

Page 1

Simulink®Design O
User’s Guide
ptimization™ 1
Page 2

How to Contact The MathWorks
www.mathworks.
com
Web
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
rks.com
Bug reports
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
rks.com
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
®
Simulink
© COPYRIGHT 1993–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Revision History
March 2009 Online only New for Version 1 (Release 2009a)
September 2009 O nline only Revised for Version 1.1 (Release 2009b)
March 2010 Online only Revised for Version 1.1.1 (Release 2010a)
Design Optimization™ User’s Guide
Page 3

Data Analysis and Processing
1
Configuring a Model for Importing Data ............. 1-2
Contents
Creating an Estimation Project
ImportingDataintotheGUI
Importing Time-Domain Data into the GUI
Importing Time-Series Data into the GUI
Importing Complex Data into the GUI
Plotting and Analyzing Data in the GUI
Why Plot the Data Before Parameter Estimation
How To Plot Data in the GUI
Preprocessing Data in the GUI
Ways to Preprocess Data Using the Data Preprocessing
Tool
.......................................... 1-14
Opening the Data Preprocessing Tool
Handling Missing Data
Handling Outliers
Detrending Data
Filtering Data
Selecting Data
Adding Preprocessed Data Sets to an Estimation Project
Exporting Prepared Data to the MATLAB Workspace
.................................... 1-18
.................................... 1-20
............................. 1-16
................................. 1-18
.................................. 1-18
..................... 1-3
........................ 1-5
............ 1-5
.............. 1-10
................ 1-10
............. 1-11
........................ 1-11
...................... 1-14
................. 1-15
........ 1-11
.. 1-28
.... 1-31
Parameter Estimation
2
Overview of Parameter Estimation .................. 2-2
iii
Page 4

Configuring Parameter Estimation in the GUI ....... 2-3
Creating an Estimation Task
Specifying Data for Parameter Estimation
Specifying Parameters to Estimate
Specifying Initial States
Selecting Views for Plotting
Specifying Estimation Options
Specifying Simulation Options
Specifying Display Options
........................ 2-3
............. 2-4
................... 2-6
............................ 2-17
......................... 2-19
....................... 2-23
....................... 2-29
.......................... 2-35
Estimating Param eters in the GUI
Validating Parameters in the GUI
BasicStepsforModelValidation
Loading and Importing the Validation Data
Performing Validation
Comparing Residuals
Accelerating Model Simulations During Estimation
About Accelerating Model Simulations During
Estimation
Limitations
Setting the Accelerator Mode for Parameter Estimation
Speeding Up Parameter Estimation Using Parallel
Computing
When to Use P arallel Computing for Estimating Model
Parameters
How Parallel Computing Speeds Up Parameter
Estimation
Specifying Model Dependencies
Configuring Your System for Parallel Computing
How to Use Parallel Computing in the GUI
Troubleshooting
..................................... 2-50
...................................... 2-50
...................................... 2-52
.................................... 2-52
..................................... 2-53
................................... 2-62
............................. 2-43
.............................. 2-47
.................. 2-36
................... 2-40
..................... 2-40
............ 2-41
...................... 2-56
....... 2-56
............ 2-58
.. 2-50
.. 2-50
iv Contents
Estimating Initial States
How to Estimate Initial States in the GUI
Estimating Initial Conditions for Blocks with External
Initial Conditions
Example — Estimating Initial States of a
Mass-Spring-Damper System
........................... 2-65
............. 2-65
............................... 2-66
..................... 2-67
Page 5

Working with Estimation Projects .................. 2-78
Structure of an Estimation Project
Managing Multiple Projects and Tasks
Adding, Deleting and Renaming an Estimation Project
Saving Control and Estimation Tools Manager Projects
Loading Control and Estimation Tools Manag er Projects
................... 2-78
................ 2-79
... 2-80
.. 2-81
.. 2-82
Estimating Param e ters at the Command Line
Workflow for Estimating Parameters at the Command
Line
.......................................... 2-83
Example — Estimating Parameters and Initial States at
the Command Line
Objects for Parameter Estimation
How to Use Parallel Computing at the Command Line
.............................. 2-84
.................... 2-95
........ 2-83
Parameter Optimization
3
Overview of Optimizing Model Parameters .......... 3-2
Optimizing Parameters Using the GUI
Constraining Model Signals
Specifying Design Requirements
Specifying Parameters to Optimize
Specifying Optimization Options
Specifying the Simulation Options
Plotting Responses in the Signal Constraint Window
Running the Optimization
......................... 3-3
..................... 3-5
..................... 3-27
.......................... 3-39
............... 3-3
................... 3-19
.................... 3-32
... 2-116
.... 3-36
Optimizing P arameters for M odel Robustness
What Is Model Robustness?
Sampling Methods for Computing Uncertain Parameter
Values
How to Optimize Parameters for Model Robustness Using
the GUI
Commands for Optimizing Parameters for Model
Robustness
Example — Optimizing Parameters for M odel Robustness
Using the GUI
........................................ 3-43
....................................... 3-46
.................................... 3-49
.................................. 3-49
......................... 3-42
........ 3-42
v
Page 6

Accelerating Model S imulations During
Optimization
About Accelerating Optimization
Limitations
Setting Accelerator Mode for Response Optimization
Speeding Up Response Optim ization Using Parallel
Computing
When to Use Parallel Computing for Response
Optimization
How Parallel Computing Speeds Up Optimization
Configuring Your System for Parallel Computing
Specifying Model Dependencies
How to Use Parallel Computing in the GUI
How to Use Parallel Computing at the Command Line
.................................... 3-58
..................... 3-58
...................................... 3-58
...................................... 3-60
................................... 3-60
....... 3-61
....... 3-64
...................... 3-65
............ 3-66
.... 3-58
... 3-70
Refining and Troubleshooting Optimization Results
Troubleshooting Optimization Results
Saving and Loading Response Optimization
Projects
Saving Response Optimization Projects
Saving Additional Settings
Reloading Response Optimization Projects
Optimizing P arameters at the Command Line
Workflow for Optimizing Parameters a t the Command
Line
Configuring a Simulink Model for Optimizing
Parameters
Creating or Extracting a Response Optimization P roject
Specifying Design Requirements
Specifying Parameter Settings
Configuring Optimization and Simulation Settings
Running the Optimization
........................................ 3-82
.......................... 3-85
.......................................... 3-87
.................................... 3-88
....................... 3-93
.......................... 3-95
................ 3-72
............... 3-82
............. 3-86
........ 3-87
..................... 3-89
...... 3-94
.. 3-72
.. 3-88
vi Contents
Page 7

Optimization-Based Linear Control Design
4
Overview of Optimization-Based Compensator
Design
Supported Time- and Frequency-Domain
Requirements
Root Locus Diagrams
Open-Loop and Prefilter Bode Diagrams
Open-Loop Nichols Plots
Step/Impulse Response Plots
Designing Optimization-Based Controllers for LTI
Systems
How to D esign Optimization-Based Controllers for LTI
Example — Frequency-Domain Optimization for LTI
.......................................... 4-2
................................... 4-4
.............................. 4-4
............................ 4-6
........................ 4-7
........................................ 4-8
Systems
System
....................................... 4-8
........................................ 4-9
............... 4-6
Designing Linear Controllers for Simulink Models
Lookup Tables
5
What Are Lookup Tables? .......................... 5-2
Static Lookup Tables
Adaptive Lookup Tables
Estimating Values of Looku p Tables
How to Estimate Values of a Lookup Table
Example — Estimating Lookup Table Values from Data
Example — Estimating Constrained Values of a Lookup
Table
Capturing Time-Varying System Behavior Using
Adaptive Lookup Tables
......................................... 5-20
............................... 5-2
............................ 5-3
................. 5-5
............. 5-5
......................... 5-37
... 4-30
.. 5-6
vii
Page 8

Building Models Using Adaptive Lookup Table Blocks ... 5-37
Configuring Adaptive Lookup Table Blocks
Example — Modeling an Engine Using n-D Adaptive
Lookup Table
Using Adaptive L ookup Tables in Real-Time
Environment
................................... 5-44
................................... 5-60
............ 5-41
Function Reference
6
Parameter Estimation ............................. 6-2
Parameter Optimization
Response Optimization Projects
Design Requirements
Parameters
Model Depende ncies
Model Robustness
Optimization Options
Simulation Options
...................................... 6-4
.............................. 6-3
............................... 6-4
................................. 6-4
.............................. 6-4
................................ 6-4
........................... 6-3
...................... 6-3
viii Contents
Page 9

Functions — Alphabetical List
7
Block Reference
8
Examples
A
Parameter Estimation ............................. A-2
Parameter Optimization
Optimization-Based Linear Control Design
Lookup Tables
..................................... A-2
........................... A-2
.......... A-2
Index
ix
Page 10

x Contents
Page 11

Data Analysis and Processing
• “Configuring a Model for Importing Data” on page 1-2
• “Creating an Estimation Project” on page 1-3
• “Importing Data into the GUI” on page 1-5
• “Plotting and Analyzing Data in the GUI” on page 1-11
• “Preprocessing Data in the GUI” on page 1-14
1
Page 12

1 Data Analysis and Processing
Configuring a Model for Importing Data
Before you can analyze and preprocess the estimation data, you must assign
thedatatothemodel’schannels. Inordertoassignthedata,theSimulink
model must contains one of the following elements:
• Top-level Inport block
Note You do not need an Inport block if your model already contains a
fixed input block, such as a Step block.
• Top-level Outport block
• Logged signal. The logged signal can be a top-level signal in the model
or a signal in the model subsystem.
For more information about the blocks and logged signals, see the Inport
and O utport block reference pages and “Logging Signals” in the Simulink
documentation.
In the Control and Estim ation Tools Manager GUI, the rows in the Input
Data tab correspond to the model’s top-level Inport blocks. Similarly, the
rows in the Output Data tab correspond to either the top-level Outport
blocks or logged signals in the model.
Adding an Inport or Outport block or marking a signal for logging creates a
new row in the corresponding Input Data or Output Data tab. You can use
the new row to import estimation data for the corresponding signal. To view
the new row, click Update Task in the Estimation Task node of the C ontrol
and Estimation Tools Manager GUI.
®
1-2
Page 13

