

Page 1
Simulink
®
7
Graphical User Interface
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
®
Simulink
© COPYRIGHT 1990–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Graphical User Interface
Page 3

Revision History
September 2007 Online only New for Simulink 7.0 (Release 2007b)
March 2008 Online only Revised for Simulink 7.1 (Release 2008a)
October 2008 Online only Revised for Simulink 7.2 (Release 2008b)
March 2009 Online only Revised for Simulink 7.3 (Release 2009a)
September 2009 Online only Revised for Simulink 7.4 (Release 2009b)
March 2010 Online only Revised for Simulink 7.5 (Release 2010a)
Page 4

Page 5

Configuration Parameters Dialog Box
• “Configuration Parameters Dialog Box Overview” on page 1-2
• “Model Configuration Pane” on page 1-5
• “Solver Pane” on page 1-8
• “Data Import/Export Pane” on page 1-77
• “Optimization Pane” on page 1-114
1
• “Diagnostics Pane: Solver” on page 1-190
• “Diagnostics Pane: Sample Time” on page 1-216
• “Diagnostics Pane: Data Validity” on page 1-232
• “Diagnostics Pane: Type Conversion” on page 1-287
• “Diagnostics Pane: Connectivity” on page 1-300
• “Diagnostics Pane: Compatibility” on page 1-329
• “Diagnostics Pane: Model Referencing” on page 1-333
• “Diagnostics Pane: Saving” on page 1-347
• “Hardware Implementation Pane” on page 1-353
• “Model Referencing Pane” on page 1-418
• “Simulation Target Pane: General” on page 1-442
• “Simulation Target Pane: Symbols” on page 1-458
• “Simulation Target Pane: Custom Code” on page 1-462
Page 6

1 Configuration Parameters Dialog Box
Configuration Parameters Dialog Box Overview
The Configuration Parameters dialog box specifies the setting s for a
model’s active configuration set. These parameters determine the type of
solver use d, import and export settings, and other values that determine how
the m odel runs. See Configuration Sets for more information.
Note YoucanalsousetheModelExplorertomodifysettingsfortheactive
configuration set or any other configuration set. See “The M odel Explorer:
Overview” for more information.
To display the dialog box, select Simulation > Configuration Parameters
in the Model Editor, or press Ctrl+E. The dialog box appears.
1-2
Page 7

Configuration Parameters Dialog Box Overview
The dialog box groups the configuration parameters into various categories.
To display the parameters for a specific category, click the category in the
Select tree on the left side of the dialog box.
In most cases, Simulink
®
software does not apply changes until you click OK
or Apply at the bottom of th e dialog box. The OK button applies your changes
and dismisses the dialog box. The Apply button applies your changes but
leaves the dialog box open.
1-3
Page 8

1 Configuration Parameters Dialog Box
Note Each of the parameters in the Configuration Parameters dialog box
canalsobesetviathe
the corresponding command line information.
sim comm and. Each parameter description includes
1-4
Page 9

Model Configuration Pane
In this section...
“Model Configuration Overview” on page 1-5
“Name” on page 1-6
“Description” on page 1-7
Model Configuration Overview
View or edit the name and description of your configuration set.
In the Model Explorer you can edit the name and description of your
configuration sets.
In the Model Explorer or Simulink Preferences window you can edit
the description of your template configuration set, Model Configuration
Preferences. Go to the Model Configuration Preferences to edit the template
Configuration Parameters to be used as defaults for new models.
Model Configuration Pane
When editing the Model Configuration preferences, you can click Restore
to Default Preferences to restore the default configuration settings for
creating new models. These underlying defaults cannot be changed.
1-5
Page 10

1 Configuration Parameters Dialog Box
Name
Specify the name of your configuration set.
Settings
Default: Configuration (for Active configuration set) or Configuration
Preferences
Edit the name of your configuration set.
In the Model Configuration Preferences, the name of the default configu r a t ion
is always Configuration Preferences, and cannot be changed.
(for default configuration set).
1-6
Page 11

Description
Specify a description of your configuration set.
Settings
No Default
Enter text to describe your configuration set.
Model Configuration Pane
1-7
Page 12

1 Configuration Parameters Dialog Box
Solver Pane
1-8
In this section...
“Solver Overview” on page 1-10
“Start time” on page 1-12
“Stop time” on page 1-14
“Type” on page 1-16
“Solver” on page 1-19
“Max Step Size” on page 1-27
“Initial Step Size” on page 1-29
“Min Step Size” on page 1-31
“Relative tolerance” on page 1-33
“Absolute tolerance” o n page 1-35
“Maximum order” on page 1-38
“Solver reset method” on page 1-40
Page 13

In this section...
“Number of consecutive min steps” on page 1-42
“Number of consecutive min steps” on page 1-43
“Solver Jacobian Method” on page 1-45
“Tasking mode for periodic sample times” on page 1-47
“Automatically handle rate transition for data transfer” on page 1-49
“Deterministic data transfer” on page 1-51
“Higher priority value indicates h igher t a sk priority” on page 1-53
“Zero-crossing control” on page 1-55
“Time tolerance” on page 1-57
“Number of consecutive zero crossings” on page 1-59
“Algorithm” on page 1-61
“Signal threshold” on page 1-63
Solver Pane
“Periodic s ample time constraint” on page 1-65
“Fixed-step size (fundamental sample time)” on page 1-68
“Sample time properties” on page 1-70
“Extrapolation order” on page 1-73
“Number Newton’s iterations” on page 1-75
1-9
Page 14
1 Configuration Parameters Dialog Box
Solver Overview
Specify the simu
the simulation.
configuration
lation start and stop time, and the solver configuration for
Use the Sol ver pane to set up a solver for a model’s active
set.
A solver compu
specified tim
tes a dynamic system’s states atsuccessivetimestepsovera
e span, using information provided by the model.
Configuration
1 Select a solver type from the Type list.
2 Select a solver from the Solver list.
3 Set the par
4 Apply the changes.
ameters displayed for the selected type and solver combination.
Tips
• Simulation time is not the same as clock time. For example, running
a simulation for 10 seconds u sually does not take 10 seconds. Total
simulation time depends on factors such as model complexity, solver step
sizes, and computer speed.
•
Fixed-step solver type is required for code generation, unless you use an
S-function or RSim target.
•
Variable-step solver type can significantly shorten the time required
to simulate models in wh ich states change rapidly or which contain
discontinuities.
1-10
See A
• Sol
• Cho
• Spe
lso
vers
osing a Solver
cifying a Simulation Start and Stop Time
Page 15

• Configuration Parameters Dialog Box
• Solver Pane
Solver Pane
1-11
Page 16
1 Configuration Parameters Dialog Box
Start time
Specify the start time for the simulation or generated code as a
double-precision value, scaled to seconds.
Settings
Default: 0.0
• A start time other than 0.0 is an offset, and must be less than or equal to
the stop time. An example of when you migh t use an offset is to set up a
delay to accommo da te some type of initialization.
• The values of block parameters with initial conditions must match the
initial condition settings at the specified start time.
• Simulation time is not the same as clock time. For example, running
a simulation for 10 seconds u sually does not take 10 seconds. Total
simulation time depends on factors such as model complexity, solver step
sizes, and computer speed.
1-12
Command-Line Information
Parameter: StartTime
Type: string
Value: a
Default:
ny valid value
'0.0'
Recommended Settings
cation
Appli
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
mpact
No i
0.0
Page 17

See Also
• Specifying a Simulation Start and Stop Time
• Configuration Parameters Dialog Box
• Solver Pane
Solver Pane
1-13
Page 18

1 Configuration Parameters Dialog Box
Stop time
Specify the stop time for the simulation or generated code as a double-precision
value, scaled to seconds.
Settings
Default: 10
• Stop time must be greater than or equal to the start time.
• Specify
pause or stop it.
• If the stop time is the same as the start time, the simulation or generated
program runs for one step.
• Simulation time is not the same as clock time. For example, running
a simulation for 10 seconds u sually does not take 10 seconds. Total
simulation time depends on factors such as model complexity, solver step
sizes, and computer speed.
• If your model includes blocks that depend on absolute time and you are
creating a design that runs indefinitely, see Blocks That Depend on
Absolute Time.
inf to run a simulation or generated program until you explicitly
Command-Line Information
Parameter: StopTime
Type: string
Value: any valid value
Default:
'10.0'
Recommended Settings
Application
Setting
1-14
Debugging No impact
Traceability No impact
Efficiency
Safety precaution Any positive value
No impact
Page 19

