

Page 1

Econometrics Tool
User’s Guide
box™ 1
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Econometrics Toolbox™ User’s Guide
© COPYRIGHT 1999–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Revision History
October 2008 Online only Version 1.0 (Release 2008b)
March 2009 Online only Revised for Version 1.1 (Release 2009a)
September 2009 Online only Revised for Version 1.2 (Release 2009b)
March 2010 Online only Revised for Version 1.3 (Release 2010a)
Page 3

Getting Started
1
Product Overview ................................. 1-2
Contents
Technical Conventions
Time Series Arrays
Conditional vs. Unconditional Variance
Prices, Returns, and Compounding
Stationary and Nonstationary Time Series
Time Series Modeling
Characteristics of Time Series
Forecasting Time Series
Serial Dependence in Innovations
Conditional Mean and Variance Models
GARCH Models
................................... 1-12
............................. 1-3
................................ 1-3
............... 1-3
................... 1-4
............. 1-4
.............................. 1-7
....................... 1-7
............................ 1-9
.................... 1-10
............... 1-11
Example Workflow
2
Estimation ........................................ 2-2
Forecasting
....................................... 2-4
Simulation
Analysis
........................................ 2-5
.......................................... 2-7
iii
Page 4

Model Selection
3
Specification Structures ........................... 3-2
About Specification Structures
Associating Model E quation Variables with Corresponding
Parameters in Specification Structures
Working with Specification Structures
Example: Specif ica t io n Structures
....................... 3-2
.............. 3-4
................ 3-5
.................... 3-9
Model Identification
Autocorrelation and Partial Autocorrelation
Unit Root Tests
Misspecification Tests
Akaike and Bayesian Information
Model Construction
Setting Model Parameters
Setting Equality Constraints
Example: Model Selection
............................... 3-11
............ 3-11
................................... 3-11
.............................. 3-30
.................... 3-43
................................ 3-46
.......................... 3-46
........................ 3-50
.......................... 3-54
Simulation
4
Process Simulation ................................ 4-2
Introduction
Preparing th e Example Data
Simulating Single Paths
Simulating Multiple Paths
...................................... 4-2
........................ 4-2
............................ 4-3
.......................... 4-5
iv Contents
Presample Data
About Presample Data
Automatically Generating Presample Data
Running Simulations With User-Specified Presample
Data
.......................................... 4-11
................................... 4-6
............................. 4-6
............ 4-6
Page 5

Estimation
5
Maximum Likelihood Estimation .................... 5-2
Estimating Initial Parameters
Computing User-Specified In itial E stimates
Computing Automatically Generated Initial Estimates
Working With Parameter Bounds
Presample Data
Calculating Presample Data
Using the garchfit Function to Generate User-Specified
Presample Observations
Automatically Generating Presample Observations
Optimization Termination
Optimization Parameters
Setting Maximum Numbers of Iterations and Function
Evaluations
Setting Function Termination Tolerance
Enabling Estimation Convergence
Setting Constraint Violation Tolerance
Examples
Presample Data
Inferring Residuals
Estimating ARMA(R,M) Parameters
Lower Bound Constraints
......................................... 5-21
................................... 5-12
.................................... 5-15
................................... 5-21
................................ 5-24
...................... 5-4
............ 5-4
.................... 5-10
......................... 5-12
.......................... 5-12
.......................... 5-15
........................... 5-15
............... 5-16
.................... 5-17
................ 5-18
.................. 5-30
........................... 5-31
... 5-6
...... 5-13
Forecasting
6
MMSE Forecasting ................................. 6-2
About the Forecasting Engine
Computing the Conditional Standard Deviations of Future
Innovations
.................................... 6-2
....................... 6-2
v
Page 6

Computing the Conditional Mean Forecasting of the Return
Series
MMSE Volatility Forecasting of Returns
Approximating Confidence Intervals Associated with
Conditional Mean Forecasts Using the Matrix of Root
Mean Square Errors (RMSE)
......................................... 6-3
.............. 6-3
...................... 6-4
Presample Data
Asymptotic Behavior
Examples
Forecasting Using GARCH Predictions
Forecasting Multiple Periods
Forecasting Multiple Realizations
......................................... 6-9
................................... 6-6
............................... 6-7
................ 6-9
........................ 6-12
.................... 6-15
Regression
7
Introduction ...................................... 7-2
Regression in Estimation
Fitting a Return Series
Fitting a Regression M odel to a Return Series
Regression in Simulation
........................... 7-3
............................. 7-3
.......... 7-5
........................... 7-8
vi Contents
Regression in Forecasting
Using Forecasted Explanatory Data
Generating Forecasted Explanatory Data
Regression in Monte Carlo
Ordinary Least Squares Regression
.......................... 7-9
......................... 7-11
.................. 7-9
.............. 7-10
................. 7-12
Page 7

Multiple Time Series
8
Multiple Time Series Models ........................ 8-2
Types of Multiple Time Series Models
Lag Operator Representation
Stable and Invertible Models
........................ 8-3
........................ 8-4
................. 8-2
Modeling Multiple Time Series
A Generic Workflow
Multiple Time Series Data Structures
Introduction to Multiple Time Series Data
Response Data Structure
Exogenous Data Structure
Example: Response Data Structure
Example: Exogenous Data Structure
Data Preproces sing
Partitioning Response Data
Seemingly Unrelated Regression for Exogenous Da ta
Creating Model Specification Structures
Models for Multiple Time Series
Specifying Models
Defining a Model Specification Structure with Known
Parameters
Defining a Model Specification Structure with No
Parameter Values
Defining a Model Specification Structure with Selected
Parameter Values
Displaying an d Changing a Model Sp ecifica tion
Structure
Determining an Appropriate Number of Lags
...................................... 8-22
............................... 8-5
................................ 8-12
................................. 8-16
.................................... 8-17
............................... 8-19
............................... 8-20
...................... 8-5
............... 8-7
............. 8-7
........................... 8-8
.......................... 8-8
................... 8-10
.................. 8-11
......................... 8-13
............ 8-16
..................... 8-16
........... 8-23
.... 8-14
Fitting Parameters
Preparing Models for Fitting
Including Exogenous Data
Converting Betw ee n Models
Fitting Models to Data
Examining the Stability of a Fitted Model
................................ 8-25
........................ 8-25
.......................... 8-26
......................... 8-26
............................. 8-31
............. 8-37
vii
Page 8

Forecasting, Simulating, and Analyzing Models ...... 8-38
Forecasting with Multiple Time Series Models
Returning to Original Scaling
Calculating Impulse Responses with vgxproc
....................... 8-44
.......... 8-38
........... 8-44
Multiple Time Series Case Study
Overview o f the Case Study
Loading and Transforming Data
Selecting and Fitting Models
Checking Model Adequacy
Forecasting
...................................... 8-58
.......................... 8-53
.................... 8-47
......................... 8-47
..................... 8-47
........................ 8-51
Lag Operator Polynomials
9
Creating a Lag Operator Object ..................... 9-2
Simple Second-Degree Polynomial
ARMA(2,1) Model
Impulse Response
Monte Carlo Simulation
ARIMA(2,1,1) Model
.................................. 9-7
................................. 9-9
............................ 9-11
................................ 9-12
.................. 9-4
viii Contents
Seasonal ARIMA Model
Time Series Filtering and Initial Conditions
Polynomial Division
Univariate Polynomial Inversion
Multivariate Polynomial Inve rsion
Transformation of VAR M odels
............................ 9-15
............................... 9-20
..................... 9-20
................... 9-24
...................... 9-25
......... 9-18
Page 9

10
Stochastic Differential Equations
Introduction ...................................... 10-2
SDE Modeling
Trials vs. Paths
NTRIALS, NPERIODS, and NSTEPS
.................................... 10-2
................................... 10-3
................. 10-4
SDE Class Hierarchy
SDE Objects
Introduction
Creating SDE Objects
Modeling with SDE Objects
SDE Methods
Example: Simulating Equity Prices
Simulating Multidimensional Market Models
Inducing Dependence and Correlation
DynamicBehaviorofMarketParameters
Pricing Equity Options
Example: Simulating Interest Rates
Simulating Interest Rates
Ensuring Positive Interest Rates
Example: Stratified Sampling
Performance Considerations
Managing Memory
Enhancing Performance
Optimizing Accuracy: About Solution Precis ion and
Error
....................................... 10-8
...................................... 10-8
...................................... 10-31
......................................... 10-75
............................... 10-5
.............................. 10-8
......................... 10-16
................. 10-32
................. 10-44
.............. 10-47
............................. 10-53
................. 10-56
.......................... 10-56
..................... 10-62
....................... 10-67
....................... 10-73
................................ 10-73
............................ 10-74
.......... 10-32
ix
Page 10

11
Function Reference
Data Preprocessing ................................ 11-2
GARCH Modeling
Model Specification
Model Visualization
Multiple Time Series
Lag Operator Polynomials
Statistics and Tests
Stochastic Differential Equations
Utilities
........................................... 11-7
.................................. 11-2
................................ 11-2
................................ 11-2
............................... 11-3
.......................... 11-3
................................ 11-4
................... 11-6
x Contents
Page 11

12
A
B
C
Functions — Alphabetical List
Data Sets, Demos, and Example Functions
Bibliography
Examples
Getting Started .................................... C-2
Example Workflow
Model Selection
Simulation
Estimation
Forecasting
Regression
Multiple Time Series
Lag Operator Polynomial
........................................ C-2
........................................ C-3
....................................... C-3
........................................ C-3
................................. C-2
................................... C-2
............................... C-3
........................... C-4
xi
Page 12

Stochastic Differential Equations ................... C-4
Glossary
Index
xii Contents
Page 13

Getting Started
• “Product Overview” on page 1-2
• “Technical Conventions” on page 1-3
• “Time Series Modeling” on page 1-7
1
Page 14
1 Getting Started
Product Overview
The Econometrics Toolbox™ software, combined with MATLAB®,
Optimization Toolbox™, and Statistics Toolbox™ software, provides an
integrated computing environment for modeling and analyzing economic
and social systems. It enables economists, quantitative analysts, and social
scientists to perform rigorous modeling, simulation, calibration, identification,
and f orecasting with a variety of standard econometrics too ls.
Specific functionality includes:
• Univariate ARMAX/GARCH composite models with several GARCH
• Dickey-Fuller and Phillips-Perron unit root tests
• Multivaria te VARX model estimation, simulation, and forecasting
• Multivariate VARMAX model simulation and forecasting
• Monte Carlo simulation of many common stochastic differential equations
variants (ARCH/GARCH, EGARCH, and GJR)
(SDEs), including arithmetic and geometric Brownian motion, Constant
Elasticity of Variance (CEV), Cox-Ingersoll-Ross (CIR), Hull-White,
Vasicek, and Heston stochastic volatility
1-2
• Monte Carlo simulation support for virtually any linear or nonlinear SDE
• Hodrick-Prescott filter
• Statistical tests such as likelihood ratio, Engle’s ARCH, Ljung-Box Q
• Diagnostic tools such as Akaike information criterion (AIC), Bayesian
information criterion (BIC), and partial/auto/cross correlation functions
• Lagoperatorobjectsfordatafiltering and time series modeling
Page 15

Technical Conventions
In this section...
“Time Series Arrays” on page 1-3
“Conditional vs. Uncondition al Variance” on page 1-3
“Prices, Returns, and Compounding” on page 1-4
“Stationary and Nonstationary Time Series” on page 1-4
Tip For information on economic modeling terminology, see the “Glossary” on
page Glossary-1.
Time Series Arrays
A time series is an ordered set of observations stored in a MATLAB array. The
rows of the array correspond to time-tagged indices, or observations, and the
columns correspond to sample paths, independent realizations, or individual
time series. In any given column, the first row contains the oldest observation
and the last row contains the most recent observation. In this representation,
a time series array is column-oriented.
Technical Conventions
Note Some Econometrics Toolbox functions can process univariate time
series arrays formatted as either row or column vectors. However, many
functions now strictly enforce the column-oriented representation of a time
series. To avoid ambiguity, format single realizations of univariate time series
as column vectors. Representing a time series in column-oriented format
avoids misinterpretation of the arguments. It also makes it easier for you to
display data in the MATLAB Command Window.
Conditional vs. Unconditional Variance
The term conditional implies explicit dependence on a past sequence of
observations. The term unconditional applies more to long-term behavior of
a time series, and assumes no explicit knowledge of the past. Time series
typically modeled by Econometrics Toolbox software have constant means
1-3
Page 16

