

g
g
■
■
■
■
■
■
■
®
ispPAC-POWR1014/A
In-System Programmable Power Supply Supervisor,
Reset Generator and Sequencing Controller
August 2007 Data Sheet DS1014
Features
Monitor and Control Multiple Power Supplies
• Simultaneously monitors up to 10 power
supplies
• Provides up to 14 output control signals
• Programmable digital and analog circuitry
Embedded PLD for Sequence Control
• 24-macrocell CPLD implements both state
machines and combinatorial logic functions
Embedded Programmable Timers
• Four independent timers
• 32µs to 2 second intervals for timing sequences
Analog Input Monitoring
• 10 independent analog monitor inputs
• Two programmable threshold comparators per
analog input
• Hardware window comparison
• 10-bit ADC for I
POWR1014A only)
High-Voltage FET Drivers
• Power supply ramp up/down control
• Programmable current and voltage output
• Independently configurable for FET control or
digital output
2-Wire (I
2
C/SMBus™ Compatible) Interface
• Comparator status monitor
• ADC readout
• Direct control of inputs and outputs
• Power sequence control
• Only available with ispPAC-POWR1014A
3.3V Operation, Wide Supply Range 2.8V to
3.96V
• In-system programmable through JTAG
• Industrial temperature range: -40°C to +85°C
• 48-pin TQFP package, lead-free option
2
C monitoring (ispPAC-
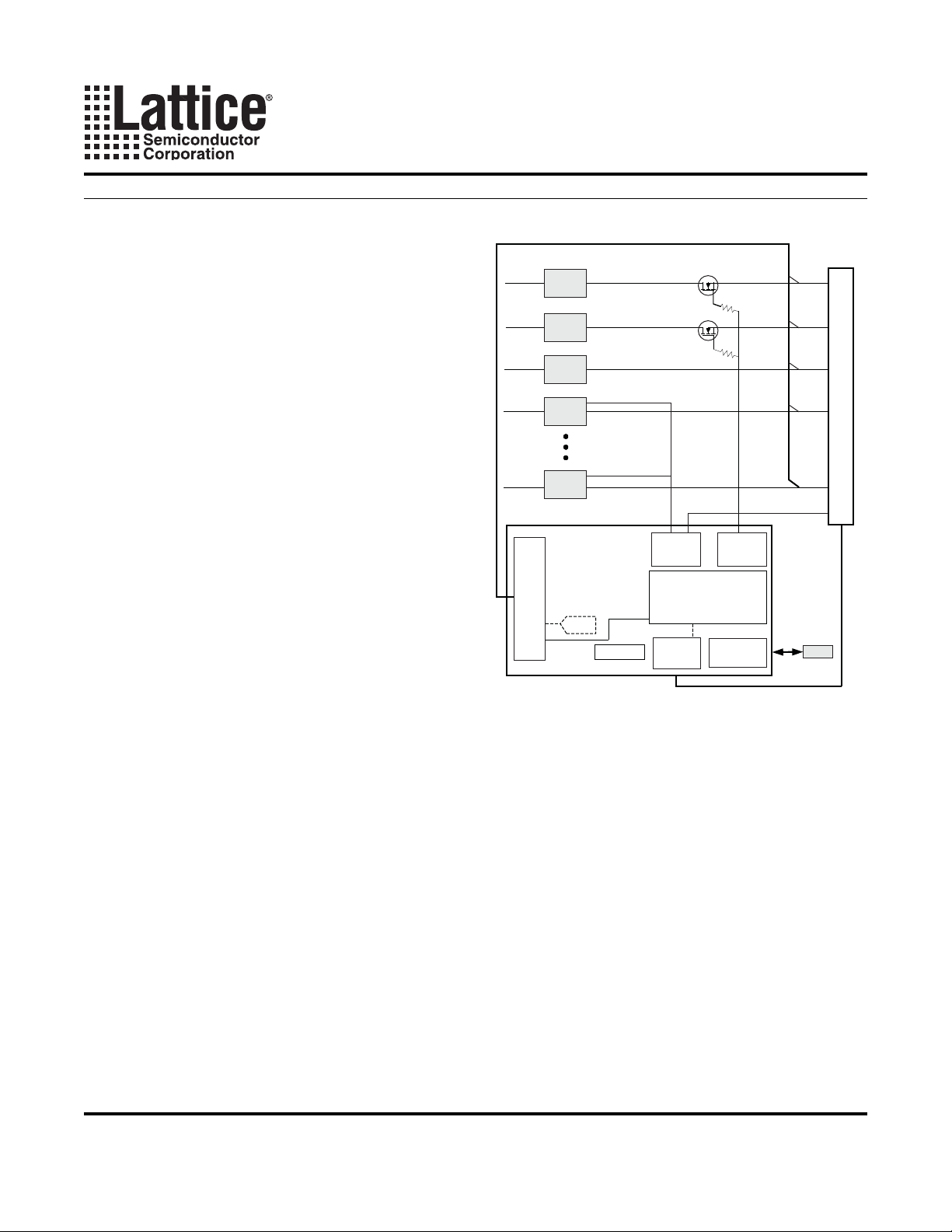
Application Block Diagram
Primary
Supply
Primary
Supply
Primary
Supply
Primary
Supply
Primary
Supply
*ispPAC-POWR1014A only.
3.3V
2.5V
1.8V
POL#1
POL#N
ADC*
10 Analog Inputs
and Voltage Monitors
ispPAC-POWR1014A
4 Timers
Enables
12 Digital
Outputs
24 Macrocells
4 Digital
Inputs
Other Control/Supervisory
Signals
2 MOSFET
Drivers
CPLD
53 Inputs
2
C
I
Interface
2
I
Bus*
Voltage
C
Other Board Circuitry
Monitoring
ital Monitorin
Di
CPU
Description
Lattice’s Power Manager II ispPAC-POWR1014/A is a
general-purpose power-supply monitor and sequence
controller, incorporating both in-system programmable
logic and in-system programmable analog functions
implemented in non-volatile E
ispPAC-POWR1014/A device provides 10 independent
analog input channels to monitor up to 10 power supply
test points. Each of these input channels has two independently programmable comparators to support both
high/low and in-bounds/out-of-bounds (window-compare) monitor functions. Four general-purpose digital
inputs are also provided for miscellaneous control functions.
2
CMOS
®
technology. The
The ispPAC-POWR1014/A provides 14 open-drain digital outputs that can be used for controlling DC-DC converters, low-drop-out regulators (LDOs) and optocouplers, as well as for supervisory and general-purpose logic interface functions. Two of these outputs
© 2007 Lattice Semiconductor Corp. All Lattice trademarks, registered trademarks, patents, and disclaimers are as listed at www.latticesemi.com/legal. All other
brand or product names are trademarks or registered trademarks of their respective holders. The specifications and information herein are subject to change without
notice.
www.latticesemi.com
(HVOUT1-HVOUT2) may be configured as high-voltage
1
DS1014_01.5
n
n
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
MOSFET drivers. In high-voltage mode these outputs can provide up to 10V for driving the gates of n-channel
MOSFETs so that they can be used as high-side power switches controlling the supplies with a programmable
ramp rate for both ramp up and ramp down.
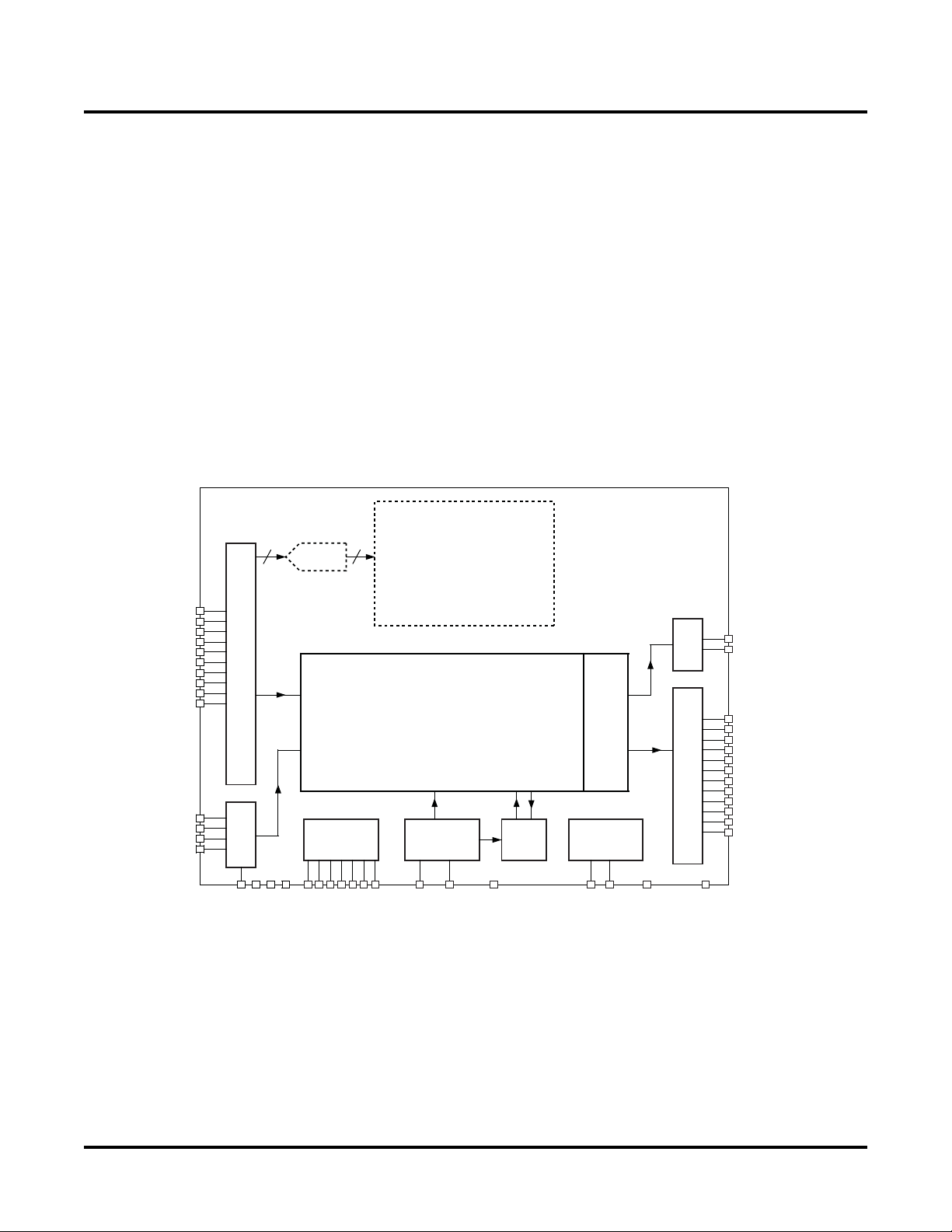
The ispPAC-POWR1014/A incorporates a 24-macrocell CPLD that can be used to implement complex state
machine sequencing for the control of multiple power supplies as well as combinatorial logic functions. The status
of all of the comparators on the analog input channels as well as the general purpose digital inputs are used as
inputs by the CPLD array, and all digital outputs may be controlled by the CPLD. Four independently programmable
timers can create delays and time-outs ranging from 32µs to 2 seconds. The CPLD is programmed using LogiBuilder™, an easy-to-learn language integrated into the PAC-Designer
monitor the status of any of the analog input channel comparators or the digital inputs.
The on-chip 10-bit A/D converter is used to monitor the V
MON
POWR1014A device.
2
The I
C bus/SMBus interface allows an external microcontroller to measure the voltages connected to the V
inputs, read back the status of each of the V
comparator and PLD outputs, control logic signals IN2 to IN4 and
MON
control the output pins (ispPAC-POWR1014A only).
®
software. Control sequences are written to
voltage through the I
2
C bus of the ispPAC-
MON
Figure 1. ispPAC-POWR1014/A Block Diagram
ADC*
VMON1
VMON2
VMON3
VMON4
VMON5
VMON6
VMON7
VMON8
VMON9
VMON10
IN1
IN2
IN3
IN4
A
N
D
V
O
L
T
A
E G
N O M
I
T
O
R
S
I
N
P
T U
S
1
0
A
N
A
L
O
G
I
N
P
S T U
4
D
I
G
I
T
A
L
VCCINP
VCCA
VCCD (2)
V
C
C
P
R
O
G
JTAG LOGIC
T
V
T
T
C
D
C
K
O
C
S M
J
TDISEL
T
D
I
A
T
D
I
MEASUREMENT
CONTROL LOGIC*
CPLD
24 MACROCELLS
53 INPUTS
CLOCK
OSCILLATOR
P
M
L
C
L
C D
K
L
K
R
S E
T E
b
TIMERS
(4)
O
U
T
P
U
P
T
O
R
O
O
L
G N I T U
I2C
INTERFACE
SCL (POWR1014A o
SDA (POWR1014A o
GNDA
D
R
2
I
V
R E
S
G I D
T I
L A
O
T U
P
U
T
S
F
T E
1
2
O
P
E
N
-
D
R
I A
N
GNDD (2)
HVOUT1
HVOUT2
OUT3/(SMBA*)
OUT4
OUT5
OUT6
OUT7
OUT8
OUT9
OUT10
OUT11
OUT12
OUT13
OUT14
*ispPAC-POWR1014A only.
2
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
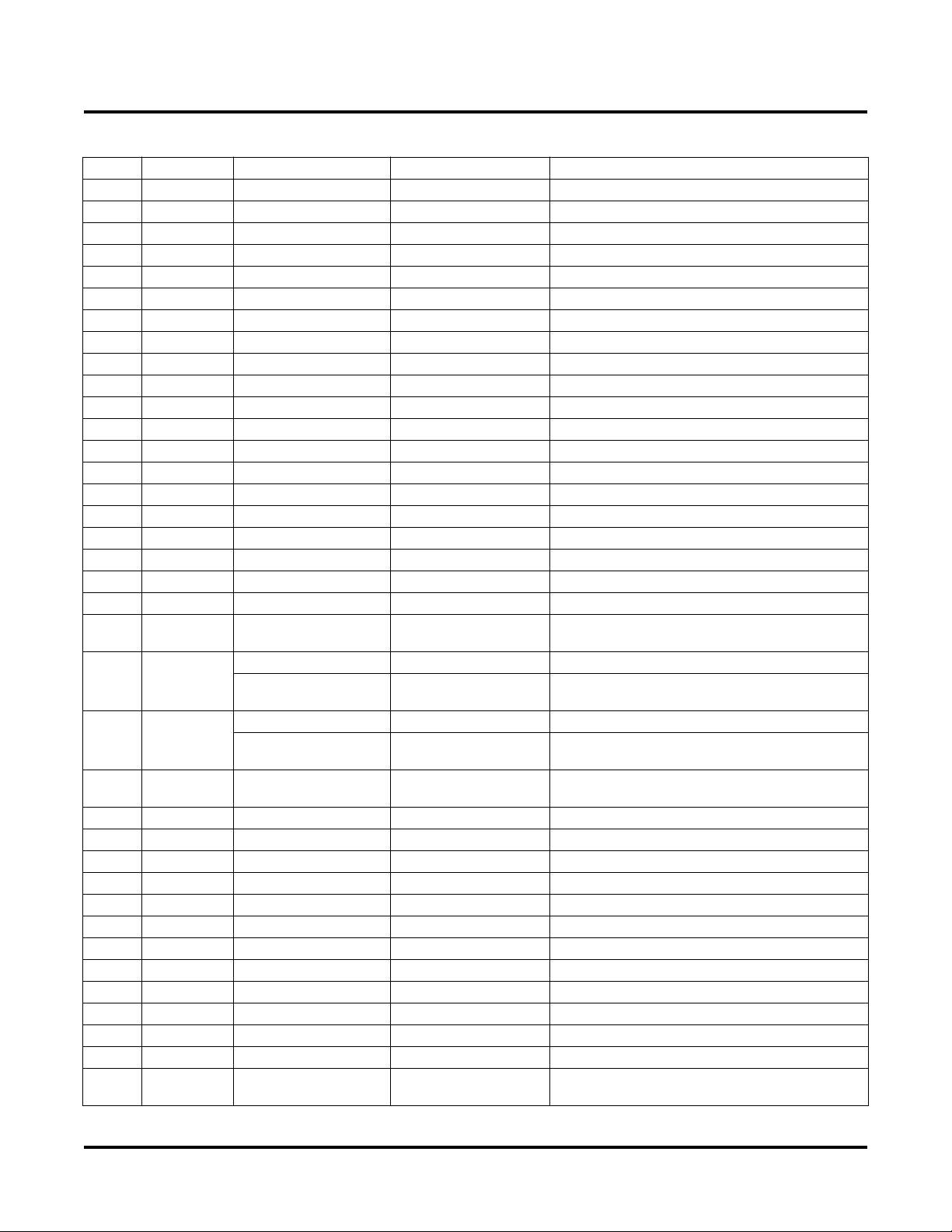
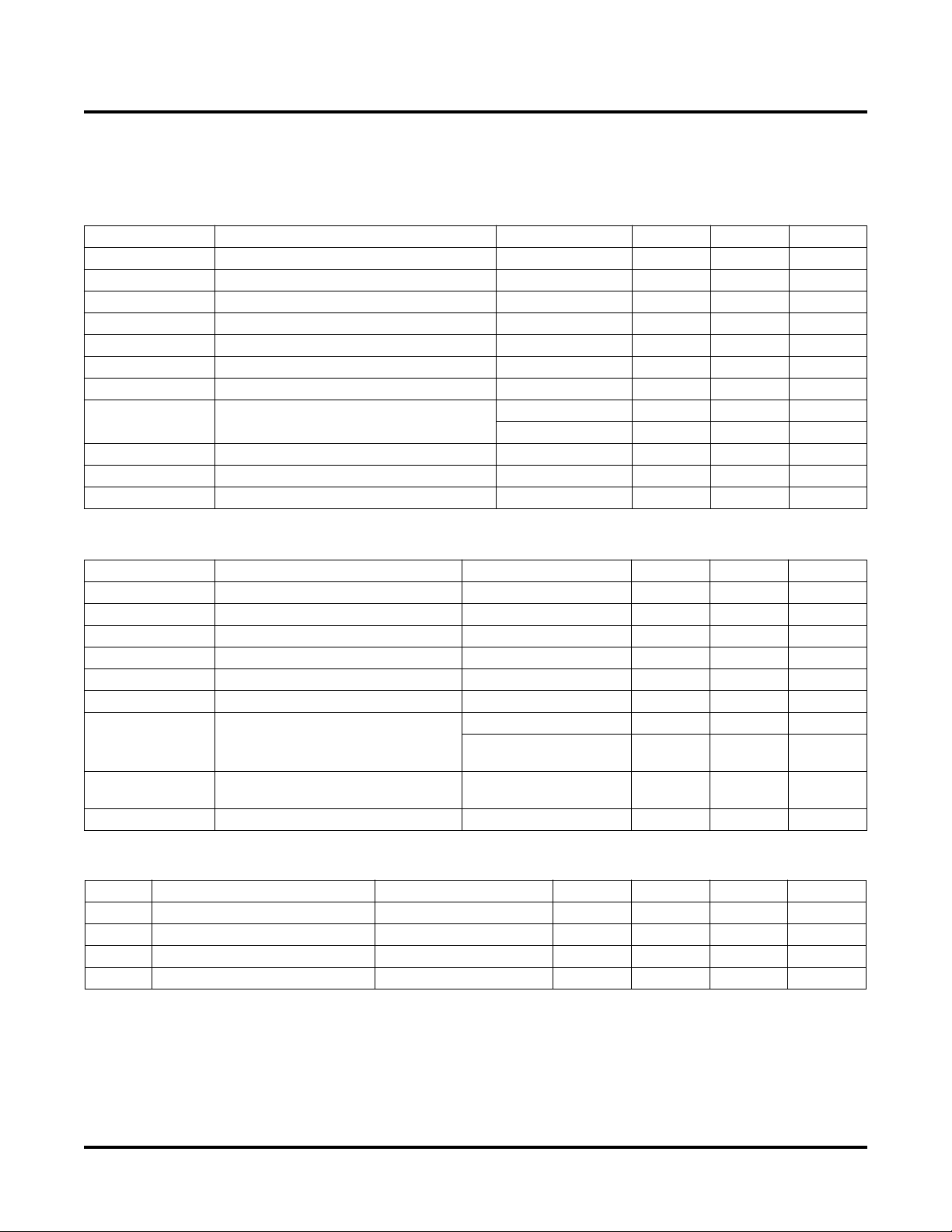
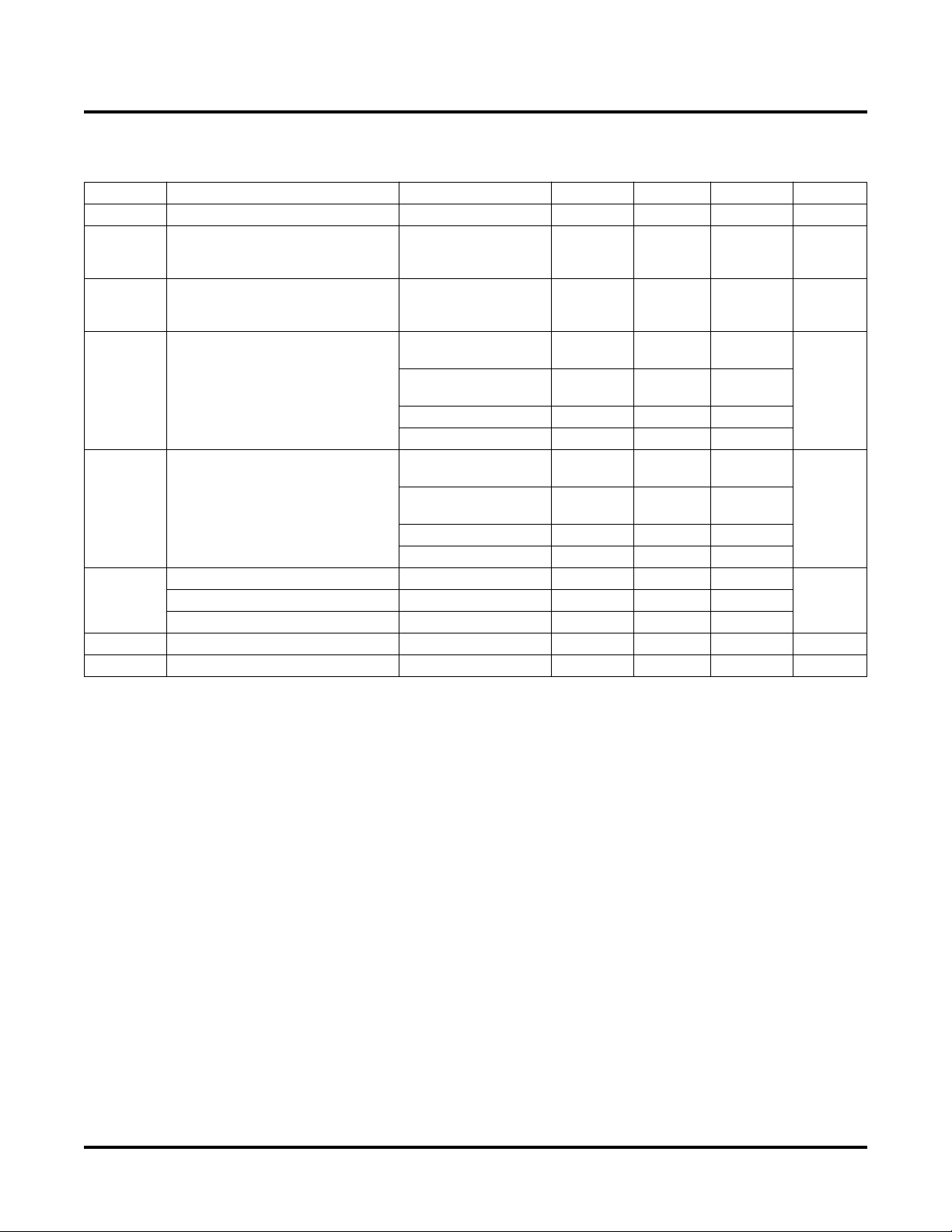
Pin Descriptions
Number Name Pin Type Voltage Range Description
44 IN1 Digital Input VCCINP
46 IN2 Digital Input VCCINP
47 IN3 Digital Input VCCINP
48 IN4 Digital Input VCCINP
25 VMON1 Analog Input -0.3V to 5.87V
26 VMON2 Analog Input -0.3V to 5.87V
27 VMON3 Analog Input -0.3V to 5.87V
28 VMON4 Analog Input -0.3V to 5.87V
32 VMON5 Analog Input -0.3V to 5.87V
33 VMON6 Analog Input -0.3V to 5.87V
34 VMON7 Analog Input -0.3V to 5.87V
35 VMON8 Analog Input -0.3V to 5.87V
36 VMON9 Analog Input -0.3V to 5.87V
37 VMON10 Analog Input -0.3V to 5.87V
7, 31 GNDD
30 GNDA
41, 23 VCCD
29 VCCA
5
5
6
6
Ground Ground Digital Ground
Ground Ground Analog Ground
Power 2.8V to 3.96V Core VCC, Main Power Supply
Power 2.8V to 3.96V Analog Power Supply
45 VCCINP Power 2.25V to 5.5V VCC for IN[1:4] Inputs
20 VCCJ Power 2.25V to 3.6V VCC for JTAG Logic Interface Pins
24 VCCPROG Power 3.0V to 3.6V
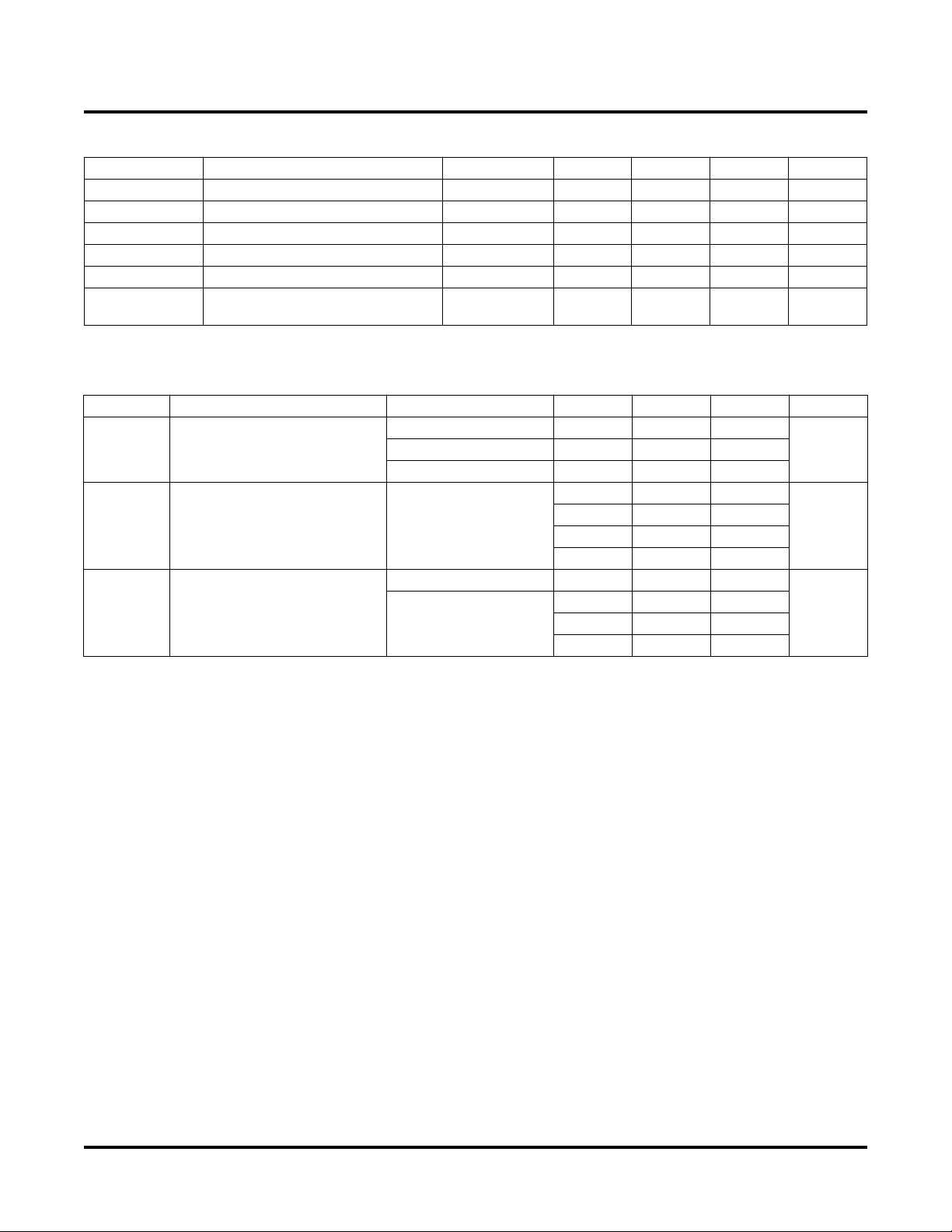
7
Open Drain Output
15 HVOUT1
Current Source/Sink
Open Drain Output
14 HVOUT2
Current Source/Sink
13 SMBA_OUT3 Open Drain Output
12 OUT4 Open Drain Output
11 OUT5 Open Drain Output
10 OUT6 Open Drain Output
9 OUT7 Open Drain Output
8 OUT8 Open Drain Output
6 OUT9 Open Drain Output
5 OUT10 Open Drain Output
4 OUT11 Open Drain Output
3 OUT12 Open Drain Output
2 OUT13 Open Drain Output
1 OUT14 Open Drain Output
8
40 RESETb
Digital I/O 0V to 3.96V Device Reset (Active Low) - Internal pull-up
0V to 10V Open-Drain Output 1
12.5µA to 100µA Source
100µA to 3000µA Sink
7
0V to 10V Open-Drain Output 2
12.5µA to 100µA Source
100µA to 3000µA Sink
7
0V to 5.5V
7
0V to 5.5V Open-Drain Output 4
7
0V to 5.5V Open-Drain Output 5
7
0V to 5.5V Open-Drain Output 6
7
0V to 5.5V Open-Drain Output 7
7
0V to 5.5V Open-Drain Output 8
7
0V to 5.5V Open-Drain Output 9
7
0V to 5.5V Open-Drain Output 10
7
0V to 5.5V Open-Drain Output 11
7
0V to 5.5V Open-Drain Output 12
7
0V to 5.5V Open-Drain Output 13
7
0V to 5.5V Open-Drain Output 14
42 PLDCLK Digital Output 0V to 3.96V
1
1
1
1
4
4
4
4
4
4
4
4
4
4
PLD Logic Input 1 Registered by MCLK
PLD Logic Input 2 Registered by MCLK
PLD Logic Input 3 Registered by MCLK
PLD Logic Input 4 Registered by MCLK
Voltage Monitor 1 Input
Voltage Monitor 2 Input
Voltage Monitor 3 Input
Voltage Monitor 4 Input
Voltage Monitor 5 Input
Voltage Monitor 6 Input
Voltage Monitor 7 Input
Voltage Monitor 8 Input
Voltage Monitor 9 Input
Voltage Monitor 10 Input
VCC for E
Powered by V
2
Programming when the Device is Not
and V
CCD
CCA
High-voltage FET Gate Driver 1
High-voltage FET Gate Driver 2
Open-Drain Output 3, (SMBUS Alert Active Low,
ispPAC-POWR1014A only).
250kHz PLD Clock Output (Tristate), CMOS
Output - Internal pull-up
3
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
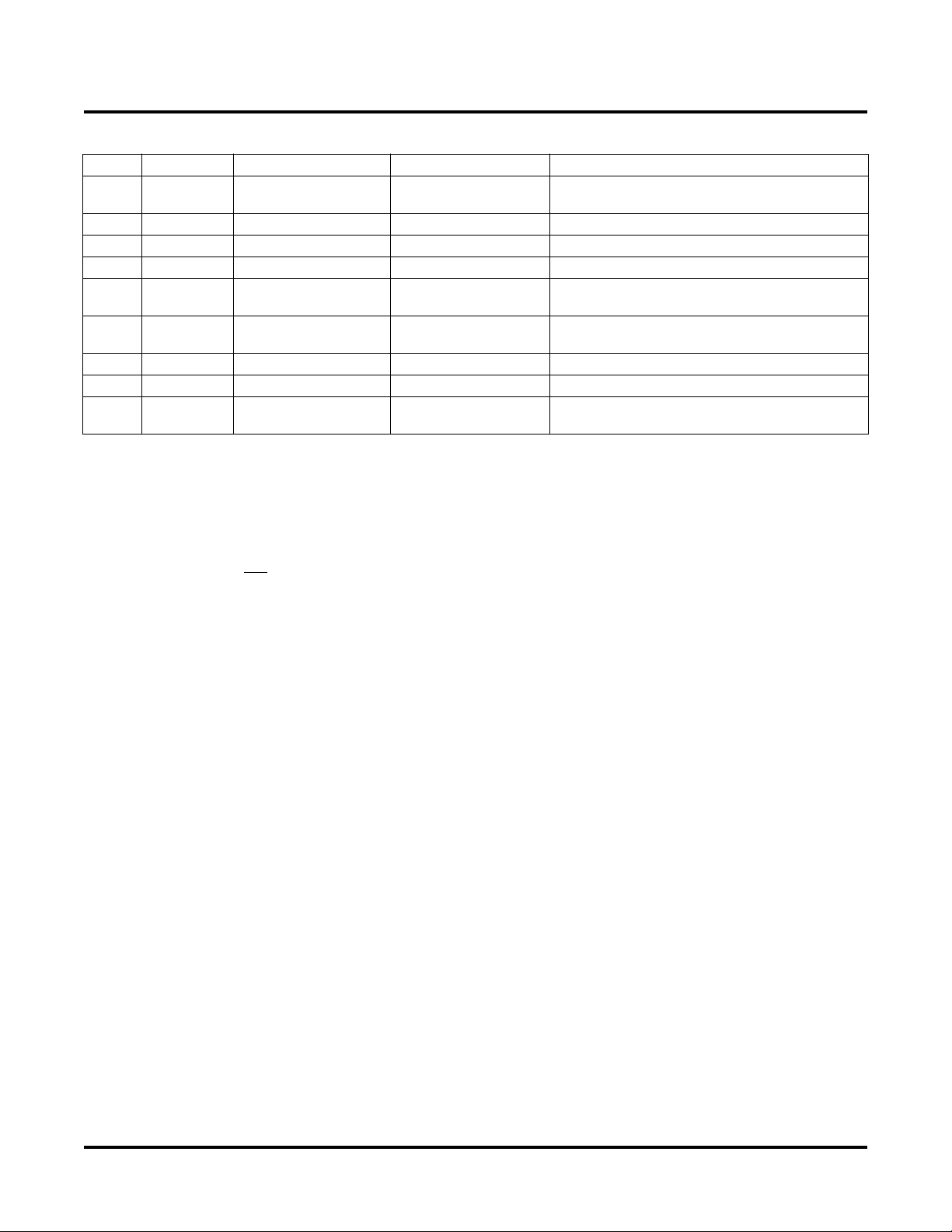
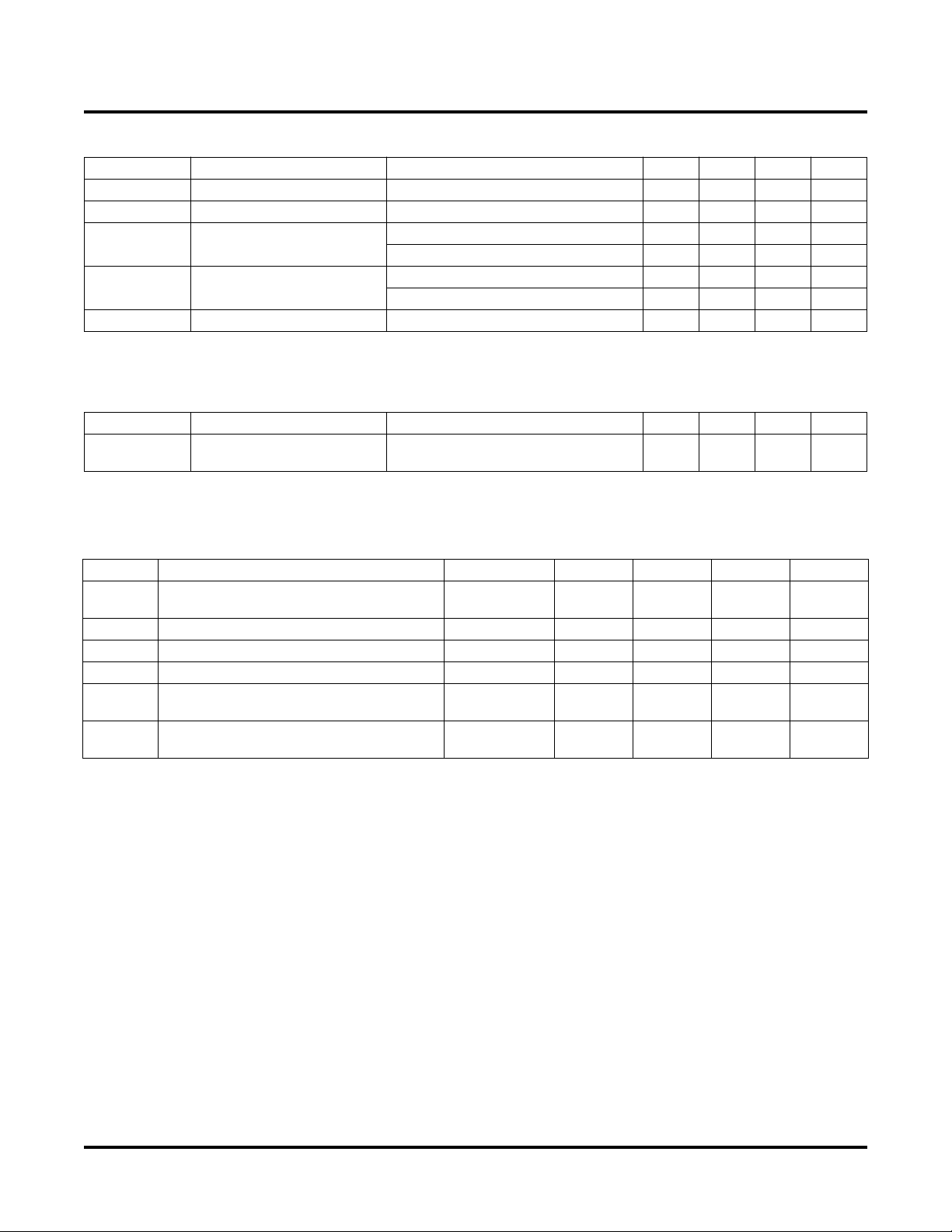
Pin Descriptions (Cont.)
Number Name Pin Type Voltage Range Description
43 MCLK Digital I/O 0V to 3.96V
21 TDO Digital Output 0V to 5.5V JTAG Test Data Out
22 TCK Digital Input 0V to 5.5V JTAG Test Clock Input
16 TMS Digital Input 0V to 5.5V JTAG Test Mode Select - Internal Pull-up
18 TDI Digital Input 0V to 5.5V
17 ATDI Digital Input 0V to 5.5V
19 TDISEL Digital Input 0V to 5.5V Select TDI/ATDI Input - Internal Pull-up
39 SCL
38 SDA
1. [IN1...IN4] are inputs to the PLD. The thresholds for these pins are referenced by the voltage on VCCINP. Unused INx inputs should be tied
to GNDD.
2. IN1 pin can also be controlled through JTAG interface.
3. [IN2..IN4] can also be controlled through I
4. The VMON inputs can be biased independently from VCCA. Unused VMON inputs should be tied to GNDD.
5. GNDA and GNDD pins must be connected together on the circuit board.
6. VCCD and VCCA pins must be connected together on the circuit board.
7. Open-drain outputs require an external pull-up resistor to a supply.
8. The RESETb pin should only
9. These pins should be connected to GNDD (ispPAC-POWR1014 device only).
9
9
Digital Input 0V to 5.5V I
Digital I/O 0V to 5.5V
2
C/SMBus interface (ispPAC-POWR1014A only).
be used for cascading two or more ispPAC-POWR1014/A devices.
8MHz Clock I/O (Tristate), CMOS Drive - Internal
Pull-up
JTAG Test Data In, TDISEL pin = 1 - Internal
Pull-up
JTAG Test Data In (Alternate), TDISEL Pin = 0 Internal Pull-up
2
C Serial Clock Input (ispPAC-POWR1014A Only)
2
I
C Serial Data, Bi-directional Pin, Open Drain
(ispPAC-POWR1014A Only)
4
C
C
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
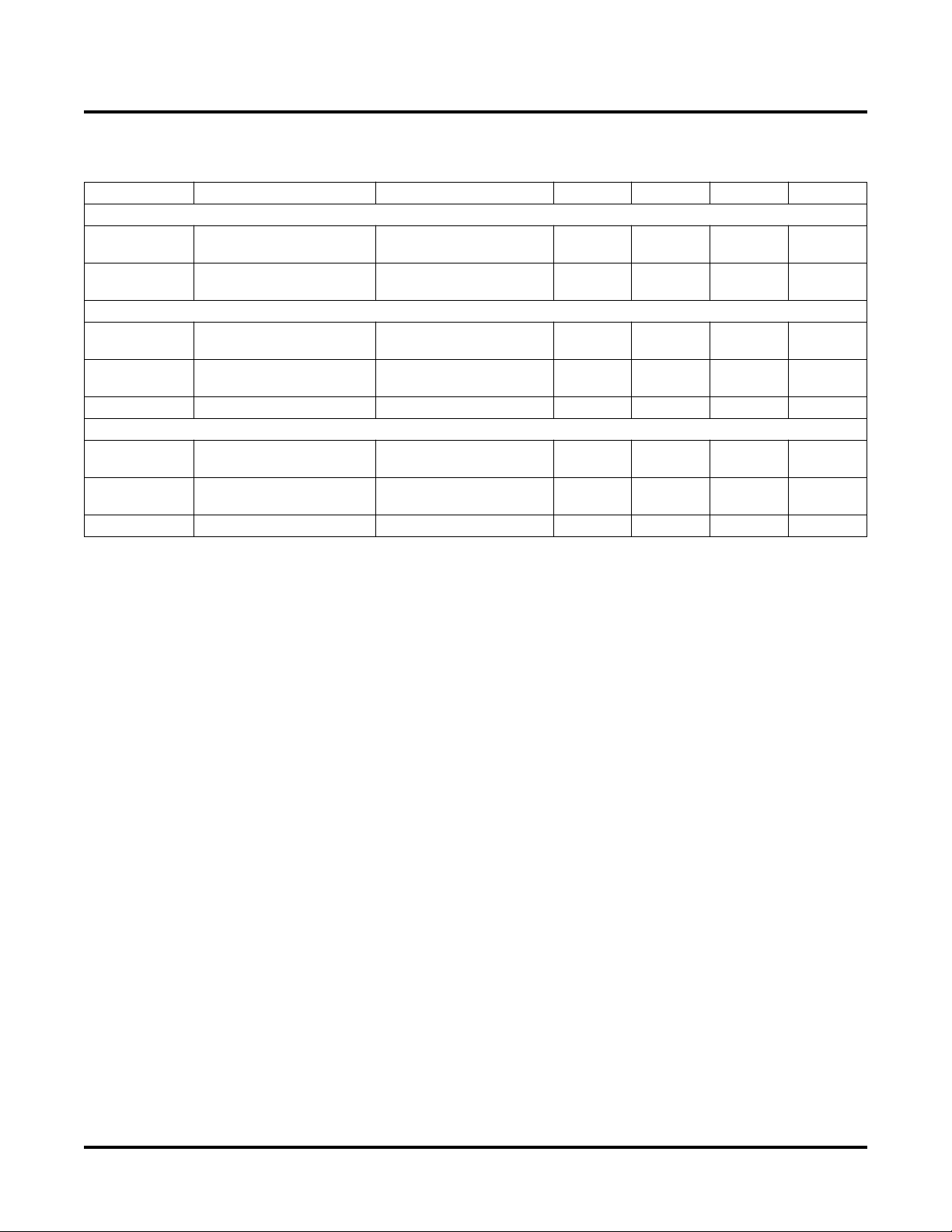
Absolute Maximum Ratings
Absolute maximum ratings are shown in the table below. Stresses beyond those listed may cause permanent damage to the device. Functional operation of the device at these or any other conditions beyond those indicated in the
recommended operating conditions of this specification is not implied.
Symbol Parameter Conditions Min. Max. Units
V
CCD
V
CCA
V
CCINP
V
CCJ
V
CCPROG
V
IN
V
MON
V
TRI
I
SINKMAXTOTAL
T
S
T
A
Core supply -0.5 4.5 V
Analog supply -0.5 4.5 V
Digital input supply (IN[1:4]) -0.5 6 V
JTAG logic supply -0.5 6 V
2
E
programming supply -0.5 4 V
Digital input voltage (all digital I/O pins) -0.5 6 V
V
input voltage -0.5 6 V
MON
Voltage applied to tri-stated pins
HVOUT[1:2] -0.5 11 V
OUT[3:14] -0.5 6 V
Maximum sink current on any output 23 mA
Storage temperature -65 150
Ambient temperature -65 125
o
C
o
Recommended Operating Conditions
Symbol Parameter Conditions Min. Max. Units
V
CCD,
V
CCINP
V
CCJ
V
CCPROG
V
IN
V
MON
V
CCA
Core supply voltage at pin 2.8 3.96 V
Digital input supply for IN[1:4] at pin 2.25 5.5 V
JTAG logic supply voltage at pin 2.25 3.6 V
2
E
programming supply at pin During E
2
programming 3.0 3.6 V
Input voltage at digital input pins -0.3 5.5 V
Input voltage at V
pins -0.3 5.9 V
MON
OUT[3:14] pins -0.3 5.5 V
V
OUT
T
APROG
T
A
Open-drain output voltage
Ambient temperature during
programming
HVOUT[1:2] pins in opendrain mode
-0.3 10.4 V
-40 85
Ambient temperature Power applied -40 85
