

Page 1

Simulink®Fixed Po
User’s Guide
int™ 6
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
®
Simulink
© COPYRIGHT 1995–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Fixed Point™ User’s Guide
Page 3

Revision History
March 1995 First Printing New for Version 1.0
April 1997 Second Printing Revised for MATLAB 5
January 1999 Third Printing Revised for MATLAB 5.3 (Release 11)
September 2000 Fourth Printing New for Version 3.0 (Release 12)
August 2001 Fifth Printing Minor revisions for Version 3.1 (Release 12.1)
November 2002 Sixth Printing Minor revisions for Version 4.0 (Release 13)
June 2004 Seventh Printing Revised for Version 5.0 (Release 14) (Renamed from
Fixed-Point Blockset)
October 2004 Online only Minor revisions for Version 5.0.1 (Release 14SP1)
March 2005 Online only Minor revisions for Version 5.1 (Release 14SP2)
September 2005 Online only Minor revisions for Version 5.1.2 (Release 14SP3)
March 2006 Online only Revised for Version 5.2 (Release 2006a)
May 2006 Online only Revised for Version 5.2.1 (Release 2006a+)
September 2006 Online only Revised for Version 5.3 (Release 2006b)
March 2007 Eighth Printing Revised for Version 5.4 (Release 2007a)
September 2007 Online only Revised for Version 5.5 (Release 2007b)
March 2008 Online only Revised for Version 5.6 (Release 2008a)
October 2008 Online only Revised for Version 6.0 (Release 2008b)
March 2009 Online only Revised for Version 6.1 (Release 2009a)
September 2009 Online only Revised for Version 6.2 (Release 2009b)
March 2010 Online only Revised for Version 6.3 (Release 2010a)
Page 4

Page 5

Getting Started
1
Product Overview ................................. 1-2
Contents
What You Need to Get Started
Installation
Sharing Fixed-Point Models
Demos
Physical Quantities and Measurement Scales
Introduction
Selecting a Measurement Scale
Example: Selecting a Measurement Scale
Why Use Fixed-Point Hardware?
Why Use the Simulink
The Development Cycle
Simulink
Configuring Blocks with Fixed-Point Output
Configuring Blocks with Fixed-Point Parameters
Passing Fixed-Point Data Between Simulink Models and
the MATLAB Software
Automatic Scaling Tools
Code Generation Capabilities
...................................... 1-4
.......................................... 1-5
...................................... 1-7
®
Fixed Point Software? ....... 1-17
............................ 1-18
®
Fixed Point Software Features ............ 1-20
............................ 1-36
...................... 1-4
......................... 1-4
........ 1-7
...................... 1-8
.............. 1-10
.................... 1-15
........... 1-20
........................... 1-32
........................ 1-37
....... 1-29
Example: Converting from Doubles to Fixed Point
About This Example
Block Descriptions
Simulations
...................................... 1-39
............................... 1-38
................................. 1-39
... 1-38
v
Page 6

Data Types a nd Scaling
2
Overview ......................................... 2-2
Fixed-Point Numbers
About F ix ed-P oint Numbers
Signed Fixed-Point Numbers
Binary Point Interpretation
Scaling
Quantization
Range and Precision
Constant Scaling for Best Precision
Fixed-Point Data Type and Scaling Notation
Scaled Doubles
Example: Port Data Type Display
Floating-Point Numbers
About Floating-Point Numbers
Scientific Notation
The IEEE Format
Range and Precision
Exceptional Arithmetic
.......................................... 2-5
..................................... 2-7
.............................. 2-3
......................... 2-3
........................ 2-4
......................... 2-4
............................... 2-9
................... 2-12
................................... 2-17
.................... 2-19
............................ 2-21
...................... 2-21
................................. 2-21
................................. 2-23
............................... 2-25
............................. 2-27
Arithmetic Operations
........... 2-15
vi Contents
3
Overview ......................................... 3-2
Limitations on Precision
Introduction
Rounding
Padding with Trailing Zeros
Example: Limitations on Precision and Errors
Example: Maximizing Precision
Net Slope and Net Bias Precision
Limitations on Range
...................................... 3-3
........................................ 3-3
........................... 3-3
......................... 3-19
.......... 3-19
...................... 3-20
.................... 3-21
.............................. 3-26
Page 7
Introduction ...................................... 3-26
Saturation and Wrapping
Guard Bits
Example: Limitations on Range
....................................... 3-30
........................... 3-27
...................... 3-30
Recommendations for Arithmetic and Scaling
Introduction
Addition
Accumulation
Multiplication
Gain
Division
Summary
Parameter and Signal Conversions
Introduction
Parameter Conversions
Signal Conversions
Rules for Arithmetic Operations
Introduction
Computational Units
Addition and Subtraction
Multiplication
Division
Shifts
Example: Conversions and Arithmetic Operations
............................................ 3-38
...................................... 3-32
......................................... 3-33
..................................... 3-36
.................................... 3-36
......................................... 3-40
........................................ 3-42
.................. 3-43
...................................... 3-43
............................. 3-44
................................ 3-45
.................... 3-48
...................................... 3-48
.............................. 3-48
........................... 3-49
.................................... 3-54
......................................... 3-61
........................................... 3-63
........ 3-32
.... 3-66
Realization Structures
4
Overview ......................................... 4-2
Introduction
Realizations and Data Types
Targeting an Embedded Processor
Introduction
...................................... 4-2
........................ 4-2
.................. 4-4
...................................... 4-4
vii
Page 8

Size Assumptions ................................. 4-4
Operation Assumptions
Design Rules
..................................... 4-5
............................ 4-4
Canonical Forms
Introduction
Direct Form II
Series Cascade Form
Parallel Form
5
Working wi
Introduct
Best Pract
Models Tha
Errors
Running t
Fixing a T
Manuall
Automat
Batch Fi
Restore
Saving
Loadin
.................................. 4-7
...................................... 4-7
.................................... 4-8
............................... 4-11
..................................... 4-14
Fixed-Point Advisor
th the Fixed-Point Advisor
ion to the Fixed-Point Advisor
ices for Using the Fixed-Point Advisor
t Might Cause Data Type Propagation
......................................... 5-4
he F ixed-Point Advisor
ask Failure
y Fix ing Failures
ically Fixing Failures
xing Failures
Points
aRestorePoint
gaRestorePoint
....................................
..............................
..............................
.............................
...........................
............................
.....................
.......................
...............
...............
........
5-2
5-2
5-2
5-7
5-8
5-9
5-9
5-10
5-10
5-11
5-12
viii Contents
ial: Converting a Model from Floating- to
Tutor
-Point
Fixed
About
Star
Prep
Prep
Perf
Pre
This Tutorial
ting the Fixed-Point Advisor
are Model for Conversion
are for Data Typing and Scaling
orm Data Typing and Scaling
pare for Code Generatio n
.....................................
................................
.....................
.......................
....................
........................
.................
5-14
5-14
5-14
5-15
5-25
5-28
5-3
2
Page 9

Fixed-Point Tool
6
Overview of the Fixed-Point Tool ................... 6-2
Introduction to the Fixed-Point Tool
Before Using the Fixed-Point Tool to Autoscale Your
Simulink Model
Best Practices for Using the Fixed-Point Tool to Autoscale
Your Simulink Model
Models That Might Cause Data Type Propagation
Errors
Opening the Fixed-Point To o l
Understanding the Interface
......................................... 6-5
................................. 6-2
............................ 6-4
........................ 6-8
........................ 6-9
.................. 6-2
Working with the Fixed-Point Tool
Fixed-Point Tool Workflow
Prerequisites for Using the Fixed-Point Tool
Running the Model to Gather a Floating-Point
Benchmark
Proposing Scaling
Examining Results to Resolve Conflicts
Applying Scaling
Storing Reference Run
Verifying New Settings
Automatic Scaling of Simulink Signal Objects
Introduction to the Tutorial
Opening the Demo Model
About the Demo Model
Simulation Setup
Idealized Feedback Design
Digital Controller R ealization
Tutorial: Feedback Controller
Before You Begin
Initial Guess at Scaling
Data Type Override
Automatic Scaling
.................................... 6-17
................................. 6-18
.................................. 6-24
.................................. 6-29
.................................. 6-33
................................ 6-37
................................. 6-41
.......................... 6-11
............................. 6-25
............................. 6-25
........................ 6-27
........................... 6-27
............................. 6-28
.......................... 6-29
............................ 6-34
.................. 6-11
....................... 6-30
...................... 6-33
........... 6-16
............... 6-20
.......... 6-26
Example: Using the Fixed-Point Tool to Autoscale
Results from Multiple Simulations
About this Example
................................ 6-47
................ 6-47
ix
Page 10

Running the Simulation ............................ 6-49
Tutorial: Producing Lookup Table Data
7
Overview ......................................... 7-2
Worst-Case Error for a Lookup Table
What Is Worst-Case Error for a Lookup Table?
Example: Square Root Function
Creating Lookup Tables for a Sine Function
Introduction
Parameters for fixpt_look1_func_approx
Setting Function Parameters for the Lookup Table
Example: Using errmax with Unrestricted Spacing
Example: Using nptsmax with Unrestricted Spacing
Example: Using errmax with Even Spacing
Example: Using nptsmax with Even Spacing
Example: Using errmax with Power of Two Spacing
Example: Using nptsmax with Power of Two Spacing
Specifying Both errmax and nptsmax
Comparison of Example R esults
Summary for Using Lookup Table Approximation
Functions
Effects of Spacing on Speed, Error, and Memory
Usage
Criteria for Comparing Types of Breakpoint Spacing
Model That Illustrates Effects of Breakpoint Spacing
Data ROM Required for Each Lookup Table
Determination of Out-of-Range Inputs
How the Lookup Tables Determine Input Location
Interpolation for Each Lookup Table
Summary of the Effects of Breakpoint Spacing
...................................... 7-6
...................... 7-19
....................................... 7-20
.......................................... 7-21
................ 7-3
......... 7-3
..................... 7-3
......... 7-6
............... 7-6
............ 7-13
........... 7-14
................. 7-18
............ 7-22
................ 7-23
.................. 7-26
.......... 7-28
...... 7-8
...... 7-8
.... 7-11
..... 7-15
.... 7-17
..... 7-21
.... 7-21
...... 7-24
x Contents
Page 11

Code Generation
8
Overview ......................................... 8-2
Code Generation Support
Introduction
Languages
Data Types
Rounding Modes
Overflow H a ndling
Blocks
Scaling
Accelerating Fixed-Point Models
Using External Mode or Ra pid Simulation Target
Introduction
External Mode
Rapid Simulation Target
Optimizing Your Generated Code
Introduction
Restrict Data Type Word Lengths
Avoid Fixed-Point Scalings with Bias
Wrap and Round to Floor or Simplest
Limit the Use of Custom Storage Classes
Limit the Use of Unevenly Spaced Lookup Tables
Minimize the Variety of Similar Fixed-Point Utility
Functions
Handle Net Slope Correction
...................................... 8-3
....................................... 8-3
....................................... 8-3
.................................. 8-4
................................ 8-4
........................................... 8-4
.......................................... 8-4
...................................... 8-7
.................................... 8-7
...................................... 8-9
...................................... 8-13
.......................... 8-3
.................... 8-5
........................... 8-8
................... 8-9
.................... 8-10
................. 8-11
................. 8-11
.............. 8-12
........................ 8-14
.... 8-7
....... 8-13
Optimizing Your Generated Code with the Model
Advisor
Introduction
Optimize Lookup Table Data
Reduce Cumbersome Multiplications
Optimize the Number of Multiply and Divide Operations
Reduce Multiplies and Divides with Nonzero Bias
Eliminate Mismatched Scaling
Minimize Internal Conversion Issues
......................................... 8-24
...................................... 8-24
........................ 8-25
................. 8-25
....... 8-27
...................... 8-27
................. 8-29
.. 8-26
xi
Page 12

Use the Most Efficient Rounding ..................... 8-31
Optimize Net Slope Correction
....................... 8-33
Fixed-Point Advisor Reference
9
Fixed-Point Advisor ............................... 9-2
Fixed-Point Advisor Overview
....................... 9-3
Prepare Model for Conversion
Prepare Model for Conversion Overview
Verify model simulation settings
Verify update diagram status
Address unsupported blocks
Set up signal logging
Create simulation reference data
Verify Fixed-Point Conversion Guidelines Overview
Check model configuration data validity diagnostic
parameters settings
Implement logic signals as Boolean data
Check for proper bus usage
Simulation range checking
Check for implicit signal resolution
Prepare for Data Typing and Scaling
Prepare for Data Typing and Scaling Overview
Remove output data type inheritance
Relax input data type settings
Verify Stateflow charts have strong data typing with
Simulink
Remove redundant specification between signal objects and
blocks
Verify hardware selection
Specify block minimum and maximum values
Summarize blocks with locked scaling
...................................... 9-26
......................................... 9-27
............................... 9-13
............................. 9-16
...................... 9-6
............... 9-7
..................... 9-8
........................ 9-10
......................... 9-11
..................... 9-14
............... 9-17
......................... 9-18
.......................... 9-19
................... 9-20
................ 9-21
......... 9-22
................. 9-23
....................... 9-24
........................... 9-29
.......... 9-30
................. 9-31
..... 9-15
xii Contents
Perform Data Typing and Scaling
Perform Data Typing and Scal ing Ov erview
Propose data type and scaling
................... 9-32
....................... 9-34
............ 9-33
Page 13

