

Page 1
Optimization Tool
User’s Guide
box™ 5
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Optimization Toolbox™ User’s Guide
© COPYRIGHT 1990–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
November 1990 First printing
December 1996 Second printing For MATLAB
®
5
January 1999 Third printing For Version 2 (Release 11)
September 2000 Fourth printing For Version 2.1 (Release 12)
June 2001 Online only Revised for Version 2.1.1 (Release 12.1)
September 2003 Online only Revised for Version 2.3 (Release 13SP1)
June 2004 Fifth printing Revised for Version 3.0 (Release 14)
October 2004 Online only Revised for Version 3.0.1 (Release 14SP1)
March 2005 Online only Revised for Version 3.0.2 (Release 14SP2)
September 2005 Online only Revised for Version 3.0.3 (Release 14SP3)
March 2006 Online only Revised for Version 3.0.4 (Release 2006a)
September 2006 Sixth printing Revised for Version 3.1 (Release 2006b)
March 2007 Seventh printing Revised for Version 3.1.1 (Release 2007a)
September 2007 Eighth printing Revised for Version 3.1.2 (Release 2007b)
March 2008 Online only Revised for Version 4.0 (Release 2008a)
October 2008 Online only Revised for Version 4.1 (Release 2008b)
March 2009 Online only Revised for Version 4.2 (Release 2009a)
September 2009 Online only Revised for Version 4.3 (Release 2009b)
March 2010 Online only Revised for Version 5.0 (Release 2010a)
Page 4

Page 5

Acknowledgments
The MathWorks™ would like to acknowledge the following contributors to
Optimization Toolbox™ algorithms.
Thomas F. Coleman researched and contributed algorithms for constrained
and unconstrained minimization, nonlinear least squares and curve fitting,
constrained linear least squares, quadratic programming, and nonlinear
equations.
Dr. Coleman is Dean of Faculty of Mathematics and Professor of
Combinatorics and Optimization at University of Waterlo o.
Dr. Coleman has published 4 books and over 70 technical papers in the
areas of continuous optimization and computational methods and tools for
large-scale problems.
Yin Zhang researched and contributed the large-scale linear programming
algorithm.
Acknowledgments
Dr. Zhang is Professor of Computational and Applied Mathematics on the
faculty of the Keck Center for Interdisciplinary Bioscience Training at Rice
University.
Dr. Zhang has published over 50 technical papers in the areas of interior-point
methods for linear programming and computational mathematical
programming.
Page 6
Acknowledgments
Page 7
Getting Started
1
Product Overview ................................. 1-2
Introduction
Optimization Functions
Optimization T ool GUI
...................................... 1-2
............................ 1-2
............................. 1-3
Contents
Example: Nonlinear Constrained Minimization
Problem Formulation: Rosenbrock’s Function
Defining the Problem in Toolbox Syntax
Running the Optimization
Interpreting the Result
.......................... 1-7
............................. 1-12
............... 1-5
...... 1-4
.......... 1-4
Setting Up an Optimization
2
Introduction to Optimization Toolbox Solvers ........ 2-2
Choosing a Solver
Optimization Decision Table
Problems Handled by Optimization Toolbox Functions
Writing Objective Functions
Writing Objective Functions
Jacobians of Vector and Matrix Objective Functions
Anonymous Function Objectives
Maximizing an Objective
................................. 2-4
........................ 2-4
........................ 2-10
......................... 2-10
..................... 2-15
........................... 2-16
... 2-7
..... 2-12
Writing Constraints
Types of Constraints
Iterations Can Violate Constraints
Bound Constraints
................................ 2-17
............................... 2-17
................................ 2-19
................... 2-18
vii
Page 8

Linear Inequality Constraints ....................... 2-20
Linear Equality Constraints
Nonlinear Constraints
An Exam ple Using All Types of Constraints
......................... 2-20
............................. 2-21
............ 2-23
Passing Extra Parameters
Anonymous Functions
Nested Functions
Global Variables
Setting Options
Default Options
Changing the Default Settings
Tolerances and Stopping Criteria
Checking Validity of Gradients or Jacobians
Choosing the Algorithm
................................. 2-28
.................................. 2-28
.................................... 2-30
................................... 2-30
.......................... 2-25
.............................. 2-25
....................... 2-30
.................... 2-36
........... 2-37
............................ 2-45
Examining Results
3
Current Point and Function Value .................. 3-2
Exit Flags and Exit Messages
Exit Flags
Exit Messages
Enhanced Exit Messages
Exit Message Options
........................................ 3-3
.................................... 3-5
.............................. 3-8
....................... 3-3
........................... 3-5
viii Contents
Iterations and Function C ounts
First-Order Optimality Measure
Unconstrained Optimality
Constrained Optimality—Theory
Constrained Optimality in Solver Form
Displaying Iterative Output
Introduction
Most Common Output Headings
...................................... 3-14
.......................... 3-11
........................ 3-14
..................... 3-10
.................... 3-11
..................... 3-11
............... 3-13
..................... 3-14
Page 9
Function-Specific Output Headings ................... 3-15
Output Structures
Lagrange Multiplier Structures
Hessian
fminunc Hessian
fmincon Hessian
Plot F unctions
Example: Using a Plot Function
Output Functions
Introduction
Example: Using Output Functions
........................................... 3-23
................................. 3-21
..................... 3-22
.................................. 3-23
.................................. 3-24
.................................... 3-26
..................... 3-26
.................................. 3-32
...................................... 3-32
................... 3-32
Steps to Take A fter Running a Solver
4
Overview of Next Steps ............................ 4-2
When the Solver Fails
Too Many Iterations or Function Evaluations
No Feasible Point
Problem Unbounded
fsolve Could Not Solve Equation
Solver T akes Too Long
When the Solver Might Have Succeeded
Final Point Equals Initial Point
Local Minimum Possible
When the Solver Succeeds
What Can Be Wrong If The Solver Succeeds?
1. Change the Initial Point
2. Check N earby Points
.............................. 4-3
................................. 4-8
............................... 4-9
..................... 4-10
............................. 4-10
...................... 4-14
............................ 4-14
.......................... 4-22
.......................... 4-23
............................ 4-24
.......... 4-3
............. 4-14
........... 4-22
ix
Page 10

3. Check your Objective and Constraint Functions ...... 4-25
Local vs. Global Optima
............................ 4-26
Optimization Tool
5
Getting Started with the Optimization Tool .......... 5-2
Introduction
Opening the Optimization Tool
Steps for Using the Optimization Tool
...................................... 5-2
...................... 5-2
................. 5-5
Running a Problem in the Optimization Tool
Introduction
Pausing and Stopping the Algorithm
Viewing Results
Final Point
Starting a New Problem
Closing the Optimization Tool
Specifying Certain Options
Plot Functions
Output function
Display to Command Window
Getting Help in the Optimization Tool
Quick Reference
Additional Help
Importing and Exporting Your Work
Exporting to the MATLAB Workspace
Importing Your Work
Generating a File
Optimization Tool Examples
About Optimization Tool Examples
Optimization T ool with the fmincon Solver
Optimization T ool with the lsqlin Solver
...................................... 5-6
.................. 5-7
................................... 5-7
....................................... 5-11
............................ 5-11
....................... 5-12
......................... 5-13
.................................... 5-13
................................... 5-14
....................... 5-14
............... 5-16
.................................. 5-16
................................... 5-16
................ 5-17
................ 5-17
.............................. 5-19
................................. 5-19
........................ 5-21
................... 5-21
............. 5-21
............... 5-25
......... 5-6
x Contents
Page 11

Optimization Algorithms and Examples
6
Optimization Th eory Overview ..................... 6-2
Unconstrained Nonlinear Optimization
Definition
Large Scale fminunc Algorithm
Medium Scale fminunc Algorithm
fminsearch Algorithm
Unconstrained Nonlinear Optimization Examples
Example: fminunc Unconstrained Minimization
Example: Nonlinear Minimization with Gradient and
Hessian
Example: Nonlinear Minimization with Gradient and
Hessian Sparsity Pattern
Constrained Nonlinear Optimization
Definition
fmincon Trust Region Reflective Algorithm
fmincon Active Set Algorithm
fmincon SQP Algorithm
fmincon Interior Point Algorithm
fminbnd Algorithm
fseminf Problem Formulation and Algorithm
Constrained Nonlinear Optimization Examples
Example: Nonlinear Inequality Constraints
Example: Bound Constraints
Example: Constraints With Gradients
Example: Constrained Minimization Using fmincon’s
Interior-Point Algorithm With Analytic Hessian
Example: Equality and Inequality Constraints
Example: Nonlinear Minimization with Bound Constraints
and Banded Preconditioner
Example: Nonlinear Minimization with E quality
Constraints
Example: Nonl inear Minimization with a Dense but
Structured Hessian and Equality Constraints
........................................ 6-3
...................... 6-3
.................... 6-6
.............................. 6-11
....................................... 6-16
......................... 6-17
........................................ 6-20
........................ 6-26
............................ 6-36
..................... 6-37
................................ 6-41
........................ 6-47
....................... 6-59
.................................... 6-63
.............. 6-3
........ 6-14
................ 6-20
............ 6-20
........... 6-41
............ 6-45
................ 6-48
......... 6-58
........ 6-65
.... 6-14
...... 6-45
...... 6-51
xi
Page 12

Example: Using Symbolic Math Toolbox Functions to
Calculate Gradients and Hessians
Example: One-Dim e n sional Sem i-In f inite Constraints
Example: Two-Dimensional Semi-Infinite Constraint
.................. 6-69
... 6-84
.... 6-87
Linear Programming
Definition
Large Scale Linear Programming
Active-Set Medium-Scale linprog Algorithm
Medium-Scale linprogSimplexAlgorithm
Linear Programming Examples
Example: Linear Programming with Equalities and
Inequalities
Example: Linear Programming with Dense Columns in the
Equalities
Quadratic Programming
Definition
Large-Scale quadprog Algorithm
Medium-Scale quadprog Algorithm
Quadratic Programming Examples
Example: Quadratic Minimization with Bound
Constraints
Example: Quadratic Minimization with a Dense b ut
Structured Hessian
........................................ 6-91
..................................... 6-105
........................................ 6-108
............................... 6-91
.................... 6-91
............ 6-95
.............. 6-99
..................... 6-104
.................................... 6-104
........................... 6-108
..................... 6-108
................... 6-113
.................. 6-118
.................................... 6-118
.............................. 6-120
xii Contents
Binary Integer Programming
Definition
bintprog Algorithm
Binary Integer Programming Example
Example: Investments with Constraints
Least Squares (Model Fitting)
Definition
Large-Scale Least Squares
Levenberg-Marquardt Method
Gauss-Newton Method
........................................ 6-126
................................ 6-126
........................................ 6-134
............................. 6-140
....................... 6-126
...................... 6-134
.......................... 6-135
....................... 6-139
.............. 6-129
............... 6-129
Page 13

Least Squares (Model Fitting) Examples ............. 6-144
Example: Using lsqnonlin With a Simulink Model
Example: Nonlinear Least-Squares with Full Jacobian
Sparsity Pattern
Example: Linear Least-Squares with Bound
Constraints
Example: Jacobian Multiply Function with Linear Least
Squares
Example: Nonlinear Curve Fitting with lsqcurvefit
....................................... 6-153
................................ 6-150
.................................... 6-151
....... 6-144
...... 6-157
Multiobjective Optimization
Definition
Algorithms
Multiobjective Optimization Examples
Example: Using fminimax with a Simu link Model
Example: Signal Processing Using fgoalattain
Equation Solving
Definition
Trust-Region Dogleg Method
Trust-Region Reflective fsolve Algorithm
Levenberg-Marquardt Method
Gauss-Newton Method
\ Algorithm
fzero Algorithm
Equation Solving Examples
Example: Nonlinear Equations with Analytic Jacobian
Example: Nonlinear Equations with Finite-Difference
Jacobian
Example: Nonlinear Equations with Jacobian
Example: Nonlinear Equations with Jacobian Sparsity
Pattern
........................................ 6-160
....................................... 6-161
.................................. 6-173
........................................ 6-173
...................................... 6-180
................................... 6-180
....................................... 6-184
........................................ 6-188
........................ 6-160
.............. 6-166
.......... 6-169
........................ 6-174
.............. 6-176
....................... 6-179
............................. 6-179
......................... 6-181
.......... 6-185
....... 6-166
... 6-181
Selected Bibliography
.............................. 6-192
xiii
Page 14

Parallel Computing for Optimization
7
Parallel Computing in Optimization Toolbox
Functions
Parallel Optimization Functionality
Parallel Estimation of Gradients
Nested Parallel Functions
Using Parallel Computing with fmincon, fgoalattain,
and fminimax
Using Parallel Computing with Multicore Processors
Using Parallel Com puting with a Multiprocessor
Network
Testing Parallel Computations
....................................... 7-2
.................. 7-2
..................... 7-2
.......................... 7-3
................................... 7-5
....................................... 7-6
....................... 7-7
.... 7-5
Improving Performance with Parallel Computing
Factors That Affect Speed
Factors That Affect Results
Searching for Global Optima
.......................... 7-8
......................... 7-9
........................ 7-9
External Interface
8
ktrlink: An Interface to KNITRO Libraries ........... 8-2
What Is ktrlink?
Installation and Configuration
Example Using ktrlink
Setting Options
Sparse Matrix Considerations
.................................. 8-2
....................... 8-2
............................. 8-4
................................... 8-8
....................... 8-9
Argument and Options Reference
9
.... 7-8
xiv Contents
Function Arguments ............................... 9-2
Page 15

Input Arguments .................................. 9-2
Output Arguments
................................ 9-5
10
Optimization Options
Options Structure
Output Function
Plot Functions
.................................... 9-27
.............................. 9-7
................................. 9-7
.................................. 9-18
Function Reference
Minimization ...................................... 10-2
Equation Solving
Least Squares (Curve Fitting)
GUI
Utilities
.............................................. 10-3
........................................... 10-4
.................................. 10-2
...................... 10-3
11
A
Functions — Alphabetical List
Examples
Constrained Nonlinear Examples ................... A-2
Least Squares Examples
............................ A-2
xv
Page 16
Unconstrained Nonlinear Examples ................. A-3
Linear Programming Examples
Quadratic Programming Examples
Binary Integer Programming Examples
Multiobjective Examples
Equation Solving Examples
........................... A-3
..................... A-3
.................. A-3
......................... A-4
............. A-3
Index
xvi Contents
Page 17
Getting Started
• “Product Overview” on page 1-2
• “Example: Nonline ar Constrained Minimization” on page 1-4
1
Page 18
1 Getting Started
Product Overview
Introduction
Optimization Toolbox provides widely us ed a lg orithms for standard
and large-scale optimization. These algorithms solve constrained and
unconstrained continuous and discrete problems. The toolbox includes
functions for linear programming, quadratic programming, binary integer
programming, nonlinear optimization, nonlinear least squares, systems of
nonlinear equations, and multiobjective optimization. You can use them to
find optimal solutions, perform tradeoff analyses, balance multiple design
alternatives, and incorporate optimization methods into algorithms and
models.
In this section...
“Introduction” on page 1-2
“Optimization Functions” on page 1 -2
“Optimization Tool GUI” on page 1-3
1-2
Key features:
• Interactive tools for defining and solving optimization problems and
monitoring solution progress
• Solvers for nonlinear and multiobjective o ptimizatio n
• Solvers for nonlinear least squares, data fitting, and nonlinear equations
• Methods for solving quadratic and linear programming problems
• Methods for solving binary integer programming problems
• Parallel computing support in selected con strai ned n on li near solvers
Optimization Functions
Most toolbox functions are MATLAB®function files, made up of MATLAB
statements that implement specialized optimization algorithms. You can view
the code for these functions using the statement
type function_name
Page 19

