

Page 1

Robust Control Too
Reference
Gary Balas
Richard Chiang
Andy Packard
Michael Safonov
lbox™ 3
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Robust Control Toolbox™ Reference
© COPYRIGHT 2005–2010 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written c onsent from The MathWorks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the gover nment hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to an d gove rn
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Documentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
September 2005 First printing New for Version 3.0.2 (Release 14SP3)
March 2006 Online only Revised for Version 3.1 (Release 2006a)
September 2006 Online only Revised for Version 3.1.1 (Release 2006b)
March 2007 Online only Revised for Version 3.2 (Release 2007a)
September 2007 Online only Revised for Version 3.3 (Release 2007b)
March 2008 Online only Revised for Version 3.3.1 (Release 2008a)
October 2008 Online only Revised for Version 3.3.2 (Release 2008b)
March 2009 Online only Revised for Version 3.3.3 (Release 2009a)
September 2009 Online only Revised for Version 3.4 (Release 2009b)
March 2010 Online only Revised for Version 3.4.1 (Release 2010a)
Page 4

Page 5

Function Reference
1
Uncertain Elements ................................ 1-3
Contents
Uncertain Matrices and Systems
Manipulation of Uncertain Models
Interconnection of Uncertain Models
Model Order Reduction
Robustness and Worst-Case Analysis
Robustness Analysis for Parameter-Dependent Systems
(P-Systems)
Controller Synthesis
µ-Synthesis
Sampled-Data Systems
Gain Scheduling
..................................... 1-7
........................................ 1-9
................................... 1-10
............................ 1-5
............................... 1-8
............................. 1-10
.................... 1-3
.................. 1-4
................ 1-5
................ 1-6
Frequency-Response Data (FRD) Models
Supporting Utilities
LMIs
.............................................. 1-11
LMI Systems
LMI Characteristics
................................ 1-11
..................................... 1-11
............................... 1-12
............ 1-10
v
Page 6

LMI Solvers ...................................... 1-12
Validation of Res ults
Modification of Systems of LMIs
............................... 1-13
..................... 1-13
2
3
Simulink
.......................................... 1-13
Functions — Alphabetical List
Block Reference
Index
vi Contents
Page 7

Function Reference
Uncertain Elements (p. 1-3) Functions for building uncertain
elements
1
Uncertain Matrices and Systems
(p. 1-3)
Manipulation of Uncertain Models
(p. 1-4)
Interconnection of Uncertain Models
(p. 1-5)
Model O rder Reduction (p. 1-5) Functions for generating low-order
Robustness and Worst-Case Analysis
(p. 1-6)
Robustness Analysis for
Parameter-Dependent Systems
(P-Systems) (p. 1-7)
Controller Synthesis (p. 1-8) H
µ-Synthesis (p. 1-9) Structured singular value control
Sampled-Data Systems (p. 1-10) Functions for analyzin g
Gain Scheduling (p. 1-10) Functions for synthesizing
Functions for building uncertain
matrices and systems
Functions for transforming and
analyzing uncertain models
Functions for connecting uncertain
models
approximations to plant and
controller models
Functions for characterizing
system robustness and worst-case
performance
Functions for analyzing P-Systems
control design functions
∞
design functions
sampled-data systems
gain-scheduled controllers
Page 8

1 Function Reference
Frequency-Response Data (FRD)
Models (p. 1-10)
Supporting Utilities (p. 1-11) Additional functions for working
LMIs (p. 1-11) Functions for building and
Simulink (p. 1-13) Functions for using with Simulink
Functions for operating on FRD
models
with systems containing uncertain
elements
solving systems of Linear Matrix
Inequalities
models
1-2
Page 9

Uncertain Elements
Uncertain Elements
Uncertain
ucomplex
ucomplexm
udyn
ultidyn
ureal
Matrices and Systems
diag
randatom
randumat
randuss
ufrd
umat
uss
Create uncertain complex param eter
Create uncertain complex matrix
Create unstructured uncertain
dynamic system object
Create uncertain linear
time-invariant object
Create uncertain real parameter
Diagonalize vector of uncertain
matrices and systems
Generate random uncertain atom
objects
Generate random uncertain umat
objects
Generate stable, random uss objects
Create uncertain frequency response
data (
ufrd) object, or convert another
model type to
Create uncertain matrix
Specify uncertain state space models
or convert LTI model to uncertain
state space model
ufrd model
1-3
Page 10
1 Function Reference
Manipulation of Uncertain Models
actual2normalized
gridureal
isuncertain
lftdata
normalized2actual
repmat
simplify
squeeze
usample
uss/ssbal
usubs
Calculate normalized distance
between uncertain atom nominal
value and specified value
Grid ureal parameters uniformly
over their range
Check whether argument is
uncertain class type
Decompose uncertain objects into
fixednormalizedandfixeduncertain
parts
Convert value for atom in normalized
coordinates to corresponding actual
value
Replicate and tile array
Simplify representation of uncertain
object
Remove singleton dimensions for
umat objects
Generate random samples of
uncertain variables
Scale state/uncertainty while
preserving uncertain input/output
map of uncertain system
Substitute given values for uncertain
elements of uncertain objects
1-4
Page 11

Interconnection of Uncertain Models
Interconnection of Uncertain M odels
iconnect
icsignal
imp2exp
stack
sysic
Model Order Reduction
balancmr
bstmr
hankelmr
hankelsv
imp2ss
modreal
ncfmr
Create empty iconnect
(interconnection) objects
Create icsignal object of specified
dimension
Convertimplicitlinear relationship
to explicit input-output relation
Construct array by stacking
uncertain matrices, models, or
arrays
Build interconnections of certain and
uncertain matrices and systems
Balanced model truncation via
square root method
Balanced stochastic model
truncation (BST) via Schur method
Hankel minimum degree
approximation (M DA) without
balancing
Compute Hankel singular
values for stable/unstable or
continuous/discrete system
System realization via Hankel
singular value decomposition
Modal form realization and
projection
Balanced model truncation for
normalized coprime factors
1-5
Page 12
1 Function Reference
reduce
Simplified access to Hankel singular
value based model reduction
functions
schurmr
Balanced model trunca t ion via Schur
method
slowfast
Slow and fast modes decomposition
Robustness and Worst-Case Analysis
cpmargin
gapmetric
loopmargin
loopsens
mussv
mussvextract
ncfmargin
popov
robopt
robustperf
Coprime stability margin of
plant-controller feedback loop
Compute upper bounds on
Vinnicombe
between two systems
Stability margin analysis of L TI a nd
Simulink
Sensitivity functions of
plant-controller feedback loop
Compute bounds on structured
singular value (µ)
Extract muinfo structure returned
by
Calculate normalized coprime
stability margin of plant-controller
feedback loop
Perform Popov robust stability test
Create options object for use with
robuststab and robustperf
Robust performance margin of
uncertain m ultivariable system
mussv
gap and nugap distances
®
feedback loops
1-6
Page 13

Robustness Analysis for Parameter-Dependent Systems (P-Systems)
robuststab
Calculate robust stability margins of
uncertain m ultivariable system
wcgain
Calculate bounds on worst-case gain
of uncertain system
wcgopt
wcmargin
Create options object for use with
wcgain, wcsens,andwcmargin
Worst-case disk stability margins of
uncertain feedback loops
wcnorm
wcsens
Worst-case norm of uncertain matrix
Calculateworst-casesensitivityand
complementary sensitivity functions
of plant-co ntro ller feedback loop
Robustness Analysis for Parameter-Dependent Systems
(P-Systems)
aff2pol
decay
ispsys
pdlstab
pdsimul
polydec
Convert affine parameter-dependent
models to polytopic models
Quadratic decay rate of polytopic or
affine P-systems
True for parameter-dependent
systems
Assess robust stability of polytopic
or parameter-dependent system
Time response of
parameter-dependent system
along given parameter trajectory
Compute polytopic coordinates with
respect to box corners
1-7
Page 14

1 Function Reference
psinfo
pvec
pvinfo
quadperf
quadstab
Controller Synthesis
augw
h2hinfsyn
h2syn
hinfsyn
loopsyn
ltrsyn
mixsyn
Inquire about polytopic or
parameter-dependent systems
created with
psys
Specify range and rate of variation
of uncertain or time-varying
parameters
Describe parameter vector specified
with
pvec
Compute quadratic H performance
of polytopic or parameter-dependent
system
Quadratic stability of polytopic or
affine pa ra m eter-de pe n de nt systems
State-space or transfer function
plant augmentation for use in
weighted mixed-sensitivity H and H
loopshaping design
Mixed H/H synthesis with p ole
placement constraints
H control synthesis for LTI plant
Compute H optimal controller for
LTI plant
H optimal controller synthesis for
LTI plant
LQG loop transfer-function recovery
(LTR) control synthesis
H mixed-sensitivity synthesis
method for robust control
loopshaping design
1-8
Page 15

µ-Synthesis
µ-Synthesis
mkfilter
ncfsyn
cmsclsyn
dkitopt
dksyn
drawmag
fitfrd
fitmagfrd
genphase
Generate Bessel, Butterworth,
Chebyshev, or RC filter
Loop shaping design using
Glover-McFarlane method
Approximately solve
constant-matrix, upper bound
µ-synthesis problem
Create options object for use with
dksyn
Robust controller design using
µ-synthesis
Mouse-based tool for sketching and
fitting
Fit frequency response data with
state-space model
Fit frequency response magnitude
data with minimum-phase
state-space model using
log-Chebychev magnitude design
Fit single-in put/single-output
magnitude data with real, rational,
minimum-phase transfer function
1-9
Page 16
1 Function Reference
Sampled-Data Systems
Gain Sched
sdhinfnorm
sdhinfsyn
sdlsim
uling
hinfgs
Compute L norm of continuous-time
system in feedback with
discrete-time system
Compute H controller for
sampled-data system
Time response of sampled-data
feedback system
Synthesis of gain-scheduled H
controllers
Frequency-Response Data (FRD) Models
frd/log
frd/rc
frd/s
frd/
frd/
log
ond
chur
semilogx
svd
Log-log
LAPACK
estima
Schur
Semil
ular value decomposition of
Sing
ct
obje
scale plot of
reciprocal condition
tor of
frd object
decomposition of
og scale plot of
frd objects
frd object
frd object
frd
1-10
Page 17

Supporting Utilities
Supporting Utilities
LMIs
bilin
dmplot
mktito
sectf
skewdec
symdec
LMI Sys
LMI Ch
LMI So
Vali
Mod
(p.
tems (p. 1-11)
aracteristics (p. 1-12)
lvers (p. 1-12)
dation of Results (p. 1-13)
ification of Systems of LMIs
1-13)
Multivariable bilinear transform of
frequency (s or z)
Interpret disk gain and phase
margins
Partition LT
two-input/t
State-spac
transforma
Form skew-symmetric matrix
Form symmetric matrix
Isysteminto
wo-output system
e sector bilinear
tion
LMI Systems
tlmis
ge
miedit
l
lmiterm
lmivar
ternal description of LMI system
In
pecify or display systems of LMIs
S
s MATLAB
a
pecify term content of LMIs
S
Specify matrix variables in LMI
problem
®
expressions
1-11
Page 18

1 Function Reference
newlmi
setlmis
LMI Characteristics
dec2mat
decinfo
decnbr
lmiinfo
lminbr
mat2dec
matnbr
Attach identifying tag to LMIs
Initialize description of LMI system
Givenvaluesofdecisionvariables,
derive corresponding values of
matrix variables
Describe how entries of matrix
variable X relate to decision
variables
Total number of decision variables
in system of LMIs
Information about variables and
term content of LMIs
Return number of LMIs in LMI
system
Extract vector of decision variables
from matrix variable values
Number of matrix variables in
system of LMIs
1-12
LMI Solvers
defcx
feasp
gevp
mincx
Help specify cTx objectives for mincx
solver
Compute solution to given system of
LMIs
Generalized eigenvalue
minimization under LMI constraints
Minimize linear objective under LMI
constraints
Page 19

