

Page 1
SimDriveline™ 1
User’s Guide
Page 2
How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
SimDriveline™ User’s Guide
© COPYRIGHT 2004–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
August 2004 Online only New for Version 1.0 (Release 14+)
October 2004 Online only Revised for Version 1.0.1 (Release 14SP1)
March 2005 Online only Revised for Version 1.0.2 (Release 14SP2)
April 2005 Online only Revised for Version 1.1 (Release 14SP2+)
September 2005 O nline only Revised for Version 1.1.1 (Release 14SP3)
March 2006 First printing Revised for Version 1.2 (Release 2006a)
September 2006 O nline only Revised for Version 1.2.1 (Release 2006b)
March 2007 Online only Revised for Version 1.3 (Release 2007a)
September 2007 O nline only Revised for Version 1.4 (Release 2007b)
March 2008 Online only Revised for Version 1.5 (Release 2008a)
October 2008 Online only Revised for Version 1.5.1 (Release 2008b)
March 2009 Online only Revised for Version 1.5.2 (Release 2009a)
September 2009 O nline only Revised for Version 1.5.3 (Release 2009b)
March 2010 Online only Revised for Version 1.5.4 (Release 2010a)
Page 4

Page 5
Introducing SimDriveline Software
1
Product Overview ................................. 1-2
Product Definition
Driveline Simulation and Physical Modeling
................................. 1-2
........... 1-2
Contents
Related Products
Required Products
Other Related Products
Running a Demo Model
What the Model Represents
What the Model Illustrates
Opening the Model
Running the Model
Modifying the Model
What Can You Do with SimDriveline Software?
About SimDriveline Software
Modeling Drivetrains
Connector Ports and Connection Lines
Inertias and Gears
Complex Driveline Elements
Actuating and Sensing Motion
Simulating and Analyzing Motion
Learning M ore
Using the MATLAB Help System for Documentation and
Demos
Finding Special SimDriveline Help
........................................ 1-25
.................................. 1-4
................................. 1-4
............................ 1-4
............................ 1-6
......................... 1-6
.......................... 1-6
................................ 1-7
................................ 1-11
............................... 1-15
........................ 1-20
.............................. 1-20
................ 1-21
................................ 1-22
........................ 1-22
....................... 1-23
.................... 1-24
.................................... 1-25
................... 1-25
...... 1-20
v
Page 6
Simple Models
2
Introducing the SimDriveline Block Libraries ........ 2-2
About the SimDriveline Block Library
Accessing the Libraries
Using the Libraries
............................. 2-2
................................ 2-4
................ 2-2
Essential Steps to Building a Driveline Model
Representing and Transferring D riv e line Motion and
Torque
About Inertia, Motion, and Gears
Coupling Rotational Motion with Gears
Coupling Two Spinning Inertias with a Simple Gear
Coupling Two Spinning Inertias with a Variable Gear
Coupling Three Spinning Inertias with a Planetary
Gear
Actuating Drivelines with Torques and Motions
About Torques, Motions, and Actuation
Modeling the Effect of a Variable Inertia
Actuating a Driveline with Torques
Actuating a Driveline with Motion s
Setting the Motion Initial Conditions of a Driveline
Controlling Gear Couplings with Clutches
About Motion, Gears, and Clutches
Engaging a nd Disengaging Gears with Clutches
Modeling Realistic Clutch Systems with Loss
Braking Motion with Clutches
Modeling Friction Clutches at a Fundamental Level
......................................... 2-9
.................... 2-9
............... 2-9
.......................................... 2-17
............... 2-22
.............. 2-24
................... 2-25
................... 2-26
................... 2-28
....................... 2-37
........ 2-7
..... 2-11
...... 2-22
...... 2-26
........... 2-28
........ 2-28
........... 2-34
..... 2-41
... 2-16
vi Contents
Combining Clutches and Gears into T ransmissions
About Gears, Clutches, and Transmissions
Modeling a Simple Two-Speed Transmission with
Braking
Introducing the Transmission Templates Library
Modeling a CR-CR 4-Speed Transmission Driveline with
Braking
....................................... 2-43
....................................... 2-51
............. 2-42
....... 2-50
... 2-42
Page 7
Modeling and Simulating a Complete Car ............ 2-58
About the Full Car Model
Modeling the Engine
Modeling the Transmission
Coupling the Engine to the Transmission
Modeling the Wheel Ass embly and Road Coupling
Controlling the Clutches and Braking
Running the Model
........................... 2-58
............................... 2-59
......................... 2-61
.............. 2-62
....... 2-63
................. 2-67
................................ 2-70
Advanced Methods
3
Using the Simscape Editing Mode ................... 3-2
Accessing and Changing the Simscape Configuration
Parameters
Editing Block Parameters in Restricted Mode
.................................... 3-2
.......... 3-3
Improving Performance
Simulating Drivelines within the Simulink
Environment
Increasing Accuracy and Speed
Optimizing Clutch Mode Changes and Fixed-Step
Solvers
Troubleshooting Simulation Errors
Analyzing Degrees of Freedom
About Drive line Degrees of Freedom and Constraints
Identifying Degrees of Freedom
Fundamental Degrees of Freedom
Connected Deg rees of Freedom
Constrained Deg rees of Freedom
Actuating, Sensing, and Terminating Degrees of
Freedom
Counting Independent Degrees of Freedom
Counting Degrees of Freedom in a Simple Driveline with a
Clutch
Trimming and Linearizing Driveline Models
About Trimming, Inverse Dynamics, and Linearization
................................... 3-5
........................................ 3-8
....................................... 3-23
........................................ 3-26
............................ 3-5
...................... 3-5
................... 3-11
...................... 3-14
...................... 3-15
.................... 3-15
...................... 3-18
..................... 3-19
............ 3-25
......... 3-31
.... 3-14
.. 3-31
vii
Page 8
Finding and Using Driveline States .................. 3-34
Trimming a Driveline with Inverse Dynamics
Linearizing a Driveline Model
Counting Driveline States in a Full Car
Trimming a Full Car to Rest
Linearizing a Full Car at Rest
....................... 3-37
........................ 3-43
....................... 3-45
.......... 3-35
............... 3-38
How Sim Driveline Software Works
About Driveline Simulation
State, Constraint, and Motion Actuation Identification
Independent State Selection and Initialization
Dependent State Selection and Initialization
Torque Analysis and Dynamical Simulation
Clutch Mode Iteration
Generating Code
About Code Generation from SimDriveline Models
Using Code-Related Products and Features
How SimDriveline Code Generation Differs from
Simulink
Using Run-Time Parameters in Generated Code
Limitations
About SimDriveline and Simulink Limitations
Continuous Sample Times Required
Restricted Simulink Tools
Unsupported Simulink Tool
Simulink Tools Not Compatible with SimDriveline
Blocks
Restrictions with Generated Code
........................................ 3-55
.................................. 3-50
...................................... 3-51
....................................... 3-54
......................... 3-48
.............................. 3-49
.......................... 3-54
......................... 3-55
.................. 3-48
.......... 3-49
........... 3-49
............ 3-49
............ 3-50
.................. 3-54
.................... 3-55
... 3-48
...... 3-50
........ 3-52
......... 3-54
viii Contents
Block Reference
4
Drivelines and Inertias ............................. 4-2
Gears
............................................. 4-2
Page 9
Dynamic Elements ................................. 4-3
Transmissions
Sensors and Actuators
Vehicle Components
Interface Elements
5
A
Drivel
ine Abbreviations and Conventions
Abbrev
Angula
Gear R
iations
rMotion
atios
..................................... 4-3
............................. 4-4
............................... 4-4
................................ 4-5
Blocks — Alphabetical List
Technical Conventions
...........
....................................
...................................
......................................
A-2
A-2
A-2
A-2
B
Drive
line Units
....................................
liography
Bib
I
A-4
ndex
ix
Page 10

x Contents
Page 11

Introducing SimDriveline Software
1
With SimDriveline™ software, you can model drivetrain and powertrain
systemsinaneasy,naturalwaywithinMATLAB
chapter introduces you to SimDriveline software, with an overview and an
example of modeling drivetrains.
• “Product Overview” on page 1-2
• “Related Products” on page 1-4
• “Running a Demo Model” on page 1-6
• “What Can You Do with Sim Driveline Software?” on page 1-20
• “Learning More” on page 1-25
®
and Simulink®.This
Page 12

1 Introduc ing SimDriveline™ Software
Product Overview
In this section...
“Product Definition” on page 1-2
“Driveline Simulation and Physical Modeling” on page 1-2
Product Definition
SimDriveline software is a block diagram modeling environment for the
engineering design and simulation of drivelines, or idealized powertrain
systems. A driveline propels a vehicle or craft by transferring its engine
torque and rotational power into vehicle kinetic energy and translational
momentum. The vehicle moves through or on a medium (air, water, ground)
which propels it by reaction forces an d which acts as a load on th e engine.
Drivelines consist of b odies spinning around fixed axes and subject to
Newton’s laws of motion. T he bodies can revolve about one axis, multiple
parallel axes, or multiple nonparallel axes. Simp l e and complex gears
constrain the bodies to revolve together and transfer torque up and down the
driveline axes. Locking and unlocking clutches switch the driveline from one
gear set to another. Gears and clutches make up transmissions.
1-2
With SimDriveline software, you represent a driveline with a connected
block diagram, like other Simulink models, and you can group blocks in to
hierarchical subsystems. You can initiate and maintain rotational motion in a
driveline with actuators wh ile measuring, via sensors, the motions of driveline
elements and the torques acting on them. You can return sensor signals to
the driveline via actuators, forming feedback loops and the basis for controls.
The SimDriveline libraries offer blocks to represent rotating bodies; gear
constraints among bodies; dynamic elements such as spring-damper forces,
rotational stops, and clutches; transmissions; and sensors and actuators.
You can also analyze linearized versions of your SimDriveline models and
generate code from them.
Driveline Simulation and Physical Modeling
SimDriveline software is based on the Simscape™ environment, the platform
product for the Simulink Physical Modeling family, encompassing the
Page 13

Product Overview
modeling and design of systems according to basic physical principles.
Simscape software runs within the Simulink environment and interfaces
seamlessly with the rest of Simulink and with MATLAB. Unlike other
Simulink blocks, which represent mathematical operations or operate on
signals, Simscape blocks represent physical components or relationships
directly.
Note This SimDriveline User’s Guide assumes that you have some
experience with modeling drivetrains and with building and running models
in Simulink.
1-3
Page 14

1 Introduc ing SimDriveline™ Software
Related Products
In this section...
“Required Products” on page 1-4
“Other Related Products” on page 1-4
Required Products
You must have current versions of the following products installed to use the
SimDriveline product:
• MATLAB
• Simulink
• Simscape
Other Related Products
The related products listed on the SimDriveline product page at the
MathWorks™ Web site include toolboxes and blocksets that extend the
capabilities of MATLAB and Simulink. These products will enhance your
SimDriveline experience in various applications.
1-4
Physical Modeling Product Family
Use the Physical Modeling product family to model physical systems in
Simulink. In addition to SimDriveline software, they include:
• Simscape, the platform and unifying environment for Physical Modeling
products
• SimElectronics
• SimHydraulics
• SimMechanics™, for modeling and simulating mechanical systems
• SimPowerSystems™, for modeling and simulating electrical power systems
®
, for modeling and simu l ati ng el ectronic systems
®
, for modeling and simulating hydromechanical systems
Page 15

Related Products
For Information About MathWorks Products
For more information about any MathWorks software products, see either
• The online documentation for that product if it is installed
• The MathWorks Web site at
www.mathworks.com; see the “Products” section
1-5
Page 16
1 Introduc ing SimDriveline™ Software
Running a Demo Model
In this section...
“What the Model Represents” on page 1-6
“What the Model Illustrates” o n page 1-6
“Opening the M odel” on page 1-7
“Running the Model” on page 1-11
“Modifying the Model” on page 1-15
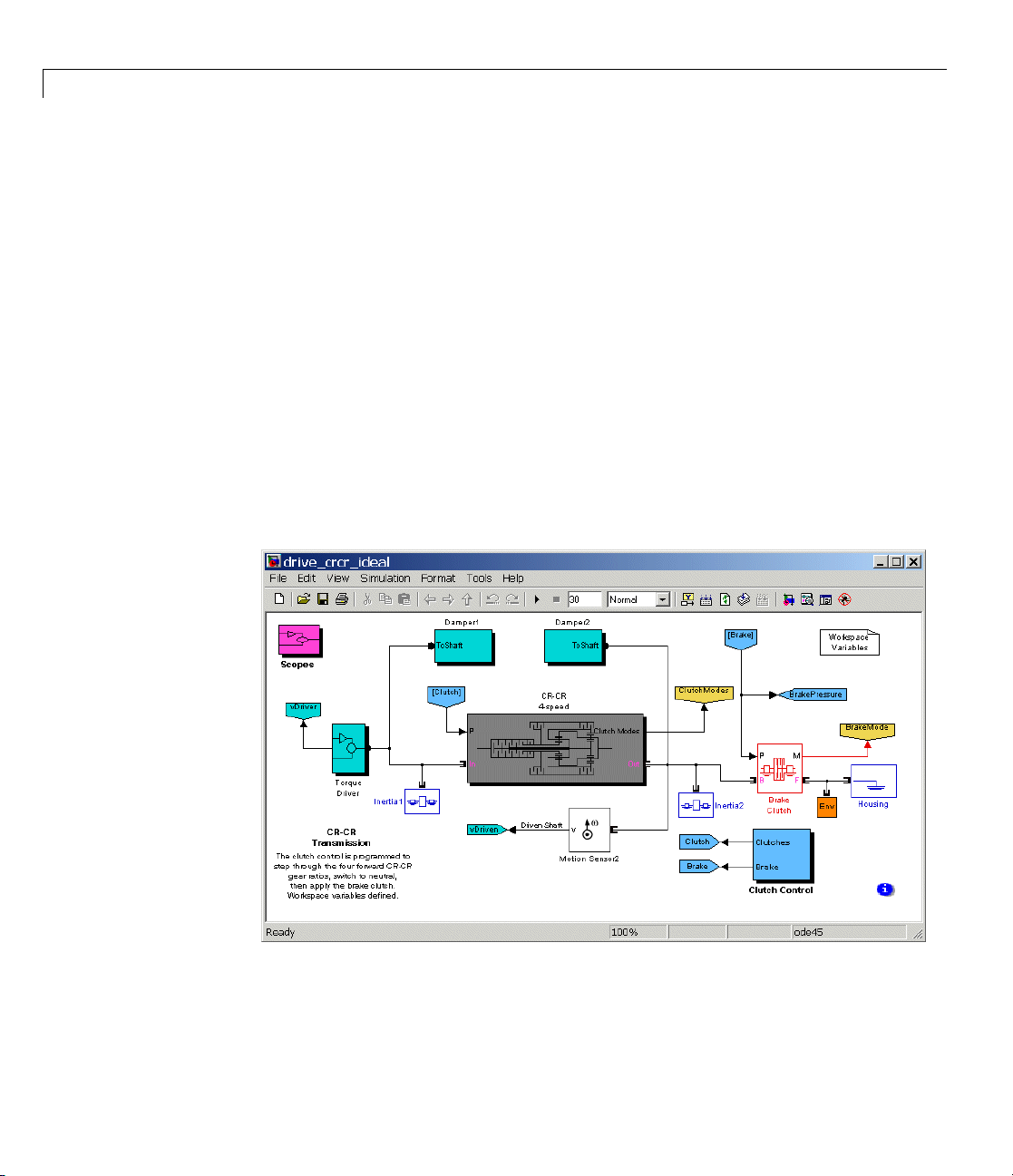
What the Model Represents
The demo model of this section, drive_crcr_ideal, simulates a complete
drivetrain. This model will help you understand how to model driveline
components with SimDriveline blocks, connect them into a realistic model,
use Simulink blocks as well, and simulate and modify a drivetrain model.
1-6
The d riveline mechanism modeled here is part of a full vehicle, without the
engine or engine-drivetrain coupling, and without the final differential and
wheel assembly. The model includes an actuating torque, driver and driven
shafts, a four-speed transmission, and a braking clutch.
What the Model Illustrates
The drive_crcr_ideal model contains a driveline that accepts a driving torque
and transfers this torque and the associated angular motion from the input
or drive shaft to an output or driven shaft through a transmission. The
model includes a CR-CR (carrier-ring–carrier-ring) four-speed transmission
subsystem, based on two gears and four clutches. (The demo does not use
the reverse gear available in the CR-CR transmission.) You can set the
transmission to four different gear combinations, allowing four different
effective torque and angular velocity ratios. A fifth clutch, outside the
transmission, acts as a brake on the driven shaft.
The CR-CR 4-Speed Transmission subsystem illustrates a critical feature
of transmission design, the clutch schedule. Tobefullyengaged,the
transmission, with four clutches and two gears, requires two clutches to
be locked and the other two unlocked at any time. (The transmission’s
Page 17
Running a Demo Model
reverse clutch is not counted here.) The choice of which two clutches to lock
determines the effective gear ratio across the transmission. T he clutch
schedule is the table of locked and free clutches corresponding to different
gear settings. If all four clutches are unlocked, the transmission is in neutral.
If the clutches are completely disengaged, no torque or angular motion at all
is transferred across the transmission.
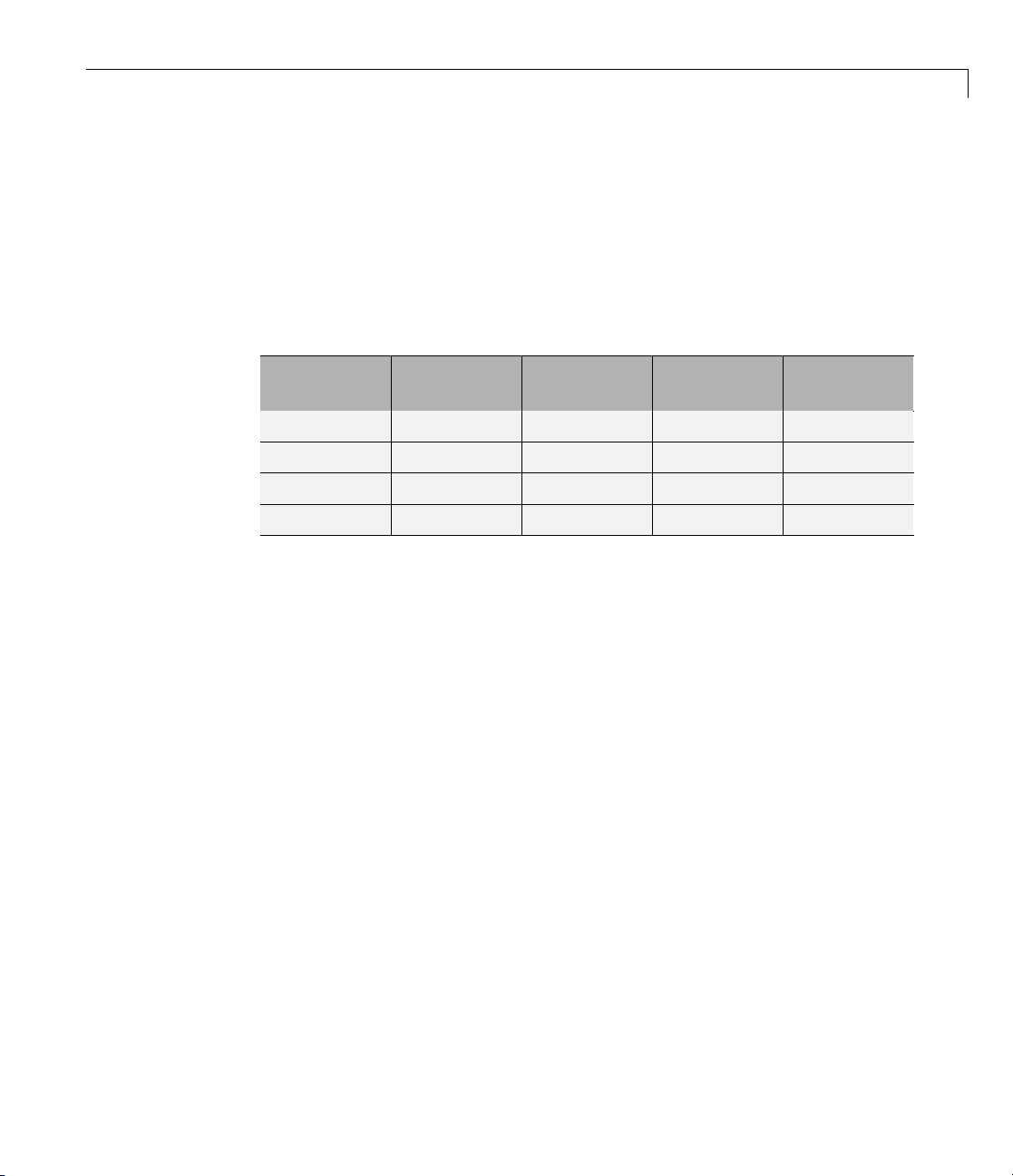
Clutch Schedule for the CR-CR 4-Speed Transmission
Gear
Setting
1
2
3
4
Clutch A
State
Clutch B
State
Clutch C
State
Clutch D
State
L FFL
L F L F
LLFF
F LLF
L = locked, F = free
Opening the Model
To get started q u ickly with the CR-CR transmission demo model, follow
either of these steps:
• Enter
• If you are working with the MATLAB Help browser, click the model name
Opening General SimDriveline Demos
You can open the complete SimDriveline demos list by:
drive_crcr_ideal at the MATLAB command line.
drive_crcr_ideal here.
1 Clicking the Start button on the lower left of the MATLAB desktop.
2 In the pop-up menu, selecting Simulink,thenSimDriveline,andthen
Demos.
This opens the SimDriveline demos list in the MATLAB Help browser.
1-7
Page 18
1 Introduc ing SimDriveline™ Software
You can locate and select any specific demo entry from the list of models.
Alternatively, you can open the same SimDriveline demos list by entering
demo simulink simdriveline or demo('simulink','simdriveline') at
the MATLAB command line.
The Block Diagram Model
Examine the model and its structure. The main model window contains the
CR-CR transmission subsystem, the input or driver shaft assembly, and the
output or drive n shaft assembly. Each assembly consists of a wheel with
applied kinetic friction. The driver shaft transmits an externally specified
torque down the driveline.
The m ain model also includes a brake clutch. When this clutch is locked, the
driven shaft stops turning. This clutch must remain unlocked if the C R-C R
transmission is engaged.
1-8
nModelWindow
Mai
Page 19
Running a Demo Model
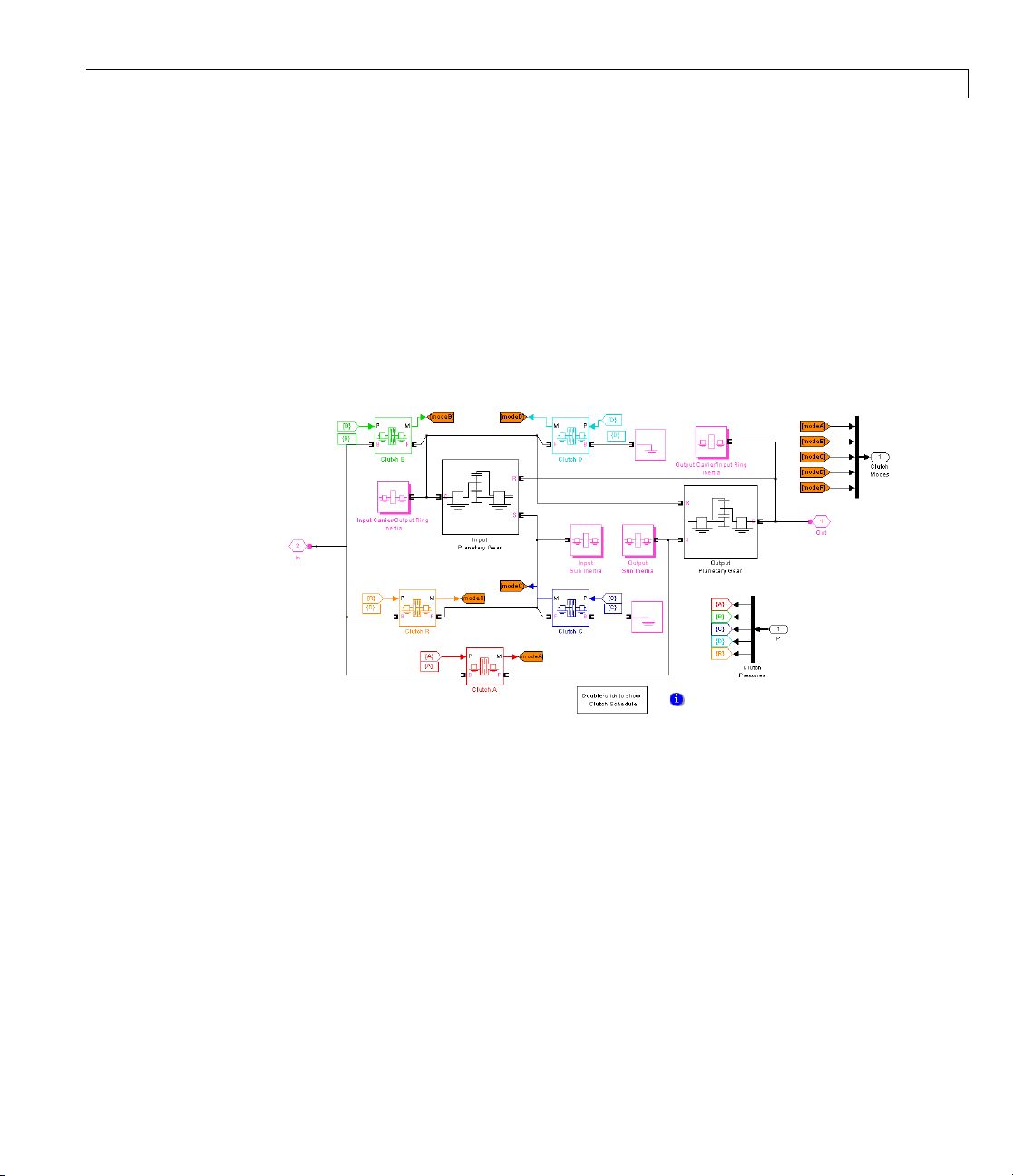
What the Model Contains — Opening the Subsystems
Open each subsystem in turn.
• The CR-CR 4-Speed Transmission subsystem is a set of fou r clutches,
two planetary gears, and four inertias (rotating bodies). (Ignore the
reverse gear and associated clutch.) Within the subsystem, open the
clutch schedule block to see the four possible (forward) gear settings for
the C R-CR 4-speed transmission. Exactly two clutches must be locked at
any one time for the transmission to be engaged and to avoid conflicting
constraints on the gear motions.
CR-CR 4-Speed Transmission Subsystem
1-9
Page 20
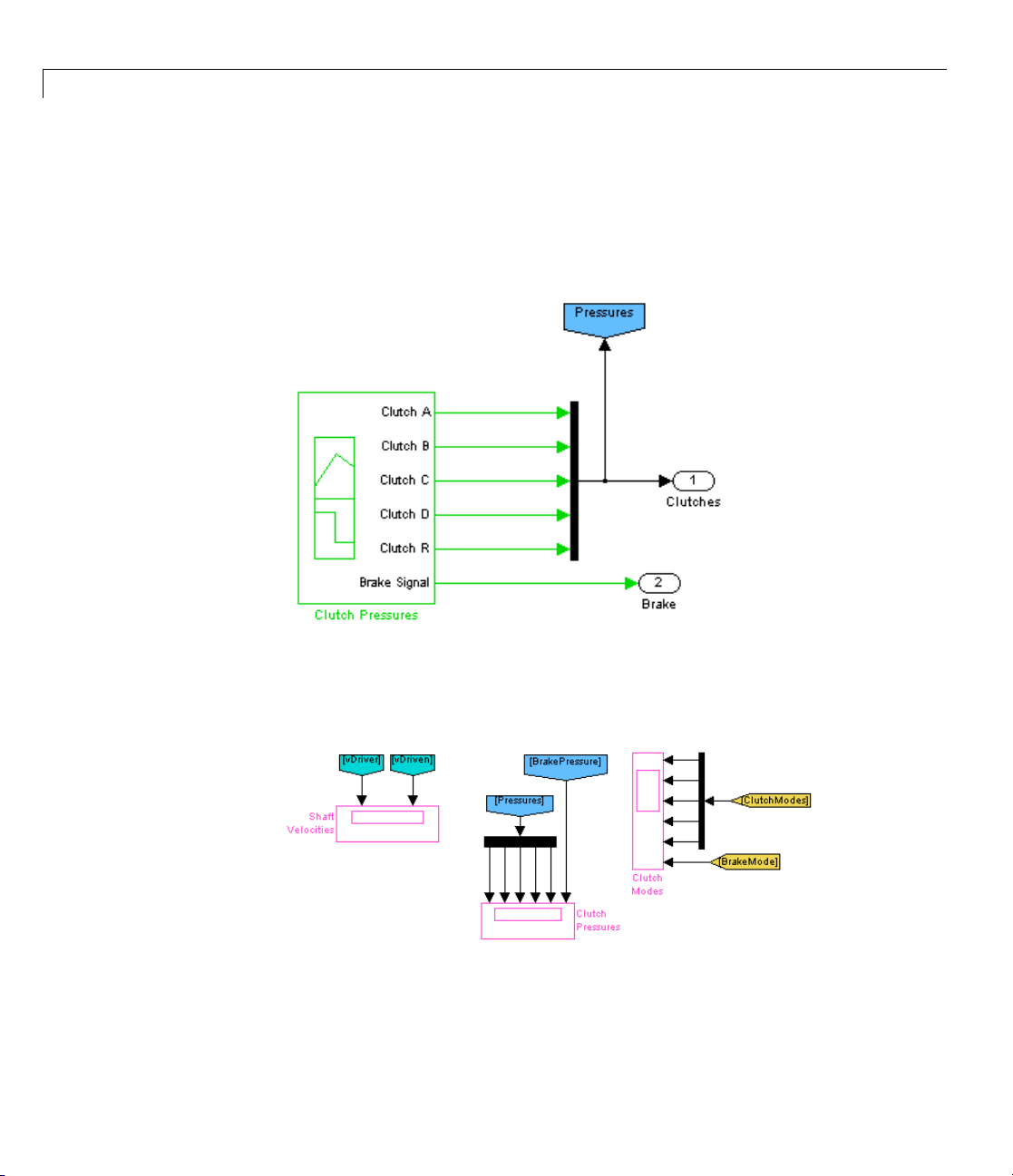
1 Introduc ing SimDriveline™ Software
• The Clutch Control subsystem provides the pressures that lock the
necessary clutches. The clutch controller is programmed to move the
transmission through a fixed sequence of gears, then unlock all the
transmission clutches, allowing the driven shaft to “coast” for a time, and
then engage and lock the brake clutch to stop the driven shaft.
1-10
Clutch Control Subsystem
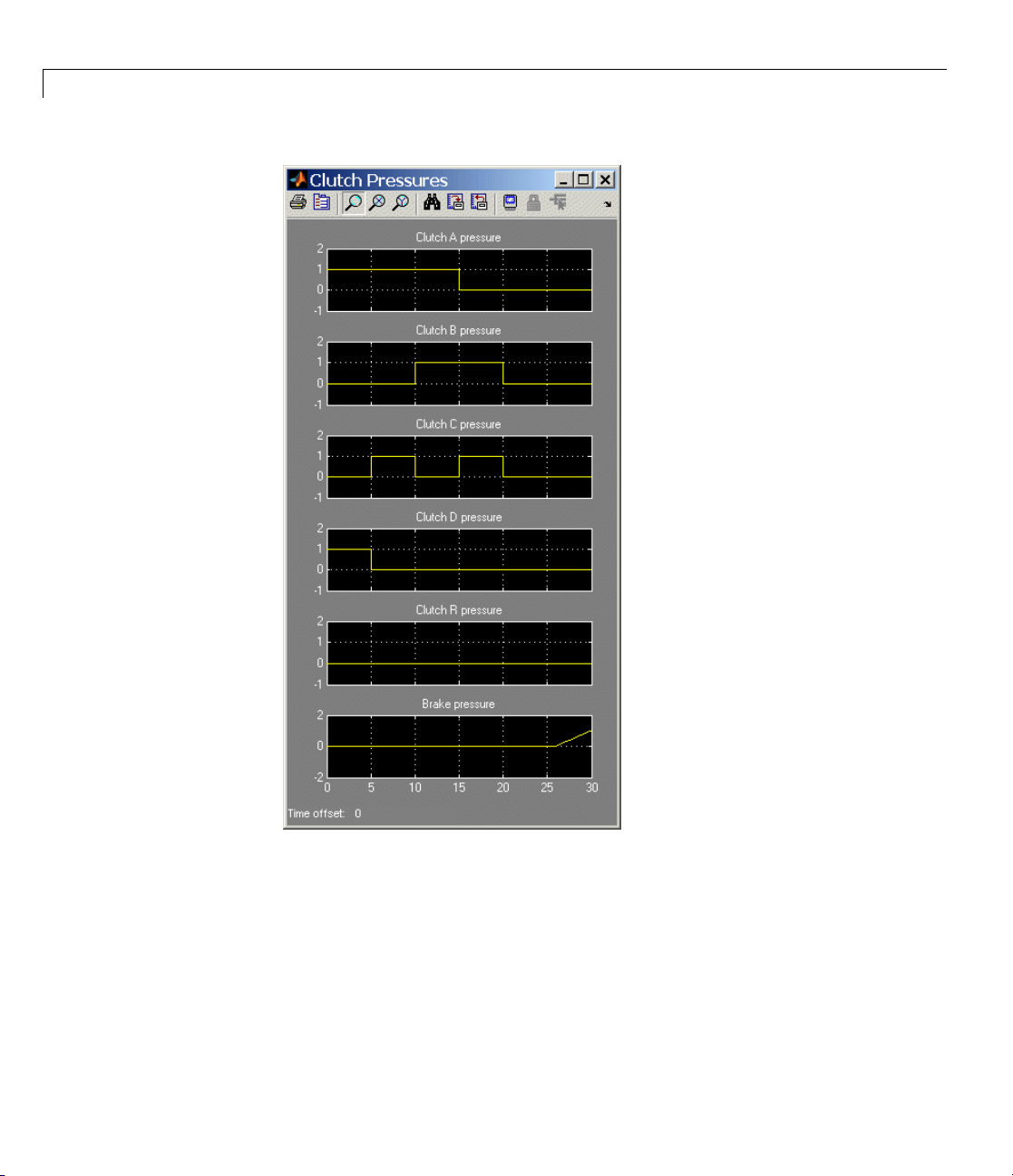
• The Scopes subsystem provides Scope blocks to display the clutch pressure,
driver and driven shaft velocity, and clutch mode signals.
Scopes Subsystem
Page 21

