

Page 1

Aerospace Blockse
User’s Guide
t™ 3
Page 2

How to Contact The MathWorks
www.mathworks.
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html T echnical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathwo
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathwo
com
rks.com
rks.com
Web
Bug reports
Sales, prici
ng, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Aerospace Blockset™ User’s Guide
© COPYRIGHT 2002–20 10 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathW orks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program
or Documentation, the government hereby agrees that this software or documentation qualifies as
commercial computer software or commercial computer software documentation as such terms are used
or defined in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and
conditions of this Agreement and only those rights specified in this Agreement, shall pertain to and govern
theuse,modification,reproduction,release,performance,display,anddisclosureoftheProgramand
Documentation by the federal government (or other entity acquiring for or through the federal government)
and shall supersede any conflicting contractual terms or conditions. If this License fails to meet the
government’s needs or is inconsistent in any respect with federal procurement law, the government agrees
to return the Program and Docu mentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand
names may be trademarks or registered trademarks of their respective holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Page 3

Revision History
July 2002 Online only New for V ersion 1.0 (Release 13)
July 2003 Online only Revised for Version 1.5 (Release 13SP1)
June 2004 Online only Revised for Version 1.6 (Release 14)
October 2004 Online only Revised for Version 1.6.1 (Release 14SP1)
March 2005 Online only Revised for Version 1.6.2 (Release 14SP2)
May 2005 Online only Revised for Version 2.0 (Release 14SP2+)
September 2005 First printing Revised for Version 2.0.1 (Release 14SP3)
March 2006 Online only Revised for Version 2.1 (Release 2006a)
September 2006 Online only Revised for Version 2.2 (Release 2006b)
March 2007 Online only Revised for Version 2.3 (Release 2007a)
September 2007 Second printing Revised for Version 3.0 (Release 2007b)
March 2008 Online only Revised for Version 3.1 (Release 2008a)
October 2008 Online only Revised for Version 3.2 (Release 2008b)
March 2009 Online only Revised for Version 3.3 (Release 2009a)
September 2009 Online only Revised for Version 3.4 (Release 2009b)
March 2010 Online only Revised for Version 3.5 (Release 2010a)
Page 4

Page 5
Getting Started
1
Product Overview ................................. 1-2
Real-Time Workshop Code Generation Support
Embedded MATLAB Function Support
................ 1-2
......... 1-2
Contents
Related Products
Requirements for the Aerospace Blockset Product
Other Related Products
Running a Demo Model
Introduction
What This Demo Illustrates
Opening the Model
Key Subsystems
Running the Demo
Modifying the Model
Learning M ore
Using the MATLAB Help System for Documentation and
Demos
Finding Aerospace Blockset Help
Using the Aerospace Blockset Software
2
.................................. 1-4
....... 1-4
............................ 1-4
............................ 1-5
...................................... 1-5
......................... 1-5
................................ 1-6
.................................. 1-7
................................ 1-10
............................... 1-12
.................................... 1-17
........................................ 1-17
..................... 1-17
Introducing the Aerospace Blockset Libraries ........ 2-2
Introduction
Opening the Aerospace Blockset Library
Summary of Aerospace Blockset Libraries
Creating Aerospace Models
...................................... 2-2
............... 2-2
............. 2-4
......................... 2-8
v
Page 6

Basic Steps ....................................... 2-8
Model Referencing Limitations
...................... 2-9
Building a Simple Actuator System
Building the Model
Running the Simulation
About Aerospace Coordinate Systems
Fundamental Coordinate System Concepts
Coordinate System s for Modeling
Coordinate System s for Navigation
Coordinate System s for Display
References
Introducing th e Flight Simulator Interface
About the FlightGear Interface
Obtaining FlightGear
Configuring Your Computer for FlightGear
Installing and Starting FlightGear
Working with the Flight Simulator Interface
Introduction
About Aircraft Geometry Models
Working w ith Aircraft Geometry Models
Running FlightGear with the Simulink Models
Running the NASA HL-20 Demo with FlightGear
....................................... 2-24
...................................... 2-32
................................ 2-10
............................ 2-14
.............................. 2-26
.................. 2-10
............... 2-16
............ 2-16
.................... 2-18
................... 2-20
...................... 2-23
...................... 2-26
............ 2-27
................... 2-30
..................... 2-33
............... 2-35
.......... 2-26
......... 2-32
......... 2-38
....... 2-48
vi Contents
Case Studies
3
Ideal Airspeed Correction .......................... 3-2
Introduction
Airspeed Correction Models
Measuring Airspeed
Modeling Airspeed Correction
Simulating Airspeed Correction
1903 Wright Flyer
...................................... 3-2
......................... 3-2
............................... 3-3
....................... 3-5
...................... 3-7
.................................. 3-9
Page 7

Introduction ...................................... 3-9
Wright Flyer Model
Airframe Subsystem
Environment Subsystem
Pilot Subsystem
Running the Simulation
References
....................................... 3-17
................................ 3-10
............................... 3-10
............................ 3-14
................................... 3-15
............................ 3-16
NASA HL -20 Lifting Body Airframe
Introduction
NASA HL-20 Lifting Body
The HL-20 Airframe and Controller Model
References
Missile G uidance System
Introduction
Missile Guidance System M odel
Modeling Airframe Dynamics
Modeling a Classical Three-Loop Autopilot
Modeling the Homing Guidance Loop
Simulating the Missile Guidance System
Extending the Model
References
...................................... 3-19
.......................... 3-19
....................................... 3-33
........................... 3-34
...................................... 3-34
........................ 3-35
............................... 3-52
....................................... 3-53
.................. 3-19
............. 3-20
...................... 3-34
............. 3-42
................. 3-44
.............. 3-50
Block Reference
4
Actuators ......................................... 4-2
Aerodynamics
Animation
MATLAB-Based Animation
Flight Simulator Interfaces
Animation Support Utilities
Environment
Atmosphere
..................................... 4-2
........................................ 4-2
...................................... 4-4
...................................... 4-4
......................... 4-3
......................... 4-3
......................... 4-3
vii
Page 8

Gravity & Magnetism .............................. 4-5
Wind
............................................ 4-5
Flight Parameters
Equations of Motion
Three DoFs
Six DoFs
Point Masses
Guidance, Navigation, and Control
Control
Guidance
Navigation
Mass Properties
Propulsion
Utilities
Axes Transformations
Math Operations
Unit Conversions
......................................... 4-8
.......................................... 4-11
........................................ 4-12
....................................... 4-12
........................................ 4-13
........................................... 4-13
................................. 4-6
............................... 4-7
...................................... 4-7
..................................... 4-10
................................... 4-13
.............................. 4-13
.................................. 4-15
.................................. 4-16
.................. 4-10
viii Contents
Blocks — Alphabetical List
5
Aerospace Units
A
Index
Page 9
Getting Started
• “Product Overview” on page 1-2
• “Related Products” on page 1-4
• “Running a Demo Model” on page 1-5
• “Learning More” on page 1-17
1
Page 10

1 Getting Started
Product Overview
The Aerospace Blockset™ product lets you model aerospace systems in the
Simulink
®
and MATLAB®environments. The Aerospace Blockset product
brings the full power of Simulink to aerospace system design, integration,
and simulation by providing key aerospace subsystems and components
in the adaptable Simulink block format. From environmental models to
equations of motion, from gain scheduling to animation, the blockset gives
you the core components to assemble a broad range of large aerospace system
architectures rapidly and efficiently.
YoucanusetheAerospaceBlocksetand Simulink products to develop
your aerospace system concepts and to efficiently revise and test your
models throughout the life cycle of your design. Animate your aerospace
motion simulations with MATLAB Graphics or the optional Simulink
®
3D
Animation™ viewer.
Real-Time Workshop Code Generation Support
UsetheAerospaceBlocksetsoftwarewiththeReal-TimeWorkshop®software
to automatically generate code for real-time execution in rapid prototyping
and for hardware-in-the-loop systems.
Embedded MATLAB Function Support
The Aerospace Blockset product supports the following Aerospace Toolbox
quaternion functions in the Embedded MATLAB Function block:
1-2
onj
quatc
quatinv
quatmod
multiply
quat
quatdivide
quatnorm
normalize
quat
further information on using the Embedded MATLAB Function block, see:
For
ing the Embedded MATLAB
• “Us
®
Function Block” in Simulink User’s Guide
Page 11

Product Overview
• asbQuatEML demo, which demonstrates quaternions and models the
equations
1-3
Page 12

1 Getting Started
Related Products
In this section...
“Requirements for the Aerospace Blockset Product” on page 1-4
“Other Related Products” on page 1-4
Requirements for the Aerospace Blockset Product
In particular, the Aerospace Blockset product requires current versions of
these products:
• MATLAB
• Aerospace Toolbox
• Simulink
Other Related Products
The related products listed on the Aerospace Blockset product page at
theMathWorksWebsiteincludetoolboxesandblocksetsthatextendthe
capabilities of the MATLAB and Simulink products. These products will
enhance you r use of the Aerospace Blockset product in various applications.
1-4
For More Information About MathWorks Products
For more information about any MathWorks™ software products, see either
• The online documentation for that product if it is installed
• The MathWorks Web site at
www.mathworks.com; see the “Products” section
Page 13

Running a Demo Model
In this section...
“Introduction” on page 1-5
“What This Demo Illustrates” on page 1-5
“Opening the M odel” on page 1-6
“Key Subsystems” on page 1-7
“Running the Demo” on page 1-10
“Modifying the Model” on page 1-12
Introduction
This section introduces a missile guidance model that uses blocks from the
Aerospace B lockset software to simulate a three- degree-of-freedom missile
guidance system, in conjunction with other Simulink blocks.
Running a Demo Model
The m o del simulates a missile guidance system with a target acquisition and
interception subsystem. The model implements a nonlinear representation of
the rigid body dynamics of the missile airframe, including aerodynamic forces
and moments. The missile autopilot is based on the trimmed and linearized
missile airframe. The missile homing guidance system regulates missile
acceleration and measures the distance between the missile and its target.
For more information on this model, see Chapter 3, “Case Studies”.
What This Demo Illustrates
The missile guidance demo illustrates the following features of the blockset:
• Representing bodies and degrees of freedom with the Equations of Motion
library blocks
• Using the Aerospace Blockset blocks with other Simulink blocks
• Using the Aerospace Blockset blocks in the Stateflow
• Feeding in and feeding out Simulink signals to and from Aerospace
Blockset blocks with Actuator and Sensor blocks
®
charts
1-5
Page 14
1 Getting Started
• Encapsulating groups of blocks into subsystems
• Visualizing and animating an aircraft with the Animation library blocks
Note The Stateflow module in this demo is precompiled and does not
require Stateflow software to be installed.
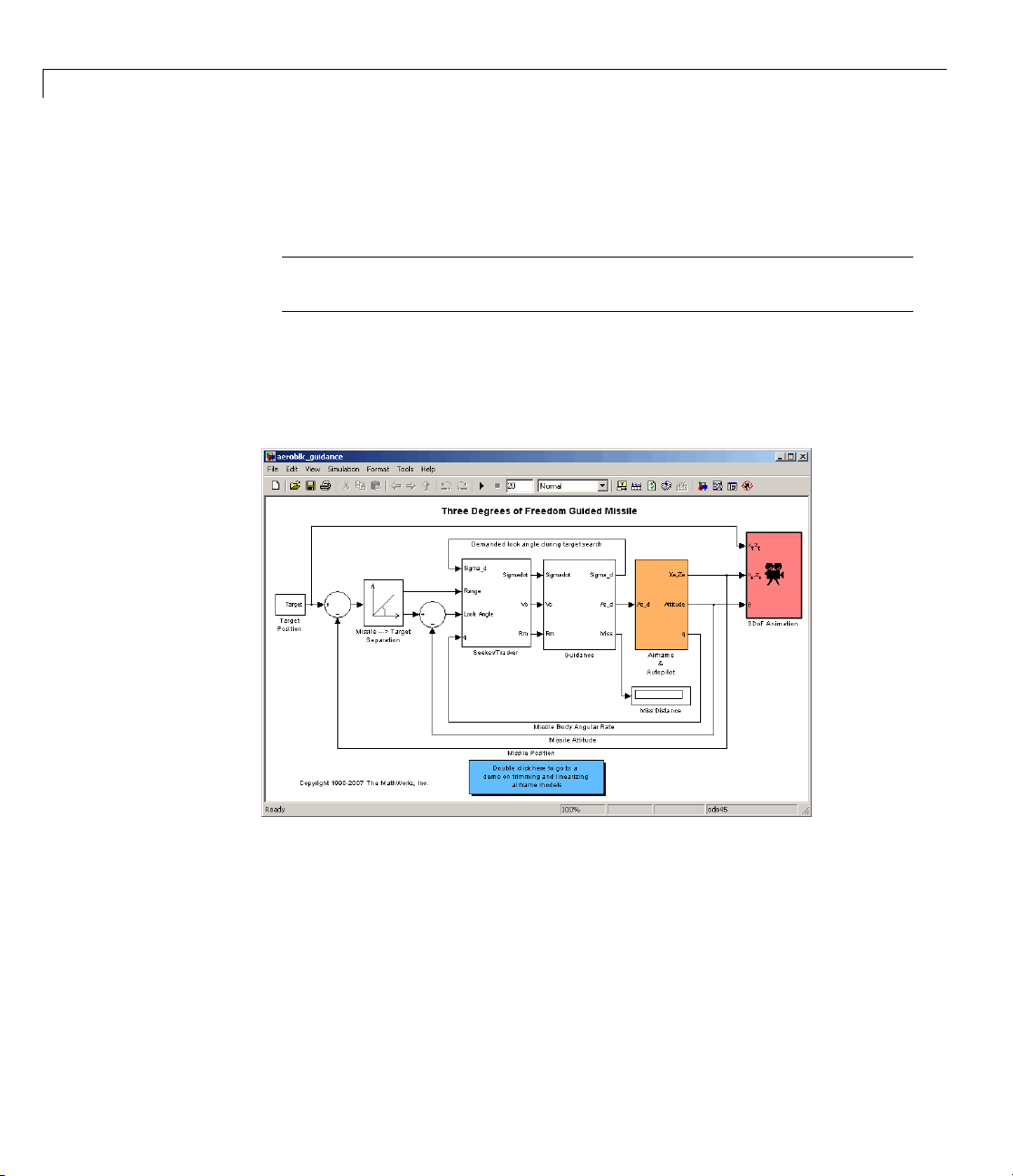
Opening the Model
To open the missile guidance demo, type the demo name, aeroblk_guidance,
at the MATLAB command line. The model opens.
1-6
A Stateflow chart for the guidance control processor also appears.
Page 15

