

BRUSHLESS DC MOTOR COMMUTATOR/CONTROLLER
FEATURES:
• Speed Control by Pulse Width Modulation (PWM)
of low-side drivers only.
• Open or closed loop motor speed control.
• +5 to +28 Volt operation (Vss - VDD).
• Externally selectable input to output code for 60°,
120°, 240°, or 300° electrical sensor spacing.
• Three or four phase operation.
• Analog Speed control.
• Forward/Reverse control.
• Output Enable control.
• Positive Static Braking.
• Overcurrent Sensing.
• Six outputs drive switching bridge directly.
DESCRIPTION:
The LS7362 is a monolithic, ion implanted MOS circuit designed to generate the signals necessary to control a three
phase or four phase brushless DC motor. It is the basic
building block of a brushless DC motor controller. The circuit responds to changes at the SENSE inputs, originating
at the motor position sensors, to provide electronic commutation of the motor windings. Pulse width modulation
(PWM) of low-side drivers for motor speed control is accomplished through either the ENABLE input or through
the V TRIP input (Analog Speed control) in conjunction with
the OSCILLATOR input. Overcurrent circuitry is provided
to protect the windings, associated drivers and power supply. The LS7362 circuitry causes the external output drivers to switch off immediately upon sensing the overcurrent
condition, and on again only when the overcurrent condition disappears and the positive edge of either the ENABLE input or the sawtooth OSCILLATOR occurs. This limits the overcurrent sense cycling to the chopping rate of the
ENABLE input or the sawtooth OSCILLATOR. A positive
braking feature is provided to effect rapid deceleration. The
LS7362 is designed for driving Bipolar and Field Effect
Transistors. Because only low-side drivers are pulse width
modulated, the LS7362 is ideally suited in situations where
the integrated circuit interfaces with level converters to
drive high voltage brushless DC motors. By pulse width
modulating the low-side drivers only, the switch losses in
the level conversion circuitry for the high-side drivers is
minimized. Figure 1 indicates how the level conversion is
accomplished.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
LSI
CS1
OUT 1
OUT 2
OUT 3
OUT 4
COMMON
OUT 5
OUT 6
BRAKE
ENABLE
CS2
FORWARD/REVERSE
VDD (-V)
S3
S2
S1
OSCILLATOR
V TRIP
OVERCURRENT SENSE
VSS (+V)
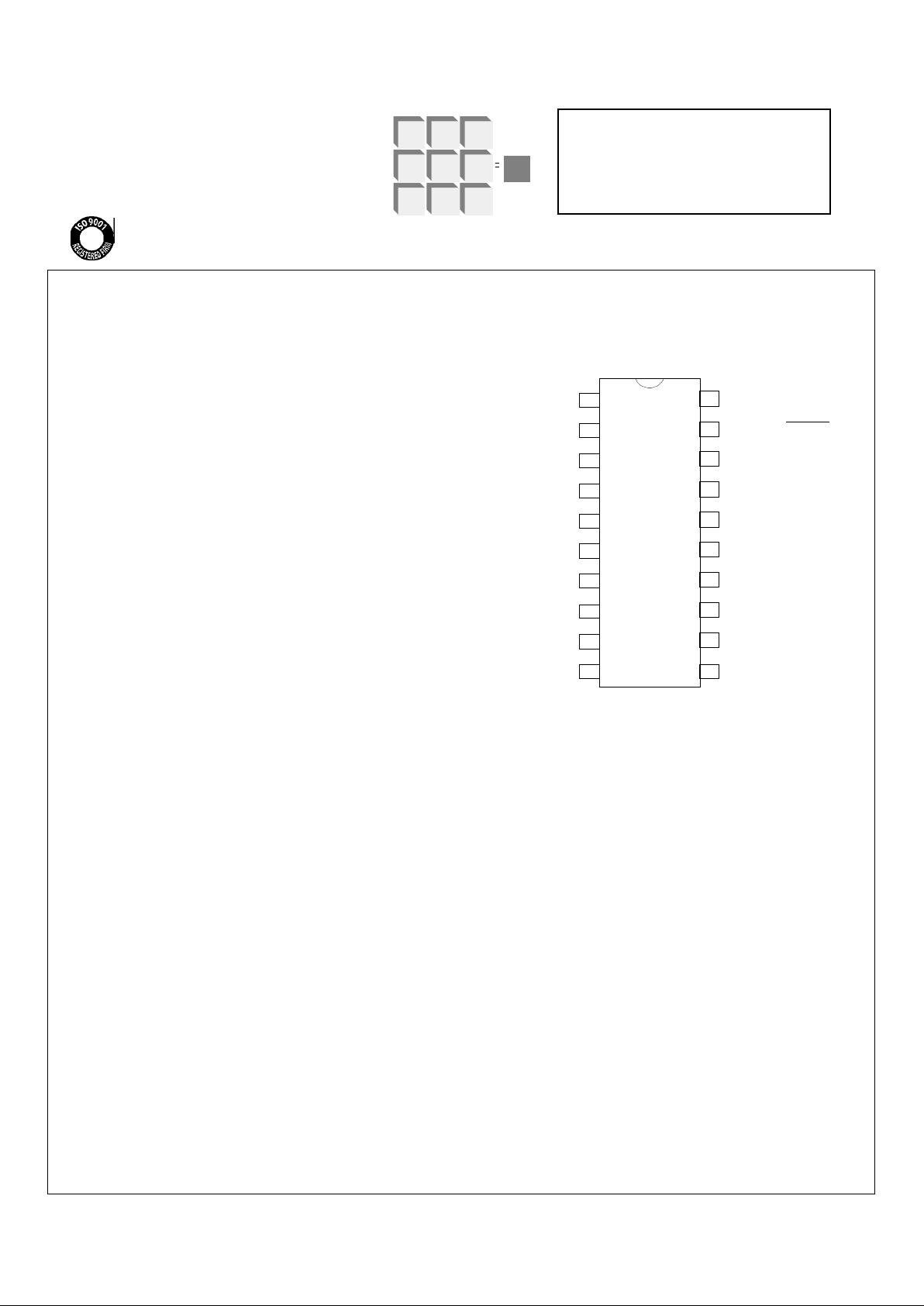
LS7362
CONNECTION DIAGRAM - TOP VIEW
STANDARD 20 PIN PLASTIC DIP
The COMMON, Pin 5, is tied to the positive supply rail
and LS7362 Outputs 1, 2, and 3 are used to drive level
converters Q101, Q102 and Q103 respectively. Only the
