

Page 1

SimMechanics™ Release
Notes
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
SimMechanics™ Release Notes
© COPYRIGHT 2002–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Summary by Version ............................... 1
Contents
Version 3.2 (R2010a) SimMechanics Software
Version 3.1.1 (R2009b) SimMechanics Software
Version 3.1 (R2009a) SimMechanics Software
Version 3.0 (R2008b) SimMechanics Software
Version 2.7.1 (R2008a) SimMechanics Software
Version 2.7 (R2007b) SimMechanics Software
Version 2.6 (R2007a) SimMechanics Software
Version 2.5 (R2006b) SimMechanics Software
Version 2.4 (R2006a) SimMechanics Software
Version 2.3 (R14SP3) SimMechanics Software
........ 5
....... 8
........ 9
........ 10
....... 15
........ 16
........ 19
........ 22
........ 25
........ 27
Version 2.2.2 (R14SP2) SimMechanics Software
Version 2.2.1 (R14SP1) SimMechanics Software
Version 2.2 (R14) SimMechanics Software
Version 2.1.1 (R13SP1) SimMechanics Software
Version 2.1 (R13+) SimMechanics Software
............ 33
.......... 41
...... 30
...... 31
...... 40
iii
Page 4

Version 2.0.1 (R13+) SimMechanics Softwa re ......... 43
Version 2.0 (R13+) SimMechanics Software
Compatibility Summary for SimMechanics Software
.......... 44
.. 46
iv Contents
Page 5

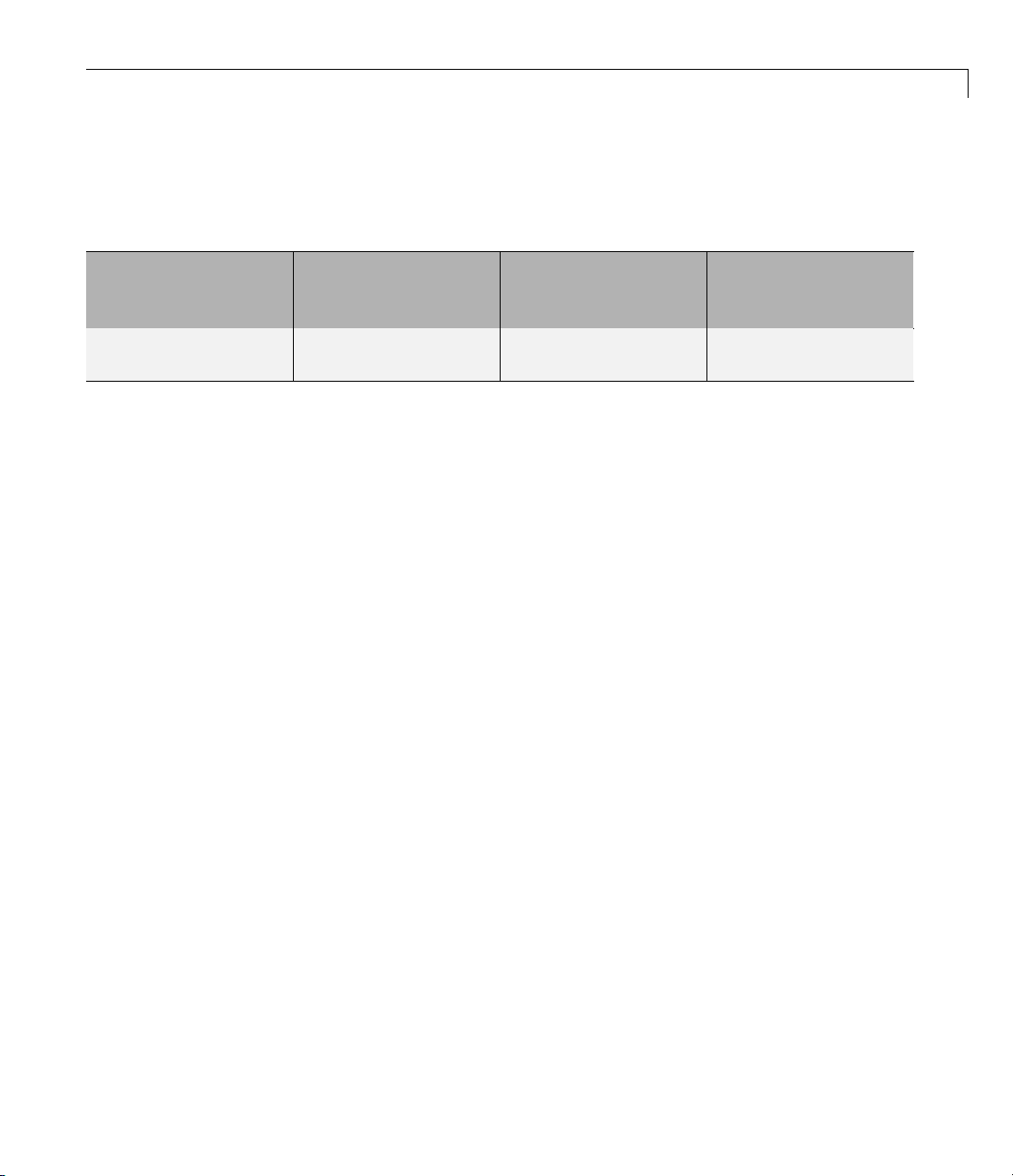
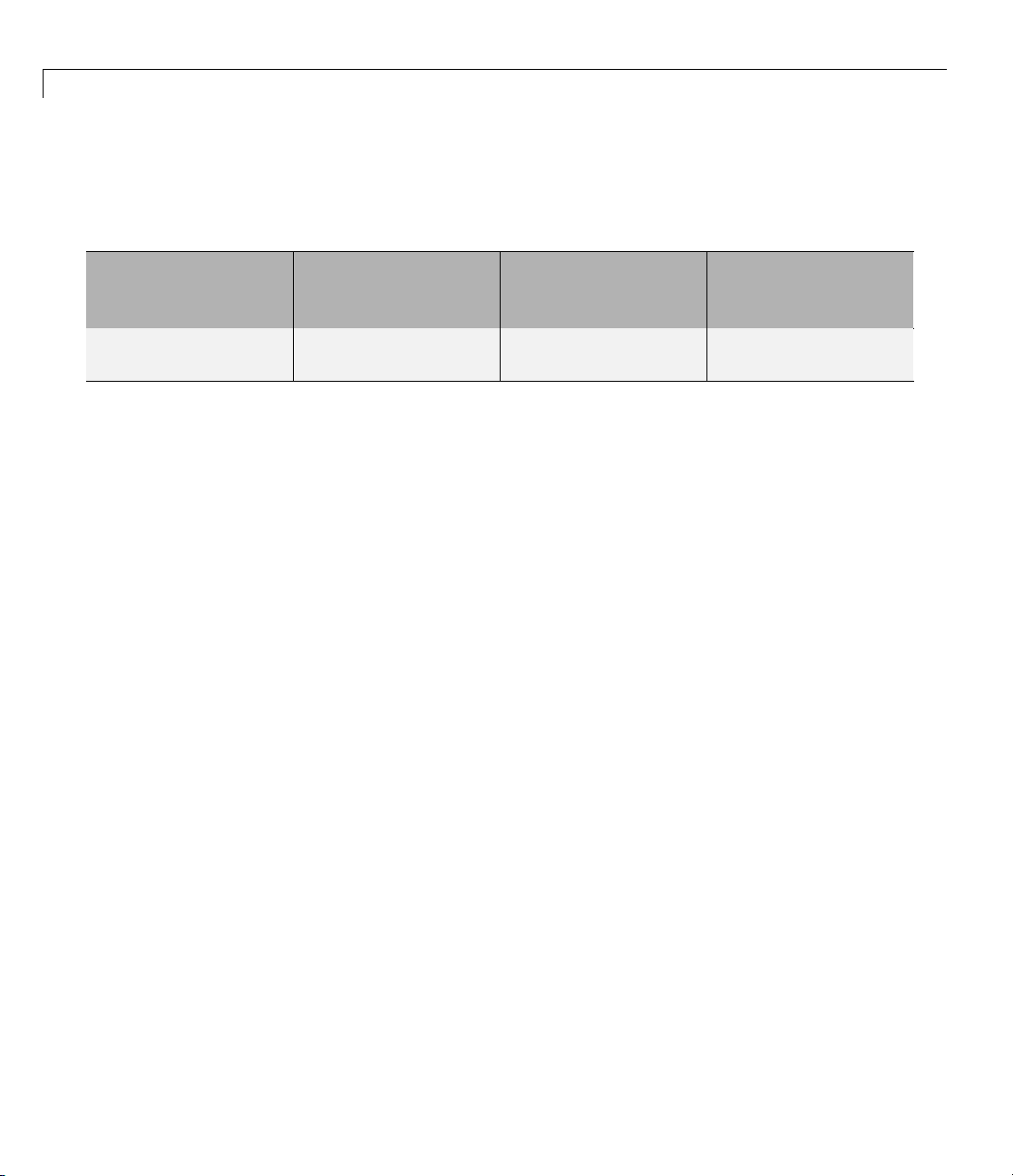
SummarybyVersion
This table provides quick access to what’s new in each version. For
clarification, see “Using Release Notes” on page 2 .
SimMechanics™ Release Notes
Version
(Release)
Latest
Version
V3.2
(R2010a)
V3.1.1
(R2009b)
V3.1
(R2009a)
V3.0
(R2008b)
New
Features
and
Changes
Yes
Details
No No Bug Reports
No No Bug Reports
Yes
Details
Version
Compatibilit
Consideratio
No Bug Reports
Yes
Summary
y
ns
Fixed Bugs and
Known Problems
Includes fixes
Includes fixes
Includes fixes
Bug Reports
Includes fixes
Related
Documentation
at Web Site
Printable Release
Notes: PDF
Current product
documentation
No
No
No
V2.7.1
(R2008a)
V2.7
07b)
(R20
V2.6
(R2007a)
Yes
Details
Yes
ils
Deta
Yes
Details
No Bug Reports
Includes fixes
No Bug R e
Incl
Yes
Summary
Bug Reports
Includes fixes
ports
udes fixes
Printable Product
Documentation:
PDF
No
No
1
Page 6