Analog Specifications
Symbol Parameter Conditions Min. Typ. Max. Units
1
I
CC
I
CCINP
I
CCJ
I
CCPROG
1. Includes currents on V
Supply current 20 mA
Supply current 5mA
Supply current 1mA
Supply current During programming cycle 20 mA
CCD
and V
supplies.
CCA
o
C
o
5
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Voltage Monitors
Symbol Parameter Conditions Min. Typ. Max. Units
R
IN
C
IN
V
Range Programmable trip-point range 0.075 5.867 V
MON
V
Sense Near-ground sense threshold 70 75 80 mV
Z
V
Accuracy Absolute accuracy of any trip-point
MON
HYST
1. Guaranteed by characterization across V
Input resistance 55 65 75 k
Input capacitance 8 pF
1
Hysteresis of any trip-point (relative to
setting)
range, operating temperature, process.
CCA
0.3 0.9 %
1%
Ω
High Voltage FET Drivers
Symbol Parameter Conditions Min. Typ. Max. Units
10V setting 9.6 10 10.4
V
PP
I
OUTSRC
I
OUTSINK
Gate driver output voltage
Gate driver source current
(HIGH state)
Gate driver sink current
(LOW state)
6V setting 5.8 6 6.2
12.5
Four settings in software
25
50
100
FAST OFF mode 2000 3000
100
Controlled ramp settings
250
500
V8V setting 7.7 8 8.3
µA
µA
6
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
ADC Characteristics
1
Symbol Parameter Conditions Min. Typ. Max. Units
ADC resolution 10 Bits
T
CONVERT
V
IN
ADC Step Size LSB
Conversion time Time from I2C request 100 µs
Input range full scale
Programmable attenuator = 1 0 2.048 V
Programmable attenuator = 3 0 5.9
2
Programmable attenuator = 1 2 mV
Programmable attenuator = 3 6 mV
Eattenuator Error due to attenuator Programmable attenuator = 3 +/- 0.1 %
1. ispPAC-POWR1014A only.
2. Maximum voltage is limited by V
ADC Error Budget Across Entire Operating Temperature Range
pin (theoretical maximum is 6.144V).
MONX
1
Symbol Parameter Conditions Min. Typ. Max. Units
TADC Error
1. ispPAC-POWR1014A only.
2. Total error, guaranteed by characterization, includes INL, DNL, Gain, Offset, and PSR specs of the ADC.
Total Measurement Error at
Any Voltage
2
Measurement Range 600 mV - 2.048V,
Attenuator =1
-8 +/-4 8 mV
Power-On Reset
Symbol Parameter Conditions Min. Typ. Max. Units
T
GOOD
V
TL
V
TH
V
T
T
POR
C
L
1. Corresponds to VCCA and VCCD supply voltages.
Power-on reset to valid VMON comparator
output
Threshold below which RESETb is LOW
Threshold above which RESETb is HIGH
Threshold above which RESETb is valid
Minimum duration dropout required to trigger
RESETb
Capacitive load on RESETb for master/slave
operation
1
1
1
2.7 V
0.8 V
15µs
500 µs
2.3 V
200 pF
V
7
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
AC/Transient Characteristics
Over Recommended Operating Conditions
Symbol Parameter Conditions Min. Typ. Max. Units
Voltage Monitors
t
PD16
t
PD64
Propagation delay input to
output glitch filter OFF
Propagation delay input to
output glitch filter ON
Oscillators
f
CLK
f
CLKEXT
f
PLDCLK
Internal master clock
frequency (MCLK)
Externally applied master
clock (MCLK)
PLDCLK output frequency f
Timers
Timeout Range
Resolution
Range of programmable
timers (128 steps)
Spacing between available
adjacent timer intervals
Accuracy Timer accuracy f
7.6 8 8.4 MHz
7.2 8.8 MHz
= 8MHz 250 kHz
CLK
= 8MHz 0.032 1966 ms
f
CLK
= 8MHz -6.67 -12.5 %
CLK
16 µs
64 µs
13 %
8
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Digital Specifications
Over Recommended Operating Conditions
Symbol Parameter Conditions Min. Typ. Max. Units
I
IL,IIH
I
OH-HVOUT
I
PU
V
IL
V
IH
V
OL
V
OH
I
SINKTOTAL
1. IN[1:4] referenced to V
2. Sum of maximum current sink from all digital outputs combined. Reliable operation is not guaranteed if this value is exceeded.
Input leakage, no pull-up/pull-down +/-10 µA
HVOUT[1:2] in open
Output leakage current
drain mode and pulled
35 60 µA
up to 10V
Input pull-up current (TMS, TDI,
TDISEL, ATDI, MCLK, PLDCLK,
70 µA
RESETb)
TDI, TMS, ATDI,
TDISEL, 3.3V supply
Voltage input, logic low
1
TDI, TMS, ATDI,
TDISEL, 2.5V supply
SCL, SDA 30% V
IN[1:4] 30% V
TDI, TMS, ATDI,
TDISEL, 3.3V supply
Voltage input, logic high
1
TDI, TMS, ATDI,
TDISEL, 2.5V supply
SCL, SDA 70% V
IN[1:4] 70% V
HVOUT[1:2] (open drain mode), I
TDO,MCLK,PLDCLK I
TDO, MCLK, PLDCLK I
2
All digital outputs 67 mA
; TDO, TDI, TMS, ATDI, TDISEL referenced to V
CCINP
= 10mA 0.8
SINK
= 20mA 0.8
SINK
= 4mA 0.4
SINK
= 4mA V
SRC
CCJ
2.0
1.7
CCD
CCINP
; SCL, SDA referenced to V
CCD.
0.8
0.7
CCD
CCINP
V
CCD
V
CCINP
- 0.4 V
CCD
V
V
VOUT[3:14] I
9
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
I2C Port Characteristics
1
Symbol Definition
F
I2C
T
SU;STA
T
HD;STA
T
SU;DAT
T
SU;STO
T
HD;DAT
T
LOW
T
HIGH
T
F
T
R
T
TIMEOUT
T
POR
T
BUF
1. Applies to ispPAC-POWR1014A only.
2. If F
is less than 50kHz, then the ADC DONE status bit is not guaranteed to be set after a valid conversion request is completed. In this
I2C
case, waiting for the T
readout. When F
I2C clock/data rate 100
After start 4.7 0.6 us
After start 4 0.6 us
Data setup 250 100 ns
Stop setup 4 0.6 us
Data hold; SCL= Vih_min = 2.1V 0.3 3.45 0.3 0.9 us
Clock low period 4.7 10 1.3 10 us
Clock high period 4 0.6 us
Fall time; 2.25V to 0.65V 300 300 ns
Rise time; 0.65V to 2.25V 1000 300 ns
Detect clock low timeout 25 35 25 35 ms
Device must be operational after power-on reset 500 500 ms
Bus free time between stop and start condition 4.7 1.3 us
CONVERT
is greater than 50kHz, ADC conversion complete is ensured by waiting for the DONE status bit.
I2C
minimum time after a convert request is made is the only way to guarantee a valid conversion is ready for
100KHz 400KHz
2
400
UnitsMin. Max. Min. Max.
2
KHz
10
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
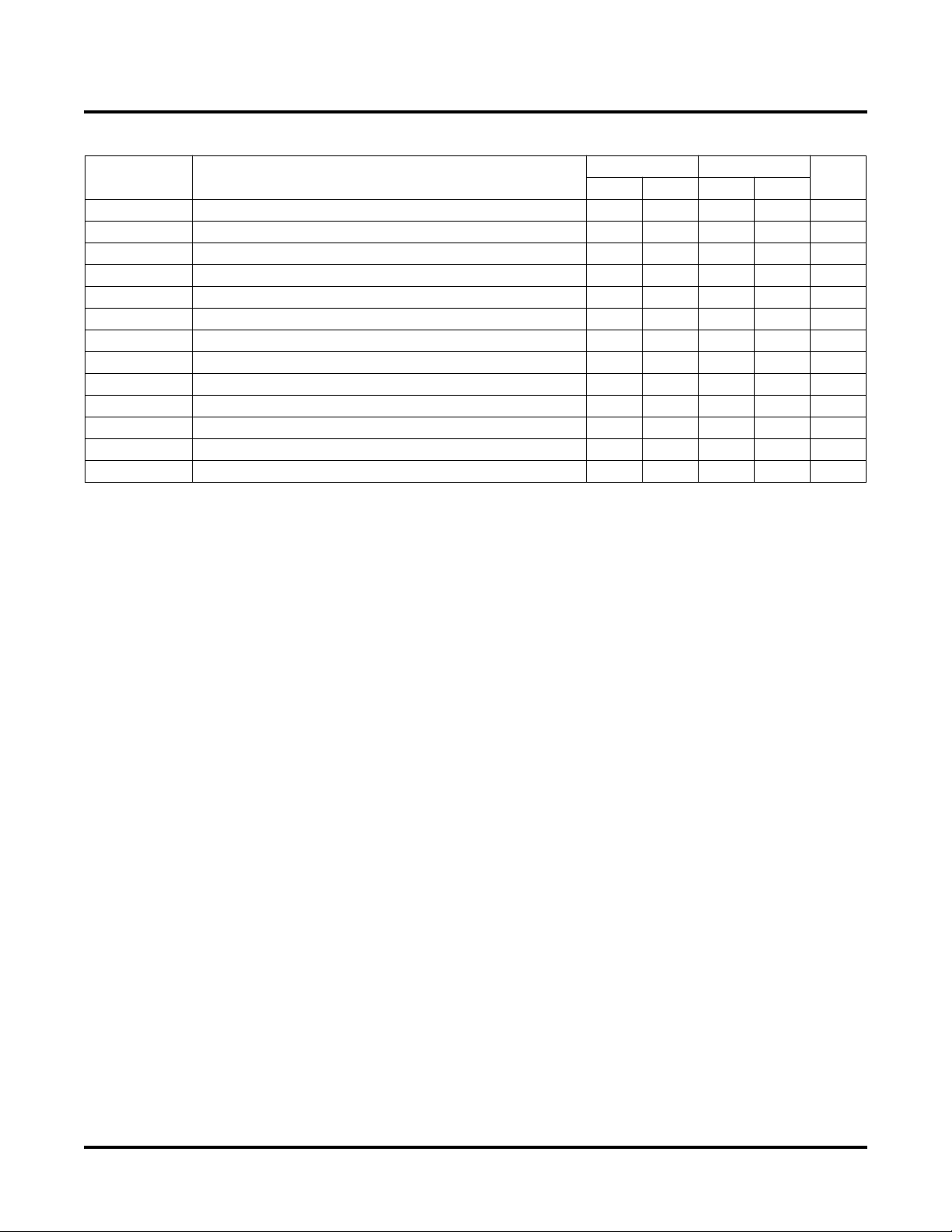
Timing for JTAG Operations
Symbol Parameter Conditions Min. Typ. Max. Units
t
ISPEN
t
ISPDIS
t
HVDIS
t
HVDIS
t
CEN
t
CDIS
t
SU1
t
H
t
CKH
t
CKL
f
MAX
t
CO
t
PWV
t
PWP
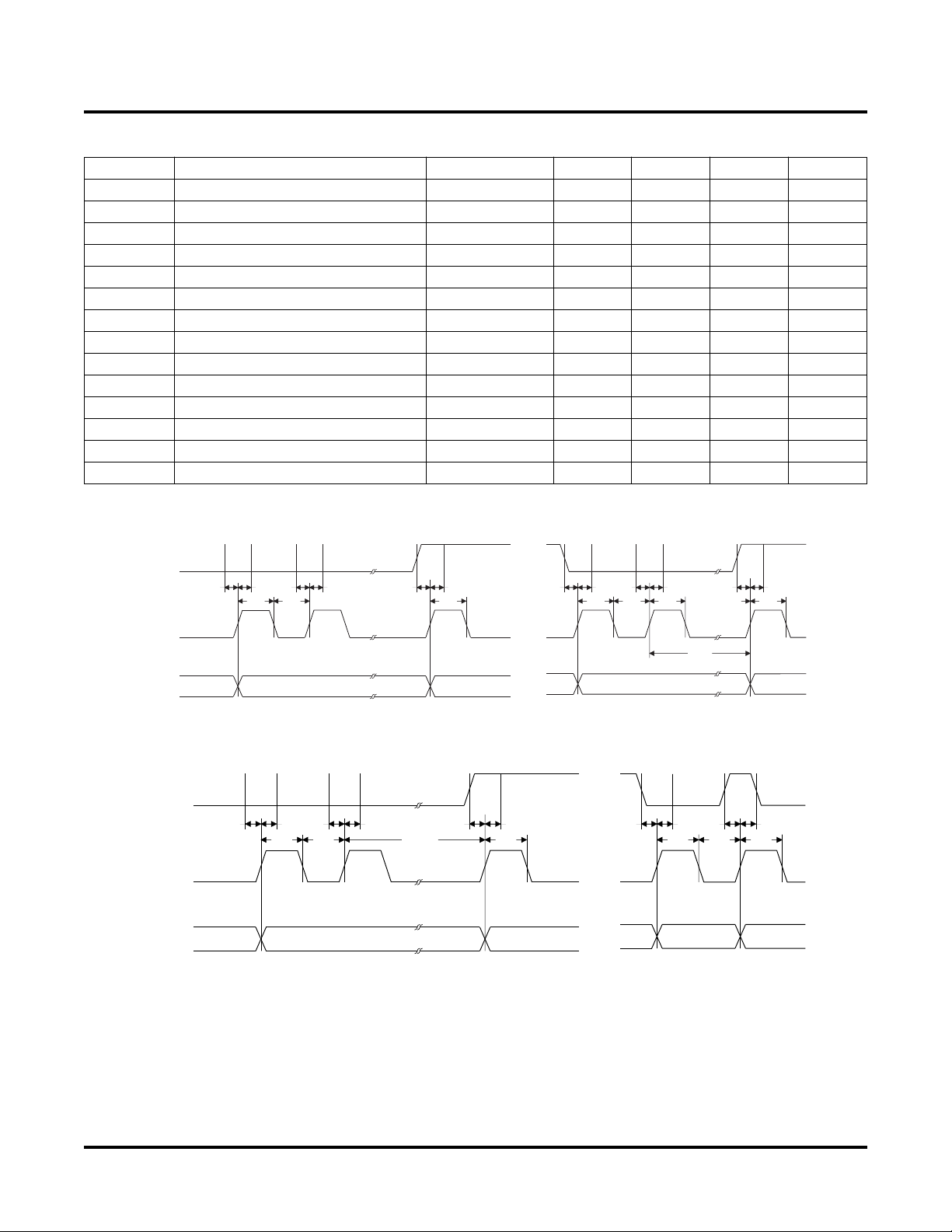
Figure 2. Erase (User Erase or Erase All) Timing Diagram
Program enable delay time 10 — — µs
Program disable delay time 30 — — µs
High voltage discharge time, program 30 — — µs
High voltage discharge time, erase 200 — — µs
Falling edge of TCK to TDO active — — 10 ns
Falling edge of TCK to TDO disable — — 10 ns
Setup time 5 — — ns
Hold time 10 — — ns
TCK clock pulse width, high 20 — — ns
TCK clock pulse width, low 20 — — ns
Maximum TCK clock frequency — — 25 MHz
Falling edge of TCK to valid output — — 10 ns
Verify pulse width 30 — — µs
Programming pulse width 20 — — ms
VIH
TMS
VIL
t
SU1
VIH
TCK
VIL
Update-IR Run-Test/Idle (Erase) Select-DR Scan
State
t
t
SU1
H
t
CKH tGKL
t
H
Figure 3. Programming Timing Diagram
VIH
TMS
VIL
TCK
State
t
SU1
VIH
VIL
Update-IR Run-Test/Idle (Program) Select-DR Scan
t
t
SU1
H
t
t
CKH
CKL
CKH
t
SU1
t
SU2
t
t
SU1
H
t
CKL
t
H
t
CKH
t
H
t
CKH
t
SU1
t
H
t
H
t
CKH
t
SU1
t
PWP
t
t
SU1
Instruction, then clock to the Run-Test/Idle state
Clock to Shift-IR state and shift in the Discharge
t
H
CKH
t
t
SU1
H
t
t
CKH
GKL
Run-Test/Idle (Discharge)
t
SU1
t
H
t
CKH
Specified by the Data Sheet
t
Update-IR
Clock to Shift-IR state and shift in the next
Instruction, which will stop the discharge process
11
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
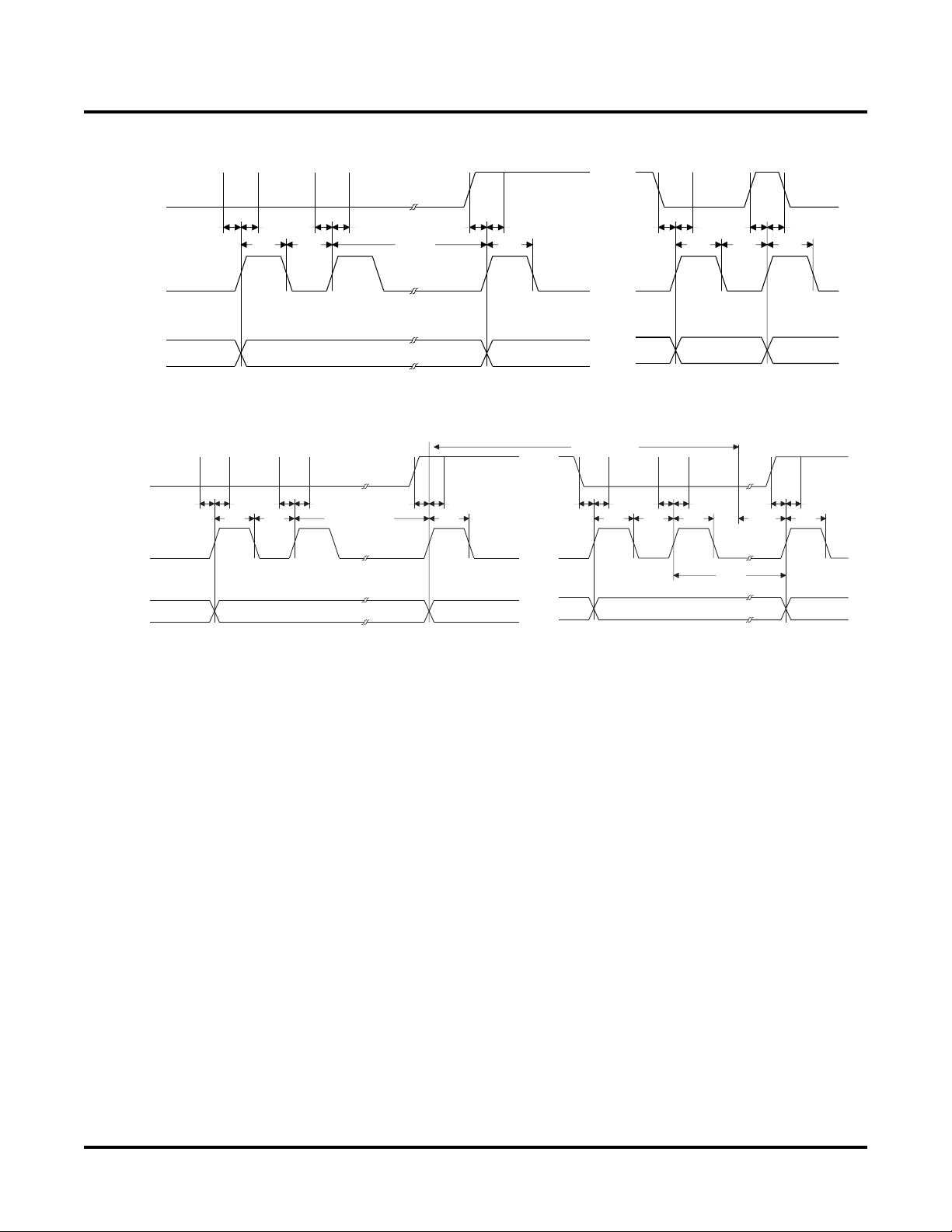
Figure 4. Verify Timing Diagram
VIH
TMS
VIL
t
H
t
CKH
TCK
VIH
t
t
SU1
VIL
t
H
SU1
t
t
CKH
CKL
t
H
t
SU1
t
PWV
t
H
t
CKH
t
SU1
t
t
H
SU1
t
CKH
t
CKL
State
Update-IR Run-Test/Idle (Program) Select-DR Scan
Update-IR
Clock to Shift-IR state and shift in the next Instruction
Figure 5. Discharge Timing Diagram
t
(Actual)
t
SU1
Clock to Shift-IR state and shift in the Verify
Instruction, then clock to the Run-Test/Idle state
HVDIS
t
t
H
SU1
t
t
CKH
CKL
Run-Test/Idle (Verify)
t
H
t
CKH
Specified by the Data Sheet
t
PWV
t
SU1
t
PWV
Actual
t
H
t
CKH
TMS
TCK
State
VIH
VIL
t
H
VIH
VIL
t
t
SU1
t
H
SU1
t
CKH tCKL
Update-IR Run-Test/Idle (Erase or Program)
t
SU1
t
PWP
t
H
t
CKH
Select-DR Scan
Theory of Operation
Analog Monitor Inputs
The ispPAC-POWR1014/A provides 10 independently programmable voltage monitor input circuits as shown in
Figure 6. Two individually programmable trip-point comparators are connected to an analog monitoring input. Each
comparator reference has 372 programmable trip points over the range of 0.672V to 5.867V. Additionally, a 75mV
‘zero-detect’ threshold is selectable which allows the voltage monitors to determine if a monitored signal has
dropped to ground level. This feature is especially useful for determining if a power supply’s output has decayed to
a substantially inactive condition after it has been switched off.
12
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Figure 6. ispPAC-POWR1014/A Voltage Monitors
ispPAC-POWR1014/A
To ADC
(POWR1014A only)
Comp A/Window
Select
MUX
Glitch
Filter
Glitch
Filter
VMONxA
Logic
Signal
VMONxB
Logic
Signal
PLD
Array
VMONx
Trip Point A
Trip Point B
Comp A
+
–
Comp B
+
–
Analog Input
Window Control
Filtering
VMONx Status
I2C Interface
Unit (POWR1014A
only)
Figure 6 shows the functional block diagram of one of the 10 voltage monitor inputs - ‘x’ (where x = 1...10). Each
voltage monitor can be divided into three sections: Analog Input, Window Control, and Filtering.
The voltage input is monitored by two individually programmable trip-point comparators, shown as CompA and
CompB. Table 1 shows all trip points and the range to which any comparator’s threshold can be set.
Each comparator outputs a HIGH signal to the PLD array if the voltage at its positive terminal is greater than its programmed trip point setting, otherwise it outputs a LOW signal.
A hysteresis of approximately 1% of the setpoint is provided by the comparators to reduce false triggering as a
result of input noise. The hysteresis provided by the voltage monitor is a function of the input divider setting. Table 3
lists the typical hysteresis versus voltage monitor trip-point.
AGOOD Logic Signal
All the VMON comparators auto-calibrate immediately after a power-on reset event. During this time, the digital
glitch filters are also initialized. This process completion is signalled by an internally generated logic signal:
AGOOD. All logic using the VMON comparator logic signals must wait for the AGOOD signal to become active.
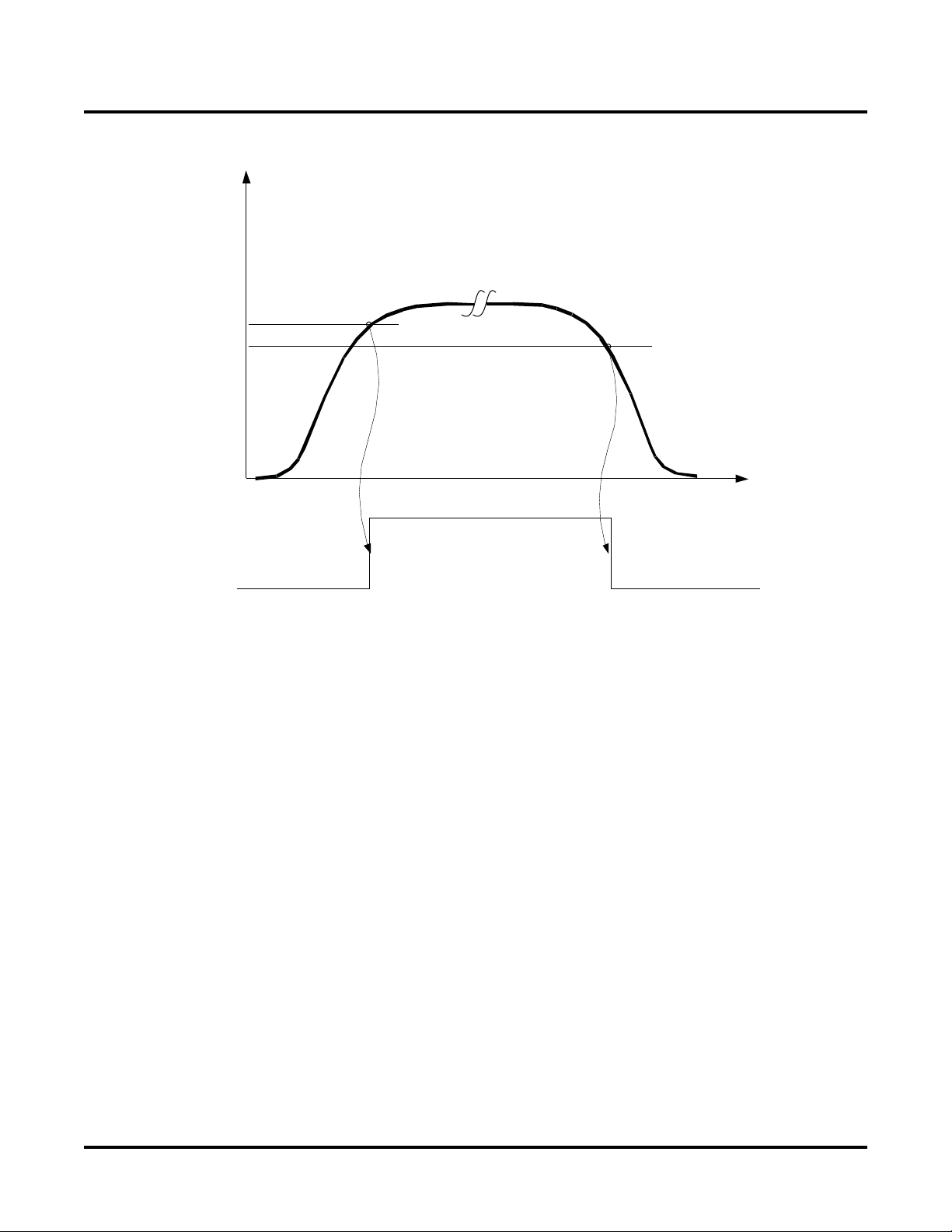
Programmable Over-Voltage and Under-Voltage Thresholds
Figure 7 (a) shows the power supply ramp-up and ramp-down voltage waveforms. Because of hysteresis, the comparator outputs change state at different thresholds depending on the direction of excursion of the monitored power
supply.
13
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Figure 7. (a) Power Supply Voltage Ramp-up and Ramp-down Waveform and the Resulting Comparator
Output, (b) Corresponding to Upper and Lower Trip Points
UTP
LTP
(a)
Monitored Power Supply Votlage
(b)
Comparator Logic Output
During power supply ramp-up the comparator output changes from logic 0 to 1 when the power supply voltage
crosses the upper trip point (UTP). During ramp down the comparator output changes from logic state 1 to 0 when
the power supply voltage crosses the lower trip point (LTP). To monitor for over voltage fault conditions, the UTP
should be used. To monitor under-voltage fault conditions, the LTP should be used.
Tables 1 and 2 show both the under-voltage and over-voltage trip points, which are automatically selected in software depending on whether the user is monitoring for an over-voltage condition or an under-voltage condition.
14