motor top side drivers consisting of Q107, Q108 and
Q109 which are connected to the motor power supply,
VM, will be subject to the high speed switching currents
that flow through the motor. The level converters are
turned on and off at the slower commutation rate.
INPUT/OUTPUT DESCRIPTION:
COMMUTATION SELECTS (Pins 1, 20)
These inputs are used to select the proper sequence of
outputs based on the electrical separation of the motor
position sensors. With both inputs low (logic zero), the
sequence is adjusted for 60° electrical separation, with
CS2 high and CS1 low 120° separation sequence is selected, with CS1 high and CS2 low 240° separation sequence is selected and with CS1 and CS2 high the 300°
separation sequence is selected. Note that in all cases
the external output drivers are disabled for invalid
SENSE input codes. Internal pull down resistors are provided at Pins 1 and 20 causing a logic zero when these
pins are left open.
September 1999
7362-041100-1
LSI/CSI
LSI Computer Systems, Inc. 1235 Walt Whitman Road, Melville, NY 11747 (631) 271-0400 FAX (631) 271-0405
LS7362
• LS7362 (DIP); LS7362-S (SOIC);
LS7362-TS (TSSOP) - See Connection Diagram
U
L
®
A3800
FORWARD/REVERSE (Pin 19)
This pin acts to modify the input to output sequence such
that when brought from high to low or low to high the direction of rotation will reverse. An internal pull up resistor is
provided at Pin 19 causing a logic one when left open.
SENSE INPUTS (Pins 15, 16, 17)
These inputs provide control of the output commutation
sequence as shown in Table III. S1, S2, S3 originate in
the position sensors of the motor and must sequence in
cycle code order. Hall switch "pull-up" resistors are provided at Pins 15, 16 and 17. The positive supply of the
Hall devices should be common to the chip Vss.
BRAKE (Pin 9)
A high level applied to this input unconditionally turns off
outputs 1, 2 and 3 and turns on outputs 4,5 and 6 (See
Figure 1). Transistors Q101, Q102 and Q103 cut off causing Q107, Q108 and Q109 to cut off and transistors Q104,
Q105 and Q106 turn on, shorting the windings together,
The BRAKE has priority over all other inputs. An internal
pull down resistor is provided at Pin 9 causing no braking
when left open. (Center- tapped motor configuration requires a power supply disconnect transistor controlled by
the BRAKE signal - See Figure 3.)
ENABLE (Pin 10)
A high level on this input permits the output to sequence
as in Table III, while a low disables all external output drivers. An internal "pull up" resistor is provided at Pin 10,
enabling when left open. Positive edges at this input will
reset the overcurrent flip-flop.
