

Page 1

Control System Too
Getting Started Guide
lbox™ 9
Page 2

How to Contact MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Control System Toolbox™ Getting Started Guide
© COPYRIGHT 2000–2010 by The MathWorks, Inc.
The software desc ribed in this document is furnished under a license agreeme nt. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathWorks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Docum entation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal governme nt)
and shall supersede any conflicti ng contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Documentation, unused , to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The M athWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
November 2002 First printing New Version 5.0 (Release 12)
June 2001 Second printing Revised for Version 5.1 (Release 12.1)
July 2002 Online only Revised for Version 5.2 (Release 13)
June 2004 Online only Revised for Version 6.0 (Release 14)
March 2005 Online only Revised for Version 6.2 (Release 14SP2)
September 2005 O nline only Revised for Version 6.2.1 (Release 14SP3)
March 2006 Online only Revised for Version 7.0 (Release 2006a)
September 2006 Online only Revised for Version 7.1 (Release 2006b)
March 2007 Online only Revised for Version 8.0 (Release 2007a)
September 2007 O nline only Revised for Version 8.0.1 (Release 2007b)
March 2008 Online only Revised for Version 8.1 (Release 2008a)
October 2008 Third printing Revised for Version 8.2 (Release 2008b)
March 2009 Online only Revised for Version 8.3 (Release 2009a)
September 2009 Online only Revised for Version 8.4 (Release 2009b)
March 2010 Online only Revised for Version 8.5 (Release 2010a)
September 2010 Online only Revised for Version 9.0 (Release 2010b)
Page 4

Page 5
1
Contents
Product Overview
Why Use This Too
Using the Docu
Related Prod
mentation
ucts
lbox?
.............................
..........................
..................................
Building M
2
Linear (LTI) Models ................................ 2-2
What Is a Plant?
Linear Model Representations
SISO Example: The DC Motor
Building SISO Models
Constructing Discrete Time Systems
Adding Delays to Linear Models
LTI Objects
MIMO Models
MIMO Example: State-Space Model of Jet Transport
Aircraft
Constructing MIMO Transfer Functions
Accessing I/O Pairs in MIMO Systems
.................................. 2-2
....................... 2-2
....................... 2-3
.............................. 2-6
.................. 2-9
..................... 2-10
...................................... 2-10
..................................... 2-13
....................................... 2-13
............... 2-15
................ 2-17
1-2
1-3
1-4
odels
Arrays of Linear Models
Model Characteristics
Interconnecting Linear Models
............................ 2-18
.............................. 2-21
..................... 2-23
v
Page 6
Arithmetic Operations for Interconnecting Models ...... 2-23
Feedback Interconnections
Converting Between Continuous- and Discrete- Time
Systems
Available Commands for Continuous/Discrete
Conversion
Available Methods for Continuous/Discrete Conversion
Digitizing the Discrete DC Motor Model
........................................ 2-26
..................................... 2-26
.......................... 2-24
.. 2-26
............... 2-26
Reducing Model Order
Model Order Reduction Commands
Techniques for Reducing Model Order
Example: Gasifier Model
............................. 2-29
................... 2-29
................. 2-29
........................... 2-30
Analyzing Models
3
Quick Start for Performing Linear Analysis Using the
LTI Viewer
LTI Viewer
Plot Types Available in the LTI Viewer
Example: Time and Frequency Responses of the DC
Motor
Right-Click Menus
Displaying Response Characteristics on a Plot
Changing Plot Type
Showing Multiple Response Types
Comparing Multiple Models
...................................... 3-2
........................................ 3-7
................ 3-7
......................................... 3-8
................................ 3-10
................................ 3-14
.................... 3-16
......................... 3-17
.......... 3-11
vi Contents
Simulating Models with Arbitrary Inputs and Initial
Conditions
What is the Linear Simulation Tool?
Opening the Linear Simulation Tool
Working with the Linear Simulation Tool
Importing Input Signals
Example: Loading Inputs from a Microsoft
Spreadsheet
...................................... 3-22
.................. 3-22
.................. 3-22
.............. 3-23
............................ 3-26
®
Excel
.................................... 3-28
Page 7

Example: Importing Inputs from the Workspace ........ 3-29
Designing Input Signals
Specifying Initial Conditions
............................ 3-33
........................ 3-35
Functions for Time and Frequency Response
When to Use F unctions for Time and Frequency
Response
Time and Frequency Response Functions
Plotting MIMO Model Responses
Data Markers
Plotting and Comparing Multip le Systems
Creating Custom Plots
...................................... 3-37
.............. 3-37
..................... 3-40
.................................... 3-42
............................. 3-47
........ 3-37
............. 3-44
Designing Compensators
4
Designing PID Controllers ......................... 4-2
Designing PID Controllers with the PID Tuner GUI
Designing PID Controllers at the Command Line
SISO Design Tool
Quick Start for Tuning Compensator Parameters Using the
SISO Design Tool
Components of the SISO Tool
Design Options in the SISO Tool
Opening the SISO Design Tool
Using the SISO Design Task Node in the Control and
Estimation Tools Manager
Importing Models into the SISO Design Tool
Feedback Structure
Analysis Plots for Loop Responses
Using the Graphical Tuning Window
Exporting the Compensator and Models
Storing and Retrieving Intermediate Designs
.................................. 4-15
............................... 4-15
........................ 4-26
..................... 4-26
....................... 4-27
........................ 4-29
................................ 4-34
.................... 4-36
................. 4-42
............... 4-49
....... 4-14
........... 4-30
........... 4-51
..... 4-2
Bode Diagram Design
What Is Bode Diagram Design?
Example: DC Motor
Adjusting the Compensator Gain
.............................. 4-55
............................... 4-55
...................... 4-55
..................... 4-56
vii
Page 8

Adjusting the Bandwidth ........................... 4-57
Adding an Integrator
Adding a Lead Network
Moving Compensator Poles and Zeros
Adding a Notch Filter
Modifying a Prefilter
.............................. 4-59
............................ 4-63
................. 4-68
.............................. 4-71
............................... 4-76
Root Locus Design
What Is Root Locus Design?
Example: Electrohydraulic Servomechanism
Changing the Compensator Gain
Adding Poles and Zeros to the Compensator
Editing Compensator Pole and Zero Locations
Viewing Damping Ratios
Nichols Plot Design
What Is Nichols Plot Desig n?
DC Motor Example
Opening a Nichols Plot
Adjusting the Compensator Gain
Adding an Integrator
Adding a Lead Network
Automated Tuning Design
Supported Automated Tuning Methods
Loading and Displaying the DC Motor Example for
Automated Tuning
Applying Automated PID Tuning
Multi-Loop Compensator Design
When to Use Multi-Loop Compensator Design
Workflow for Multi-Loop Compensator Design
Example: Position Control of a DC Motor
................................. 4-81
......................... 4-81
..................... 4-88
............ 4-91
........................... 4-100
................................ 4-103
........................ 4-103
................................ 4-103
............................. 4-104
..................... 4-105
.............................. 4-108
............................ 4-110
.......................... 4-114
................ 4-114
.............................. 4-114
..................... 4-116
.................... 4-120
.............. 4-120
........... 4-82
.......... 4-96
.......... 4-120
.......... 4-120
viii Contents
Control Design Analysis of Multiple Models
Multiple Models Represent Sy stem Variations
Control Design Analysis Using the SISO Design Tool
Specifying a Nominal Model
Frequency Grid for Multimodel Computations
How to Analyze the Controller Design for Multiple
Models
........................................ 4-137
......................... 4-133
.......... 4-132
.......... 4-132
.... 4-132
.......... 4-136
Page 9

Functions for Compensator Design .................. 4-147
When to Use Functions for Compensator Design
Root Locus Design
Pole Placement
Linear-Quadratic-Gaussian (LQG) Design
Example — Designing an LQG Regulator
Example — Designing an LQG Servo Controller
Example—DesigninganLQRServoControllerin
Simulink
................................. 4-147
................................... 4-148
.............. 4-162
...................................... 4-168
........ 4-147
............. 4-151
........ 4-165
Index
ix
Page 10

x Contents
Page 11

Product Overview
• “Why Use This Toolbox?” on page 1-2
• “Using the Documentation” on p age 1-3
• “Related Products” on page 1-4
1
Page 12

1 Product Overview
Why Use This Toolbox?
The Control System Toolbox™ product extends the MATLAB®software to
provide functions designed specifically for control engineering.
This toolbox lets you construct and analyze linear models of dynamic systems.
Use Control System Toolbox functions to model dynamic systems as transfer
functions, in state-space form, or as arrays of frequency response data. Plot
the time and frequency responses of your system to understand how your
system behaves.
You can also use the toolbox to design and tune single-loop or multiple -loop
control systems using various classical and state-space techniques.
1-2
Page 13

Using the Documentation
If you are new to Control System Toolbox, review the Control System Toolbox
Getting Started Guide to learn how to:
• Build and manipulate linear time-invariant models of dynamical systems
• Analyze such models and plot their time and frequency responses
• Design compensators using root locus and pole placement techniques
This guide also discusses model order reduction and linear quadratic
Gaussian (LQG) control design techniques with examples.
Other documentation available for this toolbox includes:
• Release Notes — Highlights new and changed features in the latest product
release.
• Creating and Manipulating Models — In-depth information about creating,
manipulating, and analyzing linear models and linear time-invariant
(LTI) arrays. You can use LTI arrays to store collections of linear models
in one variable.
Using the Documentation
• Customization — Information about setting plot properties, including
setting preferences that persist from session to session.
• Control System Toolbox Design Case Studies —Workedexamples
of control design problems, including Kalman filtering and
Linear-Quadratic-Gaussian design. The examples illustrate
design techniques in both single-input/single-output (SISO) and
multiple-input/multiple-output (MIMO) systems.
• Control System Toolbox Reliable Computations — Discussion of numerical
stability and accuracy in computation
• Using the SISO Design Tool and the LTI Viewer — Complete descriptions
of the LTI Viewer and SISO Design Tool. These tools help you analyze
systems and design SISO compensators.
• Function Reference — D escribes the purpose, syntax, and options for each
function.
1-3
Page 14

1 Product Overview
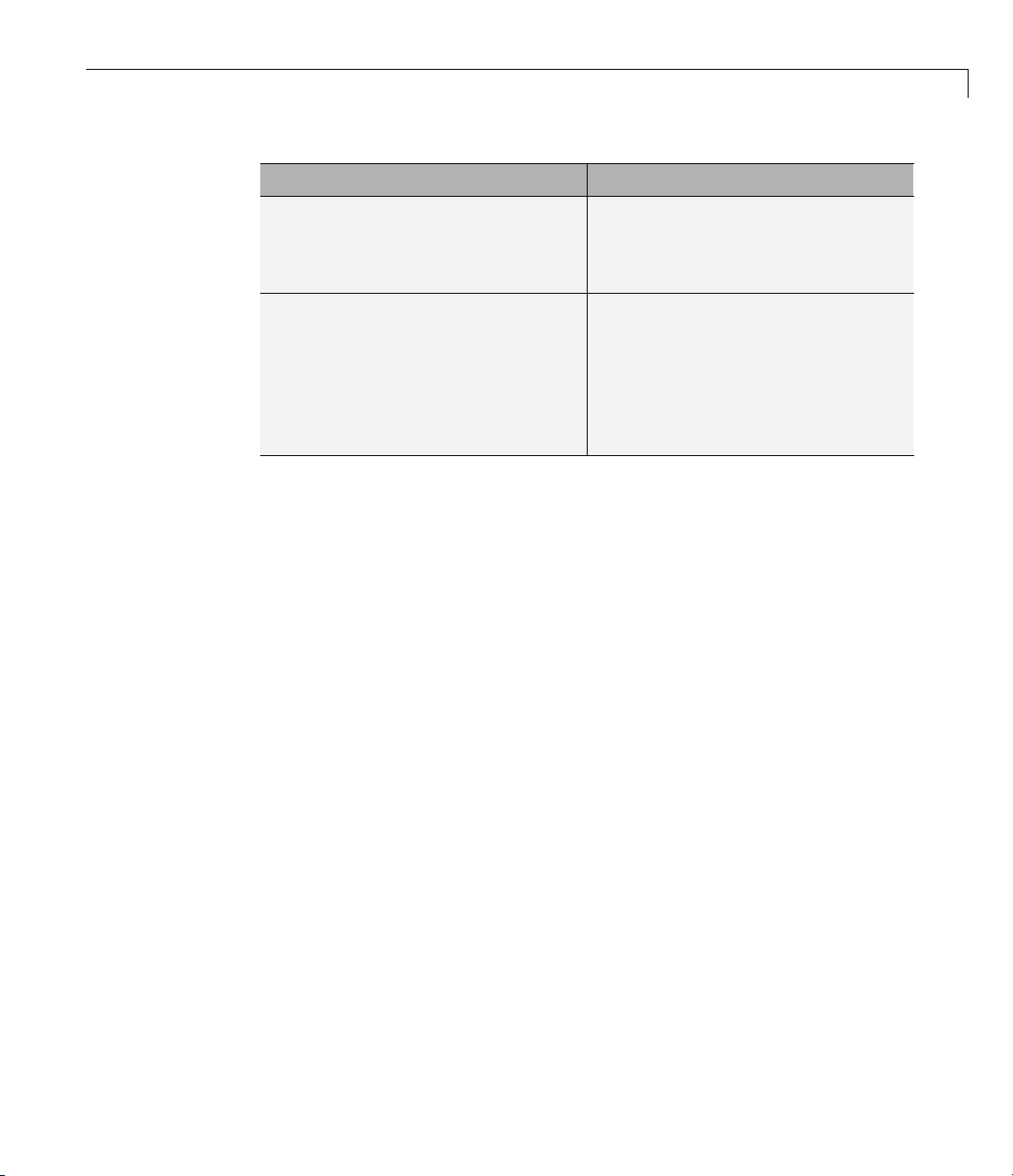
Related Products
ThefollowingtablesummarizesMathWorks®products that extend and
complement the Control System Toolbox software. For current information
about these products and other MathWorks products, point your Web browser
to:
www.mathworks.com
Product
ulink
®
®
Control Design™
Simulink
Fuzzy Logic Toolbox™
Model Predictive Control Toolbox™
Robust Control Toolbox™
Sim
Description
Provides blocks for simulating
models you create and analyze
using the Control System Toolbox
software.
Complements Control System
Toolbox software with tools for
modeling complex systems based on
fuzzy logic.
Helps you design and simulate model
predictive controllers for linear plant
models created using Control System
Toolbox functions.
Helps
syste
creat
Tool
to as
conf
mod
Let
lin
tu
you design robust control
ms based on plant models
ed using the Control System
box software. Enables you
sess robustness based on
idence bounds for your plant
els.
s y ou use Control System Toolbox
ear control to ols to analyze and
ne Simulink models.
1-4
Page 15
Related Products
Product
Simulink®Design Optimization™
“System Identification Toolbox™”
Description
Helps you improve controller
designs by estimating and tuning
model parameters using numerical
optimization.
Helps you estimate linear and
nonlinear mathematical models of
dynamic systems from measured
data. Use the Control System
Toolbox software to analyze and
design controllers for resulting
linear mo dels.
1-5
Page 16