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Table 1. Trip Point Table Used For Over-Voltage Detection
Coarse Range Setting
Fine
Range
Setting 123456789101112
1 0.806 0.960 1.143 1.360 1.612 1.923 2.290 2.719 3.223 3.839 4.926 5.867
2 0.802 0.955 1.137 1.353 1.603 1.913 2.278 2.705 3.206 3.819 4.900 5.836
3 0.797 0.950 1.131 1.346 1.595 1.903 2.266 2.691 3.190 3.799 4.875 5.806
4 0.793 0.945 1.125 1.338 1.586 1.893 2.254 2.677 3.173 3.779 4.849 5.775
5 0.789 0.940 1.119 1.331 1.578 1.883 2.242 2.663 3.156 3.759 4.823 5.745
6 0.785 0.935 1.113 1.324 1.570 1.873 2.230 2.649 3.139 3.739 4.798 5.714
7 0.781 0.930 1.107 1.317 1.561 1.863 2.219 2.634 3.122 3.719 4.772 5.683
8 0.776 0.925 1.101 1.310 1.553 1.853 2.207 2.620 3.106 3.699 4.746 5.653
9 0.772 0.920 1.095 1.303 1.544 1.843 2.195 2.606 3.089 3.679 4.721 5.622
10 0.768 0.915 1.089 1.296 1.536 1.833 2.183 2.592 3.072 3.659 4.695 5.592
11 0.764 0.910 1.083 1.289 1.528 1.823 2.171 2.578 3.055 3.639 4.669 5.561
12 0.760 0.905 1.077 1.282 1.519 1.813 2.159 2.564 3.038 3.619 4.644 5.531
13 0.755 0.900 1.071 1.275 1.511 1.803 2.147 2.550 3.022 3.599 4.618 5.500
14 0.751 0.895 1.065 1.268 1.502 1.793 2.135 2.535 3.005 3.579 4.592 5.470
15 0.747 0.890 1.059 1.261 1.494 1.783 2.123 2.521 2.988 3.559 4.567 5.439
16 0.743 0.885 1.053 1.254 1.486 1.773 2.111 2.507 2.971 3.539 4.541 5.408
17 0.739 0.880 1.047 1.246 1.477 1.763 2.099 2.493 2.954 3.519 4.515 5.378
18 0.734 0.875 1.041 1.239 1.469 1.753 2.087 2.479 2.938 3.499 4.490 5.347
19 0.730 0.870 1.035 1.232 1.460 1.743 2.075 2.465 2.921 3.479 4.464 5.317
20 0.726 0.865 1.029 1.225 1.452 1.733 2.063 2.450 2.904 3.459 4.438 5.286
21 0.722 0.860 1.024 1.218 1.444 1.723 2.052 2.436 2.887 3.439 4.413 5.256
22 0.718 0.855 1.018 1.211 1.435 1.713 2.040 2.422 2.871 3.419 4.387 5.225
23 0.713 0.850 1.012 1.204 1.427 1.703 2.028 2.408 2.854 3.399 4.361 5.195
24 0.709 0.845 1.006 1.197 1.418 1.693 2.016 2.394 2.837 3.379 4.336 5.164
25 0.705 0.840 1.000 1.190 1.410 1.683 2.004 2.380 2.820 3.359 4.310 5.133
26 0.701 0.835 0.994 1.183 1.402 1.673 1.992 2.365 2.803 3.339 4.284 5.103
27 0.697 0.830 0.988 1.176 1.393 1.663 1.980 2.351 2.787 3.319 4.259 5.072
28 0.692 0.825 0.982 1.169 1.385 1.653 1.968 2.337 2.770 3.299 4.233 5.042
29 0.688 0.820 0.976 1.161 1.377 1.643 1.956 2.323 2.753 3.279 4.207 5.011
30 0.684 0.815 0.970 1.154 1.368 1.633 1.944 2.309 2.736 3.259 4.182 4.981
31 0.680 0.810 0.964 1.147 — 1.623 1.932 2.295 — 3.239 4.156 4.950
Low-V
Sense
75mV
15