See Also
• Blocks That Depend on Absolute Time
• Using Blocks to Stop or Pause a Simulation
• Specifying a Simulation Start and Stop Time
• Configuration Parameters Dialog Box
• Solver Pane
Solver Pane
1-15
Page 20
1 Configuration Parameters Dialog Box
Type
Selectthetypeofsolveryouwanttousetosimulateyourmodel.
Settings
Default: Variable-step
Variable-step
Step size varies from step to step, depending on model dynamics. A
variable-step solver:
• Reduces step size when model states change rapidly, to maintain
accuracy.
• Increases step size when model states change slowly, to avoid
unnecessary steps.
Variable-step is recommended for models in which states change
rapidly or that contain discontinuities. In these cases, a variable-step
solver requires fewer time steps than a fixed-step solver to achieve a
comparable level of accuracy. This can significantl y shorten simulation
time.
1-16
Fixed-step
Step size remains constant throughout the simulation.
Required for code generation, unless you use an S-function or RSim
target.
Note The solv er computes the next time as the sum of the current time and
the step size.
Dependencies
Selecting Variable-step enables the following parameters:
• Solver
• Max step size
• Min step size
Page 21

• Initial step size
• Relative tolerance
• Absolute tolerance
• Shape preservation
• Initial step size
• Number of consecutive min steps
• Zero-crossing control
• Time tolerance
• Number of consecutive zero crossings
• Algorithm
Solver Pane
Selecting
Fixed-step enables the following parameters:
• Solver
• Periodic sample time constraint
• Fixed-step size (fundamental sample time)
• Tasking mode for periodic sample times
• Higher priority value indicates higher task priority
• Automatically handle rate transitions for data transfers
Command-Line Information
Parameter: SolverType
Type: string
Value:
Default: 'Variable-step'
'Variable-step' | 'Fixed-step'
1-17
Page 22

1 Configuration Parameters Dialog Box
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
Fixed-step
See Also
• Solvers
• Choosing a Solver
• “Purely Discrete Systems”
• Configuration Parameters Dialog Box
• Solver Pane
1-18
Page 23
Solver
Select the solve
simulation or co
Settings
The available
solvers chang e depending on which solv er Type you selected:
Solver Pane
r you want to use to compute the model’s states during
de generation.
• “Fixed-step
• “Variable-s
Fixed-step
ode3 (Bogac
Computes t
of the curr
Bogacki-S
derivati
derivati
X(n+1) = X(n) + h * DX(n)
Discret
e (no continuous states)
Compute
to the c
Use thi
step size. Relies on the model’s blocks to update discrete states.
fixed
The ac
ize of the steps taken by the simulation: the smaller the step size,
the s
ore accurate the results but the longer the simulation takes.
the m
Solvers” on page 1-19
tep Solvers” on p age 1-21
Solvers. Default:
ki-Shampine)
ode3 (Bogacki-Shampine)
he model’s state at the next time step as an explicit function
ent value of the state and the state derivatives, using the
hampine Formula integration technique to compute the state
ves. In the following example,
ve, and
h is the step size:
X is the state, DX is the state
s the time of the n ext time step by adding a fixed step size
urrent time.
s solver for models with no states or discrete states only, using a
curacy and length of time of the resulting simulation depends on
e Thefixed-stepdiscretesolvercannotbeusedtosimulatemodels
Not
t have continuous states.
tha
1-19
Page 24

1 Configuration Parameters Dialog Box
ode5 (Dormand-Prince)
Computes the model’s state at the next time step as an explicit function
of the current value of the state and the state derivatives. Uses the
Dormand-Prince Formula integration technique to compute the state
derivatives. In the following example,
derivative, and
X(n+1) = X(n) + h * DX(n)
ode4 (Runge-Kutta)
Uses the Fourth-Order Runge-Kutta (RK4) Formula integration
technique to compute the model’s state at the next time step as
an explicit function of the current value of the state and the state
derivatives. In the following example,
derivative, and
X(n+1) = X(n) + h * DX(n)
ode2 (Heun)
Uses the Heun’s Method integration technique to compute the model’s
state at the next time step as an explicit function of the current value of
the state and the state derivatives. In the following example,
state,
X is the state, DX is the state
h is the step size:
X is the state, DX is the state
h is the step size:
X is the
DX is the state derivative, and h is the step size:
1-20
X(n+1) = X(n) + h * DX(n)
ode1 (Euler)
Uses the Euler’s Method integration technique to computes the model’s
state at the next time step as an explicit function of the current value of
the state and the state derivatives. In the following example,
state,
DX is the state derivative, and h is the step size:
X(n+1) = X(n) + h * DX(n)
ode14x (extrapolation)
Uses a combination of Newton’s method and extrapolation from the
currentvaluetocomputethemodel’sstateatthenexttimestep,asan
implicit function of the state and the state derivative at the next time
step. In the following example,
and
h is the step size:
X(n+1) - X(n) - h * DX(n+1) = 0
X is the state, DX is the state derivative,
X is the
Page 25

Solver Pane
This solver requires more computation per step than an e xplicit solver,
but is more accurate for a given step size.
Variab le-step Solvers. Default:
ode45 (Dormand-Prince)
ode45 (Dormand-Prince)
Computes the model’s state at the next time step using an explicit
Runge-Kutta (4,5) formula (the Dormand-Prince pair) for numerical
integration.
ode45 is a one-step solver, and therefore only needs the solution at the
preceding time point.
Use
ode45 as a first try for most problems.
Discrete (no continuous states)
Computes the time of the next step by adding a step size that varies
depending on the rate of change of the model’s states.
Use this solver for models with no states or discrete states only, using
a variable step size.
ode23 (Bogacki-Shampine)
Computes the model’s state at the next time step using an explicit
Runge-Kutta (2,3) formula (the Bogacki-Shampine pair) for numerical
integration.
ode23 is a one-step solver, and therefore only needs the solution at the
preceding time point.
ode23 is more efficient than ode45 at crude tolerances and in the
presence of mild stiffness.
ode113 (Adams)
Computes the model’s state at the next time step using a variable-order
Adams-Bashforth-Moulton PECE numerical integration technique.
ode113 is a multistep solver, and thus generally needs the solutions at
several preceding time points to compute the current solution.
ode113 canbemoreefficientthanode45 at stringent tolerances.
1-21
Page 26

1 Configuration Parameters Dialog Box
ode15s (stiff/NDF)
Computes the model’s state at the next time step using variable-order
numerical differentiation formulas (NDFs). These are related to, but
more efficient than the backward differentiation formulas (BDFs), also
known as Gear’s method.
ode15s is a multistep solver, and thus generally needs the solutions at
several preceding time points to compute the current solution.
ode15s is efficient for stiff problems. Try this solve r if ode45 fails or is
inefficient.
ode23s (stiff/Mod. Rosenbrock)
Computes the model’s state at the next time step using a modified
Rosenbrock formula of order 2.
ode23s is a one-step solver, and therefore only needs the solution at
the preceding time point.
ode23s is more efficient than ode15s at crude tolerances, and can solve
stiff problems for which
ode15s is ineffective.
1-22
ode23t (Mod. stiff/Trapezoidal)
Computes the m odel’s state at the next time step using an
implementation of the trapezoidal rule with a “free” interpolant.
ode23t is a one-step solver, and therefore only needs the solution at
the preceding time point.
Use
ode23t if the problem is only moderately stiff and you need a
solution with no numerical damping.
ode23tb (stiff/TR-BDF2)
Computes the model’s state at the next time step using a multistep
implementation of TR-BDF2, an implicit Runge-Kutta formula with a
trapezoidal rule first stage, and a second stage consisting of a backward
differentiation formula of order two. By construction, the same iteration
matrix is used in evaluating both stages.
ode23tb is more efficient than ode15s at crude tolerances, and can solve
stiff problems for which
ode15s is ineffective.
Page 27

Solver Pane
Tips
• Identifying the optimal solver for a model re quires experimentation, for an
in-depth discussion, see Choosing a Solver.
• The optimal solver ba la n c es a cceptable accuracy with the shortest
simulation time.
• Simulink software uses a discrete solver for any model with no states or
discrete state s only, even if you specify a continuous solver.
• A smaller step size increases accuracy, but also increases simulation time.
• The degree of computational complexity increases for
oden,asn increases.
• As computational com plexity increases, the accuracy of the results also
increases.
Dependencies
Selecting the ode1 (Euler) , ode2 (Huen), ode 3 (Bogacki-Shampine),
ode4 (Runge-Kutta), ode 5 (Dormand-Prince),orDiscrete (no
continuous states)
• Fixed-step size (fundamental sample time)
• Periodic sample time constraint
• Tasking mode for periodic sample times
• Automatically handle rate transition for data transfers
• Higher priority value indicates higher task priority
Selecting
ode14x (extrapolation) enables the following parameters:
• Fixed-step size (fundamental sample time)
• Extrapolation order
• Number Newton’s iterations
fixed-step solvers enables the following parameters:
• Periodic sample time constraint
• Tasking mode for periodic sample times
• Automatically handle rate transition for data transfers
1-23
Page 28

