

Page 1
Software specification
for
Kontron EAPI
Version 1.21
Author: Martin Kroul
Last change date: 26.4.2011
Page 2

Software specification for Kontron EAPI
Contents
CONTENTS 2
1 INTRODUCTION 5
1.1 Purpose of this document 5
1.2 KEAPI overview 5
1.3 Architectural overview 5
1.4 Operating systems 6
2 FUNCTION DOCUMENTATION 6
2.1 Return values 6
2.1.1 Functional errors 6
2.1.2 Remote connection errors 6
2.2 Initialization 7
2.2.1 KEApiLibInitialize 7
2.2.2 KEApiLibUnInitialize 7
2.3 General information 7
2.3.1 KEApiGetBoardInfo 7
2.3.2 KEApiGetBootCounter 8
2.3.3 KEApiSystemUpTime 8
2.3.4 KEApiGetSystemStateAmt 9
2.3.5 KEApiSetSystemStateAmt 9
2.3.6 KEApiSetSystemState 9
2.3.7 KEApiGetIntruderStatus 10
2.3.8 KEApiResetIntruderStatus 10
2.4 CPU 10
2.4.1 KEApiGetCpuFreq 10
2.4.2 KEApiGetCpuInfo 11
2.4.3 KEApiGetCpuPerformance 11
2.4.4 KEApiSetCpuPerformance 12
2.5 Memory 12
2.5.1 KEApiGetMemoryInfo 12
2.5.2 KEApiGetMemoryModuleCount 13
2.5.3 KEApiGetMemoryModuleInfo 13
2.6 Hard disks and partitions 14
2.6.1 KEApiGetDiskDriveCount 14
2.6.2 KEApiGetDiskDriveList 14
2.6.3 KEApiGetDiskDrivePartitionCount 14
2.6.4 KEApiGetDiskDrivePartitionList 15
2.7 Battery 15
2.7.1 KEApiGetBatteryCount 15
2
Page 3