Check for numerical errors .......................... 9-40
Analyze logged signals
Summarize data types
............................. 9-41
............................. 9-42
Prepare for Code Generation
Prepare for Code Generation Overview
Identify blocks that generate expensive saturation and
rounding code
Identify questionable fixed-point operations
.................................. 9-46
....................... 9-43
................ 9-44
............ 9-48
Writing Fixed-Point S-Functions
A
Data Type Support ................................. A-2
Supported Data Types
The Treatment of Integers
Data Type Override
Structure of the S-Fun ction
Storage Containers
Introduction
Storage Containers in Simulation
Storage Containers in Code Generation
...................................... A-7
............................. A-2
.......................... A-3
................................ A-3
........................ A-5
................................ A-7
.................... A-7
............... A-11
Data Type IDs
The Assignment of Data Type IDs
Registering Data Types
Setting and Getting Data Types
Getting InformationAboutDataTypes
Converting Data Types
Overflow Han dling and Rounding Methods
Tokens for Overflow Handling and Rounding Methods
Overflow Lo gg ing Structure
Creating MEX-Files
Introduction
..................................... A-14
.................... A-14
............................ A-15
...................... A-17
................ A-18
............................. A-20
......................... A-22
................................ A-24
...................................... A-24
.......... A-21
... A-21
xiii
Page 14

MEX-Files on UNIX ............................... A-24
MEX-Files on Windows
............................. A-24
Fixed-Point S-Function Examples
List of Fixed-Point S-Function Examples
Getting the Input Port Data Type
Setting the Output Port Data Type
Interpreting an Input Value
Writing an Output Value
Using the Input D ata Type to Determine the Output Data
Type
.......................................... A-34
API F unction Reference
......................... A-30
........................... A-32
............................ A-35
................... A-26
.............. A-26
.................... A-27
................... A-29
Index
xiv Contents
Page 15
Getting Started
• “Product Overview” on page 1-2
• “What You Need to Get Started” on page 1-4
• “Physical Quantities and Measurement Scales” on page 1-7
• “Why Use Fixed-Point Hardware?” on page 1-15
®
• “Why Use the Simulink
• “The Development Cycle” on page 1-18
®
• “Simulink
Fixed Point Software Features” on page 1-20
Fixed Point Software?” on page 1-17
1
• “Example: Converting from Doubles to Fixed Point” on page 1-38
Page 16

1 Getting Started
Product Overview
The Simulink®Fixed Point™ software enables the intrinsic fixed-point
capabilities of the following products across the Simulink
• Simulink
• Stateflow
• Signal Processing Blockset™
• Communications Blockset™
• Target Support Package™
• Target Support Package
• Target Support Package
• Target Support Package
• VideoandImageProcessingBlockset™
The following products can be used to generate fixed-point code when used
with the Simulink Fixed Point software:
• Real-Time Workshop
• Real-Time Workshop®Embedded Coder™
• Simulink
• Stateflow
®
®
HDL Coder™
®
Coder™
®
®
product family:
1-2
• xPC Target™
You can use the Simulink Fixed Point software with Simulink products to
simulate effects commonly encountered in fixed-poin t systems for applications
such as control systems and time-domain filtering. The Simulink Fixed Point
software includes these major features:
• Integer, fractional, and generalized fixed-point data types
- Unsigned and two’s complement formats
- Word sizes in simulation from 1 to 128 bits
Page 17

Product Overview
• Floating-point data types
- IEEE-style singles and doubles
- A nonstandard IEEE-style data type, where the fraction can range from
1to52bitsandtheexponentcanrangefrom1to11bits
• Methods for overflow handling, scaling, and rounding of fixed-point data
types
• Tools that facilitate
- Collection of minimum and maximum simulation values
- Optimization of scaling parameters
- Display of input and output signals
In addition, you can generate C code and HDL code for execution on a
fixed-point embedded processor with the Real-Time Workshop product.
The generated code uses only integer types and automatically includes all
operations, such as shifts, needed to account for differences in fixed-point
locations.
The Simulink Fixed Point softwar e features l isted ab ove are a l l supported for
fixed-point Simulink blocks. Other products in the Simulink family with
fixed-point capabilities might support some or all of these features. To get
specific information about the fixed-point features supported by a particular
product, refer to the documentation for that product. For example,
• For information on fixed-point support in the Signal Processing Blockset
software, refer to “Working with Fixed-Point Data ” in the Sig nal Processing
Blockset documentation.
• For information on fixed-point support in the Stateflow software, refer
to “Using Fixed-Point Data in Stateflow Charts” in the Stateflow
documentation.
1-3
Page 18
1 Getting Started
What You Need to Get Started
In this section...
“Installation” on page 1-4
“Sharing Fixed-Point Models” on page 1-4
“Demos” on page 1-5
Installation
To determine if the Simulink Fixed Point so ftware is installed on your system,
type
ver
at the MATLAB®command line. When you enter this command, the MATLAB
Command Window displays information about the version of MATLAB
software you are running, including a list of installed a dd-on products and
their version numbers . Check the list to see if the Simulink Fixed Point
software appears.
1-4
For information about installing this product, see your platform-specific
MATLAB Installation Guide.
If you experience installation difficulties and have W eb access, look for
the installation and license information at the MathWorks™ Web site
(
http://www.mathworks.com/support).
Sharing Fixed-Point Models
You can edit a model containing fixed-point blocks without the Simulink
Fixed Point software. However, you must have a Simulink Fixed Point
software license to
• Update a Simulink diagram (Ctrl+D) containing fixed -point data types
• Run a model containing fixed-point data ty pes
• Generate code from a model containing fixed-point data types
• Log the minimum and maximum values produced by a simulation
Page 19

What You Need to Get Started
• Automatically scale the output of a model using the autoscaling tool
If you do not have the Simulink Fixed Point software, you can work with
a model containing Simulink blocks with fixed-point settings by doing the
following:
1 Access the Fixed-Point Tool from the model by selecting
Tools > Fixed-Point > Fixed-Point Tool.
2 Set the Fixed-point instrumentation mode param eter to Force off
model wide.
3 Set the Data type override parameter to True doubles or True singles
model wide.
Note If a parameter in your model specifies a fi object, you can prevent
the checkout of a Fixed-Point Toolbo x™ license by setting the
DataTypeOverride
property to TrueDoubles.See“Licensing”inthe
fipref
Fixed-Point Toolbox User’s Guide for more information.
This procedure allows you to share fixed-point Simulink models among people
in your company who may or m ay not have the Simulink Fixed Point software.
Demos
To help you learn how to use the Simulink Fixed Point software, a collection
of demos is provided. You can explore specific features of the product by
changing the parameters of Simulink blocks with fixed-point support and
observing the effects of those changes.
The demos are divided into the following groups:
• Application Exam pl e s
• Feature Demonstrations
• Filters
• Tools and Utilities
1-5
Page 20

1 Getting Started
• Custom S-Function Examples
All demos are located in the
To view the complete list of demos, see Simulink Fixed Point Demos.
fxpdemos directory.
1-6
Page 21

Physical Quantities and Measurement Scales
Physical Quantities and Measurement Scales
In this section...
“Introduction” on page 1-7
“Selecting a Measurement Scale” on page 1-8
“Example: Selecting a Measurement Scale” on page 1-10
Introduction
The decision to use fixed-point hardware is simply a choice to represent
numbers in a particular form. This representation often offers advantages
in terms of the power consumption, size, memo ry usage, speed, and cost of
the final product.
A measurement of a physical quantity can take many numerical forms. For
example, the boiling point of water is 100 degrees Celsius, 212 degrees
Fahrenheit, 373 kelvin, or 671.4 degrees Rankine. No matter what number is
given, the physical quantity is exactly the same. The numbers are different
because four different scales are u sed.
Well known standard scales like Celsius are very convenient for the exchange
of information. However, there are situations where it makes sense to create
and use unique nonstandard scales. These situations usually involve making
the most of a limited resource.
For example, nonstandard scales allow map makers to get the maximum
detail on a fixed size sheet of paper. A typical road atlas of the USA will show
each state on a two-page display. The scale of inches to miles will be unique
for most states. By using a large ratio of miles to inches, all of Texas can fit
on two pages. Using the same scale for Rhode Island would make poor use of
the page. Using a much smaller ratio of miles to inches would allow Rhode
Island to be shown with the maximum possible detail.
Fitting measurements of a variable inside an embedded processor is similar to
fitting a state map on a piece of paper. The map scale should allow all the
boundaries of the state to fit on the page. Similarly, the binary scale for a
measurement should allow the maximum and minimum possible values to
fit. The map scale should also make the most of the paper in order to get
1-7
Page 22

1 Getting Started
maximum detail. Similarly, the binary scale for a measurement should make
the most of the processor in order to get maximum precision.
Use of standard scales for measurements has definite compatibility
advantages. However, there are times when it is worthwhile to break
convention and use a unique n onstandard scale. There are also occasions
when a mix of uniqueness and compatibility makes sense. See the sections
that follow for m ore information.
Selecting a Measurement Scale
Suppose that you want to make measurements of the temperature of liquid
water, and that you want to represent these measurements using 8-bit
unsigned integers. Fortunately, the temperature ran ge of liquid water i s
limited. No matter what scale you use, liquid water can only go from the
freezing point to the boiling point. T herefore, this is the range of temperatures
that you must capture using just the 256 possible 8-bit values: 0,1,2,...,255.
One approach to representing the temperatures is to use a standard scale. For
example, the units for the integers could be Celsius. Hence, the integers 0 and
100 represent water at the freezing point and at the boiling point, re spectively.
On the upside, this scale gives a trivial conversion from the integers to degrees
Celsius. Onthedownside,thenumbers101to255areunused.Byusingthis
standard scale, more than 60% of the number range has been wasted.
1-8
A second approach is to use a nonstandard scale. In this scale, the integers
0 and 255 represent water at the freezing point and at the boiling point,
respectively. On the upside, this scale gives maximum precision since there
are 254 values between freezing and boiling instead of just 99. On the
downside, the units are roughly 0.3921568 degree Celsius per bit so the
conversion to Celsius requires division by 2.55, which is a relatively expensive
operation on most fixed-point processors.
A third approach is to use a “semistandard” scale. For example, the integers
0 and 200 could represent water at the freezing point and at the boiling
point, respectively. The units for this scale are 0.5 degrees Celsius per bit.
On the downside, this scale doesn’t use the numbers from 201 to 255, which
represents a waste of more than 21%. On the upside, this scale permits
relatively easy conversion to a standard scale. The conversion to Celsius
involves division by 2, which is a very easy shift o pe ration on most processors.
Page 23

Physical Quantities and Measurement Scales
Measurement Scales: Beyond Multiplication
One of the key operations in converting from one scale to another is
multiplication. The preceding case s tudy gave three examples of conversions
from a quantized integer value Q to a real-world Celsius value V that involved
only multiplication:
o
⎧
100
C
Q
⎪
100
bits
⎪
o
⎪
100
255
10
200
bits
o
00
bits
C
C
⎪
V
⎨
⎪
⎪
⎪
⎪
⎩
Conversion
1
Q=
Conversion
2
Conversion Q
3
Graphically, the conversion is a line with slope S, which must pass through
the origin. A line through the origin is called a purely linear conversion.
Restricting yourself to a purely linear conversion can be very wasteful and it
is often better to use the general equation of a line:
1
2
3
V = SQ + B.
By adding a bias term B, you can obtain greater precision when quantizing
to a limited number of bits.
The general equation of a line gives a very useful conversion t o a quantized
scale. However, like all quantization methods, the p r ecision is limited and
errors can be introduced by the conversion. The general equation of a line
with quantization error is given by
V SQ B Error=+± .
If the quantized value Q is rounded to the nearest representable number, then
S
−≤ ≤
Error
22
S
.
1-9
Page 24

1 Getting Started
That is, the am ount of quantization error is determined by both the number of
bits and by the scale. This scenario represents the best-case error. For other
rounding schemes, the error can be twice as large.
Example: Selecting a Measurement Scale
On typical electronically controlled internal combustion engines, the flow
of fuel is regulated to obtain the desired ratio of air to fuel in the cylinders
just prior to combustion. Therefore, knowledge of the current air flow rate
is required. Some manufacturers us e sensors that directly measure air flow,
while other manufacturers calculate air flow from measurements of related
signals. The relationship of these variables is derived from the ideal gas
equation. The ideal gas equation involves division by air temperature. For
proper results, an absolute temperature scale such as kelvin or Rankine
must be used in the equation. However, quantization di rectly to an absolute
temperature scale would cause needlessly large quantization errors.
The temperature of the air flowing into the engine has a limited range. On a
typical engine, the radiator is designed to keep the block below the boiling
point of the cooling fluid. Assume a maximum of 225
air flows through the intake manifold, it can be heated to this maximum
temperature. For a cold start in an extreme climate, the temperature can be
as low as -60
of interest is 222 K to 380 K.
o
F (222 K). Therefore, using the absolute kelvin scale, the range
o
F (380 K). As the
1-10
Theairtemperatureneedstobequantizedforprocessingbytheembedded
control system. Assuming an unrealistic quantization to 3-bit unsigned
numbers: 0,1,2,.. .,7 , the pu rel y linear conversion with maximum precision is
38075 K
VQ=
The quantized conversion and range of interest are shown in the following
figure.
.
bit.
Page 25

