

Page 1

Simulink®Control
User’s Guide
Design™ 3
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
®
Simulink
© COPYRIGHT 2004–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Control D es ign ™ User’s G uid e
Page 3

Revision History
June 2004 Online only New for V ersion 1.0 (Release 14)
October 2004 Online only Revised for Version 1.1 (Release 14SP1)
March 2005 Online only Revised for Version 1.2 (Release 14SP2)
September 2005 O nline only Revised for Version 1.3 (Release 14SP3)
March 2006 Online only Revised for Version 2.0 (Release 2006a)
September 2006 O nline only Revised for Version 2.0.1 (Release 2006b)
March 2007 Online only Revised for Version 2.1 (Release 2007a)
September 2007 O nline only Revised for Version 2.2 (Release 2007b)
March 2008 Online only Revised for Version 2.3 (Release 2008a)
October 2008 Online only Revised for Version 2.4 (Release 2008b)
March 2009 Online only Revised for Version 2.5 (Release 2009a)
September 2009 O nline only Revised for Version 3.0 (Release 2009b)
March 2010 Online only Revised for Version 3.1 (Release 2010a)
Page 4

Page 5

Working with Simulink®Control Design
1
Creating or Opening a Simulink Model .............. 1-2
Details of Possible Models
Example Model: The Magnetic Ball System
.......................... 1-2
............ 1-2
Contents
Projects
BeginningaProject
Creating a Simulink
Creating an Operating Points Task
Creating a Linearization Task
Creating a Simulink Compensator Design Task
Saving Projects
Opening Previously Saved Projects
Exporting Results
Exporting Linearization Results
Exporting Compensator Designs
Exporting Operating Points
ExportingandRestoringLinearization I/O Settings
................................ 1-7
®
Control Design Project ........... 1-7
.................................... 1-11
................................. 1-13
Operating Point Analysis Using the GUI
2
................... 1-8
....................... 1-8
......... 1-10
................. 1-12
..................... 1-13
..................... 1-14
......................... 1-15
..... 1-15
What Are Operating Points? ........................ 2-2
Definition of an Operating Point
Equilibrium Operating Points
Simulink Model Operating Points
..................... 2-2
....................... 2-2
.................... 2-3
v
Page 6

Why Are Operating Points Important? ............... 2-6
Impact of Operating Points
Choosing an Operating Point for Accurate Linearization
......................... 2-6
.. 2-7
Ways to Create Operating Points
Creating Operating Points
Simulink
Computing Operating Points from S pecifications
Specifying Operating Points from Known Values
Extracting Operating Points From Simulation
Computing Equilibrium Operating Points
Working with Operating Points
Copying Operating Points
Exporting Operating Points
Saving Operating Points
Importing Operating Points
Importing Initial Values
Constraining Outputs
Changing Optimization Settings
Recommendations for Computing Operating Points
How to Create Accurate Operating Points
Impact of Blocks on the Simulink M odel Operating
Point
Computing Operating Points for SimMechanics Models
Choosing Initial Values for Computing Operating
Points
Computing Operating Points for B l ock s with Special
Behavior
®
Control D esign De fa ult Opera t in g Point ...... 2-10
........................... 2-23
............................ 2-25
............................ 2-26
.............................. 2-27
......................................... 2-31
......................................... 2-37
...................................... 2-38
.................... 2-9
......................... 2-10
........ 2-10
........ 2-15
.......... 2-17
............. 2-22
..................... 2-23
......................... 2-24
......................... 2-25
..................... 2-27
............. 2-31
.. 2-31
.. 2-36
vi Contents
Operating Point Analysis Using the Command
Line
3
Overview ......................................... 3-2
Page 7

Example: Water-Tank System ....................... 3-3
Water-Tank System
Model Equations
............................... 3-3
.................................. 3-4
Creating or Opening a Simulink Model
Computing Operating Points from Specifications
Workflow for Computing Operating Points from
Specifications
Creating an Operating Poin t Specification Object
Configuring the Operating Point Specification Object
Computing the Complete Operating Point
Alternative Method for Specifying Initial Guesses
Adding Output Constraints to Specifications
Specifying Completely Known Operating Points
Workflow for Specifying Completely Known O pe rating
Points
Creating an Operating Point Object
Changing Operating Point Values
Extracting Values from Simulation
Using Structures and Vectors of Operating Point
Values
......................................... 3-14
.......................................... 3-17
.................................. 3-7
.................... 3-15
.............. 3-5
............. 3-10
........... 3-12
.................. 3-14
.................. 3-16
..... 3-7
....... 3-7
.... 3-8
....... 3-11
...... 3-14
Exact Linearization Using the GUI
4
What Is Linearization? ............................. 4-2
Linearization Background
Analytic Repre sentations of Linear Models
Ways to Linearize Models
Steps for Linearizing Models Using the GUI
.......................... 4-2
............. 4-3
.......................... 4-7
.......... 4-8
vii
Page 8

Choosing Linearization Settings and Algorithms ..... 4-9
HowtoChooseLinearizationSe tti ngs and Algorithms
Options for Linearization Algorithm Method
Block-by-Block Analytic Linearization
Numerical-Perturbation Linearization
Changing State Ordering in the Linearized Model
Configuring the Linearization of Specific Blocks and
Subsystems
Ways to Configure Blocks and Subsystems For
Linearization
Controlling the Analytic Linearization of Individual
Blocks
Specifying the Linearization of Blocks and Subsystems
Controlling the Block Perturbation Linearization of
Individual Blocks
Selecting Inputs and Outputs for the Linearized
Model
What are Linearization Points?
Inserting Linearization Points
Removing Linearization Points
Performing Open-Loop Analysis
Inspecting Analysis I/Os
..................................... 4-36
................................... 4-36
........................................ 4-36
............................... 4-40
.......................................... 4-45
...................... 4-45
....................... 4-46
...................... 4-48
..................... 4-49
............................ 4-52
........... 4-11
................ 4-12
................ 4-24
... 4-9
....... 4-34
... 4-37
viii Contents
Linearizing a Block
Linearizing the Model
Linearizing at an Operating Poin t
Creating Other Types of Linear Models
Linearizing Discrete-Time and Multirate M odels
Viewing Linearization Results
Using the LTI Viewer
Displaying Linearization Results
Highlighting Blocks in the Linearization
Inspecting the Linearization Results Block by Block
Comparing the Results of Multiple Linearizations
Validating Exact Linearization Results
Ways to Validate Exact Linearization Results
................................ 4-55
.............................. 4-57
.................... 4-57
............... 4-64
...................... 4-66
.............................. 4-66
..................... 4-66
.............. 4-68
.............. 4-76
........ 4-65
..... 4-69
....... 4-71
.......... 4-76
Page 9

Creating Input Signals for Validation ................. 4-76
Frequency-Domain Validation
Time-Domain Validation
....................... 4-77
........................... 4-80
Troubleshooting Exact Linearization Results
Diagnosing Blocks
Troubleshooting Your Model at the Subsystem and Block
Level
Troubleshooting L ine arization Settings
Troubleshooting Models with Events-Based Subsystems
Troubleshooting Yo ur Operating Point
......................................... 4-86
................................. 4-82
............... 4-87
................ 4-88
Exact Linearization Using the Command Line
5
Steps for Linearizing Models Using the Command
Line
Configuring the Linearization for Specific Blocks and
Subsystems
Selecting Inputs and Outputs for the Linearized
Model
Workflow for Selecting Inputs and Outputs
Choosing and Storing Linearization Points
Extracting Linearization Points from a Model
Editing an I/O Object
Open-Loop Analysis Using Functions
............................................ 5-2
..................................... 5-3
.......................................... 5-4
............. 5-4
.............................. 5-8
................. 5-10
........ 4-82
.. 4-88
............ 5-4
.......... 5-7
Linearizing the Model Using Functions
Linearizing the Model
Linearizing Discrete-Time and Multirate M odels
Computing Multiple Linearizations for Large Models
Analyzing th e Results U sing Functions
Options for Analyzing the Results
Using the LTI Viewer
Saving Your Work
.............................. 5-11
.................... 5-14
.............................. 5-14
................................. 5-16
.............. 5-11
.............. 5-14
........ 5-13
.... 5-13
ix
Page 10

Restoring Linearization I/O Settings .................. 5-16
Frequency Response Estimation of Simulink
6
About Frequency Response Estimation .............. 6-2
Using Frequency Response Models
What Is a Frequency Response Model?
Model Requirements
Estimation Requires Input and Output Signals
............................... 6-4
................... 6-2
................ 6-2
........ 6-5
Models
Creating Input Signals for Estimation
Supported Input Signals
Creating Sinestream Input Signals
Creating Chirp Input Signals
Modifying Input Signals
Estimating Frequency Response
Analyzing E stimated Frequency Response
Opening the Simulation Results Viewer
Interpreting Frequency Response Analysis Plots
Analyzing Simulated Output and FFT at Specific
Frequencies
Annotating Frequency Response Estimation Plots
Displaying Frequency Response of Multiple-Input
Multiple-Output (MIMO) Systems
Troubleshooting Frequency Response Estimation
When to Troubleshoot
Time Respo nse Not at Steady State
FFT Contains Large Harmonics at Frequencies Other than
the Inp u t Signal Frequency
Time Response Grows Without Bound
Time Respon se Is Discontinuous or Zero
Time Respo n se Is Noisy
.................................... 6-25
............................ 6-7
........................ 6-14
............................ 6-16
.............................. 6-29
....................... 6-35
............................ 6-42
............... 6-7
................... 6-7
.................... 6-18
........... 6-22
............... 6-22
........ 6-23
....... 6-27
.................. 6-28
................... 6-29
................ 6-37
............... 6-39
.... 6-29
x Contents
Page 11

Managing Estimation Speed and Memory ............ 6-51
Ways to Speed up Frequency Response Estimation
Speeding Up Estimation Using Parallel Computing
Managing Memory During Frequency Response
Estimation
..................................... 6-56
...... 6-51
Designing Compensators
7
Compensator Design Using Simulink ................ 7-2
..... 6-53
Automatic P ID Tuning
Automatic PID Tuning O v erview
Designing Controllers with the PID Tuner
Troubleshooting Automatic PID Tuning
Design and Analysis of Control Systems
Compensator Des ig n Process Overview
Beginning a Compensator Design Task
Selecting Blocks to Tune
Selecting C lo sed-Loop Responses to Des ig n
Selecting an Operating Point
Creating a SISO Design Task
Completing the Design
............................. 7-4
..................... 7-4
............. 7-6
............... 7-19
............. 7-27
................ 7-27
................ 7-27
............................ 7-29
............ 7-32
........................ 7-34
........................ 7-37
............................. 7-48
Function Reference
8
Linearization Analysis I/Os ......................... 8-1
Operating Points
.................................. 8-2
Linearization
Frequency Response Estimation
...................................... 8-3
.................... 8-3
xi
Page 12

9
10
A
Functions — Alphabetical List
Block Reference
Linearization Example Using the Graphical
Interface
........................................ A-2
Examples
Linearization Example Using Functions
Frequency Response Estimation
.................... A-2
............. A-2
Index
xii Contents
Page 13

Working with Simulink Control Design Projects
• “Creating or Opening a Simulink Model” on page 1-2
• “Beginning a Project” on page 1-7
• “Saving Projects” on page 1-11
• “Opening Previously Saved Projects” on page 1-12
• “Exporting Results” on page 1-13
1
Page 14

