

查询LTC1922EG-1供应商
FEATURES
LTC1922-1
Synchronous Phase
Modulated Full-Bridge Controller
U
DESCRIPTIO
■
Adaptive DirectSenseTM Zero Voltage Switching
■
Integrated Synchronous Rectification Control for
Highest Efficiency
■
Output Power Levels from 50W to Kilowatts
■
Very Low Start-Up and Quiescent Currents
■
Compatible with Voltage Mode and Current Mode
Topologies
■
Programmable Slope Compensation
■
Undervoltage Lockout Circuitry with 4.2V Hysteresis
and Integrated 10.3V Shunt Regulator
■
Fixed Frequency Operation to 1MHz
■
50mA Outputs for Bridge Drive and Secondary Side
Synchronous Rectifiers
■
Soft-Start, Cycle-by-Cycle Current Limiting and
Hiccup Mode Short-Circuit Protection
■
5V, 15mA Low Dropout Regulator
■
20-Pin PDIP and SSOP Packages
U
APPLICATIO S
■
Telecommunications, Infrastructure Power Systems
■
Distributed Power Architectures
■
Server Power Supplies
■
High Density Power Modules
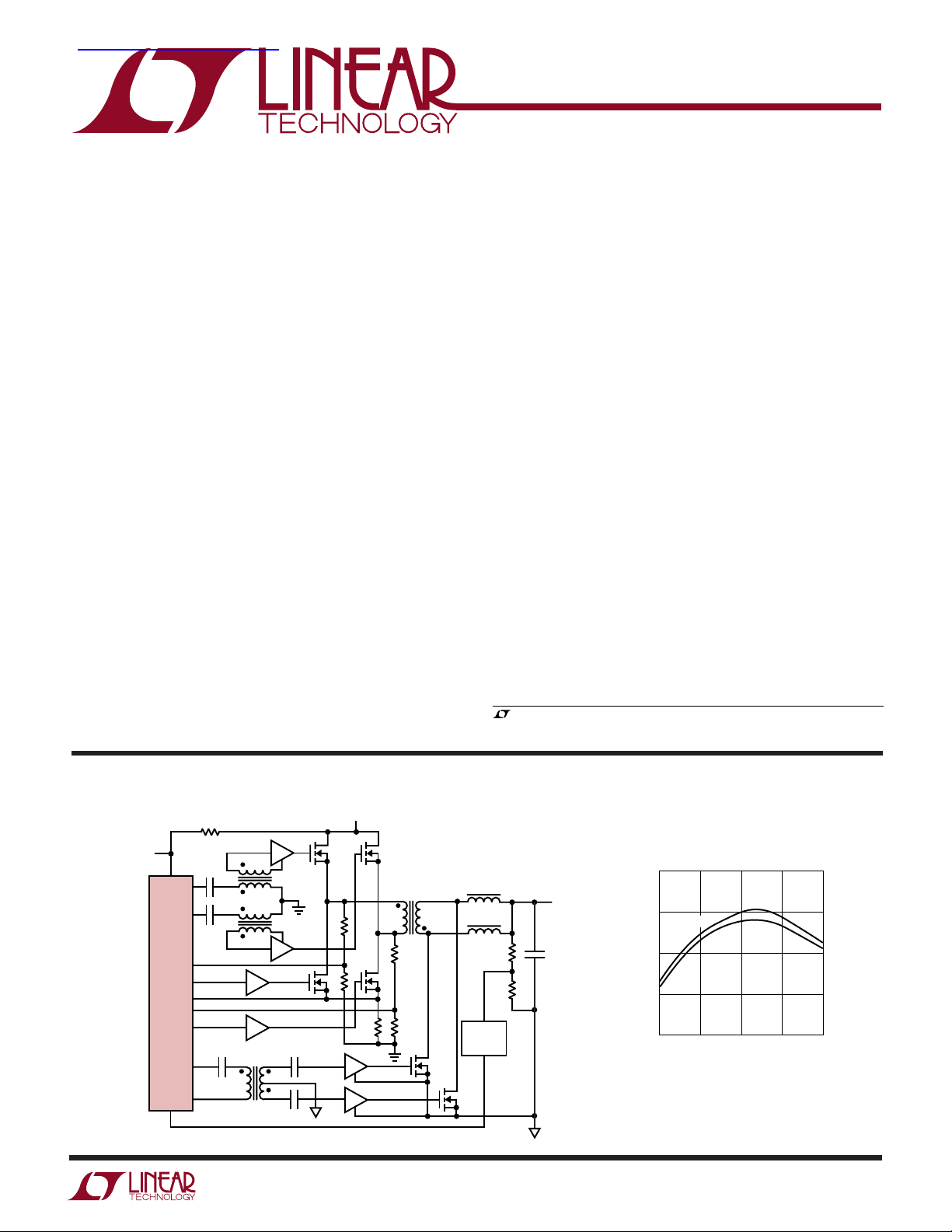
The LTC®1922-1 phase shift PWM controller provides all
of the control and protection functions necessary to implement a high performance, zero voltage switched, phase
shift, full-bridge power converter with synchronous rectification. The part is ideal for developing isolated, low
voltage, high current outputs from a high voltage input
source. The LTC1922-1 combines the benefits of the fullbridge topology with fixed frequency, zero voltage switching operation (ZVS). Adaptive ZVS circuity controls the
turn-on signals for each MOSFET independent of internal
and external component tolerances for optimal performance.
The LTC1922-1 also provides secondary side synchronous rectifier control. The device uses peak current mode
control with programmable slope comp and leading edge
blanking.
The LTC1922-1 features extremely low operating and
start-up currents to simplify off-line start-up and bias
circuitry. The LTC1922-1 also includes a full range of
protection features and is available in 20-pin through hole
(N) and surface mount (G) packages.
, LTC and LT are registered trademarks of Linear Technology Corporation.
DirectSense is a trademark of Linear Technology Corporation.
TYPICAL APPLICATIO
BIAS
SUPPLY
LTC1922-1
U
V
48V
IN
VIN = 48V
10
Efficiency
VIN = 36V
20
LOAD CURRENT (A)
30
40
1922 • TA01b
ISOLATED
FEEDBACK
1922 TA01a
V
3.3V
OUT
100
90
80
EFFICIENCY (%)
70
60
0
1
LTC1922-1
WW
W
ABSOLUTE AXI U RATI GS
U
PACKAGE/ORDER I FOR ATIO
(Note 1)
VCC to GND
Low Impedance Source .........................–0.3V to 10V
(Chip Self Regulates at 10.3V)
All Other Pins to GND
(Low Impedance Source) .....................–0.3V to 5.5V
V
(Current Fed).................................................. 25mA
CC
V
Output Current ................................ Self Regulated
REF
Outputs (A, B, C, D, E, F) Current ..................... ±100mA
Operating Temperature Range (Note 5)
LTC1922E........................................... –40°C to 85°C
LTC1922I............................................ – 40°C to 85°C
Storage Temperature Range ................. –65°C to 125°C
Lead Temperature (Soldering, 10 sec)..................300°C
ELECTRICAL CHARACTERISTICS
The ● denotes the specifications which apply over the full operating
SYNC
RAMP
CS
COMP
R
LEB
FB
SS
PDLY
SBUS
ADLY
G PACKAGE
20-LEAD PLASTIC SSOP
T
JMAX
T
Consult factory for parts specified with wider operating temperature ranges.
temperature range, otherwise specifications are at VCC = 9.5V, CT = 180pF, TA = T
TOP VIEW
1
2
3
4
5
6
7
8
9
10
N PACKAGE
20-LEAD PDIP
= 125°C, θJA = 110°C/W (G)
= 125°C,θJA = 62°C/W (N)
JMAX
MIN
to T
unless other wise noted.
MAX
UUW
ORDER PART
C
20
T
GND
19
OUTA
18
OUTB
17
OUTC
16
V
15
CC
OUTD
14
OUTE
13
OUTF
12
V
11
REF
NUMBER
LTC1922EG-1
LTC1922IG-1
LTC1922EN-1
LTC1922IN-1
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
Input Supply
UVLO Undervoltage Lockout Measured on V
UVHY UVLO Hysteresis Measured on V
I
CCST
I
CCRN
V
SHUNT
R
SHUNT
Delay Blocks
DTHR Delay Pin Threshold SBUS = 1.5V 1.38 1.50 1.62 V
DHYS Delay Hysteresis Current SBUS = 1.5V, ADLY/PDLY = 1.6V 1.1 1.3 1.45 mA
DTMO Delay Time-Out SBUS = 1.5V 600 ns
DZRT Zero Delay Threshold Measured on SBUS 3 4.15 5 V
Phase Modulator
ROS RAMP Offset Voltage Measured on COMP, RAMP = 0V 0.4 V
I
RMP
I
SLP
DCMX Maximum Phase Shift COMP = 4V ● 95 99.5 %
DCMN Minimum Phase Shift COMP = 0V ● 0.1 0.6 %
Start-Up Current VCC = V
Operating Current 47 mA
Shunt Regulator Voltage Current Into VCC = 10mA 10.2 10.8 V
Shunt Resistance Current Into VCC = 7mA to 17mA –1.5 2 Ω
ADLY and PDLY SBUS = 2.25V 2.08 2.25 2.42 V
ADLY and PDLY
SBUS = 2.25V 900 ns
RAMP Discharge Current RAMP = 1V, COMP = 0V 30 50 mA
Slope Compensation Current Measured on CS, CT = 1.5V 35 55 75 µA
CC
CC
– 0.3V ● 145 250 µA
UVLO
= 3V 70 110 150 µA
C
T
3.8 4.2 V
10.25 10.7 V
2