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Table 2. Trip Point Table Used For Under-Voltage Detection
Fine
Range
Setting 123456789101112
1 0.797 0.950 1.131 1.346 1.595 1.903 2.266 2.691 3.190 3.799 4.875 5.806
2 0.793 0.945 1.125 1.338 1.586 1.893 2.254 2.677 3.173 3.779 4.849 5.775
3 0.789 0.940 1.119 1.331 1.578 1.883 2.242 2.663 3.156 3.759 4.823 5.745
4 0.785 0.935 1.113 1.324 1.570 1.873 2.230 2.649 3.139 3.739 4.798 5.714
5 0.781 0.930 1.107 1.317 1.561 1.863 2.219 2.634 3.122 3.719 4.772 5.683
6 0.776 0.925 1.101 1.310 1.553 1.853 2.207 2.620 3.106 3.699 4.746 5.653
7 0.772 0.920 1.095 1.303 1.544 1.843 2.195 2.606 3.089 3.679 4.721 5.622
8 0.768 0.915 1.089 1.296 1.536 1.833 2.183 2.592 3.072 3.659 4.695 5.592
9 0.764 0.910 1.083 1.289 1.528 1.823 2.171 2.578 3.055 3.639 4.669 5.561
10 0.760 0.905 1.077 1.282 1.519 1.813 2.159 2.564 3.038 3.619 4.644 5.531
11 0.755 0.900 1.071 1.275 1.511 1.803 2.147 2.550 3.022 3.599 4.618 5.500
12 0.751 0.895 1.065 1.268 1.502 1.793 2.135 2.535 3.005 3.579 4.592 5.470
13 0.747 0.890 1.059 1.261 1.494 1.783 2.123 2.521 2.988 3.559 4.567 5.439
14 0.743 0.885 1.053 1.254 1.486 1.773 2.111 2.507 2.971 3.539 4.541 5.408
15 0.739 0.880 1.047 1.246 1.477 1.763 2.099 2.493 2.954 3.519 4.515 5.378
16 0.734 0.875 1.041 1.239 1.469 1.753 2.087 2.479 2.938 3.499 4.490 5.347
17 0.730 0.870 1.035 1.232 1.460 1.743 2.075 2.465 2.921 3.479 4.464 5.317
18 0.726 0.865 1.029 1.225 1.452 1.733 2.063 2.450 2.904 3.459 4.438 5.286
19 0.722 0.860 1.024 1.218 1.444 1.723 2.052 2.436 2.887 3.439 4.413 5.256
20 0.718 0.855 1.018 1.211 1.435 1.713 2.040 2.422 2.871 3.419 4.387 5.225
21 0.713 0.850 1.012 1.204 1.427 1.703 2.028 2.408 2.854 3.399 4.361 5.195
22 0.709 0.845 1.006 1.197 1.418 1.693 2.016 2.394 2.837 3.379 4.336 5.164
23 0.705 0.840 1.000 1.190 1.410 1.683 2.004 2.380 2.820 3.359 4.310 5.133
24 0.701 0.835 0.994 1.183 1.402 1.673 1.992 2.365 2.803 3.339 4.284 5.103
25 0.697 0.830 0.988 1.176 1.393 1.663 1.980 2.351 2.787 3.319 4.259 5.072
26 0.692 0.825 0.982 1.169 1.385 1.653 1.968 2.337 2.770 3.299 4.233 5.042
27 0.688 0.820 0.976 1.161 1.377 1.643 1.956 2.323 2.753 3.279 4.207 5.011
28 0.684 0.815 0.970 1.154 1.368 1.633 1.944 2.309 2.736 3.259 4.182 4.981
29 0.680 0.810 0.964 1.147 1.360 1.623 1.932 2.295 2.719 3.239 4.156 4.950
30 0.676 0.805 0.958 1.140 1.352 1.613 1.920 2.281 2.702 3.219 4.130 4.919
31 0.672 0.800 0.952 1.133 - 1.603 1.908 2.267 - 3.199 4.105 4.889
Low-V
Sense
75mV
16