Validation of Results
Simulink
®
evallmi
Given particular instance of decision
variables, evaluate all variable
terms in system of LMIs
showlmi
Return left- and right-hand sides of
LMI after evaluation of all variable
terms
Modification of Systems of LMIs
bilin
dmplot
mktito
sectf
skewdec
symdec
Multivariable bilinear transform of
frequency (s or z)
Interpret disk gain and phase
margins
Partition LTI system into
two-input/two-output system
State-space sector bilinear
transformation
Form skew-symmetric matrix
Form symmetric matrix
Simulink
ufind
ulinearize
Find uncertain variables in Simulink
model
Linearize Simulink model with
Uncertain State Space block
1-13
Page 20

1 Function Reference
1-14
Page 21

Functions — Alphabetical List
2
Page 22

actual2normalized
Purpose Calculate normalized distance between uncertain atom nominal value
and specified value
Syntax NDIST = actual2normalized(A,V)
Description NDIST = actual2normalized(A,V) is the normalized distance b etw een
thenominalvalueoftheuncertainatom
is a ureal,thenNDIST may be positive or negative, reflecting that V is
greater than, or less than the nominal value. If
uncertain atom, then
fVis an array of values, then NDIST is an array of normalized
I
distances.
ndist is nonnegative.
A and the given value V.IfA
A is any other class of
The robustness margins computed in
serve as bounds for the normalized distances in NDIST. For example, if
an uncertain system has a stability margin of 1.4, this system is stable
when the normalized distance of the uncertain element values from the
nominal is less than 1.4.
robuststab and robustperf
Examples Uncertain Real Parameter with Symmetric Range
For uncertain real parameters whose range is symmetric about their
nominal value, the normalized distance is intuitive, scaling linearly
with the numerical difference from the uncertain real parameter’s
nominal value.
Create
the nom
Point
while
the no
uncertain real parameters with a range that is symmetric about
inal value, where each end point is 1 unit from the nominal.
sthatlieinsidetherangearelessthan1unitfromthenominal,
points that lie outside the range are g reater than 1 unit from
minal.
a = ureal('a',3,'range',[1 5]);
actual2normalized(a,[1 3 5])
ans =
-1.0000 -0.0000 1.0000
actual2normalized(a,[2 4])
ans =
2-2
Page 23

actual2normalized
-0.5000 0.5000
actual2normalized(a,[0 6])
ans =
-1.5000 1.5000
Graph the normalized distance for several values. The nominal point is
shown as a red circle. Note that the relationship between a normalized
distance and a numerical difference is linear.
values = linspace(-3,9,250);
ndist = actual2normalized(a,values);
plot(values,ndist)
Uncertain Real Parameter with Nonsymmetric Range
Next, create an unasymmetric parameter. It still is true that the
end points are 1 normalized unit from nominal, and the nominal is
0 normalized units from nominal, moreover points inside the range
are less than 1 unit from nominal, and points outside the range are
greater than 1 unit from nominal. However, the relationship between
the normalized distance and numerical difference is nonlinear.
2-3
Page 24

actual2normalized
au = ureal('a',4,'range',[1 5]);
actual2normalized(a,[1 4 5])
ans =
actual2normalized(a,[2 4.5])
ans =
actual2normalized(a,[0 6])
ans =
Graph the normalized distance for several values. Note that the
relationship between normalized distance and numerical difference is
very nonlinear.
ndistu = actual2normalized(au,values);
plot(values,ndistu,au.NominalValue,0,'ro')
-1.0000 0.5000 1.0000
-0.5000 0.7500
-1.5000 1.5000
2-4
Page 25

actual2normalized
Algorithm For details on the normalize distance, s ee “Normalizing Functions for
Uncertain Atoms” in the Robust Control Toolbox™ User’s Guide.
See Also normalized2actual
robuststab
robustperf
2-5
Page 26

aff2pol
Purpose Convert affine parameter-dependent models to polytopic models
Syntax polsys = aff2pol(affsys)
Description aff2pol derives a polytopic representation polsys of the affine
parameter- dependent system
(2-1)
(2-2)
See Al
so
where p =(p
parameters taking values in a box or a polytope. The description
of this system should be specified with psys.
The vertex systems of
Equation 2-2 at the vertices p
matrices
for all corners pexof the parameter box or all vertices pexof the polytope
of parameter values.
psys
pvec
uss
,...,pn) is a vector of uncertain or time-varying real
1
polsys are the instances of Equation 2-1 and
of the parameter range, i.e., the SYSTEM
ex
affsys
2-6
Page 27

augw
Purpose State-space or transfer function plant augmentation for use in weighted
mixed-sensitivity H
Syntax P = AUGW(G,W1,W2,W3)
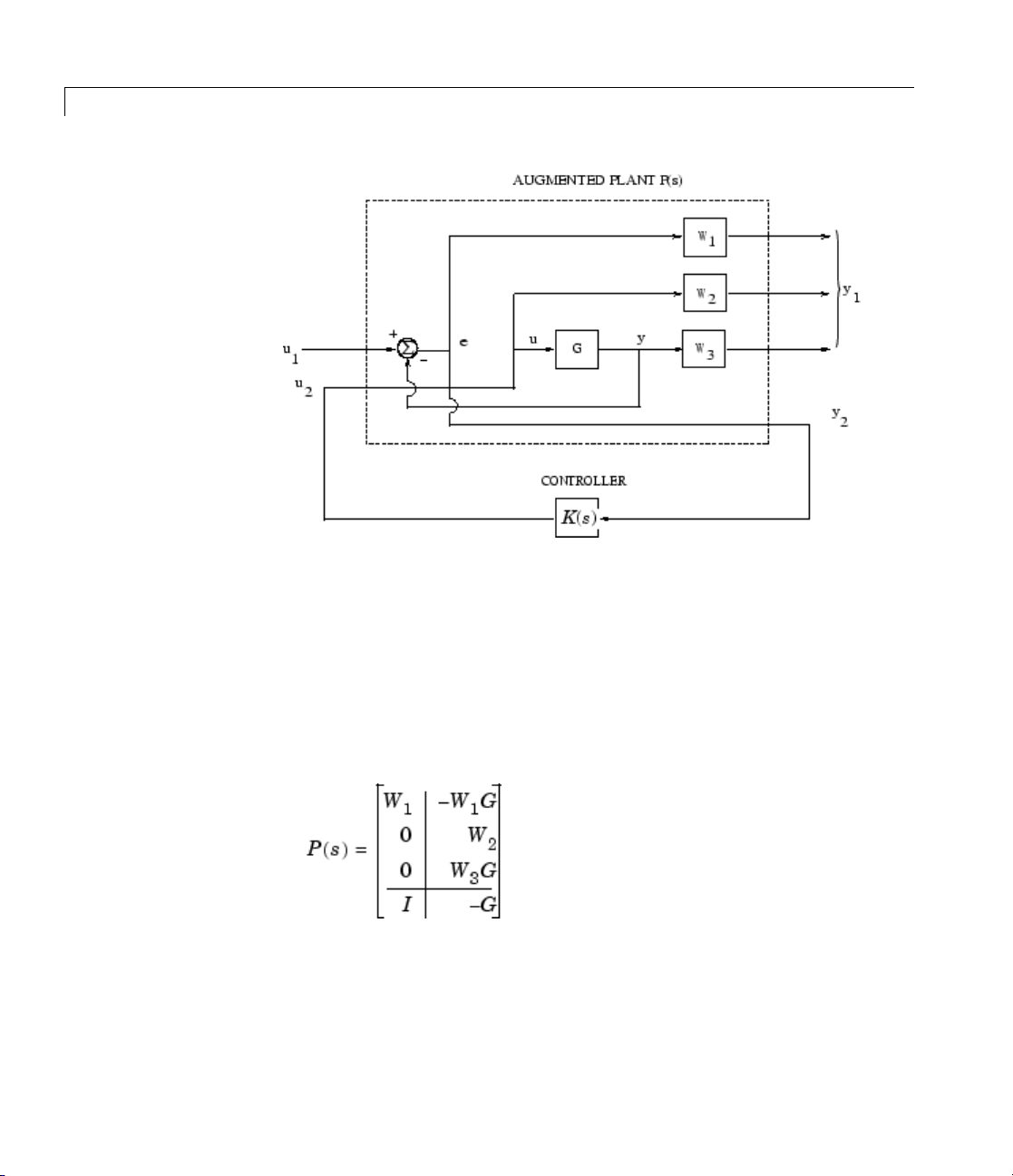
Description P = AUGW(G,W1,W2,W3) computes a state-space model of an augmented
LTI plant P(s) with weighting functions W
penalizing the error signal, control signal and output signal respectively
(see block diagram) so that the closed-loop transfer function matrix
is the weighted mixed sensitivity
where S, R and T are given by
and H2loopshaping design
∞
1
(s), W2(s), and W3(s)
The LTI systems S and T are called the sensitivity and complementary
sensitivity, respectively.
2-7
Page 28
augw
Plant Augmentation
2-8
Algori
thm
For dimensional compatibility, each of the three weights W1, W2and
W
must be e ither empty, a scalar (SISO) or have respective input
3
dimensions N
is not needed, you may simply assign an empty matrix [ ]; e.g.,
AUGW(G,W1,[],W3)
below, but without the second row (without the row containing
The aug
Partitioning is embedded via P=mktito(P,NY,NU), which sets the
InputGroup and OutputGroup properties of P as follows
mented plant P(s) produced by is
, NU,andNYwhere G is NY-by-NU. If one of the weights
Y
is P(s) as in the “Algorithm” on page 2-8 section
P=
W2).
Page 29

[r,c]=size(P);
P.InputGroup = struct('U1',1:c-NU,'U2',c-NU+1:c);
P.OutputGroup = struct('Y1',1:r-NY,'Y2',r-NY+1:r);
Examples s=zpk('s'); G=(s-1)/(s+1);
W1=0.1*(s+100)/(100*s+1); W2=0.1; W3=[];
P=augw(G,W1,W2,W3);
[K,CL,GAM]=hinfsyn(P); [K2,CL2,GAM2]=h2syn(P);
L=G*K; S=inv(1+L); T=1-S; sigma(S,'k',GAM/W1,'k-.',T,'r',GAM*G/W2,'r-.')
legend('S = 1/(1+L)','GAM/W1', 'T=L/(1+L)','GAM*G/W2',2)
augw
Limitations The transfer functions G, W
as
or, in the discrete-time case, as . Additionally, W1,
, W2and W3must be proper, i.e., bounded
1
2-9
Page 30
augw
See Also h2syn
W2and W3should be stable. The plant G should be stabilizable and
detectable; else,
hinfsyn
mixsyn
mktito
P will not be stabilizable by any K.
2-10
Page 31

balancmr
Purpose Balanced model truncation via square root method
Syntax GRED = balancmr(G)
GRED = balancmr(G,order)
[GRED,redinfo] = balancmr(G,key1,value1,...)
[GRED,redinfo] = balancmr(G,order,key1,value1,...)
Description balancmr returns a reduced order model GRED of G and a struct array
redinfo containing the error bound of the reduced model and Hankel
singular values of the original system.
The error bound is computed based on Hankel singular values of
a stable system these values indicate the respective state energy of the
system. Hence, reduced order can be directly determined by examining
the system Hankel singular values, σι.
With only one input argument
singular value plot of the original model and prompt for model order
number to reduce.
This method guarantees an error bound on the infinity norm of the
additive error
[1]:
This table describes input arguments for balancmr.
Argument Description
G
ORDER
G-GRED ∞ for well-conditioned model reduced problems
LTI model to be reduced. Without any other
inputs,
values of
(Optional) Integer for the desired order of the
reduced model, o r optionally a vector packed with
desired orders for batch runs
G, the function will show a Hankel
balancmr will plot the Hankel singular
G and prompt for reduced order
G.For
2-11
Page 32
balancmr
A batch run of a serial of different reduced order models can be
generated by specifying
order = x:y, or a vector of positive integers.
By default, all the anti-stable part of a system is kept, because from
control stability point of view, getting rid of unstable state(s) is
dangerous to model a system.
’MaxError’ can be specified in the same fashion as an alternative for
'Order'. In this case, reduced order will be determined when the sum
of the tails of the Hankel singular values reaches the
’MaxError’.
This table lists the input arguments
'key' and its 'value'.
Argument Value Description
’MaxError’
Real number or
vector of different
errors
Reduce to achieve H
∞
error. When present,
'MaxError'overides ORDER
input.
’Weights’
{Wout,Win}
array
cell
Optimal1-by-2cellarrayof
LTI weights
and
Win (input). Defaults are
Wout (output)
both identity. Weights must
be invertible.
’Display’ 'on' or 'off'
’Order’
Integer, vector or
cell array
Display Hankel singular
plots (default
'off').
Order of reduced model. Use
only if not s pecified as 2nd
argument.
Weights on the original model input and/or output can make the model
reduction algorithm focus on some frequency range of interests. But
weights have to be stable, minimum phase and invertible.
This table describes output arguments.
2-12
Page 33

