

Manuale istruzioni
Hexapod Roboter-Board
Cod. Art.: 1589388

2
Indice
1. Introduzione ................................................................................................................................................................ 3
2. Spiegazione dei simboli .............................................................................................................................................. 3
3. Uso previsto ................................................................................................................................................................ 4
4. Descrizione del prodotto............................................................................................................................................. 4
5. Nella fornitura ............................................................................................................................................................. 5
6. Per la vostra sicurezza ............................................................................................................................................... 5
7. Accessori necessari ................................................................................................................................................... 7
8. Panoramica dei collegamenti e dei componenti ........................................................................................................ 8
9. Schema a blocchi ..................................................................................................................................................... 12
10. Messa in funzione .................................................................................................................................................... 13
11. Alimentazione elettrica ............................................................................................................................................. 14
12. Installazione del Software e del Firmware ............................................................................................................... 15
13. Trasferimento del Firmware ..................................................................................................................................... 16
a) Installazione dei driver ....................................................................................................................................... 16
b) Installazione Arduino IDE ................................................................................................................................... 16
c) Arduino IDE ........................................................................................................................................................ 17
14. Preparare i servoazionamenti RC per l'installazione ............................................................................................... 21
15. Hexapod-Meccanica e configurazione base ............................................................................................................ 23
16. Connessioni RC-Servo ............................................................................................................................................. 26
17. Collegamento del Gamepad .................................................................................................................................... 28
18. Configurazione Firmware ......................................................................................................................................... 32
19. Trasferire il Firmware ............................................................................................................................................... 40
20. Controllo con il Gamepad ......................................................................................................................................... 41
21. Calibrare le gambe ................................................................................................................................................... 43
22. Utilizzo delle User-Boards ......................................................................................................................................... 47
23. Programma Demo .................................................................................................................................................... 51
24. FAQ ........................................................................................................................................................................... 55
25. Assegnazione PIN della board ................................................................................................................................. 57
26. Pulizia ....................................................................................................................................................................... 59
27. Smaltimento .............................................................................................................................................................. 59
28. Dati tecnici ................................................................................................................................................................. 60
Pagina
3
1. Introduzione
Gentile cliente,
Grazie per aver acquistato questo prodotto.
Questo prodotto soddisfa i requisiti legali, nazionali ed europei.
Per mantenere questa condizione e garantire un funzionamento sicuro, l'utente deve osservare le presenti istruzioni per
l'uso!
Questo manuale appartiene a questo prodotto. Contiene informazioni importanti per la messa in servizio e
la manipolazione. Si prega di notare questo, anche se si passa questo prodotto a terzi.
Conservare pertanto le presenti istruzioni per l'uso per riferimento futuro!
Tutti i nomi di aziende e prodotti contenuti sono marchi di fabbrica dei rispettivi proprietari. Tutti i diritti riservati.
Per domande tecniche si prega di contattare:
Italia: servizioclienti@conrad.it
Germania: www.conrad.de/kontakt
Austria: www.conrad.at www.business.conrad.at
Svizzera: www.conrad.ch www.biz-conrad.ch
2. Spiegazione dei simboli
Il simbolo con il punto esclamativo nel triangolo indica in queste istruzioni per l'uso avvertenze importanti
che devono essere osservate..
Il simbolo della freccia si trova se vengono forniti suggerimenti e istruzioni speciali per l'uso
4
3. Uso previsto
Il pannello robot Hexapod è progettato esclusivamente per l'addestramento, la ricerca e l'uso privato nel settore
dell'hobbistica e della modellistica e per i relativi tempi di funzionamento.
Il prodotto non è un giocattolo, non è adatto a bambini sotto i 14 anni.
Il prodotto è rivolto ad utenti avanzati che hanno già esperienza con Arduino e con il linguaggio di programmazione
C/C++, oltre che nell'elettronica e nella costruzione di kit meccanici.
L'uso del prodotto per scopi diversi da quelli descritti sopra può danneggiare il prodotto stesso. Inoltre, un uso
improprio può causare rischi quali cortocircuiti, incendi, scosse elettriche, ecc. Leggere attentamente le istruzioni per
l'uso e le presenti istruzioni per l'uso e conservarle in un luogo sicuro. Il prodotto deve essere consegnato a terzi
solo insieme alla documentazione.
Questo prodotto soddisfa i requisiti legali, nazionali ed europei. Tutti i nomi di aziende e prodotti contenuti sono
marchi di fabbrica dei rispettivi proprietari. Tutti i diritti riservati.
Il prodotto non deve diventare umido o bagnato. L'elettronica è concepita per funzionare a una
temperatura ambiente compresa tra 0 °C e 40 °C..
Il prodotto non è un giocattolo, non è adatto a bambini sotto i 14 anni.
Attenersi a tutte le avvertenze di sicurezza contenute in queste istruzioni per l'uso. Queste contengono
informazioni importanti per la manipolazione del prodotto. Siete i soli responsabili del funzionamento
sicuro della scheda robotizzata C-Control Hexapod!
4. Descrizione del prodotto
La scheda robot Hexapod contiene tutti i componenti importanti necessari per il funzionamento di un robot esapode
autocostruito con servo di modellazione (servo RC).
La caratteristica speciale è la possibilità di utilizzare diverse schede microcontrollori come Ardu- ino UNO, SBC
(Single Board Computer) come il lampone Pi o NodeMCU. Queste "schede utente" possono essere utilizzate per
creare i propri programmi per il controllo del robot. La comunicazione tra la scheda utente e l'utente
"Locomotion Controller" è un protocollo seriale che permette un semplice controllo del robot senza dover gestire
complessi algoritmi di funzionamento.
La scheda robot Hexapod è progettata per consentire modifiche ed estensioni individuali. Contiene anche alcuni
componenti aggiuntivi come pulsanti, slot per schede MicroSD, altoparlanti con circuiti amplificatore, connettori I2C,
ricevitore IR, interfaccia di programmazione USB per il controller di posizione, connettori ISP (SPI) e altri ingressi /
uscite.
La scheda robot Hexapod è programmata tramite la piattaforma open source Arduino. Il controllore di posizione è
compatibile con la scheda Arduino MEGA2560. Se necessario, il firmware del Locomotion Controller può essere
adattato individualmente al robot. Tutti i programmi di esempio sono disponibili all'indirizzo www.conrad.com sul
rispettivo sito web del prodotto.
5
5. Nella fornitura
• 1x Scheda C-Control Hexapod Roboter
• 2x Ponticelli
• 1x Connettori batteria XT30
Istruzioni aggiornate
Scaricare le istruzioni per l'uso attuali dal link www.conrad.com/downloads oppure seguire le
istruzioni sul sito web. www.conrad.it
6. Per la vostra sicurezza
Leggere attentamente le istruzioni per l'uso e prestare particolare attenzione alle norme di
sicurezza. Se non si seguono le avvertenze di sicurezza e le indicazioni per un uso conforme
contenute in queste istruzioni per l'uso, non ci si assume alcuna responsabilità per eventuali
lesioni personali o danni materiali da esse derivanti. Inoltre, la garanzia scade in questi casi.
• Gentile cliente, le presenti istruzioni di sicurezza servono non solo a proteggere il prodotto, ma anche
la propria sicurezza e quella di altre persone. Pertanto, leggere attentamente questo capitolo prima di
mettere in funzione il prodotto!
• - Il prodotto è rivolto ad utenti avanzati che hanno già esperienza con Arduino e con il linguaggio di
programmazione C/C++, nell'elettronica e nella costruzione di kit meccanici. Se non avete sufficiente
esperienza, si prega di contattare uno sviluppatore esperto, un club di produttori locali o il nostro
supporto.
• - Per motivi di sicurezza e di approvazione, non sono consentite modifiche non autorizzate al di fuori
delle possibilità descritte e/o modifiche del prodotto.
• - Il prodotto non è un giocattolo. Tenere lontano da bambini e animali domestici.
• - Non lasciare il materiale d'imballaggio con cautela. Questo potrebbe diventare un giocattolo
pericoloso per i bambini.
• - Proteggere il prodotto da temperature estreme, luce solare diretta, forti urti, elevata umidità, umidità,
gas, vapori e solventi infiammabili.
• - Non esporre il prodotto a sollecitazioni meccaniche.
• - Quando si collegano i servoazionamenti RC e altri componenti, nonché i relativi cavi di collegamento,
assicurarsi che vi sia un contatto sicuro. Connettori allentati o traballanti possono causare interferenze
o danni.
• - Se è necessario un lavoro di saldatura, assicurarsi che non si verifichino cortocircuiti durante la
saldatura.
.

6
• Durante l'installazione della scheda, assicurarsi che i componenti o i contatti a saldare non entrino in
contatto con parti metalliche e che quindi si verifichino cortocircuiti. Il prodotto sarà danneggiato,
perdita della garanzia/garanzia!
• Se non è più possibile un funzionamento sicuro, spegnere il prodotto e proteggerlo dall'uso
involontario. Il funzionamento sicuro non è più garantito se il prodotto:
• - ha subito danni visibili,
• - non funziona più correttamente,
• - è stato immagazzinato in condizioni ambientali sfavorevoli per un lungo periodo di tempo, oppure
• - è stato esposto a notevoli carichi di trasporto.
• - Maneggiare il prodotto con cura. È danneggiato da urti, colpi o cadute da un'altezza bassa.
• - In caso di dubbi sul funzionamento, la sicurezza o il collegamento del prodotto, rivolgersi a un tecnico
specializzato.
• - Far eseguire gli interventi di manutenzione, regolazione e riparazione esclusivamente da un'officina
specializzata.
• - Se avete domande che non trovano risposta in questo manuale, vi preghiamo di contattare il nostro
supporto tecnico o altri specialisti..
7
7. Accessori necessari
Per ottenere un robot eseguibile, oltre alla scheda robot Hexapod, sono necessari i seguenti componenti
aggiuntivi.
- 1x Meccanismo esapode (disegno proprio ad es. stampa 3D o set finito ad es. codice Conrad 1618958)
- 18x SERVIZI RC adatti alla meccanica Hexapod utilizzata, ad es. Conrad codice 1365926
- 1x gamepad compatibile con PS2 con ricevitore radio, ad es. Conrad codice d'ordine 161300
- 1 pacco batterie NiMH a 5 celle (tensione nominale 6 V/DC), capacità min. 2000 mAh
- 1 caricabatterie per la batteria NiMH usata
- 1x Arduino UNO (Conrad 191789), NodeMCU (Conrad 161301) o Raspberry Pi (Conrad 1419716)
8
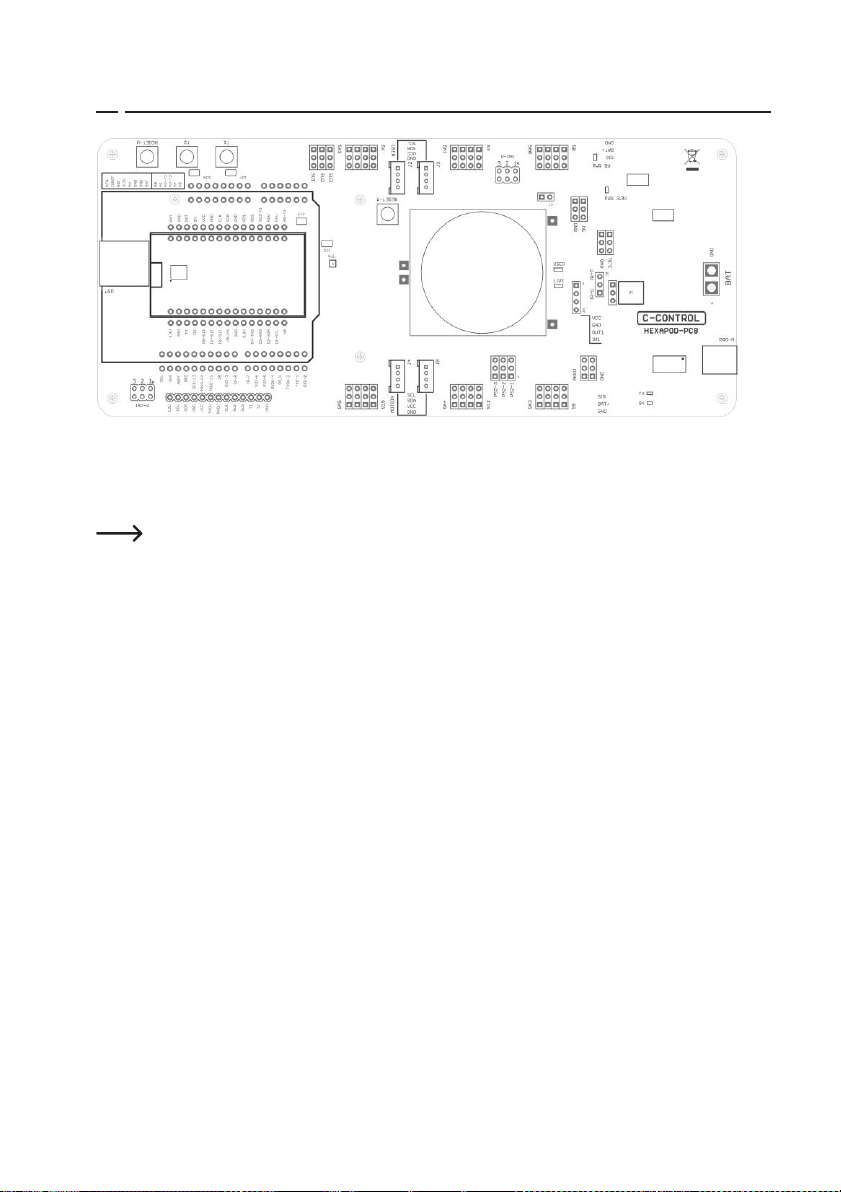
8. Panoramica dei collegamenti e dei componenti
Foto 1
Posiziona la scheda robot Hexapod davanti a te come mostrato nell'illustrazione per avere una panoramica delle
opzioni di connessione..
Sul sito www.conrad.com nella pagina del prodotto si trova anche lo schema elettrico della scheda..
La scheda robot Hexpod ha le seguenti connessioni e componenti:
BAT: Connettore XT30 per il collegamento della batteria che alimenta la scheda. Tensione di esercizio
PRG-M: Connessione USB per la programmazione del controllore di locomozione.
TX-LED: Segnala la linea di trasmissione quando un programma viene trasmesso al Locomotion
RX-LED: Segnala la linea di ricezione quando un programma viene trasmesso al Locomotion Controller
Batteria e GND: La tensione della batteria può essere toccata su questi pin (batteria = polo positivo, GND = polo
Da 4,5 a 10 V/DC (+ = polo positivo; GND = polo negativo). A seconda dei servi RC utilizzati,
utilizzare come alimentatore una batteria NiMH a 5 celle (tensione nominale 6 V/DC) con una
capacità di almeno 2000 mAh..
Controller (lampeggio rapido durante la trasmissione).
(lampeggio rapido durante la trasmissione).
negativo).
I pin non sono protetti contro i cortocircuiti! Lavorare con cura e non cortocircuitare! Questo può
portare alla distruzione dei connettori e della scheda robot Hexapod! Questa connessione è
disponibile per estensioni ed esperimenti propri.

