

Page 1

Communications To
User’s Guide
olbox™ 4
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Communications Toolbox™ User’s Guide
© COPYRIGHT 1996–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3
Revision History
April 1996 First printing Version 1.0
May 1997 Second printing Revised for Version 1.1 (MATLAB 5.0)
September 2000 Third printing Revised for Version 2.0 (Release 12)
May 2001 Online only Revised for Version 2.0.1 (Release 12.1)
July 2002 Fourth printing Revised for Version 2.1 (Release 13)
June 2004 Fifth printing Revised for Version 3.0 (Release 14)
October 2004 Online only Revised for Version 3.0.1 (Release 14SP1)
March 2005 Online only Revised for Version 3.1 (Release 14SP2)
September 2005 Online only Revised for Version 3.2 (Release 14SP3)
October 2005 Reprint Version 3.0 (Notice updated)
March 2006 Online only Revised for Version 3.3 (Release 2006a)
September 2006 Sixth printing Revised for Version 3.4 (Release 2006b)
March 2007 Online only Revised for Version 3.5 (Release 2007a)
September 2007 Online only Revised for Version 4.0 (Release 2007b)
March 2008 Online only Revised for Version 4.1 (Release 2008a)
October 2008 Online only Revised for Version 4.2 (Release 2008b)
March 2009 Online only Revised for Version 4.3 (Release 2009a)
September 2009 Online only Revised for Version 4.4 (Release 2009b)
March 2010 Online only Revised for Version 4.5 (Release 2010a)
Page 4

Page 5

Getting Started
1
Product Overview ................................. 1-2
Section Overview
Expected Background
.................................. 1-2
.............................. 1-2
Contents
Studying Components of a Communication System
Section Overview
Modulating a Random Signal
Plotting Signal Constellations
Pulse Shaping Using a Raised Cosine Filter
Using a Convolutional Code
Simulating a Communication System
Section Overview
Using BERTool to Run Simulations
Varying Parameters and Managing a Se t of Simulations
Running Simulations Using the Error Rate Test
Console
Loading the Error Rate Test Console
Running the Simulation and Obtaining Results
Generating an Error Rate Results Figure Window
Running the Simulation Using Parallel Computing Toolbox
Software
Creating a System File and Attaching It to the Test
Console
Configuring the Error Rate Test Console and Running a
Simulation
Optimizing Your System for Faster Simulations
......................................... 1-35
.................................. 1-4
........................ 1-4
....................... 1-11
............ 1-15
......................... 1-19
................ 1-23
.................................. 1-23
................... 1-23
.................. 1-35
......... 1-36
....... 1-37
....................................... 1-39
....................................... 1-40
..................................... 1-45
........ 1-47
... 1-4
.. 1-31
Learning M ore
Online Help
Demos
The MathWorks Online
.......................................... 1-54
.................................... 1-54
...................................... 1-54
............................ 1-54
v
Page 6

Signal Sources
2
White G aussian Noise .............................. 2-2
Random Symbols
Random Integers
Random Bit Error Patterns
.................................. 2-3
.................................. 2-4
......................... 2-5
Performance Evaluation
3
Performance Results via Simulation ................ 3-2
Section Overview
Using Simulated Data to Compute Bit and Sym bol Error
Rates
Example: Computing Error Rates
Comparing Symbol Error Rate and Bit Error Rate
Performance Results via the Semianalytic
Technique
Section Overview
When to Use the Semianalytic Technique
Procedure for the Semianalytic Technique
Example: Using the Semianalytic Technique
......................................... 3-2
.................................. 3-2
.................... 3-3
....... 3-4
...................................... 3-5
.................................. 3-5
.............. 3-5
............. 3-6
........... 3-7
vi Contents
Theoretical Performance Results
Computing Theoretical Error Statistics
Plotting Theoretical Error Rates
Comparing Theoretical and Empirical Error Rates
Error Rate Plots
Section Overview
Creating Error Rate Plots Using
Curve F itting for Error Rate Plots
................................... 3-14
.................................. 3-14
................... 3-10
................ 3-10
..................... 3-10
semilogy ............. 3-14
.................... 3-15
...... 3-11
Page 7

Example: Curve Fitting for an Error Rate Plot ......... 3-15
Eye Diagrams
Section Overview
EyeScope
Scatter P lots
Section Overview
Viewing Signals Using Scatter Plots
Adjacent Channel Power Ratio (ACPR)
Measurements
Overview o f ACPR Measurement Tutorial
EVM Measurements
Section Overview
MER Measurements
Section Overview
Selected Bibliography for Performance Evaluation
..................................... 3-20
.................................. 3-20
........................................ 3-20
...................................... 3-21
.................................. 3-21
.................. 3-21
.................................. 3-34
............. 3-34
................................ 3-44
.................................. 3-44
................................ 3-45
.................................. 3-45
... 3-46
Error Rate T est Console
4
Introduction to Error Rate Test Console ............. 4-2
Creating a System
Writing A Register Method
Writing a Setup Method
Writing a Reset Method
Writing a Run Method
Methods Allowing You to Communicate with the Error
Rate Test Console at Simulation Run Time
Getting Test Inputs From the Error Rate Test Console
................................. 4-3
.......................... 4-3
............................ 4-6
............................ 4-6
............................. 4-6
........ 4-8
... 4-8
vii
Page 8

Getting the Current Simulation Sweep Value of a
Registered Test Parameter
Logging Test Data to a Registered Test Probe
Logging User-Defined Data To The Test Console
........................ 4-9
.......... 4-9
........ 4-9
Debug Mode
Implementing A Default Input Generator Function For
Debug Mode
Running Simulations Using the Error Rate Test
Console
Creating a Test Console
Attaching a System to the Error Rate Test Console
Defining Simulation Conditions
Registering a Test Point
Getting Test Information
Running a Simulation
Getting Results and Plotting Data
Parsing and Plotting Results for Multiple Parameter
Simulations
....................................... 4-10
.................................... 4-10
......................................... 4-11
............................ 4-11
...... 4-12
...................... 4-13
............................ 4-15
........................... 4-16
.............................. 4-17
.................... 4-17
.................................... 4-17
BERTool: A Bit Error Rate Analysis GUI
5
Summary of Features .............................. 5-2
viii Contents
Opening BERTool
The BERTool Environment
Components of BERTool
Interaction Among BERTool Components
Computing Theoretical BERs
Section Overview
Example: Using the Theoretical Tab in BERTool
Available Sets of Theoretical BER Data
................................. 5-3
......................... 5-4
............................ 5-4
....................... 5-8
.................................. 5-8
............... 5-11
.............. 5-6
........ 5-9
Page 9

Using the Semianalytic Technique to Compute
BERs
Section Overview
Example: Using the Semianalytic Tab in BERTool
Procedure for Using the Semianalytic Tab in BERTool
........................................... 5-16
.................................. 5-16
...... 5-17
... 5-19
Running M AT LAB Simulations
Section Overview
Example: Usin g a MATLAB Simulation with BERTool
Varying the Stopping Criteria
Plotting Confidence Intervals
Fitting BER Points to a Curve
Preparing Simulation Functions for Use with
BERTool
Requirements for Functions
Template for a Simulation Function
Example: Preparing a Simulation Function for Use with
BERTool
Running Sim ulink Simulations
Section Overview
Example: Using a Simulink Model with BERTool
Varying the Stopping Criteria
Preparing Simulink Models for Use with BERTool
Requirements for Models
Tips for Preparing Models
Example: Preparing a Model for Use with BERTool
........................................ 5-29
.................................. 5-22
....................................... 5-33
.................................. 5-37
........................... 5-43
..................... 5-22
....................... 5-25
........................ 5-26
....................... 5-28
......................... 5-29
.................. 5-30
..................... 5-37
....... 5-38
....................... 5-41
.......................... 5-43
... 5-22
.... 5-43
..... 5-46
Managing BER Data
Exporting Data Sets or BERTool Sessions
Importing Data Sets or BERTool Sessions
Managing Data in the Data Viewer
............................... 5-52
............. 5-52
............. 5-55
................... 5-57
ix
Page 10

Source Coding
6
QuantizingaSignal ................................ 6-2
Section Overview
Representing Partitions
Representing Codebooks
Scalar Quantization Example 1
Scalar Quantization Example 2
Determining Which Interval Each Input Is In
.................................. 6-2
............................ 6-2
............................ 6-3
...................... 6-3
...................... 6-4
.......... 6-4
Optimizing Quantization Parameters
Section Overview
Example: Optimizing Quantization Parameters
Differential Pulse Code Modulation
Section Overview
DPCM Terminology
Representing Predictors
Example: DPCM Encoding and Decoding
Optimizing DPCM Parameters
Section Overview
Example: Comparing Optimized and Nonoptimized DPCM
Parameters
Companding a Signal
Section Overview
Example: µ-Law Compander
Huffman Coding
Section Overview
Creating a Huffman Code Dictionary
Example: Creating and Decoding a Huffman Code
.................................. 6-6
.................................. 6-8
................................ 6-8
............................ 6-8
...................... 6-11
.................................. 6-11
.................................... 6-11
.............................. 6-13
.................................. 6-13
........................ 6-13
................................... 6-15
.................................. 6-15
................ 6-6
......... 6-6
................. 6-8
.............. 6-9
................. 6-15
...... 6-16
x Contents
Arithmetic Coding
Section Overview
Representing Arithmetic Coding Parameters
Example: Creating and Decoding an Arithmetic C ode
................................. 6-17
.................................. 6-17
........... 6-17
.... 6-18
Page 11

Selected Bibliography for Source Coding ............ 6-19
Error Detection and Correction
7
Block Coding ...................................... 7-2
Section Overview
Block Coding Features of the Toolbox
Block Coding Terminology
Representing Words for Reed-Solomon Codes
Parameters for Reed-Solomon Codes
Creating and Decoding Reed-Solomon Codes
Representing Words for BCH Codes
Parameters for BCH Codes
Creating and Decoding BCH Codes
LDPC Codes
Representing Words for Linear Block Codes
Parameters for Linear Block Codes
Creating and Decoding Linear Block Codes
Performing Other Block Code Tasks
Selected Bibliography for Block Coding
.................................. 7-2
................. 7-4
.......................... 7-5
........... 7-5
.................. 7-6
........... 7-8
.................. 7-12
.......................... 7-13
................... 7-13
...................................... 7-15
............ 7-16
................... 7-20
............ 7-25
.................. 7-28
................ 7-31
Convolutional Coding
Section Overview
Convolutional Coding Features of the Toolbox
Polynomial Description of a Convolutional Encoder
Trellis D escription of a Convolutional Encoder
Creating and Decoding Convo lutio nal Codes
Examples of Convolutional Coding
Selected Bibliography for Convolutional Coding
Cyclic Redundancy Check Coding
Overview
CRC Algorithm
Selected Bibliography for CRC Coding
........................................ 7-46
.............................. 7-32
.................................. 7-32
................... 7-42
................... 7-46
................................... 7-46
................ 7-48
.......... 7-32
...... 7-32
.......... 7-36
........... 7-39
......... 7-45
xi
Page 12

Interleaving
8
Block Interleavers ................................. 8-2
Section Overview
Block Interleaving Features of the Toolbox
Example: Block Interleavers
.................................. 8-2
............. 8-2
........................ 8-3
Convolutional Interleavers
Section Overview
Convolutional Interleaving Features of the Toolbox
Example: Convolutional Interleavers
Delays of Convolutional Interleavers
Selected Bibliography for Interleaving
.................................. 8-5
......................... 8-5
...... 8-6
................. 8-7
.................. 8-9
.............. 8-14
Modulation
9
Modulation Features of the Toolbox ................. 9-2
Modulation Techniques
Baseband vs. Passband Simulation
Modulation Terminology
Analog Modulation
Representing Analog Signals
Analog Modulation Example
............................. 9-2
................... 9-3
........................... 9-4
................................ 9-5
........................ 9-5
........................ 9-6
xii Contents
Digital Modulation
Section Overview
Representing Digital Signals
Baseband ModulatedSignalsDefined
Gray Encoding a Modulated Signal
Examples of Digital Modulation and Demodulation
Plotting Signal Constellations
................................. 9-8
.................................. 9-8
........................ 9-8
................. 9-9
................... 9-10
....................... 9-14
...... 9-12
Page 13

Using Modem Objects .............................. 9-20
Section Overview
Constructing a Modem Object
Managing Object Properties
Copying a Modem Object
Displaying a Modem O b ject
Resetting a Modem Object
Modulating a Signal
Demodulating a Signal
Example of Basic Modulation and Demodulation
Exact LLR Algorithm
Approximate LLR Algorithm
.................................. 9-20
....................... 9-20
......................... 9-21
........................... 9-21
......................... 9-22
.......................... 9-23
............................... 9-24
............................. 9-25
........ 9-26
.............................. 9-26
........................ 9-27
10
Selected Bibliography for Modulation
............... 9-28
Special Filters
Noncausality and the Group Delay Parameter ....... 10-2
Section Overview
Example: Compensating for Group Delays in Data
Analysis
Designing Hilbert Transform Filters
Section Overview
Example with Default Parameters
Filtering with Raised Cosine Filters
Section Overview
Sampling Rates
Designing Filters Automatically
Specifying Filters Using Input A rguments
Controlling the Rolloff Factor
Controlling the Group Delay
Combining Two Square-Root Raised Cosine Filters
.................................. 10-2
....................................... 10-3
................ 10-5
.................................. 10-5
................... 10-5
................. 10-7
.................................. 10-7
................................... 10-7
..................... 10-8
............. 10-9
........................ 10-10
........................ 10-10
...... 10-12
Designing Raised Cosine Filters
Section Overview
Sampling Rates
.................................. 10-14
................................... 10-14
.................... 10-14
xiii
Page 14

