

Lakeshore 340 User Manual

User’s Manual
Model 340
Temperature Controller
340 Temperature Controller
Auto
Zone
Tune
Settings
P I D
Heater
Control
Range
Channel
Heater
Off Setpoint
Ramp Program
Control
Setup
Loop 1
Manual
Output Loop 2
Input
Setup
7
Scan
Setup
4
Alarm
Setup
1
Alarm
Reset
0
Display
SoftCal
Format
8
Curve
Entry5Interface
Math
Analog
Setup
Outputs
2
Math
Reset.Options
Cancel
Escape
Enter
Screen More
Previous
Setting Local
Next
Setting DataCard
Save
Screen Help
9
6
3
+/-
Lake Shore Cryotronics, Inc.
575 McCorkle Blvd.
Westerville, Ohio 43082-8888 USA
Internet Addresses:
sales@lakeshore.com
service@lakeshore.com
Visit Our Website:
www.lakeshore.com
Fax: (614) 891-1392
Telephone: (614) 891-2243
Methods and apparatus disclosed and described herein have been developed solely on company funds of Lake Shore Cryotronics, Inc.
No government or other contractual support or relationship whatsoever has existed which in any way affects or mitigates proprietary
rights of Lake Shore Cryotronics, Inc. in these developments. Methods and apparatus disclosed herein may be subject to U.S. Patents
existing or applied for. Lake Shore Cryotronics, Inc. reserves the right to add, improve, modify, or withdraw functions, design
modifications, or products at any time without notice. Lake Shore shall not be liable for errors contained herein or for incidental or
consequential damages in connection with furnishing, performance, or use of this material.
Rev. 2.1 P/N 119-011 29 March 2004

Lake Shore Model 340 Temperature Controller User’s Manual
LIMITED WARRANTY STATEMENT
WARRANTY PERIOD: ONE (1) YEAR
1. Lake Shore warrants that this Lake Shore product (the “Product”) will
be free from defects in materials and workmanship for the Warranty
Period specified above (the “Warranty Period”). If Lake Shore receives
notice of any such defects during the Warranty Period and the Product
is shipped freight prepaid, Lake Shore will, at its option, either repair
or replace the Product if it is so defective without charge to the owner
for parts, service labor or associated customary return shipping cost.
Any such replacement for the Product may be either new or equivalent
in performance to new. Replacement or repaired parts will be
warranted for only the unexpired portion of the original warranty or
90 days (whichever is greater).
2. Lake Shore warrants the Product only if it has been sold by an
authorized Lake Shore employee, sales representative, dealer or
original equipment manufacturer (OEM).
3. The Product may contain remanufactured parts equivalent to new in
performance or may have been subject to incidental use.
4. The Warranty Period begins on the date of delivery of the Product or
later on the date of installation of the Product if the Product is installed
by Lake Shore, provided that if you schedule or delay the Lake Shore
installation for more than 30 days after delivery the Warranty Period
begins on the 31st day after delivery.
5. This limited warranty does not apply to defects in the Product
resulting from (a) improper or inadequate maintenance, repair or
calibration, (b) fuses, software and non-rechargeable batteries,
(c) software, interfacing, parts or other supplies not furnished by
Lake Shore, (d) unauthorized modification or misuse, (e) operation
outside of the published specifications or (f) improper site preparation
or maintenance.
6. TO THE EXTENT ALLOWED BY APPLICABLE LAW, THE
ABOVE WARRANTIES ARE EXCLUSIVE AND NO OTHER
WARRANTY OR CONDITION, WHETHER WRITTEN OR ORAL,
IS EXPRESSED OR IMPLIED. LAKE SHORE SPECIFICALLY
DISCLAIMS ANY IMPLIED WARRANTIES OR CONDITIONS OF
MERCHANTABILITY, SATISFACTORY QUALITY AND/OR
FITNESS FOR A PARTICULAR PURPOSE WITH RESPECT TO
THE PRODUCT. Some countries, states or provinces do not allow
limitations on an implied warranty, so the above limitation or
exclusion might not apply to you. This warranty gives you specific
legal rights and you might also have other rights that vary from
country to country, state to state or province to province.
7. TO THE EXTENT ALLOWED BY APPLICABLE LAW, THE
REMEDIES IN THIS WARRANTY STATEMENT ARE YOUR
SOLE AND EXCLUSIVE REMEDIES.
8. EXCEPT TO THE EXTENT PROHIBITED BY APPLICABLE
LAW, IN NO EVENT WILL LAKE SHORE OR ANY OF ITS
SUBSIDIARIES, AFFILIATES OR SUPPLIERS BE LIABLE FOR
DIRECT, SPECIAL, INCIDENTAL, CONSEQUENTIAL OR
OTHER DAMAGES (INCLUDING LOST PROFIT, LOST DATA
OR DOWNTIME COSTS) ARISING OUT OF THE USE,
INABILITY TO USE OR RESULT OF USE OF THE PRODUCT,
WHETHER BASED IN WARRANTY, CONTRACT, TORT OR
OTHER LEGAL THEORY, AND WHETHER OR NOT LAKE
SHORE HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH
DAMAGES. Your use of the Product is entirely at your own risk.
Some countries, states and provinces do not allow the exclusion of
liability for incidental or consequential damages, so the above
limitation may not apply to you.
LIMITED WARRANTY STATEMENT (Continued)
9. EXCEPT TO THE EXTENT ALLOWED BY APPLICABLE LAW,
THE TERMS OF THIS LIMITED WARRANTY STATEMENT DO
NOT EXCLUDE, RESTRICT OR MODIFY, AND ARE IN
ADDITION TO, THE MANDATORY STATUTORY RIGHTS
APPLICABLE TO THE SALE OF THE PRODUCT TO YOU.
CERTIFICATION
Lake Shore certifies that this product has been inspected and tested in
accordance with its published specifications and that this product met its
published specifications at the time of shipment. The accuracy and
calibration of this product at the time of shipment are traceable to the
United States National Institute of Standards and Technology (NIST);
formerly known as the National Bureau of Standards (NBS).
FIRMWARE LIMITATIONS
Lake Shore has worked to ensure that the Model 340 firmware is as free
of errors as possible, and that the results you obtain from the instrument
are accurate and reliable. However, as with any computer-based software,
the possibility of errors exists.
In any important research, as when using any laboratory equipment,
results should be carefully examined and rechecked before final
conclusions are drawn. Neither Lake Shore nor anyone else involved in
the creation or production of this firmware can pay for loss of time,
inconvenience, loss of use of the product, or property damage caused by
this product or its failure to work, or any other incidental or consequential
damages. Use of our product implies that you understand the Lake Shore
license agreement and statement of limited warranty.
FIRMWARE LICENSE AGREEMENT
The firmware in this instrument is protected by United States copyright
law and international treaty provisions. To maintain the warranty, the
code contained in the firmware must not be modified. Any changes made
to the code is at the user’s risk. Lake Shore will assume no responsibility
for damage or errors incurred as result of any changes made to the
firmware.
Under the terms of this agreement you may only use the Model 340
firmware as physically installed in the instrument. Archival copies are
strictly forbidden. You may not decompile, disassemble, or reverse
engineer the firmware. If you suspect there are problems with the
firmware, return the instrument to Lake Shore for repair under the terms
of the Limited Warranty specified above. Any unauthorized duplication
or use of the Model 340 firmware in whole or in part, in print, or in any
other storage and retrieval system is forbidden.
TRADEMARK ACKNOWLEDGMENT
Many manufacturers and sellers claim designations used to distinguish
their products as trademarks. Where those designations appear in this
manual and Lake Shore was aware of a trademark claim, they appear with
initial capital letters and the ™ or
Apiezon
®
is a trademark of Biddle Instruments.
®
symbol.
CalCurve™, Carbon-Glass™, Cernox™, DriftTrak™, Duo-Twist™,
Quad-Lead™, Quad-Twist™, Rox™, SoftCal™, and Thermox™ are
trademarks of Lake Shore Cryotronics, Inc.
Chromel™ and Alumel™ are trademarks of Hoskins Manufacturing
Company.
Formvar™ is a trademark of Monsanto Chemical Company.
MS-DOS
®
and Windows® are trademarks of Microsoft Corporation.
NI-488.2™ is a trademark of National Instruments.
PC, XT, AT, and PS-2 are trademarks of IBM.
®
is a trademark of Emerson & Cuming.
Stycast
®
Teflon
is a trademark of DuPont De Nemours.
Copyright ©1996 – 2001 and 2003 – 2004 by Lake Shore Cryotronics, Inc. All rights reserved. No portion of this
manual may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic,
mechanical, photocopying, recording, or otherwise, without the express written permission of Lake Shore.
A
Lake Shore Model 340 Temperature Controller User’s Manual
Declaration of Conformity
We: Lake Shore Cryotronics, Inc.
575 McCorkle Blvd.
Westerville, OH 43082-8888 USA
hereby declare that the equipment specified conforms to the following
Directives and Standards:
Application of Council directives: ....................... 73/23/EEC
89/336/EEC
Standard to which Conformity is declared:......... EN 61010-1:2001
Overvoltage II
Pollution Degree 2
EN 61326 A2:2001
Class A
Annex B
Model Number:................................................... 340
_________________________________________________ __________________________________
Signature Date
Ed Maloof
Printed Name
Vice President of Engineering
Position
B

Lake Shore Model 340 Temperature Controller User’s Manual
This Page Intentionally Left Blank
C
Lake Shore Model 340 Temperature Controller User’s Manual
TABLE OF CONTENTS
Chapter/Paragraph Title Page
1 INTRODUCTION .................................................................................................................................................... 1-1
1.0 GENERAL ......................................................................................................................................... 1-1
1.1 TEMPERATURE CONTROL SYSTEM ............................................................................................. 1-2
1.2 TEMPERATURE CONTROL SYSTEM WITH THE MODEL 340 ...................................................... 1-2
1.2.1 Cooling Source .............................................................................................................................. 1-2
1.2.2 Feedback ....................................................................................................................................... 1-3
1.2.3 Control Equation ............................................................................................................................ 1-3
1.2.4 Heating .......................................................................................................................................... 1-3
1.3 MODEL 340 FEATURES................................................................................................................... 1-3
1.3.1 Configurable Inputs........................................................................................................................ 1-3
1.3.2 Input Isolation................................................................................................................................. 1-4
1.3.3 Input Reading Capability................................................................................................................ 1-4
1.3.4 Temperature Response Curves and CalCurves™......................................................................... 1-5
1.3.5 SoftCal™........................................................................................................................................ 1-5
1.3.6 Configurable Heater Output ........................................................................................................... 1-5
1.3.7 Heater Output Protection ............................................................................................................... 1-5
1.3.8 Second Control Loop ..................................................................................................................... 1-5
1.3.9 AutoTune ....................................................................................................................................... 1-5
1.3.10 Setpoint Ramping and Zones......................................................................................................... 1-5
1.3.11 Internal Programming .................................................................................................................... 1-6
1.3.12 Math............................................................................................................................................... 1-6
1.3.13 Alarms, Analog Outputs, and Digital I/O ........................................................................................ 1-6
1.3.14 Memory Card ................................................................................................................................. 1-6
1.3.15 Computer Interface ........................................................................................................................ 1-6
2 COOLING SYSTEM DESIGN................................................................................................................................. 2-1
2.0 General.............................................................................................................................................. 2-1
2.1 Temperature Sensor Selection .......................................................................................................... 2-1
2.1.1 Temperature Range....................................................................................................................... 2-1
2.1.2 Sensor Sensitivity .......................................................................................................................... 2-1
2.1.3 Environmental Conditions .............................................................................................................. 2-2
2.1.4 Measurement Accuracy ................................................................................................................. 2-2
2.1.5 Sensor Package............................................................................................................................. 2-2
2.2 Calibrated Sensors ............................................................................................................................ 2-2
2.2.1 Traditional Calibration .................................................................................................................... 2-2
2.2.2 SoftCal™........................................................................................................................................ 2-3
2.2.3 Standard Curves ............................................................................................................................ 2-4
2.2.4 CalCurve™ .................................................................................................................................... 2-4
2.3 SENSOR INSTALLATION................................................................................................................. 2-4
2.3.1 Mounting Materials......................................................................................................................... 2-4
2.3.2 Sensor Location ............................................................................................................................. 2-4
2.3.3 Thermal Conductivity ..................................................................................................................... 2-5
2.3.4 Contact Area .................................................................................................................................. 2-5
2.3.5 Contact Pressure ........................................................................................................................... 2-5
2.3.6 Lead Wire....................................................................................................................................... 2-6
2.3.7 Lead Soldering............................................................................................................................... 2-6
2.3.8 Heat Sinking Leads........................................................................................................................ 2-6
2.3.9 Thermal Radiation.......................................................................................................................... 2-6
2.4 HEATER SELECTION AND INSTALLATION.................................................................................... 2-6
2.4.1 Heater Resistance and Power ....................................................................................................... 2-6
2.4.2 Heater Location.............................................................................................................................. 2-7
2.4.3 Heater Types ................................................................................................................................. 2-7
2.4.4 Heater Wiring ................................................................................................................................. 2-7
2.5 CONSIDERATIONS FOR GOOD CONTROL ................................................................................... 2-7
2.5.1 Thermal Conductivity ..................................................................................................................... 2-7
2.5.2 Thermal Lag................................................................................................................................... 2-8
2.5.3 Two-Sensor Approach ................................................................................................................... 2-8
2.5.4 Thermal Mass ................................................................................................................................ 2-8
2.5.5 System Nonlinearity ....................................................................................................................... 2-8
2.6 PID CONTROL .................................................................................................................................. 2-9
2.6.1 Proportional (P).............................................................................................................................. 2-9
Table of Contents i