OVERCURRENT SENSE (Pin 12)
This input provides the user a way of protecting the motor
winding, drivers and power supply from an overload
condition. The user provides a fractional ohm resistor
between the negative supply and the common emitters of
the NPN drivers. This point is connected to one end of a
potentiometer (e.g. 100K ohms), the other end of which is
connected to the positive supply. The wiper pickoff is
adjusted so that all outputs are disabled for currents greater than the limit. The action of the input is to disable all
external output drivers. When BRAKE exists, OVERCURRENT SENSE will be overridden. The overcurrent
circuitry latches the overcurrent condition. The latch may
be reset by the positive edge of either the sawtooth OSCILLATOR or the ENABLE input. When using the ENABLE input as a chopped input, the OSCILLATOR pin
should be held at VSS. When the ENABLE input is held
high, the OSCILLATOR must be used to reset the overcurrent latch.
V TRIP (Pin 13)
This pin is used in conjunction with the sawtooth oscillator
provided on the circuit. When the voltage level applied to
V TRIP is more negative than the waveform at the OSCILLATOR pin, the low-side drivers will be enabled. When
V TRIP is more positive than the sawtooth OSCILLATOR
waveform the low-side drivers are disabled.
The sawtooth waveform at the OSCILLATOR pin typically varies from .4 Vss to Vss-2 Volts (assuming VDD is at ground potential). The purpose of the V TRIP input in conjunction with the
OSCILLATOR is to provide variable speed adjustment for the
motor by means of PWM of the low-side drivers.
OSCILLATOR (Pin 14)
A reisistor and capacitor connected to this pin (See Fig. 6) provide the timing components for a sawtooth OSCILLATOR. The
signal generated is used in conjunction with V TRIP to provide
PWM for variable speed applications and to reset the overcurrent condition.
OUTPUTS 1, 2, 3 (Pins 2, 3, 4)
These open drain outputs are enabled as shown in Table III and
provide base current when the COMMON (Pin 5) is tied to Vss.
These outputs provide commutation only for the high-side drivers. They are not pulse width modulated to control speed.
OUTPUT 4, 5, 6 (PINS 6, 7, 8)
These open drain outputs are enabled as in Table III and
provide base current to NPN transistors when the COMMON is
tied to Vss. They provide commutation and are pulse width
modulated to provide speed control.
COMMON (Pin 5)
The COMMON is connected to Vss for driving low-side drivers
and high-side level converters.
Vss (Pin 11) Supply voltage positive terminal.
VDD (Pin 18) Supply voltage negative terminal.
TYPICAL CIRCUIT OPERATION:
Figure 1 indicates an application using bipolar power transistors. The oscillator is used for motor speed control as explained under VTRIP. Only low-side drive transistors are pulse
width modulated during speed control. The outputs turn on
in pairs (See Table III). For example, two separate paths are
turned on when Q8 and Q4 are on. One path is from the positive supply through Q8, R1 and the base emitter junction of
Q101. The second is from the positive supply through Q4, R14,
the base emitter junction of Q105 and the fractional ohm resistor to ground. The current in the first path is determined by
the power supply voltage, the impedance of Q8, the value of
R1 and the voltage drop across the base-emitter junction of
Q101 (0.7 Volts for a single transistor or 1.4 Volts for a Darlington Transistor). The current in the second path is determined
by the power supply voltage, the impedance of Q4, the value of
R14 and the voltage drop across the base-emitter junction of
Q105. Table I provides the recommended value for R1; R2,
R3, R13, R14, and R15 are the same value.
Figure 2 indicates an application where Power FETS are used.
The nominal power supply for the LS7362 in this configuration
is 15 Volts so that the low side N channel Power FET drivers
will have 15 Volts of gate drive. Resistors R13, R14 and R15
serve to discharge the gate capacitance during FET turn-off.
The high-side P-channel FET drivers use 15 Volt Zener diodes
Z1, Z2 and Z3 to limit the gate drive. Resistors R8, R10 and
R12 are the gate capacitance discharge resistors. Table II indicates the minimum value of R13 (=R14=R15) needed as a
function of output drive voltage for the low-side drivers.