Running a Demo Model
Alternatively, you can open demos through the MATLAB Help browser. To
do this, click the Help button on the MATLAB Command Window. The
MATLAB Help browser displays. In this browser, you can select Aerospace
Blockset>Demos>VehicleSystemModeling>Air>ThreeDegreeof
Freedom Guided Missile.
Key Subsystems
The model impleme nts the missile environment, airframe, autopilot, and
homing guidance system in subsystems.
• The Airframe & Autopilot subsystem implements the ISA Atmosphere
Model block, the Incidence & Airspeed block, and the 3DoF (Body Axes)
block, along with other Simulink blocks.
The airframe model is a nonlinear representation of rigid body dynamics.
The aerodynamic forces and moments acting on the missile body are
generated from coefficients that are nonlinear functions of both incidence
and Mach number.
1-7
Page 16

1 Getting Started
1-8
• The model implements the missile autopilot as a classical three-loop design
using m easurements from an accelerometer located ahead of the missile’s
center of gravity and from a rate g yro to provide additional damping.
Page 17

Running a Demo Model
• The model implements the homing guidance system as two subsystems:
the G uidance subsystem and the Seeker/Tracker subsystem.
- The G uidance subsystem uses a Stateflow chart to control the tracker
directly by sending demands to the seeker gimbals.
- The Seeker/Tracker subsystem consists of Simulink blocks that control
the seeker gimbals to keep the seeker dish aligned with the target and
provide the guidance law with an estimate of the sight line rate.
1-9
Page 18
1 Getting Started
Running the Demo
Running a demo le
run the demo, you
visualization
ts you observe the model simulation in real time. After you
can examine the resulting data in plots, graphs, and other
tools. To run the missile guidance model, follow these steps:
1 If it is not alr
2 From the Simulation menu, select Start. On Microsoft
eady open, open the
aeroblk_guidance demo.
®
Windows
®
systems, yo u can also click the start button in the model window toolbar.
The simulation proceeds until the m issile intercepts the target, which takes
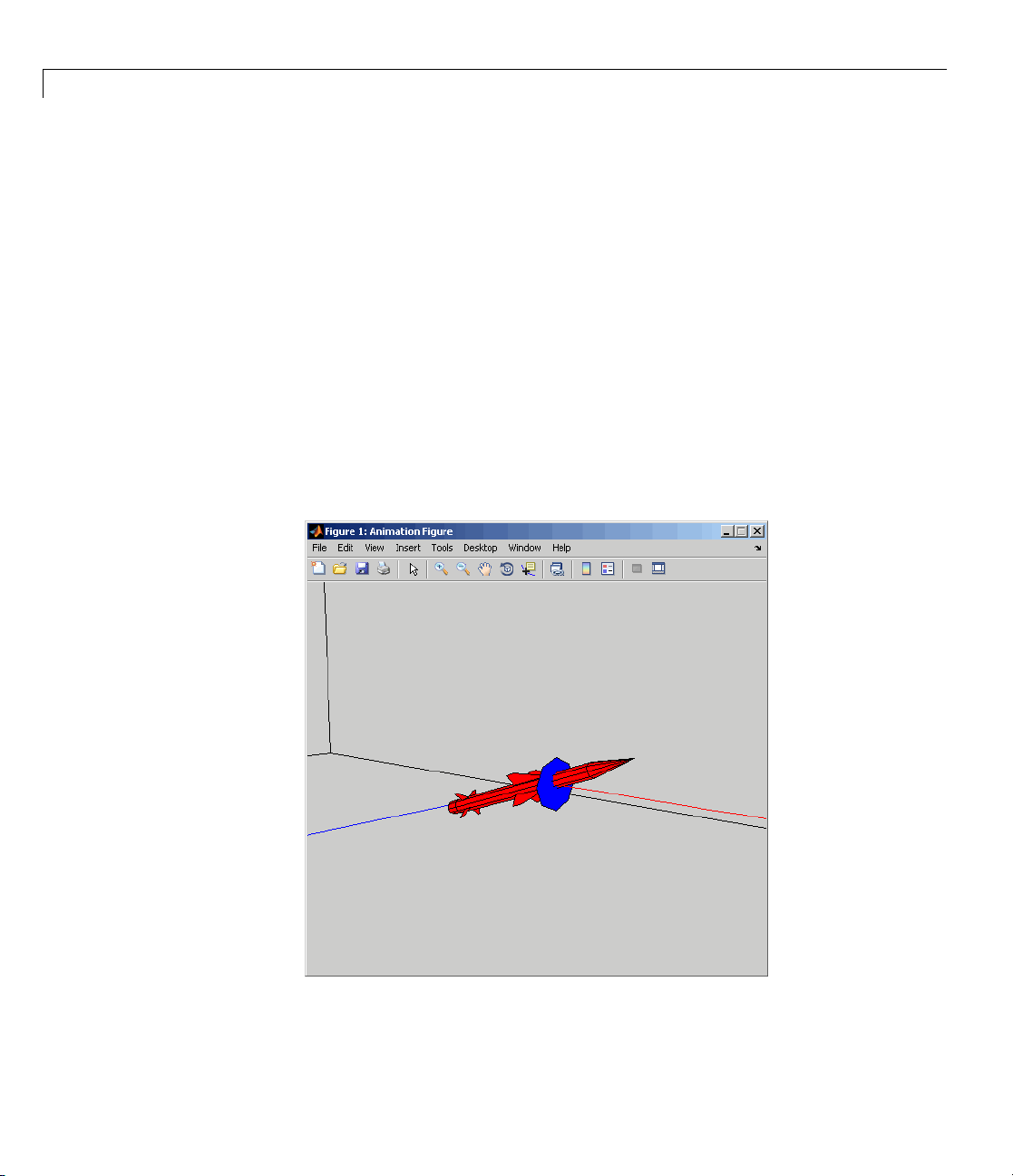
approximately 3 seconds. Once the interception has occurred, four scope
figures open to display the following d ata:
a A three-dimensional animation of th e missile and target interception
course
1-10
b Plots that measure flight parameters over time, including Mach number,
fin demand, acceleration, and degree of incidence
Page 19

Running a Demo Model
c A plot that measures gimbal versus true look angles
1-11
Page 20

1 Getting Started
d A plot that measures missile and target trajectories
1-12
Modif
You c
on si
firs
chan
ying the Model
an adjust the missile guidance model settings and examine the effects
mulation performance. Here are two modifications that you can try. The
t m od if ica tion adjusts the missile engine thrust. The second modification
ges the camera point of view for the interception animation.
Page 21

Running a Demo Model
Adjusting the Thrust
As in any Simulink model, you can adjust aerospace model parameters from
the MATLA B workspace. To demonstrate this, change the
the m odel workspace and evaluate the results in the simulation.
1 Open the aeroblk_guidance model.
2 In the MATLAB desktop, find the Thrust variable in the Workspace pane.
Thrust variable in
The Thrust variable is defined in the aeroblk_guid_dat.m file, which the
aeroblk_guidance model uses to populate parameter and variable v alu es.
By default, the
3 Single-click the Thrust variable to select it. To edit the value, right-click
the
Thrust variable and select Edit Value. Change the value to 4500.
Thrust variableshouldbesetto10000.
Beforeyourunthedemoagain,locate the Miss Distance (Display) block
display in the
aeroblk_guidance model.
1-13
Page 22

1 Getting Started
Miss Distance Display
1-14
Start the demo, and after it finishes, note the miss distance display again.
The miss distance should become greater than the original distance. You
can experiment w ith different values in the
Thrust variable and assess the
effects on missile accuracy.
Changing the Animation Point of View
By default, the missile animation view is Fly Alongside, which means the
view tracks with the missile’s flight path. You can easily change the animation
point of view by adjusting a parameter of the 3DoF Animation block:
1 Open the aeroblk_guidance model, and double-click the 3DoF Animation
block. The Block Parameters dialog box appears.
Page 23

Running a Demo Model
2 Change the view to Cockpit.
3 Click the OK button.
Run the demo again, and watch the animation. Instead of moving alongside
the missile’s flight path, the animation point of view lies in the cockpit. Upon
target interception, the screen fills with blue, the target’s color.
1-15
Page 24

1 Getting Started
1-16
You can experiment with different views to watch the animation from
different perspectives.
Page 25

Learning More
In this section...
“Using the MATLAB Help System for Documentation and Demos” on page
1-17
“Finding Aerospace Blo ck set Help” on p a ge 1-17
Using the MATLAB Help System for Documentation and Demos
TheMATLABHelpbrowserallowsyoutoaccessthedocumentationanddemo
models for all the MathW orks products that you have installed. The online
help includes an online search system.
Consult the Help for Using MATLAB section of the MATLAB Desktop Tools
and Development Environment documentation for more about the MATLA B
help system.
Learning More
Opening Aerospace Demos
To open an Aerospace Blockset demo from the Help browser, open the
MATLAB Command Window and select Aerospace Blockset > Demos.
You can also open the Aerospace Blockset demos from the Start button of
the MATLAB desktop:
1 Click the Start button.
2 Select Blocksets,thenAerospace,andthenDemos.
opens the Help browser with Demos selected in the Help Navigator
This
.
pane
ernatively, you can open the Demos window by entering
Alt
LAB command line.
MAT
nding Aerospace Blockset Help
Fi
is user’s guide also includes a reference chapter.
Th
demos at the
1-17
Page 26

1 Getting Started
• Appendix A, “Aerospace Units” explains the unit systems used by the
blockset.
1-18
Page 27

Using the Aerospace Blockset Software
• “Introducing the Aerospace Blockset Libraries” on page 2-2
• “Creating Aerospace Models” on page 2-8
• “Building a Simple Actuator System” on page 2-10
• “About Aerospace Coordinate Systems” on page 2-16
• “Introducing the Flight Simulator Interface” on page 2-26
2
• “Working with the Flight Simulator Interface” on page 2-32
Page 28

2 Using the Aerospace Blockset™ Software
Introducing the Aerospace Blockset Libraries
In this section...
“Introduction” on page 2-2
“Opening the Aerospace Blockset Library” on page 2-2
“Summary of Aerospace Blockset Libraries” on page 2-4
Introduction
Constructing a simple Aerospace Blockset model is easy to learn if you know
how to create Simulink models. If you are not familiar with the Simulink
product, please see the Simulink documentation. The Aerospace Blockset
library is organized into hierarchical libraries of closely related blocks for
use in the Simulink library.
Opening the Aerospace Blockset Library
You can open the Aerospace Blockset library from the Simulink Library
Browser. The procedure is the same on Window s and UNIX
®
platforms.
2-2
Opening the Simulink Library Browser
To start the Simulink Library Browser, click the buttonintheMATLAB
toolbar, or enter
simulink
at the command line.
Simulink Libraries
The libraries in the Simulink library Browser contain all the basic elements
you need to construct a model. Look here for basic math operations, switches,
connectors, simulation control elements, and other items that do not have a
specific aerospace orientation.
Page 29

