


FEATURES
LTC2970/LTC2970-1
Dual I2C Power
Supply Monitor and
Margining Controller
U
DESCRIPTIO
■
Less Than ±0.5% Total Unadjusted Error 14-Bit ΔΣ
ADC with On-Chip Reference
■
Dual, 8-Bit IDACs with 1x Voltage Buffers
■
Linear, Voltage Servo Adjusts Supply Voltages by
Ramping IDAC Outputs Up/Down
■
I2C™ Bus Interface (SMBus Compatible)
■
Extensive, User Confi gurable Fault Monitoring
■
On-Chip Temperature Sensor
■
Available in 24-Lead 4mm × 5mm QFN Package
U
APPLICATIO S
■
Dual Power Supply Voltage Servo
■
Monitoring Supply Voltage and Current
■
Programmable Power Supplies
■
Programmable Reference
The LTC®2970 is a dual power supply monitor and
2
margining controller with an SMBus compatible I
C bus
interface. A low-drift, on-chip reference and 14-bit ΔΣ A/D
converter allow precise measurements of supply voltages,
load currents or internal die temperature. Fault manage-
⎯A⎯L⎯E⎯R⎯
ment allows
T to be asserted for confi gurable over
and under voltage fault conditions. Two voltage buffered,
8-bit IDACs allow highly accurate programming of DC/DC
converter output voltages. The IDACs can be confi gured
to automatically servo the power supplies to the desired
voltages using the ADC. The LTC2970-1 adds a tracking
feature that can be used to turn multiple power supplies
on or off in a controlled manner.
The bus address is set to 1 of 9 possible combinations by
pin strapping the ASEL0 and ASEL1 pins. The LTC2970/
LTC2970-1 are packaged in the 24-lead, 4mm × 5mm
QFN package.
, LT, LTC and LTM are registered trademarks of Linear Technology Corporation.
All other trademarks are the property of their respective owners.
U
TYPICAL APPLICATIO
Dual Power Supply Monitor and Controller (One of Two Channels Shown)
8V TO 15V
12V
IN
V
IN
IN
DC/DC
CONVERTER
RUN/SS
SGND
GND
OUT
1/2 LTC2970
I+
I–
FB
LOAD
V
IN0_BM
V
IN0_BP
V
OUT0
V
IN0_AP
I
OUT0
V
IN0_AM
GND
ASEL0 ASEL1
V
GPIO_CFG
ALERT
SCL
SDA
GPIO_0
REF
ADC Total Unadjusted Error
vs Temperature
0.50
0.1μF
DD
0.1μF
2
C BUS
I
SMBUS
()
COMPATIBLE
0.1μF
29701 TA01
15 PARTS MOUNTED ON PCB
0.25
0
ERROR (%)
–0.25
–0.50
–25 0 50
–50
25
TEMPERATURE (°C)
ADC VIN = 5V
75
29701 TA01b
100
29701fc
1
LTC2970/LTC2970-1
WW
W
U
ABSOLUTE AXI U RATI GS
(Notes 1 and 2)
Supply Voltages:
......................................................... –0.3V to 6V
V
DD
.................................................... –0.3V to 15V
12V
IN
Digital Input/Output Voltages:
ASEL0, ASEL1 ............................ –0.3V to V
SDA, SCL, GPIO_CFG,
⎯A⎯L⎯E⎯R⎯
T, GPIO_0, GPIO_1 .......................... –0.3V to 6V
Analog Voltages:
V
IN0_AP
V
IN0_BM
V
IN1_BP
I
OUT0
, I
, V
, V
, V
OUT1
IN0_AM
IN1_AP
IN1_BM
, V
, V
, V
IN0_BP
IN1_AM
, V
OUT0
,
,
.............. –0.3V to 6V
OUT1
, REF ......................... –0.3V to V
RGND .................................................... –0.3V to 0.3V
Operating Temperature Range:
LTC2970C ................................................ 0°C to 70°C
LTC2970I ............................................. –40°C to 85°C
Storage Temperature Range ...................–65°C to 125°C
Lead Temperature (Soldering, 10 sec) .................. 300°C
+ 0.3V
DD
+ 0.3V
DD
PIN CONFIGURATION
TOP VIEW
RGND
REF
ASEL0
ASEL1
24 23 22 21 20
1
V
IN0_AP
V
2
IN0_AM
V
3
IN0_BP
4
V
IN0_BM
V
5
IN1_AP
6
V
IN1_AM
7
V
IN1_BP
24-LEAD (4mm × 5mm) PLASTIC QFN
T
EXPOSED PAD (PIN 25) IS GND MUST BE SOLDERED TO PCB
JMAX
25
8 9
10 11 12
IN
DD
V
OUT0VOUT1
12V
IN1_BM
V
UFD PACKAGE
= 125°C, θJA = 37°C/W
V
GPIO_CFG
19
SDA
18
SCL
17
ALERT
16
GPIO_0
15
GPIO_1
14
I
13
I
OUT0
OUT1
ORDER INFORMATION
LEAD FREE FINISH TAPE AND REEL PART MARKING* PACKAGE DESCRIPTION TEMPERATURE RANGE
LTC2970CUFD#PBF LTC2970CUFD#TRPBF 2970 24-Lead (4mm × 5mm) Plastic DFN 0°C to 70°C
LTC2970CUFD-1#PBF LTC2970CUFD-1#TRPBF 29701 24-Lead (4mm × 5mm) Plastic DFN 0°C to 70°C
LTC2970IUFD#PBF LTC2970IUFD#TRPBF 2970 24-Lead (4mm × 5mm) Plastic DFN –40°C to 85°C
LTC2970IUFD-1#PBF LTC2970IUFD-1#TRPBF 29701 24-Lead (4mm × 5mm) Plastic DFN –40°C to 85°C
Consult LTC Marketing for parts specifi ed with wider operating temperature ranges. *The temperature grade is identifi ed by a label on the shipping container.
For more information on lead free part marking, go to: http://www.linear.com/leadfree/
For more information on tape and reel specifi cations, go to: http://www.linear.com/tapeandreel/
2
29701fc
LTC2970/LTC2970-1
The ● denotes the specifi cations which apply over the full operating
ELECTRICAL CHARACTERISTICS
temperature range, otherwise specifi cations are at T
C
= 100nF and C
VDD
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
Power-Supply Characteristics
I
I
V
V
V12
DD
LKO
DD
12VIN Supply Current V
VDD Supply Current VDD = 5V, V
VDD Undervoltage Lockout VDD Ramping-Down, V
V
DD
Supply Input Operating Range
Regulator Output Voltage 8V ≤ V
Regulator Output Voltage
Temperature Coeffi cient
Regulator Output Voltage Load
Regulation
Regulator Line Regulation 8V ≤ V
Regulator Output Short-Circuit Current V
V
12VIN
12VIN Supply Operating Range
Voltage Reference Characteristics
V
REF
Reference Output Voltage 1.229 V
Reference Voltage Temperature
Coeffi cient
Reference Overdrive Voltage Input
Range
ADC Characteristics
N_ADC Resolution N_ADC = 8.192V/16384 500 μV/LSB
TUE_ADC Total Unadjusted Error V
INL_ADC Integral Nonlinearity (Note 4)
DNL_ADC Differential Nonlinearity (Note 7)
V
IN_ADC
V
OS_ADC
Input Voltage Range
Offset Error
Offset Error Drift 0.19 μV/°C
GAIN_ADC Gain Error Full-Scale V
Gain Error Drift 3 ppm/°C
T
CONV_ADC
C
IN_ADC
F
IN_ADC
I
LEAK_ADC
Conversion Time 33.3 ms
Input Sampling Capacitance 3pF
Input Sampling Frequency 61.4 kHz
Input Leakage Current 0V < VIN < 6V
IDAC Output Current Characteristics
N_I
OUT
INL_I
OUT
DNL_I
I
FS-IOUT
I
DRIFT-IOUT
I
OS-IOUT
Resolution (Guaranteed Monotonic) 8 Bits
Integral Nonlinearity V
Differential Nonlinearity V
OUT
Full-Scale Output Current V
Output Current Drift DAC Code = 'hff 32 ppm/°C
Offset Current DAC Code = 'h00
= 100nF.
REF
Undervoltage Lockout Hysteresis 118 mV
= 25°C. V
A
= 12V, VDD Floating
12VIN
12VIN
–1mA ≤ I
12VIN
= 12V, VDD = 0V
12VIN
= 3V, VIN = V
IN
< VDD – 1.5V
IOUTn
< VDD – 1.5V
IOUTn
< VDD – 1.5V, DAC Code = 'hff
IOUTn
12VIN
= V
12VIN
DD
≤ 15V, –1mA ≤ I
≤ 0 160 ppm/mA
VDD
≤ 15V, I
VDD
INn_xP
= 6V
IN
= 12V, VDD and REF pins fl oating unless otherwise indicated,
●
●
12VIN
= V
VDD
DD
≤ 0
●
3.7 4.14 4.4 V
●
4.5 5.75 V
●
4.75 4.95 5.25 V
= 0mA 80 ppm/V
●
–5 –34 –63 mA
●
815V
●
11.5V
– V
INn_xM
(Note 3)
●
●
–4.5 2 4.5 LSB
●
●
06V
●
–1000 –316 1000 μV
●
●
●
●
●
–236 –255 –276 μA
●
4.24 7.5 mA
3.7 5 mA
10 ppm/°C
2 ppm/°C
±0.5 %
±0.5 LSB
±0.4 %
±0.1 μA
±1 LSB
±1 LSB
±0.1 μA
29701fc
3
LTC2970/LTC2970-1
The ● denotes the specifi cations which apply over the full operating
ELECTRICAL CHARACTERISTICS
temperature range, otherwise specifi cations are at T
= 100nF and C
C
VDD
= 100nF.
REF
= 25°C. V
A
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
Voltage Buffered IDAC Output Characteristics
INL_V
DNL_V
V
OS-VOUT
V
OUT
OUT
Integral Nonlinearity R
Differential Nonlinearity R
OUT
Offset Voltage VOS = V
Output Voltage Drift No Load on V
Load Regulation 0.1V < V
Leakage Current V
Short-Circuit Current Low V
Short-Circuit Current High V
= 10kΩ, No Load on V
IOUTn
= 10kΩ, No Load on V
IOUTn
– V
OUTn
OUTn
< VDD – 1.5V, I
OUTn
0.1V < V
OUTn
OUTn
OUTn
< VDD – 1.5V, I
OUTn
High-Z, 0V ≤ V
Shorted to GND
Shorted to V
Soft Connect Comparator Characteristics (CMP0, CMP1)
V
OS
Offset Voltage ±3 mV
Temperature Sensor Characteristics
TMP Gain 0.25 °C/LSB
Voltage Divider Characteristics
12V
IN
GAIN_12V
Gain
IN
Digital Inputs SCL, SDA, GPIO_CFG, GPIO_0, GPIO_1
V
IH
Input High Threshold Voltage SDA, SCL
GPIO_CFG, GPIO_0, GIPO_1
V
IL
Input Low Threshold Voltage SDA, SCL
GPIO_CFG, GPIO_0, GIPO_1
V
I
LEAK
C
HYST
IN
Input Hysteresis 0.08 V
Input Leakage Current 0V ≤ VIN ≤ 6V
Input Capacitance 10 pF
Three State Inputs ASEL[1:0]
V
IH_ASEL
V
IL_ASEL
I
IN,HL
I
IN,Z
Open Drain Outputs SDA, GPIO_CFG, GPIO_0, GPIO_1,
V
OL
I
OH
Input High Threshold Voltage
Input Low Threshold Voltage
High, Low Input Current ASEL[1:0] = 0, V
High Z Input Current
⎯A⎯L⎯E⎯R⎯
T
Output Low Voltage I
SINK
= 3mA
Input Leakage Current 0V ≤ VIN ≤ 6V
= 12V, VDD and REF pins fl oating unless otherwise indicated,
12VIN
●
●
●
1.6 ±10 mV
, No Load on V
IOUTn
OUTn
OUTn
(Note 5)
(Note 5)
OUTn
0.17 μV/°C
Source = 1mA –57 ppm/mA
VOUTn
Sink = 1mA 100 ppm/mA
VOUTn
●
●
●
●
0.329 0.333 0.335 V/V
●
●
●
1.5 V
●
1.0 V
●
●
●
0.5 V
●
●
±2 μA
●
●
1 ±100 nA
VDD – 0.5 V
DD
DD
OUTn
≤ V
DD
±1 LSB
±1 LSB
–50 mA
50 mA
2.1 V
1.6 V
±1 μA
±20 μA
0.4 V
±1 μA
4
29701fc
LTC2970/LTC2970-1
The ● denotes the specifi cations which apply over the full operating
ELECTRICAL CHARACTERISTICS
temperature range, otherwise specifi cations are at T
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
2
C Interface Timing Characteristics
I
f
SCL
t
LOW
t
HIGH
t
BUF
t
HD,STA
t
SU,STA
t
SU,STO
t
HD,DAT
t
SU,DAT
t
SP
t
SETUP_GPIO
t
HOLD_GPIO
t
OUT_GPIO
Internal Timers
t
TIMEOUT_SMB
t
SETUP_ADC
t
TIMEOUT_
SYNC
t
HOLD_TRACK
Serial Clock Frequency (Note 6)
Serial Clock Low Period (Note 6)
Serial Clock High Period (Note 6)
Bus Free Time Between Stop and Start (Note 6)
Start Condition Hold Time (Note 6)
Start Condition Setup Time (Note 6)
Stop Condition Setup Time (Note 6)
Data Hold Time (LTC2970 Receiving Data)
Data Hold Time (LTC2970 Transmitting Data)
Data Setup Time (LTC2970 Receiving Data) (Note 6)
Pulse Width of Spike Suppressed (Note 6)
GPIO_0 and GPIO_1 Setup Time GPIO_0 and GPIO_1 input setup time
GPIO_0 and GPIO_1 Hold Time GPIO_0 and GPIO_1 input hold time