1 Product Overview
1-6
Page 17

Building Models
• “Linear (LTI) Models” on page 2-2
• “MIMO Models” on page 2-13
• “Arrays of Linear Models” on page 2 -18
• “Model Characteristics” on page 2-21
• “Interconnecting Linear Models” on page 2-23
• “Converting Between Continuous- and Discrete- Time Systems” on page
2-26
2
• “Reducing Model Order” on page 2-29
Page 18

2 Building Models
Linear (LTI) Models
In this section...
“What Is a Plant?” on page 2-2
“Linear Model Representatio ns” on page 2-2
“SISO Example: The DC Motor” on page 2-3
“Building SISO M odels ” on page 2-6
“Constructing Discrete Time Systems” on page 2-9
“Adding Delays to Linear Models” on page 2-10
“LTI Objects” on page 2-10
What Is a Plant?
Typically, control engineers begin by developing a mathematical description of
thedynamicsystemthattheywanttocontrol. Thesystemtobecontrolledis
called a plant. As an example of a plant, this section uses the DC motor. This
section develops the differential equations that describe the electromechanical
properties of a DC motor with an inertial load. It then shows you how to
use the Control System Toolbox functions to build linear models based on
these equations.
2-2
Linear Model Representations
You can use Control Sy stem Toolbox functions to create the follow ing model
representations:
• State-space models (SS) of the form
dx
Ax Bu
=+
dt
yCxDu
=+
where A, B, C,andD are matrices of appropriate dimensions, x is the state
vector, and u and y are the input and output vectors.
• Transfer functions (TF), for example,
Page 19

Linear (LTI) Models
s
Hs
()=
• Zero-pole-gain (ZPK) models, for exam ple,
Hz
()
• Frequency response data (FRD) models, which consist of sampled
measurements of a system’s frequency response. For example, you can
store experimentally collected frequency response data in an FRD model.
Note The design of FRD models is a specialized subject that this guide
does not address. See “Creating Frequency Response Data (FRD) Models”
for a discussion of this topic.
+
2
ss
++210
zjzj
()()
++ +−
=
11
3
zz
(.)(.)
++
02 01
SISO Example: The DC Motor
A simple model of a DC motor driving an inertial load shows the angular rate
υ
ω()t
of the load,
ultimate goal of this example is to control the angular rate by varying the
applied voltage. This figure shows a simple model of the DC motor.
A Simple Model of a DC Motor Driving an Inertial Load
, as the output and applied voltage,
t()
,astheinput. The
app
2-3
Page 20

2 Building Models
In this model, the dynamics of the motor itself are idealized; for instance,
themagneticfieldisassumedtobeconstant. Theresistanceofthecircuit
is denoted by R and the self-inductance of the armature by L. If you are
unfamiliar with the basics of DC motor modeling, consult any basic text on
physical modeling. With this simple model and basic laws of physics, it is
possible to develop differential equations that d escri be the behavior of this
electromechanical system. In this example, the relationships between electric
potential and mechanical force are Faraday’s law of induction and Ampère’s
law for the force on a conductor moving through a magnetic field.
Mathematical Derivation
The torqueτseen at the shaft of the motor is proportional to the current i
induced by the applied voltage,
τ() ()tKit
=
m
where Km, the armature constant, is related to physical properties of the
motor, such as magnetic field strength, the number of turns of wire around
2-4
the conductor coil, and so on. The back (induced) electromotive force,
a voltage proportional to the angular rate
υω
tKt() ()=
emf b
where Kb, the emf constant, also depends on certain physical properties
of the motor.
The mechanical part of the motor equations is derived using Newton’s law,
which states that th e inertial load J times the derivative of angular rate
equals the sum of all the torques about the motor shaft. The result is this
equation,
dw
J
==− +
∑
dt
where
Finally, the electrical part of the motor equations can be described by
Kfω
is a linear approximation for viscous friction.
KtKit
τω() ()
if m
ω
seen at the shaft,
υ
emf
,is
Page 21

Linear (LTI) Models
υυ
ttL
app emf
di
dt
Ri t() () ()−=+
or, solving for the applied voltage and substituting for the back emf,
υω
app b
di
tL
dt
Ri t K t() () ()=++
This sequence of equations leads to a set of two differential equat ions that
describe the behavior of the motor, the first for the induced current,
di
dt
R
=− − +() () ()ωυ
L
it
K
b
L
1
t
L
app
t
and the second for the resulting angular rate,
d
ω
11
KtJKit
ω=− +
() ()
dt J
fm
State-Space Equations for the DC Motor
Given the two differential equations derived in the last section, you can now
develop a state-space representation of the DC motor as a dynamic system.
The current i and the angular rate ω are the two states of the system. The
applied voltage,
υ
, is the input to the system, and the angular velocity
app
ω is the output.
K
R
⎡
−−
⎢
i
⎡
⎤
d
⎢
ωω
dt
⎣
yt
() ()=
State-Space Representation of the DC Motor Exam ple
L
⎢
=
⎥
K
⎢
⎦
m
⎢
J
⎣
i
⎡
⋅
[]
⎢
⎣
−
⎤
⎥
⎦
L
K
J
+
[]
⎤
b
⎥
⎡
⎥
⋅
⎢
⎥
f
⎣
⎥
⎦
⋅01 0ωυ
i
app
1
⎤
⎡
⎤
⎥⎥
⎢
⋅υ
+
L
⎥
⎥
⎢
⎦
0
⎥
⎢
⎦
⎣
app
t()
t
2-5
Page 22

2 Building Models
Building SISO Mo
After you develo
can construct SI
p a set of differential equations that describe your plant, you
SO models using simple commands. The following sections
dels
discuss
• Constructing
• Converting be
• Creating tra
a state-space model of the DC motor
tween model representations
nsfer function and zero/pole/gain models
Constructing a State-Space Model of the DC Motor
Enter the fo
R= 2.0 % Ohms
L= 0.5 % Henrys
Km = .015 % torque constant
Kb = .015 % emf constant
Kf = 0.2 % Nms
J= 0.02 % kg.m^2
Given th
represe
A = [-R/L -Kb/L; Km/J -Kf/J]
B = [1/L; 0];
C = [0 1];
D = [0];
sys_dc = ss(A,B,C,D)
llowing nominal values for the various parameters of a DC motor.
ese values, you can construct the numerical state-space
ntation using the
ss function.
2-6
These
a=
b=
commands return the following result:
x1 x2
x1 -4 -0.03
x2 0.75 -10
u1
Page 23

Linear (LTI) Models
x1 2
x2 0
c=
x1 x2
y101
d=
u1
y1 0
Converting Between Model Representations
Now that you have a state-space representation of the DC motor, y ou can
convert to other model representations, including transfer function (TF) and
zero/pole/gain (ZPK) models.
Transfer Function Representation. You can use
tf to convert from the
state-space representation to the transfer function. For example, use this code
to convert to the transfer function representation of the DC motor.
sys_tf = tf(sys_dc)
Transfer fu nction:
1.5
-----------------s^2 + 14 s + 40.02
Zero/Pole/Gain Representation. Similarly, the zpk function converts
from state-space or transfer function representations to the zero/pole/gain
format. Use this code to convert from the state-space representation to the
zero/pole/gain form for the DC motor.
sys_zpk = zpk(sys_dc)
Zero/pole/gain:
1.5
2-7
Page 24

2 Building Models
------------------(s+4.004) ( s+9.996)
Note The state-space representation is best suited for numerical
computations. For highest accuracy, convert to state space prior to combining
models and avoid the transfer function and zero/pole/gain representations,
except for model specif ication and inspection. See Reliable Computations for
more information on numerical issues.
Constructing Transfer Function and Zero/Pole/Gain Models
In the DC motor example, the state-space approach produces a set of matrices
that represents the model. If you choose a different approach, you can
construct the corresponding models using
sys = tf(num,den) % Transfer function
sys = zpk(z,p,k) % Zero/pol e/gain
sys = ss(a,b,c,d) % State-sp ace
sys = frd(response,fre quencies) % Frequency response data
tf, zpk, ss,orfrd.
2-8
For example, you can create the transfer function by specifying the numerator
and denominator with this code.
sys_tf = tf(1.5,[1 14 40.02])
Transfer fu nction:
1.5
-----------------s^2 + 14 s + 40.02
Alternatively, if you want to create the transfer function of the DC motor
directly, use these commands.
s = tf('s');
sys_tf = 1.5/(s^2+14*s +40.02)
These commands result in this transfer function.
Transfer f unction:
Page 25

Linear (LTI) Models
1.5
-------------------s^2 + 14 s + 40.02
To build the zero/pole/gain model, use this command.
sys_zpk = zpk([],[-9. 996 -4.004], 1.5)
This command returns the following zero/pole/gain re pre sentation.
Zero/pole/gain:
1.5
------------------(s+9.996) ( s+4.004)
Constructing Discrete Time Systems
The Control System Toolbox software provides full support for discrete-time
systems. You can create discrete systems in the same way that you create
analog systems; the only difference is that you must specify a sample time
period for any model you build. For example,
sys_disc = tf(1, [1 1], .01);
creates a SISO model in the transfer function format.
Transfer f unction:
1
----z+1
Sampling ti me: 0.01
Adding Time Delays to Discrete-Time Models
Youcanaddtimedelaystodiscrete-timemodelsbyspecifyinganinputdelay,
output delay, or I/O delay when building the model. The time delay m ust be
a nonnegative integer that represen ts a multiple of the sampling time. For
example,
sys_delay = tf(1, [1 1], 0.01,'ioDelay',5)
2-9
Page 26

