

Page 1

Содержание
ПО LEICA Geo Office (LGO) 1
Платные опции 3
Техническое обслуживание 4
Полезные советы 5
GPS Курс I : Реальное Время 7
GPS Курс I : Реальное Время 7
GPS Курс I - Урок 1: Импорт данных реального времени 8
GPS Курс I - Урок 2: Просмотр и редактирование данных реального времени 10
GPS Курс I - Урок 3: Экспорт координат в пользовательском текстовом ASCII формате 14
GPS Курс II : Пост-обработка 16
GPS Курс II : Пост-обработка 16
GPS Курс II - Урок 1: Импорт измерений 17
GPS Курс II - Урок 2: Обработка Базовых Линий 19
GPS Курс II - Урок 3: Импорт ASCII файла 21
GPS Курс II - Урок 4: Вычисление Параметров Трансформирования 22
GPS Курс II - Урок 5: Экспорт координат в определенный пользователем ASCII файл 23
GPS Курс III : GIS/ CAD Экспорт 25
GPS Курс III : GIS/ CAD Экспорт 25
GPS Курс III - Урок 1: Создание Таблицы Поиска 26
GPS Курс III - Урок 2: Экспорт DXF файла 29
TPS Курс I: Привязка растровой подложки 31
TPS Курс I: Привязка растровой подложки 31
TPS Курс I - Урок 1: Регистрация растровой подложки и идентификация общих точек 32
TPS Курс I - Урок 2: Связка общих точек и привязка растра 36
TPS Курс II: Исправление установок станции 39
TPS Курс II: Исправление установок станции 39
TPS Курс II - Урок 1: Импорт и проверка TPS данных, содержащихся в файле JOB_1 40
TPS Курс II - Урок 2: Импорт и проверка TPS данных из файла JOB_2 44
TPS Курс II - Урок 3: Обновление результатов измерений на станции, ориентированной по методу «Задать
азимут»
выполнена методом «Обратная засечка»
TPS Курс III: Обновление результатов съемки в автоматическом режиме 58
выполнена методом «Задать азимут»
TPS Курс IV: Сдвиг, разворот и масштабирование данных хода 75
TPS Курс V: Обработка хода 86
TPS Курс VI: Постобработка данных, полученных на станциях SmartStation 94
Нивелирование. 101
- ручной режим 48
TPS Курс II - Урок 4: Импорт TPS данных из файла JOB_3 51
TPS Курс II - Урок 5: Обновление результатов измерений на станции, ориентировка на которой была
- ручной режим 54
TPS Курс III: Обновление результатов съемки в автоматическом режиме 58
TPS Курс III - Урок 1: Импорт TPS данных из файла JOB_4 60
TPS Курс III - Урок 2: Обновление результатов измерений на станции, ориентировка на которой была
- автоматический режим 63
TPS Курс III. Урок 3: Обмен системами координат 69
TPS Курс III - Урок 4: Исправление высоты визирования 72
TPS Курс IV: Сдвиг, разворот и масштабирование данных хода 75
TPS Курс IV - Урок 1: Импорт данных хода 76
TPS Курс IV - Урок 2: Импорт опорных точек в формате ASCII 79
TPS Курс IV - Урок 3: Сдвиг, разворот и масштабирование результатов измерений в ходе 80
TPS Курс V: Обработка хода 86
TPS Курс V - Урок 1: Импорт данных и построение хода 87
TPS Курс V - Урок 2: Обработка хода 90
TPS Курс VI: Постобработка данных, полученных на станциях SmartStation 94
TPS Курс VI - Урок 1: Импорт и постобработка данных, полученных на станциях SmartStation 95
TPS Курс VI - Урок 2: Обновление станций 98
Нивелирование: Обработка нивелирных измерений 101
Нивелирование - Урок 1: Импорт файла измерений 102
Page 2

Нивелирование. Урок 2 - Обработка файла нивелирования 103
Нивелирование - Урок 3: Экспорт в ASCII формат 105
Проводник 107
Как пользоваться Проводником 107
Дерево каталогов 108
Окно сообщений 109
Окно свойств 112
Вырезать, Копировать, Вставить 113
Перетаскивание (Копирование и вставка) 114
Окна свойств 115
Страница/окно свойств 115
Главное и контекстное меню 116
Главное меню 116
Контекстное меню 117
Контекстное меню Редактирование 118
Список панелей 119
Список панелей 119
Список панелей: Управление 120
Список панелей: Средства 121
Список панелей: Открытие документа 123
Панели инструментов 124
Панели инструментов 124
Отображение панели инструментов 125
Создание новой панели инструментов 126
Удаление панели инструментов 127
Настройка панели инструментов 128
Команды настройки окон 129
Команды настройки окон 129
Закрытие Окна 130
Упорядочение окон 131
Печать 132
Печать 132
Предварительный просмотр 133
Настройка печати 134
Компоненты управления 135
Управление Проектом 135
Управление Проектом 135
Замечания о Проектах 136
Создать Новый Проект 137
Открыть проект 138
Удалить Проект 139
Копирование Проекта 140
Перенести проект 141
Регистрировать проект 142
Отменить регистрацию проекта 143
Свойства Проектов 144
Свойства Проектов: Общие 145
Свойства Проекта: Координаты 146
Свойства Проектов: Служебная Информация 147
Свойства Проектов: Растровая Подложка 148
Свойства Проектов: Шаблон Списка Кодов 149
Управление системами координат 150
Управление системами координат 150
Системы координат 151
Добавление новой системы координат 152
Импорт систем координат 153
Удаление системы координат 154
Page 3

Свойства систем координат 155
Свойства систем координат 155
Свойства системы координат: Общие 156
Преобразования 158
Трансформация Классическая 2D 159
Трансформация Классическая 3D 160
Трансформация в один шаг 161
Трансформация в два шага 163
Пошаговая трансформация 165
Интерполяция 167
Какой подход использовать? 168
Добавление нового преобразования 169
Удаление преобразования 170
Свойства преобразований 171
Свойства преобразований 171
Свойства преобразований: Общие 172
Свойства преобразования: Предварительная трансформация 173
Эллипсоиды 174
Эллипсоиды 174
Добавление нового эллипсоида 175
Удаление эллипсоида 176
Свойства эллипсоида 177
Свойства эллипсоида 177
Свойства эллипсоида: Общие 178
Проекции 179
Проекции 179
Добавление новой проекции 181
Удаление проекции 182
Проекции: Свойства 183
Проекция Меркатора 184
Поперечная проекция Меркатора (TM) 185
Косая проекция Меркатора 186
Универсальная поперечная проекция Меркатора (UTM) 187
Проекция Кассини - Зольднера 188
Проекция Ламберта с одной стандартной параллелью 189
Проекция Ламберта с двумя стандартными параллелями 190
Азимутальная стереографическая проекция 191
Двойная стереографическая проекция 192
Трансформированная косая равноугольная проекция 193
Определяемые пользователем проекции 194
Формат файлов INPUT.USR и OUTPUT.USR 195
Пример программ, написанных пользователем 197
Зональные системы координат штатов США 201
Зональные системы координат штатов США 201
Зональные системы координат штатов США: Свойства 202
Как выбирать между картографической проекцией и сетками координат штатов США 203
Модели геоида 204
Модели геоида 204
Добавление новой модели геоида 205
Удаление модели геоида 206
Модель геоида: Свойства 207
Модель геоида: Свойства 207
Свойства модели геоида: Общие 208
Свойства модели геоида: Охват 209
Как создать пользовательскую модель геоида 210
Вычисление отклонения геоида 212
Создание полевого файла модели геоида 213
Page 4

Модели ГГС 214
Модели ГГС 214
Добавление новой модели ГГС 216
Удаление модели ГГС 217
Свойства моделей ГГС 218
Свойства моделей ГГС 218
Свойства моделей ГГС: Общие 219
Свойства моделей ГГС: Размеры 220
Создание полевого файла модели ГГС 221
Управление антеннами 222
Управление антеннами 222
Добавить Новую Антенну 223
Удаление Антенны 224
Импорт файла Антенны 225
Свойства Антенн 226
Свойства Антенн 226
Свойства Антенн: Общие 227
Свойства антенн: Дополнительные коррекции 228
Опорная антенна для смещений фазовых центров 229
Отсчет Высоты Антенны 230
Управление списками кодов 231
Управление списками кодов 231
Список кодов 233
Структура списка кодов 233
Окно просмотра списков кодов 234
Тип списка кодов 235
Тип списка кодов 235
Тип списка кодов для DNA 236
Тип списка кодов для GPS 500 237
Тип списка кодов для GPS 900 238
Типы списков кодов для System 1200 239
Типы списков кодов для TPS 1100 240
Типы списков кодов для TPS 300/ 400/ 800 241
Типы списков кодов для TPS 700 242
Создание нового списка кодов 244
Удаление списка кодов 245
Печать списка кодов 246
Регистрация списка кодов 248
Отмена регистрации списка кодов 249
Свойства списков кодов 250
Пример - Список кодов 251
Группы кодов 252
Группы кодов 252
Добавление новой группы кодов 253
Удаление группы кодов 254
Свойства групп кодов 255
Просмотр группы кода 256
Пример - Группа кодов 257
Код 258
Код 258
Добавление нового кода 259
Удаление кода 260
Свойства кодов 261
Пример - коды 262
Атрибуты 263
Атрибуты 263
Добавление нового атрибута 265
Page 5

Удаление атрибута 266
Свойства атрибутов 267
Пример - Атрибуты 268
Пример: Типы значений (Кодирование) 269
Доступность Спутников 270
Доступность Спутников 270
Управление 271
Доступность Спутников: Управление 271
Свойства Станций 273
Импорт Альманахов 274
Создать новое Препятствие 275
Импорт Препятствий 276
Экспорт Препятствий 277
Формат файла Препятствий 278
Свойства Препятствий 279
Доступность 280
Доступность Спутников: Видимость 280
Отчет о Доступности Спутников 282
Управление Точными эфемеридами 284
Управление Точными эфемеридами 284
Импорт точных эфемерид 285
Управление скриптами 286
Управление скриптами 286
Свойства скриптов 288
Использование скриптов типа Howto 289
Обзор системы помощи LGO для написания скриптов 291
Обзор системы помощи LGO для написания скриптов 291
Модели объектов сценариев LGO 293
Управление шаблонами отчетов 295
Управление шаблонами отчетов 295
Шаблоны отчетов 296
Создать новый шаблон отчета 298
Удалить шаблон отчета 299
Свойства шаблона отчета 300
Свойства шаблона отчета 300
Свойства шаблона отчета: Общие 301
Свойства шаблона отчета: Содержание 302
Свойства шаблона отчета: Типы координат 303
Свойства шаблона отчета: формат 304
Свойства шаблона отчета: Заголовок 305
Свойства шаблона отчета: С улучшенными свойствами 306
Обработка GPS измерений 363
Обработка GPS измерений 363
Окно Отчета (GPS-обработка) 364
Графическое Окно (GPS-обработка) 365
Увеличение изображения (GPS-обработка) 366
Переназначение Интервалов (Сеансов) 367
Удаление интервала 368
Экспорт в формате RINEX 369
Выбор интервала наблюдений для вычислений 370
Выбор окна (интервала) наблюдений 371
Выбор Окна (Интервала) Спутника 373
Обработка (GPS) 375
Режимы Обработки (GPS) 376
Обзор Результатов (GPS) 377
Параметры GPS-обработки 378
Параметры GPS-обработки 378
Page 6

Параметры GPS-обработки: Главное 379
Параметры GPS-обработки: Стратегия 381
Параметры GPS-обработки: Расширенный Вывод 385
Параметры Автоматизированной Обработки 386
Изменение Параметров GPS-обработки 388
Свойства 389
Вывод на экран Свойств Интервала (Трек) 389
Параметры интервалов (Точки): Аннотация 390
Параметры интервалов (Точки): Антенна 391
Свойства Сеанса (Трек): Описание 392
Свойства Сеанса (Трек): Антенна 393
Свойства Точки (GPS-обработка) 394
Настройки Отображения 395
Настройки Отображения (GPS-обработка) 395
Настройки Отображения: Общие (GPS-обработка) 396
Настройки Отображения: Стили и Цвета (GPS-обработка) 397
TPS-
обработка 398
обработка 398
TPS-
Вычисление геометрической PPM-поправки 401
Вычисление атмосферной PPM-поправки 402
Преобразование координат (Smart Station) 403
Создание приложения Станция 405
Удаление приложения Станция 407
Редактирование приложения Станция 408
Автоматическое обновление 409
Обновление данных о станциях 410
Отчет по станциям 411
Окно Проводник TPS-обработки 414
Станции: Свойства 415
Станции: Свойства 415
Свойства станции: Общие 416
Свойства станции: Наблюдения (Методы: обратная засечка, ориентирование и передача высот) 418
Свойства станции: Наблюдения (Ориентирование по известному азимуту, Ориентирование по известной
точке) 420
Тахеометрический ход 421
Новый ход 421
Удаление хода 422
Сводка данных о ходе 423
Способы прокладки тахеометрических ходов 427
Параметры обработки хода 430
Параметры обработки хода 430
Настройки обработки хода: Полигонометрия 431
Настройка параметров обработки хода: Уравнивание углов 432
Настройки параметров обработки хода: Уравнивание высот 433
Изменение параметров обработки ходов 434
Характеристики тахеометрических ходов 435
Характеристики тахеометрических ходов 435
Свойства хода: Общие 436
Свойства хода: Проверка точек 438
Свойства хода: Станции 439
Сводка данных о ходе 440
Обработка TPS-измерений: Сводка 440
Изменение масштаба графической схемы хода 442
Угловые измерения 443
Создание приложения для угловых измерений в приемах 443
Удаление приемов угловых измерений 445
Угловые измерения: Отчет 446
Page 7

Угловые измерения: Допуски 449
Угловые измерения - Свойства 450
Угловые измерения - Свойства 450
Угловые измерения - Свойства: Общие 451
Угловые измерения - Свойства: Наблюдения 452
Настройка графики 453
Настройка графики (TPS-измерения) 453
Настройка графики: Просмотр 454
Настройка графики: Цвет 455
Обработка нивелирных ходов 459
Обработка нивелирных ходов 459
Обработка нивелирного хода: Просмотр отчетов по проектам 461
Обработка нивелирного хода: Просмотр отчетов о ходах 462
Объединение нескольких нивелирных ходов 464
Уравнивание нивелирных ходов 465
Полевой журнал 466
Обработка нивелирного хода: Полевой журнал 466
Методы наблюдений при прокладке хода 470
Классы и Подклассы Точек (Нивелирование) 473
Изменение класса точек в полевом журнале 475
Создание и удаление твердых точек 476
Переустановка высот 477
Включение и исключение точек и отсчетов в полевом журнале 478
Изменение высотных отметок точек в полевом журнале 480
Изменение идентификаторов точек в полевом журнале 481
Редактирование стандартных отклонений отсчетов 482
Просмотр схемы хода 483
Обработка нивелирного хода: Просмотр схемы хода 483
Зуммирование схемы нивелирного хода 484
Изменение масштаба по высоте схемы хода 485
Настройка отображения 486
Настройка отображения схемы нивелирного хода 486
Настройка отображения: Просмотр 487
Настройка отображения: Цвет 488
Параметры уравнивания нивелирных ходов 489
Параметры уравнивания нивелирных ходов 489
Параметры обработки нивелирных ходов: Нивелирный ход 490
Параметры обработки нивелирных ходов: Наблюдения 491
Параметры обработки нивелирных ходов: Высоты точек 492
Параметры обработки нивелирных ходов: Учет поправки для рейки 493
Изменение параметров обработки хода 494
Уравнивание 495
Уравнивание 495
Увеличение масштаба изображения 497
Уменьшение масштаба изображения 498
Изображение 100% 499
Точки и Наблюдения 500
Создать (Новая): Точка, Станция измерений, Наблюдение (Уравнивание) 500
Новая точка (графические окна) 501
Новая Станция Измерений 502
Новое Наблюдение 503
Свойства Точки 504
Свойства Точки (графические окна) 504
Свойства Точки: Станция 505
Свойства Наблюдения 506
Свойства Наблюдения 506
Свойство наблюдения: GPS 507
Page 8

Свойства Наблюдений: TPS 508
Свойства Наблюдения: Азимут 510
Свойства наблюдений: Нивелир 511
Просмотр Наблюдений 512
Подключение / Отключение Точек, Установок и Наблюдений (графические окна) 514
Удаление: Точки, Станции, Наблюдения 515
Удаление точек/ Наборов координат (графические окна) 516
Удаление Станции измерений 517
Удаление Наблюдений 518
Предварительный анализ 519
Обработка Сети 520
Вычисление невязок Полигонов 521
Настройка Отображения 523
Настройка Отображения (Уравнивание) 523
Настройки Отображения: Вид 524
Настройки Отображения: Точность 526
Настройки Отображения: Сетка 527
Настройки Отображения: Цвет 528
Настройки Отображения: Шрифт 529
Использование возможностей Проекта 530
Замечание об уравнивании GPS и Традиционных измерений 531
Настройка 532
Настройка Уравнивания 532
Общие Параметры Уравнивания 533
Общие Параметры Уравнивания 533
Общие Параметры Уравнивания: Общие 534
Общие Параметры Уравнивания: СКО Измерений 536
Общие Параметры Уравнивания: СКО центрирования и высоты прибора/цели 537
Общие Параметры Уравнивания: Опорная (известная) Станция 538
Общие Параметры Уравнивания: Тестовые Критерии 539
Общие Параметры Уравнивания: Система координат и высот 540
Параметры Уравнивания Традиционных Наблюдений 542
Параметры Уравнивания Традиционных Наблюдений 542
Традиционные Параметры: Коэффициент вертикальной рефракции 543
Традиционные параметры: Магнитное склонение 544
Традиционные Параметры: Коррекция масштаба 545
Параметры Создания Данных Уравнивания 546
Параметры Создания Данных Уравнивания 546
Создание Данных: Наблюдение 547
Создание Данных: Станция измерений 548
Результаты 549
Результаты 549
Отчет о Предварительном Анализе Уравнивания 550
Отчет об Уравнивании Сети 552
Отчет по Вычислениям Невязок Полигонов 560
Все об Уравнивании 563
Все об Уравнивании 563
Введение 564
Взаимосвязь между Уравниванием, Точностью, Надежностью и Тестированием 565
Точки 590
Обзор Точек 590
Конфигурация Окна Точки 591
Добавить новую точку в Окно Точки 593
Свойства Точек 594
Свойства Точек (Обзор Точек) 594
Свойства точки: Общие 595
Свойства точки: Общие 597
Page 9

Свойства точки: Stochastics 599
Свойства точки: Тематические коды 600
Свойства точки: Точность 601
Свойства точки: Среднее значение 602
Свойства точки: Скрытые точки 603
Скрытые точки (Положение) 604
Скрытые точки (Высота) 606
Классы и Подклассы Точек (Координат) 607
Классы и Подклассы Точек (Нивелирование) 609
Подключить и отключить точки (Окно Точки) 610
Удалить Точки/Наборы Координат (Окно Точки) 611
Изменить Элементы Точек 612
Сдвиг/ Вращение/ Масштабирование 613
Сдвиг/ Вращение/ Масштабирование 613
Мастер Сдвига/ Вращения/ Масштабирования- Начало 615
Мастер Сдвига/ Вращения/ Масштабирования - Сдвиг 616
Мастер Сдвига/ Вращения/ Масштабирования - Вращение 617
Мастер Сдвига/ Вращения/ Масштабирования - Масштабирование 618
Мастер Сдвига/ Вращения/ Масштабирования - Общие Точки 619
Мастер Сдвига/ Вращения/ Масштабирования - Параметры Трансформации 620
Мастер Сдвига/ Вращения/ Масштабирования - Окончание Трансформации 621
Поверхности 627
Поверхности 627
Прописка точек в поверхность и удаление их из поверхности 630
Включение/Исключение точек 631
Включение и исключение треугольников 632
Линии перегибов (обрывов) 633
Границы 635
Поверхности: 2D-просмотр 638
Поверхности: 3D-просмотр 640
Поверхности: Просмотр точек 642
Настройки изображения 643
Настройки изображения поверхностей 643
Настройки изображения: Просмотр 644
Настройки изображения: Цвет 645
Сведения о поверхности 646
Поверхность: Отчет по ЦМР 647
Создание "разностной" поверхности 650
Экспорт поверхностей 651
Антенны 652
Обзор Антенн 652
Управление антеннами 653
Результаты 654
Обзор Результатов (GPS) 654
Обзор Результатов (Нивелирование) 655
Конфигурация Результатов 656
Сохранение результатов запуска обработки 657
Удаление Запуска Обработки 658
Конфигурация Просмотра 659
Настройка Отчета 660
Результаты GPS-Обработки 661
Результаты GPS-Обработки: Векторы GPS (Базовые линии) 661
Результаты GPS-Обработки: Точки 663
Критерии Выбора 664
Критерии Выбора по Умолчанию 665
Параметры GPS-обработки 666
Отчеты по GPS-обработке 667
Page 10

