
ADDR
040h
041h
NAME
AR.RQSC1 RQSC1[7] RQSC1[6] RQSC1[5] RQSC1[4] RQSC1[3] RQSC1[2] RQSC1[1] RQSC1[0]
AR.TQSC1 TQSC1[7] TQSC1[6] TQSC1[5] TQSC1[4] TQSC1[3] TQSC1[2] TQSC1[1] TQSC1[0]
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
9.1.3 BERT Register Bit Map
Table 9-4. BERT Register Bit Map
ADDR NAME BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
080h
081h
082h
083h
084h
085h
086h
087h
088h
08Ah
08Bh
08Ch
08Dh
08Eh
08Fh
090h
091h
092h
093h
094h
095h
096h
097h
098h
099h
09Ah
09Bh
09Ch
09Dh
09Eh
09Fh
BCR
Reserved
BPCLR
BPCHR
BSPB0R
BSPB1R
BSPB2R
BSPB3R
TEICR
Reserved
Reserved
BSR
Reserved
BSRL
Reserved
BSRIE
Reserved
Reserved
Reserved
RBECB0R
RBECB1R
RBECB2R
Reserved
RBCB0
RBCB1
RBCB2
RBCB3
Reserved
Reserved
Reserved
Reserved
- PMU RNPL RPIC MPR APRD TNPL TPIC
- - - - - - - -
- QRSS PTS PLF4 PLF3 PLF2 PLF1 PLF0
- - - PTF4 PTF3 PTF2 PTF1 PTF0
BSP7 BSP6 BSP5 BSP4 BSP3 BSP2 BSP1 BSP0
BSP15 BSP14 BSP13 BSP12 BSP11 BSP10 BSP9 BSP8
BSP23 BSP22 BSP21 BSP20 BSP19 BSP18 BSP17 BSP16
BSP31 BSP30 BSP29 BSP28 BSP27 BSP26 BSP25 BSP24
- - TIER2 TIER1 TIER0 BEI TSEI -
- - - - - - - -
- - - - - - - -
- - - - PMS - BEC OOS
- - - - - - - -
- - - - PMSL BEL BECL OOSL
- - - - - - - -
- - - - PMSIE BEIE BECIE OOSIE
- - - - - - - -
- - - - - - - -
- - - - - - - -
BEC7 BEC6 BEC5 BEC4 BEC3 BEC2 BEC1 BEC0
BEC15 BEC14 BEC13 BEC12 BEC11 BEC10 BEC9 BEC8
BEC23 BEC22 BEC21 BEC20 BEC19 BEC18 BEC17 BEC16
- - - - - - - -
BC7 BC6 BC5 BC4 BC3 BC2 BC1 BC0
BC15 BC14 BC13 BC12 BC11 BC10 BC9 BC8
BC23 BC22 BC21 BC20 BC19 BC18 BC17 BC16
BC31 BC30 BC29 BC28 BC27 BC26 BC25 BC24
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
62 of 167
Page 63

DS33Z41 Quad IMUX Ethernet Mapper
9.1.4 Serial Interface Register Bit Map
Table 9-5. Serial Interface Register Bit Map
ADDR NAME BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
0C0h
0C1h
0C2h
0C3h
0C4h
0C5h
0C6h
0C7h
0C8h
0C9h
0CAh
0CBh
0CCh
0CDh
0CEh
0CFh
0D0h
0D1h
0D2h
0D3h
0D4h
0D5h
0D6h
0D7h
0D8h
0D9h
0DAh
0DBh
0DCh
0DDh
100h
101h
102h
Reserved
LI.RSTPD
LI.LPBK
Reserved
LI.TPPCL
LI.TIFGC
LI.TEPLC
LI.TEPHC
LI.TPPSR
LI.TPPSRL
LI.TPPSRIE
Reserved
LI.TPCR0
LI.TPCR1
LI.TPCR2
Reserved
LI.TBCR0
LI.TBCR1
LI.TBCR2
LI.TBCR3
LI.TMEI
Reserved
LI.THPMUU
LI.THPMUS
LI.TX86EDE
LI.TRX86A
LI.TRX8C
LI.TRX86SAPI
H
LI.TRX86SAPIL
LI.CIR
Reserved
LI.RPPCL
LI.RMPSCL
- - - - - - - -
- - - - - - RESET -
- - - - - - - QLP
- - - - - - - -
- - TFAD TF16 TIFV TSD TBRE -
TIFG7 TIFG6 TIFG5 TIFG4 TIFG3 TIFG2 TIFG1 TIFG0
TPEN7 TPEN6 TPEN5 TPEN4 TPEN3 TPEN2 TPEN1 TPEN0
MEIMS TPER6 TPER5 TPER4 TPER3 TPER2 TPER1 TPER0
- - - - - - - TEPF
- - - - - - - TEPFL
- - - - - - - TEPFIE
- - - - - - - -
TPC7
TPC6 TPC5 TPC4 TPC3 TPC2 TPC1 TPC0
TPC15
TPC23
TPC14 TPC13 TPC12 TPC11 TPC10 TPC9 TPC8
TPC22 TPC21 TPC20 TPC19 TPC18 TPC17 TPC16
- - - - - - - -
TBC7
TBC6 TBC5 TBC4 TBC3 TBC2 TBC1 TBC0
TBC15
TBC23
TBC31
TBC14 TBC13 TBC12 TBC11 TBC10 TBC9 TBC8
TBC22 TBC21 TBC20 TBC19 TBC18 TBC17 TBC16
TBC30 TBC29 TBC28 TBC27 TBC26 TBC25 TBC24
- - - - - - - TMEI
- - - - - - - -
- - - - - - - TPMUU
- - - - - - - TPMUS
- - - - - - - X86ED
X86TRA7 X86TRA6 X86TRA5 X86TRA4 X86TRA3 X86TRA2 X86TRA1 X86TRA0
X86TRC7 X86TRC6 X86TRC5 X86TRC4 X86TRC3 X86TRC2 X86TRC1 X86TRC0
TRSAPIH7 TRSAPIH6 TRSAPIH5 TRSAPIH4 TRSAPIH3 TRSAPIH2 TRSAPIH1 TRSAPIH0
TRSAPIL7 TRSAPIL6 TRSAPIL5 TRSAPIL4 TRSAPIL3 TRSAPIL2 TRSAPIL1 TRSAPIL0
CIRE CIR6 CIR5 CIR4 CIR3 CIR2 CIR1 CIR0
- - - - - - - -
- - RFPD RF16 RFED RDD RBRE RCCE
RMX7 RMX6 RMX5 RMX4 RMX3 RMX2 RMX1 RMX0
63 of 167
Page 64

DS33Z41 Quad IMUX Ethernet Mapper
A
DDR NAME BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
103h
104h
105h
106h
107h
108h
109h
10Ah
10Ch
10Dh
10Eh
10Fh
110h
111h
112h
113h
114h
115h
116h
118h
119h
11Ah
11Bh
11Ch
11Dh
11Eh
11Fh
120h
121h
122h
123h
124h
125h
126h
127h
LI.RMPSCH
LI.RPPSR
LI.RPPSRL
LI.RPPSRIE
Reserved
LI.RPCB0
LI.RPCB1
LI.RPCB2
LI.RFPCB0
LI.RFPCB1
LI.RFPCB2
Reserved
LI.RAPCB0
LI.RAPCB1
LI.RAPCB2
Reserved
LI.RSPCB0
LI.RSPCB1
LI.RSPCB2
LI.RBC0
LI.RBC1
LI.RBC2
LI.RBC3
LI.RAC0
LI.RAC1
LI.RAC2
LI.RAC3
LI.RHPMUU
LI.RHPMUS
LI.RX86S
LI.RX86LSIE
LI.TQLT
LI.TQHT
LI.TQTIE
LI.TQCTLS
RMX15 RMX14 RMX13 RMX12 RMX11 RMX10 RMX9 RMX8
- - - - - REPC
REPL
RAPL RIPDL RSPDL RLPDL REPCL RAPCL RSPCL
REPIE RAPIE RIPDIE RSPDIE RLPDIE REPCIE RAPCIE RSPCIE
RAPC RSPC
RPC7
RPC15
RPC23
RFPC7
RFPC15
RFPC23
RPC6 RPC5 RPC4 RPC3 RPC2 RPC1 RPC0
RPC14 RPC13 RPC12 RPC11 RPC10 RPC09 RPC08
RPC22 RPC21 RPC20 RPC19 RPC18 RPC17 RPC16
RFPC6 RFPC5 RFPC4 RFPC3 RFPC2 RFPC1 RFPC0
RFPC14 RFPC13 RFPC12 RFPC11 RFPC10 RFPC9 RFPC8
RFPC22 RFPC21 RFPC20 RFPC19 RFPC18 RFPC17 RFPC16
RAPC7
RAPC15
RAPC23
RAPC6 RAPC5 RAPC4 RAPC3 RAPC2 RAPC1 RAPC0
RAPC14 RAPC13 RAPC12 RAPC11 RAPC10 RAPC9 RAPC8
RAPC22 RAPC21 RAPC20 RAPC19 RAPC18 RAPC17 RAPC16
- - - - - - - -
RSPC7
RSPC15
RSPC23
RBC15
RBC23
RBC31
REBC7
REBC15
REBC23
REBC31
RBC7
RSPC6 RSPC5 RSPC4 RSPC3 RSPC2 RSPC1 RSPC0
RSPC14 RSPC13 RSPC12 RSPC11 RSPC10 RSPC9 RSPC8
RSPC22 RSPC21 RSPC20 RSPC19 RSPC18 RSPC17 RSPC16
RBC6 RBC5 RBC4 RBC3 RBC2 RBC1 RBC0
RBC14 RBC13 RBC12 RBC11 RBC10 RBC9 RBC8
RBC22 RBC21 RBC20 RBC19 RBC18 RBC17 RBC16
RBC30 RBC29 RBC28 RBC27 RBC26 RBC25 RBC24
REBC6 REBC5 REBC4 REBC3 REBC2 REBC1 REBC0
REBC14 REBC13 REBC12 REBC11 REBC10 REBC9 REBC8
REBC22 REBC21 REBC20 REBC19 REBC18 REBC17 REBC16
REBC30 REBC29 REBC28 REBC27 REBC26 REBC25 REBC24
- - - - - - - RPMUU
- - - - - - - RPMUUS
- - - - SAPIHNE SAPILNE CNE ANE
- - - -
SAPINE01IM SAPINEFEIM
CNE3LIM ANE4IM
TQLT7 TQLT6 TQLT5 TQLT4 TQLT3 TQLT2 TQLT1 TQLT0
TQHT7 TQHT6 TQHT5 TQHT4 TQHT3 TQHT2 TQHT1 TQHT0
- - - - TFOVFIE TQOVFIE TQHTIE TQLTIE
- - - - TFOVFLS
TQOVFLS
TQHTLS TQLTLS
Note: 0DEh–0FFh, 128h–13Fh are reserved.
64 of 167
Page 65