Software specification for Kontron EAPI
2.7.2 KEApiGetBatteryInfo 15
2.7.3 KEApiGetBatteryState 16
2.8 Temperature sensors 17
2.8.1 KEApiGetTempSensorCount 17
2.8.2 KEApiGetTempSensorList 17
2.8.3 KEApiGetTempSensorValue 17
2.8.4 KEApiGetCpuTemp 18
2.8.5 KEApiGetChipsetTemp 18
2.8.6 KEApiGetSystemTemp 18
2.9 Voltage sensors 19
2.9.1 KEApiGetVoltageSensorCount 19
2.9.2 KEApiGetVoltageSensorList 19
2.9.3 KEApiGetVoltageSensorValue 19
2.10 Fan Control 20
2.10.1 KEApiGetFanCount 20
2.10.2 KEApiGetFanList 20
2.10.3 KEApiGetFanSpeed 21
2.10.4 KEApiGetFanMode 21
2.10.5 KEApiSetFanModeManual 21
2.10.6 KEApiSetFanModeThermalCruise 22
2.10.7 KEApiGetCpuFanSpeed 22
2.10.8 KEApiSetCpuFanSpeed 22
2.10.9 KEApiGetSystemFanSpeed 23
2.10.10 KEApiSetSystemFanSpeed 23
2.11 Display 23
2.11.1 KEApiGetDisplayCount 23
2.11.2 KEApiGetBacklightValue 24
2.11.3 KEApiSetBacklightValue 24
2.12 Network and PCI devices 24
2.12.1 KEApiGetNetworkDeviceCount 24
2.12.2 KEApiGetNetworkDeviceList 25
2.12.3 KEApiGetPciDeviceCount 25
2.12.4 KEApiGetPciDeviceList 25
2.13 Storage area 26
2.13.1 KEApiGetStorageCount 26
2.13.2 KEApiGetStorageSize 26
2.13.3 KEApiStorageRead 27
2.13.4 KEApiStorageWrite 27
2.14 I2C 27
2.14.1 KEApiGetI2cBusCount 27
2.14.2 KEApiI2cWrite 28
2.14.3 KEApiI2cRead 28
2.15 SMBus 29
2.15.1 KEApiGetSmbusCount 29
2.15.2 KEApiSmbusQuickCommand 29
2.15.3 KEApiSmbusSendByte 29
2.15.4 KEApiSmbusReceiveByte 30
2.15.5 KEApiSmbusWriteByte 30
2.15.6 KEApiSmbusReadByte 31
3
Page 4
Software specification for Kontron EAPI
Author
Date
Change summary
Version
Martin Kroul
20.6.2010
Document created
1.0
Martin Kroul
5.7.2010
Major changes in functionality according to conf. call
30.6.2010
1.1
Martin Kroul
28.1.2011
First official release of KEAPI for Windows and Linux
- restructuralization of function names, parameters and types
- no changes in functionality
1.2
Martin Kroul
26.4.2011
VxWorks added to list of supported operating systems
1.21
2.15.7 KEApiSmbusWriteWord 31
2.15.8 KEApiSmbusReadWord 32
2.15.9 KEApiSmbusWriteBlock 32
2.15.10 KEApiSmbusReadBlock 32
2.16 GPIO 33
2.16.1 KEApiGpioGetCount 33
2.16.2 KEApiGpioGetDirectionCaps 33
2.16.3 KEApiGpioGetDirection 34
2.16.4 KEApiGpioSetDirection 34
2.16.5 KEApiGpioGetLevel 34
2.16.6 KEApiGpioSetLevel 35
2.17 Watchdog 35
2.17.1 KEApiWatchdogEnable 35
2.17.2 KEApiWatchdogTrigger 35
2.17.3 KEApiWatchdogDisable 36
3 ABOUT KONTRON 37
Revision history
Legal notice:
All data is for information purposes only and not guaranteed for legal purposes. Subject to change
without notice. Information in this datasheet has been carefully checked and is
believed to be accurate; however, no responsibility is assumed for inaccuracies. All brand or product
names are trademarks or registered trademarks of their respective owners.
4
Page 5
Software specification for Kontron EAPI
1 Introduction
1.1 Purpose of this document
This document describes Kontron Embedded API – a software library that enables programmers to
easily create their applications for monitoring and control hardware resources of Kontron boards,
modules, systems and platforms.
1.2 KEAPI overview
KEAPI is written in C language and distributed as a dynamic-linked library so it can be used by
arbitrary application developed in C, C++ or higher programming languages simply by linking to the
project.
KEAPI library provides a set of functions for
Obtaining basic information about the system
CPU performance control
Temperature and voltage sensors monitoring
Monitoring and control of fans
Display backlight control
Access to EEPROM user storage area
I2C and SMBus communication
GPIO control
Watchdog
All KEAPI functions can be called remotely from another computer over network (TCP/IP).
KEAPI is compatible with PICMG EAPI specification (http://www.picmg.org/pdf/COM_EAPI_R1_0.pdf).
This means that it implements all functions defined by this specification. However, these functions
offer just a small part of KEAPI functionalities and don’t allow remote connection.
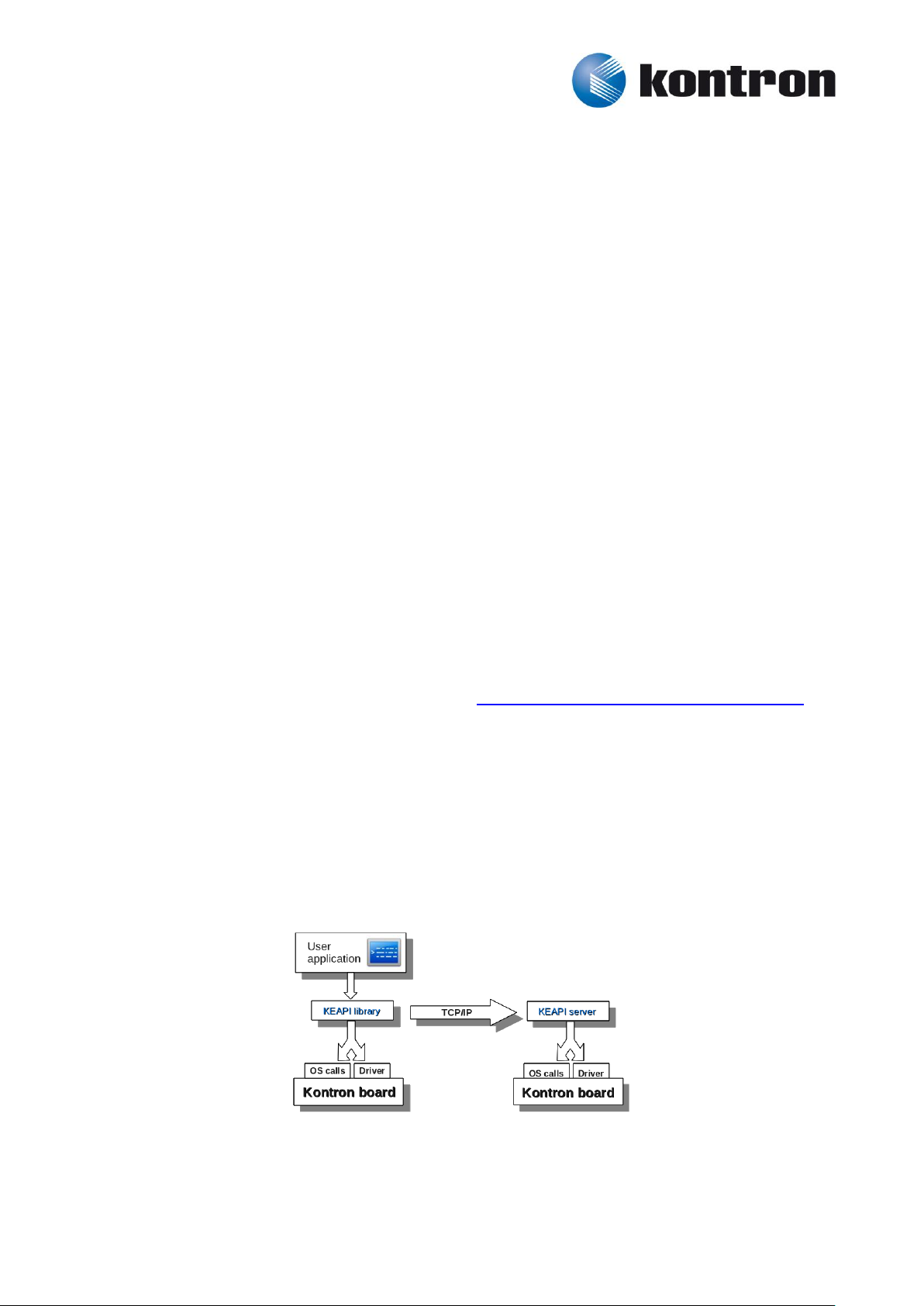
1.3 Architectural overview
Kontron EAPI is a layer between Kontron hardware and user application. KEAPI functions either use
hardware drivers and operating system calls to perform requested operation on local board or
connects to KEAPI server that is installed on remote board somewhere on the internet. The KEAPI
server application listens on a predefined port (default is 7890) and waits for incoming request. When
the request comes, it uses KEAPI library to perform the operation and sends result back to the client.
Fig.1. – Kontron EAPI Architecture
5
Page 6
Software specification for Kontron EAPI
KEAPI_RET_ERROR
General Error
KEAPI_RET_PARAM_ERROR
Wrong parameter value
KEAPI_RET_PARAM_NULL
Parameter is NULL (memory not pre-allocated)
KEAPI_RET_WD_TIMEOUT_NOT_SUPPORTED
WD timeout not supported
KEAPI_RET_BUFFER_OVERFLOW
Buffer overflow (probably configuration error)
KEAPI_RET_SETTING_ERROR
Error while setting value or feature (enable, disable)
KEAPI_RET_RETRIEVAL_ERROR
Error while retrieving information
KEAPI_RET_WRITE_ERROR
Cannot write to file
KEAPI_RET_READ_ERROR
Cannot read file
KEAPI_RET_MALLOC_ERROR
Memory allocation failed
KEAPI_RET_LIBRARY_ERROR
Exported function could not be loaded from library
KEAPI_RET_WMI_ERROR
Problems while reading from WMI
KEAPI_RET_NOT_INITIALIZED
KEAPI library is not initialized
KEAPI_RET_PARTIAL_SUCCESS
Part of requested information couldn’t be retrieved.
Returned information isn’t complete.
KEAPI_RET_FUNCTION_NOT_SUPPORTED
Function is not supported on current platform/HW
KEAPI_RET_FUNCTION_NOT_IMPLEMENTED
Function is not yet implemented
KEAPI_RET_INVALID_IP
IP address is not in a valid format
KEAPI_RET_RMT_CON_ERROR
Remote connection failed
KEAPI_RET_RPC_ERR_MAX_CONN_COUNT_EXCEEDED
Connection limit on the client side was
reached
KEAPI_RET_RPC_ERR_SOCKET_ERROR
Error with socket manipulation
KEAPI_RET_RPC_ERR_CONNECTION_NOT_FOUND
Connection for given board handle does not
exist
KEAPI_RET_RPC_ERR_NOT_IMPLEMENTED
Remote function call is not implemented
KEAPI_RET_RPC_ERR_SOCKET_TIMEOUT
Time limit for select() function expired
KEAPI_RET_RPC_ERR_PACKET_ERROR
Wrong format of KEAPI packet
1.4 Operating systems
This document describes KEAPI interface for Linux, Windows XP, Windows Vista - 32/64,
Windows 7 - 32/64, VxWorks.
2 Function Documentation
Main part of Kontron EAPI is dynamic-linked library with API functions. Before using any of these
functions, KEAPI has to be initialized and connection to the board has to be established by calling the
KEApiLibInitialize() function. This function returns a board handle (unique four-byte number) that will
other KEAPI functions take as their first parameter. The KEApiLibInitialize() function may be called
several times for simultaneous connection to several boards. When KEAPI is no longer needed, the
KEApiLibUnInitialize() function should be called.
Memory for structures and variables that will be used by KEAPI functions to store information must be
pre-allocated by the user application. KEAPI by itself doesn’t allocate memory for output parameters.
2.1 Return values
If everything goes well, all KEAPI functions return KEAPI_RET_SUCCESS. If some error occurs, the
returned error message differs for various functions. Error messages can be basically divided into two
groups: Functionality errors and Connection errors.
2.1.1 Functional errors
2.1.2 Remote connection errors
6
Page 7
Software specification for Kontron EAPI
in/out
Parameter name
Description
in
pHostIp
IP address of a remote computer. If it is set to NULL or
“localhost” then localhost is considered to be the target
machine (no KEAPI server running on the machine is
needed). If it is set to “127.0.0.1”, then it connects to KEAPI
server running on the local machine (can be used for testing
KEAPI server application locally)
in
port
Port number where KEAPI server is listening, default is 7890.
out
pBoardHandle
Returned pointer to the handle of selected board.
BoardHandle == 0 means localhost.
In
logLevel
Level of details
LV_ERROR = 0x01,
LV_WARN = 0x02,
LV_INFO = 0x04,
LV_DEBUG = 0x08,
LV_TRACE = 0x10,
LV_ALLTIME = 0xFF
in
pLogFile
Name of the log file. Can be NULL if logging not needed.
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
2.2 Initialization
2.2.1 KEApiLibInitialize
KEAPI_CALLTYPE KEAPI_UINT32 KEApiLibInitialize (
KEAPI_PCHAR pHostIp,
KEAPI_UINT32 port,
KEAPI_PUINT32 pBoardHandle,
KEAPI_UINT32 logLevel,
KEAPI_PCHAR pLogFile
);
Description:
Initialization of Kontron EAPI.
Parameters:
2.2.2 KEApiLibUnInitialize
KEAPI_CALLTYPE KEAPI_UINT32 KEApiLibUnInitialize (
KEAPI_UINT32 boardHandle
);
Description:
Uninitialization of Kontron EAPI on a selected board.
Parameters:
2.3 General information
2.3.1 KEApiGetBoardInfo
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetBoardInfo (
KEAPI_UINT32 boardHandle,
PBOARD_INFO pBoardInfo
);
7
Page 8
Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pBoardInfo
Returned board info structure BOARD_INFO
in/out
Parameter name
Description
In
boardHandle
Handle of selected board
Out
pBootCount
Number of boot cycles
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pSystemUpTime
Pointer to a variable that receives system running time in
seconds
Description:
Provides information about Kontron motherboard.
Parameters:
Structure used:
typedef struct Board_Info
{
KEAPI_CHAR boardManufacturer[MAX_STR]; // Board manufacturer
KEAPI_CHAR boardName[MAX_STR]; // Board name
KEAPI_CHAR boardVersion[MAX_STR]; // Board version
KEAPI_CHAR boardSerialNumber[MAX_STR]; // Board serial number
KEAPI_CHAR biosVersion[MAX_STR]; // Bios version
KEAPI_CHAR biosDate[MAX_STR]; // BIOS date in format
dd/mm/yyyy
} BOARD_INFO, *PBOARD_INFO;
2.3.2 KEApiGetBootCounter
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetBootCounter (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pBootCount
);
Description:
Provides information about number of boot cycles within the board's lifetime.
Parameters:
2.3.3 KEApiSystemUpTime
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSystemUpTime (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pSystemUpTime
);
Description:
Provides time left since last boot in seconds.
Parameters:
8
Page 9
Software specification for Kontron EAPI
in/out
Parameter name
Description
in
pHostIp
IP address of the remote board
in
pUser
User name for host AMT
in
pPassword
Password for host AMT
out
pSystemState
Pointer to variable that will receive remote board's state
SYSTEM_STATE_TURN_ON, 0
SYSTEM_STATE_TURN_OFF, 1
SYSTEM_STATE_HIBERNATE, 2
in/out
Parameter name
Description
in
pHostIp
IP address of the remote board
in
pUser
User name for host AMT
in
pPassword
Password for host AMT
in
systemState
Desired system state
SYSTEM_STATE_TURN_ON, 0
SYSTEM_STATE_TURN_OFF, 1
SYSTEM_STATE_RESTART, 3
2.3.4 KEApiGetSystemStateAmt
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetSystemStateAmt (
KEAPI_PCHAR pHostIp,
KEAPI_PCHAR pUser,
KEAPI_PCHAR pPassword,
KEAPI_PINT32 pSystemState
);
Description:
Uses Intel AMT to get information about state of remote board (turned on, turned off or hibernated).
The remote board must support Intel AMT and enable it in BIOS. AMT functionality can be tested via
web browser (fill in address http:// “remote board’s IP” :16992 and AMT web page should appear).
Parameters:
2.3.5 KEApiSetSystemStateAmt
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetSystemStateAmt (
KEAPI_PCHAR pHostIp,
KEAPI_PCHAR pUser,
KEAPI_PCHAR pPassword,
KEAPI_INT32 systemState
);
Description:
Uses Intel AMT to turn on, turn off or restart remote board. If the remote board doesn’t support Intel
AMT, then the KEApiSetSystemState() function using OS call can be used instead.
Parameters:
2.3.6 KEApiSetSystemState
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetSystemState (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 systemState
);
Description:
Uses operating system’s command to turn on, turn off or restart remote board. There is no guarantee
that the command was performed correctly i.e. if the system hangs.
9
Page 10
Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
systemState
Desired system state
SYSTEM_STATE_TURN_OFF, 1
SYSTEM_STATE_HIBERNATE, 2
SYSTEM_STATE_RESTART, 3
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pIntruderStatus
Pointer to a variable that receives actual intruder status
INTRUDER_STATUS_CASE CLOSED, 0
INTRUDER_STATUS_CASE OPENED , 1
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
Parameters:
2.3.7 KEApiGetIntruderStatus
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetIntruderStatus (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pIntruderStatus
);
Description:
Provides actual information whether computer case was opened or not.
Parameters:
2.3.8 KEApiResetIntruderStatus
KEAPI_CALLTYPE KEAPI_UINT32 KEApiResetIntruderStatus (
KEAPI_UINT32 boardHandle
);
Description:
Resets the case intruder status.
Parameters:
2.4 CPU
2.4.1 KEApiGetCpuFreq
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetCpuFreq (
KEAPI_UINT32 boardHandle,
KEAPI_INT8 freqType,
KEAPI_PINT32 frequency
);
Description:
Provides information about CPU frequency
minimal supported CPU frequency: CPU_FREQUENCY_MIN, 0
maximal supported CPU frequency: CPU_FREQUENCY_MAX, 1
current CPU frequency: CPU_FREQUENCY_CURRENT, 2.
10
Page 11
Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
freqType
Type of frequency (minimal (CPU_FREQUENCY_MIN, 0),
maximal (CPU_FREQUENCY_MAX, 1), current
(CPU_FREQUENCY_CURRENT, 2))
out
frequency
Frequency of the CPU, in kHz
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pCpuInfo
Returned CPU_INFO structure
Parameters:
2.4.2 KEApiGetCpuInfo
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetCpuInfo (
KEAPI_UINT32 boardHandle,
PCPU_INFO pCpuInfo
);
Description:
Provides information about processors.
Parameters:
Structure used:
typedef struct Cpu_Info
{
KEAPI_CHAR cpuName[MAX_STR]; // CPU name
KEAPI_INT32 cpuCount; // Number of CPUs
KEAPI_INT32 cpuCoreCount; // Number of cores of each CPU
KEAPI_INT32 cpuThreadCount; // Number of CPU threads
KEAPI_FLOAT cpuMaxCoreSpeed; // Designed core speed in MHz
KEAPI_INT32 fsbSpeed; // FSB speed in MHz
KEAPI_INT32 l1Cache; // L1 cache size in kB
KEAPI_INT32 l2Cache; // L2 cache size in kB
KEAPI_INT32 l3Cache; // L3 cache size in kB
} CPU_INFO, *PCPU_INFO;
2.4.3 KEApiGetCpuPerformance
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetCpuPerformance (
KEAPI_UINT32 boardHandle,
KEAPI_PINT8 pPerformanceType,
KEAPI_PINT8 pPerformancePercentage
);
Description:
Linux: Provides information about the current CPU performance mode
high performance: CPU_PERFORMANCE_HIGH, 0
power save mode: CPU_PERFORMANCE_POWER_SAVE, 1
on demand mode: CPU_PERFORMANCE_ON_DEMAND, 2
conservative mode: CPU_PERFORMANCE_CONSERVATIVE, 3.
Windows: Provides information about the current CPU performance in percentage
11
Page 12
Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pPerformanceType
Pointer to the type of current CPU performance. The
type is given by a number (0 – 3 where:
0 - high performance
1 - power save mode
2 - on demand mode
3 - conservative mode
) .
Supported only on Linux
out
pPerformancePercentage
Pointer to current CPU performance in percentage.
Supported only on Windows
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
performanceType
CPU performance type
Supported only on Linux
in
performancePercentage
CPU performance in percentage
Supported only on Windows
in/out
Parameter name
Description
in
boardHandle
Handle of selected board
out
pMemoryInfo
Returned MEMORY_INFO structure
Parameters:
2.4.4 KEApiSetCpuPerformance
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetCpuPerformance (
KEAPI_UINT32 boardHandle,
KEAPI_INT8 performanceType,
KEAPI_INT8 performancePercentage
);
Description:
Linux: Allows you to set the type of the CPU performance
high performance: CPU_PERFORMANCE_HIGH, 0
power save mode: CPU_PERFORMANCE_POWER_SAVE, 1
on demand mode: CPU_PERFORMANCE_ON_DEMAND, 2
conservative mode: CPU_PERFORMANCE_CONSERVATIVE, 3.
Windows: Allows you to set CPU performance in percentage
Parameters:
2.5 Memory
2.5.1 KEApiGetMemoryInfo
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetMemoryInfo (
KEAPI_UINT32 boardHandle,
PMEMORY_INFO pMemoryInfo
);
Description:
Provides information about physical memory.
Parameters:
12
Page 13

