

Page 1

Raspberry
ELECTRONIC EDUCATION SET
powered by Simac GmbH
Page 2
Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 2
powered by Simac GmbH
1. Einführung
2. Das Breadboard
3. Gyroskop & Beschleunigungssensor
4. Magnetfeldsensor
5. Explorer 700
6. Informations- und Rücknahmepflicht
7. Support
INHALTSVERZEICHNIS
Page 3
Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 3
powered by Simac GmbH
Sehr geehrter Kunde,
vielen Dank, dass Sie sich für unser Produkt entschieden haben.
Im Folgenden zeigen wir Ihnen, was bei der Inbetriebnahme und der
Verwendung zu beachten ist. Sollten Sie während der Verwendung
unerwartet auf Probleme stoßen, so können Sie uns
selbstverständlich gerne kontaktieren.
Dieses Raspberry Pi Kit führt Sie in die Welt der Sensoren und der
Programmierung. In diesem Set sind Sensoren und das
Explorer-Board 700 enthalten um einen vereinfachten Einstieg zu
ermöglichen, denn Sie können erlernen einen Magnetfeldsensor und
einen Beschleunigungssensor vereint mit einem Gyroskop zu
verwenden. Durch die 32 GB MSD-Karte mit dem vorbereitetem
Image wird der Einstieg um ein Vielfaches erleichtert.
Im gesamten Set ist ein Dish-Board aus Acryl, ein
Verbindungskabelset, eine 32 GB MSD-Karte mit dem vorbereitetem
Image Noobs-Betriebssystem, ein Modul mit einem kombinierten
Gyroskop- und Beschleunigungssensor, ein Magnetfeldsensor, das
Explorer-Board 700 enthalten in einem Kunststoff Mehrzweckkoffer.
1. EINFÜHRUNG
Page 4