DS33Z41 Quad IMUX Ethernet Mapper
9.1.5 Ethernet Interface Register Bit Map
Table 9-6. Ethernet Interface Register Bit Map
ADDR NAME BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
140h
141h
142h
143h
144h
145h
146h
147h
148h
149h
14Ah
14Bh
14Ch
14Dh
14Eh
14Fh
150h
151h
152h
153h
154h
155h
156h
157h
158h
159h
15Ah
15Bh
15Ch
15Dh
15Eh
Note: The address locations in this table are for Ethernet Interface 1. 15Fh–17Fh are reserved.
SU.MACRADL MACRA7 MACRA6 MACRA5 MACRA4 MACRA3 MACRA2 MACRA1 MACRA0
SU.MACRADH MACRA15 MACRA14 MACRA13 MACRA12 MACRA11 MACRA10 MACRA09 MACRA08
SU.MACRD0 MACRD7 MACRD6 MACRD5 MACRD4 MACRD3 MACRD2 MACRD1 MACRD0
SU.MACRD1 MACRD15 MACRD14 MACRD13 MACRD12 MACRD11 MACRD10 MACRD9 MACRD8
MACRD23 MACRD22 MACRD21 MACRD20 MACRD19 MACRD18 MACRD17 MACRD16
SU.MACRD3 MACRD31 MACRD30 MACRD29 MACRD28 MACRD27 MACRD26 MACRD25 MACRD24
SU.MACWD0 MACWD7 MACWD6 MACWD5 MACWD4 MACWD3 MACWD2 MACWD1 MACWD0
SU.MACWD1 MACWD15 MACWD14 MACWD13 MACWD12 MACWD11 MACWD10 MACWD09 MACWD08
SU.MACWD2 MACWD23 MACWD22 MACWD21 MACWD20 MACWD19 MACWD18 MACWD17 MACWD16
SU.MACWD3 MACD31 MACD30 MACD29 MACD28 MACD27 MACD26 MACD25 MACD24
SU.MACAWL MACAW 7 MACAW 6 MACAW 5 MACAW4 MACAW3 MACAW2 MACAW1 MACAW0
SU.MACAWH MACAW 15 MACAW 14 MACAW 13 MACAW12 MACAW11 MACAW10 MACAW9 MACAW8
SU.MACRWC - - - - - - MCRW MCS
RESERVED - - - - - - - -
RESERVED - - - - - - - -
SU.LPBK - - - - - - - QLP
SU.GCR - - - - CRCS H10S ATFLOW JAME
SU.TFRC - - - - NCFQ TPDFCB TPRHBC TPRCB
SU.TFSL UR EC LC ED LOC NOC - FABORT
SU.TFSH PR HBF CC3 CC2 CC1 CC0 LCO DEF
SU.RFSB0 FL7 FL6 FL5 FL4 FL3 FL2 FL1 Fl0
SU.RFSB1 RF WT FL13 FL12 FL11 FL10 FL9 Fl8
SU.RFSB2 - - CRCE DB MIIE FT CS FTL
SU.RFSB3 MF - - BF MCF UF CF LE
SU.RMFSRL RMPS7 RMPS6 RMPS5 RMPS4 RMPS3 RMPS2 RMPS1 RMPS0
SU.RMFSRH RMPS15 RMPS14 RMPS13 RMPS12 RMPS11 RMPS10 RMPS09 RMPS08
SU.RQLT RQLT7 RQLT6 RQLT5 RQLT4 RQLT3 RQLT2 RQLT1 RQLT0
SU.RQHT RQHT7 RQHT6 RQHT5 RQHT4 RQHT3 RQHT2 RQHT1 RQHT0
SU.QRIE - - - - RFOVFIE RQVFIE RQLTIE RQHTIE
SU.QCRLS - - - - RFOVFLS RQOVFLS RQHTLS RQLTLS
SU.RFRC - UCFR CFRR LERR CRCERR DBR MIIER BFR
65 of 167
Page 66

9.1.6 MAC Register Bit Map
Table 9-7. MAC Indirect Register Bit Map
DS33Z41 Quad IMUX Ethernet Mapper
ADDR
0000h
0001h
0002h
0003h
0004h
0005h
0006h
0007h
0008h
0009h
000Ah
000Bh
000Ch
000Dh
000Eh
000Fh
0010h
0011h
0012h
0013h
0014h
0015h
0016h
0017h
0018h
0019h
001Ah
001Bh
001Ch
001Dh
001Eh
001Fh
100h
101h
102h
103h
10Ch
10Dh
10Eh
10Fh
NAME BIT 7
SU.MACCR
31:24
23:16
15:8
7:0
SU.MACAH
31:24
23:16
15:8
7:0
SU.MACAL
31:24
23:16
15:8
7:0
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
SU.MACMIIA
31:24
23:16
15:8
7:0
SU.MACMIID
31:24
23:16
15:8
7:0
SU.MACFCR
31:24
23:16
15:8
7:0
SU.MMCCTRL
31:24
23:16
15:8
7:0
RESERVED –
initialize to FF
RESERVED –
initialize to FF
RESERVED –
initialize to FF
RESERVED –
initialize to FF
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
- - - HDB PS - - -
DRO OML1 OML0 F PM PAM - -
- - - LCC - DRTY - ASTP
BOLMT1 BOLMT0 DC - TE RE - -
- - - - - - - -
- - - - - - - PADR47 PADR46 PADR45 PADR44 PADR43 PADR42 PADR41 PADR40
PADR39 PADR38 PADR37 PADR36 PADR35 PADR34 PADR33 PADR32
PADR31 PADR30 PADR29 PADR28 PADR27 PADR26 PADR25 PADR24
PADR23 PADR22 PADR21 PADR20 PADR19 PADR18 PADR17 PADR16
PADR15 PADR14 PADR13 PADR12 PADR11 PADR10 PADR09 PADR08
PADR07 PADR06 PADR05 PADR04 PADR03 PADR02 PADR01 PADR00
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
PHYA4 PHYA3 PHYA2 PHYA1 PHYA0 MIIA4 MIIA3 MIIA2
MIIA1 MIIA0 - - - - MIIW MIIB
- - - - - - - -
- - - - - - - -
MIID15 MIID14 MIID13 MIID12 MIID11 MIID10 MIID09 MIID08
MIID07 MIID06 MIID05 MIID04 MIID03 MIID02 MIID01 MIID00
PT15 PT14 PT13 PT12 PT11 PT10 PT09 PT08
PT07 PT06 PT05 PT04 PT03 PT02 PT01 PT00
- - - - - - - -
- - - - - PCF FCE FCB
- - - - - - - -
- - - - - - - -
- -
MXFRM4 MXFRM3 MXFRM2 MXFRM1 MXFRM0
MXFRM10 MXFRM9 MXFRM8 MXFRM7 MXFRM6 MXFRM5
- - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
66 of 167
Page 67
DS33Z41 Quad IMUX Ethernet Mapper
A
110h
111h
112h
113h
200h
201h
202h
203h
204h
205h
206h
207h
300h
301h
302h
303h
308h
309h
30Ah
30Bh
30Ch
30Dh
30Eh
30Fh
334h
335h
336h
337h
338h
339h
33Ah
33Bh
Note that the addresses in the table above are the indirect addresses that must be provided to the SU.MACAWH and SU.MACAWL.
All unused and reserved locations must be initialized to zero for proper operation unless specifically noted otherwise.
DDR
NAME BIT 7
RESERVED –
initialize to FF
RESERVED –
initialize to FF
RESERVED –
initialize to FF
RESERVED –
initialize to FF
SU.RxFrmCtr
31:24
23:16
15:8
7:0
SU.RxFrmOKCtr
31:24
23:16
15:8
7:0
SU.TxFrmCtr
23:16
15:8
7:0
SU.TxBytesCtr
23:16
15:8
7:0
SU.TxBytesOkCtr
23:16
15:8
7:0
SU.TxFrmUndr
23:16
15:8
7:0
SU.TxBdFrmCtr
23:16
15:8
7:0
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
- - - - - - - -
- - - - - - - -
- - - - - - - -
- - - - - - - -
RXFRMC31 RXFRMC30 RXFRMC29 RXFRMC28 RXFRMC27 RXFRMC26 RXFRMC25 RXFRMC24
RXFRMC23 RXFRMC22 RXFRMC21 RXFRMC20 RXFRMC19 RXFRMC18 RXFRMC17 RXFRMC16
RXFRMC15 RXFRMC14 RXFRMC13 RXFRMC12 RXFRMC11 RXFRMC10 RXFRMC9 RXFRMC8
RXFRMC7 RXFRMC6 RXFRMC5 RXFRMC4 RXFRMC3 RXFRMC2 RXFRMC1 RXFRMC0
RXFRMOK31 RXFRMOK30 RXFRMOK29 RXFRMOK28 RXFRMOK27 RXFRMOK26 RXFRMOK25 RXFRMOK24
RXFRMOK23 RXFRMOK22 RXFRMOK21 RXFRMOK20 RXFRMOK19 RXFRMOK18 RXFRMOK17 RXFRMOK16
RXFRMOK15 RXFRMOK14 RXFRMOK13 RXFRMOK12 RXFRMOK11 RXFRMOK10 RXFRMOK9 RXFRMOK8
RXFRMOK7 RXFRMOK6 RXFRMOK5 RXFRMOK4 RXFRMOK3 RXFRMOK2 RXFRMOK1 RXFRMOK0
TXFRMC31 TXFRMC30 TXFRMC29 TXFRMC28 TXFRMC27 TXFRMC26 TXFRMC25 TXFRMC24
TXFRMC23 TXFRMC22 TXFRMC21 TXFRMC20 TXFRMC19 TXFRMC18 TXFRMC17 TXFRMC16
TXFRMC15 TXFRMC14 TXFRMC13 TXFRMC12 TXFRMC11 TXFRMC10 TXFRMC9 TXFRMC8
TXFRMC7 TXFRMC6 TXFRMC5 TXFRMC4 TXFRMC3 TXFRMC2 TXFRMC1 TXFRMC0
TXBYTEC31 TXBYTEC30 TXBYTEC29 TXBYTEC28 TXBYTEC27 TXBYTEC26 TXBYTEC25 TXBYTEC24
TXBYTEC23 TXBYTEC22 TXBYTEC21 TXBYTEC20 TXBYTEC19 TXBYTEC18 TXBYTEC17 TXBYTEC16
TXBYTEC15 TXBYTEC14 TXBYTEC13 TXBYTEC12 TXBYTEC11 TXBYTEC10 TXBYTEC9 TXBYTEC8
TXBYTEC7 TXBYTEC6 TXBYTEC5 TXBYTEC4 TXBYTEC3 TXBYTEC2 TXBYTEC1 TXBYTEC0
TXBYTEOK31 TXBYTEOK30 TXBYTEOK29 TXBYTEOK28 TXBYTEOK27 TXBYTEOK26 TXBYTEOK25 TXBYTEOK24
TXBYTEOK23 TXBYTEOK22 TXBYTEOK21 TXBYTEOK20 TXBYTEOK19 TXBYTEOK18 TXBYTEOK17 TXBYTEOK16
TXBYTEOK15 TXBYTEOK14 TXBYTEOK13 TXBYTEOK12 TXBYTEOK11 TXBYTEOK10 TXBYTEOK9 TXBYTEOK8
TXBYTEOK7 TXBYTEOK6 TXBYTEOK5 TXBYTEOK4 TXBYTEOK3 TXBYTEOK2 TXBYTEOK1 TXBYTEOK0
TXFRMU31 TXFRMU30 TXFRMU29 TXFRMU28 TXFRMU27 TXFRMU26 TXFRMU25 TXFRMU24
TXFRMU23 TXFRMU22 TXFRMU21 TXFRMU20 TXFRMU19 TXFRMU18 TXFRMU17 TXFRMU16
TXFRMU15 TXFRMU14 TXFRMU13 TXFRMU12 TXFRMU11 TXFRMU10 TXFRMU9 TXFRMU8
TXFRMU7 TXFRMU6 TXFRMU5 TXFRMU4 TXFRMU3 TXFRMU2 TXFRMU1 TXFRMU0
TXFRMBD31 TXFRMBD30 TXFRMBD29 TXFRMBD28 TXFRMBD27 TXFRMBD26 TXFRMBD25 TXFRMBD24
TXFRMBD23 TXFRMBD22 TXFRMBD21 TXFRMBD20 TXFRMBD19 TXFRMBD18 TXFRMBD17 TXFRMBD16
TXFRMBD15 TXFRMBD14 TXFRMBD13 TXFRMBD12 TXFRMBD11 TXFRMBD10 TXFRMBD9 TXFRMBD8
TXFRMBD7 TXFRMBD6 TXFRMBD5 TXFRMBD4 TXFRMBD3 TXFRMBD2 TXFRMBD1 TXFRMBD0
67 of 167
Page 68