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of selected board
out
pMemoryModuleCount
Number of installed memory modules
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
moduleNr
Requested memory's module number. Numbers start with
zero.
out
pMemoryModule
Returned MEMORY_MODULE structure
Structure used:
typedef struct Memory_Info
{
KEAPI_INT32 memTotal; // Total physical memory size in MB
KEAPI_INT32 memFree; // Free memory in MB
KEAPI_INT32 memSpeed; // Memory speed in MHz
KEAPI_CHAR memType[MAX_STR]; // Type of memory (DDR, DDR2, etc.
} MEMORY_INFO, *PMEMORY_INFO;
2.5.2 KEApiGetMemoryModuleCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetMemoryModuleCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pMemoryModuleCount
);
Description:
Provides number of installed memory modules.
Parameters:
2.5.3 KEApiGetMemoryModuleInfo
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetMemoryModuleInfo (
KEAPI_UINT32 boardHandle,
KEAPI_INT8 moduleNr,
PMEMORY_MODULE pMemoryModule
);
Description:
Provides information about selected memory module.
Parameters:
Structure used:
typedef struct MemoryModule
{
KEAPI_INT32 moduleSize; // Module capacity in MB
KEAPI_CHAR manufacturer[MAX_STR]; // Memory module manufacturer
KEAPI_CHAR partNumber[MAX_STR]; // Memory module part number
KEAPI_CHAR serialNumber[MAX_STR]; // Memory module serial number
} MEMORY_MODULE, *PMEMORY_MODULE;
13
Page 14

