

Page 1
Bedienungsanleitung
Hexapod Roboter-Board
Best.-Nr. 1589388
Page 2

Inhaltsverzeichnis
Seite
1. Einführung ...........................................................................................................................................................3
2. Symbol-Erklärung ................................................................................................................................................ 3
3. Bestimmungsgemäße Verwendung .....................................................................................................................4
4. Produktbeschreibung ........................................................................................................................................... 4
5. Lieferumfang ........................................................................................................................................................ 5
6. Sicherheitshinweise ............................................................................................................................................. 5
7. Benötigtes Zubehör zu Komplettierung des Roboters ......................................................................................... 7
8. Übersicht der Anschlüsse und Komponenten ......................................................................................................8
9. Schematische Systemübersicht (Blockschaltbild) .............................................................................................12
10. Inbetriebnahme .................................................................................................................................................. 13
11. Stromversorgung ...............................................................................................................................................14
12. Installation der Software und Firmware ............................................................................................................. 15
13. Übertragen der Firmware ................................................................................................................................... 16
a) Treiber installieren ....................................................................................................................................... 16
b) Arduino IDE installieren ............................................................................................................................... 16
c) Arduino IDE einrichten ................................................................................................................................. 17
14. RC-Servos für den Einbau vorbereiten .............................................................................................................. 21
15. Hexapod-MechanikundGrundkonguration ..................................................................................................... 23
16. RC-Servos anschließen ..................................................................................................................................... 26
17. Gamepad anschließen ....................................................................................................................................... 28
18. Firmware-Konguration .....................................................................................................................................32
19. Firmware übertragen .........................................................................................................................................40
20. Steuern mit dem Gamepad ................................................................................................................................ 41
21. Beine kalibrieren ................................................................................................................................................ 43
22. Verwenden von User-Boards .............................................................................................................................47
23. Demo-Programme ............................................................................................................................................. 51
24. FAQ ....................................................................................................................................................................55
25. Pinzuweisung der User-Boards ......................................................................................................................... 57
26. Reinigung ........................................................................................................................................................... 59
27. Entsorgung ........................................................................................................................................................59
28. Technische Daten .............................................................................................................................................. 60
2
Page 3
1. Einführung
Sehr geehrte Kundin, sehr geehrter Kunde,
wir bedanken uns für den Kauf dieses Produkts.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen.
Um diesen Zustand zu erhalten und einen gefahrlosen Betrieb sicherzustellen, müssen Sie als Anwender diese
Bedienungsanleitung beachten!
Diese Bedienungsanleitung gehört zu diesem Produkt. Sie enthält wichtige Hinweise zur Inbetriebnahme
und Handhabung. Achten Sie hierauf, auch wenn Sie dieses Produkt an Dritte weitergeben.
Heben Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!
Alle enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen Inhaber. Alle Rechte
vorbehalten.
Bei technischen Fragen wenden Sie sich bitte an:
Deutschland: www.conrad.de/kontakt
Österreich: www.conrad.at
Schweiz: www.conrad.ch
www.business.conrad.at
www.biz-conrad.ch
2. Symbol-Erklärung
Das Symbol mit dem Ausrufezeichen im Dreieck weist auf wichtige Hinweise in dieser Bedienungsanlei-
tung hin, die unbedingt zu beachten sind.
DasPfeil-Symbolistzunden,wennIhnenbesondereTippsundHinweisezurBedienunggegebenwerden
sollen.
3
Page 4
3. Bestimmungsgemäße Verwendung
Das Hexapod Roboter-Board ist ausschließlich für Ausbildung, Forschung und den privaten Einsatz im Hobby- bzw.
Modellbaubereich und für die damit verbundenen Betriebszeiten ausgelegt.
Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
Das Produkt richtet sich an fortgeschrittene Anwender, die bereits Erfahrung mit Arduino und der Programmierspra-
che C/C++ und auch in der Elektronik sowie beim Aufbau von mechanischen Bausätzen besitzen.
Falls Sie das Produkt für andere Zwecke verwenden, als zuvor beschrieben, kann das Produkt beschädigt werden.
Außerdem kann eine unsachgemäße Verwendung Gefahren wie z.B. Kurzschluss, Brand, Stromschlag etc. hervorrufen. Lesen Sie sich die Bedienungsanleitung und dieses Informationsblatt genau durch und bewahren Sie diese auf.
Reichen Sie das Produkt nur zusammen mit der Dokumentation an dritte Personen weiter.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen. Alle enthaltenen Firmennamen
und Produktbezeichnungen sind Warenzeichen der jeweiligen Inhaber. Alle Rechte vorbehalten.
Das Produkt darf nicht feucht oder nass werden. Die Elektronik ist für einen Betrieb bei einer Umgebungs-
temperatur zwischen 0 °C bis 40 °C ausgelegt.
Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
Beachten Sie alle Sicherheitshinweise dieser Bedienungsanleitung. Diese enthalten wichtige Informati-
onen zum Umgang mit dem Produkt. Sie allein sind für den gefahrlosen Betrieb des C-Control Hexapod
Roboter-Boards verantwortlich!
4. Produktbeschreibung
Das Hexapod Roboter-Board enthält alle wichtigen Komponenten, die zum Betrieb eines selbstgebauten HexapodRoboters mit Modellbau-Servos (RC-Servos) erforderlich sind.
Die Besonderheit dabei ist die Möglichkeit zur zusätzlichen Nutzung verschiedener Mikrocontroller-Boards wie Arduino UNO, SBC (Single Board Computer) wie Raspberry Pi oder auch NodeMCU. Auf diesen „User-Boards“ können
eigene Programme zum Steuern des Roboters erstellt werden. Die Kommunikation zwischen User-Board und dem
„Locomotion Controller“ erfolgt über ein serielles Protokoll, das die einfache Steuerung des Roboters erlaubt, ohne
sich mit den komplexen Laufalgorithmen befassen zu müssen.
DasHexapodRoboter-Boardistsoausgelegt,dassesindividuelleModikationenundErweiterungenerlaubt.Zudem
enthält es noch einige zusätzliche Komponenten wie Taster, MicroSD-Kartenslot, Lautsprecher mit Verstärkerschaltung, I2C-Anschlüsse, IR-Empfänger, USB-Programmierschnittstelle für den Locomotion-Controller, ISP-Anschlüsse
(SPI) und weitere Ein-/Ausgänge.
Die Programmierung des Hexapod Roboter-Boards erfolgt über die Open Source Arduino Plattform. Der Locomotion-Controller ist mit dem Arduino MEGA2560-Board kompatibel. Bei Bedarf kann die Firmware des LocomotionControllers individuell von Ihnen an den Roboter angepasst werden. Alle Beispielprogramme nden Sie unter
www.conrad.com auf der jeweiligen Internetseite zum Produkt.
4
Page 5
5. Lieferumfang
• 1x C-Control Hexapod Roboter-Board
• 2x Steckbrücke
• 1x Akkustecker XT30
Aktuelle Bedienungsanleitungen
Laden Sie aktuelle Bedienungsanleitungen über den Link www.conrad.com/downloads herunter
oder scannen Sie den abgebildeten QR-Code. Befolgen Sie die Anweisungen auf der Webseite.
6. Sicherheitshinweise
Lesen Sie sich die Bedienungsanleitung aufmerksam durch und beachten Sie insbesondere die
Sicherheitshinweise. Falls Sie die Sicherheitshinweise und die Angaben zur sachgemäßen
Handhabung in dieser Bedienungsanleitung nicht befolgen, übernehmen wir für dadurch resultierende Personen-/Sachschäden keine Haftung. Außerdem erlischt in solchen Fällen die Gewährleistung/Garantie.
Sehr geehrte Kundin, sehr geehrter Kunde,
diese Sicherheitshinweise dienen nicht nur dem Schutz des Produkts, sondern auch Ihrer eigenen Sicher-
heit und der Sicherheit anderer Personen. Lesen Sie sich deshalb dieses Kapitel sehr aufmerksam durch,
bevor Sie das Produkt in Betrieb nehmen!
• Das Produkt richtet sich an fortgeschrittene Anwender, die bereits Erfahrung mit Arduino und der Programmiersprache C/C++, in der Elektronik und beim Aufbau von mechanischen Bausätzen besitzen.
Sollten Sie nicht über ausreichend Erfahrung verfügen, so wenden Sie sich bitte an einen erfahrenen
Entwickler, einen umliegenden Maker-Club oder an unseren Support.
• Aus Sicherheits- und Zulassungsgründen ist das eigenmächtige Umbauen außerhalb der beschriebenen Möglichkeiten und/oder das Verändern des Produkts nicht gestattet.
• Das Produkt ist kein Spielzeug. Halten Sie es von Kindern und Haustieren fern.
• Lassen Sie das Verpackungsmaterial nicht achtlos liegen. Dieses könnte für Kinder zu einem gefährli-
chen Spielzeug werden.
• Schützen Sie das Produkt vor extremen Temperaturen, direktem Sonnenlicht, starken Erschütterungen,
hoher Feuchtigkeit, Nässe, brennbaren Gasen, Dämpfen und Lösungsmitteln.
• Setzen Sie das Produkt keiner mechanischen Beanspruchung aus.
• Achten Sie beim Anschluss der RC-Servos und anderer Komponenten sowie deren Anschlussleitun-
gen auf einen sicheren Kontakt. Lose oder wackelige Steckverbinder können Störungen oder Schäden
hervorrufen.
• Sollten Lötarbeiten erforderlich sein, so achten Sie unbedingt darauf, dass beim Löten keine Kurzschlüsse entstehen.
5
Page 6

• Achten Sie beim Einbau der Platine darauf, dass Bauteile oder Lötkontakte nicht mit metallischen Teilen
in Berührung kommen und somit Kurzschlüsse entstehen. Dabei wird das Produkt beschädigt, Verlust
von Gewährleistung/Garantie!
• Wenn kein sicherer Betrieb mehr möglich ist, nehmen Sie das Produkt außer Betrieb und schützen
Sie es vor unbeabsichtigter Verwendung. Der sichere Betrieb ist nicht mehr gewährleistet, wenn das
Produkt:
- sichtbare Schäden aufweist,
- nicht mehr ordnungsgemäß funktioniert,
- über einen längeren Zeitraum unter ungünstigen Umgebungsbedingungen gelagert wurde oder
- erheblichen Transportbelastungen ausgesetzt wurde.
• Gehen Sie vorsichtig mit dem Produkt um. Durch Stöße, Schläge oder dem Fall aus bereits geringer
Höhe wird es beschädigt.
• Wenden Sie sich an eine Fachkraft, wenn Sie Zweifel über die Arbeitsweise, die Sicherheit oder den
Anschluss des Produktes haben.
• Lassen Sie Wartungs-, Anpassungs- und Reparaturarbeiten ausschließlich von einem Fachmann bzw.
einer Fachwerkstatt durchführen.
• Sollten Sie noch Fragen haben, die in dieser Bedienungsanleitung nicht beantwortet werden, wenden
Sie sich an unseren technischen Kundendienst oder an andere Fachleute.
6
Page 7

7. Benötigtes Zubehör zu Komplettierung des Roboters
Um einen lauffähigen Roboter zu erhalten, benötigen Sie zusätzlich zum Hexapod Roboter-Board noch folgende
Zusatzkomponenten.
• 1x Hexapod-Mechanik (eigenes Design z.B. 3D-Druck oder einen fertigen Mechaniksatz, z.B. Conrad Best.-Nr.
1618958)
• 18x RC-Servos passend zur verwendeten Hexapod Mechanik. z.B. Conrad Best.-Nr. 1365926
• 1x PS2-kompatibles Gamepad mit Funkempfänger, z.B. Conrad Best.-Nr. 161300
• 1x NiMH-Akkupack mit 5 Zellen (Nennspannung 6 V/DC), Kapazität min. 2000 mAh
• 1x Ladegerät für den verwendeten NiMH-Akku
• 1x Arduino UNO (Conrad Best.-Nr. 191789), NodeMCU (Conrad Best.-Nr. 161301) oder Raspberry Pi (Conrad
Best.-Nr.1419716)User-Board(fürdieerstenSchritteempehltsichdieVerwendungeinesArduinoUNOUser)
7
Page 8
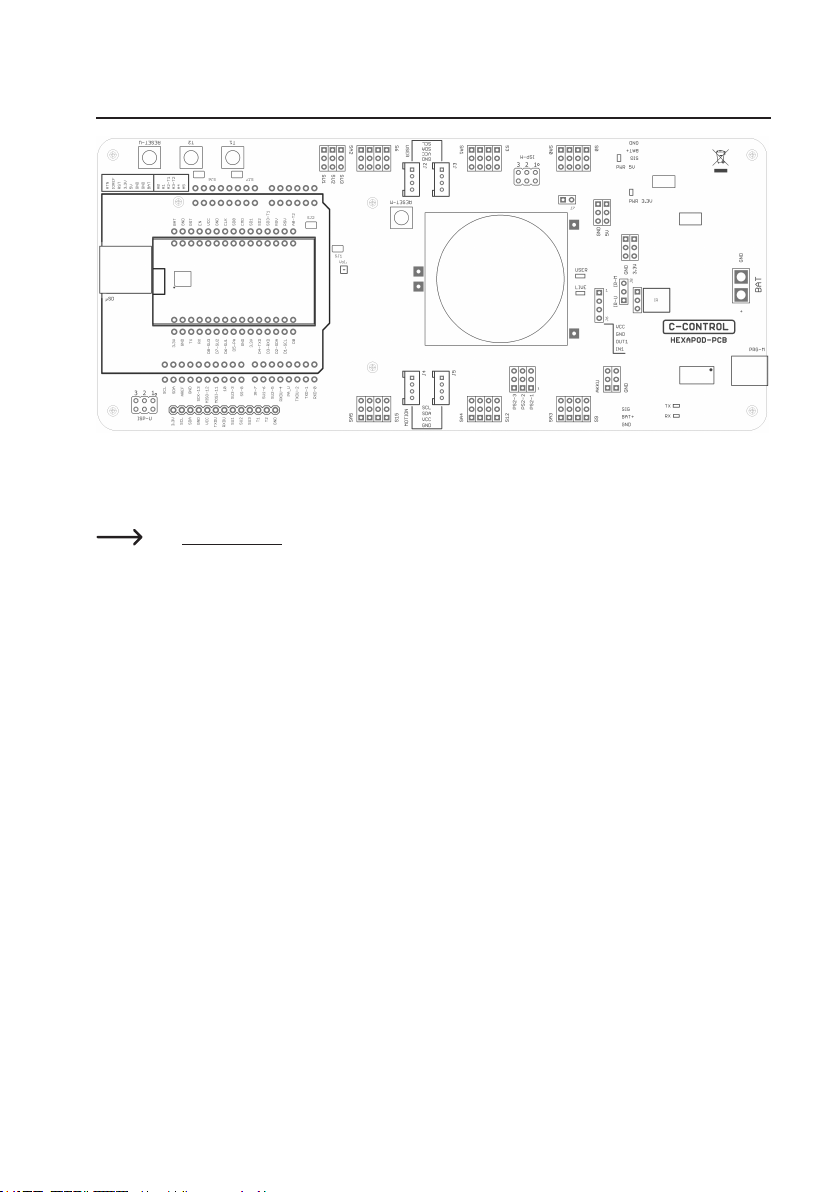
8. Übersicht der Anschlüsse und Komponenten
Bild 1
Legen Sie die das Hexapod Roboter-Board wie auf der Abbildung gezeigt vor sich hin, um sich einen Überblick über
die Anschlussmöglichkeiten zu verschaffen.
Auf www.conrad.comaufderProduktseitendenSiezudemdenSchaltplanzumBoard.
Das Hexpod Roboter-Board verfügt über folgende Anschlüsse und Komponenten:
BAT: XT30-Stecker zum Anschluss des Akkus, der zur Stromversorgung des Boards dient. Betriebs-
PRG-M: USB-Anschluss zur Programmierung des Locomotion-Controllers.
TX-LED: Signalisiert bei der Übertragung eines Programms in den Locomotion-Controller die Sendeleitung
RX-LED: Signalisiert bei der Übertragung eines Programms in den Locomotion-Controller die Empfangslei-
AKKU und GND: An diesen Pins kann die Akkuspannung abgegriffen werden (AKKU = Pluspol, GND = Minuspol).
Die Pins sind nicht gegen Kurzschluss geschützt! Arbeiten Sie hier vorsichtig und verursachen Sie
spannung 4,5 bis 10 V/DC (+ = Pluspol; GND = Minuspol). Je nach verwendeten RC-Servos sollte
als Stromversorgung ein NiMH-Akku mit 5 Zellen (Nennspannung 6 V/DC) und einer Kapazität
von mindestens 2000 mAh zum Einsatz kommen.
(schnelles Blinken bei der Übertragung).
tung (schnelles Blinken bei der Übertragung).
keinen Kurzschluss! Dies kann zur Zerstörung der Pins und des Hexapod Roboter-Boards führen!
Dieser Anschluss steht für eigene Erweiterungen und Experimente zur Verfügung.
8
Page 9