Introducing the Aerospace Blockset™ Libraries
Opening the Aerospace Blockset Library
The Simulink Library Browser opens when you type simulink in the MATLAB
Command Window or click the
button. The left pane contains a list of
all the blocksets that you currently have installed.
The fir
expand
left of
block
st item in the list is the Simulink library itself, which is already
ed to show the available Simulink libraries. Click the
any blockset name to expand the hierarchical list and display that
set’s libraries within the browser.
symbol to the
n the Aerospace Blockset window from the MATLAB command line,
To ope
r
ente
aerolib
ble-click any library in the window to display its contents. The following
Dou
ure shows the Aerospace Blockset library window.
fig
2-3
Page 30

2 Using the Aerospace Blockset™ Software
For a complete list of all the blocks in the Aerospace Blockset library, see
“Summary of Aerospace Blockset Libraries” on page 2-4.
See the Simulink documentation for a complete description of the Simulink
Library Browser.
2-4
SummaryofAerospaceBlocksetLibraries
The blocks of the A erospace Blockset library are organized into these libraries.
Actuators Library
The Actuators library provides blocks for representing linear and nonlinear
actuators with saturation and rate limits.
Aerodynamics Library
The Aerodynamics library provides the Aerodynamic Forces and Moments
block using the aerodynamic coefficients,dynamicpressure,centerofgravity,
and center of pressure.
Animation Library
The Animation library provides the animation blocks for visualizing flight
paths and trajectories and for working with a flight simulator interface. The
Page 31

Introducing the Aerospace Blockset™ Libraries
Animation library contains the MATLAB-Based Animation, Flight Simulator
Interfaces, and Anima tion Support Utilities sublibraries.
MATLAB-Based Animation Sublibrary. The MATLAB-Based Animation
sublibrary provides the 3DoF Animation block and the 6DoF Animation block.
Using the animation blocks, you can visualize flight paths and trajectories.
Flight Simulator Interfaces Sub li br ary. The Flight Simulator In terfa c es
sublibrary provides the interface blocks to connect the Aerospace Blockset
product to the third-party FlightGear flight simulator.
Animation Support Utilities Sublibrary. The Animation Support Utilities
sublibrary provides additional blocks for running the FlightGear flight
simulator. It contains a joystick interface for Windows platform and a block
that lets you set the simulation pace.
Environment L ibrary
The E nvironment library provides blocks that simulate aspects of an aircraft
and spacecraft environment, such as atmospheric conditions, gravity,
magnetic fields, and wi nd. The Environment library contains the Atmosphere,
Gravity, and Wind sublibraries.
Atmosphere Sublibrary. The Atmosphere sublibrary provides general
atmospheric models, such as ISA and COESA, and other blocks, including
nonstandard day simulations, lapse rate atmosphere, and pressure altitude.
Gravity Sublibrary. The Gravity sublibrary provides blocks that calculate
the g ravity and magnetic fields for any point on the Earth.
Wind Sublibrary. The Wind sublibrary provides blocks for wind-related
simulations, including turbulence, gust, shear, and horizontal wind.
Equations of Motion Library
The Equations of Motion library provides blocks for implementing the
equations of motion to determine body position, velocity, attitude, and related
values. The Equations of Motion library contains the 3DoF, 6DoF, and Point
Mass sublibraries.
2-5
Page 32

2 Using the Aerospace Blockset™ Software
3DoF Sublibrary. The 3DoF sublibrary provides blocks for implementing
three-degrees-of-freedom equations of motion in your simulations, including
custom variable mass models.
6DoF Sublibrary. The 6DoF sublibrary provides blocks for implementing
six-degrees-of-freedom equations of motion in your simulations, using Eu ler
angles and quaternion representations.
Point Mass Sublib rary. The Point Mass sublibrary provides blo cks for
implementing point mass equations of motion in your simulations.
Flight Parameters Library
The Flight Parameters library provides blocks for various parameters,
including ideal airspeed correction, Mach number, and dynamic pressure.
GNC Library
The GNC library provides blocks for creating control and guidance systems,
including various controller models. The GNC library contains the Control,
Guidance, and Navigation sublibraries.
2-6
Control Sublibrary. The Control sublibrary provides blocks for s imulating
various control types, such as one-dimensional, two-dimensional, and
three-dimensional models.
Guidance Sublibrary. The Guidance sublibrary provides the Calculate
Range block, which computes the range between two vehicles.
Navigation Sublibrary. The Navigation sublibrary provides blocks for
three-axis measurement of accelerations, angular rates, and inertias.
Mass Properties Library
The Mass Properties library provides blocks for simulating the center of
gravity and inertia tensors.
Propulsion Library
The Propulsion library provides the Turbofan Engine System block, which
simulates an engine system and controller.
Page 33

Introducing the Aerospace Blockset™ Libraries
Utilities Library
The Utilities library contains miscellaneous blocks useful in building models.
The library contains the Axes Transformations, Math Operations, and Unit
Conversions sublibraries.
Axes Transformations Sublibrary. The Axes Transformations sublibrary
provides blo cks for trans forming axes of coo rdinate systems to different types,
such as Euler angles to quaternions and vice versa.
Math Operations Sublibrary. The Math Operations sublibrary provides
blocks for common mathematical and matrix operations, including sine and
cosine generation and various 3-by-3 matrix operations.
Unit Conversions Sublibrary. The Unit Conversions sublibrary provides
blocks for converting common measurement units from one system to another,
such as converting velocity from feet per second to meters per second and
vice versa.
2-7
Page 34

2 Using the Aerospace Blockset™ Software
Creating Aerospace Models
In this section...
“Basic Steps” on page 2-8
“Model Referencing Limitations” on page 2-9
Basic Steps
Regardless of the model’s complexity, you use the same essential steps for
creating an aerospace model as you would for creating any other Simulink
model. For general model-building rules, see the Simulink documentation.
1 Select and position th e blocks. You must first select the blocks that you
need to build your model, and then position the blocks in the model window.
For the majority of Simulink models, you select one or more b lo cks from
each of the following categories:
a Source blocks generate or import signals into the model, such as a sine
wave, a clock, or limited-band white noise.
2-8
b Simulation blocks can consist of almost any type of block that performs
an action in the simulation. A simulation block represents a part of
the model functionality to be simulated, such as an actuator block, a
mathematical operation, a block from the Aerospace Blockset library,
and so on.
c Signal Routing blocks route signals f rom one point in a model to another.
If you need to combine or redirect two or more signals in your model,
you will probably use a Simulink Signal Routing block, such as Mux
and Demux.
As an alternative to the Mux block, you can use the
the Concatenate block Mode parameter (also known as the Vector
Concatenate block). This block provides a more general way for you to
route signals from one point in the a model to another. The Vector mode
takes as input a vector of signals of the same data type and creates a
contiguous output signal. Depending on the input, this block outputs a
row or column vector if any of the inputs are row or column vectors,
respectively.
Vector option of
Page 35

Creating Aerospace Models
d Sink blocks display, write, or save model output. To see the results of
the simulation, you must use a Sink block.
2 Configure the blocks. Most blocks feature configuration options that let
you customize block functionality to specific simulation parameters. For
example, the ISA Atmosphere Model block provides configuration options
for setting the height of the troposphere, tropopause, and air density at
sea level.
3 Connect the blocks. To create signal pathways between blocks, you connect
theblockstoeachother. Youcandothismanuallybyclickingand
dragging, or you can connect blocks automatically.
4 Encapsulate subsystems. Systems made with Aerospace Blockset blocks can
function as subsystems of larger, more complex models, like subsystems in
any Simulink model.
Model Referencing Limitations
The Model block allows you to include a model as a block in another model.
If you include a model that contains continuous blocks from the Aerospace
Blockset library, the referenced model containing the Aerospace Blockset
blocks will not inherit its sample time from the parent model of the Model
block. The referenced model will have intrinsic sample times. See “Inheriting
Sample Times” in the Simulink User’s Guide guide about this limitation. If
you want to use the Real-Time Workshop software to generate code, do not
use the following Aerospace Blockset blocks in referenced models. Because
they are noninlined S-functions, Real-Time Workshop cannot generate
standalone executables (Real-Time Workshop targets) for referenced models
that include these blocks:
• WGS84 Gravity Model
• COESA Atmosphere Model
• Non-Standard Day 210C, Non-Standard Day 310
• Pressure Altitude
If you are only interested in simulation, see “Simulink Model Referencing
Limitations” in the Simulink user’s guide documentation for additional
limitations for simulating noninlined functions.
2-9
Page 36

2 Using the Aerospace Blockset™ Software
Building a Simple Actuator System
In this section...
“Building the Model” on page 2-10
“Running the Simulation” on page 2-14
Building the Model
The Simulink product is a software environment for modeling, simulating,
and analyzing dynamic systems. Try building a simple model that drives an
actuator with a sine wave and displays the actuator’s position superimposed
onthesinewave.
Note Ifyouprefertoopenthecompletemodelshownbelowinsteadof
building it, enter
aeroblktutorial at the MATLAB command line.
2-10
The following section (“Creating a Model” on page 2-11) explains how to build
a model on Windows platforms. You can use this same procedure to build a
model on UNIX platforms.
The section describes how to build the model. It does not describe how to set
the configuration parameters for the model. See “Configuration Parameters
Dialog Box” in the Simulink Graphical User Interface documentation. That
section describes setting configuration parameters for models. If you do not set
any configuration parameters, simulating models might cause warnings like:
Warning: Using a default value of 0.2 for maximum step size.
Page 37

Building a Simple Actuator System
The simulation step size will be equal to or less than this
value. You can disable this diagnostic by setting
'Automatic solver parameter selection' diagnostic to 'none'
in the Diagnostics page of the configuration parameters
dialog
Creating a Model
1 Click the button in the MATLAB toolbar or enter simulink at the
MATLAB command line. The Simulink library browser appears.
2 Select
model
3 Add a Sine Wave block to the model.
a Click Sources in the Library Browser to view the blocks in the Simulink
New > Model from the File menu in the Library Browser. A new
window appears on your screen.
Sources library.
b DragtheSineWaveblockfromtheSourceslibraryintothenewmodel
window.
4 Add a Second Order Linear Actuator to the model.
2-11
Page 38