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pDiskDriveCount
Number of installed disk drives
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
diskDriveCount
Number of disks
out
pDiskDrives
Returned array of DISK_DRIVE structures. The array must be
allocated as DiskDriveCount * sizeof(DISK_DRIVE),
where DiskDriveCount is obtained from calling
KEApiGetDiskDriveCount.
2.6 Hard disks and partitions
2.6.1 KEApiGetDiskDriveCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetDiskDriveCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pDiskDriveCount
);
Description:
Provides number of installed disk drives.
Parameters:
2.6.2 KEApiGetDiskDriveList
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetDiskDriveList (
KEAPI_UINT32 boardHandle,
PDISK_DRIVE pDiskDrives,
KEAPI_INT32 diskDriveCount
);
Description:
Provides list of disk drives and their properties.
Parameters:
Structure used:
typedef struct Disk_Drive
{
KEAPI_CHAR name[MAX_STR]; // HDD name
KEAPI_CHAR model[MAX_STR]; // Model
KEAPI_CHAR diskSerialNumber[MAX_STR]; // Serial number
KEAPI_UINT32 size; // Size in MB
} DISK_DRIVE, *PDISK_DRIVE;
2.6.3 KEApiGetDiskDrivePartitionCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetDiskDrivePartitionCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pDiskPartitionCount
);
Description:
Provides number of partitions.
14
Page 15

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pDiskPartitionCount
Number of partitions
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
diskPartitionCount
Number of partitions (size of elements in the
pDiskPartitionData array)
out
pDiskPartitionData
Array of DISK_PARTITION structures
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pBatteryCount
Number of connected batteries
Parameters:
2.6.4 KEApiGetDiskDrivePartitionList
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetDiskDrivePartitionList (
KEAPI_UINT32 boardHandle,
PDISK_PARTITION pDiskPartitionData,
KEAPI_UINT32 diskPartitionCount
);
Description:
Provides list of disk partitions.
Parameters:
Structure used:
typedef struct Disk_Partition
{
KEAPI_CHAR name[MAX_STR]; // Partition name
KEAPI_CHAR fsType[MAX_STR]; // Filesystem type
KEAPI_UINT32 partitionSize; // Size in MB
KEAPI_UINT32 freeSpace; // Free space in MB
} DISK_PARTITION, *PDISK_PARTITION;
2.7 Battery
2.7.1 KEApiGetBatteryCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetBatteryCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pBatteryCount
);
Description:
Provides number of connected batteries.
Parameters:
2.7.2 KEApiGetBatteryInfo
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetBatteryInfo (
KEAPI_UINT32 boardHandle,
KEAPI_INT8 batteryNr,
PBATTERY_INFO pBatteryInfo
);
15
Page 16

