

Page 1

SimMechanics™ 3
User’s Guide
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
SimMechanics™ User’s Guide
© COPYRIGHT 2001–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
December 2001 Online only Version 1.0 (Release 12.1+)
July 2002 First printing Revised for Version 1.1 (Release 13)
November 2002 Online only Revised for Version 2.0 (Release 13+)
June 2004 Second printing Revised for Version 2.2 (Release 14)
October 2004 Online only Revised for Version 2.2.1 (Release 14SP1)
March 2005 Online only Revised for Version 2.2.2 (Release 14SP2)
September 2005 O nline only Revised for Version 2.3 (Release 14SP3)
March 2006 Online only Revised for Version 2.4 (Release 2006a)
September 2006 Third printing Revised for Version 2.5 (Release 2006b)
March 2007 Online only Revised for Version 2.6 (Release 2007a)
September 2007 O nline only Revised for Version 2.7 (Release 2007b)
March 2008 Online only Revised for Version 2.7.1 (Release 2008a)
October 2008 Online only Revised for Version 3.0 (Release 2008b)
March 2009 Online only Revised for Version 3.1 (Release 2009a)
September 2009 O nline only Revised for Version 3.1.1 (Release 2009b)
March 2010 Online only Revised for Version 3.2 (Release 2010a)
Page 4

Page 5

Modeling Mechanical Systems
1
Representing Machines with Models ................ 1-2
About Machines
About SimM echanics Models
Creating a SimMechanics Model
Connecting SimMechanics Blocks
Interfacing SimMechanics Blocks to Simulink Blocks
Creating SimMechanics Subsystems
Creating Custom SimMechanics Blocks with Masks
................................... 1-2
........................ 1-2
..................... 1-3
.................... 1-5
.................. 1-6
Contents
.... 1-6
..... 1-8
Modeling Grounds and Bodies
About Bodies and Grounds
Modeling Grounds
Modeling Rigid Bodies
WorkingwithBodyCoordinateSystems
Modeling Degrees of Freedom
About Joints
Modeling Joints
Creating a Joint
Modeling Massless Connectors
Modeling Disassem bled Joints
Constraining and Driving Degrees of Freedom
About Constraints
Types of Mechanical Constraints
What Constraints and Drivers Do
Directionality of Constraints and Drivers
Solving Constraints
Restrictions on Using Constraint and Driver Blocks
Constraint Example: Gear Constraint
Driver Example: Angle Driver
................................. 1-9
............................. 1-11
...................................... 1-19
................................... 1-20
................................... 1-27
................................. 1-38
................................ 1-40
...................... 1-9
.......................... 1-9
............... 1-14
...................... 1-19
....................... 1-30
....................... 1-34
..................... 1-38
.................... 1-39
.............. 1-40
................. 1-41
....................... 1-43
....... 1-38
..... 1-41
Cutting Machine Diagram Loops
Rules for Valid Machine Diagram Loops
.................... 1-46
............... 1-46
v
Page 6

Rules for Automatic Loop Cutting .................... 1-46
Specifying a Loop Joint for Cutting
Displaying the Cut Joints
For More About Disassembled and Cut Joints
For More About Constraints and Drivers
........................... 1-47
................... 1-47
.......... 1-47
.............. 1-47
Applying Motions and Forces
About Actuators
Actuating a Body
Varying a Body’s Mass and Inertia Tensor
Actuating a Joint
Actuating a Driver
Specifying Initial Positions and Velocities
Sensing Motions and Forces
About Sensors
SensingBodyMotions
Sensing Joint Motions and Forces
Sensing Constraint Reaction Forces
Adding Internal Forces
About Force Elements
Inserting a Linear Force Between Bodies
Inserting a Linear Force or Torque Through a Joint
Customizing Force Elements with Sensor-Actuator
Feedback
Combining One- and Three-Dimensional Mechanical
Elements
About Interface Elements
Working with Interface Elements
Example: Rotational Spring-Damper with Hard Stop
.................................. 1-48
.................................. 1-50
.................................. 1-56
................................ 1-62
.................................... 1-68
.............................. 1-69
.............................. 1-74
...................................... 1-78
....................................... 1-79
....................... 1-48
............. 1-53
.............. 1-62
........................ 1-68
.................... 1-70
.................. 1-71
............................ 1-74
.............. 1-74
..... 1-76
........................... 1-79
.................... 1-81
.... 1-82
vi Contents
Validating Mechanical Models
Essential Tests for Model Validity
Verifying Model Topology
Counting Model Degrees of Freedom
........................... 1-85
...................... 1-85
.................... 1-85
.................. 1-89
Page 7

Running M echanical Models
2
Configuring SimMechanics Models in Simulink ...... 2-2
SimMechanics and Simulink Options
Distinguishing Models and Machines
Machine Settings via the Machine Environment Block
Model-Wide Settings via Simulink and Simscape
Software
....................................... 2-3
................. 2-2
................. 2-2
... 2-2
Configuring Methods of Solution
About Mechanical and Mathematical Settings
Defining Gravity
Choosing Your Machine’s Dimensionality
Choosing an Analysis Mode
Hierarchy of Solvers and Tolerances
Controlling Machine Assembly
Maintaining Constraints
Configuring a Simulink Solver
Avoiding Simulation Failures
Starting Visualization and Simulation
About S im s cap e and Visualization Settings
Using the Simscape Editing Mode
Setting Up Visualization
Starting the Simulation
How Sim Mechanics Software Works
About Machine Simulation
Model Validation
Machine In itialization
Force Analys is and Motion Integration
Stiction Mode Iteration
.................................. 2-6
........................... 2-12
........................... 2-22
............................ 2-23
.......................... 2-24
.................................. 2-24
.............................. 2-24
............................. 2-25
.................... 2-6
......................... 2-8
.................. 2-11
....................... 2-12
....................... 2-16
........................ 2-17
.................... 2-20
.......... 2-6
.............. 2-7
............... 2-20
............ 2-20
................. 2-24
................ 2-25
Troubleshooting Simulation Errors
About Simulation Errors
Data Validation Errors
Ground and Body Geometry Errors
Joint Geometry Errors
Block Connection and Topology Errors
Motion Inconsistency and Singularity Errors
........................... 2-26
............................. 2-26
................... 2-27
............................. 2-27
................. 2-26
................ 2-28
........... 2-28
vii
Page 8

Analysis M ode Errors .............................. 2-31
Improving Performance
Optimizing Mechanical and Mathematical Settings
Simplifying the Degrees of Freedom
Adjusting Constraint Tolerances
Smoothing Motion Singularities
Changing the Simulink Solver and Tolerances
Adjusting the Time Step in Real-Time Simulation
Generating Code
About Code Generation from SimMechanics M odels
Using Code-Related Products and Features
How SimMechanics Code Generation Differs from
Simulink
Using Run-Time Parameters in Generated Code
Limitations
About SimMechanics and Simulink Limitations
Continuous Sample Times Required
Restricted Simulink Tools
Unsupported Simulink Tool
Simulink Tools Not Compatible with SimMechanics
Blocks
Restrictions on Two-Dimensional Simulation
Restrictions with Generated Code
........................................ 2-43
.................................. 2-38
...................................... 2-39
....................................... 2-42
............................ 2-32
.................. 2-32
..................... 2-34
..................... 2-34
............ 2-38
.................. 2-42
.......................... 2-42
......................... 2-43
.................... 2-44
...... 2-32
.......... 2-35
....... 2-36
..... 2-38
........ 2-40
........ 2-42
........... 2-44
viii Contents
Analyzing Motion
3
Dynamics of Mechanical Systems ................... 3-2
About Machine Dynamics
Forward and Inverse Dynamics
Forces, Torques, and Accelerations
Finding Forces from Motions
About Inverse Dynamics in SimMechanics Software
Inverse Dynamics Mode with a Double Pendulum
Kinematics Mode with a Four Bar Machine
........................... 3-2
...................... 3-3
................... 3-4
....................... 3-7
....... 3-8
............ 3-14
..... 3-7
Page 9

Trimming M e chanical Models ...................... 3-18
About Trimming in SimMechanics S oftware
Unconstrained Trimming of a Spring-Loaded Double
Pendulum
Constrained Trimming of a Four Bar Machine
..................................... 3-20
............ 3-18
.......... 3-26
Linearizing Mechanical Models
About Linearization and SimMechanics Software
Open-Topology Linearization: Double Pendulum
Closed-Loop Linearization: Four Bar Machine
..................... 3-32
....... 3-32
........ 3-34
.......... 3-40
Motion, Control, and Real-Time Simulation
4
Guide to This Chapter ............................. 4-3
AbouttheStewartPlatformandHowItIsModeled
About the Case Studies
Products N eeded for the Case Studies
References
About the Stewart Platform
Origin and Uses of the Stewart Platform
Characteristics of the Stewart Platform
Counting Degre es of Freedom in the Stewart Platform
Modeling the Stewart Platform
How the Stewart Platform Is Modeled
Modeling the Physical Plant
Modeling Controllers
Initializing the Stewart Platform
Identifying the Simulink and Mechanical States of the
Stewart Platform
Visualizing the Stewart Platform M otion
....................................... 4-5
............................. 4-3
................. 4-4
........................ 4-7
.............. 4-7
............... 4-7
..................... 4-13
................. 4-13
......................... 4-13
............................... 4-15
..................... 4-18
............................... 4-21
.............. 4-23
..... 4-3
... 4-8
Trimming and Linearizing Through Inverse
Dynamics
About Trimm ing and Inverse Dynamics
What Is Trimming?
Ways to Find an Operating Point
....................................... 4-24
............... 4-24
................................ 4-24
..................... 4-25
ix
Page 10

Trimming in the Kinematics Mode ................... 4-25
Linearizing the Stewart Platform at an Operating Point
Further Suggestions for Inverse Dynamics Trimming
.. 4-29
.... 4-32
About Controllers and Plants
Modeling Co ntrollers in Simulink and Plants in
SimMechanics Software
Nature of the Control Problem
Control Transfer Function Forms and Units
Controller-Plant Case Study Files
For More About Designing Controllers
Analyzing Controllers
Implementing a Simple Contro ller for the Stewart
Platform
A First Look at the Stewart Platform Control M odel
Improper and Biproper PID Controllers
Analyzing the PID Controller Response
Designing and Improving Controllers
Creating Improved Controllers for the Stewart Platform
Designing a New PID Controller
Trimming and Linearizing the Platform Motion
Improving the New PID Controller
Synthesizing a Robust, Multichannel Controller
Generating an d Simulating with Code
About the Stewart Platform Code Generation Examples
For More Information About Code Generation
Learning About the Model
Generating an S-Function Block for the Plant
Model Referencing the Plant
Generating Stand-Alone Code for the Whole Model
....................................... 4-39
.............................. 4-39
....................... 4-35
.......................... 4-35
....................... 4-36
............ 4-37
.................... 4-37
................ 4-37
............... 4-42
............... 4-46
............... 4-50
..................... 4-51
......... 4-53
................... 4-59
............... 4-71
.......... 4-71
.......................... 4-72
.......... 4-76
........................ 4-77
..... 4-39
.. 4-50
........ 4-66
.. 4-71
...... 4-80
x Contents
Simulating with Hardware in the Loop
About Dedicated Hardware Targets for Stewart Platform
Simulation
For More Information About xPC Target Software
Files Needed for This Study
Adjusting Hardware for Computational Demands
Downloading a Complete Model to the Target
Configuring for Realistic Hardware
..................................... 4-82
......................... 4-83
.............. 4-82
.......... 4-85
................... 4-90
...... 4-83
....... 4-83
Page 11

Index
xi
Page 12

xii Contents
Page 13

Modeling Mechanical Systems
1
SimMechanics™ software gives you a complete set of block libraries for
modeling machine parts and connecting them into a Simulink
• “Representing Machines with Models” on page 1-2
• “Modeling Grounds and Bodies” on page 1 -9
• “Modeling Degrees of Freedom” on page 1-19
• “Constraining and Driving Degrees of Freedom” on page 1-38
• “Cutting Machine Diagram Loops” on page 1-46
• “Applying Motions and Forces” o n page 1-48
• “Sensing Motions and Forces” on page 1-68
• “Adding Internal Forces” on page 1-74
• “Combining One- and Three-Dimensional Mechanical Elements” on page
1-79
• “Validating Mechanical Models” on page 1-85
Consult “Representing Motion” to review body kinematics. If you need more
information on rigid body mechanics, consult the physics and engineering
literature, beginning with the “Bibliography”. Classic engineering mechanics
texts include Goodman and Warner [2], [3] and Meriam [8]. The books of
Goldstein [1] and J osé and Saletan [5] are more theoretically oriented.
®
block diagram.
Page 14

1 Modeling Mechanical Systems
Representing Machines with Models
In this section...
“About Machines” on page 1-2
“About SimMechanics Models” on page 1-2
“Creating a SimMechanics Model” on page 1-3
“Connecting SimMechanics Blocks” on page 1-5
“Interfacing SimMechanics Blocks to Simulink Blocks” on page 1-6
“Creating SimMechanics Subsystems” on page 1-6
“Creating Custom SimMechanics Blocks with Masks” on page 1-8
About Machines
The SimMechanics term machine has two meanings.
1-2
• It refers to a physical system that includes at least one rigid body. The
SimMechanics block library allows you to create Simulink models of
machines.
• It also refers to a topologically distinct and separate block diagram
representing one physical m achine. A model can have one o r more
machines.
This section explains the nature of machines an d SimMechanics models.
About SimMechanics Models
ASimMechanicsmodel consists of a block diagram composed of one or more
machines, each of which is a set of connected blocks representing a single
physical machine. For example, the following model contains two mach ines.
Page 15

Representing Machines with Models
Compari
A SimMechanics model differs significantly from other Simulink models in
how it represents a machine.
• An ordinary Simulink model represents the mathematics of a machine’s
motion, i.e., the algebraic and differential equations that predict the
machine’s future state from its present state. The mathematical model
enables Simulink to simulate the machine.
• A SimMechanics model represents the physical structure of a machine,
the mass properties and geometric and kinematic relationships of its
component bodies. SimMechanics software converts this structural
representation to an internal, equivalent m athematical model. T his saves
you the time and effort of developing the mathematical model yourself.
son to Other Simulink Models
Creating a SimMechanics Model
You create a SimMechanics model in much the same way you create any
other Simulink model. First, you open a Simulink model window. Then you
1-3
Page 16

1 Modeling Mechanical Systems
drag instances of SimMechanics and other Simulink blocks from the Simulink
block libraries into the window and draw lines to interconnect the blocks (see
“Connecting SimMechanics Blocks” on page 1-5).
The SimMechanics block library provides the following blocks specifically
for modeling machines:
• Machine Environment blocks set the mechanical environment for a
machine. Exactly one Ground block in each machine m ust be connected to a
Machine Environment block. See Chapter 2, “Running Mechanical Models”.
• Body blocks represent a machine’s components and the machine’s immobile
surroundings (ground). See “Modeling Grounds and Bodies” on page 1-9.
• Joint blocks represent the degrees of freedom of one body relative to
another body or to a point on ground. See “Modeling Degrees of Freedom”
on page 1-19.
• Constraint and Driver blocks restrict motions of or impose motions on
bodies relative to one another. See “Constraining and Driving D egrees
of Freedom” on page 1-38.
1-4
• Actuator blocks specify forces, motions, variable masses and inertias, or
initial conditions applied to bodies, joints, and drivers. See “Applying
Motions and Forces” on page 1-48.
• Sensor blocks measure the forces on and motions of bodies, joints, and
drivers. See “Sensing Motions and Forces” on page 1-68.
• Force element blocks model interbody forces. See “Sensing Motions and
Forces” on page 1-68.
• Simscape™ mechanical elements model one-dimensional motion and, with
certain restrictions, can be interfaced with SimMechanics m achines. See
“Combining One- and Three-Dimensional Mechanical Elements” on page
1-79.
You can use blocks from othe r Simulink libraries in SimMechanics models.
For example, you can connect the output of SimMechanics Sensor blocks
to Scope blocks from the Simulink Sinks library to display the forces and
motions of your model’s bodies and joints. Similarly, you can connect blocks
from the Simulink Sources library to SimMechanics Driver blocks to specify
relative motions of your machine’s bodies.
Page 17

Representing Machines with Models
Connecting SimM
In general, you c
other Simulink b
exist, however
SimMechanics b
Connection Lines
The lines tha
lines, repre
represented
SimMechani
and spatial
You can dra
available
branch exi
connected
only on SimMechanics blocks (see next section) and you cannot
Connector Ports
Standar
SimMech
you to dr
connec
d Simulink blocks have input and output ports. By contrast, most
anics blocks contain only specialized connector ports that permit
aw connection lines among SimMechanics blocks. SimMechanics
tor ports are of two types: Body CS ports and general-purpose ports.
onnect SimMechanics blocks in the same w ay you connect
locks: by drawing lines between them. Significant differences
, between connecting standard Simulink blocks and connecting
locks. This section discusses these differences.
t you dra w between standard Simulink blocks, called signal
sent inputs to and outputs from the mathematical functions
by the blocks. By contrast, the lines that you draw between
cs blocks, called connection lines, represent physical connections
relationships among the bodies represented by the blocks.
w connection lines only between specialized connector ports
sting connection lines. Connection lin es appe ar as so lid black w he n
and as dashed red lines when either end is unconnected.
echanics Blocks
Body CS
on a bod
origi
General-purpose connector ports appear on Joint, Constraint, Driver, Sensor,
and Actuator blocks. They permit you to connect Joints to Bodies and connect
Sensors and Actuators to Joints, Constraints, and Drivers. General-purpose
ports appear on Body and Ground blo cks and define connection points
y or ground. Each is associated with a local coordinate system whose
nspecifiesthelocationoftheassociated connection point on the body.
1-5
Page 18

1 Modeling Mechanical Systems
connector ports appear as circles on the block icon. The circle is unfilled if the
port is unconnected and filled if the port is connected.
Interfacing
SimMechanic
1-48) contain
Simulink bl
SimMechani
and Forces
Simulink b
SimMechanics Blocks to Simulink Blocks
s Actuator blocks (see “Applying Motions and Forces” on page
standard Simulink input ports. Thus, you can connect standard
ocks to a SimMechanics model via Actuator blocks. Sim ilarly,
cs Sensor blocks contain output ports (see “Sensing Motions
” on page 1-68). Thus, you can connect a SimMechanics model to
locks via Sensor blocks.
Creating SimMechanics Subsystems
Large, complex block diagram models are often ha rd to analyze. Enclosing
functionally related groups of blocks in subsystems alleviates this difficulty
and facilitates reuse of block groups in different models.
1-6
You can create subsystems containing SimMechanics blocks that you can
connect to other SimMechanics blocks. You do this in two ways:
Page 19
Representing Machines with Models
• Automatically
• Manually
The Simulink documentation explains more about creating subsystems.
Creating a Subsystem Automatically
To create a SimMechanics subsystem automatically,
1 Create the subsystem block diagram in your model window, leaving
unconnected ports for external connections.
2 Group-se
3 Select Create subsystem from the Edit menu of the Simulink model
lect the subsystem block diagram.
window.
The last step replaces the block diagram with a Subsystem block co ntaining
the selected block diagram. It also creates and connects SimMechanics
Connection Port blocks for the ports that you left unconnected in the block
diagram. The Connection Port blocks in turn create connector port icons on
the subsystem icon, enabling you to connect external SimMechanics blocks
to the new subsystem.
1-7
Page 20

1 Modeling Mechanical Systems
Creating a S
Sometimes you need to make a subsystem configured differently from an
automatically created one. To create a SimMechanics subsystem manually,
1 Drag a Subsystem block into your model window.
2 Open the S
3 Create the subsystem block diagram in the subsystem wi ndow .
4 Drag a Connection Port block from the SimMechanics Utilities library
into the subsystem window for each port that you want to be available
externally.
5 Connec
Creat
You ca
aspr
diag
diag
to th
or w
sub
to c
ing Custom SimMechanics Blocks with Masks
n create your own SimMechanics blocks from subsystems, for example,
ing-loaded Joint block or a sphere Body block. To do this, create a block
ram that implements the functionality of your custom block, enclose the
ram as a subsystem, and add a mask (i.e., a graphical user interface)
e subsystem. To facilitate sharing your custom blocks across m odels
ith other users, create a Simulink block library and add these masked
system blocks to the library. The Simulink documentation explains how
reate custom blocks with masks.
ubsystem Manually
ubsystem block.
t the external connector ports to the Connection Port blocks.
1-8
Page 21

