


Livox Hub
User Manual
2019.02
v1.0

Searching for Keywords
Search for keywords such as “FOV” and “mount” to nd a topic. If you are using Adobe Acrobat Reader
to read this document, press Ctrl+F on Windows or Command+F on Mac to begin a search.
Navigating to a Topic
View a complete list of topics in the table of contents. Click on a topic to navigate to that section.
Printing this Document
This document supports high resolution printing.
Using this Manual
Legend
Warning Important Hints and Tips Explanation
Downloading Documents
Visit the link below to download the latest Livox Hub User Manual and other documents related to
Livox Hub.
https://www.livoxtech.com/hub
Downloading Livox Viewer
Visit the link below to download Livox Viewer.
https://www.livoxtech.com/hub
2019 Livox Tech. All Rights Reserved.
2
©

Contents
Using this Manual
Legend 2
Downloading Documents 2
Downloading Livox Viewer 2
Product Prole
Introduction 4
Overview 4
Connectors
Livox LiDAR Port 5
Power Port and Power Cable 6
GPS Sync Port and GPS Sync Cable 6
Gigabit Ethernet Port 8
Mounting Livox Hub
Dimensions (With Port Covers) 8
Dimensions (Without Port Covers) 8
Getting Started
External Power Supply 9
Connection 9
Usage
Output Data 11
Working States & Working Modes 11
Integration of Point Cloud Data 12
Livox Viewer 12
Software Development Kit (SDK) 14
After-sales Information
Appendix
Status LED Description 14
Specications
2
4
5
8
9
11
14
14
15
2019 Livox Tech. All Rights Reserved.
©
3

Product Prole
Introduction
Livox Hub is a streamlined way to integrate and manage Livox LiDAR sensors and their data outputs.
One Livox Hub can connect to up to nine Livox LiDAR sensor units.
LiDAR Management: Livox Hub communicates with each connected LiDAR sensor and reads each
sensor’s connection status, rmware version, and working states. When Livox Hub is connected, users
can monitor all connected LiDAR sensors together through Livox Hub. If there are any abnormalities
with Livox Hub or the Livox LiDAR sensors connected, Livox Hub sends a warning prompt. Users can
then check the error codes using Livox Viewer or the Livox SDK.
Each Livox LiDAR port has independent power control and short circuit protection. Users can turn the
power supply on or o to a specic LiDAR port using Livox Viewer or the Livox SDK.
Livox Hub can unify the point cloud data into the user’s coordinate system and integrate all LiDAR point
cloud data into a single output. The point cloud data of Livox Hub can be displayed in Cartesian or
Spherical coordinates, and can be changed using Livox Viewer.
Time Synchronization: Time synchronization is supported by IEEE 1588-2008 (PTPv2) and GPS,
delivering sub-microsecond-level time synchronization of point cloud data.
Livox SDK: The Livox LiDAR Software Development Kit (SDK) is provided to help develop customizable
applications using the point cloud data.
• The precision of IEEE 1588-2008 (PTPv2) was tested in a lab environment.
• Refer to the SDK Communication Protocol to check the format of the point cloud timestamps.
• When nine Livox Mid-100 sensor units are connected to a Livox Hub, the maximum data
bandwidth is approximately 300Mbps.
• Operating Livox Hub in a residential environment could cause radio interference.
Overview
Livox Mid-40
1
2
1. Port Cover × 4
Protect the ports from damage. To view the
ports on Livox Hub, unscrew and remove the
port covers.
2. Status LEDs
Displays the working states of Livox Hub.
Refer to Appendix 7.1 for more information.
2019 Livox Tech. All Rights Reserved.
4
©
4
6 7 8 9
3
5
3. Dissipation Area
Dissipates heat. DO NOT cover this area when
Livox Hub is in use. It is recommended to
keep a space of 30 mm between this area and
other objects.
4. Livox Hub
The main section of Livox Hub, which can be
used with or without the port covers.

