

Page 1

SimPowerSystems™ 5
User’s Guide
Hydro-Québec
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
SimPowerSystems™ User’s Guide
© COPYRIGHT 1998–2010 by Hydro-Québec and The MathWorks, Inc.
The software desc ribed in this docu ment is furnished under a license ag reement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathWorks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Docum entation, the government hereby agrees tha t this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal governme nt)
and shall supersede any conflicti ng contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Documentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
January 1998 First printing Version 1.0 (Release 10)
September 2000 Second printing Revised for Version 2.1 (Release 12)
June 2001 Online only Revised for Version 2.2 (Release 12.1)
July 2002 Online only Revised for Version 2.3 (Release 13) (Renamed from Power
System Blockset User’s Guide)
February 2003 Third printing Revised for Version 3.0 (Release 13SP1)
June 2004 Online only Revised for Version 3.1 (Release 14)
October 2004 Fourth printing Revised for Version 4.0 (Release 14SP1)
March 2005 Online only Revised for Version 4.0.1 (Release 14SP2)
May 2005 Online only Revised for Version 4.1 (Release 14SP2+)
September 2005 Online only Revised for Version 4.1.1 (Release 14SP3)
March 2006 Online only Revised for Version 4.2 (Release 2006a)
September 2006 Online only Revised for Version 4.3 (Release 2006b)
March 2007 Online only Revised for Version 4.4 (Release 2007a)
September 2007 Online only Revised for Version 4.5 (Release 2007b)
March 2008 Online only Revised for Version 4.6 (Release 2008a)
October 2008 Online only Revised for Version 5.0 (Release 2008b)
March 2009 Online only Revised for Version 5.1 (Release 2009a)
September 2009 Online only Revised for Version 5.2 (Release 2009b)
March 2010 Online only Revised for Version 5.2.1 (Release 2010a)
Page 4

Page 5

Acknowledgments
SimPowerSystems™ software was developed by the following people and
organizations.
Gilbert Sybille
Hydro-Québec Research Institute (IREQ), Varennes, Québec. Original
author of SimPowerSystems software, technical coordinator, author
of the Ideal Switching Solution Method, autho r of phasor simulation,
discretization techniques, and documentation. Technical supervision
and design of the FACTS and Distributed Resources libraries , and
documentation.
_
Louis-A. Dessaint
École de Technologie Supérieure (ETS), Montréal, Québec. Author of
machine models. Technical supervision and design of the electric drive
library contents, and documentation.
Bruno DeKelper
École de Technologie Supérieure (ETS), Montréal, Québec. Author
of the Ideal Switching Solution Method and author of TLC functions
associated with the simulation of the state space equations.
Olivier Tremblay, Jean-Roch Cossa
École de Technologie Supérieure (ETS), M o n tré al, Q u ébec. Validations
and tests of the Ideal Sw itching Solution Method.
Patrice Brunelle
Hydro-Québec Research Institute (IREQ), Varennes, Québec. Main
software engineer. Author of graphical user interfaces, model
integration into Simulink
®
and Physical Modeling, and documentation.
v
Page 6
Acknowledgments
Roger Champagne
École de Technologie Supérieure (ETS), Montréal, Québec. Author
of machine models, of revised state space fo rmulation. Design of the
graphical user interface of the electric drive library.
Pierre Giroux, Richard Gagnon, Silvano Casoria
Hydro-Québec Research Institute (IREQ), Varennes, Québec.
Development of the FACTS and Distributed R esources libraries. Key
beta testers and developers of several SimPowerSystems blocks, demos,
and documentation.
Hoang Lehuy
Université Laval, Québec City. Validation tests and author of several
models, functions, and documentation. Validation of the electric drives
library.
Handy Fortin-Blanchette, Olivier Tremblay, Christophe Semaille
École de Technologie Supérieure (ETS), Montréal, Québec. Development
of the AC and DC drives models.
Hassan Ouquelle, Jean-Nicolas Paquin
École de Technologie Supérieure (ETS), Montréal, Québec. Development
of the Single-Phase Asynchronous Machine model and Saturation in
Asynchronous Machine model.
vi
Pierre Mercier
iOMEGAt. Project manager for the Power System Blockset™ software
versions 1 and 2 and for the Simulink electric drives library.
The authors acknowledge the contributions of the following people:
Innocent Kamwa, Raymond Roussel, Kamal Al-Haddad, Mohamed Tou,
Christian Dufour, Momcilo Gavrilovic, Christian Larose, David McCallum,
Bahram Khodabakhchian, Manuel Alvarado Sandoval, and Stéphane
Desjardins
Page 7

Acknowledgments
Getting Started
1
Product Overview ................................. 1-2
Introduction
TheRoleofSimulationinDesign
SimPowerSystems Libraries
Required and Related Products
...................................... 1-2
..................... 1-2
........................ 1-3
...................... 1-4
Contents
Using This Guide
If You Are a New User
If You Are an Experienced Blockset User
All Users
Units
Building and Simulating a Simple Circuit
Introduction
Building the Electrical Circuit with powerlib Library
Interfacing the Electrical Circuit with Other Simulink
Blocks
Measuring Voltages and Currents
Basic Principles of Connecting Capacitors and Inductors
Using the Powergui Block to Simulate SimPowerSystems
Models
Analyzing a Simple Circuit
Introduction
Electrical State Variables
State-Space Representation Using power_analyze
Steady-State Analysis
Frequency Analysis
........................................ 1-6
........................................... 1-6
........................................ 1-13
........................................ 1-16
.................................. 1-5
............................. 1-5
.............. 1-5
........... 1-7
...................................... 1-7
.................... 1-14
......................... 1-18
...................................... 1-18
........................... 1-18
.............................. 1-19
................................ 1-21
.... 1-8
.. 1-15
....... 1-19
vii
Page 8
Specifying Initial Conditions ....................... 1-27
Introduction
State Variables
Initial States
Specify Initial Electrical States with Powergui
...................................... 1-27
................................... 1-27
..................................... 1-28
.......... 1-29
Simulating Transients
Introduction
Simulating Transients with a Circuit B reaker
Continuous, Variable Time Step Integration Algorithms
Discretizing the Electrical System
Introducing the Phasor Simulation Method
Introduction
When to Use the Phasor Solution
Phasor Simulation of a Circuit Transient
...................................... 1-33
...................................... 1-40
............................. 1-33
.......... 1-33
.................... 1-37
.......... 1-40
.................... 1-40
.............. 1-41
Advanced Components and Techniques
2
Introducing Power Electronics ..................... 2-2
Introduction
Simulation of the TCR Branch
Simulation of the TSC Branch
Simulating Variable Speed Motor Control
Introduction
Building and Simulating the PWM Motor Drive
Using the Multimeter Block
Discretizing the PWM Motor Drive
Performing Harmonic Analy sis Using the FFT Tool
...................................... 2-2
....................... 2-4
....................... 2-8
........... 2-11
...................................... 2-11
......... 2-13
......................... 2-19
................... 2-21
.. 1-35
..... 2-21
viii Contents
Three-Phase Systems and Machines
Introduction
Three-Phase Network with Electrical Machines
Load Flow and Machine Initialization
Using the Phasor Solution Method for Stability Studies
...................................... 2-25
................. 2-25
................. 2-28
......... 2-25
.. 2-36
Page 9

Building and Customizing Nonlinear Models ......... 2-40
Introduction
Modeling a Nonlinear Inductance
Customizing Your Nonlinear Model
Modeling a Nonlinear Resistance
Creating Your Own Library
Connecting Your Model with Other Nonlinear Blocks
Building a Model Using Model Construction
Commands
...................................... 2-40
.................... 2-40
................... 2-45
..................... 2-48
......................... 2-53
...................................... 2-57
Improving Simulation Performance
3
How SimPowerSystems Software Works ............. 3-2
.... 2-53
Choosing an Integration Method
Introduction
Continuous Versus Discrete Solution
Phasor Solution Method
Simulating with Continuous Integration Algorithms
Choosing an Integration Algorithm
Simulating Switches and Power Electronic Devices
Using the Ideal Switching Device Method
Simulating Discretized Electrical Systems
Introduction
Limitations of Discretization with Nonlinear Models
Simulating Power Electronic Models
Introduction
Circuit Using Forced-Commutated Power Electronics
Circuit Using Naturally Commutated Power Electronics
Increasing Simulation Speed
Ways to Increase Simulation Speed
...................................... 3-4
............................ 3-5
...................................... 3-15
...................................... 3-17
.................... 3-4
................. 3-4
................... 3-6
...... 3-7
.............. 3-8
........... 3-15
..... 3-15
................ 3-17
....................... 3-19
................... 3-19
.. 3-6
.... 3-17
.. 3-17
ix
Page 10
Using Accelerator Mode and Real-Time Workshop
Software
....................................... 3-19
The Nonlinear Model Library
HowtoAccesstheNonlinear Model Library
The Continuous Library
The Discrete Library
The Phasors Library
The Switch Current Source Library
Limitations of the Nonlinear Models
Modifying the Nonlinear Models of the powerlib_ m odels
Library
Creating Your Own Library of Models
Changing Your Circuit Parameters
Introduction
Example of MATLAB Script Performing a Parametric
Study
........................................ 3-24
...................................... 3-26
......................................... 3-26
............................ 3-22
............................... 3-23
............................... 3-23
Systems with Electric Driv es
4
....................... 3-22
............ 3-22
................... 3-23
.................. 3-23
............... 3-25
.................. 3-26
x Contents
About the Electric Drives Library ................... 4-2
Getting Started with Electric Drives Library
What Is an Electric Drive?
Three Main Components of an Electric Drive
Multiquadrant Operation
Average-Value Models
User Interface
General Layout of the Library’s GUIs
Features of the New GUIs
Advanced Usage
Simulating a DC Motor Drive
Introduction
Regenerative Braking
.................................... 4-9
.................................. 4-12
...................................... 4-13
.......................... 4-4
........................... 4-7
............................. 4-8
................. 4-9
.......................... 4-10
....................... 4-13
.............................. 4-14
......... 4-4
........... 4-4
Page 11

Example: Thyristor Converter-Based DC Motor Drive ... 4-14
Simulating an AC Motor Drive
Introduction
Dynamic Braking
Modulation Techniques
Open-Loop Volts/Hertz Control
Closed-Loop Speed Control with Slip Compensation
Flux-Oriented Control
Direct Torque Control
Example: AC Motor Drive
Mechanical Models
Mechanical Shaft Block
Speed Reducer Block
Mechanical Coupling of Two Motor Drives
Introduction
System Description
Speed Regulated AC4 with Torque Regulated DC2
Torque Regulated AC4 with Speed Regulated DC2
Winding Machine
Introduction
Description of the Winder
Block Description
Simulation Results
...................................... 4-39
................................. 4-39
............................. 4-40
.............................. 4-46
.............................. 4-49
................................ 4-69
............................ 4-69
............................... 4-70
...................................... 4-71
................................ 4-72
.................................. 4-78
...................................... 4-78
................................. 4-80
................................ 4-83
...................... 4-39
...................... 4-45
.......................... 4-50
........................... 4-78
..... 4-46
........... 4-71
...... 4-74
...... 4-75
Robot Axis Control Using Brushless DC Motor Drive
Introduction
Description of the Robot Manipu la tor
Position Control Systems for Joints 1 and 2
Modeling the Robot Position Control Systems
Tracking Performance of the Motor Drives
Building Your Own Drive
Introduction
Description of the Drive
Modeling the Induction Motor Drive
Starting the Drive
Steady-State Voltage and Current Waveforms
...................................... 4-86
................. 4-86
............ 4-87
.......... 4-88
............. 4-92
.......................... 4-97
...................................... 4-97
............................ 4-98
.................. 4-100
................................. 4-104
.......... 4-105
.. 4-86
xi
Page 12
Speed Regulation Dynamic Performance ............... 4-106
Advanced Users: Retune the Drive P a ra m ete rs
Modify the Motor Parameters
Retune the Parameters of the Flux Regulator
Retune the Parameters of the Speed Regulator
Retune the Parameters of the DC Bus Voltage
Simulate and Analyze the Results
Advanced Users: Modify a Drive Block
Disable the Drive Link
Modify the Electrical Connections
Simulate the Sys tem and Observe the R esults
Multi-Level Modeling for Rapid Prototyping
Introduction
The System Architecture
The Simplified Model
The Average-Value Model
The Detailed Model
Comparison of the Multi-Level Modeling Precision
Conclusion
...................................... 4-130
....................................... 4-150
............................. 4-123
.............................. 4-132
................................ 4-142
....................... 4-108
.......... 4-109
.......... 4-119
.................... 4-122
.............. 4-123
.................... 4-124
.......... 4-128
........................... 4-131
........................... 4-135
....... 4-108
......... 4-115
......... 4-130
...... 4-145
xii Contents
Transients and Power Electronics in Power
5
Series-Compensated Transmission System ........... 5-2
Description of the Transmission System
Setting the Initial Load Flow and Obtaining Steady
State
.......................................... 5-8
Transient Performance for a Line Fault
Frequency Analysis
TransientPerformanceforaFaultatBusB2
Thyristor-Based Static Var Compensator
Introduction
Description of the SVC
...................................... 5-20
................................ 5-13
............................. 5-21
............... 5-2
............... 5-9
........... 5-16
............ 5-20
Systems
Page 13

Steady-State and Dynamic Performance of the SVC ..... 5-24
Misfiring of TSC1
................................. 5-26
GTO-Based STATCOM
Introduction
Description of the STATCOM
Steady-State and Dynamic Performance of the
STATCOM
Thyristor-Based HVDC Link
Description of the HVDC Transmission System
Frequency Response of the AC and DC Systems
Description of the Control and Protection Systems
System Startup/Stop — Steady-State and Step
Response
DC Line Fault
AC Line-to-Ground Fault at the Inverter
VSC-Based HVDC Link
Introduction
Description of the HVDC Link
VSC Control System
Dynamic Performance
...................................... 5-29
..................................... 5-36
...................................... 5-48
.................................... 5-54
...................................... 5-61
............................. 5-29
........................ 5-30
........................ 5-39
.............. 5-57
............................. 5-61
....................... 5-61
............................... 5-65
.............................. 5-71
......... 5-39
........ 5-41
...... 5-43
Transient Stability of Power Systems Using
Phasor Simulation
6
Transient Stability of a Power System with SVC and
PSS
Introduction
Description of the Transmission System
Single-Phase Fault — Impact of PSS — No SVC
Three-Phase Fault — Impact of SVC — PSS in Service
Control of Power Flow Using a UPFC and a PST
Introduction
Description of the Power System
Power Flow Control with the UPFC
............................................ 6-2
...................................... 6-2
............... 6-2
...................................... 6-9
..................... 6-9
.................. 6-12
........ 6-4
... 6-6
..... 6-9
xiii
Page 14

UPFC P-Q Controllable Region ...................... 6-13
Power Flow Control Using a PST
..................... 6-14
Wind Farm Using Doubly-Fed Induction Generators
Description of the Wind Farm
TurbineResponsetoaChangeinWindSpeed
Simulation of a Voltage Sag on the 120 kV System
Simulation of a Fault on the 25 kV System
....................... 6-19
.......... 6-23
...... 6-25
............. 6-27
.. 6-19
Index
xiv Contents
Page 15

Getting Started
• “Product Overview” on page 1-2
• “Using This Guide” on page 1-5
• “Building and Simulating a Simple Circuit” on page 1- 7
• “Analyzing a Simple Circuit” on page 1-18
• “Specifying Initial Conditions” on page 1-27
• “Simulating Transients” on page 1-33
1
• “Introducing the Phasor Simulation Method” on page 1-40
Page 16