LTC1922-1
ELECTRICAL CHARACTERISTICS
temperature range, otherwise specifications are at VCC = 9.5V, CT = 180pF, TA = T
The ● denotes the specifications which apply over the full operating
MIN
to T
unless other wise noted.
MAX
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
Oscillator
OSCT Total Variation VCC = 6.5V to 9.5V ● 236 277 319 kHz
OSCV CT RAMP Amplitude Measured on C
T
3.6 3.85 4.2 V
OSYT SYNC Threshold Measured on SYNC 1.6 1.8 2.2 V
OSYW Minimum SYNC Pulse Width Measured at Outputs (Note 2) 6 ns
OSYWX Maximum SYNC Pulse Width Measured on Outputs, CT = 180pF 1.3 µs
OSOP SYNC Output Pulse Width Measured on SYNC, R
= 5.1k 170 ns
SYNC
Error Amplifier
V
FB
FB Input Voltage COMP = 2.5V (Note 3) 1.179 1.204 1.229 V
FBI FB Input Range Measured on FB (Note 4) –0.3 2.5 V
AVOL Open-Loop Gain COMP = 1V to 3V (Note 3) 70 90 dB
I
IB
V
OH
V
OL
I
SOURCE
I
SINK
Input Bias Current COMP = 2.5V (Note 3) 5 50 nA
Output High Load on COMP = –100µA 4.7 4.92 V
Output Low Load on COMP = 100µA 0.18 0.4 V
Output Source Current COMP = 2.5V –400 –800 µA
Output Sink Current COMP = 2.5V 3 7 mA
Reference
V
REF
Initial Accuracy TA = 25°C, Measured on V
REF
4.925 5 5.075 V
REFTV Total Variation Line, Load and Temperature ● 4.9 5 5.1 V
REFLD Load Regulation Load on V
= 100µA to 5mA 2 15 mV
REF
REFLN Line Regulation VCC = 6.5V to 9.5V 0.1 10 mV
REFSC Short-Circuit Current V
Shorted to GND 18 30 45 mA
REF
Outputs
OUTH(X) Output High Voltage I
OUTL(X) Output Low Voltage I
R
R
t
t
r(X)
f(X)
HI(X)
LO(X)
Pull-Up Resistance I
Pull-Down Resistance I
Rise Time C
Fall Time C
= –50mA 7.9 8.4 V
OUT(X)
= 50mA 0.6 1 V
OUT(X)
= –50mA to –10mA 22 30 Ω
OUT(X)
= –50mA to –10mA 12 20 Ω
OUT(X)
= 50pF 5 15 ns
OUT(X)
= 50pF 5 15 ns
OUT(X)
Current Limit and Shutdown
CLPP Pulse-by-Pulse Current Limit Threshold Measured on CS 0.34 0.415 0.48 V
CLSD Shutdown Current Limit Threshold Measured on CS 0.55 0.64 0.73 V
SSI Soft-Start Current SS = 2.5V 7 12 17 µA
SSR Soft-Start Reset Threshold Measured on SS 0.7 0.4 0.1 V
FLT FAULT Reset Threshold Measured on SS 4.4 4.1 3.8 V
Note 1: Absolute Maximum Ratings are those values beyond which the life
of a device may be impaired.
COMP
),
OSC
for these
Note 2: SYNC pulse width is valid from >20ns and <0.4 • (1/f
= 0V to 5V.
V
SYNC
Note 3: FB is driven by a servo loop amplifier to control V
tests.
Note 4: Set FB to –0.3V, 2.5 and insure that COMP does not phase invert.
Note 5: The LTC1922-1E is guaranteed to meet performance specifications
from 0°C to 85°C. Specification over the –40°C to 85°C operating
temperature range are assured by design, characterization and correlation
with statistical process controls. The LTC1922-1I is guaranteed and tested
over the – 40°C to 85°C operating temperature range.
3
LTC1922-1
UW
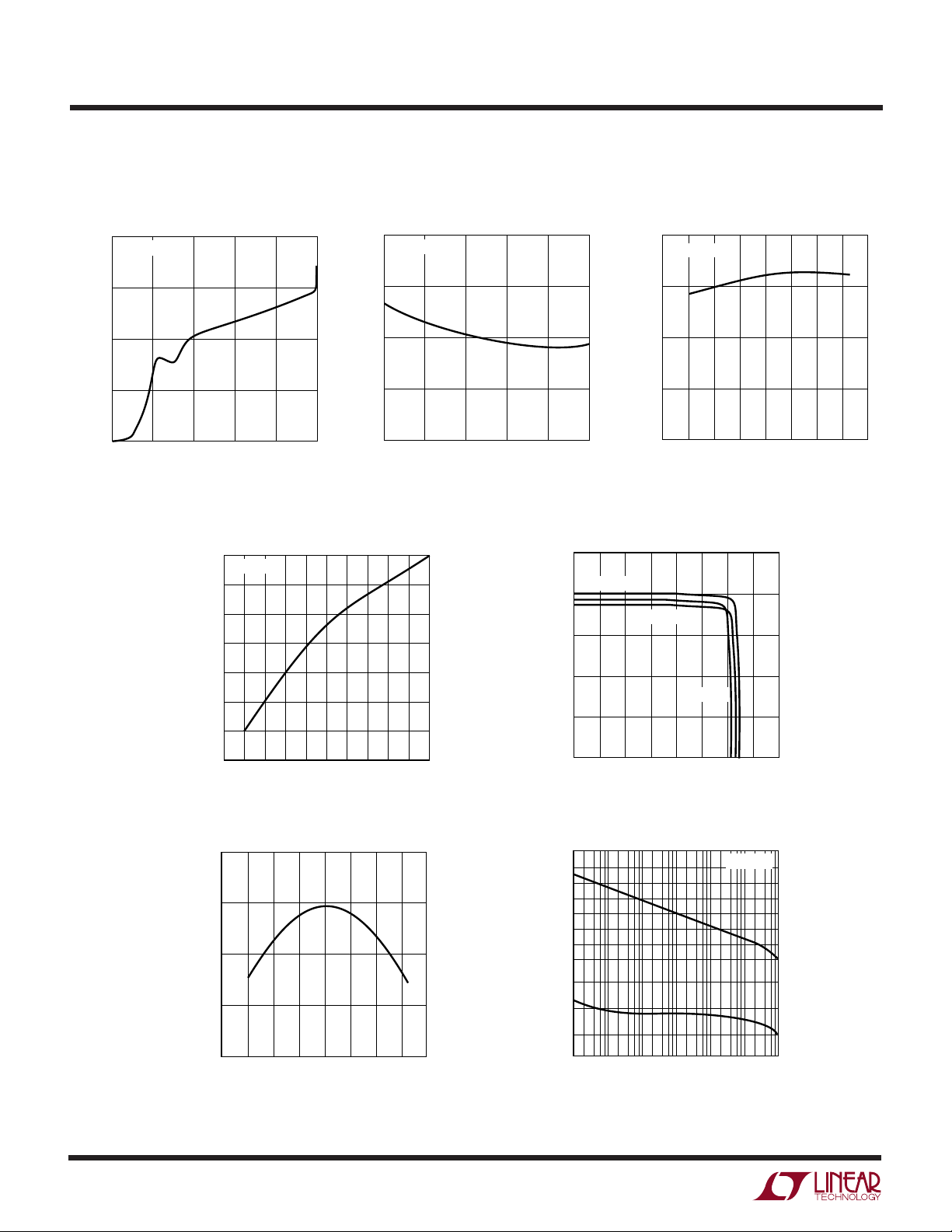
TYPICAL PERFOR A CE CHARACTERISTICS
Start-Up ICC vs V
200
TA = 25°C
150
100
(µA)
CC
I
50
0
0
2
CC
6
8
4
VCC (V)
10
1922 • G01
Leading Edge Blanking Time
vs R
LEB
350
TA = 25°C
300
250
200
150
BLANK TIME (ns)
100
50
10.50
10.25
(V)
10.00
CC
V
9.75
9.50
VCC vs I
TA = 25°C
0
SHUNT
10
20
I
SHUNT
30
(mA)
40
(V)
REF
V
5.05
5.00
4.95
4.90
4.85
1922 • G02
V
50
vs I
REF
TJ = 25°C
Oscillator Frequency vs
Temperature
280
CT = 180pF
270
260
FREQUENCY (kHz)
250
240
–40–60 –20 200 40 60 100
TEMPERATURE (°C)
REF
TJ = 85°C
TJ = –40°C
80
1922 • G03
4
(V)
REF
V
0
0
V
vs Temperature
REF
5.01
5.00
4.99
4.98
4.97
–40–60 –20 200 40 60 100
40
2010 30 50 70 90
R
(kΩ)
LEB
TEMPERATURE (°C)
60 80
1922 • G04
80
1922 • G03
100
4.80
0
510
20
15 25 40
I
(mA)
REF
Error Amplifier Gain/Phase
100
80
60
40
GAIN (dB)PHASE (DEG)
20
0
–180
–270
–360
10 1k100 10k 100k 10M
FREQUENCY (Hz)
30 35
1922 • G05
TA = 25°C
1M
1922 • G07
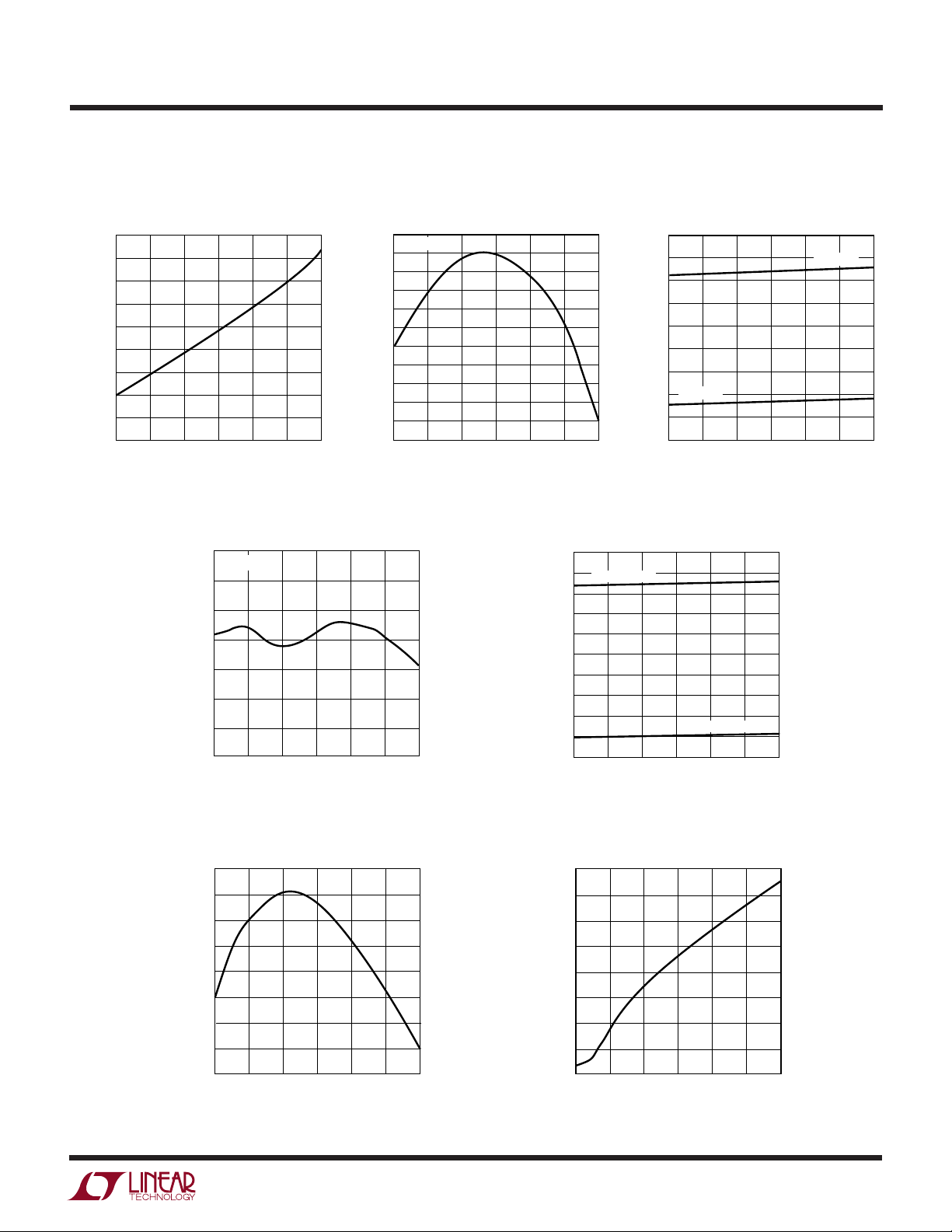
UW
TYPICAL PERFOR A CE CHARACTERISTICS
Delay Hysteresis Current vs
Start-Up ICC vs Temperature
160
150
140
130
120
(µA)
110
CC
I
100
90
80
70
–25 5 35 95 12565
–55
TEMPERATURE (°C)
1922 • G10
Temperature
1.278
SBUS = 1.5V
1.276
1.274
1.272
1.270
1.268
1.266
1.264
1.262
HYSTERESIS CURRENT (mA)
1.260
1.258
1.256
–25 5 35 95 12565
–55
TEMPERATURE (°C)
1922 • G11
LTC1922-1
Slope Current vs Temperature
130
120
110
100
90
80
CURRENT (µA)
70
CT = 1.5V
60
50
40
–55
–25 5 35 95 12565
TEMPERATURE (°C)
CT = 3.0V
1922 • G12
VCC Shunt Voltage vs Temperature
10.5
ICC = 10mA
10.4
10.3
10.2
10.1
SHUNT VOLTAGE (V)
10.0
9.9
9.8
–55
–25 5 35 95 12565
TEMPERATURE (°C)
FB Input Voltage vs Temperature
1.202
1.201
1.200
1.199
1.198
1.197
FB VOLTAGE (V)
1.196
1.195
1.194
–25 5 35 95 12565
–55
TEMPERATURE (°C)
1922 • G13
1922 • G15
Delay Pin Threshold vs
Temperature
2.4
2.3
SBUS = 2.25V
2.2
2.1
2.0
1.9
1.8
THRESHOLD (V)
1.7
1.6
1.5
1.4
–25 5 35 95 12565
–55
TEMPERATURE (°C)
Ramp Offset Voltage vs
Temperature
390
385
380
375
370
OFFSET (mV)
365
360
355
350
–25 5 35 95 12565
–55
TEMPERATURE (°C)
SBUS = 1.5V
1922 • G14
1922 • G16
5