Product Overview
You can extend the capabilities of Optimization Toolbox software by writing
your own functions, or by using the software in combination with other
toolboxes, or with the MATLAB or Simulink
®
environments.
Optimization Tool GUI
Optimization Tool (optimtool) is a graphical user interface (GUI) for selecting
a toolbox function, specifying optimization options, and running optimizations.
It provides a convenie nt interface for all optimization routines, including those
from Gl obal Optimization Toolbox software, which is licensed separately.
Optimization Tool makes it easy to
• Define and modify problems quickly
• Use the correct syntax for optimization functions
• Import and export from the MATLAB workspace
• Generate code containing your configuration for a solver and options
• Change parameters of an optimization during the execution of certain
Global Optimization Toolbox functions
1-3
Page 20
1 Getting Started
Example: Nonlinear Constrained Minimization
In this section...
“Problem Formulation: Rosenbrock’s Function” on page 1-4
“Defining the Problem in Toolbox Syntax” on page 1-5
“Running the Optimization” on page 1-7
“Interpreting the Result” on page 1-12
Problem Formulation: Rosenbrock’s Function
Consider the problem of minimizing Rosenbrock’s function
2
fx x x x() ( ),=−
over the unit disk, i.e., the disk of radius 1 centered at the origin. In other
words, find x that minimizes the function f(x)overtheset
problem is a minimization of a nonlinear function with a nonlinear constraint.
()
2
21
+−100 1
2
1
2
xx
122
1+≤
.This
1-4
Note Rosenbrock’s function is a standard test function in optimization. It
has a unique minimum value of 0 attained at the point (1,1). Finding the
minimum is a challenge for some algorithms since it has a shallow minimum
inside a deeply curved valley.
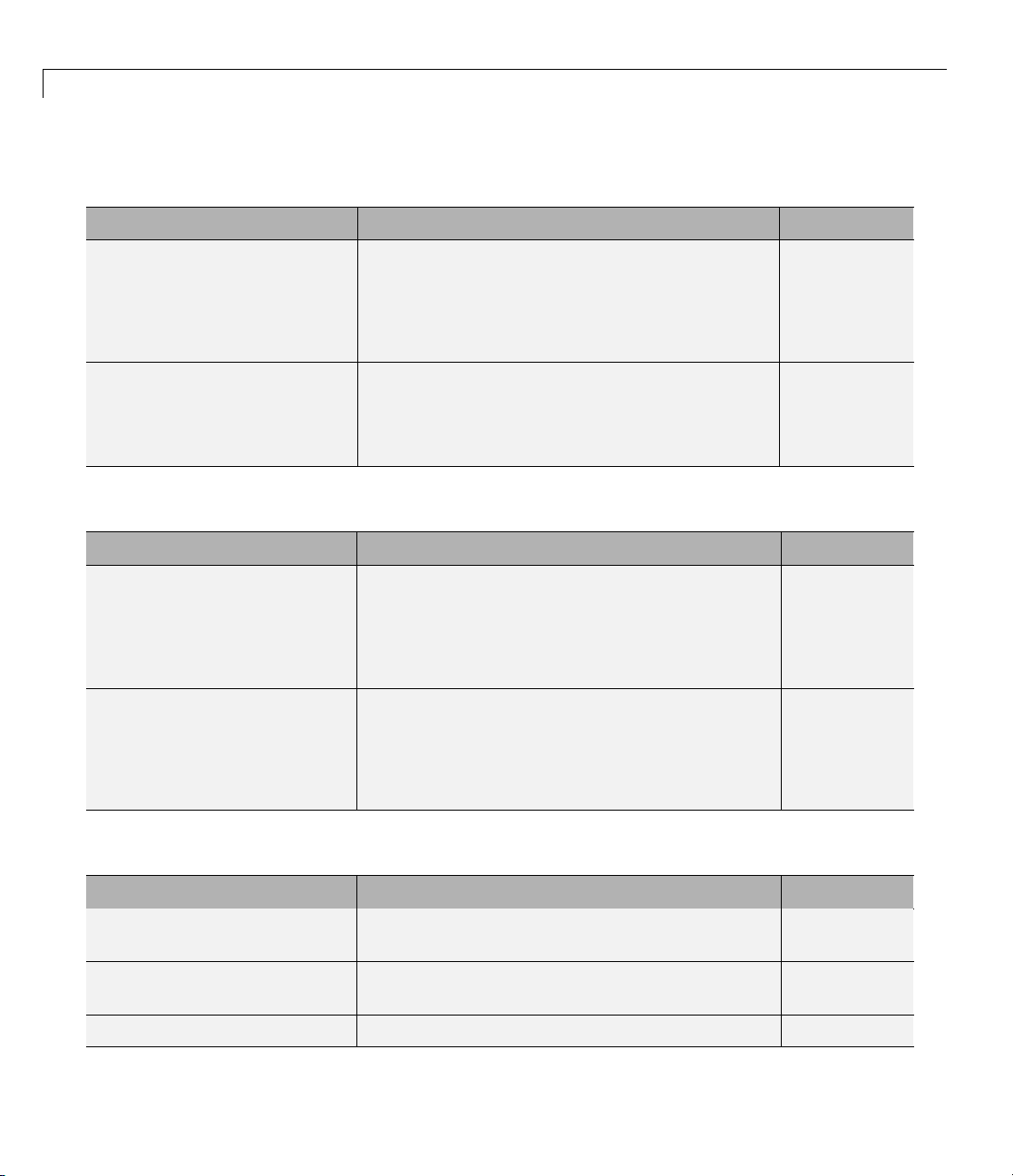
Here are two views of Ro senbrock’s function in the unit disk. The vertical
axis is log-scaled; in other words, the plot shows log(1 + f(x)). Contour lines
lie beneath the surface plot.
Page 21
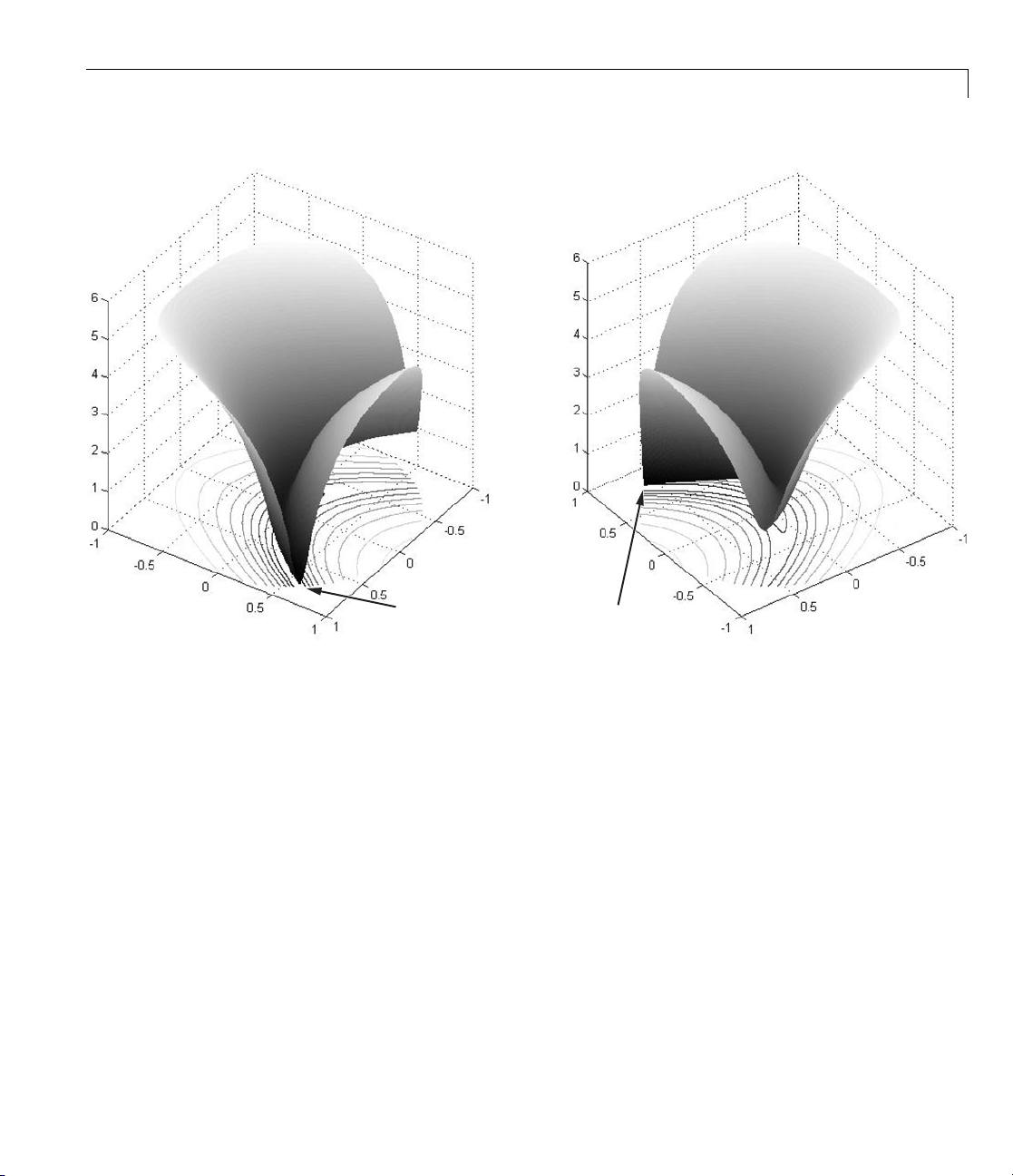
Example: Nonlinear Constrained Minimization
Minimum at (.7864, .6177)
Rosenbrock’s function, log-scaled: two views .
The function f(x)iscalledtheobjective function. This is the function you wish
to minimize. The inequality
limitthesetofx over which you may search for a minimum. You can have
any num ber of constraints, which are inequalities or equations.
All Optimization Toolbox optimization functions minimize an objective
function. To maximize a function f, apply an optimization routine to minimize
–f. For more details about maximizing, see “Maximizing an Objective” on
page 2-16.
Defining the Problem in Toolbox Syntax
To use Optimization Toolbox software, you need to
2
xx
122
is called a constraint. Constraints
1+≤
1-5
Page 22
1 Getting Started
1 Define your objective function in the MATLAB language, as a function file
or anonymous function. This example will use a function file.
2 Define your constraint(s) as a separate file or anonymous function.
Function File for Objective Function
A function file is a text file containing MATLAB commands with the extension
.m. Create a new function file in any te xt editor, or use the buil t-in MATLAB
Editor as follows:
1 At the command line enter:
edit rosenbrock
The MATLAB Editor opens.
2 In the editor enter:
function f = rosenbrock(x)
f = 100*(x(2) - x(1)^2)^2 + (1 - x(1))^2;
1-6
3 SavethefilebyselectingFile > Save.
File for Constraint Function
Constraint functions must be formulated so that they are in the form
2
c(x) ≤ 0orceq(x)=0. Theconstraint
2
xx
122
10+−≤
in order to have the correct syntax.
xx
122
Furthermore, toolbox functions that accept nonlinear constraints need to
have both equality and inequality constraints defined. In this example there
is only an inequali ty constraint, so you must pass an empty array
the equality constraint function ceq.
With these considerations in mind, write a function file for the nonlinear
constraint:
1 Create a file named unitdisk.m containing the following code:
needs to be reformulated as
1+≤
[]as
Page 23

Example: Nonlinear Constrained Minimization
function [c, ceq] = unitdisk(x)
c = x(1)^2 + x(2)^2 - 1;
ceq = [ ];
2 Save the file unitdisk.m.
Running the Optimization
Therearetwowaystoruntheoptimization:
• Using the “Optimization Tool” on page 1-7 Graphical User Interface (GUI)
• Using command line functions; see “Minimizing at the Command Line”
on page 1-11.
Optimization Tool
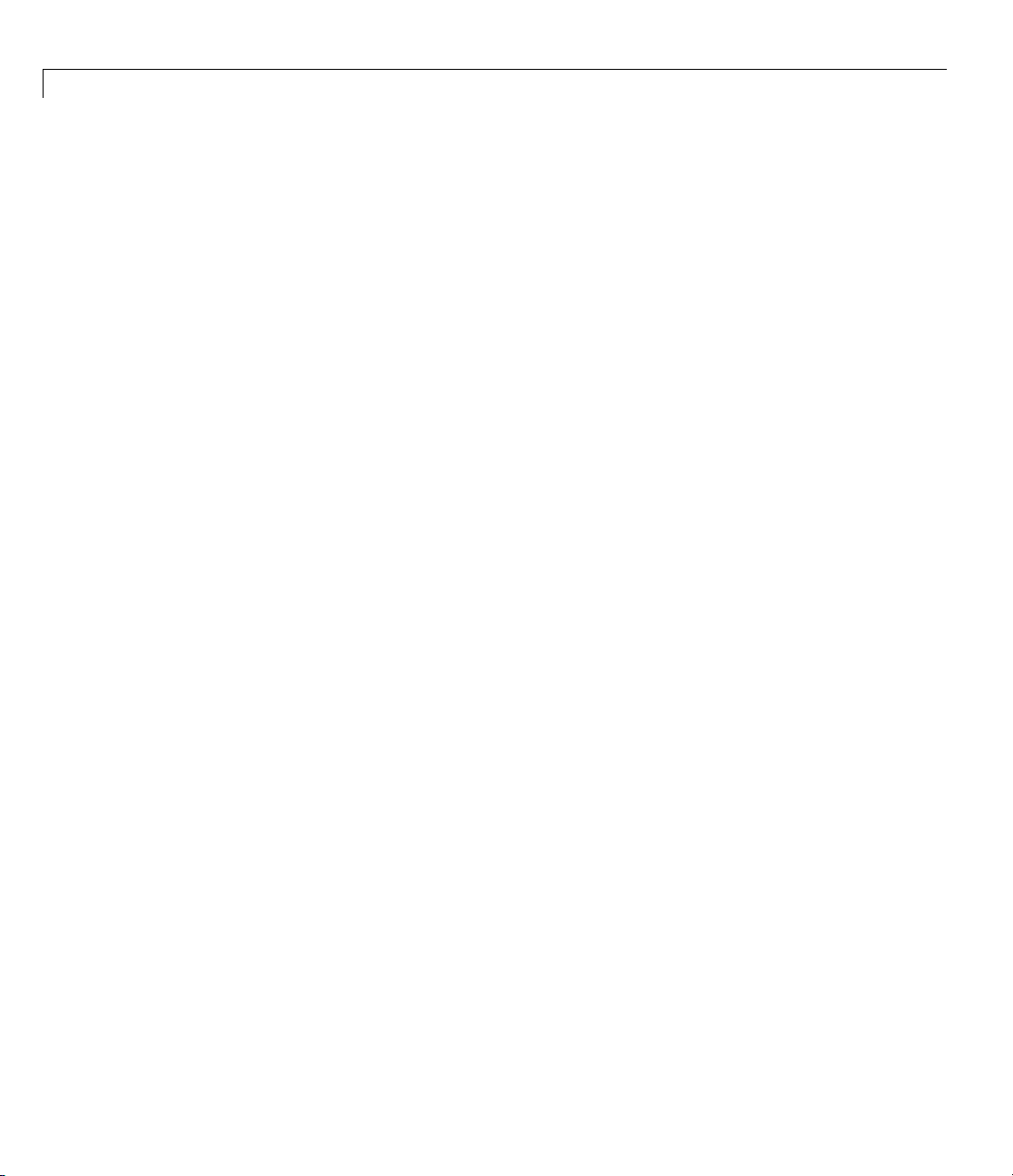
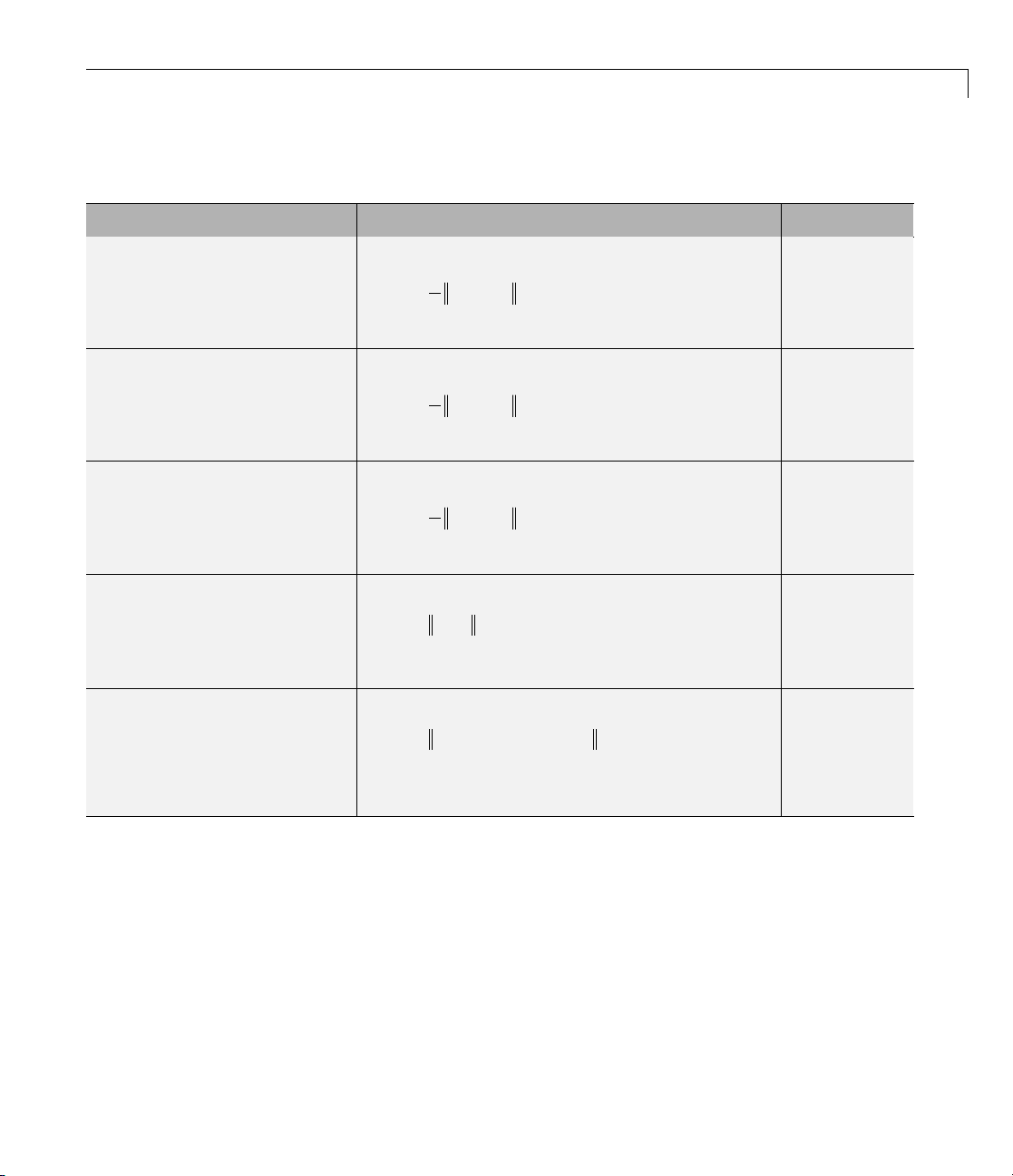
1 Start the Optimization Tool by typing optimtool at the command line.
The following GUI opens.
1-7
Page 24
1 Getting Started
1-8
ore information about this tool, see Chapter 5, “Optimization Tool”.
For m
2 The default Solver fmincon - Constrained nonlinear minimization
isselected. Thissolverisappropriatefor this problem, since Rosenbrock’s
function is nonlinear, and the problem has a constraint. For more
Page 25
Example: Nonlinear Constrained Minimization
information a bout how to choose a solver, see “Choosing a Solver” on page
2-4.
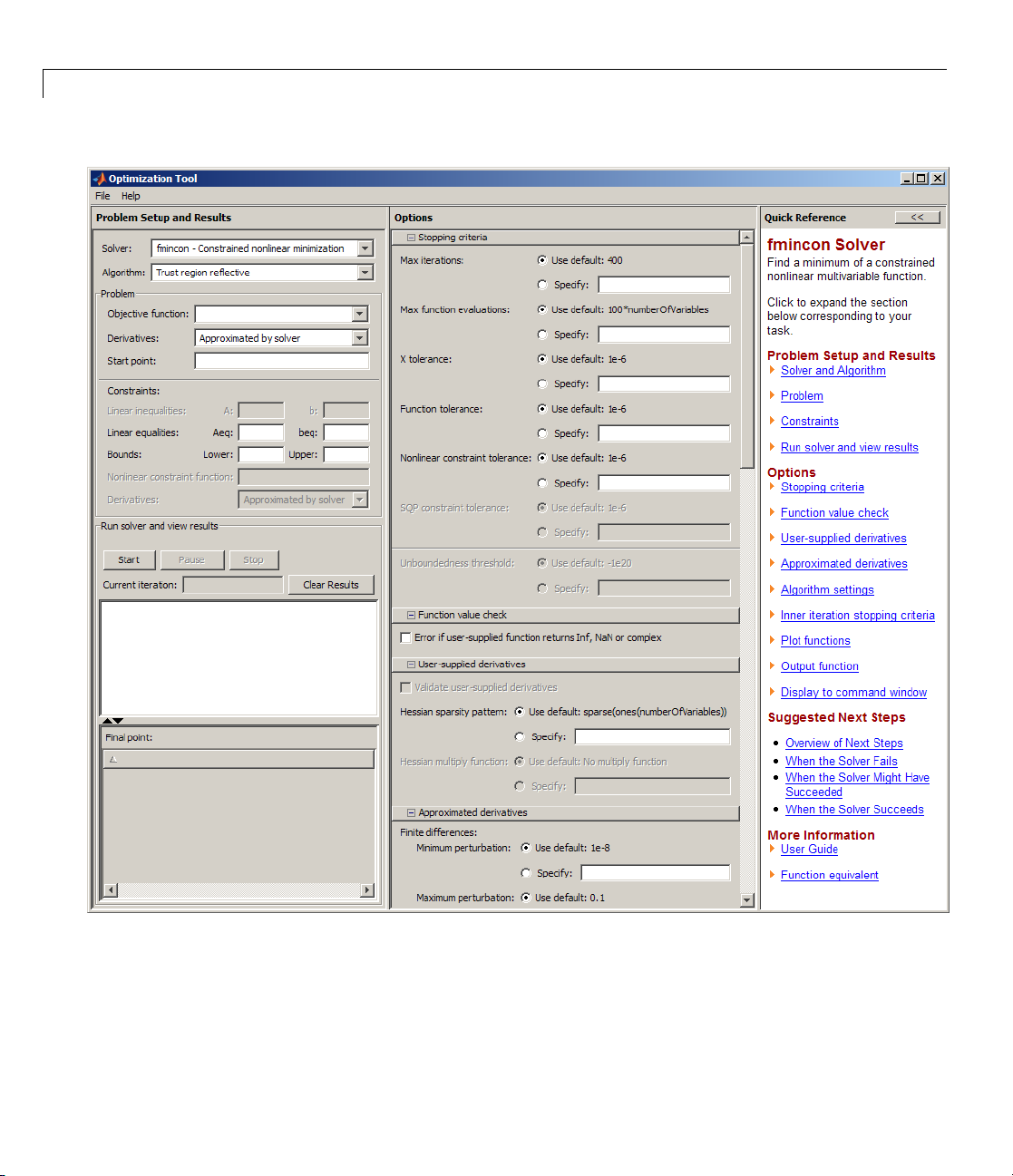
3 In the Algorithm pop-up menu choose Active set—the default Trust
region reflective
4 For Objective function enter @rosenbrock. The @ character indicates
that this is a function handle of the file
5 For Start point enter [0 0]. This is the initial point where fmincon
algorithm doesn’t handle nonlinear constraints.
rosenbrock.m.
begins its search for a minimum.
6 For Nonlinear constraint function enter @unitdisk, the function
handle of
unitdisk.m.
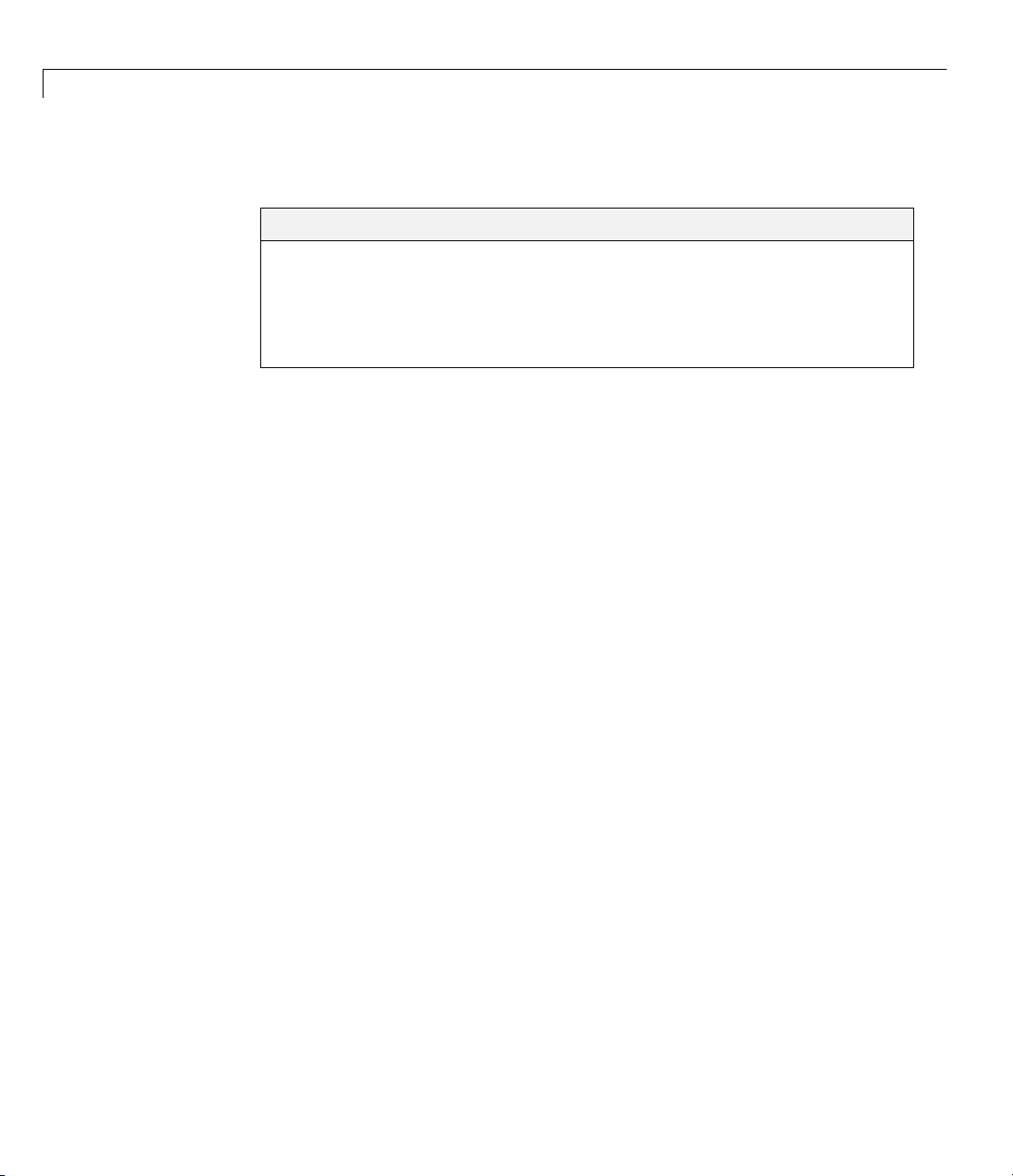
Your Problem Setup and Results pane should match this figure.
7 In the Options pane (center bottom), select iterative in the Level of
display pop-up menu. (If you don’t see the option, click
Display to
1-9
Page 26