Running a Demo Model
Running the Mode
To display the CR
1 Open the Scopes
Scopes subsyst
2 Click Start. The model steps through the gears and then brakes.
3 Observe how the clutch pressure signals move the transmission into
one gear after another, at 0, 5, 10, and 15 seconds of simulation time.
Compare these clutch pressure signals to the clutch schedule in the CR-CR
transmission subsystem to determine which gear settings the model is
implementing. (In fact, the model ste ps through gears 1, 2, 3, and 4, before
coasting and then braking.)
-CR driveline mo del’s behavior,
subsystem and then each of the Scope blocks. Close the
em.
l
1-11
Page 22
1 Introduc ing SimDriveline™ Software
1-12
Page 23
Running a Demo Model
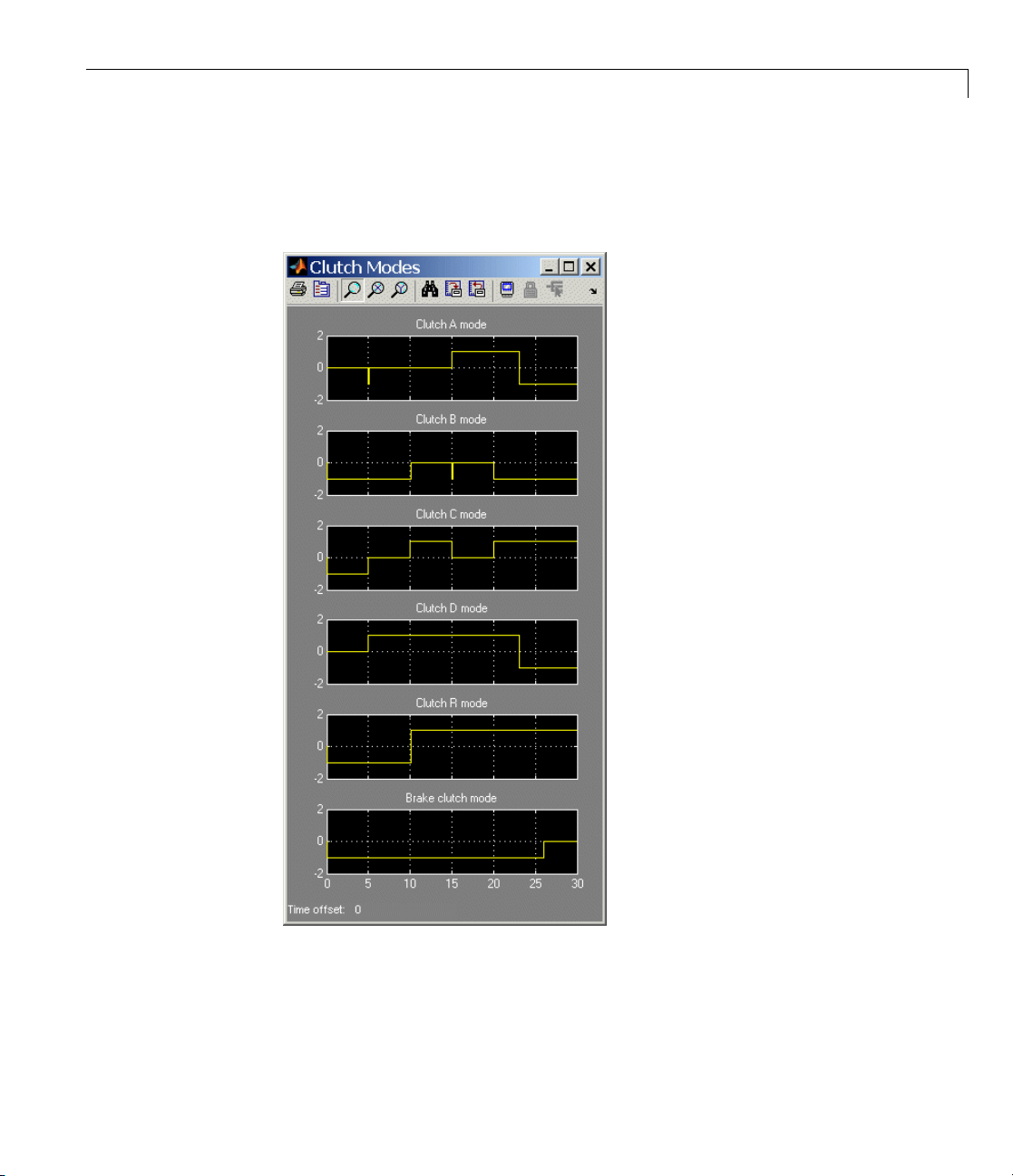
4 Observe the clutch modes at the same time. When a clutch mode is zero,
that clutch is locked. The sequence of clutch locking and unlocking matches
the sequence from the clutch schedule.
1-13
Page 24

1 Introduc ing SimDriveline™ Software
5 Compare the angular velocities of the driven and driver shafts. The effect
of the transmission is the result of the two planetary gears coupled in
different ways in the different gear settings. The effective drive ratio
of output to input shafts is the reciprocal of the ratio of output to input
angular velocities.
1-14
6 Observe what happens at 20 seconds. The transmission clutch pressures
drop to zero, and the transmission disengages. The transmission ceases
to transfer angular m otion and torque from the driver to the driven shaft,
and the driven shaft continues to spin simply from inertia. A small kinetic
friction damping gradually slows the driven shaft over the next 6 seconds.
Page 25

Running a Demo Model
7 At 26 seconds of simulation time, the brake clutch pressure begins to rise
from zero, and the brake clutch engages. The driven shaft decelerates more
drastically now. Between 26.0 and 26.1 seconds, the brake clutch locks,
and the driven shaft stops rotating completely.
Modifying the Model
You can modify this demo model to explore other SimDriveline features. Here
you modify and rerun the model to investigate two aspects of its motion.
• Measure the effective drive ratio of the CR-CR transmission in each gear
setting that it steps through.
• Change the gear sequence.
Measuring the Drive Ratio of the CR-CR Transmission States
The gear ratio (output to input) is the ratio of the output gear wheel radius to
the input gear radius. Equivalently, thegearratioistheratioofthenumber
of teeth on the output gear wheel to the number on the input wheel, or the
ratio of the output torque to the input torque. The ratio of the angular
velocities of output to input is the reciprocal of this gear ratio.
A transmission is a set of coupled gears. But for a particular transmission
gear setting, the ratio of driven (output) shaft velocity to the driver (input) is
fixed. Its reciprocal, the drive ratio, is like a gear ratio of an individ ual gear
coupling, but for the whole transmission.
1-15
Page 26

1 Introduc ing SimDriveline™ Software
Add and connect the Simulink blocks necessary to measure the drive ratio
of the transmission.
1 From the Simulink Math Op e ra tions lib rary, copy a Divide block and, from
the Simulink Sinks library, copy a Scope block.
2 From the Torque Driver subsystem outport, branch a signal line from
Motion Sensor1’s angular velocity output and connect it to the
on the Divid e block. From the velocity output of Motion Sensor2, on the
driven (output) shaft, again branch a signal line. Connect it to the ÷ inport
on the Divide block.
The effective output-to-input drive ratio is the ratio of input to output
velocities.
3 Connect the outport of the Divide block to the Scope. Rename Scope to
Drive Ratio.
X inport
1-16
CR-CR 4-Speed Model with Drive Ratio Measurement
Page 27
Running a Demo Model
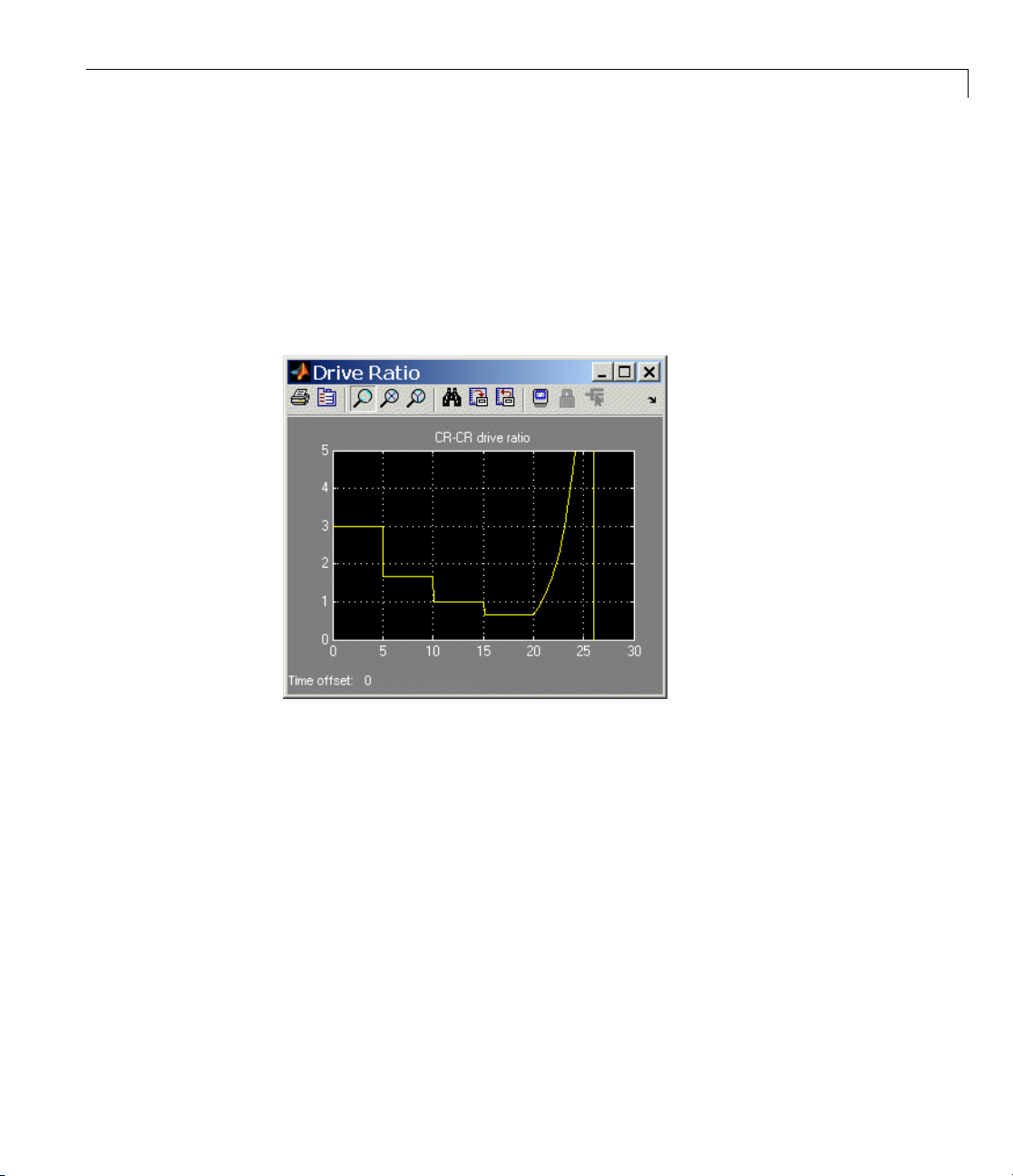
4 OpentheDriveRatioscopeandrestartthedemo. Observehowthedrive
ratio steps through a sequence of five-second states, in parallel with the
clutch pressures and clutch modes, until it reaches 20 seconds. The
drive ratio measurement after 20 seconds is not meaningful because the
transmission is uncoupled.
Just after 26 seconds, the driven shaft velocity drops to zero, and the Div ide
block produces divide-by-zero warnings at the MATLAB command line.
5 Look inside the CR-CR 4-Speed Trans mission subsystem for the Clutch
Schedule block and open it. Consult the drive ratios for each gear, 1, 2,
3, and 4, in terms of the gear ratios of the transmission’s two Planetary
Gears. Determine the numerical values for these drive ratios for gear
settings1,2,3,and4andcheckthemagainstthevaluesdisplayedinthe
Drive Ratio scope.
The drive ratio sequence should be 3, 5/3, 1, and 2/3, respectively, for the
first, second, third, and fourth intervals of five seconds each.
nging the Transmission Gear Sequence
Cha
The d rive_crcr_ideal demo, when you open it, is programmed to step through
CR-CR gear settings 1, 2, 3, and 4, before disengaging. Modify it to step
through settings 1, 2, 3, and 1, then disengage. T he fourth gear requires
1-17
Page 28

1 Introduc ing SimDriveline™ Software
A, B, C, and D to be free, locked, locked, and free, respectively . You will
modify the clutch pressure signal sequence from 15 to 20 seconds so that the
transmission is set in first, not fourth, gear. The first gear requires clutches
A, B, C, and D to be locked, free, free, and locked, respectively.
1 Open the C lutch Control and CR-CR transmission subsystems. Within
the transmission, open the Clutch Schedule block and review the clutch
lockings for each gear setting.
2 Open the Signal Builder block, labeled Clutch Pressures, to view the clutch
pressure signals.
Modify clutch pressure signals A, B, C, and D so that, between 15 and 20
seconds, clutches A and D are locked (not free) and clutches B and C are
free (not locked). Sufficient pressure will lock the clutches, while zero input
pressure leaves a clutch unlocked.
1-18
Modified CR-CR 4-Speed Transmission Clutch Pressures
Page 29

Running a Demo Model
3 Restart the model. Observe that between 15 and 20 seconds of simulation
time the clutch pressures, the clutch modes, and the driven shaft velocity
are now different from the original version of the model.
Check the effective drive ratio between 15 and 20 seconds to confirm that
the CR-CR transmission during that time is set in gear 1, not gear 4. This
fourth interval of five seconds should exhibit a drive ratio of 3 instead of 2/3.
1-19
Page 30

1 Introduc ing SimDriveline™ Software
What Can You Do with SimDriveline Software?
In this section...
“About SimDriveline Software” on page 1-20
“Modeling Drivetrains” on page 1-20
“Connector Ports and Connection Lines” on page 1-21
“Inertias and Gears” on page 1-22
“Complex Driveline Elements” on page 1-22
“Actuating and Sensing Motion” on page 1-23
“Simulating and Analyzing Motion” on page 1-24
About SimDriveline Software
SimDriveline software is a set of block libraries and special simulation
features for use in the Simulink environment. You connect SimDriveline
blocks to normal Simulink blocks through Sensor and Actuator blocks.
1-20
The blocks in these libraries are the e lem ents you need to model driveline
systems consisting of any number of rotating inertias, rotating about one or
more axes, constrained to rotate together by gears, which transfer torque to
different parts of the driveline. You can represent drivelines with components
organized into hierarchical subsystems, as in normal Simulink models. You
can add complex dynamic elements such as clutches and transmissions,
actuate bodies with external torques or motions, integrate the Newtonian
rotational dynamics, and measure the resulting motions.
Modeling Drivetrains
SimDriveline software extends Simulink with blocks to specify a driveline’s
components and properties and to solve the equations of motion. The blocks
are similar to other Simulink blocksets, with some properties unique to
SimDriveline software.
These are the major steps you follow to build and run a SimDriveline model
representation of a driveline:
Page 31