1 Getting Started
and unconditional variances but non-constant conditional variances (see
“Stationary a nd Nonstationary Time Series” on page 1-4).
Prices, Returns, and Compounding
The Econometrics T oolbox software assumes that time series vectors and
matrices are time-tagged series of observations, usually of returns. The
toolbox lets you convert a price series to a return series with either continuous
compounding or simple periodic compounding, using the
price2ret function.
If you denote successive price observations made at times t and t+1 as P
and P
into a return series {y
, respectively, continuous compounding transforms a price series {Pt}
t+1
P
+
1
y
==−
t
t
log log log
P
t
}using
t
PP
+
1
tt
t
Simple periodic compounding uses the transformation
PPPP
−
++11
tttt
y
=
t
=−
1
P
t
(1-1)
Continuous compounding is the default Econometrics Toolbox compounding
method, and is the preferred method for most of continuou s-tim e finance.
Since modeling is typically based o n relatively high frequency data (daily
or weekly observations), the difference between the two methods is usually
small. Howeve r, some toolbox functions produce results that are approximate
for simple periodic compounding, but exact for continuous compounding. If
you adopt the continuous compounding default convention when moving
between prices and returns, all toolbox functions produce exact results.
Stationary and Nonstationary Time Series
The Econometrics Toolbox software assumes that return series ytare
covariance-stationary processes, with constant mean and constant
unconditional variance. Variances conditional on the past, such as V(y
are considered to be random variables.
t|yt–1
),
1-4
Page 17

Technical Conventions
The price-to-return transformation generally guarantees a stable data set for
modeling. For example, the following figure illustrates an equity price series.
It shows daily closing values of the NASDAQ Composite Index. There appears
to be no long-run average level about which the series evolves, indicating
a nonstationary time series.
The following figure illustrates the continuously compounded returns
associated with the same price series. In contrast, the returns appear to have
a stable mean over time.
1-5
Page 18

1 Getting Started
1-6
Page 19

Time Series Modeling
In this section...
“Characteristics of Time Series” on page 1-7
“Forecasting Time Series” on page 1-9
“Serial Dependence in Innovations” on page 1-10
“Conditional Mean and Variance Models” on page 1-11
“GARCH Models” on page 1-12
Characteristics of Time Series
Econometric models are designed to capture characteristics that are
commonly associated with time series, including fat tails, volatility clustering,
and leverage effects.
Probability distributions for asset returns often exhibit fatter tails than
the standard normal distribution. The fat tail phenomenon is called excess
kurtosis. Time series that exhib it fat tails are often called leptokurtic.The
dashed red line in the following figure illustrates excess kurtosis. The solid
blue line shows a normal distribution.
Time Series Modeling
1-7
Page 20

1 Getting Started
1-8
Time serie s also often exhibit volatility clustering or persistence. In volatility
clustering, large changes tend to follow large changes, and small changes tend
to follow small changes. T he changes from one period to the next are typically
of unpredictable sign. Large disturbances, po sitive or negative, become part of
the information set used to construct the variance forecast of the next period’s
disturbance. In this way, large shocks of either sign can persist and influence
volatility forecasts for several periods.
Volatility clustering suggests a time series model in which successive
disturbances are uncorrelated but serially dependent. Th e following figure
illustrates this characteristic. It shows the daily returns of the New York
Stock Exchange Com posite Index.
Page 21

Time Series Modeling
Volatility clustering, which is a type of heteroscedasticity, accounts for
some of the excess kurtosis typically observed in financial data. Part of the
excess kurtosis can also result from the presence of non-normal asset return
distributions that happen to have fat tails. An example of such a distribution
is Student’s t.
Certain classes of asymmetric GARCH m odels can also capture the leverage
effect. This effect results in observed asset returns being negatively correlated
with changes in volatility. For certain asset classes, volatility tends to rise
in response to lower than expected returns and to fall in response to higher
than expected returns. Such an effect suggests GARCH models that include
an asymmetric response to positive and negative impulses.
Forecasting Time Series
You can treat a time series as a sequence of random observations. This
random sequence, or stochastic process, may exhibit a degree of correlation
from one observation to the next. You can use this correlation structure to
1-9
Page 22
1 Getting Started
predict future values of the process based on the past history of observations.
Exploiting the correlation structure, if any , allows you to decompose the time
series into the following components:
• A deterministic component (the forecast)
• A random component (the error, or uncertainty, associated with the
forecast)
The f ollow ing represents a univariate model of an observed time series:
yft X
=− +(,)1
tt
In this model,
• f(t –1,X) is a nonlinear function representing the forecast, or deterministic
component, of the current return as a function of information known at
time t – 1. The forecast includes:
{}
- Past disturbances
, ,...
tt−−12
1-10
{}
- Past observations
yy
, ,...
tt−−12
- Any other relevant explanatory time series data, X
}isarandominnovations process. It represents disturbances in the m ean
• {ε
t
of {y
}. You can also interpret εtas the single-period-ahead forecast error.
t
Serial Dependence in Innovations
A common assumption when modeling time series is that the forecast errors
(innovations) are zero-mean random disturbances that are uncorrelated from
one period to the next.
E
E
tt
12
Although successive innovations are uncorrelated, they are not independent.
In fact, an exp licit generating m echanism for an innovations process is
0
{}
=
t
{}
tt
12
0
=
≠
Page 23

Time Series Modeling
where σ
z=
ttt
is the conditional standard deviation (derived from o ne of the
t
(1-2)
conditional variance equations in “Conditional Variance Models” on page 1-12)
and z
is a standardized, independent, identically-distributed (i.i.d.) random
t
draw from a specified probability distribution. The Econometrics Toolbox
software provides two distributions for modeling innovations processes:
Normal and Student’s t.
Equation 1-2 says that {ε
} rescales an i.i.d. process {zt} with a conditional
t
standard deviation that incorporates the serial dependence of the innovations.
Equivalently, it says that a standardized disturbance, ε
, is itself i.i .d.
t/σt
GARCH models are consistent with various forms of efficient market theory,
which states that observed past returns cannot improve the forecasts of future
returns. Correspondingly, GARCH innovations {ε
} are serially uncorrelated.
t
Conditional Mean and Variance Models
• “Conditional Mean Models” on page 1-11
• “Conditional Variance Models” on page 1-12
Conditional Mean Models
The general ARMAX(R,M,Nx) model for the conditional mean
R
yC y Xtk
=+ ++ +
ti
∑∑∑
−
ti t j
=
111
i
applies to all variance models with autoregressive coefficients {
average coefficients {θ
M
=
j
}, innovations {εt}, and returns {yt}. X is an explanatory
j
Nx
−
tj k
=
k
(, )
ϕ
}, moving
i
(1-3)
regression matrix in which each column is a time series. X(t,k) denotes the tth
row and kth column of this matrix.
The eigenvalues {λ
RR R
−−−−
1
} associated with the characteristic AR polynomial
i
−−
1
2
...
2
R
1-11
Page 24

1 Getting Started
mustlieinsidetheunitcircletoensurestationarity.
Similarly, the eigenvalues associated with the characteristic MA polynomial
MM M
++++
−−
1
1
2
2
...
M
mustlieinsidetheunitcircletoensureinvertibility.
Conditional Variance Models
The conditional variance of innovations is
Var ( ) ( )
yE
tt tt t
==
−−
11
22
The key insight of G ARCH models lies in the distinction between the
conditional and unconditional variances of the innovations process {ε
}.
t
The term conditional implies explicit dependence on a past sequence of
observations. The term unconditional applies more to long-term behavior of a
time se ries , and assumes no explicit knowledge of the past.
GARCH Models
• “Introduction” on page 1-12
• “Modeling with GARCH” on page 1-13
• “Limitations of GARCH Models” on page 1-14
1-12
• “Types of GARCH Models” on page 1-14
• “Comparing GARCH Models” on page 1-17
• “The Default Model” on page 1-19
• “Example: Usi ng the Default Model” on page 1-20
Introduction
GARCH stands for generalized autoregressive conditional heteroscedasticity.
The word “autoregressive” indicates a feedback mechanism that incorporates
past observations into the present. The word “conditional” indicates
Page 25

Time Series Modeling
that variance has a dependence on the immediate past. The word
“heteroscedasticity” indicates a time-varying variance (volatility). GARCH
models, introduced by Bollerslev [6], generalized Engle’s earlier ARCH models
[21] to include autoregressive (AR) as well as moving average (MA) terms.
GARCH m odels can be more parsimonious (use fewer parameters), increasing
computational efficiency.
GARCH, then, is a mechanism that includes past var iances in the explanation
of future variances. More s pecifically, GARCH is a time series technique used
to model the serial dependence of volatility.
In this documentation, whenever a time series is said to have GARCH effects,
the series is heteroscedastic, meaning that its variance varies with time. If its
variances remain constant with time, the series is homoscedastic.
Modeling with GARCH
GARCHbuildsonadvancesintheunderstanding and modeling of volatility in
the last decade. It takes into account excess kurtosis (fat tail behavior) and
volatility clustering, two important characteristics of time series. It provides
accurate forecasts of variances and covariances of asset returns through its
ability to model time-varying conditional variances.
You can apply GARCH models to such diverse fields as:
• Risk management
• Portfolio management and asset allocation
• Option pricing
• Foreign exchange
• The term structure of interest rates
You can find significant GARCH effects in equity markets [7] for:
• Individual stocks
• Stock portfolios and indices
• Equity futures markets
1-13
Page 26

1 Getting Started
GARCH effects are important in areas such as value-at-risk (VaR) and other
risk management applications that concern the efficient allocation of capital.
You can use GARCH models to:
• Examine the relationship between long- and short-term interest rates.
• Analyze time-varying risk premiums [7] as the uncertainty for rates over
various horizons chang es over time.
• Model foreign-exchange markets, which couple highly persistent periods of
volatility and tranquility with significant fat-tail behavior [7].
Limitations of GARCH Models
Although GARCH models are useful across a wide range of applications, they
have limitations:
• Although GARCH models usually apply to return series, decisions are
rarely based solely on expected returns and volatilities.
1-14
• GARCH models operate best under relatively stable market conditions [27].
GARCH is explicitly designed to model time-varying conditio nal var iances,
but it often fails to capture highly irregular phenomena. These include wild
market fluctuations (for example, crashes and later rebounds) and other
unanticipated events that can lead to significant structural change.
• GARCH models often fail to fully capture the fat tails observed in asset
return series. Heteroscedasticity explains some, but not all, fat-tail
behavior. To compensate for this limitation, fat-tailed distributions such
as Student’s t are applied to GARCH modeling, and are available for use
with Econometrics Toolbox functions.
Types of GARCH Models
• “GARCH(P,Q)” on page 1-15
• “GJR(P,Q)” on page 1-15
• “EGARCH(P,Q )” on page 1-16
Page 27

Time Series Modeling
Various GARCH models characterize the conditional distribution of εtby
specifying different parametrizations to capture serial dependence on the
conditional variance.
GARCH(P,Q). The general GARCH(P,Q) model for the conditional variance
of innovations is
2
ti
P
=+ +
GA
∑∑
1
=
i
Q
2
−
ti j
1
=
j
2
−
tj
with constraints
P
∑∑
i
==
G
A
Q
GA
+<
i
11
>
0
≥
0
i
≥
0
j
j
j
1
The basic GARCH(P,Q) model is a symmetric variance process, in that it
ignores the sign of the disturbance.
GJR(P,Q). The general GJR(P,Q) model for the conditional variance of
innovations w ith leverage terms is
2
ti
where S
P
=+ + +
GA LS
∑∑ ∑
1
=
i
=1ifε
t–j
Q
2
−
ti j
1
=
j
<0,S
t–j
t–j
= 0 otherwise, with constraints
Q
2
−
tj j
1
=
j
2
−−
tjtj
(1-4)
(1-5)
1-15
Page 28

1 Getting Started
P
∑∑ ∑
i
−− −
G
A
AL
Q
GA L
++ <
i
11 1
j
≥
0
≥
0
i
≥
0
j
+≥
jj
0
Q
1
j
2
j
1
j
The name GJR comes from Glosten, Jagannathan, and Runkle [25].
EGARCH(P,Q). The general EGARCH(P,Q) model for the conditional
variance of the innovations, with leverage terms and an explicit probability
distribution assumption, is
2
log log
ti
P
=+ + −
GAE
∑∑
1
=
i
Q
2
−
ti j
1
=
j
⎡
−
tj
⎢
⎢
−
tj
⎣
⎧
⎪
⎨
⎪
⎩
−
tj
−
tj
⎤
Q
⎫
⎪
⎥
+
⎬
⎥
⎪
⎭⎭
⎦
∑
j
⎛
⎞
−
tj
L
⎜
j
⎜
=
1
⎝
−
tj
,
⎟
⎟
⎠
(1-6)
where
⎛
⎞
tj
−
Ez E
{}
tj
−
⎜
=
⎜
tj
−
⎝
2
⎟
=
⎟
⎠
for the normal distribution, and
1-16
1
−
⎛
⎧
tj
−
Ez E
{}
tj
−
⎪
=
⎨
tj
−
⎪
⎩
⎫
⎪
=
⎬
⎪
⎭
Γ
2
−
⎞
⎜
⎟
2
⎝
⎠
⎛
⎞
Γ
⎜
⎟
2
⎝
⎠
for the Student’s t distribution with degrees of freedom ν >2.
The Econometrics Toolbox software treats EGARCH(P,Q) models as
ARMA(P,Q) models for log σ
2
. Thus, it includes the constraint for stationary
t
EGARCH(P,Q) models by ensuring that the eigenvalues of the characteristic
polynomial
Page 29