9
J6: I pin VCC e GND sono disponibili con 5 V/DC/1000 mA stabilizzati. Questo connettore viene
IR: Il ricevitore IR può essere collegato al Controllore Locomozione (impostazione Jumper IR-M) o
LIVE-LED: Il simbolo blu "LIVE-LED" indica lo stato del regolatore di locomozione. Se il Locomotion
USER-LED: Il "LED USER" rosso indica che il gamepad compatibile con PS2 è attivato e che i comandi di
3.3V e GND: Su questi pin sono disponibili 3,3 V/DC/400 mA stabilizzati. Questo collegamento è disponibile per
5V e GND: Su questi pin sono disponibili 5 V/DC/1000 mA stabilizzati. Questo collegamento è disponibile per
3.3V PWR-LED: Il LED rosso indica che la tensione/alimentatore da 3,3 V è in funzione. Si accende non appena
5V PWR-LED: Il LED rosso indica che la tensione/l'alimentazione a 5 V è in funzione. Si accende non appena viene
J7: Il jumper "J7" nel firmware del Locomotion Controller disattiva la valutazione del gamepad
ISP-M: Connessione ISP ("in-system programming") del controllore Locomotion. Con questo
PS2-1 fino PS2-3: A questi pin può essere collegato un gamepad compatibile con PS2, disponibile come
J2 e J3: Entrambe le prese sono collegate al connettore I2C-BUS del Locomotion-Controller e possono
J4 e J5: Le due prese sono collegate al collegamento I2C-BUS della scheda utente e possono essere
RESET-M: Il pulsante attiva un reset hardware del controller di locomozione quando premuto.
utilizzato per estensioni ed esperimenti propri (VCC = polo positivo, GND = polo negativo).
OUT1 è un'uscita digitale del controllore di locomozione. Può essere commutato su HIGH (+5
V/DC) o LOW (0 V/DC) tramite un comando della scheda utente. Il carico di corrente massimo è
20 mA. Questa connessione è disponibile per estensioni ed esperimenti propri.
IN1 è un ingresso digitale del Locomotion Controller. È in grado di leggere uno stato digitale
tramite un comando della scheda utente. Viene rilevato un 1 logico compreso tra 3,5 e 5 V/DC;
uno 0 logico con tensione inferiore a 3,3 V/DC. La tensione d'ingresso massima di 5 V/DC non
deve essere superata! Questo connettore è disponibile per estensioni ed esperimenti propri.
alla scheda utente (impostazione Jumper IR-U) utilizzando il Jumper J8. Il ricevitore consente di
ricevere un segnale a infrarossi a 38 kHz, ad esempio da un telecomando universale o da un
trasmettitore IR autocostruito.
Controller è attivo, questo LED lampeggia in stati diversi.
controllo sono ora ignorati dalla scheda utente.
prolunghe ed esperimenti propri (3,3V = polo positivo, GND = polo negativo).
prolunghe ed esperimenti propri (5V = polo positivo, GND = polo negativo).
viene collegato un alimentatore alla connessione BAT..
collegato un alimentatore alla connessione BAT.
compatibile con PS2 (il robot non può più essere controllato tramite il gamepad). I comandi di
controllo del gamepad possono quindi essere letti solo tramite la scheda utente!
collegamento, il Locomotion Controller può essere programmato tramite un dispositivo di
programmazione ISP. È anche possibile utilizzare questo connettore per integrare i propri
componenti con l'interfaccia SPI.
accessorio. Il robot può essere controllato manualmente tramite questo controller, come
un'automobile telecomandata.
essere utilizzate per le proprie estensioni. I collegamenti sono compatibili con i componenti
"SEEED-GROVE.
utilizzate per i propri interni. I collegamenti sono compatibili con i componenti "SEEED-GROVE.