1 Working with Simulink
®
Control Design™ Projects
Creating or Opening a Simulink Model
In this section...
“Details of Possible Models” on page 1-2
“Example Model: The Magnetic Ball System” on page 1-2
DetailsofPossibleModels
The first step in the linearization or compensator design process is to create
or open a Simulink
inputs and outputs (including none), and any number of states. The model
can include user-defined blocks or S-functions. Your model can involve
multiple compensators in addition to the plant, multiple feedback loops, and
any number of subsystems.
Example Model: The Magnetic Ball System
This section introduces an example model, the magnetic ball system, that the
remaining sections and chapters use to illustrate the process of linearizing a
model or designing a compensator.
®
model of y our system. The model can have any number of
1-2
Magnetic Ball System
The electronic circuit in the following figure consists of a voltage source, a
resistor, and an inductor in the form of a tightly wound coil. An iron ball
beneath the inductor experiences a gravitational force as well as an induced
magnetic force (from the inductor) that opposes the gravitational force.
Page 15

Creating or Opening a Simulink®Model
Model Equations
Adiffer
where M is the mass of the ball, h is the height (position) of the ball, g is the
acceleration due to gravity, i is the current, and β is a constant related to the
magnetic force experienced by the ball. This equation describes the height, h,
of the ball due to the unbalanced forces acting upon it.
The current in the circuit also varies with time and is given by the following
differential equation
ential equation for the force balance on the ball is given by
M
L
2
dh
dt
di
dt
2
Mg
=−
ViR=−
2
i
β
h
1-3
Page 16

1 Working with Simulink
®
Control Design™ Projects
where L is the inductance of the coil, V is the voltage in the circuit, and R is
the resistance of the circuit.
The system of equations has three states:
dh
h
i,,
dt
Thesystemalsohasoneinput(V), and o ne output (h). It is a nonlinear system
duetothetermintheequationinvolvingthesquareofi and the inverse of h.
Due to its nonlinearity, you cannot analyze this system using methods
for linear-time-invariant (LTI) systems such as step response plots, bode
diagrams, and root-locus plots. However, you can linearize the model using
the Simulink
®
Control Design™ software to approximate the nonlinear system
as an LTI system. Linearization also occurs automatically when designing a
compensator. This linearized system can then use the LTI Viewer for display
and analysis and the SISO Design Tool for compensator design. Refer to for a
discussion of the uses of linearized models and “What Is Linearization?” on
page 4-2 for a discussion of the linearization process.
1-4
Opening the Model
To open the model for the magnetic ball example, type
magball
at the MATLAB®prompt. The magnetic ball system opens in the Simulink
model viewer as shown in this figure.
Page 17

Creating or Opening a Simulink®Model
The magball model consists of
• The magnetic ball system itself, within the sub system labeled Magnetic
Ball Plant.
• A Controller subsystem that controls the height of the ball by balancing
the forces acting on it.
• A reference signal that sets the desired height of the ball.
• A
Scope block that displays the height of the ball as a function of time.
Double-click a block to view its contents. The Controller block contains a
zero-pole-gain model. The Magnetic Ball Plant block is shown in this figure.
1-5
Page 18

1 Working with Simulink
®
Control Design™ Projects
1-6
The input to the Magnetic Ball Plant system, which is also the output of the
Controller subsystem, is the voltage, V. The output is the height of the ball,
h. The system contains three states within the three integrators:
dhdt,andCurrent.
Values of the parameters are given a s M=0.1 kg, g=9.81 m /s
height,
2
, R=2 Ohm,
L=0.02 H, and β=0.001.
Page 19

Beginning a Project
In this section...
“Creating a Simulink®Control Design Project” on page 1-7
“Creating an Operating Points Task” on page 1-8
“Creating a Linearization Task” on page 1-8
“Creating a Simulink Compensator Design Task” on page 1-10
Creating a Simulink Control Design Project
With Simulink Co ntrol Design software you can create operating points,
linearize, and design compensators for Simulink models. You perform all
these tasks in a graphical environment called the Control and Estimation
Tools Manager. The tasks are contained within a Control and Estimation
Tools Manager project. Each project is associated with a single Simulink
model and in addition to Simulink Control Design tasks, it can include tasks
from other products such as the Simulink
the Control System Toolbox™ product, and the Model Predictive Control
Toolbox™ product.
Beginning a Project
®
Design Optimization™ product,
To open a new Simulink Control Design project:
1 Select Start > Simulink > Simulink Control Design > Linearization
Task or select Start > Simulink > Simulink Control Design
> Simulink Compensator Design Task.
2 Enter a project name, select a model to analyze, and choose the tasks you
want to perform. Click OK to close the dialog box and open the new project.
Alternatively, you can create a new project from a Simul in k model window.
Within the model window select Tools > Control Design > Linear Analysis
to open a project containing a linearization task, or select Tools > Control
Design > Control Design to open a project containing a compensator design
task.
1-7
Page 20

1 Working with Simulink
®
Control Design™ Projects
Creating an Oper
An Operating Poi
automatically c
Compensator De
create operati
Creating a Lin
To create a li
use one of the
page 1-7 to ope
task for thi
File>New>T
open the New
that you wa
To open a ne
lineariz
Analysis
Manager o
followi
s project. To add a linearization task to an existing project, select
nt to open the task within, and then click OK.
w project within the Control and Estimation Tools Manager for
ation of the magball model, select Tools > Control Design > Linear
from the
pens and creates a new linearization task, as shown in the
ng figure.
nts node in the Control and Estimation Tools Manager is
reated when you begin a Linearization Task or a Simulink
sign Task.YoucanusetheOperating Points node to
ng points for a Simulink model.
earization Task
nearization task in the Control and Estimation Tools Manager,
methods in “Creating a Simulink
n a new project for your model, and choose a linearization
ask in the Control and Estimatio n Tools Manager window to
Task dialog box. Select Linearization Task and the project
magball window. The Control and Estimation Tools
ating Points Task
®
Control D es ign Project” on
1-8
Page 21

Beginning a Project
The left pane of the Control and E stimatio n Tools Manager shows the project
tree, w hich contains all your current projects. At this stage you should have
just one project, Project - magball. Select a node within the tree to display
its contents in the pane on the right.
1-9
Page 22

1 Working with Simulink
®
Control Design™ Projects
View the default operating point
and create new operating points.
Set up the linearization and
inspect theresults listed in
the Linearization Results pane.
Create customized plots of
the linearization results.
• For information on the Operating Points node or the Operating Points
pane w ithin the Linearization Task node, refer to “Creating Operating
Points” on page 2-10.
• For information on the Analysis I/Os pane within the Linearization
Task node, refer to “Selecting Inputs and Outputs for the Linearized
Model” on page 4-45.
1-10
• For information on the Linearization Results pane within the
Linearization Task node and inspecting linearization re sults, refer to
“Viewing Linearization Results” on page 4-66.
• For information on Custom Views, refer to “Viewing Linearization
Results” on page 4-66.
Creating a Simulink Compensator Design Task
To create a Simulink Compensator Design Task in the Control and Estimation
Tools Manager, use one of the methods in “Beginning a Project” on page 1-7 to
open a new project for your model, and choose a compensator design task for
this project. To add a compensator design task to an existing project, select
File>New>Taskin the Control and Estimation Tools Manager window to
open the New Task dialog box. Select Simulink Compensator Design Task
and the project that you want to open the task within, and then click OK.
Page 23

Saving Projects
A Control and Estimation Tools Manager project can consist of multiple tasks
such as linearization, compensator design, and operating points tasks as
well as Simulink Design Optimization tasks and Model Predictive Control
Toolbox tasks. Each task contains data, objects, and results for the analysis
of a particular model.
1 To save a project as a MAT-file, select File > Save from the Control and
Estimation Tools Manager window.
Saving Projects
2 In the Save Projects dialog box, select one or m ore projects you want to
save. Youcansavemultipleprojects in one file. Click OK,andbrowseto
the folder where you want to save the project. Enter the project name,
and click Save.
1-11
Page 24

1 Working with Simulink
®
Control Design™ Projects
Opening Previously Saved Projects
1 To open previously saved projects, select File > Load from the Control and
Estimation Tools Manager window. This opens the Load Projects dialog
box.
1-12
2 Choose a project-file by either brows ing for the folder and file, or typing
the full path and filename in the Load from field. Project files are always
MAT-files. After you specify the file, the projects contained in this file
appear in the list. Select one or more projects in the list, and then click
OK. When a file contains multiple projects, you can choose to load them
all or just a few.
Page 25

Exporting Results
In this section...
“Exporting Linearization Results” on page 1-13
“Exporting Compensator Designs” on page 1-14
“Exporting Operating Points” on page 1-15
“Exporting and Restoring Linearization I/O Settings” on page 1-15
Exporting Linearization Results
To export linearization results and the corresponding operating points,
right-click the results node, Model,undertheLinearization Task node
and select Export fromthemenu. IntheExportToWorkspacedialogbox,
choose new names for the linearized model and operating point, or accept the
defaults, and then click OK.
Exporting Results
The MATLAB workspace now contains two new objects, Model_op and
Model_sys.Toseethis,type
who
at the MATLAB prompt. This returns
Your variables are:
L Model_sys beta m
Model_op R g
Alternatively, you can export the results to the MATLAB workspace by
selecting File > Export from the LTI Viewer window or by clicking the
1-13
Page 26

1 Working with Simulink
®
Control Design™ Projects
Export to Workspace button at the bottom of the L inearization Summary
pane within the Model node.
By right-clicking the results node, Model, you can also de lete results.
Exporting Compensator Designs
To export a compensator design to the MATLAB workspace:
1 Select File > Export from the SISO Design Tool window.
2 In the SISO Tool Export dialog box, use the Select design list to choose
the design y ou want to export.
3 In the list, select the compensators to export, and then click either Export
to Workspace or Export to Disk.
1-14
Page 27

Exporting Results
Exporting Operating Points
After creating operating points, you can use the Export To Workspace dialog
box to export them for use outside of the Control and Estimation Tools
Manager. You can use the exported operating point to perform analysis at the
MATLAB command line or to initialize a model for simulation.
1 Under Select destination workspace, select either
• Base workspace to export the operating point to the MATLAB
workspace where you can use it with Simulink Control Design
command-line functions
• Model workspace to export the operating poin t to the Mo d el workspace
where you can save it with the model for future use.
2 Enter a nam e for the exported operating point.
3 Select Use
to use the o
inputs in
Data Impo
Simulink
Exporti
To expor
getlin
them in
them to
For mo
setli
ng and Restoring Linearization I/O Settings
t linearization I/O settings to the MATLAB workspace, use the
io
function. You can save these settings using the save function. Use
a later session by reloading them with the
the model diagram with the
re information, see the function reference pages for
nio
.
the operating point to initialize model when you want
perating point values as initial conditions for the states and
the model. The initial values are automatically set in the
rt/Export pane of the Configuration Parameters dialog box.
software uses these initial conditions when simulating the model.
load function. Upload
setlinio function.
getlinio and
1-15
Page 28

1 Working with Simulink
®
Control Design™ Projects
1-16
Page 29

Operating Point Analysis Using the GUI
• “What Are Operating Points?” on page 2-2
• “Why Are Operating Points Important?” on page 2-6
• “Ways to Create Operating Points” on page 2-9
• “Creating Operating Points” on page 2-10
• “Working with Operating Points” on page 2-23
2
• “Recommendations for Computing Operating Points” on page 2-31
Page 30