Example Designing a Square-Root Raised Cosine Filter .. 10-14
Other Options in Filter Design
....................... 10-15
11
Selected Bibliography for Special Filters
............ 10-16
Channels
Channel Features of the Toolbox .................... 11-2
AWGN Channel
Section Overview
Describing the Noise Level of an AW GN Channel
MIMO Channels
Fading Channels
Section Overview
Overview of Fading Channels
Simulation of Multipath Fading Channels: Methodology
Specifying Fading Channels
Specifying the Doppler Spectrum of a Fading Channel
Configuring Channel Objects
Using Fading Channels
Examples Using Fading Channels
Using the Channel Visualization Tool
.................................... 11-3
.................................. 11-3
....... 11-3
................................... 11-6
.................................. 11-7
.................................. 11-7
....................... 11-7
.. 11-9
......................... 11-11
... 11-15
........................ 11-20
............................ 11-23
.................... 11-24
................. 11-34
xiv Contents
Binary Symmetric Channel
Section Overview
Example: Introducing Noise in a C onvolutional Code
Selected Bibliography for Channels
.................................. 11-48
......................... 11-48
................. 11-50
.... 11-48
Page 15

12
Equalizer Features of Communications Toolbox
Software
........................................ 12-2
Equalizers
Overview of Adaptive Equalizer Classes
Section Overview
Symbol-Spaced Equalizers
Fractionally Spaced Equalizers
Decision-Feedback Equalizers
Using Adaptive Equalizer Functions and Objects
Section Overview
Basic Procedure for Equalizing a Signal
Example Illustrating the Basic Procedure
Learning More About Adaptive Equalizer Functions
Specifying an Adaptive Algorithm
Choosing an Adaptive Algorithm
Indicating a Choice of Adaptive Algorithm
Accessing Properties of an Adaptive Algorithm
Specifying an Adaptive Equalizer
Defining an Equalizer Object
Accessing Properties of an Equalizer
Using Adaptive Equalizers
Section Overview
Equalizing Using a Training Sequence
Equalizing in Decision-Directed Mode
Delays from Equalization
Equalizing Using a Loop
.................................. 12-3
.......................... 12-3
...................... 12-5
....................... 12-6
.................................. 12-8
................... 12-10
..................... 12-10
................... 12-13
........................ 12-13
......................... 12-17
.................................. 12-17
........................... 12-21
............................ 12-22
............. 12-3
............... 12-8
.............. 12-8
............. 12-11
......... 12-12
.................. 12-14
................ 12-17
................. 12-19
..... 12-8
..... 12-9
Using MLSE Equalizers
Section Overview
Equalizing a Vector Signal
Equalizing in Continuous Operation Mode
Using a Preamble or Postamble
.................................. 12-28
............................ 12-28
.......................... 12-29
...................... 12-33
............. 12-30
xv
Page 16

13
Selected Bibliography for Equalizers ................ 12-36
Galois Field Computations
Galois Field Terminology ........................... 13-3
Representing Elements of Galois Fields
Section Overview
Creating a Galois Array
Example: Creating Galois Field Variables
Example: Representing Elements of GF(8)
How Integers Correspond to Galois Field Elements
Example: Representing aPrimitiveElement
Primitive Polynomials and Element R epresentations
Arithmetic in Galois Fields
Section Overview
Example: Addition and Subtraction
Example: Multiplication
Example: Division
Example: Exponentiation
Example: Elementwise Logarithm
Logical Operations in Galois Fields
Section Overview
Testing for Equality
Testing for Nonzero Values
Matrix Manipulation in Galois Fields
Basic Manipulations of Galois Arrays
Basic Information About Galois Arrays
.................................. 13-4
............................ 13-4
......................... 13-14
.................................. 13-14
............................ 13-16
................................. 13-17
........................... 13-18
.................................. 13-20
............................... 13-20
......................... 13-21
.............. 13-4
............. 13-5
............. 13-7
.................. 13-15
................... 13-19
................. 13-20
................ 13-23
................. 13-23
................ 13-24
...... 13-8
........... 13-9
.... 13-9
xvi Contents
Linear Algebra in Galois Fields
Inverting Matrices and Computing Determinants
Computing Ranks
Factoring Square Matrices
Solving Linear Equations
................................. 13-26
........................... 13-27
..................... 13-25
.......................... 13-26
....... 13-25
Page 17

Signal Processing Operations in Galois Fields ........ 13-29
Section Overview
Filtering
Convolution
Discrete Fourier Transform
......................................... 13-29
.................................. 13-29
...................................... 13-30
......................... 13-31
Polynomials over Galois Fields
Section Overview
Addition and Subtraction of Polynomials
Multiplication and Division of Polynomials
Evaluating Polynomials
Roots of Polynomials
Roots of Binary Polynomials
Minimal Polynomials
Manipulating Galois Variables
Section Overview
Determining Whether a Variable Is a Galois Array
Extracting Information from a Galois Array
Speed and Nondefault Primitive Polynomials
Selected Bibliography for Galois Fields
.................................. 13-33
............................ 13-34
............................... 13-35
.............................. 13-37
.................................. 13-39
..................... 13-33
.............. 13-33
............. 13-34
......................... 13-36
...................... 13-39
............ 13-39
.............. 13-44
EyeScope: An Eye Diagram Analysis Tool
...... 13-39
........ 13-42
14
A
Introduction ...................................... 14-2
EyeScope Tutorial
................................. 14-3
Galois Fields of Odd C haracteristic
Galois Field Terminology ........................... A-2
xvii
Page 18

Representing Elements of Galois Fields .............. A-3
Section Overview
Exponential Format
Polynomial Format
List of All Elements of a Ga loi s Field
Nonuniqueness of Representatio ns
.................................. A-3
............................... A-3
................................ A-4
................. A-5
................... A-6
Default Primitive Polynomials
Converting and Simplifying Element Formats
Converting to Simplest Polynomial Format
Example: Generating a List of Galois Field Elements
Converting to Simplest Exponential Format
Arithmetic in Galois Fields
Section Overview
Arithmetic in Prime Fields
Arithmetic in Extension Fields
Polynomials over Prime Fields
Section Overview
Cosmetic Changes of Polynomials
Polynomial Arithmetic
Characterization of Polynomials
Roots of Polynomials
Other Galois Field Functions
Selected Bibliography for Galois Fields
.................................. A-12
.................................. A-15
............................. A-16
............................... A-17
...................... A-7
............ A-8
............ A-10
......................... A-12
.......................... A-12
...................... A-13
...................... A-15
.................... A-15
..................... A-17
....................... A-20
.............. A-21
........ A-8
.... A-10
xviii Contents
Analytical Expressions Used in berawgn,
bercoding, berfading, and BERTool
B
Common Notation ................................. B-2
Analytical Expressions Used in berawgn
............. B-5
Page 19

M-PSK .......................................... B-5
DE-M-PSK
OQPSK
DE-OQPSK
M-DPSK
M-PAM
M-QAM
Orthogonal M-FSK with Coherent De tection
Nonorthogonal 2-FSK with Coherent Detection
Orthogonal M-FSK with Noncoherent Detection
Nonorthogonal 2-FSK with Noncoherent Detection
Precoded M S K with Coherent Detection
Differentially Encoded MSK with Coherent Detection
MSK with Noncoherent Detection (Optimum
Block-by-Block)
CPFSK Co herent Detection (Optimum Block-by-Block)
....................................... B-6
.......................................... B-7
...................................... B-7
......................................... B-7
.......................................... B-8
......................................... B-8
........... B-10
......... B-10
........ B-11
...... B-11
............... B-12
.... B-12
................................. B-12
... B-12
Analytical Expressions Used in berfading
Notation
M-PSK with MRC
DE-M-PSK with MRC
M-PAM with MRC
M-QAM with MRC
M-DPSK with Postdetection EGC
Orthogonal 2-F S K, Coherent Detection with M RC
Nonorthogonal 2-FSK, Coherent Detection with MRC
Orthogonal M -FSK , Noncoherent D etection wi th EGC
Nonorthogonal 2-FSK, Noncoherent Detection with No
Diversity
Analytical Expressions Used in bercoding and
BERTool
CommonNotationforThisSection
Block Coding
Convolutional Coding
Selected Bibliography
......................................... B-14
................................. B-16
.............................. B-17
................................. B-17
................................ B-17
.................... B-19
...................................... B-21
........................................ B-23
................... B-23
..................................... B-23
.............................. B-26
.............................. B-28
............ B-14
....... B-20
.... B-20
... B-20
xix
Page 20

C
Algorithms Used to Decode BCH and Reed-Solomon
Codes
Errors-only Decoding
Compute Optimum Quantizer Boundaries for use with
Soft-Decision T ype of Viterbi Decoder
.......................................... C-2
.............................. C-2
............. C-6
Algorithms
References
........................................ C-11
D
Modulation ....................................... D-2
Special Filters
Convolutional Coding
Simulating Communication Systems
Performance Evaluation
Source Coding
Block Coding
..................................... D-2
.............................. D-2
................ D-2
........................... D-3
..................................... D-3
...................................... D-3
Examples
xx Contents
Interleaving
Equalizers
Channels
.......................................... D-4
....................................... D-4
........................................ D-4
Page 21

Galois Field Computations ......................... D-4
Index
xxi
Page 22

xxii Contents
Page 23

Getting Started
This chapter first provides a brief overview of the Communications Toolbox™
product and then uses several examples to help you get started using the
toolbox. This chapter assumes very little about your prior knowledge of the
MATLAB
you have a basic knowledge about communications subject matter.
• “Product Overview” on page 1-2
• “Studying Components of a Communication System” on page 1-4
• “Simulating a Communication System” on page 1-23
®
technical computing environment, although it does assume that
1
• “Running Simulations Using the Error Rate Test Console” on page 1-35
• “Learning More” on page 1-54
Page 24

1 Gettin g Started
Product Overview
Section Over view
Communications Toolbox software extends the MATLAB technical computing
environment with functions, plots, and a graphical user interface for
exploring, designing, analyzing, and simulating algo rithms for the physical
layer of communication systems. The toolbox helps you create algorithms for
commercial and defense wireless or wireline s ystem s.
The key features of the toolbox are
• Functions for designing the physical layer of communications links,
In this section...
“Section Overview” on page 1-2
“Expected Background” on page 1-2
including source coding, channel coding, interleaving, modulation, channel
models, and equalization
1-2
• Plots such as eye diagrams and constellations for visualizing
communications signals
• Graphical user interface for comparing the bit error rate of your system
with a wid e variety of proven analytical results
• Galois field data type for building communications alg orith ms
Expected Background
This guide assumes that you already have background knowledge in the
subject of communications. If you do not yet have this background, then you
can acquire it using a standard communications text or the books listed in one
of this guide’s sections titled “Selected Bibliography for... .”
For New Users
The discussion and examples in this chapter are aimed at new users.
Continue reading this chapter and try out the examples. Then read those
subsequent chapters that address the specific areas that concern you. When
Page 25

Product Overview
you find out which functions you want to use, refer to the online reference
pages that describe those functions.
For Experienced Users
The online reference descriptions are probably the most relevant parts of this
guide for you. Each reference description includes the function’s syntax as
well as a complete explanation of its options and operation. Many reference
descriptions also include examples, a description of the function’s algorithm,
and references to additional reading material.
You might also want to browse through nonreference parts of this
documentation set, depending on your interests or needs.
1-3
Page 26

1 Gettin g Started
Studying Components of a Communication System
In this section...
“Section Overview” on page 1-4
“Modulating a Random Signal” on page 1-4
“Plotting Signal Constellations” on page 1-11
“Pulse Shaping Using a Raised Cosine Filter” on page 1-15
“Using a Convolutional Code” on page 1-19
Section Over view
Communications Toolbox software implements a variety of
communications-related tasks. Many of the functions in the toolbox perform
computations associated with a particular component of a communication
system, such as a demodulator or equalizer. Other functions are designed
for visualization or analysis.
1-4
While the later chapters of this document discuss various toolbox features in
more depth, this section builds an example step by step to give you a first
look at the toolbox. This section also shows how Communications Toolbox
functionalities build upon the computational and visualization tools in the
underlying MATLAB environment.
Modulating a Random Signal
This first example addresses the following problem:
Problem Process a binary data stream using a communication sys tem that
consists of a baseband modulator, channel, and demodulator. Compute the
system’s bit error rate (BER). Also, display the transmitted and received
signals in a scatter plot.
The following table indicates the key tasks in solving the problem, along with
relevant Communications Toolbox functions. The solution arbitrarily chooses
Page 27

Studying Components of a Communication System
baseband 16-QAM (quadrature amplitude modulation) as the modulation
scheme and AWGN (additive white Gaussian noise) as the channel model.
Task Function or Method
Generate a random binary data stream
randint
Modulate using 16-QAM
Add white Gaussian noise
Create a scatter plot
Demodulate using 16-QAM
Compute the system’s BER
modulate method on
modem.qammod object
awgn
scatterplot
modulate method on
modem.qamdemod object
biterr
Solution of Problem
The discussion below describes each step in more detail, introducing M-code
along the way. To view all the code in one editor window, enter the following
in the MATLAB Command Window.
edit commdoc_mod
1. Generate a Random Binary Data Stream. The conventional format
forrepresentingasignalinMATLABisavectorormatrix.Thisexampleuses
the
randint function to create a column vector that lists the successive values
of a binary data stream. The length of the binary data stream (that is, the
number of rows in the column vector) is arbitrarily set to 30,000.
Note The sampling times associated with the bits do not appear explicitly,
and MATLAB has no inherent notion of time. For the purpose of this example,
knowing only the values in the data stream is enough to solve the problem.
The code below also creates a stem plot of a portion of the data stream,
showing the binary values. Your plot might look different because the
example u ses random numbers. Notice the use of the colon (
:)operatorin
1-5
Page 28

1 Gettin g Started
MATLAB to select a portion of the vector. For more information about this
syntax, se e The Colon Operator in the MATLAB documentation set.
%% Setup
% Define parameters.
M = 16; % Size of signal constellation
k = log2(M); % Number of bits per symbol
n = 3e4; % Number of bits to process
nsamp = 1; % Oversampling rate
hMod = modem.qammod(M); % Create a 16-QAM modulator
%% Signal Source
% Create a binary data stream as a column vector.
x = randint(n,1); % Random binary data stream
% Plot first 40 bits in a stem plot.
stem(x(1:40),'filled');
title('Random Bits');
xlabel('Bit Index'); ylabel('Binary Value');
1-6
Page 29

