

Lika SMAG-GA-100-...+MTAG-300, SMAG-GA-100-...+MTAG-370, SMAG-GA-50-...+MTAG-650, SMAG -GA-100-, SMAG-GA-100-... +MTAG-220 User Manual
...Page 1

User's guide
SMAG +
MTAG
• SMAG absolute linear encoder
• MTAG guided profile unaffected by dust and liquids
• Measuring length from 115 to 570 mm
• Resolution range from 0.1 mm to 0.005 mm
• SSI interface, LSB Right Aligned protocol
Suitable for the following models:
• SMAG -GA-100-...
• SMAG -GA-50-...
• SMAG -GA-10-...
• SMAG -GA-5-...
Table of Contents
Preliminary information 5
1 – Safety summary 6
2 - Identification 8
3 – Mechanical installation 9
4 – SSI interface 12
5 - Maintenance 19
Lika Electronic • Tel. +39 0445 806600 • info@lika.biz • www.lika.biz
Smart encoders & actuators
Page 2

This publication was produced by Lika Electronic s.r.l. 2017. All rights reserved. Tutti i diritti riservati. Alle Rechte vorbehalten. Todos los
derechos reservados. Tous droits réservés.
This document and information contained herein are the property of Lika Electronic s.r.l. and shall not be reproduced in whole or in
part without prior written approval of Lika Electronic s.r.l. Translation, reproduction and total or partial modification (photostat copies,
film and microfilm included and any other means) are forbidden without written authorisation of Lika Electronic s.r.l.
The information herein is subject to change without notice and should not be construed as a commitment by Lika Electronic s.r.l. Lika
Electronic s.r.l. reserves the right to make all modifications at any moments and without forewarning.
This manual is periodically reviewed and revised. As required we suggest checking if a new or updated edition of this document is
available at Lika Electronic s.r.l.'s website. Lika Electronic s.r.l. assumes no responsibility for any errors or omissions in this document.
Critical evaluation of this manual by the user is welcomed. Your comments assist us in preparation of future documentation, in order
to make it as clear and complete as possible. Please send an e-mail to the following address info@lika.it for submitting your
comments, suggestions and criticisms.
Page 3

Table of contents
User's guide......................................................................................................................................................... 1
Table of contents............................................................................................................................................ 3
Typographic and iconographic conventions..............................................................................................4
Preliminary information................................................................................................................................ 5
1 – Safety summary....................................................................................................................................... 6
1.1 Safety.......................................................................................................................................................................................... 6
1.2 Electrical safety.......................................................................................................................................................................6
1.3 Mechanical safety..................................................................................................................................................................7
2 - Identification............................................................................................................................................ 8
3 – Mechanical installation.......................................................................................................................... 9
3.1 Overall dimensions (Figure 1)...........................................................................................................................................9
3.2 Mounting instructions.........................................................................................................................................................9
3.3 Sensor (Figure 2)..................................................................................................................................................................10
3.4 Profile of the magnetic tape (Figure 2).....................................................................................................................11
3.5 Measuring length (Figure 1)...........................................................................................................................................11
3.6 Standard counting direction (Figure 2).....................................................................................................................11
4 – SSI interface........................................................................................................................................... 12
4.1 Electrical connections.......................................................................................................................................................12
4.1.1 M8 cable specifications............................................................................................................................................12
4.1.2 M12 8-pin connector specifications...................................................................................................................12
4.1.3 Connection of the shield.........................................................................................................................................13
4.1.4 Ground connection....................................................................................................................................................13
4.1.5 Zero setting input.......................................................................................................................................................13
4.1.6 Counting direction input.........................................................................................................................................14
4.2 SSI (Synchronous Serial Interface)...............................................................................................................................15
4.3 LSB Right Aligned protocol.............................................................................................................................................16
4.4 Recommended transmission rates...............................................................................................................................18
4.5 Recommended SSI circuit................................................................................................................................................18
5 - Maintenance........................................................................................................................................... 19
Page 4