1 Getting Started
Product Overview
Introduction
SimPowerSystems software and other products of the Physical Modeling
product family work together with Simulink software to model electrical,
mechanical, and control s ystem s.
SimPowerSystems software operates in the Simulink environment. Therefore,
before starting this user’s guide, make yourself familiar with Simulink
documentation. Or, if you perform signal processing and communications
tasks (as opposed to control system design tasks), see the Signal Processing
Blockset™ documentation.
In this section...
“Introduction” on page 1-2
“The Role of Simulation in Design” on page 1-2
“SimPowerSystems Libraries” on page 1-3
“Required and Related Products” on page 1-4
1-2
TheRoleofSimulationinDesign
Electrical power systems are combinations of electrical circuits and
electromechanical devices like motors and generators. Engineers working
in this discipline are constantly improving the performance of the s ystem s.
Requirements for dra stica lly increased efficiency have forced power system
designers to use power electronic devices and sophisticated control system
concepts that tax traditional analysis tools and techniques. Further
complicating the analyst’s role is the fact that the system is often so nonlinear
that the only way to understand it is through simulation.
Land-based power generation from hydroelectric, steam, or other devices is
not the only use of power system s. A common attribute of these system s
is their use of power electronics and control systems to achieve their
performance objectives.
Page 17

Product Overview
SimPowerSystems software is a modern design tool that allows scientists
and engineers to rapidly and easily build models that simulate power
systems. It uses the Simulink environment, allowing you to build a model
using simple click and drag procedures. Not only can you draw the circuit
topology rapidly, but your analysis of the circuit can include its interactions
with mechanical, thermal, control, and other disciplines. This is possible
because all the electrical parts of the simulation interact with the extensive
Simulink modeling library. Since Simulink uses the MATLAB
®
computational
engine, designers can also use MATLAB toolboxes and Simulink blocksets.
SimPowerSystems software belongs to the Physical M odeling product family
and uses similar block and connection line interface.
SimPowerSystems Libraries
SimPowerSystems libraries contain models of typical power equipment
such as transformers, lines, machines, and power ele ctronics. These models
are proven one s coming from textbooks, and their validity is based on the
experience of the Power Systems Testing and Simulation Laboratory of
Hydro-Québec, a large North American utility located in Canada, and also on
the experience of École de Technologie Supérieure and Université Laval. The
capabilities of SimPowerSystems software for modeling a typical electrical
system are illustrated in demonstration files. And for users who w an t to
refresh their knowledge of power system theory, there are also self-learning
case studies.
The SimPowerSystems main library, powerlib, organizes its blocks into
libraries according to their behavior. The powerlib library window displa ys
the block library icons and names. Double-click a library icon to open the
library and access the blocks. The main powerlib library window also
contains the Pow erg u i block that opens a graphical user interface for the
steady-state analysis of electrical circuits.
Nonlinear Simulink Blocks for SimPowerSystems Models
The nonlinear Simulink blocks of the powerlib library a re stored in a special
block library named powerlib_models. These masked Simulink models are
used by SimPowerSystems software to build the equivalent Simulink model
of your circuit. See Chapter 3, “Improving Simulation Performance” for a
description of the powerlib_models library.
1-3
Page 18
1 Getting Started
Required and Rel
SimPowerSystem
• MATLAB
• Simulink
In addition to
family includ
and electric
systems in Si
toolboxes a
with SimPow
products, s
the “Produc
ee the MathWorks Web site at
s software requires the following products:
SimPowerSystems software, the Physical Modeling product
es other products for modeling and simulating mechanical
al systems. Use these products together to model physical
mulink environment. There are also a number of closely related
nd other products from The MathWorks™ that you can use
erSystems software. For more information about any of these
ts” section.
ated Products
http://www.mathworks.com;see
1-4
Page 19

Using This Guide
In this section...
“If You Are a New User” on page 1-5
“If You Are an Experienced Blockset User” on page 1-5
“All Users” on page 1-6
“Units” on page 1-6
If You Are a New User
Begin with this chapter and also the next chapter to learn how to
• Build and simulate electrical circui ts using the powerlib library
• Interface an electrical circuit with Simulink blocks
• Analyze the steady-state and frequency response of an electrical circuit
Using This Guide
• Discretize your model to increase simulation speed, especially for power
electronic circuits and large power systems
• Use the phasor simulation method
• Build your own nonlinear models
If You Are an Experienced Blockset User
See the Release Notes for details on the latest release.
Also, see these chapters:
• Chapter 1, “Getting Started” to learn how to simulate discretized electrical
circuits
• Chapter 2, “Advanced Components and Techniques” to learn how to apply
the phasor simulation to transient stability study of multimachine systems
• Chapter 3, “Improving Simulation Performance” to learn how to increase
simulation speed
1-5
Page 20

1 Getting Started
All Users
For reference in
use the SimPower
formation on blocks, simple demos, and G UI-based tools,
Systems Reference.
For commands, r
syntax, as wel
l as a complete explanation of options and operation.
Units
This guide us
system. See T
es the International System of Units (SI) and the per unit (pu)
echnical Conventions for details.
efer to “Function Reference” for a synopsis of the command
1-6
Page 21

Building and Simulating a Simple Circuit
In this section...
“Introduction” on page 1-7
“Building the Electrical Circuit with powerlib Library” on page 1-8
“Interfacing the Electrical Circuit with Other Simulink Blocks” on page 1-13
“Measuring Voltages and Currents” on page 1-14
“Basic Principles of Connecting Capacitors and Inductors” on page 1-15
“Using the Powergui Block to Simulate SimPowerSystems Models” on page
1-16
Introduction
SimPowerSystems software allows you to build and simulate electrical
circuits containing linear and nonlinear elem ents.
Building and Simulating a Simple Circuit
In this section you
• Explore the powerlib library
• Learn how to build a sim ple circuit from the powerlib library
• Interconnect Sim u l in k blocks with your circuit
The circuit below represe nts an equivalent power system feeding a 300 km
transmission line. The line is compensated by a shunt inductor at its receiving
end. A circuit breaker allows energizing a nd de-energizing of the line. To
simplify matters, only one of the three phases is represented. The parameters
shown in the figure are typical of a 735 kV power system.
1-7
Page 22

1 Getting Started
CircuittoBeModeled
Building the Electrical Circuit with powerlib Library
The graphical user interface makes use of the Simulink functionality to
interconnect various electrical components. The electrical components are
grouped in a library called powerlib.
1 Open the SimPowerSystems main library by entering the following
command at the MATLAB prompt.
1-8
powerlib
This command displays a Simulink window showing icons of different
block libraries.
You can open these libraries to produce the windows containing the blocks
to be copied into your circuit. Each component is represented by a special
icon having one or several inputs and outputs corresponding to the different
terminals of the component:
2 From the File menu of the powerlib window, open a new window to
contain your first circuit and save it as
3 Open the Electrical Sources library and copy the AC Voltage Source block
into the circuit1 window.
circuit1.
Page 23

Building and Simulating a Simple Circuit
4 Open the AC Voltage Source dialog box by double-clicking the icon and
enter the Amplitude, Phase, and Frequency parameters according to the
valuesshowninCircuittoBeModeledonpage1-8.
Note that the amplitude to be specified f or a sinusoidal source is its p eak
value (424.4e3*sqrt(2) volts in this case).
5 Change the name of this block from AC Voltage Source to Vs.
6 Copy the Parallel RLC Branch block, which can be found in the Elements
library of powerlib, set its parameters as shown in Circuit to Be Modeled
on page 1-8, and n ame it Z_eq.
7 The resistance Rs_eq of the circuit can be obtained from the Parallel RLC
Branch block. Duplicate the Parallel RLC Branch block, which is already
in your circuit1 window. Select R for the Branch Type parameter and set
the R parameter according to Circuit to Be M odeled on page 1-8.
Once the dialog box is closed, notice that the L and C components have
disappeared so that the icon now shows a single resistor.
Note With the Branch Type parameter set to RLC, setting L and C
respectively to
inf and zero in a parallel branch changes automatically the
Branch Type to R and produces the same result. Similarly, with the Series
RLC Branch block, setting R, L, and C respectively to zero, zero, and
inf
eliminates the corresponding element.
8 Name this block Rs_eq.
9 Resize the various components and interconnect blocks by dragging lines
from outputs to inputs of appropriate blocks.
1-9
Page 24

1 Getting Started
10 To complete the circuit of Circuit to Be Modeled on page 1 -8, you need to
add a transmission line and a shunt reactor. You add the circuit breaker
later in “Simulating Transients” on page 1-33.
The model of a line with uniformly distributed R, L, and C parameters
normally consists of a delay equal to the wave propagation time along the
line. This model cannot be simulated as a linear system because a delay
corresponds to an infinite number of states. However, a good approximation
of the line with a finite number of states can be obtained by cascading
several PI circuits, each representing a small section of the line.
1-10
A PI section consists of a series R-L branch and two shunt C branches. The
model accuracy depends on the number of PI sections used for the model.
Copy the PI Section Line block from the Elements library into the circuit1
window, set its parameters as shown in Circuit to Be Modeled on page 1-8,
andspecifyonelinesection.
11 The shunt reactor is modeled b y a resistor in serie s with an inductor. You
could use a Series RLC Branch block to model the shunt reactor, but then
you would have to manually calculate and set the R and L values from
the quality factor and reactive power specified in Circuit to Be Modeled
on page 1-8.
Therefore, you might find it more convenient to use a Series RLC Load
block that allows you to specify directly the active and re active powers
absorbed by the shunt reactor.
Copy the Series RLC Load block, w h ich can be found in the Elements
library of powerlib. Name this block 110 Mvar. Set its parameters as
follows:
Page 25

Building and Simulating a Simple Circuit
Vn
fn
P
QL
Qc
424.4e3 V
60 Hz
110e6/300 W (quality factor = 300)
110e6 vars
0
Note th at, as no reactive capacitive po w er is specified, the capacitor
disappears o n the block icon when the dialog box is closed. Interconnect the
newblocksasshown.
12 You need a Voltage Measurement block to measure the voltage at node B1.
This block is found in the Measurements library of powerlib.Copyitand
name it U1. Connect its positive input to the node B1 and its negative
input to a new Ground block.
13 To observe the voltage measured by the Voltage Measurement block
named U1, a display system is needed. This can be any device found in
the Simulink Sinks library.
OpentheSinkslibraryandcopytheScopeblockintoyourcircuit1
window. If the scope were connected directly at the output of the voltag e
measurement, it would display the voltage in volts. However, electrical
engineers in pow er systems are used to working with normalized quantities
(per unit system). The voltage is normalized by dividing the v alue in volts
by a base voltage corresponding to thepeakvalueofthesystemnominal
voltage. In this case the scaling factor K is
1-11
Page 26

1 Getting Started
K =
424 4 10 2
14 Copy a Gain block from the Simulink library and set its gain as above.
1
3
××
.
Connect its output to the Scope block and connect the output of the Voltage
Measurement block to the Gain bl ock . Duplicate this voltage measurement
system at the node B2, as shown below.
15 Add a Powergui block to your model. The purpose of this block is discussed
in “Using the Powergu i Block to Simulate SimPowerSystems Models” on
page 1-16.
1-12
16 From the Simulation menu, select Start.
17 Open the Scope blocks and o bs erve the voltages at nodes B1 and B2.
18 While the simulation is running, open the Vs block dialog box and modify
the amplitude. Observe the effect onthetwoscopes. Youcanalsomodify
the frequency and the phase. You can zoom in on the waveforms in the
scope windows by drawing a box around the region of interest with the
left mouse button.
To simulate this circuit, the default integration algorithm (
ode45)wasused.
However, for most SimPowerSystems applications, your circuits contain
switches and other nonlinear models. In such a case, you must specify a
Page 27

Building and Simulating a Simple Circuit
different integration algorithm. This is discussed in “Simulating Transients”
on page 1-33, where a circuit breaker is added to your circuit.
Interfacing the Electrical Circuit with Other Simulink Blocks
The Voltage Measurement block acts as an interface between the
SimPowerSystems blocks and the Simulink blocks. For the system shown
above, you implemented such an interface from the electrical system to the
Simulink system. The Voltage Measurement block converts the measured
voltages into Sim ulink signals.
Similarly, the Current Measurement block from the Measurements library of
powerlib can be used to convert any measured current into a Simulink signal.
You can also interface from Simulink blocks to the electrical system. For
example, you can use the Controlled Voltage Source block to inject a voltage
in an electrical circuit, as shown in the following figure.
1-13
Page 28
1 Getting Started
Electrical Terminal Ports and Connection Lines SimPowerSystems
modeling environment is similar to that of other products in the Physical
Modeling family. Its blocks often feature both normal Simulink input and
output ports
> and special electrical terminal ports :
• Lines that connect normal Simulink ports
• Lines that connect terminal ports
These lines are nondirectional and can be branched, but you cannot connect
them to Simulink ports > or to normal Simulink signal lines.
• You can connect Simulink ports
electrical terminal ports
• Converting Simulink signals to electrical connections or vice versa requires
using a SimPowerSystems block that features both Simulink ports and
electrical terminal ports.
Some SimPowerSystems blocks feature only one type of port.
only to other electrical terminal ports.
are special electrical connection lines.
> only to othe r Simulink ports and
> are directional signal lines.
Measuring Voltages and Currents
When you measure a current using a Current Measurement block, the positive
direction of current is indicated on the block icon (positive current flowing
from + terminal to – terminal). Similarly, when you measure a voltage using
a Voltage Measurement block, the measured voltage is the voltage of the +
terminal w ith respect to the – terminal. However, when voltages and currents
of blocks from the Elements library are measured using the Multimeter block,
the voltage and current polarities are not immediately obvious because blocks
might have been rotated and there are no signs indicating polarities on the
block icons.
1-14
Unlike Simulink signal lines and input and output ports, the
SimPowerSystems connection lines and terminal ports
directionality. The voltage and current polarities are determined, not by line
direction, but instead by block orientation. To find out a block orientation,
first click the block to select it. Then enter the following command.
get_param(gcb,'Orientation')
lack intrinsic
Page 29

Building and Simulating a Simple Circuit
The following table indicates the polarities of the currents and voltages
measured with the Multimeter block for single-phase and three-phase RLC
branch and loads (and of the polarity of the capacitor voltage and the inductor
current), surge arresters, and single-phaseandthree-phasebreakers.
Positive Current
Block Orientation
right
left
down
up
The natural orientation of the blocks (that is, their orientation in the Element
library) is right for horizontal blocks and down for vertical blocks.
For single-phase transformers (linear or saturable), with the winding
connectors appearing on the left and right sides, the winding voltages are the
voltages of the top connector with respect to the bottom connector, irrespective
of the block orientation (right or left). The winding currents are the currents
entering the top connector.
Direction Measured Voltage
left —> right Vleft – Vright
right —> left Vright – Vleft
top —> bottom Vtop – Vbottom
bottom —> top Vbottom – Vtop
For three-phase transformers, the voltage polarities and positive current
directions are indicated by the signal labels used in th e Multimeter block.
For example, Uan_w2 means phase A-to-ne utral voltage o f the Y connected
winding #2 , Iab_w1 me an s winding current flowing from A to B in the
delta-connected winding #1.
Basic Principles of Connecting Capacitors and Inductors
You have to pay particular attention when you connect cap a c itor elements
together with voltage sources, or inductor elements in series with current
sources. When you start the simulation, the software displays an error
message if one of the following two connection errors are present in your
diagram:
1-15
Page 30

1 Getting Started
1 You have connected a voltage source in parallel with a capacitor, or a series
of capacitor elements in series, like in the two examples below.
To fix this problem, y ou can a dd a small resistance in series between the
voltage source and the capacitors.
2 You have connected a current source in series with an inductor, or a s eries
of inductors connected in parallel, like in the example below.
1-16
To fix t
induct
Using
SimPo
The P
cont
Simu
Sim
You
his problem, you can add a large re sistance in parallel with the
or.
the Powergui Block to Simulate
werSystems Models
owergui block is necessary for simulation of any Simulink model
aining SimPowerSystems blocks. It is use d to store the equivalent
link circuit that represents the state-space equations of the
PowerSystems blocks.
must follow these rules when using this block in a m o del:
Page 31