balancmr
Argument Description
GRED
REDINFO
G can be stable or unstable, continuous or discrete.
Algorithm Given a state space (A,B,C,D) of a system and k, the desired reduced
order, the following steps will produce a similarity transformation to
truncate the original state space system to the k
LTI reduced order model. Becomes multidimensional
array when input is a serial of different model order
array
A STRUCT array with three fields:
•
REDINFO.ErrorBound (bound on G-GRED ∞)
• REDINFO.StabSV (Hankel SV of stable part of
G)
• REDINFO.UnstabSV (Hankel SV of unstable part
of G)
th
order reduced model.
1 Find the SVD of the controllability and observability grammians
P=U
pΣpVp
Q=UqΣqV
2 Find the square root of the grammians (left/right eigenvectors)
L
=UpΣ
p
Lo=UqΣ
3 Find the SVD of (L
T
L
Lp=UΣ V
o
T
T
q
1/2
p
1/2
q
T
Lp)
o
T
2-13
Page 34

balancmr
4 Then the left and right transformation for the final k
th
order reduced
model is
S
L,BIG=Lo
S
R,BIG=Lp
5 Finally,
The proof o
U(:,1:k) Σ(1;k,1:k))
V(:,1:k) Σ(1;k,1:k))
f the square root balance truncation algorithm can be found
-1/2
-1/2
in [2].
Examples Given a continuous or discrete, stable or unstable system, G,the
following commands can get a set of reduced order models based on
your selections:
rand('s
[g1, red
[g2, re
[g3, re
[g4, r
rand(
wt1 = r
wt2 = r
[g5,
for i
end
tate',1234); randn('state',5678);G = rss(30,5,4);
info1] = balancmr(G); % display Hankel SV plot
% and pr
dinfo2] = balancmr(G,20);
dinfo3] = balancmr(G,[10:2:18]);
edinfo4] = balancmr(G,'
'state',12345); randn('state',6789);
ss(6,5,5); wt1.d = eye(5)*2;
ss(6,4,4); wt2.d = 2*eye(4);
redinfo5] = balancmr(G, [10:2:18], '
=1:5
re(i); eval(['sigma(G,g' num2str(i) ');']);
figu
MaxError',[0.01, 0.05]);
ompt for order (try 15:20)
weight',{wt1,wt2});
2-14
Page 35
balancmr
References [1] Glover, K., “All Optimal Hankel Norm Approximation o f Linear
Multivariable Systems, and Their Lµ-error Bounds,“ Int. J. Control,
Vol. 39, No. 6, 1984, p. 1145-1193
[2] Safonov, M.G., and R.Y. Chiang, “A Sc h ur Method for Balanced
Model Reduction,” IEEE Trans. on Automat. Contr., Vol. 34, No. 7,
July 1989, p. 729-733
See Also reduce
schurmr
hankelmr
bstmr
ncfmr
hankelsv
2-15
Page 36

bilin
Purpose Multivariable bilinear transform of frequency (s or z)
Syntax GT = bilin(G,VERS,METHOD,AUG)
Description bilin computes the effect on a system of the frequency-variable
substitution,
The variable VERS denotes the transformation direction:
VERS= 1, forward transform or .
VERS=-1, reverse transform or .
This transformation maps lines and circles to circles and lines in the
complex plane. People often use this transformation to do sampled-data
control system design [1] or, in general, to do shifting of jω modes [2],
[3], [4].
2-16
Bilin computes several state-space bilinear transformations such as
backward rectangular, etc., based on the
Bilinear Transform Types
Method Type of bilinear transform
'BwdRec'
'FwdRec'
ard rectangular:
backw
AUG = T, the sampling period.
forward rectangular:
G=
AU
T, the sampling period.
METHOD you select
Page 37

Bilinear Transform Types (Continued)
Method Type of bilinear transform
'S_Tust'
'S_ftjw'
shifted Tustin:
AUG = [Th], is the “shift” coefficient.
shifted jω-axis, bilinear pole-shifting,
continuous-time to continuous-time:
bilin
Exam
ples
AUG = [p
'G_Bilin'
Exam
tran
Con
Following is an example of four common “continuous to discrete” bilin
transformations for the sampled plant:
ple 1. Tustin continuous s-plane to discrete z-plane
sforms
sider the following continuous-time plant (sampled at 20 Hz):
METHOD = 'G_Bilin'
continuous-time to continuos-time:
AUG = .
2p1
].
, general bilinear,
2-17
Page 38

bilin
A= [-1 1; 0 -2]; B=[1 0; 1 1];
C= [1 0; 0 1]; D=[0 0; 0 0];
sys = ss(A,B,C,D); % ANALOG
Ts=0.05; % sampling time
[syst] = c2d(sys,Ts,'
[sysp] = c2d(sys,Ts,'prewarp',40); % Pre-warped Tustin
[sysb] = bilin(sys,1,'
[sysf] = bilin(sys,1,'
w = logspace(-2,3,50); % frequencies to plot
sigma(sys,syst,sysp,sysb,sysf,w);
tustin'); % Tustin
BwdRec',Ts); % Backward Rectangular
FwdRec',Ts); % Forward Rectangular
2-18
Comparison of Four Bilinear Transforms from Example 1
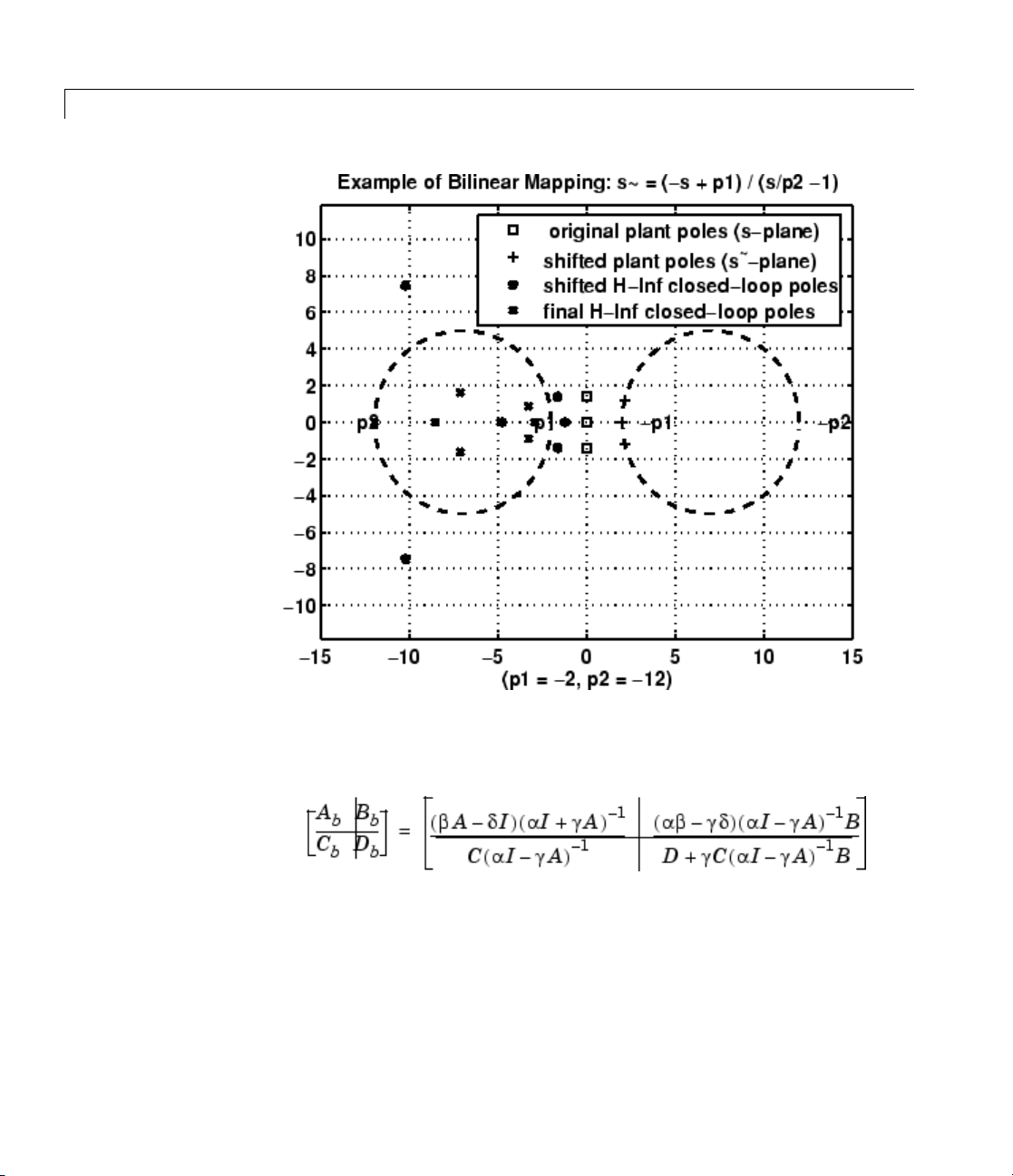
Example 2. Bilinear continuous to continuous pole-shifting
’S_ftjw’
Design an H mixed-sensitivity controller for the ACC Benchmark plant
Page 39

bilin
such that all closed-loop poles lie inside a circle in the left half of the
s-plane who se diameter lies on between points [p1,p2]=[-12,-2]:
p1=-12; p2=-2; s=zpk('s');
G=ss(1/(s^2*(s^2+2))); % original unshifted plant
Gt=bilin(G,1,'Sft_jw',[p1 p2]); % bilinear pole shifted plant Gt
Kt=mixsyn(Gt,1,[],1); % bilinear pole shifted controller
K =bilin(Kt,-1,'
As shown in the following figure, closed-loop poles are placed in the left
circle
[p1 p2]. The shifted plant, which has its non-stable poles shifted
to the inside the right circle, is
Sft_jw',[p1 p2]); % final controller K
2-19
Page 40
bilin
S_ftjw final closed-loop poles are inside the left [p1,p2] circle
Algorithm bilin employs the state-space formulae in [3]:
References [1] Franklin, G.F., and J.D. Powell, Digital Control of Dynamics System,
Addison-Wesley, 1980.
2-20
Page 41
[2] Safonov, M.G., R.Y. Chiang, and H. Flashner, “H∞Control Synthesis
for a Large S pace Structure,” AIAA J. Guidance, Control and Dynamics,
14, 3, p. 513-520, May/June 1991.
bilin
[3] Safonov, M.G., “Imaginary-Axis Zeros in Multivariable H
Control”, in R.F. Curtain (editor), Modelling, Robustness and Sensitivity
Reduction in Control Systems,p. 71-81,Springer-Varlet,Berlin,1987.
[4] Chiang, R.Y., and M.G. Safonov, “H
Shifting Transform,” AIAA, J. Guidance, Control and Dynamics,vol.
15, no. 5, p. 1111-1117, September-October 1992.
See Also c2d
d2c
sectf
Optimal
∞
Synthesis using a Bilinear Pole
∞
2-21
Page 42

bstmr
Purpose Balanced stochastic model truncation (BST) via Schur method
Syntax GRED = bstmr(G)
GRED = bstmr(G,order)
[GRED,redinfo] = bstmr(G,key1,value1,...)
[GRED,redinfo] = bstmr(G,order,key1,value1,...)
Description bstmr returns a reducedordermodelGRED of G and a struct array
redinfo containing the error bound of the reduced model and Hankel
singular values of the phase matrix of the original system [2].
The error bound is computed based on Hankel singular values of
the phase matrix of
respective state energy of the system. Hence, reduce d order can be
directly determined by examining these values.
G. For a stable system these values indicate the
With only one input argument
singular value plot of the phase matrix of
number to reduce.
This method guarantees an error bound on the infinity norm of the
multiplicative
for well-conditioned model reduction problems [1]:
This table describes input arguments for bstmr.
Argument Description
G
ORDER
GRED-1(G-GRED) ∞ or relative error G
LTI model to be reduced (without any other inputs
will plot its Hankel singular values and prompt
for reduced order)
(Optional) an integer for the desired order of the
reduced model, or a vector of desired orders for
batch runs
G, the function will show a Hankel
G and prompt for model order
-
-1(G-GRED) ∞
2-22
Page 43