2 Using the Aerospace Blockset™ Software
a Click the symbol next to A e rospace Blockset in the Library Browser
to expand the hierarchical list of the aerospace blocks.
b In the expanded list, click Actuators to view the blocks in the Actuator
library.
c Drag the Second Order Linear Actuator block into the model window.
5 Add a Mux block to the model.
a Click Signal Routing in the Library Browser to view the blocks in the
Simulink Signals & Systems library.
b Drag the Mux block from the Signal Routing library into the model
window.
6 Add a Scope block to the model.
a Click Sinks in the Library Browser to view the blocks in the Simulink
Sinks library.
b Drag the Scope block from the Sinks library into the model window.
2-12
7 Resize the Mux block in the model.
a Click the Mux block to select the block.
b Hold down the mouse button and drag a corner of the Mux block to
changethesizeoftheblock.
8 Connect the blocks.
a Position the pointer near the output port of the Sine Wave block. Hold
down the mouse button and drag the line that appears until it touches
the input port of the Second Order Linear Actuator block. Release the
mouse button.
b Using the same technique, connect the output of the Second Order
Linear Actuator block to the second input port of the Mux block.
c Using the same technique, connect the output of the Mux block to the
input port of the Scope block.
d Position the pointer near the first input port of the Mux block. Hold
down the mouse button and drag the line that appears over the line
from the output port of the Sine Wave block until double crosshairs
Page 39
Building a Simple Actuator System
appear. Release the mouse button. The lines are connected when a knot
is present at their intersection.
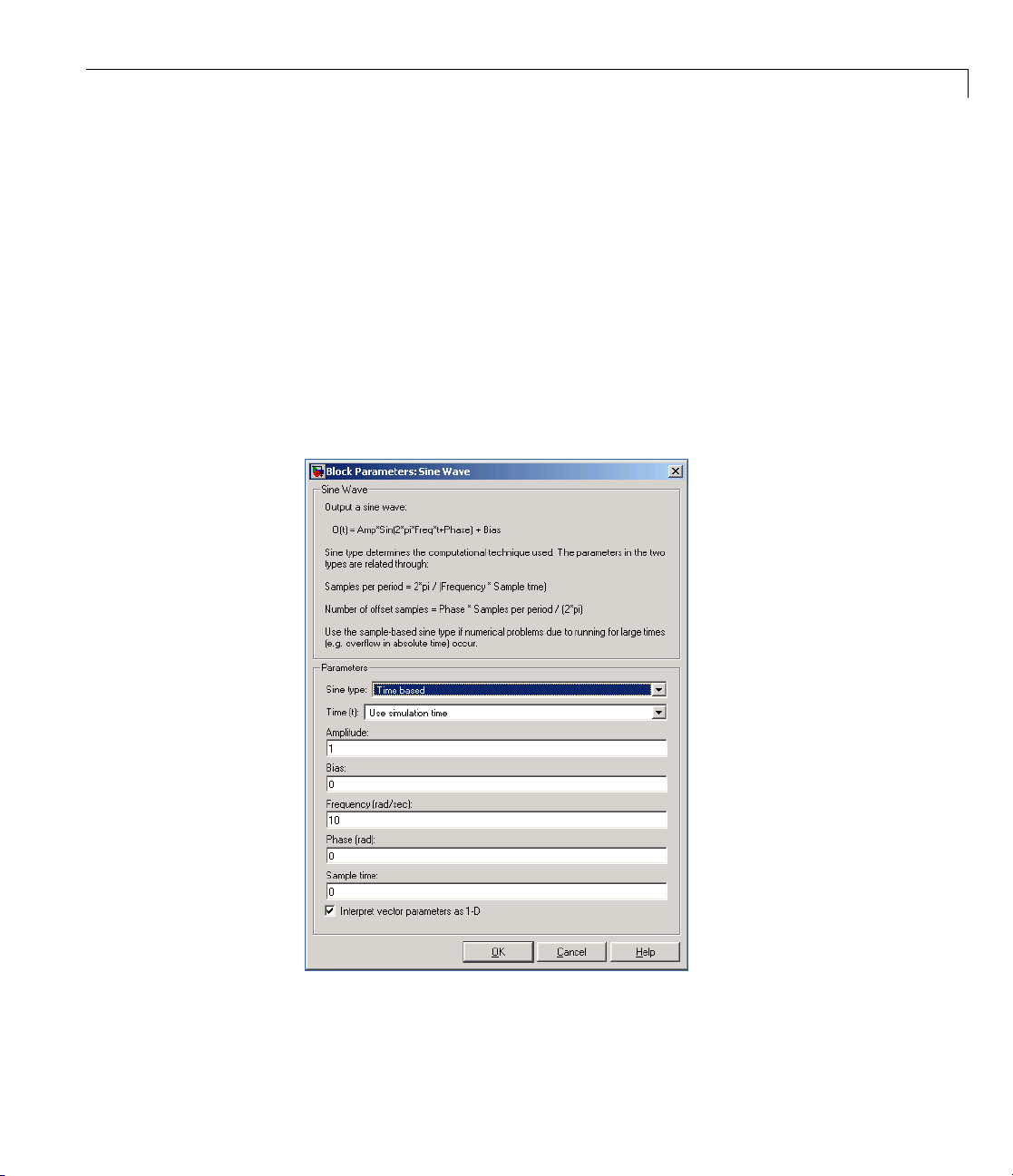
9 Set the block parameters.
a Double-clicktheSineWaveblock.Thedialogboxthatappearsallows
you to set the block’s parameters.
For this example, configure the block to generate a 10 rad/s sine wave
by entering
default amplitude of
10 for th e Frequency parameter. The sinusoid has the
1 and phase of 0 specified by the Amplitude and
Phase offset parameters.
b Click OK.
c Double-click the Second Order Linear Actuator block.
2-13
Page 40

2 Using the Aerospace Blockset™ Software
In this example, the actuator has the default natural frequency of 150
rad/s, a damping ratio of 0.7, and an initial position of 0 radians
specified by the Natural frequency, Damping ratio,andInitial
position parameters.
d Click OK.
Running the Simulation
You can now run the model that you built to see how the system behaves
in time:
2-14
1 Double-click the Scope block if the Scope window is not already open on
your screen. The Scope window appears.
2 Select
contai
positi
3 Adjust the Scope block’s display. While the simulation is running,
Start from the Simulation menu in the model window. The signal
ning the 10 rad/s sinusoid and the signal containing the actuator
on are plotted on the scope.
right-click the y-axis of the scope and select Autoscale. The vertical range
of the scope is adjusted to better fit the signal.
4 Vary the S ine Wave block parameters.
a While the simulation is running, double-click the Sine Wave block to
open its parameter dialog box. This causes the simulation to pause.
b You can then change the frequency of the sinusoid. Try entering 1 or
20 in the Frequency field. Close the Sine Wave dialog box to enter
Page 41

Building a Simple Actuator System
your change and allow the simulation to continue. You can then observe
the changes on the scope.
5 Select Stop from the Simulation menu to stop the simulation.
Many parameters cannot be changed while a simulation is running. This is
usually the case for parameters that directly or indirectly alter a signal’s
dimensions or sample rate. However, there are some parameters, like the
Sine Wave Frequency parameter, that you can tune without stopping the
simulation.
Note Opening a dialog box for a source block causes Simulink to pause. While
Simulink is paused, you can edit the parameter values. You must close the
dialog box to h av e the ch ang es take e ffect and allow Simulink to continue.
Running a Simulation from a MATLAB File
You can also modify and run a Simulink simulation from a MATLAB MATLAB
file. By doing this, you can automate the variation of model parameters to
explore a large number of simulation conditions rapidly and efficiently. For
information on how to do this, see the Simulink documentation.
2-15
Page 42

2 Using the Aerospace Blockset™ Software
About Aerospace Coordinate Systems
In this section...
“Fundamental Coordinate System Concepts” on page 2-16
“Coordinate Systems for Modeling” on page 2-18
“Coordinate Systems for Navigation” on page 2-20
“Coordinate Systems forDisplay”onpage2-23
“References” on page 2-24
Fundamental Coordinate System Concepts
Coordinate systems a llow you to keep track of an aircraft or spacecraft’s
position and orientation in space. The Aerospace Blockset coordinate systems
are based on these underlying concepts from geodesy, astronomy, and physics.
Definitions
The blockset uses right-handed (RH) Cartesian coordinate systems. The
right-hand rule establishes the x-y-z sequence of coordinate axes.
2-16
An inertial frame is a nonaccelerating motion reference frame. In an inertial
frame, Newton’s second law holds: force = mass•acceleration. Loosely
speaking, acceleration is defined with respect to the distant cosmos, and an
inertial frame is often said to be nonaccelerated with respect to the “fixed
stars.” Because the Earth and stars move so slowly with respect to one
another, this assumption is a very accurate approximation.
Strictly defined, an inertial frame is a member of the set of all frames not
accelerating relative to one another. A noninertial frame is any frame
accelerating relative to an inertial frame. Its acceleration, in general, includes
both translational and rotational components, resulting in pseudoforces
(pseudogravity, as well as Coriolis and centrifugal forces).
The blockset models the Earth’s shape (the geoid) as an oblate spheroid, a
special type of ellipsoid with two longer axes equal (defining the equatorial
plane) and a third, slightly shorter (geopolar) axis of symmetry. The equator
is the intersection of the equatorial plane and the Earth’s surface. The
Page 43

About Aerospace Coordinate Systems
geographic poles are the intersection o f the Earth’s surface and the geopolar
axis. In general, the Earth’s geopo lar and rotation axes are not identical.
Latitudes parallel the equator. Longitudes parallel the geopolar axis. The
zero longitude or prime meridian passes through Greenwich, England.
Approximations
The blockset makes three standard approximations in defining coordinate
systemsrelativetotheEarth.
• The Earth’s surface or geoid is an oblate spheroid , defined by its lo nger
equatorial and shorter geopolar axes. In reality, the Earth is slightly
deformed with respect to the standard geoid.
• The Earth’s rotation axis and equatorial plane are perpendicular, so that
the rotation and geopolar axes are identical. In reality, these axes are
slightly misaligned, and the equatorial plane wobbles as the Earth rotates.
This effect is negligible in most applications.
• The only noninertial effect in Earth-fixed coordinates is due to the Earth’s
rotation about its axis. Th is is a rotating, geocentric system. The blockset
ignores the Earth’s acceleration around the Sun, the Sun’s acceleration in
the Galaxy, and the Galaxy’s acceleration through the cosmos. In most
applications, only the Earth’s rotation matters.
This approximation must be changed for spacecraft sent into deep space,
i.e., outside the Earth-Moon system, and a heliocentric system is preferred.
Motion with Respect to Other Planets
The blockset uses the standard WGS-84 geoid to model the Earth. You can
change the equatorial axis length, the flattening, and the rotation rate.
You can represent the motion of spacecraft with respect to any celestial body
that is well approximated by an oblate spheroid by changing the spheroid
size, flattening, and rotation rate. If the celestial body is rotating westward
(retrogradely), make the rotation rate negative.
2-17
Page 44
2 Using the Aerospace Blockset™ Software
Coordinate Systems for Modeling
Modeling aircraft and spacecraft is simplest if you use a coordinate system
fixed in the body itself. In the case of aircraft, the forward d irection is
modified by the presence of wind, and the craft’s motion through the air is
not the same as its motion relative to the ground.
See the “Equations of Motion” on page 4-7 for further details on how the
Aerospace Blockset product implements body and wind coordinates.
Body Coordinates
The noninertial body coordinate system is fixed in both origin and orientation
to the moving craft. The craft is assumed to be rigid.
The orientation of the body coordinateaxesisfixedintheshapeofbody.
• The x-axis points through the nose of the craft.
• The y-axis points to the right of the x-axis (facing in the pilot’s direction of
view), perpendicular to the x-axis.
2-18
• The z-axis points down through the bottom the craft, perpendicular to the
xy plane and satisfying the RH rule.
Translational Degrees of Freedom. Translations are defined by moving
along these axes by distances x, y,andz from the origin.
Rotational Degrees of Freedom. Rotations are defined by the Euler angles
P, Q, R or Φ, Θ, Ψ.Theyare:
P or Φ
Q or Θ
R or Ψ
Roll about the x-axis
Pitch about the y-axis
Yaw about the z-axis
Page 45

About Aerospace Coordinate Systems
Wind Coordinates
The noninertial wind coordinate system has its origin fixed in the rigid
aircraft. The coordinate system orientation is defined relative to the craft’s
velocity V.
The o rientation of the wind coordinate axes is fixed by the velocity V .
• The x-axis points in the direction of V.
• The y-axis points to the right of the x-axis (facing in the direction of V),
perpendicular to the x-axis.
• The z-axis points perpendicular to the xy plane in w hatever way needed to
satisfy the RH rule with respect to the x-andyaxes.
Translational Degrees of Freedom. Translations are defined by moving
along these axes by distances x, y,andz from the origin.
Rotational Degrees of Freedom. Rotations are defined by the Euler
angles Φ, γ, χ.Theyare:
Φ
γ
χ
Bank angle about the x-axis
Flight path about the y-axis
Heading angle about the z-axis
2-19
Page 46

2 Using the Aerospace Blockset™ Software
Coordinate Systems for Navigation
Modeling aerospace trajectories requires positioning and orienting the aircraft
or spacecraft with respect to the rotating Earth. Navigation coordinates are
defined with respect to the center and surface of the Earth.
Geocentric and Geodetic Latitudes
The geocentric latitude λ on the Earth’s surface is defined by the angle
subtended by the radius vector from the Earth’s center to the surface point
with the equatorial plane.
2-20
The geodetic latitude µ on the Earth’s surface is defined by the angle
subtended by the surface normal vector n and the equatorial plane.
Page 47

About Aerospace Coordinate Systems
NED Coordinates
The north-east-down (NED) system is a noninertial system with its origin
fixed at the aircraft or spacecraft’s center of gravity. Its axes are oriented
along the geodetic directions defined by the Earth’s surface.
• The x-axis points north parallel to the geoid surface, in the polar direction.
• The y-axis points east parallel to the geoid surface, along a latitude curve.
• The z-axis points downward, toward the Earth’s surface, antiparallel to the
surface’s outward normal n.
Flying at a constant altitude means flying at a constant z above the Earth’s
surface.
ECI Coordinates
The Earth-centered inertial (ECI) system is a mixed inertial system. It is
oriented with respect to the Sun. Its origin is fixed at the center of the Earth.
(See figure following.)
• The z-axis points northward along the Earth’s rotation axis.
• The x-axis points outward in the Earth’s equatorial plane exactly at the
Sun. (This rule ignores the Sun’s oblique angle to the equator, which varies
with season. The actual Sun always remains in the xz plane.)
2-21
Page 48