Livox Hub User Manual
5. Livox LiDAR Port × 7
A JAE MX34012NF1 type connector port
used to connect to Livox LiDAR sensor units.
Only compatible with JAE MX34012SF1 type
connectors.
6. Livox LiDAR Port × 2
A JAE MX34012NF1 type connector port
used to connect to Livox LiDAR sensor units.
Only compatible with JAE MX34012SF1 type
8. GPS Sync Port
A JAE MX34005NF1 type port used to connect
the designated GPS sync cable when GPS
synchronization is required. Only compatible
with JAE MX34005SF1 type connectors.
9. Power Port
A MOLEX 76825-0004 type port that connects
to an external power source. Only compatible
with MOLEX 171692-0104 type connectors.
connectors.
7. Gigabit Ethernet Port
A RJ45 type Ethernet port used to connect to
Ethernet cables.
* To view the ports on Livox Hub, unscrew and remove the port covers.
Connectors
Livox LiDAR Port
There are nine Livox LiDAR ports available on Livox Hub, and those nine Livox LiDAR ports have the
same functionality. Below is more information on the Livox LiDAR ports.
34
56 2
1112
1
78910
Figure 2.1.1 Livox Hub LiDAR port
Pin Signal Type Description
1
Power+ Power
7
DC Output 12.8 V
5 A Over Current Protect
2
Ground Power Ground8
11
3 Ethernet_TX+ Output 100BASE-TX, TX+
4 Ethernet_TX- Output 100BASE-TX, TX-
5 PortDet Input Port Detection Signal
6 Sync+ Input RS485_A, Pulse Per Second
9 Ethernet_RX+ Input 100BASE-RX, RX+
10 Ethernet_RX- Input 100BASE-RX, RX-
12 Sync- Input RS485_B, Pulse Per Second
Table 2.1.1 Livox Hub LiDAR port description
2019 Livox Tech. All Rights Reserved.
©
5

Livox Hub User Manual
Power Port and Power Cable
The Livox Hub power port and the ends of the power cable included with Livox Hub have the same
functionality.
4
3
12
Figure 2.2.1 Livox Hub power port
Power Cable
Connect “A” to the power port of Livox Hub and connect “B” to an external DC power supply.
500±25
1
A
34
2
1
B
2
3
4
Figure 2.2.2 Power cable
Pin Signal Type Description Color
1 Power+ Power DC 10-23 V Red
2 Power+ Power DC 10-23 V Red
3 Ground Power Ground Black
4 Ground Power Ground Black
Table 2.2.1 Livox Hub power port and power cable description
GPS Sync Port and GPS Sync Cable
The Livox Hub GPS sync port and the ends of the GPS sync cable included with Livox Hub have the
same functionality.
2019 Livox Tech. All Rights Reserved.
6
©

Livox Hub User Manual
1
2
345
Figure 2.3.1 Livox Hub GPS sync port
GPS Sync Cable
Connect “A” to the GPS sync port of Livox Hub and connect “B” to the GPS sync signal. Refer to the
Data Synchronization section for more information.
A
1
2
345
500±25
Figure 2.3.2 GPS sync cable
Pin Signal Type Description Color
1 PPS_N Input RS485_B, Pulse Per Second White
2 PPS_P Input RS485_A, Pulse Per Second Blue
3 Ground Power Ground Black
4 STAMP_N Input RS485_B, Pulse Per Second Yellow
5 STAMP_P Input RS485_A, Pulse Per Second Grey
Table 2.3.1 Livox Hub GPS sync port and sync cable description
GPS Sync Signal Description:
t0
t1
1
PPS
$GPRMC
0
1
t3
t0: 1000 ms
t1: 20 ms ≤ t1 ≤ 200 ms
t2: ~70 ms @ 9600 bps
0
t2
t3: 0 ms ≤ t3 ≤ 430 ms
1
B
2
3
4
5
Figure 2.2.2 GPS sync signal description
Refer to the Software Development Kit (SDK) section for more information about the GPS sync signal.
2019 Livox Tech. All Rights Reserved.
©
7

Gigabit Ethernet Port
280
Livox Mid-40 Dimensions
The Gigabit Ethernet port is a RJ45 type Ethernet port, which supports 1000base-t and 100BASE-TX
and uses two twisted pairs to send and receive data. On the front of Livox Hub, there are three status
LEDs. LED 3 indicates the type of data transmission.
Blue: Megabit Ethernet is used for transmission
Green: Gigabit Ethernet is used for transmission
It is recommended to use Gigabit Ethernet for data transmission and to use Cat5e or above Ethernet
cables.
Refer to the Appendix section for more information on the status LEDs.
Mounting Livox Hub
Livox Hub is outtted with four M3 mounting holes with a depth of 6 mm on the bottom, and it can be
mounted using M3 screws. Livox Hub is already mounted with the port covers. The port covers can
be removed if there are spacial constraints when mounting or positioning Livox Hub. However, it is
recommended to keep the port covers mounted to Livox Hub. Only remove the port covers if absolutely
necessary. To remove the port covers, unscrew the screws.
Dimensions (With Port Covers)
4-M3 6
72
201
Figure 3.1.1 Livox Hub dimensions with port covers
194.8
Weight Approx. 1352 g (for reference only)
Dimensions 280 × 201 × 29 mm
Dimensions (Without Port Covers)
201
153.2
2019 Livox Tech. All Rights Reserved.
8
©
72
Figure 3.1.2 Livox Hub dimensions without port covers
194.8
29
Unit: mm
29
4-M3 6
Unit: mm

