

Page 1

System Identification
Toolbox™ Release Notes
Page 2
How to Contact MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
System Identification Toolbox™ Release Notes
© COPYRIGHT 2003–2010 by The MathWorks, Inc.
The software desc ribed in this document is furnished under a license agreeme nt. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathWorks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Docum entation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal governme nt)
and shall supersede any conflicti ng contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Documentation, unused , to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The M athWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Summary by Version ............................... 1
Version 7.4.1 (R2010b) System Identification Toolbox
Software
Version 7.4 (R2010a) System Identification Toolbox
Software
Version 7.3.1 (R2009b) System Identification Toolbox
Software
Version 7.3 (R2009a) System Identification Toolbox
Software
Version 7.2.1 (R2008b) System Identification Toolbox
Software
........................................ 5
........................................ 6
........................................ 9
........................................ 10
........................................ 12
Contents
Version 7.2 (R2008a) System Identification Toolbox
Software
Version 7.1 (R2007b) System Identification Toolbox
Software
Version 7.0 (R2007a) System Identification Toolbox
Software
Version 6.2 (R2006b) System Identification Toolbox
Software
Version 6.1.3 (R2006a) System Identification Toolbox
Software
Version 6.1.2 (R14SP3) System Identification Toolbox
Software
........................................ 13
........................................ 20
........................................ 21
........................................ 24
........................................ 26
........................................ 28
iii
Page 4

Version 6.1.1 (R14SP2) System Identification Toolbox
Software
Version 6.0 (R13SP2) System Identification Toolbox
Software
Compatibility S umm ary for System Identification
Toolbox Software
........................................ 29
........................................ 30
................................ 34
iv Contents
Page 5
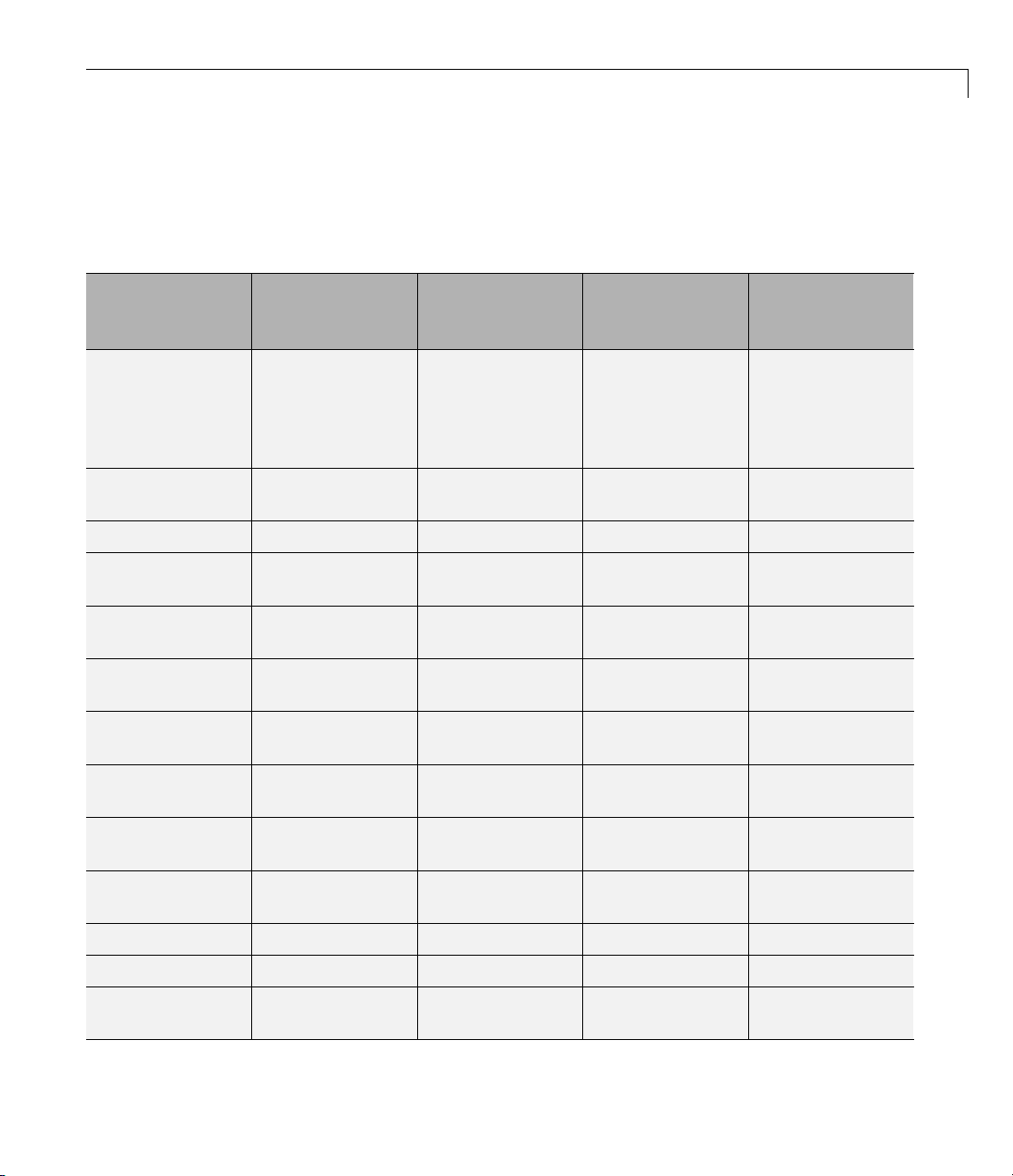
SummarybyVersion
This table provides quick access to w h at’s new in each version. For
clarification, see “Using Release No tes” on page 2.
System Identification Toolbox™ Release Notes
Version
(Release)
Latest Versi
V7.4.1 (R201
V7.4 (R2010a)
V7.3.1 (R2009b)
V7.3 (R2009a)
V7.2.1
V7.2 (R2008a)
V7.1 (R2007b)
V7.0
(R2008b)
(R2007a)
on
0b)
New Features
and Changes
No No Bug Reports
Yes
Details
No No Bug Repor
Yes
Details
No Yes
Yes
Details
Yes
ls
Detai
Yes
Details
Version
Compatibilit
Consideratio
Yes
Summary
No Bug Repo
Summary
Yes
Summary
No Bug Re
No Bug Reports No
Fixed Bugs
y
and Known
ns
Problems
Includes fix
Bug Reports No
Bug Reports No
Bug Reports No
ports
ts
rts
es
Related
Documentation
at Web S ite
Printable Release
Notes: PDF
Current product
documentation
No
No
No
V6.2 (R2006b)
V6.1.3 (R2006a)
.1.2 (R14SP3)
V6
6.1.1 (R14SP2)
V
V6.0 (R13SP2)
Yes
Details
s
Ye
tails
De
No No Bug Reports No
No No
Yes
Details
No Bug Reports No
s
Ye
mmary
Su
Yes
Summary
g Reports
Bu
Fixed bugs
No bug fixes
No
No
V6.0 product
documentation
1
Page 6