J6: Hier stehen an den Pins VCC und GND stabilisierte 5 V/DC/1000 mA zur Verfügung. Dieser
OUT1 ist ein digitaler Ausgang des Locomotion-Controllers. Er kann über ein Kommando vom
IN1 ist ein digitaler Eingang des Locomotion-Controllers. Er kann über ein Kommando vom User-
IR: Der Infrarotempfänger „IR“ kann wahlweise mit dem Jumper „J8“ mit dem Locomotion-Controller
LIVE-LED: Die blaue „LIVE-LED“ signalisiert den Zustand des Locomotion-Controllers. Ist der Locomotion-
USER-LED: Die rote „USER-LED“ signalisiert, dass das PS2-kompatible Gamepad aktiviert ist und die Steuer-
3.3V und GND: An diesen Pins stehen stabilisierte 3,3 V/DC/400 mA zur Verfügung. Dieser Anschluss steht für
5V und GND: An diesen Pins stehen stabilisierte 5 V/DC/1000 mA zur Verfügung. Dieser Anschluss steht für
3.3V PWR-LED: Die rote LED signalisiert, dass die 3.3 V-Spannungs-/Stromversorgung arbeitet. Sie leuchtet, so-
5V PWR-LED: Die rote LED signalisiert, dass die 5 V-Spannungs-/Stromversorgung arbeitet. Sie leuchtet, sobald
J7: Der Jumper „J7“ deaktiviert in der Locomotion-Controller-Firmware die Auswertung des PS2-
ISP-M: ISP-Anschluss („In-System-Programmierung“) des Locomotion-Controllers. Über diesen An-
PS2-1 bis PS2-3: An diesen Pins kann ein PS2-kompatibles Gamepad, welches als Zubehör erhältlich ist, ange-
J2 und J3: Die beiden Buchsen sind mit dem I2C-BUS-Anschluss des Locomotion-Controllers verbunden
J4 und J5: Die beiden Buchsen sind mit dem I2C-BUS-Anschluss des User-Boards verbunden und können
RESET-M: Der Taster löst beim Drücken einen Hardware-Reset des Locomotion-Controllers aus.
Anschluss dient für eigene Erweiterungen und Experimente (VCC = Pluspol, GND = Minuspol).
User-Board auf HIGH (+5 V/DC) oder LOW (0 V/DC) geschaltet werden. Die maximale Strombelastbarkeit beträgt 20 mA. Dieser Anschluss steht für eigene Erweiterungen und Experimente zur
Verfügung.
Board einen digitalen Zustand lesen. Eine logische 1 wird zwischen 3,5 und 5 V/DC erkannt;
eine logische 0 bei einer Spannung kleiner als 3,3 V/DC. Die maximale Eingangsspannung von
5 V/DC darf nicht überschritten werden! Dieser Anschluss steht für eigene Erweiterungen und
Experimente zur Verfügung.
(Jumperstellung IR-M) oder mit dem User-Board (Jumperstellung IR-U) verbunden werden. Der
Empfänger ermöglicht es, ein 38 kHz Infrarotsignal z.B. einer Universalfernbedienung oder eines
selbstgebauten IR-Senders zu empfangen.
Controller aktiv, blinkt diese LED in unterschiedlichen Zuständen.
kommandos vom User-Board nun ignoriert werden.
eigene Erweiterungen und Experimente zur Verfügung (3.3V = Pluspol, GND = Minuspol).
eigene Erweiterungen und Experimente zur Verfügung (5V = Pluspol, GND = Minuspol).
bald am BAT-Anschluss eine Stromversorgung angeschlossen ist.
am BAT-Anschluss eine Stromversorgung angeschlossen ist.
kompatiblen Gamepads (der Roboter lässt sich dann nicht mehr über das Gamepad steuern). Die
Gamepad-Steuerbefehle können dann nur noch über das User-Board ausgelesen werden!
schluss kann der Locomotion-Controller über ein ISP-Programmiergerät programmiert werden.
Es ist zudem möglich, diesen Anschluss zum Einbinden von eigenen Komponenten mit SPISchnittstelle zu verwenden.
schlossen werden. Über diesen Controller kann der Roboter manuell gesteuert werden, ähnlich
einem ferngesteuerten Auto.
und können für eigene Erweiterungen genutzt werden. Die Anschlüsse sind mit den „SEEEDGROVE“ Komponenten kompatibel.
für eigene Erweiterungen genutzt werden. Die Anschlüsse sind mit den „SEEED-GROVE“ Komponenten kompatibel.
9
Page 10

S0 bis S17: An diesen Anschlüssen werden die „Bein-Servos“ des Hexapods angeschlossen. Die Stiftleisten
SA0 bis SA5: Die analogen Eingänge SA0 bis SA5 können für eigene Erweiterungen in der Locomotion-Firm-
SJ1: Der PCB-Jumper „SJ1“ verbindet den Audioverstärker mit dem Locomotion-Controller. In den
Lautsprecher: Der Lautsprecher dient zur Ausgabe der Signaltöne und ist mit dem Audioverstärker verbunden.
Vol.: Der Trimmer „Vol.“ dient zum Einstellen der Lautstärke der Signaltöne des Locomotion-Controllers
T1 und T2: Die Taster „T1“ und „T2“ können mit dem User-Board genutzt werden. Sehen Sie sich hierzu die
SJ6 und SJ7: Die PCB-Jumper „SJ6“ und „SJ7“ verbindet die Ausgänge der Taster „T1“ und „T2“ mit einem
RESET-U: Der Taster „RESET-U“ führt einen Reset des User-Boards durch.
SJ2: Der PCB-Jumper „SJ2“ verbindet den Taster „T2“ mit dem NodeMCU User-Board. Der verwende-
SU1 bis SU3: Die Anschlüsse SU1, SU2 und SU3 sind mit den User-Board-Steckplätzen verbunden und können
µSD: Der Kartensteckplatz für eine MicroSD-Karte ist mit dem Arduino-UNO kompatiblen User-Board-
ISP-U: ISP-Anschluss („In-System-Programmierung“) des „Arduino UNO“-kompatiblen User-Board-
sind immer in Blöcken angeordnet, die dem jeweiligen Bein zugeordnet sind. Von der jeweiligen
Beschriftung (S...) aus werden die Anschlüsse für „Coxa - Hüfte“, „Femur - Oberschenkel“ und
„Tibia - Schienbein“ gezählt. Die Pins sind mit den gängigsten RC-Servos kompatibel. Achten Sie
hier auf richtige Polung. Die Polung ist auf der Platine mit „SIG“ für Signalleitung, „BAT+“ für den
Pluspol und „GND“ für den Minuspol beschriftet.
ware verwendet werden. In der „Motion-Firmware“ können diese auch über eine Funktion vom
User-Board abgefragt werden.
meisten Praxisfällen bleibt diese Verbindung bestehen. Sie können den Jumper, falls nötig, mit
einen kleinen Tapetenmesser vorsichtig durchtrennen. Mit einem Lötkolben und etwas Lötzinn
können Sie die Verbindung wieder herstellen.
Die Signaltöne können vom Locomotion-Controller und auch vom User-Board generiert werden.
und des User-Boards. Drehen Sie den Trimmer in Richtung der Taster, so wird die Lautstärke
erhöht; ein der entgegengesetzten Richtung wird sie leiser. Zum Einstellen des kleinen Trimmers
hat sich in der Praxis ein kleiner Uhrmacher-Schraubendreher herausgestellt. Seien Sie beim Einstellen vorsichtig, um den Trimmer nicht zu beschädigen! Grundeinstellung ist die Mittelstellung
des Trimmers.
Software-Beispiele an.
22 kOhm Pullup-Widerstand, so dass im User-Board Programm keine Pullup-Widerstände aktiviert werden müssen. In den meisten Praxisfällen bleibt diese Verbindung bestehen. Sie können
die Jumper, falls nötig, mit einen kleinen Tapetenmesser vorsichtig durchtrennen. Mit einem Lötkolben und etwas Lötzinn können Sie die Verbindung wieder herstellen.
te Pin der NodeMCU ist der analoge Eingang und kann bei anderweitiger Verwendung vom Taster
„T2“ über diesen Jumper abgetrennt werden. Im Normalfall bleibt diese Verbindung bestehen. Sie
können den Jumper, falls nötig, mit einen kleinen Tapetenmesser vorsichtig durchtrennen. Mit
einem Lötkolben und etwas Lötzinn können Sie die Verbindung wieder herstellen.
für eigene Anwendungen genutzt werden. Sie besitzen die gleiche Polung wie die der RC-ServoAnschlüsse der Bein-Servos. Sehen Sie sich hierzu die Software-Beispiele an.
Steckplatz verbunden und kann für eigene Anwendungen genutzt werden. Sehen Sie sich hierzu
die Software-Beispiele an.
Steckplatzes. Über diesen Anschluss kann das User-Board über ein ISP-Programmiergerät programmiert werden. Es ist zudem möglich, diesen Anschluss zum Einbinden von eigenen Komponenten mit SPI-Schnittstelle zu verwenden.
10
Page 11
User-Boards: Arduino-UNO:
Die beiden äußeren längeren Stiftleisten dienen zur Aufnahme eines „Arduino-UNO“-kompatiblen
NodeMCU:
Das beliebte WiFi-Board mit der Bezeichnung „NodeMCU“ und dem verwendeteten ESP8266-
SBC (Single Board Computer):
An der Stiftleiste neben dem „ISP-U“ Anschluss kann z.B. ein Raspberry Pi 2 oder 3 oder ein be-
DerLocomotion-ControllerbendetsichunterdemLautsprecher.
User-Boards. Alle Pins sind an Buchsenleisten daneben herausgeführt. Dies dient dazu, dass
Sie einfach auf die Pins des Boards zugreifen können. Die Pinbelegung ist auf der Platine neben
den Stiftleisten aufgedruckt und entspricht der des verwendeten Boards. Sehen Sie sich dazu die
Software-Beispiele an.
WiFi-Chip kann auf den inneren Steckplatz als User-Board verwendet werden. Auch hier sind
alle Pins auf den daneben liegenden Buchsenleisten herausgeführt, was das Experimentieren
erleichtert. Sehen Sie sich dazu die Software-Beispiele an.
liebiger anderer SBC angeschlossen werden. Es ist über diesen Anschluss auch möglich, Funkmodule oder Bluetooth®-Module als User-Board zu verwenden. Diese Stiftleiste ist als universell
zu betrachten und stellt eine Schnittstelle für eigene Erweiterungen und Entwicklungen dar.
11
Page 12
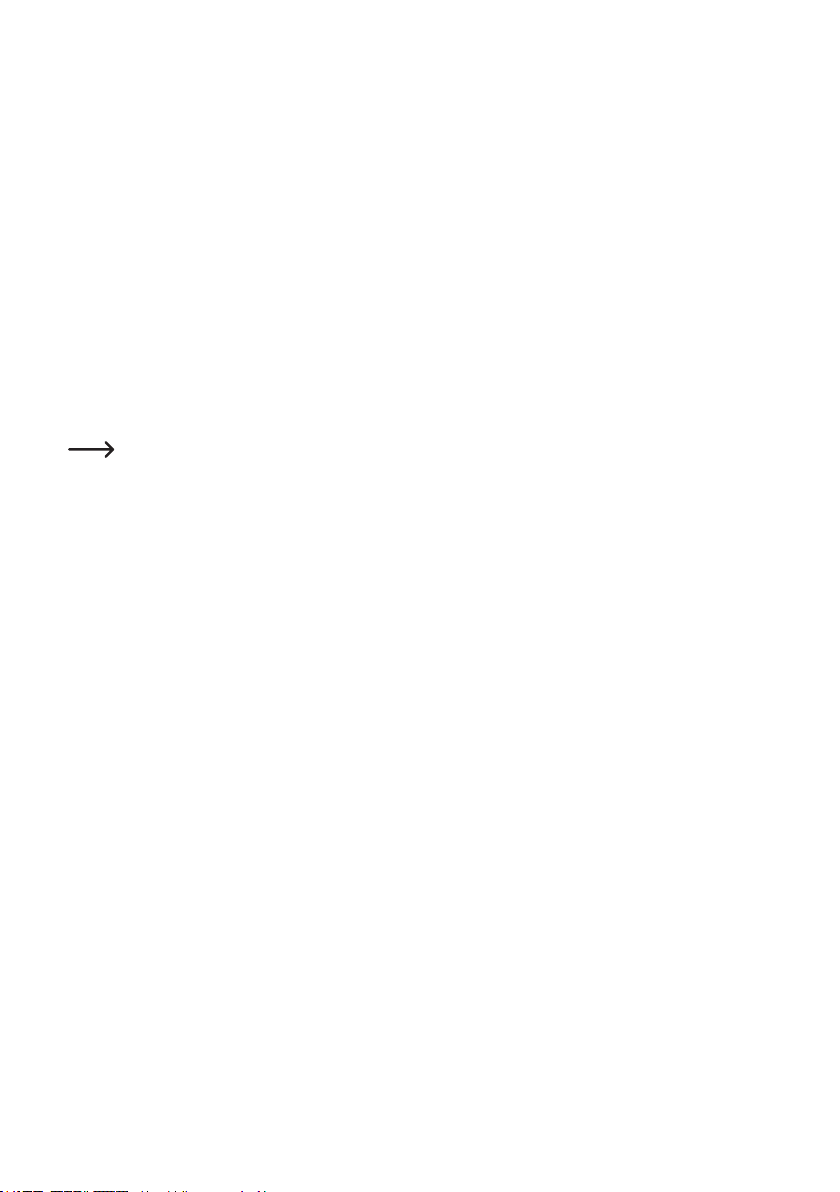
9. Schematische Systemübersicht (Blockschaltbild)
Bild 2
Das Diagramm zeigt schematisch die interne Verdrahtung und das Zusammenspiel der einzelnen Komponenten des
Hexapod Roboter-Boards und dient als Hilfestellung bei der Programmierung.
12
Page 13