Time Series Modeling
PP P
−−
1
GG G−−−−
1
2
...
2
p
are inside the unit circle.
EGARCH models are fundamentally different from GARCH and GJR models
in that the standardized innovation, z
, serves as the forcing variable for both
t
the conditional variance and the error. GARCH and GJR models allow for
volatility clustering via a combination of the G
and Ajterms. The Giterms
i
capture volatility clu steri n g in EGARCH models.
Comparing GARCH Models
Econometrics literature lacks consensus on the exact definition of particular
types of GARCH models. Although the functional form of a GARCH(P,Q)
model is standard, alternate positivity constraints exist. Thes e alternates
involve additional nonlinear inequalities that are difficult to impose in
practice. They do not affect the GARCH(1,1) model, which is by far the
most common model. In contrast, the standard linear positivity constraints
imposed by the Econometrics Toolbox software are commonly used, and are
straightforward to implement.
Many references refer to the GJR model as TGARCH (Threshold GA RCH).
Others make a clear distinction between GJR and TGARC H models—a GJR
model is a recursive e quation for the conditional variance, and a TGARCH
model is the identical recursive equation for the conditional standard
deviation (see, for example, Hamilton [32] and Bollerslev [8]). Furthermore,
additional discrepancies exist regarding whether to allow both negative and
positive innovations to affect the conditional variance process. The GJR model
included in the Econom etrics Toolbox software is relatively standard.
The Econometrics Toolbox software p arameterizes GA RCH and GJR models,
including constraints, in a way that allows you to interpret a GJR model as an
extension of a GARCH model. You can also interpret a GARCH model as a
restricted GJR model with zero leverage term s. Th is latter interpretation is
useful for estimation and hypothesis testing via lik eli hood ratios.
For GARCH(P,Q)andGJR(P,Q) models, the lag lengths P and Q,andthe
magnitudes of the coefficients G
and Aj, determine the ex tent to which
i
disturbances persist. These values then determine the minimum amount of
1-17
Page 30

1 Getting Started
presample data needed to initiate the simulation and estimation processes.
The G
terms capture persistence in EGAR CH models.
i
The functional form of the EG ARC H model given in “EGARCH(P,Q)” on page
1-16 is relatively standard, but it is not the same as Nelson’s original [46]
model. Many forms of EGARCH models exist. Another form is
2
log log [
ti
P
=+ +
GA
∑∑
i
1
=
Q
||
+
tj jtj
2
tj
1
−
j
1
=
−−
tj
L
]
−
This form appears to offer an advantage: it does not explicitly make
assumptions about the conditional probability distribution. That is, it does
not assume that the distribution of z
=(εt/σt) is Gaussian or Student’s t.
t
Even though this model does not explicitly assume a distribution, such an
assumption is required for forecasting and Monte Carlo simulation in the
absence of user-specified presample data.
Although EGARCH models require no parameter constraints to ensure
positive conditional variances, stationarity constraints are necessary. The
Econometrics Toolbox software treats EGARCH(P,Q) models as ARMA(P,Q)
models for the logarithm of the conditional variance. Therefore, this toolbox
imposes nonlinear constraints on the G
coefficients to ensure that the
i
eigenvalues of the characteristic polynomial are all inside the unit circle.
(See, for example, Bollerslev, Engle, and Nelson [8], and Bollerslev, Chou,
and Kroner [7].)
EGARCH and GJR models are asymmetric models that capture the leverage
effect, or negative correlation, between asset returns and volatility. Both
models include leverage terms that explicitly take into account the sign and
magnitude of the innovation noise term. Although both models are designed
to capture the leverage effect, they differ in their approach.
1-18
For EGARCH models, the leverage coefficients L
innovations ε
. For GJR models, the leverage coefficients enter the model
t-1
apply to the actual
i
through a Boolean indicator, or dummy, variable. Therefore, if the leverage
effect does indeed hold, the leverage coefficients L
should be negative for
i
EGARCH models and positive for GJR models. This is in contrast to GARCH
models, which ignore the sign of the innovation.
Page 31

Time Series Modeling
GARCH and GJR models include terms related to the model innovations
ε
= σtzt, but EGARCH models include terms related to the standardized
t
innovations, z
=(εt/σt), where ztacts as the forcing variable for both the
t
conditional variance and the error. In this respect, EGARCH models are
fundamentally unique.
The Default Model
The Econometrics Toolbox default model is a simple constant mean model
with GARCH(1,1) Gaussian (normally distributed) innovations:
yC
=+
tt
(1-7)
2
ttt
The returns, y
disturbance, ε
GA
=+ +
11211
−−
, consist of a constant plus an uncorrelated white noise
t
. This model is often sufficient to describe the conditional mean
t
2
(1-8)
in a return series. Most return series do not require the comprehensiveness
of an ARMAX model.
The variance forecast, σ
2
, consists of a constant plus a weighted average
t
of last period’s forecast and last period’s squared disturbance. Although
return series typically exhibit little correlation, the squared returns often
indicate significant correlation and persistence. This implies correlation in
the variance process, and is an indication that the data is a candidate for
GARCH modeling.
The default model has several benefits:
• It represents a parsimonious model that requires you to estimate only four
parameters (C, κ, G
,andA1). According to Box and Jenkins [10], th e fewer
1
parameters to estimate, the less that can go wrong. Elaborate models often
fail to offer real benefits when forecasting (see Hamilton [32]).
• It captures most of the variability in most return series. Small lags for
P and Q are common in empirical applications. Typically, G ARCH(1,1),
GARCH(2,1), or GARCH(1,2) models are adequate for modeling volatilities
even over long sample periods (see Bollerslev, Chou, and Kroner [7]).
1-19
Page 32

1 Getting Started
Example: Using the Default Model
• “Pre-Estimat ion Analysis” on page 1-20
• “Estimating Model Parameters” on page 1-29
• “Post-Estimation Analysis” on pa ge 1-31
Pre-Estimation Analysis. When estimating the parameters of a composite
conditional mean/variance m odel, you may occasionally encounter problems:
• Estimation may appear to stall, showing little or no progress.
• Estimation may terminate before convergence.
• Estimation may converge to an unexpected, suboptimal solution.
You can avoid many of these difficulties by selecting the simplest model that
adequately describes your data, and then performing a pre-fit analysis. The
following p re-estimation analysis shows how to:
1-20
• Plot the return series and examine the ACF and PACF.
• Perform preliminary tests, including Engle’s ARCH test and the Q-test.
Loading the Price Series Data
1 Load the MATLAB binary file Data_MarkPound, which contains daily price
observations of the Deutschmark/British Pound foreign-exchange rate.
View its contents in the Workspace Browser:
load Data_MarkPound
Page 33

Time Series Modeling
2 The ’Description’ field contains the description of the dataset. You can
view it in the Variable Editor.
1-21
Page 34

1 Getting Started
1-22
Page 35

Time Series Modeling
3 Use the MATLAB plot function to examine this data. Then, use the set
function to set the position of the tick marks and relabel the x-ax is ticks
of the current figure:
plot([0:1974],Data)
set(gca,'XTick',[1 659 1318 1975])
set(gca,'XTickLabel',{'Jan 1984' 'Jan 1986' 'Jan 1988' ...
'Jan 1992'})
ylabel('Exchange Rate')
title('Deutschmark/British Pound Foreign-Exchange Rate')
Converting the Prices to a Return Series
Because GARCH models assume a return series, you need to convert prices to
returns.
1 Run the utility function price2ret:
1-23
Page 36

1 Getting Started
markpound = price2ret(Data);
Examine the result. The workspace information shows both the 1975-point
price series and the 1974-point return series deriv ed from it.
2 Now, use the plot function to visualize the return series:
plot(markpound)
set(gca,'XTick',[1 659 1318 1975])
set(gca,'XTickLabel',{'Jan 1984' 'Jan 1986' 'Jan 1988' ...
'Jan 1992'})
ylabel('Return')
title('Deutschmark/British Pound Daily Returns')
The raw return series shows volatility clustering.
1-24
Page 37

Time Series Modeling
Checking for Correlation in the Return Series
Call the functions autocorr and parcorr to examine the sample
autocorrelation (ACF) and partial-autocorrelation (PACF) functions,
respectively.
1 Assuming that all autocorrelations are zero beyond lag zero, use the
autocorr function to compute and display the sample ACF of the returns
and the upper and lowe r standard deviation confidence bounds:
autocorr(markpound)
title('ACF with Bounds for Raw Return Series')
2 Use the parcorr function to display the sample PACF with upper and
lower confidence bounds:
parcorr(markpound)
title('PACF with Bounds for Raw Return Series')
1-25
Page 38

1 Getting Started
1-26
View the sample ACF and PACF with care (see Box, Jenkins, Reinsel
[10]). The individual ACF values can have large variances and can also
be autocorrelated. However, as preliminary identifica t ion tools, the ACF
and PACF provide some indica t ion of the broad correlation characte risti cs
of the returns. From these figures for the ACF and PACF, there is little
indication that you nee d to use any correlation structure in the conditional
mean. Also, note the similarity between the graphs.
Checking for Correlation in the Squared Returns
Although the ACF of the observed returns exhibits little correlation, the
ACF of the squared returns may still indicate significant correlation and
persistence in the second-order moments. Check this by plotting the ACF of
the squared returns:
autocorr(markpound.^2)
title('ACF of the Squared Returns')
Page 39

Time Series Modeling
This figure shows that, although the returns themselves are largely
uncorrelated, the variance process exhibits some correlation. This is
consistent with the earlier discussion in “The Default Model” on page 1-19.
The ACF shown in this figure appears to die out slowly, indicating the
possibility of a variance process close to being nonstationary.
Quantifying the Correlation
Quantify the preceding qualitative checks for correlation using formal
hypothesis tests, such as the Ljung-Box-Pierce Q-test and Engle’s ARCH test.
The
lbqtest function implements the Ljung-Box-Pierce Q-test for a departure
from randomness based on the ACF of the data. The Q-testismostoften
used as a post-estimation lack-of-fit test applied to the fitted innovations
(residuals). In this case, however, you can also use it as part of the pre-fit
analysis. This is because the default model assumes that returns are a simple
constant plus a pure innovations process. Under the null hypothesis of no
1-27
Page 40

1 Getting Started
serial correlation, the Q-test statistic is asymptotically Chi-Squa re distributed
(see Box, Jenkins, Re insel [10]).
The function
archtest implements Engle’s test for the presence of ARCH
effects. Under the null hypothesis that a time series is a random sequence of
Gaussian disturbances (that is, n o ARCH effects exist), this test statistic is
also asymptotically Chi-Square distributed (see Engle [21]).
Both functions return identical outputs. The first output,
decision flag.
not reject the null hypothesis).
H=0implies that no significant correlation exists (that is, do
H=1means that significant correlation exists
H, is a Boolean
(that is, reject the null hypothesis). The remaining outputs are the p-value
(
pValue), the test statistic (Stat), and the critical value of the Chi-Square
distribution (
1 Use lbqtest to verify (approximately) that no significant correlation is
CriticalValue).
present in the raw returns when tested for up to 10, 15, and 20 lags of the
ACF at the 0.05 level of significance:
[H,pValue,Stat,CriticalValue] = ...
lbqtest(markpound-mean(markpound),[10 15 20]',0.05);
[H pValue Stat CriticalValue]
ans =
0 0.7278 6.9747 18.3070
0 0.2109 19.0628 24.9958
0 0.1131 27.8445 31.4104
1-28
However, there is significant serial correlation in the squared returns when
youtestthemwiththesameinputs:
[H,pValue,Stat,CriticalValue] = ...
lbqtest((markpound-mean(markpound)).^2,[10 15 20]',0.05);
[H pValue Stat CriticalValue]
ans =
1.0000 0 392.9790 18.3070
1.0000 0 452.8923 24.9958
1.0000 0 507.5858 31.4104
2 Perform Engle’s ARCH test using the archtest function:
Page 41

Time Series Modeling
[H,pValue,Stat,CriticalValue] = ...
archtest(dem2gbp-mean(dem2gbp),[10 15 20]',0.05);
[H pValue Stat CriticalValue]
ans =
1.0000 0 192.3783 18.3070
1.0000 0 201.4652 24.9958
1.0000 0 203.3018 31.4104
This test also shows significant evidence in support of GARCH effects
(heteroscedasticity). Each of these e xamples extracts the sample mean
from the actual returns. This is consistent with the definition of the
conditional mean equation of the default model, in which the innovations
process is ε
= yt– C,andC is the mean of yt.
t
Estimating Model Parameters. This section continues the “Pre-Estimation
Analysis” on page 1-20 example.
1 The presence of heteroscedasticity, shown in the previous analysis,
indicates that GARCH modeling is appropriate. Use the estimation
function
garchfit to estimate the model parameters. Assume the default
GARCH model described in “The Default Model” on page 1-19. This only
requires that you specify the return series of interest as an argument to
the
garchfit function:
[coeff,errors,LLF,innovations,sigmas,summary] = ...
garchfit(markpound);
Diagnostic Information
Number of variables: 4
Functions
Objective: internal.econ.garchllfn
Gradient: finite-differencing
Hessian: finite-differencing (or Quasi-Newton)
Nonlinear constraints: armanlc
Gradient of nonlinear constraints: finite-differencing
Constraints
1-29
Page 42