Typographic and iconographic conventions
In this guide, to make it easier to understand and read the text the following typographic and
iconographic conventions are used:
• parameters and objects both of the device and the interface are coloured in GREEN;
• alarms are coloured in RED;
• states are coloured in FUCSIA.
When scrolling through the text some icons can be found on the side of the page: they are expressly
designed to highlight the parts of the text which are of great interest and significance for the user.
Sometimes they are used to warn against dangers or potential sources of danger arising from the use of
the device. You are advised to follow strictly the instructions given in this guide in order to guarantee
the safety of the user and ensure the performance of the device. In this guide the following symbols are
used:
This icon, followed by the word WARNING, is meant to highlight the parts of the
text where information of great significance for the user can be found: user must
pay the greatest attention to them! Instructions must be followed strictly in order
to guarantee the safety of the user and a correct use of the device. Failure to heed
a warning or comply with instructions could lead to personal injury and/or damage
to the unit or other equipment.
This icon, followed by the word NOTE, is meant to highlight the parts of the text
where important notes needful for a correct and reliable use of the device can be
found. User must pay attention to them! Failure to comply with instructions could
cause the equipment to be set wrongly: hence a faulty and improper working of
the device could be the consequence.
This icon is meant to highlight the parts of the text where suggestions useful for
making it easier to set the device and optimize performance and reliability can be
found. Sometimes this symbol is followed by the word EXAMPLE when instructions
for setting parameters are accompanied by examples to clarify the explanation.
Page 5

Preliminary information
This guide is designed to provide the most complete information the operator needs to correctly and
safely install and operate the linear encoders with guided profile of the SMAG series that provide SSI
interface and Gray output code.
The SMAG sensors are engineered to measure linear displacements in industrial machines and
automation lines.
The measuring system consists of a magnetic tape mounted on a rigid profile and a magnetic sensor. The
tape has a coded sequence of poles; the distance between two poles is referred to as “pole pitch”. The
sensor moves along the magnetic tape (or, on the contrary, the magnetic tape is moved under the
sensor), thus the sensor detects the displacement and issues an output signal equivalent to the one
generated by an absolute encoder or an optical linear scale.
The sensor must be compulsorily paired with the MTAG magnetic tape. The measuring length is from
115 mm (4.528”) to 570 mm (22.441”), see the order code.
For technical specifications please refer to the product datasheet.
To make it easier to read the text, this guide can be divided into some main sections.
In the first section (from chapter 1 to chapter 3) some general information concerning the safety, the
mechanical installation and the electrical connection as well as tips for setting up and running properly
and efficiently the SMAG linear encoder + MTAG are provided.
In the second section, entitled SSI Interface (chapter 4), you can find detailed information on the SSI
interface.
Page 6
SMAG + MTAG SSI
1 – Safety summary
1.1 Safety
Always adhere to the professional safety and accident prevention regulations
applicable to your country during device installation and operation;
installation and maintenance operations have to be carried out by qualified
personnel only, with power supply disconnected and stationary mechanical
devices;
device must be used only for the purpose appropriate to its design: use for
purposes other than those for which it has been designed could result in
serious personal and/or the environment damage;
high current, voltage and moving mechanical parts can cause serious or fatal
injury;
warning ! Do not use in explosive or flammable areas;
failure to comply with these precautions or with specific warnings elsewhere
in this manual violates safety standards of design, manufacture, and
intended use of the equipment;
Lika Electronic assumes no liability for the customer's failure to comply with
these requirements.
1.2 Electrical safety
Turn OFF the power supply before connecting the device;
connect according to the explanation in the ”4.1 Electrical connections”
section on page 12;
connect Zero Setting input to 0Vdc, if not used; to zero set the encoder,
connect Zero setting input to +Vdc for 100 µs at least, then disconnect +Vdc;
normally voltage must be at 0Vdc; zero set must be performed after
Counting direction setting; we suggest performing the zero set when the
encoder is in stop;
connect Counting direction input to 0Vdc, if not used; to have count up
information when the measuring system moves as shown in Figure 2 (see the
arrows) = connect to 0Vdc; to have count up information when the
measuring system moves in the direction opposite to the movement shown
in Figure 2 (see the arrows) = connect to +Vdc;
in compliance with 2014/30/EU norm on electromagnetic
compatibility, following precautions must be taken:
- before handling and installing the equipment, discharge electrical
charge from your body and tools which may come in touch with the device;
- power supply must be stabilized without noise; install EMC filters on device
power supply if needed;
- always use shielded cables (twisted pair cables whenever possible);
- avoid cables runs longer than necessary;
- avoid running the signal cable near high voltage power cables;
- mount the device as far as possible from any capacitive or inductive noise
source; shield the device from noise source if needed;
- to guarantee a correct working of the device, avoid using strong magnets on
or near by the unit;
MAN SMAG GA E 1.3.odt 1 – Safety summary 6 of 20
Page 7