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Table 3. Comparator Hysteresis vs. Trip-Point
Trip-point Range (V)
Hysteresis (mV)Low Limit High Limit
0.672 0.806 8
0.800 0.960 10
0.952 1.143 12
1.133 1.360 14
1.346 1.612 17
1.603 1.923 20
1.908 2.290 24
2.267 2.719 28
2.691 3.223 34
3.199 3.839 40
4.105 4.926 51
4.889 5.867 61
75 mV 0 (Disabled)
The window control section of the voltage monitor circuit is an AND gate (with inputs: an inverted COMPA “ANDed”
with COMPB signal) and a multiplexer that supports the ability to develop a ‘window’ function without using any of
the PLD’s resources. Through the use of the multiplexer, voltage monitor’s ‘A’ output may be set to report either the
status of the ‘A’ comparator, or the window function of both comparator outputs. The voltage monitor’s ‘A’ output
indicates whether the input signal is between or outside the two comparator thresholds. Important: This windowing
function is only valid in cases where the threshold of the ‘A’ comparator is set to a value higher than that of the ‘B’
comparator. Table 4 shows the operation of window function logic.
Table 4. Voltage Monitor Windowing Logic
Input Voltage Comp A Comp B
< Trip-point B < Trip-point A 0 0 0 Outside window, low
V
IN
Trip-point B < V
Trip-point B < Trip-point A < V
< Trip-point A 0 1 1 Inside window
IN
IN
1 1 0 Outside window, high
Window
(B and Not A) Comment
Note that when the ‘A’ output of the voltage monitor circuit is set to windowing mode, the ‘B’ output continues to
monitor the output of the ‘B’ comparator. This can be useful in that the ‘B’ output can be used to augment the windowing function by determining if the input is above or below the windowing range.
The third section in the ispPAC-POWR1014/A’s input voltage monitor is a digital filter. When enabled, the comparator output will be delayed by a filter time constant of 64 µs, and is especially useful for reducing the possibility of
false triggering from noise that may be present on the voltages being monitored. When the filter is disabled, the
comparator output will be delayed by 16µs. In both cases, enabled or disabled, the filters also provide synchronization of the input signals to the PLD clock. This synchronous sampling feature effectively eliminates the possibility of
race conditions from occurring in any subsequent logic that is implemented in the ispPAC-POWR1014/A’s internal
PLD logic.
2
The comparator status can be read from the I
C interface (ispPAC-POWR1014A only). For details on the I2C inter-
face, please refer to the I2C/SMBUS Interface section of this data sheet.
17

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
VMON Voltage Measurement with the On-chip Analog to Digital Converter (ADC, ispPACPOWR1014A Only)
The ispPAC-POWR1014A has an on-chip analog to digital converter that can be used for measuring the voltages at
the VMON inputs.
Figure 8. ADC Monitoring VMON1 to VMON10
VMON1
VMON2
VMON3
VMON10
VDDA
VCCINP
Programmable Analog
Attenuator
ADC
MUX
4
From I2C ADC MUX Register
(ispPAC-POWR1014A Only)
÷3 / ÷1
1
5
ADC
Internal
VREF- 2.048V
Programmable
Digital Multiplier
x3 / x1
10
To I2C Readout Register
12
(ispPAC-POWR1014A Only)
Figure 8 shows the ADC circuit arrangement within the ispPAC-POWR1014A device. The ADC can measure all
analog input voltages through the multiplexer, ADC MUX. The programmable attenuator between the ADC mux and
the ADC can be configured as divided-by-3 or divided-by-1 (no attenuation). The divided-by-3 setting is used to
measure voltages from 0V to 6V range and divided-by-1 setting is used to measure the voltages from 0V to 2V
range.
A microcontroller can place a request for any VMON voltage measurement at any time through the I2C bus (ispPAC-POWR1014A only). Upon the receipt of an I2C command, the ADC will be connected to the I2C selected
VMON through the ADC MUX. The ADC output is then latched into the I2C readout registers.
Calculation
The algorithm to convert the ADC code to the corresponding voltage takes into consideration the attenuation bit
value. In other words, if the attenuation bit is set, then the 10-bit ADC result is automatically multiplied by 3 to calculate the actual voltage at that VMON input. Thus, the I2C readout register is 12 bits instead of 10 bits. The following formula can always be used to calculate the actual voltage from the ADC code.
Voltage at the VMONx Pins
VMON = I2C Readout Register (12 bits1, converted to decimal) * 2mV
1
Note: ADC_VALUE_HIGH (8 bits), ADC_VALUE_LOW (4 bits) read from I2C/SMBUS interface (ispPAC-POWR1014A only).
18

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
PLD Block
Figure 9 shows the ispPAC-POWR1014/A PLD architecture, which is derived from the Lattice's ispMACH™ 4000
CPLD. The PLD architecture allows the flexibility in designing various state machines and control functions used for
power supply management. The AND array has 53 inputs and generates 123 product terms. These 123 product
terms are divided into three groups of 41 for each of the generic logic blocks, GLB1, GLB2, and GLB3. Each GLB
is made up of eight macrocells. In total, there are 24 macrocells in the ispPAC-POWR1014/A device. The output
signals of the ispPAC-POWR1014/A device are derived from GLBs as shown in Figure 9. GLB3 generates timer
control.
Figure 9. ispPAC-POWR1014/A PLD Architecture
Global Reset
(Resetb pin)
GLB1
AGOOD
IN[1:4]
Generic Logic Block
41
4
8 Macrocell
41 PT
HVOUT[1..2],
OUT[3..8]
VMON[1-10]
Output
Feedback
Timer0
Timer1
Timer2
Timer3
Timer Clock
AND Array
53 Inputs
IRP
123 PT
18
20
4
24
41
41
PLD Clock
GLB2
Generic Logic Block
8 Macrocell
41 PT
GLB3
Generic Logic Block
8 Macrocell
41 PT
OUT[9..14]
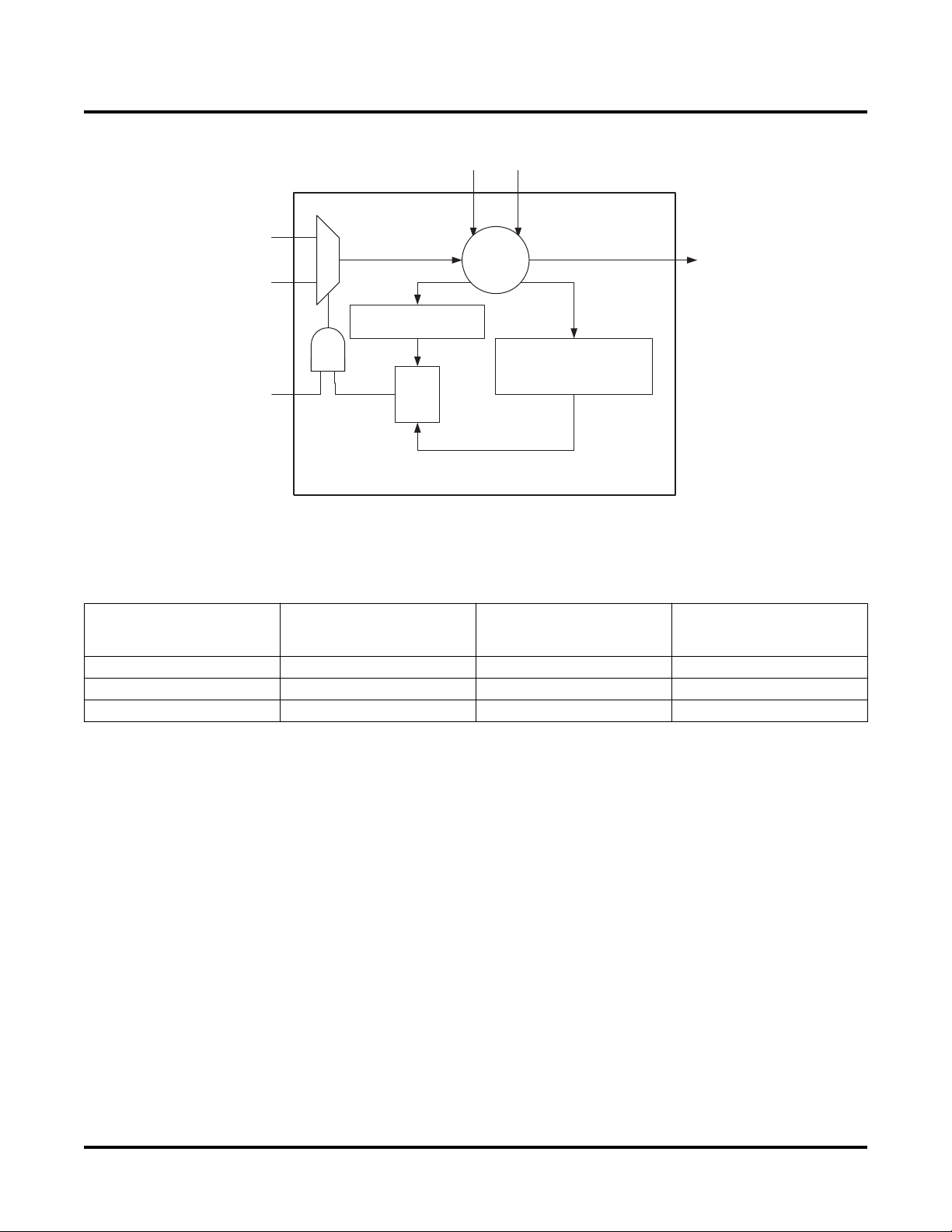
Macrocell Architecture
The macrocell shown in Figure 10 is the heart of the PLD. The basic macrocell has five product terms that feed the
OR gate and the flip-flop. The flip-flop in each macrocell is independently configured. It can be programmed to
function as a D-Type or T-Type flip-flop. Combinatorial functions are realized by bypassing the flip-flop. The polarity
control and XOR gates provide additional flexibility for logic synthesis. The flip-flop’s clock is driven from the common PLD clock that is generated by dividing the 8 MHz master clock by 32. The macrocell also supports asynchronous reset and preset functions, derived from either product terms, the global reset input, or the power-on reset
signal. The resources within the macrocells share routing and contain a product term allocation array. The product
term allocation array greatly expands the PLD’s ability to implement complex logical functions by allowing logic to
be shared between adjacent blocks and distributing the product terms to allow for wider decode functions.
19

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
C
Figure 10. ispPAC-POWR1014/A Macrocell Block Diagram
Global Reset Power On Reset
Global Polarity Fuse for
Init Product Term
Product Term Allocation
R P
D/T Q
CLK
Macrocell flip-flop provides
D, T, or combinatorial
output with polarity
To PLD Output
PT4
PT3
PT2
PT1
PT0
Block Init Product Term
Polarity
Clock
Clock and Timer Functions
Figure 11 shows a block diagram of the ispPAC-POWR1014/A’s internal clock and timer systems. The master clock
operates at a fixed frequency of 8MHz, from which a fixed 250kHz PLD clock is derived.
Figure 11. Clock and Timer System
lock
PLD
Timer 0
Internal
Oscillator
8MHz
SW0
SW1
MCLK PLDCLK
32
SW2
Timer 1
To/From
PLD
Timer 2
Timer 3
The internal oscillator runs at a fixed frequency of 8 MHz. This signal is used as a source for the PLD and timer
clocks. It is also used for clocking the comparator outputs and clocking the digital filters in the voltage monitor cir-
20

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
cuits and ADC. The ispPAC-POWR1014/A can be programmed to operate in three modes: Master mode, Standalone mode and Slave mode. Table 5 summarizes the operating modes of ispPAC-POWR1014/A.
Table 5. ispPAC-POWR1014/A Operating Modes
Timer
Operating Mode SW0 SW1 Condition Comments
Standalone Closed Open When only one ispPAC-POWR1014/A is used. MCLK pin tristated
Master Closed Closed
Slave Open Closed
When more than one ispPAC-POWR1014/A is
used in a board, one of them should be configured
to operate in this mode.
When more than one ispPAC-POWR1014/As is
used in a board. Other than the master, the rest of
the ispPAC-POWR1014/As should be programmed as slaves.
MCLK pin outputs 8MHz clock
MCLK pin is input
A divide-by-32 prescaler divides the internal 8MHz oscillator (or external clock, if selected) down to 250kHz for the
PLD clock and for the programmable timers. This PLD clock may be made available on the PLDCLK pin by closing
SW2. Each of the four timers provides independent timeout intervals ranging from 32µs to 1.96 seconds in 128
steps.
Digital Outputs
The ispPAC-POWR1014/A provides 14 digital outputs, HVOUT[1:2] and OUT[3:14]. Outputs OUT[3:14] are permanently configured as open drain to provide a high degree of flexibility when interfacing to logic signals, LEDs, optocouplers, and power supply control inputs. The HVOUT[1:2] pins can be configured as either high voltage FET drivers or open drain outputs. Each of these outputs may be controlled either from the PLD or from the I
PAC-POWR1014A only). The determination whether a given output is under PLD or I2C control may be made on a
pin-by-pin basis (see Figure 12). For further details on controlling the outputs through I2C, please see the I2C/
SMBUS Interface section of this data sheet.
2
C bus (isp-
Figure 12. Digital Output Pin Configuration
Digital Control
from PLD
Digital Control from I
2
C Register
OUTx
Pin
(ispPAC-POWR1014A only)
High-Voltage Outputs
In addition to being usable as digital open-drain outputs, the ispPAC-POWR1014/A’s HVOUT1-HVOUT2 output
pins can be programmed to operate as high-voltage FET drivers. Figure 13 shows the details of the HVOUT gate
drivers. Each of these outputs may be controlled from the PLD, or with the ispPAC-POWR1014A, from the I2C bus
(see Figure 13). For further details on controlling the outputs through I2C, please see the I2C/SMBUS Interface section of this data sheet.
21