SimMechanics™ Release Notes
Version
(Release)
V2.5
(R2006b)
V2.4
(R2006a)
V2.3
(R14SP3)
V2.2.2
(R14SP2)
V2.2.1
(R14SP1)
V2.2 (R14)
V2.1.1
(R13SP1)
V2.1
(R13+)
New
Features
and
Changes
Yes
Details
Yes
Details
Yes
Details
Yes
Details
Yes
Details
Yes
Details
No No Yes
Yes
Details
Version
Compatibility
Considerations
Yes
Summary
No Bug Reports
No Bug Reports
No Bug Reports
No
Yes
Summary
No
Fixed Bugs and
Known Problems
Bug Reports
Includes fixes
at Web site
at Web site
at Web site
Fixed bugs
at Web site
Fixed bugs
at Web site
Details
Fixed bugs
at Web site
Related
Documentation
at Web Site
No
No
No
No
No
No
No
No
V2.0.1
(R13+)
V2.0
(R13+)
No No Yes
Details
Yes
Details
No
Fixed Bugs
at Web Site
No
No
Using Release Notes
Use release notes when upgrading to a newer version to learn about:
• New features
• Changes
• Potential impact on your existing files and practices
2
Page 7

SummarybyVersion
Review the release notes for other MathWorks™ products required for this
product (for example, MATLAB
®
or Simulink®). Determine if enhancements,
bugs, or compatibility considerations in other products impact you.
If you are upgrading from a software version other than the m ost recent one,
review the current release notes and all interim versions. For example, when
you upg rade from V1.0 to V1.2, review the release notes for V1.1 and V1.2.
What Is in the Release Notes
New Features and Changes
• New functionality
• Changes to existing functionality
Version Compatibility Con si derations
When a new feature or change introduces a reported incompatibility between
versions, the Compatibility Considerations subsection explains the
impact.
Compatibility issues reported after the product release appear under Bug
Reports at The MathWorks™ Web site. Bug fixes can sometimes result
in incompatibilities, so review the fixed bugs in Bug Reports for any
compatibility impact.
Fixed Bugs and Known Problems
The MathWorks offers a user-searchable Bug Reports database so you can
view Bug Reports. The development team updates this database at release
time and as more information becomes available. Bug Reports include
provisions for any known workarounds or file replacem ents. Information is
available for bugs existing in or fixed in Release 14SP2 or later. Information
is not avail able for all bugs in earlier releases.
Access Bug Reports using y our MathWorks Account.
3
Page 8

SimMechanics™ Release Notes
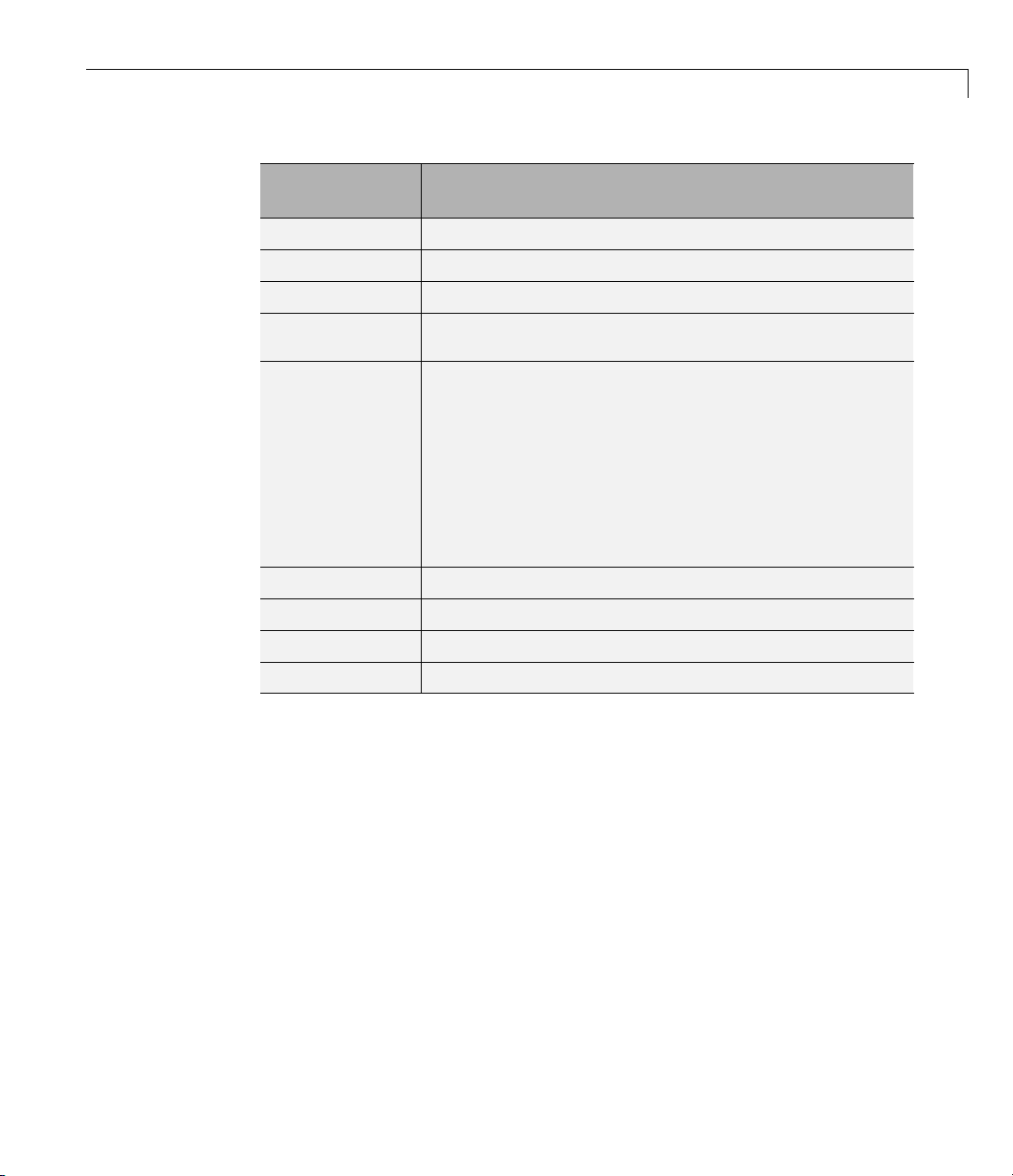
About Commands Being Removed
This section lists commands removed or in the process of being removed.
Commands typically go through several stages across multiple releases before
being co mplete ly removed. This provides time for you to make adjustments
to your code.
• Announcement — The Release Notes announce the planned removal, but
• Warning — When you execute the command, it d isplays a warning message
• Error — When you execute the command, it produces an error. The error
• Removal — When you run the command, it fails. The error message is the
Commands might be in a stage for one or more releases before moving to
another stage. Commands are listed in the Commands Being Removed section
only when they enter a new stage and their behavior changes. For example,
if a command displayed a warning in the previous release and errors in this
release, it appears on the list. If it continues to display a warn i ng , it does n ot
appear on the list because there was no change between the releases.
there are no functional changes; the command runs as it did before.
indicating it will be removed in a future release; otherwise the command
executes as it did before.
message indicates the com mand was removed and suggests a replacement
command, if one is available.
standard message when MATLAB does not recognize an entry.
Not all commands go through all stages. For example, a command’s
impending removal might not be announced, but instead, the first notification
might be that the command displays a warning.
The Release Notes include actions you can take to mitigate the effects of
command removal, such as adapting your code to use a replacement command.
4
Page 9