GPIO_0 and GPIO_1 Output Time GPIO_0 and GPIO_1 output delay after
Stuck BUS Timer The LTC2970 will release the I2C bus and
ADC Channel Setup Time After selecting a new ADC channel, the
Tracking SYNC Failure Timer LTC2970-1 Only: The LTC2970-1 will
Tracking IDAC Disconnect Delay LTC2970-1 Only: After the tracking
= 25°C.
A
(Note 6)
prior to the 26th rising SCL of an IO()
2
I
C read. These inputs must be valid and
stable by this time to be returned in the
IO() read result. (Note 6)
after the 26th rising SCL of an IO() I
read. These inputs must be held until
this amount of time has elapsed to be
returned in the IO() read result. (Note 6)
the 35th rising SCL of an I
2
C write. These
outputs will become high impedance or
begin driving low by this time. (Note 6)
terminate the current command if the
command is not completed before this
amount of time has elapsed.
LTC2970 will wait this amount of time
to allow the analog input to settle before
beginning an ADC conversion.
abort a pending SYNC() command if a
tracking command is not received before
this amount of time has elapsed.
algorithm asserts CPIO_CFG low, the
LTC2970-1 will delay disconnecting the
IDACs from the power supply feedback
nodes by this amount of time. Used while
tracking power supplies on.
●
10 400 kHz
●
1.3 μs
●
0.6 μs
●
1.3 μs
●
600 ns
●
600 ns
●
600 ns
●
0
300 900
●
100 ns
●
●
2.5 μs
●
2
C
2.5 μs
●
98 ns
2.5 μs
ns
ns
24 32 39 ms
304 μs
255 ms
32 ms
29701fc
5
LTC2970/LTC2970-1
The ● denotes the specifi cations which apply over the full operating
ELECTRICAL CHARACTERISTICS
temperature range, otherwise specifi cations are at T
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
t
SETUP_TRACK
t
DEC_TRACK
Tracking IDAC Disconnect Delay LTC2970-1 Only: After the tracking
Tracking IDAC Decrement Rate LTC2970-1 Only: The LTC2970-1 changes
= 25°C.
A
algorithm asserts CPIO_CFG high, the
LTC2970-1 will wait this amount of time
before starting to decrement Chn_a_
delay_track[9:0]. Used while tracking
power supplies off.
Chn_a_delay_track[9:0] at this rate.
32 ms
88 μs/LSB
Note 1: Stresses beyond those listed under Absolute Maximum Ratings
may cause permanent damage to the device. Exposure to any Absolute
Maximum Rating condition for extended periods may affect device
reliability and lifetime.
Note 2: All currents into device pins are positive; all currents out of device
pins are negative. All voltages are referenced to ground unless otherwise
specifi ed.
Note 3: TUE (%) is defi ned as:
%
INL V LSB V
+
+500
μ
V
IN
OS
•Gain Error
100
(• / )
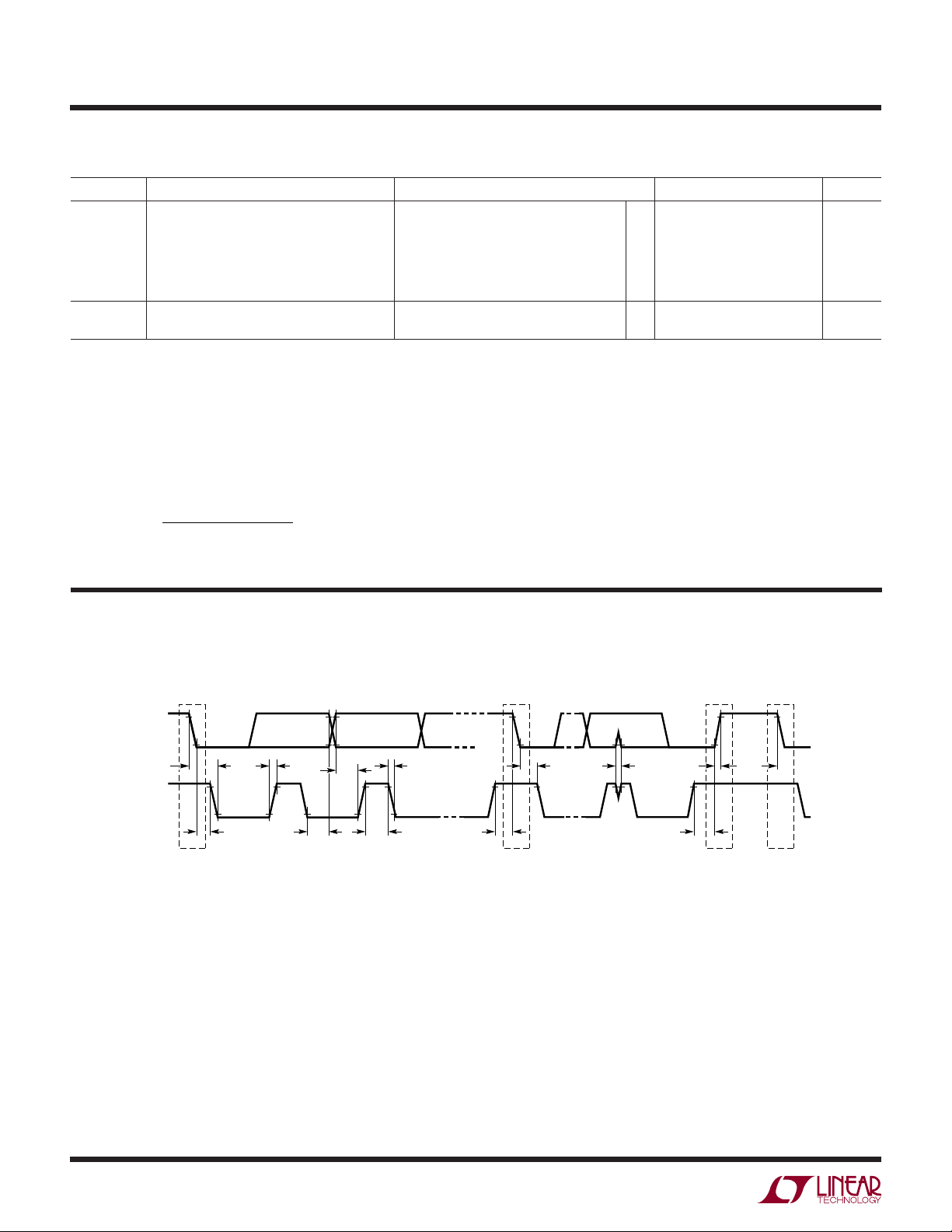
TIMING DIAGRAM
The I2C Bus Specifi cation
SDA
t
SU;DAT
t
f
SCL
t
f
t
LOW
t
r
Note 4: Integral nonlinearity (INL) is defi ned as the deviation of a code
from a straight line passing through the actual endpoints (0V and 6V)
of the transfer curve. The deviation is measured from the center of the
quantization band.
Note 5: Nonlinearity is defi ned from the fi rst code that is greater than or
equal to the maximum offset specifi cation to code 255 (full-scale).
Note 6: Maximum capacitive load, C
clock risetime (t
(20 + 0.1 • C
) and falltime (tf) are: (20 + 0.1 • CB)(ns) < tr < 300ns and
r
)(ns) < tf < 300ns. CB = capacitance of one bus line in pF.
B
SCL and SDA external pull-up voltage, V
, for SCL and SDA is 400pF. Data and
B
, is 3V < VIO < 5.5V.
IO
Note 7: This specifi cation is guaranteed by design.
t
HD;STA
t
SP
t
t
r
BUF
6
START
CONDITION
t
HD;STA
t
HD;DAT
t
HIGH
t
SU;STA
REPEATED START
CONDITION
t
SU;STO
STOP
CONDITION
START
CONDITION
29701 TD
29701fc
0
UW
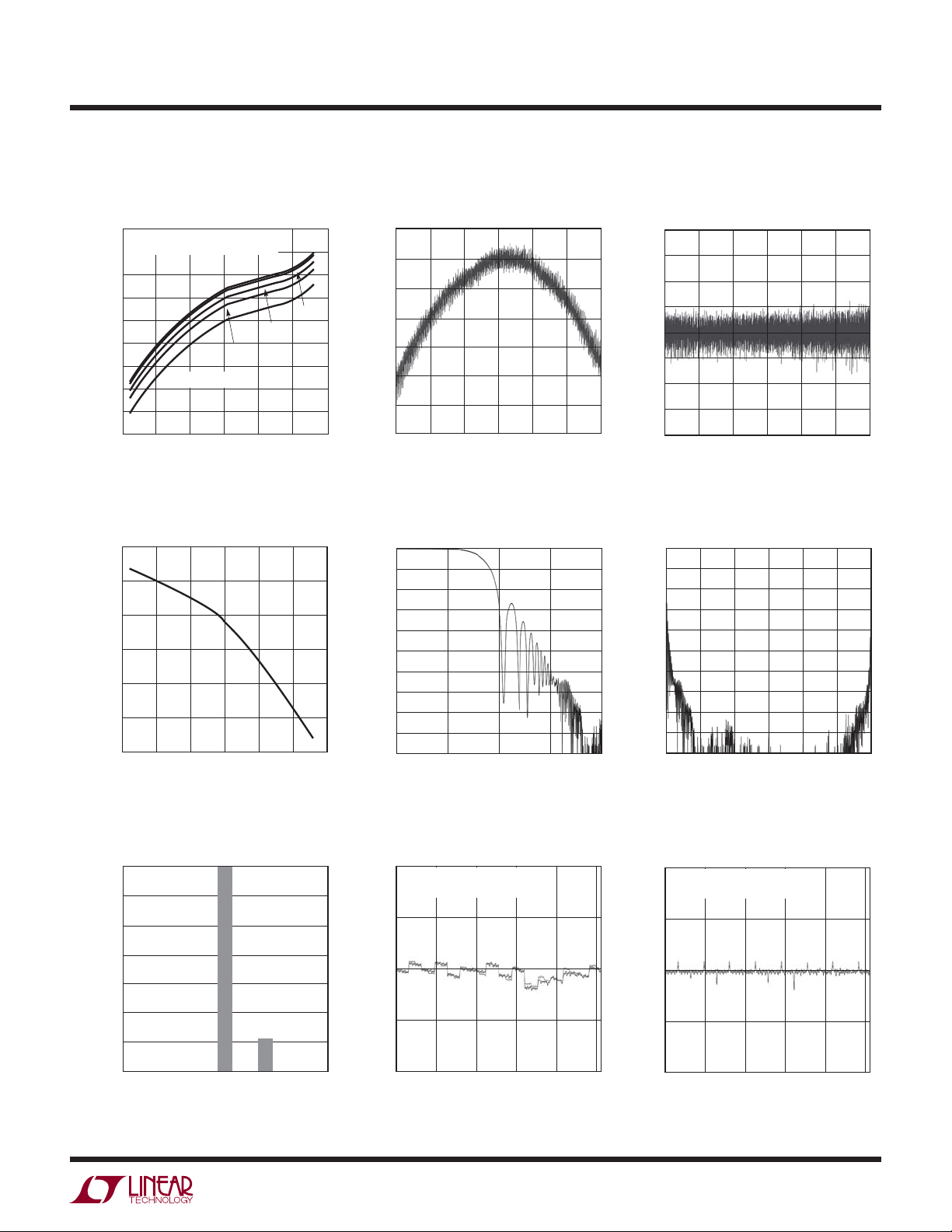
TYPICAL PERFOR A CE CHARACTERISTICS
ADC Total Unadjusted Error
vs Temperature ADC INL ADC DNL
0.050
0.025
0
–0.025
–0.050
–0.075
ERROR (%)
–0.100
–0.125
–0.150
–0.175
BASED ON AVERAGE OF 15 PARTS
ASSEMBLED ON 1/8" THICK PCB
3.3V
ADC VIN = 5V
0
–50
–25
25 10
TEMPERATURE (oC)
1V
1.8V
2.5V
50
75
29701 G01
2.5
2.0
1.5
1.0
0.5
ERROR (LSBs)
0
–0.5
–1.0
0
12
INPUT VOLTAGE (V)
46
35
LTC2970/LTC2970-1
1.00
0.75
0.50
0.25
0
–0.25
ERROR (LSBs)
–0.50
–0.75
–1.00
29701 G02
12 4
0
INPUT VOLTAGE (V)
3
5
6
29701 G03
ADC Zero Code Center Offset
Voltage vs Temperature
–305
–310
–315
(MV)
–320
OS
V
–325
–330
–335
–50
–25
ADC Noise Histogram
10,000,000
1,000,000
NUMBER OF READINGS
VIN = 0V
100000
10,000
1000
100
10
02550
TEMPERATURE (oC)
75 100
29701 G04
ADC Rejection vs Frequency
at V
IN
0
–10
–20
–30
–40
–50
–60
REJECTION (dB)
–70
–80
–90
–100
1
10
100
FREQUENCY AT VIN (Hz)
Voltage Buffered IDAC INL
0.50
CHANNELS 0 AND 1 SHOWN
= R
IOUT1
= 10k7
R
IOUT0
0.25
0
ERROR (LSBs)
–0.25
1000
10000
29701 G05
ADC Rejection vs Frequency
at V
IN
0
–10
–20
–30
–40
–50
–60
REJECTION (dB)
–70
–80
–90
–100
5000
0
15000 20000
10000
FREQUENCY AT VIN (Hz)
Voltage Buffered IDAC DNL
0.50
CHANNELS 0 AND 1 SHOWN
= R
R
IOUT0
0.25
0
ERROR (LSBs)
–0.25
IOUT1
= 10k7
25000
30000
29701 G06
1
–1 0 2
–2
OUTPUT CODE (LSBs)
1
29701 G07
–0.50
50
0
100
DAC CODE
150
200
29701 G08
250
–0.50
50
0
100
DAC CODE
150
200
250
29701 G09
29701fc
7
LTC2970/LTC2970-1
0
UW
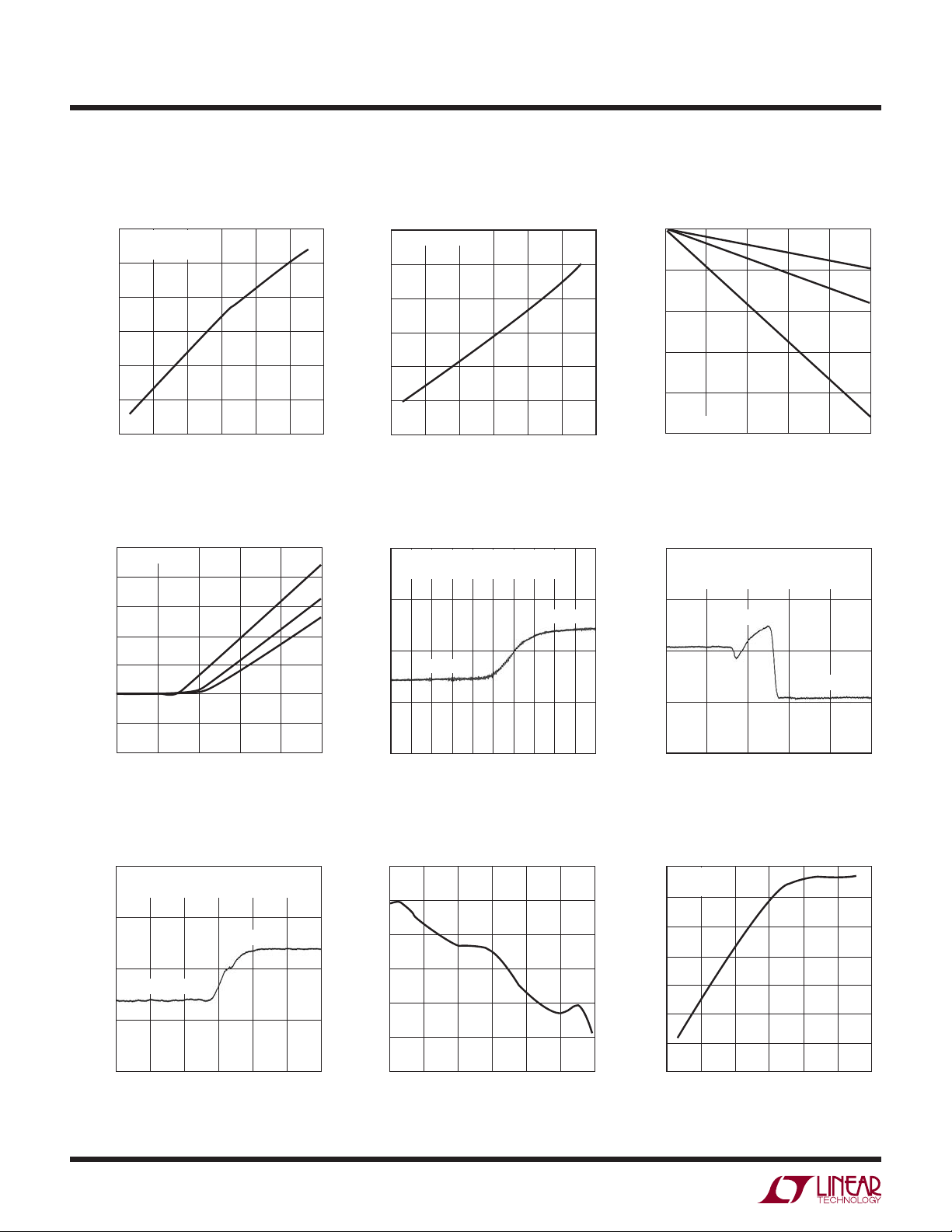
TYPICAL PERFOR A CE CHARACTERISTICS
IDAC Output Current
vs Temperature
257.4
IDAC CODE = 'hff
= 13kΩ
R
IOUT
257.2
257.0
256.8
256.6
OUTPUT CURRENT (μA)
256.4
256.2
–50
02550
–25
TEMPERATURE (°C)
Voltage Buffered IDAC Load
Regulation Sinking
0.35
V
= 0.1V
IOUT
0.30
0.25
0.20
0.15
0.10
OUTPUT VOLTAGE (V)
75 10
29701 G10
90oC
25oC
–45oC
V
Offset Voltage
OUTn
vs Temperature
1.620
IDAC CODE = 'h00
1.615
1.610
1.605
1.600
OFFSET VOLTAGE (mV)
1.595
1.590
–50
02550
–25
TEMPERATURE (oC)
Voltage Buffered IDAC Transient
Response to 1LSB DAC Code Change
100k7 SERIES RESISTANCE ON V
R
= 10k7
IOUT
CODE 'h7f
10mV PER DIVISION
75 100
29701 G11
OUTn
CODE 'h80
Voltage Buffered IDAC Load
Regulation Sourcing
3.500
3.498
3.496
3.494
OUTPUT VOLTAGE (V)
3.492
V
= 3.5V
IOUTn
3.490
–2
0
–4
CURRENT (mA)
Voltage Buffered IDAC SoftConnect Transient Response
100k7 SERIES RESISTANCE ON V
R
= 10k7
IOUT
CODE 'h80
HIGH-Z
10mV PER DIVISION
–6
CONNECTED
–8
OUTn
25oC
–45oC
90oC
–10
29701 G12
0.05
0
246 10
0
CURRENT (mA)
Voltage Buffered IDAC Transient
Response During Transition from
On State to High-Z State
100k7 SERIES RESISTANCE ON V
R
= 10k7
IOUT
HIGH-Z
CONNECTED
10mV PER DIVISION
10Ms PER DIVISION
OUTn
8
5Ms PER DIVISION
Regulator Output Voltage
= 12V
= 0A
50 100
–25 0
25 75
TEMPERATURE (oC)
29701 G15
29701 G18
29701fc
29701 G13
29701 G16
1Ms PER DIVISION
Temperature Sensor Error
vs Temperature
1.5
1.0
0.5
0
ERROR (oC)
–0.5
–1.0
–1.5
–50
02550
–25
TEMPERATURE (oC)
29701 G14
75 100
29701 G17
V
vs Temperature
4.945
V
I
VDD
4.944
4.943
4.942
(V)
DD
V
4.941
4.940
4.939
4.938
–50
DD
12VIN
8
UW
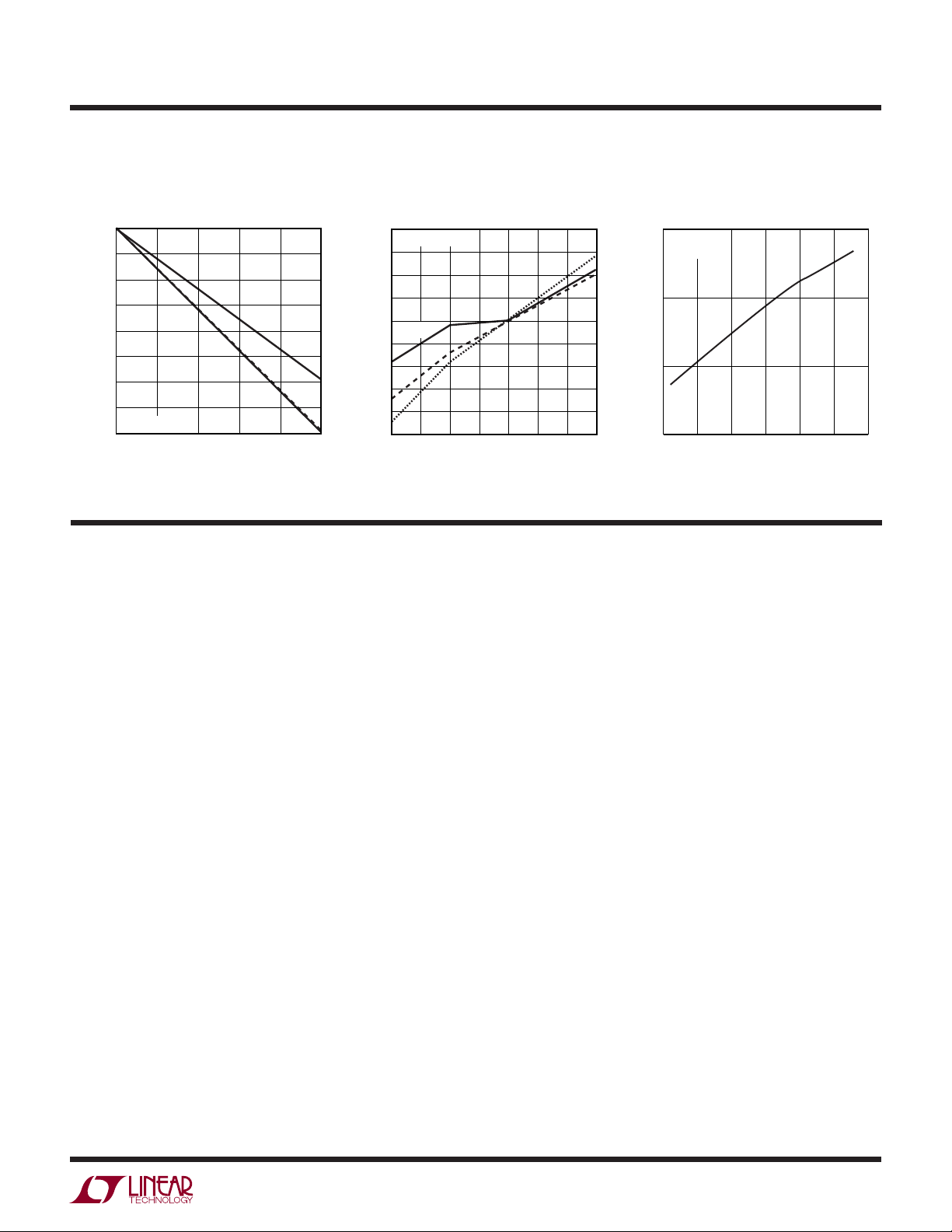
TYPICAL PERFOR A CE CHARACTERISTICS
VDD Regulator Load Regulation
0
–100
–200
–300
(ppm)
–400
DD
ΔV
–500
–600
–700
V
= 12V
12VIN
–800
–1 –2 –4
0
CURRENT (mA)
–45°C
25°C90°C
–3
29701 G19
(ppm)
DD
–100
ΔV
–200
–300
–400
–500
–5
Regulator Line Regulation
V
DD
400
NO LOAD ON V
300
200
100
0
25°C
8
–45°C
9
90°C
DD
10 15
10
V
12VIN
(V)
12
13 14
UUU
PI FU CTIO S
LTC2970/LTC2970-1
VDD Regulator Short-Circuit
Current vs Temperature
–25
V
= 12V
12VIN
= 0V
V
DD
–30
–35
SHORT-CIRCUIT CURRENT (mA)
–40
–50
–25 0 25 50
TEMPERATURE (°C)
29701 G20
75 100
29701 G21
V
(Pin 1): Positive CH0_A ADC Multiplexer Input.
IN0_AP
The output of the differential, 7:1 multiplexer connects to
the input of the ADC. CH0_A can be confi gured to servo
IDAC0.
V
(Pin 2): Negative CH0_A ADC Multiplexer Input.
IN0_AM
The output of the differential, 7:1 multiplexer connects to
the input of the ADC. CH0_A can be confi gured to servo
IDAC0.
V
(Pin 3): Positive CH0_B ADC Multiplexer Input. The
IN0_BP
output of the differential, 7:1 multiplexer connects to the
input of the ADC. CH0_B is a voltage monitor input only.
V
(Pin 4): Negative CH0_B ADC Multiplexer Input.
IN0_BM
The output of the differential, 7:1 multiplexer connects to the
input of the ADC. CH0_B is a voltage monitor input only.
V
(Pin 5): Positive CH1_A ADC Multiplexer Input.
IN1_AP
The output of the differential, 7:1 multiplexer connects to
the input of the ADC. CH1_A can be confi gured to servo
IDAC1.
V
(Pin 6): Negative CH1_A ADC Multiplexer Input.
IN1_AM
The output of the differential, 7:1 multiplexer connects to
the input of the ADC. CH1_A can be confi gured to servo
IDAC1.
V
(Pin 7): Positive CH1_B ADC Multiplexer Input. The
IN1_BP
output of the differential, 7:1 multiplexer connects to the
input of the ADC. CH1_B is a voltage monitor input only.
V
(Pin 8): Negative CH1_B ADC Multiplexer Input.
IN1_BM
The output of the differential, 7:1 multiplexer connects to the
input of the ADC. CH1_B is a voltage monitor input only.
(Pin 9): VDD Power Supply, Voltage Monitor Input,
V
DD
and Internal 5V Regulator Output. The supply input range
is 4.5V to 5.75V. The V
to the ADC through an internal mux. Bypass the V
to device ground with a 100nF capacitor (C
input voltage supply is available, fl oat the V
power the LTC2970 from the 12V
(Pin 10): 12V Power Supply and Voltage Monitor
12V
IN
Input. An internal regulator generates 5V from 12V
input range for 12V
pin voltage can be connected
DD
pin
DD
). If no 5V
VDD
pin and
DD
pin.
IN
. The
IN
is 8V to 15V. Bypass this pin with a
IN
100nF capacitor. The regulator’s output is connected to the
pin. The 12VIN pin voltage can also be monitored by
V
DD
the ADC through a 3:1 attenuator and the internal mux. If
no 12V supply input is available, tie the 12V
to the VDD
IN
pin and operate from 4.5V to 5.75V.
(Pin 11): CH0 Voltage Output. Buffered version of
V
OUT0
IDAC0 output voltage.
29701fc
9