LTC1922-1
UUU
PIN FUNCTIONS
SYNC (Pin 1): Synchronization Input/Output for the
Oscillator. Terminate SYNC with a 5.1k resistor to GND.
RAMP (Pin 2): Input to Phase Modulator Comparator. The
voltage on RAMP is internally level shifted by 400mV.
CS (Pin 3): Input to Current Limit Comparators, Output of
Slope Compensation Circuitry.
COMP (Pin 4): Error Amplifier Output, Input to Phase
Modulator.
R
(Pin 5): Timing Resistor for Leading Edge Blanking.
LEB
Use a 10k to 100k resistor to program from 40ns to 310ns
of leading edge blanking. A ±1% tolerance resistor is
recommended. Leading edge blanking may be defeated by
connecting R
FB (Pin 6): Error Amplifier Inverting Input. This is the
voltage feedback input for the LTC1922-1.
SS (Pin 7): Soft-Start/Restart Delay Circuitry Timing
Capacitor.
PDLY (Pin 8): Passive Leg Delay Circuit Input.
LEB
to V
REF
.
V
(Pin 11): 5V Reference Output. V
REF
supplying up to 15mA to external circuitry. Bypass V
with a 1µF (minimum) ceramic capacitor to GND.
OUTF (Pin 12): 50mA Driver Output for Secondary Side
Current Doubler Synchronous Rectifier.
OUTE (Pin 13): 50mA Driver Output for Secondary Side
Current Doubler Synchronous Rectifier.
OUTD (Pin 14): 50mA Driver Output for Active Leg Low
Side.
VCC (Pin 15): Chip Power Supply Input, 10.3V Shunt
Regulator. Bypass VCC with a 0.1µF or larger ceramic
capacitor to GND.
OUTC (Pin 16): 50mA Driver Output for Active Leg High
Side.
OUTB (Pin 17): 50mA Driver Output for Passive Leg Low
Side.
OUTA (Pin 18): 50mA Driver Output for Passive Leg High
Side.
is capable of
REF
REF
SBUS (Pin 9): Input (Bus) Voltage Sensing Input.
ADLY (Pin 10): Active Leg Delay Circuit Input.
GND (Pin 19): All Voltages on the LTC1922-1 Are Referred
to GND.
CT (Pin 20): Timing Capacitor for Oscillator. Use ±5% or
better multilayer NPO ceramic for best results.
6

BLOCK DIAGRA
LTC1922-1
W
COMP
RAMP
R
REF AND LDO
1.2V
50k
14.9k
SLOPE
COMPENSATION
V
REF
5V
PHASE
MODULATOR
–
+
QB
Q
FAULT
LOGIC
C
/R
T
V
CC
15 11 20 1 9
UVLO
SHUNT REG
10.25V “ON”
6V “0FF”
ERROR
1.2V
AMPLIFIER
–
+
6
FB
4
+
0.4V
600mV
CURRENT LIMIT
400mV
PULSE BY PULSE
–
V
REF
12µA
+
–
SHUTDOWN
+
–
CURRENT LIMIT
2
BLANK
7
SS
5
LEB
CS
3
BLANK
C
OSC
R
S
SYNC SBUS
T
Q
T
QB
R
QB
S
19
GND
PASSIVE
DELAY
SYNC
RECTIFIER
DRIVE
LOGIC
ACTIVE
DELAY
PDLY
8
OUTA
18
OUTB
17
OUTE
13
OUTF
12
OUTC
16
OUTD
14
ADLY
10
1922 • BD
UWW
TI I G DIAGRA
ACTIVE DELAY
OUTA
OUTB
OUTC
OUTD
RAMP
COMP
CURRENT DOUBLER
OUTE
OUTF
NOTE: SHADED AREAS CORRESPOND TO POWER DELIVERY PULSES
PASSIVE DELAY
1922 TD
7
LTC1922-1
OPERATIO
U
Phase Shift Full-Bridge PWM
Conventional full-bridge switching power supply topologies are often employed for high power, isolated DC/DC
and off-line converters. Although they require two additional switching elements, substantially greater power and
higher efficiency can be attained for a given transformer
size compared to the more common single-ended forward
and flyback converters. These improvements are realized
since the full-bridge converter delivers power during both
parts of the switching cycle, reducing transformer core
loss and lowering voltage and current stresses. The fullbridge converter also provides inherent automatic transformer flux reset and balancing due to its bidirectional
drive configuration. As a result, the maximum duty cycle
range is extended, further improving efficiency. Soft switching variations on the full-bridge topology have been proposed to improve and extend its performance and
application. These zero voltage switching (ZVS) techniques exploit the generally undesirable parasitic elements present within the power stage. The parasitic
elements are utilized to drive near lossless switching
transitions for all of the external power MOSFETs.
LTC1922-1 phase shift PWM controller provides enhanced
performance and simplifies the design task required for a
ZVS phase shifted full-bridge converter. The primary
attributes of the LTC1922-1 as compared to currently
available solutions include:
1) Truly adaptive and accurate (DirectSense technology)
ZVS switching delays.
Benefit: higher efficiency, higher duty cycle capability,
eliminates external trim.
2) Internally generated drive signals for current doubler
synchronous rectifiers.
Benefit: eliminates external glue logic, drivers, optimal
timing for highest efficiency.
3) Programmable (single resistor) leading edge blanking.
Benefit: prevents spurious operation, reduces external
filtering required on CS.
4) Programmable (single resistor) slope compensation.
Benefit: eliminates external glue circuitry.
5) Optimized current mode control architecture.
Benefit: eliminates glue circuitry, less overshoot at start-
up, faster recovery from system faults.
6) Proven reference circuits and design tools.
Benefit: substantially reduced learning curve, more time
for optimization.
As a result, the LTC1922-1 makes the ZVS topology
feasible for a wider variety of applications, including those
at lower power levels.
The LTC1922-1 controls four external power switches in
a full-bridge arrangement. The load on the bridge is the
primary winding of a power transformer. The diagonal
switches in the bridge connect the primary winding between the input voltage and ground every oscillator cycle.
The pair of switches that conduct are alternated by an
internal flip-flop in the LTC1922-1. Thus, the voltage
applied to the primary is reversed in polarity on every
switching cycle and each output drive signal is 1/2 the
frequency of the oscillator. The on-time of each driver
signal is slightly less that 50%. The actual percentage is
adaptively modulated by the LTC1922-1. The on-time
overlap of the diagonal switch pairs is controlled by the
LTC1922-1 phase modulation circuitry. (Refer to Block
and Timing Diagrams) This overlap sets the approximate
duty cycle of the converter. The LTC1922-1 driver output
signals (OUTA to OUTF) are optimized for interface with an
external gate driver IC or buffer. External power MOSFETs
A and C require high side driver circuitry, while B and D are
ground referenced and E and F are ground referenced but
on the secondary side of the isolation barrier. Methods for
providing drive to these elements are detailed in the data
sheet. The secondary voltage of the transformer is the
primary voltage divided by the transformer turns ratio.
Similar to a buck converter, the secondary square wave is
applied to an output filter inductor and capacitor to produce a well regulated DC output voltage.
Switching Transitions
The phase shifted full-bridge can be described by four
primary operating states. The key to understanding how
ZVS occurs is revealed by examining the states in detail.
8