Physical Quantities and Measurement Scales
Notice that there are 7.5 possible quantization values. This is because only
half of the first bit corresponds to temperatures (real-world values) greater
than zero.
The quantization error is –25.33 K/bit ≤ Error ≤ 25.33 K/bit.
1-11
Page 26

1 Getting Started
⎝
⎠
⎝
⎠
The range of interest of the quantized conversion and the absolute value of
the quantized error are shown in the following figure.
1-12
alternative to the purely linear conversion, consider the general linear
As an
ersion with maxim um precision:
conv
−
380 222
K K
⎛
VQ=
⎜
8
⎞
++
222 0 5
⎟
K
380 222
⎛
.
⎜
−
K K
8
⎞
⎟
Page 27

Physical Quantities and Measurement Scales
The quantized conversion and range of interest are shown in the following
figure.
The quantization error is -9.875 K/bit ≤ Error ≤ 9.875 K/bit, which is
approximately 2.5 times smaller than the error associated with the purely
linear conversion.
1-13
Page 28

1 Getting Started
The range of interest of the quantized conversion and the absolute value of
the quantized error are shown in the following figure.
1-14
Clearly, the general linear scale gives much better precision than the purely
linear scale over the range of interest.
Page 29

Why Use Fixed-Point Hardware?
Digital hardware is becoming the primary means by which control systems
and signal processing filters are implemented. Digital hardware can be
classified as either off-the-shelf hardware (for example, microcontrollers,
microprocessors, general-purpose processors, and digital signal processors)
or custom hardware. Within these two types of hardware, there are many
architecture designs. These designs range from systems with a single
instruction, single data stream processing unit to systems with multiple
instruction, multiple data stream processing units.
Within digital hardware, numbers are represented as either fixed-point or
floating-point data types. For both these data types, word sizes are fixed at
a set num b e r of bits. However, the dynamic range of fixed-p oi nt values is
much less than floating-point values with equivalent word sizes. Therefore,
in order to avoid overflow or unreasonable quantization errors, fixed-point
values must be scaled. Since floating-point processors can greatly simplify the
real-time implementation of a control law or digital filter, and floating-point
numbers can effectively approximate real-world numbers, then w hy use a
microcontroller or processor w ith fixed-point hardw a re support?
Why Use Fixed-Point Hardware?
• Size and Power Consumption — The logic circuits of fixed-point
hardware are much less complicated than those of floating-point hardware.
This means that the fixed-point chip size is sm aller with less power
consumption when compared with floating-point hardware. For example,
consider a portable telephone where one of the product des ign goals is to
make it as portable (small and light) as possible. If one of today’s high-end
floating-point, general-purpose processors is used, a large heat sink and
batterywouldalsobeneeded,resulting in a costly, large, and heavy
portable phone.
• Memory Usage and Speed — In general fixed-point calculations require
less memory and less processor time to perform.
• Cost — Fixed-point hardware is more cost effective where price/cost is
an important consideration. Whe n digital hardware is used in a product,
especially mass-produced products, fixed-point hardware costs much less
than floating-point hardware and can result in significant savings.
After making the decision to use fixed-point hardware, the next step is to
choose a method for implementing the dynamic system (for example, control
1-15
Page 30

1 Getting Started
system or digital filter). Floating-point software emulation libraries are
generally ruled out because of timing or memory size constraints. Therefore,
you are left with fixed-point math where binary integer values a re scaled.
1-16
Page 31

Why Use the Simulink®Fixed Point™ S oftwa re?
Why Use the Simulink Fixed Point Software?
The Simulink Fixed Point software allows you to efficiently design control
systems and digital filters that you will implement using fixed-point
arithmetic. With the Simulink Fixed Point software, you can construct
Simulink and Stateflow models that contain detailed fixed-point info rmation
about your systems. You can then perform bit-true simulations with the
models to observe the effects of limited range and precision on your designs.
You can configure the Fixed-Point Tool to automatically log the overflows,
saturations, and signal extremes of your simulations. You can also use it to
automate scaling decisions and to compare your fixed-point implementations
against idealized, floating-point benchmark s.
You can use the Simulink Fixed Point software with the R eal-Time
Workshop product to automatically generate efficient, integer-only C code
representations of y our designs. You can use this C code in a production
target or for rapid prototyping. You can also use the Simulink Fixed Point
software with the Real-Time Workshop Embedded Coder product to generate
real-time C code for use on an integer production, embedded target.
1-17
Page 32

1 Getting Started
The Development Cycle
The Simulink Fixed Point software provides tools that aid in the developmen t
and testing of fixed-p oint dynamic systems. You directly design dynamic
system models in the Simulink software that are ready for implementation on
fixed-point hardware. The development cycle is illustrated below.
1-18
Page 33

The Development Cycle
Using the MATLAB, Simulink, and Simulink Fixed Point software, you follow
these steps of the development cycle:
1 Model the system (plant or signal source) within the Simulink software
using double-precision numbers. Typically, the model will contain
nonlinear elements.
2 Design and simulate a fixed-point dynamic system (for example, a control
system or digital filter) with fixed-point Simulink blocks that meets the
design, performance, and other constraints.
3 Analyze the results and go back to step 1 if needed.
When you have met the design requirements , you can use the model as a
specification for creating production code using the Real-Time W orkshop
product.
The above steps interact strongly. In steps 1 and 2, there is a significant
amount of freedom to select different solutions. Generally, you fine-tune the
model based upon feedback from the results of the current implementation
(step 3). There is no specific modeling approach. For example, you may obtain
models from first principles such as equations of motion, or from a frequency
response such as a sine sweep. There are many controllers that meet the
same frequency-domain or time-domain specifications. Additionally, for each
controller there are an infinite number of realizations.
The Simulink Fixed Point software helps expedite the design cycle by allowing
you to simulate the effects of various fixed-point controller and digital filter
structures.
1-19
Page 34

1 Getting Started
Simulink Fixed Point Software Features
In this section...
“Configuring Blocks with Fixed-Point Output” on page 1-20
“Configuring B locks with Fixed-Point Parameters” on pa ge 1-29
“Passing Fixed-Point Data Between Simulink Models and the MATLAB
Software” on page 1-32
“Automatic Scaling Tools” on page 1-36
“Code Generation Capabilities” on page 1-37
Configuring Blocks with Fixed-Point Output
You can create a fi xed-point model by configuring Simulink blocks to output
fixed-point signals. Simulink blocks that support fixed-point output provide
parameters that allow you to specify whether a block should output fixed-point
signals and, if so, the size, scaling, and other attributes of the fixed-point
output. These parameters typically appear on the Signal Attributes pane
of the b lock’s parameter dialog box.
1-20
Page 35

Simulink®Fixed Point™ Software Features
The following sections explain how to use these parameters to configure a
block for fixed-point output.
• “Specifying the Output Data Type and Scaling” on page 1-21
• “Specifying Fixed-Point Data Types with the Data Type Assistant” on page
1-24
• “Rounding” on page 1-27
• “Overflow Handling” on page 1-28
• “Locking the Output Data TypeSetting”onpage1-28
• “Real-World Values Versus Stored Integer Values” on page 1-28
Specifying the Output Data Type and Scaling
Many Simulink blocks allow you to specify an output data type and scaling
using a parameter that appears on the block dialog box. This parameter
(typically na med Output data type) provides a pull-down menu that lists the
data ty pe s a pa rticu l ar block supports. In general, you can specify the output
data type as a rule that inherits a data type, a built-in data type, an expression
1-21
Page 36

1 Getting Started
that evaluates to a data type, or a Simulink data type object. See “Specifying
BlockOutputDataTypes”inSimulink User’s Guide for more information.
The Simulink Fixed Point software enables you to configure Simulink blocks
with:
• Fixed-point data types
Fixed-point data types are characterized by the ir word size in bits and by
their binary point—the means by which fixed-point values are scaled. See
“Fixed-Point N umbers” on page 2-3 for more information.
• Floating-point data types
Floating-point data types are characterized by their sign bit, fraction
(mantissa) field, and exponent field. See “Floating-Point Numbers” on page
2-21 for more information.
To configure block s with Simulink Fixed P oi nt data types, specify the data
type parameter on a block dialog box as an expression that evaluates to a
data type. Alternatively, you can use an assistant that simplifies the task of
entering data type expressions (see “Specifying Fixed-Point Data Types wi th
the Data Type Assistant” on page 1-24). The sections that follow describe
varieties of fixed-point and floating-point data types, and the corresponding
functions that you use to specify them.
1-22
Integers. You can specify unsigned and signed integers with the
sint functions, respectively.
For example, to configure a 16-bit unsigned integer via the block dialog box,
specify the Output data type parameter as
signed integer, specify the Output data type parameter as
For integer data types, the d efault binary point is a ssumed to lie to the right
of all bits.
Fractional Numbers. You can specify unsigned a nd signed fractional
numbers w ith the
For example, to configure the output a s a 16-bit unsigned fractional number
via the block dialog box, specify the Output data type parameter to be
ufrac and sfrac functions, respectively.
uint(16). To configure a 16-bit
uint and
sint(16).
Page 37

Simulink®Fixed Point™ Software Features
ufrac(16). To configure a 16-bit signed fractional number, specify Output
data type to be
sfrac(16).
Fractional numbers are distinguished from integers by their default scaling.
Whereas signed and unsigned integer data types have a default binary point
to the right of all bits, unsigned fractional data types have a default binary
point to the left of all bits, while signed fractional data types have a default
binary point to the right of the sign bit.
Bothunsignedandsignedfractionaldatatypessupportguard bits,which
act to guard against overflow. For example,
sfrac(16,4) specifies a 16-bit
signed fractional number with 4 guard bits. The guard bits lie to the left
of the default binary point.
Generalized Fixed-Point Numbers. You can specify unsigned and
signed generalized fixed-point numbers with th e
ufix and sfix functions,
respectively.
For example, to configure the outputasa16-bitunsignedgeneralized
fixed-point number via the block dialog box, specify the Output data
type parameter to be
fixed-point number, specify Output data type to be
ufix(16). To configure a 16-bit signed generalized
sfix(16).
Generalized fixed-point numbers are distinguished from integers and
fractionals by the absence of a default scaling. For these data types, a block
typically inherits its scaling from another block.
Note Alternatively, you can use the fixdt function to create integer,
fractional, and generalized fixed-point objects. The
fixdt function also allo ws
you to specify scaling for fixed-point data types.
Floating-Point Numbers. Th e Simulink Fixed Point software supports
single-precision and double-precision floating-point numbers as defined by
the IEEE
specify floating-point numbers with the Simulink
®
Standard 754-1985 for Binary Floating-Point Arithmetic. You can
float function.
Forexample,toconfiguretheoutputas a single-precision floating-point
number via the block dialog box, specify the Output data type parameter
1-23
Page 38

1 Getting Started
as float( 'single'). To configure a double-precision floating-point number,
specify Output data type as
float('double').
Specifying Fixed-Point Data Types with the Data Type Assistant
The Data Type Assistant is an interactive graphical tool that simplifies
the task of specifying data typ es for Simulink blocks and data objects. The
assistant appears on block and object dialog boxes, adj acent to parameters
that provide data type control, such as the Output data type parameter. For
more information abo ut accessing and interacting with the assistant, see
“Using the Data Type Assistant” in Simulink User’s Guide.
You can use the Data Type Assistant to specify a fixed-point data type.
When you select
for describing additional attributes of a fixed-point data type, as shown in
this example:
Fixed point in the Mode field, the assistant displays fields
1-24
Page 39

Simulink®Fixed Point™ Software Features
You can set the following fixed-point attributes:
Signedness. Select whether you want the fixed-point data to be
Signed
or Unsigned. Signed data can represent positive and negative quantities.
Unsigned data represents positive values only.
Word length. Specify the size (in bits) of the word that will hold the
quantized integer. Large word sizes represent large quantities with greater
precision than small word sizes. Fixed-point word sizes up to 128 bits are
supported for simulation.
Scaling. Specify the method for scaling your fixed-point data to avoid
overflow conditions and minimize quantization errors. You can select t h e
following scaling modes:
1-25
Page 40

1 Getting Started
Scaling
Mode
Binary
point
Slope and
bias
Description
If you select this mode, the assistant displays the Fraction length field,
specifying the binary poi n t location.
Binary points can be positive or negative integers. A positiv e integer mov es the
binary point left of the rightmost bit by that amount. For example, an entry of 2
sets the binary point in front of the second bit from the right. A negative integer
moves the binary point further right of the rightmost bit by that amount, as
in this example:
See “Binary-Point-Only Scaling” on page 2-6 for more information.
Ifyouselectthismode,theassistantdisplaysfieldsforenteringtheSlope
and Bias.
• Slope can be any positive real number.
• Bias can be any real number.
1-26
Best
precision
See “Slope and Bias Scaling” on page 2-6 for more information.
If you select this mode, the block scales a constant vector or matrix such that
the precision of its elements is maximized. This mode is available only for
particular blocks.
See “Constant Scaling for Best Precision” on page 2-12 for more information.
Page 41