1 Getting Started
command window.) This shows the progress of fmincon in th e command
window.
8 Click Start un
der Run solver and view results.
The following message appears in the box below the Start button:
Optimization running.
Objective function value: 0.045674808692966654
Local minimum possible. Constraints satisfied.
fmincon stopped because the predicted change in the objective function
is less than the default value of the function tolerance and constraints
were satisfied to within the default value of the constraint tolerance.
Your objective function value may differ slightly, depending on your computer
system and version of O p timization Toolbox software.
The message tells y ou that:
• The search for a constrained optimum ended because the derivative of the
objective function is nearly 0 in directions allowed by the constraint.
1-10
• The constraint is very nearly satisfied.
“Exit Flags a n d Exit Messages” on p a ge 3-3 discusses exit messages such
as these.
The minimizer
x appears under Final point.
Page 27

Example: Nonlinear Constrained Minimization
Minimizing at the Command Line
You can run the same optimization from the command line, as follows.
1 Create an options structure to choose iterative display and the active-set
algorithm:
options = optimset('Display','iter','Algorithm','active-set');
2 Run the fmincon solver with the options structure, reporting both the
location
function:
x of the minimizer, and value fval attained by the objective
[x,fval] = fmincon(@rosenbrock,[0 0],...
[],[],[],[],[],[],@unitdisk,options)
The six sets of empty brackets represent optional constraints that are not
being used in this example. See the
fmincon function reference pages for
the syntax.
MATLAB outputs a table of iterations, and the results of the optimization:
Local minimum possible. Constraints satisfied.
fmincon stopped because the predicted change in the objective function
is less than the default value of the function tolerance and constraints
were satisfied to within the default value of the constraint tolerance.
<stopping criteria details>
Active inequalities (to within options.TolCon = 1e-006):
lower upper ineqlin ineqnonlin
1
x=
0.7864 0.6177
1-11
Page 28

1 Getting Started
fval =
0.0457
The message tells you that the search for a constrained optimum ended
because the derivative of the objective function is nearly 0 in directions
allowed by the constraint, and that the constraint is very nearly satisfied.
Several phrases in the message contain links that give you more information
about the terms used in the message. For more details about these links, see
“Enhanced Exit Mes sages” on page 3-5.
Interpreting the Result
The iteration table in the command window shows how MATLAB searched for
the minimum value of Rosenbrock’s function in the unit disk. This table is
the same whether you use Optimization Tool or the command line. MATLAB
reports the minim ization as follows:
Max Line search Directional First-order
Iter F-count f(x) constraint steplength derivative optimality Procedure
03 1 -1
1 9 0.953127 -0.9375 0.125 -2 12.5
2 16 0.808446 -0.8601 0.0625 -2.41 12.4
3 21 0.462347 -0.836 0.25 -12.5 5.15
4 24 0.340677 -0.7969 1 -4.07 0.811
5 27 0.300877 -0.7193 1 -0.912 3.72
6 30 0.261949 -0.6783 1 -1.07 3.02
7 33 0.164971 -0.4972 1 -0.908 2.29
8 36 0.110766 -0.3427 1 -0.833 2
9 40 0.0750939 -0.1592 0.5 -0.5 2.41
10 43 0.0580974 -0.007618 1 -0.284 3.19
11 47 0.048247 -0.003788 0.5 -2.96 1.41
12 51 0.0464333 -0.00189 0.5 -1.23 0.725
13 55 0.0459218 -0.0009443 0.5 -0.679 0.362
14 59 0.0457652 -0.0004719 0.5 -0.4 0.181
15 63 0.0457117 -0.0002359 0.5 -0.261 0.0905 Hessian modified
16 67 0.0456912 -0.0001179 0.5 -0.191 0.0453 Hessian modified
17 71 0.0456825 -5.897e-005 0.5 -0.156 0.0226 Hessian modified
18 75 0.0456785 -2.948e-005 0.5 -0.139 0.0113 Hessian modified
19 79 0.0456766 -1.474e-005 0.5 -0.13 0.00566 Hessian modified
1-12
Page 29

Example: Nonlinear Constrained Minimization
This table might differ from yours depending on to olbo x ve rsio n and computing
platform. The following description applies to the table as displayed.
• The first column, labeled
fmincon took 19 iterations to converge.
• The second column, labeled
Iter, is the iteration number from 0 to 19.
F-count, reports the cumulative number
of times Rosenbrock’s function was evaluated. The final row shows an
F-count of 79, indicating that fmincon evaluated Rosenbrock’s function
79 times in the process of finding a minimum.
• The third column, labeled
f(x), displays the value of the objective function.
The final value, 0.0456766, is the minimum that is reported in the
Optimization Tool Run solver and view results box, and at the end of
the exit message in the com ma nd window.
• The fourth column,
Max constraint, goes from a value of –1 at the initial
value, to very nearly 0, –1.474e–005, at the final iteration. This column
shows the value of the constraint function
the value of
unitdisk was nearly 0 at the final iteration,
unitdisk at each iteration. Since
2
xx
122
1+≈
there.
The other columns of the iteration table are described in “Displaying Iterative
Output” on page 3-14.
1-13
Page 30

1 Getting Started
1-14
Page 31

2
Setting Up an Optimization
• “Introduction to Optimization Toolbox Solvers” on page 2-2
• “Choosing a Solver” on page 2-4
• “Writing Objective Functions” on page 2-10
• “Writing Constraints” on page 2-17
• “Passing Extra Parameters” on page 2-25
• “Setting Options” on page 2-30
Page 32
2 Setting Up an Optimization
Introduction to Optimization Toolbox Solvers
There are four general categories of Optimization Toolbox solvers:
• Minimizers
This group of solvers attempts to find a local minimum of the objective
function near a starting point
optimization, linear programming, quadratic programming, and general
nonlinear programming.
• Multiobjectiv e minimizers
This group of solvers attempts to ei ther minimize the maximum value of
a set of functions (
functions is below some prespecified values (
• Equation solvers
This group of solvers attempts to find a solution to a scalar- or vector-valued
nonlinear equation f(x)=0nearastartingpoint
be considered a form of optimization because it is equivalent to finding
the minimum norm of f(x)near
fminimax), or to find a location where a collection of
x0. They address problems of unconstrained
x0.
fgoalattain).
x0. Equation-solving can
2-2
• Least-Squares (curve-fitting) solvers
This group of solvers attempts to minimize a sum of squares. This type of
problem frequently arises in fitting a model to data. The s olv ers address
problems of finding nonnegative solutions, bounded or linearly constrained
solutions, and fitting parameterized nonlinear models to data.
For more information see “Problems Handled by Optimization Toolbox
Functions” on page 2-7. See “Optimization Decis ion Table” on page 2-4 for
aid in choosing among solvers for minimization.
Minimizers formulate optimization problems in the form
min ( ),xfx
possibly subject to constraints. f(x)iscalledanobjective function. In general,
f(x) is a scalar function of type
double. However, multiobjective optimization, equation solving, and some
sum-of-squares minimizers, can have vector or matrix objective functions F(x)
double,andx isavectororscalaroftype
Page 33

Introduction to Optimization Toolbox™ Solvers
of type double. To use Optimization Toolbox solvers for maximization instead
of minimization, see “Maximizing an Objective” on page 2-16.
Write the objective function for a solver in the form of a function file or
anonymous function handle. You can s upply a gradient
and you can supply a Hessian for several solvers. See “Writing Objective
Functions” on page 2-10. Constraints have a special form, as described in
“Writing Constraints” on page 2-17.
∇
f(x) for many solvers,
2-3
Page 34
2 Setting Up an Optimization
Choosing a Solver
Optimization Decision Table
The following table is designed to help you choose a solver. It does not address
multiobjective optimization or equation so lv in g. There are more details on
all the solvers in “Problems Handled by Optimization Toolbox Functions”
on page 2-7.
Usethetableasfollows:
1 Identifyyourobjectivefunctionasoneoffivetypes:
In this section...
“Optimization D ecision Table” on page 2-4
“Problems Handled by Optimization Toolbox Functions” on page 2-7
• Linear
2-4
• Quadratic
• Sum-of-squares (Least squares)
• Smooth nonlinear
• Nonsmooth
2 Identify your constraints as one of five types:
• None (unconstrained)
• Bound
• Linear (including bound)
• General smooth
• Discrete (integer)
3 Use
In
thetabletoidentifyarelevantsolver.
this table:
Page 35

Choosing a Solver
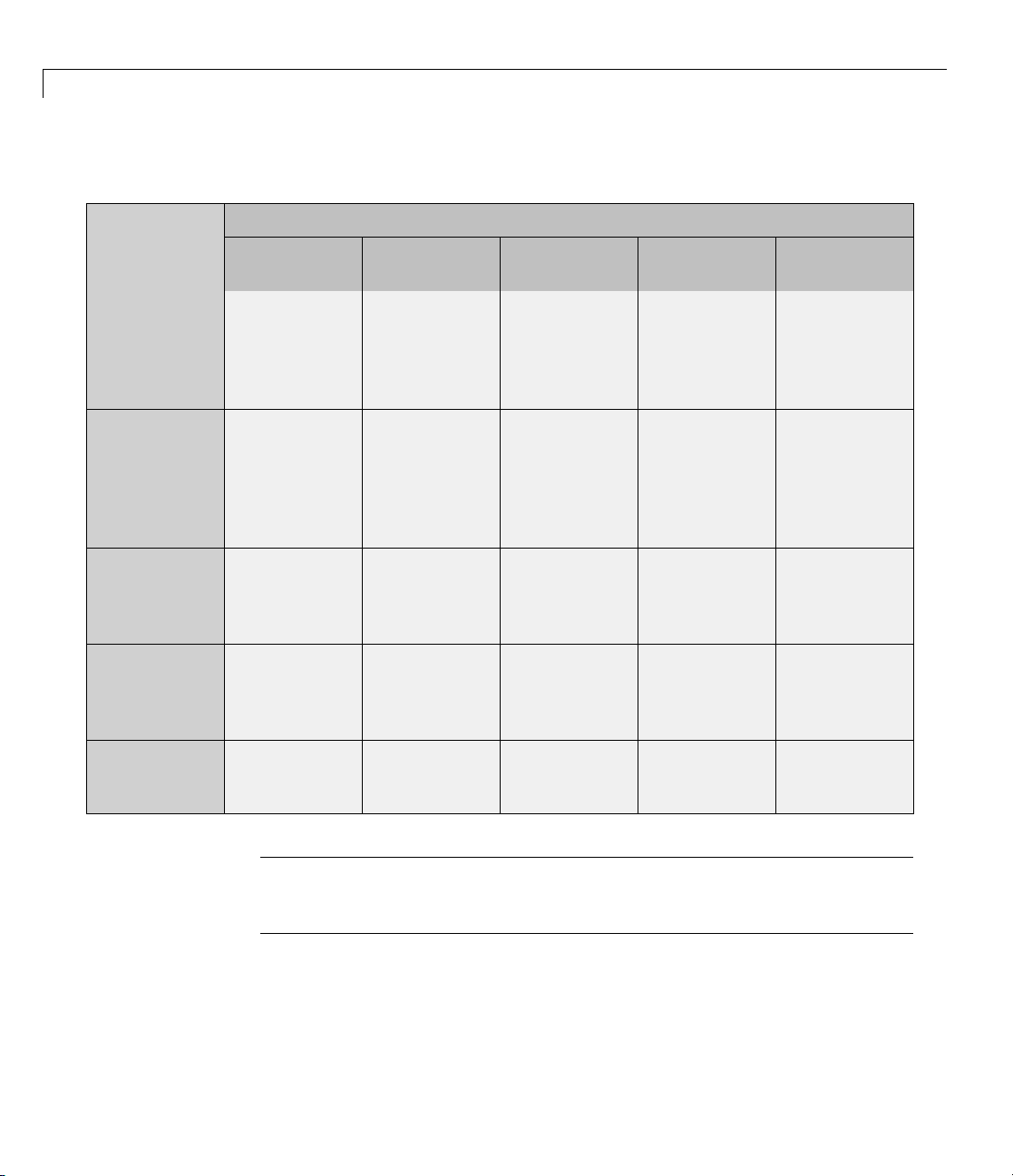
• Blank entries means there is no Optimization Toolbox solver specifically
designed for this type of problem.
• * means relevant solvers are found in Global Optimization Toolbox
functions (licensed separately from Optimization Toolbo x solvers).
•
fmincon applies to most smooth objective functions with smooth
constraints. It is not listed as a preferred solver for least squares or linear
or quadratic programming because the listed solvers are usually more
efficient.
• The table has suggested functions, but it is not meant to unduly restrict
your choices. For example,
fmincon isknowntobeeffectiveonsome
nonsmooth problems.
• The Global Optimization Toolbox
ga function can be programmed to
address discrete problems. It is not listed in the table because additional
programming is needed to solve discrete problems.
2-5
Page 36
2 Setting Up an Optimization
Solvers by Objective and Constraint
Constraint
Type
None
Bound
Linear
General
smooth
Discrete
Linear
n/a (f =const,
or min =
linprog,
−∞
Theory,
Examples
linprog,
Theory,
Examples
fmincon,
Theory,
Examples
bintprog,
Theory,
Example
Quadratic
quadprog,
Theory,
)
Examples
quadprog,
Theory,
Examples
quadprog,
Theory,
Examples
fmincon,
Theory,
Examples
Objective Type
Least
Squares
\,
lsqcurvefit,
lsqnonlin,
Theory,
Examples
lsqcurvefit,
lsqlin,
lsqnonlin,
lsqnonneg,
Theory,
Examples
lsqlin,
Theory,
Examples
fmincon,
Theory,
Examples
Smooth
nonlinear
fminsearch,
fminunc,
Theory,
Examples
fminbnd,
fmincon,
fseminf,
Theory,
Examples
fmincon,
fseminf,
Theory,
Examples
fmincon,
fseminf,
Theory,
Examples
Nonsmooth
fminsearch,*
*
*
*
2-6
Note This table does not list multiobjective solvers nor equation solvers. See
“Problems Handled by Optimization Toolbox Functions” on page 2-7 for a
complete list of problems addressed by O p tim i z a tion Toolbox functions.
Page 37
Note Some solvers have several algorithms. For help cho osing, see “Choosing
the Algorithm” on page 2- 4 5.
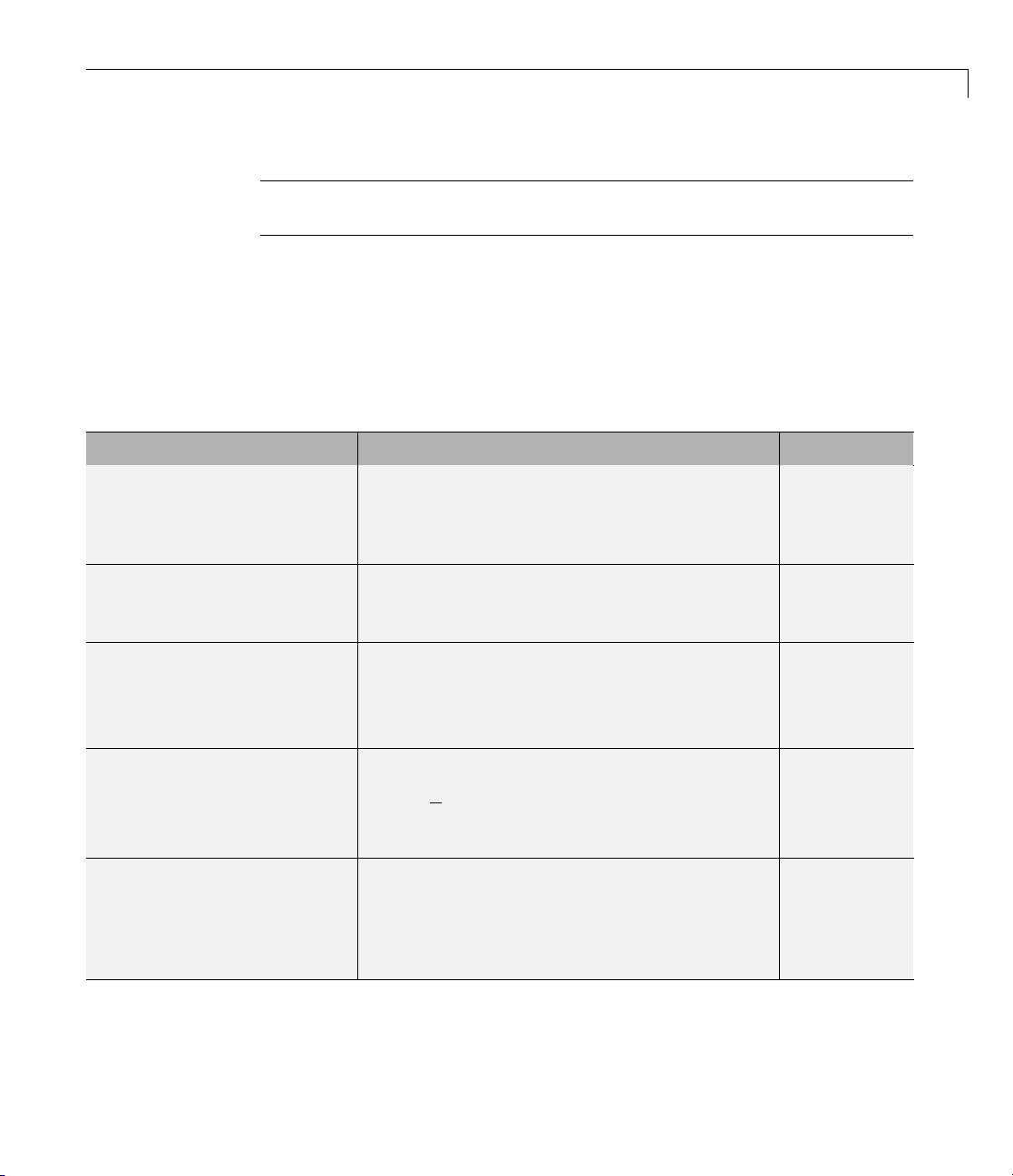
Problems Handled by Optimization Toolbox Functions
The following tables show the functions available for minimization, equation
solving, multiobjective optimization, and solving least-squares or data-fitting
problems.
Minimization Problems
Type Formulation Solver
Scalar minimization
min ( )xfx
such that l < x < u (x is scalar)
Unconstrained minimization
min ( )xfx
fminbnd
fminunc,
fminsearch
Choosing a Solver
Linear programming
Quadratic programming
Constrained minimization
T
min
fx
x
such that A·x ≤ b, Aeq·x = beq, l ≤ x ≤ u
1
min
TT
xHx cx
2
x
+
such that A·x ≤ b, Aeq·x = beq, l ≤ x ≤ u
min ( )xfx
such that c(x) ≤ 0, ceq(x)=0, A·x ≤ b,
Aeq·x = beq, l ≤ x ≤ u
linprog
quadprog
fmincon
2-7
Page 38
2 Setting Up an Optimization
Minimization Problems (Continued)
Type Formulation Solver
Semi-infinite minimization
min ( )xfx
such that K(x,w) ≤ 0forallw, c(x) ≤ 0,
ceq(x)=0, A·x ≤ b, Aeq·x = beq, l ≤ x ≤ u
Binary integer programming
T
min
fx
x
such that A·x ≤ b, Aeq·x = beq, x binary
Multiobjective Problems
Type F ormul ation Solve r
Goal attainment
min
γ
,x γ
such that F(x)–w·γ ≤ goal, c(x) ≤ 0, ceq(x)=0,
A·x ≤ b, Aeq·x = beq, l ≤ x ≤ u
Minimax
min max ( )
x
such that c(x) ≤ 0, ceq(x)=0, A·x ≤ b,
Aeq·x = beq, l ≤ x ≤ u
i
Fx
i
fseminf
bintprog
fgoalattain
fminimax
Equation Solving Problems
Type F ormul ation Solve r
Linear equations
Nonlinear equation of one
C·x = d, n equations, n variables
f(x)=0
variable
Nonlinear equations
F(x)=0,n equations, n variables
2-8
\ (matrix left
division)
fzero
fsolve
Page 39
Least-Squares (Model-Fitting) Problems
Type F ormul ation Solve r
Choosing a Solver
Linear least-squares
Nonnegative
linear-least-squares
Constrained
linear-least-squares
Nonlinear least-square s
Nonlinear curve fitting
1
minxCx d
2
⋅−
2
2
m equations, n variables
1
minxCx d
2
⋅−
2
2
such that x ≥ 0
1
minxCx d
2
⋅−
2
2
such that A·x ≤ b, Aeq·x = beq, lb ≤ x ≤ ub
min ( ) min ( )
xx
2
Fx F x
=
2
∑
2
i
i
such that lb ≤ x ≤ ub
min ( , )
Fxxdata ydata−
x
2
2
such that lb ≤ x ≤ ub
\ (matrix left
division)
lsqnonneg
lsqlin
lsqnonlin
lsqcurvefit
2-9
Page 40
2 Setting Up an Optimization
Writing Objective Functions
In this section...
“Writing Objective Functions” on page 2-10
“Jacobians of Vector and Matrix Objective Functions” on page 2-12
“Anonymous Function Objectives” on page 2-15
“Maximizing an Objective” on page 2-16
Writing Objective Functions
This section relates to scalar-value d objective functions. A few solvers
require vector-valued objective functions:
lsqcurvefit,andlsqnonlin. For vector-valued or matrix-valued objective
functions, see “Jacobians o f Vector and Matrix Objective Functions” on page
2-12. For information on how to include extra parameters, see “Passing Extra
Parameters” on p age 2-25.
fgoalattain, fminimax, fsolve,
2-10
An objective function file can return one, two, or three outputs. It can return:
• A single double-precision number, representing the value of f(x)
• Both f(x)anditsgradient
∇
• All three of f(x),
You are not required to provide a gradient for some solvers, and you are
never required to provide a Hessian, but providing one or both can lead to
faster execution and more reliable answers. If you do not provide a gradient
or Hessian, solvers may attempt to estimate them using finite difference
approximations or other numerical schemes.
For constrained problems, providing a gradient has another advantage. A
solver can reach a point
x always lead to an infeasible point. In this case, a solver can fail or halt
prematurely. Providing a gradient allows a solver to proceed.
Some solvers do not use gradient or Hessian information. You shoul d
“conditionalize” a function so that it returns just what is needed:
f(x), and the Hessian matrix H(x)=∂2f/∂xi∂x
∇
f(x)
j
x such that x is feasible, but finite differences around
Page 41

