

Page 1
General Description
The DS1862 is a closed-loop laser-driver control IC with
built-in digital diagnostics designed for XFP MSA. The
laser control function incorporates average power control (APC) and allows extinction ratio control though a
temperature indexed look-up table (LUT). The DS1862
monitors up to seven analog inputs, including temperature and monitor diode (MD) current, which are used to
regulate the laser bias current and extinction ratio.
Warning and alarm thresholds can be programmed to
generate an interrupt if monitored signals exceed tolerance. Calibration is also provided internally using independent gain and offset scaling registers for each of
the monitored analog signals. Settings such as programmed calibration data are stored in password-protected EEPROM memory. Programming is accomplished
through an I
2
C-compatible interface, which can also be
used to access diagnostic functionality.
Applications
Laser Control and Monitoring 10Gbps Optical
Transceiver Modules (XFP)
Laser Control and Monitoring
Digital Diagnostics in Optical Transmission
Features
♦ Implements XFP MSA Requirements for Digital
Diagnostics, Serial ID, and User Memory
♦ I2C-Compatible Serial Interface
♦ Automatic Power Control (APC)
♦ Extinction Ratio Control with Look-Up Table
♦ Seven Monitored Channels for Digital Diagnostics
(Five Basic Plus Two Auxiliary)
♦ Internal Calibration of Monitored Channels
(Temp, V
CC2/3
, Bias Current, Transmitted, and
Received Power)
♦ Programmable Quick-Trip Logic for Turning
Off Laser for Eye Safety
♦ Access to Monitoring and ID Information
♦ Programmable Alarm and Warning Thresholds
♦ Operates from 3.3V or 5V Supply
♦ 25-Pin CSBGA, 5mm x 5mm Package
♦ Internal or External Temperature Sensor
♦ -40°C to +100°C Operating Temperature Range
♦ One 8-Bit Buffered DAC
DS1862
XFP Laser Control and Digital Diagnostic IC
______________________________________________
Maxim Integrated Products
1
Pin Configuration
Rev 1; 12/07
For pricing, delivery, and ordering information, please contact Maxim/Dallas Direct! at
1-888-629-4642, or visit Maxim’s website at www.maxim-ic.com.
+
Denotes lead-free package.
Ordering Information
Typical Operating Circuit appears at end of data sheet.
TOP VIEW
A
B
C
D
E
1
2345
CSBGA (5mm x 5mm)
PART TEMP RANGE PIN-PACKAGE
DS1862B -40°C to +100°C 25 CSBGA (5mm x 5mm)
DS1862B+ -40°C to +100°C 25 CSBGA (5mm x 5mm)
Page 2
DS1862
XFP Laser Control and Digital Diagnostic IC
2 _____________________________________________________________________
ABSOLUTE MAXIMUM RATINGS
RECOMMENDED OPERATING CONDITIONS
(V
CC3
= +2.9V to +5.5V, TA= -40°C to +100°C, unless otherwise noted.)
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional
operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to
absolute maximum rating conditions for extended periods may affect device reliability.
Voltage on Any Open-Drain Pin
Relative to Ground.............................................-0.5V to +6.0V
Voltage on MOD-DSEL, SDA, SCL, FETG, THRSET, TX-D,
AUX1MON, AUX2MON, IBIASMON,
RSSI, BIASSET, MODSET, EN1,
and EN2 ............-0.5V to (V
CC3
+ 0.5V), not to exceed +6.0V
Voltage on SC-RX-LOS, SC-RX-LOL, RX-LOS, SC-TX-LOS,
MOD-NR, EN1,
and EN2 ............-0.5V to (V
CC2
+ 0.5V), not to exceed +6.0V
Operating Temperature Range .........................-40°C to +100°C
EEPROM Programming Temperature Range .........0°C to +70°C
Storage Temperature Range .............................-55°C to +125°C
Soldering Temperature...................See J-STD-020 Specification
Main Supply Voltage V
Secondary Supply Voltage V
High-Level Input Voltage
(SDA, SCL)
Low-Level Input Voltage
(SDA, SCL)
High-Level Input Voltage
(TX-D, MOD-DESEL,
P-DOWN/RST) (Note 3)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
CC3
CC2
V
V
V
(Note 1) +2.9 +5.5 V
V
not to exceed V
CC2
IIH (max) = 10µA
IH
IIL (max) = -10µA
IL
IIH (max) = 10µA 2
IH
(Note 2) +1.6 +3.6 V
CC3
0.7 x
V
CC3
GND -
0.3
V
CC3
0.3 x
V
V
CC3
+
0.5
CC3
+
0.3
V
V
V
Low-Level Input Voltage
(TX-D, MOD-DESEL,
P-DOWN/RST) (Note 3)
V
IIL (max) = -10µA -0.3 +0.8 V
IL
Page 3
DS1862
XFP Laser Control and Digital Diagnostic IC
_____________________________________________________________________ 3
DC ELECTRICAL CHARACTERISTICS
(V
CC3
= +2.9V to +5.5V, V
CC2
= +1.6V to +3.6V, TA= -40°C to +100°C, unless otherwise noted.)
DC ELECTRICAL CHARACTERISTICS—INTERFACE SIGNALS TO SIGNAL CONDITIONERS
(V
CC2
= +1.6V to +3.6V, V
CC3
= +2.9V to +5.5V, TA= -40°C to +100°C, unless otherwise noted.)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Supply Current I
High-Level Output Voltage
(FETG)
CC3
V
OH
P-DOWN/RST = 1 3 5 mA
V
-
IOH (max) = -2mA
CC3
0.5
V
Low-Level Output Voltage
(MOD-NR, INTERRUPT, SDA,
V
OL
IOL (max) = 3mA 0 0.4 V
and FETG)
Resistor (Pullup) R
I/O Capacitance C
Leakage Current I
Leakage Current (SCL, SDA) I
PU
I/O
L
L
(Note 4) 10 pF
91215kΩ
-10 +10 µA
-10 +10 µA
Digital Power-On Reset POD 1.0 2.2 V
Analog Power-On Reset POA 2.0 2.6 V
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
High-Level Input Voltage
(SC-RX-LOS, SC-RX-LOL,
and SC-TX-LOS)
V
IIH (max) = 100µA
IH
0.7 x
V
CC2
V
CC2
0.1
+
V
Low-Level Input Voltage
(SC-RX-LOS, SC-RX-LOL,
and SC-TX-LOS)
High-Level Output Voltage
(EN1 and EN2)
Low-Level Output Voltage
(EN1, EN2, and RX-LOS)
Leakage Current
(SC-RX-LOS, SC-RX-LOL
and SC-TX-LOS, RX-LOS)
0.3 x
V
CC2
0.40
V
V
V
V
V
OH2
OH3
V
IL
OH
OL
OL2
I
L
IIL (max) = -100µA 0
V
-
V
V
CC2
0.2
CC2
0.4
CC2
0.2
-
-
IOH (max) = -0.7mA
V
= 2.5V to 3.6V
CC2
I
(max) = -2mA
OH
V
= 1.6V
CC2
I
(max) = -0.7mA
OH
IOL (max) = 0.7mA 0.20
V
= 2.5V to 3.6V
CC2
(max) = 2mA
I
OL
-10 +10 µA
V
V
V
Page 4
DS1862
XFP Laser Control and Digital Diagnostic IC
4 _____________________________________________________________________
I2C AC ELECTRICAL CHARACTERISTICS
(V
CC3
= +2.9V to +5.5V, TA= -40°C to +100°C, unless otherwise noted.)
ANALOG OUTPUT CHARACTERISTICS
(V
CC3
= +2.9V to +5.5V, V
CC2
= +1.6V to +3.6V, TA= -40°C to +100°C, unless otherwise noted.)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
SCL Clock Frequency f
Clock Pulse-Width Low t
Clock Pulse-Width High t
Bus Free Time between STOP
and START Conditions
Start Hold Time t
Start Setup Time t
Data in Hold Time t
Data in Setup Time t
Rise Time of Both SDA and
SCL Signals
Fall Time of Both SDA and
SCL signals
STOP Setup Time t
MOD-SEL Setup Time t
MOD-SEL Hold Time t
Aborted Sequence Bus Release t
C ap aci ti ve Load for E ach Bus Li ne C
EEPROM Write Time t
SCI
LOW
HIGH
t
BUF
HD:SDA
SU:SDA
HD:DAT
SU:DAT
t
R
t
F
SU:STO
H os t_sel e ct_set up
Host_select_hold
MOD-DE SEL _Ab ort
B
W
(Note 5)
(Note 5)
(Note 5) 400 pF
≤ 4-Byte write (Note 6) 16 ms
0 400 kHz
1.3 µs
0.6 µs
1.3 µs
0.6 µs
0.6 µs
0 0.9 µs
100 ns
20 +
0.1C
B
20 +
0.1C
B
0.6 µs
2ms
10 µs
300 ns
300 ns
2ms
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
I
BIASSET
I
I
I
Voltage on I
V
V
V
(Off-State Current) I
BIASSET
MODSET
MODSET
(Off-State Current) I
and I
BIASSET
THRSET
Drift Across temperature (Note 8) -5 +5 %
THRSET
Capacitance load C
THRSET
APC Calibration Accuracy +25°C 25 µA
APC Temp Drift
I
DNL
BMD
I
INL
BMD
I
Voltage Drift 1.2 %/V
BMD
I
FS Accuracy 1.5 %
BMD
I
BIASSET
Shutdown ±10 ±100 nA
Shutdown ±10 ±100 nA
(Note 7) 0.7 3.0 V
= 100µA 50 1000 mV
MODSET
BIASSET
I
MODSET
MODSET
V
MAX
V
THRSETIMAX
THRSET
0.200mA to 1.5mA -5 +5 %
50µA to 200µA 12 µA
Sink, SRC_SNK_B = 0 -0.9 +0.9
Source, SRC_SNK_B = 1 -0.9 +0.9
Sink, SRC_SNK_B = 0 -4.0 +4.0
Source, SRC_SNK_B = 1 -4.0 +4.0
0.01 1.50 mA
0.01 1.20 mA
1nF
LSB
LSB
Page 5
DS1862
XFP Laser Control and Digital Diagnostic IC
_____________________________________________________________________ 5
AC ELECTRICAL CHARACTERISICS—XFP CONTROLLER
(V
CC3
= +2.9V to +5.5V, V
CC2
= +1.6V to +3.6V, TA= -40°C to +100°C, unless otherwise noted.)
ANALOG OUTPUT CHARACTERISTICS (continued)
(V
CC3
= +2.9V to +5.5V, V
CC2
= +1.6V to +3.6V, TA= -40°C to +100°C, unless otherwise noted.)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
I
MODSET
Accuracy
+25°C
I
MODSET
= 0.04mA to 1.2mA
75µA range -0.9 +0.9
150µA range -0.9 +0.9
I
MODSET
DNL
300µA range -0.9 +0.9
600µA range -0.9 +0.9
1200µA range -0.9 +0.9
75µA range -1.5 +1.5
150µA range -1.5 +1.5
I
MODSET
INL
300µA range -1.0 +1.0
600µA range -1.0 +1.0
1200µA range -1.0 +1.0
I
I
I
APC Bandwidth IMD / I
Temp Drift 5%
MODSET
Voltage Drift 1.2 %/V
MODSET
FS Accuracy 1.5 %
MODSET
= 1 (Note 4) 6 10 30 kHz
APC
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Time to Initialize t
TX-D Assert Time t
TX-D Deassert Time t
P-DOWN/RST Assert Time t
P-DOWN/RST Deassert Time t
MOD-DESEL Deassert Time t
INTERRUPT Assert Delay t
INTERRUPT Deassert Delay t
MOD-NR Assert Delay t
MOD-NR Deassert Delay t
RX-LOS Assert Time t
RX-LOS Deassert Time t
P-DOWN/RST Reset Time t
Shutdown Time t
V
INIT
OFF
ON
PDR-ON
PDR-OFF
MOD-DESEL
INT-ON
INT-OFF
MOD-NR-ON
MOD-NR-OFF
LOS-ON
LOS-OFF
RESET
FAULT
within ±5% of nominal 30 200 ms
CC3
IBIAS and IMOD below 10% of nominal 5 µs
IBIAS and IMOD above 90% of nominal 1 ms
IBIAS and IMOD below 10% of nominal 100 µs
IBIAS and IMOD above 90% of nominal 200 ms
Time until proper response to I2C
communication
Time from fault to interrupt assertion 100 ms
Time from read (clear flags) to interrupt
deassertion
Time from fault to MOD-NR assertion 0.5 ms
Time from read (clear flags) to MOD-NR
deassertion
Time from SC-RX-LOS assertion to
RX-LOS assertion
Time from SC-RX-LOS deassertion to
RX-LOS deassertion
Time from P-DOWN/RST assertion to
initial reset
Time from fault to I
and I
below 10%
BMD
BIASSET
, I
MODSET
-1.5 +1.5 %
LSB
LSB
2ms
500 µs
0.5 ms
100 ns
100 ns
10 µs
,
30 µs
Page 6
DS1862
XFP Laser Control and Digital Diagnostic IC
6 _____________________________________________________________________
AC ELECTRICAL CHARACTERISICS—SOFT* CONTROL AND STATUS
(V
CC3
= +2.9V to +5.5V, V
CC2
= +1.6V to +3.6V, TA= -40°C to +100°C, unless otherwise noted.)
*