Creating an Estimation Project
Before you begin data import, you m ust create and set up an estimation
project by configuring the appropriate parameters, solvers, and cost functions.
Simulink
Interface (GUI) that makes setting up the estimation project quick and easy .
To create an estimation project:
1 Open the nonlinear idle speed model of an automotive engine by typing :
at the MA TLAB®prompt.
The model appears as shown next.
®
Design Optimization™ software provides a Graphical User
engine_idle_speed
Creating an Estimation Project
The model contains the Inport block BPAV and Outport block Engine Speed
for importing input and output data, respectively. To learn more, see
“Configuring a Model for Importing Data” on page 1-2.
1-3
Page 14

1 Data Analysis and Processing
2 Open the Control and Estimation Tools Manager GUI by selecting Tools
> Parameter Estimation in the Simulink model window.
1-4
Control and Estimation Tools Manager GUI
The pr
Estim
Note
esti
oject tree displays the project name Project - engine_idle_speed.
ation tasks are organized inside the Estimation Task node.
The Simulink model must remain open to perform parameter
mation tasks.
Page 15

Importing Data into the GUI
In this section...
“Importing Time-Domain Data into the GUI” on page 1-5
“Importing Time-Series Data into the GUI” on page 1-10
“Importing Complex Data into the GUI” on page 1-10
Importing Time-Domain Data into the GUI
After you create an estimation project, as described in “Creating an
Estimation Project” on page 1-3, you can import the estimation data into
the GUI. To learn more about the types of data for paramete r estimation,
see “Types of Data for Parameter Estimation” in the Simulink Design
Optimization Getting Started Guide.
To import transient (measure d) data for your dynamic system:
Importing Data into the GUI
1 In the Control and Estimation Tools Manager, select Transient Data
under the Estimation Task node of the Workspace tree.
2 Right-click Transient Data and select New to create a New Data node.
Alternatively, you can use the New button to create this node.
1-5
Page 16

1 Data Analysis and Processing
1-6
3 Select the New Data node under the Transient Data node.
The Control and Estimation Tools Manager GUI now resembles the next
figure.
Page 17

Importing Data into the GUI
Import Data into the Co ntrol and Estimation Tools Manager
ThetablerowsintheInput Data tab corresponds to the Inport block BPAV
in the engine_idle_speed model. Similarly, the rows in the Output Data
tab corresponds to the Outport block
Engine Speed.
Note The Simulink model must contain an Inport or Outport block
or logged signals to enable importing data. For more information, see
“Configuring a Model for Importing Data” on page 1-2.
The idle-speed model of an automotive engine contains the measured data
stored in the
iodata array. The array contains two columns: the first for
input data, and the second for output data. You must import both the input
and the output data, as described in the following sections:
• “Importing Input Data and Time Vector” on page 1-8
1-7
Page 18

1 Data Analysis and Processing
Importing Input Data and Time Vector
To import the input data for the port BPAV:
1 In the New Data node, click the Input Data tab.
2 Right-click the Data cell and select Import to open the Data Import dialog
• “Importing Output Data and Time Vector” on page 1-9
box. Alternatively, you can use the Import button to open this dialo g box.
1-8
3 In the Data Import dialog box, select iodata from the list of variables.
Page 19

Importing Data into the GUI
4 Enter 1 in the Assign the following colum ns to selected channel(s)
field, and then click Import.
5 In the Input Data tab, select the Time/Ts cell.
me
6 Select ti
7 Click Im port to import the time vector for the input data.
8 Click Close to close the Data Import dialog box.
Import
in the Data Import dialog box.
ingOutputDataandTimeVector
To import the output data for the port Engine Speed:
1 In the New Data node, select the Output Data tab.
2 Right
-click the Data cell and select Import to open the Data Import dialog
box.
3 In the Data Import dialog box, select iodata from the list of variables.
4 Enter 2 in the Assign the following colum ns to selected channel(s)
field to use the second column of
he Output Data tab, select the Time/Ts cell.
5 In t
iodata,andthenclickImport.
1-9
Page 20

1 Data Analysis and Processing
6 Select time in the Data Import dialog box.
7 Click Im port to import the time vector for the output d ata.
8 Click Close to close the Data Import dialog box.
Importing Time-Series Data into the GUI
Time-series data is stored in time-series objects. For more information, see
“Time Series Objects” in the MATLAB documentation.
When you import time-series data for parameter estimation, specify the data
and time vector as t.data and t.time in the Data and Time/Ts columns of the
New Data node, respectively. For more information on how to import data
into the GUI, see “Importing Time-Domain Data into the GUI” on page 1-5.
Importing Complex Data into the GUI
Complex-valued data is data whose value is a complex number. For example,
a signal with the value
parameters of electrical systems, such as the magnitude and p hase.
1+2j is complex. You can use complex data to estimate
1-10
Note You must sample the real and imaginary parts of the data as a function
ofthesametimevector.
To use complex data for parameter estimation:
1 Split the data into two data sets that contain the real and imaginary parts.
To split the data, use the MATLAB functions
2 Import both data sets into the GUI, as described in “Importing
real,andimag.
Time-Domain Data into the GUI” on page 1-5.
3 Specify both the data sets together as estimation data, as described in
“Specifying Data for Parameter Estimation” on page 2-4.
4 Estimate the parameters, as described in “Estimating Parameters in the
GUI” on page 2-36.
Page 21

Plotting and Analyzing Data in the GUI
In this section...
“Why Plot the D ata Before Parameter Estimation” on page 1-11
“How To Plot Data in the GUI” on page 1-11
Why Plot the Data Before Parameter Estimation
After you import the estimation data, as described in “Importing D ata into
the GUI” on page 1-5, it is useful to remove o utlie rs, smooth, detrend, or
otherwise treat the data to make it more tractable for analysis and estimation
purposes. To view and analyze the data characteristics, you must plot the
data on a time plot.
HowToPlotDataintheGUI
To plot a data set, select the Data cell that you want to plot in the Transient
Data node of the Control and Estimation Tools Manager GUI, and click
Plot Data.
Plotting and Analyzing Data in the GUI
1-11
Page 22

1 Data Analysis and Processing
1-12
The data is plotted on a time plot, as shown in the next figure.
Page 23

Plotting and Analyzing Data in the GUI
Using the time plot, you can examine the data characteristics such as noise,
outliers and portions of the data to use for estimating parameters. After you
analyze the data, you the preprocess the data as described in “Preprocessing
DataintheGUI”onpage1-14.
1-13
Page 24

1 Data Analysis and Processing
Preprocessing Data in the GUI
In this section...
“Ways to Preprocess Data Using the Data Preprocessing Tool” on page 1-14
“Opening the Data Preprocessing Tool” on page 1-15
“Handling Missing Data” on page 1-16
“Handling Outliers” on page 1-18
“Detrending Data” on page 1-18
“Filtering Data” on page 1-18
“Selecting Data” on page 1-20
“Adding Preprocessed Data Sets to an Estimation Project” on page 1-28
“Exporting Prepared Data to the MATLAB Workspace” on page 1-31
Ways to Preprocess Data Using the Data Preprocessing Tool
After you import the estimation data, as described in “Importing D ata into
theGUI”onpage1-5,youcanperformthe following preprocessing operations
using the Data Preprocessing Tool in Simulink Design Optimization software:
1-14
• Exclusion — Exclude a portion of the data from the estimation process. You
can exclude data by:
- Selecting it with your mouse.
- Graphically by s electing regions on a plot.
- Using rules, such as upper or lower bounds.
• Handle missing data –– Remove missing data, or compute missing data
using interpolation.
• Handle outliers –– Remove outliers.
• Detrend — Remove mean values or a straight line trend.
• Filter — Smooth data u sing a first-order filter, an arbitrary transfer
function, or an ideal filter.
Page 25

Preprocessing Data in the GUI
Opening the Data
To open the Data P
1 In the Control a
Data node under
want to prepro
enables the Pr
reprocessing Tool:
nd Estimation Tools Manager GUI, select the Transient
the Estimation Task node, and then choose the data you
cess either in the Input Data,orOutput Data tab. This
e-process button.
Preprocessing Tool
2 Click Pre-process to open the Data Preprocessing Tool.
1-15
Page 26

1 Data Analysis and Processing
1-16
Tip Whe
to prep
Prepro
In thi
used
esti
Impo
1-3.
Han
• “R
n you have multiple data sets, select the data set that you want
rocess from the Modify data from drop-downlistintheData
cessing Tool.
s section , the sample data set imported for preprocessing is the same as
in the
engine_idle_speed Simulink mode l. For an overview of creating
mation projects and importing data sets, see “Configuring a Model for
rting D ata” on page 1-2, and “Creating an Estimation Project” on page
dling Missing Data
emoving Missing Data” on page 1 -17
Page 27

Preprocessing Data in the GUI
• “Interpolating Missing Data” on page 1-17
Removing Missing Data
Rows of missing or excluded data are represented by NaNs. To re move the rows
containing missing or excluded data, select the Remove rows where check
box in the MissingDataHandlingarea of the Data Preprocessing Tool GUI.
When the data set contains multiple column s of data, select all to remove
rows in which all the data is excluded. Select
Inthecaseofone-columndata,
any and all are equivalent.
Tip You can view the modified data in the Modified data tab of the Data
Preprocessing Tool GUI.
any to remove any excluded cell.
Interpo
lating Missing Data
The interpolation operation computes the missing data values using known
data values. When you select the Interpolate missing values using
interpolation method check box in the Missing Data Handling area of
the Data Preprocessing Tool GUI, the software interpolates the missing
data values.
You can compute the missing data values using one of the following
interpolation methods:
• Zero-order hold (
zoh) — Fills the missing data sample with the data value
immediately preceding it.
• Linear interpolation (
Linear) — Fills the missing data s ample with t he
average of the data values immediately p receding and f ollo wing it.
1-17
Page 28

