

Page 1

Signal Processing
User’s Guide
Blockset™ 7
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Signal Processing Blockset™ User’s Guide
© COPY R IGHT 1995–2010 The MathW orks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this s oftware or docume n tation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
April 1995 First printing New for Version 1.0
May 1997 Second printing Revised for Version 2.0
January 1998 Third printing Revised for Version 2.2 (Release 10)
January 1999 Fourth printing Revised for Version 3.0 (Release 11)
November 2000 Fifth printing Revised for Version 4.0 (Release 12)
June 2001 Online only Revised for Version 4.1 (Release 12.1)
July 2002 Sixth printing Revised for Version 5.0 (Release 13)
April 2003 Seventh printing Revised for Version 5.1 (Release 13SP1)
June 2004 Online only Revised for Version 6.0 (Release 14) (Renamed from DSP
Blockset User’s G uide)
October 2004 Online only Revised for Version 6.0.1 (Release 14SP1)
March 2005 Online only Revised for Version 6.1 (Release 14SP2)
September 2005 Online only Revised for Version 6.2 (Release 14SP3)
March 2006 Online only Revised for Version 6.3 (Release 2006a)
September 2006 Online only Revised for Version 6.4 (Release 2006b)
March 2007 Online only Revised for Version 6.5 (Release 2007a)
September 2007 Online only Revised for Version 6.6 (Release 2007b)
March 2008 Online only Revised for Version 6.7 (Release 2008a)
October 2008 Online only Revised for Version 6.8 (Release 2008b)
March 2009 Online only Revised for Version 6.9 (Release 2009a)
September 2009 Online only Revised for Version 6.10 (Release 2009b)
March 2010 Online only Revised for Version 7.0 (Release 2010a)
Page 4

Page 5

Working with Signals
1
Discrete-Time Signals .............................. 1-2
Time and Frequency Terminology
Recommended Settings for D i screte-Time Simulations
Other Settings for Discrete-Time Simulations
.................... 1-2
.......... 1-6
Contents
... 1-4
Continuous-Time Signals
Continuous-Time Source Blocks
Continuous-Time Nonsource Blocks
Sample-Based Signals
Sample-Based Single Channel Signals
Sample-Based Multichannel Signals
Frame-Based Signals
Frame-Based Single Channel Signals
Frame-Based Multichannel Signals
Benefits of Frame-Based Processing
Creating Sample-Based Signals
Using the Constant Block
Using the Signal from Workspace Block
Creating Frame-Based Signals
Using the Sine Wave Block
Using the Signal from Workspace Block
Creating Multichann el Sample-Based Signals
Multichannel Sample-Based Signals
Combining Single-Channel Sample-Based Signals
Combining Multichannel Sample-Based Signals
........................... 1-11
...................... 1-11
.................. 1-11
.............................. 1-13
................ 1-13
.................. 1-13
............................... 1-15
................. 1-15
................... 1-15
.................. 1-16
..................... 1-19
........................... 1-19
............... 1-21
...................... 1-25
.......................... 1-25
............... 1-28
.................. 1-32
........ 1-32
....... 1-32
........ 1-35
Creating Multichann el Frame-Based Signals
......... 1-38
v
Page 6

Multichannel Frame-Based Signals ................... 1-38
Combining Frame-Based Signals
..................... 1-39
Deconstructing Multichannel Sample-Based Signals
Splitting Multichannel Sample-Based Signals into
Individual Signals
Splitting Multichannel Sample-Based Signals into Several
Multichannel Signals
Deconstructing Multichannel Frame-Based Signals
Splitting Multichannel Frame-Based Signals into
Individual Signals
Reordering Channels in Multichannel Frame-Based
Signals
Importing and Exporting Sample-Based Signals
Importing Sample-Based Vector Signals
Importing Sample-Based Matrix Signals
Exporting Sample-Based Signals
Importing and Exporting Frame-Based Signals
Importing Frame-Based Signals
Exporting Frame-Based Signals
Displaying Time-Domain Data
Displaying Time Domain Data in the Vector Scope
Displaying Time-Domain Data in the Time Scope
........................................ 1-54
............................... 1-42
............................ 1-45
............................... 1-49
...... 1-58
............... 1-58
.............. 1-61
..................... 1-65
....... 1-70
..................... 1-70
..................... 1-73
...................... 1-79
...... 1-79
....... 1-82
.. 1-42
... 1-49
vi Contents
Displaying Frequency-Domain Data
................. 1-100
Advanced Signal Concepts
2
Inspecting Sample Rates and Frame Rates ........... 2-2
Sample Rate and Frame Rate Concepts
Inspecting Sample-Based Signals Using the Probe Block
Inspecting Frame-Based Signals Using the Probe Block
Inspecting Sample-Based Signals Using Color Coding
............... 2-2
.. 2-3
.. 2-5
.... 2-7
Page 7

Inspecting Frame-Based Signals Using Color Coding .... 2-9
Converting Sample and F ram e Rates
Rate Co nv ersion Blocks
Rate Conversion by Frame-Rate Adjustment
Rate Conversion by Frame-Size Adjustment
Avoiding Unintended Rate Conversion
Frame Rebuffering Blocks
Buffering with Preservation of the Signal
Buffering with Alteration of the Signal
Converting Frame Status
Frame Status
Buffering Sample-Based Signals into Frame-Based
Signals
Buffering Sample-Based Signals i nto Frame-Based Signals
with Overlap
Buffering Frame-Based Signals into Other Frame-Based
Signals
Buffering Delay and Initial Conditions
Unbuffering Frame-Based Signals into Sample-Based
Signals
Delay and Latency
Computational Delay
Algorithmic Delay
Zero Algorithmic Delay
Basic Algorithmic Delay
Excess Algorithmic Delay (Tasking Latency)
Predicting Tasking Latency
..................................... 2-33
........................................ 2-33
................................... 2-37
........................................ 2-41
........................................ 2-45
............................ 2-11
.......................... 2-24
........................... 2-33
................................. 2-49
.............................. 2-49
................................. 2-51
............................. 2-51
............................ 2-54
......................... 2-59
................ 2-11
........... 2-12
............ 2-15
................ 2-19
.............. 2-27
................ 2-30
................ 2-44
........... 2-57
3
Digital Filter Block ................................ 3-2
Overview o f the Digital Filter Block
Implementing a Lowpass Filter
Implementing a Highpass Filter
Filtering High-Frequency Noise
.................. 3-2
...................... 3-3
..................... 3-4
...................... 3-5
Filters
vii
Page 8

Specifying Static Filters ............................ 3-9
Specifying Time-Varying Filters
Specifying the SOS Matrix (Biquadratic Filter
Coefficients)
.................................... 3-15
..................... 3-10
Digital Filter Design Block
Overview o f the Digital Filter Design Block
Choosing Betw een Filter Design Blocks
Creating a Lowpass Filter
Creating a Highpass Filter
Filtering High-Frequency Noise
Filter Realization Wizard
Overview o f the Filter Realization Wizard
Designing and Implementing a Fixed-Point Filter
Setting the Filter Structure and Number of Filter
Sections
Optimizing the Filter Structure
Analog Filter Design Block
Adaptive Filters
Creating an Acoustic Environment
Creating an Adaptive Filter
Customizing an Adaptive Filter
Adaptive Filtering Demos
Multirate Filters
Filter Banks
Multirate Filtering Examples
....................................... 3-48
................................... 3-53
................................... 3-66
...................................... 3-66
......................... 3-17
............... 3-18
.......................... 3-21
.......................... 3-23
...................... 3-25
........................... 3-31
............. 3-31
...................... 3-49
......................... 3-51
................... 3-53
......................... 3-55
...................... 3-60
........................... 3-64
........................ 3-74
............ 3-17
....... 3-32
viii Contents
4
Transforming Time-Domain Data into the Frequency
Domain
......................................... 4-2
Transforms
Page 9

Transforming Frequency-Domain Data into the Time
Domain
......................................... 4-7
Linear and Bit-Reversed Output Order
FFT and IFFT Blocks Data Order
Finding the Bit-Reversed Order of Y our Frequency
Indices
Calculating the Channel Latencies Required for
Wavelet Reconstruction
Analyzing Your Model
Calculating the Group Delay of Your Filters
Reconstructing the Filter Bank System
Equalizing the Delay on Each Filter Path
Updating and Running the Model
References
........................................ 4-12
.......................... 4-14
.............................. 4-14
....................................... 4-22
.................... 4-12
.................... 4-21
.............. 4-12
............ 4-16
................ 4-18
.............. 4-18
Quantizers
5
Scalar Quantizers ................................. 5-2
Analysis and Synthesis of Speech
Identifying Your Residual Signal and Reflection
Coefficients
Creating a Scalar Quantizer
.................................... 5-4
.................... 5-2
......................... 5-5
Vector Quantizers
Building Your Vector Quantizer Model
Configuring and Running Your Model
................................. 5-10
................ 5-10
................. 5-11
Statistics, Estimation, and Linear Algebra
6
Statistics .......................................... 6-2
Statistics Blocks
.................................. 6-2
ix
Page 10

Basic Operations .................................. 6-3
Running Operations
............................... 6-4
Power Spectrum Estimation
Linear Algebra
Linear Algebra Blocks
Linear System Solvers
Matrix Factorizations
Matrix Inverses
.................................... 6-7
.............................. 6-7
.............................. 6-9
................................... 6-11
........................ 6-6
............................. 6-7
Working with Fixed-Point Data
7
Fixed-Point Signal Processing Development ......... 7-2
Fixed-Point Features
Benefits of Fixed-Point Hardware
Benefits of Fixed-Point Design with Signal Processing
Blockset Software
Fixed-Point Signal Processing Applications
Concepts and Terminology
Fixed-Point Data Types
Scaling
Precision and Range
.......................................... 7-6
.............................. 7-2
.................... 7-2
............................... 7-3
............ 7-4
......................... 7-5
............................ 7-5
............................... 7-7
x Contents
Arithmetic Operations
Modulo Arithmetic
Two’s Complement
Addition and Subtraction
Multiplication
Casts
Specifying Fixed-Point Attributes
Fixed-Point Block Parameters
Specifying System-Level Settings
Inherit via Internal Rule
........................................... 7-17
.................................... 7-14
............................. 7-11
................................ 7-11
................................ 7-12
........................... 7-13
....................... 7-22
........................... 7-26
................... 7-22
.................... 7-25
Page 11

Example: Selecting and Specifying Data Types for
Fixed-Point Blocks
.............................. 7-37
Fixed-Point Filtering
Fixed-Point Filtering Blocks
Filter Implementation Blocks
Filter Design and Implementation Blocks
.............................. 7-45
......................... 7-45
........................ 7-45
.............. 7-46
Getting Started with System Objects
8
What Are System Objects? .......................... 8-2
Setting Up and Running System Objects
Creating an Instance of a System Object
Using Methods to Run System Objects
Finding Help and Demos for System Objects
Using System Objects with the Embedded MATLAB
Subset
Considerations for Using System Objects with the
Embedded MATLAB Subset
Using System Objects with Embedded MATLAB Coder
Using System Objects with the Embedded MATLAB
Function Block
Using System Objects with Embedded MATLAB MEX
.......................................... 8-9
....................... 8-9
................................. 8-12
............. 8-3
............... 8-3
................ 8-6
........... 8-8
.. 8-11
... 8-12
Using Signal Processing System Objects
9
What Are Signal Processing System Objects? ......... 9-2
Generating Code for Signal Processing System
Objects
......................................... 9-3
xi
Page 12