All SOFT timing specifications are measured from the falling edge of “STOP” signal during I2C communication.
ANALOG INPUT CHARACTERISTICS
(V
CC3
= +2.9V to +5.5V, TA= -40°C to +100°C, unless otherwise noted.)
A/D INPUT VOLTAGE MONITORING (IBIASMON, AUX2MON, AUX1MON, RSSI, BMD)
(V
CC3
= +2.9V to +5.5V, TA= -40°C to +100°C, unless otherwise noted.)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Soft TX-D Assert Time t
Soft TX-D Deassert Time t
Soft P-DOWN/RST Assert Time t
Soft P-DOWN/RST Deassert Time t
Soft MOD-NR Assert Delay
Soft MOD-NR Deassert Delay
Soft RX_LOS Assert Time t
Soft RX_LOS Deassert Time t
Analog Parameter data Ready
(DATA-NR)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
I
Configurable Source or
BMD
Sink (+/-)
I
Voltage (I
BMD
I
Input Resistance R
BMD
- 0µA) V
BMD
OFF_Soft
ON_Soft
PDR-ON_Soft
PDR-OFF_Soft
t
MOD-NR-ON
_Soft
t
MOD-NR-OFF
_Soft
LOS-ON_Soft
LOS-OFF_Soft
BMD
BMD
IBIAS and IMOD below 10% of nominal 50 ms
IBIAS and IMOD above 90% of nominal 50 ms
IBIAS and IMOD below 10% of nominal 50 ms
IBIAS and IMOD above 90% of nominal 200 ms
Time from fault to MOD-NR assertion 50 ms
Time from read (clear flags) to MOD-NR
deassertion
Time from SC-RX-LOS assertion to
RX-LOS assertion
Time from SC-RX-LOS deassertion to
RX-LOS deassertion
Source mode 2.0
Sink mode
I
range 0 to 1.5mA
BMD
0.05 1.50 mA
1.2
400 550 700 Ω
50 ms
50 ms
50 ms
500 ms
V
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Input Resolution ΔV
Supply Resolution ΔV
Input/Supply Accuracy A
Update Rate
Input/Supply Offset V
Full-Scale Input (I
RSSI)
Full-Scale Input (AUX1MON,
AUX2MON, and V
BMD (Monitor) (TX-P) FS setting 1.5 mA
BIASMON
CC2/3
and
)
MON
CC2/3
CC
t
FRAME1
t
FRAME2
OS
At factory setting 0.25 0.5 %FS
AUX1MON and AUX2MON disabled 48 52
All channels enabled 64 75
(Note 4) 0 5 LSB
At factory setting 2.4875 2.5 2.5125 V
At factory setting
(Note 9)
6.5208 6.5536 6.5864 V
610 µV
1.6 mV
ms
Page 7
DS1862
XFP Laser Control and Digital Diagnostic IC
_____________________________________________________________________ 7
FAST ALARMS AND VCCFAULT CHARACTERISTICS
(V
CC3
= +2.9V to +5.5V, V
CC2
= +1.6V to +3.6V, TA= -40°C to +100°C, unless otherwise noted.)
Note 1: All voltages are referenced to ground. Current into IC is positive, out of the IC is negative.
Note 2: Secondary power supply is used to support optional variable power-supply feature of the XFP module. If V
CC2
is not used,
(i.e., signal conditioners using 3.3V supply) V
CC2
should be connected to the V
CC3
.
Note 3: Input signals (i.e., TX-D, MOD-DESEL, and P-DOWN/RST have internal pullup resistors.
Note 4: Guaranteed by design. Simulated over process and 50µA < I
BMD
< 1500µA.
Note 5: C
B
—total capacitance of one bus line in picofarads.
Note 6: EEPROM write begins after a stop condition occurs.
Note 7: This is the maximum and minimum voltage on the MODSET and BIASSET pins required to meet accuracy and drift specifi-
cations.
Note 8: For V
THRSET
, offset may be as much as 10mV.
Note 9: This is the uncalibrated offset provided by the factory; offset adjustment is available on this channel.
Note 10: % FS refers to calibrated FS in case of internal calibration, and uncalibrated FS in the case of external calibration.
Uncalibrated FS is set in the factory and specified in this data sheet FS (factory). Calibrated FS is set by the user, allowing
a change in any monitored channel scale.
Note 11: See the
Monitor Channels
section for more detail or V
CC2
and V
CC3
selection.
NONVOLATILE MEMORY CHARACTERISTICS
(V
CC3
= +2.9V to +5.5V, unless otherwise noted.)
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
HIGHBIAS and TX-P Threshold
FS
V
Fault Asserted
CC2/3
Falling Edge Delay
QT Temperature Coefficient -3 +3 %
QT Voltage Coefficient 0.5 %/V
QT FS Trim Accuracy (4.2V,
+25°C)
QT Accuracy (Trip) (INL) -2 0 +2 LSB
QT Voltco 0.5 %/V
QT Tempco 1.5 3 %
(Note 10) 2.48 2.5 2.52 mA
↓ V
CC2/3
(Note 11)
75 ms
2.480 2.500 2.520 mA
PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS
Endurance (Write Cycle) +70°C 50k Cycles
Endurance (Write Cycle) +25°C 200k Cycles
Page 8
DS1862
XFP Laser Control and Digital Diagnostic IC
8 _____________________________________________________________________
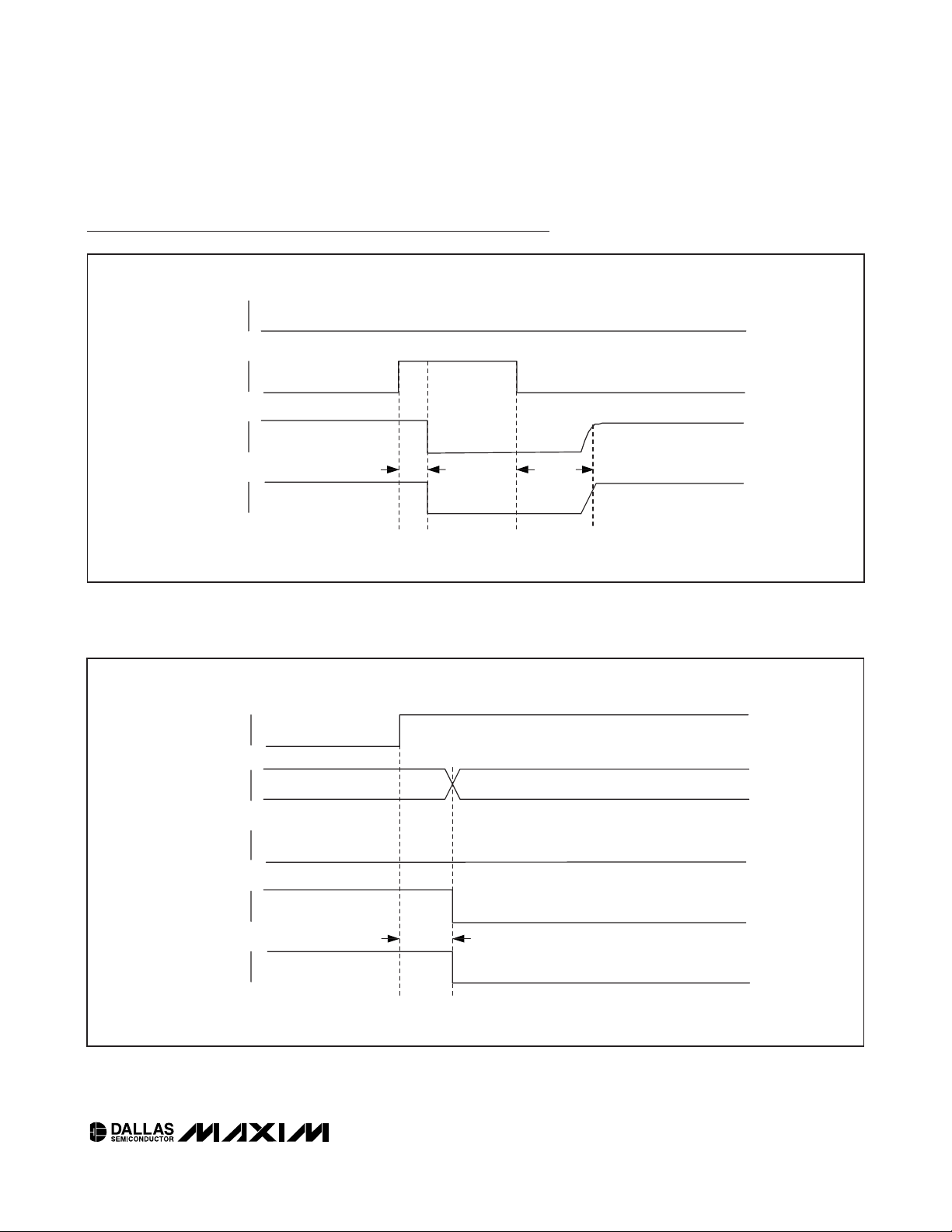
Timing Diagrams
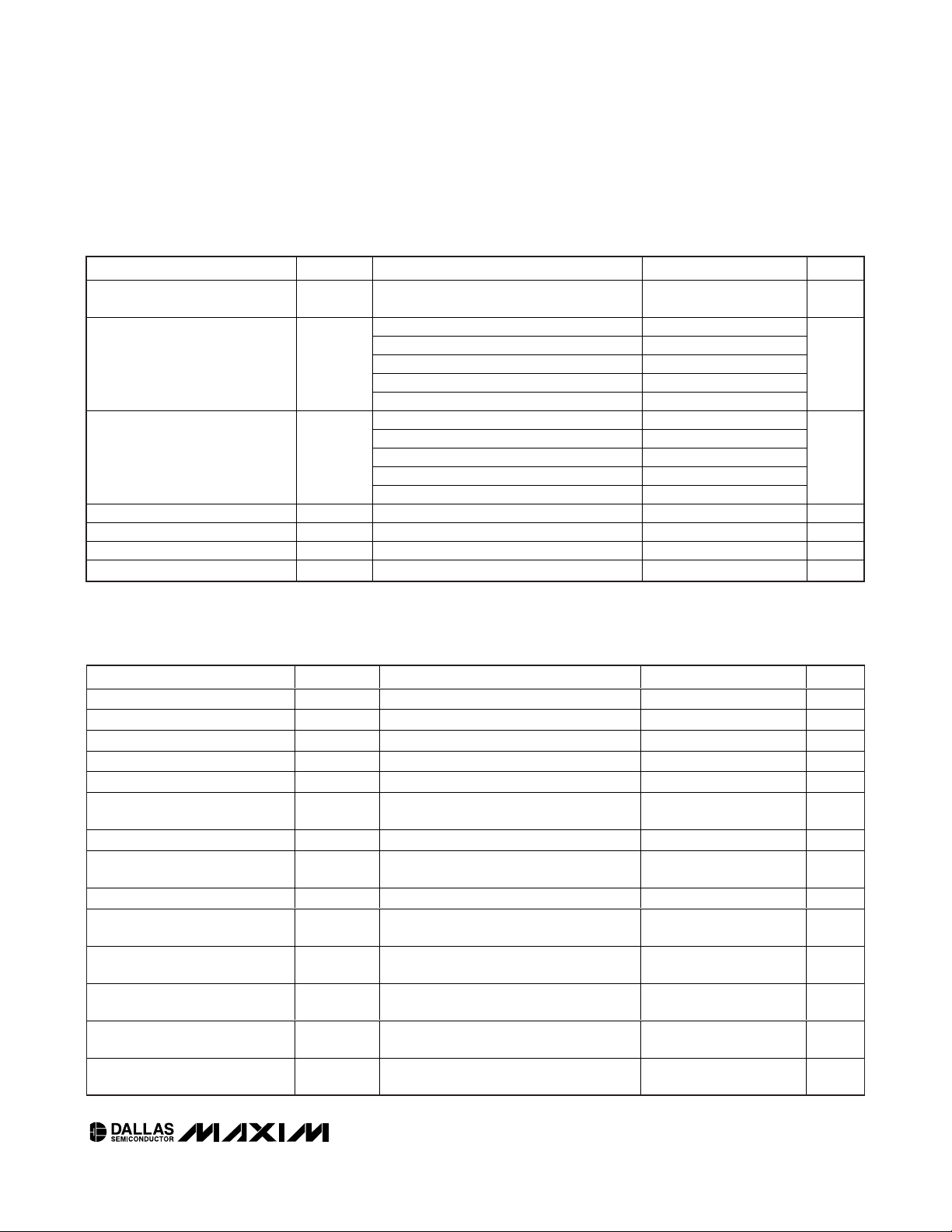
Figure 1. Power-On Initialization with P-DOWN/RST Asserted and TX-D/SOFT-TX-D Not Asserted
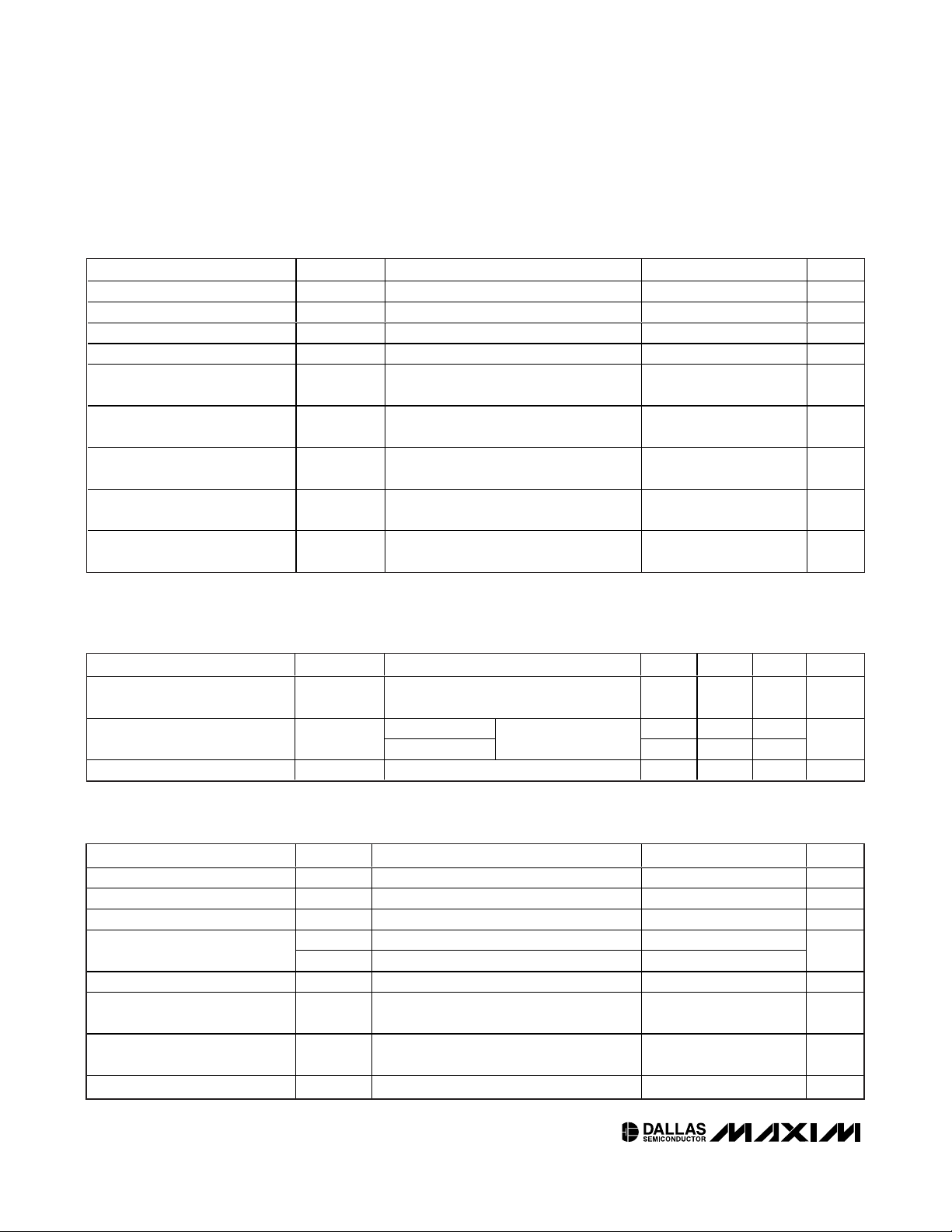
Figure 2. Power-On Initialization with P-DOWN/RST Not Asserted and TX-D/SOFT-TX-D Not Asserted (Normal Operation)
VCC > V
POA
TX-D
P-DOWN/RST
INTERRUPT
I
BIASSET
I
MODSET
READ-FLAGS
RESET-DONE
t
INIT
t
INIT ON
t
INIT OFF
t
PDR-OFF
t
INIT
RESET-DONE
VCC > V
POA
TX-D
READ-FLAGS
P-DOWN/RST
READ-FLAGS
INTERRUPT
I
BIASSET
I
MODSET
RESET-DONE
t
INIT ON
t
INIT
t
INIT OFF
Page 9
DS1862
XFP Laser Control and Digital Diagnostic IC
_____________________________________________________________________ 9
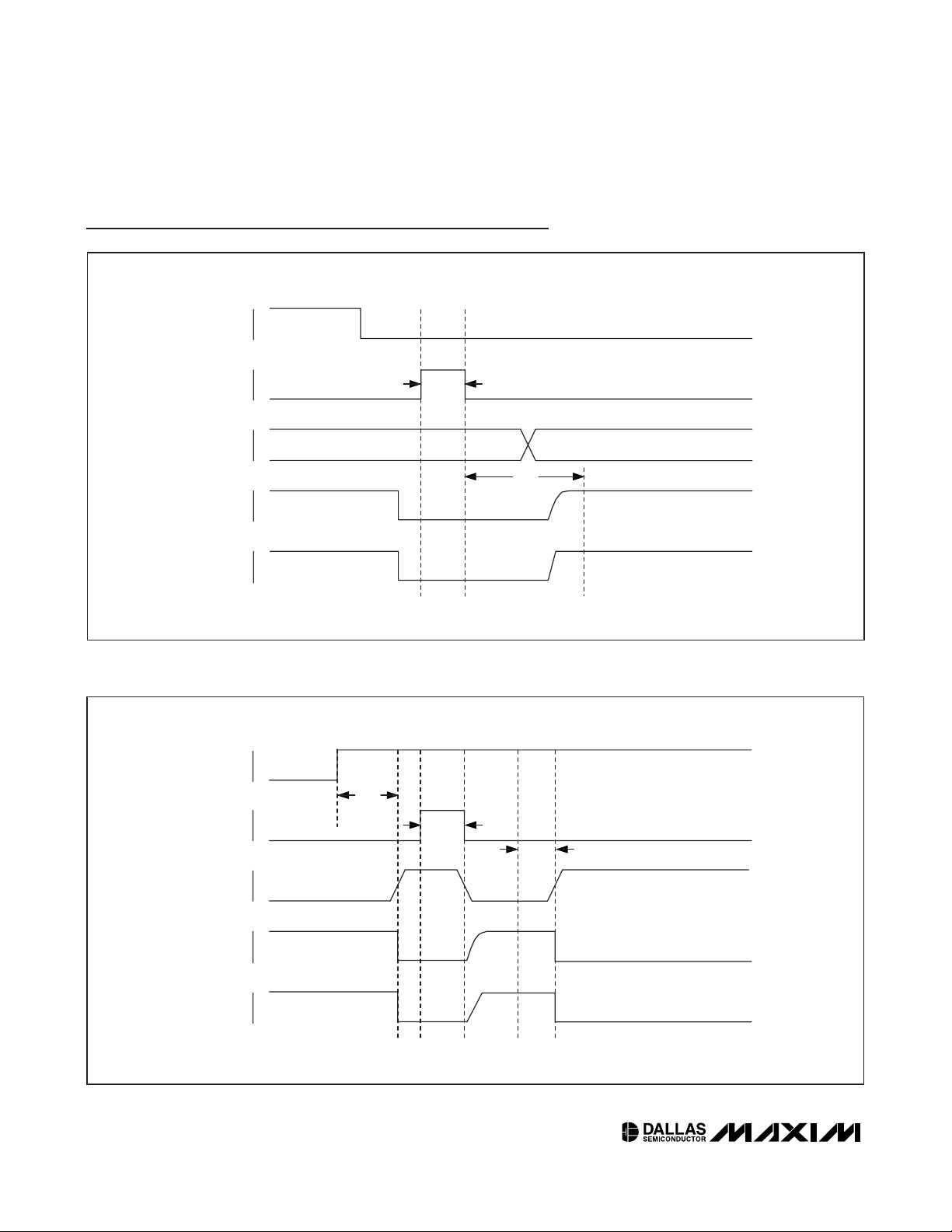
Timing Diagrams (continued)
Figure 3. TX-D Timing During Normal Operation
Figure 4. Detection of Safety Fault Condition
TX-F
TX-D
I
BIASSET
I
MODSET
t
OFF
t
ON
OCCURRENCE
OF FAULT
FETG
TX-D
I
BIASSET
I
MODSET
t
FAULT
Page 10
DS1862
XFP Laser Control and Digital Diagnostic IC
10 ____________________________________________________________________
Figure 5. Successful Recovery from Transient Safety Fault Condition Using P-DOWN/RST
Figure 6. Unsuccessful Recovery from Transient Safety Fault Condition
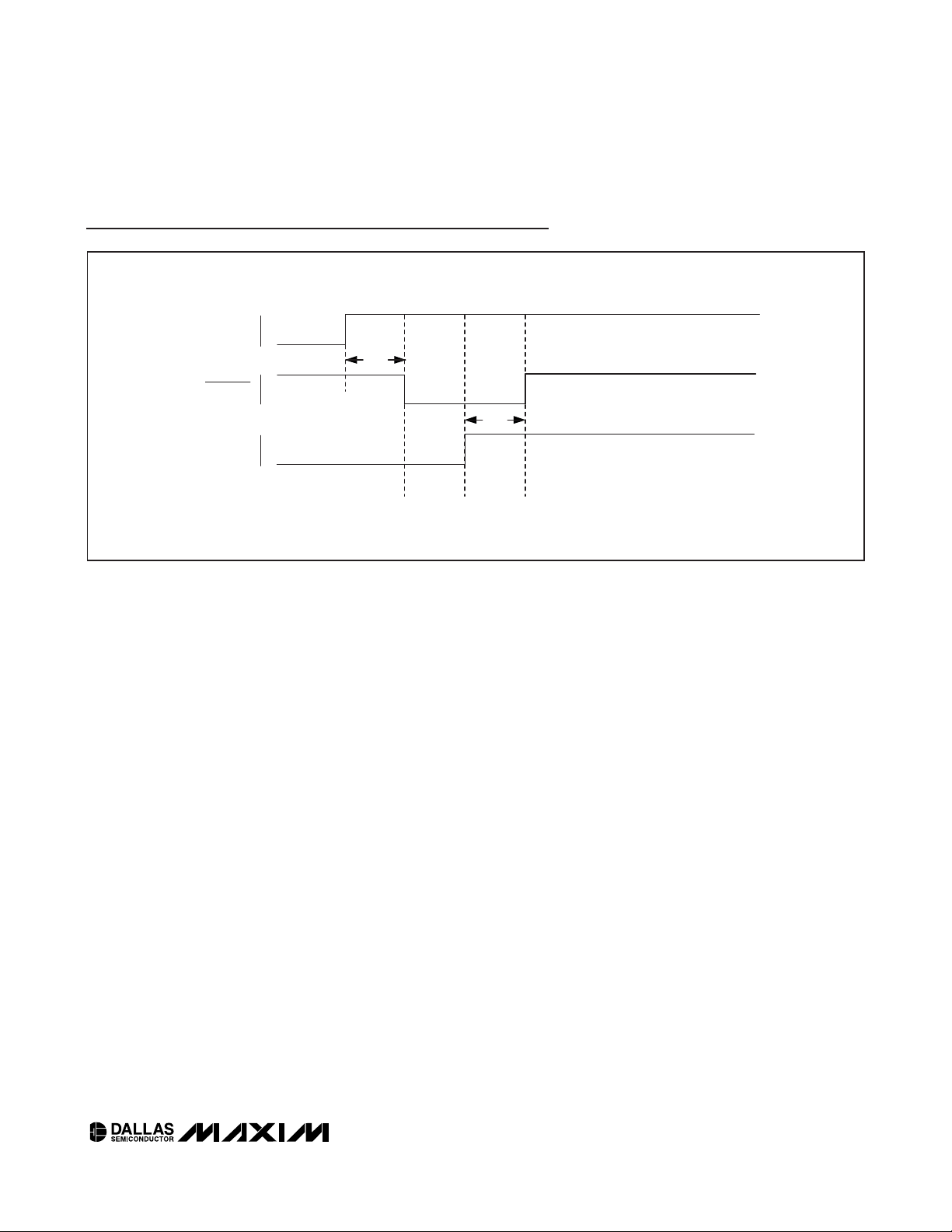
Timing Diagrams (continued)
OCCURRENCE
OF FAULT
t
P-DOWN/RST
FETG
I
BIASSET
I
MODSET
RESET
t
INIT
RESET-DONE
OCCURRENCE
OF FAULT
P-DOWN/RST
FETG
(FETG_POL = 1)
I
BIASSET
I
MODSET
t
FAULT
t
RESET
RESET-DONE
t
FAULT
Page 11
DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 11
Figure 7. Monitor Channel Fault Timing
Timing Diagrams (continued)
OCCURRENCE
OF MONITOR
CHANNEL FAULT
INTERRUPT
READ FLAGS
t
INIT_ON
t
INIT_OFF
Page 12
DS1862
XFP Laser Control and Digital Diagnostic IC
12 ____________________________________________________________________
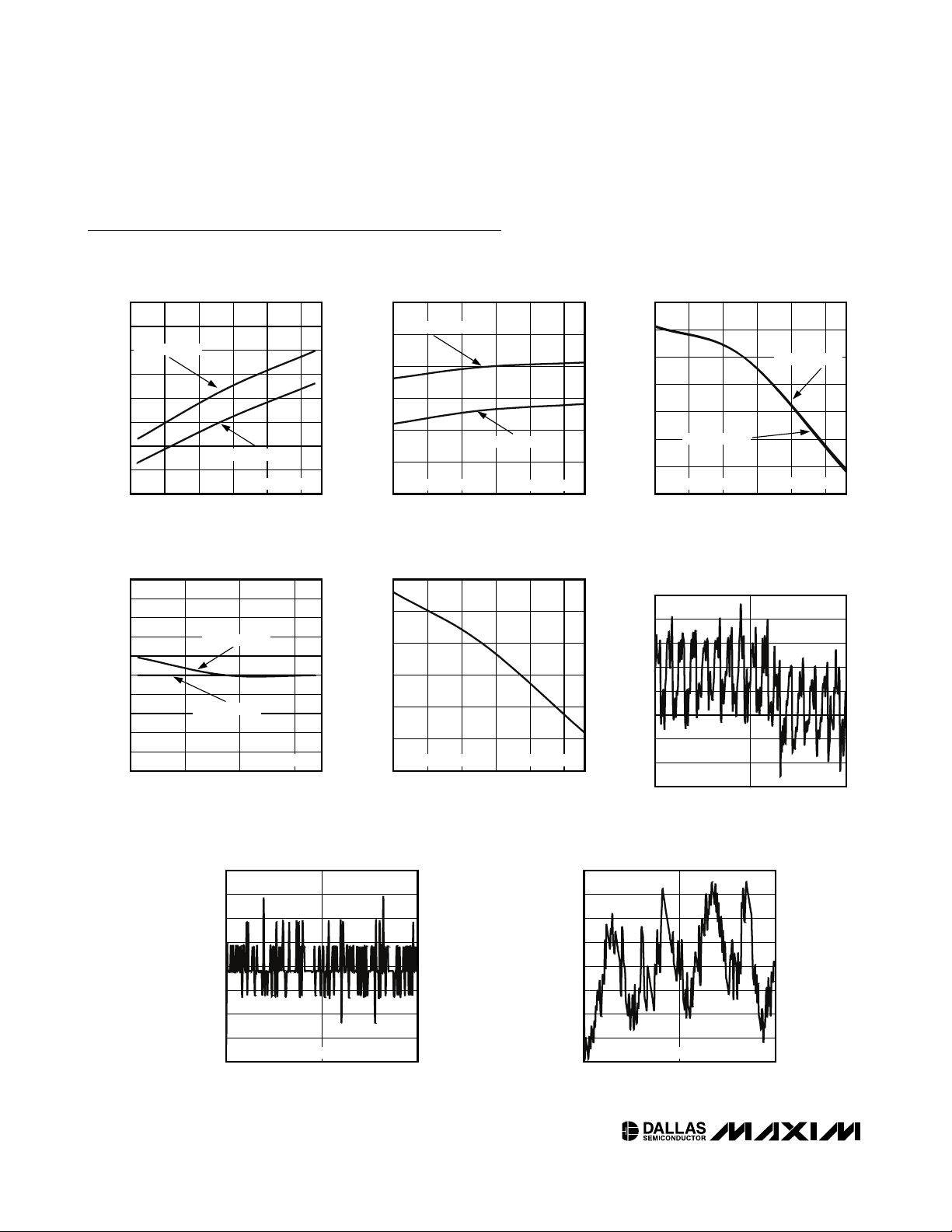
Typical Operating Characteristics
(TA = +25°C, unless otherwise noted.)
SUPPLY CURRENT vs. SUPPLY VOLTAGE
DS1862 toc01
SUPPLY VOLTAGE (V)
SUPPLY CURRENT (mA)
5.34.83.3 3.8 4.3
2.5
3.0
3.5
4.0
4.5
5.0
5.5
6.0
2.0
2.8
SRC_SINK_B = 1
SRC_SINK_B = 0
I
BMD
= 499.479μA
SUPPLY CURRENT vs. TEMPERATURE
DS1862 toc02
TEMPERATURE (°C)
SUPPLY CURRENT (mA)
8560-15 10 35
3.0
3.5
4.0
4.5
5.0
5.5
6.0
-40
SRC_SINK_B = 1
SRC_SINK_B = 0
I
BMD
= 499.479μA
V
CC3
= 5.5V, V
CC2
= 1.6V
I
BMD
DRIFT vs. TEMPERATURE
DS1862 toc03
TEMPERATURE (°C)
I
BMD
DRIFT (%)
8560-15 10 35
-2.5
-1.5
-2.0
-1.0
-0.5
0
0.5
1.0
-40
SRC_SINK_B = 1
SRC_SINK_B = 0
I
BMD
= 499.479μA
V
CC3
= 5.5V, V
CC2
= 1.6V
I
BMD
DRIFT vs. SUPPLY VOLTAGE
DS1862 toc04
SUPPLY VOLTAGE (V)
I
BMD
DRIFT (%)
5.23.6 4.4
-1.0
0
-0.2
0.2
-0.6
-0.8
-0.4
0.4
0.6
0.8
1.0
2.8
SRC_SINK_B = 1
SRC_SINK_B = 0
I
BMD
= 499.479μA
I
MODSET
DRIFT vs. TEMPERATURE
DS1862 toc05
TEMPERATURE (°C)
I
MODSET
DRIFT (%)
85-15 10 35 60
-2.0
-1.5
-1.0
-0.5
0
0.5
1.0
-40
I
BMD
= 499.479μAV
CC3
= 5.5V, V
CC2
= 1.6V
INTEGRAL NONLINEARITY
OF QUICK TRIPS
DS1862 toc06
CODE (0–255)
ERROR (LSB)
256128
-0.8
-0.2
0
-0.6
-0.4
0.2
0.4
0.6
0.8
0
DIFFERENTIAL NONLINEARITY
OF I
MODSET
DS1862 toc07
CODE (0–255)
ERROR (LSB)
256128
-0.20
-0.05
0
-0.15
-0.10
0.05
0.10
0.15
0.20
0
FSR = 75μA
V
CC3
= 4.2V, V
CC2
= 1.6V
INTEGRAL NONLINEARITY
OF I
MODSET
DS1862 toc08
CODE (0–255)
ERROR (LSB)
256128
-0.20
-0.05
0
-0.15
-0.10
0.05
0.10
0.15
0.20
0
FSR = 75μAV
CC3
= 4.2V, V
CC2
= 1.6V
Page 13
DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 13
Pin Description
NAME
DESCRIPTION
Power-Down/Reset Input. This multifunction pin is pulled high internally. See the Power-Down/Reset Pin
section for additional information.
Signal Conditioner Receiver Loss-of-Signal Input. This pin is an active-high input with LVCMOS/LVTTL
voltage levels.
Signal Conditioner Receiver Loss-of-Lock Input. This pin is an active-high input with LVCMOS/LVTTL
voltage levels.
THRSET
Threshold Set Output. This pin is a programmable voltage source that can be used for Rx signal
conditioner.
V
CC2
1.8V Power-Supply Input
RX-LOS
Receiver Loss-of-Signal. This open-drain output indicates when there is insufficient optical power.
SCL
I2C Serial-Clock Input
FETG
FET Gate Output. This pin can drive an external FET gate associated with safety fault disconnect.
RSSI
Received Power Signal Input
MODSET
Modulation Current Output. This pin is only capable of sinking current.
TX-D
Transmit Disable Input. This pin has an internal pullup resistor.
SDA
I2C Serial-Data Input/Output
EN1
Enable 1 Output. Functional control for signal conditioners.
EN2
Enable 2 Output. Functional control for signal conditioners.
BIASSET
Bias Current Output. This pin is only capable of sinking current.
Interrupt. This open-drain output pin indicates a possible operational fault or critical status condition to the
host.
MOD-NR
Indicating Module Operational Fault. Open-drain output. This pin indicates the status of the MOD-NR flag.
Aux1 Monitor Input. This pin can be used to measure any voltage quantity.
Aux2 Monitor Input. This pin can be used to measure any voltage quantity or external temperature sensor.
BMD
Monitor Diode Current Input. This pin is capable of sourcing or sinking current.
GND
Ground
Module Deselect Input. This pin must be pulled low to enable I2C communication. This pin is pulled high
internally.
IBIASMON
Bias Monitor Input. This pin can be used to monitor the voltage across the laser.
Signal Conditioner Transmitter Loss-of-Signal. This pin is an active-high input with LVCMOS/LVTTL
voltage levels.
V
CC3
3.3V or 5V Power-Supply Input
PIN
P-DOWN/RST A1
SC-RX-LOS A2
SC-RX-LOL A3
A4
A5
B1
B2
B3
B4
B5
INTERRUPT D1
AUX1MON D3
AUX2MON D4
MOD-DESEL E2
SC-TX-LOS E4
C1
C2
C3
C4
C5
D2
D5
E1
E3
E5
Page 14