bstmr
A batch run of a serial of different reduced order models can be
generated by specifying
default, all the anti-stable part of a system is kept, because from control
stability point of v iew, getting rid of unstable state(s) is dangerous to
model a system.
’MaxError’ canbespecifiedinthesamefashionasanalternative
for
'ORDER'. In this case, reduced order will be determined w hen the
accumulated product of Hankel singular values shown in the above
equation reaches the
Argument Value Description
’MaxError’
’Display’ 'on' or 'off'
’Order’
order = x:y, or a vector of integers. By
’MaxError’.
Real num ber
or vector of
different errors
Reduce to achieve H∞error.
When present,
'MaxError'overides ORDER
input.
Display Hankel singular plots
Integer, vector or
cell array
(default
Order of reduced model. Use
only if not specified as 2nd
'off').
argument.
This table describes output arguments.
Argument Description
GRED
LTI reduced order model. Become multi-dimension
array when input is a serial of different model
order array.
REDINFO
A STRUCT array with three fields:
•
REDINFO.ErrorBound (bound on G
∞)
• REDINFO.StabSV (Hankel SV of stable part
of G)
-1
(G-GRED)
2-23
Page 44

bstmr
Argument Description
• REDINFO.UnstabSV (Hankel SV of unstable
part of G)
G can be stable or unstable, continuous or discrete.
Algorithm Given a state space (A,B,C,D) of a system and k, the desired reduced
order, the following steps will produce a similarity transformation to
truncate the original state space system to the k
1 Find the controllability grammian P and observability grammian Q
of the left spectral factor Φ = Γ(σ)Γ*(-σ)=Ω*(-σ)Ω(σ)bysolvingthe
following Lyapunov and Riccati equations
th
order reduced model.
AP + PA
B
W
T
+BBT=0
=PCT+BD
T
QA + ATQ+(QBW-CT)(-DDT)(QBW-CT)T=0
2 Find the Schur decomposition for PQ in both ascending and
descending order, respectively,
2-24
Page 45

bstmr
3 Find the left/right orthonormal eigen-bases of PQ associated with
the k
*
(W
(s))-1G(s).
th
big Hankel singular values of the all-pass phase matrix
k
4 Find the SVD of (V
5 Form the left/right transformation for the final k
T
V
L,BIG
)=U ΣςΤ
R,BIG
th
order reduced
model
S
L,BIG=VL,BIG
S
R,BIG=VR,BIG
6 Finally,
U Σ(1:k,1:k)
V Σ(1:k,1:k)
-1/2
-1/2
The pr
oof of the Schur BST algorithm can be found in [1].
2-25
Page 46
bstmr
Note The BST model reduction theory requires that the original model
D matrix be full rank, for otherwise the Riccati solver fails. For any
problem with strictly proper model, you can shift the jω-axis via
such that BST/REM approximation can be achieved up to a particular
frequency range of interests. Alternatively, you can attach a small but
full rank D matrix to the original problem but remove the D matrix of
the reduced order model afterwards. As long as the size of D matrix is
insignificant inside the control bandwidth, the reduced order model
should be fairly close t o the true model. By defau lt, the
will assign a full rank D matrix scaled by 0.001 of the minimum
eigenvalue of the original model, if its D matrix is not full rank to begin
with. This serves the purpose for most problems if user does not want to
go through the trouble of model pretransformation.
Examples Given a continuous or discrete, stable or unstable system, G,the
following commands can get a set of reduced order models based on
your selections:
bilin
bstmr program
rand('state',1234); randn('state',5678);
G = rss(30,5,4); G.d = zeros(5,4);
[g1, redinfo1] = bstmr(G); % display Hankel SV plot
% and prompt for order (try 15:20)
[g2, redinfo2] = bstmr(G,20);
[g3, redinfo3] = bstmr(G,[10:2:18]);
[g4, redinfo4] = bstmr(G,'
for i = 1:4
figure(i); eval(['sigma(G,g' num2str(i) ');']);
end
MaxError',[0.01, 0.05]);
References [1] Zhou, K., “Frequency-weighted model reduction with L∞ error
bounds,” Syst.Contr.Lett., Vol. 21, 115-125, 1993.
[2] Safonov, M.G., and R.Y. Chiang, “Model Reduction for Robust
Control: A Schur Relative Error Method,” InternationalJ.ofAdaptive
Control and Signal Processing, Vol. 2, p. 259-272, 1988.
2-26
Page 47
See Also reduce
balancmr
hankelmr
schurmr
ncfmr
hankelsv
bstmr
2-27
Page 48
complexify
Purpose Replace ureal atoms by summations of ureal and ucomplex (or
ultidyn)atoms
Syntax MC = complexify(M,alpha)
MC = complexify(M,alpha,'ultidyn')
Description The command complexify replaces ureal atomswithsumsofureal
and ucomplex atoms using usubs. Optionally, the sum can consist of a
ureal and ultidyn atom.
complexify is used to improve the conditioning of robust stability
calculations (
ureal uncertain elements.
MC = complexify(M,alpha) results in each ureal atom in MC having
the same
M. If
Range is the range of one ureal atom from M, then the range of the
corresponding ureal atom in
Range(1)+alpha*diff(Range)/2 Range(2)-alpha*diff(Range)/2]
[
robuststab) for situations when there are predominantly
Name and NominalValue as the corresponding ureal atom in
MC is
The net effect is that the same real range is covered with a real and
complex uncertainty. The real parameter range is reduced by equal
amounts at each end, and
reduction in the total range. The
in range back into
ucomplex atom has NominalValue of 0, and Radius equal to
The
alpha*diff(Range). Its name is the name of the original ureal atom,
MC, but as a ball with real and imaginary parts.
appended with the characters
MC = complexify(M,alpha,'ultidyn') is the same, except that
gain-bounded
ultidyn atom has its Bound equal to alpha*diff(Range).
ultidyn atoms are used instead of ucomplex atoms. The
alpha represents (in a relative sense) the
ucomplex atom will add this reduction
'_cmpxfy'.
Examples See Robust Control Toolbox d emo “Getting Reliable Estimates of
Robustness Margins” for an example of how complexify is used in
robustness analysis.
2-28
Page 49

complexify
For illustrative purposes only, create a uncertain real parameter, cast it
to a uncertain matrix, and apply a 10% complexification. Finally, make
a scatter plot of the values that the complexified matrix (scalar) can
take a s well as the values of the original uncertain real p aram e ter.
a = umat(ureal('a',2.25,'Range',[1.5 3]));
b = complexify(a,.1);
as = usample(a,200);
bs = usample(b,4000);
plot(real(bs(:)),imag(bs(:)),'.',real(as(:)),imag(as(:)),'r.')
See Also icomplexify
robuststab
2-29
Page 50
cmsclsyn
Purpose Approximately solve constant-matrix, upper bound µ-synthesis problem
Syntax [QOPT,BND] = cmsclsyn(R,U,V,BlockStructure);
[QOPT,BND] = cmsclsyn(R,U,V,BlockStructure,opt);
[QOPT,BND] = cmsclsyn(R,U,V,BlockStructure,opt,qinit);
[QOPT,BND] = cmsclsyn(R,U,V,BlockStructure,opt,'random',N)
Description cmsclsyn approximately solves the constant-matrix, upper bound
µ-synthesis problem by minimization,
for given matrices R Cnxm, U Cnxr, V Ctxm,andasetΔ ⊂ Cmxn.This
applies to constant matrix data in R, U, and V.
[QOPT,BND] = cmsclsyn(R,U,V,BlockStructure) minimizes, by
choice of Q.
mussv(R+U*Q*V,BLK), BND.ThematricesR,U and V are constant
matrices of the appropriate dimension.
specifying the perturbation blockstructure as defined for
QOPT is the optimum value of Q, the upper bound of
BlockStructure is a matrix
mussv.
2-30
[QOPT,BND] = cmsclsyn(R,U,V,BlockStructure,OPT) uses the
options specified by
information. The default value for
[QOPT,BND] = cmsclsyn(R,U,V,BlockStructure,OPT,QINIT)
OPT in the c alls to mussv.Seemussv for more
OPT is 'cUsw'.
initializes the iterative computation from Q = QINIT.Becauseofthe
nonconvexity of the overall problem, diffe rent starting points often yield
different final answers. If
computation is performed multiple times - the
initialized at Q =
QINIT(:,:,i). The output arguments are associated
QINIT is an N-D array, then the iterative
i’th optimization is
with the best solution obtained in this brute force approach.
[QOPT,BND] = cmsclsyn(R,U,V,BlockStructure,OPT,'random',N)
initializes the iterative computation from N random instances of QINIT.
If
NCU is the number of columns of U,andNRV is the number of rows of
V, then the approximation to solving the constant matrix µ synthesis
problem is two-fold: only the upper bound for µ is minimized, and the
Page 51

cmsclsyn
minimization is not convex, hence the optimum is generally not found.
If
U i s full column rank, or V is full row rank, then the problem can (and
is) cast as a convex problem, [Packard, Zhou, Pandey and Becker], and
the global optimizer (for the upper bound for µ) is calculated.
Algorithm The cmsclsyn algorithm is iterative, alter natively holding Q fixed, and
computing the
multipliers fixed, and minimizing the bound implied by choice of Q. If
U or V is square and invertible, then the optimization is reformulated
(exactly) as an linear matrix inequality, and solved directly, without
resorting to the iteration.
References Packard, A.K., K. Zhou, P. Pandey, and G. Becker, “A collection of
robust control problems leading to LMI’s,” 30th IEEE Conference on
Decision and Control, Brighton, UK, 1991, p. 1245–1250.
See Also dksyn
hinfsyn
mussv upper bound, followed by holding the upper bound
mussv
robuststab
robustperf
2-31
Page 52

cpmargin
Purpose Coprime stability margin of plant-controller feedback loop
Syntax [MARG,FREQ] = cpmargin(P,C)
[MARG,FREQ] = cpmargin(P,C,TOL)
Description [MARG,FREQ] = cpmargin(P,C) calculates the normalized coprime
factor/gap metric robust stability of the multivariable feedback loop
consisting of
compensator in the feedback path, not any reference channels, if it
is a two degree-of-freedom (2-DOF) architecture. The output
contains upper and lower bound for the normalized coprime factor/gap
metric robust stability margin.
the upper bound.
[MARG,FREQ] = cpmargin(P,C,TOL) specifies a relative accuracy TOL
for calculating the normalized coprime factor/gap metric robust stability
margin. (
See Also Comprehensive analysis of feedback loops
C in negative feedback with P. C should only be the
FREQ is the frequency associated with
TOL=1e-3 by default).
MARG
2-32
gapmetric
wcmargin
Page 53

dcgainmr
Purpose Reduced order model
Syntax [sysr,syse,gain] = dcgainmr(sys,ord)
Description [sysr,syse,gain] = dcgainmr(sys,ord) returns a reduced order
model of a continuous-time LTI system SYS by truncating modes with
least DC gain.
Specify your LTI continuous-time system in sys. The order is specified
in
ord.
This function returns:
•
sysr—The reduced order models (a multidimensional arra y if sys is
an LTI array)
•
syse—The difference between sys and sysr (syse=sys-sysr)
gain—The g-factors ( dc-gains)
•
The DC gain of a complex mode
(1/(s+p))*c*b'
is defined as
norm(b)*norm(c)/abs(p)
See Also reduce
2-33
Page 54

