

Page 1
71M6541D/F/G
和 71M6542F/G
电表 IC
数据资料
MPU
RTC
TIMERS
IAP
VA
IBP
XIN
XOUT
RX
TX
TX
RX
COM0...5
V3P3A V3P3SYS
VBAT
VBAT_RTC
SEG
GNDA GNDD
SEG/DIO
DIO
ICE
LINE
NEUTRAL
LOAD
8888.8888
PULSES,
DIO
IR
AMR
POWER FAULT
COMPARATOR
MODUL-
ATOR
SERIAL PORTS
OSCILLATOR/
PLL
MUX and ADC
LCD DRIVER
DIO, PULSES
COMPUTE
ENGINE
FLASH
MEMORY
RAM
32 kHz
REGULATOR
Shunt
POWER SUPPLY
TERIDIAN
71M6541D/F
TEMPERATURE
SENSOR
VREF
BATTERY
PWR MODE
CONTROL
WAKE-UP
NEUTRAL
I2C or µWire
EEPROM
IAN
IBN
RTC
BATTERY
V3P3D
BATTERY
MONITOR
SPI INTERFACE
HOST
LCD DISPLAY
Resistor Divider
Pulse
Transformer
TERIDIAN
71M6xx1
Shunt
LINE
LINE
Note:
This system is referenced to LINE
11/5/2010
概述
71M6541D/71M6541F/71M6541G/71M6542F/71M6542G 是
Teridian
带有数字补偿的低功耗实时时钟(RTC)、闪存存储器和 LCD 驱动器。
采用我们的单转换器技术(Single Converter Technology®),内置一路
22 位
偿、精密电压基准和 32 位计算引擎(CE),只需少数外部元件即可支
持各种电表设计。
71M6541/2 支持 Teridian 71M6x01 系列隔离传感器的接口选项,有
效降低 BOM 成本、提高抗电磁干扰能力,进而增强系统可靠性。其
它特性包括:SPI 接口、先进的电源管理、超低功耗有效工作和电池
供电模式、3/5KB 公用 RAM 和 32/64/128KB 闪存存储器(电表工作期
间可现场编程程序和/或数据)、每个 SEG 驱动端能够驱动六段 LCD。
较高的处理和采样速率结合差分输入级,提供强大的计量功能,理想
用于住宅表设计。
完整的软件开发工具、演示程序以及参考设计有助于加速计量产品的
开发和认证,以满足 ANSI、IEC 等全球范围的电表计量标准。
Teridian和Single Converter Technology
注册商标。
MICROWIRE是National Semiconductor Corp.
Rev 2 1
TM
的第 4 代高集成度单相电表 SoC,包括:8051 兼容 MPU、
Σ-Δ ADC 数字温度传感器、三路或四路模拟输入、数字温度补
分别是
Maxim Integrated Products, Inc.
的注册商标。
的商标和
特性
• 2000:1 电流范围内,精度高达 0.1%
•
优于 IEC 62053/ANSI C12.20 标准要求
• 两路电流传感器输入,可选择差分模式
•
一路电流输入可选择增益 1 或 8,支持分流器
•
高速 Wh/VARh 脉冲输出,可编程脉冲宽度
• 32KB 闪存、3KB RAM (71M6541D)
•
64KB 闪存、5KB RAM (71M6541F/42F)
128KB 闪存、5KB RAM (71M6541G/42G)
•
多达四路脉冲输出,带有脉冲计数
•
•
四象限表计
•
数字温度补偿:
- 计量补偿
- 高精度 RTC,用于晶振自动温度补偿的
TOU 功能,支持所有功率模式
独立 32 位计算引擎
•
•
46-64Hz 电网频率范围,采用相同校准
•
相位补偿(±10°)
• 三种备份电池供电模式:
-
掉电模式(BRN)
LCD 模式(LCD)
-
-
休眠模式(SLP)
• 引脚事件唤醒和定时器唤醒
•
休眠模式电流损耗仅为 1μA
• 闪存加密
•
在系统编程
•
8 位 MPU (80515),高达 5 MIPS
• 掉电模式下的全速 MPU 时钟
•
LCD 驱动器:
-
每引脚驱动 6 段/多达 56个引脚
• 5V LCD 驱动器,带有 DAC
•
多达 51 个多功能 DIO 引脚
• 硬件看门狗定时器(WDT)
2
• I
C/MICROWIRE® EEPROM 接口
•
SPI 接口,具有闪存编程能力
•
两个 UART 用于 IR和 AMR
• 带有调制功能的 IR LED 驱动器
•
工业级温度范围
•
64 引脚(71M6541D/F/G) 和 100 引脚
(71M6542F/G)无铅(Pb) LQFP 封装
Page 2
71M6541D/F/G和 71M6542F/G 数据资料
目录
1 引言 ..................................................................................................................................................... 10
2 硬件说明 .............................................................................................................................................. 11
2.1 硬件概述 ..................................................................................................................................... 11
2.2 模拟前端(AFE) ........................................................................................................................... 12
2.2.1 信号输入引脚 ................................................................................................................. 14
2.2.2 输入复用器 ..................................................................................................................... 15
2.2.3 延迟补偿 ......................................................................................................................... 19
2.2.4 ADC 前置放大器............................................................................................................. 20
2.2.5 A/D 转换器(ADC) ........................................................................................................... 20
2.2.6 FIR 滤波器 ...................................................................................................................... 20
2.2.7 电压基准 ......................................................................................................................... 20
2.2.8 71M6x01隔离传感器接口(远端传感器接口) .................................................................. 22
2.3 数字计算引擎(CE) ...................................................................................................................... 24
2.3.1 CE 程序存储器 ............................................................................................................... 24
2.3.2 CE 数据存储器 ............................................................................................................... 24
2.3.3 CE 与 MPU通信 ............................................................................................................. 25
2.3.4 电表公式 ......................................................................................................................... 25
2.3.5 实时监测器(RTM) ........................................................................................................... 25
2.3.6 脉冲发生器 ..................................................................................................................... 27
2.3.7 CE 功能概述 ................................................................................................................... 28
2.4 80515 MPU核 ............................................................................................................................ 31
2.4.1 存储器架构和寻址 .......................................................................................................... 31
2.4.2 特殊功能寄存器(SFR) .................................................................................................... 33
2.4.3 通用 80515 特殊功能寄存器 ........................................................................................... 34
2.4.4 指令集 ............................................................................................................................ 36
2.4.5 UART ............................................................................................................................. 36
2.4.6 定时器和计数器 .............................................................................................................. 39
2.4.7 WD 定时器(软件看门狗定时器) ...................................................................................... 40
2.4.8 中断 ................................................................................................................................ 40
2.5 片上资源 ..................................................................................................................................... 48
2.5.1 物理存储器 ..................................................................................................................... 48
2.5.2 振荡器 ............................................................................................................................ 50
2.5.3 PLL 和内部时钟 .............................................................................................................. 50
2.5.4 实时时钟(RTC) ............................................................................................................... 51
2.5.5 71M654x温度传感器 ..................................................................................................... 56
2.5.6 71M654x电池监测器 ..................................................................................................... 57
2.5.7 UART 和光接口 .............................................................................................................. 58
2.5.8 数字 I/O 和 LCD 段驱动器 .............................................................................................. 59
2.5.9 EEPROM 接口 ............................................................................................................... 70
2.5.10 SPI 从机端口 .................................................................................................................. 73
2.5.11 硬件看门狗定时器 .......................................................................................................... 78
2.5.12 测试端口(TMUXOUT 和 TMUX2OUT 引脚) ................................................................... 78
3 功能说明 .............................................................................................................................................. 80
3.1 工作原理 ..................................................................................................................................... 80
3.2 电池供电模式 ............................................................................................................................. 81
3.2.1 BRN 模式 ....................................................................................................................... 83
3.2.2 LCD 模式 ........................................................................................................................ 83
3.2.3 SLP 模式 ........................................................................................................................ 84
2 Rev 2
Page 3

71M6541D/F/G和 1M6542F/G 数据资料
3.3 故障和复位操作 .......................................................................................................................... 85
3.3.1 掉电事件 ......................................................................................................................... 85
3.3.2 低电池电压下的 IC ......................................................................................................... 86
3.3.3 复位序列 ......................................................................................................................... 86
3.3.4 看门狗定时器复位 .......................................................................................................... 86
3.4 唤醒操作 ..................................................................................................................................... 87
3.4.1 硬件唤醒事件 ................................................................................................................. 87
3.4.2 定时器唤醒 ..................................................................................................................... 90
3.5 数据流和 MPU/CE 通信 .............................................................................................................. 91
4 应用信息 .............................................................................................................................................. 92
4.1 连接 5V 器件 ............................................................................................................................... 92
4.2 直接连接传感器 .......................................................................................................................... 92
4.3 使用本地传感器的 71M6541D/F/G ............................................................................................. 93
4.4 使用 71M6x01 和电流分流器的 71M6541D/F/G ........................................................................ 94
4.5 使用本地传感器的 71M6542F/G ................................................................................................ 95
4.6 使用 71M6x01 和电流分流器的 71M6542F/G ............................................................................ 96
4.7 计量温度补偿 ............................................................................................................................. 97
4.7.1 高精度电压基准 .............................................................................................................. 97
4.7.2 71M654x的温度系数 ..................................................................................................... 97
4.7.3 VREF 温度补偿,使用本地传感器 ................................................................................. 98
4.7.4 VREF 温度补偿,使用远端传感器 ................................................................................. 99
4.8 连接 I2C EEPROM ................................................................................................................... 100
4.9 连接 3 线 EEPROM .................................................................................................................. 101
4.10 UART0 (TX/RX) ....................................................................................................................... 101
4.11 光接口(UART1) ........................................................................................................................ 101
4.12 连接复位引脚 ........................................................................................................................... 102
4.13 连接仿真器端口 ........................................................................................................................ 102
4.14 闪存编程 ................................................................................................................................... 104
4.14.1 通过 ICE 端口编程闪存 ................................................................................................ 104
4.14.2 通过 SPI 端口编程闪存 ................................................................................................. 104
4.15 MPU 固件库 ............................................................................................................................. 104
4.16 晶振 .......................................................................................................................................... 104
4.17 电表校准 ................................................................................................................................... 104
5 固件接口 ............................................................................................................................................ 105
5.1 I/O RAM 映射—按功能排序 ...................................................................................................... 105
5.2 I/O RAM 映射—按字母排序 ...................................................................................................... 111
5.3 CE 接口说明 ............................................................................................................................. 125
5.3.1 CE 程序 ........................................................................................................................ 125
5.3.2 CE 数据格式 ................................................................................................................. 125
5.3.3 常量 .............................................................................................................................. 125
5.3.4 环境 .............................................................................................................................. 126
5.3.5 CE 计算 ........................................................................................................................ 126
5.3.6 CE 前端数据(原始数据) ................................................................................................ 127
5.3.7 FCE 状态和控制 ........................................................................................................... 127
5.3.8 CE 传递变量 ................................................................................................................. 129
5.3.9 脉冲发生器 ................................................................................................................... 132
5.3.10 其它 CE 参数 ................................................................................................................ 134
5.3.11 CE 校准参数 ................................................................................................................. 135
5.3.12 CE 流程图 .................................................................................................................... 136
6 电气规格 ............................................................................................................................................ 138
Rev 2 3
Page 4

71M6541D/F/G和 71M6542F/G 数据资料
6.1 绝对最大额定值 ........................................................................................................................ 138
6.2 推荐外部元件 ........................................................................................................................... 139
6.3 推荐工作条件 ........................................................................................................................... 139
6.4 性能指标 ................................................................................................................................... 140
6.4.1 输入逻辑电平 ............................................................................................................... 140
6.4.2 输出逻辑电平 ............................................................................................................... 140
6.4.3 电池监测器 ................................................................................................................... 141
6.4.4 温度监测器 ................................................................................................................... 141
6.4.5 电源电流 ....................................................................................................................... 142
6.4.6 V3P3D 开关 .................................................................................................................. 143
6.4.7 内部电源故障比较器 .................................................................................................... 143
6.4.8 2.5V 稳压器—系统电源 ................................................................................................ 143
6.4.9 2.5V 稳压器—电池供电 ................................................................................................ 144
6.4.10 晶振 .............................................................................................................................. 144
6.4.11 锁相环(PLL) ................................................................................................................. 144
6.4.12 LCD 驱动器 .................................................................................................................. 145
6.4.13 VLCD 发生器 ................................................................................................................ 146
6.4.14 VREF ........................................................................................................................... 148
6.4.15 ADC 转换器 .................................................................................................................. 149
6.4.16 IAP-IAN 前置放大器 ..................................................................................................... 150
6.5 时序规格 ................................................................................................................................... 151
6.5.1 闪存 .............................................................................................................................. 151
6.5.2 SPI 从机 ....................................................................................................................... 151
6.5.3 EEPROM 接口 ............................................................................................................. 151
6.5.4 RESET 引脚 ................................................................................................................. 152
6.5.5 RTC .............................................................................................................................. 152
6.6 封装图 ...................................................................................................................................... 153
6.6.1 64 引脚 LQFP 封装图 ................................................................................................... 153
6.6.2 100 引脚 LQFP 封装图 ................................................................................................. 154
6.7 封装标识 ................................................................................................................................... 155
6.8 引脚图 ...................................................................................................................................... 156
6.8.1 71M6541D/F/G LQFP-64封装引脚排列 ...................................................................... 156
6.8.2 71M6542F/G LQFP-100封装引脚排列 ........................................................................ 157
6.9 引脚说明 ................................................................................................................................... 158
6.9.1 电源和接地引脚 ............................................................................................................ 158
6.9.2 模拟电路引脚 ............................................................................................................... 159
6.9.3 数字电路引脚 ............................................................................................................... 160
6.9.4 I/O 等效电路 ................................................................................................................. 162
7 定购信息 ............................................................................................................................................ 163
7.1 71M6541D/F/G和 71M6542F/G .............................................................................................. 163
8 相关信息 ............................................................................................................................................ 163
9 联络信息 ............................................................................................................................................ 163
附录 A:缩写符号 ..................................................................................................................................... 164
附录 B:修订历史 ..................................................................................................................................... 165
4 Rev 2
Page 5

71M6541D/F/G和 1M6542F/G 数据资料
图
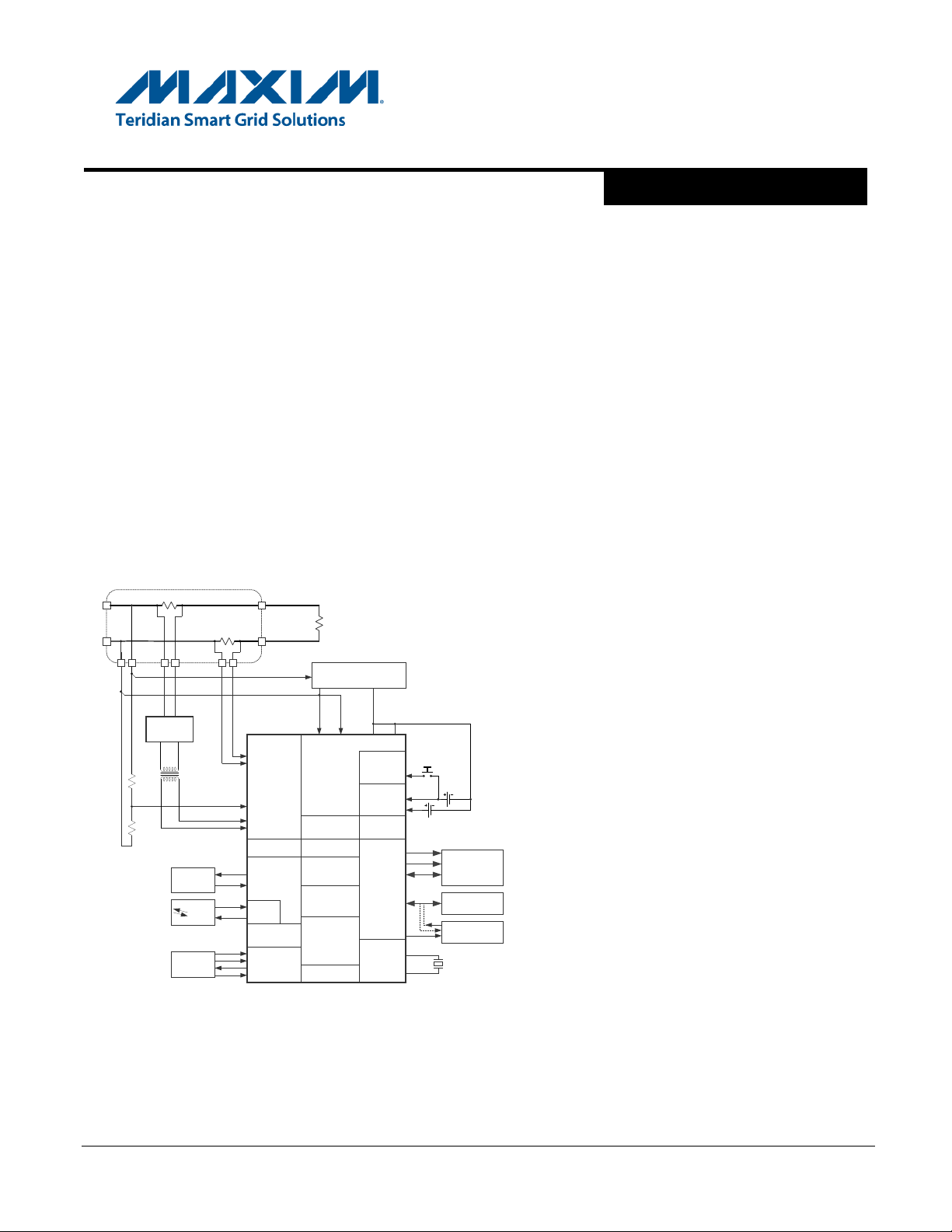
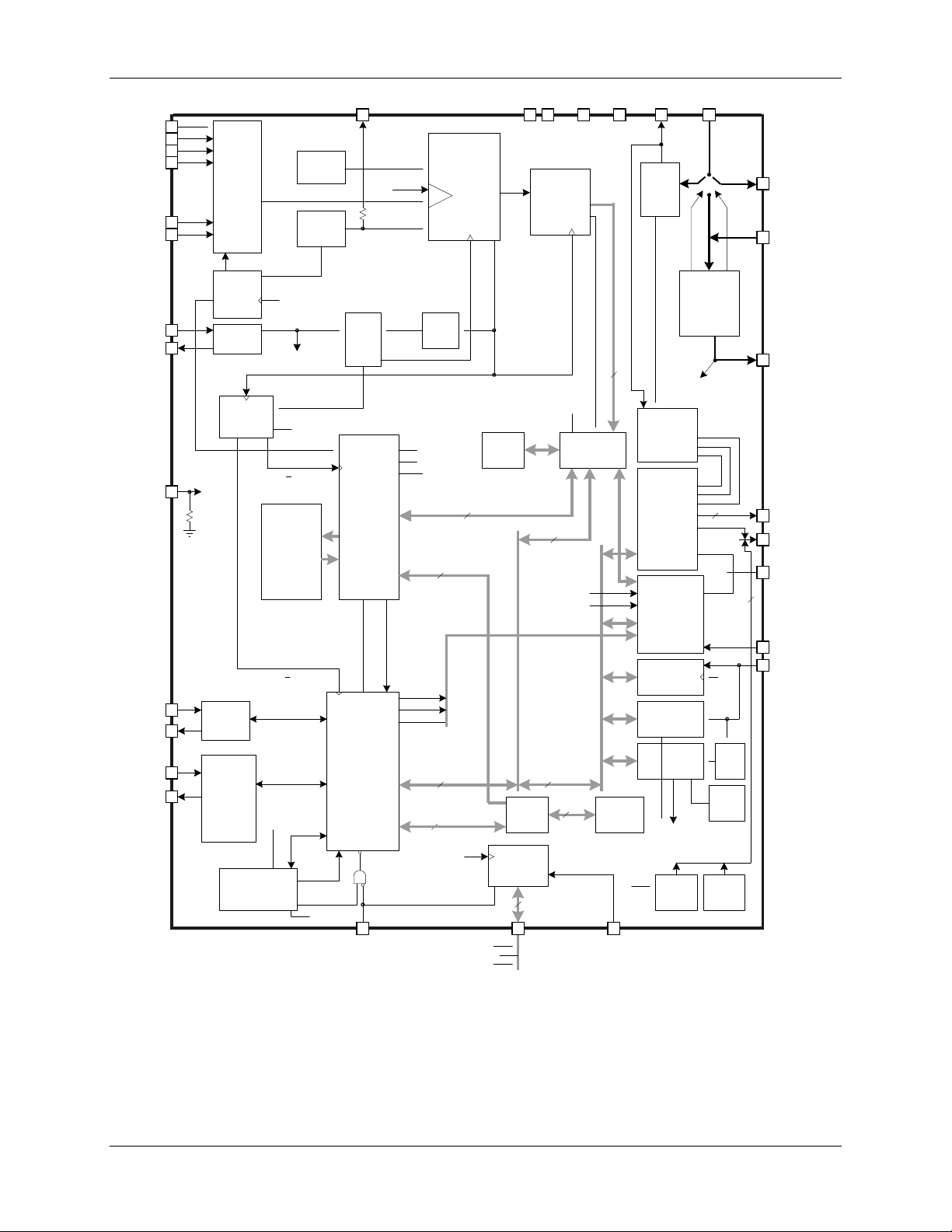
图 1. IC 功能框图 ................................................................................................................................................... 9
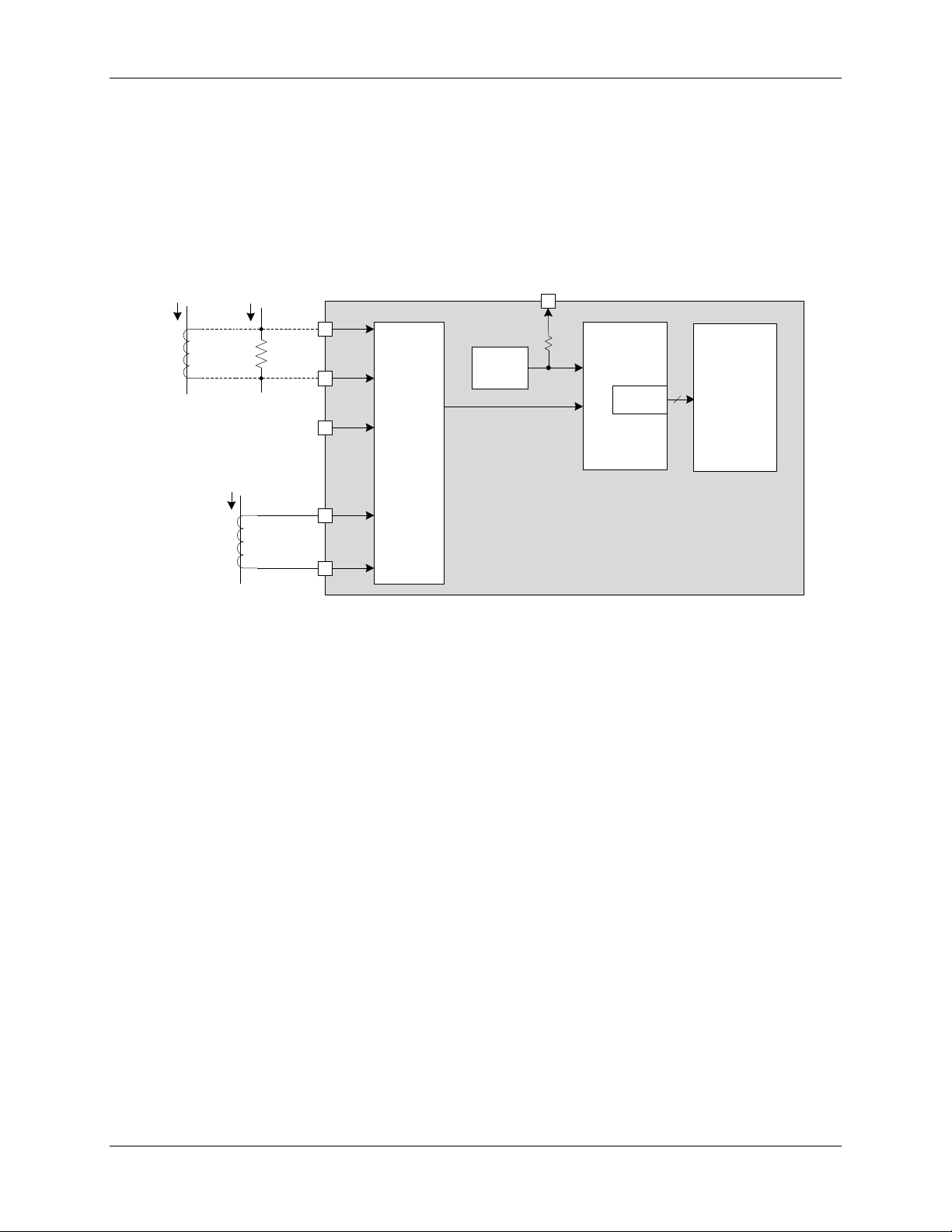
图 2. 71M6541D/F/G AFE 方框图(本地传感器) ................................................................................................... 12
图 3. 71M6541D/F/G AFE 方框图(带 71M6x01) .................................................................................................. 13
图 4. 71M6542F/G AFE 方框图(本地传感器) ....................................................................................................... 13
图 5. 71M6542F/G AFE 方框图(带 71M6x01) ..................................................................................................... 14
图 6. 复用帧状态(MUX_DIV[3:0] = 3) .................................................................................................................. 17
图 7. 复用帧状态(MUX_DIV[3:0] = 4) .................................................................................................................. 17
图 8. 斩波放大器通用拓扑 ................................................................................................................................... 21
图 9. CROSS 信号,CHOP_E = 00 ..................................................................................................................... 21
图 10. RTM 时序 .................................................................................................................................................. 26
图 11. ADC MUX、CE 和 RTM 串行传输时序关系 .............................................................................................. 26
图 12. 脉冲发生器 FIFO 时序 ............................................................................................................................... 28
图 13. 累积间隔 ................................................................................................................................................... 29
图 14. 复用周期内采样(MUX_DIV[3:0] = 3) ......................................................................................................... 30
图 15. 复用周期内采样(MUX_DIV[3:0] = 4) ......................................................................................................... 30
图 16. 中断结构 ................................................................................................................................................... 47
图 17. 自动温度补偿 ............................................................................................................................................ 54
图 18. 光接口 ....................................................................................................................................................... 58
图 19. 光接口(UART1) ......................................................................................................................................... 59
图 20. 连接外部负载至 DIO 引脚 ......................................................................................................................... 60
图 21. LCD 波形 ................................................................................................................................................... 68
图 22. 3 线接口:写命令,HiZ=0 ........................................................................................................................ 72
图 23. 3 线接口:写命令,HiZ=1 ........................................................................................................................ 72
图 24. 3 线接口:读命令 ...................................................................................................................................... 72
图 25. 3 线接口:写命令,CNT=0 ....................................................................................................................... 73
图 26. 3 线接口:写命令,HiZ=1,WFR=1 ......................................................................................................... 73
图 27. PI 从机端口—典型的多字节读、写操作 .................................................................................................... 75
图 28. 电压、电流、瞬时能量和累积能量 ............................................................................................................ 80
图 29. Operation 工作模式状态图 ........................................................................................................................ 81
图 30. MPU/CE 数据流 ........................................................................................................................................ 91
图 31. 电阻分压(电压检测) ................................................................................................................................... 92
图 32. 单端输入 CT (电流检测) ............................................................................................................................ 92
图 33. 差分输入 CT (电流检测) ............................................................................................................................ 92
图 34. 差分输入锰铜分流器(电流检测) ................................................................................................................. 92
图 35. 71M6541D/F/G (本地传感器) .................................................................................................................... 93
图 36. 71M6541D/F/G (71M6x01 远端传感器) .................................................................................................... 94
图 37. 71M6542F/G (本地传感器) ....................................................................................................................... 95
图 38. 71M6542F/G (71M6x01 远端传感器) ........................................................................................................ 96
图 39. I
图 40. UART0 连接 ............................................................................................................................................ 101
图 41. 光元件连接 .............................................................................................................................................. 102
图 42. RESET 引脚外部电路:按钮(左侧)、生产电路(右侧) .............................................................................. 102
图 43. 仿真器接口的外部电路 ............................................................................................................................ 103
图 44. CE 数据流:复用器和 ADC ..................................................................................................................... 136
图 45. CE 数据流:缩放、增益控制、中间变量 ................................................................................................ 136
图 46. CE 数据流:平方、求和运算级 ............................................................................................................... 137
图 47. 64 引脚 LQFP 封装 ................................................................................................................................. 153
图 48. 100 引脚 LQFP 封装图 ............................................................................................................................ 154
图 49. 封装标识(示例) ........................................................................................................................................ 155
图 50. 71M6541D/F/G (LQFP-64 封装)引脚排列 ............................................................................................... 156
图 51. 71M6542F/G (LQFP-100 封装)引脚排列 ................................................................................................ 157
图 52. I/O 等效电路 ............................................................................................................................................ 162
2
C EEPROM 连接 .................................................................................................................................. 101
Rev 2 5
Page 6

71M6541D/F/G和 71M6542F/G 数据资料
表
表 1. 本地传感器所要求的 CE 代码和设置 .................................................................................................. 15
表 2. CE 代码和设置(71M6x01 隔离传感器) ................................................................................................ 16
表 3. ADC 输入配置 .................................................................................................................................... 17
表 4. 复用器和 ADC 配置位 ........................................................................................................................ 19
表 5. RCMD[4:0]位 ...................................................................................................................................... 22
表 6. 远程接口读命令 ................................................................................................................................. 23
表 7. 用于远端传感器的 I/O RAM 控制位 .................................................................................................... 23
表 8. 复用器输入选择 .................................................................................................................................. 25
表 9. CKMPU 时钟频率 ............................................................................................................................... 31
表 10. 存储器映射 ........................................................................................................................................ 32
表 11. 内部数据存储器映射 ......................................................................................................................... 33
表 12. 特殊功能寄存器映射 ......................................................................................................................... 33
表 13. 通用 80515 SFR—地址和复位值 ...................................................................................................... 34
表 14. PSW 位功能(SFR 0xD0) ...................................................................................................................... 35
表 15. 端口寄存器(SEGDIO0-15) ................................................................................................................ 36
表 16. 展宽存储周期宽度 ............................................................................................................................ 36
表 17. 波特率发生器 ................................................................................................................................... 37
表 18. UART 模式 ........................................................................................................................................ 37
表 19. S0CON (UART0)寄存器(SFR 0x98) .................................................................................................. 38
表 20. S1CON (UART1)寄存器(SFR 0x9B) .................................................................................................. 38
表 21. PCON 寄存器位说明(SFR 0x87) ...................................................................................................... 39
表 22. 定时器/计数器模式说明 .................................................................................................................... 39
表 23. 定时器/计数器模式组合 ..................................................................................................................... 39
表 24. TMOD 寄存器位说明 (SFR 0x89) ...................................................................................................... 40
表 25. TCON 寄存器位功能(SFR 0x88) ....................................................................................................... 40
表 26. IEN0 位功能(SFR 0xA8) .................................................................................................................... 41
表 27. The IEN1 位功能 (SFR 0xB8) ........................................................................................................... 41
表 28. IEN2 位功能(SFR 0x9A) .................................................................................................................... 42
表 29. TCON 位功能(SFR 0x88) .................................................................................................................. 42
表 30. T2CON 位功能(SFR 0xC8) ............................................................................................................... 42
表 31. IRCON 位功能(SFR 0xC0) ................................................................................................................ 42
表 32. 外部 MPU 中断 .................................................................................................................................. 44
表 33. 中断使能和标识位 ............................................................................................................................ 44
表 34. 中断优先级组 .................................................................................................................................... 45
表 35. 中断优先级 ........................................................................................................................................ 45
表 36. 中断优先级寄存器(IP0 和 IP1) ........................................................................................................... 45
表 37. 中断轮询排序 .................................................................................................................................... 46
表 38. 中断向量 ........................................................................................................................................... 46
表 39. 闪存访问 ........................................................................................................................................... 48
表 40. 闪存加密 ........................................................................................................................................... 49
表 41. 时钟系统汇总 .................................................................................................................................... 51
表 42. RTC 控制寄存器 ............................................................................................................................... 52
表 43. 用于 RTC 温度补偿的 I/O RAM寄存器 ............................................................................................. 53
表 44. NV RAM 温度表结构 ......................................................................................................................... 54
表 45. 用于 RTC 中断的 I/O RAM 寄存器 .................................................................................................... 55
表 46. 用于温度和电池测量的 I/O RAM 寄存器 .......................................................................................... 56
表 47. 通过 DIO_Rn[2:0]位的能够选择的资源 ............................................................................................. 59
6 Rev 2
Page 7

71M6541D/F/G和 1M6542F/G 数据资料
表 48. SEGDIO0 至 SEGDIO14 数据/方向寄存器(71M6541D/F/G) ............................................................ 61
表 49. SEGDIO19至 SEGDIO27数据/方向寄存器(71M6541D/F/G) .......................................................... 62
表 50. SEGDIO36-39至 SEGDIO44-45 数据/方向寄存器(71M6541D/F/G) ............................................... 62
表 51. SEGDIO51和 SEGDIO55数据/方向寄存器(71M6541D/F/G) .......................................................... 62
表 52. SEGDIO0 至 SEGDIO15 数据/方向寄存器(71M6542F/G) ................................................................ 63
表 53. SEGDIO16至 SEGDIO31数据/方向寄存器(71M6542F/G) .............................................................. 64
表 54. SEGDIO32至 SEGDIO45数据/方向寄存器(71M6542F/G) .............................................................. 64
表 55. SEGDIO51至 SEGDIO55数据/方向寄存器(71M6542F/G) .............................................................. 64
表 56. LCD_VMODE[1:0]配置 .................................................................................................................... 65
表 57. LCD 配置 .......................................................................................................................................... 67
表 58. SEG46 至 SEG50 的 71M6541D/F/G LCD数据寄存器 .................................................................... 69
表 59. SEG46 至 SEG50 的 71M6542F/G LCD 数据寄存器 ....................................................................... 70
表 60. 2 线接口对应的 EECTRL 位 ............................................................................................................... 71
表 61. 3 线接口对应的 EECTRL 位 ............................................................................................................... 71
表 62. SPI 操作字段 ..................................................................................................................................... 74
表 63. SPI 命令时序 ..................................................................................................................................... 75
表 64. SPI 寄存器 ........................................................................................................................................ 76
表 65. TMUX[5:0]选择 ................................................................................................................................. 79
表 66. TMUX2[4:0]选择 ............................................................................................................................... 79
表 67. 电路功能 ........................................................................................................................................... 82
表 68. VSTAT[2:0] (SFR 0xF9[2:0]) .............................................................................................................. 85
表 69. 唤醒使能和标识位 ............................................................................................................................. 87
表 70. 唤醒位 ............................................................................................................................................... 89
表 71. WAKE 标识清除事件 ......................................................................................................................... 90
表 72. GAIN_ADJn 补偿通道 ....................................................................................................................... 98
表 73. GAIN_ADJn 补偿通道 ..................................................................................................................... 100
表 74. I/O RAM 映射—按功能排序,基本配置 .......................................................................................... 105
表 75. I/O RAM 映射—按功能排序 ............................................................................................................ 107
表 76. I/O RAM 映射—按功能排序 ............................................................................................................ 111
表 77. 标准 CE 代码 ................................................................................................................................... 125
表 78. CE EQU 公式和单元输入映射 ......................................................................................................... 126
表 79. CE 原始数据访问地址 ..................................................................................................................... 127
表 80. CESTATUS 寄存器 ........................................................................................................................... 127
表 81. CESTATUS (CE RAM 0x80)位定义 .................................................................................................... 128
表 82. CECONFIG 寄存器 .......................................................................................................................... 128
表 83. CECONFIG (CE RAM 0x20)位定义................................................................................................... 128
表 84. 跌落门限和增益调节控制 ................................................................................................................ 129
表 85. CE 传递变量(本地传感器) ............................................................................................................... 130
表 86. CE 传递变量(隔离传感器) ............................................................................................................... 130
表 87: CE 能量测量变量(使用本地传感器)................................................................................................. 131
表 88. CE 能量测量变量(隔离传感器) ........................................................................................................ 131
表 89. 其它传递变量 .................................................................................................................................. 132
表 90. CE 脉冲发生参数 ............................................................................................................................ 133
表 91. 用于噪声抑制和代码版本的 CE 参数 .............................................................................................. 134
表 92. CE 校准参数 .................................................................................................................................... 135
表 93. 绝对最大额定值 .............................................................................................................................. 138
表 94. 推荐外部元件 .................................................................................................................................. 139
表 95. 推荐工作条件 .................................................................................................................................. 139
Rev 2 7
Page 8

71M6541D/F/G和 71M6542F/G 数据资料
表 96. 输入逻辑电平 .................................................................................................................................. 140
表 97. 输出逻辑电平 .................................................................................................................................. 140
表 98. 电池监测器技术指标(TEMP_BAT= 1) .............................................................................................. 141
表 99. 温度监测器 ..................................................................................................................................... 141
表 100. 电源电流指标 ................................................................................................................................ 142
表 101. V3P3D 开关技术指标 .................................................................................................................... 143
表 102. 内部电源故障比较器技术指标 ...................................................................................................... 143
表 103. 2.5V 稳压器技术指标 .................................................................................................................... 143
表 104. 低功耗稳压器技术指标 .................................................................................................................. 144
表 105. 晶振指标 ....................................................................................................................................... 144
表 106. PLL 技术指标 ................................................................................................................................ 144
表 107. LCD 驱动器技术指标 .................................................................................................................... 145
表 108. LCD 驱动器技术指标 .................................................................................................................... 146
表 109. VREF 技术指标 ............................................................................................................................. 148
表 110. ADC 转换器技术指标 .................................................................................................................... 149
表 111. 前置放大器技术指标 ..................................................................................................................... 150
表 112. 闪存时序指标 ................................................................................................................................ 151
表 113. SPI 从机指标 ................................................................................................................................. 151
表 114. EEPROM 接口时序 ....................................................................................................................... 151
表 115. RESET 引脚时序 .......................................................................................................................... 152
表 116. RTC 的日期范围 ........................................................................................................................... 152
表 117. 71M6541 封装标识 ....................................................................................................................... 155
表 118. 71M6542 封装标识 ....................................................................................................................... 155
表 119. 电源和接地引脚 ............................................................................................................................ 158
表 120. 模拟电路引脚 ................................................................................................................................ 159
表 121. 数字电路引脚 ................................................................................................................................ 160
表 122. 定购信息 ....................................................................................................................................... 163
8 Rev 2
Page 9
71M6541D/F/G和 1M6542F/G 数据资料
IAP
MUX
and
PREAMP
XIN
XOUT
VREF
CKADC
CE
32-bit Compute
Engine
MPU
(80515)
CE CONTROL
OPT_RX/
SEGDIO55
OPT_TX/
SEGDIO51/
WPULSE/
VARPULSE
RESET
VBIAS
EMULATOR
PORT
3
CE_BUSY
OPTICAL
INTERFACE
UART0
TX
RX
XFER BUSY
6
COM0..5
VLC2
LCD DRIVER
CEDATA
0x000...0x2FF
PROG
0x000...0x3FF
DATA
0x0000...0xFFFF
PROGRAM
0x0000...0xFFFF
0x0000…
0xFFFF
DIGITAL I/O
CONFIGURATION
RAM
(I/O RAM)
0x2000...0x20FF
I/O RAM
MEMORY SHARE
0x0000...0x13FF
16
8
RTCLK
RTCLK (32KHz)
MUX_SYNC
CKCE
CKMPU
CK32
32
8
8
8
POWER FAULT
DETECTION
4.9 MHZ
< 4.9MHz
4.9 MHz
GNDD
V3P3A
V3P3D
VBAT
Voltage
Regulator
2.5V to logic
VDD
32KHz
MPU_RSTZ
FAULTZ
WAKE
CONFIGURATION
PARAMETERS
GNDA
VBIAS
10/11/2011
CROSS
CLOCK GEN
Oscillator
32 KHz
CK32
MCK
PLL
VREF
DIV
ADC
MUX CTRL
STRT
MUX
MUX
CKFIR
RTM
SEGDIO Pins
WPULSE
VARPULSE
WPULSE
VARPULSE
TEST
TEST
MODE
VLC1
VLC0
< 4.9MHz
CKMPU_2x
CKMPU_2x
SDCK
SDOUT
SDIN
E_RXTX/SEG48
E_TCLK/SEG49
E_RST/SEG50
FLASH
32/64/128 KB
V3P3A
FIR
EEPROM
INTERFACE
CK_4X
LCD_GEN
PB
RTC
VBIAS
MEMORY
SHARE
16
E_RXTX
E_TCLK
E_RST
ICE_E
∆ Σ
AD CONVERTER
+
-
VREF
V3P3SYS
TEST MUX
VLCD
VLCD
Voltage
Boost
MPU RAM
3/5 KB
22
SPI
VSTAT
VBAT_RTC
IAN
IBP
IBN
VA
VB*
SEG Pins
2
TEST MUX
2
Non-Volatile
CONFIGURATION
RAM
BAT
TEST
TEMP
SENSOR
RTM
* 71M6542F/G only
Rev 2 9
图 1. IC 功能框图
Page 10

71M6541D/F/G和 71M6542F/G 数据资料
1 引言
本数据资料介绍了 71M6541D (32KB)、71M6541F (64KB)、71M6541G (128KB)、71M6542F (64KB)和
71M6542G (128KB)第四代 Teridian 单相计量 SoC。以下讨论适用于全部的器件特性或性能时,我们将用
“71M654x”表示;讨论内容仅适用于特定型号的特性或性能时,将标明相应型号。本数据资料还介绍了
配套的 71M6x01 隔离电流传感器器件的基本信息。关于 71M6x01 传感器的更多完整内容,请参见
71M6xxx的数据资料。
本文介绍了使用本地电流传感器以及配合 71M6x01 隔离电流传感器时,71M654x 的使用方法。利用
71M654x 和 71M6x01 芯片组,可以使用非隔离传感器和隔离分流器构建低成本的单相和两相电能表(使用
分流器),获得这类传感器技术前所未及的性能。71M654x SoC 还支持一个本地连接分流器与一个本地连
接电流变压器(CT)配置,或者是双 CT 配置。
为方便阅读,通常采用超级链接,链接到本文相关的参考图、表格和章节。本文中的所有超级链接均以蓝
色突出显示。本文使用了大量的超级链接,提供详细的参考章节,以增强每一部分的细节描述。为进一步
方便阅读,将文章制作成书签 PDF 格式。
建议读者参考本文第 163 页第 8 章“相关信息”部分列出的文件。
10 Rev 2
Page 11