System Identification Toolbox™ Release Notes
Using Release No
Use release note
• New features
• Changes
• Potential imp
Review the re
product (for
bugs, or comp
If you are up
review the c
you upgrad
What Is in t
New Featu
• New func
• Changes
s when upgrading to a newer version to learn about:
act on your existing files and practices
lease notes for other MathWorks
example, MATLAB
atibility considerations in other products impact you.
grading from a software version other than the most recent one,
urrent release notes and all interim versions. For example, when
e from V1.0 to V1.2, review the release notes for V1.1 and V1.2.
he Release Notes
res and Changes
tionality
to existing functionality
tes
®
®
or Simulink®). Determine if enhancements,
products required for this
Vers io
When a n
versi
impac
Comp
Repo
in in
comp
Fix
Mat
Bu
n Compatibility C o n sidera tio n s
ew feature or change introduces a reported incompatibility between
ons, the Compatibility Considerations subsection explains the
t.
atibility issues reported after the product release appe ar under Bug
rtsattheMathWorksWebsite. Bugfixescansometimesresult
compatibilities, so review the fixed bugs in Bug Reports for any
atibility impact.
ed Bugs and Known Problems
hWorks offers a user-searchable Bug Reports database so you can view
g Reports. The development team updates this database at release time
2
Page 7

SummarybyVersion
and as more information becomes available. Bug Reports include provisions
for any known workarounds or file replacements. Information is available
for bugs existing in or fixed in Release 14SP2 or later. Information is not
available for all bugs in earlier releases.
Access Bug Reports using your MathWorks Account.
About Functions and Properties B eing Removed
This section lists functions or properties removed or in the process of being
removed. Functions and properties typically go through several stages across
multiple releases before being complet ely remov ed. This provides time for you
to make adjustments to your code.
• Announcement — The Release Notes announce the planned removal, but
there are no functional changes; the function runs as it did before.
• Warning — When you run the function, it displays a warning message
indicating it will be removed in a future release; otherwise the function
runs as it did before.
• Error — When you run the function, it produces an error. T he error
message indicates the function was removed and suggests a replacement
function, if one is available.
• Removal — When you run the function, it fails. The error message is the
standard message when MATLAB does not recognize an entry.
Functions and properties might be in a stage for one or more releases before
moving to another stage. Functions and properties are listed in the Functions
and Properties Being Removed section only when they enter a new stage
and their behavior changes. For example, if a function displayed a warning
in the previous release and errors in this release, it appears on the list. If it
continues to display a warning, it does not appear on the list because there
was no change between the releases.
Not all functions a nd properties go through all stages. For example, a
function’s impending removal might not be announced, but instead, the first
notification might be that the function displays a warning.
3
Page 8

System Identification Toolbox™ Release Notes
The Release Notes include actions you can take to m itigate the effects of
function or property removal, such as adapting your code to use a replacement
function.
4
Page 9

Version 7.4.1 (R2010b) System Identification Toolbox™ Software
Version 7.4.1 (R2010b) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.4.1 (R2010b):
New Features and
Changes
No No Bug Reports
Version
Compatibility
Considerations
Fixed Bugs and
Known Problems
Related
Documentation a t
Web Site
Printable Release
Notes: PDF
Current product
documentation
5
Page 10

System Identification Toolbox™ Release Notes
Version 7.4 (R2010a) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.4 (R2010a):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
Yes
Summary
New features introduced in this version:
• “New Ability to Use Discrete-Time Linear Models for Nonlinear Black-Box
Estimation” on page 6
• “New Cell Array Support for B and F Polynomials of Multi-Input
Polynomial Models” on page 7
• “Functions and Function Elements Being Removed” on page 8
Fixed Bugs and
Known Problems
Bug Reports No
Related
Documentation a t
Web Site
New Ability to Use Discrete-Time Linear Models for
Nonlinear Black-Box Estimation
You can now use the following discrete-time linear models for initi al izing a
nonlinear black-box estimation.
Discrete-time Linear Model
Single-output polynomial model of
ARX structure (
idpoly)
Use for Initializing...
Single-output nonlinear ARX model
estimation
Multi-output polynomial model of
ARX structure (
idarx)
Multi-output nonlinear ARX model
estimation
6
Page 11