Lake Shore Model 340 Temperature Controller User’s Manual
TABLE OF CONTENTS (Continued)
Chapter/Paragraph Title Page
2.6.2 Integral (I)....................................................................................................................................... 2-9
2.6.3 Derivative (D) .................................................................................................................................2-9
2.6.4 Manual Heater Output.................................................................................................................. 2-11
2.7 MANUAL TUNING ........................................................................................................................... 2-11
2.7.1 Setting Heater Range................................................................................................................... 2-11
2.7.2 Tuning Proportional...................................................................................................................... 2-11
2.7.3 Tuning Integral ............................................................................................................................. 2-12
2.7.4 Tuning Derivative ......................................................................................................................... 2-12
2.8 AUTOTUNING................................................................................................................................. 2-13
2.9 ZONE TUNING................................................................................................................................ 2-14
3 INSTRUMENT HARDWARE INSTALLATION ....................................................................................................... 3-1
3.0 GENERAL ......................................................................................................................................... 3-1
3.1 RECEIVING THE MODEL 340 .......................................................................................................... 3-1
3.1.1 Inspection and Unpacking.............................................................................................................. 3-1
3.1.2 Repackaging For Shipment............................................................................................................ 3-1
3.1.3 Safety Summary............................................................................................................................. 3-2
3.1.4 Safety Symbols ..............................................................................................................................3-2
3.1.5 Handling Liquid Helium and Liquid Nitrogen .................................................................................. 3-3
3.2 REAR PANEL DEFINITION............................................................................................................... 3-4
3.3 LINE INPUT ASSEMBLY................................................................................................................... 3-5
3.3.1 Line Voltage and Fuse Verification................................................................................................. 3-5
3.3.2 Line Voltage Selection ...................................................................................................................3-5
3.3.3 Fuse Replacement ......................................................................................................................... 3-6
3.3.4 Power Cord ....................................................................................................................................3-6
3.3.5 Power Switch ................................................................................................................................. 3-6
3.4 STANDARD SENSOR INPUTS......................................................................................................... 3-6
3.4.1 Sensor Input Connector and Pinout ............................................................................................... 3-6
3.4.2 Sensor Lead Cable ........................................................................................................................3-7
3.4.3 Grounding and Shielding Sensor Leads......................................................................................... 3-7
3.4.4 Sensor Polarity............................................................................................................................... 3-7
3.4.5 Four-Lead Sensor Measurement ...................................................................................................3-7
3.4.6 Two-Lead Sensor Measurement.................................................................................................... 3-8
3.4.7 Lowering Measurement Noise........................................................................................................ 3-8
3.5 HEATER OUTPUT SETUP ...............................................................................................................3-8
3.5.1 Loop 1 Output ................................................................................................................................3-8
3.5.2 Heater Output Connector for Loop 1 .............................................................................................. 3-8
3.5.3 Heater Output Wiring for Loop 1 ....................................................................................................3-9
3.5.4 Heater Protection and Fuse for Loop 1 .......................................................................................... 3-9
3.5.5 Loop 1 Heater Noise ...................................................................................................................... 3-9
3.5.6 Model 3003 Heater Output Conditioner.......................................................................................... 3-9
3.5.7 Loop 2 Output ..............................................................................................................................3-10
3.5.8 Loop 2 Output Resistance............................................................................................................ 3-10
3.5.9 Loop 2 Output Connector............................................................................................................. 3-10
3.5.10 Loop 2 Heater Protection ............................................................................................................. 3-10
3.5.11 Boosting the Output Power .......................................................................................................... 3-11
3.6 ANALOG OUTPUTS........................................................................................................................ 3-11
3.7 DIGITAL I/O..................................................................................................................................... 3-12
3.8 RELAYS .......................................................................................................................................... 3-12
4 FRONT PANEL OPERATION ................................................................................................................................ 4-1
4.0 GENERAL ......................................................................................................................................... 4-1
4.1 TURNING POWER ON .....................................................................................................................4-1
4.2 DISPLAY FORMATS ......................................................................................................................... 4-1
4.2.1 Normal Display............................................................................................................................... 4-2
4.2.2 Setting Displays .............................................................................................................................4-2
4.2.3 Data Entry Displays........................................................................................................................ 4-2
4.2.4 Error Displays................................................................................................................................. 4-2
4.3 KEYPAD DESCRIPTION................................................................................................................... 4-2
4.4 KEYPAD NAVIGATION ..................................................................................................................... 4-3
4.4.1 Entering Settings............................................................................................................................ 4-3
4.4.2 Direct Settings................................................................................................................................ 4-3
ii Table of Contents

Lake Shore Model 340 Temperature Controller User’s Manual
TABLE OF CONTENTS (Continued)
Chapter/Paragraph Title Page
4.4.3 Using Setting Screens ................................................................................................................... 4-4
4.4.4 Data Entry Screens........................................................................................................................ 4-4
4.4.5 The Help Key ................................................................................................................................. 4-4
4.4.6 Keypad Time-out............................................................................................................................ 4-4
4.4.7 Key Definitions............................................................................................................................... 4-5
4.5 CHANGING DISPLAY FORMAT ....................................................................................................... 4-6
4.5.1 Number of Readings Displayed ..................................................................................................... 4-6
4.5.2 Sensor Input................................................................................................................................... 4-6
4.5.3 Reading Source and Display Units ................................................................................................ 4-7
4.5.4 Control Loop Display...................................................................................................................... 4-7
4.5.5 Large Heater Display ..................................................................................................................... 4-7
4.5.6 Heater Output Display Units........................................................................................................... 4-8
4.5.7 Display Contrast............................................................................................................................. 4-8
4.5.8 Display Backlight On/Off ................................................................................................................ 4-8
4.5.9 Locking the Keypad ....................................................................................................................... 4-8
4.6 DEFAULT VALUES ........................................................................................................................... 4-8
5 SENSOR INPUT AND TEMPERATURE MEASUREMENT OPERATION............................................................. 5-1
5.0 GENERAL ......................................................................................................................................... 5-1
5.1 SENSOR INPUT SETUP................................................................................................................... 5-1
5.1.1 Sensor Type................................................................................................................................... 5-1
5.1.2 Voltage Excitation (Current Autorange) ......................................................................................... 5-2
5.1.3 Thermal EMF Compensation with Voltage Excitation .................................................................... 5-2
5.1.4 Special Sensor Type Configuration................................................................................................ 5-2
5.1.5 Turning an Input Off ....................................................................................................................... 5-3
5.2 SELECTING A TEMPERATURE RESPONSE CURVE .................................................................... 5-3
5.3 FILTER AND MATH .......................................................................................................................... 5-4
5.3.1 Filter............................................................................................................................................... 5-4
5.3.2 Max/Min ......................................................................................................................................... 5-5
5.3.3 Linear Equation.............................................................................................................................. 5-6
5.4 SCANNER SUPPORT....................................................................................................................... 5-6
5.4.1 Scan Modes ................................................................................................................................... 5-6
5.4.2 Input Setup with a Scan Mode Active ............................................................................................ 5-7
5.4.3 Manual Scanning ........................................................................................................................... 5-7
5.4.4 Auto Scanning................................................................................................................................ 5-8
5.4.5 Slave Scanning .............................................................................................................................. 5-8
6 TEMPERATURE CONTROL OPERATION............................................................................................................ 6-1
6.0 GENERAL ......................................................................................................................................... 6-1
6.1 CONTROL LOOPS............................................................................................................................ 6-1
6.1.1 Control Loops on the Normal Display ............................................................................................ 6-1
6.1.2 Loop Indication on the Normal Display .......................................................................................... 6-1
6.1.3 Loop Indication on Setting Screens ............................................................................................... 6-1
6.1.4 Control Output Display................................................................................................................... 6-2
6.2 CONTROL LOOP ENABLE............................................................................................................... 6-2
6.3 CONTROL LOOP FILTER................................................................................................................. 6-2
6.4 CONTROL CHANNEL....................................................................................................................... 6-3
6.5 CONTROL MODES........................................................................................................................... 6-3
6.6 MANUAL SETTING OF PID CONTROL PARAMETERS .................................................................. 6-4
6.6.1 Proportional (P).............................................................................................................................. 6-4
6.6.2 Integral (I)....................................................................................................................................... 6-4
6.6.3 Derivative (D) ................................................................................................................................. 6-4
6.6.4 Manual Output ............................................................................................................................... 6-4
6.7 SELECTING AN AUTOTUNE CONTROL MODE ............................................................................. 6-4
6.8 ZONE CONTROL DATA ENTRY ...................................................................................................... 6-5
6.9 USING OPEN LOOP CONTROL....................................................................................................... 6-7
6.10 SETTING A SETPOINT AND SETPOINT UNITS.............................................................................. 6-7
6.11 SETPOINT RAMPING....................................................................................................................... 6-8
6.12 CONTROL OUTPUT ......................................................................................................................... 6-8
6.12.1 Heater Output Parameter Settings and Heater Range................................................................... 6-8
6.12.2 Analog Output as Loop 2 Control Output ..................................................................................... 6-10
Table of Contents iii

Lake Shore Model 340 Temperature Controller User’s Manual
TABLE OF CONTENTS (Continued)
Chapter/Paragraph Title Page
6.13 CONTROL OUTPUT LIMITS........................................................................................................... 6-11
6.13.1 Setpoint Limit ...............................................................................................................................6-11
6.13.2 Control Output Slope Limit ........................................................................................................... 6-11
6.13.3 Heater Range Limit ...................................................................................................................... 6-11
7 ANALOG OUTPUT, DIGITAL I/O. ALARMS, AND RELAY OPERATION ............................................................ 7-1
7.0 GENERAL ......................................................................................................................................... 7-1
7.1 ANALOG OUTPUTS.......................................................................................................................... 7-1
7.1.1 Input Mode for Analog Output ........................................................................................................7-2
7.1.2 Example of Low and High Parameter Setting ................................................................................7-2
7.1.3 Loop 2 Mode for Analog Output 2 ..................................................................................................7-2
7.1.4 Manual Mode Operation of the Analog Outputs ............................................................................. 7-3
7.2 DIGITAL INPUTS AND OUTPUTS (I/O)............................................................................................7-3
7.2.1 Digital Output Modes...................................................................................................................... 7-3
7.2.2 Digital Outputs in Alarm Mode ....................................................................................................... 7-3
7.2.3 Digital Outputs in Scanner Mode.................................................................................................... 7-3
7.2.4 Digital Outputs in Manual Mode ..................................................................................................... 7-4
7.2.5 Digital Input Modes ........................................................................................................................ 7-4
7.3 INPUT ALARMS ................................................................................................................................7-4
7.3.1 Enabling an Input Alarm................................................................................................................. 7-4
7.3.2 Selecting an Input Alarm Source.................................................................................................... 7-5
7.3.3 Input Alarm High and Low Settings ................................................................................................ 7-5
7.3.4 Input Alarm Latching ...................................................................................................................... 7-5
7.3.5 Input Alarm Relay Setup ................................................................................................................ 7-5
7.3.6 Input Alarm Reset ..........................................................................................................................7-6
7.3.7 Audible Beeper............................................................................................................................... 7-6
7.4 HIGH AND LOW RELAYS................................................................................................................. 7-6
7.4.1 Selecting a Relay Mode ................................................................................................................. 7-6
7.4.2 Manually Setting a Relay ............................................................................................................... 7-6
8 INSTRUMENT PROGRAMMING............................................................................................................................ 8-1
8.0 GENERAL ......................................................................................................................................... 8-1
8.1 CURVE ENTRY FROM THE FRONT PANEL ...................................................................................8-1
8.1.1 Curve Numbers and Storage ......................................................................................................... 8-1
8.1.2 Front Panel Curve Entry Operations .............................................................................................. 8-1
8.1.3 Front Panel Curve Edit................................................................................................................... 8-2
8.1.4 Front Panel Curve Copy................................................................................................................. 8-3
8.1.5 Front Panel Curve Erase................................................................................................................ 8-3
8.2 SOFTCAL™ ...................................................................................................................................... 8-4
8.2.1 SoftCal and Silicon Diode Sensors ................................................................................................8-4
8.2.2 SoftCal Accuracy with Silicon Diode Sensors ................................................................................ 8-5
8.2.3 SoftCal and Platinum Sensors ....................................................................................................... 8-5
8.2.4 SoftCal Accuracy with Platinum Sensors ....................................................................................... 8-5
8.2.5 Creating a SoftCal Calibration Curve ............................................................................................. 8-6
8.3 INTERNAL PROGRAMMING ............................................................................................................8-6
8.3.1 Program Instructions ...................................................................................................................... 8-6
8.3.2 Internal Programming Operations ................................................................................................ 8-10
8.3.3 Enter or Edit an Internal Program................................................................................................. 8-10
8.3.4 Saving a Program ........................................................................................................................8-11
8.3.5 Summary of Key Operation.......................................................................................................... 8-11
8.3.6 Example of an Internal Program (Example 1) ..............................................................................8-11
8.3.7 Example of Using Subprograms (Example 2) .............................................................................. 8-12
8.3.8 Run an Internal Program.............................................................................................................. 8-12
8.3.9 Stop a Running Program.............................................................................................................. 8-12
8.3.10 Clear Internal Program Memory................................................................................................... 8-13
8.4 DATA CARD OPERATION.............................................................................................................. 8-13
8.4.1 Data Logging To A Data Card...................................................................................................... 8-13
8.4.2 Reading From A Data Card.......................................................................................................... 8-16
8.4.3 Writing To A Data Card ................................................................................................................ 8-16
8.4.4 Erasing A Data Card .................................................................................................................... 8-16
iv Table of Contents

