


SOFTWARE
KR C...
Error messages / troubleshooting
KUKA System Software (KSS)
Issued: 10.Oct.2004 Version: 01
Fehlermeldungen 09.02.01 en
1 of 135

e Copyright KUKA Roboter GmbH
This documentation or excerpts therefrom may not bereproduced or disclosed to third parties without the express permission of the publishers.
Other functions not described in this documentation may be operable in the controller. The user has no claim to these functions, however, in
the case of a replacement or service work.
We have checked the content of this documentation for conformity with the hardware and software described. Nevertheless, discrepancies
cannot be precluded, for which reason we are not able to guarantee total conformity. The information in this documentation is checked on a
regular basis, however, and necessary corrections will be incorporated in subsequent editions.
Subject to technical alterations without an effect on the function.
PD Interleaf
Fehlermeldungen 09.02.01 en
2 of 135

Contents
1 Error messages / troubleshooting 4.................................
1.1 Message groups 4...............................................................
1.2 Message time 4.................................................................
1.3 Message number 5..............................................................
1.4 Originator 5.....................................................................
1.5 Message text 5..................................................................
1.6 List of error messages 5..........................................................
Fehlermeldungen 09.02.01 en
3 of 135
Error messages / troubleshooting
1 Error messages / troubleshooting
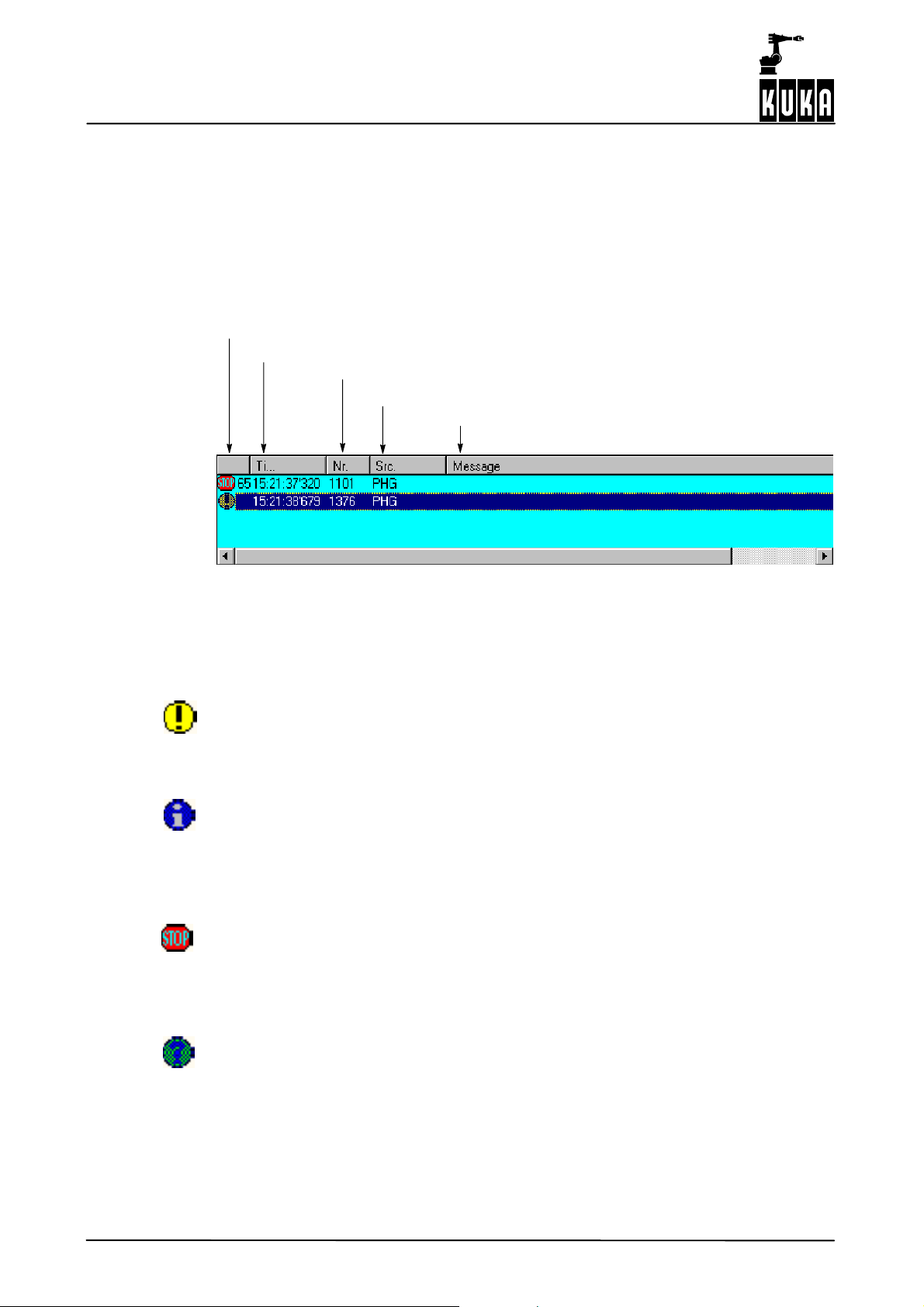
Messages of all categories are displayed in the message window. These can be either
informative messages that do not need to be acknowledged or messages that have to be
acknowledged.
A message consists of the following items of information, for example:
Message group
Message time
Message number
Originator
Message text
COMMAND ACCELERATION EXCEEDED A2
ACTIVE COMMANDS INHIBITED
1.1 Message groups
Hint messages
provide the operator with explanatory information, for example, if an illegal key has been
pressed.
Operational messages
signal the status of the system that has led to a control reaction, e.g. Emergency Stop. The
message is cleared once its cause has been eliminated. In some cases, a secondary signal
that has to be acknowledged is set for reasons of safety.
Acknowledgement messages
indicate a situation that must in all instances be recognized and acknowledged with the
acknowledge key. They are often a consequence of a status (operational) message. An
acknowledgement message stops a movement or prevents further operation.
Dialog messages
require confirmation by the operator (“Yes” or “No” softkeys). The message is cleared after
it has been confirmed.
1.2 Message time
The message time indicates the time at which the message was generated.
4 of 135
Fehlermeldungen 09.02.01 en

1.3 Message number
With the aid of the message number, the corresponding cause, effect and remedy can quickly
be located in the list of error messages.
1.4 Originator
The origin of the error is indicated in this field.
1.5 Message text
The text of the error message is shown here.
1.6 List of error messages
To make it easier to find error messages in the following list, the message number is shown
first, unlike on the display. By referring to this message number, it is possible to obtain further
information on an error and the appropriate remedial action. This information is subdivided
into:
1 Error messages / troubleshooting (continued)
Message text
is the actual text of the error message as displayed.
Cause
gives a detailed description of the cause of the error.
Monitor
indicates when the conditions for generation of the message are checked.
Effect
describes how the controller reacts to the error.
Remedy
describes what action the user can take to eliminate the error.
Fehlermeldungen 09.02.01 en
5 of 135
Error messages / troubleshooting
1 Message text EMERGENCY STOP
Cause -- Emergency Stop pushbutton pressed.
-- Emergency Stop initiated by the software.
Monitor -- Cyclic.
Effect -- Path--maintaining stop.
-- All active commands inhibited.
Remedy -- Check the Emergency Stop pushbutton and Emergency Stop circuit.
-- Release the Emergency Stop pushbutton.
-- Rectify and acknowledge the signalled fault.
2
Message text Internal error
Cause -- Internal KRL software test.
Monitor -- Within the KRL software.
Effect -- All active commands inhibited.
Remedy -- Acknowledge message.
3
Message text MESSAGE BUFFER OVERFLOW
Cause -- The message buffer, which contains the currently active messages
(acknowledgement and status messages), is full up to a specific limit.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Rectify and acknowledge the signalled faults.
4
Message text BUFFER BATTERY VOLTAGE LOW xx
Cause -- Voltage of the backup battery too low.
Monitor -- At “Power off”.
-- Cyclic.
Effect -- The battery voltage is checked when the power is switched off. When
the message is displayed, it is necessary to wait until the battery has
recharged. Only then may the controller be switched off.
-- Cyclic --> none.
Remedy -- Change the battery.
-- After the battery has been charged, the message “Ackn. batt. voltage”
is displayed --> acknowledge.
5
Message text Malfunction <HPU or RCP>
Cause -- KCP defective.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Replace KCP.
6 of 135
Fehlermeldungen 09.02.01 en
1 Error messages / troubleshooting (continued)
6 Message text Transmission error <HPU or RCP>
Cause -- Fault in KCP connection.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Check the KCP cable.
7
Message text TPBASIS
Cause -- The point could not be created
8
Message text System time invalid
Cause -- The system time is invalid after TIME_HW_FAILURE and has been
set to the initial value.
Monitor -- When the controller is booted.
Effect -- The system time is initialized with 01.01.93 00:00:00,00.
Remedy -- Update the system time with the form “systime”.
9
Message text MFC overtemperature
10
11
12
Cause -- The temperature sensor on the MFC has been triggered.
Monitor -- Cyclic.
Effect -- Path--maintaining braking.
Remedy -- Check fan. Exchange MFC if necessary.
Message text ERROR DIGITAL OUTPUTS @P1@
Cause -- Short circuit at outputs 1--8 or 9--16.
Monitor -- Cyclic.
Effect -- Maximum braking.
Remedy --
Message text PROGRAM STACK OVERFLOW
Cause -- KRL program contains too many nested structures or too many recur-
sive subprogram calls! The C--stack of the R--INT would otherwise
overflow.
Monitor -- In program processing.
Effect -- Ramp--down braking.
Remedy -- Change the structure of the program.
Message text TOO MANY MESSAGES
Fehlermeldungen 09.02.01 en
Cause -- Too many messages have been cyclically generated.
Monitor -- When a message is generated.
Effect -- All active commands are cancelled and cannot be restarted.
Remedy -- The KRC has to be booted.
7 of 135
Error messages / troubleshooting
13 Message text ERROR SAFETY LOOP
Cause -- A channel has failed or more than one enabling switch has been
pressed.
Monitor -- Cyclic.
Effect -- Path--maintaining braking, active commands inhibited.
Remedy --
14
Message text SOFTPLC: @P1@
Cause --
Monitor --
Effect --
Remedy --
15
Message text OUTPUT MONITORING DC BUS VOLTAGE KPS: @P1@
Cause -- DC bus voltage of a KPS overloaded.
Monitor --
Effect --
Remedy --
16
Message text Error while reading “O file”
17
18
Cause -- Error during loading/reading of “ident_vx.o”: memory or file not found.
Monitor -- In the write function “w_ident_state”.
Effect -- Jump to the end in load data program.
Remedy -- Copy the file “ident_vx.o” to the directory “/ir_spec/l_ident”,
or increase memory by changing the value “VxWinRAM” in the registry.
Message text WRONG/UNKNOWN HARDWARE FOUND
Cause -- During setup, the wrong control hardware (KR C1, KR C1A, KR C2)
was selected or the hardware configuration is invalid.
Monitor --
Effect -- The controller is inoperable.
-- Robot traversing not possible.
Remedy -- Carry out setup again or make appropriate changes to
hardware configuration.
Message text Servobus DSE--No. %1 participant No. %2 unknown
Cause -- An unknown device which cannot be supported has been inserted in
Interbus
Monitor -- DSE ID, device ID
Effect -- The robot can no longer be traversed
Remedy -- Remove unknown device from servo bus
8 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
19 Message text FAILURE OF MOTOR PHASE <axis>
Cause -- Power module, intermediate circuit voltage discharged.
Monitor -- Cyclic.
Effect -- Dynamic braking.
-- All active commands inhibited.
Remedy -- Switch on drives.
-- Check power module, DSE.
20
Message text EXTERNAL EMERGENCY STOP PRESSED
Cause -- Emergency Stop button pressed.
-- Emergency braking triggered by software.
Monitor -- Cyclic.
Effect -- Path--maintaining braking.
-- All active commands inhibited.
Remedy -- Check the Emergency Stop pushbutton.
-- Rectify and acknowledge the signalled fault.
21
Message text Second motorcable not connected
Cause -- Second motor cable is not connected or is incorrectly connected; the
additional cable contains two wires which are connected to the robot;
the return signal is connected to the KPS X114, pin 7
Monitor -- Cyclic.
Effect -- The robot cannot be traversed
Remedy -- Check second motor cable and return signal at KPS X114, pin 7
Fehlermeldungen 09.02.01 en
9 of 135

Error messages / troubleshooting
100 Message text RDW ** BOOT UP FAILURE
Cause -- The resolver/digital converter (RDW) could not be initialized when
the controller was booted.
Monitor -- At runup.
Effect --
Remedy -- Replace RDW, DSE or cable between RDW and DSE.
101
Message text DSE ** BOOT UP FAILURE
Cause -- The DSE could not be initialized when the controller was booted.
Monitor -- At runup.
Effect -- Maximum braking (dynamic braking).
Remedy -- Replace DSE, MFC or motherboard.
102
Message text ENCODER CABLE FAILURE **
Cause -- Cable defective (e.g. loose connection).
-- RDW defective.
-- Encoder defective.
Monitor -- Cyclic.
Effect -- Maximum braking (dynamic braking).
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Check encoder cable.
-- Check motor, resolver.
-- Possibly replace RDW.
103
Message text WATCHDOG INTERPOLATION CYCLE **
104
Cause -- DSE has not triggered software watchdog in the DP--RAM.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Replace DSE or MFC.
-- Software error.
Message text SYNCHRONIZATION ERROR WITH DSE **
Cause -- DSE has not received feed command value for 1 interpolation cycle
although servo--control is active.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Error in the DSE or PC area.
-- Software error.
10 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
105 Message text TRANSMISSION ERROR DSE -- RDW **
Cause -- Open--circuit between RDW and DSE.
-- Transmission malfunctions.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Check shielding of encoder cable.
-- Check serial interface DSE--RDW.
106
Message text PERFORM MASTERING ** !
Cause -- Position actual value difference after restart too great and sensor
mastering not possible because sensor location run has not been
performed.
Monitor -- At “Power on”.
-- During mastering.
Effect -- All active commands inhibited.
Remedy -- Perform mastering.
107
Message text EMERGENCY STOP DUE TO DIAL ADJUSTMENT
108
109
Cause -- Softkeys for dial adjustment pressed.
-- Value assignment “$TURN = 1”.
-- Encoder setting, absolute or incremental.
Monitor -- When “$TURN” instruction is executed.
Effect -- Dynamic braking.
-- 0 signal at “$ALARM_STOP” output
-- All active commands inhibited.
Remedy -- Leave the mastering menu by pressing the Recall key twice.
Message text DYNAMIC BRAKING ACTIVE
Cause -- If the controller detects a request for maximum (dynamic) braking, it
geneates the status (operational) message “DYNAMIC BRAKING
ACTIVE”, which remains active until all axies have stopped.
Monitor -- Cyclic.
Remedy -- The status message “DYNAMIC BRAKING ACTIVE” is reset by the
controller when the robot is at standstill without a secondary message
being generated.
Message text CLEAR FAST MEASURING INPUT @P1@
Cause -- Rapid gauging has been switched on.
Monitor -- During rapid gauging.
Effect -- Rapid gauging becomes active when measuring tool has been
moved free.
Remedy -- Move measuring tool free.
Fehlermeldungen 09.02.01 en
1 1 of 135

Error messages / troubleshooting
110 Message text ADVANCED PATH PROFILE NOT POSSIBLE WITH LINKED EXTER-
NAL AXES
Cause -- Coupling of external axes in higher motion profile.
Monitor -- During command and program execution.
Effect --
Remedy --
111
Message text TEPRO INACTIVE
Cause -- SBC no longer sending a signal to KRC.
Monitor -- Cyclic.
Effect -- SBC interface inoperable.
Remedy -- Re--initialize SBC program.
112
Message text INVALID $TOOL: WORKING ENVELOPE SURVEILLANCE NOT
POSSIBLE
Cause -- “$TOOL” invalid when working envelope monitoring is activated.
Monitor -- Cyclic.
Effect -- None.
Remedy -- Assign “$TOOL” or switch off working envelope monitoring.
113
Message text RANGE OVERFLOW ** **
114
115
Cause -- Overflow of the actual value of an endless axis: actual value > +/--
90*10E15 increments or --99999000 < $REVO_NUM < 999999000
Monitor -- Cyclic in the interpolation cycle.
Effect -- Path--maintaining Emergency Stop.
Remedy -- Turn back or remaster the axis concerned.
Message text WORKING ENVELOPE NO. @P1@ VIOLATED
Cause -- TCP is inside a working envelope with MODE INSIDE STOP or outside
a working envelope with MODE OUTSIDE STOP.
Monitor -- Cyclic.
Effect -- Path--maintaining braking;
-- All active commands inhibited.
Remedy -- Switch off working envelope or use key on the KCP to override work
envelope monitoring, move free in T1 mode.
Message text DRIVE FREE WORK ENVELOPE %1
Cause -- TCP is inside a working envelope with
MODE INSIDE STOP or outside a working envelope with MODE
OUTSIDE STOP and the working envelope monitoring is overridden.
Monitor -- Cyclic.
Effect --
Remedy -- Free work envelope.
12 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
116 Message text DSE WATCHDOG COMMAND **
Cause -- DSE has not executed a command.
Monitor
Effect -- Ramp--down braking.
Remedy -- Check hardware in the DSE, MFC area.
117
Message text TORQUE EXCEEDED AXIS @P1@
Cause
Monitor
Effect
Remedy
118
Message text HEAT SINK TEMPERATURE **
Cause -- Thermostatic switch on the heat sinks of the servo output stage is
tripped due to overheating of the output stage transistors.
Monitor -- Cyclic.
Effect -- Ramp--down braking. Program processing stopped.
Remedy -- Eliminate the fault and reset it by pressing the acknowledge key on the
KCP.
-- Clean the heat sinks.
119
Message text MOTOR TEMPERATURE **
120
121
Cause -- PTC thermistor (measuring shunt) in the motor winding has been
tripped (motor temperature too high).
Monitor -- Cyclic.
Effect -- Ramp--down braking. Program processing stopped.
Remedy -- Eliminate the fault and reset it by pressing the acknowledge key on the
KCP.
-- Program more movement breaks.
Message text ACKN. MOTOR BLOCKED **
Cause -- As soon as the torque command value supplied by the speed controller
exceeds 30% of the max. torque command value, integration is
started, and when the value of i*t reaches approx. 0.75 [(torque
command value / max. torque command value) * sec] the control is
switched off (i*t -- monitoring).
Monitor -- Cyclic.
Effect -- Ramp--down braking. Program processing stopped.
Remedy -- Eliminate the fault and reset it by pressing the acknowledge key on the
KCP.
-- Check that the axis is moving freely.
Message text OVERCURRENT **
Cause -- The current of each axis is monitored and the amplifier--internal current
protection is tripped if the power consumption is too high.
Monitor -- Cyclic.
Effect -- Ramp--down braking. Program processing stopped.
Fehlermeldungen 09.02.01 en
13 of 135