DS33Z41 Quad IMUX Ethernet Mapper
9.2 Global Register Definitions
Functions contained in the global registers include: framer reset, LIU reset, device ID, BERT interrupt status,
framer interrupt status, IBO configuration, MCLK configuration, and BPCLK configuration. These registers are
preserved to provide code compatibility with the multiport devices in this product family. The global registers bit
descriptions are presented below.
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name ID07
ID06 ID05 ID04 ID03 ID02 ID01 ID00
Default 0 0 1 1 0 0 0 0
Bit 7: ID07. Reserved for future use.
Bit 6: ID06. Reserved for future use.
Bit 5: ID05. If this bit is set the device contains a RMII interface.
Bit 4: ID04. If this bit is set the device contains a MII interface.
Bit 3: ID03. If this bit is set the device contains an Ethernet PHY.
Bits 2 to 0: ID03 to ID00. A three-bit count that is equal to 000b for the first die revision, and is incremented with
each successive die revision. May not match the two-letter die revision code on the top brand of the device.
GL.IDRL
Global ID Low Register
00h
Register Name:
Register Description:
Register Address:
GL.IDRH
Global ID High Register
01h
Bit # 7 6 5 4 3 2 1 0
Name ID15
ID14 ID13 ID12 ID11 ID10 ID09 ID08
Default 0 0 0 0 0 0 1 1
Bits 7 to 5: ID15 to ID13. Number of ports in the device – 1.
Bit 4: ID12. If this bit is set the device has LIU functionality.
Bit 3: ID11. If this bit is set the device has a framer.
Bit 2: ID10. Reserved for future use.
Bit 1: ID09. If this bit is set the device has HDLC or X.86 encapsulation.
Bit 0: ID08. If this bit is set the device has inverse multiplexing functionality.
68 of 167
Page 69

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.CR1
Global Control Register 1
02h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — REF_CLKO INTM RST
Default 0 0 0
Bit 2: REF_CLKO OFF (REF_CLKO). This bit determines the REF_CLKO output mode.
1 = REF_CLKO is disabled and outputs an active-low signal.
0 = REF_CLKO is active and in accordance with RMII/MII Selection
Bit 1: INT Pin Mode (INTM). This bit determines the inactive mode of the INT pin. The INT pin always drives low
when active.
1 = Pin is high impedance when not active
0 = Pin drives high when not active
Bit 0: Reset (RST). When this bit is set to 1, all of the internal data path and status and control registers (except
this RST bit), on all ports, are reset to their default state. This bit must be set high for a minimum of 100ns.
0 = Normal operation
1 = Reset and force all internal registers to their default values
Register Name:
Register Description:
Register Address:
GL.BLR
Global BERT Connect Register
03h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — —- BLC1
Default 0 0 0 0 0 0 0 0
Bit 0: BERT Connect 1 (BLC1). If this bit is set to 1, the BERT is connected to Serial Interface 1.
The BERT transmitter is connected to the transmit serial port and the BERT receive to the receive serial port.
When the BERT is connected, normal data transfer is interrupted. Note that connecting the BERT overrides a
connection to the Serial Interface, if a connection exists. When the BERT is disconnected, the connection is
restored.
69 of 167
Page 70

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.RTCAL
Global Receive and Transmit Serial Port Clock Activity Latched Status
04h
Bit # 7 6 5 4 3 2 1 0
Name — — — RLCALS1 — — — TLCALS1
Default 0 0 0 0 0 0 0 0
Bit 4: Receive Serial Interface Clock Activity Latched Status 1 (RLCALS1). This bit is set to 1 if the receive
clock for Serial Interface 1 has activity. This bit is cleared upon read.
Bit 0: Transmit Serial Interface Clock Activity Latched Status 1 (TLCALS1). This bit is set to 1 if the transmit
clock for Serial Interface 1 has activity. This bit is cleared upon read.
Register Name:
Register Description:
Register Address:
GL.SRCALS
Global SDRAM Reference Clock Activity Latched Status
05h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — REFCLKS SYSCLS
Default 0 0 0 0 0 0 0 0
Bit 1: Reference Clock Activity Latched Status (REFCLKS). This bit is set to 1 if REF_CLK has activity. This
bit is cleared upon read.
Bit 0: System Clock Input Latched Status (SYSCLS). This bit is set to 1 if SYSCLKI has activity. This bit is
cleared upon read.
70 of 167
Page 71

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.LIE
Global Serial Interface Interrupt Enable
06h
Bit # 7 6 5 4 3 2 1 0
Name — — — LIN1TIE — — — LIN1RIE
Default 0 0 0 0 0 0 0 0
Bit 4: Serial Interface 1 Tx Interrupt Enable (LINE1TIE). Setting this bit to 1 enables an interrupt on LIN1TIS.
Bit 0: Serial Interface 1 Rx Interrupt Enable (LINE1RIE). Setting this bit to 1 enables an interrupt on LIN1RIS.
Register Name:
Register Description:
Register Address:
GL.LIS
Global Serial Interface Interrupt Status
07h
Bit # 7 6 5 4 3 2 1 0
Name - - - LIN1TIS - - - LIN1RIS
Default 0 0 0 0 0 0 0 0
Bit 4: Serial Interface 1 Tx Interrupt Status (LIN1TIS). This bit is set if Serial Interface 1 Transmit has an
enabled interrupt generating event. Serial Interface interrupts consist of HDLC interrupts and X.86 interrupts.
Bit 0: Serial Interface 1 Rx Interrupt Status (LIN1RIS). This bit is set if Serial Interface 1 Receive has an
enabled interrupt generating event. Serial Interface interrupts consist of HDLC interrupts and X.86 interrupts.
Register Name:
Register Description:
Register Address:
GL.SIE
Global Ethernet Interface Interrupt Enable
08h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — SUB1IE
Default 0 0 0 0 0 0 0 0
Bit 0: Ethernet Interface 1 Interrupt Enable (SUB1IE). Setting this bit to 1 enables an interrupt on SUB1S.
Register Name:
Register Description:
Register Address:
GL.SIS
Global Ethernet Interface Interrupt Status
09h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — SUB1IS
Default 0 0 0 0 0 0 0 0
Bit 0: Ethernet Interface 1 Interrupt Status (SUB1IS). This bit is set to 1 if Ethernet Interface 1 has an enabled
interrupt generating event. The Ethernet Interface consists of the MAC and The RMII/MII port.
71 of 167
Page 72

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.TRQIE
Global Transmit Receive Queue Interrupt Enable
0Ah
Bit # 7 6 5 4 3 2 1 0
Name — — — TQ1IE — — — RQ1IE
Default 0 0 0 0 0 0 0 0
Bit 4: Transmit Queue 1 Interrupt Enable (TQ1IE). Setting this bit to 1 enables an interrupt on TQ1IS.
Bit 0: Receive Queue 1 Interrupt Enable (RQ1IE). Setting this bit to 1 enables an interrupt on RQ1IS.
Register Name:
Register Description:
Register Address:
GL.TRQIS
Global Transmit Receive Queue Interrupt Status
0Bh
Bit # 7 6 5 4 3 2 1 0
Name — — — TQ1IS — — — RQ1IS
Default 0 0 0 0 0 0 0 0
Bit 4: Transmit Queue 1 Interrupt Enable (TQ1IS). If this bit is set to 1, the Transmit Queue 1 has interrupt
status event. Transmit queue events are transmit queue crossing thresholds and queue overflows.
Bit 0: Receive Queue 1 Interrupt Status (RQ1IS). If this bit is set to 1, the Receive Queue 1 has interrupt status
event. Receive queue events are transmit queue crossing thresholds and queue overflows.
Register Name:
Register Description:
Register Address:
GL.IBIE
Global IMUX and BERT Interrupt Enable
0Ch
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — IMUXIE BIE
Default 0 0 0 0 0 0 0 0
Bit 1: IMUX Interrupt Enable (IMUXIE). Setting this bit to 1 enables an interrupt on IIS.
Bit 0: BERT Interrupt Enable (BIE). Setting this bit to 1 enables an interrupt on BIS.
Register Name:
Register Description:
Register Address:
GL.IBIS
Global IMUX and BERT Interrupt Status
0Dh
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — IIS BIS
Default 0 0 0 0 0 0 0 0
Bit 1: IMUX Interrupt Status (IIS). This bit is set to 1 if the IMUX has an enabled interrupt generating event.
Bit 0: BERT Interrupt Status (BIS). This bit is set to 1 if the BERT has an enabled interrupt generating event.
72 of 167
Page 73