Modeling Grounds and Bodies
In this section...
“About Bodies and Grounds” on page 1-9
“Modeling Grounds” o n page 1-9
“Modeling Rigid Bodies” on page 1-11
“Working w ith Body Coordinate Systems” on page 1-14
About Bodies and Grounds
The basic components of any mechanism are its constitu ent rigid bodies. A
SimMechanics body refers to any point or spatially extended object that has
mass. SimMechanics bodies, unlike physical bodies, do not have degrees
of freedom. The SimMechanics Bodies library contains two blocks for
representing bodies in a Simulink model:
• Ground
Modeling Grounds and Bodies
Models a point on an ideal body of infinite mass and extent that serves as a
fixed reference point for machines (see “Modeling Grounds” on page 1-9).
• Body
Models rigid bodies of finite mass and extent, including their attached
body coordinate systems (see “Modeling Rigid Bodies” on page 1-11 and
“Working with Body Coordinate Systems” on page 1-14).
“Representing Motion” explains, with detailed examples, more about
configuring bodies and their coordinate systems in space.
Modeling Grounds
ASimMechanicsground refers to a body of infinite mass that acts both
as a reference frame at rest for a whole machine and as a fixed base for
attaching machine components, e.g., the factory floor on which a robot stands.
SimMechanics Ground blocks enable you to represent points on ground in your
machine. This in turn enables you to specify the degrees of freedom that your
system has relative to its surroundings. You do this by connecting Joint blocks
1-9
Page 22
1 Modeling Mechanical Systems
representing the degrees of freedom between the Body blocks representing
parts of your machine and the Ground blocks representing ground points.
Each Ground block has a single connector port to which you can connect a
Joint block that can in turn be connected to a single Body block. Each Ground
block therefore allows you to represent the degrees of freedom betw een a
single part of your machine and its surroundings. If you want to specify the
motion of other parts of your machine relative to the surroundings, you must
create additional Ground blocks.
Caution Each machine in a SimMechanics m odel must contain at least one
Ground block connected to a Body block via a Joint block. Each submachine
connected by a Shared Environment block must have at least one Ground.
Machine Environment Required for Each Machine
One Ground block in each machine of your model plays a second role,
connection to that machine’s Machine Environment block, which sets its
mechanical environment. See Chapter 2, “Running Mechanical Models”.
1-10
Caution Exactly one Ground block in each machine in your model must be
connected to a Machine Environment block.
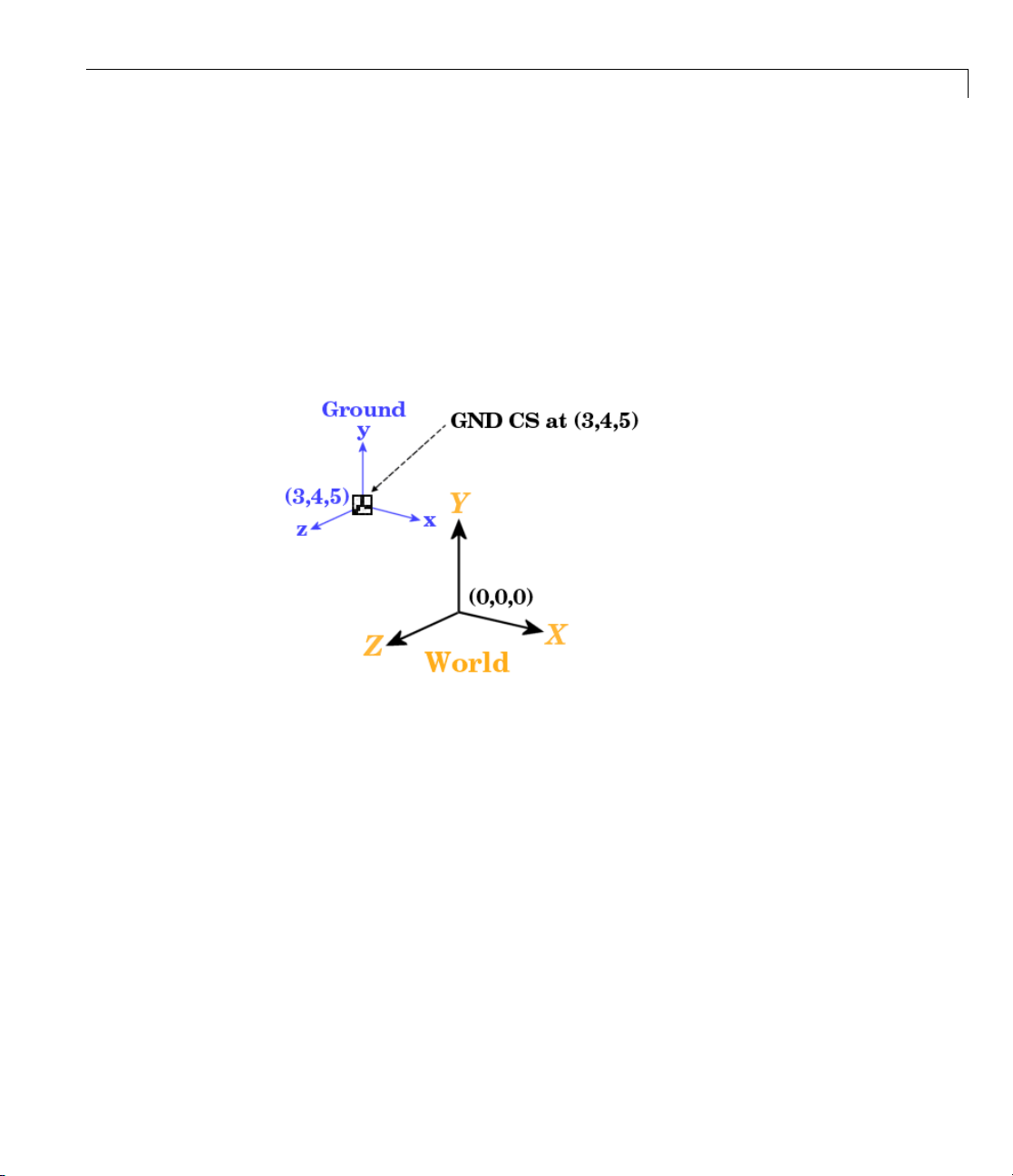
World and Grounded Coordinate Systems
The SimMechanics master coordinate system and reference frame is called
World. All grounds are at rest in World. The connector port of each Ground
block defines a grounded coordinate system called GND. The GND coordinate
system’s axes are parallel to World.
Page 23
Modeling Grounds and Bodies
By default the origin of the grounded coordinate sys tem coincides with the
origin of the World coordinate system. The Location field of a Ground block’s
dialog allows you to move the origin of GND to some other point in the World
coordinate system, as in the exampl e “Modeling and Simulating a Simple
Machine”.
The GND coordinate system allows you to specify the positions and motions of
parts of your machine relative to fixed points in the machine’s surroundings.
With a shifted origin, GND remains at rest.
Modeling Rigid Bodies
The SimMechanics Body block enables you to model rigid bodies of finite
mass and extent. A body is rigid if its internal parts cannot move relative to
one another.
About Body Blocks
A B od y block allows you to specify the following attributes of a rigid body.
Mass Properties. These include the body’s mass, which determines its
response to translational forces, and its inertia tensor, which determines its
response to rotational torques.
1-11
Page 24
1 Modeling Mechanical Systems
Body Coordinate Systems. By default a Body block defines three local
coordinate systems, one associated with a body’s center o f gravity, labeled
CG, and two others, labeled CS1 and CS2, respectively, associated w ith two
otherpointsonthebodythatyoucanspecify.YoucancreateadditionalBody
coordinate systems or delete them as necessary.
A Body block’s dialog box allows you to specify a Body CS’s origin (see “Setting
a Body CS’s Pos itio n” on pag e 1-14) and orientation (see “Setting a Body CS’s
Orientation” on page 1-16). The origin and orientation of a body’s CG CS
specify the body’s starting location and orientation. The origins o f the other
Body coordinate systems specify the initial locations of other points on the
body.
The Body b lock allows flexibility in specifying the origi ns and orientations
of Body coordinate systems. You can specify the origin and orientation of
a body CS relative to
• The World CS
• Any other CS on the same body
1-12
• The Adjoining CS, the CS on the neighboring body or ground directly
connected by a Joint, Constraint, orDrivertotheselectedBodyCSyou
are configuring
This simplifies creation and maintenance of models. The only limitation is
that you must specify the origin and location of at least one of a machine’s
Body coordinate systems relative to the World CS.
Home Configuration. Once you enter all the needed positions and
orientations into the Bodies of your model, your machine is in its home
configuration. The body velocities are zero, and any disassembled joints
remain disassembled.
Connector Ports. AnyBodyCScandisplayaBodyCSPort. ABodyCSPort
allows you to attach Joints, Actuators, and Sensors to a Body. By default, a
Body’s CS1 and CS2 coordinate systems each display a Body CS port. You
can display a port for any other Body coordinate system as well, including
aBody’sCGCS.
Page 25
Modeling Grounds and Bodies
Creating a Body Block
To create a Body block,
1 Drag a Body block icon from the SimMechanics Bodies Library and drop
it into your model window.
2 Open the Body block’s dialog box.
3 Enter the mass of the body you are modeling in the Mass field.
4 Select the units of mass from the adjacent units list.
5 Enter a 3-by-3 matrix representing the body’s inertia tensor relative to its
center of gravity coordinate system (CG CS) origin and axes in the Inertia
field (see “Determining Inertia Tensors for Common Shapes” on page 1-13).
6 Enter the initial positions of the body’s C G and coordinate systems in the
Position tab.
7 Enter the initial orientation of the body’s CG and coordinate systems in
the Orientation tab.
8 Click OK or A pply.
Determining Inertia Tensors for Common Shapes
The following table enables you to determine the inertia tensors for some
common shapes. For each shape of mass
moments of inertia, I
, I2,andI3,alongthex-, y-,andz-axes of th e shape’s
1
CG coordinate system.
Shape I
Thin rod of length L aligned
1
mL
along z
Sphere of radius R
Cylinder of radius R and
height h aligned along z
2mR
(m/4)(R2+
2
h
/3)
m, the table lists the shape’s principal
I
2
2
/12 mL2/12
2
/5 2mR2/5 2mR2/5
(m/4)(R
2
h
2
/3)
I
3
0
mR
+
2
/2
1-13
Page 26

1 Modeling Mechanical Systems
Shape I
Rectangular parallelopiped
of sides a, b,andc aligned
1
(m/12)(b
2
c
)
2
+
I
2
(m/12)(a
2
c
)
I
3
2
+
(m/12)(a
2
b
)
2
+
along x, y, z,respectively
Cone of base radius R and
height h along z
Ellipsoid of semiaxes a, b,
(m/4)(3R2/5
2
+h
)
(m/4)(3R
+h
2
2
/5
)
(m/5)(b2+c2)(m/5)(a2+c2)(m/5)(a2+b2)
3mR
2
/10
and c aligned along x, y , z,
respectively
The c orresponding inertia tensor for the shape is the following 3-by-3 matrix:
I
00
⎛
1
⎜
I
00
⎜
⎜
00
⎝
⎞
⎟
2
⎟
⎟
I
3
⎠
Working with Body Coordinate Systems
Every SimMechanics body has Body coordinate systems (CSs) attached to it.
The location of a body CS is the origin of that CS. The CS’s rectangular x-y-z
coordinate axes are rotated at some o rie ntatio n. Y ou set up body CS origins
and orientations before running your model. But once the bodies start to
move, the origins and orientations of a body’s CSs remain fixe d in the body .
The elements of a body’s inertia tensor also remain fixed in the body. Consult
“Representing Motion” for more about orienting bodies and body CSs.
1-14
The sections “Managing Body Coordinate Systems” on page 1-17 and
“Creating B ody CS Ports” on page 1-18 explain how to create custom Body
coordinate sy stems and Body CS ports or delete existing ports.
Setting a Body CS’s Position
The Position tab of a Body block’s dialog box allows you to specify the
position of any of a body’s local coordinate systems.
The Tran slate d from Origin of and Components in Axes of lists in the
tab together specify which other of your machine’s coordinate systems you
Page 27

Modeling Grounds and Bodies
use as reference points and orientations to set up the coordinate s ystem s of
the body y ou are configuring.
To specify the position of a Body CS,
1 Open the Body block’s dialog box.
The dialog box’s Position tab lists the body’s local coordinate systems in
atable.
Each row specifies the position of the coordinate system specified in the
Name column.
2 Select the units in which you want to specify the origin of the Body CS from
the CS’s Units list.
3 Specify the reference coordinate systems for the Body CS, i.e., the
coordinate systems relative to which you want to m easure the Body CS
origin and the orientation of the Body CS’s coordinate axes. The choices are
World, the adjoining CS, and other Body CSs on the same Body.
You must directly or indirectly define all Body CSs by reference to a
Ground or to World. Indirect reference means that you specify a Body CS
relative to another CS and so on, in a chain of references that ultimately
ends in a Ground or World.
1-15
Page 28

1 Modeling Mechanical Systems
You do this by selecting the origin and orientation of the specification CS
from the Body CS’s Translated from Origin o f and Components in
Axes of lists, respectively. For example, suppose that you want to specify
the position of CS2 relative to another coordinate system , whose origin is at
the origin of CS1 but whose axes run parallel to those of the CG CS. Then
you would select CS1 from the Translated from Origin of list of CS2 an d
CG from the Components in Axes of list of CS2.
1-16
4 Enter a ve
Position
The components of the vector must be in the units that you selected a nd
relative to the coordinate system that you selected. For example, suppose
that you had selected
and World as the CSs specifying the origin and orientation for CS2. Now
suppose that you want to specify the loca tion of CS2 as one meter to the
right of CS1 along the W orld x-axis. Then you would enter
CS2’s position vector.
5 Click Apply to accept the p osition setting or OK to accept the setting and
dismiss the dialog box.
ing a Body CS’s Orientation
Sett
The Orien tation tab of a Body block’s dialog box allows you to specify the
orientation of any of a body’s local coordinate systems.
To specify the orientation of a Body CS,
ctor specifying the location of the Body CS in the Origin
Vector [x y z] field of the CS.
m as the unit for specifying CS2’s origin and CS1
[1 0 0] as
Page 29

Modeling Grounds and Bodies
1 Open the Body block’s dialog box.
2 Select the dialog box’s Orientation tab.
3 Select the units (degrees or radians) in which you want to specify the
orientation of the CS from the CS’s Units list.
4 Selectthecoordinatesystemrelativetowhichyouwanttospecifythe
orientation of the Body CS from the Body CS’s Relative CS list. The
choices are World, the adjoining CS, and other Body CSs on the same Body.
5 Select the convention y ou want to use to specify the orientation of the Body
CS from the CS’s Specified Using Convention list.
6 Enter a vector that specifies the orientation of the Body CS relative to
the CS you choose for that purpose, according to the selected specification
convention.
7 Click Ap ply to accept the orientation setting or OK to accept the setting
and dismiss the dialog box.
Managing Body Coordinate Systems
You will often need to modify the default Body coordinate systems of a Body
block. You might want to connect a Body to more than two Joints, in which
case you need not only more Body CSs, but their Body CS ports as well.
Connecting Actuators and Sensors to Bodies requires a Body CS and Body
CS port for each connection.
The Body coordinate systems tab of a Body block’s dialog box contains a row
of buttons that allow you to add, delete, and reorder a Body’s local coordinate
systems.
1-17
Page 30

1 Modeling Mechanical Systems
To use these b
• Delete to re
• Up to move th
• Down to move
Select Add
uttons, select a Body CS in the CS table and select
move the selected CS from the table
e CS’s entry one row up in the CS table
theCS’sentryonerowdownintheCStable
to add a new CS.
Creating Body CS Ports
To add or d
and sele
table. C
elete a port from a Body block’s icon, open the block’s dialog box
ct or clear the CS’s Show Port check box in the dialog box’s Body CS
lick OK or Apply to confirm the change.
1-18
Page 31

Modeling Degrees of Freedom
In this section...
“About Joints” on page 1-19
“Modeling Joints” on page 1-20
“Creating a Joint” on page 1-27
“Modeling Massless Connectors” on page 1-30
“Modeling Disassembled Joints” on page 1-34
About Joints
A SimMechanics joint represents the degrees of freedom (DoF) that one body
(the follower) has relative to another body (the base). The base body can be
a movable rigid body or a ground. Unl ike a physical joint, a SimMechanics
joint has no mass, although some joints have spatial extension (see “Modeling
Massless Connectors” on page 1-30).
Modeling Degrees of Freedom
A SimMechanics joint does not necessarily imply a physical connection
between two bodies. For example, a SimMechanics Six-DoF joint allows the
follower, e.g., an airplane, unconstrained movement relative to the base, e.g.,
ground, and does not require that the followerevercomeintocontactwith
the base.
SimMechanics joints only add degrees of freedom to a machine, because the
Body blocks carry no degrees of freedom. Contrast this with physical joints,
which both add DoFs (with axes of motion) and remove DoFs (by connecting
bodies). See “Counting Model Degrees of Freedom” on page 1-89 for more
on this point.
The SimMechanics Joints Library provides an extensive selection of blocks for
modeling various types of jo ints. This section explains how to use these blocks.
1-19
Page 32

1 Modeling Mechanical Systems
Note A SimMechanics joint represents the relative degrees of freedom of
one body relative to another body. Only if a joint is connected on one side
to a ground and on the other to a body does the joint represent an absolute
DoF of the body with respect to World.
Modeling Joints
Modeling with Joint blocks requires an understanding of the following key
concepts:
• Joint primitives
• Joint types
• Joint axes
• Joint directionality
• Assembly restrictions
1-20
Joint Primitives
Each Joint block bundles together one or more joint primitives that together
specify the degrees of freedom that a follower body has relative to the base
body. The following table summarizes the joint primitives found singly or
multiply in Joint blocks.
Primitive
Type Symbol Degrees of Freedom
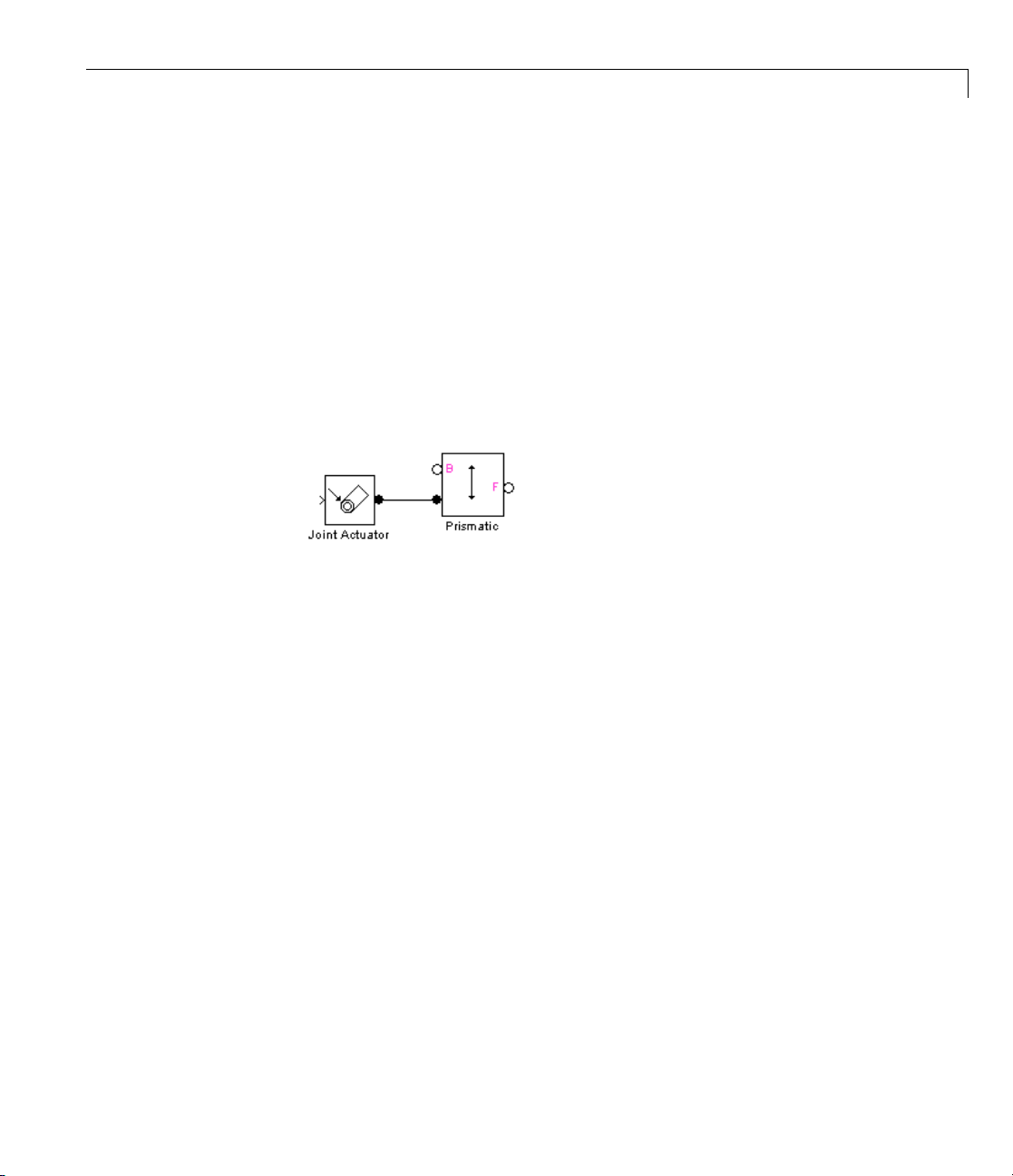
Prismatic
Revolute
Spherical
Weld
P
R
S
W
One degree of translational freedom along a
prismatic axis
One degree of rotational f reedom about a revolute
axis
Three degrees of rotational freedom about a pivot
point
Zero degrees of freedom
Page 33