Working with Signals and Fixed-Point Data .......... 9-5
What Are Sample- and Frame-Based Processing?
Working with Fixed-Point Data
Example: Using System Objects in Signal Processing
Applications: Filtering an Audio Stream
...................... 9-10
....... 9-5
........... 9-15
Index
xii Contents
Page 13
Working with Signals
1
This chapter helps you understand how sample-based and frame-based signals
are represented in the Simulink
single-channel and multichannel sample-based and frame-based signals. You
also learn how to extract single-chan n el signals from multichannel signals.
Lastly you explore how to import signals into signal processing models and
export signals to the MATLAB
• “Discrete-Time Signals” on page 1-2
• “Continuous-Time Signals” on page 1-11
• “Sample-Based Signals” on page 1-13
• “Frame-Based Signals” on page 1-15
• “Creating Sample-Based Signals” on page 1-19
• “Creating Frame-Based Signals” on page 1-25
• “Creating Multichannel Sample-Based Signals” on page 1-32
• “Creating Multichannel Frame-Based Signals” on page 1-38
• “Deconstructing Multichannel Sample-Based Signals” on page 1-42
• “Deconstructing Multichannel Frame-Based Signals” on page 1-49
• “Importing and Exporting Sample-Based Signals” on page 1-58
• “Importing and Exporting Frame-Based Signals” on page 1-70
®
environment. You learn how to create
®
workspace.
• “Displayin g Time-Doma in Data” on page 1-79
• “Displaying Frequency-Domain Data” on pa g e 1-100
Page 14

1 Working with Signals
Discrete-Time Signals
In this section...
“Time and Frequency Terminology” on page 1-2
“Recommended Settings for Discrete-Time Simulations” on page 1-4
“Other Settings for Discrete-Time Simulations” on page 1-6
Time and Frequency Terminology
Simulink models can process both discrete-time and continuous-time signals.
Models built with Signal Processing Blockset™ software are often intended
to process discrete-time signals only. A discrete-time signal is a sequence of
values that correspond to particular instants in time. The time instants at
which the signal is defined are the si gn al’s sample times, and the associated
signal values are the signal’s samples. Traditionally, a discrete-time signal
is considered to be undefined at points in time between the sample times.
For a periodically sampled signal, the equal interval between any pair of
consecutive sample times is the signal’s sample period, T
F
, is the reciprocal of the sample period, or 1/Ts. T h e sample rate is the
s
number of samples in the signal per second.
.Thesample rate,
s
1-2
The 7.5-second triangle wave segment below has a sample period of 0.5
second, and sam pl e times of 0.0, 0.5, 1.0, 1.5, ...,7.5. Th e sample rate of the
sequence is therefore 1/0.5, or 2 Hz.
A number of different terms are used to describe the characteristics of
discrete-time signals found in Simulink models. These terms, which are listed
inthefollowingtable,arefrequentlyusedtodescribethewaythatvarious
blocks operate on sample-based and frame-based signals.
Page 15

Term Symbol Units Notes
Discrete-Time Signals
Sample period
Frame period
Signal period
Sample
frequency
Frequency
Nyquist rate
Nyquist
frequency
Normalized
frequency
Angular
frequency
Digital
(normalized
angular)
frequency
T
s
T
si
T
so
T
f
T
fi
T
fo
T
F
s
Seconds
Seconds The time interval between consecutive frames in a
Seconds The time elapsed during a single repetition of a
Hz (samples
per second)
f Hz (cycles
per second)
Hz (cycles
per second)
f
nyq
Hz (cycles
per second)
f
n
Two cycles
per sample
Ω
Radians per
second
ω
Radians per
sample
The time interval between consecutive samples in a
sequence, as the input to a block (T
from a block (T
).
so
sequence, as the input to a block (T
from a block (T
).
fo
)ortheoutput
si
) or the output
fi
periodic signal.
The number of samples per unit time, Fs=1/Ts.
The number of repetitions per unit time of a periodic
signal or signal component, f =1/T.
The minimum sample rate that avoids aliasing,
usually twice the highest frequency in the signal
being sampled.
Half the Nyquist rate.
Frequency (linear) of a periodic signal normalized to
halfthesamplerate,f
= ω/π =2f/Fs.
n
Frequency of a periodic signal in angular units,
Ω =2πf.
Frequency (angu lar) of a periodic signal normalized
to the sample rate, ω = Ω/F
= πfn.
s
Note In the Block Parameters dialog boxes, the term sample time is used to
refer to the sample period, T
. For example, the Sample time parameter
s
in the Signal From W orkspace block specifies the imported signal’s sample
period.
1-3
Page 16

1 Working with Signals
Recommended Settings for Discrete-Time Simulations
Simulink allows you to select from several different simulation solve r
algorithms. You can access these solver a lgorithms from a Simulink model:
1 In the Simulink model window, from the Simulation menu, select
Configuration Parameters.TheConfiguration Parameters dialog
box opens.
2 In the Select pane, click Solver.
The sele ctions that you make here determine how discrete-time signals are
processed in Simulink. The recommended Solver option s settings for
signal processing simulations are
• Type:
• Solver: Discrete (no continuous states)
• Fixed step size (fundamental sample time): auto
• Tasking mode for periodic sample times: SingleTasking
Fixed-step
1-4
Page 17

Discrete-Time Signals
You can automatically set the above solver options for all new models by
running the
dspstartup.m file. See “Configuring th e Simulink Environment
for Signal Processing Models ” in the Signal Processing Blockset Getting
Started Guide for more information.
In
Fixed-step SingleTasking mode, discrete-time sig nals differ from the
prototype described in “Time and Frequency Terminology” on page 1-2 by
remaining defined between sample times. For example, the representation
ofthediscrete-timetrianglewavelookslikethis.
1-5
Page 18

1 Working with Signals
The above signal’s value at t=3.112 seconds is the same as the signal’s value
at t=3 seconds. In
are the instants where the signal is allowed to change values, rather than
where the signal is defined. Between the sample times, the signal takes on
thevalueattheprevioussampletime.
Fixed-step SingleTasking mode, a signal’s sample times
As a result, in
cross-rate operations such as the addition of two signals of different rates.
This is explained further in “Cross-Rate Operations” on page 1-7.
Fixed-step SingleTasking mode, Simulink permits
Other Settings for Discrete-Time Simulations
It is useful to know how the other solver options available in Simulink affect
discrete-time signals. In particular, you should be aware of the properties of
discrete-time signals under the following settings:
• Type:
• Type: Variable-step (the Simulink default solver)
• Type:
When the Fixed-step MultiTasking solver is selected, discrete signals in
Simulink are undefined between sample times. Simulink generates an error
when operations attempt to reference the undefined region of a signal, as, for
example, when signals with different sample rates are added.
When the
defined between sample times, just as in the
case described in “Recommended Settings for Discrete-Time Simulations” on
page 1-4. When the
are allowed by Simulink.
Fixed-step, Mode: MultiTasking
Fixed-step, Mode: Auto
Variable-step solver is selected, discrete time signals remain
Fixed-step SingleTasking
Variable-step solver is selected, cross-rate operations
1-6
In the
mode, single-tasking or multitasking, that is best suited to the model. See
“Simulink Tasking Mode” on page 2-57 for a description of the criteria that
Simulink uses to m ake this decision. For the typical model containing
multiple rates, Sim u li n k selects the mult ita sking mode.
Fixed-step Auto setting, Simulink automatically selects a tasking
Page 19

Discrete-Time Signals
Cross-Rate Operations
When the Fixed-step MultiTasking solver is selected, discrete signals
in Simulink are undefined between sample times. Therefore, to perform
cross-rate operations like the additionoftwosignalswithdifferentsample
rates, you must convert the two signalstoacommonsamplerate. Several
blocks in the Signal Operations and Multirate Filters libraries can accomplish
this task. See “Converting Sample and Frame Rates” on page 2-11 for more
information. By requiring explicit rate conversions for cross-rate operations
in discrete mode, Simulink helps you to identify sample rate conversion issues
early in the design process.
When the
Variable-step solver or Fixed-step SingleTasking solver
is selected, discrete time signals remain defined between sample times.
Therefore, if you sample the signal with arateorphasethatisdifferentfrom
the s ign a l’s own rate and phase, you will still measure meaning ful values:
1 At the MATLAB command line, type doc_sum_tut1.
The Cross-Rate Sum Example model opens. This model sums two signals
with different sample periods.
1-7
Page 20

1 Working with Signals
1-8
2 Double-click the upper Signal From Workspace block. The Block
Parameters: Signal From Workspace dialog box opens.
3 Set the Sample time parameter to 1.
This creates a fast signal, (T
4 Double-click the lower Signal From Workspace block
5 Set the Sample time parameter to 2.
This creates a slow signal, (T
6 From the Format menu choose Sample Time Display > Colors.
=1), with sample times 1, 2, 3, ...
s
=2), with sample times 1, 3, 5, ...
s
Page 21

Discrete-Time Signals
Checking the Colors option al lows you to see the different sampling rates i n
action. For more information about the color coding of the sample times see
“How to View Sample Time Information” in the Simulink documentation.
7 Run the model.
Note Using the dspstartup configurations with cross-rate operations
generates errors even though the
Fixed-step SingleTasking solver is
selected.ThisisduetothefactthatSingle task rate transition is set
to
error in the Sample Time pane of the Diagnostics section of the
Configuration Parameters dialog box.
8 At the MATLAB command line, type dsp_examples_yout.
The following output is displayed:
dsp_examples_yout =
112
213
325
426
538
639
7411
8412
9514
10 5 15
066
Thefirstcolumnofthematrixisthefastsignal,(Ts=1). The second column
of the matrix is the slow signal (T
=2). The third column is the sum of the
s
two signals. As expected, the slow signal changes once every 2 seconds, half
as often as the fast signal. Nevertheless, the slow signal is defined at every
moment because Simulink holds the previous value of the slower signal
during time instances that the block doesn’t run.
1-9
Page 22

1 Working with Signals
In general, for Variable-step and Fixed-step SingleTasking modes, when
you measure the value of a discrete signal between sample times, you are
observing the value of the signal at the previous sample time.
1-10
Page 23

Continuous-Time Signals
In this section...
“Continuous-Time S ource Blocks” on page 1-11
“Continuous-Time N onsource Blocks” on page 1-11
Continuous-Time Source Blocks
Most signals in a signal processing model are discrete-time signals. However,
many blocks can also operate on and generate continuous-time signals, whose
values vary continuously with time. Source blocks are those blocks that
generate or import signals in a model. Most source blocks appear in the
Signal Processing Sources library. The sample period for continuous-time
source blocks is set internally to zero. This indicates a continuous-time
signal. The Simulink Signal Generator and Constant blocks are examples
of continuous-time source blocks. Continuous-time signals are rendered in
black when, from the Format menu, you point to Sample Time Display
and select Colors.
Continuous-Time Signals
When connecting continuous-time source blocks to discrete-time blocks, you
might need to interpose a Zero-Order Hold b lo ck to discretize the signal.
Specify t he desired sample period for the discrete-time signal in the Sample
time parameter of the Zero-Order Hold block.
Continuous-Time Nonsource Blocks
Most nonsource blocks in Signal Processing Blockset software accept
continuous-time signals, and all nonsource blocks inherit the sample period
of the input. Therefore, continuous-time inputs generate continuous-time
1-11
Page 24

1 Working with Signals
outputs. Blocks that are not capable of accepting continuous-time signals
include the Digital Filter, FIR Decimation, FIR Interpolation blocks.
1-12
Page 25