2 Operating Point Analysis Using the GUI
What Are Operating Points?
In this section...
“Definition of an Operating Point” on page 2-2
“Equilibrium Operating Points” on page 2-2
“Simulink Model Operating Points” on page 2-3
Definition of an Operating Point
The operating point of a dynamic system defines its overall state at a given
time. For example, in a model of a car engine, variable s such as engine
speed, throttle angle, engine temperature, and surrounding atmospheric
conditions typically describe the o perating point. It is important to specify
the operating point accurately because it affects the system’s behavior. For
example, the behavior of a car engine can vary greatly when it operates at
high or low elevations.
2-2
Equilibrium Operating Points
An equilibrium operating point remains steady and constant with time; all
states in the model are at equilibrium. It is also known as a steady state or
trimmed operating point. For example, a car operating on cruise control on
a flat road maintains a constant speed. Its operating point is steady, or at
equilibrium.
A hanging pendulum provides an example of a stable equilibrium operating
point. When the pendulum hangs straight down, its position does not change
with time because it is at an equilibrium position. When its position deviates
slightly fro m this position, it always returns to the equilibrium; small changes
in the operating point do not cause the system to leave the region of good
approximation around the equilibrium v alue.
A pendulum that points upward provides an example of an unstable
equilibrium operating point. As long as the pendulum points exactly upward,
it is steady at this equilibrium state. However, when the pendulum deviates
slightly from this state, it swings downward and the operating point leaves
the region around the equilibrium value.
Page 31

What Are Operating Points?
Simulink Model O
This section inc
• “Operating Poi
• “Example of a S
ludes the following topics:
nt Versus Simulink Full-Model Operating Point” on page 2-3
imulink Model Operating Point” on page 2-4
perating Points
Operating Point Versus Simulink Full-Model Operating Point
The Simulink
the b locks in
GUI or the MAT
you are actu
operating p
operating p
The follow
full-mode
Makeup of
Block Types
Blocks
value s
nport blocks with
level i
edatatype
doubl
full model operating point includes information from all of
a Simulink model. When you use the Simulink Control Design
LAB command line to create operating points for a model,
ally creating an operating point object (whatisreferredtoasthe
oint). The operating point is a subset of the Simulink full-model
oint.
ing table shows the different types of blocks that make up a
l operating point and which types are included in the operating point.
Simulink Full-Model Operating Point
Included in
Operating Point?
Yes
with double
tates and root
Example of Block s
Integrator, State Space,
Transfer Function,
Inport
Root level inport blocks
with nondouble or
complex d ata type
Blocks with internal
state representation
that impacts block
outputs
Source blocks with
outputs specified by
block dialog pa r ameters
Inport No
Backlash, Memory,
Stateflow
Constant, Step
No
No
2-3
Page 32
2 Operating Point Analysis Using the GUI
The operating point includes only the block information most comm only
redefined by users. This information provides you with three places to make
changes to the parameters of these common blocks in your model:
• Directly in the Simulink Control De sig n Control and Estimation Tools
Manager GUI
• At the MATLAB command line
• In the Simulink model
Note If you want to m ake changes to any block not included in the operating
point, you must m ake the changes directly in the Simulink model.
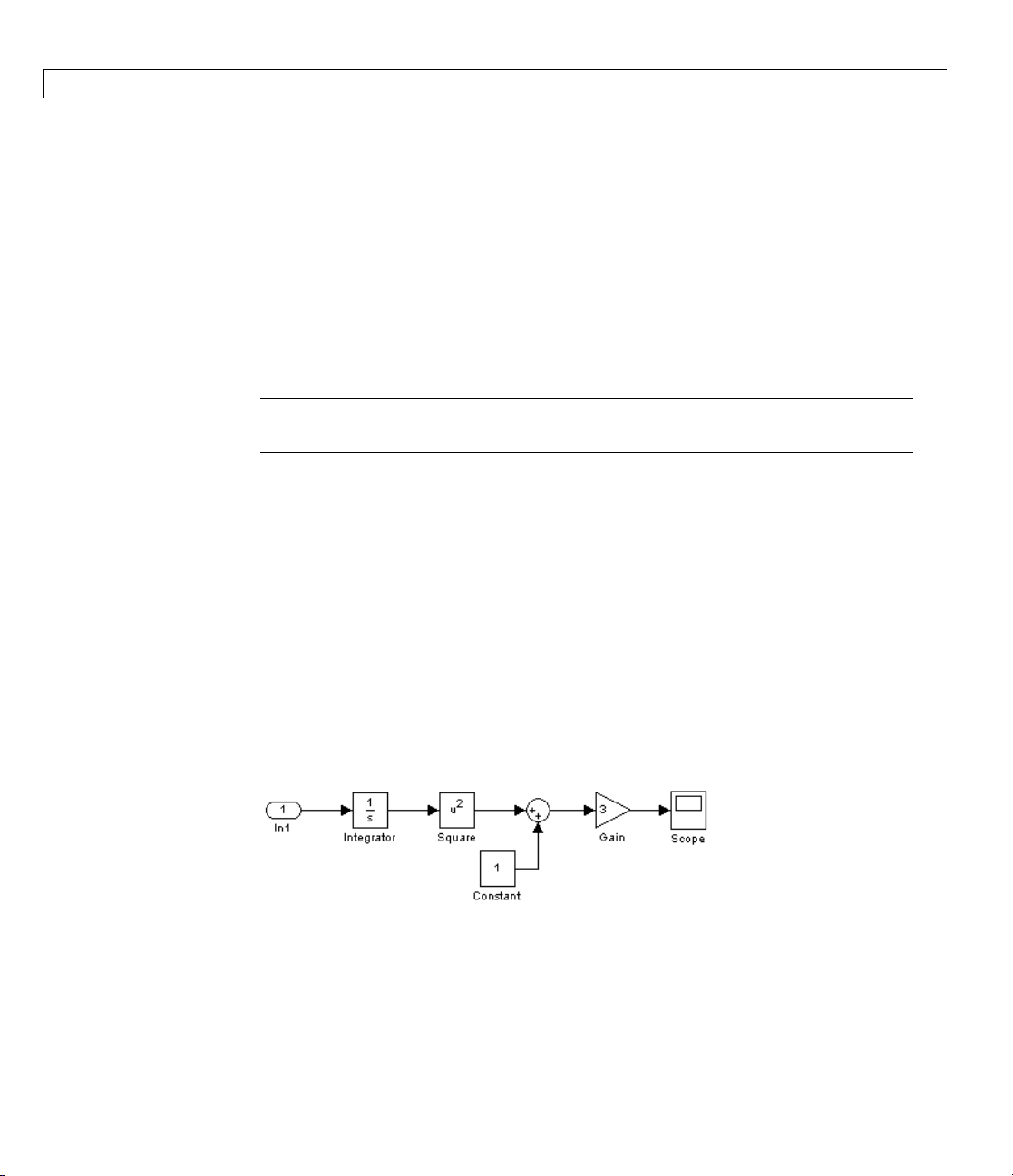
Example of a Simulink Model Operating Point
The following figure shows a simple Simulink model that has one block with
state(theintegratorblock)andthereforeonestate,
on the initial conditions set in the integrator block. The value of this state
and the input from the inport block define the operating point in the Simulink
Control Design software.
x1. This state depends
2-4
The square block output is derived from just the initial condition of the
integrator block while the gain block has its output derived from both the
initial condition of the integrator block and output of the constant block. The
derivative dx/dt of the integrator block state is defined by the output level of
therootinportblock.
tate,
The s
he model by propagating through the blocks in the model as follows.
in t
1 The
x1, defines the signal levels at the input and output of every block
integrator block initial condition of
x0 = 5 sets the state x1=5.
Page 33

What Are Operating Points?
2 The state, x1, propagates in the direction of the arrows through the blocks
in the model, defining input and output signals on each block, as described
in the following table.
Block Input Signal
Level
Square
5
Sum 25 from square,
Block
Operation
squares
sums
Output Signal
Level
25
26
1fromconstant
Gain
26
multiplies by 3
78
The following figure shows these input and output signal levels for each block.
2-5
Page 34

2 Operating Point Analysis Using the GUI
Why Are Operating Points Important?
In this section...
“Impact of Operating Points” on page 2-6
“Choosing an Operating Point for Accurate L inearization” on page 2-7
Impact of Operating Points
A linearized model is an approximation that is valid in a region around the
operating point of the syste m where the linearization took place. Near the
operating point the approximation is good, while far away it may be poor.
A linearized model of a car being operated at 3000 ft. is very accurate at
elevations close to 3000 ft. but less accurate as the car travels higher or lower.
Example of a Linear Approximation of a Nonlinear Function
The following figure shows a nonlinear function,
n,
functio
functio
approxi
is poor
The fol
linearization of
yx=−21
n about the operating point x=1, y=1. Near this operating point, the
mation is good. Away from this operating point, the approximation
. The precise boundaries of this region a re often somewhat arbitrary.
lowing figure shows a possible region of good approximation for the
. The linear function is an approximation to the nonlinear
2
.
yx=
2
yx=
,andalinear
2-6
Page 35

Why Are Operating Points Important?
Choosing an Operating Point for Accurate Linearization
Your choice of operating point is important when you:
• Linearize a Simulink model. The choice of operating point determines the
accuracy of the linear approximation.
• Designing compensators with Simulink Control Design software. A
Compensator Design Task uses linearization when analyzing a Simulink
model.
Tip Choose an operating point that is very close to the expected operating
values of the system. One option is to use an equilibrium operating point,
described in “Equilibrium Operating Points” on page 2-2.
2-7
Page 36

2 Operating Point Analysis Using the GUI
Example of Linearization Results About Two Different
Operating Points
A model can have two entirely different linearizations when the linearization
is performed about different operating points. The following model can be
linearized using the Simulink Control Design software.
The lineari
When this li nearization is performed about two different operating points,
two different linearization results occur as shown in the following table.
Operating Point
Initial Condition = 5, State x1 =5
Initial Condition = 0, State x1 =0
Note The operating point consists of values for all the states in the model,
although only those states between the linearization points are linearized.
The whole model contributes to the operating point values of the states,
inputs, and outputs of the portion of the model you are linearizing.
zation res ult for this model is shown in the following figure.
Linearization Result
30/s
0
2-8
Page 37

Ways to Create Operating Points
You can compute operating points using any technique either:
• Interactively in the GUI
• Programmatically at the command line using MATLAB code
Tip You can automatically generate MATLAB code from your GUI
configuration.
Use the following table to choose a technique for creating operating points.
Ways to Create Operating Points
When you know...
Some values and constraints for
inputs and states
Exact values for all inputs and states
Thetimeoreventinyourmodelto
extractanoperatingpointduring
simulation
Compute ope
from...
Specifications
• GUI
• Command line
Known Values
• GUI
• Command line
Simulation
• GUI
• Command line
rating points
2-9
Page 38