What Can You Do with SimDriveline™ Software?
1 Specify rotational inertia for each body and connect the bodies with
driveline connection lines representing driveline axes. If needed, ground
the driveline to one or more housings fixed in space.
2 Constrain the driveline axes to rotate together by connecting them with
gears. Gears impose static constraints on driveline motions and transfer
torques at fixed ratios.
3 As necessary and desired, add dynamic driveline elements that transfer
torque and motion among driveline axes in a nonstatic way. These
elements include internal torque-generating components such as damped
springs, clutches and transmissions, and torque converters. You can also
construct and connect your own dynamic elements.
4 Setupactuatorsandsensorstoinitiateandrecordbodymotions,aswellas
apply external torques to the driveline.
5 Connect the Sim Driveline motion solv er to the driveline and configure it.
Start the simulation, calling the Simulink solvers to find the motions of the
system. Display and analyze the motion.
Connector Ports and Connection Lines
Most SimDriveline blocks have special driveline ports . You connect
driveline ports with driveline connection lines, distinct from normal Simulink
lines. Driveline connection lines represent physical rotation axes along which
torque is transferred and around which inertias rotate.
• You can connect driveline ports only to other driveline ports.
• The driveline connection lines that connect driveline ports together are
not normal Simulink lines, which carry signals or indicate mathematical
operations. You cannot connect driveline lines directly to Simulink inports
and outports >.
• Two directly connected driveline components must corotate at the same
angular velocity.
• You can branch SimDriveline connection lines. When you do so, components
directly connected with one another continue to share the same angular
velocity. The torque transferred along the driveline axis is divided among
the multiple components connected by the branches. How the torque is
divided is determined by the driveline dynamics.
1-21
Page 32
1 Introduc ing SimDriveline™ Software
The sum of all torques flowing into a branch point equals the sum of all
torques flowing out.
Inertias and Gears
SimDriveline software defines a drive line as a collection of bodies rotating
about driveline axes represented by connection lines. The bodies are defined
by their rotational inertias. The lines carry the rotational degrees of freedom
(DoF) and, unconstrained, rotate freely. Directly connecting one body to
another constrains both bodies to rotate at th e same angular velocity. A
torque applied to one body is effectively applied to both.
You can also ground driveline axes to housings that do not move and that
represent infinite effective inertia.
Note All SimDriveline rotational DoFs are ab sol ute and m easured with
respect to a single implicit global coordinate system at rest.
1-22
In a real driveline, the bodies can also be connected indirectly by gears that
couple driveline axes. The gears constrain the axes to rotate together. T hese
gears can be simple or complex and can couple two or more axes. The g ears
have two roles:
• They constrain the connected axes to corotate at angular velocities in
fixed ratio or ratios.
• They transfer the torques flowing along one or more axes to other axes,
also in fixed ratio or ratios.
Complex Driveline Elements
Tip These blocks serve as suggestions for developing variant or entirely new
models to simulate the same components. You can study these subsystems
by looking under their masks. If necessary, break the block’s library link
before modifying it, and then create your own version. Or create your own
completely new block from scratch.
Page 33
What Can You Do with SimDriveline™ Software?
Tocreatemorerealisticdrivelinemodels, you elaborate on simple drivelines
consisting of inertias and gears by adding complex mechanical elements
that generate torques internally within the driveline, between one axis and
another. Certain SimDriveline blocks encapsulate as subsystems entire
models of complex dri veline elements:
• Clutches that model the locking and unlocking of pairs of driveline axes by
applying kinetic and static friction.
Note In the default case, adding clutches introduces algebraic loops (mode
iterations), non-time-based simulation steps.
• Transmission models that incorporate multigear sets and clutches into a
single subsystem
• Vehicle component models that represent engines, tires, and vehicle
dynamics
• Specialized torque models, such as torque converters, bilateral stops, and
damped spring-like torsion
Actuating and Sensing Motion
Sensors and Actuators are the blocks you use to interface between
SimDriveline blocks and normal Simulink blocks:
• Actuator blocks impart motion to driveline axes, e ither at zero time or
through the course of a simulation, and impose externally defined torques
on the bodies of a driveline.
• Sensor blocks measure the motions of, and the torques transferred along,
theaxesofadrivelinesystem.
Actuating inputs and sensor outputs are Simulink signals that you can define
and use like any other Simulink signal. For example, you can connect a
Sensor output to a Simulink Scope block and display the torques in a driveline
as functions of time.
1-23
Page 34
1 Introduc ing SimDriveline™ Software
Simulating and A
Once you specify
the bodies with g
of finding the s
prepare it for s
environment.
Newtonian dyn
torques and co
Once your mod
motions and i
all the rotational inertias of the bodies and interconnect
ears and other driveline elements, the dynamical problem
ystem’s motion is solvable. To finish a driveline model and
imulation, you must connect the driveline to the SimDriveline
The environment defines the solver that integrates the
amics for the system, applying all internal and external
nstraints to find the motions of the bodies.
el is ready for simulation, you can run it and analyze its
nternal torques.
nalyzing Motion
Trimming and Linearizing the Motion
In many cas
of motions
torques, y
trajector
consists
Aspecial
searchi
acceler
tools in
how the
system
es, you do not know the torques necessary to produce a given set
. By motion-actuating your driveline and measuring the resulting
ou can find the torques necessary to produce a specified motion
y. This technique inverts the canonical approach to dynamics, which
of finding motions from torques.
case of inverse dynamics is trimming. This technique involves
ng for steady-state motions of the bodies, when their angular
ations and the torques they experience vanish. Using the linearization
Simulink, you can perturb such a steady motion state slightly to find
system responds to small disturbances. Theresponseindicatesthe
’s stability and suitability for controllers.
1-24
Generating Code — Clutches and Algebraic Loops
SimDr
Realvers
enha
The p
and
The
gen
iveline software is compatible with Simulink Acceleration modes,
Time Workshop
ions of the models you create originally in Simulink with block diagrams,
ncing simulation speed and model portability.
resence of clutches in a driveline model induces mode iterations
dynamical discontinuities and triggers algebraic loops in Simulink.
se discontinuities and algebraic loops place certain restrictions on code
eration.
®
and xPC Target™ software. They let you generate code
Page 35
Learning More
In this section...
“Using the MATLAB Help System for Documentation and Demos” on page
1-25
“Finding Special SimDriveline Help” on page 1-25
Using the MATLAB Help System for Documentation and Demos
Youcangethelponlineinanumberofwaystoassistyouwhileyouuse
SimDriveline software. The MATLAB help browser allows you to access the
documentation and demo models for a ll the MATLAB and Simulink based
products that you have installed. The online help includes an online index
and search system.
Consult the MATLAB Getting Started Guide for more about the MATLAB
help system.
Learning More
Finding Special SimDriveline Help
This user’s guide includes these reference chapters:
• Appendix A, “Technical Conventions” explains special conventions,
abbreviations, and units.
• Appendix B, “Bibliography” lists external references on driveline and
powertrain modeling and related topics.
In addition, many SimDriveline demos have help links represented by the
information symbol
in the Help browser.
. Click this symbol to open that demo’s documentation
1-25
Page 36
1 Introduc ing SimDriveline™ Software
1-26
Page 37
Simple Models
This chapter introduces you to modeling drivetrains in the SimDriveline
environment. After showing you how you how to access the SimDriveline
block library and reviewing the essential rules of connecting blocks and
transferring angular motion and torque, it moves you from modeling simple
gears to simulating a full car in a series of short tutorials.
• “Introducing the SimDriveline Block Libraries” on page 2-2
• “Essential Steps to Building a Driveline Model” on page 2-7
• “Representing and Transferring Driveline Motion and Torque” on page 2-9
2
• “Actuating Drivelines with Torques and Motions” on page 2-22
• “Controlling Gear Couplings with Clutches” on page 2-28
• “Combining Clutches and Gears into Transmissions” on page 2-42
• “Modeling and Simulating a Complete Car” on pag e 2-58
This user’s guide assumes that you are familiar with building models in
Simulink. If not, see the Simulink documentation.
Page 38
2 Simple Models
Introducing the SimDriveline Block Libraries
In this section...
“About the SimDriveline Block Library” on page 2-2
“Accessing the Libraries” on page 2-2
“Using the Libraries ” on page 2-4
About the SimDriveline Block Library
SimDriveline software is organized into a set of libraries of closely related
blocks. This section shows you how to opentheseSimDriveline block libraries
and explains the nature of each library.
Accessing the Libraries
There are several ways to open the SimDriveline block library.
2-2
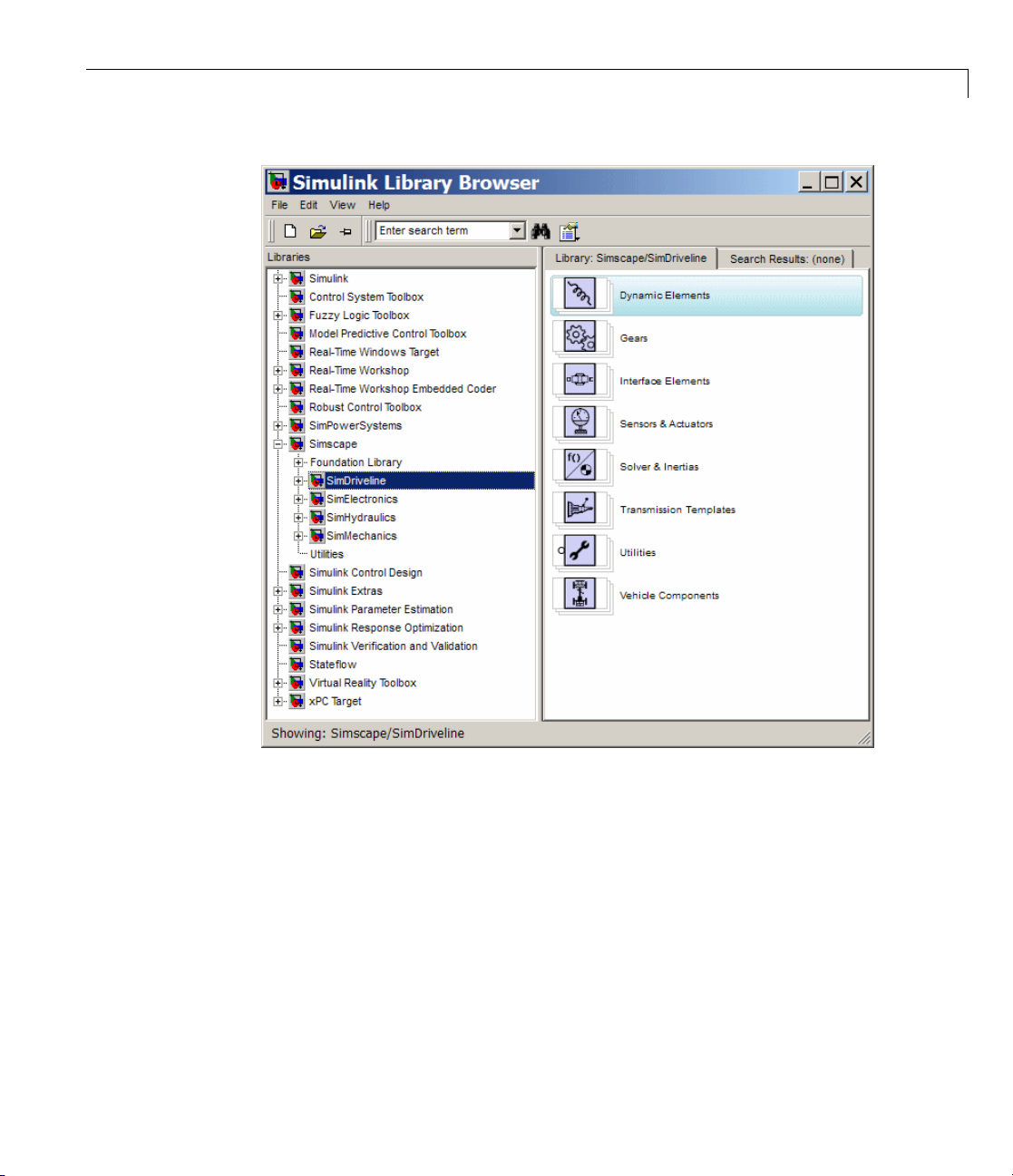
You can access the blocks through the Simulink Library Browser. Open the
browser by clicking the Simulink button
then the SimDriveline subentry, in the contents tree.
. Expand the Simscape entry,
Page 39
Introducing the SimDriveline™ Block Libraries
You can also access the blocks directly inside the SimDriveline library in
several ways:
• In the Simulink Library Browser, right-click the SimDriveline subentry
under Simscape and select Open SimDriveline Library. The library
appears.
• Click the Start button in the lower-left corner of your MATLAB desktop.
In the pop-up menu, select Simulink,thenSimDriveline,thenBlock
Library.
• Enter
drivelib at the MATLAB command line.
2-3
Page 40

2 Simple Models
SimDriveline Library
Once you perform one of these steps, the SimDriveline library opens. This
library displays seven top-level block groups. You can expand each library
by double-clicking its icon.
The next section summarizes the blocks of each library and their use. For
explanations of individual blocks, consult the SimDriveline “Block Reference”
reference.
2-4
Using the Libraries
The SimDriveline block library is organized into separate libraries, each with
a different type of driveline block.
Solver & Inertias
The Solvers & Inertias library provides the Inertia block, which represents
a rotating body specified by its moment of inertia, the fundamental unit of
driveline modeling. It also contains the Housing block, which represents an
immobile rotational ground.
Finally, the library contains the Driveline Environment block, which
configures the driveline settings of a SimDriveline block diagram, and
the Shared Environment block, which allows you to connect two driveline
block diagrams in a nonphysical way so that they share the same driveline
environment settings.
Gears
The Gears library contains blocks that represent simple and complex gears,
driveline elements that couple distinct driveline axes and constrain their
Page 41

Introducing the SimDriveline™ Block Libraries
relative motions. The Gear blocks range from simple two-wheel gear couplings
with fixed and variable gear ratios, to complex multiwheel and multiaxis
gears such as planetary and differential gears.
Dynamic Elements
The Dynamic Elements library contains blocks that model such critical
drivetrain components as clutches, torque converters, damped springs, and
stops. Dynamic elements generate internal driveline torques.
The blocks of this library serve as suggestions for developing variant or
entirely new models to simulate the same components. Look under the block
mask, break the block’s library link before modifying it, and create your own
version.
Transmission Templates
The Transmission Templates are a set of predesigned transmission examples
constructed from gears, clutches, and inertias. You can copy and use these
examples in your drivetrain models.
Transmission templates copied into your model are not linked to the block
library. You can modify and rebuild these template copies at will.
Sensors & Actuators
The Sensors & Actuators library provides blocks for sensing and initiating the
motions of driveline axes and applying and sensing torques along those axes.
Interface Elements
The Interface Elements library enables connections between SimDriveline
driveshaft connection lines and Simscape mechanical rotational motion.
Vehicle Components
The Vehicle Components library contains blocks that represent components
of a full vehicle beyond the drivetrain itself. It includes models of engines,
wheeled vehicles, and tires in contact with the ground.
2-5
Page 42

2 Simple Models
The blocks of this library serve as suggestions for developing variant or
entirely new models to simulate the same components. Look under the block
mask, break the block’s library link before modifying it, and create your own
version.
2-6
Page 43
Essential Steps to Building a Driveline Model
Essential Steps to Building a Driveline Model
The demo model of Chapter 1, “Introducing SimDriveline Software” illustrates
a typ ica l drivetrain system you can model with SimDriveline software. It also
illustrates the key rules for connecting driveline blocks to each other and the
dual roles of driveline connection lines: transferring torque and enforcing
angular velocity constraints. You should review these rules before building
and running the tutorial models of this chapter.
• Driveline blocks, in general, feature both driveline connector ports
regular Simulink inports and outports
one another and Simulink ports to one another. But you cannot connect a
drivelineporttoaSimulinkport.
• The driveline connection lines interconnecting driveline connector ports
represent driveline axes and enforce physical relationships. Unlike
Simulink lines, they do not represent signals or mathematical operations,
and they have no inherent directionality.
• A driveline connection line represents an idealized massless and perfectly
rigid spinning shaft. A driveline conne ction line between two ports enforces
the constraint that the two driveline components so connected rotate at
the same angular velocity. The connection line also transfers any torque
applied to a driveline component at one end to the component at the other
end.
• You can branch driveline connection lines. You must connect the end of
any branch of a driveline connection line to a driveline connector port
• Branching a driveline connection line modifies the physical constraints
that it represents. All driveline components connected to the ends of a
set of b ranched lines rotate at the same angular velocity. The torque
transferred along the input driveline axis is split up among the branches.
How the torque is split depends on the dynamical details of the system
that you are modeling.
>. You connect connector ports to
and
.
• Driveline connection lines satisfying the angular velocity constraint must
havethesameinitialangularvelocities.
2-7
Page 44

2 Simple Models
Branching Driveline Connection Lines
The Driveline Environment block does not use any torque. It does share the
angular velocity constraint from the branch point.
2-8
Symbolically, the branching conditions o n driveline connection lines are
ω = ω
τ = τ
= ω2= ω3...
1
+ τ2+ τ3...
1
The driveline axes have an implicit directionality. Torque and motion are
transferred “down” the driveline from input or drive shafts to output or
driven shafts. Certain SimDriveline blocks require explicit directionality and
represent it by designating one driveline connector port as the input base (B)
and the other a s the output follower (F). Relative motion of driveline axes or
shafts, when needed, is measured as follower relative to base.
Caution All motion in SimDriveline models, except when relativ e motion is
explicitly required, is measured in implicit absolute coordinates. An absolute
orientation defines zero angle, and an absolute reference frame defines zero
angular velocity. The Housing block implements the absolute zero angular
velocity and, if connected to a drivelineaxis,enforcesthiszero-motionstate
on that axis.
Page 45

Representing and Transferring Driveline Motion and Torque
Representing and Transferring Driveline Motion and
Torque
In this section...
“About Inertia, Motion, and Gears” on page 2-9
“Coupling Rotational Motion with Gears” on page 2-9
“Coupling Two Spinning Inertias with a Simple Gear” on page 2-11
“Coupling Two Spinning Inertias with a Variable Gear” on page 2-16
“Coupling Three Spinning Inertias with a Planetary Gear” on page 2-17
About Inertia, Motion, and Gears
The purpose of a gear set is to transfer rotational motion and torque at a
known ratio from one driveline axis to another. This section introduces you to
modeling gears and using them to couple bodies rotating on driveline axes.
Coupling Rotational Motion with Gears
A gear set consists of two or more meshed gears corotating at some specified
gear ratios. The ratios might or mightnotbeconstant. Thegearratios
determine how angular velocity and torque are transferred from one driveline
component to another.
Gear Coupling Rules
Ideal gears mesh and corotate at a point of contact without frictional loss
or slippage.
The simplest gear coupling consists of two circular gear wheels of radii r
r
, spinning with angular velocities ω1and ω2,respectively,andlyinginthe
2
same plane. Their connected shafts are parallel and carry torques τ
The gear ratio of gear 2 to gear 1 is the ratio of their respective radii: g
r
. The power transferred along either shaft is ω·τ.
2/r1
The gear couplin g is often sp ecified in terms of the number of gear teeth on
each gear, N
r
.
2/r1
and N2. The gear ratio of gear 2 to gear 1 is then g21= N2/N1=
1
and τ2.
1
21
1
and
=
2-9
Page 46

2 Simple Models
The fundamental conditions on the simple gear coupling of rotational motion
are ω
=±1/g21and τ2/τ1=±g21. That is, the ratio of angular velocities is the
2/ω1
reciprocal of the ratio of radii, while the ratio of torques is the ratio of radii.
The transferred power, being the product of angular velocity and torque,
isthesameoneithershaft.
The choic e of signs indicates that the gears ca n spin in the same or in opposite
directions. If the gears are external to one another (corotating on their
respective outside surfaces), they rotate in opposite directions. If the gears
are internal to one another (corota tin g with the outsid e of the smaller gear
meshing with inside of the larger gear) , they rotate in the same direction.
Warning Gear ratios should always be strictly positive. If a gear
ratio vanishes or becomes negative, the SimDriveline simulation
stops with an error.
Generalized Gear Coupling Rules
You need the general ideal gear coupling conditions if you are coupling gears
that are not constant in radii, not lying in the s ame plane, or not circular.
2-10
The general velocity constraint requires that the linear velocities of the gears
at the point of contact be the same. This is a vector condition on the angular
velocities ω
and ω2and the radius vectors r1and r2: ω
1
x r
= ω
x r
1
1
.The
2
2
alternative form in terms of the number of gear teeth is equivalent to this
linear velocity constraint. For the gear teeth to mesh, the number of teeth per
unit length of gear circumference must be the same on the two gears.
The g eneral torque condition arises from the force equilibrium at the point of
contact. If there is no linear motion of the w h ole gear a sse mbly, the forces at
contact F must be equal and opposite. The ratio of torque s is then:
|τ
|/|τ1|=|r
2
x F|/|r1x F|
2
The power transferred along either shaft is conserved across ideal gear
couplings:
ω
·(r
2
x F)=ω
2
·(r
x F)
1
1
Page 47