Building and Simulating a Simple Circuit
• Place the Powergui block at the top lev el of diagram for optimal
performance. However, you can place it anywhere inside subsystems for
your convenience; its functionality will not be affected.
• You can have a maximum of one Powerg ui block per m ode l
• You must name the block
powergui
Note When you start the simulation, yo u will get an error if no Powergui
block is found in your model.
1-17
Page 32

1 Getting Started
Analyzing a Simple Circuit
In this section...
“Introduction” on page 1-18
“Electrical State Variables” on page 1-18
“State-Space Representation Using power_analyze” on page 1-19
“Steady-State Analysis” on page 1-19
“Frequency Analysis” on page 1-21
Introduction
In this section you
• Obtain the state-space representation of your model with the
power_analyze comm and
• Compute the steady-state voltages and currents using the graphical user
interface of the Powergui block
1-18
• Analyze an electrical circuit in the frequency domain
Electrical State Variables
The electrical state variables are the Simulink states of your diagram
associated to the capacitor and inductor devices of the SimPowerSystems
blocks. Inductors and capacitors elements are found in the RLC-branch type
blocks such as the Series RLC Branch block, Three-Phase Parallel RLC Load
block, in the transformer models, in the PI Section Line block, in the snubber
devices of the power e lectronic devices, etc.
The electrical state variables consist of the inductor currents and the capacitor
voltages. Variable names forSimPowerSystems electrical states contain the
name of the block where the inductor or capacitor i s found, preceded b y the
Il_ prefix for inductor currents or the Uc_ prefix for capacitor voltages.
Page 33

Analyzing a Simple Circuit
State-Space Rep
You compute the s
power_analyze c
resentation Using power_analyze
tate-space representation of the model
ommand. Enter the following command at the MATLAB
circuitl with the
prompt.
[A,B,C,D,x0,electrical_states,inputs,outputs]=power_analyze('circuit1')
lyze
The power_ana
the four matr
electrical s
inputs, and o
electrical_states =
Il_110 Mvars
Uc_input PI Section Line
Il_ sect1 PI Section Line
Uc_output PI Section Line
Il_Z_eq
Uc_Z_eq
inputs =
U_Vs
ices A, B, C, and D. x0 is the vector of initial conditions of the
tates of your circuit. The names of the electrical state variables,
utputs are returned in three string matrices.
command returns the state-space model of your circuit in
outputs =
U_U1
U_U2
hat you could have obtained the names and ordering of the electrical
Note t
es, inputs, and outputs directly from the Powergui block. See the
stat
r_analyze
powe
ady-State Analysis
Ste
acilitate the ste ad y-state analysis of your circuit, the powerlib library
To f
ludes a graphical user interface tool. If the Powergui block is not already
inc
sent in your model, copy the block from the library into your circuit1
pre
del and double-click the block icon to open it.
mo
reference page for more details on how to use this function.
1-19
Page 34

1 Getting Started
From the Analysis tools menu of the Powergui block, select Steady-State
Voltages and Currents. This opens the Steady-State Tool window where
thesteady-statephasorsvoltagesmeasuredbythetwovoltagemeasurement
blocks of your model are displayed in polar form.
1-20
Eachmeasurementoutputisidentified b y a string corresponding to the
measurement block name. The magnitudes of the phasors U1 and U2
correspond to the peak value of the sinusoidal voltages.
From the Steady-State Tool window, you can also display the steady-state
values of the source voltage or the steady-state values of the inductor currents
and capacitor voltages by selecting either the Sources or the States check
box.
Page 35

Analyzing a Simple Circuit
Note Depending on the order you added the blocks in your circuit1 diagram,
the electrical state variables might not be ordered in the same way as in
the preceding figure.
Refer to the section “Measuring Voltages and Currents” on page 1-14 for more
details on the sign conventions used for the voltages and currents of sources
and electrical state variables listed in the Steady-State Tool window.
Frequency Analysis
The Measurements library of powerlib contains an Impedance Measurement
block that measures the impedance between any two nodes of a circuit. In the
following two sections, you measure the impedance of your circuit between
node B2 and ground by using two methods:
• Calculation from the state-space m odel
• Automatic measurement using the Impedance Measurement block and the
Powergui block
1-21
Page 36
1 Getting Started
Obtaining the Impedance vs. Frequency Relation from the
State-Space Model
Note The following section assumes you have Control System Toolbox™
software installed.
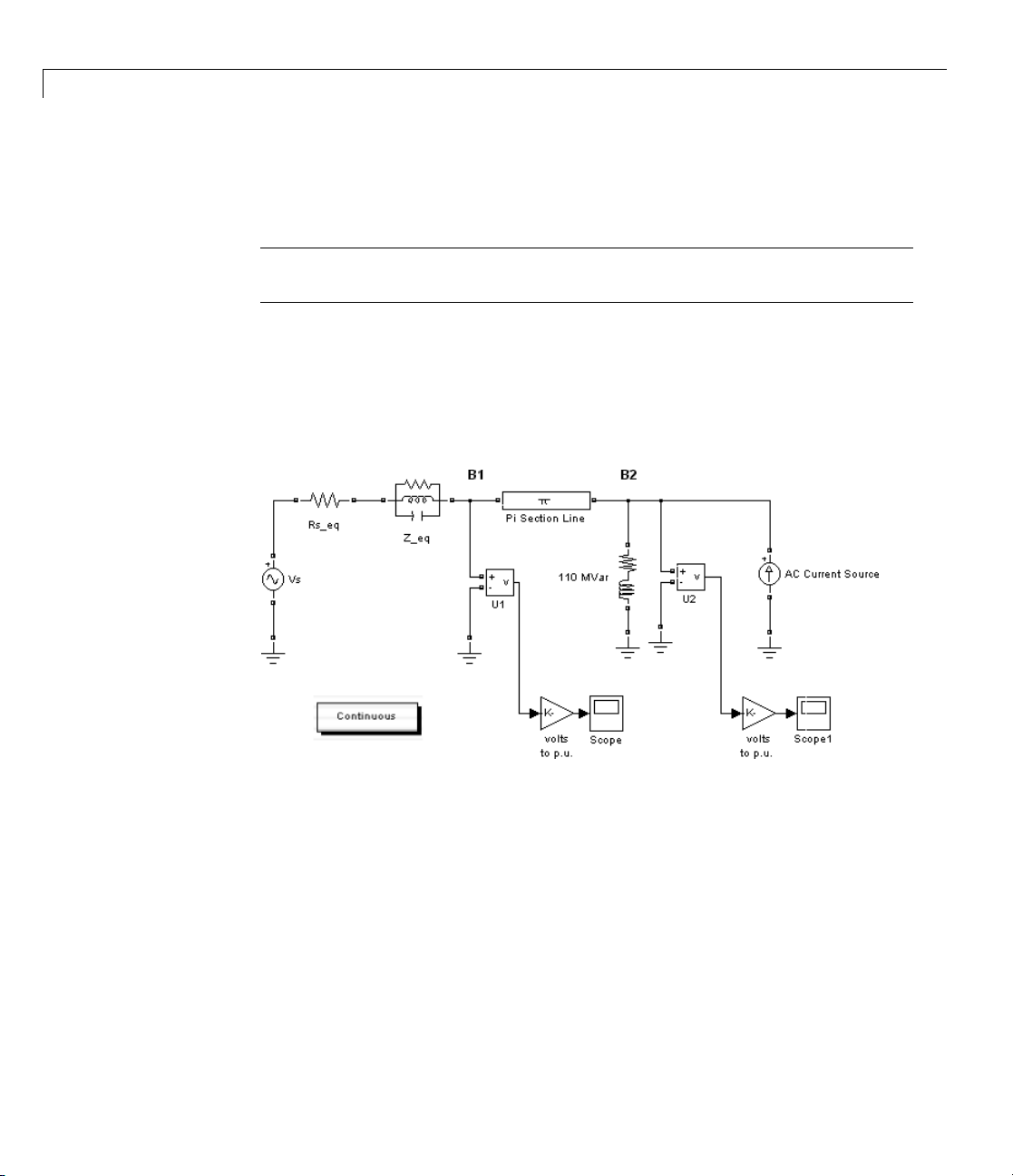
To measure the impedance versus frequency at node B2, you need a current
source at node B2 providing a second input to the state-space model. Open
the Electrical Sources library and copy the AC Current Source block into
your model. Connect this source at node B2, as shown below. Set the current
source magnitude to zero and keep its frequency at
blocks as follows.
60 Hz. Rearrange the
1-22
AC Current Source at the B2 Node
Now compute the state-space representation of the model circuitl with the
power_analyze command. Enter the following command at the MATLAB
prompt.
sys1 = power_analyze('circuit1','ss')
This command returns a state-space model representing the continuous-time
state-space model of your electrical circuit.
Page 37
Analyzing a Simple Circuit
IntheLaplacedomain,theimpedanceZ2atnodeB2isdefinedasthetransfer
function between the current injected by the AC current Source block and the
voltage measured by the U2 Voltage Measurement block.
Us
2
=
Is
()
2
()
Zs
2
()
You obtain the names of the inputs and outputs of this state-space model as
follows.
sys1.InputName
ans =
'U_Vs'
'I_AC Current Source'
sys1.OutputName
ans =
'U_U2'
'U_U1'
The impedance at node B2 then corresponds to the transfer function between
output 1 and input 2 of this state-space model. For the 0 to 1500 Hz range, it
can be calculated and displayed as follows.
freq=0:1500;
w=2*pi*freq;
bode(sys1(1,2),w);
Repeat the same process to get the frequency response with a 10 section
line model. Open the PI Section Line dialog box and change the number
of sections from
1 to 10. To calculate the new frequency response and
superimpose it upon the one obtained with a single line section, enter the
following commands.
sys10 = power_analyze('circuit1','ss');
bode(sys1(1,2),sys10(1,2),w);
Open the property editor of the Bode plot and select units for Frequency in H z
using linear scale and Magnitude in absolute using log scale. The resulting
plot is shown below.
1-23
Page 38

1 Getting Started
Impedance at Node B2 as Function of Frequency
This graph indicates that the frequency rangerepresentedbythesingleline
section model is limited to approximately 150 Hz. For higher frequencies, the
10 line section model is a better approximation.
1-24
The system with a single PI section has two oscillatory modes at 89 Hz and
229 Hz. The 89 Hz m ode is due to the equivalent source, which is modeled
by a single pole equivalent. The 229 Hz mode is the first mode of the line
modeled by a single PI section.
For a distributed parameter line model the propagation speed is
v
The propagation time for 300 km is therefore T = 300/293,208 = 1.023 ms
and the frequency of the first line mode is f1 = 1/4T = 244 Hz. A distributed
parameter line would have an infinite number of modes every 244 + n*488 Hz
(n=1,2,3...). The10sectionlinemodelsimulatesthefirst10modes. The
first three line modes can be seen in Impedance at Node B2 as Function of
Frequency on page 1-24 (244 Hz, 732 Hz, and 1220 Hz).
LC
⋅
=1293 208,/
km s=
Page 39