SMAG + MTAG SSI
- minimize noise by connecting the shield or the connector housing to ground.
Make sure that ground is not affected by noise. The connection point to
ground can be situated both on the device side and on user’s side. The best
solution to minimize the interference must be carried out by the user;
do not stretch the cable; do not pull or carry by cable; do not use the cable
as a handle.
1.3 Mechanical safety
Install the device following strictly the information in the “3 – Mechanical
installation” section on page 9;
mechanical installation has to be carried out with stationary mechanical
devices;
do not disassemble the unit;
do not tool the unit;
delicate electronic equipment: handle with care; do not subject the unit to
knocks or shocks;
protect the unit against acid solutions or chemicals that may damage it;
respect the environmental characteristics declared by manufacturer;
we suggest installing the unit providing protection means against waste,
especially swarf as turnings, chips, or filings; should this not be possible,
please make sure that adequate cleaning measures (as for instance brushes,
scrapers, jets of compressed air, etc.) are in place in order to prevent the
sensor and the magnetic scale from jamming.
MAN SMAG GA E 1.3.odt 1 – Safety summary 7 of 20
Page 8

SMAG + MTAG SSI
2 - Identification
Device can be identified through the order code and the serial number printed
on the label applied to its body. Information is listed in the delivery document
too. Please always quote the order code and the serial number when reaching
Lika Electronic for purchasing spare parts or needing assistance. For any
information on the technical characteristics of the product refer to the
technical catalogue.
Warning: devices having order code ending with “/Sxxx” may have
mechanical and electrical characteristics different from standard and
be supplied with additional documentation for special connections
(Technical info).
MAN SMAG GA E 1.3.odt 2 - Identification 8 of 20
Page 9