10. Inbetriebnahme
Da es sich bei dem „Hexapod Roboter-Board“ um ein offenes Experimentier-Board (Development Board) handelt,
können wir Ihnen in dieser Anleitung nur Tipps und Hinweise zum Aufbau Ihres eigenen Hexapoden geben. Für den
fertigen lauffähigen Roboter sind Sie jedoch selbst verantwortlich!
Die folgende Abbildung zeigt einen Hexapod, der als Anhaltspunkt für Ihre eigene Konstruktion dienen kann. Dieser
„Muster-Hexapod“ soll Ihnen das Abschätzen der Daten wie Robotergröße, Gewicht und die Auswahl der RC-Servos
erleichtern.
Bild 3
Technische Daten:
Akkupack: 5 Zellen NiMH, 3700 mAh (Anschlusskabel 2,5 mm²)
Länge Körper: 280 mm
Höhe Körper ohne Platine: 65 mm
Breite Körper ohne Beine: 150 mm
Länge Coax: 50 mm
Länge Femur: 75 mm
Länge Tibia: 115 mm
Gewicht komplett: ca. 2,7 kg
Stellkraft RC-Servo bei 6 V/DC: 8,5 kg
Anzahl RC-Servos: 18
13
Page 14
11. Stromversorgung
Für einen sicheren und störungsfreien Betrieb des Hexapod Roboter-Boards ist die richtige Stromversorgung entscheidend. Das Board arbeitet mit einer Versorgungsspannung zwischen 4,5 und 10 V/DC, wobei eine optimale
Stromversorgung von den verwendeten RC-Servos und Zusatzkomponenten abhängig ist.
Verwenden Sie z.B. analoge Standard RC-Servos, so ist in der Regel einen Versorgungsspannung von max. 6 V/DC
zulässig (überprüfen Sie die Daten im Datenblatt der von Ihnen verwendeten RC-Servos nach).
Wir empfehlen, bei der Verwendung von Standard-RC-Servos mit einer Stellkraft von <= 8 kg und einer Versorgungsspannung von 6 V/DC einen 5zelligen NiMH-Akkupack mit min. 2000 mAh zu verwenden. Bei zu geringer Kapazität
des Akkupacks werden nur sehr kurze Laufzeiten des Roboters erzielt und es kann zum Reset des User-Boards bzw.
des Locomotion-Controllers führen.
Sollten Sie für Ihren Roboter „High-Voltage RC-Servos“ verwenden (RC-Servos, die mit einem LiPo-Akku betrieben
werden dürfen), so empfehlen wir einen 2S (7,4 V) LiPo-Akkupack mit min. 2000 mAh (Endladerate 20C).
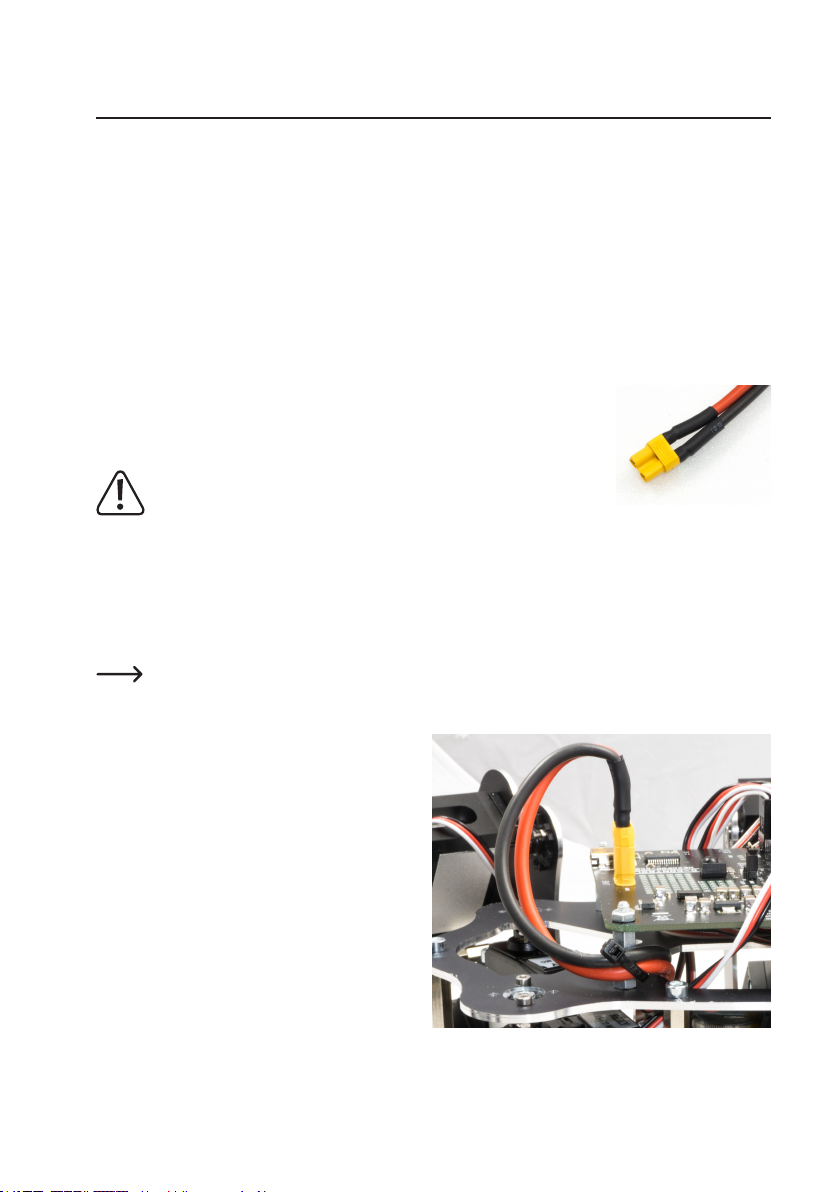
Dem Lieferumfang des Hexapod Roboter-Boards liegt ein Akkustecker vom Typ XT30
bei. Dieser wird an dem von Ihnen ausgewählten Akku angelötet. Die Kabellänge zwischen Akku und Stecker darf 20 cm nicht überschreiten! Achten Sie auf die Polung und
darauf, dass Sie beim Anlöten keinen Kurzschluss verursachen.
Akkus können im Kurzschlussfall sehr viel Strom abgeben, was zu Verbren-
nungen und Brandschäden sowie zu gefährlichen Verletzungen führen kann,
außerdem zu einer Explosion des Akkus!
Bedenken Sie bei der Planung Ihres Hexapoden, dass dieser die RC-Servos, den Akku, die Mechanik, das
Roboter-Board und Ihre zusätzlich verbauten Komponenten tragen muss!
Bedenken Sie auch, dass zu lange Beine einen sehr großen Hebel für die RC-Servos darstellen und die
Stellkraft der RC-Servos zum Anheben und Laufen ausreichen muss. Werden die RC-Servos im Grenzbereich betrieben, so kann dies zur Überhitzung der Elektronik im Servo führen und diesen auf Dauer
zerstören!
Bei der Verwendung von User-Boards, deren Stromversorgung kritisch ist (z.B. SBC oder leistungsstarke
Arduino-UNO kompatible Boards mit ARM Controller), kann es sich zudem als sinnvoll erweisen, diese
zusätzlich über eine Power-Bank zu versorgen.
In Bild 5 ist zu sehen, wie der Stecker am Hexapod
Roboter-Board aufgesteckt wird.
Bild 4
14
Bild 5
Page 15
12. Installation der Software und Firmware
Die für das Hexapod Roboter-Board benötigten Software Pakete, Firmware und Tools stehen online als
Download-Paket bereit. Dieses Paket wird regelmäßig aktualisiert und erweitert. Prüfen Sie daher gelegentlich, ob evtl. eine neue Version oder nützliche Erweiterungen zur Verfügung stehen.
Öffnen Sie Ihren Webbrowser und navigieren Sie entweder über unsere Shop-Website www.conrad.com auf die
Produktseite des Hexapod Roboter-Boards, oder auf unsere Downloadseite.
Laden Sie sich hier das Paket „C-Control_Hexapod_Vx_x“ herunter (x_x bezeichnet hier die Version des Pakets).
Entpacken Sie die heruntergeladene ZIP-Datei auf Ihrer Festplatte.
Hier noch eine kurze Erklärung zu den enthalten Ordnern.
„Arduino“ Hier ist eine Textdatei mit dem Download-Link für die Software Arduino™ enthalten. Diese wird
„Datasheets“ Datenblätter und Skizzen
„Driver“ Treiber für den FTDI USB-Chip
„Library-Demos“ Enthält die Arduino Library, Demos und die Locomotion-Firmware als ZIP-File. Wird in der Arduino
„Schematic“ Schaltplan des C-Control Hexapod Roboter-Boards als PDF-Datei
„Terminal“ Kalibriersoftware um den Hexapod einzustellen
„Manual“ Enthält diese Anleitung als PDF-Datei
z.B. benötigt, um die Firmware ohne Updater aufzuspielen.
IDE installiert werden.
15
Page 16
13. Übertragen der Firmware
Bei Auslieferung ist auf dem Hexapod Roboter-Board keine Firmware installiert. Die Firmware muss bei der Erstinbetriebnahme zunächst übertragen werden; dies erfolgt über die Arduino IDE.
Die nachfolgende Beschreibung zeigt Ihnen die Vorgehensweise zum Übertragen der Firmware. In den nachfolgenden Abschnitten werden Sie unterschiedliche Programme auf das Hexapod Roboter-Board übertragen müssen. Der
Vorgang ist bis auf die Auswahl der jeweiligen Firmware identisch.
Beim Übertragen der Firmware muss das Hexapod Roboter-Board mit der Stromversorgung verbunden
sein!
a) Treiber installieren
Verbinden Sie den „PRG-M“ Anschluss des Hexapod Roboter-Boards mit einem freien USB-Anschluss Ihres Computers. Windows wird nun versuchen, einen neuen Treiber zu installieren. Im Regelfall wird Windows die Treiber automatisch aus dem Internet herunterladen und installieren, da der Treiber für den verwendeten FTDI USB-Brückenchip
im Windows-Treiberdownload verfügbar ist (der Computer muss hierfür mit dem Internet verbunden sein).
Sollte diese Methode nicht funktionieren, verweisen Sie bei der Installation manuell auf den Treiber. Der Treiber
bendetsichimentpacktenDownload-Bundle,imVerzeichnis„Driver“.
Kontrollieren Sie nach der Installation des Treibers im Gerätemanager, ob der Treiber für das Hexapod Roboter-Board
installiert wurde und welche „COM-Port-Nummer“ zugeteilt wurde. Wählen Sie diese dann in der Arduino IDE aus.
Die Treiber können Sie auch direkt unter http://www.ftdichip.com herunterladen.
b) Arduino IDE installieren
Laden Sie sich die neueste Version der Arduino IDE unter www.arduino.cc herunter. Es gibt die Arduino IDE als
„Installer-Version“ und als „ZIP-Archiv“. Beide Versionen können verwendet werden.
Bei der Installer-Version installieren Sie die Arduino IDE wie auch von anderen Programmen gewohnt. Bei der ZIPVersion müssen Sie nach dem Download das ZIP-Archiv an die gewünschte Stelle auf Ihrem Computer entpacken.
Danach starten Sie das Programm mit einen Doppelklick auf die Datei „arduino.exe“.
16
Page 17
c) Arduino IDE einrichten
Bild 6
Starten Sie die Arduino IDE und folgen Sie den Anweisungen dieser Bedienungsanleitung.
Bild 7
17
Page 18
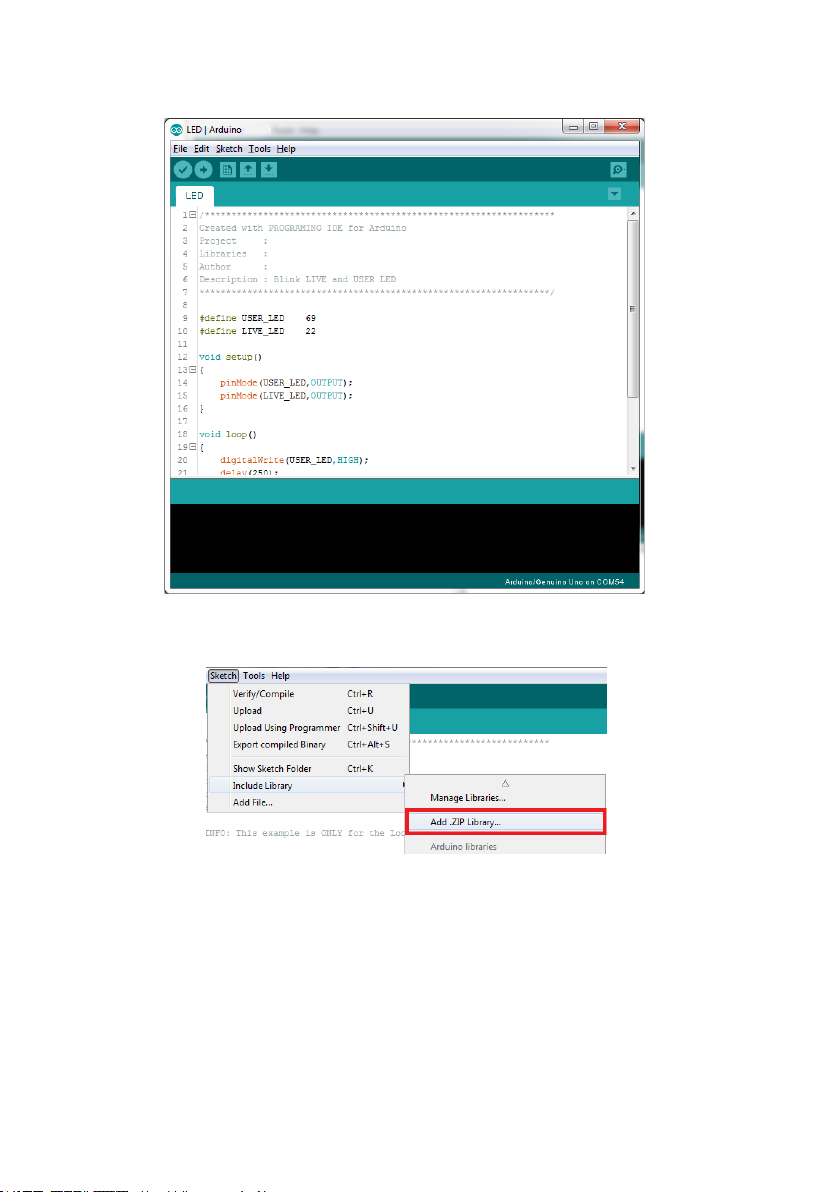
InstallierenSienundieHexapodBibliothek.DiesebendetsichimDownload-Bundleunter„\Library-Demos\C-Control-Hexapod.zip“.WählenSiedazuinderArduinoIDEdenMenüpunkt„Sketch\IncludeLibrary\Add .ZIPLibrary...“
aus.
Sollten Sie später einmal ein Update der Bibliothek durchführen, so müssen Sie die alte Bibliothek zuvor
löschen, da sonst die Arduino IDE einen Fehler meldet!
Bild 8
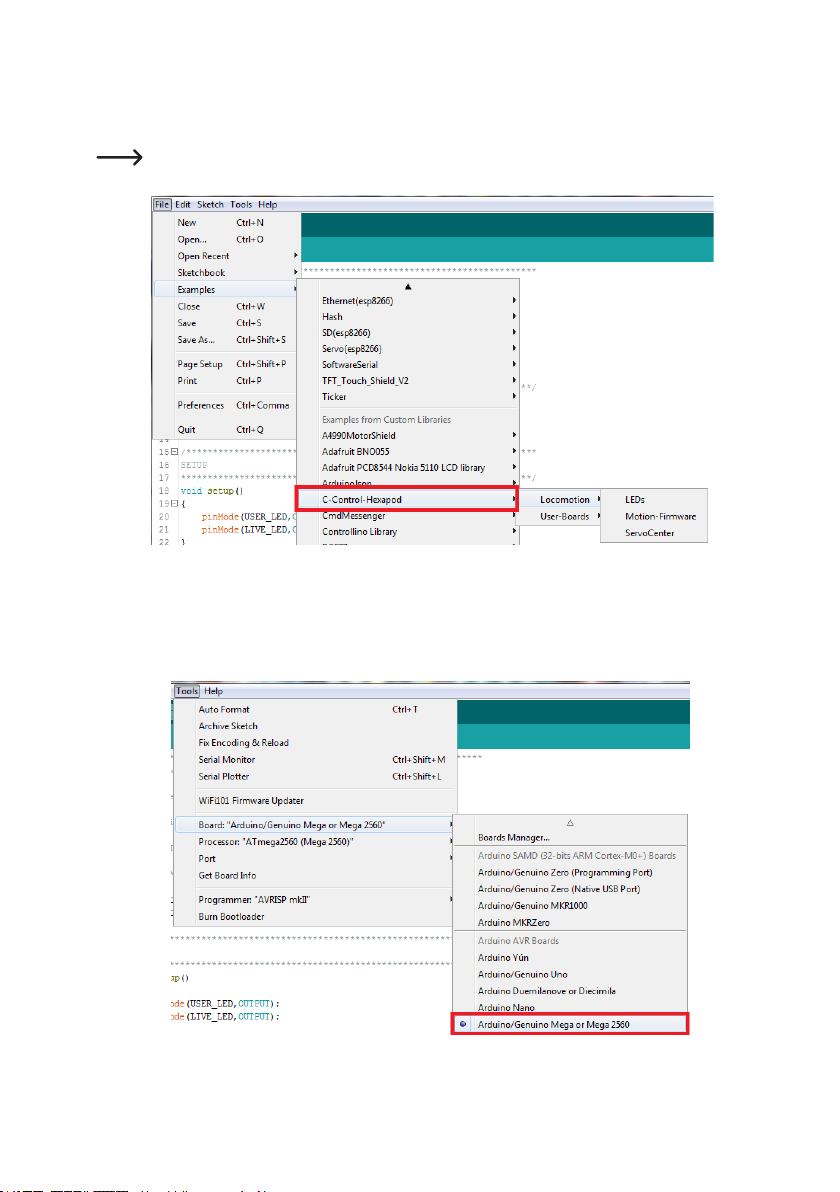
NachdemSie die Bibliothekinstalliert haben, ndenSie im Menüpunkt„\File\Examples\C-Control-Hexapod“ zwei
Ordner mit den Namen „Locomotion“ und „User-Boards“ vor. Der Ordner „Locomotion“ enthält Programme für den
Locomotion-Controller, der auf dem Hexapod Roboter-Board fest verbaut ist und für das Laufen zuständig ist. Der
Ordner „User-Boards“ enthält Programme für die Arduino kompatiblen User-Boards wie Arduino UNO und NodeMCU.
18
Bild 9
Page 19
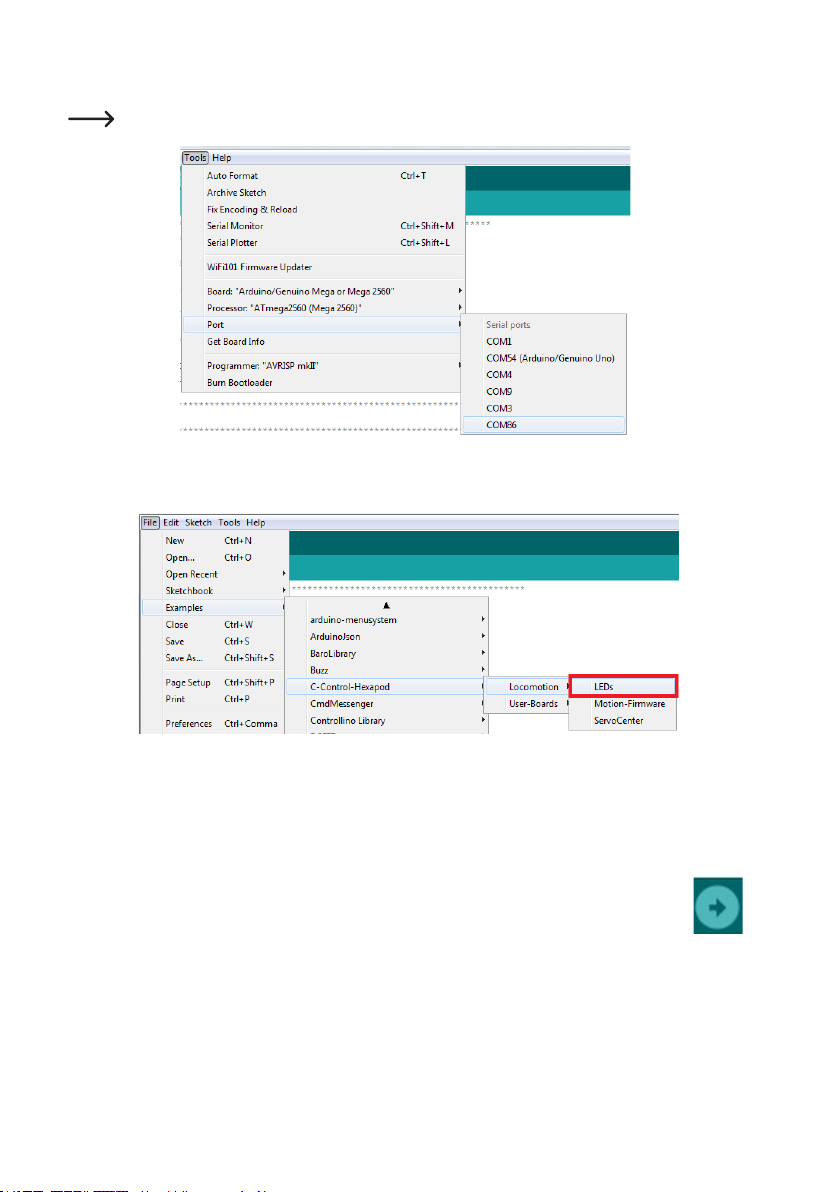
WählenSiedenverwendetenMikrocontrollerunterdemMenüpunkt„Tools\Board\Arduino/GenuinoMega“aus.
Der Locomotion-Controller ist mit dem Arduino MEGA2560 kompatibel.
Bild 10
WählenSiedenCOM-Portunter„Tools\Port“aus(wählenSiedenzuvorinstalliertenCOM-Portaus).
Bild 11
Umzutesten,oballesfunktioniert,übertragenSiedasBeispielprogramm„\User-Board\LEDs“.DasProgrammlässt
nach erfolgreicher Übertragung die blaue „LIVE-LED“ und rote „USER-LED“ abwechselnd blinken.
Nach der Auswahl des „LEDs“-Programms (in Arduino auch Sketch genannt) öffnet sich ein neues Arduino IDE Fens-
ter mit dem „LEDs“ Sketch.
Mit dem „Pfeil nach rechts“-Symbol (siehe Bild 12) im Menü übertragen Sie das Programm auf das Hexa-
pod Roboter-Board. Alternativ können Sie auch den Shortcut „CTRL+U“ verwenden.
Dieser Vorgang gilt für alle zu übertragenden Programme (Sketches), die für den Locomotion-Controller
bestimmt sind. Für die Beispiele der User-Boards ändern Sie nur das verwendete User-Board und den
„COM-Port“.
Bild 12
19
Page 20
Bitte lesen Sie sich den jeweiligen Anfangskommentar der Beispiele (Examples) vor dem Aufspielen durch.
Dieser enthält wichtige Informationen zum Programm!
Sollte die Übertragung nicht klappen, so überprüfen Sie Ihre Einstellungen für Board und Anschluss und
prüfen Sie zudem, ob das Board richtig im Gerätemanager eingetragen und installiert wurde und die Stromversorgung angeschlossen ist.
HierndenSieweitereInformationzurInstallationderArduinoIDE:
http://arduino.cc/en/Guide/Windows
20
Page 21