Error messages / troubleshooting
Remedy -- Eliminate the fault and reset it by pressing the acknowledge key on the
122
Message text BRAKE FAULT **
Cause -- The brake cable is monitored for short--circuit, overload and cable
Monitor -- Cyclic.
Effect -- Ramp--down braking. Program processing stopped.
Remedy -- Eliminate the fault and reset it by pressing the acknowledge key on the
123
Meldungstext UNDERVOLTAGE <axis number>
Cause -- The internal operating voltage (+15V) of the servo output stage is
Monitor -- Cyclic.
Effect -- Ramp--down braking. Program processing stopped.
Remedy -- Eliminate the fault and reset it by pressing the acknowledge key on the
124
Message text OVERVOLTAGE <power module number>
KCP.
break.
-- With the PM6, all axes are supplied from one brake driver.
KCP.
monitored. Undervoltage results in power failure.
KCP.
125
126
127
Cause -- The intermediate--circuit voltage is too high. Possible causes are a de-
fective ballast (feedback) resistor or ballast fuse, a defective power
module, brake ramp too steep etc.
Monitor -- Cyclic.
Effect -- Ramp--down braking. Program processing stopped.
Remedy -- Eliminate the fault and reset it by pressing the acknowledge key on the
KCP.
Message text i2--t MONITORING, CURRENT LIMIT OF THE MOTOR CABLE
<string1> AFTER <string2> s EXCEEDED 100%
Cause -- Axis overloaded. The value for the maximum permissible limit current
is specified in the machine data by “$CURR_MON[]”.
Monitor -- Cyclic.
Effect -- Ramp--down braking, active commands inhibited.
Remedy -- Reduce load.
Message text REGULATOR LIMIT EXCEEDED <axis number>
Cause -- Following error too great. The axis does not follow the command value.
Monitor -- Cyclic in the position controller.
Effect -- Maximum braking.
Remedy -- Check the axis.
Message text <axis number> DETACHED EXTERNAL AXIS
14 of 135
Cause -- Auxiliary (external) axis is operated as an asynchronous axis.
Monitor -- Cyclic.
Effect
Fehlermeldungen 09.02.01 en

128
129
130
1 Error messages / troubleshooting (continued)
Remedy
Message text SOFTWARE LIMIT SWITCH OF DETACHED EXTERNAL AXIS
<motion direction> <axis number>
Cause -- Asynchronous axis has tripped the pos. or neg. software limit
switch.
Monitor -- The software limit switch is checked cyclically if the axis is operated
as an asynchronous axis.
Effect
Remedy
Message text i2--t MONITORING, CURRENT LIMIT OF THE MOTOR CABLE
<string1> AFTER <string2> s EXCEEDED 95%
Cause -- Axis overloaded. The value for the maximum permissible limit current
is specified in the machine data by “$CURR_MON[]”.
Monitor -- Cyclic.
Effect -- Ramp--down braking, active commands inhibited.
Remedy -- Reduce load.
Message text K1 CONTACT FAIL TO OPEN <KPS number>
131
132
133
Cause -- The K1 contact is welded.
Monitor --
Effect -- The energy supply system is not interrupted.
Remedy -- Exchange contactor, KPS.
Message text BUS VOLTAGE CHARGING UNIT IS DEFECTIVE <KPS number>
Cause -- The optocoupler on the KPS is not registering current flow.
Monitor --
Effect -- Intermediate circuit cannot be loaded.
Remedy -- Exchange KPS.
Message text BRAKE DEFECTIVE <axis ...>
Cause -- Wear on brakes, defective brake.
Monitor --
Effect -- Axis moves in an uncontrolled manner.
Remedy -- Exchange motor.
Message text MONITORING OF THE ACTUAL VELOCITY @P1@
Cause -- Fault in control loop:
-- motor cables of two axes interchanged;
-- error in the axis assignment;
-- power module defective;
-- resolver unmastered.
Monitor -- Cyclic.
Effect -- Robot remains motionless.
Remedy -- Rectify the corresponding error in the control loop.
Fehlermeldungen 09.02.01 en
15 of 135

Error messages / troubleshooting
134 Message text DN CH ... WRONG FASTWRITE MACID IN INI FILE
Cause --
Monitor --
Effect --
Remedy --
135
Message text DN CH ... MODULE ERROR ...
Cause --
Monitor --
Effect --
Remedy --
136
Message text DN CH ... SLAVE ERROR ...
Cause --
Monitor --
Effect --
Remedy -- Exchange contactor, KPS.
137
Message text DN CH ... FIRMWARE ERROR
138
139
140
Cause --
Monitor --
Effect --
Remedy --
Message text DN CH ... HARDWARE ERROR
Cause --
Monitor --
Effect --
Remedy -- Exchange contactor, KPS.
Message text DN CH ... BUS ERROR ...
Cause --
Monitor --
Effect --
Remedy --
Message text DN CH ... WATCHDOG ERROR
Cause --
Monitor --
Effect --
Remedy --
16 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
141 Message text DN CH ... USER ERROR ...
Cause --
Monitor --
Effect --
Remedy --
142
Message text DN CH ... CONFIGURATION MODE ENABLED
Cause --
Monitor --
Effect --
Remedy --
143
Message text Ixtservodrive%1exceedvalue%2%%
Cause -- If the defined Ixt monitoring warning value of a drive servo is exceeded,
the robot must be brought to a standstill; otherwise, the drive servo is
deactivated when the maximum value of 100% is exceeded
Monitor -- Cyclic, the warning bit on the drive servo
Effect -- The robot is stopped in a controlled manner.
Remedy -- Verify load data
-- If necessary, reduce the load cycle (wait time)
-- Use stronger robot
146
147
Message text Wrong amplifier %1
Cause -- Drive module of a slave axis does not correspond to drive module on
the associated master axis
Monitor -- Cyclic.
Effect -- Traversing not possible
Remedy -- Shut down controller, exchange drive module for one corresponding to
the master axis and reboot controller
Message text DRIVE FREE AXIS WORK ENVELOPE NO. %1
Cause -- The robot is inside a working envelope with MODE INSIDE STOP or
outside a working envelope with MODE INSIDE STOP and the working
envelope monitoring is overridden.
Monitor -- Cyclic.
Effect --
Remedy -- Free axis work envelope
Fehlermeldungen 09.02.01 en
17 of 135

Error messages / troubleshooting
148 Message text Axis work envelope No. %1 violated
Cause -- The robot is inside a working envelope with MODE INSIDE STOP or
outside a working envelope with MODE OUTSIDE STOP
Monitor -- Cyclic.
Effect -- Path--maintaining braking, all active commands inhibited
Remedy -- Switch off axis working envelope or override work envelope monitoring
in T1 mode and move free
155
200
201
202
Message text <axis> DECOUPLED AUXILIARY AXIS
Cause --
Monitor --
Effect --
Remedy --
Message text DRIVES CONTACTOR OFF
Cause -- Power module, intermediate--circuit voltage discharged.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- All active commands inhibited.
Remedy -- Switch drives on.
-- Check power module, check DSE.
-- Emergency Stop is active, drives circuit is interrupted.
Message text KCP DEADMAN SWITCH
Cause -- The safety (deadman) switch has been released during an active
function (motion of an axis) in mode T1 or T2.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- All active commands inhibited.
Remedy -- Press safety switch.
-- Check KCP, safety logic.
Message text I/O RECONFIGURATION
18 of 135
Cause -- An I/O reload command has been transmitted via the KCP.
Monitor --
Effect -- Path--maintaining braking.
Remedy -- After successful reconfiguration, the normal operating state is
automatically restored.
Fehlermeldungen 09.02.01 en
1 Error messages / troubleshooting (continued)
203 Message text GENERAL MOTION ENABLE
Cause -- Low signal at $MOVE_ENABLE input.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Check the input.
204
Message text HARDWARE LIMIT SWITCH / +24V MISSING
Cause -- The hardware limit switch has been tripped.
Monitor -- Cyclic.
Effect -- Maximum braking.
Remedy -- Shunt out the hardware limit switch and move axis off limit switch.
205
Message text SOFTWARE LIMIT SWITCH <motion direction> <axis number>
Cause -- The software limit switch of the axis indicated has been tripped in the
direction indicated. (The message is effective only after “Robot
synchronized”).
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Movement in the direction indicated is inhibited.
Remedy -- Move the axis in the opposite direction (no change to the robot--specific
coordinate system takes place).
206
Message text SERVO PARAMETERS <axis> LINE <integer> INCORRECT
207
208
Cause -- The parameters in the servo file are incorrect.
Monitor -- While loading machine data.
Effect --
Remedy -- Correct the parameters.
Message text OPERATOR SAFETY / GATE OPEN
Cause -- Operator safety has been tripped in the AUTOMA TIC or EXTERNAL
mode (input at the peripheral interface).
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Switch to mode T1 or T2 (in these modes the robot can be moved
when the signal is low).
-- Close the safety gate.
-- Check the input.
Message text FAILURE IN ESC SAFETY LOOP
Cause -- Emergency Stop button pressed.
-- Emergency braking triggered by software.
Monitor -- Cyclic.
Fehlermeldungen 09.02.01 en
19 of 135

Error messages / troubleshooting
Effect -- Path--maintaining braking.
Remedy -- Check the Emergency Stop pushbutton;
209
Message text PASSIVE STOP <RCP or teach pendant>
Cause -- Stop from a passive operator control unit (the message is displayed
Monitor -- Cyclic.
Effect -- Ramp--down braking.
Remedy -- Acknowledge the message “Passive Stop”.
210
Message text STOP KEY <RCP or teach pendant>
Cause -- The start key or a traversing key has been actuated while the stop
Monitor -- Cyclic.
Effect -- Ramp--down braking.
Remedy -- Check the stop key.
211
Message text CHECK SAFETY LOGIC. DRIVES OFF TIMEOUT DURING EMER-
Cause --
Monitor --
Effect --
Remedy --
212
Message text ERROR WRITING TO PERCEPTRON
-- All active commands inhibited.
-- Rectify and acknowledge the signalled fault.
only if an active process has been stopped).
-- All active commands inhibited.
key is depressed.
-- All active commands inhibited.
GENCY STOP OCCURRED
--
213
214
20 of 135
Cause --
Monitor --
Effect --
--
Remedy --
Message text ERROR WRITING TO BOSCH
Cause --
Monitor --
Effect --
--
Remedy --
Message text COMMON DRIVES ERROR <axis number>
Cause --
Monitor --
Fehlermeldungen 09.02.01 en

215
216
217
1 Error messages / troubleshooting (continued)
Effect --
--
Remedy --
Message text COMMON DRIVES ERROR <axis number>
Cause --
Monitor --
Effect --
--
Remedy --
Message text DRIVES ERROR ... NO.: ...
Cause -- The Start key or a direction key was activated while the Stop key
was pressed.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Check Stop key.
Message text EMERGENCY STOP FROM KRC ( ALARM STOP )
218
219
Cause -- An alarm stop has been initiated by the KRL system software;
another serious error has occurred.
Monitor -- Cyclic.
Effect -- Maximum braking. All active commands inhibited.
Remedy -- Eliminate and acknowledge the signalled fault (serious error).
Message text FEEDBACK SWITCH TOO LONG ON **
Cause -- The energy of the axis to be braked was too high.
Monitor
Effect -- Ramp--down braking.
Remedy -- Power module ballast (feedback) switch defective.
-- Brake ramp in the program too steep.
Message text CABINET TEMPERATURE TOO HIGH **
Cause -- The cabinet temperature has risen above the permissible limit value.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
Remedy -- Reduce the external temperature.
-- Change the site of installation.
-- Check the fans.
-- Clean the heat exchanger.
Fehlermeldungen 09.02.01 en
21 of 135

Error messages / troubleshooting
220 Message text DRIVES CONTACTOR OFF, INTERMEDIATE CIRCUIT LOADED !!!
Cause -- The drives contactor drops out. The energy in the intermediate circuit
is sufficient to ensure a path--maintaining stop. Caution: the
intermediate circuit is still charged! The intermediate circuit is
discharged after about 2 minutes. The message “DRIVES NOT
READY” is then displayed.
Monitor -- Cyclic.
Effect -- Path--maintaining Emergency Stop
Remedy -- Switch drives on again.
-- Check drives circuit for faults.
221
Message text MODE NOT ALLOWED
Cause -- E2 keyswitch in AUTO mode.
Monitor
Effect
Remedy
222
Message text PARITY ERROR POWERMODULE **
223
224
225
Cause -- A parity error has occurred more than five times in succession when
reading the power module register.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
Remedy -- Too much interference at the power module interface, or power module
defective. Check cable, check shielding, replace power module.
Message text POWER MODULE AXIS ** NOT OR WRONGLY PLUGGED
Cause -- The axis is incorrectly plugged into the power module or not connected
at all.
Monitor -- At runup.
Effect -- Active commands inhibited.
Remedy -- Connect the axis correctly (high or low power).
Message text POWER FAIL
Cause -- The cabinet voltage has been switched off, the mains voltage is
interrupted.
Monitor
Effect -- Path--maintaining Emergency Stop, buffering of the mastering data,
saving all data on HDD.
Remedy -- Check the mains voltage.
Message text MOTOR CABLE **
22 of 135
Cause --
Monitor --
Effect --
Remedy --
Fehlermeldungen 09.02.01 en
1 Error messages / troubleshooting (continued)
226 Message text FAILURE OF HEAT SINK TEMPERATURE SENSOR **
Cause --
Monitor --
Effect --
Remedy --
227
Message text FAILURE OF CABINET INTERIOR TEMPERATURE SENSOR <AXIS
NUMBER>
Cause --
Monitor --
Effect --
Remedy --
228
Message text DRIVES PARAMETER DATA ** INVALID
Cause --
Monitor --
Effect --
Remedy --
229
Message text FAILURE OF MOTOR TEMPERATURE SENSOR <AXIS NUMBER>
230
231
232
Cause --
Monitor --
Effect --
Remedy --
Message text WRONG DRIVES PARAMETER <AXIS NUMBER> **
Cause --
Monitor --
Effect --
Remedy --
Message text ERROR SYNC. INPUT DRIVE <AXIS>
Cause --
Monitor --
Effect --
Remedy --
Message text SYNCHRONISATION ERROR DRIVE <AXIS>
Cause --
Monitor --
Effect --
Remedy --
Fehlermeldungen 09.02.01 en
23 of 135

Error messages / troubleshooting
233 Message text <AXIS> WITHOUT PO WER
Cause --
Monitor --
Effect --
Remedy --
234
Message text COMMON DRIVES ERROR <AXIS NUMBER>
Cause --
Monitor --
Effect --
Remedy --
235
Message text COMMON DRIVES ERROR <AXIS NUMBER>
Cause --
Monitor --
Effect --
Remedy --
236
Message text COMMON DRIVES ERROR <AXIS NUMBER>
237
238
239
Cause --
Monitor --
Effect --
Remedy --
Message text COMMON DRIVES ERROR <AXIS NUMBER>
Cause --
Monitor --
Effect --
Remedy --
Message text COMMON DRIVES ERROR <AXIS NUMBER>
Cause --
Monitor --
Effect --
Remedy --
Message text LOADING ** SERVO PARAMETERS **
Cause -- Loading drive servo parameters
Monitor --
Effect --
Remedy --
24 of 135
Fehlermeldungen 09.02.01 en
1 Error messages / troubleshooting (continued)
240 Message text PLEASE SWITCH OFF THE CABINET
Cause -- The drive servo parameters have been loaded, but will not take effect
until the next reboot.
Monitor --
Effect --
Remedy --
241
Message text SERVOFILE CONFIGURATION ** DOES NOT FIT THE ** RELEASE
**
Cause -- The servo file configuration contains parameters for the drive servos
which are not supported by the firmware.
Monitor --
Effect --
Remedy -- Upgrade drive servo firmware or servo files.
242
Message text ** FIRMWARE RELEASE **
Cause -- Information about the firmware release of the axis in question.
Monitor --
Effect --
Remedy -- Upgrade drive servo firmware or servo files.
243
Message text SOFTWARE OF DSE ** DOES NOT FIT THE HARDWARE OR
DEFECTIVE DSE
Cause -- The wrong software was configured for the DSE
DSEAT and KR C1A/KR C2.
Monitor --
Effect --
Remedy -- Configure the correct software.
244
Message text ** SOFTWARE VERSION INCORRECT
245
246
Fehlermeldungen 09.02.01 en
Cause -- DSE software and kernel system do not work together.
Monitor --
Effect --
Remedy -- Configure the correct DSE software.
Message text SERVO BUS DISTURBANCE DSE **
Cause -- Defective bus cable.
Defective bus module.
Defective bus driver.
Monitor -- Rectify fault.
Effect --
Remedy --
Message text SERVO BUS DISTURBANCE DSE **, NO BUFFERING AND
AUTOMATIC DATA STORAGE POSSIBLE
Cause -- Buffering is activated via the servo bus on the KPS. If communication
with the KPS is faulty, the buffering cannot be activated and switch--off
takes place immediately.
25 of 135