SMAG + MTAG SSI
3 – Mechanical installation
WARNING
Installation and maintenance operations must be carried out by qualified
personnel only, with power supply disconnected and mechanical parts
absolutely in stop.
3.1 Overall dimensions (Figure 1)
(values are expressed in mm)
Figure 1
L = 195 mm / 7.677” ÷ 650 mm / 25.59” (see the order code of the MTAG
profile)
3.2 Mounting instructions
Install and use the product in conformance with the protection level it has been
designed to. Protect the unit against knocks, frictions and solvents and avoid
temperatures over the allowed range.
Make sure the unit is mounted where hard or sharp objects (e.g. turnings, chips
or filings) do not come into contact with the magnetic tape and the bottom of
the sensor head. If these conditions cannot be avoided provide adequate
cleaning measures (as for instance brushes, scrapers, jets of compressed air, etc.)
in order to prevent the sensor and the magnetic tape from jamming.
The profile of the magnetic tape must be inserted in the track at the bottom of
the sensor enclosure; the shape of the track is univocal in order to prevent
mounting errors.
Two mounting options are allowed:
1. you can fasten the profile of the magnetic tape to a fixed support and
move the sensor;
MAN SMAG GA E 1.3.odt 3 – Mechanical installation 9 of 20
Page 10
SMAG + MTAG SSI
2. or, on the contrary, you can fasten the sensor to a fixed support and
move the profile of the magnetic tape.
It is customer's duty to evaluate the type of installation that is most suitable for
his application. Anyway both the sensor and the profile (according to your
choice) must be able to slide freely and accomplish a smooth linear travel.
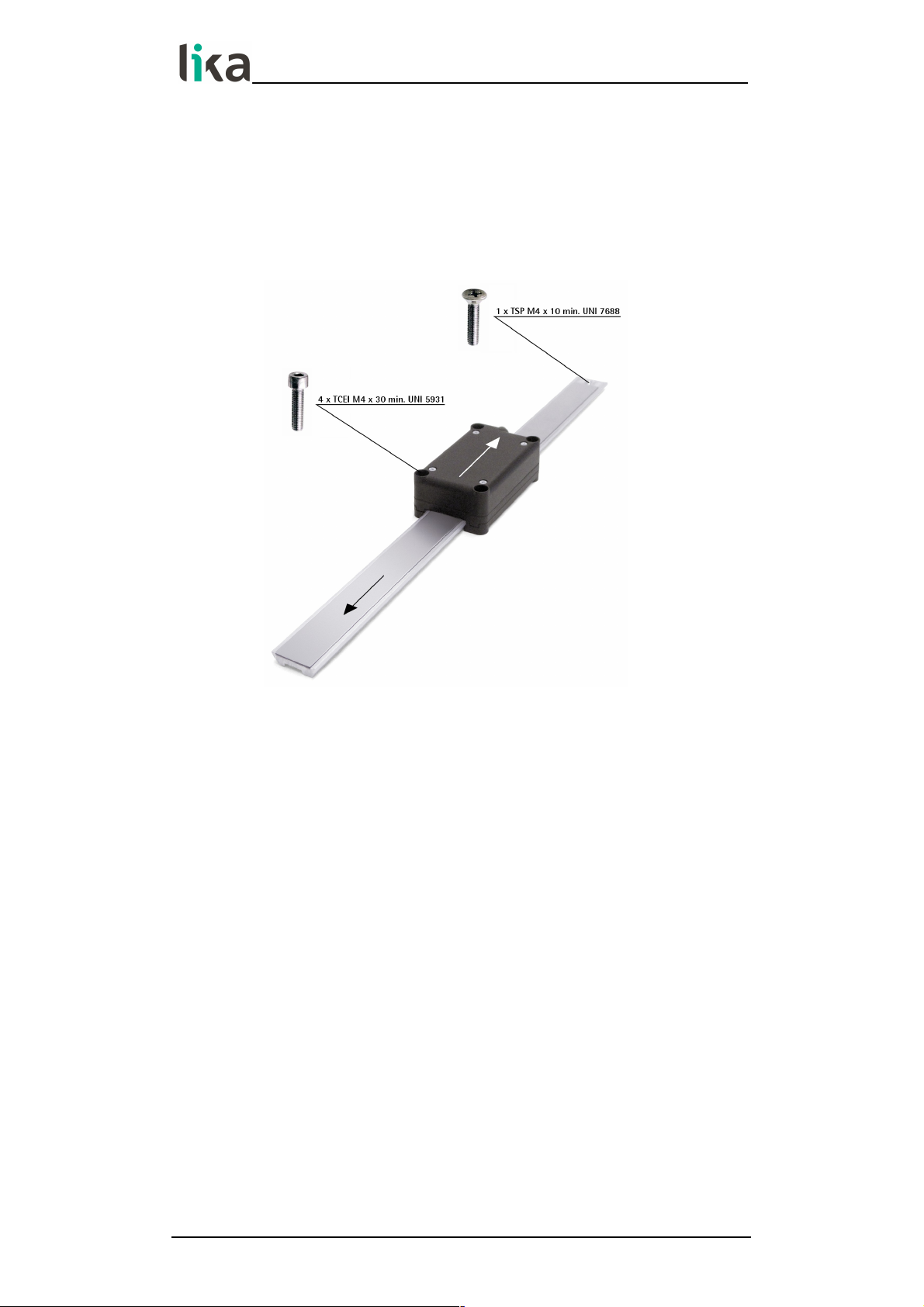
Figure 2
3.3 Sensor (Figure 2)
The sensor can be secured:
1. to a sliding carriage;
2. to an actuator;
3. to a mobile support;
4. or to a fixed support.
Use four TCEI M4 UNI 5931 type cylinder head screws inserted from the top
in the holes provided at the four angles of the enclosure. The screws must be 30
mm min. long (see Figure 1). The maximum tightening torque is 1.2 Nm. We
suggest adding a few drops of threadlocker of medium bond strength.
The fixing support will be placed at the bottom of the sensor case. Make sure
the cable does not block or hamper the movement of the sensor.
MAN SMAG GA E 1.3.odt 3 – Mechanical installation 10 of 20
Page 11