14. RC-Servos für den Einbau vorbereiten
Bevor Sie die RC-Servos in Ihrer Mechanik verbauen, müssen
Sie diese in die Mittelstellung bringen.
Packen Sie zunächst alle 18 RC-Servos aus und legen Sie sich
die Zubehörkleinteile, die bei den RC-Servos enthalten sind, sauber sortiert nach Art (Schrauben, Servohörner etc.) beiseite, so
dass diese nicht verloren gehen. Diese benötigen Sie erst zum
Einbau in die Mechanik wieder!
Bild 13
Bild 14
Schließen Sie die RC-Servos an den Stiftleisten wie in der Abbildung an (achten Sie auf die Polung!). Es werden alle
Servoanschlüsse (S0 bis S17) des Roboter-Boards mit einer Pulsbreite von 1500 µs angesteuert.
Übertragen Sie zum Einstellen der RC-Servos den Sketch „ServoCenter“ auf das Hexapod Roboter-Board. Das Programm lässt nach dem Start die RC-Servos S0 bis S17 in die Mittelstellung fahren.
Sie müssen nicht alle 18 RC-Servos gleichzeitig am Hexapod Roboter-Board anstecken. In der Praxis hat
sich bewährt, dass es einfacher ist, nur einen Anschluss (z.B. S0) oder maximal 3 (S0 bis S2) zu verwenden.
21
Page 22