Error messages / troubleshooting
Monitor --
Effect --
Remedy -- Re--establish communication with the KPS.
247
Message text SERVO BUS DISTURBANCE **
Cause --
Monitor --
Effect --
Remedy --
248
Message text SERVO BUS DISTURBANCE **
Cause --
Monitor --
Effect --
Remedy --
249
Message text $MOVE_ENABLE INPUT (1025) NOT ALLOWED
250
251
252
Cause --
Monitor --
Effect --
Remedy --
Message text INCORRECT SERVO PARAMETER <AXIS>
Cause --
Monitor --
Effect --
Remedy --
Message text <variable> OVERLAPPING OUTPUT SIGNALS
Cause -- Interface unit outputs assigned twice.
Monitor -- At “Power On”.
After editing the machine data.
After loading the machine data.
Effect -- No RC Ready.
Remedy -- Value assignment.
Message text <variable> INTERFACE--I/O ASSIGNMENT ERROR <correct index>
26 of 135
Cause -- Double assignment of interface controller output.
Monitor -- At “Power on”.
-- After editing the machine data.
-- After loading the machine data.
Effect -- No RC ready.
Remedy -- Correct the indicated machine datum.
Fehlermeldungen 09.02.01 en
1 Error messages / troubleshooting (continued)
253 Message text ERRONEOUS DSE AXIS ASSIGNMENT <axis number>
Cause -- Machine datum $IFACE_DRV[6] has been assigned twice to a drive
interface, or a non--existent interface has been addressed.
-- KTL encoders have been entered in IFACE_DRV[6] without connecting APC interfaces, or ADAR axes have been entered in $ADAR_AXIS
without connecting ADAR interfaces.
Monitor -- At “Power on”.
-- After editing the machine data.
-- After loading the machine data.
Effect -- No RC ready.
Remedy -- Correct the machine datum.
254
Message text DSE FILE <program name> NOT AV AILABLE
Cause -- The DSE program entered in the RD_HWINF.INI file does not exist.
Monitor
Effect
Remedy -- Enter or alter the DSE program.
255
Message text <$ variable> INVALID VALUE
256
Cause -- The machine data loader has detected that a variable contains an
incorrect value:
a) Limit monitoring tripped.
b) Machine data not logically coherent.
Monitor -- At “Power on”.
-- After editing the machine data.
-- After loading the machine data.
Effect -- No RC ready.
Remedy -- Correct the value assignment.
Message text CHECK MACHINE DATA !
Cause -- It cannot be assured that the machine data loaded during a cold
start are valid for the connected robot.
Monitor -- Generated at cold start.
Effect -- No RC ready.
-- Controller is in its initial state, i.e. tasks dependent on machine data
are not generated.
Remedy -- Either edit or copy the machine data or option data file.
Fehlermeldungen 09.02.01 en
27 of 135

Error messages / troubleshooting
257 Message text ERRONEOUS USER DATA
Cause -- The user data loader has detected that a variable contains an incorrect
value:
a) Limit monitoring tripped.
b) Data not logically coherent.
Monitor -- At “POWER ON”.
-- After editing the user data.
-- After loading the user data (DEFDAT $CUSTOM PUBLIC).
Effect -- No RC ready.
Remedy -- Correct value assignment of the indicated variable.
258
Message text ERRONEOUS OPTION DATA
Cause -- The option data loader has detected that a variable contains an incor-
rect value:
a) Limit monitoring tripped.
b) Data not logically coherent.
Monitor -- At “POWER ON”.
-- After editing the option data.
-- After loading the option data (DEFDAT $OPTION PUBLIC).
Effect -- No RC ready.
Remedy -- Correct value assignment of the indicated variable.
259
Message text ** MACHINE DATA LOADER ABORTED
260
Cause -- The errors detected by the machine data loader exceed the capacity
of the message buffer.
Monitor -- At “POWER ON”.
-- After editing the machine data.
-- After loading the machine data.
Effect -- No RC ready.
Remedy -- Correct value assignment of the indicated variable.
Message text USER DATA LOADER ABORTED
Cause -- The errors detected by the user data loader exceed the capacity of
the message buffer.
a) Limit monitoring tripped.
b) Data not logically coherent.
Monitor -- At “POWER ON”.
-- After editing the user data.
-- After loading the user data.
Effect -- No RC ready.
Remedy -- Correct value assignment of the indicated variable.
28 of 135
Fehlermeldungen 09.02.01 en
1 Error messages / troubleshooting (continued)
261 Message text OPTION DATA LOADER ABORTED
Cause -- The errors detected by the option data loader exceed the capacity of
the message buffer.
a) Limit monitoring tripped.
b) Data not logically coherent.
Monitor -- At “POWER ON”.
-- After editing the option data.
-- After loading the option data.
Effect -- No RC ready.
Remedy -- Correct value assignment of the indicated variable.
262
Message text ERRONEOUS <path> MACHINE DATA
Cause -- The machine data loader has detected a variable with an illegal value.
a) Limit monitoring tripped.
b) Data not logically coherent.
Monitor -- At “POWER ON”.
-- After editing the machine data.
-- After loading the machine data.
Effect -- No RC ready.
263
Message text ERRONEOUS CORRECTION DATA
264
265
Cause -- The correction data loader has detected a variable with an illegal value.
a) Limit monitoring tripped.
b) Data not logically coherent.
Monitor -- POWER ON after editing the correction data, after loading the
correction data (DEFDAT $ROBCOR).
Effect -- No RC ready.
Remedy -- Correct value assignment of the indicated variable.
Message text <path> CORRECTION DATA LOADER ABORTED
Cause -- The errors detected by the correction data loader exceed the capacity
of the message buffer.
Monitor -- At “POWER ON”.
-- After editing the correction data.
-- After loading the correction data.
Effect -- No RC ready.
Remedy -- Correct value assignment of the indicated variable.
Message text RDW FILE <program name> NOT AV AILABLE
Cause -- The RDW program entered in the RD_HWINF.INI file does not exist.
Monitor
Effect
Remedy -- Enter the RDW program correctly in the INI file.
Fehlermeldungen 09.02.01 en
29 of 135

Error messages / troubleshooting
266 Message text OVERTEMPERATURE FEEDBACK RESISTOR <power module no.>
OR FAN
Cause -- The ballast (feedback) resistor has overheated. In the motion program
the robot is cyclically accelerated and decelerated without a break.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
Remedy -- Insert wait times into the program, reduce the acceleration.
267
Message text WATCHDOG POWER MODULE <power module number>
Cause -- The watchdog on the power module has dropped out. The watchdog
is triggered by the DSE every 0.125ms.
Monitor -- Cyclic.
Effect -- Dynamic braking.
Remedy -- Troubleshooting in the DSE and power module area.
268
Message text MEMORY TEST ERROR DSE <DSE number 1 --4>
Cause -- The memory test on the DP--RAM of the DSE detected an error.
Monitor -- Runup.
Effect -- Active commands inhibited.
Remedy -- Replace DSE or MFC.
269
Message text DSE <DSE number 1--4> NOT AVAILABLE
270
271
Cause -- The bit on the MFC indicating whether a DSE is inserted is not set
although axes are allocated to this DSE.
Monitor -- At runup.
Effect -- Active commands inhibited.
Remedy -- Insert DSE, replace MFC or DSE.
Message text INCORRECT POWER MODULE SETTING <axis>
Cause -- Double assignment of $PMCHANNEL or incorrect channel.
Monitor -- When loading the robot machine data.
Effect -- Machine data loader aborted.
Remedy -- Correct $PMCHANNEL.
Message text ROBOT NO. ** DOES NOT CORRESPOND TO CALIBRATION FILE
**
Cause --
Monitor --
Effect --
Remedy --
30 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
272 Message text NO ROBOT NUMBER PROGRAMMED
Cause --
Monitor --
Effect --
Remedy --
273
Message text MORE THAN ONE CALIBRATION FILE AVAILABLE
Cause --
Monitor --
Effect --
Remedy --
274
Message text Check robot number
Cause --
Monitor --
Effect --
Remedy --
275
Message text SET ROBOT NUMBER – PROGRAM ROBOT NAME
276
277
Cause --
Monitor --
Effect --
Remedy --
Message text WRONG MACHINE DATA FOR THIS ROBOT TYPE
Cause -- The machine data do not correspond to the robot type stored in the
robot base.
Monitor -- Run--up.
Effect --
Remedy -- Load the correct machine data.
-- Reprogram the robot type.
Message text AUTOMATIC REPOSITIONING
Cause -- $MOT_STOP_OPT = TRUE. Robot not on path.
In EXTERN, $MOT_STOP (flag that the robot is not on path) has
been set by the user (via the GUI) to FALSE, so that the robot automatically moves on path at process velocity.
Monitor --
Effect -- Only a message that the robot is moving on the path in EXTERN.
Remedy -- The message is deleted as soon as BCO is reached.
Fehlermeldungen 09.02.01 en
31 of 135

Error messages / troubleshooting
278 Message text Error Power Relay K1
Cause -- Correct program.
-- The contact in drive contactor K1 is stuck.
Monitor --
Effect -- Path--maintaining braking.
-- All active commands inhibited.
Remedy -- Change power module.
279
Message text Feedback switch too long on <KPS number> while charging
Cause --
Monitor --
Effect -- Maximum braking.
-- All active commands inhibited.
Remedy -- Check the hardware.
280
Message text Overvoltage <kps number> while charging
281
Cause --
Monitor --
Effect -- Maximum braking.
-- All active commands inhibited.
Remedy -- Check the hardware.
Message text Check accumulator <kps number>
Cause -- Message comes directly from the KPS.
-- Accu voltage is under 19V.
-- The accu is not charged correctly anymore.
-- The accu is to old or broken.
Monitor --
Effect -- Eventually loss of reference.
-- Cold boot.
-- Active commands inhibited.
Remedy -- Exchange accu.
32 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
282 Message text Undervoltage <kps number> while charging
Cause -- Message comes directly from the KPS.
-- Intermediate circuit could not be charged correctly.
Monitor --
Effect -- Maximum braking.
-- All active commands inhibited.
Remedy -- Check supply voltages of KPS (especially three--phase current)
if there are interferences.
-- Exchange KPS.
283
Message text Brake error <KPS number> channel <brake channel>
Cause -- Brake error
Monitor --
Effect -- Path--maintaining braking.
-- All active commands inhibited.
Remedy -- Check the hardware for faults.
284
Message text Accu--voltage at <kps number> below <voltage level> during last
buffering
Cause -- The accu voltage was too low at the last switch off to buffer the
shutdown.
-- The accu is not charged correctly anymore.
-- The accu is to old or broken.
Monitor --
Effect -- Eventually loss of reference.
-- Cold boot.
-- Active commands inhibited.
Remedy -- Exchange accu.
285
Message text RIO configuration change: controller reboot necessary
Fehlermeldungen 09.02.01 en
Cause -- In order for the RIO configuration change to take effect, it is
necessary to restart the system.
Monitor --
Effect --
Remedy -- Restart the controller.
33 of 135

Error messages / troubleshooting
286 Message text Warning: PC fan below nominal speed
Cause -- PC controller cooling is still sufficient, but could soon become critical
Monitor -- Cyclic.
Effect -- None
Remedy -- Check PC fan and exchange if necessary
287
288
289
Message text PC fan error
Cause -- PC controller cooling is no longer sufficient; continued operation
could cause damage to components
Monitor -- Cyclic.
Effect -- The robot is stopped and can no longer be traversed
Remedy -- Check PC fan immediately and exchange if necessary
Message text Over temperature feedback resistor %1
Cause -- The feedback resistor has got too hot
-- The robot is cyclically accelerated and braked in the motion program
without a pause
Monitor -- Cyclic.
Effect -- Ramp--down braking
Remedy -- Reduce acceleration, introduce wait times
Message text Overtemperature fan %1
Cause -- One of the two fans in the cabinet is defective
Monitor -- Cyclic.
Effect -- Ramp--down braking
Remedy -- Exchange the fan in question
300
34 of 135
Message text OPERATING MODE CHANGE
Cause -- The mode selector switch is set to an illegal position.
Monitor -- In command processing.
Effect -- Maximum braking.
-- All active commands inhibited.
Remedy -- Set mode selector switch to a permissible position. The status
(operational) message is then reset.
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
301 Message text STOP WHILE MEASUREMENT ACTIVE -- MOVEMENT WILL BE
HANDLED AS TEST
Cause --
Monitor --
Effect --
Remedy --
302
Message text *<command name> ACTIVE
Cause -- OBJH command is being executed.
Monitor -- In command processing.
Effect -- None.
Remedy -- Wait until OBJH is free again.
303
Message text LIMIT <signal name>
Cause -- The value for the corresponding analog output lies outside thestandard
range and has therefore been limited to the maximum or minimum
value.
Monitor -- Cyclic, when writing to analog outputs.
Effect -- None.
Remedy -- The message remains set until the value of the analog output
concerned lies within the standardized range and therefore no
limitation occurs.
304
Message text START UP
305
306
307
Cause -- Startup (setup) menu selected.
Monitor -- In command processing.
Effect -- Program processing not possible.
Remedy -- Quit the setup menu using the ESC key.
Message text COMPLETE COMPILATION ACTIVE
Cause --
Monitor --
Effect --
Remedy --
Message text SELECTION ACTIVE
Cause -- New selection requires deselection/linking.
Monitor -- Command processing (RUN command).
Effect -- None.
Remedy -- Wait until the linking procedure is finished, i.e. until the message
disappears.
Message text ERRORS AT COMPLETE COMPILATION -- ERR FILES EXIST
Cause --
Monitor --
Fehlermeldungen 09.02.01 en
35 of 135

Error messages / troubleshooting
Effect --
Remedy --
308
Message text PALLETIZING MODE: MOVE AXIS <axis> <motion direction> INTO
Cause -- Axes 4 and 5 have palletizing mode ( $PAL_MODE = TRUE ), but
Monitor -- Cyclic.
Effect -- None.
Remedy -- Move axes into position in the specified direction.
309
Message text BLOCK SELECT : BCO REACHING IN T1/T2 REQUIRED
Cause --
Monitor --
Effect --
Remedy --
1000
Message text USER--MEMORY DELETED (**)
Cause --
Monitor --
Effect --
Remedy --
1001
Message text INTERNAL ERROR (DEFAULT MESSAGE)
POSITION
not the right position, i.e. A4=0 degrees and A5=90 degrees.
1002
1003
Cause -- Internal; the message data have not been correctly set.
Monitor
Effect
Remedy
Message text REBOOT AFTER POWERFAIL
Cause -- Controller is turned on again or voltage has returned.
Monitor --
Effect --
Remedy --
Message text LEVEL OVERFLOW <IP,PCP>
Cause -- Computing time overload of CPU.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Increase basic cycle.
-- Increase interpolation cycle or position control cycle, depending on the
indicated parameter.
36 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1004 Message text CAN CONTROLLER @P1@ FAILURE
Cause --
Monitor --
Effect --
Remedy --
1005
Message text NO MORE SYSTEM MEMORY AVAILABLE
Cause -- There is not enough memory available for the command “SHOW VAR”
or “SET INFO” to be executed (the control requires a certain amount
of memory for these commands, dependent on the length of the output
value.)
Monitor -- In form processing.
Effect -- Command is not executed.
Remedy -- Save and delete programs that are not required.
1006
Message text NO MORE USER MEMORY AVAILABLE
Cause -- No more memory is available for copying objects.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Delete objects that are not required.
1007
Message text CHANNEL <channel name> CANNOT BE ASSIGNED
1008
1009
Cause -- The selected channel cannot be assigned.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Free channel at another point (should occur only with printer channel).
Message text CONTROLLER BOOTED
Cause -- Controller is booted for the first time (not reboot after power failure).
Monitor --
Effect --
Remedy --
Message text POINT CONVERSION IMPOSSIBLE WITHOUT ABSOLUTE
ACCURACY MODEL
Cause -- $ABS_ACCUR = FALSE and $ABS_CONVERT = TRUE conversion
impossible without model. If $ABS_CONVERT is TRUE, then
$ABS_ACCUR must also be TRUE!
Monitor --
Effect --
Remedy -- $ABS_ACCUR = TRUE or $ABS_CONVERT = FALSE
Fehlermeldungen 09.02.01 en
37 of 135