OPERATIO
LTC1922-1
U
Each full cycle of the transformer has two distinct periods
in which power is delivered to the output, and two “freewheeling” periods. The two sides of the external bridge
have fundamentally different operating characteristics that
become important when designing for ZVS over a wide
load current range. The left bridge leg is referred to as the
“passive” leg, while the right leg is referred to as the
“active” leg. The following descriptions provide insight as
to why these differences exist.
State 1 (Power Pulse 1)
Referring to Figure 1, State 1 begins with MA, MD and MF
“ON” and MB, MC and ME “OFF.” During the simultaneous
conduction of MA and MD, the full input voltage is applied
across the transformer primary winding and following the
dot convention, VIN/N is applied to the left side of LO1
allowing current to increase in LO1. The primary current
during this period is approximately equal to the output
inductor current (LO1) divided by the transformer turns
ratio plus the transformer magnetizing current (VIN • tON/
L
). MD turns off and ME turns on at the end of State 1.
MAG
State 2 (Active Transition and Freewheel Interval)
MD turns off when the phase modulator comparator
transitions. At this instant, the voltage on the MD/MC
junction begins to rise towards the applied input voltage
(VIN). The transformer’s magnetizing current and the
reflected output inductor current propels this action. The
slew rate is limited by MOSFET MC and MD’s output
capacitance (C
former interwinding capacitance. The voltage transition
on the active leg from the ground reference point to VIN will
always occur, independent of load current as long as
energy in the transformer’s magnetizing and leakage inductance is greater than the capacitive energy. That is,
1/2 • (LM + LI) • I
occurs when the load current is zero. This condition is
usually easy to meet. The magnetizing current is virtually
constant during this transition because the magnetizing
inductance has positive voltage applied across it throughout the low to high transition. Since the leg is actively
driven by this “current source,” it is called the active or
linear transition. When the voltage on the active leg has
), snubbing capacitance and the trans-
OSS
2
> 1/2 • 2 • C
M
OSS
2
• V
— the worst case
IN
risen to VIN, MOSFET MC is switched on by the LTC19221 DirectSense circuitry. The primary current␣ now flows
through the two high side MOSFETs (MA and MC). The
transformer’s secondary windings are electrically shorted
at this time since both ME and MF are “ON”. As long as
positive current flows in LO1 and LO2, the transformer
primary (magnetizing) inductance is also shorted through
normal transformer action. MA and MF turn off at the end
of State 2.
State 3 (Passive Transition)
MA turns off when the oscillator timing period ends, i.e.,
the clock pulse toggles the internal flip-flop. At the instant
MA turns off, the voltage on the MA/MB junction begins to
decay towards the lower supply (GND). The energy available to drive this transition is limited to the primary leakage
inductance and added commutating inductance which
have (I
magnetizing and output inductors don’t contribute any
energy because they are effectively shorted as mentioned
previously, significantly reducing the available energy.
This is the major difference between the active and passive
transitions. If the energy stored in the leakage and commutating inductance is greater than the capacitive energy,
the transition will be completed successfully. During the
transition, an increasing reverse voltage is applied to the
leakage and commutating inductances, helping the overall
primary current to decay. The inductive energy is thus
resonantly transferred to the capacitive elements, hence,
the term passive or resonant transition. Assuming there is
sufficient inductive energy to propel the bridge leg to
GND, the time required will be approximately equal to
π • √LC/2. When the voltage on the passive leg nears GND,
MOSFET MB is commanded “ON” by the LTC1922-1
DirectSense circuitry. Current continues to increase in the
leakage and external series inductance which is opposite
in polarity to the reflected output inductor current. When
this current is equal in magnitude to the reflected output
current, the primary current reverses direction, the opposite secondary winding becomes forward biased and a
new power pulse is initiated. The time required for the
current reversal reduces the effective maximum duty cycle
MAG
+ I
/2N) flowing through them initially. The
OUT
9

LTC1922-1
OPERATIO
U
and must be considered when specifying the power trans-
.
former. If ZVS is required over the entire range of loads, a
small commutating inductor is added in series with the
primary to aid with the passive leg transition, since the
leakage inductance alone is usually not sufficient and
predictable enough to guarantee ZVS over the full load
range.
State 1.
MA
MB
State 2.
MA
MB
POWER PULSE 1
V
IN
ACTIVE
TRANSITION
MC
MD
IP ≈ I
MC
MD
/N + (VIN • T
L01
N:1
MF
MA
MB
ME
)/L
OVL
MAG
FREEWHEEL
INTERVAL
State 4 (Power Pulse 2)
During power pulse 2, current builds up in the primary
winding in the opposite direction as power pulse 1. The
primary current consists of reflected output inductor
current and current due to the primary magnetizing inductance. At the end of State 4, MOSFET MC turns off and an
active transition, essentially similar to State 2, but opposite in direction (high to low) takes place.
V
OUT
L1
L2
+
LOAD
PRIMARY AND
SECONDARY SHORTED
V
OUT
MC
LOAD
MD
MF
ME
10
State 3.
State 4.
PASSIVE
TRANSITION
MA
MB
POWER PULSE 2
MA
MB
MC
MD
V
OUT
MC
LOAD
MD
MF
ME
+
1922 F01
Figure 1. ZVS Operation

OPERATIO
LTC1922-1
U
Zero Voltage Switching (ZVS)
A lossless switching transition requires that the respective
full-bridge MOSFETs be switched to the “ON” state at the
exact instant their drain to source voltage is zero. Delaying
the turn-on results in lower efficiency due to circulating
current flowing in the body diode of the primary side
MOSFET rather than its low resistance channel. Premature
turn-on produces hard switching of the MOSFETs, increasing noise and power dissipation. Previous solutions
have attempted to meet these requirements with fixed or
first order (linear) variable open-loop time delays. Openloop methods typically set the turn-on delay to the worst
case longest bridge transition time expected plus the
tolerances of all the internal and external delay timing
circuitry. These error tolerances can be quite significant,
while the optimal transition times over the load current
range vary nonlinearly. In a volume production environment, these factors can necessitate an external trim to
guarantee ZVS operation, adding cost to the final product.
An additional side effect of longer than required delays is
a decrease in the effective maximum duty cycle. Reduced
duty cycle range can mandate a lower transformer turns
ratio, impacting efficiency or requiring a lower switching
frequency, impacting size.
LTC1922-1 Adaptive Delay Circuitry
The LTC1922-1 addresses the issue of nonideal switching
delays with novel DirectSense circuitry that intelligently
monitors both the input supply and instantaneous bridge
leg voltages, and commands a switching transition when
the expected zero voltage condition is reached. In effect,
the LTC1922-1 “closes the loop” on the ZVS turn-on delay
requirements. DirectSense technology provides optimal
turn-on delay timing, regardless of input voltage, output
load, or component tolerances and greatly simplifies the
power supply design process. The DirectSense technique
requires only a simple voltage divider sense network to
implement. If there is not enough energy to fully commutate the bridge leg to a ZVS condition, the LTC1922-1
automatically overrides the DirectSense circuitry and forces
a transition. The LTC1922-1 delay circuitry can also be
overridden, by tying SBUS to V
REF
.
Adaptive Mode
The LTC1922-1 is configured for adaptive delay sensing
with three pins, ADLY, PDLY and SBUS. ADLY and PDLY
sense the active and passive delay legs respectively via a
voltage divider network as shown in Figure 2.
V
IN
SBUS
PDLY
R2
R3
R1
1k
Figure 2. Adaptive Mode
A
R5
B
C
R6
D
R
CS
1922 F02
ADLY
R4
1k
The threshold voltage on PDLY and ADLY for both the
rising and falling transitions is set by the voltage on SBUS.
A buffered version of this voltage is used as the threshold
level for the internal DirectSense circuitry. At nominal VIN,
the voltage on SBUS is set to 1.5V by an external voltage
divider between VIN and GND, making this voltage directly
proportional to VIN. The LTC1922-1 DirectSense circuitry
uses this characteristic to zero voltage switch all of the
external power MOSFETs, independent of input voltage.
ADLY and PDLY are connected through voltage dividers to
the active and passive bridge legs respectively. The lower
resistor in the divider is set to 1k. The upper resistor in the
divider is divided into one, two or three equal value
resistors to reduce its overall capacitance. In off-line
applications, this is usually required anyway to stay within
the maximum voltage ratings of the resistors. One or two
resistor segments will work for most nominal 48V or lower
VIN applications.
To set up the ADLY and PDLY resistors, first determine at
what drain to source voltage to turn-on the MOSFETs.
Finite delays exist between the time at which the LTC1922-1
controller output transitions, to the time at which the
power MOSFET switches on due to MOSFET turn on delay
and external driver circuit delay. Ideally, we want the
power MOSFET to switch at the instant there is zero volts
across it. By setting a threshold voltage for ADLY and
11