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 4
powered by Simac GmbH
Mit Hilfe des Breadboards lassen sich benutzerdenierte Schaltungen einfach und übersichtlich gestalten.
Die ersten und letzten 30 Spalten + und - sind jeweils senkrecht durchverbunden.
Die Zeilen sind jeweils von A bis E und von F bis J waagerecht durchverbunden.
Diese durchverbundenen Spalten und Zeilen sind hier grün markiert.
2. DAS BREADBOARD
Page 5
Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 5
powered by Simac GmbH
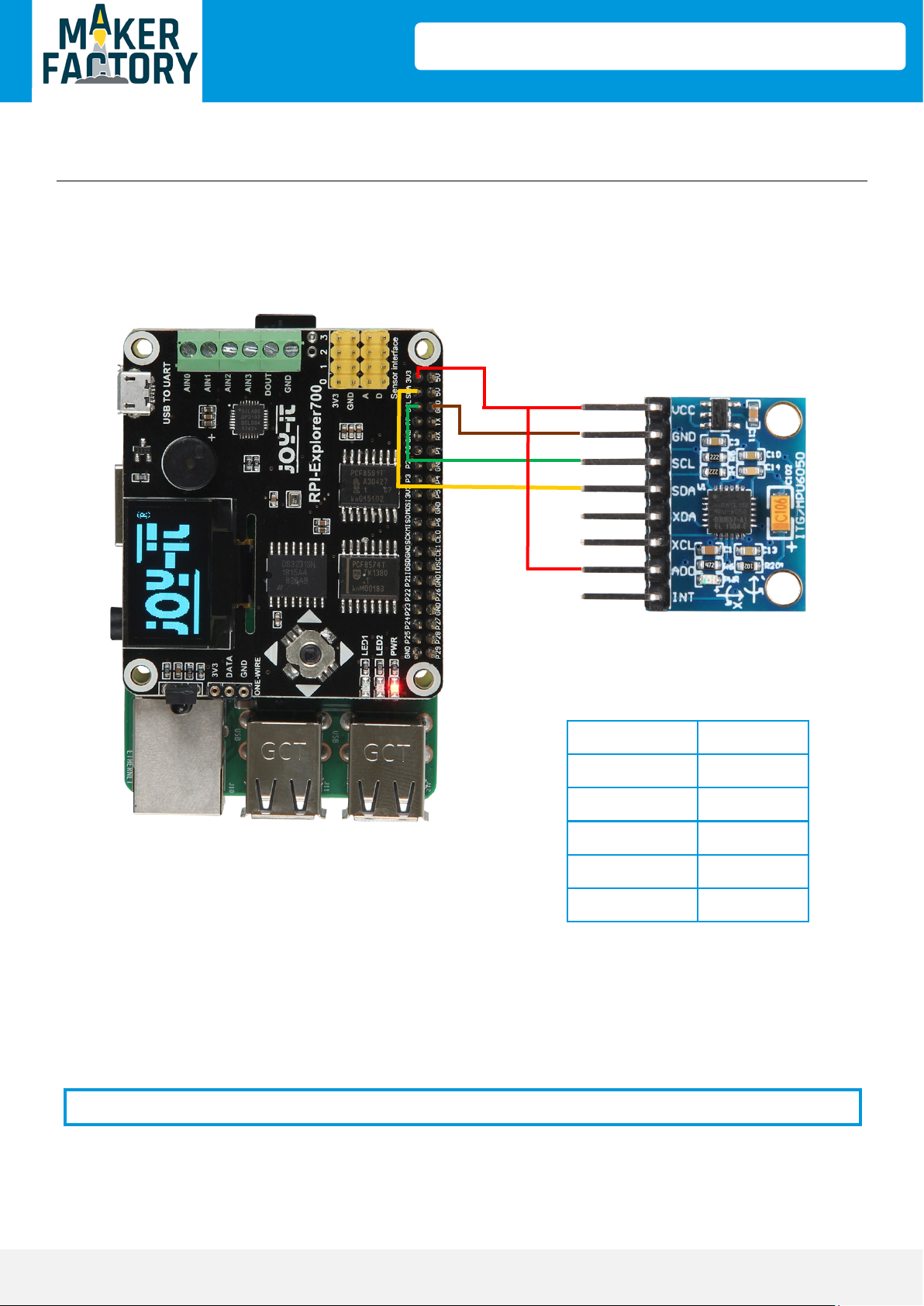
AD0 müssen Sie nur anschließen, wenn Sie zeitgleich das Explorer 700 verwenden. AD0 wird
verwendet um die I2C-Adresse des Sensors zu ändern, da die Adresse bereits vom Explorer
700 genutzt wird.
Wenn Sie AD0 nicht anschließen müssen Sie jedoch die I2C -Adresse im Beispielcode
anpassen und auf 0x68 ändern.
3. GYROSKOP & BESCHLEUNIGUNGSSENSOR
Raspberry Pi MPU6050
3v3 (Pin1/17) VCC
GND (Pin 6) GND
SCL (Pin 5) SCL
SDA (Pin 3) SDA
3v3 (Pin 1/17) AD0
address = 0x68 # I2C-Adresse
Page 6
Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 6
powered by Simac GmbH
Codebeispiel
Nachdem der Sensor angeschlossen ist, können Sie das Programm, welches sich bereits auf
dem vorbereitetem Image befindet, starten.
Dazu müssen Sie zunächst mit folgendem Befehl in das Dokumente-Verzeichnis wechseln:
Nun können Sie das Programm mit folgendem Befehl starten:
Zur Übersicht können Sie sich den Quelltext auf dieser und der folgenden Seite noch einmal anschauen.
3. GYROSKOP & BESCHLEUNIGUNGSSENSOR
#!/usr/bin/python
import smbus
import math
import time
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(reg):
return bus.read_byte_data(address, reg)
def read_word(reg):
h = bus.read_byte_data(address, reg)
l = bus.read_byte_data(address, reg+1)
value = (h << 8) + l
return value
def read_word_2c(reg):
val = read_word(reg)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
cd Documents/
sudo python MPU6050.py
Page 7