DS1862
XFP Laser Control and Digital Diagnostic IC
14 ____________________________________________________________________
Block Diagram
V
CC2
V
CC3
IBIASMON
AUX2MON
RSSI
AUX1MON
BMD
V
CC3
V
CC2
MOD-DESEL
SDA
SCL
RX-LOS
V
CC3
I
BMD
R
PU
TEMPERATURE
I TO V
V
V
CC2
I2C
INTERFACE
SENSOR
CC3
TX-P
ADDRESS
DATA BUS
R/W
ADDRESS
R/W
DATA BUS
MUX
ALARM AND
WARNING
THRESHOLDS
GAIN
ADC 13 BIT
ALARM FLAGS
WARNING FLAGS
MASKING BITS
LOWER MEMORY
TABLE-SELECT BYTE
ALARM AND
WARNING
THRESHOLDS
RIGHT
OFFSET
SHIFTING
MEASURED DATA
SERIAL ID
TABLE
01h
DATA
COMPARATORS
TABLE
EEPROM
BIAS AND
MODULATION
ENABLE
I
BMD
02h
WARNING
FLAGS
ALARM
FLAGS
CONTROL
SIGNALS
TEMPERATURE
INTERRUPT
MASKING BITS
MISC
TABLE
03h
LUT
CONTROLED
WITH
LUT
INT
DS1862
TABLE
04h
MODULE
CONFIG
A
EXT(IBMD
TABLE
THRSET
)
HIGH-BIAS QT
V
05h
CC3
INTERRUPT
THRSET
MODSET
A
BIASSET
INT
SC-RX-LOS
SC-RX-LOL
SC-TX-LOS
EN1
EN2
MOD-NR
GND
LOGIC
HIGH-BIAS ALARM THRESHOLD
I
BIASSET
TX-P
HIGH TX_P ALARM THRESHOLD
LOW TX_P ALARM THRESHOLD
TX-P
TX-F
V
OR V
CC2
SOFT TX-D
HIGH-BIAS ALARM
HIGH TX_P ALARM
LOW TX_P ALARM
CC3
STARTUP
INITIALIZATION
AND
LASER SAFETY
SHUTDOWN
BLOCK
R
PU
BIAS AND MOD
ENABLE
R
PU
TX-D
P-DOWN/RST
FETG
Page 15