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Figure 13. Basic Function Diagram for an Output in High Voltage MOSFET Gate Driver Mode
Charge Pump
(6 to 10V)
+
-
Digital Control
from PLD
Digital Control from I
(ispPAC-POWR1014A Only)
2
C Register
I
SINK
(100 to 500 µA)
+Fast Turn-off
(3000µA)
I
SOURCE
(12.5 to 100 µA)
HVOUTx
Input
Supply
Pin
Load
Figure 13 shows the HVOUT circuitry when programmed as a FET driver. In this mode the output either sources
current from a charge pump or sinks current. The maximum voltage that the output level at the pin will rise to is also
programmable between 6V and 10V. The maximum voltage levels that are required depend on the gate-to-source
threshold of the FET being driven and the power supply voltage being switched. The maximum voltage level needs
to be sufficient to bias the gate-to-source threshold on and also accommodate the load voltage at the FET’s
source, since the source pin of the FET to provide a wide range of ramp rates is tied to the supply of the target
board. When the HVOUT pin is sourcing current, charging a FET gate, the source current is programmable
between 12.5µA and 100µA. When the driver is turned to the off state, the driver will sink current to ground, and
this sink current is also programmable between 3000µA and 100µA to control the turn-off rate.
Programmable Output Voltage Levels for HVOUT1- HVOUT2
There are three selectable steps for the output voltage of the FET drivers when in FET driver mode. The voltage
that the pin is capable of driving to can be programmed from 6V to 10V in 2V steps.
RESETb Signal, RESET Command via JTAG or I2C
Activating the RESETb signal (Logic 0 applied to the RESETb pin) or issuing a reset instruction via JTAG, or with
the ispPAC-POWR1014A, I
been configured in the PINS window:
• OUT3-14 will go high-impedance.
• HVOUT pins programmed for open drain operation will go high-impedance.
• HVOUT pins programmed for FET driver mode operation will pull down.
At the conclusion of the RESET event, these outputs will go to the states defined by the PINS window, and if a
sequence has been programmed into the device, it will be re-started at the first step. The analog calibration will be
re-done and consequently, the VMONs, and ADCs will not be operational until 500 microseconds (max.) after the
conclusion of the RESET event.
CAUTION: Activating the RESETb signal or issuing a RESET command through I2C or JTAG during the ispPACPOWR1014/A device operation, results in the device aborting all operations and returning to the power-on reset
state. The status of the power supplies which are being enabled by the ispPAC-POWR1014/A will be determined by
the state of the outputs shown above.
2
C will force the outputs to the following states independent of how these outputs have
22

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
I2C/SMBUS Interface (ispPAC-POWR1014A Only)
I2C and SMBus are low-speed serial interface protocols designed to enable communications among a number of
devices on a circuit board. The ispPAC-POWR1014A supports a 7-bit addressing of the I2C communications protocol, as well as SMBTimeout and SMBAlert features of the SMBus, enabling it to easily integrated into many types
of modern power management systems. Figure 14 shows a typical I2C configuration, in which one or more ispPACPOWR1014As are slaved to a supervisory microcontroller. SDA is used to carry data signals, while SCL provides a
synchronous clock signal. The SMBAlert line is only present in SMBus systems. The 7-bit I2C address of the
POWR1014A is fully programmable through the JTAG port.
Figure 14. ispPAC-POWR1014A in I
V+
SDA
SCL
INTERRUPT
MICROPROCESSOR
2
C MASTER)
(I
2
C/SMBUS System
SDA/SMDAT (DATA)
SCL/SMCLK (CLOCK)
SMBALERT
SDA SDA
POWR1014A
2
C SLAVE)
(I
OUT5/
SCL SCL
SMBA
POWR1014A
2
C SLAVE)
(I
OUT5/
SMBA
To Other
2
I
C
Devices
In both the I2C and SMBus protocols, the bus is controlled by a single MASTER device at any given time. This master device generates the SCL clock signal and coordinates all data transfers to and from a number of slave devices.
The ispPAC-POWR1014A is configured as a slave device, and cannot independently coordinate data transfers.
Each slave device on a given I2C bus is assigned a unique address. The ispPAC-POWR1014A implements the 7-bit
addressing portion of the standard. Any 7-bit address can be assigned to the ispPAC-POWR1014A device by programming through JTAG. When selecting a device address, one should note that several addresses are reserved
by the I2C and/or SMBus standards, and should not be assigned to ispPAC-POWR1014A devices to assure bus
compatibility. Table 6 lists these reserved addresses.
Table 6. I
2C/SMBus Reserved Slave Device Addresses
Address R/W bit I2C function Description SMBus Function
0000 000 0 General Call Address General Call Address
0000 000 1 Start Byte Start Byte
0000 001 x CBUS Address CBUS Address
0000 010 x Reserved Reserved
0000 011 x Reserved Reserved
0000 1xx x HS-mode master code HS-mode master code
0001 000 x NA SMBus Host
0001 100 x NA SMBus Alert Response Address
0101 000 x NA Reserved for ACCESS.bus
0110 111 x NA Reserved for ACCESS.bus
1100 001 x NA SMBus Device Default Address
1111 0xx x 10-bit addressing 10-bit addressing
1111 1xx x Reserved Reserved
23

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
The ispPAC-POWR1014A’s I2C/SMBus interface allows data to be both written to and read from the device. A data
write transaction (Figure 15) consists of the following operations:
1. Start the bus transaction
2. Transmit the device address (7 bits) along with a low write bit
3. Transmit the address of the register to be written to (8 bits)
4. Transmit the data to be written (8 bits)
5. Stop the bus transaction
To start the transaction, the master device holds the SCL line high while pulling SDA low. Address and data bits are
then transferred on each successive SCL pulse, in three consecutive byte frames of 9 SCL pulses. Address and
data are transferred on the first 8 SCL clocks in each frame, while an acknowledge signal is asserted by the slave
device on the 9th clock in each frame. Both data and addresses are transferred in a most-significant-bit-first format.
The first frame contains the 7-bit device address, with bit 8 held low to indicate a write operation. The second frame
contains the register address to which data will be written, and the final frame contains the actual data to be written. Note that the SDA signal is only allowed to change when the SCL is low, as raising SDA when SCL is high signals the end of the transaction.
Figure 15. I
2C Write Operation
SCL
SDA
123456789
A6 A5 A4 A3 A2 A1 A0 R7 R6 R5 R4 R3 R2 R1 R0
START
R/W
123456789 123456789
D7 D6 D5 D4 D3 D2 D1 D0
Note: Shaded Bits Asserted by Slave
ACKACKACK
STOPDEVICE ADDRESS (7 BITS) REGISTER ADDRESS (8 BITS) WRITE DATA (8 BITS)
Reading a data byte from the ispPAC-POWR1014A requires two separate bus transactions (Figure 16). The first
transaction writes the register address from which a data byte is to be read. Note that since no data is being written
to the device, the transaction is concluded after the second byte frame. The second transaction performs the actual
read. The first frame contains the 7-bit device address with the R/W bit held High. In the second frame the ispPACPOWR1014A asserts data out on the bus in response to the SCL signal. Note that the acknowledge signal in the
second frame is asserted by the master device and not the ispPAC-POWR1014A.
Figure 16. I
2C Read Operation
STEP 1: WRITE REGISTER ADDRESS FOR READ OPERATION
SCL
SDA
START
STEP 2: READ DATA FROM THAT REGISTER
123456789
A6 A5 A4 A3 A2 A1 A0 R7 R6 R5 R4 R3 R2 R1 R0
DEVICE ADDRESS (7 BITS) REGISTER ADDRESS (8 BITS)
R/W
123456789
ACKACK
STOP
SCL
SDA
START
123456789
A6 A5 A4 A3 A2 A1 A0
DEVICE ADDRESS (7 BITS) READ DATA (8 BITS)
R/W
ACK
123456789
D5 D4 D3 D2 D1 D0D6D7
Note: Shaded Bits Asserted by Slave
ACK
OPTIONAL
STOP
The ispPAC-POWR1014A provides 17 registers that can be accessed through its I2C interface. These registers
provide the user with the ability to monitor and control the device’s inputs and outputs, and transfer data to and
from the device. Table 7 provides a summary of these registers.
24
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Table 7. I
2C Control Registers
Register
Address
Register
Name Read/Write Description Value After POR
0x00 vmon_status0 R VMON input status Vmon[4:1] – – – – – – – –
0x01 vmon_status1 R VMON input status Vmon[8:5] – – – –
0x02 vmon_status2 R VMON input status Vmon[10:9] X X X X
0x03 output_status0 R Output status OUT[8:3], HVOUT[2:1] – – – –
0x04 output_status1 R Output status OUT[14:9] X X – –
0x06 input_status R Input status IN[4:1] X X X X
0x07 adc_value_low R ADC D[3:0] and status – – – –
0x08 adc_value_high R ADC D[9:4] X X – –
0x09 adc_mux R/W ADC Attenuator and MUX[3:0] X X X 1
0x0A UES_byte0 R UES[7:0] – – – –
0x0B UES_byte1 R UES[15:8] – – – –
0x0C UES_byte2 R UES[23:16] – – – –
0x0D UES_byte3 R UES[31:24] – – – –
0x0E gp_output1 R/W GPOUT[8:1] 0 0 0 0
0x0F gp_output2 R/W GPOUT[14:9] X X 0 0
0x11 input_value R/W PLD Input State [4:2] X X X X
0x12 reset W Resets device on write N/A
1. “X” = Non-functional bit (bits read out as 1’s).
2. “–” = State depends on device configuration or input status.
– – – –
– – – –
– – – –
– – – –
– – – –
X X X 1
– – – –
1 1 1 1
– – – –
– – – –
– – – –
– – – –
0 1 0 0
0 0 0 0
– – – X
1, 2
Several registers are provided for monitoring the status of the analog inputs. The three registers
VMON_STATUS[0:2] provide the ability to read the status of the VMON output comparators. The ability to read both
the ‘a’ and ‘b’ comparators from each VMON input is provided through the VMON input registers. Note that if a
VMON input is configured to window comparison mode, then the corresponding VMONxA register bit will reflect the
status of the window comparison.
Figure 17. VMON Status Registers
0x00 - VMON_STATUS0 (Read Only)
VMON4B VMON4A VMON3B VMON3A VMON2B VMON2A VMON1B VMON1A
b7 b0
0x01 - VMON_STATUS1 (Read Only)
VMON8B VMON8A VMON7B VMON7A VMON6B VMON6A VMON5B VMON5A
b7 b0
0x02 - VMON_STATUS2 (Read Only)
b7 b0
b6 b5 b4 b3 b2 b1
b6 b5 b4 b3 b2 b1
VMON10B VMON10A VMON9B VMON9A1111
b6 b5 b4 b3 b2 b1
It is also possible to directly read the value of the voltage present on any of the VMON inputs by using the ispPACPOWR1014A’s ADC. Three registers provide the I2C interface to the ADC (Figure 18).
25

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Figure 18. ADC Interface Registers
0x07 - ADC_VALUE_LOW
D3 D2 D1 D0
b7 b0
0x08 - ADC_VALUE_HIGH
D11 D10 D9 D8 D7 D6 D5 D4
b7 b0
0x09 - ADC_MUX (Read/Write)
X X X ATTEN SEL3 SEL2 SEL1 SEL0
b7 b0
b6 b5 b4 b3 b2 b1
b6 b5 b4 b3 b2 b1
b6 b5 b4 b3 b2 b1
(Read Only)
1 1 1 DONE
(Read Only)
To perform an A/D conversion, one must set the input attenuator and channel selector. Two input ranges may be
set using the attenuator, 0 - 2.048V and 0 - 6.144V. Table 8 shows the input attenuator settings.
Table 8. ADC Input Attenuator Control
ATTEN (ADC_MUX.4) Resolution Full-Scale Range
0 2mV 2.048 V
1 6mV 6.144 V
The input selector may be set to monitor any one of the ten VMON inputs, the VCCA input, or the VCCINP input.
Table 9 shows the codes associated with each input selection.
Table 9. V
Address Selection Table
MON
SEL3
(ADC_MUX.3)
0000VMON1
0001VMON2
0010VMON3
0011VMON4
0100VMON5
0101VMON6
0110VMON7
0111VMON8
1000VMON9
1001VMON10
1100VCCA
1101VCCINP
Select Word
SEL2
(ADC_MUX.2)
SEL1
(ADC_MUX.1)
SEL0
(ADC_MUX.0)
Input Channel
Writing a value to the ADC_MUX register to set the input attenuator and selector will automatically initiate a conversion. When the conversion is in process, the DONE bit (ADC_VALUE_LOW.0) will be reset to 0. When the conversion is complete, this bit will be set to 1. When the conversion is complete, the result may be read out of the ADC by
performing two I2C read operations; one for ADC_VALUE_LOW, and one for ADC_VALUE_HIGH. It is recommended that the I2C master load a second conversion command only after the completion of the current conversion
26

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
command (Waiting for the DONE bit to be set to 1). An alternative would be to wait for a minimum specified time
(see T
CONVERT
value in the specifications) and disregard checking the DONE bit.
Note that if the I2C clock rate falls below 50kHz (see F
conversion is to wait the minimum specified time (T
note in specifications), the only way to insure a valid ADC
I2C
CONVERT
), as the operation of the DONE bit at clock rates lower
than that cannot be guaranteed. In other words, if the I2C clock rate is less than 50kHz, the DONE bit may or may
not assert even though a valid conversion result is available.
To insure every ADC conversion result is valid, preferred operation is to clock I2C at more than 50kHz and verify
DONE bit status or wait for the full T
CONVERT
time period between subsequent ADC convert commands. If an I2C
request is placed before the current conversion is complete, the DONE bit will be set to 1 only after the second
request is complete.
The status of the digital input lines may also be monitored and controlled through I2C commands. Figure 19 shows
the I2C interface to the IN[1:4] digital input lines. The input status may be monitored by reading the INPUT_STATUS
register, while input values to the PLD array may be set by writing to the INPUT_VALUE register. To be able to set
an input value for the PLD array, the input multiplexer associated with that bit needs to be set to the I2C register setting in E2CMOS memory otherwise the PLD will receive its input from the INx pin.
Figure 19. I
2C Digital Input Interface
IN1
USERJTAG
IN[2..4]
PLD Output/Input_Value Register Select
Bit
3
3
(E2 Configuration)
3
MUX
2
MUX
PLD
Array
3
Input_Status Input_Value
2
C Interface Unit
I
0x06 - INPUT_STATUS
b7 b0
0x11 - INPUT_VALUE (Read/Write)
XXXX
b7 b0
b6 b5 b4 b3 b2 b1
b6 b5 b4 b3 b2 b1
(Read Only)
IN4 IN3 IN2 IN11111
I4 I3 I2 X
The digital outputs may also be monitored and controlled through the I2C interface, as shown in Figure 20. The status of any given digital output may be read by reading the contents of the associated OUTPUT_STATUS[1:0] register. Note that in the case of the outputs, the status reflected by these registers reflects the logic signal used to drive
the pin, and does not sample the actual level present on the output pin. For example, if an output is set high but is
27

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
not pulled up, the output status bit corresponding with that pin will read ‘1’, but a high output signal will not appear
on the pin.
Digital outputs may also be optionally controlled directly by the I2C bus instead of by the PLD array. The outputs
may be driven either from the PLD output or from the contents of the GP_OUTPUT[1:0] registers with the choice
user-settable in E2CMOS memory. Each output may be independently set to output from the PLD or from the
GP_OUTPUT registers.
Figure 20. I
2C Output Monitor and Control Logic
PLD Output/GP_Output Register Select
PLD
Output
Routing
Pool
GP_Output1
GP_Output2
0x03 - OUTPUT_STATUS0
OUT8 OUT7 OUT6 OUT5 HVOUT2 HVOUT1OUT4
b7 b0
2
(E
Configuration)
14
14
MUX
14
2
C Interface Unit
I
(Read Only)
b6 b5 b4 b3 b2 b1
14
Output_Status0
Output_Status1
OUT3
14
HVOUT[1..2]
OUT[3..14]
0x04 - OUTPUT_STATUS1
11
b7 b0
0x0E - GP_OUTPUT1 (Read/Write)
GP8 GP7 GP6 GP5 GP4 GP3_ENb GP2 GP1
b7 b0
0x0F - GP_OUTPUT2 (Read/Write)
X X GP14 GP13 GP12 GP11 GP10 GP9
b7 b0
b6 b5 b4 b3 b2 b1
b6 b5 b4 b3 b2 b1
b6 b5 b4 b3 b2 b1
(Read Only)
OUT14 OUT13 OUT12 OUT11 OUT10 OUT9
The UES word may also be read through the I2C interface, with the register mapping shown in Figure 21.
28

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Figure 21. I
2C Register Mapping for UES Bits
0x0A - UES_BYTE0
UES7 UES6 UES5 UES4 UES3 UES2 UES1 UES0
b7 b0
0x0B - UES_BYTE1
UES15 UES14 UES13 UES12 UES11 UES10 UES9 UES8
b7 b0
0x0C - UES_BYTE2
UES23 UES22 UES21 UES20 UES19 UES18 UES17 UES16
b7 b0
0x0D - UES_BYTE3
UES31 UES30 UES29 UES28 UES27 UES26 UES25 UES24
b7 b0
(Read Only)
b6 b5 b4 b3 b2 b1
(Read Only)
b6 b5 b4 b3 b2 b1
(Read Only)
b6 b5 b4 b3 b2 b1
(Read Only)
b6 b5 b4 b3 b2 b1
The I2C interface also provides the ability to initiate reset operations. The ispPAC-POWR1014A may be reset by
issuing a write of any value to the I2C RESET register (Figure 22). Note: The execution of the I2C reset command is
equivalent to toggling the Resetb pin of the chip. Refer to the Resetb Signal, RESET Command via JTAG or I2C
section of this data sheet for further information.
Figure 22. I
2C Reset Register
0x12 - RESET (Write Only)
XXXXXXXX
b7 b0
b6 b5 b4 b3 b2 b1
29

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
SMBus SMBAlert Function
The ispPAC-POWR1014A provides an SMBus SMBAlert function so that it can request service from the bus master when it is used as part of an SMBus system. This feature is supported as an alternate function of OUT3. When
the SMBAlert feature is enabled, OUT3 is controlled by a combination of the PLD output and the GP3_ENb bit
(Figure 23). Note: To enable the SMBAlert feature, the SMB_Mode (EECMOS bit) should be set in software.
Figure 23. ispPAC-POWR1014/A SMBAlert Logic
PLD Output/GP_Output Register Select
PLD
Output
Routing
Pool
(E2 Configuration)
MUX
OUT3/SMBA Mode Select
(E2 Configuration)
MUX
OUT3/SMBA
GP3_ENb
SMBAlert
Logic
I2C Interface Unit
The typical flow for an SMBAlert transaction is as follows (Figure 23):
1. GP3_ENb bit is forced (Via I2C write) to Low
2. ispPAC-POWR1014A PLD Logic pulls OUT3/SMBA Low
3. Master responds to interrupt from SMBA line
4. Master broadcasts a read operation using the SMBus Alert Response Address (ARA)
5. ispPAC-POWR1014A responds to read request by transmitting its device address
6. If transmitted device address matches ispPAC-POWR1014A address, it sets GP3_ENb bit high.
This releases OUT3/SMBA.
Figure 24. SMBAlert Bus Transaction
SMBA
SCL
SDA
SLAVE
ASSERTS
SMBA
START
123456789
000110 0
ALERT RESPONSE ADDRESS
(0001 100)
R/W
ACK A4 A3 A2 A1 A0 xA5A6
123456789
ACK
SLAVE ADDRESS (7 BITS)
Note: Shaded Bits Asserted by Slave
SLAVE
RELEASES
SMBA
STOP
After OUT3/SMBA has been released, the bus master (typically a microcontroller) may opt to perform some service
functions in which it may send data to or read data from the ispPAC-POWR1014A. As part of the service functions,
the bus master will typically need to clear whatever condition initiated the SMBAlert request, and will also need to
reset GP3_ENb to re-enable the SMBAlert function. For further information on the SMBus, the user should consult
the SMBus Standard.
30

