

Page 1

Aerospace Toolbox
User’s Guide
2
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Aerospace Toolbox User’s Guide
© COPYRIGHT 2006–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
September 2006 Online only New for Version 1.0 (Release 2006b)
March 2007 Online only Revised for Version 1.1 (Release 2007a)
September 2007 First printing Revised for Version 2.0 (Release 2007b)
March 2008 Online only Revised for Version 2.1 (Release 2008a)
October 2008 Online only Revised for Version 2.2 (Release 2008b)
March 2009 Online only Revised for Version 2.3 (Release 2009a)
September 2009 Online only Revised for Version 2.4 (Release 2009b)
March 2010 Online only Revised for Version 2.5 (Release 2010a)
Page 4

Page 5
Getting Started
1
Product Overview ................................. 1-2
Contents
Related Products
Getting Online Help
Exploring the Toolbox
Using the MATLAB Help System for Documentation and
Demos
........................................ 1-5
.................................. 1-4
............................... 1-5
.............................. 1-5
Using Aerospace Toolbox
2
Defining Coordinate Systems ....................... 2-2
Fundamental Coordinate System Concepts
Coordinate System s for Modeling
Coordinate System s for Navigation
Coordinate System s for Display
References
Defining Aerospace Units
....................................... 2-11
.......................... 2-12
.................... 2-4
...................... 2-10
................... 2-7
............ 2-2
Importing Digital DATCOM Data
Overview
Example of a USAF Digital DATCOM File
Importing Data from DATCOM Files
Examining Imported DATCOM Data
Filling in Missing DATCOM Data
Plotting Aerodynamic Coefficients
3-D Flight Data Playback
........................................ 2-14
........................... 2-26
................... 2-14
............. 2-14
................. 2-15
................. 2-15
.................... 2-17
.................... 2-22
v
Page 6

Aerospace Toolbox Animation Objects ................. 2-26
Using Aero.Animation Objects
Using Aero.VirtualRealityAnimation Objects
Using Aero.FlightGearAnimation Objects
....................... 2-26
........... 2-35
.............. 2-48
Function Reference
3
Animation Objects ................................. 3-3
Body Objects
Camera Objects
FlightGear Objects
Geometry Objects
Node Objects
Viewpoint Objects
Virtual Reality Objects
Axes Transformations
Environment
File Reading
...................................... 3-4
................................... 3-5
................................. 3-5
.................................. 3-6
...................................... 3-7
................................. 3-8
...................................... 3-11
...................................... 3-12
............................. 3-9
.............................. 3-10
vi Contents
Flight Parameters
Gas Dynamics
..................................... 3-12
................................. 3-12
Page 7

Quaternion Math .................................. 3-13
Time
Unit Conversion
4
A
Overview
.............................................. 3-13
................................... 3-13
Alphabetical List
AC3D Files and Thumbnails
.........................................
A-2
Index
vii
Page 8

viii Contents
Page 9

Getting Started
• “Product Overview” on page 1-2
• “Related Products” on page 1-4
• “Getting Online Help” on page 1-5
1
Page 10

1 Getting Started
Product Overview
The Aerospace Toolbox product extends the MATL AB®technical computing
environment by providing reference standards, environment models, and
aerodynamic coefficient importing for performing advanced aerospace analysis
to develop and evaluate your designs. The toolbox provides the following to
enable you to visualize flight data in a three-dimensional environment and
reconstruct behavioral anomalies in flight-test results:
• Aero.Animation, Aero.Body, Aero.Camera, and Aero.Geometry objects and
• An interface to the FlightGear flight simulator
• AninterfacetotheSimulink
To ensure design consistency, the Aerospace Toolbox software provides
utilities for unit conversions, coordinate transformations, and quaternion
math, as well as standards-based environmental models for the atmosphere,
gravity, and magnetic fields. You can import aerodynamic coefficients directly
from the U.S. Air Force Digital Data Compendium (DATCOM) to carry out
preliminary control design and vehicle performance analysis.
associated methods
®
3D Animation™ software
1-2
The toolbox provides you with the following main features:
• Provides standards-based environmen ta l models for atmosphere, gravity,
and magnetic fields.
• Converts units and transforms coordinate systems and spatial
representations.
• Implements predefined utilities for aerospace parameter calcu lat io ns, tim e
calculations, and quaternion math.
• Imports aerodynamic coefficients directly from DATCOM.
• Interfaces to the FlightGear flight simulator, enabling visualization of
vehicle dynamics in a three-dimensional environment.
Page 11

Product Overview
The Aerospace Toolbox functions can be used in applications such as aircraft
technology, telemetry data reduction, flig ht control analysis, navigation
analysis, visualization for flight simulation, and environmental modeling, and
can help you perform the following tasks:
• Analyze, initialize, and visualize a broad range of large aerospace system
architectures, including aircraft, missiles, spacecraft (probes, satellites,
manned and unmanned), and propulsion systems (engines and rockets),
while reducing development time.
• Support and define new requirem ents for a ero space systems.
• Perform complex calculations and analyze data to optimize and implement
your designs.
• Test the performance of flight tests.
The Aerospace Toolbox software main tains and updates the algorithms,
tables, and standard environmental models, eliminating the need to provide
internal maintenance and verification of the models and reducing the cost of
internal software maintenance.
1-3
Page 12

1 Getting Started
Related Products
The Aerospace Toolbox software requires the MATLAB software.
In addition to Aerospace Toolbox, the Aerospace product family includes
the Aerospace Blockset product. The toolbox provides s tatic data analysis
capabilities, while blockset provides an environment for dynamic modeling
and vehicle component modeling and simulation. The Aerospace Blockset™
software uses part of the functionality of the toolbox as an engine. Use these
products together to model aerospace systems in the MATLAB and Simulink
environments.
Other related products are listed in the Aerospace Toolbox product page at
the MathWorks Web site. They include toolboxes and blocksets that extend
the capabilities of the MATLAB and Simulink products. These products will
enhance your use of the toolbox in various applications.
For more information about any MathWorks™ software products, see either
®
1-4
• The online documentation for that product if it is installed
• The MathWorks Web site at
www.mathworks.com
Page 13

Getting Online Help
In this section...
“Exploring the Toolbox” on page 1-5
“Using the MATLAB Help System for Documentation and Demos” on page
1-5
Exploring the Toolbox
A list of the toolbox functions is available to you by typing
help aero
You can view the code for any function by typing
type function_name
Getting Online Help
Using the MATLAB Help System for Documentation and Demos
TheMATLABHelpbrowserallowsyoutoaccessthedocumentationanddemo
models for all the MATLAB and Simulink based products that you have
installed. The online Help includes an online search system.
Consult the Help for Using MATLAB section of the MATLAB Desktop Tools
and Development Environment documentation for more information about
the MATLAB Help system.
1-5
Page 14
1 Getting Started
1-6
Page 15

Using Aerospace Toolbox
• “Defining Coordinate Systems” on page 2-2
• “Defining Aerospace Units” on page 2-12
• “Importing Digital D ATC OM Data” on page 2-14
• “3-D Flight Data Playback” on page 2-26
2
Page 16
2 Using Aerospace Toolbox
Defining Coordinate Systems
In this section...
“Fundamental Coordinate System Concepts” on page 2-2
“Coordinate Systems for Modeling” on page 2-4
“Coordinate Systems for Navigation” on page 2-7
“Coordinate Systems forDisplay”onpage2-10
“References” on page 2-11
Fundamental Coordinate System Concepts
Coordinate systems a llow you to keep track of an aircraft or spacecraft’s
position and orientation in space. The Aerospace Toolbox coordinate sy stems
are based on these underlying concepts from geodesy, astronomy, and physics.
Definitions
The Aerospace Toolbox software uses right-handed (RH) Cartesian coordinate
systems. The right-hand rule establishes the
axes.
x-y-z sequence of coordinate
2-2
An inertial frame is a nonaccelerating motion reference frame. Loosely
speaking, acceleration is defined with respect to the distant cosmos. In an
inertial frame, Newton’s second law (force = m ass X acceleration) holds.
Strictly defined, an inertial frame is a member of the set of all frames not
accelerating relative to one another. A noninertial frame is any frame
accelerating relative to an inertial frame. Its acceleration, in general, includes
both translational and rotational components, resulting in pseudoforces
(pseudogravity,aswellasCoriolis and centrifugal forces).
The toolbox mo dels the Earth’s shape (the geoid) as an oblate spheroid, a
special type of ellipsoid with two longer axes equal (defining the equatorial
plane) and a third, slightly shorter (geopolar) axis of symmetry. The equator
is the intersection of the equatorial plane and the Earth’s surface. The
geographic poles are the intersection o f the Earth’s surface and the geopolar
axis. In general, the Earth’s geopo lar and rotation axes are not identical.
Page 17

Defining Coordinate Systems
Latitudes parallel the equator. Longitudes parallel the geopolar axis. The
zero longitude or prime meridian passes through Greenwich, England.
Approximations
The Aerospace Toolbox software m ak e s three standard approximations in
defining coordinate systems relative to the Earth.
• The Earth’s surface or geoid is an oblate spheroid , defined by its lo nger
equatorial and shorter geopolar axes. In reality, the Earth is slightly
deformed with respect to the standard geoid.
• The Earth’s rotation axis and equatorial plane are perpendicular, so that
the rotation and geopolar axes are identical. In reality, these axes are
slightly misaligned, and the equatorial plane wobbles as the Earth rotates.
This effect is negligible in most applications.
• The only noninertial effect in Earth-fixed coordinates is due to the Earth’s
rotation about its axis. This is a rotating, geocentric system . The toolbox
ignores the Earth’s motion around the Sun, the Sun’s motion in the Galaxy,
and the Galaxy’s motion through cosmos. In most applications, only the
Earth’s rotation matters.
This approximation must be changed for spacecraft sent into deep space,
i.e., outside the Earth-Moon system, and a heliocentric system is preferred.
Motion with Respect to Other Planets
The Aerospace Toolbox software uses the standard WGS-84 geoid to model
the Earth. You can change the equatorial axis length, the flattening, and
the rotation rate.
You can represent the motion of spacecraft with respect to any celestial body
that is well approximated by an oblate spheroid by changing the spheroid
size, flattening, and rotation rate. If the celestial body is rotating westward
(retrogradely), make the rotation rate negative.
2-3
Page 18