LTC2970/LTC2970-1
UUU
PI FU CTIO S
V
(Pin 12): CH1 Voltage Output. Buffered version of
OUT1
IDAC1 output voltage.
(Pin 13): IDAC1 Current Output. Connect a resistor
I
OUT1
between this pin and the point-of-load ground for channel
1. The IDAC sources between 0 and 255μA.
(Pin 14): IDAC0 Current Output. Connect a resistor
I
OUT0
between this pin and the point-of-load ground for channel
0. The IDAC sources between 0 and 255μA.
GPIO_1 (Pin 15): General Purpose Input or Open Drain
Digital Output. GPIO_1 can be confi gured as the IDAC
Fault or Faults output, a digital input, or an open-drain
digital output.
GPIO_0 (Pin 16): General Purpose Input or Open Drain
Digital Output. GPIO_0 can be confi gured as the voltage
monitor power-good or power-good bar output, a digital
input, or a programmable open-drain output. Power good
is the NOR of all instantaneous OV and UV faults; it does
not include IDAC faults.
⎯A⎯L⎯E⎯R⎯
T (Pin 17): Open Drain Digital Output. Connect the
⎯A⎯L⎯E⎯R⎯
SMBALERT signal to this pin.
either IDAC0 or IDAC1 rails out (optional), or when one
of the monitored voltages ventures outside its UV and OV
thresholds (also optional).
SCL (Pin 18): Serial Bus Clock Input.
T is asserted low when
SDA (Pin 19): Serial Bus Data Input and Output.
GPIO_CFG (Pin 20): GPIO Confi guration Digital Input and
Open Drain Output. Pulling GPIO_CFG high will cause the
GPIO_0 and GPIO_1 open-drain outputs to automatically
assert low after a power-on reset. If GPIO_CFG is pulled
low, then GPIO_0 and GPIO_1 do not assert low after
power-up.
ASEL1 (Pin 21): Slave Address Select Bit 1. Tie this pin to
the V
location (see Table 2).
ASEL0 (Pin 22): Slave Address Select Bit 0. Tie this pin to
the V
location (see Table 2).
REF (Pin 23): Internal Reference Output or ADC Reference
Overdrive Input. The voltage at this pin determines the
full-scale input voltage of the delta-sigma ADC (V
SCALE
decouples the reference output from this pin. Bypass this
pin to RGND with a 100nF capacitor (C
RGND (Pin 24): Reference Ground. Connect to device
ground.
GND (Pin 25): Device Ground. Must be soldered to
ground.
pin, ground, or fl oat in order to select the address
DD
pin, ground, or fl oat in order to select the address
DD
= 6.65 • V
, typically). An internal 3.5k resistor
REF
).
REF
FULL-
10
29701fc
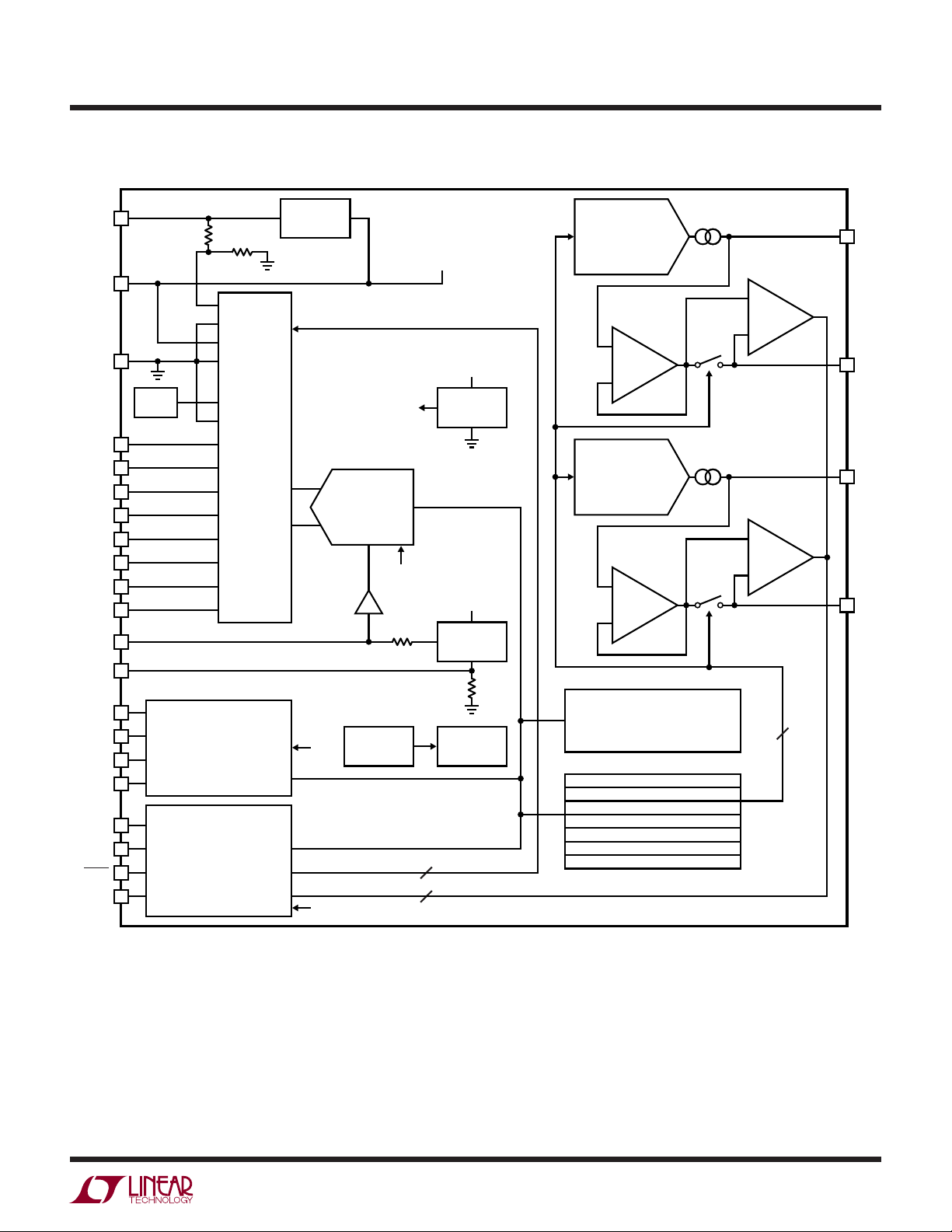
BLOCK DIAGRA
LTC2970/LTC2970-1
W
IN0_AP
IN0_AM
IN0_BP
IN0_BM
IN1_AP
IN1_AM
IN1_BP
IN1_BM
1012V
IN
9V
DD
25GND
2R
R
12V
P
12V
M
V
DDP
V
DDM
5V REGULATOR
V
V
OUT
IN
IDAC0
8 BITS
V
DD
+
V
DD
VBUF0
0μA TO 255μA
+
CMP0
–
14 I
11 V
OUT0
OUT0
–
TEMP
SENSOR
1V
2V
3V
4V
5V
6V
7V
8V
23REF
24RGND
18SCL
19SDA
(400kHz, SMBUS COMPATIBLE)
22ASEL0
21ASEL1
16GPIO_0
DAC SOFT CONNECT FUNCTION
15GPIO_1
17ALERT
20GPIO_CFG
MANAGE FAULT REPORTING
TRACKING CONTROL (LT2970-1)
TSNSP
TSNSM
CH0_AP
CH0_AM
CH0_BP
CH0_BM
CH1_AP
CH1_AM
CH1_BP
CH1_BM
7:1 MUX
I2C BUS INTERFACE
SERVO CONTROLLER
SERVO FUNCTION
MONITOR FUNCTION
WATCH DOG
POR
POR
+
DELTA-SIGMA
–
6.65X
(TYP)
OSCILLATOR
14-BIT
A/D
POR
ADC
CLOCKS
3.5k
7
2
UVLO
V
DD
REFERENCE
1.229V (TYP)
20Ω
CLOCK
GENERATION
IDAC1
8 BITS
+
VBUF1
–
RAM
ADC_Results
MONITOR LIMITS
SERVO TARGETS
REGISTERS
I/O CONFIGURATION
IDAC0
IDAC1
ADC MONITOR
FAULT ENABLE
INSTANTANEOUS FAULTS
LATCHED FAULTS
0μA TO 255μA
+
CMP1
–
13 I
OUT1
12 V
OUT1
18
29701 BD
29701fc
11

LTC2970/LTC2970-1
UU
TABLE OF CO TE TS
1. LTC2970 Operation Overview .............................................................................................................................13
2
C Serial Digital Interface .................................................................................................................................14
2. I
3. Register Command Set .......................................................................................................................................15
2
4. Detailed I
5. Soft Connecting the LTC2970 to the Power Supply Feedback Node ..................................................................20
6. Hard Connecting the LTC2970 to the Power Supply Trim Pin ............................................................................20
7. Programming a Previously Connected IDAC ......................................................................................................21
8. Disconnecting the LTC2970 from the Power Supply Trim Pin ...........................................................................21
9. Tracking Power Supplies Overview (LTC2970-1 Only) .......................................................................................21
10. Tracking Power Supplies On (LTC2970-1 Only) .................................................................................................21
11. Tracking Power Supplies Off (LTC2970-1 Only) .................................................................................................22
12. Continuous Power Supply Voltage Servo ...........................................................................................................23
C Command Register Descriptions ...................................................................................................16
(For Operations Sections)
13. One Time Power Supply Voltage Servo .............................................................................................................24
14. One Time Power Supply Voltage Servo with Repeat On Fault ..........................................................................24
15. Confi guring ADC to Monitor Input Channels and Internal Temperature Sensor ................................................24
16. Generating and Monitoring Instantaneous Faults ..............................................................................................25
17. Generating and Monitoring Latched Faults ........................................................................................................26
18. General Purpose Input/Output Pins ....................................................................................................................27
19. Advanced Development Features .......................................................................................................................27
12
29701fc