2 Using the Aerospace Blockset™ Software
• The y-axis points into the eastward quadrant, perpendicular to the xz plane
so as to satisfy the RH rule.
2-22
Earth-Centered Coordinates
ECEF Coordinates
The Earth-center, Earth-fixed (ECEF) system is a noninertial system that
rotates with the Earth. Its origin is fixed at the center of the Earth. (See
figure preceding.)
• The z′-axis points northward along the E arth’s rotation axis.
• The x′-axis points outward along the intersection of the Earth’s equatorial
planeandprimemeridian.
• The y′-axis points into the eastward quadrant, perpendicular to the x-z
planesoastosatisfytheRHrule.
Page 49

About Aerospace Coordinate Systems
Coordinate Systems for Display
Several display tools are available for use with the Aerospace Blockset
product. Each has a specific coordinate system for rendering mo tion.
MATLAB Graphics Coordinates
See the MATLAB 3-D Visualization documentation for more information
about the MATLAB Graphics coordinate axes.
MATLAB Graphics uses this default coordinate axis orientation:
• The x-axis points out of the screen.
• The y-axis points to the right.
• The z-axispointsup.
FlightGear Coordinates
FlightGear is an open-source, third-party flight simulator with an interface
supported by the blockset.
• “Working with the Flight Simulator Interface” on page 2-32 discusses the
blockset interface to FlightGear.
• See the FlightGear documentation at
information about this flight simulator.
The FlightGear coordinates form a special body-fixed system, rotated from the
standard body coordinate system about the y-axis by -180 degrees:
• The x-axis is positive toward the back of the vehicle.
• The y-axis is positive toward the right of the vehicle.
• The z-axis is positive upward, e.g., wheels typically have the lowest z values.
www.flightgear.org for complete
2-23
Page 50

2 Using the Aerospace Blockset™ Software
AC3D Coordinates
AC3D is a low-cost, widely used, geo metry editor available from
www.ac3d.org. Its body-fixed coordinates are formed by inverting the three
standard body coordinate axes:
• The x-axis is positive toward the back of the vehicle.
• The y-axis is positive upward, e.g., wheels typically have the lowest y
values.
2-24
• The z-axisispositivetotheleftofthevehicle.
References
Recommended Practice for Atmospheric and Space Flight Vehicle Coordinate
Systems, R-004-1992, ANSI/AIAA, February 1992.
Mapping Toolbox User’s Guide, The MathWorks, Inc., Natick, Massachusetts.
www.mathworks.com/access/helpdesk/help/toolbox/map/.
Page 51

About Aerospace Coordinate Systems
Rogers, R. M., Applied Mathematics in Integrated Navigation Systems, AIAA,
Reston, Virginia, 2000.
Sobel, D., Longitude, Walker & Company, New Y ork, 1995.
Stevens, B. L., and F. L. Lewis, Aircraft Control and Simulation, 2nd ed.,
Aircraft Control and Simulation, Wiley-Interscience, New York, 2003.
Thomson, W. T., Introduction to Space Dynamics, John Wiley & Sons, New
York, 1961/Dover Publications, Mineola, New York, 1986.
World Geodetic System 1984 (WGS 84),
http://earth-info.nga.mil/GandG/wgs84/.
2-25
Page 52

2 Using the Aerospace Blockset™ Software
Introducing the Flight Simulator Interface
In this section...
“About the FlightGear Interface” on page 2-26
“Obtaining FlightGear” on page 2-26
“Configuring Your Computer for FlightGear” on page 2-27
“Installing and Starting FlightGear” on page 2-30
About the FlightGear Interface
The Aerospace Blockset product supports an i nterface to the third-party
FlightGear flight simulator, an open source software package a vailable
through a GNU General Public License (GPL). The FlightGear flight
simulator interface included with the blockset is a unidirectional transmission
link from the Simulink interface to FlightGear using FlightGear’s published
net_fdm binary data exchange protocol. Data is transmitted via UDP network
packets to a running instance of FlightGear. The blockset supports multiple
standard binary distributions of FlightGear. See “Running FlightGear with
the Simulink Models” on page 2-38 for interface details.
2-26
FlightGear is a separate software entity neither created, owned, nor
maintained by The MathWorks.
• To report bugs in or request enhancements to the
Aerospace Blockset FlightGear interface, use this form
http://www.mathworks.com/contact_TS.html.
• To report bugs or request enhancements to FlightGear itself, visit
www.flightgear.org and use the contact page.
Obtaining FlightGear
You can obtain FlightGear from www.flightgear.org in the download area
or by ordering CDs from FlightGear. The dow nload area contains extensive
documentation for installation and configu ration. Because FlightGear is an
open source project, source downloads are also available for customization
and porting to custom environments.
Page 53

Introducing the Flight Simulator Interface
Configuring Your Computer for F lightGear
You must have a high performance graphics card with stable drivers to use
FlightGear. For more information, see the FlightGear CD distribution or the
hardware requirements and documentation areas of the FlightGear Web
site,
www.flightgear.org.
MathWorks tests of FlightGear’s performance and stability indicate
significant sensitivity to computer video cards, driver versions, and driver
settings. You need OpenGL
The OpenGL settings are particularly important. Withoutpropersetup,
performance can drop from about a 3 0 frames-per-second (fps) update rate to
less than 1 f ps.
Graphics Recommendations for Windows
The MathWorks recommends the following for Windows users:
• Choose a graphics card with good OpenGL performance.
• Always use the latest tested and stable driver release for your video card.
Test the driver thoroughly on a few computers before deploying to others.
®
support with hardware acceleration activated.
For Microsoft Windows XP systems running on x86 (32-bit) or
AMD-64/EM64T chip architectures, the graphics card operates in the
unprotected kernel space known as Ring Zero. This means that glitches
in the driver can caus e Windows to lock or crash. Before buying a large
number of computers for 3-D applications, test, with your vendor, one
or two computers to find a combination of hardware, operating system,
drivers, and settings that are stable for your applications.
Setting Up OpenGL Graphics on Windows
For complete information on OpenGL settings, refer to the documentation at
the OpenGL Web site:
Follow these steps to optimize your video card settings. Your driver’s panes
might look different.
1 Ensure that you have activated the OpenGL hardware acceleration on
your video card. On Windows, access this configuration through Start >
www.opengl.org.
2-27
Page 54

2 Using the Aerospace Blockset™ Software
Settings > Control Panel > Display, which opens the following dialog
box. Select the Settings tab.
2-28
2 Click the Advanced button in the lower right of the dialog box, which
brings up the graphics card’s custom configuration dialog box, and go to the
OpenGL tab. For an ATI Mobility Radeon 9000 video card, the OpenGL
pane looks like this:
Page 55

Introducing the Flight Simulator Interface
3 For best performance, move the Main Settings slider near the top of the
dialog box to the Performance end of the slider.
4 If stability is a problem, try other screen resolutions, other color depths in
the Displays pane, and other OpenGL acceleration modes.
Many cards perform m uch better at 16 bits-per-pixel color depth (also known
as 65536 color mode, 16-bit color). For example, on an ATI Mobility Radeon
9000 running a given model, 30 fps are achieved in 16-bit color mode, while 2
fps are achieved in 32-bit color mode.
Setup on Linux, Macintosh, and Other Platforms
FlightGear distributions are available for Linux®,Macintosh®, and other
UNIX platforms from the FlightGear Web site,
Installation on these platforms, like Windows, requires careful configuration
of graphics cards and drivers. Consult the documentation and hardware
requirements sections at the FlightGear Web site.
www.flightgear.org.
2-29
Page 56

2 Using the Aerospace Blockset™ Software
UsingMATLABGraphicsControlstoConfigureYourOpenGL Settings
You can also control your OpenGL rendering from the MATLAB command
line with the MATLAB Graphics
command reference for more information.
Installing and Starting FlightGear
The extensive FlightGear documentation guides you through the installation
in detail. Consult the documentation section of the FlightGear Web site for
complete installation instructio n s:
Keep the following points in mind:
• Generous central processor speed, system and video R AM, and virtual
memory are essential for good flight simulator performance.
The MathWorks recommends a minimum of 512 megabytes of system RAM
and 128 megabytes o f video RAM for reasonable performance.
opengl command. Consult the opengl
www.flightgear.org.
2-30
• Be sure to have sufficient disk space for the FlightGear download a nd
installation.
• The MathWorks recommends configuring your computer’s graphics card
before you install FlightGear. See the preceding section, “Configuring Your
Computer for FlightGear” on page 2-27.
• Shutting down all running applications (including the MATLAB interface)
before installing FlightGear is recommended.
• MathWorks tests indicate that the operational stability of FlightGear
is especially sensitive during startup. It is best to not move, resize,
mouse over, overlap, or cover up the FlightGear window until the initial
simulation scene appears after the startup splash screen fades out.
• The current releases of FlightGear are optimized for flight visualization at
altitudes below 100,000 feet. FlightGear does work not well or at all with
very high altitude and orbital views.
Aerospace Toolbox supports FlightGear on a number of platforms
(
http://www.mathworks.com/products/aerotb/requirements.html). The
following table lists the properties you should be aware of before you start to
use FlightGear.
Page 57

Introducing the Flight Simulator Interface
FlightGear
Property
FlightGearBaseDirectory
GeometryModelName
Folder Description
FlightGear
installation folder.
Model geometry
folder
Platforms
Windows
Solaris™ or
Linux
®
Mac
Windows
Solaris or
Linux
Mac
Typica l Lo cation
C:\Program Files\FlightGear
(default)
Folder into whichyouinstalled
FlightGear
/Applications
(directory to which you dragged
the FlightGear icon)
C:\Program Files\FlightGear\data\Aircraft\HL20
(default)
$FlightGearBaseDirectory/data/Aircraft/HL20
$FlightGearBaseDirectory/FlightGear.app/Contents/Resources/data/Aircraft/HL20
2-31
Page 58

2 Using the Aerospace Blockset™ Software
Working with the Flight Simulator Interface
In this section...
“Introduction” on page 2-32
“About Aircraft Geometry Models” on page 2-33
“Working w ith Aircraft Geometry Models” on page 2-35
“Running FlightGear with the Simulink Models” on page 2-38
“Running the NASA HL-20 Demo with FlightGear” on page 2-48
Introduction
Use this section to learn how to use the FlightGear flight simulator and the
Aerospace Blockset software to visualize your Simulink aircraft models. If
you have not yet installed FlightGear, see “Introducing the Flight Simulator
Interface” on page 2-26 first.
2-32
Simulink®Driven HL-20 Model in a Landing Flare at KSFC
Page 59

Working with the Flight Simulator Interface
About A ircraft Geometry Models
Before you can visualize your aircraft’s dynamics, you need to create or obtain
an aircraft model file compatible with FlightGear. This section explains h ow
to do this.
Aircraft Geometry Editors and Formats
Youhaveacompetitivechoiceofovertwelve3-Dgeometryfileformats
supported by FlightGear.
Currently, the most popular 3-D geometry file format is the AC3D form a t,
which has the suffix
www.ac3d.org. Another popular 3-D editor for aircraft models is Flight Sim
Design Studio, distributed by A ba c us Pu blications at
Aircraft Model Structure and Requirements
Aircraft models are contained in the FlightGearRoot/data/Aircraft/ folder
and subfolders. A complete aircraft model must contain a folder linked
through the required aircraft master file named
*.ac. AC3D is a low-cost geometry editor available from
www.abacuspub.com.
model-set.xml.
Allothermodelelementsareoptional. Thisisapartiallistoftheoptional
elements you can put in an aircraft data folder:
• Vehicle objects and their shapes and colors
• Vehicle objects’ surface bitmaps
• Variable geometry descriptions
• Cockpitinstrument3-Dmodels
• Vehicle sounds to tie to events (e.g., engine, gear, wind noise)
• Flight dynamics model
• Simulator views
• Submodels (independently movable items) associated with the vehicle
Model behavior reverts to defaults when these elements are not used. For
example,
• Default sound: no vehicle-related sounds are emitted.
2-33
Page 60
2 Using the Aerospace Blockset™ Software
• Default instrument panel: no instruments are shown.
Models can contain some, all, or even none of the above elements. If you
always run FlightGear from the cockpit view, the aircraft geometry is often
secondary to the instrument geometries.
A how-to document for including optional elements is included in the
FlightGear documentation at:
http://www.flightgear.org/Docs/fgfs-model-howto.html
Required Flight Dynamics Model Specification
The flight dyna mics model (FDM) specification is a required element for
an aircraft model. To set the Simulink software as the source of the flight
dynamics m odel data s tre am for a given geometry model, you put this line in
data/Aircraft/model/model-set.xml:
<flight-model>network</flight-model>
2-34
Obtaining and Modifying Existing Aircraft Models
You can quickly build models from scratch by referencing instruments,
sounds, and other optional elements from existing FlightGear models. Such
models provide examples of geometry, dynamics, instruments, views, and
sounds. It is simple to copy an aircraft folder to a n ew name, rename the
model-set.xml file, modify it for network flight dynamics, and then run
FlightGear with the
Many existing 3-D aircraft geometry models are available for use with
FlightGear. Visit the download area of
the aircraft models available. Additional models can be obtained via Web
search. S earch key words such as “flight gear aircraft model” are a good
starting point. Be sure to comply with copyrights when distributing these files.
aircraft flag set to the name in model-set.xml.
www.flightgear.org toseesomeof
Hardware Requirements for Aircraft Geometry Rendering
When creating your own geometry files, keep in mind that your graphics card
can efficiently render a limited number of surfaces. Some cards can efficiently
render fewer than 1000 surfaces with bitmaps and specular reflections at
Page 61