2 Building Models
returns a system with an I/O delay of 5 s.
Transfer f unction:
1
z^(-5) * -----
z+1
Sampling ti me: 0.01
Adding Delays to Linear Models
You can add time delays to linear models by specifying an input delay, output
delay, or I/O delay when building a m odel. F or example, to add an I/O delay to
the DC motor, use this code.
sys_tfdelay = tf(1.5, [1 14 40.02],'ioDelay',0.05 )
This command constructs the DC motor transfer function, but adds a 0.05
second delay.
2-10
Transfer f unction:
1.5
exp(-0.05*s) * ------- -----------
s^2 + 14 s + 40.02
For a complete description of adding time de lays to models and closing loops
with time delays, see Time Delays.
LTI Objects
For convenience, the Control System Toolbox software uses custom data
structures called LTI objects to store model-related data. For example, the
variable
There are also TF, ZPK, and FRD objects for transfer function, zero/pole/gain,
and frequency data response models respectively. The four LTI objects
encapsulate the model data and enable you to manipulate linear systems as
single entities rather than as collections of vectors or matrices.
To see what LTI objects contain, use the
the contents of
sys_dc created for the DC motor example is called an SS object.
get command. This code describes
sys_dc from the DC motor example.
Page 27

get(sys_dc)
a: [2x2 double]
b: [2x1 double]
c: [0 1]
d: 0
e: []
StateName: {2x1 cell}
InternalDelay: [0x1 do uble]
Ts: 0
InputDelay: 0
OutputDelay: 0
InputName: {''}
OutputName: {''}
InputGroup: [1x1 struct ]
OutputGroup: [1x1 st ruct]
Name: ''
Notes: {}
UserData: []
Linear (LTI) Models
You can manipulate the data contained in LTI o bjects using the set command;
see the Control System Toolbox online reference pages for descriptions of
set and get.
Another convenient way to set or retrieve LTI model properties is to access
them directly using dot notation. For example,ifyouwanttoaccessthevalue
of the
A matrix, instead of using get,youcantype
sys_dc.a
at the MATLAB prompt. This notation returns the A matrix.
ans =
-4.0000 -0.0300
0.7500 -10.0000
Similarly, if you want to change the values of the A matrix, you can do so
directly, as this code show s.
A_new = [-4.5 -0.05; 0.8 -12.0];
2-11
Page 28

2 Building Models
sys_dc.a = A_new;
For more information on LTI properties, type ltiprops at the MATLAB
prompt. F or a complete description of LTI objects, see Creating and
Manipulating Models.
2-12
Page 29

MIMO Models
In this section...
“MIMO Example: State-Space Model of Jet Transport Aircraft” on page 2-13
“Constructing MIMO Transfer Functions” on page 2-15
“Accessing I/O Pairs in MIMO Systems” on page 2-17
MIMO Example: State-Space Model of Jet Transport Aircraft
You can use the same functions that apply to SISO systems to create
multiple-input, multiple-output (MIMO) models. This example shows how
to build a MIMO model of a jet transport. Because the development of a
physical model for a jet aircraft is lengthy, only the state-space equations
are presented here. See any standard text in aviation for a more complete
discussion of the physics behind aircraft flight.
MIMO Models
The jet model during cruise flight at MACH = 0.8 and H = 40,000 ft. is
A = [-0.0558 -0.9968 0.0802 0.0415
0.5980 -0.1150 -0.0318 0
-3.0500 0.3880 -0.4650 0
0 0.0805 1.0000 0];
B = [ 0.0073 0
-0.4750 0.0077
0.1530 0.1430
00];
C=[0100
0001];
D=[0 0
00];
Use the following commands to specify this state-space model as an LTI object
and attach names to the states, inputs, and outputs.
2-13
Page 30

2 Building Models
states = {'beta' 'yaw' 'roll' 'phi'};
inputs = {'rudder' 'aileron'};
outputs = {'yaw rate' 'bank angle'};
sys_mimo = ss(A,B,C,D, 'statename',states,...
'inputname',inputs,...
'outputname',outputs);
You can display the LTI model by typing sys_mimo.
sys_mimo
a=
beta yaw roll phi
beta -0.0558 -0.9968 0.0802 0.0415
yaw 0.598 -0.115 -0.0318 0
roll -3.05 0.388 -0.465 0
phi 0 0.0805 1 0
2-14
b=
rudder ailer on
beta 0.0073 0
yaw -0.475 0.0077
roll 0.153 0.143
phi00
c=
beta yaw roll phi
yawrate0100
bankangle0001
d=
rudder ailer on
yawrate00
bank angle 0 0
Continuous-time model.
Page 31

MIMO Models
The model has two inputs and two outputs. The units are radians for beta
(sideslip angle) and phi (bank angle) and radians/sec for yaw (yaw rate) and
roll (roll rate). The rudde r and aileron deflections are in degrees.
As in the SISO case, use
tf(sys_mimo)
Transfer fu nction from input "rudder" to output...
yaw rate: ---------------------------------------------------
s^4 + 0.6358 s^3 + 0.9389 s^2 + 0.5116 s + 0.003674
bank angl e: ---------------------------------------------------
Transfer fu nction from input "aileron" to output...
0.0077 s^3 - 0.0005372 s^2 + 0.008688 s + 0.004523
yaw rate: ---------------------------------------------------
s^4 + 0.6358 s^3 + 0.9389 s^2 + 0.5116 s + 0.003674
bank angl e: ---------------------------------------------------
tf to derive the transfer function representation.
-0.475 s ^3 - 0.2479 s^2 - 0.1187 s - 0.05633
0.1148 s ^2 - 0.2004 s - 1.373
s^4 + 0.6358 s^3 + 0.9389 s^2 + 0.5116 s + 0.003674
0.1436 s^ 2 + 0.02737 s + 0.1104
s^4 + 0.6358 s^3 + 0.9389 s^2 + 0.5116 s + 0.003674
Constructing MIMO Transfer Functions
MIMO tra nsfer functions are two-dimensional arrays of elementary SISO
transferfunctions. TherearetwowaystospecifyMIMOtransferfunction
models:
• Concatenation of SISO transfer function models
• Using
tf with cell array arguments
Concatenation of SISO Models
Consider the following single-input, two-output transfer function.
2-15
Page 32

2 Building Models
⎡
⎢
s
()=
⎢
s
⎢
2
⎢
ss
++
⎣
Hs
You can specify H(s) by concatenation of its SISO entries. For instance,
h11 = tf([1 -1],[1 1]);
h21 = tf([1 2],[1 4 5]);
or, equivalently,
s = tf('s')
h11 = (s-1)/(s+1);
h21 = (s+2)/(s^2+4*s+5 );
can be concatenated to form H(s).
H = [h11; h21]
⎤
⎥
1
+
⎥
2
+
⎥
⎥
45
⎦
1
s
−
2-16
This syntax mimics standard matrix concatenation and tends to be easier
and more readable for MIMO systems with m any inputs and/or outputs. See
Model Interconnection Functions for more details on concatenation operations
for LTI systems.
Using the tf Function with Cell Arrays
Alternatively, to define MIMO transfer functions using tf, you need two cell
arrays (say,
polynomials, respectively. See Cell Arrays in the MATLAB documentation for
more details on cell arrays.
For example, for the rational transfer matrix H(s), the two cell arrays
should contain the row-vector representations of the polynomial entries of
Ns
() ()=
You can specify this MIMO transfer matrix H(s)bytyping
N and D) to represent the sets of numerator and denominator
s
−
1
⎡
⎤
⎢
⎥
s
+
2
⎣
⎦
Ds
s
⎡
=
⎢
2
ss
++
⎣
+
1
⎤
⎥
45
⎦
N and D
Page 33

MIMO Models
N = {[1 -1];[1 2]}; % Cell arr ay for N(s)
D = {[1 1];[1 4 5]}; % Cell array for D(s)
H = tf(N,D)
These commands return the following res ult:
Transfer f unction from input to output...
s-1
#1: -----
s+1
s+2
#2: -------------
s^2+4s+5
Notice that both N and D havethesamedimensionsasH. For a general MIMO
transfer matrix H(s), the cell array entries
row-vector representations of the numerator and denominator of H
N{i,j} and D {i,j } should be
(s), the
ij
ijth entry of the transfer matrix H(s).
Accessing I/O Pairs in MIMO Systems
After you define a MIMO system , y ou can access and manipulate I/O pairs by
specifying input and output pairs of the system. For instance, if
MIMO system with two inputs and three outputs,
sys_mimo(3,1)
extracts the subsystem, mapping the first input to the third output. Row
indices select the outputs and column indices select the inputs. Similarly,
sys_mimo(3,1) = tf(1, [1 0])
redefines the transfer function between the first input and third output as
an integrator.
sys_mimo is a
2-17
Page 34

2 Building Models
Arrays of Linear Models
You can specify and manipulate collections of linear models as single entities
using LTI arrays. For example, if you want to vary the
for the DC motor and store the resulting state-space models, use this code.
K = [0.1 0.15 0.2]; % Sev eral values for Km and Kb
A1 = [-R/L -K(1)/L; K(1)/J -Kf/J];
A2 = [-R/L -K(2)/L; K(2)/J -Kf/J];
A3 = [-R/L -K(3)/L; K(3)/J -Kf/J];
sys_lti(:,:,1)= ss(A1,B,C,D);
sys_lti(:,:,2)= ss(A2,B,C,D);
sys_lti(:,:,3)= ss(A3,B,C,D);
The number of inputs and outputs must be the same for all linear models
encapsulated by the LTI array, but the model order (number of states) can
vary from model to model within a single LTI array.
Kb and Km parameters
The LTI array
Type
sys_lti to see the contents of the LTI array.
Model sys_ lti(:,:,1,1)
======================
a=
.
.
.
Model sys_l ti(:,:,2,1)
======================
a=
.
.
sys_lti contains the state-space models for each value of K.
x1 x2
x1 -4 -0.2
x2 5 -10
x1 x2
x1 -4 -0.3
x2 7.5 -10
2-18
Page 35

Arrays of Linear Models
.
Model sys_l ti(:,:,3,1)
======================
a=
x1 x2
x1 -4 -0.4
x2 10 -10
.
.
.
3x1 array of continuous-time state-space models.
You can manipulate the LTI array like any other object. For example,
step(sys_lti)
produces a plot containing step responses for all three state-space models.
Step Responses for an LTI Array Containing Three Models
2-19
Page 36

2 Building Models
LTIarraysareusefulforperformingbatchanalysisonanentiresetofmodels.
For more information, see Arrays of LTI Models.
2-20
Page 37

Model Characteristics
You can use the Control System Toolbox commands to query model
characteristics such as the I/O dimensions, poles, zeros, and DC gain.
These commands apply to both continuous- and discrete-time models. Their
LTI-basedsyntaxissummarizedinthetablebelow.
Commands to Query Model Characteristics
Command Description
size(model_name) Number of inputs and outputs
ndims(model_name) Number of dimensions
isct(model_name) Returns 1 for continuous systems
isdt(model_name) Returns 1 for discrete systems
hasdelay(model_name)Trueifsystemhasdelays
pole(model_name)Systempoles
Model Characteristics
zero(model_name) System (transmission) zeros
dcgain(model_name)DCgain
norm(model_name)Systemnorms(H
covar(model_name,W) Covariance of response to white noise
bandwidth(model_name)
lti/order(model_name)
pzmap(model_name) Compute pole-zero map of LTI models
mp
(model_name)
da
Frequency response bandwidth
model order
LTI
tural frequency and damping of system
Na
oles
p
and L∞)
2
2-21
Page 38

2 Building Models
Commands to Query Model Characteristics (Continued)
Command Description
class(model_name) Create object or return class of object
isa(model_name) Determine whether input is object of given
class
isempty(model_name)
isproper(model_name)
issiso(model_name)
Determine whether LTI model is empty
Determine w
hether LTI model is proper
Determine w hether LTI model is
single-input/single-output (SISO)
ble
lti/issta
reshape(model_name) Change shape of LTI array
(model_name)
Determine whether system is stable
2-22
Page 39

Interconnecting Linear Models
In this section...
“Arithmetic Operations for Interconnecting Models” on page 2-23
“Feedback Interconnections” on page 2-24
Arithmetic Operations for Interconnecting Models
You can perform arithmetic on LTI models, such as addition, multiplication,
or concatenation. Addition performs a parallel interconnection. For example,
typing
tf(1,[1 0] ) + tf([1 1],[1 2]) % 1/s + (s+1)/(s+2)
produces this transfer function.
Transfer f unction:
s^2 + 2 s + 2
------------s^2+2s
Interconnecting Linear Models
Multiplication performs a series interconnection. For example, typing
2 * tf(1,[1 0])*tf([1 1],[1 2]) % 2*1/s*(s+1)/(s+2)
produces this cascaded transfer function.
Transfer f unction:
2s+2
---------
s^2 + 2 s
If the operands are models of different types, the resulting model type is
determined by precedence rules; see “Precedence and Property Inheritance”
for more information. State-space models have the highest precedence while
transfer functions have the lowe st precedence. Hence the sum of a transfer
function and a state-space model is always a state-space model.
2-23
Page 40