Сводный Отчет по GPS-Обработке 668
Отчет по GPS Обработке: Базовые Линии (Векторы GPS) 674
Отчет по GPS Обработке: Кинематические Измерения 684
Отчет по GPS-Обработке: SPP (Стандартное позиционирование точки) 696
Средство Анализа GPS-Обработки 704
Сохранение Результатов GPS-Обработки 706
Результаты Обработки Нивелирования 707
Результаты Обработки Нивелирования: Точки 707
Параметры уравнивания нивелирных ходов 708
Сводный Отчет по Обработке Нивелирования 709
Сохранение Результатов Обработки Нивелирования 712
Списки кодов 713
Окно просмотра списков кодов 713
Управление списками кодов 714
Импорт 717
RAW данные 718
Импорт исходных данных 718
Стандартные GSI обозначения 720
Как импортировать файл GPS измерений 722
Как импортировать файл TPS измерений 724
Как импортировать файл TDS измерений 726
Формат файла TDS измерений 727
Как импортировать файл измерений нивелирования 728
Объединение исходных координат во время импорта 729
Настройки импорта (TPS/ Нивелирование) 730
Настройки импорта (TPS/ Нивелирование) 730
Настройки импорта: Кодирование 731
Настройки импорта: СКО измерений 732
Настройки импорта: Центрирование/ Высота 733
GSI операционные коды 734
Присвоение установок 736
Просмотр данных (GPS) 739
Просмотр данных (TPS) 740
Просмотр данных (Нивелирование) 741
Просмотр данных (Нивелирование) 742
Просмотр данных (Точки) 743
Отчет журнала полевых наблюдений 744
Импорт ASCII 748
Импорт ASCII 748
Экспорт 763
RINEX-
ASCII -
формат 764
Экспорт в RINEX-формате 764
Экспорт RINEX-файлов 765
формат 766
Экспорт в формате ASCII 766
Экспорт файлов формата SKI ASCII 767
Формат файлов SKI ASCII 768
Формат файлов SKI ASCII 768
Формат SKI ASCII для координат точечных объектов 769
Формат SKI ASCII для GPS-векторов 773
Настройки экспорта в формате SKI ASCII 775
Экспорт файлов в пользовательском ASCII-формате 777
Пользовательские настройки экспорта в ASCII-формате 778
Пользовательские шаблоны экспорта 781
Добавление пользовательских шаблонов экспорта 781
Удаление пользовательских шаблонов экспорта 782
Запись пользовательского шаблона экспорта в файл 783
Page 11

Загрузка из файла пользовательского шаблона экспорта 784
Экспорт NGS B- и G-файлов 785
Установки для Экспорта NGS B- и G-Файлов 787
Настройка экспорта ASCII-файлов 789
Настройки ASCII-экспорта 790
Экспорт данных из проекта 792
Файлы в формате FBK 794
Экспорт файлов в формате FBK 794
Настройки экспорта в формате FBK 795
GIS / CAD 796
Экспорт в GIS / CAD 796
Экспорт GIS / CAD файлов 797
Настройка экспорта в форматах GIS и CAD 798
Настройка экспорта в форматах GIS и CAD: AutoCAD, MicroStation 800
Таблица поиска 801
Добавление новой поисковой таблицы 802
Редактирование таблицы поиска 803
Редактирование таблицы поиска: Коды по умолчанию 804
Удаление таблицы поиска 805
Загрузка таблицы поиска из файла 806
Запись таблицы поиска в виде файла 807
файлы 808
Shape-
Экспорт в формате ESRI Shape 808
Экспорт Shape-файлов 809
Настройки экспорта в Shape-формате 810
Вычисление отклонения геоида 813
Вычисление скрытых точек 814
Создание полевого файла модели геоида 815
Создание полевого файла модели ГГС 816
Отчет средних координат & отклонений 817
Отчет сравнения координат 819
Загрузка из Интернета 821
Загрузка из Интернета 821
Загрузка из Интернета: Общие 822
Загрузка из Интернета: Журнал станции 824
Загрузка из Интернета: добавление / редактирование пользовательских станций 825
Импортирование после загрузки из Интернета 826
Фильтры 827
Фильтры 827
Фильтры: Общие 828
Фильтры: Качество/ Время 829
Системы координат/Картографические проекции 830
Определение системы координат/Картографические проекции 830
Сведения о преобразовании 831
Какой подход использовать? 832
Окно Выбора 833
Окно Выбора 833
Окно Связка 834
Окно Связка 834
Минимальные требования к координатам 835
Связка общих точек 837
Подключить и отключить общие точки 838
Удаление общих точек 839
Выбрать класс для общих точек 840
Конфигурация типа трансформации 841
Параметры (Datum/ Map) 842
Трансформация Классическая 2D 844
Page 12

Трансформация Классическая 3D 845
Параметры Классич. 3D 846
Трансформация в один шаг 847
Трансформация в два шага 849
Окно Результаты 851
Окно Результаты 851
Грубые ошибки (выбросы) 852
Сохранить параметры трансформации 853
Изменить тип координат остаточных ошибок 854
Отобразить абсолютные значения остаточных ошибок (Datum / Map) 855
Диаграмма 856
Диаграмма 856
Вывод диаграммы на печать 857
Копировать диаграмму в буфер данных 858
Сохранить диаграмму в виде файла 859
Отчет 860
Окно "Отчет" (Datum/ Map) 860
COGO –
Решение задач 865
COGO –
Настройки графики 868
Программа COGO: Засечки 871
Программа COGO: Расчеты линии 873
Программа COGO: Расчеты дуги 875
Программа COGO: Прямая геодезическая задача 878
Программа COGO: Обратная геодезическая задача 879
Программа COGO: Площади (Деление площади) 881
Отчет COGO 883
Менеджер обмена данными 886
Каталоги 896
Настройки 899
Решение задач 865
Настройки графики (Cogo) 868
Графические параметры: Просмотр 869
Графические настройки: Цвет 870
Менеджер обмена данными 886
Свойства объектов 889
Новая папка 890
Переименование файла или папки 891
Удаление файла или папки 892
Обновление 893
Показать/скрыть объекты 894
Просмотр содержимого файла 895
Каталоги DXM: Мой компьютер 896
Каталоги DXM: PC-карта 897
Каталоги DXM: COM порт 898
Настройки 899
Общие параметры настройки DXM 900
COM параметры 902
Загрузка объектов в прибор 903
Загрузка объектов в прибор 903
Загрузка объектов с прибора 905
Загрузка файлов в прибор 906
Загрузка файлов с прибора 907
Отправить на 908
Передача объектов 909
Передача объектов базы данных 909
Передача объектов прибора 910
Передача объектов: Проекты 911
Page 13

Передача объектов: Проекты 912
Передача объектов: Системы координат 913
Передача объектов: Антенны 914
Передача объектов: Списки кодов 915
Передача объектов: Файлы форматов 916
Передача объектов: Полевые файлы модели геоида 917
Передача объектов: Полевые файлы модели ГГС 918
Передача объектов: Конфигурационные файлы (System 1200) 919
Передача объектов: Road проекты 920
Передача объектов: DTM проекты 921
Загрузка ПО 921
Загрузка ПО 921
Мастер установки ПО 922
Мастер установки ПО - Выбор класса инструмента и COM порт 923
Мастер установки ПО - Выбор типа ПО 923
Установка ПО - прикладное/системное встроенное ПО 926
Установка ПО - Текущий выбор 927
Загрузка ПО: Вид приложений и системы (TPS1000/ 1100, RCS1100) 928
Подготовка полевого проекта 929
Подготовка полевого проекта 929
Конверторы 931
Управление конверторами 933
Подготовка полевого проекта: Графический просмотр 934
Подготовка полевого проекта: Графические установки 936
Подготовка полевого проекта: Создание файла для прибора 937
Редактор соединений 938
Подготовка полевого проекта: Редактор соединений 938
Редактор соединений: выбор слоев 940
Навигация по профилям 941
Соединение общих точек 942
Словарь дорожных терминов 943
Редактор туннельного профиля 946
Подготовка полевого проекта: Редактор туннельного профиля 946
Редактор профиля туннеля: Просмотр и создание профилей туннеля 948
Редактор профиля туннеля: Просмотр и создание слоев 949
Редактор профиля туннеля: Просмотр и создание таблиц вращения профиля 950
Вид 951
Вид... 951
Восстановление панели инструментов 952
Параметры... 953
Параметры: Общие 954
Параметры: Единицы/ Представление 955
Параметры: Параметры по умолчанию 957
Параметры: Интернет 959
Параметры: АвтоКонтур 960
Параметры: PZ-90 961
Управление сообщениями 962
Page 14
ПО LEICA Geo Office (LGO)
Программное обеспечение LEICA Geo Office может быть настроено на поддержку данных GPS, TPS (электронных
тахеометров) и нивелиров (полная инсталляция) или только на поддержку данных электронных тахеометров и
нивелиров (наземная инсталляция).
LEICA Geo Office может быть установлено в качестве вспомогательных программ для поддержки системы 1200 (GPS
и TPS), инструментов серии GPS900, BUILDER, TPS 300, TPS 400, TPS 700, TPS 800 и TPS 1100 и TPS 1000,и
нивелиров DNA и SPRINTER.
Функциональные возможности зависят от типа инсталляции.
Для полной инсталляции LGO доступны следующие компоненты управления:
Проекты
Системы координат
Антенны
Списки кодов
Доступность спутников
Точные эфемериды
Шаблоны отчета
При инсталляции в электронном тахеометре или нивелире доступны следующие компоненты управления:
Проекты
Списки кодов
Шаблоны отчета
При инсталляции в качестве дополнительных Средств - доступны только Проекты, Списки кодов и Доступность
спутников.
Прочесть о номере версии, компоновке программы и авторских правах, предусмотренных правом уведомлении и
лицензионным соглашением на LGO в диалоговом окне
Справка.
меню
О программе..Откройте диалоговое окно через главное
Для получения более подробной информации о версии, операционной системе и опциях приобретенного продукта
LGO нажмите соответствующие кнопки:
Информация о системе..
1
Page 15

Информация о версии...
Доступные опции...
Замечание:
Часть LGO использует программу 7-Zip, защищенную лицензией GNU GPL (www.7-zip.org).
Некоторые части LGO используют библиотеку FreeImage, защищенную лицензией FreeImage Public License
(freeimage.sourceforge.net).
2
Page 16

Платные опции
Часть LGO защищена и может использоваться только если аппаратный ключ подключен к USB порту компьютера и
платные опции активированы на ключе.
Эти опции могут быть активированы через Вашего дилера Leica.
Защищенные опции доступны индивидуально:
GNSS-processing*
Adjustment
Datum and Map*
GIS / CAD Export
RINEX Import*
Level-processing
Surfaces and Volumes
Платные опции позволяют отобразить опции, которые активизированны на Вашем аппаратном ключе.
Дополнительно, отображается тип и номер аппаратного ключа.
Перейдите на страницу Тех.обслуживания
продукта LGO или для продления срока обслуживания, путем регистрации нового лицензионного ключа.
Замечание:
* Эти опции могут быть куплены только для полной инсталляции LGO, включая обработку GPS.
для просмотра даты окончания срока действия техподдержки Вашего
3
Page 17

Техническое обслуживание
LEICA предлагает Техподдержку вашего купленного продукта. По вопросу заказа обслуживания для LEICA Geo
Office свяжитесь с вашим дилером или представителем Leica. Техподдержка дает свободный доступ к новым
версиям LGO, выпущенных после покупки вашей версии.
Техподдержка продукта устанавливается при инсталляции в процессе ввода
периода техподдержки нужно ввести новый лицензионный ключ в закладке Техподдержка диалога Свойств
покупки
техподдержки
Регистрация нового лицензионного ключа:
. Данный диалог показывает Дату выпуска установленной версии LGO. Ниже отображена дата Окончания
. Новые версии LGO, выпущенные после даты окончания техподдержки не могут быть запущены.
Введите лицензионный номер зарегистрированный для вашей копии программы. Лицензионный номер
напечатан на коробке Вашего инсталляционного диска LGO.
Введите новый лицензионный ключ или нажмите кнопку для просмотра файла лицензионных ключей
(*.key).
Нажмите кнопку регистрации для активации новой лицензии техподдержки.
лицензионного ключа. Для продления
4
Page 18

Советы на каждый день
При каждом запуске вашего компьютера вам предлагаются полезные советы по специальной функциональной
взаимосвязи элементов в LGO.
Так называемые "Советы на каждый день"’ отображаются при запуске
программного обеспечения:
Выберите из главного меню Справка, а затем Советы...
Щелкнув на кнопку Далее, вы можете просмотреть все советы по выполняемым функциям.
5
Page 19

6
Page 20
GPS Курс I : Реальное Время
GPS Курс I : Реальное Время
Этот краткий курс является последовательным наставлением, в котором вы научитесь работать с данными GPS в
реальном времени. С данными реального времени обработка и применение системы координат уже была сделана в
поле. Наставление проведет вас от импорта необработанных данных через контроль полевых результатов до
экспорта окончательных локальных плоских координат.
Чтобы выполнить это упражнение, не нужно подсоединять ключ защиты вашего программного обеспечения.
Упражнение включает следующий сценарий:
Аппаратурой System 1200 в реальном времени было измерено несколько точек. Исходная станция была
установлена на точке 315. В поле использовался список кодов. Объектам измерений были присвоены коды Точки,
Линии и Области.
Местная система координат, которая использовалась в поле, определена следующим образом:
проекция UTM, зона 32, северное полушарие,
эллипсоид Бесселя,
преобразование классическое 3D
Начинаем этот Быстрый Курс с
Урока 1: Импорт данных реального времени.
7
Page 21
GPS Курс I - Урок 1: Импорт данных реального времени
В этом уроке вы будете учиться импортировать необработанные GPS данные и одновременно создавать новый
проект.
Запустите программу LGO и выберите Файл измерений из опции Импорт строки меню, либо Импорт
файла измерений из Панели инструментов или Линейки списка Средства.
Открывается диалоговое окно Импорт измерений . В этом диалоге:
Выберете в Файлах типа опцию Измер. System 1200/GPS 900.
Просмотрите в окне Смотреть директорию, которая содержит образцовые данные Реального Времени. По
умолчанию образцовые данные будут инсталлированы в папке
Users\Documents\Lgo\Sample data\Import\GPS Real Time\.
Выберете задание Sample RT 1200-0100 и щелкните на кнопку Импорт.
Откроется диалоговое окно Добавить данные в проект. В этом диалоговом окне создайте новый проект для
импорта необработанных данных, для чего:
В закладке Общие щелкните правой клавишей мыши в древовидном меню на Проекты и выберете
Создать.
Пока диалоговое окно Добавить данные в проект остается открытым на заднем плане, войдите в диалоговое окно
Новый Проект.
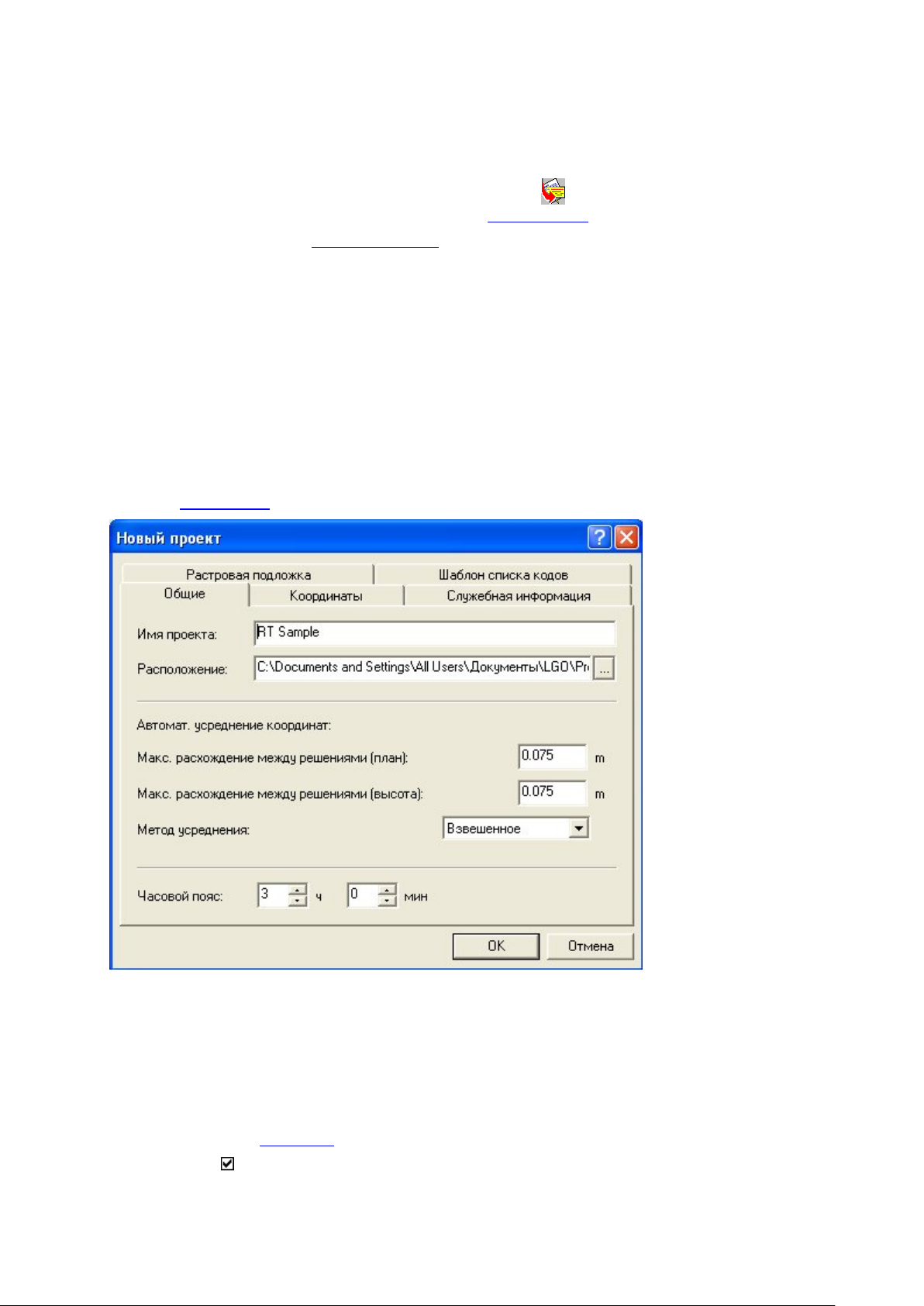
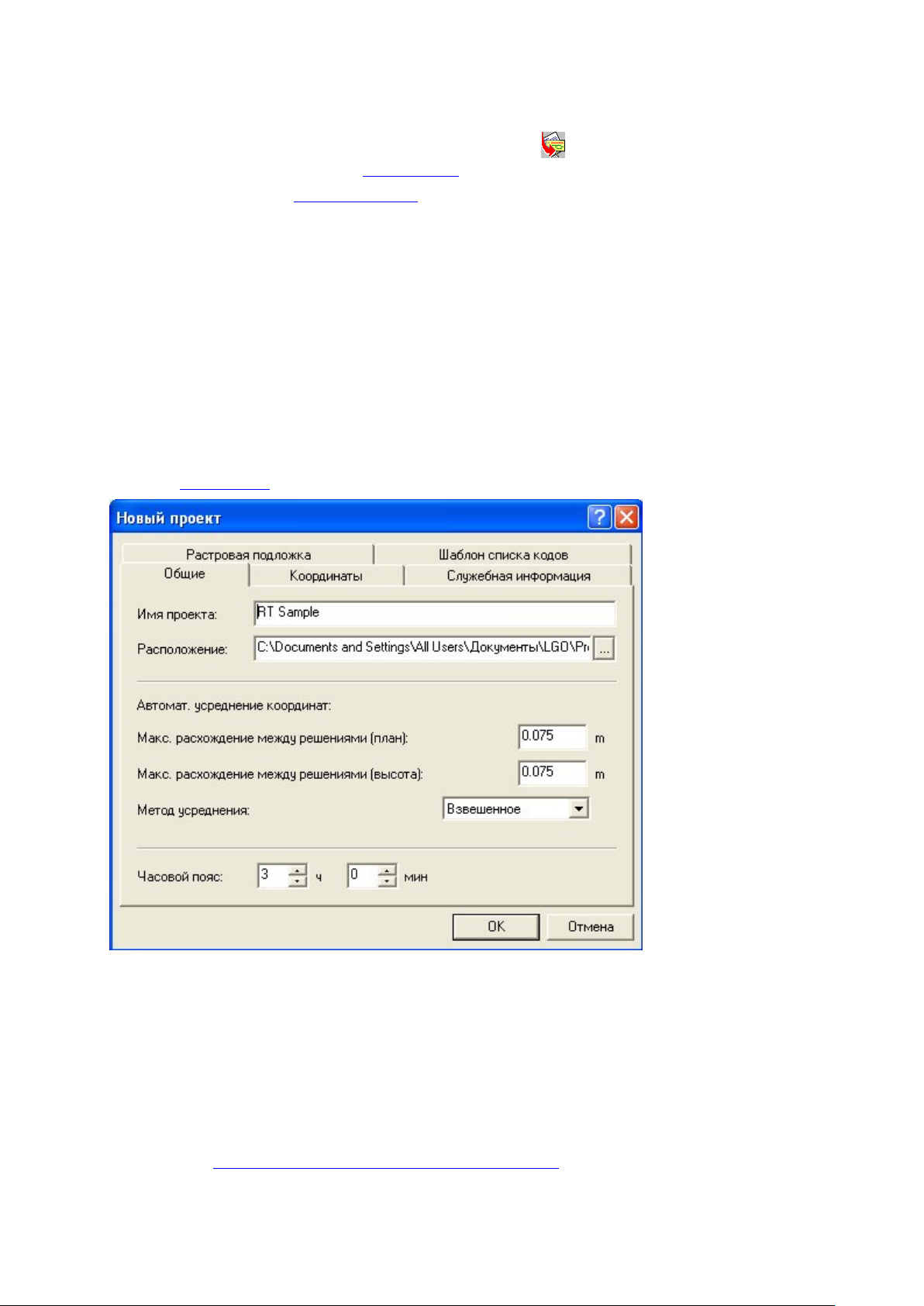
В диалоге Новый проект:
C:\Documents and Settings\All
В окне Расположение просмотрите, где бы вы хотели хранить Проект. По умолчанию проекты хранятся в
C:\Documents and Settings\All Users\Documents\LGO\Projects\.
Введите Имя Проекта, например, RT Sample. К указанному пути автоматически будет добавлена
директория с тем же самым именем. В этой директории будут храниться файлы проекта.
Щелкните OK. Будет создан новый проект, а диалоговое окно Новый Проект будет закрыто. Вы
возвращаетесь в диалог
В диалоге Добавить данные в проект новый проект выбирается автоматически.
Щелкните на закладку Параметры и поставьте:
Галочку в опции Импорт сист. коорд. и компоненты, которые использовались в поле Для Управления
Системой Координат LGO.
А также для Автоматического подключения системы координат к выбранному проекту.
Добавить данные в проект.
8
Page 22
Щелкните на кнопку Полевой журнал, чтобы создать Отчет по Полевому журналу.
Щелкните на закладку Общее, чтобы вернуться на страницу диалога Добавить данные в проект:
Щелкните кнопку Добавить и затем на Закрыть. Необработанные данные будут присвоены новому
проекту, а окно
Продолжайте с Курс
Больше информации см. также:
Как импортировать необработанные GPS данные
Создать новый проект
Проект откроется автоматически.
I по GPS - Урок 2: Просмотр и редактирование данных реального времени .
9
Page 23