LTC1922-1
OPERATIO
U
PDLY corresponding to several volts across the MOSFET,
the LTC1922-1 can “anticipate” a zero voltage VDS and
signal the external driver and switch to turn-on. The
amount of anticipation can be tailored for any application
by modifying the upper divider resistor(s). The LTC1922-1
DirectSense circuitry sources a trimmed current out of
PDLY and ADLY after a low to high level transition occurs.
This provides hysteresis and noise immunity for the PDLY
and ADLY circuitry, and sets the high to low threshold on
ADLY or PDLY to nearly the same level as the low to high
threshold, thereby making the upper and lower MOSFET
VDS switch points virtually identical, independent of VIN.
Example: V
= 48V nominal (36V to 72V)
IN
1. Set up SBUS: 1.5V is desired on SBUS with VIN = 48V.
Set divider current to 100µA.
R1 = 1.5V/100µA = 15k.
R2 = (48V – 1.5V)/100µA = 465k.
An optional small capacitor (0.001µF) can be added
across R1 to decouple noise from this input.
2. Set up ADLY and PDLY: 7V of “anticipation” are required
in this circuit to account for the delays of the external
MOSFET driver and gate drive components.
R3, R4 = 1k, sets a nominal 1.5mA in the divider
chain at the threshold.
R5, R6 = (48V – 7V – 1.5V)/1.5mA = 26.3k,
use (2) equal 13k segments.
Zero Delay Mode
The LTC1922-1 provides the flexibility through the SBUS
pin to disable the DirectSense delay circuitry. See Figure␣ 3
for details.
V
REF
SBUS
ADLY
PDLY
1922 F03
to VCC as well as signaling that the chip’s bias voltage is
sufficient to begin switching operation (under voltage
lockout). With its typical 10.2V turn-on voltage and 4.2V
UVLO hysteresis, the LTC1922-1 is tolerant of loosely
regulated input sources such as an auxiliary transformer
winding. The VCC shunt is capable of sinking up to 25mA
of externally applied current. The UVLO turn-on and turnoff thresholds are derived from an internally trimmed
reference making them extremely accurate. In addition,
the LTC1922-1 exhibits very low (145µA typ) start-up
current that allows the use of 1/8W to 1/4W trickle charge
start-up resistors.
The trickle charge resistor should be selected as follows:
R
START(MAX)
= V
– 10.7V/250µA
IN(MIN)
Adding a small safety margin and choosing standard
values yields:
APPLICATION VIN RANGE R
DC/DC 36V to 72V 100k
Off-Line 85V to 270V
PFC Preregulator 390V
RMS
DC
START
430k
1.4M
VCC should be bypassed with a 0.1µF to 1µF multilayer
ceramic capacitor to decouple the fast transient currents
demanded by the output drivers and a bulk tantalum or
electrolytic capacitor to hold up the VCC supply before the
bootstrap winding, or an auxiliary regulator circuit takes
over.
C
HOLDUP
= (ICC + I
DRIVE
) • t
DELAY
/3.8V
(minimum UVLO hysteresis)
Regulated bias supplies as low as 7V can be utilized to
provide bias to the LTC1922-1. Refer to Figure 4 for
various bias supply configurations.
V
12V ±10%
1.5k
1N5226
3V
V
BIAS
< V
UVLO
1N914
IN
R
START
Figure 3. Zero Delays
Powering the LTC1922-1
The LTC1922-1 utilizes an integrated VCC shunt regulator
to serve the dual purposes of limiting the voltage applied
12
0.1µF
V
CC
Figure 4. Bias Configurations
+
0.1µF
V
CC
C
HOLD
1922 F04

OPERATIO
LTC1922-1
U
Off-Line Bias Supply Generation
If a regulated bias supply is not available to provide V
CC
voltage to the LTC1922-1 and supporting circuitry, one
must be generated. Since the power requirement is small,
approximately 1W, and the regulation is not critical, a
simple open-loop method is usually the easiest and lowest
cost approach. One method that works well is to add a
winding to the main power transformer, and post regulate
the resultant square wave with an L-C filter (see Figure␣ 5a).
The advantage of this approach is that it maintains decent
regulation as the supply voltage varies, and it does not
require full safety isolation from the input winding of the
transformer. Some manufacturers include a primary winding for this purpose in their standard product offerings as
well. A different approach is to add a winding to the output
inductor and peak detect and filter the square wave signal
(see Figure 5b). The polarity of this winding is designed so
that the positive voltage square wave is produced while the
output inductor is freewheeling. An advantage of this
technique over the previous is that it does not require a
separate filter inductor and since the voltage is derived
from the well-regulated output voltage, it is also well
controlled. One disadvantage is that this winding will
require the same safety isolation that is required for the
main transformer. Another disadvantage is that a much
larger VCC filter capacitor is needed, since it does not
V
IN
R
START
15V*
*OPTIONAL
Figure 5a. Auxiliary Winding Bias Supply
V
IN
R
START
ISO BARRIER
+
C
HOLD
L
OUT
V
CC
2k
0.1µF
1922 F05a
V
OUT
+
generate a voltage as the output is first starting up, or
during short-circuit conditions.
Programming the LTC1922-1 Oscillator
The high accuracy LTC1922-1 oscillator circuit provides
flexibility to program the switching frequency, slope compensation, and synchronization with minimal external
components. The LTC1922-1 oscillator circuitry produces
a 3.8V peak-to-peak amplitude ramp waveform on CT and
a narrow pulse on SYNC that can be used to synchronize
other PWM chips. Typical maximum duty cycles of 99%
are obtained at 300kHz and 97% at 1MHz. The large
amplitude ramp provides a high degree of noise margin. A
compensating slope current is derived from the oscillator
ramp waveform and sourced out of CS.
The desired amount of slope compensation is selected
with single external resistor (or no resistor), if not required. A capacitor to GND on CT programs the switching
frequency. The CT ramp discharge current is internally set
to a high value (>10mA). The dedicated SYNC I/O pin easily
achieves synchronization. The LTC1922-1 can be set up to
either synchronize other PWM chips or be synchronized
by another chip or external clock source. The 1.8V SYNC
threshold allows the LTC1922-1 to be synchronized directly from all standard 3V and 5V logic families.
Design Procedure:
1. Choose CT for the desired oscillator frequency. The
switching frequency selected must be consistent with the
power magnetics and output power level. This is detailed
in the Transformer Design section. In general, increasing
the switching frequency will decrease the maximum achievable output power, due to limitations of maximum duty
cycle imposed by transformer core reset and ZVS. Remember that the output frequency is 1/2 that of the
oscillator.
CT = 1/(20k • f
OSC
)
0.1µF
V
CC
Figure 5b. Output Inductor Bias Supply
C
HOLD
1922 F05b
Example: Desired f
= 330kHz
OSC
CT = 1/(20k • 330kHz) = 152pF, choose closest standard
value of 150pF. A 5% or better tolerance multilayer NPO
or X7R ceramic capacitor is recommended for best
performance.
13

LTC1922-1
OPERATIO
U
2. The LTC1922-1 can either synchronize other PWMs, or
be synchronized to an external frequency source or PWM
chip. See Figure 6 for details.
OF SLAVE(S) IS
C
T
1.25 C
OF MASTER.
T
LTC1922-1
C
T
C
T
MASTER
SYNC
5.1k
•
•
•
UP TO
5 SLAVES
1k
5.1k
1k
5.1k
Figure 6a. SYNC Output (Master Mode)
AMPLITUDE > 1.8V
12.5ns < PW < 0.4/ƒ
EXTERNAL
FREQUENCY
SOURCE
1k
SYNC
5.1k
Figure 6b. SYNC Input from an External Source
SYNC
SYNC
LTC1922-1
LTC1922-1
SLAVES
LTC1922-1
C
C
T
C
C
T
1922 F06b
C
T
C
T
T
T
1922 F06a
(33µA/V
). Thus, at the peak of CT, this current is
(CT)
approximately 125µA and is output from the CS pin. A
resistor connected between CS and the external current
sense resistor sums in the required amount of slope
compensation. The value of this resistor is dependent on
several factors including minimum VIN, V
, switching
OUT
frequency, current sense resistor value and output inductor value. An illustrative example with the design equation
is provided below.
Example: VIN = 36V to 72V
V
= 3.3V
OUT
I
= 40A
OUT
L = 2.2µH
Transformer turns ratio (N) = V
V
␣=␣3
OUT
R
= 0.025Ω
CS
IN(MIN)
• D
MAX
/
fSW = 300kHz, i.e., transformer f = fSW/2 = 150kHz
R
= VO • RCS/(2 • L • fT • 125µA • N) = 3.3V • 0.025/
SLOPE
(2 • 2.2µA • 100k • 125µA • 3)
3. Slope compensation is required for most peak current
mode controllers in order to prevent subharmonic oscillation of the current control loop. In general, if the system
duty cycle exceeds 50% in a fixed frequency, continuous
current mode converter, an unstable condition exists
within the current control loop. Any perturbation in the
current signal is amplified by the PWM modulator resulting in an unstable condition. Some common manifestations of this include alternate pulse nonuniformity and
pulse width jitter. Fortunately, this can be addressed by
adding a corrective slope to the current sense signal or by
subtracting the same slope from the current command
signal (error amplifier output). In theory, the current
doubler output configuration does not require slope compensation since the output inductor duty cycles only
approach 50%. However, transient conditions can momentarily cause higher duty cycles and therefore, the
possibility for unstable operation. The exact amount of
required slope compensation is easily programmed by the
LTC1922-1 with the addition of a single external resistor
(see Figure 7). The LTC1922-1 generates a current that is
proportional to the instantaneous voltage on CT,
R
to account for tolerances in I
= 500Ω, choose the next higher standard value
SLOPE
, RCS, N and L.
SLOPE
LTC1922-1
)
V(C
T
33k
I =
33k
C
T
R
SLOPE
CS
ADDED
SLOPE
CURRENT SENSE
WAVEFORM
BRIDGE
CURRENT
R
CS
1922 F07
Figure 7. Slope Compensation Circuitry
Current Sensing and Overcurrent Protection
Current sensing provides feedback for the current mode
control loop and protection from overload conditions. The
LTC1922-1 is compatible with either resistive sensing or
current transformer methods. Internally connected to the
LTC1922-1 CS pin are two comparators that provide
pulse-by-pulse and overcurrent shutdown functions respectively. (See Figure 8)
14