Analyzing a Simple Circuit
Obtaining the Impedance vs. Frequency Relation from the
Impedance Measurement and Powergui Blocks
The process described above to measure a circuit impedance has been
automated in a SimPowerSystems block. Open the Measurements library of
powerlib, copy the Impedance Measurement block into your model, and
rename it ZB2. Connect the two inputs of this block between node B2 and
ground as shown.
Measuring Impedance vs. Frequency with the Impedance Measurement
Block
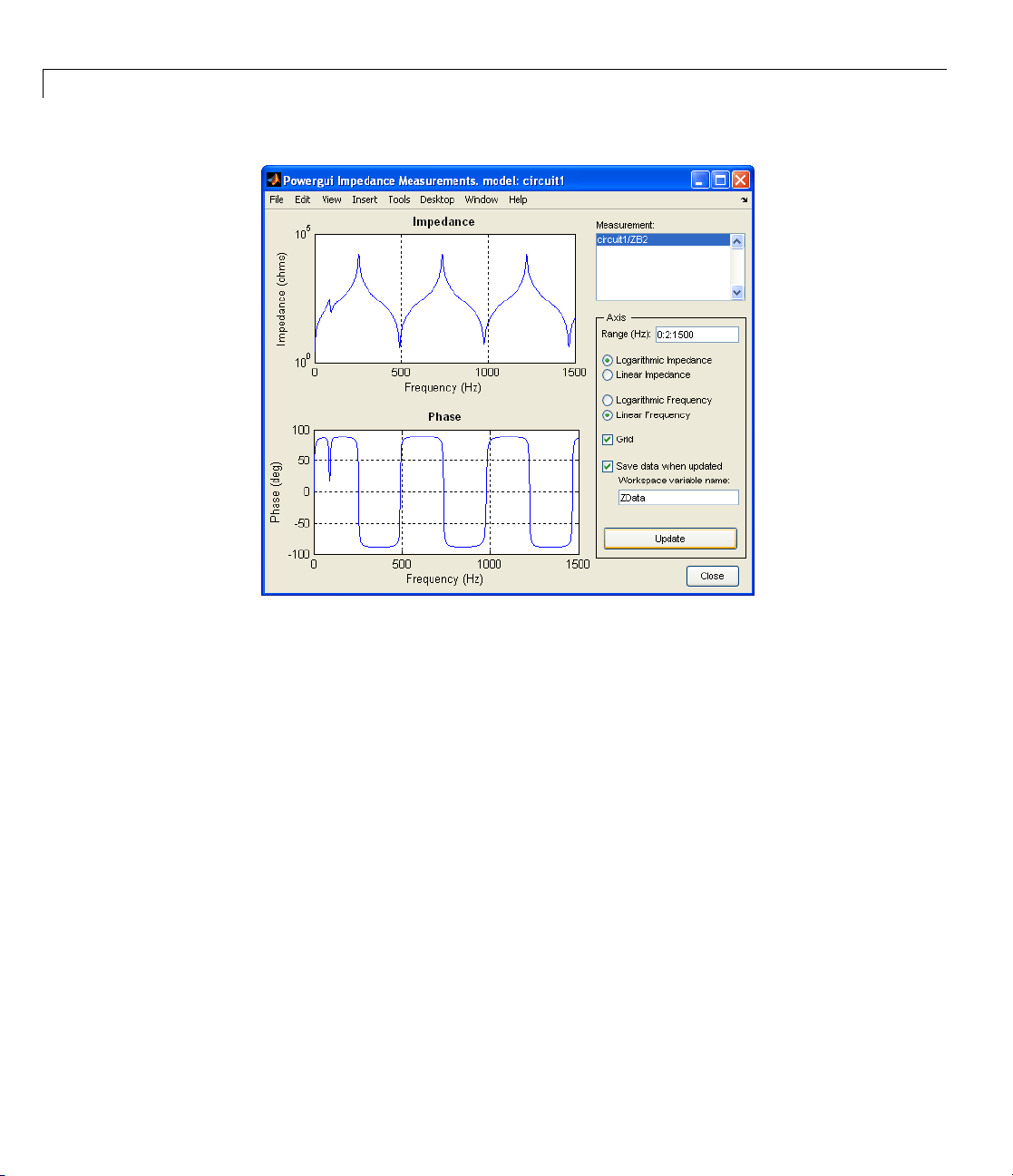
Now open the Powergui dialog. In the Tools menu, select Impedance
vs Frequency Measurement. A new window opens, showing the list of
Impedance Measurement blocks available in your circuit.
In your case, only one impedance is measured, and it is identified by ZB2 (the
name of the ZB2 block) in the window. Fill in the frequency range by en ter in g
0:2:1500 (zero to 1500 Hz by steps of 2 Hz). Select the logarithmic scale to
display Z magnitude. Select the Save data when updated check box and
enter
ZData as the variable name to contain the impedance vs. frequency.
Click the Update button.
1-25
Page 40
1 Getting Started
1-26
When the
phase as
plot (fo
Freque
variab
column
r one line section) shown in Impedance at Node B2 as Function of
ncy on page 1-24. If you look in your workspace, you should have a
le named
1 and complex impedance in column 2.
calculation is finished, the window displays the ma gnitude and
functions of frequency. The m agnitude should be identical to the
ZData. It is a two-column matrix containing frequency in
Page 41
Specifying Initial Conditions
In this section...
“Introduction” on page 1-27
“State Variables” on page 1-27
“Initial States” on page 1-28
“Specify Initial Electrical States with Powergui” on page 1-29
Introduction
In this section you
• Learn what are the state variables of a Simulink diagram containing
SimPowerSystems blocks
• Specify initial conditions for the electrical state variables
Specifying Initial Conditions
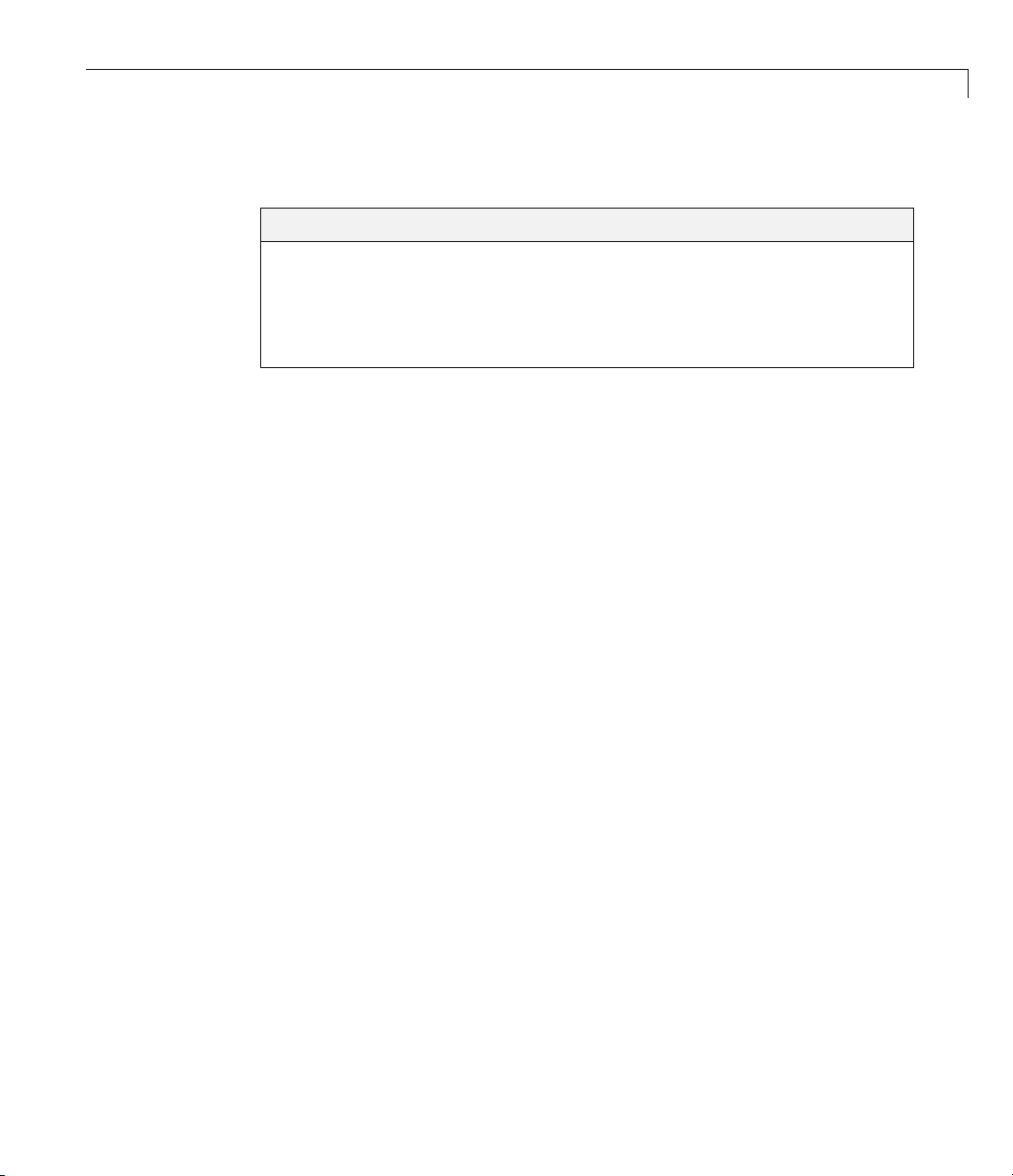
State Variables
The state variables of a Simulink diagram containing SimPowerSystems
blocks consist of
• The electrical states associated to RLC branch-type SimPowerSystems
blocks. They are defined by the state-space representation of your m odel.
See “Electrical State Variables” on page 1 -18 for more details about the
electrical states.
• The Simulink states of the SimPowerSystems electrical models such as
the Synchronous Machine block, the Saturable Transformer block, or the
Three-Phase Dynam ic Load block.
• The Simulink states of the other Simulink blocks of your model (controls,
user-defined blocks, and other blocksets).
The following picture provides an example that contains the three types of
state variables:
1-27
Page 42
1 Getting Started
Initial States
Initial conditions, which are applied to the entire system at the start of the
simulation, are generally set in the blo ck s. Most of the Simulink blocks
allow you to specify initial conditions. For the case of the electrical states,
the SimPowerSystems software automaticall y sets the initial values of the
electrical states to start the simulation in steady state.
1-28
However, you can specify the initial conditions for the capacitor voltage and
inductor currents in the mask of these blocks:
• the Series and Parallel RLC Branch blocks
• the Series and Parallel RLC Load blocks
The initial values entered in the mask of these block will overwrite the default
steady-state parameters calculated by the SimPowe rSystem s software. In
the same sense, you can overwrite initial conditions of the overall blocks by
specifying them in the States area of the Configuration Parameters dialog
box.
See the
specify initial states for a Simulink diagram with SimPowerSystems blocks.
power_init function reference page for moredetailsonhowyoucan
Page 43

Specifying Initial Conditions
Specify Initial Electrical States with Powergui
1 Open the Transient Ana lys is of a Linear Circuit demo by typing
power_transient at the comm and line. Rename the RLC Branch blocks
asshowninthenextfigure.
2 From the Analysis tools menu of the Powergui block, select Initial State
Settings. The initial values of the five electrical state variables (three
inductor currents and two capacitor voltages) are displayed. These initial
values corresponds to the values that the software automatically sets to
start the simulation in steady state.
1-29
Page 44

1 Getting Started
1-30
3 Open the Scope block and start the simulation. As the electrical state
variables are automatically initialized, the system starts in steady state
and sinusoidal waveforms are observed.
4 The initial value for STATE_D state is set to 1.589e5 V. It corresponds to the
initial capacitor voltage found in the
STATE_D block. Open this block, select
the Set the initial capacitor voltage parameter, then specify a capacitor
initial voltage of -2e5 V. Click the OK button.
5 Click the From diagram button of the Powergui Initial States Tool to
refresh the display of initial states. The initial state of
STATE_D block is
now set to -2e5 V.
6 Start the simulation. In the second trace of the Scope block, z oom around
the transient at the beginning of the simulation. As expected, the model
does not start in steady state, but the initial value for the capacitor voltage
measured by the Voltage Measurement block is -2e5 V.
Page 45

Specifying Initial Conditions
7 Select the STATE_A state variable in the Initial States Tool list. In t he
Set selected electrical state field, set the initial inductor current to 50
A, and click Apply.Openthemaskofthe
STATE_A block, and note that the
Set the initial inductor current parameter is selected and the initial
inductor current is set to 50 A.
Run the simulation and observe the new transient caused by this new setting.
Forcing Initial States to Zero
Now suppose that you want to reset all the initial electrical states to zero
without loosing the settings you have done in the previous steps.
1 From the Initial State Tool window, select the To zero check box under
Force initial electrical states,thenclickApply. Restart the simulation
and observe the transient when all the initial conditions starts from zero.
2 Open the masks of the STATE_C and STATE_A blocks and note that even if
initial conditions are still specified in these blocks, the setting for the initial
states is forced to zero by the Powergui block.
A message is displayed at the command l ine to remind you every time you
start the simulation that the e lectrical initial states of your model are forced to
zero by the Powergui block, which overwrites the block settings in your model.
Forcing Initial States to Steady State
Similarly, you can set all the initial states to steady without loosing the
settings you have done in the previous steps.
1 From the Initial State Tool window , select the To steady state check box
under Force initial electrical states,thenclickApply.
2 Restart the simulation and observe that the simulation starts in steady
state.
A message is displayed at the command line to remind you every time you
start the simulation that the electrical initial states of your model are forced
to steady state by the Powergui block.
1-31
Page 46

1 Getting Started
Returning to Block Settings
To return to the block settings, clear both check boxes under Force initial
electrical states,thenclickApply.
1-32
Page 47

Simulating Transients
In this section...
“Introduction” on page 1-33
“Simulating Transients with a Circuit Breaker” on page 1-33
“Continuous, Variable Time Step Integration Algorithms” on page 1-35
“Discretizing the Electrical System” on page 1-37
Introduction
In this section you
• Learn how to create an electrical subsystem
• Simulate transients with a circuit breaker
• Compare time domain simulation results with different line models
Simulating Transients
• Learn how to discretize a circuit and compare results thus obtained with
results from a continuous, variable time step algorithm
Simulating Transients with a Circuit Breaker
One of the main uses of SimPowerSystems software is to simulate transients
in electrical circuits. This can be done with either mechanical switches (circuit
breakers) or switches using power electronic devices.
First open your
node B2. Save this new system as
breaker, you need to modify the schematic diagram of
group several components into a subsystem. This feature is useful to simplify
complex schematic diagrams.
Use this feature to transform the source impedance into a subsystem:
1 Select the two blocks identified as Rs_eq and Z_eq by surrounding them by
a box with the left mouse button and use the Edit > Create subsystem
menu item. The two blocks now form a new block called Subsystem.
circuit1 system and delete the current source connected at
circuit2. Before connecting a circuit
circuit2.Youcan
1-33
Page 48

1 Getting Started
2 Using the Edit > Mask subsystem menu item, change the icon of that
subsystem. In the Icon section of the mask editor, enter the following
drawing command:
disp('Equivalent\nCircuit')
The icon now reads Equivalent Circuit, as shown in the figure above.
1-34
3 Use the Format > Show drop shadow menu item to add a drop shado w
to the Subsystem block.
4 You can double-click the Subsystem block and look at its content.
5 Insert a circuit breaker into your circuit to sim ulate a line energization by
opening the Elements library of powerlib.CopytheBreakerblockinto
your circuit2 window.
The circuit breaker is a nonlinear element modeled by an ideal switch in
series with a resistance. Because of modeling constraints, this resistance
cannot be set to zero. However, it can be set to a very small value, say 0.001
Ω, that does not affect the performance of the circuit:
1 Open the Breaker block dialog box and set its parameters as follows:
Ron
Initial state
Rs
0.001 Ω
0 (open)
inf
Page 49

Simulating Transients
Cs
Switching times
2 Insert the circuit breaker in series with the sending end of the line, then
0
[(1/60)/4]
rearrange the circuit as shown in the previous figure.
3 Open the scope U2 and click the P ara me te rs icon and select the Data
history tab. Click the Save data to workspace button and specify a
variable name
U2 to save the simulation results; then change the Format
option for U2 to be Array.Also,clearLimit data points to last to display
the entire waveform for long simulation times.
You are now ready to simulate your system.
Continuous, Variable Time Step Integration Algorithms
Open the PI section Line dialog box and make sure the num ber of sections
is set to 1. Open the Simulation > Configuration Parameters dialog box.
As you now have a system containing switches, you need a stiff integration
algorithm to simulate the circuit. In the Solver pane, select the variable-step
stiff integration algorithm
ode23tb.
Keep the default parameters (relative tolerance set at
time to
0.02 seconds. Open the scopes and start the simulation. Look at
1e-3) and set the stop
the waveforms of the sending and receiving en d voltages on ScopeU1 and
ScopeU2.
Once the simulation is complete, copy the variable
U2 into U2_1 by entering
the following command in the MATLAB Command Window.
U2_1 = U2;
These two variables now contain the waveform obtained with a single PI
section line model.
1-35
Page 50

1 Getting Started
Open the PI section Line dialog box and change the number of sections
from
1 to 10. Start the simulation. Once the simulation is complete, copy
the variable
U2 into U2_10.
Before modifying your circuit to use a distributed parameter line m odel, save
your system as
circuit2_10pi, which you can reuse later.
Delete the PI section line model and replace it with a single-phase D istributed
Parameter Line block . S et the number of phases to
1 and use the same R, L,
C, and length parameters as for the PI section line (see Circuit to Be Modeled
on page 1-8). Save this system as
circuit2_dist.
Restart the simulation and save the
U2 voltage in the U2_d variable.
You can now compare the three waveforms obtained with the three line
models. Each variable
U2_1, U2_10,andU2_d is a t w o-column matrix where
thetimeisincolumn1andthevoltageisincolumn2. Plotthethree
waveforms on the same graph by entering the following command.
plot(U2_1(:,1), U2_1(:,2), U2_10(:,1),U2_10(:,2),
U2_d(:,1),U2_d(:,2));
These w av eforms are shown in the next f ig ure . As expected from the
frequency analysis performed during “Analyzing a Simple Circuit” on page
1-18, the single PI model does not respond to frequencies higher than 229 Hz.
The 10 PI section model gives a better accuracy, although high-frequency
oscillations are introduced by the discretization of the line. You can clearly
see in the figure the propagation time delay of 1.03 ms associated with the
distributed parameter line.
1-36
Page 51

Receiving End Voltage Obtained with Three Different Line Models
Simulating Transients
Discretizing the Electrical System
An important product feature is its ability to simulate either with continuous,
variable step integration algorithms or w ith discrete solvers. For small
systems, variable time step algorithms are usually faster than fixed step
methods, because the number of integration steps is lower. For large systems
that contain many states or many nonli near blocks such as power electronic
switches, however, it is advantageous to discretize the electrical system.
When you discretize your system, the precision of the simulation is controlled
by the time step. If you use too large a time step, the precision might not be
sufficient. The only way to know if it is accept able is to repeat the simula t ion
withdifferenttimestepsandfindacompromise for the largest acceptable
time step. Usually time steps of 20 µs to 50 µs give good results for simulation
of switching transients on 5 0 Hz or 60 Hz power systems or on systems using
line-commutated power electronic devices such as diodes and thyristors.
You must reduce the time step for systems using forced-commutated power
electronic switches. These devices, the insulated-gate bipolar transistor
(IGBT), the field-effect transistor (FET), a n d the gate-turnof f th yri stor ( GT O )
are operating at high switching frequencies.
1-37
Page 52