Working with the Flight Simulator Interface
the nominal rate of 30 frames per second. Other cards can easily render on
the order of 10,000 surfaces.
If your performance slows while using a particular geometry, gauge the effect
of geometric complexity on graphics performance by varying the number
of aircraft model surfaces. An easy way to check this is to replace the full
aircraft geometry file with a simple shape, such as a single triangle, then test
FlightGear with this simpler geometry. If a geometry file is too complex for
smooth display, use a 3-D geometry editor to simplify your model by reducing
the number of surfaces in the geometry.
Working with Aircraft Geometry M odels
Once you have obtained, modified, or created an aircraft data file, you need to
put it in the correct folder for FlightGear to access it.
Importing Aircraft Models into FlightGear
To install a compatible model into FlightGear, use one of the following
procedures. Choose the one appropriate for your platform. This section
assumes that you have read “Installing and Starting FlightGear” on page 2-30.
If your platform is Windows:
1 Go to your installed FlightGear folder. O pen the data folder, then the
Aircraft folder: \FlightGear\data\Aircraft\.
2 Make a subfolder model\ here for your aircraft data.
3 Put model-set.xml in that subfolder, plus any other files needed.
It is common practice to make subdirectories for the vehicle geometry files
(
\model\), instruments (\instruments\), and sounds (\sounds\).
If your platform is UNIX or Linux:
1 Go to your installed FlightGear directory. Open the data directory, then
the
Aircraft directory: $FlightGearBaseDirectory/data/Aircraft/.
2 Make a subdirectory model/ here for your aircraft data.
2-35
Page 62

2 Using the Aerospace Blockset™ Software
3 Put model-set.xml in that subdirectory, plus any other files needed.
It is common practice to make subdirectories for the vehicle geometry files
(
/model/), instruments (/instruments/), and sounds (/sounds/).
If your platform is Mac:
1 Open a terminal.
2 Go to your installed FlightGear folder. O pen the data folder, then the
Aircraft folder:
$FlightGearBaseDirectory/FlightGear.app/Contents/Resources/data/Aircraft/
3 Make a subfolder model/ here for your aircraft data.
4 Put model-set.xml in that subfolder, plus any other files needed.
It is common practice to make subdirectories for the vehicle geometry files
(
/model/), instruments (/instruments/), and sounds (/sounds/).
2-36
Example: Animating Vehicle Geometries
This example illustrates how to prepare hinge line definitions for animated
elements such as vehicle control surfaces and lan d ing gear. To enable
animation, each element must be a named entity in a geometry file. The
resulting code forms part of the HL20 lifting body model presented in
“Running the NASA HL-20 Demo with FlightGear” on page 2-48.
1 The standard body coordinates used in FlightGear geometry models form a
right-handed system, rotated from the standard body coordinate system
in Y by -180 degrees:
• X = positive toward the back of the v ehicle
• Y = positive toward the right of the vehicle
• Z = positive is up, e.g., wheels typical ly have the lowest Z values.
See “About Aerospace Coordinate Systems” on page 2-16 for more details.
Page 63

Working with the Flight Simulator Interface
2 Find two points that lie on the desired named-object hinge line in body
coordinates and write them down as XYZ triplets or put them into a
MATLAB calculation like this:
a = [2.98, 1.89, 0.53];
b = [3.54, 2.75, 1.46];
3 Calculate the difference between the points:
pdiff = b - a
pdiff =
0.5600 0.8600 0.9300
4 The hinge point is either of the points in step 2 (or the midpoint as shown
here):
mid = a + pdiff/2
mid =
3.2600 2.3200 0.9950
5 Put the hinge point into the animation scope in model-set.xml:
<center>
<x-m>3.26</x-m>
<y-m>2.32</y-m>
<z-m>1.00</z-m>
</center>
6 Use the difference from step 3 to define the relative motio n vector in the
animation axis:
<axis>
<x>0.56</x>
<y>0.86</y>
<z>0.93</z>
</axis>
7 Put these steps together to obtain the complete hinge line animation used
in the HL20 demo model:
<animation>
2-37
Page 64

2 Using the Aerospace Blockset™ Software
<type>rotate</type>
<object-name>RightAileron</object-name>
<property>/surface-positions/right-aileron-pos-norm</property>
<factor>30</factor>
<offset-deg>0</offset-deg>
<center>
<x-m>3.26</x-m>
<y-m>2.32</y-m>
<z-m>1.00</z-m>
</center>
<axis>
<x>0.56</x>
<y>0.86</y>
<z>0.93</z>
</axis>
</animation>
Running FlightGear with the Simulink Models
To run a Simulink model of your aircraft and simultaneously animate it in
FlightGear with an aircraft data file
the aircraft data file and modify your Simulink model with some new blocks.
model-set.xml, you need to configure
2-38
These are the m ain steps to connecting and using FlightGear with the
Simulink software:
• “Setting the Flight Dynamics Model to Network in the Aircraft Data File”
on page 2-39 explains how to create the network connection you need.
• “Obtaining the Destination IP Address” on page 2-39 starts by determining
the IP address of the computer running FlightGear.
• “Adding and Connecting Interface Blocks” on page 2-40 shows how to add
and connect interface and pace blocks to your Simulink model.
• “Creating a FlightGear Run Script” on page 2-43 shows how to write a
FlightGear run script compatible with your Simulink model.
• “Starting FlightGear” on page 2-45 guides you through the final steps to
making the Simu link software work with FlightGear.
• “Improving Performance” on page 2-47 helps you speed your model up.
Page 65

Working with the Flight Simulator Interface
• “Running FlightGear and Simulink Software on Different Computers” on
page 2-47 explains how to connect a simulation from the Simulink software
running on one computer to FlightGear running on another computer.
Setting the Flight Dynamics Model to Network in the Aircraft
Data File
Be sure to
• Remove any pre-existing flight dynamics model (FDM) data from the
aircraft data file.
• Indicate in the aircraft data file that its FDM is streaming from the
network by adding this line:
<flight-model>network</flight-model>
Obtaining the Destination IP Address
You need the destination IP address for your Simulink model to stream its
flight data to FlightGear.
• If you know your computer’s name, enter at the MATLAB command line:
java.net.InetAddress.getByName('www.mathworks.com')
• If you are running FlightGear and the Simulink software on the same
computer, get your computer’s name by entering at the MATLAB command
line:
java.net.InetAddress.getLocalHost
• If you are working in Windows, get your computer’s IP address by entering
at the DOS prompt:
ipconfig /all
Examine the IP address entry in the resulting output. There is one entry
per Ethernet device.
2-39
Page 66

2 Using the Aerospace Blockset™ Software
Adding and Connecting Interface Blocks
The easiest way to connect your model to FlightGear with the blockset is to
use the FlightGear Preconfigured 6DoF Animation block:
FlightGear Preconfigured 6DoF Animation Block
2-40
The FlightGear Preconfigured 6DoF Animation block is a subsystem
containing the Pack net_fdm Packet for FlightGear and Send net_fdm Packet
to FlightGear blocks:
Page 67

Working with the Flight Simulator Interface
Send net_fdm Packet to FlightGear
Pack net_fdm Packet to FlightGear
These blocks transmit data to a FlightGear session. The blocks are separate
for maximum flexibility and compatibility.
• The Pack n et_fdm Packet for FlightGear block formats a binary
structure compatible with FlightGear from model inputs. In the default
configuration, the block displays only the 6DoF ports, but you can configure
the full FlightGear interface supporting more than 50 distinct signals from
the block dialog box:
2-41
Page 68

2 Using the Aerospace Blockset™ Software
2-42
• The Send net_fdm Packet to FlightGear block transmits this packet via
UDP to the specified IP address and port w here a FlightGear session awaits
an incoming datastream. Use the IP address you found in “Obtaining the
Destination IP Address” on page 2-39.
• The Simulation Pace bl o ck, available in the “Animation Support Utilities
Sublibrary” on page 2-5, slows the simulation so that its aggregate run rate
is 1 second of simulation time per second of clock time. You can also use it
to specify other ratios of simulation time to clock time.
Page 69

Working with the Flight Simulator Interface
Simulation Pace
Creating a FlightGear Run Script
To start FlightGear with the desired initial conditions (location, date, time,
weather, operating modes), it is best to create a run script by “Using the
Generate Run Script Block” on page 2-43 or “Using the Interface Provided
with FlightGear” on page 2-45.
If you make separate run scripts f or each model you intend to link to
FlightGear and place them in separate directories, run the appropriate script
from the MATLAB interface just before starting your Simulink model.
Using the Generate Run Script Block. Theeasiestwaytocreatearun
script is by using the Generate Run Script block. Use the following procedure:
1 Open the “Flight Simulator Interfaces Sublibrary” on page 2-5.
2 Create a new Simulink mode l or open an existing model.
3 Drag
4 Double-click the Generate Run Script block. Its dialog opens.
a G enerate Run Script block into the Simulink diagram.
2-43
Page 70

2 Using the Aerospace Blockset™ Software
2-44
5 In the Output file name field, type the name of the output file. This name
should be the name of the command, with the
use to start FlightGear with these initial parameters.
xample, if your filename is
For e
ute the run script and start FlightGear.
exec
6 In the FlightGear base directory field, specify the name of your
FlightGear installation folder.
runfg.bat,usetherunfg command to
.bat extension, you want to
Page 71

Working with the Flight Simulator Interface
7 In the FlightGear geometry model name field, specify the name of
the subfolder, in the
FlightGear/data/Aircraft folder, containing the
desired model geometry.
8 Specify the initial conditions as needed.
9 Click the Generate Script button at the top of the Parameters area.
The Aerospace Blockset software generates the run script, and saves it in
your MATLAB working folder under the filename that you spec if ied in
the Output file name field.
10 Repeat steps 5 through 9 to generate other run scripts, if needed.
11 Click OK to close the dialog box. You do not need to save the Generate Run
Script block with the Simulink model.
The Generate Run Script block saves the run script as a tex t file in your
working folder. This is an example of the contents of a run script file:
>> cd D:\Applications\FlightGear-1.9.1
>> SET FG_ROOT=D:\Applications\FlightGear-1.9.1\data
>> cd \bin\Win32\
>> fgfs --aircraft=HL20 --fdm=network,localhost,5501,5502,5503
--fog-fastest --disable-clouds --start-date-lat=2004:06:01:09:00:00
--disable-sound --in-air --enable-freeze --airport=KSFO --runway=10L
--altitude=7224 --heading=113 --offset-distance=4.72 --offset-azimuth=0
Using the Interface Provided with FlightGear. The FlightGear launcher
GUI (part of FlightGear, not the Aerospace Blockset product) lets you build
simple and advanced options into a visible FlightGear run command.
Starting FlightGear
If your computer has enough computational power to run both the Simulink
software and FlightGear at the same time, a simple way to start FlightGear
on a Windows system is to create a MATLAB desktop button containing the
following command to execute a run script like the one created above:
system('runfg &')
To create a desktop button:
2-45
Page 72

2 Using the Aerospace Blockset™ Software
1 From the Start button on your MATLAB desktop, click Shortcuts > New
Shortcut.TheShortcut Editor dialog opens.
2 Set the Label, Callback, Category,andIcon fields as shown in the
following figure.
3 Click Sav
e.
The FlightGear toolbar button appears in your MATLAB desktop. If you
click it, the
runfg.bat file runs in the current folder.
FlightGear button
Once you have completed the s etup, start FlightG ear and run your model:
1 Make sure your model is in a writable folder. Open the model, and update
the diagram. This step ensures that any referenced block code is compiled
and that the block diagram is compiled before running. Once you start
FlightGear, it uses all available processor power while it is running.
2 Click the FlightGear button or run the FlightGear run script manually.
2-46
Page 73