71M6541D/F/G和 1M6542F/G 数据资料
2 硬件说明
2.1 硬件概述
Teridian 71M6541D/F/G和 71M6542F/G 单芯片计量 IC 集成了实现固态住宅电表所需的全部功能模块,包
括:
• 模拟前端(AFE),具有 22位二阶 Σ-Δ ADC
• 独立的 32 位 DSP 数字计算引擎(CE),实现计量功能
• 8051 兼容微处理器(MPU),每个时钟周期执行一条指令(80515)
• 精密电压基准(VREF)
• 用于数字温度补偿的温度传感器:
- 计量数字温度补偿(MPU)
- RTC自动数字温度补偿,在任意工作模式下均可使用
• LCD 驱动器
• RAM 和闪存
• 实时时钟(RTC)
• 多种 I/O 引脚
• 电源故障中断
• 过零中断
• 可选的电流传感器接口,用于本地连接传感器及远端传感器(即使用带有检流电阻的 71M6x01 配套 IC)
• 支持锰铜分流器和电流变压器
器件支持锰铜分流器和电流变压器(CT)电流传感器。锰铜分流器可直接连接至 71M654x 器件,或采用配套
的 71M6x01 隔离 IC 进行隔离,以构成各种单相/分相(71M6541D/F/G)或两相(71M6542F/G)电表配置。采
用低成本、小尺寸脉冲变压器隔离 71M6x01 远端传感器与 71M654x。71M654x 执行与 71M6x01 的双向
数字通信,并通过隔离脉冲变压器为 71M6x01 供电。隔离(远端)分流传感器连接至 71M6x01 的差分输入。
71M6x01配套隔离器包括:
• 数字隔离通信接口
• 模拟前端(AFE)
• 精密电压基准(VREF)
• 温度传感器(用于数字温度补偿)
• 全差分分流传感器输入
• 前置放大器,用于优化分流传感器性能
• 隔离电源电路,从 71M654x 发送的脉冲获取直流电源
典型应用中,71M654x 的 32 位计算引擎(CE)顺序处理模拟输入引脚的电压输入,以及从外部 71M6x01 远
端传感器获得的采样,并进行计算,测量有功能量(Wh)和无功能量(VARh),以及四象限表计的 A
然后 MPU 存取这些测量值,进一步处理并通过 MPU 的外围器件输出。
除了高级测量功能外,时钟电路允许 71M6541D/F/G 和 71M6542F/G 分时计价(TOU),用于多费率电表以
及防时标窃电或其它篡改事件。测量信息可以显示在工作在低温环境的 3.3V LCD,片上电荷泵用于驱动
5V LCD。灵活的 LCD 段显示功能便于整合现有的定制 LCD。通过软件调节 LCD 段和 DIO 引脚,以满足
各种不同需求。
除了带有温度微调的超高精度电压基准外,片上数字温度补偿机制还包括温度传感器和相关控制,用于修
正温度对测量值和 RTC 精度的影响,以满足 ANSI 和 IEC 标准的要求。与温度相关的外部元件,例如晶振、
电阻分流器、电流变压器(CT)及其相应的信号调理电路,定义其温度特性并编程其修正因子,使得电表在
整个工业温度范围内达到高精度计量的要求。
2
h 和 V2h。
Rev 2 11
Page 12
71M6541D/F/G和 71M6542F/G 数据资料
∆Σ ADC
CONVERTER
VREF
MUX
VREF
VREF
VADC
22
FIR
IBP
IAP
VADC10 (VA)
IAN
IBN
71M6541D/F
CE RAM
*IN = Optional Neutral Current
Local
Shunt
IN*
CT
I
LINE
or
CT
11/5/2010
I
LINE
可利用两个内部 UART 其中之一支持红外 LED,提供内部驱动和检测配置,亦可作为标准 UART 使用。可
选择 38kHz 调制输出。这种灵活性方便了利用 IR 接口实现 AMR 电表的设计,图 1 所示为 IC 方框图。
2.2 模拟前端(AFE)
AFE 作为数据采集系统,由 MPU 控制。使用本地连接的传感器时,如图 2 所示,模拟输入信号(IAP-IAN、
VA、IBP-IBN 和 VB)复用至 ADC 输入并进行采样,采样数据经 FIR 滤波后储存在 CE RAM 中,由 CE 进
行后续处理。MPU 也可以访问 CE 的 RAM 区。
图 6 所示为对应于图 2 的复用器时序,图 35 所示为对应于图 2 的电表配置。
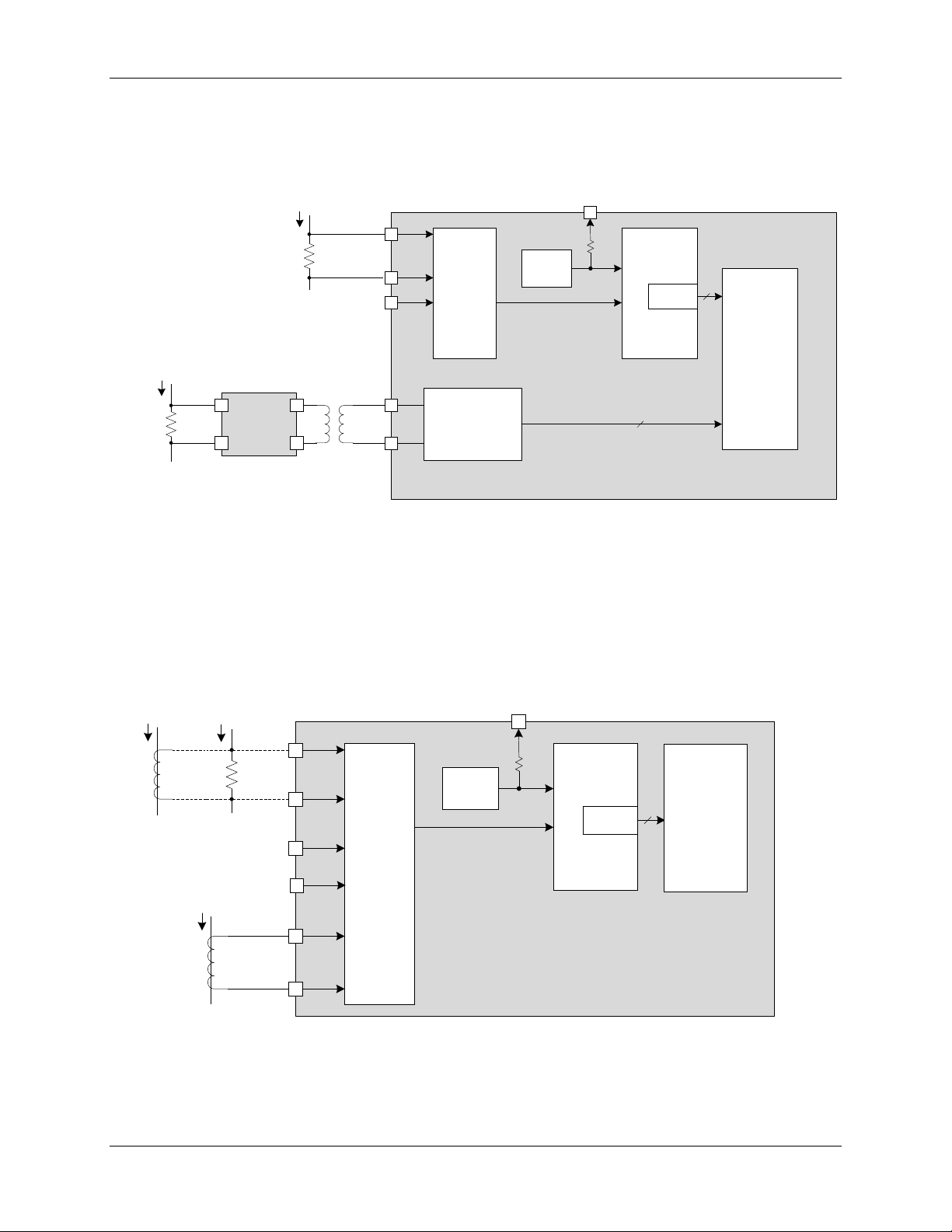
图 2. 71M6541D/F/G AFE 方框图(本地传感器)
12 Rev 2
Page 13
71M6541D/F/G和 1M6542F/G 数据资料
∆Σ ADC
CONVERTER
VREF
MUX
VREF
VREF
VADC
22
FIR
IBP
IAP
VADC10 (VA)
IAN
IBN
71M6541D/F
CE RAM
71M6x01
SP
SN
INP
INN
Remote
Shunt
IN*
Digital
Isolation
Interface
Local
Shunt
I
LINE
22
11/5/2010
* IN = Optional Neutral Current
∆Σ ADC
CONVERTER
VREF
MUX
VREF
VREF
VADC
22
FIR
IBP
IAP
VADC10 (VA)
IAN
IBN
71M6542F
CE RAM
Local
Shunt
IB
CT
IA
or
CT
11/5/2010
IA
VADC9 (VB)
图 3 所示为 71M6541D/F/G 复用器接口,带有一个本地分流传感器和一个远端电阻分流传感器。如图 3 所
示,远端隔离分流传感器通过 71M6x01连接,该电流通道的采样不会切换至复用器,而是通过数字隔离接
口直接传送至 71M6541D/F/G,并直接储存在 CE RAM。
图 6 所示为对应于图 3 的复用器时序;图 36 所示为对应于图 3 的电表配置。
图 3. 71M6541D/F/G AFE 方框图(带 71M6x01)
图 4 所示为连接了本地传感器的 71M6542F/G AFE。模式输入信号(IAP-IAN、VA、IBP-IBN 和 VB)复用至
ADC 输入并进行采样,采样数据经 FIR 滤波后储存在 CE RAM 中,由 CE 进行后续处理。MPU 也可以访
问 CE 的 RAM 区。
图 7 所示为对应于图 4 的复用器时序;图 37 所示为对应于图 4 的电表配置。
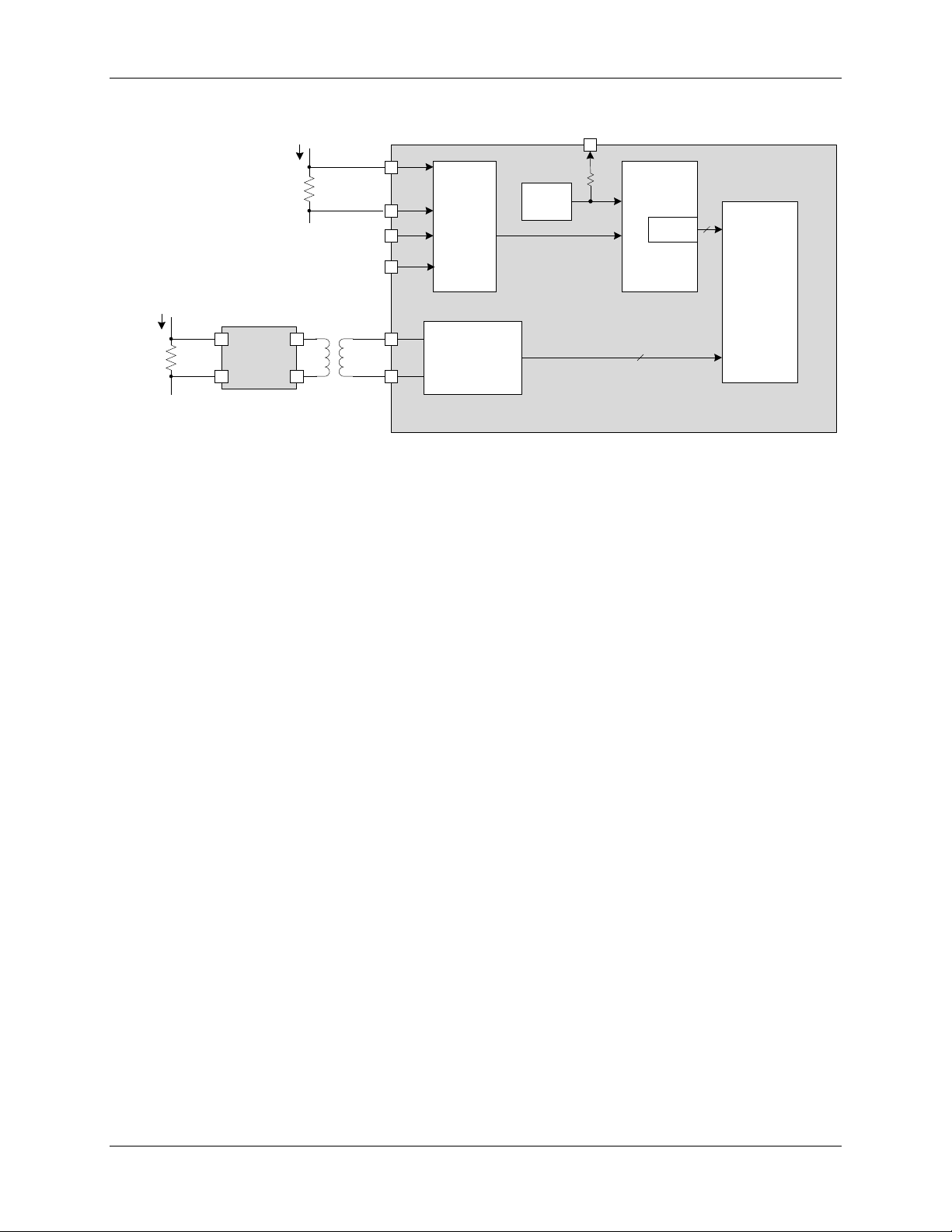
图 5 所示为 71M6542F/G 复用器接口,带有一个本地传感器和一个远端电阻分流传感器。如图 5 所示,远
端隔离分流传感器通过 71M6x01 连接,该电流通道的采样不会切换至复用器,而是通过数字隔离接口直接
传输至 71M6542F/G,并直接储存在 CE RAM。
Rev 2 13
图 4. 71M6542F/G AFE 方框图(本地传感器)
Page 14
71M6541D/F/G和 71M6542F/G 数据资料
∆Σ ADC
CONVERTER
VREF
MUX
VREF
VREF
VADC
22
FIR
IBP
VADC9 (VB)
IAP
VADC10 (VA)
IAN
IBN
71M6542F
CE RAM
71M6x01
SP
SN
INP
INN
Remote
Shunt
IB
Digital
Isolation
Interface
Local
Shunt
IA
22
11/5/2010
图 6 所示为对应于图 5 的复用器时序;图 38 所示为对应于图 5 的电表配置。
图 5. 71M6542F/G AFE 方框图(带 71M6x01)
2.2.1 信号输入引脚
71M6541D/F/G具有 5 路 ADC 输入;71M6542F/G具有 6 路 ADC 输入。
IAP-IAN 和 IBP-IBN 用作电流传感器输入。这 4 路电流传感器输入可配置为 4 路单端输入,或者配对构成 2
路差分输入。为获得最佳性能,建议将电流传感器输入配置为差分输入(即:IAP-IAN 和 IBP-IBN)。第 1 路
差分输入(IAP-IAN)具有前置放大器,增益可选择 1 或 8,用于直接连接分流电阻传感器,还可使用电流变
压器(CT)。剩下的一路差分对(IBP-IBN)可用于 CT或连接远端 71M6x01 隔离电流传感器,使用低成本脉冲
变压器为分流电阻传感器提供隔离。
71M6541D/F/G (VA)的其余输入为单端配置,在单相电表应用中按照式 0 或式 1 (见第 25 页 2.3.4 节表计公
式表计公式)检测电网电压。71M6542F/G 具有一路附加的单端电压检测输入(VB),支持式 2 对应的 2 相应
用。这些单端输入以 V3P3A 引脚为参考。
所有模拟信号均以电压方式测量。使用分流传感器时,通过测量分流器两端的电压降测量电流。参见图 3,
分流传感器直接连接至 71M654x (称为“本地”分流传感器),或通过隔离 71M6x01 连接(称为“远端”分流传感
器)。使用电流变压器(CT)时,通过连接至 CT 次级线圈的负载电阻的电压测量电流。同时,通过电阻分压
检测电网电压。VA和 VB 引脚(VB 仅在 71M6542F/G 中提供)为单端,其公共回路为 V3P3A 引脚。
引脚 IAP-IAN 可独立设置为差分或单端,由 DIFFA_E (I/O RAM 0x210C[4])控制位决定。然而,对于大多数
应用,IAP-IAN 配置为差分输入,结合外部相应的信号调整电路连接至 IAP-IAN (参见第 92 页的 4.2 直接连
接传感器)。
利用 I/O RAM 控制位 PRE_E (I/O RAM 0x2704[5])激活固定增益为 8 的前置放大器,可增强 IAP-IAN 引脚的
性能。PRE_E = 1 时,IAP-IAN 配置为 8x 增益的前置放大器输入,放大器输出送至复用器。使用低灵敏度
电流传感器时,例如锰铜分流器,8x 放大器非常有用。PRE_E 置位时,IAP-IAN 输入信号幅度峰值限制在
250/8 = 31.25mV。
14 Rev 2
Page 15
71M6541D/F/G和 1M6542F/G 数据资料
助记符
位置
十六进制
71M6542F/G
(十六进制)
Eq. 0 or 1
Eq. 2
FIR_LEN[1:0]
210C[2:1] 1 1
2
ADC_DIV
2200[5] 1 1
0
PLL_FAST
2200[4] 1 1
1
MUX_DIV[3:0]
2100[7:4] 3 3
4
MUX0_SEL[3:0]
2105[3:0] 0 0
0
MUX1_SEL[3:0]
2105[7:4] A A
A
MUX2_SEL[3:0]
2104[3:0] 2 2
2
MUX3_SEL[3:0]
2104[7:4] 1 1
9
RMT_E
2709[3] 0 0
0
DIFFA_E
210C[4] 1 1
1
DIFFB_E
210C[5] 1 1
1
EQU[2:0]
0或1
0或1
CE41A01
CE41A01
CE41A04
--
2
--
CT
CT
--
注:
对于使用两个锰铜分流传感器的 71M654x (图 3),通过置位 DIFFA_E 控制位,将 IAP-IAN 引脚配置成差分
模式,连接至本地分流器。同时,通过置位 RMT_E 控制位(I/O RAM 0x2709[3]),将 IBP-IBN 引脚重新配置
为数字平衡对,用于 Teridian 71M6x01 隔离传感器接口的通信。71M6x01 通过低成本脉冲变压器,利用
双向数据流与 71M654x 进行数据交换。71M654x 还通过隔离变压器为 71M6x01 供电。本章末尾对这一类
型的接口进行了更深入的说明(参见第 2.2.8 节 71M6x01隔离传感器接口(远端传感器接口))。
如图 2 所示,为了使用电流变压器(CT),将 RMT_E 控制位复位,从而使 IBP-IBN 引脚配置成本地模拟输入。
IAP-IAN 引脚不能配置成远端传感器接口。
2.2.2 输入复用器
使用本地传感器工作时,输入复用器将来自模拟输入引脚的输入信号依次施加到 ADC 的输入(见图 2 和图
4)。一个完整的采样过程称为一个复用帧。71M6541D/F/G 复用器的每个复用帧可选择最多三路输入信号
(IAP-IAN、VA 和 IBP-IBN),由 I/O RAM 控制字段 MUX_DIV[3:0] (I/O RAM 0x2100[7:4])控制(见图 6)。
71M6542F/G 复用器增加了 VB 信号,共支持四路输入(见图 7)。复用器总是从状态 1 开始,然后继续,直
到转换完成 MUX_DIV[3:0]决定的所有状态。
71M6541D/F/G 和 71M6542F/G 均需要针对特定应用编写的 CE 代码。此外,每个 CE 代码都需要特定的
AFE 和 MUX 设置才能正常工作。表 1 列出了与图 2和图 4 中本地传感器配置相对应的 CE代码和设置。表
2 列出了与图 3 和图 5 中使用本地/71M6x01/远端传感器配置相对应的 CE 代码和设置。
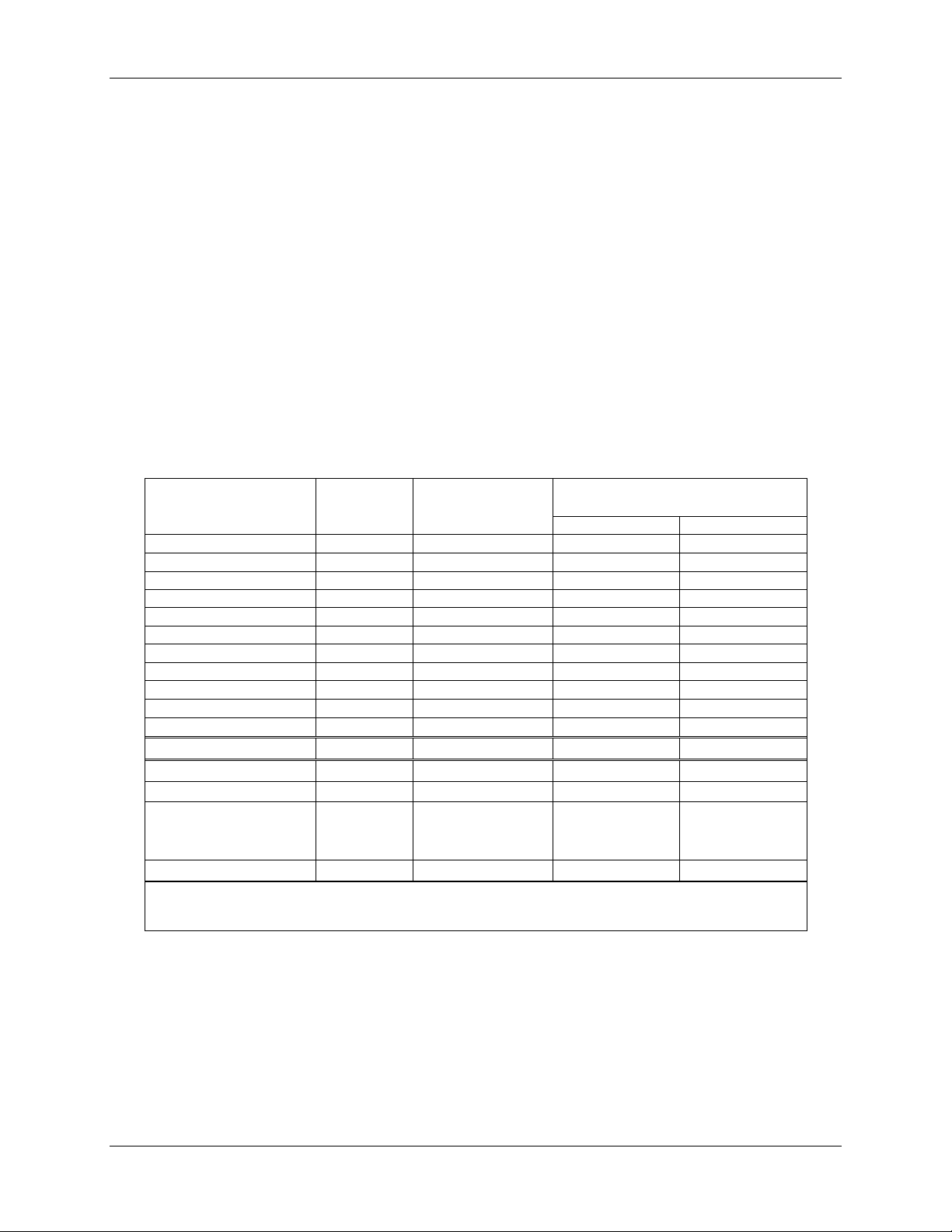
表 1. 本地传感器所要求的 CE 代码和设置
I/O RAM
I/O RAM
71M6541D/F/G
(
)
2106[7:5]
CE 代码
公式
电流传感器类型
对应电路图
TERIDIAN 定期更新 CE 代码。关于最新的 CE 代码和相关设置,请联系当地的 TERIDIAN 代表处。本表给出的配置由
MPU 示例代码在初始化期间设置。
-0 或 1 0 或 1
1 个分流器和 1 个
CT 或 2个 CT
图 2 图 4 图 4
1 个分流器和 1
个 CT 或 2 个
1 个分流器和 1
个 CT 或 2 个
2
Rev 2 15
Page 16
71M6541D/F/G和 71M6542F/G 数据资料
I/O RAM
助记符
I/O RAM
位置
71M6541D/F/G
(十六进制)
71M6542F/G
(十六进制)
FIR_LEN[1:0]
210C[2:1] 1 1
ADC_DIV
2200[5] 1 1
PLL_FAST
2200[4] 1 1
MUX_DIV[3:0]
2100[7:4] 3 3
MUX0_SEL[3:0]
2105[3:0] 0 0
MUX1_SEL[3:0]
2105[7:4] A A
MUX2_SEL[3:0]1
2104[3:0] 1 9
MUX3_SEL[3:0]1
2104[7:4] 1 1
RMT_E
2709[3] 1 1
DIFFA_E
210C[4] 1 1
DIFFB_E
210C[5] 0 0
EQU[2:0]
2106[7:5]
CE41B0162012
CE41B0166013
0、1和2
--
注:
表 2. CE 代码和设置(71M6x01 隔离传感器)
0 或 1 0、1 或 2
CE 代码
公式
电流传感器类型
对应电路图
1. 尽管没有使用,须将其置为 1 (C E 将忽略采样数据)
2. 带 71M6201 远端传感器(200A)的 71M654x
3. 带 71M6601 远端传感器(60A)的 71M654x
Teridian 定期更新 CE 代码。关于最新的 CE 代码和相关设置,请联系当地的 TERIDIAN 代表处。
本表中给出的配置由 MPU 示例代码在初始化期间设置。
--
-- 0, 1
--
1 个本地分流器和
一个远端分离器
图 3 图 5
1 个本地分流器和
一个远端分离器
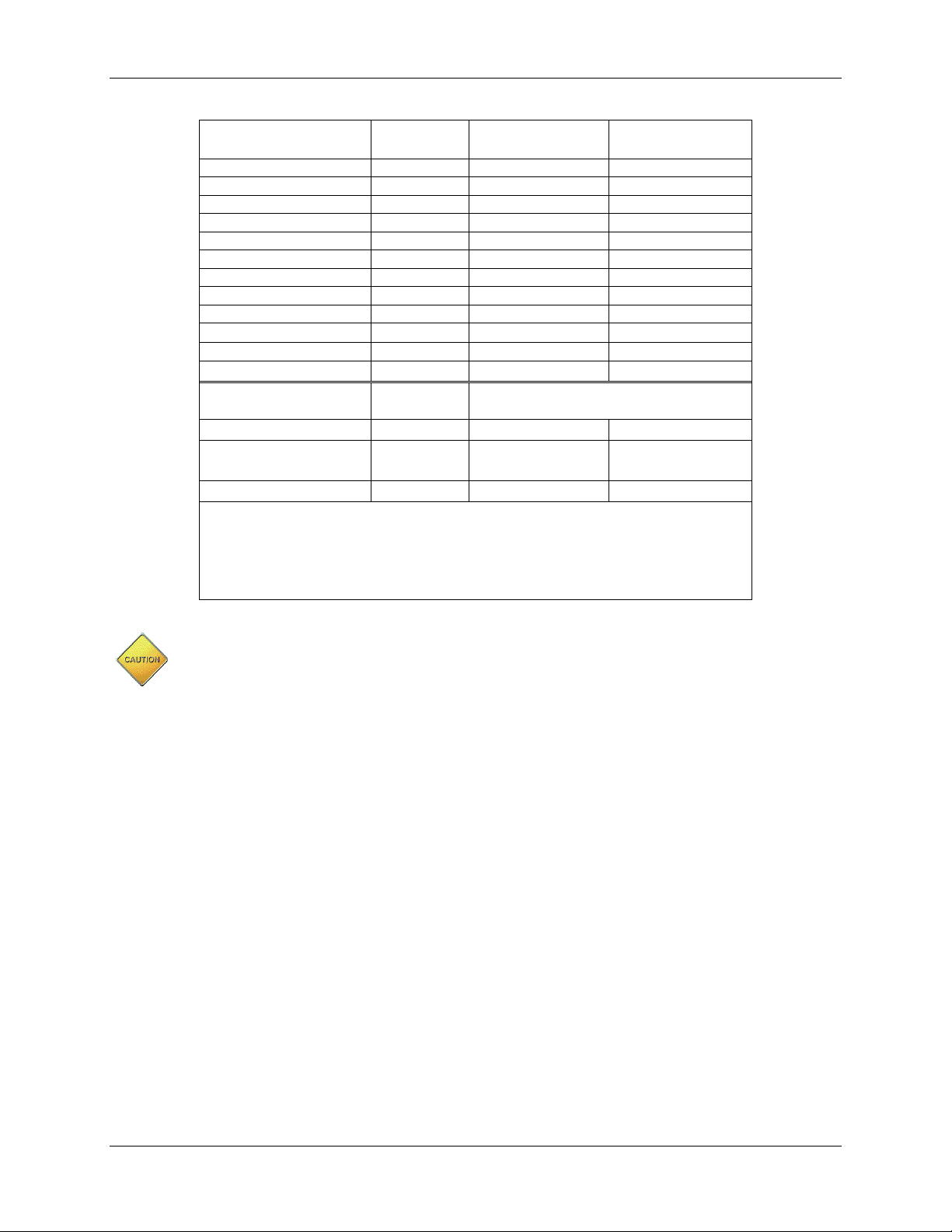
如果使用表 1 和表 2列出的 I/O RAM 助记符设置与对应的 CE 代码不匹配,则会产生负面影响,
MPU 不会选中。请联系当地的 TERIDIAN 代表处获取与之对应的正确 CE 代码和 AFE/MUX 设
置。
对于基本的单相电表,IAP-IAN 电流输入配置为差分模式,而 VA 引脚为单端输入,通常通过电阻分压器连
接到相电压。IBP-IBN 差分输入可选择用于检测零线电流。这种配置意味着复用器将三路输入之和加至
ADC,复用器时序如图 6 所示。这种配置下,采样 IAP-IAN、IBP-IBN 和 VA,额外的转换时隙(即时隙 2)
为可选的零线电流,如果不需要,则可省略测量零线电流的电流传感器。
对于标准防窃电应用,零线电流回路需要安装电流传感器,两路电流输入可配置为差分模式,使用 IAP-
IAN 和 IBP-IBN 输入对。这意味着复用器将三路输入加至 ADC。在这类应用中,系统设计通过 IAP-IAN 和
IBP-IBN 使用两个本地电流传感器,如图 2 所示,配置为差分输入。或者,IAP-IAN 对配置为差分输入并连
接至本地电流分流器,配置 IBP-IBN 连接隔离的 71M6x01 远端传感器(即 RMT_E = 1),如图 3 所示。VA
引脚通常通过电阻分压器连接至相电压。对于这种配置,复用帧如图 6 所示,时隙 2 不使用,并被 CE 忽
略,因为对应于远端传感器(IBP-IBN)的采样不通过复用器,将直接储存在 CE RAM 中。在复用帧的后半部
分对远端电流传感器采样,并且知道它与 VA 电压的准确采样间隔,以进行正确的延迟补偿。
71M6542F 支持第二相电压(加至 VB 引脚)的计量,非常适合具有两个电压和两个电流传感器的应用,例如,
按照式 2 进行计量的 2 相电表(P = VA*IA+VB*IB)。图 7 所示为利用本地连接传感器处理四路输入(图 3)的
复用器时序。使用一个本地和一个远端传感器(图 5)时,复用器时序与图 7相同。
16 Rev 2
Page 17
71M6541D/F/G和 1M6542F/G 数据资料
CK32
MUX STATE
00 1 2
MUX_DIV[3:0] = 3 Conversions
Settle
Multiplexer Frame
S
CROSS
MUX_SYNC
0S
11/5/2010
Fig. 2: IA VA IB
Fig. 3: IA VA Not Used
Fig. 5: IA VA VB
CK32
MUX STATE
0 1 2 3
MUX_DIV = 4 Conversions
Settle
Multiplexer Frame
S
CROSS
MUX_SYNC
0S
11/5/2010
Fig. 4: IA VA IB VB
引脚
通道
所需设置
注释
ADC2 (CE
CE RAM
对于图 6 和图 7 所示复用器时序,帧持续时间为 13 个 CK32 周期(其中 CK32 = 32768Hz),因此,采样率
为 32768Hz / 13 = 2520.6Hz。
表 3 汇总了各种 AFE 输入配置。
图 6. 复用帧状态(MUX_DIV[3:0] = 3)
图 7. 复用帧状态(MUX_DIV[3:0] = 4)
ADC
IAP ADC0
IAN ADC1
IBP ADC2
IBN ADC3
DIFFA_E = 1
DIFFB_E = 1
RMT_E = 1
or
必须通过 DIFFA_E = 1 (I/O RA M 0x210 C[4])选择差分模式,
ADC 结果储存在 CE RAM单元 ADC0 (CE RAM 0x0),不会影
响 ADC1 (CE RAM 0x1)。
对于本地连接的传感器(图 2 和 图 4), 必须通过置位
DIFFB_E (I/O RAM 0x210C[5]启用差分输入。
对于远端连接的分流器传感器(图 3 和图 5),必须置位
RMT_E (I/O RAM 0x2709[3])。
无论何种情况,ADC 结果均储存在 CE RAM 单元
RAM 0x2),不会影响 ADC3 (CE RAM 0x3)。
VA ADC10 --
VB ADC9 --
Rev 2 17
仅限单端模式。ADC 结果储存在 RAM 单元 ADC10 (
0xA)。
仅限单端模式(71M6542F)。ADC 结果储存在 RAM 单元
ADC9 (CE RAM 0x9)。
表 3. ADC 输入配置
Page 18