1 Data Analysis and Processing
By default, the interpolation method is set to zoh. You can select the
Linear interpolation method from the Interpolate missing values using
interpolation method drop-down list.
Tip You can view the results of interpolation in the Modified data tab of the
Data Preprocessing Tool GUI.
Handling Outliers
Outliers are data values that deviate from the mean by more than three
standard deviations. When estimating parameters from data containing
outliers, the results may not be accurate.
To remove outliers, select the Outliers check box to activate outlier exclusion.
You can set the Window length to any positiv e integer, and use confidence
limits from 0 to 100%. The window length specifies the number of data points
used when calculating outliers.
1-18
Removing outliers replaces the data samples containing outliers with
which you can interpolate in a subse quent operation. To learn more, see
“Interpolating Missing Data” on page 1-17.
NaNs,
Detrending Data
To detrend, select the Detrending check box. You can choose constant or
straight line detrending. Constant detrending removes the mean of the data
to create zero-mean data. Straight line detrending finds linear trends (in the
least-squares sense) and then removes t hem.
Filtering Data
• “Types of Filters” on page 1-18
• “How to Filter Data” on page 1-19
Types of Filters
You have these choices for filtering your data:
Page 29

Preprocessing Data in the GUI
• First order —Afilterofthetype
1
1τs +
whereτis the time constant that you specify in the associated fie ld .
Transfer function — A filter of the type
•
n
as a s a
+++
n
m
bs b s b
+++
m
n
−
1
n
−
1
m
−
1
…
…
0
0
m
−
1
where you specify the coefficients as vectors in the associated A
coefficients and Bcoefficientsfields.
•
Ideal — An idealized (noncausal) filter, either stop or pass band. Specify
either filter as a two-element vector in the Range (Hz) field. These filters
areidealinthesensethatthereisnofiniterollofforripple;theendsofthe
ranges are perfectly horizontal in the frequency domain.
How to Filter Data
To filter the data to remove noise, select the Detrend/Filtering tab in the
Data P reprocess ing Tool GUI. Select the Filtering check box, and choose the
type of filter from the Select filter type drop-down list.
1-19
Page 30

1 Data Analysis and Processing
Selecting Data
• “Techniques for
1-20
• “Graphically
• “Using Rules t
• “Using the Dat
Excluding Data in the Data Preprocessing Tool” on page
Selecting Data” on page 1-20
o Select Data Samples” on page 1-23
a Table to Select Data Sam ples” on p age 1-25
Techniques for Excluding Data in the Data Preprocessing Tool
You can use t
excluded fr
techniques
• Selecting
• Selecting
• Specifyi
You acco
When you
as red. W
becomes
he data is red, and the background is gray.
rule, t
he D ata Preprocessing Tool to select a portion of the data to be
om the estimation process. You can choose one of the following
:
data from the Data Editing Table.
data from a plot of the data.
ng a rule.
mplish the first two manually, and for the last you specify a rule.
exclude data using manual selection, the excluded data is show n
hen you exclude data using a rule, the background color of the cell
gray. When a portion of the data is excluded both manually and by a
1-20
Note C
Editi
hanges in data are visible everywhere. When you use the Data
ng table, you can view the results in the data p lot.
Graphically Selecting Data
an exclude data graphically. Click Exclude Graphically to open the
You c
ct Points for Preprocessing Rule window.
Sele
Page 31

Preprocessing Data in the GUI
The way you exclude data is similar to the way you select a region for
zooming: place your cursor in the Input Data plot and drag the mouse to
draw a region of exclusion.
This figure shows an example of resulting data exclusion in the input data.
1-21
Page 32

1 Data Analysis and Processing
1-22
In the Output Data plot, the excluded input data produces a blank area by
default. This corresponds to the
youchoosetointerpolateorremovethe exclu ded da ta, the output data shows
the interpolated points.
When you make changes in the Select Points for Preprocessing Rule window,
they immediately appear in the Data Editing pane, and vice versa.
Selection Pane. B y default, any box that you draw with your mouse selects
data for exclusion, but you can toggle between exclusion and inclusion using
the Selection pane on the left side of the Select Points for Preprocessing
Rule window.
NaNs that now represent excluded data. If
Page 33

Preprocessing Data in the GUI
Using Rules t
A more precise way to exclude data is to use mathematical rules. The
Exclusion Rules pane in the Data Preprocessing Tool allows you to enter
customized rules for excluding data.
o Select Data Samples
Thesearetherulesyoucanusetoexcludedata:
• “Upper and Lower Bounds” on page 1-24
• “MATLAB Expressions” on page 1-24
1-23
Page 34

1 Data Analysis and Processing
• “Flatlines” on page 1-24
Upper and Lower Bounds. Select the Bounds check box to activate upper
and lower bound exclusion. Enter numbers in the Exclude X and Exclude
Y fields for upper and lower bound exclusion. By default, the exclusion rule
is to include the boundary values, but you can use the menu to exclude the
boundaries as well.
MATLAB Expressions. Use the MATLAB expression field to enter any
mathematical expression using MATLA B code. Use
your expression for the data being tested.
Flatlines. If you have areas of your data set w h ere the data is con stan t,
providing no new information, then youcanchoosetoexcludethosedata
points as flatlines. The Window length field sets the minimum number of
constant data points required to define the area as a flatline.
x as the variable name in
1-24
Page 35

Preprocessing Data in the GUI
Example of Rule Exclusion. This figure shows data with a region of the
x-axis excluded.
Using the Data Table to Select Data Samples
The Data Editing table lists both the raw data set and the modified data
that you create.
1-25
Page 36

1 Data Analysis and Processing
There are
data.The
if you ex
of numbe
represe
clude rows of data in the Raw data pane, the corresponding rows
rs become red in this table. By default the Modified data pa ne
nts the rows you removed by inserting
two tabs in the Data Editing pane: Raw data and Modified
Raw Data pane shows the working copy o f the data. For example,
NaNs.
1-26
Page 37

Preprocessing Data in the GUI
In the Mod
complete
more info
After yo
Exclude
ly or interpolate it. See “Handling Missing Data” on page 1-16 for
rmation.
u select data for exclusion, you can view it graphically by clicking
Graphically.
ified data pane, you can choose to remove the excluded data
1-27
Page 38

1 Data Analysis and Processing
1-28
As you make changes in the Data Editing pane, they immediately appear in
the Select Points for Preprocessing Rule window, and vice versa.
Adding Preprocessed Data Sets to an Estimation Project
After you preprocess the data using the techniques de scribed in “Ways to
Preprocess Data Using the Data Preprocessing Tool” on page 1-14, you can
add the da ta set to an estimatio n project either by ove r writing an existin g
data set or creating a new data set.
• “Overwriting an Existing Data Set” on page 1-29
• “Creating a New Data Set” on page 1-30
Page 39

Preprocessing Data in the GUI
Overwriting an Existing Data Set
To overwrite an existing data set with the preprocessed data:
1 In the Write results to area of the Data Preprocessing Tool GUI, select
the existing dataset option.
2 Choose the data set you want to overwrite from the drop-down list.
3 Click Add.
This action overwrites the selected data set with the modified data in the
Control and Estimation Tools Manager GUI.
1-29
Page 40

1 Data Analysis and Processing
Tip You can export the preprocessed data to the MATLAB Workspace , as
described in “Exporting Prepared Data to the MATLAB W orkspace” on page
1-31.
Creating a New Data Set
If you do not want to overwrite an existing data set with the preprocessed
data, as described in “Overwriting an Existing Data Set” on page 1-29, you
can create a new data set for the preprocessed data:
1 In the Write results to area of the Data Preprocessing Tool GUI, select
2 Specify the name of the data set in the adjacent field.
the new dataset option.
1-30
3 Click Add.
This action adds a new data node in the Control and Estimation Tools
Manager GUI containing the modified data.
Page 41

Preprocessing Data in the GUI
Tip You
descri
1-31.
Expor
Afte
“Add
can e
furt
1 In t
can export the preprocessed data to the MATLAB Workspace, as
bed in “Exporting Prepared Data to the MATLAB Workspace” on p age
ting Prepared Data to the MATLAB Workspace
r you add the preprocessed data to an estimation project, as described in
ing Preprocessed Data Sets to an Estimation Project” on page 1-28, you
xport the data set to the MATLAB Workspace. You can use the data to
her prepare it or estimate parameters using the data.
he Transient Data node of the Control and Estimation Tool s Manager
, s elect the node containing the prepared data set.
GUI
1-31
Page 42

1 Data Analysis and Processing
2 Right-click the table Data cell containing the data that you want to export,
3 Specify the MATLAB variable names for the prepared data and the
4 Click OK.
and select Export.
The Export to Workspace dialog box opens.
corresponding time vector in the Data and Time fields, respectively.
The resulting MATLAB variables
Workspace browser.
data and time4 appear in the MATLAB
1-32
Page 43

Parameter Estimation
• “Overview of Parameter Estimation” on page 2-2
• “Configuring Parameter EstimationintheGUI”onpage2-3
• “Estimating Parameters in the GUI” on page 2-36
• “Validating Parameters in the GUI” on page 2-40
• “Accelerating Model Simulations During Estimation” on page 2-50
• “Speeding Up Parameter Estimation Using Parallel Computing” on page
2-52
2
• “Estimating Initial States” on page 2-65
• “Working with Estimation Projects” on page 2-78
• “Estimating Parameters at the Command Line” on page 2-83
Page 44

2 Parameter Estimation
Overview of Parameter Estimation
When you estimate model parameters, Simulink Design Optim ization
software compares the measured data with data generated by a Simulink
model. Using optimization techniques, the software estimates the param eter
and (optionally) initial conditions of states to minimize a user-selected cost
function. The cost function typically calculates a least-square error between
the empirical and model data signals.
After you import and preprocess the estimation data, as described in
“Importing Data into the GUI” on page 1-5 and “Preprocessing Data in the
GUI” on page 1-14, follow these stepstoestimatemodelparameters:
1 “Creating an Estimation Task” on page 2-3
2 “Specifying Data for Parameter Estimation” on page 2-4
3 “Specifying Parameters to Estimate” on page 2-6
4 “Specifying Initial States” on page 2 -17
2-2
5 “Selecting Views for Plotting” on page 2-19
6 “Specifying Estimation Options” on p age 2-23
7 Estimating Parameter
8 Validating Parameters
Note The Simulink model must remain open to perform parameter
estimation tasks.
To learn how to estima te parameters at the command line, see “Estimating
Parameters at the Command Line” on page 2-83.
Page 45