Modeling Degrees of Freedom
Joint Types
The blocks in the SimMechanics Joint Library fall into the following
categories:
• Primitive joints
Each of these blocks contains a single joint primitive. For example, the
Revolute block contains a revolute joint primitive.
• Composit
These bl
specify
relativ
Gimbal
multiple rotational and translational degrees of freedom of one body
e to another. Some model idealized real joints, for example, the
ejoints
ocks contain combinatio ns of joint primitives, enabling you to
and Bearing joints.
1-21
Page 34

1 Modeling Mechanical Systems
Others spec
the Six-Do
the base.
The Custom
of rotati
prefabri
of their p
• Massles
These bl
primit
assembled joints
• Dis
ify a bstract combinations of degrees of freedom. For example,
F block specifies unlimited motion of the follower relative to
Joint allows you to create joints with any desired combination
onal and translational degrees of freedom, in any order. The
cated composite Joints of the Joints library have the type and order
rimitives fixed. See “Axis Order” on page 1-24.
s connectors
ocks represent extended joints with spatially separated joint
ive axes, for example, a Revo lute-Rev olute Massless Connector.
1-22
Page 35

Modeling Degrees of Freedom
These blocks represent joints not assembled until simulation starts — for
example, a Disassembled Prismatic.
See “Assembly Restrictions” on page 1-26 and “Modeling Disassembled
Joints” on page 1-34.
Joint Axes
Joint blocks define one or more axes of translation or rotation along which
or around which a fo ll ower block can move in relation to the base b lock. T he
axes of a Joint block are the axes defined by its component primitives:
• A prismatic primitive defines an axis of translation.
• A revolute primitive defines an axis of revolution.
• A spherical primitive defines a pivot point for axis-angle rotation.
For example, a Planar Joint block combines two prismatic axes and hence
defines two axes of translation.
Axis Direction. By default the axes of prismatic and revolute primitives
point in the same direction as the z-axis of the World coordinate system (CS).
A Joint block’s dialog box allows you to point its prismatic and revolute axes
in any other direction (see “Directing Joint Axes” on page 1-28).
1-23
Page 36
1 Modeling Mechanical Systems
Axis Order. Composite SimMechanics Joints execute their motion one joint
primitive at a time. A joint that defines more than one axis of motion also
defines the order in which the follower body moves along each axis or about a
pivot. The order in which the axes and/or pivot appear in the Joint block’s
dialog box is the order in which the follower body moves.
Different primitive execution orders are physically equivalent, unless the
joint includes one spherical or three revolute primitives. Pure translations
and pure two-dimensional rotations are independent of primitive ordering.
Axis Span. The span of the primitive axes is the complete space spanned by
their combination. For example, one primitive axis defines a line, a nd two
primitive axes define a plane.
Joint Directionality
Directionality is a property of a joint that determines the dependence of the
joint on the sign of forces or torques applied to it. A joint’s directionality also
determines the sign of signals output by sensors attached to the joint. Every
SimMechanics joint in your model has a directionality. You must be able to
determine the directionality of a joint in order to actuate it correctly and to
interpret the output of sensors attached to it.
1-24
A joint’s follower moves relative to the joint’s bas e. The joint’s directionality
takes into account the joint type and the direction of the joint’s axis, as follows.
Page 37
Modeling Degrees of Freedom
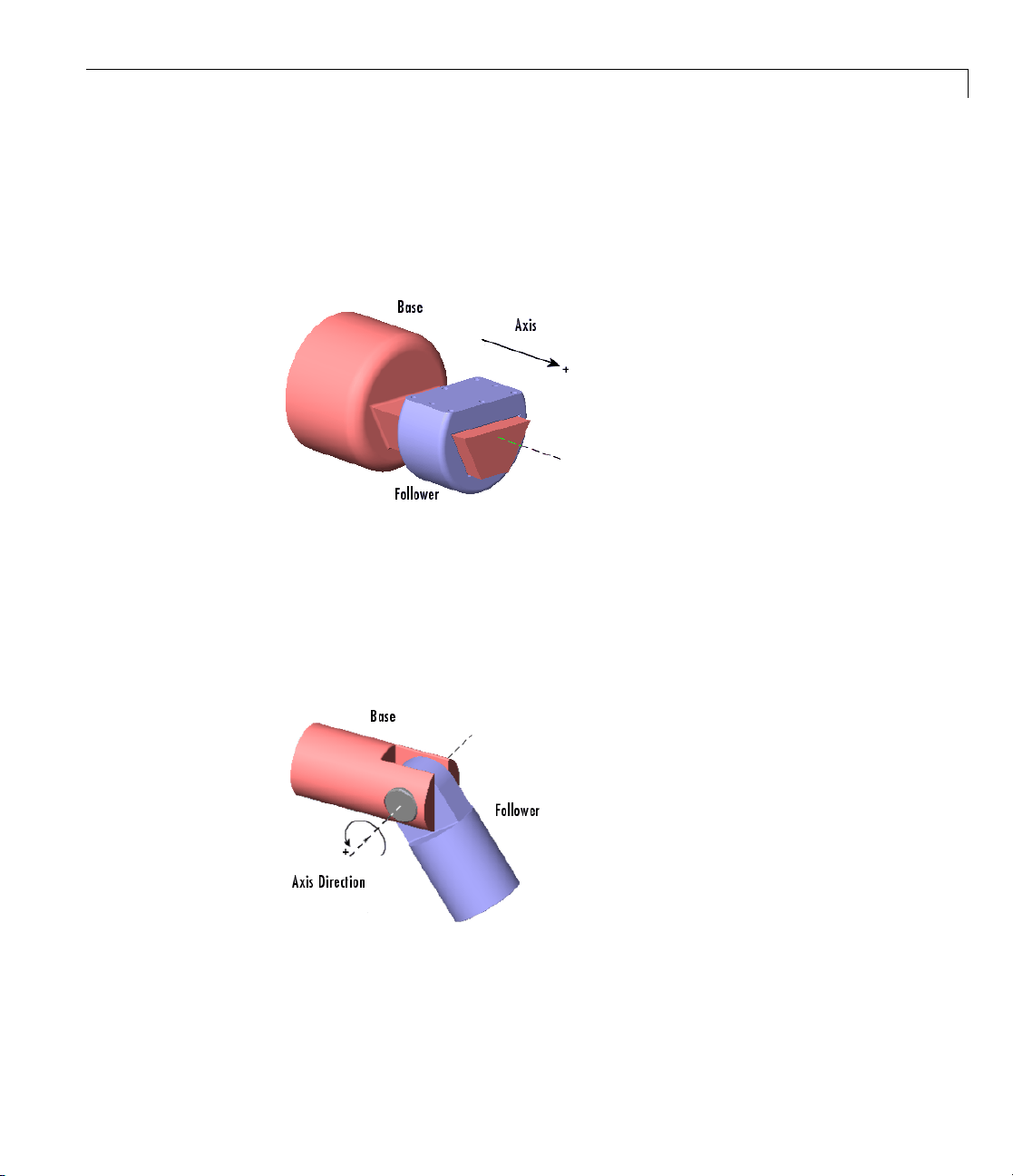
Directionality of a Prismatic Joint. If the joint is prismatic, a positive force
applied to the joint moves the follower in the positive direction along the axis
of translation. A sensor attached to the joint outputs a positive signal if the
follower moves in a positive direction along the joint’s axis of translation
relative to the base.
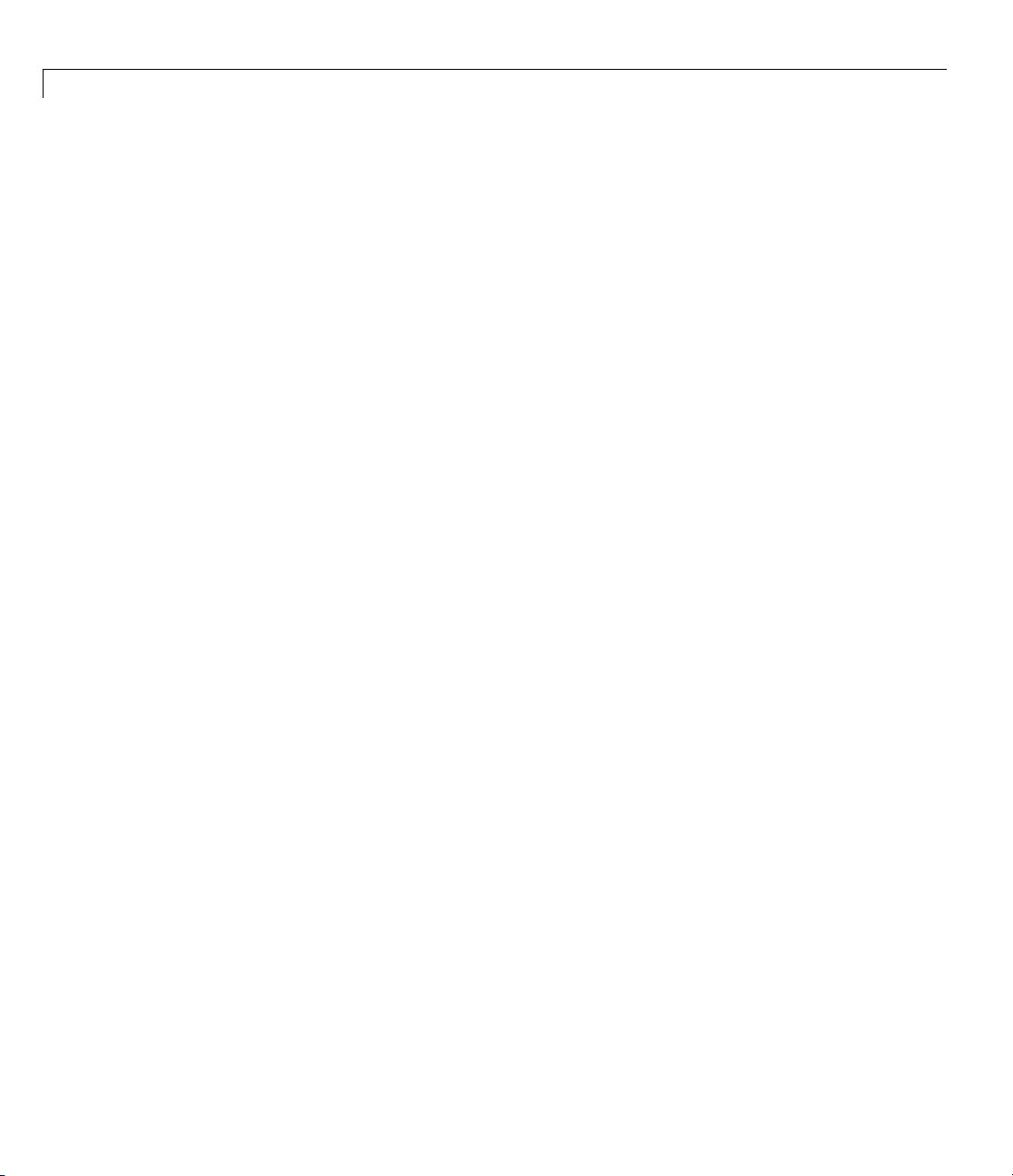
Directionality of a Revolute J oint. If the joint is revolute, a positive
torque applied to the joint rotates thefollowerbyapositiveanglearound
the joint’s axis of rotation, as determined by the right-hand rule. A sensor
attached to the revolute joint outputs a positive signal if the follower rotates
by a positive angle around the joint’s axis of revolution, as determined by
the right-hand rule.
1-25
Page 38
1 Modeling Mechanical Systems
Directionality of a Spherical Joint. Spherical joint directionality means
the positive sense of rotation of the three rotational DoFs. P ick a rotation
axis, rotating using the right-hand rule from the base Body CS axes. Then
rotate the follower Body about that axis in the right-handed sense.
Directionality and Or d er ing of Composite Joint Primitives. Each joint
primitive separately has its own directionality, based on the primitive’s
type and the direction of its axis of tran slation or rotation. In each case,
the follower body of the composite joint moves along or around the joint
primitive’s axis relativetothebasebody.
The order of primitives in the composite Joint’s dialog determines the spatial
construction of the joint.
The first listed primitive is attached to the base, the second to the first, and so
on, down to the follower, which is attached to the last primitive.
• Moving the first listed primitive moves the subsequent primitives in the
list, including the follower, relative to the base.
1-26
• Moving any primitive moves the primitives below it in the list (but not
those above it), as well as the follower.
• Moving the last listed primitive moves only the follower.
Changing the Directionality of a Joint. You can change the directionality
of a joint by either
• Reversing and reconnecting the Joint block to reverse the roles of the base
and follower bodies.
• Reversing the sign (direction) of the joint axis.
Assembly Restrictions
Many joints impose one or more restrictions, called assembly restrictions,
on the placement of the bodies that they join. The conjoined bodies must
satisfy these restrictions at the beginning of simulation and thereafter within
assembly tolerances tha t you can specify (see “Co ntrolling Mach i n e Assembly”
on page 2-12). For example, the Body CSs attached to revolute and spherical
joints must coincide within assembly tolerances; the Body CSs attached to a
Prismatic joint must lie on the prismatic axis within assembly tolerances; the
Page 39

Modeling Degrees of Freedom
Body CSs attached to a Planar joint must be coplanar with Planar primitives,
etc. Composite joints, e.g., the Six-DoF joint, impose assembly restrictions
equal to the most restrictive of its joint primitives. See the block reference for
each Joint for information on the assembly restrictions, if any, that it imposes.
Positioning bodies so that they satisfy a joint’s assembly restrictions is called
assembling the joint.
AllSimMechanicsJointsexceptblocksintheDisassembledJointssublibrary
require m anual assembly. Manual assembly entails your setting the initial
positions of conjoined bodies to valid locations (see “Assembling Joints”
on page 1-29). The simulation assembles disassembled joints during the
model initialization phase. It assumes that you have already assembled all
other joints before the start of simulation. Hence joints that require manual
assembly are called assembled joints. During model initialization and at
each time step, the simulation also checks to ensure that your model’s bodies
satisfy all assembly restrictions. If any of your model bodies fails to satisfy
assembly restrictions, the simulation stops and displays an error message.
Creating a Joint
A joint must connect exactly two bodies. Tocreateajointbetweentwobodies:
1 Select the Joint from the SimMechanics Joints library that best represents
the degrees of freedom of the follower body relative to the base body.
2 Connect the base connector port of the Joint block (labeled B) to the
Body CS origin on the base block that serves as the point of reference for
specifying the degrees of fre edom of the follower block.
3 Connect the follo we r connector port of the Joint block (labeled F) to the
Body CS origin on the follower block that serves as the point of reference
for specifying the degrees of freedom of the base block.
4 Specify the directions of the joint’s axes (see “Directing Joint Axes” on
page 1-28).
5 If you plan to attach Sensors or Actuators to the Joint, create an additional
port for each Sensor and Actuator (see “Creating Actuator and Sensor Ports
on a Joint” on page 1-28).
1-27
Page 40

1 Modeling Mechanical Systems
6 If the joint is an assembled joint, assemble the bodies joined by the joint
(see “Assembling Joints” on page 1-29).
Directing Joint Axes
By default the prism atic and revolute axes of a joint point in the same
direction as the z-axis of the World coordinate system. To change the direction
of the axis of a joint primitive:
1 Open the joint’s dialog box and select a reference coordinate system for
specifying the axis direction from thecoordinatesystemlistassociated
with the axis p rimitive.
TheoptionsaretheWorldcoordinate system or the local coordinate
systems of the base or follower attachment point. Choose the coordinate
system that is most convenient.
1-28
2 Enter in the primitive’s axis direction field a vector that points in the
desired direction of the axis in the selected coordinate system.
ting Actuator and Sensor Ports on a Joint
Crea
To create additional connector ports on a Joint for Actuators and Sensors,
open the Joint’s dialog box and set the Number of sensor/actuator ports to
the number of Actuators and Sensors you plan to attach to the Joint.
Page 41

Modeling Degrees of Freedom
Apply the setting by clicking OK or Apply.
Assembling Joints
You must manually assemble all assembled joints in your model. Assembling
a joint requires setting the initial positions of its attached base and follower
Body CSs such that they satisfy the assembly restrictions imposed by the
joint (see “Assembly Restrictions” on page 1-26). Consider, for example, the
“Modeling and Simulating a Clo sed-Loop Machine”.
This model comprises three bars connected by revolute joints to each other
and to two ground points. The model collocates the CS o rigins of the Body CS
ports connected to each Joint, thereby satisfying the assembly restrictions
imposed by the revolute joints.
Assembled Revolute Joint in the Four Bar Mechanism
1-29
Page 42

1 Modeling Mechanical Systems
Modeling Massle
Massless connec
light body to con
use a Body block
motion might be
and the simula
avoids global
model the conn
A massless co
Think of a mas
at each end.
tors simplify the modeling of machines that use a relatively
nect two relatively massive bodies. For example, you could
to model such a connector. But the resulting equations of
ill-conditioned, because that connectingbody’smassissmall,
tion can be slow or prone to failure. A massless connector also
inconsistencies that can arise if you use a Constraint block to
ector.
nnector consists of a pair of joints located a fixed distance apart.
sless connector as a massless rod with a joint primitive affixed
ss Connectors
1-30
nitial orientation and length of the massless connector are defined by
The i
tor drawn from the base attachment point to the follower attachment
avec
nt. During simulation, the orientation of the massless connecto r can
poi
nge b ut not its length. In other words, the massless connector preserves
cha
initial separation of the base and follower bodies during machine motion.
the
Page 43

Modeling Degrees of Freedom
Note You cannot actuate or sense a massless connector.
The SimMechanics Joints/Massless Connectors sublibrary contains these
Massless Connectors:
• Two revolute primitives (Revolute-Revolute)
• A revolute primitive and a spherical primitive (Revolute-Spherical)
• Two spherical primitives (Spherical-Spherical)
Creating a Massless Connector
To create a massless connector between two bodies:
1 Drag an instance of a Massless Connector block from the Massless
Connectors sublibrary into your model and connect it to the base and
follower blocks.
You can set the direction of the axes of revolute primitives. If necessary,
point the axes of the connector’s revolute joints in the direction required by
thedynamicsofthemachineyouaremodeling.
2 Assemble the connector by setting the initial positions of the base and
follower body attachment points to the initial positions required by your
machine’s structure.
During simulation, the massless connector maintains the initi al separation
between the bodies though not necessari ly the initial relative orientation.
1-31
Page 44