2 Using Aerospace Toolbox
Coordinate Systems for Modeling
Modeling aircraft and spacecraft is simplest if you use a coordinate system
fixed in the body itself. In the case of aircraft, the forward direction is
modified by the presence of wind, and the craft’s motion through the air is
not the same as its motion relative to the ground.
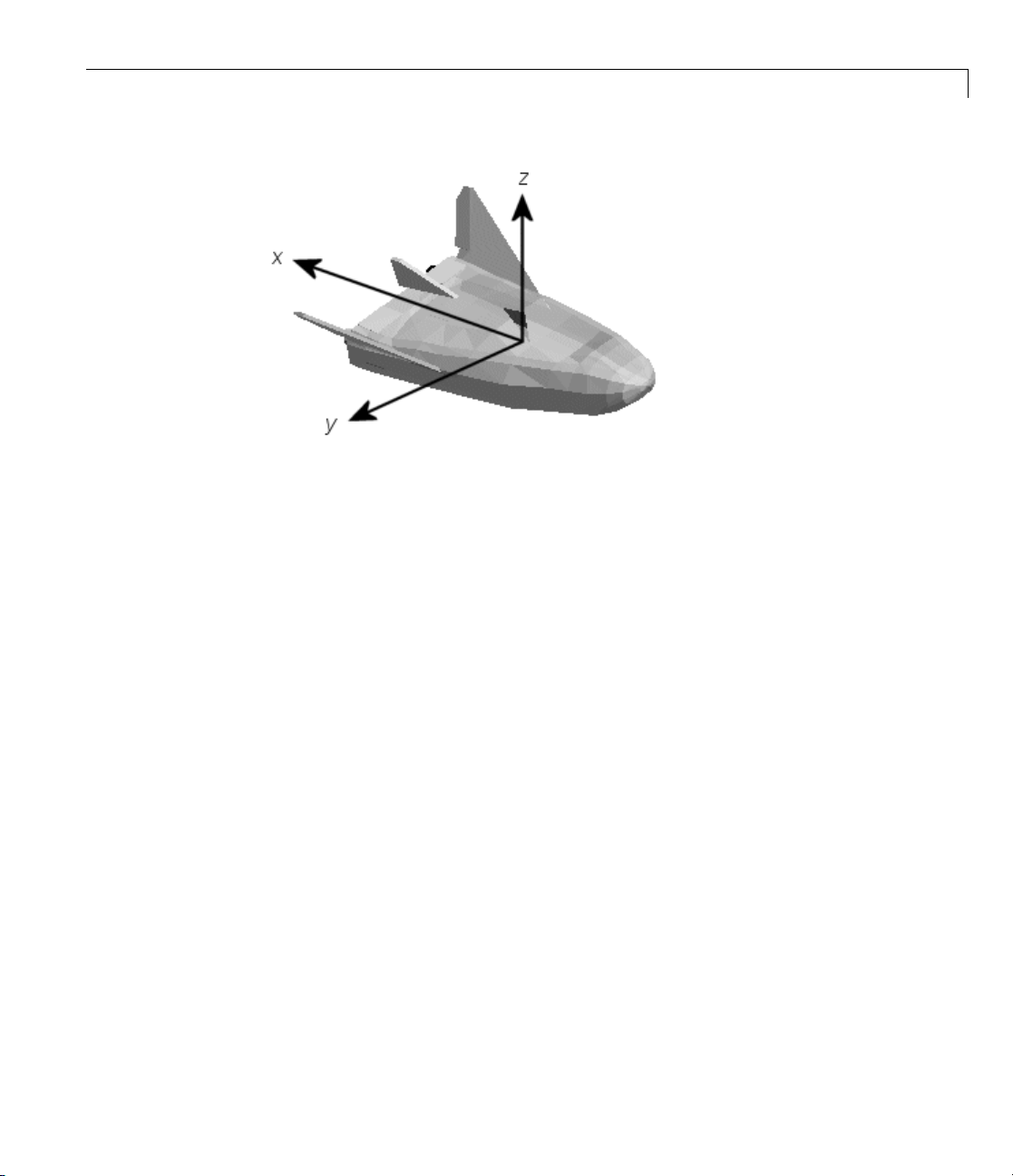
Body Coordinates
The noninertial body coordinate system is fixed in both origin and orientation
to the moving craft. The craft is assumed to be rigid.
The orientation of the body coordinateaxesisfixedintheshapeofbody.
• The
• The
• The
Translational Degrees of Freedom. Translations are defined by moving
along these axes by distances
Rotational Degrees of Freedom. Rotations are defined by the Euler angles
P, Q, R or Φ, Θ, Ψ.Theyare
•
•
•
x-axis points through the nose of the craft.
y-axis points to the right of the x-axis (facing in the pilot’s direction of
view), perpendicular to the
z-axis points down through the bottom of the craft, perpendicular to
the
x-y plane and satisfying the RH rule.
P or Φ: Roll about the x-axis
Q or Θ:Pitchaboutthey-axis
R or Ψ: Yaw about the z-axis
x-axis.
x, y,andz from the origin.
2-4
Page 19

Defining Coordinate Systems
Wind Coordinates
The noninertial wind coordinate system has its origin fixed in the rigid
aircraft. The coordinate system orientation is defined relative to the craft’s
velocity V.
The o rientation of the wind coordinate axes is fixed by the velocity V.
• The
• The
• The
x-axis points in the direction of V.
y-axis points to the right of the x-axis (facing in the direction of V),
perpendicular to the
z-axis points perpendicular to the x-y plane in whatever way needed to
satisfy the RH rule with respect to the
x-axis.
x-andy-axes.
Translational Degrees of Freedom. Translations are defined by moving
along these axes by distances
x, y,andz from the origin.
2-5
Page 20

2 Using Aerospace Toolbox
Rotational Degrees of Freedom. Rotations are defined by the Euler
angles Φ, γ, χ.Theyare
• Φ: Bank angle about the
• γ: Flight path about the
• χ:Headingangleaboutthe
x-axis
y-axis
z-axis
2-6
Page 21

Defining Coordinate Systems
Coordinate Systems for Navigation
Modeling aerospace trajectories requires positioning and orienting the aircraft
or spacecraft with respect to the rotating Earth. Navigation coordinates are
defined with respect to the center and surface of the Earth.
Geocentric and Geodetic Latitudes
The geocentric latitude λ on the Earth’s surface is defined by the angle
subtended by the radius vector from the Earth’s center to the surface point
with the equatorial plane.
The geodetic latitude μ on the Earth’s surface is defined by the angle
subtended by the surface normal vector
n and the equatorial plane.
2-7
Page 22

2 Using Aerospace Toolbox
NED Coordinates
The north-east-down (NED) system is a noninertial system with its origin
fixed at the aircraft or spacecraft’s center of gravity. Its axes are oriented
along the geodetic directions defined by the Earth’s surface.
• The
• The
• The
x-axis points north parallel to the geoid surface, in the polar direction.
y-axis points east parallel to the geoid surface, along a latitude curve.
z-axis points downward, toward the Earth’s surface, antiparallel to the
surface’s outward normal
Flying at a constant altitude means flying at a constant
surface.
n.
z above the Earth’s
2-8
Page 23

Defining Coordinate Systems
ECI Coordinates
The Earth-centered inertial (ECI) system is a mixed inertial system. It is
oriented with respect to the Sun. Its origin is fixed at the center of the Earth.
• The
• The
z-axis p oints northward along the Earth’s rotation axis.
x-axis points outward in the Earth’s equatorial plane exactly at the
Sun. (This rule ignores the Sun’s oblique angle to the equator, which varies
with season. The actual Sun always remains in the
• The
y-axis points into the eastward quadrant, perpendicular to the x-z
x-z plane.)
planesoastosatisfytheRHrule.
Earth-Centered Coordinates
2-9
Page 24

2 Using Aerospace Toolbox
ECEF Coordinates
The Earth-center, Earth-fixed (ECEF) system is a noninertial system that
rotates with the Earth. Its origin is fixed at the center of the Earth.
• The
• The
• The
z-axis p oints northward along the Earth’s rotation axis.
x-axis points outward along the intersection of the Earth’s equatorial
planeandprimemeridian.
y-axis points into the eastward quadrant, perpendicular to the x-z
planesoastosatisfytheRHrule.
Coordinate Systems for Display
The Aerospace Toolbox software lets you use FlightGear coordinates for
rendering motion.
FlightGear is an open-source, third-party flight simulator with an interface
supported by the Aerospace Toolbox product.
• “Working with the Flight Simulator Interface” on page 2-53 discusses the
toolbox interface to FlightGear.
• See the FlightGear documentation at www.flightgear.org for complete
information about this flight simulator.
The FlightGear coordinates form a special body-fixed system, rotated from the
standard bo dy coordinate system about the
• The
x-axis is positive toward the back of the vehicle.
y-axis by -180 degrees:
2-10
• The
• The
values.
y-axisispositivetowardtherightofthevehicle.
z-axis is positive upward, e.g., wheels typically have the lowest z
Page 25
Defining Coordinate Systems
References
Recommended Practice for Atmospheric and Space Flight Vehicle Coordinate
Systems, R-004-1992, ANSI/AIAA, February 1992.
Mapping Toolbox User’s Guide, The MathWorks, Inc., Natick, Massachusetts.
www.mathworks.com/access/helpdesk/help/toolbox/map/.
Rogers, R. M., Applied Mathematics in Integrated Navigation Systems,AIAA,
Reston, Virginia, 2000.
Stevens, B. L., and F. L. Lewis, Aircraft Control and Simulation,2nded.,
Wiley-Interscience, New York, 2003.
Thomson, W. T., Introduction to Space Dynamics, John Wiley & Sons, New
York, 1961/Dover Publications, Mineola, New York, 1986.
World Geodetic System 1984 (WGS 84),
http://earth-info.nga.mil/GandG/wgs84.
2-11
Page 26
2 Using Aerospace Toolbox
Defining Aerospace Units
The Aerospace Toolbox functions support standard measurement system s.
The Unit Conversion functions provide means for converting common
measurement units from one system to another, such as converting velocity
from feet per second to meters per second and vice versa.
The unit conversion functions support all units listed in this table.
Quantity
MKS (SI)
Acceleration meters/second2(m/s2),
kilometers/second
2
(km/s2),
(kilometers/hour)/second
(km/h-s), g-unit (
g)
Angle radian (rad), degree
(deg), revolution
Angular acceleration radians/second2(rad/s2),
degrees/second
2
(deg/s2),
revolutions/minute
(rpm),
revolutions/second (rps)
Angular velocity radians/second (rad/s),
degrees/second (deg/s),
revolutions/minute
(rpm)
Density
Force
Inertia
kilogram/meter
newton (N) pound (lb)
kilogram-meter
3
(kg/m3) pound mass/foot
2
(kg-m2) slug-foot2(slug-ft2)
English
inches/second
feet/second
2
(ft/s2),
2
(in/s2),
(miles/hour)/second
(mph/s), g-unit (
g)
radian (rad), degree
(deg), revolution
radians/second
degrees/second
2
(rad/s2),
2
(deg/s2),
revolutions/minute
(rpm), revolutions/seco nd
(rps)
radians/second (rad/s),
degrees/second (deg/s),
revolutions/minute (rpm)
3
(lbm/ft3), slug/foot
3
(slug/ft3), pound
mass/inch
3
(lbm/in3)
2-12
Length
meter (m) inch (in), foot (ft), m ile
(mi), nautical mile (nm)
Page 27

Defining Aerospace Units
Quantity
Mass
Pressure
Temperature
Torque
Velocity
MKS (SI)
English
kilogram (kg) slug (slug), pound mass
(lbm)
2
pascal (Pa) pound/inch
pound/foot
2
(psi),
(psf),
atmosphere (atm)
o
kelvin (K), degrees
Celsius (
o
C)
degrees Fahrenheit (
degrees Rankine (
F),
o
R)
newton-meter (N-m) pound-feet (lb-ft)
meters/second (m/s),
kilometers/second
(km/s), kilometers/hour
(km/h)
inches/second (in/sec),
feet/second (ft/sec),
feet/minute (ft/min),
miles/hour (mph), knots
2-13
Page 28