Lake Shore Model 340 Temperature Controller User’s Manual
TABLE OF CONTENTS (Continued)
Chapter/Paragraph Title Page
9 REMOTE OPERATION .......................................................................................................................................... 9-1
9.0 GENERAL ......................................................................................................................................... 9-1
9.1 IEEE-488 INTERFACE...................................................................................................................... 9-1
9.1.1 IEEE-488 Interface Settings........................................................................................................... 9-1
9.1.2 IEEE-488 Command Structure....................................................................................................... 9-1
9.1.3 Status Registers............................................................................................................................. 9-3
9.1.4 IEEE Interface Example Programs ................................................................................................ 9-4
9.1.4.1 IEEE-488 Interface Board Installation for Visual Basic Program ................................................ 9-4
9.1.4.2 Visual Basic IEEE-488 Interface Program Setup........................................................................ 9-6
9.1.4.3 IEEE-488 Interface Board Installation for Quick Basic Program................................................. 9-9
9.1.4.4 Quick Basic Program.................................................................................................................. 9-9
9.1.4.5 Program Operation................................................................................................................... 9-12
9.1.5 Troubleshooting ........................................................................................................................... 9-12
9.2 SERIAL INTERFACE OVERVIEW .................................................................................................. 9-13
9.2.1 Changing Baud Rate.................................................................................................................... 9-13
9.2.2 Physical Connection .................................................................................................................... 9-13
9.2.3 Hardware Support........................................................................................................................ 9-14
9.2.4 Character Format......................................................................................................................... 9-14
9.2.5 Message Strings .......................................................................................................................... 9-14
9.2.6 Message Flow Control ................................................................................................................. 9-15
9.2.7 Serial Interface Example Programs ............................................................................................. 9-15
9.2.7.1 Visual Basic Serial Interface Program Setup............................................................................ 9-16
9.2.7.2 Quick Basic Serial Interface Program Setup ............................................................................ 9-19
9.2.7.3 Program Operation................................................................................................................... 9-20
9.2.8 Troubleshooting ........................................................................................................................... 9-20
9.3 IEEE-488/SERIAL INTERFACE COMMANDS................................................................................ 9-21
10 OPTIONS AND ACCESSORIES.......................................................................................................................... 10-1
10.0 GENERAL ....................................................................................................................................... 10-1
10.1 OPTIONS ........................................................................................................................................ 10-1
10.2 ACCESSORIES............................................................................................................................... 10-1
10.3 MODEL DUAL STANDARD 3462 INPUT OPTION CARD .............................................................. 10-5
10.3.1 Field Installation ........................................................................................................................... 10-5
10.3.2 Operation ..................................................................................................................................... 10-7
10.3.3 Specifications............................................................................................................................... 10-7
10.4 MODEL 3464 DUAL THERMOCOUPLE INPUT OPTION CARD.................................................... 10-7
10.4.1 General ........................................................................................................................................ 10-7
10.4.2 Option Installation ........................................................................................................................ 10-8
10.4.3 Sensor Installation ....................................................................................................................... 10-8
10.4.3.1 Sensor Input Terminals ............................................................................................................ 10-8
10.4.3.2 Measurement Point Connection ............................................................................................... 10-9
10.4.3.3 Grounding and Shielding .......................................................................................................... 10-9
10.4.4 Operation ..................................................................................................................................... 10-9
10.4.4.1 Default Settings ........................................................................................................................ 10-9
10.4.4.2 Input Selection.......................................................................................................................... 10-9
10.4.4.3 Displaying Option Readings ..................................................................................................... 10-9
10.4.4.4 Curve Selection ...................................................................................................................... 10-10
10.4.4.5 Curve Data Format................................................................................................................. 10-10
10.4.4.6 Range Selection ..................................................................................................................... 10-10
10.4.4.7 Room Temperature Compensation ........................................................................................ 10-10
10.4.5 Computer Interface Commands ................................................................................................. 10-11
10.4.6 Thermocouple Temperature Curves .......................................................................................... 10-12
10.4.7 Specifications............................................................................................................................. 10-12
10.5 MODEL 3465 SINGLE CAPACITANCE INPUT OPTION CARD................................................... 10-12
10.5.1 Option Installation ...................................................................................................................... 10-12
10.5.2 Sensor Installation ..................................................................................................................... 10-12
10.5.2.1 Sensor Input Connector ......................................................................................................... 10-12
10.5.2.2 Measurement Point Connection ............................................................................................. 10-12
10.5.2.3 Grounding and Shielding ........................................................................................................ 10-12
Table of Contents v

Lake Shore Model 340 Temperature Controller User’s Manual
TABLE OF CONTENTS (Continued)
Chapter/Paragraph Title Page
10.5.3 Operation ................................................................................................................................... 10-13
10.5.3.1 Input Selection........................................................................................................................ 10-13
10.5.3.2 Displaying Option Readings ...................................................................................................10-13
10.5.3.3 Curve Selection ...................................................................................................................... 10-13
10.5.3.4 Range Selection ..................................................................................................................... 10-13
10.5.3.5 Temperature Coefficient ......................................................................................................... 10-13
10.5.3.6 Control Channel Changes ......................................................................................................10-13
10.5.4 Computer Interface Commands ................................................................................................. 10-13
10.5.5 Specifications ............................................................................................................................. 10-13
10.6 MODEL 3468 EIGHT-CHANNEL INPUT OPTION CARD ............................................................. 10-14
10.6.1 General ...................................................................................................................................... 10-14
10.6.2 Option Installation ......................................................................................................................10-14
10.6.3 Sensor Installation...................................................................................................................... 10-14
10.6.3.1 Sensor Input Connector.......................................................................................................... 10-14
10.6.3.2 Sensor Input Cabling .............................................................................................................. 10-14
10.6.3.3 Reading Rate.......................................................................................................................... 10-14
10.6.4 Operation ................................................................................................................................... 10-15
10.6.4.1 General Operation .................................................................................................................. 10-15
10.6.4.2 Input Setup ............................................................................................................................. 10-15
10.6.4.3 Temperature Control .............................................................................................................. 10-15
10.6.5 Computer Interface Commands ................................................................................................. 10-16
10.6.6 Specifications ............................................................................................................................. 10-16
11 SERVICE .............................................................................................................................................................. 11-1
11.0 GENERAL ....................................................................................................................................... 11-1
11.1 GENERAL MAINTENANCE PRECAUTIONS.................................................................................. 11-1
11.2 ELECTROSTATIC DISCHARGE..................................................................................................... 11-1
11.2.1 Identification of ESDS Components ............................................................................................. 11-2
11.2.2 Handling of ESDS Components................................................................................................... 11-2
11.3 GENERAL MAINTENANCE ............................................................................................................ 11-2
11.4 REAR PANEL CONNECTOR DEFINITIONS .................................................................................. 11-2
11.4.1 IEEE-488 Interface Connector .....................................................................................................11-5
11.5 SERIAL INTERFACE CABLE AND ADAPTERS ............................................................................. 11-6
11.6 TOP OF ENCLOSURE REMOVE AND REPLACE PROCEDURE.................................................. 11-7
11.7 EPROM AND NOVRAM REPLACEMENT ...................................................................................... 11-7
11.8 ERROR MESSAGES....................................................................................................................... 11-8
11.9 FIRMWARE IC REPLACEMENT..................................................................................................... 11-9
11.10 UPDATING THE MASTER FIRMWARE FROM A DATA CARD ................................................... 11-11
APPENDIX A –CURVE TABLES.................................................................................................................................. A-1
A1.0 General..............................................................................................................................................A-1
vi Table of Contents

Lake Shore Model 340 Temperature Controller User’s Manual
LIST OF ILLUSTRATIONS
Figure No. Title Page
1-1 Model 340 Front Panel ................................................................................................................. 1-1
1-2 Typical Temperature Control System with Model 340.................................................................. 1-2
1-3 Model 340 Temperature Controller Block Diagram ...................................................................... 1-4
2-1 Silicon Diode Sensor Calibrations and CalCurve ......................................................................... 2-3
2-2 Typical Sensor Installation in a Mechanical Refrigerator.............................................................. 2-5
2-3 Examples of PID Control ............................................................................................................ 2-10
3-1 Typical Cryogenic Storage Dewar ................................................................................................ 3-3
3-2 Model 340 Rear Panel .................................................................................................................. 3-4
3-3 Power Fuse Access ...................................................................................................................... 3-6
3-4 Model 3003 Heater Output Conditioner...................................................................................... 3-10
3-5 ANALOG OUT 1 and 2 BNC Rear Panel Connector Details...................................................... 3-11
3-6 DIGITAL I/O DA-15 Rear Panel Connector Details .................................................................... 3-12
3-7 RELAYS LO and HI Rear Panel Connector Details ................................................................... 3-12
4-1 Model 340 Front Panel ................................................................................................................. 4-1
5-1 Data Flow...................................................................................................................................... 5-5
6-1 Record of Zone Settings ............................................................................................................... 6-6
8-1 SoftCal Temperature Ranges for Silicon Diode Sensors ............................................................. 8-4
8-2 SoftCal Temperature Ranges for Platinum Sensors .................................................................... 8-5
8-3 Sample Program #1.................................................................................................................... 8-12
9-1 GPIB Setting Configuration........................................................................................................... 9-5
9-2 DEV 12 Device Template Configuration ....................................................................................... 9-5
9-3 Typical National Instruments GPIB Configuration from IBCONF.EXE ....................................... 9-10
9-4 Serial Interface Connections....................................................................................................... 9-13
10-1 Model 2001 RJ-11 Cable Assembly ...........................................................................................10-3
10-2 Model 2003 RJ-11 to DE-9 Adapter............................................................................................ 10-3
10-3 Optional Model 2002 RJ-11 to DB-25 Adapter ........................................................................... 10-4
10-4 Model 3012 Rack-Mount Kit ....................................................................................................... 10-4
10-5 Cover and Option Plate Screws.................................................................................................. 10-5
10-6 Model 340 Mounting Holes and Analog Option Plug.................................................................. 10-6
10-7 Model 3462 Mounting Holes and Analog Plug ........................................................................... 10-6
10-8 Model 340 Rear Panel with Model 3462 Option Card Installed.................................................. 10-7
10-9 Model 340 Rear Panel with Model 3464 Option Card Installed.................................................. 10-8
11-1 SERIAL I/O RJ-11 Rear Panel Connector Details...................................................................... 11-2
11-2 DIGITAL I/O DA-15 Rear Panel Connector Details .................................................................... 11-3
11-3 RELAYS LO and HI Rear Panel Connector Details ................................................................... 11-3
11-4 ANALOG OUT 1 and 2 BNC Rear Panel Connector Details...................................................... 11-4
11-5 SENSOR INPUT A and B Rear Panel Connector Details .......................................................... 11-4
11-6 HEATER OUTPUT Rear Panel Connector Details..................................................................... 11-4
11-7 IEEE-488 Rear Panel Connector Details.................................................................................... 11-5
11-8 Model 2001 RJ-11 Cable Assembly Wiring ............................................................................... 11-6
11-9 Model 2003 RJ-11 to DE-9 Adapter Wiring Details .................................................................... 11-6
11-10 Optional Model 2002 RJ-11 to DB-25 Adapter Wiring Details.................................................... 11-6
11-11 Location of Internal Components................................................................................................ 11-8
Table of Contents vii