Writing Objective Functions
• f(x)alone
∇
• Both f(x)and
• All three of f(x),
Forexample,considerRosenbrock’sfunction
fx x x x() ( ),=−
which is described and plotted in “Example: Nonlinear Constrained
Minimization” on page 1-4. The gradient of f(x)is
f(x)
∇
f(x), and H(x)
2
2
()
21
+−100 1
2
1
⎡
−−
xxx x
400 2 1
()
∇fx
and the Hessian H(x)is
Hx
Function rosenboth returns the value of Rosenbrock’s function in f,the
gradient in
function [f g H] = rosenboth(x)
% Calculate objective f
f = 100*(x(2) - x(1)^2)^2 + (1-x(1))^2;
if nargout > 1 % gradient required
⎢
⎢
⎣
⎡
1200 400 2 400
() .=
⎢
⎢
⎣
g, and the Hessian in H if required:
g = [-400*(x(2)-x(1)^2)*x(1)-2*(1-x(1));
if nargout > 2 % Hessian required
end
⎢
() ,=
21211
200
2
xx x
−+−
1
−
400 200
200*(x(2)-x(1)^2)];
H = [1200*x(1)^2-400*x(2)+2, -400*x(1);
-400*x(1), 200];
−−
()
2
xx
−
()
21
21
x
1
⎤
⎥
⎥
⎥
⎦
⎤
⎥
⎥
⎦
end
2-11
Page 42

2 Setting Up an Optimization
nargout checks the number of arguments that a calling function specifies; see
“Checking the Number of Input Arguments” in the MATLAB Programming
Fundamentals documentation.
The
to minimize Rosenbrock’s function. Tell
Hessian by setting
Run fminunc starting at [-1;2]:
fminunc solver, designed for unconstrained optimization, allows you
fminunc to use the gradient and
options:
options = optimset('GradObj','on','Hessian','on');
[x fval] = fminunc(@rosenboth,[-1;2],options)
Local minimum found.
Optimization completed because the size of the gradient
is less than the default value of the function tolerance.
x=
1.0000
1.0000
2-12
fval =
1.9310e-017
If you have a Symbolic Math Toolbox™ license, you can calculate gradients
and Hessians automatically, as described in “Example: Using Symbolic Math
Toolbox Functions to Calculate Gradients and Hessians” on page 6-69.
Jacobians of Vector and Matrix Objective Functions
Some solvers, s uch as fsolve and lsqcurvefit, have objective functions
that are vectors or matrices. T he only difference in usage between these
types of objective functions and scalar objective functions is the way to write
their derivatives. The first-order partial derivatives of a vector-valued or
matrix-valued function is called a Jacobian; the first-order partial derivatives
of a scalar function is called a gradient.
Page 43

Writing Objective Functions
Jacobians of Vector Functions
If x represents a vector of independent variables, and F(x)isthevector
function, the Jacobian J(x) is defined as
Fx
()
∂
Jx
()
ij
If F has m components, and x has k components, J is a m-by-k matrix.
For example, if
i
.=
x
∂
j
Fx
()
⎡
xxx
+
1223
⎢
⎢
⎣
sin
23
xxx
+−
()
123
⎤
,=
⎥
⎥
⎦
then J(x)is
2
Jx
()
⎡
=
⎢
cos cos cos
⎣
xx x
13 2
23 2 23 3 23
xxx xxx xxx
+−
()
123 123 123
+−
()
−+−
(()
Jacobians of Matrix Functions
The Jacobian of a matrix F(x) is defined by changing the matrix to a vector,
column by column. For example, the matrix
FF
⎡
11 12
⎢
F
FF
=
21 22
⎢
⎢
FF
31 32
⎣
is rewritten as a vector f:
F
⎡
11
⎢
F
21
⎢
⎢
F
31
f
=
⎢
F
12
⎢
⎢
F
22
⎢
F
⎢
32
⎣
The Jacobian of F is defined as the Jacobian of f,
⎤
⎥
⎥
⎥
⎦
⎤
⎥
⎥
⎥
.
⎥
⎥
⎥
⎥
⎥
⎦
⎤
.
⎥
⎦
2-13
Page 44

2 Setting Up an Optimization
If F is an m-by-n matrix, and x is a k-vector, the Jacobian is a mn-by-k matrix.
For example, if
the Jacobian of F is
J
ij
Fx
() / ,=
Jx
()
f
∂
i
=
.
x
∂
j
⎡
xx x x
12 132
⎢
⎢
xx xx
−
5
21421
⎢
⎢
⎣
⎡
⎢
⎢
⎢
⎢
=
⎢
⎢
⎢
⎢
⎢
⎣
2
xxx
−−
4
2
xx
21
3
x
−
45
1
02
2
xx
36
1
xx x
//
−
2121
2
xx
34
1
−
1
−
+
3
132
⎤⎤
⎥
⎥
⎥
x
2
⎥
.
⎥
2
⎥
⎥
⎥
3
⎥
2
⎦
2
⎤
⎥
⎥
⎥
4
⎥
⎦
2-14
Jacobians with Matrix-Valued Independent Variables
If x is a matrix, the Ja c ob ian of F(x) is defined by changing the matrix x to a
vector, column by column. For example, if
xx
⎡
11 12
X
=
⎢
xx
⎣
21 22
then the gradient is defined in terms of the vector
x
⎡
11
⎢
x
21
⎢
x
=
⎢
x
12
⎢
x
⎢
⎣
22
With
⎤
,
⎥
⎦
⎤
⎥
⎥
.
⎥
⎥
⎥
⎦
Page 45

Writing Objective Functions
FF
⎡
⎢
F
=
⎢
⎢
⎣
11 12
FF
21 22
FF
31 32
⎤
⎥
,
⎥
⎥
⎦
and f the vector form of F as above, the Jacobian of F(X) is defined to be the
Jacobian of f(x):
f
∂
J
i
=
ij
.
x
∂
j
So, for example,
J
(,)
32
()
3
()
2
∂
31
=
X
∂
21
J
,(,)
and ..
54
f
()
∂
=
x
()
∂
f
∂
=
x
∂
F
∂
5
4
22
=
X
∂
22
F
If F is an m-by-n matrix, and x is a j-by-k matrix, the Jacobian is a mn-by-jk
matrix.
Anonymous Function Objectives
Anonymous functions are useful for writing simple objective functions.
For more information about anonymous functions, see “Constructing an
Anonymous Function”. Rosenbrock’s function is simple enough to write as an
anonymous function:
anonrosen = @(x)(100*(x(2) - x(1)^2)^2 + (1-x(1))^2);
Check that this evaluates correctly at (–1,2):
>> anonrosen([-1 2])
ans =
104
Using anonrosen in fminunc yields the following results:
options = optimset('LargeScale','off');
[x fval] = fminunc(anonrosen,[-1;2],options)
Local minimum found.
2-15
Page 46

2 Setting Up an Optimization
Maximizing an Objective
All solvers are designed to minimize an objective function. If you have a
maximization problem, that is, a problem of the form
then define g(x)=–f(x), and minimize g.
For example, to find the maximum of tan(cos(x)) near x =5,evaluate:
Optimization completed because the size of the gradient
is less than the default value of the function tolerance.
x=
1.0000
1.0000
fval =
1.2262e-010
max ( ),
fx
x
2-16
[x fval] = fminunc(@(x)-tan(cos(x)),5)
Warning: Gradient must be provided for trust-region method;
using line-search method instead.
> In fminunc at 356
Local minimum found.
Optimization completed because the size of the gradient is less than
the default value of the function tolerance.
x=
6.2832
fval =
-1.5574
The maximum is 1.5574 (the negative of the reported fval), and occurs at
x = 6.2832. This is correct since, to 5 digits, the maximum is tan(1) = 1.5574,
which occurs at x =2π = 6.2832.
Page 47

Writing Co nstraints
In this section...
“Types of Constraints” on page 2-17
“Iterations Can Violate Constraints” on page 2-18
“Bound Constraints” on page 2-19
“Linear Inequality Constraints” on page 2-20
“Linear Equality Constraints” on page 2-20
“Nonlinear Constraints” on p a ge 2-21
“An Example Using All Types of Constraints” on page 2-23
Types of Constraints
Optimization Toolbox solvers have special forms for constraints. Constraints
are separated into the following types:
Writing Constraints
• “Bound Constraints” on page 2-19 — Lower and upper bounds on individual
components: x ≥ l and x ≤ u.
• “Linear Inequality Constraints” on page 2-20 — A·x ≤ b. A is an m-by-n
matrix, w hich represents m constraints for an n-dimensional vector x. b is
m-dimensional.
• “Linear Equality Constraints” on page 2-20 — Aeq·x = beq. Thisisasystem
of equations.
• “Nonlinear Constraints” on page 2-21 — c(x) ≤ 0andceq (x)=0. Bothc and
ceq are scalars or vectors representing several constraints.
Optimization Toolbox functions assume that inequality constraints are of the
form c
constraints by multiplying them by –1. For example, a constraint of the form
c
A·x ≥ b is equivalent to the constraint –A·x ≤ –b. For more information, see
“Linear Inequality Constraints” on page 2-20 and “Nonlinear Constraints”
on page 2-21.
(x) ≤ 0orAx≤ b. Greater-than constraints are expressed as less-than
i
(x) ≥ 0 is equivalent to the constraint –ci(x) ≤ 0. A constraint of the form
i
2-17
Page 48
2 Setting Up an Optimization
You can sometimes write constraints in a variety of ways. To make the best
use of the solvers, use the lowest numbered constraints possible:
1 Bounds
2 Linear equalities
3 Linear inequalities
4 Nonlinear equalities
5 Nonlinear inequalities
For example, with a constraint 5 x ≤ 20, use a bound x ≤ 4insteadofalinear
inequality or nonlinear inequality.
For information on how to pass extra parameters to constraint functions, see
“Passing Extra Parameters” on page 2-25.
2-18
Iterations Can Violate Constraints
Be careful when writing your objective and constraint functions. Intermediate
iterations can lead to points that are infeasible (do not satisfy constraints).
If you write objective or constraint functions that assume feasibility, these
functions can error or give unexpected results.
For example, if you take a square root or logarithm of x,andx <0,theresult
is not real. You can try to avoid this error by setting
Nevertheless, an intermediate iteration can violate this bound.
Algorithms that Satisfy Bound Constraints
Some solvers and algorithms honor bound constraints at every iteration.
These include:
•
fmincon interior-point, sqp,andtrust-region-reflective algorithms
lsqcurvefit trust-region-reflective algorithm
•
lsqnonlin trust-region-reflective algorithm
•
fminbnd
•
0 as a lower bound on x.
Page 49

Writing Constraints
Algorithms that can Violate Bound Constraints
The following solvers and algorithms can violate bound constraints at
intermediate iterations:
•
fmincon active-set algorithm
fgoalattain
•
• fminimax
• fseminf
Bound Constraints
Lower and upper bounds on the components of the vector x. You need not give
gradients for this type of constraint; solvers calculate them automatically.
Bounds do not affect Hessians.
If you know bounds o n the location of your optimum, then you may obtain
faster and more reliable solutions by explicitly including these bounds in your
problem formulation.
Bounds are given as vectors, with the same length as x.
• If a particular component is not bounded below, use –
similarly, use
Inf if a component is not bounded above.
Inf as the bound;
• If you have only bounds of one type (upper or lower), you do not need
to write the other type. For example, if you have no upper bounds, you
do not need to supply a vector of
Infs. Also, if only the first m out of n
components are bounded, then you need only supply a vector of length
m containing bounds.
For example, suppose your bounds are:
• x
≥ 8
3
≤ 3
• x
2
Write the constraint vectors as
• l = [–Inf; –Inf; 8]
2-19
Page 50
2 Setting Up an Optimization
• u =[Inf;3]oru = [Inf; 3; Inf]
Linear Inequality Constraints
Linear inequality constraints are of the form A·x ≤ b.WhenA is m-by-n,this
represents m constraints on a variable x with n components. You supply the
m-by-n matrix A and the m-component vector b. You do not need to give
gradients for this type of constraint; solvers calculate them automatically.
Linear inequalities do not affect Hessians.
For example, suppose that you have the following linear inequalities as
constraints:
Here m =3andn =4.
Write these using the following matrix A and vector b:
x
+ x3≤ 4,
1
2x
– x3≥ –2,
2
x
– x2+ x3– x4≥ 9.
1
2-20
1010
⎡
⎢
Ab=−
0210
⎢
⎢
−−
11 11
⎣
4
⎡
⎤
⎢
⎥
=
2
.
⎢
⎥
⎢
⎥
−
9
⎣
⎦
Notice that the “greater than” inequalities were first multiplied by –1 in order
to get them into “less than” inequality form.
⎤
⎥
,
⎥
⎥
⎦
Linear Equality Constraints
Linear equalities are of the form Aeq·x = beq.Thisrepresentsm equations
with n-component vector x. You supply the m-by-n matrix Aeq and the
m-component vector beq.Youdonotneedtogiveagradientforthistypeof
constraint; solvers calculate them automatically. Linear equalities do not
affect Hessians. The form of this type of constraint is exactly the same as
for “Linear Inequality Constraints” on page 2-20. Equalities rather than
Page 51
Writing Constraints
inequalities are implied by the position in the input argument list of the
various solvers.
Nonlinear Constraints
Nonlinear inequality constraints are of the form c(x) ≤ 0, where c is a vector of
constraints, one component for each constraint. Similarly, nonlinear equality
constraints are of the form ceq( x)=0.
Nonlinear constraint functions must return both inequality and equality
constraints, even if they do not both exist. Return empty
constraint.
If you provide gradients for c and ceq, your solver may run faster and give
more reliable results.
[] fo r a n onexistent
Providing a gradient has another advantage. A solver can reach a point
x
such that x is feasible, but finite differences around x always lead to an
infeasible point. In this case, a solver can fail or halt prematurely. Providing
a gradient allow s a solver to proceed.
For e xample, suppose that you have the following inequalities as constraints:
2
xx
122
+≤
94
1
2
xx
≥−,.
21
1
Write these constraints in a function file as follows:
function [c,ceq]=ellipseparabola(x)
% Inside the ellipse bounded by (-3<x<3),(-2<y<2)
% Above the line y=x^2-1
c(1) = (x(1)^2)/9 + (x(2)^2)/4 - 1;
c(2) = x(1)^2 - x(2) - 1;
ceq = [];
end
ellipseparabola
returns empty [] as the nonlinear equality function. Also,
both inequalities were put into ≤ 0form.
2-21
Page 52
2 Setting Up an Optimization
To include gradient information, write a conditionalized function as follows:
See “Writing Objective Functions” on page 2-10 for information on
conditionalized gradients. The gradient matrix is of the form
function [c,ceq,gradc,gradceq]=ellipseparabola(x)
% Inside the ellipse bounded by (-3<x<3),(-2<y<2)
% Above the line y=x^2-1
c(1) = x(1)^2/9 + x(2)^2/4 - 1;
c(2) = x(1)^2 - x(2) - 1;
ceq = [];
if nargout > 2
gradc = [2*x(1)/9, 2*x(1);...
x(2)/2, -1];
gradceq = [];
end
gradc
The first column of the gradient matrix is associated with
column is associated with
=[∂c(j)/∂xi].
i, j
c(1),andthesecond
c(2). This is the transpose of the form of Jacobians.
To have a solver use gradients of nonlinear constraints, indicate that they
exist by using
options=optimset('GradConstr','on');
optimset:
Make sure to pass the options structure to your solver:
[x,fval] = fmincon(@myobj,x0,A,b,Aeq,beq,lb,ub,...
@ellipseparabola,options)
If you have a license for Symbolic Math Toolbox software, you can calculate
gradients and Hessians automatically, as described in “Example: Using
Symbolic M ath Toolbox Functions to Calculate Gradients and Hessians” on
page 6-69.
2-22
Page 53