Simulink®Fixed Point™ Software Features
Calculate Best-Precision Scaling. The Simulink Fixed Point software
can automatically calculate “best-precision” values for both
Binary point
and Slope and bias scaling, based on the values that you specify for other
parameters on the dialog box. To calculate best-precision-scaling values
automatically, enter values for the block’s Output minimum and Output
maximum parameters. Afterward, click the Calculate Best-Precision
Scaling button in the assistant.
Rounding
You specify how fixed-point numbers are rounded with the Integer rounding
mode parameter. The following rounding modes are supported:
•
Ceiling — This mode rounds toward positive infinity and is equivalent to
the MATLAB
Convergent — This mode rounds toward the nearest representable
•
number, with ties rounding to the nearest even integer. Convergent
rounding is equivalent to the Fixed-Point Toolbox
Floor — This mode rounds toward n egative infinity and is equivalent to
•
the MATLAB
ceil function.
convergent function.
floor function.
Nearest — This mode rounds toward the nearest representable number,
•
with the exact midpoint rounded toward positive infinity. Rounding toward
nearestisequivalenttotheFixed-PointToolbox
Round — This mode rounds to the nearest representable number, with ties
•
nearest function.
for positive numbers rounding in the direction of positive infinity and ties
for negative num bers rounding in the direction o f negative infinity. This
mode is equivalent to the Fixed-Point Toolbox
Simplest — This mode automatically chooses between round toward floor
•
round function.
and round toward zero to produce generated code that is as efficient as
possible.
•
Zero — This mode rounds toward zero and is equivalent to the MATLAB
fix function.
For more information about each of these rounding modes, see “Rounding”
on page 3-3.
1-27
Page 42
1 Getting Started
Overflow Handling
You control how overflow conditions are handled for fixed-point ope rations
with the Saturate on integer overflow check box.
If this box is selected, overflows saturate to either the maximum or minimum
value represented by the data type. For example, an overflow associated with
a signed 8-bit integer can saturate to -128 or 127.
If this box is not selected, overf lows wrap to the appropriate value that is
representable by the data type. For example, the number 130 does not fit in a
signed 8-bit integer, and would wrap to -126.
Locking the Output Data Type Setting
If the output data type is a generalized fixed-point number, you have the
option of locking its output data type setting by selecting the Lock output
data type setting against changes by the fixed-point tools check box.
When locked, the Fixed-Point Tool and automatic scaling script
do not change the output data type setting. For more information, see
“Automatic Scaling Tools” on page 1-36. O therw ise, the Fixed-P oint Tool and
autofixexp script are free to adjust the output data type setting.
autofixexp
Real-World Values Versus Stored Integer Values
YoucanconfigureDataTypeConversionblocks to treat signals as real-world
values or as stored integers with the Input and output to have equal
parameter.
1-28
Page 43

Simulink®Fixed Point™ Software Features
The possible values are Real World Value (RWV) and Stored Integer
.
(SI)
In terms of the variables defined in “Scaling” on page 2-5, the real-world
value is given by V and the stored integer value is given by Q.Youmaywant
to treat numbers as stored integer values if you are modeling hardware that
produces integers as output.
Configuring Blocks with Fixed-Point Parameters
Certain Simulink blocks allow you t o specify fixed-point numbers as the
values of parameters used to compute the block’s output, e.g., the Gain
parameter of a Gain block.
1-29
Page 44

1 Getting Started
Note S-functions and the Stateflow Chart block do not support fixed-point
parameters.
You can specify a fixed-point parameter value either directly by setting the
value of the parameter to an express ion that evaluates to a
indirectly by setting the value of the parameter to an expression that refers to
a fixed-point
• “Specifying Fixed-Point V a lues Directly” on page 1-30
• “Specifying Fixed-Point Values Via Parameter Objects” on page 1-31
Note Simulating or performing data type override on a model with fi objects
requires a Fixed-Point Toolbox software license. See “Sharing Fixed-Po int
Models” on page 1-4 for more information.
Simulink.Parameter object.
fi object, or
1-30
Specifying Fixed-Point Values Directly
You can specify fixed-point values for block parameters using fi objects (see
“Working with fi Objects” in the Fixed-Point Toolbox User’s Guide for more
information). In the block dialog’s parameter field, simply enter the name of a
fi object or an expression that includes the fi constructor function.
For example, entering the expression
fi(3.3,true,8,3)
as the Constant value parameter for the Constant block specifies a signed
fixed-point value of 3.3, with a word length of 8 bits and a fraction length
of 3 bits.
Page 45

Simulink®Fixed Point™ Software Features
Specifying Fixed-Point Values Via Parameter Objects
You can specify fixed-point parameter objects for block parameters using
instances of the
object, either specify a
specify the relevant fixed-point data type for the parameter object’s
property.
For example, suppose you want to create a fixed-point constant in your model.
You could do this using a fixed-point parameter object and a Constant block
as follows:
1 Enter the following command at the M ATLAB prompt to create a n instance
of the
Simulink.Parameter class:
my_fixpt_param = Simulink.Parameter
2 Specify either the name of a fi object or an expression that includes the fi
constructor function as the parameter object’s Value property:
my_fixpt_param.Value = fi(3.3,true,8,3)
Simulink.Parameter class . To create a fixed-point param ete r
fi o bject as the parameter object’s Value property, or
DataType
Alternatively, you can set the parameter object’s Value and DataType
properties separately. In this case, specify the relevant fixed-point data
type using a
or a
fixdt expression. For example, the following commands independently
set the parameter object’s value and data type, using a
the
DataType string:
my_fixpt_param.Value = 3.3;
my_fixpt_param.DataType = 'fixdt(true,8,2^-3,0)'
3 Specify the parameter object as the value of a block’s parameter. For
example,
Simulink.AliasType object, a Simulink.NumericType object,
fixdt expression as
my_fixpt_param specifies the Constant value parameter for the
Constant block in the following model:
Consequently, the Constant block outputs a signed fixed-point value of 3.3,
with a word length of 8 bits and a fraction length of 3 bits.
1-31
Page 46

1 Getting Started
Passing Fixed-P
and the MATLAB So
You can read fixe
models, and the
information f
re are a number of ways in which you can log fixed-point
rom y our models and simulations to the workspace.
oint Data Between Simulink Models
ftware
d-point data from the MATLAB software into your Simulink
Reading Fixed-Point Data from the Workspace
You can read f
model via the
format with a
format, the
To read in
block must
parameter
ixed-point data from the MATLAB workspace into a Simulink
FromWorkspaceblock. Todoso,thedatamustbeinstructure
Fixed-Point Toolbox
From W orkspace block only accepts real, double-precision data.
data, the Interpolate data parameter of the From Workspace
fi
not be selected, and the Form output after final data value by
must be set to anything other than
fi object in the values field. In array
Extrapolation.
Writing Fixed-Point Data to the Workspace
You can wr
theToWor
written
read bac
block.
ite fixed-point output from a model to the MATLAB workspace via
kspace block in either array o r structure format. Fixed-point data
by a To Workspace block to the workspace in structure format can be
k into a Simulink model in structure format by a From Workspace
1-32
Note To
Log fix
dialo
works
For e
MATL
the F
a = fi([sin(0:10)' sin(10:-1:0)'])
a=
write fixed-point data to the workspace as a
ed-point data as a fi object che ck box on the To Workspace block
g. Otherwise, fixed-point data is converted to
pace as
xample, you can use the following code to create a structure in the
AB workspace with a
rom W orkspace block to bring the data into a Simulink model.
double.
fi object in the value s field. You can then use
fi object, select the
double and written to the
Page 47

0 -0.5440
0.8415 0.4121
0.9093 0.9893
0.1411 0.6570
-0.7568 -0.2794
-0.9589 -0.9589
-0.2794 -0.7568
0.6570 0.1411
0.9893 0.9093
0.4121 0.8415
-0.5440 0
DataTypeMode: Fixed-point: binary point scaling
Signed: true
WordLength: 16
FractionLength: 15
RoundMode: nearest
OverflowMode: saturate
ProductMode: FullPrecision
MaxProductWordLength: 128
SumMode: FullPrecision
MaxSumWordLength: 128
CastBeforeSum: true
Simulink®Fixed Point™ Software Features
s.signals.values = a
s=
signals: [1x1 struct]
s.signals.dimensions = 2
s=
signals: [1x1 struct]
s.time = [0:10]'
s=
1-33
Page 48

1 Getting Started
signals: [1x1 struct]
time: [11x1 double]
The From Workspace block in the following model has the fi structure s in
the Data parameter. In the model, the following parameters in the Solver
pane of the Configuration Parameters dialog box have the indicated settings:
• Start time —
0.0
• Stop time — 10.0
• Type — Fixed-step
• Solver — Discre te (no continuous states)
• Fixed-step size (fundamental sample time) — 1.0
1-34
The To Workspace block writes the result of the simulation to the MATLAB
workspace as a
out.signals.values
sim
=
ans
fi structure.
Page 49

Simulink®Fixed Point™ Software Features
0 -8.7041
13.4634 6.5938
14.5488 15.8296
2.2578 10.5117
-12.1089 -4.4707
-15.3428 -15.3428
-4.4707 -12.1089
10.5117 2.2578
15.8296 14.5488
6.5938 13.4634
-8.7041 0
Logging Fixed-Point Signals
Whenfixed-pointsignalsareloggedtotheMATLABworkspaceviasignal
logging, they are always logged as Fixed-Point Toolbox
signal logging for a signal, select the Log signal data option in the signal’s
Signal Properties dialog box. For more information, refer to “Logging
Signals” in Simulink User’s Guide.
fi objects. To enable
When you log signals from a referenced model or Stateflow chart in your
model, the word lengths of
fi objects may be larger than you e xpect. The word
lengths of fixed-point signals in referenced m ode ls and Stateflow charts are
logged as the next larger data storage container size.
Accessing Fixed-Point Block Data During Simulation
The Simulink software provides an application programming interface
(API) that enables programmatic access to block data, such as block inputs
and outputs, parameters, states, and work vectors, while a simulation is
running. You can use this interface to develop MATLAB programs capable of
accessing block data while a simulation is running or to access the data from
the MATLAB command line. Fixed-point signal information is returned to
you via this API as
“Accessing Block Data During Simulation” in Simulink User’s Guide.
fi objects. For more information about the API, refer to
1-35
Page 50

1 Getting Started
Automatic Scali
In addition to th
Fixed Point soft
tools:
• Fixed-Point A
• Fixed-Point T
ware provides you with two automatic scaling (autoscaling)
ng Tools
e features described in the previous sections, the Simulink
dvisor
ool
Fixed-Point Advisor
The Fixed-Po
floating-p
Note After
For more i
To learn h
Fixed-P
int Advisor provides a set of tasks to facilitate converting a
oint model or subsystem to an equivalent fixed-point representation.
conversion, use the Fixed-Point Tool to refine the model scaling.
nformation, see “Fixed-Point Advisor” on page 9-2.
ow to use the Fixed-Point Advisor, see “Working with the
oint Advisor” on page 5-2.
Fixed-Point Tool
The Fix
config
range d
value
value
fixed
ed-Point Tool provides a graphical user interface that allows you to
ure the parameters associated with automatic scaling. The tool collects
ata for model objects, either from design minimum and maximum
s that objects specify explicitly, or from logged minimum and maximum
s that occur during simulation. It uses this information to propose
-point scaling that covers the range with maximum precision.
1-36
g the tool, you can view the simulation results and scalingproposalsfora
Usin
l. A fter reviewing the scaling proposals, y ou can choose whether or not
mode
ply them to objects in your model.
to ap
e To prepare a model for conversion and obtain an initial scaling, first
Not
the Fixed-Point Advisor.
use
Page 51
Simulink®Fixed Point™ Software Features
For m ore information, see “Overview of the Fixed-Point Tool” on page 6-2.
To learn how to use the Fixed-Point Tool, refer to Chapter 6, “Fix ed-Point
Tool”.
Note You can also use the autofixexp script to automatically change the
scaling for each Simulink block that has generalized fixed-point output and
does not have its scaling locked. The script uses the maximum and minimum
values logged during the last simulation run. The scaling is changed such
that the simulation range is covered and the precision is maximized.
Code Generation Capabilities
With the Real-Time Workshop p r oduct, the Simulink Fixed P oint software
can generate C code. The code generated from fixed-point blocks uses only
integer types and automatically includes all operations, such as shifts, needed
to account for differences in fixed-point locations.
You can use the generated code on embedded fixed-point processors or rapid
prototyping systems even if they contain a floating-point processor. The code
is structured so that key operations can be readily replaced by optimized
target-specific libraries that you supply. You can also use Target Language
Compiler to customize the generated code. Refer to Chapter 8, “Code
Generation” for more information about code generation using fixed-point
blocks.
1-37
Page 52

1 Getting Started
Example: Converting from Doubles to Fixed Point
In this section...
“About This Example” on page 1-38
“Block Descriptions” on page 1-39
“Simulations” on page 1-39
About This Example
The purpose of this example is to show you how to simulate a continuous
real-world doubles signal using a generalized fixed-point data type. Although
simple in design, the model gives you an opportunity to explore many of the
important features of the Simulink Fixed Point software, including
• Data types
• Scaling
1-38
• Rounding
• Logging minimum and maximum simulation values to the workspace
• Overflow handling
This example uses the model in the
demo by typing its name at the MATLAB command line:
fxpdemo_dbl2fix
The se ctions that follow describe the model and its simulation results.
fxpdemo_dbl2fix demo. You launch this
Page 53