Studying Components of a Communication System
2. Prepare to Modulate. The modem.qammod object implements an M-ary
QAM modulator, M being 16 in this example. It is configured to rece ive
integers between 0 and 15 rather than 4-tuples of bits. Therefore, you must
preprocess the binary data stream
object. In particular, you arrange each 4-tuple of values from
a matrix, using the
reshape function in MATLAB, and then apply the bi2de
x before using the modulate method of the
x across a row of
function to convert each 4-tuple to a corresponding integer. (The .' characters
after the
in MATLAB. For more information about this and the similar
reshape command form the unconjugated array transpose operator
' operator, see
Reshaping a Matrix in the MATLAB documentation set.)
%% Bit-to-Symbol Mapping
% Convert the bits in x into k-bit symbols.
xsym = bi2de(reshape(x,k,length(x)/k).','left-msb');
%% Stem Plot of Symbols
% Plot first 10 symbols in a stem plot.
figure; % Create new figur e window.
stem(xsym(1:10));
title('Random Symbols');
xlabel('Symbol Index'); ylabel('Integer Value');
1-7
Page 30

1 Gettin g Started
3. Modulate Using 16-QAM. Having defined x sym as a column vector
containing integers between 0 and 15, you can use the
modem.qammod object to modulate xsym using the baseband representation.
Recall that
%% Modulation
y = modulate(modem.qammod(M),xsym); % Modulate using 16-QAM.
M is 16, the alphabet size.
modulate method of the
The result is a complex column vector whose values are in the 16-point
QAM signal constellation. A later step in this example will show what the
constellation looks like.
To learn more about modulation functions, see Chapter 9, “Modulation”. Also,
note that the
modulate method of the modem.qammod object does not apply
any pulse shaping. To extend this example to use pulse shaping, see “Pulse
Shaping Using a Raised Cosine Filter” on page 1-15. For an example that
uses rectangular pulse shaping with PSK modulation, see
basicsimdemo.
4. Add White Gaussian Noise. Applying the
awgn function to the
modulated signal adds white Gaussian noisetoit. Theratioofbitenergyto
noise power spectral density, E
, is arbitrarily set at 10 dB.
b/N0
The expression to convert this value to the corresponding signal-to-noise ratio
(SNR) involves
nsamp, the oversampling factor (which is 1 in this example). The factor k is
used to convert E
energy to noise power spectral density. The factor
E
in the symbol rate bandwidth to an SNR in the sampling bandwidth.
s/N0
k, the number of bits per symbol (which is 4 for 16-QAM), and
to an equivalent Es/N0, which is the ratio of symbol
b/N0
nsamp is used to co nvert
Note The definitions of yt x and yrx and the nsamp term in the defin ition o f
snr are not significant in this example so far, but will make it easier t o extend
the example later to use pulse shaping.
%% Transmitted Signal
ytx = y;
%% Channel
% Send signal over an AWGN channel.
1-8
Page 31

Studying Components of a Communication System
EbNo = 10; % In dB
snr = EbNo + 10*log10(k) - 10*log10(nsamp);
ynoisy = awgn(ytx,snr,'measured');
%% Received Signal
yrx = ynoisy;
To learn more about awgn and other channel functions, see Chapter 11,
“Channels”.
5. Create a Scatter Plot. Applying the
scatterplot function to the
transmitted and received signals shows what the signal constellation looks
like and how the noise distorts the signal. In the plot, the horizontal axis is
the in-phase component of the signal and the vertical axis is the quadrature
component. The code below also uses the
title, legend,andaxis functions
in MATLAB to customize the plot.
%% Scatter Plot
% Create scatter plot of noisy signal and transmitted
% signal on the same axes.
h = scatterplot(yrx(1:nsamp*5e3),nsamp,0,'g.');
hold on;
scatterplot(ytx(1:5e3),1,0,'k*',h);
title('Received Signal');
legend('Received Signal','Signal Constellation');
axis([-5 5 -5 5]); % Set axis ranges.
hold off;
1-9
Page 32

1 Gettin g Started
To learn more about scatterplot, see “Scatter P lots” on page 3-21.
6. Demodulate Using 16-QAM. Applying the
modem.qamdemod object to the received signal demodulates it. The result is a
demodulate method of the
column vector containing integers between 0 and 15.
%% Demodulation
% Demodulate signal using 16-QAM.
zsym = demodulate(modem.qamdemod(M),yrx);
7. Convert the Integer-Valued Signal to a Binary Signal. The previous
step produced
use the
4-tuple along a row of a matrix. Then use the
zsym, a vector of integers. To obtain an equivalent binary signal,
de2bi function to convert each integer to a corresponding binary
reshape function to arrange all
the bits in a single column vector rather than a four-column matrix.
%% Symbol-to-Bit Mapping
% Undo the bit-to-symbol mapping performed earlier.
z = de2bi(zsym,'left-msb'); % Convert integers to bits.
% Convert z from a matrix to a vector.
z = reshape(z.',numel(z),1);
1-10
Page 33

Studying Components of a Communication System
8. Compute the System’s BER. Applying the biterr function to the original
binary vector and to the binary vector from the demo dulation step above
yields the number of bit errors and the bit error rate.
%% BER Computation
% Compare x and z to obtain the number of errors and
% the bit error rate.
[number_of_errors,bit_error_rate] = biterr(x,z)
The statistics appear in the MATLAB Command Window. Your results might
vary because the example uses random numbers.
number_of_errors =
71
bit_error_rate =
0.0024
To learn more about biterr, see “Performance Results via Simulation” on
page 3-2.
Plotting Signal Constellations
The example in the previous section created a scatter plot from the modulated
signal. Although the plot showed the points in the QAM constellation, the plot
did not indicate wh ich integers between 0 and 15 the modulator mapped to a
given constellation point. This section addresses the following problem:
Problem Plot a 16-QAM signal constellation with annotations that indicate
the mapping from integers to constellation points.
The solution uses the scatterplot function to create the plot and the text
function in MATLAB to create the annotations.
1-11
Page 34

1 Gettin g Started
Solution of Problem
To view a completed M-file for this example, enter edit commdoc_const in
the MATLAB Command Window.
1. Find All Points in the 16-QAM Signal Constellation. The
Constellation property of the modem.qammod object contains all points in the
16-QAM signal constellation.
M = 16; % Number of points in constellation
h=modem.qammod(M); % Modulator object
mapping=h.SymbolMapping; % Symbol mapping vector
pt = h.Constellation; % Ve cto r of all points in constellation
2. Plot the Signal Constellation. The scatterplot function plots the
points in
% Plot the constellation.
scatterplot(pt);
pt.
1-12
Page 35

Studying Components of a Communication System
3. Annotate the Plot to Indicate the M apping. To annotate the plot to
show the relationship between
mapping and pt,usethetext function to place
a number in the plot beside each constellation point. The coordinates of the
annotation are near the real and imaginary parts of the constellation point,
but slightly offset to avoid overlap. The text of the annotation comes from
the binary representation of
produces a string of digit characters, while the
mapping.(Thedec2bin function in MATLAB
de2bi function used in the last
section produces a vector of numbers.)
% Include text annotations that numb er the points.
text(real(pt)+0.1,imag(pt),dec2bin(mapping));
axis([-4 4 -4 4]); % Change axis so all labels fit in plot.
Binary-Coded 16-QAM Signal Constellation
Examining the Plot
In the plot above, notice that 0001 and 0010 correspond to adjacent
constellation points on the left side of the diagram. Because these
binary representations differ by two bits, the adjacency indicates that the
modem.qammod object did not use a Gray-coded signal constellation. (That is, if
it were a Gray-coded signal constellation, then the annotations for each pair
of adjacent points would differ by one bit.)
1-13
Page 36

1 Gettin g Started
By contrast, the constellation below is one example of a Gray-coded 16-QAM
signal constellation.
1-14
Gray-Cod
The only
modem.q
%% Modified Plot, With Gr ay Coding
M = 16; % Number of points in constellation
h = modem.qammod('M',M,'SymbolOrder','Gray'); % Modulator object
mapping = h.SymbolMapping; % Symbol m appi ng vector
pt = h.Constellation; % Ve cto r of all points in constellation
scatterplot(pt); % Plot th e constellation.
% Include text annotations that number the points.
text(real(pt)+0.1,imag(pt),dec2bin(mapping));
axis([-4 4 -4 4]); % Change axis so all labels fit in plot.
ed 16-QAM Signal Constellation
difference, compared to the previous example, is that you configure
ammod
object to use a Gray-coded constellation.
Page 37

Studying Components of a Communication System
Pulse Shaping Us
This section fur
Problem Modify
of square root
filtering at t
The solution
filter and th
rcosflt
the
with Raised
for more det
Solution of Problem
This solut
code in an
Command W
edit commdoc_gray
To view a
MATLAB
ther extends the example by addressing the following problem:
the Gray-coded modulation example so that it uses a pair
raised cosine filters to perform pulse shaping and matched
he transmitter and receiver, respective ly.
uses the
e
rcosflt function to filter the signals. Alternatively, you can use
rcosine function to design the square root raised cosine
function to perform both tasks in one command; see “Filtering
Cosine Filters” on page 10-7 or the
ails.
ion modifies the code from
editor window, enter the following command in the MATLAB
indow.
completed M-file for this example, enter
Command Window.
ing a Raised Cosine Filter
rcosdemo demonstration
commdoc_gray.m. To view the original
edit commdoc_rrc in the
1. Defi
replac
Also
foll
Tran
ne Filter-Related Parameters. In the
e the definition of the oversampling rate,
nsamp = 4; % Oversampling rate
, define other key parameters related to the filter by inserting the
owing after the
smitted signal
%% Filter Definition
% Define filter-related parameters.
filtorder = 40; % Filter order
delay = filtorder/(nsamp*2); % Group delay (# of input samples)
rolloff = 0.25; % Rolloff factor of filter
Modulation section of the example and before the
section.
Setup sectio n of the example,
nsamp, with the following.
1-15
Page 38

1 Gettin g Started
2. Create a Square Root Raised Cosine Filter. To design the filter and
plot its impulse response, insert the following commands after the commands
you added in the previous step.
% Create a square root raised cosine filter.
rrcfilter = rcosine(1,nsamp,'fir/sqrt',rolloff,delay);
% Plot impulse response.
figure; impz(rrcfilter,1);
1-16
3. Filter the Modulated Signal. To filter the modulated signal, replace the
Transmitted Signal section with following.
%% Transmitted Signal
% Upsample and apply square root raised cosine filter.
ytx = rcosflt(y,1,nsamp,'filter',rrcfilter);
% Create eye diagram for part of filtered signal.
eyediagram(ytx(1:2000),nsamp*2);
The rcos flt command internally upsamples the modulated signal, y,bya
factor of
nsamp, pads the upsampled signal with zeros at the end to flush the
filter at the end of the filtering operation, and then applies the filter.
Page 39

Studying Components of a Communication System
The eyediagram command creates an eye diagram for part of the filtered
noiseless signal. This diagram illustrates the effect of the pulse shaping. Note
that the signal shows significant intersymbol interference (ISI) because the
filter is a square root raised cosine filter, not a full raised cosine filter.
To learn more about eyediagram, see “Eye Diagrams” on page 3-20.
4. Filter the Received Signal. To filter the received signal, replace the
Received Signal section with the following.
%% Received Signal
% Filter received signal u sin g square root raised cosine filter.
yrx = rcosflt(ynoisy,1,nsamp,'Fs/filter',rrcfilter);
yrx = downsample(yrx,nsamp); % Downsample.
yrx = yrx(2*delay+1:end-2*delay); % Account for delay.
These commands apply the same square root raised cosine filter that the
transmitter used earlier, and then downsample the result by a factor of
nsamp.
1-17
Page 40

1 Gettin g Started
The last command removes the first 2*delay symbols and the last 2*delay
symbols in the downsampled signal because they represent the cumulative
delay of the two filtering operations. Now
demodulator, and
y, which is the output from the modulator, have the same
yrx, which is the input to the
vector size. In the part of the example that computes the bit error rate, it is
important to compare two vectors that have the same size.
5. Adjust the S catter Plot. For variety in this example, make the scatter
plot show the received signal before and after the filtering operation. To do
this, replace the
%% Scatter Plot
% Create scatter plot of received signal before and
% after filtering.
h = scatterplot(sqrt(nsamp)*ynoisy(1:nsamp*5e3),nsamp,0,' g.') ;
hold on;
scatterplot(yrx(1:5e3),1,0,'kx',h);
title('Received Signal, Before and Af ter Filtering');
legend('Before Filtering','After Filtering');
axis([-5 5 -5 5]); % Set axis ranges.
Scatter Plot section of the example with the following.
1-18
Notice that the first scatterplot command scales ynoisy by sqr t(n samp)
when plotting. This is because the filtering operation changes the signal’s
power.
Page 41

Studying Components of a Communication System
Using a Convolut
This section fur
Problem Modify
coding and dec
of the convolu
The solution
and d ecoding
a trellis th
functions,
See also
vi
Solution of Problem
This solu
Filter” o
followin
To view
MATLAB
npage1-15. Toviewtheoriginalcodeinaneditorwindow,enterthe
g command in the MATLAB Command Window.
edit commdoc_rrc
a completed M-file fo r this example, enter
ther extends the example by addressing the following problem:
the previous example so that it includes convolutional
oding, given the constraint lengths and generator polynomials
tional code.
uses the
convenc and vitdec functions to perform encoding
, respectively. It also uses the
at repre sents a convolutional encoder. To learn more about these
see “Convolutional Coding” on page 7-32.
tsimdemo
for an example of convolutional coding and decoding.
tion modifies the code from “Pulse Shaping Using a Raised Cosine
Command Window.
ional Code
poly2trellis function to define
edit commdoc_code in the
1. Incr
of
to com
secti
Not
lon
ease the Number of Symbols. Convolutional coding at this value
o
reduces the BER markedly. As a result, accumulating enough errors
EbN
pute a reliable BER requires you to process more symbols. In the
on, replace the definition of the number of bits,
n = 5e5; % Number of bits to process
n, with the following.
e The larger number of bits in this example causes it to take a noticeably
ger time to run compared to the examples in previous sections.
Setup
1-19
Page 42