1 Configuration Parameters Dialog Box
• Higher priority value indicates higher task priority
Selecting the
enables the following parameters:
• Max step size
• Automatically handle rate transition for data transfers
• Higher priority value indicates higher task priority
• Zero-crossing control
• Time tolerance
• Number of consecutive zero crossings
• Algorithm
Selecting
(Adams)
parameters:
• Max step size
• Min step size
• Initial step size
• Relative tolerance
• Absolute tolerance
Discrete (no continuous states) variable-step solver
ode45 (Dormand-Prince), ode23 (Bogacki-Shampine), ode113
,orode23s (stiff/Mod. Rosenbrock) enables the following
1-24
• Shape preservation
• Number of consecutive min steps
• Automatically handle rate transition for data transfers
• Higher priority value indicates higher task priority
• Zero-crossing control
• Time tolerance
• Number of consecutive zero crossings
• Algorithm
Page 29

Selecting ode15s (stiff/NDF), ode23t (Mod. stiff/Trapezoidal),or
ode23tb (stiff/TR-BDF2) enables the following parameters:
• Max step size
• Min step size
• Initial step size
• Solver reset method
• Number of consecutive min steps
• Relative tolerance
• Absolute tolerance
• Shape preservation
• Maximum order
• Automatically handle rate transition for data transfers
• Higher priority value indicates higher task priority
Solver Pane
• Zero-crossing control
• Time tolerance
• Number of consecutive zero crossings
• Algorithm
Command-Line Information
Parameter: Solver
Type: string
Value:
'ode113' | 'ode15s' | 'ode23s' | 'ode23t' | 'ode23tb' |
'FixedStepDiscrete' | 'ode5' | 'ode4' | 'ode3' | 'ode2' |
'ode1' | 'ode14x'
Default: 'ode45'
'VariableStepDiscrete' | 'ode45' | 'ode23' |
1-25
Page 30

1 Configuration Parameters Dialog Box
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
Discrete (no continuous states)
See Also
• Solvers
• Choosing a Solver
• “Purely Discrete Systems”
• Configuration Parameters Dialog Box
• Solver Pane
1-26
Page 31

Max Step Size
Specify the largest time step that the solver can take.
Settings
Default: auto
• For the discrete solver, the default value (auto)isthemodel’sshortest
sample time.
Solver Pane
• For continuous solvers, the default value (
the start and stop times. If the stop time equals the start time or is
inf, Simulink software chooses 0.2 secondsasthemaximumstepsize.
Otherwise, it sets the maximum step size to
auto)isdeterminedfrom
Tips
• Generally, the default maximum step size is sufficient. If you are concerned
about the solver missing significant behavior, change the parameter to
prevent the solver from taking too large a step.
• If the time span of the simulation is very long, the default step size might
be too large for the solver to find the solution.
• Ifyourmodelcontainsperiodicornearlyperiodicbehaviorandyouknow
theperiod,setthemaximumstepsizetosomefraction(suchas1/4)of
that period.
• In general, for more output points, change the refine factor, not the
maximum step size. For more information, see Specifying Output Options.
Dependencies
This parameter is enabled only if the solver Type is set to Variable-step.
1-27
Page 32
1 Configuration Parameters Dialog Box
Command-Line Information
Parameter: MaxStep
Type: string
Value: any valid value
Default:
Recommended Settings
'auto'
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• “Purely Discrete Systems”
• Specifying Output Options
• Configuration Parameters Dialog Box
• Solver Pane
1-28
Page 33
Solver Pane
Initial Step Siz
Specify the size
e
of the first time step that the solver takes.
Settings
Default: auto
By default, th
of the states
e solver selects an initial step size by e xamining the derivatives
at the start time.
Tips
• Be careful w
large, the s
• The initia
tries this
hen increasing the initial step size. If the first step size is too
olver might step over important behavior.
l step size parameter is a suggested first step size. The solver
step size but re duces it if error criteria are not satisfied.
Dependencies
This para
meter is enabled only if the solver Type is set to
Command-Line Information
er:
'auto'
t:
InitialStep
Paramet
Type: string
Value: any valid value
Defaul
Variable-step.
Recommended Settings
ng
Application
Debugging No impact
ceability
Tra
ficiency
Ef
fety precaution
Sa
Setti
mpact
No i
No impact
No impact
1-29
Page 34
1 Configuration Parameters Dialog Box
See Also
• “Purely Discrete Systems”
• Improving Simulation Performance and Accuracy
• Configuration Parameters Dialog Box
• Solver Pane
1-30
Page 35

Min Step Size
Specify the smallest time step that the solver can take.
Settings
Default: auto
• Thedefaultvalue(auto) sets an unlimited number of warnings and a
minimum step size on the order of machine precision.
• You can specify either a real number greater than zero, or a two-element
vector for which the first element is the minimum step size and the second
element is the maximum number of minimum step size warnings before
an error was issued.
Tips
• If the solver takes a smaller step to meet error tolerances, it issues a
warning indicating the current effective relative tolerance.
Solver Pane
• Setting the second element to zero results in an error the first time the
solver must take a step smaller than the specified minimum. This is
equivalent to changing the Min step size violation diagnostic to
the Diagnostics pane (see M i n step size v iolation).
• Setting the second element to -1 results in an unlimited number of
warnings. This is also the default if the input is a scalar.
Depend
This parameter is enabled only if the solver Type is set to Variable-step.
Comm
Parameter: MinStep
Type
Value: any valid value
Default:
encies
and-Line Information
: string
'auto'
error on
1-31
Page 36

1 Configuration Parameters Dialog Box
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• “Purely Discrete Systems”
• Min step size violation
• Configuration Parameters Dialog Box
• Solver Pane
1-32
Page 37

Solver Pane
Relative tolera
Specify the larg
during each time
reduces the tim
nce
est acceptable solver error, relative to the size of each state
step. If the relative error exceeds this tolerance, the solver
estepsize.
Settings
Default: 1e-3
• The relative
• The default v
within 0.1%
tolerance i s a percentage of the state’s value.
alue (
1e-3) means that the computed state is accurate to
.
Tips
• The acceptable error at each time step is a function of both the Relative
tolerance and the Absolute tolerance. For more information about how
these settings work together, see Specifying Variable-Step Solver Error
Tolerances.
• During each time step, the solver computes the state v alues at the end of
the step and also determines the local error – the estimated error of these
state values. If the error is greater than the acceptable error for any state,
the solver reduces the step size and tries again.
• The default relative tolerance value is sufficient for most applications.
Decreasing the relative tolerance valuecanslowdownthesimulation.
• To check the accuracy of a simulationafteryourunit,youcanreduce
the relative tolerance to 1e-4 and run it again. If the results of the two
simulations are not significantly different, you can feel confident that the
solution has converged.
Dependencies
This parameter is enabled only if you set:
• Solver Type to
• Solver to a continuous variable-step solver.
Variable-step.
1-33
Page 38
1 Configuration Parameters Dialog Box
This parameter w orks along with Absolute tolerance to determine the
acceptable error at each time step. For more information about how these
settings w ork together, see Specifying Variable-Step Solver Error Tolerances.
Command-Line Information
Parameter: RelTol
Type: string
Value: any valid value
Default:
Recommended Settings
'1e-3'
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Specifying Variable-Step Solver Error Tolerances
• Improving Simulation Performance and Accuracy
• Configuration Parameters Dialog Box
• Solver Pane
1-34
Page 39

Solver Pane
Absolute tolera
Specify the larg
state approache
reduces the tim
est acceptable solver error, as the value of the measured
s zero . If the absolute error exceeds this tole rance , the solver
estepsize.
nce
Settings
Default: auto
alue (
• The default v
to 1e-6. As th
is reset to t
the relativ
For example
then by the
• If the comp
setting yo
he maximum value that the state has thus far assumed times
e tolerance for that state.
uted se tting is not suitable, you can determine an appropriate
urself.
, if a state goes from 0 to 1 and the Relative tolerance is 1e-3,
end of the simulation the Absolute tolerance is set to 1e-3.
auto) initially sets the absolute tolerance for each state
e simulation progresses, the absolute tolerance for each state
Tips
• The acceptable error at each time step is a function of both the Relative
tolerance and the Absolute tolerance. For more information about how
these settings work together, see Specifying Variable-Step Solver Error
Tolerances.
• The Integrator, Transfer Fcn, State-Space, and Zero-Pole blocks allow you
to specify absolute tolerance values for solving the model states that they
compute or that determine their output. Theabsolutetolerancevaluesthat
you specify in these blocks override the global setting in the Configuration
Parameters dialog box.
• You might want to override the Absolute tolerance setting using blocks if
the global setting does not provide sufficient error control for all of your
model’s states, for example if they vary widely in magnitude.
• If you set the Absolute tolerance too low, the solv er may take too many
steps around near-zero state values, slowing down the simulation.
• To check the accuracy of a simulation after you run it, you can reduce the
absolute tolerance and run it again. If the results of the two simulations
1-35
Page 40
1 Configuration Parameters Dialog Box
are not significantly different, you can feel confident that the solution
has converged.
• If your simulation results do not seem accurate, and your model has states
whose values ap pro ach zero, the Absolute tolerance may be too large.
Reduce the Absolute tolerance toforcethesimulationtotakemoresteps
around areas of near-zero state values.
Dependencies
This parameter is enabled only if you set:
• Solver Type to
• Solver to a continuous variable-step solver.
This parameter works along with Relative tolerance to determine the
acceptable error at each time step. For more information about how these
settings w ork together, see Specifying Variable-Step Solver Error Tolerances.
Variable-step.
Command-Line Information
Parameter: AbsTol
Type: string
Value: any valid value
Default:
'auto'
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
1-36
Page 41