Example: Converting from Doubles to Fixed Point
Block Descripti
For purposes of t
Generator block
interval
numbers.
The Data Type C
numbers from t
Point data ty
example.
The Data Typ
Fixed Point
double-pre
Simulatio
The follo
binary-p
[-5 5]
pes. For simplicity, the size of the output signal is 5 bits in this
e Conversion (FixPt-to-Dbl) block converts one of the Simulink
data types into a Simulink data type. In this example, it outputs
cision numbers.
ns
wing sections describe how to simulate the model using
oint-only scaling a nd [Slope Bias] scaling.
ons
his documentation example, you configure the Signal
to output a sine wave signal with an amplitude defined on the
. The Signal Generator block always outputs double-precision
onversion (Dbl-to-FixPt) block converts th e double-precision
he Signal Generator block into one of the Simulink F ixed
Binary-Point-Only Scaling
When usi
power-o
mode, t
ng binary-point-only scaling, your goal is to find the optimal
f-two exponent E, as defined in “Scaling” on page 2-5. For this scaling
he fractional slope F is1andthereisnobias.
To run t
1 Confi
2 Configure the Data Type Conversion (Dbl-to-FixPt) block.
he simulation:
gure the Signal Generator block to output a sine wave signal with an
tude defined on the interval
ampli
a Doub
b Set t
c Set
d Cli
le-click the Signal Generator block to open the
og.
dial
he Wave form parameter to
the Amplitude param eter to
ck OK.
[-5 5].
Block Parameters
sine.
5.
1-39
Page 54

1 Getting Started
a Double-click the Dbl-to-FixPt block to open the Block Parameters
dialog.
b Verify that the Output data type parameter is fix dt(1 ,5,2).
fixdt(1,5,2) specifies a 5-bit, signed, fixed-point number with scaling
2^-2, which puts the binary point two p laces to the left of the rightmost
bit. Hence the maximum value is 011.11 = 3.75, a minimum value of
100.00 = -4.00, and the precision is (1/2)
c V erify that the Integer rounding mode parameter is Floor. Floor
2
=0.25.
rounds the fixed-point result toward negative infinity.
d Select the Saturate on integer overflow checkbox to prevent the block
from wrapping on overflow.
e Click OK.
3 Select Simulation > Start in your Simulink model window.
The Scope displays the real-world and fixed-point simulation results.
1-40
Page 55

Example: Converting from Doubles to Fixed Point
The simulation demonstrates the quantization effects of fixed-point
arithmetic. Using a 5-bit word with a precision of (1/2)
2
= 0.25 produces a
discretized output that does not span the full range of the input signal.
If you want to span the complete range of the input signal with 5 bits using
binary-point-only scaling, then your only option is to sacrifice precision.
Hence, the o utput scaling is
2^-1, which puts the binary point one place to
the left of the rightmost bit. This scaling gives a maximum value of 0111.1 =
7.5, a minimum value of 1000.0 = -8.0, and a precision of (1/2)
1
=0.5.
To simulate using a precision o f 0.5, set the Output data type parameter of
the Data Type Conversion (Dbl-to-FixPt) block to
fixdt(1,5,1) and rerun
the simulation.
[Slope Bias] Scaling
When using [Slope Bias] scaling, your goal is to find the optimal fractional
slope F and fixed power-of-two exponent E, as define d in “Scaling” on page
2-5. Thereisnobiasforthisexamplebecausethesinewaveisontheinterval
[-5 5].
To arrive at a value for the slo pe , you beg in by assuming a fix ed power-of-two
exponent of -2. To find the fractional slope, you divide the maximum value of
the sine wave by the maximum value of the scaled 5-bit number. The result
is 5.00/3.75 = 1.3333. The slope (and precision) is 1.3333.(0.25) = 0.3333.
You specify the [Slope Bias] scaling as [0.3333 0] by entering the expression
fixdt(1,5,0.3333,0) as the value of the Output data type parameter.
You could also specify a fixed power-o f-two exponent of -1 and a corresponding
fractional slope of 0.6667. The resulting slope is the same since E is reduced
by 1 bit but F is increased by 1 bit. The Simulink Fixed Point software would
automatically store F as 1.3332 and E as -2 because of the normalization
condition of 1 ≤ F <2.
To run the simulation:
1 Configure the Signal Generator block to output a sine wave signal with an
amplitude defined on the interval
a Double-click the Signal Generator block to open the Block Parameters
[-5 5].
dialog.
1-41
Page 56

1 Getting Started
b Set the Wave form parameter to sine.
c Set the Amplitude parameter to 5.
d Click OK.
2 Configure the Data Type Conversion (Dbl-to-FixPt) block.
a Double-click the Dbl-to-FixPt block to open the Block Parameters
dialog.
b Set the Output data type parameter to fixdt(1,5,0.3333,0) to
specify [Slope Bias] scaling as [0.3333 0].
c V erify that the Integer rounding mode parameter is Floor. Floor
rounds the fixed-point result toward negative infinity.
d Select the Saturate on integer overflow checkbox to prevent the block
from wrapping on overflow.
e Click OK.
3 Select Simulation > Start in your Simulink model window.
1-42
The Scope displays the real-world and fixed-point simulation results.
Page 57

Example: Converting from Doubles to Fixed Point
You do no
of the da
simula
scalin
tneedtofindtheslopeusingthismethod. You need only the range
ta you are simulating and the size of the fixed-point word used in the
tion. You can achieve reasonable simulation results by selecting your
g based on the formula
max value min value
__
()
−
ws
−21
,
where
• max_value isthemaximumvaluetobesimulated.
• min_value is the minimum value to be simulated.
• ws is the word size in bits.
ws
-1isthelargestvalueofawordwithsizews.
• 2
1-43
Page 58

1 Getting Started
For this example, the formula produces a slope of 0.32258.
1-44
Page 59

Data Types and Scaling
• “Overview” on page 2-2
• “Fixed-Point Numbers” on page 2-3
• “Floating-Point Numbers” on page 2-21
2
Page 60

2 Data Types and Scaling
Overview
In digital hardware, numbers are stored in binary words. A binary w ord
is a fixed-length sequence of binary digits (1’s and 0’s). The way in which
hardware components or software functions interpret this sequence of 1’s
and 0’s is described by a data type.
Binary numbers are represented as either fixed-point or floating-point data
types. A fixed-point data type is characterized by the word size in bits, the
binary point, and whether it is signed or unsigned. The binary point is the
means by which fixed-point values are scaled. With the Simulink Fixed Point
software, fixed-point data types can be integers, fractionals, or generalized
fixed-point numbers. The main difference between these data types is their
default binary point.
Floating-point data types are characterized by a sign bit, a fraction (or
mantissa) field, and an exponent field. The blockset adheres to the IEEE
Standard 754-1985 for Binary Floating-Point Arithmetic (referred to simply
as the IEEE Standard 754 throughout this guide) and supports singles,
doubles, and a nonstandard IEEE-style floating-point data type.
2-2
When choosing a data type, you must consider these factors:
• The numerical range of the result
• The precision required of the result
• The associated quantization error (i.e., the rounding mode)
• The method for dealing w ith exceptional arithmetic conditions
These choices depend on your specific application, the computer architecture
used, and the cost of development, among others.
With the Simulink Fixed Point software, you can explore the relationship
between data types, range, precision, and quantization error in the modeling
of dynamic digital systems. With the Real-Time Workshop product, you can
generate production code based on that model.
Page 61

Fixed-Point Numbers
In this section...
“About Fixed-Point Numbers” on page 2-3
“Signed Fixed-Point Numbers” on page 2-4
“Binary Point Interpretation” on page 2-4
“Scaling” on page 2-5
“Quantization” on page 2-7
“Range and Precision” on page 2-9
“Constant Scaling for Best Precision” on page 2-12
“Fixed-Point D ata Type and Scaling Notation” on page 2-15
“Scaled Doubles” on page 2-17
“Example: Port Data Type Display” on page 2-19
Fixed-Point Numbers
About Fixed-Point Numbers
Fixed-point numbers and their data types are characterized by their word
size in bits, binary point, and whether they are signed or unsigned. The
Simulink Fixed Point software supports integers, fixed-point numbers. The
main difference among these data types is their binary point.
Note Fixed-point numbers can haveawordsizesupto128bits.
A common representation of a binary fixed-point number , either signed or
unsigned, is shown in the following figure.
2-3
Page 62

2 Data Types and Scaling
where
• b
are the binary digits (bits)
i
• ws is the word length in bits
• The most significant bit (MSB) is the leftmost bit, and is represented by
location b
ws–1
• The least significant bit (LSB) is the rightmost bit, and is represented
by location b
0
• The binary point is shown four places to the left of the LSB
Signed Fixed-Point Numbers
Computer hardware typically represents the negation of a binary fixed-point
number in three different ways: sign/magnitude, one’s complement, and two’s
complement. Two’s complement is the preferred representation of signed
fixed-point numbers and supported by the Simulink Fixed Point software.
Negation using two’s complement consists of a bit inversion (translation into
one’s complement) followed by the addition of a one. For example, the two’s
complement of 000101 is 111011.
2-4
Whether a fixed-point value is signed or unsigned is usually not encoded
explicitly within the binary word; that is, there is no sign bit. Instead, the
sign information is implicitly defined within the computer architecture.
Binary Point Interpretation
The binary point is the means by which fixed-point numbers are scaled. It is
usually the software that determines the binary p oint. When performing basic
math functions such as addition or subtraction, the hardware uses the same
logic circuits regardless of the value of the scale factor. In essence, the logic
circuits have no knowledge of a scale factor. They are performing signed or
unsigned fixed-point binary algebra as if the binary point is to the right of b
0
.
Page 63

Scaling
The dynamic rang
numbers with equ
minimize quant
ization errors, fixed-point numbers must be scaled.
Fixed-Point Numbers
e of fixed-point numbers is much less than floating-point
ivalent word sizes. To avoid overflow conditions and
With the Simul
whose scaling
linear scalin
available fo
You can repre
ink Fixed Point software, you can select a fixed-point d ata type
is defined by its binary point, or you can select an arbitrary
g that suits your needs. This section presents the scaling choices
r fixed-point data types.
sent a fixed-point number by a general slope and bias encoding
scheme
VVSQB≈= +~,
where
• V is an arb
~
•
is the approximate real-world value.
V
itrarily precise real-world value.
• Q, the stored value, is an integer that encodes V.
E
• S = F 2
is the slope.
• B is the bias.
The slope is partitioned into two components:
E
• 2
specifies the binary point. E is the fixed pow e r- of -two exponent.
• F is the slope adjustment factor. It is normalized such that 1 ≤ F <2.
Note S and B are constants and do not show up in the computer hardware
directly. Only the quantization value Q is stored in computer memory.
The scaling modes available to you within this e ncoding scheme are described
in the sections that follow. For detailed information about how the supported
2-5
Page 64

2 Data Types and Scaling
scaling modes effect fixed-point operations, refer to “Recommendations for
Arithmetic and Scaling” on page 3-32.
Binary-Point-Only Scaling
Binary-point-only or power-of-two scaling involves moving the binary point
within the fixed-point word. The advantage of this scaling mode is to minimize
the number of processor arithmetic operations.
With binary-point-only scaling, the components of the general slope and bias
formula have the following values:
• F =1
• S = F2
• B =0
The scaling of a quantized real-world number is defined by the slope S,which
is restricted to a power of two. The negative of the power-of-two exponent is
called the fraction length. The fraction length is the number of bits to the
right of the binary point. For Binary-Point-Only scaling, specify fixed -point
data types as
E=2E
2-6
• signed types —
• unsigned types — fixdt(0, WordL ength, FractionLength)
Integersareaspecialcaseoffixed-point data types. Integers have a trivial
scaling with slope 1 and bias 0, or equivalently with fraction length 0. Specify
integers as
• signed integer —
• unsigned integer —
fixdt(1, WordLength, FractionLength)
fixdt(1, WordLength, 0)
fixdt(0, WordLength, 0)
Slope and Bias Scaling
When you scale by slope and bias, the slope S and bias B of the quantized
real-world number can take on any value. The slope must be a positive
number. Using slope and bias, specify fixed-point data types as
Page 65

Fixed-Point Numbers
• fixdt(Signed, WordLength, Slope, Bias)
Unspecified Scaling
Specify fixed-point data types with an unspecified scaling as
•
fixdt(Signed, WordLength)
Simulink signals, parameters, and states must never have unspecified
scaling. When scaling is unspecified, you must use some other mechanism
such as automatic best precision scaling to determine the scaling that the
Simulink software uses.
Quantization
The quantization Q of a real-world value V is represented by a weighted sum
of bits. Within the context of the general slope and bias encoding scheme, the
value of an unsigned fixed-point quantity is given by
ws
−
~
VS b B
1
⎡
.,=
⎢
∑
⎢
i
=
⎣
⎤
i
+
2
⎥
i
⎥
0
⎦
while the value of a signed fixed-point quantity is given by
ws
−
~
⎡
VSb b B
.,=− +
⎢
⎢
⎣
ws
−
22
ws
−
1
2
⎤
1
∑
i
i
+
⎥
i
=
⎥
0
⎦
where
• b
are binary digits, with bi=1,0,fori = 0,1,...,ws–1.
i
• Thewordsizeinbitsisgivenbyws,withws =
E
• S is given by F2
, where the scaling is unrestricted because the binary
1, 2, 3,..., 128.
point does not have to be contiguous with the word.
b
are called bit multipliers and 2iare called the weights.
i
2-7
Page 66