2 Operating Point Analysis Using the GUI
Creating Operating Points
In this section...
“Simulink®Control D esign Default Operating Point” on page 2-10
“Computing Operating Points from Specifications” on page 2-10
“Specifying O perating Points from Known Values” on page 2-15
“Extracting O perati ng Points From Simulation” on page 2-17
“Computing Equilibrium Operating Points” on page 2-22
Simulink Control Design Default Operating Point
A default operating point is automatically created and stored in a node in the
project tree every time you open the Control and Estimation Tools Manag er
unless you indicate otherwise. The default operating point consists of a
snapshot of initial condition variables in the Simulink model. Initial condi tion
variables are a special set of variables that can be set in the Simulink
model. These variable include initial c onditions for blocks with state, such
as the integrator o r state space blocks, and output values of root level inport
blocks. F or more information on setting these variables, see “Importing and
Exporting Data” in the Simulink User’s Guide.
2-10
By clicking on the Default Operating Point node, you can view these values
and modify them for use in a linearization. The output levels for blocks like a
constant block remain defined in the model.
Computing Operating Points from Specifications
You can specify target values or constraints on a subset of the model’s inputs,
outputs, and states. The software uses numerical optimization methods to
determine the full operating poin t based on this partial specification.
This section continues the magball example from “Creating a Linearization
Task” on page 1-8. At this stage in the example, a linearization task has
already been created for the model.
Page 39

Creating Operating Points
You compute the operating point from specifications when you only know
partial or implicit information. Typical operating point specifications search
for steady state or equilibrium operating points.
2-11
Page 40

2 Operating Point Analysis Using the GUI
1 Create a new operating point by either:
• Selecting the Operating Points node and then clicking the Compute
Operating Points tab
• Clicking the New Operating Point button on the Operating Points
pane of the Linearization Task node
2 From the Compute new operating points using li st, select operating
specifications
should now resemble the following figure.
Enter a known value
or an initial guess in
this column
. The Control and Estimation Tools Manager window
Select these check boxes
when a steady-state
Select these check boxes
when the operating point
is known exactly
value is desired.
Enter maximum and
minimum bounds on
operating point values
2-12
Page 41

Creating Operating Points
3 Enter operating point specifications in the table, such as any known values
or constraints on signal values. Switch between states, inputs, and outputs
using the tabs on the left.
A suitable set of specifications for the
magball model is shown in the
following figure. This model does not contain any root-level input or output
ports and, as a result, the Inputs and Outputs panes are empty. You
can still constrain the output signal of any block by adding an Output
Constraint linearizat ion point to the model . See “Constraining Outputs”
on page 2-27 for information about adding an output constraint to the
specifications for an operating point.
The height of the ball is known exactly
(same as the reference signal height).
The ball height is 0.05 (same as the reference signal
value). For a steady ball, use initial guess of 0 for dhdt.
For the remaining states, choose arbitrary initial guesses.
A steady-state operating point
is desired.
Use a minimum value of zero for
the current (by convention
current is positive when flowing
clockwise around the circuit).
2-13
Page 42

2 Operating Point Analysis Using the GUI
When y ou add states, inputs, or outputs to the model, or remove them from
the model, click the Sync with Model button to update the operating
pointtabletoreflectthesechanges.
4 Click Compute Operating Points. The Simulink Control Design software
finds an operating point that closely matches the specifications and adds
the new operating point, labeled Operating Point,totheOperating
Points node. Some specifications, even values specified as Known,may
not be met exactly. Select the operating point in the project tree to view
its contents and assess the results.
Actual dx values are
small, because a
a steady-state
value was found.
2-14
For information on options that you can set when finding operating points
from partial specifications, see “Changing Optimization Settings” on page
2-27.
Page 43

Creating Operating Points
Note Inputs and o utputs for the operating point are not the same as the
linearization input and output points, or analysis I/Os, used to define the
inputs and outputs of the linearized model. Instead, operating-point inputs
and outputs define the full operating point of a Simulink model, along with
any additional, user-defined output constraints.
Tip To automatically generate MATLAB code that computes operating points
as specified in the Control and Estimation Tools Manager, click
or select
File > Generate MATLAB Code.
Specifying Operating Points from Known Values
You can completely specify all inputs and states in the operating point.
This section continues the magball example from “Computing Operating
Points from Specifications” on page 2 -10. At this stage in the example, a
linearization task has already been created for the model, and a steady state
operating point has been computed from specifications.
When you know the values of all states and inputs at the operating p oint,
you can create a new operating point in the Control and Estim a tion Tools
Manager and manually edit the operating point values:
1 Select the Operating Points node in the left pane and then click the
Operating Points tab in the right pane.
2 Click the New button in the bottom-right corner to create a new operating
point under the Operating Points node. This new operating point is
labeled Default Operating Point (2).
2-15
Page 44

2 Operating Point Analysis Using the GUI
3 View the details of DefaultOperatingPoint(2)(shown in the following
figure) by either:
• Selecting it under the Operating Points node in the project tree
• Selecting it in the Operating Points pane of the Linearization Task
node, and then clicking View
Enter known values
of states and inputs
at the operating point.
2-16
4 Edit the operating point by entering new values in the table. Switch
between state and input values using the tabs on the left.
Change the value of State-1 of Integrator to
to
7. The model does not contain any root-level input ports, and, as a result,
-14 and the value of Current
the Inputs pane is empty.
When y ou add states, inputs, or outputs to the model, or remove them from
the model, click the Sync with Model button to update the operating
pointtabletoreflectthesechanges.
Page 45

Creating Operating Points
5 Rename the operating point by right-clicking Default Operating Point
(2) under the Operating Points node, selecting Rename, and entering a
new name in the dialog box.
For example, label this operating condition
Thepaneshouldnowresemblethefollowingfigure.
Known Operating Conditions.
o automatically generate MATLAB code that computes operating points
Tip T
as specified in the Control and Estimation Tools Manager, click
File > Generate MATLAB Code.
or select
Extracting Operating Points From Simulation
You can create an operating point from a simulation of your model a t the
following simulation points:
2-17
Page 46

2 Operating Point Analysis Using the GUI
• Specified simulation times, such as when the simulation reaches a steady
state solution (see “Creating Operating Points at Specified Simulations
Times” on page 2-18example in this section).
• Events during a specified simulation interval (see “Creating Operating
Points at Simulation Events” on page 2-21)
CreatingOperatingPointsatSpecifiedSimulationsTimes
Youcanextractanoperatingpointatspecifiedtimesduringasimulation
of the model.
This section continues the magball example from “Specifying Operating
Points from Known Values” on page 2-15. A t this stage in the example,
a linearization task has already been created for the model, a steady state
operating point has been computed from specifications, and a completely
known operating point has been specified.
To create operating points at specified simulation times:
2-18
1 Open the Compute Operating Points tab by either:
• Selecting the Operating Points node in the project tree, and then
clicking the Compute Operating Points tab
• Clicking the New Operating Point button on the Operating Points
pane of the Linearization Task node
Page 47

Creating Operating Points
2 From the Compute new operating points using list, select simulation
snapshots
. The window sho u ld now resemble the following figure.
3 Enter a vector of times in the Simulation snapshot times (sec) field.
Enter
[1,10] to compute operating points at t=1 and t=10.
4 Click Compute Operating Points. The Simulink Control Design software
simulates the model, extracts operating points, labeled Operating Point
2-19
Page 48

2 Operating Point Analysis Using the GUI
at t=1 and Operating Point at t=10, and adds them to the Operating
Points node in the project tree.
To view the contents of the operating point you created, select the operating
point in the project tree as shown in this figure.
2-20
Note W
them
oper
To automatically generate MATLAB code that computes operating points
Tip
as specified in the Control and Estimation Tools Manager, click
File > Generate MATLAB Code.
hen you add states, inputs, or outputs to the model, or remove
from the model, click the Sync with Model button to update the
ating point table to reflect these changes.
or select
Page 49

Creating Operating Points
CreatingOperatingPointsatSimulationEvents
You can create an operating point from a simulation of your model at one or
more of the following simulation events:
• Trigger-based events
• Function-call events
For more information about modeling events in Simulink models, see
“Creating Conditional Subsystems” in the Simulink User’s Guide.
The Simulink Control Design software creates operating points at all
simulation events within a specified simulation time.
Tocreateoperatingpointsatoneormoresimulationevents:
1 AddaTrigger-BasedOperatingPoint Snapshot block to your model. This
block is in the Simulink Control Design block library.
The model in the Trigger-Based O perating Point Snapshot demo shows
the use of this block.
2 Select the Compute Operating Points tab in the Operating Points
node.
3 From the Compute new operating points using list, select simulation
snapshots
4 Enter a scalar value that specifies the simulation end time in the
.
Simulation snapshot times (sec.) field, shown in the following figure.
2-21
Page 50

2 Operating Point Analysis Using the GUI
2-22
5 Click Compute Operating Points. The software simulates the model,
extracts operating points, and adds them to the Operating Points node in
the project tree. Select an o perating point to view its contents and assess
the results.
Computing Equilibrium Operating Points
You can use the software to compute equilibrium operating points. Follow
the basic instructions in “Computing Operating Points from Specifications”
on page 2-10. When you enter specifications in the States pane, select the
Steady State check box at the top of the table. Selecting this check box
causes the algorithm to look for an operating point in which all states are at
equilibrium, or steady state.
Page 51

Working with Operating Points
In this section...
“Copying Operating Points” on page 2-23
“Exporting Operating Points” on page 2-24
“Saving Operating Poin ts” on page 2-25
“Importing Operating Points” on page 2-25
“Importing Initial Values” on page 2-26
“Constraining Outputs” on page 2-27
“Changing Optimization Settings” on page 2-27
Copying Operating Points
In some situations you might want to create and edit a copy of an operating
point. To create a copy of an operating point, right-click the operating point
in the tree on the left, and select Duplicate from the right-click menu, as
shown in the following figure.
Working with Operating Points
The new operating point appears beneath the original one in the tree. Click
the new operating point to display i ts contents in the pane on the right. To
change state or input values in the duplicated operating point, edit the values
in the right pane. To change the name of the new operating point, right-click
the operating point in the tree, select Rename from the right-click menu, and
then enter a new name for the operating point.
2-23
Page 52

2 Operating Point Analysis Using the GUI
Note that you cannot copy operating points that were computed from
specifications. These operating points contain information related to the
success of the optimization which would not be meaningful when the operating
point values were changed.
Exporting Operating Points
After creating operating points using the Simulink Control Design software,
you can export them from the Control and Estimation Tools Manager to
the MATLAB workspace or the model workspace. You can use an exported
operating point to perform analysis at the MATLAB command line or to
initialize a Simulink model for simulation. To export an operating point,
right-click the operating point under Operating Points in the pane on the
left and select Export to Workspace. This opens the Export to Workspace
dialog box, as shown below:
2-24
1 Click either
• Base Workspace to export the operating point to the MATLAB
workspace where you can use it with Simulink Control Design
command-line functions
• Model Workspace to export the operating point to the Model workspace
where you can save it with the model for future use.
2 Enter a nam e for the exported operating point.
Page 53

Working with Operating Points
3 Select Use the operating point to initialize model when you want
to use the operating point values as initial conditions for the states and
inputs in the model. The initial values are automaticall y set in the Data
Import/Export pane of the Configuration Parameters dialog box and
Simulink uses these initial conditions when simulating the model.
Saving Operating Points
After you have exported the operating point to the MATLAB workspace,
you can save it in a MAT-file for later use. To save the operating point
Operating_Point in a file named magball_operating_points.mat,enter
the following command:
save magball_operating_point Operating_Point
Importing Operating Points
This section continues the example from “Example Model: The Magnetic Ball
System”onpage1-2. Atthisstageinthe example, a linearization project
has already been created for the model, and linearization points have been
inserted, and operating points have been created from specifications, known
values, and simulation.
To import operating points from the MATLAB workspace or from a MAT-file.
1 To import a new operating point, select the Operating Points node in the
project tree and then select the Operating Points tab on the right. Click
the Im port button at the bottom of the pane. This displays the Operating
Point Import dialog box.
2-25
Page 54