1 Getting Started
For example, simulating a pulse-width-modulated (PWM) inverter operating
at 8 kHz would require a time step of at most 1 µs.
Younowlearnhowtodiscretizeyoursystem and compare simulation results
obtained with continuous and discrete systems. Open the
circuit2_10pi
system that you saved from a previous simulation. This system contains
24 electrical states and one switch. Open the Powergui, click Configure
Parameters, and in the Powergui block parameters dialog box set
Simulation type to
Discrete.Setthesampletimeto25e-6 s. When you
restart the simulation, the power system is discretized using the Tustin
method (corresponding to trapezoidal integration) using a 25 µs sample time.
Open the Simulation > Configuration Parameters dialog box and on the
Solver pane set the simulation time to
0.2 s. Start the simulation.
Note Once the system is discretized, there are no more continuous states in
the electrical system. So you do not need a variable-step integration method
to simulate. In the Sim ulation > Configuration Parameters > Solver
pane, you could have selected the
states)
options and specified a fixe d step of 25 µs.
Fixed-step and Discrete (no continuous
1-38
To measure the simulation time, you can restart the simulation by e ntering
the following commands.
tic; sim(gcs); toc
When the simulation is finished the elapsed time in seconds is displayed
in the MATLA B Command Window.
To return to the continuous simulation, open the Powergui block parameters
dialog box a nd set Simulation type to
Continuous.Ifyoucomparethe
simulation times, you find that the discrete system simulates approximately
3.5 times faster than the continuous system.
To compare the precision of the two methods, perform the following three
simulations:
1 Simulate a continuous s ystem , with Ts = 0.
Page 53

Simulating Transients
2 Simulate a discrete system, with Ts = 25 µs.
3 Simulate a discrete system, with Ts = 50 µs.
For each simulation, save the voltage U2 in a different variable. Use
respectively
U2c, U2d25,andU2d50. Plot the U2 waveforms on the same graph
by entering the following command.
plot(U2c(:,1), U2c(:,2), U2d25(:,1),U2d25(:,2),
U2d50(:,1),U2d50(:,2))
Zoom in on the 4 to 12 ms region of the plot window to compare the differences
on the high-frequency transients. The 25 µs compares reasonably well
with the continuous simulation. However, increasing the time step to 50
µs produces appreciable errors. The 25 µs time step would therefore be
acceptable for this circuit, while obta ining a gain of 3.5 on simulation speed .
parison of Simulation Results for Continuous and Discrete Systems
Com
1-39
Page 54

1 Getting Started
Introducing the Phasor Simulation Method
In this section...
“Introduction” on page 1-40
“When to Use the Phasor Solution” on page 1-40
“Phasor Simulation of a Circuit Transient” on page 1-41
Introduction
In this section, you
• Apply the phasor simulation method to a simple linear circuit
• Learn advantages and limitations of this method
Up to now you have used two methods to simulate electrical circuits:
• Simulation with variable time steps using the continuous Simulink solvers
1-40
• Simulation with fixed time steps using a discretized system
This section explains how to use a third simulation method, the phasor
solution method.
When to Use the Phasor Solution
The phasor solution method is mainly used to study electromechanical
oscillations of power systems consisting o f large generators and motors.
An example of this method is the simulation of a multimachine system in
“Three-Phase Systems and Machines” on page 2-25. However, this technique
is not restricted to the study of transient stability of machines. It can be
applied to any linear system.
If, in a linear circuit, you are interested only in the changes in magnitude and
phase of all voltages and currents when switches are closed or opened, you do
not need to solve all differential equations (state-space model) resulting from
the interaction of R, L, and C elements. You can instead solve a much simpler
set of algebraic equations relating the voltage and current phasors. This is
what the phasor solution method does. As its name implies, this method
Page 55

Introducing the Phasor Simulation Method
computes voltages and currents as p hasors. Phasors are complex numbers
representing sinusoidal voltages and currents at a particular frequency. They
can be expressed either in Cartesian coord inates (real and imaginary) or in
polar coordinates (amplitude and phase). As the electrical states are ignored,
the phasor solution method does no t require a particular solver to solve the
electrical part of your system. T he simulation is therefore much faster to
execute. You must keep in mind, however, that this faster solution technique
gives the solu tion only at one particular frequency.
Phasor Simulation of a Circuit Transient
You now apply the phasor solution method to a simple linear circuit. Open
the demo named Transient Analysis of a Linear Circuit (
power_transient).
Simple Linear Circuit
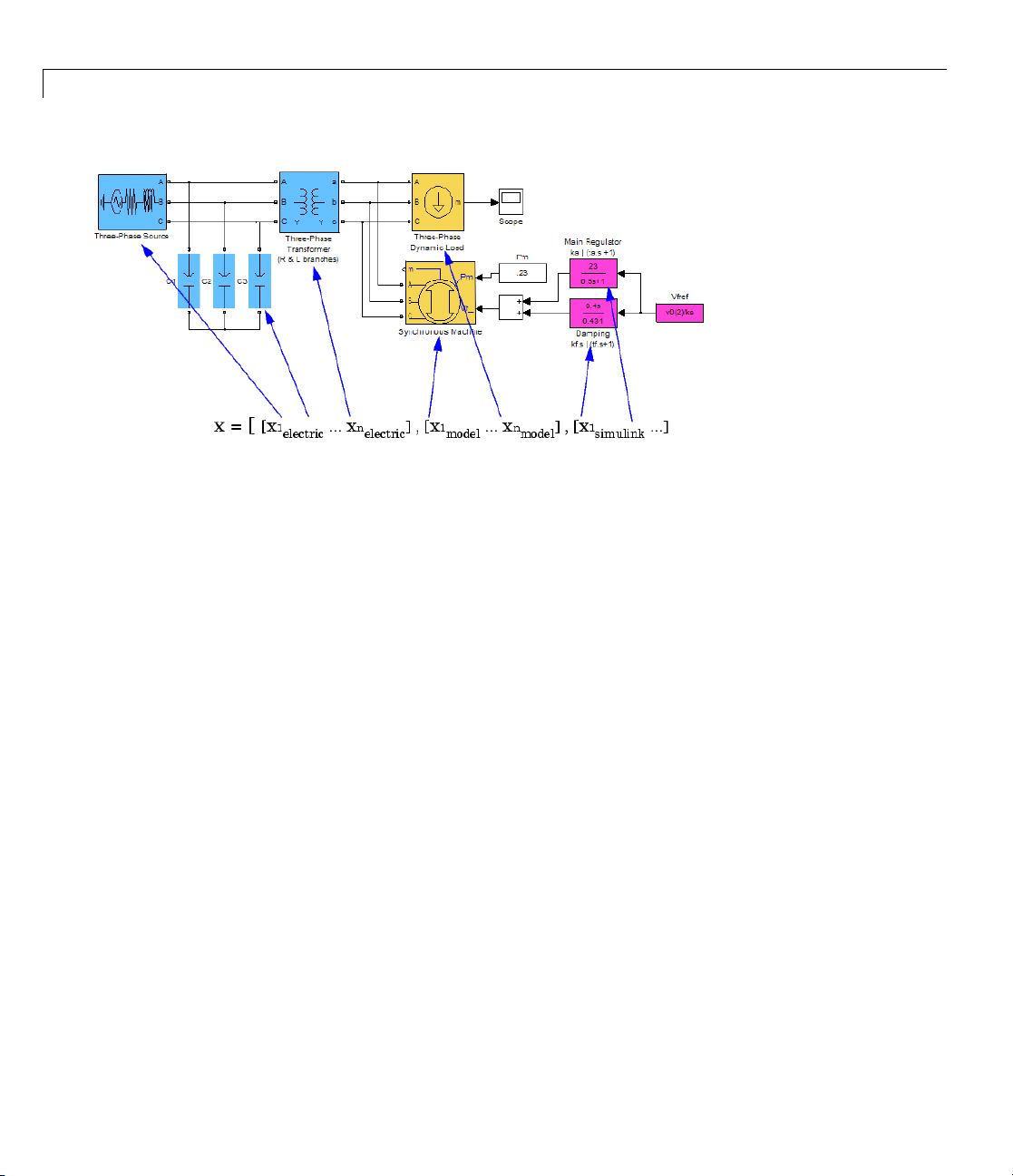
This circuit is a simplified model of a 60 Hz, 230 kV three-phase power system
where only one phase is represented. The equivalent source is modeled by a
voltage source (230 kV RMS / sqrt(3) or 132.8 kV RMS, 60 Hz) in series with
its internal impedance (Rs Ls). The source feeds an RL load through a 150 km
transmission line modeled by a single PI section (RL1 branch and two shunt
capacitances, C1 and C2). A circuit breaker is used to switch the load (75 MW,
1-41
Page 56

1 Getting Started
20 Mvar) at the receiving end of the transmission line. Two measurement
blocks are used to monitor the load voltage and current.
The Powergu i block at the lower-left corner indicates that the model is
continuous. Start the simulation and observe transients in voltage and
current waveforms when the load is first switched off at t = 0.0333 s (2 cycles)
and switched on again at t = 0.1167 s (7 cycles).
Invoking the Phasor Solution in the Powergui Block
You now simulate the same circuit using the phasor simulation method. This
option is accessible through the Powergui block. Open the Powergui, click
Configure Parameters, and in the Powergui block parameters dialog box
set Simulation type to
to solve the algebraic network equations. A default value of 60 Hz should
already be entered in the Phasor frequency field. Close the Powergui and
notice that the word
that the Powergui now applies this me thod to simulate your circuit. Before
restarting the simulation, you need to specify the appropriate format for the
two signals sent to the Scope block.
Phasor. You must also specify the frequency used
Phasors now appears on the Pow ergui icon, indicating
1-42
Selecting Phasor Signal Measurement Formats
If you now double-click the Voltage Measurement block or the Current
Measurement block, you see that a menu allows you to output phasor
signals in four different formats:
Magnitude-Angle,orjustMagnitude.TheComplex format is useful when you
want to process com plex signals. Note that the oscilloscope d oes not accept
complex signals . Select
the Load Current Measurement blocks. This will allow you to observe the
magnitude of the voltage and current phasors.
Restart the simulation. The magnitudes of the 60 Hz voltage and current
are now displayed o n the scope. Waveforms obtained from the continuous
simulation and the phasor simulation are superimposed in this plot.
Magnitude format for both the Line Voltage and
Complex (default choice), Real-Imag,
Page 57

Introducing the Phasor Simulation Method
Waveform
Note tha
occurs a
whereas
becaus
s Obtained with the Continuous and Phasor Simulation Methods
t with continuous simulation, the opening of the circuit breaker
t the next zero crossing of current following the opening order;
for the phasor simulation, this opening is instantaneous. This is
e there is no concept of zero crossing in the phasor simulation.
Processing Voltage and Current Phasors
The Co
phaso
that y
P and
and c
mplex
rs without separating real and imaginary parts. Suppose, for example,
ou need to compute the power consumption of the load (active power
reactive power
urrent phasors as
SPjQ VI=+ =⋅⋅
format allows the use of complex operations and processing of
Q). The complex power S is obtained from the voltage
1
∗
2
1-43
Page 58

1 Getting Started
where I* is the conjugate of the current phasor. The 1/2 factor is required to
convert magnitudes of voltage and current from peak values to RMS values.
Power Co
Select the
the Simulink Math library, implement the power measurement as shown.
mputation Using Complex Voltage and Current
The Comp
phasor
The pow
SimPo
block
Complex format for both current and voltage and, using blocks from
lex to Magnitude-Angle blocks are now required to convert complex
s to magnitudes before sending them to the scope.
er computation system you just implemented is already built into the
werSystems software. The Active & Reactive Power (Phasor Type)
is available in the Extras/Phasor library.
1-44
Page 59

2
Advanced Components and Techniques
This chapter introduces methods and devices that enhance your power system
simulations and make them more realistic.
The first two tutoria ls illustrate power electronics, simple motors, and
Fourier analysis. The third tutorial demonstrates three-phase power systems,
electrical machinery, load flow, and use of the phasor solution method for
transient stability studies of electromechanical systems. The fourth explains
how you can create and customize your own nonlinear blocks.
• “Introducing Power Electronics” on page 2-2
• “Simulating Variable Speed Moto r Control” on page 2-11
• “Three-Phase Systems and Machines” on page 2-25
• “Building and Customizing Nonlinear Models” on page 2-40
• “Building a Model Using Model Construction Commands” on page 2-57
Page 60

2 Advanced Components and Techniques
Introducing Power Electronics
In this section...
“Introduction” on page 2-2
“Simulation of the TCR Branch” on page 2-4
“Simulation of the TSC Branch” on page 2-8
Introduction
In this section you
• Learn how to use power electronics components
• Learn how to use transformers
• Change initial conditions of a circuit
SimPowerSystems software is designed to simulate power electronic devices.
This section uses a simple circuit basedonthyristorsasthemainexample.
2-2
Consider the circuit shown below. It represents one phase of a static var
compensator (SVC) used on a 735 kV transmission network. On the secondary
of the 735 kV/16 kV transformer, two variable susceptance branches are
connected in parallel: one t h yri stor-controlled reactor (TCR) branch and one
thyristor-switched capacitor (TSC) branch.
Page 61
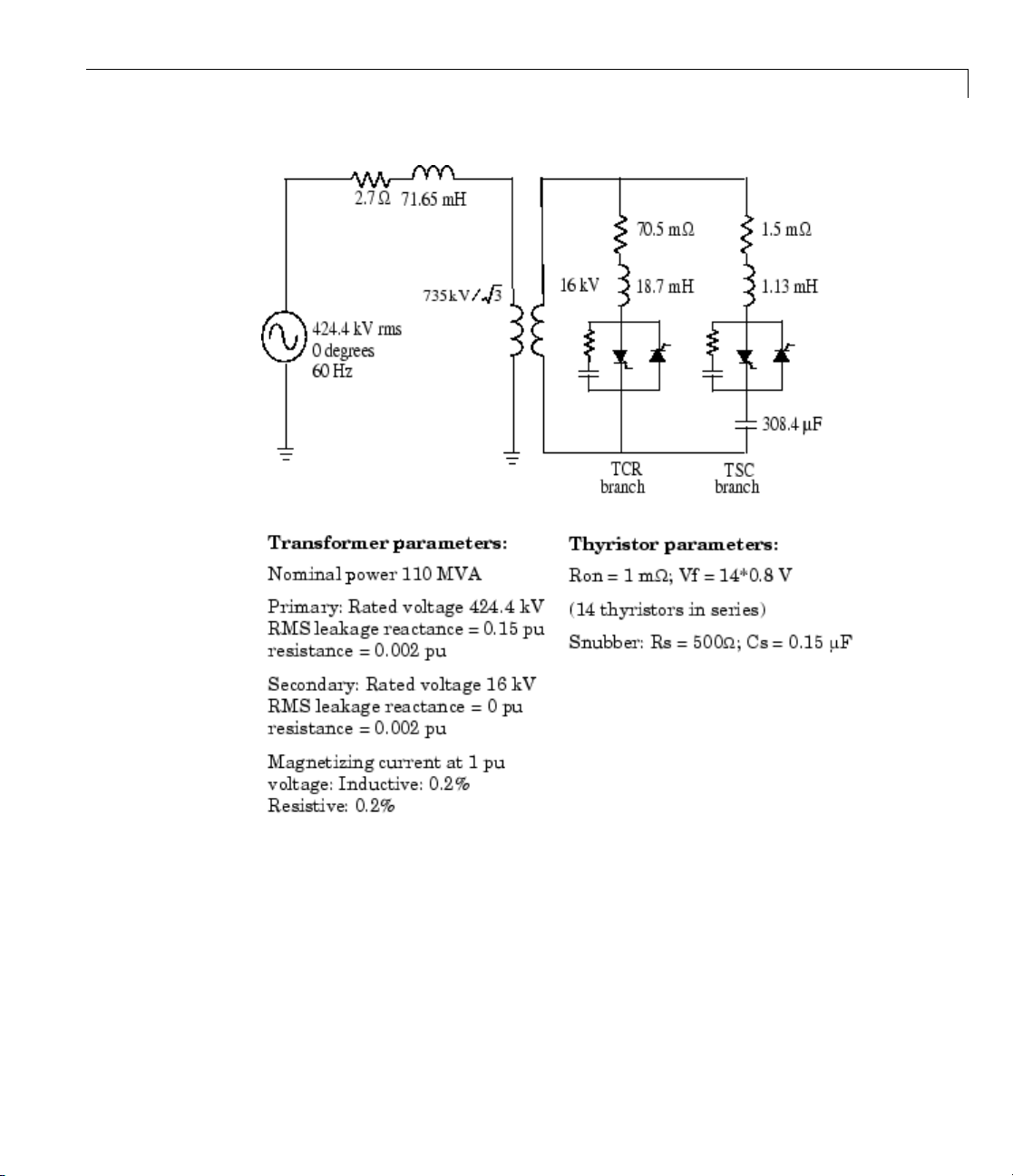
Introducing Power Electronics
One Phase of a TCR/TSC Static Var Compensator
The TCR and TSC branches are both controlled by a valve consisting of two
thyristor strings con nected in antiparall el . An RC snubber circuit is connected
across each valve. The TSC branch is switched on/off, thus providing discrete
step variation of the SVC capacitive current. The TCR branch is phase
controlled to obtain a continuous variation of the net SVC reactive current.
Now build two circuits illustrating the operation of the TCR and the TSC
branches.
2-3
Page 62