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 15
Detailed Description
The DS1862’s block diagram is described in detail
within the following sections and memory map/memory
description.
Automatic Power Control (APC)
The DS1862’s APC is accomplished by closed-loop
adjustment of the bias current (BIASSET) until the feedback current (BMD) from a photodiode matches the
value determined by the APC registers. The relationship between the APC register and I
BMD
is given by:
I
BMD
= 5.859µA x APCC<7:0> +
(1.464µA x APCF<1:0>)
where APCC<7:0> is the 8-bit value in Table 04h, byte
84h that controls the coarse BMD current and
APCF<1:0> is the 2-bit value that controls the fine BMD
current.
The BMD pin appears as a voltage source in series with
two resistors. The overall equivalent resistance of the
BMD input pin can be closely approximated by the plot
in Figure 8. The voltage that appears on the BMD pin,
assuming no external current load, is 1.2V if BMD is in
sink-current mode (SRC_SINK_B = 0) or 2.0V if BMD is
set to source current (SRC_SINK_B = 1). This allows the
photodiode to be referenced to either V
CC3
or GND.
When the control loop is at steady state, the BMD current
setting matches the current that is measured by the I
BMD
voltage across the internal resistance. During a transient
period, the DS1862 adjusts the current drive on the
BIASSET pin to bring the loop into steady state. The
DS1862 is designed to support loop gains of 1/20 to 10.
On power-up, the BMD current ramps up to the previously saved current setting in EEPROM APC registers.
While operating, the DS1862 monitors the BMD current.
If it begins to deviate from the desired (set) I
BMD
value,
then, again, the current on the BIASSET pin is adjusted
to compensate.
Extinction Ratio Control
Look-Up Table (LUT)
The DS1862 uses a temperature indexed look-up table
(LUT) to control the extinction ratio. The MODSET pin is
capable of sinking current based on the 8-bit binary
value that is controlling it. The DS1862 also features a
user-configurable current range to increase extinction
ratio resolution. Five current ranges, as described in
Table 1, are available to control the current entering
MODSET.
Figure 8. Approximate Model of the BMD Input
Table 1. Selectable Current Ranges for
MODSET
LUT CURRENT RANGE
TABLE 04h, BYTE 86h<2:0>
000 0 to 75
001 0 to 150
010 0 to 300
011 0 to 600
100 0 to 1200
CURRENT RANGE
(µA)
BMD RESISTANCE vs. BMD SUPPLY CURRENT
600
584
565
546
(Ω)
527
BMD
R
508
489
470
0
0
(mA)
I
BMD
I
BMD
VOLTAGE
BMD
R
BMD
V
BMD
1.501.250.25 0.50 0.75 1.00
NOTE: V
CONTROLLED BY THE
SRC_SINK BIT IN
BMD
TABLE 04h
IS
Page 16

DS1862
XFP Laser Control and Digital Diagnostic IC
16 ____________________________________________________________________
If the largest current range is selected, the maximum
value of FFh (from LUT) corresponds to a 1200µA sink
current. Regardless of current range, the MODSET
value always consists of 256 steps, including zero.
I
MODSET
can be controlled automatically with the temperature-based look-up table, or by three other manual
methods.
Automatic temperature addressed look-up is accomplished by an internal or external temperature sensor
controlling an address pointer. This pointer indexes
through 127 previously loaded 8-bit current values
stored in the LUT. Each one of the 127 temperature
slot locations corresponds to a 2°C increment over
the -40°C to +102°C temperature range. Any temperature above or below these points causes the code in
the first or last temperature slot to be indexed. Both the
internal temperature sensor and an external sensor
connected to AUX2MON are capable of providing a
signal to control the extinction ratio automatically with
an indexed LUT. Table 2 illustrates the relationship
between the temperature and the memory locations in
the LUT.
Automatic and manual control of MODSET is controlled
by two bits: TEN and AEN that reside in Table 04h, Byte
B2h. By default (from factory) TEN and AEN are both
set, causing complete automatic temperature-based
look-up. If TEN and/or AEN are altered, then the
DS1862 is set to one of the manual modes. Table 3
describes manual mode functionality.
Table 2. Temperature Look-Up Table
Table 3. Truth Table for TEN and AEN Bits
TEMPERATURE (°C)
< -40 80h
-40 80h
-38 81h
-36 82h
——
+96 C4h
+98 C5h
+100 C6h
+102 C7h
> +102 C7h
CORRESPONDING LOOK-UP
TABLE ADDRESS
TEN AEN DS1862 LUT FUNCTIONALITY
Manual mode that allows users to write a value
directly to the LUT Value register (Table 04h,
00
01
10
11
Byte B1h) to drive MODSET. While in this mode,
the LUT index pointer register is not being
updated, and no longer drives the LUT Value
register.
Manual mode that allows users to write a value
directly to the LUT Value register (Table 04h,
Byte B1h) to drive MODSET. While in this mode,
the LUT index pointer register is still being
updated, however it no longer drives the LUT
Value register.
Manual mode that allows users to write a value to
the LUT index pointer (Table 04h, Byte B0), then
the DS1862 updates the LUT Value register
(Table 04h, Byte B1h) based on the user’s index
pointer.
Automatic mode (factory default). This mode
automatically indexes the LUT based on
temperature, placing the resulting LUT address
in the LUT index pointer register (Table 04h, Byte
B0h). Then the MODSET setting is transferred
from that LUT address to the LUT Value register
(Table 04h, Byte B1h). Lastly the I
to the new MODSET code.
MODSET
is set
Page 17

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 17
Monitor Channels
The DS1862 has seven monitored voltage signals that
are polled in a round-robin multiplexed sequence and
are updated with the frame rate, t
FRAME
. All channels
are read as 16-bit values, but have 13-bit resolution,
and with the exception of temperature measurements,
all channels are stored as unsigned values. The resulting
16-bit value for all monitored channels, except internal
temperature, is calculated by internally averaging the
analog-to-digital result 8 times. The resulting internal
temperature monitor channel is averaged 16 times. See
the
Internal Calibration
section for a complete descrip-
tion of each channel’s method(s) of internal calibration.
The AUX1MON, AUX2MON, and V
CC2/3
monitor channels are optional and can be disabled. This feature
allows for shorter frame rate for the essential monitor
channels. Channels that can not be disabled are: internal temperature, BMD, RSSI, and IBIASMON. A table of
full-scale (FS) signal values (using factory internal calibration without right shifting) and the resulting FS code
values for all seven channels is provided below.
Measuring Temperature—Internal or External
The DS1862 is capable of measuring temperature on
three different monitor channels: internal temperature
sensor, AUX1MON, and AUX2MON. Only the internal
temperature and AUX2MON channels are capable of
indexing the LUT to control the extinction ratio. To use
an external temperature sensor on AUX2MON, the
TEMP_INT/EXT bit in Table 04h, Byte 8Bh, must be set.
While AUX2MON controls the extinction ratio, the internal temperature sensor does not stop running; despite
extinction ratio control by AUX2MON, it is this internal
temperature signal that continues to control the status
of temperature flags. Also when TEMP_INT/EXT = 1, the
internal temperature clamps at -40°C and +103.9375°C,
and when TEMP_INT/EXT = 0 it clamps at -120°C and
+127.984°C. AUX2MON, however, does have its own flag
to indicate an out-of-tolerance condition and assert the
INTERRUPT pin.
Both AUX1MON and AUX2MON can be used to measure temperature as a function of voltage on their
respective pins. They can be enabled by selecting
either 0h or 4h from Table 5. Internal (or external) calibration may be required to transmute the input voltage
to the desired two’s-complement digital code, readable
from the result registers in lower memory, Bytes 6Ah,
6Bh and 6Ch, 6Dh.
Measuring V
CC2/3
The DS1862 has the flexibility to internally measure
either V
CC2
or V
CC3
to monitor supply voltage. V
CC2
or
V
CC3
is user selectable by the V
CC2/3
_Sel bit in Table
01h, Byte DCh. To remove V
CC2/3
from the round-robin
monitor update scheme, despite having V
CC2
or V
CC3
selected to be monitored, the Reserve_EN bit in Table
04h, Byte 8Bh can be programmed to a 0. The analog
power-on-reset flag, POA, indicates the status of V
CC3
power supply. Even though POA seems to behave similarly to V
CC2/3
monitor channel, it is completely sepa-
rate and has no connection.
Measuring APC and Laser Parameters—BMD,
IBIASMON, RSSI
BMD and BIASSET are used to control and monitor the
laser functionality. Regardless of the set BMD current in
the APC register, the DS1862 measures BMD pin current and uses this value not only to adjust the current
on the BIASSET pin, but also to monitor TX-P as well.
The IBIASMON pin is used to input a voltage signal to
the DS1862 that can be used to monitor the bias current through the laser. This monitor channel does not
drive the HIGHBIAS quick-trip (QT) alarms for safety
Table 4. Monitor Channel FS and LSB Detail
RESERVE_EN V
00V
01V
10V
11V
CC2/3_Sel
RESULT
result not enabled.
CC2/3
result not enabled.
CC2/3
is being measured.
CC3
is being measured.
CC2
SIGNAL +FS SIGNAL +FS (hex) -FS SIGNAL -FS (hex) LSB
Temperature 127.984°C 7FF8 -120°C 8800 0.0625°C
V
CC2/3
IBIASMON 2.4997V FFF8 0V 0000 38.147µV
RSSI 2.4997V FFF8 0V 0000 38.147µV
AUX1MON 6.5528V FFF8 0V 0000 38.147µV
AUX2MON 6.5528V FFF8 0V 0000 38.147µV
BMD (TX-P) 1.5mA FFF8 0mA 0000 22.888nA
6.5528V FFF8 0V 0000 100µV
Page 18

DS1862
XFP Laser Control and Digital Diagnostic IC
18 ____________________________________________________________________
fault functionality, current on the BIASSET pin is monitored by the DS1862 to control the HIGHBIAS quick
trip. Similar to TX-P, the RSSI pin is used to measure
the received power, RX-P.
Measuring Voltage Quantities
using AUX1MON and AUX2MON
AUX1MON and AUX2MON are auxiliary monitor inputs
that may be used to measure additional parameters.
AUX1/2MON feature a user-selectable register that
determines the measured value’s units (i.e., voltage,
current, or temperature). In addition to indicating units,
some of the 4-bit op-codes, in Table 5, also place the
part in special modes used for alarms and faults internally. Whichever units’ scale is selected, the DS1862 is
only capable of measuring a positive voltage quantity,
therefore internal or external calibration may be
required to get the binary value to match the measured
quantity. A table of acceptable units and/or their corresponding user-programmable 4-bit op-code is provided below.
Alarms and Warning Flags
Based on Monitor Channels
All of the monitor channels feature alarm and warning
flags that are asserted automatically as user-programmed thresholds are internally compared with monitor channel results. Flags may be set, which, if not
masked, will generate an interrupt on the INTERRUPT
pin or generate a safety fault. Whenever V
CC2/3
,
AUX2MON, AUX1MON, RSSI, and internal temperature
go beyond their threshold trip points and the corresponding mask bit is 0, an interrupt is generated on the
INTERRUPT pin and a corresponding warning or alarm
flag is set. Similarly, a safety fault occurs whenever
BMD or BIASSET go beyond threshold trip points.
When this happens, the FETG pin immediately asserts
and BIASSET and MODSET currents are shut down.
Monitor Channel Conversion Example
Table 6 provides an example of how a 16-bit ADC code
corresponds to a real life measured voltage using the
factory-set calibration on either RSSI or IBIASMON. By
factory default, the LSB is set to 38.147µV.
To calculate V
CC2
, V
CC3
, AUX1MON, or AUX2MON,
convert the unsigned 16-bit value to decimal and multiply by 100µV.
To calculate the temperature (internal), treat the two’scomplement value binary number as an unsigned binary number, then convert it to decimal and divide by
256. If the result is grater than or equal to 128, subtract
256 from the result.
Temperature: high byte = -128°C to +127°C signed;
low byte = 1/256°C.
Table 5. AUX1/2MON Functionality
Selection (Unit Selection)
Table 6. A/D Conversion Example
Table 7. Temperature Bit Weights
VALUE
0000b Auxiliary monitoring not implemented
0001b
0010b Reserved
0011b
0100b
0101b Laser wavelength
0110b
0111b
1000b
1001b
1010b + 5V sup p l y cur r ent ( 16- b i t val ue i s cur r ent i n 0.1m A)
1101b
1110b
1111b
DESCRIPTION OF AUX1/2MON INTENDED USE
(UNITS OF MEASURE)
APD bias voltage (16-bit value is voltage in units of
10mV)
TEC current (mA), (16-bit value is current in units of
0.1mA)
Laser temperature (same encoding as module
temperature)
+5V supply voltage (encoded as primary voltage
monitor)
+3.3V supply voltage (encoded as primary voltage
monitor)
+1.8V supply voltage (encoded as primary voltage
monitor) (V
-5.2V supply voltage (encoded as primary voltage
monitor)
+3.3V supply current (16-bit value is current in
0.1mA)
+1.8V supply current (16-bit value is current in
0.1mA)
-5.2V supply current (16-bit value is current in
0.1mA)
CC2
)
MSB (BIN) LSB (BIN) VOLTAGE (V)
11000000 00000000 1.875
10000000 10000000 1.255
S262
-1
2
-2
2
5
-3
2
4
2
-4
2
3
2
-5
2
2
2
1
2
———
0
2
Page 19

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 19
Internal Calibration
The DS1862 has two means for scaling an analog input
to a digital result. The two devices alter the gain and
offset of the signal to be calibrated. All of the inputs
except internal temperature have unique registers for
both the gain and the offset that can be found in Table
04h. See the table below for a complete description of
internal calibration capabilities including right-shifting
for all monitor channels.
To scale a specific input’s gain and offset, the relationship between the analog input and the expected digital
result must be known. The input that would produce a
corresponding digital result of all zeroes is the null
value (normally this input is GND). The input that would
produce a corresponding digital result of all ones is the
full-scale (FS) value minus one LSB. The FS value is
also found by multiplying an all ones digital value by
the weighted LSB. For example, a digital reading is 16
bits long, assume that the LSB is known to be 50µV,
then the FS value would be 216x 50µV = 3.2768V.
A binary search can be used to find the appropriate
gain value to achieve the desired FS of the converter.
Once the gain value is determined, then it can be
loaded into the appropriate channels’ Gain register.
This requires forcing two known voltages on to the
monitor input pin. For best results, one of the forced
voltages should be the NULL input and the other
should be 90% of FS. Since the LSB of the least significant bit in the digital reading register is known, the
expected digital results are also known for both the null
and FS value inputs. Figure 9 describes the hysteresis
built into the DS1862’s LUT functionality.
With the exception of BMD, which can source or sink
current, all monitored channels are high impedance
and are only capable of directly measuring a voltage. If
other measured quantities are desired, such as: light,
frequency, power, current etc., they must be converted
to a voltage. In this situation the user is not interested in
voltage measurement on the monitored channel, but
the measurement of the desired parameter. Only the
relationship between the indirect measured quantity
(light, frequency, power, current, etc.) to the expected
digital result must be known.
An example of gain scaling using the recommended
binary search procedure is provided with the following
pseudo-code.
To help will the computation, two integers need to be
defined: count 1 and count 2. CNT1 = NULL / LSB and
CNT2 = 90%FS / LSB. CLAMP is the largest result that
can be accommodated.
Table 8. Temperature Conversion
Examples
Table 9. Internal Calibration Capabilities
Figure 9. Look-Up Table Hysteresis
MSB (BIN) LSB (BIN) TEMPERATURE (°C)
01000000 00000000 +64
01000000 00001000 +64.03215
01011111 00000000 +95
11110110 00000000 -10
11011000 00000000 -40
SIGNAL
Temperature — x —
V
CC2/3
IBIASMON x x x
RSSI (RX-P) x x x
AUX1MON x x x
AUX2MON x x x
BMD (TX-P) x x x
INTERNAL
SCALING
xx—
INTERNAL
OFFSET
RIGHT-
SHIFTING
M6
M5
M4
M3
MEMORY LOCATION
M2
M1
2 4 6 8 10 12
DECREASING
TEMPERATURE
INCREASING
TEMPERATURE
TEMPERATURE (°C)
Page 20