7362-110292-2

MAXIMUM RATINGS:
PARAMETER SYMBOL VALUE UNIT
Storage Temperature TSTG -65 to +150 °C
Operating Temperature
1. Plastic TA -25 to +70 °C
2. Ceramic TA -55 to +125 °C
Voltage (any pin to Vss) VMAX -30 to +.5 Volts
DC ELECTRICAL CHARACTERISTICS:
(All Voltages Referenced to VDD)
SYMBOL MIN TYP MAX UNIT
Supply Voltage VSS 5 - 28 Volts
Supply Current
(Excluding Outputs) IDD - 4.5 6 mA
Input Specifications:
BRAKE, ENABLE, CS1, CS2 RIN - 150 - KΩ
S1, S2, S3, FORWARD/REVERSE
Voltage (Logic "1") VIH VSS-1.5 - VSS Volts
(Logic "0") VIL 0 - VSS-4.0 Volts
OVERCURRENT SENSE (See Note)
Voltage (Logic "1") VIH (VSS/2)+.25 - VSS Volts
(Logic "0") VIL 0 - (VSS/2)-.25 Volts
Oscillator:
Frequency Range Fosc 0 1/RC 100 kHz
External Resistor Range Rosc 22 - 1000 kΩ
NOTE: Theoretical switching point of the OVERCURRENT SENSE input is one half of the power supply determined by an internal bias
network in manufacturing. Tolerances cause the switching point to vary plus or minus .25 Volts. After manufacture, the switching point
remains fixed within 10 mV over time and temperature. The input switching sensivity is a maximum of 50mV. There is no hysteresis on
the OVERCURRENT SENSE input.
TABLE I
OUTPUT CURRENT LIMITING RESISTOR SELECTION TABLE
POWER OUTPUT CURRENT
SUPPLY
(VOLTS) 20 15 10 7.5 5 2.5 mA
6 ** ** ** ** ** 2.0
9 ** ** ** .94 1.6 3.2
12 .35 .53 .88 1.2 2.1 4.0
15 .54 .76 1.2 1.7 2.6 5.3 Resistance
18 * 1.0 1.6 2.1 3.2 6.5 (kΩ)
21 * * 1.9 2.5 3.8 7.7
24 * * 2.2 2.9 4.4 9.0
28 * * * 3.5 5.3 10.3
*causes excessive power dissipation
**exceeds max current possible for this voltage
TABLE II
For Power Supply 5-28 Volts
R13 (K ohms) Output Voltage
10 Vss -0.5
5.1 Vss -1.0
2.7 Vss -2.0
TABLE III
OUTPUT COMMUTATION SEQUENCE
THREE PHASE OPERATION
SEQUENCE SELECT CS1 CS2 CS1 CS2 CS1 CS2 CS1 CS2 FORWARD/REVERSE=1 FORWARD/REVERSE=0
0 0 0 1 1 0 1 1
ELECTRICAL SEPARATION (-60°-) (-120°-) (-240°-) (-300°-) OUTPUTS DRIVERS OUTPUTS DRIVERS
SENSE INPUTS S1 S2 S3 S1 S2 S3 S1 S2 S3 S1 S2 S3 ENABLED A B C ENABLED A B C
0 0 0 0 0 1 0 1 0 0 1 1 O1, O5 + - Off O2, O4 - + Off
1 0 0 1 0 1 1 1 0 1 1 1 O3, O5 Off - + O2, O6 Off + -
1 1 0 1 0 0 1 0 0 1 1 0 O3, O4 - Off + O1, O6 + Off 1 1 1 1 1 0 1 0 1 1 0 0 O2, O4 - + Off O1, O5 + - Off
0 1 1 0 1 0 0 0 1 0 0 0 O2, O6 Off + - O3, O5 Off - +
0 0 1 0 1 1 0 1 1 0 0 1 O1, O6 + Off - O3, O4 - Off +
0 1 0 0 0 0 0 0 0 0 1 0 ALL DISABLED ALL DISABLED
1 0 1 1 1 1 1 1 1 1 0 1 ALL DISABLED ALL DISABLED
The OVERCURRENT input (BRAKE low) enables external output drivers in normal sequence when more negative than Vss/2 and disables
all external output drivers when more positive than Vss/2. The OVERCURRENT is sensed continuously, and sets a flip flop which is reset
by the rising edge of the ENABLE input or the sawtooth OSCILLATOR. (See description under OVERCURRENT SENSE.)