1 Modeling Mechanical Systems
Massless Connector Example: Triple Pendulum
Consider a triple pendulum comprising massive upper and lower bodies and a
middle body of negligible mass. The following model uses a Revolute-Revolute
massless connector to model such a pendulum.
In this model, the joint axes of the Revolute-Revolute connector have their
default orientation along the World z-axis. As a result, the lower arm (Body1)
rotates parallel to the World’s x-y plane.
1-32
Page 45

Modeling Degrees of Freedom
Massless Connector Example: Four Bar Mechanism
The following model replaces one of the bars (Bar2) in the mech_four_bar
model from the Demos library with a Revolute-Revolute massless connector.
This model changes the Body CS origins of Bar3 to the following values.
Name Origi
CG [-0.
CS1 [0.
CS2 [0 0
054 0.096 0]
npositionvector
027 -0.048 0]
0]
lated from origin of
Trans
CS1
CS2
ADJ
OINING
(Ground_2)
This creates a separation between Bar3 and Bar1 equal to the length of Bar2
in the original model.
1-33
Page 46

1 Modeling Mechanical Systems
Try simulating both the original and the modified model. Notice that the
massless connector vers ion moves differently, because you eliminated the
mass of B ar2 from the model. Notice also that the massless bar does not
appear in the animation of the massless connector version of the model.
1-34
Modeling Disassembled Joints
The SimMechanics Joints/Disassembled Joints sublibrary contains a set
of joints automatically assembled at the start of simulation; that is, the
simulation positions the joints such that they satisfy the assembly restrictions
imposed by the type of joint, e.g., prismatic or revolute. Using these joints
eliminates the need for you to assem ble the joints yourself.
Disassembled joints differ from assembled joints in significant ways. An
assembled joint primitive has only one axis of translation or rev olu ti on or on e
spherical pivot point. A disassembled prismatic or revolute primitive has two
axes of translation or rotation, one for the base and one for the follower body.
A disassembled spherical primitive similarly has two pivot points.
Page 47

Modeling Degrees of Freedom
Caution Disassembled joints can appear only in closed loops. Each closed
loop can contain at most one disassembled joint.
The dialog box for a disassembled joint allows you to specify the direction
of each axis.
During model assembly, the simulation determines a common axis of
revolution or translation that satisfies model assembly restrictions, and aligns
the base and follower axes along the common axis.
Controlling Automatic Assembly and the Assembled Configuration
If your machine contains Joint Initial Condition Actuator (JICA) blocks,
the machine is moved from its hom e to its initial configuration by applying
the initial condition information to the machine’s joints first. Then any
disassembled joints are assembled, leading to the assembled configuration.
During model assembly, the simulation might move bodies connected
by assembled joints from their in itia l positions in order to assemble the
disassembled joints. The SimMechanics solution to the assembly problem
cannot be predicted beforehand, except in simple cases. If you do not want
bodies to move during model assembly, use JICA blocks to specify the initial
positions of bodies whose positions you want to remain fixed during the
assembly process. The resulting assembly will satisfy the initial conditions
specified by the JICA blocks.
1-35
Page 48

1 Modeling Mechanical Systems
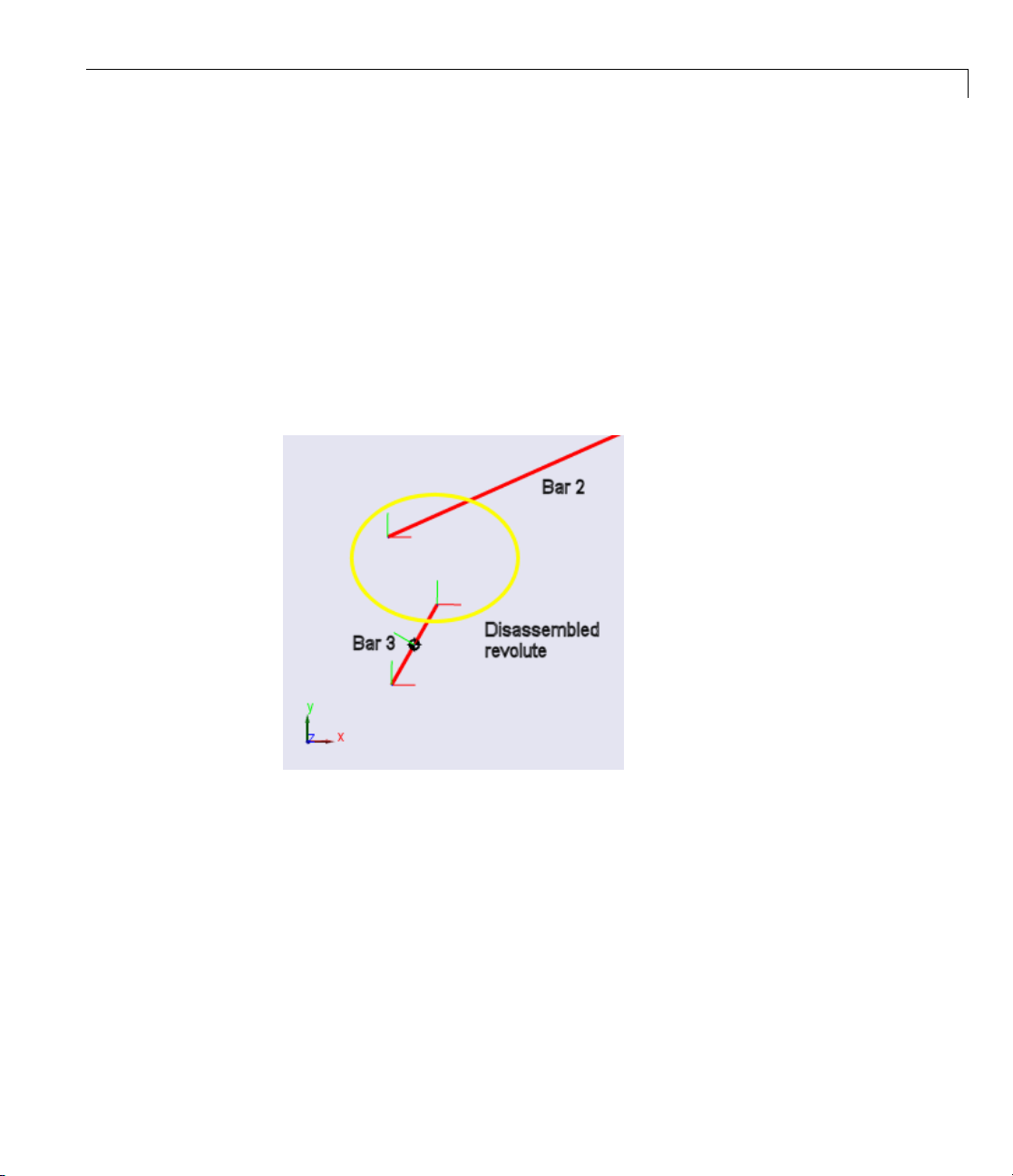
Disassembled Joint Example: Four Bar Mechanism
This example creates and runs a model of a disassembled four bar machine.
1-36
Refer to the tutorial, “Modeling and Simulating a Closed-Loop Machine”,
and the
1 Disconnect the Joint Sensor1 block from the Revolute3 block.
2 Replace Revolute3 with a Disassembled Revolute block from the
mech_four_bar demo:
Joints/Disassembled Joints sublibrary.
3 Open the Disassembled Revolute dialog box and, under Axis of Action for
both
Base and Follower axes, enter [001]. Close the dialog.
4 Open the Bar2 dialog box and dislocate the joint by displacing Bar2’s CS2
origin from Bar 3 ’s CS1 origin.
Page 49
Modeling Degrees of Freedom
Do this by entering a nonzero vector under Origin Position Vector [x
yz]for CS2, then changing the Translated from Origin of pull-down
entry to
ADJOINING. CS1 on Bar3 is the Adjoining CS of CS2 of Bar2.
Close the dialog.
5 To avoid circular CS referencing, you must check the Bar3 dialog entry for
CS1 on Bar3. Be sure that CS1 on Bar3 does not reference CS2 on Bar2.
Reference it instead to CS2 on Bar3, which adjoins Ground_2.
6 Rerun the model.
Note that the motion is different from the manually assembled case.
1-37
Page 50

1 Modeling Mechanical Systems
Constraining and Driving Degrees of Freedom
In this section...
“About Constraints” on page 1-38
“Types of Mechanical Constraints” on page 1-38
“What Constraints and Drivers D o” on page 1-39
“Directionality of Constraints and Drivers” on page 1-40
“Solving Constraints” on page 1-40
“Restrictions on Using Constraint and Driver Blocks” on page 1-41
“Constraint Example: Gear Constraint” on page 1-41
“Driver Example: Angle Driver” on page 1-43
About Constraints
The SimMechanics Constraints & Drivers Library provides a set of blocks
to model constraints on the relative motions of two bodies. You model the
constraint by connecting the appropriate Constraint or Driver block between
thetwobodies. Aswithjoints,theblockseachhaveabaseandfollower
connector port, with the body connected to the follower port viewed as moving
relative to the body connected to the base port. For example, the following
model constrains Body2 to move along a track that is parallel to the track
of Body1.
1-38
TypesofMechanicalConstraints
Constraint and Driver blocks enable you to model time-independent
constraints or time-dependent drivers.
Page 51

Constraining and Driving Degrees of Freedom
• Constraint and unactuated Driver blocks model scleronomic
(time-independent) constraints.
• Actuated Driver blocks (see “Actuating a Driver” on page 1-62) model
rheonomic (time-dependent) constraints.
Scleronomic constraints lack explicit time dependence; that is, the ir time
dependence appears only implicitly through the coordinates x.Rheonomic
constraints have explicit time de pendence as well, in addition to impli c it time
dependence through the x.
Holonomic constraint functions depend only on body p ositions, not velocities:
ft
(,;)xx = 0
BF
Constraints of the form
gt
can sometimes be integrated into a form dependent only on positions; but if
not, they are nonholonomic. For example,
• The one-dimensional rolling of a wheel of radius R along a line (the x-a xis)
imposes a holonomic constraint, x = Rθ.
• The two-dimensional rolling of a sphere of radius R on a plane (the
xy-plane) imposes a nonholonomic constraint, ds = R·dθ,withds
+dy2. This constraint is nonholo nomic because there is not enough
information to solve the constraint independently of the dynamics.
(,,,;)xxxx
BBFF
= 0
2
=dx
2
What Constraints and Drivers Do
Constrained and driven bodies are still free to respond to externally imposed
forces/torques, but only in a way consistent with the constraints.
Constraints and drivers can only remove degrees of freedom from a machine.
Constraints and unactuated Drivers prevent the machine from moving in
certain ways. Unactuated Drivers hold the constrained degrees of freedom
between the connected pair of bodies in their initial state. Actuated Drivers
externally impose a relative motion between pairs of bodies, starting with the
bodies’ initial state. See “Counting Model Degrees of Freedom” on page 1-89.
1-39
Page 52

1 Modeling Mechanical Systems
This section discusses modeling constraints and drivers in a general way.
• “Directionality of Constraints and Drivers” on page 1-40
• “Solving Constraints” on page 1-40
• “Restrictions on Using Constraint and Driver Blocks” on page 1-41
The section ends with two examples, “Constraint Example: Gear Constraint”
on page 1-41 and “Driver Example: Angle Driver” on page 1-43.
See the reference pages for information on the specific constraint that a
Constraint or D riv er block imposes.
Directionality of Constraints and Drivers
Like joints, constraints and drivers have directionality. The sequence of base
to follower body determines the directionality of the constraint or driver. The
directionality determines how the sign of Driver Actuator signals affects the
motion of the follower relative to the base and the sign of sign als output by
constraint and driver sensors.
1-40
Solving Constraints
A SimM echanics simulation uses a constraint solver to find the motion, given
the model’s Constraint and Driver blocks. You can specify both the constraint
solver type and the constraint tolerances used to find the constraint solution.
See “Maintaining Constra in ts” on page 2-12 for more in f o rm ation.
Mitigating Constraint Singularities
Some constraints, whether time-independent (Constraints) or time-dependent
(Drivers), can become singular when the constrained bodies take on certain
relative configurations; for example, if the two body axes line up when the
Bodies are connected by an Angle Driver. The simulation slows down as a
constraint becomes singular.
If you find a constrained model running slowly, consider selecting the
Use robust singularity handling option in the Constraints tab of
your machine’s Machine Environment block dialog. See “Handling Mo tion
Singularities” on page 2-18.
Page 53
Constraining and Driving Degrees of Freedom
Restrictions on
The following re
in a model:
• Constraint and
cannot contai
• AConstrainto
Constraint E
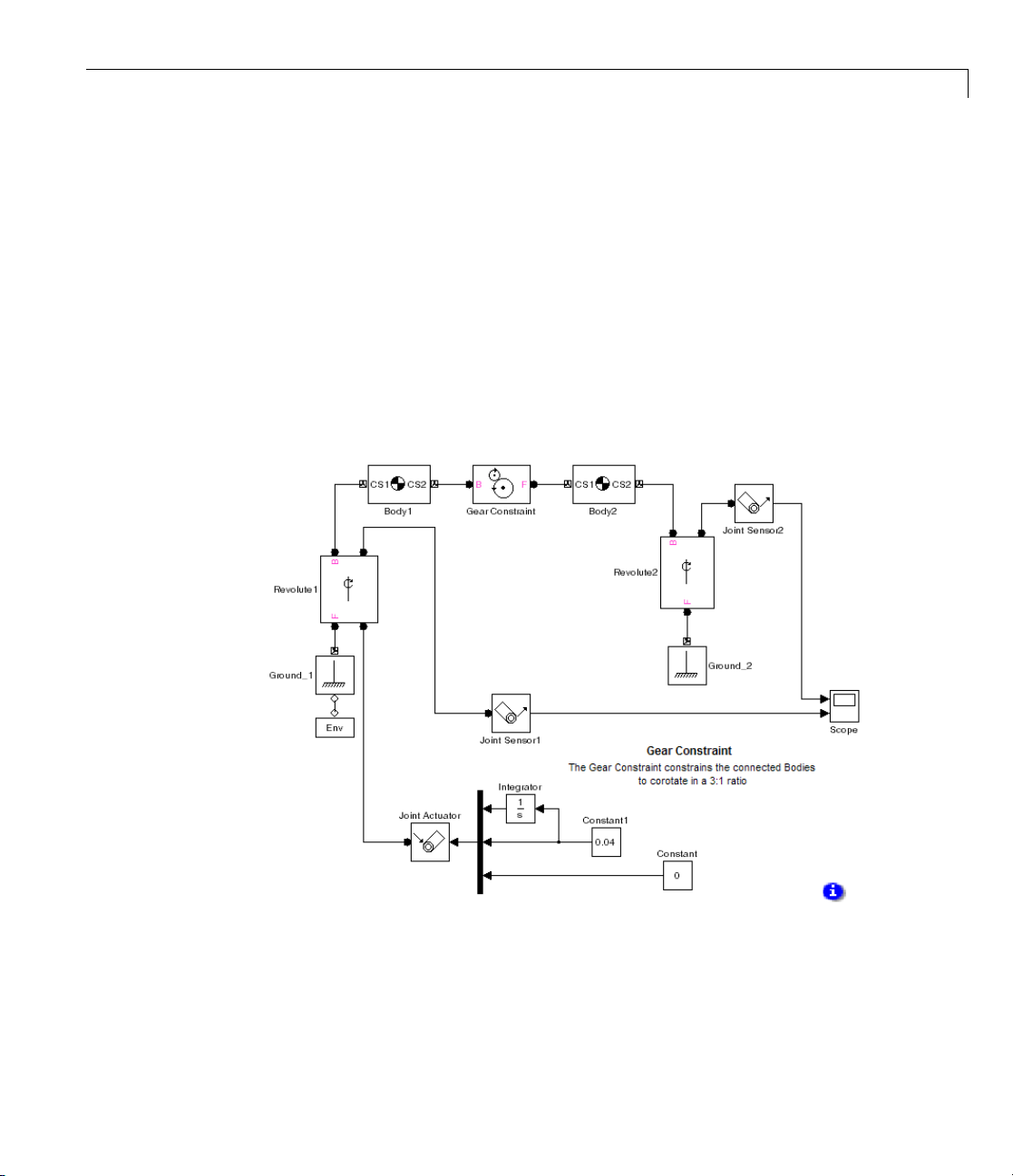
The mech_ge a
Gear Constr
strictions apply to the use of Constraint and Driver blocks
Driver blocks can appear only in closed loops. A closed loop
n m ore than one Constraint or Driver block.
r Driver must connect exactly two Bodies.
xample: G ear Constraint
rs
model illustrates the Gear Constraint. Open the Body and
aint blocks.
Using Constraint and Driver Blocks
y1 and Body2 have their CG positions 2 meters apart. CS1 and CS2 on
Bod
y1 are collocated with the Body1 CG, and similarly, CS1 and CS2 on
Bod
y2 are collocated with the Body2 CG.
Bod
1-41
Page 54
1 Modeling Mechanical Systems
The Gear Constraint between them has two pitch circles. One is centered
ontheCS2atthebaseBody,whichisBody1,andhasradius1.5meters.
The other is centered on CS1 at the follower Body, which is Body2, and has
radius 0.5 meters. The distance between CS2 on Body1 and CS1 on Body2 is 2
meters. The sum of the pitch circle radii equals this distance, as it must.
Visualizing the Gear Motion
The model is set up to open the visualization window automatically upon
simulation start, with convex hulls, as explained in the SimMechanics
Visualization and Import Guide. Start the simulation and watch the CG CS
axis triads sp in around. The CG triad at Body2 rotates three times faster
than the CG triad at Body1, because the pitch circle centered on Body2 is
three times smaller.
You can see the same behavior in the Scope. The upper plot shows the motion
of Revolute2, and the lower plot the motion of Revolute1. Note that angular
motion is mapped to the interval (-180
o
, +180o] degrees.
1-42
Page 55