2 Using Aerospace Toolbox
Importing Digital DATCOM Data
In this section...
“Overview” on page 2-14
“Example of a USAF Digital DATC OM File” on page 2-14
“Importing Data from DATCOM Files” on page 2-15
“Examining Imported DATCOM Data” on page 2-15
“Filling in Miss ing DATCOM D a t a” on page 2-17
“Plotting Aerodynamic Coefficients” on page 2-22
Overview
The Aerospace Toolbox product enables bringing United States Air Force
(USAF) Digital DATCOM files into the MATLAB environment by using
the
datcomimport function. For more information, see the datcomimport
function reference page. This section explains how to import data from a
USAF Digital DATCOM file.
2-14
TheexampleusedinthefollowingtopicsisavailableasanAerospaceToolbox
demo. You can run the demo either by entering
astimportddatcom in the
MATLAB Command Window or by finding the demo entry (Importing from
USAF Digital DATCOM Files) in the MATLAB Online Help and clicking Run
in the Comm a nd Window on its demo page.
Example of a USAF Digital DATCOM File
The following is a sample input file for USAF Digital DATCOM for a
wing-body-horizontal tail-vertical tail configuration running over five alphas,
two Mach numbers, and two altitudes and calculating static and dynamic
derivatives. You can also view this file by entering
MATLAB Command Window.
$FLTCON NMACH=2.0,MACH(1)=0.1,0.2$
$FLTCON NALT=2.0,ALT(1)=5000.0,8000.0$
$FLTCON NALPHA=5.,ALSCHD(1)=-2.0,0.0,2.0,
ALSCHD(4)=4.0,8.0,LOOP=2.0$
$OPTINS SREF=225.8,CBARR=5.75,BLREF=41.15$
type astdatcom.in in the
Page 29

Importing Digital DATCOM Data
$SYNTHS XCG=7.08,ZCG=0.0,XW=6.1,ZW=-1.4,ALIW=1.1,XH=20.2,
ZH=0.4,ALIH=0.0,XV=21.3,ZV=0.0,VERTUP=.TRUE.$
$BODY NX=10.0,
X(1)=-4.9,0.0,3.0,6.1,9.1,13.3,20.2,23.5,25.9,
R(1)=0.0,1.0,1.75,2.6,2.6,2.6,2.0,1.0,0.0$
$WGPLNF CHRDTP=4.0,SSPNE=18.7,SSPN=20.6,CHRDR=7.2,SAVSI=0.0,CHSTAT=0.25,
TWISTA=-1.1,SSPNDD=0.0,DHDADI=3.0,DHDADO=3.0,TYPE=1.0$
NACA-W-6-64A412
$HTPLNF CHRDTP=2.3,SSPNE=5.7,SSPN=6.625,CHRDR=0.25,SAVSI=11.0,
CHSTAT=1.0,TWISTA=0.0,TYPE=1.0$
NACA-H-4-0012
$VTPLNF CHRDTP=2.7,SSPNE=5.0,SSPN=5.2,CHRDR=5.3,SAVSI=31.3,
CHSTAT=0.25,TWISTA=0.0,TYPE=1.0$
NACA-V-4-0012
CASEID SKYHOGG BODY-WING-HORIZONTAL TAIL-VERTICAL TAIL CONFIG
DAMP
NEXT CASE
The output file generated by USAF Digital DATCOM for the same
wing-body-horizontal tail-vertical tail configuration running over five alphas,
two Mach numbers, and two altitudes can be viewed by entering
astdatcom.out
in the MATLAB Command Window.
type
Importing Data from DATCOM Files
Use the datcomimport function to bring the Digital DATCOM data into the
MATLAB environment.
alldata = datcomimport('astdatcom.out', true, 0);
Examining Imported DATCOM Data
The datcomimport function creates a cell array of structures containing the
data from the Digital DATCOM output file.
data = alldata{1}
data =
case: 'SKYHOGG BODY-WING-HORIZONTAL TAIL-VERTICAL TAIL CONFIG'
mach: [0.1000 0.2000]
alt: [5000 8000]
2-15
Page 30
2 Using Aerospace Toolbox
alpha: [-2 0 2 4 8]
nmach: 2
nalt: 2
nalpha: 5
rnnub: []
hypers: 0
loop: 2
sref: 225.8000
cbar: 5.7500
blref: 41.1500
dim: 'ft'
deriv: 'deg'
stmach: 0.6000
tsmach: 1.4000
save: 0
stype: []
trim: 0
damp: 1
build: 1
part: 0
highsym: 0
highasy: 0
highcon: 0
tjet: 0
hypeff: 0
lb: 0
pwr: 0
grnd: 0
wsspn: 18.7000
hsspn: 5.7000
ndelta: 0
delta: []
deltal: []
deltar: []
ngh: 0
grndht: []
config: [1x1 struct]
cd: [5x2x2 double]
cl: [5x2x2 double]
cm: [5x2x2 double]
2-16
Page 31

cn: [5x2x2 double]
ca: [5x2x2 double]
xcp: [5x2x2 double]
cla: [5x2x2 double]
cma: [5x2x2 double]
cyb: [5x2x2 double]
cnb: [5x2x2 double]
clb: [5x2x2 double]
qqinf: [5x2x2 double]
eps: [5x2x2 double]
depsdalp: [5x2x2 double]
clq: [5x2x2 double]
cmq: [5x2x2 double]
clad: [5x2x2 double]
cmad: [5x2x2 double]
clp: [5x2x2 double]
cyp: [5x2x2 double]
cnp: [5x2x2 double]
cnr: [5x2x2 double]
clr: [5x2x2 double]
Importing Digital DATCOM Data
Filling in Missing DATCOM Data
By default, missing data points are set to 99999 and data points are set to
NaN where no DATCOM methods exist or where the method is not applicable.
It can be seen in the Digital DATCOM output file and examining the imported
data that
Here are the imported data values.
data.cyb
ans(:,:,1) =
1.0e+004 *
-0.0000 -0.0000
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
,
,
C
C
Yβ
nβ
C
lq
,and
have data only in the first alpha value.
C
mq
2-17
Page 32

2 Using Aerospace Toolbox
ans(:,:,2) =
1.0e+004 *
-0.0000 -0.0000
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
data.cnb
ans(:,:,1) =
1.0e+004 *
0.0000 0.0000
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
2-18
ans(:,:,2) =
1.0e+004 *
0.0000 0.0000
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
data.clq
ans(:,:,1) =
1.0e+004 *
0.0000 0.0000
Page 33

9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
ans(:,:,2) =
1.0e+004 *
0.0000 0.0000
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
data.cmq
ans(:,:,1) =
Importing Digital DATCOM Data
1.0e+004 *
-0.0000 -0.0000
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
ans(:,:,2) =
1.0e+004 *
-0.0000 -0.0000
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
9.9999 9.9999
The missing data points will be filled with the values for the first alpha, since
these data points are meant to be used f or all alpha values.
2-19
Page 34

2 Using Aerospace Toolbox
aerotab = {'cyb' 'cnb' 'clq' 'cmq'};
for k = 1:length(aerotab)
for m = 1:data.nmach
for h = 1:data.nalt
data.(aerotab{k})(:,m,h) = data.(aerotab{k})(1,m,h);
end
end
end
Here are the updated imported data values.
data.cyb
ans(:,:,1) =
-0.0035 -0.0035
-0.0035 -0.0035
-0.0035 -0.0035
-0.0035 -0.0035
-0.0035 -0.0035
2-20
ans(:,:,2) =
-0.0035 -0.0035
-0.0035 -0.0035
-0.0035 -0.0035
-0.0035 -0.0035
-0.0035 -0.0035
data.cnb
ans(:,:,1) =
1.0e-003 *
0.9142 0.8781
0.9142 0.8781
0.9142 0.8781
0.9142 0.8781
0.9142 0.8781
Page 35

ans(:,:,2) =
1.0e-003 *
0.9190 0.8829
0.9190 0.8829
0.9190 0.8829
0.9190 0.8829
0.9190 0.8829
data.clq
ans(:,:,1) =
0.0974 0.0984
0.0974 0.0984
0.0974 0.0984
0.0974 0.0984
0.0974 0.0984
Importing Digital DATCOM Data
ans(:,:,2) =
0.0974 0.0984
0.0974 0.0984
0.0974 0.0984
0.0974 0.0984
0.0974 0.0984
data.cmq
ans(:,:,1) =
-0.0892 -0.0899
-0.0892 -0.0899
-0.0892 -0.0899
-0.0892 -0.0899
-0.0892 -0.0899
2-21
Page 36

2 Using Aerospace Toolbox
ans(:,:,2) =
-0.0892 -0.0899
-0.0892 -0.0899
-0.0892 -0.0899
-0.0892 -0.0899
-0.0892 -0.0899
Plotting Aerodynamic Coefficients
You can now plot the aerodynamic coefficients:
• “Plotting Lift Curve Moments” on page 2-22
• “Plotting Drag Polar Moments” on page 2-23
• “Plotting Pitching Moments” on page 2-24
Plotting Lift Curve Moments
2-22
h1 = figure;
figtitle = {'Lift Curve' ''};
for k=1:2
subplot(2,1,k)
plot(data.alpha,permute(data.cl(:,k,:),[1 3 2]))
grid
ylabel(['Lift Coefficient (Mach =' num2str(data.mach(k)) ')'])
title(figtitle{k});
end
xlabel('Angle of Attack (deg)')
Page 37

Importing Digital DATCOM Data
Plotting Drag Polar Moments
h2 = figure;
figtitle = {'Drag Polar' ''};
for k=1:2
subplot(2,1,k)
plot(permute(data.cd(:,k,:),[1 3 2]),permute(data.cl(:,k,:),[1 3 2]))
grid
ylabel(['Lift Coefficient (Mach =' num2str(data.mach(k)) ')'])
title(figtitle{k})
end
xlabel('Drag Coefficient')
2-23
Page 38

2 Using Aerospace Toolbox
2-24
Plotting Pitching Moments
h3 = figure;
figtitle = {'Pitching Moment' ''};
for k=1:2
subplot(2,1,k)
plot(permute(data.cm(:,k,:),[1 3 2]),permute(data.cl(:,k,:),[1 3 2]))
grid
ylabel(['Lift Coefficient (Mach =' num2str(data.mach(k)) ')'])
title(figtitle{k})
end
xlabel('Pitching Moment Coefficient')
Page 39

Importing Digital DATCOM Data
2-25
Page 40

2 Using Aerospace Toolbox
3-D Flight Data Playback
In this section...
“Aerospace Toolbox Animation Objects” on page 2-26
“Using Aero.Animation Objects” on page 2-26
“Using Aero.VirtualRealityAnimation Objects” on page 2-35
“Using A ero.FlightG earAnim ation Objects” on page 2-48
Aerospace Toolbox Animation Objects
To visualize flight data in the Aerospace Toolbox environment, you can
use the following animation objects and their asso ciated methods. These
animation objects use the MATLAB time series object,
visualize flight data.
•
Aero.Animation — You can use this animatio n object to visualize flight
data w ithout any other tool or toolbox. The follo wing objects support this
object.
timeseries to
2-26
- Aero.Body
- Aero.Camera
- Aero.Geometry
• Aero.VirtualRealityAnimation — Y ou can use this animation object
to visualize flight data with the Simulink 3D Animation product. The
following objects support this object.
- Aero.Node
- Aero.Viewpoint
• Aero.FlightGearAnimation
You can use this animation object to visualize flight data with the
FlightGear simulator.
Using Aero.Animation Objects
ThetoolboxinterfacetoanimationobjectsusestheHandleGraphics®product.
The demo, Overlaying Simulated and Actual Flight Data (
astmlanim), visually
Page 41