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.CON1
Connection Register for Ethernet Interface 1
0Eh
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — LINE1[0]
Default 0 0 0 0 0 0 0 1
Bit 0: LINE1[0]. This bit is preserved to provide software compatibility with multiport devices. The LINE1[0] bit
selects the Ethernet port that is to be connected to the Serial Interface. Note that bidirectional connection is
assumed between the Serial and Ethernet Interfaces. The connection register and corresponding queue size
must be defined for proper operation. Writing a 0 to this register will disconnect the connection. When a
connection is disconnected, “1”s are sourced to the Serial Interface transmit and to the HDLC receiver and the
clocks to the HDLC transmitter/receiver are disabled.
Register Name:
Register Description:
Register Address:
GL.C1QPR
Connection 1 Queue Pointer Reset
12h
Bit #
Name
Default
7 6 5 4 3 2 1 0
— — — — C1MRPRR C1HWPRR C1MHPR C1HRPR
0 0 0 0 0 0 0 0
Bit 3: MAC Read Pointer Reset (C1MRPR). Setting this bit to 1 resets the receive queue read pointer for
connection 1. This queue pointer must be reset after a disconnect and before a connection. The user must clear
the bit before subsequent reset operations.
Bit 2: HDLC Write Pointer Reset (C1HWPR). Setting this bit to 1 resets the receive queue write pointer for
connection 1. This queue pointer must be reset after a disconnect and before a connection. The user must clear
the bit before subsequent reset operations.
Bit 1: HDLC Read Pointer Reset (C1MHPR). Setting this bit to 1 resets the transmit queue read pointer for
connection 1. This queue pointer must be reset after a disconnect and before a connection. The user must clear
the bit before subsequent reset operations.
Bit 0: MAC Transmit Write Pointer Reset (C1HRPR). Setting this bit to 1 resets the transmit queue write pointer
for connection 1. This queue pointer must be reset after a disconnect and before a connection. The user must
clear the bit before subsequent reset operations.
73 of 167
Page 74

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.IMXCN
Inverse MUX Configuration Register
16h
Bit # 7 6 5 4 3 2 1 0
Name — T1E1 RXE SENDE L4 L3 L2 L1
Default 0 0 0 0 0 0 0 0
Bit 6: T1E1 Mode (T1E1). This bit determines if IMUX if for T1 or E1 Mode.
0 = T1 Mode
1 = E1 Mode
Bit 5: Receive Enable (RXE). If this bit is set to 1, data will be received from the Serial Interface and passed to
the packet processor. If equal to 0, no data will be sent to the packet processor.
Bit 4: SEND Enable (SENDE). If this bit is set to 1, the data will be transmitted on the Serial Interface. If equal to
0, data is blocked.
Bit 3: Link 4 (L4). If this bit is set to 1, link number four is participating in the communication. If this bit is equal to
0, the link does not participate.
Bit 2: Link 3 (L3). If this bit is set to 1, link number three is participating in the communication. If this bit is equal
to 0, the link does not participate.
Bit 1: Link 2 (L2). If this bit is set to 1, link number two is participating in the communication. If this bit is equal to
0, the link does not participate.
Bit 0: Link 1 (L1). If this bit is set to 1, link number one is participating in the communication. If this bit is equal to
0, the link does not participate.
Register Name:
Register Description:
Register Address:
GL.IMXC
Inverse MUX Command Register
17h
Bit #
Name
Default
7 6 5 4 3 2 1 0
IMUXC7 IMUXC6 IMUXC5 IMUXC4 IMUXC3 IMUXC2 IMUXC1 IMUXC0
1 1 1 1 1 1 1 1
Bits 0 to 7: Inverse Multiplexing Command (IMUXC[0:7]). This byte is used to issue IMUX commands.
AVAILABLE USER COMMANDS
VALUE COMMAND COMMENT
1111 1111b NOP No operation to perform.
Establish Link with the distant end. Upon reception of this message,
1000 0010b Link Start
this distant end begins searching for 3 consecutive sequence
numbers.
The user must send a link start command. The NOP command may be written to this register after the link start
command is written. All values other than those listed above will be ignored.
74 of 167
Page 75
DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.IMXSS
Inverse MUX Sync Status
18h
Bit #
Name
Default
Bit 7: IMUX Transmit Sync 4 (ITSYNC4). If this bit is set to 1, the device has received a rsync command for the
th
4
portion of the 8.192Mbps link from the distant node. This status bit indicates that the distant end is in sync.
Bit 6: IMUX Transmit Sync 3 (ITSYNC3). If this bit is set to 1, the device has received a rsync command for the
rd
3
portion of the 8.192Mbps link from the distant node. This status bit indicates that the distant end is in sync.
Bit 5: IMUX Transmit Sync 2 (ITSYNC2). If this bit is set to 1, the device has received a rsync command for the
nd
2
portion of the 8.192Mbps link from the distant node. This status bit indicates that the distant end is in sync.
Bit 4: IMUX Transmit Sync 1 (ITSYNC1). If this bit is set to 1, the device has received a rsync command for the
st
1
portion of the 8.192Mbps link from the distant node. This status bit indicates that the distant end is in sync.
Bit 3: IMUX Receive Sync 4 (IRSYNC4). If this bit is set to 1, the local end is in sync for the 4
7 6 5 4 3 2 1 0
ITSYNC4 ITSYNC3 ITSYNC2 ITSYNC1 IRSYNC4 IRSYNC3 IRSYNC2 IRSYNC1
0 0 0 0 0 0 0 0
th
portion of the
8.192Mbps link. The command states that the local end is in sync.
Bit 2: IMUX Receive Sync 3 (IRSYNC3). If this bit is set to 1, the local end is in sync for the 3
rd
portion of the
8.192Mbps link. The command states that the local end is in sync.
Bit 1: IMUX Receive Sync 2 (IRSYNC2). If this bit is set to 1, the local end is in sync for the 2
nd
portion of the
8.192Mbps link. The command states that the local end is in sync.
Bit 0: IMUX Receive Sync 1 (IRSYNC1). If this bit is set to 1, the local end is in sync for the 1
st
portion of the
8.192Mbps link. The command states that the local end is in sync.
Register Name:
Register Description:
Register Address:
GL.IMXSIE
Inverse Mux Sync Interrupt Enable
19h
Bit #
Name
Default
7 6 5 4 3 2 1 0
ITSYNCIE4 ITSYNCIE3 ITSYNCIE2 ITSYNCIE1 IRSYNCIE4 IRSYNCIE3 IRSYNCIE2 IRSYNCIE1
0 0 0 0 0 0 0 0
Bit 7: IMUX Transmit Sync Interrupt Enable 4 (ITSYNCIE4). Setting this bit to 1 enables an interrupt on
ITSYNCLS4.
Bit 6: IMUX Transmit Sync Interrupt Enable 3 (ITSYNCIE3). Setting this bit to 1 enables an interrupt on
ITSYNCLS3.
Bit 5: IMUX Transmit Sync Interrupt Enable 2 (ITSYNCIE2). Setting this bit to 1 enables an interrupt on
ITSYNCLS2.
Bit 4: IMUX Transmit Sync Interrupt Enable 1 (ITSYNCIE1). Setting this bit to 1 enables an interrupt on
ITSYNCLS1.
Bit 3: IMUX Receive Sync Interrupt Enable 4 (IRSYNCIE4). Setting this bit to 1 enables an interrupt on
IRSYNCLS4.
Bit 2: IMUX Receive Sync Interrupt Enable 3 (IRSYNCIE3). Setting this bit to 1 enables an interrupt on
IRSYNCLS3.
Bit 1: IMUX Receive Sync Interrupt Enable 2 (IRSYNCIE2). Setting this bit to 1 enables an interrupt on
IRSYNCLS2.
Bit 0: IMUX Receive Sync Interrupt Enable 1 (IRSYNCIE1). Setting this bit to 1 enables an interrupt on
IRSYNCLS1.
75 of 167
Page 76
DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.IMXSLS
Inverse MUX Sync Latched Status
1Ah
Bit #
Name
Default
7 6 5 4 3 2 1 0
ITSYNCLS4 ITSYNCLS3 ITSYNCLS2 ITSYNCLS1 IRSYNCLS4 IRSYNCLS3 IRSYNCLS2 IRSYNCLS1
0 0 0 0 0 0 0 0
Bit 7: IMUX Transmit Sync Latched Status 4 (ITSYNCLS4). This is a latched status bit for ITSYNC4.
Bit 6: IMUX Transmit Sync Latched Status 3 (ITSYNCLS3). This is a latched status bit for ITSYNC3.
Bit 5: IMUX Transmit Sync Latched Status 2 (ITSYNCLS2). This is a latched status bit for ITSYNC2.
Bit 4: IMUX Transmit Sync Latched Status 1 (ITSYNCLS1). This is a latched status bit for ITSYNC1.
Bit 3: IMUX Receive Sync Latched Status 4 (IRSYNCLS4). This is a latched status bit for IRSYNC4.
Bit 2: IMUX Receive Sync Latched Status 3 (IRSYNCLS3). This is a latched status bit for IRSYNC3.
Bit 1: IMUX Receive Sync Latched Status 2 (IRSYNCLS2). This is a latched status bit for IRSYNC2.
Bit 0: IMUX Receive Sync Latched Status 1 (IRSYNCLS1). This is a latched status bit for IRSYNC1.
Register Name:
Register Description:
Register Address:
GL.IMXDFD
Inverse MUX Diff Delay
1Bh
Bit # 7 6 5 4 3 2 1 0
Name IMUXDFD7 IMUXDFD6 IMUXDFD5 IMUXDFD4 IMUXDFD3 IMUXDFD2 IMUXDFD1 IMUXDFD0
Default 0 0 0 0 0 0 0 0
Bits 7 to 0 IMUX Differential Delay. These 8 bits provide the IMUX differential delay. The maximum differential
delay that can be measured is 64ms.
Register Name:
Register Description:
Register Address:
GL.IMXDFEIE
Inverse MUX Diff Delay Error Interrupt Enable
1Ch
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — IDDEIE
Default 0 0 0 0 0 0 0 0
Bit 0: IMUX Differential Delay Error Interrupt Enable (IDDEIE). Setting this bit to 1 enables an interrupt on
IDDELS0.
Register Name:
Register Description:
Register Address:
GL.IMXDFDELS
Inverse MUX Diff Delay Error Latched Status
1Dh
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — IDDELS0
Default 0 0 0 0 0 0 0 0
Bit 0: IMUX Differential Delay Error latched Status (IDDELS0). This bit provides the differential delay error
latched status. It is set to 1 when the differential delay has exceeded 7.75ms.
76 of 167
Page 77
DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.IMXOOFIE
Inverse MUX OOF Interrupt Enable
1Eh
Bit # 7 6 5 4 3 2 1 0
Name TOOFIE4 TOOFIE3 TOOFIE2 TOOFIE1 ROOFIE4 ROOFIE3 ROOFIE2 ROOFIE1
Default 0 0 0 0 0 0 0 0
Bit 7: IMUX Transmit OOF Interrupt Enable 4 (TOOFIE4). Setting this bit to 1 enables an interrupt on
TOOFLS4.
Bit 6: IMUX Transmit OOF Interrupt Enable 3 (TOOFIE3). Setting this bit to 1 enables an interrupt on
TOOFLS3.
Bit 5: IMUX Transmit OOF Interrupt Enable 2 (TOOFIE2). Setting this bit to 1 enables an interrupt on
TOOFLS2.
Bit 4: IMUX Transmit OOF Interrupt Enable 1 (TOOFIE1). Setting this bit to 1 enables an interrupt on
TOOFLS1.
Bit 3: IMUX Receive OOF Interrupt Enable 4 (ROOFIE4). Setting this bit to 1 enables an interrupt on
ROOFLS4.
Bit 2: IMUX Receive OOF Interrupt Enable 3 (ROOFIE3). Setting this bit to 1 enables an interrupt on
ROOFLS3.
Bit 1: IMUX Receive OOF Interrupt Enable 2 (ROOFIE2). Setting this bit to 1 enables an interrupt on
ROOFLS2.
Bit 0: IMUX Receive OOF Interrupt Enable 1 (ROOFIE1). Setting this bit to 1 enables an interrupt on
ROOFLS1.
77 of 167
Page 78