1 Gettin g Started
2. Encode the Binary Data. To encode the binary data before mapping it to
integers for modulation, insert the following after the
of the example and before the
%% Encoder
% Define a convolutional coding trellis and use it
% to encode the binary data.
t = poly2trellis([5 4],[23 35 0; 0 5 13]); % Trellis
code = convenc(x,t); % Enc ode .
coderate = 2/3;
Bit-to-Symbol Mapping section.
Signal Source section
The poly2trellis command defines the trellis that represents the
convolutional code that
two input arguments in the
convenc uses for encoding the binary vector, x.The
poly2trellis command indicate the constraint
length and generator polynomials, respectively, of the code. A diagram
showing this encoder is in “Example: A Rate-2/3 Feedforward Encoder” on
page 7-42.
3. Apply the Bit-to-Symbol Mapping to the Encoded Signal. The
bit-to-symbol mapping must apply to the encoded signal,
uncoded data. Replace the first definition of
Mapping
section) with the following.
xsym (within the Bit-to-Symbol
code,nottheoriginal
1-20
% B. Do ordinary binary-to-decimal mapping.
xsym = bi2de(reshape(code,k,length(code)/k).','left-msb') ;
Recall that k is 4, the number of bits per symbol in 16-QAM.
4. Account for Code Rate When Defining SNR. Converting from E
b/N0
to
the signal-to-noise ratio requires you to account for the number of information
bits per symbol. Previously, each symbol corresponded to
symbol corresponds to
k*coderate information bits. More concretely, three
k bits. Now, each
symbols correspond to 12 coded bits in 16-QAM, which correspond to 8
uncoded (information) bits, so the ratio of symbols to information bits is
= 4*(2/3) = k*coderate
Therefore, change the definition of
.
snr (within the Channel section) to the
8/3
following.
snr = EbNo + 10*log10(k*coderate)-10* log10(nsamp);
Page 43

Studying Components of a Communication System
5. Decode the Convolutional Code. To decode the convolutional
code before computing the error rate, insert the following after the entire
Symbol-to-Bit Mapping section and just before the BER Computation
section.
%% Decoder
% Decode the convolutional code.
tb = 16; % Traceback length for decoding
z = vitdec(z,t,tb,'cont','hard'); % Decode.
The syntax for the vitdec function instructs i t to use hard decisions. The
'cont' argument instructs it to use a mode designed for maintaining
continuity when you invoke the function repeatedly (as in a loop). Although
this example d oe s not use a loop, the
'cont' mode is used for the purpose of
illustrating how to com pensate for the delay in this decoding operation. The
delay is discussed further in “More About Delays” on page 1-22.
6. Account for Delay When Computing BER. The continuous operation
mode of the Viterbi decoder incurs a delay whose duration in bits equals the
traceback length,
this rate 2/3 code, the encoder has two input streams, so the delay is
tb, times the number of input streams to the encoder.For
2*tb bits.
As a result, the first
computing the bit error rate, you should ignore the first
last
2*tb bits in the original vector, x. If you do not compensate for the delay,
2*tb bits in the decoded vector, z, are just zeros. When
2*tb bits in z and the
then the BER computation is meaningless because it compares two vectors
that do not truly correspond to each other.
Therefore, replace the
%% BER Computation
% Compare x and z to obtain the number of errors and
% the bit error rate. Take the decoding delay into accou nt.
decdelay = 2*tb; % Decoder delay, in bits
[number_of_errors,bit_error_rate] = ...
biterr(x(1:end-decdelay),z(decdelay+1:end))
BER Computation se ction with the following.
1-21
Page 44

1 Gettin g Started
More About Delays
The decoding operatio n in this example incurs a delay, which means that
the output of the decoder lags the input. Timing information does not
appear explicitly in the example, and the duration of the delay depends
on the specific operations being performed. Delays occur in various
communications-related operations, including convolutional decoding,
convolutional interleaving/deinterleaving, equalization, and filtering. To find
out the duration of the delay caused by specific functions or operations, refer
to the specific documentation for those functions or operations. For example:
• The
• “Delays of Convolutional Interleavers” on page 8-9
• “Delays from Equalization” on page 12-21
• “Example: Compensating for Group Delays in Data Analysis” on page 10-3
• “Fading Channels” on page 11-7
The “Effect of Delays on Recovery of Convolutionally Interleaved Data” on
page 8-10 discussion also includes two typical ways to compensate for delays.
vitdec reference page
1-22
Page 45

Simulating a Communication System
In this section...
“Section Overview” on page 1-23
“Using BERTool to Run Simulations” on page 1-23
“Varying Parameters and Managing a Set of Simulations” on page 1-31
Section Over view
The examples so far have performed tasks associated with various components
of a communication system. In some cases, you might need to create a more
sophisticated simulation that uses one or more of these techniques:
Simulating a Communication System
• Loopingoverasetofvaluesofaspecific parameter, such as E
alphabet size, or the oversampling rate, so you can see the parameter’s
effect on the system
• Processing data in multiple smaller sets rather than in o n e large set, to
reduce the memory requirement
• Dynamically determining how much data to process to get reliable results,
instead of trying to guess at the beginning
This section discusses these issues and provides examples of constructs that
you can use in your simulations of communication systems.
b/N0
,the
Using B ERTool to Run Simulations
Communications Toolbox software includes a graphical user interface called
BERTool. Using the BERTool GUI, you can solve problems like the following:
Problem Modify the modulation example in “Modulating a Random Signal”
on page 1-4 so that it computes the BER for integer values of
0 and 7. Plot the BER as a function of
the vertical axis.
EbNo using a logarithmic scale for
EbNo between
1-23
Page 46

1 Gettin g Started
BERTool solves the problem by manag ing a series of simulations with
different values of E
, collecting the results, and creating a plot. You
b/N0
provide the core of the simulation, which in this case is a minor modification
of the example in “Modulating a Random Signal” on page 1-4.
This section introduces BERTool as well as some simulation-related issues, in
these topics:
• “Solution of Problem” on page 1-24
• “Comparing with Theoretical Results” on page 1-28
• “More About the Simulation Structure” on page 1-30
However, this section is not a comprehensive description of BERTool; for
more information about BERTool, see Chapter 5, “BERTool: A Bit Error
Rate Analysis GUI”.
Solution of Problem
This solution uses code from commdoc_gray.m as well as code from a template
file that is tailored for use with BERT ool. To view the original code in an
editor window, enter these commands in the MATLAB Command Window.
1-24
edit commdoc_gray
edit bertooltemplate
To view a completed M-file for this example, enter edit commdoc_bertool
in the MATLAB Command Window.
1. Save Template in Your Own Directory. Navigate to a directory
where you want to save your own files. Save the BERTool template
(
bertooltemplate) under the filename my_commdoc_bertool to avoid
overwriting the original template.
Also, change the first line of
my_commdoc_bertool, which is the function
declaration, to use the new filename.
function [ber, numBits] = my_commdoc_bertool(EbNo, maxNumErrs, maxNumBits)
2. Copy Setup Code Into Template. In the my_commdoc_bertool file,
replace
Page 47

Simulating a Communication System
% --- Set up parameters. --% --- INSERT YOUR CODE HERE.
with the following setup code adapted from the example in commdoc_gray.m.
% Setup
% Define parameters.
M = 16; % Size of signal constellation
k = log2(M); % Number of bits per symbol
n = 1000; % Number of bits to process
nsamp = 1; % Oversampling rate
To save time in the simulation, the code above changes the value of n from its
original value. At small values of
thousands of symbols to compute an accurate BER; at large values of
EbNo,itisnotnecessarytoprocesstensof
EbNo,
the loop structure in the template file (describ ed later) causes the simulation
to include at least 100 errors even if it must iterate several times through the
loop to accumulate that many errors.
3. Copy Simulation Code Into Template. In the
my_commdoc_bertool
file, replace
% --- Proceed with simulation.
% --- Be sure to update totErr and numBits.
% --- INSERT YOUR CODE HERE.
with the rest of the code (that is, the code following the Setup section) from
the example in
Also, type a semicolon at the end of the last line of the pasted code (the
commdoc_gray.m.
biterr
command) to suppress screen output when BERTool runs the simulation.
4. Update numBits and totErr. After the pasted code from the last step
and before the
%% Update totErr and numB its.
totErr = totErr + number_o f_e rrors;
numBits = numBits + n;
end statement from the template, insert the following code.
1-25
Page 48

1 Gettin g Started
These commands enable the function to keep track of the number of bits
processed and the number of errors detected.
5. Suppress Earlier Plots. Running multiple iterations would result in a
large number of plots, which this example suppresses for simplicity. In the
my_commdoc_bertool file, remove the lines of code that use these functions:
stem, t itle, xlabel, ylabel, figure, scat terplot, hold, legend,andaxis.
6. Omit Direct Assignment of EbNo. When BERTool invokes a simulation
function, it specifies a value of
not directly assign
pasted into
EbNo directly.
% EbNo = 10; % In dB % COMME NT OUT FOR BERTOOL
my_commdoc_bertool (within the Channel se ction) that assigns
EbNo. Therefore, remove or comment out the line that you
EbNo.Themy_commdoc_bertool function must
7. Save Simulation Function. The simulation function,
my_commdoc_bertool,iscomplete. SavethefilesothatBERToolcanuseit.
1-26
8. Open BERTool and Enter Parameters. To open BERTo ol, enter
bertool
in the MATLAB Command Window. Then click the Monte Carlo tab and
enter parameters as shown below.
Page 49

Simulating a Communication System
These parameters tell BERTool to run your simulation function,
my_commdoc_bertool,foreachvalueofEbNo in the vector 2:10 (that is, the
vector
[2345678910]). Each time the simulation runs, it continues
processing data until it detects 100 bit errors or processes a total of 1e8 bits,
whichever occurs first.
9. Use BERTool to Simulate and Plot. Click the Run button on BERTool.
BERTool begins the series of simulations and eventually reports the results
to you in a plot like the one below.
1-27
Page 50

1 Gettin g Started
1-28
To compar
and use t
e these BER results with theoretical re sults, leave BERTool open
he procedure below .
Comparing with Theoretical Results
To chec
again.
the sam
1 In the
k whether the results from the solution above are correct, use BERTool
This time, use its Theoretical panel to plot theoretical BER results in
e window as the simulation results from before. Follow this procedure:
BERTool GUI, click the Theoretical tab and enter parameters
wn below.
as sho
Page 51

Simulating a Communication System
The parameters tell BERTool to compute theoretical BER results for
16-QAM over an AWGN channel, for E
2 Click the Plot button. The resulting plot shows a solid curve for the
values in the vector 2:10.
b/N0
theoretical BER results and plotting markers for the earlier simulation
results.
ice that the plotting markers are close to the theoretical curve. It is
Not
evant that the simulation code used a Gray-coded signal constellation,
rel
like the first modulation example of this chapter (in “Modulating a
un
1-29
Page 52

1 Gettin g Started
Random Signal” on page 1-4). The theoretical performance results assume a
Gray-coded signal constellation.
To continue exploring BERTool, you can select the Fit check box to fit a curve
to the simulation data, or set Confidence Level to a numerical value to
includeconfidenceintervalsintheplot. SeealsoChapter5,“BERTool: ABit
Error Rate Analysis GUI” for more about BERTool.
More About the Simulation Structure
Looking more closely at the simulation function in this example, you might
make a few observations about its structure, and particularly about the loop
marked with the comments
% Simulate until number o f errors exceeds maxNumErrs
% or number of bits processed exceeds maxNumBits.
The loop structure means that the simulation processes some data,
accumulates bit errors, and then decides whether to repeat the process with
another set of data. The advantage of this approach is that you do not have to
guess in advance how much data you need to process to obtain an accurate
BER estimate. This is very useful when your series of simulations spans a
large E
data processing to maintain the same level of accuracy in the BER estimate.
Another advantage of this approach is that you avoid memory problems
caused by excessively large data sets.
range because simulations at higher values of Eb/N0require more
b/N0
1-30
However, a potential complication from dividing large data sets into a series
of smaller data sets that you process in a loop is that you might need to take
steps to ensure the continuity of computations from one iteration to the
next. For example, continuity is important when the simulation includes
convolutional decoding, convolutional interleaving/deinterleaving, continuous
phase modulation, fading channels, and equalization. To learn more about
how to maintain continuity, see the examples in
• The
• The
vitdec reference page
viterbisim demonstration function (designed to be used with
BERTool)
• The
muxdeintrlv reference page
Page 53

Simulating a Communication System
• The mskdemod reference page
• “Fading Channels” on page 11-7
• “Equalizing Using a Loop” on page 12-22
• “Equalizing in Continuous Operation Mode” on page 12-30
If you divide your data set into a series of very small data sets, then the large
number of function calls might make the simulation slow. You can use the
Profiler tool in MATLAB to help you make your code faster.
Varying Parameters and Managing a Set of Simulations
Acommontaskinanalyzingacommunication system is to vary a parameter,
possibly a parameter other than E
This section addresses the following problem:
Problem Modify the modulation example in “Modulating a Random Signal”
on page 1-4 so that it computes the BER for alphabet sizes (
32 and for integer values of
the BER as a function of
EbNo between 0 and 7. For each value of M,plot
EbNo us ing a logarithmic scale for the vertical axis.
, and find out how the system responds.
b/N0
M) of 4, 8, 16, and
The earlier section (“Modulating a Random Signal” on page 1-4) presented
a model of the system that computes the BER for specific values of
EbNo. Therefore, the only remaining task is to vary M and EbNo and collect
M and
multiple error ra t es. For simplicity, this solutio n uses the same number of
bits for each value of
M and EbNo, unlike the example in “Using BERTool
to Run Simulations” on page 1-23.
Solution of Problem
This solution modifies the code from “Modulating a Random Signal” on page
1-4 by introducing and exploiting a nested loop structure. To view the original
code in an editor window, enter the following command in the MA TLAB
Command Window.
edit commdoc_mod
1-31
Page 54