Configuring Parameter Estimation in the GUI
Configuring Parameter Estimation in the GUI
In this section...
“Creating an Estimation Task” on page 2-3
“Specifying Data for Parameter Estimation” on page 2-4
“Specifying Parameters to Estimate” on page 2-6
“Specifying Initial States” on page 2-17
“Selecting Views for Plotting” on page 2-19
“Specifying Estimation Options” o n page 2-23
“Specifying Simulation Options” on page 2-29
“Specifying D isplay Options” on page 2-35
Creating an Estimation Task
ThissectiondescribeshowtousetheGUItoestimateparameters. Afteryou
import the transient data, as described in “Importing Data into the GUI” on
page 1-5, you must create an estimation task and configure the estimation
settings. To create a container that stores the estimation settings:
1 In the Control and Estimation Tools Manager, right-click the Estimation
node in the Workspace tree and select New.
2 Select the New Estimation node.
The C ontrol and Estimation Tools Manager now rese mbles the next figure.
2-3
Page 46

2 Parameter Estimation
2-4
Specif
• “Prere
• “How t
ying Data for Parameter Estimation
quisite for Specifying Data” on page 2-4
oSpecifyDataintheGUI”onpage2-5
Prerequisite for Specifying Data
ecify a data set for estimation, you must have already imported the
To sp
in the GUI and created an Estimation Task, as described in “Creating
data
timation Task” on page 2-3. If your d ata contains noise or outliers,
an Es
ust also preprocess the data, as described in “Preprocessing Data in
you m
GUI” on page 1-14.
the
Page 47

Configuring Parameter Estimation in the GUI
How to Specify Data in the GUI
After you select the New Estimation node, the Data Sets tab appears. Here
you select the data set that you want to use in the estimation.
Select the Selected check box to the right of the New Data data set.
Note If you imported multiple data sets, you can select them for estimation
by selecting the check box to the right of each desired data set. When using
several data sets, you increase the estimation precisio n. However, you also
increase the number of required simulations: for N parameters and M data
sets, there are M*(2N+1) simulations per iteration.
Then, specify the weight of each output from this model by setting the Weight
column in the Output data weights table.
2-5
Page 48

2 Parameter Estimation
The relative weights are used to place more or less emphasis on specific
output variables. The following are a few guidelines for specifying weights:
• Uselessweightwhenanoutputisnoisy.
• Use more weig ht when an output strongly affects parameters.
• Use more weight when it is more important to accurately match this model
output to the data.
Specifying Parameters to Estimate
• “Choosing Which Parameters to Estimate First” on page 2-6
• “How to Specify Parameters for Estimation in the GUI” on page 2-6
• “Specifying Initial Guesses and Upper/Lower Bounds” on page 2-11
• “Specifying Parameter Dependency” on page 2-13
• “Example: Specifying Independent Parameters for Estimation” on page
2-14
2-6
Choosing Which Parameters to Estimate First
Simulink Design Optimization software lets you estimate scalar, vector and
matrix parameters. Estimating model parameters is an iterative process.
Often, it is more practical to estimate a small g roup of parameters and use the
final estima t ed values as a starting point for further estimation of parameters
that are trickier. When you have a large number of parameters to estimate,
select the parameters that influence the output the most to be estimated
first. Making these sorts of choices involves experience, intuition, and a solid
understanding of the strengths and limitations of your Simulink model.
After you estimate a subset of parameters and validate the estimated
parameters, select the remaining parameters for estimation.
How to Specify Parameters for Estimation in the GUI
To select parameters for estimation:
1 In the Control and Estimation Tools Manager, select the Variables node
in the Workspace tree to open the Estimated Parameters pane.
Page 49

Configuring Parameter Estimation in the GUI
2 In the Estimated Parameters pane, click Add to open the S e lect
Parameters dialog box.
2-7
Page 50

2 Parameter Estimation
The dialog box lists all the variables in the model workspace and the
MATLAB workspace that the model uses. You can use the mouse to select
theparameterstoestimate.
2-8
You can also enter parameters, separated by commas, in the Specify
expression field of the Select Parameters dialog box. The parameters
can be stored in one of the following:
• Simulink software parameter object
Example: For a Simulink parameter object
• Structure
Example: For a structure S, type S.fieldname (where fieldname
represents the name of the field that contains the parameter).
• Cell array
Example: Type
• MATLAB array
Example: Type
a.
C{1} to select the first element of the C cell array.
a(1:2) to select the first column ofa2-by-2arraycalled
k,typek.value.
Page 51

Configuring Parameter Estimation in the GUI
Sometimes, models have parameters that are not explicitly defined in
the model itself. For example, a gain
workspace as
k=a+b,wherea and b are not defined in the model but k
k could be defined in the MATLAB
is used. To add these independent parameters to the Select Parameters
dialog box, see “Specifying Parameter Dependency” on page 2-13.
3 Select the last seven parameters: freq1, freq2, freq3, gain1, gain2,
gain3,andmean_speed,andthenclickOK.
Note You need not estimate the parameters selected here all at once. You
can first select all the parameters that you are interested in, and then later
selecttheonestoestimateasdescribedinthenextstep.
The C ontrol and Estimation Tools Manager now rese mbles the next figure.
2-9
Page 52

2 Parameter Estimation
To learn how to specify the settings in the Default settings area of the
pane, see “Specifying Initial Guesses and Upper/Lower Bounds” on page
2-11.
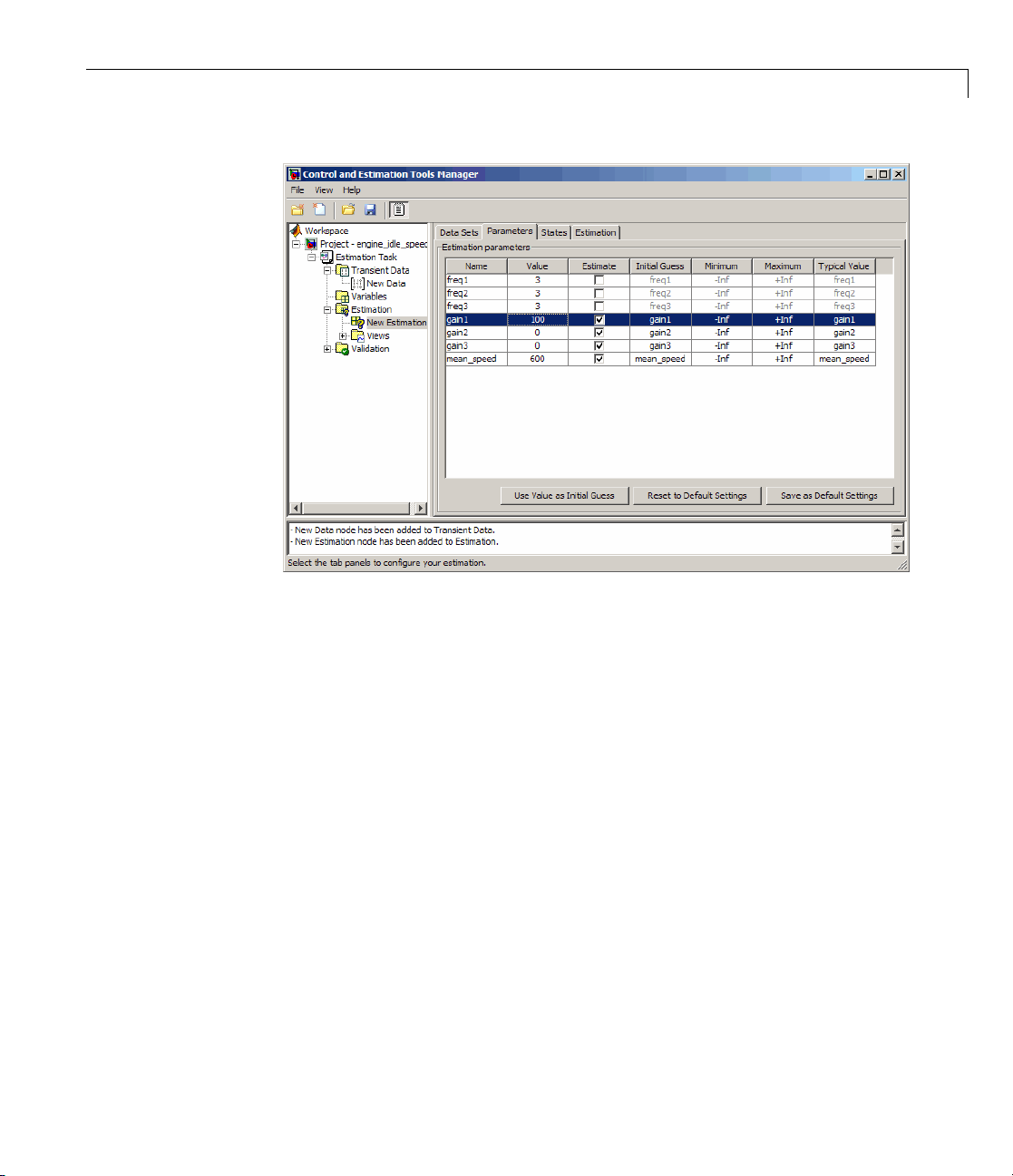
4 In the New Estimation node of the Control and Estimation Tools
Manager GUI, select the Parameters tab . In this pane, you select which
parameters to estimate and the range of values for the estimation.
a Select the parameters you want to estimate by selecting the check box
in the Estimate column.
b EnterinitialvaluesforyourparametersintheInitial Guess column.
The default values in the Minimum and Maximum columns are
-Inf
and +Inf, respectively, but you can select any range you want. For more
information, see “Specifying Initial Guesses and Upper/Lower Bounds”
on page 2-11.
Note When you specify the Minimum and Maximum values for the
parameters here, it d oes not affect your settings in the Variables node.
Youmakethesechoicesonaperestimationbasis. Youcanmovedatato
and from the Variables node into the Estimation node.
For this example, select gain1, gain2, gain3 and mean_speed for
estimation and set
gain1 to 10, gain2 to 100, gain3 to 50, and mean_speed
to 500. Alternat ively, use any initial values you like.
If you have good reason to believe a parameter lies within a finite range,
it is usually best not to use the default minimum and maximum values.
Often, there are computational advantages in specifying finite bounds if
you can. It can be very important to specify lower and upper bounds. For
example, if a parameter specifies the weight of a part, be sure to specify
0
as the absolute lower bound if better knowledge is unavailable.
The C ontrol and Estimation Tools Manager now rese mbles the next figure.
2-10
Page 53
Configuring Parameter Estimation in the GUI
Specifying Initial Guesses and Upper/Lower Bounds
After you select parameters for estimation in the Variables node of the
Control and Estimation Tools Manager GUI, the Estimated Parameters tab
in the Control and Estimation Tools Manager looks like the following figure.
2-11
Page 54