71M6541D/F/G和 71M6542F/G 数据资料
复用器切换、FIR 启动以及选择 ADC 基准电压(使用内部 CROSS 信号,参见第 2.2.7 节电压基准)由内部
MUX_CTRL 电路控制。此外,MUX_CTRL 控制每次 CE 代码的执行。从概念上讲,MUX_CTRL 由 PLL
模块的 32768 Hz 时钟 CK32驱动。下面是 MUX_CTRL 电路管理寄存器:
• CHOP_E[1:0] (I/O RAM 0x2106[3:2])
• MUX_DIV[3:0] (I/O RAM 0x2100[7:4])
• FIR_LEN[1:0] (I/O RAM 0x210C[2:1])
• ADC_DIV (I/O RAM 0x2200[5])
每个复用器状态的持续时间取决于 FIR 处理的 ADC采样通道数量,由 FIR_LEN[1:0] (I/O RAM 0x210C[2:1]
控制字段决定。每个复用器状态从 32kHz 时钟 CK32 的上升沿开始。
建议在更改 ADC 配置时将 MUX_DIV[3:0] (I/O RAM 0x2200[2:0])设置为 0,虽然不是必须要求,这样做有
助于将 ADC 输入之间瞬间短路引起的系统瞬变 降至最小,特别是在更改 DIFFn_E 控制位(I/O RAM
0x210C[5:4])的情况下。设置该配置位后,MUX_DIV[3:0]应设置在所需要的数值。
此外,可将 ADC 配置为工作在½速率(32768*75 = 2.46MHz)。该模式下,ADC 放大器的偏置电流减小,
总体系统功耗降低。ADC_DIV (I/O RAM 0x2200[5])位选择全速或半速运行。半速运行时 , 如果
FIR_LEN[1:0]设为 01 (288),每次转换需要 4 个 XTAL 周期,MUX_DIV[3:0] = 3 时采样速率为 2520Hz。
注意,为了工作在低功耗模式,需要采用相应的 CE 代码。
CK32 周期中每个时隙的持续时间取决于 FIR_LEN[1:0]
Time_Slot_Duration (PLL_FAST = 1) = (FIR_LEN[1:0]+1) * (ADC_DIV+1)
Time_Slot_Duration (PLL_FAST = 0) = 3*(FIR_LEN[1:0]+1) * (ADC_DIV+1)
CK32 周期中复用帧的持续时间为:
MUX_Frame_Duration = 3-2*PLL_FAST + Time_Slot_Duration * MUX_DIV[3:0]
CK_FIR 周期中复用帧的持续时间为:
MUX frame duration (CK_FIR cycles) =
[3-2*PLL_FAST + Time_Slot_Duration * MUX_DIV] * (48+PLL_FAST*102)
可通过 MUXx_SEL 控制字段(I/O RAM 0x210 0 至 0x2105)编程 ADC转换时序。如上所述,71M6541D/F/G 中
有三个 ADC 时隙,71M6542F/G 中有四个 ADC 时隙,由 MUX_DIV[3:0] (I/O RAM 0x2100[7:4])设置。表达
式 MUXx_SEL[3:0] = n 中,“x”指复用帧时隙数量,n 指相应的 ADC 输入编号或 ADC 序号(即 ADC0 至
ADC10,或简单的 0 至 10 十进制数)。由此,在 71M654x 器件共有 11 个有效的 ADC 序号。例如,如果
MUX0_SEL[3:0] = 0,那么 ADC0,对应于来自于 IAP-IAN 输入(配置为差分输入)的采样,定位在复用帧的
时隙 0。关于相应的 MUXx_SEL[3:0]设置及适用于特定 CE 代码的其它设置,请参见表 1 和表 2
注意,启用远程传感器接口时,即使对应于远端传感器电流(IBP-IBN)的采样不通过复用器,也必须采用未
使用的有效 ADC 序号写 MUX2_SEL[3:0]和 MUX3_SEL[3:0]控制字。通常情况下,采用 ADC1 (见表 2)。按
照这种方式,71M6541D/F/G 或 71M6542F/G 中未使用的 ADC1 序号被作为复用帧中的占位符,以生成正
确的复用帧时序和正确的采样率。储存在 CE RAM 0x1 中的结果数据未定义,CE 代码忽略。同时,数字隔
离接口负责自动将远端接口电流(IBP-IBN)的采样储存在 CE RAM 0x2。
、
ADC_DIV和 PLL_FAST。
。
18 Rev 2
Page 19
71M6541D/F/G和 1M6542F/G 数据资料
名称
位置
说明
o
delay
o
delay
ft
T
t
360360 ⋅⋅=⋅=
φ
CE 代码中的延迟补偿和其它功能要求 MUX_DIV[3:0]、MUXx_SEL[3:0]、RMT_E、FIR_LEN[1:0]
ADC_DIV 和 PLL_FAST 的设置对于给定的 CE 代码是固定的。 关于 71M6541D/F/G 和
71M6542F/G的合理设置,请参见表 1 和表 2。
表 4 汇总了用于配置复用器、信号引脚和 ADC 的 I/O RAM 寄存器。所有列出的寄存器在复位及从电池模
式唤醒后清零,可进行读、写操作。
表 4. 复用器和 ADC 配置位
MUX0_SEL[3:0]
MUX1_SEL[3:0]
MUX2_SEL[3:0]
MUX3_SEL[3:0]
MUX4_SEL[3:0]
MUX5_SEL[3:0]
MUX6_SEL[3:0]
MUX7_SEL[3:0]
MUX8_SEL[3:0]
MUX9_SEL[3:0]
MUX10_SEL[3:0]
ADC_DIV
MUX_DIV[3:0]
PLL_FAST
FIR_LEN[1:0]
DIFFA_E
DIFFB_E
RMT_E
PRE_E
关于这些 I/O RAM 位置的详细信息,请参见从第 111 页开始的表 76。
2105[3:0]
2105[7:4]
2104[3:0]
2104[7:4]
2103[3:0]
2103[7:4]
2102[3:0]
2102[7:0]
2101[3:0]
2101[7:0]
2100[3:0]
2100[7:4]
2200[5]
2200[4]
210C[1]
210C[4]
210C[5]
2709[3]
2704[5]
选择在时隙 0 期间转换 ADC输入。
选择在时隙 1 期间转换 ADC输入。
选择在时隙 2 期间转换 ADC输入。
选择在时隙 3 期间转换 ADC输入。
选择在时隙 4 期间转换 ADC输入。
选择在时隙 5 期间转换 ADC输入。
选择在时隙 6 期间转换 ADC输入。
选择在时隙 7 期间转换 ADC输入。
选择在时隙 8 期间转换 ADC输入。
选择在时隙 9 期间转换 ADC输入。
选择在时隙 10 期间转换 ADC 输入。
控制 ADC 和 FIR 时钟速率。
每个复用帧中 ADC 时隙的数量(最大 = 11)。
控制 PLL 和 MCK 速率。
决定 ADC 抽样 FIR 滤波器中的 ADC 周期数。
使能模拟输入引脚 IAP-IAN 的差分配置。
使能模拟输入引脚 IBP-IBN 的差分配置。
使能远程传感器接口,将引脚 IBP-IBN 转换为数字平衡差分对,与
71M6x01传感器通信。
使能 8x 前置放大器。
2.2.3 延迟补偿
、
测量单相能量(即 Wh 和 VARh)时,必须对该相电压和电流同步采样。否则,会产生相位差 Ф,进而引入误
差。
式中,f 为输入信号的频率,T = 1/f,t
传统上,采样是通过控制每相的两个 A/D 转换器(一个用于电压,另一个用于电流)同时采样实现的。而
Teridian 的单转换器技术利用其 CE 的 32 位信号处理能力,实现了“固定延迟”全通滤波器。全通滤波器
修正采用单路复用 A/D 转换器引起的电压和对应电流采样之间的转换时间差。
“固定延迟”全通滤波器提供 360° - θ 宽频带延迟,它与给定相的电压和电流之间的采样时间差精确匹配。
该数字滤波器不影响信号幅值,但提供精确受控的相位响应。
Rev 2 19
y 为电流和电压之间的采样延迟。
dela
Page 20
71M6541D/F/G和 71M6542F/G 数据资料
推荐 ADC 复用序列首先采样电流,随后采样对应相的电压,由此,电压比电流延迟一个相位角 Ф。CE 内
执行的延迟补偿首先将电流采样延迟一个完整的采样间隔(即 360°),然后使电压采样通过全通滤波器,由
此将电压采样延迟 360
样本对齐。剩余相位误差可忽略不计,100Hz时,误差通常小于±1.5 毫度,所以不会引起能量测量误差。
使用远程传感器时,CE 执行与上述相同的延迟补偿,将每个电压采样与对应的电流采样对齐。即使远程电
流采样不通过 71M654x 复用器,如果按照表 1 和表 2 对 MUXn_SEL[3:0]时隙分配字段编程,它与对应电
压的定时关系也是固定且精确可知的。
o
- θ,造成电流与对应电压之间的相位误差为 θ – Ф,从而将电压样本与对应的电流
2.2.4 ADC前置放大器
ADC 前置放大器为低噪声差分放大器,固定增益 8 仅可用于 IAP-IAN 传感器输入引脚。通过置位 PRE_E =
1 (I/O RAM 0x2704[5])使能 8 倍增益。禁用时,前置放大器的电源电流< 10nA,增益为单位增益。正确设置
PRE_E 和 DIFF A_E (I/O RAM 0x210C [4])位,无论是否选择差分模式,均可使用前置放大器。为获得最佳性
能,建议使用差分模式。为节约功率,根据 ADC_DIV 控制位(I/O RAM 0x2200[5])调节前置放大器和 ADC
的偏置电流。
2.2.5 A/D转换器(ADC)
利用 2 阶 Σ-Δ A/D 转换器量化输入电压和电流。ADC 分辨率(包括符号位)为 21 位(FIR_LEN[1:0] = 1,I/O
RAM 0x210C[2:1])或 22 位(FIR_LEN[1:0] = 2)。ADC 时钟由 CKADC 驱动。
如上所述, 由 MUX_CTRL 内部电路控制每次 ADC 转换的启动。ADC 转换结束时,FIR 滤波器输出数据储
存至 CE RAM,地址由复用器选项决定。该数据以 LSB 对齐并左移 9 位存储。
2.2.6 FIR滤波器
有限冲击响应滤波器是 ADC 的一部分,针对复用器进行优化,使 ADC 输出达到所要求的分辨率。每次
ADC 转换结束时,输出数据储存至固定的 CE RAM 地址,由表 1 和表 2 所示复用器选项决定地址。
2.2.7 电压基准
带隙基准为 ADC 提供基准电压,基准幅值为斩波稳定,可由 MPU 利用 I/O RAM 控制字段 CHOP_E[1:0]
(I/O RAM 0x2106[3:2])使能或禁用斩波电路。CHOP_E[1:0]字段中的两位使能 MPU,将斩波电路置于标准
模式或反相模式,或者自动切换模式(推荐)。斩波电路在复用周期之间切换时,VREF 的直流失调被自动调
整为零,因此,斩波电路必须配置为其中一种自动切换模式。
电压基准(VREF)的后级放大器通常存在长期失调电压,通过斩波电路可以自动消除失调电压的影响,提供
稳定的 VREF。71M654x 和 71M6x01 均具有斩波电路,用于各自的 VREF 电压基准。
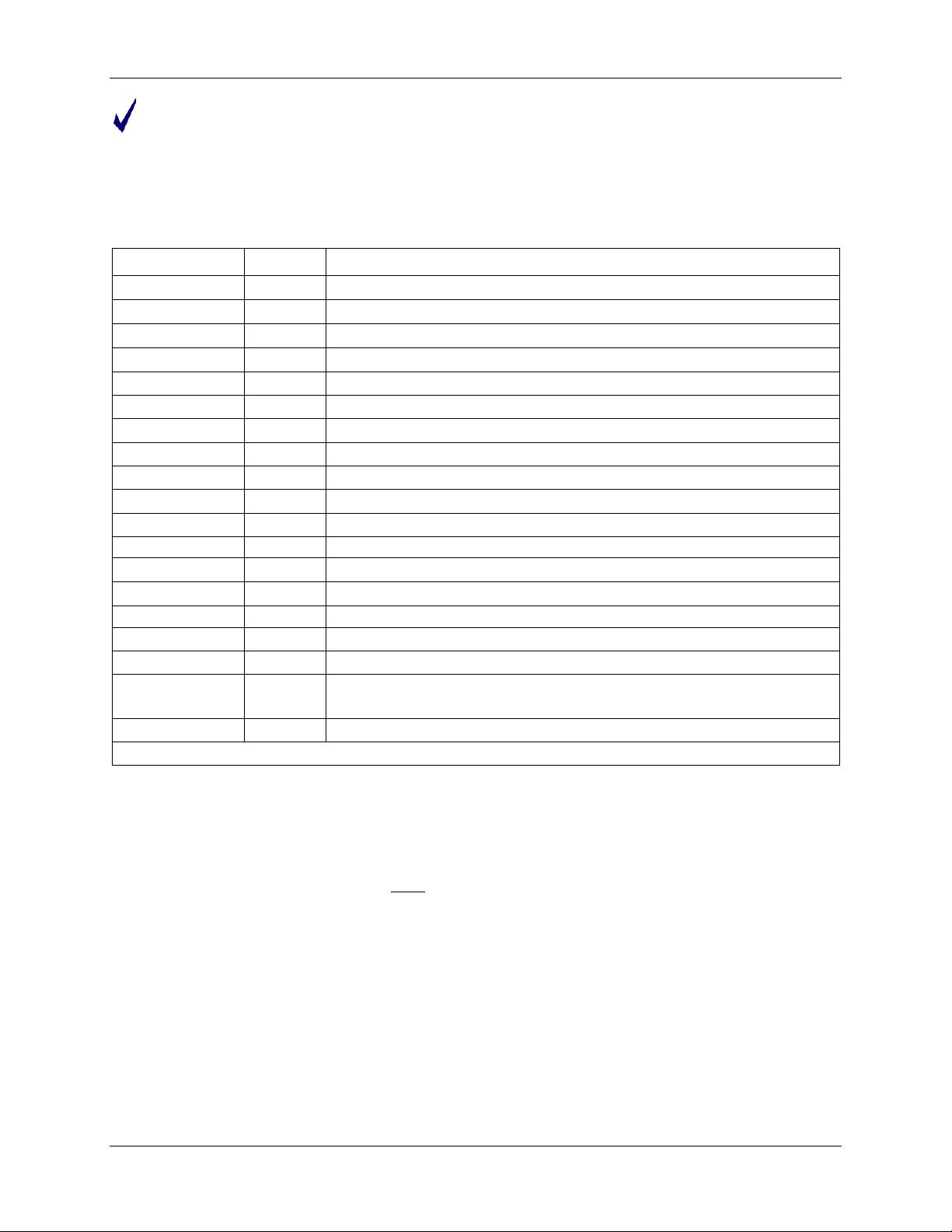
斩波放大器的典型拓扑如图 8 所示。CROSS 信号为内部信号,不能通过引脚或寄存器进行直接操作。
20 Rev 2
Page 21
71M6541D/F/G和 1M6542F/G 数据资料
G
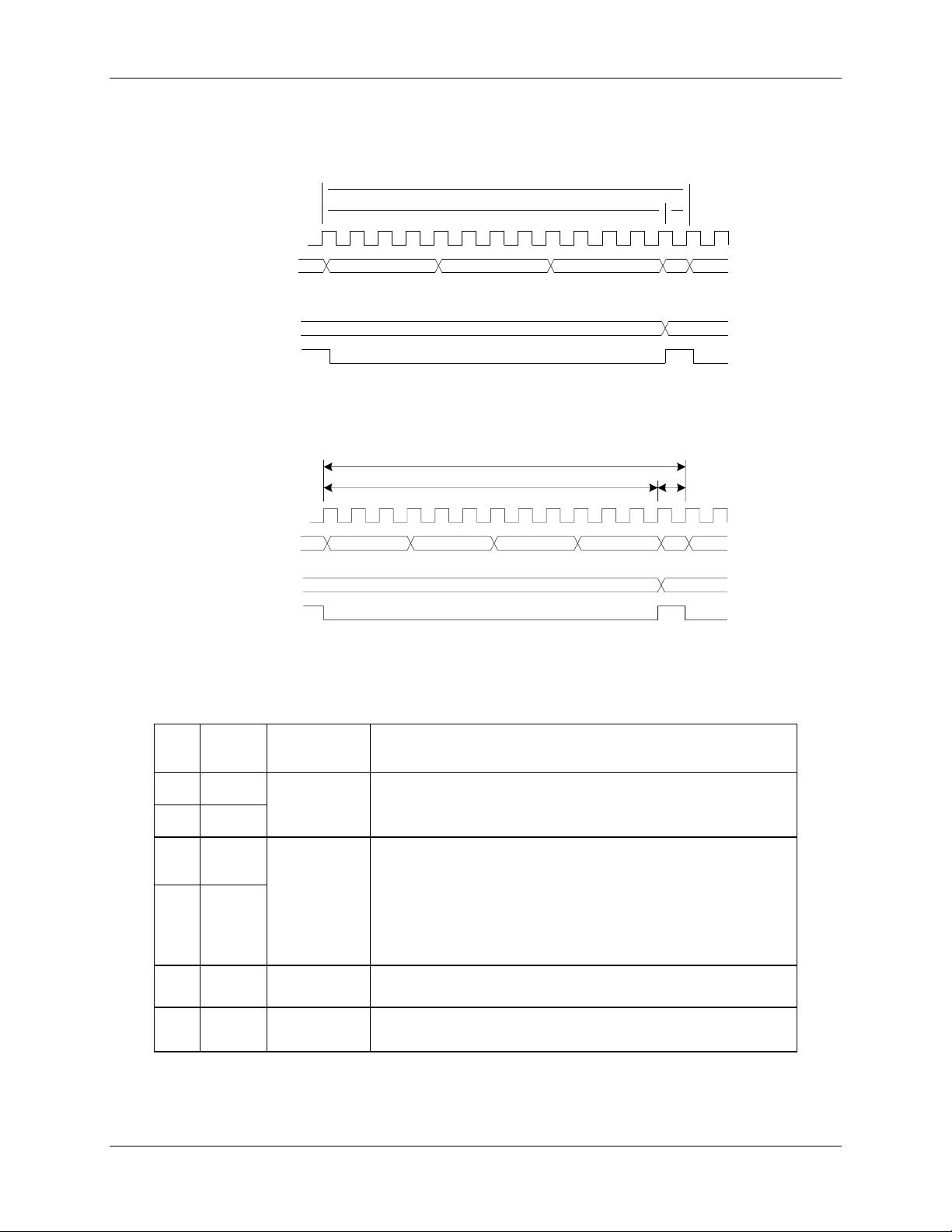
-
+V
inp
V
outp
V
outn
V
inn
CROSS
A
B
A
B
A
B
A
B
图 8. 斩波放大器通用拓扑
假设在放大器正极输入上有一个偏移电压 Voff。由 CROSS (内部信号)控制所有开关处于 A 位置时,输出
电压为:
Voutp – Voutn = G (Vinp + Voff – Vinn) = G (Vinp – V i nn) + G Voff
通过施加反相 CROSS 信号将所有开关处于 B 位置时,输出电压为:
Voutn – Voutp = G (Vinn – Vinp + Voff) = G (Vinn – Vinp) + G Voff,或者
Voutp – Voutn = G (Vinp – Vinn) - G Voff
因此,CROSS 切换时,例如每个复用周期之后,输出偏移表现为正、负交替,从而消除漂移,不受极性或
幅值影响。
CROSS 为高电平时,放大器输入连接反转。维持放大器增益的总体极性,将输入失调反相。通过交替反转
连接,对放大器失调取平均,结果为零。这样就消除了电压基准中常见的长期失调。CHOP_E[1:0] (I/O
RAM 0x2106[3:2])控制字段使能 CROSS 功能。CROSS 信号反转电压基准中的放大器连接,以抵消失调的
影响。在复用序列的最后一个转换状态之后的第一个 CK32 上升沿,复用器在开始新帧之前额外等待一个
CK32 周期。该周期开始时,根据 CHOP_E[1:0]字段更新 CROSS 数值。额外的 CK32 周期使斩波 VREF
有时间达到稳定。在此期间,MUXSYNC 保持为高电平。MUXSYNC 的前沿启动一次 CE 程序的运行,开
始时读取四个 RTM 字。
CHOP_E[1:0]有四个状态:正极、反相,以及两种自动切换状态。正极状态下,CHOP_E[1:0] = 01,
CROSS 保持为低电平;反相状态下,CHOP_E[1:0] = 10,CROSS保持为高电平。
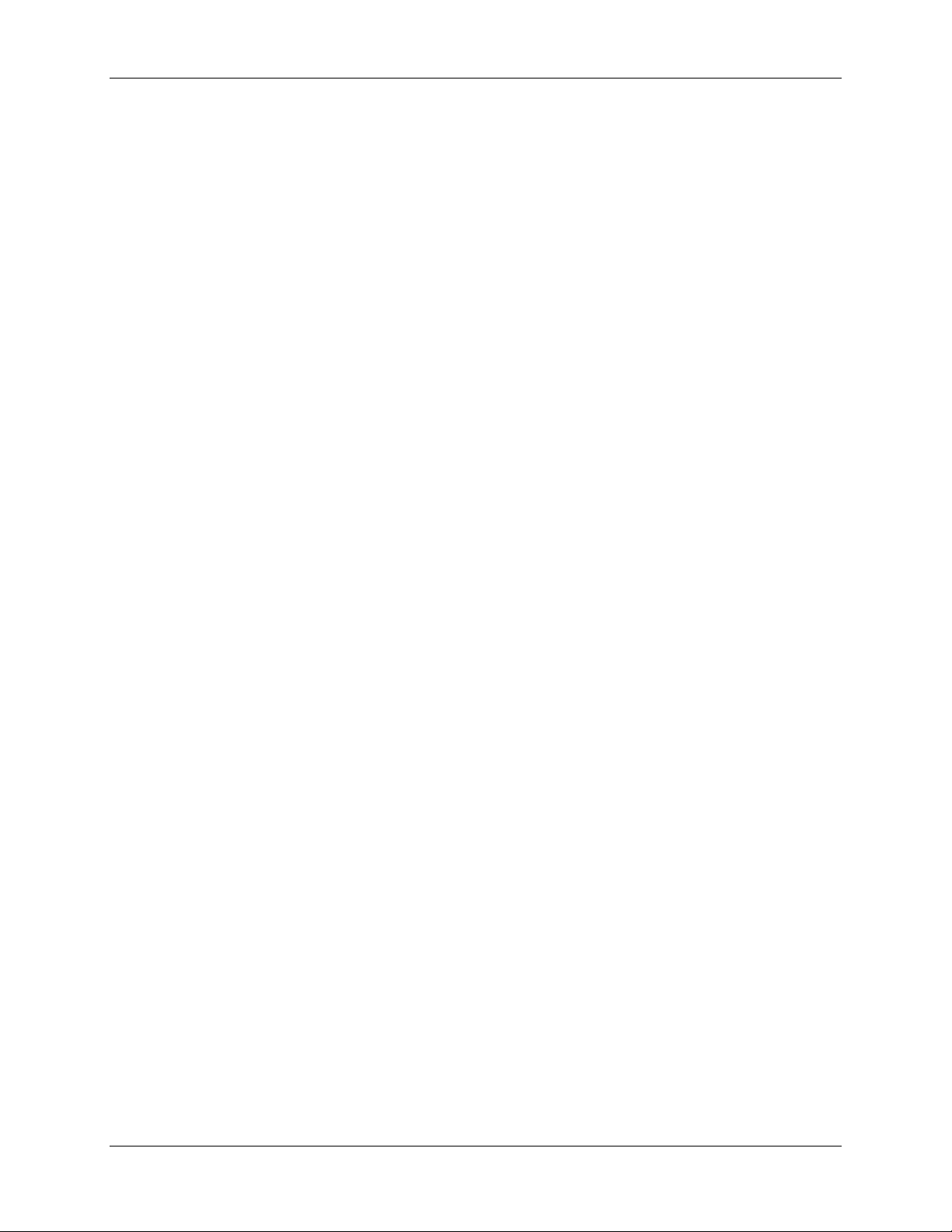
图 9. CROSS 信号,CHOP_E = 00
图 9 所示为 CHOP_E[1:0] = 00 时两个累积间隔的 CROSS 信号。第一个间隔末尾,CROSS 为高电平;第
二个间隔末尾,CROSS 为低电平。CHOP_E[1:0] = 00 时,不需要 MPU 控制斩波器。
在第二个自动切换状态,CHOP_E[1:0] = 11,CROSS 在累积间隔的最后一个复用周期结束时不切换。
低功耗电压基准用于 LCD 驱动电路和控制进入、退出电池供电模式的比较器。
Rev 2 21
Page 22
71M6541D/F/G和 71M6542F/G 数据资料
命令
相选择器
相关的
控制字段
000
00
---
001
01
IBP-IBN
TMUXRB [2:0]
100
101
111
注:
2.
2.2.8 71M6x01隔离传感器接口(远端传感器接口)
2.2.8.1 概述
非隔离传感器,例如电阻分流器,可通过 71M6x01 和脉冲变压 (图 36 所示为该传感器接口的顶层方框图)
的组合连接至 71M654x。 71M6x01 通过脉冲变压器直接从 71M654x 取电,无需专用的供电电路。
71M6x01建立与 71M654x 的双向通信,通过串行数据流提供电流采样和辅助信息(例如:传感器温度)。
71M6541D/F/G 和 71M6542F/G 均支持 71M6x01 隔离传感器。使能该功能时,两个模拟电流输入引脚
IBP 和 IBN成为连接至远程传感器的数字平衡差分接口,详细信息请参考表 3。
每个 71M6x01 远端传感器由以下模块组成:
• 电源,用于从 71M654x 接收的电源脉冲
• 数字通信接口
• 分流信号前置放大器
• Σ-Δ ADC 转换器,带有高精度带隙基准(斩波放大器)
• 温度传感器
• 熔丝器件,包含部件相关信息
在常规的复用周期内,71M654x 利用 MUX_DIV[3:0] (I/O RAM 0x2100[7:4])决定使能哪个通道。同时,对
远端传感器的调制器输出进行采样。每个转换结果在 CE 操作时隙写入 CE RAM。关于采样信号的 CE
RAM 地址,请参见表 3。
2.2.8.2 71M654x和 71M6x01 隔离传感器之间的通信 71M6x01的 ADC 定时时钟来自 71M654x 产生的脉冲信号。电源脉冲的产生,以及 71M654x 和 71M6x01
远端传感器之间的通信协议通过硬件自动完成,用户无需进行任何操作,本数据资料不作详细介绍。
2.2.8.3 71M6x01 隔离传感器的控制 71M654x可读、写每个 71M6x01远端传感器的特定字节信息。
读取数据由 RCMD[4:0]和 TMUXRn[2:0]组合选择。为执行对 71M6x01 器件的读操作,MPU 首先写
TMUXRn[2:0]字段(其中 n = 2、4、6,分别位于 I/O RAM 0x270A[2:0]
、
0x270A[6:4]和 0x2709[2:0])。接着,
MPU 根据所要求的命令和相选择写入 RCMD[4:0] (SFR 0xFC[4:0])。RCMD[4:2]位清零时,操作完成,请
求发送的数据位于 RMT_RD[15:0] (I/O RAM 0x2602[7:0]为 MSB,0x2603[7:0]为 LSB)。操作期间还更新读
取奇偶校验位 PERR_RD (SFR 0xFC[6])。如果 MPU 在完成上次读操作之前写入 RCMD[4:0],则忽略命令。
因此,MPU 在继续发出下一条读命令之前必须判断 RCMD[4:2]是否清零。
RCMD[4:0]字段分为两个子域:COMMAND=RCMD[4:2]和 PHASE=RCMD[1:0],如表 5 所示。
表 5. RCMD[4:0]位
RCMD[4:2]
无效
RCMD[1:0]
无效
TMUXRn
命令 1
保留
无效
110
保留
保留
1. 只有两个 RCMD[4:2] (SFR 0xFC[4:2]) 码与常规工作有关,为
RCMD[4:2] = 001 和 010。000 和 101 吗无效,如果使用,将被忽略。
其余编码为保留,不得使用。
对于 RCMD[1:0]控制子域,编码01、10和11有效,00无效,不得使
22 Rev 2
Page 23
71M6541D/F/G和 1M6542F/G 数据资料
读操作
TRIMT[7:0]
VSENSE[7:0]
VERSION[7:0]
注:
名称
地址
默认值
默认值
读/写
说明
向由
RMT_RD[15:8]
2602[7:0]
2603[7:0]
用。
表 6 所示为所允许的 RCMD[4:2]和 TMUXRn[2:0]数值组合、71M6x01远端传感器返回的对应数据类型和格
式,并显示了数据如何储存至 RMT_RD[15:8]和 RMT_RD[7:0]。MPU 通过设置 RCMD[1:0]字段中的有效编
码,选择读取三相电中的一相,如表 5 所示。
表 6. 远程接口读命令
RCMD[4:2] TMUXRn[2:0]
001 00X
010 00X
010 01X
010 10X
1. TRIMT[7:0]是用于全部 71M6x01 器件的 TRIMT 熔丝值。注意,TRIMT[7:0] 8 位数值由 RMT_RD[8]和
RMT_RD[7:1]组成。关于 TRIMT[7:0]的更多信息,请参见 71M6xxx 的数据资料。
2. 关于利用 71M6x01 读取的 STEMP[7:0]数值计算温度的公式,请参见 71M6xxx 的数据资料。
3. 关于利用 71M6x01 读取的 VSENSE[7:0]数值计算电压的公式,请参见 71M6xxx 的数据资料。
( 熔丝寄存器,适用于全部
71M6x01)
STEMP[10:0]
(检测的 71M6x01温度)
(检测的 71M6x01供电电压)
(芯片版本)
RMT_RD [15:8] RMT_RD [7:0]
TRIMT[7]=RMT_RD[8] TRIMT[6:0]=RMT_RD[7:1]
STEMP[10:8]=RMT_RD[10:8]
(RMT_RD[15:11]高位带符号部分)
全零
VERSION[7:0]
STEMP[7:0]
VSENSE[7:0]
全零
71M6541D/F/G 获取每个隔离传感器 71M6x01 的硬件和相关信息,MPU 根据 71M6x01 隔离传感器的温度
特性实现电能测量的温度补偿。详情参见第 97 页第 4.7 节的计量温度补偿。
表 7 列出了用于控制外部 71M6x01隔离传感器的全部 I/O RAM 寄存器,详情参见 71M6xxx 数据资料。
表 7. 用于远端传感器的 I/O RAM 控制位
RST
WAKE
MPU 向 RCMD 写非零值时,71M654x
RCMD[4:0]
SFR
FC[4:0]
0 0 R/W
RCMD[1:0]选中的相应远端传感器发出一条命令。
完成命令后,71M654x 清除 RCMD[4:2]。命令码
本身位于 RCMD[4:2]。
PERR_RD
PERR_WR
SFR FC[6]
SFR FC[5]
0 0 R/W
71M654x 将这些位置位,表示在远端传感器上检
测到奇偶校验错误。这些位一旦置位,则被记忆,
直到由 MPU 清除。
用于远端传感器的 CHOP。
00 – 自动斩波,每个复用帧变化。
CHOPR[1:0]
2709[7:6] 00 00 R/W
01 – 正
10 – 负
11 – 同 00
TMUXRB[2:0]
270A[2:0] 000 000 R/W TMUX 位,用于控制远端传感器。
RMT_RD[7:0]
0 0 R
用于 71M6x01 读操作的读缓冲器。
控制 71M654x 驱动 71M6x01 电源脉冲的方式。置
RFLY_DIS
210C[3]
0 0 R/W
1,脉冲驱动为高或低电平;清 0,驱动至高电
平,后接一个开路反激间隔。
RMTB_E
2709[3] 0 0 R/W
使能隔离远程传感器,重新将引脚 IBP-IBN 配置为
平衡线对的数字远程接口。
关于这些 I/O RAM 地址的详细信息,请参见从第 111 页开始的表 76。
Rev 2 23
Page 24

71M6541D/F/G和 71M6542F/G 数据资料
2.3 数字计算引擎(CE)
CE 是一个专用的 32 位数字信号处理器,用来执行电量计量所需的精确运算。CE 运算和处理包括:
• 每个电流采样值与其对应电压采样值相乘,以获得每次采样的电能(与固定的采样时间相乘)。
• 对四个通道的非同步采样所产生的延迟进行算法补偿(不受频率影响)。
• 90°相移(用于无功计算)。
• 脉冲发生器。
• 输入信号频率监测(用于频率和相位信息)。
• 输入信号幅值监测(用于电压跌落检测)。
• 根据校准参数对采样进行缩放处理。
• 根据温度补偿信息对采样进行缩放处理。
2.3.1 CE程序存储器
CE 程序存储在程序存储器(FLASH)。CE 和 MPU 对 FLASH 的公共访问由存储器公用电路控制。每个 CE
指令为 2 字节长度。为 CE 程序分配的闪存空间不得超过 4096 个 16 位字(8KB)。CE 程序在复用器状态 0
开始启动。执行到 HALT 指令时,程序结束。为确保 CE 的正确运行,程序必须在复用周期结束之前执行
完毕。
CE 程序必须在 FLASH 地址以 1KB 为 边界处开始。I/O RAM 控制字段 CE_LCTN[5:0] (I/O RAM
0x2109[5:0])定义哪个 1KB 边界为 CE 代码的起始地址。所以,第一条 CE 指令位于 1024*CE_LCTN[5:0]。
2.3.2 CE数据存储器
CE 和 MPU 共用数据存储器(XRAM)。CE 和 MPU 对 XRAM 的公共访问由存储器公用电路控制。CE 最多
可访问 3KB 数据 RAM (XRAM)中的全部 3KB,即从 RAM 地址 0x0000至 0x0C00。
XRAM 可由 FIR 滤波器模块、RTM 电路、CE 和 MPU 访问。分别为 FIR 和 MPU 保留分配的时隙,以防止
CE 访问 XRAM 数据时发生总线冲突。
MPU 读、写 CE 和 MPU 之间共用的 XRAM 是两个处理器之间数据通信的主要途径。
表 3 列出了 XRAM 分配给 AFE 模拟输入的 CE 地址。
CE 通过支持硬件实现计量运算、脉冲计数和累加。通过 I/O RAM 控制字段 EQU[2:0]、计量公式选择字段
(I/O RAM 0x2106[7:5])、DIO_PV 位(I/O RAM 0x2457[6])、DIO_PW 位 (I/O RAM 0x24 57[7]) 、脉冲辅助位和
SUM_SAMPS[12:0]累积周期辅助位(I/O RAM 0x2107[4:0]和 0x2108[7:0])控制硬件。
SUM_SAMPS[12:0]是一种能量累积方案,在一个累积周期内累加 SUM_SAMPS[12:0]
能量输出的积分时间,比如 SUM_SAMPS[12:0]/2520.6 (MUX_DIV[3:0] = 011,I/O RAM 0x2100[7:4]和
FIR_LEN[1:0] = 10,I/O RAM 0x210C[2:1])。完成累积时,CE 触发硬件 XFER_BUSY 中断。
个
复用帧的能量。每个
24 Rev 2
Page 25

71M6541D/F/G和 1M6542F/G 数据资料
说明
有功和无功计量公式
推荐的复用器序列
单元0 单元
单元
2.3.3 CE与MPU通信
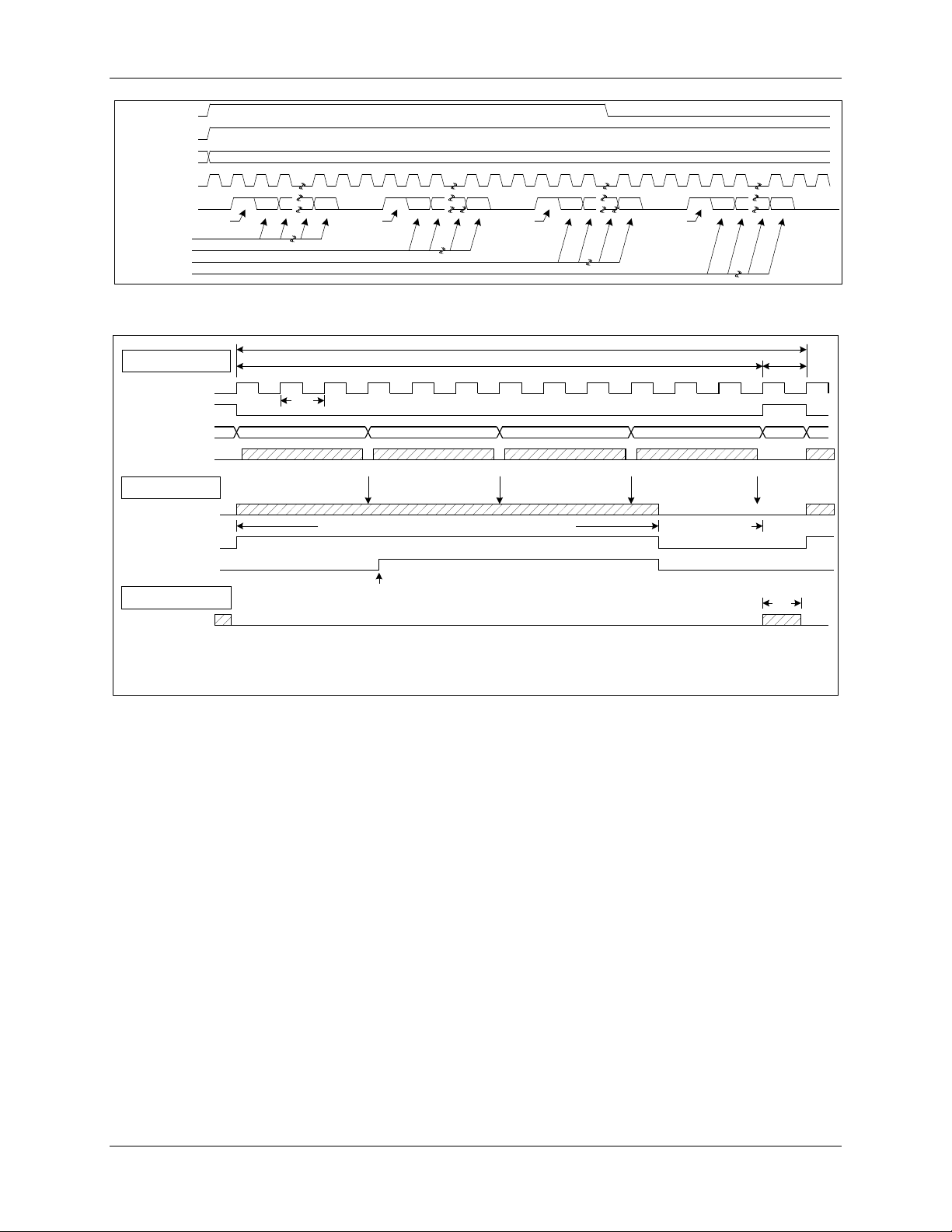
CE 向 MPU 输出 6 种中断信号:CE_BUSY、XFER_BUSY、XPULSE、YPULSE、WPULSE 和 VPULSE。
这些信号在芯片内部已连接至 MPU 中断服务。CE_BUSY 表示 CE 正在处理数据,该信号每个复用帧出现
一次。XFER_BUSY 表示 CE 正在更新 CE RAM 的输出区域,累积循环结束时产生中断。CE 执行 HALT
指令后,CE_BUSY 和 XFER_BUSY自动清零。
XPULSE、YPULSE、VPULSE 和 WPULSE 也可配置成中断,监测电网电压跌落故障、过零和脉冲事件中
断。此外,这些信号也可直接输出至 DIO 引脚,CE 提供直接输出。这些信号对应的中断为上升沿触发(参
见图 16 中的“外部”中断源 No. 2)。
2.3.4 电表公式
71M6541D/F/G 和 71M6542F/G 为 CE 提供辅助硬件,以支持不同的计量公式。辅助电路通过 I/O RAM 寄
存器 EQU[2:0] (公式辅助)控制。利用 CE 固件配置执行表 8 所列公式,完全满足工业计量需求。同时
EQU[2:0]也含有计量公式及计量相数信息。
表 8. 复用器输入选择
EQU
0
1
2 †
单元 1,2W,1
电流检测
单元 1,3W,1
单元 2,3W,3
,带零线
Ф
Ф
∆
Ф
VA ∙ IA VA ∙ IB
1
1
N/A IA VA IB1
2
VA(IA-IB)/2 N/A N/A IA VA IB
VA ∙ IA VB ∙ IB N/A IA VA IB VB
注:
1. 可选,IB 可用于测量零线电流
† 仅限 71M6542F/G
2.3.5 实时监测器(RTM)
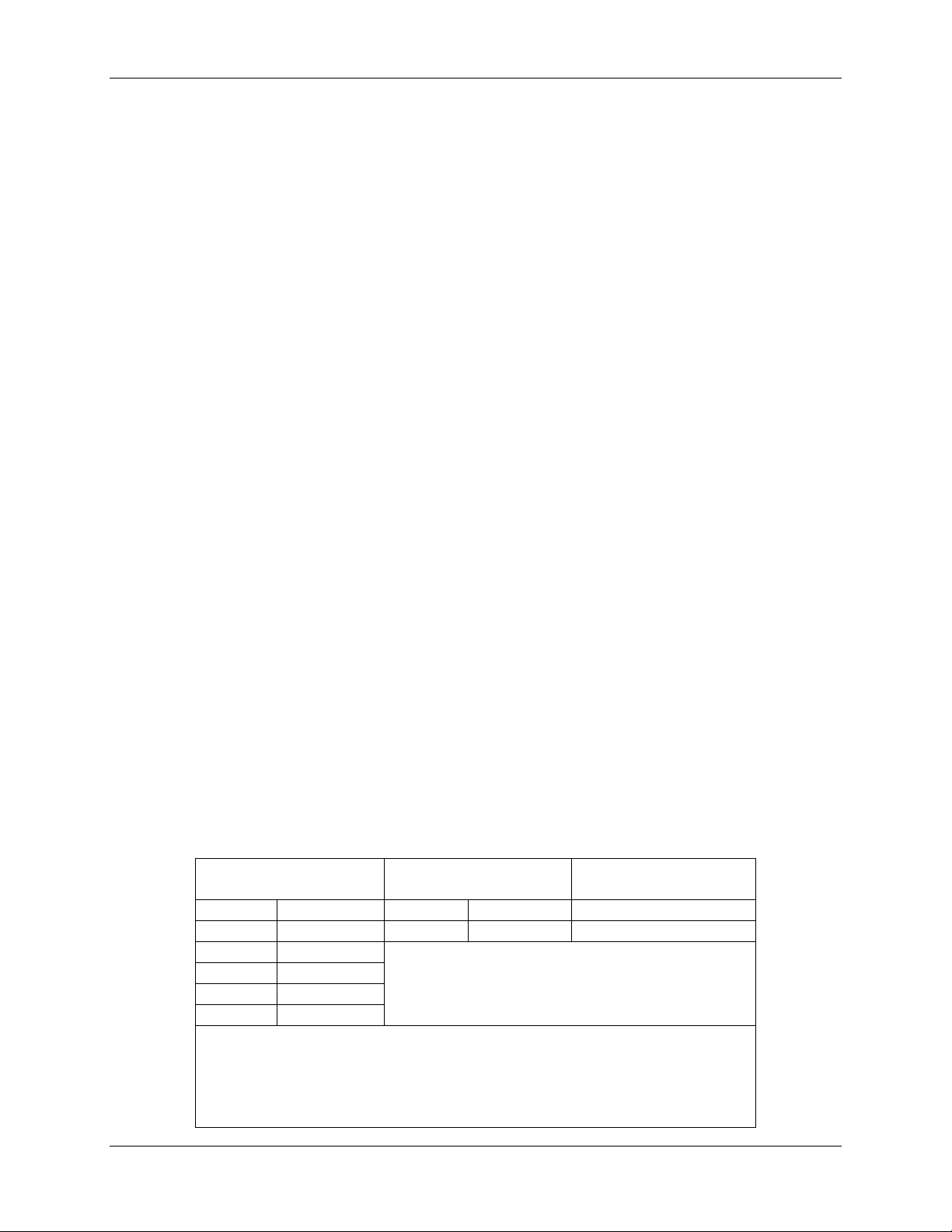
CE 含有一个实时监测器(RTM),可设置为在全速采样速率下监测四个可选的 XRAM。四个被监测位置,由
I/O RAM 寄存器 RTM0[9:8]、RTM0[7:0]、RTM1[9:8]、RTM1[7:0]、RTM2[9:8]、RTM2[7:0]、RTM3[9:8]和
RTM3[7:0]选择,以上数据在每次 CE 执行之前串行输出至 TMUXOUT (多功能监测口)引脚。RTM 可由控
制位 RTM_E (I/O RAM 0x2106[1])使能和禁用。RTM输出时钟为 CKTEST。每个 RTM 字需要 35 个 CKCE
周期(1 个 CKCE 周期等于 203ns),含起始位,RTM 输出格式请参见图 10。RTM 未输出时,TMUXOUT
引脚为低电平。
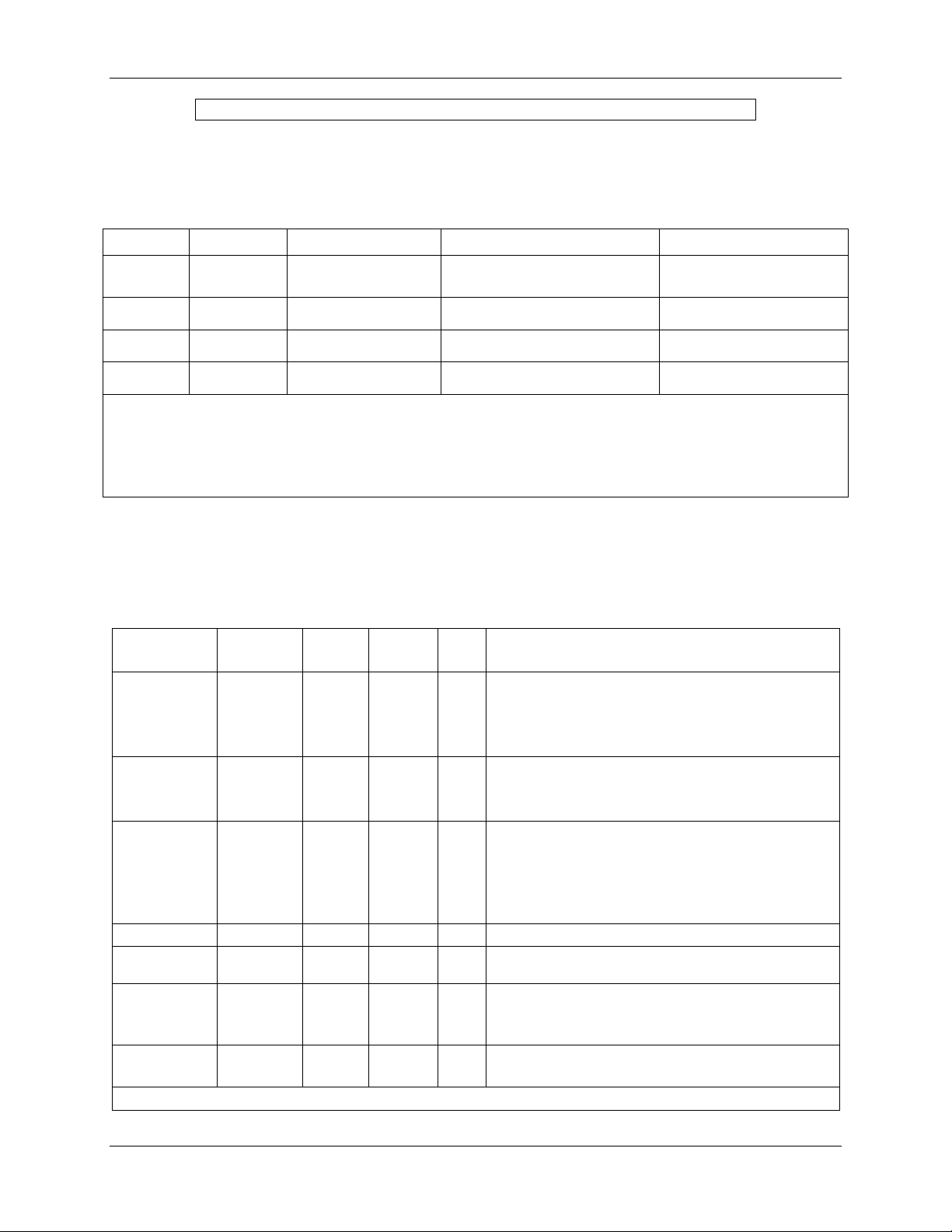
图 11 为 MUX、CE_BUSY 和 RTM 时序关系图。本例中,MUX_DIV[3:0] = 4 (I/O RAM 0x2100[7:4])和
FIR_LEN[1:0] = 10 (I/O RAM 0x210C[1]) , (384),4 个 ADC 转换帧结果。每个 ADC 转换帧占用整数个
CK32 周期。最后还需要一个 CK32 的存储周期。
图 11 中还显示,RTM 串行数据流在状态“S”起始位置开始输出。整个 RTM需要 140个 CKCE周期,总
是在下一次 CE 码执行开始之前结束。
Rev 2 25
Page 26
71M6541D/F/G和 71M6542F/G 数据资料
CK32
MUX STATE 0
MUX_DIV Conversions, MUX_DIV=4 is shown
Settle
ADC MUX Frame
ADC EXECUTION
S
MUX_SYNC
S
CE_EXECUTION
RTM
140
MAX CK COUNT
0 450
150
900 1350 1800
ADC0 ADC1 ADC2 ADC3
CK COUNT = CE_CYCLES + 1CK for e ach ADC transfer
NOTES:
1. ALL DIMENSIONS ARE 5 MHZ CK COUNTS.
2. THE PRECISE FREQUENCY OF CK IS 150*CRYSTAL FREQUENCY = 4.9152MHz.
3. XFER_BUSY OCCURS ONCE EVERY SUM_SAMPS CODE PASSES.
CE_BUSY
XFER_BUSY
INITIATED BY A CE OPCODE AT END OF SUM INTERVAL
ADC TIMING
CE TIMING
RTM TIMING
1 2 3
CKTEST
RTM
FLAG
RTM DATA0 (32 bits)
LSB
SIGN
LSB
SIGN
RTM DATA1 (32 bits)
LSB
LSB
SIGN
SIGN
RTM DATA2 (32 bits)
RTM DATA3 (32 bits)
0 1 30 31 0 1 30 31
0 1
30 31 0 1 30 31
FLAG FLAG FLAG
MUX_STATE S
MUX_SYNC
CK32
图 10. RTM 时序
图 11. ADC MUX、CE 和 RTM 串行传输时序关系
26 Rev 2
Page 27