Error messages / troubleshooting
1010 Message text INTERNAL ERROR <system error number> (<task ID>, <status>)
Cause -- Internal test of KRC.
-- Software.
Monitor -- Within the KRC.
-- Software.
Effect -- RC Ready reset during processing.
Remedy -- Acknowledge message.
1011
Message text SYNTAX ERROR IN FILE <filename> IN ROW <contents of the line>
Cause -- Syntax error when interpreting the parameter file (absolutely accurate
robot).
Monitor -- When loading $OPTION.DAT or defining $LOAD or $LOAD_A3.
Effect --
Remedy -- Load file, boot controller.
1012
Message text GENERAL ERROR: <error no.> <function> <additional info>
1013
1014
1015
Cause -- Unknown feedback from a function in the object.
Monitor -- In command processing.
Effect -- None.
Remedy -- Inform service department.
Message text FILE <file name> NOT FOUND
Cause -- Parameter file for absolutely accurate robot is not available.
Monitor -- When loading $OPTION.DAT.
Effect --
Remedy -- Load file, boot controller.
Message text UNKNOWN COMPILER ERROR: <error class>
Cause -- Compiler software has detected an error.
Monitor -- In command processing.
Effect -- None.
Remedy -- Inform service department.
Message text OBJH ERROR: <localization>
Cause -- Internal error in the OBJH.
Monitor -- In command processing.
Effect -- None.
Remedy -- Inform service department.
38 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1016 Message text HARDWARE LIMIT--SWITCH / +24V MISSING
Cause -- The interface module monitoring function has detected that a common
input for hardware limit switches has been set.
Monitor -- Cyclic in interface module monitoring.
Effect -- The roboter is stopped with maximum braking and the active
commands are inhibited until this message has been acknowledged.
Remedy -- Move robot off limit switch and acknowledge message.
!!!Caution!!! Moving the robot off the limit switch correctly is the
operator’s responsibility, since no axis--specific interlocks are set.
1017
Message text ABSOLUTE ACCURACY ROBOT: POINT CONVERSION ONLY POS-
SIBLE IN T1 MODE
Cause -- $ABS_CONVERT = TRUE and no T1 mode
Point conversion must be carried out carefully .
Monitor --
Effect -- Ramp--down braking.
Active commands inhibited.
Remedy -- Set variable $ABS_CONVERT in $CUSTOM.DAT to FALSE or select
T1 mode.
1018
Message text ERROR OCCURRED WHILE READING IDF FILE
1019
1020
1021
Cause --
Monitor --
Effect --
Remedy --
Message text PALLETIZING MODE NOT POSSIBLE WITH THIS ROBOT TYPE
Cause -- Palletizing is only possible with floor and ceiling--mounted robots. If
$ROBROOT A or B <> 0, palletizing is not possible.
Monitor -- Write function.
Effect -- Maximum braking.
Remedy -- Enter correct $ROBROOT or $PAL_MODE = FALSE.
Message text INTERNAL ERROR <error number> (<task ID>, <return status>)
Cause -- Internal software error.
Monitor
Effect
Remedy
Message text INTERNAL ERROR WHEN ACCESSING <object name>
Cause -- An internal error has occurred when accessing a file (acknowledge-
ment message already set). The action was not c orrectly carried out.
Monitor -- In object processing.
Effect
Remedy
Fehlermeldungen 09.02.01 en
39 of 135

Error messages / troubleshooting
1022 Message text COMMUNICATION <operator control device> – KRC INTERRUPTED
Cause -- Communication between the active operator control unit and the KRC
has been interrupted while a motion was being executed in the test
mode.
Monitor -- In command processing.
Effect -- Maximum braking.
Remedy -- Re--establish the connection.
1023
Message text INPUT BUFFER OVERFLOW **
Cause --
Monitor --
Effect --
Remedy --
1024
Message text ERROR DURING READING OF INI FILE ** **
Cause -- Error in INI file.
Monitor -- At system start.
Effect -- All commands are inhibited.
Remedy -- Correct INI file.
1025
Message text CONFIGURATION ERROR I/O DRIVER <driver name>
1026
1027
1028
Cause -- Error in the INI file.
Monitor -- In system runup.
Effect
Remedy -- Check io_int.ini.
Message text ERROR DIGITAL INPUT READING PORT: **
Cause
Monitor
Effect
Remedy -- Check I/O components.
Message text ERROR WRITE DIGITAL OUTPUTS PORT: **
Cause
Monitor
Effect -- Maximum braking.
Remedy -- Check the corresponding I/O hardware.
Message text ERROR RESTART I/O <bus/driver name>
Cause -- Field bus error is still present.
Monitor
Effect -- Bus I/O still not available.
Remedy -- Eliminate field bus error (hardware).
40 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1029 Message text SEN: <string> ** **
Cause -- Hint message of a sensor that does not require a stop.
Monitor
Effect
Remedy
1030
Message text SEN: <string> ** **
Cause -- Sensor error that requires ramp--down braking.
Monitor
Effect
Remedy -- Depends on sensor concerned.
1031
Message text SEN: <string> ** **
Cause -- Sensor error that requires ramp--down braking.
Monitor
Effect
Remedy
1032
Message text SEN: **
1033
1034
1035
Cause -- Sensor error that requires ramp--down braking.
Monitor
Effect
Remedy
Message text ERROR ON READING, DRIVER: ** **
Cause --
Monitor --
Effect --
Remedy --
Message text ERROR ON WRITING, DRIVER: ** **
Cause --
Monitor --
Effect --
Remedy --
Message text SINGULARITY--LESS MOTION: MAX. ORIENTATION ERROR
Cause --
Monitor --
Effect --
Remedy --
Fehlermeldungen 09.02.01 en
41 of 135

Error messages / troubleshooting
1036 Message text CHECK SAFETY LOGIC. DRIVES OFF TIMEOUT DURING EMER-
GENCY STOP
Cause --
Monitor --
Effect --
Remedy --
1037
Message text LOCAL EMERGENCY STOP BUTTON PRESSED
Cause --
Monitor --
Effect --
Remedy --
1038
Message text INVALID OPERATING MODE
Cause -- STARTMINUSwaspressedinAUTorEXT.OnlypossibleinT1or
T2.
Monitor -- Command execution.
Effect --
Remedy --
1039
Message text BACKWARD MOTION EXECUTION NOT POSSIBLE: TRACE EMPTY
1040
1041
1042
Cause -- All recorded motions have already been executed.
Monitor -- Command execution.
Effect --
Remedy -- Forward motion.
Message text BACKWARD MOTION EXECUTION NOT POSSIBLE: NO TRACE
Cause -- No points were executed and recorded in the forwards direction, or
the traces were rejected.
Monitor -- Command execution.
Effect --
Remedy -- Forward motion.
Message text SOFTPLC: **
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN K1 CONTACT FAIL TO OPEN < KPS number>
Cause -- The K1 contact is welded.
Monitor --
Effect -- The energy supply is not interrupted.
Remedy -- Exchange contactor, KPS.
42 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1043 Message text ACKN BUS VOLTAGE CHARGING UNIT IS DEFECTIVE <KPS number>
Cause -- The optocoupler on the KPS is not registering current flow.
Monitor --
Effect -- Intermediate circuit cannot be loaded.
Remedy -- Exchange KPS.
1044
Message text ACKN BRAKE DEFECTIVE **
Cause -- Wear on brakes, defective brake.
Monitor --
Effect -- Axis moves in an uncontrolled manner.
Remedy -- Exchange motor.
1045
Message text SERVO INDEPENDENT COMMAND EXECUTION
Cause --
Monitor --
Effect --
Remedy --
1046
Message text BLOCKING OF OUTPUTS IN AUT/EXT IS ENABLED
1047
1048
1049
Cause -- Variable $BLK_IO_AUT is set to TRUE (setting outputs in AUT/EXT
is blocked). The user nevertheless tries to set the outputs by hand.
Monitor --
Effect --
Remedy --
Message text SERVO INDEPENDENT COMMAND EXECUTION ONLY POSSIBLE
IN TESTING MODE
Cause -- Robot simulation not allowed in operating modes #AUT or #EXT.
Monitor --
Effect -- No program execution/simulation possible.
Remedy -- Change operating mode.
Message text ACKN. OUTPUT MONITORING DC BUS VOLTAGE KPS: **
Cause -- DC bus voltage of a KPS overloaded.
Monitor --
Effect --
Remedy --
Message text PROFIBUS MASTER IS IN STATE AUTOCLEAR. PLEASE EXECUTE
RESET COMMAND
Cause -- Bus error in Profibus. Option AUTOCLEAR is set. This means that the
bus no longer starts again automatically. A Profibus reset is necessary.
Monitor --
Effect -- Indication that a bus reset is necessary since the bus does not start
again automatically (the corresponding option is not set).
Remedy -- Rectify bus error and carry out RESET via the menu.
Fehlermeldungen 09.02.01 en
43 of 135

Error messages / troubleshooting
1050 Message text PROFIBUS : ERROR IN MASTER CIRCUIT ** **
Cause --
Monitor --
Effect --
Remedy --
1051
Message text PROFIBUS: ERROR IN SLAVE CIRCUIT
Cause --
Monitor --
Effect --
Remedy --
1052
Message text KCP: CAN BUS ERROR
Cause -- Transmission error in CAN BUS.
Monitor -- Teach pendant task.
Effect -- Path--maintaining braking.
Remedy -- Acknowledge.
1053
Message text CP VEL. REDUCTION POINT ** ** BY **
1054
1055
1056
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. DN CH ** TOO MANY MODULE ERRORS **
Cause --
Monitor --
Effect --
Remedy --
Message text TRACE BUFFER EMPTY, START WITH BACKWARD SCAN
Cause -- Empty trace for backward motion, switching to SCAN method.
Monitor -- When START minus is pressed.
Effect -- Active commands inhibited.
Remedy -- Acknowledge.
Message text ACKN. SERVOBUS DSE--NO.: <DSE no.> PARTICIPANT NO.: <IBS
device> UNKNOWN
Cause -- An unknown device which is not supported was inserted in Interbus.
44 of 135
Monitor -- DSE ID, device ID.
Effect --
Remedy -- Remove the device causing the fault from the bus system.
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1057 Message text ACKN. FAILURE OF MOTOR PHASE <axis>
Cause -- Backup battery voltage low.
Monitor -- At “Power on”.
-- Cyclic.
Effect -- At “Power on” --> automatic general reset, and in addition the message
“User memory deleted” is displayed (machine data, user data, application programs must be reloaded).
-- Cyclic --> none.
Remedy -- Exchange battery. After exchange, the message
“Ackn. check accumulator” appears --> acknowledge.
1058
Message text BCO MOTION: PRESS START PLUS
Cause -- An attempt was made to carry out BCO motion with START MINUS.
Monitor -- When START MINUS is pressed.
Effect -- The robot does not start.
Remedy -- Use START PLUS or set Implicit_BCO = TRUE in BACKWARD.INI.
1059
Message text FINISHED SUBROUTINE: SKIP MOTIONS
1060
1061
Cause -- During backward motion, the interpreter encounters a subprogram
which has already been completely executed.
Monitor -- Each time before backward motion is started.
Effect -- Active commands inhibited.
Remedy -- Acknowledge.
Message text $BWDSTART NOT IN FOLD. NO TOOL AND BASE INFORMATION
FOUND
Cause -- Backward motion in SCAN method: a $BWDSTART assignment must
be programmed as the first instruction in a motion fold. From this line
onwards, all following instructions up to the motion are executed before
backward motion is carried out.
Monitor -- Each time before backward motion is started.
Effect -- Active commands inhibited.
Remedy -- Correct program or set the entry BACKWARDSTART = FALSE in
BACKWARD.INI. In this case, however, BASE and TOOL changes
cannot be carried out during backward motion.
Message text Rapid EMERGENCY STOP with fixed braking ramps
Cause -- In the event of EMERGENCY STOP with dynamic model, the fixed
braking ramp strategy is used as this brakes the robot significantly
more quickly
Monitor -- In the event of EMERGENCY STOP with dynamic model
Effect -- EMERGENCY STOP brakes the robot more quickly than the strategy
based on the dynamic model
Remedy -- Verify load data and correct if necessary
-- Verify machine data
Fehlermeldungen 09.02.01 en
45 of 135

Error messages / troubleshooting
1062 Message text Ackn. second motorcable not connected
Cause -- Second motor cable was not connected or was connected incorrectly
Monitor --
Effect --
Remedy -- Acknowledge message
1063
Message text Ackn. over temperature feedback resistor %1
Cause -- The feedback resistor has got too hot
-- The robot is cyclically accelerated and braked in the motion program
without a pause
Monitor -- Cyclic.
Effect --
Remedy -- Acknowledge message
1064
Message text Ackn.: over temperature fan %1
Cause -- One of the two fans in the cabinet is defective
Monitor -- Cyclic.
Effect -- Ramp--down braking
Remedy -- Acknowledge message
1065
Message text Ackn. mainboard overtemperature
1066
1067
Cause -- The cabinet fan has failed
-- The ambient temperature is too high
Monitor -- Cyclic.
Effect --
Remedy -- Acknowledge message
Message text Mainboard temperature reached warning level
Cause -- PC controller cooling is still sufficient, but could soon become critical
Monitor -- Cyclic.
Effect -- None
Remedy -- Check fan
-- Exchange fan filter
Message text Mainboard temperature check not available
Cause -- Motherboard does not support temperature monitoring
Monitor -- O n c e
Effect -- No monitoring
Remedy -- Exchange motherboard
-- Switch temperature monitoring off
46 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1068 Message text INTERBUS: Watchdog Time expired!
Cause -- The Interbus driver read function was not called in the time defined
Monitor -- Cyclic.
Effect -- Inputs and outputs are not set
Remedy -- Terminate the Watchdog by reconfiguring the I/Os
-- De--energize controller board
-- Watchdog cycle time possibly set too low
-- Fault in the KRC system since the read function of the driver was not
called cyclically
1071
Message text MOTOR HOLDING TORQUE %1 EXCEEDED
Cause -- The motor holding torque of the axis is not sufficient to keep the robot
motion permanently stopped at a point.
Monitor -- Not cyclic, during path planning
Effect -- Interpreter stop
Remedy -- Correct or reduce load data
-- Verify machine data
1072
1073
Message text BRAKE HOLDING TORQUE %1 EXCEEDED
Cause -- The brake holding torque on the axis is not sufficient to keep the robot
motion permanently stopped at a point.
Monitor -- Not cyclic, during path planning
Effect -- Interpreter stop
Remedy -- Correct or reduce load data
-- Verify machine data
Message text COMMANDED GEAR TORQUE %1
Cause -- Permissible gear torque exceeded, dependent on dynamic data
$DYN_DAT()
Monitor -- Cyclic.
Effect -- Path--maintaining braking
-- Output ”$ALARM_STOP” 0 signal
-- Active commands inhibited.
Remedy -- Verify load data and reduce if necessary, reduce programmed accel-
eration, reduce programmed velocity; acknowledge message
Fehlermeldungen 09.02.01 en
47 of 135

Error messages / troubleshooting
1074 Message text COMMANDED MOTOR TORQUE %1
Cause -- Permissible motor torque exceeded, dependent on dynamic data
$DYN_DAT()
Monitor -- Cyclic.
Effect -- Path--maintaining braking
-- Output ”$ALARM_STOP” 0 signal
-- Active commands inhibited.
Remedy -- Verify load data and reduce if necessary, reduce programmed accel-
eration, reduce programmed velocity; acknowledge message
1075
Message text MAXIMUM KINETIC ENERGY %1
Cause -- Permissible kinetic energy for crash exceeded, dependent on dynamic
data $DYN_DAT()
Monitor -- Cyclic.
Effect -- Path--maintaining braking
-- Output ”$ALARM_STOP” 0 signal
-- Active commands inhibited.
Remedy -- Verify load data and reduce if necessary, reduce programmed velocity;
acknowledge message
1078
Message text Ackn. servobus DSE--No. %1 participant No. %2 not available
1079
1100
Cause -- The device number in the servo bus was too low
Monitor --
Effect --
Remedy -- Acknowledge message
Message text Ackn. servobus DSE--No. %1 participant No. %2 not available
Cause -- The device number in the servo bus was higher than the number
defined in the machine data
Monitor --
Effect --
Remedy -- Acknowledge message
Message text STOPPED <axis number>
Cause -- Axis has beeen moved out of the standstill position according to the
machine data. Positioning window ($IN_POS_MA) times standstill
window minus factor ($IN_STILL_MA).
Monitor -- With robot “in position”.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Check manipulator.
-- Check output stage, check motor brake.
-- Acknowledge message.
48 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1101 Message text COMMAND ACCELERATION EXCEEDED <axis number>
Cause -- Permissible command acceleration exceeded; e.g. because robot
has been moved through singularity in cartesian mode.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Check program for alpha5 transitions (singularity).
-- Reduce path velocity.
-- Reduce path acceleration.
-- Acknowledge message.
1102
Message text COMMAND VELOCITY EXCEEDED <axis number>
Cause -- Permissible command velocity exceeded; e.g. because robot has
been moved through singularity in cartesian mode.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at ”$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Reduce path velocity.
-- Reduce path acceleration.
1103
Message text DATA EXCHANGE WITH TEPRO MISSING
1104
1105
Cause -- The SBC is not transmitting cyclic data on time (TEPRO =
Technological Process).
Monitor -- Cyclic by transfer task.
Effect -- Ramp--down braking; interruption of the SBC interface.
Remedy -- Re--initialize the SBC program or eliminate the error in the SBC program.
Message text ACKN. REGULATOR LIMIT EXCEEDED <axis number>
Cause -- The set value of the machine datum $COM_VAL_MI has been exceed-
ed. The position controller output has gone into limitation. The axis
does not follow the command value.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Check power module.
-- The brake control must be checked (LED on PM) if the error occurs on
more than one axis.
Message text POSITIONING MONITOR <axis number>
Cause -- Positioning window $IN_POS_MA has not been reached within the
set positioning time $TIME_POS.
Monitor -- When positioning.
Fehlermeldungen 09.02.01 en
49 of 135

Error messages / troubleshooting
Effect -- Maximum braking.
Remedy -- Enlarge positioning window.
1106
Message text TOOL WEIGHT NOT YET LEARNT
Cause -- During EMT mastering a check run was carried out for a tool whose
Monitor -- During EMT mastering.
Effect --
Remedy -- “Learn” tool weight.
1107
Message text WORKING ENVELOPE SURVEILLANCE CAN ONLY BE OVERRIDDEN
Cause -- An attempt was made to define the variable $WBOXDISABLE in
Monitor -- Cyclic.
Effect --
Remedy -- Change operating mode.
1108
Message text DYNAMIC BRAKING ERROR <axis number>
-- All active commands inhibited.
-- The axis has the status “in position” after the message has been
acknowledged.
-- Lengthen positioning time.
-- Check power module.
-- Acknowledge message.
-- Check manipulator.
weight has not yet been learnt.
IN T1 MODE
mode T2, AUT, EXT.
1109
1110
1111
Cause -- Actual value does not decrease although braking ramp is predefined
in terms of command values.
Monitor -- Cyclic.
Effect -- Short--circuit braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Message text COMMUNICATION WITH TEPRO FAULTY
Cause -- The SBC is not collecting cyclic data on time.
Monitor -- Cyclic by transfer task.
Effect -- Ramp--down braking; interruption of the SBC interface.
Remedy -- Re--initialize the SBC program.
Message text SENSOR LOCATION SEARCH FOR <axis>
Cause -- During the sensor location search, the sensor switching point was
detected.
Monitor -- Command execution.
Effect -- None.
Remedy -- None.
Message text DRIFT COMPLETED
50 of 135
Cause -- Drift is completed.
Fehlermeldungen 09.02.01 en