Belassen Sie dieses Programm auf dem Hexapod Roboter-Board, bis der Roboter fertig zusammengebaut ist. Sollten
Sie beim Zusammenbau ein Servo verdrehen, so können Sie dieses wieder anstecken und in Mittelstellung fahren
lassen. Es hat sich in der Praxis bewährt, jedes einzelne Bein, welches fertig montiert wurde, mit allen 3 Servos am
Board anzustecken und zu kontrollieren, ob die Servostellung noch korrekt ist. Wird das Servo beim Einbau aus der
Mittelstellung gedreht, wirkt sich dies negativ auf die Laufeigenschaften aus bzw. kann dies Servo und Mechanik
beschädigen.
Stecken Sie die RC-Servos nur an den jeweils ersten 3 Stiftleisten (im Abbildungsausschnitt rot bzw. mit
einem Kreis gekennzeichnet) an. Der jeweils letzte Anschluss mit der Bezeichnung SA0 bis SA5 (im Abbildungsausschnitt SA0) ist für eigene Erweiterungen vorgesehen und führt kein Steuersignal! Die Anschlüsse SA0 bis SA5 sind mit den analogen Eingängen des Locomotion-Controllers verbunden. Die Anschluss-
zuordnungndenSieinderPorttabelleimAnhangundinderSystemübersicht(Blockschaltbild).
Trennen Sie das Roboter-Board von der Stromversorgung, wenn Sie es längere Zeit nicht benutzen, um versehentliche Kurzschlüsse zu vermeiden!
RC-Servos besitzen eine Elektronik, einen Motor und ein Potentiometer. Das Potentiometer greift die Po-
sition des Servos ab und leitet diese an die Elektronik weiter. Die Elektronik im RC-Servo vergleicht die
vorgegebene Stellung (Sollwert), in unserem Fall die Pulsbreite gegeben vom Locomotion-Controller mit
der des Potentiometers im RC-Servo (Istwert) und regelt den Motor auf die Sollposition.
Bild 15
Der RC-Servo bekommt als Signal vom Mikrocontroller einen positiven Puls mit einer Pulsbreite zwischen
500 µs und 2500 µs. Die gesamte Periodenlänge des Steuersignals beträgt 20 ms. Die Mittelstellung des RC-Servos
beträgt eine Pulsbreite von 1,5 ms/1500 µs.
DieGrakveranschaulichtdasPuls/PeriodenverhältniswieeszurAnsteuerungeinesRC-Servosnötigist.Indiesem
Fall hat der Puls eine Länge von 1,5 ms/1500 µs, was der Mittelstellung des RC-Servos entspricht.
Wird die Pulsbreite kleiner 1500 µs, so dreht das RC-Servo in die eine Richtung. Wird die Pulsbreite größer
1500 µs, so dreht es in die andere Richtung. Der Drehwinkel ist dabei proportional zur Pulsbreite, d.h. je länger oder
kürzer der Puls, desto mehr oder weniger dreht das RC-Servo in die entsprechende Richtung.
22
Page 23

15. Hexapod-Mechanik und Grundkonguration
Bild 16
DieAbbildungzeigtdieGrundkongurationeinesHexapod-Beins.NachdemSiedieServosimletztenAbschnittindie
Mittelstellung gebracht haben, können Sie nun Ihre Roboterbeine montieren.
Zu beachten ist, dass der Oberschenkel (Femur) parallel zum Boden („Ground“ oben im Bild) ausgerichtet wird.
Der Drehpunkt des Schienbeines („Tibia“) steht parallel zum Körper („Body“). Wenn das Bein fertig eingestellt ist,
ergibt es zwischen „Femur“ und „Tibia“ einen 90°-Winkel. Die Anordnung zwischen „Body“ und „Femur“ verlaufen in
einer Linie parallel. Der Höhenunterschied spielt hierbei keine Rolle.
Bild 17
23
Page 24

Die Abbildung zeigt zur realen Veranschaulichung ein Bein des Muster-Hexapoden. Trotz des abgewinkelten TibiaServo müssen am Ende „Femur“ parallel zum Boden und „Tibia“ parallel zum Körper stehen. „Femur“ und „Tibia“
ergeben am Ende einen 90° Winkel! Die RC-Servos selbst sind weiterhin in Mittelstellung!
Sollten Sie die Beine, bedingt durch die Zahnung der Servoscheibe bzw. der allgemeinen mechanischen Toleranzen,
noch nicht zu genau ausrichten können, so stellt dies kein Problem dar. Stellen Sie das Bein so gut wie möglich
mechanisch ein, wie in der Abbildung zu erkennen. Eine genaue Kalibrierung erfolgt nach dem Zusammenbau mit
Hilfe der Software.
Bild 18
Die Skizze veranschaulicht den Hexapod-Körper von „oben“ betrachtet. Die zwei vorderen und die beiden hinteren
Beine werden so eingebaut, dass sie in einem Winkel von 45° nach außen zeigen, ohne dabei die Mittelstellung des
RC-Servos zu verdrehen.
Die beiden mittleren Beine (linke sowie rechte Seite) werden gerade nach außen (90°) eingebaut.
24
Page 25

Die Abbildung zeigt zur realen Veranschaulichung die fertig ausgerichteten Beine des Muster-Hexapoden in der
Grundkonguration.
Bild 19
25
Page 26

16. RC-Servos anschließen
Bild 20
Die Abbildung zeigt den Anschlussstecker des RC-Servos. Die Farben der Kabel können von denen des von
Ihnenverwendeten RC-Servos abweichen! Kontrollieren
Sie die Steckerbelegung im Datenblatt Ihres RC-Servos
nach.
Sollte kein Datenblatt zu Ihrem Servo verfügbar sein,
so können Sie als Orientierung Folgendes verwenden:
Der Pluspol ist bei RC-Servos immer in der Mitte. Der
Minuspol (GND) ist meist braun oder schwarz; die Signalleitung orange, gelb oder weiß.
SIG = Eingang Servo-Impuls
+ = Pluspol
- = Minuspol (GND)
Bild 21
26
Page 27

Stecken Sie die RC-Servos wie folgt am Hexapod Roboter-Board an:
Zuordnung RC-Servo zu Bein:
RR („right rear“ = hinten rechts)
S0 = Coax
S1 = Femur
S2 = Tibia
RM („right middle“ = Mitte rechts)
S3 = Coax
S4 = Femur
S5 = Tibia
RF („right front“ = vorne rechts)
S6 = Coax
S7 = Femur
S8 = Tibia
LR („left rear“ = hinten links)
S9 = Coax
S10 = Femur
S11 = Tibia
LM („left middle“ = Mitte links)
S12 = Coax
S13 = Femur
S14 = Tibia
LF („left front“ = vorne links)
S15 = Coax
S16 = Femur
S17 = Tibia
27
Page 28

17. Gamepad anschließen
Um den aufgebauten Hexapod-Roboter zu steuern und die Einstellungen komfortabel und schnell zu überprüfen, ist
es vorteilhaft, den Roboter mit dem Gamepad zu bedienen. Alternativ können Sie ihn auch gleich über ein User-Board
steuern. Dies hat sich in der Praxis jedoch für die erste Inbetriebnahme als weniger komfortabel herausgestellt.
An das Hexapod Roboter-Board kann jedes handelsübliche PS2-kompatible Gamepad (kabelgebundene bzw. drahtlose Version) angeschlossen werden. Sie müssen dazu die Kontakte des Gamepads mit Kabel und RC-Servostecker
(3polig, Rastermaß 2,54 mm) versehen.
Mit dem Gamepad stehen Ihnen nach der Inbetriebnahme sofort alle Funktionen des Locomotion-Controllers zur
Verfügung und der Roboter kann ähnlich wie ein ferngesteuertes Auto bewegt werden, ohne zuvor ein eigenes Programm erstellen zu müssen.
Zudem können Sie später bei der Nutzung eines User-Boards mit Hilfe des Gamepads in den Ablauf Ihres Programms
eingreifen. Es ist auch möglich, die Steuerbefehle (Joystickwerte und Taster) vom User-Board auszulesen und diese
im eigenen Programm zu verwenden.
Wir empfehlen die Verwendung speziell für den Einsatz mit Mikrocontrollern vorbereiteten Funk-Game-
pads, Conrad-Best.-Nr. 1613300, bestehend aus Funkempfänger und Controller.
Vergewissern Sie sich, dass der Empfänger richtig angeschlossen ist und die Stecker nicht verdreht auf
den Pinleisten stecken, da sonst der Empfänger Schaden nehmen kann! Der Jumper „J7“ darf nicht aufgesteckt sein!
Bild 22
1 Gamepad (PS2-kompatibel)
2 Gamepad-Empfänger
3 Anschlussstecker zum Verbinden mit dem Hexapod Roboter-Board
28
Page 29

Pinbelegung des PS2-kompatiblen Gamepads:
Bild 23
Bild 24
1 PS2-1
2 PS2-2
3 PS2-3
Pin 1 der drei jeweils 3poligen Stiftleisten (PS2-1, PS2-2 und PS2-3), liegt zum Rand der Platine hin.
29
Page 30

Bild 25
Der Empfänger wird mit den 3 Anschlusskabeln, wie in der Abbildung gezeigt, an das Hexapod Roboter-Board angeschlossen. Kabel (1) kommt auf Pinheader (1), Kabel (2) auf Pinheader (2), Kabel (3) auf Pinheader (3).
Die Kabelfarben können zu Ihrem verwendeten Gamepad abweichen! Halten Sie sich an die Pinbelegung
beim Anschließen!
Vergewissern Sie sich, dass der Empfänger richtig angeschlossen ist und die Stecker nicht verdreht auf
den Pinleisten stecken, da sonst der Empfänger Schaden nehmen kann!
30
Page 31

Bild 26
Beim Muster-Hexapod wurde der Empfänger unter dem Roboter-Board mit Servo-Tape (doppelseitiges Klebeband
mit Schaumstoff zwischen den Klebeschichten) montiert.
Bild 27
Durch die verdeckte Montage sieht der Muster-Hexapod sehr aufgeräumt aus. Sie können den Empfänger natürlich
an einer beliebigen Stelle an Ihren Hexapod montieren. Die Bilder des Muster-Hexapoden sollen nur als Veranschaulichung dienen.
Montieren Sie den Empfänger nicht zu nahe an den RC-Servos! Diese können durch die Motoren Störun-
gen im Empfänger erzeugen, was eine minimierte Reichweite zur Folge haben kann. Im schlimmsten Fall
kommt keine Bindung zwischen Gamepad und Empfänger zustande.
31
Page 32

18. Firmware-Konguration
Sie müssen zunächst die „Locomotion-Firmware“ auf die Parameter Ihres Hexapoden anpassen. Öffnen Sie dazu
in der Arduino IDE den Sketch „Motion-Firmware“. Dieser Sketch enthält die komplette Firmware zur Steuerung des
Hexapoden.
Bild 28
Folgenden Parameter müssen in den nachfolgenden Dateien angepasst werden:
Datei: Motion-Firmware.ino
In dieser Datei sind bereits verschiedene Mechaniken (Body-Frames) hinterlegt. Um Ihre Mechanik auszuwählen,
entfernen Sie die Kommentarzeichen „//“ bei „//#include HEX_3DOF_USER.h“. Die restlichen #include „HEX_xxx_
xxx.h“ bleiben mit „//“ auskommentiert. Dadurch wird beim Kompilieren nur Ihre Header-Datei „HEX_3DOF_USER.H“
verwendet.
/*************************************************************************
ROBOT-MECHANIC
*************************************************************************/
#include „HEX_3DOF_USER.h“
//#include „HEX_CNC_3DOF_V2.h“
32
Page 33

Datei: HEX_3DOF_USER.h
Min/Max Speed
Diese Parameter können Sie für die ersten Tests so belassen. Die Parameter geben die maximale und minimale
Laufgeschwindigkeit an. SPEED_INIT ist die default Geschwindigkeit nach dem Einschalten. Die Parameter legen die
Zykluszeit in Millisekunden fest. Aus diesem Grund ist der Wert von SPEED_MAX kleiner als der von SPEED_MIN.
#dene SPEED_MIN 200
#dene SPEED_MAX 25
#dene SPEED_INIT 100
Schritthöhe
Diese Parameter können Sie für die ersten Tests so belassen. Die Parameter geben die normale und die erhöhte
Schritthöhe an, also wie hoch ein Bein beim Laufen angehoben wird.
#dene WALK_HEIGHT_NORMAL 40
#dene WALK_HEIGHT_DOUBLE 100
RC-Servo Anschlüsse und Inverse-Funktion
In der folgenden Datei werden die RC-Servo Anschlüsse den Arduino Pins zugeordnet. Diese sind bereits in der Datei
festgelegtundmüssenfürdasHexapodRoboter-Boardnichtverändertwerden.MitdenDenitionenmitderEndung
„...Inv“ kann die Drehrichtung der RC-Servos umgedreht werden. Für die meisten Standard-RC-Servos können die
vorgegebenen Einstellungen belassen werden. Drehen sich die RC-Servos beim Gehen in die falsche Richtung, so
müssen die Werte von 1 auf 0 bwz. von 0 auf 1 abgeändert werden.
ObdieRC-ServosindierichtigeRichtungdrehen,könnenSiesehrleichtherausnden,indemSienach
dem Übertragen der Firmware den Roboter mit Hilfe des Gamepads einschalten und aufstehen lassen.
Fahren die Beine dabei nicht aus, sondern entgegengesetzt, so dass sich der Körper nicht anhebt, müssen
die„Invers-Denes“geändertwerden.
/*************************************************************************
Servo pin denes and inverse function
*************************************************************************/
// --> LEFT
#dene cLFCoxaPin 36 // S15
#dene cLFFemurPin 37 // S16
#dene cLFTibiaPin 40 // S17
#dene cLFCoxaInv 1
#dene cLFFemurInv 1
#dene cLFTibiaInv 1
#dene cLMCoxaPin 33 // S12
#dene cLMFemurPin 34 // S13
#dene cLMTibiaPin 35 // S14
#dene cLMCoxaInv 1
#dene cLMFemurInv 1
#dene cLMTibiaInv 1
33
Page 34

#dene cLRCoxaPin 25 // S9
#dene cLRFemurPin 26 // S10
#dene cLRTibiaPin 27 // S11
#dene cLRCoxaInv 1
#dene cLRFemurInv 1
#dene cLRTibiaInv 1
// --> RIGHT
#dene cRFCoxaPin 6 // S6
#dene cRFFemurPin 7 // S7
#dene cRFTibiaPin 8 // S8
#dene cRFCoxaInv 0
#dene cRFFemurInv 0
#dene cRFTibiaInv 0
#dene cRMCoxaPin 3 // S3
#dene cRMFemurPin 17 // S4
#dene cRMTibiaPin 16 // S5
#dene cRMCoxaInv 0
#dene cRMFemurInv 0
#dene cRMTibiaInv 0
#dene cRRCoxaPin 12 // S0
#dene cRRFemurPin 5 // S1
#dene cRRTibiaPin 2 // S2
#dene cRRCoxaInv 0
#dene cRRFemurInv 0
#dene cRRTibiaInv 0
34
Page 35