71M6541D/F/G和 1M6542F/G 数据资料
2.3.6 脉冲发生器
71M6541D/F/G 和 71M6542F/G 支持四路脉冲发生器:VPULSE、WPULSE、XPULSE 和 YPULSE,其
中 VPULSE 和 WPULSE 有相应的硬件脉冲发生器支持。脉冲发生器可以将 CE 状态、SAG 输出到对应的
IO 口。所有脉冲均可配置为 MPU 中断。
PLS_INV (I/O RAM 0x210C[0])可以控制脉冲的极性。该位置 1 时,脉冲为高电平有效。默认为 0,低电平
有效。PLS_INV 会同时改变 4 路脉冲输出极性。
每个特定 CE 代码决定每个脉冲发生器的功能,MPU 必须配置 CE 寄存器实现脉冲输出功能。例如,在标
准 CE 代码中 XPULSE 用来产生过零信号,YPULSE 用来产生 SAG 信号。
过零脉冲常用于产生一个中断,使软件能够修正实时时钟,以及针对晶振老化进行调节,前提是电网频率
足够精确和稳定。SAG 脉冲通常用在交流电源跌落时产生预警中断,MPU 即可在 V3P3SYS 电压下降之前
将重要信息(比如电量)存入外部 EEPROM。
2.3.6.1 XPULSE和YPULSE CE 产生的脉冲可输出至 XPULSE 和 YPULSE 脉冲输出引脚,SEGDIO6 和 SEGDIO7 引脚分别用于这些
脉冲。一般而言,XPULSE和 YPULSE输出可在每个 CE 代码周期更新一次。
详情参见第 125 页第 5.3 节 CE 接口说明。
2.3.6.2 VPULSE和WPULSE 参见图 12,每个 CE 代码周期,硬件将 WPULSE 和 VPULSE 输出符号位保存在一个 8 位 FIFO 中,并以
规定的间隔输出。这样 CE 代码就需要在其执行完之前计算 VPULSE 和 WPULSE 输出,并依靠硬件将其
分配至复用帧。如图 12 所示,FIFO 在每个复用帧开始时复位。从图 12 还可以看出 I/O RAM 寄存器
PLS_INTERVAL[7:0] (I/O RAM 0x210B[7:0])控制到第一个脉冲更新之间的延迟,以及随后更新之间的间隔。
PLS_INTERVAL[7:0]寄存器的 LSB 等于 4 个 CK_FIR 周期(如果 PLL_FAST = 1 且 ADC_DIV = 0,CK_FIR
通常为 4.9152MHz,但也可能是其它 CK_FIR 频率;参见表 76 中的 ADC_DIV 定义)。如果
PLS_INTERVAL[7:0] = 0,FIFO禁用,脉冲输出由 CE 更新。
以 CK_FIR 时钟周期为单位的 MUX 帧持续时间由下式决定:
如果 PLL_FAST=1:
MUX frame duration in CK_FIR cycles = [1 + (FIR_LEN+1) * (ADC_DIV+1) * (MUX_DIV)] * [150 / (ADC_DIV+1)]
如果 PLL_FAST=0:
MUX frame duration in CK_FIR cycles = [3 + 3*(FIR_LEN+1) * (ADC_DIV+1) * (MUX_DIV)] * [48 / (ADC_DIV+1)]
以 CK_FIR 时钟周期为单位的 PLS_INTERVAL[7:0]计算如下:
PLS_INTERVAL[7:0] = floor (Mux frame duration in CK_FIR cycles / CE pulse updates per Mu x f r ame / 4 )
由于 FIFO 在每个复用帧开始时复位,用户必须指定 PLS_INTERVAL[7:0],CE 在复用帧结束之前完成脉冲
更新。例如,71M654x CE代码在每个复用周期更新 6 次输出,如果复用间隔为 1950 个 CK_FIR 时钟周期
长,适用于该间隔的理想值为 1950/6/4 = 81.25。然而,如果 PLS_INTERVAL[7:0] = 82,第 6 次输出太晚,
将丢失数据。这种情况下,PLS_INTERVAL[7:0]的合理数值为 81 (即四舍五入结果)。
由于 PLS_INTERVAL[7:0]
间隔 T
为:
I
的
一个 LSB 等于 4 个 CK_FIR 时钟周期,以 CK_FIR 时钟周期为单位的脉冲时间
= 4*PLS_INTERVAL[7:0]
T
I
Rev 2 27
Page 28
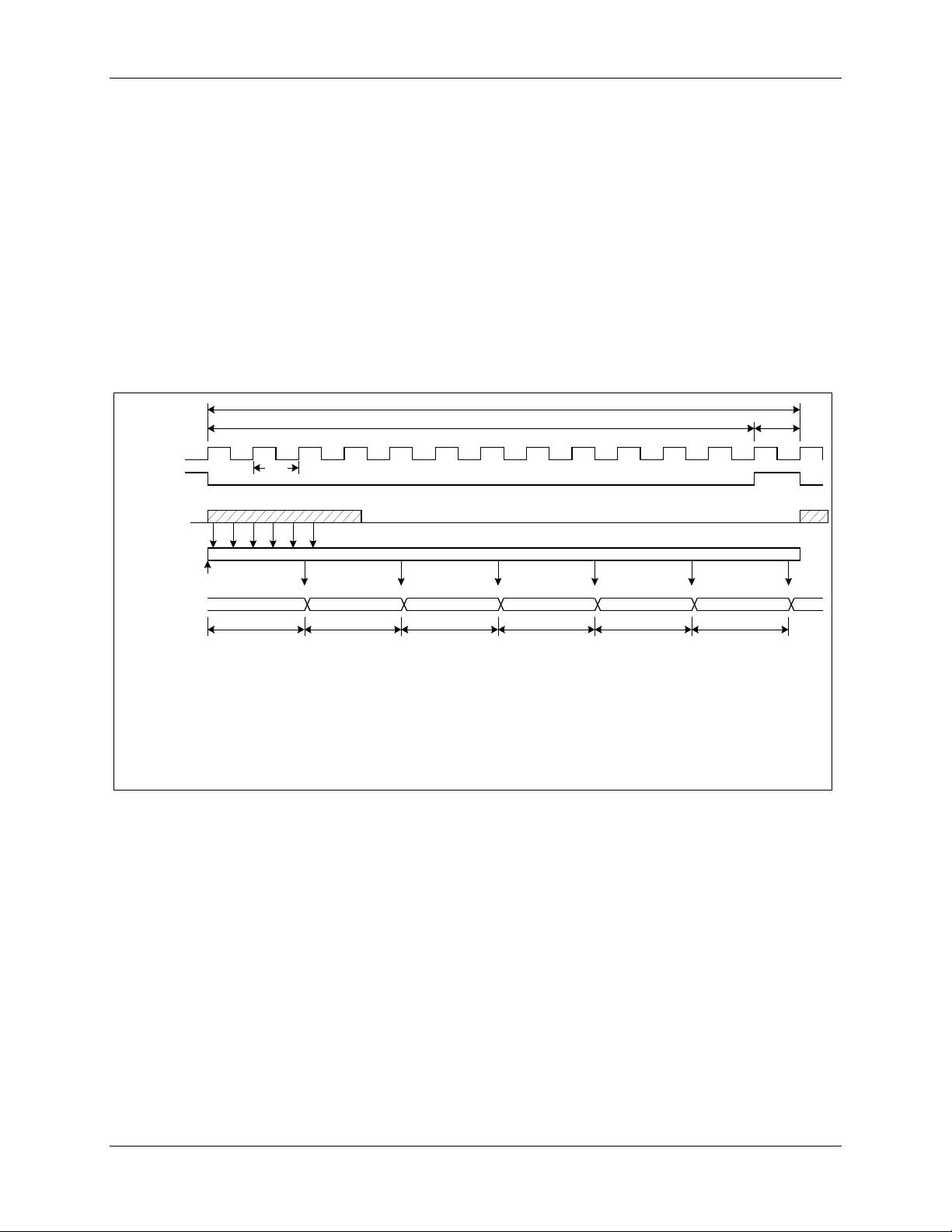
71M6541D/F/G和 71M6542F/G 数据资料
CK32
MUX_DIV Conversions (MUX_DIV=4 is shown)
Settle
ADC MUX Frame
MUX_SYNC
150
WPULSE
S
0
S
1
S
2
S
3
S
4
S
5
CE CODE
RST
W_FIFO
S
0
S
1
S
2
S
3
S
4
S
5
S
0
S
1
S
2
S
3
S
4
S
5
4*PLS_INTERVAL
2. If WPULSE is low longer than (2*PLS_MAXWIDTH+1) updates, WPULSE will be raised until the next
low-going pulse begins.
3. Only the WPULSE circuit is shown. The VARPULSE circuit behaves identically.
4. All dimensions are in CK_FIR cycles (4.92MHz).
5. If PLS_INTERVAL=0, FIFO does not perform delay.
4*PLS_INTERVAL
4*PLS_INTERVAL
4*PLS_INTERVAL
4*PLS_INTERVAL
4*PLS_INTERVAL
1. This example shows how the FIFO distributes 6 pulse generator updates over one MUX frame.
如果使能 FIFO(及 PLS_INTERVAL[7:0] ≠ 0,硬件也提供脉宽调整功能,由寄存器 PLS_MAXWIDTH[7:0]
(I/O RAM 0x210A)
LED)。PLS_MAXWIDTH[7:0]决定以 CK_FIR 时钟周期为单位的最大负脉冲宽度 T
实现
。默认配置下,WPULSE 和 VPULSE 为负脉冲(即低电平脉冲,通过灌电流驱动
,取决于脉冲间隔 T
MAX
I
,
计算公式如下:
T
= (2 * PLS_MAXWIDTH[7:0] + 1) * TI
MAX
如果 PLS_MAXWIDTH = 255 或 PLS_INTERVAL = 0,则不执行脉宽检查,脉冲默认为 50%占空比。T
MAX
通
常设置为 10 ms,对于大多数校准系统工作良好。
脉冲极性可用控制位 PLS_INV (I/O RAM 0x210C[0])反转。置位 PLS_INV 时,脉冲为高电平有效。PLS_INV
默认值为零,低电平有效。
WPULSE 和 VPULSE 脉冲分别输出连接至 SEGDIO0/WPULSE 和 SEGDIO1/VPULSE (引脚 45 和 44)引
脚。脉冲也可以从 OPT_TX 引脚 53 输出(详情参见 OPT_TXE[1:0] 、I/O RAM 0x2456[3:2])。
图 12. 脉冲发生器 FIFO 时序
2.3.7 CE功能概述
71M654x 通过一个 ADC 和复用器对模拟输入进行采样,如图 2 和图 3 所示。VA 和 VB 电压采用由直接连
接在 71M654x 的电阻分压器组成,因此,始终使用 71M654x器件的 ADC 和复用器功能。而电流传感器也
可以直接连接至 71M654x 或通过远端隔离器连接,71M6x01 远端传感器有其独立的 ADC 和电压基准。电
流传感器通过远端传感器连接时,71M654x 将通过隔离接口(通过脉冲变压器)以数字方式接收采样数据。
直接将其存入相应的 CE RAM,如图 3 所示。ADC (即 71M654x中的 ADC 和 71M6x01中的 ADC)处理其
对应传感器通道,每个复用周期内对每个通道进行一次采样。
图 14 (71M6541D/F/G)和 图 15 (71M6542F/G)所示为两个电流传感器(IA 和 IB) 均直接连接至
71M6541D/F/G 时(如图 2 所示)的采样时序。而 IB 通道为 71M6x01 远端传感器时,采样数据不通过
71M6541D/F/G 复用器,如图 3 所示。这种情况下,在复用周期的后半部分进行采样,数据直接储存到相
应的 CE RAM,如图 3 所示。远端电流传感器通道与其对应电压的时序关系被确定,因此 CE 可以精确补
偿延迟。
28 Rev 2
Page 29
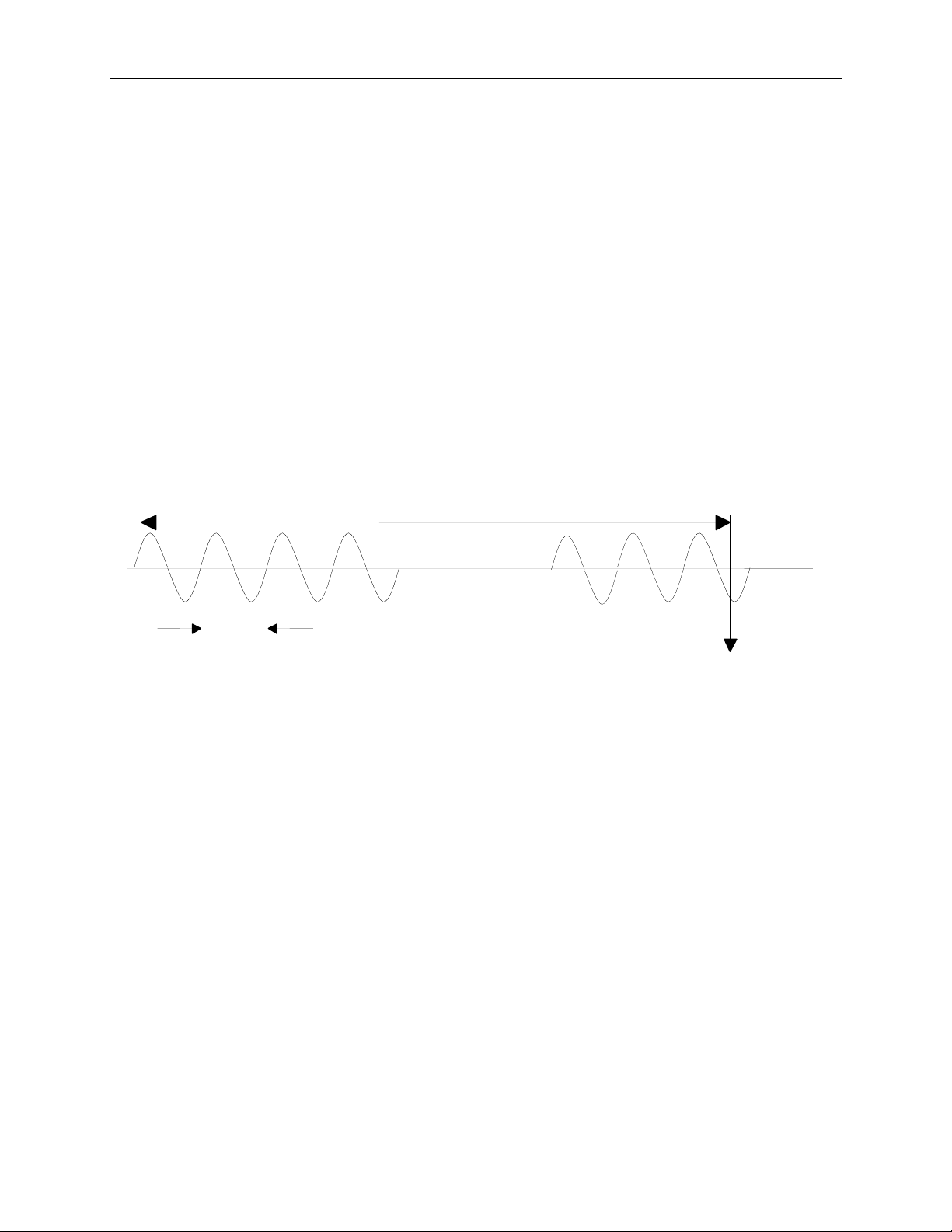
71M6541D/F/G和 1M6542F/G 数据资料
XFER_BUSY
Interrupt to MPU
20ms
833ms
参见图 15,71M6542F/G 具有一路附加的电压输入(VB),支持 2 相电表设计。与 VA 相同,VB 通过电阻
分压器直接连接至 71M6542F/G,使用 71M6542F/G 内的 ADC 和复用功能。MUX_DIV[3:0] = 4 配置复用
器 具有一个附加时隙,用来处理 VB 电压采样。和 71M6541D/F/G 一样,IA 采样从直接连接至
71M6542F/G 的电流传感器获得,而 IB 采样从连接的 CT 或通过 71M6x01 隔离器件远程连接(见图 2 和图
3)的分流器获得。
一个累积周期内处理的采样数量由 I/O RAM 寄存器 SUM_SAMPS[12:0] (I/O RAM 0x2107[4:0]
控制。每个能量输出的积分时间为:
SUM_SAMPS / 2520.6,其中 2520.6 为采样率,单位为 Hz
例如,SUM_SAMPS = 2100 时,每个累积周期建立 2100 个采样,持续时间为 833ms。完成累积周期后,
XFER_BUSY 中断通知 MPU 有更新的累积数据。
每个复用周期结束时,都可以通过 CE_BUSY 中断通知 MPU 状态寄存器已更新,例如电压跌落数据和数
字化的输入信号。
图 13 所示为 SUM_SAMPS = 2100 个累积周期,包括 2100 个样本,每个采样周期 397μs, 随 后 是
XFER_BUSY 中断。本例为 50Hz 信号采样情况,具体的电网频率与 SUM_SAMPS 无关。此外,并非必须
从电网电压过零点开始采样,累积周期也无需是信号周期的整数倍。
、
0x2108[7:0])
图 13. 累积间隔
Rev 2 29
Page 30
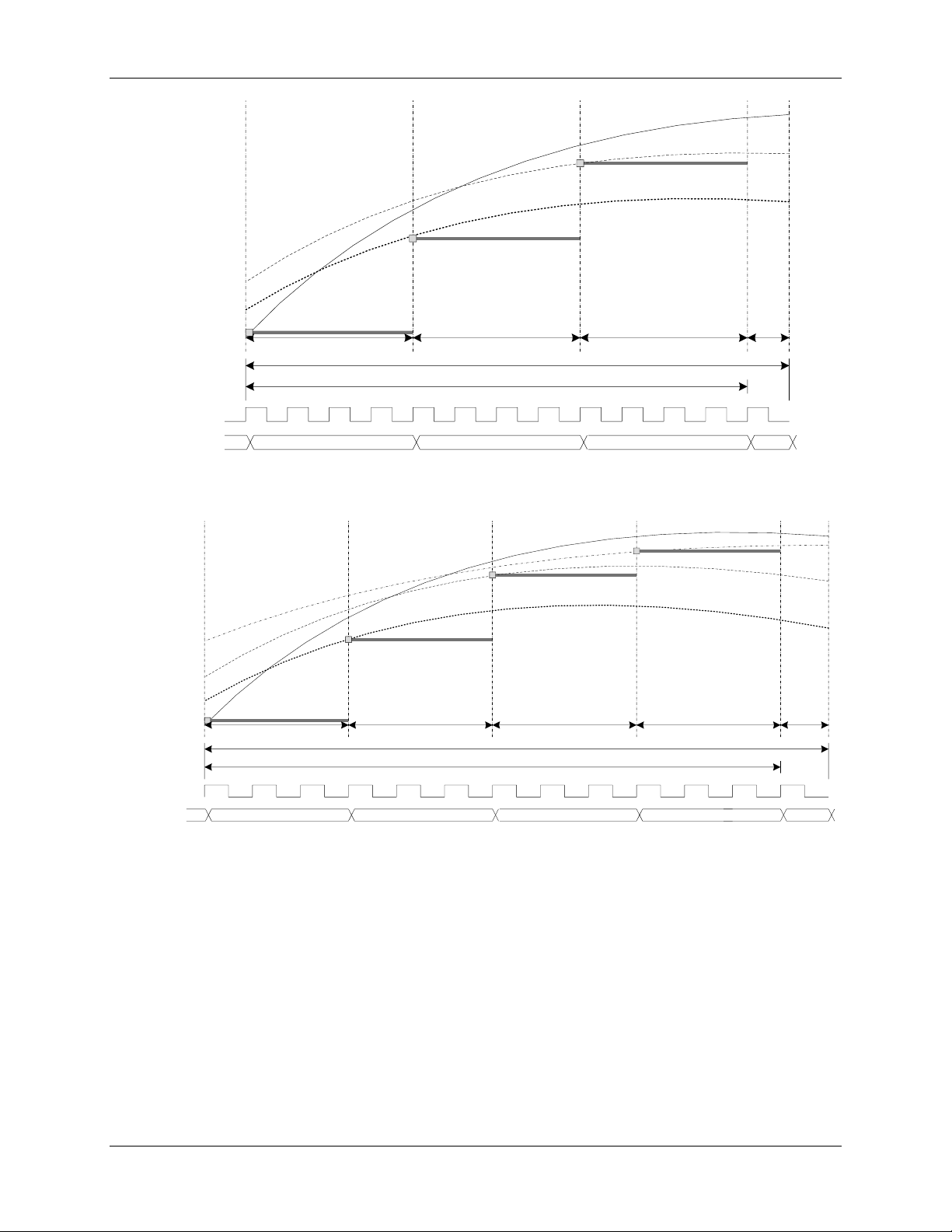
71M6541D/F/G和 71M6542F/G 数据资料
MUX STATE
CK32
(32768 Hz)
0 1 2
MUX_DIV[3:0] = 3 Conversions
Settle
Multiplexer Frame (13 x 30.518 µs = 396.7 µs -> 2520.6 Hz)
SS
IA
VA
IB
30.5
µs
122.07 µs
122.07 µs 122.07 µs
MUX STATE
CK32
(32768 Hz)
0 31 2
MUX_DIV[3:0] = 4 Conversions
Settle
Multiplexer Frame (13 x 30.518 µs = 396 µs à2520Hz)
S
S
IA
VA
IB
30.5 µs
91.5 µs
91.5 µs 91.5 µs
91.5 µs
VB
图 14. 复用周期内采样(MUX_DIV[3:0] = 3)
图 15. 复用周期内采样(MUX_DIV[3:0] = 4)
30 Rev 2
Page 31

71M6541D/F/G和 1M6542F/G 数据资料
频率
001
2.4576MHz
100
111
2.4 80515 MPU核
71M6541D/F/G 和 71M6542F/G 集成了 80515 MPU (8 位、8051 兼容),大多数指令可以在一个时钟周期
完成。因此 4.9MHz 主频相当于 4.9 MIPS 的处理能力。80515 架构消除了冗余总线状态,指令读取和执行
并行执行。通常情况下,机器周期与存储周期对齐,因此,大多数单字节指令在单个机器周期(MPU 时钟周
期)内完成,相对于相同时钟频率的 Intel
表 9 中 CKMPU 是 MCK 时钟(19.6608MHz)的分频输出,可以通过控制字段 MPU_DIV[2:0] (I/O RAM
0x2200[2:0])设置 MPU 时钟频率。具体运行频率取决于实际需求(表计计算、AMR 管理、存储器管理、
LCD 驱动管理和 I/O 管理),如表 9 所示。
®
8051 速率提升了 8 倍(MIPS)。
表 9. CKMPU 时钟频率
MPU_DIV [2:0] CKMPU
000 4.9152MHz
010 1.2288MHz
011 614.4kHz
101
110
307.2kHz
CE 代码以一种库文件的形式提供给客户,具体的计量性能和功能与 CE 代码版本有关。Teridian 提供演示
源代码,帮助用户缩短设计周期。
2.4.1 存储器架构和寻址
80515 MPU 核心采用 Harvard 架构,代码和数据空间相隔离。80515 中的存储器管理与工业标准 8051 类
似。有三个存储区域:程序存储器(MPU和 CE 共用)、外部 RAM (CE 和 MPU 共用,以及配置 I/O RAM)和
内部数据存储器(内部 RAM)。表 10 列出了存储器映射。
程序存储器(FLASH)
80515 可寻址高达 64KB 程序存储空间(0x0000 至 0xFFFF)。MPU 取指令或执行 MOVC 操作时,进行存储
器读操作。
从复位或低功耗状态唤醒后,MPU 从程序存储器的地址 0x0000 开始执行。程序存储器的低地址部分包括
复位和中断向量。中断向量以 8字节间隔分布,从 0x0003 开始。
MPU外部数据存储器(XRAM)
不管是内部还是外部数据存储器,物理上均在 71M654x 器件内部。本文提及的外部数据存储器只是相对于
80515 MPU内核而言。
从地址 0x0000 开始的 3KB RAM 由 CE 和 MPU 共用。CE 通常使用前 1KB,为 MPU 留 2KB。不同版本
CE 代码,所占用的存储空间不同。准确数据请查阅具体版本代码的说明文档。
Rev 2 31
如果 MPU 覆盖 CE 的工作 RAM,CE 输出可能破坏。如果 CE 被禁用,MUX_DIV[3:0] ≠ 0 时,
RAM 的前 0x40 字节仍然不可用,因为 71M654x ADC 原始数据会更新到这些地址。设置
MUX_DIV[3:0] = 0 禁用 ADC 输出,防止 CE 覆盖 RAM 的前 0x40 字节。
此外,MUXn_SEL[3:0]值必须在 MUX_DIV[3:0]写操作之后写入。
Page 32

71M6541D/F/G和 71M6542F/G 数据资料
地址
十六进制
存储器技术
存储器类型
名称
典型用途
存储器大小
字节
MPU 执行 MOVX @Ri,A 或 MOVX @DPTR,A 指令时,80515 写外部数据存储器。MPU 通过执行 MOVX
A,@Ri 或 MOVX A,@DPTR 指令(PDATA, SFR 0xBF 为 MOVX A,@Ri指令提供高 8个字节)读外部数据存储
器。
内部和外部存储器映射
表 10 中列出了各种存储器件的地址、类型、用途及大小。
表 10. 存储器映射
(
0000-7FFF
0000-0BFF
2000-27FF
2800-287F
0000-00FF
†存储器大小取决于 IC 具体型号,详情参见第 2.5.1 节物理存储器。
MOVX寻址
有两种类型的指令,区别在于提供 8 位或 16位外部数据 RAM的间接地址。
第一种类型中,MOVX A,@Ri,当前寄存器组的 R0 或 R1 提供地址的 8 个低位。地址的 8 个高位由
PDATA SFR 指定。这种方法允许用户按页存取(256 页,每页 256 字节)外部数据 RAM 的整个范围。
第二种类型 MOVX 指令中,MOVX A,@DPTR,数据指针产生一个 16 位地址。这种形式在存取非常大的
数据数组(高达 64 KB)时,由于无需额外指令来设置地址的 8 个高位,所以更快、更高效。
)
闪存 非易失
静态 RAM 易失
静态 RAM 易失
静态 RAM
静态 RAM 易失 内部 RAM 80515 核心的一部分
非易失
(电池)
MPU 和 CE程序
存储器
外部 RAM
(XRAM)
配置 RAM (I/O
RAM)
配置 RAM (I/O
RAM)
MPU 程序和非易失数
CE 程序(在 1KB 边
CE 和 MPU共用
硬件控制
电池缓冲存储器
据
界)
(
64/32KB †
最大 3KB.
5/3KB †
2KB
128
256
)
可以混合使用两种类型。这为用户提供了四个独立的数据指针,两个直接寻址,两个按页存取,可寻址整
个外部存储器范围。
双数据指针
双数据指针加快了数据的块搬移。标准 DPTR 为 16位寄存器,用于寻址外部存储器或外设。在 80515 核中,
标准数据指针为 DPTR,第二个数据指针为 DPTR1。数据指针选择位位于 DPS 寄存器的 LSB (DPS[0], SFR
0x92)。DPS[0] = 0 时选择 DPTR,DPS[0] = 1 时选择 DPTR1。
用户通过改变 DPS 寄存器的 LSB 实现指针之间的切换。数据指针中的数值不受 DPS 寄存器的 LSB 影响。
所有 DPTR 相关指令将使用当前的有效 DPTR 数值。
有些编译器不支持第二个数据指针。
DPTR1 对于数据搬迁非常有用,相对于从寄存器重新加载 DPTR,它可使此类操作更快。如果在中
断服务程序中使用 DPTR1 时,必须保存并恢复 DPS
延长了中断响应时间。
通过在 Keil 编译器项目设置中选择 R80515 核,以及使用编译器指令“MODC2”,可在特定的库中
使能双数据指针。
32 Rev 2
、
DPTR 和 DPTR1,增大了堆栈使用量,同时也
Page 33

71M6541D/F/G和 1M6542F/G 数据资料
地址范围 直接寻址
间接寻址
十六
二进
制
位寻址
字节寻址
二/十
六进
制
F8
FF
F0
F7
E8
EF
E0
E7
D8
DF
D0
D7
C8
CF
C0
C7
B8
BF
B0
B7
A8
AF
A0
A7
98
9F
90
97
88
8F
80
87
PDATA 寄存器(SFR 0xBF)提供了另一种数据指针(USR2),定义了使用指令 MOVX A,@Ri 或 MOVX @Ri,A
读/写 XDATA 时的 16 位地址的高字节。
内部数据存储器映射和存取 80515 内部有 256 字节(0x00 至 0xFF)的数据存储器。内部数据存储器地址始终为单字节宽,表 11 列出了
内部数据存储器映射。
特殊功能寄存器(SFR)占用高 128 个字节。内部数据存储器的 SFR 区域只能通过直接寻址使用,该区域的
内部 RAM 必须使用间接寻址存取。低 128 字节包含工作寄存器和位寻址存储器。低 32 字节形成 4 组八寄
存器(R0-R7)组。程序存储器状态字的两位(PSW
一块位寻址存储器空间,位地址为 0x00-0x7F。低 128字节中的全部字节通过直接或间接寻址存取。
表 11. 内部数据存储器映射
,
SFR 0xD0)选择使用哪组寄存器。接下来的 16 字节形成
0x80 0xFF
0x30 0x7F
0x20 0x2F
0x00 0x1F
特殊功能寄存器(SFR)
字节寻址区域
位寻址区域
工作寄存器组 R0…R7
RAM
2.4.2 特殊功能寄存器(SFR)
特殊功能寄存器的映射如表 12 所示。
SFR 存储器空间中只有少数几个地址被占用,其它无效。对未生效的地址进行读操作将返回未定义的数据,
写操作无影响。71M654x所特有的 SFR 以
均为字节寻址。
/
INTBITS VSTAT
IFLAGS
WDCON
T2CON
IRCON
P3 (DIO12:15)
P2 (DIO8:11)
S0CON S0BUF IEN2 S1CON S1BUF S1RELL
P1(DIO4:7)
P0 (DIO0:3)
X000 X001 X010 X011 X100 X101 X110 X111
B
A
PSW
IEN1 IP1 S0RELH S1RELH PDATA
FLSHCTL
IEN0 IP0 S0RELL
TCON TMOD TL0 TL1 TH0 TH1 CKCON
SP DPL DPH DPL1 DPH1 PCON
粗体表示。地址为 0x80、0x88、0x90 等寄存器位可寻址,其它
表 12. 特殊功能寄存器映射
DPS
RCMD SPI_CMD
ERASE
FLSHPG
EEDATA EECTRL
Rev 2 33
Page 34

71M6541D/F/G和 71M6542F/G 数据资料
名称
地址
十六进制
复位值
十六进制
说明 页码
TMOD
TL0
TL1
TH0
IEN0
IP0
B
2.4.3 通用 80515 特殊功能寄存器
表 13列出了通用 80515 SFR 的位置、说明及默认值。关于寄存器的更多说明,可参见表中所列页码。
表 13. 通用 80515 SFR—地址和复位值
P0
SP
DPL
DPH
DPL1
DPH1
PCON
TCON
TH1
CKCON
P1
DPS
S0CON
S0BUF
IEN2
S1CON
S1BUF
S1RELL
P2
S0RELL
P3
IEN1
IP1
S0RELH
S1RELH
PDATA
IRCON
T2CON
PSW
WDCON
A
(
(
)
0x80 0xFF
0x81 0x07
0x82 0x00
0x83 0x00
0x84 0x00
0x85 0x00
0x87 0x00
0x88 0x00
0x89 0x00
0x8A 0x00
0x8B 0x00
0x8C 0x00
0x8D 0x00
0x8E 0x01
0x90 0xFF
0x92 0x00
0x98 0x00
0x99 0x00
0x9A 0x00
0x9B 0x00
0x9C 0x00
0x9D 0x00
0xA0 0xFF
0xA8 0x00
0xA9 0x00
0xAA 0xD9
0xB0 0xFF
0xB8 0x00
0xB9 0x00
0xBA 0x03
0xBB 0x03
0xBF 0x00
0xC0 0x00
0xC8 0x00
0xD0 0x00
0xD8 0x00
0xE0 0x00
0xF0 0x00
)
端口 0
堆栈指针
数据指针,低 0
数据指针,高 0
数据指针,低 1
数据指针,高 1
UART 速度控制
定时器/计数器控制
定时器/模式控制
定时器 0,低字节
定时器 1,低字节
定时器 0,高字节
定时器 1,高字节
时钟控制(展宽=1)
端口 1
数据指针选择寄存器
串口 0,控制寄存器
串口 0,数据缓存器
中断使能寄存器 2
串口 1,控制寄存器
串口 1,数据缓存器
串口 1,重装载寄存器,低字节
端口 2
中断使能寄存器 0
中断优先级寄存器 0
串口 0,重装载寄存器,低字节
端口 3
中断使能寄存器 1
中断优先级寄存器 1
串口 0,重装载寄存器,高字节
串口 1,重装载寄存器,高字节
用于 MOVX@Ri 的地址高字节—也称为 USR2
中断请求控制寄存器
用于 INT2 和 INT3 的极性
程序状态字
波特率控制寄存器(仅使用 WDCON[7]位)
累加器
B 寄存器
36
35
35
35
35
35
39
42
40
39
39
39
39
36
36
32
38
36
42
38
36
36
36
41
45
36
36
41
45
36
36
32
42
42
35
36
35
35
34 Rev 2
Page 35

71M6541D/F/G和 1M6542F/G 数据资料
符号
功能
CV
寄存器组选择控制位。
的内容选择工作寄存器组:
所选组 位置
累加器(ACC, A, SFR 0x E0):
ACC 为累加器寄存器,大多数指令使用累加器保存操作数。累加器相关指令的助记法将累加器记为 A,而
非 ACC。
B寄存器(SFR 0xF0):
B 寄存器用于乘、除指令的过渡,亦可作为中间结果寄存器保存临时数据。
程序状态字(PSW, SFR 0xD0 ):
该寄存器包含各种标识和控制位,用于选择寄存器组(见表 14)。
表 14. PSW 位功能(SFR 0xD0)
PSW位
7
6
5
AC
F0
进位标识。
用于 BCD 操作的辅助进位标识。
用户可使用通用 Flag 0。.
请勿将 F0 与 CESTATUS 寄存器中的 F0 标识混淆。
4
3
2
1 –
0
RS1
RS0
OV
P
RS1和RS0
RS1/RS0
00
01
10
11
第 0 组
第 1 组
第 2 组
第 3 组
0x00 – 0x07
0x08 – 0x0F
0x10 – 0x17
0x18 – 0x1F
溢出标识。
用户定义标识。
奇偶标识,受硬件影响,指示累加器中 1 位的奇、偶数,即奇偶性。
堆栈指针(SP, SFR 0x81):
堆栈指针为 1 字节寄存器,复位后初始化为 0x07。该寄存器在 PUSH 和 CALL 指令之前递增,即实际应用
中堆栈从位置 0x08 开始。
数据指针:
数据指针(DPTR 和 DPRT1)为 2 字节宽。低字节部分分别为 DPL (SFR 0x82)和 DPL1 (SFR 0x84)。高字节分
别为 DPH (SFR 0x83)和 DPH1 (SFR 0x85)。数据指针可作为两个寄存器(例如 MOV DPL, #data8)赋值。它
们一般用于存取外部代码或数据空间(例如分别为 MOVC A,@A+DPTR 或 MOVX A,@DPTR)。
程序计数器:
程序计数器(PC)为 2 字节宽,复位后初始化为 0x0000。该寄存器在执行指令或操作程序存储器的数据时自
动递增。
端口寄存器:
SEGDIO0 至 SEGDIO15 由特殊功能寄存器 P0、P1、P2 和 P3 控制,如表 15 所示。SEGDIO15 以上由
I/O RAM 中的 LCD_SEGDIOn[ ]控制。由每个 SFR Pn 寄存器的上半字节控制输入/输出方向,下半字节为
DIO 状态数据,可通过一次写操作配置指定 DIO 引脚的方向并设置其输出值,有利于实现位脉冲接口。向
DIO_DIR 位写 1,将 DIO 配置为输出;写 0 将其配置为输入。向 DIO 位写 1,使对应引脚为高电平(V3P3);
写 0 使对应引脚为低电平(GND)。更多详情请参见第 2.5.8节数字 I/O。
Rev 2 35
Page 36

71M6541D/F/G和 71M6542F/G 数据资料
名称
地址
展宽值
读信号宽度
写信号宽度
表 15. 端口寄存器(SEGDIO0-15)
SFR
P0
P1
P2
P3
芯片端口 P0-P3 为双向端口,对应 SEGDIO0-15 引脚。每个端口由锁存(SFR P0 至 P3)、输出驱动器和输
入缓冲器组成,因此 MPU 可通过其中任意端口输出或读取数据。即使 DIO 引脚配置为输出,MPU 仍可读
取该引脚状态,例如,在 CE 控制下通过 DIO 引脚对脉冲计数。
SEGDIO0-15 上电默认配置为输入,并且未使能。必须写 PORT_E = 1 (I/O RAM 0x270C[5])才能使
能 SEGDIO0-15。默认 PORT_E = 0,防止 SEGDIO0-15 上电复位时可能发生的短时间输出瞬态脉
冲。
时钟展宽(CKCON)
CKCON[2:0] (SFR 0x8E)寄存器的三个低有效位定义访问外设时用于 MOVX 指令的展宽存储周期。对于
71M6541D/F/G 和 71M6542F/G,该寄存器的实际值保证 CE、MPU 和 SPI 之间对 XRAM的访问。不应更
改 CKCON[2:0]的默认设置(001)。
表 16
列出了展宽值从 0 置为 7 时,外部存储器接口的信号变化。信号宽度以 MPU 时钟周期计数,下表中
用
粗体标记 CKCON[2:0] (001)的默认配置。
SFR
0x80
0x90
0xA0
0xB0
D7 D6 D5 D4 D3 D2 D1 D0
DIO_DIR[3:0] DIO[3:0]
DIO_DIR[7:4] DIO[7:4]
DIO_DIR[11:8] DIO[11:8]
DIO_DIR[15:12] DIO[15:11]
表 16. 展宽存储周期宽度
CKCON[2:0]
000 0 1 1 2 1
001 1 2 2 3 1
010 2 3 3 4 2
011 3 4 4 5 3
100 4 5 5 6 4
101 5 6 6 7 5
110 6 7 7 8 6
111 7 8 8 9 7
memaddr memrd memaddr memwr
2.4.4 指令集
支持通用 8051 微控制器的所有指令。71M654X
单。
软件用户指南
(SUG)提供了指令集及相关操作码的完整清
2.4.5 UART
71M6541D/F/G 和 71M6542F/G 具有 UART (UART0),可设置为与各种 AMR 模块及其它外部器件通信。
第二个 UART (UART1)连接至光电接口,在 2.5.7部分详细说明 UART 和光电接口。
UART 为专用 2 线串口,可与外部主控处理器以高达 38,400 bits/s (MPU 时钟 = 1.2288MHz 时)的速率通
信。RX 和 TX UART0工作如下:
• UART0 RX:该引脚用于串行数据输入,符合 RS-232 标准,LSB 在前输入字节。
• UART0 TX:该引脚用于串行数据输出,LSB 在前输出字节。
36 Rev 2
Page 37

71M6541D/F/G和 1M6542F/G 数据资料
使用定时器
使用内部波特率发生器
smod
smod
模式
模式
模式
模式
提供丰富的 UART 相关寄存器,用于控制和缓存数据。
SxBUF 寄存器既作为发送缓存器,又作为接收缓存器(S0BUF
,
SFR 0x99 用于 UART0,S1BUF,SFR 0x9C
用于 UART1)。MPU 写入时,SxBUF 作为发送缓存器;MPU 读取时,作为接收缓存器。向发送缓存器写
数据,对应 UART 开始发送。接收缓存器读取接收到的、数据。两个 UART 可同时发送、接收数据。
WDCON[7] (SFR 0xD8)选择使用定时器 1 还是内部波特率发生器。所有 UART 均可使能奇偶校验、奇/偶校
验、2/1 个停止位和 XON/XOFF 选项,通信波特率范围:300~38400 bps。表 17 给出了波特率的计算方法,
表 18 列出了可选的 UART 工作模式。
表 17. 波特率发生器
UART0
UART1
2
N/A
(WDCON[7] = 0)
* f
/ (384 * (256-TH1)) 2
CKMPU
1
* f
CKMPU
f
/(32 * (210-S1REL))
CKMPU
(WDCON[7] = 1)
/(64 * (210-S0REL))
S0REL 和 S1REL 为 10 位组合可重装载寄存器(S0RELL
S0RELH、S1RELL、S1RELH 地址分别为 SFR 0xAA
、
、
SFR 0xBA、FR 0x9D和 SFR 0xBB)。SMOD 为 SFR PCON 寄存器(SFR 0x87)中的 SMOD 位。TH1(SFR 0x8D)
为定时器 1 的高字节。
表 18. UART 模式
N/A
0
起始位,8 个数据位、停止位、可变波特
1
率(内部波特率发生器或定时器 1)。
起始位,8 个数据位、奇偶校验、停止
2
位、固定波特率,1/32 或 1/64 f
UART 0 UART 1
起始位,8 个数据位、奇偶校验、停止位、可
变波特率(内部波特率发生器)。
起始位,8 个数据位、停止位、可变波特率(内
部波特率发生器)。
N/A
。
CKMPU
起始位,8 个数据位、奇偶校验、停止
3
位、可变波特率(内部波特率发生器或定
N/A
时器 1)。
发送数据的奇偶校验可通过累加器的 P 标识获得。7 位带奇偶校验的串行模式:如 FLAG 通讯协议,
可通过设置和读取 8 位输出数据中的第 7 位实现。7 位不带奇偶校验的串行模式,可将第 7 位固定
置 1。通过设置和读取第 9 位,模拟带奇偶校验的 8 位串行模式,利用 S0CON (SFR 0x98)和
S1CON (SFR 0x9B)寄存器中的控制位 TB80 (S0CON[3])和 TB81 (S1CON[3])进行发送操作,
S1CON[2] 中的 RB81 用于接收操作。
接收的第 9 位(对 UART0 为模式 3,对于 UART1 为模式 A)可作为多处理器系统中处理器通信之间的握手
信号。这种情况下,从机将 SM20 (S0CON[5]) (UART0)或 SM21 (S1CON[5] (UART1)置 1。主机输出从地址
时,将第 9 位设为 1,使所有从机中的串口接收中断。从机将接收到的地址与本身地址进行比较。如果地
址匹配,从机清除 SM20 或 SM21 位,并接收剩余消息,其它从处理器忽略此消息。寻址从处理器后,主处
理器将第 9 位设为 0,输出剩余消息,产生从机串口接收中断。
Rev 2 37
Page 38

71M6541D/F/G和 71M6542F/G 数据资料
位 符号
功能
模式 说明
0
N/A 0 0
S0CON[4]
REN0
位 符号
功能
模式 说明
波特率
UART控制寄存器:
UART0和 UART1 的功能分别取决于串行端口控制寄存器 S0CON、S1CON (如表 19 和表 20 所示)和 PCON
寄存器(如表 21 所示)。
虽然 TI0、RI0、TI1 和 RI1 位于 SFR 寻址字节中,但须避免清除常见位。因为位操作将被用
“读-修改-写”所在字节的硬件宏实现。如果在读操作之后、写操作之前发生中断,会错误地清
除标识。
清除这些标识位的正确方式是写一个掩码,其中除被清除位为零外,其它位均为 1。标识位写 1
将被硬件忽略。
表 19. S0CON (UART0)寄存器(SFR 0x98)
S0CON[7] SM0
S0CON[6] SM1
S0CON[5] SM20
S0CON[3] TB80
S0CON[2] RB80
S0CON[1] TI0
S0CON[0] RI0
S1CON[7] SM
SM0 和 SM1 位设置 UART0 模式:
1
2
3
8 位 UART
9 位 UART
9 位 UART
SM0 SM1
0 1
1 0
1 1
使能多机通信功能。
如置位,使能串行接收。由软件清除,禁用接收。
模式 2 和 3 中发送数据的第 9 位。由 MPU 置位或清除,取决于要实现的
功能(奇偶校验、多处理器通信等)。
模式 2 和 3 中接收数据的第 9 位。模式 1 中,SM20 为 0,RB80 为停止
位。模式 0 中,不使用该位。必须由软件清除。
发送中断标识;完成一次串行传输后由硬件置位。 必须由软件清除(见上文
提示)。
接收中断标识;完成一次串行接收后由硬件置位。 必须由软件清除(见上文
提示)。
表 20. S1CON (UART1)寄存器(SFR 0x9B)
设置 UART1 的波特率和模式。
S1CON[5] SM21
S1CON[4] REN1
S1CON[3] TB81
SM
0 A
1 B
9 位 UART 可变
8 位 UART 可变
使能多机通信功能。
如置位,使能串行接收。由软件清除,禁用接收。
模式 A 中发送数据的第 9 位。由 MPU 置位或清除,取决于要实现的功能
(奇偶校验、多处理器通信等)。
S1CON[2] RB81
模式 A 和 B 中发送数据的第 9 位。模式 B 中,如果 SM21 为 0,RB81 为
停止位。必须由软件清除。
S1CON[1] TI1
发送中断标识,完成一次串行传输后由硬件置位。必须由软件清除(见上文
提示)。
S1CON[0] RI1
接收中断标识,完成一次串行接收后由硬件置位。必须由软件清除(见上文
提示)。
38 Rev 2
Page 39

71M6541D/F/G和 1M6542F/G 数据资料
位 符号
功能
模式
功能
定时器
模式
模式
模式
定时器
模式
定时器
模式
定时器
模式
表 21. PCON 寄存器位说明(SFR 0x87)
PCON[7] SMOD
SMOD 置位时波特率翻倍。
2.4.6 定时器和计数器
80515 有两个 16 位定时器/计数器寄存器:定时器 0 和定时器 1。这些寄存器可配置为计数或定时功能。
定时器模式下,寄存器在每个机器周期递增,即每 12 个 MPU 时钟周期加 1。计数器模式下,每次在相应
输入信号 T0 或 T1 (T0 和 T1为定时器输入,来自于特定的 DIO 引脚,参见第 2.5.8节数字 I/O)观察到下降
沿时,寄存器递增。由于识别一次 1 至 0 跳变需要 2 个机器周期,所以最大输入计数率为 1/2 时钟频率
(CKMPU)。对占空比没有限制,然而为了正确识别 0 或 1 状态,输入应稳定至少 1 个机器周期。
定时器 0 和定时器 1 有四种工作模式可供选择,如表 22 和表 23.所示。TMOD (SFR 0x89)寄存器(见表 24)
用于选择相应模式。定时器或计数器功能由 TCON (SFR 0x88)寄存器控制,如表 25 所示。TCON 寄存器中
的 TR1 (TCON[6])和 TR0 (TCON[4])分别是定时器 1和定时器 0 的启动位。
表 22. 定时器/计数器模式说明
M1 M0
0 0
0 1
1 0
1 1
模式 3 中,TL0 受 TR0 和门控位影响,溢出标志位 TF0;TH0 受 TR1 位影响,溢出标志位 TF1。
模式 0 13 位计数器/定时器模式,低 5 位位于 TL0 或 TL1 (SFR 0x8A
模式 1 16 位计数器/定时器模式。
模式 2 8 位自动重装载计数器/定时器。重装载值保存在 TH0 或 TH1,TL0 或
模式 3 如果定时器 1 的 M1 和 M0 置 1,定时器 1 停止。
或
SFR
0x8B)寄存器,其余 8 位位于 TH0 或 TH1 (SFR 0x8C
器(分别为定时器 0 和定时器 1)。TL0 和 TL1 的 3 个位固定为零。
TL1 每个机器周期递增。TL(x)溢出时,TH(x)中的值被复制至 TL(x) (其
中,x 在计数器/定时器 0 时为 0,在计数器/定时器 1 时为 1)。
如果定时器 0 的 M1 和 M0 置 1,定时器 0 作为两个独立的 8位定时器
/计数器。
或
SFR 0x8D)寄存
表 23 给出了定时器 0 和定时器 1 允许的工作模式组合。
表 23. 定时器/计数器模式组合
1
0 0 0 -
Rev 2 39
0 允许 允许 允许
1 允许 允许 允许
2 不允许 不允许 允许
0
1
2
Page 40