1 Gettin g Started
To view a completed M-file for this example, enter edit commdoc_mcurves
in the MATLAB Command Window.
1. Define the Set of Values for the Parameter. At the beginning of
the s cript, introduce variables that list all the values of
M and EbNo that the
problem requires. Also, preallocate space for error statistics corresponding
to each combination of
%% Ranges of Variables
Mvec = [4 8 16 32]; % Values of M to consider
EbNovec = [0:7]; % Values of EbNo to consider
%% Preallocate space for results.
number_of_errors = zeros(length(Mvec),length(EbNovec));
bit_error_rate = zeros(length(Mvec),length(EbNovec));
M and EbNo.
2. Introduce a Loop Structure. After Mvec and EbNovec are defined and
space is preallocated for statistics, all the subsequent commands can go inside
a loop, as illustrated below.
1-32
%% Simulation loops
for idxM = 1:length(Mvec)
for idxEbNo = 1:length(EbNovec)
% OTHER COMMANDS
end % End of loop over EbNo values
end % End of loop over M values
3. Inside the Loop, Parameterize as Appropriate. The M-code
from
commdoc_gray.m specifies fixed values of M and EbNo, while this problem
requires using a different value for each iteration of the loop. Therefore,
change the definitions of
Channel section) as follows.
M = Mvec(idxM); % Size of signal constellation
EbNo = EbNovec(idxEbNo); % In dB
M (within the Setup section) and EbNo (within the
Page 55

Simulating a Communication System
Also, the original M-code returns scalar values for the BER and number of
errors, while it makes sense in this case to save the whole array of error
statistics instead of overwriting the variables in each iteration. Therefor e,
replace the
%% BER Computation
% Compare x and z to obtain the number of errors and
% the bit error rate.
[number_of_errors(idxM,idxEbNo),bit_error_rate(idxM,idxEbNo)] = ...
BER Computation section with the following.
biterr(x,z);
Note An earlier step preallocated space for the matrices number_of_errors
and bit_ erro r_rate. While not strictly necessary, this is a better MATLAB
programming practice than expanding the matrices’ size in each iteration. To
learn more, see “Preallocating Arrays” in the MATLAB documentation set.
4. Suppress Earlier Plots. Runn i ng multiple iterations would r esult in a
large number of plots, which this example suppresses for simplicity. Remove
the lines of code that use these functions:
figure, scatterplot, hold, legend,andaxis.
stem, title, xlabel, ylabel,
5. Create BER Plot. The
semilogy function in MATLAB creates a plot with
a logarithmic scale in the vertical axis. The following commands, placed just
before the end of the loop over
M values, create the desired BER plot curve by
curve during the simulation.
%% Plot a Curve.
markerchoice = '.xo*';
plotsym = [markerchoice(idxM) '-']; % Plotting style for this curve
semilogy(EbNovec,bit_error_rate(idxM,:),plotsym); % Plot one curve.
drawnow; % Update the plot instead of waiting until the end.
hold on; % Make sure next iteration does not remove this curve.
You might also want to customize the plot at the end by adding this code
after the end of both loops.
%% Complete the plot.
title('Performance of M-QAM for Varyi ng M');
xlabel('EbNo (dB)'); ylabel('BER');
1-33
Page 56

1 Gettin g Started
legend('M = 4','M = 8','M = 16','M = 32',...
'Location','SouthWest');
6. R un the En ti re Script. The script creates a plot like the one shown in
the following figure.
1-34
Page 57
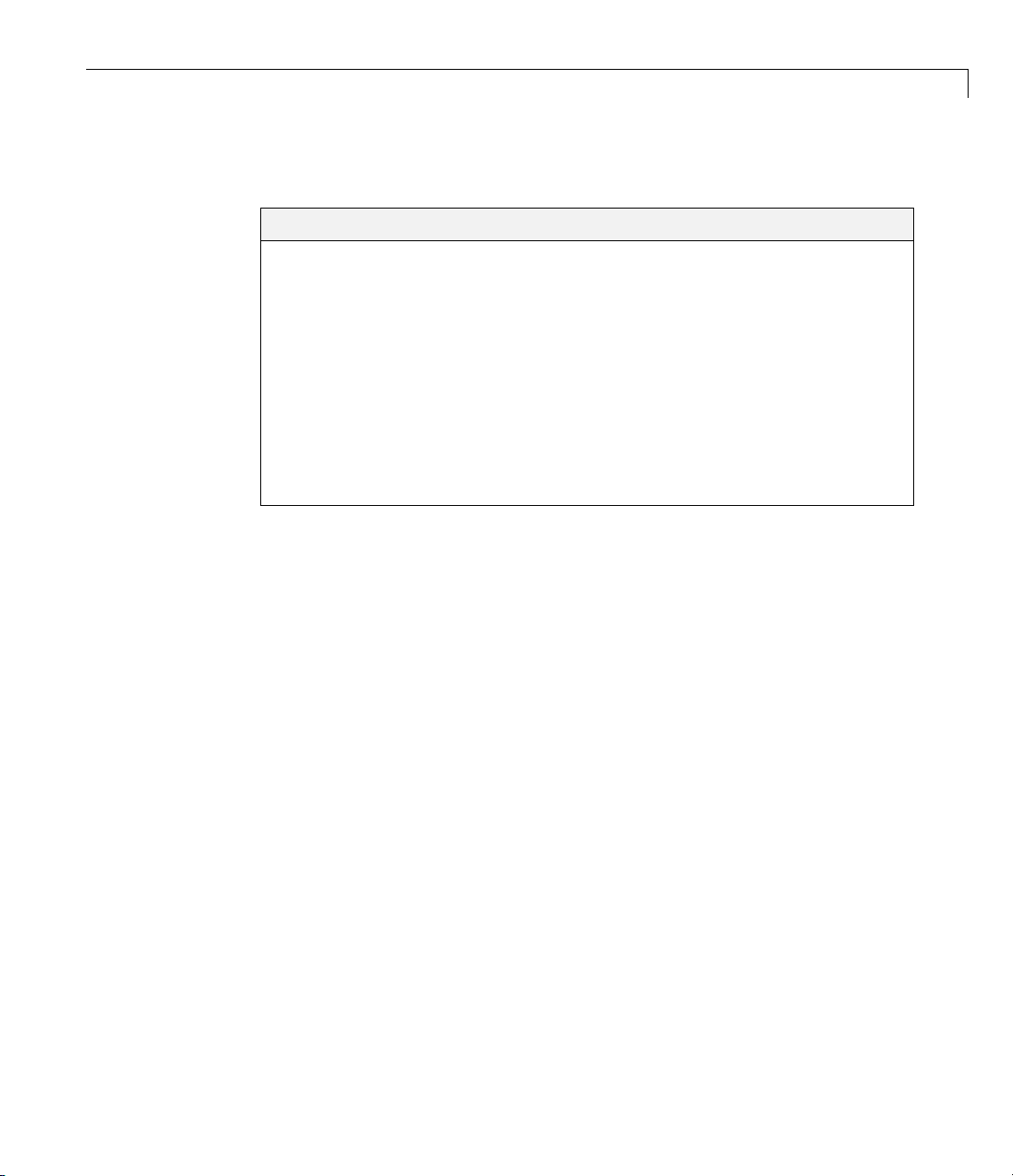
Running Simulations U sing the Error Rate Test Console
Running Simulation s Using the Error Rate Test Console
In this section...
“Loading the Error Rate Test Console” on page 1-35
“Running the Simulation and Obtaining Results” on page 1-36
“Generating an Error Rate Results Figure Window” on page 1-37
“Running the Simulation Using Parallel Computing Toolbox Software”
on page 1-39
“Creating a System File and Attaching It to the Test Console” on page 1-40
“Configuring the Error Rate Test Console and Running a Simulation” on
page 1-45
“Optimizing Your System for Faster Simulations” on page 1-47
Loading the Error Rate Test Console
The Error Rate Test Console is a simulation tool for obtaining error rate
results. The M ATL AB™ software includesadatafileforusewiththeError
Rate Test Console. You use this data file while performing the steps of this
tutorial. The data file contains an Error Rate Test Console object with an
attached Gray coded modulation system. This example Error Rate Test
Console is configured to run bit error rate simulations for various EbNo and
modulation order, or M, values.
1 Load the file containing the Error Rate Test Console and attached Gray
coded modulation system. At the MATLAB command line, enter:
load GrayCodedModulationTester
2 Examine the test console by displaying its properties. At the MATLAB
command line, enter:
testConsole
MATLAB returns the following output:
testConsole =
1-35
Page 58

1 Gettin g Started
Description: 'Error Rate T est Console'
SystemUnderTestName: 'GrayCodedModulation2'
IterationMode: 'Combinatorial'
SystemResetMode: 'Reset at new simu lation point'
SimulationLimitOption: 'Number of errors or transm issi ons'
TransmissionCountTestPoint: 'DemodBitErrors'
MaxNumTransmissions: 100000000
ErrorCountTestPoint: 'DemodBitErrors'
MinNumErrors: 100
Notice that SystemUnderTest is a Gray coded modulation system. Because
the SimulationLimitOption is ’Number of error or transmission’, the
simulation runs until reaching 100 errors or 1e8 bits.
Running the Simulation and Obtaining Results
In this example, you use tic and tok to compare simulation run time.
1 Run the simulation, using the tic and toc commands to measure
simulation time. At the MATLAB command line, enter:
1-36
tic; run(testConsole); toc
MATLAB returns output similar to the following:
Running simulations...
Elapsed time is 275.671536 seconds.
2 Obtain the results of the simulation using the getResults method by
typing the following at the MATLAB command line:
grayResults = getResults(testConsole)
MATLAB returns the following output:
grayResults =
TestConsoleName: 'commtest.ErrorRate'
SystemUnderTestName: 'GrayCodedModulation2'
IterationMode: 'Combinatorial'
TestPoint: 'DemodBitErrors'
Metric: 'ErrorRate'
Page 59

Running Simulations U sing the Error Rate Test Console
TestParameter1: 'EbNo'
TestParameter2: 'None'
In the next section, you use the results object to o btain error values and plot
error rate curves.
Generating an Error Rate Results Figure Window
The semilogy method generates a figure containing error rate curves for
the demodulator bit error test point (DemodBitErrors) of the Gray coded
modulation system. The next figure shows an Error Rate and E
curve for the demodulator bit errors test point. This test point collects bit
errors by comparing the bits the system transmits with the bits it receives.
Thex-axisdisplaysthe
TestParameter1 property of grayResults,which
contains EbNo values.
1 Generate the figure by entering the following at the MATLAB command
line:
over N
b
o
semilogy(grayResults)
This script g enerates the foll owing figure.
1-37
Page 60
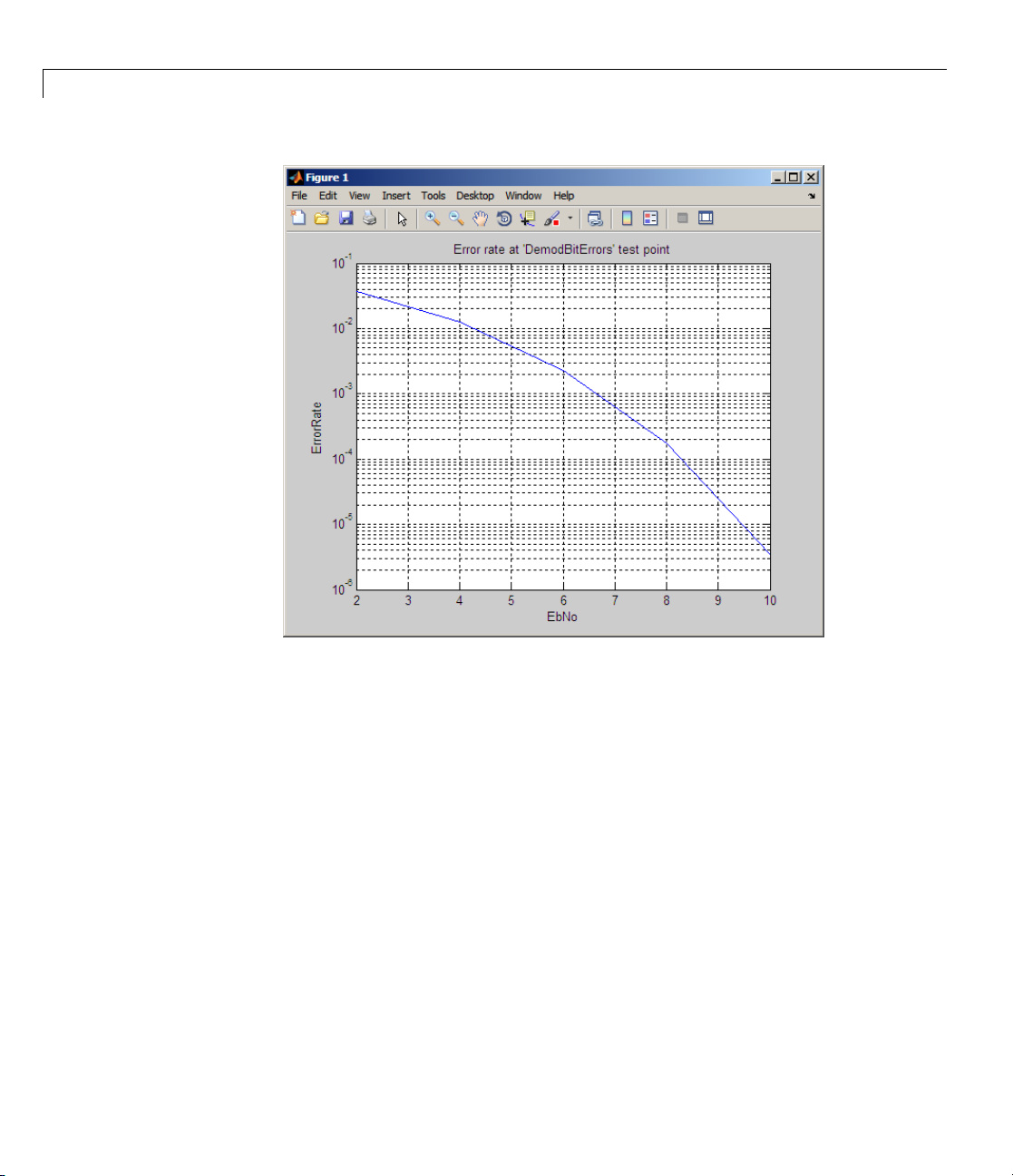
1 Gettin g Started
1-38
2 Set the TestParameter2 property to M. At the MATLAB command line,
enter:
grayRe
sults.TestParameter2 = 'M'
Previously, the simulation ran for multiple modulation order (M) values.
Thex-axisdisplaysthe
TestParameter1 property of grayResults,which
contains EbNo values. Although the simulation ran for multiple M values,
this run contains data for M=2.
3 Plot
multiple error rate curves by entering the following at the MATLAB
and line.
comm
semilogy(grayResults)
s script genera tes the following figure.
Thi
Page 61