See Also
• Specifying Variable-Step Solver Error Tolerances
• Improving Simulation Performance and Accuracy
• Configuration Parameters Dialog Box
• Solver Pane
Solver Pane
1-37
Page 42

1 Configuration Parameters Dialog Box
Maximum order
Select the orde
the
ode15s solv
r of the numerical differentiation formulas (NDFs) used in
er.
Settings
Default: 5
5
Specifies t
1
Specifies t
2
Specifies
3
Specifie
4
Specifi
hat the solver uses fifth order NDFs.
hat the solver uses first order NDFs.
that the solver uses second order NDFs.
s that the solver uses third order NDFs.
es that the solver u ses fourth order NDFs .
Tips
• Although the higher order formulas are more accurate, they are less stable.
• If your model is stiff and requires more stability, reduce the maximum
order to 2 (the highest order for which the NDF formula is A-stable).
1-38
• As an alternative, you can try using the
order (and A-stable) solver.
ode23s solver, which is a lower
Dependencies
This parameter is enabled only if Solver is set to ode15s.
Page 43
Command-Line Information
Parameter: MaxOrder
Type: integ er
Value:
Default: 5
1 | 2 | 3 | 4 | 5
Recommended Settings
Solver Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Specifying Variable-Step Solver Error Tolerances
• Improving Simulation Performance and Accuracy
• Configuration Parameters Dialog Box
• Solver Pane
1-39
Page 44
1 Configuration Parameters Dialog Box
Solver reset met
Select how the so
crossing.
lver behaves during a reset, such as when it detects a zero
hod
Settings
Default: Fast
Fast
Specifies th
solver reset
Robust
Specifies t
the integra
at the solver will not recompute the Jacobian matrix at a
.
hat the solver will recompute the Jacobian matrix needed by
tion step at every solver reset.
Tips
• Selecting Fast speeds up the simulation. However, it can result in incorrect
solutions in some cases.
• If you suspect that the simulation is giving incorrect results, try the
setting. If there is no difference in simulation results between the fast and
robust settings, revert to the fast setting.
Robust
1-40
Dependencies
This parameter is enabled only if you select one of the following solvers:
•
ode15s (Stiff/NDF)
• ode23t (Mod. Stiff/Trapezoidal)
• ode23tb (Stiff/TR-BDF2)
Command-Line Information
Parameter: SolverResetMethod Type: string
'Fast' | 'Robust'
ue:
Val
Default: 'Fast'
Page 45

Recommended Settings
Solver Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Choosing a Solver
• Configuration Parameters Dialog Box
• Solver Pane
1-41
Page 46

1 Configuration Parameters Dialog Box
Number of consecutive min steps
Specify the maximum number of consecutive minimum step size violations
allowed during simulation.
Settings
Default: 1
• A minimum step size violation occurs when a variable-step continuous
solver takes a smaller step than tha t specified by the Min step size
property (see Min step size).
• Simulink software counts the number of consecutive violations that it
detects. If the count exceeds the value of Number of consecutive min
steps, Simulink software displays either a warning or error message as
specified by the Min step size violation diagnostic (see Min step size
violation).
Dependencies
This parameter is enabled only if you set:
1-42
• Solver Type to
• Solver to a continuous variable step solver.
Variable-step.
Command-Line Information
Parameter: MaxConsecutiveMinStep
Type: string
Value: any valid value
Default:
'1'
Recommended Settings
Application
Debugging No impact
Traceability No impact
Setting
Page 47

Solver Pane
Application
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Choosing a Solver
• Min step size violation
• Min step size
• Configuration Parameters Dialog Box
• Solver Pane
Number of consecutive min steps
Specify the maximum number of consecutive minimum step size violations
allowed during simulation.
Settings
Default: 1
• A minimum step size violation occurs when a variable-step continuous
solver takes a smaller step than tha t specified by the Min step size
property (see Min step size).
• Simulink software counts the number of consecutive violations that it
detects. If the count exceeds the value of Number of consecutive min
steps, Simulink software displays either a warning or error message as
specified by the Min step size violation diagnostic (see Min step size
violation).
Dependencies
This parameter is enabled only if you set:
• Solver Type to
• Solver to a continuous variable step solver.
Variable-step.
1-43
Page 48
1 Configuration Parameters Dialog Box
Command-Line Information
Parameter: MaxConsecutiveMinStep
Type: string
Value: any valid value
Default:
Recommended Settings
'1'
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Choosing a Solver
• Min step size violation
• Min step size
• Configuration Parameters Dialog Box
• Solver Pane
1-44
Page 49

Solver Pane
Solver Jacobian
Method
Settings
Default: Auto
auto
Sparse pertur
Full perturb
Sparse analy
Full analyt
bation
ation
tical
ical
Tips
• The default setting (Auto) usually provides good accuracy for most models.
Dependencies
This parameter is enabled only if an implicit solver is used.
Command-Line Information
Parameter: SolverJacobianMethodControl
Type: s
Value:
'SparseAnalytical' |'FullAnalytical'
Default: 'auto'
Reco
Application
Deb
Traceability No impact
Efficiency
Safety precaution
tring
'auto' | 'SparsePerturbation'|'FullPerturbation' |
mmended Settings
Setting
ugging
mpact
No i
No impact
No impact
1-45
Page 50

1 Configuration Parameters Dialog Box
See Also
• “Choosing a Solver”
• Solver Pane
1-46
Page 51

Tasking mode for periodic sample times
Select how block s with periodic sample times execute.
Settings
Default: Auto
Auto
Specifies that single-tasking execution is used if:
• Your model contains one sample time.
• Your model contains a continuous and a discrete sample time, and
the fixed-step size is equal to the discrete sample time.
Selects multitasking execution for models operating at different sample
rates.
SingleTasking
Specifies that all blocks are processed through each stage of simulation
together (for example, calculating output and updating discrete states).
Solver Pane
MultiTasking
Specifies that groups of blocks with the same executio n priority
are processed through each stage of simulation (for ex ample,
calculating output and updating discrete states) based on task
priority. M ultitasking mode helps to create valid models of real-world
multitasking systems, where sections of yo ur model represent
concurrent tasks.
Tip
The Multitask rate transition parameter on the Diagnostics > Sample
Time pane allows you to adjust error checking for sample rate transitions
between blocks that operate at different sample rates.
Dependency
This parameter is enabled by selecting Fixed-step solve r type.
1-47
Page 52
1 Configuration Parameters Dialog Box
Command-Line Information
Parameter: SolverMode
Type: string
Value:
Default: 'Auto'
Recommended Settings
'Auto' | 'SingleTasking' | 'MultiTasking'
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Rate Transition block
• Model Execution and Rate Transitions
• Single-Tasking and Multitasking Execution Modes
• Sample Rate Transitions
• Single-Tasking and Multitasking Execution of a Model: an Example
• Configuration Parameters Dialog Box
• Solver Pane
1-48
Page 53
Solver Pane
Automatically handle rate transition for data transfer
Specify whether Simulink software automatically inserts hidden Rate
Transition blocks between blocks that have different sa m ple rates to ensure:
the integrity of data transfers between tasks; and optional determinism o f
data transfers for periodic tasks.
Settings
Default: Off
On
Inserts hidden Rate Transition blocks between blocks when rate
transitions are detected. Handles rate transitions for asynchronous and
periodic tasks. Simulink software adds the hidden blocks configured
to ensure data integrity for data transfers. Selecting this option also
enables the parameter Deterministic data transfer,whichallowsyou
to control the level of data transferdeterminismforperiodictasks.
Off
Does not insert hidden Rate Transition blocks when rate transitions are
detected. If Simulink software detects invalid tra n s itions, you m ust
adjust the model such that the sample rates for the blocks in question
match or manually add a Rate Transition block.
See Rate Transition Block Options in the Real-Tim e Workshop
documentation for further details.
®
Tips
• Selecting this parameter allows you to handle rate transition issues
automatically. This saves you from having to manually insert Rate
Transition blocks to avoid invalid rate transitions, including invalid
asynchronous-to-periodic and asynchronous-to-asynchronous rate
transitions, in multirate models.
• For asynchronous tasks, Simulink software configures the inserted blocks
to ensure data integrity but not determinism during data transfers.
1-49
Page 54