2 Advanced Components and Techniques
Simulation of the TCR Branch
1 Open a new window and save it as circuit3.
2 Open the Pow er Electronics library and copy the Thy risto r block into your
circuit3 model.
3 Double-click the block to open the Thyristor dialog box and set the
parameters as follows:
Ron
Lon
Vf
Rs
Cs
1e-3
0
14*0.8
500
0.15e-6
Notice that the snubber circuit is integral to the Thyristor dialog box.
4 Rename this block Th1 and duplicate it.
5 Connect this new thyristor Th2 in antiparallel with Th1, a s shown in
Simulation of the TCR Branch on page 2-6.
As the snubber circuit has already been specified with Th1, the snubber
of Th2 m ust be eliminated.
6 Open the Th2 dialog box and set the snubber parameters to
Rs
Cs
Inf
0
2-4
Notice that the snubber disappears on the Th2 icon.
7 The Linear Transformer block is locat e d in the Elements library. Copy it,
rename it to TrA, and open its dialog box. Set its nominal power, frequency,
and winding parameters ( winding 1 =
primary; winding 2 = secondary)
as shown in One Phase o f a TCR/TSC Static Var Compensator on page 2-3.
Page 63

Introducing Power Electronics
The Units parameter allows you to specify the resistance R and leakage
inductance L of each winding as well as the magnetizing branch Rm/Lm,
either in SI units (ohms, henries) or in per units (pu). Keep the default
pu setting to specify directly R and L in per unit quantities. As there is
no tertiary winding, deselect Three windings transformer.Winding3
disappears on the TrA block.
Finally, set the magnetizing branch parameters Rm and Xm at
. These values correspond to 0.2% resistive and inductive currents.
500]
[500,
For more information on the per unit (pu) system, see “Per Unit”.
8 Add a voltage source, a Ground block, and a Series RLC Branch Block.
Set its parameters to
Branch type
Resistance
Inductance
9 Add a current measurement to measure the primary current. Interconnect
RL
70.5e-3
18.7e-3
the circuit as shown in Simulation of the TCR Branch on page 2-6.
10 Notice that the Thyristor blocks have an output identified by the letter m.
This output returns a Simulink vectorized signal containing the thyristor
current (Iak) and voltage (Vak). Connect a Demux block with two outputs
at the m output of Th1. Then connect the two demultiplexer outputs to a
dual trace scope that you rename Scope_Th1. (To create a second input
to your scope, in the Scope properties > General menu item, set the
number of axes to
2.) Label the two connection lines Ith1 and Vth1.These
labels are automatically displayed on the top of each trace.
2-5
Page 64

2 Advanced Components and Techniques
Simulation of the TCR Branch
11 You can now model the synchronized pulse generators firing thyristors Th1
and Th2. Copy two Simulink pulse generators into your system, name
them Pulse1 and Pulse2, and connect them to the gates of Th1 and Th2.
2-6
12 Now you have to define the timing of the Th1 and Th2 pulses. At every
cycle a pulse has to be sent to each thyristor α degrees after the zero
crossing of the thyristor commutation voltage. Set the Pulse1 and Pulse2
block parameters as follows:
Amplitude
Period
Pulse width (% of period)
Phase Delay
13 The pulses sent to Th2 are delayed by 180 degrees with re spe ct to pulses
1
1/60 s
1% (3.6 degrees pulses)
1/60+T for Pulse1
1/60+1/120+T for Pulse2
sent to Th1. The delay T is used to specify the firing angle α.Togeta120
degree firing angle, specify
T = 1/60/3;
T in the workspace by entering
Page 65

Introducing Power Electronics
14 Now open the Simulation > Configuration Parameters dialog box.
Select the
set the relative tolerance to
15 Add a Powergui block at the top level of your model, then start the
ode23tb integration algorithm. Keep the default parameters but
1e-4 and the stop time to 0.1.
simulation. The results are shown in TCR Simulation Results on page 2-7.
Note You could also choose to discretize your system. Try, for example,
asampletimeof50µs. Thesimulationresultsshouldcomparewellwith
the continuous system.
Simulation Results
TCR
2-7
Page 66

2 Advanced Components and Techniques
Simulation of the TSC Branch
You can now modify your circuit3 system and change the TCR branch to a
TSC branch.
1 Save circuit3 a s a new system and nam e it circuit4.
2 Connect a capacitor of 308e-6 Farad in series with the RL inductor and
Th1/Th2 valve as shown in the fo llow ing figure, Simulation of the TSC
Branch on page 2-9. Ch an g e the param e t ers of the RL block to
Resistance
Inductance
3 Connect a voltmeter and scope to monitor the voltage across the capacitor.
4 Contrary to the TCR branch, which was fired by a synchronous pulse
generator, a continuous firing signal is now applied to the two thyristors.
Delete the two pulse generators. Copy a Step block from the Simulink
library and connect its output at both gates of Th1 and Th2. Set its step
time at 1/60/4 (energizing at the first positive peak of the source voltage).
Your circuit should now be similar to the o ne shown here.
1.5e-3
1.13e-3
2-8
Page 67

Introducing Power Electronics
Simulation of the TSC Branch
5 Open the three scopes and start the simulation.
As the capacitor is energized from zero, you can observe a low damping
transient at 200 Hz, superimposed with the 60 Hz component in the
capacitor voltage and primary current. During normal TSC operation,
the capacitor has an initial voltage left since the last valve opening. To
minimize the closing transient with a charged capacitor, the thyristors of
the TSC branch must be fired when the source voltage is at maximum value
and with the correct polarity. The initial capacitor voltage corresponds to
the steady-state voltage obtained when the thyristor switch is closed. The
capacitor voltage is 17.67 kVrms when the valve is conducting. At the
closing time, the capacitor must be charged at the peak voltage.
UV
=×=17670 2 24989
c
6 You can now use the Powergui block to change the capacitor initial voltage.
Open the Powergui and select Initial States Setting.Alistofallthe
state variables with their default initial values appears. The value of the
initial voltage across the capacitor C (variable
Uc_C) should be -0.314 1 V.
2-9
Page 68

2 Advanced Components and Techniques
This voltage is not exactly zero because the snubber allows circulation of a
small current when both thyristors are blocked. Now select the
variable and enter
button to make this change effective.
7 Start the simulation. As expected the transient component of capacitor
voltage and current has disappeared. The voltages obtained with and
without initial voltage a re compared in this plot.
Uc_C state
24989 in the upper right field. Then click the Apply
2-10
Transient Capacitor Voltage With and Without Initial Charge
Page 69

Simulating Variable Speed Motor Control
In this section...
“Introduction” on page 2-11
“Building and Simulating the PWM Motor Drive” on page 2-13
“Using the Multimeter Block” on page 2-19
“Discretizing the PWM Motor Drive” o n page 2-21
“Performing Harmonic Analysis Using the FFT Tool” on page 2-21
Introduction
In this section you
• Use electrical machines and power electronics to simulate a simple AC
motor drive with variable speed control
• Learn how to use the Universal Bridg e block
Simulating Variable Speed Motor Control
• Discretize your model and compare variable-step and fixed-step simulation
methods
• Learn how to use the Multimeter block
• Learn how to use the FFT tool
Variable speed control o f AC electrical machines makes use of
forced-commutated electronic switches such as IGBTs, MOSFETs, and GTOs.
Asynchronous machines fed by pulse width modulation (PWM) voltage
sourced converters (VSC) are n owadays gradually replacing the DC motors
and thyristor bridges. With PWM, combined with modern control techniques
such as field-oriented control or direct torque control, you can obtain the same
flexibility in speed and torque control as with DC machines. This section
shows how to build a simple open loop AC drive controlling an asynchronous
machine. Chapter 4 will introduce you to a specialized library containing 13
models of DC and AC drives. These “ready to use” models will enable you
to simulate electric drive systems without the need to build those complex
systems yourself.
2-11
Page 70

2 Advanced Components and Techniques
The Machines library contains four of the most commonly used three-phase
machines: simplified and complete synchronous machines, asynchronous
machine, and p ermanent magnet synchronous machine. Each machine can be
used either in generator or motor mode. Combined with linear and nonlinear
elements such as transformers, lines, loads, breakers, etc., they can be used to
simulate electromechanical transients in an electrical network. They can also
be combined with power electronic devices to simulate drives.
The Power Electronics library contains blocks allowing you to simulate
diodes, thyristors, GTO thyristors, MOSFETs, and IGBT devices. You
could interconnect several blocks together to build a three-phase bridge.
For examp le , an IGBT inverter bridge would require six IGBTs and six
antiparallel diodes.
To facilitate implementation of bridges, the Universal Bridge block
automatically performs these interconnections for you.
Circuit 5: PWM Control of an Induction Motor
2-12
Page 71

Simulating Variable Speed Motor Control
Building and Sim
Follow these ste
ps to build a PWM -controlled motor.
ulating the PWM Motor Drive
Assembling and Configuring the Motor Blocks
In the first st
1 Open a new wind
2 Open the Power Electronics library and copy the U niv ersal Bridge block
into your
3 Open the Universal Bridge dialog box and set its parameters as follows:
Power electronic device
Snubber
Forward voltages
eps, you copy and set up the motor blocks:
ow and save it as
circuit5 model.
Rs
Cs
Ron
Vf
Vfd
circuit5.
IGBT/Diode
1e5 Ω
inf
1e-3 Ω
0V
0V
s
Tail
6s
Tf
Tt
1e-
1e
-6 s
Notice that the snubber circuit is integral to the Universal Bridge dialog
box. As the Cs capacitor value of the snubber is set to
Inf (short-circuit), we
are using a purely resistive snubber. Generally, IGBT bridges do not use
snubbers; however, because each nonlinear element in SimPowerSystems
software is modeled as a current source, you have to provide a parallel path
across each IGBT to allow connection to an inductive circuit (stator of the
asynchronous machine). The high resistance value of the snubber does
not affect the circuit performance.
2-13
Page 72

2 Advanced Components and Techniques
4 Open the Machines library. Copy the Asynchronous Machine SI Units block
as well as the M achine Measurement Demux block into your
model.
5 Open the Asynchronous Machine menu and look at its parameters. Set the
nominal power Pn parameter to 3*746 VA and the nominal line-to-line
voltage Vn to 220 Vrms to implement a 3 HP, 60 Hz machine with two pairs
of poles. Its nominal speed is therefore slightly lower th an the synchronous
speed of 1800 rpm, or w
6 Notice that the three rotor terminals a,b,andc are made accessible.
During normal motor operation these terminals should be short-circuited
together. In the Asynchronous Machine menu change the rotor type to
Squirrel cage. Notice that after this change the rotor connections are
no longer accessible.
7 Open the Machine Measurement Demux block menu. When this block is
connected to a machine measurement output, it allows you to access specific
internal signals of the machine. First select the Asynchronous machine
type. Deselect all signals except the following three signals:
stator currents),
circuit5
= 188.5 rad/s.
s
is_abc (three
wm (rotor speed), and Te (electromagnetic torque).
2-14
Loading and Driving the Motor
You n ow implement the torque-spe ed characteristic of the motor load. Assume
a quadratic torque-speed characteristic (fan or pump type load). The torque T
is then proportional to the square of the speed ω.
=
T
×=3 746
188 5
n
2
2
11 87
.
188 5
11 87..
334 10
.
−
.
4
Tk=×
The nominal torque of the m otor is
TNm
n
Therefore, the constant k should be
k
== = ×
Page 73

Simulating Variable Speed Motor Control
1 Open the User-Defined Functions library of Simulink and copy the Fcn
block into your
expression of torque as a function of speed:
2 Connect the input of the Fcn block to the speed output of the Machines
Measurement Demux block, labeled
of the motor, labeled
3 Open the Electrical Sources library and copy the DC Voltage Source block
into your
circuit5 model. Open the block menu and enter the
3.34e-4*u^2.
wm, and its output to the torque input
Tm.
circuit5 model. Open the block menu and set the v oltage to
400 V.
4 Open the Measurements library and copy a Voltage Measurement block
into your
5 Using Ground blocks from the Elements library, complete the power
circuit5 model. Change the block name to Vab.
elements and voltage sensor interconnections as shown in Circuit 5: PWM
Control of an Induction Motor on page 2-12.
Controlling the Inverter Bridge with a Pulse Generator
To control your inverter bridge, you need a pulse generator. Such a generator
is available in the Extras library of powerlib:
1 Open the Extras/Discrete Control blocks library and copy the Discrete
3-Phase PWM Generator block into your
can be used to generate pulses for a t w o-lev el or a three-level bridge. In
addition the block generates two sets of pulses (outputs P1 and P2) that
can be sent to two different three-arm bridges when the converter uses a
twin bridge configur a t ion . In this case, use it as a two-level single-bridge
PWM generator. The converter operates in an open loop, and the three
PWM modulating signals are generated internally. Connect the P1 output
to the pulses input of the Universal Bridge block
2 Open the D iscrete Three-Phase PW M Generator block dialog box and set
the parameters as follows.
Type
Mode of operation
Carrier frequency
circuit5 model. This block
2 level
Un-synchronized
18*60Hz (1080 Hz)
2-15
Page 74

2 Advanced Components and Techniques
Internal generation of modulating
selected
signals
Modulation index m
Output voltage frequency
Output voltage phase
Sample time
3 Use the Edit > Look Under Mask menu item of your model window to see
0.9
60 Hz
0 degrees
10e-6 s
how the PWM is implemented. This control system is made entirely with
Simulink blocks. The block has been discretized so that the pulses change
at multiples of the sp ecif ied time step. A time step of 10 µs corresp onds to
+/- 0.54% of the switching period at 1080 Hz.
One common method of generating the PWM pulses uses comparison of the
output voltage to synthesize (60 Hz in this case) with a triangular wave
at the switching frequency (1080 Hz in this case). This is the method
that is implemented in the Discrete 3-Phase PWM Generator block. The
line-to-line RMS output voltage is a function of the DC input voltage and of
the modulation index m as given by the following equation:
m
V
LLrms
=× =× ×
3
2
Vdc m VDC
2
0 612.
2-16
Therefore, a DC voltage of 400 V and a modulation facto r of 0.90 yield the
220 Vrms output line-to-line v oltag e, which is the nominal voltage of the
asynchronous motor.
Displaying Signals and Measuring Fundamental Voltage and Current
1 You now add blocks measuring the fundamental component (60 Hz)
embedded in the chopped Vab voltage and in the phase A current. Open the
Extras/Discrete Measurements library of powerlib and copy the dis crete
Fourier block into your
circuit5 model.
Page 75