2 Building Models
Other available operations include system inversion, transposition, and
pertransposition; see Arithmetic Operations. You can a ls o perform matrix-like
indexing for extracting subsystems; see Extracting and Modifying Subsystems
for more information.
You can also use the
multiplication and addition, respectively.
Equivalent Ways to Interconnect Systems
Operator Function Resulting Transfer Function
sys1 + sys2 parallel(sys1,sys2)
sys1 - sys2 parallel(sys1,-sys2)
sys1 * sys2 series(sys2,sys1)
series and parallel functions as substitutes for
Systems in parallel
Systems in parallel
Cascaded systems
Feedback Interconnections
You can use the feedback and lft functions to d erive closed-loop models.
For example,
sys_f = feedback(tf(1 ,[1 0]), tf([1 1],[1 2])
computes the closed-loop transfer function from r to y for the feedback loop
shown below. The result is
Transfer f unction:
s+2
-------------
s^2 + 3 s + 1
2-24
This figure shows the interconnected system in block diagram format.
Page 41
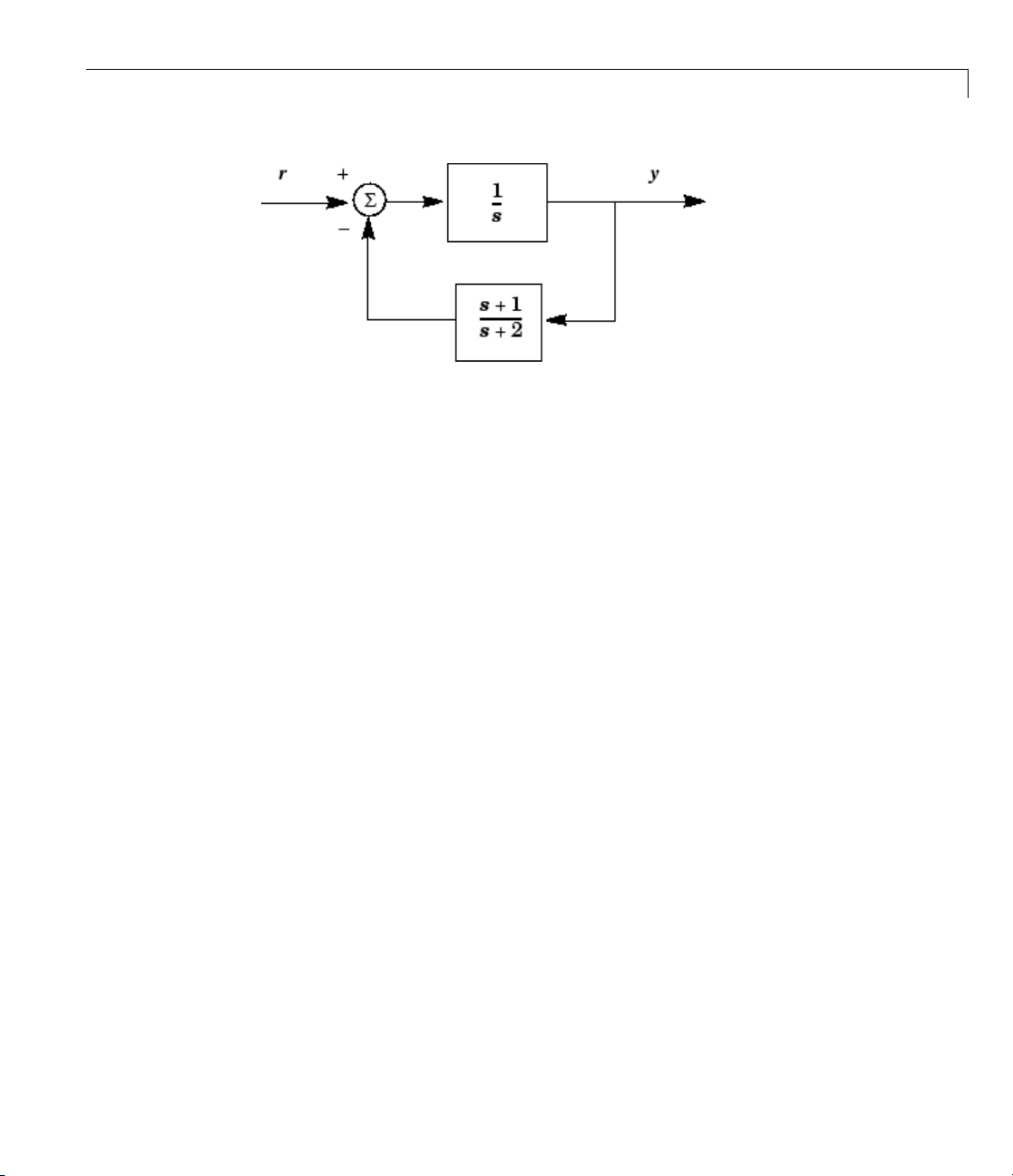
Interconnecting Linear Models
Feedback Interconnection
You can use the lft function to create more complicated feedback structures.
This function constructs the linear fractional transformation of two systems.
See the reference page for more information.
2-25
Page 42

2 Building Models
Converting Between Continuous- and Discrete- Time Systems
In this section...
“Available Commands for Continuous/Discrete Conversion” on page 2-26
“Available Methods for Continuous/Discrete Conversion” on page 2-26
“Digitizing the Discrete DC Motor Model” on page 2-26
Available C
Conversio
The comman
continuou
sysd = c2d(sysc,Ts) % Discretization w/ sample period Ts
sysc = d2c(sysd) % Equivalent continuous -time model
sysd1= d2d( sysd,Ts) % Resampling at the period Ts
s, and discrete to discrete (resampling) conversions, respectively.
Available Met
ommands for Continuous/Discrete
n
ds
c2d, d2c,andd2d perform continuous to discrete, discrete to
hods for Continuous/Discrete
Conversion
Various discr
zero-order h
without prew
sysd = c2d(sysc,Ts,'f oh') % Uses first-order hold
sysc = d2c(sysd,'tusti n') % Uses Tustin approximation
Digitizing the Di
You can digitize
appropriate sam
factors, includ
constant in your
to run. For this
Example: The DC
sys_dc.
etization/interpolation methods are available, including
old (default), first-order hold, Tustin approximatio n with or
arping, and matched zero-pole. For ex ample,
screte DC Motor Model
the DC motor plant using the
ple time. Choosing the rig ht sample time involves many
ing the performance you want to achieve, the fastest time
system, and the spe ed at which you expect your controller
example, choose a time constant of 0.01 second. See “SISO
Motor” on page 2-3 for the cons truction of the SS object
c2d function and selecting an
2-26
Ts=0.01;
Page 43

sysd=c2d(sys_dc,Ts)
a=
x1 0.96079 -0.00027976
x2 0.006994 0.90484
b=
x1 0.019605
x2 7.1595e-005
c=
y101
Converting Between Continuous- and Discrete- Time Systems
x1 x2
u1
x1 x2
d=
u1
y1 0
Sampling ti me: 0.01
Discrete-time model.
To see the discrete-time zero-pole gain for the digital DC motor, use zpk to
convert the model.
fd=zpk(sysd)
Zero/pole/gain:
7.1595e-005 (z+0.9544)
------------------------
(z-0.9608) (z-0.9049)
Sampling ti me: 0.01
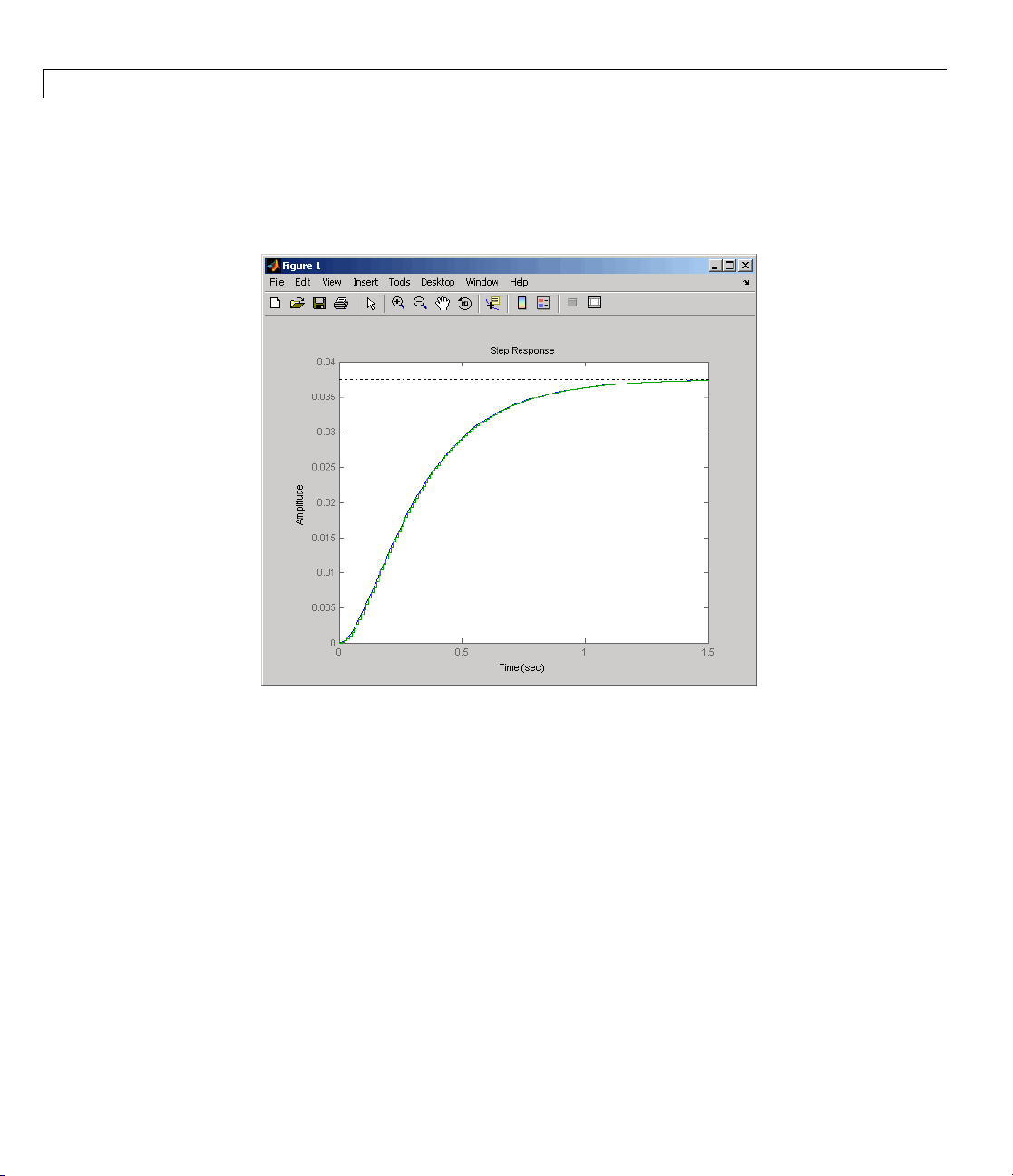
You can compare the step responses of sys_dc and sysd by typing
2-27
Page 44
2 Buildin g Models
step(sys_dc,sysd)
This figure shows the result.
2-28
Note the s t ep response match. C ontinuous and FOH-discretized step
responses match for models without internal delays.
Page 45

Reducing Model Order
In this section...
“Model Order Reduction Commands” o n page 2-29
“Techniques for Reducing Model Order” on page 2-29
“Example: Gasifier Model” on page 2-30
Model Order Reduction Commands
You can derive reduced-order SISO and MIMO models with the commands
shown in the following table.
Model Order Reduction
Commands
hsvd
balred
minreal
balreal
modred
sminreal
Reducing Model Order
Compute Hankel singular values of LTI model
Reduced-order model approximation
Minimal realization (pole/zero cancellation)
Compute input/output balanced realization
State deletion in I/O balanced realization
Structurally minimal realization
hniques for Reducing Model Order
Tec
educe the order of a model, you can perform any of the following actions:
To r
iminate states that are structurally disconnected from the inputs or
• El
tputs using
ou
iminating structurally disconnected states is a good first step in model
El
duction because the process is cheap and does not involve any numerical
re
omputation.
c
ompute a low-order approximation of your model using
• C
liminate cancelling pole/zero pairs using
• E
sminreal.
balred.
minreal.
2-29
Page 46

2 Buildin g Models
Example: Gasifier Model
This example presents a model of a gasifier, a device that converts solid
materials into gases. The original m odel is nonlinear.
Loading the Model
To load a linearized version of the model, type
load ltiex amples
at the MATLAB prompt; the gasifier example is stored in the variable named
gasf.Ifyoutype
size(gasf)
you get in return
State-space model wit h 4 outputs, 6 inputs, and 25 states.
2-30
SISO Model Order Reduction
You can reduce the order of a single I/O pair to understand how the model
reduction tools work before attempting to reduce the full MIMO model as
described in “MIMO Model Order Reduction” on page 2-34.
This example focuses on a single input/output pair of the gasifier, input
to output 3.
sys35 = gasf(3,5);
Before attempting model order reduction, inspect the pole and zero locations
by typing
pzmap(sys35)
Zoom in near the origin on the resulting plo t using the zoom feature or by
typing
axis([-0.2 0.05 -0.2 0.2])
The following figure shows the results.
5
Page 47