OPERATIO
LTC1922-1
U
PWM
PULSE BY PULSE
CURRENT LIMIT
CS
400mV
R
CS
CURRENT LIMIT
600mV
φ
MOD
+
–
OVERLOAD
+
–
UVLO
ENABLE
Figure 8. Current Sense/Fault Circuitry Detail
LATCH
Q
S
SQ
R
The pulse-by-pulse comparator has a 400mV nominal
threshold, which can reduce sense resistor losses by 67%
compared to previous solutions. This corresponds to 3W
in a 200W, 48V to 3.3V converter. If the 400mV threshold
is exceeded, the PWM cycle is terminated. The overcurrent
comparator is set approximately 50% higher than the
pulse-by-pulse level. If the current signal exceeds this
level, the PWM cycle is terminated, the soft-start capacitor
is quickly discharged and a soft-start cycle is initiated. If
the overcurrent condition persists, the LTC1922-1 halts
PWM operation and waits for the soft-start capacitor to
charge up to approximately 4V before a retry is allowed.
The soft-start capacitor is charged by an internal 12µA
current source. If the fault condition has not cleared when
soft-start reaches 4V, the soft-start pin is again discharged and a new cycle is initiated. This is referred to as
hiccup mode operation. In normal operation and under
most abnormal conditions, the pulse-by-pulse comparator is fast enough to prevent hiccup mode operation. In
severe cases, however, with high input voltage, very low
RDS
MOSFETs and a shorted output, or with saturat-
(ON)
ing magnetics, the overcurrent comparator provides a
means of protecting the power converter.
Leading Edge Blanking
The LTC1922-1 provides programmable leading edge
blanking to prevent nuisance tripping of the current sense
H = SHUTDOWN
4.1V
0.4V
Q
OUTPUTS
12µA
1922 F08
SS
C
SS
PWM
LOGIC
UVLO
ENABLE
SQ
R
+
–
+
–
Q
circuitry. Although the ZVS full-bridge topology is somewhat more immune to leading edge noise spikes than
other types of converters, they are not totally eliminated.
Leading edge blanking relieves the filtering requirements
for the CS pin, greatly improving the response to real
overcurrent conditions. It also allows the use of a ground
referenced current sense resistor or transformer(s), further simplifying the design. With a single 10k to 100k
resistor from R
to GND, blanking times of approxi-
LEB
mately 40ns to 320ns are programmed. If not required,
connecting R
LEB
to V
can disable leading edge blank-
REF
ing. Keep in mind that the use of leading edge blanking will
set a minimum linear control range for the phase modulation circuitry.
Resistive Sensing
A resistor connected between input common and the
sources of MB and MD is the simplest, fastest and most
accurate method of current sensing for the full-bridge
converter. This is the preferred method for low to moderate power levels. A graph of resistive sense power losses
vs output power is shown Figure 9. The sense resistor
should be chosen such that the maximum rated output
current for the converter can be delivered at the lowest
expected VIN. Use the following formula to calculate the
optimal value for RCS.
15

LTC1922-1
OPERATIO
U
2.0
RS = 0.025
1.8
= 48V
V
IN
= 3.3V
V
O
1.6
= 2.2µH
L
O
1.4
1.2
1.0
0.8
POWER LOSS (W)
0.6
0.4
0.2
0
Figure 9. R
10 20 25
515 303540
0
OUTPUT CURRENT (A)
Power Loss vs I
SENSE
If RAMP and CS are connected together:
R
=
CS
I PEAK
()
P
VAR
=+ +
2
µ0 4 125.–( • )
SLOPE
I PEAK
()
P
I
() ()
O MAX IN MAX MIN
N EFF
••
VD
(– )
1
OMIN
LfN
••
OUT CLK
VD
••
2
Lf
•
MAG CLK
where: N = Transformer turns ratio
If RAMP and CS are separated
1922 • F09
OUT
include, higher cost and complexity, lower accuracy, core
reset/max duty cycle limitations and lower speed. Nevertheless, for very high power applications, this method is
preferred. The sense transformer primary is placed in the
same location as the ground referenced sense resistor, or
between the upper MOSFET drains in the (MA, MC) and
VIN. The advantage of the high side location is a greater
immunity to leading edge noise spikes, since gate charge
current and reflected rectifier recovery current are largely
eliminated. Figure 10 illustrates a typical current sense
transformer based sensing scheme. RS in this case is
calculated the same as in the resistive case, only its value
is increased by the sense transformer turns ratio. At high
duty cycles, it may become difficult or impossible to reset
the current transformer. This is because the required
transformer reset voltage increases as the available time
for reset decreases to equalize the (volt • seconds) applied.
The interwinding capacitance and secondary inductance
of the current sense transformer form a resonant circuit
that limits the dV/dT on the secondary of the CS transformer. This in turn limits the maximum achievable duty
cycle for the CS transformer. Attempts to operate beyond
this limit will cause the transformer core to “walk” and
eventually saturate, opening up the current feedback loop.
Common methods to address this limitation include:
1. Reducing the maximum duty cycle by lowering the
power transformer turns ratio.
V
R
CS
04.
=
I PEAK
()
P
Current Transformer Sensing
A current sense transformer can be used in lieu of resistive
sensing with the LTC1922-1. Current sense transformers
are available in many styles from several manufacturers.
A typical sense transformer for this application will use a
1:50 turns ratio (N), so that the sense resistor value is N
times larger, and the secondary current N times smaller
than in the resistive sense case. Therefore, the sense
resistor power loss is about N times less with the transformer method, neglecting the transformers core and
copper losses. The disadvantages of this approach
16
2. Reducing the switching frequency of the converter.
3. Employ external active reset circuitry.
4. Using two CS transformers summed together.
5. Choose a CS transformer optimized for high frequency
applications.
MB
SOURCE
R
RAMP
CS
Figure 10. Current Transformer Sense Circuitry
SLOPE
OPTIONAL
FILTERING
R
N:1
S
MD
SOURCE
CURRENT
TRANSFORMER
1922 F10

OPERATIO
LTC1922-1
U
Phase Modulator
The LTC1922-1 phase modulation control circuitry is
comprised of the phase modulation comparator and logic,
the error amplifier, and the soft-start amplifier (see
Figure␣ 11). Together, these elements develop the required
phase overlap (duty cycle) required to keep the output
voltage in regulation. In isolated applications, the sensed
output voltage error signal is fed back to COMP across the
input to output isolation boundary by an optical coupler
and shunt reference/error amplifier (LT®1431) combination. The FB pin is connected to GND, forcing COMP high.
The collector of the optoisolator is connected to COMP
directly. The voltage COMP is internally attenuated by the
LTC1922-1. The attenuated COMP voltage provides one
input to the phase modulation comparator. This is the
current command. The other input to the phase modulation comparator is the RAMP voltage, level shifted by
approximately 400mV. This is the current loop feedback.
During every switching cycle, alternate diagonal switches
(MA-MD or MB-MC) conduct and cause current in an
output inductor to increase. This current is seen on the
primary of the power transformer divided by the turns
ratio. Since the current sense resistor is connected
between GND and the two bottom bridge transistors, a
voltage proportional to the output inductor current will be
seen across R
. The high side of R
SENSE
SENSE
is also
connected to RAMP and CS, usually through a small
resistor (R
). When the voltage on RAMP/CS exceeds
SLOPE
either COMP/5.2 – 400mV, or 400mv, the overlap conduction period will terminate. During normal operation, the
attenuated COMP voltage will determine the RAMP/CS trip
point. During start-up, or slewing conditions following a
large load step, the 400mV CS threshold will terminate the
cycle, as COMP will be driven high, such that the attenuated version exceeds the 400mV threshold. In extreme
conditions, the 600mV threshold on CS will be exceeded,
invoking a soft-start/restart cycle.
COMP
SS
R
LEB
RAMP
TOGGLE
F/F
ERROR
V
REF
AMPLIFIER
+
–
SOFT-START
AMPLIFIER
+
–
BLANKING
50k
14.9k
PHASE
MODULATION
COMPARATOR
–
+
+
400mV
–
SQ
R
FB
1.2V
12µA
CLK
CLK
FROM
CURRENT
LIMIT
COMPARATOR
CLK
Q
Q
PHASE
MODULATION
LOGIC
SQ
R
A
B
C
D
1922 F11
Figure 11. Phase Modulation Circuitry
17

LTC1922-1
OPERATIO
U
Selecting the Power Stage Components
Perhaps the most critical part of the overall design of the
converter is selecting the power MOSFETs, transformer,
inductors and filter capacitors. Tremendous gains in efficiency, transient performance and overall operation can
be obtained as long as a few simple guidelines are followed
with the phase shifted full-bridge topology.
Power Transformer
This guide is aimed at selecting readily available standard
“off the shelf” transformers. The basic requirements,
however, apply to custom transformer designs as well.
Switching frequency, core material characteristics, series
resistance and input/output voltages all play an important
role in transformer selection. Close attention also needs to
be paid to leakage and magnetizing inductances as they
play an important role in how well the converter will
achieve ZVS. Planar magnetics are very well suited to
these applications because of their excellent control of
these parameters.
Turns Ratio
The required turns ratio for a current doubler secondary is
given below. Depending on the magnetics selected, this
value may need to be reduced slightly.
Turns ratio formula:
N
VD
IN MIN MAX
= 2•
•
()
V
OUT
where:
impact on efficiency. Other factors to consider are switching frequency and required maximum duty cycle. A lower
value of magnetizing inductance will require a longer time
to reset the core, cutting into the available duty cycle
range. As switching frequencies increase, this becomes
more significant. In general, the magnetizing inductance
value should be the lowest value required in order to
achieve the necessary maximum duty cycle at the chosen
switching frequency. Output inductor value determines
the magnitude of output ripple current and therefore the
ripple voltage along with the output capacitors. Generally
speaking, the output inductance should be minimized as
much as possible in order to improve transient response.
In addition, output capacitance ESR should be minimized
as much as possible. Using the equations below, plug in
the manufacturers magnetizing inductance value and a
“starting value” of commutating inductance (1% of L
MAG
)
to verify that a sufficient max duty cycle can be achieved
at the desired switching frequency. Next, use equation (2)
to determine what the absolute minimum required L
COM
is
to guarantee ZVT over the entire load range. One or two
iterations may be required in order to arrive at the final
selections.
MAX DC vs L
MAXDC
≥
at f
COM
22–•
SW
fT
SW R
;
(1)
where:
TR = transformer reset time (worst case)
V
IN(MIN)
D
= Minimum VIN for operation
= Maximum duty cycle of controller
MAX
Magnetizing, Output, and Leakage Inductors
A lower value of magnetizing and output inductance will
improve the ability of the converter to achieve ZVS over the
full range of loads and reduce the size of the external
commutating inductor. One of the trade-offs is increased
primary referred ripple current which has a small negative
18
IfLVDN
O MAX SW MAG IN
=
L
COM
LL
COM L
•• •••
()
fL N
SW MAG
vs ZVS vs Load
/••
+=
43
+
2
••
CL f
OSS MAG SW
2
22
2
•
D
IN
+
LL
COM L
V
(2)