Version 3.2 (R2010a) SimMechanics™ Software
Version 3.2 (R2010a) SimMechanics Software
This table summarizes what’s new in Version 3.2 (R2010a):
New Features and
Changes
Yes No Bug Reports
Version
Compatibility
Considerations
New features and changes introduced in this version are
• “Optional Simplification of Subsystem Hierarchy During Model Import”
on page 5
• ““What’s This?” Context-Sensitive Help Available for Import Physical
Modeling XML Dialog Box” on p age 6
• “Connection Port Block Consolidated to Simscape Library and
Documentation” on page 6
• “New Demos” on page 6
Fixed Bugs an d
Known Problems
at Web site
Optional Simplification of Subsystem Hierarchy
During Model Import
When you generate SimMechanics™ models with the mech_import command,
you can now choose certain automatic simplification s of the imported model’s
hierarchy:
Related
Documentation at
Web Site
Printable Release
Notes: PDF
Current product
documentation
• Bringing all joints in the generated model to the highest level being
imported, either the whole m ode l or a subsystem.
• Grouping all we lded bodies at each level of the model hierarchy into new
rigid subsystems at the same level.
Without these options, the generated model’s hierarchy follow s the h ierarchy
specified in the imported XML file, derived from its original CAD assembly.
5
Page 10

SimMechanics™ Release Notes
“What’s This?” Context-Sensitive Help Available for
Import Physical Modeling XML Dialog Box
This release introduces “What’s This?” context-sensitive help for parameters
that appear in the Import Physical Modeling XML dialog opened by entering
mech_import with no arguments at the command line. This feature provides
quick access to a detailed description of the parameters, saving you the time it
would take to find the information in the Help browser.
To use the "What’s This?" help, do the following:
1 Placeyourcursoroverthelabelofaparameter.
2 Right-click. A What’s This? context menu appears.
For example, the following figure shows the What’s This? context menu
appearing after a right-click on the Start time parameter in the Solver
pane.
3 Click What’s This? A context-sensitive help window appears showing a
description of the parameter.
Connection Port Block Consolidated to Simscape
Library and Documentation
The Connection Port block has been removed from the block libraries
of all add-on products dependent on Simscape™ software. When using
these dependent add-on products, look for the Conne ction Port block in the
Simscape “Utilities” library.
The Connection Port block help for these add-on products now directs you to
the Simscape block reference.
New Demos
Two new demos have been added.
6
Page 11

Version 3.2 (R2010a) SimMechanics™ Software
Model Hierarchy Simplification During Import
You can learn m ore about how to simplify importe d model hierarchy by
reviewing the new demo page.
This demo uses two new Physical Modeling XML files,
SimplificationExample1.xml and SimplificationExample2.xml.
Reference Coordinate Systems in Imported Physical Modeling
XML
With the SimMechanics Link utility, you can export reference coordinate
systems that you insert into CAD assemblies. (This feature is not supported
on all CAD platforms. ) From the ex ported Physical Modeling XML, you
can generate a SimMechanics model with extra B ody coordinate systems
corresponding to the assembly reference coordinate systems and not
associated with CAD constraints and automatically generated Joints.
Using the new
can u se reference coordinate systems to help you manually add a Constraint
block to a model after import.
GearAssembly.xml file, the new demo page explains how you
7
Page 12

SimMechanics™ Release Notes
Version 3.1.1 (R2009b) SimMechanics Software
This table summarizes what’s new in Version 3.1.1 (R2009b):
New Features and
Changes
No No Bug Reports
Version
Compatibility
Considerations
Fixed Bugs an d
Known Problems
at Web site
Related
Documentation at
Web Site
No
8
Page 13

Version 3.1 (R2009a) SimMechanics™ Software
Version 3.1 (R2009a) SimMechanics Software
This table summarizes what’s new in Version 3.1 (R2009a):
New Features and
Changes
No No Bug Reports
Version
Compatibility
Considerations
Changes introduced in this version are
• “Changes to External Virtual Reality Visualization” on page 9
• “Pro/ENGINEER CAD Translation Case Study” on page 9
Fixed Bugs an d
Known Problems
at Web site
Changes to External V irtual Reality Visualization
The new Simulink®3D Animation™ software replaces the Virtual Reality
Toolbox™ product for visualizing virtual scenes. The documentation section
on building and using a virtual reality client to visualize SimMechanics
models has been updated to reflect this change.
Pro/ENGINEER CAD Translation Case Study
The CAD translation chapter now contains a case study demonstrating
assembly export and re-export, along with model import and update. The
study uses SimMechanics and Si mMechanics Link software, together with
Pro/ENGINEER
a triple pendulum. The study illustrates how you can update an existing
generated CAD-based model with successive changes to the original CAD
assembly.
®
, and models a double pendulum, subsequently modified to
Related
Documentation at
Web Site
No
9
Page 14

SimMechanics™ Release Notes
Version 3.0 (R2008b) SimMechanics Software
This table summarizes what’s new in Version 3.0 (R2008b):
New Features and
Changes
Yes
Version
Compatibility
Considerations
Yes—Details labeled
as Compatibility
Considerations,
below. See also
Summary.
New features and changes introduced in this version are
• “New SimMechanics Visualization and Animation” on page 10
• “New SimMechanics Link Utility” on page 12
• “Upgraded Mechanical Import and Automatic Model Generation” on page
13
• “BodyBuilder for Creating STL Body Geometry Files” on page 13
• “Command Being Removed” on page 14
• “SimMechanics Documentation Reorganized” on page 14
• “Physical Modeling of Mechanical Friction” on page 14
Fixed Bugs an d
Known Problems
Bug Reports
at Web site
Related
Documentation at
Web Site
No
New SimMechanics Visualization and Animation
The visualization has been upgraded with new features and a new interface.
It now supports
10
• Customizable body geometries with STL (stereolithographic) files
• Customizable body colors
• Better dynamic view control
• Better animation speed control
Page 15

Version 3.0 (R2008b) SimMechanics™ Software
Consult the new SimMechanics Visualization and Import Guide for complete
information.
For more about creating STL files, see “BodyBuilder for Creating STL B ody
Geometry Files” on pag e 13.
Compatibility Considerations
The old SimMechanics visualization allowed you to save visualization settings
to a MAT-file associated with a SimMechanics model.
When you open such a model in the new version, the model will attempt to
load the MAT-file, as before, and map the old visualization options to the new
optionsascloselyaspossible. Thisisaone-time conversion. The MAT-file has
tobeontheMATLABpathsoitcanbefoundwhenyouopenthemodel.
To save these converted visualization settings:
1 You must open the visualization window and save these settings to the
model.
2 Then you must save the model itself.
Usethevisualizationcontrolstosavethesettingstothemodel. Seethe
SimMechanics Visualization and Import Guide.
Caution Tosavevisualizationsettingsfromanoldmodelinthenew
visualization, you must follow these steps, in this order. Otherwise, you might
lose the old settings permanently.
Compressed Animation Recording from New Visualization on
Windows Vista and 64-Bit Windows Operating Systems
To compress a recorded animation of a s imulation, you need the Indeo 5 codec.
This codec might not be available on the 32-bit Windows Vista™ operating
system and the 64-bit Windows
you require compression and the codec is not found, the animation AVI file is
still saved, but without compression. A warning appears.
®
XP and Windows Vista operating systems. If
11
Page 16