Constraining and Driving Degrees of Freedom
The Gear Constraint is inside a closed loop formed by
Ground_1–Revolute1–Body1–Gear Constraint–Body–Revolute2–Ground_2
Although Ground_1 and Ground_2 are distinct blocks, they represent
different points on the same immobile ground at rest in World. So the blocks
form a loop.
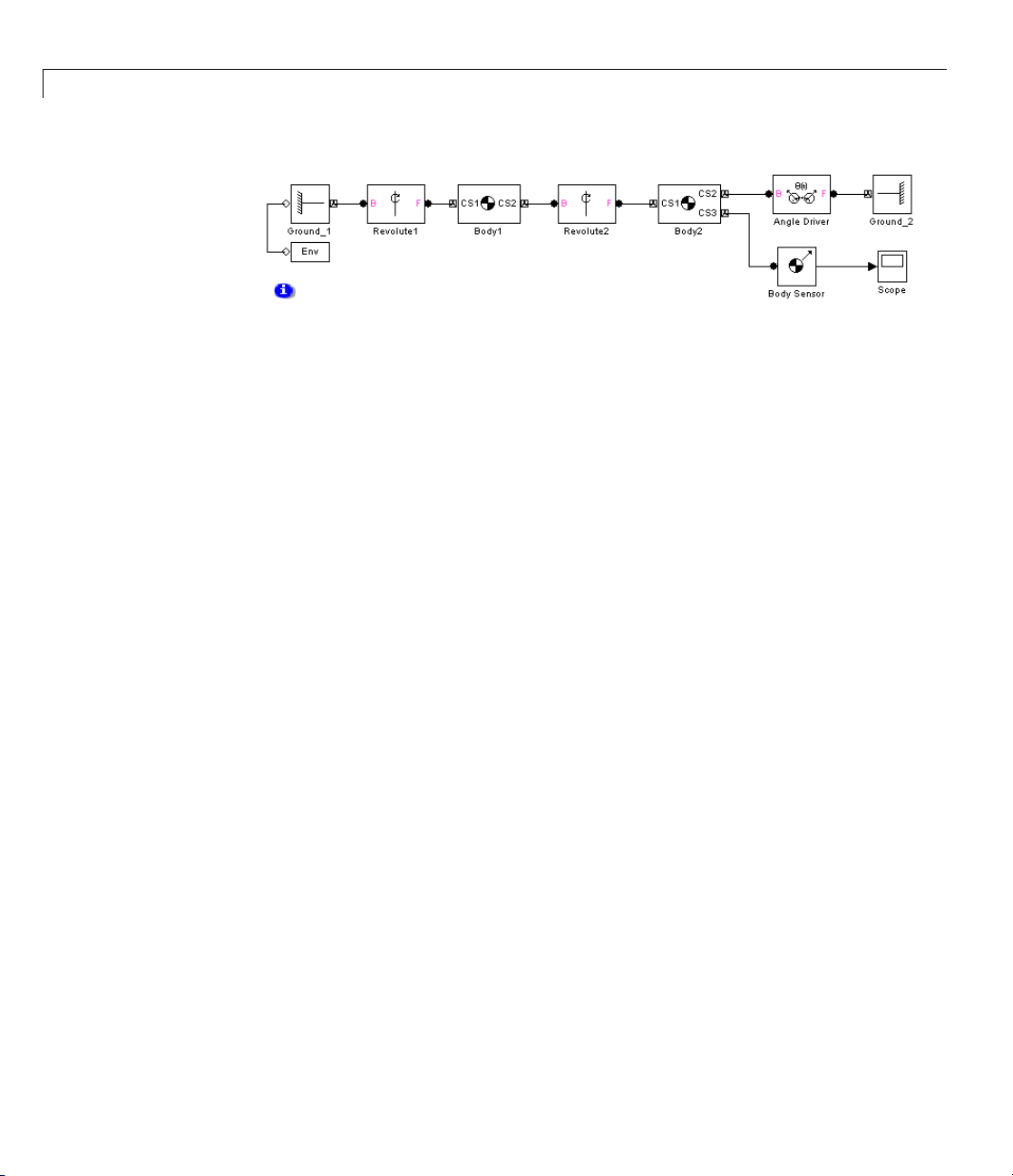
Driver Example: Angle Driver
The following two models illustrate the Angle Driver, both without and with a
Driver Actuator.
The Angle Driver Without a Driver Actuator
The first is mech_angle_unact.OpentheBody2block.
1-43
Page 56
1 Modeling Mechanical Systems
The bodies for
to Body2 at CS3
velocity vect
The Angle Dri
Angle Drive
time-indep
constant at
m a double pendulum of two rods. The Body Sensor is connected
= CS2 and measures all three components of Body2’s angular
or with respect to the ground.
ver is connected between Body2 and Ground_2. Because the
r is not actuated in this model, it acts during the simulation as a
endent constraint to hold the angle between Body2 and Ground_2
its initial value.
Visualizing the Angle Driver Motion
The model
simulati
Visualiz
Start th
body mai
ground.
and thi
is set up to open the visualization window automatically upon
on start, with convex hulls, as explained in the SimMechanics
ation and Import Guide.
e simulation. The upper body swings like a pendulum, but the lower
ntains its horizontal orientation with respect to the horizontal
The Scope measures Body2’s angular velocity with respect to ground,
s remains at zero.
1-44
Page 57
Constraining and Driving Degrees of Freedom
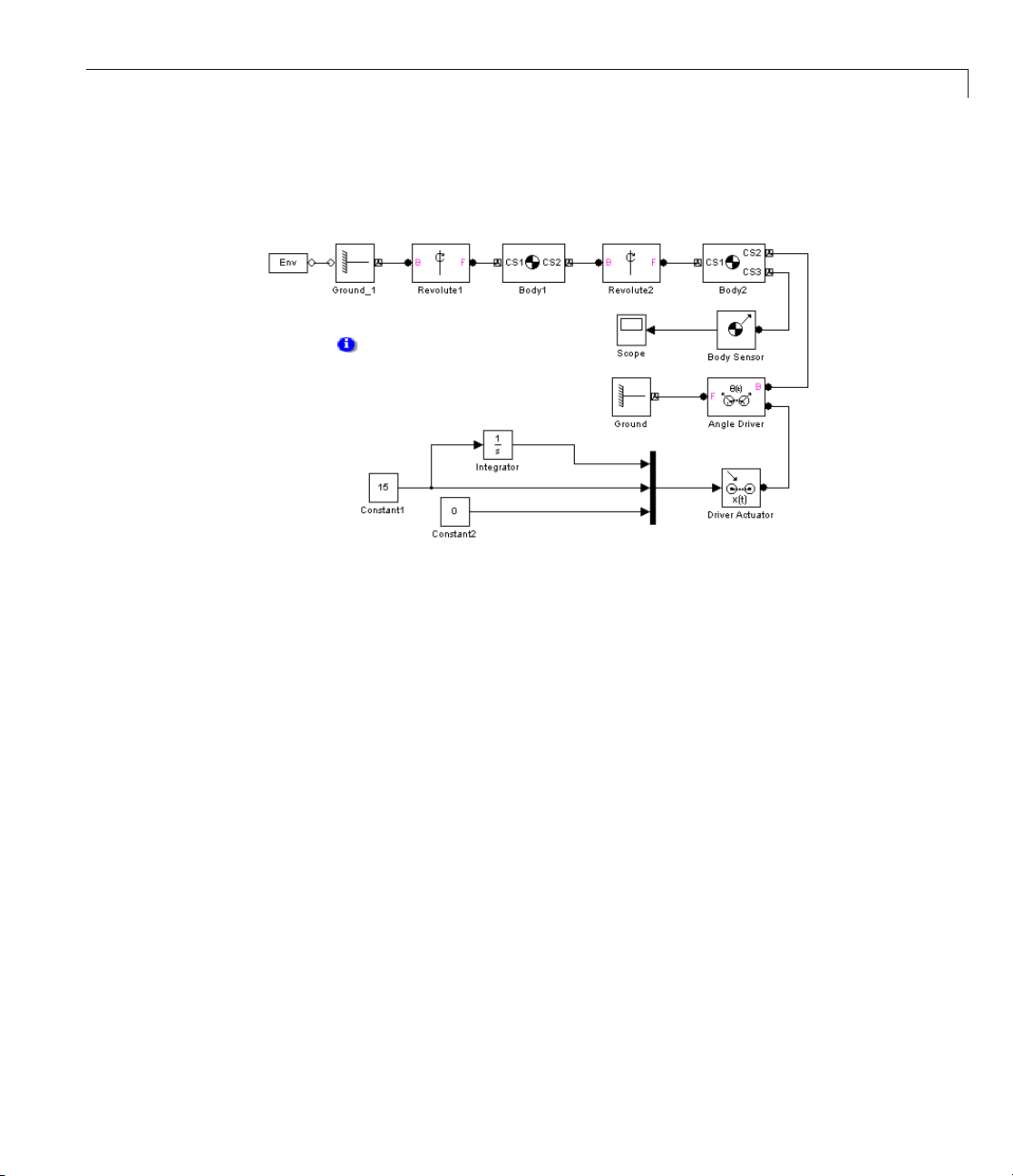
The Angle Driver With a Driver Actuator
The second model is mech_angle_act. Open the Driver Actuator block.
The Driver Actuator drives the Angle Driver block. Here, the Actuator accepts
a constant angu la r velocity signal from the Simulink blocks. The Actuator
also requires the angle itse lf and the angular acceleration, together with the
angular velocity, in a vector signal format. The Angle Driver’s angle signal
is added to the angle’s initial value.
The Body Sensor again measures three components of Body2’s angular
velocity with respect to the ground. Constant1 drives the angle at 15
o
/second.
While the simulation is running, this angle changes at the constant rate. At
the same time, the assembly and the constant length of the two pendulum
rods must be maintained by Simulink, while both rods are subject to gravity.
As the two axes line up, the mutual constraint between the bodies enforced
the D river becomes singular. The simulation slows down.
As in the Gear Constraint model, the two Ground blocks in these models
represent points on the same immobile ground at rest in World, so the Angle
Driver is part of a closed loop.
1-45
Page 58

1 Modeling Mechanical Systems
Cutting Machine Diagram Loops
In this section...
“Rules for Valid Machine Diagram Loops” on page 1-46
“Rules for Automatic Loop Cutting” on page 1-46
“Specifying a Loop Joint for Cutting” on page 1-47
“Displaying the Cut Joints” on page 1-47
“For More About Disassembled and Cut Joints” on page 1-47
“For More About Constraints and Drivers” on page 1-47
Rules for Valid Machine Diagram Loops
In a SimMechanics model, you form a closed loop by the closure of
SimMechanics blocks, of any type, on themselves. From a starting point, you
can trace a path around a closed loop back to the starting point with no jumps
or cuts. A closed loop is valid if it contains:
1-46
• AtleastoneJointblock
• No more than one Disassembled Joint block
• No more than one Constraint or Driver block
To simulate a model containing closed loops, the SimMechanics simulation
internally co nverts a closed-loop model to an op en-topology tree model. This is
accomplished by internally cutting each of the model’s closed loops once, at
a joint, constraint, or driver block, then replacing each cut by an additional
internal constraint.
Rules for Automatic Loop Cutting
A SimMechanics simulation follows these loop-cutting rules.
• If a loop contains a constraint, driver, or disassembled joint, the simulation
cuts the loop at one of those blocks. Selecting a preferred cut joint has
no effect.
Page 59

Cutting Machine Diagram Loops
• If the loop does not contain a constraint, driver, or disassembled joint, the
simulation cuts the loop at the preferred cut joint if you have specified one.
• If the loop does not contain a constraint, drive r , or disassembled joint, and
you have not specified a preferred cut joint, the simulation cuts the loop at
the joint with the most degrees of freedom.
Note A SimMechanics simulation cuts a closed loop at a Disassembled Joint,
Constraint, or Driver block, if one or more of these blocks is present, regardless
of other Joints also present in the loop or of your preferred cut choice.
Specifying a Loop Joint for Cutting
You can specify a joint to cut if the loop does not contain a disassembled joint,
constraint, or driver. Open the joint’s dialog box and select the Mark as the
preferred cut joint check box on the Advanced tab in that joint’s dialog
Parameters area.
Displaying the Cut Joints
To display automatically cut joints in your model, select the Mark
automatically cut joints check box in the Diagnostics area of the
SimMechanics node of your model’s Configuration Parameters dialog. See
“Configuring SimMechanics Simulation Diagnostics” on page 2-18.
For More About Disassembled and Cut Joints
Refer to “Modeling Disassembled Joints” on page 1-34 for more on
disassembled joints. Consult “Verifying Model Topology” on page 1-85 to
learn more about closed loop analysis.
For More About Constraints and Drivers
A SimMechanics simulation represents a cut Joint, Constraint, or Driver as
an additional internal constraint. See “Constraining and Driving Degrees of
Freedom” on page 1-38 for more about these specialize d blocks.
1-47
Page 60

1 Modeling Mechanical Systems
Applying Motions and Forces
In this section...
“About Actuators” on page 1-48
“Actuating a Body” on page 1-50
“Varying a Body’s Mass and Inertia Te ns or” on page 1-53
“Actuating a Joint” on page 1-56
“Actuating a Driver” on page 1-62
“Specifying Initial PositionsandVelocities”onpage1-62
About Actuators
The SimMechanics Actuators & Sensors Library provides a set of Actuator
blocks that enable you to apply time-dependent forces and motions to bodies,
joints, and drivers. You can also vary a body’s mass and inertia tensor.
1-48
Caution Do not connect an Actuator to a Ground. An error results if you
attempttosimulateorupdateamodelcontaining such a connection. This is
because ground is immobile and cannot be actuated.
You can use Actuator blocks to perform the following tasks:
• Apply a time-varying force or torque to a body o r joint.
• Specify the position, velocity, and acceleration of a joint or driver as a
function of time.
• Specify the initial position and velocity of a joint primitive.
• Specify the mass and/or inertia tensor of a body as a function of time.
In general, actuators can apply any combination of forces and motions to a
machine provided that
• The applied forces and motions are consistent with each other and with the
machine’s g eometry, constraints, and assembly restrictions.
Page 61

Applying Motions and Forces
• The actuation signals representing these forces and motions remain
consistent when differentiated or integrated. See “Stabilizing Numerical
Derivatives in Actuator Signals” on page 1-49.
• Itispossibletofindauniquesolutionforthemotionofeachactuated
degree of freedom (D oF).
Stabilizing Numerical Derivatives in Actuator Signals
To actuate a phys ical system m od eled by blocks, you often need to differentiate
an incoming Simulink actuation signal.
Simulink provides a Derivative block for numerical differentiation of a signal.
However, this block’s output is sometimes not stable or accurate enough for
Physical Modeling purposes. Recommended alternatives to the Derivative
block include the following.
Integrating Higher Derivative Signals. Start by specifying the highest
derivative signal (such as an acceleration), then integrate this signal to obtain
lower derivative signals (such as a velocity) using the Integrator block.
Transforming Signals with Transfer Functions. To differentiate a signal,
use a transfer function block (Transfer Fcn). This block actually performs a
Laplace transform convolution to smooth the output, which is not exactly
the derivative.
You can eliminate this drawback by filtering the original signal f,then
defining exact derivatives dF/dt, etc., of the filtered signal F by adding higher
orders to the transfer function numerator. The order of the denominator
should be equal to or greater than the number of output signals. Use the
filtered signal F (instead of f), as well as the filtered derivatives.
In this example, the constant τ represents a smoothing time. The transfer
functions define a filtered signal and its first derivative, two signals in all.
Therefore, the transfer function deno minator should be seco nd order or high er.
1-49
Page 62

1 Modeling Mechanical Systems
Examples of Numerical Deriv atives of Actuator Signals
A SimMechanics example requiring numerical derivatives is motion actuation
of a joint, which requires position, velocity, and acceleration of each joint
primitive as a function of time. You specify this information as a set of
Simulink signals, which you can stabilize with one of the previous methods.
The transfer function method is illustrated by the
model. For an example of the derivative-integration method, see the
mech_body_driver model.
mech_stewart_control
Actuating a Body
You can use the Body Actuator to apply forces and/or torques, but not motions,
to bodies. (You can apply motions to a body indirectly, using Joint Actuators.
See “Applying Motions to Bodies” on page 1-52.)
To actuate a body,
1 If there is not already a n unused connector port available for the Actuator
create a Body CS port on the Body for the Actuator. See the Body block
reference if you need to learn how.
2 Drag a Body Actuator block from the Sensors & Actuators library into your
model and connect its output port to a Body CS port on the Body.
3 Open
4 Choose to apply a force or torque to the body:
the Actuator’s d ialog box.
• Select the Applied force check box if you want to apply a force to the
body, and select the units of force from the adjacent list.
1-50
Page 63

Applying Motions and Forces
• Select the Applied torque check box if you want to apply a torque to
the body, and select the units of torque from the adjacent list.
5 Selectthecoordinatesystemusedtospecify the applied torque from the
With respect to CS list.
The list allows you to choose either the World CS or the Body CS of the port
to which you attached the Actuator.
6 Create vector signals that specify thevalueoftheappliedtorqueandforce
at each time step.
You can use any Simulink source block (for example, an Input port block or
a Sine Wave block) or combination of Simulin k blocks to cre ate the Body
Actuator signal. You can also use the output of a Sensor block connected
to the Body as input to the Actuator, thereby creating a feedback loop.
Such loops are useful for modeling springs and dampers (see “Validating
Mechanical Models” on page 1-85).
7 Connect the force and/or torque signal to the input port of the Actuator.
If you are applying both a force and a torque to the body, connect the force
and torque signals to the inputs of a two-input Mux block. Then connect
the o utput of the Mux block to the input of the Actuator.
Body Actuator Example: Pure Kinetic Friction
The mech_ballistic_kin_fric model in the Demos library provides an
example of how to implement pure kinetic friction. This type of friction is a
continuous force that depends on a body’s motion relative to a medium (such
as air), as well as on physical characteristics of the body. K inetic friction,
unlike “stiction,” involves no “sticking” or locking of motion, and the friction
is not discontinuous. While you could use the Joint Stiction Actuator, this is
not necessary. This model applies air friction or drag to a projectile w ith
a Body Actuator.
1-51
Page 64

1 Modeling Mechanical Systems
Open the Air Drag subsystem. If you double-click the block, a mask dialog box
opens asking for the drag coefficient
Look under mask, the subsystem itself appears:
Cd. If you right-click the block and select
1-52
The Air Drag subsystem computes the air friction according to a standard
air friction m odel. (See the Aerospace Blockset documentation for more
information.) The drag always opposes the projectile’s motion and is
proportional to the product of the air density, the projectile’s cross-sectional
area, and the square of its speed.
Run the model with the default drag coefficient (zero). The XY Graph window
opens to plot the parabolic path o f the projectile. Now open the Air Drag
dialog again and experiment w ith different drag coefficients C
smallvaluessuchasC
= 0.05. For a rigid sphere, Cdis two. The effect of the
d
. Start with
d
drag is dramatic in that case.
Applying Motions to Bodies
The Body Actuator block cannot actuate a Body with motion signals. But y ou
can construct such body motion actuators with a combination of other blocks.
See “Joint Actuator Example: Body Driver” on page 1-58.
Page 65
Applying Motions and Forces
Varying a Body’ s
The Variable Mas
mass and/or iner
functions with
Caution The Va
thrust forces
particular d
apply these f
The variabl
apply force
by initial c
affect its
forces/to
The Varia
mass and r
body at a
mass and
externa
invisib
mass, n
two con
s/torques on the body. When a body’s motion is determined only
onditions, changing the mass or inertia tensor of a body does not
motion, because the variable mass/inertia actuator does not apply
rques to the body.
ble Mass & Inertia Actuator block changes the actuated Body’s
otational inertia by attaching an invisible body to the actuated
particular Body coordinate system (CS). This invisible body has a
an inertia tensor that vary in time as specified by the Actuator’s
l Simulink signal. The simulation treats the actuated body and the
le body as a single composite body. The composite body has a new
ew center of gravity ( CG ), and new inertia tensor com po unded from its
stituent bodies.
s & Inertia Actuator block gives you a w a y to vary a body’s
tia tensor as external functions of time. You specify these
incoming Simulink signals.
riable Mass & Inertia Actuator block does not apply any
or torques to the Body so actuated. Mass loss or gain in a
irection results in thrust forcesandtorquesonthebody. Youmust
orces/torques to the Body separately with B ody Actuator blocks.
e mass/inertia actuator affects a body’s motion only when you
Mass and Inertia Tensor
1-53
Page 66

1 Modeling Mechanical Systems
You can add multiple Variable Mass & Inertia Actuator blocks to one Body. In
that case, the simulation treats the actuated body and all attached invisible
bodies as a single composite body. This composite body’s mass, CG, and
inertia tensor are compounded from its constituent bodies.
1-54
Attaching Variable Mass and Inertia Bodies to a Visible Body
To vary the mass and/or inertia tensor of a Body with this Actuator:
1 From the Sensors & Actuators library, drag a Variable Mass & Inertia
Actuator block into your model.
2 Attach the Actuator’s connector port to the Body CS on the Body where you
want the invisible variable mass to be. If a suitable Body CS port does not
exist on the Body, open its dialog and create one.
3 Create an external Simulink signal to model the time-varying mass and/or
inertia tensor for this invisible body. Connect it to the Variable Mass &
Inertia Actuator b lock’s Simulink input port.
This Simulink signal can have one, nine, or ten components, depending on
whether you are varying the mass only, the inertia tensor only, or both.
Page 67

Applying Motions and Forces
Example: Simple Rocket
The following model simulates a simple rocket. It treats the rocket as a point
mass moving upward (+y direction) with an exhaust pointing downward (-y
direction). The rocket losesmassataconstantrate.
The Rocket block is the point mass. The Thrust Velocity block represents the
downward exhaust and, multiplied by the mass loss represented by the Fuel
Loss block, actuates the Rocket body with a thrust force pointing upward. The
Thrust block (a body actuator) applies this force at the local Body CS, which,
for a point rocket, is identical to the Rocket’s CG CS.
The same mass loss from the Fuel Loss block that produces the thrust force
also must vary the rocket’s mass directly. The Variable Mass Actuator block
accomplishes this by feeding the same mass loss signal to the Rocket block.
1-55
Page 68
1 Modeling Mechanical Systems
Actuating a Joint
You individually actuate each of the prismatic and revolute primitives of an
assembled joint with a Joint Actuator. You can apply
• Forces or translational motions (but not both) to prismatic primitives
• Torques or rotational motions (but not both) to revolute primitives
Caution You cannot actuate spherical or weld primitives, disassembled
joints, or massless connectors.
Do not connect multiple Actuators to the same joint primitive. An error results
if you attempt to update or simulate a model containing such a connection.
Exception: You can apply a Joint Initial Condition Actuator and force or
torque actuation (including stiction) to the same primitive. You cannot apply
a Joint Initial Condition Actuator and motion actuation to thesameprimitive.
See “Specifying Initial Positions and V elocities” on page 1-62.
1-56
Actuating a Joint Primitive
Tip If you have multiple forces/torques or motions you want to apply to a
joint primitive, sum their values as Simulink signals first, then apply the net
result as the input to the Joint Actuator.
To actuate a prismatic or revolute joint primitive of an assembled joint:
1 Create an Actuator port on the Joint block for the primitive (see “Creating
Actuator and Sensor Ports on a Joint” on page 1-28).
2 Drag a Joint Actuator or Joint Stiction Actuator from the Sensors &
Actuators library into your model and connect its output port to the
Actuator port on the Joint.
remaining steps in this procedure apply to the creation of a standard
The
nt Actuator. For information on creating a stiction actuator, which
Joi
Page 69