Sample-Based Signals
In this section...
“Sample-Based Single Channel Signals” on page 1-13
“Sample-Based Multichannel Signals” on page 1-13
Sample-Based Single Chan nel Signals
Signals can be sample-based or frame-based, sing le channel or multichannel.
The following figure shows a discrete-time signal. If this s ignal is propagated
through a model sample-by-sample, rather than in batches of samples, it is
called a sample-based signal. It is also single-channel signal, because there is
only one independent sequence of numbers.
Sample-Based Signals
The representation of single-channel signals is actually a specia l case of the
general multichannel signal.
Sample-Based Multichannel Signals
Sample-based multichannel signals are represented as matrices. An M-by-N
sample-based matrix represents M*N independent channels, each containing
a single value. In other words, each matrix elemen t represents one sample
from a distinct channel.
1-13
Page 26

1 Working with Signals
As an example, consider the 24-channel (6-by-4) sample-based signal in the
figure below, where u
t=2
u
is the third, and so on.
t=0
is the first matrix in the series, u
t=1
is the second,
The signal in channel 1 is composed of the following sequence:
ttt
uuu
,,,…
11011111
2===
1-14
Similarly, channel 9 (counting down the columns) contains the following
sequence:
ttt
uuu
,, ,…
32032132
2===
In practice, signal samples are frequently transmitted in batches, or frames,
and several channels of data are often transmitted simultaneously in
order to accelerate simulations. Hence, most signals are frame-based and
multichannel signals.
Page 27

Frame-Based Signals
In this section...
“Frame-Based Single Channel Signals” on page 1-15
“Frame-Based Multichannel Signals” on page 1-15
“Benefits of Frame-Based Processing” on page 1-16
Frame-Based Single Channel Signals
Signals can be sample-based or frame-based, sing le channel or multichannel.
The following figure shows a discrete-time signal. If this s ignal is propagated
through a model in batches of samples, it is called a frame-based signal. It is
also a single-channel signal, because there is only one independent sequence
of numbers.
Frame-Based Signals
Frame-based single channel signals are represented as vectors. An M-by-1
frame-based v ector represents M consecutive samples from a single channel.
In other words, each matrix row represents one sample, or time slice, from
one distinct channel.
Frame-Based M ultichannel Signals
Frame-based multichannel signals are represented as matrices. An M-by-N
frame-based matrix represents M consecutive samples from each of N
independent channels. In other words, each matrix row represents one
sample, or time slice, from N distinct signal channels, and each matrix column
represents M consecutive samples from a single channel.
1-15
Page 28

1 Working with Signals
Consider a sequence of frame matrices, where u
series, u
t=1
is the second, u
t=2
is the third, and so on.
The signal in channel 1 is the following sequence:
tttMtttt
uuu uuuu u
,,,,,,, ...,... ,
11021031
0
1011121131
1== = ====
ttt
MM
1111221
uu
,, ...,
t=0
is the firs t matrix in a
2===
1-16
arly, the signal in channel 3 is the following sequence:
Simil
tt tMt ttt
uu u uuuu u
, , ,..., , , , ...,
0
3013123133
1== = ====
===
M13023033
uu
,,,...
33113223
2ttt
Benefits of Frame-Based Processing
Frame-based processing is an established method of accelerating both
real-time systems and simula tions.
Accelerating Real-Time Systems
Frame-based data is a common format in real-time systems. Data acquisition
hardware often operates by accumulating a large number of signal samples
Page 29

Frame-Based Signals
at a high rate, and propagating these samples to the real-time system as a
block of data. This maximizes the efficiency of the system by distributing the
fixed process overhead across many samples; the “fast” data acquisition is
suspended b y “slow” interrupt processes after each frame is acquired, rather
than after each individual sample.
The figure below illustrates how throughput is increased by frame-based
data acquisition. The thin blocks each represent the time elapsed during
acquisition of a sample. The thicker blocks each represent the time elapsed
during the interrupt service routine (ISR) that reads the data from the
hardware.
In this example, the frame-based operation acquires a frame of 16 samples
between each ISR. The frame-based throughput rate is therefore many times
higher than the sample-based alternative.
It’simportanttonotethatframe-based processing introduces a certain
amount of latency into a process due to the inherent lag in buffering the
initial frame. In many instances, however, it is p os sible to select frame sizes
that improve throughput without creating unacceptable latencies. For more
information, see “Delay and Latency” on page 2-49.
1-17
Page 30

1 Working with Signals
Accelerating Simulations
The simulation of your model also benefits from frame-based processing. In
this case, it is the overhead of block-to-block communications that is reduced
by propagating frames rather than individual samples.
1-18
Page 31

Creating Sample-Based Signals
In this section...
“Using the Constant Block” on page 1-19
“Using the Signal from Workspace Block” on page 1-21
Using the Constant Block
A constant sample-based signal has identical successive samples. The Signal
Processing Sources library provides the following blocks for creating constant
sample-based signals:
• Constant Diagonal Matrix
• Constant
• Identity Matrix
The m ost versatile of the blocks listed above is the Constant block. This topic
discusses how to create a constant sample-based signal using the Constant
block:
Creating Sample-Based Signals
1 Create a new Simulink model.
2 From the Signal Processing Sources library, click-and-drag a Constant
block into the model.
3 From t
into t
4 Connect the two blocks.
5 Double-click the Constant block, and set the block parameters as follows:
• Constant value =
he Signal Processing Sinks library, click-and-drag a Display block
he model.
[123;456]
• Interpret vector parameters as 1–D = Clear th is check box
• Sampling Mode =
Sample based
• Sample time = 1
1-19
Page 32

1 Working with Signals
Based on these parameters, the Constant block outputs a constant,
discrete-valued, sample-based matrix signal with a sample period of 1
second.
The Constant block’s Constant value parameter can be any valid
MATLAB variable or expression that evaluates to a matrix. See “Linear
Algebra” in the MATLAB documentation for a thorough introduction to
constructing and indexing matrices.
6 Save these parameters and close the dialog box by clicking OK.
7 From the Format menu, point to Port/ Signal Displays and select
Signal Dimensions.
8 Run the model and expand the Display block so you can view the entire
signal.
You have now successfully created a six-channel, constant sample-based
signal with a sample period of 1 second.
1-20
To view the model you just created, and to learn how to create a 1–D vector
signal from the block diagram you just constructed, continue to the next
section.
Creating a 1-D Vector Signal
You can create a 1-D vector signal by modifying the block diagram you
constructed in the previous section:
1 To add another sample-based signal to your model, copy the block diagram
you created in the previous section and paste it below the existing
sample-based signal in your model.
2 Double-click the Constant1 block, and set the block parameters as follows:
• Constant value =
• Interpret vector parameters as 1–D =Checkthisbox
• Sample time =
3 Save these parameters and close the dialog box by clicking OK.
[123456]
1
Page 33

Creating Sample-Based Signals
4 Run the model and expand the Display1 block so you can view the entire
signal.
Your model should now look similar to the following figure. You can also
open this model by typing
line.
doc_usingcnstblksb at the MA TLAB command
The Co nstant1 block generates a length-6 1-D vector signal. This means that
the output is not a matrix. However, most nonsource signal processing blocks
interpret a length-M 1-D vector as an M-by-1 matrix (column vector).
Note A 1-D vector signal must always be sample based.
Using the Signal from Workspace Block
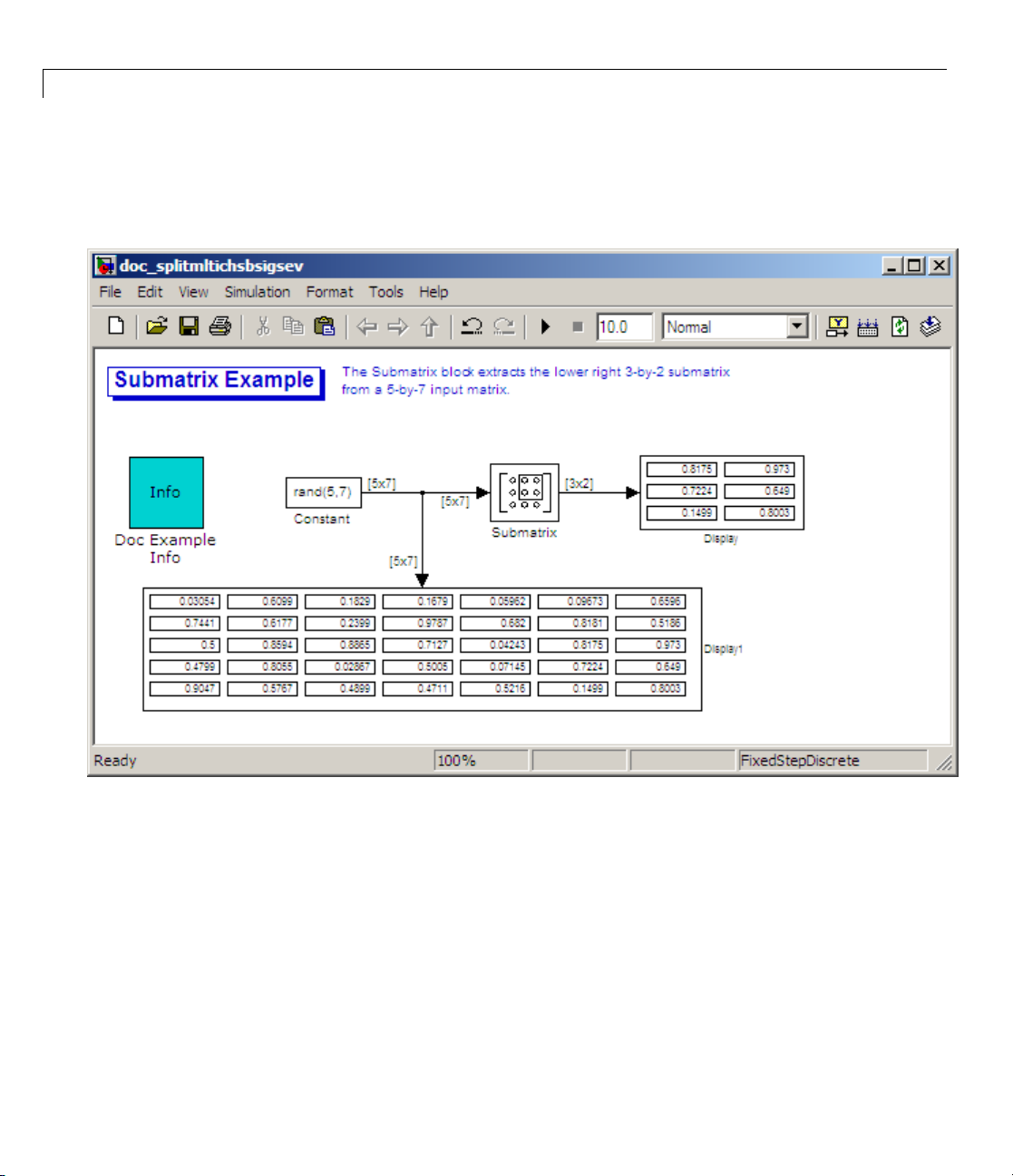
This topic discusses h ow to create a four-channel sample-based signal with a
sample perio d of 1 second using the Signal From Workspace block:
1-21
Page 34