Writing Constraints
An Example Using All Types of Constraints
This section contains an example of a nonlinear minimization problem with
all possible types of constraints. The objective function is in the subfunction
myobj(x). The nonlinear constraints are in the subfunction myconstr(x).
This example does not use gradients.
function fullexample
x0 = [1; 4; 5; 2; 5];
lb = [-Inf; -Inf; 0; -Inf; 1];
ub = [ Inf; Inf; 20];
Aeq = [1 -0.3 0 0 0];
beq = 0;
A = [0 0 0 -1 0.1
0 0 0 1 -0.5
0 0 -1 0 0.9];
b = [0; 0; 0];
[x,fval,exitflag]=fmincon(@myobj,x0,A,b,Aeq,beq,lb,ub,...
@myconstr)
%--------------------------------------------------------function f = myobj(x)
f = 6*x(2)*x(5) + 7*x(1)*x(3) + 3*x(2)^2;
%--------------------------------------------------------function [c, ceq] = myconstr(x)
c = [x(1) - 0.2*x(2)*x(5) - 71
0.9*x(3) - x(4)^2 - 67];
ceq = 3*x(2)^2*x(5) + 3*x(1)^2*x(3) - 20.875;
Calling fullexample produces the following display in the command window:
fullexample
Warning: Trust-region-reflective algorithm does not solve this type of problem, using active-set
algorithm. You could also try the interior-point or sqp algorithms: set the Algorithm option to
'interior-point' or 'sqp' and rerun. For more help, see Choosing the Algorithm in the documentation.
> In fmincon at 472
In fullexample at 12
2-23
Page 54
2 Setting Up an Optimization
Local minimum found that satisfies the constraints.
Optimization completed because the objective function is non-decreasing in
feasible directions, to within the default value of the function tolerance,
and constraints were satisfied to within the default value of the constraint tolerance.
Active inequalities (to within options.TolCon = 1e-006):
lower upper ineqlin ineqnonlin
3
x=
0.6114
2.0380
1.3948
0.3587
1.5498
fval =
37.3806
2-24
exitflag =
1
Page 55

Passing Extra Parameters
Sometimes objective or constraint functions hav e parameters in addition
to the independent variable. There are three methods of including these
parameters:
• “Anonymous Functions” on page 2-25
• “Nested Functions” on page 2-28
• “Global Variables” on page 2-28
Global variables are troublesome because they do not allow names to be
reused among functions. It is better to use one of the other two methods.
For example, suppose you want to minimize the function
fx a bx x x xx c cx x() ,
=− +
()
121
4312
/
++−+
12 222
Passing Extra Parameters
()
2
(2-1)
for diffe
depend o
how to pr
paramet
Anonym
To pass
1 Write
2 Ass
rent values of a, b,andc. Solvers accept objective functions that
nly on a single variable (x in th is case). The following sections show
ovide the additional parameters a, b,andc.Thesolutionsarefor
er values a =4,b =2.1,andc =4nearx
=[0.50.5]usingfminunc.
0
ous Functions
parameters using anonymous functions:
a file contain ing the follo wing code:
function y = parameterfun(x,a,b,c)
y = (a - b*x(1)^2 + x(1)^4/3)*x(1)^2 + x(1)*x(2) + ...
(-c + c*x(2)^2)*x(2)^2;
ign values to the parameters and define a function handle
nymous function by entering the following commands at the MATLAB
ano
mpt:
pro
a = 4; b = 2.1; c = 4; % Assign parameter values
x0 = [0.5,0.5];
f to an
2-25
Page 56
2 Setting Up an Optimization
3 Call the solver fminunc with the anonymous function:
f = @(x)parameterfun(x,a,b,c)
[x,fval] = fminunc(f,x0)
The following output is displayed in the command window:
Warning: Gradient must be provided for trust-region algorithm;
using line-search algorithm instead.
> In fminunc at 347
Local minimum found.
Optimization completed because the size of the gradient is less than
the default value of the function tolerance.
x=
-0.0898 0.7127
2-26
fval =
-1.0316
Page 57
Passing Extra Parameters
Note The parameters passed in the anonymous function are those that exist
at the time the anonymous function is created. Consider the example
a=4;b=2.1;c=4;
f = @(x)parameterfun(x,a,b,c)
Suppose you subsequently change, a to 3 and run
[x,fval] = fminunc(f,x0)
You get the same answer as before, since parameterfun uses a=4,thevalue
when
parameterfun was created.
To change the parameters that are passed to the function, renew the
anonymous function by reentering it:
a=3;
f = @(x)parameterfun(x,a,b,c)
You can create anonymous functions of more than one argument. For
example, to use
arguments,
fh = @(x,xdata)(sin(x).*xdata +(x.^2).*cos(xdata));
x = pi; xdata = pi*[4;2;3];
fh(x, xdata)
ans =
9.8696
9.8696
-9.8696
lsqcurvefit, first create a function that takes two input
x and xdata:
Now call lsqcurvefit:
% Assume ydata exists
x = lsqcurvefit(fh,x,xdata,ydata)
2-27
Page 58
2 Setting Up an Optimization
Nested Function
To pass the param
file that
• Accepts
• Contains the o
• Calls
Here is the co
function [x,fval] = runnested(a,b,c,x0)
[x,fval] = fminunc(@nestedfun,x0);
% Nested function that computes the objective function
end
The obje
to the va
To run th
a, b, c,
fminunc
de for the function file for this example:
function y = nestedfun(x)
y = (a - b*x(1)^2 + x(1)^4/3)*x(1)^2 + x(1)*x(2) +...
end
ctivefunctionisthenestedfunction
riables
e optimization, enter:
a, b,andc.
s
eters for Equation 2-1 via a nested function, write a single
and
x0 as inputs
bjective function as a nested function
(-c + c*x(2)^2)*x(2)^2;
nestedfun, which has access
2-28
a = 4; b = 2.1; c = 4;% Assign parameter values
x0 = [0.5,0.5];
[x,fval] = runnested(a,b,c,x0)
The ou
Glob
Glob
glob
the
tput is the same as in “Anonymous Functions” on page 2-25.
al Variables
al va riab le s can be troublesome, it is better to avoid u sin g them. To u se
al variables, declare the variables to be global in the workspace and in
functions that use the variables.
te a function file:
1 Wri
function y = globalfun(x)
Page 59

Passing Extra Parameters
global a b c
y = (a - b*x(1)^2 + x(1)^4/3)*x(1)^2 + x(1)*x(2) + ...
(-c + c*x(2)^2)*x(2)^2;
2 In your MATLAB workspace, define the variables and run fminunc:
global a b c;
a = 4; b = 2.1; c = 4; % Assign parameter values
x0 = [0.5,0.5];
[x,fval] = fminunc(@globalfun,x0)
The output is the same as in “Anonymous Functions” on page 2-25.
2-29
Page 60

2 Setting Up an Optimization
Setting Options
Default Options
The options structure contains options used in the optimization routines.
If, on the first call to an optimization routine, the
provided, or is empty, a set of default options is generated. Some of the default
options values are calculated using factors based on problem size, such as
MaxFunEvals. Some options are dependent on the specific solver algorithms,
and a re documented on those solver f unction reference pages.
In this section...
“Default Options” on page 2-30
“Changing the Default Settings” on page 2-30
“Tolerances and Stopping Criteria” on page 2-36
“Checking Validity of Gradients or Jacobians” on page 2-37
“Choosing the Algorithm” on page 2-45
options structure is not
2-30
“Optimization Options” on page 9-7 provides an overview of all the options in
the
options structure.
Changing the Default Settings
The optimset function creates or updates an options structure to pass
to the various optimiz ation functions. The arguments to the
function are option name and option value pairs, such as TolX and 1e-4.Any
unspecified properties have default values. You need to type only enough
leading characters to define the option name uniquely. Case is ignored for
option names. For option values that are strings, however, case and the exact
string are necessary.
help optimset provides information that defines the different options and
describes how to use them.
Herearesomeexamplesoftheuseof
optimset.
optimset
Page 61

Setting Options
Returning All Options
optimset returns all the options that can be set with typical values and
default values.
Determining Options Used by a Function
The options structure defines the options passed to solvers. Because
functions do not use all the options, it can be useful to find which options
are used by a particular function. There are several ways of determining
the available options:
• Consult the combined “Optimization Options” on page 9-7 table.
• To find detailed descriptions of the options and their default values,
consult the Options table in the function reference pages. For example, the
available options for
• To find available options at the command line, pass the name of the
function (in this example,
optimset('fmincon')
fmincon appear in this table.
fmincon)tooptimset:
or
optimset fmincon
or
optimset(@fmincon)
This statement returns a structure. Generally, fields not used by the
function have empty values (
[]); fields used by the function are set to their
default values for the given function. However, some solvers have different
default values depending on the algorithm used. For example,
adefault
active-set algorithms, but a default value of 1000 for the interior-point
MaxIter value of 400 for the trust-region-reflective, sqp,and
fmincon has
algorithm. optimset fmincon returns [] for the MaxIter field.
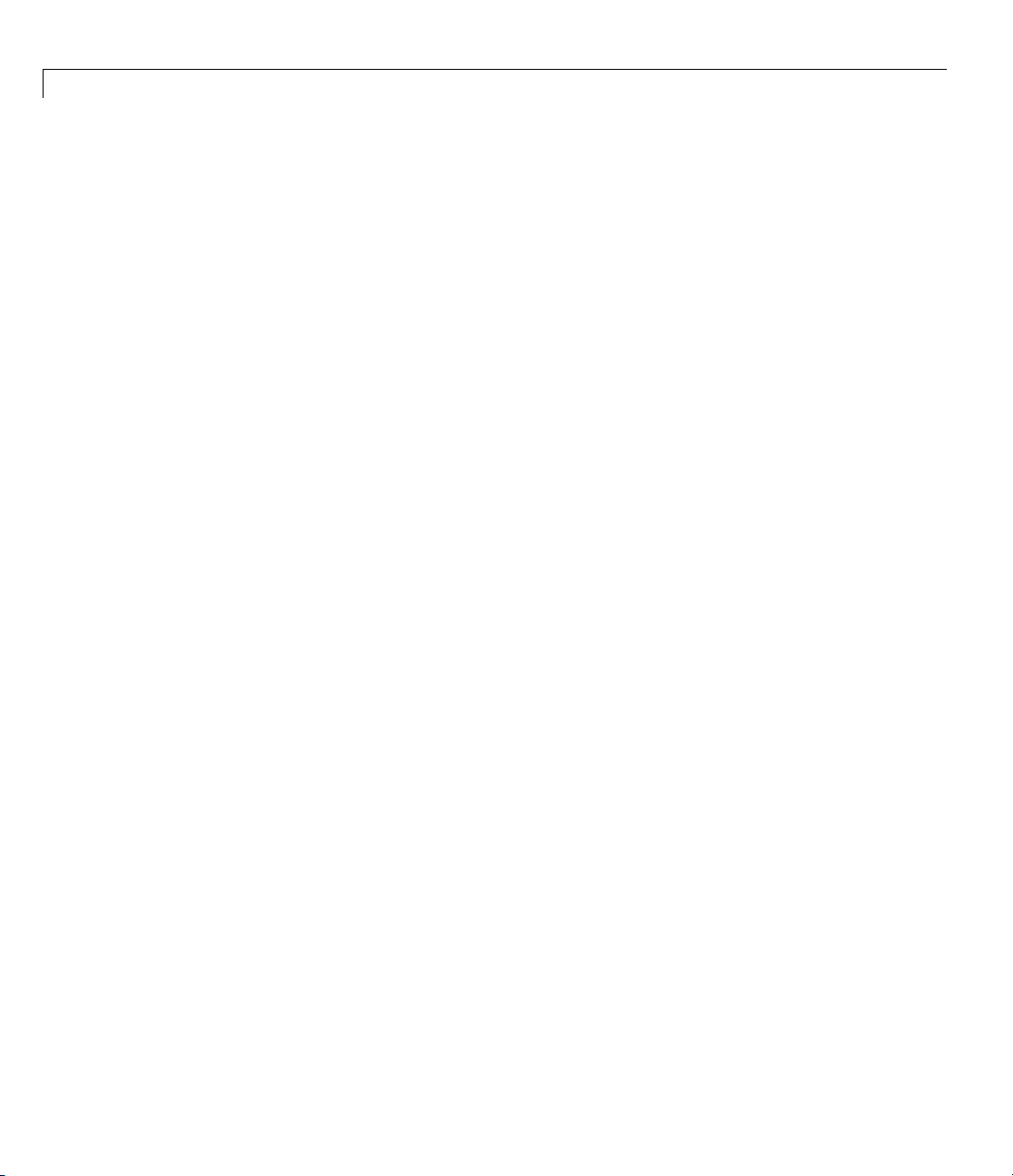
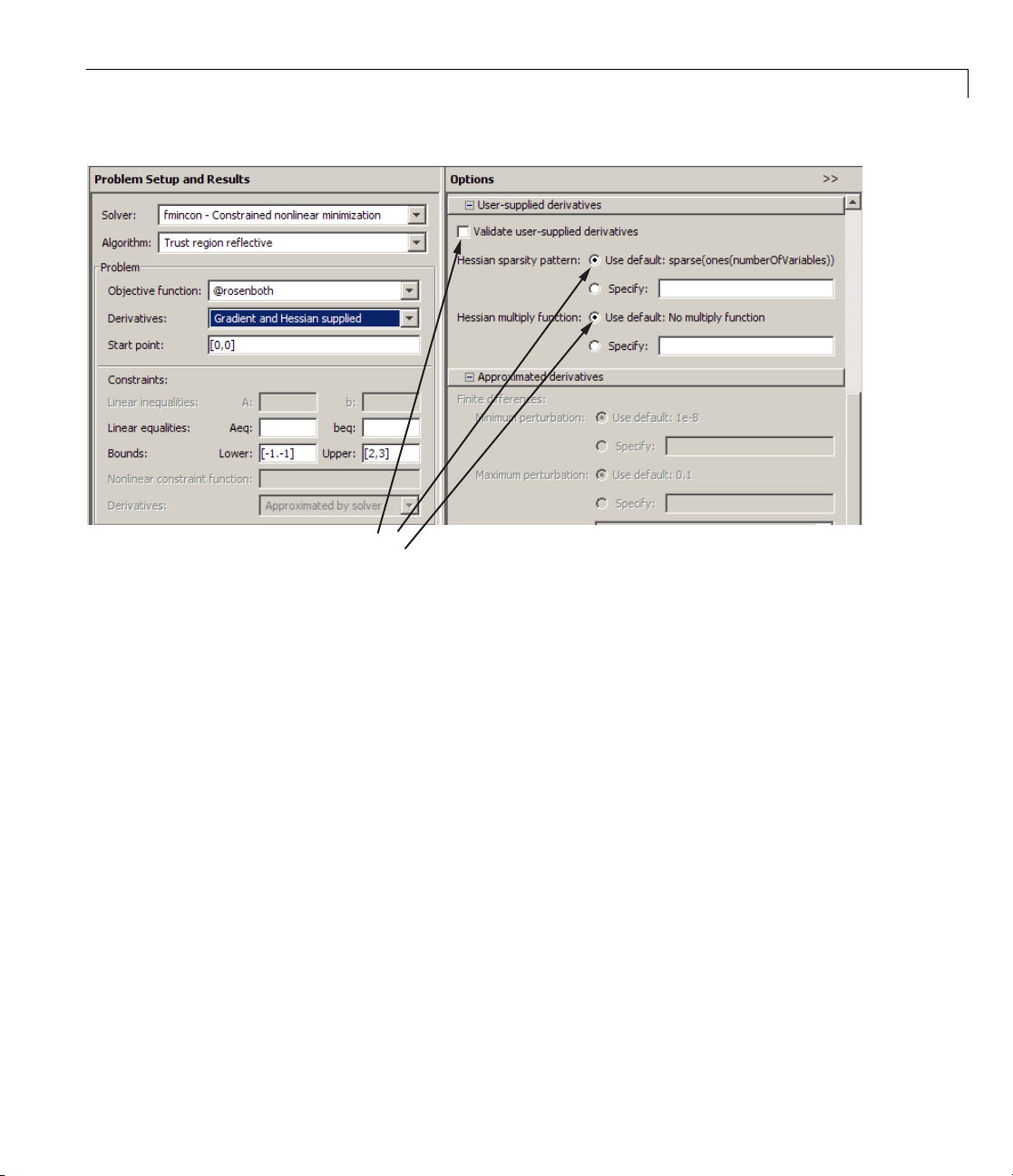
• You can also check the available options and their defaults in the
Optimization Tool. These can change depending on problem and algorithm
settings. These three pictures show how the available options for
derivatives change as the type of supplied derivatives change:
2-31
Page 62

2 Setting Up an Optimization
Settable
options
2-32
Settable
options
Page 63
Settable
options
Setting Options
Setting More Than One Option
You can specify multiple options with one call to optimset. For example, to
reset the
options = optimset('Display','iter','TolX',1e-6);
Display option and the tolerance on x,enter
Updating an options Structure
To update an existing options structure, call optimset and pass the existing
structure name as the first argument:
options = optimset(options,'Display','iter','TolX',1e-6);
Retrieving Option Values
Use the optimget function to get option values from an options structure.
Forexample,togetthecurrentdisplay option, enter the following:
verbosity = optimget(options,'Display');
2-33
Page 64
2 Setting Up an Optimization
Displaying Output
To display output at each iteration, enter
This command sets the value of the Display option to 'iter', which causes
the solver to display output at each iter ation. You can also turn off any output
display (
output only if the problem fails to converge (
Choosing an Algorithm
Some solvers explicitly use an option called LargeScale for choosing which
algorithm to use:
the
instead: fmincon, fsolve, and others. All algorithms in Algorithm solvers
are large scale, unless otherwise noted in their function reference pages. The
term large-scale is explained in “Large-Scal e vs. Medium-Scale Algorithms”
on page 2-35. For all solvers that have a large-scale algorithm, the default
is for the function to use a large-scale algorithm (e.g.,
'on' by default).
options = optimset('Display','iter');
'off'), display output only at termination ('final'), or display
'notify').
fminunc, linprog, and others. O ther solvers do not use
LargeScale attribute explicitly, but have an option called Algorithm
LargeScale is set to
2-34
For help deciding which algorithm to use, see “Choosing the Algorithm” on
page 2-45.
To use a medium-scale algorithm in a solver that takes the
LargeScale
option, enter
options = optimset('LargeScale','off');
For solvers that use the Algorithm option, choose the algorithm by entering
options = optimset('Algorithm','algorithm-name');
algorithm-name
is the name of the chosen algorithm. You can find the
choices in the function reference pages for each solver.
Page 65