Version 7.4 (R2010a) System Iden tification Toolbox™ So ftware
Discrete-time Linear Model
Single-output polynomial model
of Output-Error (OE) structure
(
idpoly) or state-space model with
no disturbance component (
object with K = 0
State-space model with no
disturbance component (
object with K = 0)
During estimation, the software uses the linear model orders and delay as
initial values of the nonlinear model orders and delay. For nonlinear ARX
models, this initialization always provides a better fit to the estimation data
than the linear ARX model.
You can use a linear model as an alternative approach to using model orders
and delay for nonlinear estimation of the same system.
You can estimate or construct the linear model and then use this model
for constructing (see
nlhw) the nonlinear model. For more information, see “Using Linear
Model for Nonlinear ARX Estimation”, and “Using Linear M odel for
Hammerstein-Wiener Estimation” in the System Identification Toolbox User’s
Guide.
idnlarx and idnlhw) or estimating (see nlarx or
idss)
idss
Use for Initializing...
Single-output Hammerstein-Wiener
model estimation
Multi-output Hammerstein-Wiener
model estimation
New Cell Array Support for B and F Polynomials of
Multi-Input Polynomial M odels
You can now use cell arrays to specify the B and F polynomials of multi-input
polynomial models. The B and F polynomials are represented by the
properties of an idpoly object These properties are currently double matrices.
For multi-input polynomial models, these polynomials will be represented by
cell arrays only in a future version. If your code performs operations on the
and f properties, make one of the following changes in the code:
b and f
b
7
Page 12

System Identification Toolbox™ Release Notes
• When you construct the model using the idpoly command, use cell arrays
to specify the B and F polynomials. Using cell arrays causes the
properties to be represented by cell array s.
b and f
• After you construct or estimate the model, use the new
When you use cell arrays, you must also update your code to use cell array
syntax on
Note For single-input polynomial models, the b and f properties continue to
be double row vectors.
Functions and Function Elements Being Removed
Function or Function
Element Name
Double matrix support
for
b and f properties
of multi-input
models.
idpoly
setPolyFormat
command to:
- Convert b and f properties to cell arrays.
- Make the model backward compatible to continue using double matrices
for
b and f properties. This operation ensures that operations on b and
f properties that use matrix syntax continue to work without errors
in a future version.
b and f properties instead of matrix syntax.
What Happens
When you Use
the Function or
Element?
Warns
UseThisInstead Compatibility
Considerations
Use cell array
to specify the
and f properties
of multi-in put
polynomial models.
b
If your code performs
operations on the
b and f properties,
update the code to
be compatible with
a future release.
See “New Cell
Array Support for B
and F Polynomials
of Multi-Input
Polynomial Models”
on page 7.
8
Page 13

Version 7.3.1 (R2009b) System Identification Toolbox™ Software
Version 7.3.1 (R2009b) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.3.1 (R2009b):
New Features and
Changes
No No Bug Reports No
Version
Compatibility
Considerations
Fixed Bugs and
Known Problems
Related
Documentation a t
Web Site
9
Page 14
System Identification Toolbox™ Release Notes
Version 7.3 (R2009a) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.3 (R2009a):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
No Bug Reports
New features introduced in this version:
• “Enhanced Handling of Offsets and Trends in Signals” on page 10
• “Ability to Get Regressor Values in Nonlinear ARX Models” on page 11
Fixed Bugs and
Known Problems
Related
Documentation a t
Web Site
Printable Release
Notes: PDF
Current product
documentation
Enhanced Handling of Offsets and Trends in Signals
This version of the product includes new and expanded functionality for
handling offsets and trends in signals. This data processing operation is
necessary for estimating more accurate linear models because linear models
cannot capture arbitrary differences between the input and output signal
levels.
The previous vers ion of the product let you remove mean values or linear
trends from steady-state signals using the GUI and the
For transient signals, you had to remove offsets and trends using matrix
manipulation.
detrend function.
10
The GUI functionality for removing means and linear trends from signals is
unchanged. However, you can now do the following at the command line:
• Save the values of means or linear trends removed during detrending using
anew
detrend output argument. You can use this saved trend information
to detrend other data sets. You can also restore subtracted trends to the
Page 15

Version 7.3 (R2009a) System Iden tification Toolbox™ So ftware
output simulated by a linear model that was estimated from detrended
data.
For example, this syntax computes and removes mean values
from the data, and saves these values to the output variable
[data_d,T]=detrend(data). T is an object with properties that store offset
T:
and slope information for input and output signals.
• Remove any offset or linear trend from the data using a new
detrend
input argument. This is useful for removing arbitrary nonzero offsets from
transient data or applying previously saved trend information to any data
set.
For example, this syntax removes an offset or trend specified by
= detrend(data,T)
.
T: data_d
• Add an arbitrary offset or linear trend to data signals. This is useful when
you want to simulate the response of a linear model about a nonzero
equilibrium input-output level and this model was estimated from
detrended data.
For example, this syntax adds trend information to a simulated model
output
y_sim,whichisaniddata object: y = retrend(y_sim,T). T
specifies the offset an d slope information for in puts and outputs.
For more information, see “Handling Offsets and Trends in Data”.
Ability to Get Regressor Values in Nonlinear ARX
Models
The getreg command can now return the numerical values of regressors in
nonlinear ARX models and provides an intermediate output of nonlinear
ARX m odels .
This advanced functionality converts input and output values to regressors,
and passes the regressor values to the
evaluate command to compute
the model response. This incremental step lets you gain insight into the
propagation of information through the nonlinear ARX model.
For more information, see the
getreg reference page. To learn more about
the nonline ar ARX model structure, see “Nonlinear B lack-Box Model
Identification”.
11
Page 16