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
batteryNr
Requested battery's number. Numbers start with zero.
out
pBatteryInfo
Returned BATTERY_INFO structure
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
batteryNr
Requested battery's number. Numbers start with zero
out
pBatteryState
Pointer to a BATTERY_STATE structure
POWER_STATE_CHARGING, 0
POWER_STATE_CHARGED, 1
POWER_STATE_DISCHARGING, 2
Description:
Provides information about selected battery.
Parameters:
Structure used:
typedef struct Battery_Info
{
KEAPI_CHAR deviceName[MAX_STR]; // Device name
KEAPI_CHAR type[MAX_STR]; // LION, NiCd, NiMH…
KEAPI_CHAR serialNumber[MAX_STR]; // Serial number
KEAPI_INT32 designedVoltage; // Designed voltage in mV
KEAPI_INT32 designedCapacity; // Designed capacity of fully
charged battery in mAh
KEAPI_INT32 fullyChargedCapacity; // Real capacity of fully charged
battery in mAh
KEAPI_INT32 cycleCount; // Number of charge/discharge cycles
experienced during lifetime
} BATTERY_INFO, *PBATTERY_INFO;
2.7.3 KEApiGetBatteryState
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetBatteryState (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 batteryNr,
PBATTERY_STATE pBatteryState
);
Description:
Provides information about selected battery.
Parameters:
Structure used:
typedef struct BatteryState
{
KEAPI_INT32 powerState; // Current power state - charging = 0,
charged = 1, discharging = 2
KEAPI_INT32 fullBatteryRemainingTime; // Remaining time in seconds
when battery is full and AC power unplugged
KEAPI_INT32 remainingTime; // Remaining time in seconds
KEAPI_INT32 remainingCapacity; // Remaining capacity in mAh
KEAPI_INT32 currentVoltage; // Current voltage in mV
KEAPI_INT32 rate; // Current charging/discharging rate in mA
16
Page 17

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pTempSensorCount
Pointer to number of installed temperature sensors
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
tempSensorCount
Number of temperature sensors
out
pTempSensors
Pointer to the temperature sensors structure
KEAPI_INT32 chargeState; // Battery charge state in percentage
} BATTERY_STATE, *PBATTERY_STATE;
2.8 Temperature sensors
2.8.1 KEApiGetTempSensorCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetTempSensorCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pTempSensorCount
);
Description:
Provides number of temperature sensors.
Parameters:
2.8.2 KEApiGetTempSensorList
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetTempSensorList (
KEAPI_UINT32 boardHandle,
PTEMP_SENSOR pTempSensors,
KEAPI_INT32 tempSensorCount
);
Description:
Provides information about temperature sensors (name and current value in millidegrees), stored in
the TEMP_SENSOR structure.
Parameters:
Structure used:
typedef struct Temp_Sensor
{
KEAPI_CHAR name[MAX_STR]; // Sensor’s name
KEAPI_INT32 value; // Value obtained from sensor in millidegrees
} TEMP_SENSOR, *PTEMP_SENSOR;
2.8.3 KEApiGetTempSensorValue
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetTempSensorValue (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 tempSensorNr,
KEAPI_PINT32 pTempSensorValue
);
Description:
Derives information about current value of a temperature sensor with a given ID.
17
Page 18

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
tempSensorNr
Number (index) of a temperature sensor. Numbers start
with 0
out
pTempSensorValue
Pointer to the value of a given temperature sensor
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
cpuNr
Selected CPU number. CPU numbers start with zero
out
pCpuTemp
Pointer to a variable that receives selected CPU’s
temperature in millidegrees.
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pChipsetTemp
Pointer to a variable that receives chipset temperature in
millidegrees
in/out
Parameter name
Description
in
boardHandle
Handle of selected board
out
pSystemTemp
Pointer to a variable that receives system temperature in
millidegrees.
Parameters:
2.8.4 KEApiGetCpuTemp
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetCpuTemp (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 cpuNr,
KEAPI_PINT32 pCpuTemp
);
Description:
Provides information about actual temperature of the selected CPU.
Parameters:
2.8.5 KEApiGetChipsetTemp
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetChipsetTemp (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pChipsetTemp
);
Description:
Provides information about actual chipset temperature.
Parameters:
2.8.6 KEApiGetSystemTemp
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetSystemTemp (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pSystemTemp
);
Description:
Provides information about actual system temperature.
Parameters:
18
Page 19

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pVoltageSensorCount
Pointer to the voltage sensors count
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
voltageSensorCount
Number of sensors, obtained from the function
KEApiGetVoltageSensorCount
out
pVoltageSensors
Pointer to the voltage sensors structure
VOLTAGE_SENSOR
2.9 Voltage sensors
2.9.1 KEApiGetVoltageSensorCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetVoltageSensorCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pVoltageSensorCount
);
Description:
Provides number of voltage sensors.
Parameters:
2.9.2 KEApiGetVoltageSensorList
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetVoltageSensorList (
KEAPI_UINT32 boardHandle,
PVOLTAGE_SENSOR pVoltageSensors,
KEAPI_INT32 voltageSensorCount
);
Description:
Provides information about voltage sensors in the structure VOLTAGE_SENSOR.
Parameters:
Structure used:
typedef struct Voltage_Sensor
{
KEAPI_CHAR name[MAX_STR]; // Sensor’s name
KEAPI_INT32 value; // Value obtained from the sensor in millivolts
} VOLTAGE_SENSOR, *PVOLTAGE_SENSOR;
2.9.3 KEApiGetVoltageSensorValue
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetVoltageSensorValue (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 voltageSensorNr,
KEAPI_PINT32 pVoltageSensorValue
);
Description:
Provides current voltage value of a selected voltage sensor.
19
Page 20

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
voltageSensorNr
Number (index) of a voltage. Numbers start with 0
out
pVoltageSensorValue
Pointer to the value of the selected sensor, in millivolts
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pFanCount
Pointer to number of fans
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
fanCount
Number of fans, which can be obtained from the
KEApiGetFanCount function
out
pFans
Pointer to PFAN structure
Parameters:
2.10 Fan Control
2.10.1 KEApiGetFanCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetFanCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pFanCount
);
Description:
Provides number of fans.
Parameters:
2.10.2 KEApiGetFanList
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetFanList (
KEAPI_UINT32 boardHandle,
PFAN pFans,
KEAPI_INT32 fanCount
);
Description:
Provides information about fans.
Parameters:
Structure used:
typedef struct Fan
{
KEAPI_CHAR name[MAX_STR]; // Fan name
KEAPI_UINT32 rpm; // Revolutions per minute
KEAPI_UINT8 pwm; // Pulse width modulation fan control
KEAPI_UINT8 powerMode; // Fan speed control mode 0 = DC, 1 = PWM
KEAPI_UINT8 method; // Method of control - Maximal speed,
manual control or thermal cruise
} FAN, *PFAN;
20
Page 21