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
GL.IMXOOFLS
Inverse MUX Out Of Frame Latched Status
1Fh
Bit #
Name
Default
7 6 5 4 3 2 1 0
TOOFLS4 OOFLS3 TOOFLS2 TOOFLS1 ROOFL4 ROOFL3 ROOFLS2 ROOFLS1
0 0 0 0 0 0 0 0
Bit 7: IMUX Transmit OOF Latched Status 4 (TOOFLS4). This is a latched bit for Transmit OOF, this bit is set if
the distant end is out of frame.
Bit 6: IMUX Transmit OOF Latched Status 3 (TOOFLS3). This is a latched bit for Transmit OOF, this bit is set if
the distant end is out of frame.
Bit 5: IMUX Transmit Sync Latched Status 2 (TOOFLS2). This is a latched bit for Transmit OOF, this bit is set if
the distant end is out of frame.
Bit 4: IMUX Transmit Sync Latched Status 1 (TOOFLS1). This is a latched bit for Transmit OOF , this bit is set
if the distant end is out of frame.
Bit 3: IMUX Receive Sync Latched Status 4 (ROOFLS4). This is a latched bit for Receiver OOF, this bit is set if
the receiver end is out of frame.
Bit 2: IMUX Receive Sync Latched Status 3 (ROOFLS3). This is a latched bit for Receiver OOF, this bit is set if
the receiver end is out of frame.
Bit 1: IMUX Receive Sync Latched Status 2 (ROOFLS2). This is a latched bit for Receiver OOF, this bit is set if
the receiver end is out of frame.
Bit 0: IMUX Receive Sync Latched Status 1 (ROOFLS1). This is a latched bit for Receiver OOF, this bit is set if
the receiver end is out of frame.
Note that the user must clear the GL.IMXCN
.SENDE bit to stop data transmission when an OOF condition is
detected. The user must re-initiate the handshaking procedure for re-establishment of communication.
Register Name:
Register Description:
Register Address:
GL.BISTEN
BIST Enable
20h
Bit #
Name
Default
7 6 5 4 3 2 1 0
— — — — — — — BISTE
0 0 0 0 0 0 0 0
Bit 0: BIST Enable (BISTE). If this bit is set the DS33Z41 performs BIST test on the SDRAM. Normal data
communication is halted while BIST enable is high. The user must reset the DS33Z41 after completion of BIST
test before normal dataflow can begin.
Register Name:
Register Description:
Register Address:
GL.BISTPF
BIST PassFail
21h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — BISTDN BISTPF
Default 0 0 0 0 0 0 0 0
Bit 1: BIST DONE (BISTDN). If this bit is set to 1, the DS33Z41 has completed the BIST Test initiated by BISTE.
The pass fail result is available in BISTPF.
78 of 167
Page 79

DS33Z41 Quad IMUX Ethernet Mapper
Bit 0: BIST Pass-Fail (BISTPF). This bit is equal to 0 after the DS33Z41 performs BIST testing on the SDRAM
and the test passes. This bit is set to 1 if the test failed. This bit is valid only after the BIST test is complete and
the BIST DN bit is set. If set this bit can only be cleared by resetting the DS33Z41.
Register Name:
Register Description:
Register Address:
GL.SDMODE1
Global SDRAM Mode Register 1
3Ah
Bit # 7 6 5 4 3 2 1 0
Name — — — — WT BL2 BL1 BL0
Default 0 0 0 0 0 0 1 1
Bit 3: Wrap Type (WT). This bit is used to configure the wrap mode.
0 = Sequential
1 = Interleave
Bits 2 to 0: Burst Length 2 to 0 (BL2 to BL0). These bits are used to determine the burst length.
Note: This register has a non-zero default value. This should be taken into consideration when initializing
the device.
Note: After changing the value of this register, the user must toggle the GL.SDMODEWS.SDMW bit to
write the new values to the SDRAM.
Register Name:
Register Description:
Register Address:
GL.SDMODE2
Global SDRAM Mode Register 2
3Bh
Bit # 7 6 5 4 3 2 1 0
Name — — — — — LTMOD2 LTMOD1 LTMOD0
Default 0 0 0 0 0 0 1 0
Bits 2 to 0: CAS Latency Mode (LTMOD2 to LTMOD0). These bits are used to set up CAS latency. Note: Only
CAS latency of 2 or 3 is allowed.
Note: This register has a non-zero default value. This should be taken into consideration when initializing
the device.
Note: After changing the value of this register, the user must toggle the GL.SDMODEWS.SDMW bit to
write the new values to the SDRAM.
Register Name:
Register Description:
Register Address:
GL.SDMODEWS
Global SDRAM Mode Register Write Status
3Ch
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — SDMW
Default 0 0 0 0 0 0 0 0
Bit 0: SDRAM Mode Write (SDMW). Setting this bit to 1 will write the current values of the mode control and
refresh time control registers to the SDRAM. The user must clear this bit and set it again for subsequent write
operations.
79 of 167
Page 80

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description
Register Address:
GL.SDRFTC
Global SDRAM Refresh Time Control
3Dh
Bit # 7 6 5 4 3 2 1 0
Name SREFT7 SREFT6 SREFT5 SREFT4 SREFT3 SREFT2 SREFT1 SREFT0
Default 0 1 0 0 0 1 1 0
Bits 7 to 0: SDRAM Refresh Time Control (SREFT7 to SREFT0). These 8 bits are used to control the SDRAM
refresh frequency. The refresh rate will be equal to this register value x 8 x 100MHz.
Note: This register has a non-zero default value. This should be taken into consideration when initializing
the device.
Note: After changing the value of this register, the user must toggle the GL.SDMODEWS.SDMW bit to
write the new values to the SDRAM.
80 of 167
Page 81
DS33Z41 Quad IMUX Ethernet Mapper
9.3 Arbiter Registers
The Arbiter manages the transport between the Ethernet port and the Serial Interface. It is responsible for
queuing and dequeuing data to an external SDRAM. The arbiter handles requests from the HDLC and MAC to
transfer data to/from the SDRAM. The base address of the Arbiter register space is 0040h.
9.3.1 Arbiter Register Bit Descriptions
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name RQSC7 RQSC6 RQSC5 RQSC4 RQSC3 RQSC2 RQSC1 RQSC0
Default 0 0 1 1 1 1 0 1
Bits 7 to 0: Receive Queue Size (RQSC7 to RQSC0). These 7 bits of the size of receive queue associated with
the connection. Receive queue is for data arriving from the MAC to be sent to the WAN. The Queue address size
is defined in increments of 32 x 2048 bytes. The queue size is AR.RQSC1 multiplied by 32 to determine the
number of 2048 byte packets that can be stored in the queue. This queue is constructed in the external SDRAM.
Note: Queue size of 0 is not allowed and should never be set.
Register Name:
Register Description:
Register Address:
Bit #
Name TQSC7 TQSC6 TQSC5 TQSC4 TQSC3 TQSC2 TQSC1 TQSC0
Default 0 0 0 0 0 0 1 1
Bits 7 to 0: Transmit Queue Size (TQSC7 to TQSC0). This is size of transmit queue associated with the
connection. The queue address size is defined in increments of 32 packets. The range of bytes will depend on the
external SDRAM connected to the DS33Z41. Transmit queue is the data queue for data arriving on the WAN that
is sent to the MAC. Note that queue size of 0 is not allowed and should never be set.
7 6 5 4 3 2 1 0
AR.RQSC1
Arbiter Receive Queue Size Connection
40h
AR.TQSC1
Arbiter Transmit Queue Size Connection 1
41h
81 of 167
Page 82

DS33Z41 Quad IMUX Ethernet Mapper
9.4 BERT Registers
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name — PMU RNPL RPIC MPR APRD TNPL TPIC
Default 0 0 0 0 0 0 0 0
Bit 7: This bit must be kept low for proper operation.
Bit 6: Performance Monitoring Update (PMU). This bit causes a performance monitoring update to be initiated.
A 0 to 1 transition causes the performance monitoring registers to be updated with the latest data, and the
counters reset (0 or 1). For a second performance monitoring update to be initiated, this bit must be set to 0, and
back to 1. If PMU goes low before the PMS bit goes high, an update might not be performed.
Bit 5: Receive New Pattern Load (RNPL). A zero to one transition of this bit will cause the programmed test
pattern (QRSS, PTS, PLF [4:0], PTF [4:0], and BSP [31:0]) to be loaded in to the receive pattern generator. This
bit must be changed to zero and back to one for another pattern to be loaded. Loading a new pattern will forces
the receive pattern generator out of the “Sync” state which causes a resynchronization to be initiated. Note:
QRSS, PTS, PLF [4:0], PTF [4:0], and BSP [31:0] must not change from the time this bit transitions from 0 to 1
until four RCLKI clock cycles after this bit transitions from 0 to 1.
BCR
BERT Control Register
80h
Bit 4: Receive Pattern Inversion Control (RPIC). When 0, the receive incoming data stream is not altered.
When 1, the receive incoming data stream is inverted.
Bit 3: Manual Pattern Resynchronization (MPR). A zero to one transition of this bit will cause the receive
pattern generator to resynchronize to the incoming pattern. This bit must be changed to zero and back to one for
another resynchronization to be initiated. Note: A manual resynchronization forces the receive pattern generator
out of the “Sync” state.
Bit 2: Automatic Pattern Resynchronization Disable (APRD). When 0, the receive pattern generator will
automatically resynchronize to the incoming pattern if six or more times during the current 64-bit window the
incoming data stream bit and the receive pattern generator output bit did not match. When 1, the receive pattern
generator will not automatically resynchronize to the incoming pattern. Note: Automatic synchronization is
prevented by not allowing the receive pattern generator to automatically exit the “Sync” state.
Bit 1: Transmit New Pattern Load (TNPL). A 0-to-1 transition of this bit will cause the programmed test pattern
(QRSS, PTS, PLF[4:0], PTF[4:0], and BSP[31:0]) to be loaded in to the transmit pattern generator. This bit must
be changed to zero and back to one for another pattern to be loaded. Note: QRSS, PTS, PLF[4:0], PTF[4:0], and
BSP[31:0] must not change from the time this bit transitions from 0 to 1 until four TCLKI clock cycles after this bit
transitions from 0 to 1.
Bit 0: Transmit Pattern Inversion Control (TPIC). When 0, the transmit outgoing data stream is not altered.
When 1, the transmit outgoing data stream is inverted.
82 of 167
Page 83