1 Getting Started
Number of nonlinear inequality constraints: 0
Number of nonlinear equality constraints: 0
Number of linear inequality constraints: 1
Number of linear equality constraints: 0
Number of lower bound constraints: 4
Number of upper bound constraints: 4
Algorithm selected
medium-scale: SQP, Quasi-Newton, line-search
____________________________________________________________
End diagnostic information
Max Line search Directional First-order
Iter F-count f(x) constraint steplength derivative optimality Procedure
0 5 -7915.72 -2.01e-006
1 27 -7916.01 -2.01e-006 7.63e-006 -7.68e+003 1.41e+005
2 34 -7959.65 -1.508e-006 0.25 -974 9.85e+007
3 42 -7964.03 -3.102e-006 0.125 -380 5.1e+006
4 48 -7965.9 -1.578e-006 0.5 -92.8 4.43e+007
5 60 -7967 -1.566e-006 0.00781 -520 1.6e+007
6 67 -7967.28 -2.407e-006 0.25 -231 2.23e+007
7 75 -7972.64 -2.711e-006 0.125 -177 8.62e+006
8 81 -7981.52 -1.356e-006 0.5 -150 1.33e+007
9 93 -7981.75 -1.473e-006 0.00781 -72.7 2.59e+006
10 99 -7982.65 -7.366e-007 0.5 -45.5 1.89e+007
11 107 -7983.07 -8.324e-007 0.125 -79.7 4.93e+006
12 116 -7983.11 -1.224e-006 0.0625 -20.5 7.44e+006
13 121 -7983.9 -7.635e-007 1 -32.5 1.42e+006
14 126 -7983.95 -7.982e-007 1 -7.62 6.66e+005
15 134 -7983.95 -7.972e-007 0.125 -13 5.73e+005
1-30
Local minimum possible. Constraints satisfied.
fmincon stopped because the predicted change in the objective function
is less than the selected value of the function tolerance and constraints
were satisfied to within the selected value of the constraint tolerance.
<stopping criteria details>
Page 43

Time Series Modeling
No active inequalities.
The default value of the Display param eter in the specification structure i s
'on'.Asaresult,garchfit prints diagnostic optimization and summary
information to the command window in the following example. (For
information about the
fmincon function.)
2 Once you complete the estimation, display the parameter estimates and
their standard errors using the
garchdisp(coeff,errors)
Mean: ARMAX(0,0,0); Variance: GARCH(1,1)
Conditional Probability Distribution: Gaussian
Number of Parameters Estimated: 4
Parameter Value Error Statistic
----------- ----------- ------------ ----------C -6.3728e-005 8.379e-005 -0.7606
K 9.9718e-007 1.2328e-007 8.0890
GARCH(1) 0.81458 0.015727 51.7956
ARCH(1) 0.14721 0.013285 11.0812
Display parameter, see the Optimization Toolbox
garchdisp function:
Standard T
If you substitute these estimates in the definition of the default model, the
estimation process implies that the constant conditional mean/GARCH(1,1)
conditional variance model that best fits the observed data is
−
y
=− × +
6 3728 10
.
tt
2712
=×+ +
9.9718 81458 1472122,
ttt
5
−
10 0 0
..
−−
1
where G1= GARCH(1) = 0.81458 and A1= ARCH(1) = 0.14721.In
addition, C =
-6.3728e-005 and κ = K = 9.9718e-007.
Post-Estimation Analy sis. This continues the example in “Pre-Estimation
Analysis” on page 1-20 and “Estimating Model Parameters” on page 1-29.
1-31
Page 44

1 Getting Started
Comparing the Residuals, Conditional Standard Deviations, and
Returns
In addition to the parameter estimates and standard errors, garchfit also
returns the optimized loglikelihood function value (
(
innovations), and conditiona l standard deviations (sigmas).
logL), the residuals
Use the
innovations (residuals) derived from the fitted model, the corresponding
conditional standard deviations, and the observed returns.
garchplot function to inspect the relationship between the
garchplot(innovations,sigmas,markpound)
1-32
Both the innovations (shown in the top plot) and the returns (shown in the
bottom plot) exhibit volatility clustering. Al so, the sum, G
0.15313 = 0.95911, is close to the integrated, nonstationary boundary g iven by
the constraints associated with the default model.
+ A1= 0.80598 +
1
Page 45

Time Series Modeling
Comparing Correlation of the Standardized Innovations
The figure in Comparing the Residuals, Conditional Standard Deviations,
and Returns on page 32 shows that the fitted innovations exhibit volatility
clustering.
1 Plot the standardized innovations (the innovations divided by their
conditional standard deviation):
plot(innovations./sigmas)
ylabel('Innovation')
title('Standardized Innovations')
The standardized innovations appear generally stable with little clustering.
2 Plot the ACF of the squared standardized innovations:
autocorr((innovations./sigmas).^2)
title('ACF of the Squared Standardized Innovations')
1-33
Page 46

1 Getting Started
1-34
The standardized innovations also show no correlation. Now compare the
ACF of the squared standardized innovations in this figure to the ACF of
the squared returns before fitting the default model. (See “Pre-Estimation
Analysis” on page 1-20.) The comparison shows that the default model
sufficiently explains the heteroscedasticity in the raw returns.
Quantifying and Comparing Correlation of the Standardized
ations
Innov
are the results of the Q-testandtheARCHtestwiththeresultsofthese
Comp
tests i n “Pre-Estimation Analysis” on page 1-20:
same
[H, pValue,Stat,CriticalValue] = ...
lbqtest((innovations./sigmas).^2,[10 15 20]',0.05);
[H pValue Stat CriticalValue]
ans =
0 0.5014 9.3271 18.3070
Page 47

Time Series Modeling
0 0.3675 16.2220 24.9958
0 0.6019 17.7793 31.4104
[H, pValue, Stat, CriticalValue] = ...
archtest(innovations./sigmas,[10 15 20]',0.05);
[H pValue Stat CriticalValue]
ans =
0 0.5389 8.9289 18.3070
0 0.4305 15.2940 24.9958
0 0.6741 16.6727 31.4104
In the pre-estimation analysis, both the Q-test and the ARCH test indicate
rejection (
H=1with pValue = 0) of their respective null hypotheses. This
shows significant evidence in support of GARCH effects. The post-estimate
analysis uses standardized innovations based on the estimated model. These
same tests now indicate acceptance (
H=0with highly significant pValues)
of their respective null hypotheses. These results confirm the explanatory
power of the default model.
1-35
Page 48
1 Getting Started
1-36
Page 49

Example Workflow
• “Estimation” on page 2-2
• “Forecasting” on page 2-4
• “Simulation” on page 2-5
• “Analysis” on page 2-7
2
Page 50

2 Example Workflow
Estimation
This example fits the NASDAQ daily returns from example nasdaq data set to
an ARMA(1,1)/GJR(1,1) model with conditionally t-distributed residuals.
1 Load the nasdaq datasetandconvertdailyclosing prices to daily returns:
load Data_EquityIdx
nasdaq = price2ret(Dataset.NASDAQ);
2 Create a specification structure for an ARMA(1,1)/GJR(1,1) model with
conditionally t-distributed residuals:
spec = garchset('VarianceModel','GJR',...
'R',1,'M',1,'P',1,'Q',1);
spec = garchset(spec,'Display','off','Distribution','T');
Note This example is for illustration purposes only. Such an elaborate
ARMA(1,1) model is typically not needed, and should only be used after you
have performed a sound pre-estimation analysis.
2-2
3 Estimate the parameters of the mean and conditional variance models via
garchfit. Make sure that the example returns the estim a t ed residuals
and conditional standard deviations inferred from the optimization process,
so that they can be used as presample data:
[coeff,errors,LLF,eFit,sFit] = garchfit(spec,nasdaq);
Alternatively, you could replace this call to garchfit with the following
successive calls to
garchfit and garchinfer. Thisisbecausetheestimated
residuals and conditional standard deviations are also available from the
inference function
[coeff,errors] = garchfit(spec,nasdaq);
[eFit,sFit] = garchinfer(coeff,nasdaq);
garchinfer:
Either approach produces the same estimation results:
garchdisp(coeff,errors)
Mean: ARMAX(1,1,0); Variance: GJR(1,1)
Page 51

Conditional Probability Distribution: T
Number of Model Parameters Estimated: 8
Standard T
Parameter Value Error Statistic
----------- ----------- ------------ ----------C 0.00099917 0.00023367 4.2760
AR(1) -0.10744 0.11568 -0.9287
MA(1) 0.2629 0.11205 2.3462
K 1.4275e-006 3.8119e-007 3.7447
GARCH(1) 0.90103 0.01111 81.1007
ARCH(1) 0.048454 0.01352 3.5838
Leverage(1) 0.085675 0.016792 5.1022
DoF 7.8263 0.9286 8.4280
Estimation
2-3
Page 52

2 Example Workflow
Forecasting
Use the model from “Estimation” on page2-2tocomputeforecastsforthe
nasdaq return series 30 days into the future.
1 Set the forecast horizon to 30 days (one month):
horizon = 30; % Define the forecast horizon
2 Call the forecasting engine, garchpred, with the estimated model
parameters,
[sigmaForecast,meanForecast,sigmaTotal,meanRMSE] = ...
coeff,thenasdaq returns, and the forecast horizon:
garchpred(coeff,nasdaq,horizon);
This call to garchpred returns the following parameters:
• Forecasts of conditional standard deviations of the residuals
(
sigmaForecast)
2-4
• Forecasts of the
nasdaq returns (meanForecast)
• Forecasts of the standard deviations of the cumulative holding period
nasdaq returns (sigmaTotal)
• Standard errors associated with forecasts of
Because the return series
vectors. Because
garchpred uses iterated conditional expectations to
nasdaq is a vector, all garchpred outputs are
nasdaq returns (meanRMSE)
successively update forecasts, all of its outputs have 30 rows. The first row
stores the 1-period-ahead forecasts, the second row stores the 2-period-ahead
forecasts, and so on. Thus, the last row stores the forecasts at the 30-day
horizon.
Page 53

Simulation
Simulation
This example simulates 20000 realizations for a 30-day period. It is based
on the fitted m odel from “Estimation” on page 2-2 and the horizon from
“Forecasting” on p age 2-4.
The example explicitly specifies the needed presample data:
• It uses the inferred residuals (
presample inputs
• It uses the
PreInnovations and PreSigmas, respectively.
nasdaq return series as the presample input PreSeries.
Becauseallinputsarevectors,
column of the corresponding outputs,
eFit) and standard deviations (sFit)asthe
garchsim applies the same vector to each
Innovations, Sigmas,andSeries.In
this context, called dependent-path simulation, all simulated sample paths
share a commo n conditioning set and e volve from the same set of initial
conditions. This enables Monte Carlo simulation of forecasts and forecast
error distributions.
Specify
PreInnovations, PreSigmas,andPreSeries as matrices, where each
column is a realization, or as single-colum n vectors. In either case, they must
have a sufficient number of rows to initiate the simulation (see “Running
Simulations With User-SpecifiedPresampleData”onpage4-11).
For this application of Monte Carlo simulation, the example generates a
relatively large number of realizations, or sample paths, so that it can
aggregate across realizations. Because each realization corresponds to a
column in the
garchsim time series output arrays, the output arrays are
large, with many colum ns.
1 Simulate 20000 paths (columns):
nPaths = 20000; % Define the number of realizations.
strm = RandStream('mt19937ar','Seed',5489);
RandStream.setDefaultStream(strm);
[eSim,sSim,ySim] = garchsim(coeff,horizon,nPaths,...
[],[],[], eFit,sFit,nasdaq);
Each time series output that garchsim returns is an array of size
horizon-by-nPaths, or 30-by-20000. Although more realizations (for
2-5
Page 54

2 Example Workflow
example, 100000) provide more accurate simulation re sults, you may want
to decrease the number of paths (for example, to 10000) to avoid memory
limitations.
2 Because garchsim needs only the last, or most recent, observation of each,
the following command produces identical results:
strm = RandStream('mt19937ar','Seed',5489);
RandStream.setDefaultStream(strm);
[eSim,sSim,ySim] = garchsim(coeff,horizon,nPaths, ...
[],[],[], eFit(end),sFit(end),nasdaq(end));
2-6
Page 55