Simulating Variable Speed Motor Control
Open the discrete Fourier block dialog box and check that the parameters
are set as follows:
Fundamental frequency f1
Harmonic number
Initial input
Sample time
60 Hz
1
[0 0]
10e-6 s
Connect this block to the output of the Vab voltage sensor.
2 Duplicate the Discrete Fourier block. To measure the phase A current,
you need to select the first element of the
is_abc output of the ASM
Measurement Demux block.
Copy a Selector block from the Signals & Systems Simulink library.
Open its menu and set Element to
second Discrete Fourier block and its input to the
1. Connect the Selector output to the
is_abc output of the
Machines Measurement Demux block as shown in Circuit 5: PWM Control
of an Induction Motor on page 2-12.
3 Finally, add scopes to your model. Copy one Scope block into your circuit.
This scope is use d to display the instantaneous motor voltage, currents,
speed, and electromagnetic torque. In the Scope properties > General
menu of the scope, set the following parameters:
Number of axes
Time range
Tick labels
4
0.05 s
bottom axis only
Connect the four inputs and label the four connection lines as shown in
TCR Simulation Results on page 2-7. When you start the simulation, these
labels are displayed on top of each trace.
To allow further processing of the signals displayed on the oscilloscope,
you have to store them in a variable. In the Scope properties > Data
history menu of the scope, set the following parameters:
2-17
Page 76
2 Advanced Components and Techniques
Limit data point to last
Save data to worksp ace
variable name
Format
After simulation, the four signals displayed on the scope are available in a
structure array named ASM.
4 Duplicate the four-input Scope and change its number of inputs to 2. This
scopeisusedtodisplaythefundamental component of Vab voltage and Ia
current. Connect the two inputs to the outputs of the Fourier blocks. Label
the two connection lines as shown in TCR Simulation Results on page 2-7.
You are n ow ready to simulate the mot or starting.
deselected
selected
ASM
Structure with time
Simulating the PWM Motor Drive with Continuous Integration
Algorithm
Open the Simulation > Configuration Parameters dialog box. S elect
the
ode23tb integration algorithm. Set the relative tolerance to 1e-4,the
absolute tolerance and the Max step size to
Start the simulation. The sim ulation results are shown in PWM Motor Drive ;
Simulation Results for Motor Starting at Full Voltage on pag e 2-19.
auto, and the stop time to 1s.
2-18
The motor starts and r eaches its steady-state speed of 181 rad/s (1728 rpm)
after 0.5 s. At starting, the magnitude of the 60 Hz current reaches 90 A peak
(64 A RMS) whereas its steady-state value is 10.5 A (7.4 A RMS). As expected,
the magnitude of the 60 Hz voltage contained in the chopped w ave stays at
220 2 311×= V
Also notice strong oscillations of the electromagnetic torque at starting. If you
zoom in on the torque in steady state, you should observ e a noisy signal with
a mean value of 11.9 N.m, corresponding to the load torque at nominal speed.
If you zoom in on the three motor currents, you can see that all the harmonics
(multiples of the 1080 Hz switching frequency) are filtered by the stator
inductance, so that the 60 Hz component is dominant.
Page 77

Simulating Variable Speed Motor Control
PWM Motor Drive; Simulation Results for Motor Starting at Full Voltage
Using the Multimeter Block
The Universal Bridge block is not a conventional subsystem where all the six
individual switches are accessible. If you want to measure the switch voltages
and currents, you must use the Multimeter block, which gives access to the
bridge internal signals:
1 Open the Universal Bridge dialog box and set the Measurement
parameter to
y the Multimeter block from the Measurements library into your
2 Cop
cuit5
cir
six switch currents appears.
the
Device currents.
circuit. Double-click the Multimeter block. A window showing
2-19
Page 78

2 Advanced Components and Techniques
3 Select the two currents of the bridge arm connected to phase A. They are
identified as
iSw1
iSw2
4 Click OK. The number of signals (2) is displayed in the multimeter icon.
5 UsingaDemuxblock,sendthetwomultimeter output signals to a two-trace
scope and label the two connection lines (Trace 1:
6 Restart the simulation. The waveforms obtained for the first 20 ms are
Universal Bridge
Universal Bridge
iSw1 Trace 2: iSw2).
showninthisplot.
2-20
Currents in IGBT/Diode Switches 1 and 2
As expected, the currents in switches 1 and 2 are complementary. A positive
current indicates a current flowing in the IGBT, whereas a n egative current
indicates a current in the an t iparallel diode.
Page 79

Simulating Variable Speed Motor Control
Note Multimeter block use is not limited to the Universal Bridge block. Many
blocks of the Electrical Sources and Elements libraries have a Measurement
parameter where you can select voltages, currents, or saturable transformer
fluxes. A judicious use of the Multimeter block reduces the number of current
and voltage sensors in your circu it, making it easier to follow.
Discretizing the PWM Motor Drive
You might have noticed that the simulation using a variable-step integration
algorithm is relatively long. Depending on your computer, it might take tens
of seconds to simulate one second. To shorten the simulation time, you can
discretize your circuit and simulate at fixed simulation time steps.
Open the Powergui, click Configure Parameters, and in the Powergui
block parameters dialog box set Simulation type to
Sample time to
including the asynchronous machine, is discretized at a 10 µs sample time.
10e-6 s. When you restart the simulation, the power system,
Discrete.Setthe
As there are no more continuous states in the electrical system, you do
notneedavariable-stepintegrationmethod to solve this system. In the
Simulation > Configuration Parameters > Solver dialog box pane, select
the
Fixed-step and Discrete (no continuous states) options.
Start the simulation. Observe that the simulation is now approximately
three times faster than with the continuoussystem. Resultscomparewell
with the continuous system.
Performing Harmonic Analysis Using the FFT Tool
The two Discrete Fourier b locks allow computation of the fundamental
component of voltage and current while simulation is running. If you would
like to observe harmonic components alsoyouwouldneedaDiscreteFourier
block for each harmonic. This approach i s not conve nient.
Now use the FFT tool of Powergui to display the frequency spectrum of
voltage and current waveforms. These signals are stored in your workspace in
the ASM structure with time variable generated by the Scope block. Because
2-21
Page 80
2 Advanced Components and Techniques
your model is discretized, the signal saved in this structure is sampled at a
fixed step and consequently satisfies the FFT tool requirements.
Open the Powergui and select FFT Analysis. A new window opens. Set
the parameters specifying the analyzed signal, the time window, and the
frequency range as follows:
Structure
Input
Signal number
Start time
Number of cycles
(pull-down menu)
Fundamental frequency
Max Frequency
Frequency axis
Display style
ASM
Vab
1
0.7 s
2
Display FFT window
60 Hz
5000 Hz
Harmonic order
Bar (relative to Fund or DC)
The analyzed signal is displayed in the upper w indow. Click Display.The
frequency spectrum is displayed in the bottom window, as shown in the
next figure.
2-22
Page 81

Simulating Variable Speed Motor Control
FFT Analysis of the Motor Line-to-Line Voltage
The fundamental component and total harmonic distortion (THD)ofthe
Vab voltage are displayed above the spectrum window. The magnitude of
the fundamental of the inverter voltage (312 V) compares well with the
theoretical value (311 V for m=0.9).
Harmonics are displayed in percent of the fundamental component. A s
expected, harmonics occur around multiples of carrier frequency (n*18 +- k).
2-23
Page 82

2 Advanced Components and Techniques
Highest harmonics (30%) appear a t 16th h armonic (18 - 2) and 20th harmonic
(18 + 2).
Finally, select input Ia instead of Vab and display its current spectrum.
2-24
Page 83

Three-Phase Systems and Machines
In this section...
“Introduction” on page 2-25
“Three-Phase Network with Electrical Machines” on page 2 -25
“Load Flow and Machine Initialization” on page 2-28
“Using the Phasor Solution Method for Stability Studies” on page 2-36
Introduction
In this section you
• Learn how to simulate a three-phase power system containing electrical
machines and other three-phase models
• Perform a load flow study and initialize machines to start simulation in
steady state by using the Load Flow and Machine Initialization option
of the Powergui
Three-Phase Systems and Machines
• Simulate the power system and observe its dynam ic performance by using
both the standard solution technique using a continuous solver and the
phasor simulation method
You now use three types of machines of the Electrical Machines library:
simplified synchronous machine, detailed synchronous machine, and
asynchronous machine. You interconnect these machines with linear and
nonlinear elements such as transformers, loads, and breakers to study the
transient stability of an uninterruptible power supply using a diesel generator.
Three-Phase Network with Electrical Machines
The two-machine system shown in this single line dia gram is this section’s
main example:
2-25
Page 84
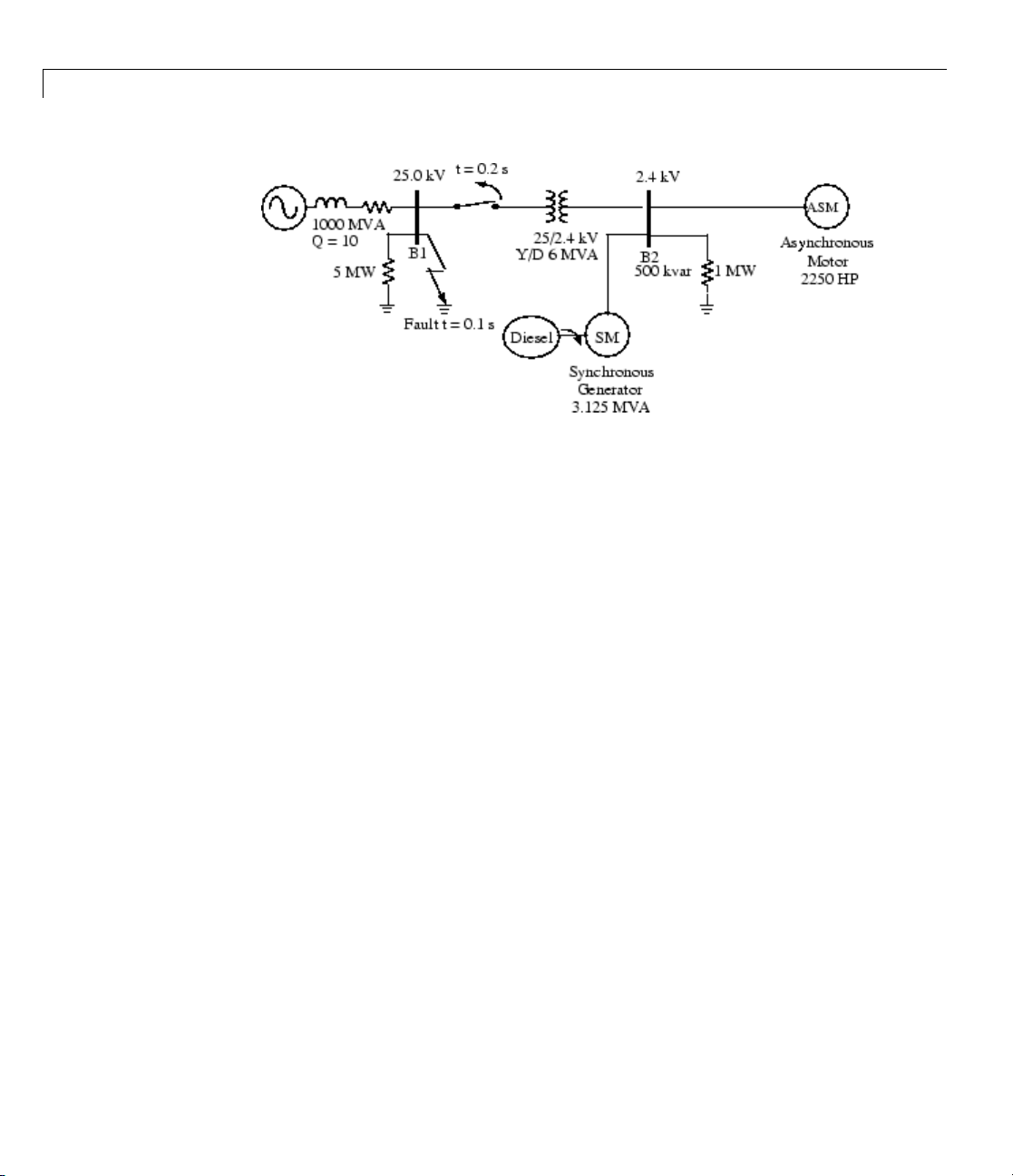
2 Advanced Components and Techniques
DieselGeneratorandAsynchronousMotoronDistributionNetwork
This system consists of a plant (bus B2), simulated by a 1 MW resistive load
andamotorload(ASM)fedat2400Vfromadistribution25kVnetwork
through a 6 MVA, 25/2.4 kV transformer, and from an emergency synchronous
generator/diesel engine unit (SM).
2-26
The 25 kV network is modeled by a simple R-L equivalent source (short-circuit
level 1000 MVA, quality factor X/R = 10) and a 5 MW load. The asynchronous
motor is rated 2250 HP, 2.4 kV, and the synchronous machine is rated 3.125
MVA, 2.4 kV.
Initially, the motor develops a mechanical power of 2000 HP and the diesel
generator is in standby, delivering no active power. The synchronous machine
therefore operates as a synchrono us condenser g enerating only the reactive
power required to regulate the 2400 V bus B2 voltage at 1.0 pu. At t = 0.1
s, a three-phase to ground fault occurs on the 25 kV system, causing the
opening of the 25 kV circuit breaker at t = 0.2 s, and a s udden increase of
the generator loading. During the transient period following the fault and
islanding of the motor-generator system, the synchronous machine excitation
system and the diesel speed governor react to maintain the voltage and speed
at a constant value.
This system is modeled in the
illustration.
power_machines demo, shown in the following
Page 85

Three-Phase Systems and Machines
Power System of Diesel Generator and Asynchronous Motor on Distribution Network
The Synchronous Machine (SM) block uses standard parameters, whereas the
Asynchronous Machine (ASM) block uses SI parameters.
The other three-phase elements such as the inductive voltage source, the
Y grounded/Delta transformer, and the loads are standard blocks from the
Electrical Source and Elements libraries of powerlib. If you open the dialog
box of the Three-Phase Fault and Three-Phase Breaker blocks, you see how
the switching times are specified. The M achine Measurement Demux block
provided in the Machines library is used to demux the output signals of the
SM and ASM machines.
The SM voltage and speed outputs are used as feedback inputs to a Simulink
control system that contains the diesel engine and g ov ernor block as well as
an excitation block. The excitation system is the standard block provided in
the Machines library. The SM parameters as well as the diesel engine and
governor models were taken from reference [1].
2-27
Page 86

2 Advanced Components and Techniques
Diesel Engine and Governor System
If you simulate this system for the first time, you normally do not know what
the initial conditions are for the SM and ASM to start in steady state.
These initial conditions are
• SM block: Initial values of speed deviation (usually 0%), rotor angle,
magnitudes and phases of currents in stator windings, and initial field
voltage required to obtain the desired terminal voltage under the specified
load flow
2-28
• ASM block: Initial values of slip, rotor angle, magnitudes and phases of
currents in stator windings
Open the dialog box of the Synchronous Machine and Asynchronous Machine
blocks. All initial conditions should b e set at
fieldvoltageandASMslip,whicharesetat
monitoring the SM and ASM signals as well as the bus B2 voltage. Start the
simulation and observe the first 100 ms before fault is applied.
As the simulation starts, note that the three ASM currents start from zero
and contain a slowly decaying DC component. The machine speeds take a
much longer time to stabilize because of the inertia of the motor/load and
diesel/generator systems. In our example,theASMevenstartstorotatein
the wrong direction because the motor starting torque is lower than the
applied load torque. Stop the simulation.
0, except for the initial SM
1pu. Open the three scopes
Load Flow and Machine Initialization
To start the simulation in steady state with sinusoidal currents and constant
speeds, all the machi n e states must be init ialized properly. This is a d if ficult
task to perform manually, ev en for a simple system. In the next section you
Page 87