SimMechanics™ Release Notes
For further details, consult Technical Solution 1-1HTNHW a t the MathWorks
web site.
New Visualization Window Status Bar Not Available on Intel
Mac Operating System
The status bar of the new visualization window, below the machine display,
doesnotappearatallontheIntel
operating systems, the status bar shows simulation time, as well as Body
block and coordinate system names.
New Visualization Not Supported on Solaris 64 UNIX
Operating System
The new visualization and animation interface is not available on the Solaris
64 UNIX operating system. SimMechanics software automatically reverts to
the old visualization interface.
Consult the R2008a SimMechanics User’s Guide (PDF format) on the
MathWorks Web site for more information about the old visualization
interface (chapter 6).
®
Mac®operating system. On other
12
New SimMechanics Link Utility
The new SimMechanics Link utility provides a bridge from third-party
mechanical design and modeling applications to the system and control design
features of MATLAB and Simulink. It connects computer-aided design (CAD)
platforms to mechanical modeling with SimMechanics software by enabling
export of CAD assemblies into the Physical Modeling XML format that allows
for automatic generation of SimMechanics models.
Refer to the SimMechanics Link documentation for more information. The
SimMechanics Link utility requires MATLAB, but not Simulink, Simscape,
or SimMechanics.
Page 17

Version 3.0 (R2008b) SimMechanics™ Software
Upgraded Mechan
ical Import and Automatic Model
Generation
ort
The new mech_imp
Modeling XML fi
supports a new
SimMechanics feature, updating models generated previously.
Compatibility Considerations
Physical Mod
translators
can still imp
these m odel
visualize u
The updati
XML files g
feature do
old CAD-t
You shoul
with the
page 14.
eling XML files generated by the old CAD-to-SimMechanics
remain compatible with
ort old XML files to generate SimMechanics models. Because
s have no associated exported STL body geometry files, they will
sing the standard (noncustom) body shapes.
ng feature of
enerated by exporting from the SimMechanics Link utility. This
es not work with Physical Modeling XML files generated from the
o-SimMechanics translators.
d replace all existing instances of the
new
mech_import command. See “Command Being Removed” on
command works with externally defined Physical
les to automatically generate SimMechanics models. It
mech_import works only with Physical Modeling
mech_import.Usingthiscommand,you
import_physmod command
Cautio
SimMec
new Sim
BodyB
In ad
CAD a
geom
prov
vis
MAT
n Do not attempt to use the
hanics versions with Physical Modeling XML files generated by the
Mechanics Link exporter.
uilder for Creating STL Body G eometry Files
dition to generating STL body geometry files automatically from a
ssembly, you can also create STL files by hand or by using a body
etry editor. BodyBuilder is an application based on MATLAB that
ides a graphical means to create STL files for use in SimM echanics body
ualization. You can obtain BodyBuilder from MATLAB Central. In the
LAB Desktop File Exchange tool, search for “BodyBuilder”.
import_physmod command in older
13
Page 18

SimMechanics™ Release Notes
Command
Name
import_physmod
Command Being Re
What Happens
When You Use
Command?
Still runs
SimMechanic
The SimMech
Book
SimMechanics Getting Started Guide
SimMechanics User’s Guide
SimMechanics Visualization and
Import Guide
SimMechanics Reference
Use This
Instead
mech_import
s Documentation Reor ganized
anics documentation is now organized into four books.
moved
Compatibility Consid e rations
Replace all existing instances of
import_physmod with mech_import.
Includes Material from O ld
Chapters
1, 2, and 3
4, 5, 8, and 9
6and7
10, 11, 12, and 13
Physical Modeling of Mechanical Friction
ArecentMATLABDigestarticleexplainshow to simulate mechanical friction
with Simulink, SimDriveline™, and S imMechanics models. A set of models
accompanies the article in a compressed zip archive available from MATLAB
Central. In the MATLAB Desktop File Exchange tool, search for “Mechanical
Friction with S i mulink and Ph ysical Modeling”.
14
Page 19

Version 2.7.1 (R2008a) SimMechanics™ S oftware
Version 2.7.1 (R2008a) SimMechanics Software
This table summarizes what’s new in Version 2.7.1 (R2008a):
New Features and
Changes
Yes No Bug Reports
Version
Compatibility
Considerations
New features and changes introduced in this version are
Fixed Bugs an d
Known Problems
at Web site
“What’s This?” Context-Sensitive Help Available for
Simulink Configuration Parameters Dialog
R2008a introduces “What’s This?” context-sensitive help for parameters
that appear in the Simulink Configuration Parameters dialog. This feature
provides quick access to a detailed description of the parameters, saving you
the time it would take to find the information in the Help browser.
To use the "What’s This?" help, do the following:
1 Placeyourcursoroverthelabelofaparameter.
2 Right-click. A What’s This? context menu appears.
For example, the following figure shows the What’s This? context menu
appearing after a right-click on the Start time parameter in the Solver
pane.
Related
Documentation at
Web Site
Printable Product
Documentation: PDF
3 Click What’s This? A context-sensitive help window appears showing a
description of the parameter.
15
Page 20

SimMechanics™ Release Notes
Version 2.7 (R2007b) SimMechanics Software
This table summarizes what’s new in Version 2.7 (R2007b):
New Features and
Changes
Yes No Bug Reports
Version
Compatibility
Considerations
New features and changes introduced in this version are
• “Interfacing with One-Dimensional Simscape Domains” on page 16
• “SimMechanics State Name s Now Available to Simul in k and Real-Time
Workshop” on page 17
• “Controlling Redundant Constraint Analysis with New Tolerance Setting”
on page 17
• “New Demos” on page 17
• “Code Generation Documentation Consolidated to Simscape User’s Guide”
on page 18
Fixed Bugs an d
Known Problems
at Web site
Interfacing with One-Dimensional Simscape Domains
The Prismatic-Translational Interface and Revolute-Rotational Interface
blocks of the new Interface Elements library allow you to connect a
SimMechanics Prismatic or Revolute joint primitive to a Physical Networks
line connected to Simscape blocks. The Prismatic-Translational Interface
and Revolute-Rotational Interface blocks transfer mechanical velocities
and forces/torques as Physical Networks cross- and through-variables,
respectively, without energy loss, along or around axes that you can define.
Related
Documentation at
Web Site
No
16
Several new demos illustrate the use of the Interface Elements blocks. See
“New Demos” on page 17.
Page 21

Version 2.7 (R2007b) SimMechanics™ Software
SimMechanics St
Simulink and Rea
You can access th
models through
states and the
Simulink and a
in simulation
See the Simul
about states
Controllin
Tolerance S
You can now
analysis i
allows you
specifyi
Certain m
toleran
is adjus
SimMech
in the S
ntheConstraints tab of the Machine Environment block, which
to choose between automatic constraint redundancy analysis or
ng a constraint redundancy tolerance explicitly.
echanical configurations are sensitive to the constraint redundancy
ce and can spuriously lose or gain degrees of freedom if this tolerance
ted incorrectly. See “Configuring Methods of Solution”, “How
anics Software Works”, and “Troubleshooting Simulation Errors”
imMechanics User’s Guide.
enamesofthemechanicalstates of your SimMechanics
the
mech_stateVectorMgr command. The names of these
SimMechanics blocks that define them are now available to
ppear in the outputs of model simulations. They also appear
s based on code generated with Real-Time Workshop
ink and Real-Time Workshop documentation for further details
.
gRedundantConstraintAnalysiswithNew
etting
adjust the sensitivity of the SimMechanics redundant con strain t
ate Names Now Available to
l-Time Workshop
®
.
New Dem
Nine n
ew demos have been added.
os
Interface Blocks
e demos illustrate how to use the new Interface Elements blocks. See
Thes
erfacing with One-Dimensional Simscape Domains” on page 16.
“Int
h_interface_crate_transfer
•
mec
h_interface_dspring_damper
• mec
h_interface_hyd_cylinder
• mec
ch_interface_hyd_slidercrank
• me
17
Page 22

SimMechanics™ Release Notes
• mech_interface_rot_spr_damper
• mech_interface_trans_spr_damper
Car Modeling
These new demos prov ide examples of sophisticated automotive modeling.
•
• mech_car_kinematics
These demos shipped in the Version 2.6 (R2007a) SimMechanics product.
Code Generation Documentation Consolidated to
Simscape User ’s Guide
Documentation of code generation features common to all Physical Modeling
add-on products based on Simscape software has been consolidated to
the Simscape User’s Guide.TheSimMechanics User’s Guide continues to
document uniquely SimMechanics features related to code generation.
mech_car_handling
18
Page 23