Working with the Flight Simulator Interface
3 When FlightGear starts, it displays the initial view at the initial
coordinates specified in the run script. If you are running the Simulink
software and FlightGear on different computers, arrange to view the two
displays at the same time.
4 Now begin the simulation and v iew the animation in FlightG e ar.
Improving Performance
If your Simulink model is complex and cannot run at the aggregate rate
needed for the visualization, you might need to
• Use the Accelerator mode in Simulink (“Accelerating Models” i n Simulink
User’s Guide) to speed up your model execution.
• Free up processor power by running the Simulink model on one computer
and FlightGear on another computer. Use the Destination IP Address
parameter of the Send net_fdm Packet to FlightGear block to specify the
network address of the computer w here FlightGear is running.
• Simulate the Simulink model first, then save the resulting translations
(x-axis, y-a xis, z-axis) and positions (latitude, longitude, altitude ), and use
the FlightGear Animation object in Aerospace Toolbox to visualize this
data.
Running FlightGear and Simulink Software on Different Computers
ItispossibletosimulateanaerospacesystemintheSimulinkenvironment
on one computer (the source) and use its simulation output to animate
FlightGear on another computer (the target). The steps are similar to those
already explained, with certain modifications.
1 Obtain the IP address of the com puter running FlightGear. See “Obtaining
the Destination IP Address” on pa ge 2-39.
2 Enter this target computer’s IP address in the Send net_fdm Packet to
FlightGear block. See “Adding and Connecting Interface Blocks” on page
2-40.
2-47
Page 74

2 Using the Aerospace Blockset™ Software
3 Update the Generate Run Script block in your model with the target
computer’s FlightGear base folder. Regenerate the run script to reflect the
target computer’s separate identity.
See “Creating a FlightGear Run Script” on page 2-43.
4 Copy the generated run script to the target computer. Start FlightGear
there. See “Starting FlightGear” on page 2-45.
5 Start your Simulink model on the source computer. FlightGear running on
the target displays the simulation motion.
Running the NASA HL-20 Demo with FlightGear
The Aerospace Blockset software contains a demo model of the NASA HL-20
lifting body that uses the FlightGear interface.
YouneedtohaveFlightGearinstalledand configured before attempting to
simulate this model. See “Introducing the Flight Simulator Interface” on
page 2-26. This section assumes that you have read “Installing and Starting
FlightGear” on page 2-30. Before you start, perform the following, depending
on your platform.
2-48
Windows
Copy the
HL20 folder from matlabroot\toolbox\aeroblks\aerodemos\
folder to FlightGear\data\Aircraft\ folder. This
folder contains the preconfigured geometries for
the HL-20 simulation and
matlabroot\toolbox\aeroblks\aerodemos\HL20\models\HL20.xml
HL20-set.xml.Thefile
defines the geometry.
For more about this step, see “Im porting Aircraft Models into
FlightGear” on page 2-35.
UNIX/Linux
Copy the
matlabroot/toolbox/aeroblks/aerodemos/ directory to
$FlightGearBaseDirectory/data/Aircraft/ directory.
HL20 directory from
This directory contains the preconfigured geometries
for the HL-20 simulation and
HL20-set.xml.Thefile
Page 75

Working with the Flight Simulator Interface
matlabroot/toolbox/aeroblks/aerodemos/HL20/models/HL20.xml
defines the geometry.
For more about this step, see “Im porting Aircraft Models into
FlightGear” on page 2-35.
Mac
Copy the
matlabroot/toolbox/aeroblks/aerodemos/ folder to
$FlightGearBaseDirectory/FlightGear.app/Contents/Resources/-
data/Aircraft/
geometries for the HL-20 simulation and
matlabroot\toolbox\aeroblks\aerodemos\HL20\models\HL20.xml
HL20 folder from
folder. This folder contains the preconfigured
HL20-set.xml.Thefile
defines the geometry.
For more about this step, see “Im porting Aircraft Models into
FlightGear” on page 2-35.
1 Start the MATLAB interface. Open the demo either by entering asbhl20
in the MATLAB Command Window or by finding the demo entry (NASA
HL-20 with FlightGear Interface) in Aerospace Blockset > Demos and
clicking Open this model on its demo page. The model opens.
2-49
Page 76

2 Using the Aerospace Blockset™ Software
2 If this is your first time running FlightGear for this model, double-click the
Generate Run Script block to create a run script. Make sure to specify your
FlightGear installation folder in the FlightGear base directory field. For
more information, see “Creating a FlightGear Run Script” on p age 2-4 3.
3 Execute the script you just created manually by entering the following at
the MATLAB command line:
dos('runfg &')
If you created a FlightGear desktop button, you can click it instead to
start the run script and start FlightGear. For more information, see
“Starting FlightGear” on page 2-45.
4 Now start the simulation and view the animation in FlightGear.
Note With the FlightGear window in focus, press the V key to alternate
between the different aircraft views: cockpit view, helicopter view, chase
view, and so on.
2-50
Page 77

Case Studies
• “Ideal Airspeed Correction” on page 3-2
• “1903 Wright Flyer” on page 3-9
• “NASA HL-20 Lifting Body Airframe” on page 3-19
• “Missile Guidance System” o n page 3-34
3
Page 78

3 Case Studies
Ideal Airspeed Correction
In this section...
“Introduction” on page 3-2
“Airspeed Correction Models” on page 3-2
“Measuring Airspeed” on page 3-3
“Modeling Airspeed Correction” on page 3-5
“Simulating Airspeed Correction” on page 3-7
Introduction
This case study simulates indicated and true airspeed. It constitutes a
fragment of a complete aerodynamics problem, including only measurement
and calibration.
Airspeed Correction Models
To view the airspeed correction models, enter the following at the MATL AB
command line:
3-2
aerobl
aerob
k_indicated
lk_calibrated
Page 79

aeroblk_indicated Model
Ideal Airspeed Correction
aeroblk_calibrated Model
Measuring Airspeed
To measure airspeed, most light aircraft designs implement pitot-static
airspeed indicators based on Bernoulli’s principle. Pitot-static airspeed
indicators measure airspeed by an expandable caps ule that expands and
contracts with increasing and decreasingdynamicpressure. Thisisknownas
calibrated airspeed (CAS). It is what a pilot sees in the cockpit of an aircraft.
3-3
Page 80

3 Case Studies
To compensate for measurement errors , it helps to distinguish three types of
airspeed. These type s are explained more completely in the following.
Airspeed Type Description
Calibrated Indicated airspeed corrected for calibration
error
Equivalent
True
Calibrated airspeed corrected for
compressibility error
Equivalent airspeed corrected for density
error
Calibration Error
An airspeed sensor features a static vent to maintain its internal pressure
equal to atmospheric pressure. Position and placement of the static vent
with respect to the angle of attack and velocity of the aircraft determines the
pressure inside the airspeed sensor and therefore the calibration error. Thus,
a calibration error is specific to an aircraft’s design.
An airspeed calibration table, which is usually included in the pilot operating
handbook or other aircraft documentation, helps pilots convert the indicated
airspeed to the calibrated airspeed.
Compressibility Error
The density of air is n ot constant, and the compressibility of air increases with
altitude and airspeed, or when contained in a restricted volume. A pitot-static
airspeed sensor contains a res tricted volume of air. At high altitudes and high
airspeeds, calibrated airspeed is always higher than equivalent airspeed.
Equivalent airspeed can be derived by adjusting the calibrated airspeed for
compressibility error.
3-4
Density Error
At high altitudes, airspeed indicators read lower than true airspeed because
the air density is lower. True airspeed represents the compensation of
equivalent airspeed for the density error, the difference in air density at
altitude from the air density at sea level, in a standard atmosphere.
Page 81

Ideal Airspeed Correction
Modeling Airspe
The aeroblk_ind
true airspeed an
aCessna150MCo
implements a co
model impleme
Each model con
• “COESA Atmos
atmospheric
• “Ideal Airs
calibrated
icated
d correct it to indicated airspeed for ins trument display in
nversion to indicated airspeed. The
nts a conversion to true airspeed.
sists of two main components:
conditions with changing altitude.
peed Correction Block” on page 3-5 transforms true airspeed to
airspeed and vice versa.
ed Correction
and aeroblk_calibrated models show how to take
mmuter light aircraft. The
phere Model Block” on page 3-5 calculates the change in
COESA Atmosphere Model Block
The COESA A
of the U.S
Atmosphe
pressure
32,000 m
with the
Organiz
ation).
tmosphere Model block is a mathematical representation
. 1976 COESA (Committee on Extension to the Standard
re) standard lower atmospheric values for absolute temperature,
, density, and speed of sound for input geopotential altitude. Below
eters (104,987 fee t), the U.S. Standard Atmosphere is identical
Standard Atmosphere of the ICAO (International Civil Aviation
aeroblk_indicated model
aeroblk_calibrated
The
aer
Atmosp
for the
oblk_indicated
here Mo del block to supp ly the spe ed of soun d and a ir pressure inputs
Ideal Airspeed Correction block in each model.
and aeroblk_calibrated models use the COESA
Ideal Airspeed Correction Block
The Id
erro
cont
eal Airspeed Correction block compensates for airspeed measurement
rs to convert airspeed from one type to another type. The following table
ains the Ideal A irspeed Correction block’s inputs and outputs.
Airspeed Input Airspeed Output
ivalent airspeed
True Airspeed
Equ
librated airspeed
Ca
3-5
Page 82

3 Case Studies
Airspeed Input Airspeed Output
Equivalent Airspeed
True airspeed
Calibrated airspeed
Calibrated Airspeed
True airspeed
Equivalent airspeed
In the aeroblk_indicated model, the Ideal Airspeed Correction block
transforms true to calibrated airspeed. In the
aeroblk_calibrated model,
the Ideal Airspeed Correction block transforms calibrated to true airspeed.
The following sections explain how the Ideal Airspeed Correction block
mathematically represents airspeed transformations:
• “True Airspeed Implementation” on page 3-6
• “Calibrated Airspeed Implementation” on page 3-6
• “Equivalent Airspeed Im plementation” on page 3-7
True Airspeed Implementation. True airspeed (TAS) is implemented as an
input and as a function of equivalent airspeed (EAS), expressible as
EAS a
TAS
=
×
a
0
3-6
where
α
δ
a
0
Speed of sound at altitude in m/s
Relative pressure ratio at altitude
Speed of sound at mean sea level in m/s
Calibrated Airspeed Implementation. Calibrated airspeed (CAS), derived
using the compressible form of Bernoulli’s equation and assuming isentropic
conditions, can be expressed as
Page 83

where
Ideal Airspeed Correction
Air density at mean sea level in kg/m
Static pressure at mean sea level in N/m
3
2
Ratio of s pecific heats
Dynamic pres
sure at mean sea level in N/m
2
Equivalent Airspeed Implementation. Equivalent airspeed (EAS) is the
same as CAS, except static pressure at sea level is replaced by static pressure
at altitude.
The symbols are defined as follows:
Air density at mean sea level in kg/m
Static pressure at altitude in N/m
3
2
Ratio of specific heats
Dynam
ic pressure at mean sea level in N/m
2
Simulating Airspeed Correction
In the aeroblk_indicated model, the aircraft is defined to be traveling at
a constant speed of 72 knots (true airspeed) and altitude of 500 feet. The
flaps are set to 40 degrees. The COESA A tmosphere Model block takes the
altitude as input and outputs the speed of sound and air pressure. Taking
the s pe ed of sound, air pressure, and airspeed as inputs, the Ideal Airspeed
Correction block converts true airspeed to calibrated airspeed. Finally, the
Calculate IAS subsystem uses the flap setting and calibrated airspeed to
calculate indicated airspeed.
3-7
Page 84

3 Case Studies
The m odel’s Display block shows both indicated and calibrated airspeeds.
In the aero
aconstant
The flaps
the altit
Calculat
to calcul
air pres
Correct
The mod
ude as input and outputs the speed of sound and air pressure. The
eCAS
ate the calibrated airspeed. Finally, using the speed of sound,
sure, and true calibrated airspeed as inputs, the Ideal Airspeed
ion block converts calibrated airspeed back to true airspeed.
el’s Display block shows both calibrated and true airspeeds.
blk_calibrated
speed of 70 knots (indicated airspeed) and altitude of 500 feet.
are set to 10 degrees. The COESA Atmosphere Model block takes
subsystem uses the flap setting and indicated airspeed
model, the aircraft is defined to be traveling at
3-8
Page 85