2 Data Types and Scaling
Example: Fixed-Point Format
Formats for 8-bit signed and unsigned fixed-point values are shown in the
following figure.
Note that you cannot discern whether these numbers are signed or unsigned
data types merely by inspection since this information is n ot explicitly
encoded within the word.
The binary number
two’s complement representation because the MSB =
using the appropriate weights, bit multipliers, and scaling, the value is
~
VF Q b
Conversely, the binary number 1011.0101 yields different values for the
unsigned a nd two’s complement representation since the MSB =
Setting B =
the unsigned value is
~
VF Q b
EEii
=
22 2
()
−
47 654
= × +× +× +× +×
2020212120
()
3 3125
= ..
0 and using the appropriate weights, bit multipliers, and scaling,
EEii
=
22 2
()
−
47654
= × +× +× +× +×
2120212120
()
11 3125
= .,
0011.0101 yields the same value for the unsigned and
0.SettingB = 0 and
ws
−
1
⎡
=
⎢
∑
⎢
i
=
⎣
ws
⎡
=
⎢
∑
⎢
i
=
⎣
⎤
⎥
⎥
0
⎦
3210
22120212
+× +× +×
1.
−
1
⎤
⎥
⎥
0
⎦
3210
22120212
+× +× +×
2-8
Page 67

Fixed-Point Numbers
while the two’s complement value is
−
2
~
VF Q b b
EEwsws
=
22 2 2
()
−
476
=−×+×
21202
()
=−
4 6875
..
⎡
=− +
⎢
−
1
⎢
⎣
++× +× +× +× +× +×
12 12 02 12 02 12
ws
−
1
∑
=
i
54 3210
⎤
i
⎥
i
⎥
0
⎦
Range and Precision
The range of a number gives the limits of the representation, while
the precision gives the distance between successive numbers in the
representation. The range and precision of a fixed-point number depends on
the length of the word and the scaling.
Range
The range of representable numbers for an unsigned and two’s complement
fixed-point number of size ws,scalingS,andbiasB is illustrated in the
following figure.
For both the signed and unsigned fixed-point numbers of any data type, the
number of different bit patterns is 2
ws
.
For e xa m p le, if the fixed-point data type is an integer with scaling defined as
S =1 and B = 0, then the maximum unsigned value is 2
ws–1
, because zero must
be represented. In two’s complement, negative numbers must be represented
as well as zero, so the maximum value is 2
ws–1
–1. Additionally, since there is
only one representation for zero, there must be an unequal number of positive
2-9
Page 68

2 Data Types and Scaling
and negative numbers. This means there is a representation for –2
not for 2
ws–1
.
ws–1
but
Precision
The precision of a data type is given by the slope. In this usage, precision
means the difference between neighboring representable values.
Fixed-Point Data Type Parameters
The low limit, high limit, and default binary-point-only scaling for the
supported fixed-point data types discussed in “Binary Point Interpretation”
on p age 2-4 are given in the following table. See “Limitations on Precision” on
page 3-3 and “Limitations on Range” on page 3-26 for more information.
Fixed-Point Data Type Range and Default Scaling
Default
Scaling
Name Data Type Low Limit High Limit
Unsigned
fixdt(0,ws,0)
0
ws
2
- 11
Integer
Signed
fixdt(1,ws,0) -2
ws - 1
ws - 1
2
- 11
Integer
Unsigned
fixdt(0,ws,fl)
0
ws
2
(
- 1)2
-fl
Binary
Point
Signed
fixdt(1,ws,fl) -2
ws-1-fl
(2
ws - 1
- 1)2
Binary
Point
Unsigned
fixdt(0,ws,s,b) 0
(2ws- 1) +b
s
Slope
Bias
Signed
fixdt(1,ws,s,b)
-s
(2
ws - 1
) +b s(2
ws - 1
- 1) +b
Slope
Bias
-fl
(~Precision)
-fl
2
-fl
2
s
s
2-10
Page 69

Fixed-Point Numbers
s =Slope,b =Bias,ws = WordLength, fl = FractionLength
Range of an 8-Bit Fixed-Point Data Type — Binary-Point-Only
Scaling
The precisions, range of signed values, and range of unsigned values for an
8-bit generalized fixed-point data type with binary-point-only scaling are
listed in the follow table. Note that the first scaling value (2
binary point that is not contiguous with the word.
Range of Signed
Scaling Precision
1
2
0
2
-1
2
-2
2
-3
2
-4
2
-5
2
-6
2
-7
2
-8
2
2.0 -256, 254 0, 510
1.0 -128, 127 0, 255
0.5 -64, 63.5 0, 127.5
0.25 -32, 31.75 0, 63.75
0.125 -16, 15.875 0, 31.875
0.0625 -8, 7.9375 0, 15.9375
0.03125 -4, 3.96875 0, 7.96875
0.015625 -2, 1.984375 0, 3.984375
0.0078125 -1, 0.9921875 0, 1.9921875
0.00390625 -0.5, 0.49609375 0, 0.99609375
Val ues (Low,
High)
Range o f Unsigned
Values (Low, High)
1
)representsa
Range of an 8-Bit Fixed-Point Data Type — Slope and Bias Scaling
The precision and ranges of signed and unsigned values for an 8-bit fixed-point
data type using slope and bias scaling are listed in the following table. The
slopestartsatavalueof
slope is the same as the precision.
1.25 with a bias of 1.0 for all slopes. Note that the
2-11
Page 70

2 Data Types and Scaling
Bias Slope/Precision
1
1
1
1
1
1
1
1
1
1.25 -159, 159.75 1, 319.75
0.625 -79, 80.375 1, 160.375
0.3125 -39, 40.6875 1, 80.6875
0.15625 -19, 20.84375 1, 40.84375
0.078125 -9, 10.921875 1, 20.921875
0.0390625 -4, 5.9609375 1, 10.9609375
0.01953125 -1.5, 3.48046875 1, 5.98046875
0.009765625 -0.25, 2.240234375 1, 3.490234375
0.0048828125 0.375, 1.6201171875 1, 2.2451171875
Range of Signed
Values (low, high)
Range of Unsigned
Values (lo w , high)
Constant Scaling for Best Precision
The following fixed-point Simulink b locks provide a mode for scaling
parameters whose values are constant vectors o r matrices:
• Constant
• Discrete FIR Filter
• Gain
2-12
• Relay
• Repeating Sequence Stair
This scaling mode is based on binary-point-only scaling. Using this mode, you
can scale a constant vector or matrix such that a common binary point is
found based on the best precision for the largest value in the vector or matrix.
Constant scaling for best precis ion is available only for fixed-point da ta types
with unspecified scaling. All other fixed-po int data types use their specified
scaling. You can use the Data Type Assistant (see “Using the Data Type
Assistant” in Simulink User’s Guide) on a block dialog box to enable the best
precision scaling mode.
Page 71

Fixed-Point Numbers
1 On a block dialog box, click the Show data type assistant button
.
The Data Type Assistant appears.
2 In the Data Type
Assistant,andfromtheMode list, select
Fixed point.
The Data Type Assistant displays additional options associated with
fixed-point data types.
3 From the Scaling list, select Best precision.
2-13
Page 72

2 Data Types and Scaling
To understand how you might use this scaling mode, consider a 3-by-3 matrix
of doubles, M, defined as
3.3333e-003 3.3333e-004 3.3333e-005
3.3333e-002 3.3333e-003 3.3333e-004
3.3333e-001 3.3333e-002 3.3333e-003
Now suppose you specify M as the value of the Gain para m eter for a G ain
block. The results of specifying your own scaling versus using the constant
scaling mode are described here:
• Specified Scaling
Suppose the matrix e le ments are co nv erted to a signed, 10-bit generalized
fixed-point data type with binary-point-only scaling of
-7
2
(that is, the
binary point is located seven places to the left of the right most bit). With
this data format, M becomes
000
3.1250e-002 0 0
3.3594e-001 3.1250e-002 0
Note that many of the matrix elements are zero, and for the nonzero
entries, the scaled values differ from the original values. This is because a
double is converted to a binary word of fixed size and limited precision for
each element. The larger and more precise the conversion data type, the
more closely the scaled values match the original values.
• Constant Scaling for Best Precision
If M is scaled based on its largest matrix value, you obtain
2.9297e-003 0 0
3.3203e-002 2.9297e-003 0
3.3301e-001 3.3203e-002 2.9297e-003
Best precision would automatically select the fraction length that
minimizes the quantization error. Even though precision was maximized
for the given word length, quantization errors can still occur. In this
example, a few elements still quantize to zero.
2-14
Page 73
Fixed-Point Numbers
Fixed-Point Dat
Simulink data ty
128 characters.
type, number en
You can repres
VVSQB≈= +~,
where
• V is the real
~
•
is the appr
V
• S = F2
E
• F is the sl
• E is the f
• Q is the s
• B is the b
pe names must be valid MATLAB identifiers with less than
The data type name provides information about container
coding, and scaling.
ent a fixed-point number using the fixed-point scaling e quation
-world value.
oximate real-world value.
he slope.
is t
ope adjustment factor.
ixed power-of-two exponent.
tored integer.
ias.
a Type and Scaling Notation
For mor
The fo
Simul
e information, see “Scaling” on page 2-5.
llowing table provides a key for various symbols that appear in
ink products to indicate the data type and scaling of a fixed-point value.
Symbol Description Example
Container Type
ufix
sfix
Unsigned fixed-point
data type
Signed fixed-point data
type
x8
ufi
fix
sf
fi
is an 8-bit unsigned
ed-point data type
ix128
is a 128-bit signed
xed-point data type
2-15
Page 74

2 Data Types and Scaling
Symbol Description Example
fltu
Scaled Doubles override
of an unsigned
fltu32 is a scaled doubles
override of
fixed-point data type
(
ufix)
flts
Scaled Doubles override
of a signed fixed-point
data type (
sfix)
flts64 is a scaled doubles
override of
Number Encoding
e
n
p
10^
125e8 equals 125*(10^(8))
Negative n31 equals -31
Decimal point 1p5 equals 1.5
equals 0.2
p2
Scaling Encoding
S
Slope
ufix16_S5_B7 is a 16-bit
unsigned fixed-point data
type with
Bias of 7
B
Bias ufix16_S5_B7 is a 16-bit
unsigned fixed-point data
type with
Bias of 7
E
Fixed exponent (2^)
A negative fixed
exponent describes
sfix32_En31 is a 32-bit
signed fixed-point d a ta type
with a fraction length of
the f raction length
F
Slope adjustment factor
ufix16_F1p5_En50
is a 16-bit unsigned
fixed-point data type with a
SlopeAdjustmentFactor of
1.5 and a FixedExponent
of -50
ufix32
sfix64
Slope of 5 and
Slope of 5 and
31
2-16
Page 75

Symbol Description Example
Fixed-Point Numbers
C,c,D, or d Compressed encoding for
Bias
Note If you pass
this string to the
slDataTypeAndScale
function, it returns a
valid
fixdt data type.
Tort
Compressed encoding for
Slope
Note If you pass
this string to the
slDataTypeAndScale,
it returns a valid
fixdt
data type.
Scaled Doubles
No example available. For
backwards compatibility
only.
No example available. For
backwards compatibility
only.
What are Scaled Doubles?
Scaled doubles are a hybrid between floating-point and fixed-point numbers.
The Simulink Fixed Point software stores them as doubles with the
scaling, sign, and word length information retained. For example, the
storage container for a fixed-point data type
storage container of the equivalent scaled doubles data type,
is floating-point doubl e. (For details of the fixed-point scaling notation,
see “Fixed-Point Data Type and Scaling Notation” on page 2-15. The
Simulink Fixed P oint software applies the scaling information to the stored
floating-point double to obtain the real-world value. Storing the value in a
double almost always eliminates overflow and precision issues.
sfix16_En14 is int16.The
flts16_En14
2-17
Page 76

2 Data Types and Scaling
What is the Difference between Scaled Doubles and True Doubles?.
The storage container for both the scaled doubles and true doubles data types
is floating-point
doubles
and Scaled doubles, provide the range and precision advantages
double. Therefore both data type override settings, T rue
of floating-point doubles. Scaled doubles retain the information about
the specified data type and scaling, but true doubles do not retain this
information.
Consider an example where you are storing
type
sfix16_En13. For this data type:
• The slope, S =2
–13
.
• The bias, B =0.
Using the scaling equation
VVSQB≈= +~,
and Q is the stored value.
• B =0.
~
•
= SQ =2
V
•
QVS=~/
The data type
of Q is quantized to
If you override the data type
changes to
stored-value equals the real-world value
–13
Q = 0.75001.
= 0.75001/2
sfix16_En13 can only represent integers, so the ideal value
double and you lose the information about the scaling. The
-13
= 6144.08192.
6144 causing precision loss.
sfix16_En13 with true doubles, the data type
0.75001.
0.75001 degrees Celsius in a data
where V is the real-world value
2-18
If you override the data type
changes to
flts16_En13. The scaling is still given by _En13 and is identical
sfix16_En13 with scaled doubles, the data type
to that of the original data type. The only difference is the storage container
used to hold the stored value which is now
6144.08192. This example demonstrates one advantage of using scaled
double so the stored-value is
doubles: the virtual elimina tion of quantization errors.
Page 77