SMAG + MTAG SSI
3.4 Profile of the magnetic tape (Figure 2)
It is mandatory to pair the sensor with the MTAG type magnetic tape.
The profile of the magnetic tape can be secured:
1. to a sliding device driven manually, pneumatically or by a motor; in this
first case the tape will move back and forth while the sensor will be
mounted in a fixed position;
2. or to a fixed support: in this case, the tape will be mounted in a fixed
position while the sensor will move back and forth.
The profile must be installed so that the active magnetic surface (black side) is
turned towards the active surface of the sensor (electronic card).
Use one TSP M4 UNI 7688 type countersunk head screw to secure the
profile of the magnetic tape; insert the screw in the hole provided at one end of
the profile. The screw is 10 mm min. long. The maximum tightening torque is
2.5 Nm.
The length of the profile ranges between 195 mm / 7.677” and 650 mm / 25.59”.
WARNING
Do not expose the sensor and the magnetic tape to magnetic fields. Avoid any
possible interference of the unit with magnetic fields.
WARNING
After having installed the sensor on the magnetic tape a zero setting operation
is compulsorily required. The zero setting operation is further required every
time either the sensor or the tape is replaced. For any information on the zero
setting operation please refer to the “4.1.5 Zero setting input” section on page
13.
3.5 Measuring length (Figure 1)
The maximum tape length L is between 195 mm / 7.677”” and 650 mm /
25.59” (for further information refer the order code in the product datasheet).
As the sensor area has always to be fully within the limits of the tape magnetic
surface, then the maximum measuring length ML is the maximum tape
length minus the sensor length (see the Figure 1) = L – 80 mm / 3.149” (115
mm / 4.528” ÷ 570 mm / 22.441”).
3.6 Standard counting direction (Figure 2)
The positive counting direction (count up information) is achieved when the
sensor moves on the tape according to the white arrow shown in Figure 2; or,
on the contrary, when the tape moves according to the black arrow shown in
Figure 2. For further information see the “4.1.6 Counting direction input” section
on page 14.
MAN SMAG GA E 1.3.odt 3 – Mechanical installation 11 of 20
Page 12