OPERATIO
LTC2970/LTC2970-1
U
1. LTC2970 Operation Overview
The LTC2970 is designed to control and monitor two
power supplies. The LTC2970’s superior accuracy allows
it to precisely servo each supply’s output voltage over a
wide range of operating conditions; increasing accuracy,
reducing power requirements and component costs. Margining may be performed with equal ease and precision.
The monitoring functions allow for increased reliability
by alerting a system host about incipient failures before
they occur. The seven channel ADC may also be used to
monitor current, temperature, and the 5V or optional 12V
supply.
The LTC2970’s unique architecture and control algorithm
have been especially tailored for power supply management. The soft connect feature allows the LTC2970 to begin
controlling a power supply without perturbing its initial
value. The delta-sigma ADC architecture was specifi cally
chosen to average out power-supply noise and allow the
LTC2970 to ignore fast transients. Unlike discrete time
DACs, the LTC2970’s continuous time, voltage buffered
IDAC is ideal for noise sensitive applications. The servo
algorithm limits the IDAC step size to one LSB per iteration
in order to minimize power supply transients. The point
of load ground reference for the IDAC outputs minimize
errors that would otherwise occur in a power system that
experiences ground bounce. By selecting two resistor
values, the user can choose the appropriate resolution
while providing an important hardware range limit beyond
which the supply may not be driven. The servo on fault
option allows the LTC2970 to further reduce output voltage
disturbances by only stepping the IDAC when the output
voltage drifts outside of a user programmable window.
The LTC2970 powers up in a high impedance state and
will not interfere with default power supply operation.
Similarly, powering down the LTC2970 will restore its
high impedance state.
All communication with the LTC2970 is performed over
an industry standard I
also meets all SMBus setup times, hold times, and timeout
requirements. The ALERT pin may be used to signal that
one or more of the fourteen confi gurable fault limits have
been reached. Each fault may be individually masked. The
2
C interface supports word reads, word writes and the
I
SMBus Alert Response Address protocol. Two general
purpose IO pins may be used to provide additional fault
information or user defi ned system control. Powering down
the LTC2970 will not interfere with I
The LTC2970-1 enables power supply tracking and sequencing with the addition of a few external components.
A special global address and synchronization command
allow multiple LTC2970-1’s to track and sequence multiple
pairs of power supplies.
The LTC2970 can perform the following operations:
• Accept all programming commands and report status
over the I
• Command each voltage buffered IDAC to connect to the
corresponding power supply’s feedback node through
an external resistor using the IDAC code that most
closely approximates the feedback node’s regulation
voltage (Soft Connect).
• Command each voltage buffered IDAC output to connect
to the corresponding power supply’s feedback node
through an external resistor with a user-selected IDAC
code (Hard Connect).
• Change the code of a previously connected IDAC.
• Disconnect each voltage buffered IDAC output from the
power supply’s feedback node.
• LTC2970-1 Only: Track two power supplies up or down.
Multiple LTC2970-1’s can be confi gured to track simultaneously or in a sequence.
2
C or SMBus bus.
2
C bus. The LTC2970 I2C interface
2
C operation.
29701fc
13

LTC2970/LTC2970-1
U
OPERATIO
• Continuously servo one or both supplies to a programmed voltage.
• Perform a one-time servo of one or both supplies to a
programmed voltage and hold the servo codes in the
controlling IDAC.
• Perform a one time servo of one or both supplies to
a programmed voltage and hold the code(s) in the
controlling IDAC(s) until over/under voltage monitoring detects a fault, at which point a control bit may be
used to allow the LTC2970 to servo back to the initial
voltage target.
• Select any combination of seven possible ADC channels
to be monitored by the ADC.
• Generate instantaneous faults based on user programmable over-voltage and under-voltage limits and fi xed
IDAC limits. The status of OR’d voltage limit faults and
IDAC faults may be output over GPIO_0 and GPIO_1,
respectively.
• Enable instantaneous faults to set associated latched
faults using the FAULT_EN register. The status of OR’d
latched faults may be signalled using ALERT.
• Confi gure the GPIO_0 and GPIO_1 pins to act as inputs
or outputs.
2
C Serial Digital Interface
2. I
The LTC2970 communicates with a host (master) using
the 2-wire, I
shows the timing relationship of the signals on the bus.
2
C serial bus interface. The Timing Diagram
The two bus lines, SDA and SCL, must be high when the
bus is not in use. External pull-up resistors or current
sources are required on these lines.
2
The LTC2970 I
all SMBus setup times, hold times and timeout requirements.
The LTC2970 is a receive-only (slave) device. The LTC2970
can signal the host through the SMBALERT protocol that it
wants to talk by asserting ALERT low. The LTC2970 supports the three I
Slave Address
The LTC2970 can respond to one of nine 7-bit addresses.
The two slave address select pins (ASEL1 and ASEL0) are
programmed by the user and determine the slave address,
as shown in Table 2.
The LTC2970 also supports the ARA address and a global
address that allows multiple LTC2970s to be programmed
with the same data simultaneously, as shown in Table 3.
Table 1. Supported I2C Command Types
READ DATA WORD:
S:ADR:W:A:CMD:A:Sr:ADR:R:A:DATA:A:DATA:NACK:P
WRITE DATA WORD:
S:ADR:W:A:CMD:A:DATA:A:DATA:A:P
ALERT RESPONSE
S:ARA:R:A:ADR:NACK:P:
C interface is SMBus compatible; it meets
2
C protocols summarized in Table 1.
14
29701fc

OPERATIO
LTC2970/LTC2970-1
U
Table 2. LTC2970 Address Table
ADDRESS[7:0]
(R/W = 0)
8’hB8 7’h5C L L
8’hBA 7’h5D L F
8’hBC 7’h5E L H
8’hBE 7’h5F F L
8’hD6 7’h6B F F
8’hD8 7’h6C F H
8’hDA 7’h6D H L
8’hDC 7’h6E H F
8’hDE 7’h6F H H
ASELn
< V
IL_ASEL
L: V
ADDRESS[7:1] ASEL1 ASEL0
F: ASELn Floating H: V
ASELn
> V
IH_ASEL
Table 3. Special LTC2970 Addresses
ADDRESS[7:0]
(R/W = 0)
ARA 8’h18 7’h0C This is the standard Alert
Global 8’hB6 7’h5B This a global address to which
ADDRESS[7:1] FUNCTION
Response Address for all
SMBus devices. This address is
independent of the value of the
ASEL1 and ASEL0 pins.
all LTC2970s will respond. This
address is independent of the
value of the ASEL1 and ASEL0
pins.
3. Register Command Set
COMMAND FUNCTION DESCRIPTION R/W DATA
FAULT() Instantaneous Fault Status For All Channels Read Only 16 Bits ‘h00
FAULT_EN() Enable For All Latched Faults and Servo On Fault Read/Write 16 Bits ‘h08
FAULT_LA_INDEX() Index to All Latched Faults Read Only 16 Bits ‘h10
FAULT_LA() Latched Fault Status For All Channels Read Only 16 Bits ‘h11
IO() IO Control and Status Register Read/Write 16 Bits ‘h17
ADC_MON() Control Register For Selecting ADC Channels to Monitor Read/Write 16 Bits ‘h18
*SYNC() Control Register For Synchronizing Tracking Across Multiple Devices Read/Write 16 Bits ‘h1F
VDD_ADC() V
VDD_OV() V
VDD_UV() V
V12_ADC() 12V
V12_OV() 12V
V12_UV() 12V
CH0_A_ADC() CH0_A ADC Conversion Result Register Read Only 16 Bits ‘h40
CH0_A_OV() CH0_A Over-Voltage Monitor Control Register Read/Write 16 Bits ‘h41
CH0_A_UV() CH0_A Under-Voltage Monitor Control Register Read/Write 16 Bits ‘h42
CH0_A_SERVO() CH0_A Voltage Servo Control Register Read/Write 16 Bits ‘h43
CH0_A_IDAC() CH0_A IDAC Control Register Read/Write 16 Bits ‘h44
*CH0_A_IDAC_TRACK() CH0_A IDAC Track Final Value Register Read/Write 16 Bits ‘h45
*CH0_A_DELAY_TRACK() CH0_A IDAC Track Delay Register Read/Write 16 Bits ‘h46
CH0_B_ADC() CH0_B ADC Conversion Result Register Read Only 16 Bits ‘h48
CH0_B_OV() CH0_B Over-Voltage Monitor Control Register Read/Write 16 Bits ‘h49
CH0_B_UV() CH0_B Under-Voltage Monitor Control Register Read/Write 16 Bits ‘h4A
CH1_A_ADC() CH1_A ADC Conversion Result Register Read Only 16 Bits ‘h50
CH1_A_OV() CH1_A Over-Voltage Monitor Control Register Read/Write 16 Bits ‘h51
CH1_A_UV() CH1_A Under-Voltage Monitor Control Register Read/Write 16 Bits ‘h52
ADC Conversion Result Register Read Only 16 Bits ‘h28
DDIN
Over-Voltage Monitor Control Register Read/Write 16 Bits ‘h29
DDIN
Under-Voltage Monitor Control Register Read/Write 16 Bits ‘h2A
DDIN
ADC Conversion Result Register Read Only 16 Bits ‘h38
IN
Over-Voltage Monitor Control Register Read/Write 16 Bits ‘h39
IN
Under-Voltage Monitor Control Register Read/Write 16 Bits ‘h3A
IN
LENGTH
COMMAND
BYTE VALUE
29701fc
15

LTC2970/LTC2970-1
U
OPERATIO
3. Register Command Set (Cont.)
COMMAND FUNCTION DESCRIPTION R/W DATA
CH1_A_SERVO() CH1_A Voltage Servo Control Register Read/Write 16 Bits ‘h53
CH1_A_IDAC() CH1_A IDAC Control Register Read/Write 16 Bits ‘h54
*CH1_A_IDAC_TRACK() CH1_A IDAC Track Control Register Read/Write 16 Bits ‘h55
*CH1_A_DELAY_TRACK() CH1_A IDAC Track Delay Register Read/Write 16 Bits ‘h56
CH1_B_ADC() CH1_B ADC Conversion Result Register Read Only 16 Bits ‘h58
CH1_B_OV() CH1_B Over-Voltage Monitor Control Register Read/Write 16 Bits ‘h59
CH1_B_UV() CH1_B Under-Voltage Monitor Control Register Read/Write 16 Bits ‘h5A
TEMP_ADC() Temperature ADC Conversion Result Register Read/Write 16 Bits ‘h68
RESERVED() All other commands are reserved for future expansion and should not be
written or read.
*LTC2970-1 Only. LTC2970 will not acknowledge these commands.
Read/Write 16 Bits ‘hXX
LENGTH
COMMAND
BYTE VALUE
4. Detailed I2C Command Register Descriptions
FAULT: Instantaneous Fault Register – Read
BIT(s) SYMBOL OPERATION
b[0]
b[1]
b[2]
b[3]
b[4]
b[5]
b[6]
b[7]
b[8]
b[9]
b[10]
b[11]
b[12]
b[13]
b[15:14] Reserved Always Returns 0
Fault_ch0_a_ov
Fault_ch0_a_uv
Fault_ch0_a_idac
Fault_ch0_b_ov
Fault_ch0_b_uv
Fault_ch1_a_ov
Fault_ch1_a_uv
Fault_ch1_a_idac
Fault_ch1_b_ov
Fault_ch1_b_uv
Fault_vdd_ov
Fault_vdd_uv
Fault_v12_ov
Fault_v12_uv
0 = The associated channel is clear of
instantaneous faults.
1 = The associated channel has an
instantaneous fault.
The reported faults are instantaneous
and not latched. When used in
conjunction with latched faults they
may indicate faults that are transient in
nature.
FAULT_EN: Fault Enabling Register – Read/Write
BIT(s) SYMBOL OPERATION
b[0]
b[1]
b[2]
b[3]
b[4]
b[5]
b[6]
b[7]
b[8]
b[9]
b[10]
b[11]
b[12]
b[13]
b[14] Fault_en_ch0_a_servo 0 = Do not re-servo CH0_A in
b[15] Fault_en_ch1_a_servo 0 = Do not re-servo CH1_A in
Fault_en_ch0_a_ov
Fault_en_ch0_a_uv
Fault_en_ch0_a_idac
Fault_en_ch0_b_ov
Fault_en_ch0_b_uv
Fault_en_ch1_a_ov
Fault_en_ch1_a_uv
Fault_en_ch1_a_idac
Fault_en_ch1_b_ov
Fault_en_ch1_b_uv
Fault_en_vdd_ov
Fault_en_vdd_uv
Fault_en_v12_ov
Fault_en_v12_uv
0 = The associated bit in the
FAULT_LA register will always be 0.
(default)
1 = Instantaneous faults reported in
the FAULT register will set associated
bit in the FAULT_LA register.
response to instantaneous OV or UV
fault.
1 = Repeat a one time servo of CH0_A
in response to instantaneous OV or
UV fault. CH0_A must have servo
operation enabled with Ch0_a_idac_
servo_repeat set low, and Adc_mon_
ch0_a set high.
response to instantaneous OV or UV
fault.
1 = Repeat a one time servo of CH1_A
in response to instantaneous OV or
UV fault. CH1_A must have servo
operation enabled with Idac_ch1_a_
servo_repeat set low, and Adc_mon_
ch1_a set high.
29701fc
16

OPERATIO
LTC2970/LTC2970-1
U
4. Detailed I2C Command Register Descriptions
(Cont.)
FAULT_INDEX: Latched Fault Index Register – Read
BIT(s) SYMBOL OPERATION
b[0] Fault_la_index 0 = All faults indicated by FAULT_LA
b[15:1] Reserved Always Returns 0
FAULT_LA: Latched Fault Register – Read
BIT(s) SYMBOL OPERATION
b[0]
b[1]
b[2]
b[3]
b[4]
b[5]
b[6]
b[7]
b[8]
b[9]
b[10]
b[11]
b[12]
b[13]
b[15:14] Reserved Always Returns 0
Fault_la_ch0_a_ov
Fault_la_ch0_a_uv
Fault_la_ch0_a_idac
Fault_la_ch0_b_ov
Fault_la_ch0_b_uv
Fault_la_ch1_a_ov
Fault_la_ch1_a_uv
Fault_la_ch1_a_idac
Fault_la_ch1_b_ov
Fault_la_ch1_b_uv
Fault_la_vdd_ov
Fault_la_vdd_uv
Fault_la_v12_ov
Fault_la_v12_uv
are clear.
1 = One or more faults indicated by
FAULT_LA are set.
This register allows a summary of all
latched faults to be viewed in a single
read without resetting latched faults.
0 = The associated channel is clear of
faults.
1 = The associated channel has faulted
and is enabled.
The latched faults are set and held
when the associated channel's
instantaneous fault has occured with
faults enabled. Clearing the enable bit
for the associated channel in FAULT_EN
will immediately clear its corresponding
latched fault bit.
All latched channel faults are cleared
when this register is read. They may
be set again if the instantaneous
fault condition and fault_en have not
changed.
IO: Input/Output Data and General Purpose Control Register
– Read/Write unless specifi ed otherwise.
BIT(s) SYMBOL OPERATION
b[1:0] Io_cfg_0[1:0] Io_cfg_0[1:0] is used to confi gure the function of
b[3:2] Io_cfg_1[1:0] Io_cfg_1[1:0] is used to confi gure the function
b[4] Io_gpio_0 See Io_cfg_0.
b[5] Io_gpio_1 See Io_cfg_1.
b[6] Io_alertb Mirrors the value of the ALERT pin.
b[7] Io_alertb_enb 1 = ALERT pin never asserts (default).
b[8] Io_i2c_adc_
wen
b[9] Io_gpio_cfg Read only. GPIO_CFG digital input and open-
b[10] Io_track_start Writing a 1 to this bit will start tracking all
b[15:11] Reserved Always Returns 0
the GPIO_0 pin and IO(Io_gpio_0).
00: Io_gpio_0 = GPIO_0 = Power_good. Power_
good asserts high if there are no instantaneous
over-voltage or under-voltage faults.
01: Io_gpio_0 = GPIO_0 = Power_good_bar.
Power_good_bar is the complement of
Power_good.
10: GPIO_0 is a general-purpose open-drain
output and mirrors the value written to Io_gpio_0
(default).
11: GPIO_0 is a general-purpose digital input
with Io_gpio_0 = GPIO_0
of the GPIO_1 pin and IO(Io_gpio_1).
00: Io_gpio_1 = GPIO_1 = Idac_fault.
Idac_fault asserts if either IDAC value is faulted
(Chn_idac[7:0] = 8’h00 or 8’hff)
01: Io_gpio_1 = GPIO_1 = Idac_fault_bar.
Idac_fault_bar is the complement of Idac_fault.
10 = GPIO_1 is a general-purpose opendrain output and mirrors the value written to
Io_gpio_1 (default).
11 = GPIO_1 is a general-purpose digital input
with Io_gpio_1 = GPIO_1
If the GPIO_CFG pin is pulled-high during a
power on reset, Io_gpio_0 is cleared and the
GPIO_0 open-drain output will assert low.
If the GPIO_CFG pin is pulled-high during a
power on reset, Io_gpio_1 is cleared and the
GPIO_1 open-drain output will assert low.
Read only.
0 = ALERT pin asserts low when one or more
FAULT_LA bits are set.
1 = Special test mode that inhibits ADC from
writing to ADC result register and allows user
to update registers over the I
0 = Normal operation (default).
drain output. Reading this bit returns the
current state of the GPIO_CFG pin voltage.
enabled channels. Returns a 1 when tracking
is pending (LTC2970-1). Reserved on LTC2970
and always returns 0.
2
C serial interface.
29701fc
17