Running Simulations U sing the Error Rate Test Console
Running the Simulation Using Parallel Computing Toolbox Software
If you have a Parallel Computing Toolbox™ user license and you create a
matlabpool, the test console runs the simulation in parallel. This approach
reduces the processing time.
Note If you do not have a Parallel Computing Toolbox user license you are
unable to perform this section of the tutorial.
1 If you have a Parallel Computing Toolbo x license, run the following
command to start your default matlabpool:
matlabpool
1-39
Page 62

1 Gettin g Started
Ifyouhaveamulticorecomputer,then the default matlabpool uses the
cores as workers.
2 Using the workers, run the simulation. At the MATLAB command line,
enter:
tic; run(testConsole); toc
MATLAB returns output similar to the following:
4 workers available for p aral lel computing. Simulations ...,
will be distributed among these worke rs.
Running simulations...
Elapsed time is 87.449652 seconds.
Notice that the simulation runs more than three times as fast than in the
previous section.
1-40
Creating a System File and Attaching It to the Test Console
In the previous sections, you used an existingGraycodedmodulatorsystem
file to generate data. In this section, you create a system file and then attach
it to the Error Rate Test C onsole.
This example outlines the tasks necessary for converting legacy code to a
system file you can attach to the Error Rate Test Console. Use commdoc_gray
as the starting point for your system file. The files you use in this section of
the tutorial reside in the following folder:
matlab\help\toolbox\comm\examples
1 Copy the system basic API template, SystemBasicTemplate.m, as
MyGrayCodedModulation . m.
2 Rename the references to the system name in the file. First, rename the
system definition by changing the class name to MyGrayCodedModulation.
Replace the following lines, lines 1 and 2, of the file:
classdef SystemBasicTemplate < testconsole.SystemBasicAPI
Page 63

Running Simulations U sing the Error Rate Test Console
%SystemBasicTemplate Template for creating a syst em
with these lines:
classdef MyGrayCodedModulation < testconsole.SystemBasicAPI
%MyGrayCodedModulation Gray coded modulation system
3 Rename the constructor by replacing:
function obj = SystemBasi cTemplate
%SystemBasicTemplate Construct a system
with
function obj = MyGrayCode dModulation
%MyGrayCodedModulation Construct a Gray coded mod ulat ion system
4 Enter a description for your system. Update the obj.Description
parameter with the following information:
obj.Description = 'Gray c oded modulation';
Becauseyouarenotusingthereset and setup methods for this system,
leave these methods empty.
5 Copy lines 12–44 from commdoc_gray.m to the body of the run method.
6 Copy Lines 54–57 from commdoc_gray.m to the body of the ru n method.
7 Change EbNo to a test parameter. This change allows the system to obtain
EbNo values from the Error Rate Test Console. As a test parameter, EbNo
becomes a variable, which allows simulations to run for different values.
Locate the following line of syntax in the file:
EbNo = 10; % In dB
Replace it with:
EbNo = getTestParameter(obj,'EbNo');
8 Add modulation order, M, as a new test parameter for the simulation.
Locate the following syntax:
1-41
Page 64

1 Gettin g Started
M = 16; % Size of signal constellation
Replace it with:
M = getTestParameter(obj,'M');
9 Register the test parameters to the test console.
• Declare EbNo as a test parameter by placing the following line of code in
the body of the
registerTestParameter(obj,'EbNo',0,[-50 50]);
register method:
The parameter defaults to 0 dB and can take values between -50 dB
and 50 dB.
• Declare M as a test parameter by placing the following line of code in
the body of the
registerTestParameter(obj,'M',16,[2 1024]);
register method:
1-42
The parameter defaults to 16 QAM Modulation and can take values
from 2 through 1024.
10 AddEbNoandMtothetestparameterslistinthe
MyGrayCodedModulationF ile file.
% Test Parameters
properties
EbNo = 0;
M=16;
end
This adds EbNo and M to the possible test parameters list. EbNo defaults
to a value of 0 dB. M defaults to a value of 16.
11 Define test probe locations in the run method. In this example, you are
calculating end-to-end error rate. This calculation requires transmitted
bitsandreceivedbits. Addoneprobefor obtaining transmitted bits and
one probe for received bits.
• Locate the random binary data stream creation code by searching for
the following lines:
Page 65

Running Simulations U sing the Error Rate Test Console
% Create a binary data stream as a column vector.
x = randi([0 1],n,1); % Random binary data stream
• Add a probe, TxBits, after the random binary data stream creation:
% Create a binary data stream as a column vector.
x = randi([0 1],n,1); % Random binary data stream
setTestProbeData(obj,'TxBits',x);
This code sends the random binary data stream, x,totheprobeTxBits.
• Locate the demodulation code by searching for the following lines:
% Demodulate signal using 16-QAM.
z = demodulate(hDemod,yRx);
• Add a probe, RxBits, after the demodulation code.
% Demodulate signal using 16-QAM.
z = demodulate(hDemod,yRx);
setTestProbeData(obj,'RxBits',z);
This code sends the binary received data stream, z,totheprobeRxBits.
12 Register the test probes to the Error Rate Test Console, making it
possible to obtain data from the system. Add these probes to the function
register(obj) by adding two lines to the register method:
function register(obj)
% REGISTER Register the sy ste m with a test console
% REGISTER(H) registers te st parameters and test probes of the
% system, H, with a test console.
registerTestParameter(obj,'EbNo',0,[-50 50]);
registerTestParameter(obj,'M',16,[2 1024]);
registerTestProbe(obj,'TxBits')
registerTestProbe(obj,'RxBits')
end
13 Save the file. The file is ready for use with the system.
1-43
Page 66

1 Gettin g Started
14 Create a Gray coded modulation system. At the MATLAB command line,
enter:
mySystem = MyGrayCodedModulation
MATLAB returns the following output:
mySystem =
Description: 'Gray coded modulation'
EbNo: 0
M: 16
15 Create an Error Rate Test Console by entering the following at the
MATLAB command line:
testConsole = commtest.ErrorRate
TheMATLABsoftwarereturnsthefollowingoutput:
1-44
testConsole =
Description: 'Error Rate T est Console'
SystemUnderTestName: 'commtest.MPSKSystem'
FrameLength: 500
IterationMode: 'Combinatorial'
SystemResetMode: 'Reset at new simu lation point'
SimulationLimitOption: 'Number of transmissions'
TransmissionCountTestPoint: 'Not set'
MaxNumTransmissions: 1000
16 Attach the system file MyGrayCodedModulation to the error rate test
console by entering the following at the MATLAB command line:
attachSystem(testConsole, mySystem)
Page 67

Running Simulations U sing the Error Rate Test Console
Configuring the Error Rate Test Console and Running aSimulation
Configure the Error R ate Test Console to obtain error rate metrics from the
attached sys tem. The Error Rate Test Console defines metrics as number of
errors, number of transmissions, and error rate.
1 At the MATLAB command line, enter:
registerTestPoint(testConsole, 'DemodBitErrors', 'TxBits', 'RxBits');
This line defines the test point, DemodBitErrors, and compares bits from
theTxBitsprobetothebitsfromtheRxBitsprobe. TheErrorRateTest
Console calculated metrics for this test point.
2 Configure the Error Rate Test Console to run simulations for EbNo values.
Start at 2 dB and end at 10 dB, with a step size of 2 dB and M values of 2,
4, 8, and 16. At the MATLAB command line, enter:
setTestParameterSweepValues(testConsole, 'EbNo', 2:2:10)
setTestParameterSweepValues(testConsole, 'M', [2 4 8 16])
3 Set the simulation limit to the number of transmissions.
testConsole.SimulationLimitOption = 'Number of transmissions'
4 Set the maximum number of transmissions to 1000.
testConsole.MaxNumTransmissions = 1000
5 Configure the Error Rate Test Console so it uses the demodulator bit error
test point for determining the number of transmitted bits.
testConsole.TransmissionCountTestPoint = 'DemodBitErrors'
6 Run the simulation. At the MATLAB command line, enter:
run(testConsole)
7 Obtain the results of the simulation. At the MATLAB command line, enter:
grayResults = getResults(testConsole)
1-45
Page 68

1 Gettin g Started
8 To obtain more accurate results, run the simulations for a given minimum
number of errors. In this example, you also limit the number of simulation
bits so that the simulations do not run indefinitely. At the MATLAB
command line, enter:
testConsole.SimulationLimitOption = 'Number of errors
or transmissions';
testConsole.MinNumErrors = 100;
testConsole.ErrorCountTestPoint = 'DemodBitErrors';
testConsole.MaxNumTransmissions = 1e8;
testConsole
9 Run the simulation by entering the following at the MATLAB command
line.
run(testConsole);
10 Generate the new results in a Figure window by entering the following at
the MATLAB command line.
1-46
grayResults = getResults(testConsole);
grayResults.TestParameter2 = 'M'
semilogy(grayResults)
This script g enerates the foll owing figure.
Page 69
Running Simulations U sing the Error Rate Test Console
Optimizing Your System for Faster Simulations
In the previous example, the system only utilizes the run method. Every time
the object calls the
the object sets the M and SNR values. This time interval includes: obtaining
numbers from the test console, calculating intermediate values, and setting
other variables.
In contrast, the system basic API provides a
Rate Test Console configures the system once for each simulation point.
This change relieves the
parameters, thus reducing simulation time.
The
run method o f a system also creates a new modulator (hMod) and a new
demodulator (hDemod). Creating a modulator or a demodulator is much more
time consuming than just modifying a property of these objects. Create a
modulator and a demodulator object once when the system is constructed.
run method, which is every 3e4 bits for this simulation,
setup method where the Error
run method from getting and setting simulation
1-47
Page 70

1 Gettin g Started
Then, modify its properties in the setup method of the system to speed up
the simulations.
1 SavethefileMyGrayCodedModulationas
MyGrayCodedModulationOptimized .
2 In the MyG rayC odedModulationO ptimi zed file, replace the constructor
name and the class definition name.
• Locate the following lines of code:
classdef MyGrayCodedModulation < testconsole.SystemBasicAPI
%MyGrayCodedModulation Gray coded modulation system
• Replace them with:
classdef MyGrayCodedModulationOptimized < testconsole.SystemBasicAPI
%MyGrayCodedModulationOptimized Gray coded modulation system
3 In the MyGrayC odedModulationOptimized file, replace the constructor
name.
1-48
• Locate the following lines of code:
function obj = MyGrayCode dModulation
%MyGrayCodedModulation Construct a Gray coded mod ulat ion system
• Replace them with:
function obj = MyGrayCode dModulationOptimized
%MyGrayCodedModulationOptimized Construct a Gray
%coded modulation system
4 Move the overs am pling rate definition from the run method to the setup
method.
nSamp = 1; % Oversampling rate
5 Move code r
from the
r
elated to setting M to the
un
method and paste to the setup method.
M = getTestParameter(obj,'M');
k = log2(M); % Number of bits per symbol
setup method. Cut the following lines
Page 71

Running Simulations U sing the Error Rate Test Console
6 In the setup method, replace M with the object property M.
obj.M = getTestParameter(obj,'M');
k = log2(obj.M); % Number of bits per symbol
This change provides access to the M value from the run method.
7 Move code related to setting EbNo to the setup method. Cut the following
lines from the
EbNo = getTestParameter(obj,'EbNo');
SNR = EbNo + 10*log10(k) - 10*log10(nSamp);
8 In the setup method, replace EbNo with the object property EbNo. T his
run method and paste to the setup method.
change provides access to the EbNo value from the run method.
obj.EbNo = getTestParameter(obj,'EbNo');
SNR = obj.EbNo + 10*log10(k) - 10*log10(nSamp);
9 Create a new internal variable called SNR to store the calculated SNR
value. Define the SNR property as a private property; it is not a test
parameter. With this change, the system calculates SNR in the
setup
method and accesses it from the run method. Add the following lines of
code the system file, after the Test Parameters block.
%=================================================================
% Internal variables
properties (Access = private)
SNR
end
10 In the setup method, replace SNR with object property SNR.
obj.SNR = obj.EbNo + 10* log1 0(k) - 10*log10(nSamp);
11 In the run method, replace M with obj.M and SN R with obj.SNR.
hMod = modem.qammod(obj.M); % Create a -QAM modulator
yNoisy = awgn(yTx,obj.SNR,'measured');
1-49
Page 72