Abmessung der Beine
Geben Sie bei „LEG DIMENSIONS“ die Maße Ihres Roboterbeines in Millimetern (mm) ein.
Messen Sie bei „cXXCoaxLenght“ und „cXXFemurLenght“ von Drehpunktmitte zur Drehpunktmitte und bei „cXXTibi-
aLenght“ von Drehpunktmitte bis zum Ende des Beines.
Bild 29
Messen Sie sehr sorgfältig. Eine falsche Angabe wird sich negativ auf das Laufverhalten auswirken!
/*************************************************************************
LEG DIMENSIONS
Universal dimensions for each leg in mm
*************************************************************************/
#dene cXXCoxaLength 51
#dene cXXFemurLength 75
#dene cXXTibiaLength 117
35
Page 36

Min/Max Servo-Drehwinkel
Die Werte für „MIN-MAX ANGLES“ können Sie zunächst so wie vorgegeben belassen. Diese Werte begrenzen den
Drehwinkel der RC-Servos, d.h. wie weit die Beine sich in einem mechanisch sicheren Bereich ohne Blockieren
ansteuern lassen. Die bereits vorgebenden Werte sind ein guter Mittelwert aus der Praxis. Sie können diese Werte
später noch ändern und genauer auf Ihre verbauten RC-Servos anpassen.
DieWertesindvonderGrundkongurationeinesHexapodBeinesauszubetrachtenundwerdenin1/10Gradangeben. D.h. eine Angabe der Begrenzung von max. 300 und min. -300 lässt eine Ansteuerung von +/- 30° zu.
/*************************************************************************
MIN-MAX ANGLES
*************************************************************************/
#dene cCoxaMin -300
#dene cCoxaMax 300
#dene cFemurMin -1050
#dene cFemurMax 750
#dene cTibiaMin -530
#dene cTibiaMax 900
36
Page 37

Hexapod Body-Masse
Die Werte für „BODY DIMENSIONS“ sind für ein Body-Setup von 45° vorgegeben. D.h. die vorderen und hinteren
Beine des Roboters stehen im 45° Winkel, wie in der Abbildung zu sehen, vom Body weg. Wünschen Sie andere
Werte, so ändern Sie die Parameter entsprechend ab. Die Werte werden wieder in 1/10 Grad angegeben.
/*************************************************************************
BODY DIMENSIONS
45° setup
*************************************************************************/
#dene cRRCoxaAngle1 -450
#dene cRMCoxaAngle1 0
#dene cRFCoxaAngle1 450
#dene cLRCoxaAngle1 -450
#dene cLMCoxaAngle1 0
#dene cLFCoxaAngle1 450
Um die Body Offset-Werte zu ermitteln, benutzen Sie folgende Abbildung:
Bild 30
37
Page 38

#dene cRROffsetX -40 // Distance X from center of the body to the Right Rear coxa
#dene cRROffsetZ 100 // Distance Z from center of the body to the Right Rear coxa
#dene cRMOffsetX -55 // Distance X from center of the body to the Right Middle coxa
#dene cRMOffsetZ 0 // Distance Z from center of the body to the Right Middle coxa
#dene cRFOffsetX -40 // Distance X from center of the body to the Right Front coxa
#dene cRFOffsetZ -100 // Distance Z from center of the body to the Right Front coxa
#dene cLROffsetX 40 // Distance X from center of the body to the Left Rear coxa
#dene cLROffsetZ 100 // Distance Z from center of the body to the Left Rear coxa
#dene cLMOffsetX 55 // Distance X from center of the body to the Left Middle coxa
#dene cLMOffsetZ 0 // Distance Z from center of the body to the Left Middle coxa
#dene cLFOffsetX 40 // Distance X from center of the body to the Left Front coxa
#dene cLFOffsetZ -100 // Distance Z from center of the body to the Left Front coxa
Die nun folgenden Parameter sind etwas schwieriger einzustellen und müssen teils experimentell ermittelt werden,
bis der korrekte Wert gefunden ist.
Der Paramter „cHexInitXY“ gibt den Anstand von Drehpunkt des Coax-Servos zum Bein-Auftrittpunkt an.
Bild 31
Abbildung (XZ) gibt den Abstand vom Coax-Servo-Drehpunkt zum Bein-Ende wieder.
Die Werte „cHexInitXZCos45“ und „cHexInitXZSin45“ werden aus dem Wert „cHexInitXZ“ ermittelt. Wenn Sie eine
andere Beinkonstellation verwenden möchten (z.B. dass die vorderen und hinteren Beine nicht wie hier vorgegeben
im 45° Winkel stehen sondern z.B. im 60° Winkel), so ändern Sie cos(45) und sin(45) auf den entsprechenden Winkel
z.B. 60 ab.
38
Page 39

/*************************************************************************
START POSITIONS FEET -> nach dem Aufstehen!
*************************************************************************/
#dene cHexInitXZ 110 // 110 distance Coax servo to Tibia end (ground contact)
#dene cHexInitXZCos cos(45) * cHexInitXZ
#dene cHexInitXZSin sin(45) * cHexInitXZ
#dene cHexInitY 35 // Center Femur servo after start!
Der Paramter „MAX_BODY_Y“ gibt die maximale Höhe die der Body erreichen kann an. Je nach Bein-Abmessungen
können Sie hier die Werte „g_abHexIntXZ“ und „g_abHexMaxBodyY“ noch anpassen.
Die drei Parameter bei „g_abHexIntXZ“ sind der Abstand vom Drehpunkt Coax-Servo zu den Bein-Enden, die am
Boden stehen. Wird der Wert vergrößert, so gehen beim Erhöhen die Beine weiter weg vom Body. Die Angabe der
Werte erfolgt in Millimetern! Es ist vom Vorteil wenn die Beine nicht zu weit vom Körper weg zeigen, sondern näher
an den Körper sind, da hierdurch die Hebelwirkung auf die RC-Servos verringert wird!
/*************************************************************************
Lets try some multi leg positions depending on height settings
*************************************************************************/
#dene CNT_HEX_INITS 3
#dene MAX_BODY_Y 135 // max body height
#ifdef DEFINE_HEX_GLOBALS
const byte g_abHexIntXZ[] PROGMEM = {cHexInitXZ, 125, 125};
const byte g_abHexMaxBodyY[] PROGMEM = {35, 50, MAX_BODY_Y};
#else
extern const byte g_abHexIntXZ[] PROGMEM;
extern const byte g_abHexMaxBodyY[] PROGMEM;
#endif
Alle anderen Werte in dieser Datei müssen Sie nicht anpassen.
39
Page 40

19. Firmware übertragen
Lesen Sie vor dem ersten Übertragen das Kapitel „Steuern mit dem Gamepad“, sofern Sie mit der Bedienung noch
nicht vertraut sind.
Danach können Sie das Programm mit den neuen Parametern auf das Hexapod Roboter-Board übertragen. Sofern
noch nicht alle Werte 100% stimmen, passen Sie die Werte weiter an Ihren Hexapod Body an.
Prüfen Sie vor dem Übertragen und Einschalten des Hexapod Roboter-Boards noch Folgendes:
• Sind alle RC-Servos richtig angeschlossen (Polung)?
• Sind alle RC-Servos mechanisch in der Mitte?
• Ist der PS2-Controller angeschlossen?
• Ist die Stromversogung ausreichend?
• Steht genügend Fläche für den Roboter auch bei einem Fehlverhalten zur Verfügung?
Bedingt durch die Zahnung der Ruderhörner der RC-Servos stehen die Beine nach dem Zusammenbau
mechanisch nicht 100% gerade. Lesen Sie dazu das Kapitel „Hexapod kalibrieren“, bevor Sie die Werte
weiteranpassen.MitderKalibrierungkönnenSiedieBeineexaktaufdieGrundkongurationjustieren.Erst
danach macht es Sinn, die Parameter weiter anzupassen!
40
Page 41

20. Steuern mit dem Gamepad
Nachdem Sie die „Motion-Firmware“ auf den Locomotion-Controller übertragen haben, können Sie den Roboter mit
dem Gamepad steuern.
Bild 32
Schnellstart:
• Trennen Sie die Stromversorgung vom Hexapod Roboter-Board.
• Schalten Sie das Gamepad mit dem Schalter (6) ein. Die LED (12) „Grün“ und LED „Rot“ blinken.
• Stecken Sie das Hexapod Roboter-Board an der Stromversorgung (Akku) an. LED (12) „Grün“ und LED „Rot“
leuchten nach ein paar Sekunden dauerhaft. Der Sender ist nun mit dem Empfänger verbunden.
• Drücken Sie die Taste „START“ (15). Der Roboter piepst und die rote „USER-LED“ auf dem Hexapod RoboterBoard leuchtet dauerhaft.
• Schalten Sie den Roboter mit der Taste (3) ein. Der Roboter piepst und die blaue „LIVE-LED“ blinkt.
• Lassen Sie den Roboter mit der Taste (1) aufstehen.
• Bewegen Sie den Roboter mit den Daumenjoystick (7) vor/zurück und links/rechts. Mit dem Daumenjoystick (5)
können Sie den Roboter auf der Stelle wenden.
41
Page 42

Ausführliche Beschreibung der Gamepad-Funktionen:
1 Roboter aufstehen und hinsetzen lassen (Toggle Funktion)
2 System-Reset
3 Roboter ein-/ausschalten, nachdem das Gamepad mit (15) aktiviert wurde
4 Balance-Mode ein-/ ausschalten
5 Daumenjoystick rechts (auf der Stelle drehen, im Rotate- und Translate-Mode drehen und Höhe des Roboters
ändern)
6 Gamepad ein-/ausschalten
7 Daumenjoystick links (vorwärts/rückwärts, im Rotate- und Translate-Mode Body vor/zurück sowie seitliche
Bewegung)
8 D-Pad auf/ab stellt die Höhe des Roboters ein (auf = höher, ab = niedriger)
9 D-Pad links/rechts stellt die Laufgeschwindigkeit ein (links = langsamer, rechts = schneller)
10 Obere Taste = Translate-Mode
11 Untere Taste = Rotate-Mode
12 Die LEDs zeigen die Stromversorgung und die Verbindung zum Empfänger an
13 Gangart auswählen (Tripod-6, Tripod-8, Tripple-12, Tripple-16, Ripple-12, Wave-24). Bei jedem erneuten
Betätigen des Tasters wird die Gangart, wie in der Liste beschrieben, durchgeschaltet. Beginnt die Liste von vorne
(Tripod-6), so wird dies mit einer anderen Tonfolge durch das Hexapod Roboter-Board signalisiert
14 Ohne Funktion
15 Gamepad aktivieren
16 Aktiviert doppelte Schritthöhe
17 Aktiviert doppelte Schrittweite
Alle Taster mit Toggle-Funktion (erneutes Betätigen wechselt den Zustand) lassen das Hexapod Roboter-
Board in unterschiedlicher Tonfolge piepen. Drücken Sie die Taste zum ersten Mal, so quittiert das Hexapod Roboter-Board dies mit einem Piepton und beim erneuten Betätigen (Urzustand) mit einen Tonfolge.
Sokönnen Sieleichtherausnden, inwelchem Zustand sichder Roboter bendet.Nach Ertönen der
Tonfolge ist der immer der Urzustand (Startzustand) aktiv.
42
Page 43

21. Beine kalibrieren
Um die Beine genau einzustellen, verwenden Sie das Programm „Terminal“, welches Sie im Ordner „Terminal“ im ent-
packtenDownload-Bundlenden.DasZielistes,dieBeineaufeinegenaueGrundkongurationeinzustellen.Beim
Zusammenbau der Mechanik werden Sie die Beine aufgrund der Zahnung der Servohörner und der mechanischen
Toleranzennichtzu 100% in die Grundkonguration bringen können. Mit Hilfe desToolskönnenSiedieseFehler
ausgleichen.
Bild 33
• Starten Sie das Programm mit der Datei „Terminal.exe“ und führen Sie die Kalibrierung durch. Stellen Sie den
Roboter zuvor auf eine Erhöhung, so dass sich die Beine frei in der Luft bewegen können. Eine stabile Schachtel
kann z.B. als Erhöhung dienen.
• Verbinden Sie das Hexapod Roboter-Board (PRG-M Anschluss) mit Ihrem Computer, wie bereits beim Aufspielen
der Firmware durchgeführt.
• Schließen Sie den Akku am Hexapod Roboter-Board an.
• Starten Sie das Programm „Terminal.exe“.
• Wählen Sie jetzt den seriellen Anschluss aus (gleicher Anschluss wie bei der Programmierung). Klicken Sie dazu
auf „Select Port“. Falls mehr als ein Gerät angezeigt wird, so stecken Sie die Hauptplatine einfach kurz aus und
wieder am USB-Anschluss an. Das Gerät, welches dann kurz verschwunden war, ist das richtige.
43
Page 44

• Wählen Sie unter „Baudrate“ 38400 Baud aus.
• Klicken Sie auf „Connect“. Der Roboter meldet im Terminalfenster, wie in Bild 33 gezeigt.
• Klicken Sie auf „Servo offset mode“, um in den Kalibriermodus zu gelangen.
• Der Roboter „wackelt“ nun mit dem RC-Servo, das zum Einstellen ausgewählt ist.
• Durch mehrmaliges Klicken auf „+“ und „-“ können Sie in kleinen Schritten das ausgewählte RC-Servo exakt ein-
stellen.
• Haben Sie das RC-Servo fertig eingestellt, so können Sie mit einem Klick auf „Next“ das nächste RC-Servo einstel-
len,bisSiealle18Servoseingestellthaben.SiekönnenauchmiteinenKlickaufdieSchaltächen„LegRR“,„Leg
RM“, „Leg RF“, „Leg LR“, „Leg LM“ und „Leg LF“ gezielt ein Bein auswählen.
• Sind alle RC-Servos eingestellt, so klicken Sie auf „Exit“. Das Programm fragt nun, ob die Einstellungen gespeichert werden sollen. Klicken Sie auf „Yes“ um die Einstellungen zu speichern oder „No“ um die Einstellungen zu
verwerfen.
• Mit „Clear Terminal“ können Sie den Inhalt des Terminalfensters löschen.
44
Page 45