Representing and Transferring Driveline Motion and Torque
Coupling Two Spi
In this example,
(driveline axis
spinning along
velocities; an
spinning at di
most basic Sim
Environment.
you couple two spinning inertias, first, along a single shaft
), so that they spin with the same angular velocity; then
two shafts and coupled by a gear so that they spin at different
d finally, coupled by a gear and actuated by an external torque,
fferent rates and experiencing different torques. You use the
Driveline blocks, such as Inerti a, Simple Gear, and Driveline
nning Inertias with a Simple Gear
Modeling Two Spinning Inertias
Here you cre
spinning to
block libra
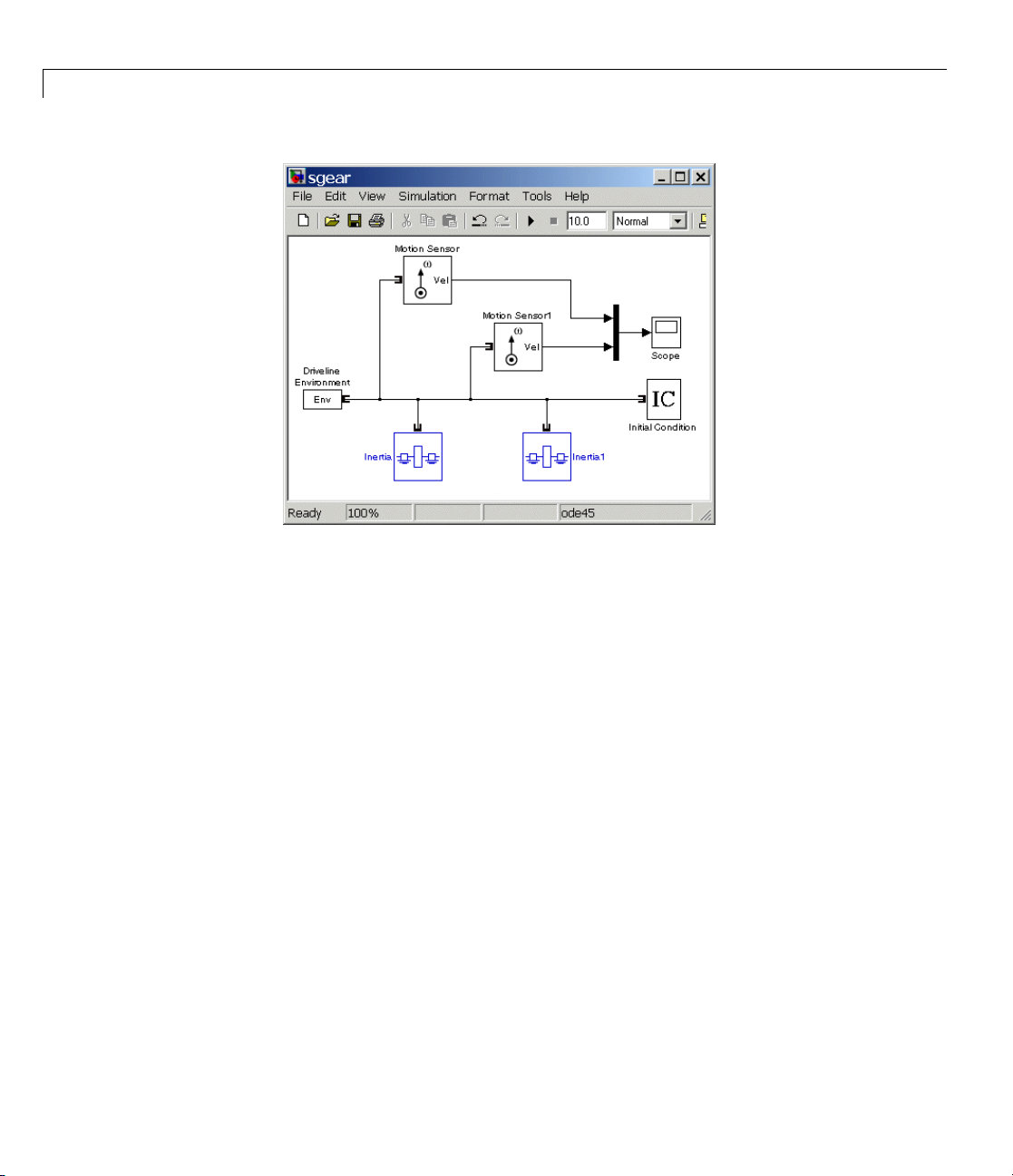
1 Drag and drop two Inertia, two Motion Sensor, and one Initial Condition
blocks into the model window.
2 Every topologically distinct driveline block diagram requires exactly one
Driveline Environment block, found in the SimDriveline Solver & Inertias
library. Copy one such block into your model.
3 From the
connect
ate the first version of the simplest driveline model, tw o inertias
gether along the same axis. Open the SimDriveline and Simulink
ries and a new Simulink model window.
Simulink library, drag and drop a Scope and a Mux block. Then
theblocksasshown.
2-11
Page 48
2 Simple Models
Two Spinning Inertias
2-12
4 Open the Initial Condition block. In the Initial angular velocity field,
replace its default
0 entry with pi radians/second (rad/s). Click OK.
If you do not connect an Initial Condition block to a driveline axis, the
axis by default starts the simulation with zero angular velocity. You must
ensure that the initial angular velocities of your coupled driveline axes are
consistent with one another. If they are not, the simulation stops with
an error.
5 Open the Scope block and start the simulation. The two angular velocities
are constant at 3.14 radians/second.
Coupling Two Spinning Inertias with a Simple Gear
Now you modify the model you just created by coupling the two spinning
inertias with a simple, ideal gear with a fixed gear ratio.
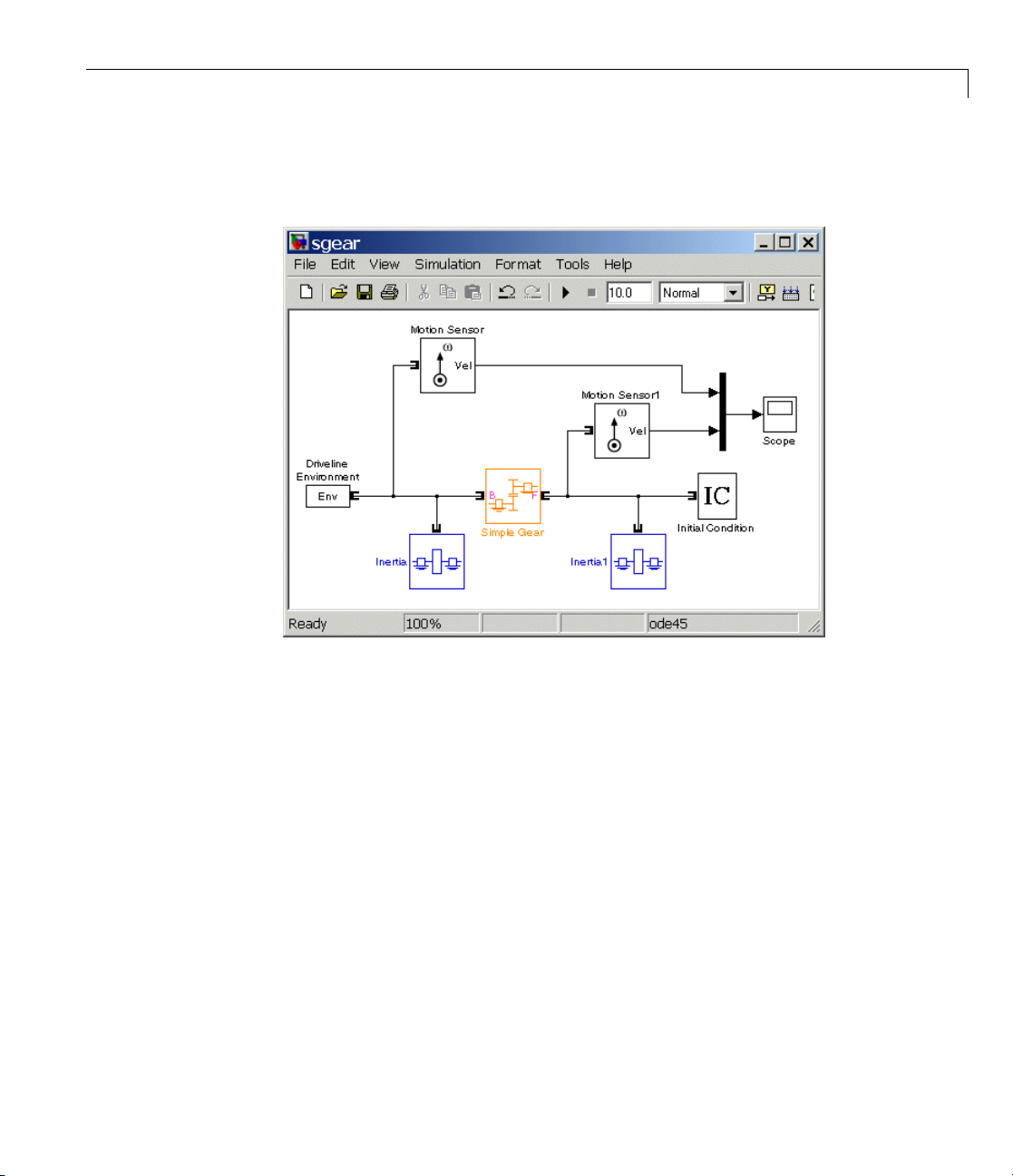
1 From the SimDriveline block library, drag and drop a Simple Gear block
into your model. Open the block. Leave the default follower-base gear ratio
value at
check box and click OK. The simple gear then represents two gear wheels
2.CleartheFollower and base rotate in opposite directions
Page 49
Representing and Transferring Driveline Motion and Torque
corotating in the sam e direction, with the sm aller wheel inside the larger.
Reconnect the b locks as shown.
Two Spinning Inertias Coupled by a Gear
Leave the initial angular velocities at pi in the Initial Condition block.
SimDriveline software automatically sets the correct initial angular
velocity for Inertia.
2 Open the Scope and start the simulation. The two angular velocities
are constant at 3.14 and 6.28 radians/second for Inertia1 and Inertia,
respectively. The fo llower-base gear ratio is 2, and the angular velocity of
Inertia is twice that of Inertia1, with the same sign, because the two bodies
are spinning in the same direction.
3 Now s
4 Restart the simulation. The two angular velocities are 3.14 and -6.28
elect the Follower and base r otate in opposite directions check
. The simple gear then becomes two w heels corotating in opposite
box
ections, with the two wheels meshed on their respective outer surfaces.
dir
radians for Inertia1 and Inertia, respectively. The second angular velocity
2-13
Page 50
2 Simple Models
is twice the first and with opposite sign, because the two bodies are
spinning in opposite directions.
5 Finally, again clear the Follower and base rotate in opposite
directions check box.
Torque-Actuating Two Coupled, Spinning Inertias
In the final version of the simple gear model, you actuate the inertias with an
external torque instead of starting them with fixed initial angular velocities.
The external torque varies sinusoidally. You can find a completed version of
this model in the demo drive_sgear.
1 From the SimDriveline block library, copy a Torque Actuator and two
Torque Sensor blocks. From the Sim ulink block library, drag and drop a
second Scope block, a second Mux block, and a Sine Wave block.
2 Disconnect the Inertia blocks from theSimpleGearandinserttheTorque
Sensors. Disconnect and delete the Initial Condition blo ck. The two axes
will now default back to zero angular velocities.
2-14
Connect the other blocks as shown.
Page 51

Representing and Transferring Driveline Motion and Torque
Two Spinn
3 Open both Scope blocks and start the simulation.
ing Inertias Coupled by a Gear and Actuated with Torque
The measured torques and angular velocities vary sinusoidally. The angular
velocity of Inertia1 is half that of Inertia, as you saw in the previous models.
But the torque in the second shaft is twice that in the first, as required by the
laws of gear coupling.
If you select the Follower and base rotate in opposite directions check
box in Simple Gear and restart the simulation, the same angular velocities
and torques result, except that the values associated with Inertia1 and the
second shaft are negative, because the second body and second shaft are
spinning in opposite directions.
Sensing and Actuating Motion and Torque
The Sensor and Actuator blocks you use in the preceding mo de ls illustrate
their dual nature: they act as driveline components themselves, but also let
you connect drivelin e blocks with the rest of Simulink.
2-15
Page 52
2 Simple Models
• Sensor & Actuator blocks have both driveline connector ports and normal
Simulink ports
Simulink outports. You can actuate motion or apply external torques by
feeding in actuation signals with a block’s Simulink inports.
Many other SimD r iveline blocks feature Simulink ports for inserting and
measuring signals.
• You connect a Torque Sensor along a driveline axis, by placing it in series
with other driveline components.
• You connect the other Sensor and Actuator blocks across a driveline axis,
by branching the driveline connectionlineofftoonesideandconnecting
this secondary line to the block; or by connecting the block to the end of
adrivelineaxis.
>. You can extract sensor signal information with a block’s
Coupling Two Spinning Inertias with a Variable Gear
You can modify the simple gear model further by replacing the fixed-ratio
gear with a gear whose gear ratio variesintime. Youspecifythegearratio
variation with a Simulink signal. Start with the simple gear model you built
in the preceding section or by opening and editing the drive_sgear demo.
2-16
1 From the SimDriveline block library, drag and drop a Variable Ratio Gear
block and replace the Simple Gear block with it. Open Variable Ratio Gear
and ensure that the Follower and base rotate in opposite directions
check box is selected (the default). The two shafts will spin in opposite
directions.
2 The Variable Ratio Gear block accepts the continuously varying gear ratio
as a Simulink signal through the extra inport labeled
create a S i m ulink signal f or the gear ratio with a Signal Builder block
from the Sim ul ink block library . Build a signal that rises with consta n t
slope from 1 to 2 over 10 seconds. Then connect the Signal Builder block
to the
r port.
r. For this ex ample,
Page 53

Representing and Transferring Driveline Motion and Torque
Simple Variable Ratio Gear Model
3 Leave the other, original settings of the simple gear m o del unchanged.
Open both Scopes and start the simulation.
The two shafts’ angular velocities and torques have opposite signs. Apart
from this sign difference, the ratios of angular velocities and torques start at
1, because the initial gear ratio is 1. But as the gear ratio increases toward
2, the angular velocity of Inertia1 becomes smaller than that of Inertia,
while the associated torque in the second shaft (apart from the opp osite s ign)
becomes larger than that in the first shaft. Because of the changing gear
ratio, the motion and the torques are no longer strictly sinusoidal, even
though the actuating external torque is.
The drive_vgear demo is a full model of this type. To learn more about how to
use variable gears, including the Coriolis acceleration, consult the Variable
Ratio Gear block reference page.
Coupling Three Spinning Inertias with a Planetary Gear
You can further modify the simple gear model and use it as a starting point for
studying more complex gear sets. One of the most important is the planetary
gear, which has three wheels, the ring, the sun, and the planet, all held in
place by a common carrier body. The planetary gear is inte resting in its own
2-17
Page 54
2 Simple Models
right, but also important because it is a common component in complex,
realistic transmissions.
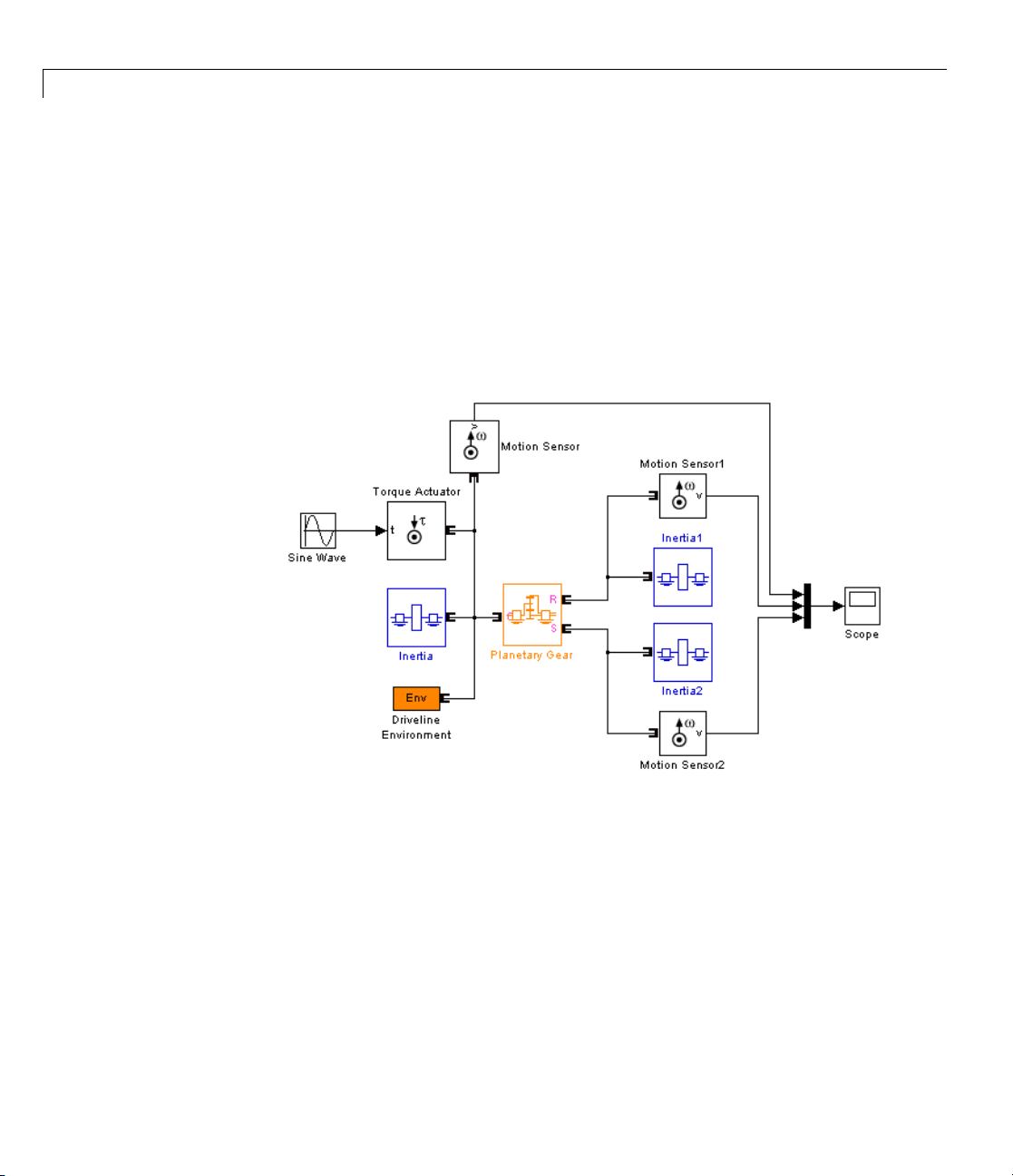
1 Replace the Simple Gear in your model with a Planetary Gear from the
SimDriveline block library. A planetary gear splits input angular motion
from the carrier between the ring and sun wheels, each connected to their
respective bodies.
2 Copy another Inertia and another Motion Sensor as well. Connect the
blocks to form the new diagram as shown.
2-18
Simple Planetary Gear Model
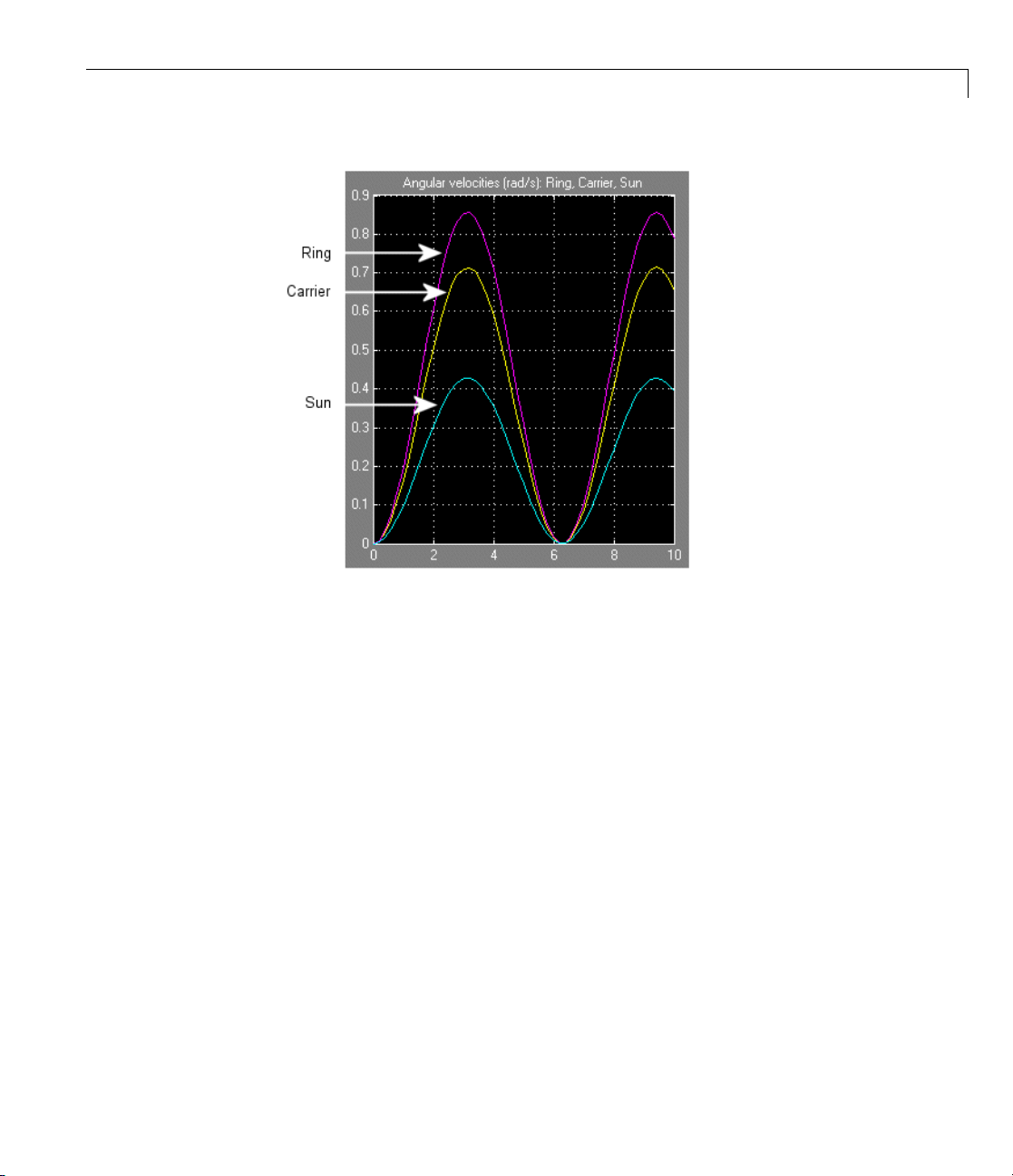
3 Enter 2 for the Ring/Sun gear ratio in Planetary Gear. Open the Scope
and start the simulation to observe the angular velocities of the ring,
carrier, and sun, from largest to smallest. The ratio of the ring to sun gear
velocities is always two.
Page 55
Representing and Transferring Driveline Motion and Torque
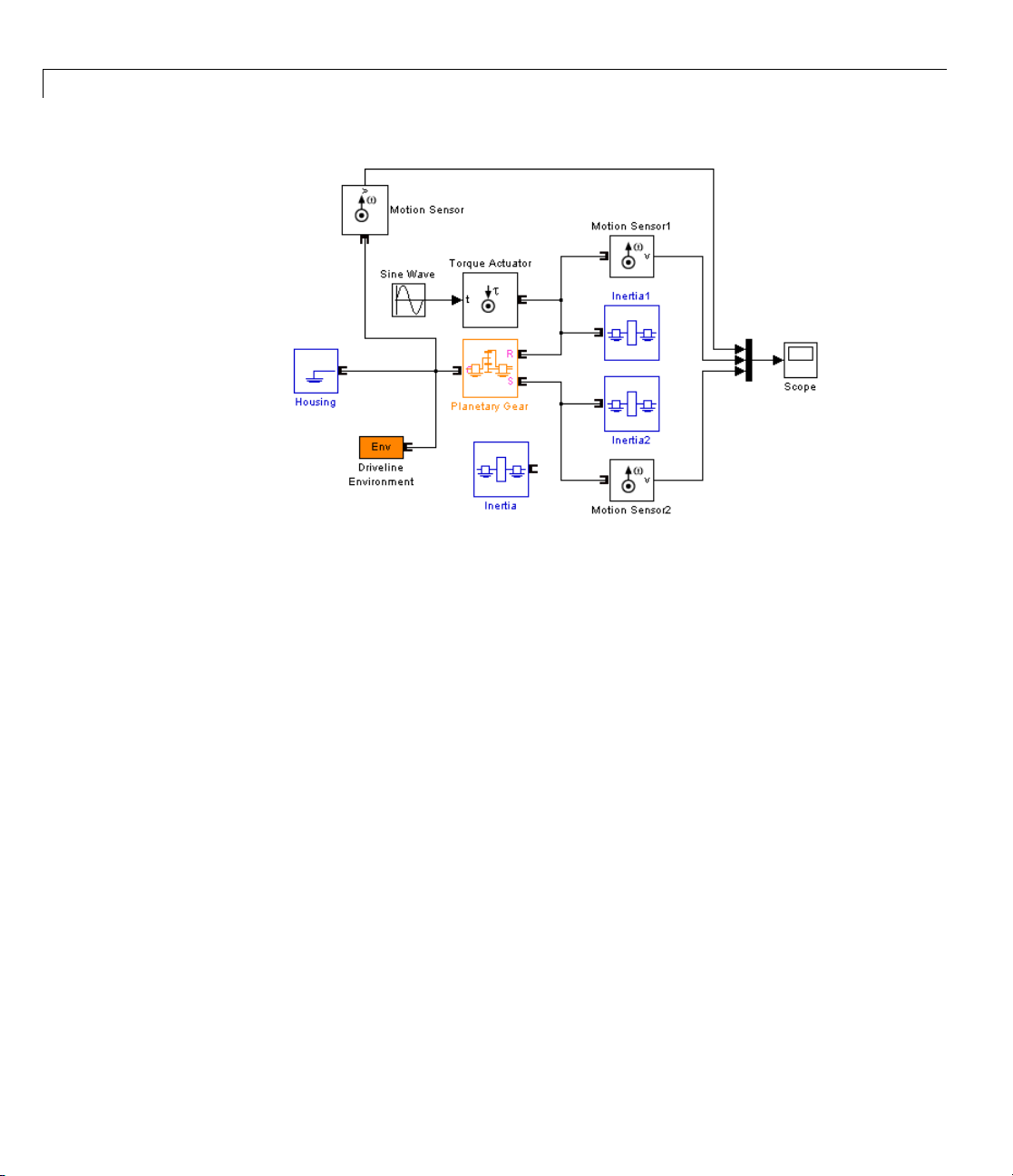
4 To see the ring and sun wheels spinning alone, you must lock the carrier.
In this case, you switch the torque actuation to the ring wheel. Copy
a Housing block from the SimDriveline block library. Disconnect and
delete Inertia, replacing it on the carrier driveline axis w ith Housing, and
reconnect the Driveline Environment block to this connection line.
5 Insert a Torque Actuator and move the Sine Wave block next to it. Connect
it to the inport.
2-19
Page 56
2 Simple Models
Simple Planetary Gear Model with Locked Carrier
2-20
6 Open the Scope and start your model. Observe the angular velocities of
the ring, carrier, and sun.
Page 57

Representing and Transferring Driveline Motion and Torque
The carrier, connected to Housing, does not move. The ring is driven with a
sinusoidal torque, and the sun responds by spinning in the opposite direction
(ring and sun g ear wheels are external to one another) at tw ice the rate. The
ring wheel has twice the radius (or twice the number of teeth) as the sun, so
itspinshalfasfast.
To learn more about modeling planetary gears, see the Planetary Gear block
reference page.
2-21
Page 58

2 Simple Models
Actuating Drivelines with Torques and Motions
In this section...
“About Torques, Motions, and Actuation” on page 2-22
“Modeling the Effect of a Variable Inertia” o n page 2-24
“Actuating a Driveline with Torques” on page 2-25
“Actuating a Driveline with Motions” on page 2-26
“Setting the Motion Initial Conditions of a Driveline” on page 2-26
About Torques, Motions, and Actuation
A SimDriveline simulation solves, from the torques applied to spinning
inertias, a driveline’s dynamics for its motions. H ow ev er, it can also accept
motions imposed on a driveline and solve for the torques needed to produce
those motions. A driveline simulation is typically a mixture of these two
requirements, solving dynamics both forward (torque to motion) and inverse
(motion to torque). Imposing motions and applying torques are together forms
of driveline actuation.
2-22
This section discusses actuating drivelines with time-varying inertias,
torques, motions, and motion initial conditions. All of these actuation
types (except for initial conditions) require input Simulink signals to define
time-varying functions.
Torque and Motion Actuation are Complementary and
ally Exclusive
Mutu
In all cases, you should exercise care as you apply a mixture of actua tion s to
a driveline and its degrees of freedom (DoFs), as discussed in greater detail
by the section, “Analyzing Degrees of Freedom” on page 3-14. The complete
effect of the actuations must be such that
• Driveline DoFs actuated by torques are not also subject to motion
actuations. (They can be subject to motion initial condition actuation.)
• Driveline DoFs actuated by motions are not also subject to torque
actuations.
Page 59

Actuating Drivelines with Torques and Motions
For a SimDriveline model to successfully simulate nontrivial motion, torque
and motion actuations must exactly complement one another to account
consistently for the motion of all the DoFs, no more and no less. If this
criterion is not satisfied, one of these outcomes results.
• The motion of the driveline is trivial, staying in its initial motion state for
the entire simulation.
• The actuations are inconsistent with each other, and the simulation stops
with an error.
• The actuations leave the driveline underdetermined or overdetermined,
and the simulation stops with an error.
For more about driveline simulation errors, see “Troubleshooting Simulation
Errors” on page 3-11.
Stabilizing Numerical Derivatives in Actuator Signals
To actuate a phys ical system m od eled by blocks, you often need to differentiate
an incoming Simulink actuation signal.
Simulink provides a Derivative block for numerical differentiation of a signal.
However, this block’s output is sometimes not stable or accurate enough for
Physical Modeling purposes. Recommended alternatives to the Derivative
block include the following.
Integrating Higher Derivative Signals. Start by specifying the highest
derivative signal (such as an acceleration), then integrate this signal to obtain
lower derivative signals (such as a velocity) using the Integrator block.
Transforming Signals with Transfer Functions. To differentiate a signal,
use a transfer function block (Transfer Fcn). This block actually performs a
Laplace transform convolution to smooth the output, which is not exactly
the derivative.
You can eliminate this drawback by filtering the original signal f,then
defining exact derivatives dF/dt, etc., of the filtered signal F by adding higher
orders to the transfer function numerator. The order of the denominator
should be equal to or greater than the number of output signals. Use the
filtered signal F (instead of f), as well as the filtered derivatives.
2-23
Page 60