1 Gettin g Started
Notice that the run method creates the QAM modulator and demodulator.
12 Move the QAM modulator and demodulator creation out of the run method.
Move following lines from the
run method to the constructor (i.e the m e thod
named MyGrayCodedModulationOptimized)
%% Create Modulator and D emod ulator
hMod = modem.qammod(obj.M); % Create a 16-QAM modulator
hMod.InputType = 'Bit'; % Accept bits as inputs
hMod.SymbolOrder = 'Gray'; % Accept bits as inputs
hDemod = modem.qamdemod(hMod); % Create a 16-QAM based on
% the modulator
13 Create private properties called Modulator and Demodulator to store the
modulator and demodulator objects.
% Internal variables
properties (Access = priva te)
SNR
Modulator
Demodulator
end
1-50
14 In the constructor method, replace hMod and hDemod with the object
property
15 In the run method, replace hMod and hDemod with o bject properties
obj.Modulator and obj.Demodulator.
16 Locate the setup region of the file.
obj.Modulator and obj.Demodulator respectively.
obj.Modulator = modem.qammod(obj.M); % Create a 16-QAM modulator
obj.Modulator.InputType = 'Bit'; % Accept bits as inputs
obj.Modulator.SymbolOrder = 'Gray'; % A ccept bits as inputs
obj.Demodulator = modem.qamdemod(obj.Modulator);
y = modulate(obj.Modulator,x);
z = demodulate(obj.Demodulator,yRx);
function setup(obj)
% SETUP Initialize the sys tem
Page 73

Running Simulations U sing the Error Rate Test Console
% SETUP(H) gets current te st parameter value(s) from the test
% console and initializes system, H, accordingly.
17 Set the M value of the modulator and demodulator by adding the following
lines of code to the setup.
obj.Modulator.M = obj.M;
obj.Demodulator.M = obj.M;
18 Save the file.
19 Create an optimized system. At the MATLAB command line, enter:
myOptimSystem = MyGrayCodedModulationOptimized
20 Create an Error Rate Test Console and attach the system to the test
console. At the MAT LAB command line, type:
testConsole = commtest.ErrorRate(myOptimSystem)
21 At the MATLAB command line, type:
registerTestPoint(testConsole, 'DemodBitErrors',
'TxBits', 'RxBits');
This line defines the test point, DemodBitErrors, and compares bits from
theTxBitsprobetothebitsfromtheRxBitsprobe. TheErrorRateTest
Console calculated metrics for this test point.
22 Configure the Error Rate Test Console to run simulations for EbNo values.
Start at 2 dB and end at 10 dB, with a step size of 2 dB and M values of 2,
4, 8, and 16. At the MATLAB command line, type:
setTestParameterSweepValues(testConsole, 'EbNo', 2:2:10)
setTestParameterSweepValues(testConsole, 'M', [2 4 8 16])
23 Configure the Error Rate Test Console so it uses the demodulator bit error
test point for determining the number of transmitted bits.
testConsole.TransmissionCountTestPoint = 'DemodBitErrors'
1-51
Page 74

1 Gettin g Started
24 To obtain more accurate results, run the simulations for a given minimum
number of errors. In this example, you also limit the number of simulation
bits so that the simulations do not run indefinitely. At the MATLAB
command line, type:
testConsole.SimulationLimitOption = 'Number of errors
or transmissions';
testConsole.MinNumErrors = 100;
testConsole.ErrorCountTestPoint = 'DemodBitErrors';
testConsole.MaxNumTransmissions = 1e8;
testConsole
25 Run the simulation. At the MATLAB command line, type:
tic; run(testConsole); toc
MATLAB returns the following information:
Running simulations...
Elapsed time is 240.459286 seconds.
1-52
Notice that these optimization changes reduce the simulation run time
about 10%.
26 Generate the new results in a Figure window. At the MATLAB command
line, type:
grayResults = getResults(testConsole);
grayResults.TestParameter2 = 'M'
semilogy(grayResults)
This script g enerates the foll owing figure.
Page 75

Running Simulations U sing the Error Rate Test Console
1-53
Page 76

1 Gettin g Started
Learning More
In this section...
“Online Help” on page 1-54
“Demos” on page 1-54
“The MathWorks Online” on page 1-54
Online Help
To find online documentation, select Product Help from the Help menu
in the MATLAB desktop. This launches the Help browser. For a more
detailed explanation of any of the topics covered in this chapter, see the
Communications Toolbox documentation in the left pane of the Help brow ser.
Besides this chapter, the online documentation set contains these components:
• A chapter about each of the core areas o f functionality of the toolbox (such
as error-control coding, modulation, and equalizers)
1-54
• A reference page for each function in the toolbox, indexed alphabetically
and by category
You can also use the online index of examples to find code examples that are
relevant for the tasks you want to do.
Demos
To see more Communications Toolbox examples, select Demos from
the Help me nu in the MATLAB desktop. This opens the Help browser
to the demonstration area. Double-click Toolboxes and then select
Communications to list the available demos.
The MathWorks Online
To read the Communications Toolbox documentation on the MathWorks Web
site, point your Web browser to
http://www.mathworks.com/access/helpdesk/help/toolbox/comm/
Page 77

Other res ources for the Communications Toolbox product are available at
http://www.mathworks.com/products/communications/
Learning More
1-55
Page 78

1 Gettin g Started
1-56
Page 79

Signal Sources
Every communication system has one or more signal sources. This chapter
describes h ow to use Communications Toolbox to generate random signals,
which are useful for simulating noise, errors, or signal sources. The sections
are as follows.
• “White Gaussian Noise” on page 2-2
• “Random Symbols” on page 2-3
• “Random Integers” on page 2-4
• “Random Bit Error Patterns” on page 2-5
2
For more random number g enerators, see the online reference pages for the
built-in MATLAB functions
rand and randn.
Page 80

2 Signal Sources
White Gaussian Noise
The wgn function generates random matrices using a w hite Gaussian noise
distribution. You specify the powe r of the noise in either dBW (decibels
relative to a watt), dBm, or linear units. You can generate either real or
complex noise.
For example, the command below generates a column vector of length 50
containing real white Gaussian noise whose power is 2 dBW. The function
assumes that the load impedance is 1 ohm.
y1 = wgn(50,1,2);
To generate complex white Gaussian noise whose power is 2 watts, across a
load of 60 ohms, use either of the commands below. The ordering of the string
inputs does not matter.
y2 = wgn(50,1,2,60,'complex','linear');
y3 = wgn(50,1,2,60,'linear','complex');
2-2
To send a signal through an additive white Gaussian noise channel, use the
awgn function. See “AWGN Channel” on page 11-3 for more information.
Page 81

Random Symbols
The randsr c function generates random matrices whose entries are chosen
independently from an alphabet that you specify, with a distribution that you
specify. A special case generates bipolar matrices.
For example, the command below generates a 5-by-4 matrix whose entries
are independently chosen and uniformly distributed in the set {1,3,5}. (Your
results might vary because these are random numbers.)
a = randsrc(5,4,[1,3,5])
a=
Random Symbols
3515
1533
1331
1135
3113
If you want 1 to be twice as likely to occur as either 3 or 5, use the command
below to prescribe the skewed distribution. The third input argument has two
rows, o ne of which indicates the possible values of
b and the other indicates
the probability of each value.
b = randsrc(5,4,[1,3,5; .5,.25,.25])
b=
3351
1111
1511
1313
3131
2-3
Page 82

2 Signal Sources
Random Integers
The randint function generates random integer matrices whose entries are in
a rang e that yo u specify. A special case generates random binary matrices.
For example, the command below generatesa5-by-4matrixcontaining
random integers between 2 and 10.
c = randint(5,4,[2,10])
c=
2446
45105
97108
5523
103410
If your desired range is [0,10] instead of [2,10], you can use either of the
commands below . They produce different numerical results, but use the same
distribution.
2-4
d = randint(5,4,[0,10]);
e = randint(5,4,11);
Page 83

Random Bit Error Patterns
The randerr function generates matrices w ho se entries are either 0 or 1.
However, its options are different from those of
is meant for testing error-control coding. For example, the command below
generates a 5-by-4 binary matrix, where each row contains exactly one 1.
f = randerr(5,4)
f=
0010
0010
0100
1000
0010
You might use such a comm and to perturb a binary code that consists of five
four-bit codewords. Adding the random matrix
2) introduces exactly one error into each co dewo rd.
Random Bit Error Patterns
randint,becauseranderr
f to your code matrix (modulo
On the other hand, to perturb each codeword by in trod u cing one error with
probability 0.4 and two errors with probability 0.6, use the command below
instead.
% Each row has one '1' with probability 0.4, otherwise two '1's
g = randerr(5,4,[1,2; 0.4,0.6])
g=
0110
0100
0011
1010
0110
Note The probability matrix that is the third argument of randerr affects
only the number of 1s in each row, not their placement.
2-5
Page 84

2 Signal Sources
As another application, you can generate an equiprobable binary 100-element
column vector using any of the commands below. The three commands
produce different numerical outputs, but use the same distribution.The
third input arguments vary according to each function’s particular way of
specifying its behavior.
binarymatrix1 = randsrc(100,1,[0 1]); % Possible values are 0,1.
binarymatrix2 = randint(100,1,2); % T wo possible values
binarymatrix3 = randerr(100,1,[0 1;.5 .5]); % No 1s, or one 1
2-6
Page 85

Performance Evaluation
Simulating a communication system often involves analyzing its response to
the noise inherent in real-world components, studying its behavior using
graphical means, and determining whether the resulting performance meets
standards of acceptability. The sections in this chapter are as follows.
• “Performance Results via Simulation” on page 3-2
• “Performance Results via the Semianalytic Technique” on page 3-5
• “Theoretical Performance Results” on page 3-10
• “Error Rate Plots” on page 3-14
3
• “Eye Diagrams” on page 3-20
• “Scatter Plots” on page 3-21
• “Adjacent Channel Power Ratio (ACPR) Measurements” on page 3-34
• “EVM Measurements” on page 3-44
• “MER Measurements” on page 3-45
• “Selected Bibliography for Performance Evaluation” on page 3-46
Because error analysis is often a component of communication system
simulation, other portions of this guide provide additional examples.
Page 86

3 Performance Evaluation
Performance Results via Simulation
In this section...
“Section Overview” on page 3-2
“Using Simulated Data to Compute Bit and Symbol Error Rates” on page 3-2
“Example: Computing Error Rates” on page 3-3
“Comparing Symbol Error Rate and Bit Error Rate” on page 3-4
Section Over view
One way to compute the bit error rate or symbol error rate for a communication
system is to simulate the transmission of data messages and compare all
messages before and after transmission. The simulation of the communication
system components using Communications Toolbox is covered in other parts
of this guide. This section describes how to compare the data messages that
enter and leave the simulation.
3-2
Another example of computing performance results via simulation is in “Curve
Fitting for Error Rate Plots” on page 3-15 in the discussion of curve fitting.
Using Simulated Data to Compute Bit and Symbol Error Rates
The biterr function compares two sets of data and computes the number of
bit errors and the bit error rate. The
data and computes the number of symbol errors and the symbol error rate. An
error is a discrepancy between corresponding points in the two sets of data.
Of the two sets of data, typically one represents messages entering a
transmitter and the other represents recovered messages leaving a receiver.
You might also compare data entering and leaving other parts of your
communication system, for e xample, data entering an encoder and data
leaving a decoder.
If your communication system uses several bits to represent one symbol,
counting bit errors is different from counting symbol errors. In e ither the bit-
symerr function compares two s ets of
Page 87

Performance Results via Simulation
or symbol-counting case, the error rate is the number of errors divided by the
total number (of bits or symbols) transmitted.
Note To ensure an accurate error rate, you should typically simulate enough
data to produce at least 100 errors.
If the error rate is very small (for example, 10-6or smaller), the semianalytic
technique might compute the result more quickly than a simulation-only
approach. See “Performance Results v ia the Semianalytic Technique” on page
3-5 for more information on how to use this technique.
Example: Computing Error Rates
The script below uses the symerr function to compute the symbol error rates
for a noisy linear block code. After artificially adding noise to the encoded
message, it compares the resulting noisy code to the original code. Then it
decodes and compares the decoded message to the original one.
m = 3; n = 2^m-1; k = n-m; % Prepare to use Hamming code.
msg = randint(k*200,1,2); % 200 messa ges of k bits each
code = encode(msg,n,k,'hamming');
codenoisy = rem(code+(rand(n*200,1)>.95),2); % Add noise.
% Decode and correct some errors.
newmsg = decode(codenoisy,n,k,'hamming');
% Compute and display symbol error rates.
[codenum,coderate] = symerr(code,codenoisy);
[msgnum,msgrate] = symerr(msg,newmsg);
disp(['Error rate in the received code: ',num2str(coderate)])
disp(['Error rate after de coding: ',num2str(msgrate)])
The output is below. The error rate decreases after decoding because the
Hamming decoder corrects some of the errors. Your results might vary
because this example uses random numbers.
Error rate in the received code: 0.054286
Error rate after decoding: 0.03
3-3
Page 88

3 Performance Evaluation
Comparing Symbo
In the example ab
each symbol is a b
symbol errors a
a = [1 2 3]'; b = [1 4 4]';
format rat % Display fractions instead of decimals.
[snum,srate] = symerr(a,b)
[bnum,brate] = biterr(a,b)
The output is
snum =
2
srate =
2/3
bnum =
5
ove, the symbol errors and bit errors are the same because
it. The commands below illustrate the difference between
nd bit errors in other situations.
below.
l Error Rate and Bit Error Rate
3-4
brate =
5/9
is 5 because the second entries differ in two bits and the third entries
bnum
er in three bits.
diff
l number of bits is, by definition, the number of entries in
tota
mum number of bits among all entries of
maxi
brate is 5/9 because the total number of bits is 9. The
a or b times the
a and b.
Page 89