1903 Wright Flyer
In this section...
“Introduction” on page 3-9
“Wright Flyer Model” on page 3-10
“AirframeSubsystem”onpage3-10
“Environment Subsystem” on page 3-14
“Pilot Subsystem” on page 3-15
“Running the Simulation” on page 3-16
“References” on page 3-17
Introduction
Note The final section of this study requires the Simulink 3D An imation
software.
1903 Wright Flyer
This case study describes a model of the 1903 Wright Flyer. Built by Orville
and Wilbur Wright, the Wright Flyer took to the skies in December 1903
andopenedtheageofcontrolledflight. TheWrightbrothers’flyingmachine
achieved the following goals:
• Left the ground under its own power
• Movedforwardandmaintaineditsspeed
• Landed at an elevation no lower than where it started
This model is based on an earlier simulation [1] that ex plored the longitudinal
stability of the Wright Flyer and therefore modeled o nly forward and vertical
motion along with the pitch angle. The Wright Flyer suffered from numerous
engineering challenges, including dynamic and static instability. Laterally,
the Flyer tended to overturn in crosswinds and gusts, and longitudinally,
its pitch angle would undulate [2].
3-9
Page 86

3 Case Studies
Under these constraints, the model recreates the longitudinal f light dynamics
that pilots of the Wright Flyer would have experienced. Because they were
able to control lateral motion, Orville and Wilbur Wright were able to
maintain a relatively straight flight path.
Note, running this model generates assertion messages in the MATLAB
Command Window. This is because the model illustrates the use of the
Assertion block to indicate that the flyer is hitting the ground when landing.
Wright Flyer Model
Open the Wright Flyer model by entering aeroblk_wf_3dof at the MATLAB
command line.
3-10
rame Subsystem
Airf
irframe subsystem simulates the rigid body dynamics of the Wright
The A
er airframe, including elevator angle of attack, aerodynamic coefficients,
Fly
ces and moments, and three-degrees-of-freedom equations of motion.
for
Page 87

The Airframe subsystem consists of the following parts:
• “Elevator Angle of Attack Subsystem” on page 3-11
1903 Wright Flyer
• “Aerodynamic Coefficients Subsystem” on page 3-12
• “Forces and Moments Subsystem” on page 3-12
• “3DoF (Body Axes) Block” on page 3-13
Elevator Angle of Attack Subsystem
The Elevator Angle of Attack subsystem calculates the effective elevator angle
fortheWrightFlyerairframeandfeeds its output to the Pilot subsystem.
3-11
Page 88

3 Case Studies
Aerodynamic Coefficients Subsystem
The Aerodynamic Coefficie nts subsystem contains aerodynamic data and
equations for calculating the aerodynamic coefficients, which are summed
and passed to the Forces and Moments subsystem. Stored in data sets, the
aerodynamic coefficients are determined by interpolation using Prelookup
blocks.
3-12
Forces and Moments Subsystem
The aerodynamic forces and moments acting on the airframe are generated
from aerodynamic coefficients. The Forces and Moments subsystem calculates
the body forces and body moments acting on the airframe about the center of
gravity. These forces and moments depend on the aerodynamic coefficients,
thrust, dynamic pressure, and reference airframe parameters.
Page 89

1903 Wright Flyer
3DoF (Body Axes) Block
The 3DoF (Body Axes) block use equations of motion to define the linear and
angular motion of the Wright Flyer airframe. It also performs conversions
from the original model’s axis system and the body axes.
3-13
Page 90

3 Case Studies
3-14
3DoF (Body Axes) Block Parameters
Environment Subsystem
The first and final flights of the Wright Flyer occurred on December 17, 1903.
Orville and Wilbur Wright chose an area near Kitty Hawk, North Carolina,
situated near the Atlantic coast. Wind gusts of more than 25 miles per hour
were recorded that day. After the final flight on that blustery December day,
a wind gust caught and ov erturned theWrightFlyer,damagingitbeyond
repair.
The Environment subsystem of the Wright Flyer model contains a variety of
blocks from the Environment sublibrary of the Aerospace Blockset software,
including wind, atmosphere, and gravity, and calculates airspeed and
Page 91

1903 Wright Flyer
dynamic pressure. The Discrete Wind Gust Model block provides wind gusts
to the simulated environment. The other blocks are
• The Incidence & Airspeed block calculates the angle of attack and airspeed.
• The COESA Atmosphere Model block calculates the air density.
• The Dynamic Pressure block computes the dynamic pressure from the air
density and velocity.
• The WGS84 Gravity Model block pro du ce s the gravity at the W righ t Flyer’s
latitude, longitude, and height.
Pilot Subsystem
The Pilot subsystem controls the aircraft by responding to both pitch angle
(attitude) and angle of attack. If the angle of attack differs from the set angle
of attack by more than one degree, thePilotsubsystemrespondswitha
correction of the elevator (canard) angle. When the angular velocity exceeds
+/- 0.02 rad/s, angular velocity and angular acceleration are also taken into
consideration with add iti onal c orrections to the elevator an gle.
Pilot reaction time largely determined the success of the flights [1]. Without
an automatic controller, a reaction time of 0.06 seconds is optimal for
successful flight. The D elay of Pilot (VariableTimeDelay)block recreates this
effect by producing a delay of no more than 0.08 second.
3-15
Page 92

3 Case Studies
Running the Simulation
The default values for this simulation allow the Wright Flyer model to take off
and land successfully. The p ilot reaction time (
the desired angle of attack (
is low. The Wright Flyer model reacts similarly to the actual Wright Fly er. It
leaves the ground, moves forward, and lands on a point as high as that from
which it started. This model exhibits the longitudinal undulation in attitude
of the o riginal aircraft.
wf_alphaa) is constant, and the altitude attained
wf_B3) is set to 0.06 seconds,
3-16
Attitude Scope (Measured in Radians)
A pilot with quick reaction times and ideal flight conditions makes it possible
to fly the Wright Flyer successfully. The Wright Flyer model confirms that
Page 93

1903 Wright Flyer
controlling its longitudinal motion was a serious challenge. The longest
recorded flight on that day lasted a mere 59 seconds and covered 852 feet.
Virtual Reality Visualization of the Wright Flyer
Note This section requires the Simulink 3D Animation.
The Wright Flyer model also provides a virtual world visualization, coded in
Virtual Reality Modeling Language (VRML) [3] . The VR Sink block in the
main model allows you to view the flight motion in three dimensions.
1903 Wright Flyer V ir tual Reality World
References
[1] Hooven, Frederick J., “Longitudinal Dynamics of the Wright Brothers’
Early Flyers: A Study in Computer Simulation of Flight,” from The Wright
Flyer: An Engineering Perspective, ed. Howard S. Wolko, Smithsonian
Institution Press, 1987.
3-17
Page 94

3 Case Studies
[2]Culick,F.E.C.andH.R.Jex,“Aerodynamics,Stability,andControlof
the 1903 Wright Flyer,” from The Wright Flyer: An Engineering Perspective,
ed. H oward S. Wolko, Smithsonian Institution Press, 1987.
[3] Thaddeus Beier created the initial Wright Flyer model in Inventor format,
and Timothy Rohaly converted it to VRML.
Additional Information About the 1903 Wright Flyer
• http://www.wrightexperience.com
• http://wright.nasa.gov
3-18
Page 95

NASA HL-20 Lifting Body Airframe
In this section...
“Introduction” on page 3-19
“NASA HL-20 Liftin g Body” on page 3-19
“The HL-20 Airframe and Controller Model” on page 3-20
“References” on page 3-33
Introduction
This case study models the airframe of aNASAHL-20liftingbody,alow-cost
complement to the Space Shuttle orbiter. The HL-20 is unpowered, but the
model includes both airframe and controller.
For most flight control designs, the airframe, or plant model, needs to be
modeled, simulated, and analyzed. Ideally, this airframe should be modeled
quickly, reusing blocks or model structuretoreducevalidationtimeandleave
more time available for control design. In this study, the Aerospace Blockset
software efficiently m odels portions of the HL-20 ai rfra me. The remaining
portions, including calculation of the aerodynamic coefficients, are modeled
with the Simu l in k software. This case study examines the HL-20 airframe
model and touches on how the aerodynamic data are used in the model.
NASA HL-20 Lifting Body Airframe
NASA HL-20 Lifting Body
The HL-20, also known as the Personnel Launch System (PLS), is a lifting
body reentry v ehicle designed to complement the Space Shuttle orbiter. It was
developed o riginally as a low-cost solution for getting to and from low Earth
orbit. It can carry up to 10 people and a limited cargo [1].
The HL-20 lifting body can be placed in orbit either by launching it vertically
with booster rockets or by transporting it in the payload bay of the Space
Shuttle orbiter. The HL-20 lifting body deorbits using a small onboard
propulsion system. Its reentry profile is nose first, horizontal, and unpowered.
3-19
Page 96

3 Case Studies
Top-Front View of the HL-20 Lifting Body (Photo: NASA Langley)
The HL-20 design has a number of benefits:
3-20
• Rapid turnaround between landing and launch reduces operating costs.
• The HL-20 has exceptional flight safety.
• It can land conventionally on aircraft runways.
Potential uses for the HL-20 include
• Orbital rescue of stranded astronauts
• International Space Station crew exchanges
• Observation missions
• Satellite servicing missions
Although the HL-20 program is not currently active, the aerodynamic data
from HL-20 tests are being used in current NASA projects [2].
The HL-20 Air frame and Controller M odel
You can open the HL-20 airframe and controller model by en te ring
aeroblk_HL20 at the MATLAB command line.
Page 97

NASA HL-20 Lifting Body Airframe
Modeling Assumptions and Limitations
Prelimi
NASA doc
The air
• The air
• HL-20
• Comp
• Cont
• The
nary aerodynamic data for the HL-20 lifting body are taken from
ument TM4302 [1].
frame model incorporates several key assumptions and limitations:
frameisassumedtoberigidandhaveconstantmass,centerof
ty, and inertia, since the model represents only the unpowered reentry
gravi
on of a m issio n .
porti
is assumed to be a laterally symmetric vehicle.
ressibility (Mach) effects are assumed to be negligible.
rol effectiveness is assumed to vary nonlinearly with angle of attack
inearly with angle of deflection. Control effectiveness is not dependent
and l
ideslip angle.
on s
nonlinear six-degrees-of-freedom aerodynamic model is a
resentation of an early version of the HL-20. Therefore, the model is not
rep
ended for realis tic performance simulation of later versions of the HL-20.
int
3-21
Page 98

3 Case Studies
The typical airframe model consists of a number of components, such as
• Equations of motion
• Environmental models
• Calculation of aerodynamic coefficients, forces, and moments
TheairframesubsystemoftheHL-20modelcontainsfivesubsystems,which
model the typical airframe components:
• “6DoF (Euler Angles) Subsystem” on page 3-23
• “Environm ental Models Su b s ystem” on page 3-24
• “Alpha, Beta, Mach Subsystem” on page 3-26
• “Aerodynamic Coefficients Subsystem” on page 3-27
• “Forces and Moments Subsystem” on page 3-32
3-22
Page 99

NASA HL-20 Lifting Body Airframe
HL-20 Airframe Subsystem
6DoF (Euler Angles) Subsystem
The 6DoF (Euler Angles) subsystem contains the six-degrees-of-freedom
equations of motion for the airframe. In the 6DoF (Euler Angles) subsystem,
the body attitude is propagated in time using an Euler angle representation.
This subsystem is one of the equations of motion blocks from the Aerospace
Blockset library. A quaternion representation is also available. See the
6DoF (Euler Angles) and 6DoF (Quaternion) block reference pages for more
information on these blocks.
3-23
Page 100

3 Case Studies
Environmental Models Subsystem
The Environmental Models subsystem contains the following subsystems
and blocks:
• The WGS84 Gravity Model block implements the mathematical
representation of the geocentric equipotential ellipsoid of the World
Geodetic System (WGS84).
See the WGS84 Gravity Model block reference page for more information
on this block.
• The COESA Atmosphere Model block implements the mathematical
representation of the 1976 Committee on Extension to the Standard
Atmosphere (COESA) standard lower atmospheric v alues for absolute
temperature, pressure, density, and speed of sound, given the input
geopotential altitude.
See the COESA Atmosphere Model block reference page for more
information on this block.
• The Wind M odels subsystem contains the following blocks:
3-24
- The Wind Shear Model block adds wind shear to the model.
See the Wind Shear Model block reference page for more information
on this block.
- The Discrete Wind Gust Model block implements a wind gust of the
standard “1 - cosine” shape.
See the Discrete W ind Gust Model block reference page for more
information on this block.
- The Dryden Wind Turbulence Model (Continuous) b lock uses the Dryden
spectral representation to add turbulence to the aerospace model by
passing band-limited wh ite noise through appropriate forming filters.
See the Dryden Wind Turbulence Model (Continuous) block reference
page for more information on this block.
The environmental m odels implement mathematical representations with i n
standard references, such as U.S. Standard Atmosphere, 1976.
 Loading...
Loading...