Version 2.6 (R2007a) SimMechanics™ Software
Version 2.6 (R2007a) SimMechanics Software
This table summarizes what’s new in Version 2.6 (R2007a):
New Features and
Changes
Yes
Version
Compatibility
Considerations
Yes—Details labeled
as Compatibility
Considerations,
below. See also
Summary.
New features and changes introduced in this version are
• “SimMechanics Software Now Requires Simscape Product” on page 19
• “Sharing Models Using Simscape Editing Mode s” on page 19
• “Block Library Links Must Be Resolved” on page 20
• “Two Blocks Now with Tunable Parameters” on page 20
• “Demos Expanded” on page 21
• “Modeling Constraints wi th SimMechanics Software” on page 21
Fixed Bugs an d
Known Problems
Bug Reports
at Web site
Related
Documentation at
Web Site
No
SimMechanics Software Now Requires Simscape
Product
SimMechanics software now depends on and requires Simscape software,
the foundation for Physical Modeling products. Simscape software includes
common Physical Modeling utilities and block libraries. See “Product
Overview” and the Simscape documentation.
Sharing Models Using Simscape Editing M odes
SimMechanics software now features a selection of two Simscape editing
modes that allow full or restricted editing of models.
19
Page 24

SimMechanics™ Release Notes
• TheRestrictedmoderequiresSimMechanics product to be installed, but
• The Full mode requires both Simscape and SimMechanics products to be
For more details, see “Using the Simscape Editing Mode” in “Running
Mechanical Models”.
Block Library Links Must Be Resolved
All SimMechanics blocks in your models must now have resolved block library
links. You can neither disable nor break these library links. This is a global
Simscape requirement. Consult the Simscape documentation for further
details.
Compatibility Considerations
If you have an existing SimMechanics model with disabled or broken links
from SimMechanics blocks to the SimMechanics block library, you must
restore all the broken block library links for your model to be valid.
does not require a license. It allows you to change a limited set of model
parameters, but not the blocks or connections, in a SimMechanics model.
installed. It allows you to change anythin g in a SimMechanics model.
20
If you have disabled or broken the SimMechanics library link for blocks that
you have customized and want to keep these modified blocks in your model,
you must move these modified blocks to your own custom library or libraries,
then copy the block instances that you need to your model.
You must still restore the block link to its parent library, whether that parent
is the SimMechanics block library or your own.
Two Blocks Now with Tunable Parameters
These SimMechanics parameters are now tunable from their respective block
dialogs:
• The Gravity vector field of the Machine Environment block.
• All three parameter fields of the Body Spring & Damper block.
Page 25

Version 2.6 (R2007a) SimMechanics™ Software
See “Limitations” in “Running Mechanical Models” for more about
SimMechanics tunable parameters and the Simulink documentation for
tunable parameters in general.
Demos Expanded
Five new demos have been added.
Angular Motion Equivalence
The mech_gimbal_transform demo shows the equivalence of a body’s angular
motion as measured by Joint Sensors and as measured by Body Sensors.
Joint Limits
Two demos illustrate how to model limits or clearance on joint motion:
•
mech_jointlimit_prismatic
• mech_jointlimit_revolute
The first illustrates limits on translational motion; the second, limits on
rotational motion.
Stochastic Oscillator and Controller
Two demos simulate a mixture of deterministic and random forces with a
model of a micromechanical damped linear oscillator:
•
mech_brownian_osc
• mech_brownian_osc_control
The first model has no controller; the second, a control force in addition to the
damped spring and white noise forces.
Modeling Constraints with SimMechanics Software
A new MATLAB Dige st article explains how to model mechanical
constraints with SimMechanics blocks. The article uses a set of four existing
SimMechanics demos as illustrations.
21
Page 26

SimMechanics™ Release Notes
Version 2.5 (R2006b) SimMechanics Software
This table summarizes what’s new in Version 2.5 (R2006b):
New Features and
Changes
Yes
Version
Compatibility
Considerations
Yes—Details labeled
as Compatibility
Considerations,
below. See also
Summary.
New features and changes introduced in this version are described here.
• “Computer-Aided Design Translator for Pro/ENGINEER Available via
theWeb”onpage22
• “SolidWorks-to-SimMechanics Translator Now Available Only via the
Web” on page 23
• “New Demo” on page 24
• “Modeling Flexible Bodies with SimMechanics Software” on page 24
Fixed Bugs an d
Known Problems
Bug Reports
at Web site
Related
Documentation at
Web Site
No
Computer-Aided Design Translator for Pro/ENGINEER
Available via the Web
A new computer-aided design (CAD) Pro/ENGINEER -to-SimMechanics
translator is available. You install and use this translator with
Pro/ENGINEER. It is independent of MATLAB.
22
The translator converts a Pro/ENGINEER CAD machine assembly into an
XML file in the Physical Modeling format. The XML file represents the
assembly in a form that you can use to generate a SimMechanics block
diagram model dynamically equivalent to the original CAD assembly. To
generate models, use the
import_physmod command.
Page 27

Version 2.5 (R2006b) SimMechanics™ Software
Installing the Pro/ENGINEER-to-SimMechanicsTranslator
Obtain and use the installer executable by locating and downloading its
archive at
is provided that describes installation and configuration details.
www.mathworks.com/products/simmechanics/. A README page
Translator Documentation
Help files accompany the Pro/ENGINEER-to-SimMechanics translator. They
include two HTML pages and a PDF book. These files are independent of
the MATLAB help system.
Translator Examples
Some examples of Pro/ENGINEER CAD assemblies are included with the
Pro/ENGINEER-to-SimMechanics translator.
One of the examples is a robot arm assembly. The corresponding
XML file in Physical Modeling format,
toolbox/physmod/mech/mechdemos/ folder, relative to your MATLAB root.
robot.xml,islocatedinthe
Compatibility Considerations
Versions of Pro/ENGIN EER compatible with the
Pro/ENGINEER-to-SimMechanics translator are listed at the MathWorks
Web site. The translator is available only for the M icrosoft Windows (32-bit)
operating system.
SolidWorks-to-SimMechanics Translator Now
Available Only via the Web
The existing SolidWorks®-to-SimMechanics translator for the
SolidWorks CAD platform con t i nu es to be available via the Web , at
www.mathworks.com/products/simmechanics/. However, it no longer ships
with the SimMechanics product.
Compatibility Considerations
Versions of SolidWorks compatible with the SolidWorks-to-SimMechanics
translator are listed at the MathWorks Web site.
23
Page 28

SimMechanics™ Release Notes
The SolidWorks CAD platform and the SolidWorks-to-SimMechanics
translator are available only for the Microsoft Windows (32-bit) operating
system.
New Demo
This version of SimMechanics software includes one new demo model,
mech_brownian_osc, a stochastic linear harmonic oscillator based on micro-
and biomechanics.
Modeling Flexible Bodies with SimMechanics
Software
A new MATLAB Digest article and related technical paper explain how to
simulate flexible bodies with SimMechanics models and third-party finite
element analysis applications. A set of models accompanies the technical
paper in a compressed zip archive available from MATLAB Central. In the
MATLAB Desktop File Exchange tool, search for “Modeling Flexible Bodies in
SimMechanics”.
24
Page 29

Version 2.4 (R2006a) SimMechanics™ Software
Version 2.4 (R2006a) SimMechanics Software
This table summarizes what’s new in V2.4 (R2006a):
New Features and
Changes
Yes
Version
Compatibility
Considerations
Yes—Details labeled
as Compatibility
Considerations,
below. See also
Summary.
New features and changes introduced in this version are described here.
• “New Block Dialogs and the Simulink Model Explorer” on page 25
• “Joint Spring & Damper Adds Extra Simulink State When Connected to a
Revolute” on page 25
• “Improved SolidWorks CAD Translation” on page 26
Fixed Bugs an d
Known Problems
Bug Reports
at Web site
Related
Documentation at
Web Site
No
New Block Dialogs and the Simulink Model Explorer
Most of the SimMechanics block dialogs have been u pgraded and are
now compatible with the Simulink Model Explorer. See the Simulink
documentation for more about Model Explorer.
Block Dialogs Not Rendered in Model Explorer
Model Explorer cannot render the dialogs of these blocks:
• Shared Environment
• Point-Curve Constraint
Joint Spring & Damper Adds Extra Simulink State
When Connected to a Revolute
Each Joint Spring & Damper block connected to a revolute primitive now adds
a Simulink state to your model. These states a re in addition to other normal
25
Page 30