Performance Results via the Semianalytic Technique
Performance Results via the Semianalytic Technique
In this section...
“Section Overview” on page 3-5
“When to Use the Semianalytic Technique” on page 3-5
“Procedure for the Semianalytic Technique” on page 3-6
“Example: Using the Semianaly tic Technique” on page 3-7
Section Over view
The technique described in “Performance Results via Simulation” on page
3-2 works well for a large v ariety of communication systems, but can be
prohibitively time-consuming if the system’s error rate is very small (for
example, 10
technique as an a lternative way to compute error rates. For certain types of
systems, the semianalytic technique can produce results much more quickly
than a nonanalytic method that uses only simulated data.
-6
or smaller). This section describes how to use the semianalytic
The semianalytic technique uses a combination of simulation and analysis
to determine the error rate of a communication system. The
function in Communications Toolbox helps you implement the semianalytic
technique by performingsomeoftheanalysis.
For more background information on the semianalytic technique, refer to [3].
semianalytic
When to Use the Semianalytic Technique
The semianalytic technique works well for certain types of communication
systems, but not for others. The semianalytic technique is applicable if a
system has all of these characteristics:
• Any effects of multipath fading, quantization, and amplifier nonlinearities
must precede the effects of noise in the actual channel being modeled.
• The receiver is perfectly synchronized with the carrier, and timing jitter is
negligible. Because phase noise and timing jitter are slow processes, they
reduce the applicability of the semianalytic technique to a communication
system.
3-5
Page 90

3 Performance Evaluation
• The noiseless simulation has no errors in the received signal constellation.
Distortions from sources other than noise should be mild enough to keep
each signal point in its correct decision region. If this is not the case,
the calculated BER is too low. For instance, if the modeled system has a
phase rotation that places the received signal points outside their proper
decision regions, the semianalytic technique is not suitable to predict
system performance.
Furthermore, the
semianalytic function assumes that the noise in the
actual channel being modeled is Gaussian. For details on how to adapt
the semianalytic technique for non-Gaussian noise, see the discussion of
generalized exponential distributions in [3].
Procedure for the Semianalytic Technique
The procedure below describes how you would typically implem e nt the
semianalytic technique using the
1 Generate a message signal containing at least M
the alphabet size of the modulation and L is the length of the impulse
response of the channel in symbols. A common approach is to start with an
augmented binary pseudonoise (PN) sequence of total length
augmented PN sequence is a PN sequence with an extra zero appended,
which makes the distribution of ones and zeros equal.
2 Modulate a carrier with the message signal using baseband modulation.
Supported modulation types are listed on the reference page for
semianalytic. Shape the resultant signal with rectangular pulse shaping,
using the oversampling factor that you will later use to filter the modulated
signal. S tore the result of this step as
3 Filter the modulated signal with a transmit filter. This filter is often a
square-root raised cosine filter, but you can also use a Butterworth, Bessel,
Chebyshev type 1 or 2, elliptic, or more general FIR or IIR filter. If you use
a square-root raised cosine filter, use it on the nonoversampled modulated
signal and specify the oversampling factor in the filtering function. If you
use another filter type, you can apply it to the rectangularly pulse shaped
signal.
semianalytic function:
L
symbols, where M is
txsig for later use.
(log2M)M
L
.An
3-6
Page 91

Performance Results via the Semianalytic Technique
4 Run the filtered signal through a noiseless channel. This channel can
include multipath fading effects, phase shifts, amplifier nonlinearities,
quantization,andadditionalfiltering,butitmustnotincludenoise.Store
the result of this step as
5 Invoke the semianalytic function using the txsig and rxsig data from
rxsig for later use.
earlier steps. Specify a receive filter as a pair of input arguments, unless
you want to use the function’s default filter. The function filters
rxsig
and then determines the error probability of each received signal point by
analytically applying the Gaussian noise distribution to each point. The
function averages the error probabilities over the entire received signal to
determine t he overall error probability. If the error probability calculated
in this way is a symbol error probability, the function converts it to a bit
error rate, typically by assuming Gray coding. The function returns the
bit error rate (or, in the case of DQPSK modulation, an upper b ound on
the bit error rate).
Example: Using the Semianalytic Technique
The example below illustrates the procedure described above, using 16-QAM
modulation. It also compares the error rates obtained from the semianalytic
technique w ith the theoretical error rates obtained from published formulas
and computed using the
the error rates obtained using the two methods are nearly identical. The
discrepancies between the theoretical and computed error rates are largely
due to the phase offset in this example’s channel model.
berawgn function. The resulting plot shows that
% Step 1. Generate message signal of length >= M^L.
M = 16; % Alphabet size of modulation
L = 1; % Length of impulse response of channel
msg = [0:M-1 0]; % M-ary message sequence of length > M^L
% Step 2. Modulate the message signal using baseband modulation.
modsig = qammod(msg,M); % Use 16-QAM.
Nsamp = 16;
modsig = rectpulse(modsig,Nsamp); % Use rectangular pulse shapin g.
% Step 3. Apply a transmit filter.
txsig = modsig; % No filter in this example
% Step 4. Run txsig through a noiseless channel.
3-7
Page 92

3 Performance Evaluation
rxsig = txsig*exp(1i*pi/180); % Static phase offset of 1 degree
% Step 5. Use the semianalytic function.
% Specify the receive filter as a pair of input arguments.
% In this case, num and den describe an ideal integrator.
num = ones(Nsamp,1)/Nsamp;
den = 1;
EbNo = 0:20; % Range of Eb/No values under study
ber = semianalytic(txsig,rxsig,'qam',M,Nsamp,num,den,EbNo );
% For comparison, calculate theoretical BER.
bertheory = berawgn(EbNo,'qam',M);
% Plot computed BER and theoretical BER.
figure; semilogy(EbNo,ber,'k*');
hold on; semilogy(EbNo,bertheory,'ro');
title('Semianalytic BER Compared with Theoretical BER');
legend('Semianalytic BER with Phase O ffset',...
'Theoretical BER Without P hase Offset','Location','SouthWest');
hold off;
3-8
This example creates a figure like the one below.
Page 93

Performance Results via the Semianalytic Technique
3-9
Page 94

3 Performance Evaluation
Theoretical Performance Results
In this section...
“Computing Theoretical Error Statistics” on page 3-10
“Plotting Theoretical Error Rates” on page 3-10
“Comparing Theoretical and Empirical Error Rates” on page 3-11
Computing Theoretical Error Statistics
While the biterr function discussed above can help you gather e m pirical
error statistics, you might also compare those results to theoretical error
statistics. Certain types of communication systems are associated with
closed-form expressions for the bit error rate or a bound on it. The functions
listed in the table below compute the closed-form expressions for some types
of communication systems, where such expressions exist.
Type of Communication System
Uncoded AWGN channel
Coded AWGN channel
Uncoded Rayleigh and Rician fading
channel
Uncoded AWGN channel with
imperfect synchronization
Each function’s reference page lists one or more books containing the
closed-form expressions that the function implements.
Function
berawgn
bercoding
berfading
bersync
Plotting Theoretical Error Rates
The example below uses the bercoding function to compute upper bounds
on bit error rates for convolutional coding with a soft-decision decoder. The
data used for the generator and distance spectrum are from [5] and [2],
respectively.
coderate = 1/4; % Code rate
3-10
Page 95

Theoretical Performance Results
% Create a structure dspec with information about distance spectrum.
dspec.dfree = 10; % Minimum free distance of code
dspec.weight = [1 0 4 0 12 0 32 0 80 0 192 0 44 8 0 1024 ...
0 2304 0 5120 0]; % Distance spectrum of code
EbNo = 3:0.5:8;
berbound = bercoding(EbNo,'conv','soft',coderate,dspec);
semilogy(EbNo,berbound) % Plot the re sults.
xlabel('E_b/N_0 (dB)'); ylabel('Upper Bound on BE R');
title('Theoretical Bound on BER for Convolutional Coding');
grid on;
This example produces the following plot.
Comparing Theoretical and Empirical Error Rates
The example below uses the berawgn function to compute symbol error rates
for pulse amplitude modulation (PAM) with a series of E
comparison, the code simulates 8-PAM with an AWGN channel and computes
empirical symbol error rates. The code also plots the theoretical and empirical
symbol error rates on the same set of ax es.
% 1. Compute theoretical error rate using BERAWGN.
M = 8; EbNo = [0:13];
[ber, ser] = berawgn(EbNo, 'pam',M);
values. For
b/N0
3-11
Page 96

3 Performance Evaluation
% Plot theoretical results.
figure; semilogy(EbNo,ser,'r');
xlabel('E_b/N_0 (dB)'); ylabel('Symbol Error Rate');
grid on; drawnow;
% 2. Compute empirical error rate by simulating.
%Setup.
n = 10000; % Number of symbols to process
k = log2(M); % Number of bits per symbol
% Convert from EbNo to SNR.
% Note: Because No = 2*noiseVariance^ 2, we must add 3 dB
% to get SNR. For details, see Proakis book listed in
% "Selected Bibliography for Performance Evaluation."
snr = EbNo+3+10*log10(k);
ynoisy=zeros(n,length(snr)); % Preallocate to save time.
% Main steps in the simulation
x = randint(n,1,M); % Crea te message signal.
y = pammod(x,M); % Modulat e.
% Send modulated signal th rou gh AWGN channel.
% Loop over different SNR values.
for jj = 1:length(snr)
ynoisy(:,jj) = awgn(real(y),snr(jj),'measured');
end
z = pamdemod(ynoisy,M); % Demodulate.
3-12
% Compute symbol error rat e from simulation.
[num,rt] = symerr(x,z);
% 3. Plot empirical results, in same figure.
hold on; semilogy(EbNo,rt,'b.');
legend('Theoretical SER','Empirical SER');
title('Comparing Theoretical and Empirical Error Rates');
hold off;
This example produces a plot like the one in the following figure. Your plot
might vary because the simulation uses random numbers.
Page 97

Theoretical Performance Results
3-13
Page 98

3 Performance Evaluation
Error Rate Plots
In this section...
“Section Overview” on page 3-14
“Creating Error Rate Plots Using semilogy”onpage3-14
“Curve Fitting for Error Rate Plots” on p age 3-15
“Example: Curve Fitting for an Error Rate Plot” on page 3-15
Section Over view
Errorrateplotsprovideavisualwaytoexaminetheperformanceofa
communication system, and they are often included in publications. This
section mentions som e of the tools you can use to create error rate plots,
modify them to suit your needs, and do curve fitting on error rate data. It
also provides an example of curve fitting. For more detailed discussions
about the more general plotting capabilities in MATLAB, see the MATLAB
documentation set.
3-14
Creating Error Rate Plots Using semilogy
In many error rate plots, the horizontal axis indicates Eb/N0values in dB
and the vertical axis indicates the error rate using a logarithmic (base 10)
scale. To see an example of such a plot, as well as the code that creates it, see
“Comparing Theoretical and Empirical Error Rates” on page 3-11. The part of
that example that creates the plot uses the
logarithmic scale on the vertical axis and a linear scale on the horizontal axis.
Other examples that illustrate the use o f
• “Example: Using the Semianalytic Technique” on page 3-7, which also
illustrates
semilogy function to produce a
semilogy are in these sections:
- Plotting two sets of data on one pair of axes
- Adding a title
- Adding a legend
• “Plotting Theoretical Error Rates” onpage3-10,whichalsoillustrates
Page 99

Error Rate Plots
- Adding axis labels
- Addi ng grid line s
Curve Fitting for Error Rate Plots
Curve fitting is useful when you have a small or imperfect data set but want
to plot a smooth curve for presentation purposes. The
Communications Toolbox offers curve-fitting capabilities that are well suited
to the situation when the empirical data describes error rates at different
E
values. This function enables you to
b/N0
• Customize various relevant aspects of the curve-fitting process, such as the
type of closed-form function (from a list of preset choices) used to generate
the fit.
berfit function in
• Plot empirical data along with a curve that
• Interpolate points on the fitted curve between E
empirical data set to make the plot smoother looking.
• Collect relevant information about the fit, such as the numerical values of
points along the fitted curve and the coefficients of the fit expression.
Note The berfit function is intended for curve fitting or interpolation, not
extrapolation. Extrapolating BER data beyond an order of m agnitude below
the s mallest empirical BER value is inherently unreliable.
For a full list of inputs and outputs for berfit, see its reference page.
berfit fits to the data.
values in your
b/N0
Example: Curve Fitting for an Error Rate Plot
This example simulates a simple DBPSK (differential binary phase shift
keying) co mmunicatio n system and plots error rate data for a series of E
values. It uses the berfit function to fit a curve to the somewhat rough set of
empirical error rates. Because the example is long, this discussion presents it
in multiple steps:
• “Setting Up Parameters for the Simulation” on page 3-16
b/N0
• “Simulating the System Using a Loop” on page 3-16
3-15
Page 100

3 Performance Evaluation
• “Plotting the Empirical Results and the Fitted Curve” on page 3-18
Setting Up Parameters for the Simulation
Thefirststepintheexamplesetsuptheparameterstobeusedduringthe
simulation. Parameters include the range of E
minimum number of errors that must occur before the simulation computes
an error rate for that E
b/N0
value.
Note For most applications, you should base an error rate computation on
a larger number of errors than is used here (for instance, you might change
numerrmin to 100 in the code below). However, this example uses a small
number of errors merely to illustrate ho w curve fitting can smooth ou t a
rough data set.
% Set up initial parameters.
siglen = 100000; % Number of bits in each trial
M = 2; % DBPSK is binary.
hMod = modem.dpskmod('M', M); % Creat e a DPSK modulator
hDemod = modem.dpskdemod(hMod); % Create a DPSK
% demodulator using the mo dula tor object
EbNomin = 0; EbNomax = 9; % EbNo range, in dB
numerrmin = 5; % Compute BER only after 5 errors occur.
EbNovec = EbNomin:1:EbNomax; % Vector of EbNo values
numEbNos = length(EbNovec); % Number of EbNo values
% Preallocate space for certain data.
ber = zeros(1,numEbNos); % BER values
intv = cell(1,numEbNos); % Cell array of confidence intervals
values to consider and the
b/N0
3-16
Simulating the System Using a Loop
Thenextstepintheexampleistouseafor loop to vary the Eb/N0value
(denoted by
each value. The inner
agiven
has occurred. When the system is very noisy, this requires only one pass
through the
EbNo in the code) and simulate the communication system for
while loop ensures that the simulation continues to use
EbNo value until at least the predefined minimum number of errors
while loop, but in other cases, this requires multiple passes.
 Loading...
Loading...