2 Operating Point Analysis Using the GUI
2 Click Workspace or MAT-file as the location to import the operating point
from, select an operating point from the list below, and then click Import.
For this example, two operating points are loaded into the MA TLAB
workspace when you open the magball model.
2-26
Importing Initial Values
When you want populate the Value column of the operating point
specifications by importing initial or known values from another operating
point, a Simulink states structure, o r a vector of values, click the Import
Initial Values button at the bottom of the window. The Operating Point
Import dialog box opens, as shown below.
Page 55

Working with Operating Points
Select where to import th e initial values from (a project, the workspace, or a
file), then select the operating point from the list of available operating points
below ( or in the case of MAT-files, browse for a file). Click Import to import
the initial values from the selected operating point into the Value column
of the operating point specifications.
Constraining Outputs
Operating specifications often includeconstraintsonthevaluesofspecific
signalsinthemodel. Toconstrainoutput signals when determining operating
points from specifications, add an output constraint annotation to the model
by right-clicking the signal line and choosing Output Constraint from the
menu. This adds a small T to the signal line. Then, within the Outputs pane
of the Compute Operating Points pane, select the Known check box and
enter desired values as well as minimum and maximum values for this signal.
Changing Optimization Settings
To change the settings used when determining operating points by
optimization, select Tools > Options and then click the Operating Point
Search tab. This opens the Options dialog box.
2-27
Page 56

2 Operating Point Analysis Using the GUI
2-28
To get help on each option or setting in the Options dialog box, right-click an
option’s label and select What’s This?.
Additionally, you can r efer to the Optimization Toolbox™ documentation and
the
linoptions reference page for more information about these settings. If
youdonothavetheOptimizationToolbox documentation you can find it at
http://www.mathworks.com/access/helpdesk/help/toolbox/optim/optim.shtml
The methods Gradient descent with elimination, Simplex search,and
Nonlinear least squares refer to the optim ization methods fmincon,
fminsearch,andlsqnonlin respectively. The method Gradient descent
Page 57

Working with Operating Points
refers to the optimization method graddescent, described in the linoptions
reference page. The reference page for the Optimization Toolbox function
optimset contains documentation for the following operating point search
settings (the corresponding
optimset parameter values are given in
parentheses):
Operating Point Search Option
Large Scale
Medium Scale
Maximum change
Minimum change
Function tolerance
Constraint tolerance
Maximum fun evals
Maximum iterations
Parameter tolerance
Enable analytic jacobian
Parameter in
LargeScale set to 'on'
LargeScale set to 'off'
DiffMaxChange
DiffMinChange
TolFun
TolCon
MaxFunEvals
MaxIter
TolX
Jacobian.
optimset
When this option is selected, the
Jacobian is computed at each
iteration by linearizing the model
about the current operating point.
This option does not work with
models that contain references to
other models using the Model block
or with models from products based
on the Simscape™ platform that are
in Trimming mode.
Display results
Display information contained in the
output variable of the optimization
functions, such as number of
iterations, stepsize, etc.
2-29
Page 58
2 Operating Point Analysis Using the GUI
2-30
Page 59

Recommendations for Computing Operating Points
Recommendations for Computing Operating Points
In this section...
“How to Create Accurate Operating Points” on page 2-31
“Impact of Blocks on the Simulink Model Operating Point” on page 2-31
“Computing Operating Points for SimMechanics Mo de ls” on page 2-36
“Choosing Initial Values for Computing Operating Points” on page 2-37
“Computing Operating Points for Blocks with Special Behavior” on page
2-38
How to Create Accurate Operating Points
Particular Simulink blocks and modeling situations can sometimes cause
difficulties with computing operating points (trimming). However, by
understanding what it means to trim a Simulink model and by using the
correct modeling techniques, you can create accurate operating points for
use in further analysis and design.
This section consists of examples that highlight modeling situations that can
lead to problems when computing operating points, with recommendations
for ways to avoid these situations.
Impact of Blocks on the Simulink Model Operating Point
The full operating point in a Simulink model is specified in a number of ways
by the blocks in the model:
• Integrator, State Space, and Transfer Function blocks have their outputs
defined by double-valued discrete states.
• Source blocks such as Constant or Step blocks have their output specified
by their block dialog parameters.
• Blocks such as Backlash, Memory, and Stateflow blocks have an internal
state representation that impacts block outputs.
2-31
Page 60

2 Operating Point Analysis Using the GUI
It is important to understand the impact of the blocks on the full operating
point of your Simulink model. In particular, blocks with internal state
representation can have a profound impact when you search for operating
points or linearize a Simulink model. For more information on which blocks’
states are included in an operating point versus a full model operating point,
see “Simulink Model Operating Points” on page 2-3.
Example of the Impact of Blocks w ith Internal States
The following simple Simulink model shows the impact of blocks with internal
states on the full operating point of a Simulink model. Each Backlash block
has internal states that are initialized by the Initial output block dialog
parameter.
2-32
The operating point for this model in the Simulink Control Design software
does not include the backlash block states that exist in the model. See the
following table for a comparison.
States
Full model operating
point
Operating point
In this case, the value specified for the root level input is not propagated
through the full model. However, the initial output for the Backlash1 b lock is
propagated through the model.
When you linearize this model, the linearization is performed around the
full model operating point, which includes the two states. For the input and
2
0
Inputs
1
1
Page 61

Recommendations for Computing Operating Points
output points specified in this model, the second backlash block is not in the
linearization path and thus its state does not impact the linearization result.
TypesofBlockswithInternalStates
Blocks with internal states that cannot be seen by the operating point object
include:
• Action Subsystem blocks which are not enabled
• Backlash block
• Embedded MATLAB Function block with persistent data
• Transport Delay and Variable Transport Delay blocks
• Memory block
• Rate Transition block
®
• Stateflow
• S-Function blocks with states not registered as Continuous or Double
Value Discrete
blocks
Finding Blocks with Internal States in Your Model
To determine when your model contains any of these blocks with internal
states, run the following command:
sldiagnostics('modelname','CountBlocks')
This command returns a list of all the blocks in the model and the number of
occurrences of each.
Working with Models Containing Blocks with Internal States
The following techniques provide strategies for working with models
containing blocks with internal states:
• Block specific techniques
• Removing, replacing blocks, or both
• Linearizing at steady state using linearization snapshots
2-33
Page 62

2 Operating Point Analysis Using the GUI
Block specific techniques exist for accurately computing operating points and
linearizing m odels that contain the following blocks with internal states:
• “Memory Blocks” on page 2-34
• “Transport Delay and Variable Transport Delay Blocks” on page 2-36
• “Backlash Block” on page 2-36
For other blocks with internal states, you should consider their impact on the
analysis tools in the Simulink Control Design software in the following ways:
• When searching for an operating point you should determine if the output
of the block impacts any of the state derivatives or desired output levels.
• When linearizing a model you should ascertain the effects on the model
operating point. In particular, you should determine the effect on blocks
between linearization input and output points.
If the block does have impact, consider replacing it using a configurable
subsystem when searching for an operating point and linearizing.
2-34
In many cases, performing a linearization using linearization snapshots
avoids the challenges associated with blocks with internal states. You
can linearize your model at steady state using linearization snapshots as
described in “Linearizing at Specified Simulation Times” on page 4-61 and
“Linearizing at Simulation Events” o n page 4-63.
Memory Blocks. When you have Memory blocks in your model, y ou can
configure the block to use a steady state output value when using the
Simulink Control Design software. The model
illustrates this issue.
delayex.mdl,shownbelow,
Page 63

Recommendations for Computing Operating Points
In this model the Memory block is configured in the block dialog to have an
initial output of 0 but is driven by a Constant block with an output of 1. This
causes the output signal of the block to be 0 in the operating point. However,
in the steady-state operating point for this model, the output of the Memory
block is 1. When searching for an operating point or when linearizing a model
at a steady state condition, select the Direct feedthrough of input during
linearization option in the block dialog. This will force the output of the
Memory block to be the same as the input during operating point searches
or linearization.
2-35
Page 64

2 Operating Point Analysis Using the GUI
2-36
Transport Delay and Variable Transport Delay Blocks. When you have
Transport Delay or Variable Transport Delay blocks in your model, you
can properly configure the initial outputs of these blocks so that operating
point searches or linearization uses the correct output value at steady state
condition. The discussion in “Memory Blocks” on page 2-34 applies to
configuring the initial outputs of the Transport Delay and Variable Transport
Delay blocks.
Backlash Block. The initial output and the output at the steady-state
operating point of the Backlash block do not always match. There is no way
to force the output of the Backlash block to be the same as the input during
operating point searches or linearization. Extra care should be taken when
working with a model containing Backlash blocks.
Computing Operating Points for SimMechanics Models
When computing operating points (trimming) for a SimMechanics™ model,
youfirstneedtoputitintrimmingmode. Todothis:
Page 65

Recommendations for Computing Operating Points
1 Locate and open the machine environment (Env) block for the system.
2 From the Parameters pane, set Analysis mode to Trimming.ClickOK to
close the block dialog box. This will create an output port in the model that
contains constraints related to errors in the system that must be set to zero
for a steady state operating point.
3 To set these constraints to zero within a project for the model in the Control
and Estimation Tools Manager, select Operating Points in the pane on
the left, and then select Compute Operating Points > Outputs.Within
this pane, set all constraints to
0.
At this point you can enter other design specifications on the states and inputs,
and then compute an operating point for your model. After you have finished
computing operating points for the SimMechanics model, make sure that you
reset the Analysis mode to
Forward dynamics in the Env block dialog box.
Choosing Initial Values for Computing Operating Points
When you compute an operating point from design specifications (trimming),
it is often important to begin with a set of state and input values that are
close to the actual steady state operating point values that you are trying
to compute. To do this you can simulate the model for a specified period of
time and then take a snapshot of the state and input values at that time.
You can do this using either the Control and Estimation Tools Manager
(see “Extracting Operating Points From Simulation” on page 2-17for more
information) or using the
Simulation” on page 3-16 for more information).
findop function (see “Extracting Values from
You can then use the values from the simulation snapshot as initial values for
an operating point that you compute from specifications using optimization
methods. To initialize the operating point specifications using these snapshot
values, click the Import Initial Values buttonintheCompute Operating
Points pane of the Control and Estimation Tools Manager, or use the
initopspec function. For more information, see “Importing Operating
Points” on page 2-25.
2-37
Page 66

2 Operating Point Analysis Using the GUI
Computing Operating Points for Blocks with Special Behavior
Blocks such as Memory, Transport Delay, and Variable Transport Delay
have states that cannot be optimized when com puting operating points from
specifications. In ad di tion they do not have dire ct feedthrough as the input to
the block at the current time does not determine the output of the block at the
current tim e. This can cause problems when you determine operating points
from specifications or create linearized models. To avoid these proble ms,
select the Direct feedthrough of input during linearization option in
the Block Parameters dialog box for the block in question (such as a Memory
block) when determin in g operating points from specification s or linearizing
models. Thisforcestheinputtofeed through to the o utput, as if the system
were operating at steady-state, and removes the problems associated with the
states that cannot be used to compute operating points.
2-38
Page 67