71M6541D/F/G和 71M6542F/G 数据资料
位
符号
功能
定时器/计数器
TMOD[5:4]
M1:M0
定时器/计数器
TMOD[3]
Gate
TMOD[2]
C/T
位
符号
功能
TCON[7]
TF1
TCON[6]
TR1
TCON[5]
TF0
TCON[0]
IT0
表 24. TMOD 寄存器位说明 (SFR 0x89)
1
TMOD[7] Gate
TMOD[6] C/T
0
TMOD[1:0] M1:M0
如果 TMOD[7]置位,使能计数器 1 的外部输入信号控制。TCON 寄存器(SFR
0x88)中的 TR1 位也必须置位,允许计数器 1 递增。如此设置时,计数器 1 将根据
对应的一个或多个引脚信号的下降沿递增,如 DIO_R2 至 DIO_R11 寄存器内容规
定。参见第 2.5.8 节数字 I/O 和 LCD 段驱动器和表 47。
定时器或计数器的功能选择位。置 1 时,执行计数器操作。清 0 时,对应的寄存
器作为定时器。
选择定时器/计数器 1 的模式,如表 22 所示。
如果 TMOD[3]置位,使能计数器 0 的外部输入信号控制。TCON 寄存器(SFR
0x88)中的 TR0 位也必须置位,以允许计数器 0递增。如此设置时,计数器 0 将会
根据对应的一个或多个引脚信号的下降沿递增,如 DIO_R2 至 DIO_R11 寄存器内
容规定。参见第 2.5.8 节数字 I/O 和 LCD 段驱动器和表 47。
定时器或计数器的功能选择位。置 1 时,执行计数器操作。清 0 时,对应的寄存
器作为定时器。
选择定时器/计数器 0 的模式,如表 22 所示。
表 25. TCON 寄存器位功能(SFR 0x88)
TCON[4] TR0
TCON[3] IE1
TCON[2] IT1
TCON[1] IE0
定时器 1 溢出标识位,由硬件置位。该位可由软件清零,或响应中断处理时硬件
自动清零。
定时器 1 运行控制位。如清零,定时器 1 停止。
定时器 0 溢出标志位,由硬件置位。该位可由软件清零,或响应中断处理时硬件
自动清零。
定时器 0 运行控制位。如清零,定时器 0 停止。
在外部引脚 int1 监测到下降沿时,通过硬件置位中断 1 边沿标志位。响应中断处
理时硬件自动清零。
中断 1 类型控制位。选择输入引脚的下降沿或低电平触发中断。
在外部引脚 int0 监测到下降沿时,通过硬件置位中断 0 边沿标志位。响应中断处
理时硬件自动清零。
中断 0 类型控制位。选择输入引脚的下降沿或低电平触发中断。
2.4.7 WD定时器(软件看门狗定时器)
无内部软件看门狗定时器。代之以标准硬件看门狗定时器(见第 2.5.11 节硬件看门狗定时器)。
2.4.8 中断
80515 提供 11 种中断源,分四个优先级水平。每个中断源在特殊功能寄存器(TCON、IRCON 和 SCON)中
都有其自己的中断请求标识。利用 IEN0 (SFR 0xA8)、IEN1 (SFR 0xB8)和 IEN2 (SFR 0x9A)中的中断使能位,
可独立使能或禁用相应中断。
40 Rev 2
Page 41

71M6541D/F/G和 1M6542F/G 数据资料
位 符号
功能
IEN0[7]
EAL
IEN0[5]
IEN0[4]
ES0
IEN0[1]
ET0
IEN0[0]
EX0
位 符号
功能
IEN1[7]
IEN1[6]
–
IEN1[5]
EX6
IEN1[3]
EX4
IEN1[2]
EX3
IEN1[1]
EX2
图 16 所示为器件中断结构。
参见图 16,中断源可来自 80515 MPU 核内部(称为内部源)或来自 71M654x SoC 的其它部分(称为外部源)。
有 7 种外部中断源,如图 16 最左侧及表 26 和表 27 所示(即 EX0-EX6)。
中断概述
发生中断时,MPU 向量指向预定义的地址,如表 38 所示。一旦开始中断服务,只有更高优先级的中断才
能将其打断。中断服务由中断返回指令 RETI 结束。执行 RETI 指令时,处理器返回发生中断时的下一条指
令。
发生中断条件时,处理器置位对应的中断标识位。无论此中断是否使能,该位均被置位。每机器周期采样
一次中断标识,然后由硬件轮询。中断使能时,如果采样表明有未处理的中断,则置位中断请求标识。在
下一个指令周期,如果满足以下条件,硬件强制 LCALL 转至相应的向量地址,从而响应中断:
• 没有在执行相同或更高优先级的中断。
• 当前正在执行某条指令,且尚未完成。
• 正在执行的指令不是 RETI 或者对寄存器 IEN0、IEN1、IEN2、IP0 或 IP1 的任何写操作。
用于中断的特殊功能寄存器
以下的 SFR 寄存器控制中断功能:
• 中断使能寄存器: IEN0
、
IEN1 和 IEN2 (见表 26、表 27 和表 28)。
• 定时器/计数器控制寄存器, TCON 和 T2CON (见表 29 和表 30)。
• 中断请求寄存器, IRCON (见表 31)。
• 中断优先级寄存器:IP0 和 IP1 (见表 36)。
表 26. IEN0 位功能(SFR 0xA8)
EAL = 0 禁用全部中断。
IEN0[6] WDT
–
不用于中断控制。
未使用。
ES0 = 0 禁用串行通道 0 中断。
IEN0[3] ET1
IEN0[2] EX1
ET1 = 0 禁用定时器 1 溢出中断。
EX1 = 0 禁用外部中断 1:DIO 状态变化。
ET0 = 0 禁用定时器 0 溢出中断。
EX0 = 0 禁用外部中断 0:DIO 状态变化。
表 27. The IEN1 位功能 (SFR 0xB8)
–
未使用。
未使用。
EX6 = 0 禁用外部中断 6:
XFER_BUSY、RTC_1S、RTC_1M或 RTC_T
IEN1[4] EX5
EX5 = 0 禁用外部中断 5:EEPROM 或 SPI
EX4 = 0 禁用外部中断 4:VSTAT
EX3 = 0 禁用外部中断 3:CE_BUSY
EX2 = 0 禁用外部中断 2:
XPULSE、YPULSE、WPULSE 或 VPULSE
IEN1[0]
–
未使用。
Rev 2 41
Page 42

71M6541D/F/G和 71M6542F/G 数据资料
位 符号
功能
位 符号
功能
TCON[5]
TF0
TCON[4]
TR0
TCON[3]
IE1
1 =
TCON[1]
IE0
TCON[0]
IT0
位 符号
功能
T2CON[7]
–
T2CON[5]
I2FR
T2CON[4:0]
–
位 符号
功能
–
IRCON[6]
–
IRCON[5]
IEX6
VSTAT
IRCON[2]
IEX3
表 28. IEN2 位功能(SFR 0x9A)
IEN2[0] ES1
ES1 = 0 禁用串行通道 1中断。
表 29. TCON 位功能(SFR 0x88)
TCON[7] TF1
TCON[6] TR1
定时器 1 溢出标识。
不用于中断控制。
定时器 0 溢出标识。
不用于中断控制。
外部中断 1 标识:DIO 状态变化。
TCON[2] IT1
外部中断 1 类型控制位:
0 = 低电平中断。
下降沿中断。
外部中断 0 标识:DIO 状态变化。
外部中断 0 类型控制位:
0 = 低电平中断。
1 = 下降沿中断。
表 30. T2CON 位功能(SFR 0xC8)
未使用。
T2CON[6] I3FR
外部中断 3 的极性控制:CE_BUSY
0 = 下降沿。
1 = 上升沿。
外部中断 2 的极性控制:
XPULSE、YPULSE、WPULSE 和 VPULSE
0 = 下降沿。
1 = 上升沿。
未使用。
表 31. IRCON 位功能(SFR 0xC0)
IRCON[7]
未使用。
未使用。
1 = 发生外部中断 6,且尚未清除:
XFER_BUSY、RTC_1S、RTC_1M或 RTC_T
IRCON[4] IEX5
1 = 发生外部中断 5,且尚未清除:
EEPROM 或 SPI
IRCON[3] IEX4
1 = 发生外部中断 4,且尚未清除:
1 = 发生外部中断 3,且尚未清除:
CE_BUSY
42 Rev 2
Page 43

71M6541D/F/G和 1M6542F/G 数据资料
IRCON[1] IEX2
IRCON[0]
TF0 和 TF1 (定时器 0 和定时器 1 溢出标识)由硬件在服务例程调用时自动清零(调用服务例程时,信
号 T0ACK 和 T1ACK—端口 ISR—高电平有效)。
–
1 = 发生外部中断 2,且尚未清除:
XPULSE、YPULSE、WPULSE 或 VPULSE
未使用。
Rev 2 43
Page 44

71M6541D/F/G和 71M6542F/G 数据资料
外部中断
连接
极性
标识复位
中断使能
中断标识
中断说明
名称 位置
名称 位置
EX0
SFR 0xA8[[0]
IE0
SFR 0x88[1]
EX1
IE1
EX4
SFR 0xB8[3]
IEX4
SFR 0xC0[3]
4
EX5
SFR 0xB8[4]
IEX5
SFR 0xC0[4]
5
EX6
IEX6
EX_XFER
0x2700[0]
IE_XFER
SFR 0xE8[0]
外部MPU中断
这 7 种外部中断是在 80515 核外部的中断,即由 71M654x 其它电路产生,例如:CE、DIO、RTC 或
EEPROM 接口。
外部中断连接如表 32 所示。中断 2 和中断 3 的极性可在 MPU 中通过 T2CON (SFR 0xC8)的 I3FR 和 I2FR
位设置。中断 2 和中断 3 应设置为下降沿触发(I3FR = I2FR = 0)。通用 8051 MPU 资料规定中断 4 至 6 定义
为上升沿触发。所以,连接至中断 5 和 6 的下降沿触发信号在内部进行了反相,实现表 32所示的触发沿极
性。
表 32. 外部 MPU 中断
0
1
数字 I/O 见 2.5.8 自动
数字 I/O 见 2.5.8 自动
2 CE_PULSE
3 CE_BUSY
4
5
6
VSTAT (VSTAT[2:0]改变) 上升 自动
EEPROM busy (下降), SPI (上升)
XFER_BUSY (下降), RTC_1SEC, RTC_1MIN, RTC_T
上升 自动
下降 自动
自动
下降 手动
(上升)
外部中断 0 和 1 可通过 DIO 映射表映射到器件引脚,更多信息请参见第 2.5.8 节数字 I/O。
SFR 对应的中断使能位必须置 1,才能允许相应中断发生。同样,每种中断都有其自身的标识位,由中断
硬件设置,并由 MPU 响应中断处理程序后 复位。除了外部中断 6、 5 和 2 使能及其标识位外,
XFER_BUSY、RTC_1SEC、RTC_1MIN、RTC_T、SPI、EEPROM 和 4 个 W/V/X/YPULSE 都需要其自
身的使能和标识位(见表 33:中断使能和标识位)。
IE0 至 IEX6 在硬件指向中断处理程序后自动清除。其它标识,IE_XFER 至 IE_VPULSE,必须软
件写 0 清除。
由于这些位位于 SFR 寻址字节内,多数应用中通过位操作将其清除,但在此必须避免。硬件以
一个字节宽的“读-修改-写”硬件宏实现位操作。如果在读操作之后、写操作之前发生中断,其标
识将被意外清除。
清除标识位的正确方式是写一个掩码,除被清除位为零外,其它位均为 1。标识位写 0 清除,写
1 时硬件忽略。
表 33. 中断使能和标识位
外部中断 0
EX2
EX3
SFR 0xA8[2]
SFR 0xB8[1]
SFR 0xB8[2]
IEX2
IEX3
SFR 0x88[3]
SFR 0xC0[1]
SFR 0xC0[2]
外部中断 1
外部中断 2
外部中断 3
外部中断
外部中断
SFR 0xB8[5]
SFR 0xC0[5]
外部中断 6
XFER_BUSY 中断(int 6)
EX_RTC1S
EX_RTC1M
0x2700[1]
0x2700[2]
IE_RTC1S
IE_RTC1M
SFR 0xE8[1]
SFR E0x8[2]
RTC_1SEC中断(int 6)
RTC_1MIN中断(int 6)
44 Rev 2
Page 45

71M6541D/F/G和 1M6542F/G 数据资料
中断使能
中断标识
中断说明
名称 位置
名称 位置
EX_RTCT
0x2700[4]
IE_RTCT
SFR 0xE8[4]
RTC_T
(int 6)
组
组成内容
优先级
寄存器 地址
第7位
第6位
第5位
第4位
第3位
第2位
第1位
第0位
EX_SPI
EX_EEX
EX_XPULSE
EX_YPULSE
EX_WPULSE
EX_VPULSE
0x2701[7]
0x2700[7]
0x2700[6]
0x2700[5]
0x2701[6]
0x2701[5]
中断优先级结构
全部中断源被分组,如表 34 所示。
0
1
2
3
4
外部中断 0 串行通道 1 中断
定时器 0 中断
外部中断 1
定时器 1 中断
串行通道 0 中断
5 – –
IE_SPI
IE_EEX
IE_XPULSE
IE_YPULSE
IE_WPULSE
IE_VPULSE
SFR 0xF8[7]
SFR 0xE8[7]
SFR 0xE8[6]
SFR 0xE8[5]
SFR 0xF8[4]
SFR 0xF8[3]
表 34. 中断优先级组
报警时钟中断
SPI 中断
EEPROM 中断
CE_XPULSE 中断(int 2)
CE_YPULSE 中断(int 2)
CE_WPULSE 中断(int 2)
CE_VPULSE 中断(int 2)
–
–
–
–
–
外部中断 2
外部中断 3
外部中断 4
外部中断 5
外部中断 6
外部中断 0~6 的优先级由 IP0 (SFR 0xA9)和 IP1 (SFR 0xB9)共同决定(表 36)。每个中断支持四级优先级(如表
35 所示)。如果同时接收到相同优先级中断请求,8051 将会按照表 37 所示的内部轮询顺序决定首先处理哪
个请求。
如果在中断使能的情况下修改中断优先级,此时很容易引起软件问题。因此推荐在中断使能之前时
初始化中断优先级。
表 35. 中断优先级
IP1[x] IP0[x]
0 0
0 1
1 0
1 1
优先级 0 (最低)
优先级 1
优先级 2
优先级 3 (最高)
表 36. 中断优先级寄存器(IP0 和 IP1)
IP0
IP1
(MSB)
SFR 0xA9 – –
SFR 0xB9 – –
IP0[5] IP0[4] IP0[3] IP0[2] IP0[1] IP0[0]
IP1[5] IP1[4] IP1[3] IP1[2] IP1[1] IP1[0]
(LSB)
Rev 2 45
Page 46

71M6541D/F/G和 71M6542F/G 数据资料
中断请求标识 说明
中断向量地址
IEX4
IEX6
表 37. 中断轮询排序
外部中断 0
串行通道 1 中断
定时器 0 中断
外部中断 2
外部中断 1
外部中断 3
定时器 1 中断
轮询排序
外部中断 4
串行通道 0 中断
外部中断 5
外部中断 6
中断源和向量
表 38 中列出了中断及其对应的标识和向量地址。
表 38. 中断向量
IE0
TF0
IE1
TF1
RI0/TI0
RI1/TI1
IEX2
IEX3
IEX5
外部中断 0
定时器 0 中断
外部中断 1
定时器 1 中断
串行通道 0 中断
串行通道 1 中断
外部中断 2
外部中断 3
外部中断 4
外部中断 5
外部中断 6
0x0003
0x000B
0x0013
0x001B
0x0023
0x0083
0x004B
0x0053
0x005B
0x0063
0x006B
46 Rev 2
Page 47

71M6541D/F/G和 1M6542F/G 数据资料
TCON.1 (IE0 )
Individual
Enable Bits
S1 CON.0 ( RI1)
S1 CON.1 ( TI1)
Individual Flags
Internal
Source
>= 1
TCON.5 (TF0 )
TCON.3 (IE1 )
TCON.7 (TF1 )
S0 CON.0 ( RI0)
S0 CON.0 ( TI0)
>= 1
IRCON.1
(IEX2)
I 2 FR
IRCON.2
(IEX3)
I 3 FR
IRCON.3
(IEX4)
IRCON.4
(IEX5)
IRCON.5
(IEX6)
IEN0.7
(EAL)
IP1.0/
IP0.0
IP1.1/
IP0.1
IP1.2/
IP0.2
IP1.3/
IP0.3
IP1.4/
IP0.4
IP1.5/
IP0.5
Interrupt
Flags
Priority
Assignment
Interrupt
Vector
Polling Sequence
Interrupt Enable
Logic and Polarity
Selection
DIO
Timer 0
DIO
Timer 1
CE_BUSY
UART0
EEPROM
XFER_BUSY
RTC_1S
EX_RTC1S
VSTAT
RTC_T
EX_RTCT
XPULSE
External
Source
DIO_Rn
DIO_Rn
SPI
>= 1
EX_VPULSE
VPULSE
>= 1
IEN2.0
(ES1)
IEN0.1
(ET0)
IEN0.0
(EX0)
IEN1.1
(EX2)
IEN0.2
(EX1)
IEN1.2
(EX3)
IEN0.3
(ET1)
IEN1.3
(EX4)
IEN0.4
(ES0)
IEN1.4
(EX5)
IEN1.5
(EX6)
IE_XFER
IE_RTC1S
IE_RTCT
EX_XFER
>= 1
EX_EEX
EX_SPI
IE_EEX
IE_SPI
IT0
IE_XPULSE
IE_VPULSE
EX_XPULSE
RTC_1M
EX_RTC1M
IE_RTC1M
UART1
(optical)
0
2
1
3
4
5
6
No.
Flag=1
means that
an interrupt
has occurred
and has not
been cleared
EX0 – EX6 are cleared
automaticallywhen the
hardware vectors to the
interrupt handler
byte received
byte transmitted
overflow occurred
overflow occurred
byte received
byte transmitted
accumulation
cycle completed
alarm clock
Supply status changed
CE completed code run and
has new status information
DIO status
changed
DIO status
changed
CE detected sag
every second
every minute
BUSY fell
command
received
WPULSE
YPULSE
EX_WPULSE
EX_YPULSE
IE_YPULSE
IE_WPULSE
CE detected zero
crossing
Wh pulse
VARh pulse
3/19/ 2010
“External Source”
71M654x SoC
80515 MPU
Rev 2 47
“Internal Source”表示来自于 80515 MPU 核的中断源。
表示来自于
其它电路、在
核之外的中断源。
图 16. 中断结构
Page 48

71M6541D/F/G和 71M6542F/G 数据资料
访问者
访问类型
条件
2.5 片上资源
2.5.1 物理存储器
2.5.1.1 闪存模式
器件包括 128KB (71M6541G、71M6542G)、64KB (71M6542F、71M6541F)或 32KB (71M6541D)片上
FLASH,用来装载 MPU和 CE程序代码。它还包括 CE RAM 和 I/O RAM 映像。上电时,使能 CE 之前,
MPU 需要将这些映像复制到各自位置。
CE 程序空间限制为 4096 个 16 位字(8KB)。并且它在 FLASH 的起始地址必须以完整的 1KB 为单位。
CE_LCTN[5:0]字段(I/O RAM 0x2109[5:0] )定义哪个 1KB 边界含有 CE 代码。所以,第一条 CE 指令位于
1024*CE_LCTN[5:0]。
FLASH 可由 MPU、CE 及 SPI接口(读/写)访问。
表 39. 闪存访问
MPU R/W/E
CE R
SPI R/W/E
FLASH 写操作步骤
如果 FLSH_UNLOCK[3:0] (I/O RAM 0x2702[7:4])密钥设置正确,MPU 可写入 FLASH。这是除外部
EEPROM 之外,用户可以操作的非易失存储器之一。
FLASH 程序写使能位 FLSH_PWE (SFR 0xB2[0])用来区分存储器指令(MOVX@DPTR,A)操作的是 FLASH
还是 XRAM。该位由硬件在每个字节写操作之后自动清零。使能中断时,禁止对该位进行写操作。
如果 CE 位使能(CE_E = 1,I/O RAM 0x2106[0]),FLASH写操作只有在 FLSH_PSTWR (SFR 0xB2[2])置位时
才有效,该位使能“posted flash write”。CE_E = 0 时,FLSH_PSTWR 操作无效;而 CE_E = 1 时,
FLSH_PSTWR 延迟 FLASH 写操作,延时间隔为 CE 程序的执行周期。延迟时间内, FLSH_PEND 位(SFR
0xB2[3])置 1,MPU 继续执行命令。CE 程序周期结束时(CE_BUSY 变低), FLSH_PEND 位清零,同时进
行写操作。MPU 可查询 FLSH_PEND 位,确定何时完成写操作。FLSH_PEND = 1 时,忽略其它 FLASH 写
操作请求。
更新 FLASH 的个别字节
FLASH 单元的初始值为 0xFF (全部位为 1)。将非 0xFF 数值写入 FLASH 单元时,首先需要擦除该单元。
由于单元不能独立擦除,所以需要将整页内容复制到 RAM,然后擦除该页。之后,更新需要的 RAM 内容,
再写回至 FLASH。
只有 CE 被禁用时才能写和擦除。
只有调用 SFM (MPU 暂停)时才可访问。
FLASH 擦除步骤
按照一定的顺序,将特定的操作码写入至特定 SFR 寄存器,才能启动 FLASH 擦除功能。这些特殊的操作
码/顺序可以防止 FLSH 的意外擦除。
整体擦除顺序为:
• 写 1 至 FLSH_MEEN 位(SFR 0xB2[1])。
• 写操作码 0xAA 至 FLSH_ERASE 寄存器(SFR 0x94)
该功能只有在 ICE 端口使能(即硬件的 ICE_E 引脚拉高)时才有效。
48 Rev 2
。
Page 49

71M6541D/F/G和 71M6542F/G 数据资料
名称 位置
复位
唤醒 方向
说明
SECURE
5:0] (I/O RAM
页擦除顺序为:
• 写页地址至 FLSH_PGADR[5:0] (SFR 0xB7[7:2] )。
• 写操作码 0x55 至 FLSH_ERASE 寄存器(SFR 0x94)
。
程序加密
加密位使能时,安全机制将限制 ICE 除全局 FLASH 擦除之外的任何操作,确保用户 MPU 和 CE 程序代码
的安全。用户需要在主程序执行前的 64 个 CKMPU 周期内使能 SECURE 位,启用加密功能。一旦加密机
制使能,将其禁用的唯一方式是执行 FLASH 全局擦除,然后进行芯片复位。
MPU 引导代码的前 64个周期称为预引导阶段,ICE 在该阶段禁用。PREBOOT (SFR 0xB2[7])位是该阶段的
只读状态位,MPU 可以通过它识别启动阶段。完成预引导后,可使能 ICE,并允许控制 MPU。
芯片复位时,安全使能位 SECURE (SFR 0xB2[6])也同时复位,与该位相关的硬件只允许写 1。所以,在预
引导代码内需要置位 SECURE 位来使能安全特性,一旦使能,软件将无法取消该功能。同时预引导代码受
到保护,外部将无法读取任何程序代码。
具体说,SECURE 置位时,以下情况适用:
• ICE 仅限于整体 FLASH 擦除。
• FLASH 的 0 页,用户预引导代码的首选位置,不可被 MPU 或 ICE 页擦除。第 0 页只能通过全局
FLASH 擦除。
• 禁止 MPU 或 ICE 对 0 页进行写操作。
71M6541D/F/G 和 71M6542F/G还具有防止意外写入及擦除 FLASH 的硬件机制。为了使能 FLASH 写入和
擦除操作,必须向 FLSH_UNLOCK[3:0]字段写入 4 位硬件密钥。 密钥为二进制数‘0010’ 。如果
FLSH_UNLOCK[3:0]不是‘0010’,硬件禁止 FLASH 擦除和写操作。在 SPI FLASH 编程(SFM 模式)时,密
钥应由外部 SPI 主控器件写入;或者在 ICE FLASH 编程时,通过 ICE 接口写入。使用装载器功能时,应
该将密钥送至装载程序,由装载程序将其写入 FLSH_UNLOCK[3:0]。 FLSH_UNLOCK[3:0]不自动复位,应
该在 SPI 或 ICE 结束更改 FLASH 时将其清零。表 40 中汇总了用于 FLASH 安全的 I/O RAM 寄存器。
表 40. 闪存加密
必须为 2,才允许 FLASh 的写操作,更多详
FLSH_UNLOCK[3:0]
2702[7:4] 0 0 R/W
情参见 FLASH 安全说明。
SFR B2[6] 0 0 R/W
禁止擦除 0 页及 CE_LCTN[
0x2109[5:0])定义的 CE 代码开始以上的地
址。也禁止通过 ICE 和 SPI 端口读
FLASH。
SPI FLASH 模式
一般器件的 SPI 从接口不能读或写 FLASH。然而,71M6541D/F/G 和 71M6542F/G具有特殊 FLASH 模式
(SFM),以方便用户的初始(生产)编程。71M654x 处于 SFM 模式时,SPI 接口可擦除、读和写 FLASH。该
模式下,SPI 不可访问其它存储器元件,例如 XRAM 和 I/O RAM。为保护 FLASH 内容,需要几步操作才
能激活 SFM 模式。
关于 SFM 详情请参见第 2.5.10 节(SPI 从机接口)。
Rev 2 49
Page 50

71M6541D/F/G和 71M6542F/G 数据资料
2.5.1.2 MPU/CE RAM
71M654x 包括 3~5KB 片上静态 RAM 存储器(XRAM)和 MPU 核的 256 字节内部 RAM。静态 RAM 用于
MPU 和 CE操作的数据存储。
2.5.1.3 I/O RAM (配置RAM)
I/O RAM 可看做是一系列控制基本硬件功能的寄存器。I/O RAM 地址空间从 0x2000 开始。表 74 列出了
I/O RAM 寄存器。
71M6541D/F/G 和 71M6542F/G 在 I/O RAM 地址空间包括 128 字节片上非易失 RAM 存储器(地址 0x2800
至 0x287F)。该存储器部分由 VBAT_RTC 引脚的电压支持,只要 VBAT_RTC 上的电压处于规定范围内
(2.0~3.8V),在 BRN、LCD 和 SLP 模式下就可保持其中的数据。
2.5.2 振荡器
振荡器驱动标准的 32.768kHz 钟表晶体。这种类型的晶体具有较高精度,且驱动功耗很小。振荡器经过特
殊设计,配合钟表晶体工作,支持高阻、低功耗操作。振荡器功耗非常低,可有效延长连接至 VBAT_RTC
的电池寿命。
振荡器校准可提高 RTC 和表计精度,更多信息请参见第 2.5.4 节实时时钟(RTC)。
振荡器由 V3P3SYS 引脚或 VBAT_RTC 引脚供电,取决于 V3OK (即如果 V3P3SYS ≥ 2.8 VDC, V3OK =
1;如果 V3P3SYS < 2.8 VDC,V3OK = 0)。振荡器消耗大约 100nA,相对于电池内部漏电流可忽略不计。
2.5.3 PLL和内部时钟
器件时钟源来自 32.768 kHz 晶振输出,经过 PLL 倍频 600倍,得到 19.660800 MHz 的主控时钟(MCK)。
除 RTC 时钟之外,所有片上定时都源于 MCK。表 41 为时钟功能及其控制汇总。
MPU 中的两个通用计数器/定时器由 CKMPU 控制(参见第 2.4.6 节定时器和计数器)。
通过设置 PLL_FAST 位= 1 (I/O RAM 0x2200[4]),主控时钟可升至 19.66MHz;通过设置 PLL_FAST = 0,
可降至 6.29MHz。MPU 时钟频率 CKMPU 可由 I/O RAM 控制字段 MPU_DIV[2:0] (I/O RAM 0x2200[2:0])控
制分频输出,设为 MCK*2
71M654x电流损耗。ICE_E 引脚为高电平时,电路还产生 9.83MHz 时钟,供仿真器使用。
LCD_BSTE 禁用时,PLL 只有在 SLP 模式或 LCD 模式下关闭。LCD_BSTE 取决于 LCD_VMODE [1:0]字
段的设置(见表 56)。
该部件从 SLP 或 LCD 模式唤醒时,PLL 在 6.29 MHz 模式下开启,PLL_OK 标识(SFR 0xF9[4])置 1 之前
PLL 频率不精确。由于潜在的过冲,在 PLL_OK 为 1 之前,MPU 不应更改 PLL_FAST 值。
-(MPU_DIV+2)
,其中, MPU_DIV[2:0]为 0 至 4。通过降低 MPU 时钟频率,可减小
50 Rev 2
Page 51

71M6541D/F/G和 71M6542F/G 数据资料
时钟 源自
固定频率或范围
功能
控制
表 41. 时钟系统汇总
OSC
MCK
CKCE MCK 4.9152MHz 1.5728MHz –
CKADC MCK
CKMPU MCK
CKICE MCK
CKOPTMOD MCK 38.40kHz 38.6kHz –
CK32 MCK 32.768kHz –
晶体
晶体/PLL
PLL_FAST=1 PLL_FAST=0
32.768 kHz –
19.660800MHz
(600*CK32)
4.9152MHz,
2.4576MHz
4.9152MHz …
307.2kHz
9.8304MHz…
614.4kHz
6.291456MHz
(192*CK32)
1.572864MHz,
0.786432MHz
1.572864MHz…
98.304kHz
3.145728MHz …
196.608kHz
PLL_FAST
ADC_DIV
MPU_DIV[2:0]
MPU_DIV[2:0]
晶振时钟
主控时钟
CE 时钟
ADC 时钟
MPU 时钟
ICE 时钟
光 UART 调
制
32kHz 时钟
2.5.4 实时时钟(RTC)
2.5.4.1 RTC概述
RTC 由晶振直接驱动,由 V3P3SYS 引脚或 VBAT_RTC 引脚供电,取决于 V3OK。RTC 由计数器链和输
出寄存器组成。计数器链由秒、分、时、星期、日、月和年寄存器组成。链寄存器支持影子寄存器功能,
方便读写操作。
表 42 列出了 RTC 控制的 I/O RAM 寄存器。
2.5.4.2 访问RTC
RTC_RD (I/O RAM 0x2890[6])位和 RTC_WR (I/O RAM 0x2890[7])位,用控制影子寄存器功能。
RTC_RD 为低电平时,RTC 每 2ms 更新一次影子寄存器。RTC_RD 为高电平时,暂停更新,影子寄存器内
容保持不变,适合 MPU 读取。所以,MPU 希望读取 RTC 时,通过设置 RTC_RD 位冻结影子寄存器,读取
影子存器,然后将 RTC_RD 位置低,恢复更新影子寄存器。RTC_RD 位在 RTC 更新完影子寄存器后自动
清除。由于 RTC 更新频率 500Hz,因此 RTC_RD 位从高变低到影子寄存器接收第一次更新,大约延迟
2ms。
RTC_WR 为高电平时,也禁止影子寄存器的更新。在此期间,MPU 可以修改影子寄存器的内容。RTC_WR
变低时,硬件电路将在下一个 2ms 之内使用影子寄存器覆盖 RTC 寄存器。影子寄存器中的每个字包括一
个变更位,确保 MPU 向 RTC_WR 写 0 时只更新编程字。RTC_WR 位在 RTC 将影子寄存器更新至 RTC 寄
存器之后自动清除。
RTC 的亚秒寄存器 RTC_SBSC (I/O RAM 0x2892)在一次秒中断之后、下一个秒中断边界之前可由 MPU 读取。
RTC_SBSC 寄存器表示到下一个秒边界剩余的 1/128 秒周期的数量。写 0x00 至 RTC_SBSC 复位计数器,重
新开始从 0 至 127 计数。读和复位亚秒计数器可作为准确设置 RTC 的算法的一部分。
RTC 能够处理闰年。每个计数器都有其自身的输出寄存器。RTC 链寄存器不受复位引脚、看门狗定时器复
位或电池模式和任务模式之间转换的影响。
Rev 2 51
Page 52

71M6541D/F/G和 71M6542F/G 数据资料
名称
位置
复位
唤醒
方向
说明
pF
ADJRTCA
C
ADJ
5.16
128
_
⋅=
+
⋅∆+
⋅
=+⋅
−
5.0
101
832768
RTC_QRTC_P4
6
floor
表 42. RTC 控制寄存器
RTC_ADJ[6:0]
RTC_P[16:14]
RTC_P[13:6]
RTC_P[5:0]
RTC_Q[1:0]
RTC_RD
RTC_WR
RTC_FAIL
RTC_SBSC[7:0]
2.5.4.3 RTC频率控制 提供两种频率修正方法:
2504[6:0] 00 – R/W
289B[2:0]
289C[7:0]
289D[7:2]
289D[1:0] 0 0 R/W
2890[6] 0 0 R/W
2890[7] 0 0 R/W
2890[4] 0 0 R/W
2892[7:0] R
4
0
0
4
0
0
R/W
用于模拟 RTC 频率调节的寄存器。
用于数字 RTC 调节的寄存器。有效范围:
0x0FFBF ≤ RTC_P ≤ 0x10040
用于数字 RTC 调节的寄存器。
冻结 RTC 影子寄存器,使其适合于 RTC 读取。
读 RTC_RD 时,返回影子寄存器的状态:0 = 更
新,1 = 冻结。
冻结 RTC 影子寄存器,使其适合于 RTC 写操
作。RTC_WR 被清除时,在下一个 RTC 时钟(大
约 500Hz)将影子寄存器的内容写入 RTC 寄存
器。读 RTC_WR 时,只要 RTC_WR 置位,则返
回 1。在 RTC 寄存器更新之前,它将继续返回
1。
表示 RTC 发生计数错误,此时时间不可信。该位
可通过写 0 清除。
自上 1 秒边界的时间,LSB = 1/128秒。
• 第一种方法是模拟频率修调,使用 I/O RAM 寄存器 RTCA_ADJ[6:0] (I/O RAM 0x2504[6:0]),微调晶振
负载电容。
• 第二种方法是数字频率修正,调整 RTC 时钟频率。
将 RTCA_ADJ[6:0]设为 00,对应负载电容最小化,振荡器频率最大化。将 RTCA_ADJ[6:0]设为 7F,将负
载电容最大化,振荡器频率最小化。可调电容大约为:
最小调整量(大约为 0.3ppm)取决于晶振特性、PCB 布局及外部晶振电容的值。任何时候均可调节,并应该
在 1 秒间隔内测量获得的时钟频率。
第二种频率修调方法为数字式,调节范围±988ppm,分辨率为 3.8 ppm (±1.9 ppm)。注意,3.8 ppm 对应
于 4*RTCP+RTCQ 构成的 19 位参量数的 1 个 LSB,1.9ppm 对应于½ LSB。速率调节从调整后的下一个秒
边界开始执行。由于 LSB 造成每次调整为 4 秒,所以应在 4 秒的整数倍间隔内测量频率。
、
通过向 RTC_P[16:0] (I/O RAM 0x289B[2:0]
入相应数值调节时钟频率。如上所述,通过影子寄存器更新 RTC 速率调节寄存器 RTC_P 和 RTC_Q。
RTC_WR (I/O RAM 0x2890[ 7])降低时,新值被加载至计数器。
默认频率为 32,768 RTCLK 周期/秒。为了将时钟频率改变 Δppm,利用下式计算 RTC_P 和 RTC_Q:
相反,给定 4RTC_P+RTC_Q 数值时,ppm 变化量为:
0x289C, 0x289D[7:2])和 RTC_Q[1:0] (I/O RAM 0x289D[1:0] )写
() =
52 Rev 2
32768 8
4
+
110
Page 53

71M6541D/F/G和 71M6542F/G 数据资料
名称 位置
复位 唤醒
方向
说明
LKPADDR
例如,对于-988ppm 的变化,4·RTC_P + RTC_Q = 262403 = 0x40103。RTC_P = 0x10040,RTC_Q = 0x03。
RTC_P 和 RTC_Q 的默认值分别为 0x10000 和 0x0,对应于 0 调节。
TMUX2OUT 测试引脚的两种设置,PULSE_1S 和 PULSE_4S,可用于测量和校准 RTC 时钟频率。其占
空比大约为 25%,周期为 1s 或 4s 的方波
RTCA_ADJ
RTC_P 写 0)会造成工作不正常。
如果已知晶振的温度系数,MPU 可根据集成的温度传感器,在必要时修正 RTC 时钟。或者,将温度补偿
值写入 RTC 调整 NV RAM (注,此处的 128 字节与 IO RAM 区不是同一存储块),并置位 OSC_COMP 位
(I/O RAM 0x28A0[5])。这种情况下,即使在 LCD/SLP 模式,振荡器也可以自动修正。详情请参见实时
RTC 温度补偿部分。
2.5.4.4 RTC温度补偿
71M6541D/F/G 和 71M6542F/G 可配置为定期测量管芯温度,包括 SLP 模式、LCD 模式和 MPU 停止模式。
如果由 OSC_COMP 位使能,硬件电路可根据温度信息查表,修正晶振输出频率,无需 MPU 介入。查找表
是 RTC 专用的 128 字节 NV RAM 存储器,用户需要在启动 OSC_COMP 之前填写适当的频率修正数据。
表 43 所示为用于自动 RTC 温度补偿的 I/O RAM寄存器。
OSC_COMP
STEMP[10:3]
STEMP[2:0]
LKPADDR[6:0]
LKPAUTOI
LKPDAT[7:0]
LKP_RD
LKP_WR
参见图 17,查表法通过将 STEMP[10:0]寄存器中的 10 位加符号位数值右移 2 位,获得 8 位加符号位数值
(即 NV RAM 地址 = STEMP/4)。限制器确保得到的查找地址在 6 位加符号位范围:-64 至+63 (十进制)之内。
地址指向的 8 位 NV RAM内容作为 2 的补码增加至 4*RTC_P + RTC_Q 标称值,0x40000。
、
RTC_P 和 RTC_Q 的默认值应为标称值,处于调节范围的中间。写入非法数值 (比如
表 43. 用于 RTC 温度补偿的 I/O RAM 寄存器
28A0[5]
2881[7:0]
2882[7:5]
2887[6:0] 0 0 R/W
2887[7] 0 0 R/W
2888[7:0] 0 0 R/W
2889[1]
2889[0] 0 0
0 0 R/W
– – R
0
0
R/W
R/W
使能 RTC_P 和 RTC_Q 在每次温度测量时被自动更
新。
温度测量结果(10位数据加 1 个符号位)。
整体读取 16 位 STEMP[10:0]数据,然后右移 5
位。如以下代码所示:
volatile int16_t xdata STEMP _at_0x2881;
fa = (float)(STEMP/32);
读和写 RTC 查找表的 RAM 地址。
自动递增标识。置位时,
LKP_RD 或 LKP_WR 位在每次触发后自动递增。
递增地址可从 LKPADDR[6:0]读取。
读/写 RTC 查找 RAM 数据。
用于 RTC 查找表 RAM 读/写的选通位。置位时,
LKPADDR 和 LKPDAT 寄存器用于读或写操,操作
完成后选通位硬件清除。如果此时 LKPAUTOI 置
位, LKPADDR 自动递增。
[6:0] 在
关于利用寄存器 RTC_P[16:0] (I/O RAM 0x289B[2:0]
0x2891[1:0]进行时钟频率调整的内容,请参见第 2.5.4.3 节 RTC 频率控制。必须正确定标加载至 NV RAM
的 8 位值,以便与第 2.5.4.3 节 RTC 频率控制给定的 RTC_P 和 RTC_Q 公式一致。注意,8 位 2 的补码查找
值与 0x40000 之和构成一个 19 位数值,等于 4*RTC_P+RTC_Q,如图 17 所示。每次查找及求和运算后,
温度补偿输出自动加载 RTC_P[16:0]和 RTC_Q[1:0]寄存器。
Rev 2 53
、
0x289C、0x289D[7:2])和 RTC_Q[1:0] (I/O RAM
Page 54

71M6541D/F/G和 71M6542F/G 数据资料
Σ
0x40000
19
10+S
STEMP
>>2
63
-64
-64 63 255-256
LIMIT
Look Up
RAM
ADDR
6+S
8+S
Q
7+S
4*RTC_P+RTC_Q
19
十进制
温度
公式
十进制
限制器输出
十进制
温度
查找表
… … …
…
…
… … …
…
…
图 17. 自动温度补偿
128 个 NV RAM 单元以 2的补码形式组合,如表 44 所示。如上所述,STEMP[10:0]数字温度补偿值标定为
对应 NV RAM 地址等于 STEMP[10:0]/4 (限制在-64 至+63)。关于利用 STEMP[10:0]读数计算温度值(以°C
为单位)的公式,请参见第 56 页的第 2.5.5 节:71M654x 温度传感器。
该温度公式用于计算表 44 中的两个温度列(第二列和最右侧一列)。第二列使用 STEMP[10:0]的全部 11 位,
最右 侧一列则由经过限制器之后的数据(6+S)值与 4 相乘得到。由于每个查找表地址步长对应于 4 x
0.325°C 温度步长,所以乘以 4 后,将限制器之后的 6+S 值加 2,计算出最右侧一列的数值。该方法确保
补偿数据以最小量化误差加载至查找表。表 44 列出了与图 17 每一节点对应的数值。表中未列出超出-256
至+255 范围的 STEMP[10:0]值。限制器输出被限制在-64 至+63 范围,它直接就是 128 字节查找表的相应
地址。最右侧一列给出对应于 128 字节补偿表中每个地址单元的标称温度。
表 44. NV RAM 温度表结构
STEMP[10:0]
(10+S)
)
(
-256 -61.71
-255 -61.39
-254 -61.06
-253 -60.73
-4 20.69
-3 21.02
-2 21.35
-1 21.67
0 22.00
1 22.33
2 22.65
3 22.98
4 23.31
5 23.64
6 23.96
7 24.29
252 104.40
253 104.73
254 105.06
255 105.39
(oC)
(
)
STEMP[10:0]>>2
(8+S)
)
(
-64 -64 -61.06
-1 -1 21.35
0 0 22.65
1 1 23.96
63 63 105.06
(6+S)
(
)
(oC)
(
)
54 Rev 2
Page 55
71M6541D/F/G和 71M6542F/G 数据资料
名称 位置
复位
唤醒 方向
说明
RTC_TMIN[5:0]
289E[5:0]
0 0 R/W
RTC_THR[4:0]
289F[4:0]
0 0 R/W
等于
为正确工作,MPU 必须将反映晶体温度特性的数值加载至查找表,通常在初始化期间完成。由于不能直接
寻址查找表,MPU 需采用以下步骤加载整个 NV RAM 表:
1. 将 LKPAUTOI 位(I/O RAM 0x2887[7])置位,使能地址自动递增。
2. 向 I/O RAM 寄存器 LKPADDR[6:0] (I/O RAM 0x2887[6:0])写 0。
3. 将 8 位数据写至 I/O RAM 寄存器 LKPDAT (I/O RAM 0x2888)。
4. 将 LKP_WR 位(I/O RAM 0x2889[0])置位,将 8 位数据写至 NV_RAM。
5. 等待 LKP_WR 清零(LKP_WR 在数据复制到 NV RAM 后自动清零)。
6. 重复第 3 步至第 5 步,直到将全部数据写至 NV RAM。
NV RAM 亦可通过将 1 写 入 LKP_RD 位(I/O RAM 0x2889[1])读取。通过置位 LKPAUTOI 位(I/O RAM
0x2887[7]),可加快读/写 NV RAM 的过程。LKPAUTOI 置位时,LKPADDR[6:0]在 LKP_RD 或 LKP_WR 每
次触发后自动递增。通过写 0 至 LKPAUTOI 位,并将相应地址加载至 LKPADDR[6:0],可随机存取 NV
RAM。
如果未使用振荡器的温度补偿功能,可将 NV RAM 存储区域作为普通 NV存储空间,利用以上介
绍的步骤读/写 NV RAM 数据。这种情况下,保持 OSC_COMP位(I/O RAM 0x28A0[5])为 0,即禁
用自动振荡器温度补偿特性。
2.5.4.5 RTC中断 RTC 每秒和每分钟产生中断。这些中断称为 RTC_1SEC 和 RTC_1MIN。此外,RTC 还具有闹钟功能,分
钟和小时寄存器等于表 45 中定义的相应数值时,产生中断。闹钟中断称为 RTC_T。三种中断均在 MPU 的
外部中断 6。关于这些中断的使能位和标识,请参见中断部分的表 33。
分钟和小时的目标寄存器列在表 45 中。
表 45. 用于 RTC 中断的 I/O RAM 寄存器
目标分钟寄存器,参见下文的 RTC_THR[4:0]。
目标小时寄存器。RTC_T 中断,RTC_MIN
RTC_TMIN 且 RTC_HR 等于 RTC_THR 时,发生 RTC_T
中断。
Rev 2 55
Page 56