LTC2970/LTC2970-1
U
OPERATIO
4. Detailed I2C Command Register Descriptions
(Cont.)
ADC_MON: ADC Monitoring Mux Control Register – Read/Write
BIT(s) SYMBOL OPERATION
b[0]
b[1]
b[2]
b[3]
b[4]
b[5]
b[6]
b[15:7] Reserved Always Returns 0
SYNC: Tracking Synchronization Control Register – Read/Write
LTC2970-1 Only
BIT(s) SYMBOL OPERATION
b[0] Sync_track Write
b[15:1] Reserved Always Returns 0
Adc_mon_vdd
Adc_mon_v12
Adc_mon_ch0_a
Adc_mon_ch0_b
Adc_mon_ch1_a
Adc_mon_ch1_b
Adc_mon_temp
0 = ADC will not convert associated
channel. (Default)
1 = ADC will continuously convert
associated channel.
0 = Do not synchronize.
1 = Synchronize all tracking enabled
registers to the same starting point.
Read
0 = The LTC2970-1 is not synchronized
for tracking (default).
1 = The LTC2970-1 is synchronized for
tracking.
Use of the global address will allow
the synchronization status of multiple
LTC2970-1s to be verifi ed in a single
read; since a one can only be returned
if all LTC2970-1s are synchronized. The
IO_track_start command may then be
issued with the same global address
to begin synchronized tracking across
multiple ICs.
VDD_ADC, V12_ADC, CH0_A_ADC, CH0_B_ADC, CH1_A_ADC,
CH1_B_ADC, and TEMP_ADC: ADC Conversion Result Registers
– Read Only Unless Specifi ed Otherwise
BIT(s) SYMBOL OPERATION
b[14:0] Vdd_adc[14:0]
V12_adc[14:0]
Ch0_a_adc[14:0]
Ch0_b_adc[14:0]
Ch1_a_adc[14:0]
Ch1_b_adc[14:0]
Temp_adc[14:0]
b[15] Vdd_adc_new
V12_adc_new
Ch0_a_adc_new
Ch0_b_adc_new
Ch1_a_adc_new
Ch1_b_adc_new
Temp_adc_new
Measured data from ADC conversion.
'h4000 corresponds to negative full-
scale input voltage.
'h0000 corresponds to 0V.
'h3fff corresponds to full-scale input
voltage.
2’s complement format, b[14] = sign.
Read/Write when Io_i2c_adc_wen = 1.
Default value is undefi ned.
1 = The ADC has updated the
associated result register since the last
time the data was read.
0 = Previously read data. (Default)
VDD_OV, V12_OV, CH0_A_OV, CH0_B_OV, CH1_A_OV, CH1_B_
OV: Over Voltage Limit Registers – Read/Write
BIT(s) SYMBOL OPERATION
b[14:0] Vdd_ov[14:0]
V12_ov[14:0]
Ch0_a_ov[14:0]
Ch0_b_ov[14:0]
Ch1_a_ov[14:0]
Ch1_b_ov[14:0]
b[15] Reserved Always Returns 0
ADC over-voltage threshold limit.
The associated instantaneous over
voltage fault is asserted if the channel’s
ADC result is greater than this limit.
Code 'h3fff disables OV threshold
detect feature for that channel.
2’s complement format, b[14] = sign.
Default value is undefi ned.
VDD_UV, V12_UV, CH0_A_UV, CH0_B_UV, CH1_A_UV, CH1_B_
UV: Under Voltage Limit Registers – Read/Write
BIT(s) SYMBOL OPERATION
b[14:0] Vdd_uv[14:0]
V12_uv[14:0]
Ch0_a_uv[14:0]
Ch0_b_uv[14:0]
Ch1_a_uv[14:0]
Ch1_b_uv[14:0]
b[15] Reserved Always Returns 0
ADC under-voltage threshold limit.
The associated instantaneous under
voltage fault is asserted if the channel’s
ADC result is greater than this limit.
Code 'h4000 disables UV threshold
detect feature for that channel.
2’s complement format, b[14] = sign.
Default value is undefi ned.
18
29701fc

OPERATIO
LTC2970/LTC2970-1
U
4. Detailed I2C Command Register Descriptions
(Cont.)
CH0_A_SERVO, CH1_A_SERVO: Voltage Servo Control
Registers – Read/Write
BIT(s) SYMBOL OPERATION
b[14:0] Ch0_a_servo[14:0]
Ch1_a_servo[14:0]
b[15] Ch0_a_servo_en
Ch1_a_servo_en
CH0_A_IDAC, CH1_A_IDAC: IDAC Control/Data Registers –
Read/Write
BIT(s) SYMBOL OPERATION
b[7:0] Ch0_a_idac[7:0]
Ch1_a_idac[7:0]
b[8] Ch0_a_idac_en
Ch1_a_idac_en
b[9] Ch0_a_idac_con
Ch1_a_idac_con
During servo operation
Chn_a_idac[7:0] output current is
stepped to force Chn_a_adc[14:0]
code to equal target code stored in
Chn_a_servo[14:0].
2’s complement format, b[14] = sign
Default value is undefi ned.
0 = Chn_a servo disabled (default).
1 = Chn_a servo enabled.
Chn_a IDAC data value.
0 = V
1 = V
There are two ways to enable
V
1) When Chn_a_idac_en is set
high with Chn_a_idac_con low,
the LTC2970 will perform a soft
connect. During a soft connect,
the V
will not be connected to the V
pin until the internal algorithm
has servo’d the voltage at the
IDACn pin to match the V
pin voltage. Resolution is one
Chn_a_idac LSB.
2) When Chn_a_idac_en is
enabled with Chn_a_idac_con
high, the LTC2970 will perform
a hard connect. The V
voltage buffer will be immediately
connected to the V
0 = V
has been enabled but is not yet
connected to the output of the
CHn voltage buffer. (Default)
1 = V
connected to the output of the
CHn voltage buffer.
See Chn_a_idac_en for additional
information.
output tri-stated.
OUTn
output enabled.
OUTn
.
OUTn
voltage buffer output
OUTn
is not enabled or
OUTn
is enabled and has been
OUTn
OUTn
OUTn
pin.
OUTn
OUTn
b[10] Ch0_a_idac_pol
Ch1_a_idac_pol
b[11] Ch0_a_idac_servo_repeat
Ch1_a_idac_servo_repeat
b[15:12] Reserved Always Returns 0
0 = Use this setting when
increasing V
(VINn_AP-VINn_AM) to decrease.
Inverting confi guration common
to DC/DC converters with external
feedback networks.
1 = Use this setting when
increasing V
(VINn_AP-VINn_AM) to increase.
Non-inverting confi guration
common to DC/DC converters
with trim pins.
0 = During servo operation, servo
Chn_a until the measured result
is stable and matches the target
code.
1 = During servo operation,
continuously servo Chn_a to the
target code.
OUTn
OUTn
causes
causes
CH0_A_IDAC_TRACK and CH1_A_IDAC_TRACK: IDAC Tracking
data and control registers – Read/Write
LTC2970-1 Only
BIT(s) SYMBOL OPERATION
b[7:0] Ch0_a_idac_
b[8] Ch0_a_idac_track_en
b[15:9] Reserved Always Returns 0
track[7:0]
Ch1_a_idac_
track[7:0]
Ch1_a_idac_track_en
Final target value for of Chn_a_
idac[7:0]. During tracking, Chn_a_
idac[7:0] is incremented/decremented
by 1 until it is equal to this value.
0 = inhibit tracking of Chn_a_idac[7:0].
1 = enable tracking of Chn_a_idac[7:0]
CH0_A_DELAY_TRACK and CH1_A_DELAY_TRACK: IDAC
Tracking delay register – Read/Write
LTC2970-1 Only
BIT(s) SYMBOL OPERATION
b[9:0] Ch0_a_delay_track[9:0]
Ch1_a_delay_track[9:0]
b[1510] Reserved Always Returns 0
Delay used to synchronize or offset
tracking events.
29701fc
19

LTC2970/LTC2970-1
U
OPERATIO
5. Soft Connecting the LTC2970 to the Power Supply
Feedback Node
The soft connect feature allows the LTC2970 to connect to
the power supply’s feedback node with minimal disturbance
to the supply’s output voltage. This is accomplished by
comparing the buffered voltage of I
and incrementing or decrementing Chn_a_idac[7:0]
V
n
OUT
until the comparator output (COMPn) changes. The value
of Chn_a_idac[7:0] when the comparator transitions is the
appropriate value for a soft connect. The voltage buffer
output is only connected to V
soft connect value without generating an instantaneous
IDAC fault (Fault_chn_a_idac).
Soft-Connect Procedure:
Determine the appropriate polarity for Chn_a_idac_pol.
Select Chn_a_idac_pol = 1 if incrementing V
differential voltage (VINn_AP – VINn_AM) to increase.
When properly programmed, lowering the value in Chn_
a_idac[7:0] will always cause the output of the controlled
power supply to decrease.
Ensure that the channel’s IDAC is not currently enabled for
connection, i.e., the Chn_a_idac_en bit must be 0.
Update CHn_A_IDAC() with Chn_a_idac_pol, Chn_a_idac_
con = 0, Chn_a_idac_en = 1, and Chn_a_idac[7:0] = 0x80.
The value programmed into Chn_a_idac[7:0] is ignored
and Chn_a_idac[7:0] is initially set to 8’h80.
The LTC2970 will now ramp Chn_a_idac[7:0] while monitoring the output of the soft connect comparator. If the soft
connect comparator trips, the LTC2970 will connect the
output of V
If the soft connect comparator does not trip before the
IDAC value reaches ‘h00 or ‘hFF, then the soft connection
will fail, an IDAC fault will be indicated (Fault_chn_a_idac),
and Chn_a_idac_con will remain low.
Soft-Connect Rules:
When both channels are requesting a soft connect, channel 0 has priority.
Soft connect requests will be ignored and the user will not
be able to change Chn_a_idac_pol or Chn_a_idac[7:0] if
the LTC2970 is servicing a previously issued soft connect
BUFn
to V
and set Chn_a_idac_con high.
OUTn
if the IDAC reaches this
OUTn
to the voltage at
OUTn
OUTn
causes
on that channel or the previously issued soft connect failed
with an IDAC fault (Fault_chn_a_idac = 1). Recall that the
Chn_a_idac_en bit must initially have been set to 0.
LTC2970-1 Only: Soft connect requests will be ignored
and the user will not be able to change Chn_a_idac_pol or
Chn_a_idac[7:0] if GPIO_CFG is high and either GPIO_0
or GPIO_1 are high.
LTC2970-1 Only: Soft connect requests will be ignored and
the user will not be able to change the Chn_a_idac_pol bit
if there is a pending tracking operation.
6. Hard Connecting the LTC2970 to the Power Supply
Trim Pin
The hard connect feature allows the LTC2970 to bypass the
soft connect algorithm and connect directly to the power
supply’s feedback node using the value programmed into
Chn_a_idac[7:0]. This feature is useful for systems that
have calculated or measured an acceptable voltage at which
to connect the IDAC’s buffered voltage V
Hard Connect Procedure:
Determine the appropriate polarity for Chn_a_idac_pol.
Select Chn_a_idac_pol = 1 if incrementing V
(VINn_AP – VINn_AP) to increase. When properly programmed, lowering the value in the IDAC will always cause
the output of the controlled power supply to decrease.
Determine the value for Chn_a_idac[7:0]. The values ‘h00
or ‘hff are allowed, but they will trip the IDAC’s fault bit
(Fault_chn_a_idac = 1).
When the IDAC is already connected, the value Chn_a_
idac[7:0] and Chn_a_idac_pol will be programmed into the
IDAC provided all other conditions are met. See “Programming a Previously Connected Current DAC” for details
Update CHn_A_IDAC() with Chn_a_idac_pol, Chn_a_idac_
con = 1, Chn_a_idac_en = 1, and Chn_a_idac[7:0].
Hard Connect Rules:
Hard connect requests will be ignored and the user will not
be able to change Chn_a_idac_pol, Chn_a_idac_con or
Chn_a_idac[7:0] if the LTC2970 is servicing a previously
issued soft connect on that channel or the previously issued
BUFn
to V
OUTn
.
OUTn
causes
20
29701fc

OPERATIO
LTC2970/LTC2970-1
U
soft connect failed with an IDAC fault (Fault_chn_a_idac =
1). Recall that a new hard connection requires the previous
value of Chn_a_idac_en = 0.
LTC2970-1 Only: Hard connect requests will be ignored
and the user will not be able to change Chn_a_idac_pol,
Chn_a_idac_con or Chn_a_idac[7:0] if GPIO_CFG is high
and either GPIO_0 or GPIO_1 are high.
LTC2970-1 Only: Hard connect requests will be ignored and
the user will not be able to change Chn_a_idac_pol, Chn_a_
idac_con or Chn_a_idac[7:0] if there is a pending tracking
operation.
7. Programming a Previously Connected IDAC
The LTC2970 IDAC’s may be programmed after they have
been connected with a soft connect or a hard connect
provided a servo operation is not enabled on the associated channel.
Procedure:
Determine the value for Chn_a_idac[7:0]. The values
‘h00 or ‘hff are allowed, but will trip the IDAC’s fault bit
(Fault_chn_a_idac = 1).
8. Disconnecting the LTC2970 from the Power Supply
Trim Pin
can be placed in a high impedance state simply by
V
OUTn
clearing the Chn_a_idac_en bit. In order to minimize the
resulting disturbance to the power supply voltage, the
IDAC code should not be changed from its current value
when clearing the Chn_a_idac_en bit. This is not an issue
if the channel’s associated servo_en bit is high.
Disconnect Procedure:
Update CHn_IDAC() with Chn_a_idac_en set low.
The LTC2970 will immediately disconnect the buffered
from V
I
OUTn
Disconnect Rules:
Clearing Chn_a_idac_con with Chn_a_idac_en high will
not disconnect the IDAC. Only setting Chn_a_idac_en low
will clear Chn_a_idac_con.
LTC2970-1 Only: Chn_a_idac_en may not be changed if
the feedback node connection is confi gured for tracking.
Tracking is enabled when GPIO_CFG is high and either
GPIO_0 or GPIO_1 are high.
OUTn
.
Verify that the IDAC is already connected, and that
Chn_a_idac_con is high.
Ensure that servo mode is not enabled for the channel
being programmed. Chn_a_servo_en must be low. This
requirement prevents the user from interfering with a
previously requested servo operation.
Update the CHn_A_IDAC() register with Chn_a_idac_pol,
Chn_a_idac_con = 1, Chn_a_idac_en = 1, and Chn_a_
idac[7:0].
Note: Care should be taken to preserve the current value
of the Chn_a_idac_pol bit, since the LTC2970 does not
prevent the user from changing this value when writing
to the IDAC control registers.
Rules:
Setting Chn_a_idac_con to zero will not disconnect the
DAC unless Chn_a_idac_en is also set low.
All Hard Connect rules apply.
9. Tracking Power Supplies Overview (LTC2970-1
Only)
2
The LTC2970-1 tracking feature allows the I
to initiate a controlled power up or power down of two
or more supplies (Figure 2 shows a typical LTC2970-1
application circuit). Multiple LTC2970-1’s with different
addresses may be simultaneously programmed using
the LTC2970 group address and the SYNC() command.
Tracking is enabled when GPIO_CFG is pulled high and
either GPIO_0 or GPIO_1 are high.
10. Tracking Power Supplies On (LTC2970-1 Only)
The LTC2970-1 tracking feature allows the I
a controlled power up of two or more supplies.
Procedure: This procedure describes all the steps necessary to track up two or more power supplies. Steps that
require I
command function.
Power-up the LTC2970-1 with GPIO_CFG pulled high.
2
C interaction are prefi xed with the required I2C
C interface
2
C to initiate
29701fc
21