Setting Options
Large-Scale vs. Medium-Scale Algorithms. An optimization algorithm
is large scale when it uses linear algebra that does not need to store, nor
operate on, full matrices. This may be done internally by storing sparse
matrices, and by using sparse linear algebra for computations whenever
possible. Fu r th erm ore, the internal algorithms either preserve sparsity, such
as a sparse Cholesky decomposition, or do not generate matrices, such as a
conjugate gradient method. Large-scale algorithms are accessed by setting
the
LargeScale option to on, or setting the Algorithm option appropriately
(this is solver-dependent).
In contrast, medium-scale methods internally create full matrices and use
dense linear algebra. If a problem is sufficiently large, full matrices take up a
significant amount of memory, and the dense linear algebra may require a
long time to execute. Medium-scale algorithms are accessed by setting the
LargeScale option to off, or setting the Algorithm option appropriately (this
is solver-dependent).
Don’t let the name “large-scale” mislead you; you can use a large-scale
algorithm on a small problem. Furthermore, you do not need to specify any
sparse matrices to use a la rge-scale algorithm. Choose a medium-scale
algorithm to access extra functionality, such as additional constraint types,
or possibly for better performance.
Defining Output Functions and Plot Functions
Output functions and plot functions give information on the progress of a
solver. They report results after each iteration of a solver. Additionally,
they can halt a solver. For more information and examples of their use, see
“Output Functions” on page 3-32 and “Plot Functions” on page 3-26.
Call output or plot functions by passing a function handle, or a cell array of
function handles. For output functions, the syntax is
options = optimset('OutputFcn',@outfun);
or
options = optimset('OutputFcn',...
outfun1,@outfun2,...});
{@
For plot functions, the syntax is
2-35
Page 66
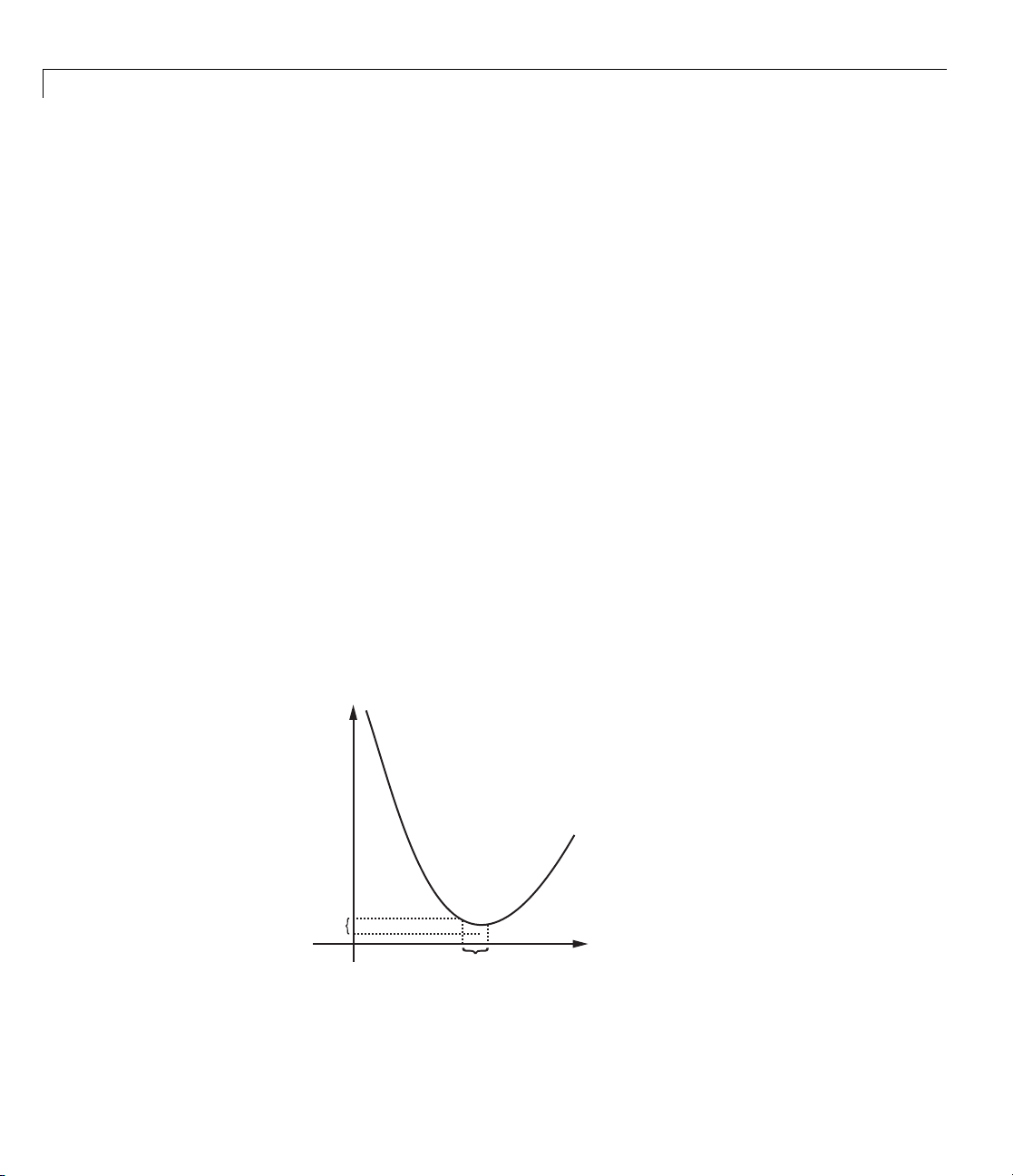
2 Setting Up an Optimization
or
There are several predefined plot f unctions. See the solver function reference
pages for a list, or view a list in the
on page 9-7 table.
Tolerances and Stopping Criteria
The number of iterations in an optimization depends on a solver’s stopping
criteria. These criteria include several tolerances you can set. Genera lly, a
tolerance is a threshold which, if crossed, stops the iterations of a solver.
options = optimset('PlotFcns',@plotfun);
options = optimset('PlotFcns',...
plotfun1,@plotfun2,...});
{@
PlotFcns entry of the “Options Structure”
Set tolerances and other criteria using
optimset as explained in “Setting
Options” on page 2-30.
•
TolX is a lower bound on the size of a step, meaning the norm of (x
the solver attempts to take a step that is smaller than
end.
TolX is sometimes used as a relative bound, meaning iterations end
when |(x
– x
)| < TolX*(1 + |xi|),orasimilarrelativemeasure.
i
i+1
TolX, the iterations
i
– x
i+1
). If
Iterations end
when the last step
1
is smaller than
TolFun or TolX
2
3
4
5
TolFun
TolX
• TolFun is a lower bound on the change in the value of the objective function
during a step. If |f(x
)–f(x
i
)| < TolFun,theiterationsend. TolFun
i+1
2-36
Page 67
is sometimes used as a relative bound, meaning iterations end when
|f(x
)–f(x
i
TolFun is also a bound on the first-order optimality measure. If the
•
optimality measure is less than
)| < TolFun(1 + |f(xi)|), or a similar relative measure.
i+1
TolFun, the iterations end. TolFun can
also be a relative bound. First-order optimality measure is defined in
“First-Order Optimality Measure” on page 3-11.
•
TolCon is an upper bound on the magnitude of any constraint functions.
Ifasolverreturnsapointx with c(x)>
solver reports that the constraints are violated at x.
TolCon or |ceq(x)| > TolCon,the
TolCon canalsobea
relative bound.
Note TolCon operates differently from other tolerances. If TolCon is not
satisfied (i.e., if the magnitude of the constraint function exceeds
TolCon),
the solver attempts to continue, unless it is halted for another reason. A
solver does not halt simply because
TolCon is satisfied.
Setting Options
• MaxIter is a bound on the number of solver iterations. MaxFunEvals is
a bound on the number of function evaluations. Iterations and function
evaluations are discussed in “Iterations and Function Counts” on page 3-10.
There are two other tolerances that a ppl y to particular solvers:
MaxPCGIter. These relate to preconditioned conjugate gradient steps. For
TolPCG and
more information, see “Preconditioned Conjugate Gradient Method” on page
6-23.
There are several tolerances that apply only to the
fmincon interior-point
algorithm. For more information, see “Optimization Options” on page 9-7.
Checking Validity of Gradients or Jacobians
• “How to Check Derivatives” on page 2-38
• “Best Practices for Checking Derivatives” on page 2-39
• “Example: Checking Derivatives of Objective and Constraint Functions”
on page 2-39
2-37
Page 68
2 Setting Up an Optimization
Many solvers allow you to supply a function that calculates first derivatives
(gradients or Jacobians) of objective or constraint functions. You can check
whether the derivatives calculated b y your function match finite-difference
approximations. This check can help you diagnose whether your derivative
function is correct.
• If a component of the gradient function is less than
1, “match” means
the absolute difference of the gradient function and the finite-difference
approximation of that component is less than
• Otherwise, “match” means that the relative difference is less than
The
DerivativeCheck option causes the solver to check the supplied
1e-6.
1e-6.
derivative against a finite-difference approximation only at the initial point. If
the finite-difference and supplied derivatives do not match, the solver reports
the discrepancy, and asks whether you want to continue. If the derivatives
match, the solver reports the differences, and continues without asking.
When
DerivativeCheck is 'on' and GradObj or Jacobian is 'on',the
solver compares your objective gradient function against a finite difference
approximation. Similarly, when
DerivativeCheck is 'on' and GradConstr
is 'on', the solver compares your constraint gradient function against a
finite-difference approximation.
Choose an initial point with nonzero, noninteger components when using
DerivativeCheck. Often, gradients match at a simple initial point, but not
at other points. Furthermore, as shown in “Checking Derivatives with the
Optimization Tool” on page 2-42, the small inaccuracy inherent in finite
difference approximations can be e specially problematic at
0 or other integer
components.
2-38
How to Check Derivatives
• At the MATLAB com mand line:
1 Set the
optimset. Make sure your objective or constraint functions supply the
appropriate derivatives.
2 Set the
GradObj, GradConstr,orJacobian options to 'on' with
DerivativeCheck option to 'on'.
Page 69

Setting Options
• Using the Optimization Tool:
1 In the Problem Setup and Results pane, choose Derivatives:
Objective function:
function: Derivatives:
or constraint functions supply the appropriate derivatives.
2 In the Options pane, check User-supplied derivatives > Validate
user-supplied derivatives
Gradient supplied or Nonlinear constraint
Gradient supplied. Makesureyourobjective
Best Practices for Checking Derivatives
• Choose a random initial point, such as randn(size(x0)).Ifallcomponents
have lower and upper bounds, choose a random point satisfying the bounds:
rand(size(x0)).*(ub-lb) + lb.Herex0 has same size as your initial
vector,
• Use central finite differences (for applicable solvers). These d ifferences are
more accurate than the default forward differences. To do so:
lb is the vector of lower bounds, and ub is the vector of upper bounds.
- At the MATLAB command line, set FinDiffType option to 'central'
with optimset.
- Using the Optimization Tool, in the Approximated derivatives pan e,
set Type to
Example: Checking Derivatives of Objective and Constraint
Functions
• “Objective and Constraint Functions” on page 2-39
• “Checking Derivatives at th e Command Line” on page 2-41
• “Checking Derivatives with the Optimization Tool” on page 2-42
Objective and Constraint Functions. Consider the problem of minimizing
the Rosenbrock function within the unit disk as described in “Example:
Nonlinear Constrained Minimization” on page 1-4. The
calculates the objective function and its gradient:
function [f g H] = rosenboth(x)
central differences.
rosenboth function
2-39
Page 70
2 Setting Up an Optimization
f = 100*(x(2) - x(1)^2)^2 + (1-x(1))^2;
if nargout > 1
g = [-400*(x(2)-x(1)^2)*x(1)-2*(1-x(1));
200*(x(2)-x(1)^2)];
if nargout > 2
H = [1200*x(1)^2-400*x(2)+2, -400*x(1);
-400*x(1), 200];
end
end
rosenboth
calculates the Hessian, too, but this example does not use the
Hessian.
The
unitdisk2 function correctly calculates the constraint function and its
gradient:
function [c,ceq,gc,gceq] = unitdisk2(x)
c = x(1)^2 + x(2)^2 - 1;
ceq = [ ];
if nargout > 2
gc = [2*x(1);2*x(2)];
gceq = [];
end
The unitdiskb function incorrectly calculates gradient of the constraint
function:
function [c ceq gc gceq] = unitdiskb(x)
c = x(1)^2 + x(2)^2 - 1;
ceq = [ ];
if nargout > 2
gc = [x(1);x(2)]; % Gradient incorrect: off by a factor of 2
gceq = [];
end
2-40
Page 71

Setting Options
Checking Derivatives at the Command Line.
1 Set the options to use the interior-point algorithm , gradient of objective and
constraint functions, and the
options = optimset('Algorithm','interior-point',...
'DerivativeCheck','on','GradObj','on','GradConstr','on');
DerivativeCheck option:
Setting Algorithm to 'active-set' works, too. Best practice would set
FinDiffType to 'central'.
2 Solve the minimization with fmincon using the erroneous unitdiskb
constraint function:
[x fval exitflag output] = fmincon(@rosenboth,...
[-1;2] + randn(2,1),[],[],[],[],[],[],@unitdiskb,options);
Objective function derivatives:
Maximum relative discrepancy between derivatives = 2.60089e-008
Nonlinear inequality constraint derivatives:
Maximum relative discrepancy between derivatives = 1
Caution: user-supplied and forward finite-difference derivatives
do not match within 1e-006 relative tolerance.
Maximum relative difference occurs in element (1,1):
User-supplied constraint gradient: -3.25885
Finite-difference constraint gradient: -6.51769
Strike any key to continue or Ctrl-C to abort.
The constraint function does no t match the calculated gradient,
encouraging you to check the function for an error.
3 Replace the unitdiskb constraint function with unitdisk2 and run the
minimization again:
[x fval exitflag output] = fmincon(@rosenboth,...
[-1;2] + randn(2,1),[],[],[],[],[],[],@unitdisk2,options);
Objective function derivatives:
Maximum relative discrepancy between derivatives = 3.59821e-008
Nonlinear inequality constraint derivatives:
Maximum relative discrepancy between derivatives = 1.14322e-008
Local minimum found that satisfies the constraints...
2-41
Page 72
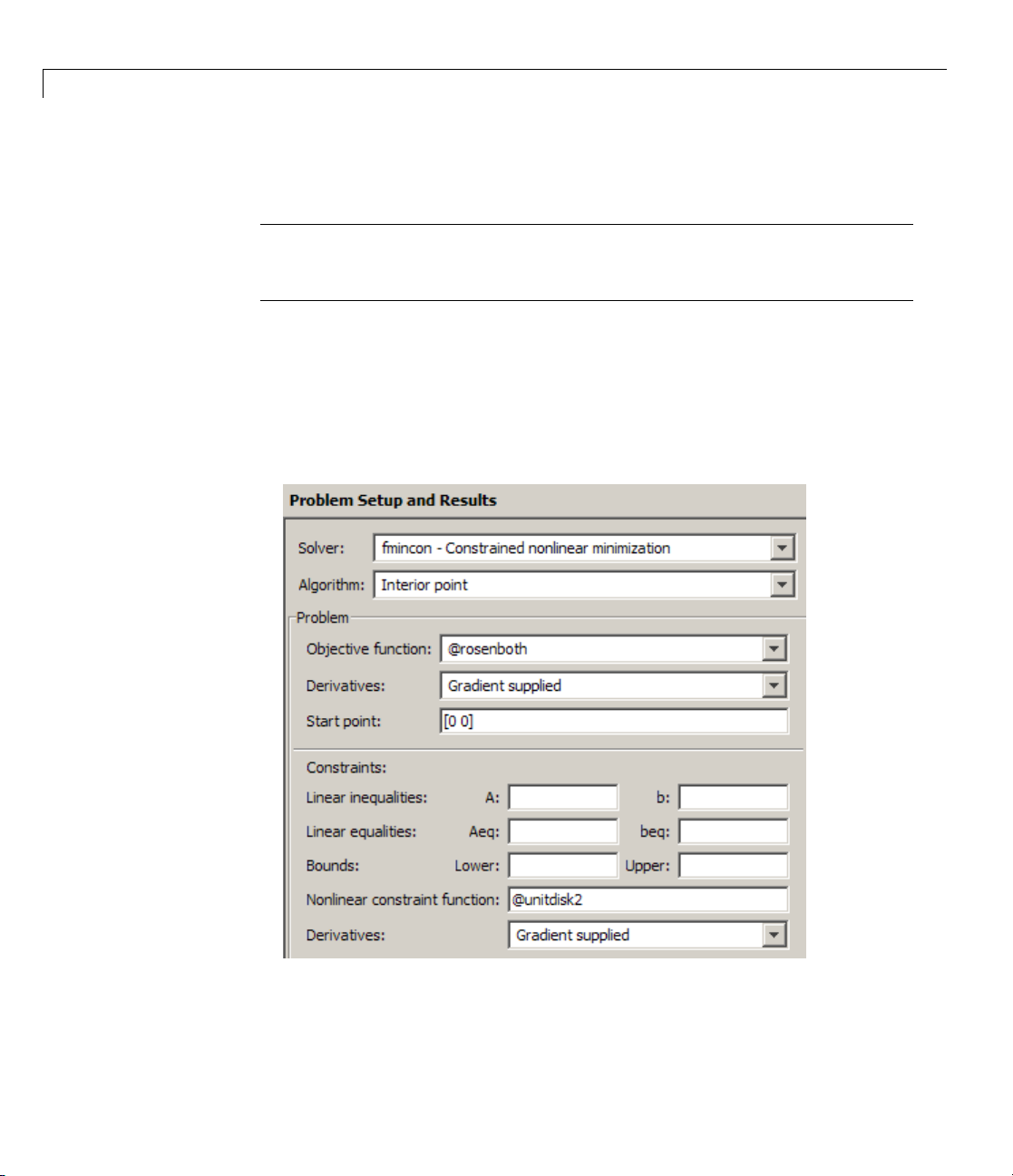
2 Setting Up an Optimization
Checking Derivatives with the Optimization Tool.
Note Take care when using DerivativeCheck with the Optimization Tool.
Ifthederivativecheckfails,thereisno indication in the Optimization Tool.
Check the Command Window to see the message and act, if necessary.
To set up the example using correct derivative functions, but starting from
[0 0], using the Optimization Tool:
1 Launch the Optimization Tool by entering optimtool at the command line.
2 Set the Problem Setup and Results pane to match the following figure:
2-42
3 Set the Options pane to match the following figure:
Page 73
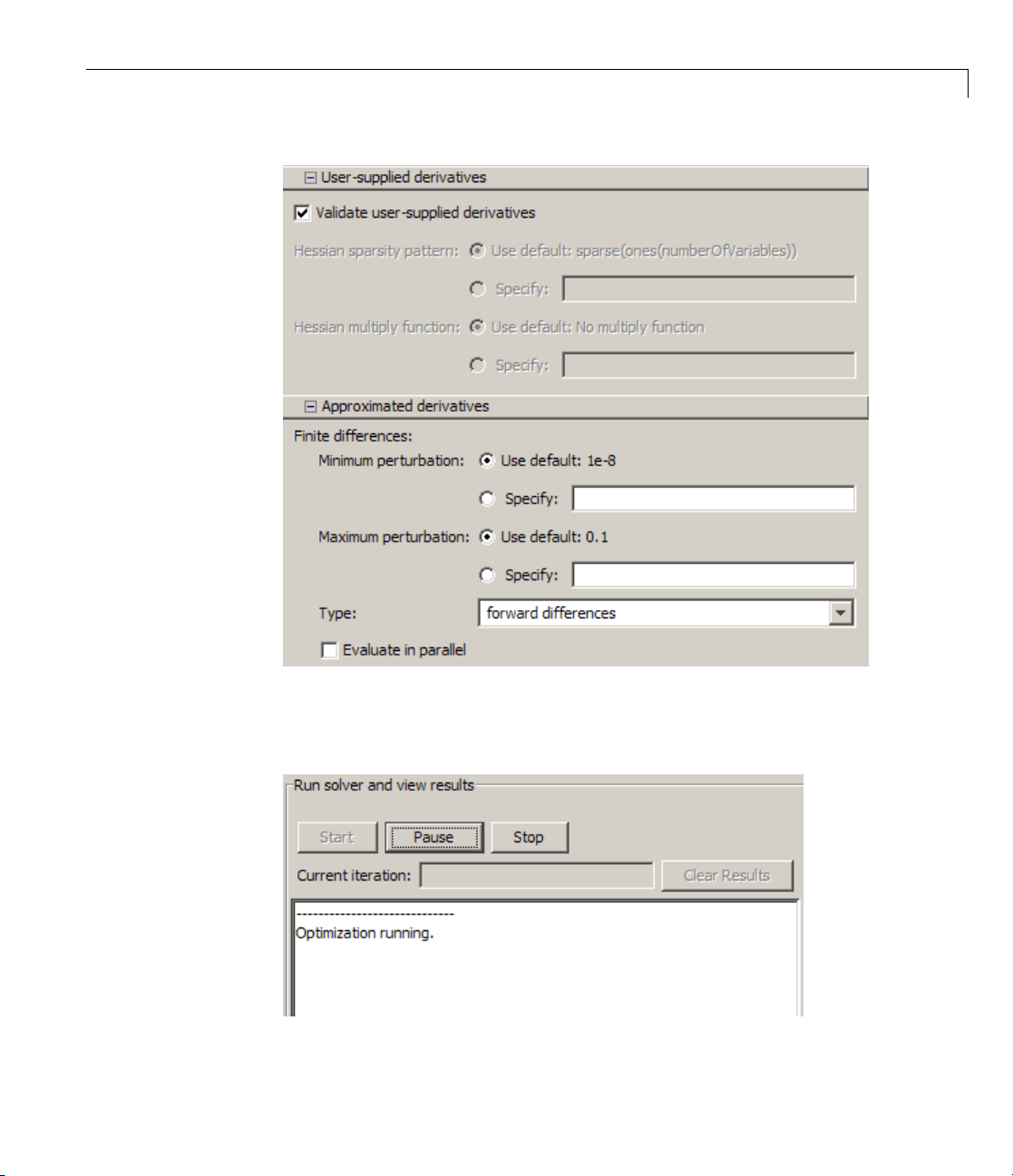
Setting Options
4 Press t
The out
he Start button under Run solver and view results.
put screen displays
2-43
Page 74

2 Setting Up an Optimization
5 Strike a key in the command window, and the optimization continues to
However, the process does not continue. The MATLAB command window
displays:
Objective function derivatives:
Maximum relative discrepancy between derivatives = 1.49012e-006
Caution: user-supplied and forward finite-difference derivatives
do not match within 1e-006 relative tolerance.
Maximum relative difference occurs in element 2 of gradient:
User-supplied gradient: 0
Finite-difference gradient: 1.49012e-006
Strike any key to continue or Ctrl-C to abort.
The forward finite difference approximation is inaccurate enough at [0
that the derivative check fails.
0]
completion.
2-44
Page 75