Lake Shore Model 340 Temperature Controller User’s Manual
LIST OF TABLES
Table No. Title Page
1-1 Comparison of Control Loops 1 and 2 ..........................................................................................1-6
1-2 Model 340 Sensor Performance Chart..........................................................................................1-8
3-1 Comparison of Liquid Helium to Liquid Nitrogen...........................................................................3-3
3-2 AC Line Input Definitions...............................................................................................................3-5
3-3 Sensor INPUT A and B Connector Definitions..............................................................................3-6
5-1 Sensor Types Recognized by the Model 340 ...............................................................................5-1
5-2 Special Sensor Type Configuration...............................................................................................5-3
5-3 Standard Curve Table ...................................................................................................................5-4
5-4 Linear Equation Configuration.......................................................................................................5-6
6-1 Control Mode Description..............................................................................................................6-3
6-2 Full Scale Heater Power at Typical Resistance ............................................................................6-9
6-3 Example of Maximum Current Settings.........................................................................................6-9
8-1 Recommended Curve Parameters................................................................................................8-2
8-2 Storage Capability for a 1 MB Data Card....................................................................................8-13
9-1 IEEE-488 Interface Program Control Properties...........................................................................9-7
9-2 Visual Basic IEEE-488 Interface Program ....................................................................................9-8
9-3 Quick Basic IEEE-488 Interface Program ...................................................................................9-11
9-4 Serial Interface Specifications .....................................................................................................9-14
9-5 Serial Interface Program Control Properties ...............................................................................9-17
9-6 Visual Basic Serial Interface Program.........................................................................................9-18
9-7 Quick Basic Serial Interface Program .........................................................................................9-19
10-1 Thermocouple Polarity ................................................................................................................10-8
10-2 Standard Thermocouple Curves .................................................................................................10-9
A-1 Lake Shore DT-470 Standard Curve 10....................................................................................... A-1
A-2 Standard DT-500-D and -E1 Silicon Diode Curves...................................................................... A-2
A-3 Standard Platinum Curves ........................................................................................................... A-2
A-4 Standard K (Nickel-Chromium vs. Nickel-Aluminum) Thermocouple Curve................................ A-3
A-5 Standard E (Nickel-Chromium vs. Copper-Nickel) Thermocouple Curve.................................... A-4
A-6 Standard T (Copper vs. Copper-Nickel) Thermocouple Curve.................................................... A-5
A-7 Standard Chromel-AuFe0.03% Thermocouple Curve ................................................................. A-6
A-8 Standard Chromel-AuFe0.07% Thermocouple Curve ................................................................. A-7
A-9 Standard DT-670 Diode Curve..................................................................................................... A-8
viii Table of Contents
Lake Shore Model 340 Temperature Controller User’s Manual
CHAPTER 1
INTRODUCTION
1.0 GENERAL
This chapter provides an introduction to the Model 340 Temperature Controller. The Model 340 was
designed and manufactured in the United States of America by Lake Shore Cryotronics, Inc. The Lake Shore
Model 340 is our most advanced temperature controller to date. It is a result of 25 years of experience in the
cryogenics industry and reflects our dedication to customer service. Combined with the complete line of Lake
Shore temperature sensors, the Model 340 is one of the most useful and flexible tools available for cryogenic
temperature measurement and control.
Many features requested by our users are included without the need for additional plug-in circuitry. Every
effort was made to make these features available for automatic instrument control, manual control, or
computer control. This ensures that the Model 340 can work effectively in any experimental environment. The
Model 340 has the best display capability and provides the most operator feedback of any Lake Shore
instrument. The Model 340 has also not lost sight of its primary functions: accurate temperature measurement
and stable temperature control.
If you have just received your new Model 340, please read Chapters 2 thru 4 completely before attempting to
setup and use the instrument. Chapter 2 contains cooling system design and setup considerations. Chapter 3
contains instrument hardware setup instructions. Chapter 4 contains initial instrument startup and setup
instructions. Input sensor reading operation is described in Chapter 5. Temperature control operation is
described in Chapter 6. Analog and digital I/O operation is described in Chapter 7. Instrument programming is
provided in Chapter 8. Remote interface operation (IEEE-488 and Serial) is covered in Chapter 9. Service is
provided in Chapter 10. Options and accessories are detailed in Chapter 10. Finally, various curve tables are
provided in Appendix A.
We welcome your comments concerning this manual. Although every effort has been made to keep it free
from errors, some may occur. When reporting a specific problem, please describe it briefly and include the
applicable paragraph, figure, table, and page number. Send comments to Lake Shore Cryotronics, Attn:
Technical Publications, 575 McCorkle Blvd, Westerville, Ohio 43082-8888. The material in this manual is
subject to change without notice.
Due to the Lake Shore commitment to continuous product improvement, it is reasonable to expect that
modifications will be made in the Model 340 software with time. Some of these changes are the result of
Customer feedback regarding operation on various cryogenic systems. We encourage you to contact us with
any observations or suggestions which you have regarding the use of this controller. Also, please return your
warranty card to ensure that any software updates are sent to you.
LakeShore
340 Temperature Controller
340-1-1.eps
Introduction 1-1
Auto
Zone
Ramp
Manual
Output
Pro gr am
Control
D
Setup
Loop 1
Loop 2
Tune
Settings
PI
Heater
Control
Range
Channel
Heater
Setpoint
Off
Figure 1-1. Model 340 Front Panel
Input
Setup
Scan
Setup
Alarm
Setup
Alarm
Reset
Display
SoftCal
Format
789
Curve
Inte r f a ce
Ent r y
456
Analog
Math
Outputs
Setup
123
Math
Options
Reset
0
+/-
.
+/-
Cance l
Escape
Sc r e en M o r e
Previous
Setting
Loca l
Next
DataCard
Setting
Save
Ent er
Help
Sc r e en
Lake Shore Model 340 Temperature Controller User’s Manual
1.1 TEMPERATURE CONTROL SYSTEM
The goal of a temperature control system is to balance the effect of heating and cooling to provide a stable
temperature in an area of interest. In order to control temperature, you need the following elements:
1. A heating source.
2. A cooling source.
3. A means to measure temperature.
4. A means to compare the measured temperature to a desired temperature (called the setpoint).
5. A means to make any necessary changes to either the heating, the cooling, or both.
One familiar example is the temperature control system in a typical home. When the outside temperature
(cooling source) lowers the temperature inside (area of interest) below the temperature setting (desired
temperature) the thermostat measures the temperature and detects the difference (comparison) and turns on
the furnace (changes heat source). Substituting some control jargon would result in the description of a
temperature control loop: When the cooling source reduces the temperature of the load below the
setpoint, a temperature sensor provides feedback to the control equation which detects the error and
actuates the heat source.
In our house example, there is only one actuator: the heat of the furnace. If the house is equipped with air
conditioning, the cooling source is a second actuator allowing control over a greater range of temperature. All
of the parts are called a closed loop control system and the operation is referred to as a control loop
because there is a cycle of cause and effect: From the control equation to the actuator to the load to the
sensor to the control loop and so on. The loop operation allows the heat source to turn on and off repeatedly,
keeping the temperature constant over a long period of time.
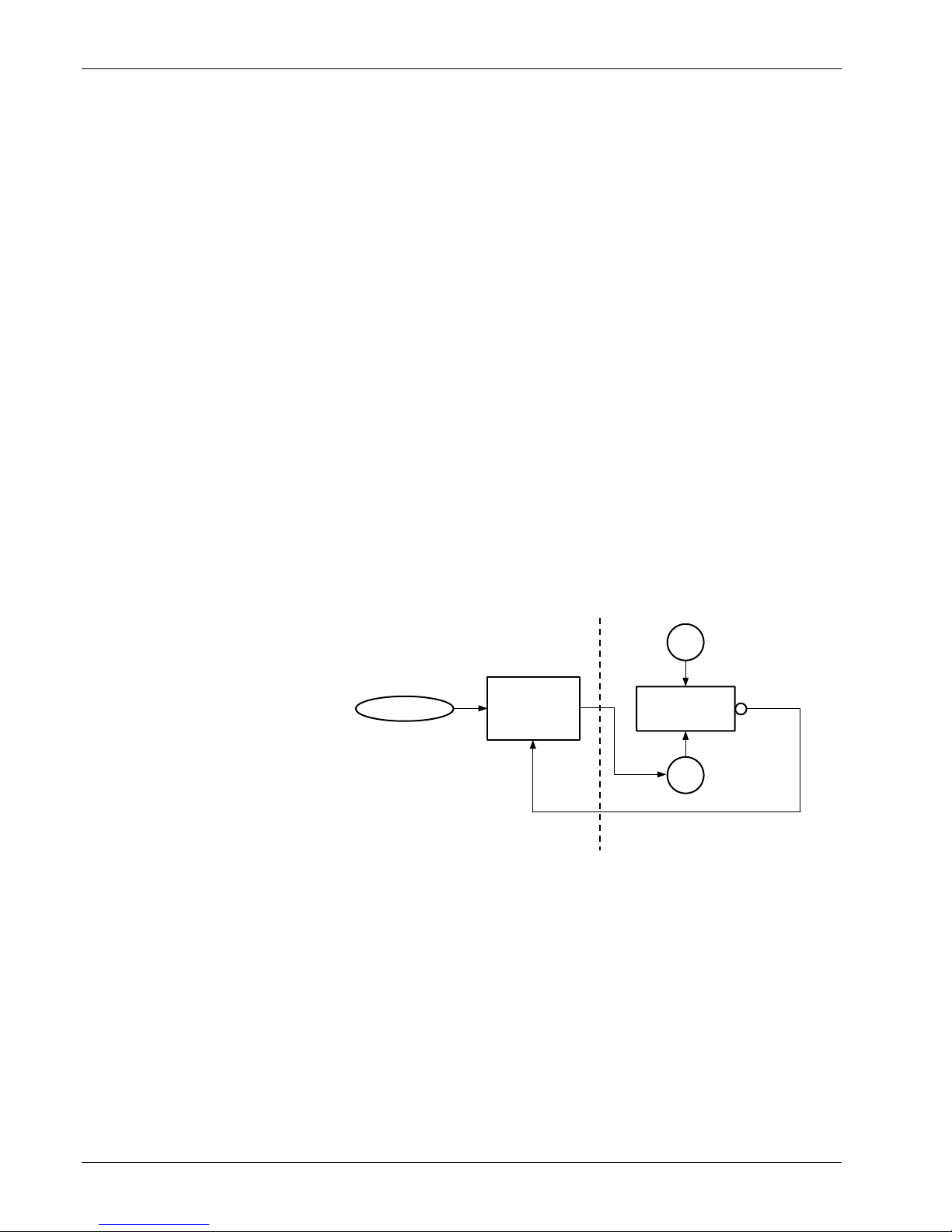
1.2 TEMPERATURE CONTROL SYSTEM WITH THE MODEL 340
The Model 340 is designed to work
as an integral part of a cryogenic
temperature control system (as
Cooling Source
(Cryogen)
described in Paragraph 1.1). The
Model 340 has many specialized
features that uniquely qualify it for
this difficult job. These features are
built on a fundamentally sound
design that can be used in many
applications requiring stable and
Setpoint
Temp erature
You Want
Model 340
(Control
Equation)
Load
(Cryostat)
Heater
Sensor
(Actual Temp.)
accurate control from cryogenic
temperatures, to room temperature
and above. Much of the information
in this manual refers to cryogenic
Warm Side Cold Side
Feedback
systems, but the ideas generally
apply at any temperature.
Figure 1-2. Typical Temperature Control System With Model 340
1.2.1 Cooling Source
The Model 340 integrates many of the elements of a complete control system. There are a few parts that the
Model 340 does not provide. The largest and most notable part missing is a cooling source. The Model 340
provides power to a resistive heater acting as the heating source, but it does not provide cooling. When
operating at cryogenic temperatures a vacuum insulated cryostat or dewar typically provides cooling power to
a relatively small load that may be a block of copper or other thermally conductive material. The load has a
sample holder or mounting surface for the material that is being studied. Sample holders are often custom
made for individual experiments.
1-2 Introduction

Cooling Source (Continued)
Lake Shore Model 340 Temperature Controller User’s Manual
The load must also accommodate a temperature sensor for feedback and a resistive heater for heating. The
sensor and heater are in thermal contact with the cooled load while the Model 340 stays at room temperature.
There are a large number of combinations of loads, sensors, and heaters to meet different sample and
experimental requirements. For this reason, sensors and heaters are not included with the instrument but are
either included with the cooling system or sold separately. Lake Shore has the most comprehensive line of
temperature sensors in the industry, and the Model 340 will work with most of them. Heaters and other
accessories are also available.
1.2.2 Feedback
Temperature sensing is important to the feedback parts of a control system as well as an important
experimental parameter. The sensitivity of a sensor in the temperature range plays a critical role in the
accuracy and resolution of the measurement as well as the control stability. The Model 340 provides current
to (excites) the sensors and measures the resulting signal. The signal is converted to temperature by
comparing it to a temperature response curve that is stored in the instrument. Every effort is made within the
instrument to keep the measurement as accurate and quiet as possible. Temperature feedback begins the
role of the Model 340 in a control system.
1.2.3 Control Equation
The Model 340 can implement a control equation with an algorithm that calculates the amount of heating
needed to keep the load at the setpoint temperature. For most systems the cryostat or other cooling source is
running all of the time. It is necessary to tune the control equation because cooling sources and loads are
different. The Model 340 provides several different tuning options for choosing the best control settings. An
improperly tuned system will either not stabilize or will stabilize at a temperature below the setpoint.
1.2.4 Heating
Once the control equation computes the adjustment needed in heating, the Model 340 implements it by
changing the amount of current being sent to the resistive heater. There are significant differences between
the Model 340 and a home thermostat. First, the Model 340 can source the necessary power with an internal
direct current (DC) power supply while a thermostat depends on the furnace to provide heating power.
Second the Model 340 can make small adjustments in power to maintain a stable continuous temperature.
A thermostat can only turn the furnace on and off creating a abrupt change in temperature that includes
warming above the setpoint then cooling below. The heater output of a Model 340 can be optimized for
individual systems with heater ranges and limits.
1.3 MODEL 340 FEATURES
The following chapters of this manual are intended to help integrate the Model 340 into a temperature control
system with the fundamental building blocks described in Paragraph 1.2. This section is a brief overview of
some individual features of the instrument that may not be obvious in the setup and operation sections. These
features illustrate the Lake Shore goal of making the Model 340 a valuable part of the temperature control
environment. See Figure 1-3.
1.3.1 Configurable Inputs
Each of the many different types of temperature sensor has qualities that make it the best choice for some
application. The Model 340 has the ability to operate with many different types of sensors so that it is not a
limiting factor when deciding which sensor to use. The two sensor inputs included in the Model 340 can be
configured to measure and control with nearly any diode or resistive sensor. Appropriate excitation and input
gain can be selected from the front panel. There are no modules or cards to swap or internal switches to
change. Resistive sensors that change many orders of magnitude are measured in an autorange mode that
keeps the power in the sensor low to reduce self heating. The Model 340 does require the installation of an
option card to read sensors other than diodes and resistors or to read more than two inputs continuously.
Introduction 1-3

Lake Shore Model 340 Temperature Controller User’s Manual
Power Supply
Heater
Digital
AC Line
Rear
Pane l
Sensor A
Rear
Pane l
Input
IEEE-488
Sensor B
Input
A
Input
B
A/D
A/D
Input
µP
Isolation
386EX
µP
Code
Serial
Analog Out 1
Analog Out 2
High Alarm Relay
Low Alarm Relay
Digital I/O
Memory Card
Flash
High Power
Heater
Current Source
D/A
Heater
A/D
Meter
Isolation
Isolation
Curve
Flash
SRAM
Keypad
Display
Front
Pane l
NOVRAM
340-1-3.eps
Figure 1-3. Model 340 Temperature Controller Block Diagram
1.3.2 Input Isolation
The sensor inputs on the Model 340 are isolated from chassis and earth ground to minimize the amount of
earth ground reference noise on the sensor input leads and in the sensor measurement. The two sensor
inputs included in the Model 340 make differential measurements and share their isolated input ground. If an
option is added to the Model 340 it may have its own isolated ground. The heater output is also isolated from
earth ground and from the sensor inputs to minimize interaction between the heater output and any other
circuitry. Figure 1-3 illustrates the isolation boundaries.
1.3.3 Input Reading Capability
The Model 340 is well suited to measure temperature in addition to controlling. Sensor inputs are read
constantly with a high-resolution analog-to-digital converter (A/D) that is dedicated to that input. Data from the
ADC is converted to temperature using a temperature response curve for the sensor. Temperature readings
and raw sensor readings are always available for every input and can be displayed, sent over computer
interface or used for one of the many built in features of the Model 340. New readings are taken as often as
20 times a second, the update rate is slower for more complex readings. The display is updated more slowly
than data is read because the flicker of fast changes is distracting. Readings are available at full speed over
computer interface.
1-4 Introduction