LTC2970/LTC2970-1
U
OPERATIO
This causes open-drain outputs GPIO_1 and GPIO_0 to
automatically pull the power supplies’ run/soft-start pins
to ground.
CHn_A_IDAC(): Hard connect Chn_a_idac[7:0] with a value
that forces the power supplies off when GPIO_CFG = 1.
Verify that Chn_a_idac_pol is at the appropriate value.
CHn_A_IDAC_TRACK(): Set Chn_a_idac_track_en = 1,
and set the Chn_a_idac_track[7:0] target value to the
code that causes V
corresponding power supply’s feedback node voltage
when it is in regulation.
CHn_A_DELAY_TRACK(): Set the value by which the
incrementing of IDACn should be delayed with respect to
the start of tracking event. This controls whether the power
supplies track up coincidentally or sequentially.
IO(): Release the run/soft-start pins by programming
io_gpio_n = 1. This will enable the power supplies without
allowing their outputs to move since these are held low
by Chn_a_idac[7:0]. Wait until power supplies have had
suffi cient time to start running before starting tracking.
SYNC(): Optional command that allows multiple LTC29701’s to be synchronized for tracking. Writing Sync_track
= 1 will allow the LTC2970-1 to fi nish its current ADC
conversion before having it wait to receive io_track_start
= 1. The LTC2970-1 will timeout this wait command after
t
TIMEOUT_SYNC
global address will ensure all LTC2970-1’s are synchronized
before proceeding with the tracking operation.
IO(): Set Io_track_start = 1 and keep the run/soft-start pins
enabled. Use the global I
up power supplies across multiple LTC2970-1’s.
LTC2970-1 response: For each tracking enabled channel,
the LTC2970-1 will decrement the CHn_A_delay_track
counter at a rate of t
tracking counter reaches zero, the LTC2970-1 will begin
stepping the value of Chn_a_idac[7:0] by one count until
the fi nal value of Chn_a_idac_track[7:0] is reached, at which
point Chn_a_idac_track_en is de-asserted. When the fi nal
value is reached for all channels, GPIO_CFG is asserted
low. After a time delay of t
de-asserted.
. Reading back Sync_track = 1 using the
to most closely approximate the
OUTn
2
C address to simultaneously track
DEC_TRACK
. As soon as a channel’s
HOLD_TRACK
, Chn_a_idac_en is
Power-Up Tracking Rules:
Tracking cannot begin if Chn_a_idac_con is not connected.
This condition is met when the previous procedure is
followed.
Chn_a_idac_track_pol, Chn_a_idac_track_en, and ch0_
idac[7:0] updates will be ignored after IO(Io_track_start)
is asserted until tracking is complete or whenever tracking
is pending, i.e., GPIO_CFG pulled high with either GPIO_0
or GPIO_1 asserted pulled high.
11. Tracking Power Supplies Off (LTC2970-1 Only)
2
The LTC2970-1 tracking feature allows the I
a controlled power down of two or more supplies.
Procedure: This procedure describes all steps necessary
to track down two or more power supplies. Steps that
require I
command function.
CHn_IDAC(): Disable the IDAC’s for each tracking enabled
channel (Chn_a_idac_en = 0). Ensure Chn_a_idac_pol is
at the appropriate value.
CHn_IDAC_TRACK(): Select the channels to be tracked
by setting Chn_a_idac_track_en = 1, and set the target
value for each Chn_a_idac_track[7:0] to that which forces
the supply off.
CHn_A_DELAY_TRACK(): Set the value by which the
decrementing of that channel’s DAC should be delayed
with respect to the start of the tracking event. This controls whether the supplies track down coincidentally or
sequentially.
SYNC(): Optional command that allows multiple LTC29701’s to be synchronized for tracking. Writing Sync_track
= 1 will allow the LTC2970-1 to fi nish its current ADC
conversion before having it wait to receive io_track_start
= 1. The LTC2970-1 will timeout this wait command after
t
TIMEOUT_SYNC
global address will ensure all LTC2970’s are synchronized
before proceeding with the tracking operation.
IO(): Set Io_track_start = 1. Use the global I
to simultaneously track down power supplies across
multiple LTC2970’s.
2
C interaction are prefi xed with the required I2C
. Reading back Sync_track = 1 using the
C to initiate
2
C address
22
29701fc

OPERATIO
LTC2970/LTC2970-1
U
LTC2970-1 response: Each tracking enabled channel is soft
connected. The GPIO_CFG pin is released allowing it to be
pulled high. The LTC2970-1 waits t
GPIO_CFG to settle. For each tracking enabled channel,
the Chn_a_delay_track counter is decremented at a rate
of t
DEC_TRACK
reaches zero, the LTC2970-1 will begin stepping the value
of Chn_a_idac[7:0] by one count until the fi nal value of
Chn_a_idac_track[7:0] is reached. The tracking enable bit
is then cleared for both channels (Chn_a_idac_track_en
= 0).
IO(): The I
and GPIO_0 low, disabling the power supplies.
Power Down Tracking Rules:
Power down tracking requests will be ignored until the
user has disabled the IDAC’s by setting Chn_a_idac_en =
0 for each tracking enabled channel.
Chn_a_idac_track_pol, Chn_a_idac_track_en, and ch0_
idac[7:0] updates will be ignored after IO(IO_track_start) is
asserted until tracking is complete and whenever tracking
range is confi gured; (GPIO_CFG high with either GPIO_0
or GPIO_1 asserted high).
12. Continuous Power Supply Voltage Servo
The continuous voltage servo feature allows the LTC2970
to servo an external power supply to a programmed
value. The voltage of the external supply is monitored
over Chn_A_ADC and compared to a target value stored
in Chn_a_servo. After each conversion, Chn_A_IDAC is
incremented by 1, decremented by 1, or held; whichever
brings or keeps the measured voltage closer to the targeted
servo value.
. As soon as a channel’s tracking counter
2
C interface may then be used to set GPIO_1
SETUP_TRACK
to allow
Determine the target servo voltage, Chn_a_servo[14:0].
Update CHn_A_SERVO() with Chn_a_servo_en = 1, and
Chn_a_servo[14:0].
Update CHn_A_IDAC() with Chn_a_idac_servo_repeat =
1. This step may be skipped if Chn_a_idac_servo_repeat
was set high during the soft or hard connect procedure.
LTC2970 response: The LTC2970 will continuously increment, decrement or hold Chn_a_idac[7:0] in order
to match the measured value of (VINn_AP-VINn_AM) to
Chn_a_servo[14:0].
Whenever the CHn_A_SERVO() register is updated an internal fl ag is cleared indicating that a successful servo has
not been completed. This internal fl ag, Chn_a_servo_done,
initially causes the ADC to operate in an accelerated 12-bit
mode. Once the channel reaches the servo target, the ADC
switches back to 14-bit mode for two conversions before
asserting Chn_a_servo_done high.
In continuous voltage servo mode the Chn_a_servo_done
fl ags allow the initial servo target to be reached quickly.
During this time, ADC conversions for all non-servo channels are temporarily inhibited.
Rules:
The IDAC associated with the servo channel must be
enabled. If Chn_a_idac_en is low the servo enable bit
Chn_a_servo_en is always forced low.
The IDAC associated with the servo channel must be connected (Chn_a_idac_con = 1).
An IDAC fault may be generated during a continuous servo
operation. The LTC2970 will report the fault and continue
trying to servo that channel.
Procedure:
Follow procedure for hard connecting or soft connecting
the LTC2970 to power supply trim pin; when updating
CHn_A_IDAC(), Chn_a_idac_servo_repeat should be asserted high. The servo channel’s IDAC must be enabled
before Chn_A_servo_en can be set high.
LTC2970-1 Only: There must be no pending tracking
commands. A pending tracking command will clear
Chn_a_servo_en.
LTC2970-1 Only: The tracking range must not be enabled;
(GPIO_CFG high with either GPIO_0 or GPIO_1 asserted
high). An enabled tracking range will clear Chn
low.
_a_servo_en
29701fc
23

LTC2970/LTC2970-1
U
OPERATIO
13. One Time Power Supply Voltage Servo
The one time voltage servo feature allows the LTC2970 to
servo an external power supply to a programmed value
and then stop updating the IDAC once the target value
has been reached.
Procedure:
Follow procedure for hard connecting or soft connecting
the LTC2970 to power supply trim pin; when updating
CHn_A_IDAC(), Chn_a_idac_servo_repeat should be deasserted low. The servo channel’s IDAC must be enabled
before Chn_a_servo_en may be set high.
Update CHn_A_IDAC() with Chn_a_idac_servo_repeat = 0.
This step may be skipped if Chn_a_idac_servo_repeat was
cleared low during the soft or hard connect procedure.
Update FAULT_EN() with Fault_en_chn_a_servo = 0. This
prevents the LTC2970 from reinitiating a servo after an
over-voltage or under-voltage fault.
Determine the target servo voltage, Chn_a_servo[14:0].
Procedure:
Follow procedure outlined for “One Time Power Supply
Voltage Servo”.
Update FAULT_EN() with Fault_en_chn_a_servo = 1.
Enable detection of the appropriate instantaneous faults
for all servo channels; see “Generating and Monitoring
Instantaneous Faults”.
LTC2970 response: Any time an instantaneous undervoltage or over-voltage fault is detected on the servo
channel (Fault_ov_a_chn or Fault_uv_a_chn), the internal
Chn_a_servo_done fl ag for that channel is cleared, and
the LTC2970 will perform a complete one time servo. This
allows the LTC2970 to precisely restore the power supply
to the target servo value, after it has drifted beyond a user
defi ned operating window.
Rules:
All “Continuous Power Supply Voltage Servo” rules
apply.
Update CHn_A_SERVO() register with Chn_a_servo_en
= 1, and Chn_a_servo[14:0].
LTC2970 response: The LTC2970 will increment, decrement
or hold Chn_a_idac[7:0] in order to match the measured
value of (VINn_AP-VINn_AM) to Chn_a_servo[14:0]. The
servo procedure will end when the internal Chn_a_servo_
done fl ag is set (see “Continuous Power Supply Voltage
Servo”). At this point the IDAC is either programmed to
the appropriate servo value or faulted.
Rules:
All “Continuous Power Supply Voltage Servo” rules
apply.
14. One Time Power Supply Voltage Servo with
Repeat On Fault
The LTC2970 one time voltage servo feature may be
modifi ed to allow the LTC2970 to perform an additional
power supply servo operation after an under-voltage or
over-voltage fault is detected on the servo channel.
During a permanent under-voltage or over-voltage fault
the LTC2970 will continuously try to correct the faulted
channel, after each failed attempt all other channels that
need monitoring by the ADC will be serviced.
15. Confi guring ADC to Monitor Input Channels and
Internal Temperature Sensor
The LTC2970 is able to perform ADC conversions on any
combination of seven different input channels. A channel
is converted if its associated ADC_MON() bit is set high.
Refer to Table 7 for details.
Procedure:
Update ADC_MON() with the control bit of each channel
that is to be monitored set high.
LTC2970 response: All enabled channels will be sequentially converted. The result of the most recent conversion
may be read from the ADC result register. Each time a
conversion is completed the new data bit associated with
the result register is asserted high. The new data bit is
24
29701fc

LTC2970/LTC2970-1
U
OPERATIO
Table 7. LTC2970 ADC Conversion and Fault Limit Registers
INPUT CHANNEL ADC_MON()
CONTROL BIT
TEMPERATURE Adc_mon_temp Temp_adc[14:0] - -
VIN1_BP-VIN1_BM Adc_mon_b_ch1 Ch1_b_adc[14:0] Ch1_b_ov[14:0] Ch1_b_uv[14:0]
VIN1_AP-VIN1_AM Adc_mon_a_ch1 Ch1_a_adc[14:0] Ch1_a_ov[14:0] Ch1_a_uv[14:0]
VIN0_BP-VIN0_BM Adc_mon_b_ch0 Ch0_b_adc[14:0] Ch0_b_ov[14:0] Ch0_b_uv[14:0]
VIN0_AP-VIN0_AM Adc_mon_a_ch0 Ch0_a_adc[14:0] Ch0_a_ov[14:0] Ch0_a_uv[14:0]
12VIN Adc_mon_v12 V12_adc[14:0] V12_ov[14:0] V12_uv[14:0]
VDD Adc_mon_vdd Vdd_adc[14:0] Vdd_ov[14:0] Vdd_uv[14:0]
ADC RESULT REGISTER
(2s COMPLEMENT)
OV FAULT REGISTER
(2s COMPLEMENT)
UV FAULT REGISTER
(2s COMPLEMENT)
reset each time the result register is read. This provides a
simple mechanism for supervisory software to determine
if a new conversion has been completed since data was
last read.
Rules:
The LTC2970 assigns priority to ADC conversions of
CH1_A_ADC and CH0_A_ADC when these channels are
in their initial fast servo mode.
16. Generating and Monitoring Instantaneous Faults
The LTC2970 supports fourteen different types of instantaneous faults. These faults together with the conditions
that trigger them are defi ned in Table 8. There are six
under-voltage faults, six over-voltage faults and two IDAC
limit faults. The FAULT() command may be used to read
the status of all instantaneous fault bits. The IO() command may be used to confi gure GPIO_0 and GPIO_1 to
view voltage limit and IDAC faults respectively. The state
The IO() register control bit Io_i2c_adc_wen must be low
of GPIO_0 and GPIO_1 may be read using IO().
in order for ADC conversions to be performed.
LTC2970-1 Only: ADC conversions are suspended during
any pending tracking requests.
Table 8. LTC2970 Fault Reporting Bits and Conditions
CONDITION THAT GENERATES AN
INSTANTANEOUS FAULT
V12_adc[14:0] < V12_uv[14:0] Fault_v12_uv Fault_en_v12_uv Fault_la_v12_uv
V12_adc[14:0] > V12_ov[14:0] Fault_v12_ov Fault_en_v12_ov Fault_la_v12_ov
Vdd_adc[14:0] < Vdd_uv[14:0] Fault_vdd_uv Fault_en_vdd_uv Fault_la_vdd_uv
Vdd_adc[14:0] > Vdd_ov[14:0] Fault_vdd_ov Fault_en_vdd_ov Fault_la_vdd_ov
Ch1_b_adc[14:0] < Ch1_b_uv[14:0] Fault_ch1_b_uv Fault_en_ch1_b_uv Fault_la_ch1_b_uv
Ch1_b_adc[14:0] > Ch1_b_ov[14:0] Fault_ch1_b_ov Fault_en_ch1_b_ov Fault_la_ch1_b_ov
Idac_a_ch1[7:0] = 8’ff or 8’h00 Fault_ch1_a_idac Fault_en_ch1_a_idac Fault_la_ch1_a_idac
Ch1_a_adc[14:0] < Ch1_a_uv[14:0] Fault_ch1_a_uv Fault_en_ch1_a_uv Fault_la_ch1_a_uv
Ch1_a_adc[14:0] > Ch1_a_ov[14:0] Fault_ch1_a_ov Fault_en_ch1_a_ov Fault_la_ch1_a_ov
Ch0_b_adc[14:0] < Ch0_b_uv[14:0] Fault_ch0_b_uv Fault_en_ch0_b_uv Fault_la_ch0_b_uv
Ch0_b_adc[14:0] > Ch0_b_ov[14:0] Fault_ch0_b_ov Fault_en_ch0_b_ov Fault_la_ch0_b_ov
Idac_a_ch0[7:0] = 8’ff or 8’h00 Fault_ch0_a_idac Fault_en_ch0_a_idac Fault_la_ch0_a_idac
Ch0_a_adc[14:0] < Ch0_a_uv[14:0] Fault_ch0_a_uv Fault_en_ch0_a_uv Fault_la_ch0_a_uv
Ch0_a_adc[14:0] > Ch0_a_ov[14:0] Fault_ch0_a_ov Fault_en_ch0_a_ov Fault_la_ch0_a_ov
INSTANTANEOUS FAULT REPORTING
FAULT()
ENABLE FOR LATCHED FAULT REPORTING
FAULT_EN()
FAULT_LA()
LATCHED FAULT REPORTING
29701fc
25

LTC2970/LTC2970-1
U
OPERATIO
Procedure:
Update the over-voltage limit register with the value above
which the ADC result should generate an over-voltage fault.
Instantaneous over-voltage faults are updated after each
ADC conversion. They are asserted high when the ADC
result is greater than the over-voltage limit. They are cleared
if the ADC result is less than or equal to the over-voltage
limit. Setting the over-voltage limit to 14’h3fff inhibits
instantaneous faults for the associated channel.
Update the under-voltage limit register with the value below
which the ADC result should generate an under-voltage
fault. Instantaneous under-voltage faults are updated
after each ADC conversion. They are asserted high when
the ADC result is less than the under-voltage limit. They
are cleared if the ADC result is greater than or equal to
the under-voltage limit. Setting the over-voltage limit to
14’h4000 inhibits instantaneous faults for the associated
channel.
Update ADC_MON() control bits to allow ADC conversions
on all channels that are to be monitored for over and under
voltage limits. Instantaneous IDAC faults are polled after
all ADC conversions are completed and set when the associated IDAC registers are at ‘h00 of ‘hff.
Read FAULT() to view the value of all instantaneous
faults.
Instantaneous Ch0_a and Ch1_a faults may be used to
trigger a servo on fault event.
Over-voltage and under-voltage faults require that the
associated ADC_MON control bit be asserted high for
instantaneous fault detection to be updated.
17. Generating and Monitoring Latched Faults
The LTC2970 is able to selectively latch instantaneous faults
in the latched fault register FAULT_LA. Each instantaneous
fault has an associated latched fault bit in FAULT_LA and
a fault enable bit in FAULT_EN; (see Table 8) for details.
When an instantaneous fault enable bit is high, any event
that sets the instantaneous fault will simultaneously set
the latched fault. The latched fault will remain set even if
conditions permit the instantaneous fault to be cleared.
The latched faults are immediately cleared whenever the
associated fault enable bit is cleared. All latched faults are
also cleared when the latched fault register is read over
FAULT_LA().
The FAULT_INDEX() command may be read to determine
if any latched faults are asserted. Reading FAULT_INDEX()
does not clear latched faults. The ALERT output may also
be confi gured to view whether any latched faults are asserted.
Procedure:
The IO(Io_cfg_0) command may be used to confi gure
the GPIO_0 pin to output the internal Power_good fl ag.
Power_good is asserted high if there are no instantaneous
over-voltage or under-voltage faults. IO() may be used to
read the value of Power_good through io_gpio_0.
The IO(Io_cfg_1) command may be used to confi gure the
GPIO_1 pin to output the internal Idac_fault fl ag. Idac_fault
is asserted high if either IDAC value is faulted. IO() may be
used to read the value of Idac_fault through io_gpio_1.
Rules:
The over-voltage and under-voltage limits must be initialized; they do not have a default value.
All over-voltage limits, under-voltage limits and ADC results use 2’s complement notation with bit position [14]
of register [14:0] being used for the sign.
26
Follow procedure for generating instantaneous faults.
Write FAULT_EN() to enable any combination of latched
faults.
Read FAULT_INDEX() to determine if any latched faults
are asserted without clearing latched faults.
Read FAULT_LA() to monitor all latched faults. Reading
FAULT_LA() will clear all latched faults. These will remain
clear until the next time the LTC2970 polls and sets an
associated instantaneous fault.
Setting IO(Io_alert_enb) low will cause ALERT to be asserted low whenever any one of the fourteen latched faults
is asserted high. The value of the ALERT pin may also be
read through IO(Alertb).
29701fc