GPS Курс I - Урок 2: Просмотр и редактирование данных реального
времени
В этом уроке вы научитесь исследовать данные Реального Времени в компоненте LGO Просм/Редакт. Вы сможете
проконтролировать качество ваших координат, а также информацию по тематическим кодам, прежде чем
продолжить экспорт данных.
Щелкните на закладку Просм/Редакт, чтобы открыть окно проекта Просм/Редакт.
Просмотр производится в локальной плоской системе координат и масштабируется в полной мере, включая
опорную станцию.
Для изменения масштаба вблизи нужных точек используйте кнопку линейки инструментов (или колесико
мыши).
Векторы базовых линий GPS (красные линии) высвечиваются по умолчанию. Чтобы изменить этот
параметр:
Щелкните правой кнопкой мыши на задний фон и выберите Настройки отображения ....
В закладке Вид:
В разделе Общее выберите Сетка.
В разделе Данные отмените GPS измерения.
Теперь у вас есть ясный вид того, как производились измерения.
Образцовые данные реального времени состоят из двух разных классов точек (измеренные
осредненные
либо более низких классов точек, таких как, например, Навигационные). Объектам съемки были присвоены коды
Точек, а так же Линий и Областей (Площадей).
Вначале посмотрим на качество
Щелкните правой кнопкой на Point 001 и выберите Свойства.
; поскольку точки в режиме Реального Времени уже были обработаны в поле, вы не найдете каких-
осредненной точки Point 001:
, а также
Щелкните на закладку Средн., чтобы увидеть два решения для Point 001 и их расхождение со взвешенным
средним.
Чтобы выйти из панели, щелкните на OK или на Отмена.
Координаты точек, полученные осреднением, даются в сводке по проекту, их можно увидеть в Отчете о средних
координатах и отклонениях.
Чтобы открыть отчет, в главном меню Средства выберете Средние коорд. и отклон.
Теперь проконтролируем информацию о тематических кодах на двух разных Областных объектах.
В поле со списком Выбор точек Панели инструментов выберете точку Point 184, центрируйте обзор этой
точки через кнопку
пока не увидите следующее изображение
Прокр. до выбр. точки и изменяйте увеличение, используя кнопку до тех пор,
:
10
Page 24
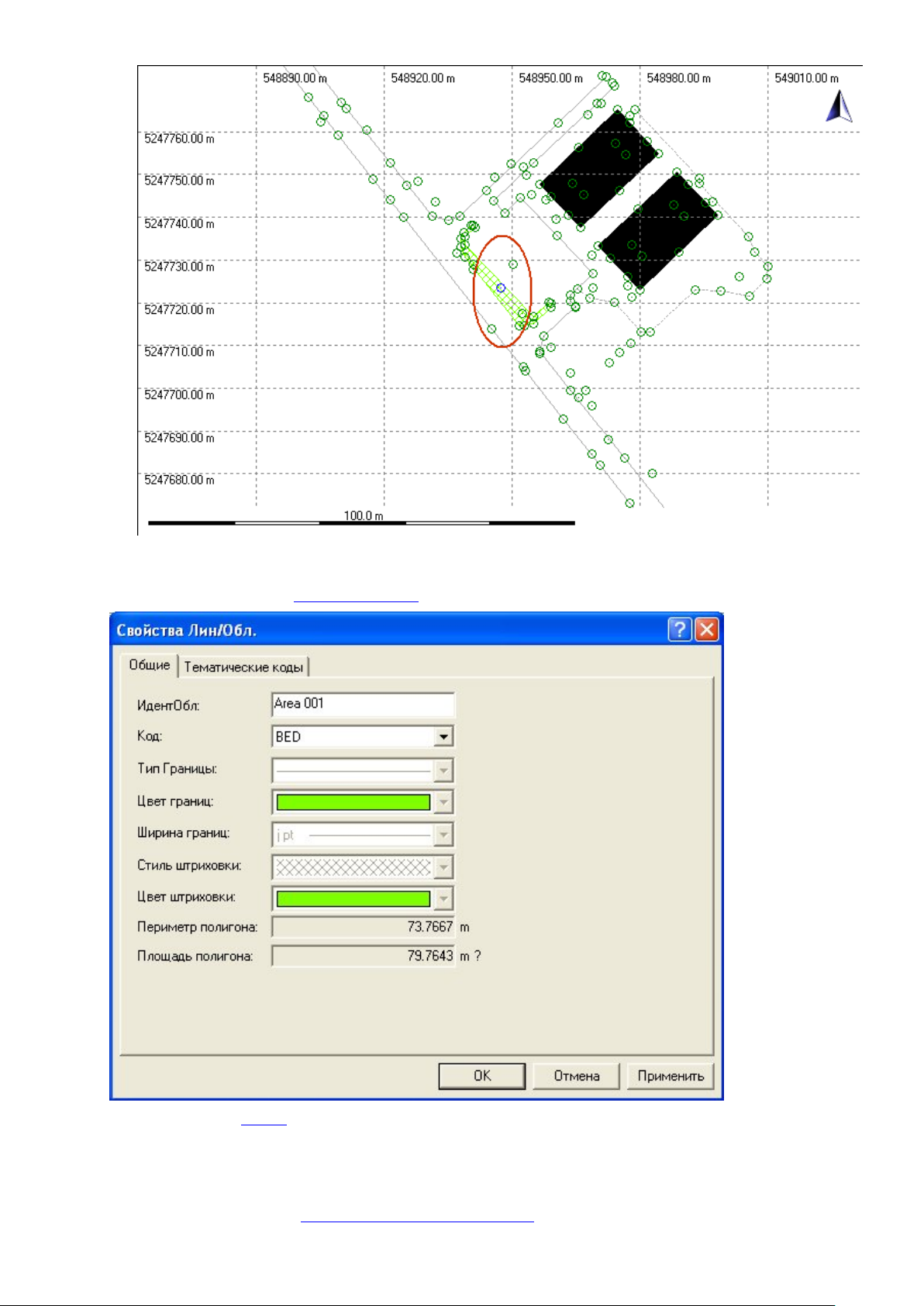
Чтобы увидеть характеристики обведенной Области, щелкните правой клавишей на одну из ее границ и
выберите в контекстном меню Свойства....
Откроется диалоговое окно Свойства Лин/Обл.
В закладке Общие просматривается ИдентОбл., ее Код, Тип Границы, Цвет границ, Ширина границ,
Стиль Штриховки, Цвет штриховки, Периметр Полигона и Площадь Полигона.
Чтобы получить возможность для изменения типа оформления границы или штриховки этой области, вы
можете установить Код на [ничего] в закладке Общие: тогда поля списка Тип, Цвет и Толщина Границы и
Стиль и Цвет Штриховки становятся доступными для редактирования. Либо вы можете изменить
определение кода в списке кодов по специфике проекта
.
11
Page 25
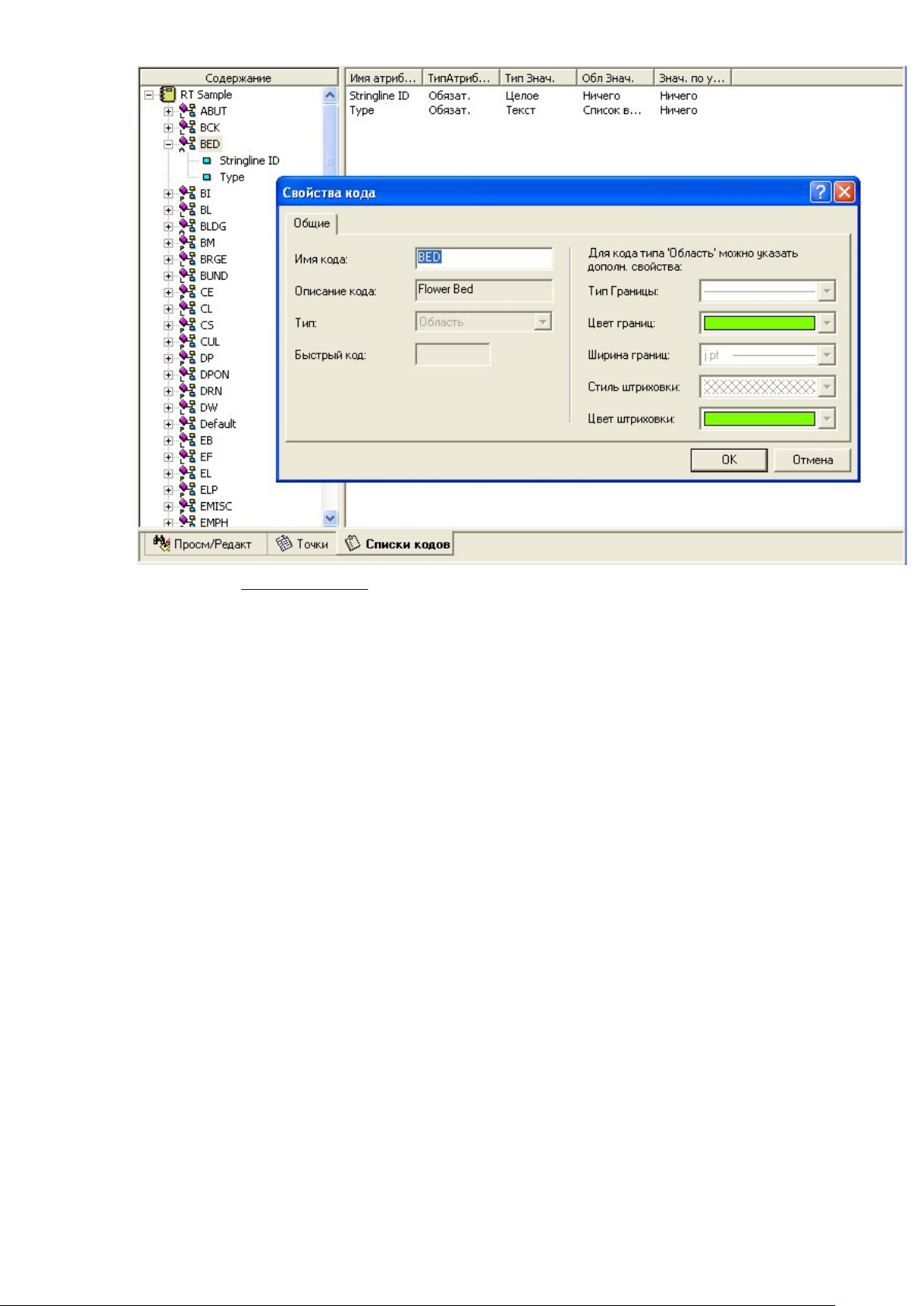
В закладке Тематические коды просмотрите детали Кодов, как они определены в списке кодов по
специфике проекта.
Выходите из диалогового окна командами OK или Отмена.
Давайте теперь изменим оформление одного из черных квадратов:
Щелкните правой клавишей на границу черного квадрата и в контекстном меню выберите Свойства.
В отличие от клумбы, эта область была измерена в поле без кода. Поэтому вы можете непосредственно
редактировать
В закладке Общие диалогового окна Свойства Лин / Обл. увидите, что Код для этой области [ничего].
Измените
Свойства Лин / Обл.
Цвет Границы и Цвет Штриховки и выберите другой Стиль Штриховки.
12
Page 26

Результат выглядит как этот:
Продолжайте Курс I по GPS - Урок 3: Экспорт координат в ASCII файл пользователя.
13
Page 27
GPS Курс I - Урок 3: Экспорт координат в пользовательском текстовом
ASCII формате
В этом уроке вы узнаете, как экспортировать координаты в ASCII файл потребителя. В экспорте В ASCII формат для
вывода данных используется заранее определенный файл с шаблонным форматом (*.frt). Файлы в формате
шаблона можно создавать, используя программу
Для выполнения этого упражнения на вашем компьютере вместе с LGO автоматически инсталлируется образец
файла с шаблонным форматом (sample.frt). Если вы хотите создать свой собственный файл с шаблоном формата,
пожалуйста, обращайтесь к
разделе
В диалоговом окне Эксп. ASCII данных:
На страничке
Помощи в реальном времени (Online Tutorial of the Format Manager Online Help).
При открытом проекте в разделе Экспорт главного меню, или на панели Инструментов, или на Панели
списка Средства выберите опцию Экспорт в ASCII формат .
в опции Тип файла выберите Польз ASCII файл (*.cst)
Введите Имя файла, например ,RT Sample1, без расширения.
Щелкните на опцию Настройки, чтобы изменить настройки и выбрать файл с шаблоном формата.
Классы координат в диалоговом окне ПользУстЭксп. ASCIIфайла:
Измените Класс координат на Основн. При этом будут экспортироваться тройки координат самого
высокого класса.
Online Tutorial (Наставлению в реальном времени) в Управление форматами в
Leica Geosystems Format Manager.
Для выбора файла с шаблоном формата Sample.frt используйте браузер на страничке Общие. По
умолчанию файл будет инсталлирован в папке C:\Documents and Settings\All Users\Documents\Lgo\Sample
data\Format files\.
На страничке Система координат в диалоговом окне ПользУстЭксп. ASCIIфайла :
Убедитесь в том, что выбрана координатная система Sample RT 1200.
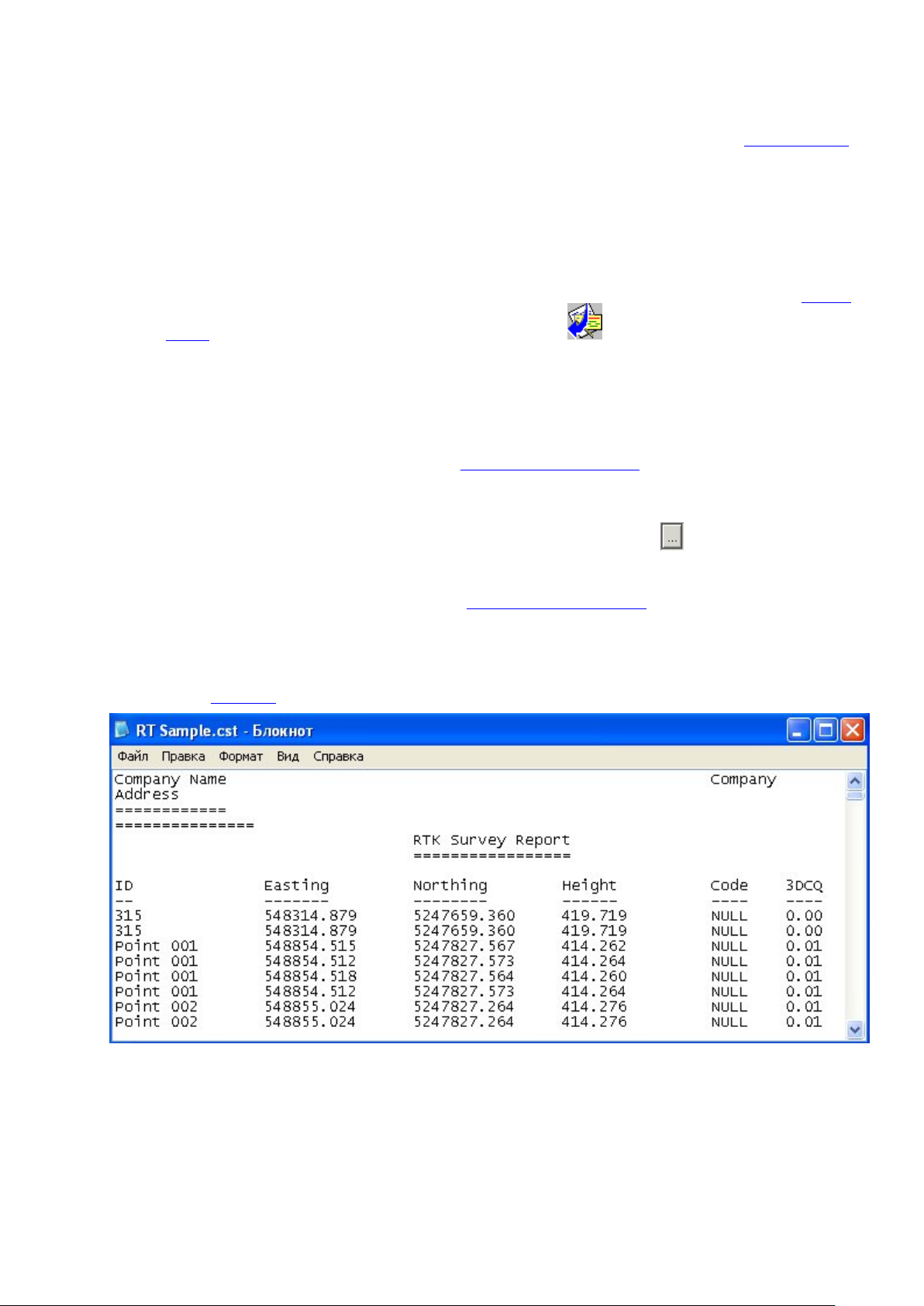
Щелкните на OK, чтобы закрыть страницу с характеристиками Настроек. Вернитесь к диалогу Эксп. ASCII
данных
Чтобы увидеть результат
и щелкните на Экспорт, чтобы записать ASCII файл на жесткий диск.
, откройте ASCII файл в текстовом редакторе.
Поздравляем! Вы успешно прошли этот Быстрый Курс в LGO.
Замечание:
В Быстром Курсе III объясняется, как экспортировать проект в формате DXF.
Чтобы узнать больше о других предопределенных форматах для экспорта обращайтесь к:
14
Page 28