SMAG + MTAG SSI
4 – SSI interface
4.1 Electrical connections
WARNING
Electrical connection must be carried out by qualified personnel only, with
power supply disconnected and mechanical parts compulsorily in stop.
Function M8 cable M12 8-pin
0Vdc
Black 1
+10Vdc +30Vdc
Red 2
Clock IN +
Yellow 3
Clock IN -
Blue 4
Data OUT +
Green 5
Data OUT -
Orange 6
Zero setting
White 7
Counting direction
Grey 8
Shielding
Shield Case
4.1.1 M8 cable specifications
Model : LIKA HI-FLEX sensor cable type M8
Wires : 2 x 0.22 mm2 + 6 x 0.14 mm2 (24/26 AWG)
Jacket : Matt Polyurethane (TPU) halogen free, oil, hydrolysis,
abrasion resistant
Screening : tinned copper braid, coverage 85%
Outer diameter : 5.3 mm ÷ 5.6 mm (0.209” ± 0.220”)
Min. bending radius : Ø x 7.5
Work temperature : -40°C +90°C (-40°F +194°F) – dynamic installation
-50°C +90°C (-58°F +194°F) - fixed installation
Conductor resistance : 90 /km / 148 /km
4.1.2 M12 8-pin connector specifications
Male
Frontal side
A coding
MAN SMAG GA E 1.3.odt 4 – SSI interface 12 of 20
Page 13
SMAG + MTAG SSI
4.1.3 Connection of the shield
For signals transmission always use shielded cables. The cable shielding must be
connected properly to the metal ring nut of the connector in order to ensure a
good earthing through the frame of the device.
4.1.4 Ground connection
Minimize noise by connecting the shield or the connector housing to ground.
Make sure that ground is not affected by noise. The connection point to ground
can be situated both on the device side and on user’s side. The best solution to
minimize the interference must be carried out by the user.
4.1.5 Zero setting input
The output value can be set to zero (reset) via an external signal issued by a PLC
or other controller device. When the internal microprocessor receives the signal
it resets the output information. This can be very useful for setting the zero
position of both the sensor and the machine. To zero set the encoder position,
connect Zero setting input to +Vdc for 100 µs at least, then disconnect +Vdc;
normally voltage must be at 0Vdc; zero set must be performed after Counting
direction setting; we suggest performing the zero set when the encoder is in
stop. Connect to 0Vdc if not used.
WARNING
It is necessary to zero set the sensor after having set a new counting direction.
WARNING
After having installed the sensor on the magnetic tape a zero setting operation
is compulsorily required. The zero setting operation is further required every
time either the sensor or the tape is replaced.
NOTE
Please note that, after setting the zero point, the positive counting will be from
0 towards the max. value (see the table below); if you move the axis before the
0 point, the detected value will be the max. number of information – 1 down.
EXAMPLE
Let's suppose we are using the SMAG-GA-5-... model, it is paired with the
MTAG-650-... profile. If you set the 0 along the path, starting from the 0 point,
the output values will be from 0 towards the max. value (114,000, see the table
below) when the measuring system moves according to the arrows shown in
Figure 2; when the system moves back, the value immediately after 0 will be the
max. number of information – 1 (131,071).
... 131.070 131.071 0 1 2 ... 114.000
MAN SMAG GA E 1.3.odt 4 – SSI interface 13 of 20
Page 14

SMAG + MTAG SSI
Model Max. value
Max. number of
information
SMAG-GA-100-... + MTAG-650
5,700 8,192 (13 bits)
SMAG-GA-100-... + MTAG-370
2,900 4,096 (12 bits)
SMAG-GA-100-... + MTAG-300
2,200 4,096 (12 bits)
SMAG-GA-100-... + MTAG-240
1,600 2,048 (11 bits)
SMAG-GA-100-... + MTAG-220
1,400 2,048 (11 bits)
SMAG-GA-100-... + MTAG-192
1,150 2,048 (11 bits)
SMAG-GA-50-... + MTAG-650
11,400 16,384 (14 bits)
SMAG-GA-50-... + MTAG-370
5,800 8,192 (13 bits)
SMAG-GA-50-... + MTAG-300
4,400 8,192 (13 bits)
SMAG-GA-50-... + MTAG-240
3,200 4,096 (12 bits)
SMAG-GA-50-... + MTAG-220
2,800 4,096 (12 bits)
SMAG-GA-50-... + MTAG-192
2,300 4,096 (12 bits)
SMAG-GA-10-... + MTAG-650
57,000 65,536 (16 bits)
SMAG-GA-10-... + MTAG-370
29,000 32,768 (15 bits)
SMAG-GA-10-... + MTAG-300
22,000 32,768 (15 bits)
SMAG-GA-10-... + MTAG-240
16,000 16,384 (14 bits)
SMAG-GA-10-... + MTAG-220
14,000 16,384 (14 bits)
SMAG-GA-10-... + MTAG-192
11,500 16,384 (14 bits)
SMAG-GA-5-... + MTAG-650
114,000 131,072 (17 bits)
SMAG-GA-5-... + MTAG-370
58,000 65,536 (16 bits)
SMAG-GA-5-... + MTAG-300
44,000 65,536 (16 bits)
SMAG-GA-5-... + MTAG-240
32,000 32,768 (15 bits)
SMAG-GA-5-... + MTAG-220
28,000 32,768 (15 bits)
SMAG-GA-5-... + MTAG-192
23,000 32,768 (15 bits)
4.1.6 Counting direction input
The standard counting direction is to be intended with sensor moving
according to the white arrow in Figure 2; or with magnetic profile moving
according to the black arrow in Figure 2. The counting direction circuit allows to
reverse the counting direction. In other words it allows the count up when the
sensor (or the profile) moves in reverse of the standard direction, i.e. in the
direction opposite to the movement shown by the arrows in Figure 2. Connect
MAN SMAG GA E 1.3.odt 4 – SSI interface 14 of 20
Page 15