1112
1113
1114
1 Error messages / troubleshooting (continued)
Monitor --
Effect -- None.
Remedy -- None.
Message text PERFORM SENSOR LOCATION SEARCH <axis number> !
Cause -- Sensor location search was not carried out or $ROBCOR.DAT not
available.
Monitor -- During command execution.
Effect -- None.
Remedy -- Notify customer support.
Message text SENSOR LOCATION SEARCH INV ALID <axis number>
Cause -- Command “Sensor location search”:
a) axis was not mastered
b) last mastering type was sensor adjustment
Monitor -- When command “ADJUST SENSOR”.
Effect -- Command is not executed.
Remedy -- Master axis with EMT or dial gauge.
-- Leave menu via Recall.
-- Acknowledge message.
Message text INVALID MASTERING SEQUENCE
1115
1116
1117
Cause -- Mastering sequence defined in machine datum $SEQ_CAL has not
been observed.
Monitor -- In mastering.
Effect
Remedy -- Master axis with EMT probe or depth gauge.
-- Press ESC to quit menu.
-- Acknowledge message.
Message text SERVO PARAMETERS NOT TRANSFERRED!
Cause -- Servo parameters were not sent to DSE.
Monitor -- When defining the structure $SERVOPARA.
Effect --
Remedy -- Define $SERVOPARA correctly.
Message text SENSOR ADJUSTMENT INVALID <axis number>
Cause -- When selecting sensor adjustment for an axis with incremental or
absolute encoder.
Monitor -- During sensor adjustment.
Effect -- Command is not executed.
Remedy -- Set axis with DIAL or TURN.
Message text ACYCLIC DATA NOT RELEASED BY TEPRO
Fehlermeldungen 09.02.01 en
Cause -- Semaphore is inhibiting access to acyclic data.
Monitor -- In acyclic data transfer.
Effect -- Ramp--down braking; interruption of the SBC interface.
51 of 135

Error messages / troubleshooting
Remedy -- Eliminate the error in the SBC program.
1118
Message text CYCLIC DATA NOT RELEASED BY TEPRO
Cause -- Semaphore is inhibiting access to acyclic data.
Monitor -- Cyclic by transfer task.
Effect -- Ramp--down braking; interruption of the SBC interface.
Remedy -- Eliminate the error in the SBC program.
1119
Message text WRONG DATA TYPE FROM TEPRO
Cause -- SBC is cyclically sending incorrect data.
Monitor -- Cyclic by transfer task.
Effect -- Ramp--down braking; interruption of the SBC interface.
Remedy -- Eliminate the error in the SBC program.
1120
Message text INCOMPLETE INSTRUCTION
Cause -- The interface with the SBC is not initialized.
Monitor -- In KRL interface instruction.
Effect -- None.
Remedy -- Initialize the interface.
1121
Message text DATA EXCHANGE
1122
1123
1124
Cause -- The SBC stops data exchange because of an error.
Monitor -- Cyclic by transfer task.
Effect -- Ramp--down braking; interruption of the SBC interface.
Remedy -- Eliminate the error in the SBC program.
Message text ANALOG OUTPUT : DELAY REDUCTION
Cause -- The memory provided internally for the output function with a delay
is not adequate for the programmed delay.
Monitor
Effect -- The programmmed delay is automatically reduced.
Remedy -- Program a shorter delay .
Message text APPROXIMATION NOT POSSIBLE
Cause -- Approximation (approximate positioning) is not possible for computing
time reasons.
Monitor -- When the approximate positioning criterion is reached in the interpolator.
Effect -- None.
Remedy -- Program $ADVANCE > 0.
-- Switch off axis simulation.
Message text WRONG START POSITION
52 of 135
Cause -- 1. EMT mastering starts in the groove rather than before it.
-- 2. Cable for EMT mastering connected during sensor location run or
sensor mastering.
Monitor -- In command processing.
Fehlermeldungen 09.02.01 en

1125
1126
1127
1 Error messages / troubleshooting (continued)
Effect -- Command aborted.
Remedy -- 1. Move axis to correct starting position.
-- 2. Disconnect cable for EMT mastering.
Message text EMT SENSOR FAULTY
Cause -- Sensor supplies a zero signal because it is not properly tightened.
Monitor -- In command processing.
Effect -- Command aborted.
Remedy -- Check screwed connection of sensor.
-- Check robot--EMT connection.
-- Check A3/DSE module.
Message text STOP COMMAND IGNORED
Cause -- Axis does not stop within a certain time after a stop command.
Monitor -- After command processing.
Effect -- Command aborted.
Remedy --
Message text MASTERING PERFORMED <axis number>
1128
1129
1130
Cause -- Attempt to remaster an axis that has already been mastered.
Monitor -- After command processing.
Effect -- Ramp--down braking.
Remedy -- Press ESC to cancel.
-- Repeat measurement.
Message text STOP, APPROXIMATION NOT POSSIBLE
Cause -- Approximation not possible for reasons of planning or time. Robot
stops because $STOP_NOUES = TRUE is set and operating mode
=T1orT2.
Monitor --
Effect -- Ramp--down braking.
Remedy -- Reduce the velocity and/or acceleration in the instruction until approxi-
mation is possible.
Message text TOO MANY ASYPTP COMMANDS
Cause --
Monitor -- During program execution of ASYPTP commands.
Effect -- Program execution is stopped.
Remedy -- Fewer ASYPTP commands.
Message text ACKN. MOTOR TEMPERATURE <axis number>
Fehlermeldungen 09.02.01 en
Cause -- A motor temperature fault is signalled by the DSE board if the tem-
perature exceeds 155 degrees.
Monitor -- Cyclic in the interpolation cycle.
Effect
Remedy -- Acknowledge message.
53 of 135

Error messages / troubleshooting
1131 Message text ACKN. TORQUE EXCEEDED <axis>
Cause -- The motor torque is not located in the specified monitoring tunnel.
Monitor -- Cyclic in interpolation cycle.
Effect -- Motion is stopped.
Remedy -- Verify load data, increase size of tunnel.
1132
Message text REFPO DETERMINES AXIS <axis>
Cause -- Output after reference point for axes 1--6 has been calculated.
Monitor -- In program mode.
Effect -- None.
Remedy -- None.
1133
Message text GEAR TORQUE EXCEEDED AXIS <axis>
Cause -- The calculated gear torque is larger than the maximum permissible
gear torque.
Monitor -- Cyclic in interpolation cycle.
Effect -- Motion and program are stopped.
Remedy -- Reteach points.
1134
Message text ACKNOWLEDGE ERROR 6SC620 <axis number>
1135
1136
1137
Cause -- Malfunction/error in drive module or on processor module in Simodrive
6SC620 acknowledgement.
Monitor -- Cyclic.
Effect -- None.
Remedy -- Acknowledge message.
Message text TORQUE MODE VELOCITY LIMIT EXCEEDED <axis>
Cause -- Velocity limit exceeded in torque mode.
Monitor -- In torque mode.
Effect -- Short--circuit braking.
Remedy --
Message text ACKN. HEATSINK TEMPERATURE <axis number: AX>
Cause -- A heat sink temperature fault is signalled by the DSE board if the
temperature exceeds 80 degrees.
Monitor -- Cyclic in the interpolation cycle.
Effect
Remedy -- Acknowledge message.
-- Clean heat sink.
Message text EMT MASTERING DISTANCE EXCEEDED
54 of 135
Cause -- Groove not located, axis position not before groove prior to start.
Monitor
Effect -- Axis stops.
Remedy -- Move axis into mastering position; check EMT and groove.
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1138 Message text DYNAMIC BRAKING
Cause -- If during an activated Emergency Stop a fault occurs that permits only
maximum (dynamic) braking, this message is additionally displayed.
Monitor -- With the following messages: 100, 101, 102, 103, 104, 105, 110,
1 11, 114, 200, 202, 206, 1100, 1 108.
Effect -- Maximum braking.
Remedy -- Acknowledge message.
1139
Message text SYNACT NOT POSSIBLE <block number>
Cause -- The programming of synchronous actions with the variable $M_TIME
or $M_TIME_APO causes the message to be output when the
program is resumed after ramp--down braking, a path--maintaining
Emergency Stop ramp or maximum braking.
1140
Message text BLOCK CHANGE AT STOP
Cause -- Maximum braking or a path--maintaining stop and a simultaneous
block change which makes calculation of $POS_RET and the system
time impossible, with the result that the system time and $POS_RET
are determined by the beginning of a new block.
Monitor -- (e.g. cyclic; in command processing; in mastering).
Effect -- (e.g. ramp--down braking; program processing stopped; etc.).
Remedy -- (e.g. eliminate fault, correct operator action).
1141
Message text TTS NOT EXISTING
1142
1143
Cause -- The X--axis of the tool coordinate system and the path tangent are
parallel. (TTS = tool--based technological system).
Monitor -- Cyclic in the interpolation cycle when calculating the path correction.
Effect -- Maximum braking.
Remedy -- Reprogram the movement. Correct the point.
Message text DEVIATION AT TARGET POINT
Cause -- An exact stop point has been approached with a deviation.
Monitor -- Function generator becomes active during positioning.
Effect -- Ramp--down braking.
Remedy -- SCALE_IN must be corrected.
Message text REFERENCE OFFSET NOT VALID
Cause -- Mastering is not possible by transferring the reference offset as this
is not valid in $ROBCOR.DAT.
Monitor
Effect
Remedy
Fehlermeldungen 09.02.01 en
55 of 135

Error messages / troubleshooting
1144 Message text V--GROOVE HAS WRONG PROFILE
Cause -- The mastering groove for EGP adjustment does not have a V or U
profile.
Monitor -- In EMT mastering.
Effect -- Ramp--down braking; mastering procedure is aborted.
Remedy -- Replace EMT groove.
-- Clean EMT.
1145
Message text STOP DUE TO VALUE OUT OF RANGE OVERFLOW, <motion direc-
tion> <axis number>
Cause -- Overflow of the actual value of an endless axis.
Monitor -- Cyclic in the interpolation cycle.
Effect -- The motion is stopped by a path--maintaining Emergency Stop.
Remedy -- Remaster the axis concerned.
1146
Message text ACKN. MOTOR BLOCKED <axis number>
Cause -- I*t monitoring is signalled by a DSE.
Monitor -- Cyclic in the interpolation cycle.
Effect
Remedy -- Acknowledge message.
1147
Message text PERFORM INITIAL MASTERING <axis number>
1148
1149
1150
Cause -- An attempt was made to carry out a sensor location search for an axis
on which initial mastering has not yet been performed.
Monitor -- When selecting the function “dat_ueb” for the corresponding axis.
Effect -- The sensor location search is not carried out.
Remedy -- Perform initial mastering (e.g. dial gauge or EMT mastering) for the
corresponding axis.
Message text INVALID AXIS COUPLING RATIO <axis number>
Cause -- An attempt was made to carry out “Extended sensor adjustment” for
an axis when the coupling axes are not in the same position as was
reported in the data transfer.
Monitor -- When selecting the function “Extended sensor adjustment” for the
corresponding axis.
Effect -- The function “Extended sensor adjustment” is not carried out.
Remedy -- Move coupling axes to the same position as in the data transfer.
Message text ADJUSTMENT PROCEDURE NOT POSSIBLE <axis number>
Cause -- An attempt is made to carry out sensor adjustment or the axis is not
equipped with a KTL encoder and DSE.
Monitor -- When selecting the function “Extended sensor adjustment” for the
corresponding axis.
Effect -- The sensor adjustment is not carried out.
Remedy -- Cancel via Recall or master axis with EMT / dial gauge.
Message text DATA TRANSFER INVALID <axis number>
56 of 135
Fehlermeldungen 09.02.01 en

1151
1152
1153
1 Error messages / troubleshooting (continued)
Cause -- An attempt is made to carry out a sensor location search for an axis
which is not equipped with a KTL encoder and DSE.
Monitor -- When selecting the sensor location search function for the correspond-
ing axis.
Effect -- The sensor location search for the axis is not carried out.
Remedy -- Cancel via Recall.
Message text PERFORM DATA TRANSFER <axis number>
Cause -- An attempt was made to carry out sensor adjustment for an axis on
which no sensor location search has been performed.
Monitor -- When selecting the function “Extended sensor adjustment” for the
corresponding axis.
Effect -- The function “Sensor location search” is not carried out.
Remedy -- Carry out sensor location search for the corresponding axis.
Message text DATA TRANSFER PERFORMED <axis number>
Cause -- The sensor location search has been properly carried out.
Monitor -- When the function “Sensor location search” for the corresponding
axis is selected and the Enter key is pressed.
Effect -- None.
Remedy --
Message text DEVIATION IN THE START POINT
1154
1155
Cause -- A PTP motion is to be executed with a sensor offset value.
Monitor -- Interpolator.
Effect -- Ramp--down braking.
Remedy -- Sensor offset must be eliminated before a PTP block is executed.
Message text SBC ERROR: <Watchd.,Transf.,Corr>
Cause -- Error in communication between SBC and KRC32.
Monitor -- Cyclic in the TEP task.
Effect -- Maximum braking.
Remedy -- Check SBC (SW, HW).
Message text APPROXIMATION NOT POSSIBLE, TORQUE TOO HIGH
Cause -- For an approximate positioning block to be executed, the velocity must
already be reduced in the preceding block. However, this block is not
long enough to allow that.
Monitor -- Not cyclic, in motion planning.
Effect -- Interpreter.
Remedy -- Increase the length of the individual block by:
decreasing the approximate positioning radius at the end point of the
current motion block or, if the start point is approximated, by decreasing this approximate positioning radius.
Decreasing the velocity and acceleration of the individual block.
Fehlermeldungen 09.02.01 en
57 of 135

Error messages / troubleshooting
1156 Message text APPROX. NOT POSSIBLE INTERNAL ERROR IN PTP MOTION
PLAN
Cause -- Error in planning of the approximate positioning block.
Monitor -- Not cyclic, in motion planning.
Effect -- Approximate positioning is not executed; exact stop.
Remedy -- Modify profile data (rounding factor, velocity, acceleration). Please
consult KUKA.
1157
Message text OVERLOAD OF GEAR TORQUE <axis number> BY <percentage
value>
Cause -- The max. gear torque of the axis is statically exceeded by ....%.
Monitor -- Not cyclic, in motion planning.
Effect -- Interpreter stop.
Remedy -- Check load data (mass, center of gravity , moments of inertia).
1158
Message text STATIC MOTOR TORQUE OVERLOAD <axis number> BY <percentage
value>
Cause -- The max. motor torque of the axis is statically exceeded by ....%.
Monitor -- Not cyclic, in motion planning.
Effect -- Interpreter stop.
Remedy -- Check load data (mass, center of gravity , moments of inertia).
1159
Message text INTERNAL ERROR IN PTP MOTION PLANNING <number>
1160
1161
Cause -- Error in planning of the PTP motion profile.
Monitor -- Not cyclic, in motion planning.
Effect -- Interpreter stop.
Remedy -- Modify profile data (rounding factor, velocity, acceleration). Please
consult KUKA.
Message text TRACE: RECORDING TIME IS TOO LONG
Cause -- The recording time in TRACE.DEF is too long. There is not enough
memory available for recording.
Monitor -- When starting the TRACE.
Effect -- TRACE is not recorded.
Remedy -- Shorten TRACE recording time or reduce the number of channels.
Message text ACKN MONITORING OF THE ACTUAL VELOCITY **
Cause -- Fault in control loop:
-- motor cables of two axes interchanged;
-- error in the axis assignment;
-- power module defective;
-- resolver unmastered.
Monitor -- Cyclic.
Effect -- Robot remains motionless.
Remedy -- Rectify the corresponding error in the control loop.
58 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1162 Message text SEPARATE BREAK CONTROL OF AUXILIARY AXIS NOT ENABLED
Cause --
Monitor --
Effect --
Remedy --
1163
Message text AXIS COUPLING NOT POSSIBLE (DSE/PM--CHANNEL ASSIGNMENT)
Cause --
Monitor --
Effect --
Remedy --
1164
Message text COUPLE PROCESS ACTIVE
Cause --
Monitor --
Effect --
Remedy --
1165
Message text ERROR ON AXIS COUPLING
1166
1167
1168
1169
Cause --
Monitor --
Effect --
Remedy --
Message text ERROR ON AXIS DECOUPLING
Cause --
Monitor --
Effect --
Remedy --
Message text <axis> DECOUPLED AUXILIARY AXIS
Cause --
Monitor --
Effect --
Remedy --
Message text <axis> DECOUPLED AUXILIARY AXIS, MOVE NOT PERMITTED
Cause --
Monitor --
Effect --
Remedy --
Message text <axis> DECOUPLED AUXILIARY AXIS, MASTERING NOT PERMITTED
Fehlermeldungen 09.02.01 en
59 of 135