decay
Purpose Quadratic decay rate of polytopicoraffineP-systems
Syntax [drate,P] = decay(ps,options)
Description For affine parameter-dependent systems
E(p)
= A(p)x, p(t)=(p1(t), . . ., pn(t))
or polytopic systems
E(t)
= A(t)x,(A, E) Co{(A1, E1),...,(An, En)},
decay returns the quadratic decay rate drate, i.e., the smallest α R
such that
T
A
QE + EQAT< αQ
holds for some Lyapunov matrix Q > 0 and all possible values of (A, E).
Two control parameters can be reset via
options(1) and options(2):
See Also quadstab
2-34
• If
options(1)=0 (default), decay runs in fast mode, using the least
expensive sufficient conditions. Set
conservative conditions.
•
options(2) is a bound on the condition number of the Lyapunov
matrix P. The default is 109.
pdlstab
psys
options(1)=1 to use the least
Page 55
decinfo
Purpose Describe how entries of matrix variable X relate to decision variables
Syntax decinfo(lmisys)
decX = decinfo(lmisys,X)
Description The function decinfo expresses the entries of a matrix variable X in
terms of the decision variables x
variables are the free scalar variables of the problem, or equivalently,
the free entries of all matrix variables described in
of X is either a hard zero, some decision variable x
X is the identifier of X supplied by lmivar,thecommand
If
decX = decinfo(lmisys,X)
returns an integer matrix decX of the same dimensions as X whose
(i, j)entryis
• 0ifX(i, j) is a hard zero
,. . .,xN. Recall that the decision
1
lmisys.Eachentry
, or its opposite –xn.
n
• n if X(i, j)=x
• –n if X(i, j)=–x
decX clarifies the structure of X as well as its entry-wise dependence
on x
,...,xN.Thisisusefultospecifymatrixvariableswithatypical
1
structures (see
decinfo can also be used in interactive mode by invoking it with a
(the n-th decision variable)
n
n
lmivar).
single argument. It then prompts the user for a matrix variable and
displays in return the decision variable content of this variable.
Example 1 Consider an LMI with two matrix variables X and Y with structure:
• X = xI
• Y rectangular of size 2-by-1
If these variables are defined by
with x scalar
3
2-35
Page 56

decinfo
setlmis([])
X = lmivar(1,[3 0])
Y = lmivar(2,[2 1])
:
:
lmis = getlmis
the decision variables in X and Y are given by
dX = decinfo(lmis,X)
dX =
100
010
001
dY = decinfo(lmis,Y)
dY =
2
3
This indicates a total of three decision variables x1, x2, x3that are
related to the entries of X and Y by
Note that the number of decision variables corresponds to the number
of free entries in X and Y when taking structure into account.
Example 2 Suppose that the matrix variable X is symmetric block diagonal with
one 2-by-2 full block and one 2-by-2 scalar block, and is declared by
2-36
Page 57
decinfo
setlmis([])
X = lmivar(1,[2 1;2 0])
:
lmis = getlmis
The decision variabl e distribution in X can be visualized interactively
as follows:
decinfo(lmis)
There are 4 decision variables labeled x1 to x4 in this problem.
Matrix variable Xk of interest (enter k between 1 and 1, or 0 to quit):
?> 1
The decision variables involved in X1 are among {-x1,...,x4}.
Their entry-wise distribution in X1 is as follows
(0,j>0,-j<0 stand for 0,xj,-xj, respectively):
X1 :
1200
2300
0040
0004
Matrix variable Xk of interest (enter k between 1 and 1, or 0 to quit):
?> 0
See Also lmivar
mat2dec
dec2mat
*********
2-37
Page 58

decnbr
Purpose Total number of decision variables in system of LMIs
Syntax ndec = decnbr(lmisys)
Description The function decnbr returns the number ndec of decision variables
(free scalar variables) in the LMI problem described in
words,
ndec is the length of the vector of decision variables.
Examples For an LMI system lmis with two matrix variables X and Y such that
• X is symmetric block diagonal with one 2-by-2 full block, and one
2-by-2 scalar block
• Y is 2-by-3 rectangular,
the number of decision variables is
ndec = decnbr(LMIs)
ndec =
10
lmisys.Inother
See Also dec2mat
2-38
This is exactly the number of free entries in X and Y when taking
structure into account (see
decinfo
mat2dec
decinfo for more details).
Page 59

dec2mat
Purpose Given values of decision variables, deriv e corresponding values of
matrix variables
Syntax valX = dec2mat(lmisys,decvars,X)
Description Given a value decvars of the vector of decision variables, dec2mat
computes the corresponding value valX of the matrix variable with
identifier
matrix variable.
Recall that the decision variables are all free scalar variables in the LMI
problem and correspond to the free entries of the matrix variables X
., X
of decision variables,
feasible or optimal values of the matrix variables.
Examples See the description of feasp.
See Also mat2dec
X. This identifier is returned by lmivar when declaring the
. Since LMI solvers return a feasible or optimal value of the vector
K
dec2mat is useful to derive the corresponding
,..
1
decnbr
decinfo
2-39
Page 60
defcx
Purpose Help specify c
T
x objectives for mincx solver
Syntax [V1,...,Vk] = defcx(lmisys,n,X1,...,Xk)
Description defcx is useful to derive the c vector needed by mincx when the objective
is expressed in terms of the matrix v ariables.
Given the identifiers
objective,
the n-th decision variable is set to one and all others to zero.
defcx returns the values V1,...,Vk of these variables when
X1,...,Xk of the matrix variables involved in this
See Also mincx
decinfo
2-40
Page 61
Purpose RemoveLMIfromsystemofLMIs
Syntax newsys = dellmi(lmisys,n)
Description dellmi deletes the n-th LMI from the system of LMIs described in
lmisys. The updated system is returned in newsys.
dellmi
The ranking
and corresponds to the identifier returned by
ranking is not modified by deletions, it is safer to refer to the remaining
LMIs by their identifiers. Finally, matrix variables that only appeared
in the deleted LMI are removed from the problem.
n is relative to the order in which the LMIs were declared
Examples Suppose that the three LMIs
X1+ X1A1+ Q
X2+ X2A2+ Q2<0
X3+ X3A3+ Q3<0
have be en declared in this order, labeled
andstoredin
lmis =
lmis
now describes the system of LMIs
lmisys. To delete the second LMI, type
dellmi(lmisys,LMI2)
1
<0
newlmi. Since this
LMI1, LMI2, LMI3 with newlmi,
d the second variable X
an
longer appears in the system.
no
has been removed from the problem since it
2
2-41
Page 62

dellmi
See Also newlmi
To further delete LMI3 from the system, type
lmis = dellmi(lmis,LMI3)
or equivalently
lmis = dellmi(lmis,3)
Note that the system h as retained its original ranking after the first
deletion.
lmiedit
lmiinfo
2-42
Page 63

delmvar
Purpose Remove one matrix variable from LMI problem
Syntax newsys = delmvar(lmisys,X)
Description delmvar removes the matrix variable X wi th identifier X from the list
of variables defined in
argument returned by
are automatically removed from the list of LMI terms. The description
of the resulting system of LMIs is returned in
Examples Consider the LMI
lmisys.TheidentifierX should be the second
lmivar when declaring X. All terms involving X
newsys.
involving
variable
lmisys = delmvar(lmisys,X)
Now lmis
with only one variable Y.NotethatY is still identified by the label Y.
See Also lmivar
setmvar
lmiinfo
two variables X and Y with identifiers
X,type
ys
describes the LMI
X and Y. To delete the
2-43
Page 64

diag
Purpose Diagonalize vector of uncertain matrices and systems
Syntax v = diag(x)
Description If x is a vector of uncertain system models or matrices, diag(x) puts x
on the main diagonal. If x is a matrix of unc ertain system models or
matrices,
diagonal matrix of uncertain system models or matrices.
Examples The statement produces a diagonal system mxg of size 4-by-4. G iv en
multivariable system
found using
x = rss(3,4,1);
xg = frd(x,logspace(-2,2,80));
size(xg)
FRD model with 4 output(s) and 1 input(s), at 80 frequency point(s).
diag(x) is the main diagonal of x. diag(diag(x)) is a
xx, a vector of the diagonal elements of xxg is
diag.
See Also append
2-44
mxg = diag(xg);
size(mxg)
FRD model with 4 output(s) and 4 input(s), at 80 frequency point(s).
xxg = [xg(1:2,1) xg(3:4,1)];
m = diag(xxg);
size(m)
FRD model with 2 output(s) and 1 input(s), at 80 frequency point(s).
Page 65

dkitopt
Purpose Create options o bject for use w ith dksyn
Syntax opt = dkitopt
opt = dkitopt('name1',value1,'name2',value2,...)
Description opt=dkitopt creates an options object opt of class dkitopt,usedto
define user-specified options in the µ-synthesis command
properties of
opt = dkitopt('name1',value1,'name2',value2,...) accepts
inputsasoneormoreProperty/Valuepairs to set user-specified values
of individual properties of
case-insensitive, and only enough characters to uniquely specify the
property name are required.
opt are set to their default values.
opt. Property names specification is not
dksyn.All
This table lists the
Object Property Description
FrequencyVector
InitialController
AutoIter
DisplayWhileAutoIter
StartingIterationNumber
NumberOfAutoIterations
MixedMU
dkitopt object properties.
Frequency vector used for analysis. Default is an
empty matrix ([]) which results in the frequency range
and number of points chosen automatically.
Controller used to initiate first iteration. Default is
an empty SS object.
Automated µ-synthesis mode. Default is 'on'.
Displays iteration progress in AutoIter mode. Default
is
'off'.
Starting iteration number. Default is 1.
Number of D-K iterations to perform. Default is 10.
Accounts for real-valued uncertain parameters for
µ-synthesis. For systems with atleast one real-valued
uncertain parameter, closed-loop robust performance
may improve when the option is set to
is
'off'.
'on'. Default
2-45
Page 66
dkitopt
Object Property Description
AutoScalingOrder
AutoIterSmartTerminate
AutoIterSmartTerminateTol
Default
Meaning
If the AutoIter property is set to 'off', the D-K iteration procedure
is interactive. You are prompted to fit the D-Scale data and provide
input on the control design process.
If the
AutoIterSmartTerminate property is on, and a stopping criteria
(described below) is satisfied, the iteration performed by
will terminate before reaching the specified number of automated
iterations (value of
involves the objective value (peak value, across frequency, of the
upper bound for µ) in the current iteration, denoted v
the previous two iterations, (denoted v
AutoIterSmartTerminateTol.If
State order for fitting D-scaling and G-scaling data for
real or complex µ-synthesis. Defau lt is [5 2], 5th order
D-scalings and 2 nd order G-scaling s.
Automatic termination of iteration procedure based on
progress of design iteration. Default is
'on'.
Tolerance used by AutoIterSmartTerminate.Default
is 0.005.
Structure of property default values.
Structure text description of each property.
dksyn
NumberOfAutoIterations). The stopping criteria
,aswellas
and v-2) and the value of
-1
0
2-46
and
then the stopping criteria is satisfied (for lack of progress). The stopping
criteria is also satisfied if
which captures a significant increase (undesirable) in the objective.
Page 67

dkitopt
Examples This example creates a dkitopt options object called opt with default
property values.
opt = dkitopt
Property Object Values:
FrequencyVector: []
InitialController: [0x0 ss]
AutoIter: 'on'
DisplayWhileAutoIter: 'off'
StartingIterationNumber: 1
NumberOfAutoIterations: 10
MixedMU: 'off'
AutoScalingOrder: [5 2]
AutoIterSmartTerminate: 'on'
AutoIterSmartTerminateTol: 0.0050
Default: [1x1 struct]
Meaning: [1x1 struct]
The properties can be modified directly with assignment statements:
here user-specified values for the frequency vector, the number of
iterations, and the maximum state dimension of th e D-scale fittings
are set.
opt.FrequencyVector = logspace(-2,3,80);
opt.NumberOfAutoIterations = 16;
opt.AutoScalingOrder = 16;
opt
Property Object Values:
FrequencyVector: [1x80 double]
InitialController: [0x0 ss]
AutoIter: 'on'
DisplayWhileAutoIter: 'off'
StartingIterationNumber: 1
NumberOfAutoIterations: 16
MixedMU: 'off'
AutoScalingOrder: 16
2-47
Page 68