10
S0 fino S17: A questi collegamenti sono collegati i "servi delle gambe" dell'esapode. Le strisce di connessione
SA0 fino SA5: Gli ingressi analogici da SA0 a SA5 possono essere utilizzati per le proprie estensioni nel firmware
SJ1: Il ponticello PCB "SJ1" collega l'amplificatore audio al controller Locomotion. Nella maggior parte
Speaker: L'altoparlante emette un segnale acustico ed è collegato all'amplificatore audio. I segnali acustici
Vol.: Il trimmer "Vol." serve per regolare il volume del controllore di locomozione e dei segnali acustici
T1 e T2: I pulsanti "T1" e "T2" possono essere utilizzati con la scheda utente. Guarda gli esempi di
SJ6 e SJ7: I ponticelli PCB "SJ6" e "SJ7" collegano le uscite dei pulsanti "T1" e "T2" con una resistenza pull-
RESET-U: Il pulsante "RESET-U" azzera la scheda utente.
SJ2: Il ponticello PCB "SJ2" collega il pulsante "T2" alla scheda utente del NodeMCU. Il pin utilizzato
SU1 fino SU3: I collegamenti SU1, SU2 e SU3 sono collegati agli slot della scheda utente e possono essere
µSD: Lo slot per scheda MicroSD è collegato allo slot per scheda utente compatibile con Arduino UNO
ISP-U: Connessione ISP ("in-system programming") dello slot per scheda utente compatibile con
sono sempre disposte in blocchi assegnati alla rispettiva gamba. I collegamenti per "Coxo anca", "femore - coscia" e "Coxo - anca" sono contrassegnati sulla rispettiva etichetta
(S...)."Tibia - Shin" contato. I pin sono compatibili con i più comuni servo RC. Accertarsi che la
polarità sia corretta. La polarità sulla scheda è contrassegnata con "SIG" per la linea del
segnale, "BAT+" per il polo positivo e "GND" per il polo negativo.
Locomotion. Nel "Motion firmware" è possibile richiederle anche alla scheda utente tramite una
funzione.
dei casi, questo collegamento rimane attivo. Se necessario, è possibile tagliare con cura il
ponticello con un piccolo coltello. Con una saldatura è possibile ristabilire il collegamento.
possono essere generati dal controllore di locomozione e anche dalla scheda utente.
della scheda utente. Ruotando il trimmer nella direzione dei pulsanti si aumenta il volume,
mentre ruotandolo in una delle direzioni opposte si diminuisce il volume. Per regolare il piccolo
trimmer, in pratica è stato utilizzato un piccolo cacciavite da orologiaio. Fare attenzione a non
danneggiare il trimmer durante la regolazione! L'impostazione di base è la posizione centrale del
trimmer.
software.
up da 22 kOhm, in modo che non sia necessario attivare resistenze pull-up nel programma della
scheda utente. Nella maggior parte dei casi, questo collegamento rimane attivo. Se necessario,
è possibile tagliare con cura i ponticelli con un piccolo coltello. Con una saldatura è possibile
ristabilire il collegamento.
del NodeMCU è l'ingresso analogico e può essere utilizzato dal pulsante "T2" può essere
disinserito tramite questo ponticello. Normalmente questo collegamento viene mantenuto. Se
necessario, è possibile tagliare con cura il ponticello con un piccolo coltello. Con una saldatura è
possibile ristabilire il collegamento.
utilizzati per le proprie applicazioni. Hanno la stessa polarità dei collegamenti dei
servoazionamenti RC dei servoazionamenti per le gambe. Guarda gli esempi di software.
e può essere utilizzato per le proprie applicazioni. Guarda gli esempi di software.
"Arduino UNO". Con questo collegamento la scheda utente può essere programmata tramite un
dispositivo di programmazione ISP. È anche possibile utilizzare questo connettore per integrare i
propri componenti con l'interfaccia SPI.
11
User-Boards: Arduino-UNO:
Le due strisce più lunghe dei connettori esterni sono utilizzate per alloggiare una scheda utente
compatibile con "Arduino UNO". Tutti i pin sono condotti fuori a strisce di presa accanto ad esso.
Questo permette di accedere facilmente ai pin della scheda. L'assegnazione dei pin viene
stampata accanto alle strisce di pin e corrisponde a quella utilizzata. Guarda gli esempi di
software.
NodeMCU:
La popolare scheda WiFi con la denominazione "NodeMCU" e il chip ESP8266 utilizzato
possono essere utilizzati sullo slot interno come una scheda utente. Anche qui, tutti i pin sono
condotti fuori sulle strisce adiacenti, che facilita la sperimentazione. Guarda gli esempi di
software.
SBC (Single Board Computer):
Un Raspberry Pi 2 o 3 o qualsiasi altro SBC può essere collegato alla morsettiera accanto al
connettore "ISP-U". È inoltre possibile utilizzare moduli radio o moduli Bluetooth® come schede
utente tramite questo collegamento. Questa testata pin può essere considerata universale e
rappresenta un'interfaccia per le estensioni e gli sviluppi propri.
Il Locomotion Controller si trova sotto l'altoparlante.
12
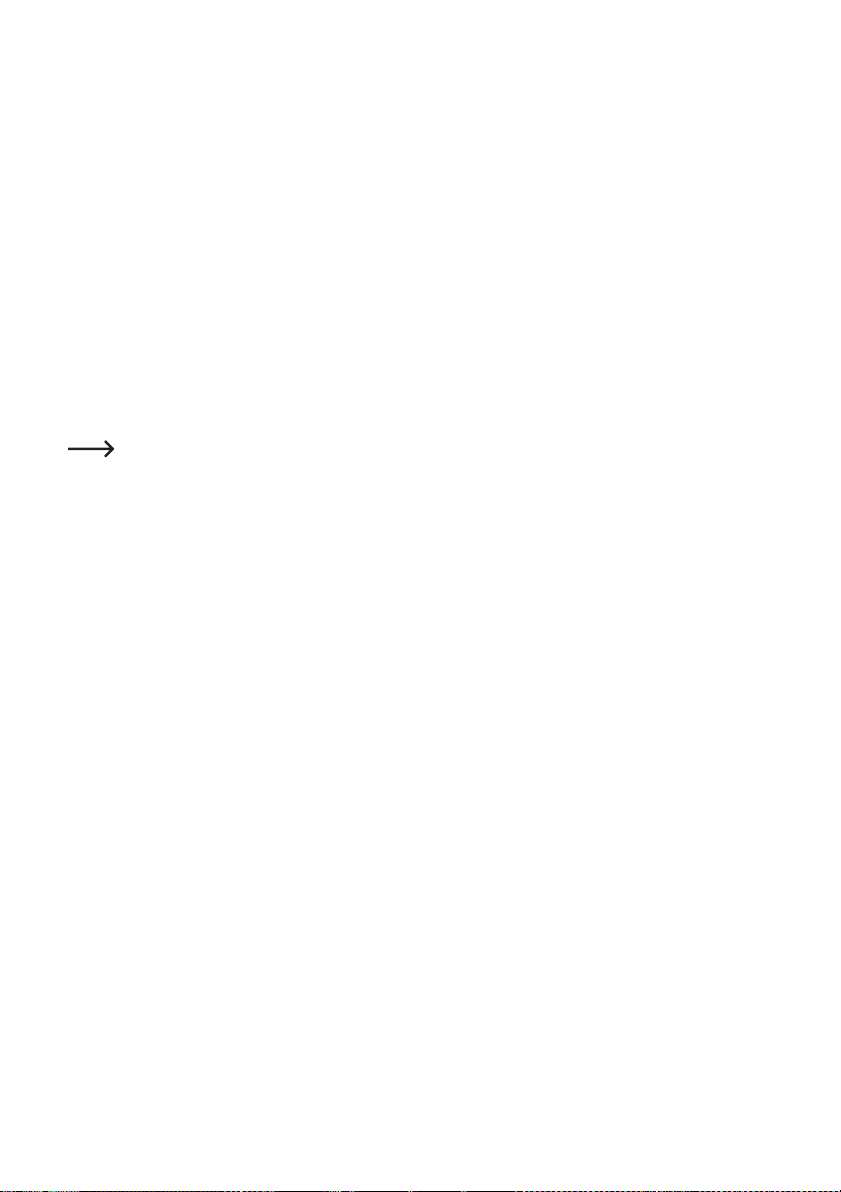
9. Schema a blocchi
Foto 2
Il diagramma mostra schematicamente il cablaggio interno e l'interazione dei singoli componenti della scheda robot
Hexapod e funge da ausilio alla programmazione.
13
10. Messa in funzione
Poiché "Hexapod Robot Board" è una scheda sperimentale aperta (Development Board), in questo manuale
possiamo solo darvi suggerimenti e consigli su come costruire il vostro esapode. Tuttavia, si è responsabili per il
robot finito eseguibile!
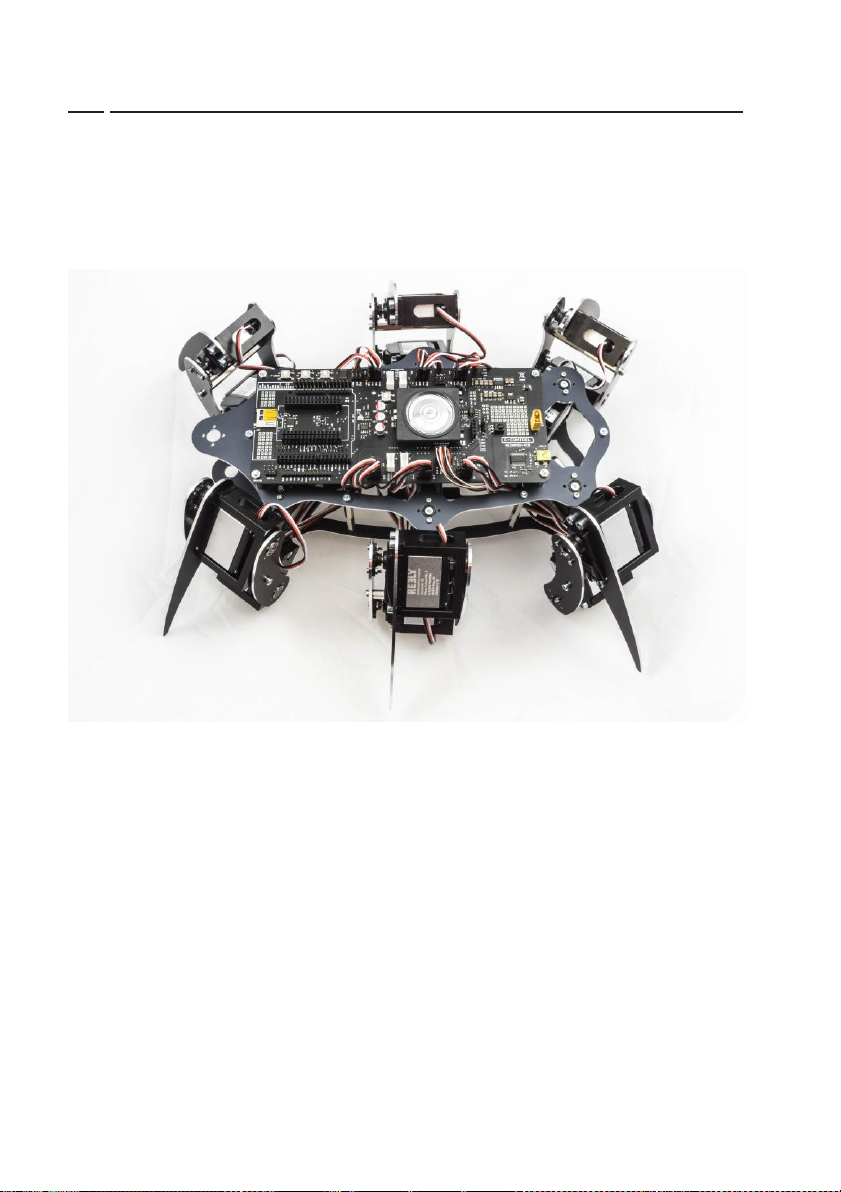
La figura seguente mostra un esapode che può essere utilizzato come guida per il proprio disegno. Questo "esapode
campione" è progettato per aiutarvi a stimare dati quali dimensione del robot, peso e selezione dei servi RC.
Foto 3
Specifiche tecniche:
Pacco batteria: 5 celle NiMH, 3700 mAh (cavetto 2,5 mm²)
Lunghezza corpo: 280 mm
Altezza corpo senza scheda: 65 mm
Larghezza corpi senza gambe: 150 mm
Lunghezza asse: 50 mm
Lunghezza femore: 75 mm
Lunghezza Tibia: 115 mm
Peso: ca. 2,7 kg
Forza di azionamento su 6 V/DC: 8,5 kg
Numero servo RC: 18
14
11. Alimentazione elettrica
Per un funzionamento sicuro e senza problemi della scheda robot Hexapod, è fondamentale la corretta
alimentazione elettrica. La scheda funziona con una tensione di alimentazione compresa tra 4,5 e 10 V/DC, per cui
un'alimentazione ottimale dipende dai servoazionamenti RC utilizzati e dai componenti aggiuntivi.
Ad esempio, se si utilizzano servoazionamenti RC analogici standard, è generalmente consentita una tensione di
alimentazione di max. 6 V/DC (controllare la scheda tecnica dei servoazionamenti RC in uso).
Si consiglia di utilizzare una batteria NiMH a 5 celle con almeno 2000 mAh quando si utilizzano servoazionamenti
RC standard con una forza di posizionamento <= 8 kg e una tensione di alimentazione di 6 V/DC. Se la capacità
della batteria è troppo bassa, i tempi di funzionamento del robot sono molto brevi e questo può portare ad un reset
della scheda utente o del controllore di locomozione.
Se si utilizzano "servoazionamenti RC ad alta tensione" per il robot (servoazionamenti RC che possono essere
azionati con una batteria LiPo), si consiglia un pacco batteria LiPo 2S (7,4 V) con almeno 2000 mAh (velocità di
scarica 20C).
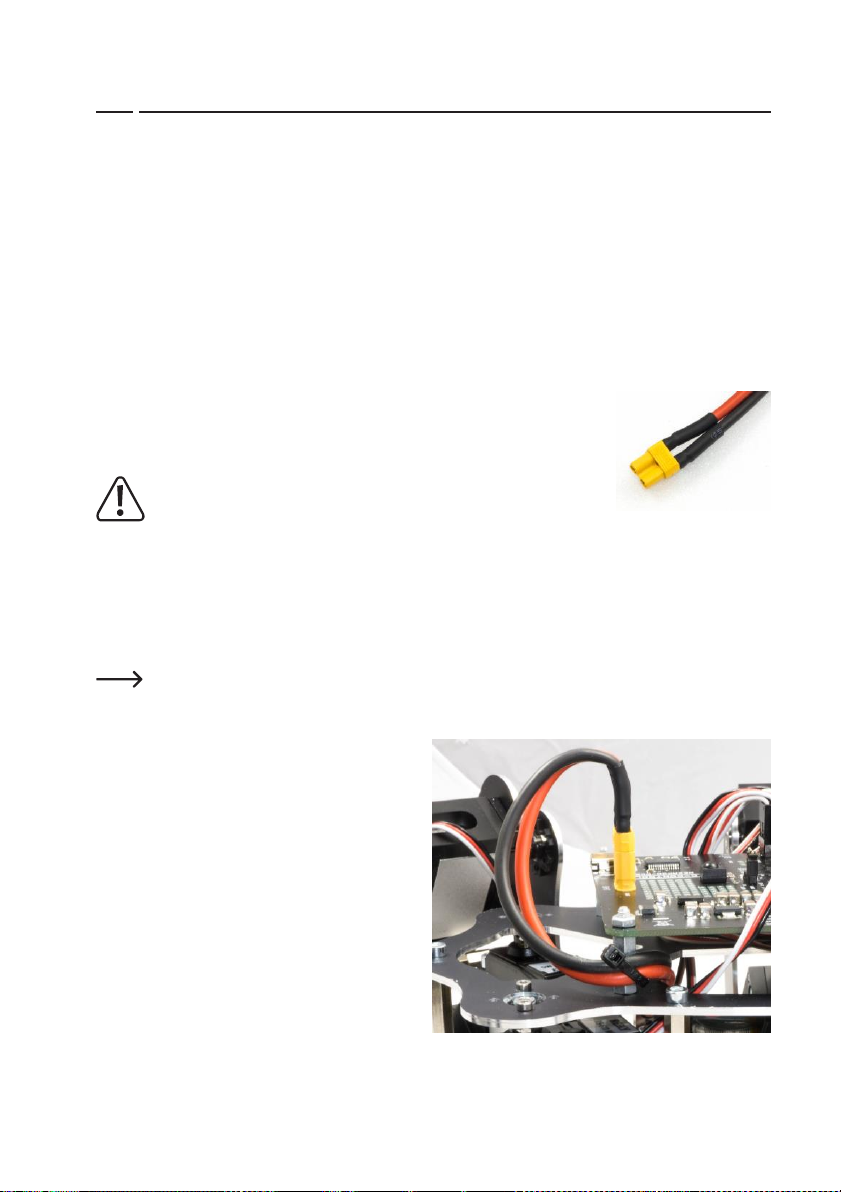
La scheda robot Hexapod è dotata di una spina per la batteria XT30. Questo viene
saldato alla batteria selezionata dall'utente. La lunghezza del cavo tra la batteria e la
spina non deve superare i 20 cm! Prestare attenzione alla polarità e a non causare
cortocircuiti durante la saldatura..
In caso di cortocircuito, le batterie possono emettere una grande quantità di
corrente che può provocare ustioni, incendi e lesioni pericolose!
Quando pianifichi il tuo esapode, ricorda che deve trasportare i servi RC, la batteria, la meccanica, la
scheda robotizzata e i tuoi componenti aggiuntivi!
Ricordare inoltre che gambe troppo lunghe sono una leva molto grande per i servoazionamenti RC e che
la forza di azionamento dei servoazionamenti RC deve essere sufficiente per il sollevamento e la corsa. Il
funzionamento dei servoazionamenti RC nel campo limite può provocare il surriscaldamento
dell'elettronica nel servoazionamento e distruggerla a lungo termine!
Quando si utilizzano schede utente la cui alimentazione è critica (ad esempio, schede SBC o potenti
schede compatibili con Arduino UNO e controller ARM), potrebbe essere opportuno alimentarle anche
tramite un power bank.
La foto 5 mostra come collegare il connettore alla
scheda robot Hexapod.
Foto 4
Foto 5