Analysis
This example visually compares the forecasts from “Forecasting” on page
2-4 w ith those derived from “Simulation” on page 2-5. The first four figures
compare directly each of the
garchpred outputs with the corresponding
statistical result obtained from simulation. The last two figures illustrate
histograms from which you can compute approximate probability density
functions and empirical confidence bounds.
Note For an EGARCH model, multiperiod MMSE forecasts are generally
downward-biased and underestimate their true expected values for conditional
variance forecasts. This is not true for one-period-ahead forecasts, which are
unbiased in all cases. For unbiased multiperiod forecasts of
sigmaTotal,andmeanRMSE, you can perform Monte Carlo simulation using
garchsim. For more information, see “Asymptotic Behavior” on page 6-7.
1 Compare the first garchpred output, sigmaForecast (the conditional
sigmaForecast,
standard deviations of future innovations), with its counterpart derived
from the Monte Carlo simulation:
Analysis
figure
plot(sigmaForecast,'.-b')
hold('on')
grid('on')
plot(sqrt(mean(sSim.^2,2)),'.r')
title('Forecast of STD of Residuals')
legend('forecast results','simulation results')
xlabel('Forecast Period')
ylabel('Standard Deviation')
2-7
Page 56

2 Example Workflow
2-8
2 Compare the second garchpred output, meanForecast(the MMSE forecasts
of the conditional mean of the
nasdaq return series), with its counterpart
derived from the Monte Carlo simulation:
figure(2)
plot(meanForecast,'.-b')
hold('on')
grid('on')
plot(mean(ySim,2),'.r')
title('Forecast of Returns')
legend('forecast results','simulation results',4)
xlabel('Forecast Period')
ylabel('Return')
Page 57

Analysis
3 Compare the third garchpred output, sigmaTotal,thatis,cumulative
holding period returns, with its counterpart derived from the Monte Carlo
simulation:
holdingPeriodReturns = log(ret2price(ySim,1));
figure(3)
plot(sigmaTotal,'.-b')
hold('on')
grid('on')
plot(std(holdingPeriodReturns(2:end,:)'),'.r')
title('Forecast of STD of Cumulative Holding Period Returns')
legend('forecast results','simulation results',4)
xlabel('Forecast Period')
ylabel('Standard Deviation')
2-9
Page 58

2 Example Workflow
2-10
4 Compare the fourth garchpred output, meanRMSE, that is the root mean
square errors (RMSE) of the forecasted returns, with its counterpart
derived from the Monte Carlo simulation:
figure
plot(m
hold(
grid(
plot(
titl
lege
xlab
ylab
(4)
eanRMSE,'.-b')
'on')
'on')
std(ySim'),'.r')
e('Standard Error of Forecast of Returns')
nd('forecast results','simulation results')
el('Forecast Period')
el('Standard Deviation')
Page 59

Analysis
5 Useahistogramtoillustratethedistributionofthecumulativeholding
period return obtained if an asset was held for the full 30-day forecast
horizon. That is, plot the return obtained by purchasing a mutual fund
that mirrors the performance of the NASDAQ Composite Index today,
andsoldafter30days. Thishistogramis directly related to the final red
dot in step 3:
figure
hist(
grid(
title
xlab
ylab
(5)
holdingPeriodReturns(end,:),30)
'on')
('Cumulative Holding Period Returns at Forecast Horizon')
el('Return')
el('Count')
2-11
Page 60

2 Example Workflow
2-12
6 Use a histogram to illustrate the distribution of the single-period return
at the forecast horizon, that is, the return of the same mutual fund, the
30th day from now. This histogram is directly related to the final red dots
in steps 2 and 4:
figure
hist(y
grid(
title
xlabe
ylabe
(6)
Sim(end,:),30)
'on')
('Simulated Returns at Forecast Horizon')
l('Return')
l('Count')
Page 61

Analysis
Note Detailed analyses of such elaborate conditional mean and
variance models are not usually required to describe typical time series.
Furthermore, such a graphical analysis may not necessarily make sense
for a given model. This example is intended to highlight the range of
possibilities and provide a deeper understanding of the interaction between
the simulation, forecasting, and estimation engines. For more information,
see
garchsim, garchpred,andgarchfit.
2-13
Page 62

2 Example Workflow
2-14
Page 63

Model Selection
• “Specification Structures” on page 3-2
• “Model Identification” on page 3-11
• “Model Construction” on page 3-46
• “Example: Model Selection” on page 3-54
3
Page 64

3 Model Selection
Specification Structures
In this section...
“About Specification Structures” on page 3-2
“Associating Model E quation Variables with Corresponding Parameters in
Specification Structures” on page 3-4
“Working with Specification Structures” on page 3-5
“Example: S pecification Structures” on page 3-9
About Specification Structures
The Econometrics Toolbox software maintains the parameters that define a
model and control the estimation process in a specification structure.
The
garchfit function creates the specification structure for the default
model (see “The Default Model” on page 1-19), and stores the model orders
and estimated parameters in it. For more complex models, use the
function to explicitly specify, in a specification structure:
garchset
3-2
• The conditional variance mo del
• The mean and variance model orders
• (Optionally) The initial coefficient estimates
The primary analysis and modeling functions,
garchsim, all operate on the specification structure. The following table
describes how each function uses the specification structure.
For more information abo ut specification structure parameters, see the
garchset function reference page.
garchfit, garchpred,and
Page 65

Specification Structures
Function Description Use of GARCH Specification Struc t ur e
garchfit
Estimates the parameters
of a conditional mean
specification of ARMAX form
and a conditional variance
specification of GARCH,
GJR, or EGARCH form.
• Input. Optionally accepts a GARCH
specification structure as input.
If the structure contains the model
orders (
vectors (
GARCH, Leverage), garchfit uses
R, M, P, Q) but no coefficient
C, AR, MA, Regress, K, ARCH,
maximum likelihood to estimate the
coefficients for the specified m e an and
variance models.
If the structure contains coefficient
vectors,
garchfit uses them as initial
estimates for further refinement. If you
do not provide a specification structure,
garchfit returns a specification
structure for the default model.
• Output. Returns a specification
structure that contains a fully specified
ARMAX/GARCH model.
garchpred
garchsim
Provides
minimum-mean-square-error
(MMSE) forecasts of the
conditional mean and
standard deviation of a
return series, for a specified
number of periods into
the future.
Uses Monte Carlo methods
to simulate sample paths for
return series, innovations,
and conditional standard
deviation processes.
• Input. Requires a GARCH specification
structure that contains the coefficient
vectors for the m odel for which
garchpred forecasts the conditional
mean and standard deviation.
• Output. The
garchpred function does
not modify or return the specification
structure.
• Input. Requires a GARCH specification
structure that contains the coefficient
vectors for the m odel for which
garchsim simulates sample paths.
• Output.
garchsim does not modify or
return the specification structure.
3-3
Page 66

3 Model Selection
Associating Mod
Corresponding P
el Equation Variables with
arameters in Specification Structures
Specification Structure Parameter Names
The names of sp
GARCH models u
components in
in “Conditio
ecification structure parameters that define the ARMAX and
sually reflect the variable names of their corresponding
the conditional mean and variance model equations described
nal Mean and Variance Models” on page 1-11.
Conditional Mean Model
In the condi
•
R and M repre
•
C represen
•
AR represe
•
MA repres
•
Regress r
Unlike t
specifi
that so
the reg
contai
return
ate argument you can use to specify it.
separ
tional mean model:
sent the order of the ARMA(R,M) conditional mean model.
ts the constant C.
nts the
ents the
epresents the regression coefficients β
R-element autoregressive coefficient vector Φ
M-element moving average coefficient vector Θ
.
k
he other components of the conditional mean equation, the GARCH
cation structure does not include X. X is an optional matrix of returns
me Econometrics Toolbox functions use as explanatory variables in
ression component of the conditional mean. For example, y could
n return series of a market index collected over the same period as the
series X. Toolbox functions that require a regression matrix provide a
.
i
.
j
3-4
Conditional Variance Models
nditional variance models:
In co
•
•
•
•
P and
EGA
K re
GAR
AR
Q represent the order of the GARC H(P,Q ), GJR(P,Q), or
RCH(P,Q) conditional variance model.
presents the constant κ.
CH
represents the P-element coefficient vector Gi.
CH
represents the Q-element coefficient v ector Aj.
Page 67

Specification Structures
• Leverage represents the Q-element leverage coefficient vector, Lj,for
asymmetric EGARCH(P,Q) and GJR(P,Q) models.
Working with Specification Structures
Creating Specification Structures
In general, you must use the garchset function to create a sp ecif ication
structure that contains at least the chosen variance model and the mean and
variance model orders. The only exception is the default model, for which
garchfit can create a specification structure. The model parameters you
provide must specify a valid model.
When you create a specification structure, you can specify both the conditional
mean and variance models. Alternatively, you can specify either the
conditional mean or the conditional variance model. If you do not specify
both models,
not specify.
garchset assigns default parameters to the one that you d id
For the conditional mean, the default is a constant ARMA(0,0,?) model. For
the conditional variance, the default is a constant GARCH(0,0) model. The
question mark (?) indicates that
garchset cannot interpret whether you
intend to include a regression component (see Chapter 7, “Regression”).
The following examples create specification structures and display the
results. You need only enter the leading characters that uniquely identify
the parameter. As illustrated here,
garchset parameter names are case
insensitive.
For the Default Model. The following is a sampling of statements that all
create specification structures for the default model.
spec = garchset('R',0,'m',0,'P',1,'Q',1);
spec = garchset('p',1,'Q',1);
spec = garchset;
The output of each of these commands is the same. The Comment field
summarizes the m ode l. Because
R=M=0,thefieldsR, M, AR,andMA do
not appear.
3-5
Page 68

3 Model Selection
spec =
Comment: 'Mean: ARMAX(0,0,?); Variance: GARCH(1,1)'
Distribution: 'Gaussian'
C: []
VarianceModel: 'GARCH'
P: 1
Q: 1
K: []
GARCH: []
ARCH: []
For ARMA(0,0)/GJR(1,1). garchset accepts the constant default for the
mean model.
spec = garchset('VarianceModel','GJR','P',1,'Q',1)
spec =
Comment: 'Mean: ARMAX(0,0,?); Variance: GJR(1,1)'
Distribution: 'Gaussian'
C: []
VarianceModel: 'GJR'
P: 1
Q: 1
K: []
GARCH: []
ARCH: []
Leverage: []
3-6
For AR(2)/GARCH(1,2 ) with Initial Parameter Estimates. garchset
infers the model orders from the lengths of the coefficient vectors, assuming a
GARCH(P,Q) conditional variance process as the default:
spec = garchset('C',0,'AR',[0.5 -0.8],'K',0.0002,...
'GARCH',0.8,'ARCH',[0.1 0.05])
spec =
Comment: 'Mean: ARMAX(2,0,?); Variance: GARCH(1,2)'
Distribution: 'Gaussian'
R: 2
C: 0
Page 69

Specification Structures
AR: [0.5000 -0.8000]
VarianceModel: 'GARCH'
P: 1
Q: 2
K: 2.0000e-004
GARCH: 0.8000
ARCH: [0.1000 0.0500]
Modifying Specification Structures
The following example creates an initial structure, and then updates the
existing structure with additional parameter/value pairs. At each step, the
result must b e a valid specification structure:
spec = garchset('VarianceModel','EGARCH','M',1,'P',1,'Q',1);
spec = garchset(spec,'R',1,'Distribution','T')
spec =
Comment: 'Mean: ARMAX(1,1,?); Variance: EGARCH(1,1)'
Distribution: 'T'
DoF: []
R: 1
M: 1
C: []
AR: []
MA: []
VarianceModel: 'EGARCH'
P: 1
Q: 1
K: []
GARCH: []
ARCH: []
Leverage: []
Retrieving Specification Structure Values
Thisexampledoesthefollowing:
1 Creates a specification structure, spec, by providing the model coefficients.
3-7
Page 70

3 Model Selection
2 Uses the garchset function to infer the model orders from the lengths of
specified model coefficients, assuming the GARCH(P,Q) default variance
model.
3 Uses garchget to retrieve the variance model and the model orders for
the conditional mean.
You need only type the leading characters that uniquely identify the
parameter.
spec = garchset('C',0,'AR',[0.5 -0.8],'K',0.0002,...
'GARCH',0.8,'ARCH',[0.1 0.05])
spec =
Comment: 'Mean: ARMAX(2,0,?); Variance: GARCH(1,2)'
Distribution: 'Gaussian'
R: 2
C: 0
AR: [0.5000 -0.8000]
VarianceModel: 'GARCH'
P: 1
Q: 2
K: 2.0000e-004
GARCH: 0.8000
ARCH: [0.1000 0.0500]
R = garchget(spec,'R')
R=
2
3-8
M = garchget(spec,'m')
M=
0
var = garchget(spec,'VarianceModel')
var =
GARCH
Page 71