System Identification Toolbox™ Release Notes
Version 7.2.1 (R2008b) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.2.1 (R2008b):
New Features and
Changes
No Yes
Version
Compatibility
Considerations
Summary
Functions and Properties Being Rem oved
For more information about the process of removing functions, see "About
Functions and Properties Being Remove d" in “What Is in the Release Notes”
on page 2.
Function or Property Name
model.Algorithm.
Trace
What
Happens
When
You Us e
Function
or
Property?
Still runs
Fixed Bugs and
Known Problems
Bug Reports No
Use This Instead Compatibility
model.Algorithm.
Display
Related
Documentation a t
Web Site
Considerations
Using
model.Algorithm.
Trace
results in a
warning.
12
Page 17

Version 7.2 (R2008a) System Iden tification Toolbox™ So ftware
Version 7.2 (R2008a) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.2 (R2008a):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
Yes
Summary
New features introduced in this version are:
• “Simulating Non linear Black-Box Models in Simulink Software” on page 13
• “Linearizing Nonlinear Black-Box Models a t User-Specified Operating
Points” on page 14
• “Estimating Multiple-Output Models Using Weighted Sum of Least
Squares Minimization Criterion” o n page 15
• “Improved H andling of Initial States for Linear and Nonlinear Models”
on page 16
• “Improved Algorithm Options for L i n ear Models” on page 17
• “New Block Reference Pages” on page 18
• “Functions and Properties Being Removed” on page 18
Fixed Bugs and
Known Problems
Bug Reports No
Related
Documentation a t
Web Site
Simulating Nonlinear Black-Box Models in Simulink
Software
You can now simulate nonlinear ARX and Hammerstein-Wiener models in
Simulink using the nonlinear ARX and the Hammerstein-Wiener model
blocks in the System Identification Toolbox™ block library. This is useful
in the following situations:
• Representing dynamics of a physical component in a Simulink model using
a data-based nonlinear model
13
Page 18

System Identification Toolbox™ Release Notes
• Replacing a complex Simulink sub system with a simpler data- ba s ed
nonlinear model
Note Nonlinear ARX Model and Hammerstein-Wiener Model blocks read
variables from the MATLAB (base) workspace or model workspace. When the
MATLAB workspace and model workspace contain a variable with the same
name and this variable is referenced by a Simulink block, the variable in the
model workspace takes precedence.
IfyouhaveinstalledReal-TimeWorkshop®software, you can generate code
from models containing nonlinear ARX and the Hammerstein-Wiener model
blocks. However, you cannot generate code when:
• Hammerstein-Wiener models use the
output nonlinearity.
• Nonlinear ARX models use custom regressors or use the
neuralnet nonlinearity estimator.
You can access the new System Identification Toolbox blocks from the
Simulink Library Browser. For more information about these blocks, see
the IDNLARX Model (nonlinear ARX model) and the IDNLHW Model
(Hammerstein-Wiener model) block reference pages.
customnet estimator for input or
customnet or
Linearizing Nonlinear Black-Box Models at
User-Specified Operating Points
You can now use the linearize command to linearize nonlinear black-box
models, including nonlinear ARX and Hammerstein-W iener models, at
specified operating poin ts. Linearization produces a first-order Taylor series
approximation of the system about an operating point. An operating point is
defined by the set of constant input and state values for the model.
Ifyoudonotknowtheoperatingpoint,youcanusethe
compute it from specifications, such as steady-state requirements or values of
these quantities at a given time instant from the simulation of the model.
findop command to
14
Page 19

Version 7.2 (R2008a) System Iden tification Toolbox™ So ftware
For nonlinear ARX models, if all of the steady-state input and output values
are known, you can map these values to the model state values using the
data2state command.
linearize replaces lintan and removes the restriction for linearizing models
containing custom regressors or specific nonlinearity estimators, such as
neuralnet and treepartition.
If you have installed Simulink
®
Control Design™ software, you can linearize
nonlinear ARX and Hammerstein-Wiener models in Simulink after importing
them into Simulink.
For more information, see:
• “Linear Approximation of Nonlinear Black-Box Models” about comput i ng
operating points and linearizing models
• “Simulating Model Output” about importing nonlinear black-bo x models
into Simulink
Estimating Multiple-Output Models Using Weighted
Sum of Least Squares Minimization Criterion
You can now specify a custom weighted trace criterion for minimization
when estimating linear and nonlinear black-box models for multiple-output
systems. This feature is useful for controlling the relative importance of
output channels during the estimation process.
The
Algorithm property of linear and nonlinear models now provides the
Criterion field for choosing the minimization criterion. This new field can
have the following values:
•
det — (Defau lt) Specify this option to minimize th e determinant of the
prediction error covariance. This choice leads to maximum likelihood
estimates of model parameters. It implicitly uses the inverse of estimated
noise variance as the weighting function. This option was already available
in previous releases.
•
trace — Specify this option to define your own weighing function that
controls the relative weights of output signals during the estimation. This
criterion minimizes the weighted sum of least square prediction errors. You
15
Page 20
System Identification Toolbox™ Release Notes
can specify the relative weighting of prediction errors for each output using
the new
Weighting field of the Algorithm property. B y default, Weighting
is an identity matrix, which means that all outputs are weighed e qually.
Set
Weighting to a positive semidefinite symmetric m atrix.
For more information about these new Algorithm fields for linear estimation,
see the
Algorithm Properties reference page. For more information about
Algorithm fields for nonlinear estimation, see the
reference pages.
Note If you are estimating a single-output model, det and tr ace values of
the
Criterion field produce the same estimation results.
Improved Handling of Initial States for Linear and
Nonlinear Models
The following are new options to handle initial states for nonlinear models:
idnlarx and idnlhw
16
• For n onlinear ARX models (
vector for initial states when using
idnlarx), you can now specify a numerical
sim or predi ct by setting the Init
argument. For example:
predict(model,data,'init',[1;2;3;4])
where the last argument is the state vector.
For more information, see the
• For Hammerstein-Wiener models (
the initial states when using
For more information, see the
sim and predict reference pages.
idnlhw), you can now choose to estimate
predict or nlhw by setting INIT='e'.
predict and nlhw reference pages.
If you want to specify your own initial states, s ee the corresponding model
reference pages for a definition of the states for each model type.
If you do not know the states, you can use the
findop or the findstates
command to compute the states. For more information about using
these commands, see the
findstates(idnlarx),andfindstates(idnlhw) reference pages.
findop(idnlarx), findop(idnlhw),
Page 21