Lake Shore Model 340 Temperature Controller User’s Manual
1.3.4 Temperature Response Curves and CalCurves™
A temperature response curve is needed to convert a sensor readings to temperature. Some types of sensors
share the same response and have a standard curve. The Model 340 includes standard curves for several
sensors. If an application requires more accuracy or a standard curve is not available, a specific curve must
be loaded into the instrument for an individually calibrated sensor. Lake Shore offers a broad range of
calibrated sensors and a CalCurve service that helps get calibration data into the instrument. The Model 340
provides several ways to load curves from Lake Shore calibrations or user supplied sensors. Any curve can
be entered from the front panel or over computer interface. CalCurves hold a copy of a curve called a
breakpoint interpolation table and are installed at the factory when purchased with a Model 340, or they can
be field installed using the data card slot.
1.3.5 SoftCal™
SoftCal is a good solution for applications that need more accuracy than a standard curve, but need no
traditional calibration. SoftCal is an algorithm that utilizes the predictability of standard curves to improve the
accuracy of an individual sensor around a few known temperature reference points. SoftCal generated curves
can be purchased with some types of sensors. The Model 340 also generates SoftCal curves.
1.3.6 Configurable Heater Output
The heater output is the most visible Model 340 control function because heater action is in direct opposition
with the cooling system. The Model 340 can source up to 100 watts of variable DC power to control Loop 1.
For good control, heater power should complement cooling power. For example a heater output may need a
range of 0 to 25 watts to work well with a cooling source that is 10 watts. Heating power is determined by the
resistance of the heater and the current being sent to it. Heater resistance is usually fixed once installed, so
the Model 340 heater output has several current ranges. These ranges allow different powers without the loss
of control resolution. The Model 340 allows for heaters of different resistance, but at highest power the choice
of resistance is limited.
1.3.7 Heater Output Protection
Cryostats have delicate sensors and wiring that can be damaged if over heated. Features have been added
to the Model 340 to minimize the possibility of over heating. These include setpoint temperature limit, heater
current range limit, internal heater diagnostics and a fuse in the heater output wiring.
1.3.8 Second Control Loop
When a instrument can run one closed loop control system it is referred to as a single loop controller. The
Model 340 has a the ability to run a second, independent control loop so it is called a two loop controller. The
second loop is used more often to reduce the temperature gradients in one cooling system than run two
different cooling systems. Even in well designed systems temperature gradients can be too large for some
experiments. The second loop can be used to control the temperature of radiation shields and other physical
structures or to control a small heater close to the sample while a large heater controls the load. The second
loop has much less power than the first loop and a few less software features.
1.3.9 AutoTune
Selecting the appropriate control settings (tuning) is a sometimes frustrating and tedious task. The AutoTune
feature can help by choosing a workable set of control settings on most systems. The AutoTune feature is
only available one control loop at a time.
1.3.10 Setpoint Ramping and Zones
In some applications getting to a controlled temperature is as important as being there. The setpoint ramp
feature allows smooth continuous changes in setpoint. With this feature data can be taken as the system is
changing in temperature for faster experiment cycles. It can also be used to make the approach to a setpoint
temperature more predictable. Ramping over large temperature changes may require different control settings
and the zone feature will change them automatically. Control settings for several different temperature zones
can be loaded in the Model 340 and the proper settings are used for any new setpoint.
Introduction 1-5
Lake Shore Model 340 Temperature Controller User’s Manual
1.3.11 Internal Programming
The Model 340 can run a set of instrument instructions called an internal program. Each program represents
the temperature changes needed to do a users experiment. Setpoint can be changed or ramped up and down
and other controller parameters can be programmed. For simple experiments the internal program eliminates
the need for computer control. It is also common for the internal program to be used with computer control so
the computer is not slowed down by temperature control overhead.
1.3.12 Math
Some math features are included to improve usability and aid in setting up experiments. It can be useful to
have reading filters and maximum and minimum calculations easily available on the front panel. The Model
340 also computes a linear equation on reading data to allow some flexibility in how the display represents
experimental inputs. The Model 340 does not include the ability to do significant data manipulation. Serious
numerical analysis must be done off line.
1.3.13 Alarms, Analog Outputs, and Digital I/O
A clear example of the commitment to making the Model 340 a real part of the experimental environment is
the inclusion of analog and digital (TTL level) inputs and outputs. These features are not needed for a typical
temperature control loop but they provide an effective interface to other experimental hardware at relatively
low cost to the user. Relays can be tied to temperature alarms or opened and closed manually. Analog
outputs can transmit temperature to data recorders or be used as a variable voltage source. Digital inputs and
outputs can improve the efficiency of external sensor scanning or be used to set and monitor system function.
1.3.14 Memory Card
A memory card slot conforming to PCMCIA pin out is included for special instrument applications. The slot is
not a general purpose PCMCIA interface. Supported applications include data logging, curve transfer and
loading, saving and restoring instrument setup.
1.3.15 Computer Interface
The Model 340 has two types of computer interfaces. The parallel interface conforms to IEEE-488.2 standard
unless otherwise specified. The IEEE-488 interface is high speed and allows for multiple instruments to
communicate on the same bus. It is commonly used with laboratory instrumentation. Necessary interface
hardware is not included with most personal computers so it must be added with a third party card.
The serial interface conforms to
RS-232C electrical format included
with most personal computers. Serial
interfaces are much faster now than
they were just a few years ago but
this interface is less common in
laboratories because only one
instrument can communicate per
channel.
Either interface can send settings to
the Model 340 and collect reading
data back from it. Every attempt is
made to allow full access to
instrument features so it can be fully
involved in computer controlled
experiments. Even the analog
outputs and digital inputs and outputs
(I/O) can be controlled by computer
interface.
Control Output Heater Output Analog Output 2
Maximum Output Power 100 W 1 W
Output Type Current Source Voltage Source
Multiple Output Ranges Yes No
PID Control Yes Yes
AutoTune Yes Yes
Zone Tuning Yes Yes
Ramping Yes Yes
Internal Programming Yes No
Open Loop Control Yes Yes
Display in Current or Power Yes No
Large Display Yes Yes
Setpoint Limit Yes Yes
Slope Limits Yes Yes
Heater Range Limit Yes No
Table 1-1. Comparison of Control Loops 1 and 2
Hardware Features Loop 1 Loop 2
Software Features Loop 1 Loop 2
Control Loop Filter Yes Yes
1-6 Introduction
Lake Shore Model 340 Temperature Controller User’s Manual
Thermometry:
Number of Inputs: Two included, more optional
Measurement Type: Four-lead Differential
Standard Sensor Inputs: Silicon Diode, GaAIAs Diode, Platinum RTD, Cernox RTD, Germanium RTD,
Carbon-Glass RTD, Ruthenium Oxide, Rhodium Iron, other resistive sensors
Optional Sensor Inputs: Thermocouple, Capacitance
Input Accuracy: Sensor Dependent. Refer to Table 1-2
A/D Resolution: 24-bit Analog-to-Digital
Update Rate: Up to 20 readings/second on an input, 40 readings/second on all inputs
Standard Curves 11 standard curves
User Curve Storage: Forty 200-point CalCurves or user curves
SoftCal: Improves accuracy of DT-470 diode or platinum RTD sensors.
Math: Maximum and Minimum of input readings and linear equation.
Filter: Averages input readings to quiet display, settable time constant,
can average from 2 to 64 input readings
Control:
Control Loops: Two
Control Type: Digital PID with Manual output
Control Stability: Sensor Dependent, refer to Table 1-2
Heater Output (Loop 1 Only):
Heater Output Type: Variable DC current source
Heater Output Resolution: 18-bit Digital-to-Analog converter
Max. Heater Power: 100 W (2 A into 25 Ω load)
Max. Heater Output Current: 2 A
Current Limit Settings: 2 A, 1 A, 0.5 A, 0.25 A
Heater Output Compliance: 50 V
Heater Output Ranges: Five in decade steps of power
Heater Load Type: Resistive
Heater Load Range: 10 Ω to 100 Ω, 25 Ω for max heater power
Heater Noise: 50 µV + 0.001% of output voltage
PID Control Settings:
Gain (Proportional): 0-1000 with 0.1 setting resolution
Reset (Integral): 1-1000 with 0.1 setting resolution
Rate (Derivative): 1-1000 seconds with 1 second resolution
Manual Output: 0-100% with 0.01% setting resolution
Zone Control Mode: 10 temperature zones with control parameters
Setpoint Ramping: 0.1
– 100 K/minute
Internal Program: 100 program steps
Front Panel:
Display Type Graphic LCD with fluorescent backlight
Number of Input Displays: One to eight
Display Units: Temperature in K, °C, or sensor units V, mV, Ω, kΩ, nF
Display Resolution Input Temp: 0.0001 K below 10 K, 0.001 K above 10 K
Display Resolution Sensor Units: Sensor dependent, to six digits
Setpoint Setting Resolution: Same as display resolution (actual resolution is sensor dependent)
Heater Output Display: Numeric display in percent of full scale for power or current. Bar graph display of Heater
Output available.
Keypad: Numeric plus special function
Curve Entry: Front panel curve entry
Interfaces:
IEEE-488.2 Interface: SH1, AH1, T5, L4, SR1, RL1, PP0, DC1, DT0, C0, E1
Serial Interface: RS-232C electrical format, 19,200 baud, RJ-11 connector
Analog outputs: Temperature monitor or Loop 2 control output
Number: Two
Voltage Range: ±10 volts
Resolution: 1.25 mV
Maximum Current: 0.1 amperes
Minimum Load: 100 Ω
Alarm Type: High and low alarm for each input
Alarm Actuators: Audible beeper or relays
Relays:
Number: Two
Contacts Available: Normally open (N.O.), normally closed (N.C.), and common (C)
Contact Rating: 30 VDC at 2 A
Digital I/O: 5 inputs and 5 outputs. TTL voltage level compatible
Data Card: PC card Type II slot used for curve transfer, setup storage, and data logging
General:
Ambient Temperature Range: 20
– 30 °C (68 – 86 °F) for specified accuracy; 15 – 35 °C (59 – 95 °F) for reduced accuracy
Power Requirements: 100, 120, 220, 240 VAC (+5%, –10%), 50 or 60 Hz; 190 VA
Enclosure Type: Full 19-inch Rack Mount
Size: 432 mm × 89 mm × 381 mm (17 × 3.5 × 15 inches)
Weight: 8 kilograms (17.6 pounds)
Introduction 1-7
Lake Shore Model 340 Temperature Controller User’s Manual
Sensor Type Silicon Diode GaAlAs Diode
Table 1-2. Model 340 Sensor Input Performance Chart
100 Ω Platinum RTD
250 Ω Full scale
100 Ω Platinum RTD
500 Ω Full scale
1000 Ω
Platinum RTD
Temperature Coefficient Negative Negative Positive Positive Positive
Sensor Units Volts (V) Volts (V)
Input Range 0 - 2.5 V 0 – 7.5 V
Ohms (Ω) Ohms (Ω) Ohms (Ω)
0 – 250 Ω 0 – 500 Ω 0 – 2500 Ω
Sensor Excitation (Constant Current) 10 µA ±0.01% 10 µA ±0.01% 1 mA 1 mA 0.1 mA
Display Resolution Sensor Units 10 µV 10 µV
Example Lake Shore Sensor
DT-470-CO-13 with
1.4H calibration
TG-120SD with 1.4H
calibration
1 mΩ 1 mΩ 10 mΩ
PT-103 with 14J
calibration
PT-103 with 14J
calibration
PT-1001
calibration
*
with 1.4G
Temperature Range 1.4 – 475 K 1.4 - 475 K 30 – 675 K 30 – 800 K 30 – 675 K
Standard Sensor Curve Lake Shore
Curve 10
Typical Sensor Sensitivity
†
-30 mV/K at 4.2 K
-1.9 mV/K at 77 K
-2.4 mV/K at 300 K
-2.2 mV/K at 475 K
Measurement Resolution:
Sensor Units
Temperature Equivalence
10 µV
0.4 mK at 4.2 K
5.5 mK at 77 K
4.2 mK at 300 K
4.5 mK at 475 K
Electronic Accuracy:
Sensor Units
Temperature Equivalence
±80 µV ±0.005%
of reading
±5 mK at 4.2 K
±70 mK at 77 K
±50 mK at 300 K
±40 mK at 475 K
Temperature Accuracy including
electronic accuracy, CalCurve
and calibrated sensor
Control Stability:
Sensor Units
Temperature Equivalence
±27 mK at 4.2 K
±110 mK at 77 K
±85 mK at 300 K
±150 mK at 475 K
±20 µV
±0.8 mK at 4.2 K
±11 mK at 77 K
±8.4 mK at 300 K
±9 mK at 475 K
Magnetic Field Use
Recommended for
T ≥ 60 K and B ≤ 3 T
Requires calibrated
sensor
-180 mV/K at 10 K
-1.25 mV/K at 77 K
-2.75 mV/K at 300 K
-2.75 mV/K at 475 K
10 µV
0.1 mK at 10 K
8.0 mK at 77 K
3.6 mK at 300 K
3.6 mK at 475 K
±80 µV ±0.01%
of reading
±3 mK at 10 K
±150 mK at 77 K
±75 mK at 300 K
±55 mK at 475 K
±23 mK at 10 K
±195 mK at 77 K
±120 mK at 300 K
±165 mK at 475 K
±20 µV
±0.2 mK at 10 K
±16 mK at 77 K
±7.2 mK at 300 K
±7.2 mK at 475 K
Recommended for
T > 4.2 K & B ≤ 5 T
DIN 43760 DIN 43760 Scaled from
DIN 43760
0.19 Ω /K at 30 K
0.42 Ω /K at 77 K
0.39 Ω /K at 300 K
0.34 Ω /K at 675 K
1 mΩ
5.3 mK at 30 K
2.4 mK at 77 K
2.6 mK at 300 K
3.0 mK at 675 K
±0.002 Ω ±0.01%
of reading
±16 mK at 30 K
±10 mK at 77 K
±31 mK at 300 K
±82 mK at 675 K
±26 mK at 30 K
±20 mK at 77 K
±51 mK at 300 K
±182 mK at 675 K
±2 mΩ
±11 mK at 30 K
±4.8 mK at 77 K
±5.2 mK at 300 K
±6.0 mK at 675 K
Recommended for
T > 40 K & B ≤ 2.5 T
0.19 Ω /K at 30 K
0.42 Ω /K at 77 K
0.39 Ω /K at 300 K
0.33 Ω /K at 800 K
1 mΩ
5.3 mK at 30 K
2.4 mK at 77 K
2.6 mK at 300 K
3.0 mK at 800 K
±0.002 Ω ±0.01%
of reading
±16 mK at 30 K
±10 mK at 77 K
±31 mK at 300 K
±82 mK at 800 K
±26 mK at 30 K
±20 mK at 77 K
±51 mK at 300 K
±182 mK at 800 K
±2 mΩ
±11 mK at 30 K
±4.8 mK at 77 K
±5.2 mK at 300 K
±6.0 mK at 800 K
Recommended for
T > 40 K & B ≤ 2.5 T
1.9 Ω /K at 30 K
4.2 Ω /K at 77 K
3.9 Ω /K at 300 K
3.4 Ω /K at 675 K
10 mΩ
5.3 mK at 30 K
2.4 mK at 77 K
2.6 mK at 300 K
3.0 mK at 675 K
±0.03 Ω ±0.02%
of reading
±26 mK at 30 K
±17 mK at 77 K
±59 mK at 300 K
±161 mK at 675 K
±36 mK at 30 K
±27 mK at 77 K
±79 mK at 300 K
±261 mK at 675 K
±20 mΩ
±11 mK at 30 K
±4.8 mK at 77 K
±5.2 mK at 300 K
±6.0 mK at 675 K
Recommended for
T > 40 K & B ≤ 2.5 T
* No longer available from Lake Shore.
† Typical sensor sensitivities were taken from representative calibrations for the sensor listed.
1-8 Introduction