Operating Point Analysis Using the Command Line
• “Overview” on page 3-2
• “Example: Water-Tank System” on page 3-3
• “Creating or Opening a Simulink Model” on page 3-5
• “Computing Operating Points from Specifications” on page 3-7
• “Specifying Completely Know n Operating Points” on page 3-14
3
• “Extracting Values from Simulation” on page 3-16
• “Using Structures and Vectors of Operating Point Values” on page 3-17
Page 68

3 Operating Point Analysis Using the Command Line
Overview
This section describes how to specify operating points for a model using
functions in the MATLAB comm and window. Use the functions when you
want to create code files to automate the linearization process, or when
you want to use an operating point to initialize a Simulink model. For a
description of how to use the graphical interface for this task, see Chapter 2,
“Operating Point Analysis Using the GUI”.
Before linearizing the model, you must choose an operating point to linearize
the system a bout. This is often a steady-state value. Refer to “Why Are
Operating Points Important?” on page 2-6 for more information on the role
of operating points in linearization.
Use the Simulink Control Design functions for any of the following methods of
specifying the operating point:
• You do not know all the input and state values, but you can characterize
the operating point indirectly by specifying operating point values and
constraints for specific signals and variables in the model (implicit
specification).
3-2
• You know the operating point explicitly, i.e., you know the values of all
inputs and states in the model.
• Youwanttosimulatethemodelandextract the operating point at a given
time.
Note The operating point consists of values for all the states in the
model although only those states between the linearization points will be
linearized. This is because the whole model contributes to the operating
point values of the states/inputs/outputs of the portion of the model you
are linearizing.
Page 69

Example: Water-Tank System
aH
In this section...
“Water-Tank System” on page 3-3
“Model Equations” on page 3-4
Water-Tank System
This section introduces an example that continues throughout the remaining
sections of this chapter. By following this example, you will learn the process
of linearizing a model using Simulink Control Design functions.
Water enters a tank from the top and leaves through an orifice in its base.
The rate that water enters is proportional to the voltage, V, applied to the
pump. The rate that water leaves is proportional to the square root of the
height of water in the tank.
Example: Water-Tank System
bV
Water in
Tank
H
Water out
Schematic Diagram for the Water-Tank System
3-3
Page 70

3 Operating Point Analysis Using the Command Line
Model Equations
This section des
previous sectio
cribes the model equations for the example started in the
n “Example: Water-Tank System” on page 3-3.
Adifferential
d
Vol A
dt
where Vol is the volume of water in the tank, A is the cross-sectional area of
the tank, b is a constant related to the flow rate into the tank, and a is a
constant related to the flow rate out o f the tank. The equation describes the
height of water, H, as a function of time, due to the difference between flow
rates into and out of the tank.
The equation contains one state, H,oneinput,V, and one output, H.Itis
nonlinear due to its dependence on the square-root of H. Linearizing the model
simplifies the analysis of this model. For information on the linearization
process, see Chapter 4, “Exact Linearization Using the GUI”.
equation for the height of water in the tank, H,isgivenby
dH
bV a H==−
dt
3-4
Page 71

Creating or Opening a Simulink Model
To begin linearization using functions, you must first create or open a
Simulink model of your system. The model can have any number of inputs and
outputs (including none) and any number of states. The model can include
user-defined blocks or S-functions. Your model can involve a plant only, a
plant with a feedback loop and controlle r, or any number of subsystems.
To continue with the water-tank example, type
watertank
at the MATLAB prompt. This opens a Simulink model containing the
water-tank system as shown in this figure.
Creating or Opening a Simulink®Model
Simulink®Model of the Water-Tank System
3-5
Page 72

3 Operating Point Analysis Using the Command Line
The watertank model consists of
• The water-tank system itself
• A PID Controller to control the height of water in the tank by varying the
voltageappliedtothepump
• A reference signal that sets the desired water level
• A
Scope block that displays the height of water as a function of time
Double-click a b lock to view its contents. The Water-Tank System block is
shown in this figure.
3-6
Water-Tank System Block
The input to the Water-Tank System block, which is also the output of the
PID Controller block, is the voltage, V. The output is the height of water, H.
Thesystemcontainsjustonestate(withintheintegrator),H. Values of the
parameters are given as a=2 cm
2.5
/s, A=20 cm2, b=5 cm3/(s·V).
Page 73

Computing Operating Points from Specifica tions
Computing Operating Points from Specifications
In this section...
“Workflow for Computi ng Operating P oi nts from Specifications” on page 3-7
“Creating an Operating Point Specification Object” on page 3-7
“Configuring the Operating Point Specification Object” on page 3-8
“Computing the Complete Operating Point” on page 3-10
“Alternative Method forSpecifyingInitialGuesses” on page 3-11
“Adding Output Constraints to Specifications” on page 3-12
Workflow for Computing Operating Points from Specifications
This section continues the example from “Example: Water-Tank System” on
page 3-3. At this stage in the example, linearization point objects have been
created in the MATLAB workspace. See “Selecting Inputs and Outputs for the
Linearized Model” on page 5-4 for more information on creating linearization
point objects.
To determine the operating points from specifications:
1 Create an operating point specification object. See “Creating an Operating
Point Specification Object” on page 3-7.
2 Configure the object to store the specifications such as any constraints
or known information about the operating point. See “Configuring the
Operating Point Specification Obj ect” on page 3-8.
3 Use the findop function to find the operating point values by optimization.
See “Computing the Complete Operating Point” on page 3-10.
Creating an Operating Point Specification Object
When you know only some values exactly, or you know constraints on
the values in the operating point, use the function
operating point specification object for your model.
operspec to create an
3-7
Page 74

3 Operating Point Analysis Using the Command Line
For example, to create an operating point specification object for the
watertank model, type
watertank_spec = operspec('watertank')
MATLAB software displays
Operating Specification for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
States:
---------(1.) watertank/PID Controller/Integrator
spec: dx = 0, initial guess: 0
(2.) watertank/Water-Tank System/H
spec: dx = 0, initial guess: 1
Inputs: None
----------
3-8
Outputs: None
----------
Configuring the Operating Point Specification Object
The operating point specification object contains objects for all the states,
inputs, and outputs in the model. By typing the object’s name at the command
line you can see a formatted display of key object properties. Alternatively, to
list all the properties for a particular object, use the
get(watertank_spec.States(1))
returns
Block: 'watertank/PID Controller/Integrator'
StateName: ''
x: 0
Nx: 1
Ts: [0 0]
SampleType: 'CSTATE'
inReferencedModel: 0
get function. For example
Page 75

Computing Operating Points from Specifica tions
Known: 0
SteadyState: 1
Min: -Inf
Max: Inf
Description: ''
Edit these properties to provide specifications for the operating point. For
example:
• To set the second state to a known value (such as the desired height of
water), first change
watertank_spec.States(2).Known=1
Known to 1.
Next, provide the kno wn value.
watertank_spec.States(2).x=10
• To find a steady-state value for the first state, set SteadyState to 1.
watertank_spec.States(1).SteadyState=1
• To provide an initial guess of 2 for this steady-state value, first make sure
that
Known is set to 0 for this state.
watertank_spec.States(1).Known=0
Then, provide the initial guess.
watertank_spec.States(1).x=2
• To set a lower bound of 0 on this state,
watertank_spec.States(1).Min=0
Optimization settings used with the findop function can be configured with
the
linoptions function.
3-9
Page 76

3 Operating Point Analysis Using the Command Line
Computing the Co
The operating po
specifications
complete opera
[watertank_op,op_report]=findop('watertank',watertank_spec)
This returns t
are containe
Operating Point for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
States:
---------(1.) watertank/PID Controller/Integrator
x: 1.26
(2.) watertank/Water-Tank System/H
x: 10
Inputs: None
----------
The oper
values
of each
values
ating p oint search report,
give the state or input values. The
state, with desired
are both zero indicates that the operating point is at steady state.
int specification object,
for the operating p oint. Use this information to find the
ting point using the
he optimized operating point. The optimized values of the states
dinthe
mplete Operating Point
watertank_spec, now contains
findop command. Type
x property, or u property for inputs.
op_report, is also generated. The x or u
dx values give the time derivatives
dx values in parentheses. The fact that the dx
3-10
Operating Report for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
Operating point specifications were successfully met.
States:
---------(1.) watertank/PID Controller/Integrator
x: 1.26 dx: 0 (0)
(2.) watertank/Water-Tank System/H
x: 10 dx: 0 (0)
Page 77

Computing Operating Points from Specifica tions
Inputs: None
----------
Outputs: None
----------
Alternative Method for Specifying Initial Guesses
In some cases you might want to use a previously created operating point
to specify initial guesses in another operating point specification object.
For example, after extracting an operating point from a simulatio n, as in
“Extracting Values from Simulation” on page 3-16, you can use this operating
pointasastartingpointforfindingamore accurate steady state value using
findop. Youcandothiswiththeinitopspec function.
For example, first extract an operating point from simulation, in this case
after 10 time units.
watertank_op2=findop('watertank',10);
Then create an operating point specification object.
watertank_spec=operspec('watertank');
Specify initial guesses in this object with the following command.
watertank_spec=initopspec(watertank_spec,watertank_op2)
This returns an operating point specification with the initial guess, or x
property filled with operating point values from watertank_op2.
Operating Specification for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
States:
---------(1.) watertank/PID Controller/Integrator
spec: dx = 0, initial guess: 1.69
(2.) watertank/Water-Tank System/H
spec: dx = 0, initial guess: 10.1
3-11
Page 78

3 Operating Point Analysis Using the Command Line
Inputs: None
----------
Outputs: None
----------
This operating point specification can now be used with findop to find an
optimized steady state operating point. You can access individual elements
of this object using the
Operating Point Specification Object” on page 3-8.
Adding Output Constraints to Specifications
When you want to constrain additional signals of the model, you can add an
output constraint to the operating point specification object with the function
addoutputspec.
For example, to add an output constraint to the operating point specification
created in “Alternative Method for Specifying Initial Guesses” on page 3-11,
use the following command:
get function or dot-notation as in “Configuring the
3-12
watertank_spec=addoutputspec(watertank_spec,'watertank/Water-Tank System/Sum',1)
This adds a constraint on the signal between the Sum block and the
integrator block, H, within the Water-Tank System block. The constraint
is associated with an outport of a block, in this case outport
watertank/Water-Tank System/Sum (the preceding block).
Operating Specification for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
States:
---------(1.) watertank/PID Controller/Integrator
spec: dx = 0, initial guess: 1.69
(2.) watertank/Water-Tank System/H
spec: dx = 0, initial guess: 10.1
Inputs: None
----------
1 of the block
Page 79

Computing Operating Points from Specifica tions
Outputs:
---------(1.) watertank/Water-Tank System/Sum
spec: none
You can edit the specifications for this output in the same way as you would
foranyotherspecifications, by changing the values of
There is no
SteadyState option for outputs.
Known, y, Min,etc.
3-13
Page 80