2 Parameter Estimation
2-12
For eac
• Initia
• Minimu
• Maxim
• Typic
hparameter,usetheDefault settings pane to specify the following:
lguess— The value the estimation uses to start the process.
al value — The average order of magnitude. If you exp ect your
meter to vary over several orders of magnitude, enter the number
para
specified the average o rder of magnitude you expect. For example, if
that
initial guess is 10, but you expect the parameter to vary between
your
d 1000, enter 100 (the average of the order of magnitudes) for the
10 an
ical value.
typ
m — The smallest allowable parameter value. The default is
um — The largest allowable parameter value. The default is
-Inf.
+Inf.
Page 55

Configuring Parameter Estimation in the GUI
You use the typical value in two ways:
• To scale paramete rs with radically different orders of magnitude for equal
emphasis during the estimation. For example, try to select the typical
values so that
anticipated value
typical value
≅ 1
or
initial value
typical value
≅ 1
• To put more of less emphasis on specific parameters. Use a larger typical
value to put more emphasis on a parameter during estimation.
Specifying Parameter Dependency
Sometimes parameters in your model depend on independent parameters
that do not appear in the model. The following steps give an overview of how
to specify independent parameters for estimation:
1 Add the independent parameters to the model workspace (along with
initial values).
2 Define a Simulation Start function that runs before each simulation of the
model. This Simulation Start function defines the relationship between the
dependent parameters in the model and the independent parameters in
the model workspace.
3 The independent parameters now appear in the Select Parameters dialog
box. Add these parameters to the list of parameters to be estimated.
Caution Avoid adding independent parameters together with their
corresponding dependent parameters to the lists of parameters to be
estimated. Otherwise the estimation could give incorrect results. For
example, when a parameter
x depends on the parameters a and b,avoid
adding all three parameters to the list.
2-13
Page 56

2 Parameter Estimation
For an example of how to specify independent parameters, see “Example:
Specifying Independent Parameters for Estimation” on page 2-14.
Example: Specifying Independent Parameters for Estimation
Assume that the parameter Kint in the model srotut1 is related to the
parameters
the i nitial values of
instead of Kint, first define these parameters in the model workspace. To
do this:
1 At the MATLAB prompt, type
srotut1
This opens the srotut1 model window.
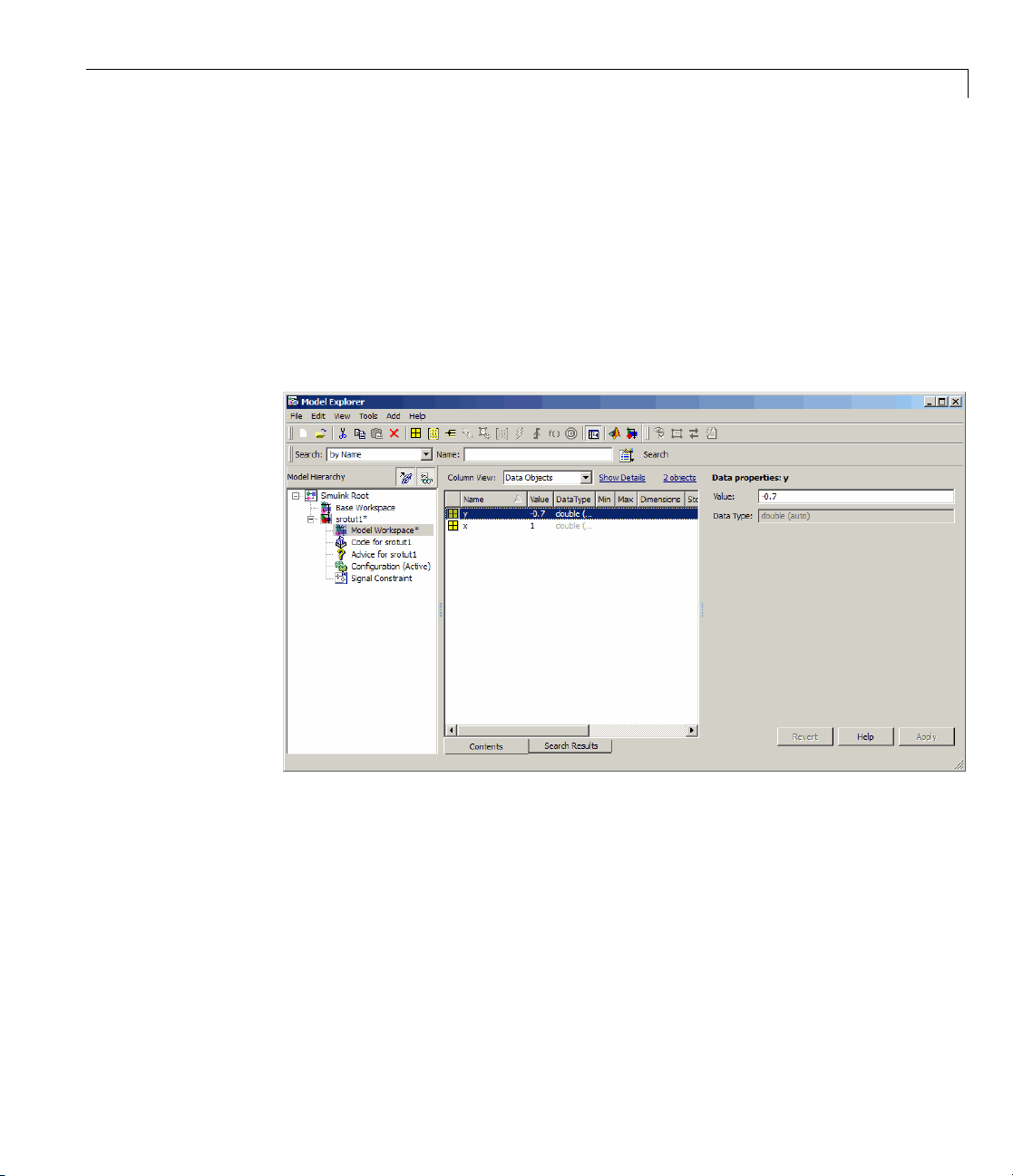
2 Select View > Model Explorer from the srotut1 w i ndow to open the
Model Explorer window.
x and y according to the relationship Kint=x+y. Also assume that
x and y are 1 and -0.7 respectively. To estimate x and y
2-14
3 In the Model Hierarchy tree, select srotut1 > Model Workspace.
Page 57
Configuring Parameter Estimation in the GUI
4 Select Add > MATLAB Variable to add a new variable to the model
workspace. A new variable with a default name
Var appears in the Name
column.
5 Double-click Var to make it editable and change the variable name to x.
Edit the initial Value to
6 Repeat steps 4 and 5 to add a variable y with an initial value of -0.7.
1.
The Model Explorer window resembles the following figure.
7 To add
Kint a
Prop
8 In the Model Properties window , click the Callbacks tab.
9 To enter a Simulation start function, select StartFcn*, and type the name
of a new function. For example,
the Sim ulation Start function that defines the relationship between
nd the independent parameters
erties in the
srotut1 model window.
srotut1_start in the Simulation start
x and y, select File > Model
function panel. Then, click OK.
2-15
Page 58

2 Parameter Estimation
10 Create a MATLAB file named srotut1_start. The content of the file
defines the relationship between the parameters in the model and the
parameters in the workspace. For this example, the content resembles
the following:
wks = get_param(gcs, 'ModelWorkspace')
x = wks.evalin('x')
y = wks.evalin('y')
Kint = x+y;
Note You m ust first use the get_param function to get the variables x and
y from the model workspace before you can use them to define Kint.
When you select parameters for estimation in the Variables node of Control
and Estimation Tools Manager,
x and y appear in the Select Parameters
dialog box.
2-16
Page 59

Configuring Parameter Estimation in the GUI
Specifying Initial States
• “When to Specify Initial States Versus Estimate Initial States” on page 2-17
• “How to Specify Initial States in the GUI” on page 2-17
When to Specify Initial States Versus Estimate Initial States
Often, sets of measured data are collected at various times and under
different initial conditions. When you estimate model parameters using one
data set and subsequently run another estimation with a second data set,
your parameter v alues may not match. Given that the Simulink Design
Optimization software attempts to find constant values for parameters, this
is clearly a problem.
You can estimate the initial conditions using procedures that are similar to
thoseyouusetoestimateparameters. Youcanthenusetheseinitialcondition
estimates as a basis for estimating parameters for your Simulink model. The
Control and Estimation Tools Manager has an Estimated States pane that
lists the states available for initial condition estimation. To learn how to
estimate initial states, see “Estimating Initial States” on page 2-65.
How to Specify Initial States in the GUI
After you select parameters for estimation, as described in “Specifying
Parameters to Estimate” on page 2-6, you can s pecify initial conditions of
states in your model. By default, the estimation uses initial conditions
specified in the S i mulink model. If you want to specify initial cond iti ons
other than the defaults, use the State Data tab. You can select the State
Data tab in the New Data node under the Transient Data node in the
Workspace tree.
2-17
Page 60