Fixed-Point Numbers
When to Use Scaled Doubles
The Fixed-Point To ol enables you to perform various data type overrides
on fixed-point signals in your simulations. Use scaled doubles to override
the f ixed-point data types and scaling using double-precision numbers, thus
avoiding quantization effects. Overriding the fixed-point data types provides
a floating-point bench m ark that represents the ideal output. Scaled doubles
are useful for:
• Testing and debugging
• Applying data type override to individual subsystems.
If you apply data type override to subsystems in your model rather than
to the whole model,
fixed-point portions of the model need for consistent data type propa ga tio n.
Scaled doubles provide the information that the
Example: Port Data Type Display
To display the data types for the ports in your model.
1 From the Simulink Format menu, point to Port/Signal Displays,and
then click Port Data Types .
The port display for fixed-point signals consists of three parts: the data
type, the number of bits, and the scaling. These three parts reflect the block
Output data type parameter value or the data type and scaling that is
inherited from the driving block or through back propagation.
The following model displays its port data types.
2-19
Page 78

2 Data Types and Scaling
In the model, the data type displayed with the In1 block indicates that the
output data type name is
16, 0.2, 10)
bias
10.0. The data type displayed with the In2 block indicates that the
output data type name is
which is a signed 16 bit fixed-point number with fraction length of 6.
which is a signed 16 bit fixed-point number with slope 0.2 and
sfix16_Sp2_B10. This corresponds to fixdt(1,
sfix16_En6. This corresponds to fixdt(1, 16, 6)
2-20
Page 79

Floating-Point Numbers
In this section...
“About Floating-Point Numbers” on page 2-21
“Scientific Notation” on page 2-21
“The IEEE Format” on page 2-23
“Range and Precision” on page 2-25
“Exceptional Arithmetic” on page 2-27
About Floating-Point N umbers
Fixed-point numbers are limited in that they cannot simultaneously represent
very large or very small numbers using a reasonable word size. T his limitation
can be overcome by using scientific notation. With scientific notation, you can
dynamically place the binary point at a convenient location and use powers of
the b inary to keep track of that location. Thus, y ou can represent a range of
very large and very small numbers with only a few digits.
Floating-Point Numbers
You can represent any binary floating-point number in scientific notation
form as f ×2
(binary in this case), and e is the exponent of the radix. The radix is always a
positive number, while f and e can be positi ve or negative.
When performing arithmetic operations, floating-point hardware must take
into account that the sign, exponent, and fraction are all encoded within the
same binary word. This results in complex logic circuits when compared with
the circuits for binary fixed-point operations.
The Simulink Fixed Point software supports single-precision and
double-precision floating-point numbers as defined by the IEEE Standard
754. Additionally, a nonstandard IEEE-style number is supported.
e
,wheref is the fraction (or mantissa), 2 is the radix or base
Scientific Notation
A direct analogy exists between scientific notation and radix point notation.
For example, scientific notation using five decimal digits for the fraction
would take the form
2-21
Page 80

2 Data Types and Scaling
±×=± ×=± ×
d dddd ddddd ddddd
...,10 0 10 0 10
pp p
−+
41
where d = 0,...,9 and p is an integer of unrestricted range.
Radix point notation using five bits for the fraction is the same except for
the number base
±×=± ×=± ×
b bbbb bbbbb bbbbb
...,20202
qq q
−+
41
where b =0,1andq is an integer of unrestricted range.
For fixed-point numbers, the exponent is fixed but there is no reason why
the binary point must be contiguous with the fraction. For example, a word
consisting of three unsigned bits is usually represented in scientific notation
in one of these four ways.
..
=×
bbb bbb
..
=×
bb b bbb
=×
b bb bbb
..
=×
bbb bbb
..
0
2
−
1
2
−
2
2
−
3
2
If the exponent were greater than 0 or less than -3, then the representation
would involve lots of zeros.
2-22
bb.×−2
5
2
−
5
8
bbb bbb
.
00000
..
00000 2
bbb bbb
..
00 2
=×
..
=×
00 2
bbb bbb
=×
bbb bb
=
These extra zeros never change to ones, however, so they don’t show up in
the hardware. Furthermore, unlike floating-point exponents, a fixed-point
exponent never shows up in the hardware, so fixed-point exponents are not
limited by a finite number of bits.
Page 81

Floating-Point Numbers
Note Restricting the binary point to being contiguous with the fraction is
unnecessary; the Simulink Fixed Point software allows you to extend the
binary point to any arbitrary location.
The IEEE Format
The IEEE Standard 754 has been widely adopted, and is used with virtually
all floating-point processors and arithm etic coprocessors—with the notable
exception of many DSP floating-point processors.
Among other things, this standard specifies four floating-point number
formats, of which singles and doubles are the most widely used. Each format
contains three components: a sign bit, a fraction field, and an exponent field.
These components, as well as the specific formats for singles and doubles, are
discussed in the sections that follow.
The Sign Bit
While two’s complement is the preferred representation for signed fixed-point
numbers, IEEE floating-point numbers use a sign/magnitude representation,
where the sign bit is explicitly included in the word. Using this representation,
a sign bit of 0 represents a positive number and a sign bit of 1 represents a
negative number.
The Fraction Field
In gene ral, floating-point numbers can be represented in many different ways
by shifting the number to the left or right of the binary point and decreasing
or increasing the exponent of the binary by a corresponding amount.
To simplify operations on these numbers, they are normalized in the IEEE
format. A norm alized binary number h as a fraction of the form 1.f where f has
a fixed size for a given data type. Since the leftmost fraction bit is always a 1,
it is unnecessary to store this bit and is therefore implicit (or hidden). Thus,
an n-bit fraction stores an n+1-bit number. The IEEE format also supports
denormalized numbers, which have a fraction of the form 0.f.Normalizedand
denormalized formats are discussed in more detail in the next section.
2-23
Page 82

2 Data Types and Scaling
The Exponent Field
In the IEEE format, exponent representations are biased. This means a fix ed
value (the bias) is subtracted from the field to get the true exponent value.
For example, if the exponent field is 8 bits, then the numbers 0 through 255
are represented, and there is a bias of 127. Note that some values of the
exponent are reserved for flagging
Inf (infinity), NaN (no t- a-number), and
denormalized numbers, so the true exponent values range from -126 to 127.
See the sections “Inf” on page 2-28 and “NaN” on page 2-28.
Single-Precision Format
The IEEE single-precision floating-pointformatisa32-bitworddividedintoa
1-bit sign indicator s, an 8-bit biased exponent e, and a 23-bit fraction f.For
more information, see “The Sign Bit” on page 2-23, “The Ex ponent Field” on
page 2-24, and “The Fraction Field” on page 2-23. A representation of this
format is given below.
2-24
The rela
is give
“Exc
tionship between this format and the representation of real numbers
nby
se
−
127
1 2 1 0 255
se
−
126
12
0000.) , ,fefdenormalized,
normalized,
fe
=>
value
⎧
()( )(.) ,
−<<
⎪⎪
⎨
()( )(
=
−
⎪
exceptional value otherwise.
⎩
eptional A rithmetic” on page 2-27 discusses denormalized values.
Double-Precision Format
IEEE double-precision floating-po in t format is a 64-bit word divided into
The
bit sign indicator s, an 11-bit biased exponent e, and a 52-bit fraction f.For
a1-
re information, see “The Sign Bit” on pa g e 2-23, “The Exponent Field” on
mo
Page 83

Floating-Point Numbers
page 2-24, and “The Fraction Field” on page 2-23. A representation of this
format is shown in the following figure.
The relationship between this format and the repres entation of real numbers
is given by
se
−
1023
1 2 1 0 2047
se
−
102
12
fe
normalized,
22
000)( . ) ,fefdenormalized,
=>
,
value
⎧⎧
−<<
()( )(.) ,
⎪
⎨
=
−
()(
⎪
exceptional value otherwise.
⎩
“Exceptional Arithmetic” on page 2-27 discusses denormalized values.
Range and Precision
The range of a number gives the limits of the representation while
the precision gives the distance between successive numbers in the
representation. The range and precisionofanIEEEfloating-pointnumber
depend on the specific format.
Range
The range of representable numbers for an IEEE floating-point number with f
bits allocated for the fraction, e bits allocated for the exponent, and the bias of
e given by bias =2
where
(e-1)
–1 is given below.
2-25
Page 84

2 Data Types and Scaling
• Normalized positive numbers are defined within the range 2
-f
)×2
bias
.
(2–2
• Normalized negative numbers are defined within the range –2
-f
)×2
bias
-f
.
)×2
bias
are overflows.
-f
bias
)×2
(1–bias)
and negative numbers less than –2
and n egative numbers greater
–(2–2
• Positive numbers greater than (2–2
than –(2–2
• Positive numbers less than 2
(1–bias)
(1–bias)
to
to
(1–bias)
are either underflows or denormalized numbers.
• Zero is given by a special bit pattern, where e =0andf =0.
Overflows and underflows result from exceptional arithmetic conditions.
Floating-point numbers outside the defined range are always mapped to ±Inf.
Note You can use the MATLAB commands realmin and realmax to
determine the dynamic range of double-precision floating-point values for
your computer.
Precision
Because of a finite word size, a floating-point number is only an approximation
of the “true” value. Therefore, it is important to have an understanding of the
precision (or accuracy) of a floating-point result. In gene ral, a value v with an
accuracy q is specified by v±q. For IEEE floating-point numbers,
2-26
v = (–1)
s(2e–bias
)(1.f)
and
–f×2e–bias
q =2
Thus, the precision is associated with the number of bits in the fraction field.
Page 85

Floating-Point Numbers
Note In the MATLAB software, floating-point relative accuracy is given by
the command
eps, which returns the distance from 1.0 to the next larger
floating-point number. For a computer that supports the IEEE Standard 754,
eps =2
-52
or 2.22045 · 10
-16
.
Floating-Point Data Type Parameters
The high and low limits, exponent bias, and precision for the supported
floating-point data types are given in the following table.
Data Type Low Limit High Limit Exponent Bias Precision
Single
Double
Nonstandard
-126
2
-1022
2
(1 - bias)
2
-38
≈ 10
≈ 2·10
-308
128
2
≈ 3·10
1024
2
≈ 2·10
(2 - 2-f)·2
bias
38
308
127 2
1023 2
(e -1)
2
-1 2
-23
-52
-f
≈ 10
≈ 10
-7
-16
Because of the sign/magnitude representation of floating-point numbers,
there are two representations of zero, one positive and one negative. For both
representations e =0andf.0 = 0.0.
Exceptional Arithmetic
In addition to specifying a floating-point format, the IEEE Standard 754
specifies practices and procedures so that predictable results are produced
independently of the hardware platform. Specifically, denormalized numbers,
Inf,andNaN are defined to deal with exceptional arithmetic (underflow and
overflow).
If an underflow or overflow is handled as
processor overhead is required to deal with this exception. Although the IEEE
Standard 754 specifies practices and procedures to deal with exceptional
arithmetic conditions in a consistent manner, microprocessor manufacturers
might handle these conditions in ways that depart from the standard. Some
of the alternative approaches, such as saturation and wrapping, are discussed
in Chapter 3, “Arithmetic Operations”.
Inf or NaN, then significant
2-27
Page 86

2 Data Types and Scaling
Denormalized Numbers
Denormalized numbers are used to handle cases of exponent underflow. When
the exponent of the result is too small (i.e., a negative exponent with too large
a magnitude), the result is denormalized by right-shifting the fraction and
leaving the exponent at its minimum value. The use of denormalized numbers
is also referred to as gradual underflow. Without denormalized numbers, the
gap between the smallest representable nonzero number and zero is much
wider than the gap between the smallest representable nonzero number and
the next larger number. Gradual underflow fills tha t gap and reduces th e
impact of exponent underflow to a level comparable with roundoff among the
normalized numbers. Thus, denormalized numbers provide extended range
for small numbers at the expense of precision.
Inf
Arithmetic involving Inf (infinity) is treated as the limiting case of real
arithmetic, with infinite value s defined as those outside the range of
representable numbers, or –∞≤(representable numbers) < ∞.Withthe
exception of the special cases discussed below (
involving
allowed by the format and a fraction of zero.
Inf yields Inf. Inf is represented by the largest biased exponent
NaN), any arithmetic operation
2-28
NaN
A NaN (not-a-number) is a symbolic entity encoded in floating-point format.
Therearetwotypesof
invalid operation exception. A quiet
arithmetic operation without signaling an exception. The following operations
result in a
Both types of
the format and a fraction that is nonzero. The bit pattern for a quiet
given by 0.f where the most significant number in f must be a one, while the bit
pattern for a signaling
in f must be zero and at least one of the remaining numbers must be nonzero.
NaN: ∞–∞,–∞+∞,0×∞,0/0,and∞/∞.
NaN are represented by the largest biased exponent allowed by
NaN: signaling and quiet. A signaling NaN signals an
NaN propagates through almost every
NaN is
NaN is given b y 0.f where the most significant number
Page 87

Arithmetic Operations
• “Overview” on page 3-2
• “Limitations on Precision” on page 3-3
• “Limitations on Range” on page 3-26
• “Recommendations for Arithmetic and Scaling” on page 3-32
• “Parameter and Signal Conversions” on page 3-43
• “Rules for Arithmetic Operations” on page 3-48
• “Example: Conversions and Arithmetic Operations” on page 3-66
3
Page 88