DS1862
XFP Laser Control and Digital Diagnostic IC
20 ____________________________________________________________________
/* Assume that the Null input is 0.5V. */
/* In addition, the requirement for LSB is 50µV. */
FS = 65536 * 50e-6; /* 3.2768 */
CNT1 = 0.5 / 50e-6; /* 10000 */
CNT2 = 0.90*FS / 50e-6; /* 58982 */
/* Thus the NULL input of 0.5V and the 90% of FS input
is 2.94912V. */
set the trim-offset-register to zero;
set Right-Shift register to zero (Typically zero.
See the
Right-Shifting
section);
gain_result = 0h;
CLAMP = FFF8h/2^(Right_Shift_Register);
For n = 15 down to 0
begin
gain_result = gain_result + 2^n;
Force the 90% FS input (2.94912V);
Meas2 = read the digital result from the part;
If Meas2 >= CLAMP then
gain_result = gain_result - 2^n;
Else
Force the NULL input (0.5V);
Meas1 = read the digital result from the part;
if (Meas2 - Meas1) > (CNT2 - CNT1) then
gain_result = gain_result - 2^n;
end;
Set the gain register to gain_result;
The gain register is now set and the resolution of the
conversion will best match the expected LSB. The next
step is to calibrate the offset of the DS1862. With the
correct gain value written to the gain register, again
force the NULL input to the monitor pin. Read the digital result from the part (Meas1). The offset value is
equal to negative value of Meas1.
The calculated offset is now written to the DS1862 and
the gain-and offset-scaling procedure is complete.
Right-Shifting A/D Conversion Result
(Scalable Dynamic Ranging)
Right-shifting is a digital method used to regain some
of the lost ADC range of a calibrated system. If rightshifting is enabled, by simply loading a non-zero value
into the appropriate Right-Shifting Register, then the
DS1862 shifts the calibrated result just before it is
stored into the monitor channels’ register. If a system is
calibrated so the maximum expected input results in a
digital output value of less than 7FFFh (50% of FS),
then it is a candidate for using the right-shifting
method.
If the maximum desired digital output is less than
7FFFh, then the calibrated system is using less than 1/2
the ADC’s range. Similarly, if the maximum desired digital output is less than 1FFFh, then the calibrated system is only using 1/8th the ADC’s range. For example, if
an applied maximum analog signal yields a maximum
digital output less than 1FFCh, then only 1/8th of the
ADC’s range is used. Right-shifting improves the resolution of the measured signal as part of internal calibration. Without right-shifting, the 3 MS bits of the ADC will
never be used. In this example, a value of 3 for the
right-shifting maximizes the ADC range and a larger
gain setting must be loaded to achieve optimal conversion. No resolution is lost since this is a 13-bit converter
that is left justified. The value can be right-shifted 3
times without losing any resolution. The following table
describes when the right-shifting method can be effectively used.
Table 10. Right-Shifting Selection
OFFSET REGISTER
_
=
MEAS
()
−
11
⎡
⎢
4
⎣
⎤
⎥
⎦
OUTPUT RANGE USED WITH
ZERO RIGHT-SHIFTS
0h .. FFFFh 0
0h .. 7FFFh 1
0h .. 3FFFh 2
0h .. 1FFFh 3
0h .. 0FFFh 4
NUMBER OF RIGHT-
SHIFTS NEEDED
Page 21

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 21
Warning and Alarm Logic Based on
AUX1/2MON, V
CC2/3
, Temp, RX-P,
and IBIASMON
The DS1862 is capable of generating an alarm and/or
warning whenever an analog monitored channel goes
out of a user-defined tolerance. Temperature, bias current (based on IBIASMON), receive power (based on
RSSI), AUX1MON, AUX2MON, and V
CC2/3
, are moni-
tored channels that generate latched flags. See the figure below for more detail pertaining to AUX1MON and
AUX2MON. Flags are latched into a high state the first
time a monitored channel goes out of the defined operating window and for each monitored signal there is a
Mask bit that can be set to prevent the corresponding
alarm or warning flag from being set. Once a flag is set,
it is cleared by simply reading its memory location.
Figure 10. AUX1/2 Monitor Logic
AUX1MON (PIN)
THRESHOLD
AUX2MON (PIN)
THRESHOLD
AUX1MON
(APD MODE)
AUX2MON
(APD MODE)
ADC
ADC
LATCH
AUX1/2MON LOGIC
C
C
MASK BIT
LATCHED-APDSUPPLY-FAULT
4-BIT UNIT SELECT
AUX1MON
(TEC MODE)
AUX2MON
(TEC MODE)
AUX1MON
AUX2MON
*COMPARATOR LOGIC IS
DUPLICATED FOR HIGH
AND LOW ALARMS AND
WARNINGS.
LATCHED-TECFAULT
LATCH
AUX1MON
(LASER WL MODE)
AUX2MON
(LASER WL MODE)
AUX1MON
MODE)
(V
EE5
AUX2MON
MODE)
(V
EE5
AUX1MON
MODE)
(V
CC2
AUX2MON
MODE)
(V
CC2
AUX1MON
MODE)
(V
CC5
AUX2MON
(V
CC5
AUX1MON
(V
CC3
AUX2MON
(V
CC3
ANY FLAG
MODE)
MODE)
MODE)
BIT
LATCH
LATCH
LATCHED-V
LATCHED-V
INTERRUPT (PIN)
CC5
CC3
LATCH
LATCH
LATCH
LATCHEDWAVELENGH-UL
LATCHED-V
LATCHED-V
EE5
CC2
CORRESPONDING MASK
Page 22

DS1862
XFP Laser Control and Digital Diagnostic IC
22 ____________________________________________________________________
Warning and Alarm Logic Based on
Signal Conditioners
The DS1862 also has flags that are set by certain logical
conditions on signal conditioner (SC) pins: SC-RX-LOL,
SC-RX-LOS, SC-TX-LOS. Similarly, for each latched
signal conditioner flag there are also mask bits that are
capable of preventing the alarm or warning flag from
causing an INTERRUPT pin to assert. Again, flags are
cleared automatically whenever their memory address
is read. See Figure 11 for more detail.
Quick-Trip Logic and FETG
Shutdown Functionality
In addition to alarms and warnings, the DS1862 also
has quick-trip (QT) functionality (sometimes referred to
as fast alarms) that is capable of shutting down the
LASER with the FETG pin in conjunction with shutting
down I
MODSET
and I
BIASSET
. I
BMD
and I
BIASSET
currents are measured and are compared with userdefined trip points to set the quick-trip flags: QT LOW
TX-P, QT HIGH TX-P, and QT HIGH BIAS. These flags
are also capable of being masked to prevent FETG
from being asserted when an out-of-tolerance condition
is detected. FETG is not asserted by setting the TX-D
pin, SOFT TX-D, or P-DOWN/RST pin to a high state,
however, I
MODSET
, and I
BIASSET
will shut down. See
Figure 12 for more detail.
Figure 11. Signal Conditioner and Other Logic
SIGNAL CONDITIONER AND MISCELLANEOUS LOGIC
HIGH TX-P
LOW TX-P
HIGH BIAS
SC-RX-LOS
(PIN)
SC-RX-LOL
(PIN)
LATCH
LATCH
LATCHED-TX-FAULT
LATCHED-RX-NR
SC-TX-LOS
(PIN)
LATCHED-TX-FAULT
P-DOWN/RST
(PIN)
TIMER
LATCHED-TX-NR
LATCH
LATCHED-RESET-DONE
LATCHLATCH
SC-RX-LOS
(PIN)
SC-RX-LOL (PIN)
TX-FAULT
VCC2-FAULT
LATCHEDRX-LOS
LATCH
MOD-NR (PIN)
*OPEN DRAIN
ANY FLAG
ANY MASK BIT
RX-LOS (PIN)
*OPEN DRAIN
LATCHEDMOD-NR
LATCH
SC-RX-LOL
(PIN)
INTERRUPT (PIN)
LATCHED
RX-CDR-NL
Page 23

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 23
The polarity of the FETG pin can also be reversed by
setting the FETG_POL bit. Once a safety fault has
occurred, the FETG pin and all of the attendant flags can
only be reset by pulsing the P-DOWN/RST pin high for the
reset time, t
RESET
, or by toggling the P-DOWN/RST bit in
Byte 6Eh, bit 4. See the
Power-Down/Reset Pin
section for
more details.
Power-Down/Reset Pin
The P-DOWN/RST pin is a multifunction input pin that
resets and/or powers down the DS1862. Since the pin is
internally pulled up, its normal state is released, which
corresponds to power-down mode. If the P-DOWN/RST
pin is released, or driven high, the DS1862 responds by
shutting down the MODSET and BIASSET currents.
Once the pin is pulled low, operation continues (if not
inhibited by a safety fault). Besides powering down the
DS1862, a high-going pulse with minimum reset time,
t
RESET
, can be applied to the P-DOWN/RST pin. This is
necessary to restart the DS1862, especially if it is in a
safety shutdown condition and needs to be restarted
after the safety condition has been rectified. See the
timing diagrams for proper pin timing.
Power-Down Functionality
During power-down mode I
BIASSET
and I
MODSET
drop
below 10µA, effectively shutting down the laser. FETG
is not asserted and safety faults do not occur during
this period. During power-down, I2C communication is
still active, but the signal conditioner pins EN1 and EN2
are noncontrollable and automatically change to the
states: EN1 = 1 and EN2 = 0. Other internal flags/signals that are based on the signal conditioner inputs still
reflect the status on the signal conditioner pins during
power-down. For example, RX-LOS still reflects the status of SC-RX-LOS, and MOD-NR still reflects the logical
states for the signal conditioner pins. Similarly, it is possible for FETG to be asserted, even though the BIASSET
and MODSET currents are shut down. However, during
power-down and a short period, t
PDR-OFF
, during powerup, TX-P Low flag is ignored (internally automatically
masked out) and does not contribute to FETG’s logic.
Figure 12. Safety Fault and Shutdown Logic
SHUTDOWN LOGIC
LATCHED-TX-FAULT
LATCH
BMD (PIN)
(TX-P CURRENT)
ADC
THRESHOLD
QT LOW
TX-P FLAG
LOW TX-P MASK
BMD (PIN)
(TX-P CURRENT)
BIASSET (PIN)
(BIASSET CURRENT)
SOFT TX-D
P-DOWN/RST (PIN)
TX-D (PIN)
SAFETY FLAG
SOFT P-DOWN/RST
ADC
THRESHOLD
ADC
THRESHOLD
HIGH TX-P MASK
BIAS HIGH MASK
SHUTDOWN
FLAG
QT HIGH
TX-P FLAG
QT BIAS
HIGH FLAG
QT LOW TX-P FLAG
QT HIGH TX-P FLAG
QT BIAS HIGH FLAG
FETG_POL
FETG_POL
DRIVE A P-CHANNEL SWITCH
0
DRIVE A N-CHANNEL SWITCH
1
SAFETY FLAG
LATCH
FETG (PIN)
Page 24

DS1862
XFP Laser Control and Digital Diagnostic IC
24 ____________________________________________________________________
During an asserted period of P-DOWN/RST (DS1862 in
power-down), and V
CC3
is cycled, the DS1862 remains
in power-down mode upon power-up. While in powerdown mode the INTERRUPT pin does not assert. Once
V
CC3
has returned, the reset done flag asserts after the
interrupt assert delay, t
INIT ON
.
Reset Functionality
Besides powering down the DS1862, the P-DOWN/RST
pin also functions to reset the DS1862. After a highgoing pulse of time t
RESET
, several events occur within
the DS1862. First, MODSET and BIASSET currents shut
down and are then reinstated. Second, between the rising edge of the reset pulse and the assertion of the
reset-done flag (t
INIT
), the low TX-P flag is ignored and
does not cause FETG to trip. After time t
INIT,
the low
TX-P flag becomes functional. Also, at this time, the
reset-done flag is asserted, causing an interrupt to be
generated. If there are no faults before t
INIT
, then no
interrupts are asserted on the INTERRUPT pin.
If V
CC3
is powered up while P-DOWN/RST is high, then
the reset-done flag must be cleared twice. The first time
the reset-done flag is generated by V
CC3
powering up,
the second time reset-done is generated by a falling
edge on P-DOWN/RST. If V
CC3
is continuously powered while P-DOWN/RST is low then only one resetdone flag needs to be cleared. See the timing
diagrams for graphical detail.
DS1862 Memory Map
Memory Organization
The DS1862 features six separate memory tables that
are internally organized into four byte rows. The Lower
Memory is addressed from 00h to 7Fh and contains
alarm and warning thresholds, flags, masks, several
control registers, password entry area (PE), and the
Table Select byte. Table 01h primarily contains user
EEPROM as well as several control bytes for various
functions. Table 02h is strictly user EEPROM that is protected by a host password. Table 03h is strictly used
for controlling the extinction ratio with an LUT. Table
04h is a multifunction space that contains internal calibration values for monitored channels, LUT index pointers, and miscellaneous control bytes. Table 05h is
factory programmed and stores SCALE values for use
with suggested external temperature sensors. Also, one
byte in Table 05h controls the THRSET voltage source
and is completely accessible without any password
protection. See the Memory section for a more complete detail of each byte’s function, as well as Table 11
for read/write permissions for each Byte. Many nonvolatile memory locations (listed within the
Detailed
Register Description
section) are actually SRAMShadowed EEPROM, which are controlled by the SEEB
bit in Table 4, Byte B2h.
The DS1862 incorporates SRAM-shadowed EEPROM
memory locations for key memory addresses that may
be rewritten many times. By default the Shadowed
EEPROM Bit, SEEB, is not set and these locations act
as ordinary EEPROM. By setting SEEB, these locations begin to function like SRAM cells, which allow an
infinite number of write cycles without concern of wearing out the EEPROM. This also eliminates the requirement for the EEPROM write time, tWR. Because
changes made with SEEB enabled do not affect the
EEPROM, these changes are not retained through
power cycles. The power-up value is the last value written with SEEB disabled. This function can be used to
limit the number of EEPROM writes during calibration or
to change the monitor thresholds periodically during
normal operation helping to reduce the number of times
EEPROM is written. The Memory Map description indicates which locations are shadowed-EEPROM.
Page 25

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 25
Figure 13. General View of DS1862 Memory Organization
Register Map
Table 11. Permission Table
DEC hex
00
127 7F
128 80
2
C SLAVE ADDRESS A0h
I
00h
LOWER MEMORY
DIGITAL DIAGNOSTIC
FUNCTIONS
PASSWORD ENTRY (PWE)
(4 BYTES)
TABLE SELECT BYTE
TABLE 01h
TABLE 00h
XFP MSA
SERIAL ID DATA
7Fh
80h
TABLE 02h
USER EEPROM DATA
80h 80h80h
MODULATION DAC
LUT
C7h
TABLE 04hTABLE 03h
CONTROL AND
CONFIGURATION
TABLE
(72 BYTES)
80h
OPTIONAL SCALE VALUES
AND THRSET CONTROL
BBh
TABLE 05h
87h
DC220 MISC CONTROL BITS
255 FF
FFh
PERMISSION READ WRITE
At least one byte in this row is different than
<0>
<1> ALL ALL
<2> ALL MODULE
<3> ALL HOST
<4> MODULE MODULE
<5> ALL FACTORY
<6> NEVER HOST
<7> NEVER MODULE
the rest of the bytes, so look at each byte
separately for permissions.
FFh
Page 26