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
fanNr
Number (index) of a fan you are interested in. Fan numbers
start with 0
out
pwm
Fan speed modulation pwm. Can be set to NULL if not
wanted.
out
rpm
Returned fan speed in rpm. Can be set to NULL if not
wanted.
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
fanNr
Number (index) of a fan. Fan numbers start with 0.
out
fanMode
Current fan mode (max speed, manual control, thermal
cruise).
2.10.3 KEApiGetFanSpeed
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetFanSpeed (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 fanNr,
KEAPI_PUINT8 pwm,
KEAPI_PINT32 rpm
);
Description:
Provides information about fan speed.
Parameters:
2.10.4 KEApiGetFanMode
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetFanMode (
KEAPI_UINT32 boardHandle,
KEAPI_UINT32 fanNr,
KEAPI_PUINT8 fanMode
);
Description:
Provides information about fan mode.
Maximal speed: FAN_METHOD_MAX_SPEED, 0
Manual control: FAN_METHOD_MANUAL, 1
Thermal cruise: FAN_METHOD_THERMAL_CRUISE, 2.
Parameters:
2.10.5 KEApiSetFanModeManual
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetFanModeManual (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 fanNr,
KEAPI_UINT8 targetPwm
);
Description:
Sets the fan into manual control mode.
21
Page 22

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
fanNr
Number (index) of a fan. Fan numbers start with 0.
in
targetPwm
Required fan speed modulation pwm in a range of 0 (min) 255 (full speed)
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
fanNr
Number (index) of a fan you are interested in. Fan numbers
start with 0.
in
targetTemp
What temperature should not be exceeded, in millidegrees
Celsius
in
toleranceTemp
Tolerance of the target temperature. The controlled
temperature should fluctuate around the target temperature
within given tolerance, i.e. If the target temperature is 30
degrees Celsius, and the tolerance is set to 2 degrees, then
the temperature is kept in the range of 28 - 32 degrees.
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pCpuFanRpm
Pointer to a variable that receives CPU fan rpm
Parameters:
2.10.6 KEApiSetFanModeThermalCruise
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetFanModeThermalCruise (
KEAPI_UINT32 boardHandle,
KEAPI_UINT32 fanNr,
KEAPI_UINT32 targetTemp,
KEAPI_UINT32 toleranceTemp
);
Description:
Sets the fan into thermal cruise mode.
Parameters:
2.10.7 KEApiGetCpuFanSpeed
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetCpuFanSpeed (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pCpuFanRpm
);
Description:
Provides CPU fan speed (revolutions per minute).
Parameters:
2.10.8 KEApiSetCpuFanSpeed
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetCpuFanSpeed (
KEAPI_UINT32 boardHandle,
KEAPI_UINT8 cpuFanSpeedPwm
);
Description:
Sets speed of CPU fan using Pulse Width Modulation.
22
Page 23

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
cpuFanSpeedPwm
Required CPU fan speed pwm 0 (min) - 255 (max. speed)
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pSystemFanRpm
Pointer to a variable that receives system fan rpm
in/out
Parameter name
Description
in
boardHandle
Handle of selected board
in
systemFanSpeedPwm
Required system fan speed pwm 0 (min) - 255 (max.
speed)
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pDisplayCount
Number of installed displays
Parameters:
2.10.9 KEApiGetSystemFanSpeed
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetSystemFanSpeed (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pSystemFanRpm
);
Description:
Provides system fan speed (revolutions per minute).
Parameters:
2.10.10 KEApiSetSystemFanSpeed
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetSystemFanSpeed (
KEAPI_UINT32 boardHandle,
KEAPI_UINT8 systemFanSpeedPwm
);
Description:
Sets speed of system fan using Pulse Width Modulation.
Parameters:
2.11 Display
2.11.1 KEApiGetDisplayCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetDisplayCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pDisplayCount
);
Description:
Provides number of installed displays.
Parameters:
23
Page 24

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
displayNr
Requested display's number. Numbers start with zero
out
pBacklight
Pointer to variable that receives actual brightness intensity in
percentage
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
displayNr
Requested display's number. Numbers start with zero
out
backlight
Required backlight intensity in percentage (0 - 100)
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pNetworkDeviceCount
Number of installed network devices
2.11.2 KEApiGetBacklightValue
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetBacklightValue (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 displayNr,
KEAPI_PINT32 pBacklight
);
Description:
Provides information about current backlight intensity of the selected display.
Parameters:
2.11.3 KEApiSetBacklightValue
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSetBacklightValue (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 displayNr,
KEAPI_INT32 backlight
);
Description:
Sets backlight intensity of selected LVDS display.
Parameters:
2.12 Network and PCI devices
2.12.1 KEApiGetNetworkDeviceCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetNetworkDeviceCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pNetworkDeviceCount
);
Description:
Provides a number of installed network devices.
Parameters:
24
Page 25

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
networkDeviceCount
Number of network devices
out
pNetworkDevices
Pointer to array of NETWORK_DEVICE structures. The array
must be preallocated as NetworkDev iceCount *
sizeof(NETWORK_DEVICE), where
NetworkDeviceCount is obtained from calling
KEApiGetNetworkDeviceCount.
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pPciDeviceCount
Number of installed PCI devices
2.12.2 KEApiGetNetworkDeviceList
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetNetworkDeviceList (
KEAPI_UINT32 boardHandle,
PNETWORK_DEVICE pNetworkDevices,
KEAPI_INT32 networkDeviceCount
);
Description:
Provides information about installed network devices.
Parameters:
Structure used:
typedef struct Network_Device
{
KEAPI_CHAR ip[MAX_STR]; // IP address
KEAPI_CHAR mac[MAX_STR]; // MAC address in format XX-XX-XX-XX-XX-XX
KEAPI_INT32 speed; // Connection speed
KEAPI_CHAR deviceName[MAX_STR]; // Name of the network device
} NETWORK_DEVICE, *PNETWORK_DEVICE;
2.12.3 KEApiGetPciDeviceCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetPciDeviceCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pPciDeviceCount
);
Description:
Provides a number of installed PCI devices.
Parameters:
2.12.4 KEApiGetPciDeviceList
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetPciDeviceList (
KEAPI_UINT32 boardHandle,
PPCI_DEVICE pPciDevices,
KEAPI_INT32 pciDeviceCount
);
Description:
Provides a list of PCI devices.
25
Page 26