SimMechanics™ Release Notes
Simulink states, such as those associated with Integrator and Transfer Fcn
blocks. See the Simulink documentation for more about Simulink model
states.
This new feature does not change the mechanical states of your model, those
associated with SimMechanics joint b locks. See the
command reference for more about mechanical states.
Improved SolidWorks CAD Translation
The SolidWorks-to-SimMechanics translator and Physical Modeling XML
import command have been improved. See “Importing Mechanical Models”
and the
Guide.
• Mates in a CAD assembly (restrictions on the free motion of CAD parts)
mech_stateVectorMgr
import_physmod command reference in the SimMechanics User’s
are n ow translated into Joint blocks that reflect a particular combination
of joint primitives, such as Prismatic, Revolute, Spherical, Bushing, etc.
Previously, all degrees of freedom in a CAD assembly were translated into
appropriately configured Custom Joint blocks. Rigid connections between
parts continue to be translated into Welds.
26
• Blocks in SimMechanics models generated from Physical Modeling XML
files are now, by default, labeled with shorter names. You can change the
naming convention in the
import_physmod command options.
Page 31

Version 2.3 (R14SP3) SimMechanics™ Software
Version 2.3 (R14SP3) SimMechanics Software
This table summarizes what’s new in V2.3 (R14SP3):
New Features and
Changes
Yes No Bug Reports
Version
Compatibility
Considerations
New features and changes introduced in this version are described here.
• “New Shared Environment Block” on page 27
• “Updated Body Spring & Damper Block” on page 27
• “Normalizing Rotations” on page 28
• “New State Vector Commands” on page 28
• “New import_physmod Dialog” on page 28
• “Demos Expanded” on page 28
• “Documentation Enhancements” on page 29
Fixed Bugs an d
Known Problems
at Web site
New Shared Environment Block
The new Shared Environment block allows you to link two separate
SimMechanics block diagrams with a nonphysical connection. The block
enforces the same machine environment settings on both machines but adds
no mechanical components (bodies or degrees of freedom) to either. Two
machines so connected require exactly one Machine Environment block,
rather than two.
Related
Documentation at
Web Site
No
See the Shared Environment block reference for further details.
Updated Body Spring & Damper Block
The Body Spring & Damper block no longer contains any degrees of freedom.
27
Page 32

SimMechanics™ Release Notes
Previous versions of the Body Spring & Damper block contained six degre es
of freedom (DoFs) represented by a Joint. This Joint had to be taken into
account when counting DoFs and loops in your model.
The new Body Spring & Damper block in ste ad uses a Shared Environment
block to connect the two sides and contains no DoFs. See their respective
block references for more information.
Normalizing Rotations
The Body dialog accepts various rotational forms (Euler angles, rotation
matrix, quaternion). The Body block now interprets these rotational form s
in a slightly different way, so that the standard normalization conditions on
rotation matrices and quaternions are consistently enforced. As a result, you
might now see slightly different simulation results from earlier versions.
New State Vector Commands
Four new SimMechanics commands allow you to manipulate the mechanical
states of your models. See the command references for more.
28
•
mech_get_states
• mech_runtime_states
• mech_set_states
• mech_transfer_states
New import_physmod Dialog
The import_physmod command generates SimMechanics m odels from
Physical Modeling XML files. In addition to importing Physical Modeling XML
through the command line, you can now set up the command through a dialog.
See the
import_physmod command reference for further information.
Demos Expanded
Two new demos have been added:
•
mech_flexible_four_bar models a flexible four bar machine.
Page 33

Version 2.3 (R14SP3) SimMechanics™ Software
• mech_pole_vault models a rigid pole vaulter, with a discrete event.
The second demo has an associated MAT-file.
Documentation Enhancements
The SimM echanics User’s Guide has been enhanced.
• The review on representing motion has been revised.
• The analyzing motion has been revised.
• The computer-aided design (CAD) documentation (also available as a
separate book) has been significantly revised. See the CAD chapter.
• A new chapter of case studies, based on the Stewart platform, has been
added. The studies apply advanced methods and tasks to this system.
SimMechanics softw are includes a related set of demo model and library
files.
- Degrees of freedom, states, closed topology, and constraints
- Trimming and linearization
- Designing controllers for the platform
- Generating code versions of the model
- Implementing code on dedicated hardware (hardware in the loop)
29
Page 34

SimMechanics™ Release Notes
Version 2.2.2 (R14SP2) SimMechanics Software
This table summarizes what’s new in V2.2.2 (R14SP2):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
No Bug Reports
New features and changes introduced in this version are described here.
• “Demos Expanded” on page 30
• “Documentation Enhancements” on page 30
Fixed Bugs an d
Known Problems
at Web site
Related
Documentation at
Web Site
No
Demos Expanded
Two new demos have been added:
•
mech_sticky_box
• mech_sticky_screw
Each demo has an associated MAT-file.
These demos illustrate static friction (stiction) implemented with the Joint
Stiction Actuator.
30
Documentation Enhancements
The online SimMechanics Help has been enhanced with links to four new
Web-based AVI animation files (one of them new in this release) that record
SimMechanics simulations.
You can access these links most easily by using the Examples index in the
Help browser, under Prerecorded Animations.
Page 35
Version 2.2.1 (R14SP1) SimMechanics™ Software
Version 2.2.1 (R14SP1) SimMechanics Software
This table summarizes what’s new in V2.2.1 (R14SP1):
New Features and
Changes
Yes No
Version
Compatibility
Considerations
New features and changes introduced in this version are described here.
• “Demos Updated and Expanded” on page 31
• “Documentation Enhancements” on page 31
Demos Updated and Expanded
The demos used in the open-topology Inverse Dynamics case study have been
changed:
•
mech_dpend_invdyn1
• mech_dpend_invdyn2
• mech_dpend_act (a new demo replacing mech_dpend_stat)
The last, new demo has an associated MAT-file,
“Documentation Enhancements” on page 31.
Fixed Bugs an d
Known Problems
Fixed bugs
at Web site
Related
Documentation at
Web Site
No
mech_dpend_act.mat.See
Two other new demos have been added:
•
mech_cambelt models a cam, belt, and pulley system with a Point-Curve
Constraint block.
•
mech_viscous illustrates how to model a viscous medium with a Join t
Spring & Damper block.
Documentation Enhancements
TheonlineSimMechanicsHelphasbeen enhanced w ith additional
multimedia support.
31
Page 36

SimMechanics™ Release Notes
• The online Help contains four detailed mechanical drawings for systems
• TheonlineHelpalsocontainslinkstothreenewWeb-basedAVIanimation
You can access these features most easilybyusingtheExamplesindex
in the Help browser, under Mechanical Drawings and Prerecorded
Animations,respectively.
The open-topology Inverse Dynamics section of the motion analysis chapter
has been enhanced with a new, more complex and more realistic example.
The related demo s have been changed as well; see “Demos Updated and
Expanded” on page 31 previously.
modeled in the user’s guide: the conveyor, the four bar machine, and the
Stewart platform.
files that record SimMechanics simulations.
32
Page 37

Version 2.2 (R14) SimMechanics™ Software
Version 2.2 (R14) SimMechanics Software
This table summarizes what’s new in V2.2 (R14):
New Features and
Changes
Yes
Version
Compatibility
Considerations
Yes—Details labeled
as Compatibility
Considerations,
below. See also
Summary.
New features and changes introduced in this version are described here.
• “Simulation and Visualization Controls Changes” on page 34
• “New Machine Environment Block” on page 34
• “Choosing a Gro u nd Block as Machine Root” on page 35
• “Optional Two-Dimensional Solver” on page 35
• “Optional Gravity Signal” on page 35
• “New SimMechanics Diagnostics Settings” on page 36
• “Restricted Body Co ordinate System References” on page 36
• “Minimum Number of Body Coordinate Systems” on page 36
• “Visualizati on Controls Relocated” on pa ge 37
Fixed Bugs an d
Known Problems
Fixed bugs
at Web site
Related
Documentation at
Web Site
No
• “Manual Updating of Body Visualization” on page 37
• “Internal Virtual Reality Visualization No Longer Supported” on page 37
• “Code Generation with Point-Curve Constraint Now E nabled” on page 38
• “Code Generation Improvements” on page 38
• “Additional Simulink Features Now Supported” on page 38
• “SimMechanics Software Now Supported on HP-UX Platforms” on page 38
• “Demos Updated and Expanded” on page 38
33
Page 38