Version 7.2 (R2008a) System Iden tification Toolbox™ So ftware
To help you interpret the states of a nonlinear ARX model, you can use the
getDelayInfo command. For more information, see the get DelayInfo
reference page.
The
findstates command is available for all linear and nonlinear models.
Also see the
findstates(idmodel) and findstates(idnlgrey) reference
pages.
Improved Algorithm Options for Linear Models
The following improvements are available for the Algorithm property of
linear models to align linear and nonlinear models (where appropriate) and
improve robustness for default settings:
• The
SearchDirection field (model.Algorithm.SearchDirection)has
been renamed to
SeachMethod (model.Algorithm.SearchMethod)tobe
consistent with the nonlinear models, where the corresponding field is
SeachMethod.
• The new
model.Algorithm.SearchMethod='lsqnonlin' uses the lsqnonlin
lsqnonlin option for specify ing SearchMethod is available.
optimizer from the Optimization Toolbox™ software. You must have
Optimization Toolbox software installed to use this option.
• The improved
for specifying
gn algorithm (subspace Gauss-Newton method) is available
SearchDirection. The updated gn algorithm better handles
the scale of the parameter Jacobians and is also consistent with the
algorithm used for nonlinear model estimation.
• The default values for th e
(
modelname.Algorithm.LimitError) is changed to 0, which is consistent
LimitError field of the Algorithm property
with the corresponding option f or estimating no n linear models. In
previous releases,
LimitError default value was 1.6, which robustified
the estimation process against data outliers by associating a linear
penalty for large errors, rather than a quadratic penalty. Now, there is no
robustification by default (
the default setting and plot the prediction errors using
LimitError=0). You can estimate the model with
pe(data.model).If
the resulting plot s hows occasional large values, repeat the estimation with
model.Algorithm.LimitError set to a value between 1 and 2.
• The
model.Algorithm.Advanced property has a new tolerance field
GnPinvConst corresponding to the gn SearchMethod. GnPinvConst
17
Page 22

System Identification Toolbox™ Release Notes
specifies that singular values of the Jacobian that are sm aller tha n
GnPinvConst*max(size(J))*norm(J)*eps are discarded when computing
the search direction. You can assign a p ositive real value for this field.
Default value is
1e4.
• The d efault value of
has been changed from
possibility of a situation where the estimation algorithm does not converge
(predictor becomes unstable) while still allowing enough flexibility to
capture lightly damped modes.
For more information about Algorithm properties of linear models, see the
Algorithm Properties reference page.
New Block Reference Pages
New documentation for System Identification Toolbox blocks is provided. For
more information, see “Block Reference” in the System Identification Toolbox
reference documentation.
Functions and Properties Being Rem oved
For more information about the process of removing functions, see "About
Functions and Properties Being Remove d" in “What Is in the Release Notes”
on page 2.
Function or Property Name
lintan
What
Happens
When
You Us e
Function
or
Property?
Still runs
model.Algorithm.Advanced.Zstability property
1.01 to 1+sqrt(eps). The new default reduces the
Use This Instead Compatibility
Considerations
linearize(idnlhw)
linearize(idnlarx)
See “Linearizing
Nonlinear
Black-Box Models
at User-Specifi ed
Operating Points”
on page 14.
18
Page 23

Version 7.2 (R2008a) System Iden tification Toolbox™ So ftware
Function or Property Name
model.Algorithm.
SearchDirection
gns option of
model.Algorithm.
SearchDirection
GnsPinvTol of
model.Algorithm.Advanced
What
Happens
When
You Us e
Function
or
Property?
Still runs
Still runs
Still runs
Use This Instead Compatibility
Considerations
model.Algorithm.
SearchMethod
See “Improved
Algorithm Options
for Linear Models”
on page 17.
gn
See “Improved
Algorithm Options
for Linear Models”
on page 17.
GnPinvConst
See “Improved
Algorithm Options
for Linear Models”
on page 17.
19
Page 24

System Identification Toolbox™ Release Notes
Version 7.1 (R2007b) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.1 (R2007b):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
No Bug Reports No
New feature introduced in this version:
Fixed Bugs and
Known Problems
Related
Documentation a t
Web Site
New Polynomial Nonlinearity Estimator for
Hammerstein-Wiener Models
You can now estimate nonlinearities for Hammerstein-Wiener models using a
single-variable polynom ial at either the input or the output. This nonlinearity
estimator is available at the command line.
For more information, see the
information about estimating Hammerstein-Wiener models, see “Identifying
Hammerstein-Wiener Models ” in the System Identifica t ion Toolbox
documentation.
poly1d reference pages. For more
20
Page 25