2 Parameter Estimation
2-18
Page 61

Configuring Parameter Estimation in the GUI
To specify t he initial condition of a state for the engine_idle_speed model:
1 Select the Data cell associated with the state.
2 Enter the initial conditions. In this example, enter -0.2 for State - 1 of
the engine_idle_speed/Transfer Fcn.ForState - 2,enter
0.
cting Views for Plotting
Sele
• “Typ
• “Ba
es of Plots” on page 2-19
sicStepsforCreatingPlots”onpage2-20
Types of Plots
u can choose the plot type from the Plot Type drop-down list. The following
Yo
pes of pl o ts are available for viewing and evaluating the estimation:
ty
2-19
Page 62

2 Parameter Estimation
• Cost function — Plot the cost function values.
Measured and simulated — Plot empirical data against simulated data.
•
Parameter sensitivity — Plot the rate of change of the cost function as a
•
function of the change in the parameter. That is, plot the derivative of the
cost function with respect to the parameter being varied.
•
Parameter trajectory — Plot the parameter values as they change.
Residuals — Plot the error betw een the experimental data and the
•
simulated output.
Basic Steps for Creating Plots
Before you begin estimating the parameters, you must create the plots for
viewing the progress of the estimation.
Note An estimation must be created before creating views. Otherwise, the
Options tablewillbeempty.Tolearnmore,see“CreatinganEstimation
Task” on page 2-3.
2-20
To create plots for viewing the estimation progress, follow the steps below:
1 Right-click the Views node in the Control and Estimation Tools Manager
and select New.
Page 63

Configuring Parameter Estimation in the GUI
2 In the Workspace tree, select New View to open the View Setup pane.
2-21
Page 64

2 Parameter Estimation
3 In the Select plot types table, select the Plot Type from the drop-down
list. In this e xample , select
Cost function.
2-22
t
4 Selec
will b
5 In the Options area, select the check-box for both Plot 1 and Plot 2.
6 Click Show Plots. This displays an empty cost function plot and a plot of
Measured and simulated as the Plot Type for Plot 2.Thisplot
e used in validating estimated parameters.
the measured data.
Page 65

Configuring Parameter Estimation in the GUI
When you perform the estimation, the plot updates automatically.
Specifying Estimation Options
• “Accessing Estimation Options” on page 2-24
• “Supported Estimation Methods” on page 2-25
• “Selecting Optimization Termination Options” on page 2-27
• “Selecting Additional Optimization Options” on page 2-27
• “Specifying Goodness of Fit Criteria (Cost Function)” on page 2-28
• “How to Specify Estimation Op t ions in the GUI” on page 2-28
2-23
Page 66

2 Parameter Estimation
Accessing Estimation Options
In the New Estimation node in the Workspace tree, click the Estimation
tab.
2-24
Click Estimation Options. This action opens the Options- New Estimation
dialog box where you can specify the estimation method, algorithm options
and cost function for the estimation.
Page 67

Configuring Parameter Estimation in the GUI
The following sections describe the estimation method settings and cost
function:
• “Supported Estimation Methods” on page 2-25
• “Selecting Optimization Termination Options” on page 2-27
• “Selecting Additional Optimization Options” on page 2-27
• “Specifying Goodness of Fit Criteria (Cost Function)” on page 2-28
Supported Estimation Methods
Both the Method and Algorithm options define the optimization method.
Use the Optimization method area of the Options dialog box to set the
estimation method and its algorithm.
For the Method option, the four choices are:
•
Nonlinear least squares (default) — Uses the Optimization Toolbox™
nonlinear least squares function
Gradient descent — Uses the Optimization T oolbo x function fmin con.
•
lsqnonlin.
2-25
Page 68

2 Parameter Estimation
• Pattern search — Uses the pattern search method patternsearch.This
option requires Global Optimization Toolbox software.
•
Simplex search — Uses the Optimization Toolbox function fminsearch,
which is a direct search method.
problems and is sometimes faster than
Simplex search is most useful for simple
fmincon for models that contain
discontinuities.
The following table summarizes the Algorithm options for the
least squares
Method Algorithm Option
Nonlinear
least squares
and G radi ent descent estimation methods:
Learn More
• Trust-Region-Reflective
(default)
Levenberg-Marquardt
•
In the Optimization
Toolbox
documentation,
see:
• “Large Scale
Trust-Region
Reflective Least
Squares”
• “Levenberg-Marquardt
Method”
Gradient
descent
• Active-Set (default)
Interior-Point
•
• Trust-Region-Reflective
In the Optimization
Toolbox
documentation,
see:
• “fmincon Active
Set Algorithm”
• “fmincon Interior
Point Algorithm”
Nonlinear
2-26
• “fmincon Trust
Region Reflective
Algorithm”
Page 69

Configuring Parameter Estimation in the GUI
Selecting Optimization Termination Options
Specify termination options in the Optimization options area.
Several options define when the optimiz ation terminates:
• Diff max change — The maximum allowable change in variables
for finite-difference derivatives. See
Toolboxdocumentation for details.
• Diff min change — The minimum allowable change in variables for
finite-difference derivatives. See
documentation for details.
• Parameter tolerance — Optimization terminates when successive
parameter values change by less than this number.
fmincon in the Optimization
fmincon in the Optimization Toolbox
• Maximum fun evals — The maximum number of cost function
evaluations allowed. The optimization terminates when the number of
function evaluations exceeds this value.
• Maximum iterations — The maximum number of iterations allowed. The
optimization terminates when the number of iterations exceeds this value.
• Function tolerance — The optimization terminates when successive
function values are less than this value.
By varying these parameters, you can force the optimization to continue
searching for a solution or to continue searching for a more accurate solution.
Selecting Additional Optimization Options
At the bottom of the Optimization options pane is a group of additional
optimization options.
2-27
Page 70

2 Parameter Estimation
Additional options for optimization include:
• Display level — Specifies the form of the output that appears in the
MATLAB command window. The options are
information after each iteration,
None, which turns off all output, Notify,
which displays output only if the function does not converge, and
Iteration,whichdisplays
Final,
which only displays the final output. Refer to the Optimization Toolbox
documentation for more information on w hat type of iterative output each
method displays.
• Gradient type — When using
squares
difference methods. The
as the Method, the gradients are calculated based on finite
Refined method offers a more robust and less
noisy gradient calculation method than
to run optimizations using the
Gradient Descent or Nonlinear least
Basic,althoughitdoestakelonger
Refined method.
Specifying Goodness of Fit Criteria (Cost Function)
The cost function is a function that estimation methods attempt to minimize.
You can specify the cost function at the bottom of the Optimization options
area.
You hav
• Cost fu
• Use ro
e the following options when selecting a cost function:
nction —Thedefaultis
-squares approach. You can also use
least
SSE (sum of squared errors), which uses a
SAE, the sum of absolute errors.
bust cost — Makes the optimizer use a robust cost function instead
default least-squares cost. This is useful if the experimental data has
of the
outliers, or if your data is noisy.
many
How to Specify Estimation Options in the GUI
can set several options to tune the results of the estimation. These
You
ions include the optimization methods and their tolerances.
opt
2-28
et options f or estimation:
To s
lect the New Estimation node in the Workspace tree.
1 Se
Page 71

Configuring Parameter Estimation in the GUI
2 Click the Estimation tab.
3 Click Estimation Options to open the Options dialog box.
4 Click the Optimization Options tab and specify the options.
Specifying Simulation Options
• “Accessing Simulation Options” on page 2-29
• “Selecting Simulation Time” on page 2-30
• “Selecting Solvers” on page 2-32
Accessing Simulation Options
To estimate paramete rs of a model, Simulink Design Optimization software
runs simulations of the model.
To set options for simulation:
1 Select the New Estimation node in the Workspace tree.
2 Click the Estimation tab.
3 Click Estimation Options to open the Options dialog box.
2-29
Page 72

2 Parameter Estimation
4 Click the Simulation Options tab and specify the options, as described in
the following sections:
2-30
• “Selecting Simulation Time” on page 2-30
• “Selecting Solvers” on page 2-32
Selecti
You can specify the simulation start and stop times in the Simulation time
area of the Simulation Options tab.
By default, Start time and Stop time are automatically computed based on
thestartandstoptimesspecifiedintheSimulinkmodel.
To set alternative start and stop times for the optimization, enter the new
times under Simulation time. This action overwrites the sim ulation start
andstoptimesspecifiedintheSimulinkmodel.
ng Simulation Time
Page 73

Configuring Parameter Estimation in the GUI
Simulation Time for Data Sets with Different Time Lengths. Simulink
Design Optimization software can simulate models containing empirical
data sets of different time lengths. You can use experimental data sets for
estimation that contain I/O samples collected at different time points.
The following example shows a single-input, tw o-output model for which
you want to estimate the parameters.
y1(t)
u(t)
y2(t)
The model uses two output data sets containing transient data samples for
parameter estimation:
• Output y1(t) at time points
• Output y2(t) at time points
The simulation time t is computed as:
tt t tttt tt
=∪=
12
This new set ranges from tmin to tmax.Thevaluestmin and tmax represent
the minimum and maximum time points in t respectively.
When you run the estimation, the model is simu la ted over the time range t.
Simulink extracts the simulat ed data for eac h output based on the following
criteria:
• Start time — Typically, the start time in the Simulink model is set to
For a nonzero start time, the simulated data corresponding to time points
1
before
t
1
,,,,.....,
{}
1112212
for y1(t) and
tttt
1
ttt t
2
212
nm
2
t
for y2(t) are discarded.
1
11
=
, ,....
{}
112
22
=
, ,.....
{}
122
.
n
.
m
0.
2-31
Page 74