OPERATIO
LTC2970/LTC2970-1
U
Rules:
See “Generating and Monitoring Instantaneous Faults”.
18. General Purpose Input/Output Pins
The GPIO_0 and GPIO_1 may be used to: (1) monitor
instantaneous faults (see “Generating and Monitoring
Instantaneous faults”); (2) control switcher run/start pins
during tracking (see “Tracking Power Supplies Overview”);
or (3) provide general purpose input/output pins.
Procedure:
To program GPIO_n as an open drain output set Io_cfg_n
= 2’b10. The value written to lo_gpio_n will be output
over GPIO_n.
To program GPIO_n as an input set Io_cfg_n = 2’b11. The
value of GPIO_n may now be read through lo_gpio_n.
U
WUU
APPLICATIO S I FOR ATIO
Rules:
The power on reset confi gurations for GPIO_0 and GPIO_1
are output pins with a value equal to the complement of
the GPIO_CFG level.
19. Advanced Development Features
The internal ADC may be disabled with the ADC result
2
registers accepting written I
C data. This feature allows
faults to be generated for diagnostic purposes, without
having to generate an actual overvoltage or undervoltage
event.
Procedure:
Set IO(Io_i2c_adc_wen) high to enable ADC result register
writes and disable internal ADC updates.
Rules:
Io_i2c_adc_wen must be clear for normal operation.
Margining DC/DC Converters with External Feedback
Resistors
Figure 1 shows a typical application circuit for margining
a power supply with an external feedback network. The
IN0_AP
and V
V
age directly, and differential inputs V
differential inputs sense the load volt-
IN0_AM
and V
IN0_BP
IN0_BM
are connected across load current sense resistor R50. A
correction voltage is developed at the I
pin by sourcing
OUT0
IDAC0’s current into resistor R40. R40 is Kelvin connected
to the point-of-load GND in order to isolate V
ground bounce due to load current changes. V
replicated at V
is then connected to the feedback node of the power
V
OUT0
by an on-chip, unity-gain voltage buffer.
OUT0
IOUT0
IOUT0
from
is
supply through resistor R30. The feedback node can be
isolated from the DAC’s correction voltage by placing the
pin in high-impedance mode. Since the GPIO_CFG
V
OUT0
pin is pulled-up to V
, the LTC2970’s GPIO_0 pin will
DD
automatically hold the power supply’s RUN/SS pin low
2
after power-up until the I
C interface releases it.
8V TO 15V
V
V
V
V
V
I
V
OUT0
IN0_BM
IN0_BP
OUT0
IN0_AP
IN0_AM
GND
IN
1/2 LTC2970
GPIO_CFG
ASEL0
V
IN
IN
DC/DC
CONVERTER
RUN/SS
SGND
GND
OUT
R50
+
I
–
I
R30
FB
R20
LOAD
+
V
DC0
–
R40R10
Figure 1. Typical LTC2970 Application Circuit for
DC/DC Converters with External Feedback Resistors
V
DD
ALERT
SCL I
SDA
GPIO_0
REF
ASEL1
2
C BUS
0.1μF
29701 F01
0.1μF
0.1μF
29701fc
27

LTC2970/LTC2970-1
U
WUU
APPLICATIO S I FOR ATIO
4-Step Resistor Selection Procedure for DC/DC
Converters with External Feedback Resistors
The following 4-step procedure should be used to quickly
calculate the resistor values shown for the Typical Application Circuit shown in Figure 1.
1. Assume values for feedback resistor R20 and the
nominal DC/DC converter output voltage V
DC0,NOM
solve for R10.
V
DC0,NOM
verter when the LTC2970’s V
state. V
when the loop is in regulation, and I
is the desired output voltage of the DC/DC con-
pin is in a high impedance
OUT0
is the voltage at the converter’s feedback node
FB0
is the feedback
FB0
node’s input current.
RV
20
•
FB
R
10
=
VIRV
DC NOM FB FB
−•−
,
0
20
00
(1)
2. Solve for the maximum value of R30 that yields the
maximum required DC/DC converter output voltage
V
DC0,max
When V
.
is at 0V, the output of the DC/DC converter
OUT0
is at its maximum voltage. Note that the 10mV term corresponds to the maximum offset voltage of the IDAC 1X
voltage buffer.
, and
R
20
VV
DC NOM FB FB0
VV
DC MIN DC NOM
40 236 10
RAVm
()
VV
DC MAX DC NOM FB00 0
=•+
,
≤−•
00
,,
•−−μ VV
≥+•−
,,
⎛
1
⎜
⎝
FB
0
R
R
R
10
20
⎞
IR
+•
⎟
⎠
(5)
(4)
20
30
20
R
R
VmV
()
30
10
(6)
The margining resolution is bounded by:
R
20
RA
••
R
40 276
V
RES
30
≤
256
μ
volts/DAC LSB (7)
Margining DC/DC Converters with a TRIM Pin
Figure 2 illustrates a typical application circuit for margining
the output voltage of a DC/DC converter with a TRIM Pin.
The LTC2970’s V
pin through resistor R30 and the I
pin connects directly to the TRIM
OUT0
pin is terminated
OUT0
at the converter's point-of-load ground throught R40.
Resistors R30 and R40 give this application circuit two
degrees of freedom so that the margin-up and margindown percentages can be specifi ed independently.
RV mV
20 10
•−
()
R
30
≤
VV
FB
−
,,
DC MAX DC NOM
(2)
3. Solve for the minimum value of R40 that’s needed
to yield the minimum required DC/DC converter output
voltage V
DC0,MIN
.
The DC/DC converter output voltage will be a minimum
when IDAC0 is at its full-scale current. In order to guarantee
that R40 is large enough, assume that IDAC0’s full-scale
current is at the datasheet minimum of 236μA.
30
VV
()
DC NOM DC MIN FB
≥
R
40
−
,,
R
•++
20
R
236
A
μ
10
VmV
(3)
4. Re-calculate the minimum, nominal, and maximum
DC/DC converter output voltages and the resulting margining resolution.
28
Following power-up, the LTC2970's V
pin defaults to a
OUT0
high-impedance state. If the soft-connect feature is used,
8V TO 15V
2
C BUS
0.1μF
29701 F02
29701fc
0.1μF
0.1μF
12V
V
IN
VO+
TRIM
DC/DC
CONVERTER
V
SENSE+
ON/OFF
V
SENSE–
VO–
Figure 2. LTC2970 Application Circuit for
DC/DC Converters with a TRIM Pin
LOAD
R30
+
V
DC0
–
V
V
I
R40
V
IN
1/2 LTC2970
GPIO_CFG
OUT0
IN0_AP
OUT0
IN0_AM
GND ASEL0 ASEL1
V
DD
ALERT
SCL I
SDA
GPIO_0
REF

LTC2970/LTC2970-1
U
WUU
APPLICATIO S I FOR ATIO
the LTC2970 will automatically fi nd the IDAC code that most
closely approximates the TRIM pin's open-circuit voltage
before enabling V
and the converter's output is typically non-invert-
V
TRIM
ing, so be sure to set the LTC2970's CH0_a_idac_pol bit
to 1 in order to allow the voltage servo feature to function
properly.
DC/DC converters with a TRIM pin are usually margined
high or low by connecting an external resistor between
the TRIM pin and either the V
relationships between these resistors and the Δ% change
in the output voltage of the DC/DC converter are typically
expressed as:
R
TRIM DOWN
=
R
_
TRIM UP
⎡
RV
TRIM DC UP
⎢
⎣
=
•• %
2
100
()
V
••%
REF UP
. Note: The relationship between
OUT0
or V
SENSE+
R
•
50
TRIM
Δ
DOWN
+Δ
Δ
%
R
−
TRIM_
R
RRIM
T
−
Δ
UP
•%50
SENSE–
R
−
pin. The
⎤
⎥
TRIM
⎦
(8)
(9)
Tracking with the LTC2970-1
A typical LTC2970-1 tracking application circuit is shown in
Figure 3 (the sequence of events for tracking are described
in sections 9 and 10 of the Operation section). The GPIO_0
and GPIO_1 pins are tied directly to their respective DC/DC
converter RUN/SS pins. Since GPIO_CFG is pulled-up to
, the LTC2970-1 will automatically hold off the DC/DC
V
DD
converters after power-up by asserting open drain outputs
GPIO_0 and GPIO_1 low. N-channel FETs Q10/11 and
diodes D10/11 form unidirectional range switches around
resistors R30A/31A while GPIO_CFG is high. These range
switches allow the LTC2970-1’s V
OUT0
and V
OUT1
pins to
drive the converter outputs all the way to/from ground
through resistors R30B/31B. When GPIO_CFG pulls low,
N-channel FETs Q10 and Q11 will turn off. R30A/31A
and R30B/31B then combine in series for normal margin
operation. The 100k/0.1μF low-pass fi lter in series with
the gates of Q10/11 minimizes charge injection into the
feedback nodes of the DC/DC converters when GPIO_CFG
pulls low.
8V TO 15V
where R
is the TRIM pin's opern-circuit output voltage and
V
REF
is the DC/DC converter's nominal output voltage.
V
DC
% and Δ
Δ
UP
is the resistance looking into the TRIM pin,
TRIM
% denote the percentage change in the
DOWN
converter's output voltage when margining up or down
respectively.
2-Step Resistor Selection Procedure for DC/DC
Converters with a TRIM Pin
The following two-step procedure should be used to
calculate values for resistors R30 and R40 shown in
Figure 2.
1. Solve for R30:
RR
3050≤
TRIM
⎛
−Δ
Δ
DOWN
DOWN
•
⎜
⎝
%
⎞
%
⎟
⎠
(10)
2. Solve for R40:
⎛
R
40 1
≥+
Δ
⎜
Δ
⎝
DOWN
UP
%
%
⎞
V
REF
•
⎟
⎠
236
μ
A
(11)
I
10k
100k
Q10
Q11
R30A
0.1μF
R31A
0.1μF
Q10, Q11: 2N7002
0.1μF
D10, D11: MMBD4448V
*SOME DETAILS OMITTED FOR CLARITY
D10
R30B
R40
D11
R31B
R41
2
C BUS
ALERT
SCL
SDA
12V
IN
GPIO_CFG
LTC2970-1
GND
V
GPIO_0
V
OUT0
I
OUT0
GPIO_1
V
OUT1
I
OUT1
DD
Figure 3. LTC2970-1 Tracking Application Circuit
RUN/SS
DC/DC
CONVERTER
FB
R10
RUN/SS
DC/DC
CONVERTER
FB
R11
R20
R21
OUT
OUT
V
IN
IN
V
DC0
V
IN
IN
V
DC1
29701 F03
29701fc
29

LTC2970/LTC2970-1
U
WUU
APPLICATIO S I FOR ATIO
7-Step Procedure for Calculating Tracking Application
Circuit Resistor Values, Counter Delay Values, and
Terminal IDAC Codes
The following 7-step procedure should be used to calculate
the resistor values, tracking counter delays, and terminal
IDAC codes for the Tracking Application Circuit shown in
Figure 3.
1. Assume a value for R20 and solve for R21.
V
DCn,NOM
the LTC2970’s V
2. Solve for R10 and R11.
3. Solve for R40 and R41.
For simplicity, this procedure assumes that R40 = R41.
V
DCn,MAX
converter output margin voltages, respectively.
is the output voltage of the DC/DC converter when
pin is in a high impedance state.
OUTn
V
DC NOM
1
,
RR
21 20
=•
R
1
n
=
V
⎛
DC NOM
⎜
⎝
and V
V
DC NOM
Rn
2
n
,
V
FB
n
DCn,MIN
(12)
0
,
(13)
⎞
1
−
⎟
⎠
are the maximum and minimum
Due to the forward drop of diodes D10 and D11 (0.8V
max), the minimum value for R40 = R41 from expression
(14) may result in small or even negative values of R30
and R31 in Step 4. If this is the case, assume a minimum
allowable value for R3nB, and use the following expression
to calculate the minimum value R40 = R41:
RR
40 41
=≥
V
•+ +
FB
n
n
RBRRB
3
⎛
1
⎜
⎝
n
1
n
3
⎞
.
V
08 1
++
⎟
⎠
n
R
2
(15)
00
236mVAμ
Note: Use the channel whose parameters yield the maximum value for R40 = R41.
4. Solve for R30B and R31B.
Solve for the upper limits of R30B and R31B and then
determine which resistor value constrains the maximum
value of the other resistor using Equation 17.
RAVVmV
4 236 0 8 10
n
•−−−
RB
3
n
≤
RBRRB
30
=
20
()
31
R
21
μ .
FB
⎛
V
•+
⎜
FB
n
⎝
RR
n
1
1
1
⎞
⎟
22n
⎠
n
(16)
(17)
The value of R40 = R41 is constrained by:
RR
40 41=≥
⎛
VV
()
V
FB
n
DC NOM DC MIN
•
⎜
⎜
VV
()
⎝
DC MAX D
−
nn
,,
−
CC NOM
236μ
n,
A
n
,
+
⎞
+110
⎟
⎟
⎠
30
mV
(14)
5. Solve for R30A and R31A.
R30A and R31A are constrained by:
RA
3
n
≤
R
2
n
⎛
R
2
⎛
1
+
⎜
⎝
R
1
n
VV
n
⎞
DC MAX DC NOM
•
⎟
⎜
⎠
⎝
−
nn
,,
V
DC
nnn,NOM
− 3
⎞
⎟
⎠
(18)
RB
29701fc

LTC2970/LTC2970-1
U
WUU
APPLICATIO S I FOR ATIO
6. Solve for Channel 1’s tracking counter delay relative to
Channel 0, CH1_A_DELAY_TRACK().
CH A DELAY TRACK
1
__ _ ()
VV
()
DC NOM DC NOM
Note: V
R1n. If the result for CH1_A_DELAY_TRACK() is less than
0, apply the unsigned result to the CH0_A_DELAY_TRACK()
register.
7. Solve for the IDAC0 and IDAC1 terminal tracking codes,
Chn_a_idac_track[7:0].
Ch a idac track
n
255
Note: This formula assumes that the Chn_a_idac_pol bit
is set to 0.
Margining Application Circuit Design Example
Consider the LTC2970 application circuit shown in Figure
1. Channel 0 is a DC/DC converter whose output needs
to be varied between 3.63V and 1.62V. V
assume that I
1. Assume values for feedback resistor R20 and the
nominal DC/DC converter output voltage V
solve for R10.
Let V
DC0,NOM
and assume that R20 = 10kΩ. From Equation 1:
R
10
10 0 8
22 625 0 8
..
Let R10 = 4.37kΩ (the nearest E192 series resistor
value).
′
−
10
,,
141
A count R
μ /
DCn,NOM
__ _ [:]
−
=
kV
ʹ is based on the fi nal values of R2n and
V
ALSBR
/
14
FB0
= 2.625V (the average of 3.63V and 1.62V)
VIRV
,
DC NOM FB FB
.Ω
•
VV−
•
FB
n
n
•μ
= 0A.
RV
20
•
−•−
00
4 384
,
=Ω
′
70
L
(
FB
=
R
331
B
•
21
R
counts
()
(20)
=
SSB s’)
0
20
=
(19)
= 0.8V and
FB0
DC0,NOM
, and
2. Solve for the value of R30 that yields the maximum
required DC/DC converter output voltage V
From Equation 2:
RV mV
20 10
•−
()
R
30
≤
VV
k
10 0 0
..Ω 8810
3 63 2 625
Let R30 = 7.68kΩ.
3. Solve for the value of R40 that’s needed to yield the
minimum required DC/DC converter output voltage
V
DC0,MIN
From Equation 3:
Let R40 = 6.81kΩ.
4. Re-calculate the minimum, nominal, and maximum
DC/DC converter output voltages and the resulting margining resolution.
From Equations 4, 5, and 6:
..
.
VV
()
≥
R
40
2 625
.μVVV
()
VV
DC NOM FB FB0
,
⎛
V
08 1
.
•+
⎜
⎝
VV
DC MIN DC NOM FB00 0
,,
→<−•
VV
DC MIN0
,
Ak
236 6 81 0
()
FB
−
,,
DC MAX DC NOM
•
VmV
−
()
VV
−
DC NOM DC MIN FB
−
<−••−
•−
−
,,
236
162
=•+
437
..
•+
.
μ
A
236
⎛
1
⎜
⎝
110
k
Ω
⎞
⎟
⎠
k
Ω.
2 631
.
Ωμ 8810 159VmV V−
796
.
k
10
R
20
R
10
2 631
=
R
R
768
=
7 861
=
, Ω
30
R
•+
20
R
A
Ω
k
08
Ω
.
20
30
10
.
.
⎞
IR
+• =
⎟
⎠
V
236 40
()
k
Ω
k
Ω
DC0,MAX
V
=
V
=
6 780
,
20
AR V
μ
= .
Ω
29701fc
31