Weight
Approx. 865 g
(for reference only)
Dimensions 201 × 153.2 × 29 mm
Getting Started
External Power Supply
The working voltage of Livox Hub is 10 V to 23 V. Regardless of how many Livox LiDAR sensors are
connected to Livox Hub, the working voltage range of Livox Hub remains the same. Contact Livox if you
intend to use an external power source exceeding 23 V.
Connection
Livox Hub uses an Ethernet cable for data transmission and supports user datagram protocol (UDP).
Both static and dynamic IP address congurations are supported and the addresses are assigned by
default to Livox Hub using dynamic host conguration protocol (DHCP).
The static and dynamic IP addresses are connected in different ways. The dynamic IP address is
connected by default using a router with DHCP. To connect to the static IP address, make sure Livox
Hub is in static IP mode by using Livox Viewer or the Livox SDK.
If Livox LiDAR sensors are connected to Livox Hub after the IP address is set, make sure to disconnect
the power source and connect again with the LiDAR sensors connected. Otherwise, the external
power source cannot provide power to the LiDAR sensors connected.
• DO NOT connect or disconnect the Livox LiDAR sensors to or from Livox Hub while powering on. It
is required to reconnect Livox Hub to the external power source after the Livox LiDAR sensors are
connected or disconnected.
Dynamic IP Address
PC
Ethernet Cable
Ethernet Cable
Gigabit Router (DHCP
Figure 4.2.1 Connecting using dynamic IP address
External Power Source
)
Livox Mid-40
1. Connect the Livox LiDAR sensors to Livox Hub (a Livox Hub can connect to up to nine Livox LiDAR
sensor units).
2. Connect the computer and Livox Hub to the router using Ethernet cables. Make sure both the
computer and Livox Hub are connected to the LAN port on the router.
3. Connect Livox Hub to an external power source.
4. Connect one end of the GPS sync cable to the sync port and the other end to the designated sync
signal. Note that the GPS sync cable may not always be required.
2019 Livox Tech. All Rights Reserved.
©
9

Livox Hub User Manual
The working voltage of Livox Hub is 10 V to 23 V. Contact Livox if you intend to use an external power
source exceeding 23 V.
• Make sure to use Gat5e or above Gigabit Ethernet cables and a Gigabit router.
Static IP address
1. Connect Livox LiDAR sensors, router, external power source, and computer by following Figure 4.2.1.
2. Run Livox Viewer, and Click to open Device Manager. Select Livox Hub, and click to open
Properties. Set the IP address of Livox Hub to static IP address. Note that the static IP address of
Livox Hub should be 192.168.1.X. X can be set to any number between 2 to 233.
3. Disconnect Livox Hub, Livox LiDAR sensors, router, external power source, and computer.
4. Set the IP address of your computer to static IP address. Note that the static IP address of the
computer should be 192.168.1.X. X can be set to any number between 2 to 233 and should be
dierent from the IP address of Livox Hub set in Step 2.
Ethernet Cable
Livox Hub
External Power Source
PC
Figure 4.2.2 Connecting using static IP address
Livox Mid-40
5. Connect the Livox LiDAR sensors to Livox Hub (a Livox Hub can connect up to nine Livox LiDAR
sensor units).
6. Connect Livox Hub to the computer using an Ethernet cable.
7. Connect Livox Hub to an external power source.
Make sure to use a Gat5e or above Gigabit Ethernet cable.
• Make sure to set the IP address of Livox Hub back to dynamic IP address if it has been set to static IP
address to use a router for connection. Also, make sure to set your computer to dynamic IP address,
and follow the instructions in the Dynamic IP Address section.
• When Livox Hub is in use, it is not required to set the IP address to all the LiDAR sensors connected.
Only Livox Hub’s IP address should be set, and then Livox Hub will automatically assign an IP address
to each LiDAR sensor.
2019 Livox Tech. All Rights Reserved.
10
©