2 Parameter Estimation
• Stop time —Ifthestoptime
tt
stop≥max
,thesimulateddata
corresponding to time points in t1 are extracted for y1(t). Similarly, the
simulated data for time points in t2 are extracted for y2(t).
If the stop time
tt
stop<max
, the data spanning time points
> t
stop
are
discarded for both y1(t) and y2(t).
Selecting Solvers
When running the estimation, the software solves the dynamic system using
one of several Simulink solvers.
Specify the solver type and its options in the Solver options area of the
Simulation Options tab of the Options dialog box.
The solver can be one of the following Type:
•
Auto (default) — Uses the simulation settings specified in the Simulink
model.
•
Variable-step — Variable-step solvers keep the error within specified
tolerances by adjusting the step size the solver uses. For example, if the
states o f your model are likely to vary rapidly, you can use a variable-step
solverforfastersimulation. Formore information on the variable-step
solver options, see “Variable-Step Solver Options” on page 2-33.
2-32
•
Fixed-step — Fixed-step solvers use a constant step-size. For more
information on the fixed-step solver options, see “ Fix ed-Step Solver
Options” on page 2-34.
See “Choosing a Solver” in the Simulink documentation for information about
solvers.
Page 75

Configuring Parameter Estimation in the GUI
Note To obtain faster simulations during estimation, you can change the
solver Type to
Variable-step or Fixed-step. Howev er, the estimated
parameter values apply only for the chosen solver type, and may differ from
valuesyouobtainusingsettingsspecified in the Simulink model.
Variable-Step Solver Options . When you select Variabl e-st ep as the
solver Type, you can choose one of the following as the Solver:
•
Discrete (no continuous states)
• ode45 (Dormand-Prince)
• ode23 (Bogacki-Shampine)
• ode113 (Adams)
• ode15s (stiff/NDF)
• ode23s (stiff/Mod. Rosenbrock)
• ode23t (Mod. s tiff/Trapezoidal)
• ode23tb (stiff/TR-BDF2)
You can also specify the following parameters that affect the step-size of the
simulation:
• Maximum step size — The largest step-size the solver can use during a
simulation.
• Minimum step size — The smallest step-size the solver can use during a
simulation.
• Initial step size — The step-size the solver uses to begin the simulation.
2-33
Page 76

2 Parameter Estimation
• Relative tolerance — The largest allowable relative error at any step in
the simulation.
• Absolute tolerance — The largest allowable absolute e rror at any step in
the simulation.
• Zero crossing control —Setto
the signal crosses the x-axis. This option is useful when using functions
that are nonsmooth and the output depends on when a signal crosses the
x-axis, such as absolute values.
By default, the software automatically chooses the values for these options.
To specify your own values, enter them in the appropriate fields. For more
information, see “Solver Pane” in the Simulink documentation.
Fixed-Step Solver Options. When you select
Type, you can choose one of the following as the Solver:
•
Discrete (no continuous states)
• ode5 (Dormand-Prince)
• ode4 (Runge-Kutta)
• ode3 (Bogacki-Shanpine)
• ode2 (Heun)
• ode1 (Euler)
on for the solver to compute exactly where
Fixed-step as the solver
2-34
You can also specify the Fixed step size value, which determines the
step size the solver uses during the simulation. By default, the software
automatically chooses a value for this option. For more information, see
“Fixed-step size (fundamental sample time)” in the Simulink documentation.
Page 77

Configuring Parameter Estimation in the GUI
Specifying Display Options
You can specify the display options by clicking Display Options in the
Estimation tab in the Control and E stimation toolsManager. Thisopensthe
following dialog box.
Clearing a check box implies that feature will not appear in the display table
as the estimation progresses. To learn more about the display table, see
“Displaying Iterative Output” in the Optimization Toolbox documentation.
2-35
Page 78

2 Parameter Estimation
Estimating Parameters in the GUI
Before you begin estimating the parameters, you must have configured the
estimation data and parameters, and specified estimation and simulation
options, as described in “Configuring Parameter Estimation in the GUI” on
page 2-3.
To start the estimation, select the New Estimation node in the Control and
Estimation Tools Manager and select the Estimation tab.
Click Start to begin the estimation process. At the end of the iterations, the
window should resemble the following:
2-36
Usually, a lower cost function value indicates a successful estimation,
meaning that the experimental data matches the model simulation with the
estimated parameters.
Page 79

Estimating Parameters in the GUI
Note For information on types of problems you may encounter using
optimization solvers, see “Steps to Take After Running a Solve r” in the
Optimization Toolbox documentation.
The Estimation pane displays each iteration of the optimization methods. To
see the final values for the parameters, click the Parameters tab.
ThevaluesoftheseparametersarealsoupdatedintheMATLABworkspace.
IfyouspecifythevariablenameintheInitial Guess column, you can restart
the e stim a tion from where you left off at the end of a previous estimation.
After the estimation process completes, the cost function minimization plot
appearsasshowninthefollowingfigure.
2-37
Page 80

2 Parameter Estimation
2-38
If the optimization went well, you should see your cost function converge on a
minimum value. The lower the cost, the more successful is the estimation.
You can also examine the measured versus simulated data plot to see how
closely the simulated data matches the measured estimation data. The n ext
figure shows the measured versus simulated data plot generated by running
the estimation of the
engine_idle_speed model.
Page 81

Estimating Parameters in the GUI
2-39
Page 82
2 Parameter Estimation
Validating Parameters in the GUI
In this section...
“Basic Steps for Model Validation” on page 2-40
“Loading and Importing the Validation Data” on page 2-41
“Performing Validation” on page 2-43
“Comparing Residuals” on page 2-47
Basic Steps for Model Validation
After you complete estimating the parameters, as described in “Estimating
Parameters in the G UI” on page 2-36, you must validate the results against
another set of data.
The steps to validate a model using the Control and Estimation Tools
Manager are:
2-40
1 Import the validation data set to the Transient Data node.
2 Add a new validation task in the Validation node in the Workspace tree.
3 Config
4 Click Show Plots in the Validation Setup pane and view the results
5 Compare the validation plots to the corresponding view plots to see if they
The basic difference between the validation and views features is that you
can run validation after the estimation is complete. All views should be set
up before an estimation, and you can watch the views update in real time.
Validations can use other validation data sets for comparison with the model
response. Also, validations appear after you hav e completed an e stimatio n
and do not update.
ure the validation settings by selecting the plot types and the
ation data set from the Validation Setup pane.
valid
in the plot window.
match.
Page 83

Validating Parameters in the GUI
You can validate your data by comparing measured vs. simulated data for
your estimation data and validation data sets. Also, it is often useful to
compare residuals in the same way.
Loading and Importing the Validation Data
To validate the estimated parameters computed in “Estimating Parameters
in the GUI” on page 2-36, you must first import the data into the Control
and Estimation Tools Manager GUI.
To load the validation data, type
load iodataval
at the MATLAB prompt. This loads the data into the MATLAB workspace.
The next step is to import this data into the Control and Estimation Tools
Manager. See “Importing Data into the GUI” on page 1-5 for information on
importing d ata, but the quickest way is to follow these steps:
1 Right-click the Transient Data node in the Workspace tree in the
Control and Estimation Tools Manager and select New.
2 Select New Data (2) from the Transient Data pane.
3 Right-click the New Data (2) node in the Workspace tree and s ele ct
Rename. Change the name of the data to Validation Data.
4 In the Input Data pane, select the Data cell associated with Channel
and click Import. In the Data Import dialog box, select iodataval
-1
and assign column 1 to the selected channel by entering 1 in the Assign
columns field. Click Import to import the input data.
2-41
Page 84

2 Parameter Estimation
5 Select the Time/Ts cell and import time using the Data Import dialog box.
6 Similarly, in the Output Data pane, select Time/Ts and import time.
2-42
7 In the Out
and cli
-1
put Data pane, select the Data cell associated with
ck Import. Import the second column of data in
iodataval by
Channel
Page 85

Validating Parameters in the GUI
selecting it from the list in the Import Data dialog box and entering 2 in the
Assign columns field. Click Import to import the output data.
The Control and Estim ation Tools Manager should resemble the next
figure.
Perfo
Afte
the V
New.
Too
rming Validation
r you import the validation data, as described in “Loading and Importing
alidation Data” on page 2-41, right-click the Validation node and select
This creates a New Validation node in the Control and Estimation
ls Manager.
2-43
Page 86

2 Parameter Estimation
2-44
To perf
1 Select
Valida
orm the validation:
the New Validation no de in the Workspace tree to open the
tion Setup pane.
Page 87

Validating Parameters in the GUI
2 Click the Plot Type cell for Plot 1 and select Measured and si mula ted
from the d rop-down menu.
3 In the Options area, select Va lid ation Data in the Validation data set
drop-down list.
4 Click Show Plots to open a plot figure window as shown next.
2-45
Page 88

2 Parameter Estimation
2-46
Measured Versus Simulated Data Plot for Validation Data
5 Compare
the val
“Selec
idation data. For more information on how to create this plot, see
ting Views for Plotting” on page 2-19.
this plot with the plot of
Measured and simulated data for
Page 89

Validating Parameters in the GUI
Measured and Simulated Data Views Plot
Comparing Residuals
To look at the residuals, select Resid uals as the Plot Type for Plot 2 in the
New Validation pane. In the Options area, select the Plot 2 check box and
click Show Plots. The following figure shows the resulting residuals plot.
2-47
Page 90

2 Parameter Estimation
2-48
Plot of Residuals Using the Validation Data
Compare the validation data residuals with the original data set residuals
from the Views node in the Workspace tree. T o create the plot of residuals
for the orig inal data set, select the New View node and choose
the Plot Type.
Residuals as
Page 91

Validating Parameters in the GUI
Plot of Residuals Using the Test Data
The plot on the left agrees with the plot of the residuals for the validation
data. The right side has no plot because residuals were not calculated for the
validation data during the original estimation process.
2-49
Page 92

2 Parameter Estimation
Accelerating Model Simulations During Estimation
In this section...
“About Accelerating Model Simulations During Estimation” on page 2-50
“Limitations” on p age 2-50
“Setting the Accelerator Mode for Parameter Estimation” on page 2-50
About Accelerating Model Simulations During Estimation
You can accelerate the parameter estimation computations by changing the
simulation mode of your Simulink model. Simulink Design Optimization
software supports
information about these modes, see “Accelerating Models” in the Simulink
documentation.
Normal and Accelerator simulation modes. For more
The default simulation mode is
interpreted code, rather than compiled C code during simulations.
In the
simulations during estimation with compiled C code. Using compiled C code
speeds up the simulations and reduces the time to estimate parameters.
Accelerator mode, Simulink Design Optimization software runs
Normal. In this mode, Simulink software uses
Limitations
You cannot use the Accelerator mode if your model co ntains a lgebraic loops.
If the model contains MATLAB function blocks, you must either remove them
or replace them with Fcn blocks.
Setting the Accelerator Mode for Parameter Estimation
To set the simulation mode to Accelerator, open the Simulink model window
and perform one of the following actions:
• Select Simulation > Accelerator.
• Choose
Accelerator from the drop-down list as shown in the next figure.
2-50
Page 93