1 Configuration Parameters Dialog Box
Command-Line Information
Parameter: AutoInsertRateTranBlk
Type: string
Value:
Default: 'off'
Recommended Settings
'on' | 'off'
Application
Debugging No impact
Traceability
Efficiency
Safety precaution Off
Setting
No impact (for simulation an d d uring
development)
Off (for production code generation)
No impact
See Also
• Rate Transition Block Options
• Configuration Parameters Dialog Box
• Solver Pane
1-50
Page 55
Solver Pane
Deterministic data transfer
Control whether the Rate Transition block parameter Ensure deterministic
data transfer (maximum delay) is set for auto-inserted Rate Transition
blocks
Default:
Always
Whenever possible
Specifies that the block parameter Ensure deterministic d ata
transfer (maximum delay) is always set for auto-inserted Rate
Transition blocks.
If
Always is selected and if a model needs to auto-insert a Rate
Transition block to handle a rate transition that is not between two
periodic sample times related by an integer multiple, Simulink errors
out.
Whenever possible
Specifies that the block parameter Ensure deterministic d ata
transfer (maximum delay) is set for auto-inserted Rate Transition
blocks whenever po ssible. If an auto-inserted R ate Transition block
handles data transfer between two periodic sample times that are
related by an integer m u ltip le, Ensure deterministic data transfer
(maximum delay) is set; otherwise, it is cleared.
Never (minimum delay)
Specifies that the block parameter Ensure deterministic d ata
transfer (maximum delay) isneversetforauto-insertedRate
Transition blocks.
Note Clearing the Rate Transition block parameter Ensure deterministic
data transfer (maximum delay) can provide reduced latency for
models that do not require determinism. See the description of Ensure
deterministic data transfer (maximum delay) on the Rate Transition
block reference page for more inform ation.
1-51
Page 56

1 Configuration Parameters Dialog Box
Dependencies
This parameter is enabled only if Automatically handle rate transition
for data transfer is checked.
Command-Line Information
Parameter: InsertRTBMode
Type: string
Value:
Default: 'Whenever possible'
Recommended Settings
'Always' | 'Whenever possible'| 'Never (minimum delay)'
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
'Whenever possible'
See Also
• Rate Transition Block Options
• Configuration Parameters Dialog Box
• Solver Pane
1-52
Page 57

Solver Pane
Higher priority
Specify whether
or lower priorit
asynchronous d
y values to higher priority tasks when implementing
ata transfers
value indicates higher task priority
the real-time system targeted by the model assigns higher
Settings
Default: Off
On
Real-time system assigns higher priority values to higher priority tasks,
for exam ple, 8 has a higher task priority than 4. Rate Transition blocks
treat asynchronous transitions between rates with lower priority values
and rates with higher priority values as low-to-high rate transitions.
Off
Real-time system assigns lower priority values to higher priority tasks,
for exam ple, 4 has a higher task priority than 8. Rate Transition blocks
treat asynchronous transitions between rates with lower priority values
and rates with higher priority values as high-to-low rate transitions.
Command-Line Information
Parameter: PositivePriorityOrder
Type: string
Value:
Default: 'off'
'on' | 'off'
Recommended Settings
ication
Appl
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
impact
No
oimpact
N
1-53
Page 58

1 Configuration Parameters Dialog Box
See Also
• Rate Transitions and Asynchronous Blocks
• Configuration Parameters Dialog Box
• Solver Pane
1-54
Page 59

Solver Pane
Zero-crossing c
Enables zero-cr
For most models,
larger time ste
Settings
Default: Use l
Use local set
Specifies th
basis. For a
To specify z
block’s pa
detection
Enable all
Enables z
Disable a
Disables
Tips
ossing detectio n during variable-ste p simulation of the model.
this speeds up simulation by enabling the solver to take
ps.
ocal settings
tings
at zero-crossing detection be enabled on a block-by-block
list of applicable blocks, see “Simulating Dynamic Systems”
ero-crossing detection for one of these blocks, open the
rameter dialog b ox and select the E nable zero-crossing
option.
ero-crossing detection for all blocks in the model.
ll
zero-crossing detection for all blocks in the model.
ontrol
• For most models, enabling zero-crossing detection speeds up simulation by
allowingthesolvertotakelargertimesteps.
• If a model has extreme dynamic changes, disabling this option can speed
up the simulation but can also decrease the accuracy of simulation results.
See Zero-crossing Detection for more information.
• Selecting
detection setting for individual blocks.
Enable all or Disable all overrides the local zero-crossing
Dependencies
This parameter is enabled only if the solver Type is set to Variable-step.
Selecting either
parameters:
Use local settings or Enable all enables the following
1-55
Page 60

1 Configuration Parameters Dialog Box
• Time tolerance
• Number of consecutive zero crossings
• Algorithm
Command-Line Information
Parameter: ZeroCrossControl
Type: string
Value:
Default: 'UseLocalSettings'
Recommended Settings
'UseLocalSettings' | 'EnableAll' | 'DisableAll'
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Zero-Crossing Detection
• Number of consecutive zero crossings
• Consecutive zero-crossings violation
• Time tolerance
• Configuration Parameters Dialog Box
• Solver Pane
1-56
Page 61

Time tolerance
Specify a tolera
occurtobeconsi
Settings
Default: 10*1
nce factor that controls how closely zero-crossing events must
dered consecutive.
28*eps
Solver Pane
• Simulink sof
events is les
simulation t
ZC
and ZC2,
1
tware defines zero crossings as consecutive if the time between
s than a particular interval. The following figure d epicts a
imeline during which Simulink software detects zero crossings
bracketed a t successive time steps t
and t2.
1
Simulink software determines that the zero crossings are consecutive if
dt < Rel
TolZC * t
2
where dt is the time between zero crossings and RelTolZC is the Time
tolerance.
• Simulink software counts the number of consecutive zero crossings that it
detects. If the count exceeds the value of Number of consecutive zero
crossings allowed, Simu li nk software displays either a warni ng or error
as s p ecified by the Consecutive zero-crossings violation diagnostic (see
Consecutive zero-crossings violation).
s
Tip
• Sim
ulink software resets the counter each time it detects nonconsecutive
ro crossings (successive zero crossings that fail to meet the relative
ze
lerance setting); therefore, decreasing the relative tolerance value may
to
ford your model’s behavior more time to recov er.
af
1-57
Page 62

1 Configuration Parameters Dialog Box
• If your model experiences excessive zero crossings, you can also increase
the Number of consecutive zero crossings to increase the threshold
at which Simulink so ftw are triggers the Consecutive zero-crossings
violation diagnostic.
Dependencies
This parameter is enabled only if Zero-crossing control is set to either
Use local settings or Enable all.
Command-Line Information
Parameter: ConsecutiveZCsStepRelTol
Type: string
Value: any valid value
Default:
Recommended Settings
'10*128*eps'
1-58
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Zero-crossing Detection
• Zero-crossing Control
• Number of consecutive zero crossings
• Consecutive zero-crossings violation
• Configuration Parameters Dialog Box
• Solver Pane
Page 63

Solver Pane
Number of consecutive zero crossings
Specify the number of consecutive zero crossings that can occur before
Simulink software displays a warning or an error.
Settings
Default: 1000
• Simulink software counts the number of consecutive zero crossings that
it detects. If the count exceeds the specified value, Simulink software
displays either a warning or an error as specified by the Consecutive
zero-crossings violation diagnostic (see Consecutive zero-crossings
violation).
• Simulink software defines zero crossingsasconsecutiveifthetimebetween
events is less than a particular interval (see Time tolerance).
Tips
• If your model experiences excessive zero crossings, you can increase this
parameter to increase the threshold at which Simulink software triggers
the Consecutive zero-crossings violation diagnostic. This may afford
your model’s behavior more time to recover.
• Simulink software resets the counter each time it detects nonconsecutive
zero crossings; therefore, decreasing the relative tolerance value may also
afford your model’s behavior more time to recov er.
Dependencies
This parameter is enabled only if Zero-crossing control is set to either
Use local settings or Enable all.
Command-Line Information
Parameter: MaxConsecutiveZCs
Type: string
Value: any valid value
Default:
'1000'
1-59
Page 64
1 Configuration Parameters Dialog Box
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Zero-Crossing Detection
• Zero-Crossing Control
• Consecutive zero-crossings violation
• Time tolerance
• Configuration Parameters Dialog Box
• Solver Pane
1-60
Page 65