dkitopt
AutoIterSmartTerminate: 'on'
AutoIterSmartTerminateTol: 0.0050
Default: [1x1 struct]
Meaning: [1x1 struct]
Thesameproperty/valuepairsmaybesetwithasinglecalltodkitopt.
opt = dkitopt('FrequencyVector',logspace(-2,3,80),...
'NumberOfAutoIterations',16,...
'AutoScalingOrder',9);
Algorithm The dksyn command stops iterating before the total number
of automated iterations (
'AutoIterSmartTerminate' is set t o 'on' and a stopping criterion
is satisfied. The stopping criterion involves the m(i)valueofthe
current ith iteration,
and the options property
D-K iteration procedure automatically terminates if the difference
between each of the three µ values is less than the relative tolerance
of
AutoIterSmartTerminateTol xµ(i) or the current µ value µ(i)has
increased relative to the µ value of the previous iteration µ(i-1) by
20x
AutoIterSmartTerminateTol.
'NumberOfAutoIterations')if
m(i-1) and m(i-2), the previous two iterations
'AutoIterSmartTerminateTol'.The
See Also dksyn
2-48
When the system contains some real-valued uncertain parameters and
MixedMU is set to 'on', the dksyn command takes into account that
the uncertain parameters are real and this may result in improved
robust performance.
h2syn
hinfsyn
mussv
robopt
robuststab
Page 69

robustperf
wcgopt
Tutorials Control of Spring-Mass-Damper Using Mixed mu-Synthesis
dkitopt
2-49
Page 70

dksyn
Purpose Robust controller design using µ-synthesis
Syntax [k,clp,bnd] = dksyn(p,nmeas,ncont)
[k,clp,bnd] = dksyn(p,nmeas,ncont,opt)
[k,clp,bnd,dkinfo] = dksyn(p,nmeas,ncont,...)
[k,clp,bnd,dkinfo] = dksyn(p,nmeas,ncont,prevdkinfo,opt)
[...] = dksyn(p)
Description [k,clp,bnd] = dksyn(p,nmeas,ncont) synthesizes a robust controller
k for the uncertain open-loop plant model p via the D-K or D-G-K
algorithm for µ-synthesis.
The last
nmeas outputs and ncont inputs of p areassumedtobethe
measurement and control channels.
closed-loop m odel and
p, k, clp,andbnd are related as follows:
clp = lft(p,k);
bnd1 = robustperf(clp);
bnd = 1/bnd.LowerBound
p is an uncertain state space uss model.
k is the controller, clp is the
bnd is the robust closed-loop performance bound.
2-50
[k,clp,bnd] = dksyn(p,nmeas,ncont,opt) specifies user-defined
options
k,clp,bnd,dkinfo] = dksyn(p,nmeas,ncont,...) returns a log of the
[
algorithm execution in
N is the total number of iterations performed. The
opt for the D-K or D-K-G algorithm. Use dkitopt to create opt.
dkinfo. dkinfo is an N-by-1 cell array where
ith cell contains a
structure with the follow ing fields:
Field Description
K
Bnds
DL
DR
Controller at ith iteration, a ss object
Robust performance bound on the closed-loop
system (
double)
Left D-scale, an ss object
Right D -scale, an ss object
Page 71

dksyn
Field Description
GM
GR
GFC
MussvBnds
MussvInfo
[k,clp,bnd,dkinfo] = dksyn(p,nmeas,ncont,prevdkinfo,opt)
allows you to use information from a previous dksyn
iteration. prevdkinfo
designing a robust controller using
dksyn starting iteration is not 1 (opt.StartingIterationNumber = 1)
to determ ine the correct D-scalings to initiate the iteration procedure.
[...] = dksyn(p) takes p as a uss object that has
two-input/two-output partitioning as defined by
Offset G-scale, an ss object
Right G -scale, an ss object
Center G-scale, an ss object
Upper and lower µ bounds, an frd object
Structure returned from mussv at each iteration.
is a structure from a previous attempt at
dksyn. prevdkinfo is used when the
mktito.
Examples The following statements create a robust performance control design
for an unstable, uncertain single-input/single-output plant model. The
nominal plant model, G, is an unstable first order system
G = tf(1,[1 -1]);
The model itself is uncertain. At low frequency, below 2 rad/s, it can
vary up to 25% from its nominal value. Around 2 rad/s the percentage
variation starts to increase a nd reaches 400% at approximately 32 rad/s.
The percentage model uncertainty is represented by the weight
which corresponds to the frequency variation of the model uncertainty
and the uncertain LTI dynamic object
Wu = 0.25*tf([1/2 1],[1/32 1]);
InputUnc = ultidyn('InputUnc',[1 1]);
InputUnc.
.
Wu
2-51
Page 72

dksyn
The uncertain plant model Gpert represents the model of the physical
system to be controlled.
Gpert = G*(1+InputUnc*Wu);
The robust stability objectiveistosynthesizeastabilizingLTIcontroller
for all the plant models parameterized by the uncertain plant model,
Gpert. The performance objective is defined as a weighted sensitivity
minimization problem. The control interconnection structure is shown
in the following figure.
2-52
The sensitivity function, S, is defined as where P is the
plant model and
problem selects a weight
desired sensitivity function of th e closed-loop system as a function of
frequency. Hence the product of the sensitivity weight
closed-loop sensitivity function is less than 1 across all frequencies.
The sensitivity weight
decrease at 0.006 rad/s, and reaches a minimum magnitude of 0.25
after 2.4 rad/s.
Wp = tf([1/4 0.6],[1 0.006]);
The defined sensitivity weight Wp implies that the desired disturbance
rejection should be at least 100:1 dis turbance rejection at DC, rise
K is the controller. A weighted sensitivity minimization
Wp, which corresponds to the inverse of the
Wp and actual
Wp has a gain of 100 at low frequency, begins to
Page 73

dksyn
slowly between 0.006 and 2.4 rad/s, and allow the disturbance rejection
to increase above the open-loop level, 0.25, at high frequency.
When the plant model is uncertain, the closed-loop performance
objective is to achieve the desired sensitivity function for all plant
models defined by the uncertain plant model,
objective for an uncertain system is a robust performance objective.
A block diagram of this uncertain closed-loop system illustrating the
performance objective (closed-loop transfer function from d→e )isshown.
From the definition of the robust performance control objectiv e, the
weighted, uncertain control design interconnection model, which
includes the robustness and performance objectives, can be constructed
and is denoted by
P. The robustness and performance weights are
selected such that if the robust performance structure singular value,
bnd, of the closed-loop uncertain system, clp, is less than 1 then the
performance objectives have been achieved for all the plant models in
the model set.
Gpert. T he performance
You can form the uncertain transfer matrix
using the following commands.
P = [Wp; 1 ]*[1 Gpert];
[K,clp,bnd] = dksyn(P,1,1);
bnd
bnd =
0.6819
P from [d; u] to [e; y]
2-53
Page 74

dksyn
The controller K achieves a robust performance µ value bnd of 0.6819.
Therefore you have achieved the robust performance objectives for the
given problem.
You can use the
performance of
[rpnorm,wcf,wcu,report] = robustperf(clp);
disp(report{1})
Uncertain system, clp, achieves robust performance.
The analysis showed clp can tolerate 146% of the model uncertainty
and achieve the performance and stability objectives.
A model uncertainty exists of size 146% that results in
a peak gain performance of 0.686 at 0.569 rad/s.
robustperf command to analyze the closed-loop robust
clp.
Algorithm dksyn synthesizes a robust controller via D-K iteration. The D-K
iteration procedure is an approximation to µ-synthesis control design.
The objective of µ-synthesis is to minimize the structure singular
value µ of the corresponding robust performance problem associated
with the uncertain system
interconnection containing known components including the nominal
plant model, uncertain parameters,
dynamics,
ultidyn, and performance and uncertainty weighting
functions. You use weighting functions to include magnitude and
frequency shaping information in the optimization. The control
objectiveistosynthesizeastabilizingcontroller
robust performance µ value, which corresponds to
The D-K iteration procedure involves a sequence of minimizations, first
over the controller variable K (holding the D variable associated with
the scaled µ upper bound fixed), and then over the D variable (holding
the controller K variable fixed). The D-K iteration procedure is not
guaranteed to converge to the minimum µ value, but often works well
in practice.
p. The uncertain system p is an open-loop
ucomplex, and unmodeled LTI
k that minimizes the
bnd.
2-54
dksyn automates the D-K iteration procedure and the options object
dkitopt allows you to customize its behavior. Internally, the algorithm
Page 75

dksyn
works with the generalized scaled plant model P, which is extracted
from a
The following is a list of what occurs during a single, complete step
of the D-K iteration.
1 (In the first iteration, this step is skipped.) The µ calculation (from
uss object using the command lftdata.
the previous step) provides a frequency-dependent scaling matrix, D
The fitting procedure fits these scalings with rational, stable transfer
function matrices. After fitting, plots of
and
are shown for comparison.
.
f
(In the first iteration, this ste p is skipp ed.) The rational
is
absorbed into the open-loop interconnection for the nex t controller
synthesis. Using either the previous frequency-dependent D’sor
the just-fit rational
,anestimateofanappropriatevalueforthe
H∞norm is made. This is simply a conservative value of the scaled
closed-loop H
norm, using the most recent controller and either a
∞
frequency sweep (using the frequency-dependent D’s) or a state-space
calculation (with the rational D’s).
2 (The first iteration begins at this point.) A controller is designed
using H
the
synthesis on the scaled open-loop interconnection. If you set
∞
DisplayWhileAutoIter field in dkitopt to 'on', the following
information is displayed:
a The progress of the γ-iteration is displayed.
b The singular values of the closed-loop frequency response are
plotted.
2-55
Page 76
dksyn
c You are given the option to change the frequency range. If you
change it, all relevant frequency responses are automatically
recomputed.
d You are given the option to rerun the H
modified parameters if you set the
'off'. This is convenient if, for instance, the bisection tolerance
was too large, or if
3 The structured singular value of the closed-loop system is calculated
maximum gamma value was too small.
synthesis with a set of
∞
AutoIter field in dkitopt to
and plotted.
4 An iteration summary is displayed, showing all the controller order,
as well as the peak value of µ of the closed-loop frequency responses.
5 The choic e of stopping or performing another iteration is given.
Subsequent iterations proceed along the same lines without the need to
reenter the iteration number. A summary at the end of each iteration is
updated to reflect data from all previous iterations. This often provides
valuable information about the progress of the robust controller
synthesis procedure.
Interactive Fitting of D-Scalings
Setting the AutoIter field in dkitopt to 'off' requires that you
interactively fit the D-scales each iteration. During step 2 of the D-K
iteration procedure, you are prompted to enter y our choice of options
for f itting the D-scaling data. You press return after, the following is a
list of your options.
2-56
Enter Choice (return for list):
Choices:
nd Move to Next D-Scaling
nb Move to Next D-Block
i Increment Fit Order
d Decrement Fit Order
apf Auto-PreFit
Page 77

dksyn
mx 3 Change Max-Order to 3
at 1.01 Change Auto-PreFit tol to 1.01
0 Fit with zeroth order
2 Fit with second order
n Fit with n'th order
e Exit with Current Fittings
s See Status
• nd and nb allow you to move from one D-scale data to another. nd
moves to the next scaling, whereas nb moves to the next scaling block.
For scalar D-scalings, these are identical operations, but for problems
with full D-scalings, (perturbations of the form δI) they are different.
In the (1,2) subplot w indow, the title displays the D-scaling block
number, the row/column o f the scaling that is currently being fitted,
and the order of the current fit (with
• Y ou can increment or decrement the order of the current fit (by 1)
using
i and d.
apf automatically fits each D-scaling data. The default maximum
•
state order of individual D-scaling is 5. The
to change the maximum D-scaling state order used in the automatic
prefitting routine.
mx must be a positive, nonzero integer. at allows
you to define how close the rational, scaled µ upper bound is to
approximate the actual µ upper bound in a norm sense. Setting
1 would require an exact fit of the D-scale data, and is not allowed.
Allowable values for
at are greater than 1. This setting plays a role
(mildly unpredictable, unfortunately) in determining where in the
(D,K)spacetheD-K iteration converges.
d fo r data when no fit exists).
mx variable allows you
at to
• E n tering a positive integer at the prompt will fit the current D-scale
data with that state order rational transfer function.
•
e exits the D-scale fitting to continue the D-K iteration.
• The variable
s displays a status of the current and fits.
Limitations There are two shortcomings of the D-K iteration control design
procedure:
2-57
Page 78