15
12. Installazione del Software e del Firmware
I pacchetti software, il firmware e gli strumenti necessari per la scheda robot Hexapod sono disponibili
online come pacchetto di download. Questo pacchetto è aggiornato ed esteso regolarmente. Verificare se
Aprite il vostro browser web e navigate attraverso il nostro sito web www.conrad.it fino alla pagina dei prodotti della scheda
robot Hexapod o fino alla nostra pagina di download.
Scaricare qui il pacchetto "C-Control_Hexapod_Vx_x" (x_x è la versione del pacchetto). Aprire il file ZIP scaricato sul disco
rigido.
Ecco una breve spiegazione delle schede incluse.
"Arduino" Ecco un file di testo con il link per il download del software Arduino™ incluso. Questo sarà
Ad esempio, è necessario aggiornare il firmware senza un programma di aggiornamento.
"Schede tecniche" Schede tecniche e disegni.
"Driver" per il chip USB FTDI
"Libreria-Demo" Contiene la libreria Arduino, le demo e il firmware della Locomozione come file ZIP. Sarà installato nell'IDE
di Arduino.
"Schema elettrico della scheda robotizzata C-Control Hexapod in formato PDF
"Software di calibrazione "Terminale" per l'impostazione dell'esapode
"Manuale" Contiene questo manuale come file PDF.
sono disponibili una nuova versione o utili estensioni.
16
13. Trasferimento del Firmware
Nessun firmware è installato sulla scheda robot Hexapod al momento della consegna. Il firmware deve essere prima
trasferito durante l'installazione iniziale; ciò avviene tramite l'IDE di Arduino.
La seguente descrizione mostra la procedura per il trasferimento del firmware. Nelle sezioni seguenti dovrete
trasferire diversi programmi sulla scheda robot Hexapod. Il processo è identico ad eccezione della selezione del
rispettivo firmware..
Durante il trasferimento del firmware, la scheda robot Hexapod deve essere collegata all'alimentazione!
a) Installazione dei driver
Collegare il connettore "PRG-M" della scheda robot Hexapod ad una porta USB libera del computer. Windows
cercherà ora di installare un nuovo driver. Normalmente Windows scarica e installa i driver automaticamente da
Internet, perché il driver per il chip bridge USB FTDI utilizzato è disponibile nel download del driver di Windows (il
computer deve essere connesso a Internet).
Se questo metodo non funziona, puntare manualmente il driver durante l'installazione. Il driver
si trova nel pacchetto di download scompattato nella directory "Driver".
Dopo aver installato il driver, verificare nella Gestione periferiche se è stato installato il driver per la scheda robot
esapode e a quale "numero di porta COM" è stato assegnato. Quindi selezionarli nell'IDE di Arduino.
È inoltre possibile scaricare i driver direttamente da http://www.ftdichip.com.
b) Installazione Arduino IDE
Scaricare l'ultima versione dell'IDE di Arduino dal sito www.arduino.cc L'IDE di Arduino è disponibile come
"Versione del programma di installazione" e come "archivio ZIP". Entrambe le versioni possono essere utilizzate.
Con la versione del programma di installazione si installa l'IDE di Arduino come al solito. Con la versione ZIP è
necessario decomprimere l'archivio ZIP nella posizione desiderata sul computer dopo il download. Quindi avviare il
programma facendo doppio clic sul file "arduino.exe“.
17
c) Arduino IDE
Foto 6
Avviare l'IDE Arduino e seguire le istruzioni in questo manuale.
Foto 7
18
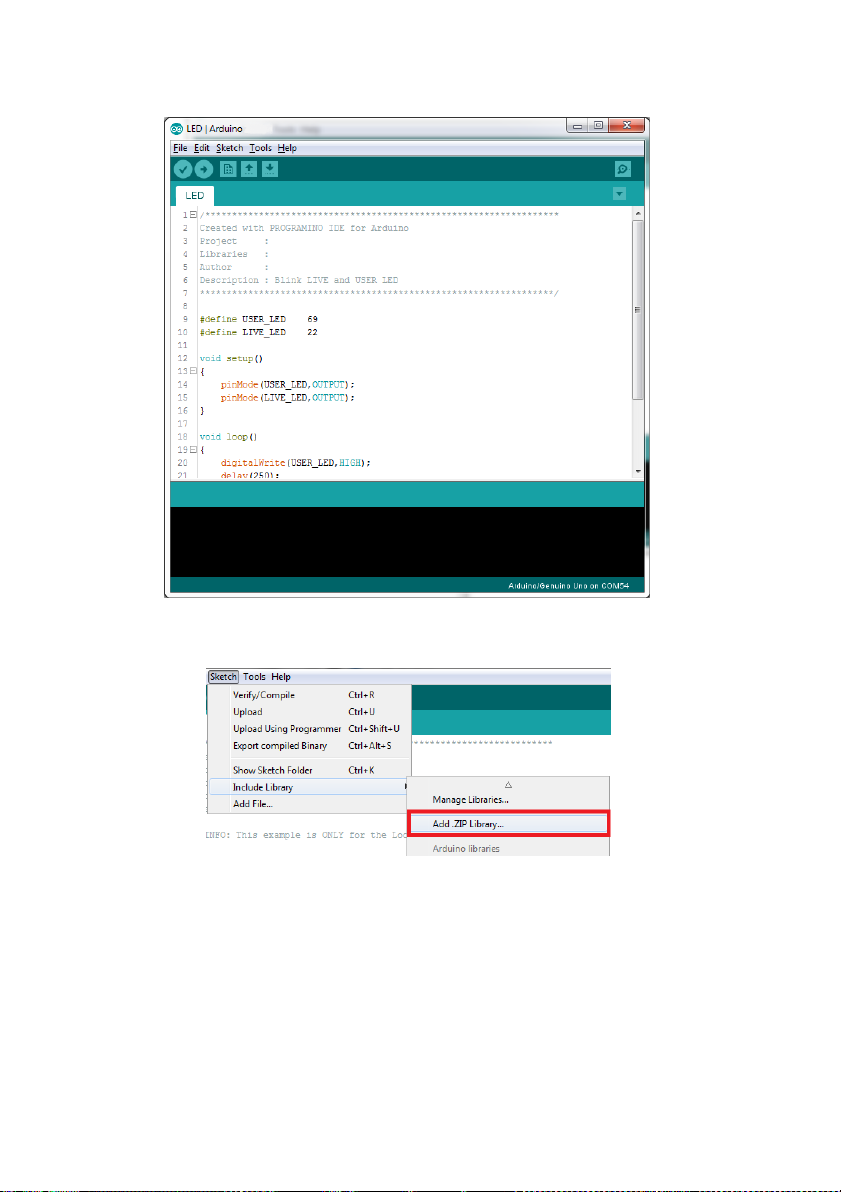
Ora installare la libreria Hexapod. Potete trovarlo nel pacchetto di download sotto "\Library-Demos\C-Con- trolHexapod.zip". A tale scopo, selezionare la voce di menu "Sketch\Include Library\Add.ZIP Library..." nell'IDE di
Arduino..
Se si aggiorna la libreria in un secondo momento, è necessario prima cancellarla, altrimenti l'IDE di
Arduino segnalerà un errore!
Foto 8
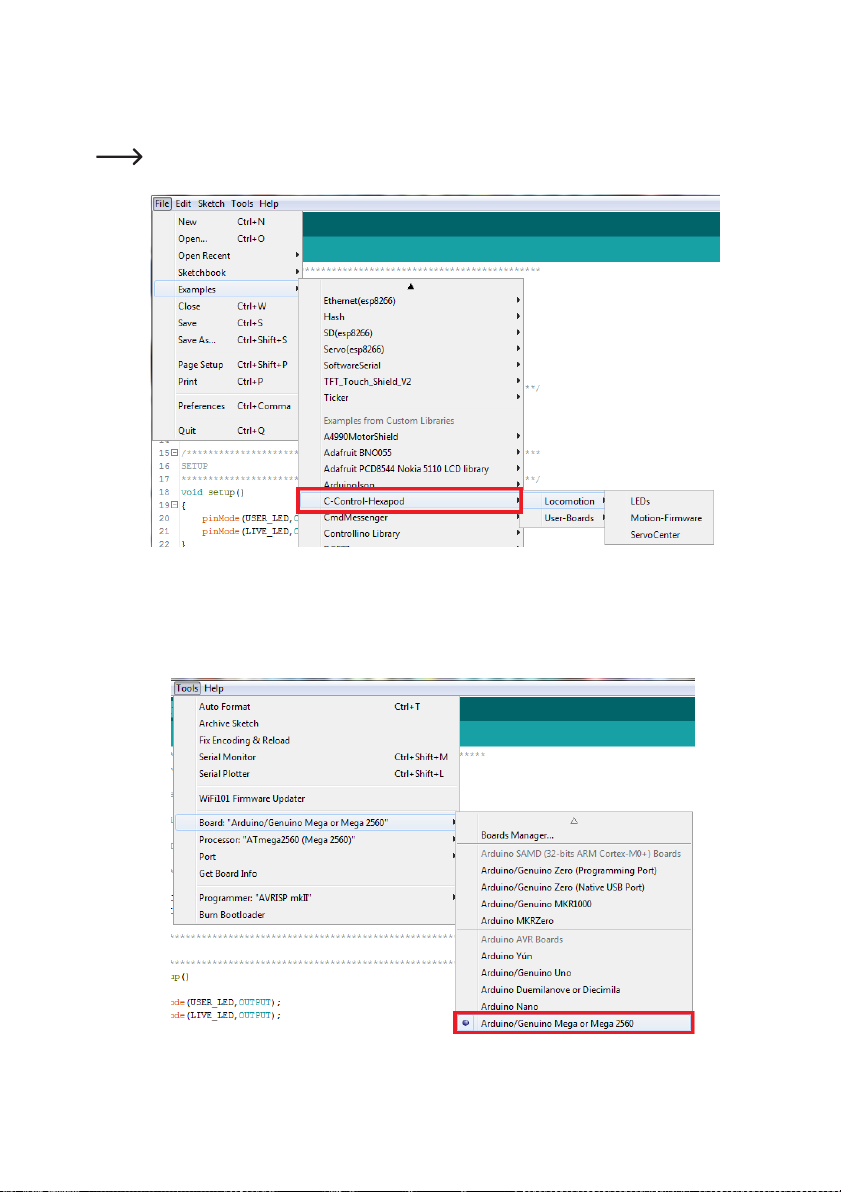
Dopo aver installato la libreria, alla voce di menu "\File\Examples\C-Control-Hexapod" si trovano due cartelle
denominate "Locomotion" e "User Boards". La cartella "Locomotion" contiene i programmi per il LocomotionController, che è installato in modo permanente sulla scheda robot Hexapod ed è responsabile dell'esecuzione. La
cartella "Schede Utente" contiene programmi per schede utente compatibili con Arduino come Arduino UNO e
NodeMCU.
Foto 9
19
Selezionare il microcontrollore utilizzato alla voce di menu "Tools\Board\Arduino/Genuino Mega.
Il controller Locomotion è compatibile con il MEGA2560 Arduino.
Foto 10
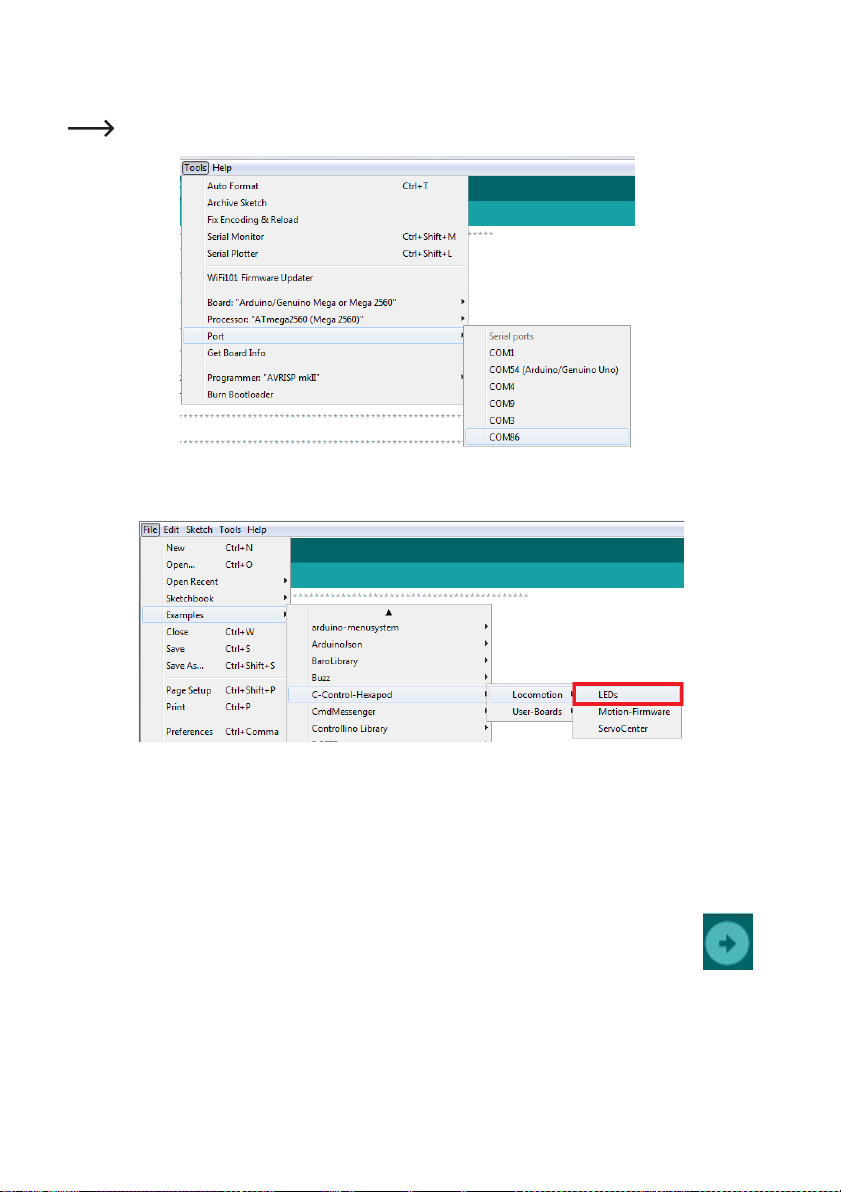
Selezionare la porta COM sotto "Tools\Port" (selezionare la porta COM installata in precedenza).
Foto 12
Foto 11
Per verificare se tutto funziona, trasferire il programma di esempio "\User-Board\LEDs". Il
programma permette
A trasmissione avvenuta, i LED blu "LIVE-LED" e rosso "USER-LED" lampeggiano
alternativamente.
Dopo aver selezionato il programma "LED" (chiamato anche sketch in Arduino) si apre una nuova
finestra IDE di Arduino con lo sketch "LED"..
Con il simbolo "freccia destra" (vedi foto 12) nel menu trasferire il programma sulla
scheda robot hexa pod. In alternativa, è anche possibile utilizzare il collegamento
"CTRL+U.
sono destinati. Per gli esempi di schede utente, modificare solo la scheda utente e l'opzione „COM-Port“.
20
Leggere i commenti iniziali degli esempi prima di installarli. Contiene informazioni importanti sul
Clicca qui per maggiori informazioni sull'installazione dell'IDE di Arduino.
http://arduino.cc/en/Guide/Windows
programma!
Se la trasmissione non funziona, controllare le impostazioni della scheda e del collegamento, nonché se
la scheda è stata inserita e installata correttamente nella Gestione periferiche e se l'alimentatore è
collegato.