Version 7.0 (R2007a) System Iden tification Toolbox™ So ftware
Version 7.0 (R2007a) System Identification Toolbox
Software
This table summarizes what’s new in Version 7.0 (R2007a):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
No Bug Reports No
New features and changes introduced in this version are:
• “New N onlinear Black-Box Modeling Options” on page 21
• “New Nonlinear Grey-Box Modeling Option” on page 22
• “New Getting Started Guide” on page 23
• “Revised and Expanded User’s Guide” on page 23
Fixed Bugs and
Known Problems
Related
Documentation a t
Web Site
New Nonlinear Black-Box Modeling Options
You can now estimate nonlinear discrete-time black-box models for
both single-output an d multiple-out put time-do main data. The System
Identification Toolbox product supports the following types of nonlinear
black-box models:
• Hammerstein-Wiener
• Nonlinear ARX
To learn how to estimate nonlinear b lack-box models using the System
Identification Tool GUI or commands in the MATLAB Command Window, see
the System Identification Toolbox documentation.
Note You can estimate Hammerstein-Wiener black-box models from
input-output data only. These models do not support time-series data, where
thereisnoinput.
21
Page 26

System Identification Toolbox™ Release Notes
New demos are available to help you explore nonlinear black-box functions.
For more information, see the collection of demos in the Tutorials on
Nonlinear ARX and Hammerstein-Wiener Model Identification category.
New Nonlinear Grey-Box Modeling Option
You can now estimate nonlinear discrete-time and continuous-time models
for arbitrary nonlinear ordinary differential equations using single-output
and multiple-output time-domain data, or time-series data (no measured
inputs). Models that you can specify as a set of nonlinear ordinary differential
equations (ODEs) are called grey-box models.
To learn how to estimate nonlinear grey-box models using the co mmands
in the MATLAB Co mmand Window, see System Identification Toolbox
documentation.
Specify the OD E in a function or a MEX-file. The template file for
writing the MEX-file,
matlab/toolbox/ident/nlident.
IDNLGREY_MODEL_TEMPLATE.c, is located in
22
To estimate the equation parameters, first construct an
specify the ODE file and the parameters you want to estimate. Use
estimate the ODE parameters. For more information, see the
pem reference pages.
New demos are available to help you e xplore nonlinear grey-box functions. For
more information, see the collection ofdemosintheTutorialsonNonlinear
Grey-Box Model Identification category.
idnlgrey object to
pem to
idnlgrey and
Optimization Toolbox Search Method for Nonlinear
Estimation Is Supported
If you have Optimization Toolbox software installed, you can specify the
lsqnonlin search method for estimating black-box and grey-box nonlinear
models in the MATLAB Command Window.
model.algorithm.searchmethod='lsqnonlin'
For more information, see the idnlarx, idnlhw,andidnlgrey reference
pages.
Page 27

Version 7.0 (R2007a) System Iden tification Toolbox™ So ftware
New Getting Star
The System Ident
Started Guide. T
provides the fo
• “Tutorial – Id
the System Ide
linear black-
• “Tutorial – I
Using the GUI
graphical u
fit single-
• “Tutorial –
Tutorial f
and method
Revised a
The Syste
expanded
m Identification Toolbox docum entation has been revised and
.
ification Toolbox product now provides a new Getting
his guide introduces fundamental identification concepts and
llowing tutorials to help you get started quickly:
entifying Linear Models Using the GUI” — Tutorial for using
ntification Tool grap hi ca l user interface (GUI) to estimate
box models for single-input and single-output (SISO) data.
dentifying Low-Order Transfer Functions (Process Models)
” — Tutorial for using the System Identification Tool
ser interface (GUI) to estimate low-o rde r transfer functions to
input and single-output (SISO) d ata.
Identifying Linear Models Using the Command Line” —
or estimating models using System Identification Toolbox objects
s for multiple-input and single-output (MISO) data.
nd Expanded User’s Guide
ted Guide
23
Page 28

System Identification Toolbox™ Release Notes
Version 6.2 (R2006b) System Identification Toolbox
Software
This table summarizes what’s new in Version 6.2 (R2006b):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
No Bug Reports No
New feature introduced in this version:
Fixed Bugs and
Known Problems
Related
Documentation a t
Web Site
MATLAB Compiler Support
The System Identification Too lbox product now supports the MATLAB
Compiler™ product.
YoucanuseMATLABCompilertotakeMATLABfilesasinputandgenerate
redistributable, standalone applications that include System Identification
Toolbox functionality, including the following:
• Creating data and model objects
• Preprocessing and manipulating data
• Simulating models
• Transforming models, including conversions between continuous and
discrete time and model reduction
®
24
• Plotting transient and frequency response
To use these features, write a function that uses System Identification Toolbox
commands. Use the MATLAB Compiler software to create a standalone
application from the MATLAB Compiler file. F or more information, see the
MATLAB Compiler documentation.
Page 29

Version 6.2 (R2006b) System Iden tification Toolbox™ So ftware
Standalone applications that include System Identification Toolbox
functionality have the following limitations:
• No access to the System Identification library in the Simulink software
(
slident)
• No support for model estimation
25
Page 30