Livox Hub User Manual
Usage
Output Data
The output data of Livox Hub includes point cloud data, timestamps, and status codes.
Point Cloud Data
Livox Hub, as a processing unit to connect and integrate Livox LiDAR sensors, will not aect the point
cloud data output of the LiDAR sensors connected. Only the LiDAR sensors will aect the point cloud
data. Refer to the Output Data section in the corresponding Livox LiDAR sensor’s user manual for more
information.
Timestamp
Time synchronization is supported by IEEE 1588-2008 (PTPv2) and GPS.
IEEE 1588-2008 (PTPv2): IEEE 1588-2008 is the Precision Time Protocol (PTP) enabling precise
synchronization of clocks in measurement and control systems by Ethernet. Livox LiDAR sensors, as the
ordinary clock in the PTP, only supports UDP/IPV4 for PTP. Livox LiDAR sensors support the following
message events: Sync, Fllow_up, Delay_req, Delay_resp.
GPS: GPS is a way to precisely synchronize the point cloud sampling time using the sync pulse
generated. The time synchronization can be completed with a PPS signal and a NMEA $GPRMC record.
PPS is the precise pulse per second, and its rising edge is 1s. $GPRMC oers the UTC time of PPS. The
time sequence of PPS and $GPRMC is shown below. After time synchronization, each point cloud data
packet will include a timestamp indicating the sampling time of the point cloud. Please refer to the SDK
Communication Protocol for more information.
t0
t1
1
PPS
$GPRMC
0
1
0
t3
t2
Figure 5.1.1 GPS sync signal description
t0: 1000 ms
t1: 20 ms ≤ t1 ≤ 200 ms
t2: ~70 ms @ 9600 bps
t3: 0 ms ≤ t3 ≤ 430 ms
Working States & Working Modes
Working States
When Livox Hub is in use, it automatically monitors the working states of all the Livox LiDAR sensors
connected. Users can check the working state of Livox Hub and all the Livox LiDAR sensors connected
using Livox Viewer or the Livox SDK.
2019 Livox Tech. All Rights Reserved.
©
11
Livox Hub User Manual
If Livox Hub detects any abnormalities when monitoring the LiDAR sensors, it sends a warning prompt or
may even cut o the power supply of a specic LiDAR sensor if a critical error is detected. The error codes
can be viewed using Livox Viewer or the Livox SDK.
Working Modes
The working mode of each Livox LiDAR sensors must be set separately using Livox Viewer or the Livox
SDK. Additionally, the Rain/Fog Suppression of the Livox LiDAR sensors should also be set individually.
Integration of Point Cloud Data
Livox Hub is capable of unifying the point cloud data into the user’s coordinate system and integrating all
LiDAR point cloud data into a single output. When using Livox Viewer, after opening Import Extrinsics Tool,
the point cloud data integration of Livox Hub will be paused after clicking “Start Cali.” After the coordinates
have been set and applied to all the Livox LiDAR sensors by clicking “Apply,” then click “Stop Cali.” Livox
Hub will automatically integrate the point cloud data and produce a single output.
The integration of point cloud data can be achieved by using the Livox SDK as well. Refer to the SDK
Communication Protocol for more information.
Livox Viewer
Livox Viewer is a Windows software designed for Livox LiDAR sensors and Livox Hub. Users can check
real-time point cloud data of all the Livox LiDAR sensors connected to Livox Hub. With the help of Livox
Viewer, it is easier to check and record the point cloud data for future use.
Visit www.livoxtech.com to download the latest Livox Viewer. Livox Viewer supports WINDOWS® 7/8/10
(64 bit).
Turn o Windows Firewall and set the computer to obtain IP address automatically before using Livox
Viewer.
• Make sure the video driver is correctly installed. Otherwise, Livox Viewer may not launch or may crash.
After turning o Windows Firewall and setting the IP address, unzip and run Livox Viewer.
This user manual only focuses on some functions of Livox Viewer that are related to Livox Hub. Refer to
the Livox Mid Series User Manual for more information.
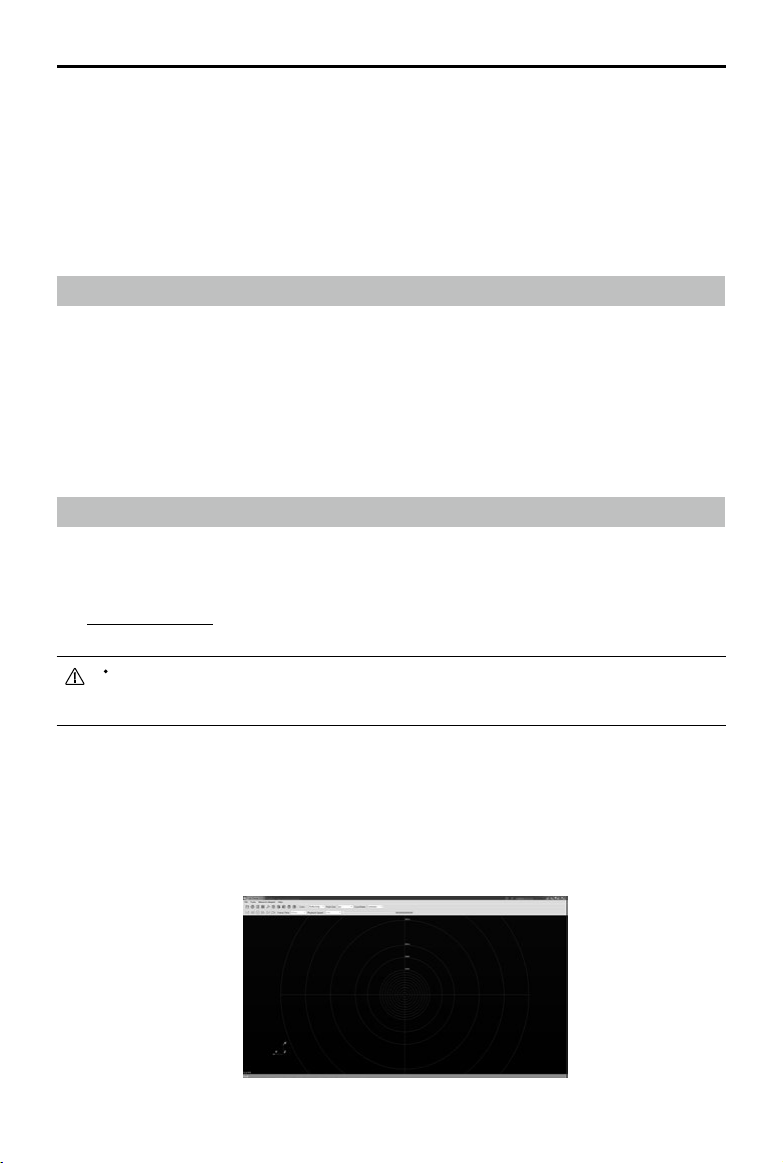
Livox Viewer Homepage
4.1.1 Livox Viewer Homepage
2019 Livox Tech. All Rights Reserved.
12
©