21
14. Preparare i servoazionamenti RC per l'installazione
Prima di installare i servoazionamenti RC nella meccanica, è
necessario spostarli in posizione centrale.
Prima di tutto disimballare tutti i 18 servoazionamenti RC e
mettere da parte i piccoli accessori inclusi nei servoazionamenti
RC, ordinati per tipo (viti, trombe dei servoazionamenti, ecc.) in
modo che non vadano persi. Questi sono necessari solo per
l'installazione nella meccanica di nuovo!
Foto 13
Foto 14
Collegare i servoazionamenti RC alle strisce di connettori come illustrato in figura (prestare attenzione alla polarità!). Tutti i
collegamenti dei servi (da S0 a S17) della scheda robot con una larghezza di impulso di 1500 µs vengono controllati.
Per impostare i servoazionamenti RC, trasferire lo schizzo "ServoCenter" sulla scheda robot Hexapod. Dopo l'avvio
del programma, i servoazionamenti RC da S0 a S17 si spostano nella posizione centrale.
Non è necessario collegare contemporaneamente tutti e 18 i servoazionamenti RC alla scheda robot
Hexapod. In pratica, è risultato più facile utilizzare un solo collegamento (ad es. S0) o un massimo di 3
(da S0 a S2).

22
Lasciare questo programma sulla scheda robot Hexapod fino a quando il robot non viene assemblato. Se si ruota un
servo durante il montaggio, è possibile ricollegarlo e lasciarlo in posizione centrale. Ha dimostrato nella pratica di
collegare ogni singola gamba, che è stata montata, con tutti e 3 i servi sulla scheda e di controllare se la posizione
del servo è ancora corretta. Se il servo viene ruotato dalla posizione centrale durante l'installazione, ciò ha un effetto
negativo sulle caratteristiche di funzionamento o può danneggiare il servo e la meccanica.
Collegare i servoazionamenti RC solo alle prime strisce a 3 pin (rosse nella sezione illustrata o
contrassegnate da un cerchio). L'ultimo collegamento con la designazione da SA0 a SA5
(nell'illustrazione SA0) è previsto per i propri ampliamenti e non è dotato di segnale di comando! I
collegamenti da SA0 a SA5 sono collegati agli ingressi analogici del Locomotion Controller.
L'assegnazione dei collegamenti è riportata nella tabella delle porte in appendice e nella panoramica del
sistema (schema a blocchi).
Scollegare la scheda robot dalla rete di alimentazione se non la si utilizza per lungo tempo per evitare cortocircuiti
accidentali.!
I servoazionamenti RC sono dotati di elettronica, motore e potenziometro. Il potenziometro rileva la
posizione del servo e la inoltra all'elettronica. L'elettronica del servocomando RC confronta la posizione
preimpostata (valore nominale), nel nostro caso l'ampiezza d'impulso del regolatore di locomozione con
quella del potenziometro del servocomando RC (valore reale) e comanda il motore nella posizione
preimpostata.
Foto 15
Il servocomando RC riceve un impulso positivo con un'ampiezza di impulso compresa tra 500 µs e 2500 µs come
segnale dal microcontrollore. La durata totale del segnale di controllo è di 20 ms. La posizione centrale del
servocomando RC ha una larghezza di impulso di 1,5 ms/1500 µs.
Il grafico mostra il rapporto impulso/periodo necessario per controllare un servocomando RC. In questo
caso, l'impulso ha una lunghezza di 1,5 ms/1500 µs, che corrisponde alla posizione centrale del servo RC.
Se l'ampiezza dell'impulso è inferiore a 1500 µs, il servocomando RC ruota in una direzione. Se l'ampiezza
dell'impulso supera i 1500 µs, ruota nella direzione opposta. L'angolo di rotazione è proporzionale alla larghezza
dell'impulso, vale a dire che più lungo o breve è l'impulso, più o meno il servo RC ruota nella direzione
corrispondente.

23
15. Hexapod-Meccanica e configurazione base
Asse
Femore
Foto 16
La figura mostra la configurazione di base di una gamba esapode. Dopo aver inserito i servi nell'ultima sezione del file nella
posizione centrale, è ora possibile assemblare le gambe del robot.
Si noti che la coscia (femore) è allineata parallelamente al suolo ("Terra" nella parte superiore della figura)..
Il perno della tibia è parallelo al corpo. Quando la gamba è completamente regolata, l'angolo tra "femore" e "tibia" è
di 90°. La disposizione tra "Corpo" e "Femore" corre parallela in una linea. Il dislivello è irrilevante in questo caso.
Foto 17

24
L'illustrazione mostra una gamba dell'esapode modello per l'illustrazione reale. Nonostante il servo angolato della
tibia, "femore" deve essere parallelo alla terra e "tibia" parallelo al corpo alla fine. "Femur" e "Tibia" formano un
angolo di 90° alla fine! I servo RC stessi sono ancora in posizione centrale!
Se non è possibile allineare i piedini con precisione a causa della dentatura del servodisco o delle tolleranze
meccaniche generali, questo non è un problema. Regolare la gamba nel modo più meccanico possibile, come
mostrato in figura. La calibrazione esatta viene eseguita dopo il montaggio utilizzando il software.
Foto 18
Lo schizzo illustra il corpo dell'esapode visto dall'alto. Le due gambe anteriore e posteriore sono installate in modo da
puntare verso l'esterno con un angolo di 45° senza ruotare la posizione centrale del servocomando.
Le due gambe centrali (lato destro e sinistro) sono montate direttamente verso l'esterno (90°)..

25
L'illustrazione mostra per l'illustrazione reale le gambe completamente allineate dell'esapode modello nella
configurazione di base.
Foto 19

26
16. Connessioni RC-Servo
La figura mostra la spina del connettore del RC-Servos. I colori dei cavi possono differire da quelli del
servo RC utilizzato dall'utente! Controllare
l'assegnazione dei pin nella scheda tecnica del
servocomando RC.
Se non è disponibile una scheda tecnica per il
servoazionamento, è possibile utilizzare le seguenti
opzioni come orientamento: Il polo positivo dei servo
RC è sempre al centro. Il polo negativo (GND) è
solitamente marrone o nero; la linea del segnale è
arancione, gialla o bianca.
SIG = Ingresso segnale servo
+ = Polo positivo
- = Polo negativo (GND)
Foto 20
Foto 21

27
Collegare i servoazionamenti RC alla scheda robot Hexapod come segue:
Assegnazione del servo RC alla gamba:
RR ("right rear" = inten destro) S0 = Coassiale
S1 = Femore S2 = Tibia
RM ("right middle" = metà destra)
S3 = Coassiale S4 = Femmina S5 = Tibia
RF ("right front" = fronte destro)
S6 = Coassiale S7 = Femore S8 = Tibia
LR ("left rear" = posteriore sinistro)
S9 = Coassiale S10 = Femmina S11 = Tibia
LM ("left middle" = centro sinistro)
S12 = Coassiale S13 = Femmina S14 = Tibia
LF ("left front" = fronte sinistro)
S15 = Coassiale S16 = Femmina S17 = Tibia

28
17. Collegamento del Gamepad
Per controllare il robot esapode costruito e per controllare le impostazioni in modo comodo e veloce, è vantaggioso
utilizzare il robot con il gamepad. In alternativa, è possibile controllarlo tramite una scheda utente. In pratica,
tuttavia, ciò si è rivelato meno conveniente per la messa in servizio iniziale.
Qualsiasi gamepad compatibile con PS2 disponibile in commercio (versione cablata o wireless-free) può essere
collegato alla scheda robot Hexapod. Devi fornire i contatti del gamepad con cavo e connettore RC servo (3 -pin,
distanza tra i pin 2,54 mm).
Con il gamepad, tutte le funzioni del Locomotion Controller sono disponibili subito dopo la messa in servizio e il
robot può essere spostato in modo simile a un'auto telecomandata senza dover creare in anticipo il proprio
programma.
Inoltre, quando si utilizza una scheda utente, è possibile intervenire successivamente nel flusso del programma con
l'aiuto del gamepad. È inoltre possibile leggere i comandi di comando (valori e pulsanti del joystick) dalla scheda
utente e utilizzarli nel proprio programma..
Si consiglia l'uso di pad wireless, Conrad No. Ordine 1613300, appositamente preparati per l'uso con
microcontrollori, composto da ricevitore radio e controller.
Assicurarsi che il ricevitore sia collegato correttamente e che le spine non siano attorcigliate sulle strisce
di spine, altrimenti il ricevitore potrebbe danneggiarsi! Il ponticello "J7" non deve essere collegato!
Foto 22
1 Gamepad (compatibile con PS2)
2 ricevitore gamepad
3 Connettore per collegamento alla scheda robot Hexapod

29
Assegnazione dei pin del gamepad compatibile con PS2:
1 PS2-1
2 PS2-2
3 PS2-3
Foto 23
Foto 24
Il pin 1 delle tre strisce di pin a 3 pin (PS2-1, PS2-2 e PS2-3) è rivolto verso il bordo della scheda.

30
Foto 25
Il ricevitore è collegato alla scheda robot Hexapod con i 3 cavi di collegamento come mostrato in figura. Il cavo (1) è
collegato alla morsettiera (1), il cavo (2) alla morsettiera (2), il cavo (3) alla morsettiera (3).
I colori dei cavi possono differire da quelli del gamepad usato! Mantenere l'assegnazione dei pin durante
il collegamento!
Assicurarsi che il ricevitore sia collegato correttamente e che le spine non siano attorcigliate sulle strisce
di spine, altrimenti il ricevitore potrebbe danneggiarsi.!

31
Foto 26
Nell'esapode campione, il ricevitore è stato montato sotto la scheda robot con nastro servo (nastro biadesivo con
schiuma tra gli strati adesivi).
Foto 27
Il montaggio a scomparsa rende l'esapode campione molto ordinato. Naturalmente, è possibile montare il ricevitore
in qualsiasi punto dell'esapode. Le immagini dell'esapode campione sono solo a scopo illustrativo.
Non montare il ricevitore troppo vicino ai servi RC! Questi possono causare interferenze nel ricevitore da
parte dei motori, con conseguente riduzione della portata. Nel peggiore dei casi non c'è connessione tra
gamepad e ricevitore.

32
18. Configurazione Firmware
È necessario prima adattare il "firmware della locomozione" ai parametri dell'esapode. Aprire lo schizzo del firmware
di movimento nell'IDE di Arduino. Questo schizzo contiene il firmware completo per il controllo dell'esapode.
Foto 28
I seguenti parametri devono essere impostati nei seguenti file:
file: Firmware.ino di movimento
In questo file sono già memorizzate varie meccaniche (cornici). Per selezionare la meccanica, rimuovere i caratteri
di commento „//“ prossimo „//#include HEX_3DOF_USER.h“.Il resto #include „HEX_xxx_ xxx.h“ bleiben mit „//“
commentato. Questo significa che solo il file di intestazione „HEX_3DOF_USER.H“utilizzati.
/*************************************************************************
ROBOT-MECHANIC
*************************************************************************/
#include „HEX_3DOF_USER.h“
//#include „HEX_CNC_3DOF_V2.h“

33
File: HEX_3DOF_USER.h
#define SPEED_MIN
200
#define SPEED_MAX
25
#define SPEED_INIT
100
// -->
#define
LEFT
cLFCoxaPin
36 // S15
#define
cLFFemurPin
37
// S16
#define
cLFTibiaPin
40
// S17
#define
cLFCoxaInv
1
#define
cLFFemurInv
1
#define
cLFTibiaInv
1
#define
cLMCoxaPin
33
// S12
#define
cLMFemurPin
34
// S13
#define
cLMTibiaPin
35
// S14
#define
cLMCoxaInv
1
#define
cLMFemurInv
1
#define
cLMTibiaInv
1
Min/Max Speed
Questi parametri possono essere lasciati invariati per i primi test. I parametri specificano la velocità massima e
minima di marcia. SPEED_INIT è la velocità predefinita dopo l'accensione. I parametri definiscono il tempo di ciclo
in millisecondi. Per questo motivo, il valore di SPEED_MAX è inferiore a quello di SPEED_MIN..
Schritthöhe
Questi parametri possono essere lasciati invariati per i primi test. I parametri indicano l'altezza normale e l'altezza
maggiore del gradino, cioè l'altezza di sollevamento di una gamba durante la corsa.
#define WALK_HEIGHT_NORMAL 40
#define WALK_HEIGHT_DOUBLE 100
Connessioni servo RC e funzione inversa
Nel file seguente i connettori RC-Servo sono assegnati ai pin Arduino. Questi sono già nel file
e non devono essere cambiati per la scheda robot Hexapod. Con le definizioni che terminano con
"Inv", il senso di rotazione dei servo RC può essere invertito. Le impostazioni predefinite possono essere lasciate
per la maggior parte dei servo RC standard. Se i servo RC ruotano nella direzione sbagliata, i valori devono essere
modificati da 1 a 0 o da 0 a 1..
Si può facilmente scoprire se i servo RC stanno girando nella giusta direzione accendendo il robot con
l'aiuto del gamepad dopo il trasferimento del firmware. Se le gambe non si estendono, ma nella direzione
opposta, in modo che il corpo non si sollevi, è necessario modificare la "definizione inversa".
/*************************************************************************
Servo pin defines and inverse function
*************************************************************************/