Reducing Model Order
Pole-Zer
Because
for mode
To find
1 Select
o Map of the Gasifier Model (Zoomed In)
the m odel displays near pole-zero cancellations, it is a good candidate
l reduction.
a low-order reduction of this SISO model, perform the following steps:
an appropriate orde r for your reduced system by examining the
ve amount of energy per state using a Hankel singular value (HSV)
relati
Type the command
plot.
hsvd(sys35)
eate the HSV plot.
to cr
Changing to log scale using the right-click menu results in the following
plot.
2-31
Page 48

2 Buildin g Models
2-32
Small Hankel singular values indicate that the associated states contribute
little to the I/O behavior. This plot shows that discarding the last 10 states
(associated with the 10 sma llest Hankel singular values) has little impact
on the approximation error.
2 To remove the last 10 states and create a 15th order approximation, type
rsys35
= balred(sy s35,15);
You can type s ize (rsys35) to see that your reduced system contains only
15 states.
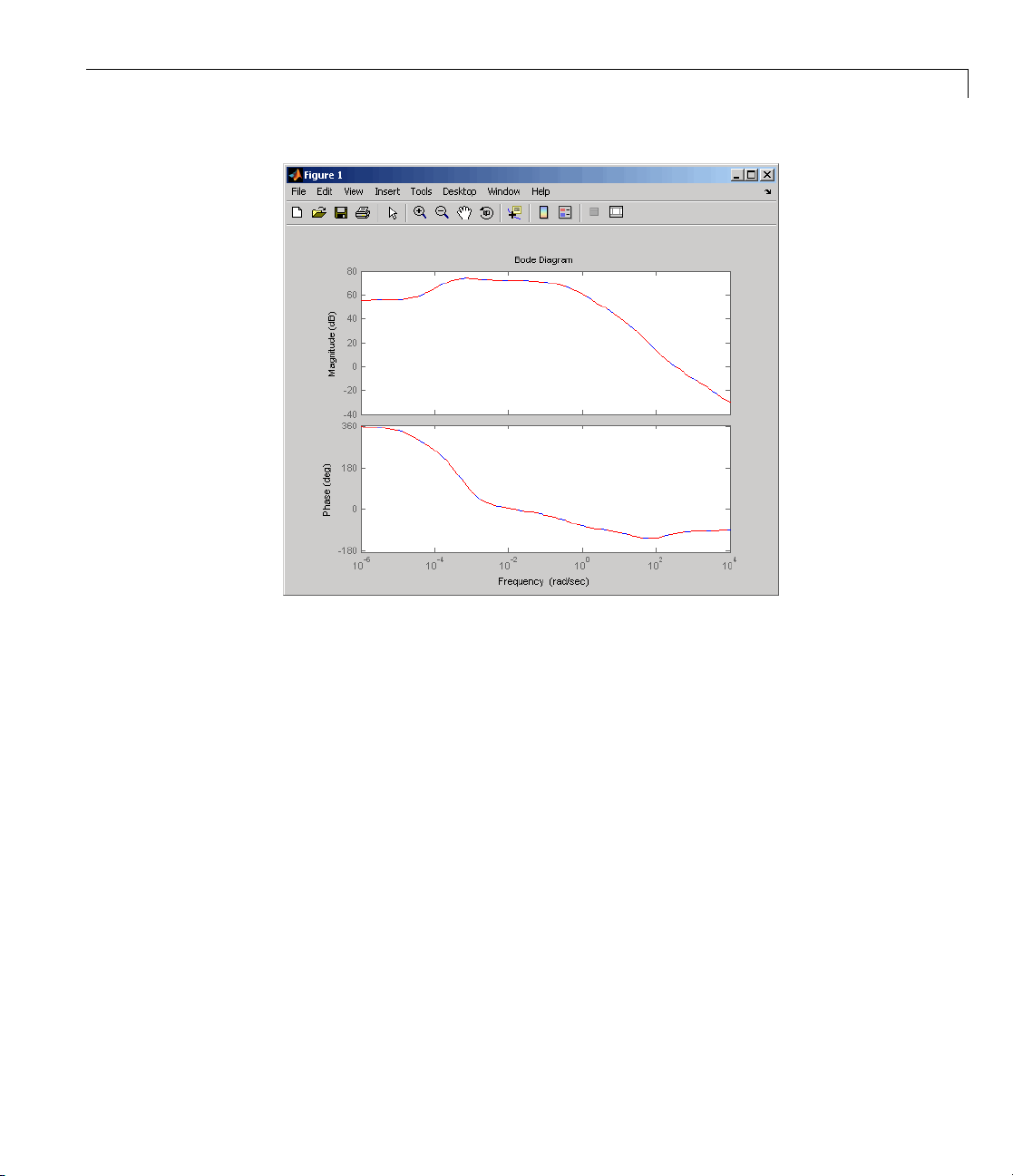
3 Comp
are the Bode response of the full-order and reduced-order models
g the bode command:
usin
bode(sys35,'b',rsys35,'r--')
s figure shows the result.
Thi
Page 49
Reducing Model Order
As the overlap of the curves in the figure shows, the reduced m odel provides
a good approximation of the original system.
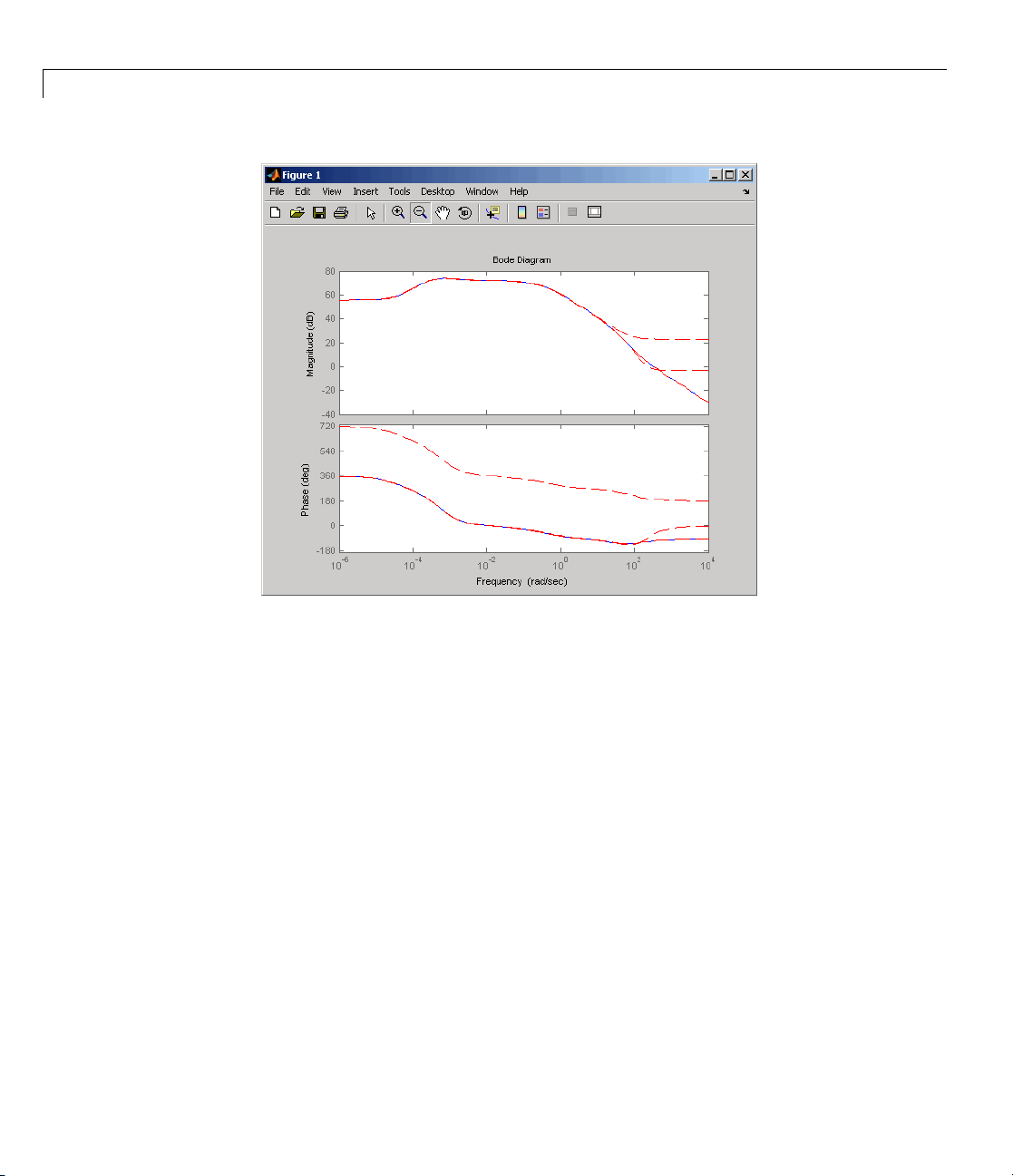
You can try reducing the model order further by repeating this process and
removing more states. Reduce the
gasf model to 5th, 10th, and 15th orders
allatoncebytypingthefollowingcommand
rsys35 = balred(sys35 ,[5 10 15]);
Plot a bode diagram of these three reduced syste ms along with the full order
system by typing
bode(sys35,'b',rsys35,'r--')
2-33
Page 50
2 Buildin g Models
2-34
Observe h
ow the error increases as the order decreases.
MIMO Model Order Reduction
You can a
follow
1 Select
relati
plot.
Type
to create the HSV plot.
pproximate MIMO models using the same steps as SISO models as
s:
an appropriate orde r for your reduced system by examining the
ve amount of energy per state using a Hankel singular value (HSV)
hsvd(gasf)
Page 51

Reducing Model Order
Discarding the last 8 states (associat ed with the 8 smallest Hankel singular
values) should have little impact on the error in the resulting 17th order
system.
2 To remove the last 8 states and create a 17th order MIMO system, type
rsys=b
alred(gasf,17);
You can type size(gasf) to see that your reduced system contains only
17 states.
3 To fac
ilitate visual inspection of the approximation error, use a singular
e plot rather than a MIMO Bode plot. Type
valu
sigma(gasf,'b',gasf-rsys,'r')
reateasingularvalueplotcomparingtheoriginalsystemtothe
to c
uction error.
red
2-35
Page 52

2 Buildin g Models
2-36
The reduction e rror is small compared to the original system so the reduced
order model provides a good approximation of the original model.
Acknowledgment
MathWorks thanks ALSTOM®Power UK for permitting use of their gasifier
model for this example. This model was issued as part of the ALSTOM
Benchmark Challenge on Gasifier Control. For more details see Dixon, R.,
(1999), "Advanced Gasifier Control," Computing & Control Engineering
Journal, IEE, Vol. 10, No. 3, pp. 92–96.
Page 53

Analyzing Models
• “Quick Start for Performing Linear Analysis Using the LTI Viewer” on
page 3-2
• “LTI Viewer” on page 3-7
• “Simulating Models with Arbitrary Inputs and Initial Conditions” on page
3-22
• “Functions for Time and Frequency Response” on page 3-37
3
Page 54

3 Analyzing Models
Quick Start for Performing Linear Analysis Using the LTI Viewer
In this Quick Start, you learn how to analyze the time- and frequency-d omain
responses of one or more linear models using the LTI Viewer GUI.
Before you can perform the analysis, you must have already created linear
models in the MATLAB workspace. For information on how to create a model,
see Chapter 2, “Building Models”.
To perform linear analysis:
1 Open the LTI Viewer showing one or more models using the following
syntax:
ltiview(model1,model2,...,modelN)
By default, this syntax opens a step response plot of your models, as shown
in the following figure.
3-2
Page 55

Quick Start for Performing Linear Ana lysi s Using the LTI Viewer
Click to add a legend
3-3
Page 56

3 Analyzing Models
2 Add more plots to the LTI Viewer.
a Select Edit > Plot Configurations.
b In the Plot Configurations dialog box, select the number of plots to open.
3-4
Select the
number of
plots to open
Page 57

Quick Start for Performing Linear Ana lysi s Using the LTI Viewer
3 To view a different type of response on a plot, right-click and select a plot
type.
Right-click
to select
a plot type
3-5
Page 58

3 Analyzing Models
4 Analyze system performance. For example, you can analyze the peak
response in the Bode plot and settling time in the step response plot.
a Right-click to select performance characteristics.
b Click on the dot that appears to view the characteristic value.
Right-click to show
performance
characteristics
Click dot to
view value
3-6
Page 59
LTI Viewer
LTI Viewe r
In this section...
“Plot Types Available in the LTI Viewer” on page 3-7
“Example: Time and Frequency Responses of the DC Motor” on page 3-8
“Right-Click Menus” on page 3-10
“Displaying Response Characteristics on a Plot” on page 3-11
“Changing Plot Type” on page 3-14
“Showing Multiple Response Types” on page 3-16
“Comparing Multipl e Models” on page 3-17
Plot Types Available in the LTI Viewer
The LTI Viewer is a GUI for vie wing and manipulating the response plots of
linear models. You can display the following plot types for linear models
using the LTI Viewer:
• Step and impulse responses
• Bode and Nyquist plots
• Nichols plots
• Singular values of the frequency response
• Pole/zero plots
• Response to a general input signal
• Unforced response starting from given initial states (only for state-space
models)
Note that time responses and pole/zero plots are not available for FRD models.
Note The LTI Viewer displays up to six different plot types simultaneously.
You can also analyze the response plots of several linear models at once.
3-7
Page 60