71M6541D/F/G和 71M6542F/G 数据资料
22325.0)( +⋅=° STEMPCTemp
4.64609.000218.0325.0)(
2
+⋅−⋅+⋅= BSENSEBSENSESTEMPCTemp
o
名称 位置
复位 唤醒
方向
说明
TEMP_PER
时间
2.5.5 71M654x温度传感器
71M654x 具有片上温度传感器,用于确定其带隙基准的温度。温度数据的主要用途是对计量(电流、电压和
能量)及 RTC 进行温漂补偿。请参见第 97 页第 4.7 节计量温度补偿,另请参考第 53 页第 2.5.4.4 节 RTC
温度补偿。
与前几代 Teridian SoC 不同,71M654x 不与计量部分共用 ADC 转换温度,而是采用一片低功耗 ADC,支
持 SLP、LCD 模式,以及 BRN 和 MSN 模式的测量需求。这意味着即使在 MPU 暂停 LCD/SLP 模式下,
也可以对晶振频率进行温度补偿,参见第 53 页第 2.5.4.4 节 RTC 温度补偿。
MSN 和 BRN 模式下,通过置位 TEMP_START (I/O RAM 0x28B4[6])控制位,利用命令唤醒温度传感器。
MPU 必须等待 TEMP_START 位清零,才能读取 STEMP[10:0]并进行下次测量,置位 TEMP_START。SLP
和 LCD 模式下,以 TEMP_PER[2 :0] (I/O RAM 0x28A0[2:0])设定的间隔定期唤醒。
从两个 I/O RAM 地址 STEMP[10:3] (I /O RAM 0x2881)和 STEMP[2:0] (I/O RA M 0x2882[7:5])读取温度测量结
果。注意,必须读取这两个 I/O RAM 地址并正确组合,构成 STEMP[10:0]的 11 位数值(见表 46 中的
STEMP)。 所 得到的 11 位值为 2 的补码,范围从-1024 至+1023 (十进制)。利用以下公式从 11 位
STEMP[10:0]读数计算检测到的温度。
以下公式用于计算检测到的温度。第一个公式适用于 71M654x 工作在 MSN 模式及 TEMP_PWR = 1 的条件
下。第二个公式用于 71M654x 处于 BRN 模式下,这种情况下,TEMP_PWR 和 TEMP_BSEL 位必须设为相
同值,从而检测为温度传感器供电的电池,BSENSE 为电池电压测量值。所以,第二个公式需要读取
STEMP 和 BSENSE。第二个公式中,芯片处于 BRN 模式时,BSENSE (检测到的电池电压)用于获取更准确
的温度读数。
71M654x处于 MSN 模式时(TEMP_PWR = 1):
71M654x处于 BRN模式时(TEMP_PWR = TEMP_BSEL):
表 46 列出了用于温度和电池测量的 I/O RAM 寄存器。
如果 TEMP_PWR 选择 VBAT_RTC,并且 VBAT_RTC 引脚的电池电量已经耗尽(电压低于 2.0V),那
么 温度测量过程会无法结束(即 TEMP_START 位一直为 1)。这种情况下,必须选择 V3P3D
(TEMP_PWR = 1)供电方式来实现正常的温度测量。
表 46. 用于温度和电池测量的 I/O RAM 寄存器
TBYTE_BUSY
28A0[3] 0 0 R
表示硬件仍然在写 0x28A0 字节;为 1 时,不允许对
该字节进行写操作。写操作持续时间可长达 6ms。
设置两次温度测量之间的时间间隔,任何模式
(MSN、BRN、LCD 或 SLP)下均可使能自动测量。
TEMP_PER[2:0]
TEMP_BAT
28A0[2:0] 0 – R/W
28A0[4] 0 – R/W
只要进行温度测量,则测量 VBAT。
1-6
0
7
手动更新(见 TEMP_START)
2 ^ (3+TEMP_PER) (秒)
连续
56 Rev 2
Page 57

71M6541D/F/G和 71M6542F/G 数据资料
名称 位置
复位 唤醒
方向
说明
VBAT_RTC。
功能
STEMP[10:3]
2881[7:0]
R
BSENSE[7:0]
2885[7:0]
– – R
BCURR
TEMP_BSEL
VSTEMPVBSENSEVRTCorVBATVBAT 000276.0]0:10[0246.0)142]0:7[(293.3)_( ⋅+⋅−+=
TEMP_PER[2:0]必须清零,使 TEMP_START 生效。
如果 TEMP_PER[2:0] = 0,置位 TEMP_START 开始温
TEMP_START
28B4[6] 0 – R/W
度测量。SLP 和 LCD 模式下忽略。完成温度测量
时,硬件清除 TEMP_START 。 MPU 必须等待
TEMP_START 位清零,才能读取 STEMP[10:0]以及再
次置位 TEMP_START。
选择温度传感器电源:
TEMP_PWR
28A0[6] 0 – R/W
1 = V3P3D,0 = VBAT_RTC。SLP 和 LCD 模式下忽
略该位,总是由 VBAT_RTC 供电。
TEMP_BSEL
28A0[7] 0 – R/W
选择温度传感器监测的电池:1 = VBAT, 0 =
该位用于监测 VCO 温度。常规工作时,TEMP_TEST
必须为 00。其它任何值都会造成 VCO 以如下控制电
压连续运行。
TEMP_TEST[1:0]
2500[1:0] 0 – R/W
TEMP_TEST
00
01
1X
温度测量结果。为了正确形成 STEMP[10:0],MPU
STEMP[2:0]
2882[7:5]
R
必须读取 0x2881[7:0],将其左移 3 位(LSB 补零),然
后读取 0x2882[7:5],将其右移 5 位(5 个 MSB 补
零),然后将两个数进行逻辑或。
电池测量结果。
2704[3] 0 0 R/W
将 100μA 负载连接至
关于读取 71M6x01 器件中温度传感器的信息,请参见 71M6xxx
正常工作
保留,用于工厂测试
保留,用于工厂测试
数据资料
。
所选电池。
2.5.6 71M654x电池监测器
71M654x温度测量电路还可监测 VBAT 和 VBAT_RTC 处的电池。被测电池(即 VBAT 或 VBAT_RTC 引脚)
由 TEMP_BSEL (I/O RAM 0x28A0[7])选择。
TEMP_BAT (I/O RAM 0x28A0[4])置位时,测量电池作为每次温度测量的一部分。电池读数储存在寄存器
BSENSE[7:0] (I/O RAM 0x2885)。以下公式用于从 BSENSE[7:0] 和 STEMP[10:0]计算在 VBAT 引脚(或
VBAT_RTC 引脚)上测得的电压。下式结果以伏特为单位:
MSN 模式下,可通过置位 BCURR (I/O RAM 0x2704[3])位将 100μA 负载加至所选电池(即 TEMP_BSEL 位选
定的电池)。通过在有或没有 BCURR 的情况下测量电池,可测得电池阻抗。BRN、LCD 和 SLP 模式下,无
论 BCURR 是否置位,均不施加电池负载。
关于读取 71M6x01 器件中 VCC 检测器的信息,请参见 71M6xxx
Rev 2 57
数据资料
。
Page 58

71M6541D/F/G和 71M6542F/G 数据资料
B
A
OPT_TXMOD = 0
OPT_TXMOD = 1,
OPT_FDC = 2 (25%)
B
A
1/38kHz
OPT_TXINV
from
OPT_TX UART
MOD
EN DUTY
OPT_TX
OPT_TXMOD
OPT_FDC
OPT_TXE[1:0]
1
2
V3P3
Internal
A
B
0
2
3
DIO2
WPULSE
VARPULSE
2.5.7 UART和光接口
71M6541D/F/G 和 71M6542F/G 提供两个异步接口:UART0 和 UART1。两个接口均可用于连接至 AMR
模块、用户接口等。
参见图 19,UART1 包括实现 IR/光接口。引脚 OPT_TX 设计可直接驱动外部 LED,用于通过光链路发送
数据。引脚 OPT_RX 与 RX 引脚的门限相同,但是亦可用于检测来自光链路接收器的外部光电探测器输入,
OPT_TX 和 OPT_RX 连接至专用 UART 端口(UART1)。
OPT_TX 和 OPT_RX 引脚可分别通过配置 OPT_TXINV (I/O RAM 0x2456[0])和 OPT_RXINV (I/O RAM
0x2457[1])翻转。此外,OPT_TX 输出支持 38K 调制, 调制可用于 MSN 和 BRN 模式(见表 67)。
OPT_TXMOD位(I/O RAM 0x2456[1])使能调制。占空比由 OPT_FDC[1:0] (I/O RAM 0x2457[5:4])控制,可选
择 50%、25%、12.5%和 6.25%占空比。6.25%占空比意味着 OPT_TX 在 6.25%周期内为低电平。T
无需 UART1 时,可选择将 OPT_TX 配置为 SEGDIO51。通过 OPT_TXE[1:0] (I/O RAM 0x2456[3:2])字段和
LCD_MAP[51] (I/O RAM 0x2405[0])配置。OPT_TXE[1:0]字段允许 MPU 选择将 VPULSE、WPULSE、
SEGDIO51 或脉冲调制器通过 OPT_TX 引脚输出。同样,亦可选择将 OPT_RX 引脚配置为 SEGDIO55,
其控制位为 OPT_RXDIS (I/O RAM 0x2457[2])和 LCD_MAP[55] (I/O RAM 0x2405[4]) 。
图 18. 光接口
DIO 模拟光 UART (第 3 个 UART)
如图 19 所示,71M654x 还可将 DIO5设置成光驱动 UART。控制位 OPT_BB (I/O RAM 0x2022[0])置位时,
光端口由 DIO5 驱动,而原有 SEGDIO5 引脚由 UART1_TX 驱动。这种配置通常用于高速串口多于 2 个的
应用,且允许光 UART 速率较慢的设计。
58 Rev 2
Page 59

71M6541D/F/G和 71M6542F/G 数据资料
OPT_TXINV
UART1_TX
MOD
EN DUTY
SEGDIO51/
OPT_TX
OPT_TXMOD
OPT_FDC
OPT_TXE[1:0]
0
2
V3P3
Internal
A B
OPT_TXMOD=0
OPT_TXMOD=1,
OPT_FDC=2 (25%)
B
A
1/38kHz
1
2
3
DIO51
WPULSE
VARPULSE
SEG51
LCD_MAP[51]
1
0
SEGDIO55/
OPT_RX
SEG55
LCD_MAP[55]
1
0
DIO55
1
0
OPT_RXDIS
UART1_RX
DIO5
SEGDIO5/TX2
SEG5
1
0
LCD_MAP[5]
OPT_BB
0
0
1
1
数值
选择用于
引脚的资源
图 19. 光接口(UART1)
2.5.8 数字I/O和LCD段驱动器
2.5.8.1 通用信息
71M6541D/F/G 和 71M6542F/G 大多数引脚支持 DIO/LCD 功能复用。每个 SEG/DIO引脚可配置为 DIO 引
脚或段(SEG)驱动器引脚。
复位或上电时,所有 DIO 引脚为 DIO 输入(SEGDIO0-15 除外,参见下面的注意事项),只有在 MPU 控制
下进行相应配置才可用于其它功能。引脚功能可由 I/O RAM 寄存器 LCD_MAPn (0x2405 – 0x240B)配置。将
LCD_MAPn 中与引脚对应的位置 1,即可将引脚配置为 LCD;将 LCD_MAPn 置 0,将其配置为 DIO。
复位或上电后,引脚 SEGDIO0 至 SEGDIO15 初始为 DIO 输出,但由 PORT_E = 0 (I/O RAM
0x270C[5])禁用,以避免复位期间脉冲引脚误动作。配置引脚 SEGDIO0 至 SEGDIO15 后,MPU
必须通过置位 PORT_E 使能这些引脚。
一旦引脚配置为 DIO,即可独立配置为输入或输出。对于 SEGDIO0 至 SEGDIO15,通过 SFR 寄存器 P0
(SFR 0x80)、P1 (SFR 0x90)、P2 (SFR 0xA0)和 P3 (SFR 0xB0) 实现,如表 48 (71M6541D/F/G)和表 52
(71M6542F/G)所示。
PB 引脚为专用数字输入,不属于 SEGDIO 系统。
CE 具有脉冲计数寄存器,每个脉冲计数器的中断输出在内部连接到脉冲中断逻辑。因此,产生脉
冲中断不需要将脉冲信号连接到外部引脚,参见图 16 中的 No. 2 中断源。
I/O RAM 寄存器 DIO_Rn (I/O RAM 0x2009[2:0]至 0x200E[6:4]),用于独立配置引脚 SEGDIO2 至
SEGDIO11 (配置为 DIO 时)和 PB 的内部信号源。例如:中断或定时器控制(DIO_RPB[2:0]
0x2450[2:0],配置 PB 引脚)。这种方式下,即使 DIO 引脚配置为输出,亦可跟踪。表 47 列出了可利用
DIO_R2[2:0]至 DIO_R11[2:0]和 DIO_RPB[2:0]分配的内部信号源。如果多个输入连接至同一源,它们之间
与信号源的触发是逻辑或的关系。
表 47. 通过 DIO_Rn[2:0]位的能够选择的资源
DIO_Rn[2:0]
Rev 2 59
0
1
2
3
无
保留
T0 (计数器 0 时钟)
T1 (计数器 1 时钟)
SEGDIOn或PB
,
I/O RAM
Page 60

71M6541D/F/G和 71M6542F/G 数据资料
数值
选择用于
引脚的资源
4
5
注:
(71M6541D/F/G)
52 (71M6542F/G)。
V3P3SYS
VBAT
V3P3D
DIO
GNDD
MISSION
BROWNOUT
LCD/SLEEP
LOW
HIGH
HIGH-Z
V3P3SYS
VBAT
V3P3D
DIO
GNDD
MISSION
BROWNOUT
LCD/SLEEP
LOW
HIGH
HIGH-Z
Not recommended Recommended
DIO_Rn[2:0]
SEGDIOn或PB
高优先级 I/O 中断(INT0)
低优先级 I/O 中断(INT1)
资源只有 SEGDIO2 至 SEGDIO11 和 PB 引脚可选, 参见表 48
和表
驱动 LED、继电器线圈等时,DIO 引脚应该灌入电流至 GNDD (如图 20 中右侧所示),不是从
V3P3D 源出电流(如
图 20 中左侧所示)。这是由于将 V3P3D 连接至 V3P3SYS 或 VBAT 的内部
开关电阻造成的,参见第 143 页第 6.4.6 节 V3P3D 开关。
必须避免在专用于唤醒功能的DIO引脚上灌入或输出电流,例如利用上拉或下拉电阻。违反这一
规则将造成休眠或LCD模式下静态电流增大。
图 20. 连接外部负载至 DIO 引脚
60 Rev 2
Page 61

71M6541D/F/G和 71M6542F/G 数据资料
引脚
2.5.8.2 用于 71M6541D/F/G的数字I/O
71M6541D/F/G 总共有 37个 SEG 复用引脚。这些引脚可分类如下:
17 个 SEG/DIO复用引脚:
o SEGDIO4…SEGDIO5 (2个引脚)
o SEGDIO9…SEGDIO14 (6 个引脚)
o SEGDIO19…SEGDIO25 (7 个引脚)
o SEGDIO44…SEGDIO45 (2个引脚)
15 个与其它功能共用的 SEG/DIO 复用引脚:
o SEGDIO0/WPULSE, SEGDIO1/VPULSE (2 个引脚)
o SEGDIO2/SDCK, SEGDIO3/SDATA (2 个引脚)
o SEGDIO6/XPULSE, SEGDIO7/YPULSE (2 个引脚)
o SEGDIO8/DI (1 个引脚)
o SEGDIO26/COM5, SEGDIO27/COM4 (2个引脚)
o SEGDIO36/SPI_CSZ…SEGDIO39/SPI_CKI (4 个引脚)
o SEGDIO51/OPT_TX, SEGDIO55/OPT_RX (2 个引脚)
5 个与其它功能共用的 SEG 段复用引脚:
o ICE 接口引脚:SEG48/E_RXTX, SEG49/E_TCLK, SEG50/E_RST (3 个引脚)
o 测试端口引脚:SEG46/TMUX2OUT, SEG47/TMUXOUT (2 个引脚)
有 4 个专用的 COM 输出(COM0 至 COM3),加上 2 个被列在共用组合 SEG/DIO 引脚下的 COM 输出
(SEGDIO26/COM5、SEGDIO27/COM4)。
因此,在没有引脚被作为 DIO 的配置中,可有多达 37 个 LCD 段引脚加 4 个 COM,或者 35 个 LCD 段引
脚加 6 个 COM。在不使用 LCD 段引脚的配置中,可有多达 32 个 DIO 引脚。
SEGDIO19 至 SEGDIO27 的配置如表 49 所示,引脚 SEGDIO36-39和 SEGDIO44-45 的配置如表 50所示。
SEG46 至 SEG50不可配置为 DIO。引脚 SEGDIO51 和 SEGDIO55 的配置如表 51 所示。
表 48. SEGDIO0 至 SEGDIO14 数据/方向寄存器(71M6541D/F/G)
SEGDIO 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
# 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 –
配置:
0 = DIO, 1 = LCD
SEG 数据寄存器
DIO 数据寄存器
方向寄存器:
0 = 输入, 1 = 输出
内部资源可配置
(见表 47)
0 1 2 3 4 5 6 7 0 1 2 3 4 5 6
LCD_MAP[7:0] (I/O RAM 0x240B) LCD_MAP[14:8] (I/O R AM 0x240A)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
LCD_SEG0[5:0]至 LCD_SEG14[5:0] (I/O RAM 0x2410[5:0]至 0x241E[5:0]
0 1 2 3 0 1 2 3 0 1 2 3 0 1 2
P0 (SFR 0x80) P1 (SFR 0x90) P2 (SFR 0xA0) P3 (SFR 0xB0)
4 5 6 7 4 5 6 7 4 5 6 7 4 5 6
P0 (SFR 0x80) P1 (SFR 0x90) P2 (SFR 0xA0) P3 (SFR 0xB0)
– –
Y Y Y Y Y Y Y Y Y Y – – – –
–
–
–
–
Rev 2 61
Page 62

71M6541D/F/G和 71M6542F/G 数据资料
引脚
– – –
– – –
–
– – –
– – –
–
– – –
– – –
–
SEGDIO
36
37
38
39
44
45
引脚
– – –
– –
引脚
表 49. SEGDIO19 至 SEGDIO27 数据/方向寄存器(71M6541D/F/G)
SEGDIO – – – 19 20 21 22 23 24 25 26 27 – – – –
# – – – 16 15 14 13 12 11 10 9 8 – – – –
配置:
0 = DIO, 1 = LCD
LCD_MAP[23:19] (I/O RAM 0x2409) LCD_MAP[27:24] (I/O RAM 0x2408)
3 4 5 6 7 0 1 2 3
19 20 21 22 23 24 25 26 27
SEG 数据寄存器
LCD_SEGDIO19[5:0]至 LCD_SEGDIO27[5:0]
(I/O RAM 0x2423[5:0]至 0x242C[5:0])
– – –
DIO 数据寄存器
19 20 21 22 23 24 25 26 27
LCD_SEGDIO19[0] 至 LCD_SEGDIO27[0]
– – – –
(I/O RAM 0x2423[0]至 0x242C[0])
方向寄存器:
0 = 输入, 1 = 输出
19 20 21 22 23 24 25 26 27
LCD_SEGDIO19[1]至 LCD_SEGDIO27[1]
(I/O RAM 0x2423[1]至 0x242C[1])
表 50. SEGDIO36-39 至 SEGDIO44-45 数据/方向寄存器(71M6541D/F/G)
配置:
0 = DIO, 1 = LCD
SEG 数据寄存器
DIO 数据寄存器
方向寄存器:
0 = 输入, 1 = 输出
#
– – – –
– – – –
3 2 1 64
– – – –
– – – –
– – – – 4 5 6 7 – – – – 4 5
LCD_MAP[39:36]
(I/O RAM 0x2407)
– – – – 36 37 38 39 –
LCD_SEGDIO36[5:0]至 LCD_SEGDIO45[5:0]
(I/O RAM 0x2434-2437[5:0]至 0x243C-243D[5:0])
– – – – 36 37 38 39 – – – – 44 45
LCD_SEGDIO32[0]至 LCD_SEGDIO45[0]
(I/O RAM 0x2434-2437[0]至 0x243C-243D[0])
– – – – 36 37 38 39 –
LCD_SEGDIO32[1]至 LCD_SEGDIO45[1]
(I/O RAM 0x2434-2437[1]至 0x243C-243D[1])
表 51. SEGDIO51 和 SEGDIO55 数据/方向寄存器(71M6541D/F/G)
SEGDIO 51 – – – 55 – – –
# 33 – – – 32 – – –
配置:
0 = DIO, 1 = LCD
SEG 数据寄存器
DIO 数据寄存器
方向寄存器:
0 = 输入, 1 = 输出
3
– – –
LCD_MAP[55], LDC_MAP[51]
(I/O RAM 0x2405)
51
– – –
LCD_SEGDIO51[5:0], LCD_SEGDIO55[5:0]
(I/O RAM 0x2443[5:0]
51
– – –
LCD_SEGDIO51[0]至 LCD_SEGDIO55[0]
(I/O RAM 0x2443[0 ]
51
– – –
LCD_SEGDIO51[1]至 LCD_SEGDIO55[1]
(I/O RAM 0x2443[1 ]
7
55
和
0x2447[5:0])
55
和
0x2447[0])
55
和
0x2447[1])
– – –
– – –
– – –
– – –
63 62
LCD_MAP[45:44]
(I/O RAM 0x2406)
44 45
– 44 45
62 Rev 2
Page 63

71M6541D/F/G和 71M6542F/G 数据资料
引脚
2.5.8.3 用于 71M6542F/G的数字I/O
71M6542F/G 总共有 55个 SEG 复用引脚可用。这些引脚可分类如下:
35 个 SEG/DIO复用引脚:
o SEGDIO4…SEGDIO5 (2 个引脚)
o SEGDIO9…SEGDIO25 (17 个引脚)
o SEGDIO28…SEGDIO35 (8 个引脚)
o SEGDIO40…SEGDIO45 (6 个引脚)
o SEGDIO52…SEGDIO53 (2个引脚)
15 个与其它功能共用的 SEG/DIO 复用引脚:
o SEGDIO0/WPULSE, SEGDIO1/VPULSE (2 个引脚)
o SEGDIO2/SDCK, SEGDIO3/SDATA (2 个引脚)
o SEGDIO6/XPULSE, SEGDIO7/YPULSE (2 个引脚)
o SEGDIO8/DI (1 个引脚)
o SEGDIO26/COM5, SEGDIO27/COM4 (2个引脚)
o SEGDIO36/SPI_CSZ…SEGDIO39/SPI_CKI (4 个引脚)
o SEGDIO51/OPT_TX, SEGDIO55/OPT_RX (2 个引脚)
5 个与其它功能共用的 SEG 段复用引脚:
o ICE 接口引脚:SEG48/E_RXTX, SEG49/E_TCLK, SEG50/E_RST (3 个引脚)
o 测试端口引脚:SEG46/TMUX2OUT, SEG47/TMUXOUT (2 个引脚)
有 4 个专用 COM (COM0 至 COM3),加上 2 个列在复用 SEG/DIO 引脚的 COM(SEGDIO26/COM5、
SEGDIO27/COM4)。
因此,在没有引脚作为 DIO 的配置中,可提供多达 55 个 LCD 段控制引脚和 4 个 COM,或者 53 个 LCD
段控制引脚和 6 个 COM。在不使用 LCD 段控制引脚的配置中,可提供多达 50 个 DIO 引脚。
例:通过写 0 至 LCD_MAP[15:8]的第 4位,写 1至 P3[4] 和 P3[0],将 SEGDIO12 (见表 52 中的引脚 32)
配置为 DIO 输出,为 1 (高电平)。通过写 1 至 LCD_MAP[15:8]的第 4 位,将相同引脚配置为 LCD 驱动器。
显示信息被写入至 LCD_SEG12的第 0 至第 5 位。
SEGDIO16 至 SEGDIO31 配置如表 53 所示,引脚 SEGDIO32 至 SEGDIO45 配置如表 54 所示。SEG46
至 SEG50 不可配置为 DIO 引脚。引脚 SEGDIO51至 SEGDIO55的配置如表 55 所示。
表 52. SEGDIO0 至 SEGDIO15 数据/方向寄存器(71M6542F/G)
SEGDIO 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
# 45 44 43 42 41 39 38 37 36 35 34 33 32 31 30 29
配置:
0 = DIO, 1 = LCD
SEG 数据寄存器
DIO 数据寄存器
方向寄存器:
0 = 输入, 1 = 输出
内部资源可配置
(见表 47)
0 1 2 3 4 5 6 7 0 1 2 3 4 5 6 7
LCD_MAP[7:0] (I/O RAM 0x240B) LCD_MAP[15:8] (I/O RAM 0x240A)
0 1 2 3 4 5 6 7 8 9
10 11 12 13 14 15
LCD_SEG0[5:0]至 LCD_SEG15[5:0] (I/O RAM 0x2410[5:0]至 0x241F[5:0]
0 1 2 3 0 1 2 3 0 1 2 3 0 1 2 3
P0 (SFR 0x80)
P1 (SFR 0x90)
P2 (SFR 0xA0) P3 (SFR 0xB0)
4 5 6 7 4 5 6 7 4 5 6 7 4 5 6 7
P0 (SFR 0x80) P1 (SFR 0x0) P2 (SFR 0xA0) P3 (SFR 0xB0)
– – Y Y Y Y Y Y Y Y Y Y – – – –
Rev 2 63
Page 64

71M6541D/F/G和 71M6542F/G 数据资料
引脚
引脚
引脚
– – –
– – –
表 53. SEGDIO16 至 SEGDIO31 数据/方向寄存器(71M6542F/G)
SEGDIO 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
#
配置:
0 = DIO, 1 = LCD
28 27 25 24 23 22 21 20 19 18 17 16 11 10 9 8
0 1 2 3 4 5 6 7 0 1 2 3 4 5 6 7
LCD_MAP[23:16] (I/O RAM 0x2409) LCD_MAP[31:24] (I/O RAM 0x2408)
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
SEG 数据寄存器
LCD_SEGDIO16[5:0]至 LCD_SEGDIO31[5:0]
(I/O RAM 0x2420[5:0] to 0x242F[5:0])
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
DIO 数据寄存器
LCD_SEGDIO16[0]至 LCD_SEGDIO31[0]
(I/O RAM 0x2420[0 ] to 0x242F[0])
方向寄存器:
0 = 输入, 1 = 输出
16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
LCD_SEGDIO16[1]至 LCD_SEGDIO31[1]
(I/O RAM 0x2420[1 ] to 0x242F[1])
表 54. SEGDIO32 至 SEGDIO45 数据/方向寄存器(71M6542F/G)
SEGDIO 32 33 34 35 36 37 38 39 40 41 42 43 44 45
# 7 6 5 4 3 2 1 100 99 98 97 96 95 94
配置:
0 = DIO, 1 = LCD
0 1 2 3 4 5 6 7 0 1 2 3 4 5
LCD_MAP[39:32]
(I/O RAM 0x2407)
LCD_MAP[45:40]
(I/O RAM 0x2406[5:0])
32 33 34 35 36 37 38 39 40 41 42 43 44 45
SEG 数据寄存器
LCD_SEGDIO32[5:0]至 LCD_SEGDIO45[5:0]
(I/O RAM 0x2430[5:0]
至
0x243D[5:0])
32 33 34 35 36 37 38 39 40 41 42 43 44 45
DIO 数据寄存器
方向寄存器:
0 = 输入, 1 = 输出
32 33 34 35 36 37 38 39 40 41 42 43 44 45
LCD_SEGDIO32[0]至 LCD_SEGDIO45[0]
(I/O RAM 0x2430[0 ]
至
0x243D[0])
LCD_SEGDIO32[1]至 LCD_SEGDIO45[1]
(I/O RAM 0x2430[1 ]
至
0x243D[1])
表 55. SEGDIO51 至 SEGDIO55 数据/方向寄存器(71M6542F/G)
SEGDIO 51 52 53 54 55 – – –
# 53 52 51 47 46 – – –
配置:
0 = DIO, 1 = LCD
SEG 数据寄存器
0 1 2 3 4
LCD_MAP[55:51]
(I/O RAM 0x2405[7:3])
51 52 53 54 55
– – –
LCD_SEGDIO51[5:0]至 LCD_SEGDIO55[5:0]
(I/O RAM 0x2443[5:0]
至
0x2447[5:0])
51 52 53 54 55
DIO 数据寄存器
方向寄存器:
0 = 输入, 1 = 输出
LCD_SEGDIO51[0]至 LCD_SEGDIO55[0]
(I/O RAM 0x2443[0 ]
51 52 53 54 55
至
0x2447[0])
– – –
LCD_SEGDIO51[1]至 LCD_SEGDIO55[1]
(I/O RAM 0x2443[1 ]
至
0x2447[1])
64 Rev 2
Page 65

71M6541D/F/G和 71M6542F/G 数据资料
说明
注:
2.5.8.4 LCD驱动器 LCD 驱动器由多达 6 个 COM (COM0 至 COM5)和多达 56 个段驱动组成。LCD 接口非常灵活,可驱动 7
段数字、14段数字或指示符号。
倍压电路和对比度调节 DAC 从 VBAT 或 V3P3SYS 产生 VLCD 电压,电压值取决于 V3P3SYS电压。倍压
电路可驱动 500Ω 负载,所产生的最大电压比两倍供电电压低 1V,用于 LCD 供电。倍压电路和 DAC 采用
经过微调的低功耗基准供电。
产生 VLCD 的配置由 I/O RAM 字段 LCD_VMODE[1:0] (I/O RAM 0x2401[7:6])控制,解码为 LCD_EXT、
LDAC_E 和 LCD_BSTE 内部信号。表 56中列出了详细的 LCD_VMODE[1:0]配置。
表 56. LCD_VMODE[1:0]配置
LCD_VMODE [1:0]
11 1 0 0
LCD_EXT LDAC_E LCD_BSTE
连接至 VLCD 引脚的外部 VLCD。
V3P3L 的定义请参见下方注释 2。
使能 LCD 升压,最大 VLCD 引脚电压为 2*V3P3L-
10 0 1 1
1。
一般而言,VLCD 引脚电压如下:
VLCD = max(2*V3P3L-1, 2.5(1+LCD_DAC[4:0]/31)
01 0 1 0
00 0 0 0
禁用 LCD 升压时,最大 VLCD 电压为 V3P3L。
VLCD = max(V3P3L, 2.5V+2.5*LCD_DAC[4:0]/31)
VLCD=V3P3L,禁用 LCD DAC 和 LCD 升压。
LCD 模式下,该设置获得最小电池电流。
1. LCD_EXT、LDAC_E 和 LCD_BSTE 为 71M654x 内部信号,解码自 LCD_VMODE[1:0]控制字
段设置(I/O RAM 0x2401[7:6])。这些解码信号有效时,具有以上说明栏的影响,总结如下:
LCD_EXT:置位时,VLCD 引脚接收外部供电电压
LDAC_E:置位时,使能 LCD DAC
LCD_BSTE:置位时,使能 LCD 升压电路
2. V3P3L 为内部电源,源自 VBAT 引脚或 V3P3SYS 引脚供电,取决于 V3P3SYS 引脚电压。
V3P3SYS 引脚下降至低于 3.0 VDC 时,71M654x 切换至 BRN 模式,V3P3L 从 VBAT 引脚供
电;否则,MSN 模式下,V3P3L从 V3P3SYS 引脚供电。
使用 VLCD 升压电路时,须谨慎设置 LCD_DAC[4:0] (I/O RAM 0x240D[4:0])数值,确保不超过
LCD 制造商推荐的工作电压指标。
倍压电路在所有 LCD 模式下均有效,包括 LCD_BSTE = 1 时的 LCD 模式。如果禁用升压电路,LCD 系统
直接工作于 VBAT,可降低 LCD 模式下的耗流。
LCD DAC 使用低功耗基准供电,在 VBAT 和倍压限制之内,产生的 VLCD 电压为 2.5 VDC + 2.5 *
LCD_DAC[4:0]/31。
LCD_BAT 位(I/O RAM 0x2402[7])可以设定 LCD 系统在任何功耗模式下均使用电池供电(这样会在 V3P3SYS
具有供电电压时,仍然消耗电池电压)。
如果 LCD_EXT = 1,液晶驱动电源由 VLCD 引脚供给。这种情况下,LCD DAC功能无效。
LCD 系统的每个 SEG 引脚可驱动多达 6 段。如果显示器支持 6COM,那么设定 6COM 驱动模式可以大大
减少所需的 SEG 引脚数,进而增加 DIO 引脚可用数量。关于不同 LCD 驱动模式选择的信息,请参见
LCD_MODE[2:0]字段(I/O RAM 0x2400[6:4])设置(表 57)。如果选择 5COM 模式,SEGDIO27 则转换为
COM4。如果选择 6COM模式,SEGDIO26 转换为 COM5。这种转换优先于 SEGDIO26 和 SEGDIO27 的
SEG/DIO 映射。此外,与 LCD_MODE[2:0]无关,如果 LCD_ALLCOM = 1,在 SEGDIO26 和 SEGDIO27
的 LCD_MAP[ ]置位时,它们则变为 COM4 和 COM5。
Rev 2 65
Page 66

71M6541D/F/G和 71M6542F/G 数据资料
LCD_ON (I/O RAM 0x240C[0])和 LCD_BLANK (I/O RAM 0x240C[1])位是控制 LCD 显示全灭或全亮的便捷方
寄
式。任何一位都不影响 LCDSEG_DIO[ ]
则可将全部 LCD 数据清 0。LCD_RST 仅影响配置为 LCD的引脚。
将 LCD 频率设置在能够在所需温度范围内提供满意的 LCD 视觉效果的最低值,能够一定程度降低
功耗。
存器中储存的 LCD 数据内容。而 LCD_RST (I/O RAM 0x240C[2])
66 Rev 2
Page 67

71M6541D/F/G和 71M6542F/G 数据资料
名称 位置
复位
唤醒
方向
说明
SEG/COM
COM
LCD_BAT
LCD_ON = 1
LCD
LCD
LCD
LCD
LCD
SEGDIO
00-fw/2^9, 01-fw/2^8, 10-fw/2^7, 11-fw/2^6
输出
000
4COM,1/3
001
010
011
3COM,½偏压
100
101
5COM,1/3
110
说明
11
VLCD
10
LCD
LCD DAC
01
LCD DAC
V3P3SYS
表 57 列出了控制 LCD 接口工作的全部 I/O RAM寄存器。
表 57. LCD 配置
LCD_ALLCOM
LCD_E
LCD_ON
LCD_BLANK
LCD_RST
LCD_DAC[4:0]
LCD_CLK[1:0]
LCD_MODE[2:0]
2400[3] 0 – R/W
2402[7] 0 – R/W
2400[7] 0 – R/W
240C[0]
240C[1] 0 0
–
R/W
R/W
240C[2] 0 – R/W
240D[4:0] 0 – R/W
2400[1:0] 0 – R/W
2400[6:4] 0 – R/W
将全部6个
引脚配置为
。不影响
LCD_MAP为 0 的引脚。
在所有模式下将 LCD 电源连接至 VBAT。
使能 LCD 显示。禁用时,VLC2、VLC1 和 VLC0 接地
(如果其 LCD_MAP 位为 1),类似于 COM 和 SEG 输
出。
打开全部
段,不影响
数据。类
似地,LCD_BLANK= 1 关闭全部 LCD 段,不影响 LCD
数据。如果两位均置位,则打开所有
清零所有
器的
数据位。这些位影响被配置为
引脚。
段。
该寄存器控制 LCD 对比度 DAC,调节 VLCD 电压,输
出范围为 2.5 VDC 至 5 VDC。VLCD 电压为:
VLCD = 2.5 + 2.5 * LCD_DAC[4:0]/31
所以,DAC 的 LSB 为 80.6mV。最大 DAC 输出电压受
限于 V3P3SYS、VBAT,以及 LCD_BSTE 是否置位。
设置 LCD 时钟频率(1/T),参见图 21 关于 T 的定义。.
注意:fw = 32768 Hz
LCD 偏压和复用模式。
LCD_MODE
偏压
3COM,1/3 偏压
2COM,½偏压
驱动
LCD_VMODE[1:0]
2401[7:6] 00 00 R/W
LCD 可驱动为静态、 ½偏压和 1/3 偏压。图 21 定义了 COM 波形。注意,特定模式下不使用的 COM 引脚
保持“段关闭”状态,而非 GND、VCC 或高阻。
段驱动器 SEGDIO22 和 SEGDIO23 可配置为以 0.5Hz 或 1Hz 闪烁。闪烁频率由 LCD_Y (I/O RAM
0x2400[2])控制。连接至这些驱动引脚的段可最多有 6 个。I/O RAM 字段 LCD_BLKMAP22[5:0] (I/O RAM
0x2402[5:0])和 LCD_BLKMAP23[5:0] (I/O RAM 0x2401[5:0])设定哪些像素需要闪烁。LCD_BLKMAP22[5:0]
和 LCD_BLKMAP23[5:0]为非易失。
Rev 2 67
静态显示
6COM,1/3 偏压
该寄存器制定如何产生 VLCD。
LC_VMODE
外部
使能
升压和
使能
00
无升压和 DACVLCD = VBAT
或
偏压
Page 68

71M6541D/F/G和 71M6542F/G 数据资料
STATIC (LCD_MODE=100)
COM0
COM1
COM2
COM3
COM4
COM5
SEG_ON
SEG_OFF
(1/2)
(1/2)
(1/2)
(1/2)
(1/2)
1/2 BIAS, 2 STATES (LCD_MODE = 010 )
COM0
COM1
COM2
COM3
COM4
COM5
SEG_ON
SEG_OFF
(1/2)
(1/2)
(1/2)
(1/2)
0 1
1/2 BIAS, 3 STATES (LCD_MODE = 011 )
COM0
COM1
COM2
COM3
COM4
COM5
SEG_ON
SEG_OFF
(1/2)
(1/2)
(1/2)
0 1 2
1/3 BIAS, 3 STATES (LCD_MODE = 011 )
COM0
COM1
COM2
COM3
COM4
COM5
SEG_ON
SEG_OFF
(2/3)
0 1 2
(1/3)
1/3 BIAS, 4 STATES (LCD_MODE = 000 )
COM0
COM1
COM2
COM3
COM4
COM5
SEG_ON
SEG_OFF
0 1 2
1/3 BIAS, 6 STATES (LCD_MODE = 110 )
COM0
COM1
COM2
COM3
COM4
COM5
SEG_ON
SEG_OFF
0 1 2
3
3
4 5
T
可利用 LCD_DAC[4:0]字段(I/O RAM 0x240D[4:0])对 LCD 偏压进行温度补偿,偏压在 1.4 V 至 3.3 V (MSN
模式下为 V3P3SYS,BRN 和 LCD 模式下为 VBAT)范围内调节。LCD_DAC[4:0]字段设为 000 时,DAC 被
旁路并关断,用于减小 LCD 模式下的电流。
68 Rev 2
图 21. LCD 波形
Page 69

71M6541D/F/G和 71M6542F/G 数据资料
引脚
LCD驱动器(71M6541D/F/G)
71M6541D/F/G 如果采用 6COM 模式,则最多提供 35 个 SEG 引脚,能够驱动最多 6 x 35 = 210 像素的
LCD 显示。8 段/数字时,这相当于 26 个数字。
LCD 段数据写入 LCD_SEGn[5:0] I/O RAM寄存器,如第 2.5.8.2 节和第 2.5.8.3 节介绍。
SEG46 至 SEG50 不可配置为 DIO 引脚。这些引脚的显示数据写入 I/O RAM 寄存器 LCD_SEG46[5:0]至
LCD_SEG50[5:0] ( 见 表 58) 。 ICE_E 引脚拉高时,引脚 E_RXTX/SEG48 、 E_TCLK/SEG49 和
E_RST/SEG50 作为 ICE 接口引脚。反之,使能 SEG 功能。
LCD_MAP[46]和 LCD_MAP[47] (I/O RAM 0x2406[6]和 0x2407[7])必须设为 1,以允许 TMUX2OUT/SEG46
和 TMUXOUT/SEG47 作为 SEG 驱动器工作。如果 LCD_MAP[46]和 LCD_MAP[47]为 0,这些引脚作为
TMU2XOUT和 TMUXOUT 工作 (见第 78 页第 2.5.12 节测试端口(TMUXOUT和 TMUX2OUT 引脚))。
表 58. SEG46 至 SEG50 的 71M6541D/F/G LCD数据寄存器
SEG 46 47 48 49 50
# 61 60 38 37 36
总为 LCD 引脚,除用于 ICE
配置
接口或
TMUXOUT/TMUX2OUT时。
SEG 数据寄存器
LCD_SEG46[5:0]
LCD_SEG47[5:0]
LCD_SEG48[5:0]
LCD_SEG49[5:0]
LCD_SEG50[5:0]
Rev 2 69
Page 70