LTC2970/LTC2970-1
U
WUU
APPLICATIO S I FOR ATIO
20
660V
R
R
VmV
()
30
k
10
Ω
k
768
.
Ω
VV
DC MAX DC NOM FB00 0
>+•−
,,
→>+•
VV
DC MAX0
,
−
VmV
08 10 36
..
()
2 631
.
=
From Equation 7, the margining resolution will be less
than:
R
20
RA
••
V
RES
10
768
.
R
30
<
256
40 276
k
Ω
k
Ω
k
••
665
Ω
.
256
2276
μ
=
μA
933
= . mV/LSB
Margining DC/DC Converter with TRIM Pin Design
Example
10
Tracking Application Circuit Design Example
Consider the LTC2970-1 application circuit shown in Figure
3. Channel 0 is a 1.8V DC/DC converter while channel 1
is a 2.5V switching power supply. Both converters have
a feedback node voltage of 0.8V and need to track on and
off coincidentally. In addition, a margin range of +5% and
–10% is required for each supply.
1. Assume a value for R20 and solve for R21.
Let R20 = 5,970Ω. From Equation 12:
V
DC NOM
1
RR
21 20 5 970
=• = • =
,
V
DC NOM
0
,
,
25
.
18
.
V
8
,Ω 2292Ω
V
Let R21 = 8,250Ω (the nearest E192 Series resistor
value).
2. Solve for R10 and R11.
From Equation 13:
The output voltage of the DC/DC converter in Figure 2 needs
to be margined ±10% about its nominal value. Assume
that R
= 10.22kΩ and V
TRIM
= 1.225V.
REF
1. Solve for R30 using Equation 10:
≤
RR
30
.•
=
10 22
TRIM
Ω
k
⎛
•
⎜
⎝
50
⎛
⎜
⎝
50
10
Δ
−
Δ
−
DOWN
110
DOWN
⎞
⎟
⎠
= , Ω
⎞
%
⎟
%
⎠
40 880
Let R30 = 39.2kΩ.
2. Solve for R40 using Equations 11:
⎛
≥+
R
40 1
⎜
⎝
10
⎛
=+
1
⎜
⎝
10
⎞
⎟
⎠⎠
Δ
Δ
DOWN
236
UP
.,1 225
%
%
V
Aμ
⎞
•
⎟
236
⎠
=•
10 381
V
REF
μ
A
Ω
Let R40 = 10.5kΩ.
,
R
R
10
=
⎛
⎜
11
⎝
=
R
⎛
⎜
⎝
V
DC NOM
0
V
FB
R
V
DC NOM
1
,
V
FB
,
20
0
21
1
=
⎛
⎞
1
−
−
⎜
⎟
⎝
⎠
8 250
=
25
⎛
⎞
1
⎜
⎟
⎝
08
⎠
5 970
V
.
18
V
.
08
,
V
.
V
.
Ω
−
Ω
−
Let R10 = 4,750Ω and R11 = 3,880Ω.
3. Solve for R40 and R41.
Assume that R40 = R41.
RR
40 41=≥
⎛
VV
()
V
FB
n
V
08
.
DC NOM DC MIN
•
⎜
⎜
VV
()
⎝
DC MAX D
n
⎛
−
109
(.)
•
⎜
(
1105 1
.)
⎝
236
−
nn
,,
−
CC NOM
236
n,
A
μ
,
+
⎞
110
+
+=mV
−
⎟
⎠
Aμ
4 776
= , Ω
⎞
11
⎟
⎠
3 882
= , Ω
⎞
11
⎟
⎠
⎞
mV
+
110
⎟
⎟
⎠
10 212
,
Ω
=
32
Let R40 = R41 = 10.5kΩ
29701fc

LTC2970/LTC2970-1
U
WUU
APPLICATIO S I FOR ATIO
4. Solve for R30B and R31B.
RAVVmV
40 236 0 8 10
RB
10 5 236 0 8 0 8 10
()
30
≤
• −−−(. . . )
k AVVmV
Ωμ
••+
08
.
V
RAVVmV
41 236 0 8 10
RB
()
31
≤
10 5 236 0 8 0 8 10
• −−−(. . . )
k AVVmV
Ωμ
••+
08
.
V
For coincident tracking to occur Equation 17 also must
be satisfi ed:
μ .
•−−−
V
FB
FB
0
1
⎛
•+
⎜
0
⎝
RR
10
1
220
⎞
⎟
⎠
=
1
⎛
⎜
⎝
4 750
,,
ΩΩ
•−−−
μ .
⎛
V
•+
⎜
FB
1
⎝
1
⎞
⎟
1
221
⎠
⎞
⎟
⎠
5 970
FB
1
1
RR
11
=
1
⎛
⎜
⎝
3 880
,,
ΩΩ
1
8 250
⎞
⎟
⎠
=
2 870
,
=
2 863
,
Ω
Ω
R
RA
31
≤
R
21
⎛
1
⎜
⎝
8 250
,
8 250
⎛
1
+
⎜
⎝
,
3 880
⎞
+
,
Ω
Ω
R
11
⎞
⎟⎟
⎠
•
⎟
⎠
Ω
105 1
⎛
•
⎜
⎝
21
⎛
VV
DC MAX DC NOM
⎜
⎝
.
−
1
−
11
,,
V
DC
11
,
NOM
2 890 49 888
,,ΩΩ
−=
⎞
⎟
⎠
31
RB
−=
⎞
⎟
⎠
Let R30A = 49.9kΩ and R31A = 48.7kΩ.
6. Solve for Channel 1’s tracking counter delay relative to
Channel 0, CH1_A_DELAY_TRACK().
First, recalculate the values of V
DCn,NOM
based on the fi nal
values of R1n and R2n:
R
20
′
VV
DC NOM FB FB0
.
V
08 1
=•+
,
5 970
⎛
• ++
⎜
⎝
4 750
,
,
Ω
Ω
⎛
1
⎜
⎝
⎞
⎟
⎠
⎞
⎟
⎠
R
10
+=
0 1 805
+• =
IR
20
.
V
RBRRB
30
20
→=•= • =RB
→= •= • =RB
=
31
R
21
RB
31
R
21
RB
30
R
20
2 863
,
R30
20
R31
21
8 250
,
2 870
,
5 970
,
Ω
5 970 2 078
,,
Ω
Ω
8 250 3 957
,,
Ω
Let R30B = 2,100Ω and R31B = 2,890Ω.
5. Solve for R30A and R31A.
Referring to Equation 18:
R
RA
30
≤
,
5 970
⎛
1
+
⎜
⎝
,
4 750
⎛
1
+
⎜
⎝
,
5 970
Ω
Ω
R
20
R
10
⎞
⎟⎟
⎠
⎞
•
⎟
⎠
Ω
105 1
⎛
•
⎜
⎝
.
20
⎛
VV
DC MAX DC NOM
⎜
⎝
−
1
−
00
,,
V
DC
00
,
NOM
2 100 50 806
,,ΩΩ
−=
⎞
⎟
⎠
ΩΩΩ
ΩΩΩ
30
RB
−=
⎞
⎟
⎠
8 250
,
3 880
,
Ω
Ω
⎞
0 2 501
+=
⎟
⎠
.
VV
VV
DC NOM1
′
08 1
=•+
,
⎛
.
⎜
⎝
Next, apply Equation 19:
CH A DELAY TRACK
1
__ _ ()
VV
()
DC NOM DC NOM
2 501 1 805
..
()
′
−
10
,,
141
A count R
μ /
VV
−
•
2 890
•
88 250
1105
/.
•
=
R
331
′
,
,
B
•
21
R
=
Ω
Ω
23
counts
=
ΩμA count k
7. Solve for the IDAC0 and IDAC1 terminal tracking codes,
Chn_a_idac_track[7:0].
Ch a idac Ch a idac
070170
__ [:] __ [:]
255
−
A
1
μ
//.LSB k•=10 5
==
V
08
.
179
Ω
29701fc
33

LTC2970/LTC2970-1
U
WUU
APPLICATIO S I FOR ATIO
2.7
2.4
2.1
1.8
1.5
VOLTS
1.2
0.9
0.6
0.3
0
Figure 4. Tracking Design Example DC/DC
Converter Output Waveforms
Figure 4 shows the DC/DC converter output voltages for
this design example tracking-up and tracking-down.
Temperature Sensor Conversion
The LTC2970's internal temperature sensor output is
proportional to absolute temperature (PTAT). In order to
convert the ADC reading to degress Celsius, apply the
following formula:
ADC temp sensor reading
result C
()
(21)
__ _
Negative Power Supply Application Circuit
Figure 5 shows the LTC2970 controlling a negative power
supply. The R30/R40 resistor divider translates the point
of load voltage to the LTC2970’s V
inputs monitor the converter’s input current I • R
V
IN0_B
0.1μF
R
SENSE
GND
OUT
DC/DC
CONVERTER
FB
V
IN
Figure 5. Negative Power Supply Application Circuit
R20
R10
R20
LOAD
R10
V
V
DC1
V
DC0
5ms/DIV
29701 F04
.°= −4273 15
inputs while the
IN0_A
8V TO 15V
29701 F05
– V
IN0_AM
0.1μF
I2C BUS
0.1μF
)
12V
V
IN
DD
V
IN0_AP
V
IN0_AM
1/2 LTC2970
–
(
ALERT
SCL
SDA
REF
R30
•
V
1 +
(
IN0_AP
)
R40
V
IN0_BP
V
IN0_BM
Q1
TP0610K
I
OUT0
GND ASEL0 ASEL1
= V
V
OUT
EE
DD
drop across resistor R
. Since the VDD pin voltage
SENSE
is monitored by the LTC2970, its tolerance can be accounted for when calculating the point of load voltage.
Transistor Q1 allows the I
pin to force current into
OUT0
the converter’s feedback node without forward biasing
the LTC2970’s I
body diode. Note that I
OUT0
OUT0
’s output
current defaults to 128μA after the LTC2970 comes out
of power-on reset.
15-Bit Programmable Power Supply Application
Circuit
Figure 6 illustrates how both servo channels of the LTC2970
can be confi gured to adjust a single DC/DC converter over
a 15-bit dynamic range. R30 and R31 are sized to force
1 bit of overlap between the coarse (channel 0) and fi ne
(channel 1) servo loops. One coarse servo iteration should
be performed fi rst on channel 0 with IDAC1 programmed
to mid-scale, and then channel 1 can be programmed to
servo to the desired voltage.
Programmable Reference Application Circuit
Figure 7 shows a LTC2970 confi gured as a programmable reference that can span a 0V to 3.5V range with
a resolution of 100μV and an absolute accuracy of less
than ±0.5%. The two IDAC’s are paralleled by terminating
IDAC1’s output resistor in the V
output of the composite DAC from V
output and taking the
OUT0
. IDAC0 should
OUT1
servo once with IDAC1 set to mid-scale, and then IDAC1
can servo once, continuously, or trigger on drift to the
desired target voltage.
8V TO 15V
12V
V
V
V
V
I
I
V
V
GND
OUT1
OUT0
OUT1
OUT0
IN0_AP
IN1_AP
IN0_AM
IN1_AM
IN
LTC2970
GPIO_CFG
ALERT
GPIO_0
ASEL0 ASEL1
V
SCL
SDA
REF
DD
V
IN
IN
OUT
DC/DC
CONVERTER
RUN/SS
SGND
GND
FB
+
C
LOAD
R31
R30
R31 ≥ R30 • 128
R41 = R40
R20
LOAD
R41
R40R10
Figure 6. Programmable Power Supply Application Circuit
0.1μF
0.1μF
I2C BUS
0.1μF
29701 F06
29701fc
34

PACKAGE DESCRIPTIO
LTC2970/LTC2970-1
U
UFD Package
24-Lead Plastic QFN (4mm × 5mm)
(Reference LTC DWG # 05-08-1696)
4.50 ± 0.05
3.10 ± 0.05
2.65 ± 0.05
(2 SIDES)
0.25 ±0.05
0.50 BSC
3.65 ± 0.05
(2 SIDES)
4.10 ± 0.05
RECOMMENDED SOLDER PAD PITCH AND DIMENSIONS
NOTE:
1. DRAWING PROPOSED TO BE MADE A JEDEC PACKAGE OUTLINE MO-220 VARIATION (WXXX-X).
2. DRAWING NOT TO SCALE
3. ALL DIMENSIONS ARE IN MILLIMETERS
5.50 ± 0.05
TYPICAL APPLICATIO
U
0.70 ±0.05
PACKAGE OUTLINE
5.00 ± 0.10
(2 SIDES)
4.00 ± 0.10
(2 SIDES)
PIN 1
TOP MARK
(NOTE 6)
2.65 ± 0.10
(2 SIDES)
0.75 ± 0.05
3.65 ± 0.10
(2 SIDES)
0.200 REF
0.00 – 0.05
4. DIMENSIONS OF EXPOSED PAD ON BOTTOM OF PACKAGE DO NOT INCLUDE
MOLD FLASH. MOLD FLASH, IF PRESENT, SHALL NOT EXCEED 0.15mm ON ANY SIDE
5. EXPOSED PAD SHALL BE SOLDER PLATED
6. SHADED AREA IS ONLY A REFERENCE FOR PIN 1 LOCATION
ON THE TOP AND BOTTOM OF PACKAGE
R = 0.115
TYP
BOTTOM VIEW—EXPOSED PAD
23 24
PIN 1 NOTCH
R = 0.30 TYP
0.25 ± 0.05
0.50 BSC
0.40 ± 0.05
1
2
(UFD24) QFN 0505
8V TO 15V
29701 F07
0.1μF
0.1μF
2
C BUS
I
0.1μF
12V
IN
V
LTC2970
V
IN1_AP
V
IN1_AM
V
IN0_AP
V
IN0_AM
V
OUT1
I
22μF
+
V
OUT
–
10Ω
OUT1
100Ω
V
I
OUT0
12.7k
GND ASEL0 ASEL1
OUT0
DD
ALERT
SCL
SDA
REF
Figure 7. Programmable Reference Application Circuit
Information furnished by Linear Technology Corporation is believed to be accurate and reliable.
However,
no responsibility is assumed for its use. Linear Technology Corporation makes no representation that
the interconnection of its circuits as described herein will not infringe on existing patent rights.
29701fc
35

LTC2970/LTC2970-1
U
TYPICAL APPLICATIO
V
IN
IN
OUT
DC/DC
CONVERTER 0
RUN/SS
SGND
PGND
I+
I–
FB
R50
R30
R20
LOAD
R10 R40
8V TO 15V
10
12V
IN
4
V
IN0_BM
3
V
IN0_BP
11
V
OUT0
1
V
IN0_AP
14
I
OUT0
V
IN0_AM
2
16
GPIO_0
GPIO_CFG
V
ALERT
SCL
SDA
9
DD
10k
20
17
18
19
0.1μF
0.1μF
2
C BUS
I
SMBUS
()
COMPATIBLE
V
IN1_BM
V
IN1_BP
V
OUT1
V
IN1_AP
I
OUT1
V
IN1_AM
GPIO_1
GND
LTC2970
ASEL0 ASEL1
REF
RGND
212225
23
0.1μF
24
29701 TA01
V
IN
IN
OUT
DC/DC
CONVERTER 1
RUN/SS
SGND
PGND
R51
I+
I–
R31
R21
FB
LOAD
R11 R41
8
7
12
5
13
6
15
Figure 8. Typical LTC2970 Application Circuit for
DC/DC Converters with External Feedback Resistors
RELATED PARTS
PART NUMBER DESCRIPTION COMMENTS
LTC2920-1/LTC2920-2 Single/Dual Power Supply Margining Controllers Symmetric/Asymmetric High and Low Voltage Margining
LTC2921/LTC2922 Power Supply Trackers with Input Monitors 3 (LTC2921) or 5 (LTC2922) Remote Sense Switches
LTC2923 Power Supply Tracking Controller Up to 3 Supplies
LTC2924 Quad Power Supply Sequencer Voltage Monitoring and Sequence Error Detection and Reporting
LTC2925 Multiple Power Supply Tracking Controller Power Good Timer, Remote Sense Switch
LTC2926 MOSFET Controller Power Supply Tracker Up to 3 Modules
LTC2927 Single Power Supply Tracker Point of Load Applications
29701fc
0308 REV C • PRINTED IN USA
36
Linear Technology Corporation
1630 McCarthy Blvd., Milpitas, CA 95035-7417
(408) 432-1900 ● FAX: (408) 434-0507
●
www.linear.com
© LINEAR TECHNOLOGY CORPORATION 2006
 Loading...
Loading...