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
BPCLR
BERT Pattern Configuration Low Register
82h
Bit # 7 6 5 4 3 2 1 0
Name — QRSS PTS PLF4 PLF3 PLF2 PLF1 PLF0
Default 0 0 0 0 0 0 0 0
The BERT’s BPCLR, BPCHR, and BSPB registers are used for polynomial-based pattern generation, with a
formula of x
n
+ xy + 1. The initial value for x (the seed) is placed in the BSPB (bert seed/pattern) register. The
BERT generates a series of bits by iteration of the formula.
Bit 6: QRSS Enable (QRSS). When 0, the pattern generator configuration is controlled by PTS, PLF[0:4], and
PTF[0:4], and BSP[0:31]. When 1, the pattern generator configuration is forced to a QRSS pattern with a
generating polynomial of x
20
+ x17 + 1. The output of the pattern generator is forced to one if the next 14 output
bits are all zero.
Bit 5: Pattern Type Select (PTS). When 0, the pattern is a PRBS pattern. When 1, the pattern is a repetitive
pattern.
Bits 4 to 0: Pattern Length Feedback (PLF4 to PLF0). These five bits control the “length” feedback of the
pattern generator. The “length” feedback will be from bit n of the pattern generator (n = PLF[4:0] +1). For a PRBS
signal, the feedback is an XOR of bit n and bit y. For a repetitive pattern the feedback is bit n. The values possible
are outlined in Section 8.15
.
Register Name:
Register Description:
Register Address:
BPCHR
BERT Pattern Configuration High Register
83h
Bit # 7 6 5 4 3 2 1 0
Name — — — PTF4 PTF3 PTF2 PTF1 PTF0
Default 0 0 0 0 0 0 0 0
Bits 4 to 0: Pattern Tap Feedback (PTF4 to PRF0). These five bits control the PRBS “tap” feedback of the
pattern generator. The “tap” feedback will be from bit y of the pattern generator (y = PTF[4:0] +1). These bits are
ignored when programmed for a repetitive pattern. For a PRBS signal, the feedback is an XOR of bit n and bit y.
The values possible are outlined in Section 8.15
.
83 of 167
Page 84

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
BSPB0R
BERT Pattern Byte 0 Register
84h
Bit # 7 6 5 4 3 2 1 0
Name BSP7 BSP6 BSP5 BSP4 BSP3 BSP2 BSP1 BSP0
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: BERT Pattern (BSP7 to BPS0). Lower eight bits of 32 bits. Register description follows next register.
Register Name:
Register Description:
Register Address:
BSPB1R
BERT Pattern Byte 1 Register
85h
Bit # 7 6 5 4 3 2 1 0
Name BSP15 BSP14 BSP13 BSP12 BSP11 BSP10 BSP9 BSP8
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: BERT Pattern (BSP15 to BSP8). 8 bits of 32 bits. Register description below.
Register Name:
Register Description:
Register Address:
BSPB2R
BERT Pattern Byte 2 Register
86h
Bit # 7 6 5 4 3 2 1 0
Name BSP23 BSP22 BSP21 BSP20 BSP19 BSP18 BSP17 BSP16
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: BERT Pattern (BSP23 to BSP16). 8 bits of 32 bits. Register description below.
Register Name:
Register Description:
Register Address:
BSPB3R
BERT Seed/Pattern Byte 3 Register
87h
Bit # 7 6 5 4 3 2 1 0
Name BSP31 BSP30 BSP29 BSP28 BSP27 BSP26 BSP25 BSP24
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: BERT Pattern (BSP31 to BSP24). Upper 8 bits of 32 bits. Register description below.
BERT Pattern (BSP31 to BSP0). These 32 bits are the programmable seed for a transmit PRBS pattern, or the
programmable pattern for a transmit or receive repetitive pattern. BSP(31) is the first bit output on the transmit
side for a 32-bit repetitive pattern or 32-bit length PRBS. BSP(31) is the first bit input on the receive side for a 32bit repetitive pattern.
84 of 167
Page 85

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
TEICR
Transmit Error Insertion Control Register
88h
Bit # 7 6 5 4 3 2 1 0
Name — — TIER2 TIER1 TIER0 BEI TSEI —
Default 0 0 0 0 0 0 0 0
Bits 5 to 3: Transmit Error Insertion Rate (TEIR2 to TEIR0). These three bits indicate the rate at which errors
are inserted in the output data stream. One out of every 10
value of 0 disables error insertion at a specific rate. A TEIR[2:0] value of 1 result in every 10
TEIR[2:0] value of 2 results in every 100
th
bit being inverted. Error insertion starts when this register is written to
n
bits is inverted. TEIR[2:0] is the value n. A TEIR[2:0]
th
bit being inverted. A
with a TEIR[2:0] value that is non-zero. If this register is written to during the middle of an error insertion process,
the new error rate is started after the next error is inserted.
Bit 2: Bit Error Insertion Enable (BEI). When 0, single bit error insertion is disabled. When 1, single bit error
insertion is enabled.
Bit 1: Transmit Single Error Insert (TSEI). This bit causes a bit error to be inserted in the transmit data stream if
and single bit error insertion is enabled. A 0 to 1 transition causes a single bit error to be inserted. For a second
bit error to be inserted, this bit must be set to 0, and back to 1. Note: If this bit transitions more than once between
error insertion opportunities, only one error is inserted.
All other bits in this register besides BEI and TSEI and TIER must be reset to 0 for proper operation.
Register Name:
Register Description:
Register Address:
BSR
BERT Status Register
8Ch
Bit # 7 6 5 4 3 2 1 0
Name — — — — PMS — BEC
OOS
Default 0 0 0 0 0 0 0 0
Bit 3: Performance Monitoring Update Status (PMS). This bit indicates the status of the receive performance
monitoring register (counters) update. This bit will transition from low to high when the update is completed. PMS
is asynchronously forced low when the PMU bit goes low. TCLKI and RCLKI must be present.
Bit 1: Bit Error Count (BEC). When 0, the bit error count is zero. When 1, the bit error count is one or more.
Bit 0: Out Of Synchronization (OOS). When 0, the receive pattern generator is synchronized to the incoming
pattern. When 1, the receive pattern generator is not synchronized to the incoming pattern.
85 of 167
Page 86

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
BSRL
BERT Status Register Latched
8Eh
Bit # 7 6 5 4 3 2 1 0
Name — — — — PMSL BEL
BECL OOSL
Default — — — — — — — —
Bit 3: Performance Monitor Update Status Latched (PMSL). This bit is set when the PMS bit transitions from 0
to 1.
Bit 2: Bit Error Detected Latched (BEL). This bit is set when a bit error is detected.
Bit 1: Bit Error Count Latched (BECL). This bit is set when the BEC bit transitions from 0 to 1.
Bit 0: Out Of Synchronization Latched (OOSL). This bit is set when the OOS bit changes state.
Register Name:
Register Description:
Register Address:
BSRIE
BERT Status Register Interrupt Enable
90h
Bit # 7 6 5 4 3 2 1 0
Name — — — — PMSIE BEIE BECIE OOSIE
Default 0 0 0 0 0 0 0 0
Bit 3: Performance Monitoring Update Status Interrupt Enable (PMSIE). This bit enables an interrupt if the
PMSL bit is set.
0 = interrupt disabled
1 = interrupt enabled
Bit 2: Bit Error Interrupt Enable (BEIE). This bit enables an interrupt if the BEL bit is set.
0 = interrupt disabled
1 = interrupt enabled
Bit 1: Bit Error Count Interrupt Enable (BECIE). This bit enables an interrupt if the BECL bit is set.
0 = interrupt disabled
1 = interrupt enabled
Bit 0: Out Of Synchronization Interrupt Enable (OOSIE). This bit enables an interrupt if the OOSL bit is set.
0 = interrupt disabled
1 = interrupt enabled
86 of 167
Page 87
DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
RBECB0R
Receive Bit Error Count Byte 0 Register
94h
Bit # 7 6 5 4 3 2 1 0
Name BEC7
BEC6 BEC5 BEC4 BEC3 BEC2 BEC1 BEC0
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Bit Error Count (BEC7 to BEC0). Lower eight bits of 24 bits. Register description below.
Register Name:
Register Description:
Register Address:
RBECB1R
Receive Bit Error Count Byte 1 Register
95h
Bit # 7 6 5 4 3 2 1 0
Name BEC15
BEC14 BEC13 BEC12 BEC11 BEC10 BEC9 BEC8
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Bit Error Count (BEC15 to BEC8). Eight bits of a 24 bit value. Register description below.
Register Name:
Register Description:
Register Address:
RBECR2
Receive Bit Error Count Byte 2 Register
96h
Bit # 7 6 5 4 3 2 1 0
Name BEC23
BEC22 BEC21 BEC20 BEC19 BEC18 BEC17 BEC16
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Bit Error Count (BEC23 to BEC16). Upper 8-bits of the register.
Bit Error Count (BEC23 to BEC0). These 24 bits indicate the number of bit errors detected in the incoming data
stream. This count stops incrementing when it reaches a count of FF FFFFh. The associated bit error counter will
not incremented when an OOS condition exists.
Register Name:
Register Description:
Register Address:
RBCB0
Receive Bit Count Byte 0 Register
98h
Bit # 7 6 5 4 3 2 1 0
Name BC7
BC6 BC5 BC4 BC3 BC2 BC1 BC0
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Bit Count (BC7 to BC0). Eight bits of a 32-bit value. Register description below.
87 of 167
Page 88