MAC und Linux
Sofern Sie einen MAC oder Linux benutzen, können Sie das Terminal nicht nutzen. Sie können jedoch die Beine
trotzdem einstellen, indem Sie ein anderes Terminal-Programm Ihrer Wahl nutzen. Am einfachsten ist es, hier das
Arduino Terminal zu nutzen. Dieses können Sie in der Arduino IDE aufrufen.
Bild 34
Die Abbildung zeigt das Arduino-Terminal, nachdem sich das Terminal mit dem Hexapod Roboter-Board verbunden
hat.
Gehen Sie wie folgt vor:
• Verbinden Sie das Hexapod Roboter-Board (PRG-M Anschluss) mit Ihrem Computer, wie bereits beim Aufspielen
der Firmware durchgeführt.
• Schließen Sie den Akku am Hexapod Roboter-Board an.
• Starten Sie das Terminal-Programm.
• Sofern Sie ein anderes Terminal verwenden als das Arduino-Terminal, wählen Sie den seriellen Anschluss aus
(gleicher Anschluss wie bei der Programmierung).
• Wählen Sie als Baudrate 38400 Baud aus. Kein LF und CR bzw. im Arduino-Terminal „No line encoding“.
• Verbinden Sie das Terminal mit dem Roboter. Der Roboter meldet im Terminalfenster, wie in der Abbildung gezeigt.
Das Arduino-Terminal verbindet sich sofort nach dem Öffnen!
• Drücken Sie einmal den Taster „RESET-M“ auf dem Hexapod Roboter-Board. Dies ist bei der Verwendung des
Arduino-Terminals nicht nötig.
• Im Terminalfenster erscheint folgender Text.
PS2 Init: 0
C-Control Hexapod Monitor
O - Enter Servo offset mode
45
Page 46

• Senden Sie ein „O“ an das Hexapod Roboter-Board, indem Sie „O“ in die Sendezeile schreiben und danach Enter
drücken. Der Roboter „wackelt“ nun mit dem RC-Servo, das zum Einstellen ausgewählt ist.Die Zeichen können
klein oder groß geschrieben werden („o“ als auch „O“ ist möglich). Danach erscheint im Terminal folgende Meldung:
Serial Cmd Line:o<eol>
Find Servo Zeros.
$-Exit, +- changes, *-change servo
0-5 Chooses a leg, C-Coxa, F-Femur, T-Tibia
Servo: RR Coxa(0)
Mit „$“ verlassen Sie die Kalibrierung -> Exit
Mit „+“ oder „-“ können Sie in kleinen Schritten das ausgewählte RC-Servo exakt einstellen. Die Zeichen müssen
so oft an das Hexapod Roboter-Board gesendet werden, bis das Bein richtig justiert ist.
Mit „*“ wählen Sie das nächste RC-Servo aus.
Mit einer Zahl von 0 bis 5 können Sie Beine einzeln anwählen.
0 = Leg RR
1 = Leg RM
2 = Leg RF
3 = Leg LR
4 = Leg LM
5 = Leg LF
• Sind alle RC-Servos eingestellt, senden Sie ein „$“ Zeichen. Das Programm fragt nun, ob die Daten gespeichert
werden sollen. Senden Sie „y“ für speichern oder „n“, um die Einstellungen zu verwerfen.
Wenn alle Beine fertig kalibriert sind, können Sie den Roboter mit dem Gamepad steuern. Im Gamepad-Modus ist der
Roboter wie ein RC-Modell zu betrachten, das mit einer Funkfernsteuerung ferngesteuert wird.
Möchten Sie jedoch mehr aus Ihrem Hexapod-Roboter herausholen, so lesen Sie das nächste Kapitel über die
Nutzung der User-Boards durch. Damit haben Sie die einfache Möglichkeit, eigene Programme zum Steuern des
Roboters mit Hilfe der C-Control Hexapod-Bibliothek zu schreiben.
Es kann sein, dass Sie diesen Vorgang nach einiger Zeit nochmals durchführen müssen. Grund hierfür ist,
dass die RC-Servos nach einer gewissen Betriebszeit ein größeres Getriebespiel bekommen und sich die
erste Kalibrierung nicht mehr als ideal erweist.
46
Page 47

22. Verwenden von User-Boards
Das Hexapod Roboter-Board kann mit verschiedenen User-Boards ausgestattet werden, um die Funktionalität zu
erweitern. Mögliche User-Boards sind z.B. Arduino UNO, NodeMCU oder kompatible Boards. Diese können direkt auf
das Roboter-Board aufgesteckt werden.
Mit der im nächsten Kapitel beschriebenen Software-Bibliothek können Sie vom User-Board an den LocomotionController Steuerbefehle senden oder Werte vom Locomotion-Controller lesen. Dazu aber später mehr im nächsten
Kapitel „Demo Programme“.
Arduino UNO
Stecken Sie ein „Arduino UNO“ Board auf das Hexapod Roboter-Board wie in der folgenden Abbildung zu erkennen.
Gehen Sie dabei vorsichtig vor und achten Sie darauf, dass beim Aufstecken die längeren Stiftleisten, welche in die
Buchsen des „Arduino UNO“ Boards gesteckt werden, nicht verbogen werden. Achten Sie auch darauf, dass alle
Stiftleisten-Pins in die Buchsen des „Arduino UNO“ Boards eingesteckt wurden.
Nach dem Aufstecken des Boards können Sie direkt zum Kapitel „Demo Programme“ springen.
Bild 35
Die Abbildung zeigt ein aufgestecktes „Arduino UNO“ Board. Es ist möglich, fast alle Arduino UNO kompatiblen
Boards zu verwenden.
47
Page 48

NodeMCU WiFi Board
Das WiFi-Board mit der Bezeichnung „NodeMCU“ und dem verwendeteten ESP8266 WiFi Chip kann auf dem inneren
Steckplatz als User-Board verwendet werden.
Wenn Sie das Hexapod Roboter-Board mit WiFi erweitern möchten, können Sie dies ganz leicht mit Hilfe dieses
User-Boards tun. In den Beispielen sind bereits Programme für das NodeMCU Board enthalten, die die Steuerung
von einem Webbrowser aus zeigen.
Stecken Sie ein NodeMCU Board auf das Hexapod Roboter-Board wie in der folgenden Abbildung zu erkennen.
Gehen Sie dabei vorsichtig vor und achten Sie darauf, dass beim Aufstecken die Stiftleisten nicht verbogen werden
und alle Pins richtig eingesteckt sind.
Nach dem Aufstecken des Boards können Sie direkt zum Kapitel „Demo Programme“ springen.
Bild 36
Die Abbildung zeigt ein aufgestecktes NodeMCU Board.
Achten Sie beim Kauf darauf, dass der Abstand der Stiftleisten stimmt! Es gibt zwei verschiedene Versi-
onen auf dem Markt. Eine besitzt als USB-Chip einen Silabs CP2102,die andere Version einen CH340G.
Die Version mit dem CH340G hat einen breiteren Pinabstand und passt nicht in das Hexapod RoboterBoard! Das zu verwendende NodeMCU Board muss einen Stiftleistenabstand von 23 mm besitzen.
Bild 37
48
Page 49

Single-Board-Computer (SBCs) und andere Boards
Das Hexapod Roboter-Board bietet die Möglichkeit über Platinenabstandshalter einen SBC wie z.B. einen Raspberry
Pi 2/3 oder kompatible zu montieren. SBC mit einem anderen Lochabstand lassen sich mit einer selbstgebauten Adapterplatine leicht montieren. Hier bietet das Hexapod Roboter-Board genügend Spielraum für eigene Erweiterungen.
Die abgebildete Stiftleiste neben dem „ISP-U“ Anschluss ist ein universeller Anschlussport für SBC oder eigene Erweiterungen. Verwenden Sie für die Verdrahtung zwischen dem SBC und dem Hexapod Roboter-Board am besten
sogenannte „Jumpwire“.
Bild 38
Pinbeschreibung:
3,3V 3,3 V/DC Versorgungseingang für die internen Pegelwandler des Hexapod Roboter-Boards (hier 3,3 V
SCL I²C Taktleitung (hier SCL vom SBC anschließen, der I²C-Bus steht dann an den Buchsen J2 und J3 zur
SDA I²C Datenleitung (hier SCL vom SBC anschließen, der I²C-Bus steht dann an den Buchsen J2 und J3
GND Ground (Minuspol).
VCC Ausgang +5 V/DC, 1000 mA vom Spannungsregler
TXDU UART Sendeleitung vom Locomotion-Controller (hier die UART des SBC anschließen).
RXDU UART Empfangsleitung vom Locomotion-Controller (hier die UART des SBC anschließen).
SU1 - SU3 Diese Anschlüsse führen direkt zu der Stiftleiste SU1, SU2, SU2. Diese Pins können z.B. für RC-
T1 und T2 Diese Pins sind mit den Tastern T1 und T2 verbunden. Die Taster sind extern mit Pull-Up Widerständen
GND Ground (Minuspol).
vom SBC anschließen). Verwenden Sie ein Board mit 5 V Pegel, dann schließen Sie hier 5 V statt den
3,3 V an. Hier die jeweilige Versorgungsspannung anschließen!
Verfügung).
zur Verfügung).
Servos oder digitale Signale frei verwendet werden.
versehen und liefern ein High-Signal, wenn diese nicht betätigt sind. Die Pull-Up Widerstände können
mit den Platinen-Jumpern SJ6 und SJ7 deaktiviert werden.
49
Page 50

Bild 39
Die Abbildung zeigt den Muster-Hexapoden und einen auf 3 Platinen-Abstandshaltern mit 25 mm Länge montierten
Raspberry Pi 2. Die Bohrungen zur Befestigung sind bereits im Hexapod Roboter-Board vorhanden. Die Verbindung
zwischen Raspberry Pi und Hexapod Roboter-Board wurde mittels Steckbrücken (Jumpwire) hergestellt. Die Kabel
der Steckbrücken wurden unter dem Raspberry Pi untergebracht, um eine saubere Verdrahtung zu erhalten.
Eskannvorkommen,dassderSBCsehrempndlichaufSpannungsschwankungenreagiertundeinsiche-
rer Betrieb über den Akku, der auch die Bein-Servos versorgt, nicht möglich ist. Wir empfehlen in diesem
Fall den SBC über eine kleine separate Powerbank zu versorgen. Hier reicht in der Praxis eine Akkukapazität der Powerbank von 2000 - 3000 mAh aus, um den SBC so lange zu versorgen, bis der Hexapod-Akku
leer ist. Teils reicht es auch aus, die Stromversorgung direkt am SBC mit einem großen Kondensator
2200 µF (oder mehr) zu stützen. Grund für den instabilen Betrieb kann ein zu kleiner Akku mit hohem
Innenwiderstand sein, oder RC-Servos mit sehr hohem Strombedarf bzw. großen Stromspitzen.
50
Page 51

23. Demo-Programme
Um die User-Boards einfach und komfortabel zu verwenden, nutzen Sie die C-Control Hexapod Bibliothek. Diese
wurde bereits am Anfang dieser Anleitung installiert. Die mitgelieferten Beispiele zeigen die Verwendung der UserBoards und die Funktionalität der Arduino Hexapod Bibliothek.
Bei der Verwendung von User-Boards, welche nicht Arduino kompatibel sind (wie z.B. SBC) sehen Sie
sich die „Hexapod_Lib.h“ Datei an. In dieser wird gezeigt, wie die Kommunikation zwischen dem UserBoard und dem Locomotion-Controller funktioniert. Diese soll Ihnen als Beispiel zum Entwickeln einer
eigenen Funktionsbibliothek dienen. Entpacken Sie dazu die ZIP-Datei „C-Control-Hexapod.zip“ aus dem
Download-Bundle und sehen Sie sich den Quellcode der Bibliothek in einem Editor wie Notepad oder einer
Entwicklungsumgebung Ihrer Wahl an.
Die mitgelieferten Beispiele sind für „Arduino UNO“ und „NodeMCU“ Boards, die mit der Arduino IDE
programmiert werden, ausgelegt.
Bild 40
Die Arduino-Beispiele zeigen, wie die Bibliothek zu verwenden ist. Diese nden Sie in der Arduino IDE unter
„Examples\C-Control-Hexapod\...“.SehenSiesichinRuhealleBeispieleanundtestenSiedieseaufIhremHexapo-
den. Wenn Sie die Beispiele verstanden haben, können Sie loslegen und eigene Programme damit erstellen. Sehen
Sie sich dazu auch die „Hexapod_Lib.h“ genauer an. Diese können Sie mit etwas Erfahrung sehr leicht mit eigenen
Funktionen erweitern.
51
Page 52

Kurzbeschreibung der mitgelieferten Beispiele (Locomotion):
ImOrdner„Locomotion“ndenSiedieBeispielefürdenLocomotion-Controller(ArduinoMEGA2560).
LEDs
Kleines Testprogramm, das die beiden LEDs (User und Live) abwechselnd blinken lässt.
Motion-Firmware
Firmware des Locomotion-Controllers.
ServoCenter
Dieses Programm bringt die RC-Servos in die Mittelstellung. Wird zum mechanischen Zusammenbau des HexapodRoboters benötigt.
Kurzbeschreibung der mitgelieferten Beispiele (User-Boards):
ImOrdnerUser-BoardsndenSiedieBeispielefürArduinoUNOundNodeMCUbzw.kompatibleBoards.
Stellen Sie vor der Verwendung die Arduino IDE auf das richtige Arduino-Board um! Lesen Sie auch die
Informationen in den Kommentaren zu den jeweiligen Beispielen!
CardInfo
Dieses Beispiel ist nur für Arduino UNO bzw. kompatible Boards!
Sie können mit diesem Beispiel die Funktion des µSD-Karten Lesers prüfen. Stecken Sie dazu eine MicroSD-Speicherkarte mit willkürlichem Inhalt in den Kartenslot und starten Sie das Beispiel. Im Terminal wird Ihnen der Inhalt der
Speicherkarte angezeigt (Dateinamen). Es funktionieren alle original Arduino SD-Karten Beispiele. Es muss dabei nur
der Pin für „CS“ (Chipselect) wie in diesem Beispiel abgeändert werden. Die Terminal-Baudrate beträgt 19200 Baud.
EspMoveAP
Dieses Beispiel ist nur für NodeMCU Boards!
Das Beispiel zeigt die Steuerung über einen HTTP-Server über eine direkte WiFi-Verbindung zum NodeMCU Board.
Das Programm baut einen Access-Point auf, mit dem Sie sich z.B. mit einem Smartphone verbinden können. Die
vergebene IP-Adresse wird im Terminal ausgegeben. Diese tippen Sie in Ihren Browser ein. Danach lädt dieser die
WeboberächezumSteuerndes Roboters. Sie könnendanndurchAntippen oderKlicken derSchaltächen den
Roboter über WiFi steuern. Das Beispiel kann leicht von Ihnen auf weitere Funktionalitäten erweitert werden. Die
Terminal-Baudrate beträgt 115200 Baud.
EspMoveWiFi
Dieses Beispiel ist nur für NodeMCU Boards!
Das Beispiel zeigt die Steuerung über einen Webbrowser über eine WiFi-Verbindung zum NodeMCU Board. Das
Programm baut eine Verbindung zu Ihrem Router auf und der Roboter ist dann innerhalb Ihres Netzwerkes erreichbar.
Die vergebene IP-Adresse wird im Terminal ausgegeben. Diese tippen Sie in Ihren Browser ein. Danach lädt dieser
dieWeboberächezumSteuerndesRoboters.SiekönnendanndurchAntippenoderKlickenderSchaltächenden
Roboter über WiFi steuern. Das Beispiel kann leicht von Ihnen auf weitere Funktionalitäten erweitert werden. Die
Terminal-Baudrate beträgt 115200 Baud.
52
Page 53