Error messages / troubleshooting
Cause --
Monitor --
Effect --
Remedy --
1170
Message text ASYPTP COMMAND INCLUDES DECOUPLED AUXILIARY AXIS
Cause --
Monitor --
Effect --
Remedy --
1171
Message text VALUE O F $ASYNC_AXIS CONTAINS DECOUPLED AUXILIARY AXIS
Cause --
Monitor --
Effect --
Remedy --
1172
Message text VALUE CANNOT BE CHANGED, PROGRAM IS SELECTED
1173
1174
1175
Cause --
Monitor --
Effect --
Remedy --
Message text Ackn. deviation warning master--slave %1
Cause -- Positional deviation between master and slave exceeds lower limit
value
Monitor -- Cyclic.
Effect -- None
Remedy -- Acknowledge message
Message text Ackn. deviation alarm master--slave %1
Cause -- Positional deviation between master and slave exceeds middle limit value
Monitor -- Cyclic.
Effect -- Maximum braking
Remedy -- Acknowledge message; the drives synchronize themselves automati-
cally
Message text Ackn. deviation critical master--slave %1
60 of 135
Cause -- Positional deviation between master and slave exceeds upper limit value
Monitor -- Cyclic.
Effect -- Maximum braking
-- Loss of mastering of the corresponding axis
Remedy -- Dial mastering of the axis
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1176 Message text Ackn. speed deviation master--slave %1
Cause -- Speed deviation between master and slave exceeds limit value
Monitor -- Cyclic.
Effect -- Maximum braking
Remedy -- Acknowledge message
1200
Message text ACKN. EMERGENCY STOP
Cause -- Emergency Stop was active.
Monitor -- Cyclic.
Effect -- All active commands inhibited.
Remedy -- Acknowledge message.
1201
Message text BUFFER BATTERY VOLTAGE LOW **
Cause -- The battery voltage is too low for backup purposes. Do not switch
off until battery has recharged.
Monitor -- Cyclic.
Effect -- None.
Remedy -- Acknowledge message.
1202
Message text ACKN. RDW <axis number> BOOT UP FAILURE
1203
1204
Cause -- Secondary message following the status (operational) message
“RDW BOOT UP FAILURE”.
Monitor
Effect
Remedy -- Acknowledge message.
Message text ACKN. DSE <DSE number> BOOT UP FAILURE
Cause -- Secondary message following the status (operational) message
“DSE BOOT UP FAILURE”.
Monitor -- Runup.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Replace encoder.
-- Acknowledge message.
Message text ACKN. ENCODER CABLE FAILURE <axis number>
Cause -- Secondary message following the status (operational) message
“ENCODER CABLE FAILURE”.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Acknowledge message.
Fehlermeldungen 09.02.01 en
61 of 135

Error messages / troubleshooting
1205 Message text ACKN. WATCHDOG INTERPOLA TION CYCLE <DSE number>
Cause -- Secondary message following the status (operational) message
“WATCHDOG INTERPOLATION CYCLE”.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Replace DSE or MFC.
-- Acknowledge message.
1206
Message text ACKN. SYNCHRONIZATION ERROR WITH DSE <axis number>
Cause -- DSE has not received feed command value for 1 interpolation cycle
although servo--control is active.
Monitor -- Cyclic.
Effect
Remedy -- Acknowledge message.
1207
Message text ACKN. TRANSMISSION ERROR DSE -- RDW <DSE number>
1208
1209
1210
Cause -- Open--circuit between RDW and DSE.
-- Transmission malfunction
Monitor -- Cyclic.
Effect -- Maximum braking.
-- Low signal at “$ALARM_STOP” output.
-- All active commands inhibited.
Remedy -- Check shielding of encoder cable.
-- Check serial interface DSE--RDW.
-- Acknowledge message.
Message text ACKN. MASTERING PERFORMED <axis number>
Cause -- Follow--up message for status message “PERFORM MASTERING”
Monitor -- Cyclic.
Effect -- All active commands inhibited.
Remedy -- Perform mastering
-- Acknowledge message.
Message text ACKN. GENERAL SERVO ENABLE
Cause -- There was a low signal at $SERVO_RDY input.
Monitor -- Cyclic.
Effect -- All active commands inhibited.
Remedy -- Acknowledge message.
Message text ACKN. GENERAL MOTION ENABLE
62 of 135
Cause -- There was a low signal at $MOVE_ENABLE input.
Monitor -- Cyclic.
Effect -- All active commands inhibited.
Fehlermeldungen 09.02.01 en

1211
1212
1213
1 Error messages / troubleshooting (continued)
Remedy -- Acknowledge message.
Message text STOP DUE TO SOFTWARE LIMIT SWITCH <motion direction> <axis
number>
Cause -- Overrun of a sofware limit switch (command value) has been detected.
Monitor -- Cyclic, not with axis--specific manual traversing.
Effect -- Maximum braking.
Remedy -- If necessary acknowledge message, move robot in the opposite
direction.
Message text ACKN. OPERATOR SAFETY
Cause -- Operator safety has been tripped in the AUTOMA TIC or EXTERNAL
mode.
Monitor -- Cyclic.
Effect -- All active commands inhibited.
Remedy -- Acknowledge message. (The robot can then be started in the AUTO-
MATIC or EXTERNAL mode again.)
Message text ACKN. PASSIVE STOP <RCP or teach pendant>
1214
1215
1216
Cause -- The originator of the passive stop has acknowledged the message.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Acknowledge message. (Acknowledgement possible only on active
unit.)
Message text POWER FAILURE
Cause -- The cabinet voltage has been switched off, the mains voltage is
interrupted.
Monitor --
Effect -- Path--maintaining Emergency Stop, buffering of the mastering data,
saving all data on HDD.
Remedy -- Check the mains voltage.
Message text <command name> <action>
Cause -- OBJH command finished.
Monitor -- Command processing.
Effect -- None.
Remedy -- None.
Message text ACKN. DRIVES ERROR <axis number> NO.: **
Fehlermeldungen 09.02.01 en
Cause --
Monitor --
Effect --
Remedy --
63 of 135

Error messages / troubleshooting
1217 Message text ACKN. SBX--HPU CONNECTED INPUT
Cause -- Safety box has detected a fault in signal input “teach pendant
plugged in”.
Monitor -- Cyclic.
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Acknowledge message.
1218
Message text ACKN. SBX--HPU DEPOSITED INPUT
Cause -- Safety box has detected a fault in the input unit of the permanently
installed input.
Monitor -- Cyclic.
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Acknowledge message.
1219
Message text ACKN. SBX--HPU CONNECTED
Cause -- The software has detected that in the dual--channel evaluation of the
signal “Teach pendant plugged in” the two channels (MPC interface
and safety box) have different statuses.
1220
1221
1222
Monitor -- Cyclic.
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Acknowledge message.
Message text ACKN. EMERGENCY STOP DUE TO DIAL MASTERING
Cause -- Softkeys for dial mastering pressed.
Monitor -- When $TURN instruction is executed.
Effect -- Dynamic braking.
-- All active commands inhibited.
-- Low signal at “$ALARM_STOP 0” output; ramp--down braking.
Remedy -- Press the Recall key twice.
Message text ACKN. POWER MODULE AXIS <axis number> NOT /OR INCOR-
RECTLY CONNECTED
Cause -- The axis is incorrectly plugged into the power module or not connected
at all.
Monitor -- At runup.
Effect -- Active commands inhibited.
Remedy -- Connect axis correctly.
-- Acknowledge message.
Message text ACKN. BRAKE ERROR <axis number>
1223
64 of 135
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. UNDERVOLTAGE <power module>
Fehlermeldungen 09.02.01 en

1224
1225
1226
1 Error messages / troubleshooting (continued)
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. OVERVOLTAGE <power module>
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. OVERCURRENT <axis number>
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. E<2 or 7 keyswitch> SWITCH CLOSED
1227
1228
1229
1230
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. E<2 or 7 keyswitch> SWITCH OPEN
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. FEEDBACK SWITCH ON TOO LONG **
Cause -- The energy of the axis to be braked was too high.
Monitor
Effect -- Ramp--down braking.
Remedy -- Power module ballast (feedback) switch defective.
-- Brake ramp in the program too steep.
Message text ACKN. WATCHDOG POWER MODULE <number>
Cause -- The watchdog on the power module has dropped out. The watchdog
is triggered by the DSE every 0.125ms.
Monitor -- Cyclic.
Effect -- Maximum braking.
Remedy -- Troubleshooting in the DSE and power module area.
Message text ACKN. OVERTEMPERATURE, BALLAST RESISTOR <number> OR
FAN
Cause -- The ballast (feedback) resistor has overheated. In the motion program
the robot is cyclically accelerated and decelerated without a break.
Fehlermeldungen 09.02.01 en
65 of 135

Error messages / troubleshooting
Monitor -- Cyclic.
Effect -- Ramp--down braking.
Remedy -- Insert wait times into the program, reduce the acceleration.
1231
Message text ACKN. CABINET OVER TEMPERATURE **
Cause -- The cabinet temperature has risen above the permissible limit value.
Monitor -- Cyclic.
Effect -- Ramp--down braking.
Remedy -- Reduce the external temperature.
1232
Message text ACKN. MOTOR CABLE **
Cause --
Monitor --
Effect --
Remedy --
1233
Message text ACKN. FAILURE OF HEAT SINK TEMPERATURE SENSOR <axis
Cause --
Monitor --
Effect --
Remedy --
1234
Message text ACKN. CABINET INTERIOR TEMPERATURE SENSOR FAILURE
Cause --
Monitor --
Effect --
Remedy --
1235
Message text ACKN. DRIVES PARAMETER DAT A <axis number> INVALID
-- Change the site of installation.
-- Check the fans.
-- Clean the heat exchanger.
number>
<axis number>
1236
66 of 135
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. FAILURE OF MOTOR TEMPERATURE SENSOR <axis number>
Cause --
Monitor --
Effect --
Remedy --
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1237 Message text ACKN. WRONG DRIVES PARAMETER <axis number> **
Cause --
Monitor --
Effect --
Remedy --
1238
Message text ACKN. ERROR SYNC. INPUT DRIVE <axis>
Cause --
Monitor --
Effect --
Remedy --
1239
Message text ACKN. SYNCHRONISA TION ERROR DRIVE <axis>
Cause --
Monitor --
Effect --
Remedy --
1240
Message text ACKN. <axis> WITHOUT POWER
1241
1242
1243
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN. i2t MONITORING, CURRENT LIMIT OF THE MOTOR CABLE
<string> AFTER <string>s EXCEEDED 100%
Cause -- Axis overloaded. The value for the maximum permissible limit current
is specified in the machine data by “$CURR_MON[]”.
Monitor -- Cyclic.
Effect -- Ramp--down braking, active commands inhibited.
Remedy -- Reduce load.
Message text ACKN. i2t MONITORING, CURRENT LIMIT OF THE MOTOR CABLE
** AFTER ** EXCEEDED 95%
Cause --
Monitor --
Effect --
Remedy --
Message text LINE ** IN ** TOO LONG. LINE WAS CUT OFF.
Cause -- An excessively long program line was cut off in order to avoid deletion
of the rest of the program.
Monitor -- Triggered during line compilation.
Effect -- The line is cut off. The program is retained.
Remedy -- Modify the incorrect line in expert mode.
Fehlermeldungen 09.02.01 en
67 of 135

Error messages / troubleshooting
1244 Message text SUCCESS LOADING ** SERVO PARAMETERS **
Cause -- Completed loading of servo parameters.
Monitor --
Effect --
Remedy --
1245
Message text ACKN SERVO BUS DISTURBANCE DSE **
Cause --
Monitor --
Effect --
Remedy --
1246
Message text ACKN SERVO BUS DISTURBANCE DSE **, NO BUFFERING AND
AUTOMATIC DATA STORAGE POSSIBLE
Cause --
Monitor --
Effect --
Remedy --
1247
Message text ACKN SERVO BUS DISTURBANCE **
1248
1254
1255
Cause --
Monitor --
Effect --
Remedy --
Message text ACKN SERVO BUS DISTURBANCE **
Cause --
Monitor --
Effect --
Remedy --
Message text Ackn. PC fan error
Cause -- PC fan speed was below the alarm threshold and is now back in the
nominal range
Monitor -- Cyclic.
Effect -- None
Remedy -- Acknowledge message
Message text Ackn. Ixt servo drive %1 exceed value of %2 %%
Cause -- If the defined Ixt monitoring warning value of a drive servo is exceeded,
the robot must be brought to a standstill; otherwise, the drive servo is
deactivated when the maximum value of 100% is exceeded
Monitor --
Effect --
Remedy -- Acknowledge message
68 of 135
Fehlermeldungen 09.02.01 en

1300 Message text PARITY ERROR
Cause -- Parity incorrectly set.
Monitor -- On transmission.
Effect -- None.
Remedy -- Check parity setting on controller and operator control unit (PC).
1301
Message text PROCEDURE ERROR
Cause -- Transmission error in LSV2 procedure which was not detected by
the parity monitor.
Monitor -- On transmission.
Effect -- None.
Remedy -- Repeat transmission.
-- Increase procedure repetition counter.
-- Check cable.
1302
Message text CHANNEL NOT AVAILABLE
Cause -- Procedure monitoring time elapsed.
Monitor -- On transmission.
Effect -- None.
Remedy -- Increase procedure monitoring time.
1303
Message text SCC OVERFLOW
1 Error messages / troubleshooting (continued)
1304
1305
Cause -- Baud rate set too high (SCC = Serial Communication Controller).
Monitor -- On transmission.
Effect -- None.
Remedy -- Reduce baud rate.
Message text REFERENCING AXIS <axis number> INADMISSIBLE
Cause -- Attempt to reference a non--incremental axis.
Monitor -- During single--axis referencing.
Effect -- The specified axis is not referenced.
Remedy -- Master the axis.
Message text RCP SWITCH POSITION INADMISSIBLE
Cause -- Too many transfer processes started (a maximum of 4 transfer pro-
cesses can be started.)
Monitor -- During transfer.
Effect -- None.
Remedy -- Wait until one process has been completed.
-- Stop one process.
Fehlermeldungen 09.02.01 en
69 of 135

Error messages / troubleshooting
1306 Message text DEVICE NOT READY
Cause -- Cable defective or not connected.
-- Device switched off (e.g. printer).
Monitor -- During transfer.
Effect -- None.
Remedy -- Check cable and device.
1307
Message text FORMAT ERROR
Cause -- Hardware error of the interface on I--CPU.
Monitor -- During transfer.
Effect -- None.
Remedy -- If the error occurs repeatedly, change the board (interface CPU).
1308
Message text CHANNEL NOT ALLOWED IN COMMAND
Cause -- Command does not support any channels.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- None.
1309
Message text OBJECT IS NOT AVAILABLE
1310
1311
Cause -- Objects that are not available in the KRC cannot be addressed.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Wrong object selected.
Message text TOO MANY OBJECTS ARE SELECTED
Cause -- Too many objects selected.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Select only the permitted number of objects (approx. 150).
Message text <object name> NOT CORRECTLY COPIED
Cause -- Errors have been detected in the line analysis.
Monitor -- In command processing.
Effect -- Error token in the object.
Remedy -- Correct object.
70 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1312 Message text <object name> ASSIGNED
Cause -- Object cannot be processed in this state (object already assigned).
-- Module package cannot be linked since at least one of the objects
of the module package is assigned.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- None.
1313
Message text INVALID STATEMENT
Cause -- The source and target specifications do not conform to the convention
for “COPY”.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Specify the source and target correctly.
1314
Message text DATA NOT ALLOWED
Cause -- Extension not compatible.
-- copy *.* (copy *.* is possible into a directory only).
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Specify extension correctly.
1315
Message text <module name> IS NOT A MODULE
1316
1317
Cause -- The name represents a directory.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Take a different module.
Message text RUNTIME VALUES FOR TRIGGER IN SUBROUTINES INADMISSIBLE
Cause -- In a subroutine a trigger is defined which is possibly not activated until
the main program. If runtime values are used in trigger assignment,
they are not valid at the time of activation.
Monitor -- During program execution.
Effect -- Ramp--down braking, all active commands inhibited.
Remedy -- Alter program, use only global variables, acknowledge message.
Message text DELETING OF SYSTEM FILES IS INADMISSIBLE
Cause --
Monitor --
Effect --
Remedy --
Fehlermeldungen 09.02.01 en
71 of 135

Error messages / troubleshooting
1318 Message text FILE DESCRIPTION CANNOT BE PROCESSED
Cause -- Module information that cannot be evaluated has been received in a
COPY operation from an external source.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Check interface software.
1319
Message text <object> CANNOT BE CORRECTED
Cause -- An invalid extension has been specified (only “DAT” is allowed).
-- An attempt has been made to transmit or edit a protected file.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Select data list.
-- Set INIT switch on I--CPU to position 3.
1320
Message text EXTENSION NOT ALLOWED
Cause -- An extension has been specified in a command where it is not allowed
(e.g. analyse otto.src).
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Correct command.
1321
Message text <path> IS NOT A DIRECTORY
1322
1323
Cause -- Command contains an invalid subdirectory (e.g. dir /R1/otto/abc,
/abc not allowed).
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Correct command.
Message text <module> NOT LINKED
Cause -- “UNLINK” has been applied to an object that is not a program.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- None.
Message text <path> INVALID DATA MODULE NAME OR EXTENSION
Cause -- An invalid path, module name or extension has been specified.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Correct command.
72 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1324 Message text <object> NOT AVAILABLE
Cause -- An object that is not available has been addressed.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Create the object.
1325
Message text <object> CANNOT BE PROCESSED
Cause -- An object that has already been assigned has been addressed.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Free the assignment (/R1/CONFIG>DAT).
1326
Message text <object> : <number of errors> COMPILATION ERROR
Cause -- The indicated number of errors have been detected in the indicated
object during total compilation.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Correct the errors.
1327
Message text <module> LINKING ERROR
1328
1329
1330
Cause -- One or more errors have been detected in the indicated module
during linking.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Using t he error list, correct the error(s).
Message text FAULTY FILE
Cause -- Module is not correct for TTS calculation.
Monitor -- In command processing.
Effect -- None.
Remedy --
Message text ACCESS TO IMPORTED VARIABLE IS NOT POSSIBLE
Cause -- The search path has not been extended to the external data list.
Monitor -- In command processing.
Effect -- Command has not been executed.
Remedy -- Extend the search path.
Message text SOURCE AND TARGET OBJECT ARE IDENTICAL
Cause -- The source and target specifications define the same object.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Change target object.
Fehlermeldungen 09.02.01 en
73 of 135