3 Operating Point Analysis Using the Command Line
Specifying Completely Known Operating Points
In this section...
“Workflow for Specifying Completely Known Operating Points” on page 3-14
“Creating an Operating Point Object” on page 3-14
“Changing Operating Point Values” on page 3-15
Workflow for Specifying Completely Known Operating Points
To use functions to specify completely known operating points
1 Create an operating point object.
2 Make changes to the object values.
This section continues the example from “Example: Water-Tank System” on
page 3-3. At this stage in the example, linearization point objects have been
created in the MATLAB workspace. See “Selecting Inputs and Outputs for the
Linearized Model” on page 5-4 for more information on creating linearization
point objects.
3-14
Creating an O perating Point Object
An operating point object contains information about your system’s states and
inputs at the operating point. When you know your operating point explicitly,
use the function
For example, to create an operating point object for the water-tank model, type
watertank_op=operpoint('watertank')
MATLAB software displays
Operating Point for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
States:
operpoint to create an operating point object for your model.
Page 81

Specifying Completely Known Operating Points
---------(1.) watertank/PID Controller/Integrator
x: 0
(2.) watertank/Water-Tank System/H
x: 1
Inputs: None
----------
Within the operating point object are objects for all the states and inputs in
the model. Each of these objects has a property called
x,oru inthecaseof
inputs, that gives the value of that state or input.
Changing Operating Point Values
Change the x and u properties of the operating point object to known values
at the operating point. For example, to change the value of the first state to
1.26 and the second state to 10, type
watertank_op.States(1).x=1.26, watertank_op.States(2).x=10
which returns
Operating Point for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
States:
---------(1.) watertank/PID Controller/Integrator
x: 1.26
(2.) watertank/Water-Tank System/H
x: 10
Inputs: None
----------
The operating point object, watertank_op, now contains the known operating
point of the system.
3-15
Page 82

3 Operating Point Analysis Using the Command Line
Extracting Values from Simulation
This section continues the example from “Example: Water-Tank System” on
page 3-3. At this stage in the example, linearization point objects have been
created in the MATLAB workspace. See “Selecting Inputs and Outputs for the
Linearized Model” on page 5-4 for more information on creating linearization
point objects.
Use Simulink Control Design software to extract operating points from a
simulation of your model at specified times, such as when the simulation
reaches a steady state solution.
For example, to create an operating point object for the water-tank model
after it has simulated for 20 time units, type
watertank_op=findop('watertank',20)
MATLAB software displays the operating point at time t=20.
3-16
Operating Point for the Model watertank.
(Time-Varying Components Evaluated at time t=20)
States:
---------(1.) watertank/PID Controller/Integrator
x: 1.54
(2.) watertank/Water-Tank System/H
x: 10.2
Inputs: None
----------
Page 83

Using Structures and Vectors of Operating Point Values
Using Structures and Vectors of Operating Point Values
This section continues the example from “Example: Water-Tank System”
on page 3-3. At this stage in the example, linearization point objects and
operating points have been created in the MATLAB wo rkspace. See Chapter
3, “Operating Point Analysis Using the Command Line” for more information
on creating operating point objects using functions.
Operating point objects store the operating point values. However, when you
want to use an operating point’s values to initialize the simulatio n of a model,
it is useful to work with vectors of operating point values, or with Simulink
structures. Simulink structures have the benefits that you can use them to
initialize models that reference other models using the Model block, and you
do not need to worry about the ordering of states in the structure.
You can extract vectors and structures of operating point values from
operating point objects using the functions
can then use these vectors or structures to initialize a model for simulation.
Models that reference other models using the Model block, must be initialized
with a Simulink structure of values, such as those from simulation data,
extracted w ith the
getstatestruct function. See “Importing and Exporting
States” in the Simulink documentation for details on initializing model
reference models.
getxu and getstatestruct.You
To extract a structure of operating point values from the operating point
object,
watertank_op, created in “Extracting Values from Simulation” on
page 3-16, use the following command:
x=getstatestruct(watertank_op)
This extracts a structure of state values, x from the operating point object:
x=
time: 20
signals: [1x2 struct]
To access the values within this structure, use the following syntax:
x.signals.values
3-17
Page 84

3 Operating Point Analysis Using the Command Line
which returns
ans =
1.5431
ans =
10.1872
Note that these values are in the same order as those used by Simulink.
To extract a vector of operating point values from the operating point object,
watertank_op, use the following command.
[x,u]=getxu(watertank_op)
This extracts vectors of states, x,andinputs,u,asshownbelow.
x=
10.1872
1.5431
3-18
u=
[]
To create an operating point object from a vector, or structure, of values, such
as those returned from a simulation, you can use the function
setxu.To set
operating point values in an operating point object using a vector or structure
of known values, you can use the following command.
new_op=setxu(watertank_op2,x,u)
This command creates a new operating point, new_op, that is based on the
operating point
structure of state values,
The ordering of the states in
watertank_op2, but with the values from the vector or
x, and the vector of input values, u.
x and the inputs in u must be the same as the
ordering used by Simulink which is not necessarily the same as the order the
states appear in the operating point object. When you extract values from
simulation data they will already be in the correct order.
Page 85

Exact Linearization Using the GUI
• “What Is Linearization?” on page 4-2
• “Ways to Linearize Models” on page 4-7
• “Steps for Linearizing Models Using the GUI” on page 4-8
• “Choosing Linearization Settings and Algorithms” on page 4-9
• “Configuring the Linearization of Specific Blocks and Subsystems” on page
4-36
4
• “Selecting Inputs and Outputs for the Linearized Model” on page 4-45
• “Linearizing a Block” on page 4-55
• “Linearizing the Model” on page 4-57
• “Viewing Linearization Results” on page 4-66
• “Validating Exact Linearization Results” on page 4-76
• “Troubleshooting Exact Line arization Results” on page 4-82
Page 86

4 Exact Linearization Using the GUI
What Is Linearization?
In this section...
“Linearization Background” on page 4-2
“Analytic Representations of Linear Models” on page 4-3
Linearization Background
A linearized model is an approximation to a nonlinear system, which is valid
in a small region around the operating point of the system. Engineers often
use linearization in the design and analysis of control systems and physical
models.
The following figure shows a visual representation of a nonlinear system
as a block diagram. The diagram consists of an external input signal, u(t),
a measured output signal, y(t), and the nonlinear system that describes the
system’s states and its dynamic behavior, P.
4-2
You can also express a nonlinear system in terms of the state space equations
xt f xt ut t
() (), (),
=
()
=
yt g xt ut t
() (), (),
()
where x(t) represents the system’s states, u(t) represents the inputs, and y(t)
represents the outputs. In these equations, the variables vary continuously
with time. Discrete-time and multi-rate models are discussed in “Analytic
Page 87

What Is Linearization?
Representations of Linear Models” on page 4-3. A linear time-invariant
approximation to this nonlinear system is valid in a region around the
operating point at t=t
, x(t0)=x0,andu(t0)=u0. If the values of the system’s
0
states, x(t)andinputs,u(t) are close enough to the operating point, the system
will behave approximately linearly.
Simulink uses a series of connected blocks tomodelphysicalsystemsand
control systems. Input and output signals connect the blocks, which represent
mathematical operations. The nonlinear system, P, in the previous figure,
represents a series of connected Simulink blocks.
The Simulink Control Design software linearizes both continuous and
discrete-time nonlinear systems b y computing the state-space matrices of the
linearized model, A, B, C,andD, using one of the linearization algorithms
described in “Choosing Linearization Settings and Algorithms” on page 4-9.
Analytic Representations of Linear Models
Linearization of Nonlinear Models
To describe the linearized model, it helps to first define a new set of variables
centered about the operating point of the states, inputs, and outputs:
δ
xt xt x
() ()
=−
δ
ut ut u
() ()
=−
δ
yt yt y
() ()
=−
The value of the outputs at the operating point is given by y(t0)=g(x0,u0,t0)=y0.
Note When comparing a linearized model with the orig i nal mo d e l, remember
that the convention used in this book is to write the linearized model in terms
of δx, δu,andδy. The value of each of these variables at the operating point
is zero.
The linearized state space equations written in terms of δx(t), δu(t), and
δy(t)are
0
0
0
4-3
Page 88

4 Exact Linearization Using the GUI
δδδ
xt A xt B ut
() () ()
δδδ
yt C xt D ut
() () ()
where A, B, C,andD are constant coefficient matrices. These matrices are
defined as the Jacobians of the system, evaluated at the operating point
=+
=+
f
∂
A
=
x
∂
txu txu
,, ,,
000 000
g
∂
C
=
x
∂
txu txu
,, ,,
000 000
f
∂
B
=
u
∂
g
∂
D
=
u
∂
The transfer function of the linearized model can be used in place of the
system, P, in the previous figure. To find the transfer function, divide the
Laplace transform of δy(t) by the Laplace transform of δu(t):
Ys
()
()
δ
=
Us
()
δ
Ps
lin
Linearization of Discrete-Time Models
Discrete-time models are similar to continuous models, discussed in the
previous section, with the exception that the values of system variables
change at discrete times, t
equations for a nonlinear, discrete-time system are
xfxut
=
,,
kkkk
ygxut
kkkk
()
+
1
=
,,
()
,wherek is an integer value. The state-space
k
4-4
A linear time-invariant approximation to this system is valid in a region
around the operating point
ttxxuu y gxut y
== = =
,,, ,,and
kkkkkk k kkk k
000 0000
()
=
If the values of the system’s states, xk, inputs, uk, and outputs, yk, are close
enough to the operating point, the system will behave approximately linearly.
Page 89

What Is Linearization?
As with continuous time system s it is helpful to define variables centered
about the operating point values
δ
=−
xxx
kkk
δ
=−
uuu
kkk
=−
δ
yyy
kkk
0
0
0
where the value of the outputs at the operating point are defined as:
ygxut
=
kkkk
0000
,,
()
The linearized state-space equations can then be written in terms of these
new variables
δδδ
xAxBu
≈+
kkk
+
1
δδδ
yCxDu
≈+
kkk
where A, B, C,andD are given by
f
∂
A
=
x
∂
k
,, ,,
txu
000 000
g
∂
C
=
x
∂
k
,, ,,uu
txu
000 00
f
∂
B
=
u
∂
k
txu
g
∂
D
=
u
∂
k
tx
0
Linearization of Multirate Models
Multirate models involve states with various sampling rates. This means
that the state variables change values at different times and with different
frequencies, with some variables possiblychangingcontinuously. Thegeneral
state-space equations f or a nonlinear, m u lti r ate system are
4-5
Page 90

4 Exact Linearization Using the GUI
()
() ,
xk f xt x k
11 1 1 1
() , ,, ,,
xk fxtxk x k ut
mm i m m
yt gxt x k x k ut t
()
where k1,..., kmare integer values and
The linearized equations will approximate this system as a single-rate
discrete model:
δδδ
xAxBu
kkk
+
1
δδδ
yCxDu
kkk
For more information, see the Simulink Control Design demo “Linearization
of Multirate Models”.
=
+=
1,,, , ,
+=
1
=
≈+
≈+
,,, ,,
() ( )
()
() ( )
()
() ( )
()
,,, ,,
() ( )
()
…xt f xt x k x k ut t
11
11
11
mm
…
xk utt
mm
…
…
mm
()
()
()
()
t
t
,...,
k
k
1
()
()
()
()
m
tt
are discrete times.
4-6
Page 91