34
#define
cLRCoxaPin
25
//
S9
#define
cLRFemurPin
26
//
S10
#define
cLRTibiaPin
27
//
S11
#define
cLRCoxaInv
1
#define
cLRFemurInv
1
#define
cLRTibiaInv
1
// -->
#define
RIGHT
cRFCoxaPin
6
//
S6
#define
cRFFemurPin
7
//
S7
#define
cRFTibiaPin
8
//
S8
#define
cRFCoxaInv
0
#define
cRFFemurInv
0
#define
cRFTibiaInv
0
#define
cRMCoxaPin
3
//
S3
#define
cRMFemurPin
17
//
S4
#define
cRMTibiaPin
16
//
S5
#define
cRMCoxaInv
0
#define
cRMFemurInv
0
#define
cRMTibiaInv
0
#define
cRRCoxaPin
12
//
S0
#define
cRRFemurPin
5
//
S1
#define
cRRTibiaPin
2
//
S2
#define
cRRCoxaInv
0
#define
cRRFemurInv
0
#define
cRRTibiaInv
0

35
Dimensioni delle gambe
Immettere le dimensioni della gamba del robot in millimetri (mm) in "LEG DIMENSION".
Misurare con "cXXCoaxLenght" e "cXXFemurLenght" dal centro del punto di rotazione al centro del punto di rotazione e
con "cXXTibi- aLenght" dal centro del punto di rotazione all'estremità della gamba..
Foto 29
Misurare con molta attenzione. Una specifica errata ha un effetto negativo sul comportamento durante il
funzionamento.
/*************************************************************************
LEG DIMENSIONS
Universal dimensions for each leg in mm
*************************************************************************/
#define cXXCoxaLength 51
#define cXXFemurLength 75
#define cXXTibiaLength 117

36
Angolo di rotazione servo Min/Max
#define cCoxaMin
-300
#define cCoxaMax
300
#define cFemurMin
-1050
#define cFemurMax
750
#define cTibiaMin
-530
#define cTibiaMax
900
È possibile lasciare i valori per "MIN-MAX ANGLES" come predefiniti. Questi valori limitano l'angolo di rotazione dei
servo RC, ovvero la possibilità di controllare le gambe in un'area meccanicamente sicura senza bloccarle. I valori già
indicati sono un buon valore medio dalla pratica. È possibile modificare questi valori in un secondo momento e
adattarli con maggiore precisione ai servo RC integrati.
I valori sono visualizzabili dalla configurazione base di una gamba esapode e sono visualizzati in 1/10 di grado. Ciò
significa che un limite di max. 300 e min. - 300 consente un controllo di +/- 30°.
/*************************************************************************
MIN-MAX ANGLES
*************************************************************************/

37
Massa corpo esapode
#define cRRCoxaAngle1
-450
#define cRMCoxaAngle1
0
#define cRFCoxaAngle1
450
#define cLRCoxaAngle1
-450
#define cLMCoxaAngle1
0
#define cLFCoxaAngle1
450
I valori per "BODY DIMENSION" sono specificati per un'impostazione del corpo di 45°. Ciò significa che le gambe
anteriore e posteriore del robot sono ad un angolo di 45° dal corpo, come mostrato in figura. Se si desiderano altri
valori, modificare i parametri di conseguenza. I valori sono nuovamente espressi in 1/10 gradi..
/*************************************************************************
BODY DIMENSIONS
45° setup
*************************************************************************/
Per determinare i valori di offset della carrozzeria, utilizzare la seguente figura:
Foto 30

38
#define cRROffsetX
-40
// Distance X from center of the body to the Right Rear coxa
#define cRROffsetZ
100
// Distance Z from center of the body to the Right Rear coxa
#define cRMOffsetX
-55
// Distance X from center of the body to the Right Middle coxa
#define cRMOffsetZ
0
// Distance Z from center of the body to the Right Middle coxa
#define cRFOffsetX
-40
// Distance X from center of the body to the Right Front coxa
#define cRFOffsetZ
-100
// Distance Z from center of the body to the Right Front coxa
#define cLROffsetX
40
// Distance X from center of the body to the Left Rear coxa
#define cLROffsetZ
100
// Distance Z from center of the body to the Left Rear coxa
#define cLMOffsetX
55
// Distance X from center of the body to the Left Middle coxa
#define cLMOffsetZ
0
// Distance Z from center of the body to the Left Middle coxa
#define cLFOffsetX
40
// Distance X from center of the body to the Left Front coxa
#define cLFOffsetZ
-100
// Distance Z from center of the body to the Left Front coxa
I seguenti parametri sono un po' più difficili da impostare e devono essere determinati sperimentalmente fino a
quando non viene trovato il valore corretto.
Il parametro "cHexInitXY" indica la declinazione dal punto di rotazione del servo coassiale al punto d'impatto della
gamba..
Foto 31
La figura (XZ) mostra la distanza tra il punto di rotazione del servoassiale e il poggiagambe.
I valori "cHexInitXZCos45" e "cHexInitXZSin45" sono determinati dal valore "cHexInitXZZ". Se si desidera utilizzare
una costellazione di gambe diversa (ad es. che le gambe anteriore e posteriore non siano inclinate di 45°, come
mostrato in figura, ma di 60°), cambiare cos(45) e sin(45) nell'angolo corrispondente.
Ad esempio 60 da.

39
/*************************************************************************
START POSITIONS FEET -> nach dem Aufstehen!
*************************************************************************/
#define cHexInitXZ 110 // 110 distance Coax servo to Tibia end (ground contact)
#define cHexInitXZCos cos(45) * cHexInitXZ
#define cHexInitXZSin sin(45) * cHexInitXZ
#define cHexInitY 35 // Center Femur servo after start!
Il parametro "MAX_BODY_Y" indica l'altezza massima che la carrozzeria può raggiungere. A seconda delle dimensioni
delle gambe, qui è possibile regolare i valori "g_abHexIntXZ" e "g_abHexMaxBodyY".
I tre parametri per "g_abHexIntXZ" sono la distanza tra il punto di rotazione del servo coassiale e le estremità delle
gambe a terra. Se il valore aumenta, le gambe si allontanano ulteriormente dal corpo durante il sollevamento. I
valori sono espressi in millimetri! È vantaggioso se le gambe non sono troppo lontane dal corpo, ma più vicine al
corpo, in quanto questo riduce la leva sui servo RC.!
/*************************************************************************
Consente di provare alcune posizioni delle gambe a seconda delle impostazioni di
altezza*************************************************************************/
#define CNT_HEX_INITS 3
#define MAX_BODY_Y 135 // max body height
#ifdef DEFINE_HEX_GLOBALS
const byte g_abHexIntXZ[] PROGMEM = {cHexInitXZ, 125, 125};
const byte g_abHexMaxBodyY[] PROGMEM = {35, 50, MAX_BODY_Y};
#else
extern const byte g_abHexIntXZ[] PROGMEM;
extern const byte g_abHexMaxBodyY[] PROGMEM;
#endif
Non è necessario regolare altri valori in questo file.

40
19. Trasferire il Firmware
Prima del primo trasferimento, leggi il capitolo intitolato "Controllo del Gamepad" se non hai ancora familiarità con il
suo funzionamento.
Successivamente è possibile trasferire il programma con i nuovi parametri sulla scheda robot Hexapod. Se non tutti i
valori sono corretti al 100%, regolare ulteriormente i valori sul corpo dell'esapode..
• - Tutti i servoazionamenti RC sono collegati correttamente (polarità)?
• - Tutti i servo RC sono meccanicamente nel mezzo?
• - Il controller PS2 è collegato?
• - L'alimentazione elettrica è sufficiente?
• - Lo spazio disponibile per il robot è sufficiente anche in caso di malfunzionamento?
Prima di trasferire e accendere la scheda robot Hexapod, controllare quanto segue:
A causa della dentatura delle corna del timone dei servo RC, le gambe non sono meccanicamente al
100% subito dopo il montaggio. Consultare il capitolo "Calibrazione dell'esapode" prima di procedere con
la regolazione dei valori. Con la calibrazione è possibile adattare le gambe esattamente alla
configurazione di base. Solo allora ha senso regolare ulteriormente i parametri!

41
20. Controllo con il Gamepad
Dopo aver trasferito il "firmware di movimento" al controller Locomotion, è possibile controllare il robot con il
gamepad.
Foto 32
Avvio rapido:
• - Scollegare l'alimentazione elettrica dalla scheda robot Hexapod.
• - Accendere il gamepad con l'interruttore (6). Il LED (12) "Verde" e il LED "Rosso" lampeggiano.
• - Collegare la scheda robot Hexapod all'alimentatore (batteria). Il LED (12) "Verde" e il LED "Rosso" si accendono
continuamente dopo alcuni secondi. Il trasmettitore è ora collegato al ricevitore.
• - Premere il tasto "START" (15). Il robot emette un segnale acustico e il LED rosso "USER-LED" sulla scheda
robot dell'esapode si accende in modo permanente.
• - Accendere il robot con il pulsante (3). Il robot emette un segnale acustico e lampeggia il LED blu "LIVE".
• - Lasciare che il robot si alzi con il pulsante (1).
• - Usare la leva di comando (7) per muovere il robot in avanti/indietro e a sinistra/destra. Con il joystick del pollice
(5) è possibile ruotare il robot sul posto..

42
Descrizione dettagliata delle funzioni del gamepad:
1. Lasciate che il robot si alzi e si sieda (funzione di commutazione)
2. Reset del sistema
3. Accendere/spegnere il robot dopo che il gamepad è stato attivato con (15)
4. Attivare/disattivare il modo bilanciamento
5. Joystick pollice a destra (girare sul posto, girare in modalità di rotazione e traslazione e modificare
l'altezza del robot)
6. Accensione e spegnimento del gamepad
7. Joystick del pollice sinistro (avanti/indietro, in rotazione e traslazione avanti/indietro del corpo e
movimento laterale)
8. D-Pad su/giù regola l'altezza del robot (su = più alto, giù = più basso)
9. Il D-Pad sinistra/destra imposta la velocità di marcia (sinistra = più bassa, destra = più veloce)
10. Tasto superiore = Modo traduzione
11. Tasto inferiore = Modo Rotazione
12. I LED indicano l'alimentazione e il collegamento al ricevitore.
13. Selezionare la andatura (Treppiede-6, Treppiede-8, Treppiede-12, Treppiede-16, Onda-12, Onda-24).
Ogni volta che si preme di nuovo il pulsante, si passa da una marcia all'altra come descritto nell'elenco.
Se l'elenco ricomincia (treppiede-6), la scheda robot Hexapod lo segnala con una diversa sequenza di
toni.
14. Nessuna funzione
15. Abilita Gamepad
16. Attiva la doppia altezza del gradino
17. Attiva la dimensione di un doppio passo
Tutti i pulsanti con la funzione di commutazione (premendo di nuovo cambia stato) emettono un segnale
acustico nella scheda robot Hexapod in diverse sequenze di toni. Se si preme il tasto per la prima volta,
la scheda robot hexa pod lo riconosce con un bip e lo preme di nuovo (stato originale) con una sequenza
di toni. Questo rende facile per voi scoprire in quale stato è il robot. Dopo il suono della sequenza di toni,
lo stato originale (stato iniziale) è sempre attivo..

43
21. Calibrare le gambe
Per regolare con precisione le gambe, utilizzare il programma "Terminale", che si trova nella cartella "Terminale" del
pacchetto di download disimballato. L'obiettivo è quello di adattare le gambe ad un'esatta configurazione di base.
Durante l'assemblaggio della meccanica non sarà possibile portare le gambe al 100% nella configurazione di base a
causa della dentatura delle squadrette e delle tolleranze meccaniche. È possibile utilizzare lo strumento per
correggere questi errori.
Foto 33
• - Avviare il programma con il file "Terminal.exe" ed eseguire la calibrazione. Posizionare il robot su un'altura in
modo che le gambe possono muoversi liberamente in aria. Una scatola stabile può servire, ad esempio, come un
aumento.
• - Collegare la scheda robot esapode (connettore PRG-M) al computer come già fatto durante l'installazione del
firmware.
• - Collegare la batteria alla scheda robot Hexapod.
• - Avviare il programma "Terminal.exe".
• - Ora selezionare la porta seriale (la stessa porta utilizzata per la programmazione). Cliccare su "Seleziona porta".
Se viene visualizzato più di un dispositivo, è sufficiente scollegare la scheda madre e ricollegarla alla porta USB.
Il dispositivo, che poi è scomparso brevemente, è quello giusto per voi..