SMAG + MTAG SSI
the Counting direction input to 0Vdc if not used. Connect the counting
direction input to 0Vdc to have the count up information when the sensor
moves as shown by the white arrow in Figure 2 (or when the profile moves as
shown by the black arrow in Figure 2); connect the counting direction input to
+Vdc to have the count up information when the sensor moves in reverse of the
standard direction, i.e. in the direction opposite to the movement shown by the
white arrow in Figure 2 (or when the profile moves in reverse of the standard
direction, i.e. in the direction opposite to the movement shown by the black
arrow in Figure 2).
WARNING
After having set the new counting direction it is necessary to zero set the
sensor.
4.2 SSI (Synchronous Serial Interface)
SSI (the acronym for Synchronous Serial
Interface) is a synchronous point-to-point serial
interface engineered for unidirectional data
transmission between one Master and one Slave.
Developed in the first eighties, it is based on the RS422 serial standard. Its most peculiar feature is that data transmission is
achieved by synchronizing both the Master and the Slave devices to a common
clock signal generated by the controller; in this way the output information is
clocked out at each controller's request. Furthermore only two pairs of twisted
wires are used for data and clock signals, thus a six-wire cable is required.
The main advantages in comparison with parallel or asynchronous data
transmissions are:
• less conductors are required for transmission;
• less electronic components;
• possibility of insulting the circuits galvanically by means of
optocouplers;
• high data transmission frequency;
• hardware interface independent from the resolution of the absolute
encoder.
Furthermore the differential transmission increases the noise immunity and
decreases the noise emissions. It allows multiplexing from several encoders, thus
process controls are more reliable with simplified line design and easier data
management.
Data transmission is carried out as follows.
At the first falling edge of the clock signal (1, the logic level changes from high
to low) the absolute position value is stored while at the following rising edge
(2) the transmission of data information begins starting from the MSB.
MAN SMAG GA E 1.3.odt 4 – SSI interface 15 of 20
Page 16

SMAG + MTAG SSI
At each change of the clock signal and at each subsequent rising edge (2) one
bit is clocked out at a time, up to LSB, so completing the data word
transmission. The cycle ends at the last rising edge of the clock signal (3). This
means that up to n + 1 rising edges of the clock signals are required for each
data word transmission (where n is the bit resolution); for instance, a 13-bit
encoder needs 14 clock edges. If the number of clocks is greater than the
number of bits of the data word, then the system will send a zero (low logic
level signal) at each additional clock, zeros will either lead (LSB ALIGNED
protocol) or follow (MSB ALIGNED protocol) or lead and/or follow (TREE FORMAT
protocol) the data word. After the period Tm monoflop time, having a typical
duration of 16 µsec, calculated from the end of the clock signal transmission,
the encoder is then ready for the next transmission and therefore the data
signal is switched high.
The clock signal has a typical logic level of 5V, the same as the output signal
which has customarily a logic level of 5V in compliance with RS-422 standard.
4.3 LSB Right Aligned protocol
“LSB right aligned” protocol allows to right align the bits, beginning from MSB
(most significant bit) to LSB (least significant bit); LSB is then sent at the last
clock cycle. Transmitted bits are always 25, the sensor uses a variable number of
bits according to resolution. Unused bits are set to 0 (zero) and lead the data
word:
Model
Information
per mm
Resolution
Length of the
word
Max. number
of information
SMAG-GA-100-...
10 0.1 mm 25 bits 13 bits (8,192)
SMAG-GA-50-...
20 0.05 mm 25 bits 14 bits (16,384)
SMAG-GA-10-...
100 0.01 mm 25 bits 16 bits (65,536)
SMAG-GA-5-...
200 0.005 mm 25 bits 17 bits (131,072)
* When the profile is 650 mm / 25.59” long
See also the table on page 14
MAN SMAG GA E 1.3.odt 4 – SSI interface 16 of 20
Page 17