Algorithm
Specifies the al
is used.
Settings
Default: Nona
Adaptive
Use an improv
and deactiva
set a zero-c
learn how to
Solver Pane
gorithm to detect zero cro ssing s when a variable-step solver
daptive
ed z ero-crossing algorithm which dynamically activates
tes zero-crossing bracketing. With this algorithm you can
rossing tolerance. See “Signal threshold” on page 1-63 to
set the zero-crossing tolerance.
Nonadaptiv
e
Use the non
software p
backward c
adaptive zero-crossing algorithm present in the Simulink
rior to Vers ion 7.0 (R2008a). This option is provided for
ompatibility.
Tips
• The adaptive zero-crossing algorithm is especially useful in systems
having strong “chattering”, or Zeno behavior. In such systems, this
algorithm yields shorter simulation run times compared to the nonadaptive
algorithm. See Zero-Crossing Detection for more information.
Dependencies
• This parameter is enabled only if the solver Type is set to Variable-step.
• Selecting
Comm
Parameter: ZeroCrossAlgorithm
Typ
Value:
Default: 'Nonadaptive'
Adaptive enables the Signal threshold parameter.
and-Line Information
e: string
'Nonadaptive' | 'Adaptive'
1-61
Page 66

1 Configuration Parameters Dialog Box
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Zero-Crossing Detection
• Number of consecutive zero crossings
• Consecutive zero-crossings violation
• Time tolerance
• Configuration Parameters Dialog Box
• Solver Pane
1-62
Page 67

Solver Pane
Signal threshol
Specifies the de
Signals falling
The signal thre
adband region used during the detection of zero crossings.
within this region are defined as having crossed through zero.
shold is a real number, greater than or equal to zero.
d
Settings
Default: Aut
Auto
The signal t
algorithm.
String
Use the spe
real numbe
o
hreshold is determined automaticallybytheadaptive
cified value for the signal threshold. The value must be a
r equal to or greater than zero.
Tips
• Entering too small of a value for the Signal Threshold parameter will
result in long simul ation run times.
• Entering a large Signal Threshold valuemayimprovethesimulation
speed (especially in systems having extensive chattering). How ever,
making the value too large may reduce the simulation accuracy.
Dependency
This parameter is enabled if the zero-crossing Algorithm is set to Adaptive.
Command-Line Information
Parameter: ZCThreshold
Type: string
'auto' | any real number greater than or equal to zero
ue:
Val
Default: 'auto'
1-63
Page 68

1 Configuration Parameters Dialog Box
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Zero-Crossing Detection
• Number of consecutive zero crossings
• Consecutive zero-crossings violation
• Time tolerance
• Configuration Parameters Dialog Box
• Solver Pane
1-64
Page 69

Solver Pane
Periodic sample
Select constrai
does not satisfy
software displ
Settings
Default: Unco
Unconstrain
Specifies no
to display a
Use the Fixe
specify so
Ensure sam
Specifies
which the
intrinsi
youplano
you shou
can dete
• Model Bl
nts on the sample time s defined by this model. If the m odel
the specified constraints during simulation, Simulink
ays an error message.
nstrained
ed
constraints. Sele cti ng this option causes Simulink software
field for entering the solver step size.
d-step size (fundamental sample time) option to
lver step size.
ple time independent
that Model blocks inherit sample time from the context in
y are used. You cannot use a referenced m odel that has
c sample times in a triggered subsystem or iterator subsystem. If
n referencing this model in a triggered or iterator subsystem,
ld select
ct sam p le time problems while unit testing this model.
ock Sample Times
time constraint
Ensure sample time independent so that Simulink
Spe
• Inheri
• Functi
Simul
sampl
behav
cann
caus
Fixe
cified
Spe
ope
the
mo
ted Sample Time for Re fe renced Models
on Call Models
ink software checks to ensure that this model can inherit its
e times from a model that references it without altering its
ior. Models that specify a step size (i.e., a base sample time)
ot satisfy this constraint. For this reason, selecting this option
es Simulink software to hide the group’s step size field (see
d-step size (fundamental sample time)).
cifies that Simulink software check to ensure that this model
rates at a specified set of prioritized periodic sample times. Use
Sample time properties option to specify and assign priorities to
del sample times.
1-65
Page 70
1 Configuration Parameters Dialog Box
Executing Multitasking Models explains how to use this option for
multitasking models.
Tips
During simulation, Simulink software checks to ensure that the model
satisfies the constraints. If the model does not satisfy the specified constraint,
then Simulink software displays an error message.
Dependencies
This parameter is enabled only if the solver Type is set to Fixed-step.
Selecting
• Fixed-step size (fundamental sample time)
• Tasking mode for periodic sample times
• Higher priority value indicates higher task priority
• Automatically handle rate transitions for data transfers
Selecting
• Sample time properties
• Tasking mode for periodic sample times
• Higher priority value indicates higher task priority
• Automatically handle rate transitions for data transfers
Unconstrained enables the following parameters:
Specified enables the following parameters:
Command-Line Information
Parameter: SampleTimeConstraint
Type: string
Value:
Default: 'unconstrained'
'unconstrained' | 'STIndependent' | 'Specified'
1-66
Page 71

Recommended Settings
Solver Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
Specified or Ensure sample time
independent
See Also
• Model Block Sample Times
• Inherited Sample Time for Referenced Models
• Function Call Models
• Fixed-step size (fundamental sample time)
• Executing Multitasking Models
• Configuration Parameters Dialog Box
• Solver Pane
1-67
Page 72

1 Configuration Parameters Dialog Box
Fixed-step size (fundamental sample time)
Specify the step size used by the selected fixed-step solver.
Settings
Default: auto
• Entering auto (the default) in this field causes Simulink software to choose
the step size.
• If the model specifies one or more periodic sample times, Simulink software
chooses a step size equal to the least common denominator of the specified
sample times. This step size, known as the fundamental sample time of
the model, ensures that the solver will take a step at every sample time
defined by the model.
• If the model does not define any periodic sample times, Simulink software
chooses a step size that divides the total simulation time into 50 equal steps.
Dependencies
This param eter is enabled only if the Periodic sample time constraint is
set to
Unconstrained.
1-68
Command-Line Information
Parameter: FixedStep
Type: string
Value: any valid value
Default:
'auto'
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
Page 73

See Also
• Modeling Dynamic Systems
• Configuration Parameters Dialog Box
• Solver Pane
Solver Pane
1-69
Page 74

1 Configuration Parameters Dialog Box
Sample time prop
Specify and assi
Settings
No Default
• Enter an Nx3 ma
time propert
• Faster sampl
Format.
[period, of
period
offset
priorit
y
gn priorities to the sample times that this model implements.
trix with rows that specify the model’s discrete sample
ies in order from fastest rate to slowest rate.
e times must have higher priorities.
fset, priority]
Thetimein
during the
Atimeint
is update
operatin
Executi
the samp
erties
terval (sample rate) at which updates occur
simulation.
erval indicating an update delay. The block
d later in the sample interval than other blocks
gatthesamesamplerate.
on priority of the real-time task associated with
le rate.
1-70
SeeSpecifyingSampleTimeformoredetails and options for specifying
sample time.
Example.
[[0.1, 0, 10]; [0.2, 0, 11]; [0.3, 0, 12]]
• Declares that the model s hou ld specify three sample times.
• Sets the fundamental sample time period to 0.1 second.
• Assigns priorities of 10, 11, and 12 to the sample times.
• Assumes higher priority values indicate lower priorities — the Higher
priority value indicates higher task priority optio n is not selected.
Page 75

Solver Pane
Tips
• If the model’s fundamental rate differs from the fastest rate specified by
the model, specify the fundamental rate as the first entry in the matrix
followed by the specified rates, in order from fastest to slowest. See “Purely
Discrete Systems”.
• If the model operates at one rate, enter the rate as a three-element vector
in this field — for example, [0.1, 0, 10].
• When you update a model, Simulink softw are displays an error message if
what you specify does not match the sample times defined by the model.
• If Periodic sample time constraint is set to
Unconstrained, Simulink
software assigns priority 40 to the model base sample rate. If Higher
priority value indicates higher task priority is selecte d, Simulink
software assigns priorities 39, 38, 37, and so on, to subrates of the base
rate. Otherwise, it assigns priorities 41, 42, 43, and so on, to the subrates.
• Continuous rate is assigned a higher priority than is the discrete base rate
regardless of whether Pe riodic sample time constraint is
Unconstrained.
Specified or
Dependencies
This parameter is enabled by selecting Specified from the Periodic sample
time constraint list.
1-71
Page 76
1 Configuration Parameters Dialog Box
Command-Line Information
Parameter: SampleTimeProperty
Type: structure
Value: any valid matrix
Default:
Note If you specify SampleTimeProperty at the command line, you must
enter the sample time properties as a structure with the following fields:
•
SampleTime
• Offset
• Priority
Recommended Settings
[]
1-72
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution Period, offset, and priority of each sample
Setting
No impact
time in the model; faster sample times
must have higher priority than slower
sample times
See Also
• “Purely Discrete Systems”
• Specifying Sample Time
• Configuration Parameters Dialog Box
• Solver Pane
Page 77