Error messages / troubleshooting
1331 Message text <module> NOT CORRECT
Cause -- An incorrect module has been selected in a linking operation.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Correct the error in the indicated module (perform ANALYSE).
1332
Message text Line selection not possible: too many Interrupts
Cause -- An attempt has been made to carry out a block selection in a local
subprogram that is not in the caller stack. At this point, the maximum
permissible number of interrupts that can be declared or activated was
exceeded.
Monitor --
Effect -- Block selection to the subprogram is not possible.
Remedy -- Reduce the number of KRL interrupts accordingly.
1333
Message text <object> CANNOT BE DELETED
Cause -- Object cannot be deleted because it is write--protected.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- None.
1334
Message text MORE THAN 16 INTERRUPTS DEFINED
1335
1336
1337
Cause -- Program instruction INTERRUPT ON can switch on a maximum of
16 defined interrupts but more than 16 are defined.
Monitor -- Program processing.
Effect -- Ramp--down braking.
Remedy -- Reduce number.
Message text <module> SELECTED
Cause -- Program cannot be unlinked; module is selected with “RUN”.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Terminate program run (CANCEL).
Message text COR ARE FOR DATA LISTS ONLY
Cause -- COR is allowed for data lists only.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Select a data list.
Message text TOO COMPLEX
Cause -- Copying from one channel to another (not allowed in SWP1).
Monitor -- In command processing.
Effect -- Command is not executed.
74 of 135
Fehlermeldungen 09.02.01 en

1338
1339
1340
1341
1 Error messages / troubleshooting (continued)
Remedy -- None.
Message text BLOCK CANNOT BE CORRECTED
Cause -- TTS or BASE calculation cannot be performed. (TTS = tool--based
technological system).
Monitor -- In command processing.
Effect -- None.
Remedy
Message text UNKNOWN EXTERNAL MESSAGE (<external message number>)
Cause -- It has not been possible to convert an external message (e.g. from
the interface CPU, PSX) into an RCX message.
Monitor -- In command processing.
Effect -- None.
Remedy -- Acknowledge message.
Message text NOT ALLOWED REFERENCE SYSTEM
Cause -- The reference system for manual motion is not possible for the kine-
matic system.
Monitor -- A t s t a r t .
-- With traversing keys.
Effect --
Remedy -- Select a different reference system (TRANSSYS).
Message text REFERENCE SYSTEM DEFINITION NOT COMPLETE
1342
1343
1344
Cause -- At least one frame required for calculating the reference matrix has
not been assigned.
Monitor -- In cartesian motion commands (e.g. MOVE, PTP, LIN).
Effect
Remedy
Message text WORK ENVELOPE EXCEEDED
Cause -- Working zone limit has been exceeded.
Monitor -- Cyclic.
Effect -- Maximum braking.
-- All active commands inhibited.
Remedy -- Acknowledge message.
Message text SYNC()--CALL NOT PROGRAMMED
Cause -- In IRSTOPMESS, the user has failed to respond to $Power--Fail by
calling the SYNC() function.
Monitor -- During power failure.
Effect -- None.
Remedy -- Correct the application program.
Message text Robot system is not available
Fehlermeldungen 09.02.01 en
75 of 135

Error messages / troubleshooting
Cause -- No second robot system activated in the machine data (command:
Monitor -- During command execution.
Effect -- In command execution
Remedy -- Alter machine data.
1345
Message text CHANGE REFERENCE DIRECTION <axis number>
Cause -- During single--axis referencing the wrong direction key was pressed,
Monitor -- During referencing.
Effect -- Axis cannot be referenced in this direction.
Remedy -- Carry out referencing in the other direction.
1346
Message text INADMISSIBLE MASTERING SEQUENCE
$HOME = “/R2”)
-- During program execution.
a) The command is not executed.
-- In program execution
-- Ramp--down braking
-- All active commands inhibited.
-- Acknowledge message.
depending on machine datum $DIR_CAL.
-- All axes are mastered.
1347
1348
1349
Cause -- The mastering sequence was not adhered to (depending on machine
datum $SEQ_CAL).
Monitor -- During mastering.
Effect -- Axis cannot be mastered.
Remedy -- Observe mastering sequence.
Message text ROBOT NOT MASTERED
Cause -- Selection of a program without the robot being mastered.
-- Start of a program without the robot being mastered.
Monitor -- In command processing.
-- In program processing.
Effect --
Remedy -- Master the robot.
-- Acknowledge message.
Message text <axis number> AXIS SYNCHRONIZED
Cause -- In single--axis referencing, an attempt has been made to reference
an axis which has already been referenced.
Monitor -- During referencing.
Effect -- The axis is not referenced.
Remedy -- Select the next axis which has not been referenced.
Message text ROBOT MASTERED
76 of 135
Cause -- All axes mastered.
Fehlermeldungen 09.02.01 en

1350
1351
1352
1 Error messages / troubleshooting (continued)
Monitor -- In mastering.
Effect -- Robot is mastered.
Remedy --
Message text BCO REACHED
Cause -- After the first position in the user program has been reached.
-- After repositioning ($POS_RET, $AXIS_RET, $POS_FOR,
$AXIS_FOR, etc.).
Monitor -- W i t h B C O t r a v e l .
Effect -- Signalling that BCO has been achieved.
Remedy -- None.
Message text DRIFT COMPENSATION ABORTED
Cause -- The drift compensation was interrupted by a stop (Stop key, message
triggering a stop).
Monitor -- Cyclic for the duration of drift compensation.
Effect -- Drift compensation failed (dynamic braking).
Remedy -- Repeat drift compensation.
Message text AXIS <axis number> INHIBITED
1353
1355
1356
Cause -- An attempt has been made to move an axis in the inhibited direction
(inhibited by software limit switch).
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Move axis off limit switch in other direction.
Message text KEY COMBINATION <KCP> INADMISSIBLE
Cause -- Simultaneous pressing of more than one key on the KCP.
Monitor -- Cyclic.
Effect -- KCP operation momentarily interrupted.
Remedy -- Release all keys on the KCP.
Message text DEADMAN SWITCH REQUIRED
Cause -- The safety (deadman) switch has not been pressed while actuating
the start or traversing key in mode T1 or T2.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Press safety switch.
Message text START KEY REQUIRED
Fehlermeldungen 09.02.01 en
Cause -- The “START” command has been entered textually.
-- Execution of the command requires the start key to be pressed.
Monitor -- In command processing.
Effect -- None.
77 of 135

Error messages / troubleshooting
Remedy -- P r e s s s t a r t k e y .
1357
Message text RESET REQUIRED
Cause -- RUN has been applied to a process in the end state.
Monitor -- In command processing.
Effect -- In command processing
Remedy -- RESET program.
1358
Message text SELECTION REQUIRED
Cause -- Start key pressed without a program being selected.
Monitor -- When start key is pressed.
Effect -- Command is not executed.
Remedy -- Select program.
1359
Message text TTS CANNOT BE DETERMINED
-- External computer: check job identification.
-- In program processing.
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
-- In program processing the message has to be acknowledged.
-- “RUN” without path specification and no program is selected.
-- At RUN command.
1360
1361
1362
Cause -- Termination of search for the path direction point. (TTS = tool--based
technological system).
Monitor -- In command processing.
Effect -- None.
Remedy --
Message text SELECTION NOT ALLOWED
Cause -- Selected block does not exist in the program.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Select correct block number.
Message text STOP DUE TO NODE SWITCHOVER
Cause -- The node setting has been changed during actuation of a traversing
key or execution.
Monitor -- In command processing.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Acknowledge message.
Message text STOP DUE TO OPERATING MODE CHANGE
78 of 135
Cause -- Active processes are stopped if the mode is changed.
Monitor -- Cyclic.
Fehlermeldungen 09.02.01 en

1363
1364
1365
1 Error messages / troubleshooting (continued)
Effect -- Path--maintaining Emergency Stop.
Remedy -- Acknowledge message.
Message text OPERATOR CONTROL UNIT DISABLED
Cause -- Command cannot be executed because the KCP settings do not
fulfil the conditions.
a) For RCP and stationary KCP the mode AUT is required.
b) For non--stationary KCP the mode T1 or T2 is required.
c) For host computers the mode EXT is required.
Monitor -- In command processing.
Effect -- Command cannot be executed.
Remedy -- Fulfil the “active” conditions.
Message text OUT PARAMETERS INADMISSIBLE
Cause -- Trigger with subprogram call where reference parameters are trans-
ferred.
Monitor --
Effect --
Remedy -- Correct program, acknowledge.
Message text PATH TRIGGER WITH PTP MOTION INADMISSIBLE
1366
1367
1368
Cause -- Path triggers are not permissible with PTP motions.
Monitor --
Effect -- Program execution is stopped.
Remedy -- Correct program, acknowledge, reboot.
Message text CARTESIAN TARGET NOT POSSIBLE
Cause -- When using a 5--axis robot ($DEF_A4FIX=TRUE) and palletizing
mode is deactivated ($PAL_MODE=FALSE), only PTP motions with
an axis--specific target may be carried out.
Monitor -- In the line interpreter.
Effect -- Path--maintaining braking.
Remedy --
Message text ACTIVE STATUS REQUIRED
Cause -- The command entered may only be issued from an active operator
control unit (modes T1, T2, AUT).
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Switch operator control unit to active status.
Message text <operator control device> IS ACTIVE
Fehlermeldungen 09.02.01 en
Cause -- Indicated operator control unit is active.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Switch indicated operator control unit to passive status.
79 of 135

Error messages / troubleshooting
1369 Message text ACTIVE ALLOWED IN <mode> ONLY
Cause -- For RCP and stationary KCP the mode AUT is required.
-- For non--stationary KCP the mode T1 or T2 is required.
-- For host computers the mode EXT is required.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Set the correct mode.
1370
Message text PASSIVE STOP
Cause -- Stop from a passive operator control unit (the message is displayed
only if an active process has been stopped).
Monitor -- Cyclic.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Acknowledge message (acknowledgement possible only on the
originating unit, even in passive status).
1371
Message text STOP DUE TO UNIT PASSIVE
1372
1373
Cause -- The operator control unit has been deactivated during actuation of
the start key or a traversing key in mode T1 or T2, or during the
BCO run.
Monitor -- In command processing.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Switch operator control unit to active status.
-- Acknowledge message.
Message text PROCESS ACTIVE
Cause -- An attempt has been made to start an active command during an
active process.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Wait until end of processing.
-- Stop active processing.
-- In program processing the message has to be acknowledged.
Message text PROCESS BUSY
80 of 135
Cause -- Program already selected.
Monitor -- In command processing.
-- In program processing.
Fehlermeldungen 09.02.01 en

1374
1375
1376
1 Error messages / troubleshooting (continued)
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Deselect program already selected.
-- In program processing the message has to be acknowledged.
Message text PROCESS DISABLED
Cause -- All selected processes have the program mode “DISABLED” or a
non--disabled process is finished.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Alter program mode.
Message text COMMAND NOT ALLOWED
Cause -- Impermissible or unknown command.
Monitor -- In command processing.
Effect -- None.
Remedy -- Enter command correctly.
Message text ACTIVE COMMANDS INHIBITED
1377
1378
1379
Cause -- A message which causes the active commands to be inhibited has
been set.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Acknowledge active messages in the message window.
Message text COMMAND EXECUTION NOT POSSIBLE
Cause -- A preceding command is still being processed.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Cancel command.
-- Wait until end of preceding command.
Message text COMMAND NOT BEING PROCESSED
Cause -- The command that is to be cancelled has already been processed.
Monitor -- In command processing.
Effect -- None.
Remedy -- None.
Message text COMMAND ABORTED
Fehlermeldungen 09.02.01 en
Cause -- The command has been cancelled.
-- During editing abort has been selected by the editor kernel before
the command concerned (ERASE,GET,FIND) is called.
81 of 135

Error messages / troubleshooting
Monitor -- In command processing.
Effect --
Remedy --
1380
Message text BACKGROUND PROCESS BUSY WITH <operator control device>
Cause -- The background is exclusively assigned to another operator.
Monitor -- In command processing.
Effect -- Background cannot be exclusively assigned.
Remedy -- Cancel the exclusive assignment of the indicated device.
1381
Message text BACKGROUND OCCUPIED
Cause -- A command is already being processed in the background.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Cancel command.
1382
Message text ABORTED
-- In editing.
-- Provide complete specifications in $OPTION.DAT.
-- Wait until command has been executed.
1383
1384
1385
Cause -- “BREAK” has been repeated.
Monitor -- In command processing.
Effect -- None.
Remedy -- None.
Message text ** IS NOT A MEMORY DUMP
Cause -- When writing a data block (a file received from the controller or a
temporary file created by the server), it has been discovered that there
is not enough space available on the storage medium (hard disk).
Monitor
Effect -- The currently edited file is deleted.
Remedy -- Create space on the storage medium
(delete files that are no longer required).
Message text PARAMETER NOT PROCESSED
Cause -- A RUN command with a parameter has been executed for a program
that is already selected.
Monitor -- In command processing.
Effect -- The parameter is not evaluated.
Remedy -- Cancel and reselect the program.
Message text PROTOCOL ERROR
82 of 135
Cause -- Error in the protocol software of the operator control unit or output
device.
Monitor -- In command processing.
Effect -- The command is aborted.
Fehlermeldungen 09.02.01 en

1386
1387
1388
1389
1 Error messages / troubleshooting (continued)
Remedy -- Check protocol software.
Message text INTERRUPT--UP: MAX. 10 ARGUMENTS ADMISSIBLE
Cause -- More than 10 arguments have been specified.
Monitor --
Effect --
Remedy -- Reduce the number of arguments to the maximum permissible number.
Message text VARIABLE TOO LARGE
Cause -- The variable specified in SHOW VAR or SET INFO is too complex
or too large (e.g. field is larger than the display).
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Subdivide the request into several sections.
Message text <string> VARIABLE WRITE PROTECTED IN MODULE <string> LINE
<string>
Cause -- In a program module an attempt was made to change a write--
protected variable.
Monitor -- In program mode.
Effect --
Remedy --
Message text OPTION <option name> MISSING
1390
1391
1392
Cause -- The option has not been entered.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Enter the option.
Message text CIRC ANGLE NOT ACCEPTED
Cause
Monitor
Effect -- None.
Remedy
Message text Access to component not allowed
Cause -- Illegal access to a component of the program/motion trace
(e.g. SHOW VAR $PRO_TRACE[5].NAME[2]).
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy
Message text WRITE PROTECTION DUE TO PROCESS STATUS
Fehlermeldungen 09.02.01 en
Cause -- Write access to a “$” variable with an illegal process status
(active, not active, RC Ready).
Monitor -- In command processing.
83 of 135

Error messages / troubleshooting
Effect -- Command is not executed.
Remedy -- Set a permissible process status.
1393
Message text WRITE PROTECTION DUE TO OPERATOR CONTROL UNIT
Cause -- An attempt has been made to write a “$” variable with the operator
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Switch operator control unit to “active” status.
1394
Message text READ PROTECTION DUE TO PROCESS STATUS
Cause -- Reading of a “$” variable with an inadmissible process status
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Set a permissible process status.
1395
Message text READ PROTECTION DUE TO OPERATOR CONTROL UNIT STATUS
STATUS
control unit status incorrectly set.
(active, not active, RC ready).
1396
1397
1398
Cause -- Reading of a “$” variable with the operator control unit status incorrectly
set.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Switch operator control unit to “active” status.
Message text PROGRAM NOT LINKED
Cause -- Selection of a non--linked program.
Monitor -- At selection.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Link the program.
-- In program processing the message has to be acknowledged.
Message text MEMORY REQUEST FOR PARAMETER LIST TOO LARGE
Cause -- The transfer parameters of the program require too much memory.
Monitor -- During command execution.
Effect --
Remedy -- Acknowledge message, correct program, reselect program.
Message text Check rcp selector switch
84 of 135
Cause -- The selector switch on the RCP is not set to “RUN” in the case of
selection or start from another operator control unit.
Monitor -- In command processing.
Effect -- Command is not executed.
Fehlermeldungen 09.02.01 en

1399
1400
1401
1402
1 Error messages / troubleshooting (continued)
Remedy -- Turn the selector switch on the RCP to “RUN”.
Message text MESSAGE CANNOT BE ACKNOWLEDGED
Cause -- Acknowledgement of a status (operational) message.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- None. Read the message.
Message text Message not available
Cause -- Textual acknowledgement of a message that is not available.
Monitor -- In command processing.
Effect -- Command cannot be executed.
Remedy --
Message text Control structure next block <block number>
Cause -- Selection into a control structure.
Monitor -- In program processing.
Effect -- Ramp--down braking.
-- All active commands inhibited.
-- The control structure is exited when the end is identified.
Remedy -- Acknowledge message.
Message text Select startup
1403
1404
Cause -- A command has been entered that is only allowed in the startup mode.
Monitor -- With all commands of the startup mode.
Effect -- Command is not executed.
Remedy -- Select the startup mode.
-- Acknowledge message.
Message text Interrupt instruction aborted
Cause -- Motion instruction in the interrupt routine that is executed after an error
stop. The interrupt module that is called after an error stop may not
contain any motion instructions.
Monitor -- In program processing.
Effect -- Ramp--down braking.
Remedy -- Modify interrupt module accordingly.
-- Acknowledge message.
Message text Edit commands now allowed
Cause -- The user is in the mode “Editing without implicit block selection”, and
after completion of the current motion block has received an editor
enable. The object is write--protected.
Monitor -- During command execution.
Effect --
Remedy -- Note: editing is now possible.
Fehlermeldungen 09.02.01 en
85 of 135