44
• - Selezionare 38400 baud sotto "Velocità di trasmissione".
• - Fare clic su "Connetti". Il robot segnala nella finestra terminale come mostrato nella foto 33.
• - Fare clic su "Modalità offset servo" per accedere alla modalità di calibrazione.
• - Il robot ora "oscilla" con il servo RC selezionato per la regolazione.
• - Facendo più volte clic su "+" e "-" è possibile regolare il servocomando RC selezionato esattamente in piccoli
passi.
• - Una volta impostato il servo RC, è possibile impostare il servo RC successivo facendo clic su "Avanti" fino a
quando non sono stati impostati tutti e 18 i servo. È anche possibile selezionare una gamba facendo clic sui
pulsanti "Gamba RR", "Gamba RM", "Gamba RF", "Gamba LR", "Gamba LM" e "Gamba LF".
• - Una volta impostati tutti i servo RC, fare clic su "Esci". Il programma chiede ora se le impostazioni devono essere
salvate. Fare clic su "Sì" per salvare le impostazioni o su "No" per eliminarle.
• - Con "Cancella terminale" è possibile cancellare il contenuto della finestra del terminale.

45
MAC e Linux
Se si utilizza un MAC o Linux, non è possibile utilizzare il terminale. Tuttavia, è ancora possibile regolare le gambe
utilizzando un altro programma di terminale a scelta. Il modo più semplice è quello di utilizzare il terminale Arduino.
È possibile accedervi nell'IDE di Arduino.
Foto 34
La figura mostra il terminale Arduino dopo che il terminale si è collegato alla scheda robot Hexapod.
Procedere come segue:
• - Collegare la scheda robot esapode (connettore PRG-M) al computer come già fatto durante l'installazione del firmware.
• - Collegare la batteria alla scheda robot Hexapod.
• - Avviare il programma morsetti.
• - Se si utilizza un terminale diverso da quello di Arduino, selezionare la porta seriale (la stessa porta utilizzata per la
programmazione).
• - Selezionare 38400 baud come velocità di trasmissione. Nessuna codifica LF e CR o "Nessuna codifica di linea" nel
terminale Arduino.
• - Collegare il terminale al robot. Il robot segnala nella finestra terminale come mostrato in figura. Il terminale Arduino si
collega subito dopo l'apertura!
• - Premere una volta il pulsante "RESET-M" sulla scheda robot Hexapod. Ciò non è necessario quando si utilizza il
terminale Arduino.
• - Nella finestra morsettiera appare il seguente testo.
PS2 Init: 0
C-Control Hexapod Monitor
O - Enter Servo offset mode

46
• - Inviare una "O" alla scheda robot Hexapod scrivendo "O" nella linea di trasmissione e premendo Invio. Il robot
ora "oscilla" con il servo RC selezionato per la regolazione, i caratteri possono essere scritti in lettere maiuscole o
minuscole ("o" e "O" sono possibili). Sul terminale viene visualizzato il seguente messaggio:
Serial Cmd Line:o<eol>
Find Servo Zeros.
$-Exit, +- changes, *-change servo
0-5 Chooses a leg, C-Coxa, F-Femur, T-Tibia
Servo: RR Coxa(0)
Con "$" si esce dalla taratura -> Esci
Con "+" o "-" è possibile impostare il servo RC selezionato esattamente a piccoli passi. I caratteri devono essere
inviati alla scheda robot Hexapod fino a quando la gamba non è regolata correttamente.
Premere "*" per selezionare il servo RC successivo.
Con un numero da 0 a 5 è possibile selezionare le gambe individualmente. 0 = Leg RR
1 = Leg RM
2 = Leg RF
3 = Leg LR
4 = Leg LM
5 = Leg LF
• - Quando tutti i servo RC sono impostati, inviare un carattere "$". Il programma chiede ora se i dati devono essere
salvati. Inviare "y" per salvare o "n" per annullare le impostazioni.
Quando tutte le gambe sono calibrate, è possibile controllare il robot con il gamepad. In modalità gamepad, il robot
può essere visto come un modello RC controllato a distanza da un radiocomando.
Tuttavia, se si desidera ottenere di più dal robot esapode, leggere il prossimo capitolo sull'utilizzo delle schede
utente. Questo vi dà la semplice possibilità di scrivere i vostri programmi per il controllo del robot con l'aiuto della
libreria C-Control Hexapod.
Potrebbe essere necessario ripetere l'operazione dopo un po'. Il motivo è che i servoazionamenti RC
hanno un gioco maggiore dopo un certo tempo di funzionamento e la prima calibrazione non si rivela più
ideale.

47
22. Utilizzo delle User-Boards
La scheda robot Hexapod può essere equipaggiata con diverse schede utente per estenderne la funzionalità. Le
schede utente possibili sono ad esempio Arduino UNO, NodeMCU o schede compatibili. Questi possono essere
collegati direttamente alla scheda robotizzata.
Con la libreria software descritta nel prossimo capitolo è possibile inviare comandi di controllo dalla scheda utente al
Locomotion Controller o leggere i valori dal Locomotion Controller. Maggiori informazioni in merito nel prossimo
capitolo "Programmi dimostrativi“.
Arduino UNO
Posizionare una scheda "Arduino UNO" sulla scheda robot Hexapod come mostrato nella figura seguente. Fare
attenzione e assicurarsi che le strisce più lunghe inserite nelle prese della scheda "Arduino UNO" non siano piegate
durante il collegamento. Assicurarsi inoltre che tutti i pin del connettore siano inseriti nelle prese della scheda
"Arduino UNO".
Dopo aver collegato la scheda è possibile saltare direttamente al capitolo "Programmi demo.
Foto 35
L'immagine mostra una scheda "Arduino UNO" allegata. È possibile utilizzare quasi tutte le schede compatibili con
Arduino UNO.

48
NodeMCU WiFi Board
La scheda WiFi contrassegnata con "NodeMCU" ed il chip ESP8266 utilizzati possono essere utilizzati come una
scheda utente sullo slot interno.
Se vuoi aggiungere il WiFi alla scheda robot Hexapod, puoi farlo facilmente con questa scheda utente. Gli esempi
contengono già programmi per la scheda NodeMCU che mostrano il controllo da un browser web.
Collegare una scheda NodeMCU alla scheda robot Hexapod come mostrato nella figura seguente. Procedere con
cautela e assicurarsi che le strisce di perni non siano piegate e che tutti i perni siano inseriti correttamente durante il
collegamento..
Dopo aver collegato la scheda è possibile saltare direttamente al capitolo "Programmi demo.
Foto 36
La figura mostra una scheda NodeMCU allegata.
Al momento dell'acquisto, assicurarsi che la distanza tra le strisce di spillo sia corretta! Sul mercato
esistono due diversi tipi di assicurazione. Uno ha come chip USB un Silabs CP2102, l'altra versione un
CH340G. La versione con il CH340G ha una spaziatura più ampia dei perni e non si adatta alla scheda
robot Hexapod! La scheda NodeMCU da utilizzare deve avere una distanza tra le strisce dei perni di 23
mm.
Foto 37

49
Single-Board-Computer (SBCs) e altre Boards
La scheda robot Hexapod offre la possibilità di montare un SBC come ad esempio un Lampone Pi 2/3 o compatibile
tramite distanziatori. SBC con una diversa distanza tra i fori può essere facilmente montato con una scheda
autocostruita apter. Qui la scheda robot Hexapod offre abbastanza spazio per le proprie espansioni.
La striscia dei pin mostrata accanto al connettore "ISP-U" è una porta di connessione universale per SBC o per le
proprie estensioni. Per il cablaggio tra l'SBC e la scheda robot Hexapod è consigliabile utilizzare il cosiddetto
"Jumpwire".
Foto 38
Descrizione pin:
3,3V Ingresso di alimentazione 3,3 V/DC per i convertitori di livello interni della scheda robot Hexapod
SCL Linea di clock I²C (qui collegare SCL da SBC, il bus I²C è quindi disponibile alle prese J2 e J3).
SDA Linea dati I²C (qui collegare SCL da SBC, il bus I²C è quindi disponibile alle prese J2 e J3).
GND Terra (Polo negativo).
VCC Uscita +5 V/DC, 1000 mA dal regolatore di tensione
TXDU Linea trasmissione UART dal regolatore di locomozione (collegare qui la UART dell'SBC).
RXDU Linea di ricezione UART da Locomotion-Controller (collegare la UART dell'SBC qui).
SU1 - SU3 Questi collegamenti conducono direttamente alle morsettiere SU1, SU2, SU2 Questi pin possono
T1 e T2 Questi pin sono collegati ai tasti T1 e T2. I pulsanti sono dotati di resistenze di pull-up esterne e
GND Terra (Polo negativo).
(collegare qui 3,3 V dall'SBC). Se si utilizza una scheda con livello a 5 V, collegare qui 5 V invece di
3,3 V. Collegare qui la tensione di alimentazione corrispondente!
essere utilizzati liberamente, ad esempio per i servoazionamenti RC o i segnali digitali..
forniscono un segnale elevato se non sono attivati. Le resistenze di pull-up possono essere
disattivate con i jumper SJ6 e SJ7..

50
Foto 39
L'illustrazione mostra l'esapode campione e un lampone Pi 2 montati su 3 distanziali PCB con lunghezza 25 mm. Il
collegamento tra il lampone Pi e la scheda robot Hexapod è stato stabilito per mezzo di ponticelli (Jumpwire). I cavi
dei ponticelli sono posizionati sotto il lampone Pi per il cablaggio pulito..
Può accadere che l'SBC reagisca in modo molto sensibile alle fluttuazioni di tensione e che non sia
possibile un funzionamento sicuro tramite la batteria, che alimenta anche i servi delle gambe. In questo
caso si consiglia di alimentare l'SBC tramite un piccolo banco di alimentazione separato. In pratica, una
capacità della batteria del banco di potenza di 2000 - 3000 mAh è sufficiente per alimentare l'SBC fino a
quando la batteria dell'esapode è scarica. A volte è anche sufficiente supportare l'alimentazione
direttamente all'SBC con un grande condensatore da 2200 µF (o più). La ragione del funzionamento
instabile può essere una batteria troppo piccola con alta resistenza interna, o servo RC con consumo di
corrente molto elevato o grandi picchi di corrente.

51
23. Programma Demo
Per utilizzare le schede utente in modo semplice e confortevole, utilizzare la libreria C-Control Hexapod. Questo è
già stato installato all'inizio di questo manuale. Gli esempi forniti mostrano l'uso delle schede utente e le funzionalità
della libreria Arduino Hexapod.
Quando si utilizzano schede utente non compatibili con Arduino (come SBC), consultare il file
"Hexapod_Lib.h". Questo mostra come funziona la comunicazione tra la scheda utente e il controllore di
locomozione. Questo dovrebbe servire da esempio per sviluppare la propria libreria di funzioni.
Disimballare il file ZIP "C-Control-Hexapod.zip" dal bundle di download e visualizzare il codice sorgente
della libreria in un editor come Notepad o un ambiente di sviluppo a scelta..
Gli esempi forniti sono progettati per schede "Arduino UNO" e "NodeMCU" programmate con l'IDE di
Arduino.
Foto 40
Gli esempi di Arduino mostrano come usare la libreria. Li potete trovare nell'IDE di Arduino all'indirizzo
"Examples\C-Control-Hexapod\...". Prendetevi il vostro tempo per guardare tutti gli esempi e provateli sul vostro
Hexapo-den. Una volta compresi gli esempi, è possibile iniziare a creare i propri programmi. Guarda più da vicino
"Hexapod_Lib.h". Con un po 'di esperienza si può facilmente estendere con le proprie funzioni.