1 Working with Signals
1 Create a new Simulink model.
2 From the Signal Processing Sources library, click-and-drag a Signal From
Workspace block into the model.
3 From the Signal Processing Sinks library, click-and-drag a Signa l To
Workspace block into the model.
4 Connect the two blocks.
5 Double-click the Signal From Workspace block, and set the block
parameters as follows:
• Signal =
cat(3,[1 -1;0 5],[2 -2;0 5],[3 -3;0 5])
• Sample time = 1
• Samples per frame = 1
• Form output after final data value by = Setting to zero
Based on these parameters, the Signal From Workspace block outputs a
four-channel sample-based signal with a sample period o f 1 second. After
the block has output the signal, all subsequent outputs have a value of
zero. The four channels contain the following values:
• Channel1: 1,2,3,0,0,...
• Channel 2: -1, -2, -3, 0, 0,...
• Channel3: 0,0,0,0,0,...
• Channel4: 5,5,5,0,0,...
6 Save these parameters and close the dialog box by clicking OK.
7 From the Format menu, point to Port/Signal D isplays,andselect
Signal Dimensions.
8 Run the model.
1-22
Page 35

Creating Sample-Based Signals
The following figure is a graphical representation of the model’s
behavior during simulation. You can also open the model by typing
doc_usingsfwblksb at the MATLAB command line.
9 At the MATLAB command line, type yout.
The following is a portion of the output:
yout(:,:,1) =
1-1
05
yout(:,:,2) =
2-2
05
yout(:,:,3) =
3-3
05
1-23
Page 36

1 Working with Signals
yout(:,:,4) =
00
00
You have now successfully created a four-channel sample-based signal with
sample perio d of 1 second using the Signal From Workspace block.
1-24
Page 37

Creating Frame-Based Signals
In this section...
“UsingtheSineWaveBlock”onpage1-25
“Using the Signal from Workspace Block” on page 1-28
Using the Sine Wave Block
A frame-based signal is propagated through a model in batches of samples
called frames. Frame -based processing can significantly improve the
performance of your model by decreasing the amo unt of time it takes your
simulation to run. The Signal Processing Sources library provides the
following blocks for automatically generating common frame-based signals:
• Chirp
• Discrete Impulse
• Constant
Creating Frame-Based Signals
• Multipha se Clock
• N-Sample Enable
• Signal From Workspace
• Sine Wave
For information about the specific functionality of these blocks, see their
respective block refere nce pages.
One of the most commonly used blocks in the Signal Processing Sources
library is the Sine Wave block. This topic describes how to create a
three-channel frame-based signal using the Sine Wave block:
1 Create a new Simulink model.
2 From the Signal Processing Sources library, click-and-drag a Sine Wave
block into the model.
om the Matrix Operations library, click-and-drag a Matrix Sum block
3 Fr
to the model.
in
1-25
Page 38

1 Working with Signals
4 From the Signal Processing Sinks library, click-and-drag a Signal to
Workspace block into the model.
5 Connect the blocks in the order in which you added them to your model.
6 Double-click the Sine Wave block, and set the block parameters as follows:
• Amplitude =
[1 3 2]
• Frequency = [100 250 500]
• Sample time = 1/5000
• Samples per frame = 64
Based on these parameters, the Sine Wave block outputs three sinusoids
with amplitudes 1, 3, and 2 and frequencies 100, 250, and 500 hertz,
respectively. The sample period, 1/5000, is 10 times the highest sinusoid
frequency, which satisfies the Nyquist criterion. The frame size is 64 for all
sinusoids, and, therefore, the output has 64 rows.
7 Save these parameters and close the dialog box by clicking OK.
You have now successfully created a three-channel frame-based signal
using the Sine Wave block. The rest o f this procedure describes how to
add these three sinusoids together.
8 Double-click the Matrix Sum block. Set the Sum over parameter to
Specified dimension, and set the Dimension parameter to 2.ClickOK.
9 From the Format menu, point to Port/Signal D isplays,andselect
Signal Dimensions.
10 Run the model.
1-26
Page 39

Creating Frame-Based Signals
Your model should now look similar to the following figure. You can
also open the model by typing
doc_usingsinwaveblkfb at the MATLAB
command line.
The three signals are summed point-by-point by a Matrix Sum block. Then,
they are exported to the MATLAB workspace.
1-27
Page 40

1 Working with Signals
11 At the MATLAB command line, type plot(yout(1:100)).
Your plot should look similar to the following figure.
1-28
This figure represents a portion of the sum of the three sinusoids. You have
now a dded the channels of a three-channel frame-based signal together and
displayed the results in a figure window.
Using the Signal from Workspace Block
A frame-based signal is propagated through a model in batches of samples
called frames. Frame -based processing can significantly improve the
performance of your model by decreasing the amount of time it takes
your simulation to run. This topic describes how to create a two-channel
Page 41

Creating Frame-Based Signals
frame-based signal with a sample period of 1 second, a frame period of 4
seconds, and a frame size of 4 samples using the Signal From Workspace block:
1 Create a new Simulink model.
2 From the Signal Processing Sources library, click-and-drag a Signal From
Workspace block into the model.
3 From the Signal Processing Sinks library, click-and-drag a Signa l To
Workspace block into the model.
4 Connect the two blocks.
5 Double-click the Signal From Workspace block, and set the block
parameters as follows:
• Signal =
[1:10; 1 1 0 0 1 1 0 0 1 1]'
• Sample time = 1
• Samples per frame = 4
• Form output after final data value by = Setting to zero
Based on these parameters, the Signal From Workspace block outputs a
two-channel, frame-based signal has a sample period of 1 second, a frame
period of 4 seconds, and a frame size of four samples. After the block
outputs the signal, all subsequent outputs have a value of zero. The two
channels contain the following values:
• Channel1:1,2,3,4,5,6,7,8,9,10,0,0,...
• Channel2:1,1,0,0,1,1,0,0,1,1,0,0,...
6 Save these parameters and close the dialog box by clicking OK.
7 From the Format menu, point to Port/Signal D isplays,andselect
Signal Dimensions.
1-29
Page 42

1 Working with Signals
8 Run the model.
The following figure is a graphical representation of the model’s
behavior during simulation. You can also open the model by typing
doc_usingsfwblkfb at the MATLAB command line.
1-30
9 At the MATLAB command line, type yout.
The following is the output displayed at the MATLAB command line.
yout =
11
Page 43

Creating Frame-Based Signals
21
30
40
51
61
70
80
91
10 1
00
00
Note that zeros were appended to the end of each channel. You have now
successfully created a two-channel frame-based signal an d exported it to the
MATLAB workspace.
1-31
Page 44

1 Working with Signals
Creating Multichannel Sample-Based Signals
In this section...
“Multichannel Sample-Based Signals” on page 1-32
“Combining Single-Channel Sample-Based Signals” on page 1-32
“Combining Multichannel Sample-Based Signals” on page 1-35
Multichannel Sample-Based Signals
When you want to perform the same operations on several independent
signals, you can group those signals together as a multichannel signal. For
example, if you need to filter each of four independent signals using the
same direct-form II transpose filter, you can combine the signals into a
multichannel signal, and connect the signal to a single Digital Filter Design
block. The block applies the filter to each channel independently.
A sample-based signal with M*N channels is represented by a sequence of
M-by-N matrices. Multiple sample-based signals can be combined into a
single multichannel sample-based signal using the Concatenate block. In
addition, several multichannel sample-based signals can be combined into a
single multichannel sample-based signal using the same technique.
1-32
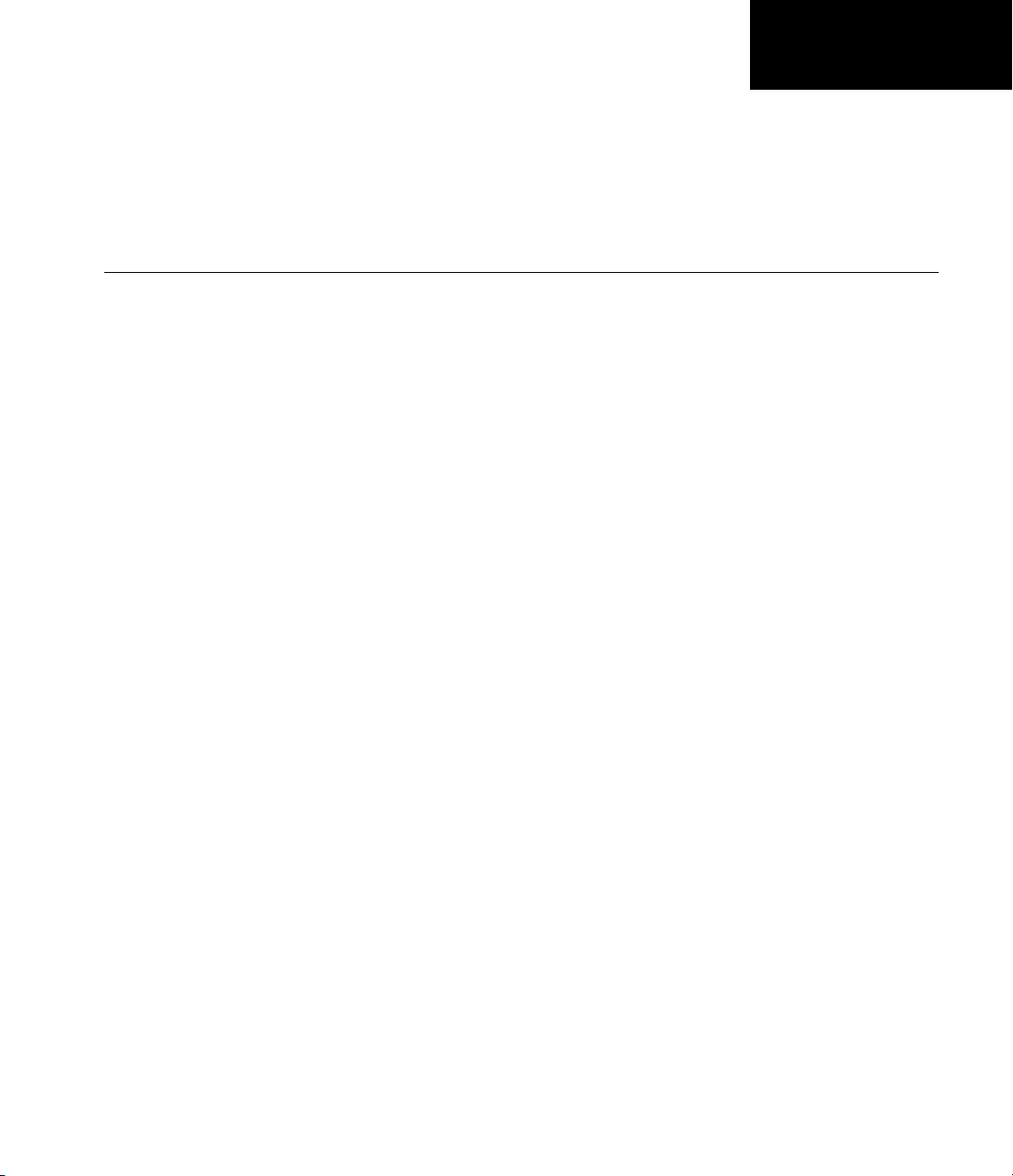
Combining Single-Channel Sample-Based Signals
You can combine individual sample-based signals into a multichannel signal
by using the Matrix Concatenate block in the Simulink Math Operations
library:
1 Open the Matrix Concatenate Example 1 model by typing
doc_cmbsnglchsbsigs
at the MATLAB command line.
Page 45
Creating Multichannel Sample-Based Signals
2 Double-click the Signal From Workspace block, and set the Signal
parameter to
3 Doub
4 Double-click the Signal From Workspace2 block, and set the Signal
le-click the Signal From Workspace1 block, and set the Signal
meter to
para
parameter to
5 Double-click the Signal From Workspace3 block, and set the Signal
parameter to
1:10.ClickOK.
-1:-1:-10.ClickOK.
zeros(10,1).ClickOK.
5*ones(10,1).ClickOK.
1-33
Page 46