ASCII Экспорт
GIS / CAD Экспорт
15
Page 29
GPS Курс II : Пост-обработка
GPS Курс II : Пост-обработка
Этот Быстрый Курс является последовательным наставлением, в котором вы научитесь делать пост-обработку
данных GPS. Это наставление проведет вас от импорта необработанных данных до экспорта окончательных
местных плоских координат.
Для выполнения этого упражнения должен быть вставлен электронный ключ защиты, две опции
Исходные геодезические даты и Карты должны активироваться по ключу.
Упражнение включает следующий сценарий:
Были проведены измерения в режиме быстрой статики. Они включают точки 309, 311, 315, 401 и 402. Локальные
координаты точек 315, 402 и 309 известны. Данные необходимо обработать и получить локальные координаты точек
311 и 401.
Начинаем этот Быстрый Курс с
GPS Курса II - Урок 1: Импорт измерений.
- GPS-обработка и
16
Page 30
GPS Курс II - Урок 1: Импорт измерений
В этом уроке вы узнаете, как импортировать GPS измерения и одновременно создавать новый проект.
Запустите программу LGO и выберите Файл измерений либо из опции Импорт главного меню, или из
Панели инструментов, или из Панели списка
Откроется диалоговое окно Импорт измерений. В этом диалоге:
Выберите Измер. System 1200/GPS 900 в опции Файлы типа.
Просмотрите каталог, который содержит образцовые данные, через окно Смотреть. По умолчанию они
будут инсталлированы в папке
.
Static\
Проконтролируйте, что Включены подкаталоги (поставлена галочка). Тогда за один запуск будут
импортированы все измерения System1200, содержащиеся в двух подкаталогах: Data_1 и Data_2.
Щелкните на кнопку Импорт.
Откроется диалоговое окно Добавить данные в проект. Чтобы импортировать измерения, создайте новый проект:
В закладке Общие щелкните правой клавишей мыши в древовидном списке на Проекты и выберите из
контекстного меню
Пока окно Добавить данные в проект остается открытым на заднем плане, вы входите в диалоговое окно Новый
проект
В диалоге Новый проект:
.
Создать.
C:\Documents and Settings\All Users\Documents\LGO\Sample data\Import\GPS
.
В окне Расположение просмотрите, где вы хотите хранить проект. По умолчанию проекты хранятся в папке
C:\Documents and Settings\All Users\Documents\LGO\Projects\.
Введите Имя проекта, например, PP Sample. Директория с таким же именем будет автоматически
добавлена к пути. В этой директории будут храниться файлы проекта.
Щелкните на OK. Новый проект будет создан, диалоговое окно Новый Проект будет закрыто. Вы
возвращаетесь в диалог Добавить данные в проект.
В диалоге Добавить данные в проект новый проект открывается автоматически.
Щелкните на Добавить и затем на Закрыть. Измеренные данные будут присвоены новому проекту, и
автоматически открывается окно
Продолжайте с Курсом по GPS II - Урок 2: Обработка базовых линий.
Больше информации см. также:
Проект.
17
Page 31

Как импортировать данные GPS измерений
Создать новый Проект
18
Page 32

GPS Курс II - Урок 2: Обработка Базовых Линий
В этом уроке вы научитесь обрабатывать и сохранять базовые линии.
В окне
В опции Просм... вы видите графическое представление каждой точки. Сразу после импорта измерений их
наивысший класс есть
Теперь переключитесь на вид GPS-обработка и выберите базовые линии для вычислений.
Пожалуйста, обратите внимание на то, что LGO предлагает два режима обработки:
этом упражнении проведем обработку сети вручную, шаг за шагом.
Проект вы можете переключаться между различными Видами окна, чтобы выводить содержание проекта.
Навигационный .
Ручной и Автоматический. В
Щелкните на закладку
интервалах наблюдений.
Щелкните на Режим выбора: Исходн. на Панели инструментов. Курсор показывает Исходный.
Щелкните на горизонтальную полосу точки 402, чтобы выбрать ее как Исходную.
Щелкните на Выбор Режима: Опред. на Панели инструментов. Курсор показывает Определяемую.
Щелкните на горизонтальные полосы в начале на точки 315, 401 и 309, чтобы выбрать их интервалы
наблюдений как Определяемые.
Щелкните на Обработка на Панели инструментов.
Иллюстрация:
GPS - обраб. внизу окна Проект. Вид GPS-... дает графическое представление обо всех
Когда обработка выполнена, дисплей автоматически переключается на вид Результ... , позволяя вам проверять и
сохранять базовые линии. Определяемые точки всех базовых линий, для которых были разрешены многозначности,
выбираются автоматически.
Для сохранения базовых линий нажмите на Запомнить на Панели инструментов или щелкните правой
клавишей мыши на вид и выберите в контекстном меню
графически видеть сохраненные базовые линии.
Чтобы закончить обработку сети, вы должны сделать еще три запуска обработки:
Вернитесь на вид GPS-обработка, щелкните правой клавишей мыши на фон и выберите в контекстном
меню Отменить весь выбор. Чтобы выбрать, обработать и сохранить оставшиеся базовые линии, вы
должны действовать так же, как в первом случае: для запуска второй обработки выберите точку 309 как
Исходную, а 311 и 315 как Определяемые; для третьего запуска выберите точку 315 как Исходную, а точки
311 и 401 как Определяемые; для четвертого запуска выберите точку 401 как опорную, а 309 - как
Определяемую.
Чтобы обработать сеть в
Сразу после импорта данных выберите в опции GPS-обраб. главного меню Автоматический режим
обработки. В строке Режим обработки поставте галочку против Авто. режим. Выберите все базовые
линии и обработайте. Детали см. в: Режимы Обработки (GPS)
Вы можете увидеть всю сеть, снова щелкнув на закладку Просм.... Классы Точек теперь изменились на Исходные
или Осредненные . Для точек, на которых есть больше чем одно измерение, автоматически вычисляется
взвешенное среднее. Чтобы проверить, как решения согласуются, щелкните правой клавишей мыши на такую точку,
выберите Свойства.. и в диалоге Свойства точки щелкните на закладку Средн. знач..
автоматическом режиме, поступают следующим образом:
Запомнить. В закладке Просм... вы можете
19
Page 33

Чтобы проверить свои результаты, можно также вычислить Невязки GPS Полигонов.
Теперь вы закончили GPS обработку. Продолжайте с Курсом по GPS II -Урок 3: Импорт ASCII Файла.
Больше информации также см.:
Просм...
Классы и Подклассы Точек (Координат)
Обзор GPS Обработки
Выбор интервала для вычислений
Обработка GPS данных
Обзор Результатов
Сохранение Результатов GPS-Обработки
20
Page 34

GPS Курс II - Урок 3: Импорт ASCII файла
В этом уроке вы узнаете, как импортировать в Проект местные опорные точки определенного пользователем ASCII
файла.
Выберите в опции Импорт главного меню ASCII файлы , или Импорт ASCII файла в Панели
инструментов или Панели списка
Откроется диалоговое окно Импорт ASCII Данных
Выберите Текст. файлы в разделе Файлы типа.
Просмотрите директорию, которая содержит образцы ASCII данных через окно Смотреть. По умолчанию
образцы данных будут инсталлированы на
data\Import\GPS Static\
Выберите файл Local.txt.
В окне Системы координат выберите Местная а в окне Тип высот выберите Нормальн.
Щелкните на кнопку Импорт.
Мастер Импорта ASCII файла позволяет вам определить формат файла. В этом упражнении файл, который
должен импортироваться, является простым ASCII файлом с локальными координатами трех точек, разделенных
пробелами.
На 1-ом шаге из 4-х выберите формат Разделит. и продолжайте командой Далее.
На 2-ом шаге выберите Пробел в качестве разделителя столбцов и дайте команду Далее.
На 3-ем шаге убедитесь, что Тип координат установлен на Мест. Плоск. Затем щелкните правой клавишей
мыши на первый столбец и выберите
ВостКоор, СевКоор и Норм. H. Нажмите Далее.
.
Средства.
. В этом диалоге:
C:\Documents and Settings\All Users\Documents\LGO\Sample
Идент Тчк. Тем же самым образом присвойте следующим столбцам
На 4-ом шаге вы можете сохранить маску для импорта как шаблон для следующего раза, когда вы
пожелаете импортировать ASCII файл. Нажмите
проект
В диалоге Добавить данные в проект Создайте новый проект, чтобы импортировать ASCII данные:
В закладке Общие правой клавишей мыши щелкните на Проекты и в выпадающем меню выберите
Создать.
Введите Имя Проекта (например, PP Sample Local) и подтвердите командой OK.
Щелкните на Добавить и затем на Закрыть. Автоматически открывается Проект и в нем выводятся на
экран точки 315, 309 и 402 в местной системе координат.
Теперь местные контрольные точки хранятся в проекте. Вы можете закрыть проект и продолжить с Курсом по GPS II
- Урок 4: Вычисление Параметров Трансформирования.
Больше информации также см.:
Импорт текстового файла
Мастер Импорта Определенного Пользователем ASCII Файла
Создать новый Проект
.
Готово, чтобы перейти к диалогу Добавить данные в
21
Page 35

GPS Курс II - Урок 4: Вычисление Параметров Трансформирования
В этом уроке вы узнаете, как использовать средство Трансформ. Координат для вычисления параметров
трансформирования. Простое Onestep (Одношаговое
координат в системе WGS84 Проекта
Запустите средство Трансформ. Координат либо из опции Средства главного меню или из Панели
списка Средства.
В верхней части Окна Выбора выберите Проект PP Sample.
В нижней части Окна Выбора выберите Проект PP Sample local.
Чтобы продолжить, щелкните на закладку Match (Согласовать) .
В окне Match view щелкните правой клавишей мыши на фон и выберите Configuration.... В окне
Transformation type (Тип трансформирования) выберите Onestep. Установите Height mode (Тип высот) на
Orthometric и подтвердите командой OK.
Щелкните правой клавишей мыши на фон и выберите Auto Match, чтобы автоматически согласовать общие
точки в соответствии с идентификаторами идентичных точек Point IDs. Для вычислений будут
автоматически согласованы три точки.
Чтобы увидеть результаты трансформирования, щелкните на закладку Results (Результаты).
Дополнительно вы можете вывести на экран Chart (График) или Report (Отчет), щелкнув на
соответствующие закладки.
Чтобы сохранить параметры трансформирования, щелкните правой клавишей мыши на фон или на вид
Results (Результаты) и выберите в контекстном меню
Имя для нового набора параметров трансформирования. Дополнительно проконтролируйте два поля
диалогового окна, чтобы автоматически создать новую систему координат, используя новые параметры
трансформирования, и автоматически присоединить эту систему координат к проекту PP Sample.
В вашем проекте PP Sample вы теперь можете вывести координаты либо в системе WGS84, либо в Местной
системе. Откройте снова проект (или переключите окно проекта, если он еще открыт), щелкните на закладку Точки
и переключайте между WGS84 Геодезическими и Местными Плоскими системами, используя кнопки
Формат Координат на Панели инструментов.
Продолжайте с Курсом по GPS II: Урок 5: Экспорт координат в определенный пользователем ASCII файл
PP Sample в местные координаты, как они даны в Проекте PP Sample Local.
) трансформирование будет производиться для перевода
Сохранить как....В последующем диалоге введите
.
Больше информации см. также:
Системы координат/Карты
Вид Выбора
Вид Согласования
Результаты (Системы координат/Карты)
Сохранение параметров трансформирования
22
Page 36

GPS Курс II - Урок 5: Экспорт координат в определенный пользователем
ASCII файл
В этом уроке вы узнаете, как экспортировать координаты в определенный пользователем ASCII файл.
Пока проект еще открыт, выберите Экспорт ASCII данных либо из опции Экспорт главного меню, либо
из Панели инструментов, либо из Панели списка
Откроется диалоговое окно Экспорт ASCII данных. В этом диалоге:
В поле Тип файла выберите ТекстФайл [разд. Tab] (*.txt).
Введите имя файла.
Щелкните на поле Настройки, чтобы изменить установки для экспорта.
Откроется диалоговое окно Польз. настр. Экспорта.
Средства.
На странице Общие измените Тип коорд. на Местная и Местн. плоск. Установите тип высот Нормальн.
Измените Класс координат на Основн. Будут экспортироваться координаты точек самого высокого класса.
Щелкните Закладку Точка, чтобы выбрать пункты для экспорта в том порядке, который вам нужен.
Щелкните дважды на
ИдентТчк, затем на ВостКоор, затем на СевКоор, затем на Норм. H.
23
Page 37

Щелкните на OK, чтобы закрыть страницу соответствующих настроек и, наконец, на Экспорт, чтобы
записать файл. Теперь вы можете проверить ASCII файл, который вы записали с помощью текстового
редактора.
Поздравляем! Вы успешно выполнили этот Быстрый Курс в LGO.
Больше информации см. также:
Экспорт определенного пользователем ASCII файла
Настройки для определенного пользователем Экспорта
Чтобы больше узнать о заранее определенных форматах для Экспорта, отсылаем к:
ASCII Экспорт
GIS / CAD Экспорт
24
Page 38

GPS Курс III : GIS/ CAD Экспорт
GPS Курс III : GIS/ CAD Экспорт
Этот Быстрый Курс является наставлением, в котором вы шаг за шагом узнаете, как экспортировать данные из LGO
в GIS или CAD Системы, используя формат DXF.
Чтобы выполнить упражнение электронный ключ защиты вашего программного обеспечения должен быть
подсоединен, а опция
Для GIS/CAD Экспорта требуется файл DXF-header. Файл DXF-header можно создать в вашем CAD пакете, он
содержит определения всех блоков и атрибутов, определения слоев, стилей линий, пределы рисовки и другие
настройки, необходимые вашей GIS/CAD программе для конвертирования DXF файла в файл изображения. Файл
DXF header должен базироваться на файле GIS/CAD шаблона, который содержит все определения, с которыми вы
работаете. За информацией о том, как создавать файл DXF
GIS/CAD программного обеспечения.
Для выполнения данного упражнения файл шаблона DXF-header уже скопирован на ваш жесткий диск при
инсталляции LGO.
Прежде чем стартовать этот Быстрый Курс, убедитесь, что вы уже импортировали образцы данных Реального
Времени в LGO, как это объяснялось в Курсе I по GPS
координаты точек в вашем проекте должны быть конвертированы в местные плоские координаты, то системы
координат должна быть прикреплена к проекту.
Начните этот Быстрый Курс с Курс III по GPS
GIS/ CAD Экспорта должна быть активирована на ключе.
-header, мы отсылаем к документации вашего пакета
- Реальное Время. Поскольку для GIS/ CAD Экспорта
-Урок 1: Создание Таблицы Поиска.
25
Page 39

GPS Курс III - Урок 1: Создание Таблицы Поиска
В этом уроке вы узнаете, как создавать Таблицу Поиска.
В Таблице Поиска вы определяете, как преобразовать данные съемки в соответствующие символы в пакете CAD.
Использованные в поле тематические коды
Блок может содержать графический символ и атрибуты, которые определяют точку. Использованные в поле Линии и
Области также должны быть согласованы со стилем линии, цветом и толщиной, как это определено в DXF
заголовке файла. Каждый тематический код для точек, линий и областей, использованный в полевой системе,
может быть согласован с требуемым символом в вашем GIS/ CAD пакете.
Откройте Проект RT Sample и щелкните на закладку Точки, чтобы вывести на экран вид Точки.
Выведите на экран сетку местных координат, используя в Панели инструментов Формат Координат:
Выберите Экспорт в GIS/CAD формат либо из опции Экспорт главного меню, либо из Панели
инструментов, либо из Панели списка
Открывается диалоговое окно Экспорт GIS/CAD данных
В поле Тип файла выберите Файлы AutoCAD (*.dxf; *.dwg).
Щелкните правой клавишей мыши на поле Таблица поиска и выберите Создать, чтобы создать новую
Таблицу Поиска. Как только Таблица поиска создана, она доступна для будущего применения.
Открывается диалоговое окно Настройки поиска в код. таблицах. В этом диалоге:
В закладке Общие введите Имя Таблицы Поиска, например, Sample DXF.
должны совпадать с блоками, определенными в DXF- заголовке файла.
-
Средства.
. В этом диалоге:
На странице AutoCAD Параметры выберите файл DXF-header для использования в GIS/ CAD Экспорте.
Для выбора файла Sample_Header.dxf используйте браузер . По умолчанию образец шаблона будет
инсталлирован на C:\Documents and Settings\All Users\Documents\LGO\Sample data\Export GISCAD.
Щелкните на OK, чтобы подтвердить настройки новой Таблицы Поиска.
Вернитесь в диалог
Чтобы продолжить, щелкните на Поиск.
Открывается диалоговое окно Определ. табл. поиска кодов:
В левом подокне представлен список использованных в поле кодов в виде дерева, которое можно
расширять.
Правое подокно разделено на две части.
В верхней части расположены друг против друга два типа Кодирования, которые должны быть согласованы,
то есть
левой части дерева и он не может редактироваться. Соответствующий блок AutoCAD для линии или
области, как он определен в файле DXF-header, выбирается в правой стороне.
Можно согласовывать Leica коды для Линий и Областей со стилями AutoCAD линий, по толщине и цвету.
Экспорт GIS/CAD Данных, вы увидите, что теперь кнопка Поиск активна.
Leica Кодирование и AutoCAD Кодирование. Код Leica, который согласуется, выбирается из
26
Page 40