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
pciDeviceCount
Number of installed PCI devices
out
pPciDevices
Returned array of PCI_DEVICE structures
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pStorageCount
Number of available storage areas
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
storageNr
Number of the storage area. Number of storage areas can be
obtained from the KEApiGetStorageCount function
out
pStorageSize
Pointer to variable that receives size of the selected storage
area.
Parameters:
Structure used:
typedef struct Pci_Device
{
KEAPI_INT32 domain; // Domain number
KEAPI_INT32 bus; // Bus number
KEAPI_INT32 slot; // Slot number
KEAPI_INT32 funct; // Function number
KEAPI_INT32 deviceId; // Device ID
KEAPI_INT32 vendorId; // Vendor ID
KEAPI_INT32 classId; // Class ID
KEAPI_CHAR deviceName[MAX_STR]; // Name of the device
KEAPI_CHAR vendorName[MAX_STR]; // Name of the vendor
KEAPI_CHAR className[MAX_STR]; // Name of the class
} PCI_DEVICE, *PPCI_DEVICE;
2.13 Storage area
2.13.1 KEApiGetStorageCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetStorageCount (
KEAPI_UINT32 boardHandle,
KEAPI_PINT32 pStorageCount
);
Description:
Provides number of EEPROM storage areas.
Parameters:
2.13.2 KEApiGetStorageSize
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetStorageSize (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 storageNr,
KEAPI_PINT32 pStorageSize
);
Description:
Provides information about EEPROM storage area’s size.
Parameters:
26
Page 27

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
storageNr
EEPROM storage number (starts from 0). Number of storage
areas can be obtained
from KEApiGetStorageCount function
in
offset
Start address offset
out
pData
Pointer to buffer that receives data
in
dataLength
Number of bytes to read
in/out
Parameter name
Description
in
boardHandle
Handle of selected board
in
storageNr
EEPROM storage number. Number of storage areas can be
obtained
from KEApiGetStorageCount function
in
offset
Start address offset
in
pData
Pointer to buffer that contains data to write to EEPROM
in
dataLength
Number of bytes to write
2.13.3 KEApiStorageRead
KEAPI_CALLTYPE KEAPI_UINT32 KEApiStorageRead (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 storageNr,
KEAPI_INT32 offset,
KEAPI_PUINT8 pData,
KEAPI_INT32 dataLength
);
Description:
Reads block of bytes from selected EEPROM.
Parameters:
2.13.4 KEApiStorageWrite
KEAPI_CALLTYPE KEAPI_UINT32 KEApiStorageWrite (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 storageNr,
KEAPI_INT32 offset,
KEAPI_PUINT8 pData,
KEAPI_INT32 dataLength
);
Description:
Writes block of bytes to selected EEPROM.
Parameters:
2.14 I2C
2.14.1 KEApiGetI2cBusCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetI2cBusCount (
KEAPI_UINT32 boardHandle,
KEAPI_PUCHAR pI2cBusCount
);
Description:
Function for getting number of active I2C buses.
27
Page 28

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
out
pI2cBusCount
Pointer to the variable where the I2C bus count is saved
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
i2cNr
Number of I2C Buses. From 0 to (I2cBusCount - 1) returned
by KEApiGetI2cBusCount.
in
i2cAddress
Address of I2C slave device
in
memoryAddress
Address of register/memory (EEPROM cell address for
example). Depends on device.
in
pData
Data to write
in
dataLength
Length of data to write
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
i2cNr
Number of I2C Buses. From 0 to (I2cBusCount - 1)
returned by KEApiGetI2cBusCount.
in
i2cAddress
Address of I2C slave device
in
memoryAddress
Address of register/memory (EEPROM cell address for
example). Depends on device.
in
memoryAddressUsed
If TRUE – function reads data from address in
MemoryAddress parameter. Otherwise – from a current
position index (depends on device).
out
pData
Buffer for read data
Parameters:
2.14.2 KEApiI2cWrite
KEAPI_CALLTYPE KEAPI_UINT32 KEApiI2cWrite (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR i2cNr,
KEAPI_UCHAR i2cAddress,
KEAPI_UCHAR memoryAddress,
KEAPI_PUCHAR pData,
KEAPI_UINT32 dataLength
);
Description:
This function writes data to the slave I2C device connected to the I2C bus.
Parameters:
2.14.3 KEApiI2cRead
KEAPI_CALLTYPE KEAPI_UINT32 KEApiI2cRead (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR i2cNr,
KEAPI_UCHAR i2cAddress,
KEAPI_UCHAR memoryAddress,
KEAPI_BOOL memoryAddressUsed,
KEAPI_PUCHAR pData,
KEAPI_PUINT32 pDataLength
);
Description:
This function reads data from the slave I2C device connected to the I2C bus.
Parameters:
28
Page 29

Software specification for Kontron EAPI
in/ out
pDataLength
Also an "out" parameter. When the function finishes,
this parameter contains a real value of the read data
length.
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
out
pSmbusCount
Pointer to variable to save SMBus count
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
in
operation
What should be done
SMBUS_WRITE (0)
SMBUS_READ (1)
2.15 SMBus
2.15.1 KEApiGetSmbusCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGetSmbusCount (
KEAPI_UINT32 boardHandle,
KEAPI_PUCHAR pSmbusCount
);
Description:
Function for getting number of active SMBuses.
Parameters:
2.15.2 KEApiSmbusQuickCommand
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusQuickCommand (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR operation
);
Description:
Quick command read/write may be used to simply turn a device on/off or to enable/disable low-power
standby mode etc. There is no data received. For additional information, refer to the System
Management Bus(SMBus) Specification Version 2.0, which is available at
http://smbus.org/specs/smbus20.pdf.
Parameters:
2.15.3 KEApiSmbusSendByte
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusSendByte (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR byte
);
29
Page 30

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
in
byte
Command. Depends on device
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
out
pByte
Device information byte. Depends on device
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
Description:
A simple device may accept up to 256 possible encoded commands in a form of a byte. For additional
information, refer to the System Management Bus (SMBus) Specification Version 2.0, which is
available at http://smbus.org/specs/smbus20.pdf.
Parameters:
2.15.4 KEApiSmbusReceiveByte
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusReceiveByte (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_PUCHAR pByte
);
Description:
A simple device may have information that the host needs. It can do so with Receive byte protocol. For
additional information, refer to the System Management Bus (SMBus) Specification Version 2.0, which
is available at http://smbus.org/specs/smbus20.pdf.
Parameters:
2.15.5 KEApiSmbusWriteByte
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusWriteByte (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR command,
KEAPI_UCHAR byte
);
Description:
This function writes data of size of byte to a device. For additional information, refer to the System
Management Bus (SMBus) Specification Version 2.0, which is available at
http://smbus.org/specs/smbus20.pdf.
Parameters:
30
Page 31

Software specification for Kontron EAPI
in
command
Command code. Depends on device
in
byte
Data
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
in
command
Command code. Depends on device
out
pByte
Pointer to the data value
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
in
command
Command code. Depends on device
in
word
Data word to write
2.15.6 KEApiSmbusReadByte
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusReadByte (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR command,
KEAPI_PUCHAR pByte
);
Description:
This function reads data of size of byte from a device. For additional information, refer to the System
Management Bus (SMBus) Specification Version 2.0, which is available at
http://smbus.org/specs/smbus20.pdf.
Parameters:
2.15.7 KEApiSmbusWriteWord
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusWriteWord (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR command,
KEAPI_UINT16 word
);
Description:
This function writes data of size of word to a device. For additional information, refer to the System
Management Bus (SMBus) Specification Version 2.0, which is available at
http://smbus.org/specs/smbus20.pdf.
Parameters:
31
Page 32