1 Working with Signals
6 Double-click the Matrix Concatenate block. Set the block parameters as
follows, and then click OK:
• Number of inputs =
4
• Mode = Multidimensional array
• Concatenate dimension = 1
7 Double-click the Reshape block. Set the block parameters as follows, and
then click OK:
• Output dimensionality =
Customize
• Output dimensions = [2,2]
8 Run the model.
Four independent sample-based signals are combined into a 2-by-2
multichannel matrix signal.
Each 4-by-1 output from the Matrix Concatenate block contains one sample
from each of the four input signals at the same instant in time. The
Reshape block rearranges the samples into a 2-by-2 matrix. Each element
of this matrix is a separate channel.
Note that the Reshape block works columnwise, so that a column vector
input is reshaped as shown below.
1-34
The 4-by-1 matrix output by the Matrix Concatenate block and the 2-by-2
matrix output by the Reshape block in the above model represent the same
four-channel sample-based signal. In s ome cases, one representation of the
signal may be more useful than the other.
9 At the MATLAB command line, type dsp_examples_yout.
The four-channel, sample-based signal is displayed as a series of matrices
in the MATLAB Command Window. Note that the last matrix contains
Page 47

Creating Multichannel Sample-Based Signals
only zeros. This is because every Signal From Workspace block in this
model has its Form output after final data value by parameter set
to
Setting to Zero.
Combining Multichannel Sample-Based Signals
You can combine existing multichannel sample-based signals into larger
multichannel signals using the Simulink Matrix Concatenate block:
1 Open the Matrix Concatenate Example 2 model by typing
doc_cmbmltichsbsigs
at the MATLAB command line.
1-35
Page 48

1 Working with Signals
1-36
2 Double-click the Signal From Workspace block, and set the Signal
parameter to
3 Double-click the Signal From Workspace1 block, and set the Signal
parameter to
4 Double-click the Matrix Concatenate block. Set the block parameters as
[1:10;-1:-1:-10]'.ClickOK.
[zeros(10,1) 5*ones(10,1)].ClickOK.
follows, and then click OK:
• Number of inputs =
2
• Mode = Multidimensional array
Page 49

Creating Multichannel Sample-Based Signals
• Concatenate dimension = 1
5 Run the model.
The model combines both two-channel sample-based signals into a
four-channel signal.
Each 2-by-2 output from the Matrix Concatenate block contains both
samples from each of the two input signals at the same instant in time.
Each element of this matrix is a separate channel.
1-37
Page 50

1 Working with Signals
Creating Multichannel Frame-Based Signals
In this section...
“Multichannel Frame-Based Signals” on page 1-38
“Combining Frame-Based Signals” on page 1-39
Multichannel Frame-Based Signals
When you want to perform the same operations on several independent
signals, you can group those signals together as a multichannel signal. For
example, if you need to filter each of four independent signals using the
same direct-form II transpose filter, you can combine the signals into a
multichannel signal, and connect the signal to a single Digital Filter Design
block. The block applies the filter to each channel independently.
A frame-based signal with N channels and frame size M is represented by
a sequence of M-by-N matrices. Multiple individual frame-based signals,
with the same frame rate and size, can be combined into a multichannel
frame-based signal using the Simulink Matrix Concatenate block. Individual
signals can be added to an existing multichannel signal in the same way.
1-38
Page 51

Creating Multichannel F rame-Based Signals
Combining Frame
You can combine e
signal by using t
the same frame r
frame-based si
produce a thre
1 Open the Matri
doc_combiningfbsigs
at the MATLA
xisting frame-based signals into a larger multichannel
he Simulink Concatenate block. All signals must have
ate and frame s ize. In this example, a single-channel
gnal is combined with a two-channel frame-based signal to
e-channel frame-based signal:
x Concatenate Example 3 model by typing
B command line.
-Based Signals
1-39
Page 52

1 Working with Signals
1-40
2 Double-click the Signal From Workspace block. Set the block parameters
as follows:
• Signal =
• Sample time = 1
• Samples per frame = 4
Based on these parameters, the Signal From Workspace block outputs a
frame-based signal with a frame size of four.
3 Save these parameters and close the dialog box by clicking OK.
[1:10;-1:-1:-10]'
Page 53

Creating Multichannel F rame-Based Signals
4 Double-click the Signal From Workspace1 block. Set the block parameters
as follows, and then click OK:
• Signal =
5*ones(10,1)
• Sample time = 1
• Samples per frame = 4
The Signal From Workspace1 block has the same sample time and frame
size as the Signal From Workspace block. When yo u combine frame-based
signals into multichannel signals, the original signals must have the same
frame rate and frame size.
5 Double-click the Matrix Concatenate block. Set the block parameters as
follows, and then click OK:
• Number of inputs =
2
• Mode = Multidimensional array
• Concatenate dimension = 2
6 Run the model.
The 4-by-3 matrix output from the Matrix Concatenate block contains all
three input channels, and preserves their common frame rate and frame
size.
1-41
Page 54

1 Working with Signals
Deconstructing Multichannel Sample-Based Signals
In this section...
“Splitting Multichannel Sample-Based Signals into Individual Signals”
on page 1-42
“Splitting Multichannel Sample-Based Signals into Several Multichannel
Signals” on page 1-45
Splitting Multichannel Sample-Based Signals into
Individual Signals
Multichannel signals, rep resen t ed by matrices in the Simul in k environment,
are frequently used in signal processing models for efficiency and compactness.
Though most of the signal processing blocks can process multichannel signals,
you may need to access just one channel or a particular range of samples in a
multichannel signal. You can access individual channels of the multichannel
signal by using the blocks in the Indexing library. This library includes the
Selector, Submatrix, Variable Selector, Multiport Selector, and Submatrix
blocks.
1-42
You can split a multichannel sample-based signal into single-channel
sample-based signals using the Multiport Selector block. This block allows
you to select specific rows and/or columns and propagate the selection to a
chosen output port. In this example, a three-channel sample-based signal is
deconstructed into three independent sample-based signals:
1 Open the Multiport Selector Example 1 model by typing
doc_splitmltichsbsigsind at the MATLAB command line.
Page 55

Deconstructing Multichannel Sample-Based Signals
2 Double-click the Signal From Workspace block, and set the block
parameters as follows:
• Signal =
randn(3,1,10)
• Sample time = 1
• Samples per frame = 1
ed on these parameters, the Signal From Workspace block outputs a
Bas
ee-channel, sample-based signal with a sample period of 1 second.
thr
3 Save these parameters and close the dialog box by clicking OK.
1-43
Page 56

1 Working with Signals
4 Double-click the Multiport Selector block. Set the block parameters as
follows, and then click OK:
• Select =
Rows
• Indices to output = {1,2,3}
Based on these parameters, the M ultiport Selector block extracts the rows
of the input. The Indices to output parameter setting sp ecifies that row 1
of the input should be reproduced at output 1, row 2 of the input should
be reproduced at output 2, and row 3 of the input should be reproduced
at output 3.
5 Run the model.
6 At the MATLAB command line, type dsp_examples_yout.
The following is a portion of what is displayed at the MATLAB command
line. Because the input signal is random, your output might be different
than the output show here.
dsp_examples_yout(:,:,1) =
-0.1199
dsp_examples_yout(:,:,2) =
-0.5955
1-44
dsp_examples_yout(:,:,3) =
-0.0793
This sample-based signal is the first row of the input to the Multiport
Selector block. You can view the other two input rows by typing
dsp_examples_yout1 and dsp_examples_yout2,respectively.
You have now successfully created three, single-channel sample-based signals
from a multichannel sample-based signal using a Multiport Selector block.
Page 57

Deconstructing Multichannel Sample-Based Signals
Splitting Multi
channel Sample-Based Signals into
Several Multich
Multichannel si
are frequently
Though most of
you may need to
multichannel
signal by usin
Selector, Su
blocks.
You can spli
sample-bas
most versat
channel se
sample-ba
signal fro
1 Open the S
at the MAT
gnals, represented by matrices in the Simulink environment,
used in signal processing models for efficiency and compactness.
the signal processing blocks can process multichannel signals,
access just one channel or a particular range of samples in a
signal. You can access individual channels of the multichannel
g the blocks in the Indexing library. This library includes the
bmatrix, Variable Selector, Multiport Selector, and Submatrix
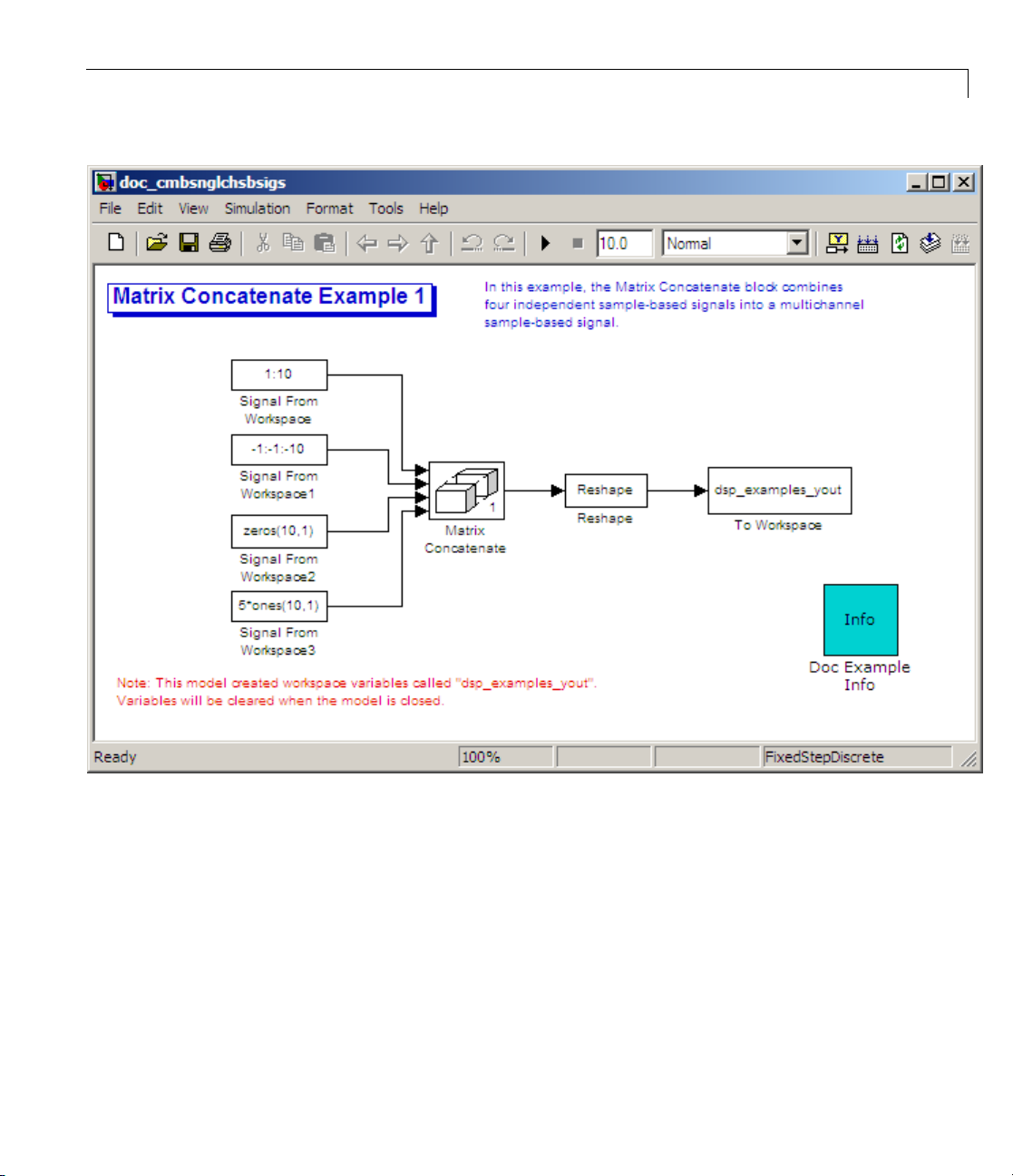
t a multichannel sample-based signal into other multichannel
ed signals using the Submatrix block. The Submatrix block is the
ile o f the blocks in the Indexing library because it allows arbitrary
lections. Therefore, you can extract a portion of a multichannel
sed signal. In this example, you extract a six-channel, sample-based
m a 35-channel, sample-based signal (5-by-7 matrix):
ubmatrix Example model by typing
LAB command line.
annel Signals
doc_splitmltichsbsigsev
1-45
Page 58