3-D Flight Data Playback
compares simulated and actual flight trajectory data. It does this by creating
animation objects, creating bodies for those objects, and loading the flight
trajectory data. This section describes what happens when the demo runs.
1 Create and configure an animation object.
a Configure the animation object.
b Create and load bodies for that object.
2 Load recorded data for flight trajectories.
3 Displaybodygeometriesinafigurewindow.
4 Play back flight trajectories using the animation object.
5 Manipulate the camera.
6 Manipulate bodies, as follows:
a Move and reposition bodies.
b Create a transparency in the first body.
c Change the color o f the second body.
d Turn off the landing gear of the second body.
Running the Demo
1 Start the MATLAB software.
2 Run the demo either by entering astmlanim in the MATLAB Command
Window or by finding the demo entry (Overlaying Simulated and Actual
Flight Data) in the MATLAB Online Help and clicking Runinthe
Command Window on its demo page.
While running, the demo performs several steps by issuing a series of
commands, as explained below.
Creating and Configuring an Animation Object
This series of commands creates an animation object and configures the object.
2-27
Page 42

2 Using Aerospace Toolbox
1 Create an animation object.
h = Aero.Animation;
2 Configure the animation object to set the number of frames per second
(
FramesPerSecond) property. This controls the rate at which frames are
displayed in the figure window.
h.FramesPerSecond = 10;
3 Configure the animation object to set the seconds of animation data per
second time scaling (
h.TimeScaling = 5;
TimeScaling) property.
The combination of FramesPerSecond and TimeScaling property determine
the time step of the simulation. The settings in this demo result in a time
step of approximately 0.5 s.
4 Create and load bodies for the animation object. The demo will use these
bodies to work with and display the simulated and actual flight trajectories.
The first body is orange; it represents simul ate d data. The second body is
blue; it represents the actual flight data.
2-28
idx1 = h.createBody('pa24-250_orange.ac','Ac3d');
idx2 = h.createBody('pa24-250_blue.ac','Ac3d');
Both bodies are AC3D format files. AC3D is one of several file formats that
the a nimation objects support. FlightGear uses the same file format. The
animation object reads in the bodies in the AC3D format and stores them
as patches in the geometry object within the animation object.
Loading Recorded Data for Flight Trajectories
This series of commands loads the recorded flight trajectory data, which is
contained in files in the
•
simdata – Contains simulated flight trajectory data, which is set up as a
6DoF array.
•
fltdata – Contains actual flight trajectory data, which is set up in a
custom format. To access this custom format data, the demo needs to
matlabroot\toolbox\aero\astdemos folder.
Page 43

3-D Flight Data Playback
set the body object TimeSeriesSourceType parameter to Custom,then
specify a custom read function.
1 Load the flight trajectory data.
load simdata
load fltdata
2 Set the time series data for the two bodies.
h.Bodies{1}.TimeSeriesSource = simdata;
h.Bodies{2}.TimeSeriesSource = fltdata;
3 Identify the time series for the second body as custom.
h.Bodies{2}.TimeSeriesSourceType = 'Custom';
4 Specify the custom read function to access the data in fltdata for
the second body. The demo provides the custom read function in
matlabroot\toolbox\aero\astdemos\CustomReadBodyTSData.m.
h.Bodies{2}.TimeseriesReadFcn = @CustomReadBodyTSData;
Displaying Body Geometries in a Figure Window
This command creates a figure object for the animation object.
h.show();
Playing Back Flight Trajectories Using the Animation Object
This command plays the animation bodies for the duration of the time series
data. This illustrates the differences between the simulated and actual flight
data.
h.play();
2-29
Page 44
2 Using Aerospace Toolbox
2-30
Manipulating the Camera
This command series describes how you can manipulate the camera on the two
bodies, and redisplay the animation. The
object controls the camera position relative to the bodies in the animation. In
the section “Playin g Back Flight Trajectories Usin g the Animation Object”
on page 2-29, the camera obje ct uses a default value for the
property. In this command series, the demo references a custom PositionFcn
function, which uses a static position based on the position of the bodies; no
dynamics are involved. The custom
matlabroot\toolbox\aero\astdemos folder.
1 Set the camera PositionFcn to the custom function
staticCameraPosition.
h.Camera.PositionFcn = @staticCameraPosition;
PositionFcn property of a camera
PositionFcn
PositionFcn function is located in the
Page 45

3-D Flight Data Playback
2 Run the animation again.
h.play();
Manipulating Bodies
This sectio n illustrates some of the actions you can perform on bodie s.
Moving and Reposition ing Bodies. This series of commands illustrates
how to move and reposition bodies.
1 Set the starting time to 0.
t=0;
2 Move the body to the starting position that is based on the time series data.
Use the Aero.Animation object
h.updateBodies(t);
Aero.Animation.updateBodies method.
3 Update the camera position using the custom PositionFcn
function set in the previous section. Use the Aero.Animation object
Aero.Animation.updateCamera method.
h.updateCamera(t);
4 Reposition the bodies by first getting the current body position, then
separating the bodies.
a Get the current body positions and rotations from the objects of both
bodies.
pos1 = h.Bodies{1}.Position;
rot1 = h.Bodies{1}.Rotation;
pos2 = h.Bodies{2}.Position;
rot2 = h.Bodies{2}.Rotation;
b Separate and reposition the bodies by moving them to new positions.
h.moveBody(1,pos1 + [0 0 -3],rot1);
h.moveBody(2,pos1 + [0 0 0],rot2);
2-31
Page 46

2 Using Aerospace Toolbox
2-32
Creating a Transparency in the First Body. This series of commands
illustrates how to create and attach a t ransparency to a body. The animation
object stores the body geometry as patches. This example manipulates the
transparency properties of these patches (see “Creating 3-D Models with
Patches” in the MATLAB documentation).
Note The use of transparencies might decrease animation speed on
platforms that use software OpenGL
®
rendering (see opengl in the MATLAB
documentation).
1 Change the body patch properties. Use the Aero.Body PatchHandles
property to get the patch handles for the first body.
patchHandles2 = h.Bodies{1}.PatchHandles;
2 Set the desired face and edge alpha values for the transparency.
Page 47

3-D Flight Data Playback
desiredFaceTransparency = .3;
desiredEdgeTransparency = 1;
3 Get the current face and edge alpha data and change all values to
the desired alpha values. In the figure, note the first body now has a
transparency.
for k = 1:size(patchHandles2,1)
tempFaceAlpha = get(patchHandles2(k),'FaceVertexAlphaData');
tempEdgeAlpha = get(patchHandles2(k),'EdgeAlpha');
set(patchHandles2(k),...
'FaceVertexAlphaData',repmat(desiredFaceTransparency,size(tempFaceAlpha)));
set(patchHandles2(k),...
'EdgeAlpha',repmat(desiredEdgeTransparency,size(tempEdgeAlpha)));
end
2-33
Page 48

2 Using Aerospace Toolbox
Changing the Color of the S econd Body. This series of commands
illustrates how to change the color of a body. The animation object
stores the b ody geometry as patches. This example will manipulate the
FaceVertexColorData property of these patches.
1 Change the body patch properties. Use the Aero.Body PatchHandles
property to get the patch handles for the first body.
patchHandles3 = h.Bodies{2}.PatchHandles;
2 Set the patch color to red.
desiredColor = [1 0 0];
3 Get the current face color and data and propagate the new patch color,
red, to the face. Note the following:
• The
• The
if condition prevents the windows from being colored.
name property is stored in the body geometry data
(h.Bodies{2}.Geometry.FaceVertexColorData(k).name).
• The code changes only the i ndices in
patchHandles3 with nonwindow
counterparts in the body geometry data.
Note If you cannot access the name property to determine the parts of
the vehicle to color, you must use an alternative way to se lectively c olor
your vehicle.
for k = 1:size(patchHandles3,1)
tempFaceColor = get(patchHandles3(k),'FaceVertexCData');
tempName = h.Bodies{2}.Geometry.FaceVertexColorData(k).name;
if isempty(strfind(tempName,'Windshield')) &&...
isempty(strfind(tempName,'front-windows')) &&...
isempty(strfind(tempName,'rear-windows'))
set(patchHandles3(k),...
'FaceVertexCData',repmat(desiredColor,[size(tempFaceColor,1),1]));
end
end
2-34
Page 49

3-D Flight Data Playback
Turning Off the Landing Gear of the Second Body. This command series
illustrates how to turn off the landing g ea r on the second body by turning off
the visibility of all the vehicle parts associated with the landing gear.
Note The indices into the patchHandles3 vector are determined from the
name property. If you cannot access the name property to determine the
indices, you must use an alternative way to determine the indices that
correspond to the geometry parts.
for k = [1:8,11:14,52:57]
set(patchHandles3(k),'Visible','off')
end
Using Aero.VirtualRealityAnimation Objects
The A eros pace Toolbox interface to virtual reality animation objects uses the
Simulink 3D Animation software. See
Aero.Node,andAero.Viewpoint for details.
Aero.VirtualRealityAnimation,
1 Create and configure an animation object.
a Configure the animation object.
b Initialize that object.
2 Enable the tracking of changes to virtual worlds.
3 Load the animation world.
4 Load time series data for simulation.
5 Set coordination information for the object.
6 Add a chase helicopter to the object.
7 Load time series data for chase helicopter simulation.
8 Set coordination information for the new object.
9 Add a new viewpoint for the helicopter.
2-35
Page 50

2 Using Aerospace Toolbox
10 Play the animation.
11 Create a new viewpoint.
12 Add a route.
13 Add another helicopter.
14 Remove bodies.
15 Revert to the original world.
Running the Demo
1 Start the MATLAB software.
2 Run the demo either by entering astvranim in the MATLAB Command
Window or by finding the demo entry (Visualize Aircraft Takeoff via the
Simulink 3D Animation product) in the MATLAB Online Help and clicking
RunintheCommandWindowon its demo page.
2-36
While running, the demo performs several steps by issuing a series of
commands, as explained below.
Creating and Configuring a Virtual Reality Animation Object
This series of commands creates an animation object and configures the object.
1 Create an animation object.
h = Aero.VirtualRealityAnimation;
2 Configure the animation object to set the number of frames per second
(
FramesPerSecond) property. This controls the rate at which frames are
displayed in the figure window.
h.FramesPerSecond = 10;
3 Configure the animation object to set the seconds of animation data per
second time scaling (
h.TimeScaling = 5;
TimeScaling) property.
Page 51