Можно согласовывать Leica коды для Точек с AutoCAD блоками. В нижней части окна диалога можно
согласовывать Атрибуты Leica Кодов и AutoCad Блока.
Пожалуйста, обратите внимание, если Leica Кодирование и AutoCAD Кодирование используют
то Группы Кодов, Коды и Атрибуты согласовываются
согласовывать вручную Группы Кодов и Коды Leica со Слоями и Блоками AutoCAD, просмотрите на рабочий
пример, данный ниже. Если атрибуты не используют идентичные имена, то они также должны согласовываться
вручную в нижней части диалога.
Рабочий Пример (Точки):
автоматически, как в данном примере. Чтобы научиться
Идентичные имена,
Чтобы вручную создать Таблицу Поиска для Кодов Точек, вы должны произвести следующие действия. Вначале
посмотрите на
На расположенном слева дереве кодов раскрываются все Группы Кодов.
На раскрытом дереве кодов выберите Код TREE (Дерево) из Группы Кодов Vegetation (Растительность).
В поле AutoCAD Кодирование согласуйте поля AutoCAD Слой и Блок с Leica Код. группа и Код: в полях
Теперь вы умеете успешно согласовывать
Тем же образом вы можете продолжить, чтобы согласовать остальные Leica Коды Точек с
Рабочий пример (Линии):
Рабочий Пример:
Посмотрите, что справа в поле Leica Кодирование соответствующая информация о кодировании
выводится только для чтения
списка выберите Vegetation и TREE.
соответствующими AutoCAD блоками.
.
Leica Код TREE с AutoCAD Блоком TREE.
27
Page 41

Для продолжения создания Таблицы Поиска для Кодов Линий взгляните на Рабочий Пример и сделайте
следующее:
В расширяющемся дереве кодов выберите Код FENC (Ограда) из Группы Кодов Boundary (Граница).
Смотрите, что в поле Leica Кодирование справа соответствующая информация выводится только для
чтения.
Для согласования кодов Leica Линия и Область с соответствующими стилями AutoCAD линия и область
выберите AutoCAD стиль линии, толщина и цвет.
Продолжайте согласовывать остальные Коды Leica Линий и Областей с соответствующими AutoCAD
блоками. Когда
Теперь вы все успешно определили в Таблице Поиска Sample DXF. Чтобы узнать, как окончательно экспортировать
DXF файл, продолжайте с Курсом III по GPS - Урок 2: Экспорт DXF файла.
все Коды будут согласованы, подтвердите командой OK.
28
Page 42

GPS Курс III - Урок 2: Экспорт DXF файла
В этом уроке вы узнаете, как создавать GIS/ CAD файл в DXF-формате, основанный на Таблице Поиска,
которую вы определили в предыдущем уроке.
Вернитесь в диалоговое окно Экспорт Файла
Щелкните на кнопку Настройки.
Откроется окно Настройки Экспорта.
В закладке Общие этого диалога:
Измените Класс Коорд. на Основн., чтобы всегда экспортировать тройки координат наивысшего
класса.
Убедитесь, что Тип Коорд. установлен на Местные и Плоские а Система высот установлена
Нормальн..
В закладке Система координат:
Убедитесь, что выбрана Система Координат Sample RT 1200.
В закладке AutoCAD:
Убедитесь, что установлен Формат DXF. DXF является ASCII форматом, который поддерживается
большинством GIS/ CAD пакетов.
Покиньте диалог Настройки Экспорта, дав команду OK.
Возвращаетесь в диалоговое окно Экспорт GIS/CAD данных:
В поле Сохран. в посмотрите директорию, в которой вы хотите сохранить AutoCAD файл.
Введите Имя файла, например, Sample. Расширение *.DXF будет добавлено автоматически.
Наконец, чтобы экспортировать файл, щелкните на поле Сохранить.
Будет создан GIS/ CAD файл в DXF формате.
следующим образом:
Поздравляем! Вы успешно прошли этот Быстрый Курс LGO.
Теперь вы можете импортировать файл в ваш GIS/ CAD пакет. В AutoCAD он должен выглядеть следующим
образом
:
29
Page 43

30
Page 44

TPS Курс I: Привязка растровой подложки
TPS Курс I: Привязка растровой подложки
Данный обзорный курс является учебным руководством (наставлением), который научит вас, как привязывать
растровую подложку с помощью программы LGO
Вы научитесь сначала регистрировать данное изображение, идентифицировать и связывать общие точки и,
наконец, привязать изображение к местной системе координат.
Пространственно привязанное изображение будет использоваться в качестве растровой подложки в
последующих обзорных лекциях. Вы поймете, как важно научиться идентифицировать существующие и вновь
измеренные точки на растровой подложке. Данные, полученные тахеометром и используемые в примерах, в
большинстве своем являются предварительными, и должны быть сориентированы так, чтобы стать
пригодными для работы. Будет показано, что после обновления данных все измеренные точки будут
идеально размещаться на растровой подложке.
Map Referencing (Привязка карты).
Перейдем к следующему уроку: TPS Курс I
общих точек.
- Урок 1: Регистрация растровой подложки и идентификация
31
Page 45

TPS Курс I - Урок 1: Регистрация растровой подложки и идентификация
общих точек
Цели данного урока:
Регистрация растрового изображения Leica Arial-map.
Идентификация общих точек на растре.
Начните выполнение задания с активизации инструмента LGO
Выберите команду Растровая подложка из пункта главного меню Средства, либо из Список
задач в разделе Управление.
Щелкните правой кнопкой мыши на древовидную структуру или окно просмотра отчетов, и выберите
в открывшемся меню пункт Зарегистрировать.
В открывшемся диалоговом окне Зарегистрировать:
В строке Смотреть укажите путь к изображению. По умолчанию файл для данного урока при
инсталляции размещается в папке C:\Documents and Settings\All Users\Documents\LGO\data\Image\*.*
Выберите файл Leica Arial-map.jpg, который необходимо зарегистрировать
Щелкните кнопку Зарегистрировать.
Вернитесь в предыдущее окно Растровая подложка:
Щелкните на изображение в левой части древовидной структуры, чтобы открыть его в правой части.
Чтобы легко идентифицировать общие точки
точек отмечено красными окружностями.
, взгляните на следующий снимок, на котором положение общих
Привязка карты и загрузки растра для этого:
32
Page 46

Теперь вы должны Увеличить масштаб изображения внутри любой из красных окружностей, для того чтобы
лучше идентифицировать положение общих точек и определить их координаты на растре.
Щелкните правой кнопкой мыши, поместив курсор на растр, и выберите в контекстном меню команду
Увел. масшт. изобр.
Увеличивайте изображение в области первой общей точки М1 до тех пор, пока не увидите очертания
следующих
Выберите точку М1 на растре, как показано на снимке, щелкнув дважды в указанной точке.
Маленький крестик
Обратите внимание, что точка с координатами изображения, полученными с растра, под именем
ИдентТчк 1 будет добавлена в список, расположенный под изображением. .
Снова выполните масштабирование изображения во весь экран (Масштаб 100%) для того, чтобы
определить положение второй общей точки
участков:
показывает положение общей точки.
М2.
Щелкните правой кнопкой мыши, поместив курсор на растр, и выберите команду Увел. масшт.
изобр.
Увеличивайте изображение в области точки М2 до тех пор, пока не увидите очертания следующих
участков:
Выберите точку М2 на растре, как показано на снимке, щелкнув дважды в указанной точке.
Обратите внимание, что точка
будет добавлена в список, расположенный под изображением.
Увеличивайте изображение в области точки М3 до тех пор, пока не увидите очертания следующих
участков:
из контекстного меню
с координатами, полученными с растра, под именем ИдентТчк 2
33
Page 47

Выберите точку М3 на растре, как показано на снимке, щелкнув дважды в указанной точке.
Обратите внимание, что точка
будет добавлена в список, расположенный под изображением.
Увеличивайте изображение в области точки М4 до тех пор, пока не увидите очертания следующих
участков:
Выберите точку М4 на растре, как показано на снимке, щелкнув дважды в указанной точке.
Обратите внимание, что точка
будет добавлена в список, расположенный под изображением.
Теперь вы идентифицировали все общие точки и определили их координаты на растровой подложке
Areal-map
плоских координат в LGO.
. Вы готовы к продолжению операции, то есть к импорту координат общих точек в местной системе
с координатами, полученными с растра, под именем ИдентТчк 3
с координатами, полученными с растра, под именем ИдентТчк 4
Leica
Перейдем к уроку: TPS Курс I - Урок 2: Связка общих точек и привязка растра.
34
Page 48

35
Page 49

TPS Курс I - Урок 2: Связка общих точек и привязка растра
Цели урока:
Импортировать координаты общих точек (в местной системе плоских координат) из файла-проекта
GPS RTK job в программу LGO.
С помощью команд «копировать и вставить» эти координаты на Растровую подложку.
Выполнить привязку растровой подложки.
Точки измерены на местности в местной системе координат и результаты измерений содержатся в job-файле
GPS RTK, который называется MAP. Данные следует импортировать в отдельный проект программы LGO,
который тоже будет называться MAP.
Выберите команду Импорт файла измерений из пункта главного меню Импорт, или панели
инструментов или из Списка задач
В открывшемся окне диалога Импорт файла измерений:
Выберите тип файла System 1200 измерения.
В строке Смотреть укажите путь к файлу с данными. По умолчанию файл для данного урока при
инсталляции размещается в папке C:\Documents and Settings\All Users\Documents\LGO\Sample
data\Import\TPS\Map\*.*
Выберите job-файл MAP для импорта данных.
Нажмите кнопку Импорт.
В открывшемся диалоговом окне Добавить необходимо выполнить следующее:
Убедитесь в том, что на закладке Настройки установлен флажок перед опцией Импорт сист. коорд.
и компонентов.
Для создания нового проекта, в который будут импортированы данные, в пункте меню Общее
поместите курсор на строку Проекты в левой части окна, щелкните правой кнопкой мыши и выберите
из контекстного меню пункт
В то время как окно Добавить будет оставаться открытым, вы сможете вводить информацию в окне Новый
.
проект
На закладке Общие в окне диалога Новый проект:
.
.
Новый.
36
Page 50

В строке Расположение укажите, где будет сохранен Проект. По умолчанию проекты будут
сохраняться в папке
Введите Имя проекта, например MAP. Папка с таким же именем будет автоматически добавлена в
описание места расположения файла. Файлы проекта будут сохраняться в данной папке
Нажмите кнопку ОК. Будет создан новый проект, а диалоговое окно будет закрыто. Вы вернетесь в
предыдущее окно
В диалоговом окне Передать новый проект выделяется автоматически
Добавить, а затем Закрыть. Данные из job-файла будут переданы в проект, и автоматически будет
открыто Окно проекта.
Цель заключается в копировании и вставке координат каждой общей точки в плоской системе координат в
компонент Растровой подложки..
Для этого следует перейти к закладке просмотра Точки и выполнить следующие действия:
Перейдите от системы координат WGS84 к местной системе, с помощью панели инструментов
Формат координат.
Выделите одновременно все точки М1, М2, М3 и М4 (с помощью кнопки CTRL).
Щелкните кнопку Копировать на Стандартной панели инструментов. Наборы плоских координат
всех четырех общих точек, которые были получены в местной системе координат, будут скопированы
в буфер обмена
C:\Documents and Settings\All Users\Documents\LGO\Projects\.
.
Добавить.
.
Перейдите снова в окно Растровая подложка и выполните команду Вставить наборы
плоских координат точек
После того, как вы успешно скопировали измеренные координаты всех четырех общих точек в Растровую
подложку,
Между точками будет установлена связка, и теперь можно выполнить привязку растра:
Поздравляем! Вы добились успеха в программе LGO, выполнив привязку растровой подложки.
Теперь исходное изображение преобразовано в местную систему плоских координат (
Sample готов к дальнейшему использованию для импорта и обновления TPS данных.
необходимо связать растровые координаты каждой точки с плоскими координатами.
Переименуйте точки 1, 2, 3 и 4 на M1, M2, M3 и M4. Теперь общие точки на растре и точки на
местности имеют одинаковые имена, и вы можете выполнить
Поместите курсор в окне отчета, щелкните правой кнопкой мыши и выберите из контекстного меню
Автосвязка точек.
пункт
Впрочем, эту же операцию можно выполнить и по-другому: выберите пару общих точек (например,
точка
1 и M1) а затем из контекстного меню пункт Связка для одной пары точек.
Щелкните правой кнопкой мыши в поле просмотра отчета в окне Растровая подложка и выберите в
контекстном меню пункт
растр уже привязан.
M1, M2, M3 и M4 в окно отчета.
Автосвязку точек.
Привязать. Маленькая буква ( ) в верхнем правом углу показывает, что
utm32) и проект TPS
37
Page 51

38
Page 52

TPS Курс II: Исправление установок станции
TPS Курс II: Исправление установок станции
В данном курсе приведены пошаговые инструкции, которые помогут вам понять, как скорректировать данные,
полученные со станций различного типа.
Три отдельных job
помощью Smart Station и один
проект
TPS Sample. Некоторые корректировки необходимы, до того, как они будут окончательно обработаны
совместно.
Растровое изображение участка, где проводились измерения, уже загружено в проект в LGO. Это позволяет
вам видеть, как должны быть трансформированы результаты измерений после выполнения корректировки.
Улица, представленная линиями, должна быть развернута в правильное положение, тоже самое касается и
измеренных углов зданий.
Во всех трех job
конце выполнения задания, координаты этой точки совпадут, это будет означать, что все корректировки были
выполнены правильно.
Файл JOB_1 - содержит результаты измерений со станции Smart Station, ориентировка на которой выполнялась по методу
Задать азимут
ориентирную точку записаны в файле
помощью Smart Station, они определены с помощью GPS 1200 от ближайшей базовой станции. В поле была использована
система координат
координат при
станции выполнены при неправильной ориентировке, поскольку изначально координаты задней точки были неизвестны.
Азимут ориентирного направления был задан равным 0, и, следовательно, задняя точка BS
координаты в местной системе. Однако ориентировка неверна, и, следовательно, все пикеты, снятые вдоль улицы
(P001&ldots;.P029), и углы здания (В001&ldots;В003) окажутся в неправильном положении. Иными словами вся съемка
будет развернута. После выполнения корректировок станции, все пикеты будут повернуты на вычисленный угол. Вы
увидите, что все измеренные в поле точки совпадут с соответственными точками на растровой подложке.
Файл JOB_2 - содержит результаты измерений со станции ST_02, координаты которой известны, с ориентировкой на
Исходную заднюю точку
ST_02 с известными координатами. Они определены с помощью GPS System 1200 от ближайшей базовой станции. Метод
ориентировки
на станции ST_02 был установлен инструмент Smart Station и определены координаты с помощью GPS System 1200 от
ближайшей базовой станции. Как и в первом примере, в поле была использована система координат
определения координат точек в местной системе плоских координат. Поскольку координаты станции и задней ориентирной
точки известны, съемка с этой станции выполнена полностью и ориентирована правильно. Координаты точки BS
файла JOB_1 определяются с этой станции и будут использованы в программе LGO для обновления результатов
измерений на первой станции.
Файл JOB_3 - Обратная засечка. Станция определена с двух точек (R-01 и R-02), которые были измерены с первой
станции (результаты измерений содержатся в файле
R-02 были определены предварительно. Этот факт должен быть учтен, когда результаты съемки с первой станции будут
корректироваться в LGO на основе данных из файла JOB_2.
Совокупность данных будет использована следующим образом:
1. Импорт данных из файла JOB_1. Станция и ее ориентировка (и соответственно измеренные точки из
файла JOB_1) должны быть скорректированы с использованием данных из файла JOB_2.
2. Импорт данных из файла JOB_2 и корректировка результатов измерений на первой станции на
основе известной теперь точки, которая являлась ориентирной в файле JOB
3. Теперь можно выполнить импорт данных из файла JOB_3. Координаты станции 3, полученные из
обратной засечки, поскольку получены по некорректированным данным файла (JOB
выполнить корректировку данных засечки в программе LGO.
Продолжим курс и перейдем к уроку : TPS Курс II - Урок 1: Импорт и проверка TPS данных, содержащихся в
файле JOB_1
-файла содержат результаты TPS съемки: два, полученных со станций установленных с
- обратной засечкой. Файлы должны быть импортированы в один и тот же
-файлах содержатся измерения на так называемую усредненную точку (Check-1). Если в
на заднюю точку BS-01, координаты которой изначально неизвестны. Результаты измерений на эту
JOB_2. Координаты ST_01 станции известны. Поскольку измерения выполнялись с
utm32 для определения координат точек в местной системе плоских координат. Эта же самая система
Импорте результатов измерений будет передана в проект программы LGO. TPS наблюдения с данной
-01 приобрела некоторые
с известными координатами (исходная точка 1000). содержит результаты измерений со станции
- Исходная задняя точка. Координаты задней ориентирной точки известны (это исходная точка 1000). Снова
utm32 для
-01 из
JOB_1). Когда в поле выполнялась засечка, координаты точек R-01 и
-1.
-1. Необходимо
39
Page 53

TPS Курс II - Урок 1: Импорт и проверка TPS данных, содержащихся в
файле JOB_1
Цели урока:
Выполнить импорт результатов измерений с первой станции, которые содержатся в файле JOB_1.
В процессе выполнения процедуры импорта в LGO, создать новый проект и добавить в него
растровую подложку Leica Areal-map
Проверка импортированных данных, просмотр на закладках Просм/Редакт и TPS-обраб. Принятие
решения о необходимости выполнить корректировку данных, полученных с первой станции.
Теперь выполните импортирование данных результаты измерений, выполненных TPS System 1200, из файла
JOB_1 в проект TPS Sample.
Выберите команду Импорт файла измерений из пункта главного меню Импорт, или панели
инструментов или из Списка задач
В открывшемся окне диалога Импорт файла измерений:
Выберите тип файла System 1200 измерения.
В строке Смотреть укажите путь к файлу с данными. По умолчанию файл для данного урока при
инсталляции размещается в папке
data\Import\TPS\Job_1\*.*
Выберите для импорта файл JOB_1.
Нажмите кнопку Импорт..
Будет открыто окно диалога Добавить в котором следует: :
Убедиться, что на закладке Настройки установлены флажки перед опциями Импорт и Импорт сист.
коорд. и компонентов
.
.
..
C:\Documents and Settings\All Users\Documents\LGO\Sample
40
Page 54

На закладке Общие поместить курсор на строку Проекты в левой части окна, щелкнуть правой
кнопкой мыши и выбрать из контекстного меню пункт Новый., в который будут импортированы
данные.
В то время, когда диалоговое окно
проект.
На странице Общие в окне диалога Новый проект:
Добавить остается открытым на растре, введите в окно диалога Новый
В строке Расположение укажите, где будет сохранен Проект. По умолчанию проекты будут
сохраняться в папке C:\Documents and Settings\All Users\Documents\LGO\Projects\.
Введите Имя проекта, например, TPS Sample. Папка с таким же именем будет автоматически
добавлена в описание места расположения файла. Файлы проекта будут сохраняться в данной
папке.
Перейдите на страницу Растровая подложка и выберите из списка файл Leica Areal-map.
Этот растр уже привязан к используемой системе координат в предыдущем уроке TPS Курс I.
41
Page 55