1 Working with Signals
1-46
2 Double
• Consta
• Inter
• Sampl
• Samp
-click the Constant block, and set the block parameters as follows:
nt value =
rand(5,7)
pret vector parameters as 1–D = Clear th is check box
ing mode =
le Time =
Sample based
1
Based on these parameters, the Constant block outputs a constant-valued,
sample-based signal.
3 Save these parameters and close the dialog box by clicking OK.
ble-click the Submatrix block. Set the block parameters as follows,
4 Dou
dthenclickOK:
an
Page 59

Deconstructing Multichannel Sample-Based Signals
• Row span = Range of rows
• Starting row = Index
• Starting row index = 3
• Ending row = Last
• Column span = Range of columns
• Starting column = Offset from last
• Starting column offset = 1
• Ending column = Last
Based on these parameters, the Submatrix block outputs rows three to five,
the last row of the input signal. It also outputs the second to last column
and the last column of the input signal.
1-47
Page 60
1 Working with Signals
5 Run the model.
The model should now look similar to the following figure.
1-48
e that the output of the Submatrix block is equivalent to the matrix
Notic
ted by rows three through five and columns six through seven of the
crea
tmatrix.
inpu
ave now successfully created a six-channel, sample-based signal from a
You h
channel sample-based signal using a Submatrix block.
35-
Page 61

Deconstructing Multichannel Frame-Based Signals
Deconstructing Multichannel Frame-Based Signals
In this section...
“Splitting Multichannel Frame-Based Signals into Individual Signals” on
page 1-49
“Reordering Channels in Multichannel Frame-Based Signals” on page 1-54
Splitting Multichannel Frame-Based Signals into
Individual Signals
Multichannel signals, rep resen t ed by matrices in the Simul in k environment,
are frequently used in signal processing models for efficiency and compactness.
Though most of the signal processing blocks can process multichannel signals,
you may need to access just one channel or a particular range of samples in a
multichannel signal. You can access individual channels of the multichannel
signal by using the blocks in the Indexing library. This library includes the
Selector, Submatrix, Variable Selector, Multiport Selector, and Submatrix
blocks. ItisalsopossibletousethePermute Matrix block, in the Matrix
operations library, to reorder the channels of a frame-based signal.
You can use the Multiport Selector block in the Indexing library to extract the
individual channels of a multichannel frame-based signal. These signals form
single-channel frame-based signals that have the same frame rate and size
of the m ultichannel signal.
1-49
Page 62

1 Working with Signals
The figure below is a graphical repre sentation of this process.
In this example, you use the Multiport Selector block to extract a
single-channel and a two channel frame-based signal from a multichannel
frame-based signal:
1-50
1 Open the Multiport Selector Example 2 model by typing
doc_splitmltichfbsigsind
at the MATLAB command line.
Page 63

Deconstructing Multichannel Frame-Based Signals
2 Doubl
e-click the Signal From Workspace block, and set the block
param
• Sign
• Samp
eters as follows:
al =
[1:10;-1:-1:-10;5*ones(1,10)]'
les per frame =
4
Based on these parameters, the Signal From Workspace block outputs a
three-channel, frame-based signal with a frame size of four.
3 Save these parameters and close the dialog box by clicking OK.
1-51
Page 64

1 Working with Signals
4 Double-click the Multiport Selector block. Set the block parameters as
follows, and then click OK:
• Select =
• Indices to output = {[1 3],2}
Based on these parameters, the Multiport Selector block outputs the first
andthirdcolumnsatthefirstoutputportandthesecondcolumnatthe
second output port of the block. Setting the Select parameter to
ensures that the block preserves the frame rate and frame size of the input.
5 Run the model.
The figure below is a graphical representation of how the Multiport
Selector block splits one frame of the three-channel frame-based signal into
a single-channel signal and a two-channel signal.
Columns
Columns
1-52
Page 65

Deconstructing Multichannel Frame-Based Signals
The Multiport Selector block outputs a two-channel frame-based signal,
comprised of the first and third column of the input signal, at the first port. It
outputs a single-channel frame-based signal, comprised of the second column
of the input signal, at the second port.
1-53
Page 66

1 Working with Signals
You have now successfully created a single-channel and a two-channel
frame-based signal from a multichannel frame-based signal using the
Multiport Selector block.
Reordering Channels in Multichannel Frame-Based Signals
Multichannel signals, represented by matrices in Simulink, are frequently
used in signal processing models for efficiency and compactness. Though
most of the signal processing blocks can process multichannel signals, y ou
may need to access just one channel or a particular range of samples in a
multichannel signal. You can access individual channels of the multichannel
signal by using the blocks in the Indexing library. This library includes the
Selector, Submatrix, Variable Selector, Multiport Selector, and Submatrix
blocks. ItisalsopossibletousethePermute Matrix block, in the Matrix
operations library, to reorder the channels of a frame-based signal.
Some Signal Processing Blockset blocks have the ability to process the
interaction of channels. Typically, Signal Processing Blockset blocks com pare
channel one of signal A to channel one of signal B. However, you might want
to correlate channel one of signal A with channel three of signal B. In this
case, in order to compare the correct signals, you need to use the Permute
Matrix block to rearrange the channels of your frame-based signals. This
example explains how to accomplish this task:
1-54
1 Open the Permute Matrix Example model by typing
doc_reordermltichfbsigs at the MATLAB command line.
Page 67

Deconstructing Multichannel Frame-Based Signals
2 Double-click the Signal From Workspace block, and set the block
parameters as follows:
• Signal =
[1:10;-1:-1:-10;5*ones(1,10)]'
• Sample time = 1
• Samples per frame = 4
Based on these parameters, the Signal From Workspace block outputs a
three-channel, frame-based signal with a sample period of 1 second and a
frame size of 4. The frame period of this block is 4 seconds.
3 Save these parameters and close the dialog box by clicking OK.
1-55
Page 68

1 Working with Signals
4 Double-click the Constant block. Set the block parameters as follows, and
then click OK:
• Constant value =
[1 3 2]
• Interpret vector parameters as 1–D = Clear th is check box
• Sampling mode =
Frame based
• Frame period = 4
The discrete-time, frame-based vector output by the Constant block tells
the Permute Matrix block to swap the second and third columns of the
input signal. Note that the frame period of the Constant block must match
the frame period of the Signal From Workspace block.
5 Double-click the Permute Matrix block. Set the block parameters as
follows, and then click OK:
• Permute =
Columns
• Index mode = One-based
Based on these parameters, the Permute Matrix block rearranges the
columns of the input signal, and the index of the first column is now one.
6 Run the model.
The f igure below is a graphical representation of what happens to the first
input frame during sim u la tion.
1-56
Page 69

Deconstructing Multichannel Frame-Based Signals
The second and third channel of the frame-based input signal are swapped.
7 At the MATLAB command line, type yout.
You can now verify that the second and third columns of the input signal
are rearranged.
You have now successfully reordered the channels of a frame-based signal
using the Permute Matrix block.
1-57
Page 70

1 Working with Signals
Importing and Exporting Sample-Based Signals
In this section...
“Importing Sample-Based Vector Signals” on page 1-58
“Importing Sample-Based Matrix Signals” on page 1-61
“Exporting Sample-Based Signals” on page 1-65
Importing Sample-Based Vector Signals
The Signal From Workspace block generate s a sample-based vector signal
when the variable or expression in the Signal parameter is a matrix and the
Samples per frame parameter is set to
represents a different channel. Beginning with the first row of the matrix, the
block outputs one row of the matrix at each sample time. Therefore, if the
Signal parameter specifies an M-by-N matrix, the output of the Signal From
Workspace block is M 1-by-N row vectors representing N channels.
1.Eachcolumnoftheinputmatrix
1-58
Page 71

Importing and Exporting Sample-Based Signals
The figure below is a graphical representation of this pro cess for a 6-by-4
workspace matrix,
A.
In the following example, you use the Signal From Workspace block to import
a sample-based vector signal into your model:
1 Open the Signal From Workspace Example 3 model by typing
doc_importsbvectorsigs at the MATLAB comm and line.
1-59
Page 72

1 Working with Signals
1-60
2 At the MATLAB command line, type A = [1:100;-1:-1:-100]';
The matrix A represents a two column signal, where each column is a
different channel.
3 At the MATLAB command line, type B = 5*ones(100,1);
The vector
4 Double-click the Signal From Workspace block, and set the block
B represents a single-channel signal.
parameters as follows:
• Signal =
[A B]
• Sample time = 1
• Samples per frame = 1
• Form output after final data value = Setting to zero
Page 73

Importing and Exporting Sample-Based Signals
The Signal expression [A B] uses the standard MATLAB syntax for
horizontally concatenating matrices a nd appends column vector
right of matrix
A. The Signal From W orkspace block outputs a sample-based
B to the
signal with a sample period of 1 second. After the block has output the
signal, all subsequent outputs have a value of zero.
5 Save these parameters and close the dialog box by clicking OK.
6 Run the model.
The following figure is a graphical representation of the model’s behavior
during simulation.
The first row of the input matrix [AB]is output at time t=0, the second
row o f the input matrix is output at time
t=1,andsoon.
You have now successfully imported a sample-based vector signal into your
signal processing model using the Signal From Workspace block.
Importing Sample-Based Matrix Signals
The Signal From Workspace block generates a sample-based matrix
signal when the variable or expression in the Signal parameter is a
three-dimensional array and the Samples per frame parameter is set to
Beginning with the first page of the array, the block outputs a single page
of the array to the output at each sample time. Therefore, if the Signal
parameter specifies an M-by-N-by-P array, the output of the Signal From
Workspace block is P M-by-N matrices representing M*N channels.
1.
1-61
Page 74

1 Working with Signals
The f ol lowing f ig u re is a graphical illustration of this process for a 6-by-4-by-5
workspace array
A.
1-62
In the following example, you use the Signal From Workspace block to import
a four-channel, sample- based matrix signal into a Simulink model:
1 Open the Signal From Workspace Example 4 model by typing
doc_importsbmatrixsigs at the MATLAB comm and line.
Page 75