71M6541D/F/G和 71M6542F/G 数据资料
引脚
接口或
LCD驱动器(71M6542F/G)
71M6542F/G 如果采用 6COM 模式,则最多提供 56 个 SEG 引脚,能够驱动最多 6 x 56 = 336 像素的
LCD 显示。8 段/数字时,这相当于 42 个数字。
LCD 段数据写入 LCD_SEGn[5:0] I/O RAM 寄存器,如第 2.5.8.3 节用于 71M6542F/G 的数字 I/O 介绍。
SEG46 至 SEG50 不可配置为 DIO 引脚。这些引脚的显示数据写入 I/O RAM 寄存器 LCD_SEG46[5:0] (I/O
RAM 0x243E[5:0])至 LCD_SEG50[5:0] (I/O RAM 0x2442[5:0]),参见表 59。相关引脚作为 ICE 接口引脚,
并且只要 ICE_E 拉高,ICE 功能设置将优先于 SEG 功能。
表 59. SEG46 至 SEG50 的 71M6542F/G LCD 数据寄存器
SEG 46 47 48 49 50
# 93 92 58 57 56
除用于 ICE
配置:
SEG 数据寄存器
TMUXOUT/TMUX2OUT ,则
始终为 LCD 引脚。
LCD_SEGDIO46[5:0]
LCD_SEGDIO47[5:0]
LCD_SEGDIO48[5:0]
LCD_SEGDIO49[5:0]
LCD_SEGDIO50[5:0]
2.5.9 EEPROM 接口
71M654x 支持硬件 2 线或 3 线(μ-wire)型 EEPROM 接口。接口使用 SFR EECTRL (SFR 0x9F)和 EEDATA
(SFR 0x9E)寄存器通信。
2.5.9.1 2 线EEPROM接口
71M654x 有两个专用 I2C 接口引脚,此类引脚与外部 EEPROM 器件通信。通过配置 DIO_EEX[1:0] = 01
(I/O RAM 0x2456[7:6])开启 SEGDIO2 (SDCK)和 SEGDIO3 (SDATA)引脚的第二功能(I2C 接口)。MPU 通
过 SFR 寄存器 EEDATA 和 EECTRL 与接口通信。如果 MPU 希望写入 EEPROM 一个字节数据,应将数据
放入 EEDATA,然后写发送命令至 EECTRL。这将触发传送操作,BUSY 位变低时结束。BUSY 变低时,
触发 INT5。MPU 然后可检查 RX_ACK 位,查看 EEPROM 是否应答。
读字节时,写接收命令至 EECTRL,然后等待 BUSY 位变低。完成之后,接收数据位于 EEDATA。串行发送
和接收时钟在每次传输时为 100kHz,然后保持为高电平状态,直到下次传输开始。选择双引脚接口时,
EECTRL 位如表 60 所示。
70 Rev 2
Page 71
71M6541D/F/G和 71M6542F/G 数据资料
状态位
名称
读/写
复位
状态
极性
说明
操作
控制位
名称
读/写
说明
表 60. 2 线接口对应的 EECTRL 位
7
6
5
4
ERROR
BUSY
RX_ACK
TX_ACK
R 0
R 0
R 1
R 1
正 接收到非法命令后为 1。
正 串行数据总线忙时为 1。
正 1 表示 EEPROM 发送了 ACK 位。
正 1 表示已向 EEPROM 发送 ACK 位。
CMD[3:0]
0000
0010
无操作命令。
从 EEPROM 接收一个字节,然后发
送 ACK。
3:0
CMD[3:0]
W 0000
正
0011
0101
0110
发送一个字节至 EEPROM。
发起一个 STOP 序列。
从 EEPROM 接收最后字节,不发送
ACK。
1001
Others
发起一个 START 序列。
无操作,置位 ERROR 位。
EEPROM 接口也可通过软件直接控制 DIO2 和 DIO3 实现,即软件模拟 I2C 接口。DIO 线的方向可由
输入该位输出,可利用单次写操作写输出值,从而避免冲突(见表 15 端口寄存器(SEGDIO0-15));串
行 SDATA 中防止冲突无需电阻。
2.5.9.2 带有单独数据引脚的 3 线(μ-wire) EEPROM接口
71M654x提供一个 500kHz 3线接口,使用 SDATA、SDCK 和 DIO 引脚用于 CS。接口通过 DIO_EEX[1:0]
= 10 选择。选择 3 线接口时,EECTRL 如表 61 所示。写 EECTRL 时,来自 EEDATA 的 8 位数据写入
EEPROM 或从 EEPROM 读取,取决于 EECTRL。
2.5.9.3 带有独立DI/DO引脚的 3 线(μ-wire/SPI) EEPROM接口 如果 DIO_EEX[1:0] = 11,除 DI和 DO 为独立引脚外,3 线接口同上。这种情况下,SEGDIO3 变为 DO,
SEGDIO8 变为 DI。除了输出数据出现在 DO 引脚以及全部输入数据出现在 DI 之外,时序与 DIO_EEX[1:0]
= 10 时相同。该模式下,DI忽略,在 DO 接收数据。该模式兼容于 SPI 模式 0、0 和 1、1,数据在时钟下
降沿移出,在时钟上升沿写入。
表 61. 3 线接口对应的 EECTRL 位
等待就绪。如果该位置位,BUSY 下降沿将被延迟,直到在数据线出现上
7
WFR
W
升沿。该位可用于写命令的最后字节期间,在 EEPROM 结束其内部写序
列后产生 INT5 中断。如果 Hi-Z=0,该位被忽略。
6
5
4
BUSY
HiZ
RD
R
串行数据总线忙时有效。BUSY 位下降时,产生 INT5 中断。
W
表示 SD 信号在最后一个 SDCK 上升沿后立即悬空或置为高阻。
W
表示 EEDATA (SFR 0x9E)由来自 EEPROM 的数据填充。
设定要发送的时钟数量。允许值为 0~8。如果 RD=1,从高到低的顺序读
3:0
CNT[3:0]
取 CNT 位数据,并以右对齐存入 EEDATA 寄存器。如果 RD=0,EEDATA
W
寄存器数据被从高到低的顺序发送 CNT 位数据至 EEPROM 接口。如果
CNT[3:0]为 0,SDATA 将处于 HiZ 状态。
Rev 2 71
Page 72

71M6541D/F/G和 71M6542F/G 数据资料
SCLK (output)
BUSY (bit)
CNT Cycles (6 shown)
SDATA (output)
Write -- No HiZ
D2D3D4D5D6D7
EECTRL Byte Written
INT5
SDATA output Z
(LoZ)
CNT Cycles (6 shown)
Write -- Wi th HiZ
INT5
EECTRL Byte Written
SCLK (output)
BUSY (bit)
SDATA (output)
D2D3D4D5D6D7
(HiZ)(LoZ)
SDATA output Z
CNT Cycles (8 shown)
READ
D0D1D2D3D4D5
INT5
D6D7
EECTRL Byte Written
SCLK (output)
BUSY (bit)
SDATA (input)
SDATA output Z
(HiZ)
图 22 至图 26 中的时序图说明了 3 线 EEPROM 接口的操作。写 EECTRL (SFR 0x9F)寄存器时,意味着所
有命令开始执行。首先从连接至 CS 的 DIO 引脚上升沿开始;然后通过 EECTRL 和 EEDATA 发送多于 8 位
或少于 8 位的命令,如图 22 至图 26所示。
会话结束后,必须将 CS 拉低。在读操作结束时,EEPROM 接口正在驱动 SDATA,但是当 CS 变低时将
转换为 Hi-Z (高阻)。MPU 程序应立即发出一个写命令,CNT=0,HiZ=0,接管控制 SDATA,强制其为低
阻状态。
图 22. 3 线接口:写命令,HiZ=0
图 23. 3 线接口:写命令,HiZ=1
图 24. 3 线接口:读命令
72 Rev 2
Page 73

71M6541D/F/G和 71M6542F/G 数据资料
CNT Cycles (0 shown)
Write -- No HiZ
D7
INT5 not issued
CNT Cycles (0 shown)
Write -- HiZ
INT5 not issued
EECTRL Byte Written EECTRL Byte Written
SCLK (output)
BUSY (bit)
SDATA (output)
SCLK (output)
BUSY (bit)
SDATA (output)
(HiZ)
SDATA output ZSDATA output Z
(LoZ)
CNT Cycles (6 shown)
Write -- With HiZ and WFR
EECTRL Byte Written
BUSY
(bit)
D2
D3
D4
D5
D6
D7
BUSY
READY
(From EEPROM)
INT5
(From 654x)
SDATA output Z
图 25. 3 线接口:写命令,CNT=0
SCLK (output)
SDATA (out/in)
(LoZ)
(HiZ)
图 26. 3 线接口:写命令,HiZ=1,WFR=1
2.5.10 SPI从机端口
SPI 从机接口直接与 MPU 数据总线通信,能够读和写数据 RAM 和 I/O RAM 位置。它还能够发送命令至
MPU。连接从机接口的端口包括:SPI_CSZ、SPI_CKI、SPI_DI 和 SPI_DO 引脚。这些引脚与 DIO/LCD
段驱动器引脚 SEGDIO36 至 SEGDIO39 组合复用。
此外,SPI 接口允许读取 FLASH 并对其编程。为便于 FLASH 编程,芯片需要重新上电或复位一次,使
SPI 引脚复位为默认的 PSI 模式。通过清除 SPI_E 位(I/O RAM 0x270C[4])直接禁用 SPI 端口。
SPI 接口的应用包括:
1) 外部主机从CE地址读取数据,获取表计信息。这可用于71M654x作为智能前端的应用。由于地址为16
位格式,所以可访问任何类型的XRAM数据:CE、MPU、I/O RAM,,但不能访问SFR或80515内部寄
存器组。
2) 可通过SPI接口建立通信链路:通过写MPU存储器,外部主机可启动和控制71M654x MPU的进程。写
CE或MPU通常产生一个中断,用来通知MPU读取和处理外部主机写入的字节功能。亦可在不产生中断
的情况下由外部主机写入数据。
3) 外部 DSP 可访问 ADC 产生的前端数据。这种模式将 71M654x 作为模拟前端(AFE)。
4) 由外部主机对 FLASH 编程(SPI FLASH 模式)。
SPI 传输
典型的 SPI 传输如下。SPI_CSZ 为高电平时,端口保持在初始化/复位状态。该状态期间,SPI_DO 保持在
高阻状态,SPI_CLK 和 SPI_DI 上的所有跳变被忽略。SPI_CSZ 为低电平时,端口在 SPI_CLK 的第一个
上升沿开始传输。如表 62 所示,一次传输包括可选的 16 位地址、8 位命令、8位状态字节,后边跟一个或
多个字节的数据。SPI_CSZ为高时,传输结束。有些传输可能仅包含命令。
Rev 2 73
Page 74

71M6541D/F/G和 71M6542F/G 数据资料
字段名称 必需
大小
字节
说明
SPI_CSZ 为高时,非 x000 0000 形式的 SPI 命令字节将更新 SPI_CMD (SFR 0xFD)寄存器,同时触发中断。
通讯为单字节的情况例外。这种情况下,SPI_CMD字节总是更新并请求中断。SPI_CSZ 为高电平时,不清
除 SPI_CMD。
SPI 端口支持高达 10Mb/s 的数据传输。串行读、写操作需要至少 8个时钟/字节,进而 SPI 对 RAM 的访问
速度在 1.25MHz 以下,确保 SPI总是能够访问 DRAM。
表 62. SPI 操作字段
地址 是,单字节通信
(
)
2
16 位地址。如果发送一简单 SPI 命令,则无需地址字段。
除外
命令 是
1
8 位命令。该字节可作为 MPU 的控制命令。多字节通信中,
MSB 为读/写位。除非通信为多字节,且 SPI_CMD 准确为
0x80 或 0x00,SPI_CMD 寄存器更新,并请求 SPI 中断。否
则,SPI_CMD 寄存器保持不变,并且不请求中断。
状态 是,如果通讯包
括数据
1
8 位状态字段,表示之前的通信状态,该字节亦可用于 MPU
存储器映射为 SPI_STAT (I/O RAM 0x2708)寄存器。内容请参
见表 64。
数据 是,如果通讯包
1 或多 读或写数据。每个新字节的地址自动递增。
括数据
每次 SPI 通信输出 SPI_STAT字节,并指示前一通信的奇偶校验和错误状态。潜在故障源有:
• 71M654x 未就绪。
• 通信未在字节边界结束。
SPI 安全模式
有时候希望防止 SPI 接口对任意 RAM 地址进行写操作,以免干扰 MPU 和 CE 工作,尤其是在 AFE 应用中。
出于这一原因,提供了 SPI 安全模式。SPI 安全模式下,只有地址 0x400 至 0x40F 的 16 个字节 SPI 可进
行写操作。如果 SPI 主机需要写其它地址,可以利用 SPI_CMD 寄存器从 MPU 请求写操作。SPI 安全模式
由 SPI_SAFE 位(I/O RAM 0x270C[3])位使能。
单字节通信
如果为单字节通信,该字节由 71M654x 解析为 SPI_CMD。对于任何命令,单字节通信总是更新 SPI_CMD
寄存器,从而生成 SPI 中断。
多字节通信
如图 27 所示,多字节操作包括 16 位地址字段、8 位 CMD、状态字节和数据字节序列。多字节通信为三或
四字节格式。
74 Rev 2
Page 75
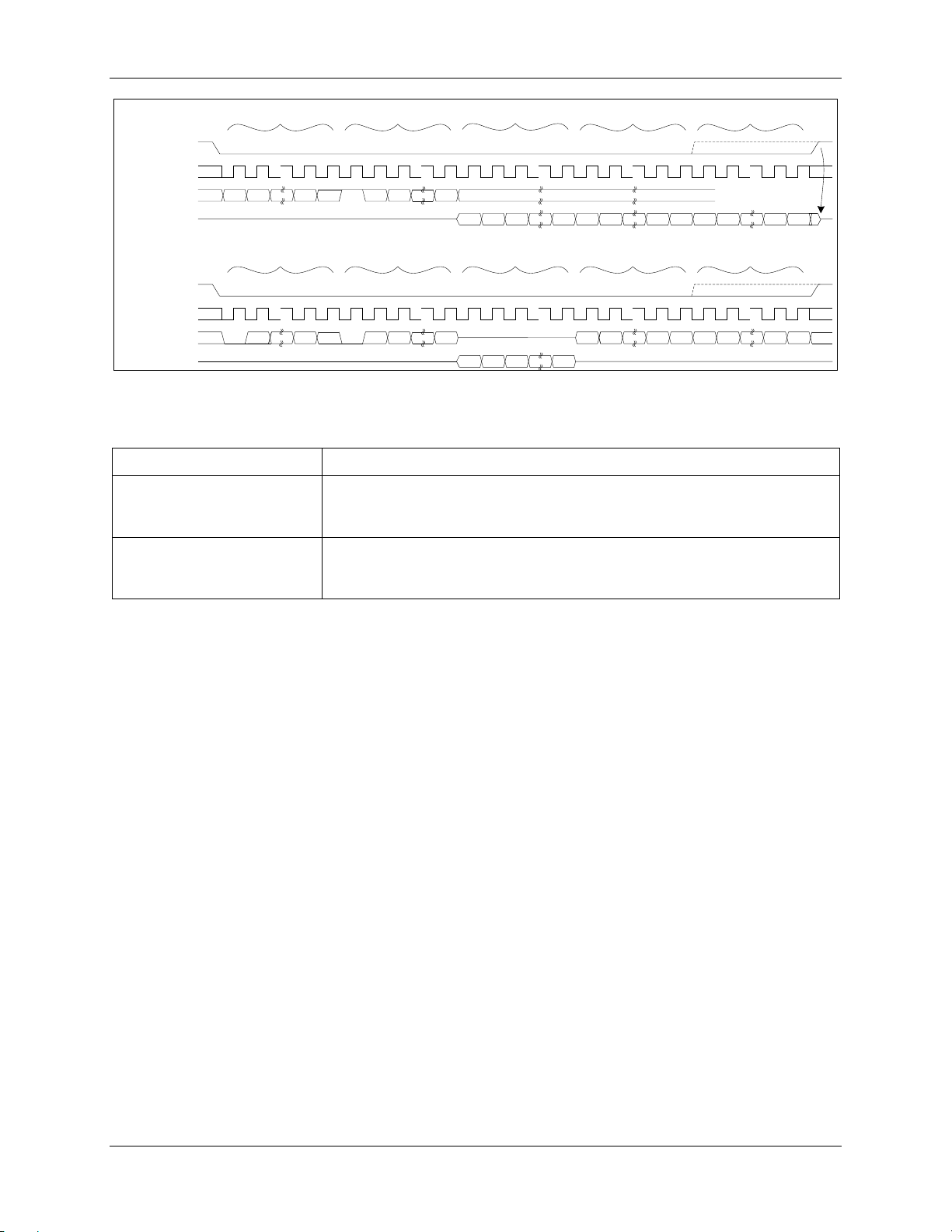
71M6541D/F/G和 71M6542F/G 数据资料
A15 A14
A1
A0
C0
0 31
x
D6
D1 D0 D7
D6 D1 D0
C5C6C7
(From Host) SPI_CSZ
(From Host) SPI_CK
(From Host) SPI_DI
(From 654x) SPI_DO
8 bit CMD
16 bit Address DATA[ADDR]
DATA[ADDR+1]
15 16 23 24 32 39
Extended Read . . .
SERIAL READ
A15
A14
A1 A0 C0
C5C6C7
x
8 bit CMD16 bit Address
DATA[ADDR]
DATA[ADDR+1]
Extended Write . . .
SERIAL WRITE
D6
D1 D0 D7
D6 D1 D0
x
HI Z
HI Z
Status Byte
ST7
ST6
ST5
ST0 D7
40 47
0 31
15 16 23 24 32 39
40 47
Status Byte
D7
ST7
ST6 ST5 ST0
(From Host) SPI_CSZ
(From Host) SPI_CK
(From Host) SPI_DI
(From 654x) SPI_DO
命令时序
说明
ADDR 1xxx xxxx STATUS
图 27. PI 从机端口—典型的多字节读、写操作
表 63. SPI 命令时序
Byte0 ... ByteN
0xxx xxxx ADDR Byte0 ...
ByteN
从 ADDR 开始读取数据。ADDR 自动递增,直到 SPI_CSZ 为高;完成
后,SPI_CMD (SFR 0xFD )更新至 1xxx xxxx,产生 SPI 中断。命令字节为
1000 0000时例外。这种情况下,不产生 MPU 中断,不更新 SPI_CMD。
从 ADDR 开始写数据。ADDR 自动递增,直到 SPI_CSZ 为高;完成后,
SPI_CMD 更新至 0xxx xxxx,产生 SPI 中断。命令字节为 0000 0000 时
例外。这种情况下,不产生 MPU 中断,不更新 SPI_CMD。
Rev 2 75
Page 76

71M6541D/F/G和 71M6542F/G 数据资料
名称 位置
复位 唤醒
方向
说明
表 64. SPI 寄存器
EX_SPI
2701[7] 0 0 R/W
SPI_CMD SFR FD[7:0]
SPI_E
IE_SPI
SPI_SAFE
SPI_STAT
270C[4] 1 1 R/W
SFR F8[7] 0 0 R/W
270C[3] 0 0 R/W
2708[7:0] 0 0 R
– – R
SPI 中断使能位。
SPI 命令,来自总线主控制器的 8 位命令。
SPI 端口使能位,使能引脚 SEGDIO36 至 SEGDIO39
的 SPI 接口。
SPI 中断标识,由硬件置位,通过写 0 清除。
SPI 安全模式使能位。置位时,将 SPI 写操作限制在
SPI_CMD及 DRAM 中的 16 字节区域。
SPI_STAT 含有前一 SPI 通讯的状态结果。
第 7 位:就绪错误:71M654x 未准备好按照前一命令
读或写。
第 6 位:读数据奇偶性:该位是前一命令从 71M654x
读取的全部字节的奇偶校验。不包括 SPI_STAT 字节。
第 5 位:写数据奇偶性:该位时前一命令写入至
71M654x 的全部字节的总奇偶校验。它包括 CMD 和
ADDR 字节。
第 4 至 2 位:字节数的最低 3 位。不包括 ADDR 和
CMD 字节。1、2 和 3 字节指令返回 111。
第 1 位:SPIFLASH 模式:TEST 引脚为零时,该位为
零。
第 0 位:SPIFLASH 模式就绪:用于 SPIFLASH 模
式。表示 FLASH 已准备好接收另一条写指令。
76 Rev 2
Page 77

71M6541D/F/G和 71M6542F/G 数据资料
SPI FLASH 模式(SFM)
常规模式,SPI 从器件接口不能读或写 FLASH。然而,71M6541D/F/G 和 71M6542F/G 支持 SPI FLASH
模式(SFM),方便 FLASH 的初始编程。SFM 模式下,SPI 接口可擦除、读、写 FLASH。该模式下,不可
访问其它存储器,例如 XRAM 和 I/O RAM。为防止 FLASH 被错误地更改,需要特殊条件和操作才能激活
SFM 模式。
SFM 模式下,支持对 FLASH 的 n 字节读取和双字节写入。关于读、写命令的格式,请参见第 73 页的 SPI
通信说明。由于 FLASH 写操作总是基于双字节字,所以初始地址必须为偶数。在写完奇数字节后,数据更
新至 16 位 FLASH 总线。
SFM 模式下,MPU 完全暂停。由于这一原因,以上 SPI 通信部分介绍的中断特性不适用于 SFM 模式。
71M6541D/F/G和 71M6542F/G 只有被 WD 定时器或 RESET 引脚复位,才能退出 SFM 模式。
激活 SFM
激活 SFM 之前,必须满足以下条件:
• 引脚 ICE_E = 1。禁用看门狗,同时为防止无意篡改 FLASH增加了另一层保护。
• 外部电源(V3P3SYS、V3P3A)处于适当电平(> 3.0 VDC)。
• PREBOOT = 0 (SFR 0xB2 [7]),SECURE (SFR 0xB2[6])功能有效。
• SECURE = 0。该 I/O R AM寄存器指示 SPI加密模式被禁止。如果 SECURE 位 = 1 (在 SPI 加密模式下
不允许读取 FLASH),操作被限制为 SFM 整体擦除模式。
• FLSH_UNLOCK[3:0] (I/O RAM 0x2702[7:4]) = 0010。
I/O RAM 寄存器 SFMM (I/O RAM 0x2080)和 SFMS (I/O RAM 0x2081)用于激活 SFM。需顺序写 SFMM 和
SFMS 才能激活 SFM。顺序写过程可以防止 MPU 意外进入 SFM。
激活 SFM 的顺序为:
• 首先,写 SFMM (I/O RAM 0x2080)寄存器。写入该寄存器的值定义 SFM 模式。
o 0xD1:整体擦除模式。进入 SFM 时,激活 FLASH 整体擦除循环。
o 0x2E:FLASH 读回模式。进入 SFM 的目的是为了 FLASH 读回。不阻止 FLASH 写操作,由
用户保证只写之前未被写的位置。SPI加密模式被置位时,该模式不可用。
o 如果向 SFMM 寄存器写入其它任何值,均不会激活 SFM。
• 接着,写 0x96 至 SFMS (I/O RAM 0x2081)寄存器。如果之前对 SFMM 的写操作满足要求,该动作将激
活 SFM。向该寄存器写入其它任何值都不会激活 SFM。此外,对该寄存器的任何写操作都自动将之前
写入 SFMM 寄存器的值复位为 0。
Rev 2 77
Page 78

71M6541D/F/G和 71M6542F/G 数据资料
SFM 详细介绍
进入 SFM 时,发生以下事件:
• CE 被禁用。
• MPU 暂停。MPU 一旦暂停,只能通过复位重新启动。复位可通过 RESET 引脚、看门狗复位或重新上
电 (VBAT 引脚上无电池)完成。
• 当 MPU 处于 FLASH 写操作或擦除期间,FLASH 控制逻辑被复位。
• 如果在 SFMM 寄存器 I/O RAM 0x2080 (见上文激活 SFM)已经写入 0xD1,执行 FLASH 整体擦除。
SECURE 位(SFR 0xB2[6])在该循环及所有整体擦除循环结束时被清除。
• 现在,所有 SPI 读、写操作都针对 FLASH 而非 XRAM 空间。
通过对任意地址执行 4 字节 SPI写操作并检查状态字段,SPI 主机可获取“循环 FLASH”操作的状态。
SFM 模式下的所有 SPI 写操作必须为 6 字节通信格式,将两个字节写入偶数地址。写通信必须含有 0xxx
xxxx 形式的命令字节。写操作时禁用自动递增。
SPI 读操作可使用自动递增,并且访问单字节。SFM 读操作中,命令字节必须总为 1xxx xxxx 形式。
SFM 模式下的 SPI 命令
SFM 模式下,由于 MPU暂停,所以不产生中断。命令的格式在第 73 页的 SPI 通信说明部分介绍。
2.5.11 硬件看门狗定时器
71M6541D/F/G和 71M6542F/G 中包括一个独立、可靠、固定 1.5 秒溢出时间的看门狗定时器(WDT)。它
利用 RTC 晶振作为时基, MPU 固件必须每 1.5 秒内刷新一次(喂狗)。超过刷新时间,WDT 溢出,
71M654x将复位。看门狗复位与 RESET 引脚被拉高复位一样(关于 RESET 和唤醒之后的 I/O RAM 位状态
的完整清单,请参见第 5.2 节 I/O RAM映射—字母顺序)。WDT 溢出之后经过 4100 个 CK32 周期(即 125
ms),MPU 才能够从程序地址 0x0000 开始运行。
内部信号 WAKE=0 时,看门狗定时器也复位(参见第 3.4 节唤醒操作)。
详情请参见第 3.3.4 节看门狗定时器复位。
2.5.12 测试端口(TMUXOUT和TMUX2OUT引脚)
TMUXOUT 和 TMUX2OUT 是两个独立的多功能测试引脚,用户固件可以选择输出内部模拟或数字信号。
这些引脚与 SEG47 和 SEG46 功能复用。为作为测试引脚,LCD_MAP[46] (I/O RAM 0x2406[6])和
LCD_MAP[47] (I/O RAM 0x2406[7])必须为 0。
可选择表 65 中所列数字或模拟信号之一在 TMUXOUT 引脚输出。复用器功能由 I/O RAM 寄存器
TMUX[5:0] (I/O RAM 0x2502[5:0])控制,如表 65 所示。
可选择表 66 中所列数字或模拟信号之一在 TMUX2OUT 引脚输出。复用器功能由 I/O RAM 寄存器
TMUX2[4:0] (I/O RAM 0x2503[4:0])控制,如表 66 所示。
TMUX[5:0]和 TMUX2[4:0] I/O RAM 为非易失存储器,其内容由电池电源保持,复位不会丢失。
78 Rev 2
Page 79
71M6541D/F/G和 71M6542F/G 数据资料
信号名称
说明
注:
信号名称
说明
注:
TMUXOUT 和 TMUX2OUT 引脚可用于产品开发期间或生产测试期间的诊断。PULSE_1S:秒信号输出,
可用于校准晶振。PULSE_4S:4 秒输出为 RTC 校准提供更高的精度。RTCLK:亦可用于校准 RTC。
表 65. TMUX[5:0]选择
TMUX[5:0]
1 RTCLK
9 WD_RST
A CKMPU
D
E
1B MUX_SYNC
1C
1D
1F
未列出的 TMUX[5:0]值均为保留。
V3AOK位
V3OK 位
CE_BUSY 中断
CE_XFER 中断
从 CE 的 RTM 输出 参见第 25 页第 2.3.5 节。
32.768kHz 时钟波形。
MPU 固件“喂狗”指示。通过监测确定看门狗定时器的空闲时
间。
MPU 时钟—见表 9。
表示 V3P3A 引脚电压≥ 3.0V。预计 V3P3A 和 V3P3SYS 引脚在
PCB 板级连接在一起。71M654x 仅监测 V3P3A 引脚电压。
表示 V3P3A 引脚电压≥ 2.8V。预计 V3P3A 和 V3P3SYS 引脚在
PCB 板级连接在一起。71M654x 仅监测 V3P3A 引脚电压。
内部复用帧 SYNC 信号。请参见图 6 和图 7。
参见第 25 页第 2.3.3 节和第 47页图 16。
表 66. TMUX2[4:0]选择
TMUX2[4:0]
0 WD_OVF
1 PULSE_1S
2 PULSE_4S
3 RTCLK
8
9
A WAKE
B MUX_SYNC
C MCK
E GNDD
12 INT0 – DIG I/O
13 INT1 – DIG I/O
14 INT2 – CE_PULSE
15 INT3 – CE_BUSY
16 INT4 - VSTAT
17 INT5 – EEPROM/SPI
18 INT6 – XFER, RTC
1F RTM_CK (flash)
未列出的 TMUX2[4:0]均为保留位。
SPARE[1] 位 – I/O RAM
0x2704[1]
SPARE[2] 位 – I/O RAM
0x2704[2]
看门狗定时器溢出指示。
占空比为 25%的 1 秒脉冲。该信号可用于测量 RTC 相对于理想 1
秒间隔的偏差。应对多个周期的测试进行平均,滤除抖动。
占空比为 25%的 4 秒脉冲。该信号可用于测量 RTC 相对于理想 4
秒间隔的偏差。应对多个周期的测试进行平均,滤除抖动。4 秒脉
冲比 1 秒脉冲测量的精度更高。
32.768kHz 时钟波形。
复制 0x2704[1]的储存值,通用。
复制 0x2704[2]的储存值,通用。
指示何时发生了 WAKE 事件。
内部复用帧 SYNC 信号,参见图 6 和图 7。
参见第 50 页第 2.5.3 节。
数字地,利用该信号将 TMUX2OUT 引脚置于静态。
中断 0,参见第 40 页第 2.4.8 节,另请参见第 47 页图 16。
参见第 25 页第 2.3.5 节。
Rev 2 79
Page 80
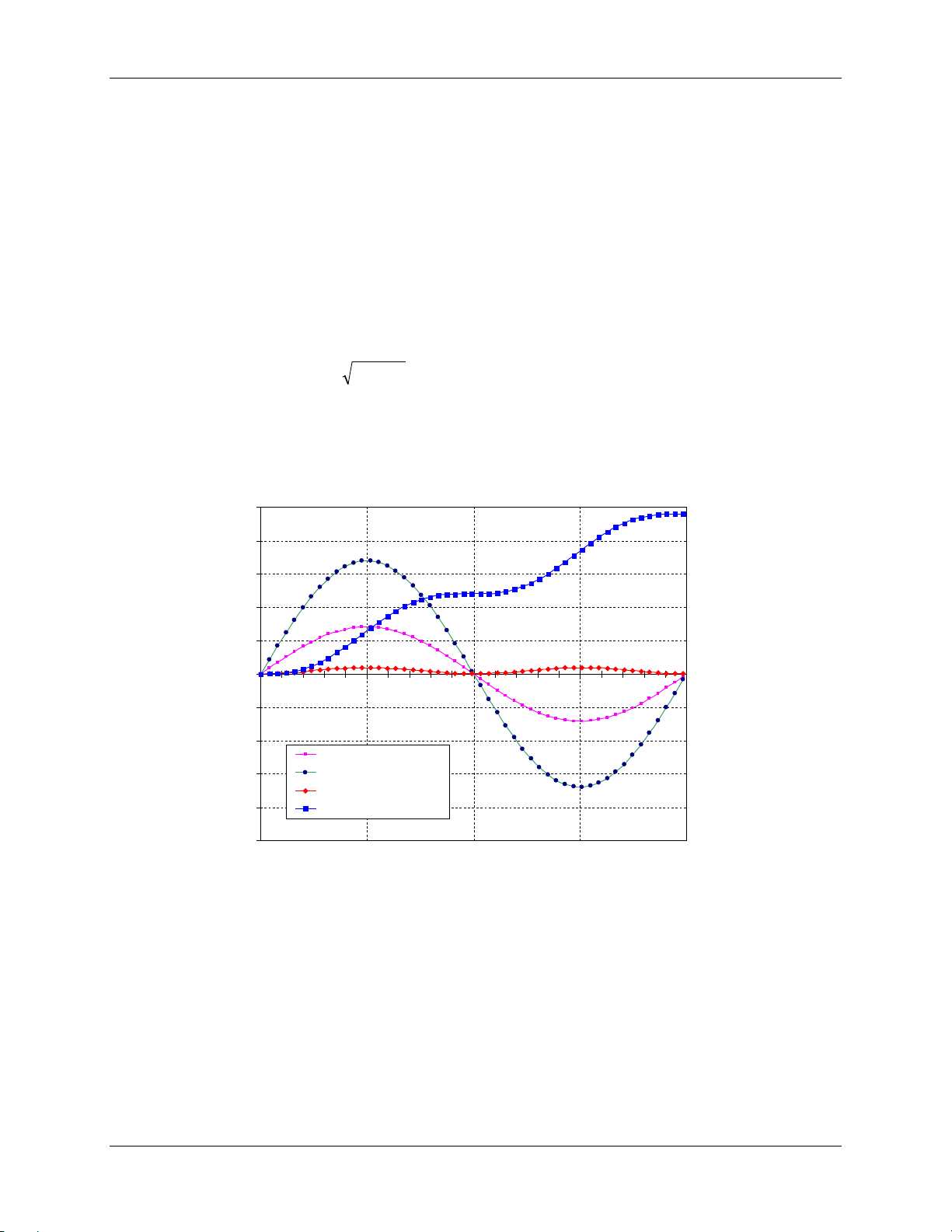
71M6541D/F/G和 71M6542F/G 数据资料
∫
=
t
dttItVE
0
)()(
22
QP +
-500
-400
-300
-200
-100
0
100
200
300
400
500
0 5 10 15 20
Current [A]
Voltage [V]
Energy per Interval [Ws]
Accumulated Energy [Ws]
3 功能说明
3.1 工作原理
电源供给负载的能量可表示为:
假设相角不变,则下式成立:
P = 有功能量[Wh] = V * A * cos φ* t
Q = 无功能量[VARh] = V * A * sin φ * t
S = 视在能量[VAh] =
对于实际电表,电压、电流幅值、相位角和谐波分量会时常变化。所以,简单的 RMS 测量本质上并不精确。
现代固态电表 IC,例如 Teridian 71M654x,通过模拟上述积分运算进行计算,即处理 ADC 以恒定频率采
集的电流和电压值。只要 ADC 分辨率足够高,采样频率高于所要求的谐波范围,将电流和电压采样值乘以
采样时间周期,即可获得准确的瞬时能量。在时间上对瞬时能量值求和,即可获得非常准确的累积能量。
图 28. 电压、电流、瞬时能量和累积能量
图 28 所示为 V(t)、I(t)、瞬时功率和累积功率波形,电压和电流信号为 50 个采样点,周期为 20ms。
240VAC 和 100A 应用在 20ms 周期内的累积结果为 480Ws (= 0.133Wh),如累积功率曲线所示。即使存
在动态相位偏移和谐波失真,上述采样法也能够可靠工作。
80 Rev 2
Page 81

71M6541D/F/G和 71M6542F/G 数据资料
3.2 电池供电模式
施加系统电源(V3P3SYS)后,器件马上处于任务模式(MSN 模式)。MSN 模式意味着器件由系统电源供电,
内部 PLL 稳定。该模式是器件能够测量能量的常规工作模式。
系统电源不可用时,71M654x工作于以下三种电池模式之一:
• BRN 模式(掉电模式)
• LCD 模式(LCD 模式)
• SLP 模式(休眠模式).
内部比较器监测 V3P3SYS 引脚电压(注意,V3P3SYS 和 V3P3A 通常在 PCB 上连接在一起)。V3P3SYS
电压下降至 3.0 VDC 以下时,比较器复位 V3OK 内部电源状态位。只要断开系统电源且 V3OK = 0,
71M654x 就切换至电池电源(VBAT 引脚),通过发起中断并更新 VSTAT[2:0]寄存器(SFR 0xF9[2:0] ,见表
68)通知 MPU。系统从 MSN 转换至 BRN 模式时,MPU 继续执行代码。关于 BRN 模式期间获得最低功耗
的设置,请参见第 3.2.1 节 BRN 模式。根据 MPU 代码,MPU 可选择留在 BRN 模式还是转换至 LCD 或
SLP 模式(通过 I/O RAM 位 LCD_ONLY
V3P3A 电源供电外,BRN 模式与 MSN 模式类似,例如,ADC 不准确。BRN 模式下,CE 继续运行,应将
其关闭以节约 VBAT 功率。另外,PLL 继续以与 MSN 模式相同的频率工作,应降低其频率以节省功率
(CKGN = 0x24 (I/O RAM 0x2200)。
系统电源恢复时,71M654x 从任何电池模式(BRN、LCD、SLP)自动恢复至 MSN 模式,切回系统电源
(V3P3SYS、V3P3A)供电,发起中断并更新 VSTAT[1:0]。MPU 软件应通过发起软复位恢复 MSN 工作模式,
恢复与 MSN 模式对应的系统设置。
,
I/O RAM 0x28B2[6]和 SLEEP,I/O RAM 0x28B2[7])。除了由
图 29所示为各种工作模式的状态图,以及模式之间可能的转换。
器件在电池电源下唤醒时,自动进入 BRN 模式(见第 3.4 节唤醒功能)。从 BRN 模式,器件可进入 LCD 模
式或 SLP 模式,由 MPU 控制。
RESET
RESET &
VBAT
sufficient
SLEEP or
VBAT
insufficient
V3P3SYS
rises
System Power
Battery Power
VBAT
insufficient
V3P3SYS
rises
LCD_ONLY
LCD
VBAT
insufficient
V3P3SYS
Wake
event
RESET &
insufficient
MSN
rises
BRN
Wake Flags
VBAT
VSTAT=001VSTAT=00X
V3P3SYS
falls
Wake
event
SLP
图 29. Operation 工作模式状态图
Rev 2 81
Page 82

71M6541D/F/G和 71M6542F/G 数据资料
电路功能
系统电源
电池电源
MSN (任务模式)
BRN (掉电模式)
休眠
PLL_FAST=1
PLL_FAST=0
PLL_FAST=1
PLL_FAST=0
--2
--
FIR
--
--
--
--
ADC, VREF
--
--
--
--
PLL
--
有 有 有 有
--
--
MPU_DIV
--
--
ICE
--
--
--
--
有 有 有 有
--
--
LCD
有 有 有
--
--
--
38.4kHz
38.9kHz
38.4kHz
38.9kHz
--
--
--
--
FLASH
有 有 有 有
--
--
--
--
--
--
注:
从 LCD 和 SLP 模式至 BRN 模式的转换可由以下事件发起:
• 唤醒定时器超时。
• 按下按钮(PB)。
• SEGDIO4、SEGDIO52 (仅限 71M6542F/G)或 SEGDIO55引脚产生上升沿。
• RX 或 OPT_RX 引脚有上升或下降沿产生。
MPU 可访问各种唤醒事件的标识寄存器,详情参见第 3.4 节唤醒功能。
表 67 所示为各种工作模式下的电路功能。
表 67. 电路功能
CE (计算引擎) 有 有 注 1 注 1
有 有
有 有
有 有 有 有 升压2
电池测量
温度传感器 有 有 有 有 有 有
最大 MPU 时钟速率
时钟分频器 有 有 有 有
DIO 引脚 有 有 有 有
看门狗定时器
LCD 升压 有 有 有 有 有
EEPROM 接口(2 线) 有 有 有 有
EEPROM 接口(3 线) 有 有 有 有
UART (全速) 有 有 有 有
光 TX 调制
FLASH读 有 有 有 有
页擦除
FLASH写 有 有 有 有
RAM 读和写 有 有 有 有
唤醒定时器 有 有 有 有 有 有
OSC 和 RTC 有 有 有 有 有 有
DRAM 数据保持 有 有 有 有
NV RAM 数据保持 有 有 有 有 有 有
1. CE 在 BRN 模式下有效,但是 ADC 数据不准确。MPU 应停止 CE 工作,以降低功耗(CE_E = 0,I/O RAM 0x2106[0])。
2. “--”表示相应电路不工作。
3. “升压”代表 LCD 升压电路工作(即 LCD_VMODE[1:0] = 10 (I/O RAM 0x2401[7:6])。LCD升压电路需要来自 PLL 的时钟才可
工作。所以,LCD 模式下,如果 LCD 升压使能,PLL 将自动保持势能状态,否则 PLL 关闭。
4.92MHz
(从 PLL)
有 有 有 有
有
1.57MHz
(从 PLL)
4.92MHz
(从 PLL)
1.57MHz
(从 PLL)
LCD
-- --
有
-- --
-- --
-- --
82 Rev 2
Page 83

71M6541D/F/G和 71M6542F/G 数据资料
3.2.1 BRN模式
BRN 模式下,大多数非计量数字功能处于有效工作状态(如表 67 所示),包括 ICE、UART、EEPROM、
LCD 和 RTC。BRN 模式下,PLL 继续以与 MSN 模式下相同的频率工作。MPU 应按比例缩小 PLL (使用
,
PLL_FAST
BRN 模式下,MPU 可选择进入 LCD或 SLP模式。如果系统电源恢复时 71M654x 处于 BRN 模式,器件自
动转换至 MSN 模式。
BRN 模式下推荐的最小功耗配置如下:
• RCE0 = 0x00 (I/O RAM 0x2709[7:0]) - 禁用远端传感器
• LCD_BAT = 1 (I/O RAM 0x2402[7]) - LCD由 VBAT 供电
• LCD_VMODE[1:0] = 0 (I/O RAM 0x2401[7:6]) - 禁用 5V LCD 升压
• CE6 = 0x00 (I/O RAM 0x2106) - 禁用 CE、RTM 和 CHOP
• MUX_DIV[3:0] = 0 (I/O RAM 0x2100[7:4]) - 禁用 ADC 复用器
• ADC_E = 0 (I/O RAM 0x2704[4]) – 禁用 ADC
• VREF_CAL = 0 (I/O RAM 0x2704[7]) – 未驱动 Vref
• VREF_DIS = 1 (I/O RAM 0x2704[6]) - 禁用 Vref
• PRE_E = 0 (I/O RAM 0x2704[5] - 禁用前置放大器
• BCURR = 0 (I/O RAM 0x2704[3]) - 关闭电池 100μA 电流负载
• TMUX[5:0] = 0x0E (I/O RAM 0x2502[5:0]) – TMUXOUT输出设置为直流值(即不做脉冲类输出)
• TMUX2[4:0] = 0x0E (I/O RAM 0x2503[4:0]) – TMUXOUT2 输出设置为直流值(即不做脉冲类输出)
• CKGN = 0x24 (I/O RAM 0x2200) - PLL设置为低速,MPU_DIV[2:0] (I/O RAM 0x2200[2:0])设置为最大
• TEMP_PER[2:0] = 6 (I/O RAM 0x28A0[2:0]) - 温度测量设置为每 512s 自动测量
• TEMP_BSEL = 1 (I/O RAM 0x28A0[7]) - 温度传感器监测 VBAT
• PCON = 1 (SFR 0 x87) - 主 BRN周期结束时,挂起 MPU 并等待中断
• 根据需要调节波特率寄存器
• 禁用所有不使用的中断
I/O RAM 0x2200[4])或 MPU 频率(使用 MPU_DIV[2:0],I/O RAM 0x2200[2:0]),以降低功耗。
3.2.2 LCD模式
通过置位 LCD_ONLY 控制位(I/O RAM 0x28B2[6]),MPU 任何时候均可控制 LCD 模式。然而,建议 MPU
只有在 71M654x 进入 BRN 模式后置位 LCD_ONLY 控制位。例如,如果 71M654x 处于 MSN 模式时置位
LCD_ONLY,LCD 模式的持续时间就非常短,71M654x马上被“唤醒”。
LCD 模式下,V3P3D 禁用,从而断开 VBAT 的全部漏电流。LCD_ONLY 模式有效之前,建议 MPU 把 PLL
输出频率降低至 6.2 MHz (即写 PLL_FAST = 0,I/O RAM 0x2200[4]),使 PLL 电流最小化。LCD 升压系统
需要来自 PLL 的时钟才可工作。所以,如果使能 LCD 升压系统(即 LCD_VMODE[1:0] = 10,I/O RAM
0x2401[7:6]),PLL 在 LCD 模式下将自动保持有效,否则 PLL 关闭。
LCD 模式下,LCD_SEG 寄存器数据通过对应的段驱动器引脚显示。最多可使两个连接至 SEGDIO22 和
SEGDIO23 的 LCDE 段闪烁,无需 MPU 参与(MPU 在 LCD 模式下被禁用)。为了将电池功耗最小化,应仅
仅使能使用的段。
从 LCD 模式转换至 MSN 或 BRN 模式后,PC (程序计数器)为 0x0000,XRAM 处于未定义状态,配置 I/O
RAM 位被复位(I/O RAM 唤醒后的状态见表 76)。LCD 模式下,储存在非易失 I/O RAM 的数据保持(表 76
中的阴影部分为非易失)。
Rev 2 83
Page 84

71M6541D/F/G和 71M6542F/G 数据资料
3.2.3 SLP模式
V3P3SYS 引脚电压下降至低于 2.8 VDC 时,71M654x 进入 BRN 模式,V3P3D 引脚从 VBAT (而非
V3P3SYS)供电。一旦处于 BRN 模式,MPU 即可通过置位 SLEEP 位(I/O RAM x28B2[7])激活 SLP 模式。
SLP 模式下功耗最低,此时仍然维持 RTC (实时时钟)、RTC 温度补偿和非易失 I/O RAM 工作。
SLP 模式下,V3P3D 断开,从而断开所有可能的 VBAT电流消耗。非易失 I/O RAM、SLP 模式下的功能电
路,例如温度传感器、振荡器、RTC 和 RTC 温度补偿,由 VBAT_RTC 引脚供电。SLP 模式只能通过系统
上电或第 3.4 节唤醒功能介绍的方法之一退出。
V3P3SYS 引脚连接有供电电源时(即处于 MSN 模式),如果触发 SLEEP 位,71M654x 则进入 SLP 模式,
复位内部 WAKE 信号,此时,71M654x 开始第 3.4节唤醒功能中介绍的从休眠模式唤醒的标准步骤。
V3P3SYS 恢复供电时,71M654x从 SLP 模式转换至 MSN 模式,MPU PC (程序计数器)初始化为 0x0000。
此时,XRAM 处于未定义状态,但非易失 I/O RAM 的内容保持(表 76 中的阴影部分为非易失存储器)。
84 Rev 2
Page 85