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 7
powered by Simac GmbH
3. GYROSKOP & BESCHLEUNIGUNGSSENSOR
bus = smbus.SMBus(1)
address = 0x69 # I2C-Adresse
bus.write_byte_data(address, power_mgmt_1, 0)
while True:
gyroskop_xout = read_word_2c(0x43)
gyroskop_yout = read_word_2c(0x45)
gyroskop_zout = read_word_2c(0x47)
print
print ("MPU6050")
print ("---------------------")
print ("gyroskop_xout: "), ("%5d" % gyroskop_xout), (" skaliert: "), (gyroskop_xout / 131)
print ("gyroskop_yout: "), ("%5d" % gyroskop_yout), (" skaliert: "), (gyroskop_yout / 131)
print ("gyroskop_zout: "), ("%5d" % gyroskop_zout), (" skaliert: "), (gyroskop_zout / 131)
print ("")
beschleunigung_xout = read_word_2c(0x3b)
beschleunigung_yout = read_word_2c(0x3d)
beschleunigung_zout = read_word_2c(0x3f)
print ("")
beschleunigung_xout_skaliert = beschleunigung_xout / 16384.0
beschleunigung_yout_skaliert = beschleunigung_yout / 16384.0
beschleunigung_zout_skaliert = beschleunigung_zout / 16384.0
print ("beschleunigung_xout: "), ("%6d" % beschleunigung_xout), (" skaliert: "), beschleu-
nigung_xout_skaliert
print ("beschleunigung_yout: "), ("%6d" % beschleunigung_yout), (" skaliert: "), beschleunigung_yout_skaliert
print ("beschleunigung_zout: "), ("%6d" % beschleunigung_zout), (" skaliert: "), beschleunigung_zout_skaliert
print ("")
print ("X Rotation: ") , get_x_rotation(beschleunigung_xout_skaliert, beschleunigung_yout_skaliert, beschleunigung_zout_skaliert)
print ("Y Rotation: ") , get_y_rotation(beschleunigung_xout_skaliert, beschleunigung_yout_skaliert, beschleunigung_zout_skaliert)
print ("------------------------------------------------")
time.sleep(1) # Zeit zwischen den Messungen in Sekunden
Page 8

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 8
powered by Simac GmbH
Da es sich bei dem Magnetfeldsensor um einen analogen Sensor handelt und der Raspberry
Pi keine analogen Eingänge besitzt, müssen Sie, um diesen Sensor verwenden zu können,
einen ADC (Analog-Digital Konverter) benutzen.
In diesem Beispiel verwenden wir den im Explorer 700 integrierten ADC, welcher im
Lieferumfang enthalten ist.
4. MAGNETFELDSENSOR
Explorer700 KY035BM
3v3 VCC
GND GND
AIN0 Signal
Page 9

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 9
powered by Simac GmbH
Codebeispiel
Nachdem der Sensor angeschlossen ist, können Sie das Programm, welches sich bereits auf
dem vorbereitetem Image befindet, starten.
Dazu müssen Sie zunächst mit folgendem Befehl in das Dokumente-Verzeichnis wechseln:
Nun können Sie das Programm mit folgendem Befehl starten:
Zur Übersicht können Sie sich den Quelltext hier noch einmal anschauen.
4. MAGNETFELDSENSOR
cd /Documents
sudo python Magnet.py
#!/usr/bin/python
# -*- coding:utf-8 -*-
import smbus
import time
address = 0x48
A0 = 0x40
A1 = 0x41
A2 = 0x42
A3 = 0x43
bus = smbus.SMBus(1)
while True:
bus.write_byte(address,A0)
value = bus.read_byte(address)
if value == 128:
print("Kein Magnetfeld erkannt! "), (" Wert: "), (value)
if value < 128:
print("Negatives Magnetfeld erkannt! "), (" Wert: "), (value)
if value > 128:
print("Positives Magnetfeld erkannt! "), (" Wert: "), (value)
time.sleep(1)
print("-------------------------------------")
Page 10

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 10
powered by Simac GmbH
Durch das vorbereitete Image können Sie die Funkonen des
Explorer 700 in vollem Umfang nutzen.
LEDs
Auf dem Explorer-Board sind zwei Status-LEDs verbaut, die wir in diesem Beispiel benutzen werden.
Wechseln Sie mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit dem folgenden Befehl können Sie das Programm starten, welches LED1 blinken lässt.
Sie können die LED auch langsam immer heller werden lassen die geschieht mit folgendem Befehl:
5. EXPLORER 700
cd Desktop/RB-Explorer700/LED/python
sudo python led.py
sudo python pwm.py
Page 11