Importing and Exporting Sample-Based Signals
Also, the following variables are loaded into the MATLAB workspace:
Fs 1x1 8 double array
dsp_examples_A 2x2x100 3200 double array
dsp_examples_sig1 1x1x100 800 double array
dsp_examples_sig12 1x2x100 1600 double array
dsp_examples_sig2 1x1x100 800 double array
dsp_examples_sig3 1x1x100 800 double array
dsp_examples_sig34 1x2x100 1600 double array
1-63
Page 76

1 Working with Signals
dsp_examples_sig4 1x1x100 800 double array
mtlb 4001x1 32008 double array
2 Double-click the Signal From Workspace block. Set the block parameters
as follows, and then click OK:
• Signal =
dsp_examples_A
• Sample time = 1
• Samples per frame = 1
• Form output after final data value = Setting to zero
The dsp_examples_A array represents a four-channel, sample-based signal
with 100 samples in each channel. This is the signal that you want to
import, and it was created in the following way:
dsp_examples_sig1 = reshape(1:100,[1 1 100])
dsp_examples_sig2 = reshape(-1:-1:-100,[1 1 100])
dsp_examples_sig3 = zeros(1,1,100)
dsp_examples_sig4 = 5*ones(1,1,100)
dsp_examples_sig12 = cat(2,sig1,sig2)
dsp_examples_sig34 = cat(2,sig3,sig4)
dsp_examples_A = cat(1,sig12,sig34) % 2-by-2-by-100 array
3 Run the model.
Thefigurebelowisagraphicalrepresentation of the model’s behavior
during simulation.
1-64
Page 77

Importing and Exporting Sample-Based Signals
The Signal From Workspace block imports the four-channel sample based
signal from the MATLAB workspace into the Simulink model one matrix at
atime.
You have now successfully imported a sample-based matrix signal i n t o your
model using the Signal From Workspace block.
Exporting Sample-Based Signals
The Signal To Workspace and Triggered To Works pace blocks are the primary
blocks for exporting signals of all dimensions from a Simulink model to the
MATLAB workspace.
1-65
Page 78

1 Working with Signals
A sample-based signal, w ith M*N channels, is represented in Simulink as a
sequence of M-by-N matrices. When the input to the Signal To Workspace
block is a sample-based signal, the block creates an M-by-N-by-P array in
the MATLAB works pace containing the P most recent samples from each
channel. The number of pages, P, is specified by the Limit data points to
last parameter. The newest samples are added at the end of the array.
The f ol lowing figure is the graphical illustration of this process using a 6-by-4
sample-based signal exported to workspace array
A.
1-66
The workspace array always has time running along its third dimension, P.
Samples are saved along the P dimension whether the input is a matrix,
vector, or scalar (single channel case).
InthefollowingexampleyouuseaSignalToWorkspaceblocktoexporta
sample-based matrix signal to the MATLAB workspace:
Page 79
Importing and Exporting Sample-Based Signals
1 Open the Signal From Workspace Example 6 model by typing
doc_exportsbsigs at the MATLAB command line.
Also, the following variables are loaded into the MATLAB workspace:
dsp_examples_A 2x2x100 3200 double array
dsp_examples_sig1 1x1x100 800 double array
dsp_examples_sig12 1x2x100 1600 double array
dsp_examples_sig2 1x1x100 800 double array
dsp_examples_sig3 1x1x100 800 double array
1-67
Page 80

1 Working with Signals
dsp_examples_sig34 1x2x100 1600 double array
dsp_examples_sig4 1x1x100 800 double array
In this model, the Signal From Workspace block imports a four-channel
sample-based signal called
dsp_examples_A. This signal is then exported
to the MATLAB workspace using a Signal to Workspace block.
2 Double-click the Signal From Workspace block. Set the block parameters
as follows, and then click OK:
• Signal =
dsp_examples_A
• Sample time = 1
• Samples per frame = 1
• Form output after final data value = Setting to zero
Based on these parameters, the Signal From Workspace block outputs a
sample-based signal with a sample period of 1 second. After the block has
output the signal, all subsequent outputs have a value of zero.
3 Double-click the Signal To Workspace block. Set the block parameters as
follows, and then click OK:
• Variable name =
dsp_examples_yout
• Limit data points to last parameter to inf
• Decimation = 1
Based on these parameters, the Signal To Workspace block exports its
sample-based input signal to a variable called
dsp_examples_yout in the
MATLAB workspace. The workspace variable can grow indefinitely large
in order to capture all of the input data. The signal is not decimated before
it is exported to the MATLAB workspace.
4 Run the model.
1-68
5 At the MATLAB command line, type dsp_examples_yout.
The four-channel sample-based signal,
dsp_examples_A,isoutputatthe
MATLAB command line. The following is a portion of the output that is
displayed.
Page 81

dsp_examples_yout(:,:,1) =
1-1
05
dsp_examples_yout(:,:,2) =
2-2
05
dsp_examples_yout(:,:,3) =
3-3
05
dsp_examples_yout(:,:,4) =
4-4
05
Importing and Exporting Sample-Based Signals
Each page of the output represents a different sample time, and each element
of the matrices is in a separate channel.
You h ave now successfully exported a four-channel sample-based signal from
a Simulink model to the MATLAB workspace us in g the Signal To Workspace
block.
1-69
Page 82

1 Working with Signals
Importing and Exporting Frame-Based Signals
In this section...
“Importing Fram e-Based Signals” on page 1-70
“Exporting Frame-Based Signals” on page 1-73
Importing Frame-Based Signals
The Signal From Workspace block creates a frame-based multichannel signal
when the Signal parameter is a matrix, and the Samples per frame
parameter, M, is greater than
matrix, the block releases M rows of the matrix (that is, one frame from each
channel) to the output port every M*T
parameter s pecifies a W-by-N workspace matrix, the Signal From Workspace
block outputs a series of M-by-N matrices representing N channels. The
workspace matrix must be oriented so that its columns represent the channels
of the signal.
1. Beginning with the first M rows of the
seconds. Therefore, if the Signal
s
1-70
The figure below is a graphical illustration of this process for a 6-by-4
workspace matrix,
A,andaframesizeof2.
Page 83

Importing and Exporting Frame-Based Signals
Note Although independent channels are generally represented as columns,
a single-channel signal can be represented in the workspace as either a
column vector or row vector. The output from the Signal From Workspace
block is a column vector in both cases.
In the following example, you u se the Signal From W orkspace block to create
a three -channe l frame-based signal and import it into the model:
1 Open the Signal From Workspace Example 5 model b y typing
doc_importfbsigs
at the MATLAB command line.
dsp_examples_A = [1:100;-1:-1:-100]'; % 100-by-2 matrix
dsp_examples_B = 5*ones(100,1); % 100-by-1 column vector
The variable called dsp_examples_A represents a two-channel signal
with 100 samples, and the variable called dsp_exam ples_
B represents a
one-channel signal with 100 samples.
Also, the following variables are defined in the MATLAB workspace:
1-71
Page 84

1 Working with Signals
1-72
2 Double-click the Signal From Workspace block. Set the block parameters
as follows, and then click OK:
• Signal parameter to
• Sample time parameter to 1
• Samples per frame parameter to 4
• Form output after final data value parameter to Setting to zero
Based on these parameters, the Signal From Workspace block outputs
aframe-basedsignalwithaframesizeof4andasampleperiodof1
second. The signal’s frame period is 4 seconds. The Signal parameter
uses the standard MATLAB syntax for horizontally concatenating
matrices to append column vector
dsp_examples_A. After the block has output the signal, all subsequent
outputshaveavalueofzero.
[dsp_examples_A dsp_examples_B]
dsp_examples_B to the right of matrix
Page 85

Importing and Exporting Frame-Based Signals
3 Run the model.
Thefigurebelowisagraphicalrepresentation of how your three-channel,
frame-based signal is imported into your model.
You have now successfully imported a three-channel frame-based signal into
your model using the Signal From Workspace block.
Exporting Frame-Based Signals
The Signal To Workspace and Triggered To Works pace blocks are the primary
blocks for exporting signals of all dimensions from a Simulink model to the
MATLAB workspace.
Aframe-basedsignalwithN channels and frame size M is represented by a
sequence of M-by-N matrices. When the input to the Signal To Workspace
block is a frame-based signal, the block creates a P-b y-N array in the MATLAB
workspace containing the P most recent samples from each channel. The
number of rows, P,isspecifiedbytheLimit data points to last parameter.
The newest samples are added at the bottom of the matrix.
1-73
Page 86

1 Working with Signals
The following figure is a graphical illustration of this pro cess for three
consecutive frames of a frame-based signal with a frame size of 2 that is
exported to matrix
A in the MATLAB workspace.
1-74
In the fol
frame-b
1 Open the
doc_ex
lowing example, you use a Signal To Workspace block to export a
ased signal to the MATLAB workspace:
Signal From Workspace Example 7 model by typing
portfbsigs
at the MATLAB command line.
Page 87

Importing and Exporting Frame-Based Signals
Also, th
The variable called dsp_examples_
with 100 samples, and the variable called dsp_exam ples_
e following variables are defined in the MATLAB workspace:
A represents a two-channel signal
B represents a
one-channel signal with 100 samples.
dsp_examples_A = [1:100;-1:-1:-100]'; % 100-by-2 matrix
dsp_examples_B = 5*ones(100,1); % 100-by-1 column vector
2 Double-click the Signal From Workspace block. Set the block parameters
as follows, and then click OK:
• Signal =
[dsp_examples_A dsp_examples_B]
• Sample time = 1
• Samples per frame = 4
• Form output after final data value = Setting to zero
1-75
Page 88

1 Working with Signals
Based on these parameters, the Signal From Workspace block outputs
aframe-basedsignalwithaframesizeof4andasampleperiodof1
second. The signal’s frame period is 4 seconds. The Signal parameter
uses the standard MATLAB syntax for horizontally concatenating
matrices to append column vector
dsp_examples_A. After the block has output the signal, all subsequent
dsp_examples_B to the right of matrix
outputshaveavalueofzero.
3 Double-click the Signal To Workspace block. Set the block parameters as
follows, and then click OK:
• Variable name =
dsp_examples_yout
• Limit data points to last = inf
• Decimation = 1
• Frames = Concatenate frames (2-D array)
Based on these parameters, the Signal To Workspace block exports its
frame-based input sig n al to a varia ble called
dsp_examples_yout in the
MATLAB workspace. The workspace variable can grow indefinitely large
in order to capture all of the input data. The signal is not decimated before
it is exported to the MATLAB workspace, and each input frame is vertically
concatenated to the previous frame to produce a 2-D array output.
4 Run the model.
The following figure is a graphical representation of the model’s behavior
during simulation.
1-76
Page 89

Importing and Exporting Frame-Based Signals
5 At the MATLAB command line, type dsp_examples_yout.
The output is shown below:
dsp_examples_yout =
1-1 5
2-2 5
3-3 5
4-4 5
5-5 5
6-6 5
7-7 5
8-8 5
9-9 5
10 -10 5
11 -11 5
12 -12 5
1-77
Page 90

1 Working with Signals
Theframesofthesignalareconcatenated to form a two-dimensional array.
You have now successfully output a frame-based signal to the MATLAB
workspace using the Signal To Workspace block.
1-78
Page 91