2 Simple Models
In this example, the constant τ represents a smoothing time. The transfer
functions define a filtered signal and its first derivative, two signals in all.
Therefore, the transfer function deno minator should be seco nd order or high er.
Modeling th
You cannot
However, y
Ratio Gear
momentum
1 Place a Va
2 Connect this constant Inertia to the Gear’sbase(B)orfollower(F)port.
3 Vary the gear ratio of the Variable Ratio Gear with an incoming Simulink
signal.
By changing the gear ratio, you change the effective inertia on the shaft from
the constant Inertia.
• Effective inertia = (constant inertia)•(variable gea r ratio)
if the B port is connected to Inertia
• Effective inertia = (constant inertia)/(variable gear ratio)
if the F port is connected to Inertia
e Effect of a Variable Inertia
vary the inertia value of an Inertia block during a simulation.
ou can model a time-varying inertia indirectly with a Variable
block. This method relies on the conservation of angular
.
riable Ratio Gear between a shaft and an Inertia.
2-24
Page 61

Actuating Drivelines with Torques and Motions
Effective Variable Inertia with a Variable Ratio Gear
Actuating a Driveline with Torques
You can apply a torque to a driveshaft
• Directly, with a Torque Actuator block
• Indirectly, with a block that generates torque, using a Torque Actuator as
part of a larger subsystem. Such blocks include:
- Dynamic elements such as clutches, torque converters, and engines
- Transmissions, which contain clutches
In any case, a Torque Actuator accepts an incoming Simulink signal and
originates, from its driveline connector port, a driveline connection l in e
carrying that torque.
The SimDriveline simu la t ion so lves for the motion of the spinning driveshaft,
given the torque it is subject to. Therefore you cannot, in addition, subject
that same driveshaft to motion actuation.
2-25
Page 62
2 Simple Models
Caution A driveline actuated by a torque must have a nonzero inertia,
represented by one or more connected Inertia blocks. A torque-actuated
driveline without any inertia experiences a singular acceleration. In this case,
the SimDriveline simulation will stop with an error.
Actuating a Driveline with Motions
You can apply a motion to a driveshaft directly, with a Motion Actuator block.
A Motion Actuator accepts an incoming Simulink signal and originates,
from its driveline connector port, a driveline connection lin e spinning with
the specified motion.
TheSimDrivelinesimulationsolvesforthetorquecarriedbythespinning
driveshaft, given its motion. Therefore you cannot, in addition, subject that
same driveshaft to torque actuation.
2-26
Setting the Motion Initial Conditions of a Driveline
When driveline simulation starts, the c omplete driveline determines the
initial motion of all dri veshafts by a combination of constra in ts, motio n
actuators, and initial condition actuators. If, after the application of the
complete driveline’s con strai nts and actuators, one or more of the driveshaft
motions remain undetermined, these driveshafts start simulation with zero
angular velocity by default.
You can exercise direct control over how a driveshaft starts motion during
simulation by connecting it to an Initial Condition actuation block. You set
the initial velocity of the driveshaft in the block’s dialog.
For more about constraints and degrees of freedom, see “Analyzing Degrees of
Freedom” on page 3-14.
Page 63
Actuating Drivelines with Torques and Motions
Caution You must ensure that whatever initial conditions you impose on
the driveshafts in yo ur driveline are consistent with all of the driveline’s
constraints and motion actuators. If an inconsistency occurs, the SimDriveline
simulation stops with error.
Resolving Undetermined Motions in Complex Gears
A simple gear has two ports and imposes one constraint between them,
leaving one independent DoF. Once one port is connected to a driveshaft, the
motion of the other port’s driveshaft is determined.
A complex gear has three or more ports and imposes one or more constraints
among them. A complex gear can have any number of independent DoFs,
including none.
For more about complex gears, see “Representing and Transferring Drivel ine
Motion and Torque” on page 2-9.
Tip If a simulation apportions the initial motions of a complex gear in an
unsatisfactory way, determine how you want the overall initial motion divided
up and enforce that division with one or more Initial Condition blocks on one
or more of the complex gear shafts.
However you divide the initial motion among the gear shafts, ensure that
this division is consistent with all constraints in your driveline, as well as
any motion actuators.
2-27
Page 64
2 Simple Models
Controlling Gear Couplings with Clutches
In this section...
“About M otion, Gears, and Clutches” on page 2-28
“Engaging and Disengaging Gears with Clutches” on page 2-28
“Modeling Re alistic Clutch Systems with Loss” on page 2-34
“Braking Motion with Clutches” on page 2-37
“Modeling Friction Clutches a t a F undamental Level” on page 2-41
About Motion, Gears, and Clutches
The most important requirement of a practical drivetrain is the ability
to transfer rotational motion and torque among spinning components at
different speeds and gear ratios. A single set of gears is usually not sufficient
to accomplish this. Clutches are the critical components that allow the
drivetrain to selectively transfer mot ion and torque at different gear ratios
under manual or automatic control.
2-28
This section e xplains how to model and use clutches in driveline models
without and with frictional losses and braking.
Engaging and Disengaging Gears with Clutches
A common problem in drivetrain design is transferring motion and torque at
different fixed gear ratios. Drivetrains are typically designed to switch among
a set of discrete gear ratios. Implementing the switch from one gear ratio to
another requires gradually disengaging one set of driveline couplings and
engaging another set. Clutches allow you to gradually engage and disengage
driveline shafts from one another.
The Controllable Friction Clutch block represents a standard surface
friction-based clutch that models this behavior and requires no more than
modest preparation to use. This section uses this block. You also can model
clutches in greater detail u sing the Fundamental Friction Clutch block, which
requires you to specify the static and kinetic clutch friction more completely.
See “Modeling Friction Clutches at a Fundamental Level” on page 2-41.
Page 65

Controlling Gear Couplings with Clutches
Tip You can model continuous motion-torque transfer with the Torque
Converter block, which simulates fluid viscosity instead of surface friction
and which never locks.
How a Clutch Works
A clutch makes two shafts spinning at different rates spin at a single rate by
applying forces that tend to accelerate one shaft and decelerate the other. The
most common way for a clutch to accomplish this is with surface friction. Such
a clutch can operate in one of three modes of motion:
• Disengaged: the clutch applies no friction at all.
• Engaged but unlocked: the clutch applies kinetic friction, and the two
shafts spin at different rates.
• Engaged and locked: the clutch applies static friction, and the two shafts
spin together.
A clutch consists of mated frictional surfaces overlapping one another and
connected on either side to a shaft. If the clutch is disengaged, the frictional
surfaces have no contact and the shafts spin independently. To engage the
clutch, a moderate amount of contact between two surfaces is induced by
applying clutch pressure (a force normal to the surfaces). The two surfaces in
contact and moving relative to one another experience kinetic friction, which
causes them to narrow their relative velocity. The faster surface tends to slow
down (unless an external torque is acting) and the slower one to speed up.
At some critical combination of reduced relative speed and pressure (normal
force), the clutch locks, so that the two shafts are spinning at the same rate.
The locking of the shafts is controlled by static friction, which holds the shafts
together as long as sufficient normal force is applied and no relative torque
is large enough to overcome the locking. If the clutch unlocks but is still
engaged, it again applies kinetic rather than static friction.
2-29
Page 66
2 Simple Models
Note The transition between unlocked and locked states is discontinuous.
Modeling a clutch locking or unlocking requires searching for the correct
combination o f pressure and torque acting on the clutch.
The locking and unlocking are determined during simulation by accurate
zero-crossing detection and repeated mode iteration. In the default case, this
mode iteration induces algebraic loops in Simulink, non-time-based simulation
steps that trigger warnings at the MATLAB command line. You can change
this default behavior through your driveline’s Driveline Environment block.
Engaging and Disengaging a Gear with a Clutch
Here you construct a simple model that simulates a gear being engaged, then
disengaged, by a clutch. Torque and motion are transferred from one s haft to
another over a finite time interval. Start with the simple gear model of the
last section or with the drive_ sge ar demo. The completed clutch model is
the drive_sclutch demo.
2-30
1 From the SimDriveline block library, you need a Controllable Friction
Clutch block. Also copy a Signal Builder and a Constant block from the
Simulink block library.
2 Remove the Torque Sensor blocks, insert the Clutch between Inertia1 and
Simple Gear, then reconnect the connection lines.
3 In the Clutch dialog, select the Output clutch mode check box, but leave
the other defaults. Rearrange and connect the blocks as shown here.
Page 67
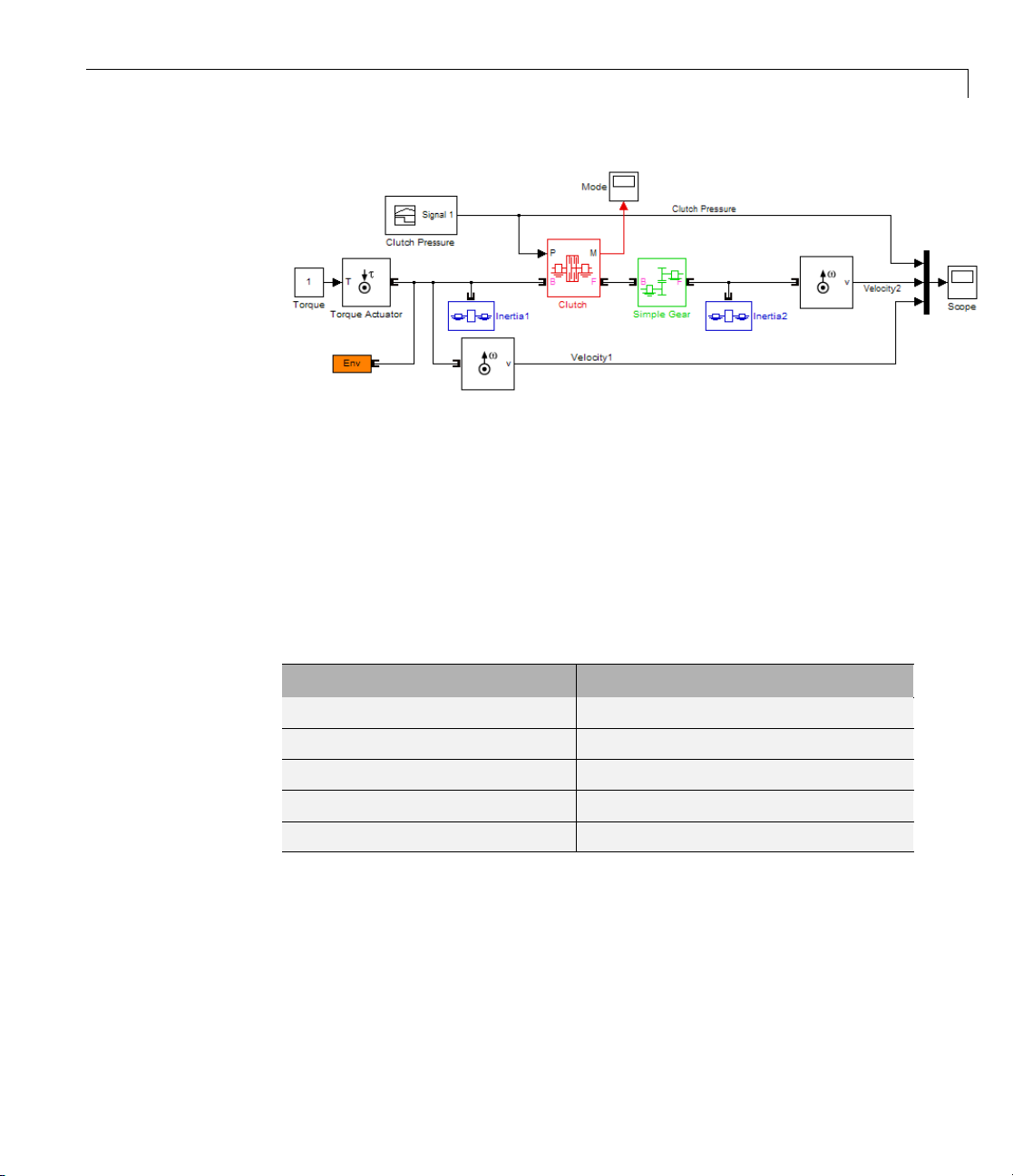
Controlling Gear Couplings with Clutches
Simple Clutch Model with Programmed Clutch Pressure
4 Use the Constant block as the input torque signal in place of the sinusoidal
signal. Reconfigure Mux and the first Scope blocks to accept three signals,
the two angular velocities and the clutch pressure. Connect the second
ScopetodisplaytheClutchmodesignal.
5 Open Signal Builder and construct the following signal. Signal Builder
specifies the clutch pressure signal, which is normalized between 0 and
1. (The Peak normal force field in Clutch determines the maximum
clutch pressure.)
Time Range (Seconds) Signal Value
0–2 0
2–4
0–0.8withconstantslope
4–6 0.8
6–7
0.8–0withconstantslope
7–10 0
6 Open the Scopes and start the simulation.
The normalized clutch pressure signal follows the profile you created in
Signal Builder and determines the model’s behavior.
• From 0 to 2 seconds, the velocity of Inertia1 increases linearly because
it is subject to a constant torque.
2-31
Page 68
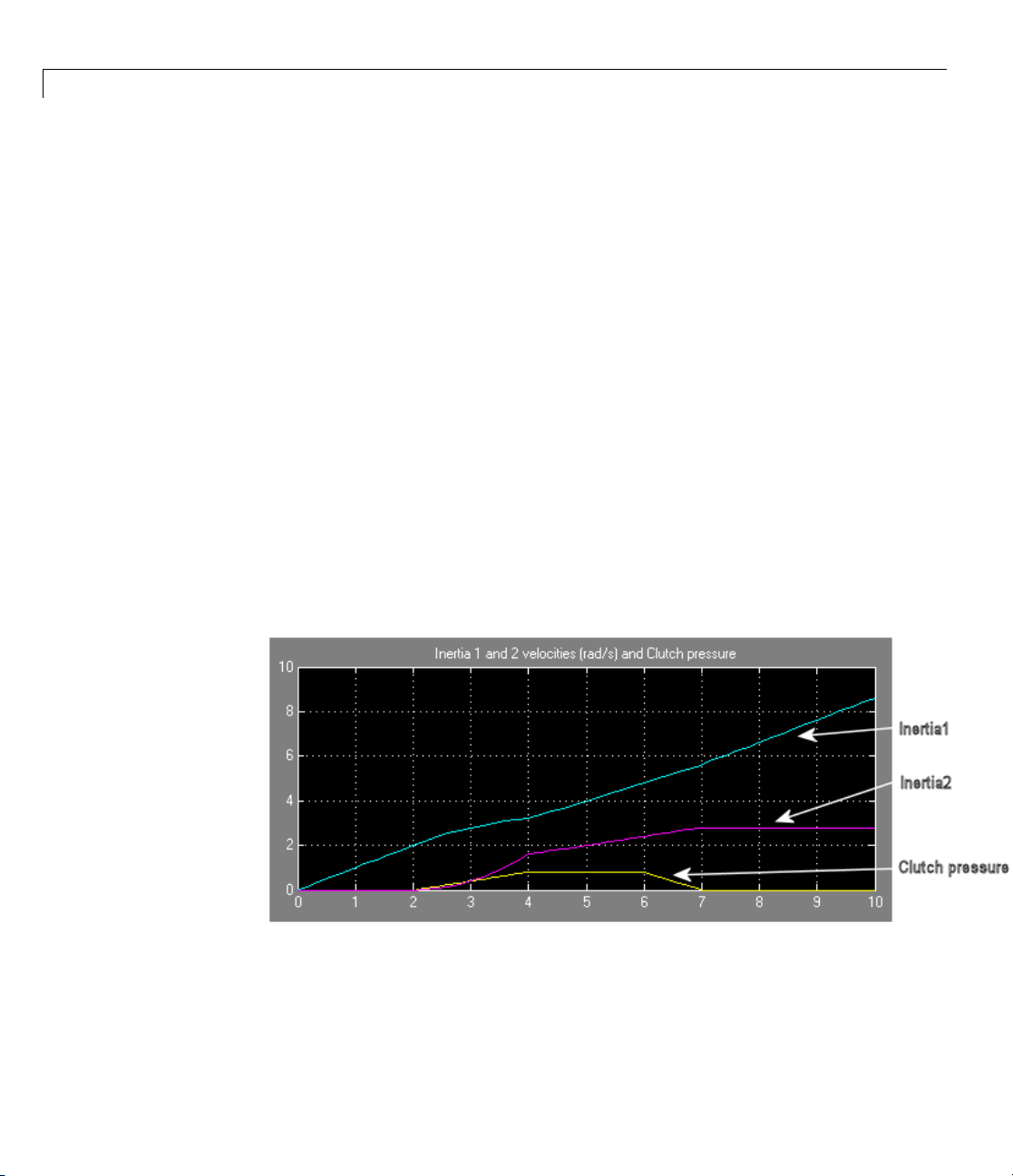
2 Simple Models
• At 2 seconds, the clutch begins to engage, and Inertia2 begins to spin. The
velocity of Inertia1 continues to rise, although at a slower rate, because the
two inertias now share the external torque.
• At 4 seconds, the pressure reaches its maximum, and the clutch locks. The
driveshafts connected by the clutch spin together. Inertia1 and Inertia2
continue to speed up at constant accelerations.
• At 6 seconds, the clutch begins to disengage as the pressure drops. Inertia1
and Inertia2 continue to accelerate with the applied torque.
The clutch unlocks at 6.77 seconds and fully disengages at 7 seconds. (The
clutch unlocks a little before completely disengaging because the pressure,
even before vanishing, becomes too small to maintain the lock.) Inertia1 is
still accelerating. But Inertia2 now freeofthedriveshaftanditstorque,no
longer accelerates and instead spins at a constant rate without frictional
loss.
While the two shafts are locked, between 4 and 6.77 seconds, Inertia1 and
Inertia2 spin in a fixed 2:1 ratio. The Simple Gear, with a gear ratio of 2
between follower and base, transforms Inertia2’s velocity to half that of
Inertia1.
2-32
Page 69
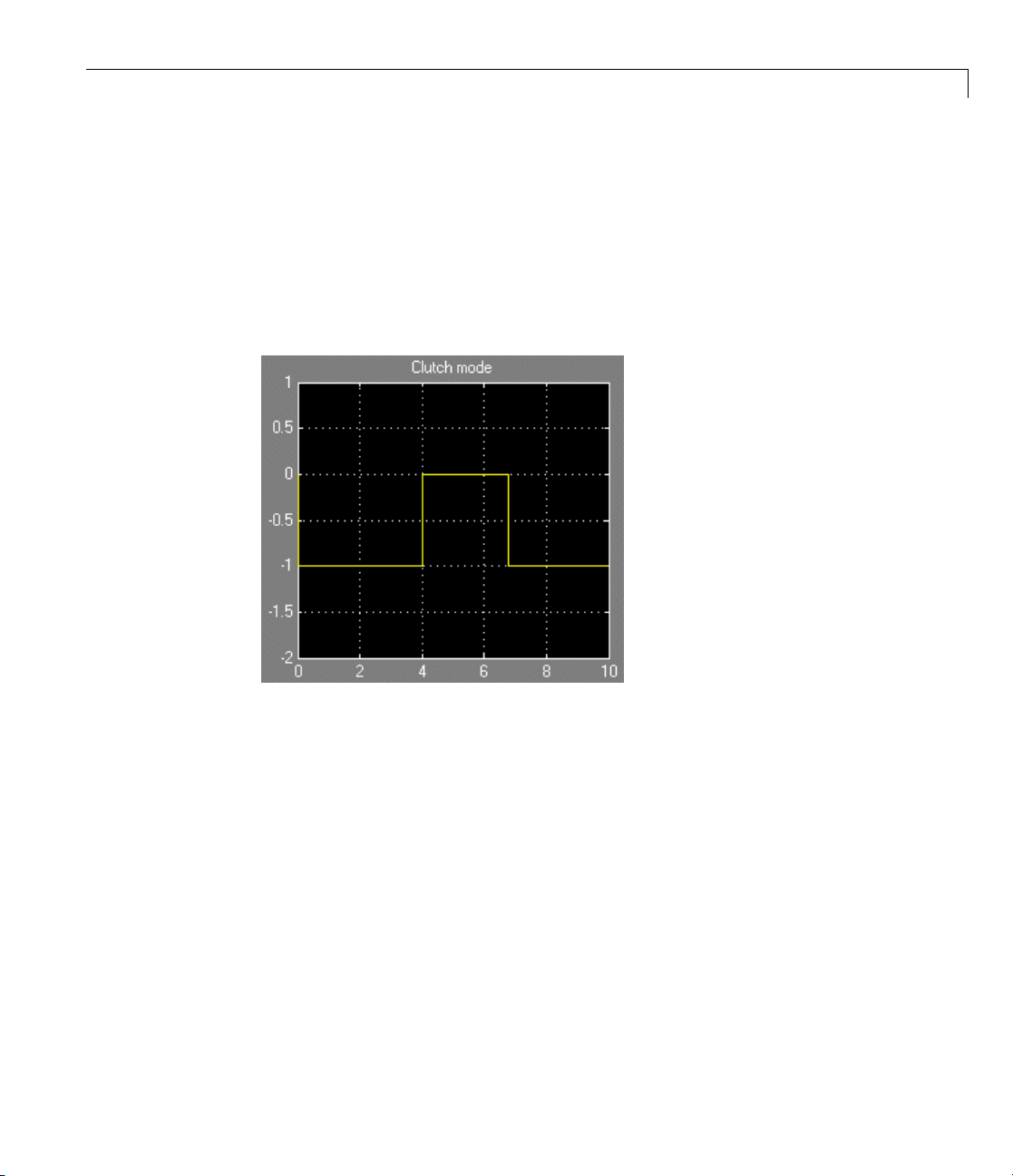
Controlling Gear Couplings with Clutches
How the Clutch Mode Indicates Locking and Unlocking. The Clutch
mode signal indicates the relative motion of its two connected shafts. From 0
to 4 seconds, the two shafts are moving relative to one another. The follower
(driven) shaft is slower than the base (drive) shaft, so the mode signal is -1.
Once the two shafts lock, their relative velocity is 0, and the mode signal
switches to 0. At 6.77 seconds, they u nl ock , and the drive (base) shaft starts
accelerating faster than the driven (follower) shaft. The mode signal switches
back to -1.
Engaging and Disengaging Driveshafts with a Clutch and
Witho
To see the two Inertias of the preceding model locked and spinning at the
same rate,
1 Remove Simple Gear and connect Inertia1 directly to the Clutch. Change
2 Rest
ut a Gear
the Peak normal force value in Clutch to
art the simulation. Inertia1 and Inertia2 now spin at the same rate
le the clutch is locked between 4 and 6.77 seconds.
whi
2.5 (ne w ton s ) .
2-33
Page 70
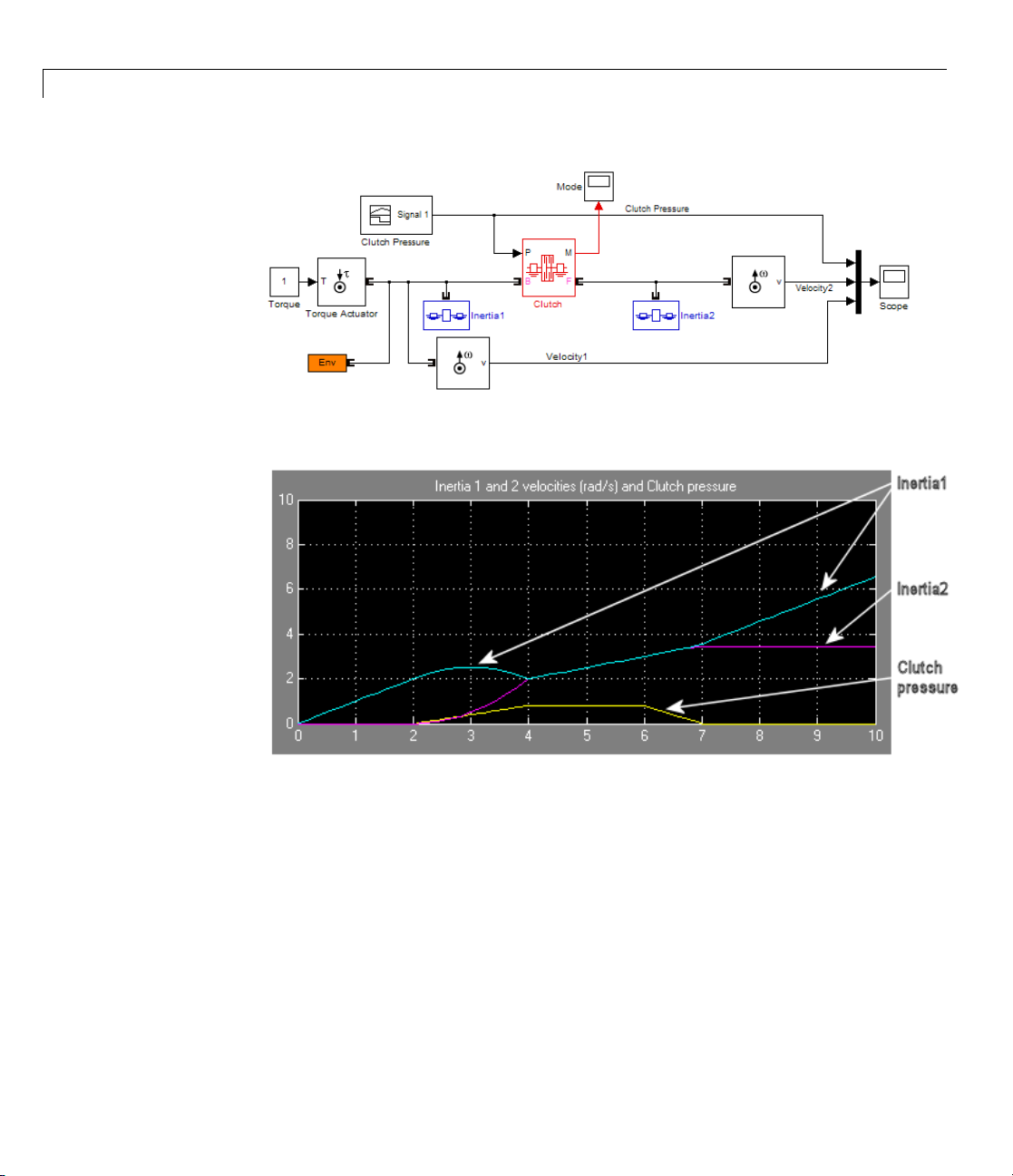
2 Simple Models
Simple Clutch Model with No Ge ar
2-34
Modeling Realistic Clutch Systems with Loss
To make your clutch system model more realistic, you should add frictional
damping to the spinning shafts of drive_sclutch. Here you add a kinetic
friction torque proportional to the angular velocity to both sides of the clutch.
A simple way to do this is to create a friction subsystem that applies such
a torque to any driveline axis it is connected to. Then you can copy the
subsystem and m odify your existing clutch model by connecting the two copies
on either side of the clutch.
Page 71
Controlling Gear Couplings with Clutches
Tip The velocity used for this damping is the absolute velocity of a single
shaft relative to rest (as defined by a Housing block, for example). If you
had two driveline shafts and wanted to exert a relative damping between
them as a function of their relative velocities, you could use the Torsional
Spring-Damper b lock. In general, this block applies a mixture of spring-like
and damping torques between the two connected axes. But you can apply a
pure damping torque by simply settingthespringconstanttozero.
Creating a Torque Damping Subsystem
The frictional torque is τ
constant. To apply the frictional torque proportional to the velocity, you
need to
1 Measure the angular velocity of the driveline axis
2 Multiply it by -μ, because the frictional torque opposes the motion
=-μω,whereμ is the frictional proportionality
fric
3 Apply the resulting torque bac k to the dr iveline axis
To implement kinetic damping torque:
1 Copy Motion Sensor and Torque Actuator blocks and, from the Simulink
library, a Gain block, into your model window.
2 Connect the angular velocity port Vel to the inport of the Gain block and
the outport of the Gain block to the torque inport of the Torque Actuator
block. Enter
-0.3 for the Gain value in the Gain dialog, leaving the other
defaults.
3 With your cursor, select the connected Sensor-Gain-Actuator block set, and
create a subsystem. Call it
port appearing on its block is a driveline connector port
port
>.
Now create a second copy of
Damper. When you create the subsystem, the
, not a Simulink
Damper.
2-35
Page 72
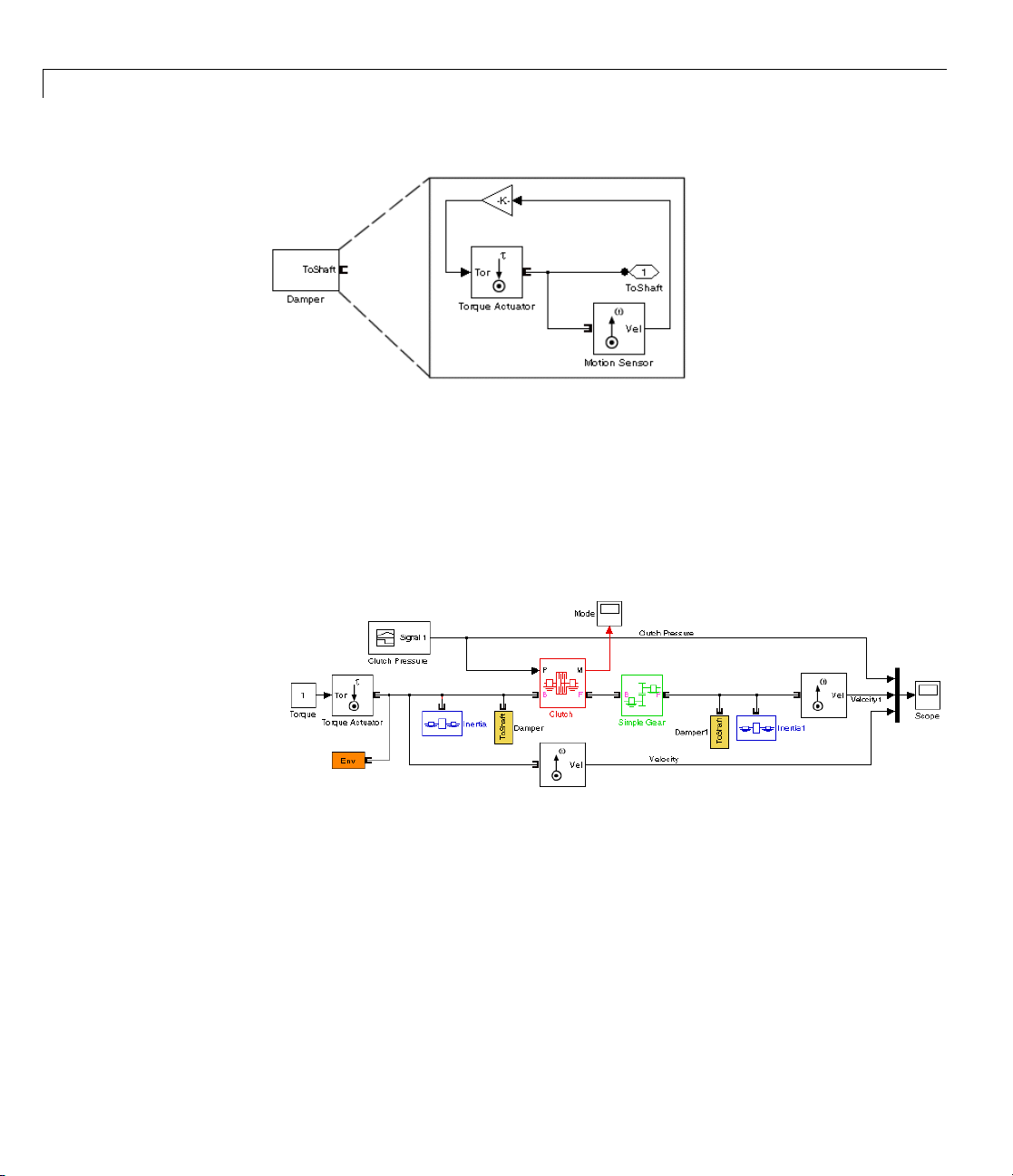
2 Simple Models
Rotational Kinetic Damping Subsystem
Connecting and Simulating the Damped Clutch S ystem
Complete and run the model.
1 Connect the two Damper subsystems to the driveline of your previous
clutch model as shown.
2-36
Damped Simple Clutch Model
2 Changethesimulationtimeto20seconds. ThenopentheScopeblocks
and click Start.
Readjust the horizontal axes of the Scopes with Autoscale to see the full
plots. The clutch pressure and external torques are applied as before. But
the shaft rotations are different now because of the damping.
Page 73