Specification Structures
Example: Specification Structures
1 Display the fields of the coeff specification structure, for the estimated
default model from “Example: Using the Default Model” on page 1-20:
coeff
coeff =
Comment: 'Mean: ARMAX(0,0,0); Variance: GARCH(1,1)'
Distribution: 'Gaussian'
C: -6.1919e-005
VarianceModel: 'GARCH'
P: 1
Q: 1
K: 1.0761e-006
GARCH: 0.8060
ARCH: 0.1531
Thetermstotheleftofthecolon(:) denote parameter names.
When you display a specification structure, only the fields that are
applicable t o the specified model appear. For example,
model, so these fields do not appear.
R=M=0in this
By default,
garchset and garchfit automatically generate the Comment
field. This field summarizes the ARMAX and GARCH models used for
the conditional mean and variance equations. You can use
set the value of the
Comment field, but the value you give it replaces the
garchset to
summary statement.
2 Display the MA(1)/GJR(1,1) estimated model from “Presample Data” on
page 5-21:
coeff =
Comment: 'Mean: ARMAX(0,1,0); Variance: GJR(1,1)'
Distribution: 'Gaussian'
M: 1
C: 5.6403e-004
MA: 0.2501
VarianceModel: 'GJR'
P: 1
Q: 1
3-9
Page 72

3 Model Selection
K: 1.1907e-005
GARCH: 0.6945
ARCH: 0.0249
Leverage: 0.2454
Display: 'off'
length(MA) = M
3 Consider what you would see if you had created the specification structure
, length(GARCH) = P,andlength(ARCH) = Q.
for the same MA(1)/GJR(1,1) example, but had not yet estimated the model
coefficients. The specification structure would appear as follows:
spec = garchset('VarianceModel','GJR','M',1,'P',1,'Q',1,...
'Display','off')
spec =
Comment: 'Mean: ARMAX(0,1,?); Variance: GJR(1,1)'
Distribution: 'Gaussian'
M: 1
C: []
MA: []
VarianceModel: 'GJR'
P: 1
Q: 1
K: []
GARCH: []
ARCH: []
Leverage: []
Display: 'off'
The empty matrix symbols, [], indicate that the specified model requires
these fields, but that you have not yet assigned them values. For the
specification to be complete, you must assign valid values to these fields.
For example, you can use the
garchset function to assign values to these
fields as initial parameter estimates. You can also pass such a specification
structure to
the model specification. You cannot pass such a structure to
garchinfer,orgarchpred. These functions require complete specifications.
garchfit, w hich uses the parameters it estimates to complete
garchsim,
3-10
For descriptions of all specification structure fields, see the
function reference page.
garchset
Page 73

Model Identification
In this section...
“Autocorrelation and Partial Autocorrelation” on page 3-11
“UnitRootTests”onpage3-11
“Misspecification Tests” on page 3-30
“Akaike and Bayesian Information” on page 3-43
Autocorrelation and Partial Autocorrelation
See “Example: Using the Default Model” on page 1-20 for information
about using the autocorrelation (
(
parcorr) functions as qualitative guides in the process of model selection and
assessment. This example also introduces the following functions:
Model Identification
autocorr) and partial autocorrelation
• The Ljung-Box-Pierce Q-test (
• Engle’s ARCH test functions (
lbqtest)
archtest)
Unit Root Tests
• “What Is a Unit Root Test?” on page 3-11
• “Modeling Unit Root Processes” on page 3-12
• “Available Tests” on page 3-15
• “Testing for Unit Roots” on page 3-17
• “Examples of Unit Root Tests” on pag e 3-18
What Is a Unit Root Test?
A unit root process is a data-generating process whose first difference is
stationary. In other words, a unit root process y
y
= y
t
+ stationary process.
t–1
A unit root test attempts to determine whether a given time series is
consistent with a unit root process.
has the form
t
3-11
Page 74

3 Model Selection
The next section gives more details of unit root processes, and suggests why it
is important to detect them.
Modeling Unit Root Processes
There are two basic models for economic data with linear growth
characteristics:
• Trend-stationary process (TSP): y
• Unit root process, also called a difference-stationary process (DSP): Δy
= c + dt + stationary process
t
t
= d
+ stationary process
Here Δ is the differencing operator, Δy
= yt– y
t
t–1
.
The processes are indistinguishable for finite data. In other words, there are
both a TSP and a DSP that fit a finite data set arbitrarily well. However,
the processes are distinguishable when restricted to a particular subclass of
data-generating processes, such as AR(p) processes. After fitting a model to
data, a unit root test checks if the AR(1) coefficient is 1.
There are two main reasons to distinguish between these types of processes:
•
•
Forecasting. A TSP and a DSP produce different forecasts. Basically, shocks
to a TSP return to the trend line c + dt as time increases. In contrast, shocks
to a DSP might be persistent over time.
Forexample,considerthesimpletrend-stationarymodel
y
(t)=0.9y1(t–1) + 0.02t + ε1(t)
1
3-12
and the difference-stationary model
y
(t)=0.2+y2(t–1) + ε2(t).
2
In these models, ε
(t)andε2(t) are independent innovation processes. For this
1
example, the innovations are independent and distributed N(0,1).
Page 75
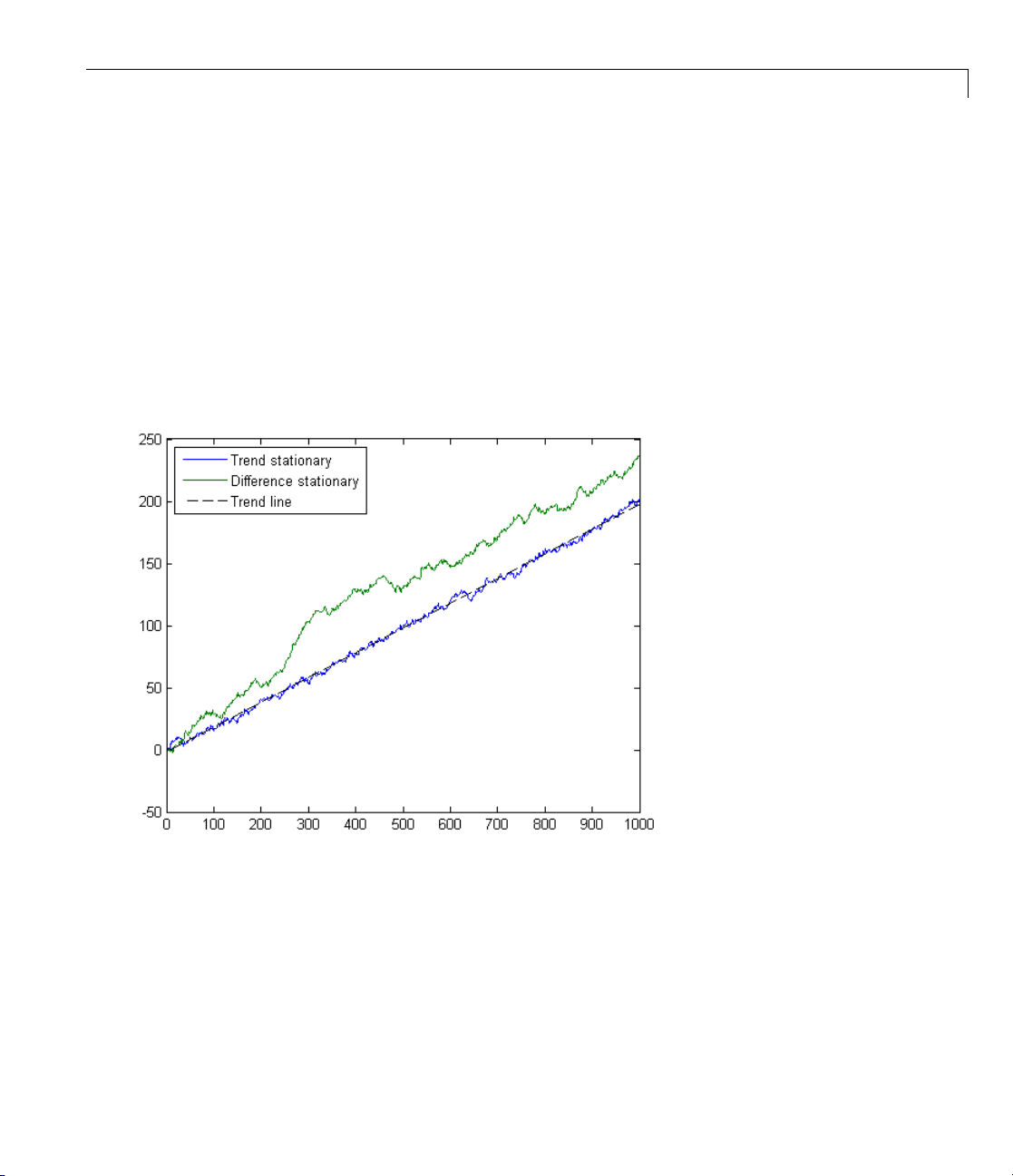
Model Identification
Both processes grow at rate 0.2t. TocalculatethegrowthratefortheTSP,
which has a linear term 0.02t,setε
(t)=0. Thensolvethemodely1(t)=a
1
+ ct for a and c:
a + ct =0.9(a + c(t–1)) + 0.02t.
The solution is a = –1.8, c =0.2.
Aplotfort = 1:1000 shows the TSP stays very close to the trend line, while
the D SP has persistent deviations away from the trend line.
Forecasts based on the two series are different. To see this difference, plot the
predicted behavior of the two series using the
vgxpred function. The following
plot shows the last 100 data points in the two series and predictions of the
next 100 points, including confidence bounds.
3-13
Page 76

3 Model Selection
3-14
The TSP
the DS
the tr
y =0.2
Spur
in re
Supp
as r
has confidence intervals that do not grow with time. Whereas,
P has confidence intervals that grow. Furthermore, the TSP goes to
end line quickly, while the DSP does not tend towards the trend line
t asymptotically.
ious Regression. The presence of unit roots can lead to false inferences
gressions between time series.
ose x
and ytareunitrootprocesseswithindependent increments, such
t
andom walks with drift
Page 77

Model Identification
xt= c1+ x
y
= c2+ y
t
where ε
(t) are independent innovations processes. Regressing y on x results,
i
t–1
t–1
+ ε1(t)
+ ε2(t),
in general, in a nonzero regression coefficient, and significant coefficient of
determination R
2
. This result holds d es pite xtand ytbeing independent
random walks.
If both processes have trends (c
because of their linear trends. However, even if the c
roots in the x
and ytprocesses yields correlation. For more information on
t
≠ 0), there is a correlation between x and y
i
= 0, the presence of unit
i
spurious regression, see Granger and Newbold [28].
Available Tests
There are four Econometrics Toolbox tests for unit roo ts. These functions
test for the existence of a single unit root; when there are two or more unit
roots, their results might not be valid.
• “Dickey-Full er and Phillips-Perron Tests” on page 3-15
• “KPSS Test” on page 3-16
• “Variance Ratio Test” on page 3-16
Dickey-Fuller and Phillips-Perron Tests.
Dickey-Fuller test.
pptest performs the Phillips-Perron test. These two
classes of tests have a null hypothesis of a unit root process of the form
adftest performs the augmented
y
= y
t
+ c + dt + et,
t–1
which the functions test against an alternative model
y
t
= ay
+ c + dt + et,
t–1
where a < 1. The null and alternative models for a Dickey-Fuller test are like
those for a Phillips-Perron test. The d ifference is
adftest extends the model
with extra parameters accounting for serial correlation among the residues:
y
= c + dt + ay
t
t –1
+ b1Δy
t –1
+ b2Δy
+...+ bpΔy
t –2
t – p
+ e(t),
3-15
Page 78
3 Model Selection
where
• L is the lag operator: Ly
• Δ =1–L,soΔy
= yt– y
t
t–1
t
= y
.
t–1
.
• e(t) is the innovations process.
Phillips-Perron adjusts the test statistics to account for serial correlation.
There are three variants of both
following values of the
•
'AR' assumes c and d, which appear in the preceding equations, are both 0.
'ARD' assumes d is 0.The'ARD' alternative has mean c/(1–a); the 'AR'
•
'model' parameter:
adftest and pptest, corresponding to the
alternative has mean 0.
'TS' makes no assumption about c and d.
•
For informatio n on how to choose the appropriate value of
KPSS Test. The K PSS test,
kpsstest, is an inverse of the Phillips-Perron
'model',see.
test: it reverses the null and alternative hypotheses. The KPSS test uses
the model:
y
= ct+ dt + ut,with
t
c
= c
t–1
+ vt.
t
3-16
Here u
variance σ
c
t
is a stationary process, and vtis an i.i.d. process with mean 0 and
t
2
. The null hypothesis is that σ2= 0, so that the random walk term
becomes a constant intercept. The alternative is σ2> 0, which introduces
the unit root in the random walk.
Variance Ratio Test. Thevarianceratiotest,
vratiotest, is based on
the fact that the variance of a random walk increases linearly with time.
vratiotest can also take into account heteroscedasticity, where the variance
increases at a variable rate with time. The test has a null hypotheses of
a random walk:
Δy
= et.
t
Page 79