SimMechanics™ Release Notes
• “Documentation Enhancements” on page 39
Simulation and Visualization Controls Changes
This version of SimMechanics software introduces significant changes to
how you control simulation, mechanical environment, and visualization in
SimMechanics models. These changes, summarized below, include
• “New Machine Environment Block” on page 34
• “Choosing a Gro u nd Block as Machine Root” on page 35
• “Optional Two-Dimensional Solver” on page 35
• “Optional Gravity Signal” on page 35
• “New SimMechanics Diagnostics Settings” on page 36
• “Visualizati on Controls Relocated” on pa ge 37
• “Manual Updating of Body Visualization” on page 37
The new controls are fully documented in the SimMechanics User’s Guide
chapters on running simulations and visualization.
34
New Machine Environment Block
In the new version of SimMechanics software, you configure the mechanical
environment for an entire model in the SimMechanics node of the
Configuration Parameters dialog, accessed via the Simulation menu. You
configure the mechanical environment for each separate machine diagram
(one or more per model) via its Machine Environment block. These two dialogs
replace the old Mechanical Environment Settings dialog.
You must connect exactly one Machine Environment block to each separate
machine diagram at one of the machine’s Ground blocks. The new Machine
Environment block is located in the Bodies library.
See “Choosing a Ground Block as Machine Root” on page 35.
Compatibility Considerations
Prior to this version, SimMechanics models recorded mechanical environment
data in the Mechanical Environment Settings dialog. Although you can
Page 39

Version 2.2 (R14) SimMechanics™ Software
no longer access this dialog from the Simulation menu, you can continue
to run old models as they are. If you want to view these old settings, enter
mech_environment(gcs) at the command line with your old model open. You
cannot change the dialog settings.
If you want to change the settings in old models or build a new SimMechanics
model, you must use the new Machine Environment block. Copying this
block from the Bodies library into an old model causes the old Mechanical
Environment Settings data to be copied into the block. You can then
reconfigure the new block as you want.
Choosing a Ground Block as Machine Root
The new Ground block has the option of being chosen as the root for a
machine’s Machine Environment block. In each separate machine diagram
(one or more per model), choose one such Ground by selecting Show
Mechanical Environment port in its dialog. The corresponding port then
appears on the Ground. Then connect a Machine Environment block to the
Ground at this port.
See “New Machine Environment Block” on page 34.
Optional Two-Dimensional S olver
The new Machine Environment block allows you to choose, through its
Machine dimensionality pull-down menu, a specialized solver fo r a
machine that moves in only two dimensions. SimM echanics software detects
the dimensionality and automatically adjusts the solver b y default. But you
can override the default and require SimMechanics software to simulate in
either three or two dimensions.
The two-dimensional solver significantly improves s imulation performance
in two and one dimensions.
Optional Gravity Signal
ThenewMachineEnvironmentblock allows you to input gravity as an
external Simulink signal. In the block dialog, select Input gravity as
signal. A Simulink inport appears for connecting the Simulink signal line.
The gravity must be a three-component vector signal. You choose the units in
35
Page 40

SimMechanics™ Release Notes
the Gravity vector units pull-down menu of the block dialog. SimMechanics
software interprets the vector gravity signal the same way it interprets the
static Gravity vector field value in the block dialog.
If you choose gravity as a signal, the Gravity vector field is ignored.
New SimMechanics Diagnostics Settings
SimMechanics software now lets you control diagnostic messages. In the
SimMechanics node of the Configuration Parameters dialog, accessed via
the Simulation menu, you can select to enable or disable certai n warning
messages, and whether to m ark closed-loop joints cut automatically by
SimMechanics software.
Restricted Body Coordinate System References
All c oordinate system (CS) references in Body blocks from one CS to another
CS must now refer to only
36
• OtherCSsonthesameBody
• Adjoining CSs (coordinate systems on Bodies directly connected to the
referring body)
• World
All other CS references now cause simulation errors.
Compatibility Considerations
Other types of CS references from one Body to another now lead to simulation
errors. If any of your old models contain such references, you must update
them.
Minimum Number of Body Coordinate Systems
You can no longer eliminate all the non-center-of-gravity (CG) Body coordinate
systems (CSs) on a Body block dialog. Besides the undeletable CG CS entry,
at least one non-CG CS must remain.
Page 41

Version 2.2 (R14) SimMechanics™ Software
Visualization C
You now enable Si
model in the Visu
Configuration
now enable or di
via the Visual
“New Machine E
All SimMecha
configured M
menu and tool
mMechanics visualization and animation for an entire
alization area of the SimMechanics node of the
Parameters dialog, reached via the Simulation menu. You
sable visualization for individual machines within a model
ization tab of the Machine Environment block dialog. See
nvironment Block” on page 34.
nics visualization controls are now located on the specially
ATLAB Graphics visualization window, in the SimMechanics
bar.
Manual Upda
SimMechan
added to a m
Diagram fr
Internal
Support
SimMech
Reality
default
suppor
ics visualization no longer immediatel y displays a Body newly
odel. Instead you must update the model by s ele cting Update
om the Edit menu.
Virtual Reality Visualization N o Longer
ed
anics software no longer includes internally integrated Virtual
Toolbox visualization. Models configured to use virtual reality now
to the MATLAB Graphics visualization/animation tool, w hich is still
ted by SimMechanics software.
ontrols Relocated
ting of Body Visualization
See the
in the
Consu
“Visualizing with a Virtual Reality Client” of the visualization chapter
SimMechanics documentation.
lt the Web product page for more about Virtual Reality Toolbox.
Compatibility Considerations
an continue to use Virtual Reality Toolbox with SimMechanics models
You c
eating your own virtual world for your machine, incorporating into your
by cr
el a VR Sink block linked to your virtual world, and feeding Body Sensor
mod
nals to the VR Sink.
sig
37
Page 42

SimMechanics™ Release Notes
Code Generation
Enabled
The Point-Curve
This improveme
containing Po
Code Generati
The stand-al
precompiled
significant
SimMechani
ly speeds up compilation of generated code.
Additiona
SimMechan
target. I
visualiz
limitati
t also now supports Simulink External mode, but without
ation. See the sections on generating code and SimMechanics
ons in the SimMechanics documentation.
SimMech
Platfor
SimMec
(HP-UX
ms
hanics software is now supported on the Hewlett-Packard UNIX
) operating system.
Constraint no longer creates algebraic loops in Simulink.
nt means that you can now generate code from models
int-Curve Constraints.
on Improvements
one SimMechanics library used for code generation is now
for supported platforms using standard targets. This feature
cs code generation now supportsReal-TimeWindowsTarget.
l Simulink Features Now Supported
ics software now supports Model Referencing and S-function
anics Software Now Supported on HP-UX
with Point-Curve Constraint Now
®
38
Demos
All Si
Envi
•
mech
forc
•
mec
•
mec
•
me
co
Updated a nd Expanded
mMechanics demos have been updated with the new Machine
ronment block. New demos have also been added:
_bouncing_ball
es using a bouncing ball.
h_flyball
h_rack_pinion
ch_rolling_sphere
nstraints using a sphere rolling on a two-dimensional surface.
models a flyball governor mechanism.
demonstrates how to model impact and collisional
models a driven rack-and-pinion mechanism.
demonstrates how to model nonholonomic
Page 43

Version 2.2 (R14) SimMechanics™ Software
• mech_toroid illustrates the Point-Curve Constraint with a body sliding
on a toroidal curve.
Documentation Enhancements
The SimM echanics User’s Guide has been enhanced.
• The review chapter on body motion and coordinate systems is expanded
with greater detail and more examples.
• The computer-aided design (CAD) documentation (also available as a
separate boo k) has been significantly revised and expanded. See the CAD
chapter.
• The case study sections on trimming and linearization have been revised
and expanded, including a new closed-loop linearization exam ple.
You can find a more complex closed-loop linearization example using a
Stewart platform model at
www.mathworks.com/company/newsletters/digest/sept02/stewart.html
39
Page 44
SimMechanics™ Release Notes
Version 2.1.1 (R13SP1) SimMechanics Software
This table summarizes what’s new in V2.1.1 (R13SP1):
New Features and
Changes
No No Yes
Version
Compatibility
Considerations
New changes introduced in this version are described here.
Fixed Bugs an d
Known Problems
Details below
Model Reinitialization After Simulation Errors
Restarting a model that had encountered an error during a previous
simulation sometimes returned warnings and zero results. Starting the
model a third time reproduced the errors of the first simulation. This bug
is now fixed.
Related
Documentation at
Web Site
No
40
Page 45