Error messages / troubleshooting
1405 Message text <object name> is write protected
Cause -- Object is write--protected.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Check object status (e.g. unlink or deselect object).
1406
Message text Error in path
Cause -- Error in path specification e.g. /R5.
Monitor -- In command processing.
Effect -- Command is not executed.
Remedy -- Check and correct path specification.
1407
Message text Edit commands inadmissible, finish movement first
Cause -- The user tries to edit a program while in mode “Editing without implicit
block selection”. The user is still located in a motion instruction.
Monitor -- During command execution.
Effect -- Editing is not possible.
Remedy -- Press the Start key again until the message “Edit commands now
allowed” appears. Editing is then possible.
1408
Message text Line compilation or decompilation error
1409
1410
Cause -- Message will soon be deleted.
Monitor
Effect -- No effect.
Remedy
Message text No trigger allowed in ISR or *.SUB
Cause -- Trigger was programmed in interrupt or SUB module.
Monitor -- Program execution.
Effect -- Program execution stopped, all active commands inhibited.
Remedy -- Correct program, acknowledge message.
Message text Program line does not exist
Cause --
Monitor --
Effect --
Remedy --
86 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1411 Message text Line selection beyond buffer: Next start deletes buffer.
Cause -- Line selection outside the trace.
Monitor -- During line selection.
Effect -- When the Start key is pressed, the buffer for backward motion is
deleted.
Remedy -- Before pressing the Start key, make another line selection within the
buffer. After that the backward motion can be carried out.
1412
Message text Axis <axis number> acceleration not programmed
Cause -- No value has been assigned to the program datum “$ACC_AXIS”.
Monitor -- When starting a PTP block.
Effect -- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
1413
Message text Axis <axis number> velocity not programmed
Cause -- No value has been assigned to the program datum “$VEL_AXIS”.
Monitor -- When starting a PTP block.
Effect -- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
1414
Message text Path acceleration not programmed
1415
1416
Cause -- No value has been assigned to the program datum “$ACC.CP”.
Monitor -- At the first CP block.
Effect -- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
Message text Path velocity not programmed
Cause -- No value has been assigned to the program datum “$VEL.CP”.
Monitor -- At the first CP block.
Effect -- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
Message text Orientation acceleration not programmed
Cause -- No value has been assigned to the program data “$ACC.ORI1” and
“$ACC.ORI2”.
Monitor -- At the first CP block.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
Fehlermeldungen 09.02.01 en
87 of 135

Error messages / troubleshooting
1417 Message text Orientation velocity not programmed
Cause -- No value has been assigned to the program data “$VEL.ORI1” and
“$VEL.ORI2”.
Monitor -- At the first CP block.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
1418
Message text <X,Y,Z,A,B,C> BASE not programmed
Cause -- No value has been assigned to the program datum “$BASE”.
-- in a user program
-- after overall reset of the control for a cartesian command.
Monitor -- With a cartesian motion.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- In command processing
-- Assign a value to “$BASE”.
-- In program processing
-- Alter the program accordingly
-- Acknowledge message.
1419
Message text <X,Y,Z,A,B,C> TOOL not programmed
1420
Cause -- No value has been assigned to the program datum “$TOOL”
-- in a user program
-- after overall reset of the control for a cartesian command.
Monitor -- With a cartesian motion.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- In command processing
-- Assign a value to “$TOOL”.
-- In program processing
-- Alter the program accordingly
-- Acknowledge message.
Message text Approximation not programmed <approximation criterion>
Cause -- No value has been assigned to the program data “$APO.VEL”,
“$APO.ROB”, “$APO.DIS”, and/or “$APO.ORI”.
Monitor -- When starting the first motion block with approximate positioning.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
88 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1421 Message text <file> : <number> compilation error
Cause -- Compilation error due to unrecognized data type can occur in the case
of global self--defined data types and ENUMs. This means that the GUI
must initiate a second download.
Monitor -- During command execution.
Effect -- When this error is caused by global types, it can be corrected by down-
loading the files twice.
Remedy -- The GUI filters out the error number and initiates the double download
for the file in question.
1422
Message text <$ variable> invalid value
Cause -- Read access to a variable that is not initialized or that has an invalid
value, e.g. reading of “$POS_INT” outside an interrupt routine.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program.
-- Acknowledge message.
1423
Message text Overflow
1424
Cause -- Value is not compatible with the specified data type, e.g. value
assignment of a number >255 to the data type “char”.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter data type.
-- Acknowledge message in program processing.
Message text PROGRAM STACK OVERFLOW
Cause -- The nesting depth for subprograms and functions has been
exceeded.
Monitor -- In program processing.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
Fehlermeldungen 09.02.01 en
89 of 135

Error messages / troubleshooting
1425 Message text Instruction not allowed
Cause -- Program instruction that is not allowed as a command.
-- Program instruction that is only allowed in an interrupt routine.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
1426
Message text Variable stack depth exceeded
Cause -- The nesting depth of the variable has been exceeded.
Monitor -- In program processing.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Alter the variable accordingly.
-- Acknowledge message.
1427
Message text $OUT_C[N] IS NOT PERMISSIBLE IN INTERRUPT PROGRAMS
1428
1429
Cause -- Instruction not permissible here
Monitor --
Effect -- Interpreter stop
Remedy -- Revise SRC file and acknowledge message
Message text Function value not defined
Cause -- RETURN instruction missing in the function module.
Monitor -- In the program.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Insert a RETURN instruction.
Message text String too long
Cause -- In a value assignment to arrays, the string consists of more characters
than the existing array.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
90 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1430 Message text <Interrupt or Trigger> not defined
Cause -- An interrupt that has not been defined has been switched on.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Define interrupt.
-- Acknowledge message.
1431
Message text Selection not possible
Cause -- Selection of the editor is not possible.
The file may not exist or it may have the attribute “hidden”.
Monitor
Effect
Remedy -- Check whether the file exists (e.g. when attempting to open a file
in the view mode) or has the attribute “hidden”.
1432
Message text Max. no. of interrupts defined
1433
Cause -- More than 32 interrupts have been defined.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Acknowledge message.
-- Alter the program accordingly.
Message text Max. no. of interrupts on
Cause -- More than 8 interrupts have been switched on.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Acknowledge message.
-- Alter the program accordingly.
Fehlermeldungen 09.02.01 en
91 of 135

Error messages / troubleshooting
1434 Message text Target point not reached
Cause -- The contour cannot be determined when selecting a CIRC block
with a circle angle. A LIN motion to the programmed target point is
executed when the robot is started.
Monitor -- In program processing.
Effect -- The next motion is also a BCO run.
Remedy -- None.
1435
Message text Read protection
Cause -- A “$” variable that is not admissible for the selected interpreter type
has been read.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- In program processing the message has to be acknowledged.
1436
Message text Disk write protected
1437
1438
Cause -- The write protection is activated.
Monitor
Effect -- It is not possible to save data on the floppy disk.
Remedy -- Remove the write protection.
Message text Reposition
Cause -- BCO was not achieved on returning from the interrupt routine. The
robot must be repositioned to the interrupt point before the end of the
interrupt routine, e.g. with LIN $POS_RET.
Monitor -- In program processing.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
Message text Data storage device not ready: ...
Cause -- There is no disk inserted or the floppy disk drive is defective.
Monitor
Effect -- It is not possible to save to floppy disk.
Remedy -- Insert floppy disk into the disk drive in; check disk drive.
92 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1439 Message text <variable name> argument inadmissible
Cause -- At least one argument in the function is inadmissible; e.g. SQRT
(negative value).
Monitor -- In interpretation of C functions.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
1440
Message text Mailbox identification not allowed
Cause -- An incorrect MBX_ID is specified in the C function “MBX_REC”.
Monitor -- In interpretation of “MBX_REC”.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
1441
Message text Interrupt priority not allowed
1442
Cause -- Interrupt priority greater than 128 or less than 1
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Acknowledge message.
-- Alter the program accordingly.
Message text Approximation not allowed for instructions
Cause -- “DRIFT”, “$TOOL” or “$FIL TER” is programmed between two motion
instructions.
Monitor -- In program processing.
Effect -- Approximate positioning is not performed for the motion instructions.
Remedy -- Alter the program accordingly.
Fehlermeldungen 09.02.01 en
93 of 135

Error messages / troubleshooting
1443 Message text Start movement not allowed
Cause -- The first motion instruction in the program is relative.
-- The first motion instruction in the program is not programmed
completely, e.g. PTP [33.33].
Monitor -- In program processing.
Effect -- No program motion.
Remedy -- Alter the program.
-- Acknowledge message.
1444
Message text Array index inadmissible
Cause -- An attempt has been made to access an array element that does
not exist.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
Acknowledge message.
1445
Message text Angle status inadmissible
1446
Cause -- After repositioning with LIN the angle status does not agree with the
status of the programmed block.
Monitor -- In program processing.
Effect -- Ramp--down braking.
-- All active commands inhibited.
Remedy -- Acknowledge message.
-- Perform repositioning with PTP.
Message text Value assignment not allowed
Cause -- Inadmissible value assignment for predefined variables,
e.g. $SPEED.ORI1 <= 0.0 or > $SPEED_MA.ORI1.
-- Assigned $BASE or $TOOL not possible for the kinematic system.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program accordingly.
-- Acknowledge message.
94 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1447 Message text Software limit <motion direction> <axis number> out of range
Cause -- Target point cannot be reached due to a software limit switch.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program.
-- Acknowledge message.
1448
Message text <Name> ambiguous
Cause -- The specified memory dump name contains wildcards. Expansion of
these wildcards has resulted in more than one valid file name. This is
not allowed however.
Monitor
Effect -- Data transfer is not carried out.
Remedy -- Specify an unambiguous name.
1449
Message text <$variable> variable write protected
1450
Cause -- Write access to a write--protected variable e.g. “$POS_ACT”.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program.
-- Acknowledge message.
Message text Transformation not configured
Cause -- $BASE or $TOOL has been assigned although no transformation is
configured.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- Command is not executed.
-- In program processing
-- Ramp--down braking
-- All active commands inhibited.
Remedy -- Alter the program.
-- Acknowledge message.
Fehlermeldungen 09.02.01 en
95 of 135

Error messages / troubleshooting
1451 Message text Division by 0
Cause -- An attempt has been made to divide a value by “0”.
Monitor -- In command processing.
-- In program processing.
Effect -- In command processing
-- In program processing
Remedy -- Alter the program.
-- Acknowledge message.
1452
Message text Backward motions not active
Cause -- Backward motion is deactivated ($VW_BACKWARD = FALSE).
Monitor -- When START MINUS key is pressed.
Effect -- Command is rejected.
Remedy -- Set variable $VW_BACKWARD to TRUE.
1454
Message text Start continue not possible
-- Command is not executed.
-- Ramp--down braking
-- All active commands inhibited.
1455
1456
Cause -- BSTEP
Monitor -- In command processing.
Effect -- None.
Remedy --
Message text Inadmissible in this edit mode
Cause -- A command that would alter the object has been entered in the listing
mode of the editor.
-- An attempt has been made in the data correction mode to delete or
copy a range of blocks or to delete a block consisting of only one line.
Monitor -- In the editor.
Effect -- The attempted action is not executed.
Remedy -- Edit in full edit mode.
Message text Start point equal to end point
Cause -- Distance between start point and end point is too small.
Monitor -- During preparation.
Effect -- Ramp--down braking.
-- Active commands inhibited.
Remedy -- Reprogram start point and/or end point.
-- Acknowledge message.
96 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1457 Message text Start point equal to mid point
Cause -- Distance between start point and auxiliary point is too small.
Monitor -- During preparation.
Effect -- Ramp--down braking.
-- Active commands inhibited.
Remedy -- Reprogram start point and/or auxiliary point.
1458
Message text Mid point equal to end point
Cause -- Distance between auxiliary point and end point is too small.
Monitor -- During preparation.
Effect -- Ramp--down braking.
-- Active commands inhibited.
Remedy -- Reprogram auxiliary point and/or end point.
1459
Message text Backward motions not possible: finished subroutine
Cause -- An attempt was made to carry out backward a motion located inside
a subprogram which has already been executed.
Switching to forwards in this subprogram would not be possible.
Backward motion is thus also disabled.
Monitor -- When the “Start backwards” key is pressed.
Effect -- Command is not executed.
Remedy -- Forward motion.
1460
Message text Deleting Trace: no backward motions possible
1462
1463
Cause -- Editing was carried out or a block selection was made at a position
which causes the trace to be discarded.
From now on backward motion is no longer possible.
Monitor -- When the “Start backwards” key is pressed.
Effect -- Command is not executed.
Remedy -- Forward motion.
Message text Command syntax error
Cause -- The command contains a syntax error.
Monitor -- In the editor.
Effect -- Command is not executed.
Remedy -- Correct the command.
Message text Object not ready
Cause -- Program cannot be processed by the editor.
Monitor -- In the editor.
Effect -- Command is not executed.
Remedy -- Select program with “Edit”.
Fehlermeldungen 09.02.01 en
97 of 135

Error messages / troubleshooting
1464 Message text $OUT_C[N] IS NOT PERMISSIBLE IN SUBMIT
Cause -- Instruction not permissible here
Monitor --
Effect -- Interpreter stop
Remedy -- Revise SRC file and acknowledge message
1465
Message text ONLY 8 $OUT_C[N] ASSIGNMENTS PER MOTION PERMISSIBLE
Cause -- Instruction not permissible here
Monitor --
Effect -- Interpreter stop
Remedy -- Revise SRC file and acknowledge message
1468
Message text Key not assigned
Cause -- An unassigned softkey or function key has been pressed during
prompted operation.
Monitor -- When a softkey is pressed.
-- When a function key is pressed.
Effect -- None.
Remedy -- None.
1472
Message text Key not allowed
1474
1477
Cause -- Impermissible key (e.g. softkey) pressed in textual operation.
-- Alphanumeric key pressed in prompted operation when no input field
is available.
Monitor -- When a key is pressed.
Effect -- Entry is ignored.
Remedy -- Acknowledge the message.
Message text Change of direction not possible
Cause
Monitor -- In command processing.
Effect -- None.
Remedy
Message text Main process not available
Cause -- Main run display (motion trace) selected but no main run block inter-
preted yet.
Monitor -- In command processing.
Effect -- None.
Remedy -- Start the program.
98 of 135
Fehlermeldungen 09.02.01 en

1 Error messages / troubleshooting (continued)
1478 Message text Pre process not available
Cause -- Advance run display (program trace) selected but no program is in the
STOP or END state.
Monitor -- In command processing.
Effect -- None.
Remedy -- Start the program.
1481
Message text No runtime data access
Cause -- Access to an invalid or non--existent object value memory or runtime
data area via the hierarchy table (search path).
Monitor -- In the interpreter (prim -- init).
Effect -- None.
Remedy -- Set the search path to the current interpreter environment.
1482
Message text Volume too small
Cause -- Monitoring of the dispensed volume has been triggered. Insufficient
adhesive has been dispensed.
Monitor -- From the PCL application program (bonding technology).
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Check the adhesive application hardware, purge it if necessary.
1483
Message text Excessive volume
1484
1485
Cause -- Monitoring of the dispensed volume has been triggered. Too much
adhesive has been dispensed.
Monitor -- From the PCL application program (bonding technology).
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Check the adhesive application hardware, purge it if necessary.
Message text Wrong adhesive pressure
Cause -- The initial pressure of the adhesive is continuously monitored by the
PLC during dispensing. A pressure value outside the permissible
tolerance range has been detected. Possibly there are bubbles in the
adhesive supply line, or the outlet nozzle is clogged.
Monitor -- From the PCL application program (bonding technology).
Effect -- Ramp--down braking, all active commands inhibited.
Remedy -- Check the adhesive application hardware, purge it if necessary.
Message text Oil filter dirty
Cause -- The hydraulic pressure is no longer adequate because the hydraulic
oil filter is dirty.
Monitor -- From the PCL application program (bonding technology).
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Clean or replace oil filter.
Fehlermeldungen 09.02.01 en
99 of 135

Error messages / troubleshooting
1486 Message text Max. oil temperature exceeded
Cause -- The maximum permissible hydraulic oil temperature has been ex-
ceeded.
Monitor -- From the PCL application program (bonding technology).
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Wait until the hydraulic oil has cooled down.
-- If this situation occurs frequently , check the hydraulic unit.
1487
Message text General system air pressure
Cause -- The required air supply pressure for the pneumatic valves is not
available.
Monitor -- From the PCL application program (bonding technology).
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Ensure that the air pressure and quantity are sufficient.
1488
Message text Vacuum error
Cause -- Vacuum missing or insufficient.
In the application of adhesive to glass, the glass is held in position by
means of a vacuum. If this vacuum is not available, the glass cannot
be held in position after it has been centered.
Monitor -- From the PCL application program (bonding technology).
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Check the vacuum pump and hoses.
1489
Message text Centering error
1490
Cause -- The workpiece is not correctly positioned or clamped. There is possibly
a fault in the feed equipment, or the fixture is defective.
Monitor -- From the PLC application program (bonding technology).
Effect -- Ramp--down braking. All active commands inhibited.
Remedy -- Check fixture, feed equipment or workpiece position.
Message text Component check error
Cause -- Component damaged or no longer clamped to the fixture.
-- In the application of adhesive to glass, the adhesive nozzle is pressed
onto the glass. If this pressure is missing during adhesive application,
the glass might be damaged or might no longer be clamped to the
fixture.
In this case, the robot motion and adhesive application must be
stopped immediately!
Monitor -- From the PLC application program (bonding technology).
Effect -- Maximum braking. All active commands inhibited. Emergency Stop.
Remedy -- Check the workpiece.
100 of 135
Fehlermeldungen 09.02.01 en
 Loading...
Loading...