Livox Hub User Manual
Checking Real-time Point Cloud Data
1. Connect all the Livox LiDAR sensors and Livox Hub as shown in Figure 4.2.1 or Figure 4.2.2. Run
Livox Viewer. Click to open Device Manager. Device Manager will display Livox Hub in the LAN.
2. Select “Hub” in Device Manager.
3. Select Livox Hub, and click to connect. Alternatively, select Livox Hub, right click, and click
“Connect Device”. When Livox Hub is connected, all the LiDAR sensors connected to Livox Hub will
be automatically connected.
4. After connecting, click to view the point cloud data.
To see all the LiDAR sensors connected, right click Livox Hub in Device Manager. Next, click on the
right of each LiDAR sensor to check the working state, or click on the left of each LiDAR sensor to
display or hide the point cloud of the selected Livox LiDAR sensor.
Checking and Setting LiDAR Sensor Properties
1. Connect all the Livox LiDAR sensors and Livox Hub as shown in Figure 4.2.1 or Figure 4.2.2. Run
Livox Viewer. Click to open Device Manager. The Device Manager will display Livox Hub in the
LAN.
2. Select “Hub” in Device Manager.
3. Select Livox Hub and click to connect. Alternatively, select Livox Hub, right click, and click
“Connect Device”.
4. Click to check device properties. Click Livox Hub to view the current status of Livox Hub, including
the rmware version, IP address, and the type of coordinates. Under the “Hub Slot Power Options”,
unselect a number to cut o the power supply of the corresponding LiDAR sensor.
5. Click the triangle icon to the left of Livox Hub to view all the LiDAR sensors connected. Click each
LiDAR sensor to check the properties. For each LiDAR sensor, you can check its current status,
including the rmware version and work state. Under settings, you can set the working mode for an
individual LiDAR sensor and enable or disable Rain/Fog Suppression.
Importing Extrinsics
When importing extrinsics, the coordinates of each LiDAR sensor will be calibrated individually. Refer
to the Importing Extrinsics section of the Livox LiDAR sensors’ user manual for more information about
importing extrinsics.
Firmware Update
The rmware of Livox Hub can be updated by using Livox Viewer. To update the rmware, follow the
steps below:
1. Click Tools > Firmware Update. A page appears displaying all detected devices.
2. Select “Hub Update” under update mode to display the detected Livox Hub.
3. Click “Check Firmware” to check the current rmware version of the selected Livox Hub.
4. Select the firmware version under “Firmware Version”, and click “Download” to download the
rmware to the computer.
5. After downloading the le, select Livox Hub you wish to update under “Firmware Update” and click
“…” to select the downloaded rmware.
2019 Livox Tech. All Rights Reserved.
©
13
Livox Hub User Manual
6. Click “Start” to update the rmware of the selected Livox Hub.
7. Livox Hub restarts and reconnects to the computer after the update. Repeat the steps above if the
update fails.
8. To update the Livox LiDAR sensors connected to Livox Hub, select “Hub LiDAR Update” under
update mode and follow steps 3 to 4. Afterwards, under “Fimware Update,” select the Livox LiDAR
sensors you wish to update. Click “…” to select the downloaded firmware, and click “Start” to
update the rmware of the selected Livox LiDAR sensors.
Make sure the computer is connected to the internet when downloading the rmware. After the rmware
is downloaded, internet connection is not required.
Software Development Kit (SDK)
Besides using Livox Viewer to check real-time point cloud data, users can also use the SDK to apply the
point cloud data acquired from Livox LiDAR sensors to dierent scenarios.
SDK Communication Protocol
There are two types of communication protocols between the user and a Livox LiDAR sensor, and the
protocol formats of these two kinds of data are dierent. The specic functions and dierences of these
types of communications are as follows:
Control Command Data: Conguration and query of LiDAR parameters and status information.
Point Cloud Data: Point cloud coordinate data generated by LiDAR.
Both communication protocols are located in the data segment of the UDP package and stored in littleendian format.
To download the Livox SDK Communication Protocol and Livox SDK API Reference, please visit:
https://www.livoxtech.com/sdk
After-sales Information
Visit www.livoxtech.com/support to check the after-sales policy and warranty conditions for Livox Hub.
Appendix
Status LED Description
There are three LEDs on Livox Hub: LED 1 is red, LED 2 is green, and LED 3 alternates between blue
and green.
LED 1 and LED 2 display the working status of Livox Hub:
2019 Livox Tech. All Rights Reserved.
14
©