3-D Flight Data Playback
The combination of FramesPerSecond and TimeScaling property determine
the time step of the simulation. The settings in this demo result in a time
step of approximately 0.5 s.
4 Specify the .wrl file for the vrworld object.
h.VRWorldFilename = [matlabroot,'/toolbox/aero/astdemos/asttkoff.wrl'];
The virtual reality animation object reads in the .wrl file.
Enabling Aero.Vir tualRealityAnimation Methods to Track
Changes to Virtual Worlds
Aero.VirtualRealityAnimation methods that change the current virtual
reality world use a temporary
these methods to work in a write-protected folder such as
the following.
1 Copy the virtual world file, asttkoff.wrl,toatemporaryfolder.
.wrl file to manage those changes. To enable
astdemos,type
copyfile(h.VRWorldFilename,[tempdir,'asttkoff.wrl'],'f');
2 Set the asttkoff.wrl world filename to the copied .wrl file.
h.VRWorldFilename = [tempdir,'asttkoff.wrl'];
Loading the Animation World
Load the animation world described in the VRWorldFilename field of the
animation object. When parsing the world, this method creates node objects
for existing nodes with
Simulink 3D Animation Viewer.
h.initialize();
DEF nam e s. The initialize method also opens the
2-37
Page 52
2 Using Aerospace Toolbox
2-38
Displaying Figures
While working with this demo, you can capture a view of a scene with the
takeVRCapture tool. This tool is specific to the astvranim demo. To display
the initial scene, type
takeVRCapture(h.VRFigure);
Page 53

3-D Flight Data Playback
A MATLAB figu r e window displays with the initial scene.
Loading Time Series Data for Simulation
Toprepareforsimulation,setthesimulationtimeseriesdata.
takeoffData.mat contains logged simulated data that you can use
to set the time series data.
structure
1 Load the takeoffData.
2 Set the time series data for the node.
'StructureWithTime', which is a default data format.
load takeoffData
h.Nodes{7}.TimeseriesSource = takeoffData;
h.Nodes{7}.TimeseriesSourceType = 'StructureWithTime';
takeoffData is set up as the Simulink
Aligning the Position and Rotation Data with Surrounding
Virtual World Objects
The virtual reality animation object expects positions and rotations in
aerospace body coordinates. If the input data coordinate system is different, as
isthecaseinthisdemo,youmustcreateacoordinate transformation function
to correctly line up the position and rotation data with the surrounding objects
in the virtual world. This code should set the coordinate transformation
function for the virtual reality animation. The custom transfer function for this
demo is
In this demo, if the input translation coordinates are
transform function must adjust them as:
matlabroot/toolbox/aero/astdemos/vranimCustomTransform.m.
[x1,y1,z1],thecustom
[X,Y,Z] = -[y1,x1,z1]
To run this custom transformation function, type:
h.Nodes{7}.CoordTransformFcn = @vranimCustomTransform;
Viewing the Nodes in a Virtual Reality Animation Object
While working with this demo, you can view all the n odes currently in the
virtual reality animation object with the
nodeInfo method.
2-39
Page 54

2 Using Aerospace Toolbox
h.nodeInfo;
This method displays the nodes currently in your demo:
Node Information
1_v1
2 Lighthouse
3_v3
4 Terminal
5 Block
6_V2
7 Plane
8 Camera1
Adding a Chase Helicopter
As part of the demo, add a chase helicopter node to your demo. Use the
addNode method to add another node to the virtual reality animation object.
2-40
Note By default, each time you add or remove a node, or when you call the
saveas method, a message shows the current .wrl file location. To disable
this message, set the
'ShowSaveWarning' property in the virtual reality
animation object. You can disable this message before adding the chase
helicopter.
1 Disable the message.
h.ShowSaveWarning = false;
2 Add the chase helicopter node.
h.addNode('Lynx',[matlabroot,'/toolbox/aero/astdemos/chaseHelicopter.wrl']);
The helicopter appears in the Simulink 3D Animation Viewer.
3 Move the camera angle of the virtual reality figure to view the aircraft
and newly added helicopter.
set(h.VRFigure,'CameraDirection',[0.45 0 -1]);
Page 55

4 View the scene with the chase helicopter.
takeVRCapture(h.VRFigure);
3-D Flight Data Playback
Loading Time Series Data for Simulation
Topreparetosimulatethechasehelicopter,setthesimulationtime
series data.
chaseData.mat contains logged simulated data that you
2-41
Page 56
2 Using Aerospace Toolbox
can use to set the time series data. chaseData is set up as the Simulink
structure
1 Load the chaseData.
2 Set the time series data for the node.
'StructureWithTime', which is a default data format.
load chaseData
h.Nodes{2}.TimeseriesSource = chaseData;
Aligning the Chase Helicopter Position and Rotation Data with
Surrounding Virtual World Objects
Use the custom transfer function to align the chase helicopter.
h.Nodes{2}.CoordTransformFcn = @vranimCustomTransform;
2-42
Adding a New Viewpoint
To add a viewpoint for the chase helicopter, use the addViewpoint method.
New viewpoints appear in the Viewpoints menu of the Simulink 3D
Animation Viewer. Type the following to add the viewpoint
Helicopter
h.addViewpoint(h.Nodes{2}.VRNode,'children','chaseView','View From Helicopter');
to the Viewpoints menu.
View From
Page 57

3-D Flight Data Playback
Playing Back the Simulation
The play command animates the virtual reality world for the given position
and angle for the duration of the time series data. Set the orientation of the
viewpoint first.
1 Set the orientat ion of the viewpoint via the vrnode object associated with
the node object for the viewpoint.
setfield(h.Nodes{1}.VRNode,'orientation',[0 1 0 convang(160,'deg','rad')]);
set(h.VRFigure,'Viewpoint','View From Helicopter');
2 Play the animation.
h.play();
Adding a Route to the Camera1 Node
The vrworld has a Ride on the Plane viewpoint. To enable this viewpoint to
function as intended, connect the plane position to the Camera1 node with the
addRoute method. This method add s a VRML ROUTE statement.
h.addRoute('Plane','translation','Camera1','translation');
2-43
Page 58

2 Using Aerospace Toolbox
Adding Another Helicopter and Viewing All Bodies Simultaneously
You can add another helicopter to the scene and also change the viewpoint to
one that views all three bodies in the scene at once.
1 Add a new node, Lynx1.
h.addNode('Lynx1',[matlabroot,'/toolbox/aero/astdemos/chaseHelicopter.wrl']);
2 Change the viewpoint to one that views all three bodies.
set(h.VRFigure,'Viewpoint','See Whole Trajectory');
2-44
Page 59

3-D Flight Data Playback
Removing Bodies
Use the removeNode method to remove the second helicopter. To obtain the
name of the node to remove, use the
1 View all the nodes.
h.nodeInfo
nodeInfo method.
2-45
Page 60

2 Using Aerospace Toolbox
Node Information
1 Lynx1_Inline
2 Lynx1
3 chaseView
4 Lynx_Inline
5 Lynx
6_v1
7 Lighthouse
8_v3
9 Terminal
10 Block
11 _V2
12 Plane
13 Camera1
2 Remove the Lynx1 node.
h.removeNode('Lynx1');
2-46
3 Change the viewpoint to one that views the whole trajectory.
set(h.VRFigure,'Viewpoint','See Whole Trajectory');
4 Check that you have removed the node.
h.nodeInfo
Node Information
1 chaseView
2 Lynx_Inline
3 Lynx
4_v1
5 Lighthouse
6_v3
7 Terminal
8 Block
9_V2
10 Plane
11 Camera1
Page 61

3-D Flight Data Playback
The following figure is a view of the entire trajectory with the third body
removed.
Reverting to the Original World
Theoriginalfilenameisstoredinthe'VRWorldOldFilename' property
of the virtual reality animation object. To display the original world, set
'VRWorldFilename' to the original name and reinitialize it.
2-47
Page 62

2 Using Aerospace Toolbox
1 Revert to the original world, 'VRWorldFilename'.
h.VRWorldFilename = h.VRWorldOldFilename{1};
2 Reinitialize the restored world.
h.initialize();
Closing and Deleting Worlds
To close and delete a world, use the delete method.
h.delete();
Using Aero.FlightGearAnimation Objects
The Aerospace Toolbox interface to the FlightGear flight simulator enables
you to visualize flight data in a three-dimensional environment. The
third-party FlightGear simulator is an open source software package available
through a GNU
obtain and install the third-party FlightGear flight simulator. It then explains
how to play back 3-D flight data by using a FlightGear demo, provided with
your Aerospace Toolbox software, as an example.
®
General Public License (GPL). This section explains how to
2-48
• “About the FlightGear Interface” on page 2-48
• “Configuring Your Computer for FlightGear” on page 2-49
• “Installing and Starting FlightGear” on page 2-52
• “Working with the Flight Simulator Interface” on page 2-53
• “Running the Demo” on page 2-56
About the FlightGear Interface
The FlightGear flight simulator interface included with the Aerospace Toolbox
product is a unidirectional transmission link from the MATLAB software
to FlightGear using FlightGear’s published
protocol. Data is transmitted via UDP network packets to a running instance
of FlightGear. The toolbox supports multiple standard binary distributions of
FlightGear. See “Working with the Flight Simulator Interface” on page 2-53
for interface details.
net_fdm binary data exchange
Page 63

3-D Flight Data Playback
FlightGear is a separate software entity neither created, owned, nor
maintained by The MathWorks.
• To report bugs in or request enhancements to the Aerospace Too lbox
FlightGear interface, contact MathWorks Technical Support at
http://www.mathworks.com/contact_TS.html.
• To report bugs or request enhancements to FlightGear itself, visit
www.flightgear.org and use the contact page.
Obtaining FlightG ear. You can obtain FlightGear from
www.flightgear.org in the download area or by ordering CDs from
FlightGear. The download area contains extensive documentation for
installation and configuration. Because FlightGear is an open source project,
source downloads are also available for customization and porting to custom
environments.
Configuring Your Computer for FlightGear
You must have a high performance graphics card with stable drivers to use
FlightGear. For more information, see the FlightGear CD distribution or the
hardware requirements and documentation areas of the FlightGear Web
site,
www.flightgear.org.
The MathWorks tests of FlightGear’s performance and stability indicate
significant sensitivity to computer video cards, driver versions, and driver
settings. You need OpenGL support with hardware acceleration activated.
The OpenGL settings are particularly important. Withoutpropersetup,
performance can drop from about a 3 0 frames-per-second (fps) update rate to
less than 1 f ps.
Graphics Recommendations for Microsoft Windows. The MathWorks
recommends the following for Windows
®
users:
• Choose a graphics card with good OpenGL performance.
• Always use the latest tested and stable driver release for your video card.
Test the driver thoroughly on a few computers before deploying to others.
For Microsoft
®
Windows XP systems running on x86 (32-bit) or
AMD-64/EM64T chip architectures, the graphics card operates in the
unprotected kernel space known as Ring Zero. This means that glitches in
2-49
Page 64

2 Using Aerospace Toolbox
the driver can cause the Windows operating system to lock or crash. Before
buying a large number of computers for 3-D applications, test, with your
vendor, one or two computers to find a combination of hardware, operating
system, drivers, and settings that are stable for you r applications.
Setting Up OpenGL Graphics on Windows. For complete information on
Silicon Graphics OpenGL settings, refer to the documentation at the OpenGL
Web site,
Follow these steps to optimize your video card settings. Your driver’s panes
might look different.
1 Ensure that you have activated the OpenGL hardware acceleration on
your video card. On Windows, access this configuration through Start >
Settings > Control Panel > Display, which opens the following dialog
box. Select the Settings tab.
www.opengl.org.
2-50
2 Click the Advanced button in the lower right of the dialog box, which
opens the graphics card’s custom configuration dialog box, and go to the
Page 65