SMAG + MTAG SSI
The output code is GRAY.
The measuring step is equal to the resolution (0.1 mm … 0.005 mm).
Structure of the transmitted position value:
SMAG-GA-100-... bits 25 … 14 13 ... 1
SMAG-GA-50-... bits 25 … 15 14 ... 1
SMAG-GA-10-... bits 25 … 17 16 ... 1
SMAG-GA-5-... bits 25 … 18 17 ... 1
value
00 … 00 MSB … LSB
* When the profile is 650 mm / 25.59” long
See also the table on page 14
WARNING
Please note that the position value issued by the sensor is expressed in pulses;
thus you have then to convert the number of pulses into a linear measuring
unit.
To convert the position value into millimetres (mm) or micrometres (µm) you
have to multiply the pulses by the linear resolution of the encoder expressed in
millimetres or micrometres.
EXAMPLE 1
SMAG-GA-50-…
resolution = 50 µm = 0.05 mm
detected pulses = 123
position value = 123 * 50 = 6150 µm = 6.15 mm
EXAMPLE 2
SMAG-GA-10-…
resolution = 10 µm = 0.01 mm
detected pulses = 1569
position value = 1569 * 10 = 15690 µm = 15.69 mm
MAN SMAG GA E 1.3.odt 4 – SSI interface 17 of 20
Page 18

SMAG + MTAG SSI
4.4 Recommended transmission rates
The SSI interface has a frequency of data transmission ranging between 100 kHz
and 1.5 MHz.
The CLOCK signals and the DATA signals are transmitted according to the “EIA
RS-422” standard.
The clock frequency (baud rate) depends on the length of the cables and must
comply with the technical information reported in the following table.
Cable length Baud rate
< 50 m < 400 kHz
< 100 m < 300 kHz
< 200 m < 200 kHz
< 400 m < 100 kHz
The time interval between two consecutive Clock sequence transmissions must
be at least 30 µs (Tp = pause time > 30 µs).
4.5 Recommended SSI circuit
MAN SMAG GA E 1.3.odt 4 – SSI interface 18 of 20
Page 19

SMAG + MTAG SSI
5 - Maintenance
This magnetic measurement system does not need any particular maintenance;
anyway it has to be handled with the utmost care as it is a delicate electronic
equipment. From time to time we recommend the following operations to be
performed:
• periodically check the soundness of the structure and make sure that
there are no loose screws; tighten them if necessary;
• the surface of the magnetic tape has to be cleaned regularly using a soft
and clean cloth to remove dust, chips, moisture etc.
MAN SMAG GA E 1.3.odt 5 - Maintenance 19 of 20
Page 20

Document release Release date Description HW SW
Installation
file version
1.0 15.09.2011 First issue - - -
1.1 11.01.2012 General review, English translation - - -
1.2 18.05.2015
General review, “3 – Mechanical installation”
section updated
- - -
1.3 24.01.2017
General review, Italian and English versions
separated, mounting instructions updated
Lika Electronic
Via S. Lorenzo, 25 • 36010 Carrè (VI) • Italy
Tel. +39 0445 806600
Fax +39 0445 806699
info@lika.biz • www.lika.biz
 Loading...
Loading...