DS1862
XFP Laser Control and Digital Diagnostic IC
26 ____________________________________________________________________
*
V
CC2/3
are in reserved locations.
LOWER MEMORY (00H–7FH)
A D DR ESS
( h ex )
<0,2>
00
<2>
08
<2>
10
38
70
78
18
20
28
30
40
48
50
58
60
68
<2>
<2>
<2>
<2>
<0,2>
<1>
<1>
<1>
<1>
<1>
<1>
<0,1>
<0,1>
BYTE
BYTE 0/8 BYTE 1/9 BYTE 2/A BYTE 3/B BYTE 4/C BYTE 5/D BYTE 6/E BYTE 7/F
Reserved Reserved Reserved Reserved Reserved Reserved SRAM SRAM
Temp/Res/Bias/
TxP Alarm
Temp/Res/Bias/
TxP Mask
Reserved Reserved Reserved Reserved POA Reserved PEC_EN Host PW
Host PW Host PW Host PW PWE (MSB) PWE (LSB) Table Select
BYTE/WORD
(hex)
01 Signal Cond
50
51
52
53
54
55
56
WORD 0 WORD 1 WORD 2 WORD 3
EE Signal Cond Temp Alarm Hi Temp Alarm Lo Temp Warn Hi
Temp Warn Lo V
V
Warn Lo* Bias Alarm Hi Bias Alarm Lo Bias Warn Hi
CC3
Alarm Hi* V
CC3
Alarm Lo* V
CC3
Bias Warn Lo TX-P Alarm Hi TX-P Alarm Lo TX-P Warn Hi
TX-P Warn Lo RX-P Alarm Hi RX-P Alarm Lo RX-P Warn Hi
RX-P Warn Lo Aux1 Alarm Hi Aux1 Alarm Lo Aux1 Warn Hi
Aux1 Warn Lo Aux2 Alarm Hi Aux2 Alarm Lo Aux2 Warn Hi
Aux2 Warn Lo EE EE Reserved Reserved Reserved Reserved
SRAM SRAM SRAM SRAM SRAM SRAM SRAM SRAM
RxP/Aux1/Aux2/
Res Alarm
RxP/Aux1/Aux2/
Res Mask
Temp Value V
Temp/Res/Bias/
TxP Warn
Temp/Res/Bias/
TxP Mask
CC2/3
RxP/Aux1/Aux2/
Res Warn
RxP/Aux1/Aux2/
Res Mask
Tx/Rx Misc
Flags
Rx/Rx Misc
Mask
Apd/Tec/
Wave/Res Flags
Apd/Tec/Wave/
Res Mask
V
CC5/3/2
Alarm Flags
V
CC5/3/2/
Alarm Mask
Value* Bias Value TX-P Value
RX-P Value Aux1 Value Aux2 Value GCS1 GCS0
EXPANDED BYTES
Bit7 Bit6* Bit5 Bit4 Bit3 Bit2 Bit1 Bit0**
NAME
<1>
<1>
<1>
<1>
<1>
<1>
<1>
<1>
bit14bit13bit12bit11bit10bit9bit8bit7bit6bit5bit4bit3bit2bit1bit
bit
15
EE EE EE EE EE EN2 Value EN1 Value Lock-T1-221
L-HI-TEMP-ALL-LO-TEMP-
AL
L-HI-RX-P-AL
L-HI-TEMP-W
L-LO-RX-P-ALL-HI-AUX1-ALL-LO-AUX1-ALL-HI-AUX2-ALL-LO-AUX2-
L-LO-TEMP-
W
Reserved Reserved L-HI-BIAS-AL
Reserved Reserved L-HI-BIAS-W L-LO-BIAS-W L-HI-TX-P-W L-LO-TX-P-W
L-HI-RX-P-W L-LO-RX-P-W L-HI-AUX1-W
L-LO-AUX1-
W
L-HI-AUX2-W
L-LO-BIAS-
AL
AL
L-LO-AUX2-
W
L-HI-TX-P-AL
Reserved Reserved
Reserved Reserved
L-TX-NR L-TX-F L-TX-CDR-NL L-RX-NR L-RX-LOS L-RX-CDR-NL L-MOD-NR
L-APD-SUP-F L-TEC-F L-WAVE-NL Reserved Reserved Reserved Reserved Reserved
L-HI-V
CC5
-AL
L-LO–V
AL
CC5-
L-HI-V
CC3
-AL
L-LO–V
AL
CC3
L-HI-V
CC2
-AL
L-LO–V
AL
CC2-
L-HI-V
CC3
Vee
Vee
EE5
Warn Hi*
V
CC5/3/2
Warn Flags
V
CC5/3/2
Warn Mask
L-LO-TX-
L-RESET-
L-LO-V
-AL
P-AL
DONE
AL
Vee
/Vee
EE5
0
-
Page 27

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 27
*
Bit 6 and Bit 3 of Byte 6Eh are masked by Bit 6 and Bit 5 of Byte DDh in Table 01h, respectively.
**
Bit 0 of Address 01h can be written only if Bit 0 of Byte DDh in Table 01h is set.
BYTE
(hex)
57
58
59
5A
5B
5C
5D
5E
5F
6E
6F
74
BYTE/WORD
NAME bit
<1>
<1>
<1>
<1>
<1>
<1>
<1>
<1>
<1>
<1>
<1>
POA <1>
77 Host PW
78 Host PW
79 Host PW
7A Host PW
7B PWE
7C PWE
7D PWE
7E PWE
7F Table Select
<6>
<6>
<6>
<6>
<6>
<6>
<6>
<6>
Bit7 Bit6* Bit5 Bit4 Bit3 Bit2 Bit1 Bit0**
bit14bit13bit12bit11bit10bit9bit8bit7bit6bit5bit4bit3bit2bit1bit
15
L-HI-V
CC5
HI-TEMP-AL
MASK
HI-RX-P-AL
MASK
HI-TEMP-W
MASK
HI-RX-P-W
MASK
TX-NR MASK TX-F MASK
APD-SUP-F
MASK
HI-V
-AL
CC5
MASK
HI-V
CC5
MASK
TX-D SOFT TX-D MOD-NR P-DOWN/RST
TX-NR TX-F TX-CDR-NL RX-NR RX-CDR-NL Reserved Reserved Reserved
POA Reserved Reserved Reserved Reserved Reserved Reserved Reserved
31
2
23
2
15
2
7
2
31
2
23
2
15
2
7
2
<1>
7
2
-W L-LO-V
LO-TEMP-AL
LO-RX-P-AL
LO-TEMP-W
LO-RX-P-W
TEC-F MASK
LO-V
-W
LO-V
EXPANDED BYTES (CONTINUED)
CC5
MASK
MASK
MASK
MASK
CC5
MASK
CC5
MASK
30
2
22
2
14
2
6
2
30
2
22
2
14
2
6
2
6
2
-W L-HI-V
HI-AUX1-AL
HI-AUX1-W
TX-CDR-NL
-AL
HI-V
-W
HI-V
WAVE-NL
-W L-LO-V
CC3
Reserved Reserved
LO-AUX1-AL
MASK
MASK
Reserved Reserved
LO-AUX1-W
MASK
MASK
MASK
CC3
MASK
CC3
MASK
29
2
21
2
13
2
5
2
29
2
21
2
13
2
5
2
5
2
-AL
MASK
RX-NR MASK
Reserved Reserved Reserved Reserved Reserved
LO-V
MASK
-W
LO-V
MASK
CC3
2
2
2
2
2
2
2
2
2
CC3
28
20
12
28
20
12
CC3
-AL
-W
4
4
4
-W L-HI-V
HI-BIAS-AL
MASK
HI-AUX2-AL
MASK
HI-BIAS-W
MASK
HI-AUX2-W
MASK
RX-LOL
MASK
HI-V
MASK
HI-V
MASK
SOFT
P-DOWN
CC2
CC2
CC2
27
2
19
2
11
2
2
27
2
19
2
11
2
2
2
3
3
3
-W L-LO-V
LO-BIAS-AL
LO-AUX2-AL
LO-BIAS-W
LO-AUX2-W
RX-CDR-NL
-AL
LO-V
-W
LO-V
CC2
MASK
MASK
MASK
MASK
MASK
CC2
MASK
CC2
MASK
-W L-HI-V
EE5
HI-TX-P-AL
MASK
Reserved Reserved
HI-TX-P-W
MASK
Reserved Reserved
MOD-NR
MASK
-AL
HI-V
-AL
EE5
MASK
-W
HI-V
-W
EE5
MASK
-W L-LO-V
INTERRUPT RX-LOS DATA-NR
26
2
18
2
10
2
2
2
26
2
18
2
10
2
2
2
2
2
25
2
17
2
9
2
1
2
25
2
17
2
9
2
1
2
1
2
-W
EE5
LO-TX-P-AL
MASK
LO-TX-P-W
MASK
RESET-
DONE MASK
LO-V
-AL
EE5
MASK
LO-V
-W
EE5
MASK
24
2
16
2
8
2
0
2
24
2
16
2
8
2
0
2
0
2
0
Page 28

DS1862
XFP Laser Control and Digital Diagnostic IC
28 ____________________________________________________________________
Note: Byte DDh <6:5> of Table 01h enables bit 6 and bit 3 of Byte 6Eh in the lower memory.
TABLE 01H (SERIAL ID MEMORY)
ADDRESS
(hex)
<2>
80
<2>
88
<2>
90
<2>
98
<2>
A0
<2>
A8
<2>
B0
<2>
B8
<2>
C0
<2>
C8
<2>
D0
<2>
D8
<2>
E0
<2>
E8
<2>
F0
<2>
F8
BYTE
(hex)
DC
DD
DE
BYTE/WORD
NAME
<2>
<2>
LO Mem EN Reserved
<2>
AUX1/2 UNIT SEL AUX1-SEL 23AUX1-SEL 22AUX1-SEL 21AUX1-SEL 20AUX2-SEL 23AUX2-SEL 22AUX2-SEL 21AUX2-SEL 2
EE EE EE EE EE EE EE EE EE
WORD 0 WORD 1 WORD 2 WORD 3
Byte 0/8 Byte 1/9 Byte 2/A Byte 3/B Byte 4/C Byte 5/D Byte 6/E Byte 7/F
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE V
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EE EE EE EE EE EE EE EE
EXPANDED BYTES
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
bit14bit13bit12bit11bit10bit9bit8bit7bit6bit5bit4bit3bit2bit1bit
bit
15
Reserved Reserved Reserved Reserved Reserved Reserved Reserved V
Enable 6Eh,
bit 6
Enable 6Eh,
bit 3
Reserved Reserved Reserved Reserved LOCK-bit
CC2/3
_Sel
LO Mem 6Eh
enable
AUX1/2 Unit
Select
EE
CC2/3
0
_Sel
0
TABLE 02H (HOST USER MEMORY)
ADDRESS
(hex)
<3>
80–FF
WORD 0 WORD 1 WORD 2 WORD 3
Byte 0/8 Byte 1/9 Byte 2/A Byte 3/B Byte 4/C Byte 5/D Byte 6/E Byte 7/F
EE EE EE EE EE EE EE EE
TABLE 03H (MODSET LOOK-UP TABLE)
ADDRESS
(hex)
<4>
80–87
<4>
88–BF
<4>
C0–C7
WORD 0 WORD 1 WORD 2 WORD 3
Byte 0/8 Byte 1/9 Byte 2/A Byte 3/B Byte 4/C Byte 5/D Byte 6/E Byte 7/F
EE,
< -40°C
EE,
-40°C
EE,
-38°C
EE,
-36°C
EE,
-34°C
————————
EE,
+88°C
EE,
+90°C
EE,
+92°C
EE,
+94°C
EE,
+96°C
EE,
-32°C
EE,
+98°C
EE,
-30°C
EE,
+100°C
EE,
-28°C
EE, > +102°C
Page 29

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 29
ADDRESS
(hex)
<4>
80
<4>
88
<4>
90
<4>
98
Scale MS B RX-P
<4>
A0
<4>
A8
Offset MSB RX-P
<4>
B0
<7>
B8
BYTE
(hex)
81
82
83
84
85
86
87
8B
B2
ONF
B4
B8
B9
BA
BB
TABLE 04H (CONTROL AND CONFIG) (80H–BBH)
WORD 0 WORD 1 WORD 2 WORD 3
Byte 0/8 Byte 1/9 Byte 2/A Byte 3/B Byte 4/C Byte 5/D Byte 6/E Byte 7/F
Reserved
Quic k trip TX-P
high
Bia s shift,
TX-P shift
Quic k trip
TX-P low
Reserved Reserved
Scale
LSB RX-P
Offset MSB
temp
Offset
LSB temp
Offset
LSB RX-P
LUT INDEX
pointer
Module PWD
setting
LUT value LUT_conf Reserved DAC status Reserved Reserved Reserved
Module PWD
setting
RX-P shift
AUX1 shift
QT high bia s
setting
Scale MSB
V
CC3
Scale
MSB AUX1
Offset MSB
V
CC3
Offset MSB
AUX1
Module PWD
setting
AUX2 shift
Reserved
Control
Regi ster 2
Scale LSB
V
CC3
Scale
LSB AUX1
Offset
LSB V
CC3
Offset
LSB AUX1
Module PWD
setting
APC
course setting
APC
fine setting
LUT current
range
Reserved Reserved Reserv ed Reserved
Scale MSB
BIAS
Scale
MSB AUX2
Offset
MSB Bias
Offset MSB
AUX2
Scale
LSB BIAS
Scale LSB
AUX2
Offset LSB
BIAS
Offset LSB
AUX2
Scale
MSB TX-P
Reserved Reserved
Offset MSB
TX-P
Reserved Reserved
EXPANDED BYTES
BYTE
WORD
NAME
<4>
<4>
<4>
<4>
<4>
<4>
<4>
<4>
LUT_C
<4>
Module
<7>
PW
Module
<7>
PW
Module
<7>
PW
Module
<7>
PW
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
bit14 bit13 bit12 bit11 bit10 bit9 bit8 bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit
bit
15
Bias shift 23 Bias shift 22 Bias shift 21 Bias shift 20 TX-P shift 23 TX-P shift 22 TX-P shift 21 TX-P shift 2
RX-P shift
3
2
AUX2 shift
3
2
Rx-P shift
2
2
AUX2 shift
2
2
Rx-P shift
1
2
AUX2 shift
1
2
Rx-P shift
0
2
AUX2 shift
0
2
AUX1 shift
3
2
AUX1 shift
2
2
AUX1 shift
1
2
Reserved Reserved Reserved Reserved
APC 29 APC 28 APC 27 APC 26 APC 25 APC 24 APC 23 APC 2
Reserved Reserved Reserved R eserved Reserved Reserved APC 21 APC 2
Reserved Reserved Reserved Reserv ed Reserved LUT range 22 LUT range 21 LUT range 2
FET_POL
QT TX-P HI
mask
Reserved Reserved
Reserved Reserved Reserved Reserv ed Reserved SEEB TEN AEN
<4>
Safety flag Shutdown Reserved
231 2
223 2
215 2
27 2
30
22
14
6
QT BIAS HI
mask
Reserved-
enable
2
2
2
2
29
2
21
2
13
2
5
2
QT TX-P LO
mask
Reserved Reserved scr_sink_b Reserved
TEMP_int-ext Reserved Reserved Reserved Reserved
QT TX-P LO
FLAG
28
2
20
2
12
2
4
2
QT TX-P HI
FLAG
27
2
19
2
11
2
3
2
QT BIAS HI
FLAG
Reserved Reserved
26
2
18
2
10
2
2
2
25
2
17
2
9
2
1
2
Control
Regi ster 1
Scale
LSB TX-P
Offset
LSB TX-P
AUX1 shift
0
2
2
0
24
16
8
0
0
0
0
Page 30

DS1862
XFP Laser Control and Digital Diagnostic IC
30 ____________________________________________________________________
Detailed Register Description
Conventions
Name of Row
•
Name of Byte
...................<Read/Write><Volatile><Power-On Value>
•
Name of Byte
...................<Read/Write><Nonvolatile><Factory-Default Setting>
•
Name of Byte
...................<Read/Write><Shadowed Nonvolatile><Factory-Default Setting>
•
Name of Byte
...................<Read/Write><Status><Power-On Value>
Lower Memory
00h
•
User EE
............................< R-all / W-all ><Shadowed Nonvolatile><00>
01h
•
SRAM
...............................< R-all / W-all ><Volatile><00> Bit 0 can only be written if Table 01h, Byte DDh, bit
<0> is high. Bits <2:1> control EN2 and EN1, repectively.
02h → 39h
•
Alarms and warnings
.......< R-all / W-Module ><Shadowed Nonvolatile ><Note*> These registers set the 16-
bit threshold level for corresponding monitor channels. *Note: High alarm and warnings factory default to FFFFh, and low alarm shut warnings default to 0000h.
3Ah, 3Bh
•
User EE
............................< R-all / W-all ><Shadowed Nonvolatile><00>
46h → 4Fh
•
User SRAM
......................< R-all / W-all ><Volatile><00>
50h → 57h
•
Latched Flags
..................< R-all /clear-all ><Volatile><00> These are latched flags for corresponding signals.
Any flag is cleared by simply reading it.
58h → 5Fh
•
masks
...............................< R-all / W-all >< Nonvolatile><00> These mask bits internally block the signals that
drive the INTERRUPT pin. A low setting causes the corresponding monitor channel
to drive the INTERRUPT pin.
60h → 6Dh
Monitor values
............................< R-all / W-all ><Volatile><xxxx> These registers are internally updated with the
monitor channel’s digital result. They can be read as left-justified 16-bit values.
6Eh
GCS1
.........................................< R-all / W-all ><Volatile><xx> These are nonlatched flags, indicating the real-time
digital state of a corresponding signal as well as control bits for particualr functions.
TABLE 05H (OPTIONAL OFFSETS AND THRSET)
ADDRESS
(hex)
80–87 DS60 SCALE LM50 SCALE Reserved Reserved Reserved
BYTE
(hex)
80 DS60 SCALE
82 LM50 SCALE
87 V
BYTE/WORD
T H R S E T_ V al ue
WORD 0 WORD 1 WORD 2 WORD 3
Byte 0/8 Byte 1/9 Byte 2/A Byte 3/B Byte 4/C Byte 5/D Byte 6/E Byte 7/F
EXPANDED BYTES
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
NAME
bit
bit14bit13bit12bit11bit
< 5> 215214213212211210
< 5> 215214213212211210
15
7
2
6
2
5
2
bit
10
bit8bit7bit6bit5bit4bit3bit2bit1bit
9
9
2
9
2
8
7
2
2
8
7
2
2
4
2
3
2
262
262
5
4
2
2
5
4
2
2
2
2
V
TH
3
3
1
2
DAC Value
22212
22212
0
2
<1>
0
0
0
Page 31