3-D Flight Data Playback
OpenGL tab. For an ATI Mobility Radeon 9000 video card, the OpenGL
pane looks like this:
3 For best performance, move the Main Settings slider near the top of the
dialog box to the Performance end of the slider.
4 If stability is a problem, try other screen resolutions, other color depths in
the Displays pane, and other OpenGL acceleration modes.
Many cards perform m uch better at 16 bits-per-pixel color depth (also known
as 65536 color mode, 16-bit color). For example, on an ATI Mobility Radeon
9000 running a given model, 30 fps are achieved in 16-bit color mode, while 2
fps are achieved in 32-bit color mode.
2-51
Page 66

2 Using Aerospace Toolbox
Setup on Linux®,MacOS®X, and Other Platforms. FlightGear
distributions are available for Linux, Mac OS X, and other UNIX
from the FlightGear Web site,
platforms, like Windows, requires careful configuration of graphics cards and
drivers. Consult the documentation and hardware requirements sections
at the FlightG ear Web site.
Using MATLAB Graphics Controls to Configure Your OpenGL Settings.
You can also control your OpenGL rendering from the MATLAB command
line with the MATLAB Graphics
command reference for more information.
www.flightgear.org. Installationonthese
opengl command. Consult the opengl
®
platforms
Installing and Starting FlightGear
The extensive FlightGear documentation guides you through the installation
in detail. Consult the documentation section of the FlightGear Web site for
complete installation instructio n s:
Keep the following points in mind:
• Generous central processor speed, system and video R AM, and virtual
memory are essential for good flight simulator performance.
The MathWorks recommends a minimum of 512 megabytes of system RAM
and 128 megabytes o f video RAM for reasonable performance.
www.flightgear.org.
2-52
• Be sure to have sufficient disk space for the FlightGear download a nd
installation.
• The MathWorks recommends configuring your computer’s graphics card
before you install FlightGear. See the preceding section, “Configuring Your
Computer for FlightGear” on page 2-49.
• Shutting down all running applications (including the MATLAB software)
before installing FlightGear is recommended.
• The MathWorks tests indicate that the operational stability of FlightGear
is especially sensitive during startup. It is best to not move, resize,
mouse over, overlap, or cover up the FlightGear window until the initial
simulation scene appears after the startup splash screen fades out.
Page 67

3-D Flight Data Playback
• The current releases of FlightGear are optimized for flight visualization at
altitudes below 100,000 feet. FlightGear does not work well or at all with
very high altitude and orbital views.
The Aerospace Toolbox product supports FlightGear on a number of platforms
(
http://www.mathworks.com/products/aerotb/requirements.html). The
following table lists the properties you should be aware of before you start to
use FlightGear.
FlightGear
Property
FlightGearBaseDirectory
GeometryModelName
Folder Description
FlightGear
installation folder.
Platforms
Windows
Sun™
Solaris™ or
Typica l Lo cation
C:\Program Files\FlightGear
(default)
Directory into which you installed
FlightGear
Linux
Mac
®
/Applications
(folder to which you d ragged the
FlightGear icon)
Model geometry
folder
Windows
C:\Program Files\FlightGear\data\Aircraft\HL20
(default)
Solaris or
Linux
Mac
$FlightGearBaseDirectory/data/Aircraft/HL20
$FlightGearBaseDirectory/FlightGear.app/Contents/Resources/data/Aircraft/HL20
Working with the Flight Simulator Interface
The Aerospace Toolbo x product provides a demo named Displaying Flight
Trajectory Data, which shows you how you can visualize flight trajectories
withFlightGearAnimationobject. Thedemoisintendedtobemodified
depending on the particulars of your FlightGear installation. This section
explains how to run this demo. Use this demo as an example to play back your
own 3-D flight d ata with FlightGear.
2-53
Page 68

2 Using Aerospace Toolbox
YouneedtohaveFlightGearinstalledand configured before attempting to
simulate this model. See “About the FlightGear Interface” on page 2-48.
To run the demo:
1 Import the aircraft geometry into FlightGear.
2 Run the demo. The demo performs the following steps:
a Loads recorded trajectory data
b Creates a time series object from trajectory data
c Creates a FlightGearAnimation object
3 Modify the animation object properties, if needed.
4 Create a run script for launching FlightGear flight simulator.
5 Start FlightGear flight simulator.
6 Play back the flight trajectory.
2-54
The following sections describe howtoperformthesestepsindetail.
Importing the Aircraft G e ometry into FlightGear. Before running the
demo, copy the aircraft geometry model into FlightGear. From the following
procedures, choose the one appro priate for your platform. This section
assumes that you have read “Installing and Starting FlightGear” on page 2-52.
If your platform is Windows:
1 Go to your installed FlightGear folder. O pen the data folder, then the
Aircraft folder: FlightGear\data\Aircraft\.
2 You may already have an HL20 subfolder there, if you have previously run
the Aerospace Blockset NASA HL-20 with FlightGear Interface demo. In
this case, you don’t have to do anything, because the geometry model
is the same.
Otherwise, copy the
matlabroot\toolbox\aero\aerodemos\ folder to the
FlightGear\data\Aircraft\ folder. This folder contains the
HL20 folder from the
Page 69

3-D Flight Data Playback
preconfigured geometries for the HL-20 simulation and HL20-set.xml.
The file
matlabroot\toolbox\aero\aerodemos\HL20\models\HL20.xml
defines the geometry.
If your platform is Solaris or Linux:
1 Go to your installed FlightGear folder. O pen the data folder, then the
Aircraft folder: $FlightGearBaseDirectory/data/Aircraft/.
2 You may already have an HL20 subfolder there, if you have previously run
the Aerospace Blockset NASA HL-20 with FlightGear Interface demo. In
thiscase,youdonothavetodoanything,becausethegeometrymodel
is the same.
Otherwise, copy the
matlabroot/toolbox/aero/aerodemos/ folder to the
$FlightGearBaseDirectory/data/Aircraft/ folder. This folder contains
the preconfigured geometries for the HL-20 simulation and
The file
matlabroot/toolbox/aero/aerodemos/HL20/models/HL20.xml
HL20 folder from the
HL20-set.xml.
defines the geometry.
If your platform is Mac:
1 Open a terminal.
2 List the contents of the Aircraft folder. For example, type
ls $FlightGearBaseDirectory/data/Aircraft/
3 You may already have an HL20 subfolder there, if you have previously run
the Aerospace Blockset NASA HL-20 with FlightGear Interface demo. In
this case, you do not have to do anything, because the geometry model is
the same. Continue to “Running the Demo” on page 2-27.
Otherwise, copy the
matlabroot/toolbox/aero/aerodemos/
HL20 folder from the
folder to the
$FlightGearBaseDirectory/FlightGear.app/Contents/Resources/data/Aircraft/
2-55
Page 70

2 Using Aerospace Toolbox
folder. This folder contains the preconfigured geometries
for the HL-20 simulation and
matlabroot/toolbox/aero/aerodemos/HL20/models/HL20.xml
HL20-set.xml.Thefile
defines the geometry.
Running the Demo
1 Start the MATLAB software.
2 Run the demo either by entering astfganim in the MATLAB Command
Window or by finding the demo entry (Displaying Flight Trajectory Data)
intheMATLABOnlineHelpandclickingRunintheCommandWindow
on its demo page.
While running, the demo performs several steps by issuing a series of
commands, as explained below.
Loading Recorded Flight Trajectory Data. The flight trajectory data for
this example is stored in a comma separated value formatted file. Using
dlmread, the data is read from the f ile starting at row 1 and column 0, which
skips the header information.
2-56
tdata = dlmread('asthl20log.csv',',',1,0);
Creating a Time Series Object from Trajectory Data. Thetimeseries
object,
dataalongwiththetimearrayin
ts, is created from the latitude, longitude, altitude, and Euler angle
tdata using the MATLAB timeseries
command. Latitude, longitude, and Euler angles are also converted from
degrees to radians using the
ts = timeseries([convang(tdata(:,[3 2]),'deg','rad') ...
tdata(:,4) convang(tdata(:,5:7),'deg','rad')],tdata(:,1));
convang function.
Creating a FlightGearAnimation Object. This series of commands creates
a FlightGearAnimation object:
1 Opening a FlightGearAnimation object.
h = fganimation;
2 Setting FlightG earAnimation object properties for the time series.
Page 71

h.TimeseriesSourceType = 'Timeseries';
h.TimeseriesSource = ts;
3-D Flight Data Playback
3 Setting FlightGearAnimation object properties relating to Flight
These properties include the path to the installation folder, the ve
number, the aircraft geometry model, and network information fo
Gear.
rsion
rthe
FlightGear flight simulator.
h.FlightGearBaseDirectory = 'C:\Program Files\FlightGear191';
h.FlightGearVersion = '1.9.1';
h.GeometryModelName = 'HL20';
h.DestinationIpAddress = '127.0.0.1';
h.DestinationPort = '5502';
4 Setting the initial conditions (location and orientation) for the FlightGear
flight simulator.
h.AirportId = 'KSFO';
h.RunwayId = '10L';
h.InitialAltitude = 7224;
h.InitialHeading = 113;
h.OffsetDistance = 4.72;
h.OffsetAzimuth = 0;
5 Setting the seconds of animation data per second of wall-clock time.
h.TimeScaling = 5;
6 Checking the FlightGearAnimation object properties and their values.
get(h)
At this point, the demo stops running and returns the FlightGearAnimation
object,
h:
TimeseriesSource: [196x1 timeseries]
TimeseriesSourceType: 'Timeseries'
TimeseriesReadFcn: @TimeseriesRead
TimeScaling: 5
FramesPerSecond: 12
FlightGearVersion: '1.9.1'
OutputFileName: 'runfg.bat'
2-57
Page 72

2 Using Aerospace Toolbox
FlightGearBaseDirectory: 'C:\Program Files\FlightGear191'
GeometryModelName: 'HL20'
DestinationIpAddress: '127.0.0.1'
DestinationPort: '5502'
AirportId: 'KSFO'
RunwayId: '10L'
InitialAltitude: 7224
InitialHeading: 113
OffsetDistance: 4.7200
OffsetAzimuth: 0
You can now set the object properties for data playback (see “Modifying the
FlightGearAnimation Object Properties” on page 2-58).
Modifying the FlightGearAnimation Object Properties. Modify the
FlightGearAnimation object properties as needed. If your FlightGear
installation folder is other thanthatinthedemo(forexample,
modify the
FlightGearBaseDirectory property by issuing the following
FlightGear),
command:
2-58
h.FlightGearBaseDirectory = 'C:\Program Files\FlightGear';
Similarly,ifyouwanttouseaparticularfilenamefortherunscript,modify
the
OutputFileName property.
Verify the FlightGearAnimation object properties:
get(h)
You can now generate the run script (see “Generating the Run Script” on
page 2-58).
Generating the Run Script. To start FlightGear with the desired initial
conditions (location, date, time, weather, operating modes), it is best to create
a run script by using the
GenerateRunScript(h)
GenerateRunScript command:
By default, GenerateRunScript saves the run script as a text file
named
runfg.bat. You can specify a different name by modifying the
Page 73