Applying Motions and Forces
applies classical Coulombic friction to a prismatic or revolute joint, see the
Joint Stiction Actuator block reference page.
3 Open the Joint Actuator’s dialog box.
4 Select the primitive you want to actuate from the Connected to primitive
list on the dialog box.
5 SelectthetypeofactuationyouwanttoapplyfromtheActuate with
pull-down menu, either
6 If you are actuating a prismatic primitive:
Generalized Forces or Motion.
• If you selected
Generalized Forces as the actuation type, select the
units of force from the Applied force units list.
• If you selected
Motion as the actuation type, select the units for each
motion to be actuated (position, velocity, acceleration).
7 If you are actuating a revolute primitive:
• If you selected
Generalized Forces as the actuation type, select the
units of torque from the Applied torque units list.
• If you selected
Motion as the actuation type, select the units for each
motion to be actuated (angle, angular velocity, angular acceleration).
8 Click OK to apply your choices and dismiss the dialog box.
Each joint primitive that you motion-actuate is lost as a true degree of
freedom in your machine. That is because the DoF can no lo nger respond
freely to externally applied forces or torques. See “Co unting Model Degre es
of Freedom” on page 1-89.
9 Create a signal that specifies the applied force, torque, or motions at each
time step.
You can use any Simulink source block or any combination of blocks to
create the actuator signal. You can also connect the output of a Sensor
block attached to the Joint to the Actuator input, thereby creating a
feedback loop. You can use such loops to model springs and dampers
attached to the joint.
1-57
Page 70

1 Modeling Mechanical Systems
A force or torque signal must be a scalar signal. A motion signal must be
a 1-D array signal comprising three components: position, velocity, and
acceleration. The directionality of thejointdeterminestheresponseofthe
follower to the sign of the actuator signal (see “Joint Directionality” on
page 1-24).
10 Connect the Actuator signal to the Actuator port on the Joint.
Joint Actuator Example: Body Driver
The mech_body_driver model illustrates the use of Joint Actuators to create
a custom driver.
1-58
Page 71
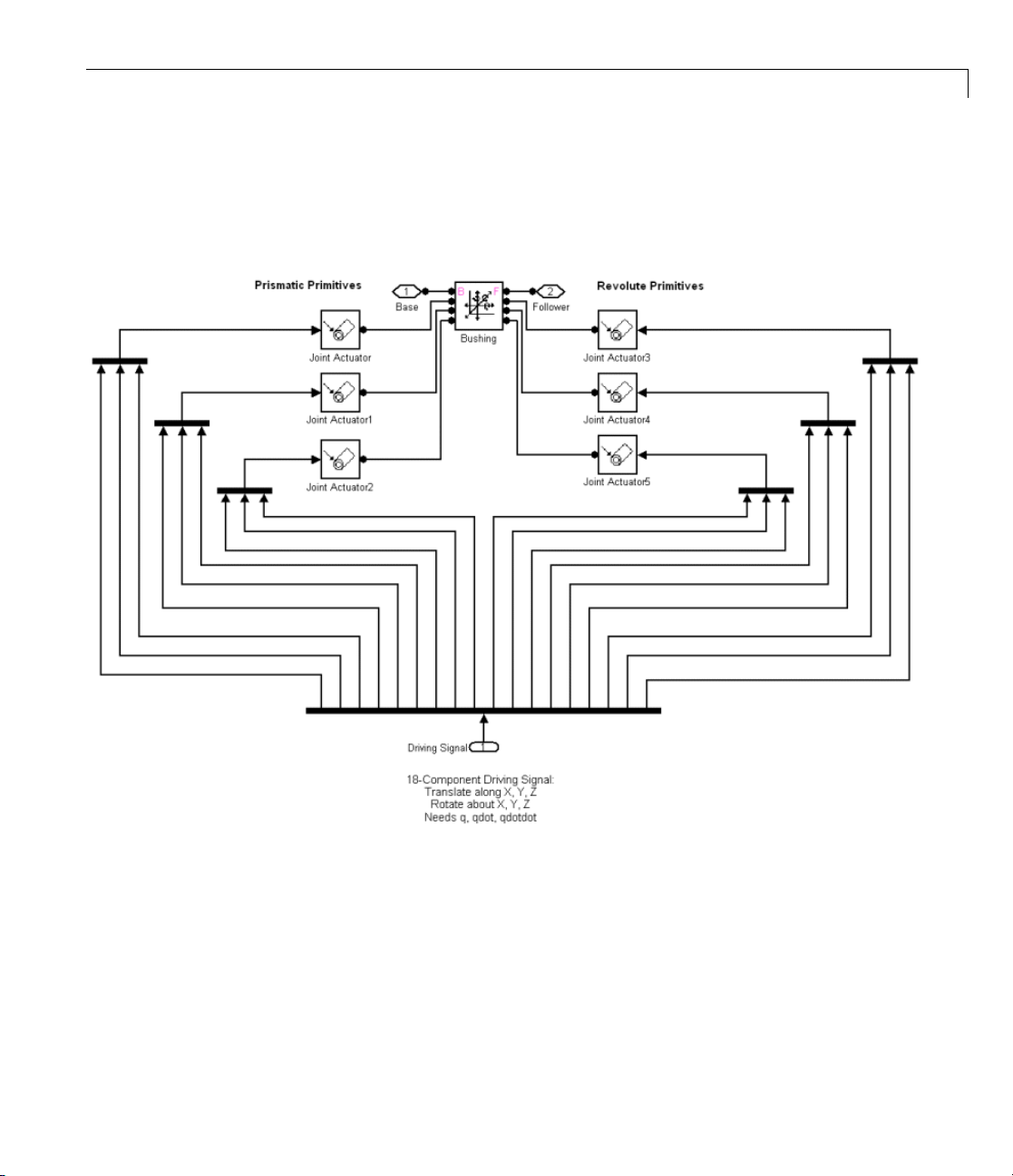
Applying Motions and Forces
The Body Driver subsystem accepts an 18-component signal that feeds the
coordinates, velocities, and accelerations for all six relative DoFs between
Body and Body1. The subsystem uses a Bushing block that contains three
translational and three rotational primitivestorepresenttherelativeDoFs:
You can modify the body driver to move only one of the bodies, thereby
creating a motion actuator. To move B od y1 relative to World, for example,
remove the blocks Body and Weld and connect the subsystem Body Driver
directly to Ground.
1-59
Page 72

1 Modeling Mechanical Systems
Joint Stiction Actuator Example: Mixed Static and Kinetic
Friction
Tip You should use the Joint Stiction Actuator block only if you need static
(locking) friction that removes one or more degrees of freedom from your
machine.
You can model pure kinetic friction (damping) with other Actuator and Sensor
blocks. See “Actuating a Body” on page 1-50 and “Adding Internal Forces”
on page 1-74.
The mech_dpen_sticky model in the Demos library illustrates a driven
double pendulum, with “sticky” friction or stiction applied to both revolute
joints with the Joint Stiction Actuator block.
1-60
Page 73
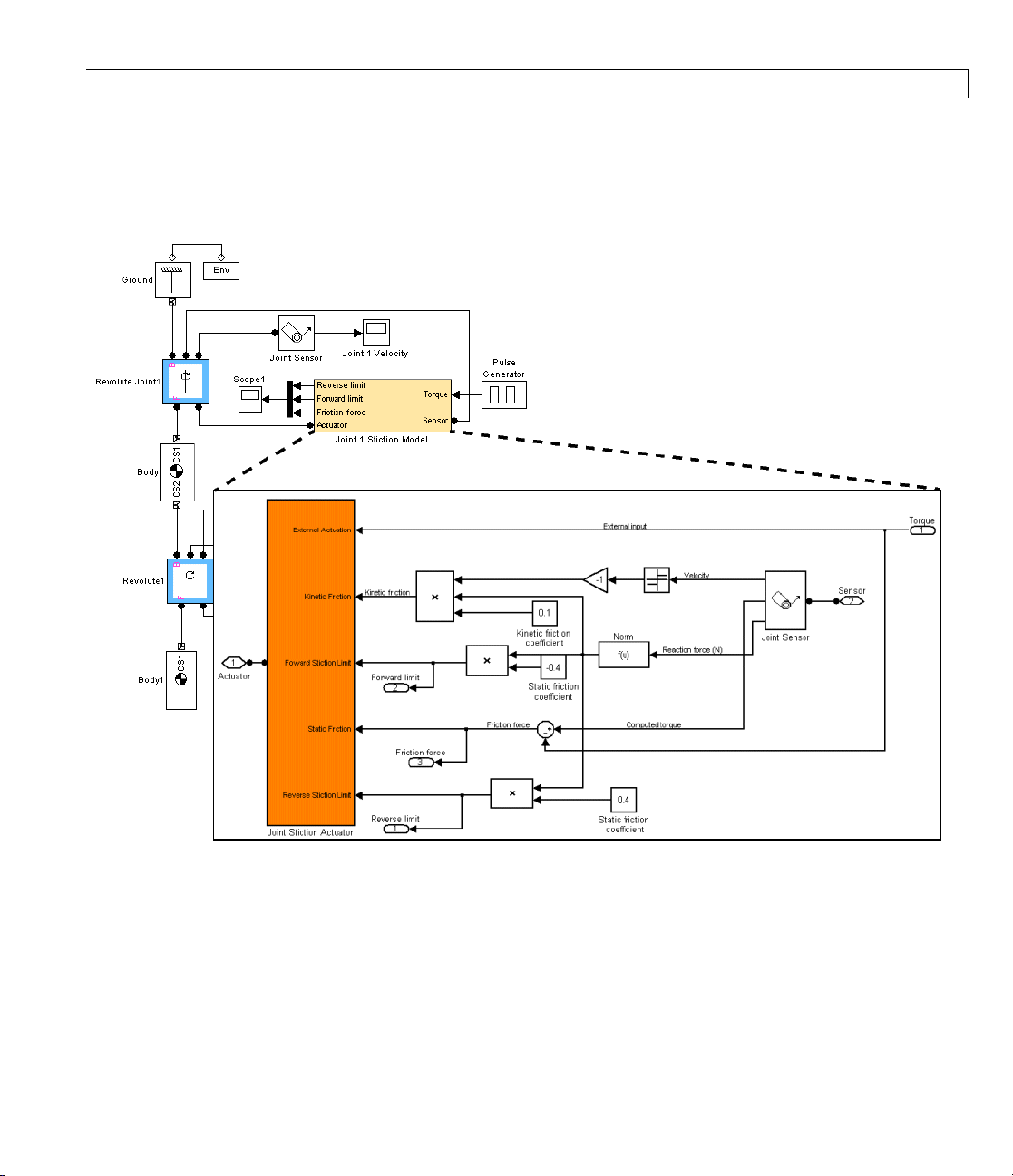
Applying Motions and Forces
Open the unmasked Joint1 or Joint2 Stiction Model blocks (marked in yellow)
to view the subsystems:
Each Stiction subsystem contains a Joint Stiction Actuator block (marked
in orange) that requires static and kinetic friction coefficients via their
respective blocks. For either revolute, an angular velocity threshold, specified
through the block dialog, determines if a joint locks. Once locked, the joint
cannot move until a combination of forces reaches a threshold specified by the
Forward Stiction Limit or Reverse Stiction Limit.
1-61
Page 74

1 Modeling Mechanical Systems
Run the m odel with different kinetic and static friction coefficients and
different velocity thresholds. View the results in the Scope blocks and through
a visualization window. You can find more details on how SimMechanics
stiction works by consulting the Joint Stiction Actuator block reference page.
Actuating a Driver
Actuating a Driver with a Driver Actuator allows you to specify the time
dependence of the rheonomic constraint applied by the Driver.
To actuate a Driver:
1 Create an additional connector port on the Driver for the Actuator.
Create the additional port in the same way you create an additional
Sensor/Actuator port on a Joint (see “Creating Actuator and Sensor Ports
on a Joint” on page 1-28).
2 Drag an instance of a Driver Actuator from the Sensors & Actuators library
into your model.
1-62
3 Connect the Actuator’s output port to the Actuator port on the Driver.
4 Create a signal that specifies the time dependence of the Driver constraint.
5 Connect the actuation signal to the input port of the Driver Actuator.
Specifying Initial Positions and Velocities
The Joint Initial Condition Actuator (JICA) block allows you to specify the
initial positions and velocities of unactuated joints and hence the bodies
attached to them. You can use JICA blocks to
• Specify nonzero initial joint velocities
The default initial velocity of a joint primitive is zero. You m ust use a JICA
block to specify a joint’s initial velocity if the initial velocity is not zero.
• Override the initial position settings of a body pair
TheCGCSoriginsettingsinthedialogboxesofBodyblocksspecifythe
bodies’ initial positions. Using JICA blocks, you can override these initial
Page 75

Applying Motions and Forces
body positions by resetting their relative positions in the Joints connecting
them.
Your model simulation starts with your machines at first in their home
configurations, defined by the Body dialog data. It then transforms your
machines to their initial configurations by applying JICA data.
Caution You cannot simultaneously actuate a joint primitive with a Joint
Initial Condition Actuator and motion actuation from a Joint Actuator block.
Using JICA Blocks
Specifying initial conditions on a joint p rimitive is a special kind of actuation,
one that occurs only once at the beginning of simulation. That is why the
JICA block resides in the Sensors & Actuators library.
Note A JICA block, unlike other Actuators, does not have an input port. The
JICA’s dialog box specifies the Actuator input completely.
With a JICA block, you can specify the initial positions and velocities of any
combination of prismatic and revolute primitives within a given Joint. (You
cannot specify ICs for spherical and w eld primitives.)
To specify the initial velocity and/or position of a joint primitive:
1 Drag a JICA block from the Sensors & Actuators library and drop it into
your model window.
2 Create an additional connector port on the Joint block containing the
primitive whose initial condition you want t o specify.
3 Connect the connector port on the JICA block to the new connector port on
the Joint block.
1-63
Page 76

1 Modeling Mechanical Systems
Caution Do not connect the JICA block to the Joint ports marked "B" or
"F" (base or follower). These ports are intended for connecting to Bodies.
4 Open the JICA block’s dialog box. From the primitive list for the Joint,
choose the primitives you want to actuate by selecting their check boxes.
5 Enter the init ial positions of the actuated primitives, relative to the Body
CSs attached to the Joint, in the Position field.
From the pull-down menu on the right, select Units for the initial positions.
6 Enter the initia l velocities of the actuated primitives, re la t ive t o the Body
CSs attached to the Joint, in the Velocity field.
From the pull-down menu on the right, select Units for t he initial velocities.
7 Click Apply or OK.
1-64
JICA Example: A Simple Pendulum
Open mech_spen from the Demos library, then open the Sensors & Actuators
library. Follow the steps from the preceding section, “Using JICA Blocks”
on page 1-63, to connect one Joint Initial Condition Actuator block to the
Revolute block and configure it. This Joint contains only one primitive,
which is the primitive listed in the JICA dialog box.
R1,
Page 77

Applying Motions and Forces
Set the initial conditions in two ways and compare the resulting simulations
in the scope:
1 First set the initial Position (angle) to 60 deg,whichis60
the left horizontal (30
Velocity to
0 deg/s.
o
clockwise from vertically down), and set the initial
o
down from
1-65
Page 78

1 Modeling Mechanical Systems
2 Run the simulation for one second. Note in the scope that the initial angle
(yellow curve) is displaced upward to 60
o
, while the i nitial velocity (purple
curve) still s tarts at zero.
3 Now reset the initial Velocity to 30 deg/s, leaving the initial Position
(angle) at
4 Rerun the simulation for one second. Note in Scope that the initial angle
is still displaced upward to 60
upward to 30
60 deg.
o
/sec.
o
, but the initial velocity is also displaced
1-66
Page 79

Applying Motions and Forces
The joint directionality is assigned in mech_spen so that the positive rotation
axis is the +z-axis. Looking from the front, positive rotation sw ings down
and right, counterclockwise.
1-67
Page 80
1 Modeling Mechanical Systems
Sensing Motions and Forces
In this section...
“About Sensors” on page 1-68
“Sensing Body Motions” on page 1-69
“Sensing Joint Motions and Forces” on page 1-70
“Sensing Constraint Reaction Forces” on page 1-71
About Sensors
The SimMechanics Sensors & Actuators library p rovides a set of Sensor
blocks that enable you to measure
• Body motions
• Joint motions and forces or torques on joints
• Constraint reaction forces and torques
1-68
All Sensor output is defined with respect to a fixed, conventional “zero.” See
“Home C onfiguratio n and Position-Orientation Measurements” on page 1-68.
Tip You can feed Sensor output back into Actuator blocks to model springs,
dampers, and other mechanical devices that depend on force feedback. See
“Actuating a Body” on page 1-50, “Actuating a Joint” on page 1-56, “Adding
Internal Forces” on page 1-74, and “Validating Mechanical Models” on page
1-85.
Home Configuration and Position-Orientation Measurements
The Body and Joint Sensor blocks can measure the position and/or orientation
of bodies and degrees of freedom. They make these measurements relative
to the home configuration of the machine, the machine state before the
application of initial condition actuators and assembly of disassembled joints.
Thus motion sensors include the effect of the latter, which act before the
simulation starts.
Page 81

Sensing Motions and Forces
For furthe r discussion, see “Modeling Disassembled Joints” on page 1-34 and
“Specifying Initial Positions and Velocities” on page 1-62, and “Kinematics
and the Machine’s State of Motion”.
Sensing Body Motions
To sense the position, velocity, or acceleration of a body represented by a
Body block with a Body Sensor:
1 If the Body block does not have a spare local coordinate system with a
Body CS port, create one (see “Managing Body Coordinate Systems” on
page 1-17).
2 Drag a Body Sensor block from the Sensors & Actuators library into your
model.
3 Connect its connector port to a spare Body CS port on the Body.
4 Open the Sensor’s dialog box.
1-69
Page 82
1 Modeling Mechanical Systems
5 Selectthecoordinatesystemrelativetowhichthesensormeasuresits
output from the With respect to CS list.
6 Select the check boxes next to the motions that you want to sense ( see the
Body Sensor block reference page).
7 Ifyouhavechosentosensemorethanonetypeofmotionandwantthe
Sensor to multiplex the motions into a single output signal, select the
Output selected parameters as one signal check box.
8 Click OK or A pply.
9 Connect the output of the Body Sensor block to a Simulink Scope or other
signal sink or to a motion feedback loop, depending on your needs.
Sensing Joint Motions and Forces
The Joint Sensor block enables you to measure the motions of degrees of
freedom. It can also measure the relative forces and torques between the
bodies connected to the joint. These include the computed force or torque (the
force or torque needed to reproduce the joint’s motion) and the reaction force
and torque on a joint primitive. (You cannot measure the computed force or
torque on a spherical or weld primitive.) You must connect a separate Joint
Sensor block to a Joint block for each joint primitive that you want to sense.
1-70
To sense the motions, forces, and torques of a joint primitive contained by a
Joint block:
1 If the Joint block does not have a spare Sensor port, create one (see
“Creating Actuator and Sensor Ports on a Joint” on page 1-28).
2 Drag a Joint Sensor block from the Sensors & Actuators library into your
model.
3 Connect its connector port to the spare Sensor port on the joint.
4 Use the Sensor’s dialog box to configure the Sensor to measure the motions,
forces, and torques that you want to measure (see the Joint Sensor block
reference page).
5 Connect the output of the Joint Sensor block to a Simulink Scope or other
signal sink or to a motion feedback loop, depending on your needs.
Page 83