Solver Pane
Extrapolation o
Select the extra
states at the nex
Settings
Default: 4
1
Specifies fi
2
Specifies s
3
Specifies
4
Specifies
Tip
Selecti
computa
ng a h igher order produces a more accurate solution, but is more
tionally intensive per step size.
Dependencies
This pa
Solver
rameter i s enabled by selecting
list.
polation order used by the
t time step from the states at the current time step.
rst order extrapolation.
econd order extrapolation.
third order extrapolation.
fourth order extrapolation.
rder
ode14x so lver to compute a model’s
ode14x (extrapolation) from the
Command-Line Information
eter:
Param
Type: integer
Value:
ult:
Defa
ExtrapolationOrder
1 | 2 | 3 | 4
4
1-73
Page 78

1 Configuration Parameters Dialog Box
Recommended Settings
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Choosing a Fixed-Step Solver
• Configuration Parameters Dialog Box
• Solver Pane
1-74
Page 79

Solver Pane
Number Newton’s
Specify the numb
to compute a mode
current time st
er of Newton’s method iterations used by the
l’s states a t the next time step from the states at the
ep.
iterations
Settings
Default: 1
Minimum: 1
Maximum: 214
More iterat
computatio
7483647
ions produce a more accurate solution, but are more
nally intensive per step size.
Dependencies
This param
Solver lis
eter is enabled by selecting
t.
Command-Line Information
er:
Paramet
Type: integer
Value: any valid number
Defaul
NumberNewtonIterations
t:
1
ode14x solver
ode14x (extrapolation) from the
Recommended Settings
ng
Application
Debugging No impact
ceability
Tra
iciency
Eff
fety precaution
Sa
Setti
mpact
No i
No impact
No impact
1-75
Page 80

1 Configuration Parameters Dialog Box
See Also
• Choosing a Fixed-Step Solver
• Configuration Parameters Dialog Box
• Solver Pane
• “Purely Discrete Systems”
1-76
Page 81
Data Import/Export Pane
Data Import/Export Pane
In this
“Data
“Inpu
“Ini
“Ti
“St
“O
“F
Save complete SimState in final state” on page 1-92
“
“Signal logging” on page 1-95
section...
Import/Export Overview” on page 1-79
t” on page 1-80
tial state” on page 1-82
me” on page 1-84
ates” on page 1-86
utput” on page 1-88
inal states” on page 1-90
1-77
Page 82

1 Configuration Parameters Dialog Box
In this section...
“Inspect signal logs when simulation is paused/stopped” on page 1-97
“Data stores” on page 1-99
“Limit data points to last” on page 1-100
“Decimation” on page 1-103
“Format” on page 1-105
“Output options” on page 1-107
“Refine factor” on page 1-109
“Output times” on page 1-111
“Return as Single Object” on page 1-112
1-78
Page 83

Data Import/Export Pane
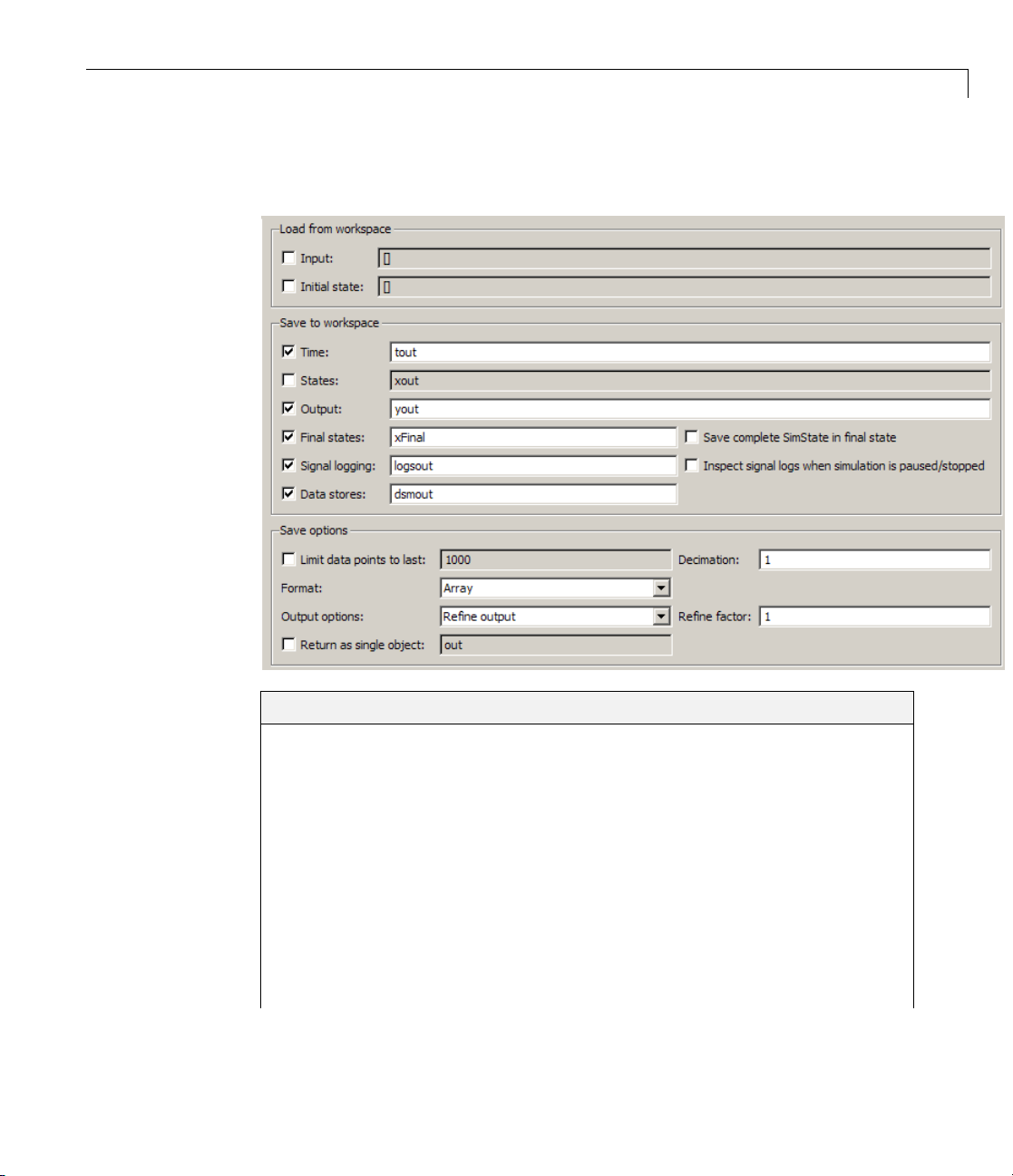
Data Import/Exp
The Data Import/
state data from a
MATLAB
standard or cus
signals and to
®
Export pane allows you to import input signal and initial
workspace and export output signal and state data to the
worksp
tom MATLAB functions to generate a simulated system’s input
graph, analyze, or otherwise postprocess the system’s outputs.
ort Overview
ace during simulation. This capability allows you to use
Configuration
1 Specify the data to load from a workspace before simulation begins.
2 Specify the data to save to the MATLAB workspace after simulation
completes.
Tips
• For more i
Simulati
• See the do
availab
nformation on using this pane, see Importing and Exporting
on Data.
cumentation of the
leonlyforprogrammaticsimulation.
sim command for some cap a bilities th at are
See Also
• Importing Data from a Workspace
• Exporting Data to the MATLAB Workspace
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-79
Page 84

1 Configuration Parameters Dialog Box
Input
Loads input data from a workspace be fore the simulation beg ins.
Settings
Default: Off, [t,u]
On
Loads data from a workspace.
Specify a MATLAB expression for the data to be imported from a
workspace. The Simulink software resolves symbols used in this
specification as de scrib ed in “Resolving Symbols”. Th e input data can
take any of the following forms:
• Time series
• Data array
• Time expression
1-80
• Data structure
See Importing Data from a Workspace for information on how to use
this field.
Off
Does not load data from a workspace.
Tips
• You must select the Input check box before entering input data.
• Simulink software linearly interpolates or extrapolates input values as
necessary if the Interpolate data option is selected for the corresponding
Inport.
• The use of the Input box is independent of the setting of the Format list
on the Data Import/Export pane.
Page 85
Command-Line Information
Parameter: LoadExternalInput
Type: string
Value:
Default: 'off'
Parameter: ExternalInput
Type: scalar or vector
Value: any valid value
Default:
'on' | 'off'
[t,u]
Recommended Settings
Data Import/Export Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution No impact for simulation and during
Setting
No impact
development
Off for production code generation
See Also
• Importing Data from a Workspace
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-81
Page 86