Нажмите кнопку ОК. Новый проект будет создан и в него загружен растровый файл. Окно диалога
Новый проект будет закрыто. Вы вернетесь к окну диалога Добавить.
В данном окне новый проект будет выделен автоматически.
Нажмите кнопку Добавить и затем Закрыть. Данные из Job-файла будут переданы в новый проект,
и Окно проекта будет открыто автоматически.
На закладке
Просм/Редак после Импорта вы увидите следующую картину.
Для проверки TPS данных выполните следующее:
1. Настройте изображение для лучшего восприятия результатов измерений на растровой подложке.
Щелкните правой кнопкой мыши на фоне растра и выберите из контекстного меню пункт Настройка
изображения.
2. Поменяйте свойства линий, изображающих улицы, так, чтобы линии стали толще и отличались от
стрелок, показывающих измерения. Наведите курсор на такую линию, щелкните правой кнопкой
мыши и выберите пункт контекстного меню Свойства линий
линии на 1 ½ pt.
Теперь вы ясно видите улицу, съемка которой была выполнена на местности. Эти линии сняты со станции
ST_01 с помощью Smart Station. Базовая станция GPS System 1200 была установлена на крыше. Таким
образом, координаты точки ST_01 известны. .
Однако, создается впечатление, что съемка улицы выполнена неправильно. Линия должна быть развернута
влево. Причина такой «некорректности» съемки состоит в том, что на первой станции ST_01 ориентировка
электронного тахеометра было предварительным.
Перейдите к закладке TPS-обраб. и вызовите окно Свойства станции ST_01.
На закладке Общие вы можете видеть, что станция, с которой выполнялись все измерения, была
ориентирована по методу «Задать Азимут
равным нулю, поскольку координаты задней ориентирной точки BS
извлечены из файла JOB_2.
». Причем в данном случае, значение азимута было задано
. В окне диалога измените Толщину
-01 были неизвестны. Они были
42
Page 56
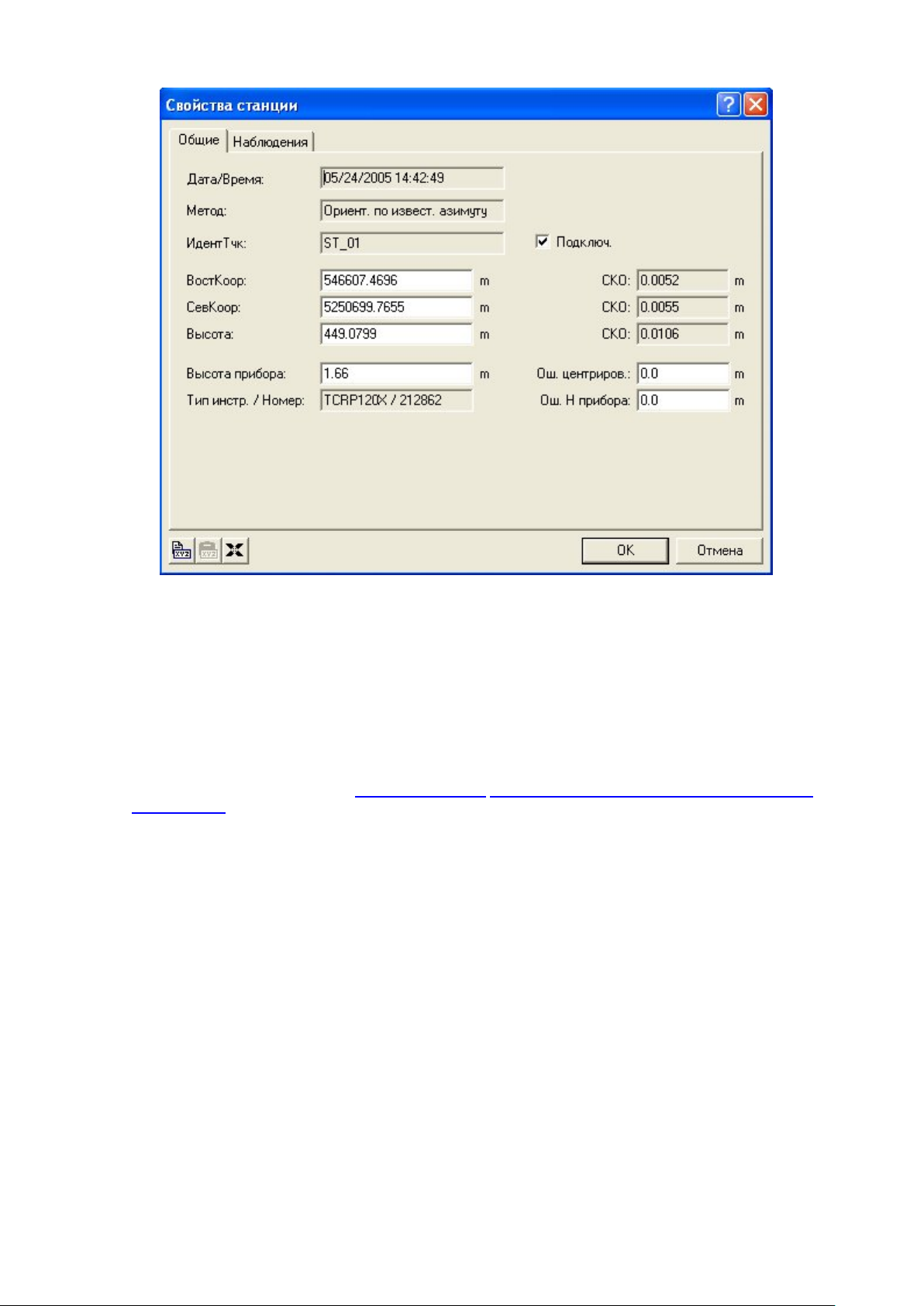
В программе LGO этот Азимут должен быть перевычислен, для придания результатам съемки правильной
ориентации. Для этого должны быть известны правильные координаты точки BS
импортированы из файла JOB_2 в следующем уроке.
После вычисления правильного значения Азимута все съемочные пикеты и линии, измеренные со станции
ST_01, будут развернуты в «правильное положение». Среди всех этих точек присутствуют три точки углов
здания (В
засечки и усредненная точка Check-1. Точка Check-1 будет импортирована 3 раза из всех трех job-файлов.
Целью является получение усредненных координат точки Check
-001..В-003), две точки (R-01, R-02), которые будут использованы в Уроке 4 для обработки обратной
-1, которые хорошо связаны друг с другом.
-01. Они будут
Начните следующий урок с темы: TPS Курс II
файле JOB_2.
- Урок 2: Импорт и проверка TPS данных, содержащихся в
43
Page 57

TPS Курс II - Урок 2: Импорт и проверка TPS данных из файла JOB_2
Цели урока:
Выполнить импорт TPS данных со второй станции, сохраненных в файле JOB_2.
Убедитесь, что для задней ориентирной точки BS-01 используются правильные значения координат.
Результаты измерений, записанные в файл
TPS Sample в программе LGO.
Выберите команду Импорт файла измерений из пункта главного меню Импорт или из Списка
инструментов.
В открывшемся окне диалога Импорт файла измерений:
Выберите тип файла System 1200 измерения.
В строке Смотреть укажите путь к файлу с данными. По умолчанию файл для данного урока при
инсталляции размещается в папке C:\Documents and Settings\All Users\Documents\LGO\Sample
data\Import\TPS\Job_2\*.*
Выберите для импорта файл JOB_2.
Нажмите кнопку Импорт.
Будет открыто окно диалога Добавить, в котором следует:
Убедиться, что на закладке Общие выбран нужный проект TPS Sample для импорта данных.
Нажмите кнопку Добавить и затем Закрыть. Данные из Job-файла будут переданы в проект TPS
Sample
В процессе выполнения импорта вы получите сообщение «
Вернувшись к закладке Просм/Редакт, вы сразу же обнаружите, что это задняя ориентирная точка BS-01,
измеренная со станции ST_01, и усредненная Check-1.
, и Окно проекта будет автоматически открыто.
.
JOB_2, должны быть импортированы в созданный ранее проект
Превыш. допуск.осредн.» для двух точек.
Просмотрите Свойства обеих точек.
44
Page 58

Сначала выделите точку Check-1 в окне Свойства точки: Средн.знач. и перейдите к закладке Средн.
знач.. Вы увидите, что разница в координатах данной точки, полученных с разных станций (ST_01 и
ST_02), составляет более 60 метров. Причина такого несоответствия состоит в том, что станция
ST_01 неверно сориентирована.
Теперь, выделите точку BS-01, в окне Свойства точки: Средн. знач. перейдите к закладке Средн.
Как и усредненная точка Check-1 расхождения в полученных координатах объясняются
знач.
неверной ориентировкой на станции ST_01. Таким образом, измерение со станции ST_02 не следует
включать в обработку.
45
Page 59

Щелкните правой кнопкой мыши в колонке Статус усреднения (Состояние) для измерений со станции ST_01,
выберите пункт
на точку BS
что при выполнении Процедуры обновления результатов съемки, которая будет выполняться в следующем
уроке, будут использованы верные координаты точки BS
Теперь переходим к следующему уроку: TPS Курс II - Урок 3: Обновление результатов измерений на станции,
ориентированной по методу «Задать азимут» вручную.
.
Изменить в контекстном меню, а затем выберите вариант Ничего. Измерение, выполненное
-01 со станции ST_01, больше не будет использовано при обработке, и вы можете быть уверены,
-01.
46
Page 60

47
Page 61

TPS Курс II - Урок 3: Обновление результатов измерений на станции,
ориентированной по методу «Задать азимут»
Цели урока:
• Вычислить заново ориентировку на первой станции ST_01.
• Обновить координаты первой станции ST_01 и всех съемочных пикетов.
• Проверить координаты усредненной точки Check-1
После успешного завершения импорта двух файлов и изменения статуса усреднения для точки BS-01 вы
увидите на закладке Просм/Редакт следующую картину.
- ручной режим
Координаты станции ST_02 получены из GPS-измерений на базовой станции и являются правильными.
Координаты ориентирной точки 1000 известны изначально, так как она является усредненной и,
соответственно, станция ST_02 описана и сориентирована верно. Точка, которая использовалась как
задняя ориентированная с первой станции, теперь подлежит корректировке. Для этого:
1. Перейдите на закладку TPS-обраб. и вызовите окно Свойства станции ST_01.
2.
Перейдите на страницу Наблюдения и убедитесь, что кнопка с зависимой фиксацией ИдентТчк
утоплена. В качестве задней ориентирной точки должна быть выбрана точка BS-01.
48
Page 62

3. Нажмите кнопку Перевычислить для вычисление ориентировки.
4. Нажмите ОК для выполнения корректировки координат станции ST_01 и всех измеренных точек,
полученных со станции ST_01
Теперь перейдите к закладке
Линии съемки вдоль улиц развернулись в правильное положение и согласно вновь вычисленному
значению ориентирования и это точно соответствуют изображению улицы на растровой подложке.
Расхождения между значениями координат точек BS-01 и Check-1, полученные с разных станций,
теперь не превышают заданные допуски. См. страницу Свойства точки: Средн.знач.
Оба измерения на точке CHECK-1 теперь участвуют в определении средних значений координат и
результат не должен превышать заданного допуска.
Просм/Редакт. Вы немедленно увидите результаты корректировки:
для CHECK-1.
49
Page 63
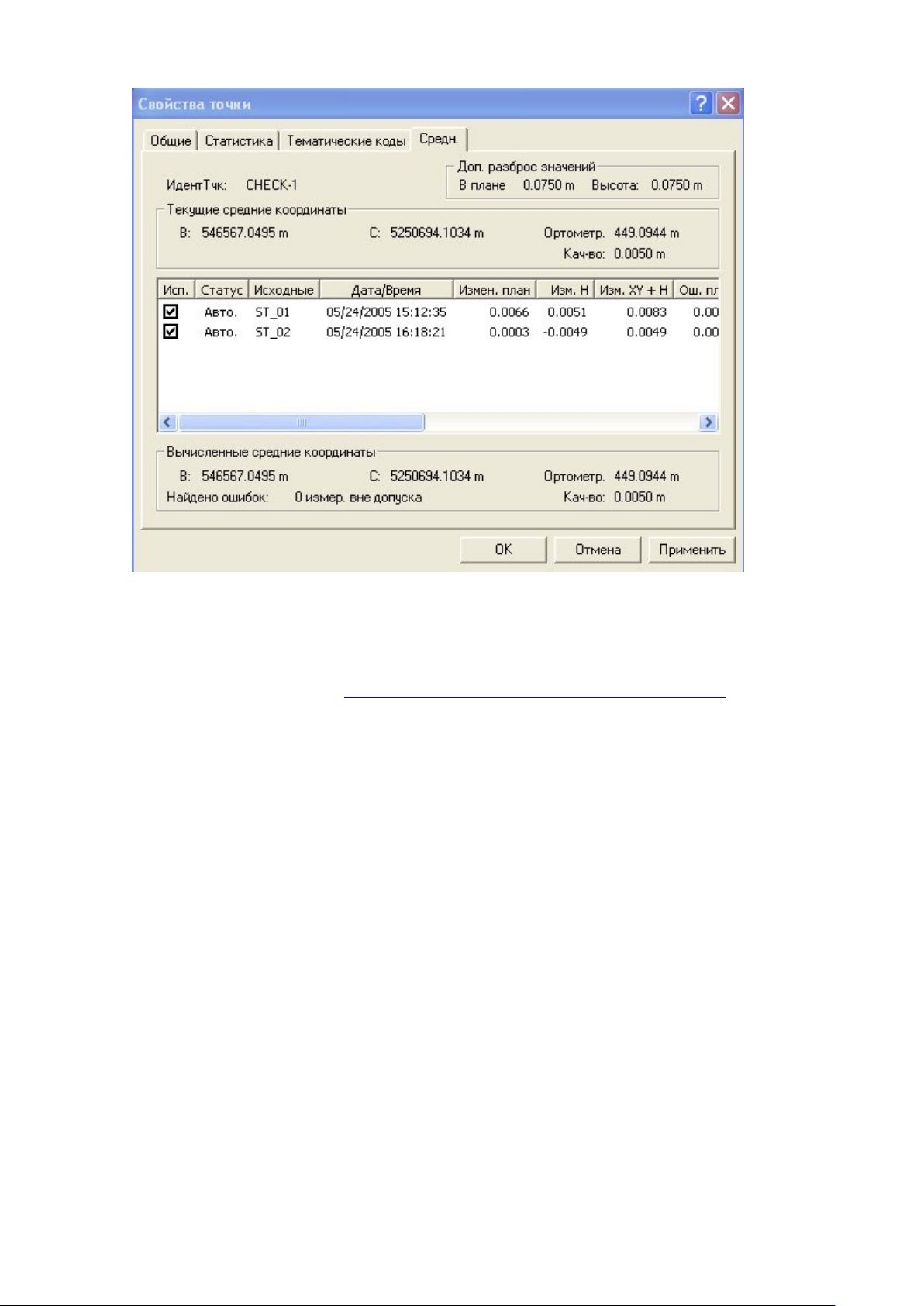
Поздравляем! Вы успешно завершили корректировку результатов измерений на первой станции!
Перейдем к следующему уроку: TPS Курс II.. Урок 4: Импорт TPS данных из файла JOB_3.
50
Page 64

TPS Курс II - Урок 4: Импорт TPS данных из файла JOB_3
Цели урока:
Импортировать файл результатов измерений с третьей станции, который называется JOB_3.
Проверить усредненные значения трех точек, расхождения между измерениями на которых с разных
станций превышают допустимые значения.
Подтвердить, что для обработки обратной засечки с точек R-01 и R-02 используются правильные
координаты.
Результаты измерений, записанные в файл
два. И они должны быть импортированы в созданный ранее проект TPS Sample в программе LGO.
Выберите команду Импорт файла измерений из пункта главного меню Импорт или из Списка
инструментов..
Откроется окно диалога Импорт файла измерений. В данном окне:
Выберите тип файла System 1200 измерения.
В строке Смотреть укажите путь к файлу с учебными данными. По умолчанию файл для данного
курса при инсталляции размещается в папке C:\Documents and Settings\All
Users\Documents\LGO\Sample data\Import\TPS\Job_3\*.*
Выберите для импорта файл JOB_3.
Нажмите кнопку Импорт.
Будет открыто окно диалога Добавить, в котором следует
Убедиться, что на закладке Общие выбран нужный проект для импорта данных. В первом примере
он был создан и назван
Нажмите кнопку Добавить и затем Закрыть. Данные из Job будут переданы в проект TPS Sample и
окно проекта будет открыто автоматически.
В процессе выполнения импорта для трех точек вы получите сообщение «Превыш. допуск. осредн.» (при
многократных измерениях на одну и туже точку). Вернувшись к закладке Просм/Редакт, вы обнаружите, что
это точки R-01 и R-02, от которых выполнялась засечка на станции 3, и усредненная CHECK-1.
TPS Sample.
JOB_3, относятся к тому же самому объекту съемки, что и первые
.
51
Page 65

Просмотрите свойства всех трех этих точек.
Прежде всего, проверьте точку CHECK-1. Для этого выделите ее и, выбрав правой кнопкой из
контекстного меню пункт
как результаты измерений на первой станции были скорректированы в программе LGO, два
измерения на данную точку, выполненные со станций
Третье измерение на данную точку, выполненное со станции
координат от среднего значения превышает допустимый предел более, чем на 60 м.
Свойства, перейдите на страницу Свойства точки: Средн. знач.. После того,
ST_01 и ST_02 соответствуют друг другу.
ST_03 некорректно. Отклонение
Причина этого заключается в том, что точки R-01и R-02, от которых выполнялась засечка, при определении
станции
выполнена ориентировка на неизвестную точку. Как следствие, станция ST_03 имеет неверные координаты и
неверную ориентировку и, все точки, полученные с этой станции, также имеют неверные координаты. Это
относится и к усредненной точке
Точка CHECK-1 была измерена со всех трех станций как Съемочный пикет с флажком усреднения со
Статусом Automatic. В результате, после корректировки станции ST_03 ни одно из измерений не будет
отличаться от среднего с превышением заданного предела.
ST_03, все еще имеют некорректные координаты, вследствие того, что на станции ST_01 была
CHECK-1.
Теперь перейдите на страницу Свойства точки: Средн. знач. и проверьте точки R-01и R-02. Эти точки
служили в поле как известные, а их координаты получены со станции
точек неверны. Точки R-01и R-02 имеют «неверные» координаты, т.е. они неправильно
ориентированы, когда импортировались в LGO.
ST_01. Однако координаты этих
52
Page 66

При съемке в поле все измерения соответствовали друг другу, но после того, как координаты и ориентировка
станции ST-01 в LGO (в предыдущем уроке) были скорректированы, координаты точек R-01и R-02 из файла
JOB_3 стали сильно отличаться. После корректировки станции ST_03, полученные значения не превышали
допустимый предел усреднения для точек
Обратите внимание, что координаты, импортированные из файла JOB_3, в колонке статуса усреднения
имеют статус Ничего. Это следствие того, что в поле точки были использованы для засечки и всегда
получают флаг усреднения Ничего. Как следствие, измерения со станции ST_03 на точки R-01и R-02 не будут
использованы. Для обеих точек будут использованы координаты, полученные со станции ST-01 как
Съемочные пикеты
уверены, что при выполнении Процедуры обновления в следующем уроке, будут использованы
«правильные» координаты точек R
приобретают статус усреднения Automatic.
Следующим будет урок: TPS Курс II .Урок 5: Обновление результатов измерений на станции, ориентировка на
которой была выполнена методом «Обратная засечка» - ручной режим.
(предварительные точки), и которые уже успешно скорректированы. Вы можете быть
-01и R-02. Обычно, съемочные пикеты в программе LGO после импорта
R-01и R-02 и все наборы точек снова были связаны.
53
Page 67