System Identification Toolbox™ Release Notes
Version 6.1.3 (R2006a) System Identification Toolbox
Software
This table summarizes what’s new in Version 6.1.3 (R2006a):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
Yes
Details below. See
also Summary.
New features and changes introduced in this version are:
• “balred Introduced for Model Reduction” on page 26
• “Search Direction for Minimizing Criteria Can Be Computed by Adaptive
Gauss-Newton Method” on page 26
• “Maximum Number of Bisections Used by Line Search Is Increased” o n
page 27
Fixed Bugs and
Known Problems
Bug Reports No
Related
Documentation a t
Web Site
balred Introduced for Model Reduction
Use balred to perform model re duction instead of idmodred.
Search Direction for Minimizing Criteria Can Be
Computed by Adaptive Gauss-Newton Method
An adaptive Gauss-Newton method is now available for computing the
direction of the line search for cost-function minimization. Use this method
when you observe convergence problems in the estimation results, or as an
alternative to the Levenberg-Marquard (
lm)method.
26
The
gna search method was suggested by Adrian Wills, Brett Ninness, and
Stuart Gibson in their paper "On Gradient-Based Search for Multivariable
System Estimates", presented at the IFAC World Congress in Prague in 2005.
gna is an adaptive version of gns and uses a cutoff value for the singular
values of the criterion Hessian, which is adjusted adaptively depending on
thesuccessofthelinesearch.
Page 31

Version 6.1.3 (R2006a) System Identification Toolbox™ Software
Specify the gna method by setting the Search Direction property to 'gna'.
For example:
m = pem(data,model_structure,'se','gna')
The default initial value of gamma in the gna search is 10^-4.Youcanseta
different value using the
SearchDirection,seetheAlgorithm Properties reference pages.
InitGnaTol property. For more information about
Maximum Number of Bisections Used by Line Search
Is Increased
The default value for the MaxBisections property, which is the maximum
number of bisections along the search direction used by line search, is
increased from
criterion value along the search vector.
10 to 25. This increases the number of attempts to find a lower
For more information about
Properties
Functions and Properties Being Rem oved
For more information about the process of removing functions, see "About
Functions and Properties Being Remove d" in “What Is in the Release Notes”
on page 2.
Function or Property Name
idmodred
reference page.
What
Happens
When
You Us e
Function
or
Property?
Still runs
Search properties, see the Algorithm
Use This Instead Compatibility
Considerations
balred
See “balred
Introduced for
Model Reduction”
on page 26.
27
Page 32

System Identification Toolbox™ Release Notes
Version 6.1.2 (R14SP3) System Identification Toolbox
Software
This table summarizes what’s new in Version 6.1.2 (R14SP3):
New Features and
Changes
No No Bug Reports No
Version
Compatibility
Considerations
Fixed Bugs and
Known Problems
Related
Documentation a t
Web Site
28
Page 33

Version 6.1.1 (R14SP2) System Identification Toolbox™ Software
Version 6.1.1 (R14SP2) System Identification Toolbox
Software
This table summarizes what’s new in Version 6.1.1 (R14SP2):
New Features and
Changes
No No
Version
Compatibility
Considerations
Fixed Bugs and
Known Problems
Fixed bugs
Related
Documentation a t
Web Site
No
29
Page 34
System Identification Toolbox™ Release Notes
Version 6.0 (R13SP2) System Identification Toolbox
Software
This table summarizes what’s new in Version 6.0 (R13SP2):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
Yes
Summary
New features and changes introduced in this version are:
• “idproc Model Object Added” on page 30
• “Estimation and Vali dation in Frequency Domain Now Supported” on
page 31
• “Continuous-Time Data Can Now Be Stored Using Frequency-Domain
Objects” on page 31
• “Simulink Software Now Supports iddata and idmodel Objects” on page 32
• “advice About Data and Models Now Available” on page 32
• “Theta Models No Longer Supported” on page 32
Fixed Bugs and
Known Problems
No bug fixes
Related
Documentation a t
Web Site
V6.0 product
documentation
idproc Model Object Added
A new model object, idproc, is used to represent simple continuous-time
process models. This object is characterized by static gain, possible dead time,
and dominating time constant(s). A new GUI that supports this object is
available in the System Identification Toolbox GUI.
30
To learn more about this object, type
run a demo.
You can also try the comman d
m = pem(data,'p1d')
iddemopr at the MATLAB prompt to
Page 35

Version 6.0 (R13SP2) System Identification Toolbox™ Software
Estimation and V
Supported
You can now perfo
such as the foll
• Inputs and out
• Frequency-re
Both System I
(GUI) suppor
All estimat
data and fre
frequency
Use the
domains. U
frequenc
Type at th
help iddata
or
ion, simulation, and validation routines accept frequency-domain
-response data must be packaged as an
fft
y-dependent resolution.
e MATLAB prompt:
rm estimation and validation using frequency-domain data,
owing:
puts, entered as frequency-domain data in the
sponse data from a frequency analyzer
dentification Toolbox functions and the graphical user interface
tthis.
quency-response data as inputs, similar to time-domain data. The
and ifftfunctions to transform between the time and frequency
se the
spafdr function to estimate frequency responses using
alidation in Frequency Domain Now
iddata object
frd or idfrd object.
idprops data
mplete descriptions. To access a demo, type
for co
Cont
Freq
You c
Cont
arb
For
inuous-Time Data Can Now Be Stored Using
uency-Domain Objects
an now store continuous-time data as a frequency-domain data object.
inuous-time Fourier-transformed data is now stored at a finite number of
itrary frequencies, letting you estimate continuous-time models directly.
example, type at the MATLAB prompt:
help oe
iddemofr.
31
Page 36

System Identification Toolbox™ Release Notes
Simulink Software Now Supports iddata and
idmodel Objects
You can now import and simulate System Identification Toolbox idmodel
models in the Simulink environment. You can also import iddata objects
into Simulink.
The command
can use to simulate
contains data sou rces and sinks for
slident opens a System Identification block library, which you
idmodel models (with or without noise). This library also
iddata objects.
advice About Data and Models Now Available
Use the new advice command to get h elpful tips about the quality, problems,
and options associated with an
For more information, type at the MATLAB prompt:
help iddata/advice
and
help idmodel/advice
iddata or idmodel obje ct.
Theta Models No Longer Supported
Theta models (matrices) are no longer supported.
Functions and Properties Being Rem oved
For more information about the process of removing functions, see "About
Functions and Properties Being Remove d" in “What Is in the Release Notes”
on page 2.
32
Page 37