Three-Phase Systems and Machines
learn how to use the Load Flow and Machine Initialization option of the
Powergui block to perform a load flow and initialize the machines.
Double-click the Pow ergui block and click the Load Flow an d Machine
Initialization button. A new window appears. In the upper right window
you have a list of the machines appearing in your system. Select the SM 3.125
MVA machine. Note that for the Bus Type, you have a menu allowing you to
choose either PV Generator, PQ Generator, or Swing G enerator.
For synchronous machines you normally specify the desired term in a l voltage
and the active power that you want to generate (positive p ow er for generator
mode)orabsorb(negativepowerformotormode). Thisispossibleaslongas
you have a swing (or slack) bus that generates or absorbs the excess po we r
required to balance the active powers throughout the network.
The swing bus can be either a voltage source or any other synchronous
machine. If you do not have any voltage source in your system, you must
declare one of the machines as a swing machine. In the next section, you
perform a load flow with the 25 kV voltage source connected to bus B1, which
is used as a swing bus.
Load Flow Without a Swing Machine
In the Load Flow window, your SM Bus Type should a lread y be initialized
as
P & V generator, in d icating that the load flow is performed with the
machine controlling its active power and terminal voltag e. By default, the
desired Terminal Voltage UAB is initialized at the nominal machine voltage
(2400 Vrms). Keep it unchanged and set the Active Power to zero. The
synchronous machine therefore absorbs or generates reactive power only to
keep terminal voltage at 1 pu. Now select the ASM 2250 HP machine in the
upper right window. The only parameter that is needed is the Mechanical
power developed by the motor. Enter 2000*746 (2000 HP) and click the
Update Circuit & Measurements button. You now perform the load flow
with the f ollowing parameters.
SM
Terminal Voltage
Active Power
2400 Vrms
0kW
2-29
Page 88

2 Advanced Components and Techniques
ASM
Click the Update Load Flow button. Once the load flow is solved, the three
phasors of line-to-line machine voltages as well as currents are updated as
shownonthenextfigure.ValuesaredisplayedbothinSIunits(voltsRMS
or amperes RMS) and in pu.
Mechanical Power
2000*746 W (2000 HP)
2-30
The SM active and reactive powers, mechanical power, and field voltage are
displayed.
P0W
Q85
6 kvar
or 856/3125 = 0.2739 pu
Page 89

Three-Phase Systems and Machines
Pmec
844.2 W
or 0.00027 pu, representing
internal machine losses in stator windings
Ef (field voltage) 1.427 pu
The ASM active and reactive powers absorbed by the motor, slip, and torque
are also displayed.
P 1.515 MW (0.9024 pu)
Q 615 kvar (0.3662 pu)
Pmec 1.492 MW (2000 HP)
Slip 0.006119
Torque 7964 N.m (0.8944 pu)
Close t
The ASM
block
ASM di
the lo
You c
of th
of th
Faul
pha
he Load Flow window.
torque value (7964 N.m) should already be entered in the Constant
connected at the ASM torque input. If you now open the SM and
alog boxes you can see the updated initial conditions. If you open
ad flow tool, you can see updated values of the measurement outputs.
an also click the Nonlinear button to obtain voltages and currents
e nonlinear blocks. For example, you should find that the magnitude
e Phase A voltage across the fault breaker (named
t/Breaker1
) is 14.42 kV RMS, corresponding to a 24.98 kV RMS
Uc_3-Phase
se-to-phase voltage.
tart the simulation in steady state, the states of the Governor & D iesel
To s
ine and the Excitation blocks should also be initialized according to the
Eng
lues calculated by the load flow. Open the Governor & Diesel Engine
va
bsystem, which is inside the Diesel Engine Speed and Voltage Control
su
bsystem. Notice that the initial mechanical power has been automatically
su
tto
0.0002701 pu. Open the Excitation block and notice that the initial
se
erminal voltage and field voltage have been set respectively to
t
.427 pu
1
.
1.0 and
2-31
Page 90

2 Advanced Components and Techniques
Note that t he load flow also initializes the Constant blocks connected at the
reference inputs (wref and v ref) of the Governor and Excitation blocks as
well as the Constant block connected at the load torque input (Tm) of the
Asynchronous Machine block.
Open the three scopes displaying the internal signals of synchronous and
asynchronous machines and phase A voltage. Start the simulation. The
simulation results are shown in the following figure.
2-32
Simulation Results
Observe that during the fault, the terminal voltage drops to about 0.2 pu, and
the excitation voltage hits the limit of 6 pu. After fault clearing and islanding,
the SM m echanical power quickly increases from its initial value of 0 pu
Page 91

Three-Phase Systems and Machines
to 1 pu an d stabilizes at the final value of 0.82 pu required by the resistive
and motor lo ad (1.0 MW resistive lo ad + 1.51 MW motor load = 2.51 MW =
2.51/3.125 = 0.80 pu). After 3 seconds the terminal voltage stabilizes close
to its reference value of 1.0 pu. The motor speed temporarily decreases from
1789 rpm to 1635 rpm, then recovers close to its normal value after 2 seconds.
If you increase the fault duration to 12 cycles by changing the breaker opening
time to 0.3 s, notice that the system collapses. The ASM speed slows down to
zero after 2 seconds.
Load Flow with a Swing Machine
In this section y ou make a load flow with two synchronous machine types:
a PV generator and a swing generator.Inyourpower_machines window,
delete the inductive source and replace it with the Simplified Synchronous
Machine block in pu from the Machines library. Rename this machine SSM
1000MVA. Add two constant blocks at the Pm and E inputs of the Simplified
Synchronous Machine. These two blocks, which are used to specify the
mechanical power and the machine internal voltage, will be autom a tica lly
initialized when you perform a new load flow. Save this new system in your
working directory as
box and enter the following parameters:
power_machines2.mdl.Open the SSM 1000 MVA dialog
Connection type
Pn(VA), Vn(Vrms),
3-wire Y
[1000e6 25e3 60]
fn(Hz)
H(s), Kd(), p (),
R(pu), X(pu)
Init. cond.
[inf 0 2]
[0.1 1. 0]
Leave all initial conditions at zero.
As you specify an infinite inertia, the speed and therefore the frequency of the
machine are kept constant. Notice how easily you can specify an inductive
short-circuit level of 1000 MVA and a quality factor of 10 with the per unit
system.
Also, connect at inputs 1 and 2 of the SSM block two Constant blocks
specifying respectively the required mechanical power (Pmec) and its internal
2-33
Page 92
2 Advanced Components and Techniques
voltage (E). These two constants are updated automatically according to the
load flow solution.
When there is no voltage source imposi ng a reference ang le for voltages, you
must choose one of the synchronous machines as a reference. In a load flow
program, this reference is called the swing bus. The swing bus absorbs or
generates the power neededtobalancetheactivepowergeneratedbytheother
machines and the power dissip ated in loads as well as losses in all elemen ts.
Open the Powergui. In the Tools menu, select Load Flow and Machine
Initialization. Change the SSM Bus Type to
load flow by entering the following parameters for the SM and ASM machines:
SM 1000 MVA:
Terminal voltage UAB
Active power
ASM 2250 HP:
Mechanical power
Swing Generator.Specifythe
2400 Vrms
0W
1.492e+06 W (2000 HP)
2-34
For the SSM swing machine you only have to specify the requested terminal
voltage (magnitude and phase). The active power is unknow n . How ev er, you
canspecifyanactivepowerthatisusedasaninitialguessandhelploadflow
convergence. Respecify the following SSM param eters:
Terminal voltag e
24984 Vrms
(this voltage obtained at bus B1 from the
previous load flow)
Phase of UAN voltage
Active power guess
0 degrees
7.5e6 W
(estimated power = 6 MW (resistive load) + 1.5
MW motor load)
Page 93

Three-Phase Systems and Machines
Click the Update Load Flow button. Once the load flow is s olved the
following solution is displayed. Use the scroll bar of the left window to look at
the solution for each of the three machines.
The active and reactive electrical powers, mechanical power, and internal
voltage are displayed for the SSM block.
.542 MW; Q=-147 kvar
P=7
ec=7.547 MW (or 7.547/1000=0.007547 pu)
Pm
ternal voltage E=1.0 pu
In
2-35
Page 94

2 Advanced Components and Techniques
The active and reactive electrical powers, mechanical power, and field voltage
of the SM block are
P=0 W; Q=856 kvar
Pmec=844 W
Vf=1.428 pu
The active and reactive powers absorbed by the motor, slip, and torque of the
ASM block are also displayed.
P=1.515MW Q=615 kvar Pmec=1.492 MW (2000 HP)
Slip=0.006119 Torque=7964 N.m
As expected, the solution obtained is exactly the same as the one obtained
with the R-L voltage source. T he active power delivered by the swing bus
is 7.54 MW (6.0 MW resistive load + 1.51 MW motor load = 7.51 MW, the
difference (0.03 MW) corresponding to losses in the trans former).
Restart the simulation. You should get the same waveforms as those show n
in the figure called Simulation Results o n page 2-32.
2-36
Reference
[1] Yeager, K.E., and J.R.Willis, “Modeling of Emergency Diesel Generators
in an 800 Megawatt Nuclear Power Plant,” IEEE
Conversion, Vol. 8, No. 3, September, 1993.
®
Transactions on Energy
Using the Phasor Solution Method for Stability Studies
Up to now, you have simulated a relatively simple power system consisting of
a maximum of three machines. If you increase complexity of your network
by adding extra lines, loads, transformers, and machines, the required
simulation time becomes longer and longer. Moreover, if you are interested in
slow electromechanical oscillation modes (typically between 0.02 Hz and 2
Hzonlargesystems)youmighthavetosimulateforseveraltensofseconds,
implying simulation times of minutes and even hours. The conventional
continuous or discrete solution method is therefore not practical for stability
studies involving low-frequency oscillation modes. To allow such studies, you
Page 95

Three-Phase Systems and Machines
have to use the phasor technique (see “Introducing the Phasor Simulation
Method” on page 1-40).
For a stability study, we are not interested in the fast oscillation modes
resulting from the interaction of l inear R, L, C elements and distributed
parameter lines. These oscillation modes, which are usually located above
the fundamental frequency of 50 H z or 60 H z, do not interfere with the slow
machine modes and regulator time constants. In the phasor solution method,
these fast modes are ignored by replacing the network’s differential equations
by a set of algebraic equations. The state-space model of the network is
therefore replaced by a transfer function evaluated at the fundamental
frequency and relating inputs (current injected by machines into the network)
and outputs (voltages at machine terminals). The phasor solution method
uses a reduced state-space model consisting of slow states of machines,
turbines, and regulators, thus dramatically reducing the required simulation
time. Continuous variable-step solvers are very efficient in solving this type
of problem. Recommended solver is
ode23tb with a maximum time step of
one cycle of the fundamental frequency (1/60 s or 1/50 s).
Now apply the phasor solution method to the two-machine system you have
just simulated with the conventional method. Open the
power_machines
demo.
Double-click the Powergui, click Configure Parameters,andinthe
Powergui block parameters dialog box set Simulation type to
Phasor.You
must also specify the fundamental frequency used to solve the algebraic
network equations. A default value of 60 Hz should already be entered in
the Phasor frequency field. Close the Powergui and notice that the word
Phasors now appears on the Powergui icon, indicating that this new method
canbeusedtosimulateyourcircuit.Tostart the simulation in steady state,
you must first repeat the load flow and machine initialization procedure
explained in the previous section, “Load Flow and Machine Initialization”
on page 2-28.
In the Configuration Parameters dialog box, specify a Max step size of
1/60 s (one cycle) and start the simulation.
Observe that simulation is now much faster. T he results compare well with
those obtained in the previous simulation. A comparison of synchronous
machine and asynchronous machine signals is shown b elow.
2-37
Page 96

2 Advanced Components and Techniques
2-38
Comparison of Results for Continuous and Phasor Simulation Methods
The phasor solution method is illustrated on more complex networks
presented as the following demos:
• Transient stability of two machines with power sys tem stabilizers (PSS)
and a static var compensator (SVC) (
• Performance of three power system stabilizers for interarea oscillations
(
power_PSS model)
power_svc_pss model)
Page 97

Three-Phase Systems and Machines
The first demo illustrates the impact of PSS and use of a SVC to stabilize a
two-machine system. The second demo compares the performance of three
different types of power system stabilizers on a four-machine, two-area
system.
The phasor solution method is also used for FACTS models available in the
factslib library. Three case studies demonstrating p h asor simulation are
presented in Chapter 6, “Transient Stability of Power Systems Using Phas or
Simulation”.
2-39
Page 98

2 Advanced Components and Techniques
Building and Customizing Nonlinear Models
In this section...
“Introduction” on page 2-40
“Modeling a Nonlinear Inductance” on page 2-40
“Customizing Your Nonlinear Model” on page 2 -45
“Modeling a Nonlinear Resistance” on page 2-48
“Creating Your Own Library” on page 2-53
“Connecting Your Model with Other Nonlinear Blocks” on page 2-53
Introduction
SimPowerSystems software provides a wide collection of nonlinear models. It
can happen, however, that you need to interface your own nonlinear model
with the standard models provided in the powerlib library. This model could
be a simple nonlinear resistance simulating an arc or a varistor, a saturable
inductor, a new type of motor, etc.
2-40
In the following section you learn how to build such a nonlinear m odel. A
simple saturable inductance and a nonlinear resistance serve as examples.
Modeling a Nonlinear Inductance
Consider an inductor of 2 henries designed to operate at a nominal voltage,
Vnom = 120 V RMS, and a nominal frequency, fnom = 60 Hz. From zero to
120 V RMS the inductor has a constant inductance, L = 2 H. W hen voltage
exceeds its nominal voltage, the inductor saturates and its inductance is
reduced to Lsat = 0.5 H. The nonlinear flux-current characteristic is plotted in
the next figure. Flux and current scales are in per units. The nominal voltage
and nominal current are chosen as base values for the per-unit system.
Page 99

Building and Customizing Nonlinear Models
Flux-Curr
The curre
that, in t
are given
The model of the nonlinear inductance can therefore be implemented as a
controlled current source, where current i is a nonlinear function of v oltage
v,asshown.
Model of a Nonlinear Inductance
ent Characteristic of the Nonlinear Inductance
nt i flowing in the inductor is a nonlinear function of flux linkage ψ
urn, is a function of v appearing across its terminals. These relations
by the f ollowing equations:
didtd
vL
=⋅ = = ⋅
i
=
L
()
dt
or
vdt
∫
2-41
Page 100

2 Advanced Components and Techniques
Implementation of a Nonlinear Inductance on page 2-42 shows a circuit using
a 2 H nonlinear inductance. The nonlinear inductance is connected in series
with two voltage sources (an AC Voltage Source block of 120 volts RMS, 60
Hz, and a DC Voltage Source block) and a 5 ohm resistor.
All the elements used to build the nonlinear model have been grouped in a
subsystem named Nonlinear Inductance. The inductor terminals are labeled
In and Out. Notice that a second output returning the flux has been added to
the subsystem. You can use this output to observe the flux by connecting it
to a Simulink Scope block.
The nonlinear model uses two powerlib blocks and two Simulink blocks. The
two powerlib blocks are a Voltage Measurement block to read the voltage
at the inductance terminals and a Controlled Current Source block. The
direction of the arrow of the current source is oriented from input to output
according to the model shown above.
The two Simulink blocks are an Integrator block computing the flux from
the voltage input and a Look-Up Table block imp lementing the sa tu rati on
characteristic i=f(ψ) described by Flux-Current Characteristic of the
Nonlinear Inductance on page 2-41.
2-42
lementation of a Nonlinear Inductance
Imp
 Loading...
Loading...