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
in
command
Command code. Depends on device
out
pWord
Pointer to the data value
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
in
command
Command code. Depends on device
in
pData
Pointer to a data block of size up to 32 bytes
in
dataLength
Length of a data block
2.15.8 KEApiSmbusReadWord
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusReadWord (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR command,
KEAPI_PUINT16 pWord
);
Description:
This function reads data of size of word from a device. For additional information, refer to the System
Management Bus (SMBus) Specification Version 2.0, which is available at
http://smbus.org/specs/smbus20.pdf.
Parameters:
2.15.9 KEApiSmbusWriteBlock
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusWriteBlock (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR command,
KEAPI_PUCHAR pData,
KEAPI_UCHAR dataLength
);
Description:
This function writes up to 32 bytes to the device. For additional information, refer to the System
Management Bus (SMBus) Specification Version 2.0, which is available at
http://smbus.org/specs/smbus20.pdf.
Parameters:
2.15.10 KEApiSmbusReadBlock
KEAPI_CALLTYPE KEAPI_UINT32 KEApiSmbusReadBlock (
KEAPI_UINT32 boardHandle,
KEAPI_UCHAR smbusNr,
KEAPI_UCHAR smbusAddress,
KEAPI_UCHAR command,
32
Page 33

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
smbusNr
Number of SMBus. From 0 to (SmbusCount - 1) returned by
KEApiGetSmbusCount.
in
smbusAddress
Address of SMBus slave device
in
command
Command code. Depends on device
out
pData
Pointer to a data block of size up to 32 bytes
in/ out
pDataLength
This is also the "out" parameter. It is a pointer to the length of
data to read. After completing the function, this parameter
contains real value of the data length.
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
out
pGpioCount
Pointer to a variable where the GPIO count is saved
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
gpioNr
Number of a GPIO port. From 0 to (GpioCount - 1) returned
KEAPI_PUCHAR pData,
KEAPI_PUCHAR pDataLength
);
Description:
This function reads up to 32 byte from the device. For additional information, refer to the System
Management Bus (SMBus) Specification Version 2.0, which is available at
http://smbus.org/specs/smbus20.pdf.
Parameters:
2.16 GPIO
2.16.1 KEApiGpioGetCount
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGpioGetCount (
KEAPI_UINT32 boardHandle,
KEAPI_PUINT32 pGpioCount
);
Description:
Function for getting number of active GPIOs.
Parameters:
2.16.2 KEApiGpioGetDirectionCaps
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGpioGetDirectionCaps (
KEAPI_UINT32 boardHandle,
KEAPI_UINT32 gpioNr,
KEAPI_PBOOL pIsInput,
KEAPI_PBOOL pIsOutput
);
Description:
Function to get possible directions of a selected GPIO.
Parameters:
33
Page 34

Software specification for Kontron EAPI
by KEApiGpioGetCount.
out
pIsInput
If TRUE then pin can be input
out
pIsOutput
If TRUE then pin can be output
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
gpioNr
Number of an input GPIO. From 0 to (GpioCount - 1) returned
by KEApiGpioGetCount.
out
pDirection
Pointer to a variable where the GPIO direction (0 – in, 1- out)
is saved
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
gpioNr
Number of an input GPIO. From 0 to (GpioCount - 1) returned
by KEApiGpioGetCount.
in
direction
GPIO direction to set (0 – in, 1- out)
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
2.16.3 KEApiGpioGetDirection
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGpioGetDirection (
KEAPI_UINT32 boardHandle,
KEAPI_UINT32 gpioNr,
KEAPI_PUCHAR pDirection
);
Description:
Function for getting current direction of selected GPIO pin.
Parameters:
2.16.4 KEApiGpioSetDirection
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGpioSetDirection (
KEAPI_UINT32 boardHandle,
KEAPI_UINT32 gpioNr,
KEAPI_UCHAR direction
);
Description:
Function for setting direction of selected GPIO pin.
Parameters:
2.16.5 KEApiGpioGetLevel
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGpioGetLevel (
KEAPI_UINT32 boardHandle,
KEAPI_UINT32 gpioNr,
KEAPI_PUCHAR pLevel
);
Description:
Function for getting level of selected GPIO pin.
Parameters:
34
Page 35

Software specification for Kontron EAPI
in
gpioNr
Number of an input GPIO. From 0 to (GpioCount - 1) returned
by KEApiGpioGetCount.
out
pLevel
Pointer to a variable where the GPIO level (0 – low, 1- high)
is saved
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board.
in
gpioNr
Number of an output GPIO. From 0 to (GpioCount - 1)
returned by KEApiGpioGetCount.
in
level
Level to be set (0 - low, 1 - high)
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
in
timeout
Watchdog timeout interval in milliseconds
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
2.16.6 KEApiGpioSetLevel
KEAPI_CALLTYPE KEAPI_UINT32 KEApiGpioSetLevel (
KEAPI_UINT32 boardHandle,
KEAPI_UINT32 gpioNr,
KEAPI_UCHAR level
);
Description:
Function for setting level of selected GPIO pin.
Parameters:
2.17 Watchdog
2.17.1 KEApiWatchdogEnable
KEAPI_CALLTYPE KEAPI_UINT32 KEApiWatchdogEnable (
KEAPI_UINT32 boardHandle,
KEAPI_INT32 timeout
);
Description:
Enables the watchdog.
Parameters:
2.17.2 KEApiWatchdogTrigger
KEAPI_CALLTYPE KEAPI_UINT32 KEApiWatchdogTrigger (
KEAPI_UINT32 boardHandle
);
Description:
Triggers the WatchDog timer.
Parameters:
35
Page 36

Software specification for Kontron EAPI
in/out
Parameter name
Description
in
boardHandle
Handle of the selected board
2.17.3 KEApiWatchdogDisable
KEAPI_CALLTYPE KEAPI_UINT32 KEApiWatchdogDisable (
KEAPI_UINT32 boardHandle
);
Description:
Disables the watchdog.
Parameters:
36
Page 37

Software specification for Kontron EAPI
3 About Kontron
Kontron, the global leader of embedded computing technology, designs and manufactures embedded
and communications standards-based, rugged COTS and custom solutions for OEMs, systems
integrators, and application providers in a variety of markets. Kontron engineering and manufacturing
facilities, located throughout Europe, North America, and Asia-Pacific, work together with streamlined
global sales and support services to help customers reduce their time-to-market and gain a
competitive advantage. Kontron’s diverse product portfolio includes: boards & mezzanines, Computeron-Modules, HMIs & displays, systems & platforms, and rugged & custom capabilities.
Kontron is a Premier member of the Intel® Embedded and Communications Alliance and has been a
VDC Platinum Vendor for Embedded Computer Boards 5 years running.
Kontron is listed on the German TecDAX stock exchange under the symbol "KBC". For more
information, please visit: www.kontron.com
37
 Loading...
Loading...