Version 2.1 (R13+) SimMechanics™ Software
Version 2.1 (R13+) SimMechanics Software
This table summarizes what’s new in V2.1 (R13+):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
No
New features and changes introduced in this version are described here.
• “Computer-Aided Design Translator for SolidWorks” on page 41
• “import_physmod Command for Generating Models” on page 42
• “Documentation and Example s for SolidWorks-to-SimMechanics
Translator” on page 42
Fixed Bugs an d
Known Problems
Fixed bugs
at Web site
Related
Documentation at
Web Site
No
Computer-Aided Design Translator for SolidWorks
SimMechanics version 2.1 contains a standalone computer-aided design
(CAD) translator for the SolidWorks CAD platform. You install and use this
translator with SolidWorks but independently of MATLAB.
The translator converts a SolidWorks CAD machine assembly into an XML
file in the Physical Modeling format. The XML file represents the assembly
in a form that you can use to generate a SimMechanics block diagram model
dynamically equivalent to the original CAD assembly. To generate models,
use the new
Generating Models” on page 42 below.
import_physmod command. See “import_physmod Command for
Installing the SolidWorks-to-SimMechanics Translator
Obtain the self-extracting executable archive
SimMechanics_Translator_for_SolidWorks.exe by locating and
downloading its archive at
www.mathworks.com/products/simmechanics/.
41
Page 46

SimMechanics™ Release Notes
import_physmod Command for Generating Models
Using the CAD-to-SimMechanics translator, you export a CAD assembly into
an XML file in the Physical Modeling format. (See “Computer-Aided Des ign
Translator for SolidWorks” on page 41.)
This XML file represents the assembly in a form that y ou can use to
generate a SimMechanics block diagram model dynamically equivalent to
the original CAD assembly. You generate the model from the XML file w ith
the
The generated model contains Bodies and Joints that represent the original
parts and degrees of freedom of the assembly. You can edit the generated
model to add additional SimMechanics and Simulink blocks.
Documentation and Examples for
SolidWorks-to-SimMechanics Translator
The SimMechanics User’s Guide has not been updated for this release.
import_physmod command.
42
Translator Documentation
Special help files accompany the SolidWorks-to-SimMechanics translator.
They include two HTML pag es and a PDF book. These files are independent
of the MATLAB help system.
Translator Examples
Some examples of SolidWorks CAD assemblies are included with the
SolidWorks-to-SimMechanics translator.
One of the examples is a robot arm assembly. The corresponding
XML file in Physical Modeling format,
toolbox/physmod/mech/mechdemos folder, relative to your MATLAB root.
robot.xml,islocatedinthe
Page 47

Version 2.0.1 (R13+) SimMechanics™ Software
Version 2.0.1 (R13+) SimMechanics Software
This table summarizes what’s new in V2.0.1 (R13+):
New Features and
Changes
No No Yes
Version
Compatibility
Considerations
New changes introduced in this version are described here.
Fixed Bugs an d
Known Problems
Details below
Code Compilation with LCC Compiler
Attempting to compile code generated from SimMechanics models using LCC
led to errors in Version 2.0. This bug is now fixed.
Related
Documentation at
Web Site
No
43
Page 48

SimMechanics™ Release Notes
Version 2.0 (R13+) SimMechanics Software
This table summarizes what’s new in V2.0 (R13+):
New Features and
Changes
Yes
Details below
Version
Compatibility
Considerations
No
New features and changes introduced in this version are described here.
• “Code Generation w ith Real-Time Workshop” on page 44
• “Accelerator Mode a nd Discrete Events” on page 44
• “Expanded Handle Graphics Visualization Features” on page 45
• “Variable Body Mass and Inertia Tensor” on page 45
• “Vectorized Joint Initial Condition Actuation” on page 45
• “Damped Linear Force Element Blocks” on page 45
• “New Mechanical Branching Bar Block” on page 45
Fixed Bugs an d
Known Problems
Fixed Bugs
at Web Site
Related
Documentation at
Web Site
No
Code Generation with Real-Time Workshop
You can now generate stand-alone C code from SimMechanics models using
Real-Time Workshop. You can also export it to a PC kernel using xPC Target.
44
SimMechanics version 2.0 requires Real-Time Workshop 5.0.1 or later to
generate code for the Rapid Simulation (RSIM) target.
Accelerator Mode and Discrete Events
Accelerator mode now supports discrete events associated with the Joint
Stiction Actuator and the Po int-C u rve Constraint.
Page 49

Version 2.0 (R13+) SimMechanics™ Software
Expanded Handle
The SimMechanic
including recor
Variable Body
The Sensors & A
Actuator bloc
inertia tens
simulates th
the effect of
ejection of
mass.
Vectorize
The Joint I
Joint bloc
initial v
nitial Condition Actuator block now lists all the primitives in the
k to which it is connected. You can set initial positions/angles and
elocities separately for each prismatic and revolute primitiv e.
Damped Li
This rel
represe
Damper b
The Joi
spring
ease introduces a new block library, Force Elements, with two blocks
ntingdampedlinearharmonicoscillatorforces. TheBodySpring&
lock simulates a damped spring-like force between two bodies.
nt Spring & Damper block actuates a joint primitive with a damped
-like force or torque.
s visualization tool has a large number of new features,
ding and playback of simulation animations.
Mass and Inertia Tensor
ctuators library features a new Variable Mass & Inertia
k. This block accepts Simulink signals that vary the mass and/or
or of the Body block to which it is connected. The block only
e changes in the body’s mass properties and does not simulate
the thrust forces or torques resulting from the accretion or
d Joint Initial Condition Actuation
near Force Element Blocks
Graphics Visualization Features
New Me
The Ut
You ca
or/actuatorportonaJoint,Constraint,orDriverortooneBody
sens
dinate system on a Body.
coor
chanical Branching Bar Block
ilities library features the new Mecha n ical Branching Bar block.
n use this block to map multiple sensor and actuator lines to one
45
Page 50

SimMechanics™ Release Notes
Compatibility Summar y for SimMechanics Software
This table summarizes new features and changes that might cause
incompatibilities when you upgrade from an earlier version, or wh en you
use files on multiple versions. Details are provided in the description of the
new feature or change.
Version
(Release)
Latest Version
V3.2 (R2010a)
V3.1.1 (R2009b)
V3.1 (R2009a)
V3.0 (R2008b) See the Compatibility Considerations subheading
V2.7.1 (R2008a)
V2.7 (R2007b)
V2.6 (R2007a) See the Compatibility Considerations subheading
NewFeaturesandChangeswithVersion
Compatibility Impact
No
No
No
for this new feature:
• “New SimMechanics Visualization and Animation”
on page 10
• “Upgraded Mechanical Import and Automatic Model
Generation” on page 13
See “Command Being Removed” on page 14.
No
No
for this new feature:
• “Block Library Links Must Be Resolved” on page 20
46
V2.5 (R2006b) See the Compatibility Considerations subheading for
each of these new features:
• “Computer-Aided Design Translator for
Pro/ENGINEER Available via the Web” on page 22
• “SolidWorks-to-SimMechanics Translator Now
AvailableOnlyviatheWeb”onpage23
Page 51
Compatibility Summary for SimMechanics™ Software
Version
(Release)
V2.4 (R2006a)
V2.3 (R14SP3)
V2.2.2 (R14SP2)
V2.2.1 (R14SP1)
NewFeaturesandChangeswithVersion
Compatibility Impact
No
No
No
No
V2.2 (R14) See the Comp atibility Considerations subheading for
each of these new features or changes:
• “New Machine Environment Block” on page 34
• “Restricted Body Coordinate System References” on
page 36
• “Internal Virtual Reality Visualization No Longer
Supported” on page 37
V2.1.1 (R13SP1)
V2.1 (R13+)
V2.0.1 (R13+)
V2.0 (R13+)
No
No
No
No
47
 Loading...
Loading...