3-D Flight Data Playback
OutputFileName property of the FlightGearAnimation object, as described
in the previous step.
This file does not need to be generated each time the data is viewed, only
when the desired initial conditions or FlightGear information changes.
You are now ready to start FlightGear (see “Starting the FlightGear Flight
Simulator” on page 2-59).
Starting the FlightGear Flight Simula tor. To start FlightGear from the
MATLAB command prompt, use the
system command to execute the run
script. Provide the name of the output file created by GenerateRunScript
as the argument:
system('runfg.bat &');
FlightGear starts in a separate window.
Tip With the FlightGear window in focus, press the V key to alternate
between the different aircraft views: cockpit view, helicopter view, chase
view, and so on.
You are now ready to play back data (see “Playing Back the Flight Trajectory”
on page 2-59).
Playing Back the Flight Trajectory. Once FlightGear is running, the
FlightGearAnimation object can start to communicate with FlightGear. To
animate the flight trajectory data, use the play command:
play(h)
The following illustration shows a snapshot of flight data playback in tower
view without yaw.
2-59
Page 74

2 Using Aerospace Toolbox
2-60
Page 75

Function Reference
Animation Objects (p. 3-3) Manipulate Aero.Animation objects
Body Objects (p. 3-4) Manipulate Aero.Body objects
Camera Objects (p. 3-5) Manipulate Aero.Camera objects
3
FlightGear Objects (p. 3-5)
Geometry O bjects (p. 3-6) Manipulate Aero.Geometry objects
Node Objects (p. 3-7) Manipulate Aero.Node objects
Viewpoint Objects (p. 3-8) Manipulate Aero.Viewpoint objects
Virtual Reality Objects (p. 3-9)
Axes Transfo rmations (p. 3-10) Transform axes of coordinate
Environment (p. 3-11) Simulate various aspects of aircraft
File Reading (p. 3-12) Read standard aerodynamic file
Flight Parameters (p. 3-12) Various flight parameters, including
Manipulate
Aero.FlightGearAnimation objects
Manipulate
Aero.VirtualRealityAnimation
objects
systems to different types, such as
Euler angles to quaternions and vice
versa
environment, such as atmosphere
conditions, gravity, magnetic fields,
and wind
formats into the MATLAB interface
ideal airspeed correction, Mach
number, and dynamic pressure
GasDynamics(p.3-12)
Various gas dynamics tables
Page 76

3 Function Reference
Quaternion Math (p. 3-13) Common ma th ematical and
matrix operations, including
quaternion multiplication, division,
normalization, and rotating vector
by quaternion
Time (p. 3-13)
Unit Conversion (p. 3-13) Convert common measurement units
Time calculations, including Julian
dates, decimal year, and leap year
from one system to another, such as
converting acceleration from feet per
second to meters per second and vice
versa
3-2
Page 77

Animation Objects
addBody (Aero.Animation) Add loaded body to animation object
Aero.Animation Construct animation object
createBody (Aero.Animation) Create body and its associated
Animation Objects
and generate its patches
patches in animation
delete (Aero.Animation)
hide (Aero.Animation) Hide animation figure
initialize (Aero.Animation) Create animation object figure and
initIfNeeded (Aero.Animation) Initialize animation graphics if
moveBody (Aero.Animation)
play (Aero.Animation) Animate
removeBody (Aero.Animation) Remove one body from animation
show (Aero.Animation) Show animation object figure
updateBodies (Aero.Animation) Update bodies of animation object
updateCamera (Aero.Animation)
Destroy animation object
axes and build patches for bodies
needed
Move body in animation object
Aero.Animation object
given position/angle time series
Update camera in animation object
3-3
Page 78
3 Function Reference
Body Objects
Body (Aero.Body) Construct body object for use with
animation object
findstartstoptimes (Aero.Body) Return start and stop times of time
series data
generatePatches ( Aero.Body) Generate patches for body with
loaded face , vertex, and color data
load (Aero.Body) Get geometry data from source
move (Aero.Body) Change animation body position and
orientation
update (Aero.Body) Change body position and orientation
as function of time
3-4
Page 79

Camera Objects
Camera (Aero.Camera) Construct camera object for use with
Camera Objects
animation object
update (Aero.Camera)
FlightGear Objects
ClearTimer
(Aero.Flig
delete (Ae
fganimat
(Aero.Fl
Generat
(Aero.F
initialize
(Aero.FlightGearAnimation)
play ( A ero.FlightGearAnimation) Animate FlightGear flight simulator
SetTimer
(Aero.FlightGearAnimation)
lightGearAnimation)
htGearAnimation)
ro.FlightGearAnimation)
ion
ightGearAnimation)
eRunScript
Update camera position based on
time and position of other Aero.Body
objects
Clear and de
of Flig htGe
Destroy Fl
Construc
object
Generat
flight s
Set up F
using given position/angle time
series
Set name of timer for animation of
FlightGear flight simulator
lete timer for animation
ar flight simulator
ightGear animation object
t FlightGear animation
e run script for FlightGear
imulator
lightGear animation object
update (Aero.FlightGearAnimation) Update position data to FlightGear
animation object
3-5
Page 80

3 Function Reference
Geometry Objects
Geometry (Aero.Geometry) Construct 3-D geometry for use with
animation object
read (Aero.Geometry)
Read geometry data using current
reader
3-6
Page 81

Node Objects
Node Objects
findstartstoptimes (A ero.Node) Return start and stop times for time
series data
move (Aero.Node) Changenodetranslationand
rotation
Node (Aero.Node) Create node object for use with
virtual reality animation
update (Aero.Node) Change node position and
orientation v ersus time data
3-7
Page 82

3 Function Reference
Viewpoint Objects
Viewpoint (Aero.Viewpoint) Create viewpoint object for use in
virtual reality animation
3-8
Page 83

Virtual Reality Objects
Virtual Reality Objects
addNode
(Aero.VirtualRealityAnimation)
addRoute
(Aero.VirtualRealityAnimation)
addViewpoint
(Aero.VirtualRealityAnimation)
delete
(Aero.VirtualRealityAnimation)
initializ
(Aero.Vir
nodeInfo
(Aero.VirtualRealityAnimation)
play (Aero.VirtualRealityAnimation) Animate virtual reality world for
remove
(Aero
remov
(Aer
saveas
(Aero.VirtualRealityAnimation)
e
tualRealityAnimation)
Node
.VirtualRealityAnimation)
eViewpoint
o.VirtualRealityAnimation)
Add existing node to current virtual
reality world
Add VRML ROUTE statement to
virtual reality animation
Add viewpoint for virtual reality
animation
Destroy virtual reality animation
object
Create and populate virtual reality
animation object
Create list of nodes associated with
virtual reality animation object
given position and angle in time
series data
Remove node from virtual reality
animation object
Remove viewpoint node from virtual
reality animation
Save vi rtu al reality world associated
with virtual reality animation object
ateNodes
upd
ro.VirtualRealityAnimation)
(Ae
VirtualRealityAnimation
(Aero.VirtualRealityAnimation)
Change virtual reality animation
node position and orientation as
function of time
Construct virtual reality animation
object
3-9
Page 84

3 Function Reference
Axes Transformations
angle2dcm
angle2quat
dcm2alphabeta
dcm2angle
dcm2latlon
dcm2quat
dcmbody2wind
dcmecef2ned Convert geodetic latitude and
ecef2lla Convert Earth-centered Earth-fixed
geoc2geod
Create direction cosine matrix from
rotation angles
Convert rotation angles to
quaternion
Convert direction cosine matrix to
angle of attack and sideslip angle
Create rotation angles from direction
cosine matrix
Convert direction cosine matrix to
geodetic latitude and longitude
Convert direction cosine matrix to
quaternion
Convert angle of attack and sideslip
angletodirectioncosinematrix
longitude to direction cosine matrix
(ECEF) coordinates to geo detic
coordinates
Convert geocentric latitude to
geodetic latitude
3-10
geod2geoc
lla2ecef Convert geodetic coordinates to
quat2angle
quat2dcm
Convert g eodetic latitude to
geocentric latitude
Earth-centered Earth-fixed (ECEF)
coordinates
Convert quaternion to rotation
angles
Convert quaternion to direction
cosine matrix
Page 85

Environment
Environment
atmoscira
atmoscoesa
atmosisa
atmoslapse
atmosnonstd
atmosnrlmsise00 Implement mathematical
atmospa
geoide
gravitycentrifugal Implement centrifugal effect of
grav
lt
gm96
itysphericalharmonic
Use COSPAR International
Reference Atmos phere 1986 model
Use 1976 COESA model
Use International Standard
Atmosphere model
Use Lapse Rate Atmosphere model
Use climatic data from MIL-STD-210
or MIL-HDBK-310
representation of 2001 United
States Naval Research Laboratory
Mass Spectrometer and Incoherent
Scatter Radar Exosphere
Calculate pressure altitude based on
ambient pressure
Calculate geoid height as determined
from EGM96 Geopotential Model
planetary gravity
ement spherical harmonic
Impl
resentation of planetary gravity
rep
gravitywgs84
gravityzonal Implement zonal harmonic
wrldmagm Use World Magne t ic Model
lement 1984 World Geodetic
Imp
tem (WGS84) representation of
Sys
rth’s gravity
Ea
representation of planetary gravity
3-11
Page 86

3 Function Reference
File Reading
datcomimport
Flight Parame
airspeed
alphabeta Incidence a
dpressure
geocradius
machnumber
rrdelta
rrsigma
rrtheta
ters
Bring DATCOM file into MATLAB
environment
Airspeed from velocity
nd sideslip angles
Compute dyn
velocity a
Estimate r
at geocent
Compute M
y and speed of sound
velocit
Compute
Comput
Compu
amic pressure using
nd density
adius of ellipsoid p lanet
ric latitude
ach number using
relative pressure ratio
erelativedensityratio
te relative temperature ratio
Gas Dynamics
3-12
flowfanno Fanno line f low relations
flowisentropic Isentropic flow ratios
flownormalshock
flowprandtlmeyer Calculate Prandtl-Meyer functions
flowrayleigh Rayleigh line flow relations
Normal shock relations
for expansion waves
Page 87

Quaternion Math
Quaternion Math
Time
quatconj
quatdivide Divide quaternion by another
quatinv
quatmod
quatmultip
quatnorm
quatnorma
quatrota
decyea
ndate
julia
year
leap
mjuliandate
ly
lize
te
r
Calculate conjugate of quaternion
quaternion
Calculate inverse of quaternion
Calculate modulus of quaternion
Calculate product of two quaternions
Calculate norm of quaternion
Normalize
Rotate vector by quaternion
Calculate decimal year
Calculate Julian date
Dete
ulate modified Julian date
Calc
quaternion
rmine leap year
Unit Conversion
convacc
convang
convangacc
Convert from acceleration units to
desired acceleration units
Convert from angle units to desired
angle units
Convert from angular acceleration
units to desired angular acceleration
units
3-13
Page 88