Controlling Gear Couplings with Clutches
Inertia1, as before, begins to spin when the clutch starts to engage at 2
seconds. After the clutch locks at 4 seconds, the body continues to accelerate,
but at a slower rate than it did without damping. At 6 seconds, the clutch
begins to disengage and completely disengages at 7 seconds. Unlike the
friction-free case, Inertia1, subject to friction, now starts to slow down. Its
angular velocity d rops exponentiallywithtimeoncetheexternaltorque
is removed.
The behavior of Inertia is more complex. It begins to spin up, but at a lower
rate than before, because of the damping. Between 2 and 7 seconds, Inertia
has to share the external torque with Inertia1 via the Clutch and the Simple
Gear. After seven seconds, the external torque applies to Inertia alone. It
continues to accelerate, but at an ever-slowing rate, because of the damping.
If you let the simulation run without stopping, Inertia will approach its
terminal angular velocity, a state where the frictional torque exactly balances
the externally applied torque. The terminal velocity is ω
term
= τ
/μ or 1/0.3 =
ext
3.3333 radians/second in this case. The Scope plot shows this terminal value.
Braking Motion with Clutches
A special case of transferring motion occurs when you want to brake the
spinning of a driveline component, slowing it down until it stops. The
common way to brake the motion is to couple the spinning component to a
fixed housing, which effectively has infinite inertia and is represented by a
SimDriveline Housing block. Because the housing cannot move, a driveline
2-37
Page 74
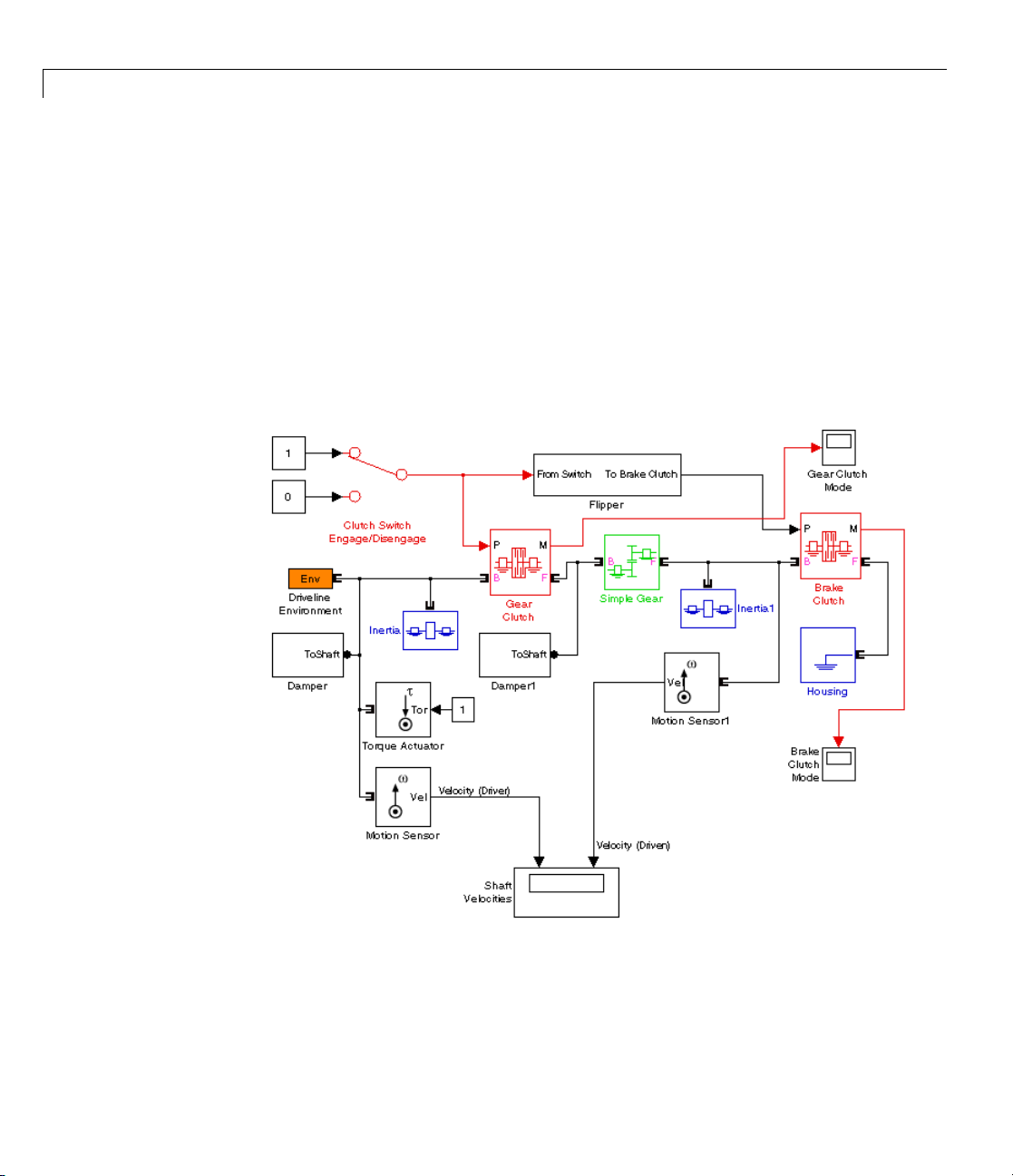
2 Simple Models
axis locked to a housing also cannot move. You can implement the gradual
engagement or disengagement of a driveline component with a housing
using a clutch, just as you use a clutch to gradually couple or uncouple two
spinning shafts.
Braking with a Double-Clutch System
The drive_clutch_engage demo model is an elaboration on the preceding
models of this chapter and features two clutches, one of which acts as a
brake. The model also includes frictional damping for greater realism. The
simulation time is set to
inf (infinity).
2-38
ple Clutch Model with Brake Clutch
Sim
is model again uses the basic structure of inertia-clutch-gear-inertia.
Th
efirstbody,Inertia,isstilldrivenby an external torque, and the initial
Th
Page 75

Controlling Gear Couplings with Clutches
velocities are still 0. There is, however, another clutch for the second body,
Inertia1, that can couple Inertia1 to the Housing and bring it to a stop.
Another new feature, compared to the preceding models, is the switching
assembly made of the Clutch Switch and Flip per blocks. You can flip this
switch to apply a constant clutch pressure signal to either Gear Clutch
or Brake Clutch. The two Damper subsystems are identical to those you
constructed in “Modeling Realistic Clutch Systems with Loss” on page 2-34,
except that the frictional constants, the Gain values of the Gain blocks, are
set to
-0.1.
1 Start the model with the Clutch Switch set to 1. T he clutch pressure is
then applied to Gear Clutch, which engages and locks the driver and driven
shafts and causes Inertia and Inertia1 to rotate together.
The angular velocity of Inertia1 (2.5 radians/second) is half that of Inertia
(5 radians/second) because the gear rat io of the Simple Gear block is 2,
follower to base. In this switch mode, no clutch pressure is applied to Brake
Clutch, which remains unengaged. The mode of Brake Clutch is then -1,
because Brake Clutch’s follower, the Housing block, is at rest, while the
base, Inertia1, is spinning. The mode of Gear Clutch is 0, because its base
and follower, the driver and driven shafts, are locked together.
After an initial transient, the system settles into a steady state of motion
where the external torque is exactly balanced by the frictional losses. The
effective frictional constant, with two dampers, is 0.2. With an external
torque of 1 newton-meter, the terminal angular velocity of Inertia is then ω
= 1/0.2 = 5 radians/second.
2 With the simulation running, n ow change the Clutch Switch to 0 to
disengage Gear Clutch and engage Brake Clutch. The system undergoes
another transient while Gear Clutch disengages and Brake Clutch engages.
The angular velocity of Inertia and the driver shaft settles down to a new
steady state of 10 radians/second, twice its old speed. The mode of Gear
Clutch is now -1, because the driven shaft (follower) is not moving, while
the driver shaft (base) continues to spin.
Because Gear Clutch is now disengaged, Inertia is no longer subject to
the second frictional damping block, Damper1. The effective frictional
constant drops in half, to 0.1, and the terminal velocity doubles. At the
same time, Inertia1 is no longer receiving torque through Gear Clutch. But
2-39
Page 76

2 Simple Models
Brake Clutch is engaged and couples Inertia1 to the immobile Housing.
Once engaged, the kinetic friction of Brake Clutch and Damper1 bring
the driven shaft and Inertia1 to a stop. Because it locks, Brake Clutch’s
mode becomes 0.
To see the transient behavior at simulation start and when you switch the
clutches,
1 Start the simulation and let it run for a short time. Then switch Clutch
Switch to the other mode.
2 After another short time, stop the sim ulation. Use the Autoscale feature
of the Scopes to capture the entire simulation sequence. The transients
from the starting behavior and the switching transition will be visible.
For example, in these plots, the model was started with Clutch Switch set to 1
(Gear Clutch locked, Brake Clutch disengaged, no braking). The velocities
quickly climbed to their steady-state values. Then Clutch Switch was changed
at about 682 seconds of simulation time. Gear Clutch disengaged and Brake
Clutch engaged, braking the driven shaft. The driver shaft’s angular velocity
rose from 5 to 10 radians /seco n d. The driven shaft’s angular velocity dropped
to 0.
2-40
Page 77

Controlling Gear Couplings with Clutches
Modeling Fricti
The Controllabl
normalized pres
other characte
Modeling a fri
the kinetic an
gives you that
external sig
friction and
e F riction Clutch block is easy to use, requiring only a single
sure signal to modulate the kinetic friction. You fix all its
ristics before starting simulation.
ctionclutchatafundamentallevel requires direct control over
d static friction torques. The Fundamental Friction Clutch block
greater control. With this block, you must specify, by either
nals or internal sensor-actuator feedback, the clutch’s kinetic
static friction limits (positive and negative) as functions of time.
on Clutches at a Fundamental Level
2-41
Page 78

2 Simple Models
Combining Clutches and Gears into Transmissions
In this section...
“About G ears, Clutches, and Transmissions” on page 2-42
“Modeling a Simple Two-Speed Transmission with Braking” on page 2-43
“Introducing the Transmission Templates Library” on page 2-50
“Modeling a CR-CR 4-Speed Transmission Driveline with Braking” on page
2-51
About Gears, Clutches, and Transmissions
In a real drive train, you coup le an input or drive shaft to one of many output
or driven shafts, or to one driven shaft with a choice of several gear ratios.
Thedrivetrainthenrequiresseveralclutches to switch between gears. You
couple one of the driven shafts or one of the gear sets by engaging one of the
clutches. You then sw itch to another output shaft or another gear ratio by
disengaging one clutch and engaging another.
2-42
You can also engage more than one clutch at a time to use multiple gear sets
simultaneously. Realistic transmissions engage multiple gear sets at the
same time to produce a single effective gear ratio, or drive ratio. Changing
gears requires disengaging one set of clutches and engaging another set. You
specify the set of clutches to engage and disengage for each desired gear ratio
in a clutch schedule. Designing a clutch schedule and shaping and sequencing
the clutch pressure signals frequently constitute the most difficult part of
transmission design. A realistic transmission model must also include losses
duetofrictionandimperfect gear meshing.
This section explains how to model transmissions, first by creating a
transmission mo del from g ears and clu tches, then by using the SimDriveline
library of predesigned transmission subsystems. One such predesigned
transmission, the CR-CR 4-speed transmission, is the basis of another
example.
Page 79

Combining Clutches and Gears into Transmissions
Note The examples in this section contain unrealistic clutch pressure signals
that rise and fall sharply. A realistic transmis sio n is controlled by clutch
pressure signals that rise and fall s m oothly. For a car demo with smoothed
clutch pressure signals, see “Modeling and Simulating a Complete Car” on
page 2-58. “Improving Performance” on page 3-5 discusses the relationship
of sharp and smooth clutch pressure signals to the Simulink solver choice
and settings.
Modeling a Simple Two-Speed Transmission with Braking
The demo model drive_strans_ideal contains a driveline system that makes
up a simple but complete transmission.
Simple Transmission with Two Gear-Clutch Pairs and Braking
2-43
Page 80
2 Simple Models
The model is an elaboration of the drive_clutch_engage demo model presented
in “Braking Motion with Clutches” on page 2-37. This model also contains
two driveline shafts or axes, with an actuating torque applied to the driven
shaft. Both the driver and the driven shafts are subject to, respectively, large
and very small kinetic damping torques. (The kinetic to rqu e constants μ are
0.1 and 10
In the steady state, the driving and damping torques balance one another,
and the two shafts spin at constant rates. (If braking is engaged, the driven
shaft is stopped, as before.) But there are now two selectable gears to couple
the two axes, instead of one.
This transmission model couples the gears in a simple way, with each gear
and the brake associated with its own respective clu tch . Coupling one gea r
requires engaging and locking its corresponding clutch, while ensuring that
the other two clutches are disengaged. Switching on the brake requires
disengaging the two gear clutches and locking the brake clutch.
-4
newton-seconds/radian, respectively, in Damper1 and Damper2.)
Setting Up the Gears, Clutches, and Brake
The two gears are Simple Gear blocks with different gear ratios, each
connected in series with its corresponding clutch. The two gear-clutch pairs
are coupled in parallel, and this parallel assem bly then cou ples the driv er
shaft to the driven shaft, with their two spinning inertias. One gear is a
“low” gear, the other a “high” gear. The “low” and “high” labels, following
common usage for automobile gears, refer, not to the gear ratios, but the
angular velocity ratios.
2-44
Caution The ratio of speeds in a gear is the reciprocal of the gear ratio.
• The “low” gear is the Simple Gear 5:1 block, which can be coupled by
engaging its corresponding clutch, modeled by the Lo Gear Clutch block.
The gear ratio is 5:1, so that the ratio of output to input (follower to base)
angular speeds is 1/5. Hence the name “low gear.” Such a gear, by the same
token, has a high torque transfer ratio of 5, from base to follower. In an
automobile, a “low” gear like this is used to accelerate the vehicle from a
stop by transferring a large torque down the drivetrain from the engine.
• The “high” gear is the Simple Gear 2:1 block, coupled by engaging its own
clutch, represented by the Hi Gear Clutch block. The gear ratio is 2:1, and
Page 81

Combining Clutches and Gears into Transmissions
theangularvelocityratiooffollowertobaseis1/2,or5/2timestheratioin
the“low”gear. Hencethename“highgear.”Thetorquetransferratiois
only2frombasetofollower. Anautomotive “high” gear is used for milder
acceleration or coasting once a vehicle is moving at a significant speed. The
vehicle acceleration generated by this gear is less than that generated
by the “low” gear.
While either Gear Clutch is engaged, the Brake Switch is disable d. Yo u can
start braking and bring the driven shaft to a stop by engaging Brake Clutch.
This clutch, once locked, holds the driven axis fixed relative to the Housing.
The driver shaft contin ue s to spin, subject to the competing driving and
damping torques. In this transmission, the brake is completely disabled if
either gear clutch is engaged. Disengaging the gears puts the transmission
into “neutral” and allows you to use the Brake Switch to apply or not apply
brake clutch pressure.
Clearly, this simple transmission is based o n mapping each transmission
state one-to-one with an engaged clutch. You cannot engage more than one
clutch at a time without creating conflicts between gear ratios or between the
driver shaft and the Housing. In a real tr ansmissio n, such conflicts generate
internal stresses and might destroy the driveline. Such conflicts cause a
SimDriveline simulation to stop with an error.
Controlling the Transmission State with a Clutch Schedule
The requirement to engage a certain clutch or set of clutches and disengage
others, both to implement transmissio n functions and to avoid motion conflicts
between gears, is the basis for all clutch schedules. Simulink provides a
number of ways to implement clutch schedules, depending on the complexity
of the transmission and how much realism you require for the clutch pressure
signals.
Warning You must check every transmission’s clutch schedule to
implement the various transmission states correctly and to avoid
motion conflicts among gear sets. You must also check clutch
pressure signal profiles to make sure that any transmission’s clutches
are engaged, locked, unlocked, and disengaged in a realistic and
conflict-free manner. Unphysical or conflicting clutch schedules and
clutch pressure signals lead to SimDriveline simulation errors.
2-45
Page 82