Lake Shore Model 340 Temperature Controller User’s Manual
Table 1-2. Model 340 Sensor Input Performance Chart (Continued)
Sensor Type Rox™ Thermox™ Carbon-Glass™ Cernox™ Germanium
Temperature Coefficient Negative
Sensor Units
Ohms (Ω) Ohms (Ω) Ohms (Ω) Ohms (Ω) Ohms (Ω)
Input Range 10 ranges from
10 Ω to 300 kΩ
Sensor Excitation (Constant Current) 10 mV maximum
(10 current settings
from 30 nA to 1 mA)
Negative
10 ranges from
(1)
10 Ω to 300 kΩ
10 mV maximum
(10 current settings
from 30 nA to 1 mA).
Negative Negative Negative
10 ranges from
*
10 Ω to 300 kΩ*
10 mV maximum
(10 current settings
from 30 nA to 1 mA)
10 ranges from
10 Ω to 300 kΩ*
10 mV maximum
(10 current settings
from 30 nA to 1 mA)
10 ranges from
1 Ω to 30 kΩ
1 mV maximum
(10 current settings
from 30 nA to 1 mA)
Display Resolution Sensor Units Six digits Six digits Six digits Six digits Six digits
Example Lake Shore Sensor
RX-102A-AA with
0.3E calibration
TX-104-GB with 70L
calibration
CGR-1-500 with 1.4L
calibration
CX-1050-SD with 1.4L
calibration
GR-200A-100 with
0.3 A calibration
Temperature Range 0.3 – 200 K 70 – 325 K 1.4 – 325 K 0.3 – 325 K 0.3 – 40 K
Standard Sensor Curve Requires calibrated
sensor
Typical Sensor Sensitivity†
-16 kΩ/K at 0.3 K
-80 Ω/K at 4.2 K
-4 Ω/K at 20 K
-0.3 Ω/K at 77 K
Measurement Resolution:
Sensor Units
Temperature Equivalence
6 digits above 10 Ω
0.1 mK at 0.3 K
0.3 mK at 4.2 K
5 mK at 20 K
70 mK at 77 K
Electronic Accuracy:
Sensor Units
Temperature Equivalence
±0.02% RNG
±0.05% RDG
10 Ω to 80 kΩ.
±0.02% RNG
±0.2% RDG >80kΩ
±0.5 mK at 0.3 K
±16 mK at 4.2 K
±275 mK at 20 K
±3700 mK at 77 K
Temperature Accuracy including
electronic accuracy, CalCurve
and calibrated sensor
Control Stability:
Temperature Equivalence
±5.5 mK at 0.3 K
±28 mK at 4.2 K
±385 mK at 20 K
±4900 mK at 77 K
±0.2 mK at 0.3 K
±0.6 mK at 4.2 K
±10 mK at 20 K
±150 mK at 77 K
Magnetic Field Use
Recommended for
T > 2 K and B ≤ 10 T
Requires calibrated
sensor
-9.5 kΩ/K at 77 K
-780 Ω/K at 100 K
-0.78 Ω/K at 200 K
-0.035 Ω/K at 300 K
6 digits above 10 Ω
0.1 mK at 77 K
0.1 mK at 100 K
3 mK at 200 K
60 mK at 300 K
±0.02% RNG
±0.05% RDG
0 Ω to 80 kΩ.
±0.02% RNG
±0.2% RDG >80kΩ
±6.6 mK at 77 K
±8 mK at 100 K
±22 mK at 200 K
±100 mK at 300 K
±34.6 mK at 77 K
±29 mK at 100 K
±52 mK at 200 K
±160 mK at 300 K
±0.2 mK at 77 K
±0.2 mK at 100 K
±6 mK at 200 K
±120 mK at 300 K
Requires calibrated
sensor
-200 kΩ/K at 1.4 K
-706 Ω/K at 4.2 K
-0.15 Ω/K at 77 K
-0.015 Ω/K at 300 K
6 digits above 10 Ω
0.1 mK at 1.4 K
0.2 mK at 4.2 K
20 mK at 77 K
133 mK at 300 K
±0.02% RNG
±0.05% RDG
10 Ω to 80 kΩ.
±0.02% RNG
±0.2% RDG >80kΩ
±2 mK at 1.4 K
±2 mK at 4.2 K
±235 mK at 77 K
±2900 mK at 300 K
±7 mK at 1.4 K
±7 mK at 4.2 K
±285 mK at 77 K
±3150 mK at 300 K
±0.2 mK at 1.4 K
±0.4 mK at 4.2 K
±40 mK at 77 K
±300 mK at 300 K
Not recommended Recommended for
T > 2 K and B ≤ 19 T
Requires calibrated
sensor
-300 kΩ/K at 1.4 K
-10 kΩ/K at 4.2 K
-5 Ω/K at 77 K
-0.1 Ω/K at 300 K
6 digits above 10 Ω
0.1 mK at 1.4 K
0.1 mK at 4.2 K
0.5 mK at 77 K
20 mK at 300 K
±0.02% RNG
±0.05% RDG
10 Ω to 80 kΩ
±0.02% RNG
±0.2% RDG >80kΩ
±1 mK at 1.4 K
±2 mK at 4.2 K
±80 mK at 77 K
±400 mK at 300 K
±6 mK at 1.4 K
±7 mK at 4.2 K
±110 mK at 77 K
±450 mK at 300 K
±0.2 mK at 1.4 K
±0.2 mK at 4.2 K
±1 mK at 77 K
±40 mK at 300 K
Recommended for
T > 2 K and B ≤ 19 T
Requires calibrated
sensor
-209 kΩ /K at 0.3 K
-400 Ω /K at 1.4 K
-20 Ω /K at 4.2 K
-8.7 Ω /K at 6.0 K
6 digits above 1 Ω
0.1 mK at 0.3 K
0.1 mK at 1.4 K
0.3 mK at 4.2 K
0.6 mK at 6.0 K
±0.02% RNG
±0.1% RDG
10 Ω to 8 kΩ.
±1 mK at 0.3 K
±20 mK at 1.4 K
±25 mK at 4.2 K
±50 mK at 6.0 K
±6 mK at 0.3 K
±25 mK at 1.4 K
±30 mK at 4.2 K
±55 mK at 6.0 K
±0.2 mK at 0.3 K
±0.2 mK at 1.4 K
±0.6 mK at 4.2 K
±1.2 mK at 6.0 K
Not recommended
* Can be used below 3 Ω with reduced resolution and accuracy.
† Typical sensor sensitivities were taken from representative calibrations for the sensor listed.
Introduction 1-9
Lake Shore Model 340 Temperature Controller User’s Manual
Sensor Type Thermocouple 25 mV Thermocouple 50
Table 1-2. Model 340 Sensor Performance Chart (Continued)
Capacitance 15 nF Capacitance 150 nF
mV
Temperature Coefficient Positive. Positive or Negative.
Sensor Units mV nF
Input Range ±25 mV ±50 mV 0-15 nF 0-150 nF
Sensor Excitation Not applicable. 4.88 kHz, 1V square wave
Display Resolution
Sensor Units
0.1 µV 0.1 pF 1 pF
Example Lake Shore Sensor AuFe0.07% vs. Cr CS-401LGB CS-501GR
Temperature Range 1.4 – 325 K.
1-60 K (pos)
80-300 K (neg)
1.4-290 K (pos)
Standard Sensor Curve By type. None.
Typical Sensor Sensitivity
*
16 µV/K at 4.2 K
20 µV/K at 300 K
66 pF/K at 4.2 K
7 pF/K at 60 K
31 pF/K at 4.2 K
58 pF/K at 77 K
197 pF/K at 200 K
Measurement Resolution:
Sensor Units
Temperature Equivalence
Electronic Accuracy†:
Sensor Units
Temperature Equivalence
0.2 µV
12 mK at 4.2 K
10 mK at 300 K
±1 µV ±0.05% RDG
80 mK at 4.2 K
50 mK at 300 K
0.4 µV
24 mK at 4.2 K
20 mK at 300 K
±1 µV ±0.05% RDG
100 mK at 4.2 K
60 mK at 300 K
0.2 pF
3 mK at 4.2 K
28 mK at 60 K
±50 pF ±0.1% RDG
0.84 K at 4.2 K
7.8 K at 60 K
2.0 pF
65 mK at 4.2 K
34 mK at 77 K
10 mK at 200 K
±50 pF ±0.1% RDG
1.8 K at 4.2 K
1 K at 77 K
0.36 K at 200 K
Temperature Accuracy
including electronic accuracy,
Calibration not available from Lake Shore.
Not applicable.
CalCurve, & calibrated sensor
Control Stability:
Sensor Units
Temperature Equivalence
0.4 µV
24 mK at 4.2 K
20 mK at 300 K
0.8 µV
50 mK at 4.2 K
40 mK at 300 K
±0.4 pF
6 mK at 4.2 K
56 mK at 60 K
±4 pF
130 mK at 4.2 K
68 mK at 77 K
20 mK at 200 K
Magnetic Field Use Thermocouple type dependent. Recommended for high field.
* Typical sensor sensitivities were taken from representative calibrations for the sensor listed.
† Accuracy specification does not include errors from room temperature compensation.
1-10 Introduction

Lake Shore Model 340 Temperature Controller User’s Manual
CHAPTER 2
COOLING SYSTEM DESIGN
2.0 GENERAL
Selecting the proper cryostat or cooling source is probably the most important decision in designing a
temperature control system. The cooling source defines minimum temperature, cool-down time, and cooling
power. This chapter provides information on how to get the best temperature measurement and control from
cooling sources with proper setup including sensor and heater installation.
Chapter 2 contains the following major topics. Temperature sensor selection is covered in Paragraph 2.1.
Calibrated sensors are covered in Paragraph 2.2. Sensor installation is covered in Paragraph 2.3. Heater
selection and installation is covered in Paragraph 2.4. Considerations for good control are covered in
Paragraph 2.5. PID Control is covered in Paragraph 2.6. Manual Tuning is covered in Paragraph 2.7.
AutoTuning is covered in Paragraph 2.8. Finally, Zone Tuning is covered in Paragraph 2.9.
2.1 TEMPERATURE SENSOR SELECTION
This section is intended to help the user ask the proper questions about sensor selection, and not to give all
the answers. Additional useful information on temperature sensor selection is available in the Lake Shore
Temperature Measurement and Control Catalog. The catalog has a large reference section that includes
sensor characteristics and sensor selection criteria.
Temperature range is discussed in Paragraph 2.1.1. Sensor sensitivity is discussed in Paragraph 2.1.2.
Environmental conditions are discussed in Paragraph 2.1.3. Measurement accuracy is discussed in
Paragraph 2.1.4. Finally, sensor packages are discussed in Paragraph 2.1.5.
2.1.1 Temperature Range
Several important sensor parameters must be considered when choosing a sensor. The first is temperature
range. The experimental temperature range must be known when choosing a sensor. Some sensors can be
damaged by temperatures that are either too high or too low. Manufacturer recommendations should always
be followed.
Sensor sensitivity is also dependent on temperature and can limit the useful range of a sensor. It is important
not to specify a range larger than necessary. If an experiment is being done at liquid helium temperature and
a very high sensitivity is needed for good measurement resolution, that same resolution may not be required
to monitor warm up to room temperature. Two different sensors may be required to tightly cover the range
from helium to room temperature, but lowering the requirement on warm up may allow a less expensive, one
sensor solution.
Another thing to consider when choosing a temperature sensor is that instruments like the Model 340 are not
able to read some sensors over their entire temperature range. Lake Shore sells calibrated sensors that
operate down to 50 millikelvin (mK), but the Model 340 is limited to 300 mK in its standard configuration.
2.1.2 Sensor Sensitivity
Temperature sensor sensitivity is a measure of how much a sensor signal changes when the temperature
changes. It is an important sensor characteristic because so many measurement parameters are related to it.
Resolution, accuracy, noise floor, and even control stability depend on sensitivity. Many sensors have
different sensitivities at different temperatures. For example, a platinum sensor has good sensitivity at higher
temperatures but has limited use below 30 kelvin (K) because its sensitivity drops sharply. It is difficult to
determine if a sensor has adequate sensitivity over the experimental temperature range. This manual has
specifications (Table 1-1) that include sensor sensitivity translated into temperature resolution and accuracy
at different points. This is typical sensor response and can be used as a guide when choosing a sensor to be
used with the Model 340.
Cooling System Design 2-1