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 31
Bit 0: DATA_NOT_READY. Bit is high until DS1862 has achieved power-up. Bit goes low, signaling that monitor
channel data is ready to be read.
Bit 1: RX-LOS. Indicates optical loss of the signal and is updated within t
LOS-ON
.
Bit 2: Interrupt. Indicates the state of the INTERRUPT pin and is updated within t
INIT ON
.
Bit 3: Soft P-DOWN/RST. R/W bit that places the DS1862 in power-down mode. Toggle to reset. Masked by Bit 5
of Byte DDh in Table 01h.
Bit 4: P-DOWN/RST. Indicates the digital state of the P-DOWN/RST pin and is updated within t
PDR-ON
.
Bit 5: MOD_NR State. Indicates the state of MOD_NR pin and is updated within t
PDR-ON
.
Bit 6: Soft TX-D. R/W bit that disables (shuts down) I
BIASSET
and I
MODSET
. Masked by Bit 6 of Byte DDh in Table 01h.
Bit 7: TX-D. Indicates the digital state of the TX-D pin and is updated within t
OFF
.
6Fh
• 6Fh
GCS0
........................< R-all / W-all ><Status><XX> These are nonlatched flags, indicating the real-time
digital state of a corresponding signal.
Bit 0: Reserved.
Bit 1: Reserved.
Bit 2: Reserved.
Bit 3: RX_CDR not locked. Indicates LOL in Rx path CDR.
Bit 4: RX_NR state. Indicates a NOT READY condition in the Rx path.
Bit 5: Reserved.
Bit 6: TX-FAULT State. Indicates a laser safety fault condition.
Bit 7: TX_NR State. Indicates a NOT READY condition on the Tx path.
74h
•
POA
..................................< R-all / W-all ><Volatile><00> A high on bit 7 indicates that V
CC3
is below the
Power-on analog trip point, POA.
76h
•
PEC Enable
........................< R-all / W-all ><Volatile><00> Bit 0 is used to enable PEC. A value of 1 enables PEC.
77h → 7Ah
•
Host PW Change
.............< R-never / W-Host ><Shadowed Nonvolatile P><00> This is the 32-bit location that
the DS1862 uses to compare with the PWE to grant host password access. A Read
result is always <FFh>.
7Bh → 7Eh
•
PWE
.....................................< R-never / W-all ><Volatile><00> This is the 32-bit location that is used to enter the host
and module password to gain acess to the DS1862. A Read result is always <FFh>.
7Fh
• Table Select ..................... < R-all / W-all ><Volatile><01> This is the 8-bit register that controls which section
of upper memory (table) is being adressed by I2C. A value of 00h and 01h results in
adressing Table 01h. Values above 05h are accepted, but do not correspond to any
physical memory.
Table 01h
80h → DBh
•
User EE
............................< R-all / W-Module ><Nonvolatile><00>
DCh
• V
CC2/3
_
Sel
.......................< R-all / W-Module ><Shadowed Nonvolatile><00> Bit 0 of this register controls
whether V
CC2
or V
CC3
is internally measured by the V
CC2/3
monitor channel. A ‘1’
selects V
CC2
to be measured.
Page 32

DS1862
XFP Laser Control and Digital Diagnostic IC
32 ____________________________________________________________________
DDh
•
6Eh Enable
......................< R-all / W-Module ><Shadowed Nonvolatile><00> If bit 5 is high, then bit 3 of 6Eh
is not masked. If bit 6 is high, then bit 6 of 6Eh is not masked. Bit 0 is the Lock_Bit. If
set, Lower Memory address 01h, bit 0 is writable.
DEh
•
AUX1/2 Unit Sel
...............< R-all / W-Module ><Shadowed Nonvolatile><00> These two 4-bit values define
what is being meausred on AUX1MON and AUX2MON. MSB is AUX1MON unit
select and LSB is AUX2MON unit select. See Table 5 for more detail.
DFh
•
User EE
............................< R-all / W-Module ><Shadowed Nonvolatile><00>
E0h → FFh
•
User EE
............................< R-all / W-Module ><Nonvolatile><00>
Table 02h
80h → FFh
•
User EE
............................< R-all / W-Host ><Nonvolatile><00>
Table 03h
80h → C7h
•
LUT
..................................< R-Module / W-Module ><Nonvolatile><00> These registers control the output cur-
rent on MODSET as a function of temperature.
Table 04h
80h → B8h
81h
•
Bias shift
..........................< R-Module / W-Module ><Shadowed Nonvolatile><0> This 4-bit value in <7:4>
defines how many right-shifts IBIASMON monitor channel receives. The MSB is bit 7.
•
TX-P shift
..........................< R-Module / W-Module ><Shadowed Nonvolatile><0> This 4-bit value in <3:0>
defines how many right-shifts TX-P (BMD) monitor channel receives. The MSB is bit 3.
82h
•
AUX1 shift
........................< R-Module / W-Module ><Shadowed Nonvolatile><0> This 4-bit value in <7:4>
defines how many right-shifts AUX1MON monitor channel receives. The MSB is bit 7.
•
RX-P shift
.........................< R-Module / W-Module ><Shadowed Nonvolatile><0> This 4-bit value in <3:0>
defines how many right-shifts RX-P (RSSI) monitor channel receives. The MSB is bit 3.
83h
•
AUX2 shift
........................< R-Module / W-Module ><Shadowed Nonvolatile><0> This 4-bit value in <7:4>
defines how many right-shifts AUX2MON monitor channel receives. The MSB is bit 3.
84h
•
APC REF COARSE
...........< R-Module / W-Module ><Shadowed Nonvolatile><00> This 8-bit value sets the
coarse APC current on BMD.
Page 33

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 33
85h
•
APC REF FINE
.................< R-Module / W-Module ><Shadowed Nonvolatile><00> This 2-bit value in <1:0>
sets the fine APC current on BMD. The MSB is bit 6.
86h
•
LUT Range
.......................< R-Module / W-Module ><Shadowed Nonvolatile><00> This 3-bit register in <2:0>
sets the current range on MODSET. The MSB is bit 2.
87h
•
Control Reg1
....................< R-Module / W-Module ><Shadowed Nonvolatile><00>
Bit 0: Reserved.
Bit 1: SRC_SNK_B. If set, then BMD sources current, otherwise BMD sinks current.
Bit 2: Reserved.
Bit 3: Reserved.
Bit 4: QT TX-P Low mask. If set, then TX-P low does not have the ability to cause a safety fault.
Bit 5: QT HIGH BIAS mask. If set, then HIGH BIAS does not have the ability to cause a safety fault.
Bit 6: QT TX-P High mask. If set, then TX-P high does not have the ability to cause a safety fault.
Bit 7: FETG_POL. If set, then FETG asserts with a high logic level, otherwise it asserts with a low logic level.
88h
•
QT TX-P HI
.......................< R-Module / W-Module ><Shadowed Nonvolatile><FF> This is the TX-P quick-trip
threshold setting that is used as a comparison to generate a TX-P High safety fault.
89h
•
QT TX-P LO
......................< R-Module / W-Module ><Shadowed Nonvolatile><00> This is the TX-P quick-trip
threshold setting that is used as a comparison to generate a TX-P Low safety fault.
8Ah
•
QT HIGH BIAS
.................< R-Module / W-Module ><Shadowed Nonvolatile><FF> This is the TX-P quick-trip
threshold setting that is used as a comparison to generate a BIAS High safety fault.
8Bh
•
Control Reg2
....................< R-Module / W-Module ><Shadowed Nonvolatile><00>.
Bit 0: Reserved.
Bit 1: Reserved.
Bit 2: Reserved.
Bit 3: Reserved.
Bit 4: TEMP_INT-EXT. If set, then the LUT index pointer is controlled by AUX2MON. Otherwise the internal temperature sensor controls the LUT.
Bit 5: Reserve_EN. If set, then V
CC2/3
is actively updated in the monitor loop.
Bit 6: Reserved.
Bit 7: Reserved.
Page 34

DS1862
XFP Laser Control and Digital Diagnostic IC
34 ____________________________________________________________________
92h
V
CC2/3
SCALE
...........................< R-Module / W-Module ><Shadowed Nonvolatile><Factory Trimmed> This 16-bit
register controls the scale value for the V
CC2/3
monitor channel.
94h
•
BIAS SCALE
.....................< R-Module / W-Module ><Shadowed Nonvolatile><Factory Trimmed> This 16-bit
register controls the scale value for the BIAS monitor channel.
96h
•
TX-P SCALE
.....................< R-Module / W-Module ><Shadowed Nonvolatile><Factory Trimmed> This 16-bit
register controls the scale value for the TX-P (BMD) monitor channel.
98h
•
RX-P SCALE
.....................< R-Module / W-Module ><Shadowed Nonvolatile><Factory Trimmed> This 16-bit
register controls the scale value for the RX-P (RSSI) monitor channel.
9Ah
•
AUX1 SCALE
...................< R-Module / W-Module ><Shadowed Nonvolatile><Factory Trimmed> This 16-bit
register controls the scale value for the AUX1MON monitor channel.
9Ch
•
AUX2 SCALE
...................< R-Module / W-Module ><Shadowed Nonvolatile><Factory Trimmed> This 16-bit
register controls the scale value for the AUX2MON monitor channel.
A0h
•
TEMP OFFSET
.................< R-Module / W-Module ><Shadowed Nonvolatile><Factory Trimmed> This 16-bit
register controls the offset value for the internal temperature monitor channel.
A2h
• V
CC2/3
OFFSET
................< R-Module / W-Module ><Shadowed Nonvolatile><0000> This 16-bit register con-
trols the offset value for the V
CC2/3
monitor channel.
A4h
• BIAS OFFSET................... < R-Module / W-Module ><Shadowed Nonvolatile><0000> This 16-bit register con-
trols the offset value for the BIAS monitor channel.
A6h
•
TX-P OFFSET
...................< R-Module / W-Module ><Shadowed Nonvolatile><0000> This 16-bit register con-
trols the offset value for the TX-P (BMD) monitor channel.
A8h
•
RX-P OFFSET
...................< R-Module / W-Module ><Shadowed Nonvolatile><0000> This 16-bit register con-
trols the offset value for the RX-P (RSSI) monitor channel.
AAh
•
AUX1 OFFSET
..................< R-Module / W-Module ><Shadowed Nonvolatile><0000> This 16-bit register con-
trols the offset value for the AUX1MON monitor channel.
ACh
•
AUX2 OFFSET
..................< R-Module / W-Module ><Shadowed Nonvolatile><0000> This 16-bit register con-
trols the offset value for the AUX2MON monitor channel.
B0h
•
LUT INDEX PNTR
.............< R-Module / W-Module ><Volatile><xx> This register controls the index pointer
vaue for the LUT. It is automatically updaded (in normal operating mode) and can
be read or overwriten using the TEN and AEN bits.
Page 35

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 35
B1h
•
LUT VALUE
......................< R-Module / W-Module ><Shadowed Nonvolatile><00> This register contains the
fetched LUT value that drives the MODSET current. It can be read or overwritten to
directly control the MODSET current (manual mode).
B2h
•
LUT_CONF
.......................< R-Module / W-Module ><Shadowed Nonvolatile><03>
Bit 0: AEN. A high on AEN enables data placed in the LUT Value register to drive MODSET.
Bit 1: TEN. A high on TEN enables the LUT index pointer to fetch data from the LUT.
Bit 2: SEEB. A high on SEEB disables EEPROM writes of Shadowed EEPROM locations.
Bit 3: Reserved.
Bit 4: Reserved.
Bit 5: Reserved.
Bit 6: Reserved.
Bit 7: Reserved.
B4h
•
DAC STATUS
...................< R-Module / W-Module ><Status><xx0xxx00b>
Bit 0: Reserved.
Bit 1: Reserved.
Bit 2: QT HIGH BIAS flag. This flag indicates that the current entering BIASSET is above the threshold.
Bit 3: QT HIGH TX-P flag. This flag indicates that TX-P is above the threshold.
Bit 4: QT LOW TX-P flag. This flag indicates that TX-P is below the threshold.
Bit 5: Reserved.
Bit 6: Shutdown flag. A high indicates that the DS1862 is in shutdown mode and that FETG is asserted.
Bit 7: Safety flag. A high indicates that a safety fault (quick trip) has occurred.
B8h
•
MOD_PW_CHNG
.............< R-never / W-Module ><Shadowed Nonvolatile><00h> This is the 32-bit location
that the DS1862 uses to compare with the PWE to grant Module password access.
A Read result is always <FFh>.
Table 05h
80h
•
DS60 SCALE
....................< R-all / W-Factory ><Nonvolatile><Factory Trimmed> This unique 16-bit value sets
the SCALE register for use with a DS60 temperature sensor on AUX2MON.
82h
•
LM5O SCALE
...................< R-all / W-Factory ><Nonvolatile><Factory Trimmed> This unique 16-bit value sets
the SCALE register for use with a LM50 temperature sensor on AUX2MON.
87h
•
V
THRSET_Value
..................< R-all / W-all ><Shadowed Nonvolatile><80> This 8-bit value sets the voltage on
the signal conditioner voltage source, THRSET.
Page 36

DS1862
XFP Laser Control and Digital Diagnostic IC
36 ____________________________________________________________________
Security/Password Protection
The DS1862 features two separate and independent
32-bit passwords for important memory locations. The
host password and the module password allow their
own allocated memory locations to be locked to prevent write and/or read access. To enhance the security
of the DS1862, the Password Entry and Setting bytes
can never be read.
To gain access to host-protected or module-protected
memory locations, the correct 32-bit value must be
entered in to the password entry bytes (PWE) in either a
single four-byte write, or four single-byte writes. To reprogram either password, simply enter the appropriate current password to gain memory access, write the new Host
or Module PW with one four-byte write, and finally reenter
the new password into the PWE to regain memory access.
Power-Up Sequence
The DS1862 does require a particular power-up
sequence to ensure proper functionality. V
CC3
should
always be applied first or at the same time as V
CC2
. If
this power-up sequence is not followed, then current can
be sourced out of V
CC2
as if it was connected to V
CC3
with a resistor internal to the DS1862. If V
CC2
is not used
then it should be externally connected to V
CC3
.
Signal Conditioners—
EN1 and EN2 and VTHRES
Signal Conditioners—EN1 and EN2
The EN1 and EN2 output pins are controlled by the bits
at address 01h, bits 2 and 1. The logic state of the pins
is directly analogous to the logical state of the register.
EN1 and EN2 automatically change to a high and low
state, respectively, during power-down mode as
described in the
Power-Down Functionality
section.
Signal Conditioners—VTHRES
A programmable voltage source, THRSET is also provided for use with signal conditioners. This source is
programmable from 0 to 1V in 256 increments.
I2C and Packet Error
Checking (PEC) Information
The DS1862 supports I2C data transfers as well as data
transfers with PEC. The slave address is unalterable
and is set to A0h. The DS1862, however, does have an
additional dedicated pin, MOD-DESEL, which acts as
an active-low chip select to enable communication. See
the
I2C Serial Interface
and the
I2C Operation Using
Packet Error Checking
sections for details.
Precision SCALE Register
Settings for AUX2MON
The DS1862 features a factory-trimmed SCALE value
for use with DS60 or LM50 temperature sensors. If
external temperature measurement on AUX2MON is
used with one of these two sensors, the 16-bit SCALE
value can be read from Table 05h and written into the
SCALE register in Table 04h, Byte 9Ch and 9Dh. This
option allows for the most precise setting for SCALE
without requiring additional trimming. Since the SCALE
register value is precisely trimmed at the factory, the
OFFSET register will always be a non-unique value and
can simply be written into are OFFSET register. For the
DS60, the value of EF0Ah in OFFSET completes the
internal calibration. For the LM50, the value of F380h in
OFFSET completes the internal calibration.
I2C Serial Interface
I2C Definitions
The following terminology is commonly used to describe
I2C data transfers.
Master device: The master device controls the slave
devices on the bus. The master device generates SCL
clock pulses, start and stop conditions.
Slave devices: Slave devices send and receive data at
the master’s request.
Bus idle or not busy: Time between stop and start
conditions when both SDA and SCL are inactive and in
their logic-high states.
Start condition: A start condition is generated by the
master to initiate a new data transfer with a slave.
Transitioning SDA from high to low while SCL remains
high generates a start condition. See Figure 14 for
applicable timing.
Stop condition: A stop condition is generated by the
master to end a data transfer with a slave. Transitioning
SDA from low to high while SCL remains high generates
a stop condition. See Figure 14 for applicable timing.
Repeated start condition: The master can use a
repeated start condition at the end of one data transfer
to indicate that it will immediately initiate a new data
transfer following the current one. Repeated starts are
commonly used during read operations to identify a specific memory address to begin a data transfer. A repeated start condition is issued identically to a normal start
condition. See Figure 14 for applicable timing.
Page 37