dksyn
• Calculation of the structured singular value µΔ(·) is approximated by
its upper bound. This is not a serious problem because the value of µ
and its upper bound are often close.
• The D-K iteration is not guaranteed to converge to a glo bal, or even
local minimum. This is a serious problem, and re pre sents the biggest
limitation of the design procedure.
In spite of these drawbacks, the D-K iteration control design technique
appears to work well on many engineering problems. It has been
applied to a number of real-world applications with success. These
applications include vibration suppressio n for flexible structures, flight
control, chemical process control problems, and acoustic reverberation
suppression in enclosures.
References • Balas, G.J., and J.C. Doyle, “Robust control of flexible modes in the
controller crossover region,” AIAA Journal of Guidance, Dynamics
and Control, Vol. 17, no. 2, March-April, 1994, p. 370-377.
• Balas, G.J., A.K. Packard, and J.T. Harduvel, “Application of
µ-synthesis techniques to momentum management and attitude
control of the space station,” AIAA Guidance, Navigation and Control
Conference, New Orleans, August 1991.
See Also dkitopt
2-58
• D oy le, J.C., K. Lenz, and A. Packard, “Design examples using
µ-synthesis: Space shuttle lateral axis FCS during reentry,” NATO
ASI Series, Modelling, Robustne ss, and Sensitivity Reduction in
Control Systems, vol. 34, Springer-Verlag, Berlin 1987.
• P ackard, A., J. Doyle, and G. Balas, “Linear, multivariable robust
control w ith a µ perspective,” ASME Journal of Dynamic Systems,
Measurement and Control, 50th Anniversary Issue, Vol. 115, no.
2b, June 1993, p. 310-319.
• Stein, G., and J. Doyle, “Beyond singular values and loopshapes,”
AIAA Journal of Guidance and Control,Vol.14,No.1,January,
1991, p. 5-16.
Page 79

h2syn
hinfsyn
Comprehensive analysis of feedback loop
mktito
mussv
robuststab
robustperf
wcgain
wcsens
wcmargin
Tutorials Control of Spring-Mass-Damper Using Mixed mu-Synthesis
dksyn
2-59
Page 80

dmplot
Purpose Interpret disk g ain and phase margins
Syntax dmplot
dmplot(diskgm)
[dgm,dpm] = dmplot
Description dmplot plots disk gain margin (dgm) and disk phase margin (dpm). Both
margins are derived from the largest disk that
• Contains the critical point (-1,0)
• Does not intersect the Nyquist plot of the open-loop response L
diskgm is the radius of this disk and a lower bound on the classical
gain margin.
dmplot(diskgm) plots the maximum allowable phase variation as a
function o f the actual gain variation for a given disk gain margin
(the maximum gain variation being diskgm). The c lo sed-loop system
is guaranteed to remain stable for all combined gain/phase variations
inside the plotted ellipse.
diskgm
[dgm,dpm] = dmplot returns the data used to plot the gain/phase
variation ellipse.
Examples When you call dmplot (without an argument), the resulting plot shows a
comparison of a disk margin analysis w ith the classical notations of gain
and phase margins. The Nyquist plot is of the loop transfer function L(s)
• The Nyquist plot of L corresponds to the blue line.
• T he unit disk corresponds to the dotted red line.
2-60
Page 81
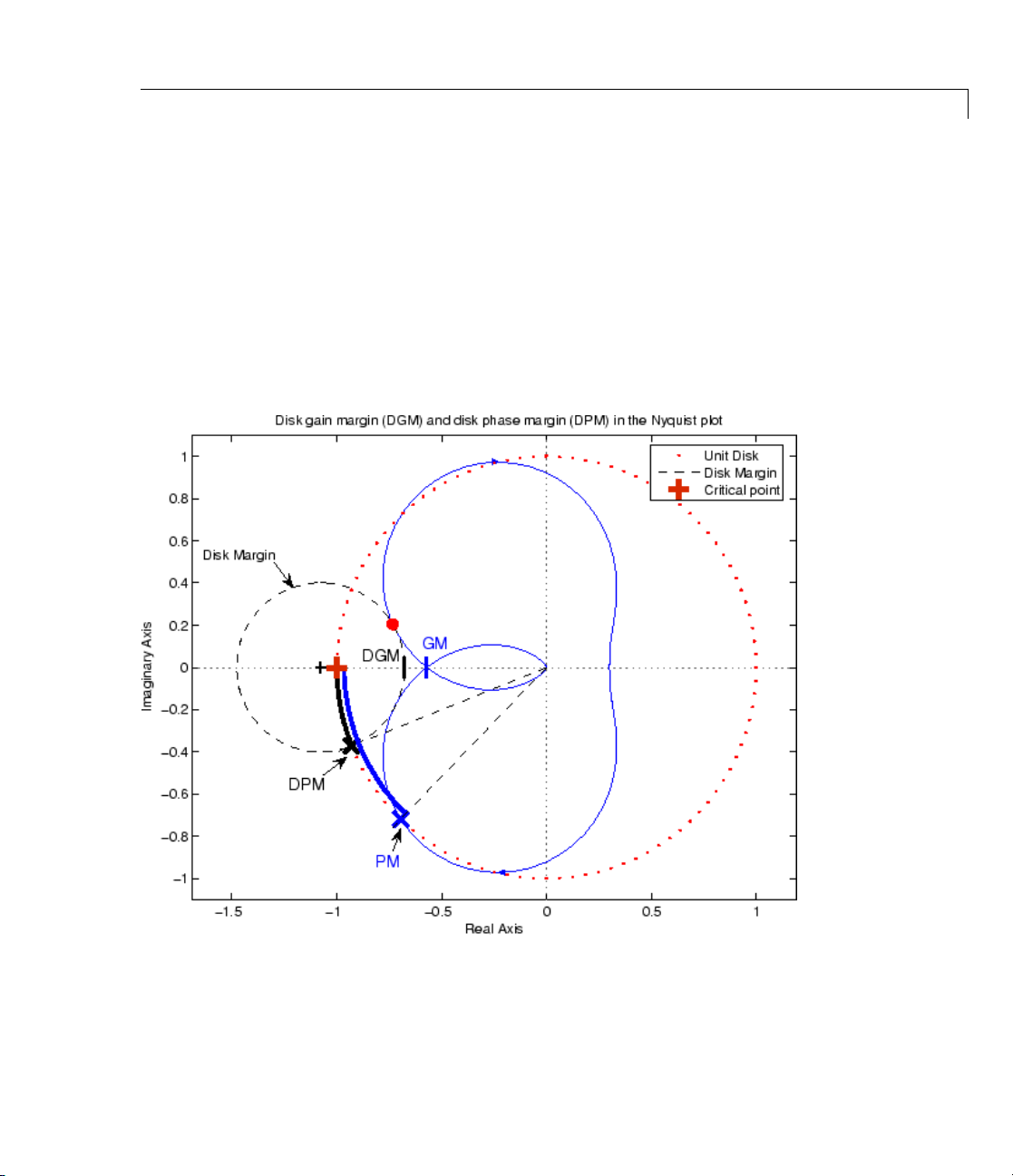
dmplot
• GMandPMindicatethelocationof the classical gain and phase
margins for the system L.
• D G M and DPM correspond to the disk gain and phase margins,
respectively. The disk margins provide a lower bound on classical
gain and phase margins.
• The disk margin circle, represented by the dashed black line,
corresponds to the largest disk centered at
just touches the loop transfer function L. This location is indicated
by the red dot.
(DGM + 1/DGM)/2 that
2-61
Page 82

dmplot
The x-axis corresponds to the gain variation, in dB, and the y-axis
corresponds to the phase variation allowable, in degrees. For a disk
gain margin corresponding to 3 dB (1.414), the closed-loop system is
stable for all phase and gain variations inside the blue ellipse. For
example, the closed-loop system can simultane ously tolerate +/- 2 dB
gain variation and +/- 14 deg phase variations.
dmplot(1.414)
2-62
Page 83

dmplot
References Barrett, M.F., Conservatism with robustness tests for linear feedback
control systems, Ph.D. Thesis, Control Science and Dynamical Systems,
University of Minnesota, 1980.
Blight, J.D., R.L. Dailey, and Gangsass, D., “Practical control law design
for aircraft using multivariable techniques,” International Journal of
Control, Vol. 59, No. 1, 1994, 93-137.
Bates, D., and I. Postlethwaite, Robust Multivariable Control of
Aerospace Systems, Delft University Press, Delft, The Netherlands,
ISBN: 90-407-2317-6, 2002.
See Also Comprehensive stability analysis of feedback loops
wcmargin
2-63
Page 84

drawmag
Purpose Mouse-based tool for sketching and fitting
Syntax [sysout,pts] = drawmag(data)
[sysout,pts] = drawmag(data,init_pts)
Description drawmag interactively uses the mouse in the plot window to create pts
(the frd object) and sysout (a stable minimum-phase ss object), which
approximately fits the frequency response (magnitude) in
Input arguments:
pts.
data
init_pts
Output arguments:
sysout
pts
While
drawmag is running, all interaction with the program is through
the mouse and/or the keyboard. The mouse, if there is one, must be in
the plot window. The program recognizes several commands:
• C licking the mouse button adds a point at the cross-hairs. If the
cross-hairs are outside the plotting window, the points are plotted
when the fitting, windowing, or replotting mode is invoked. Typing
a is the same as clicking the mouse button.
• Typing
cross-hairs.
• Typing any integer between
transfer function of that order. The fitting routine a pproximately
Either a frequency response object that is plotted
as a reference, or a constant matrix of the form
[x
minxmaxyminymax
data.
Optional frd objectsofinitialsetofpoints
Stable, minimum-phase ss object that approximately
fits, in magnitude, the
Frequency response of points.
r removes the point with frequency nearest that of the
] specifying the plot window on the
pts data.
0 and 9 fits the existing points with a
2-64
Page 85

drawmag
minimizes the maximum error in a log sense. The new fit is displayed
along with the po ints, and the most recent previous fit, if it exists.
• Typing
window. M oving the cross-hairs and clicking the mouse or pressing
any key then gives a second point at the new cross-hair location.
These two points define a new window on the data, which is
immediately replotted. This is useful in fine tuning parts of the data.
You can call windowing repeatedly.
• Typing
current data points as well as w hatever was specified in
used after windowing to view all the data.
• Typing
should exercis e caution when using this option, as it can wreak havoc
on the program if variables are changed.
See Also ginput
loglog
w uses the cross-hair location as the initial point in creating a
p simply replots the data using a window that covers all the
in.Typically
k invokes the keyboard using the keyboard command. You
2-65
Page 86

evallmi
Purpose Given particular instance of decision variables, evaluate all variable
terms in system of LMIs
Syntax evalsys = evallmi(lmisys,decvars)
Description evallmi evaluates all LMI constraints for a particular instance decvars
of the vector of decision variables. Recall that decvars fully determines
the values of the matrix variables X
of replacing all terms involving X
output
evalsys is an LMI system containing only constant terms.
,.. .,XK. The “evaluation” consists
1
,.. .,XKby their matrix value. The
1
The function
The vector returned by these solvers can be fed directly to
evallmi is useful for validation of the LMI solvers’ output.
evallmi
to evaluate all variable terms. The matrix values of the left- and
right-hand sides of each LMI are then returned by
showlmi.
Observation evallmi is meant to operate on the output of the LMI solvers. To
evaluate all LMIs for particular instances of the matrix variables X
., X
, first form the corresponding decision vector x with mat2dec and
K
then call
evallmi with x as input.
Examples Consider the feasibility problem of finding X >0suchthat
T
A
XA – X + I <0
where
setlmis([])
X = lmivar(1,[2 1]) % full symmetric X
lmiterm([1 1 1 X],A',A) % LMI #1: A'*X*A
lmiterm([1 1 1 X],-1,1) % LMI #1: -X
lmiterm([1 1 1 0],1) % LMI #1: I
lmiterm([-2 1 1 X],1,1) % LMI #2: X
lmis = getlmis
This LM I system is defined by:
,..
1
2-66
Page 87