Lake Shore Model 340 Temperature Controller User’s Manual
2.1.3 Environmental Conditions
Environmental factors such as high vacuum, magnetic field, corrosive chemicals, or even radiation may limit
the effectiveness of some sensors. Lake Shore has devoted much time to develop sensor packages that
withstand the environmental factors found in typical cryogenic cooling systems.
Magnetic field experiments are very common. Field dependence is an important selection criteria for
temperature sensors used in these experiments. Table 1-1 states the field dependence of most common
sensors. The Lake Shore Temperature Measurement and Control Catalog includes detailed field dependence
tables along with specific data on other environmental factors when available.
2.1.4 Measurement Accuracy
Temperature measurements have several sources of error that reduce accuracy. Be sure to account for
errors induced by both the sensor and the instrumentation when computing accuracy. The instrument has
measurement error in reading the sensor signal and error in calculating a temperature using a temperature
response curve. Error results from the sensor being compared to a calibration standard and the temperature
response of a sensor will shift with time and with repeated thermal cycling (from very cold temperatures to
room temperature). Instrument and sensor makers specify these errors but there are things a user can do to
maintain good accuracy. For example, choose a sensor that has good sensitivity in the most critical
temperature range, as sensitivity can minimize the effect of most error sources. Install the sensor properly
following guidelines in Paragraph 2.3. Have the sensor and instrument periodically recalibrated, or in some
other way null the time dependent errors. Use a sensor calibration appropriate for the accuracy requirement.
2.1.5 Sensor Package
There are many types of sensor packages which generally determine sensor size, thermal and electrical
contact to the outside, and sometimes limit temperature range. Some sensors may be purchased as bare
chips without a package. When different packages are available for a sensor, consider the sensor mounting
surface and how leads will be heat sinked.
2.2 CALIBRATED SENSORS
It can be difficult to choose the right sensor, calibrate it, translate calibration data into a temperature response
curve understandable to the Model 340, and load the curve into the instrument. Lake Shore offers a variety of
calibration and curve loading services to fit different accuracy requirements and budgets: traditional
calibration in Paragraph 2.2.1, SoftCal™ in Paragraph 2.2.2, standard curves in Paragraph 2.2.3, and the
Lake Shore CalCurve Service in Paragraph 2.2.4.
2.2.1 Traditional Calibration
Calibration compares a sensor with an unknown temperature response to an accepted standard. Lake Shore
temperature standards are traceable to the U.S. National Institute of Standards and Testing (NIST) or the
National Physical Laboratory in Great Britain. These standards allow Lake Shore to calibrate sensors from 50
mK to above room temperature. Calibrated sensors are more expensive than uncalibrated sensors.
Calibrated temperature sensors are the most accurate available from Lake Shore. Errors from sensor
calibration are almost always smaller than error contributed by the Model 340. The Lake Shore Temperature
Measurement and Control Catalog has complete accuracy specifications for calibrated sensors.
Calibrated sensors include measured test data printed and plotted, coefficients of a Chebychev polynomial
fitted to the data, and two tables of data points used as interpolation tables optimized for accurate
temperature conversion. The smaller table, called a breakpoint interpolation table, fits into instruments like the
Model 340 where it is called a temperature response curve. Install a curve into a Model 340 through a
CalCurve™ (Paragraph 2.2.4) or manually through the instrument front panel.
Note instrument specifications before ordering calibrated sensors. A calibrated sensor is required when a
sensor does not follow a standard curve if the user wishes to display in temperature. Otherwise the Model 340
operates in sensor units like ohms or volts. The Model 340 may not work over the full temperature range of
some sensors. The standard inputs are limited to operation above 300 mK even with sensors that can be
calibrated to 50 mK.
2-2 Cooling System Design
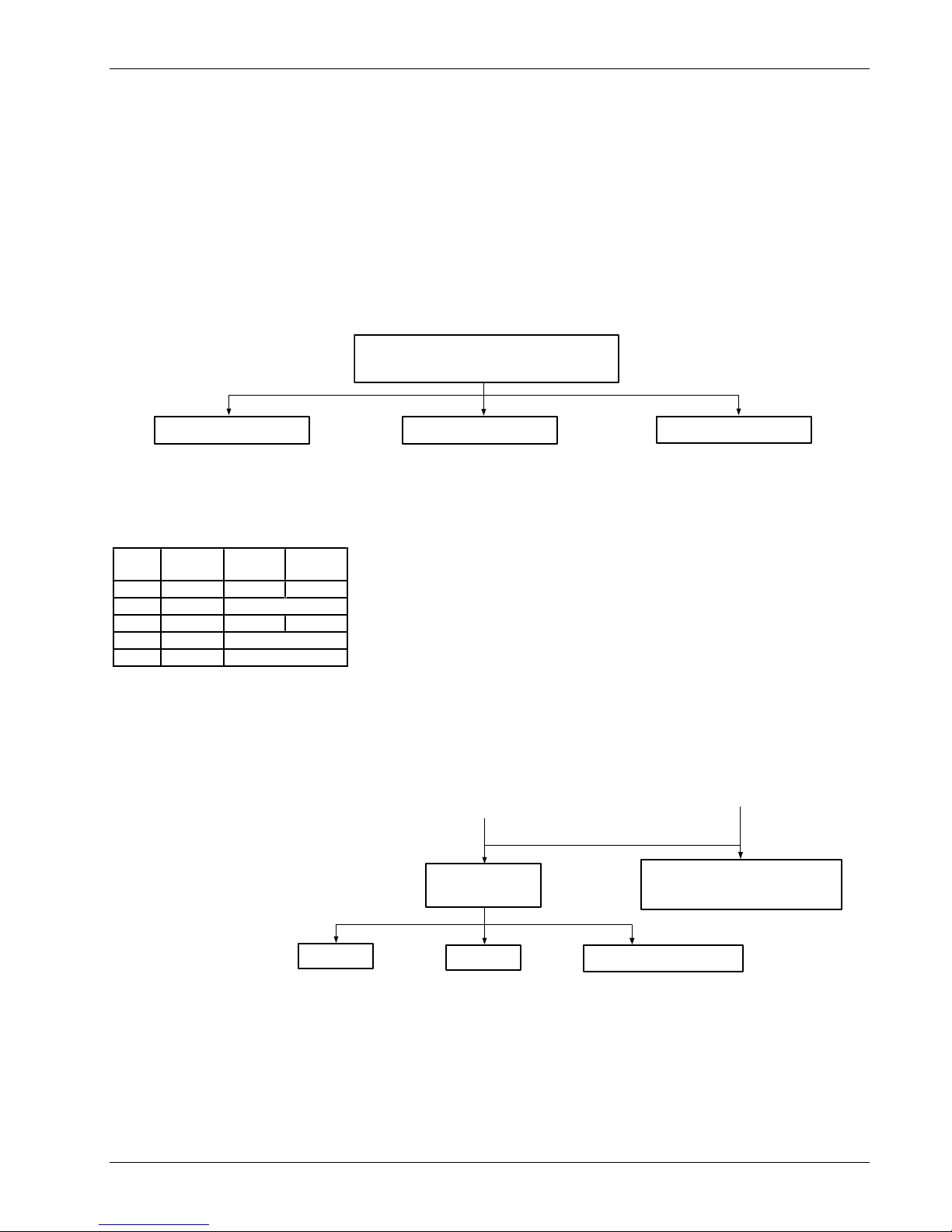
Lake Shore Model 340 Temperature Controller User’s Manual
2.2.2 SoftCal™
SoftCal is a good solution for applications that do not require the accuracy of a traditional calibration. The
SoftCal algorithm uses the well behaved nature of sensors that follow a standard curve to improve the
accuracy of individual sensors. A few known temperature points are required to perform SoftCal.
Lake Shore sells SoftCal calibrated sensors that include both the large interpolation table and the smaller
breakpoint interpolation table. A CalCurve, described in Paragraph 2.2.4, may be required to get the
breakpoint table into a Model 340 where it is called a temperature response curve.
The Model 340 can also perform a SoftCal calibration. The user must provide one, two, or three known
temperature reference points. The range and accuracy of the calibration is based on these points.
Lake Shore DT-400 Series
There are 3 ways to improve
temperature sensor accuracy:
Silicon Diode Temperature Sensor
Standard
Standard sensors are interchangeable within the published tolerance band. Below are
Standard Curve 10 Tolerance
(Accuracy) Bands for DT-470.
Band
2 K* 100 K
11 ±0.25 K ±0.5 K ±1.0 K
11A ±0.25 K ±1% of Temp.
12 ±0.5 K ±1.0 K ±2.0 K
12A ±0.5 K ±1% of Temp.
13 ±1 K ±1% of Temp.
* Temps down to 1.4 K only with
Precision Calibrated Sensors.
To increase accuracy,
perform a SoftCal™ with the
controller and sensor. After
sensor calibration, the
custom curve for that sensor
replaces the standard Curve
10.
Generate a CalCurve™ for either
SoftCal™ or Precision Calibration.
100 K -
305 K
305 K -
375 K
SoftCal™ Calibration
A 2-point SoftCal™ uses data
points at 77.35 K and 305 K. A 3point SoftCal™ uses data points at
4.2 K, 77.35 K, and 305 K.
Typical 2-Point Accuracy
±1.0 K 2 K to <30 K
±0.25 K 30 K to <60 K
±0.15 K 60 K to <345 K
±0.25 K 345 K to <375 K
±1.0 K 375 K to 475 K
Typical 3-Point Accuracy
±0.5 K 2 K to <30 K
±0.25 K 30 K to <60 K
±0.15 K 60 K to <345 K
±0.25 K 345 K to <375 K
±1.0 K 375 K to 475 K
Enter the voltage at 2 or 3 data
points into a SoftCal™ capable
controller. A calibration report is
sent with the sensor.
CalCurve™
- or -
Precision Calibration
Lake Shore can calibrate most
sensors with up to 200 data points
and can concentrate data-taking in
specific areas of interest.
Typical Precision Cal. Accuracy
Temp. Typical Maximum
<10 K 12 mK 20 mK
10 K 12 mK 20 mK
20 K 15 mK 25 mK
30 K 25 mK 45 mK
50 K 30 mK 55 mK
100 K 25 mK 50 mK
300 K 25 mK 50 mK
340 K — 100 mK
480 K — 100 mK
Lake Shore fits a curve to these
points, and sends a detailed report
to the sensor that includes Raw
Temperature Data, Polynomial
Fits, and Interpolation Tables.
User calculates break-
points and manually enters
data into the controller
Model Number
8001
Breakpoint pairs
are factoryloaded in nonvolatile mem ory.
340-2-1.eps
Figure 2-1. Silicon Diode Sensor Calibrations and CalCurve
Cooling System Design 2-3
8000
Breakpoint pairs are
loaded on a Floppy Disk
in ACSII format for
Customer downloading.
3405-128F-CALCRV
Breakpoint pairs
are loaded in a
Datacard for field
installation.

Lake Shore Model 340 Temperature Controller User’s Manual
2.2.3 Standard Curves
Some types of sensors behave in a very predictable manner and a standard temperature response curve can
be created for them. Standard curves are a convenient and inexpensive way to get reasonable temperature
accuracy. Sensors that have a standard curve are often used when interchangeability is important. Some
individual sensors are selected for their ability to match a published standard curve and sold at a premium,
but in general these sensors do not provide the accuracy of a calibrated sensor. For convenience, the Model
340 has several standard curves included in firmware.
2.2.4 CalCurve™
The CalCurve service provides the user with a convenient way get the temperature response curve from Lake
Shore calibrated sensors into instruments like the Model 340. It can be performed at the factory when
calibrated sensors and instruments are ordered together. The factory installed CalCurve option is Model 8001
and should be ordered with the calibrated sensor. A CalCurve can be done in the field when additional or
replacement sensors are installed. Curve data is loaded into some type of non-volatile memory that is
installed into the instrument by the user. In the case of the Model 340, the curve is loaded into a non-volatile
memory card which can be used for transfer into the instrument. The field installed version is a Model 3405128F-CALCRV and it should be ordered with the calibrated sensor. Customers that have a PC compatible
computer with an RS-232C or IEEE-488 interface have another option. The Model 8000 can also be ordered
with the calibrated sensor.
2.3 SENSOR INSTALLATION
This section highlights some of the important elements of proper sensor installation. For more detailed
information, Lake Shore sensors are shipped with installation instructions that cover that specific sensor type
and package. The Lake Shore Temperature Measurement and Control Catalog includes an installation
section as well. To further help users properly install sensors, Lake Shore offers a line of Cryogenic
Accessories. Many of the materials discussed are available through Lake Shore and can be ordered with
sensors or instruments.
Mounting materials is discussed in Paragraph 2.3.1. Sensor location is discussed in Paragraph 2.3.2. Thermal
conductivity is discussed in Paragraph 2.3.3. Contact area is discussed in Paragraph 2.3.4. Contact pressure
is discussed in Paragraph 2.3.5. Lead wire is discussed in Paragraph 2.3.6. Lead soldering is discussed in
Paragraph 2.3.7. Heat sinking leads is discussed in Paragraph 2.3.8. Finally, thermal radiation is discussed in
Paragraph 2.3.9.
2.3.1 Mounting Materials
Choosing appropriate mounting materials is very important in a cryogenic environment. The high vacuum
used to insulate cryostats is one source of problems. Materials used in these applications should have a low
vapor pressure so they do not evaporate or out-gas and spoil the vacuum insulation. Metals and ceramics do
not have this problem but greases and varnishes must be checked. Another source of problems is the wide
extremes in temperature most sensors are exposed to. The linear expansion coefficient of a materials
becomes important when temperature changes are so large. Never try to permanently bond materials with
linear expansion coefficients that differ by more than three. A flexible mounting scheme should be used or the
parts will break apart, potentially damaging them. The thermal expansion or contraction of rigid clamps or
holders could crush fragile samples or sensors that do not have the same coefficient. Thermal conductivity is
a property of materials that can change with temperature. Do not assume that a heat sink grease that works
well at room temperature and above will do the same job at low temperatures.
2.3.2 Sensor Location
Finding a good place to mount a sensor in an already crowded cryostat is never easy. There are less
problems if the entire load and sample holder are at the same temperature. Unfortunately, this not the case in
many systems. Temperature gradients (differences in temperature) exist because there is seldom perfect
balance between the cooling source and heat sources. Even in a well-controlled system, unwanted heat
sources like thermal radiation and heat conducting through mounting structures can cause gradients. For best
accuracy, sensors should be positioned near the sample, so that little or no heat flows between the sample
and sensor. This may not, however, be the best location for temperature control as discussed below.
2-4 Cooling System Design
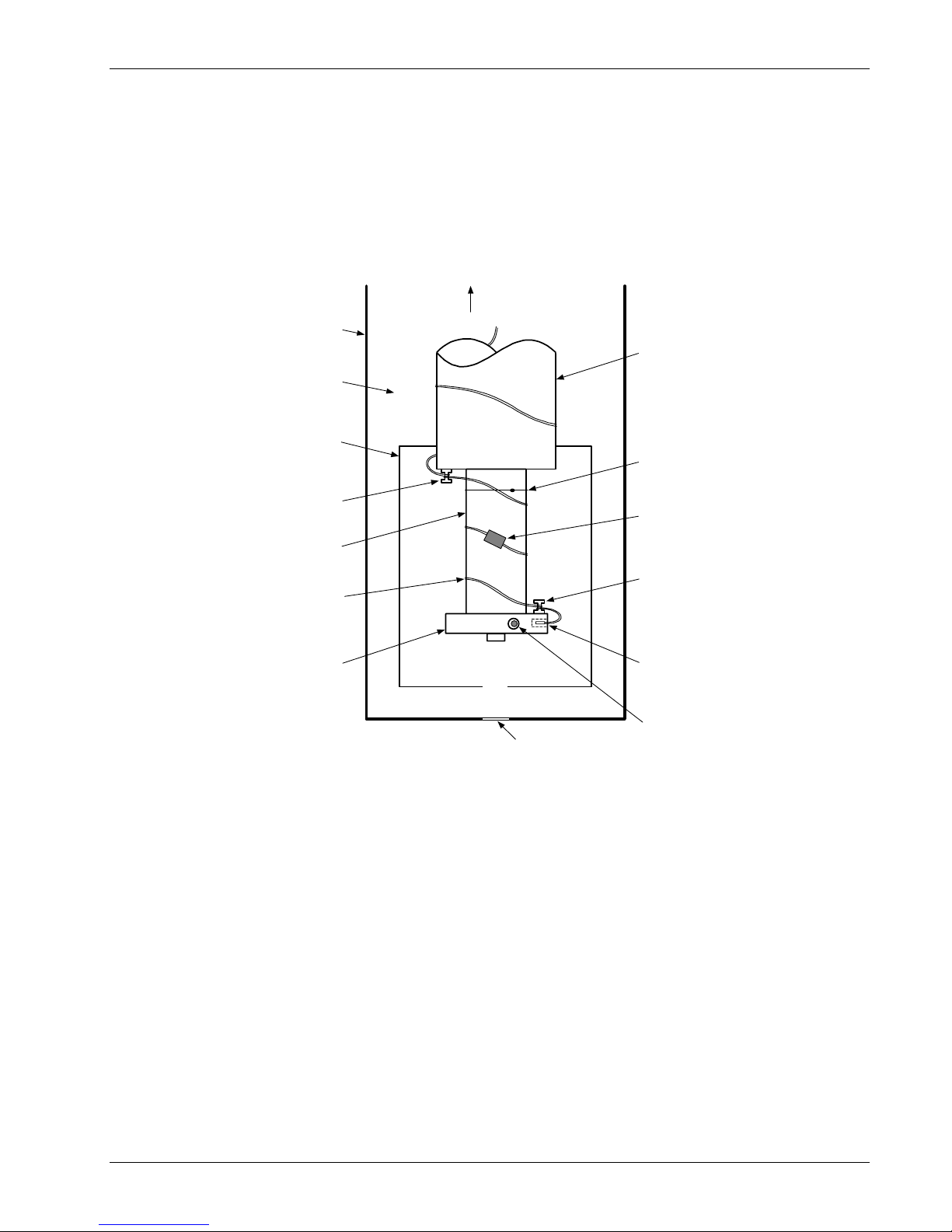
Lake Shore Model 340 Temperature Controller User’s Manual
2.3.3 Thermal Conductivity
The ability of heat to flow through a material is called thermal conductivity. Good thermal conductivity is
important in any part of a cryogenic system that is intended to be the same temperature. Copper and
aluminum are examples of metals that have good thermal conductivity, while stainless steel does not.
Non-metallic, electrically-insulating materials like alumina oxide and similar ceramics have good thermal
conductivity, while G-10 epoxy-impregnated fiberglass does not. Sensor packages, cooling loads, and sample
holders should have good thermal conductivity to reduce temperature gradients. Surprisingly, the connections
between thermally conductive mounting surfaces often have very poor thermal conductivity.
To Room
Temperature
Vacuum Shroud
Refrigerator
Vacuum Space
Radiation Shield
Thermal Anchor
(Bobbin)
Expander
Dental Floss
Tie-Down
-or-
Cryogenic Tape
Refrigerator
Stage
Second
Thermal Anchor
Cryogenic Wire
diameter,
(small
large AWG)
Cold Stage and
Sample Holder
Drawing
Not To Scale
340-2-2.eps
Optical Window
(If Required)
(Bobbin)
Sensor
Heater
(wirin g not sho wn
for clarity)
Figure 2-2. Typical Sensor Installation In A Mechanical Refrigerator
2.3.4 Contact Area
Thermal contact area greatly affects thermal conduction because a larger area has more opportunity to
transfer heat. Even when the size of a sensor package is fixed, thermal contact area can be improved with the
use of a gasket material. A soft gasket material forms into the rough mating surface to increase the area of
the two surfaces that are in contact. Good gasket materials are soft, thin, and have good thermal conductivity.
They must also withstand the environmental extremes. Indium foil and cryogenic grease are good examples.
2.3.5 Contact Pressure
When sensors are permanently mounted, the solder or epoxy used to hold the sensor act as both gasket and
adhesive. Permanent mounting is not a good solution for everyone because it limits flexibility and can
potentially damage sensors. Much care should be taken not to over heat or mechanically stress sensor
packages. Less permanent mountings require some pressure to hold the sensor to its mounting surface.
Pressure greatly improves the action of gasket material to increase thermal conductivity and reduce thermal
gradients. A spring clamp is recommended so that different rates of thermal expansion do not increase or
decrease pressure with temperature change.
Cooling System Design 2-5