1 Configuration Parameters Dialog Box
Initial state
Loads the model’
Settings
Default: Off,
On
Simulink software loads initial states from a workspace.
Specify the name of a variable that contains the initial state values, for
example, a variable containing states saved from a previous simulation.
Use the structure or structure-with-time option to specify initial states
if you want to accomplish any of the following:
• Associate initial state values directly with the full path name to the
states. This eliminates errors that could occur if Simulink software
reorders the states, but the initial state array is not correspondingly
reordered.
s initial states from a workspace before simulation begins.
xInitial
1-82
• Assign a different data type to each state’s initial value.
• Initialize only a subset of the states.
See Importing and Exporting States for more information.
Off
Simulink softw are does not load initial states from a workspace.
Tips
• You must select the Initial State check box before entering initial state
data.
• The initial values specified by the workspace variable override the initial
values specified by the model itself (thevaluesspecifiedbytheinitial
condition parameters of those blocks in the model that have states).
• You must use the structure or structure-with-time format to initialize the
states of a top model and the models that it references.
Page 87

Command-Line Information
Parameter: LoadInitialState
Type: string
Value:
Default: 'off'
Parameter: InitialState
Type: variable (string) or vector
Value: any valid value
Default:
'on' | 'off'
'xInitial'
Recommended Settings
Data Import/Export Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution No impact for simulation and during
Setting
No impact
development
Off for production code generation
See Also
• Importing Data from a Workspace
• Importing and Exporting States
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-83
Page 88

1 Configuration Parameters Dialog Box
Time
Saves simulation time data to the specified v ariable during simulation.
Settings
Default: On, tout
On
Simulink software exports time data to the MATLAB workspace during
simulation.
Specify the name of the MATLAB variable used to store time data. See
Exporting Data to the MATLAB Works pace for more information.
Off
Simulink software does not export time data to the MATLAB workspace
during simulation.
Tips
1-84
• You must
• Simulin
sample r
output
• The Sav
amount
select the Time check box befo re entering the time variable.
ksoftwaresavestheoutputtotheMATLABworkspaceatthebase
ate of the model. Use a To Workspace block if you want to save
at a different sample rate.
eoptionsarea enables you to specify the format and restrict the
of output saved.
Command-Line Information
meter:
Para
Type: string
Value:
ult:
Defa
Parameter: TimeSaveName
e: string
Typ
Value: any valid value
Default:
SaveTime
'on' | 'off'
'on'
'tout'
Page 89
Recommended Settings
Data Import/Export Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution No impact for simulation and during
Setting
No impact
development
Off for production code generation
See Also
• Exporting Data to the MATLAB Workspace
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-85
Page 90

1 Configuration Parameters Dialog Box
States
Saves state data
Settings
Default: Off,
On
Simulink software exports state data to the MATLAB w orkspace during
simulation.
Specify the name of the MATLAB variable used to store state data. See
Importing a nd Exporting States for more information.
Off
Simulink does not export state data during simulation.
Tips
to the specified MATLAB variable during a simulation.
xout
1-86
• You must select the States check box before entering the states variable.
• Simulink saves the states in a MATLAB workspace variable having the
specified name.
• The saved data has the format that you specify in the Save options area.
• Simulink creates empty variables for state logging (
conditions apply:
xout)ifbothofthese
- You enable States.
- A model has no states.
Page 91
Command-Line Information
Parameter: SaveState
Type: string
Value:
Default: 'off'
Parameter: StateSaveName
Type: string
Value: any valid value
Default:
'on' | 'off'
'xout'
Recommended Settings
Data Import/Export Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution No impact for simulation and during
Setting
No impact
development
Off for production code generation
See Also
• Importing and Exporting States
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-87
Page 92
1 Configuration Parameters Dialog Box
Output
Saves signal data to the specified MATLAB variable during simulation.
Settings
Default: On, yout
On
Simulink software exports signal data to the MATLAB workspace
during simulation.
SpecifythenameoftheMATLABvariableusedtostoresignaldata. See
Exporting Data to the MATLAB Works pace for more information.
Off
Simulink software does not export signal data during simulation.
Tips
1-88
• You must select the Output check box before entering the output variable.
• Simulink software saves the output to the MATLAB workspace at the base
sample rate of the m odel. Use a To Workspace block if you want to save
output at a different sample rate.
• The Save options area enables you to specify the format and restrict the
amount of output saved.
Command-Line Information
Parameter: SaveOutput
Type: string
Value:
Default: 'on'
Parameter: OutputSaveName
Type: string
Value: any valid value
Default:
'on' | 'off'
'yout'
Page 93

Recommended Settings
Data Import/Export Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution No impact for simulation and during
Setting
No impact
development
Off for production code generation
See Also
• Exporting Data to the MATLAB Workspace
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-89
Page 94

1 Configuration Parameters Dialog Box
Final states
Saves the logged
MATLAB variable
Settings
Default: Off,
On
Simulink software exports final logged state data to the MATLAB
workspace during simulation.
Specify the name of the MATLAB variable in which to store the values
of these final states. Se e Importing and Exporting States for more
information.
Off
Simulink software does not export the final state data during simulation.
states of the model at the end of a simulation to the specified
.
xFinal
1-90
Tips
• You must select the Final states check box before entering the final states
variable.
• Simulink software saves the final states in a MATLAB workspace variable
having the specified name.
• The saved data has the format that you specify in the Save options area.
• Simulink creates empty variables for final state logging (
these conditions apply:
xfinal)ifbothof
- You enable Final states.
- A model has no states.
Page 95

Command-Line Information
Parameter: SaveFinalState
Type: string
Value:
Default: 'off'
Parameter: FinalStateName
Type: string
Value: any valid value
Default:
'on' | 'off'
'xFinal'
Recommended Settings
Data Import/Export Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution No impact for simulation and during
Setting
No impact
development
Off for production code generation
See Also
• Importing and Exporting States
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-91
Page 96

1 Configuration Parameters Dialog Box
Save complete SimState in final state
At the end of a simulation, Simulink saves the complete set of states of the
model, including logged states, to the specified MATLAB variable.
Settings
Default: Off, xFinal
On
Simulink software exports the complete set of final state data (i.e., the
SimState) to the MATLAB workspace during simulation.
Specify the name of the MATLAB variable in which to store the values
of the final states. See Importing and Exporting States for more
information.
Off
Simulink software exports the final logged states during simulation.
1-92
Tips
• You must select the Final states check b ox to enable the Save complete
SimState in final state option.
• Simulink saves the final states in a MATLAB workspace variable having
the specified name.
• The saved data has the format that you specify in the Save options area.
Dependencies
This parameter is enabled by Final states.
Command-Line Information
Parameter: SaveCompleteFinalSimState
Type: string
Value:
Default: 'off'
Parameter: FinalStateName
'on' | 'off'
Page 97

Type: string
Value: any valid value
Default:
'xFinal'
Recommended Settings
Data Import/Export Pane
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution
Setting
No impact
No impact
See Also
• Importing and Exporting States
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-93
Page 98
1 Configuration Parameters Dialog Box
1-94
Page 99

Signal logging
Globally enable
Settings
Default: On, l
On
Enables signal logging to the MATLAB workspace during simulation.
Specify the name of the signal logging object used to record logged
signal data in the MATLAB workspace. See Logging Signals for more
information.
Off
Disables signal logging to the MATLAB workspace during simulation.
Tips
or disable signal logging for this model.
ogsout
Data Import/Export Pane
• You must select the Signal logging check box before entering the signal
logging variable.
• Simulink software saves the signal data in a MATLAB workspace variable
having the specified name.
• The saved data has the format that you specify in the Save options area.
• Simulink software does not support signal logging for the following types of
signals:
- Output of a Function-Call Generator block
- Signal connected to the input of a Merge block
- Outputs of Trigger and Enable blocks
Dependencies
This parameter enables Inspect signal logs when simulation is
paused/stopped.
1-95
Page 100
1 Configuration Parameters Dialog Box
Command-Line Information
Parameter: SignalLogging
Type: string
Value:
Default: 'on'
Parameter: SignalLoggingName
Type: string
Value: any valid value
Default:
Recommended Settings
'on' | 'off'
'logsout'
Application
Debugging No impact
Traceability No impact
Efficiency
Safety precaution No impact for simulation and during
Setting
No impact
development
Off for production code generation
See Also
• Logging Signals
• Configuration Parameters Dialog Box
• Data Import/Export P ane
1-96
 Loading...
Loading...