Setting Options
The derivative check succeeds when you select central differences in
the Approximated derivatives > Type pane. The derivative check also
succeeds when you select the initial point
[-1 2], or most random points.
Choosing the Algorithm
• “fmincon Algorithms” on page 2-45
• “fsolve Algorithms” on page 2-46
• “fminunc Algorithms” on page 2-47
• “Least Squares Algorithms” on page 2-48
• “Linear Programming Algorithms” on page 2-49
• “Quadratic Programming Algorithms” on p age 2-50
fmincon Algorithms
fmincon has four algorithm options:
•
'interior-point'
• 'sqp'
• 'active-set'
• 'trust-region-reflective' (default)
Use
optimset to set the Algorithm option at the command line.
Recommendations
• Use the 'interior-point' algorithm first.
For help if the minimization fails, see“WhentheSolverFails”onpage
4-3 or “When the Solver Might Have Succeeded” on page 4-14.
• Torunanoptimizationagaintoobtainmorespeedonsmall-to
medium-sized problems, try
• Use
'trust-region-reflective' when applicable. Your problem must
'sqp' next, and 'active-set' last.
have: objective function includes gradient, only bounds, or only linear
equality constraints (but not both).
2-45
Page 76

2 Setting Up an Optimization
Reasoning Behind the Recommendations.
•
•
•
•
'interior-point' handles large, sparse problems, as well as small dense
problems. The algorithm satisfies bounds at all iterations, and can recover
from
NaN or Inf results. It is a large-scale algorithm; see “Large-Scale
vs. Medium-Scale Algorithms” on page 2-35. The algorithm can use
special techniques for large-scale problems. For details, see “Interior-Point
Algorithm” on page 11-56.
'sqp' satisfies bou nd s at all iterations. Th e algorithm can recover from
NaN or Inf results. It is not a large-scale algorithm ; see “Large-Scale vs.
Medium-Scale Algorithms” on page 2-35.
'active-set' can take large steps, which adds speed. The algorithm
iseffectiveonsomeproblemswithnonsmooth constraints. It is not a
large-scale algorithm; see “Large-Scale vs. Medium-Scale Algorithms”
on page 2-35.
'trust-region-reflective' requires you to provide a gradient, and
allows only bounds or linear equality constraints, but not both. Within
these limitations, the algorithm handles both large sparse problems
and small dense problems efficie n t ly. It is a large-scale algorithm; see
“Large-Scale vs. Medium-Scale Algorithms” on page 2-35. The algorithm
can use special technique s to save memory usage, such as a Hessian
multiply function. For details, see “Trust-Region-Reflective Algorithm” on
page 11-53.
2-46
- 'trust-region-reflective' is the default algorithm for historical
reasons. It is effective when applicable, but it has many restrictions,
so is not always applicable.
fsolve Algorithms
fsolve has three algorithms:
•
'trust-region-dogleg' (default)
'trust-region-reflective'
•
• 'levenberg-marquardt'
Use optimset to set the Algorithm option at the command line.
Page 77

Recommendations
• Use the 'trust-region-dogleg' algorithm first.
Setting Options
For help if
fsolve fails, see “When the Solver Fails” on page 4-3 or
“When the Solver Might Have Succeeded” on page 4-14.
• To solve equations again if you have a Jacobian multiply function,
or want to tune the internal algorithm (see “Trust-Reg io n-Re flectiv e
Algorithm Only” on p age 11-126), try
• Try timing all the algorithms, including
'trust-region-reflective'.
'levenberg-marquardt',tofind
the algorithm that works b est on your problem.
Reasoning Behind the Recommendations.
•
'trust-region-dogleg' is the only algorithm that is specially designed
to solve nonlinear equations. The others attempt to minimize the sum
of squares of the function.
• The
'trust-region-reflective' algorithm is effective on sparse
problems. It can use special techniques such as a Jacobian multiply
function for large-scale problems.
fminunc Algorithms
fminunc has two algorithms:
• Large-scale
• Medium-scale
Choose between them at the command line by using
LargeScale option to:
•
'on' (default) for Large-scale
'off' for Medium-scale
•
optimset to set the
2-47
Page 78

2 Setting Up an Optimization
Recommendations
• If your objective function includes a gradient, use 'LargeScale' = 'on'.
• Otherwise, use
'LargeScale' = 'off'.
For he lp if the minimization fails, see “When the Solver Fails” on page 4-3
or “When the Solver Might Have Succe eded” on page 4-14.
Least Squares Algorithms
lsqlin. lsqlin has two algorithms:
• Large-scale
• Medium-scale
Choose between them at the command line by using
LargeScale option to:
•
'on' (default) for Large-scale
'off' for Medium-scale
•
Recommendations
• If you have no constraints or only bound constraints, use
'LargeScale' = 'on'.
• If you have linear constraints, use
'LargeScale' = 'off'.
optimset to set the
2-48
For he lp if the minimization fails, see “When the Solver Fails” on page 4-3
or “When the Solver Might Have Succe eded” on page 4-14.
lsqcurvefit and lsqnonlin. lsqcurvefit and lsqnonlin have two
algorithms:
•
'trust-region-reflective' (default)
'levenberg-marquardt'
•
Use optimset to set the Algorithm option at the command line.
Page 79

Setting Options
Recommendations
• If you have no constraints or only bound constraints, use
'trust-region-reflective'.
• If your problem is underdetermined (fewer equations than dimensions),
use
'levenberg-marquardt'.
For he lp if the minimization fails, see “When the Solver Fails” on page 4-3
or “When the Solver Might Have Succe eded” on page 4-14.
Linear Programming Algorithms
linprog has three algorithms:
• Large-scale interior-point
• Medium-scale active set
• Medium-scale Simplex
Choose between them at the command line by using
LargeScale option to:
•
'on' (default) for large-scale interior-point
'off' for one of the other tw o
•
When
by setting the
LargeScale is 'off', choose between the two remaining algorithms
Simplex option to:
optimset to set the
- 'on' for Simplex
- 'off' (default) for active set
Recommendations
Use 'LargeScale' = 'on'
For he lp if the minimization fails, see “When the Solver Fails” on page 4-3
or “When the Solver Might Have Succe eded” on page 4-14.
2-49
Page 80
2 Setting Up an Optimization
Quadratic Programming Algorithms
quadprog has two algorithms:
• Large-scale
• Medium-scale
Choose between them at the command line by using
LargeScale option to:
•
'on' (default)
'off'
•
Recommendations
• If you have only b ounds, or only linear equalities, use
'LargeScale' = 'on'.
• If you have linear inequalities, or both bounds and linear equalities,
use
'LargeScale' = 'off'.
For he lp if the minimization fails, see “When the Solver Fails” on page 4-3
or “When the Solver Might Have Succe eded” on page 4-14.
optimset to set the
2-50
Page 81
Examining Results
• “Current Point and Function Value” on page 3-2
• “Exit Flags and Exit Messages” on page 3-3
• “Iterations and Function Counts” on page 3-10
• “First-Order Optimality Measure” on page 3-11
• “Displaying Iterative Output” on page 3-14
• “Output Structures” on page 3-21
• “Lagrange Multiplier Structures” on page 3-22
3
• “Hessian” on page 3-23
• “Plot Functions” on page 3-26
• “Output Functions” on page 3-32
Page 82
3 Examining Results
Current Point and Function Value
The current point and function value are the first two outputs of all
Optimization Toolbox solvers.
• The current point is the final p oint in the solver iterations. It is the best
point the solver found in its run.
- If you call a solver without assigningavaluetotheoutput,thedefault
output,
• The function value is the value of the objective function at the current point.
ans, is the current point.
- Thefunctionvalueforleast-squares solvers is the sum of squares, also
known as the residual norm.
- fgoalattain, fminimax,andfsolve return a vector function value.
- Sometimes fval or Fval denotes function value.
3-2
Page 83
Exit Flags and Exit Messages
In this section...
“ExitFlags”onpage3-3
“Exit Messages” on page 3-5
“Enhanced Exit Messages” on page 3-5
“Exit Message Options” on page 3-8
Exit Flags
When an optimization solver co mplete s its task, it sets an exit flag.Anexit
flag is an integer that is a code for the reason the s olver halted i ts iterations.
In general:
• Positive exit flags correspond to successful outcomes.
• Negative exit flags correspond to unsuccessful outcomes.
Exit Flags and Exit Messages
• The zero exit flag corresponds to the solver being halted by exceeding
an iteration limit or limit on the number of function evaluations (see
“Iterations and Function Counts” on page 3-10, and also see “Tolerances
and Stopping Criteria” on page 2-36).
A table of solver outputs in the solver’s function reference section lists the
meaning of each solver’s exit flags.
Note Exit flags are not infallible guides to the quality of a solution. Many
other factors, such as tolerance settings, can affect whether a solution is
satisfactory to you. You are responsible for deciding whether a solver returns
a satisfactory answer. Sometimes a negative exit flag does not correspond to a
“bad” solution. Similarly, sometimes a positive exit flag does not correspond
to a “good” solution.
Youobtainanexitflagbycallingasolverwiththeexitflag syntax. This
syntax depends on the solver. For details, see the solver function reference
pages. For example, for
fsolve,thecallingsyntaxtoobtainanexitflagis
3-3
Page 84
3 Examining Results
[x,fval,exitflag] = fsolve(...)
The following example uses this syntax. Suppose you want to solve the system
of nonlinear equations
x
−
2
xx e
−=
12
2
xxe
−+ =
12
1
x
−
2
.
Write these equations as an anonymous function that gives a zero vector
at a solution:
myfcn = @(x)[2*x(1) - x(2) - exp(-x(1));
-x(1) + 2*x(2) - exp(-x(2))];
Call fsolve with the exitflag syntax at the initial point [-5 -5]:
[xfinal fval exitflag] = fsolve(myfcn,[-5 -5])
3-4
Equation solved.
fsolve completed because the vector of function values is near
zero as measured by the default value of the function tolerance,
and the problem appears regular as measured by the gradient.
xfinal =
0.5671 0.5671
fval =
1.0e-006 *
-0.4059
-0.4059
exitflag =
1
In the table for fsolve under “Output Arguments” on page 11-91, you find
that an exit flag value
words,
fsolve reports myfcn is nearly zero at x = [0.5671 0.5671].
1 means “Function converged to a solution x.” In other
Page 85

Exit Flags and Exit Messages
Exit Messages
Each solver issues a message to the MATLAB command window at the end
of its iterations. This message explains briefly why the solver halted. The
message might give more detail than the exit flag.
Many examples in this documentation show exit messages. For example, see
“Minimizing at the Command Line” on page 1-11, or “Step 2: Invoke one of
the unconstrained optimization routines.” on page 6-14. The example in the
previous section, “Exit Flags” on page 3-3, shows the following exit message:
Equation solved.
fsolve completed because the vector of function values is near
zero as measured by the default value of the function tolerance,
and the problem appears regular as measured by the gradient.
Thismessageismoreinformativethantheexitflag. Themessageindicates
that the gradient is relevant. The message also states that the function
tolerance controls how near 0 the vector of function values must be for
to regard the solution as completed.
fsolve
Enhanced Exit Messages
Some solvers have exit messages that contain links for more information.
Therearetwotypesoflinks:
• Links on words or phrases. If you click such a link, a window opens that
displays a definition of the term, or gives other information. The new
window can contain links to the Help browser documentation for more
detailed information.
• A link as the last li ne of the display saying <stopping criteria details>. If
you click this link, MATLAB displays more detail about the reason the
solver halted.
The
fminunc solver has enhanced exit messages:
opts = optimset('LargeScale','off'); % LargeScale needs gradient
[xfinal fval exitflag] = fminunc(@sin,0,opts)
This yields the following results:
3-5
Page 86
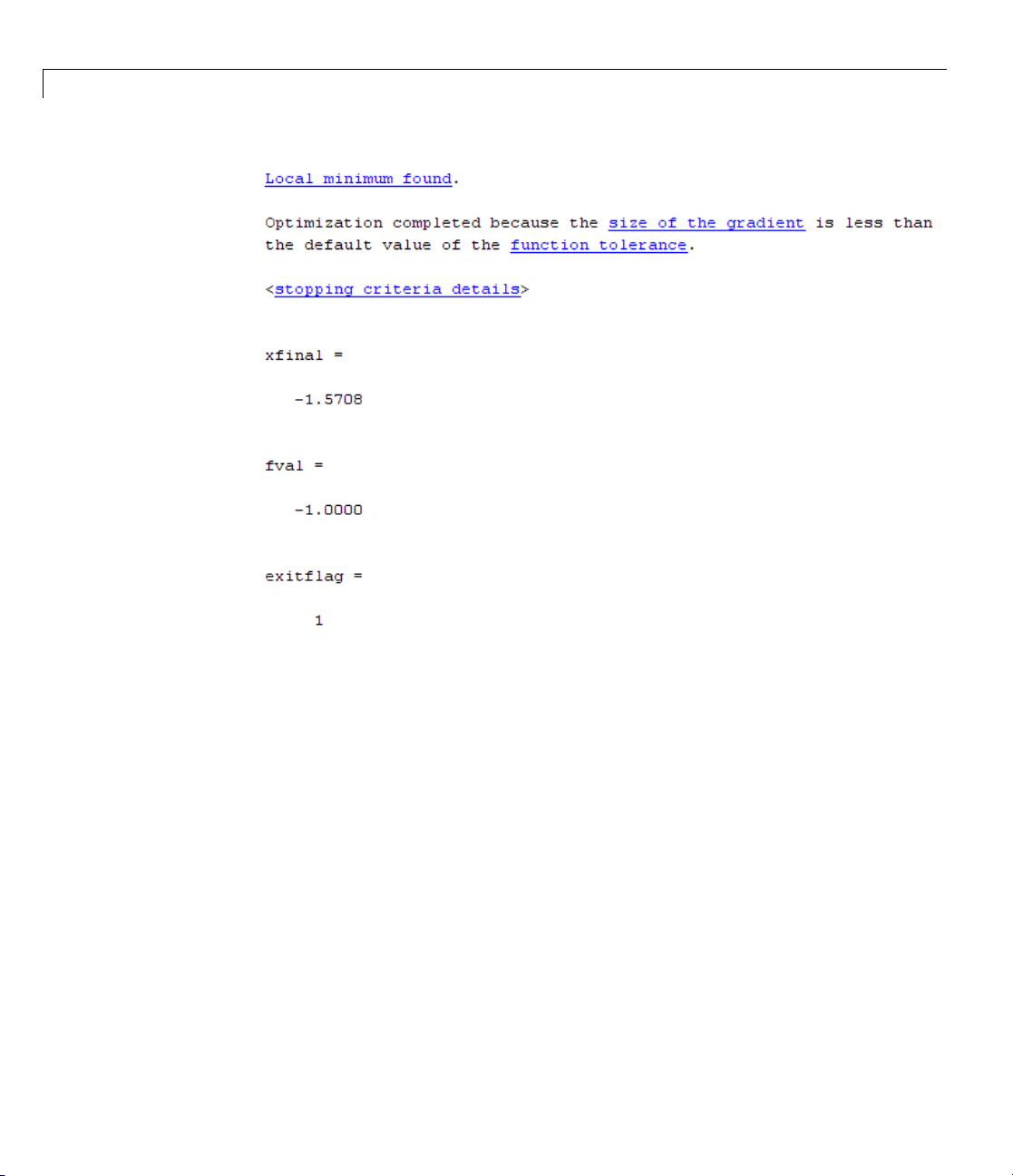
3 Examining Results
3-6
Each of the underlined words or phrase s contains a link that provides more
information.
• The
<stopping criteria details> link prints the following to the
MATLAB command line:
Optimization completed: The first-order optimality measure, 0.000000e+000, is less
than the default value of options.TolFun = 1.000000e-006.
Optimization Metric User Options
relative norm(gradient) = 0.00e+000 TolFun = 1e-006 (default)
• The other links bring up a help window with term definitions. For example,
clicking the
Local minimum found link opens the following window:
Page 87
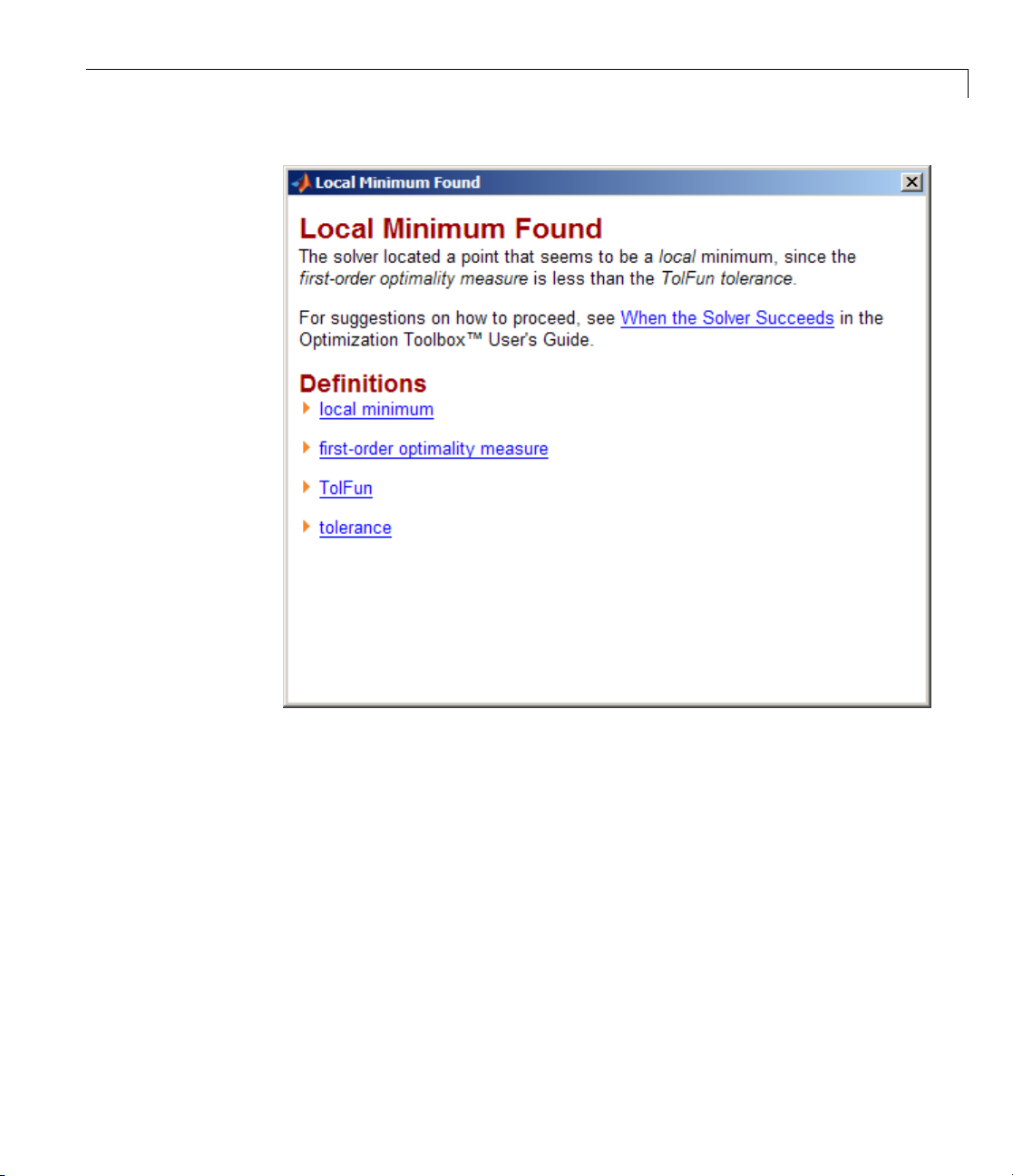
Exit Flags and Exit Messages
Clicking the first-order optimality measure expander link brings up
the d efinition of first-order optimality measure for
fminunc:
3-7
Page 88
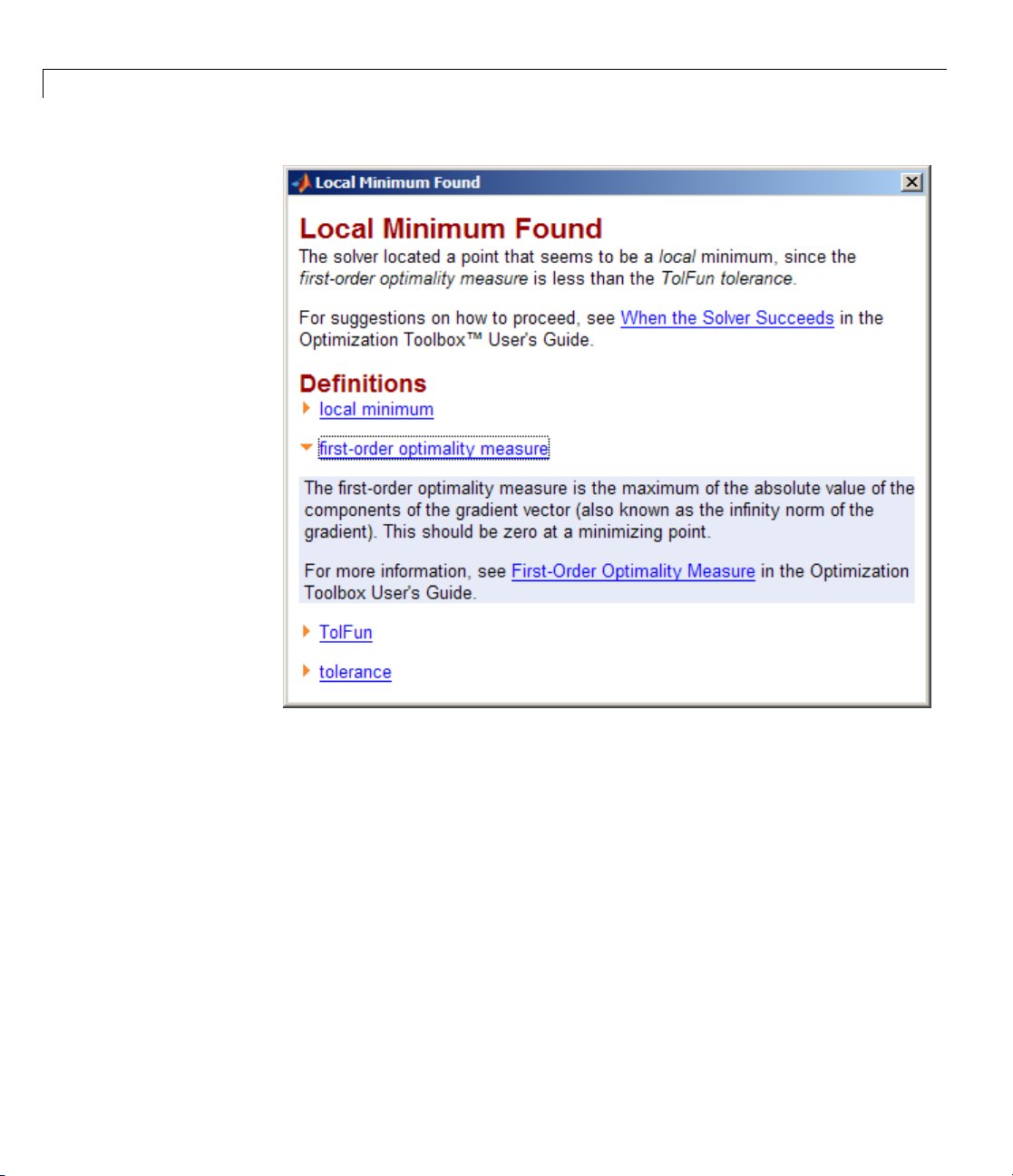
3 Examining Results
3-8
Theexpanderlinkisawaytoobtainmoreinformationinthesamewindow.
Clicking the
closes the definition.
• The other links open the Help Viewer.
first-order optimality measure expander link again
Exit Message Options
Set the Display option to control the appearance of both exit messages and
iterative display. For more information, see “Displaying Iterative Output” on
page 3-14. The following table shows the effect of the various settings of the
Display option.
Page 89
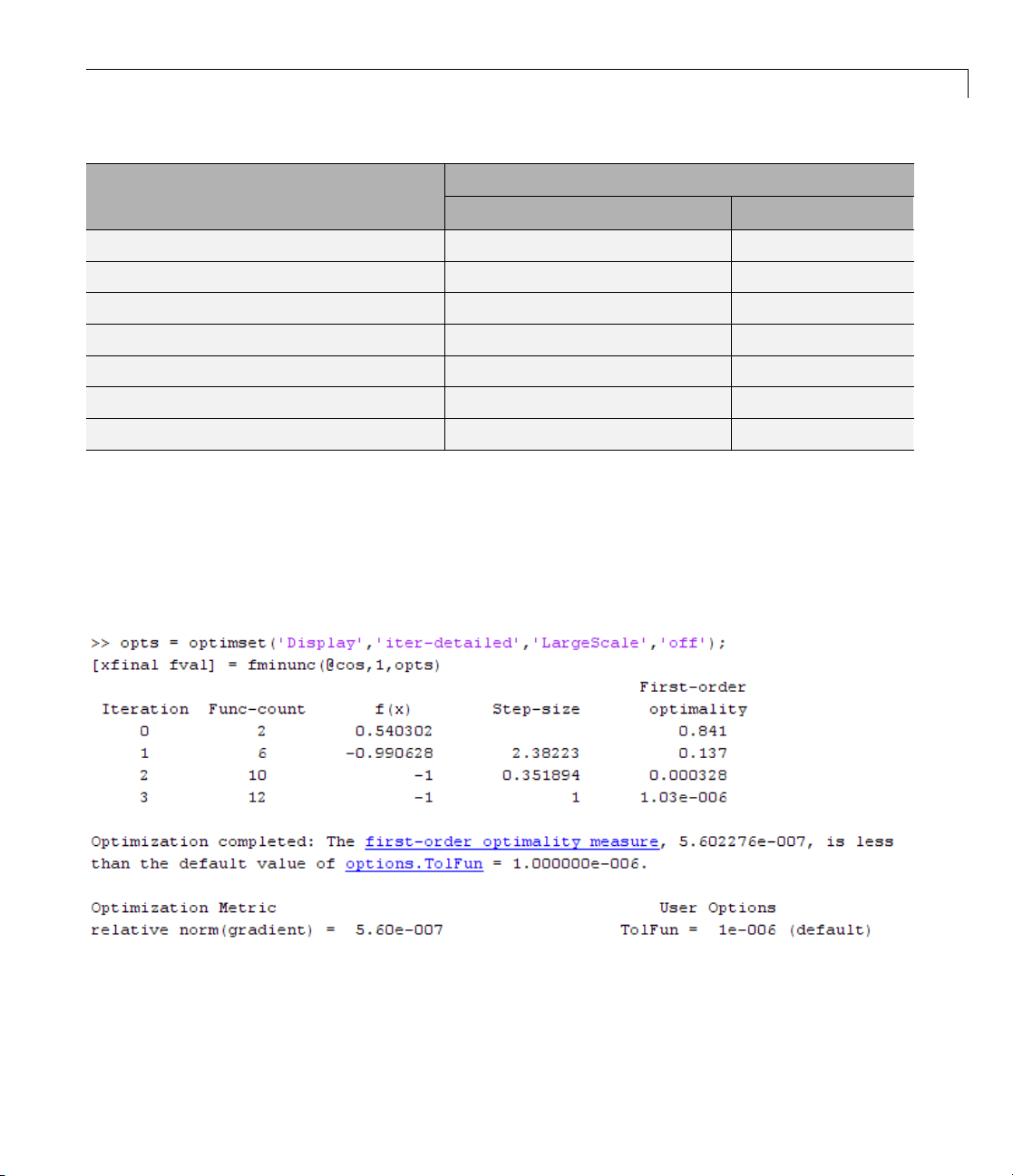
Exit Flags and Exit Messages
Value of the Display Opti on
Output to Command Window
Exit message
'none', or the synonymous 'off'
'final' (default for most solvers) Default
'final-detailed'
'iter'
'iter-detailed'
'notify'
'notify-detailed'
None None
Detailed
Default
Detailed
Default only if exitflag ≤ 0
Detailed only if exitflag ≤ 0
For example,
opts = optimset('Display','iter-detailed','LargeScale','off');
[xfinal fval] = fminunc(@cos,1,opts);
yields the following display:
Iterative Display
None
None
Yes
Yes
None
None
3-9
Page 90