3 Arithmetic Operations
Overview
When developing a dynamic system using floating-point arithmetic, you
generally don’t have to worry about numerical limitations since floating-point
data types have high precision and range. Conversely, when working with
fixed-point arithmetic, you must consider these factors when developing
dynamic systems:
• Overflow
Adding two sufficiently large negative or positive values can produce a
result that does not fit into the representation. This will have an adverse
effect on the control system.
• Quantization
Fixed-point values a re rounded. Therefore, the output signal to the
plant and the input signal to the control system do not have the same
characteristics as the ideal discrete-time signal.
• Computational noise
3-2
The accumulated errors that result from the rounding of individual terms
within the realization introduce noise into the control signal.
• Limit cycles
In the ideal system, the output of a stable transfer function (digital filter)
approaches s ome constant for a constant input. With quantization, limit
cycles occur where the o utput oscillates between two values in steady state.
This chapter describes the limitations involved when arithmetic operations
are performed using encoded fixed-point variables. It also provides
recommendations for encoding fixed-point variables such that simulations
and generated code are reasonably efficient.
Page 89

Limitations on Precision
In this section...
“Introduction” on page 3-3
“Rounding” on page 3 -3
“Padding with Trailing Zeros” on page 3-19
“Example: Limitations on Precision and Errors” on page 3-19
“Example: Maximizing Precision” on page 3-20
“Net Slope and Net Bias Precision” on page 3-21
Introduction
Computer words consist of a finite numbers of bits. This means that the
binary encoding of variables is only an approximation of an arbitrarily precise
real-world value. Therefore, the limitations of the binary representation
automatically introduce limitations on the precision of the value. For a general
discussion of range and precision, refer to “Range and Precision” on page 2-9.
Limitations on Precision
The precision of a fixed-point word depends on the word size and binary point
location. Extending the precision of a word can always be accomplished with
more bits, but you face practical limitationswiththisapproach.Instead,you
must carefully select the data type, word size, and scaling such that numbers
are accurately represented. Rounding and padding with trailing zeros are
typical methods implemented on processors to deal w ith the precision of
binary words.
Rounding
The result of any operation on a fixed-point number is typically stored in a
register that is longer than the number’s original format. When the result is
put back into the original format, the extra bits must be disposed of. That is,
the result must be rounded. Rounding involves going from high precision to
lower precision and produces quantization errors and computational noise.
3-3
Page 90

3 Arithmetic Operations
How to Choose a Rounding Mode
To choose the most suitable rounding mode for your application, you need to
consider your system requirements and the properties of e ach rounding mode.
The most important properties to consider are:
• Cost — Independent of the hardware b eing used, how much processing
expense does the rounding method require?
• Bias — What is the expected value of the rounded values minus the
original values?
• Possibility of overflow — Does the rounding method introduce the
possibility of overflow?
For more information on when to use each rounding mode, see “Rounding
Methods” in the Fixed-Point Toolbox User’s Guide.
Choosing a Rounding Mode for Diagnostic Purposes. Rounding
toward ceiling and rounding toward floor are sometimes useful for diagnostic
purposes. For example, after a series of arithmetic operations, you may not
know the exact answer because of word-size limitations, which introduce
rounding. If every operation in the series is performed twice, once rounding to
positive infinity and once rounding to negative infinity, you obtain an upper
limit and a lower limit on the correct answer. Youcanthendecideiftheresult
is sufficiently accurate or if additional analysis is necessary.
3-4
Rounding Modes for Fixed-Point Simulink Blocks
Fixed-point Simulink blocks support the rounding modes shown in the
expanded drop-down menu o f the following dialog bo x.
Page 91

Limitations on Precision
The following table illustrates the differences between these rounding modes:
Rounding Mode
Ceiling
Descri
Rounds to the nearest
ption
Tie Handling
N/A
representable number
in th e direc tion of
positive infinity.
Floo
Zero
r
ds to the nearest
Roun
resentable number
rep
he direction of
in t
ative infinity.
neg
Rounds to the nearest
N/A
N/
A
representable number
in the direction of zero.
3-5
Page 92

3 Arithmetic Operations
Rounding Mode
Convergent
Nearest
Round Rounds to the nearest
Simplest Automatically chooses
Description
Rounds to the nearest
representable number.
Rounds to the nearest
representable number.
representable number.
between
Zero to produce
generated code that is
as efficient as possible.
Floor and
Tie Handling
Ties are rounded
toward the nearest
even integer.
Ties are rounded to the
closest representable
number in the direction
of positive infinity.
For positive numbers,
ties are rounded
toward the closest
representable number
in th e direc tion of
positive infinity.
For negative numbers,
ties are rounded
toward the closest
representable number
in th e direc tion of
negative infinity.
N/A
3-6
Rounding Mode: Ceiling
When you round toward ceiling, both po sitive and negative numbers are
rounded toward positive infinity. As a result, a positive cumulative bias is
introduced in the number.
Page 93

In the MATLAB software, you can round to ceiling using the ceil function.
Rounding toward ceiling is show n in the following figure.
All numbers are rounded
toward positive infinity
Limitations on Precision
Rounding Mode: Convergent
vergent
Con
ard the nearest even integer. It eliminates bias due to rounding. However,
tow
ntroduces the possibility of overflow.
it i
rounds toward the nearest representable value with ties rounding
3-7
Page 94
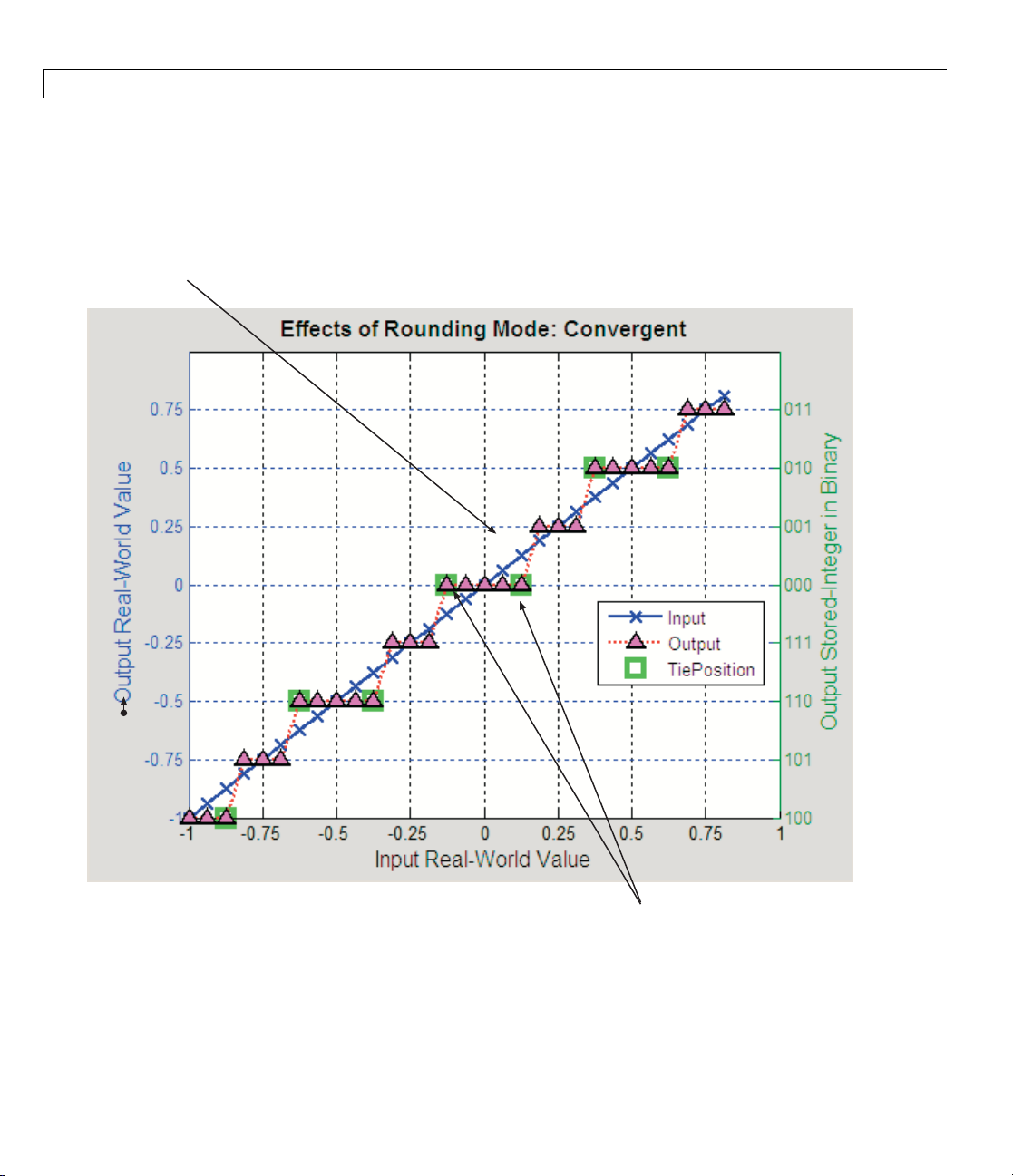
3 Arithmetic Operations
All numbers are rounded to the
nearest representable number
In the MATLAB software, you can perform convergent rounding using the
convergent function. Convergent rounding is shown in the following figure.
3-8
Ties are rounded to the
nearest even number
Page 95

Limitations on Precision
Rounding Mode: Floor
When you round toward floor, both positive and negative numbers are
rounded to negative infinity. As a result, a negative cumulative bias is
introduced in the number.
In the MATLAB software, you can round to floor using the
Rounding toward floor is showninthefollowingfigure.
floor function.
All numbers are rounded
toward negative infinity
3-9
Page 96

3 Arithmetic Operations
Rounding Mode: Nearest
When you round toward nearest, the number is rounded to the nearest
representable value. In the case of a tie,
representable number in the direction o f positive infinity.
In the Fixed-Point Toolbox software, you can round to nearest using the
nearest function. Rounding toward nearest is shown in the following figure.
All numbers are rounded to
the nearest representable number
nearest rounds to the closest
Ties are rounded to the closest
representable number in the
direction of positive infinity
3-10
Page 97

Limitations on Precision
Rounding Mode: Round
Round rounds to the closest representable number. In the case of a tie, it
rounds:
• Positive numbers to the closest representable number in the direction of
positive infinity.
• Negative numbers to the closest representable number in the direction
of negative infinity.
As a result:
• A small negative bias is introduced for negative samples.
• No bias is introduce d for samples with evenly distributed positive and
negative values.
• A small positive bias is introduced for positive samples.
3-11
Page 98

3 Arithmetic Operations
In the MATLAB software, you can perform this type of rounding using the
round function. The rounding mode Round is shown in the following figure.
All numbers are rounded to the
nearest representable number
For positive numbers, ties are rounded
to the closest representable number in
the direction of positive infinity
3-12
For negative numbers, ties are
rounded to the closest representable
number in the direction of negative
infinity
Page 99

Limitations on Precision
Rounding Mode: Simplest
The simplest rounding mode attempts to reduce or eliminate the need for
extra rounding code in your generated code using a combination of techniques,
discussed in the following sections:
• “Optimize Rounding for Casts” on page 3-13
• “Optimize Rounding for High-Level Arithmetic Operations” on page 3-14
• “Optimize Rounding for Intermediate Arithmetic Operations” on page 3-15
In nearly all cases, the simplest rounding mode produces the most efficient
generated code. For a very specialized case of division that meets three specific
criteria, round to floor might be more efficient. These three criteria are:
• Fixed-point/integer signed division
• Denominator is an invariant constant
• Denominator is an exact power of two
For this case, set the rounding mode to floor and the Con figuration
Parameters > Hardware Implementation > Embedded Hardware >
Signed integer division rounds to parameter to describe the rounding
behavior of your production target. For more in f orm ation, see “Improving
Efficiency of Code That Uses Division by Constant Power of 2” in the
Real-Time Workshop documentation.
Optimize Rounding for Casts. The Data Type Conversion block casts a
signal with one data type to another data type. When the block casts the
signal to a data type with a shorter word length than the original data
type, precision is lost and rounding occurs. The simplest rounding mode
automatically chooses the best rounding for these cases based on the following
rules:
• When casting from one integer or fixed-point data type to another, the
simplest mode rounds toward floor.
• When casting from a floating-point data type to an integer or fixed-point
data type, the simplest mode rounds toward zero.
3-13
Page 100

3 Arithmetic Operations
Optimize Rounding for High-Level Arithmetic Operations. The simplest
rounding mode chooses the best rounding for each high-level arithmetic
operation. For example, consider the operation y = u
× u2/ u3implemented
1
using a Product block:
As stated in
multiplic
not specif
the operan
divide ope
your prod
The simpl
• Rounds t
• Rounds
Config
Embedd
To get t
round
to zer
to zer
enab
mult
If th
the s
e. The simplest mode rounds to zero for division for this case, but it
cod
not rely on your production target to perform the rounding, because the
can
ameter is
par
sure rounding to zero behavior.
en
the C standard, the most efficient rounding mode for
ation operations is always floor. However, the C standard does
y the rounding mode for division in cases where at least one of
ds is negative. Therefore, the most efficient rounding mode for a
ration with signed data types can befloororzero,dependingon
uction target.
est rounding m ode:
o floor for all nondivision operations.
to zero or floor for division, depending on the setting of the
uration Parameters > Hardware Implementation >
ed Hardware > Signed integer division rounds to parameter.
he m ost efficient code, you must set the Signed integer division
stoparameter to specify whether your production target rounds
o or to floor for integer division. Most production targets round
o for integer division operations. Note that
Simplest rounding
les “mixed-mode” rounding for such cases, as it rounds to floor for
iplication and to zero for division.
e Signed integer division rounds to parameter is set to
implestroundingmodemightnotbeabletoproducethemostefficient
Undefined. Therefore, you need additional rounding code to
Undefined,
3-14
 Loading...
Loading...