Version 6.0 (R13SP2) System Identification Toolbox™ Software
Function or Property Name
th
th2par
th2ss
What
Use This Instead Compatibility
Happens
When
You Us e
Function
or
Property?
Errors None
Still runs
Still runs
None
None
Considerations
See “Theta
Models No Longer
Supported” on
page 32.
See “Theta
Models No Longer
Supported” on
page 32.
See “Theta
Models No Longer
Supported” on
page 32.
33
Page 38

System Identification Toolbox™ Release Notes
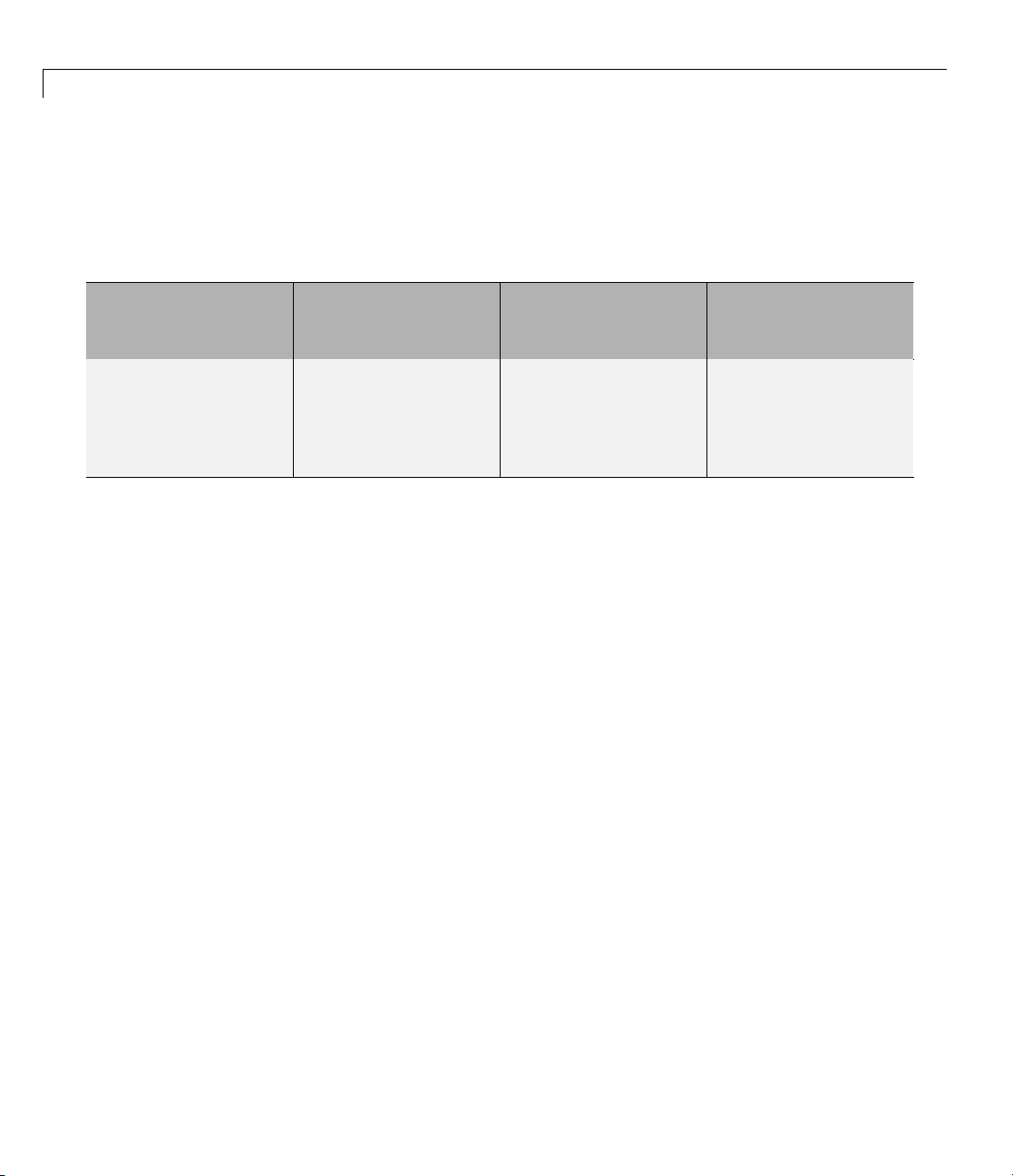
Compatibility Summary for System Identification Toolbox
Software
This table summarizes new features and changes that might cause
incompatibilities when you upgrade from an earlier version, or when you
use files on multiple versions. Details are provided with the description of
the new feature or change.
Version (Release) New Features and Changes with Version
Compatibility Impact
Latest Version
V7.4.1 (R2010b)
V7.4 (R20010a) See “Functions and Function Elements Being
V7.3.1 (R2009b)
V7.3 (R2009a)
V7.2.1 (R2008b) See “Functions and Properties Being
V7.2 (R2008a) See “Functions and Properties Being
V7.1 (R2007b)
V7.0 (R2007a)
V6.2 (R2006b)
V6.1.3 (R2006a) See “Functions and Properties Being
V6.1.2 (R14SP3)
V6.1.1 (R14SP2)
V6.0 (R13SP2) See “Functions and Properties Being
None
Removed” on page 8.
None
None
Removed” on page 12.
Removed” on page 18.
None
None
None
Removed” on page 27.
None
None
Removed” on page 32.
34
 Loading...
Loading...