3 Examining Results
Iterations and Function Counts
In general, Optimization Toolbox solvers iterate to find an optimum. This
means a solver begins at an initial value x
calculations that eventually lead to a new point x
process to find successiv e approximation s x
Processing stops after some number of iterations k.
At any step, intermediate calculations may involve evaluating the objective
function and constraints, if any, at points near the current iterate x
example, the solver may estimate a gradient by finite differences. At each of
these nearby points, the function count (
, performs some intermediate
0
2
F-count) is increased by one.
,andthenrepeatsthe
1
, x3, ... of the local minimum.
.For
i
• If there are no constraints, the
F-count reports the total number of
objective function evaluations.
• If there are constraints, the
F-count reports only the number of points
where function evaluations took place, not the total number of evaluations
of constraint functions.
• If there are many constraints, the
F-count can be significantly less than
the total number of function evaluations.
F-count is a header in the iterative display for many solvers. For an example,
see “Interpreting the Result” on page 1-12.
The
F-count appears in the output structure as output.funcCount.This
enables you to access the evaluation count programmatically. For more
information on output structures, see “Output Structures” on page 3-21.
Sometimes a solver attempts a step, and rejects the attempt. The
trust-region-reflective,andtrust-region-dogleg algorithms
LargeScale,
count these failed attempts as iterations, and report the (unchanged)
result in the iterative display. The
levenberg-marquardt algorithms do not count such an attempt as an
interior-point, active-set,and
iteration, and do not report the attempt in the iterative display. All attempted
steps increase the
F-count, regardless of the algorithm.
3-10
Page 91

First-Order Optimality Measure
First-order optimality is a measure of how close a point x is to optimal. It
is used in all smooth solvers, constrained and unconstrained, though it
has different meanings depending on the problem and solver. For more
information about first-order optimality, see Nocedal and Wright [31].
First-Order Optimality Measure
The tolerance
optimality measure is less than
TolFun relates to the first-order optimality measure. If the
TolFun, the solver iterations will en d.
Unconstrained Optimality
For a smooth unconstrained problem,
min ( ),xfx
the optimality measure is the infinity-norm (i.e., maxi m um absolute value)
of ∇f(x):
First-order optimality measure = max ( ) ( ) .
This mea
functio
proble
functi
minimi
funct
Const
The t
cons
func
sure of optimali ty is based on the familiar condition for a smooth
n to achieve a minimum: its gradient must be zero. For unconstrained
ms, when the first-order o ptimality measure is nearly zero, the objective
on has gradient nearly zero, so the objective function could be nearly
zed. If the first-order optimality measureisnotsmall,theobjective
ion is n ot minimized.
rained Optimality—Theory
heory behind the definition of first-order optimality measure for
trained problems. The definition as used in Optimization Toolbox
tionsisin“ConstrainedOptimality in Solver Form” on page 3-13.
fx fx∇∇
()
i
=
i
∞
a smooth constrained problem let g and h be vector functions representing
For
inequality and equality constraints respectively (i.e., bou nd, linear, and
all
linear constraints):
non
min ( ) ( ) , ( ) .
fx gx hx subject to ≤=00
x
3-11
Page 92

3 Examining Results
The m eaning of first-order optimality in this case is more involved than for
unconstrained problems. The definition is based on the Karush-Kuhn-Tucker
(KKT) conditions. The KKT conditions are analogous to the condition that
the gradient must be zero at a minimum, modified to take constraints into
account. The difference is that the KKT conditions hold for constrained
problems.
The KKT conditions are given via an auxiliary Lagrangian function
Lx f x g x h x
(, ) () () ().
=+ +
gi i hi i
,,
∑∑
(3-1)
The vector λ, which is the concatenation of λ
multiplier vector. Its length is the total number of constraints.
The KKT conditions are:
∇xLx(, ) ,
⎧
⎪
⎨
⎪
⎩
The three expressions in Equation 3-4 are not used in the calculation of
optimality measure.
The optimality measure associated with Equation 3-2 is
The optimality measure associated with Equation 3-3 is
= 0
gx i
() ,=∀0
gi i
,
gx
() ,
≤
0
hx
() ,
=
0
≥
∇∇ ∇ ∇
.
0
gi
,
Lx f x g x h x(, () () ().
x gi i hi hi
=+ +
,,,
∑∑
and λh, is called the Lagrange
g
gx
(),
g
(3-2)
(3-3)
(3-4)
(3-5)
(3-6)
3-12
where the infinity norm (maximum) is used for the vector
gi i
gx,()
.
Page 93

First-Order Optimality Measure
Thecombinedoptimalitymeasureisthemaximumofthevaluescalculatedin
Equation 3-5 and Equation 3-6. In solvers that accept nonlinear constraint
functions, constraint violations g(x)>0or|h(x)|>0aremeasuredand
reported as tolerance violations; see “Tolerances and Stopping Criteria” on
page 2-36.
Constrained Optimality in Solver Form
The first-order optimality measure used by toolbox solvers is expressed as
follows for constraints given separately by bounds, linear functions, and
nonlinear functions. The measure is the maximum of the following two norms,
which correspond to Equation 3-5 and Equation 3-6:
∇∇
Lx f x A Aeq(, ()
x
=+ +
+++
lx xu
−−
iiloweriiiupperi
,
,,
T
ineqlin
ineqnonlin i i eqnonlin i i
,,
,( ) , ( )
T
eqlin
c x ceq x
() (),∇∇
∑∑
Ax b c x
−
i ineqlin i i ineqno
,
nnlin i,
(3-7)
,
(3-8)
where the infinity norm (maximum) is used for the vector in Equation 3-7 and
in Equation 3-8. The subscripts on the Lagrange multipliers correspond to
solver Lagrange multiplier structures; see “Lagrange Multiplier Structures”
on page 3-22. The summations in Equation 3-7 range over all constraints. If
a bound is ±
Inf, that term is not co nsidered constrained, so is not part of
the summation.
For some large-scale problems with only linear equalities, the first-order
optimality measure is the infinity norm of the projected gradient (i.e., the
gradient projected onto the nullspace of
Aeq).
3-13
Page 94

3 Examining Results
Displaying Iterative Output
In this section...
“Introduction” on page 3-14
“Most Common Output Headings” on page 3-14
“Function-Specific Output Headings” on page 3-15
Note An optimization function does not return all of the output headings,
described in the following tables, each time you call it. Which output headings
are returned depends on the algorithm the optimization function uses for
a particular problem.
Introduction
When you set 'Display' to 'iter' or 'iter-detailed' in options,the
optimization functions display iterative output in the Command Window.
This output, which provides information about the progress of the algorithm,
is displayed in columns with descriptive headings. For more information
about iterations, see “Iterations and Function Counts” on page 3-10.
3-14
For example, if you run medium-scale
the output headings are
Iteration Func-count f(x) Step-size optimality
fminunc with 'Display' set to 'iter',
First-order
Most Common Output Headings
The following table lists some common output headings of iterative output.
Outp
ration
Ite
nc-count
Fu
count
F-
ut Heading
or Iter
or
rmation Displayed
Info
ration number; see “Iterations and Function
Ite
nts” on page 3-10
Cou
mber of function evaluations; see “Iterations
Nu
d Function Counts” on page 3-10
an
Page 95

Displaying Iterative Output
Output Heading Information Displayed
x
f(x)
Step-size
Norm of step
Current point for the algorithm
Current function value
Step size in the current search direction
Norm of the current step
Function-Specific Output Headings
The following sections describe output headings of iterative output whose
meaning is specific to the optimization function you are using.
• “bintprog” on page 3-15
• “fminsearch” on page 3-16
• “fzero and fminbnd” on p ag e 3-17
• “fminunc” on page 3-17
• “fsolve” on page 3-18
• “fgoalattain, fmincon, fminimax, and fseminf” on page 3-18
• “linprog” on page 3-19
• “lsqnonlin and lsqcurvefit” on page 3-20
bintprog
The following table describes the output headings specific to bintprog.
bintprog
Output
Heading Information Displayed
Explored
nodes
Obj of LP
relaxation
Cumulative number of explored nodes
Objective function value of the linear programming (LP)
relaxation problem
3-15
Page 96
3 Examining Results
bintprog
Output
Heading Information Displayed
Obj of best
integer point
Objective function value of the best integer point found
so far. This is an upper bound for the final objective
function value.
Unexplored
nodes
Best lower
bound on obj
Number of nodes that have been set up but not yet
explored
Objective function value of LP relaxation problem that
gives the best current lower bound on the final objective
function value
Relative
gap between
bounds
1001()
ba
b−+
,
where
• b is the objective function value of the b est integer
point.
3-16
• a is the best lower bound on the o bjectiv e function
value.
fminsearch
The following table describes the output headings specific to fminsearch.
fminsearch
Output
Heading Information Displayed
min f(x)
Procedure
Minimum function value in the current simplex
Simplex p rocedure at the current iteration. Procedures
include
inside
initial, expand, reflect, shrink, contract
,andcontract outside. See “fminsearch
Algorithm” on page 6-11 for explanations of these
procedures.
Page 97
Displaying Iterative Output
fzero and fminbnd
The following table des cribes the output headings specific to fzero and
fminbnd.
fzero and
fminbnd
Output
Heading Information Displayed
Procedure
Procedure at the current operation. Procedures for
fzero:
•
initial (initial point)
search (search for an interval containing a zero)
•
bisection (bisection search)
•
interpolation
•
Operations for fminbnd:
•
initial
• golden (golden section search)
parabolic (parabolic interpolation)
•
fminunc
The following table describes the output headings specific to fminunc.
fminunc
Output
Heading Information Displayed
First-order
optimality
CG-iterations
First-order optimality measure (see “First-Order
Optimality Measure” on page 3-11)
Number of conjugate gradient iterations taken by the
current (optimization) iteration (see “Preconditioned
Conjugate Gradient Method” on page 6-23)
3-17
Page 98
3 Examining Results
fsolve
The following table describes the output headings specific to fsolve.
fsolve Output
Heading Information Displayed
First-order
optimality
Trust-region
radius
Residual
Directional
derivative
First-order optimality measure (see “First-Order
Optimality Measure” on page 3-11)
Current trust-region radius (change in the norm of the
trust-region radius)
Residual (sum of squares) of the function
Gradient of the function along the search direction
fgoalattain, fmincon, fminimax, and fseminf
The following table describes the output headings specific to fgoalattain,
fmincon, fminimax,andfseminf.
3-18
fgoalattain,
fmincon,
fminimax, fseminf
Output Heading Information Displayed
Max constraint
Maximum violation among all constraints, both
internally constructed and user-provided
First-order
optimality
CG-iterations
First-order optimality measure (see “First-Order
Optimality Measure” on page 3-11)
Number of conjugate gradient iterations taken by the
current (optimization) iteration (see “P r econditioned
Conjugate Gradient Method” on page 6-23)
Trust-region
radius
Residual
Attainment factor
Current trust-region radius
Residual (sum of squares) of the function
Value of the attainment factor for fgoalattain
Page 99
Displaying Iterative Output
fgoalattain,
fmincon,
fminimax, fseminf
Output Heading Information Displayed
Objective value
Objective function value of the nonlinear
programming reformulation of the minimax problem
for
fminimax
Directional
derivative
Procedure
Current gradient of the function along the search
direction
Hessian update and QP subproblem. The Procedure
messages are discuss ed in “Updating the Hessian
Matrix” on page 6-29.
linprog
The following table describes the output headings specific to linprog.
linprog Output
Heading Information Displayed
Primal Infeas
A*x-b
Dual Infeas
A'*y+z-w-f
Duality Gap
x'*z+s'*w
Primal infeasibility
Dual infeasibility
Duality gap (see “Large Scale Linear Programming” on
page 6-91) between the primal objective and the dual
objective.
s and w appear only in this equation if there
are finite upper bou n ds.
Total Rel
Error
Objective f'*x
Total relative error, described at the end of “Main
Algorithm” on page 6-91.
Current objective value
3-19
Page 100
3 Examining Results
lsqnonlin and lsqcurvefit
The following table describes the output headings specific to lsqnonlin and
lsqcurvefit.
lsqnonlin and
lsqcurvefit
Output
Heading Information Displayed
Resnorm
Residual
First-order
optimality
CG-iterations
Directional
derivative
Lambda
Valueofthesquared2-normoftheresidualatx
Residual vector of the function
First-order optimality measure (see “First-Order
Optimality Measure” on page 3-11)
Number of conjugate gradient iterations taken by the
current (optimization) iteration (see “Preconditioned
Conjugate Gradient Method” on page 6-23)
Gradient of the function along the search direction
λkvalue d efined in “Levenberg-Marquardt Method” on
page 6-139. (This value is displayed w hen you use the
Levenberg-Marquardt method and omitted when you
use the Gauss-Newton method.)
3-20
 Loading...
Loading...