OPERATIO
LTC1922-1
U
where:
C
= MOSFET D-S capacitance
OSS
l
= magnetizing inductance
MAG
f
= switching frequency
SW
D = duty cycle
LL= leakage inductance
For a 48V to 3.3V/5V, 200W converter, the following
values were derived:
f
: 300kHz
SW
L
: 100µH
MAG
L
: 0.9µH
COM
L
: 2.2µH
OUT
Turns Ratio (N) = 2.5
Output Capacitors
Output capacitor selection has a dramatic impact on ripple
voltage, dynamic response to transients and stability.
Capacitor ESR along with output inductor ripple current
will determine the peak-to-peak voltage ripple on the
output. The current doubler configuration is advantageous because it has inherent ripple current reduction.
The dual output inductors deliver current to the output
capacitor 180 degrees out of phase, in effect, partially
canceling each other’s ripple current. This reduction is
maximized at high duty cycle and decreases as the duty
cycle reduces. This means that a current doubler converter requires less output capacitance for the same
performance as a conventional converter. By determining
the minimum duty cycle for the converter, worse-case
V
ripple can be derived by the formula given below.
OUT
V ESR
•
V I ESR
ORIPPLE RIPPLE
==•
O
Lf
••
2
OSW
(– )(– )
112
DD
where:
The amount of bulk capacitance required is usually system
dependent, but has some relationship to output inductance value, switching frequency, load power and dynamic
load characteristics. Polymer electrolytic capacitors are
the preferred choice for their combination of low ESR,
small size and high reliability. For less demanding applications, or those not constrained by size, aluminum electrolytic capacitors are commonly applied. Most
DC/DC converters in the 100kHz to 300kHz range use 20µF
to 25µF of bulk capacitance per watt of output power.
Converters switching at higher frequencies can usually
use less bulk capacitance. In systems where dynamic
response is critical, additional high frequency capacitors,
such as ceramics, can substantially reduce voltage transients,
Power converter stability is, to a large extent, determined
by the choice of output capacitor. A zero in the converter’s
transfer function is given by 1/(2π • ESR • CO). Aluminum
electrolytic ESR is highly variable with temperature, increasing by about 4× at cold temperatures, making the
ESR zero frequency highly variable. Polymer electrolytic
ESR is essentially flat with temperature. This characteristic simplifies loop compensation and allows for a much
faster responding power supply compared to one with
aluminum electrolytic capacitors. Specific details on loop
compensation are given in the Compensation section of
the data sheet.
Power MOSFETs
The full-bridge power MOSFETs should be selected for
their R
DS(ON)
and BV
ratings. Select the lowest BV
DSS
DSS
rated MOSFET available for a given input voltage range
leaving at least a 20% voltage margin. Conduction losses
are directly proportional to R
. Since the full-bridge
DS(ON)
has two MOSFETs in the power path most of the time,
conduction losses are approximately equal to:
D = minimum duty cycle
fSW= oscillator frequency
LO= output inductance
ESR = output capacitor series resistance
2 • R
• I2, where I = IO/2N
DS(ON)
Switching losses in the MOSFETs are dominated by the
power required to charge their gates, and turn-on and
turn-off losses. At higher power levels, gate charge power
is seldom a significant contributor to efficiency loss. ZVS
operation virtually eliminates turn-on losses. Turn-off
losses are reduced by the use of an external drain to source
19

LTC1922-1
OPERATIO
U
snubber capacitor and/or a very low resistance turn-off
driver. If synchronous rectifier MOSFETs are used on the
secondary, the same general guidelines apply. Keep in
mind, however, that the BV
be greater than V
IN(MAX)
rating needed for these can
DSS
/N, depending on how well the
secondary is snubbed. Without snubbing, the secondary
voltage can ring to levels far beyond what is expected due
to the resonant tank circuit formed between the secondary
leakage inductance and the C
(output capacitance) of
OSS
the synchronous rectifier MOSFETs.
Switching Frequency Selection
Unless constrained by other system requirements, the
power converter’s switching frequency is usually set as
high as possible while staying within the desired efficiency
target. The benefits of higher switching frequencies are
many including smaller size, weight and reduced bulk
capacitance. In the full-bridge phase shift converter, these
principles are generally the same with the added complication of maintaining zero voltage transitions, and therefore, higher efficiency. ZVS is achieved in a finite time
during the switching cycle. During the ZVS time, power is
not delivered to the output; the act of ZVS reduces the
maximum available duty cycle. This reduction is proportional to maximum output power since the parasitic capacitive element (MOSFETs) that increase ZVS time get
larger as power levels increase. This implies an inverse
relationship between output power level and switching
frequency. Table 1 displays recommended maximum
switching frequency vs power level for a 30V/75V in to
3.3V/5V out converter. Higher switching frequencies can
be used if the input voltage range is limited, the output
voltage is lower and/or lower efficiency can be tolerated.
Closing the Feedback Loop
Closing the feedback loop with the full-bridge converter
involves identifying where the power stage and other
system poles/zeroes are located and then designing a
compensation network around the converters error amplifier to shape the frequency response to insure adequate
phase margin and transient response. Additional modifications will sometimes be required in order to deal with
parasitic elements within the converter that can alter the
feedback response. The compensation network will vary
depending on the load current range and the type of output
capacitors used. In isolated applications, the compensation network is generally located on the secondary side of
the power supply, around the error amplifier of the
optocoupler driver, usually an LT1431or equivalent. In
nonisolated systems, the compensation network is located around the LTC1922-1’s error amplifier.
In current mode control, the dominant system pole is
determined by the load resistance (VO/IO) and the output
capacitor 1/(2π • RO • CO). The output capacitors ESR
1/(2π • ESR • CO) introduces a zero. Excellent DC line and
load regulation can be obtained if there is high loop gain at
DC. This requires an integrator type of compensator
around the error amplifier. A procedure is provided for
deriving the required compensation components. More
complex types of compensation networks can be used to
obtain higher bandwidth if necessary.
Step 1. Calculate location of minimum and maximum
output pole:
F
P1(MIN)
F
P1(MAX)
= 1/(2π • R
= 1/(2π • R
O(MAX)
O(MIN)
• CO)
• CO)
Table 1.Switching Frequency vs Power Level
<50W 600kHz
<100W 450kHz
<200W 300kHz
<500W 200kHz
<1kW 150kHz
<2kW 100kHz
20
Step 2. Calculate ESR zero location:
FZ1 = 1/(2π • R
ESR
• CO)
Step 3. Calculate the feedback divider gain:
RB/(RB + RT) or V
REF/VOUT
If Polymer electrolytic output capacitors are used, the ESR
zero can be employed in the overall loop compensation
and optimum bandwidth can be achieved. If aluminum
electrolytics are used, the loop will need to be rolled off
prior to the ESR zero frequency, making the loop response

OPERATIO
LTC1922-1
U
slower. A linearized SPICE macromodel of the control loop
is very helpful tool to quickly evaluate the frequency
response of various compensation networks.
Polymer Electrolytic (see Figure 12) 1/(2πCCRI) sets a
low frequency pole. 1/(2πCCRF) sets the low frequency
zero. The zero frequency should coincide with the worstcase lowest output pole frequency. The pole frequency
and mid frequency gain (RF/RI) should be set such so that
the loop crosses over zero dB with a –1 slope at a
frequency lower than (fSW/8). Use a bode plot to graphically display the frequency response. An optional higher
frequency pole set by CP2 and Rf is used to attenuate
switching frequency noise.
C
V
OUT
R
C
I
O
R
L
ESR
Figure 12. Compensation for Polymer Electrolytic
REF
2.5V
R
D
P2
R
f
–
+
LT1431 OR EQUIVALENT
PRECISION ERROR
AMP AND REFERENCE
OPTIONAL
C
C
COLL
V
OUT
OPTO
COMP
1922 F12
Aluminum Electrolytic (see Figure 12) the goal of this
compensator will be to cross over the output minimum
pole frequency. Set a low frequency pole with CC and R
IN
at a frequency that will cross over the loop at the output
pole minimum F, place the zero formed by CC and Rf at the
output pole F.
Current Doubler
The current doubler secondary employs two output inductors that equally share the output load current. The transformer secondary is not center-tapped. This configuration
provides 2× higher output current capability compared to
similarly sized single output inductor modules, hence the
name. Each output inductor is twice the inductance value
as the equivalent single inductor configuration and the
transformer turns ratio is 1/2 that of a single inductor
secondary. The drive to the inductors is 180 degrees out
of phase which provides partial ripple current cancellation
in the output capacitor(s). Reduced capacitor ripple current lowers output voltage ripple and enhances the
capacitors’s reliability. The amount of ripple cancellation
is related to duty cycle (see Figure 13). Although the
current doubler requires an additional inductor, the inductor core volume is proportional to LI2, thus the size penalty
is small. The transformer construction is simplified without a center-tap winding and the turns ratio is reduced by
1/2 compared to a conventional full wave rectifier configuration.
NORMALIZED
OUTPUT RIPPLE
CURRENT
ATTENUATION
1
NOTE: INDUCTOR(S) DUTY CYCLE
IS LIMITED TO 50% WITH CURRENT
DOUBLER PHASE SHIFT CONTROL.
Synchronous Rectification
The LTC1922-1 produces the precise timing signals necessary to control current doubler secondary side synchronous MOSFETs on OUTE and OUTF. Synchronous rectifiers are used in place of Schottky or Silicon diodes on the
secondary side of the power supply. As MOSFET R
DS(ON)
levels continue to drop, significant efficiency improvements can be realized with synchronous rectification,
provided that the MOSFET switch timing is optimized. An
additional benefit realized with synchronous rectifiers is
bipolar output current capability. These characteristics
improve transient response, particularly overshoot, and
improve ZVS ability at light loads.
0
0 0.25 0.5
Figure 13. Ripple Current Cancellation vs Duty Cycle
DUTY CYCLE
1922 • F13
Synchronous rectification of the current doubler secondary requires two ground referenced N-channel MOSFETs.
The timing of the LTC1922-1 drive signals is shown in the
Timing Diagram. Synchronous rectifier turn-on is internally delayed by the LTC1922-1 after OUT (C or D)
turn-off—just after the end of a power cycle. Synchronous
rectifier turn-off occurs coincident with OUT (A or B)
turn-off. This gives a passive transition time margin before
21