Model Identification
Testing for Unit Roots
• “Transform Data” on page 3-17
• “Choose Models to Test” on page 3-17
• “Determine Appropriate Lags” on page 3-17
• “Run Tests” on page 3-18
Transform Data. Transformyourtimeseriestobeapproximatelylinear
before testing for a unit root. If a series has exponential growth, take its
logarithm. For e xample, GDP and consumer prices typically have exponential
growth, so test their logarithms for unit roots. There is more discussion of
this topic in “Data P reprocessing” on page 8-12.
If you want to transform your data to be stationary instead of approximately
linear, unit root tests can help you determine whether to difference your data,
or to subtract a linear trend. For a discussion of this topic, see .
Choose Models to Test.
• For
adftest or pptest,choosemodel in as follows:
- If your data shows a linear trend, set model to 'TS'.
- If your data shows no trend, but seem to have a nonzero mean, set
model to 'ARD'.
- If your data shows no trend and seem to have a zero mean, set model
to 'AR' (the default).
• For
• For
Determine Appropriate Lags. Setting appropriate lags depends on the
test you use:
•
kpsstest,settrend to true (default)ifthedatashowsalineartrend.
Otherwise, set
vratiotest,setIID to true if you want to test for independent,
identically distributed innovations (no heteroscedasticity). Otherwise, leave
IID at the default value, false. Linear trends do not affect vratiotest.
adftest —Onemethodistobeginwithamaximumlag,suchasthe
one recommended by Schwert [56]. Then, test down by assessing the
trend to false.
3-17
Page 80

3 Model Selection
significance of the coefficient of the term at lag p
. Schwert recommends
max
amaximumlagof
/
pT
where
maximum lag 12 100
max
x
is the integer part of x. The usual t statistic is appropriate
⎣⎦
⎢
()
⎣
for testing the significance of coefficients, as reported in the
14
/,==
⎥
⎦
reg output
structure.
Another method is to combine a measure of fit, such as SSR, with
information criteria such as AIC, BIC, and HQC. These statistics also
appear in the
reg output structure. Ng and Perron [49] provide further
guidelines.
•
kpsstest — One method is to begin w ith few lags, and then evaluate
the sensitivity of the results by adding more lags. For consistency of the
Newey-West estimator, the number of lags must go to infinity as the
sample size increases. Kwiatkowski et al. [36] suggest using a number of
lags on the order of T
For an example of choosing lags for
pptest — O ne method is to begin with few lags, and then evaluate the
•
1/2
,whereT isthesamplesize.
kpsstest,see.
sensitivity of the results by adding more lags. Another method is to look at
sample autocorrelations of y
– y
; slow rates of decay require more lags.
t
t–1
The Newey-West estimator is consistent if the number of lags is O(T
where T is the effective sample size, adjusted for lag and missing values.
White and Domowitz [57] and Perron [50] provide further guidelines.
1/4
),
3-18
For an example of choosing lags for
vratiotest does not use lags.
•
pptest,see.
Run Tests. Run multiple tests simultaneously by entering a vector of
parameters for
lags, alpha, model,ortest. All vector parameters must have
the same length. The test expands any scalar parameter to the length of a
vector parameter. For an example using this technique, see .
Examples of Unit Root Tests
• “Example: Testing Simulated Data for a Unit Root” on page 3-19
Page 81

Model Identification
• “Example: Testing Wage Data for a Unit Root” on page 3-23
• “Example: Testing Stock Data for a Random Walk” on page 3-26
Example: Testing Simulated Data for a Unit Root. This example
generates trend-stationary, difference -stationary, stationary (AR(1)), and
heteroscedastic random walk time series using simulated data. The example
shows how to test the resulting series. It also shows that the tests give the
expected results.
1 Generate four time series:
T = 1e3; % Sample size
strm = RandStream('mt19937ar','Seed',142857); % reproducible
t = (1:T)'; % time multiple
y1 = randn(strm,T,1) + .2*t; % trend stationary
y2 = randn(strm,T,1) + .2;
y2 = cumsum(y2); % difference stationary
y3 = randn(strm,T,1) + .2;
for ii = 2:T
y3(ii) = y3(ii) + .99*y3(ii-1); % AR(1)
end
sigma = (sin(t/200) + 1.5)/2; % std deviation
y4 = randn(strm,T,1).*sigma + .2;
y4 = cumsum(y4); % heteroscedastic
2 Plot the first 100 points in each series:
y=[y1y2y3y4];
plot1 = plot(y(1:100,:));
set(plot1(1),'LineWidth',2)
set(plot1(3),'LineStyle',':','LineWidth',2)
set(plot1(4),'LineStyle',':','LineWidth',2)
legend('trend stationary','difference stationary','AR(1)',...
'Heteroscedastic','location','northwest')
3-19
Page 82

3 Model Selection
3-20
It is diff
looking
3 Plot the entire data set:
icult to distinguish which series comes from which model simply by
at these initial segments of the series.
plot2 = plot(y);
set(plot2(1),'LineWidth',2)
set(plot2(3),'LineStyle',':','LineWidth',2)
set(plot2(4),'LineStyle',':','LineWidth',2)
legend('trend stationary','difference stationary','AR(1)',...
'Heteroscedastic','location','northwest')
Page 83

Model Identification
The diffe
• The tren
• The dif
• The AR(
• The di
4 Per
pur
rences between the series are clearer here:
d stationary series has little deviation from its mean trend.
ference stationary and Heteroscedastic series have persistent
ions away from the trend line.
deviat
1) series exhibits long-run stationary behavior; the others grow
ly.
linear
fference stationary and Heteroscedastic series appear similar. But
e that the Heteroscedastic series has much more local variability
notic
time 300, and much less near time 900. The model variance is
near
mal when sin(t/200) = 1, at time 200*π/2 ≈ 314. The model variance
maxi
nimal when sin(t/200) = –1, at time 200*3*π/2 ≈ 942. So the visual
is mi
ability matches the model.
vari
formthefollowingtests(thenumberoflagsissetto
poses):
2 for demonstration
3-21
Page 84

3 Model Selection
• Test the three growing series:
- Null: y
- Alternative: y
t
= y
+ c + b1Δy
t –1
= ay
t
+ b2Δy
t –1
+ c + dt + b1Δy
t –1
t–2
• Test the stationary AR(1) series:
- Null: y
- Alternative: y
t
= y
t –1
+ b1Δy
= ay
t
t –1
t –1
+ b1Δy
+ b2Δy
t –1
t–2
+ b2Δy
+ e(t)
• Test all the series:
- Null: Var(Δy
- Alternative: Var(Δy
) = constant
t
) ≠ constant
t
Test Results
Tested
Model
'TS' adftest(y1,
'AR' adftest(y3,
Data Generation Process
Trend stationary
y1
'model','ts',
'lags',2)
1
Difference
stationary y2
adftest(y2,
'model','ts',
'lags',2)
0
Stationary AR(1)
y3
'model','ar',
'lags',2)
+ e(t)
t –1
t–2
+ b2Δy
+ e(t)
+ e(t)
t–2
Heteroscedastic
Random Walk y4
adftest(y4,
'model','ts',
'lags',2)
0
3-22
0
Page 85

Test Results (Continued)
Model Identification
Tested
Model
Stationary
(KPSS)
Random
Walk
Data Generatio
Trend station
ary
y1
kpsstest(y1,
'lags',32,
'trend',true)
0
vratiotest(y1)
1
In each
• The fi
• The ne
• The fi
resu
to ma
n Process
Difference
stationary y2
kpsstest(y2,
'lags',32,
'trend',true)
1
vratiotest(y2,
'IID',true)
0
Stationary AR(1)
y3
kpsstest(y3,
'lags',32)
1
vratiotest(y3,
'IID',true)
0
Heteroscedas
Random Walk y
kpsstest(y4,
'lags',32,
'trend',true)
1
vratiotest(y4)
0
vratiotest (y4,
'IID',true)
×
0
cell of the table:
rst line represents the command.
xt line represents the result of running the command.
nal symbol indicates whether the result matches the expected
lt based on the data generation process:
for a match, × for failure
tch.
tic
4
• You c
The
vra
is a
nu
an
ample: Testing Wage Data for a Unit Root. This example tests
Ex
hether there is a unit root in wages in the manufacturing sector. The data
w
or the years 1900–1970 is in the Nelson-Plosser data set [47].
f
1 Load the Nelson-Plosser data. Extract the nominal wages data:
an substitute
re is one incorrect inference. In the lower right corner of the table,
tiotest
does not reject the hypothesis that the heteroscedastic process
n IID random walk. This inference depends on the pseudorandom
mbers. Run the data generation procedure with
d the inference changes.
pptest for adftest.
Seed equal to 857142
3-23
Page 86

3 Model Selection
load Data_NelsonPlosser
wages=Dataset.WN;
2 Trim the NaN data from the series and the associated dates. (This step is
optional, since the test ignores NaN values.)
wdates = dates(isfinite(wages));
wages = wages(isfinite(wages));
3 Plot the data to look for trends:
plot(wdates,wages)
title('Wages')
3-24
4 The plot suggests exponential growth. Use the log of wages to linearize
the data set:
lwages = log(wages);
plot(wdates,lwages)
title('Log Wages')
Page 87

Model Identification
5 The data appear to have a linear trend. Test the hypothesis that this
process is a unit root process with a trend (difference stationary), aga in st
the alternative that there is no unit root (trend stationary). Following ,
set
'lags' = [2:4]:
[h,pValue] = pptest(lwages,'lags',[2:4],'model','TS')
h=
000
pValue =
0.6303 0.6008 0.5913
pptest
6 Check the inference using kpsstest. Following , set 'lags' to [7:2:11]:
fails to reject the hypothesis of a unit root at all lags.
[h,pValue] = kpsstest(lwages,'lags',[7:2:11])
Warning: Test statistic #1 below tabulated critical values:
maximum p-value = 0.100 reported.
3-25
Page 88

3 Model Selection
> In kpsstest>getStat at 606
In kpsstest at 290
Warning: Test statistic #2 below tabulated critical values:
maximum p-value = 0.100 reported.
> In kpsstest>getStat at 606
In kpsstest at 290
Warning: Test statistic #3 below tabulated critical values:
maximum p-value = 0.100 reported.
> In kpsstest>getStat at 606
In kpsstest at 290
h=
000
pValue =
0.1000 0.1000 0.1000
3-26
kpsstest
If the result would have been
fails to reject the hypothesis that the data is trend-stationary.
[1 1 1], the two inferences would provide
consistent evidence of a unit root. It remains unclear whether the data has
a unit root. This is a typical result of tests on many macroeconomic series.
The warning that the test statistic “...is below tabulated critical values”
does not indicate a problem.
kpsstest has a limited set of calculated
critical values. When the calculated test statistic is outside this range, the
test reports the p-value at the endpoint. So, in this case,
pValue reflects
the closest tabulated value. When a test statistic lies inside the span of
tabulated values,
kpsstest reports linearly interpolated values.
Example: Testing Stock Data for a Random Walk. This example uses
market data for daily returns of stocks and cash (money market) from the
period January 1, 2000 to November 7, 2005. The question is whether a
random walk is a good model for the data.
1 Load the data.
load CAPMuniverse
Page 89

Model Identification
2 Extract two series to test. The first column of data is the daily return of a
technology stock. The last (14th) column is the daily return for cash (the
daily money market rate).
tech1 = Data(:,1);
money = Data(:,14);
The returns are the logs of the ratios of values at the end of a day over the
values at the beginning of the day.
3 Convert the data to prices (values) instead of returns. vratiotest takes
prices as inputs, as opposed to returns.
tech1 = cumsum(tech1);
money = cumsum(money);
4 Plotthedatatoseewhethertheyappeartobestationary:
subplot(2,1,1)
plot(Dates,tech1);
title('Log(relative stock value)')
datetick('x')
hold('on')
subplot(2,1,2);
plot(Dates,money)
title('Log(accumulated cash)')
datetick('x')
hold('off')
3-27
Page 90

3 Model Selection
3-28
Cash has a small variability, and appears to have long-term trends. The
stock series has a good deal of variability, and no definite trend, tho ugh it
appearstoincreasetowardstheend.
5 Test whether the stock series matches a random walk:
[h,pValue,stat,cValue,ratio] = vratiotest(tech1)
h=
0
pValue =
0.1646
stat =
-1.3899
cValue =
Page 91