Infrared
Dieses Beispiel ist nur für Arduino UNO bzw. kompatible Boards!
Das Beispiel liest einen RC5 Infrarot-Code aus und gibt die Werte am Terminal aus. Stecken Sie den Jumper J8 dazu
in Richtung der Beschriftung „IR-U“. Als IR-Sender kann eine Universalfernbedienung dienen, die auf RC5 eingestellt
wurde (viele Philips-Geräte arbeiten mit RC5), welche für TV und Audiogeräte im Handel erhältlich sind. Die TerminalBaudrate beträgt 19200 Baud.
Moving_01
Dieses Beispiel zeigt, wie Daten ohne die „Hexapod Bibliothek“ an den Locomotion-Controller gesendet werden.
Dieses Beispiel eignet sich gut als Grundlage für die Verwendung von SBC. Es sollte jedoch bereits Erfahrung in der
Programmierung vorhanden sein! Sehen Sie sich dazu die Funktion SendData() genauer an. Hier sehen Sie, wie
Daten vom User-Board an den Locomotion-Controller gesendet werden.
Moving_02
Dieses Beispiel ist ideal für den Einstieg in die Programmierung der User-Boards und zeigt die Grundfunktionen, um
den Hexapod mit Hilfe der Bibliothek zu steuern.
Moving_03
Dieses Beispiel zeigt die Verwendung der ROBOT_MOVE() Funktion.
Moving_04
Dieses Beispiel zeigt die Verwendung der ROBOT_ROTATE_MODE() und ROBOT_TRANSLATE_MODE() Funktion.
Moving_05
Dieses Beispiel zeigt die Verwendung der ROBOT_SINGLE_LEG() Funktion.
Moving_06
Dieses Beispiel zeigt, wie ein User-Programm mit Hilfe des Gamepads unterbrochen werden kann. Verwenden Sie
bei diesem Beispiel das Terminal, um die Meldungen vom Roboter zu erhalten. Stellen Sie dazu den Roboter auf
eine Erhöhung, so dass sich die Beine in der Luft bewegen, ohne den Boden zu berühren. So haben Sie die Möglichkeit, die Ausgaben beim Steuern des Roboters auf dem Terminal zu beobachten. Die Terminal-Baudrate beträgt
115200 Baud.
ReadGamepad
Das Beispiel zeigt, wie Sie die Steuerdaten des Gamepads vom Locomotion-Controller lesen können. Wenn Sie den
Jumper „J7“ aufstecken, reagiert der Locomotion-Controller nicht mehr auf das Gamepad. Es ist dann möglich, die
Daten nur auf dem User-Board zu verwenden und eigene Steuerungen zu realisieren. Die Terminal-Baudrate beträgt
115200 Baud.
ReadValues_01
Das Beispiel zeigt, wie Sie Daten zwischen Locomotion-Controller und User-Board ohne Bibliothek senden und einlesen können. Dieses Beispiel eignet sich gut als Grundlage für die Verwendung von SBC. Es sollte jedoch bereits
Erfahrung in der Programmierung vorhanden sein! Die Terminal-Baudrate beträgt 115200 Baud.
ReadValues02
Dieses Beispiel zeigt, wie Daten vom Locomotion-Controller mit Hilfe der Bibliothek eingelesen werden. Die TerminalBaudrate beträgt 115200 Baud.
53
Page 54

Servo
Das Beispiel zeigt die Verwendung von zusätzlichen RC-Servos, welche über das User-Board gesteuert werden. Es
werden die Anschlüsse SU1 bis SU3 dazu verwendet. Es ist auch möglich, die Anschlüsse SU1 bis SU3 für andere
Komponenten wie Sensoren, Taster, Schalter etc. zu verwenden. Die Terminal-Baudrate beträgt 115200 Baud.
Sound
Das Beispiel zeigt eine einfache Tonausgabe über den Lautsprecher.
Switches
Das Beispiel zeigt wie, die User-Taster T1 und T2 abgefragt werden.
Talkie
Talkie zeigt, wie eine Sprachausgabe mit Hilfe der Talkie-Bibliothek realisiert werden kann. Talkie ist eine Implementierung des Texas Instruments Sprachsynthesizers ICs auf einem Arduino Board. Dieses IC wurde in den frühen 80igern
sehr oft verbaut. Man fand diese Sprachausgabe oft in teuren Uhren, Spiele-Computern, Lerncomputern und vielen
anderen Geräten. Der unverwechselbare Sound aus den 80igern ist damit auch auf dem Hexapod Roboter-Board
verfügbar. Es sind in den Beispielen über 1000 vorgefertigte Phrasen enthalten, die zu Sätzen zusammengebaut
werden können. Sollte Ihnen die Sprachausgabe zu leise sein, so können Sie die Lautstärke am Trimmer „Vol.“ auf
dem Hexapod Roboter-Board erhöhen. Zudem können Sie noch eine kleine „Lautsprecherbox“ für den Lautsprecher
bauen, dies erhöht die Lautstärke deutlich! Eine einfache kleine Schachtel kann hier wahre Wunder bewirken.
WriteOUT1
Dieses Beispiel zeigt, wie Sie die Aus-/Eingänge IN1 und OUT1 des Locomotion-Controllers lesen und schreiben
können. Sie erhalten somit einen zusätzlichen Ein- und Ausgang zum User-Board. Die Pins sind direkt mit dem
Locomotion-Controller verbunden und können maximal 20 mA Strom liefern. Die maximale Eingangsspannung für
den Eingang beträgt 5 V/DC!
54
Page 55

24. FAQ
Fehler beim Kompilieren der Beispiele
Sollte es zu Problemen beim Kompilieren der Firmware kommen: Die zur Verfügung gestellte Firmware sowie die
Beispiele wurde mit der Arduino Version 1.8.3 entwickelt. Alternativ laden Sie diese unter www.arduino.cc herunter!
Tonausgabe zu leise
Prüfen Sie die Einstellung des Trimmers „Vol.“. Bauen Sie sich einen kleine „Lautsprecherbox“ zum Hexapod Roboter-Board Lautsprecher. Diese erhöht die Lautstärke und verbessert den Klang erheblich.
Es kommt keine Kommunikation mit SPI Geräten und dem User-Board zustande
Setzen Sie den Chip Select (CS) Pin des User-Boards auf „High“ und überprüfen Sie Ihre Anschlüsse am ISP-U
Anschluss und ob die verwendete SPI Komponente mit Strom versorgt wird.
const int chipSelect = 8;
pinMode(chipSelect,OUTPUT);
digitalWrite(chipSelect,HIGH);
Das Gampad verbindet sich nicht
• Überprüfen Sie die Akkus im Sender.
• Ist der Empfänger richtig am Hexapod Roboter-Board angeschlossen?
• Ist die „Motion-Firmware“ auf das Hexapod Roboter-Board aufgespielt?
• Trennen Sie die Stromversorgung des Hexapod Roboter-Boards, schalten Sie das Gampad ein und stellen danach
die Verbindung zur Stromversorgung des Hexapoden wieder her (Akku anstecken).
• Ist das Gamepad PS2-kompatibel?
Der Roboter reagiert nicht auf das Gamepad
• Überprüfen Sie die Akkus im Sender.
• Ist der Empfänger richtig am Hexapod Roboter-Board angeschlossen?
• Ist die „Motion-Firmware“ auf den Hexapod Roboter-Board aufgespielt?
• Trennen Sie die Stromversorgung des Hexapod Roboter-Boards, schalten Sie das Gampad ein und stellen danach
die Verbindung zur Stromversorgung des Hexapoden wieder her (Akku anstecken).
• Ist das Gamepad PS2-kompatibel?
• Ist der Jumper J7 abgezogen?
55
Page 56

Der Roboter läuft nicht sauber
• Sind alle Parameter richtig eingestellt?
• Wurden die Beine kalibriert?
• Sind die Akkus ausreichend stark und geladen?
• Sind die verbauten RC-Servos ausreichend stark?
• Ist der Roboter zu schwer?
• Sind die RC-Servos vor dem Einbau in Mittelstellung gestellt worden?
• Rutschen die Beine auf dem Untergrund?
• Sind alle Schrauben festgezogen?
• Wackelt die Mechanik?
• Ist die Mechanik zu schwergängig?
Wo nde ich den Schaltplan?
DerSchaltplanbendetsichimOrdner„Schematic“imDownload-Bundlebzw.kannunterwww.conrad.com heruntergeladen werden.
Der Roboter führ nach dem Einschalten bzw. aufstehen einen Reset durch.
• Vergewissern Sie sich, dass der voll Akku geladen ist.
• Ist das Anschlusskabel des Akkus zu dünn (< 1,5 mm²) oder länger als 20 cm?
• Ist der Akkustecker sauber angelötet?
• Ist der Akku zu klein gewählt, dann kann er den nötigen Betriebsstrom für die RC-Servos nicht liefern.
• Blockiert ein oder mehrere Servos?
• Bewegt sich die Mechanik zu schwergängig?
56
Page 57

25. Pinzuweisung der User-Boards
Locomotion-Controller (ATmega2560)
Port Arduino
S0 PB6 12
S1 PE3 5
S2 PE4 2
S3 PE5 3
S4 PH0 17
S5 PH1 16
S6 PH3 6
S7 PH4 7
S8 PH5 8
S9 PA3 25
S10 PA4 26
S11 PA5 27
S12 PC4 33
S13 PC3 34
S14 PC2 35
S15 PC1 36
S16 PC0 37
S17 PG1 40
SA0 PF0 A0
SA1 PF1 A1
SA2 PF2 A2
SA3 PF4 A4
SA4 PF5 A5
SA5 PF6 A6
PS2_DAT PA6 28
PS2_CMD PC7 30
PS2_SEL PC5 32
PS2_CLK PC6 31
IR PJ0 15
UB-MESS PF3 A3
SOUND PL3 46
Jumper J7 PG5 4
IN1 PA2 24
OUT1 PA1 23
RxD-U PDs/RxD1 Serial1
TxD-U PD3/TxD1 Serial1
LIVE-LED PA0 22
USER-LED PK7 69
Port Arduino
57
Page 58

User-Board Arduino
Port Arduino
T1 ADC2 A2
T2 ADC3 A3
SCK PB5 13
MISO PB4 12
MOSI PB3 11
SS_SD PB0 8
PA PD3 3
IR-DAT PD7 7
SU1 PD6 6
SU2 PD5 5
SU3 PB1 9
RxD_U PD4 4
TxD_U PD2 2
User-Board NodeMCU
Port Arduino
T1 10
T2 ADC0 A0
PA D5 GPIO14
SU1 D6 GPIO12
SU2 D7 GPIO13
SU3 D8 GPIO15
RxD_U D3 GPIO0
TxD_U D4 GPIO2
58
Page 59

26. Reinigung
Äußerlich sollte das Hexapod Roboter-Board nur mit einem weichen, trockenen Tuch oder Pinsel gereinigt werden.
Verwenden Sie auf keinen Fall aggressive Reinigungsmittel oder chemische Lösungen, da sonst die Platine beschädigt werden könnte.
Schützen Sie die Platine vor Schmutz und Feuchtigkeit.
27. Entsorgung
Elektronische Geräte sind Wertstoffe und gehören nicht in den Hausmüll. Entsorgen Sie das Produkt am
Ende seiner Lebensdauer gemäß den geltenden gesetzlichen Bestimmungen.
59
Page 60

28. Technische Daten
Betriebsspannung .............................................4,5 - 10 V/DC
Stromaufnahme nur Roboter-Board ................ca. 80 mA
Anzahl der Servoanschlüsse ...........................18 Locomotion-Controller + 3 User-Board
Programmierung ...............................................Arduino IDE (C/C++)
Programmierschnittstelle ..................................USB
User-Board Steckplätze ....................................3
I2C-Anschlüsse Locomotion-Controller ............2
I2C-Anschlüsse User-Board .............................2
IR-Empfänger (*) ..............................................1x 38 kHz
Audio Verstärker mit Lautsprecher ..................1
MicroSD Kartensteckplatz (*) ...........................1
Locomotion-Controller ......................................1 (Atmel ATmega2560 - Arduino MEGA kompatibel)
Reset-Taster Locomotion-Controller .................1
Reset-Taster User-Board ..................................1
ISP-Anschluss Locomotion-Controller ..............1
ISP-Anschluss User-Board ...............................1
PS2 kompatibler Gamepad Anschluss .............1
Stromversorgung intern ....................................3,3 V/DC und 5 V/DC
Strombelastbarkeit 3,3 V/DC ............................400 mA
Strombelastbarkeit 5 V/DC ...............................1000 mA
Abmessung (L x B x H) .....................................200 x 88 x 23 mm
Platinen-Gewicht nur Platine ............................ca. 100 g
Arbeits-Temperaturbereich ...............................0 °C bis +40 °C
(*) Nur verwendbar in Verbindung des Arduino UNO Steckplatz oder kompatiblen Boards!
60
Page 61

616263
Page 62

Page 63

Page 64

Dies ist eine Publikation der Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
AlleRechte einschließlich Übersetzung vorbehalten.Reproduktionen jederArt, z. B.Fotokopie,Mikroverlmung, oder
die Erfassung in elektronischen Datenverarbeitungsanlagen, bedürfen der schriftlichen Genehmigung des Herausgebers.
Nachdruck, auch auszugsweise, verboten. Die Publikation entspricht dem technischen Stand bei Drucklegung.
Copyright 2018 by Conrad Electronic SE.
1589388_V2_0518_01_VTP_m_de
 Loading...
Loading...