52
Breve descrizione degli esempi forniti (Locomozione):
Nella cartella "Locomotion" si trovano gli esempi di Locomotion-Controller (Arduino MEGA2560).
LEDs
Piccolo programma di test che fa lampeggiare alternativamente i due LED (User e Live).
Motion-Firmware
Firmware dei controllori di locomozione.
ServoCenter
Questo programma mette i servi RC in posizione centrale. Necessario per il montaggio meccanico del robot esapode.
Breve descrizione degli esempi forniti (Schede utente):
Nella cartella Schede utente sono presenti esempi di schede compatibili con Arduino UNO e NodeMCU..
Prima di utilizzarlo, commuta l'IDE Arduino sulla scheda Arduino corretta! Leggere anche le informazioni
CardInfo
Con questo esempio è possibile controllare il funzionamento del lettore di schede µSD. Inserire una scheda di
memoria MicroSD con contenuto arbitrario nello slot e avviare l'esempio. Il contenuto della scheda di memoria viene
visualizzato sul terminale (nome file). Tutti gli esempi di schede SD originali Arduino funzionano. È sufficiente
cambiare il pin per "CS" (Chipselect) come in questo esempio. Il baud rate terminale è 19200 Baud.
EspMoveAP
L'esempio mostra il controllo tramite un server HTTP tramite una connessione WiFi diretta alla scheda NodeMCU. Il
programma crea un punto di accesso con il quale è possibile, ad esempio, connettersi a uno smartphone. Nel
terminale viene emesso l'indirizzo IP assegnato. Digitarli nel browser. Poi carica l'interfaccia web per controllare il
robot. È quindi possibile controllare il robot via WiFi toccando o facendo clic sui pulsanti. È possibile estendere
facilmente l'esempio ad altre funzioni. Il baud rate terminale è 115200 Baud.
EspMoveWiFi
L'esempio mostra il controllo tramite un browser web tramite una connessione WiFi alla scheda NodeMCU. Il
programma stabilisce una connessione al router e il robot è quindi accessibile all'interno della rete. Nel terminale
viene emesso l'indirizzo IP assegnato. Digitarli nel browser. Poi carica l'interfaccia web per controllare il robot. È
quindi possibile controllare il robot via WiFi toccando o facendo clic sui pulsanti. È possibile estendere facilmente
l'esempio ad altre funzioni. Il baud rate terminale è 115200 Baud.
nei commenti ai rispettivi esempi.!
Questo esempio è solo per Arduino UNO o schede compatibili!
Questo esempio è solo per schede NodeMCU!
Questo esempio è solo per schede NodeMCU!

53
Infrared
Questo esempio è solo per Arduino UNO o schede compatibili!
L'esempio legge un codice a infrarossi RC5 e invia i valori al terminale. A tale scopo inserire il ponticello J8 in
direzione dell'etichetta "IR-U". Il trasmettitore IR può essere un telecomando universale impostato su RC5 (molte
unità Philips utilizzano RC5), disponibile sul mercato per TV e apparecchiature audio. Il baud rate terminale è 19200
Baud.
Moving_01
Questo esempio mostra come inviare i dati al controllore Locomotion senza la "Hexapod Library". Questo esempio è
una buona base per l'utilizzo di SBC. Tuttavia, l'esperienza nella programmazione dovrebbe essere già disponibile!
Guardare più da vicino la funzione SendData(). Qui potete vedere come vengono inviati i dati dalla scheda utente al
controllore Locomotion.
Moving_02
Questo esempio è ideale per l'introduzione alla programmazione delle schede utente e mostra le funzioni di base
per controllare l'esapode con l'aiuto della libreria.
Moving_03
Questo esempio mostra l'uso della funzione ROBOT_MOVE().
Moving_04
Questo esempio mostra l'uso della funzione ROBOT_ROTATE_MODE() e ROBOT_TRANSLATE_MODE().
Moving_05
Questo esempio mostra l'uso della funzione ROBOT_SINGLE_LEG().
Moving_06
Questo esempio mostra come un programma utente può essere interrotto usando il gamepad. In questo esempio,
utilizzare il terminale per ricevere i messaggi dal robot. Posizionare il robot su un'altura in modo che le gambe si
muovono in aria senza toccare il suolo. Ciò consente di monitorare l'uscita quando si controlla il robot sul terminale.
Il baud rate terminale è 115200 Baud.
ReadGamepad
L'esempio mostra come leggere i dati di controllo del gamepad dal controller Locomotion. Se si collega il jumper
"J7", il controller Locomotion non reagisce più al gamepad. È quindi possibile utilizzare i dati solo sulla scheda
utente e implementare i propri controlli. Il baud rate terminale è 115200 Baud.
ReadValues_01
L'esempio mostra come inviare e leggere i dati tra Locomotion-Controller e User-Board senza libreria. Questo
esempio è una buona base per l'utilizzo di SBC. Tuttavia, l'esperienza nella programmazione dovrebbe essere già
disponibile! Il baud rate terminale è 115200 Baud.
ReadValues02
Questo esempio mostra come leggere i dati dal Locomotion Controller utilizzando la libreria. Il baud rate terminale è
115200 Baud.

54
Servo
L'esempio mostra l'uso di servoazionamenti RC aggiuntivi, che vengono controllati tramite la scheda utente. I
collegamenti da SU1 a SU3 vengono utilizzati a questo scopo. È inoltre possibile utilizzare i collegamenti da SU1 a
SU3 per altri componenti quali sensori, pulsanti, interruttori, ecc. Il baud rate terminale è 115200 Baud.
Sound
L'esempio mostra una semplice emissione sonora tramite l'altoparlante.
Switches
L'esempio mostra come vengono interrogati i tasti utente T1 e T2.
Talkie
Talkie mostra come si può realizzare un output vocale con l'aiuto della libreria Talkie. Talkie è un'implementazione dei CI
sintetizzatori vocali di Texas Instruments su una scheda Arduino. Questo circuito integrato è stato utilizzato molto spesso
all'inizio degli anni '80. Questa uscita vocale è stata spesso trovata in orologi costosi, computer giochi, computer di
apprendimento e molti altri dispositivi. L'inconfondibile suono degli anni '80 è ora disponibile anche sulla scheda robot
Hexapod. Negli esempi, ci sono oltre 1000 frasi pronte per l'uso che possono essere assemblate in record. Se la
riproduzione vocale è troppo silenziosa, è possibile aumentare il volume sul trimmer "Vol." sulla scheda robot Hexapod. È
anche possibile costruire un piccolo "altoparlante" per l'altoparlante, questo aumenta notevolmente il volume! Una semplice
casella può fare miracoli.
WriteOUT1
Questo esempio mostra come leggere e scrivere le uscite IN1 e OUT1 del controllore di locomozione. Ciò fornisce
un ingresso e un'uscita aggiuntivi alla scheda utente. I pin sono collegati direttamente al controllore Locomotion e
possono fornire una corrente massima di 20 mA. La tensione d'ingresso massima per l'ingresso è 5 V/DC!

55
24. FAQ
Errore nella compilazione degli esempi
Se ci sono problemi nella compilazione del firmware: Il firmware e gli esempi forniti sono stati sviluppati con la
versione 1.8.3 di Arduino. In alternativa, scaricarli da www.arduino.cc
Uscita sonora troppo silenziosa
Controllare l'impostazione di "Vol. Costruisci un piccolo "speaker box" per l'altoparlante della scheda robotizzata
Hexapod. Questo aumenta il volume e migliora il suono in modo considerevole.
Nessuna comunicazione con i dispositivi SPI e la scheda utente è stabilita
Impostare il pin Chip Select (CS) della scheda utente su "High" e controllare le connessioni al connettore ISP-U e se
il componente SPI utilizzato è alimentato.
const int chipSelect = 8;
pinMode(chipSelect,OUTPUT);
digitalWrite(chipSelect,HIGH);
Il Gampad non si connette
• - Controllare le batterie nel trasmettitore.
• - Il ricevitore è collegato correttamente alla scheda robot Hexapod?
• - Il firmware di movimento è installato sulla scheda robot Hexapod?
• - Scollegare l'alimentazione della scheda robot Hexapod, accendere il gampad e quindi ricollegarlo all'alimentazione
dell'esapode (spina della batteria).
• - Il gamepad PS2 è compatibile?
Il robot non risponde al gamepad
• - Controllare le batterie nel trasmettitore.
• - Il ricevitore è collegato correttamente alla scheda robot Hexapod?
• - Il firmware di movimento è installato sulla scheda robot Hexapod?
• - Scollegare l'alimentazione della scheda robot Hexapod, accendere il gamepad e quindi ricollegarlo all'alimentazione
dell'esapode (spina della batteria).
• - Il gamepad PS2 è compatibile?
• - Il ponticello J7 è spento?

56
Il robot non gira pulito
• - Tutti i parametri sono impostati correttamente?
• - Le gambe sono state calibrate?
• - Le batterie sono sufficientemente robuste e cariche?
• - I servoazionamenti RC integrati sono sufficientemente potenti?
• - Il robot è troppo pesante?
• - I servi RC erano in posizione centrale prima dell'installazione?
• - Le gambe scivolano a terra?
• - Tutte le viti sono serrate a fondo?
• - La meccanica sta tremando?
• - La meccanica è troppo rigida?
Dove posso trovare lo schema elettrico?
Lo schema circuitale è disponibile nella cartella "Schematic" del pacchetto di download o può essere scaricato dal sito
www.conrad.it
Il robot esegue un reset dopo l'accensione..
• - Assicurarsi che la batteria sia completamente carica.
• - Il cavo di collegamento della batteria è troppo sottile (< 1,5 mm²) o più lungo di 20 cm?
• - La spina della batteria è saldata correttamente?
• - Se la batteria è troppo piccola, non può fornire la corrente di funzionamento necessaria per i servoazionamenti
RC.
• - Blocca uno o più servi?
• - Se la meccanica si muove in modo troppo rigido?

57
25. Assegnazione PIN della board
Port
Arduino
Port
Arduino
S0
PB6
12
SA1
PF1
A1
S1
PE3 5 SA2
PF2
A2
S2
PE4 2 SA3
PF4
A4
S3
PE5 3 SA4
PF5
A5
S4
PH0
17
SA5
PF6
A6
S5
PH1
16
PS2_DAT
PA6
28
S6
PH3 6 PS2_CMD
PC7
30
S7
PH4 7 PS2_SEL
PC5
32
S8
PH5 8 PS2_CLK
PC6
31
S9
PA3
25
IR
PJ0
15
S10
PA4
26
UB-MESS
PF3
A3
S11
PA5
27
SOUND
PL3
46
S12
PC4
33
Jumper J7
PG5 4 S13
PC3
34
IN1
PA2
24
S14
PC2
35
OUT1
PA1
23
S15
PC1
36
RxD-U
PDs/RxD1
Serial1
S16
PC0
37
TxD-U
PD3/TxD1
Serial1
S17
PG1
40
LIVE-LED
PA0
22
SA0
PF0
A0
USER-LED
PK7
69
Locomotion-Controller (ATmega2560)

58
User-Board Arduino
Port
Arduino
T1
ADC2
A2
T2
ADC3
A3
SCK
PB5
13
MISO
PB4
12
MOSI
PB3
11
SS_SD
PB0 8 PA
PD3 3 IR-DAT
PD7
7
SU1
PD6
6
SU2
PD5 5 SU3
PB1 9 RxD_U
PD4 4 TxD_U
PD2
2
Port
Arduino
T1 10
T2
ADC0
A0
PA
D5
GPIO14
SU1
D6
GPIO12
SU2
D7
GPIO13
SU3
D8
GPIO15
RxD_U
D3
GPIO0
TxD_U
D4
GPIO2
User-Board NodeMCU

59
26. Pulizia
Esternamente, la scheda robot Hexapod deve essere pulita solo con un panno o una spazzola morbidi e asciutti. Non
utilizzare mai detergenti aggressivi o soluzioni chimiche che potrebbero danneggiare la scheda.
Proteggere la scheda da sporcizia e umidità.
27. Smaltimento
I dispositivi elettronici sono riciclabili e non devono essere smaltiti con i rifiuti domestici. Smaltire il
prodotto al termine del suo ciclo di vita in conformità alle disposizioni di legge vigenti.

60
28. Dati tecnici
Tensione d'esercizio............................................. 4,5 - 10 V/DC
Consumo di energia solo scheda................ ca. 80 mA
Numero di collegamenti dei servoazionamenti........... 18 Locomotion-Controller + 3 User-Board
Programmazione............................................... Arduino IDE (C/C++)
Interfaccia di programmazione .................................. USB
Slot scheda utente ............................................ 3
Connettori I2C Controllore di locomozione ...... 2
Connessioni I2C Scheda utente....................... 2
ricevitore infrarosso (*) .............................................. 1x 38 kHz
Amplificatore audio con altoparlante ................ 1
Slot per scheda MicroSD (*) ............................. 1
Regolatore di locomozione...................................... 1 (Atmel ATmega2560 - Arduino MEGA)
Tasto Reset locomotion-Controller .................. 1
Tasto Reset User-Board................................... 1
Connessione ISP Controllore locomozione ..... 1
Connessione ISP Scheda utente ..................... 1
Connettore gamepad compatibile con PS2 ..... 1
Alimentazione interna .................................... 3,3 V/DC e 5 V/DC
Capacità di carico di corrente 3,3 V/DC .......... 400 mA
Capacità di carico di corrente 5 V/DC .... 1000 mA
Dimensioni (L x B x H)..................................... 200 x 88 x 23 mm
Solo peso PCB............................ ca. 100 g
Campo temperatura di esercizio............................... 0 °C fino +40 °C
(*)Utilizzabile solo in combinazione con lo slot o la scheda compatibile Arduino UNO!

61

62

63

Questa è una pubblicazione di Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Tutti i diritti riservati, compresa la traduzione. Le riproduzioni di qualsiasi tipo, ad esempio fotocopie, microfilm o registrazioni in
sistemi elettronici di elaborazione dati, necessitano dell'autorizzazione scritta dell'editore. È vietata la ristampa, anche parziale.
Questa pubblicazione corrisponde allo stato dell'arte al momento della stampa.
Copyright 2018 di Conrad Electronic SE.
1589388_V2_0518_01
 Loading...
Loading...