Livox Hub User Manual
Livox Mid-40/ Livox Mid-100
LED 1 and LED 2 blinks continuously Livox Hub is initializing
LED 2 blinks slowly GPS synchronization
LED 2 blinks fast IEEE 1588 V2 synchronization
LED 2 is solid on No sync signal
Livox Mid-40 Mounting Bracket
LED 1 blinks slowly GPS synchronization abnormal
LED 1 blinks fast IEEE 1588 V2 synchronization abnormal
LED 1 blinks twice
No IP address is assigned to Livox Hub (restart Livox Hub or
the router)
LED 1 is solid on Critical error. Please contact Livox.
LED 3 expresses the Ethernet transmission speed:
Blue: Megabit Ethernet is used for transmission.
Green: Gigabit Ethernet is used for transmission.
Specications
LiDAR Ports 9
Voltage Range 10 ~ 23 V DC
Power Input* Varies in dierent situations
Operating Temperature Range -40° to 185° F (-40° to 85° C)
Data Interface 1Gbps Ethernet
Time Sync Protocol
Weight
**
Dimensions
**
Model LIVOX HUB
* The typical input power of Livox Hub is 180 W (12 V, 15 A) when ve Livox Mid-100 sensor units are connected at a
temperature of 77° F(25° C) using an external power supply of 12 V. The output power of Livox Hub varies based on
the number of the Livox LiDAR sensors connected and will be aected by the operational temperature. Refer to the
Livox LiDAR sensors' user manul to view their working power.
** The port covers are detachable. Users can attach or detach the four port covers based on personal demands.
IEEE 1588 V2 PTP
GPS Precision Time
Approx. 865 g (without port covers)
Approx. 1352 g (with port covers)
153.2 × 201 × 29 mm (without port covers)
208 × 201 × 29 mm (with port covers)
2019 Livox Tech. All Rights Reserved.
©
15

Copyright © 2019 Livox Tech. All Rights Reserved.
Livox and Livox Mid are trademarks of Livox Technology Company Limited.
Windows is a registered trademark of Microsoft Corporation in United States and other countries.
 Loading...
Loading...