7362-110292-3

6
12
Output
Encoder
7
8
5
4
3
2
Q106
Q105
Q104
A
L1
B
L2
L3
R13
R14
R15
Q6
Q7Q8
Q3
Q4Q5
BRAKE
11
Fractional
Ohm
Resistor
TO OVERCURRENT
ADJUSTMENT
Vss
Vss
O4
O5
O6
O3
O2
O1
M
O
T
O
R
FIGURE 1. BIPOLAR THREE PHASE OUTPUT DRIVER CIRCUITRY
C
Q107 Q108
Q109
R16
R17 R18
R4 R5 R6
Q101
Q102
Q103
R8
R7
R10
R9
R12
R11
R1
R2
R3
VM
6
12
Output
Encoder
7
8
5
4
3
2
A
L1
B
L2
L3
Q6Q7Q8
Q3Q4Q5
BRAKE
11
Fractional
Ohm
Resistor
TO OVERCURRENT
ADJUSTMENT
Vss
Vss
O4
O5
O6
O3
O2
O1
M
O
T
O
R
FIGURE 2. POWER FET THREE PHASE OUTPUT DRIVER CIRCUITRY
C
R13
R14
R15
R4 R5 R6
Q101
Q102
Q103
R8
R7
R10
R9
R12
R11
R1
R2
R3
VM
Z3
Z2
Z1
Q104
Q105
Q106
Q107
Q108
Q109
7362-101992-4

Vss
+
13
V TRIP
EXT. OSCILLATOR
R6
R2
C1
S1
R1
15
Vss
C3
Vss
R3
R4
R5
D1
C2
Vss
R8
LS7362
FROM MOTOR
POSITION
SENSOR
14
C4
R7
FIGURE 5
CLOSED-LOOP SPEED CONTROLLER
A closed loop system can be configured by differentiating
one of the motor position sense inputs and integrating only
the negative pulses to form a DC voltage that is applied to
the inverting input of an op-amp. The non-inverting input
voltage is adjusted with a potentiometer until the resultant
voltage at V TRIP causes the motor to run at desired speed.
The R2-C1 differentiator, the R3-D1 negative pulse transmitter and the R4-C2 integrator form a frequency to voltage
converter. An increase in motor speed above the desired
speed causes V TRIP to increase which lowers the duty cycle modulation of the oscillator and the resultant motor
speed. A decrease in speed lowers V TRIP and raises the
duty cycle modulation and the resultant motor speed. For
proper operation, both R5 and R6 should be greater than
R4, and R4 in turn should be greater than both R2 and R3.
Also the R4-C2 time constant should be greater than the
R2-C1 time constant. C3 may be added across R6 for
additional V TRIP smoothing.
BRAKE
MOTOR
SUPPLY
Vss
O6
8
5
COMMON
BRAKE
INPUT
7
O4
6
9
O5
LS7362
FIGURE 3.
SINGLE-ENDED
DRIVER CIRCUIT
This configuration requires only
one base current limiting resistor
connected from the COMMON
pin to Vss.
FORWARD
REVERSE
IN914
2.2K
Inputs form SG1731
or UC1637
F/R
LS7362
ENABLE
19
10
FIGURE 4. PRECISION CONTROL
BRUSHLESS DC MOTOR DRIVE
For controlled acceleration and deceleration of motors
in the forward or reverse directions, a motor control
pulse width modulator circuit such as the SG1731 or
UC1637 can be interfaced with the LS7362.
The logical OR gate made up of the resistor-diode network permits the LS7362 to be enabled when either the
forward or reverse input is high. By applying the forward
input directly to Pin 19, the motor can only operate in the
forward direction when the forward input is high and only
in the reverse direction when the reverse input is high.
Motor direction is determined by relative pulse widths of
the forward and reverse inputs while acceleration or
deceleration is determined by variations of these widths.
The information included herein is believed to be
accurate and reliable. However, LSI Computer Systems,
Inc. assumes no responsibilities for inaccuracies, nor for
any infringements of patent rights of others which may
result from its use.
7362-101992-5

OUTPUT
DRIVERS
OUTPUT
ENCODER
INPUT
DECODER
R
Q
S
SAWTOOTH
OSCILLATOR
+
+
POSITIVE
EDGE
DETECTOR
COMMUTATION
SEQUENCE
SELECT LOGIC
LOW-SIDE
DRIVERS
HIGH-SIDE
DRIVERS
5
6
8
11
VDD18
VSS
GND
COMMON
4
+V
1
20
19
15
16
17
9
10
12
13
14
≈30KHz
CS1
CS2
FWD/REV
S1
S2
S3
BRAKE
ENABLE
OVERCURRENT
SENSE
V TRIP
.001µF
33K
+V
+V
FIGURE 6. LS7362 BLOCK DIAGRAM
R
R
+V
2
3
4
5
6
7
O1
O2
O3
O4
O5
O6
-
 Loading...
Loading...