2 Simple Models
Avoiding such conflicts leads, for the drive_strans_ideal model, to a unique
clutch schedule.
Clutch Schedule for the Simple Two-Speed Transmission
Transmission State
Neutral/Braked
Low Gear
High Gear
The model contains a simple Clutch Control subsystem to implement the
clutch schedule and to output (or, in the case of the brake, enable) the clutch
pressure signals to lock each clutch as needed.
h Control Subsystem for Simple Transmission Model
Clutc
is simplified and unrealistic clutch control model, the clutch pressure
In th
als are just constants: 1 to engage and lock a clutch, and 0 to disengage it.
sign
utch pressure signal is normalized to equal 1 when the surface friction
(A cl
e equals the peak normal force specified in the Controllable Friction
forc
tch dialog.) The brake signal is not a pressure, but only an enabling signal
Clu
the Brake Switch in the main model. The table of these constants, for
for
h transmission state, is contained in the Clutch Schedule Table block,
eac
tomized from the Simulink LookupND Direct block, which is discussed in
cus
e Simulink documentation. Open the dialog to see this table.
th
Clutch1 State Clutch2 State Clutch3 State
D/L
Disengaged Locked Disengaged
Disengaged Disengaged Locked
Disengaged Disengaged
2-46
Page 83
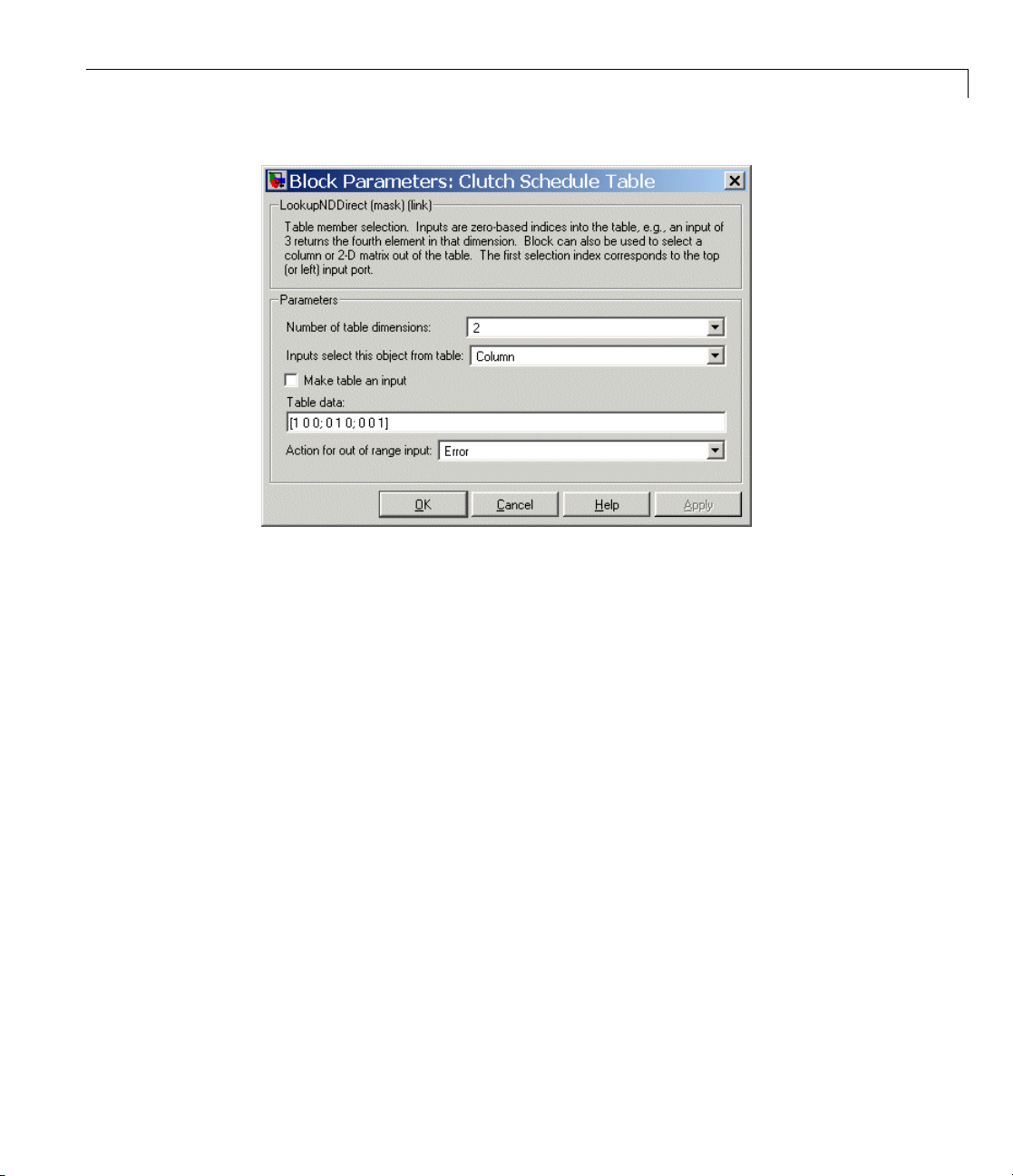
Combining Clutches and Gears into Transmissions
Thetableisindexed,startingfromzero, in both row and column. An input
signal of 0 causes the block to output the first column of table values; a value
of 1 outputs the second column; and a value of 2, the third column. The first
column applies zero pressure to the two gear clutches and enables the Brake
Switch in the main model. Turning this switch on applies full pressure to the
brake clutch. Turning it off releases the brake pressure. The second column
applies full pressure to the low gear clutch and zero pressure to the high gear
and the brake clutches. The third column applies full pressure to the high
gear clutch and zero pressure to the other two.
These different table columns are activated by changing the positions of the
two M anual Switch b locks, labeled G ea r Switch and Neutral Switch. Putting
the transmission into “neutral” and enabling the brake (upper position of
Neutral Switch) feeds a zero signal to Clutch Schedule Table and activates
the braking schedule. Switching the brake to off (lower position) allows the
Gear Switch schedule signal to pass through instead. This signal has value 1
forthelowgearand2forthehighgear.
This clutch control subsystem is adequate for a simple model like this one,
but not realistic. A full clutch control model requires realistic clutch pressure
signals that rise from and fall back to zero in a smooth way. See “Shaping
2-47
Page 84

2 Simple Models
Realistic Clutch Pressure Signals” on page 2-57 for more about modeling
realistic clutch control pressures.
Running the Model, Switching Gears, and Braking
To see how gear switching works,
1 Start the model.
Its initial transmission state is low gear. The driven shaft spins at one-fifth
therateofthedrivershaft.
2 Change the Gear Switch from Low to High, and observe how the driven
shaft velocity increases in the Shaft Velocities scope.
The driven-to-driver ratio is no w one-half. (The driver shaft velocity
decreases slightly, because it experiences the damping torque on the driven
shaft differently depending on which gear is engaged.)
3 Change the Gear Switch back to Low, then observe that the driven shaft
again spins more slowly.
2-48
At the same tim e, while you switch the gears back and forth, the clutches,
asshownintheClutchModesscope,switchfromLoGearClutchbeing
locked, to the Hi Gear Clutch being locked, and back. When one is locked,
the other is unlocked.
4 Now enable the brake by changing the Neutral Switch to the upper position.
The two gear clutches unlock and dis engage . The driven shaft, subject
to very light damping, now slows gradually. The Brake Clutch remains
unengaged.
5 By turning the Brake Switch to on, you can switch the Brake Clutch to the
locked mode and bring the driven shaft to an immediate and complete stop.
The driver shaft continues to spin at 10 radians/second.
Running the Model Without Clutch Mode Iteration
In realistic transmissions, the pressure signal applied to one clutch is often
determined by the locked/unlocked mode of another clutch. Simulation of
such a system requires simulation timetobrieflystopprogressingandmode
Page 85

Combining Clutches and Gears into Transmissions
iteration to search for a self-consistent state of all clutches across the entire
driveline.
This transmission is simple and non-self-referential, insofar as each clutch
is controlled by external signals only. No clutch is controlled by the mode
of another clutch. In such a case, you do not need mode iteration for the
clutches, because the simulation does not have to search for a collective
self-consistent state of all clutches. The externally imposed clutch schedule
does that automatically.
To turn off clutch mode iteration,
1 Open the model’s Driveline Environment block (the block with the “Env”
icon).
2 Select the Disable m od e iteration for clutch locking check box.
3 Start the model again. The model runs faster and without mode iterations.
Disabling clutch mode iteration to avoid algebraic loops is sometimes
necessary when you are using code generation-based simulation options in
Simulink and Real-Time Workshop. See the Controllable Friction Clutch and
Driveline Environment block reference pages for more details.
Adding Realistic Clutch Signals
The most critical addition you can make to the drive_strans_ideal model
for greater realism is to change the clutch pressure signals from step
functions (0 to 1, or 1 to 0) to signals with a smooth rise and fall. A variant
model, drive_strans, has smoothed clutch pressure signals. The price of
this greater realism is a potentially more complex model. It is critical for
Simulink to determine transmission motion for exactly two clutches to always
remain locked, or for all four to be unlocked, at any instant. Changing
the transmission’s gear settings while maintaining this requirement is an
example of the central problem of transmission design.
The final case study of the chapter, “Modeling and Simulating a Complete
Car” on page 2-58, implements smoothed clutch pressure signals. See
“Shaping Clutch Pressure Signals” on page 2-69.
2-49
Page 86
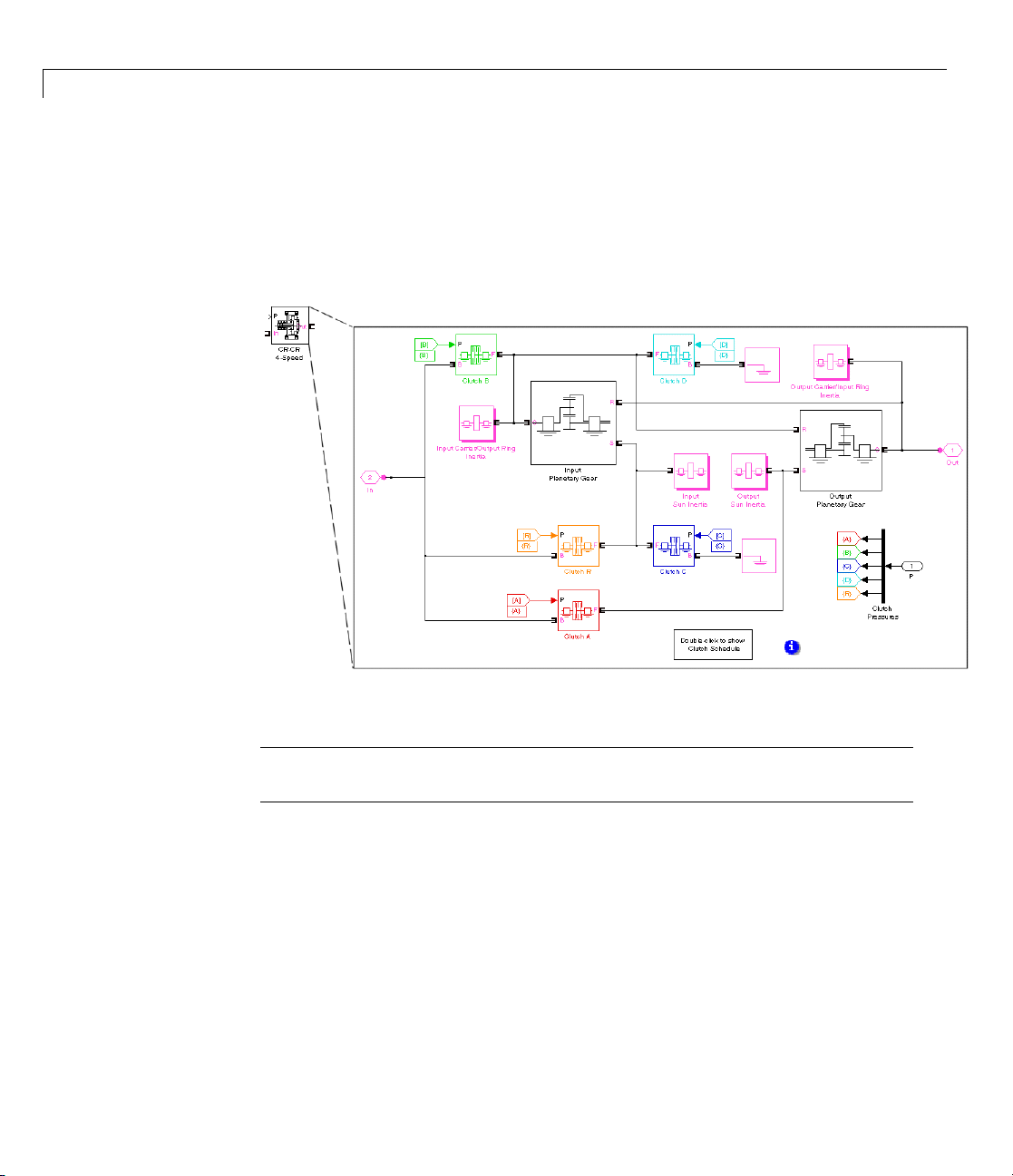
2 Simple Models
Introducing the
The SimDrivelin
complete, worki
library are unm
subsystem open
CR-CR 4-Speed Transmission Template Subsystem
e Transmission Templates library provides examples of
ng multiclutch transmission subsystems. The blocks in this
asked. If you copy one into a model and double-click it, the
s directly, allowing you to inspect the component blocks.
Transmission Templates Library
2-50
Note The Transmission blocks are not library-linked. Once you make a copy
from the library to your model, you are free to modify your copy.
Each type of transmission block has its own clutch schedule, which you can
view by opening the subsystem, then opening the clutch schedule block inside.
(The corresponding block reference pages also list the clutch schedules for
each Transmission block.) Properly engaging a transmission in a particular
gear setting requires engaging a certain number of clutches, no more and
no fewer. Locking too few or too many clutches, or engaging the wrong
clutches, will lead to conflicting gear meshings and simulation errors. You
can disen gage a transmission by setting all clutch pressure signals to 0.
Page 87

Combining Clutches and Gears into Transmissions
Customizing and Using Transmission Blocks
Becauseyoudonothavetotakeanyextra steps to unlink a transmission
block from its library, you can easily modify the Transmission block copies in
your models. You will typical ly need to change gear ratios, clutch pressures,
and gear shaft inertias in any case. If you open the Transmission block to
view the underlying subsystem, you can proceed to modify blocks at will.
Caution Observe certain cautions when modifying the transmission
subsystem component blocks:
• Do not rem ov e any of the gear shaft inertiablocksorsettheirinertiavalues
to 0. These inertias are needed for realistic simulation and preventing
acceleration singularities when torques are applied.
• The clutch schedule for any transmission type specifies those clutches
that must be engaged and those that must be free at any instant for the
transmission to be properly in gear. Make sure that your clutch pressures
respect this requirement. Set all clutch pressures to 0 only if you want to
disengage the transmission completely (place it in neutral). Do not engage
any more or fewer clutches than needed, at any time during simulation.
• If you want to redesign the transmis s ion, by adding or removing gears,
you must consider whether you need as well to add or remove clutches
and redesign the clutch schedule. You also might need to add or remov e
gear shaft inertias.
The next section presents a driveline model based on the CR-CR 4-speed
transmission model of the Transmissions library.
Modeling a CR-CR 4-Speed Transmission Driveline with Braking
The drive_crcr_ideal demo model builds on the previous clutch and
transmission models with a more realistic transmission. (This is the same
model presented in “Running a Demo Model” on page 1-6.) It uses the CR-CR
4-Speed transmission block from the Transmissions library to transfer motion
2-51
Page 88

2 Simple Models
and torque from one shaft and inertia to another. T he model is otherwise
similar to drive_strans_ideal.
CR-CR 4-Speed Transmission Model
2-52
A Torque Driver subsystem feeds a constant driving torque to the driver shaft
(Inertia1). Two damping subsystems apply hea vy and light kinetic friction
to the driver and driven shafts, respectively. The three Scopes measure
the shaft velocities, clutch pressures, and clutch modes, respectively. T he
model pre-load function defines essential parameters in the workspace. You
can view these by opening the Workspace Variables block or opening the
Callbacks tab of the File > Model Properties dialog. The CR-CR 4-Speed
transmission subsystem couples the driver to the driven shaft (Inertia2). A
brake clutch and fixed housing allow you to brake the driven shaft if the
transmission is disengaged. When you first open the model, the Clutch
Control subsystem contains a set of program med clutch signals for shifting
the CR-CR transmission through a preconfigured gear and braking sequence
over 30 seconds.
For clarity, the model’s major signal buses have been bundled as vectors and
directed using Goto and From blocks. The Scopes are collected in the Scopes
subsystem for convenience.
lacing Programmed with Controllable Clutch Pressures
Rep
To achieve manual control over the clutch pressure s,
Page 89
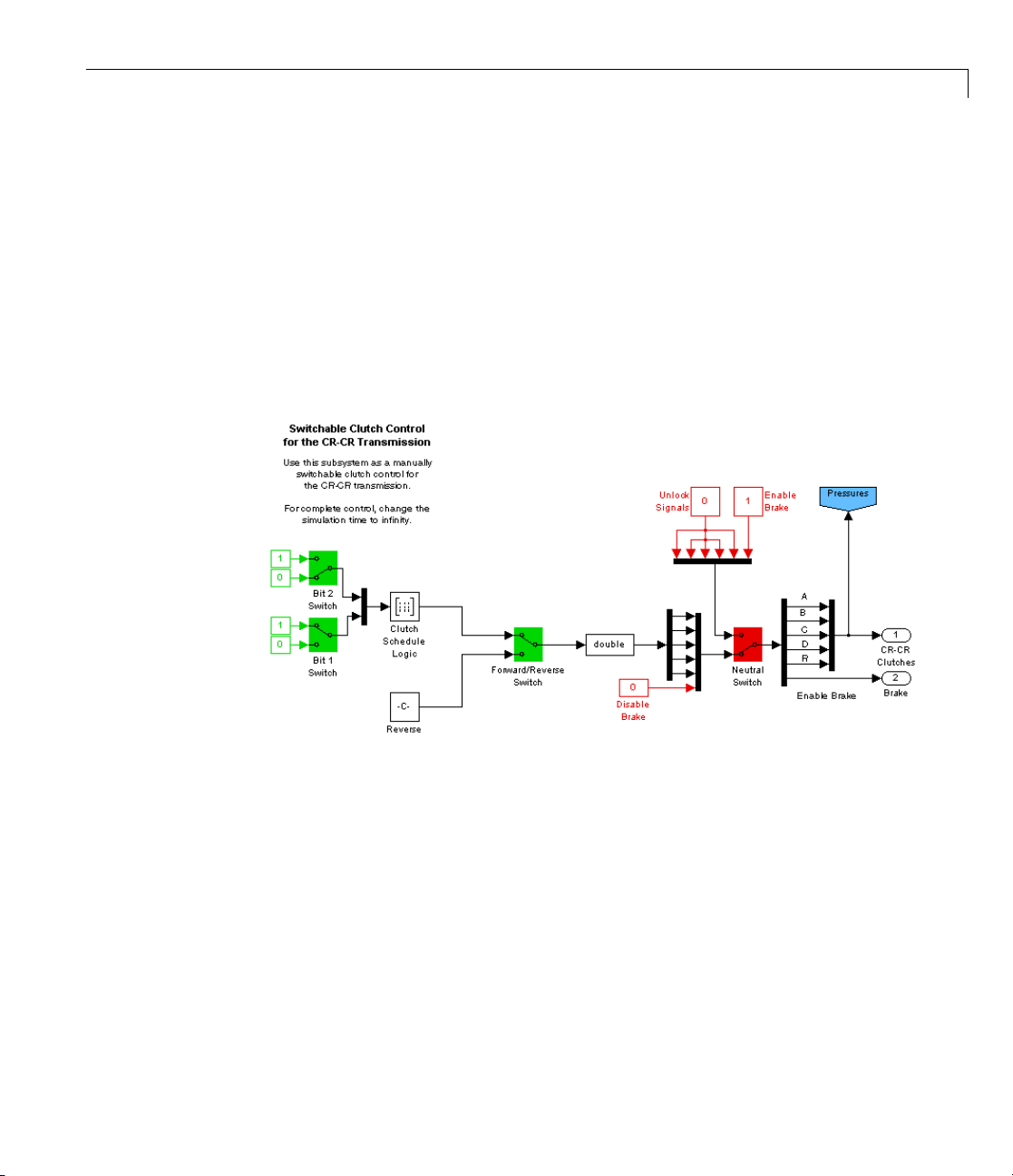
Combining Clutches and Gears into Transmissions
1 Change the sim ulation time in the Simulink model to o lbar from 30 to inf.
2 Open the drive_crcr_clutch_control_switch model and convert the entire
model to a replacement Clutch Control subsystem. (This model is not
intended to be run by itself.)
3 Delete the original Clutch Control subsystem in drive_crcr_ideal and
replace it with this new subsystem.
When you have completed these steps, you can run the model without
stopping and manually switch the transmission into different gear settings.
Manual
Clutch Control for CR-CR Transmission
Configuring the CR-CR Transmission Subsystem
R-CR 4-Speed transmission block used in drive_crcr_ideal has
The C
ult settings for its component Gears, Clutches, and Inertias, with some
defa
ptions. C ertain parameters are changed for greater realism and are
exce
renced to variables defined in the workspace when the model opens. These
refe
iables are used in the four CR-CR Clutch blocks A, B, C, and D. (Ignore
var
reverse gear clutch, Clutch R.)
the
2-53
Page 90
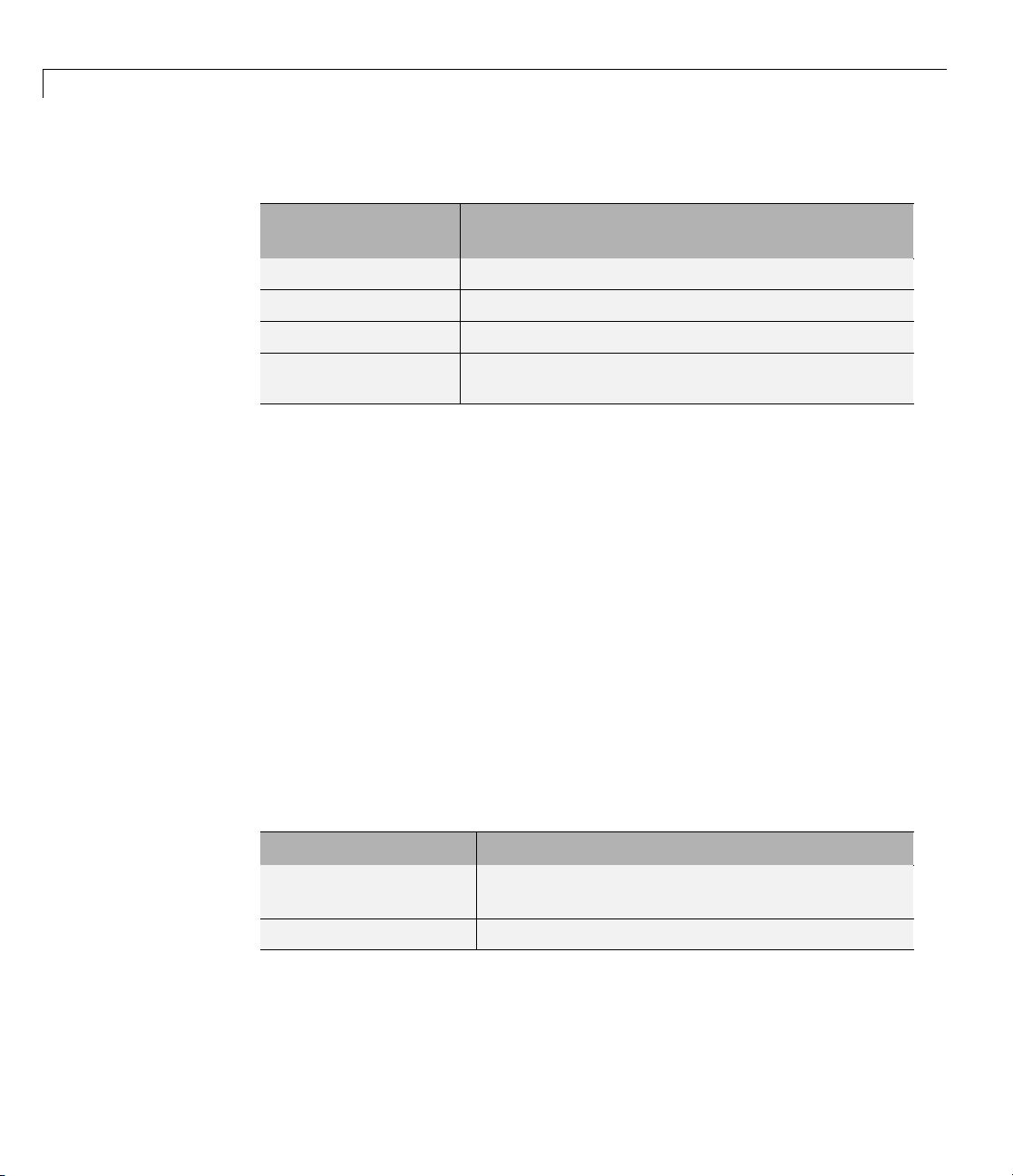
2 Simple Models
CR-CR 4-Speed Transmission Clutch Variables
Workspace
Meaning
Variable
num_fric_surf
eff_tor_rad
peak_normal
fric_coeff (matrix) Kinetic friction coefficient as a function of the
Number of frictional surfaces in each clutch
Effective torque radius in each clutch (m)
Peak normal force on clutch surfaces (N)
relative angular velocity of the clutch shafts
Within the CR-CR transmission subsystem,
1 Open the Clutch Schedule block to see the table of gear settings, clutch
lockings, and gear ratios. (The CR–CR 4-Speed block reference page also
discusses the clutch schedule.)
There are four distinct (forward) gear settings, each with a different
effective gear ratio. For the transmission to be properly engaged and
transmit torque and motion, exactly two clutches must be locked at any
instant. Unlocking all the clutches simultaneously puts the transmission
into neutral (no motion or torque transfer).
2 Close t
The mai
dampi
trans
he transmission subsystem and return to the main m odel window.
n model’s Damping subsystems use these variables for frictional
ng of the driving (engine) and driven shafts coupled across the
mission.
2-54
Drive
Shaft Damping Coefficients
Workspace Variable
eng_damping
driven_damping
Meaning
Driver (engine) shaft kinetic friction coefficient
(N·m·s/rad)
Driven shaft kinetic friction coefficient (N·m·s/rad)
Page 91
Combining Clutches and Gears into Transmissions
Programming the Clutch Schedule Logic
Note This and the following sections assume you have replaced the original
programmed Clutch Control subsystem with the manually switchable
replacement subsystem. See “Replacing Programmed with Controllable
Clutch Pressures” on page 2-52.
From the main model, open the Clutch Control subsystem. The Clutch
Schedule Logic block embo dies the CR-CR 4-Speed clutch schedule as a truth
table for the four forward gears. Each row re presents a different gear setting.
You select a particular row for output by inputting a set of 1’s and 0’s that
specify the row value as a binary number.
CR-CR 4-Speed Clutch Schedule Log ic
Gear Setting
1
201
310
4
Truth Table Row Truth Table Value
00
=0 10010
2
=1 10100
2
=2 11000
2
11
=3 01100
2
In the order of the CR-CR Clutches — A, B, C, and D, respectively — the
sequence of 1’s and 0’s indicates which clutches are locked (1) and which are
free (0). These Boolean values are then converted into normalized clutch
pressure signals. The fifth value in each row represents the disengaged
reverse gear Clutch R.
Programming the Reverse Gear. By default, the Forward/Reverse Switch
is set to the up position, placing the transmissioninforwardmotion. Ifyou
want to engage the reverse gear, flip the switch to the down position.
Open the corresponding Reverse block to see the reverse gear clutch schedule
as a truth table.
2-55
Page 92