3 Function Reference
convangvel
convdensity
convforce Convert from force units to desired
convlength
convmass
convpres
convtemp
Convert from angular velocity units
to desired angular velocity units
Convert from density units to desired
density units
force units
Convert from length units to desired
length units
Convert from mass units to desired
mass units
Convert from pressure units to
desired pressure units
Convert from temperature units to
desired temperature units
3-14
Page 89

Alphabetical List
4
Page 90

Aero.Animation.addBody
Purpose Add loaded body to animation object and generate its patches
Syntax idx = addBody(h,b)
idx = h.addBody(b)
Description idx = addBody(h,b) and idx = h.addBody(b) add a loaded body, b,
to the animation object
thebodytobeadded.
h and generates its patches. idx is the index of
Input
Arguments
Output
h
b
idx
Animation object.
Loaded body.
Index of the body to be added.
Arguments
Examples Add a second body to the list that is a pointer to the first body. This
means that if you change the properties of one body, the properties of
the other body change correspondingly.
h = Aero.Animation;
idx1 = h.createBody('pa24-250_orange.ac','Ac3d');
b = h.Bodies{1};
idx2 = h.addBody(b);
4-2
Page 91

addNode (Aero.VirtualRealityAnimation)
Purpose Add existing node to current virtual reality world
Syntax addNode(h, node_name, wrl_file)
h.addNode(node_name, wrl_file)
Description addNode(h, node_name, wrl_file) and h.addNode(node_name,
wrl_file)
reality world. The
taken.
points to) the
names in the same
added. You must specify the full path for this file. The vrnode object
associated with the node object must be defined using a
in the
Transform.
add an existing node, node_name, to the current virtual
wrl_file isthefilefromwhichthenewnodeis
addNode adds a new node named node_name, which contains (or
wrl_file. node_name must be unique from other node
.wrl file. wrl_file must contain the node to be
DEF statement
.wrl file. This method creates a node object on the world of type
When you use the
.wrl file will be added to the virtual reality animation object under one
addNode method to add a node, all the objects in the
node. If you want to add separate nodes for the objects in the
placeeachnodeinaseparate
.wrl file.
Example AddnodetoworlddefinedinchaseHelicopter.wrl.
h = Aero.VirtualRealityAnimation;
h.VRWorldFilename = [matlabroot,'/toolbox/aero/astdemos/asttkoff.wrl'];
copyfile(h.VRWorldFilename,[tempdir,'asttkoff.wrl'],'f');
h.VRWorldFilename = [tempdir,'asttkoff.wrl'];
h.initialize();
h.addNode('Lynx',[matlabroot,'/toolbox/aero/astdemos/chaseHelicopter.wrl']);
See Also Aero.Node, move, removeNode, updateNodes,
Aero.VirtualRealityAnimation
.wrl file,
4-3
Page 92

addRoute (Aero.VirtualRealityAnimation)
Purpose Add VRML ROUTE statement to virtual reality animation
Syntax addRoute(h, nodeOut, eventOut, nodeIn, eventIn)
h.addNode(nodeOut, eventOut, nodeIn, eventIn)
Description addRoute(h, nodeOut, eventOut, nodeIn, eventIn) and
h.addNode(nodeOut, eventOut, nodeIn, eventIn) add a VRML
ROUTE statement to the virtual reality animation, where
is the node from which information is routed, eventOut is the event
(property),
eventIn is the receiving event (property).
Examples Add a ROUTE command to connect the Plane position to the Camera1
node.
h = Aero.VirtualRealityAnimation;
h.VRWorldFilename = [matlabroot,'/toolbox/aero/astdemos/asttkoff.wrl'];
copyfile(h.VRWorldFilename,[tempdir,'asttkoff.wrl'],'f');
h.VRWorldFilename = [tempdir,'asttkoff.wrl'];
h.initialize();
h.addNode('Lynx',[matlabroot,'/toolbox/aero/astdemos/chaseHelicopter.wrl']);
h.addRoute('Plane','translation','Camera1','translation');
nodeIn isthenodetowhichinformationisrouted,and
nodeOut
See Also addViewpoint
4-4
Page 93
addViewpoint (Aero.VirtualRealityAnimation)
Purpose Add viewpoint for virtual reality animation
Syntax addViewpoint(h, parent_node, parent_field, node_name)
h.addViewpoint(parent_node, parent_field, node_name)
addViewpoint(h, parent_node, parent_field, node_name,
description)
h.addViewpoint(parent_node, parent_field, node_name,
description)
addViewpoint(h, parent_node, parent_field, node_name,
description, position)
h.addViewpoint(parent_node, parent_field, node_name,
description, position)
addViewpoint(h, parent_node, parent_field, node_name,
description, position, orientation)
h.addViewpoint(parent_node, parent_field, node_name,
description, position, orientation)
Description addViewpoint(h, parent_node, parent_field, node_name) and
h.addViewpoint(parent_node, parent_field, node_name) add a
viewpoint named
field of the vrnode object and whose
field of the vrnode object to the virtual world animation object,
node_name whose parent_node is the parent node
parent_field is a valid parent
h.
addViewpoint(h, parent_node, parent_field, node_name,
description)
node_name, description)
parent_node is the parent node field of the vrnode object and whose
parent_field is a valid parent field of the vrnode object to the virtual
world animation object,
and h.addViewpoint(parent_node, parent_field,
add a viewpoint named node_name whose
h. description is the string you want to
describe the viewpoint.
addViewpoint(h, parent_node, parent_field, node_name,
description, position)
parent_field, node_name, description, position)
viewpoint named
node_name whose parent_node is the parent node
field of the vrnode object and whose
field of the vrnode object to the virtual world animation object,
description is the string you want to describe the viewpoint and
and h.addViewpoint(parent_node,
add a
parent_field is a valid parent
h.
4-5
Page 94

addViewpoint (Aero.VirtualRealityAnimation)
position is the position of the viewpoint. Specify position using
VRML coordinates (
addViewpoint(h, parent_node, parent_field,
node_name, description, position, orientation)
h.addViewpoint(parent_node, parent_field, node_name,
description, position, orientation)
node_name whose parent_node istheparentnodefieldofthevrnode
object and whose
object to the virtual world animation object,
you want to describe the viewpoint,
viewpoint, and
position using VRML coordinates (xyz). Specify orientation in a
VRML axes angle format (
Note If you call addViewpoint with only the description argument,
you must set the position and orientation of the viewpoint with the
Simulink 3D Animation
to use VRML coo rdinates.
xyz).
add a viewpoint named
parent_field is a valid parent field of the vrnode
h. description is the string
position is the position of the
orientation is the orientation of the viewpoint. Specify
xyzΘ).
vrnode/setfield function. This requires you
and
Examples Add a viewpoint named chaseView.
h = Aero.VirtualRealityAnimation;
h.VRWorldFilename = [matlabroot,'/toolbox/aero/astdemos/asttkoff.wrl'];
copyfile(h.VRWorldFilename,[tempdir,'asttkoff.wrl'],'f');
h.VRWorldFilename = [tempdir,'asttkoff.wrl'];
h.initialize();
h.addViewpoint(h.Nodes{2}.VRNode,'children','chaseView','View From Helicopter');
See Also addRoute, removeViewpoint
4-6
Page 95
Aero.Animation class
Purpose Visualize aerospace animation
Description Use the Aero.Animation class to visualize flight data without any other
tool or toolbox. You only need the Aerospace Toolbox to visualize this
data.
Construction
Methods
Aero.Animation Construct animation object
addBody
createBody
delete Destroy animation object
hide
initialize
initIfNeeded Initialize animation graphics if
moveBody Move b od y in animation object
play
removeBody
show
Add loaded body to animation
object and generate its patches
Create body and its associated
patches in animation
Hide animation figure
Create animation object figure
and axes and build p atch es for
bodies
needed
Animate
given positio n/ang le time s erie s
Remove one body from animation
Show animation object f igure
Aero.Animation object
updateBodies
updateCamera
Update bodies of animation object
Update camera in animation
object
4-7
Page 96

Aero.Animation class
Properties
Bodies
Camera Specify camera that animation
Figure
FigureCustomizationFcn Specify figure customization
FramesPerSecond Animation rate
Name
TCurrent Current time
TFinal End time
TimeScaling Scaling time
TStart Start time
See Also Aero.FlightGearAnimation
Aero.VirtualRealityAnimation
“Using Aero.Animation Objects” on page 2-26
Specify name of animation object
object contains
Specifynameoffigureobject
function
Specify name of animation object
4-8
Page 97

Aero.Animation
Purpose Construct animation object
Syntax h = Aero.Animation
Description h = Aero.Animation constructs an animation object. The animation
object is returned to
Note The Aero.Animation constructor does not retain the properties
of previously created animation objects, even those that you have saved
to a MAT-file. This means that subsequent calls to the animation object
constructor always create animation objects with default properties.
Examples h=Aero.Animation
h.
4-9
Page 98

Aero.Body
Purpose Create body object for use with animation object
Syntax h = Aero.Body
Description h = Aero.Body constructs a body for an animation object. The
animation object is returned in
typically:
1 Create the animation body.
2 Configure or customize the body object.
3 Load the body.
4 Generate patches for the body (requires an axes from a figure).
5 Set time series data sou rce.
6 Move or update the body.
h. TousetheAero.Bodyobject,you
Constructor
Summary
4-10
By default, an Aero.Body object natively uses aircraft
for the body geometry and the time series data. It expects the rotation
order
z-y-x (psi,theta,phi).
Convert time series data from other coordinate systems on the fly by
registering a different
Constructor
Body
CoordTransformFcn function.
Description
Construct body object for use with animation
object.
x-y-z coordinates
Page 99

Aero.Body
Method
Summary
Property
Summary
Method
findstartstoptimes
generatePatches
load
move
update
Property
CoordTransformFcn
Name
Position
Rotation
Geometry
PatchGenerationFcn
PatchHandles
ViewingTransform
TimeseriesSource
Description
Return start and stop times of time series
data.
Generate patches for body with loaded face,
vertex, and color data.
Get geometry data from source.
Change Aero.Body position and orientation.
Changes body position and orientation
versus time data.
Description
Specify a function that
controls the coordinate
transformation.
Specify name of body.
Specify position of
body.
Specify rotation of
body.
Specify geometry of
body.
Specify patch
generation function.
Specify patch handles. MATLAB array
Specify viewing
transform.
Specify time series
source.
Values
string
MATLAB array
MATLAB array
handle
MATLAB array
MATLAB array
MATLAB array
4-11
Page 100

Aero.Body
Property
TimeseriesSourceType
Description
Specify the type of time
series data stored in
'TimeseriesSource'.
Values
string
Five values are
available. They are
listed in the following
table. The default
TimeseriesReadFcn
value is
Specify time series
'Array6DoF'.
MATLAB array
read function.
Thetimeseriesdata,storedintheproperty'TimeseriesSource',is
interpreted according to the
'TimeseriesSourceType' property, which
can be one of:
'Timeseries'
MATLAB time series data with six
values per time:
lat lon alt phi theta psi
The values are resampled.
'StructureWithTime'
Simulink struct with time (for
example, Simulink root outport
logging
'Structure with time'):
4-12
•
signals(1).values: lat lon
alt
• signals(2).values: phi theta
psi
Signals are linearly interpolated vs.
time using
interp1.
 Loading...
Loading...