3 Analyzing Models
This figure shows an LTI Viewer with two response plots.
The LTI Viewer with Step and Impulse Response Plots
The next section presents an example that shows you how to import a system
into the LT I Viewer and how to customize the viewer to fit your requirements.
Example: Time and Frequency Responses of the DC Motor
“SISO Example: The DC Motor” on page 2-3 presents a DC motor example. If
you have not yet built that example, type
ltiexamples
load
at the MATLAB prompt. This loads several LTI models, including a
state-space representation of the DC motor called
3-8
sys_dc.
Page 61

LTI Viewe r
Opening the LTI Viewer
To open the LTI Viewer, type
ltiview
This opens an LTI Viewer with an empty step response plot window by default.
Importing Models into the LTI Viewer
To import the DC motor model, select Import under the File m enu. This
opens the Import System Data dialog box, which lists all the models available
in your MATLAB workspace.
Import System Data Dialog Box w ith the DC Motor M od el Selected
Select sys_dc from the list of available models and click OK to close the
browser. This im po rts the DC motor model into the LTI Viewer.
To select more than one model at a time, do the follow ing:
• To select individual (noncontiguous) models, select one model and hold
down the Ctrl key while selecting additional models. To clear any models,
hold down the Ctrl k ey while you click the highlighted model nam es.
• To select a list of contiguous models, select the first mode l and hold down
the Shift key while selecting the last model you want in the list.
3-9
Page 62

3 Analyzing Models
The figure below shows the LTI Viewer with a step response for the DC
motor example.
3-10
Step Response for the DC Motor Example in the LTI Viewer
Alternatively, you can open the L TI Viewer and import the DC mo to r example
directly from the MATLAB prompt.
ltiview('step', sys_dc)
See the ltiview reference page for a complete list of options.
Right-Click Menus
The LTI Viewer provides a set of controls and options that you can access by
right-clicking your mouse. Once you have imported a model into the LTI
Viewer, the options you can select include
• Plot Types — Change the plot type. Available types include step, impulse,
Bode,Bodemagnitude,Nichols,Nyquist,andsingularvaluesplots.
Page 63

• Systems — Select or clear any models that you included when you created
theresponseplot.
• Characteristics — Add information about the plot. The characteristics
available change from plot to plot. For example, Bode plots have stability
margins available, but step responses have rise time and steady-state
values available.
• Grid —Addgridstoyourplots.
• Normalize — Scale responses to fit the view (only available for
time-domain plot types).
• Full View — Use automatic limits to make the entire curve visible.
• Properties — Open the Property Editor.
LTI Viewe r
You can use this editor to customize various attributes of your plot. See
Customizing Plot Properties and Preferences for a full description of the
Property Editor.
Alternatively, you can open the Property Editor by double-clicking in an
empty region of the response plot.
Displaying Response Characteristics on a Plot
Forexample,toseetherisetimeforthe DC m otor step response, right-click
and select Characteristics > Rise Time.
3-11
Page 64

3 Analyzing Models
3-12
Using Rig
By defau
respons
range in
proper
The LTI
e to go from 10% to 90% of the steady-state value. You can change this
ty editor, see Customizing Plot Properties and Pre ferences.
ht-Click Menus to Display the Rise Time for a Step Response
lt, the rise time is defined as the amount of time it takes the step
the options tab of the property editor. For more information on the
Viewer calculates and displays the rise time for the step response.
Page 65

LTI Viewe r
DC Motor S
To displ
your mou
data mar
persis
For exa
respon
tep Response with the Rise Time Displayed
ay the values of any plot characteristic marked on a plot, place
se on the blue dot that marks the characteristic. This opens a
ker with the relevant information displayed. To make the marker
tent, left-click the blue dot.
mple, this figure shows the rise time value for the DC motor step
se.
3-13
Page 66

3 Analyzing Models
3-14
Using You
Note tha
respons
over the
For mor
Chang
You ca
examp
sele
r Mouse to Get th e Rise Time Values
t you can left-click anyw here on a particular plot line to see the
e values of that plot at that point. You must either place y our cursor
bluedotorleft-click,however,ifyouwanttoseetherisetimevalue.
e information about data markers, see “Data Markers” on page 3-42.
ing Plot Type
n view other plots using the right-click menus in the LTI Viewer. For
le, if you want to see the open loop Bode plots for the DC motor model,
ct Plot Type and then Bode from the right-click menu.
Page 67

LTI Viewe r
Changing
Selecti
ng Bode changes the step response to a Bode plot for the DC motor
model.
the Step Response to a Bode Plot
3-15
Page 68

3 Analyzing Models
3-16
Bode Plot
for the DC Motor Model
Showing
If you wa
the sam
respon
Edit me
nt to see, for example, both a step response and a Bode plot at
e time, you have to reconfig ure the LTI View er. To view different
se types in a single LTI Viewer, select Plot Configurations under the
nu. This opens the Plot Configurations dialog box.
Multiple Response Types
Page 69

Using the Plot Configurations Dialog Box to Reco nfigure the LTI Viewer
You can select up to six plots in one viewer. Choose the R esponse type for
each plot area from the right-side menus. There are nine available plot types:
• Step
LTI Viewe r
• Impulse
• Linear Simulation
• Initial Condition
• Bode (magnitude and phase)
• Bode Magnitude (only)
• Nyquist
• Nichols
• Singular Value
• Pole/Zero
• I/O pole/zero
Comparing Multiple Models
This section shows you how to import and manipulate multiple models in
one LTI Viewer. For example, if you h ave designed a set of compensators to
control a system, you can compare the closed-loop step responses and Bode
plots using the LTI Viewer.
3-17
Page 70
3 Analyzing Models
A sample set of clo sed-loo p transfer function models is included (along with
some other models) in the MAT-file
load ltiex amples
to load the provided transfer functions. The three closed-loop transfer function
models,
Gcl1, Gcl2,andGcl3, are for a satellite attitude controller.
ltiexamples.mat.Type
In this example, you analyze the response plots of the
functions.
Gcl1 and Gcl2 transfer
Initializing the LTI Viewer with Multiple Plots
To load the two models Gcl1 and Gcl2 into the LTI Viewer, select Import
under the File menu and select the desired models in the LTI Browser. See
“Importing Models into the LTI Viewer” on page 3-9 for a description of how
to select groups of models. If necessary, you can reconfigure the viewer to
display both the step responses and the Bode plots of the two systems using
the Viewer Configuration dialog box. See“ShowingMultipleResponseTypes”
on page 3-16 for a discussion of this feature.
Alternatively, you can open an LTI Viewer with both systems and both the
step responses and Bode plots displayed. To do this, type
ltiview({'step';'bode'},Gcl1,Gcl2)
Either approach opens the following LTI Viewer.
3-18
Page 71

LTI Viewe r
Multiple
Response Plots in a Single LTI Viewer
Inspecting Response Characteristics
To mark t
do the f
• Right-
opens t
• Selec
To mar
sele
Your
he settling time on the step responses presented in this example,
ollowing:
click anywhere in the plot region of the step response plots. This
he right-click menu list in the plot region.
t Characteristics > Settling Time.
k the stability margins of the Bode plot in this example, right-click and
ct Characteristics > Minimum Stability Margins.
LTI Viewer should now look like this.
3-19
Page 72

3 Analyzing Models
3-20
Multiple
The mini
gain mar
diagram
right-
Plots with Response Characteristics Added
mum stability margins, meaning the smallest magnitude phase and
gins, are displayed as green and blue markers on the Bode phase
. Ifyouwanttoseeallthegainandphasemarginsofasystem,
click and select Characteristics > Minimum Stability Margins.
Toggling Model Visibility
have imported more than one model, you can s elect and clear which
If you
s to plot in the LTI Viewer using right-click menus. For example, if you
model
t the following three models into the viewer, you can choose to view any
impor
ination of the three you want.
comb
s=tf('s');
sys1=1/(s^2+s+1);
sys2=1/(s^2+s+2);
sys3=1/(s^2+s+3);
Page 73
LTI Viewe r
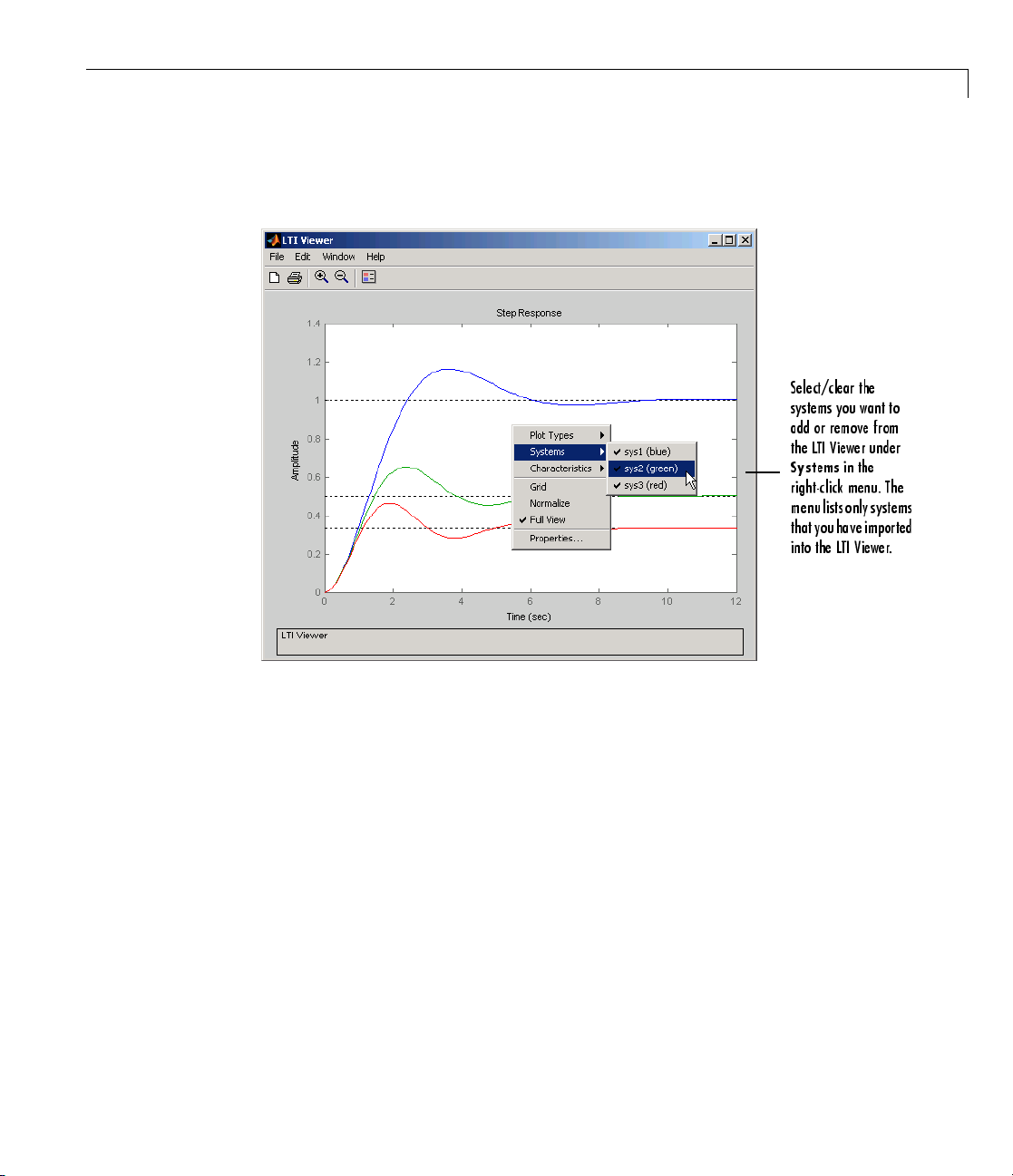
This figure shows how to clear the second of the three models using right-click
menu options.
Using Right-Click Menus to Select/Clear Plotted Systems
The Systems menu lists all the imported models. A system is selected if a
check mark is visible to the left of the system name.
3-21
Page 74
3 Analyzing Models
Simulating Models with Arbitrary Inputs and Initial Conditions
In this section...
“What is the Linear Simulation Tool?” on page 3-22
“Opening the Linear Simulation Tool” on page 3-22
“Working with the Linear Simulation Tool” on page 3-23
“Importing Input Signals” on page 3-26
“Example: Loading Inputs from a M icrosoft®Excel Spreadsheet” on page
3-28
“Example: Importing Inputs from the W orkspace” on page 3-29
“Designing Input Signals” on page 3-33
“Specifying Initial Conditions” on page 3-35
3-22
What is
You can
rary input s i gn als and ini tia l conditions.
arbit
The Li
• Impo
• Impo
ASC
• Gen
pfunction,orwhitenoise.
ste
ecify initial states for state-space models.
• Sp
fault initial states are zero.
De
pening the Linear Simulation Tool
O
o open the Linear Simulation Tool, do one of the following:
T
the Linear Simulation Tool?
use the Linear Simulation Tool to simulate linear models with
near Simulation Tool lets you do the following:
rt input signals from the MATLA B workspace.
rt input signals from a MAT-file, Microsoft
II flat-file, comma-separated variable file (CSV), or text file.
erate arbitrary input signals in theformofasinewave,squarewave,
®
Excel®spreadsheet,
Page 75