2 Simple Models
CR-CR Reverse Gear Clutch Schedule Logic
Gear Setting
Reverse
Truth Table Value
00011
Running the CR-CR Transmission Model — Changing Gears
You are now ready to run the model.
1 Open the Scopes subsystem, then the individual Scope blocks. Close the
Scopes subsystem.
With the Scopes, you can observe the angular velocities of the driving and
driven shafts, and the pressures and modes of the four clutches.
2 Open the Clutch Control subsystem. (This should be the manually
switchable subsystem.) Ensure that the Forward/Reverse Switch is set to
up and the Neutral Switch to down.
Start the model. You can change the forward gear settings by flipping
the Bit0 and Bit1 Switch b locks and moving through truth table entries
corresponding to each setting. (See the table, CR-CR 4-Speed Clutch
Schedule Logic on page 2-55.) Switching from one gear setting to another
unlocks some clutches and locks others, but always leaves two clutches
locked. As you flip betwee n gear settings, the transmission transfers
motion and torque at different ratios.
2-56
3 You can disengage the CR-CR transmission completely by flipping the
Neutral Switch to up. This step also enables the Brake Switch in the main
model. (If the transmission is engaged, not in neutral, the Brake Switch
is disabled.)
If the transmission is disengaged but without braking, the driven shaft
velocity slowly decreases under the influence of frictional damping. If
you brake, however, by switching on the Brake Switch, the driven shaft
velocity im mediately drops to 0. Th e braking here works the same way as
in the p revious examples.
Page 93

Combining Clutches and Gears into Transmissions
4 You can put the CR-CR transmission into reverse by keeping the Neutral
Switch flipped to down and by flipping the Forward/Reve rse Switch to
down.
As with a real transmission, it is best to transition the transmission model
through neutral and bring the driven shaft to a rest before putting the
transmission into reverse gear.
Shaping Realistic Clutch Pressure Signals
The drive_crcr_ideal model allows you to switch forward gear settings without
placing the CR-CR transmission in neutral. Of course, controlling a real
manual transmission requires moving the transmission out of gear and into
neutral, picking a new gear setting, then putting the transmission into the
new gear. You can mimic these steps by flipping the Neutral Switch on,
changing the gear setting, then slipping the Neutral Switch off.
The most critical addition you can make to this model for greater realism is to
change the clutch pressure signals from step functions (0 to 1, or 1 to 0) to
signals with a smooth rise and fall. A variant model, drive_crcr, has smoothed
clutch pressure signals. The price of this greater realism is a potentially
more complex model. It is critical for Simulink to determine transmission
motion for exactly two clutches to always remain locked, or for all four to be
unlocked, at any instant. Changing the CR-CR transmission’s gear settings
while maintaining this requirement is an example of the central problem of
transmission design.
The following case study, “Modeling and Simulating a Complete Car” on page
2-58, implements smoothed clutch pressure signals. See “Shaping Clutch
Pressure Signals” o n page 2-69.
2-57
Page 94
2 Simple Models
Modeling and Simulating a Complete Car
In this section...
“About the Full Car Model” on page 2-58
“Modeling the Engine” on page 2-59
“Modeling the Transmission” on page 2-61
“Coupling the Engine to the Transmission” on page 2 -62
“Modeling the Wheel Assembly and Road Coupling” on page 2-63
“Controlling the Clutches and Braking” on page 2-67
“Running the Model” on page 2-70
About the Full Car Model
The full car drivetrain simulation of the drive_full_car demo encompasses
all the points of this chapter and many key SimDriveline features. It
includes engine and transmission models and a simplified model of the
drivetrain-wheel-road coupling. The engine and transmission are coupled
with a torque converter. Programmed clutch control steps the transmission
through four gears and neutral before a braking torque is applied. The
clutch press ure signals are smooth and more realistic than the sharp clutch
pressure signals used in the preceding studies. This section explains these
features, subsystems, and their relationship and purposes, leading you to
actual simulation.
2-58
Understanding the Model’s Global Structure
Open the demo. The model pre-load function defines a set of workspace
variables in MATLAB used by some of the blocks. N ote the major systems
of this car model.
Page 95
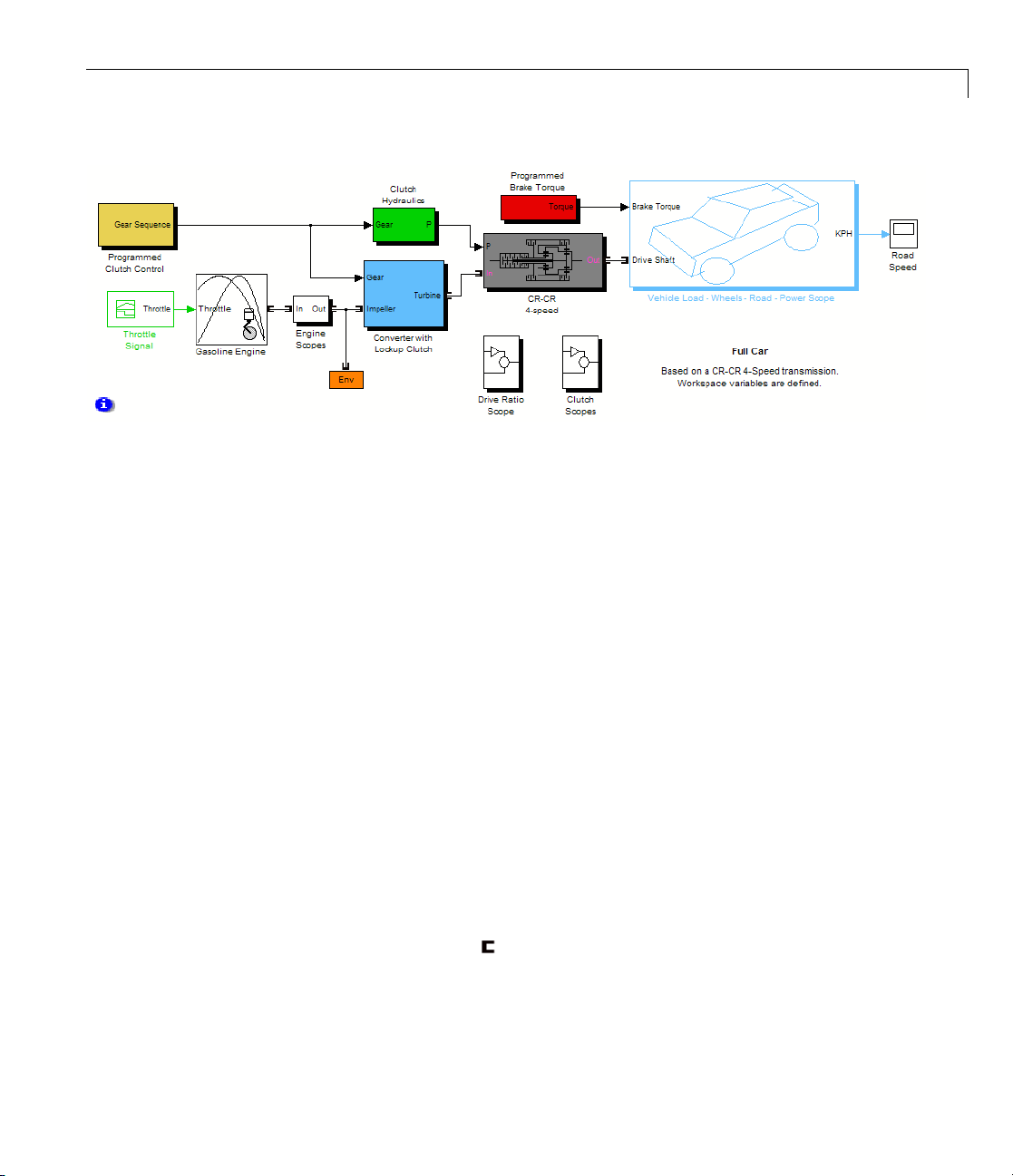
Full Car Model
Modeling and Simulating a Complete Car
The main driveline subsystems are
• Engine
• Torque converter
• Transmission
The large subsystem to the right represents the final part of the drivetrain:
the vehicle inertia, the wheels, their coupling to the road, and braking. All the
other subsystems in the model represent inputs that control the drivetrain or
outputs that measure its behavior.
Modeling the Engine
SimDriveline software is primarily devoted to modeling the rotational
dynamics of drivelines, accepting rotational power from any source that can be
modeled in Simulink and converted to a connection line transferring torque.
In most applications, your modeled driveline power and torque sources will
represent engines and motors. For the purposes of system modeling, an
engine or motor specifies an output torque as a function of driveline speed.
However you specify the behavior of theengineormotor,itsSimDriveline
output is a connector port
transferring torque to the rest of the system.
2-59
Page 96
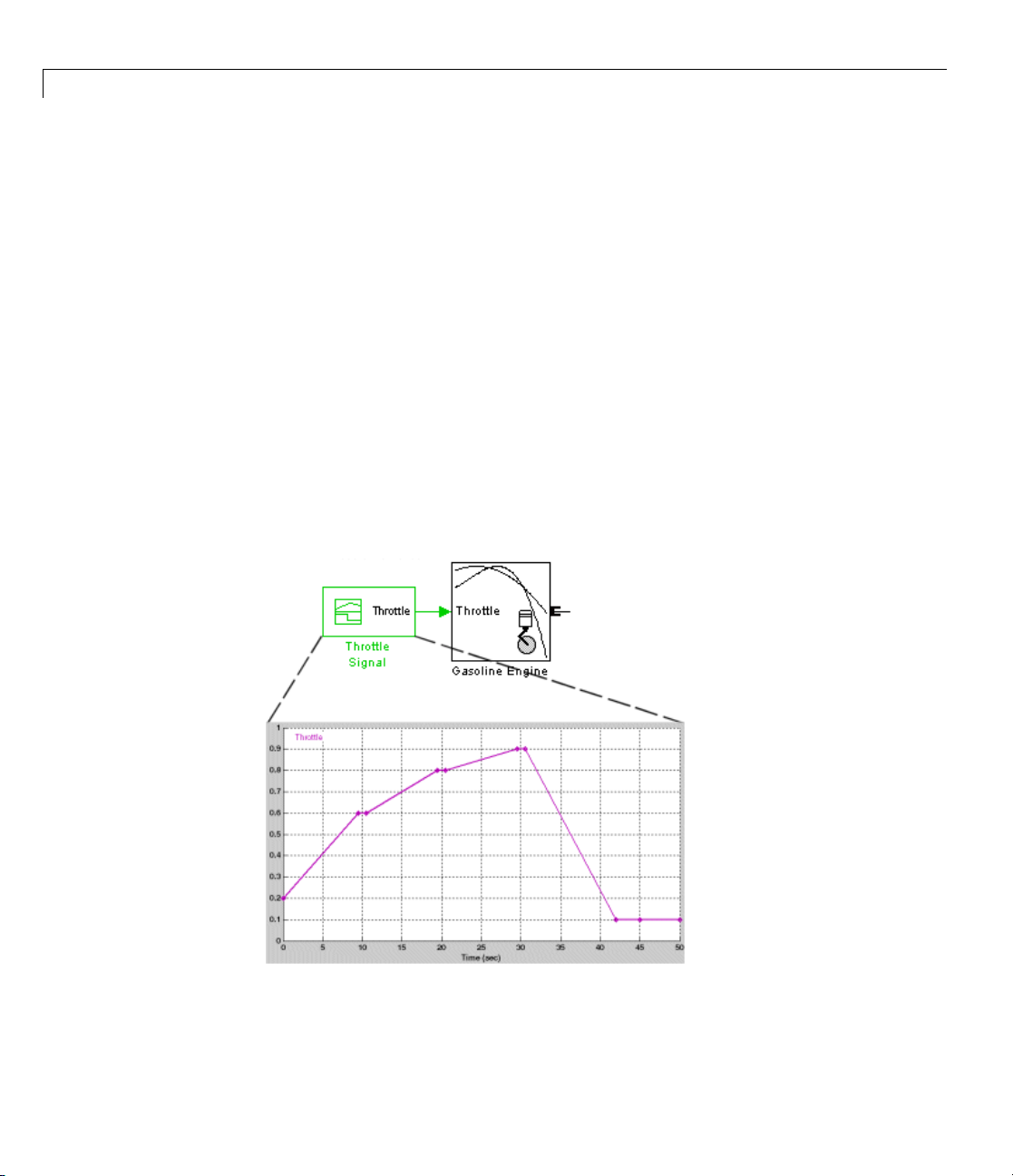
2 Simple Models
Using an Engine Block from Vehicle Components
The Vehicle Components library containsblocksrepresentingsimpleengine
models. You control these engine models with a Simulink throttle signal. The
heart o f the engine model is a function that specifies the maximum engine
torque possible for each engine speed. The throttle signal controls how much
torque, out of this maximum possible, the engine can deliver. The m aximum
possible torque itself is a function of the engine speed at any instant.
The drive_full_car demo uses a Gasoline Engine block from Vehicle
Components. Th e block’s properties specified i n its dia log inclu d e the engi n e’s
maximum power, its speed at maximum power, and its maximum possible
speed. The throttle signal is programmed by a Signal Builder block that
specifies a time-depend throttle profile over the course of the simulation.
Open these block dialogs to view these settings and the throttle profile. The
throttle signal is programmed to produce a realistic acceleration profile and to
be consistent with the gear shifting sequence discussed in “Controlling the
Clutches and Braking” on page 2-67.
2-60
Engine Throttle Signal Profile
Page 97

Modeling and Simulating a Complete Car
Learn more about the Engine block models from their b lock reference pages.
See also “Vehicle Components” on page 2-5.
Alternative and Advanced Methods for Modeling Engines
The engine models of the Vehicle Components library are simple. You can
create your own, more complex, engine models by elaborating on the b asic
pattern of engine speed determining enginetorqueoutput. Thecomplete
engine model involves a feedback loop because the output torque, once
connected to the external load, determines how fast the output driveshaft
spins. The engine model then uses this output speed to set the maximum
possible torque.
Several important engine features to consider in a more complete model
would be
• Distinguishing steady-state behavior from engine start-up, when the
engine speed-engine torque function has not yet reached its maximum
possible envelope
• Details of mechanical power production, such as air-fuel compression and
combustion, or electromagnetic induction
• Additional controls beyond what can be represented by a single throttle
signal
Modeling the Transmission
The CR-CR 4-speed transmission subsystem in the drive_full_car model is
similar to the previous example, “Modeling a CR-CR 4-Speed Transmission
Driveline with Braking” on page 2-51. The clutch and planetary gear
properties are set in the block dialogs with workspace variables.
Workspace Variable
inPlanetRatio
outPlanetRatio
numFricSurf
effTorqueRadius
Meaning
Gear: input planetary gear ring/sun ratio
Gear: output planetary gear ring/sun ratio
Clutch: number of surface friction surfaces
Clutch: effective torque radius (m)
2-61
Page 98
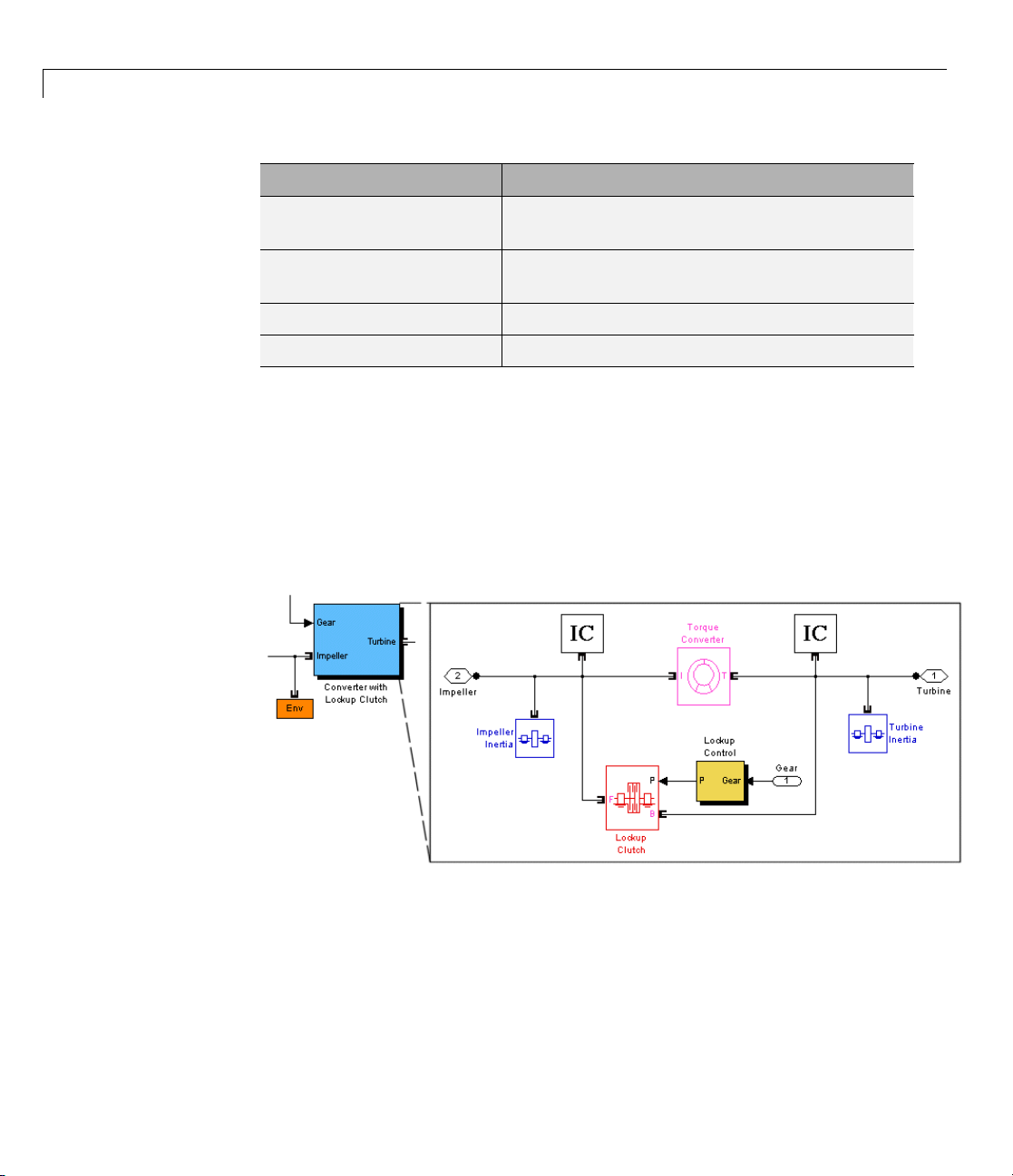
2 Simple Models
Workspace Variable
peakNormForce
coeffFricTable (matrix) Clutch: surface friction function (tabulated
staticFricPeak
velTol
For more about gears, clutches, and transmissions, see the Controllable
Friction Clutch and CR–CR 4-Speed block reference pages, as well as “Gears”
on page 2-4 and “Transmission Templates” on page 2-5.
Meaning
Clutch: peak normal force on friction surfaces
(N)
discrete function)
Clutch: static (locking) friction peak factor
Clutch: clutch velocity locking tolerance (rad/s)
Coupling the Engine to the Transmission
The drive_full_car model couples the engine and the transmission through a
torque converter subsystem.
2-62
Torque Converter Subsystem
A torque converter, like a clutch, couples two independent driveline axes in
such a way as to transfer angular motion and torque from an input to an
output shaft. However, unlike a clutch, a torque converter never locks and
the output shaft never exactly reaches the speed of the input. (The torque
converter transfers motion by hydrodynamic viscosity, not by surface friction.)
Page 99

Modeling and Simulating a Complete Car
So a torque converter does not step through discrete stages and avoids the
motion discontinuities inherent in friction clutches.
To mimic engine idling at the start of the simulation, the initial condition (IC)
actuators start the input and output shafts at nonzero velocities.
The clutch in this subsystem is present to lock the input and output shafts
together once the main clutches of the transmission have reached the highest
gear. See “Controlling the Clutches and Braking” on page 2-67.
See the To rque Converter and Initial Condition block reference pages for more
details about these blocks.
Modeling the Wheel Assembly and Road Coupling
The CR-CR 4-speed transmission feeds its output torque to the final drive
subsystem, Vehicle Load - Wheels - Road - Power Scope, which represents
the vehicle inertia (the load on the transmission), the wheels, and the wheel
contact with the road. This subsystem also incorporates a brake model that
can impose, with the appropriate input signal, a brake torque on the wheels.
This torque acts on the driveline in addition to the reaction stress imposed by
the wheel contact with the road. The wheel-road load model is implemented
with Simulink alone.
This final drive subsystem is masked. Open it by right-clicking it, then
selecting Look Under Mask.
2-63
Page 100
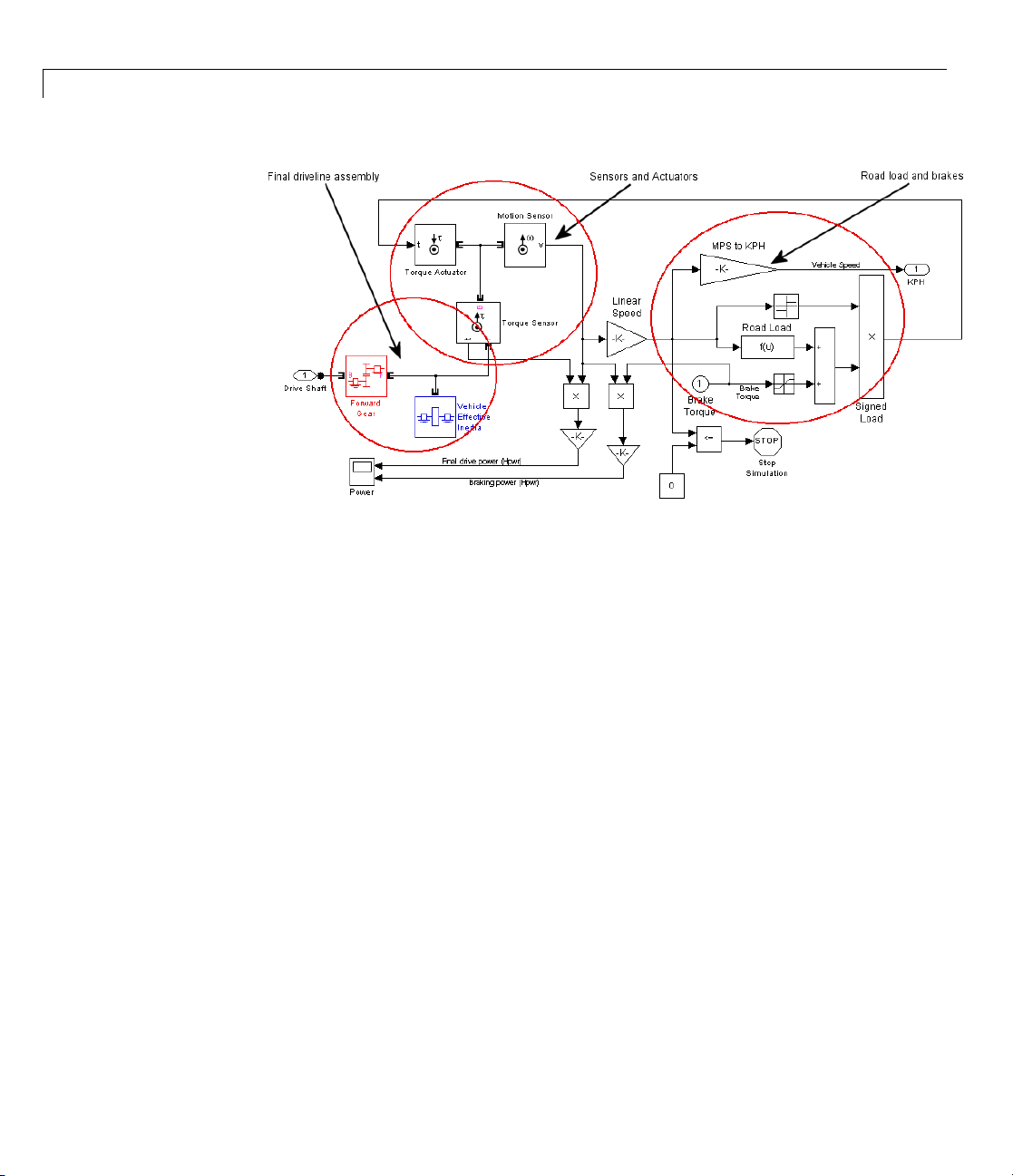
2 Simple Models
Final Drive Subsystem: Vehicle Load, Wheels, and Road Coupling
The subsystem has three major areas:
2-64
• Ontheleftmostpartofthediagramisthe terminus of the driveline proper,
where the driveline connection lines end.
• Attheupperleftareacollectionofsensor and actuator blocks coupling the
driveline proper to the wheels and brakes.
• In the center and right are the Simulink blocks that model the wheel-road
coupling and braking.
Modeling the Final Driveline Assembly and Vehicle Load
The driveline connection line sequence of the whole full car model ends with
the first set of blocks on the left of the subsystem. The torque and motion are
transferred forward through the Forward Gear and are loaded down with
the Vehicle Effective Inertia. Two workspace variables specify the relevant
variables.
 Loading...
Loading...