TPS Курс II - Урок 5: Обновление результатов измерений на станции,
ориентировка на которой была выполнена методом «Обратная
засечка»
Цели урока:
Перевычисление координат и ориентировки станции ST_03.
Обновление координат станции, ориентировка на которой была выполнена методом «Обратная
Проверка среднего усредненной точки CHECK-1.
После успешного завершения процедуры импорта файлаJOB_3 на закладке Просм/Редакт вы увидите
следующую картину
- ручной режим
засечка» и всех съемочных пикетов, измерения на которые выполнялись со станции ST_03.
.
Координаты точек R-01 и R-02, использовавшихся при засечке, "известны".
В поле точки были выбраны из файла
То есть эти точки были скопированы как опорные в файл JOB_3 и затем были использованы для засечки как
Наблюдения на станции, то есть на них были выполнены измерения для определения координат станции
JOB_3. При импорте JOB_3 в LGO координаты точек R
использованы в качестве
приоритет, чем результаты измерений.
Но мы не хотим, чтобы эти наборы координат опорных точек были в дальнейшем использованы в LGO,
поскольку они получены в поле на станции ST_01, но еще нескорректированы. Нам необходимо использовать
скорректированные координаты точек, относящихся к станции ST_01.
Поэтому наборы координаты этих
координат измеренных. Координаты измеренных точек R-01и R-02 соответствуют скорректированным
координатам со станции ST_01. Как мы уже видели в окне просмотра
01и R-02, предварительные координаты, взятые со станции ST_03, использоваться не будут (они имеют
статус усреднения Ничего). После удаления набора координат опорные точки засечки в окне Просм/Редакт
переместятся в правильное положение.
Все, что осталось теперь сделать, это перевычислить ориентировку станции ST_03 по новыми координатами
точек R-01и R-02. После корректировки станции ST_03, все относящиеся к ней результаты измерений также
текущих, поскольку наборы опорных точек этого класса имеют более высокий
JOB_1, который был выбран в качестве файла наборы опорных точек.
-01и R-02, имеющие класс Опорные, были
опорных точек, должны быть удалены, чтобы текущими стали наборы
Свойства точки: Средн. знач. для R-
54
Page 68

будут скорректированы. И, следовательно, третье измерение усредненной точки CHECK-1 будет
соответствовать первым двум.
1. Удалить координаты точек R-01и R-02, имеющие класс Опорные. Для каждой точки сделайте
следующее: выделите ее, нажмите правую кнопку мыши, выберите из контекстного меню
последовательно команды
Скорректируйте засечку. Для этого, выберите закладку TPS-обраб. и вызовите окно Свойства
2.
станции ST_03, затем перейдите к закладке Наблюдения. Координаты точек засечки R-01и R-02
теперь являются верными.
Удалить/Наборы координат/Опорные.
3. Нажмите кнопку Перевычисл. для вычисления новой ориентировки.
4. Нажмите кнопку ОК для перевычисления координат станции ST_03 и всех пикетов, съемка которых
выполнялась с данной станции.
Перейдите снова к закладке
результатов.
Просм/Редакт, чтобы теперь убедиться в правильности и сходимости всех
55
Page 69

Во-первых, выберите усредненную точку CHECK-1 и посмотрите ее свойства на закладке Свойства
точки: Средн. знач.. Обратите внимание, теперь все три измерения имеют хорошую сходимость. Это
главное доказательство того, что все данные скорректированы правильно
Исчезли также и расхождения допустимого предела усреднения для точек R-01и R-02. После
корректировки станции ST_03 измерения с этой станции и станции ST_01сходятся.
Сравнивая изображение на подложке с результатами измерений, можно видеть, что станция ST_03
переместилась с крыши здания в более подходящее место.
56
Page 70

Точки на линии P030…P034 также занимают соответствующее положение.
Точки B006…B008 охватывают углы зданий и они соотносятся с измеренными и хранимыми в файлах
JOB_1 и JOB_2.
Примите поздравления! Вы успешно справились с заданиями Курса II.
57
Page 71
TPS Курс III: Обновление результатов съемки
в автоматическом режиме
TPS Курс III: Обновление результатов съемки в автоматическом
режиме
Уроки данного курса преследуют цель обучить Вас решению следующих трех задач:
1. Как в автоматическом режиме выполнить совместную корректировку результатов измерений на
нескольких станциях, ориентировка на которых была по методу «Задать азимут».
2. Как выполнить изменение системы координат использованной при работе со SmartStation, на
систему координат, в которой должны быть представлены окончательные результаты.
3. Как исправить высоту наведения для нескольких измеренных точек.
Один файл результатов съемки содержит измерения, выполненные на трех станциях с помощью
SmartStation. Другой файл включает результаты съемки, выполненной с помощью GPS
файла должны быть импортированы в уже известный проект
объекте, что и в уроках темы 2, но в другой системе координат (
исходная система координат должна быть заменена
уроках. Вы сможете увидеть, как пикеты «перемещаются» на фоне подложки и как контур зоны парковки и
деревья будут точно соответствовать своему положению на растре, после успешного выполнения процедуры
изменения системы координат.
системой utm32, которая использовалась в предыдущих
TPS Sample. Съемка выполнялась на том же
utm32). В настоящем задании, во-первых,
-приемника. Оба
Представьте себе следующий сценарий:
Файл JOB_4 - Зона парковки и несколько деревьев были измерены с трех различных SmartStation станций.
Координаты всех этих станций (
установлен GPS приемник, который служит базовой станцией GPS
координат (названная CAR_PARK_OS) применялась для получения местных плоских координат. Однако,
точка, которую предполагалось использовать в качестве исходной задней
грузовиком. Поэтому исполнитель был вынужден ориентировать тахеометр на предварительную заднюю
точку (названную
Файл JOB_5 - съемка парковочной зоны была выполнена дополнительно GPS-приемником и задняя
ориентирная точка C_B_1 получила координаты из GPS-наблюдений. Та же самая система координат
(CAR_PARK_OS), выбранная в поле, применялась для преобразования координат из системы WGS84
(полученных с помощью GPS) в местную систему плоских координат.
Теперь в программе LGO эту задачу можно с легкостью решить. В автоматическом режиме все три станции
будут скорректированы и получат сразу правильную ориентировку. Элементы зоны парковки будут
развернуты так, что они переместятся в правильное положение и совпадут с контурами на растровой
подложке.
Файлы данных будут использоваться для следующих действий:
1. Импорт файла JOB_4. Все результаты измерений в данном файле и ориентировки всех измеренных
точек будут автоматически скорректированы с помощью данных из файла
Импорт файла JOB_5 и автоматическое обновление файла JOB_4 с помощью исходной теперь точки
2.
C_B_1.
Замена произвольной системы координат на utm32.
3.
4. Корректировка высоты наведения для измерения на заднюю точку (Наблюдения на станции) со
станции ST_05. По ошибке на данной станции была введена неверно высота отражателя.
5. Корректировка высоты отражателя для всех съемочных пикетов, измеренных со станции ST_04.
C_B_1).
ST_04, ST_05, ST_06) известны. Как и в предыдущем примере, на крыше
System 1200. Произвольная система
, была, к сожалению, заблокирована
JOB_5.
Начнем этот курс с урока: TPS Курс III. Урок 1: Импорт TPS данных из файла JOB_4
.
58
Page 72

59
Page 73

TPS Курс III - Урок 1: Импорт TPS данных из файла JOB_4
Цели урока:
Импортировать четвертый файл результатов измерений, который называется JOB_4.
Подвергнуть сомнению использование системы координат в программе LGO.
Файл
JOB_4 полевых измерений нужно импортировать в тот же самый LGO проект - TPS Sample. Поскольку
съемка выполнялась на том же объекте, данные из этого файла в конечном итоге должны согласоваться с
данными из первых трех job
Снова выберите команду Импорт файла измерений из пункта главного меню Импорт или из
списка инструментов
В открывшемся окне диалога Импорт файла измерений:
Выберите тип файла System 1200 измерения.
В строке Смотреть укажите путь к файлу с данными. По умолчанию файл для данного курса при
инсталляции размещается в папке
data\Import\TPS\Job_4\*.*
Выберите для импорта файл JOB_4.
Нажмите кнопку Импорт.
Будет открыто окно диалога Добавить в котором следует:
Убедитесь, что на закладке Общие выбран нужный проект TPS Sample для импорта данных.
Нажмите кнопку Добавить и затем Закрыть. Данные из Job будут переданы в проект TPS Sample, и
Окно проекта будет открыто автоматически.
-файлов
.
C:\Documents and Settings\All Users\Documents\LGO\Sample
.
Не расстраивайтесь! Сразу после выполнения импорта вы можете быть озадачены. Подложка исчезла и в
окне
Просм/Редакт видны только две группы точек. Что же случилось?
60
Page 74

Запомните, при съемке и записи результатов в файл JOB_4 использовалась предварительная система
координат, принятая в поле. Она отличается от системы
первых трех job
При импорте файла JOB_4 в тот же самый проект TPS Sample, система координат, которая была передана в
проект ранее (
все координаты точки, определенные в системе WGS84 (среди них и базовая станция GPS System1200),
теперь преобразованы в произвольную систему. Это означает, что в окне Просм/Редакт базовая станция
«переехала» во вторую группу точек, импортированных из файла JOB-4.
Прежде всего, необходимо увеличить масштаб изображения в области «верхней» группы точек (из
первых трех файлов). Подложка появилась! Однако, базовая станция GPS
крыши здания.
Теперь увеличьте масштаб изображения области «нижней» группы точек (из файла JOB_4). Здесь вы
обнаружите базовую станцию GPS System 1200, соответствующую данным из файла JOB_4.
Сохраните это увеличенное изображения во второй группе точек для следующих уроков.
-файлов.
utm32) , была заменена на произвольную систему, используемую в файле JOB_4. В результате
utm32, которая использовалась при формировании
System 1200 «исчезла» с
Переходим к уроку: TPS Курс III. Урок 2: Обновление результатов измерений на станции, ориентировка на
которой была выполнена методом «Задать азимут» - автоматический режим.
61
Page 75

62
Page 76

TPS Курс III - Урок 2: Обновление результатов измерений на станции,
ориентировка на которой была выполнена методом «Задать азимут»
автоматический режим
Цели данного урока:
Подготовить и проверить настройки для автоматического обновления результатов измерений.
Импортировать пятую группу результатов измерений, хранимых в файле под названием JOB_5. В
этот раз данные получены из GPS
Поразмышляйте об использовании систем координат в проекте LGO.
Автоматическая коррекция ориентировок, выполненных по методу «Задать азимут» и корректировка
всех результаты измерений в JOB_4.
-наблюдений.
-
После успешного выполнения импорта данных из
точек вы увидите следующую
картинку в окне Просм /Редакт.
JOB_4 и масштабирования изображения в «нижней» группе
В поле была выполнена съемка следующей парковочной зоны:
63
Page 77

Съемка парковки выполнялась с двух различных станций (ST_04 и ST_05). Дополнительно со станции ST_06
были измерены некоторые деревья.
Чего мы должны достичь, так это развернуть пикеты, снятые с трех станций так, чтобы они соответствовали
друг другу, как на аэрофотоснимке.
Подготовка автоматического обновления результатов измерений в JOB_4:
1. Перейдите к закладке TPS-обраб.. Результаты измерений со станций ST_04,и ST_05 ST_06
должны быть скорректированы и заново сориентированы.
2. Откройте окно Свойства станции для станции ST_04 и перейдите на страницу Наблюдения.
64
Page 78

3. Убедитесь, что кнопка с зависимой фиксацией Азимут в рабочем состоянии. Обратите внимание, что
значение азимута равно 0, т.е. таким, каким оно было задано в поле.
4. Отметьте флажком опцию Разреш. автомат. обновл. Это необходимо, если вы будете выполнять
автоматическую коррекцию.
Замечание: этот флажок может быть установлен в поле, тогда при импорте флажок появится
автоматически, что исключает его установку вручную для каждой станции
5. Нажмите OK и покиньте диалоговое окно .
6.
Повторите шаги с 2 по 5 для станций ST_05 и ST_06.
Замечание: Вы можете изменить флажок Разреш. автомат. обновл. одновременно для всех трех
станций, используя контекстное меню в окне просмотра отчетов
После этого выберите файл JOB_5 для импорта в тот же самый проект LGO, который называется TPS
Sample. Этот файл завершает съемку парковки. Данные из всех 5 файлов в конечном итоге должны
соответствовать друг другу и истинному положению.
В процессе выполнения импорта вы получите сообщение «Превыш. допуск. осредн.» при многократных
измерениях на одну и ту же точку. Вернувшись к закладке Просм/Редакт
ориентирная точка
и ST_05) и дополнительно с помощью
Again select Import Rawdata either from the Import main menu or from the Toolbar or from the Tools
List Bar.
The Import Raw Data dialog opens. In this dialog:
Select System 1200 raw data under Files of type.
Browse to the directory that contains the sample data under Look in. By default the sample data for this
tutorial will be installed in C:\Documents and Settings\All Users\Documents\LGO\Sample
data\Import\TPS\Job_5\*.*
Select JOB_5 to be imported.
С_В_1, которая измерялась посредством Smart Station со всех трех станций (ST_04,ST_05
GPS.
.
Станций.
вы тут же обнаружите, что это
Click the Import button.
65
Page 79

The Assign dialog opens. In this dialog:
In the General tab make sure that the project TPS Sample is selected for import.
Click Assign and then Close. The job data will be assigned to the project TPS Sample and you are returned
Project window automatically.
to the
During the Import procedure you will get the 'Averaging limit exceeded' message for one point. Back in the View/ Edit
tab you can immediately identify this point as the backsight point
Station Setups (ST_04, ST_05 and ST_06) and additionally with GPS.
C_B_1 which was measured from all three Smart
Note that the GPS measurements are displayed in the same area as the TPS measurements coming from JOB_4.
This is because the WGS84 coordinates are converted with the coordinate system CAR_PARK_OS that was used
with JOB_4 and is now attached to the project.
См. Свойства точки С_В_1.
На странице Свойства точки: Средн. знач. вы увидите, что все три набора координат для данной
точки, полученные электронным тахеометром, имеют в колонке Статус тип Ничего. Это абсолютно
верно, поскольку координаты получены в произвольной системе координат и с применением метода
«Задать азимут». Они отличаются друг от другу на несколько метров.
Наоборот, GPS
координат. На странице Средние вы увидите, что координаты, полученные из GPS-наблюдений,
являются единственными, которые используются в качестве текущих координат точки С_В_1. Это
означает, что именно эти координаты будут использованы при процедуре автоматического
обновления данных.
-координаты являются «окончательными». Они конвертированы в местную систему
66
Page 80

Запомните: Станции автоматически не обновляются при импорте, даже если в их свойствах установлен
флажок «
обновлены при импорте файла
После успешного импорта файла JOB_5:
Все три станции (
этих станций, также скорректированы.
Для визуализации результатов зайдите снова на закладку Просм/Редакт. и проверьте, что
ориентирование всех трех станций скорректировано. Все измерения теперь выполнены правильно, и
парковочная зона соответствует изображению на аэроснимке.
Разреш. автомат. обновл.»! Это значит, что станции ST_04, ST_05 и ST_06 не будут автоматически
JOB_5.
Из главного меню TPS-обраб. выберите пункт Корректировать результаты измерений на станциях.
Теперь все станции тщательно проверяются на возможность разрешения автоматического
обновления
текущими координатами.
. Если появится флажок Разреш. автомат. обновл., то задняя точка обновится с
ST_04, ST_05 и ST_06) автоматически обновлены. Дополнительно и все пикеты, снятые с
67
Page 81

Поэтому осталось теперь «переместить» данные в область первых трех JOB-файлов. Начните эту тему с
урока TPS Курс III. Урок 3: Обмен системами координат.
68
Page 82
TPS Курс III. Урок 3: Обмен системами координат
Цели урока:
Понять эффект от использования различных систем координат в проектах LGO.
Понять различие GPS и TPS данных.
Изменение системы координат для набора TPS данных.
Изучить полученный эффект.
После успешной корректировки данных со всех станций, содержащихся в файле JOB_4, все данные о съемке
парковки соответствуют друг другу, то есть все измерения электронным тахеометром соотносятся с GPS
измерениями, но в целом данные из файлов JOB_4 и JOB_5 все еще не соответствуют данным из первых
трех файлов.
Запомните. По
Sample
конвертированы из системы WGS84 в эту же самую систему. TPS данные из первых трех файлов сохранены
в системе координат
Следовательно, необходимо, чтобы все данные были в одной системе координат.
. TPS данные сохраняются в этой системе координат. Координаты точек из GPS измерений
-прежнему, заданная в поле система координат CAR_PARK_OS, загружена в проект LGO TPS
utm32.
-
Вам может показаться, что задачу можно было бы решить, загрузив систему
отличие от GPS измерений, данные, полученные электронным тахеометром, не сохраняются в системе WGS
84. Загрузив в проект систему utm32 вместо CAR_PARK_OS, мы успешно «переместим» GPS-данные из
файла JOB_5 к точкам из первых трех файлов. Это произойдет потому, что координаты GPS
преобразованы из WGS84 в UTM, вместо системы CAR_PARK_OS. Но координаты, полученные электронным
тахеометром, не могут быть конвертированы. Следовательно, они будут сохранены в местной системе и
точки останутся там, где они были.
Именно поэтому, мы должны использовать специальную функцию Измен. сист. координат,
С такой функцией мы можем менять координаты точек, хранимых в местной системе координат.
1. Перейдите на закладку Точки и выберите станции ST_04, ST_05 и ST_06.
Или же, находясь в окне Просм/Редакт, выберите все точки в нижней части экрана с помощью
рамки.
Из контекстного меню или главного меню просмотра выберите пункт Измен. сист. координат
2.
3. На Стартовой странице мастера Измен. сист. координат три станции, съемка с которых
выполнялась электронным тахеометром, перечислены вместе со всеми пикетами.
utm32 в проект. Однако, в
-точек будут
доступную в LGO.
-
69
Page 83

4. Нажмите кнопку Дальше.
На странице мастера Выбор системы координат увидите, что система координат CAR_PARK_OS,
5.
заданная в поле, уже выбирается как «старая» система координат.
6. Выберите в качестве новой системы систему utm32.
Убедитесь, что опция Подкл. новую сист. коорд. к проекту отмечена флажком ..
7.
Этим вы достигните того, что система координат utm32, которая использовалась с данными,
пришедшими из первых трех файлов, будет вновь загружена в проект TPS Sample.
8.
Нажмите кнопку Дальше. Все выбранные точки будут приведены в списке с новыми UTM -
координатами.
9. Нажмите кнопку Готово для принятия изменений
70
Page 84

Вернувшись в окно Просм/Редакт, вы увидите следующую картину.
Парковочная зона «переместилась» в соответствующее место на растровой подложке, что указывает на
полное соответствие данных. Обычно все корректировки данных файла JOB_4 бывают выполнены корректно.
Данные GPS измерений, пришедшие из файла JOB_5, конвертированы в систему координат
Сравнивая с растровой подложкой, вы увидите, насколько близки эти измерения.
Начнем следующий урок с темы: TPS Курс III.. Урок 4: Исправление высоты визирования
utm32.
.
71
Page 85

TPS Курс III - Урок 4: Исправление высоты визирования
Цели данного урока:
Исправить высоту визирования при наблюдении на заднюю точку со станции ST_05.
Исправить высоту визирования для всех точек, измеренных со стации ST_04.
Вы определенно удивлены, что после всех манипуляций на точке С_В_1 все еще присутствует индикатор в
окне Просм/Редакт, показывающий превышение допуска.
Посмотрите на закладку Свойства точки: Средн.знач.
на странице свойств данной точки C_B_1:
Обратите внимание, превышение допуска для данной точки относится только к высоте, а не к
плановым координатам. Очевидно, что на станции ST_05 была введена неверная высота
визирования
Другая ошибка была допущена на станции ST_04. Она не так очевидна, как ошибка на станции ST_05. Все
измерения со станции ST_05 имеют неверные отметки, поскольку в поле была введена неверная высота
визирования. В плане все измерения верны.
Мы увидим, что LGO предлагает изящное решение по корректировке всех результатов измерений сразу!
Начнем с исправления измерений на точке ST_05
Перейдите к закладке TPS-обраб. и откройте узел Наблюд. на станции для Станции
ST_05 на дереве каталогов.
, при измерении на точку C_B_1.
72
Page 86