1.9600
ratio =
0.9436
Model Identification
vratiotest
does not reject the hypothesis that a random walk is a
reasonable model for the stock series.
6 Test whether an i.i.d. random walk is a reasonable model for the stock
series:
[h,pValue,stat,cValue,ratio] = vratiotest(tech1,'IID',true)
h=
1
pValue =
0.0304
stat =
-2.1642
cValue =
1.9600
ratio =
0.9436
vratiotest
reasonable model for the
vratiotest indicates that the most appropriate model of the tech1 series
rejects the hypothesis that an i.i.d. random walk is a
tech1 stock series at the 5% level. Thus,
is a heteroscedastic random walk.
7 Test whether the cash series matches a random walk:
[h,pValue,stat,cValue,ratio] = vratiotest(money)
h=
1
pValue =
3-29
Page 92

3 Model Selection
4.6093e-145
stat =
25.6466
cValue =
1.9600
ratio =
2.0006
vratiotest
reasonable model for the cash series (pValue = 4.6093e-145). Removing a
linear trend from the cash series does not affect the resulting statistics.
emphatically rejects the hypothesis that a random walk is a
Misspecification Tests
• “The Classical Misspecification Tests” on page 3-30
• “Covariance Estimators” on page 3-33
• “Example: Specifying Distribution Parameters” on page 3-34
• “Example: Comparing GARCH Models” on page 3-40
• “Testing Multiple Time Series” on page 3-43
The Classical Misspecification Tests
Econometrics Toolbox includes three classical frameworks for model
misspecification testing:
• Lagrange multiplier test (
• Likelihood ratio test (
• Wald test (
waldtest)
lmtest)
lratiotest)
3-30
These functions all estimate the difference in maximum loglikelihood between
a restricted model and an unrestricted model. They test whether unrestricted
model parameters are statistically significant.
Page 93

Model Identification
Some examples of model restrictions that can be tested in these frameworks
are:
• A GARCH(1,1) model (restricted) versus a GARCH(2,1) model (unrestricted,
see “Types of GARCH Models” on page 1-14)
• A V ARMA model with two autoregressive lags (restricted) versus a VARMA
model w ith three autoregressive lags (unrestricted, see “Types of Multiple
Time Series Models” on page 8-2)
• A Gamma(k,θ) distribution with k = 1 (restricted) versus a Gamma(k,θ)
distribution with no restrictions on parameters
The setting for all of these tests is a vector of model parameters θ,data
d, and a loglikelihood function L(θ|d). When data represent independent
observations, L is a sum of individual loglikelihoods over all data points. The
unrestricted optimizer
r(θ) = 0 occurs, in general, at some
LdLd
||.
<
()
()
ˆ
maximizes L. The optimizer subject to restrictions
. Therefore,
Each test assesses the difference in loglikelihood in a different way:
•
lratiotest finds the difference of loglikelihoods (the log of the likelihood
and
ˆ
directly. If the restrictions are insignificant, this
ˆ
). Since r(
ˆ
()
∇
=L
0
,since
) = 0, if the restrictions are
ˆ
is the
∇
()
L
ratio) at
difference should be near 0.
•
lmtest uses the gradient (score), ∇L(θ).
unrestricted maximum of L. If the restrictions are insignificant,
should also be near 0.
waldtest finds the value of r(
•
insignificant, this should also be near 0.
lratiotest evaluates the difference in loglikelihoods directly. lmtest
and waldtest do so indirectly, with the idea that insignificant changes
in the evaluated quantities are equivalent to insignificant changes in the
parameters. This equivalence depends on the curvature of the loglikelihood
surface in the neighborhood of the maximum likelihood estimator. As a result,
3-31
Page 94

3 Model Selection
Types of Hypothe sis Tests
the Wald and Lagrange multiplier tests include an estimate of parameter
covariance in the formulation of the test statistic.
Each test requires different input data. The following table shows the input
requirements for the tests, and some MATLAB functions that can provide
the inputs.
Test
lratiotest
lmtest
waldtest
Required Inputs
Unrestricted maximum
loglikelihood (
uLL)
Helper Functions for the Inputs
garchfit, vgxvarx, Optimization Toolbox
fmincon, fminunc, Statistics Toolbox mle,
betalike, explike, and other functions
named
*like (see “Negative Log-Likelihood
Functions” in the Statistics Toolbox user
guide documentation).
Restricted maximum loglikelihood
(
rLL)
garchfit, vgxvarx, Optimization Toolbox
fmincon
Degrees of freedo m Number of restrictions
Score a t restricted maximum Optimization Toolbox fmincon
Estimated unrestricted covariance
You must compute the Jacobian analytically
at restricted maximum
Degrees of freedo m Number of restrictions
Restriction function r at
unrestricted maximum
R =Jacobianofr at unrestricted
maximum
Optimization Toolbox fmincon, fminunc
can find the maximum point
Optimization Toolbox fmincon, fminunc
can find the maximum point; you must
compute the Jacobian analytically
Estimated unrestricted covariance
at unrestricted maximum
garchfit, vgxvarx, Statistics Toolbox
mlecov
3-32
• Use fmincon or fminunc to find the location and value of restricted
or unrestricted maxima of the loglikelihood functions.
fminunc minimize,soinputthenegativeloglikelihood function to obtain
fmincon and
Page 95

Model Identification
amaximum. (Don’tforgettotakethenegativeoftheresultforthetrue
loglikelihood.)
•
garchfit and vgxvarx return both the loglikelihood and an estimated
covariance at the unrestricted maximizer.
• If you have a Symbolic Math Toolbox™ license, you can obtain the score
for the Lagrange multiplier test, or the Jacobian for the Wald test, using
the
diff or jacobian functions. Using jacobian twice yields a Hessian
matrix, which y ou can use to calculate the co variance. See “Example: Using
Symbolic Math Toolbox Functions to Calculate Gradients and Hessians” in
the O ptimization Toolbox User’s Manual for an example.
Covariance Estimators
lmtest and waldtest require an estimate of the parameter covariance.
Parameter covariance is related to the curvature of the loglikelihood function.
This curvature indirectly indicates parameter significance used by the two
tests.
There are several common methods for estimating the parameter covariance,
including:
• Outer Product of Gradients (OPG). Let G be the matrix of contributions
to the gradient, the gradient of the loglikelihood function L.(Thisisalso
called the CG matrix.) G is an ndata-by-n matrix,witheachrowbeing
the score at one data point. ndata is the number of data points, and n is
the num ber of dimensions in the gradient. Then (G
–1
'G)
is an estimate of
the covariance, an n-by-n m atrix. This estimator is convenient because it
requires only first derivatives.
• Inverse negative Hessian. The covariance estimator is:
cov( , )
⎛
−
⎜
⎜
⎝
∂
∂∂
⎞
()
L
⎟
⎟
ij
⎠
−21
.ij
There are two forms of this estimator.
- Observed Hessians. Calculate the Hessian of the loglikelihood. Take the
inverse of the negative of this quantity.
3-33
Page 96

3 Model Selection
- Expe cted Hessian. Calculate the expected value of the H essian of the
loglikelihood. Take the inverse of the negative of this quantity. This
requires calculating analytic expectations, so obtaining this es timate is
usually m ore difficult than the observed Hessian.
For
lmtest, evaluate the estimator at the restricted maximum point
waldtest, evaluate the estimator at the unrestricted maximum point
garchfit and vgxvarx return an estim ated covariance matrix, along with
other parameter estimates.
and
vgxvarx returns an estimator based on the expected Hessian.
garchfit returns an estimator based on OPG,
Example: Specifying Distribution Parameters
The following reproduces the example in Greene [29], Sec. 16.6.4. The
example fits a Gamma distribution to the simulated education and income
data in
IncomeData.mat:
load Data_Income1
x = Dataset.EDU;
y = Dataset.INC;
.For
ˆ
.
3-34
The unrestricted model has a likelihood l given by the probability density
function for the Gamma distribution:
ly x y e
(|,, )
i
=
()
Γ
y
−
−
1
i
,
where
1
i
.
x=+
i
This yields the loglikelihood
Page 97

Model Identification
Ll yy
( , ) log ( , ) log log ( ) ( ) log( ) .
==−+−−Γ 1
ii
(3-1)
Gamma distributions are sums of ρ exponential distributions, so admit
natural restrictions on the value of ρ. Greene’s restricted m odel is ρ =1,a
simple exponential distribution.
lratiotest. To perform this test, you need estimates of both the unrestricted
and restricted maximum likelihood. To find the unrestricted maximum
likelihood estimates of β and ρ,youcanuse
% Negative loglikelihood function with parameters p = [beta,rho]:
nLLF = @(p)sum(p(2)*(log(p(1) + x)) + gammaln(p(2))...
-(p(2) - 1)*log(y) + y./(p(1) + x));
options = optimset('LargeScale','off'); % 'on' with gradients
% Unrestricted estimate: General gamma model
[umle,unLL] = fminunc(nLLF,[.1 .1],options)
fminunc:
This code produces:
umle =
-4.7186 3.1509
unLL =
82.9160
To find the unrestricted maximum likelihood estimates:
ubeta = umle(1); % Unrestricted beta estimate
urho = umle(2); % Unrestricted rho estimate
uLL = -unLL; % Unrestricted loglikelihood
lratiotest
% Restricted estimate with rho = p(2) = 1
rnLLF = @(p)nLLF([p 1]);
[rmle,rnLL] = fminunc(rnLLF,.1,options)
rmle =
also requires the restricted maximum likelihood:
15.6027
3-35
Page 98

3 Model Selection
rnLL =
88.4363
rbeta = rmle(1); % Restricted beta estimate
rrho = 1; % Restricted rho
rLL = -rnLL; % Restricted loglikelihood
To evaluate the likelihood ratio, be careful to use the negative of unLL and
rnLL. There is one restriction, so dof = 1:
dof = 1;
[LRh,LRp,LRstat,cV] = lratiotest(uLL,rLL,dof)
LRh =
1
LRp =
8.9146e-004
3-36
LRstat =
11.0404
cV =
3.8415
LRh = 1
means lratiotest rejects the restricted hypothesis. This is a strong
rejection: the p-value is less than 1/1000.
lmtest.
lmtest requires the score, and an estimate of the covariance matrix,
evaluated at the restricted parameter estimates.
By analytic calculation, the gradient of the loglikelihood function has
components:
∂
L
=− +
∑∑
∂
∂
L
=−+
∑∑
∂
iii
log ( ) log .Ψ
ii
2
y
ny
Page 99

Model Identification
Here Ψ(ρ) is the digamma (psi) function, the derivative of the logarithm
of Γ(ρ), and n is the number of terms in the sum, which is the number of
data points.
The OPG estimator of the covariance is (G
–1
'G)
,whereG is the matrix of
gradients. For more information, see . Since the score is evaluated as the sum
of these derivatives, the simplest way to estimate the covariance for
lmtest
is to use the OPG estimator.
Calculate the gradient of L at the restricted maximum β =
rbeta, ρ =1,and
calculate the OPG estimator, as follows:
RCG = [-rrho./(rbeta+x)+y.*(rbeta+x).^(-2),...
-log(rbeta+x)-psi(rrho)+log(y)];
Rscore = sum(RCG)';
REstCov1 = inv(RCG'*RCG);
There is one restriction, so dof = 1.
[LMh,LMp,LMstat,LMcv] = lmtest(Rscore,REstCov1,dof)
LMh =
1
LMp =
7.4744e-005
LMstat =
15.6868
LMcv =
3.8415
LMh = 1
means lmtest rejects the restricted hypothesis. This is a strong
rejection: the p-value is less than 1/10000.
waldtest.
waldtest requires the value and gradient of the restriction
function at the unrestricted maximum. The restriction function is
r(β, ρ)=ρ – 1 = 0. This has gradient [0 1]. In other words, at the unrestricted
ˆ
maximum
=(β, ρ),
3-37
Page 100

3 Model Selection
r = 3.1509 – 1
R=[01].
R = [0 1];r = urho - 1;n = size(x,1);
TheWaldtestalsorequiresanestimated covariance. This time, use the sum
of observed Hessians,
H
2
⎡
∂
⎢
∂
⎢
=
⎢
22
∂
⎢
⎢
∂∂
⎣
2
∂
∂∂
∂
∂
⎤
⎥
⎥
,
⎥
⎥
⎥
2
⎦
LL
2
LL
which you find through analytic calculation:
2
∂
∂
2
∂
∂∂
2
∂
∂
L
n
=−
∑∑
2
==
1
i
n
=−
∑
i
=
1
L
n
=−
Ψ’()..
2
The e stimated covariance is given by –H
n
2
2Ly
i
i
3
ii
1
i
–1
, where H is the observed Hessian;
see . Calculate the Hessian and covariance matrices as follows:
UDPsi = psi(1,urho);
UH = [sum(urho./(ubeta+x).^2)-2*sum(y./(ubeta+x).^3),...
-sum(1./(ubeta+x)); -sum(1./(ubeta+x)),-n*UDPsi];
UEstCov2 = -inv(UH);
(3-2)
3-38
The Wald test is
[Wh,Wp,Wstat,Wcv] = waldtest(r,R,UEstCov2)
Wh =
1
 Loading...
Loading...