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
RBCB1
Receive Bit Count Byte 1 Register #1
99h
Bit # 7 6 5 4 3 2 1 0
Name BC15
BC14 BC13 BC12 BC11 BC10 BC9 BC8
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Bit Count (BC15 to BC8). Eight bits of a 32-bit value. Register description below.
Register Name:
Register Description:
Register Address:
RBCB2
Receive Bit Count Byte 2 Register
9Ah
Bit # 7 6 5 4 3 2 1 0
Name BC23
BC22 BC21 BC20 BC19 BC18 BC17 BC16
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Bit Count (BC23 to BC16). Eight bits of a 32-bit value. Register description below.
Register Name:
Register Description:
Register Address:
RBCB3
Receive Bit Count Byte 3 Register
9Bh
Bit # 7 6 5 4 3 2 1 0
Name BC31
BC30 BC29 BC28 BC27 BC26 BC25 BC24
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Bit Count (BC31 to BC24). Upper 8-bits of the register.
Bit Count (BC31 to BC0). These 32 bits indicate the number of bits in the incoming data stream. This count
stops incrementing when it reaches a count of FFFF FFFFh. The associated bit counter will not incremented
when an OOS condition exists.
88 of 167
Page 89

DS33Z41 Quad IMUX Ethernet Mapper
9.5 Serial Interface Registers
The Serial Interface contains the Serial HDLC transport circuitry and the associated serial port. The Serial
Interface register map consists of registers that are common functions, transmit functions, and receive functions.
Bits that are underlined
designation should be written to zero, unless specifically noted in the register definition. When read, the
information from reserved registers and bits designated with “-“ should be discarded.
Counter registers are updated by asserting (low to high transition) the associated performance monitoring update
signal (xxPMU). During the counter register update process, the associated performance monitoring status signal
(xxPMS) is deasserted. The counter register update process consists of loading the counter register with the
current count, resetting the counter, forcing the zero count status indication low for one clock cycle, and then
asserting xxPMS. No events are missed during this update procedure.
A latched bit is set when the associated event occurs, and remains set until it is cleared by reading. Once cleared,
a latched bit will not be set again until the associated event occurs again. Reserved configuration bits and
registers should be written to zero.
are read-only; all other bits can be written. All reserved registers and bits with “-“
9.5.1 Serial Interface Transmit and Common Registers
Serial Interface Transmit Registers are used to control the HDLC transmitter associated with each Serial
Interface. The register map is shown in the following Table. Note that throughout this document the HDLC
Processor is also referred to as a “packet processor”.
9.5.2 Serial Interface Transmit Register Bit Descriptions
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — RESET —
Default 0 0 0 0 0 0 0 0
LI.RSTPD
Serial Interface Reset Register
0C1h
Bit 1: Reset (RESET). If this bit set to 1, the Data Path and Control and Status for this interface are reset. The
Serial Interface is held in Reset as long as this bit is high. This bit must be high for a minimum of 200ns for a valid
reset to occur.
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — QLP
Default 0 0 0 0 0 0 0 0
Bit 0: Queue Loopback Enable (QLP). If this bit set to 1, data received on the Serial Interface is looped back to
the Serial Interface transmitter. Received data will not be sent from the Serial Interface to the Ethernet Interface.
Buffered packet data will remain in queue until the loopback is removed.
LI.LPBK
Serial Interface Loopback Control Register
0C2h
89 of 167
Page 90

DS33Z41 Quad IMUX Ethernet Mapper
9.5.3 Transmit HDLC Processor Registers
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name — — TFAD TF16 TIFV TSD TBRE TIAEI
Default 0 0 0 0 0 0 0 0
Note: The user should take care not to modify this register value during packet error insertion.
Bit 5: Transmit FCS Append Disable (TFAD). This bit controls whether or not an FCS is appended to the end of
each packet. When equal to 0, the calculated FCS bytes are appended to packets. When set to 1, packets are
transmitted without FCS. In X.86 Mode, FCS is always 32 bits and is always appended to the packet.
Bit 4: Transmit FCS-16 Enable (TF16). When 0, the FCS processing uses a 32-bit FCS. When 1, the FCS
processing uses a 16-bit FCS. In X.86 Mode, 32-bit FCS processing is enabled.
Bit 3: Transmit Bit Synchronous Inter-Frame Fill Value (TIFV). When 0, inter-frame fill is done with the flag
sequence (7Eh). When 1, inter-frame fill is done with all ones. This bit is ignored in byte synchronous mode. In
X.86 mode the interframe flag is always 7E.
Bit 2: Transmit Scrambling Disable (TSD). When equal to 0, X
scrambling is disabled. Note that in hardware mode, transmit scrambling is controlled by the SCD hardware pin.
Bit 1: Transmit Bit Reordering Enable (TBRE). When equal to 0, bit reordering is disabled (The first bit
transmitted is from the MSB of the transmit FIFO byte TFD [7]). When set to 1, bit reordering is enabled (The first
bit transmitted is from the LSB of the transmit FIFO byte TFD [0]). Note that this function can be controlled in
Hardware mode with the BREO hardware pin.
LI.TPPCL
Transmit Packet Processor Control Low Register
0C4h
43
+1 scrambling is performed. When set to 1,
Bit 0: Transmit Initiate Automatic Error Insertion (TIAEI). This write-only bit initiates error insertion. See the
LI.TEPHC register definition for details of usage.
90 of 167
Page 91
DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.TIFGC
Transmit Inter-Frame Gapping Control Register
0C5h
Bit # 7 6 5 4 3 2 1 0
Name TIFG7 TIFG6 TIFG5 TIFG4 TIFG3 TIFG2 TIFG1 TIFG0
Default 0 0 0 0 0 0 0 1
Bits 7 to 0: Transmit Inter-Frame Gapping (TIFG7 to TIFG0). These eight bits indicate the number of additional
flags and bytes of inter-frame fill to be inserted between packets. The number of flags and bytes of inter-frame fill
between packets is at least the value of TIFG[7:0] plus 1. Note: If inter-frame fill is set to all ones, a TFIG value of
2 or 3 will result in a flag, two bytes of ones, and an additional flag between packets.
Register Name:
Register Description:
Register Address:
LI.TEPLC
Transmit Errored Packet Low Control Register
0C6h
Bit # 7 6 5 4 3 2 1 0
Name TPEN7 TPEN6 TPEN5 TPEN4 TPEN3 TPEN2 TPEN1 TPEN0
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Errored Packet Insertion Number (TPEN7 to TPEN0). These eight bits indicate the total
number of errored packets to be transmitted when triggered by TIAEI. Error insertion will end after this number of
errored packets have been transmitted. A value of FFh results in continuous errored packet insertion at the
specified rate.
91 of 167
Page 92

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.TEPHC
Transmit Errored Packet High Control Register
0C7h
Bit # 7 6 5 4 3 2 1 0
Name MEIMS TPER6 TPER5 TPER4 TPER3 TPER2 TPER1 TPER0
Default 0 0 0 0 0 0 0 0
Bit 7: Manual Error Insert Mode Select (MEIMS). When 0, the transmit manual error insertion signal (TMEI) will
not cause errors to be inserted. When 1, TMEI will cause an error to be inserted when it transitions from a 0 to a
1. Note: Enabling TMEI does not disable error insertion using TCER[6:0] and TCEN[7:0].
Bits 6 to 0: Transmit Errored Packet Insertion Rate (TPER6 to TPER0). These seven bits indicate the rate at
which errored packets are to be output. One out of every x * 10
the value x, and TPER[6:4] is the value y which has a maximum value of 6. If TPER[3:0] has a value of 0h errored
packet insertion is disabled. If TPER[6:4] has a value of 6xh or 7xh the errored packet rate is x * 10
value of 01h results in every packet being errored. A TPER[6:0] value of 0Fh results in every 15
errored. A TPER[6:0] value of 11h results in every 10
th
packet being errored.
y
packets is to be an errored packet. TPER[3:0] is
6
. A TPER[6:0]
th
packet being
To initiate automatic error insertion, use the following routine:
1) Configure LI.TEPLC and LI.TEPHC for the desired error insertion mode.
2) Write the LI.TPPCL.TIAEI bit to 1. Note that this bit is write-only.
3) If not using continuous error insertion (LI.TPELC is not equal to FFh), the user should monitor the
LI.TPPSR.TEPF bit for completion of the error insertion. If interrupt on completion of error insertion is enabled
(LI.TPPSRIE.TEPFIE = 1), the user only needs to wait for the interrupt condition.
4) Proceed with the cleanup routine listed below.
Cleanup routine:
1) Write LI.TEPLC and LI.TEPHC each to 00h.
2) Write the LI.TPPCL.TIAEI bit to 0.
92 of 167
Page 93
DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.TPPSR
Transmit Packet Processor Status Register
0C8h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — TEPF
Default 0 0 0 0 0 0 0 0
Bit 0: Transmit Errored Packet Insertion Finished (TEPF). This bit is set when the number of errored packets
indicated by the TPEN[7:0] bits in the TEPC register have been transmitted. This bit is cleared when errored
packet insertion is disabled, or a new errored packet insertion process is initiated.
Register Name:
Register Description:
Register Address:
LI.TPPSRL
Transmit Packet Processor Status Register Latched
0C9h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — TEPFL
Default — — — — — — — —
Bit 0: Transmit Errored Packet Insertion Finished Latched (TEPFL). This bit is set when the TEPF bit in the
TPPSR register transitions from zero to one.
Register Name:
Register Description:
Register Address:
LI.TPPSRIE
Transmit Packet Processor Status Register Interrupt Enable
0CAh
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — TEPFIE
Default 0 0 0 0 0 0 0 0
Bit 0: Transmit Errored Packet Insertion Finished Interrupt Enable (TEPFIE). This bit enables an interrupt if
the TEPFL bit in the LI.TPPSRL register is set.
0 = interrupt disabled
1 = interrupt enabled
93 of 167
Page 94
DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.TPCR0
Transmit Packet Count Byte 0
0CCh
Bit # 7 6 5 4 3 2 1 0
Name TPC7
TPC6 TPC5 TPC4 TPC3 TPC2 TPC1 TPC0
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Packet Count (TPC7 to TPC0). Eight bits of 24-bit value. Register description below.
Register Name:
Register Description:
Register Address:
LI.TPCR1
Transmit Packet Count Byte 1
0CDh
Bit # 7 6 5 4 3 2 1 0
Name TPC15
TPC14 TPC13 TPC12 TPC11 TPC10 TPC9 TPC8
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Packet Count (TPC15 to TPC8). Eight bits of 24-bit value. Register description below.
Register Name:
Register Description:
Register Address:
LI.TPCR2
Transmit Packet Count Byte 2
0CEh
Bit # 7 6 5 4 3 2 1 0
Name TPC23
TPC22 TPC21 TPC20 TPC19 TPC18 TPC17 TPC16
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Packet Count (TPC23 to TPC16). These 24 bits indicate the number of packets extracted
from the Transmit FIFO and output in the outgoing data stream.
94 of 167
Page 95