Sensing Motions and Forces
Sensing Constraint Reaction Forces
The Constraint & Driver Sensor block enablesyoutomeasurethereaction
forces and torques induced on the constraints modeled by SimMechanics
Constraint and Driver blocks.
To sense the reaction force and/or torque induced by a constraint or driver,
1 If the Constraint or Driver does not have a spare Sensor port, create one.
2 Drag a Constraint & Driver Sensor block from the Sensors & Actuators
library into your model.
3 Connect its
connector port to a Sensor port on the Constraint or Driver
block.
4 Open the Sensor block’s dialog box.
5 Select the body (follower or base) on which to measure the reaction force
from the Reactions measured on list.
6 Select the coordinate system relativetowhichtheSensormeasuresits
output from the W ith respect to coordinate system list.
7 Select the Reaction torque check box if you want the Sensor to output
the reaction torque on the base (or follower) body.
1-71
Page 84
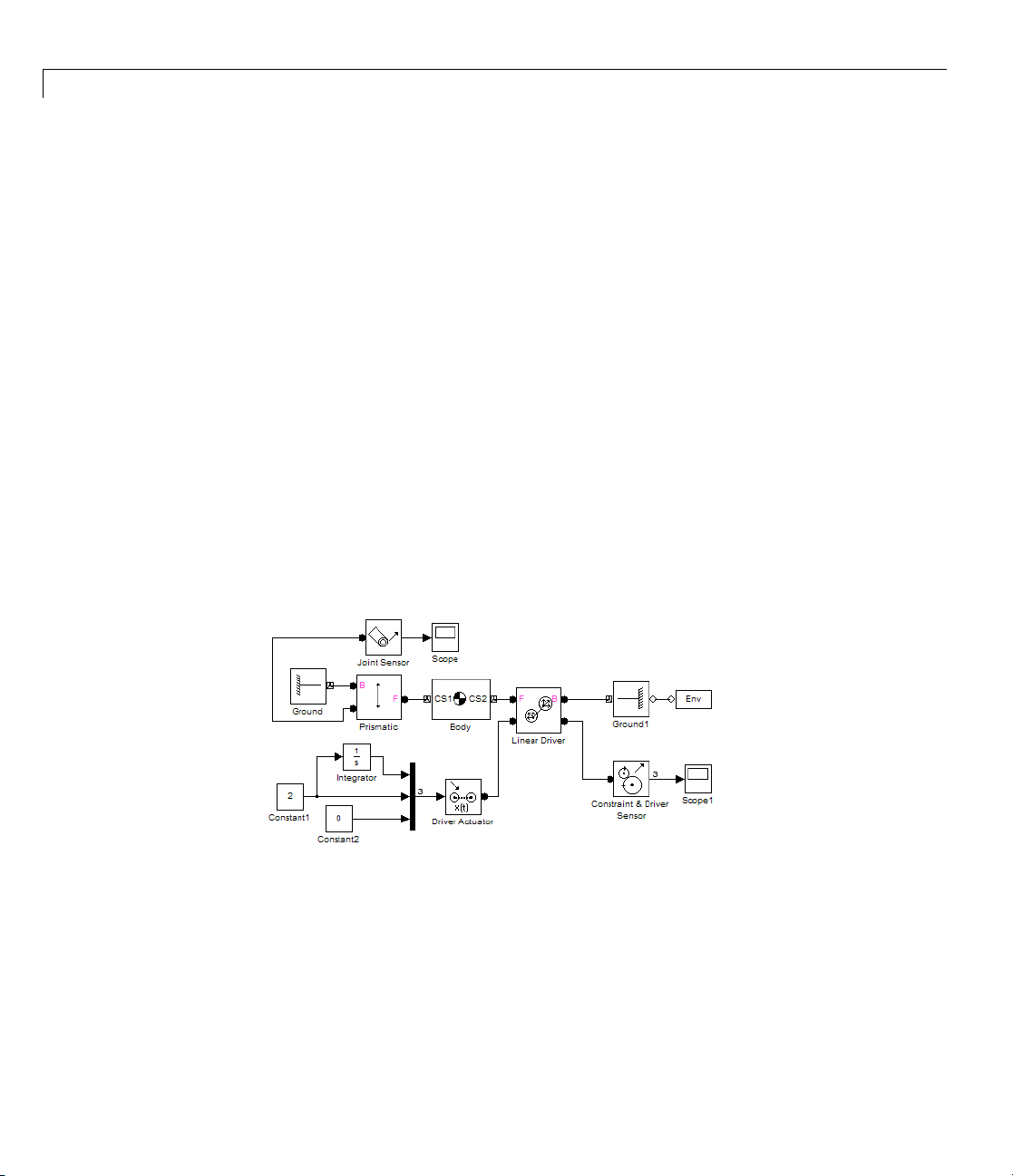
1 Modeling Mechanical Systems
8 Select the Reaction force check box if you want the Sensor to output the
reaction force on the base (or follower) body.
9 Ifyouhavechosentooutputbothreactionforceandtorqueandwantthe
Sensor to multiplex them into a single output signal, select the Output
selected parameters as one signal check box.
10 Click OK or Apply. Connect the output of the Constraint & Driver Sensor
block to a Simulink Scope or other signal sink or to a motion feedback loop,
depending on your needs.
Not all the reaction force/torque components are significant. Only those
components projected into the subspace of constrained or driven degrees of
freedom (DoFs) are physical. Components orthogonal to the constrained or
driven degrees of freedom are not physical.
Example: Linear Driver
In this example, you drive a body along the x-axis, but only allow it a prismatic
DoF tilted at an angle in the x-y plane. Construct the following model.
1-72
Configure the Constraint & Driver Sensor to measure only the reaction force,
not the torque. Configure the Linear Driver to drive the Body along the W orld
x-axis, but set up the Prismatic with a primitive axis along (1, 2, 0). The body
can then move only along this axis, but is driven along the horizontal x-axis.
Measure all motions and forces in World. Leave all other settings at default.
Page 85
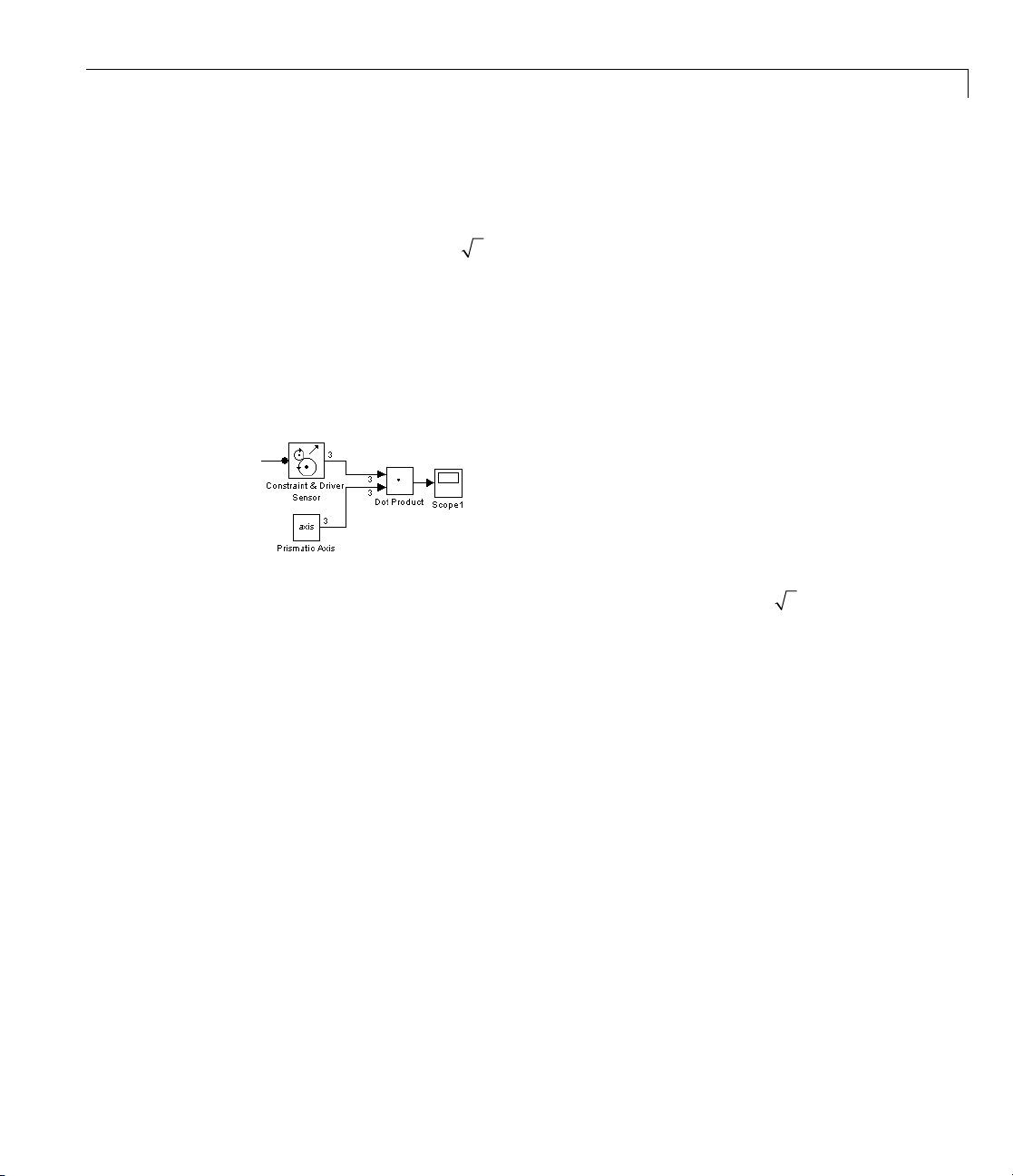
Sensing Motions and Forces
Open the Scopes and run the model. The measured reaction force lies along
the x-axis, with a value of -19.62 N (newtons) = -2mg. Because the constrained
DoF is not parallel to the x-axis, you need to project the reaction force along
the unit vector (1, 2, 0)/
5
defining the direction of the prismatic primitive
to obtain the physical part.
Add to the model the Simulink blocks that form a dot product between the
reaction force signal (three components) and the prismatic unit vector (also
three components). (You can define a workspace vector for this axis and use
it in both the joint and the dot product.) Reconnect Scope1 to measure this
physical component of the reaction force.
The physical component of the reaction force is -(19.62 N)·(1/5)=-8.77N.
The component of the reaction force orthogonal to (1, 2, 0) is not physical.
1-73
Page 86

1 Modeling Mechanical Systems
Adding Internal Forces
In this section...
“About Force Elements” on page 1-74
“Inserting a Linear Force Between Bodies” on page 1-74
“Inserting a Linear Force or Torque Through a Joint” on page 1-76
“Customizing Force Elements with Sensor-Actuator Feedback” on page 1-78
About Force Elements
Internal forces are forces the machine applies to itself as a result of its own
motion. Unlike actuation forces, you do not apply these forces from outside
the machine with Simulink signals. The body motions instead generate the
forces and torques directly.
The Force Elements library provides ready-made blocks to represent certain
kinds of internal forces and torques acting between bodies. You can also
create y our own customized sensor-actuator feedback loops to model springs,
dampers, and more complex internal force s.
1-74
Inserting a Linear Force Between Bodies
A generalized linear force between two bodie s is a linear function of the two
bodies’ relative displacement vector r and relative velocity v,withconstant
coefficients. The Body Spring & Damper block models a force acting between
two bodies along the axis r connecting them:
F =-k(r - r
The block is connected on either side to Bodies at a Body coordinate system
(CS). The displacement r is a vector from one Body CS on one Body to the
other Body CS on the other Body. Newton’s third law requires that the forces
that the bodies exert on one another be equal and opposite.
The common physical s ystem this force modelrepresentsisaspring-damper
combination, where the damper is a dashpot acting only along the spring
axis. The damping is solely a function of the component v
)-bv
0
||
of the velocity
||
Page 87

Adding Internal Forces
vector projected along the displacement r . (Thus the damping in this block
cannot represent the damping due to a viscous medium, because there is no
damping force perpendicular to the spring axis. See “Inserting a Linear Force
or Torque Through a Joint” on page 1-76.)
You enter the constant parameters r
dialog. r
is the spring’s natural length, the length it has when no forces
0
, k,andb in the Body Spring & Damper
0
areactingonit. Thespringconstantk and damping constant b should be
nonnegative.
To complete a linear force model between bodies, you need to model the
translational d eg ree s of free do m (DoFs) between them, as the Force Element
block itself does not represent these DoFs. You can use any Joint block
containing at least one prismatic primitive to represent translational motion.
The two Bodies, the Joint, and the Body Spring & Damper must form a
closed loop.
The following block diagram represents two Bodies w ith a damped spring
between them. The Custom Joint represents the bodies’ relative translational
DoFs with three prismatic primitives. In this case, CS2 and CS3 on Body1
are the same, and CS2 and CS3 on Body2 are the same. Thus, the Joint is
connected to the same Body CSs that define the ends of the spring-damper
axis.
1-75
Page 88
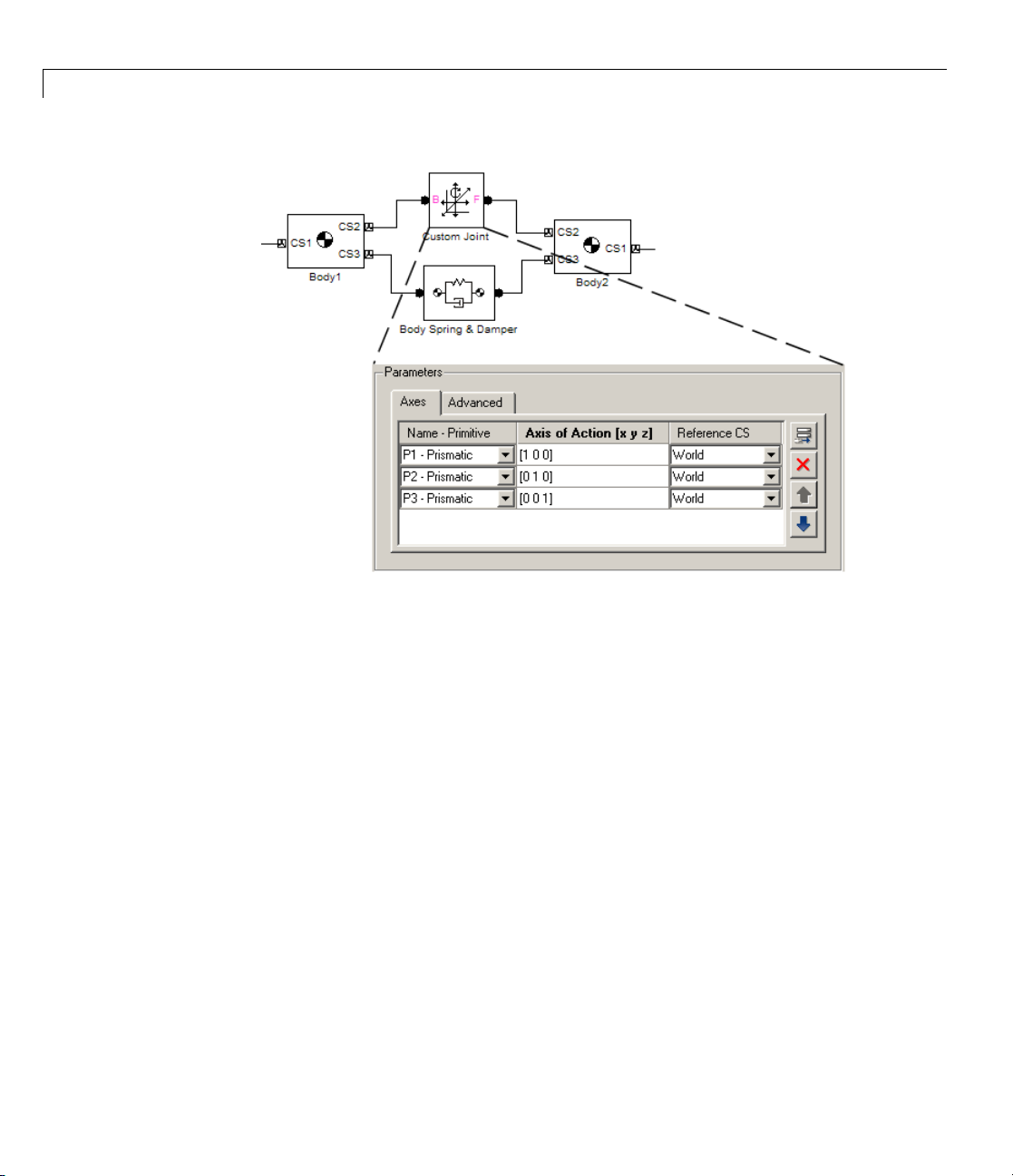
1 Modeling Mechanical Systems
1-76
Inserting a Linear Force or Torque Through a Joint
Another way of inserting a linear force element between two bodies is to
connect it to a joint that already connects the bodies. You have to apply the
force element, like an actuator, to each primitive in the joint individually.
This approach has several advantages over the Body Spring & Damper:
• You can create a different force law, with a different spring length, spring
constant, and damping constant, for each of the joint’s primitives.
• The spring and damper forces acting on each primitive act independently
in their respective directions, instead of depending on just the interbody
distance with a single spring length, spring constant, and damping
constant.
This allo ws you t o create sprin g and damping forces that act independently
in two or three dimensions, unlike the Body Spring & Damper force, which
acts only along a single axis. Damping forces acting on multiple primitives
act as a two- and three-dimensional viscous medium, not as a dashpot.
• The joint representing the DoFs between the bodies is already present.
Page 89
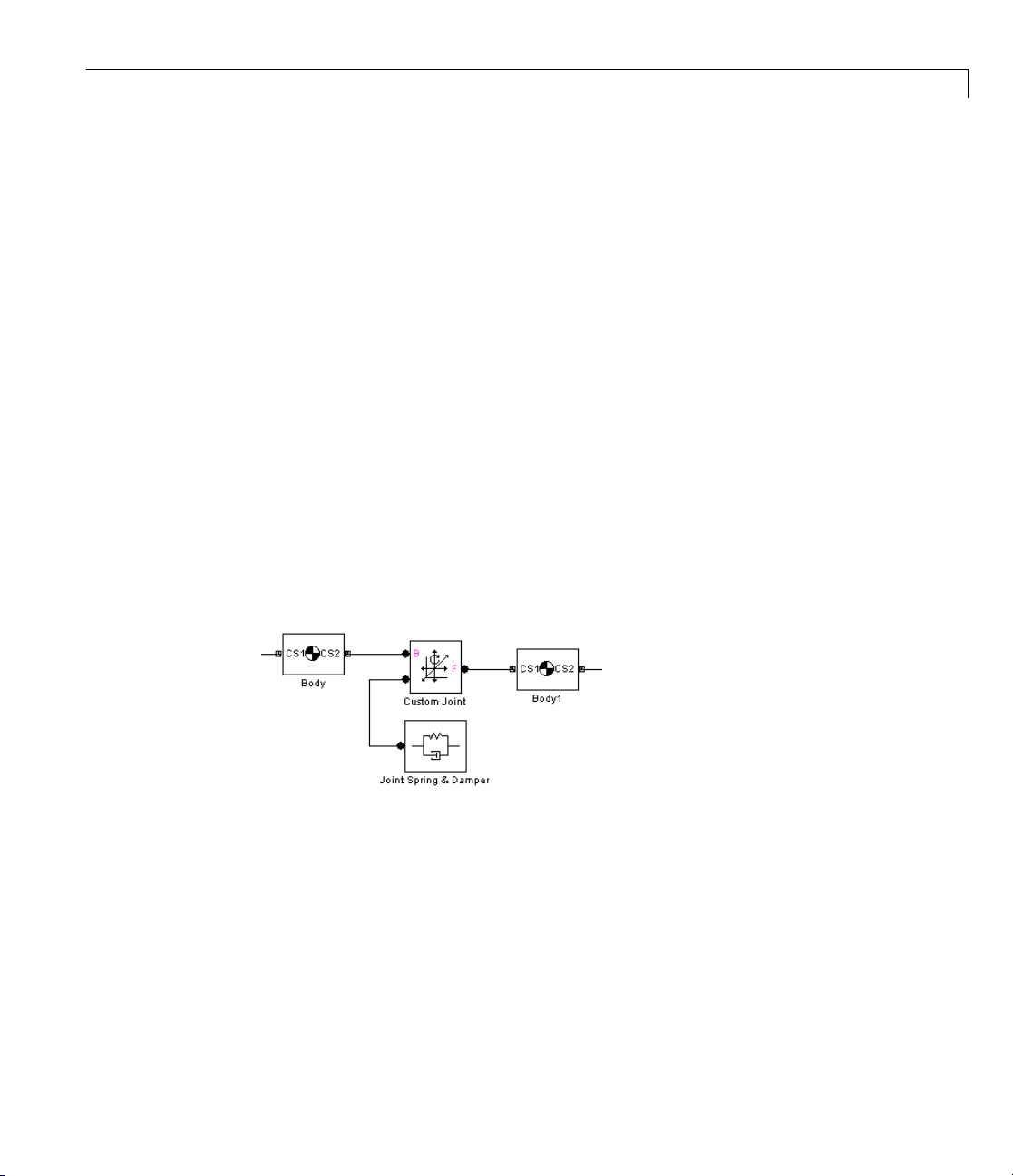
Adding Internal Forces
You use the Joint Spring & Damper block to implement such spring-damper
forces/torques together with a Joint. With it, you can apply a linear spring
and damper force to each prismatic primitive and a linear torsion and damper
torque to each revolute primitive in a Joint block. (You cannot apply these
torques to a spherical primitive.)
Pick a Joint already connected between two Bodies. You connect the Joint
Spring & Damper block to a Joint block at a sensor/actuator port on the Joint.
(The section “Actuating a Joint” on page 1-56 explains how to create such a
port.) The Joint Spring & Damper dialog then lists each primitive in t h e Joint.
For each prismatic primitive you want to actuate with a spring-damper
force, you specify a natural spring length (offset), spring constant, and
damping constant. For each revolute primitive you want to actuate with a
torsion-damper torque, you specify a natural torsion angle (offset, or angle in
which the primitive points absent any torques), torsion constant, and damping
constant. You make these specifications in the Joint Spring & Damper dialog.
Here are two bodies connected by a Custom Joint in turn connected to a Joint
Spring & Damper block.
Unlike the example in the preceding section, “Inserting a Linear Force
Between Bodies” on page 1-74, the Custom Joint can have up to three
prismatics and three revolutes, each with a separate linear force or torque
acting through it. Each force or torque acts equally and oppositely on each
body, following Newton’s third law.
1-77
Page 90