evallmi
To compute a solution xfeas,callfeasp by
[tmin,xfeas] = feasp(lmis)
The result is
tmin =
-4.7117e+00
xfeas' =
1.1029e+02 -1.1519e+01 1.1942e+02
The LMI constraints are therefore feasible since tmin <0. Thesolution
X corresponding to the feasible decision vector
by
X = dec2mat(lmis,xfeas,X).
xfeas would be given
To check that
xfeas is ind eed feasible, evaluate all LMI constraints
by typing
evals = evallmi(lmis,xfeas)
The left- and right-hand sides of the first and second LMIs are then
given by
[lhs1,rhs1] = showlmi(evals,1)
[lhs2,rhs2] = showlmi(evals,2)
and the test
eig(lhs1-rhs1)
ans =
-8.2229e+01
-5.8163e+01
confirms that the first LMI constraint is satisfied by xfeas.
2-67
Page 88

evallmi
See Also showlmi
setmvar
dec2mat
mat2dec
2-68
Page 89

feasp
Purpose Compute solution to given system of LMIs
Syntax [tmin,xfeas] = feasp(lmisys,options,target)
Description The function feasp computes a solution xfeas (ifany)ofthesystemof
LMIs des cribed by
decision variables for which all LMIs are satisfied.
Given the LMI system
lmisys.Thevectorxfeas is a particular value of the
(2-3)
rol
Cont
Parameters
xfeas is com
Minimize t subject to
The global minimum of this program is the scalar value tmin returned
as first output argument by
tmin ≤ 0 and strictly feasible if tmin < 0. If the problem is feasible but
not strictly feasible,
maythenberequiredtodecidewhether
feasible.
The optional argument
optimization code terminates as soon as a value of t below this target is
reached. The default value is
Note that
in terms of the matrix variables of the problem. Use
feasible values of the matrix variables from
ptional argument
The o
meters for the optimization algorithm. This five-entry vector is
para
nized as follows:
orga
ions(1)
•
opt
ions(2)
•
opt
formed by the optimization procedure (100 by default).
per
puted by solving the auxiliary convex program:
feasp. The LMI constraints are feasible if
tmin is positive and very small. Some post-analysis
xfeas is close enough to
target sets a target value for tmin.The
target =0.
xfeas is a solution in terms of the decision variables and not
dec2mat to derive
xfeas.
options gives access to certain control
is not used.
sets the maximum number of iterations allowed to be
2-69
Page 90

feasp
• options(3) resets the feasibility radius.Settingoptions(3) to a
value R > 0 further constrains the decision vector x =(x
,.. .,xN)to
1
lie within the ball
In other words, the Euclidean norm of xfeas should not exceed R.The
feasibility radius is a simple means of controlling the magnitude of
solutions. Upon termination,
feasp displays the f-radius saturation,
that is, the norm of the solution as a percentage of the feasibility
radius R.
The default value is R = 109. Setting
options(3) to a neg ative value
activates the “flexible bound” m ode. In this mode, the feasibility
radius is initially set to 108, and increased if necessary during the
course of optimization
•
options(4) helps speed up termination. When set to an integer
value J > 0, the code terminates if t did not decrease by more than
one percent in relative terms during the last J iterations. The default
value is 10. This p arameter trades off speed vs. accuracy. If set to a
small value (< 10), the code term inates quickly but without guarantee
of accuracy. On the contrary, a large value results in natural
convergence at the expense of a possibly large number of iterations.
•
options(5) = 1 turns off the trace of exec ution of the optimization
procedure. Resetting
options(5) to zero (default value) turns it
back on.
Setting
option(i) to zero is equivalent to setting the corresponding
control parameter to its default value. Consequently, there is no need to
redefine the entire vector when changing just one control parameter.
To set the maximum number of iterations to 10, for instance, it suffices
to type
options=zeros(1,5) % default value for all parameters
options(2)=10
2-70
Page 91

feasp
Memory
Problems
When the least-squares problem solved at each iteration becomes
ill conditioned, the
QR-based linear algebra (see “Memory Problems” on page 2-2 10 for
details). Since the QR mode typically requires much more memory,
MATLAB may run out of memory and display the message
??? Error using ==> feaslv
Out of memory. Type HELP MEMORY for your options.
You should then ask your system man ag er to increase your swap space
or, i f no additional swap space is available, set
will prevent switching to QR and
fails due to numerical instabilities.
feasp solver switches from Cholesky-based to
feasp will terminate w hen Cholesky
Examples Consider the problem of finding P > I such that
with data
options(4) = 1.This
(2-4)
(2-5)
(2-6)
This problem arises when studying the quadratic stability of the
polytope of matrices Co{A
To assess feasibility with
-Equation2-6:
setlmis([])
p = lmivar(1,[2 1])
, A2, A3}.
1
feasp, first enter the LMIs Equation 2-4
2-71
Page 92

feasp
lmiterm([1 1 1 p],1,a1,'s') % LMI #1
lmiterm([2 1 1 p],1,a2,'s') % LMI #2
lmiterm([3 1 1 p],1,a3,'s') % LMI #3
lmiterm([-4 1 1 p],1,1) % LMI #4: P
lmiterm([4 1 1 0],1) % LMI #4: I
lmis = getlmis
Then call feasp to find a feasible decision vector:
[tmin,xfeas] = feasp(lmis)
This returns tmin = -3.1363. Hence Equation 2-4 - Equation 2-6 is
feasible and the dynamical system
A(t)
Co{A1, A2, A3}.
= A(t)x is quadratically stable for
To obtain a Lyapunov matrix P proving the quadratic stability, type
P = dec2mat(lmis,xfeas,p)
This returns
It is possible to add further constraints on this feasibility problem. For
instance, you can bound the Frobenius norm of P by 10 while asking
tmin to be less than or equal to –1. This is done by
[tmin,xfeas] = feasp(lmis,[0,0,10,0,0],-1)
The third entry 10 of options sets the feasibility radius to 10 while the
third argument
-1.1745
and a matrix P with largest eigenvalue λ
-1 sets the target value for tmin. This yields tmin =
(P) = 9.6912.
max
References The feasibility solver feasp is based on Nesterov and N e m iro vski’s
Projective Method described in
2-72
Page 93

feasp
Nesterov, Y., and A. Nemirovski, Interior Point Polynomial Methods in
Convex Programming: Theory and Applications,SIAM,Philadelphia,
1994.
Nemirovski, A ., and P. Gahinet, “The Projective Method for Solving
Linear Matrix Inequalities,” Proc. Amer. Contr. Conf., 1994, Baltimore,
Maryland, p. 840–844.
The optimization is p erformed by the C-MEX file
See Also mincx
gevp
dec2mat
feaslv.mex.
2-73
Page 94

fitfrd
Purpose Fit frequency response data with state-space model
Syntax B = fitfrd(A,N)
B = fitfrd(A,N,RD)
B = fitfrd(A,N,RD,WT)
Description B = fitfrd(A,N) is a state-space object w ith state dimension N, wh ere
A is an frd object and N is a nonnegative integer. The frequency
response of
A must have either 1 row or 1 column, although it need not be 1-by-1. B
willbethesamesizeasA.Inallcases,N should be a nonnegative scalar.
B = fitfrd(A,N,RD) forces the relative degree of B to be RD. RD must be
a nonnegative integer. The default value for
column) then
relative degree of each entry of
relative degree for all entries of
RD by setting RD to an empty matrix.
B = fitfrd(A,N,RD,WT) uses the magnitude of WT to weight the
optimization fit criteria.
scalar, then it is used to weight all entries of the error criteria (
WT is a vector, it must be the same size as A, and each individual entry
of
WT acts as a weighting function on the corresponding entry of (A-B).
B closely matches the D-scale frequency response data in A.
RD is 0. If A is a row (or
RD canbeavectorofthesamesizeaswell,specifyingthe
B.IfRD is a scalar, then it specifies the
B. You can specify the d efault value for
WT can be a double, ss or frd.IfWT is a
A-B). If
Examples You can use the fitfrd command to fit D-scale data. For example,
create D -scale frequency response data from a fifth-order system.
sys = tf([1 2 2],[1 2.5 1.5])*tf(1,[1 0.1]);
sys = sys*tf([1 3.75 3.5],[1 2.5 13]);
omeg = logspace(-1,1);
sysg = frd(sys,omeg);
bode(sysg,'r-');
2-74
Page 95

You can try to fit the frequency response D-scale data sysg with a
first-order system,
a third-order system,
b1. Similarly, you can fit the D- scale data with
b3.
fitfrd
b1 = fitfrd(sysg,1);
b3 = fitfrd(sysg,3);
Compare the original D-scale data sysg with the frequency responses of
the first and third-order models calculated by
b1g = frd(b1,omeg);
b3g = frd(b3,omeg);
bode(sysg,'r-',b1g,'k:',b3g,'b-.')
fitfrd:
2-75
Page 96

fitfrd
Limitations Numerical conditioning problems arise if the state order of the fit N is
selected to be higher than required by the dynamics of
A.
See Also fitmagfrd
2-76
Page 97

fitmagfrd
Purpose Fit frequency response magnitude data with minimum-phase
state-space model using log-Chebychev magnitude design
Syntax B = fitmagfrd(A,N)
B = fitmagfrd(A,N,RD)
B = fitmagfrd(A,N,RD,WT)
B = fitmagfrd(A,N,RD,WT,C)
Description B = fitmagfrd(A,N) is a stable, minimum-phase ss object, with
state-dimension
matches the magnitude data in
nonnegative integer.
B = fitmagfrd(A,N,RD) forces the relative degree of B to be RD. RD
must be a nonnegative integer whose default value is 0. You can specify
the default value for
B = fitmagfrd(A,N,RD,WT) uses the magnitude of WT to weight the
optimization fit criteria.
then it is used to weight all entries of the error criteria
vector,itmustbethesamesizeas
as a weighting function on the corresponding entry of (
value for
WT is 1, and you can specify it by setting WT to an empty matrix.
N, whose frequency response magnitude closely
A. A is a 1-by-1 frd object, and N is a
RD by setting RD to an empty matrix.
WT can be a double, ss or frd.IfWT is a scalar,
(A-B).IfWT is a
A,andeachindividualentryofWT acts
A-B). The default
B = fitmagfrd(A,N,RD,WT,C) enforces additional magnitude
constraints on
C.UpperBound.Thesecanbeempty,double or frd (with C.Frequency
B,specifiedbythevaluesofC.LowerBound and
equal to A.Frequency). If C.LowerBound is non-empty, then the
magnitude of
bound is enforced at frequencies where
Similarly, the
on the magnitude of
to
A.Frequency), then the upper and lower bound constraints on B are
taken directly from
B is constrained to lie above C.LowerBound. No lower
C.LowerBound is equal to -inf.
UpperBound field can be used to specify an upper bound
B.IfC is a double or frd (with C.Frequency equal
A as:
• if C(w) == –1, then enforce abs(B(w)) <= abs(A(w))
• if C(w) == 1, then enforce abs(B(w)) >= abs(A(w))
2-77
Page 98

fitmagfrd
• if C(w) == 0, then no additional constraint
where
w denotes the frequency.
Examples Fit frequency response magnitude data with a stable, min imum-phase
statespace model:
1 Create frequency response magnitude data from a fifth-order system.
sys = tf([1 2 2],[1 2.5 1.5])*tf(1,[1 0.1]);
sys = sys*tf([1 3.75 3.5],[1 2.5 13]);
omega = logspace(-1,1);
sysg = abs(frd(sys,omega));
bodemag(sysg,'r');
2-78
Page 99

fitmagfrd
2 Fit the
syste
magnitude data with a minimum-phase, stable third-order
m:
ord = 3;
b1 = fitmagfrd(sysg,ord);
b1g = frd(b1,omega);
bodemag(sysg,'r',b1g,'k:');
2-79
Page 100

fitmagfrd
2-80
3 Fit the
below
magnitude data with a third-order system constrained to lie
and above the given data.
C2.UpperBound = sysg;
C2.LowerBound = [];
b2 = fitmagfrd(sysg,ord,[],[],C2);
b2g = frd(b2,omega);
C3.UpperBound = [];
C3.LowerBound =sysg;
b3 = fitmagfrd(sysg,ord,[],[],C3);
 Loading...
Loading...