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 11
powered by Simac GmbH
Joysck
In diesem Beispiel gibt der Buzzer einen Ton aus wenn der Joysck bewegt wird, außerdem wird die
Richtung in der Konsole ausgegeben.
Dazu wechseln Sie mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit folgendem Befehl können Sie nun das Programm starten:
Um das Herunterdrücken des Joysck anzeigen zulassen, müssen Sie ein anderes Programm starten.
Es zeigt in der Konsole an wenn der Joysck herunter gedrückt wurde.
Dazu wechseln Sie mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit folgendem Befehl können Sie nun das Programm starten:
BMP280
Der BMP280 ist ein Ludruck- und Temperatursensor, in diesem Beispiel benutzen wir Ihn um uns seine
Werte anzeigen zulassen.
Wechseln Sie dafür mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit dem folgenden Befehl können Sie das Programm starten, welches Temperatur und Ludruck anzeigt:
Mit dem folgendem Befehl können Sie sich die relave Höhe anzeigen lassen.
6. EXPLORER 700
sudo python key.py
cd Desktop/RB-Explorer700/PCF8574/python
sudo python pcf8574.py
cd Desktop/RB-Explorer700/KEY/python
cd Desktop/RB-Explorer700/BMP280/python
sudo python temperature-and-pressure.py
sudo python relative-altitude.py
Page 12

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 12
powered by Simac GmbH
Echtzeituhr (RTC)
Für die Echtzeituhr müssen Sie eine Baerie (CR-1225) in die Baeriehalterung auf der Rückseite der
Plane einlegen.
Mit Hilfe der Echtzeituhr kann Ihr Raspberry Pi selbst bei einem Stromausfall weiterhin die aktuelle
Uhrzeit speichern.
In diesem Beispiel wird die in der RTC gespeicherte Uhrzeit ausgelesen.
Wechseln Sie dafür mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit folgendem Befehl können Sie das Programm starten:
OLED
In diesem Beispiel wird ein Bild auf dem integriertem OLED-Display des Explorer-Boardes angezeigt.
Wechseln Sie dafür mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit folgendem Befehl können Sie das Programm starten:
IR-Receiver
In diesem Beispiel wird das vom IR-Receiver empfangene Signal in der Konsole ausgegeben.
Dazu wechseln Sie mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit folgendem Befehl können Sie das Programm starten:
6. EXPLORER 700
cd Desktop/RB-Explorer700/DS3231/python
sudo python ds3231.py
cd Desktop/RB-Explorer700/OLED/python
sudo python image.py
cd Desktop/RB-Explorer700/IRM/python
sudo python irm.py
Page 13

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 13
powered by Simac GmbH
DS18B20
Der DS18B20 ist ein One-Wire Temperatursensor.
Bevor Sie den Sensor benutzen können müssen Sie ihn zunächst in das Board stecken.
Achten Sie unbedingt darauf, dass der Sensor wie im Bild zusehen, mit der abgerundeten Seite vom
OLED weg zeigen muss.
Danach wechseln Sie mit folgendem Befehl in das Verzeichnis der Beispieldatei:
Mit folgendem Befehl können Sie das Programm starten:
6. EXPLORER 700
cd Desktop/RB-Explorer700/DS18B20/python
sudo python ds18b20.py
Page 14