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 37
Bit write: Transitions of SDA must occur during the low
state of SCL. The data on SDA must remain valid and
unchanged during the entire high pulse of SCL plus the
setup and hold time requirements (Figure 14). Data is
shifted into the device during the rising edge of the SCL.
Bit read: At the end of a write operation, the master
must release the SDA bus line for the proper amount of
setup time (Figure 14) before the next rising edge of
SCL during a bit read. The device shifts out each bit of
data on SDA at the falling edge of the previous SCL
pulse and the data bit is valid at the rising edge of the
current SCL pulse. Remember that the master generates all SCL clock pulses including when it is reading
bits from the slave.
Acknowledgement (ACK and NACK): An Acknowledgement (ACK) or Not Acknowledge (NACK) is always
the 9th bit transmitted during a byte transfer. The device
receiving data (the master during a read or the slave during a write operation) performs an ACK by transmitting a
zero during the 9th bit. A device performs a NACK by
transmitting a one during the 9th bit. Timing (Figure 14)
for the ACK and NACK is identical to all other bit writes.
An ACK is the acknowledgment that the device is properly receiving data. A NACK is used to terminate a read
sequence or as an indication that the device is not
receiving data.
Byte write: A byte write consists of 8 bits of information
transferred from the master to the slave (most significant bit first) plus a 1-bit acknowledgement from the
slave to the master. The 8 bits transmitted by the mas-
ter are done according to the bit write definition and the
acknowledgement is read using the bit read definition.
Byte read: A byte read is an 8-bit information transfer
from the slave to the master plus a 1-bit ACK or NACK
from the master to the slave. The 8 bits of information
that are transferred (most significant bit first) from the
slave to the master are read by the master using the bit
read definition, and the master transmits an ACK using
the bit write definition to receive additional data bytes.
The master must NACK the last byte read to terminate
communication so the slave returns control of SDA to
the master.
Slave address byte: Each slave on the I
2
C bus
responds to a slave addressing byte sent immediately
following a start condition. The slave address byte contains the slave address in the most significant 7 bits
and the R/W bit in the least significant bit.
The DS1862’s slave address is 1010000Xb. The MODDESEL pin is used as a chip select, and allows the
device to respond or ignore I2C communication that
has A0h as the device address. By writing the correct
slave address with R/W = 0, the master indicates it will
write data to the slave. If R/W = 1, the master will read
data from the slave. If an incorrect slave address is
written, the DS1862 assumes the master is communicating with another I2C device and ignores the communications until the next start condition is sent.
Memory address: During an I2C write operation, the
master must transmit a memory address to identify the
memory location where the slave is to store the data.
Figure 14. I2C Timing Diagram
SDA
t
BUF
SCL
STOP START
NOTE: TIMING IS REFERENCED TO V
IL(MAX)
t
t
HD:STA
LOW
AND V
t
t
HD:STA
t
R
t
HD:DAT
.
IH(MIN)
t
F
t
t
HIGH
t
SU:DAT
REPEATED
SU:STA
START
SP
t
SU:STO
Page 38

DS1862
XFP Laser Control and Digital Diagnostic IC
38 ____________________________________________________________________
The memory address is always the second byte transmitted during a write operation following the slave
address byte.
I2C Communication
Writing a single byte to a slave: The master must
generate a start condition, write the slave address byte
(R/W = 0), write the memory address, write the byte of
data, and generate a stop condition. Remember the
master must read the slave’s acknowledgement during
all byte write operations.
Writing multiple bytes to a slave: To write multiple
bytes to a slave, the master generates a start condition,
writes the slave address byte (R/W = 0), writes the
memory address, writes up to 4 data bytes, and generates a stop condition.
The DS1862 is capable of writing 1 to 4 bytes (referred
to as 1 row or page) with a single write transaction. This
is internally controlled by an address counter that
allows data to be written to consecutive addresses
without transmitting a memory address before each
data byte is sent. The address counter limits the write
to one row of the memory map. Attempts to write to
additional memory rows without sending a stop condition
between rows results in the address counter wrapping
around to the beginning address of the present row.
To prevent address wrapping from occurring, the master must send a stop condition at the end of the row,
and then wait for the bus free or EEPROM write time to
elapse. Then the master can generate a new start condition, write the slave address byte (R/W = 0), and the
first memory address of the next memory row before
continuing to write data.
Acknowledge polling: Any time EEPROM is written,
the DS1862 requires the EEPROM write time (tW) after
the stop condition to write the contents of the row to
EEPROM. During the EEPROM write time, the DS1862
does not acknowledge its slave address because it is
busy. It is possible to take advantage of this phenomenon by repeatedly addressing the DS1862, which
allows the next row to be written as soon as the DS1862
is ready to receive the data. The alternative to acknowledge polling is to wait for the maximum period of tWto
elapse before attempting to write again to the DS1862.
EEPROM write cycles: When EEPROM writes occur,
the DS1862 writes the whole EEPROM memory 4-byte
row even if only a single byte on the row was modified.
Writes that do not modify all 4 bytes on the row are
allowed and do not corrupt the remaining bytes of
memory on the same row. Because the whole row is
written, bytes on the row that were not modified during
the transaction are still subject to a write cycle. This
can result in a whole row being worn out over time by
writing a single byte repeatedly. Writing a row one byte
at a time wears out the EEPROM four times faster than
writing the entire row at once. The DS1862’s EEPROM
write cycles are specified in the
Nonvolatile Memory
Characteristics
table.
Reading a single byte from a slave: Unlike the write
operation that uses the memory address byte to define
where the data is to be written, the read operation
occurs at the present value of the memory address
counter. To read a single byte from the slave at the
location currently in the address counter; the master
generates a start condition, writes the slave address
byte with R/W = 1, reads the data byte with a NACK to
indicate the end of the transfer, and generates a stop
condition.
Manipulating the address counter for reads: A
dummy write cycle can be used to force the address
counter to a particular value. To do this the master generates a start condition, writes the slave address byte
(R/W = 0), writes the memory address where it desires
to read, generates a repeated start condition, writes the
slave address byte (R/W = 1), reads data with ACK or
NACK as applicable, and generates a stop condition.
See Figure 15 for a read example using the repeated
start condition to specify the starting memory location.
Reading multiple bytes from a slave: The read operation can be used to read multiple bytes with a single
transfer. When reading bytes from the slave, the master
simply ACKs the data byte if it desires to read another
byte before terminating the transaction. After the master reads the last byte it NACKs to indicate the end of
the transfer and generates a stop condition. This can
be done with or without modifying the address
counter’s location before the read cycle. If the address
counter reaches the last physical address, the internal
index pointer loops back to the first memory location in
a given memory table. For example, if address FFh in
Table 02h is read, the next byte of data to be returned
to the master is address 80h in Table 2, not 00h in
lower memory.
Page 39

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 39
I2C Operation using
Packet Error Checking
Read Operation with
Packet Error Checking
Packet error checking during reads is supported by the
DS1862. Information is transferred form the DS1862 in
much the same way as conventional I2C protocol, however, an extra CRC field is added and checked. The
still begins by sending the device address (A0h for
DS1862), then the index pointer to the memory address
of interest. The next byte transferred, however will be
the value of the intended number of bytes to be read.
The calculation of the CRC-8 includes and requires the
explicit starting memory address to be included as the
second transferred byte (dummy write byte). Next, the
slave transfers the data back as the master acknowledges. Only 1 to 128 bytes can be sequentially read
during one transmission while using PEC. After the
master reads the intended number of bytes, the CRC-8
value is transmitted by the DS1862. The master ends
the communication with a NACK and a STOP. See
Figure 16 for a graphical representation. The CRC-8 is
calculated starting with the MSB of the memory
address pointer, number of bytes to read, and the read
data. The master can then verify the CRC-8 value and
reject the read data if the CRC-8 value does not correspond to the received CRC value. The CRC-8 must be
calculated by using the following polynomial for both
reads and writes:
C(x) = X
8+X2
+ X + 1
Write Operation with
Packet Error Checking
Packet error checking during writes is also supported
by the DS1862. Information is written to the DS1862 in
much the same way as conventional I2C protocol, however, an extra CRC field is added and checked. The
master still begins by sending the device address, then
the index pointer to the memory address of interest.
The next byte however, will be the value of the intended
number of bytes to be written. The calculation of the
Figure 15. I2C Communications Examples
COMMUNICATIONS KEY
START ACK
S
STOP
PN
REPEATED
SR
START
WRITE A SINGLE BYTE
S
101 0 0000
WRITE UP TO A 4-BYTE PAGE WITH A SINGLE TRANSACTION
S
101 0 0000
READ A SINGLE BYTE WITH A DUMMY WRITE CYCLE TO SET THE ADDRESS COUNTER
101 0 0000
S
READ MULTIPLE BYTES WITH A DUMMY WRITE CYCLE TO SET THE ADDRESS COUNTER
101 0 0000
S
A
NOT
ACK
XXXXXXXX
WHITE BOXES INDICATE THE MASTER IS
CONTROLLING SDA
SHADED BOXES INDICATE THE SLAVE IS
CONTROLLING SDA
8-BITS ADDRESS OR DATA
A
MEMORY ADDRESS
A
MEMORY ADDRESS
MEMORY ADDRESS
A
A
MEMORY ADDRESS
A
A
ASR
SR
A
DATA
DATA
101 0 0000
101 0 0000
NOTE:
ALL BYTES ARE SENT MOST SIGNIFICANT BIT FIRST.
THE FIRST BYTE SENT AFTER A START CONDITION IS
ALWAYS THE SLAVE ADDRESS FOLLOWED BY THE
READ/WRITE BIT.
A
P
A
A
A
DATA
DATA
DATA
A
P
N
P
A
DATA
AA
DATA
DATA
N
P
Page 40

DS1862
XFP Laser Control and Digital Diagnostic IC
40 ____________________________________________________________________
CRC-8 includes and requires the explicit starting memory address to be included as the second transferred
byte. Next, the master transfers the data as the DS1862
acknowledges. Only 4 bytes can be sequentially written
during one transmission while using PEC. After the
master writes the intended number of bytes, the CRC-8
value should be transmitted. Following the CRC-8 byte
the master should transmit the CAB byte (CRC Add-on
Byte). At this point, the DS1862 sends an ACK if the
CRC-8 matches its internal calculated value or a NACK
if not. Finally the master should end the communication
and send a STOP. See Figure 16 for a graphical representation. The CRC-8 is calculated starting with the
MSB of the memory address pointer, number of bytes
to be written, and the written data. The master can then
poll the last ACK or NACK for successful transfer of
written data.
For more information on I2C PEC communications,
please refer to the XFP and/or SMBus 2.0 standard.
Applications Information
Calibrating APC and Extinction Ratio
Before calibrating, the APC register should be set to a
low value to ensure the laser’s maximum power level is
not exceeded before the power level is calibrated.
Additionally, the ER should be set to a minimum value
to ensure that a data test pattern does not cause the
laser to shut off. Once the APC and ER registers are at
minimal values, enable a data pattern and calibrate the
average power level.
Calibrating the Average Power Level
While sending data through the laser diode, increase
the value in the APC register until the light output
matches the desired average
power level. The average
power level is the arithmetic average of the ‘1’ and ‘0’
power levels.
Figure 16. I2C PEC Communications Examples
COMMUNICATIONS KEY
START ACK
S
STOP
PN
REPEATED
SR
START
A
NOT
ACK
XXXXXXXX
WHITE BOXES INDICATE THE MASTER IS
CONTROLLING SDA
SHADED BOXES INDICATE THE SLAVE IS
CONTROLLING SDA
8-BIT ADDRESS OR DATA
NOTE:
ALL BYTES ARE SENT MOST SIGNIFICANT BIT FIRST.
THE FIRST BYTE SENT AFTER A START CONDITION IS
ALWAYS THE SLAVE ADDRESS FOLLOWED BY THE
READ/WRITE BIT.
WRITE UP TO A 4-BYTE PAGE WITH A SINGLE TRANSACTION USING PEC
S
101 0 0000
DATA
READ 1–128 BYTES WITH A DUMMY WRITE CYCLE TO SET THE ADDRESS COUNTER
101 0 0000 101 0 0000
S
DATA
A
MEMORY ADDRESS
A
A
AA
DATA
A (IF CRC-8 IS CORRECT)
MEMORY ADDRESS
DATA
A
A
A
NUMBER OF BYTES
DATADATA
P
NUMBER OF BYTES
CRC-8 VALUE
A
A
SR
A
DATA
CRC-8 VALUE
N
P
A
A
A
Page 41

DS1862
XFP Laser Control and Digital Diagnostic IC
____________________________________________________________________ 41
Power-Supply Decoupling
To achieve best results, it is recommended that the
power supply is decoupled with a 0.01µF or a 0.1µF
capacitor. Use high-quality, ceramic, surface-mount
capacitors, and mount the capacitors as close as possible to the V
CC2/VCC3
and GND pins to minimize lead
inductance.
SDA and SCL Pullup Resistors
SDA is an open-collector bidirectional data pin on the
DS1862 that requires a pullup resistor to realize high
logic levels. Either an open-collector output with a
pullup resistor or a push-pull output driver can be utilized for the SCL input. Pullup resistor values should be
chosen to ensure that the rise and fall times listed in the
AC Electrical Characteristics
are within specification.
*ADDITIONAL MONITORS NOT USED IN THIS EXAMPLE.
SDA
SCL
4.7kΩ
RX-LOS
MOD-NR
V
CC2
TX-D
INTERRUPT
MOD-DESEL
V
CC3
EN1
SC-TX-LOS
GND
EN2
BMD
BIASSET
MODSET
FETG
BIASMON
RSSI
SC-RX-LOL
SC-RX-LOS
THRSET
AUX1MON
AUX2MON
P-DOWN/RST
HOST
1.8V 3.3V
3.3V
0.1μF
0.1μF
BIASSET
MODSET
MON
LASER
DRIVER
10nF
OUT
LIMITING
AMP
LOS
LOL
FCTL2
FCTL1
VTH
LOS
FCTL2
FCTL1
EQUALIZER
RECEIVER CURRENT SENSE (VOLTAGE)
TX-DISABLE
TX-DISABLE
DISABLE
1nF
*
1kΩ
DS1862
MAX3975
MAX3991
MAX3992
4.7kΩ
3.3V
10kΩ
3.3V
10kΩ
3.3V
10kΩ
3.3V
Typical Operating Circuit
Page 42

DS1862
XFP Laser Control and Digital Diagnostic IC
42 ____________________________________________________________________
Chip Topology
TRANSISTOR COUNT: 75,457
SUBSTRATE CONNECTED TO GROUND
Package Information
For the latest package outline information, go to
www.maxim-ic.com/DallasPackInfo
.
PACKAGE TYPE DOCUMENT NO.
25 CSBGA
56-G6013
Page 43

DS1862
XFP Laser Control and Digital Diagnostic IC
Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are
implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.
Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600 ____________________
43
© 2007 Maxim Integrated Products is a registered trademark of Maxim Integrated Products, Inc.
is a registered trademark of Dallas Semiconductor Corporation.
Heaney
Revision History
REVISION
NUMBER
0 2/06 Initial release. —
1 12/07
REVISION
DATE
DESCRIPTION
Removed I
Corrected password level control for B8h of Table 04h from <4> to <7>.
Corrected grammar for Byte 01h SRAM description: “bits” after “Byte DDh”
changed to “bit”.
Clarified the function of the DDh enable bits, added the following sentence to
the 6Eh Bit 3 description: “Mas ked by Bit 5 of B yte DDh in Table 01h.”
Clarified the function of the DDh enable bits, added the following sentence to
the 6Eh Bit 6 description: “Mas ked by Bit 6 of B yte DDh in Table 01h.”
Clarified the Read function of the Host PW Change and PWE descriptions,
added the following sentence to both descriptions: “A Read result is always
<FFh>.”
Corrected and clarified the Module pas sword value, changed the current
description to:
<R-never / W-Module><Shadowed Nonvolatile><00h> This is the 32-bit
location that the DS1862 uses to compare with the PWE to grant Module
password access. A Read result is always <FFh>.
Added Package Information table.
2
C disclaimer.
PAGES
CHANGED
1, 29–31, 35, 42
 Loading...
Loading...