1 Modeling Mechanical Systems
Customizing For
Feedback
You can create yo
by using Sensor
only model lin
and velocitie
This simple ex
Hooke’s law s
to its displa
The followi
law.
ng SimMechanics model represents a spring that obeys Hooke’s
ur own force elements acting through Joints or on Bodies
-Actuator feedback loops. With this technique, you can not
ear forces, but any force that depends on body or joint positions
s.
ample illustrates the method w ith a linear spring force law.
tates that the force exerted by an extended spring is proportional
cement from its unextended position: F =-kx.
ce Elements with Sensor-Actuator
1-78
The mo
displ
the sp
by the
Actu
subs
del uses the Gain block labeled Spring Constant to multiply the
acement of the prismatic joint labeled Spring along the World’s y-axis by
ring constant
spring. The model feeds the force back into the prismatic joint via the
ator labeled Force. The model encapsulates the spring block diagram in a
ystem to clarify the model and to allow a spring to be i nserted elsewhere.
-0.8. The output of the Gain block is the force exerted
Page 91

Combining One- and Three-Dimensional Mechanical Elements
Combining One- and Three-Dimensional M echanical
Elements
In this section...
“About Interface Elements” on page 1-79
“Working with Interface Elements” on page 1-81
“Example: Ro t ati on al Spring-Damper with Hard Stop” on page 1-82
About Inter
SimMechan
one-dimen
about a sin
Simscape
and torqu
Elements
amechan
Consult
one-dim
Foundation library include ma sse s , inertias, and internal forces
es, as well as sensors and actuators. The blocks of the Interface
library allow you to selectively couple a SimMechanics machine to
ical circuit.
the Simscape documentation for more about Physical Networks and
ensional domains.
face Elements
ics software is built on the Simscape environment, which supports
sional domains of translational and rotational motion, along or
gle axis for one body at a time. The mechanical elements of the
How Mechanical Inter face Elements Couple Motion and Forces
Between SimMechanics Machines and Simscape Circuits
BecauseSimscapemodelssimulatemotion along or about one axis, one
Interface Element block can couple only one SimMechanics joint primitive
at a time to a Simscape circuit, interfacing through a Sensor/Actuator port
on a Joint block. An Interface Element neither adds nor subtracts degrees
of freedom (DoFs) to or from the combined machine-mechanical circuit.
Its coupling is like a force element between the two domains (see “Adding
Internal Forces” on page 1-74):
• From the point of view of the SimMechanics machine, an Interface Element
behaves like a force actuator acting on the selected joint primitive. The
interface block injects f orce or torque from the mechanical circuit between
the Bodies connected to either side of the Joint.
1-79
Page 92

1 Modeling Mechanical Systems
• From the point of view of the Simscape mechanical circuit, an Interface
Element behaves like a mo tion actuator. The interface block injects
translational or rotational motion from the machine into the circuit
connection line.
• The directionality or sense of motion, established by the base (B)-follower
(F) order in the SimMechanics Joint, is preserved in the Simscape
mechanical circuit.
• An Interface Element preserves the force or torque flowing through the
Interface Element into the machine and the motion acting across the Joint
transmitted into the mechanical circuit. Interface Elements thus conserve
mechanical power, transferring it without loss between the two domains.
Interface Elements can couple prismatic or revolute joint primitives to
translational or rotational motion, through the Prismatic-Translational
Interface o r Revolute-Rotational Interface blocks, respectively.
Limitations on the Inter faced Simscape Mechanical Circuit
SimMechanics and Simscape mechanical simulations are separately valid.
However, simulation of moving bodies modeled as Simscape mass and inertia
elements coupled through Interface Elements to a SimMechanics machine is
not complete and requires care to avoid unphysical results. These limitations
arise from their different representations of motion and dynamics coming
into conflict:
1-80
• One-dimensional motion in Simscape circuits versus three-dimensional
motion in SimMechanics machines.
A Simscape circuit does not model the motion of such bodies along or about
axes orthogonal to the coupled primitiveaxischosenintheinterfacedJoint.
• Absolute motion of each Simscape mass and inertia represented by
connection lines versus relative motion, represented by Joints, between
SimMechanics bodies.
All masses in Simscape models live in an implicit inertial reference frame.
A Simscape mechanical circuit interfaced to a SimMechanics machine in
general moves in an accelerated frame. A simulation wi th such a circuit
does not include the pseudoforces acting on the Simscape mass and inertia
elements as experienced in such a noninertial frame and thus violates
Newton’s second law of mechanics.
Page 93

Combining One- and Three-Dimensional Mechanical Elements
As the mass and/or inertia modeled in the interfaced mechanical circuit is
increased, so is the violation of Newton’ssecondlaw. Assuchmassand/or
inertia is decreased, so is the violation.
Warning Model all masses and inertias in your system as Bodies
in the SimM echanics machine and avoid placing mass and inertia
elements into any interfaced Simscape mechanical circuits.
Models with mass and inertia elements in Simscape mechanical
circuits interfaced to a SimMechanics machine are not physically
valid. Simulating with such models does not yield valid results.
Working with Interface Elements
To interface a Joint with a Simscape mechanical circuit:
1 Select the appropriate Interface Element block, prismatic or revolute, from
the Interface Elements library.
• Ifyouwishtocoupleatranslational mechanical circuit to a prismatic
primitive, select Prismatic-Translational Interface.
• Ifyouwishtocouplearotationalmechanical circuit to a revolute
primitive, select Revolute-Rotational Interface.
You cannot mix translational and rotational motion with an Interface
Element.
2 Copy the selected Interface Element block into your model.
3 Open the Joint dialog and add an extra Sensor/Actuator port. Close the
dialog.
4 Connect the Interface Element mechanical connector port to the new
Sensor/Actuator port on the Joint.
1-81
Page 94

1 Modeling Mechanical Systems
5 Open the Interface Element dialog. The Connected to primitive
pull-down menu contains a list of all the primitives of appropriate type
(prismatic or re vo lute) in the interfaced Joint.
Select the primitive you want to interface. The Simscape circuit will move
along or about that axis. Click OK or Apply.
On the machine side, the Joint must follow the standard rules for Joints and
in particular be connected to a Body on each side. (See “Modeling Degre es of
Freedom” on page 1-19.) You should connect the Interface Element with the
rest of the mechanical circuit.
1-82
Example: Rotational Spring-Damper with Hard Stop
The mech_ inte rface_rot_spr_damper demo illustrates proper interface of
Simscape mechanical elements with a three-dimensional SimMechanics
machine.
Page 95

Combining One- and Three-Dimensional Mechanical Elements
The interfaced mechanical circuit has no inertia or mass elements, which
prevents the problems discussed in “Limitations on the Interfaced Simscape
Mechanical Circuit” on page 1-80. It contains only force elements: a rotational
spring, a rotational damper, and a rotational hard stop. Together, these
force elements create a hard stop for the Revolute block. This block contains
only one primitive,
R1, which you can view by opening its dialog. Through
this primitive, the Simscape force elements act between Body A and Body
B, limiting their relative angular motion about the revolute
R1 axis to ±π/6
radians.
1-83
Page 96
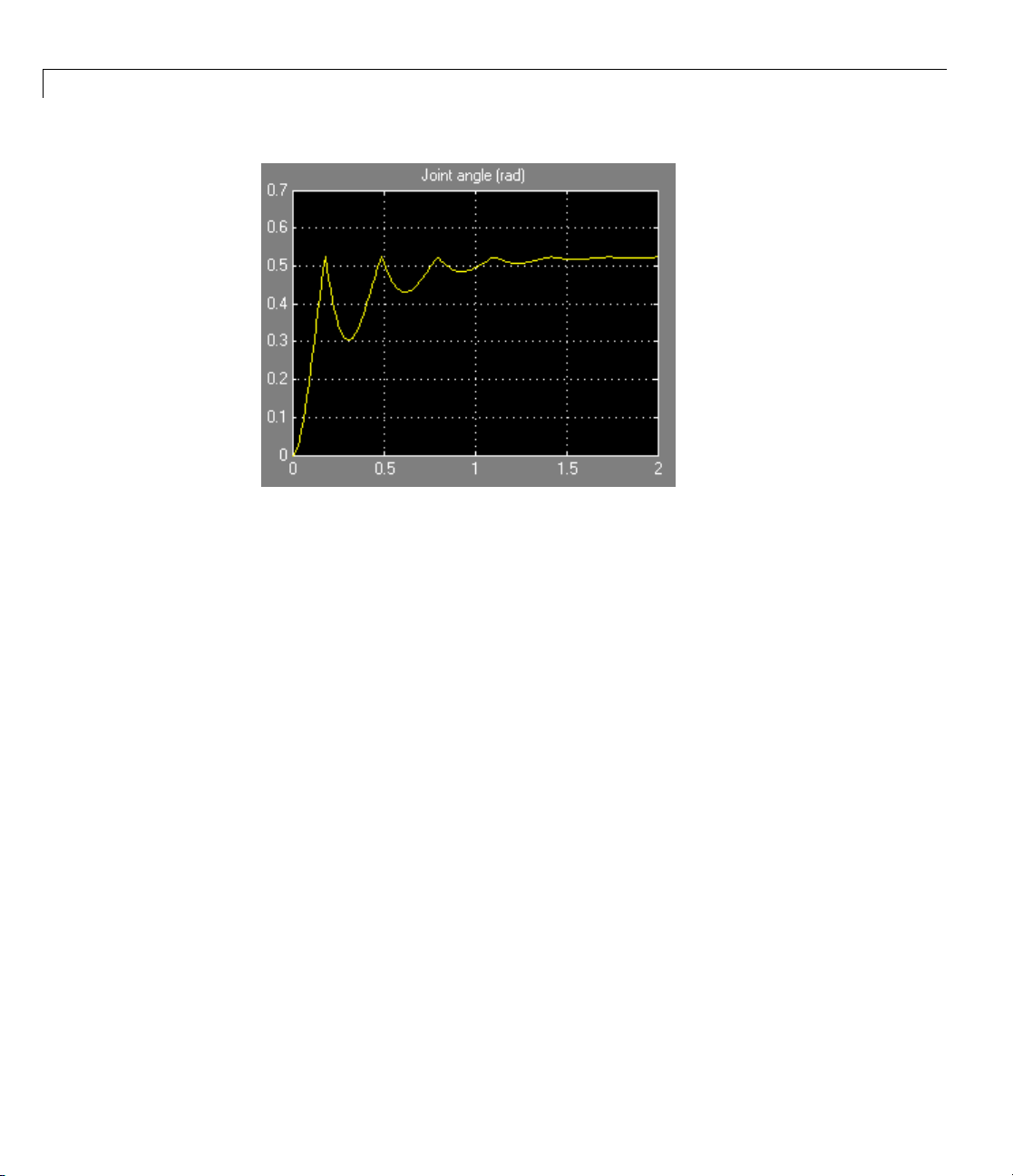
1 Modeling Mechanical Systems
1-84
Page 97

Validating Mechanical Models
In this section...
“Essential Tests for Model Validity” on page 1-85
“Verifying Model Topology” on page 1-85
“Counting Model Degrees of Freedom” on page 1-89
Essential Tests for Model Validity
Simulink can simulate a SimMechanics model only if it is valid. A model is
valid if it satisfies the following rules:
• Each machine in the model contains at least one Ground, and exactly one
Ground in each machine is connected to a Machine Environment block.
Each submachine connected to a full machine by a Shared Environment
block must have at least one Ground.
See “Representing Machines with Models” on page 1-2.
Validating Mechanical Models
• Every machine in the model is topologically valid. See “Verifying Model
Topology” on page 1-85.
• The model contains at least one degree of freedom. See “Counting Model
Degrees of F reedom” on page 1-89.
• Any machine in the model interfaced to Simscape mechanical circuits
satisfies both SimMechanics and Simscape modeling rules. See “Combining
One- and Three-Dimensional Mechanical Elements” on page 1-79.
Verifying Model Topology
To avoid simulation failures, you must ensure that the topology of your block
diagram is valid. A block diagram is topologically valid if each machine that
it contains is valid. A machine is valid if its spanning tree is valid. Th us to
determine if your model is valid, first determine the spanning tree of each
machine that it contains and then the validity of each resulting tree.
1-85
Page 98

1 Modeling Mechanical Systems
Machine Topology and Subsystems
When examining your model’s topology, be sure to inspect all its subsystems,
including m asked subsystems, down to the bottom of the model’s subsystem
hierarchy.
Determining a Mach ine’s Spanning Tree
You can think of a machine as a graph with elements (bodie s) and connectors
(joints, constraints, and drivers). A spanning tree is a reduced graph with
bodies connected only by joints and all closed loops cut once.
To determine the spanning tree of a machine, remove all blocks from the
machine except Body and Joint blocks and open every closed loop in the
resulting reduced machine. To open a closed loop, follow the loop-cutting rules
in “Cutting Machine Diagram Loops” on page 1-46.
For example, here is a machine with two closed loops.
1-86
Page 99
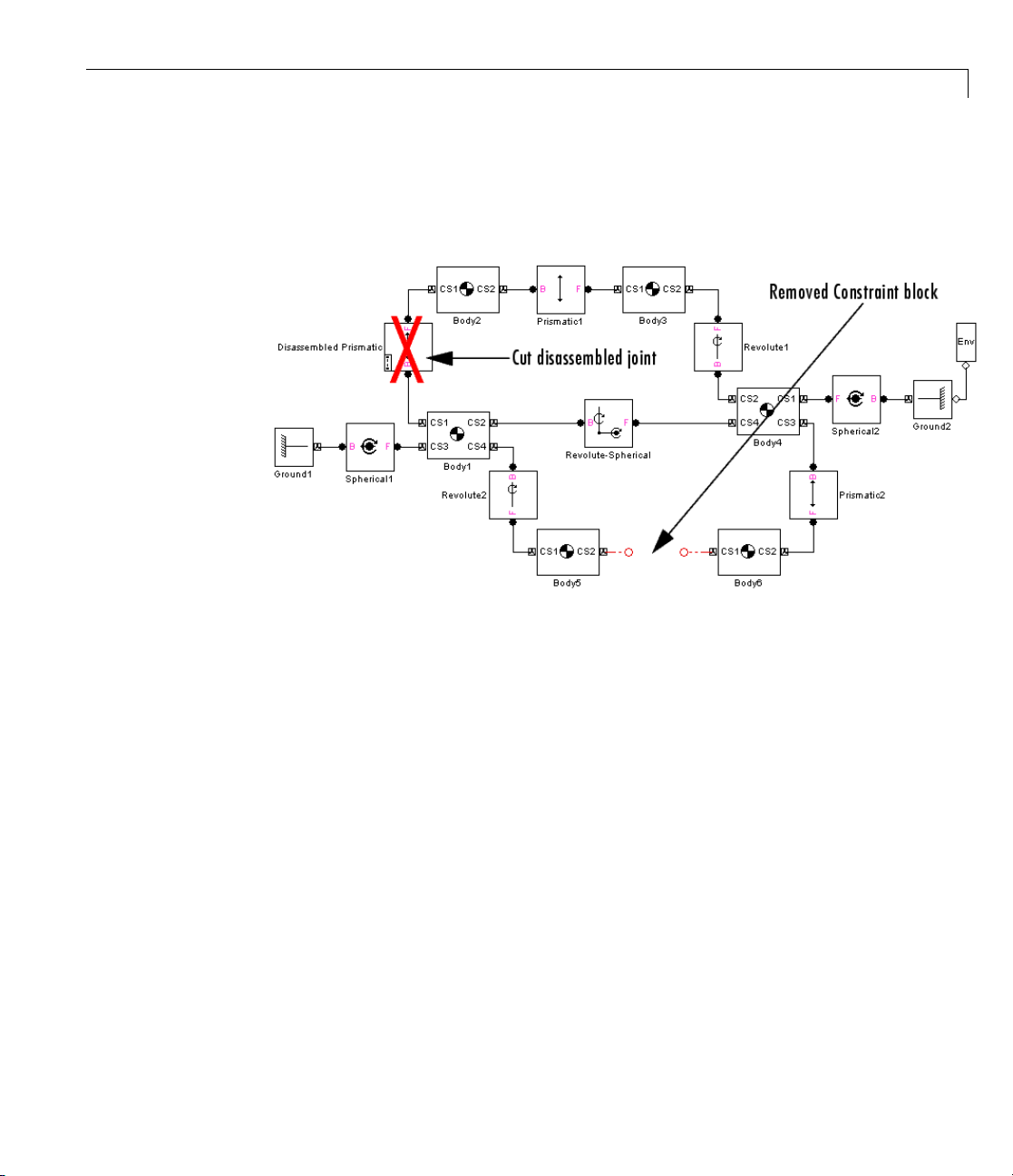
Validating Mechanical Models
CuttingthetoploopattheDisassembledPrismaticandremovingtheParallel
Constraint block (thus simultaneously cutting the bottom loop) yields the
machine’s spanning tree, as shown here.
Determining the Validity of a Spanning Tree
To be valid, a spanning tree must meet these requirements:
• ThespanningtreemusthaveatleastoneGroundblocktoserveasa
reference to World.
• Every Joint block must be connected to exactly two Body blocks.
• Every non-Ground Body block must have a unique path to a Ground block.
(This need not be true of the whole machine.) This ensures that, while
each body moves via joints relative to other bodies, the simulation can
resolve all bodies’ motions relative to one another into absolute motions
with respect to World.
• Every non-Ground Body block at an end of a chain of Bodies must have
nonzero inertia (mass or inertial moment) associated with all joint
primitives that can move. Each translational DoF must carry a nonzero
mass, and each rotational DoF a nonzero inertial moment. This prevents
infinite accelerations when forces and torques are applied.
1-87
Page 100

1 Modeling Mechanical Systems
Examples of Invalid Machine Topologies
Herearesomeexamplesofinvalidtopologies:
• This one-loop machine lacks a Ground block.
• This open machine has a dangling Joint block.
1-88
 Loading...
Loading...