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Software-Based Design Environment
Designers can configure the ispPAC-POWR1014/A using PAC-Designer, an easy to use, Microsoft Windows compatible program. Circuit designs are entered graphically and then verified, all within the PAC-Designer environment.
Full device programming is supported using PC parallel port I/O operations and a download cable connected to the
serial programming interface pins of the ispPAC-POWR1014/A. A library of configurations is included with basic
solutions and examples of advanced circuit techniques are available on the Lattice web site for downloading. In
addition, comprehensive on-line and printed documentation is provided that covers all aspects of PAC-Designer
operation. The PAC-Designer schematic window, shown in Figure 25, provides access to all configurable ispPACPOWR1014/A elements via its graphical user interface. All analog input and output pins are represented. Static or
non-configurable pins such as power, ground, and the serial digital interface are omitted for clarity. Any element in
the schematic window can be accessed via mouse operations as well as menu commands. When completed, configurations can be saved, simulated, and downloaded to devices.
Figure 25. PAC-Designer ispPAC-POWR1014/A Design Entry Screen
In-System Programming
The ispPAC-POWR1014/A is an in-system programmable device. This is accomplished by integrating all E2 configuration memory and control logic on-chip. Programming is performed through a 4-wire, IEEE 1149.1 compliant
serial JTAG interface at normal logic levels. Once a device is programmed, all configuration information is stored
on-chip, in non-volatile E2CMOS memory cells. The specifics of the IEEE 1149.1 serial interface and all ispPACPOWR1014/A instructions are described in the JTAG interface section of this data sheet.
Programming ispPAC-POWR1014/A: Alternate Method
Some applications require that the ispPAC-POWR1014/A be programmed before turning the power on to the entire
circuit board. To meet such application needs, the ispPAC-POWR1014/A provides an alternate programming
method which enables the programming of the ispPAC-POWR1014/A device through the JTAG chain with a separate power supply applied just to the programming section of the ispPAC-POWR1014/A device with the main power
supply of the board turned off.
31

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
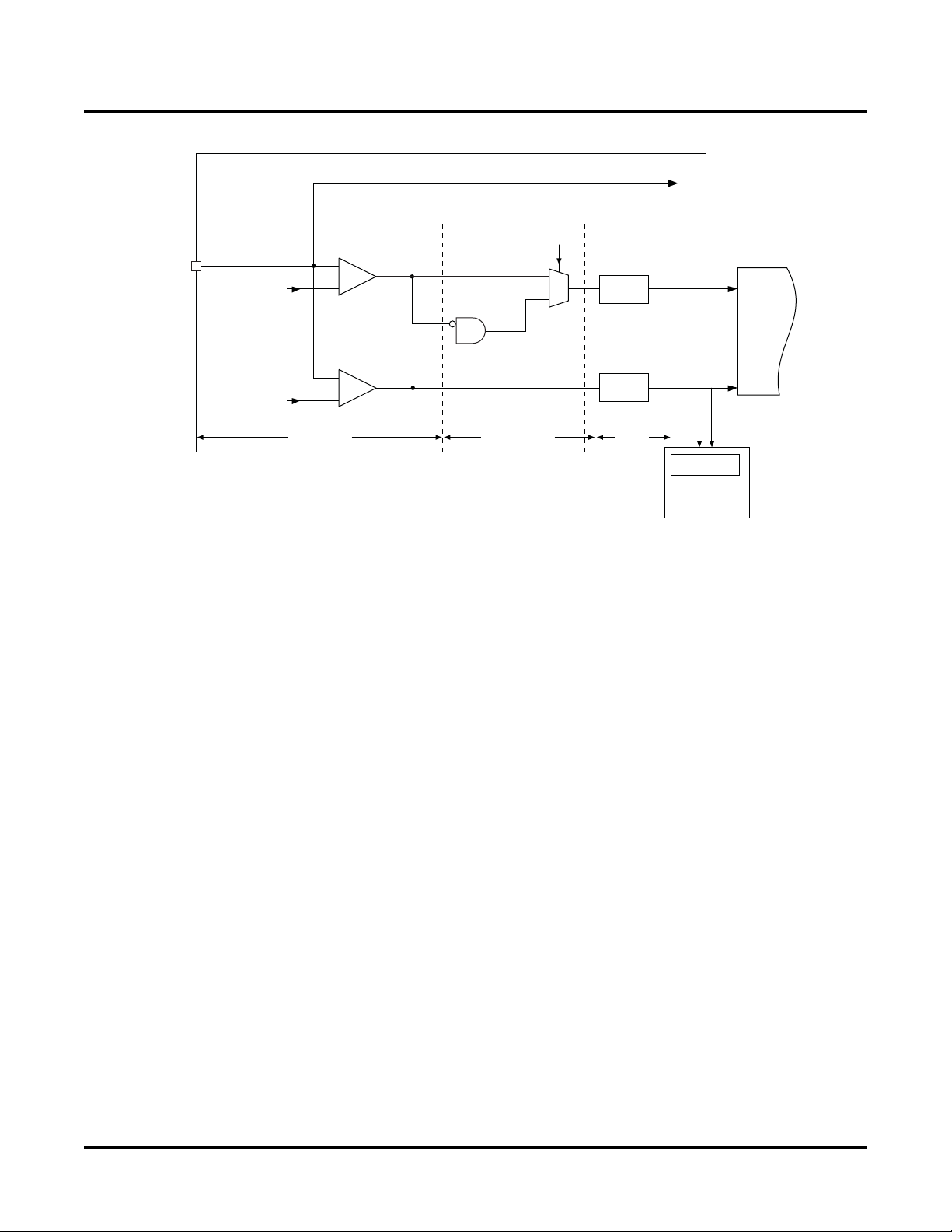
Three special purpose pins, VCCPROG, ATDI and TDISEL, enable programming of the un-programmed ispPACPOWR1014/A under such circumstances. The VCCPROG pin powers just the programming circuitry of the ispPACPOWR1014/A device. The ATDI pin provides an alternate connection to the JTAG header while bypassing all the
un-powered devices in the JTAG chain. TDISEL pin enables switching between the ATDI and the standard JTAG
signal TDI. When the internally pulled-up TDISEL = 1, standard TDI pin is enabled and when the TDISEL = 0, ATDI
is enabled.
In order to use this feature the JTAG signals of the ispPAC-POWR1014/A are connected to the header as shown in
Figure 26. Note: The ispPAC-POWR1014/A should be the last device in the JTAG chain.
Figure 26. ispPAC-POWR1014/A Alternate TDI Configuration Diagram
1. Power for
Programming
POWR1014A
VCCJ
VCC
ispPAC-POWR
1014A
TCK
TMS
VCCPROG
TDO
TDISEL
JTAG Signal
Connector
TDI
3. Sequenced Power
Supply Turn-on
VCCJ
VCC
Other JTAG
TDI
Device(s)
TCK
TMS
VCCIO
TDO
2. Initial Power
Supply Turn-On
TDI
ATDI
TCK
TMS
TDO
TDISEL
Alternate TDI Selection Via JTAG Command
When the TDISEL pin held high and four consecutive IDCODE instructions are issued, ispPAC-POWR1014/A
responds by making its active JTAG data input the ATDI pin. When ATDI is selected, data on its TDI pin is ignored
until the JTAG state machine returns to the Test-Logic-Reset state.
This method of selecting ATDI takes advantage of the fact that a JTAG device with an IDCODE register will automatically load its unique IDCODE instruction into the Instruction Register after a Test-Logic-Reset. This JTAG capability permits blind interrogation of devices so that their location in a serial chain can be identified without having to
know anything about them in advance. A blind interrogation can be made using only the TMS and TCLK control
pins, which means TDI and TDO are not required for performing the operation. Figure 27 illustrates the logic for
selecting whether the TDI or ATDI pin is the active data input to ispPAC-POWR1014/A.
32
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Figure 27. ispPAC-POWR1014/A TDI/ATDI Pin Selection Diagram
TMS TCK
TDI
ATDI
TDISEL
1
0
Test-Logic-Reset
JTAG
SET
Q
CLR
ispPAC-POWR1014/A
TDO
4 Consecutive
IDCODE Instructions
Loaded at Update-IR
Table 10 shows in truth table form the same conditions required to select either TDI or ATDI as in the logic diagram
found in Figure 27.
Table 10. ispPAC-POWR1014/A ATDI/TDI Selection Table
TDISEL Pin
H No Yes ATDI (TDI Disabled)
HYesNo TDI (ATDI Disabled)
L X X ATDI (TDI Disabled)
JTAG State Machine
Test-Logic-Reset
4 Consecutive
IDCODE Commands
Loaded at Update-IR
Active JTAG
Data Input Pin
Please refer to the Lattice application note AN6068, Programming the ispPAC-POWR1220AT8 in a JTAG Chain
Using ATDI. The application note includes specific SVF code examples and information on the use of Lattice
design tools to verify device operation in alternate TDI mode.
VCCPROG Power Supply Pin
Because the VCCPROG pin directly powers the on-chip programming circuitry, the ispPAC-POWR1014/A device
can be programmed by applying power to the VCCPROG pin (without powering the entire chip though the VCCD
and VCCA pins). In addition, to enable the on-chip JTAG interface circuitry, power should be applied to the VCCJ
pin.
When the ispPAC-POWR1014/A is using the VCCPROG pin, its VCCD and VCCA pins can be open or pulled low.
Additionally, other than JTAG I/O pins, all digital output pins are in Hi-Z state, HVOUT pins configured as MOSFET
driver are driven low, and all other inputs are ignored.
To switch the power supply back to VCCD and VCCA pins, one should turn the VCCPROG supply and VCCJ off
before turning the regular supplies on.
User Electronic Signature
A user electronic signature (UES) feature is included in the E2CMOS memory of the ispPAC-POWR1014/A. This
consists of 32 bits that can be configured by the user to store unique data such as ID codes, revision numbers or
33

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
inventory control data. The specifics of this feature are discussed in the IEEE 1149.1 serial interface section of this
data sheet.
Electronic Security
An electronic security “fuse” (ESF) bit is provided in every ispPAC-POWR1014/A device to prevent unauthorized
readout of the E
2
CMOS configuration bit patterns. Once programmed, this cell prevents further access to the functional user bits in the device. This cell can only be erased by reprogramming the device, so the original configuration cannot be examined once programmed. Usage of this feature is optional. The specifics of this feature are
discussed in the IEEE 1149.1 serial interface section of this data sheet.
Production Programming Support
Once a final configuration is determined, an ASCII format JEDEC file can be created using the PAC-Designer software. Devices can then be ordered through the usual supply channels with the user’s specific configuration already
preloaded into the devices. By virtue of its standard interface, compatibility is maintained with existing production
programming equipment, giving customers a wide degree of freedom and flexibility in production planning.
Evaluation Fixture
Because the features of an ispPAC-POWR1014/A are all included in the larger ispPAC-POWR1220AT8 device,
designs implemented in an ispPAC-POWR1014/A can be verified using an ispPAC-POWR1220AT8 engineering
prototype board connected to the parallel port of a PC with a Lattice ispDOWNLOAD® cable. The board demonstrates proper layout techniques and can be used in real time to check circuit operation as part of the design process. Input and output connections are provided to aid in the evaluation of the functionality implemented in ispPACPOWR1014/A for a given application. (Figure 28).
Figure 28. Download from a PC
PAC-Designer
Software
ispDOWNLOAD
Cable (6')
4
ispPAC-POWR
Other
System
Circuitry
1220AT8
Device
IEEE Standard 1149.1 Interface (JTAG)
Serial Port Programming Interface Communication with the ispPAC-POWR1014/A is facilitated via an IEEE 1149.1
test access port (TAP). It is used by the ispPAC-POWR1014/A as a serial programming interface. A brief description of the ispPAC-POWR1014/A JTAG interface follows. For complete details of the reference specification, refer to
the publication, Standard Test Access Port and Boundary-Scan Architecture, IEEE Std 1149.1-1990 (which now
includes IEEE Std 1149.1a-1993).
Overview
An IEEE 1149.1 test access port (TAP) provides the control interface for serially accessing the digital I/O of the ispPAC-POWR1014/A. The TAP controller is a state machine driven with mode and clock inputs. Given in the correct
sequence, instructions are shifted into an instruction register, which then determines subsequent data input, data
output, and related operations. Device programming is performed by addressing the configuration register, shifting
data in, and then executing a program configuration instruction, after which the data is transferred to internal
E2CMOS cells. It is these non-volatile cells that store the configuration or the ispPAC-POWR1014/A. A set of
34

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
instructions are defined that access all data registers and perform other internal control operations. For compatibility between compliant devices, two data registers are mandated by the IEEE 1149.1 specification. Others are functionally specified, but inclusion is strictly optional. Finally, there are provisions for optional data registers defined by
the manufacturer. The two required registers are the bypass and boundary-scan registers. Figure 29 shows how
the instruction and various data registers are organized in an ispPAC-POWR1014/A.
Figure 29. ispPAC-POWR1014/A TAP Registers
MULTIPLEXER
DATA REGISTER (123 BITS)
ADDRESS REGISTER (109 BITS)
UES REGISTER (32 BITS)
IDCODE REGISTER (32 BITS)
CFG ADDRESS REGISTER (12 BITS)
CFG DATA REGISTER (56 BITS)
BYPASS REGISTER (1 BIT)
INSTRUCTION REGISTER (8 BITS)
TEST ACCESS PORT (TAP)
LOGIC
E2CMOS
NON-VOLATILE
MEMORY
OUTPUT
LATCH
TDI
TCK TMS TDO
TAP Controller Specifics
The TAP is controlled by the Test Clock (TCK) and Test Mode Select (TMS) inputs. These inputs determine whether
an Instruction Register or Data Register operation is performed. Driven by the TCK input, the TAP consists of a
small 16-state controller design. In a given state, the controller responds according to the level on the TMS input as
shown in Figure 30. Test Data In (TDI) and TMS are latched on the rising edge of TCK, with Test Data Out (TDO)
becoming valid on the falling edge of TCK. There are six steady states within the controller: Test-Logic-Reset, RunTest/Idle, Shift-Data-Register, Pause-Data-Register, Shift-Instruction-Register and Pause-Instruction-Register. But
there is only one steady state for the condition when TMS is set high: the Test-Logic-Reset state. This allows a
reset of the test logic within five TCKs or less by keeping the TMS input high. Test-Logic-Reset is the power-on
default state.
35

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Figure 30. TAP States
Test-Logic-Rst
1
Run-Test/Idle
0
0
11 1
Select-DR-Scan Select-IR-Scan
11
00
00
Capture-DR Capture-IR
00
Shift-DR Shift-IR
11
Exit1-DR Exit1-IR
00
Pause-DR Pause-IR
11
Exit2-DR Exit2-IR
11
Update-DR Update-IR
00
11
00
0011
Note: The value shown adjacent to each state transition in this figure
represents the signal present at TMS at the time of a rising edge at TCK.
When the correct logic sequence is applied to the TMS and TCK inputs, the TAP will exit the Test-Logic-Reset state
and move to the desired state. The next state after Test-Logic-Reset is Run-Test/Idle. Until a data or instruction shift
is performed, no action will occur in Run-Test/Idle (steady state = idle). After Run-Test/Idle, either a data or instruction shift is performed. The states of the Data and Instruction Register blocks are identical to each other differing
only in their entry points. When either block is entered, the first action is a capture operation. For the Data Registers, the Capture-DR state is very simple: it captures (parallel loads) data onto the selected serial data path (previously chosen with the appropriate instruction). For the Instruction Register, the Capture-IR state will always load
the IDCODE instruction. It will always enable the ID Register for readout if no other instruction is loaded prior to a
Shift-DR operation. This, in conjunction with mandated bit codes, allows a “blind” interrogation of any device in a
compliant IEEE 1149.1 serial chain. From the Capture state, the TAP transitions to either the Shift or Exit1 state.
Normally the Shift state follows the Capture state so that test data or status information can be shifted out or new
data shifted in. Following the Shift state, the TAP either returns to the Run-Test/Idle state via the Exit1 and Update
states or enters the Pause state via Exit1. The Pause state is used to temporarily suspend the shifting of data
through either the Data or Instruction Register while an external operation is performed. From the Pause state,
shifting can resume by reentering the Shift state via the Exit2 state or be terminated by entering the Run-Test/Idle
state via the Exit2 and Update states. If the proper instruction is shifted in during a Shift-IR operation, the next entry
into Run-Test/Idle initiates the test mode (steady state = test). This is when the device is actually programmed,
erased or verified. All other instructions are executed in the Update state.
Test Instructions
Like data registers, the IEEE 1149.1 standard also mandates the inclusion of certain instructions. It outlines the
function of three required and six optional instructions. Any additional instructions are left exclusively for the manufacturer to determine. The instruction word length is not mandated other than to be a minimum of two bits, with only
the BYPASS and EXTEST instruction code patterns being specifically called out (all ones and all zeroes respectively). The ispPAC-POWR1014/A contains the required minimum instruction set as well as one from the optional
instruction set. In addition, there are several proprietary instructions that allow the device to be configured and verified. Table 11 lists the instructions supported by the ispPAC-POWR1014/A JTAG Test Access Port (TAP) controller:
36