Ways to Linearize Models
You can linearize Simulink models either:
• Interactively in the GUI
For more information, see “Steps for Linearizing Models Using the GUI”
on page 4-8.
• Programmatically at the command line using MATLAB code
For more information, see Chapter 5, “Exact Linearization Using the
Command Line”. If you are computing multiple linearizations of large
models when only a few blocks or model references change per linearization,
see“ComputingMultipleLinearizationsforLargeModels”onpage5-13.
Tip You can automatically generate MATLAB code from your GUI
configuration.
Way s to Line a r ize Models
You can also compute the frequency response of Simulink models, including
models with event-based dynamics that might not linearize using exact
linearization. Examples of event-based dynamics are
• Stateflow charts
• Triggered subsystems
• PWM signals
For information on how to compute the frequency response of a Simulink
model, see Chapter 6, “Frequency Response Estimation of Simulink Models”.
4-7
Page 92

4 Exact Linearization Using the GUI
Steps for Line ar izing Mo dels Using the GUI
The main steps to linearize a model using the Simulink Control Design GUI
are as follows:
1 Create or open a model. See “Creating or Opening a Simulink Model” o n
page 1-2.
2 Create a new linearization task on the Control and Estimation Tools
Manager. See “Creating a Linearization Task” on page 1-8.
3 Specify an operating point for the model. See “Creating Operating Points”
on page 2-10.
4 (optional) Specify the li nearization settings and method. See “Choosing
Linearization Settings and Algorithms” on page 4-9.
5 (optional) Configure how specific blocks and subsystems in your model
linearize. See “Configuring the Linearization of Specific Blocks and
Subsystems” on page 4-36.
4-8
6 Insert linearization input and output points in the model. See “Selecting
Inputs and Outputs for the Linearized Model” on page 4-45.
7 Linearize the model. See “Linearizing the Model” on page 4-57.
8 Inspect the linearization. See “Viewing Lineariz ation Results” on page 4-66.
9 If necessary, validate and troubleshoot the linearization. See “Validating
Exact Linearization Results” on page 4-76 and “Validating Exact
Linearization R esults” on page 4-76.
10 Save your project and export the results to the MATLAB Workspace. See
“Saving Projects” on page 1-11 and “Exporting Results” on page 1-13.
The f irst three steps in this process were completed in the previous chapters.
This chapter continues the magball model example to give a detailed
discussion of the remaining steps.
Page 93

Choosing Linearization Settings and Algorithms
Choosing Linearization Settings and Algorithms
In this section...
“How to Choose Linearization Settings and Algorithms” on page 4-9
“Options for Linearization Algorithm Method” on page 4-11
“Block-by-Block Analytic Linearization ” on page 4-12
“Numerical-Perturbation Linearization” on page 4-24
“Changing State Ordering in the Linearized Model” on page 4-34
How to Choose Linearization Settings and Algorithms
To change the linearization settings and algorithms, select Tools > Options
in the Con trol and Estimation Tools Manager window, and then click the
Linearization tab. This opens the Linearization Task Options dialog box.
4-9
Page 94

4 Exact Linearization Using the GUI
4-10
To get h
option
For m
page
is us
alg
4-24.
elp on each option or s etting in the Options dialog box, right-click an
’s label and select What’s This?.
ore information on these settings, refer to the
. For information about numerical-perturbation linearization, which
ed when you select
orithm parameter, see “Numerical-Perturbation Linearization” on page
Numerical perturbation as the Linearization
linoptions reference
Page 95

Choosing Linearization Settings and Algorithms
Options for Linearization Algorithm Method
You can choose from the following two linearization methods in the Simulink
Control Design software:
• Block-by-block analytic linearization (the default method)
• Numerical-perturbation linearization
Note To use numerical-perturbation linearization, you must select an option
in the Linearization Options dialog box of the GUI, or if you are using
functions, with the
Advantages of Block-by-Block Analytical Linearization
The default linearization method, block-by-block analytic linearization,
linearizes the blocks individually and then combines the results to produce
the linearization of the whole system. This method has several advantages:
linoptions function.
• It divides the linearization problem into several smaller, easier problems.
• It defines the system being linearized by input and output markers on the
signal lines rather than root-level inport and outport blocks.
• It supports open-loop analysis.
• You can control the linearization of each block by using an analytic
linearization that is programmed into the block or by selecting a
perturbation level for the block.
• You can compute linearized model s w ith exact representations of
continuous time delays.
For more information, see “Block-by-Block Analytic Linearization” on page
4-12.
Advantages and Disadvantages of Numerical-Perturbation
Linearization
Numerical-perturbation linearization linearizes the whole system by
numerically perturbing the system’s inputs and states around the operating
4-11
Page 96

4 Exact Linearization Using the GUI
point. The advantage of this method is that it is quick and simple,
especially for large or complicated systems. However, there are also several
disadvantages with this method:
• It relies on root-level inport and outport blocks to define the system being
linearized.
• Thereisnosupportforopen-loopanalysis.
• You have limited control over the perturbation levels for each block.
• It does not use any of the analytic, preprogrammed block linearizations.
• It is sensitive to scaling issues (m odels with large and small signal values).
For more information, see “Numerical-Perturbation Linearization” on page
4-24.
Block-by-Block Analytic Linearization
• “What Is Block-by-Block Analytic Linearization?” on page 4-12
4-12
• “Linearizing Individual Blocks Using Analytic Linearization” on page 4-13
• “Linearizing Individual Blocks Using Block Perturbation” on page 4-13
• “Linearizing Models with Time Delays” on page 4-15
• “Blocks with Discontinuities” on p a ge 4-17
• “Integrator Blocks Near Saturation or a Reset Point” on page 4-18
• “Event-Based Models and Triggered Subsystems” on page 4-20
• “Pulse Width Modulation” on page 4-22
What Is Block-by-Block Analytic Linearization?
Block-by-block analytic linearization is the default linearization method in the
Simulink Control Design software. This method linearizes each block within
the linearization path individually.
There are two types of block-by-block linearization:
• “Linearizing Individual Blocks Using Analytic Linearization” on page 4-13
Page 97

Choosing Linearization Settings and Algorithms
• “Linearizing Individual Blocks Using Block Perturbation” on page 4-13
Each method has options that you can control to create accurate linearized
models.
Linearizing Individual Blocks Using Analytic Linearization
You can linearize blocks with analytic Jabcobians using analytic linearization.
This type of linearization results in an exact linearization of each block.
When you linearize a system using block-by-block analytic linearization, the
Simulink C ontrol Design software uses these exact linearizations instead of
numerically perturbing the block. This approach is especially useful for blocks
that contain discontinuities and do not give good results using numerical
perturbation.
Note The preprogrammed, analytic block linearizations are only
used in block-by-block analytic linearization. When you use the
numerical-perturbation linearization method, such blocks are numerically
perturbed with the rest of the system.
Linearizing Individual Blocks Using Block Perturbation
When you cannot use a preprogrammed block linearization, the Simulink
Control Design so ftw are automatically computes the block linearization by
numerically perturbing the states and inputs of the block about the operating
point of the block. As opposed to the numerical-perturbation linearization
method, this perturbation is local and its propagation through the rest of
the model is restricted.
Block Perturbation Algorithm. The block perturbation algorithm
introduces a small perturbation to the no n linear block and measuring the
response to this perturbation. Both the perturbation and the resulting
response are used to create the matrices in the linear state-space model of
this block. Changing the size of the perturbations changes the resulting
linearized model.
As described in “What Is Linearization?” on page 4-2, you can write a
nonlinear Simulink block as a state-space system:
4-13
Page 98

4 Exact Linearization Using the GUI
xt f xt ut t
() (), (),)
yt g xt ut t
() (), (), )
In these equations, x(t) represents the states of the block, u(t) represents the
inputs of the block, and y(t) represents the outputs of the block.
A linearized model of this system is valid in a small region around the
operating point t=t
operating point values from the states, inputs, and outputs defines a set of
variables centered about the operating point:
δ
xt xt x
() ()
δ
ut ut u
() ()
δ
yt yt y
() ()
You can write the linearized model in terms of these new variables. The
representation is usually valid when the variables are small, i.e., when the
departure from the operating point is small:
=
()
=
()
, x(t0)=x0, u(t0)=u0,andy(t0)=g(x0,u0,t0)=y0. Subtracting the
0
=−
=−
=−
0
0
0
4-14
δδδ
xt A xt B ut
() () ()
=+
δδδ
yt C xt D ut
() () ()
=+
The state-space matrices A, B, C,andD of this linea rized model represen t
the Jacobians of the block, as defined in “What Is Linearization?” on page 4-2.
To compute the matrices, the states and inputs are perturbed, one at a time,
and the response of the system to this perturbation is measured by computing
δx
and δy. The perturbation and response are then used to compute the
matrices in the followi ng way:
xx
−
o
x
pi pi
Ai
(:, ) , (:, )
Ci
(:, )
,,
=
xx
−
pi o
,,
y
−
y
=
xx
o
x
ppi pi
,,
,(:,)
−
pi o
,,
Bi
Di
xx
−
u
=
uu
−
pi o
yy
−
u
=
uu
−
pi o
o
o
Page 99

Choosing Linearization Settings and Algorithms
where
• x
is the state vector whose ith component is perturbed from the operating
p,i
point value.
• x
is the state vector at the operating point.
o
is the input vector whose ith component is perturbed from the operating
• u
p,i
point value.
• u
is the input vector at the operating point.
o
x
•
•
•
•
•
• y
is the value of
x
pi,
is the value of
x
u
pi,
x
is the value of
o
is the value ofyat x
y
x
pi,
y
is the value ofyat u
u
pi,
is the value of y at the operating point.
o
x
at x
, uo.
p,i
at u
p,i
p,i
p,i
, xo.
, uo.
, xo.
x
x
at the operating point.
Linearized models of discrete-time are computed in a similar way. F o r more
information, see “Lin ea r izing Discrete-Time and Multirate Models” on page
4-65 for the equations of linearized discrete-time and multirate systems.
Note A perturbed value is one that has been changed by a very small amount
from the operatin g point value. The default difference between the perturbed
value and the operating point value is
10 15−+
x
()
for b lock-by-block analytic
linearization, where x is the operating point value.
Linearizing Models with Time Delays
You can linearize models with time dela ys using:
• Padé approximation provides the following results:
4-15
Page 100

4 Exact Linearization Using the GUI
- An approximate representation of continuous delays using the Padé
order y ou specify in the block dialog for the delay Simulink blocks
- Discrete delays as states
For more information, see “Finding Linearized Models with Padé
Approximation of Delays” on page 4-16.
• Exact linearization provides the following results:
- An exact representation of continuous delays
- An internal representation of discrete delays
These discrete delays do not appear as states in the linea r ized model but
are accounted for as internal delays.
For more information, see “Finding Linearized Models with Exact Delays”
on page 4-17.
Blocks with Delays. The delays in your model can arise from any of the
following Simulink blocks:
4-16
• Transport Delay
• Variable Time Delay
• Variable Transport Delay
• Integer Delay
• Unit Delay
For more information on time delays, see “Time Delay s” in the Control System
Toolbox documentation.
Finding Linearized Models with Padé Approximation of Delays. To
find linearized m o d el s with Padé approximations of delays, first adjust the
order of the Padé approximation in the Block Parameters window for any
block with delay. Then, perform the linearization.
Note To use a Padé approximation for continuous delay blocks, set the
UseExactDelayModel optio n of the linoptions function to the default setting,
off.
 Loading...
Loading...