71M6541D/F/G和 71M6542F/G 数据资料
说明
3.3 故障和复位操作
3.3.1 掉电事件
内部比较器通过监测 V3P3A 引脚的电压并监测内部产生的 VDD 电压(2.5 VDC)监测电源故障。V3P3SYS
和 V3P3A 引脚必须在 PCB 连接在一起,从而使内部连接至 V3P3A 的比较器能够同时监测 V3P3SYS 和
V3P3A 引脚电压。以下讨论假设 V3P3A 和 V3P3SYS 引脚在 PCB 连接在一起。
电源故障期间,当 V3P3A 下降时,检测两个门限:
• 第一个门限,3.0 VDC (VSTAT[2:0] = 001),向 MPU 报告模拟电路不再准确。除报告 MPU 外,硬件不
切换电源。该状态对应内部标志位 V3AOK。
• 第二个门限,2.8 VDC,使 71M654x切换至电池供电。此时仍然能够对 FLASH 和 RAM 进行读、写。
该状态对应内部标志位 V3OK。
电源状况由 SFR VSTAT[2:0]字段反映,如表 68 所示。VSTAT[2:0]字段位于 SFR 地址 0xF9,占用[2:0]位,
为只读。
除了主电源状态,VSTAT[2:0]寄存器还提供电池供电时内部 VDD 电压的信息。注,如果系统电源(V3P3A)
高于 2.8 VDC,71M6541D/F/G和 71M6542F/G 总是从电池切换至系统电源供电。
表 68. VSTAT[2:0] (SFR 0xF9[2:0])
VSTAT[2:0]
000
001
010
011
101
对系统电源故障的响应几乎完全受固件控制。电源故障期间,系统性能缓慢下降。由内部比较器监测,使
硬件自动切换至 VBAT 输入供电。中断通知 MPU 由电池供电,此时,MPU 负责降低主频、禁用 PLL,以
降低功耗。
精密模拟电路,例如带隙基准、带隙缓冲器和 ADC,只能由 V3P3A 引脚供电(即由 V3P3A 引脚供电的电
路不能切换至 VBAT 供电);随着 V3P3A 引脚电压持续下降,这部分电路的精度下,最终导致失效。
V3P3A 引脚下降至 2.8 VDC 以下时,ADC 时钟暂停,放大器无偏置电压。在此期间,控制位,例如
ADC_E 位(I/O RAM 0x 2704[4]),不受影响,因为其 I/O RAM 由 VDD 引脚(2.5 VDC)供电。VDD 引脚通过连
接至 V3P3D 引脚的内部 2.5 VDC 稳压器供电。V3P3SYS 引脚下降至 3.0 VDC 以下时,V3P3D 引脚切换
至 VBAT 引脚供电。注意,V3P3SYS 和 V3P3A 引脚通常在 PCB 连接在一起。
系统电源正常,V3P3A > 3.0 VDC。模拟电路正常工作并保持精确采集。
系统电源低,2.8 VDC < V3P3A < 3.0 VDC。模拟电路不准确。即将切换至电池电源。
IC 由电池供电,VDD 正常。VDD > 2.25 VDC,IC 保持完整的数字功能。
IC 由电池供电,2.25 VDC > VDD > 2.0 VDC。禁止 FLASH 写操作。
IC 由电池供电,VDD < 2.0 VDC,MPU 接近电压失效。在 4 个晶振时钟 CK32 周期内产
生复位。
Rev 2 85
Page 86

71M6541D/F/G和 71M6542F/G 数据资料
3.3.2 低电池电压下的IC
没有系统电源供电时,71M6541D/F/G和 71M6542F/G 将依赖 VBAT 引脚供电。如果 VBAT 电压不足以将
VDD 维持在 2.0 VDC 或更高,MPU 则无法可靠工作。器件工作于 BRN 模式,或者潜伏于 SLP 或 LCD 模
式时,将导致 VBAT 电压跌落。依据 MPU 代码,可区分两种情形:
• 情形 1:无系统电源供电,器件从 SLP 或 LCD 模式唤醒。这种情况下,硬件检查 VDD 数值,确定处
理器是否可能工作。如果不可能工作,器件将配置为 BRN 工作模式,保持处理器复位(WAKE=0)到该
模式下,VBAT 为 LCD系统、VDD 稳压器、PLL 和故障比较器提供 1.0 VDC 基准。器件维持在这种等
待模式,直到施加系统电源或更换电池或重新为 VBAT 电池充电,使 VDD 达到足够的电压。
• 情形 2:器件由 VBAT 供电,VSTAT[2:0] (SFR 0xF9[2:0])变为 101(二进制),表示 VDD 下降至 2.0
VDC。这种情况下,固件有两种选择:
1) 一种选择是立即触发 SLEEP 位(I/O RAM 0x28B2[7])。这样可以保持 VBAT 中的剩余电量。当然,如
果电池电压未升高,71M654x只要试图唤醒,则进入情形 1。
2) 另一种选择是立即进入情形 1 所述的等待模式,即如果固件未触发 SLEEP 位,硬件在 VSTAT[2:0]变
为 101 后 4 个 CK32 时钟周期(即 122μs)后复位处理器,如情形 1 所述,开始等待 VDD 变为高于
2.0 VDC。系统电源恢复时,或者 VDD 高于 2.0 VDC 时,MPU 唤醒。
无论哪种情况,当 VDD 恢复,同时 MPU 唤醒时,可读取 WF_BADVDD 标识(I/O RAM 0x28B0[2]),确定处
理器正从 VBAT 失效条件下恢复。WF_BADVDD标识保持置位,直到下一次 WAKE 变低。该标记独立于其
它 WF 标识。
任何情况下,低 VBAT 电压都不会破坏 RTC 工作、NV 存储器状态或非易失存储器状态。因为这些电路由
VBAT_RTC 引脚供电。
3.3.3 复位序列
RESET 引脚拉高时,芯片内的所有数字功能停止,只有振荡器和 RTC 除外。此外,全部 I/O RAM 强制为
其 RST 状态。只有 RESET 为高电平并维持至少 2μs 的条件下,才发生可靠复位。注意,TMUX 和 RTC
的复位条件:TEST 引脚在 RESET 为高电平时拉高。
RESET 控制位(I/O RAM 0x 2200[3])与 RESET 引脚的复位效果完全相同。唯一需要保证的是 RESET控制位
使用的复位定时器更短。
一旦启动,复位序列进行等待,直到复位定时器超时。超时发生在 4100 个 CK32 周期(125ms)内,此时,
MPU 从 0x0000 地址开始执行预引导和引导程序。关于预引导和引导程序的详细说明,请参见第 2.5.11 节
硬件看门狗定时器。
如果没有系统电源,复位定时器持续时间为 2 个 CK32 周期,此时,MPU 从地址 0x0000开始执行 BRN 模
式。
ICE 接口的 E_RST 引脚拉低时,启动软件复位。该事件造成 MPU 及 MPU 核内其它寄存器复位,但是不
复位 IC 的其余部分,例如 I/O RAM。它不触发复位过程。这类复位的本意是复位 MPU 程序,而对芯片的
状态不做其它更改。
3.3.4 看门狗定时器复位
看门狗定时器(WDT)在第 2.5.11节硬件看门狗定时器中详细说明。
WDT 发生溢出时,状态位 WF_OVF (I/O RAM 0x28B0 [4])置位。与其它唤醒标识相似,该位由非易失电源供
电,可由 MPU 读取,以确定芯片复位是因为 WD 溢出、还是重新上电。WF_OVF 位由 RESET信号清零,
也可以软件清零。
MPU 内部没有寄存器可以禁止 WDT。然而,为了调试,可将 ICE_E 引脚升高至 3.3 VDC,禁用 WDT。
正常工作时,通过定期向 WD_RST 控制位(I/O RAM 0x28B4[7])写 1 进行“喂狗”。71M654x 从 LCD 或
SLP 模式唤醒时,以及 ICE_E = 1 时,看门狗定时器也复位。
86 Rev 2
Page 87

71M6541D/F/G和 71M6542F/G 数据资料
唤醒使能
唤醒标识
去抖
说明
名称
位置 名称
位置
ms
信号眼
OPT_RXDIS: I/O RAM 0x2457[2]
28B0[6]
2µs
WF_RSTBIT
(
ICE_E
)
3.4 唤醒操作
如上所述,系统电源恢复时,器件总是在 MSN 模式唤醒。如第 3.2 节电池供电模式所述,从 LCD 和 SLP
模式至 BRN 模式的转换可由唤醒定时器超时、按钮(PB) 输入置 为高电平、
SEGDIO4/SEGDIO52/SEGDIO55 置高,或者触发 RX 或 OPT_RX 引脚启动。
3.4.1 硬件唤醒事件
以下引脚信号事件将 71M654x 从 SLP 或 LCD 模式唤醒:PB 引脚的高电平、RX 引脚的任意信号沿、
SEGDIO4 引脚的上升沿、SEGDIO52 引脚(71M6542F/G)的高电平,SEGDIO55 引脚的高电平或
OPT_RX 引脚的任意信号沿。关于每一引脚的去抖,及 OPT_RX/SEGDIO55 引脚的更多信息,请参见表
69。SEGDIO4、SEGDIO52 (71M6542F/G)和 SEGDIO55 引脚必须配置为 DIO 输入,且必须置位其唤醒
使能位(EW_x 位)。SLP 和 LCD 模式下,MPU 保持在复位状态,不能轮询引脚或响应中断。发生其中一个
硬件唤醒事件时,内部 WAKE 信号升高,MPU 在 3 个 CK32 周期内开始执行。MPU 通过检查 WF_PB
WF_RX、WF_SEGDIO4、WF_DIO52 (71M6542F/G)或 WF_DIO55 标识,可确定哪个引脚将其唤醒(见表
69)。
如果器件处于 SLP 或 LCD 模式,可由 PB 引脚的高电平唤醒。该引脚通常拉至 GND,可从外部连接,所
以可用按钮将其拉高。
有些引脚需要去抖,以抑制 EMI 噪声。检测硬件忽略初始跳变以后的所有跳变。表 69 列出了配有防抖电
路的引脚。
、
没有去抖电路的引脚,仍然必须保持为高电平至少达 2μs才能有效识别。
表 69 还列出了唤醒使能和标识位。唤醒标识位由硬件在 MPU 从唤醒事件唤醒时置位。注意,只要按下
PB,PB 标识即被置位,即使器件处于唤醒状态。
表 71 列出了清除 WF 标识的事件。
除按钮和定时器外,器件还可以由以下事件重启:RESET引脚、RESET 控制位(I/O RAM 0x2200[3])、WDT、
冷启动检测器和 E_RST。如表 69所示,每种方法都有一个标识位,向 MPU 通告唤醒源。如果唤醒是由于
系统电源恢复引起的,则没有有效的 WF 标识,VSTAT[2:0]字段(SFR 0xF9[2:0])表示系统电源稳定。
表 69. 唤醒使能和标识位
WAKE_ARM
EW_PB
EW_RX
EW_DIO4
EW_DIO52†
EW_DIO55
28B2[5]
28B3[3]
28B3[4]
28B3[2]
28B3[1]
28B3[0]
WF_TMR
WF_PB
WF_RX
WF_DIO4
WF_DIO52
WF_DIO55
28B1[5]
28B1[3]
28B1[4] 2µs
28B1[2] 2µs
28B1[1]
28B1[0]
无 定时器唤醒。
有 PB 唤醒*。
有 SEGDIO52 唤醒*。
有
RX 信号沿唤醒。
SEGDIO4 唤醒。
SECURE = 1:DIO55*唤醒,64
去抖。
OPT_RXDIS = 0:OPT_RX
唤醒,2μs 去抖。
总使能
总使能
总使能
Rev 2 87
WF_RST
WF_ERST
28B0[5]
28B0[3] 2µs
无 RESET 位之后唤醒。
RESET 后唤醒。
E_RST 后唤醒。
只有
为高电平才有效
Page 88

71M6541D/F/G和 71M6542F/G 数据资料
唤醒使能
唤醒标识
去抖
说明
名称
位置 名称
位置
WD
WF_CSTART
VBAT
总使能
总使能
总使能
WF_OVF
WF_BADVDD
28B0[4]
28B0[7]
28B0[2]
无
复位后唤醒。
无 冷启动后唤醒—首次加电。
无
电压不足后唤醒。
†仅限 71M6542F/G。
*每 2ms 采样该引脚一次,必须保持为高达 64ms 才能为有效的高电平。该引脚为高电平触发。
88 Rev 2
Page 89

71M6541D/F/G和 71M6542F/G 数据资料
名称
位置
复位 唤醒
方向
说明
DIO55至WAKE
DIO55
WAKE
3.4.1
SEGDIO4
SEGDIO4
(71M6542F/G)。
SEGDIO55
SEGDIO55
WF_RST
WF_BADVDD
28B0[6]
28B0[2]
*
*
I/O RAM
表 70. 唤醒位
EW_DIO4
EW_DIO52
EW_DIO55
WAKE_ARM
EW_PB
EW_RX
WF_DIO4
WF_DIO52
28B3[2] 0 – R/W
28B3[1] 0 – R/W
28B3[0] 0 – R/W
28B2[5] 0 – R/W
28B3[3] 0 – R/W
28B3[4] 0 – R/W
28B1[2] 0 – R
28B1[1] 0 – R
连接 SEGDIO4 至 WAKE 逻辑,允许 SEGDIO4 上升
唤醒器件。除非 SEGDIO4 配置为数字输入,否则无
效。
连接 DIO52 至 WAKE 逻辑,允许 DIO52 高电平唤醒
器件(1M6542)。除非 DIO52 被配置为数字输入,否则
无效。
连接
逻辑,允许
高电平唤醒
器件。除非 DIO55 配置为数字输入,否则无效。
准备好 WAKE 定时器,并装载 WAKE_TMR 寄存器(I/O
RAM 0x2880)值。MPU 使能 SLP 模式或 LCD 模式时,
定时器有效工作。
连接 PB 引脚至 WAKE 逻辑,允许 PB 高电平唤醒器
件。PB 总是配置为输入。
连接 RX 引脚至 WAKE 逻辑,允许 RX 上升唤醒器
件。关于去抖事项,请参见第
标识位。如果
节。
配置为唤醒器件,
只要 SEGDIO4 升高,该位置位。如果 SEGDIO4 未配
置为唤醒,它将保持在复位状态。
SEGDIO52 标识位。如果 SEGDIO52 配置为唤醒器
件,只要 SEGDIO52 为高电平,该位置位。如果
SEGDIO52 未配置为唤醒,它将 保持在复位状态
WF_DIO55
WF_TMR
WF_PB
WF_RX
WF_RSTBIT
WF_ERST
WF_CSTART
28B1[0] 0 – R
28B1[5] 0 – R
28B1[3] 0 – R
28B1[4] 0 – R
28B0[5]
28B0[3]
28B0[7]
*
*
*
– R
标识位。如果
配置为唤醒器
件,只要 SEGDIO55 为高电平,该位置位。如果
SEGDIO55 未配置为唤醒,它将保持在复位状态。
表示唤醒定时器造成器件唤醒。
表示 PB 引脚造成器件唤醒。
表示 RX 引脚造成器件唤醒。
表示 RST 引脚、E_RST 引脚、RESET 位(
0x2200[3])、冷启动检测或 VBAT 引脚的低电压造成器
件复位。
*详细信息请参见表 71。
Rev 2 89
Page 90

71M6541D/F/G和 71M6542F/G 数据资料
标识
唤醒事件
清除事件
注:
表 71. WAKE 标识清除事件
WF_TMR
WF_PB
WF_RX
WF_DIO4
WF_DIO52
WF_DIO55
WF_RST
WF_RSTBIT
WF_ERST
WF_OVF
WF_CSTART
“WAKE 变低”意味着内部 WAKE 信号已复位,在进入 LCD 模式或 SLEEP 模式时自动发生 WAKE 信号
复位(即 MPU 置位 LCD_ONLY 位(I/O RAM 0x28B2[6])或 SLEEP (I/O RAM 0x28B2[7])
号复位时,全部唤醒标识被复位。由于各种唤醒标识在 WAKE 变低时自动复位,MPU 就没必要在进入
LCD 模式或 SLEEP 模式之前复位这些标识。此外,其它唤醒事件会造成唤醒标识复位,如上所示(例如,
WF_RST标识在以下标识置位时被复位:WF_CSTART、WS_RSTBIT、WF_OVF、WF_BADVDD)。
定时器终止 WAKE 变低
PB 引脚高电平 WAKE 变低
RX 引脚信号沿 WAKE变低
SEGDIO4 上升沿 WAKE 变低
SEGDIO52 高电平(仅限 71M6542F/G) WAKE 变低
如果 OPT_RXDIS = 1 (I/O RAM
0x2457[2]),SEGDIO55高电平唤醒
如果 OPT_RXDIS = 0,OPT_RX任意信号
沿唤醒
RESET 引脚驱动为高 WAKE 变低,WF_CSTART, WF_RSTBIT,
RESET 位置位(I/O RAM 0x2200[3]) WAKE 变低,WF_CSTART, WF_OVF,
E_RST 引脚驱动为高,必须通过驱动
ICE_E 引脚为高电平,使能 ICE。
看门狗(WD)复位 WAKE 变低,WF_CSTART, WF_RSTBIT,
冷启动(即首次加电后) WAKE 变低,WF_RSTBIT, WF_OVF,
WAKE 变低
WF_OVF, WF_BADVDD
WF_BADVDD, WF_RST
WAKE 变低,WF_CSTART, WF_RST,
WF_OVF, WF_RSTBIT
WF_BADVDD, WF_RST
WF_BADVDD, WF_RST
位
)。内部 WAKE 信
3.4.2 定时器唤醒
如果器件处于 SLP 或 LCD 模式,可由唤醒定时器唤醒。该定时器超时之前,由于 WAKE 信号为低,MPU
处于复位状态。唤醒定时器超时时,WAKE 升高,MPU 在三个 CK32 周期内开始执行。通过检查 WF_TMR
唤醒标识(I/O RAM 0x28B1[2 ]),MPU可判断为定时器唤醒。
器件进入 LCD 或 SLP 模式时,唤醒定时器开始计时。其持续时间由 WAKE_TMR[7:0]
0x2880)控制。定时器持续时间为 WAKE_TMR +1秒。
通过设置 WAKE_ARM = 1 (I/O RAM 0x28B2[5])使能唤醒定时器,置位与进入 SLP 或 LCD 模式之前必须至
少有 3 个 CK32 的延时。置位 WAKE_ARM 以使能 WAKE_TMR 中的值预设定时器,MPU 写 SLEEP (I/O
RAM 0x28B2[7])或 LCD_ONL Y (I /O RAM 0x 28 B2[6])位时,启动唤醒定时器。MPU 唤醒时,定时器既不复位
也不运行。因此,一旦设定和置位,MPU 在进入 SLP 模式或 LCD 模式后将每 WAKE_TMR[7:0]秒后唤醒
(即,一旦写入,WAKE_TMR[7:0]寄存器保持其值,不必在 MPU 每次进入 SLP 或 LCD 模式时重写。此外,
由于 WAKE_TMR[7:0]非易失,所以能在复位和电源故障时保持值)。
90 Rev 2
寄
存器(I/O RAM
Page 91

71M6541D/F/G和 71M6542F/G 数据资料
MPU
CE
I/O RAM (Configuration RAM)
Pulses
Samples
WPULSE
VPULSE
XPULSE
YPULSE
Control
Processed
Metering
Data
MUX
Control
Control
Interrupts
CECONFIG
CESTATUS
XRAM
CE_BUSY
XFER_BUSY
3.5 数据流和MPU/CE通信
计算引擎(CE)和 MPU 之间的数据流如图 30 所示。典型应用中,32 位 CE 顺序处理来自 IA、VA、IB 等引
脚输入电压的采样,执行计算,测量有功(Wh)、无功(VARh)、A
2
h 和 V2h,实现四象限表计。然后 MPU 存
取这些测量值,进一步处理并通过 MPU 可用的外围器件输出。
CE 和复用器均由 MPU 通过 I/O RAM 和 RAM 中的共用寄存器控制。
CE 总共可以输出 6 种信号至 MPU。包括 4 个脉冲和 2个中断:
• CE_BUSY
• XFER_BUSY
• WPULSE, VPULSE (用于有功和无功能量的脉冲)
• XPULSE, YPULSE (辅助脉冲)
这些中断作为外部中断连接至 MPU 中断服务输入。CE_BUSY 表示 CE 正在处理数据。该信号每个复用循
环(典型为 1/2520=396μs)一次,表示 CE 已经更新 CESTATUS 寄存器(CE RAM 0x80)中的状态信息。
XFER_BUSY 表示 CE 正在将数据更新至 RAM 输出区域。CE 完成由 SUM_SAMPS[12:0]、I/O RAM
0x2107[4:0]、2108[7:0]确定的累积间隔(典型设定为 2520,即每 1000 ms)内的数据累加,就会产生该指示。
MPU 的中断发生在 XFER_BUSY 和 CE_BUSY信号的下降沿。
WPULSE 和 VPULSE 通常用于表示有功(Wh)和无功(VARh)能量的能量累积。将 WPULSE 和 VPULSE 纳
入 MPU 中断系统可实现脉冲计数。
XPULSE 和 YPULSE 可用于向 MPU 发出事件告警。例如电网电压跌落和过零。将这些输出纳入 MPU 中
断系统,MPU 就没必要在每次发生 CE_BUSY 中断时读取 CESTATUS 寄存器,以检测跌落或过零事件。
图 30. MPU/CE 数据流
更多有关 CE 设置的信息,请参见第 5.3 节的 CE 接口说明。
Rev 2 91
Page 92

71M6541D/F/G和 71M6542F/G 数据资料
R
IN
V
IN
R
OUT
V3P3A
VA
I
IN
IAP
V3P3A
V
OUT
I
OUT
R
BURDEN
CT
1:N
Noise Filter
I
IN
IAP
IAN
V3P3A
V
OUT
I
OUT
R
BURDEN
CT
1:N
Bias Network and Noise Filter
I
IN
R
SHUNT
IAP
IAN
V3P3A
V
OUT
Bias Network and Noise Filter
4 应用信息
4.1 连接 5V器件
71M654x 的全部数字输入兼容于外部 5V 供电器件。配置为输入的 I/O 引脚连接至外部 5V 供电器件时,不
需要加限流电阻。
4.2 直接连接传感器
图 31 至图 34 所示为电压检测分压电阻、电流检测电流变压器(CT)和电流检测锰铜分流器,以及它们与
71M654x 连接示意图。连接至 71M654x 传感器输入的全部输入信号为电压信号,按比例表示检测到的电
压或电流。
71M654x 的模拟输入引脚设计用于低阻传感器。RC 滤波器的电阻值不要超过 Teridian 演示板
中的电阻阻值。关于完整的传感器输入电路及对应元件值,请参见演示板原理图。
图 31. 电阻分压(电压检测)
图 32. 单端输入 CT (电流检测)
图 33. 差分输入 CT (电流检测)
92 Rev 2
图 34. 差分输入锰铜分流器(电流检测)
Page 93

71M6541D/F/G和 71M6542F/G 数据资料
MPU
RTC
TIMERS
IAP
VA
IBP
XIN
XOUT
RX
TX
TX
RX
COM0...5
V3P3A V3P3SYS
VBAT
VBAT_RTC
SEG
GNDA GNDD
SEG/DIO
DIO
ICE
LINE
NEUTRAL
LOAD
8888.8888
PULSES,
DIO
IR
AMR
POWER FAULT
COMPARATOR
MODUL-
ATOR
SERIAL PORTS
OSCILLATOR/
PLL
MUX and ADC
LCD DRIVER
DIO, PULSES
COMPUTE
ENGINE
FLASH
MEMORY
RAM
32 kHz
REGULATOR
CT
POWER SUPPLY
TERIDIAN
71M6541D/F
TEMPERATURE
SENSOR
VREF
BATTERY
PWR MODE
CONTROL
WAKE-UP
NEUTRAL
I2C or µWire
EEPROM
IAN
IBN
RTC
BATTERY
V3P3D
BATTERY
MONITOR
SPI INTERFACE
HOST
LCD DISPLAY
Resistor Divider
CT
LINE
LINE
Note:
This system is referenced to LINE
Shunt
or
11/5/2010
4.3 使用本地传感器的 71M6541D/F/G
图 35 所示为使用本地电流传感器的 71M6541D/F/G 接线示意图。IAP-IAN 电流通道可采用锰铜分流器或
CT,IBP-IBN 通道采用 CT,因为需要隔离。此配置实现单相测量,利用一个电流传感器测量零线电流,具
有防窃电检测功能。这种配置亦可用于构建分相电表(例如 ANSI Form 2S)。为获得最佳性能,IAP-IAN 和
IBP-IBN 电流传感器输入均配置为差分模式(即,DIFFA_E = 1, DIFFB_E = 1
0x210C[5])。同时 IBP-IBN 通道必须配置成禁用远端传感器接口(即,RMT_E = 0,I/O RAM 0x2709[3] )。与
图 35 对应的 AFE 配置请参见图 2。
,
I/O RAM 0x210C[4]和
Rev 2 93
图 35. 71M6541D/F/G (本地传感器)
Page 94

71M6541D/F/G和 71M6542F/G 数据资料
MPU
RTC
TIMERS
IAP
VA
IBP
XIN
XOUT
RX
TX
TX
RX
COM0...5
V3P3A V3P3SYS
VBAT
VBAT_RTC
SEG
GNDA GNDD
SEG/DIO
DIO
ICE
LINE
NEUTRAL
LOAD
8888.8888
PULSES,
DIO
IR
AMR
POWER FAULT
COMPARATOR
MODUL-
ATOR
SERIAL PORTS
OSCILLATOR/
PLL
MUX and ADC
LCD DRIVER
DIO, PULSES
COMPUTE
ENGINE
FLASH
MEMORY
RAM
32 kHz
REGULATOR
Shunt
POWER SUPPLY
TERIDIAN
71M6541D/F
TEMPERATURE
SENSOR
VREF
BATTERY
PWR MODE
CONTROL
WAKE-UP
NEUTRAL
I
2
C or µWire
EEPROM
IAN
IBN
RTC
BATTERY
V3P3D
BATTERY
MONITOR
SPI INTERFACE
HOST
LCD DISPLAY
Resistor Divider
Pulse
Transformer
TERIDIAN
71M6xx1
Shunt
LINE
LINE
Note:
This system is referenced to LINE
11/5/2010
4.4 使用 71M6x01 和电流分流器的 71M6541D/F/G
图 36 所示为隔离和非隔离锰铜传感器的典型连接(采用 71M6x01 远端传感器接口)。该配置实现单相测量,
采用第二个电流传感器,具有防窃电检测功能。这种配置亦可用于构建分相电表(例如 ANSI Form 2S)。为
获得最佳性能,IAP-IAN 电流传感器输入配置为差分模式(即,DIFFA_E = 1,I/O RAM 0x210C[4])。
71M6x01 远端传感器接口的输出通过脉冲变压器连接至引脚 IBP-IBN。IBP-IBN 引脚必须配置为远端传感
器通信接口(即 RMT_E = 1,I/O RAM 0x2709[3])。与图 36 对应的 AFE配置请参见图 3。
94 Rev 2
图 36. 71M6541D/F/G (71M6x01 远端传感器)
Page 95

71M6541D/F/G和 71M6542F/G 数据资料
MPU
RTC
TIMERS
IAP
VA
IBP
XIN
XOUT
RX
TX
TX
RX
COM0...5
V3P3A V3P3SYS
VBAT
VBAT_RTC
SEG
GNDA GNDD
SEG/DIO
DIO
ICE
PHASE A
NEUTRAL
LOAD
8888.8888
PULSES,
DIO
IR
AMR
POWER FAULT
COMPARATOR
MODUL-
ATOR
SERIAL PORTS
OSCILLATOR/
PLL
MUX and ADC
LCD DRIVER
DIO, PULSES
COMPUTE
ENGINE
FLASH
MEMORY
RAM
32 kHz
REGULATOR
Shunt
POWER SUPPLY
TERIDIAN
71M6542F
TEMPERATURE
SENSOR
VREF
BATTERY
PWR MODE
CONTROL
WAKE-UP
PHASE A
I2C or µWire
EEPROM
IAN
IBN
RTC
BATTERY
V3P3D
BATTERY
MONITOR
SPI INTERFACE
HOST
LCD DISPLAY
Resistor Dividers
PHASE B
LOAD
VB
NEUTRAL
PHASE A
Shunt
Note:
This system is referenced to PHASE A
11/5/2010
CT or
4.5 使用本地传感器的 71M6542F/G
图 37 所示为使用本地电流传感器的 71M6542F/G 接线示意图。IAP-IAN 电流通道可采用锰铜分流器或 CT,
IBP-IBN 通道采用 CT,因为需要隔离。此配置实现两相测量,按照公式 2 计算。为获得最佳性能,IAPIAN 和 IBP-IBN电流传感器输入均配置为差分模式(即 DIFFA_E = 1,DIFFB_E = 1,I/O RAM 0x210C[4]和
0x210C[5])。同时 IBP-IBN 输入必须配置为禁用远端传感器接口(即,RMT_E = 0,I/O RAM 0x2709[3])。与
图 37 对应的 AFE 配置请参见图 4。
Rev 2 95
图 37. 71M6542F/G (本地传感器)
Page 96

71M6541D/F/G和 71M6542F/G 数据资料
MPU
RTC
TIMERS
IAP
VA
IBP
XIN
XOUT
RX
TX
TX
RX
COM0...5
V3P3A V3P3SYS
VBAT
VBAT_RTC
SEG
GNDA GNDD
SEG/DIO
DIO
ICE
PHASE A
NEUTRAL
LOAD
8888.8888
PULSES,
DIO
IR
AMR
POWER FAULT
COMPARATOR
MODUL-
ATOR
SERIAL PORTS
OSCILLATOR/
PLL
MUX and ADC
LCD DRIVER
DIO, PULSES
COMPUTE
ENGINE
FLASH
MEMORY
RAM
32 kHz
REGULATOR
Shunt
POWER SUPPLY
TERIDIAN
71M6542F
TEMPERATURE
SENSOR
VREF
BATTERY
PWR MODE
CONTROL
WAKE-UP
PHASE A
I2C or µWire
EEPROM
IAN
IBN
RTC
BATTERY
V3P3D
BATTERY
MONITOR
SPI INTERFACE
HOST
LCD DISPLAY
Resistor Dividers
Pulse
Transformer
TERIDIAN
71M6XX1
PHASE B
LOAD
VB
NEUTRAL
PHASE A
Shunt
Note:
This system is referenced to PHASE A
4.6 使用 71M6x01 和电流分流器的 71M6542F/G
图 38 所示为使用隔离和非隔离的 71M6542F/G 的典型 2 相连接。为获得最佳性能,IAP-IAN 电流传感器输
入配置为差分模式(即,DIFFA_E = 1,I/O RAM 0x210C[4])。71M6x01 远端传感器接口用于隔离 B 相。
71M6x01 远端传感器接口的输出通过脉冲变压器连接至引脚 IBP-IBN。IBP-IBN 引脚必须配置为远端传感
器通信接口(即 RMT_E = 1,I/O RAM 0x2709[3])。与图 38 对应的 AFE配置请参见图 5。
96 Rev 2
图 38. 71M6542F/G (71M6x01 远端传感器)
Page 97

71M6541D/F/G和 71M6542F/G 数据资料
%252.02520/40)2285( +=+=⋅− ppmCppmCC
ooo
%248.02480/40)2240( −=−=⋅−− ppmCppmCC
ooo
]0:7[95.42751 TRIMTTC ⋅−=
]0:7[108.2557.02
4
TRIMTTC ⋅⋅+−=
−
14632.221
195.15
2
7
21
TCTCPPMC ⋅=⋅
⋅
=
2116.11502
195.15
2
2
8
29
TCTCPPMC ⋅=⋅
⋅
=
4.7 计量温度补偿
4.7.1 高精度电压基准
由于 VREF 的带隙放大器带有斩波稳定电路(由 CHOP_E[1:0] I/O RAM 0x2106[3:2]控制字段设置),因此可
以有效的消除电压基准(VREF)最常见的长期直流漂移。71M654x 和 71M6x01 各自的 VREF 电压基准源均
具有斩波电路。
Teridian 在器件生产过程中对 VREF电压基准进行调节。
基准电压(VREF)调整在目标值 1.195V。调节过程中,TRIMT[7:0] (I/O RAM 0x2309 )储存在非易失熔丝器件
中。TRIMT[7:0]调节到某一适当值,使得 VREF 随温度变化的波动最小。
对于 71M654x 器件(±0.5%能量精度), MPU 可在初始化期间读取 TRIMT[7:0]值,以计算适合每个
71M654x器件的抛物线温度补偿系数。保证 71M654x 中 VREF 的温度系数为±40ppm/°C。
考虑工厂的 VREF 校准温度为+22°C,工业温度范围(-40°C 至+85°C),所以 71M654x 器件在极端温度时
的 VREF 误差可计算如下:
and
以上计算结果表示:理论上,电压和电流测量值的最大误差分约为±0.25%。电压采样和电流采样相乘,获
得每次采样的能量时,电压误差和电流误差组合造成最大能量测量误差为±0.5%。然而,理论误差±0.5%仅
考虑了电压基准(VREF)一个误差源。实际应用中,系统中还有其它误差源。基本的剩余误差源包括:电流
传感器(分流器或 CT)及其对应的信号处理电路,以及用于测量电压的分压电阻。因此 0.5%级 71M654x 器
件应用于 Class 1%设计时,为系统中其它误差源留有足够裕量。
4.7.2 71M654x的温度系数
下面提供的公式用于计算加至 71M654x (0.5%能量精度)的 TC1 和 TC2。为了获得 TC1 和 TC2,MPU 读
取 TRIMT[7:0] (I/O RAM 0x2309),并使用提供的 TC1 和 TC2 公式。然后即可利用 TC1 和 TC2 计算 PPMC
和 PPMC2,如下所示。得到的基准电压(VREF)曲线控制在±40ppm/°C 之内,对应于±0.5%能量测量精度。
请参见第 4.7.1 节电压基准精度。
TC1 和 TC2 分别乘以一个系数得到 PPMC 和 PPMC2,该系数由 1.195V ADC 电压基准和 CE 的比例调节
电路决定,如上所示。
关于温度补偿的更多详细信息,请参见第 4.7.3 节和第 4.7.4节。
Rev 2 97
Page 98
71M6541D/F/G和 71M6542F/G 数据资料
23
2
14
2
2_100
2
_10
16385_
PPMCXTEMPPPMCXTEMP
ADJGAIN
⋅⋅
+
⋅⋅
+=
增益调节输出
地址
4.7.3 VREF温度补偿,使用本地传感器
本节讨论使用本地传感器的电表设计的计量温度补偿,如图 35 和图 37 所示。
在这些配置中,所有传感器直接连接至 71M654x,每个传感器通道的精度受 71M654x 中 VREF 随温度变
化引起的电压变动的影响。71M654x 中的 VREF 可利用温度的二阶多项式函数进行数字补偿。71M654x
具有片上温度传感器,用于对其 VREF 进行温度补偿。71M654x 还存在外部误差源。电压采样部分的电分
压阻和电流采样部分的锰铜分流器和/或 CT,及其对应的信号调理电路也受温度的影响。根据要求的精度
等级,它们也可能需要补偿。对于这些外部误差源的补偿,可选择与 VREF 的补偿集总在一起,将其补偿
合并至每个对应通道的 PPMC 和 PPMC2系数。
MPU 根据检测到的温度计算每个传感器通道所需的补偿值。Teridian 提供演示程序,实现如下所示
GAIN_ADJn 补偿方程。得到的 GAIN_ADJn 值被 MPU 储存在三个 CE RAM 地址 GAIN_ADJ0-GAIN_ADJ2
(CE RAM 0x40-0x42)。演示代码提供了合适的温度补偿方法,但利用片上温度传感器和 CE RAM
GAIN_ADJn 储存地址,可在 MPU 固件中采用其它方法。演示代码维护三组独立的 PPMC 和 PPMC2 系统,
并根据检测到的温度用下式计算三个独立的 GAIN_ADJn 值:
式中,TEMP_X 为相对于标称值或校准温度的偏差,以 0.1 °C 的整数倍表示。例如,由于 71M654x 校准
(基准)温度为 22
的偏差为+5
o
C,实测温度为 27 oC,所以 TEMP_X = (27-22) x 10 = 50 (十进制),表示相对于 22 oC
o
C。
表 73 给出了 GAIN_ADJn 输出值,以及补偿后的电压或电流测量值。
• GAIN_ADJ0 补偿 71M654x 中的 VA 和 VB (71M6542F/G)电压测量值,用于补偿 71M654x 中的 VREF。
设计者可选择把对分压电阻的补偿增加至该通道的 PPMC 和 PPMC2 系数。
• GAIN_ADJ1 提供对 IA 电流通道的补偿和对 71M654x VREF 的补偿。设计者可选择把对锰铜分流器或
CT 及对应信号调理电路的补偿增加至该通道的 PPMC 和 PPMC2系数。
• GAIN_ADJ2 提供对 IB 电流通道的补偿和对 71M654x VREF 的补偿。设计者可选择把对 CT 及对应信
号调理电路的补偿增加至该通道的 PPMC 和 PPMC2 系数。
表 72. GAIN_ADJn 补偿通道
71M6541D/F/G 71M6542F/G
GAIN_ADJ0
GAIN_ADJ1
GAIN_ADJ2
CE RAM
0x40 VA VA, VB
0x41 IA IA
0x42 IB IB
在演示代码中,温度补偿由储存在每个通道的 PPMC 和 PPMC2 系数决定,由 MPU 演示代码在初始化时从
之前储存在 EEPROM 的数值设置。
为了禁用演示代码中的温度补偿,将每个 GAIN_ADJn 通道的 PPMC 和 PPMC2 设为零。为使能温度补偿,
PPMC 和 PPMC2 系数设置为与每个对应传感器通道的预期温度变动相匹配的值。
对于 VREF 补偿,线性系数 PPMC和二次系数 PPMC2 按第 4.7.2 节 71M654x 的温度系数的介绍确定。
对外部误差源的补偿通过将与 VREF 相关的 PPMC 和与外部误差源相关的 PPMC 求和,得到该传感器通道
最终的 PPMC。同理,将与 VREF 相关的 PPMC2 值和与外部误差源相关的 PPMC2 值相加。
为了确定锰铜分流器或 CT 对 PPMC 和 PPMC2 系数的影响,设计者必须通过分流器或 CT 的数据资料获得
其温度系数,或者通过实验室测量获得。设计者必须考虑批量生产元件的差异,确保产品在生产过程中满
足其精度要求。
98 Rev 2
Page 99

71M6541D/F/G和 71M6542F/G 数据资料
23
2
14
2
2_100
2
_10
16385_
PPMCXTEMPPPMCXTEMP
ADJGAIN
⋅⋅
+
⋅⋅
+=
4.7.4 VREF温度补偿,使用远端传感器
本节讨论将电流分流器传感器与 Teridian 的 71M6x01 远端传感器配合使用的电表设计中的温度补偿,如图
36 和图 38所示。
任何直接连接至 71M654x 的传感器受 71M654x 中 VREF 随温度变化引起的电压变动的影响。另一方面,
连接至 71M6x01 远端传感器的传感器受 71M6x01 中 VREF 的影响。71M654x 和 71M6x01 中的 VREF 可
利用温度的二阶多项式函数进行数字补偿。71M654x 和 71M6x01 都具有温度传感器,用于对其 VREF 进
行温度补偿。
参见图 36 和图 38,VA 电压传感器可用于 71M6541D/F/G 和 71M6542F/G,直接连接至 71M654x。VB
电压传感器仅在 71M6542F/G 中可用,也采用直接连接。所以,这些直接连接电压传感器的精度受
71M654x 中 VREF 的影响。71M654x 还有一个分流器传感器(IA),采用直接连接,因此也受 71M654x 中
VREF 的影响。外部电流传感器及其对应信号调理电路也受温度的影响,根据要求的精度等级,它们也可
能需要补偿。最后,第二个电流传感器(IB)被 71M6x01 隔离,依赖于 71M6x01 中的 VREF,另外还有对应
的锰铜分流器阻值随温度的变化。
MPU 负责根据检测到的温度计算每个传感器通道所需的补偿值。Teridian 提供演示代码,实现如下所示的
GAIN_ADJn 补偿方程。得到的 GAIN_ADJn 值被 MPU 储存在三个 CE RAM 地址 GAIN_ADJ0-GAIN_ADJ2
(CE RAM 0x40-0x42)。演示代码提供了合适的温度补偿方法,但利用片上温度传感器和 CE RAM
GAIN_ADJn 储存地址,可在 MPU 固件中采用其它方法。演示代码维护三组独立的 PPMC 和 PPMC2 系统,
并根据检测到的温度用下式计算三个独立的 GAIN_ADJn 值:
式中,TEMP_X 为相对于标称值或校准温度的偏差,以 0.1 °C 的整数倍表示。例如,由于 71M654x 校准
(基准)温度为 22
的偏差为+5
o
C,实测温度为 27 oC,所以 TEMP_X = (27-22) x 10 = 50 (十进制),表示相对于 22 oC
o
C。
表 73 给出了 GAIN_ADJn 公式输出值,以及被补偿的电压或电流测量值。
• GAIN_ADJ0 补偿 71M654x 中的 VA 和 VB (71M6542F/G)电压测量值,用于补偿 71M654x 中的 VREF。
设计者可选择把对分压电阻的补偿增加至该通道的 PPMC 和 PPMC2 系数。
• GAIN_ADJ1 提供对 IA 电流通道的补偿和对 71M654x VREF 的补偿。设计者可选择把对锰铜分流器及
对应信号调理电路的补偿增加至该通道的 PPMC 和 PPMC2 系数。
• GAIN_ADJ2 提供对远端连接的 IB 分流器电流传感器的补偿和对 71M654x VREF 的补偿。设计者可选
择将对连接至 71M6x01的分流器的补偿增加至该通道的 PPMC 和 PPMC2 系数。
Rev 2 99
Page 100

71M6541D/F/G和 71M6542F/G 数据资料
增益调节输出
地址
表 73. GAIN_ADJn 补偿通道
71M6541D/F/G 71M6542F/G
GAIN_ADJ0
GAIN_ADJ1
GAIN_ADJ2
CE RAM
0x40 VA VA, VB
0x41 IA IA
0x42 IB IB
在演示代码中,温度补偿由储存在 PPMC 和 PPMC2 的系数决定,MPU 演示代码在初始化时,从之前储存
在 EEPROM 的数值设置。
为了禁用演示代码中的温度补偿,将每个 GAIN_ADJn 通道的 PPMC 和 PPMC2 设为零。为使能温度补偿,
PPMC 和 PPMC2 系数设置为与对应通道的预期温度变动相匹配的值。
对于 VREF 补偿,线性系数 PPMC 和二次系数 PPMC2 按第 4.7.2 节 71M654x 的温度系数的介绍确定。关
于 71M6x01 VREF 确定 PPMC 和 PPMC2 系数的信息,请参阅 71M6xxx 数据资料。
对外部误差源的补偿通过将与 VREF 相关的 PPMC 值和与外部误差源相关的 PPMC 值求和,得到该传感器
通道最终的 PPMC 值。同理,将与 VREF相关的 PPMC2 值和与外部误差源相关的 PPMC2 值相加。
为了确定分流器传感器对 PPMC 和 PPMC2 系数的影响,设计者必须通过分流器或 CT 的数据资料获得其温
度系数,或者通过实验室测量获得。设计者必须考虑批量生产元件的差异,确保产品在生产过程中满足其
精度要求。
4.8 连接I2C EEPROM
I2C EEPROM 或其它 I2C 兼容器件应连接至 DIO 引脚 SEGDIO2和 SEGDIO3,如图 39 所示。
SDCK 和 SDATA 信号应该使用大约 10 kΩ 的上拉电阻拉至 V3P3D (确保工作于 BRN 模式)。I/O RAM 中
的 DIO_EEX[1:0] (I/O RAM 0x2456[7:6])字段必须设为 01,以便将 DIO 引脚 SEGDIO2 和 SEGDIO3转换至
2
硬件 I
C 引脚 SDCK和 SDATA。
100 Rev 2
 Loading...
Loading...