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Table 11. ispPAC-POWR1014/A TAP Instruction Table
Instruction
Code Comments
BULK_ERASE 0000 0011 Bulk erase device
BYPASS 1111 1111 Bypass - connect TDO to TDI
DISCHARGE 0001 0100 Fast VPP discharge
ERASE_DONE_BIT 0010 0100 Erases ‘Done’ bit only
EXTEST 0000 0000 Bypass - connect TDO to TDI
IDCODE 0001 0110 Read contents of manufacturer ID code (32 bits)
OUTPUTS_HIGHZ 0001 1000 Force all outputs to High-Z state, FET outputs pulled low
SAMPLE/PRELOAD 00011100 Sample/Preload. Default to bypass.
PROGRAM_DISABLE 0001 1110 Disable program mode
PROGRAM_DONE_BIT 0010 1111 Programs the Done bit
PROGRAM_ENABLE 0001 0101 Enable program mode
PROGRAM_SECURITY 0000 1001 Program security fuse
Command
RESET 0010 0010
Resets device (refer to the RESETb Signal, RESET Command via
JTAG or I
2
C section of this data sheet)
IN1_RESET_JTAG_BIT 0001 0010 Reset the JTAG bit associated with IN1 pin to 0
IN1_SET_JTAG_BIT 0001 0011 Set the JTAG bit associated with IN1 pin to 1
CFG_ADDRESS 0010 1011 Select non-PLD address register
CFG_DATA_SHIFT 0010 1101 Non-PLD data shift
CFG_ERASE 0010 1001 ERASE Just the Non PLD configuration
CFG_PROGRAM 0010 1110 Non-PLD program
CFG_VERIFY 0010 1000 VRIFY non-PLD fusemap data
PLD_ADDRESS_SHIFT 0000 0001 PLD_Address register (109 bits)
PLD_DATA_SHIFT 0000 0010 PLD_Data register (123 Bits)
PLD_INIT_ADDR_FOR_PROG_INCR 0010 0001 Initialize the address register for auto increment
2
PLD_PROG_INCR 0010 0111 Program column register to E
PLD_PROGRAM 0000 0111 Program PLD data register to E
and auto increment address register
2
PLD_VERIFY 0000 1010 Verifies PLD column data
2
PLD_VERIFY_INCR 0010 1010 Load column register from E
UES_PROGRAM 0001 1010 Program UES bits into E
and auto increment address register
2
UES_READ 0001 0111 Read contents of UES register from E2 (32 bits)
BYPASS is one of the three required instructions. It selects the Bypass Register to be connected between TDI and
TDO and allows serial data to be transferred through the device without affecting the operation of the ispPACPOWR1014/A. The IEEE 1149.1 standard defines the bit code of this instruction to be all ones (11111111).
The required SAMPLE/PRELOAD instruction dictates the Boundary-Scan Register be connected between TDI
and TDO. The ispPAC-POWR1014/A has no boundary scan register, so for compatibility it defaults to the BYPASS
mode whenever this instruction is received. The bit code for this instruction is defined by Lattice as shown in
Table 11.
The EXTEST (external test) instruction is required and would normally place the device into an external boundary
test mode while also enabling the boundary scan register to be connected between TDI and TDO. Again, since the
ispPAC-POWR1014/A has no boundary scan logic, the device is put in the BYPASS mode to ensure specification
compatibility. The bit code of this instruction is defined by the 1149.1 standard to be all zeros (00000000).
37

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
The optional IDCODE (identification code) instruction is incorporated in the ispPAC-POWR1014/A and leaves it in
its functional mode when executed. It selects the Device Identification Register to be connected between TDI and
TDO. The Identification Register is a 32-bit shift register containing information regarding the IC manufacturer,
device type and version code (Figure 31). Access to the Identification Register is immediately available, via a TAP
data scan operation, after power-up of the device, or by issuing a Test-Logic-Reset instruction. The bit code for this
instruction is defined by Lattice as shown in Table 11.
Figure 31. ispPAC-POWR1014/A ID Code
MSB LSB
0001 0000 0001 0100 0101 / 0000 0100 001 / 1 (ispPAC-POWR1014)
0000 0000 0001 0100 0101 / 0000 0100 001 / 1 (ispPAC-POWR1014A)
Part Number
00145h = ispPAC-POWR1014A
(20 bits)
10145h = ispPAC-POWR1014
JEDEC Manufacturer
Identity Code for
Lattice Semiconductor
(11 bits)
Constant 1
(1 bit)
per 1149.1-1990
ispPAC-POWR1014/A Specific Instructions
There are 25 unique instructions specified by Lattice for the ispPAC-POWR1014/A. These instructions are primarily
used to interface to the various user registers and the E2CMOS non-volatile memory. Additional instructions are
used to control or monitor other features of the device. A brief description of each unique instruction is provided in
detail below, and the bit codes are found in Table 11.
PLD_ADDRESS_SHIFT – This instruction is used to set the address of the PLD AND/ARCH arrays for subsequent
program or read operations. This instruction also forces the outputs into the OUTPUTS_HIGHZ.
PLD_DATA_SHIFT – This instruction is used to shift PLD data into the register prior to programming or reading.
This instruction also forces the outputs into the OUTPUTS_HIGHZ.
PLD_INIT_ADDR_FOR_PROG_INCR – This instruction prepares the PLD address register for subsequent
PLD_PROG_INCR or PLD_VERIFY_INCR instructions.
PLD_PROG_INCR – This instruction programs the PLD data register for the current address and increments the
address register for the next set of data.
PLD_PROGRAM – This instruction programs the selected PLD AND/ARCH array column. The specific column is
preselected by using PLD_ADDRESS_SHIFT instruction. The programming occurs at the second rising edge of
the TCK in Run-Test-Idle JTAG state. The device must already be in programming mode (PROGRAM_ENABLE
instruction). This instruction also forces the outputs into the OUTPUTS_HIGHZ.
PROGRAM_SECURITY – This instruction is used to program the electronic security fuse (ESF) bit. Programming
the ESF bit protects proprietary designs from being read out. The programming occurs at the second rising edge of
the TCK in Run-Test-Idle JTAG state. The device must already be in programming mode (PROGRAM_ENABLE
instruction). This instruction also forces the outputs into the OUTPUTS_HIGHZ.
PLD_VERIFY – This instruction is used to read the content of the selected PLD AND/ARCH array column. This
specific column is preselected by using PLD_ADDRESS_SHIFT instruction. This instruction also forces the outputs
into the OUTPUTS_HIGHZ.
DISCHARGE – This instruction is used to discharge the internal programming supply voltage after an erase or programming cycle and prepares ispPAC-POWR1014/A for a read cycle. This instruction also forces the outputs into
the OUTPUTS_HIGHZ.
38

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
CFG_ADDRESS – This instruction is used to set the address of the CFG array for subsequent program or read
operations. This instruction also forces the outputs into the OUTPUTS_HIGHZ.
CFG_DATA_SHIFT – This instruction is used to shift data into the CFG register prior to programming or reading.
This instruction also forces the outputs into the OUTPUTS_HIGHZ.
CFG_ERASE – This instruction will bulk erase the CFG array. The action occurs at the second rising edge of TCK
in Run-Test-Idle JTAG state. The device must already be in programming mode (PROGRAM_ENABLE instruction).
This instruction also forces the outputs into the OUTPUTS_HIGHZ.
CFG_PROGRAM – This instruction programs the selected CFG array column. This specific column is preselected
by using CFG_ADDRESS instruction. The programming occurs at the second rising edge of the TCK in Run-TestIdle JTAG state. The device must already be in programming mode (PROGRAM_ENABLE instruction). This
instruction also forces the outputs into the OUTPUTS_HIGHZ.
CFG_VERIFY – This instruction is used to read the content of the selected CFG array column. This specific column
is preselected by using CFG_ADDRESS instruction. This instruction also forces the outputs into the
OUTPUTS_HIGHZ.
BULK_ERASE – This instruction will bulk erase all E2CMOS bits (CFG, PLD, UES, and ESF) in the ispPAC-
POWR1014/A. The device must already be in programming mode (PROGRAM_ENABLE instruction). This instruction also forces the outputs into the OUTPUTS_HIGHZ.
OUTPUTS_HIGHZ – This instruction turns off all of the open-drain output transistors. Pins that are programmed as
FET drivers will be placed in the active low state. This instruction is effective after Update-Instruction-Register
JTAG state.
PROGRAM_ENABLE – This instruction enables the programming mode of the ispPAC-POWR1014/A. This
instruction also forces the outputs into the OUTPUTS_HIGHZ.
IDCODE – This instruction connects the output of the Identification Code Data Shift (IDCODE) Register to TDO
(Figure 32), to support reading out the identification code.
Figure 32. IDCODE Register
Bit
31
Bit
30
Bit
29
Bit
28
Bit
27
Bit
Bit
4
3
Bit
2
Bit
1
Bit
TDO
0
PROGRAM_DISABLE – This instruction disables the programming mode of the ispPAC-POWR1014/A. The TestLogic-Reset JTAG state can also be used to cancel the programming mode of the ispPAC-POWR1014/A.
UES_READ – This instruction both reads the E2CMOS bits into the UES register and places the UES register
between the TDI and TDO pins (as shown in Figure 29), to support programming or reading of the user electronic
signature bits.
Figure 33. UES Register
Bit
14
15
12
13
10
11
8
9
6
7
4
5
2
3
0
1
TDO
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
Bit
UES_PROGRAM – This instruction will program the content of the UES Register into the UES E2CMOS memory.
The device must already be in programming mode (PROGRAM_ENABLE instruction). This instruction also forces
the outputs into the OUTPUTS_HIGHZ.
ERASE_DONE_BIT – This instruction clears the 'Done' bit, which prevents the ispPAC-POWR1014/A sequence
from starting.
39

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
PROGRAM_DONE_BIT – This instruction sets the 'Done' bit, which enables the ispPAC-POWR1014/A sequence
to start.
RESET – This instruction resets the PLD sequence and output macrocells.
IN1_RESET_JTAG_BIT – This instruction clears the JTAG Register logic input 'IN1.' The PLD input has to be con-
figured to take input from the JTAG Register in order for this command to have effect on the sequence.
IN1_SET_JTAG_BIT – This instruction sets the JTAG Register logic input 'IN1.' The PLD input has to be configured
to take input from the JTAG Register in order for this command to have effect on the sequence.
PLD_VERIFY_INCR – This instruction reads out the PLD data register for the current address and increments the
address register for the next read.
Notes:
In all of the descriptions above, OUTPUTS_HIGHZ refers both to the instruction and the state of the digital output
pins, in which the open-drains are tri-stated and the FET drivers are pulled low.
2
Before any of the above programming instructions are executed, the respective E
using the corresponding erase instruction.
CMOS bits need to be erased
40

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Package Diagrams
48-Pin TQFP (Dimensions in Millimeters)
3.
A
PIN 1 INDICATOR
D
N
1
0.20
C A-B D
E
B
3.
0.20 DA-BH
D1
E1
e
8.
0.08
MCbA-B D
4X
D
3.
SEE DETAIL "A"
C SEATING PLANE
LEAD FINISH
b
c
b
1
c
1
BASE METAL
SECTION B - B
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI Y14.5 - 1982.
2. ALL DIMENSIONS ARE IN MILLIMETERS.
DATUMS A, B AND D TO BE DETERMINED AT DATUM PLANE H.
3.
4. DIMENSIONS D1 AND E1 DO NOT INCLUDE MOLD PROTRUSION.
ALLOWABLE MOLD PROTRUSION IS 0.254 MM ON D1 AND E1
DIMENSIONS.
5. THE TOP OF PACKAGE MAY BE SMALLER THAN THE BOTTOM
OF THE PACKAGE BY 0.15 MM.
6. SECTION B-B:
THESE DIMENSIONS APPLY TO THE FLAT SECTION OF THE
LEAD BETWEEN 0.10 AND 0.25 MM FROM THE LEAD TIP.
7. A1 IS DEFINED AS THE DISTANCE FROM THE SEATING PLANE
TO THE LOWEST POINT ON THE PACKAGE BODY.
EXACT SHAPE OF EACH CORNER IS OPTIONAL.
8.
0.08 C
AA2
A1
H
0.20 MIN.
1.00 REF.
DETAIL "A"
SYMBOL
A-
A1
A2
D
D1
E
E1
L 0.45
N
e
b1 0.17
c1 0.09
MIN.
0.05
1.35
B
B
NOM.
-
-
1.40
9.00 BSC
7.00 BSC
9.00 BSC
7.00 BSC
0.60
48
0.50 BSC
0.220.17b 0.27
0.20
0.15
0.13
GAUGE PLANE
0.25
0-7∞
L
MAX.
1.60
0.15
1.45
0.75
0.23
0.200.09c
0.16
41

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Part Number Description
Device Family
Device Number
ADC Support
A = ADC present
ispPAC-POWR1014X - 01XX48X
ispPAC-POWR1014/A Ordering Information
Conventional Packaging
Part Number Package Pins
ispPAC-POWR1014A-01T48I TQFP 48
ispPAC-POWR1014-01T48I TQFP 48
Lead-Free Packaging
Part Number Package Pins
ispPAC-POWR1014A-01TN48I Lead-Free TQFP 48
ispPAC-POWR1014-01TN48I Lead-Free TQFP 48
Operating Temperature Range
I = Industrial (-40oC to +85oC)
Package
T = 48-pin TQFP
TN = Lead-Free 48-pin TQFP*
Performance Grade
01 = Standard
42

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Package Options
IN4
IN3
IN2
VCCINP
IN1
MCLK
VCCD
RESETB
SCL
SDA
PLDCLK
VMON10
OUT14
OUT13
OUT12
OUT11
OUT10
OUT9
GNDD
OUT8
OUT7
OUT6
OUT5
OUT4
4847464544434241403938
1
2
3
4
5
6
7
ispPAC-POWR1014A
48-Pin TQFP
8
9
10
11
12
1314151617181920212223
TDI
TMS
ATDI
HVOUT2
HVOUT1
SMBA_OUT3
TDISEL
VCCJ
TDO
TCK
VCCD
37
36
35
34
33
32
31
30
29
28
27
26
25
24
VCCPROG
VMON9
VMON8
VMON7
VMON6
VMON5
GNDD
GNDA
VCCA
VMON4
VMON3
VMON2
VMON1
43
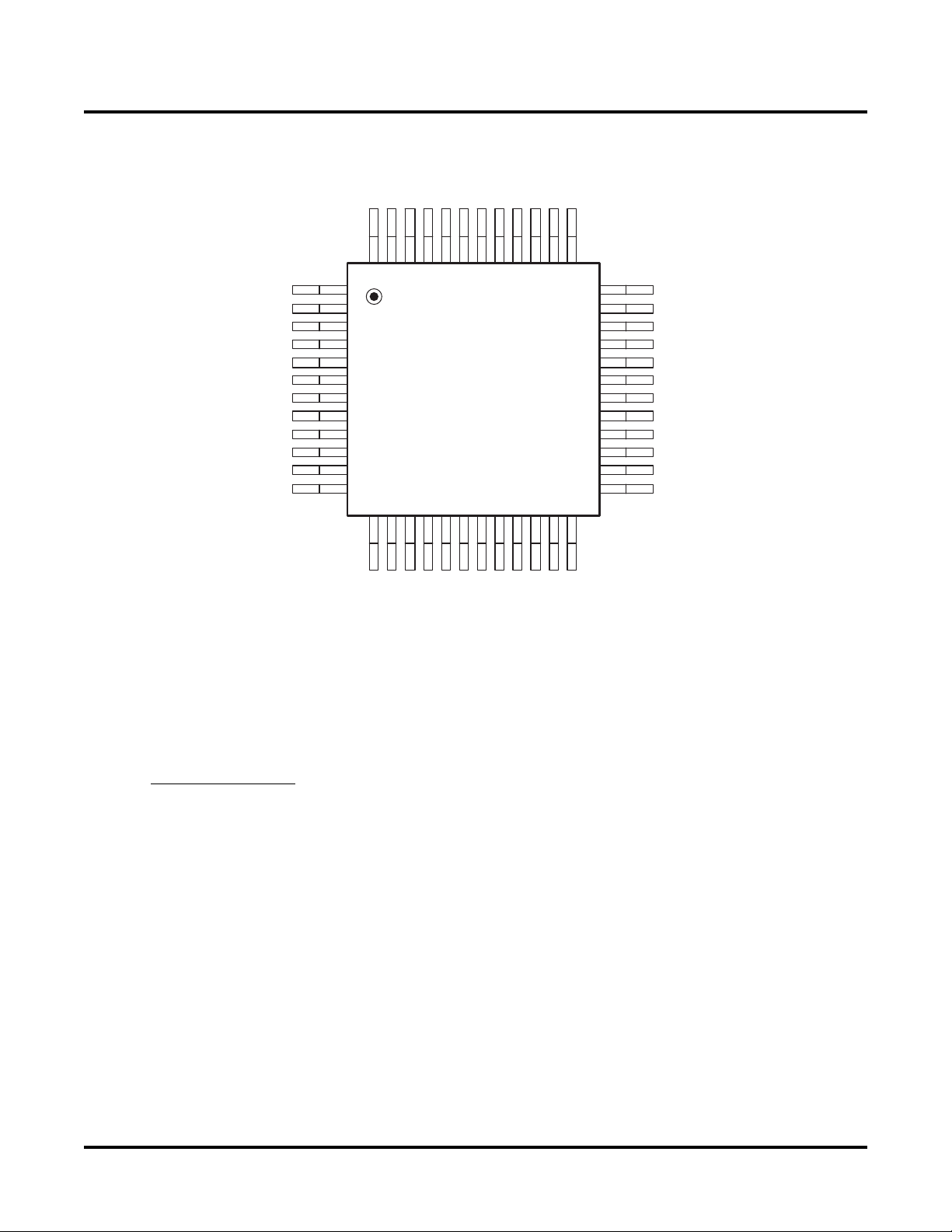
Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Package Options (Cont.)
IN4
IN3
IN2
VCCINP
IN1
MCLK
VCCD
PLDCLK
RESETB
GNDD
GNDD
VMON10
OUT14
OUT13
OUT12
OUT11
OUT10
OUT9
GNDD
OUT8
OUT7
OUT6
OUT5
OUT4
1
2
3
4
5
6
7
8
9
10
11
12
1314151617181920212223
4847464544434241403938
SMBA_OUT3
Technical Support Assistance
Hotline: 1-800-LATTICE (North America)
+1-503-268-8001 (Outside North America)
e-mail: isppacs@latticesemi.com
Internet: www.latticesemi.com
ispPAC-POWR1014
48-Pin TQFP
TDI
TMS
HVOUT2
ATDI
HVOUT1
VCCJ
TDISEL
TDO
TCK
VCCD
37
36
35
34
33
32
31
30
29
28
27
26
25
24
VCCPROG
VMON9
VMON8
VMON7
VMON6
VMON5
GNDD
GNDA
VCCA
VMON4
VMON3
VMON2
VMON1
44

Lattice Semiconductor ispPAC-POWR1014/A Data Sheet
Revision History
Date Version Change Summary
February 2006 01.0 Initial release.
March 2006 01.1
May 2006 01.2 Update HVOUT I source range: 12.5µA to 100µA
October 2006 01.3 Data sheet status changed to “Final”
March 2007 01.4 Corrected VCCINP Voltage range from "2.25V to 3.6V" to "2.25V to 5.5V".
August 2007 01.5 Changes to HVOUT pin specifications.
ispPAC-POWR1014/A block diagram: “SELTDI” changed to “TDISEL”.
Pin Descriptions table: “InxP” changed to “Inx”, “MONx” to “VMONx”, VMON upper range
from “5.75V” to “5.87V”.
Pin Descriptions table, note 4 - clarification for un-used VMON pins to be tied to GNDD.
Absolute Maximum Ratings table and Recommended Operating Conditions table:
“VMON+” changed to VMON”.
Digital Specifications table: add note # 2 to ISINKTOTAL: “Sum of maximum current sink
by all digital outputs. Reliable operation is not guaranteed if this value is exceeded.”
Typographical corrections: Vmon trip points and thresholds
Typographical corrections: “InxP” to “Inx”, “MONx” to “VMONx”.
Clarify operation of ADC conversions
2
Digital Specifications table, added footnotes on I
TAP Instructions table, clarify DISCHARGE instruction of JTAG. Added instruction descriptions for others.
Analog Specifications table, reduced Max. I
Tightened Input Resistor Variation to 15%.
AC/Transient Characteristics table, tightened Internal Oscillator frequency variation down
to 5%.
Digital Specifications table, included V
Removed reference to Internal Pull-up resistor for signal line TDO.
Corrected the Maximum Vmon Range value from 5.734V to 5.867V.
Removed references to VPS[0:1].
and VIH specifications for I2C interface.
IL
C frequency
to 20 mA.
CC
45
 Loading...
Loading...