Simulating Models with Arbitrary Inputs and Initial Conditions
• In the LTI Viewer, right-click the plot area and select Plot Types >
Linear Simulation.
• Use the
lsim function at the MATLAB prompt:
lsim(modelname)
• IntheMATLABFigurewindow,right-click a response plot and select
Input data .
Working with the Linear Simulation Tool
The Linear Simulation Tool contains two tabs, Input signals and Initial
states.
After opening the Linear Simulation Tool (as described in “Opening the Linear
Simulation Tool” on page 3-22), follow these steps to simulate your model:
1 Click the Input signals tab, if it is not displayed.
3-23
Page 76

3 Analyzing Models
2 In the Timing area, specify the simulation time vector by doing one of
the following:
• Import the time vector by clicking Import time.
• Enter the end time and the time interval in s econds. The start time
is set to
3 Specify the input signal by doing one of the following:
0 seconds.
• Click Import signal to import it from the MATLAB workspace or a file.
For more information, see “Importing Input Signals” on page 3-26.
• Click Design signal to create your ow n inputs. For more information,
see “Designing Input Signals” on page 3-33.
4 If you have a state-space model and want to specify init ial conditions, click
the Initial states tab. By default, all initial states are set to zero.
You can either enter state values in the Initial value column, or import
values by clicking Import state vector. For more information about
entering initial states, see “Specif yi n g In iti al Conditions” on page 3-35.
3-24
Page 77

Simulating Models with Arbitrary Inputs and Initial Conditions
5 For a con
the Inte
• Zero or
• First o
• Autom
hold a
Note
mode
ck Simulate.
6 Cli
tinuous model, select one of the following interpolation methods in
rpolation method list to be used by the simulation solver:
der hold
rder hold (linear interpolation)
atic (Linear Simulation Tool selects first order hold or zero order
utomatically, based on the smoothness of the input)
The interpolation method is not used when simulating discrete
ls.
3-25
Page 78

3 Analyzing Models
Importing Input
You can import in
the Linear Simul
page 3-22). You ca
spreadsheet, A
For informati
Signals” on pa
Tool, see “Wo
To import one
1 In the Linea
displayed.
2 Specify the simulation time in the Timing area.
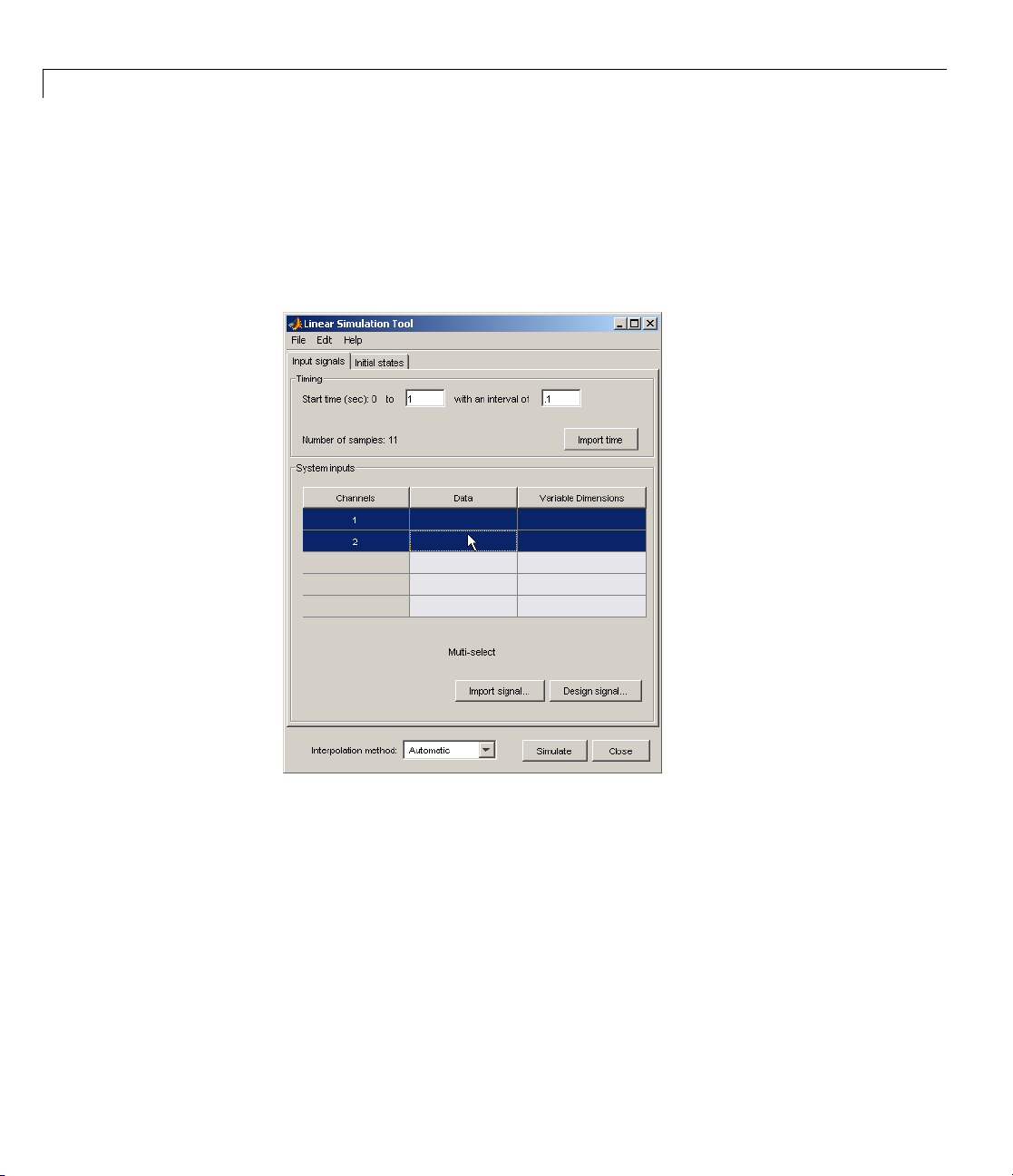
3 Select one or mo re rows for the input channels you want to import. The
following figure shows an example with two selected channels.
ation Tool (see “Opening the Linear Simulation Tool” on
SCII flat-file, comma-separated variable file (CSV), or text file.
on about creating your own inputs, see “D esigning Input
ge 3-33. For an overview of w ork ing with the Linear Simulation
rking with the Line ar Simulation Tool” on page 3-23.
or more input signals:
r Simulation Tool, click the Input signals tab, if it is not
Signals
put signals from the MATLAB workspace after opening
n also import inputs from a MAT-file, Microsoft Excel
3-26
Page 79

Simulating Models with Arbitrary Inputs and Initial Conditions
4 Click Import signal to open the Data Import dialog box. The following
figure shows an example of the Data Import dialog box.
3-27
Page 80

3 Analyzing Models
5 In the Import from list, select the source of the input signals. It can be
one of the following:
•
Workspace
• MAT file
• XLS file
• CSV file
• ASCII file
6 Select the data you want to import. The Data Import dialog box contains
different options depending on which source format you selected.
7 Click Import.
For an example of importing input signals, see the foll owing:
• “Example: Loading Inputs from a Microsoft
®
Excel Spreadsheet” on p ag e
3-28
• “Example: Importing Inputs from the Workspace” on page 3-29
Example: Loading Inputs from a Microsoft Excel Spreadsheet
To load inputs from a Microsoft Excel (XLS) spreadsheet:
1 In the Linear Simu lation Tool, click Impo r t signal in the Input signals
tab to ope n the Data Import dialog box .
2 Select XLS file in th e Import from list.
3 Click Browse.
4 Select the file you want to import and click Open. This populates the Data
Import dialog box with the data from the Microsoft Excel spreadsheet.
3-28
Page 81

Simulating Models with Arbitrary Inputs and Initial Conditions
Example: Importing Inputs from the Workspace
To load an input signal from the M ATLAB workspace:
1 Enter this code to open a response plot with a second-order system:
s=tf('s');
ss=(s+2)/(s^2+3*s+2);
lsim(ss,randn(100,1),1:100);
2 Right-click the plot background and select Input data.
3-29
Page 82

3 Analyzing Models
3-30
This opens the Linear Simulation Tool with default input data.
Page 83

Simulating Models with Arbitrary Inputs and Initial Conditions
3 Create an input signal for your system in the MATLAB Command Window,
such as the following:
new_signal=[-3*ones(1,20) 2*ones(1,30) 0.5*ones(1,50)]';
4 In the Linear Simulation Tool, click Import signal.
5 In the Data Imp ort dialog box, click, Assign columns to assign the first
column of the input signal to the selected channel.
3-31
Page 84

3 Analyzing Models
6 Click Import. This imports the new signal into the Linear Simulation Tool.
3-32
Page 85

Simulating Models with Arbitrary Inputs and Initial Conditions
7 Click Simulate to see the response of your second-order system to the
imported signal.
Designing Input Signals
You can generate arbitrary input signals in the form of a sine wave, square
wave, step function, or white noise after opening the Linear Simulation Tool
(see “Opening the Linear Simulation Tool” on page 3-22).
For information about importing inputs from the MATLAB workspace or from
a file, see “Importing Input Signals” on page 3-26. For an overview of working
with the Linear Simulation Tool, see “W orking with the Linear Simulation
Tool” on page 3-23.
To design one or more input signals:
1 In the Linear Simulation Tool, click the Input signals tab (if it is not
displayed).
3-33
Page 86
3 Analyzing Models
2 Specify the simulation time in the Timing area. The time interval (in
seconds) is used to evaluate the input signal you design in later steps of
this procedure.
3 Select one or more rows for the signal channels you want to design. The
following figure shows an example with two selected channels.
3-34
4 Click Design signal to open the Signal Designer dialog box. The following
figure shows an example of the Signal Designer dialog b ox.
Page 87

Simulating Models with Arbitrary Inputs and Initial Conditions
5 In the Signa
can be one o
•
Sine wav e
• Square wa
• Step func
• White no
6 Specify the signal characteristics. The Signal Designer dialog box contains
ltypelist, select the type of signal you want to create. It
f the following:
ve
tion
ise
different options depending on which signal type you selected.
7 Click Insert. This brings the new signal into the Linear Simulation Tool.
8 Click S
Speci
If you
afte
Tool
For a
wit
You
imulate in the Linear Sim u la t ion T o o l to view th e system response.
fying In itial Conditions
r system is in state-space form, you can enter or import initial states
r opening the Linear Simulation Tool (see “Opening the Linear Simulation
”onpage3-22).
n overview of working with the Linear Simulation Tool, see “Working
h the Linear Simulation Tool” on page 3-23.
can also import initial states from the MATLAB workspace.
3-35
Page 88

3 Analyzing Models
To import one or more initial states:
1 In the Linear Sim ulation Tool, click the Initial s tates tab (if it is not
already displayed).
2 In the Selected system list, select the system for which you want to
specify initial conditions.
3 You can either enter state values in the Initial value column, or import
values from the MATLAB workspace by clicking Import state vector.
The following figure shows an example of the import window:
3-36
Note For
4 After s
Tool to
n-states, your initial-condition vector must have n entries.
pecifying the initial states, click Simulate in the Linear Simulation
view the system response.
Page 89