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 14
powered by Simac GmbH
USB to UART
Sie können über die USB to UART Schnistelle Ihren Raspberry Pi mit einen Computer verbinden und
kommunizieren lassen.
Dazu benutzen wir in diesem Beispiel HTerm. Laden Sie sich das Programm hier herunter und installieren Sie
es.
Önen Sie HTerm und übernehmen Sie die Einstellungen, wie Sie in der untere Abbildung zu sehen ist. Jedoch
kann der Port bei Ihnen abweichen, was Sie im Geräte-Manager überprüfen können.
Nun können Sie mit einem Klick auf Connect die Verbindung herstellen.
Als nächstes müssen Sie das Beispielprogramm auf Ihrem Raspberry Pi starten.
Wechseln Sie dafür mit folgendem Befehl in das Zielverzeichnis:
Nun können Sie mit dem folgendem Befehl das Programm ausführen:
Der Raspberry Pi sendet nun „Hello World!!!“ and den PC und schickt alles was er gesendet bekommt wieder
zurück.
Diese Ausgabe sollten Sie erhalten, nachdem Sie das Programm gestartet haben.
6. EXPLORER 700
cd Desktop/RB-Explorer700/UART/RPI3/python
sudo python uart.py
Page 15

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 15
powered by Simac GmbH
Nun können Sie etwas an den Raspberry Pi schicken, indem Sie es unten in das Feld eingeben und auf „ASend“
klicken.
Danach sollten Sie die folgende Ausgabe erhalten:
6. EXPLORER 700
Page 16

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 16
powered by Simac GmbH
Symbol auf Elektro- und Elektronikgeräten
Diese durchgestrichene Mülltonne bedeutet, dass Elektro - und Elektronikgeräte nicht in
den Hausmüll gehören. Sie müssen die Altgeräte an einer Erfassungsstelle abgeben. Vor der
Abgabe haben Sie Altbatterien und Altakkumulatoren, die nicht vom Altgerät umschlossen
sind, von diesem zu trennen.
Rückgabemöglichkeiten
Als Endnutzer können Sie beim Kauf eines neuen Gerätes, Ihr Altgerät (das im Wesentlichen
die gleiche Funktion wie das bei uns erworbene neue erfüllt) kostenlos zur Entsorgung
abgeben. Kleingeräte bei denen keine äußere Abmessungen größer als 25 cm sind können
unabhängig vom Kauf eines Neugerätes in Haushaltsüblichen Mengen abgeben werden.
Möglichkeit Rückgabe an unserem Firmenstandort während der Öffnungszeiten
Simac GmbH, Pascalstr. 8, D -47506 Neukirchen-Vluyn
Möglichkeit Rückgabe in Ihrer Nähe
Wir senden Ihnen eine Paketmarke zu mit der Sie das Gerät kostenlos an uns zurücksenden
können. Hierzu wenden Sie sich bitte per E-Mail an Service@joy-it.net oder per Telefon an
uns.
Informationen zur Verpackung
Verpacken Sie Ihr Altgerät bitte transportsicher, sollten Sie kein geeignetes
Verpackungsmaterial haben oder kein eigenes nutzen möchten kontaktieren Sie uns, wir
lassen Ihnen dann eine geeignete Verpackung zukommen.
6. INFORMATIONS- UND RÜCKNAHMEPFLICHTEN
Page 17

Raspberry ELECTRONIC EDUCATION SET
Veröffentlicht: 15.10.2019 Copyright by Makerfactory 17
powered by Simac GmbH
7. SUPPORT
Makerfactory ist powered by Simac GmbH.
Wir sind auch nach dem Kauf für Sie da. Sollten noch Fragen offen bleiben
oder Probleme auftauchen stehen wir Ihnen auch per E-Mail, Telefon und
Ticket-Supportsystem zur Seite.
E-Mail: service@joy-it.net
Ticket-System: http://support.joy-it.net
Telefon: +49 (0)2845 98469 – 66 (10- 17 Uhr)
Für weitere Informationen besuchen Sie unsere Website:
www.joy-it.net
Dies ist eine Publikation der Simac Electronics Handel GmbH | Pascalstr. 8 | 47506 NV
Alle Rechte einschließlich Übersetzung vorbehalten. Reproduktion jeder Art, z. B.
Fotokopie, Mikroverfilmung, oder die Erfassung in elektronischen
Datenverarbeitungsanlagen, bedürfen der schriftlichen Genehmigung des Herausgebers.
Nachdruck, auch auszugsweise, verboten. Die Publikation entspricht dem technischen Stand
bei Drucklegung.
Copyright 2019 by Simac GmbH
 Loading...
Loading...