Lake Shore Model 340 Temperature Controller User’s Manual
2.3.6 Lead Wire
Different types of sensors come with different types and lengths of electrical leads. In general a significant
length of lead wire must be added to the sensor for proper heat sinking and connecting to a bulk head
connector at the vacuum boundary. The lead wire must be a good electrical conductor, but a poor thermal
conductor, or heat will transfer down the leads and change the temperature reading of the sensor. Small 30 to
40 AWG wire made of an alloy like phosphor bronze is much better than copper wire. Thin wire insulation is
preferred and twisted wire should be used to reduce the effect of RF noise if it is present. The wire used on
the room temperature side of the vacuum boundary is not critical so copper cable is normally used.
2.3.7 Lead Soldering
When additional wire is soldered to short sensor leads, care must be taken not to overheat the sensor. A heat
sink such as a metal wire clamp or alligator clip will heat sink the leads and protect the sensor. Leads should
be tinned before bonding to reduce the time that heat is applied to the sensor lead. Solder flux should be
cleaned after soldering to prevent corrosion.
2.3.8 Heat Sinking Leads
Sensor leads can be a significant source of error if they are not properly heat sinked. Heat will transfer down
even small leads and alter the sensor reading. The goal of heat sinking is to cool the leads to a temperature
as close to the sensor as possible. This can be accomplished by putting a significant length of lead wire in
thermal contact with every cooled surface between room temperature and the sensor. Lead wires can be
adhered to cold surfaces with varnish over a thin electrical insulator like cigarette paper. They can also be
wound onto a bobbin that is firmly attached to the cold surface. Some sensor packages include a heat sink
bobbin and wrapped lead wires to simplify heat sinking.
2.3.9 Thermal Radiation
Thermal (black body) radiation is one of the ways heat is transferred. Warm surfaces radiate heat to cold
surfaces even through a vacuum. The difference in temperature between the surfaces is one thing that
determines how much heat is transferred. Thermal radiation causes thermal gradients and reduces
measurement accuracy. Many cooling systems include a radiation shield. The purpose of the shield is to
surround the load, sample, and sensor with a surface that is at or near their temperature to minimize
radiation. The shield is exposed to the room temperature surface of the vacuum shroud on its outer surface,
so some cooling power must be directed to the shield to keep it near the load temperature. If the cooling
system does not include an integrated radiation shield (or one cannot be easily made), one alternative is to
wrap several layers of super-insulation (aluminized Mylar) loosely between the vacuum shroud and load. This
reduces radiation transfer to the sample space.
2.4 HEATER SELECTION AND INSTALLATION
There is a variety of resistive heaters that can be used as the controlled heating source for temperature
control. The mostly metal alloys like nichrome are usually wire or foil. Shapes and sizes vary to permit
installation into different systems.
Heater Resistance and power are discussed in Paragraph 2.4.1. Heater location is discussed in Paragraph
2.4.2. Heater types are discussed in Paragraph 2.4.3. Finally, heater wiring is discussed in Paragraph 2.4.4.
2.4.1 Heater Resistance and Power
Cryogenic cooling systems have a wide range of cooling power. The resistive heater must be able to provide
sufficient heating power to warm the system. The Model 340 can supply up to 100 W of power to a heater
(if the heater resistance is appropriate). The Model 340 heater output current source has a maximum output
of 2 A, limiting maximum power to: Max Power (watts) = (2 A)
2
× Resistance (ohms).
Even though the Model 340 output is a current source, it has a voltage limit (called the compliance voltage)
of 50 V, which also limits maximum power:
Max Power (watts)
= .
Resistance (ohms)
2-6 Cooling System Design
(50 volts)
2

Heater Resistance and Power (Continued)
Lake Shore Model 340 Temperature Controller User’s Manual
Both limits are in place at the same time, so the smallest of the two computations gives the maximum power
available to the heater. A heater of 25 Ω allows the instrument to provide its maximum power of 100 watts.
A typical smaller resistance of 10 Ω allows 40 watts of power, while a typical larger resistance of 50 Ω allows
50 watts. The resistor chosen as a heater must be able to withstand the power being dissipated in it.
Pre-packaged resistors have a power specification that is usually given for the resistor in free air. This power
may need to be derated if used in a vacuum where convection cooling can not take place and it is not
adequately heat sinked to a cooled surface.
2.4.2 Heater Location
For best temperature measurement accuracy the heater should be located so that heat flow between the
cooling power and heater is minimized. For best control the heater should be in close thermal contact with the
cooling power. Geometry of the load can make one or both of these difficult to achieve. That is why there are
several heater shapes and sizes.
2.4.3 Heater Types
Resistive wire like nichrome is the most flexible type of heater available. The wire can be purchased with
electrical insulation and has a predictable resistance per given length. This type of heater wire can be
wrapped around a cooling load to give balanced, even heating of the area. Similar to sensor lead wire, the
entire length of the heater wire should be in good thermal contact with the load to allow for thermal transfer.
Heat sinking also protects the wire from over heating and burning out.
Resistive heater wire is also wound into cartridge heaters. Cartridge heater are more convenient but are bulky
and more difficult to place on small loads. A typical cartridge is ¼ inch in diameter and 1 inch long. The
cartridge should be snugly held in a hole in the load or clamped to a flat surface. Heat sinking for good
thermal contact is again important.
Foil heaters are thin layers of resistive material adhered to, or screened on to, electrically insulating sheets.
There are a variety of shapes and sizes. The proper size heater can evenly heat a flat surface or around a
round load. The entire active area should be in good thermal contact with the load, not only for maximum
heating effect, but to keep spots in the heater from over heating and burning out.
2.4.4 Heater Wiring
Small 30 AWG copper wire is recommended for heater leads inside of a vacuum shroud. Larger wire causes
too much heat to leak. These leads should be heat sunk similar to sensor leads so that heat leak does not
warm the load when the heater is not running. The lead wires should be twisted to minimize noise coupling
between the heater and other leads in the system. Outside the vacuum shroud larger copper cable should be
used but twisting is still recommended.
2.5 CONSIDERATIONS FOR GOOD CONTROL
Most of the techniques discussed above to improve cryogenic temperature accuracy apply to control as well.
There is an obvious exception in sensor location. A compromise is suggested below in the Two Sensor
Approach.
Thermal conductivity is discussed in Paragraph 2.5.1. Thermal lag is discussed in Paragraph 2.5.2. The twosensor approach is discussed in Paragraph 2.5.3. Thermal mass is discussed in Paragraph 2.5.4. Finally,
system nonlinearity is discussed in Paragraph 2.5.5.
2.5.1 Thermal Conductivity
Good thermal conductivity is important in any part of a cryogenic system that is intended to be at the same
temperature. Most systems begin with materials that have good conductivity themselves, but as sensors,
heaters, sample holders, etc., are added to an ever more crowded space, the junctions between parts are
often overlooked. In order for control to work well, junctions between the elements of the control loop must be
in close thermal contact and have good thermal conductivity. Gasket materials should always be used along
with reasonable pressure.
Cooling System Design 2-7

Lake Shore Model 340 Temperature Controller User’s Manual
2.5.2 Thermal Lag
Poor thermal conductivity causes thermal gradients that reduce accuracy but they also cause thermal lag that
make it difficult for controllers to do their job. Thermal lag is the time it takes for a change in heating or cooling
power to propagate through the load and get to the feedback sensor. Because the feedback sensor is the
only thing that lets the controller know what is happening in the system, slow information to the sensor slows
the controllers response time. For example, if the temperature at the load drops slightly below the setpoint,
the controller gradually increases heating power. If the feedback information is slow, the controller puts too
much heat into the system before it is told to reduce heat. The excess heat causes a temperature overshoot,
degrading control stability. The best way to improve thermal lag is to pay close attention to thermal
conductivity both in the parts used and their junctions.
2.5.3 Two-Sensor Approach
There is a conflict between the best sensor location for measurement accuracy and the best sensor location
for control. For measurement accuracy the sensor should be very near the sample being measured which is
away from the heating and cooling sources to reduce heat flow across the sample and thermal gradients. The
best control stability is achieved when the feedback sensor is near both the heater and cooling source to
reduce thermal lag. If both control stability and measurement accuracy are critical it may be necessary to use
two sensors, one for each function. Many temperature controllers including the Model 340 have two sensor
inputs for this reason.
2.5.4 Thermal Mass
Cryogenic designers understandably want to keep the thermal mass of the load as small as possible so the
system can cool quickly and improve cycle time. Small mass can also have the advantage of reduced thermal
gradients. Controlling a very small mass is difficult because there is no buffer to adsorb small changes in the
system. Without buffering, small disturbances can very quickly create large temperature changes. There are
systems where it is necessary to add a small amount of thermal mass such as a copper block in order to
improve control stability.
2.5.5 System Nonlinearity
Because of nonlinearities in the control system, a system controlling well at one temperature may not control
well at another temperature. While nonlinearities exist in all temperature control systems, they are most
evident at cryogenic temperatures. When the operating temperature changes the behavior of the control loop,
the controller must be retuned. As an example, a thermal mass acts differently at different temperatures. The
specific heat of the load material is a major factor in thermal mass and the specific heat of materials like
copper change as much as three orders of magnitude when cooled from 100 K to 10 K. Changes in cooling
power and sensor sensitivity are also sources of nonlinearity.
The cooling power of most cooling sources also changes with load temperature. This is very important when
operating at temperatures near the highest or lowest temperature that a system can reach. Nonlinearities
within a few degrees of these high and low temperatures make it very difficult to configure them for stable
control. If difficulty is encountered, it is recommended to gain experience with the system at temperatures
several degrees away from the limit and gradually approach it in small steps.
Keep an eye on temperature sensitivity. Sensitivity not only affects control stability but it also contributes to
the overall control system gain. The large changes in sensitivity that make some sensors so useful may make
it necessary to retune the control loop more often.
2-8 Cooling System Design
 Loading...
Loading...