Displaying Time-Domain Data
You can use Signal Processing Blockset blocks to work with signals in both
the time and frequency domain. The Signal Processing Sinks library contains
the following blocks for displaying time-domain signals:
• Time Scope
• Vector Scope
• Matrix Viewer
• Waterfall Scope
See the following sections for examples of how you can use the Vector Scope
and Time Scope blocks to display time-domain data:
• “Displayin g Time Domain Data in the Vector Scope” on page 1-79
• “Displaying Time-Domain Data in the Time Scope” on page 1-82
Displaying Time-Domain Data
Displaying Time Domain Data in the Vector Scope
The following example shows you how you can use the Vector Scope block to
display time-domain signals:
1 At the MATLAB command prompt, type doc_vectorscope_tut.
The Vector Scope Example opens and the variables
into the MATLAB workspace.
Fs and mtlb are loaded
1-79
Page 92
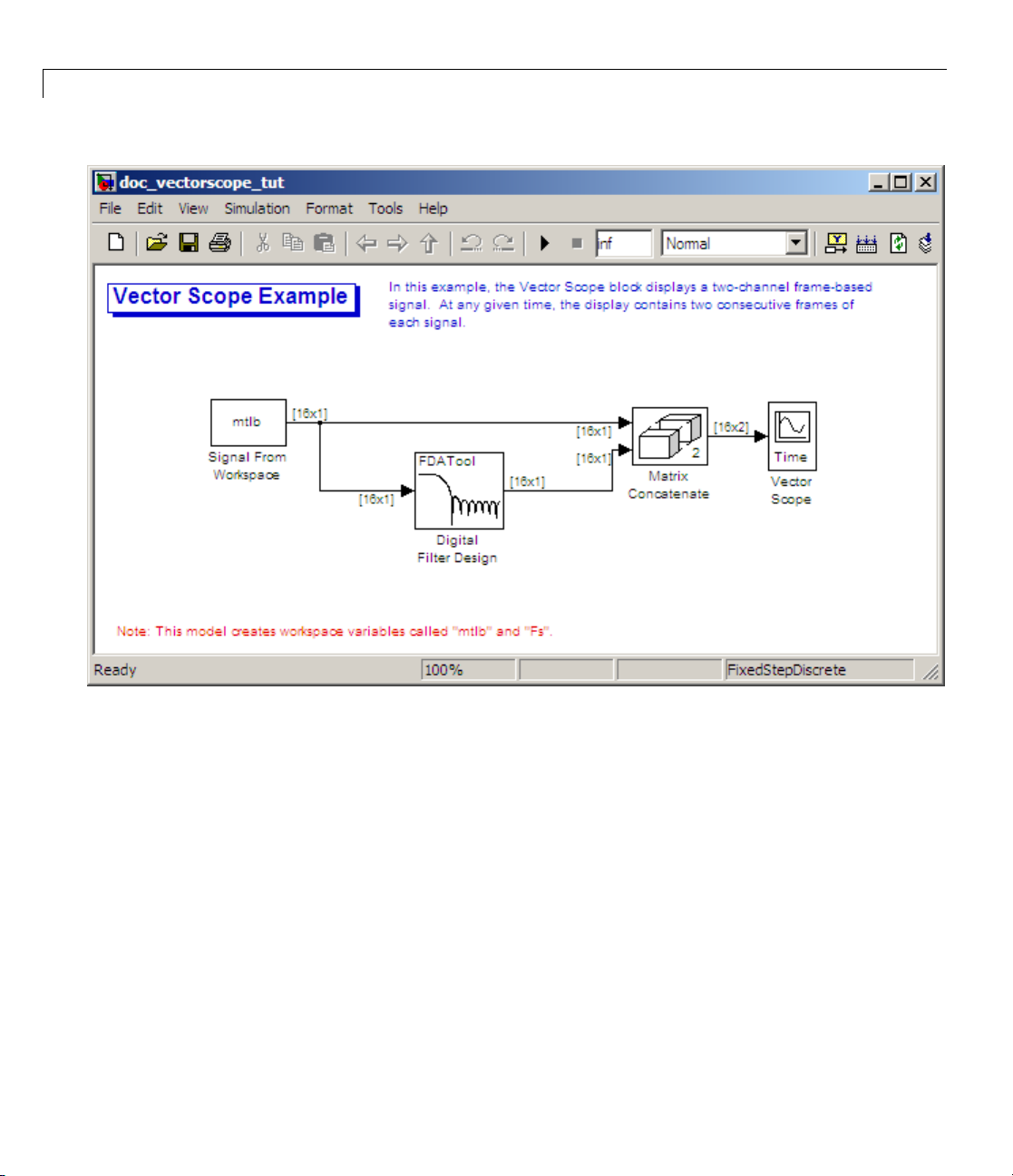
1 Working with Signals
1-80
2 Double-click the Signal From Workspace block. The Block Parameters:
Signal From Workspace dialog box opens.
3 Set the
• Signa
• Sampl
• Samp
• Form
block parameters as follows:
l =
mtlb
etime=
les per frame =
1
16
output after final data value =
Cyclic Repetition
Based on these parameters, the Signal From Workspace block outputs a
frame-basedsignalwithaframesizeof16andasampleperiodof1second.
The frame period of the signal is 16 seconds. Your input signal is output
repeatedly from the Signal From Workspace block.
Page 93

Displaying Time-Domain Data
4 Save these parameters and close the dialog box by clicking OK.
5 Double-click the Digital Fi lter Design block.
You are going to use this block to f ilter the input signal in order to produce
two distinct signals to send to the Vector Scope block.
6 To specify a lowpass filter, in the Response Type section, choose Lowpass.
7 In the Design Method section, choose FIR. Then, from the list, select
Window.
8 In the Filter Order section, select Specify order and enter 22.
9 From the Window list, select Hamming.
10 In the Frequency Specifications section, from the Units list, select
Normalized (0 to 1).
11 In the Frequency Specifications section, set the wc parameter to 0.25.
12 Click Design Filter. Then, close the Block Parameters: Digital Filter
Design dialog box.
13 Double-click the Matrix Concatenate block. The Function Block
Parameters: Matrix Concatenate dialog box opens.
14 Set the block parameters as follows:
• Number of inputs =
2
• Mode = Multidimensional array.
• Concatenate dimension =
2
Based on these parameters, the Matrix Concatenate block combines the
two signals so that each column corresponds to a different signal.
15 Save these parameters and close the dialog box by clicking OK.
16 Double-click the Vector Scope block.
17 Set the block parameters as follows, and then click OK:
1-81
Page 94

1 Working with Signals
• Click the Scope Properties tab.
• Input domain =
• Time display span (number of frames) = 2
When you run the model, the Vector Scope block plots two consecutive
frames of each channel at each update.
18 Run the model.
The Vector Scope window displays the original signal in blue and the
filtered signal in black. To display the channel legend, right-click inside of
the Vector Scope window and select Channel legend from the menu.
You have now successfully displayed two frame-based signals in the time
domain using the Vector Scope block.
Time
Displaying Time-Domain Data in the Time Scope
Thefollowingexampleshowsyouhowtoconfigure the Time Scope blocks in
the d oc_timesco pe _tut model to display time-domain signals.
1-82
Page 95

Displaying Time-Domain Data
The Time Scope – Configuration dialog box provides a central location
from which you can change the appearance and behavior of the Time Scope
block. To open the Time Scope – Configuration dialog box, double-click the
Time Scope block in your model and select File > Configuration.
1-83
Page 96

1 Working with Signals
The Time Scope – Configuration dialog box has three different tabs, Core,
Visuals,andTools, each of which offers you a different set of options. For
more information about the options available on e ach of the tabs, see the
Time Scope reference page.
1-84
Example W
orkflow
Use the following workflow to configure the Time Scope blocks in the
doc_timescope_tut model:
1 “ConfiguringtheTimeScope”onpage1-85
2 “Using
3 “Modifying the Scope Display” on page 1-91
4 “Inspecting Your Data (Scaling the Axes and Zooming)” on page 1-94
5 “Man
To ge
at t
the Playback Controls” on page 1-89
aging M ultiple Time Scopes” on page 1-97
t started with this example, open the model by typing doc_timescope_tut
he MATLAB command line.
Page 97

Displaying Time-Domain Data
Configuring the Time Scope
To open the Time Scope – Configuration dialog box, you mu st first open the
Time Scope window by double-clicking the Time Scope block in your model.
When the window opens, select File > Configuration.
First, you configure the appearance of the Time Scope window and specify
how the Time Scope block should interpret input signals using the Time
Scope – Visuals:Time Domain Options dialog box.
Note As you progress through this workflow, notice the blue question mark
icon (
) in the lower-left corner of the subsequent dialog box es. This
icon indicates that context-sensitive help is available. You can get more
information about any of the parameters on the dialog box by right-clicking
the parameter name and selecting What’s This?
Configuring Appearance and Specifying Signal Interpretation. To
configure the appearance of the Time Scope window and specify how the Time
Scope block interprets input signals:
1 Click the Visuals tab of the main Time Scope – Configuration dialog
box.
2 Select Time Domain, and click the Options button.
The following options dialog box appears.
1-85
Page 98

1 Working with Signals
This table shows the appropriate parameter settings for the Main tab of
the Visuals:Time Domain Options dialog box.
1-86
Parameter
Input Processing
Show grid Checked
Channel legend Checked
The Time Scope block accepts both sample- and frame-based input signals,
but you must specify how the b lock should handle them. To do so, set
the Input processing parameter on the Time Scope – Visuals:Time
Domain Options dialog box to the appropriate choice.
In this example, you want the block to treat the input signal as frame
based, so you must set the Input processing parameter to
channels (Frame-based)
Setting Axis Properties. Navigate to the Axis Properties tab of the
Visuals:Time Domain O ptions dialog box, and set the parameters to the
values shown in the following table.
.
Setting
Columns as channels
(Frame-based)
Columns as
Page 99

Displaying Time-Domain Data
Parameter
Time range
Time display offset
Minimum Y-limit
Maximum Y-limit
Y-axis label
Setting
Input sample time
0
-2.5
2.5
Amplitude
The Time range parameter allows you to enter a numeric value, a variable
that evaluates to a numeric value, or select the
Input sample time menu
option. The actual range of values that the block displays on the X-axis
depends on the value of b oth the Time range and Time display offset
parameters. See the following figure.
For information on the other labels in thescopewindow,seetheTimeScope
reference page. In this example, the values on the X-axis range from
the
Input sample time,wheretheInput sample time is 0.05 seconds (50
0 to
ms). Click OK to save your changes and close the Visuals:Time Domain
Options dialog box.
1-87
Page 100

1 Working with Signals
Configuring Axis Scaling and Data Alignment. The Plot Navigation
options for the Time Scope block allow you to control when and how the block
scales the axes. These options also control how the block aligns your data with
respect to the axes. The following table describes these options.
Parameter
Axis scaling Allows you to specify when the block should
Data range (%) Allows you to s pecify how much white space
Align Allows you to specify where the block should
Description
scaletheaxes. Youcanchoosetoscale
the axes manually, allow the scope to
automatically scale the a xes when simulation
stops, or allow scaling as needed throughout
simulation.
surrounds your signal in the scope window.
You can specify a value for both the Y- and
X-axis. The higher the value you enter for
the Y-axis Data range (%),thetighterthe
Y-axis range is with respect to the minimum
and maximum values in your signal. For
example, to have your signal cover the entire
Y-axis range when the block scales the axes,
set this value to
align your data with respect to each axis.
You can choose t o have your data aligned
with the top, bottom, or center of the Y-axis.
Additionally, if you select the Scale X-axis
limits check box, you can choose to have your
data aligned with the right, left, or center of
the X-axis.
100.
1-88
1 To open the Plot Navigation options dialog box, navigate to the Tools
tab of the main configuration dialog box, and click Options.
 Loading...
Loading...