Functions for Time and Frequency Response
Functions for Time and Frequency Response
In this section...
“When to Use Functions for Time and Frequency Response” on page 3-37
“Time and Frequency Response Functions” on page 3-37
“Plotting MIMO M odel Responses” on page 3-40
“Data Markers” on page 3-42
“Plotting and Comparing Multiple Systems” on page 3-44
“Creating Custom Plots” on page 3-47
When to Use Functions for Time and Frequency Response
You can use the LTI Viewer GUI for a wide range of applications. There
are situations, however, where you may want a more open and extensible
environment. You can use the Control System Toolbox functions for basic
time and frequency domain analysis plots used in control system engineering.
These functions apply to any kind of linear model (continuous or discrete,
SISO or MIMO, or arrays of models). Yo u can o nly apply the frequency
domain analysis functions to FRD models.
Use the LTI Viewer when a GUI-driven environment is desirable. On the
other hand, use functions when you want customized plots. If you want to
include data unrelated to your models, you must use functions instead of the
LTI Viewer (which only plots model data).
The next sections discuss time and frequency response functions and how to
use these functions to create customized plots of linear model responses.
Time and Frequency Response Functions
Time responses investigate the time-domain transient behavior of linear
modelsforparticularclassesofinputs and disturbances. You can determine
such system characteristics as rise time, settling time, overshoot, and
steady-state error from the time response. You can use the Control System
Toolbox functions for step response, impulse response, initial condition
3-37
Page 90

3 Analyzing Models
response, and general linear simulations. For example, you can simulate the
response to white noise inputs using
lsim and the MATLAB function randn.
In addition to time-domain analysis, you can use the Control System Toolbox
functions for frequency-domain analysis using the following standard plots:
• Bode
• Nichols
• Nyquist
• Singular value
This table lists available time and frequency response functions and their use.
Functions for Frequency and Time Response
Functions Description
bode
evalfr
Bode plot
Computes the frequency response at a single complex
frequency (not for FRD models)
freqresp
Computes the frequency response for a set of
frequencies
gensig
impulse
initial
iopzmap
lsim
margin
nichols
nyquist
pzmap
step
Input signal generator (for lsim)
Impulseresponseplot
Initial condition response plot
Pole-zero map for each I/O pair of an LTI model
Simulation of response to arbitrary inputs
Computes and plots gain and phase margins
Nichols plot
Nyquist plot
Pole-zero map
Step response plot
3-38
Page 91
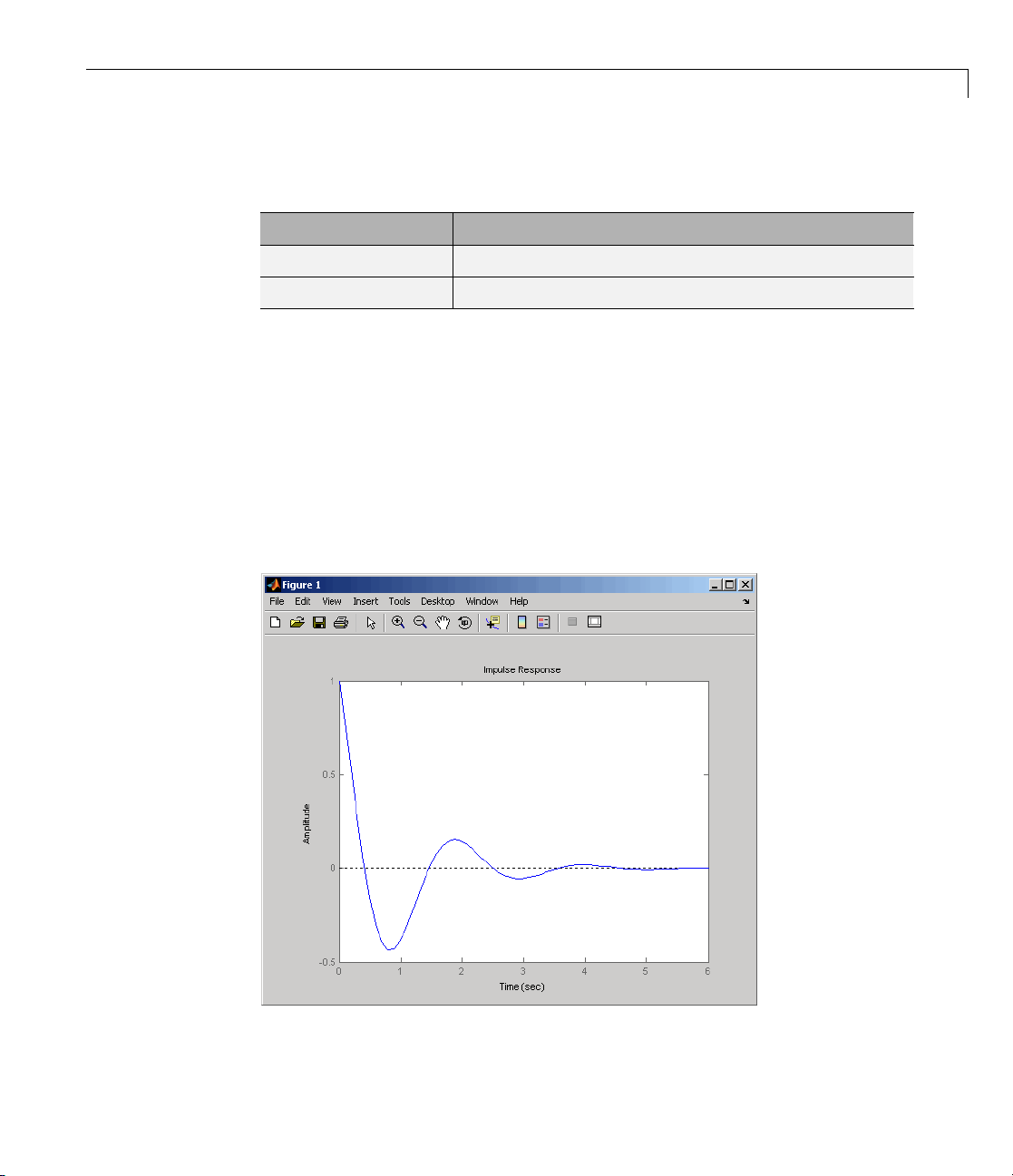
Functions for Time and Frequency Response
Functions for Frequency and Time Response (Continued)
Functions Description
hsvd
bodemag
Compute Hankel singular values of LTI model
Bode magnitude response of LTI models
ThesefunctionscanbeappliedtosinglelinearmodelsorLTIarrays.
The functions
step, impulse,andinitial automatically generate an
appropriate simulation horizon for the time response plots. For example,
h = tf([1 0],[1 2 10])
impulse(h)
produces the following plot.
Impulse Response of a SISO Model
3-39
Page 92

3 Analyzing Models
Frequency-domain plots automatically generate an appropriate frequency
range as well.
Plotting MIMO Model Responses
For MIMO models, time and frequency response functions produce an array
of plots with one plot per I/O channel (or per output for
For example,
h = [tf(10,[1 2 10]) , tf (1,[1 1])]
step(h)
produces the following plot.
initial and lsim).
3-40
Step Responses for a MIMO Model
The simulation horizon is automatically determined based on the model
dynamics. You can override this automatic mode by specifying a final time,
ep(h,10) % Simulates from 0 to 10 seco nds
st
Page 93

Functions for Time and Frequency Response
or a vector of evenly spaced time samples.
t = 0:0.01:10 % Time samples spaced every 0.01 second
step(h,t)
Right-Click Menus
All the time and frequency response functions provide right-click menus
that allow you to customize your plots. For more information on using the
LTI Viewer right-click menus, see “Using the Right-Click Menu in the LTI
Viewer”. This figure shows the plots from Step Responses for a MIMO Model
on page 3-40, with the right-click menu open.
Using the Right-Click Menu in a Step Re spon se Plot
The options you can select include
3-41
Page 94

3 Analyzing Models
• Systems — Select or clear any models that you included when you created
theresponseplot.
• Characteristics — Add information about the plot. The characteristics
available change from plot to plot. For example, Bode plots have stability
margins available, but step responses have rise time and steady-state
values available.
• Axes Grouping — Change the grouping of your plots. Available options
are All, None, Inputs, and Outputs. You can group all the plots together,
placeeachinaseparateplotregion(none), or group the inputs or outputs
together.
• I/O Selector —OpentheI/O Selector dialog box.
3-42
Use this dialog box to select/clear which inputs and outputs to plot.
• Normalize — Scale responses to fit the view (only available for
time-domain plot types).
• Full View — Use automatic limits to make the entire curve visible.
• Grid —Addgridstoyourplots.
• Properties — Open the Property Editor, which you can use to customize
various attributes of your plot. See Customization for a full description of
the Property Editor.
Alternatively, you can open the Property Editor by double-clicking in an
empty region of the response plot.
Data Markers
In addition to right-click menus, you can use plot data markers. These allow
you to identify key data points on your plots. This figure, using the s ame
plot as Step Responses for a MIMO M odel on page 3-40, shows markers on
the plots.
Page 95

Functions for Time and Frequency Response
Using Plo
You can m
• Grabbi
• Draggi
The ti
does n
rise t
by pla
To ma
Note
dat
Des
t Ma r kers to Identify Data Points
ove a data marker by
ng the black square located at the corner of the marker
ngthemarkerwithyourmouse
me and am plitude values will change as you move the marker. This
ot apply to markers that display plot characteristics (e.g., peak value or
ime). In the case of plot characteristic data markers, you can view them
cing your cursor over the dot that represents the active characteristic.
ke the data marker persistent, left-click the marker.
Data markers do not apply to the SISO Design Tool, which displays
a about plot characteristics in the status pane at the bottom o f the SISO
ign Tool window.
3-43
Page 96
3 Analyzing Models
Right-Click Menus
Right-click on any data marker to open a property menu for the marker.
Property options for the marker include
• Alignment — Change the position of the marker. Available options are
top-right, top-left, bottom-right, and bottom-left.
• FontSize — Change the font size.
• Movable — By default, you can move data markers by clicking and
dragging. Clearing Movable forces the marker to remain at a f ixed data
point.
3-44
• Delete — Remove the sele cte d marker. Alternati vely, left-click anywher e
in the empty plot region to delete all markers in the plot
• Interpolation — By default, data m arkers linearly interpolate between
points along the plotted curve. Select None to force the markers to snap to
nearest points along the plotted curve.
Since characteristic data markers are by definition fixed, the right-click
menus for them have fewer options.
eoptionsworkthesameastheydoforthefullright-clickmenu.
Thes
tting and Comparing Multiple Systems
Plo
can use the command-line response-plotting functions to plot the
You
sponse of continuous and discrete linear models on a single plot. To do
re
Page 97

Functions for Time and Frequency Response
so, invoke the corresponding command-line function using the l ist sys1,...,
sysN of models as the inputs.
stepplot(sys1,sys2,...,sysN)
impulseplot(sys1,sys2,...,sysN)
...
bodeplot(sys1,sys2,...,sysN)
nicholsplot(sys1,sys2,...,sysN)
...
All models in the argument lists of any of the response plotting functions
(except for
sigma) must have the same number of inputs and outputs.
To differentiate the plots easily, you can also specify a distinctive
color/linestyle/marker for each system just as you would with the
plot
command. For example,
bodeplot(sys1,'r',sys2,'y--',sys3,'gx')
plots sys1 with solid red lines, sys2 with yellow dashed lines , and sys3 with
green
x markers.
You can plot responses of multiple models on the same plot. These models do
not need to be all continuous-time or all discrete-time.
Example: Comparing Continuous and Discretized Systems
The following example compares a continuous model with its zero-order-hold
discretization.
sysc = tf(1000,[1 10 1000])
sysd = c2d(sysc,0.2)
% ZOH sampled at 0.2 second
stepplot(sysc,'--',sysd,'-')
% Compare step responses
These commands produce th e plot shown below.
3-45
Page 98

3 Analyzing Models
3-46
Comparis
Use this
bodeplot(sysc,'--',sysd,'-')
% Compare Bode responses
The fol
on of a Continuo us Model to Its Discretized Version
command to compare the Bode plots of the two systems.
lowing plot results from the last command.
Page 99

Functions for Time and Frequency Response
Comparis
Acompar
undersa
oscill
contin
Creat
Time a
You ca
comm
on of Bode Plots for a Continuous Model and Its Discretized Version
ison of the continuous and discretized responses reve als a drastic
mpling of the continuous-time system. Specifically, there are hidden
ations in the discretized time response and aliasing conceals the
uous-time resonance near 30 rad/sec.
ing Custom Plots
nd frequency response commands are useful for creating custom plots.
n mix model response plots with other data views using response
ands together with
plot, subplot,andhold.
Example: Custom Plots
xample, the following sequence of commands displays the Bode plot, step
For e
ponse, pole/zero map, and some additional data in a single figure window.
res
h = tf([4 8.4 30.8 60],[1 4.12 17.4 30.8 60]);
subplot(221)
3-47
Page 100

3 Analyzing Models
bodeplot(h)
subplot(222)
stepplot(h)
subplot(223)
pzplot(h)
subplot(224)
plot(rand(1, 100)) % Any d ata can go here
title('Some noise')
Your plot should look similar to this illustration.
3-48
Example of Creating a Custom Plot
For information about plot, subplot, hold, and other options for plotting
general data, see Basic Plots and Graphs in the MATLAB Function Reference.
ThesedocumentsareavailableintheMATLABonlinehelp.
 Loading...
Loading...