Щелкните правой кнопкой мыши на Наблюд. на станции и выберите Свойства для точки C_В-1 из
контекстного меню.
В окне Наблюдения на станции выберите поле Ред. высоту визиров. и измените H Визир. с 1,85 на
1,75 м.
Нажмите ОК. Высота визирования на точку С_В_1 будет изменена. Соответственно изменяться и
координаты этой точки. Подтвердите изменения, нажав кнопку
Вернитесь в окно Просм/Редакт и обратите внимание, что исчез указатель превышения
допустимого значения среднего, т.е. усреднение для этой точки теперь в норме
Продолжим работу и займемся исправлением высоты визирования для всех наблюдений со станции ST_04:
Да в окне Предупреждения.
.
73
Page 87
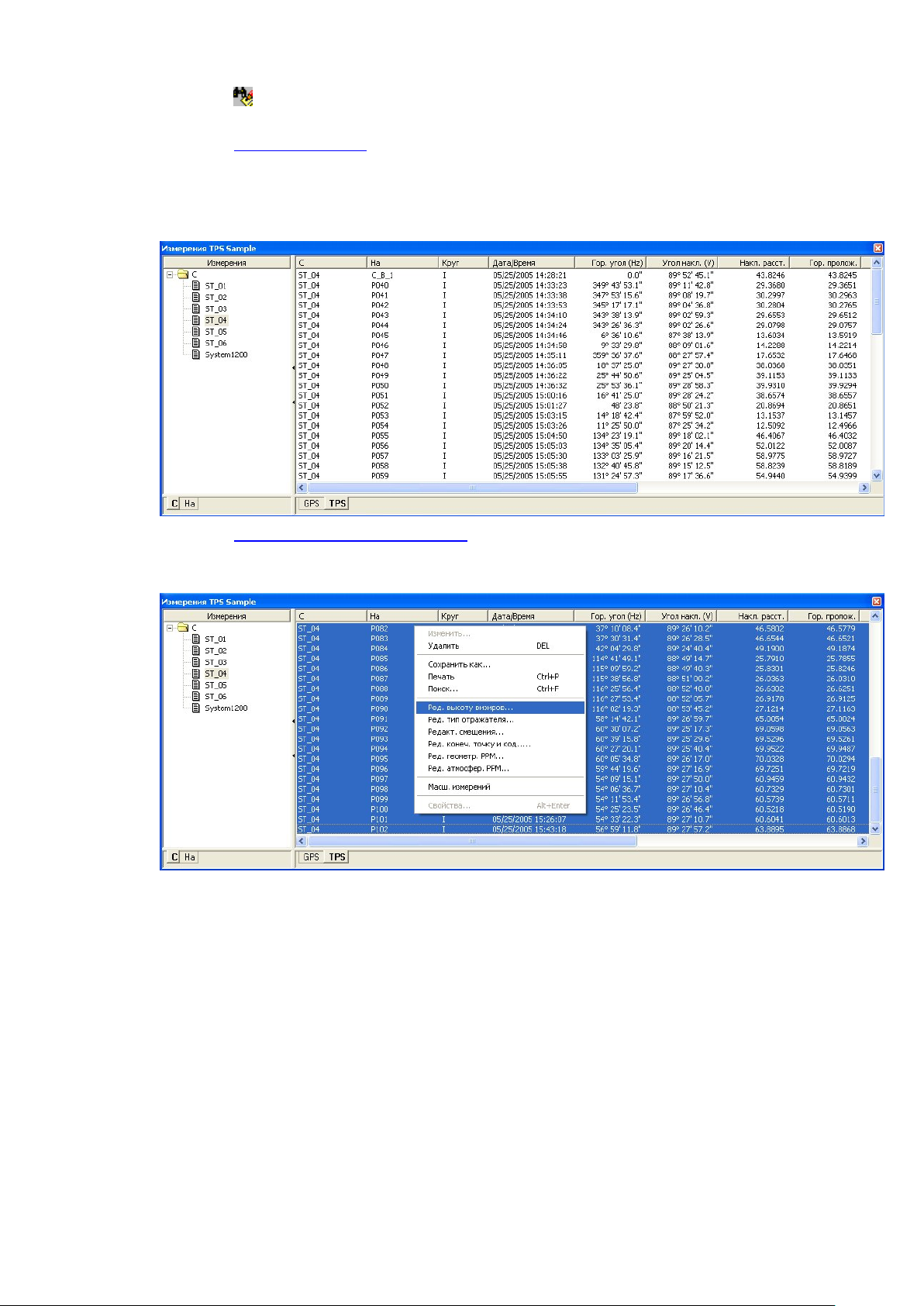
В окне Просм/Редакт щелкните правой кнопкой мыши и выберите из контекстного меню пункт
Просм. наблюдения......
В окне Наблюд. на станции перейдите к дереву каталогов и выберите станцию ST_04. В правой части
выберите Окно просмотра измерений (Просм)..
Вы получите общее представление обо всех наблюдениях и пикетах на станции ST_04. Результаты
измерений со станции ST_04 отобразятся в правой части окна и вы тогда убедитесь, что
Наблюдения на станции (т.е. ориентирование на точку C_B_1) в порядке.
В окне Представление отчета по станциям выберите все пикеты. Щелкните правой кнопкой и
выберите из контекстного меню пункт Ред. высоту визиров.
В открывшемся окне диалога измените высоту визирования с 1,85 на 2,15 м.
Нажмите ОК. Высоты визирования для всех съемочных пикетов будут немедленно изменены.
Соответственно изменяться и координаты этих точек. Подтвердите изменения, нажав кнопку
окне Предупреждения.
Поздравляем! Вы успешно справились с уроком курса III.
Да в
74
Page 88
TPS Курс IV: Сдвиг, разворот и
масштабирование данных хода
TPS Курс IV: Сдвиг, разворот и масштабирование данных хода
В данной теме описаны пошаговые инструкции для изучения процесса разворота, сдвига и масштабирования
одного набора точек так, чтобы эти точки сходились с точками другого набора в проекте
Набор точек, который должен быть трансформирован (сдвинут, развернут и масштабирован), представляет
собой точки хода. Координаты первой (исходной) точки хода получены с помощью SmartStation. Использован
метод ориентирования станции
задней ориентирной точки были определены с помощью GPS System 1200.
Конечная точка хода известна и является опорной. Таким образом, обе точки (первая задняя, задающая
ориентировку хода, и конечная точка) имеют «правильные» координаты и одновременно временные
координаты, полученные при «произвольной» ориентировке хода..
Целью данного упражнения является трансформация хода таким образом, чтобы точки хода были получены в
верных координатах. Эта цель достигается использованием функции Сдвиг/Разворот/Масштаб
LGO
Замечание: Те же данные хода можно уравнивать методом 2D по Гельмерту после того, как для известных
точек будут введены наборы координаты опорной точки. Это более предпочтительная процедура, но в
данном уроке мы все же применим функцию Сдвиг/Разворот/Масштаб.
«Задать азимут». Азимут был установлен равным нулю. Местоположение
TPS Sample.
. в программе
Начнем следующий урок с выполнения импорта данных хода как и в случае с данными измерений System
1200: TPS Курс IV. Урок 1: Импорт данных хода.
75
Page 89

TPS Курс IV - Урок 1: Импорт данных хода
Цели урока:
Импортировать в проект TPS Sample данные хода, содержащиеся в файле JOB_6.
Поразмышлять о существующих наборах координат первой задней точки хода С_В_1: какие
существуют наборы и каковы текущие координаты точки С_В_1.
Шестой файл
проект LGO, который называется
предыдущим файлам
Выберите команду Импорт файла измерений из пункта главного меню Импорт или из Списка
В открывшемся окне диалога Импорт файла измерений:
Выберите тип файла System 1200 измерения.
В строке Смотреть укажите путь к файлу с данными. По умолчанию файл при инсталляции
Выберите для импорта файл JOB_6.
Нажмите кнопку Импорт.
Будет открыто окно диалога Добавить, в котором следует:
Убедиться, что на закладке Общие выбран нужный проект TPS Sample для импорта данных.
Нажмите кнопку Добавить и затем Закрыть. Данные из файла Job будут переданы в проект TPS
В процессе выполнения импорта для одной точки, вы получите сообщение «Превыш. допуск. осредн.».
Вернувшись к закладке Просм/Редакт, вы обнаружите, что это ориентирная точка С_В_1 измерялась с
применением GPS System 1200 со всех трех станций (ST_04,ST_05 и ST_06) и со станции хода ST_07.
JOB_6, содержащий данные полевых измерений, должен быть импортирован в тот же самый
TPS Sample. Данные из этого файла должны соответствовать всем 5
инструментов.
размещается в папке
data\Import\TPS\Job_6\*.*
Sample, и Окно проекта будет открыто автоматически.
C:\Documents and Settings\All Users\Documents\LGO\Sample
.
76
Page 90

Запомните, что измерения, выполненные со станций ST_04...ST_06 уже были скорректированы при
выполнении предыдущих упражнений и они хорошо соотносятся с GPS-измерениями на точке С_В_1. В
колонке статуса усреднения измерений со станций ST_04...ST_06 отображается вариант
хорошо.
Ничего и это очень
:Посмотрите снова закладку Свойства точки: Средн. знач.
для точки С_В_1:
В колонке статуса усреднения наблюдений на станции ST_07 также отображается вариант Ничего и
это абсолютно верно, поскольку координаты были определены с использованием метода «Задать
Азимут» и произвольных значений координат. Это измерение помечено значком ( ), что означает
«превышение допустимого предела» при усреднении.
В отличии от измерений, выполненных электронным тахеометром, координаты, полученные с
помощью GPS, являются «окончательными». На закладке
координаты остаются единственными, которые будут в дальнейшем использоваться как текущие
координаты точки C_B_1.
Пожалуйста, запомните, это означает, что GPS
использованы для первой задней точки хода при трансформировании (Сдвиг/Разворот/Масштаб.).
Замечание: В окне
сориентировано верно. Но это происходит потому, что в окне отображается точка С_В_1 в
соответствии с текущими координатами, а
измерений со станции ST_07!
Начните следующий урок с: TPS Курс IV. Урок 2: Импорт опорных точек в формате ASCII.
Просм/Редакт. кажется, что наблюдение со станции ST_07 на точку С_В_1 уже
-координаты будут теми координатами, которые будут
не в соответствии с некорректированными результатами
Средние вы можете видеть, что GPS-
77
Page 91

78
Page 92

TPS Курс IV - Урок 2: Импорт опорных точек в формате ASCII
Цель урока:
Импортировать «верные» координаты передней по ходу известной точки 5000 из файла в формате
ASCII.
Замечание: Файл в формате ASCII также содержит опорные точки, которые понадобятся для Урока
V: TPS Обработка хода.
Теперь займемся импортом «верных» координат опорной точки 5000 (5000 CTRL). Точно также как и задняя
точка С_В_1, передняя точка 5000 сориентирована предварительно (неверно). Она унаследовала
«неверную» ориентировку от первой задней точки С_В_1.
Известные координаты опорной точки
посредством функции Импорт ASCII данных
Выберите команду Импорт ASCII данных из пункта главного меню Импорт или из списка
инструментов.
Откроется окно диалога Импорт ASCII-данных. В данном окне:
Выберите тип импортируемого файла Текстовые файлы.
В строке Смотреть укажите путь к файлу с данными. По умолчанию файл при инсталляции
размещается в папке
Выберите для импорта файл fixpoints.txt.
Убедитесь, что в качестве Шаблона выбран вариант Ничего, Система координат - местная, а
Система высот
Нажмите кнопку Импорт.
Вы будете работать с Мастером импорта ASCII файлов, который позволит вам описать формат файла. В
данном примере импортировать следует простой ASCII текстовый файл, содержащий координаты только
одной точки в местной системе плоских координат, разделенные знаками табуляции.
На шаге 1/4 выберите формат Свободный и нажмите кнопку Следующий.
На шаге 2/4 выберите в качестве разделителя знак табуляции Tab и нажмите кнопку Следующий.
На шаге 3/4 убедитесь, что Тип координат выбран - плоские. Щелкните правой кнопкой мыши на
первой колонке и выберите тип данных
Нормальн (H) и нажмите кнопку Следующий.
C:\Documents and Settings\All Users\Documents\LGO\Sample data\Import\TPS\*.*.
- нормальная.
5000 CTRL записаны в формате ASCII и будут импортированы в LGO
(TPS/Level) для текстовых файлов.
Идент. точки, а в остальных колонках - ВостКоор, СевКоор,
На шаге 4/4 вы можете сохранить созданный шаблон импорта для последующего импорта ASCI
файла. Нажмите кнопку Завершить для перехода к диалогу Присвоить
Данные будут переданы в тот же самый проект TPS Sample. Нажмите кнопку Закрыть.
Автоматически будет выполнен возврат в Окно проекта.
Опорная точка 5000 CTRL теперь сохранена в проекте. Она соответствует измеренной точке 5000, хотя и
размещается в совершенно другом месте в окне
использованием известных координат точки 5000 CTRL.
Начните следующий урок с: TPS Курс IV. Урок 3: Сдвиг, разворот и масштабирование результатов измерений
в ходе.
Просм/Редакт. Точка 5000 должна быть преобразована с
79
Page 93

TPS Курс IV - Урок 3: Сдвиг, разворот и масштабирование результатов
измерений в ходе
Цель данного урока:
Трансформирование (сдвиг, разворот и масштабирование) результатов измерений в ходе таким
образом, чтобы они соответствовали координатам точки C_B_1, полученным из GPS
координатам известной опорной точки 5000 CTRL.
-измерений и
После успешного импортирования в LGO данных из файла
(5000 CTRL) в окне Просм/Редакт. вы увидите следующую картину.
JOB_6 и известных координат опорной точки 5000
Представьте себе следующий сценарий:
Исполнители, выполнявшие измерения в ходе, в поле не знали координат точки C_B_1. Координаты этой
точки были измерены другой бригадой с помощью GPS и записаны в файл JOB-5. Поэтому они, выполняя
измерения на точку C_B_1, использовали ее вспомогательные координаты и на первой станции выполнили
ориентировку по методу "Задать азимут
ST_07) равным нулю. Как следствие, весь ход был сориентирован "неправильно".
Координаты станции ST_07 получены с помощью SmartStation, поэтому они являются известными и верными,
не нуждающимися в исправлении.
В LGO следует добиться того, чтобы весь ход был «развернут» (трансформирован) в правильное положение.
На последней станции хода была выполнена привязка к точке 5000. Как и все остальные точки хода, привязка
к точке 5000 лишь предварительная и ход был сориентирован неверно, а точка 5000 получила неверные
координаты. Известные координаты точки 5000 (5000 CTRL) были импортированы в LGO из ASCI
Трансформирование хода будет выполнено в LGO с помощью специального мастера Сдвиг/, Вращ/Масштаб
С помощью данной функции Вы можете выполнять преобразование плоских координат с использованием
Классич. 2D трансформации по Гельмерту (для координат X,Y) и выполнять сдвиг по высоте.
Точки С_В_1 и 5000/ 5000 CTRL служат общими точками для 2D трансформации по Гельмерту. Установив
соответствие между предварительными плоскими координатами точки С_В_1, полученными из GPS
", задав значение азимута ориентирного направления (на станции
I файла.
.
80
Page 94

измерений со станции ST_07, и координатами точки 5000 CTRL, импортированными из текстового файла и
измеренными в поле, можно вычислить параметры трансформации, выполнить трансформацию и сразу
получить верные координаты всех точек хода.
1. Перейдите на страницу Точки и выберите станции ST_07...ST_12 из списка точек.
2. Щелкните правой кнопкой и выберите из контекстного меню пункт Сдвиг/Вращ/Масштаб..
Или же выберите команду Сдвиг/Разворот/Масштаб. из пункта Точки главного меню.
3. На стартовой странице мастера координаты всех точек, подлежащих сдвигу, будут представлены в
виде списка.
Remember the selection mechanisms:
- If you have selected a Reference point triplet, then all connected measured point triplets will automatically be
included in the list. Thus, you will automatically find all measured triplets coming from ST_07...ST_12 in the list,
including the measurements to point 5000.
According to the selection mechanisms you can be sure that all points belonging to the traverse (and none not
belonging to the traverse!) will be transformed when you select the setups ST_07...ST_12 for the Shift/ Rotate/
Scale procedure!
4.
Выберите опцию Вычислить, используя общие точки и нажмите кнопку Далее для перехода на
страницу
5. На странице Общие точки пропишите соответствия между точками: C_B_1 и C_B_1 (GPS); 5000
(усредненная) и 5000 CTRL.
Общие точки.
81
Page 95

Select the points to be transformed from the top left hand-side view and the control points from the top right handside view. Note that the left hand-side view offers only those local grid points for selection which have also been
indicated to you in the Start page plus the Averaged triplets, whereas the right hand-side view offers all point triplets
which are either stored as local grid or can be converted to local grid in the selected project. Thus it contains apart
from the traverse points also the GPS point C_B_1 and the control point 5000 CTRL.
To ensure you pick the GPS point triplet for point C_B_1 switch on the column for the point subclass in the right-hand
view: Click on the column heading and select View and then Point Subclass from the context menu. The Measured
point triplet with subclass Phase can then be identified as the GPS derived coordinates.
Note: You need not select a different project for your control points since they are contained in the same project as
the points to be transformed.
In the bottom report view the matched points are listed together with the residuals of the transformation.
Note: With only two common points the residuals of the position transformation are zero. You can nevertheless check
the transformation by having a look at the scale factor in the next wizard page (in the Transformation Parameters
page). It has to be very close to 1.0 since the transformation is basically just a rotation!
Нажмите кнопку Далее для перехода к странице Параметры трансформ.
6.
7. На странице Параметры трансформации вы увидите обзор результатов вычислений этих
параметров.
82
Page 96

Note that the transformation can be stored as any other 2D Helmert transformation if required.
Нажмите кнопку Далее для перехода к странице Завершение трансформации.
8.
9.
На странице Завершение трансформации приведен список всех смещенных точек, то есть всех точек
хода. Все точки приведены с новыми трансформированными координатами. Нажав кнопку
Завершить трансформацию, произойдет замена текущих координат точек, на новые
трансформированные.
83
Page 97

10. Нажмите кнопку Готово для принятия результатов трансформации координат точек хода.
Все необработанные результаты измерений остались неизменными, но ориентировка всех выбранных для
трансформации станций будет скорректирована по завершении трансформации.
Результаты вы можете видеть в окне
теперь будут соответствовать изображению на подложке.
Просм/Редакт.. Посмотрите, как ход и связанные с ним измерения
84
Page 98

Поздравляем! Вы успешно завершили уроки Курса IV.
85
Page 99

86
Page 100

TPS Курс V: Обработка хода
TPS Курс V: Обработка хода
В данном курсе описаны пошаговые инструкции для изучения процесса, как строить ход на основе серии
станций, измерения на которых выполнены электронным тахеометром TPS 1200, и как его перевычислить.
Файл под названием Ход импортируется в проект TPS Sample. Файл содержит серию TPS 1200 станций,
первая из которых определена с использованием метода «Задать Азимут», а остальные являются «опорными
задними» станциями. Полевые данные не содержат информацию о том, что ход был измерен. Программой
LGO распознаются лишь только одиночные Станции.
Основными задачами данного курса являются:
Сначала построить ход в программе LGO.
Выполнить перевычисление хода и сохранить результаты для последующей корректировки
координат всех станций и всех ориентировок.
Обновить координаты дополнительных станций, которые наблюдались с основных станций на
боковые точки хода.
Ход был измерен на том же участке, на который имелись уже данные, использованные в предыдущих уроках.
При сравнении с растровой подложкой, вы увидите полное соответствие хода после перевычисления.
Начнем ускоренный курс с урока: TPS Курс V. Урок 1: Импорт данных и построение хода
..
87
 Loading...
Loading...