LTC1922-1
OPERATIO
U
the start of a new power cycle. A noninverting MOSFET
driver such as the LTC1693-1 (Figure 14) is used so that
a single signal transformer with secondary center tap can
be employed to translate the drive signals from the primary to the secondary side. In the event of overcurrent
shutdown, or UVLO condition, both synchronous rectification MOSFETs are driven on in order to protect the load
circuitry.
Full-Bridge Gate Drive
The full-bridge converter requires high current MOSFET
gate driver circuitry for two ground referenced switches
and two high side referred switches. Providing drive to the
ground referenced switches is not too difficult as long as
the traces from the gate driver chip or buffer to the gate and
source leads are short and direct. Drive requirements are
LTC1922-1
1:2
OUTE
OUTF
further eased since all of the switches turn on with zero
VDS, eliminating the “Miller” effect. Low turn-off resistance is critical, however, in order to prevent excessive
turn-off losses resulting from the same Miller effects that
were not an issue for turn on. The LTC1922-1 does not
require the propagation delays of the high and low side
drive circuits to be precisely matched as the DirectSense
ZVS circuitry will adapt accordingly, unlike previous solutions. As a result, LTC1922-1 can drive a simple NPN-PNP
buffer or a gate driver chip like the LTC1693-1 to provide
the low side gate drive. Providing drive to the high side
presents additional challenges since the MOSFET gate
must be driven above the input supply. A simple circuit
(Figure 15) using a single LTC1693-1, an inexpensive
signal transformer, and a few discrete components provides both high side gate drives (A and C) reliably.
LTC1693-1
OUT1
IN1
GND1
GND2
LTC1922-1
OUTA
OR
OUTC
OUT2
IN2
Figure 14. Isolated Drive Circuitry
REGULATED
BIAS
V
CC
OUT
IN
1/2
LTC1693-1
GND
0.1µF
SIGNAL
TRANSFORMER
0.1µF
2k
BAT
54
Figure 15. High Side Gate Driver Circuitry
2µF
CER
V
IN
1922 F14
POWER
MOSFET
BRIDGE
LEG
1922 F15
22

PACKAGE DESCRIPTIO
U
Dimensions in inches (millimeters) unless otherwise noted.
G Package
20-Lead Plastic SSOP (0.209)
(LTC DWG # 05-08-1640)
7.07 – 7.33*
(0.278 – 0.289)
1718 14 13 12 1115161920
LTC1922-1
7.65 – 7.90
(0.301 – 0.311)
5.20 – 5.38**
(0.205 – 0.212)
° – 8°
0
0.13 – 0.22
(0.005 – 0.009)
NOTE: DIMENSIONS ARE IN MILLIMETERS
*
DIMENSIONS DO NOT INCLUDE MOLD FLASH. MOLD FLASH
SHALL NOT EXCEED 0.152mm (0.006") PER SIDE
**
DIMENSIONS DO NOT INCLUDE INTERLEAD FLASH. INTERLEAD
FLASH SHALL NOT EXCEED 0.254mm (0.010") PER SIDE
0.55 – 0.95
(0.022 – 0.037)
20-Lead PDIP (Narrow 0.300)
0.255 ± 0.015*
(6.477 ± 0.381)
0.65
(0.0256)
BSC
N Package
(LTC DWG # 05-08-1510)
19 1112
20
18
12345678910
0.25 – 0.38
(0.010 – 0.015)
1.040*
(26.416)
MAX
1517
0.05 – 0.21
(0.002 – 0.008)
131416
1.73 – 1.99
(0.068 – 0.078)
G20 SSOP 1098
12
0.300 – 0.325
(7.620 – 8.255)
0.009 – 0.015
(0.229 – 0.381)
+0.035
0.325
–0.015
+0.889
8.255
()
–0.381
*THESE DIMENSIONS DO NOT INCLUDE MOLD FLASH OR PROTRUSIONS.
MOLD FLASH OR PROTRUSIONS SHALL NOT EXCEED 0.010 INCH (0.254mm)
Information furnished by Linear Technology Corporation is believed to be accurate and reliable.
However, no responsibility is assumed for its use. Linear Technology Corporation makes no representation that the interconnection of its circuits as described herein will not infringe on existing patent rights.
0.020
(0.508)
MIN
0.130 ± 0.005
(3.302 ± 0.127)
0.125
(3.175)
MIN
0.005
(0.127)
MIN
3
(1.143 – 1.651)
0.100
(2.54)
BSC
5
4
0.045 – 0.065
7
6
8
(0.457 ± 0.076)
910
0.065
(1.651)
TYP
0.018 ± 0.003
N20 1098
23

LTC1922-1
TYPICAL APPLICATIO
Synchronous Phase Shifted Full Bridge 48V to 3.3V, 40A Isolated Converter
U
+V
1.5µF
100V
–V
10V
D2
D1
BAS21
BAS21
8
V
V
CC2
R7
2.2k
D4
BAT54
C14
0.1µF
T3
D14
12V
CC1
1
OUT1
IN1
U1
LTC1693-1
3
OUT2
IN2
2
GND2
GND1
R8
470Ω
R12
13.3k
1%
R20
R16
310k
13.3k
R23
30k
15
1%
R25
R24
1k
10k
1%
910188 16
SBUS
V
IN
SYNC V
REF
111 20 5197 6
5.1k
R3
470Ω
R5
2.2k
D3
BAT54
C12
0.1µF
T2
TTWB-1010
IN
L1
C5
4.7µH
C10
1.5µF
100V
IN
1N4683
0.1µF
C27
D15
1.5µF
100V
3V
C2
470Ω
10V
2.2µF
R6
C28
68µF
20V
1.5µF
C3
TTWB-1010
C6
100V
1N4699
R29
510Ω
+
C1
6
2.2µF
7
5
Q5
FMMT619
Q13
FMMT718
10V
22µF
25V
C18
0.1µF
C22
0.1µF
C33
R35
3.3k
R4
10Ω
Q4
FMMT718
Q11 Q12
R10
470Ω
L5
+
1mH
T4, TTWB-1010
R21
3.3Ω
0.125W
R28
3.3Ω
0.125W
T5, TTWB-1010
P
R13
13.3k
1%
R17
C34
13.3k
0.1µF
1%
R26
1k
1%
U3
LTC1922-1
CTR
LEB
C30
R34
180pF
20k
4
10V
A
0.1µF
ADLY DRVA PDLY DRVC DRVB DRVDRAMP
C29
1µF
R1
10
A
Q3
L4
2.2µH
P
10V
Q6
FMMT619
Q14
FMMT718
BAS21
BAS21
R19
C16
4.7k
1nF
R27
C19
4.7k
1nF
C23
100pF
2171443
GND SS FB
Q2
FMMT718
C31
0.068µF
8T 2T
R9
0.06Ω
1W
7T
D11
BAT54
D13
BAT54
CS
OUTF
OUTE
COMP
Q1
R14
510Ω
V
V
0.125W
12
13
LOW
HIGH
R18
470Ω
R22
950Ω
0.125W
D16
6
5
L2
2.4µH
C8, 1nF
100V
R2
10k
0.125W
Q9 Q8 Q7Q10
U2
LTC1693-1
8
V
CC1
3
IN2
1
IN1
2
GND2
C1, C3 TAIYO YUDEN EMK316BJ225ML (X5R, 16V, 1206)
C2, C5, C6, C10 VITRAMON VJ1825Y155MXB(X7R, 1825)
C4, C7, C9, C11 KEMET T510X477M006AS (TANT, 7343H)
C15 MU RATA GHM3035C7R222K-GC (X7R, 2220)
C17 TAIYO YUDEN UMK316BJ224ML (X7R,1206)
C20, C29 TAIYO YUDEN UMK316BJ105ML (X7R,1206)
C28 AVX TPSE686M020R0125 (TANT 7343H)
C21 TAIYO YUDEN EMK325BJ475MN (X5R, 1210)
R9 DALE WSL
L1 COILCRAFT DO3316P-472
L5 COILCRAFT DO1608C-105
L2, L2 PULSE P1977 PQ20/20 1.25mohms 20A
Q7, Q8, Q9, Q10 SUD50N03
Q1, Q3, Q11, Q12 SUD30N10-25
R30
ISO1
470
MOC207
7
431
8
2
R36
100k
V
OUT2
OUT1
GND1
CC2
C25
0.1µF
6
5
7
4
C24
0.01µF
2.4µH
V
HIGH
V
1
6
5
7
L3
LOW
COLL
GNDF
GNDS
RMID
+
BAS21
BAS21
C20
1µF
U4
LT1431
D6
D6
FZT600
COMP
+
C7
470µF
6V
C9
470µF
6V
R11
10Ω
0.125W
Q15
MMSZ4240BT1
C21
4.7µF
3
+
V
2
4
RTOP
8
REF
+
+V
OUT
+
C4
470µF
6V
C11
470µF
6V
C15
2.2nF
250V
AC "Y"
R15
2k
0.125W
D12
10V
C17
0.22µF
50V
–V
OUT
NOTE: UNLESS OTHERWISE
NOTED
ALL CAPS 25V
ALL RESISTORS 1206, 5%
ALL DIODES MMBT914LT1
ALL NPNs MMBT3904LT1
ALL PNPs MMBT3906LT3
+V
OUT
R33
R31
7.5k
3.01k
1%
R37
9.3k
1%
R32
10k
C26
0.02µF
–V
1922 TA02
OUT
RELATED PARTS
PART NUMBER DESCRIPTION COMMENTS
LT1105 Off-Line Switching Regulator Built-In Isolated Regulation without Optoisolator
LT1681/LTC1698 36V to 72V Input Isolated DC/DC Converter Chipset Synchronous Rectification; Overcurrent, Overvoltage, UVLO
Protection; Power Good Output Signal;h Voltage Margining;
Compact Solution
LT1683 Ultralow Noise Push-Pull DC/DC Converter Minimizes Conducted and Radiated EMI; Reduces Need for Filters,
Shields and PCB Iterations
LTC1693-1 High Speed Dual MOSFET Driver 1.5A Peak Output Current; 4.5V ≤ VIN ≤ 13.2V
LT1725 General Purpose Isolated Flyback Controller 48V to 5V Conversion; No Optoisolator Required
1922f LT/TP 0501 2K • PRINTED IN USA
LINEAR TECHNOLOGY CORPORATION 2000
24
Linear Technology Corporation
1630 McCarthy Blvd., Milpitas, CA 95035-7417
(408) 432-1900 ● FAX: (408) 434-0507
●
www.linear-tech.com
 Loading...
Loading...