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.TBCR0
Transmit Byte Count Byte 0
0D0h
Bit # 7 6 5 4 3 2 1 0
Name TBC7
TBC6 TBC5 TBC4 TBC3 TBC2 TBC1 TBC0
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Byte Count (TBC7 to TBC0). Eight bits of 32-bit value. Register description below.
Register Name:
Register Description:
Register Address:
LI.TBCR1
Transmit Byte Count Byte 1
0D1h
Bit # 7 6 5 4 3 2 1 0
Name TBC15
TBC14 TBC13 TBC12 TBC11 TBC10 TBC9 TBC8
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Byte Count (TBC15 to TBC8). Eight bits of 32-bit value. Register description below.
Register Name:
Register Description:
Register Address:
LI.TBCR2
Transmit Byte Count Byte 2
0D2h
Bit # 7 6 5 4 3 2 1 0
Name TBC23
TBC22 TBC21 TBC20 TBC19 TBC18 TBC17 TBC16
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Byte Count (TBC23:TBC16). Eight bits of 32-bit value. Register description below.
Register Name:
Register Description:
Register Address:
LI.TBCR3
Transmit Byte Count Byte 3
0D3h
Bit # 7 6 5 4 3 2 1 0
Name TBC31
TBC30 TBC29 TBC28 TBC27 TBC26 TBC25 TBC24
Default 0 0 0 0 0 0 0 0
Bits 7 to 0: Transmit Byte Count (TBC31 to TBC24). These 32 bits indicate the number of packet bytes
inserted in the outgoing data stream.
Register Name:
Register Description:
Register Address:
LI.TMEI
Transmit Manual Error Insertion
0D4h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — TMEI
Default 0 0 0 0 0 0 0 0
Bit 0: Transmit Manual Error Insertion (TMEI). A zero to one transition will insert a single error in the transmit
direction.
95 of 167
Page 96

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.THPMUU
Serial Interface Transmit HDLC PMU Update Register
0D6h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — TPMUU
Default 0 0 0 0 0 0 0 0
Bit 0: Transmit PMU Update (TPMUU). This signal causes the transmit cell/packet processor block performance
monitoring registers (counters) to be updated. A 0 to 1 transition causes the performance monitoring registers to
be updated with the latest data, and the counters reset (0 or 1). This update updates performance monitoring
counters for the Serial Interface.
Register Name:
Register Description:
Register Address:
LI.THPMUS
Serial Interface Transmit HDLC PMU Update Status Register
0D7h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — TPMUS
Default 0 0 0 0 0 0 0 0
Bit 0: Transmit PMU Update Status (TPMUS). This bit is set when the Transmit PMU Update is completed. This
bit is cleared when TPMUU is reset.
96 of 167
Page 97

DS33Z41 Quad IMUX Ethernet Mapper
9.5.4 X.86 Registers
X.86 Transmit and common Registers are used to control the operation of the X.86 encoder and decoder.
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name — — — — — — — X86ED
Default 0 0 0 0 0 0 0 0
Bit 0: X.86 Encoding Decoding (X86ED). If this bit is set to 1, X.86 encoding and decoding is enabled for the
Transmit and Receive paths. The MAC Frame is encapsulated in the X.86 Frame for Transmit and the X.86
headers are checked for in the received data. If X.86 functionality is selected, the X.86 receiver byte boundary is
provided by the RSYNC signal and the DS33Z41 provides the transmit byte synchronization TSYNC. No HDLC
encapsulation is performed.
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name X86TRA7 X86TRA6 X86TRA5 X86TRA4 X86TRA3 X86TRA2 X86TRA1 X86TRA0
Default 0 0 0 0 0 1 0 0
Bits 7 to 0: X86 Transmit Receive Address (X86TRA7 to X86TRA0). This is the address field for the X.86
transmitter and for the receiver. The register default value is 0x04.
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name X86TRC7 X86TRC6 X86TRC5 X86TRC4 X86TRC3 X86TRC2 X86TRC1 X86TRC0
Default 0 0 0 0 0 0 1 1
Bits 7 to 0: X86 Transmit Receive Control (X86TRC7 to X86TRC0). This is the control field for the X.86
transmitter and expected value for the receiver. The register is reset to 0x03
LI.TX86EDE
X.86 Encoding Decoding Enable
0D8h
LI.TRX86A
Transmit Receive X.86 Address
0D9h
LI.TRX8C
Transmit Receive X.86 Control
0DAh
Register Name:
Register Description:
Register Address:
LI.TRX86SAPIH
Transmit Receive X.86 SAPIH
0DBh
Bit # 7 6 5 4 3 2 1 0
Name
TRSAPIH7 TRSAPIH6 TRSAPIH5 TRSAPIH4 TRSAPIH3 TRSAPIH2 TRSAPIH1 TRSAPIH0
Default 1 1 1 1 1 1 1 0
Bits 7 to 0: X86 Transmit Receive Address (TRSAPIH7 to TRSAPIH0). This is the address field for the X.86
transmitter and expected for the receiver. The register is reset to 0xfe.
97 of 167
Page 98

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.TRX86SAPIL
Transmit Receive X.86 SAPIL
0DCh
Bit # 7 6 5 4 3 2 1 0
Name
TRSAPIL7 TRSAPIL6 TRSAPIL5 TRSAPIL4 TRSAPIL3 TRSAPIL2 TRSAPIL1 TRSAPIL0
Default 0 0 0 0 0 0 0 1
Bits 7 to 0: X86 Transmit Receive Control (TRSAPIL7 to TRSAPIL0). This is the address field for the X.86
transmitter and expected value for the receiver. The register is reset to 0x01.
Register Name:
Register Description:
Register Address:
LI.CIR
Committed Information Rate
0DDh
Bit # 7 6 5 4 3 2 1 0
Name CIRE CIR6 CIR5 CIR4 CIR3 CIR2 CIR1 CIR0
Default 0 0 0 0 0 0 0 1
Bit 7: Committed Information Rate Enable (CIRE). Set this bit to 1 to enable the Committed Information Rate
Controller feature.
Bits 6 to 0: Committed Information Rate (CIR6 to CIR0). These bits provide the value for the committed
information rate. The value is multiplied by 500kbps to get the CIR value. The user must ensure that the CIR
value is less than or equal to the maximum Serial Interface transmit rate. The valid range is from 1 to 104. Any
values outside this range will result in unpredictable behavior. Note that a value of 104 translates to a 52Mbps line
rate. Hence if the CIR is above the line rate, the rate is not restricted by the CIR. For instance, if using a T1 line
and the CIR is programmed with a value of 104, it has no effect in restricting the rate.
98 of 167
Page 99

DS33Z41 Quad IMUX Ethernet Mapper
9.5.5 Receive Serial Interface
Serial Receive Registers are used to control the HDLC Receiver associated with each Serial Interface. Note that
throughout this document HDLC Processor is also referred to as “Packet Processor”. The receive packet
processor block has seventeen registers.
Register Name:
Register Description:
Register Address:
Bit # 7 6 5 4 3 2 1 0
Name — — RFPD RF16 RFED RDD RBRE RCCE
Default 0 0 0 0 0 0 0 0
Bit 5: Receive FCS Processing Disable (RFPD). When equal to 0, FCS processing is performed and FCS is
appended to packets. When set to 1, FCS processing is disabled (the packets do not have an FCS appended). In
X.86 mode, FCS processing is always enabled.
Bit 4: Receive FCS-16 Enable (RF16). When 0, the error checking circuit uses a 32-bit FCS. When 1, the error
checking circuit uses a 16-bit FCS. This bit is ignored when FCS processing is disabled. In X.86 mode, the FCS is
always 32 bits.
Bit 3: Receive FCS Extraction Disable (RFED). When 0, the FCS bytes are discarded. When 1, the FCS bytes
are passed on. This bit is ignored when FCS processing is disabled. In X.86 mode, FCS bytes are discarded.
Bit 2: Receive Descrambling Disable (RDD). When equal to 0, X
descrambling is disabled.
LI.RPPCL
Receive Packet Processor Control Low Register
101h
43
+1 descrambling is performed. When set to 1,
Bit 1: Receive Bit Reordering Enable (RBRE). When equal to 0, reordering is disabled and the first bit received
is expected to be the MSB DT [7] of the byte. When set to 1, bit reordering is enabled and the first bit received is
expected to be the LSB DT [0] of the byte. Note that function is controlled by the BREO in Hardware Mode.
Bit 0: Receive Clear Channel Enable (RCCE). When equal to 0, packet processing is enabled. When set to 1,
the device is in clear channel mode and all packet-processing functions except descrambling and bit reordering
are disabled.
Register Name:
Register Description:
Register Address:
LI.RMPSCL
Receive Maximum Packet Size Control Low Register
102h
Bit # 7 6 5 4 3 2 1 0
Name RMX7 RMX6 RMX5 RMX4 RMX3 RMX2 RMX1 RMX0
Default 1 1 1 0 0 0 0 0
Bits 7 to 0: Receive Maximum Packet Size (RMX7 to RMX0). Eight bits of a 16-bit value. Register description
below.
99 of 167
Page 100

DS33Z41 Quad IMUX Ethernet Mapper
Register Name:
Register Description:
Register Address:
LI.RMPSCH
Receive Maximum Packet Size Control High Register
103h
Bit # 7 6 5 4 3 2 1 0
Name RMX15 RMX14 RMX13 RMX12 RMX11 RMX10 RMX9 RMX8
Default 0 0 0 0 0 1 1 1
Bits 7 to 0: Receive Maximum Packet Size (RMX15 to RMX8). These 16 bits indicate the maximum allowable
packet size in bytes. The size includes the FCS bytes, but excludes bit/byte stuffing. Note: If the maximum packet
size is less than the minimum packet size, all packets are discarded. When packet processing is disabled, these
16 bits indicate the "packet" size the incoming data is to be broken into.
The maximum packet size allowable is 2016 bytes plus the FCS bytes. Any values programmed that are greater
than 2016 + FCS will have the same effect as 2016+ FCS value.
In X.86 mode, the X.86 encapsulation bytes are included in maximum size control.
Register Name:
Register Description:
Register Address:
LI.RPPSR
Receive Packet Processor Status Register
104h
Bit # 7 6 5 4 3 2 1 0
Name — — — — — REPC
RAPC RSPC
Default 0 0 0 0 0 0 0 0
Bit 2: Receive FCS Errored Packet Count (REPC). This read-only bit indicates that the receive FCS errored
packet count is non-zero.
Bit 1: Receive Aborted Packet Count (RAPC). This read-only bit indicates that the receive aborted packet count
is non-zero.
Bit 0: Receive Size Violation Packet Count (RSPC). This read-only bit indicates that the receive size violation
packet count is non-zero.
100 of 167
 Loading...
Loading...