Accelerating Model Simulations During Estimation
Tip To obtain the maximum performance from the Accelerator mode, close
all Scope blocks in your model.
2-51
Page 94

2 Parameter Estimation
Speeding Up Parameter Estimation Using Parallel Computing
In this section...
“When to Use Parallel Computing for Estimating Model Parameters” on
page 2-52
“How Parallel Computing Speeds Up Parameter Estimation” on page 2-53
“Specifying Model Depende ncies” on page 2-56
“Configuring Your System for Parallel Computing” on page 2-56
“How to Use Parallel Computing in the GUI” on page 2-58
“Troubleshooting” on page 2-62
When to U
Model Pa
You can u
Toolbo
Using p
cases:
• The mo
• The
• The m
Whe
dis
MAT
th
si
on
Es
x™ software to speed up parameter estimation of Simulink models.
arallel computing may reduce the estimation time in the following
near least squares
Nonli
ation method.
estim
attern search
P
odel is complex and takes a long time to simulate.
n you use parallel computing, Simulink Design Optimization software
tributes independent simulations to run them in parallel on multiple
LAB sessions, also known as workers. The time required to simulate
e model dominates the total estimation time. Therefore, distributing the
mulations significantly reduces the estimation time. For more information
the expected speedup, see “How Parallel Computing Speeds Up Parameter
timation” on p age 2-53.
se Parallel Computing for Estimating
rameters
se Simulink Design Optimization software with Parallel Computing
del contains a large number parameters to estimate, and the
or Gradient descent is selected as the
method is selected as the estimation method.
2-52
Page 95

Speeding Up Parameter Estimation Using Parallel Computing
The following sections describe how to configure your system, and use parallel
computing:
• “Configuring Your System for Parallel Compu ting ” on page 2-56
• “How to Use Parallel Computing in the GUI” on page 2-58
• “How to Use Parallel Computing at the Command Line” on page 2 -116
How Parallel Computing Speeds Up Parameter Estimation
You can enable parallel computing with the Nonlinear l east squares,
Gradient descent and Pattern search estimation methods in the Simulink
Design Optimization software. The following sections describe how parallel
computing speeds up the estimation:
• “Parallel Computing with Nonlinear least squares and Gradient descent
Methods” on page 2-53
• “Parallel Computing with the Pattern search Method” on page 2-54
Parallel Computing with Nonlinear least squares and Gradient
descent Methods
When you select Gradient descent as the estimation method, the model is
simulated during the following computations:
• Objective value computation — One simulation per iteration
• Objective gradient computations — Two simulations for every tuned
parameter per iteration
• Line search computations — Multiple simulations per iteration
The total time,
given by the following equation:
TTNTNTT NNtotal p ls p ls=+ × + × =×+××+())()(( )()212
whereTisthetimetakentosimulatethemodelandisassumedtobeequal
for all simulations,
the number of line searches.
, taken per iteration to perform these simulations is
Ttotal
is the number of parameters to estimate, and
Np
Nls
is
2-53
Page 96

2 Parameter Estimation
When you use parallel computing, Simulink Design Optimization software
distributes the simulations required for objective gradient computations.
The simulation time taken per iteration when the gradient computations
are performed in parallel,
TtotalP
, is approximately given by the following
equation:
totalP
Nw
=
T T ceil
where
p
N
⎛
⎞
+
()()(212
⎜
w
N
⎝
T N T T ceil
×× + × = × +×
⎟
⎠
ls
is the number of MATLAB workers.
p
N
⎛
⎞
ls)
+ N
⎜
⎟
w
N
⎝
⎠⎠
Note The equation does not include the tim e overheads associated with
configuring the system for parallel computing and loading Simulink software
on the rem ote MATLAB workers.
The expected reduction of the total estim ation time is given by the following
equation:
N
p
⎛
ceil
+×
T
T
totalP
total
12
=
12(
+×
For example, for a model with N
the total estimation time equals
⎞
N
+
⎜
⎟
N
w
⎝
⎠
+
)
NN
pls
ls
=3, Nw=4,andNls=3, the expected reduction of
p
3
⎛
12
+×
ceil
1233
+×+
()
⎞
3
+
⎜
⎟
4
⎝
⎠
06
.
=
.
2-54
Parallel Computing with the Pattern search Method
The Pattern search method uses search and poll sets to create and compute
a set of candidate solutions at each estimation iteration.
Page 97

Speeding Up Parameter Estimation Using Parallel Computing
The total time,
, taken per iteration to perform these simulations, is
Ttotal
given by the following equation:
TTNNTNNTNNNtotal p ss p ps p ss ps=× × +×× =× × +(( ()))
whereTisthetimetakentosimulatethemodelandisassumedtobeequal
for all simulations,
is the number of parameters to estimate,
Np
factor for the search set size, and
is a factor for the p oll set size .
Nps
Nss
is a
When you use parallel computing, Simulink Design Optimization software
distributes the simulations required for the search and poll set computations,
which are evaluated in separate parfor loops. The simulation time taken pe r
iteration when the search and poll sets are computed in parallel,
TtotalP
,
is given by the following equation:
T T ceil N
totalP p
=× × +× ×
(( ))(( ))
T ceil N
=× ×
where
is the number of MATLAB workers.
Nw
((
ss
N
N
N
p
N
T ceil N
w
sss
ceil N
)( ))+×
w
N
p
N
p
ps
ps
N
N
w
w
Note The equation does not include the tim e overheads associated with
configuring the system for parallel computing and loading Simulink software
on the rem ote MATLAB workers.
The expected speed up for the total estimation time is given by the following
equation:
N
ss
T
T
totalP
total
ceil N
=
×+ ×
p
()( )
NN N
pssps
ceil N
N
w
×
+
()
For example, for a model with N
15
×+ ×
3
ceil ceil()()
speedup equals
4
×+
3152
()
N
ps
p
N
w
=3, Nw=4, Nss=15,andNps=2,theexpected
p
2
3
4
=
027
.
.
2-55
Page 98

2 Parameter Estimation
Using the Pattern search method with parallel computing may not speed
up the estimation time. When you do not use parallel computing, the method
stops searching for a candidate solution at each iteration as soon as it finds a
solution better than the current solution. When you use parallel computing,
the candidate solution search is more comprehensive. Although the number
of iterations may be larger, the estimation without using parallel computing
may be faster.
Specifying Model Dependencies
Model dependencies are file s, such as referenced models,datafilesand
S-functions, without w hich a model cannot run. When you use parallel
computing, Simulink Design Optimization software helps you identify model
path dependencies. To do so, the software uses the Simulink Manifest Tools.
The dependency analysis may not find all the files required by your model.
Forexample,folderpathsthatcontaincode for your model or block callback.
To learn more, see the “Scope of Dependency Analysis” in the Simulink
documentation.
2-56
If your model has dependencies that the software cannot detect automatically,
you must add the dependencies before you start the estimatio n using parallel
computing:
1 Add the path dependencies, as described “How to Use Parallel Computing
in the GUI” on page 2-58 and “How to Use Parallel Computing at the
Command Line” on page 2-116.
2 Add the file dependencies, as described in “Configuring Parallel Computing
on Multiprocessor Networks” on page 2-57.
Note When you use parallel computing, verify that the remote MATLAB
workers can access all the model dependencies. The optimization errors out if
all the remote workers cannot access all the model dependencies.
Configuring Your System for Parallel Computing
You can use parallel computing on multi-core processors or multi-processor
networks. To configure your system for parallel computing, see the following
sections:
Page 99

Speeding Up Parameter Estimation Using Parallel Computing
• “Configuring Parallel Computing on Multicore Processors” on page 2-57
• “Configuring Parallel Computing on Multiproces sor Networks” on page 2-57
After you configure your system for parallel computing, you can use the GUI
or the command-line functions to estimate the model parameters.
Configuring Parallel Computing on Multicore Processors
With a basic Parallel Computing Toolbox license, you can establish a pool of
up to four parallel MATLAB sessions in addition to the MATLAB client.
To start a pool of four MATLAB sessions in local configuration, type the
following at the MATLAB prompt:
matlabpool open local
To learn more, see the matlabpool reference page in the Parallel Computing
Toolbox documentation.
Configuring Parallel Computing on Multiprocessor Networks
To use parallel computing on a multiprocessor network, you must hav e
the Parallel Computing Toolbox software and the MATLAB
Computing Server™ software. To learn more, see the Parallel Computing
Toolbox and MATLAB Distributed Computing Server documentation.
To configure a multiprocessor network for parallel computing:
1 Create a user configuration file to include any model file dependencies, as
described in “ D ef in i ng Configurations” and FileDependencies reference
page in the Parallel Computing Toolbox documentation.
2 Open the pool of MATLAB workers using the user configuration file,
as described in “Applying Configurations in Client Code” in the Parallel
Computing Toolbox documentation.
Opening the pool allows the remote workers to access the file dependencies
included in the user configuration file.
®
Distributed
2-57
Page 100

2 Parameter Estimation
How to Use Parall
After you config
“Configuring Yo
the GUI to estim
Tip If you want
computing, se
page 2-116.
1 Open the Sim
prompt.
2 Configure the model for parameter estimation, as described in “Configuring
Parameter Estimation in the GUI” on page 2-3.
3 In the Estimation tab of the New Estimation node, click Estimation
Options.
ure your system for parallel computing, as described in
ur System for Parallel Computing” on page 2-56, you can use
ate the model parameters.
to use functions to estimate parameters using parallel
e “How to Use Parallel Computing at the Command Line” on
ulink model by typing the model name at the MATLAB
el Computing in the GUI
2-58
 Loading...
Loading...